Apuntes PLC Continuacion Unidad 2
44
2.6 MODOS DE OPERACIÓN INTRODUCCIÓN Los autómatas programables son máquinas secuénciales que ejecutan correlativamente las instrucciones indicadas en el programa de usuario almacenado en su memoria, generando unas órdenes o señales de mando a partir de las señales de entrada leídas de la planta: al detectarse cambios en las señales, el autómata reacciona según el programa hasta obtener las órdenes de salida necesarias. Esta secuencia se ejecuta continuamente para conseguir el control actualizado del proceso. La secuencia de operación del autómata se puede dividir en tres fases principales: -Lectura de señales desde la interfaz de entradas. -Escritura de señales en la interfaz de salidas. -Procesado del programa para obtención de las señales de control. A fin de optimizar los tiempos de acceso a las interfaces E/S, se realiza la lectura y escritura de señales simultáneamente para todas las entradas y salidas complicadas, de forma que las entradas leídas se almacenan en una memoria temporal o memoria imagen de entradas, a la
-
Upload
j-leks-rohndez -
Category
Documents
-
view
22 -
download
0
description
informacion sobre la materia de controladores logicos programables
Transcript of Apuntes PLC Continuacion Unidad 2

2.6 MODOS DE OPERACIÓN
INTRODUCCIÓN
Los autómatas programables son máquinas secuénciales que ejecutan
correlativamente las instrucciones indicadas en el programa de usuario almacenado en
su memoria, generando unas órdenes o señales de mando a partir de las señales de
entrada leídas de la planta: al detectarse cambios en las señales, el autómata reacciona
según el programa hasta obtener las órdenes de salida necesarias. Esta secuencia se
ejecuta continuamente para conseguir el control actualizado del proceso.
La secuencia de operación del autómata se puede dividir en tres fases principales:
-Lectura de señales desde la interfaz de entradas.
-Escritura de señales en la interfaz de salidas.
-Procesado del programa para obtención de las señales de control.
A fin de optimizar los tiempos de acceso a las interfaces E/S, se realiza la lectura
y escritura de señales simultáneamente para todas las entradas y salidas complicadas, de
forma que las entradas leídas se almacenan en una memoria temporal o memoria
imagen de entradas, a la que acude la CPU durante la ejecución del programa, mientras
que los resultados o señales de mando se van almacenando en otra memoria temporal, o
memoria imagen de salidas, según se van obteniendo.
Finalizada la ejecución, estos resultados se colocan en la interfaz de salida de
una sola vez.
El Autómata realiza también una serie de acciones comunes que garantizan la
seguridad en el funcionamiento, como son los chequeos de memoria y de CPU,
comprobación del “watchdog” o reloj de guarda.

Además, y eventualmente, establece comunicación con periféricos exteriores,
por ejemplo para volcado de datos en impresora, y ordenadores, conexión con la unidad
de programación, etc. comunicación con otros autómatas
Todas estas acciones se van repitiendo periódicamente, definiendo un ciclo de
operación que necesita de un cierto tiempo para ser ejecutado. Este tiempo será
determinante cuando el autómata pretenda controlar procesos rápidos, con señales de
muy corta duración o alta frecuencia de conmutación.
En la presente unidad se describen el ciclo de operación del autómata y las
comprobaciones o tests que realiza durante su funcionamiento, con una valoración
cualitativa de los tiempos que emplea en realizar cada operación. Se define también el
concepto de respuesta del autómata en tiempo real y se indican las soluciones que
ofrecen los fabricantes para el control de procesos rápidos.
2.6.1 MODOS DE OPERACIÓN
Un autómata bajo tensión puede mantenerse en uno de los siguientes estados de
funcionamiento (modos de operación):
RUN: El autómata ejecuta normalmente el programa de usuario contenido en su
memoria.
-Las salidas evolucionan ON/OFF según el estado de las entradas y las órdenes del
programa.
-Los temporizadores y contadores programados operan con normalidad.
STOP: La ejecución del programa se detiene por orden del usuario.
-Las salidas pasan a estado OFF.
-Las posiciones internas (relés, registros), contadores y temporizadores mantienen su
estado en memoria interna.

En el paso a RUN, todas las posiciones internas, excepto las mantenidas, o
protegidas contra perdidas de tensión, pasan a estado OFF.
ERROR: El autómata detiene la ejecución por un error de funcionamiento y queda
bloqueado hasta que se corrige el error.
-Las salidas pasan a estado OFF.
-Corregido el error, el autómata sale de este modo bien por reset de puesta en tensión u
ordenado desde la CPU, bien por comando enviado desde la unidad de programación.
El modo STOP es normalmente utilizado para servicios de mantenimiento o
diagnóstico, al congelar el funcionamiento del autómata sin pérdida de la información
contenida en su interior, que puede entonces ser visualizada desde la unidad de
programación.
El modo de operación del autómata puede ser controlado desde conmutadores
situados en la misma CPU, o desde la unidad de programación, con el envío de los
comandos adecuados.
Ambas posibilidades pueden encontrarse simultáneamente en autómatas de
gamas media y alta, mientras que los modelos compactos de gama baja suelen incluir
solo la segunda.
Algunos autómatas compactos no disponen de conmutadores para el cambio de
modo, aunque pueden sustituirlos por interruptores externos que se leen a través de
puntos de la interfaz de entradas, asignados para esta función mediante los parámetros
de configuración.

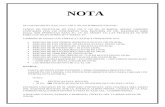
Figura 2.9 Modos de Operación de un Autómata
Tras la puesta en tensión, el autómata pasa a modos RUN o HALT/STOP,
dependiendo del modelo y de la configuración del mismo. En cualquier caso, las
conmutaciones RUN/STOP pueden ser forzadas por el usuario desde la unidad de
programación o desde los interruptores previstos a tal efecto sobre la CPU.
Si en el intento de puesta en marcha o paso a estado RUN el autómata detecta
algún mal funcionamiento sobre el aparato (conexiones, alimentación, etc.) o sobre el
programa (sintaxis), no se mantiene el estado RUN y la CPU cae en ERROR. Más
adelante se discutirán posibles causas de error y los procesos de depuración
subsiguientes.
La figura 2.9 muestra la relación entre los distintos modos, indicando los
cambios entre ellos con los códigos:
SIS – Cambio de modo ordenado por el sistema monitor.
CPU – Cambio de modo ordenado por usuario desde conmutadores de la CPU.
PRG – Cambio de modo ordenado por usuario por comandos desde la unidad de
programación.
El autómata puede disponer de una función de Reset que, activada desde la CPU
o desde la unidad de programación, borra todas las posiciones internas, incluso las

mantenidas, y deja al autómata totalmente reinicializando para comenzar a ejecutar el
programa.
Normalmente, y puesto que en el modo RUN no puede modificarse el programa
de usuario (solamente es posible en autómatas con programación On-Line), el aparato
debe estar en modo HALT/STOP cuando se desea introducir o modificar un programa
de aplicación.
La comprobación del modo de funcionamiento se realiza fácilmente sobre unos
LED incorporados en la CPU, por observación de su estado apagado, encendido o
parpadeante, facilitando las labores de mantenimiento y puesta a punto en caso de error.
La figura 2.10 muestra tres posibles disposiciones de estos indicadores LED,
correspondientes a otros tantos autómatas Izaumi FA-2j, Matsushita FP1, y
Telemecanique TSX 17-20, respectivamente.
Como se observa en la figura, algunos autómatas incluyen indicadores
específicos para monitorización del estado de las conexiones E/S, de la memoria de
programa, de funcionamiento de la CPU, etc., lo que facilita la identificación rápida de
la avería, aunque siempre puede leerse el código o identificador de error desde la unidad
de programación.

Figura 2.10 Indicadores LED de la CPU.
2.7 CICLO DE FUNCIONAMIENTO
El funcionamiento del autómata es, salvo el proceso inicial que sigue a un Reset,
de tipo secuencial y cíclico, es decir, las operaciones tienen lugar una tras otra, y se van
repitiendo continuamente mientras el autómata esté bajo tensión.
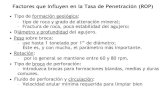
La figura 2.11 muestra esquemáticamente la secuencia de operaciones que
ejecuta el autómata, sobre la que se define el llamado ciclo de operación con aquellas
que se repiten indefinidamente.
Como se muestra en la figura (2.11), antes de entrar en el ciclo de operación el
autómata realiza una serie de acciones comunes (power-on sequence), que tratan
fundamentalmente de inicializar los estados del mismo y de checar el hardware.
Estas rutinas de chequeo, incluidas en el monitor ROM, comprueban:

-El bus de conexión de las unidades de E/S.
-El nivel de la batería, si esta existe.
-La conexión de las memorias internas del sistema.
-El módulo de memoria exterior conectado, si existe.
Figura 2.11 Ciclo de Funcionamiento del Autómata.
Si se encuentra algún error en el chequeo, se activa el LED de error y queda
registrado el código del mismo. El funcionamiento puede quedar interrumpido en ese
punto, según la gravedad del error.
Comprobadas las conexiones, se inicializan las variables internas:

-Se ponen a OFF las posiciones de memoria interna (excepto las mantenidas o
protegidas contra perdidas de tensión).
-Se borran todas las posiciones de memoria imagen E/S.
-Se borran todos los contadores y temporizadores (excepto los mantenidos o protegidos
contra pérdidas de tensión).
El tiempo total empleado en ejecutar estas rutinas de inicialización es siempre
menor que 1 segundo.
Como ejemplo, la figura 2.12 muestra los tiempos de puesta en marcha de un
autómata Hitachi de la serie E (microautómatas) en tres circunstancias:
-Arranque simultáneo con la puesta en tensión.
-Arranque tras la puesta en tensión.
-Arranque desde el estado STOP.

Figura 2.12 Tiempos de puesta en marcha de microautómatas de Hitachi.
Transcurrida la secuencia de inicialización, y si no han aparecido errores, el
autómata entra en el ciclo de operación, constituido por aquellas operaciones que se

ejecutan continuamente. Este ciclo puede considerarse dividido en tres bloques (figura
2.11):
-Proceso común,
-Ejecución del programa de usuario,
-Servicio a periféricos.
En el primero de ellos se comprueba el reloj de guarda y realizan los chequeos
cíclicos de conexiones y de memoria de programa, protegiendo al sistema contra:
-Errores de hardware (conexiones I/O, ausencia de memoria de programa, etc.).
-Errores de sintaxis (programa imposible de ejecutar).
El reloj de guarda (Watchdog) es un temporizador interno no accesible por el
usuario que fija el tiempo máximo de ejecución de un ciclo de operación. Si este
temporizador alcanza el valor prefijado, entre 0,1 y 0,5 según modelos, el autómata pasa
al estado STOP y se ilumina el indicador de error.
Las posibles causas para la activación del reloj de guarda pueden ser:
-Existencia de algún error de sintaxis en el programa, de forma que nunca se alcanza la
instrucción END.
-Bloqueo de la comunicación con periféricos externos.
-Avería en el funcionamiento de la CPU, etc.
El chequeo cíclico de conexiones comprueba los siguientes puntos:
-Niveles de las tensiones de alimentación,
-Estado de la batería, si existe, y

-Buses de conexión con las interfaces E/S.
En el chequeo de la memoria de programa se comprueban la integridad de la misma y
los posibles errores de sintaxis y gramática:
-Mantenimiento de los datos, comprobados con el “ checksum”.
-Existencia de la instrucción END de fin de programa.
-Estructuras de salto y anidamiento de bloques correctas.
-Códigos de instrucción correctos, etc.
Este proceso común no supera normalmente 1 o 2 milisegundos de tiempo.
En el segundo bloque de operaciones, ejecución del programa de usuario, se
consultan y actualizan los estados de las entradas y las salidas y se elaboran las órdenes
de mando a partir de ellos, por ejecución secuencial de las instrucciones del programa.
El tiempo de ejecución de este bloque de operaciones es la suma del:
-Tiempo de acceso a interfaces de E/S,
-Tiempo de escrutación del programa.
Que a su vez dependen, respectivamente, de:
-Número y ubicación de las interfaces de E/S.
-Longitud del programa y tipo de CPU que lo procesa.
El tiempo de acceso a las interfaces depende de si estas están cableadas como
locales o remotas (conectadas a la CPU por el bus interno, o a través de procesadores de
comunicaciones), y del número de entradas/salidas instaladas.
En un autómata compacto o modular con interfaces locales, este tiempo es del
orden de 5 ms, aunque puede variar significamente de uno a otro modelo.

El tiempo de ejecución del programa depende del tipo de instrucciones que se
procesan, siendo mayor en caso de instrucciones aritméticas o de manipulación de datos
y del modelo de CPU que lo ejecuta, reduciéndose si el autómata utiliza procesadores a
medida o personalizados (custom) en vez de microprocesadores estándar.
La tabla 2.2 muestra los tiempos de ejecución de instrucciones, en
microsegundos, de la gama de autómatas OMRON. Los tiempos más bajos
corresponden a la ejecución de las instrucciones básicas (AND, OR, etc. ), y los más
largos a los de manipulación de datos, contadores y temporizadores.
El tercer bloque de operaciones dentro de un ciclo de ejecución, el servicio a
periféricos externos, solo es atendido si hay pendiente algún intercambio con el exterior.
Estos periféricos se comunican con el autómata bien directamente, a través de un
conector situado sobre la CPU, bien a través de procesadores de comunicaciones
específicos, que soportan los protocolos de comunicación descargando a la unidad de
control de esta tarea.
La comunicación a través del conector incorporado queda reservada casi
exclusivamente para la unidad de programación, aunque existen productos de mercado
(por ejemplo, visualizadores y terminales de operador) directamente conectables a esta
línea.
Tabla 2.2 Familia de autómatas OMRON y tiempos de ejecución.
AUTOMATA NUMERO DE
PUNTOS E/S
TIEMPO DE
EJECUCION
(US/INSTR.)
ALTA
C 2000 H
C 1000 H
C 200
2048
1680
0,4 A 2,4
0,75 A 2,25

MEDIA
C 500
C 120
512
256
3 A 83
3 A 83
BAJA
SERIE K
SERIE P
C 20
100 A 148
36 A 120
84
4 A 95
4 A 95
4 A 80
La conexión con otros periféricos se realiza normalmente a través de
procesadores de comunicaciones, que permiten el enlace con:
-Ordenadores.
-Impresoras.
-Visualizadores de plasma o siete segmentos.
-Lectores de códigos de barra.
-Otros autómatas, etc.
Una vez establecida la comunicación, la CPU dedica un tiempo limitado, de 1 a
2 ms, en atender al intercambio de datos. Si este tiempo no fuera suficiente, el servicio
queda interrumpido hasta el siguiente ciclo (fig. 2.13).
Esta suspensión del servicio puede llegar a ser apreciable en procesos de
monitorización de estados, cuando la unidad de programación u otro periférico
específico pretende visualizar la evolución de las variables en el autómata, dando como
resultado la aparición de un retardo entre el estado de los LED’S indicadores de señal en
las interfaces de E/S y la información visualizada sobre la unidad externa. Para el resto
de servicios, conexión con impresora, con monitores o visualizadores industriales, etc.,
los retardos resultan inapreciables.
GAMA DE
AUTOMATAS

2.7.1 CHEQUEOS DEL SISTEMA
Como se ha indicado en el apartado anterior, el autómata incorpora rutinas de
autochequeo , en su monitor ROM, que le permiten diagnosticar el estado del programa
y del hardware conectado.
Estas rutinas pueden ser:
1.- Iniciales, que corren únicamente tras la puesta o reanudación de la tensión.
2.- Cíclicas, que se repiten continuamente mientras el autómata esta ejecutando el
programa.
Las primeras se encargan de comprobar las conexiones físicas del sistema, y de
identificar la configuración existente:
-Comprobacion de la CPU:
Microprograma.
Memoria interna.
Reloj de guarda, etc.
-Comprobación de la memoria de programa:
Control de presencia.
Identificación de tipo.
Comprobación del contenido (cheksum).
-Comprobación de interfaces E/S:
Control de presencia.
Identificación de los tipos.
Generación de la tabla de direcciones.

Figura 2.13 Suspensión del servicio de atención a periféricos externos.
Las rutinas cíclicas se encargan de comprobar la integridad del programa y de
las conexiones E/S utilizadas en el mismo:

-Control de memoria interna (direcciones y datos).
-Comprobación del contenido de memoria de programa (cheksum).
-Control de presencia y funcionamiento de interfaces E/S.
-Comprobaciones del bus interno y de las correctas transferencias de datos sobre él.
Si en alguno de los chequeos o comprobaciones anteriores se detecta algún
problema, el autómata acusa el error, memoriza el código identificador correspondiente
y, eventualmente, señaliza la situación iluminado el LED de error y algún otro
especifico, si lo posee.
Combinando el estado de los diferentes pilotos y/o estudiando los códigos de
error, es posible analizar los defectos y corregirlos con rapidez.
La identificación completa del error se realiza visualizando una tabla cruzada de
códigos y nombres de error.
El fabricante incluye siempre en la documentación del autómata un capítulo de
diagnóstico y corrección de errores (troubleshooting) que permite, primero, la
identificación del mismo, y proporciona, después, posibles soluciones para su
corrección.
Los errores pueden clasificarse en dos categorías: fatales y no fatales. Los
primeros provocan la detención del autómata (STOP) y exigen la reiniciación de la
máquina por reset o puesta en tensión.
Los errores no fatales quedan recogidos y señalizados en el autómata, pero no
provocan la parada de la máquina.
Algunos autómatas pueden disponer de un histórico de errores, que van
almacenando los errores producidos con sus códigos de identificación, e incluso la fecha
y hora en que se producen, si la CPU dispone de reloj de tiempo real.

Los contenidos de esta tabla de registros se van actualizando conforme aparecen nuevos
errores, siempre que estos no provoquen la parada del autómata.
Los errores más frecuentemente detectados son:
-Fallos de alimentación,
-Ausencia del modulo de memoria (autómatas sin RAM de programa interna),
-Desbordamiento del reloj de guarda,
-Pérdida o destrucción del programa o parte de el,
-Valores de preselección de temporizadores y contadores fuera de rango,
-Fallos de conexión con las interfaces de entrada/salida,
-fallo de conexión con la unidad de programación o con otros autómatas dentro de una
red,
-Direccionamiento incorrecto de interfaces E/S o de variables internas.
-Imposibilidad de carga del programa (demasiado largo, o incorrectamente
identificado), etc.
Además de las rutinas de autochequeo incorporadas en el monitor del autómata,
las unidades de programación pueden disponer de comandos de test que se encargan de
realizar una comprobación sistemática de todo el sistema: entradas/salidas, conexiones
del bus, estado de la CPU y de las memorias, conexiones con la unidad de
programación, teclados y visualizadores de esta, etc.
Esta función de test, si existe, es siempre ordenada por el usuario, a diferencia de
las rutinas de auto chequeos anteriores, de activación automática.
2.8 TIEMPO DE EJECUCIÓN Y CONTROL EN TIEMPO REAL
El tiempo total que el autómata emplea para realizar un ciclo de operación se
llama tiempo de ejecución de ciclo o más sencillamente tiempo de ciclo (Scan Time).
Dicho tiempo depende de:

-El número de entradas/salidas involucradas.
-La longitud del programa de usuario.
-El numero y tipo de periféricos conectados al autómata.
El tiempo total de ciclo es entonces la suma de los tiempos empleados en
realizar las distintas operaciones del ciclo, a saber:
-Autodiagnósticos.
-Actualización de E/S.
-Ejecución (escrutación) del programa.
-Servicio a periféricos.
Los tiempos empleados en chequeos y comprobaciones cíclicas
(autodiagnósticos) son del orden de 1 a 2 ms, al igual que los consumidos en la atención
a periféricos externos.
Los tiempos de ejecución de instrucciones se miden en unidades de
microsegundos (us), resultando un tiempo de escrutación del programa variable en
función del número y tipo de instrucciones contenidas. Precisamente, el tiempo de
escrutacion es uno de los parámetros que caracterizan a un autómata, expresado
normalmente en milisegundos por cada mil instrucciones (ms/k).
Tabla 2.3 Retardo de conmutación típicos de interfaces de autómatas (ms).
INTERFAZ
CONMUTACION
ENTRADA (TINP DEL) SALIDA (TOUT DEL)
AC DC RELE TRANSISTOR TRIAC
OFF- ON
ON- OFF
15-30 5-10 5-15 0,5, - 2 1-10
15-30 5-10 5-20 1-2 11-12

Lógicamente, el tiempo resultante dependerá del tipo de instrucciones elegidas,
por lo que el fabricante suele indicar las utilizadas como base de cálculo (boolenas,
aritméticas, de temporizacion, etc.), y las proporciones entre ellas dentro del programa
muestra.
Son tiempos típicos de 5 a 15 ms/k instrucciones, aunque la aplicación de nuevas
tecnologías y diseños a la CPU están reduciendo los tiempos a valores menores de 1
ms/k instrucciones.
Los tiempos de acceso al exterior para lectura/escritura de datos son del orden de
1 a 5 ms, dependiendo del número de E/S involucradas, de la CPU del autómata, de si
este es compacto o modular, si se utilizan o no entradas/salidas remotas, etc.
En un autómata estándar de gama media, para una aplicación que necesite
aproximadamente unas 1000 instrucciones, el tiempo de ciclo total puede, por tanto,
estimarse del orden de 20 milisegundos.
Este tiempo de ciclo será uno de los factores determinantes en el diseño del
sistema de control cuando en este aparezcan muy bajas constantes de tiempo (sistemas
de respuesta rápida), pero no el único a considerar, ya que también la electrónica de las
interfaces introduce retardos adicionales.
La lectura/escritura de señales de planta, realizada a través de las interfaces de
entrada/salida, está afectada por los retardos propios de estos circuitos que, al incluir
filtros que tratan de evitar la entrada de ruido eléctrico en el autómata, introducen
también retardos en las conmutaciones de la señal, limitando la frecuencia máxima de
estas a valores inferiores a 100 hz.
La tabla 2.3 presenta los rangos de retardo máximo típicos, en milisegundos,
para distintas interfaces de entrada y salida en las conmutaciones de encendido a
apagado y viceversa.
Como se observa, las entradas en DC son más rápidas que en AC, por la mayor
necesidad de filtrado de las tensiones de red, mientras que las salidas estáticas son
también más rápidas que las salidas por relé. Nótese el largo tiempo de conmutación

ON-OFF de la salida por triac, por el retardo que introduce el apagado natural (a
corriente cero) del dispositivo.
Si el proceso utiliza además señales analógicas, será preciso considerar también
los tiempos de conversión A/D y D/A, lo que, dado el procedimiento de conversión por
doble rampa normalmente utilizado, obliga a considerar retardos aun mayores, de 15 o
20 ms.
Dada una señal de mando (salida) función de una o varias señales de planta
(entradas), se denomina tiempo de respuesta al que transcurre desde que un cambio en
una de aquellas señales de planta es acusado por la señal de mando.
Este tiempo dependerá, por tanto, de los retardo de conmutación y adaptación
de señal en las interfaces de entrada y salida, Tinput delay y Tout delay y del tiempo
de ciclo del autómata.
Aunque el tiempo de respuesta es variable dependiendo del instante en que
cambia la entrada respecto al ciclo de operación, se mueve siempre entre dos valores
límite máximo mínino, según se muestra en el esquema de la figura 2.14
Estos valores límite son:
● Valor mínimo (la señal esta disponible en la interfaz justo antes de la lectura de
entradas)
TRES min =TINPUT delay +TCICLO +
+TOUTPUT delay
●Valor máximo (la señal esta disponible en la interfaz justo después de la lectura de
entradas)
TRES min= TINPUT delay + 2 TCICLO +
+TOUTPUT delay

El tiempo de retardo en las interfaces de entradas y salidas depende del tipo de
conmutación, ON/OFF o bien OFF/ON, así que para el cálculo del tiempo de respuesta
máximo habrá que tomar los mayores posibles que indique el fabricante.
Los valores del tiempo de respuesta resultante, y de su inversa, la frecuencia de
operación, pueden resultar despreciables frente a las constantes de tiempo de los
sistemas electromecánicos (relés, solenoides, electro válvulas, etc.) a los que el
autómata sustituía o controlaba en sus primeras aplicaciones de mercado, pero no lo
son tanto comparados con los tiempos extremadamente cortos que intervienen en la
lectura y control de elementos electrónicos, típicos en procesos de posicionamiento de
motores (lecturas de pulsos de encoders), respuesta a alarmas, detección de móviles a
alta velocidad etc.
Si se trata de controlar uno de estos procesos relativamente rápidos, puede darse
el caso de que la respuesta del autómata resulte demasiado lenta, con lo que el control
no actuará como se espera.
Se dice que el autómata es capaz de controlar en tiempo real a un proceso, si sus
tiempos de respuesta o retardo resultan muy pequeños frente a los tiempos de reacción
del mismo. Por ejemplo, utilizando un autómata con interfaz de entrada DC y salida por
relé, con un tiempo de ciclo de ejecución de 10 ms, y despreciando los tiempos de auto
chequeo y actualización E/S, se obtiene un tiempo de respuesta máximo de:
Tres max= 10ms+ 2 X10 ms +
+ 10 ms= 40ms
A este tiempo le corresponde una frecuencia máxima de conmutación que el autómata
pueda leer de:
f= 1/Tres max = 1/40 ms =25 Hz

Figura 2.14 Valores limite del tiempo de respuesta a una señal.
Si el proceso a controlar necesita un tiempo de respuesta en alguna variable
inferior a 40 ms, o si generan o manipulan frecuencias superiores a 25 HZ, el autómata
del ejemplo anterior no podrá controlar dicho proceso son riesgo de provocar
oscilaciones, pudiendo llegar incluso a la saturación y bloqueo del mismo.
Para mantener la potencialidad de los autómatas incluso en estas nuevas
aplicaciones que exigen mayor rapidez, los fabricantes suelen incluir en sus modelos

elementos o funciones de proceso rápido, cuyo funcionamiento y características se
describen a continuación.
2.9 ELEMENTOS DE PROCESO RÁPIDO
Hay tres tipos de actividades que exigen rápidas respuestas del autómata:
-Ejecución de subrutinas o programas a intervalos menores de los que permite el tiempo
de ciclo general del autómata (por ejemplo, para el procesado de alarmas).
-Lectura de impulsos de entrada a alta frecuencia (por ejemplo, procedentes de
encoders).
-Detección de señales de muy corta duración, menor que el tiempo de ciclo (por
ejemplo, para detección de móviles a alta velocidad).
Cada una de las circunstancias anteriores plantea problemas distintos, que
obligan también a buscar distintas soluciones en el autómata.
Así, para el primer supuesto, reducción del tiempo de respuesta para una señal
determinada, puede ordenarse la ejecución del bloque de programa que la controla de
forma independiente al resto del ciclo, iniciándose esta:
-Por medio de una señal periódica (para reducir el tiempo de ciclo).
-Por medio de una señal de interrupción exterior (para obtener respuestas rápidas).
En el primer caso, activación de una rutina rápida mediante una señal periódica
(normalmente, una temporizacion interna), se asegura la reducción del tiempo de ciclo
para las señales E/S manipuladas dentro de la rutina (figura 2.15), mientras que en el
segundo caso, activación mediante interrupción responder con rapidez frente a
estímulos externos.

Figura 2.15 Ejecución periódica de rutinas rápidas
En el segundo supuesto, lectura de impulsos de alta frecuencia, la pérdida de
información que supone la aparición de varios impulsos dentro de un mismo ciclo de
ejecución, al ser leído solo el que coincida con el instante de lectura (figura 2.16), puede
evitarse disponiendo de un contador rápido que, aprovechando un hardware específico
con entradas débilmente filtradas y circuito propio, sea capaz de leer señales de alta
frecuencia.
Figura 2.16 Pérdidas de información en la lectura de señales de alta frecuencia
Por último para la detección de señales de muy corta duración podría emplearse
cualquiera de las dos soluciones anteriores, aunque algunos autómatas que no las
incluyen, sobre todo en gamas bajas, pueden tener en cambio una o varias entradas
detectoras de flancos, capaces de captar y mantener en un relé interno, y hasta su lectura
por parte de la CPU, señales individuales de tan corta duración como 1 ms (menores de
un <<scan>>), de forma que el autómata llega a tener constancia de ellas (figura 2.17).

Figura 2.17 Lectura de impulsos de entrada
2.9.1 PROCESADO RÁPIDO DE PROGRAMAS.
Un programa, o bloque de programa, puede ejecutarse de las siguientes formas:
-Procesamiento cíclico, propio del programa principal, con ejecución de las
instrucciones según la numeración de sus direcciones. De este procesamiento cíclico se
obtiene el ciclo de ejecución del autómata.
-Procesamiento rápido, con ejecución de instrucciones en respuesta a una señal
independiente y asíncrona con el ciclo de ejecución del autómata.

Con el procesamiento rápido de programas se elimina la dependencia de algunas
señales con el tiempo de ciclo del programa base, mejorando la velocidad de respuesta
de estas señales frente cambios en la variable de entrada. A fin de reducir al máximo el
tiempo de respuesta, es frecuente que los autómatas con capacidad de procesamiento
rápido tengan definidas algunas entradas y salida con tiempo de conmutación más
pequeños que las ordinarias (menores filtrados), denominadas entradas rápidas.
La combinación del proceso rápido de instrucciones con el uso de estas
entradas/salidas no filtradas o con filtados muy reducidos, disminuye las respuestas
entre la aparición de las señales de planta y la ejecución de la señal de mando a valores
menores de 5 ms.
La figura 2.18 muestra un ejemplo de ejecución de rutina rápida a partir del
programa principal, activado por una señal externa que puede repetirse más de una vez.
El programa se está ejecutando continuamente mientras no se active la rutina
rápida. Cuando esto ocurre, se interrumpe aquel momentáneamente y se ejecuta la rutina
como sigue:
-Adquisición de entradas.
-Ejecución de las instrucciones del programa rápido,
-Activación de las salidas.
-Retorno al programa principal.

Figura 2.18 Ejecución de una rutina rápida ordenada por interrupción
La interrupción al programa puede generarse de dos formas:
-Por entrada asíncrona externa (interrupción),
-Según un ciclo de período prefijable por el usuario (temporización): 2 ms, 5ms, 10ms,
100 ms, 1s, por ejemplo.
La interrupción externa puede, a su vez, obtenerse por:
-Activación de una entrada exterior.
-Alcance del valor de preselección de un contador rápido.

Si se utilizan las entradas exteriores como entradas de interrupción, el inicio de
la ejecución del programa rápido ocurre cuando varía el estado de alguna o cualquiera
de ellas, de forma asíncrona con la consulta del resto de entradas en la interfaz.
Si se utiliza un contador rápido como control de la rutina, esta se dispara cuando
el contador alcanza el valor de preselección fijado, a partir de los impulsos de alta
frecuencia leídos en el exterior.
También puede programarse el contador como temporizador rápido
autocargable, de forma que dispare la ejecución rápida según un ciclo de periodo
prefijable (procesado asíncrono).
En cualquier caso, el programa principal continúa en el punto en que fue
interrumpido tras la ejecución del bloque de tratamiento rápido. Esto significa que, si
bien se reducen los tiempos de respuesta para las entradas/salidas procesadas en la
rutina, se incrementan los correspondientes al resto de señales, en un valor igual al del
tiempo de ciclo de la rutina rápida por el número de interrupciones al programa normal.
Algunos autómatas (de gamas media y alta) permiten la programación de varios
bloques de proceso específico, cada uno de ellos con su propia retícula de tiempo:
alcanzado uno de estos tiempos se activa una interrupción, y si la tarea que se estaba
ejecutando era de un período mayor (menor prioridad), se interrumpe para ejecutar la
tarea asociada a la interrupción activada, transcurrida la cual el proceso se reanuda en el
punto en que fue interrumpido.
Esta estructura de multiprogramación o multitarea permite definir programas
diferentes, para ejecutar sobre el procesador principal o sobre los auxiliares:
-Programa básico.
-Programa rápido.
-Programa lento.
-Rutinas de emergencia, etc.

Todos estos programas pueden intercambiar datos y acceder a las mismas
entradas, salidas y variables internas, resultando una mayor simplicidad y facilidad de
programación y supervisión del funcionamiento.
Una estructura como la descrita permite además la priorización absoluta de las
tareas de control, lo que significa que en la práctica el usuario puede elegir los tiempos
de respuesta que desea para cada una de las señales de su proceso.
2.10 DISPOSITIVOS PERIFÉRICOS Y DE PROGRAMACIÓN.
Como elementos auxiliares y físicamente independientes del Autómata, los
equipos periféricos realizan funciones concretas de gran importancia.
El incremento que experimenta las prestaciones de los Autómatas hace que el número
de periféricos aumente día a día para equipos de la misma gama, pero en general para
un equipo de la gama baja podría decirse que son:
Impresora, que permite obtener en papel el listado de instrucciones o programas
de usuario, el de temporizadores, contadores.
Unidades de cinta o memoria, por medio de las cuales se graban los programas
en cinta casete o chips de memoria EPROM o EEPROM, respectivamente.
Otros equipos que se utilizarían en la gama media o en algún caso en la gama baja
serian:
Monitores de tipo TRC.
Lectores de códigos de barras.
Displays y teclados alfanuméricos.
Unidad de teclado y test.

2.10.1 EQUIPOS O UNIDADES DE PROGRAMACIÓN.
La unidad de programación es el medio material del que se auxilia el
programador para grabar o introducir en la memoria de usuario las instrucciones del
programa. Pero esta unidad realiza otras tareas fundamentales.
Funciones principales:
La gama de funciones que son capaces de ejecutar los equipos de programación son
múltiples y variadas, aumentando el tipo de estas en razón directa a la complejidad del
equipo.
a) Programación.
Introducción de instrucciones (programa).
Búsqueda de instrucciones o posiciones de memoria
Modificación del programa:
-Borrado de instrucciones
-Búsqueda de instrucciones
-Modificación de instrucciones.
Detección de errores de sintaxis o formato.
Visualización del programa de usuario o parte del mismo, contenido en la
memoria de usuario.
Forzamiento del estado de marcas, registros, contadores, temporizadores, etc.
b) Grabación de programas.
En cinta casete
En chip de memoria EPROM o EEPROM.
En papel mediante impresora.
En disquete mediante PC.
Visualización y verificación dinámica del programa.
Del programa o parte de él.

De entradas y salidas.
De temporizadores, contadores, registros, etc.
a) Modos de servicio.
STOP (off-line), o salidas en reposo.
RUN (on-line) o ejecutando el programa.
Otros modos intermedios como MONITOR, etc.
Tipos:
Desde el punto de vista constructivo, podemos distinguir tres tipos principales:
a) Unidades tipo calculadora
Son las más comúnmente utilizadas en los Autómatas de la gama baja; consta del
correspondiente teclado, conmutador de modos, display de cristal líquido o siete
segmentos de dos o más líneas, así como de las entradas para la grabación del programa
de usuario. Puede ser totalmente independiente, ser enchufada directamente en la CPU,
o con ambas posibilidades.
En las de pocas líneas (2,4) solo es posible escribir neumónicos, pero en las de pantalla
llamadas de programación gráfica pueden visualizarse algunas líneas de programa de
lenguajes gráficos, datos del programa, etc.
b) Consola de programación
Esta en una posición intermedia entre la unidad tipo calculadora y el PC. consta de
pantalla de plasma o tipo similar y tamaño suficiente para 20-30 líneas y 60-80
caracteres por línea, así como teclado. Al igual que el PC que se describe a
continuación, utiliza el software de programación preciso para los lenguajes utilizados
en el PLC, almacenando los programas en disquete.
c) Unidad con PC

Esta unidad que se adapta al Autómata mediante el interfaz correspondiente lleva
incorporado un monitor de tubo de rayos catódicos (TRC) y realizan la misma función
que la unidad de programación normal, pero con mayores prestaciones, permitiendo
visualizar los esquemas o diagrama completos o partes importantes de los mismos. Este
equipo incorpora el software necesario para poder trabajar en más de un lenguaje de
programación, incluso realizar la transformación de lenguajes.
La grabación de programas se realiza en disquete o disco duro, según modelos del
PC.
Funcionamiento:
Las instrucciones que se introducen en la unidad de programación no son
directamente interpretables por el procesador, que se ha de auxiliar de un circuito
intermedio llamado Compiler. Es, por tanto, el Compiler el elemento de unión entre el
Autómata y la unidad de programación.
Su misión es la de traducir la información textual de la unidad de programación
a lenguaje máquina y viceversa mediante unos códigos intermedios que son
interpretados por un programa residente en el firmware.
2.10.2 INTERFACES
Son circuitos que permiten la comunicación de la CPU con el exterior llevando
la información acerca del estado de las entradas y transmitiendo las órdenes de
activación de las salidas.
Constan de enlaces del tipo RS-232 ó RS-422, y efectúan la comunicación
mediante el código ASCII.

Asimismo, permiten la introducción, verificación y depuración del programa
mediante la consola de programación, así como la grabación del programa a casete, en
memoria EPROM, comunicación con TRC (monitor), impresora, etc.