Unidad 1 Plc
14
PLC INSTITUTO NACIONAL DE MÉXICO INSTITUTO TECNOLÓGICO DE VERACRUZ Semestre Ago./Dic 2014 Unidad: Introducción PRESENTAN: Torres Grajeda Patricia Monserrat H. Veracruz Ver 6 de febrero 2015 Dr. Iván Valencia Salazar
description
controladores logicos programables
Transcript of Unidad 1 Plc

PLC
Dr. Iván Valencia Salazar
H. Veracruz Ver 6 de febrero 2015
Torres Grajeda Patricia Monserrat
PRESENTAN:
Unidad: Introducción
Semestre Ago./Dic 2014
INSTITUTO NACIONAL DE MÉXICOINSTITUTO TECNOLÓGICO DE VERACRUZ

2
CONTENIDO:
Definiciones 3
Antecedentes e historia de los controladores lógicos programables 6
Principios de un sistema automático 9
Fases de estudio en la elaboración de un automatismo. 9
Opciones tecnológicas 10
Página
INDICE
3
INTRODUCCIÓN
Definiciones
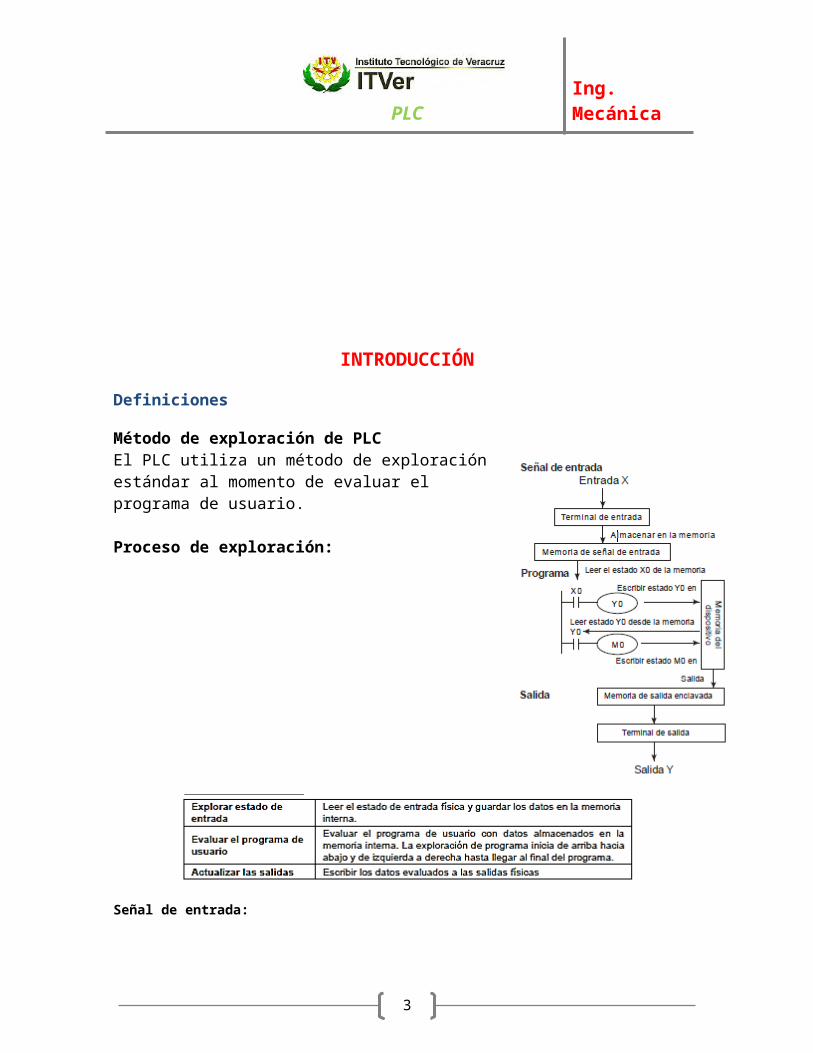
Método de exploración de PLCEl PLC utiliza un método de exploración estándar al momento de evaluar el programa de usuario.
Proceso de exploración:
Señal de entrada:El PLC lee el estado de ON/OFF (activado / desactivado) de cada entrada y almacena el estado en la memoria antes de evaluar el programa de usuario.Una vez que el estado de la entrada externa es almacenado en la memoria interna, cualquier cambio hecho a las entradas externas no se actualizará hasta el inicio del próximo ciclo de exploración.
Programa:El PLC ejecuta instrucciones en el programa de usuario de arriba a abajo y de izquierda a derecha y luego almacena los datos evaluados en la memoria interna. Parte de esta memoria está enclavada.
Salida:Cuando se llega al comando FIN la evaluación del programa está completa. La memoria de salida se transfiere a las salidas físicas externas.
Tiempo de exploraciónLa duración del ciclo total de exploración (leer, evaluar, escribir) se llama “tiempo de exploración”.Con más entradas y salidas o un programa más largo, se extiende el tiempo de exploración.

4
Excepción de tiempo de exploraciónEl PLC puede procesar ciertos artículos más rápido que el tiempo de exploración. Algunos de estos artículos interrumpen y detienen el tiempo de exploración para procesar el programa de subrutina de interrupción. Una REF de instrucción directa de actualización de entrada o salida permite al PLC acceso a entrada o salida inmediatamente durante la evaluación del programa de usuario en lugar de tener que esperar hasta el siguiente ciclo de exploración.
Flujo de corrienteLa lógica de escalera sigue un principio de izquierda a derecha. En el ejemplo de abajo, la corriente fluye por los patrones iniciados de X0 o X3.
Corriente inversaCuando la corriente fluye de derecha a izquierda, lo cual crea una lógica de corriente inversa, se detectará un error al compilar el programa. El ejemplo de abajo muestra el flujo de corriente inversa.
Contacto NO, Contacto NC

5
Registros y Relés de PLCIntroducción a los dispositivos internos básicos en un PLC

6
Antecedentes e historia de los controladores lógicos programables
Cuando se empezaron a usar los relés en el control de procesos productivos, se comenzó a añadir lógica a la operación de las máquinas y así se redujo e incluso se eliminó la carga de trabajo del operador humano.
Los relés permitieron establecer automáticamente una secuencia de operaciones, programar tiempos de retardo, contar las veces que se producía un suceso o realizar una tarea en dependencia de que ocurrieran otras.
Los relés sin embargo, tienen sus limitaciones: Tienen un tiempo limitado de vida, debido a que sus partes mecánicas están sometidas a desgaste, los conductores de corriente pueden quemarse o fundirse, y con ello puede provocarse una avería y tendrán que ser remplazados.
Desde el punto de vista de la programación, su inconveniente mayor era que la estructura de programación era fija. El panel de relés lo configuraban los ingenieros de diseño. Luego se construía y se cableaba. Cuando cambiaban las necesidades de producción había que construir un panel nuevo. No se podía modificar, al menos sin un coste excesivo en tiempo y mano de obra.
Una aplicación típica de estos sistemas utilizaba un panel de 300 a 500 relés y miles de conexiones por cable, lo que suponía un coste muy elevado en instalación y mantenimiento del sistema (aproximadamente de 25 a 45 euros por relé).
En aquella época, al entrar en una sala de control, era habitual oír el clic continuo de los relés al abrirse y cerrarse.
7
Hacia 1970 surgieron los sistemas lógicos digitales construidos mediante circuitos integrados, aunque eran productos diseñados para una aplicación específica y no eran controladores genéricos. ¡Un paso es un paso!
Muchos de ellos usaban microprocesadores, pero al programarse en un lenguaje extraño
a los ingenieros de control (el assembler, observa la figura de la izquierda), el mantenimiento era muy complejo.La existencia de ordenadores en el momento del desarrollo de los PLC fue lo que inspiró su concepto: Había que diseñar un artefacto que, como una computadora, pudiese efectuar el control y pudiese ser re-programada, pero pudiera soportar el ambiente industrial.
Los primeros controladores completamente programables fueron desarrollados en 1968 por una empresa de consultores en ingeniería (Bedford y Asociados), que luego se llamó MODICOM.
Así el primer PLC fue construido en 1969 por encargo de General Motors Hydramatic Division (fábrica de transmisiones para los vehículos de la General Motors). Este PLC se diseñó como un sistema de control con un computador dedicado para controlar una parte de la cadena de producción y sustituir los sistemas de cableado que usaban hasta la fecha, que resultaban difíciles de modificar, cada vez que se requerían cambios en la producción.
Con estos controladores primitivos era posible:
Programar desarrollos de aplicaciones para su uso en ambientes industriales.
Cambiar la lógica de control sin tener que cambiar la conexión de los cables.
Diagnosticar y reparar fácilmente los problemas detectados.

8
Los primeros PLC incorporaban sólo un procesador para programas sencillos y algunos dispositivos de entrada / salida. Posteriormente han ido desarrollándose hasta los equipos actuales, que ya integran:
Módulos multiprocesadores. Entradas y salidas digitales de contacto seco, de relé o TTL
(Transistor-Transistor-Logic o "Lógica Transistor a Transistor", tecnología de construcción de circuitos electrónicos digitales, en los que los elementos de entrada de la red lógica son transistores, así como los elementos de salida del dispositivo).
Entradas y salidas analógicas para corriente continua o alto voltaje.
Puertas de comunicación en serie o de red. Multiplexores análogos, Controladores PID (Proporcional Integral Derivativo, controlador
que intenta mantener la salida del dispositivo en un nivel predeterminado).
Interfaces con pantallas, impresoras, teclados, medios de almacenamiento magnético.
Introducción a los automatismos

9
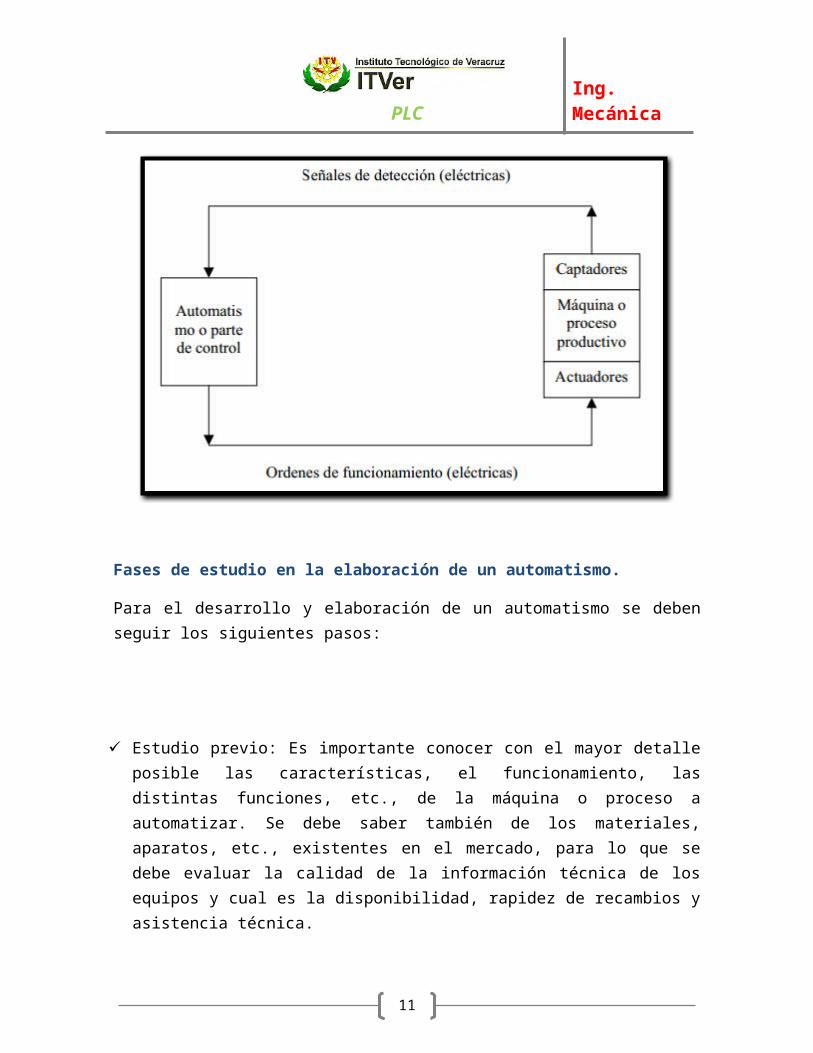
La automatización de una máquina o proceso productivo simple, tiene como consecuencia la liberación física y mental del hombre de dicha labor. Se denomina automatismo al dispositivo físico que realiza esta función controlando su funcionamiento.
Principios de un sistema automático
Todo sistema automático por simple que éste sea se basa en el concepto de bucle o lazo, tal y como se representa en la siguiente figura.
Fases de estudio en la elaboración de un automatismo.
Para el desarrollo y elaboración de un automatismo se deben seguir los siguientes pasos:

10
Estudio previo: Es importante conocer con el mayor detalle posible las características, el funcionamiento, las distintas funciones, etc., de la máquina o proceso a automatizar. Se debe saber también de los materiales, aparatos, etc., existentes en el mercado, para lo que se debe evaluar la calidad de la información técnica de los equipos y cual es la disponibilidad, rapidez de recambios y asistencia técnica.
Estudio técnico – económico: En este punto se tiene en cuenta las distintas opciones posibles (lógica cableada o lógica programada), la adaptación de los dispositivos seleccionados al sistema a automatizar y al entorno en el que se haya inscripto; se valora la parte operativa como mantenimiento y fiabilidad, etc.. La importancia de la evaluación desde el punto de vista técnico y económico radica en que a veces la mejor solución técnica resulta ser totalmente antieconómica.
Decisión final: Los parámetros que se deben valorar para una decisión correcta pueden ser muchos y variados, algunos de los cuales serán específicos en función del problema concreto que se va a resolver, pero otros serán comunes, tales como la posibilidad de ampliación y de aprovechamiento de lo existente en cada caso, el ahorro desde el punto de vista de necesidades para su manejo y mantenimiento, etc.
Opciones tecnológicas
El siguiente cuadro muestra las opciones tecnológicas posibles derivadas de las dos generales: lógica cableada y lógica programada.
11
REFERENCIAS
http://sistemamid.com/preview.php?a=77468
http://recursostic.educacion.es/observatorio/web/gl/component/content/article/502-monografico-lenguajes-de-programacion?start=2
http://www.sc.ehu.es/sbweb/webcentro/automatica/WebCQMH1/PAGINA%20PRINCIPAL/PLC/plc.htm




![Plc Equipos Alex[1]](https://static.fdocuments.es/doc/165x107/577c7ff51a28abe054a6b7b8/plc-equipos-alex1.jpg)