
Universidad de San Buenaventura Facultad de Ingenierías ...
88
Diseño y construcción de un dispositivo para caracterizar las propiedades mecánicas de materiales metálicos y plásticos a través de la técnica de excitación por impulso. Paulina Higuita Caro, [email protected] David Alonso Echavarría Rúa, [email protected] Proyecto presentado para optar al título de Ingeniero de Sonido Asesor: Juan David Berrío Bernal, Magíster (MSc) en Ingeniería Mecánica Universidad de San Buenaventura Facultad de Ingenierías (Medellín) Ingeniería de Sonido Medellín, Colombia 2020
Transcript of Universidad de San Buenaventura Facultad de Ingenierías ...

Diseño y construcción de un dispositivo para caracterizar las propiedades mecánicas de
materiales metálicos y plásticos a través de la técnica de excitación por impulso.
Paulina Higuita Caro, [email protected]
David Alonso Echavarría Rúa, [email protected]
Proyecto presentado para optar al título de Ingeniero de Sonido
Asesor: Juan David Berrío Bernal, Magíster (MSc) en Ingeniería Mecánica
Universidad de San Buenaventura
Facultad de Ingenierías (Medellín)
Ingeniería de Sonido
Medellín, Colombia
2020

Citar/How to cite [1]
Referencia/Reference
Estilo/Style:
IEEE (2014)
[1] P. Higuita Caro, y D. A. Echavarría Rúa, “Diseño y construcción de un
dispositivo para caracterizar las propiedades mecánicas de materiales metálicos
y plásticos a través de la técnica de excitación por impulso.”, Trabajo de grado
Ingeniería de Sonido, Universidad de San Buenaventura, Facultad de Ingenierías,
Medellín, 2020.
Bibliotecas Universidad de San Buenaventura
• Biblioteca Fray Alberto Montealegre OFM - Bogotá.
• Biblioteca Fray Arturo Calle Restrepo OFM - Medellín, Bello, Armenia, Ibagué.
• Departamento de Biblioteca - Cali.
• Biblioteca Central Fray Antonio de Marchena – Cartagena.
Universidad de San Buenaventura Colombia
Universidad de San Buenaventura Colombia - http://www.usb.edu.co/
Bogotá - http://www.usbbog.edu.co
Medellín - http://www.usbmed.edu.co
Cali - http://www.usbcali.edu.co
Cartagena - http://www.usbctg.edu.co
Editorial Bonaventuriana - http://www.editorialbonaventuriana.usb.edu.co/
Revistas - http://revistas.usb.edu.co/
Biblioteca Digital (Repositorio)
http://bibliotecadigital.usb.edu.co

Dedicatoria
Dedicado a nuestros padres, Alonso, Jairo, Natalia y Liliana, y a mi abuela Noemi por su apoyo,
comprensión y paciencia en este camino.
Agradecimientos
Agradecemos a los profesores, empleados de la universidad y compañeros que, de alguna
manera, nos brindaron ayudas, conocimientos y enseñanzas, para la realización de este trabajo de
grado y para la vida.

TABLA DE CONTENIDO
RESUMEN ..................................................................................................................................... 10
ABSTRACT ................................................................................................................................... 11
I. INTRODUCCIÓN ...................................................................................................................... 12
II. PLANTEAMIENTO DEL PROBLEMA .................................................................................. 13
III. PROBLEMA DE INVESTIGACIÓN ...................................................................................... 13
IV. JUSTIFICACIÓN .................................................................................................................... 14
V. OBJETIVOS .............................................................................................................................. 15
A. Objetivo general ................................................................................................................. 15
B. Objetivos específicos .......................................................................................................... 15
VI. ESTADO DEL ARTE .............................................................................................................. 16
VII. MARCO TEÓRICO ............................................................................................................... 22
A. Mecánica de materiales ......................................................................................................... 22
1) Esfuerzo .............................................................................................................................. 22
2) Esfuerzo Cortante ............................................................................................................... 22
3) Deformación ....................................................................................................................... 23
4) Ley de Hooke ...................................................................................................................... 24
B. Ondas y Vibraciones .............................................................................................................. 24
1) Ondas transversales y longitudinales .................................................................................. 24
2) Parámetros de una vibración en materiales ........................................................................ 25
a) Frecuencia de resonancia ............................................................................................... 25
b) Nodos y Antinodos ....................................................................................................... 26
C. Propiedades mecánicas de los materiales .............................................................................. 26
1) Módulo de Young ............................................................................................................... 28
2) Módulo dinámico de corte .................................................................................................. 31

D. Materiales Isotrópicos ........................................................................................................... 32
E. Transformada de Fourier ....................................................................................................... 33
1) Transformada discreta de Fourier ....................................................................................... 34
2) Transformada rápida de Fourier ......................................................................................... 34
F. Dispositivo generador de impulsos ........................................................................................ 35
1) Campo magnético generado por una corriente en un conductor ........................................ 35
2) Transistor de efecto de campo metal-oxido (MOSFET) como interruptor ........................ 36
G. Transductores ........................................................................................................................ 36
VIII. METODOLOGÍA ................................................................................................................. 38
IX. RESULTADOS ........................................................................................................................ 49
X. DISCUSIÓN .............................................................................................................................. 59
XI. CONCLUSIONES ................................................................................................................... 62
XII. RECOMENDACIONES ......................................................................................................... 64
REFERENCIAS ............................................................................................................................. 65
ANEXOS ........................................................................................................................................ 68

LISTA DE TABLAS
TABLA 1.CARACTERÍSTICAS ELÉCTRICAS DEL SOLENOIDE EQUIVALENTES PARA
LOS VALORES MÁXIMOS Y MÍNIMOS DE VOLTAJE ENTREGADOS POR LA PRIMERA
ETAPA. .......................................................................................................................................... 44
TABLA 2. VALORES ESTANDARIZADOS DE LAS PROPIEDADES MECÁNICAS DE LOS
MATERIALES A MEDIR. ............................................................................................................ 51
TABLA 3. VARIABLES INICIALES PARA EL CÁLCULO DE LAS CARACTERÍSTICAS
MECÁNICAS Y LOS VALORES DE FRECUENCIA FLEXURAL Y TORSIONAL DE LA
MUESTRA 1 PLÁSTICA (ULTEM 9085). .................................................................................. 52
TABLA 4. VARIABLES INICIALES PARA EL CÁLCULO DE LAS CARACTERÍSTICAS
MECÁNICAS Y LOS VALORES DE FRECUENCIA FLEXURAL Y TORSIONAL DE LA
MUESTRA 2 PLÁSTICA (ULTEM 9085). .................................................................................. 53
TABLA 5. VARIABLES INICIALES PARA EL CÁLCULO DE LAS CARACTERÍSTICAS
MECÁNICAS Y LOS VALORES DE FRECUENCIA FLEXURAL Y TORSIONAL DE LA
MUESTRA 3 PLÁSTICA (POLICARBONATO). ....................................................................... 53
TABLA 6. VARIABLES INICIALES PARA EL CÁLCULO DE LAS CARACTERÍSTICAS
MECÁNICAS Y LOS VALORES DE FRECUENCIA FLEXURAL Y TORSIONAL DE LA
MUESTRA 4 PLÁSTICA (POLICARBONATO). ....................................................................... 53
TABLA 7. VARIABLES INICIALES PARA EL CÁLCULO DE LAS CARACTERÍSTICAS
MECÁNICAS Y LOS VALORES DE FRECUENCIA FLEXURAL Y TORSIONAL DE LA
MUESTRA 1 METÁLICA (HIERRO). ......................................................................................... 54
TABLA 8. VARIABLES INICIALES PARA EL CÁLCULO DE LAS CARACTERÍSTICAS
MECÁNICAS Y LOS VALORES DE FRECUENCIA FLEXURAL Y TORSIONAL DE LA
MUESTRA 2 METÁLICA (HIERRO). ......................................................................................... 54
TABLA 9. VARIABLES INICIALES PARA EL CÁLCULO DE LAS CARACTERÍSTICAS
MECÁNICAS Y LOS VALORES DE FRECUENCIA FLEXURAL Y TORSIONAL DE LA
MUESTRA 3 METÁLICA (ACERO INOXIDABLE). ................................................................ 54
TABLA 10. VARIABLES INICIALES PARA EL CÁLCULO DE LAS CARACTERÍSTICAS
MECÁNICAS Y LOS VALORES DE FRECUENCIA FLEXURAL Y TORSIONAL DE LA
MUESTRA 4 METÁLICA (ACERO INOXIDABLE). ................................................................ 55

TABLA 11. CARACTERÍSTICAS MECÁNICAS DE LOS ESPECÍMENES DE PRUEBA CON
SUS RESPECTIVOS VALORES DE INCERTIDUMBRE. ........................................................ 58
TABLA 12. PORCENTAJES DE ERROR DE LAS MUESTRAS MEDIDAS PARA LOS
VALORES EXPERIMENTALES DEL MÓDULO DE YOUNG, MÓDULO DE CORTE Y
COEFICIENTE DE POISSON CON RESPECTO A LOS VALORES ESTANDARIZADOS. .. 58

LISTA DE FIGURAS
Fig. 1. Arreglo experimental utilizado en el método estático para determinar el módulo de Young
de distintos materiales. Tomada de [5]. .......................................................................................... 16
Fig. 2. Esquema del dispositivo experimental, espectro típico obtenido y el resultante de la
descomposición en frecuencias usando transformada de Fourier. Tomada de [11]. ...................... 19
Fig. 3. Desplazamiento (∆x) debido al esfuerzo cortante (P) aplicado tangencialmente sobre un área
(A) paralela a la sección transversal y perpendicular al eje longitudinal (L) de un material. ........ 23
Fig. 4. Deformación unitaria normal en un cuerpo longitudinal. Tomada de [4]. ......................... 24
Fig. 5. Esquema de ondas longitudinales y transversales. Tomada de [15]. .................................. 25
Fig. 6. Representación de la vibración para el modo flexural y el modo torsional. Modificada de
[17]. ................................................................................................................................................ 26
Fig. 7. Ensayo de tensión y compresión. La imagen de la izquierda es la máquina que estira la
muestra, la imagen de la derecha es la probeta estándar. Tomada de [4]. ..................................... 27
Fig. 8. Diagrama de proceso iterativo para estimar el coeficiente de Poisson. Modificada de [2].
........................................................................................................................................................ 30
Fig. 9. Tipo de transformada de Fourier correspondiente a cada tipo de señal. ............................. 34
Fig. 10. Diagrama de un MOSFET empleado como interruptor. ................................................... 36
Fig. 11. Modelo en AutoCAD de la base de dispositivo donde va suspendida la muestra. ........... 39
Fig. 12. Vista isométrica (izquierda) y vista lateral (derecha) del esquema para medir la frecuencia
de resonancia flexural, el punto 𝑀𝑓 es la posición del micrófono y el punto 𝐼𝑓 es la posición del
dispositivo generador de impulsos. ................................................................................................ 40
Fig. 13. Vista isométrica (izquierda) y vista lateral (derecha) del esquema para medir la frecuencia
de resonancia torsional, el punto 𝑀𝑡 es la posición del micrófono y el punto 𝐼𝑡 es la posición del
dispositivo generador de impulsos. ................................................................................................ 40
Fig. 14. Diagrama empleado para controlar el solenoide y su magnitud de impacto. ................... 41
Fig. 15. Diagrama empleado para construir el circuito regulador de voltaje. ................................ 41
Fig. 16. Diagrama empleado para construir el circuito interruptor del solenoide basado en un
transistor MOSFET controlado mediante Arduino. ....................................................................... 43
Fig. 17.Diagrama empleado para analizar el comportamiento del solenoide ................................ 44
Fig. 18. Modelo en AutoCAD de la base para el solenoide. .......................................................... 44

Fig. 19. Flujo de señal para medir la frecuencia de resonancia asociada al modo fundamental
flexural. .......................................................................................................................................... 45
Fig. 20. Flujo de señal para calcular la frecuencia torsional estimada. .......................................... 46
Fig. 21. Flujo para medir la frecuencia de resonancia asociada al modo fundamental torsional. .. 47
Fig. 22. Flujo de señal para calcular las características mecánicas, módulo de Young, módulo de
corte y la estimación del coeficiente de Poisson. ........................................................................... 47
Fig. 23. Modelo en AutoCAD de todo el dispositivo físico de medición. ..................................... 48
Fig. 24. Construcción final del dispositivo (Izquierda) y ubicación de todos los dispositivos
necesarios para realizar las mediciones (derecha). ......................................................................... 49
Fig. 25. Interfaz principal del algoritmo que calcula las características mecánicas de metales y
plásticos. ......................................................................................................................................... 50
Fig. 26. Interfaz del módulo para seleccionar de forma manual las frecuencias flexural y torsional.
........................................................................................................................................................ 50
Fig. 27. Muestras de materiales plásticos usados para medir sus características mecánicas utilizando
el dispositivo diseñado. .................................................................................................................. 51
Fig. 28. Muestras de materiales metálicos usados para medir sus características mecánicas
utilizando el dispositivo diseñado. ................................................................................................. 51
Fig. 29. Frecuencia flexural calculada con el módulo manual para la muestra 3 metálica (Acero
inoxidable). ..................................................................................................................................... 55
Fig. 30. Frecuencia torsional calculada con el módulo manual para la muestra 3 metálica (Acero
inoxidable). ..................................................................................................................................... 56
Fig. 31. Frecuencia flexural calculada con el módulo manual para la muestra 4 metálica (Acero
inoxidable). ..................................................................................................................................... 56
Fig. 32. Frecuencia torsional calculada con el módulo manual para la muestra 4 metálica (Acero
inoxidable). ..................................................................................................................................... 57

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 10
RESUMEN
Este informe explica el diseño, construcción, metodología y resultados obtenidos de la
caracterización de las propiedades mecánicas de materiales, acorde con en el estándar internacional
ASTM E1876-01. El método de medición consiste en un dispositivo que actúa como soporte para
la muestra de material, la cual es excitada de manera impulsiva por el efecto de un solenoide;
finalmente, mediante captura de audio y procesamiento digital de señales en el software
MATLAB®, se obtienen tres características mecánicas de dicha muestra de material (módulo de
Young, módulo cortante y se estima el coeficiente de Poisson). Tras comparar los valores
estandarizados con los valores obtenidos de manera experimental, se encontró que: para el módulo
de Young se tienen errores menores al 20% y con un promedio del 10% de error, para el módulo
de corte se tienen errores menores al 49% y con un promedio del 25% de error y para el coeficiente
estimado de Poisson se tienen errores superiores al 27% y con un error promedio del 56%. Con el
fin de obtener resultados más precisos, se recomienda prestar atención especial a la geometría y
masa de los especímenes utilizados, así como a los instrumentos de medida y al posicionamiento
de los componentes.
Palabras clave: Características mecánicas de materiales, Módulo de Young, Módulo cortante,
coeficiente de Poisson, Modo de vibración flexural, Modo de vibración torsional, Transformada
discreta de Fourier, Generador de impulsos.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 11
ABSTRACT
This report explains the design, construction, methodology and results obtained from the
characterization of the mechanical properties of materials, in accordance with the international
standard ASTM E1876-01. The measurement method consists of a device that acts as a support for
the sample of material, which is impulsively excited by the effect of a solenoid; finally, by audio
capture and digital signal processing in the MATLAB® software, three mechanical characteristics
of said material sample are obtained (Young's modulus, Shear modulus and the estimated Poisson
ratio). After comparing the standardized values with the experimentally obtained values, it was
obtained: for the Young modulus there are errors less than 20% and with an average error of 10%,
for the shear modulus there are errors less than 49% and with an average error of 25% and for the
estimated Poisson coefficient there are errors greater than 27% and with an average error of 56%.
In order to obtain more precise results, it is recommended to pay special attention to the geometry
and mass of the sample used, as well as the measuring instruments and the positioning of the
components.
Keywords: Mechanical characteristics of materials, Young's modulus, Shear modulus, Poisson's
ratio, Flexural vibration mode, Torsional vibration mode, Discrete Fourier transform, Impulse
generator.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 12
I. INTRODUCCIÓN
Existen diferentes métodos empleados para caracterizar mecánicamente materiales, algunos de
estos métodos ilustran y describen procesos, cálculos y limitaciones de cada proceso, así como los
dispositivos o prototipos de medición que se consideran adecuados para realizar de manera correcta
la caracterización. Generalmente, los métodos tradicionales empleados en la industria para realizar
esta labor tienden a ser destructivos y, en ocasiones, los dispositivos y algoritmos de medición
requeridos no son de fácil acceso. Como alternativa existen métodos no destructivos como el de
excitación de los materiales por medio de impulsos, el cual basa su funcionamiento en el
procesamiento digital de señales. [1]
Este proyecto tiene como objetivo general “diseñar y construir un dispositivo que permita
caracterizar las propiedades mecánicas de materiales metálicos y plásticos a través de la técnica de
excitación por impulso”, como pilar fundamental de esta investigación, se emplea el estándar
internacional ASTM E1876-01, cumpliendo con los procesos, ecuaciones y condiciones que se
describen en ella a partir de la automatización. Como resultado, se desean obtener características
mecánicas de materiales, cuyos valores no difieran considerablemente de los valores
estandarizados de cada material de estudio, y que puedan ser de utilidad posteriormente en el
ámbito ingenieril [2].

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 13
II. PLANTEAMIENTO DEL PROBLEMA
En el ámbito ingenieril y de la construcción, conocer las características mecánicas de los materiales
empleados para llevar a cabo diferentes proyectos, se ha convertido en un factor esencial en
términos de seguridad y durabilidad; especialmente en aplicaciones de alto desempeño o de soporte
de cargas [3]. Para poder calcular o estimar las características mecánicas en materiales existen
diferentes estándares y normativas que describen los métodos (dinámicos o estáticos), procesos y
dispositivos de medición requeridos para caracterizar mecánicamente un material [4]. El método
tradicional llamado ensayo de tensión tiene desventajas marcadas, la primera y más importante es
que al realizar las mediciones las muestras o probetas de ensayo ya no quedan sirviendo debido a
que se deforman por completo y la segunda es la poca accesibilidad que se tiene a la maquinaria
necesaria para realizar las mediciones, lo que hace que para algunas personas o proyectos, medir
las propiedades mecánicas de un material utilizando los métodos tradicionales no sea posible [1].
Dado esto, se crea un tipo de medición propuesta en una normativa internacional elaborada por la
Sociedad Americana para Pruebas y Materiales (ASTM por sus siglas en inglés), la cual permite
estimar acústicamente y mediante procesamiento digital de señales el módulo de elasticidad
flexural (módulo de Young), el módulo de elasticidad transversal (módulo de corte) y el coeficiente
de Poisson de una muestra de material sin necesidad de destruirlo o deformarlo permanentemente.
III. PROBLEMA DE INVESTIGACIÓN
Cuando se realizan mediciones experimentales en las cuales se requiere la participación humana
en alguna etapa de sus procesos, se añade incertidumbre en la ejecución y en la toma de medidas,
que finalmente se ven traducidas en resultados poco precisos y fiables. Buscando disminuir la
incertidumbre inducida por el factor humano al momento de excitar las muestras de material de
manera impulsiva, se automatiza este proceso y se delega esta responsabilidad a un conjunto de
componentes electrónicos, capaces de variar la fuerza de impacto generada y, a su vez, mantenerla
lo más constante posible. Este proceso de automatización se encarga de reducir la incertidumbre
en la ejecución de cada experimento y, a su vez, hace de este un proceso reproducible por otros
usuarios, en caso de ser necesario.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 14
IV. JUSTIFICACIÓN
Partiendo de la importancia de conocer de manera precisa las características mecánicas de los
materiales empleados en proyectos arquitectónicos e ingenieriles y buscando reducir la línea de
procesos requeridos para esto, se realiza este proyecto, el cual busca encontrar valores para el
módulo de Young, el módulo de corte y el coeficiente estimado de Poisson de materiales metálicos
y plásticos que sean alternativos a los obtenidos mediante los métodos tradicionales, como el
ensayo de tensión y compresión; los cuales destruyen o deforman el espécimen de estudio,
dejándolo inutilizable.
Se hace uso del estándar internacional ASTM E1876-01, con el fin de darle validez al dispositivo
y la metodología implementada para caracterizar materiales mecánicamente por medio de la técnica
de excitación por impulso, la cual se automatiza para facilitar la operación y omitir la incertidumbre
generada por el factor humano al momento de intervenir en el proceso, dando lugar a resultados
más exactos que permitan plantear, de manera directa, comparaciones entre los valores obtenidos
con los métodos tradicionales destructivos y el diseño planteado, evaluando la validez de éste. Este
método incentiva a desarrollar una estrecha relación entre la ingeniería de materiales y la ingeniería
de sonido, dado que se caracterizan materiales a través de técnicas de medición acústica y el
procesamiento digital de señales.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 15
V. OBJETIVOS
A. Objetivo general.
Desarrollar un dispositivo de medición que mediante el uso de la técnica de excitación por impulso
y el procesamiento digital de señales logre caracterizar las propiedades mecánicas de: módulo de
Young dinámico, el módulo de corte y el coeficiente de Poisson de materiales metálicos y plásticos
logrando cumplir con el estándar ASTM E 1876-01.
B. Objetivos específicos.
• Diseñar y construir un dispositivo tipo base para disponer las muestras de los materiales a
medir, deben estar en una suspensión lo suficientemente estable para no permitir el
movimiento libre y lo suficientemente liviana para no adicionar masa al material, estará
limitado a una cantidad de peso máxima y formas específicas de las muestras a partir del
estándar ASTM E 1876-01.
• Diseñar y construir un generador de impulsos automatizable, que excite las muestras de los
materiales con la misma magnitud de impulso, con una desviación estándar del 10%, para
un cálculo más preciso a la hora de hacer un promedio de las mediciones.
• Diseñar un algoritmo en MATLAB que permita procesar la señal captada por un micrófono
de medición, haciendo uso de la transformada de Fourier, que pueda calcular de manera
aproximada el módulo de Young dinámico, el módulo de corte y el coeficiente estimado de
Poisson de materiales como metales y plásticos.
• Verificar el buen funcionamiento del dispositivo midiendo diferentes muestras de
materiales metálicos y plásticos dispuestos con diferentes formas para poder realizar
comparaciones con los resultados obtenidos.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 16
VI. ESTADO DEL ARTE
Dentro de los procesos investigativos que llevan a la búsqueda de realizar mediciones de las
propiedades mecánicas de materiales, se pueden encontrar diferentes técnicas que ayudan con esta
búsqueda, estas técnicas se fueron dando y aplicando de acuerdo con las necesidades de quienes
realizaban estas mediciones para llegar a un valor lo más acertado posible y poder estudiar a fondo
los materiales y sus características. En 1997 en el departamento de física de la UBA se realizó la
medición del módulo de elasticidad de Young del acero, bronce, hierro y grilón haciendo uso del
método estático, donde estudiaron la deformación de barras del material sometidas a fuerzas
transversales en un plano vertical midiendo el ancho de la abertura que se crea en la barra al poner
diferentes masas en un extremo de ella, su montaje experimental se muestra en la Fig. 1 y el método
dinámico midiendo las oscilaciones verticales que generan las barras a partir de fuerzas aplicadas,
las cuales fueron las mismas masas del método anterior, procesando los datos y encontrando la
frecuencia de oscilación y el factor de amortiguamiento con los datos obtenidos. Para cada uno de
los métodos encontraron márgenes de error bastante amplios, pero con valores similares a los
estandarizados, el método estático con un error aproximado del 10 % debido a la forma indirecta
de medir la ranura de deformación y el método dinámico con un error aproximado del 30% debido
a la indefinición de la frecuencia de oscilación y el factor de amortiguamiento [5].
Fig. 1. Arreglo experimental utilizado en el método estático para determinar el módulo de Young de distintos
materiales. Tomada de [5].

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 17
Así mismo, en 2001 el profesor Ricardo M. Baettig de la Universidad de Talca en Chile Determinó
el módulo de la elasticidad de la madera mediante vibraciones transversales de manera que se
pudiera realizar una clasificación adecuada del material para saber su utilidad en la construcción a
través de su rigidez. El uso de las propiedades vibratorias de los materiales ayudan a esta
clasificación, en este caso se utilizaron dos dispositivos que calculaban la frecuencia de oscilación
basados en la ASTM E1876-99 y el equipo 340E-Computer de Metriguard Inc, el primero de ellos
consistió en una lámina piezoeléctrica adherida a la pieza de madera la cual generaba una pequeña
señal eléctrica cuando a la muestra se le generaba una vibración, teniendo precaución de que la
lámina piezoeléctrica no alterara la vibración, el segundo dispositivo se basó en poner la pieza a
vibrar sostenida en sus extremos por una celda de carga de tipo universal, al final los datos
obtenidos en ambas dispositivos fueron procesados mediante computador, realizaron pruebas con
5 piezas de madera Pinus radiata D en cada uno de los dispositivos y obtuvieron errores del 0,4%
para el primer dispositivo y 2.2% para el segundo dispositivo, mostrando la factibilidad del método
tanto en construcción como en medición [6].
En 2003 el Centro de Investigaciones en Óptica, México, publicó como realizaron la medición del
módulo de Young en el látex haciendo uso del método EPSI y comparado con el obtenido mediante
el ensayo de tensión para corroborar así la eficiencia del método EPSI. Para empezar el método
EPSI significa interferometría electrónica de patrones de moteado, este fenómeno se utiliza para
iluminar con una haz de luz materiales o superficies rugosas visualizando así un patrón de manchas
con la adición de un segundo frente de onda para hacerlos interferir generando un nuevo patrón
moteado, estos patrones son comparados mediante la sustracción de intensidad de luz en el patrón
hallando así una fase notoria con la cual al hacer uso de ecuaciones matemáticas podemos hallar el
módulo de Young el cual fue de 874.5±14.5 KPa, al no encontrar bibliografía o literatura que
tuviera el valor del módulo de Young del látex realizaron la medición con una máquina de ensayos
de tensión y obtuvieron 703.3±39.7 KPa, al comparar estos valores se nota una diferencia que se
da por la incertidumbre dada en el método óptico por el error humano pero que es bastante cercana
al valor de referencia medido [7].
Los doctores María Fernanda Serrano y Diego Darío Pérez investigadores de ingeniería civil
buscaron implementar el cálculo y medición del módulo de elasticidad estático analizando la

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 18
sensibilidad del concreto. Usaron 611 especímenes con dimensiones de 40m3, esta prueba está
definida en la norma ASTM C469 donde las muestras son sometidas a cargas axiales que se
incrementan gradualmente hasta que el concreto falla o se agrieta y las deformaciones que se crean
son medidas de manera constante, a partir de estos valores se hace aplicación de fórmulas que se
encuentran en la norma, es importante a su vez tener en cuenta los factores que afectan al concreto,
ya que es una estructura heterogénea por el proceso de agregado de componentes a la hora de
crearlo, esto puede generar errores en los resultados obtenidos en las mediciones. Notaron después
de todo este procedimiento que las empresas concreteras estaban usando cementos de diferentes
marcas y con agregados de petróleo, aunque su resistencia sigue estando en el marco de la Norma
Colombiana con una resistencia aproximada de 210 Kg/ cm3 [8].
En 2006 en la Universidad Nacional de Colombia, Manizales, el departamento de ingeniería
industrial estudió a detenimiento las propiedades mecánicas de la fibra de guadua con el fin de
determinar si las fibras de este podrían ayudar en el refuerzo de materiales compuestos, para
determinar estos parámetros usaron el ensayo de tensión bajo la norma NTC-959 haciendo uso de
un dinamómetro que medía la elongación máxima cuando los haces de la fibra de la guadua se
rompían sometidas a una velocidad de rompimiento de 80 milímetros por minuto encontrando un
módulo de elasticidad promedio de 26.61 Gpa y una resistencia a la tensión máxima de 642.58
Mpa, paralelo a esto compararon los datos obtenidos con otras fuentes presentando grandes
variabilidades, concluyendo que tal fenómeno se dio por tratarse de un material orgánico ya que su
resistencia se puede modificar por parámetros medioambientales analizando también como parte
de sus resultados que las haces más resistentes fueron las que se encontraban en el centro de la
guadua [9].
Para ese mismo año la facultad de ciencias exactas, UNCentro, Tandil, Argentina y la comisión de
investigaciones científicas de la provincia de Buenos Aires presentan un dispositivo diseñado para
medir constantes elásticas mediante la técnica de excitación por impulso en compuestos epoxy, el
diseño se basa en dos soportes que sostienen el materia, este debe tener forma de viga, en la cual
se suelta una bola de plástico en caída libre de manera que se logran excitar las frecuencias de
resonancia del material, estas son captadas a través de un micrófono ubicado a cierta distancia de
este, los datos fueron procesados en un computador, aplicando la transformada rápida de Fourier

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 19
con la cual se obtuvieron los espectros de frecuencia y aplicando las fórmulas adecuadas se
pudieron conseguir los valores de la constante de elasticidad, el esquema del dispositivo se
encuentra en la Fig. 2. Para las pruebas se usaron compuestos de matriz epoxy con carga particulada
de aluminio, cuarzo y cobre, las muestras fueron cortadas de manera rectangular para la
funcionalidad del dispositivo, las pruebas se realizaron con al menos 20 mediciones para realizar
un promedio adecuado, los resultados obtenidos son bastante similares a los encontrados en otras
bibliografías y están en el límite del modelo de Hashin-Shtrikman [10].
Fig. 2. Esquema del dispositivo experimental, espectro típico obtenido y el resultante de la descomposición en
frecuencias usando transformada de Fourier. Tomada de [11].
Esta técnica fue utilizada en 2018 por las mismas entidades y haciendo uso del mismo dispositivo,
pero en este caso para realizar mediciones en metales, las muestras fueron tratadas térmicamente a
840°C con templado en agua a temperatura ambiente y colocadas en el dispositivo para proceder a
la medición usando un micrófono electret para obtener las señales, las cuales fueron monitoreadas
por un osciloscopio y un controlador de temperatura, los datos recolectados tienen el mismo
procesamiento digital de señales que en la medición de compuestos epoxy con la variante de poder
observar los cambios que puede tener el módulo de elasticidad al alterar la temperatura y notaron
que al comparar estos datos con los estándar encontrados en otras literaturas se presentan errores a
los valores esperados atribuido a la presencia de diferentes texturas en las muestras [11].
Como se había mencionado existen varias técnicas que nos ayudan a calcular las características
mecánicas de ciertos materiales, algunas como se ha notado más precisas que otras y más fáciles

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 20
de implementar. En 2008 la revista de metalurgia publicó un artículo que reunía a varias
Universidades latinoamericanas en donde implementaron dos métodos para medir el módulo de
elasticidad de materiales de ingeniería. El primer método pretende medir la dureza del material con
el coeficiente de carga máxima apoyada sobre un área, este deja una huella en la superficie la cual
se mide con técnicas de microscopía, para entender este proceso hablamos de que cuando una carga
es muy baja y el material muy duro la huella dejada es pequeña, al medir esta huella y realizar
cálculos matemáticos podemos encontrar el módulo de elasticidad y la dureza, a este método se les
llama indentación instrumentada, el segundo método es mediante ultrasonidos el cual se puede
implementar gracias a que en los sólidos se propagan ondas longitudinales y transversales por el
desplazamiento de las partículas, es así que la elasticidad se puede medir a partir de la velocidad
de propagación de tales ondas en el material, para realizar esta medición con ultrasonidos se pueden
tener dos transductores uno como receptor y otro como transmisor dispuestos de manera coaxial
sumergidos en agua, o un solo transductor que es receptor y transmisor a la vez, la muestra es
colocada entre los transductores, para definir y obtener la velocidad de propagación se realiza una
comparación de tiempo en que transcurren las ondas con y sin muestra, estas señales fueron
digitalizadas por un osciloscopio. En la realización de los métodos se utilizaron diferentes muestras
de materiales desde vidrio, zafiro hasta acero de diferentes tamaños y pudieron concluir que usar
muestras demasiado pequeñas no sirve para el método de ultrasonidos ya que esta debe ser de una
tamaño mayor al de los transductores, y una vez comparados los resultados entre los dos métodos
y los estándar de otras literaturas encontraron menor desviación en los resultados de ultrasonidos
que de la técnica de indentación dependiendo a su vez de la homogeneidad del material ya que un
limitante del método acústico (ultrasonidos) es que no funciona en materiales que sean recubiertas
con capas [12].
En el estudio del comportamiento de los materiales Daniela Soto de la Universidad Católica de la
Santísima Concepción, Chile buscó asegurar que los materiales usados en la ingeniería civil
tuvieran funcionalidad estructural para así evitar deformaciones o colapsos en las estructuras, en
especial la madera por la gran variedad y propiedades intrínsecas que puede tener por las
condiciones medioambientales, por esto, realizó un estudio para determinar el módulo de
elasticidad dinámico del pino ponderosa con el método de vibraciones acústicas, haciendo uso de
diferentes dispositivos, uno de ellos fue haciendo uso del Timber Grander MTG, este es un

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 21
medidor que tiene incorporado un sensor que calcula el retraso de una señal de sonido que es dada
por el mismo medidor, casi que inmediatamente se muestra en un display el resultado medido, este
procedimiento se debe realizar con las muestras puestas sobre un soporte, otro dispositivo usado
fue Portable Lumber Grander de Fakopp Enterprise siendo similar al mencionado anteriormente
solo que con un sistema de apoyo, un micrófono aparte y una balanza , en esta balanza debe estar
ubicada la muestra y a poca distancia el micrófono que capta la señal, para ambos dispositivos se
debe tener una previa instalación de los software que calcula la velocidad de propagación
y procediendo a su vez con el cálculo de las características mecánicas, esta medición se hizo en
140 muestras de pino ponderosa, estos resultados fueron comparados con resultados obtenidos en
ensayos mecánico, donde los módulos de elasticidad medidos con vibración se ajustan a la
distribución normal y cercanos a los ensayos mecánicos, resaltando en el método de las vibraciones
la viabilidad y facilidad de los métodos y la rapidez de procesamiento digital [13].

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 22
VII. MARCO TEÓRICO
A. Mecánica de materiales.
Es de gran importancia entender los procedimientos que se llevan a cabo a la hora de realizar
mediciones en los materiales, ya que el objetivo es obtener de manera aproximada los valores
necesarios para trabajar con estos materiales correctamente en diferentes procesos. Al incorporar
la tecnología y los avances que como sociedad hemos creado, se han mejorado los procedimientos
ingenieriles gracias a la optimización en los cálculos, como por ejemplo en el cálculo de las
propiedades mecánicas de materiales, las cuales estudiar la relación que hay entre las fuerzas
aplicadas a cuerpos deformables y las fuerzas internas que hay en este [14].
1) Esfuerzo.
El esfuerzo tiene una relación intrínseca con la resistencia del material ya que este se define como
la intensidad de una o varias fuerzas que se aplica sobre una sección del cuerpo, es decir, un área
determinada. Cuando en un cuerpo o material la distribución de las cargas ejercidas por las fuerzas
externas es uniforme se considera como un material continuo, y se considera cohesivo cuando las
partes están conectadas entre sí y no hay ruptura. El esfuerzo se representa con la letra griega 𝜎
donde 𝐹 es la fuerza externa que se le aplica al cuerpo y 𝐴 es el área de sección donde se ejerce la
fuerza, sus unidades son 𝑁/𝑚2 [14] [4].
𝜎 =𝐹
𝐴 1
2) Esfuerzo Cortante.
Se produce al aplicar fuerzas (P) de forma tangencial sobre un área de referencia (A) de un cuerpo,
dicha fuerza se conoce como tensión cortante y el área de referencia es, generalmente, paralela a
la sección transversal del elemento (perpendicular al eje longitudinal). De manera gráfica la Fig. 3
explica este concepto con mayor facilidad [14].

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 23
Fig. 3. Desplazamiento (∆x) debido al esfuerzo cortante (P) aplicado tangencialmente sobre un área (A) paralela a la
sección transversal y perpendicular al eje longitudinal (L) de un material.
El efecto de este esfuerzo se observa como un deslizamiento del área transversal de estudio en
dirección de la fuerza aplicada. Generalmente se presentan inconvenientes al momento de realizar
su cálculo, esto debido a que la fuerza aplicada no se distribuye de manera uniforme sobre el área
de acción. Se representa el esfuerzo cortante con la letra griega 𝜏, como se expresa en la ecuación
2, y sus unidades son 𝑁/𝑚2 [14].
𝜏 =𝑃
𝐴 2
3) Deformación.
La deformación de un cuerpo se da cuando al aplicar una fuerza externa cambia su forma original
en forma y tamaño, esta deformación no será completamente uniforme en todo el cuerpo del
material, ya que un segmento de línea dentro del cuerpo puede cambiar su longitud (alargarse o
contraerse), esto se conoce como deformación unitaria normal. La deformación unitaria normal 𝜖
se da por la necesidad de saber el cambio en la longitud que tiene un cuerpo alargado después de
aplicar una carga axial 𝑃 como se muestra en la Fig. 4, y se representa como la diferencia entre ∆𝑠
que es la longitud inicial y ∆𝑠′ que es la longitud después de aplicar la carga 𝑃 sobre el cuerpo, sus
unidades serán adimensionales por ser la relación de dos longitudes. [14] [4].
𝜖𝑝𝑟𝑜𝑚 =∆𝑠′−∆s
∆s 3

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 24
Fig. 4. Deformación unitaria normal en un cuerpo longitudinal. Tomada de [4].
4) Ley de Hooke.
Los materiales tienden a tener comportamientos elásticos, ya sea a gran o menor escala, se dice que
hay deformaciones elásticas cuando al aplicar una fuerza el material tiene la capacidad de volver a
su estado original, ya que la relación entre el esfuerzo y la deformación unitaria es lineal se dice
que si se aumenta el esfuerzo habrá un aumento proporcional en la deformación, y se representa
con la ecuación 4, donde 𝜎 es el esfuerzo realizado, 𝐸 es el módulo de elasticidad o módulo de
Young y 𝜖es la deformación que se da de acuerdo a el esfuerzo realizado [15].
𝜎 = 𝐸𝜖 4
B. Ondas y Vibraciones.
1) Ondas transversales y longitudinales.
Las ondas longitudinales son conocidas a su vez como ondas de presión, que generan
perturbaciones mecánicas de desplazamiento en el material y ocurre en el mismo sentido de la
propagación, vista desde el punto de partículas, es el movimiento vibratorio de estas en la misma
dirección que la propagación de la onda, en cambio las ondas transversales presentan
perturbaciones perpendiculares a la propagación, en la Fig. 5 se observa un esquema que explica
tales ondas. La relación directa con estas ondas a través de los materiales se da por la velocidad de
propagación la cual depende del resultado en los coeficientes de elasticidad [15] [16].

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 25
Fig. 5. Esquema de ondas longitudinales y transversales. Tomada de [15].
2) Parámetros de una vibración en materiales.
a) Frecuencia de resonancia.
Las frecuencias de resonancia dependen exclusivamente de tres variables, las restricciones de
frontera, la masa y geometría de la muestra, estas están relacionadas con los modos de vibración,
los cuales se dan naturalmente en un material debido a la excitación de una fuerza eterna, esta
vibración es la que caracterizará el material ya que representa la máxima oscilación del cuerpo,
gracias a esto se pueden calcular las frecuencias de resonancia de un material mediante excitación
por impulso. En un material existen diferentes frecuencias a las que resuena, una de ellas es la
frecuencia asociada al primer modo de vibración flexural (𝑓𝑓) la cual se usa para calcular el módulo
de Young y la frecuencia asociada al primer modo torsional (𝑓𝑡) la cual se usa para calcular el
módulo de corte, cada uno de estos modos de vibración se miden excitando en los puntos de
máxima amplitud y soportándolos en los puntos de mínima amplitud del material, en la Fig. 6 se
observa la vibración del material para cada uno de estos modos de vibración [16] [1] .

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 26
Fig. 6. Representación de la vibración para el modo flexural y el modo torsional. Modificada de [17].
b) Nodos y Antinodos.
Los nodos y antinodos del primer modo de vibración de una muestra rectangular son aquellos que
nos muestran la ubicación de desplazamientos mínima y máxima de amplitud como se puede
apreciar en la Fig. 6, los antinodos del primer modo flexural están en los extremos y centro de la
muestra y los nodos del primer modo flexural están ubicados según sea la longitud de la muestra y
se puede calcular con la ecuación 5 y su resultado se mide con respecto a los extremos. Donde 𝐿
es la longitud de la muestra y 𝑛 la distancia a la que aparecen los nodos de cada uno de los extremos,
es decir, la posición donde se debe poner los soportes para realizar la medición, esta ecuación se
cumple para una barra libre [16] [18].
𝑛 = 0.224 𝐿 5
C. Propiedades mecánicas de los materiales.
Es importante buscar caracterizar materiales a través de diferentes pruebas y ensayos, uno de estos
tiene como objetivo encontrar la relación que hay entre el esfuerzo y la deformación para así
obtener un estudio detallado de los materiales y cuerpos a medir. De los conceptos más importantes
a resaltar es la resistencia de los materiales, este se relaciona con la capacidad de soportar peso sin
tener deformaciones y para poder determinarlo se usan pruebas como el ensayo de tensión y
comprensión, esta técnica se basa en descubrir la relación que hay entre el esfuerzo y la
deformación de un material, para realizar esta prueba se utiliza una muestra o probeta estándar, se

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 27
le dibujan dos puntos separados de los extremos de la muestra y se toman las medidas iniciales del
área de sección transversal 𝐴 y la distancia entre los puntos dibujados, luego se estira la muestra
con una máquina (ver Fig. 7) de manera constante y a baja velocidad hasta que hay una ruptura,
mientras se va indicando la carga requerida 𝑃 para llegar a esto, y al final se mide el alargamiento
que hay entre la distancia inicial medida 𝐿0 y la final 𝐿 entre los puntos dibujados, se utilizan las
ecuaciones 1 y 3 con estos valores en la ecuación 4 se despeja el módulo de Young 𝐸 [4].
Fig. 7. Ensayo de tensión y compresión. La imagen de la izquierda es la máquina que estira la muestra, la imagen de
la derecha es la probeta estándar. Tomada de [4].
Por otro lado, la técnica de excitación por impulso se fundamenta en medir las frecuencias de
resonancia de una muestra, es decir, las frecuencias que están asociadas a los modos normales de
vibración, una vez obtenidas estas frecuencias y los datos de las dimensiones y la masa, se pueden
calcular las características mecánicas a partir de ciertas ecuaciones, estas ecuaciones se basan en
un modelo masa-resorte regido por la ecuación 6, donde 𝑚 es la masa, 𝑘 es la contante de rigidez,
�̈� representa la aceleración y 𝑥 el desplazamiento, además se tienen en cuenta las restricciones de
frontera que ayudan a resolver la ecuación, de aquí salen infinitas soluciones que se resuelven a
través de eigen valores y eigen funciones, donde se ha demostrado que se encuentran las
frecuencias en términos del módulo de Young, la densidad, la geometría y las raíces características
que dependen del modo de vibración que se desee, en este caso el primer modo fundamental
flexural y el primer modo fundamental torsional [1].
𝑚�̈� + 𝑘𝑥 = 0 6

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 28
Par comprender el procedimiento antes descrito, considere una barra con densidad y masa
uniforme, la ecuación que rige su movimiento, teniendo en cuenta el módulo de Young, se obtiene
mediante la ecuación 7, donde 𝑢(𝑥) es el desplazamiento longitudinal, 𝜌 es la densidad de la barra,
y E el módulo de Young [19].
𝜕2𝑢
𝜕𝑥2= (
𝜌
𝐸)
𝜕2𝑢
𝜕𝑡2 7
Sabemos que la velocidad de una onda longitudinal se expresa con la ecuación 8 y se reemplaza en
la ecuación 7 se obtiene la ecuación 9 y si separamos las variables obtenidas en la ecuación 9, se
obtiene la ecuación 10, que es la misma ecuación 6 representada en el método de energía de
Rayleigh [19].
𝑐 = √𝐸
𝜌 8
𝜕2𝑢
𝜕𝑥2= (
1
𝑐2)
𝜕2𝑢
𝜕𝑡2 9
𝑢(𝑥, 𝑡) = 𝑈(𝑥)𝑇(𝑥) 10
Ahora con las ecuaciones 11 y 12, siendo 𝜔 la frecuencia, se puede encontrar una solución por
inspección y se obtiene la ecuación 13 [19].
𝑇′′(𝑡) + 𝜔2𝑇(𝑡) = 0 11
𝑈′′(𝑥) +𝜔2
𝑐2𝑈(𝑥) = 0 12
𝑈(𝑥) = 𝑑 𝑠𝑖𝑛 (𝜔𝑥
𝑐) + 𝑒 𝑐𝑜𝑠 (
𝜔𝑥
𝑐) 13
1) Módulo de Young.
El módulo de Young 𝐸 es un parámetro que nos ayuda a caracterizar la elasticidad de un material
a partir de la dirección en que se ejerce una carga o fuerza, este parámetro se encuentra mediante

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 29
diferentes métodos, en este caso queremos hallarlo mediante la excitación de frecuencias en
materiales con forma rectangular, por lo que al resolver la ecuación 6 para dicha geometría se ha
demostrado que la ecuación resultante es [11] [10].
𝐸 = 0.9465 (𝑚𝑓𝑓2/𝑏)(𝐿3/𝑡3)𝑇1 14
Donde 𝑚 es la masa de la barra en gramos, 𝑓𝑓 es la frecuencia de resonancia de la barra, 𝑏 es el
ancho de la barra en mm, 𝐿 es la longitud de la barra en mm, 𝑡espesor de la barra en mm y 𝑇1 es
un factor de corrección para el modo de flexión fundamental [2].
Es importante encontrar la incertidumbre que puede tener el cálculo, para esto es necesario tener
en cuenta los errores sistemáticos, los cuales están asociados a los efectos los instrumentos de
medición y los errores de medida, los cuales muestran cuando un valor no coincide con el real o
esperado y se puede calcular con la ecuación 15. [20]
𝑒 = 𝑋𝑚𝑒𝑑 − 𝑋𝑟𝑒𝑎𝑙 15
La incertidumbre del cálculo del módulo de Young se realiza con la ecuación 16, donde ∆𝑚, ∆𝑓𝑓,
∆𝑏, ∆𝐿, ∆𝑡 son las incertidumbres de las medidas de cada variable (Anexo 2: Incertidumbre de la
medida) y ∆𝜇 =2𝜇
√3√(
∆𝐸
𝐸)
2
+ (∆𝐺
𝐺)
2
, para hallar ∆𝜇 se debe calcular primero ∆𝐺 de la ecuación 25
[21].
∆𝐸 = 2𝐸
1.73205√(
∆𝑚
𝑚)
2
+ (2∆𝑓𝑓
𝑓𝑓)
2
+ (∆𝑏
𝑏)
2
+ (3∆𝐿
𝐿)
2
+ (3∆𝑡
𝑡)
2
+ (∆𝜇
40𝜇)
2
16
El factor de corrección 𝑇1 se calcula de dos maneras, la primera cuando (𝐿/𝑡) < 20 a través de la
ecuación 17 y la segunda cuando (𝐿/𝐷) ≥ 20 a través de la ecuación 18 [2].

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 30
𝑇1 = 1 + 6.585(1 + 0.0752 𝜇 + 0.8109𝜇2) (𝑡
𝐿)
2
− 0.868 (𝑡
𝐿)
4
−
[8.340 (1+0.2023 𝜇+2.173𝜇2)(𝑡/𝐿)4
1+6.338 (1+0.1408 𝜇+1.536𝜇2)(𝑡/𝐿)2] 17
𝑇1 = 1 + 6.585(𝑡/𝐿)2 18
Donde 𝜇 es el coeficiente de Poisson que representa la relación que hay en la deformación
transversal y la axial. Los parámetros ya antes mencionados como módulo de Young 𝐸, el módulo
de corte 𝐺 y coeficiente de Poisson 𝜇 se relacionan en la ecuación 19. Cuando este valor es
desconocido o no se asume se debe realizar un proceso iterativo con las ecuaciones de los módulos
de elasticidad como se observa en la Fig. 8 [2].
𝜇 = (𝐸/2𝐺) − 1 19
Fig. 8. Diagrama de proceso iterativo para estimar el coeficiente de Poisson. Modificada de [2].
El módulo de Young puede ser calculado a su vez en materiales con sección transversal circular a
partir de su frecuencia de resonancia, donde se ha demostrado que la ecuación obtenida para este
tipo de geometría es.
𝐸 = 1.6067 (𝑚𝑓𝑓2)(𝐿3/𝐷4)𝑇′1 20

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 31
Y la incertidumbre del cálculo se realiza con la ecuación 21, donde ∆𝑚, ∆𝑓𝑓, ∆𝐷, ∆𝐿 son las
incertidumbres de las medidas de cada variable y ∆𝜇 =2𝜇
√3√(
∆𝐸
𝐸)
2
+ (∆𝐺
𝐺)
2
para hallar ∆𝜇 se debe
calcular primero ∆𝐺 de la ecuación 29 [21].
∆𝐸 = 2𝐸
1.73205√(
∆𝑚
𝑚)
2
+ (2∆𝑓𝑓
𝑓𝑓)
2
+ (4∆𝐷
𝐷)
2
+ (3∆𝐿
𝐿)
2
+ (∆𝜇
40𝜇)
2
21
Donde 𝐷 es diámetro de la barra en mm, 𝐿 es la longitud de la barra en mm y 𝑇′1es un factor de
corrección para el modo de flexión fundamental, este se calcula de dos maneras, la primera cuando
(𝐿/𝐷) < 20 a través de la ecuación 22, y la segunda cuando (𝐿/𝐷) ≥ 20 a través de la ecuación
23 [2].
𝑇′1 = 1 + 4.939(1 + 0.0752 𝜇 + 0.8109𝜇2) (𝐷
𝐿)
2
− 0.4883 (𝐷
𝐿)
4
−
[4.691 (1+0.2023 𝜇+2.173𝜇2)(𝐷/𝐿)4
1+4.754 (1+0.1408 𝜇+1.536𝜇2)(𝐷/𝐿)2] 22
𝑇′1 = 1 + 4.939(𝐷/𝐿)2 23
2) Módulo dinámico de corte.
Conocido también como el módulo de rigidez 𝐺, nos muestra como constante elástica la
deformación de un material cuando a este se le aplican esfuerzos cortantes. Este parámetro puede
calcularse de varias maneras, en este caso, a partir de la frecuencia fundamental de torsión en
materiales rectangulares, dado por la siguiente ecuación [2].
𝐺 = (4𝐿𝑚𝑓𝑡2/𝑏𝑡)(𝐵/(1 + 𝐴)) 24
Y la incertidumbre del cálculo se realiza con la ecuación 25, donde ∆𝑚, ∆𝑓𝑓, ∆𝑏, ∆𝐿, ∆𝑡 son las
incertidumbres de las medidas de cada variable [21].

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 32
∆𝐺 = 2𝐺
1.73205√(
∆𝑚
𝑚)
2
+ (2∆𝑓𝑡
𝑓𝑡)
2
+ (∆𝑏
𝑏)
2
+ (∆𝐿
𝐿)
2
+ (∆𝑡
𝑡)
2
25
Donde 𝑚 es la masa de la barra en gramos, 𝑓𝑡 es la frecuencia torsional de la barra en torsión, 𝑏 es
el ancho de la barra en mm, 𝐿 es la longitud de la barra en mm, 𝑡 es el espesor de la barra en mm,
𝐴 es un factor empírico de corrección para la relación entre el ancho y largo del material y se
calcula con la ecuación 26 y 𝐵 es un coeficiente que se debe calcular haciendo uso de la ecuación
27 [2].
𝐴 =0.5062−0.8776 (𝑏/𝑡) + 0.3504 (𝑏/𝑡)2− 0.0078(𝑏/𝑡)3
12.03 (𝑏/𝑡) + 9.892 (𝑏/𝑡)2 26
𝐵 =𝑏/𝑡 + 𝑡/𝑏
4(𝑡/𝑏) − 2.52(𝑡/𝑏)2 +0.21(𝑡/𝑏)6 27
Así como el módulo de Young, el módulo de corte puede ser calculado para materiales cilíndricos
a través de la ecuación que se muestra a continuación.
𝐺 = 16𝑚𝑓𝑡2(𝐿/𝜋𝐷2) 28
Y la incertidumbre del cálculo se realiza con la ecuación 29, donde ∆𝑚, ∆𝑓𝑓, ∆𝑏, ∆𝐿, ∆𝑡 son las
incertidumbres de las medidas de cada variable [21].
∆𝐺 = 2𝐺
1.73205√(
∆𝑚
𝑚)
2
+ (2∆𝑓𝑡
𝑓𝑡)
2
+ (∆𝐿
𝐿)
2
+ (2∆𝐷
𝐷)
2
29
D. Materiales Isotrópicos.
Como ya se había mencionado es importante tener una relación intrínseca entre las características
mecánicas que describen la elasticidad de los materiales, cuando hablamos de materiales
isotrópicos nos referimos a materiales homogéneos en donde los valores encontrados y medidos
como el módulo de Young, el módulo dinámico de corte y el coeficiente de Poisson sean iguales
en todas las direcciones. La homogeneidad hace referencia a que la distribución en densidad es
uniforme, por lo tanto, cualquier muestra extraída del material original debe representar todas sus

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 33
características fielmente, con la única condición que tales muestras deben ser más grandes que los
granos o cristales que lo componen, así se tendrá la certeza de obtener valores cercanos a los
estandarizados [2] [22].
E. Transformada de Fourier.
Se puede describir como una operación matemática basada en la descomposición de una señal en
componentes sinusoidales, mediante la ecuación 30, este proceso se implementa en señales
continuas y no periódicas; en caso de tener otra clase de señal, se realizan variaciones a la
transformada de Fourier y se da origen a cuatro tipos de transformaciones.
ℱ[𝑓(𝑡)] = ∫ 𝑓(𝑡)𝑒−𝑗𝜔𝑡𝑑𝑡∞
−∞
30
Para señales continuas y no periódicas se implementa la transformada de Fourier, para señales
continuas y periódicas se utilizan las series de Fourier, para señales discretas y no periódicas se
conoce como la transformada de Fourier de tiempo discreto y en señales discretas y periódicas se
utiliza la transformada discreta de Fourier [23], en la Fig. 9 se da un ejemplo de cada tipo de señal.
Acorde con Oppenheim y Smith, una señal no periódica se puede definir como una señal periódica
con periodo infinito, por lo cual se puede implementar la transformada discreta de Fourier en
señales discretas y no periódicas. [24].

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 34
Fig. 9. Tipo de transformada de Fourier correspondiente a cada tipo de señal.
1) Transformada discreta de Fourier.
Conocida como DFT (por sus siglas en inglés: Discrete Fourier Transform), es un equivalente de
la transformada de Fourier aplicada a señales finitas. La función de esta herramienta de cálculo es
convertir una señal discreta en el dominio del tiempo en una señal discreta y equivalente en el
dominio de la frecuencia, es decir, elabora el espectro de frecuencia de una señal discreta a partir
de la ecuación 31 [25].
𝑋(𝑘) = ∑ 𝑥(𝑛)
𝑁−1
𝑛=0
𝑒−𝑗(2𝜋𝑁
)𝑘𝑛 ∴ 𝑘 = 0, 1, … , 𝑁 − 1 31
2) Transformada rápida de Fourier.
Existen diferentes métodos para solucionar la transformada discreta de Fourier, uno de estos es la
transformada rápida de Fourier, comúnmente conocida como FFT (por sus siglas en inglés: Fast
Fourier Transform). Es una solución que no difiere de los resultados obtenidos por otros métodos
y es eficiente, en términos de tiempo de computación, debido al proceso de descomposición,

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 35
reordenamiento y cálculo que realiza. Su eficiencia radica en la diferencia de recursos
computacionales empleados al realizar la transformada de N señales compuestas de una muestra
cada una y realizar la misma operación en una señal compuesta de N muestras [23].
F. Dispositivo generador de impulsos.
Con el fin de conocer las frecuencias de resonancia de un material mediante el método de respuesta
al impulso, acorde con el estándar internacional ASTM E 1876-01, se requiere excitar cada muestra
de manera impulsiva. Acorde a esto y mediante la automatización de este proceso, se busca reducir
la incertidumbre que añade el factor humano al momento de realizar mediciones experimentales.
Dado esto, se emplea un dispositivo (solenoide) controlado por voltaje y basado en la teoría de
campos magnéticos.
1) Campo magnético generado por una corriente en un conductor.
Al existir flujo de cargas (corriente) a través de un conductor se genera un campo magnético a su
alrededor. En el caso de un solenoide, cuando lo atraviesa una corriente y la distancia entre cada
espira es muy pequeña, se genera en su interior un campo magnético más fuerte y en la dirección
de su eje. La magnitud de este campo se puede conocer mediante la ley de Ampère como se muestra
en la ecuación 32 [26].
𝐵 = 𝜇0𝑁
𝑙𝐼 32
Donde 𝜇0 es la permeabilidad del espacio libre, 𝑁 es el número de espiras que componen el
solenoide, 𝑙 es la longitud del conductor y la única variable es la corriente 𝐼 que circula por el
solenoide. Haciendo uso de la ley de Ohm para expresar la corriente en términos del voltaje y la
resistencia del solenoide en la ecuación 32 se obtiene la ecuación 33.
𝐵 = 𝜇0𝑁
𝑙
𝑉
𝑅𝑠𝑜𝑙𝑒𝑛𝑜𝑖𝑑𝑒 33

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 36
2) Transistor de efecto de campo metal-oxido (MOSFET) como interruptor.
Con el fin de utilizar los MOSFET como interruptores se realizan cambios de voltaje en la
compuerta del dispositivo respecto a la tierra del sistema 𝑉𝐺𝑆, como se muestra en Fig. 10, donde
la resistencia 𝑅 cumple la función de regular la corriente que entra por la compuerta del transistor.
Para que el transistor funcione como un interruptor abierto el voltaje 𝑉𝐺𝑆 debe ser menor al voltaje
de umbral de la compuerta 𝑉𝐺𝑆(𝑡ℎ) y en el caso de emplearse como un interruptor cerrado el voltaje
𝑉𝐺𝑆 debe ser mayor al voltaje 𝑉𝐺𝑆(𝑡ℎ). El valor del voltaje 𝑉𝐺𝑆(𝑡ℎ) se encuentra en la ficha técnica
del fabricante de cada transistor [27].
Fig. 10. Diagrama de un MOSFET empleado como interruptor.
G. Transductores.
Buscando procesar señales acústicas en un sistema digital, se requiere obtener una señal eléctrica
(voltaje) que sea análoga a la señal acústica que incide en el transductor. Las variaciones de voltaje
obtenidas al hacer la transducción se convierten en variaciones de voltaje digital discretizados
mediante un conversor análogo-digital. Para la realización de las mediciones es importante la
implementación de dispositivos que cumplan con características específicas para la buena
ejecución y el éxito de esta, es por esto que, al querer medir materiales de manera no destructiva,
se busca obtener información, mediante la captura de una señal acústica, que ayude a procesar los
datos. Las características buscadas en los transductores son que capten de la forma más lineal
posible, con una respuesta en frecuencia plana, es decir, que para todo el rango de frecuencias
requerido tenga la misma sensibilidad y que el rango de frecuencias sea lo más amplio posible para

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 37
evitar pérdida de información importante. Este tipo de transductor, también llamado micrófono, es
conectado a un proceso de amplificación, ya que por sí solo tiene una salida de voltaje muy
pequeña, esta información amplificada pasa por un convertidor análogo-digital para poder procesar
los datos en un sistema de cómputo; en esta parte hay que entender que de no tener la
instrumentación adecuada lo captado no es 100% fiel a la realidad y que existen márgenes de error
que deben ser tomados en cuenta a la hora de realizar los cálculos [28] [29].

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 38
VIII. METODOLOGÍA
El método de excitación por impulso, el cual se implementa en este trabajo, se basa en medir las
frecuencias de resonancia flexural y torsional de muestras de metales y plásticos, las cuales deben
cumplir con ciertas características geométricas que se disponen según el diseño de la base del
dispositivo, este debe tener dimensiones menores o iguales a 40 cm de largo y 12 cm de ancho.
Mediante un golpe impulsivo hecho con un dispositivo generador de impulsos, se golpean las
muestras en determinados puntos con la restricción de obtener 5 mediciones consecutivas con
menos de un 1% de error entre ellas para cumplir las condiciones del estándar ASTM E 1876-01 ,
a su vez, un transductor (micrófono de medición) detecta las vibraciones acústicas resultantes de
movimiento de la muestra y las transforma en señales eléctricas, este debe ser ubicado de manera
que pueda captar la mayor presión que proviene de los primeros modos de vibración del material,
las señales se analizan mediante procesamiento digital de señales utilizando la herramienta
MATLAB a través de la Transformada rápida de Fourier para proporcionar el comportamiento
frecuencial de la misma. Las frecuencias de resonancia flexural y torsional, las dimensiones y la
masa de la muestra se utilizan para calcular el módulo dinámico de Young, el módulo de corte y
estimar el coeficiente de Poisson utilizando las ecuaciones 14, 19, 20 ,24 y 28 vistas anteriormente
[2].
Como se mencionó anteriormente, las muestras que se utilizan para medir las propiedades de
materiales isotrópicos deben cumplir con ciertas características para poder llegar a resultados
verídicos o bastante aproximados, estas pueden ser rectangulares o circulares en su sección
transversal, se ha de entender que cualquiera de estas configuraciones sirve para el cálculo de los
coeficientes necesarios, solo que se debe especificar esta condición para realizar los cálculos
adecuados. La selección del tamaño se realizará de modo que las frecuencias resonantes medidas
se encuentren dentro del rango de respuesta de frecuencia del micrófono y el conversor análogo
digital a utilizar y cumpla con las características dimensionales de la base del dispositivo [2].
El diseño de la base del dispositivo como se muestra en la Fig. 11 se basa en dos rieles que deslizan
unos bloques en paralelo en el cual se encuentra dos hilos (nylon) en donde se disponen las
muestras, en cada una de las puntas hay unas clavijas que permiten controlar la tensión de las
cuerdas de acuerdo a la necesidad de la medición, a los costados de la base hay unos medidores
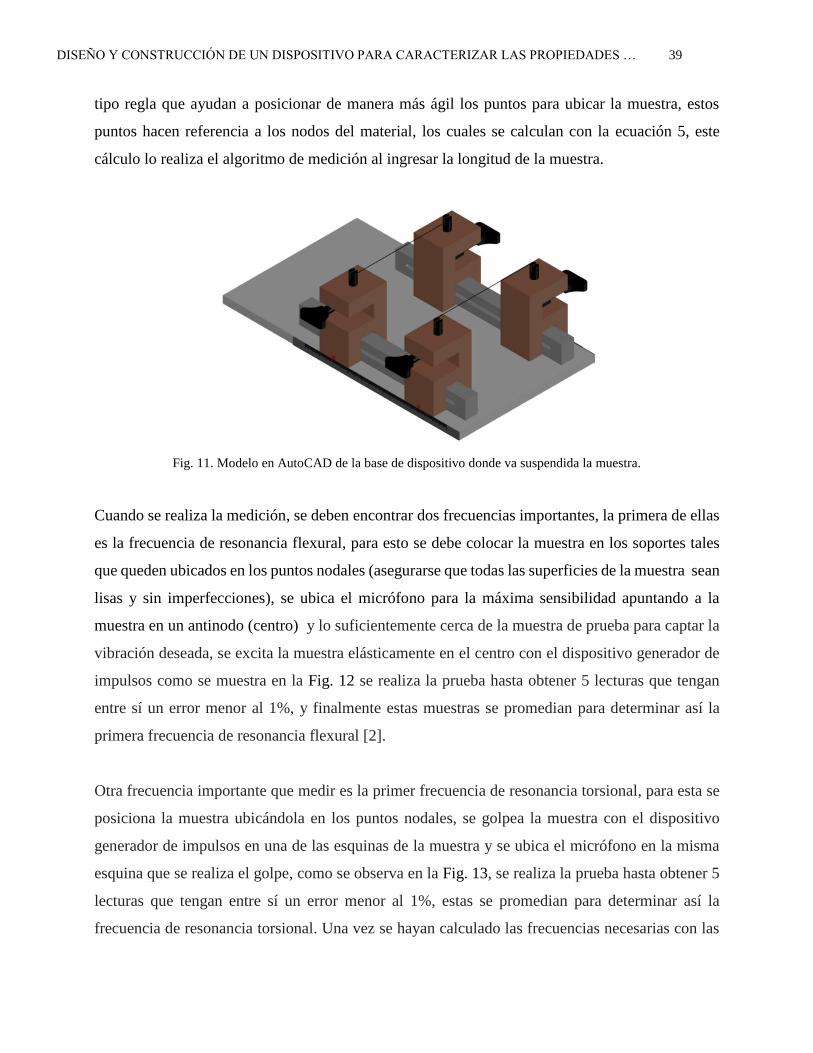
DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 39
tipo regla que ayudan a posicionar de manera más ágil los puntos para ubicar la muestra, estos
puntos hacen referencia a los nodos del material, los cuales se calculan con la ecuación 5, este
cálculo lo realiza el algoritmo de medición al ingresar la longitud de la muestra.
Fig. 11. Modelo en AutoCAD de la base de dispositivo donde va suspendida la muestra.
Cuando se realiza la medición, se deben encontrar dos frecuencias importantes, la primera de ellas
es la frecuencia de resonancia flexural, para esto se debe colocar la muestra en los soportes tales
que queden ubicados en los puntos nodales (asegurarse que todas las superficies de la muestra sean
lisas y sin imperfecciones), se ubica el micrófono para la máxima sensibilidad apuntando a la
muestra en un antinodo (centro) y lo suficientemente cerca de la muestra de prueba para captar la
vibración deseada, se excita la muestra elásticamente en el centro con el dispositivo generador de
impulsos como se muestra en la Fig. 12 se realiza la prueba hasta obtener 5 lecturas que tengan
entre sí un error menor al 1%, y finalmente estas muestras se promedian para determinar así la
primera frecuencia de resonancia flexural [2].
Otra frecuencia importante que medir es la primer frecuencia de resonancia torsional, para esta se
posiciona la muestra ubicándola en los puntos nodales, se golpea la muestra con el dispositivo
generador de impulsos en una de las esquinas de la muestra y se ubica el micrófono en la misma
esquina que se realiza el golpe, como se observa en la Fig. 13, se realiza la prueba hasta obtener 5
lecturas que tengan entre sí un error menor al 1%, estas se promedian para determinar así la
frecuencia de resonancia torsional. Una vez se hayan calculado las frecuencias necesarias con las

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 40
mediciones y promedios realizados, se utilizan las ecuaciones del marco teórico según sea
necesario, para encontrar así los parámetros de elasticidad de las muestras medidas [2].
Fig. 12. Vista isométrica (izquierda) y vista lateral (derecha) del esquema para medir la frecuencia de resonancia
flexural, el punto 𝑀𝑓 es la posición del micrófono y el punto 𝐼𝑓 es la posición del dispositivo generador de impulsos.
Fig. 13. Vista isométrica (izquierda) y vista lateral (derecha) del esquema para medir la frecuencia de resonancia
torsional, el punto 𝑀𝑡 es la posición del micrófono y el punto 𝐼𝑡 es la posición del dispositivo generador de impulsos.
El dispositivo generador de impulsos se diseñó a partir de la teoría de campos magnéticos y
eléctricos aplicados a un solenoide, al cual se le puede modificar la magnitud de la fuerza de
impacto de acuerdo con las necesidades de la medición, para esto se empleó un circuito regulador
de voltaje mostrado en la Fig. 14, el funcionamiento de este consta de dos etapas, la primer etapa

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 41
se encarga de variar el voltaje que cae en el solenoide para variar así la magnitud de impacto
generada por el mismo, mientras que la segunda etapa se encarga de actuar como interruptor para
el solenoide mediante un transistor y un microcontrolador, ambas etapas se explican con mas
detalle a continuación.
Fig. 14. Diagrama empleado para controlar el solenoide y su magnitud de impacto.
Con el fin de generar diferentes magnitudes de impacto, se implementa un circuito regulador de
voltaje para alimentar el solenoide (primera etapa). Esta etapa se compone de un circuito integrado
(𝐿𝑀 317), dos resistencias (𝑅1 y 𝑅𝑝) y un potenciómetro (𝑃), como se muestra en la Fig. 15.
Diagrama empleado para construir el circuito regulador de voltaje.Fig. 15.
Fig. 15. Diagrama empleado para construir el circuito regulador de voltaje.
Para conocer el voltaje que se tiene en la salida del circuito (𝑉𝑜𝑢𝑡) en función del cambio de
impedancia del potenciómetro se emplea la ecuación 34, de acuerdo con la hoja técnica del circuito
integrado (𝐿𝑀 317).

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 42
𝑉𝑜𝑢𝑡 = 1.25 𝑉 (1 +𝑅2
𝑅1) 34
Donde
𝑅2 = 𝑃 + 𝑅𝑃 35
Se conoce el rango de voltajes requeridos para obtener un correcto funcionamiento del solenoide.
Para conocer el valor mínimo y máximo del potenciómetro, se da un valor comercial a la resistencia
𝑅1 = 270 Ω y se depeja 𝑅2 de la ecuación 34.
Despejando 𝑅2 de la ecuación 34, se obtiene
𝑅2 = 𝑅1 (𝑉𝑜𝑢𝑡
1.25 𝑉− 1) 36
Reemplazando la ecuación 35 en la ecuación 36, se obtiene
𝑃 + 𝑅𝑃 = 𝑅1 (𝑉𝑜𝑢𝑡
1.25 𝑉− 1) 37
Mediante la ecuación 37 se calcula el valor de 𝑅2 para que el circuito entregue el voltaje mínimo
y máximo requerido en la siguiente etapa. Para obtener un voltaje de salida mínimo de 8 𝑉, es
decir, cuando el valor del potenciómetro 𝑃 ≈ 0 Ω.
𝑅𝑃 = 270 Ω (8 𝑉
1.25 𝑉− 1) 38
𝑅𝑃 = 1458 Ω 39
Conociendo el valor de 𝑅𝑃 = 1458 Ω y con un voltaje de salida máximo de 16 𝑉, se despeja 𝑃 de
la ecuación 37.
𝑃 = 270 Ω (16 𝑉
1.25 𝑉− 1) − 𝑅𝑃 40
𝑃 = 1728 Ω 41

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 43
Con valores comerciales y teóricamente, se emplearía 𝑅1 = 270 Ω, 𝑅𝑃 = 1500 𝑘Ω, y 𝑃 =
2000 Ω. Los valores reales empleados para la costrucción de esta estapa fueron 𝑅1 = 277 Ω, 𝑅𝑃 =
1560 𝑘Ω, y 𝑃 = 2.31 𝑘Ω, con estos elementos y un voltaje de entrada 𝑉𝑖𝑛 = 19.75 𝑉𝐷𝐶 se obtiene
una salida de voltaje entre 8.8 𝑉𝐷𝐶 y 18.2 𝑉𝐷𝐶.
Con el fin de controlar el solenoide digitalmente, se emplea un circuito que opera como interruptor
(segunda etapa), el circuito se elabora mediante un transistor MOSFET IRF630 empleado como
interruptor y controlado por un microcontrolador (Arduino). Para el correcto funcionamiento del
solenoide se requiere un diodo rueda libre 1N4007, empleado para descargar la carga inductiva del
solenoide y para eliminar los picos de voltaje que se generan al interrumpirse el suministro de
corriente. El esquema de la segunda etapa se muestra en la Fig. 16. El microcontrolador entrega,
por el pin digital 2, un nivel lógico alto (5 𝑉𝐷𝐶) durante 20 𝑚𝑠 para no exceder el tiempo de
operación recomendado por el fabricante del solenoide.
Fig. 16. Diagrama empleado para construir el circuito interruptor del solenoide basado en un transistor MOSFET
controlado mediante Arduino.
Conociendo el voltaje en la salida de la primera etapa, el funcionamiento de la segunda etapa y con
el fin de conocer las variables que influyen en el comportamiento del solenoide, el circuito se puede
expresar como se muestra en la Fig. 17, las magnitudes máximas y mínimas de voltaje, corriente,
resistencia y potencia consumida por el solenoide, se muestran en la TABLA 1.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 44
Fig. 17.Diagrama empleado para analizar el comportamiento del solenoide
TABLA 1.CARACTERÍSTICAS ELÉCTRICAS DEL SOLENOIDE EQUIVALENTES PARA LOS VALORES
MÁXIMOS Y MÍNIMOS DE VOLTAJE ENTREGADOS POR LA PRIMERA ETAPA.
Características del solenoide
𝑉𝐼𝑁 = 8 𝑉
𝑉 = 8 𝑉 𝑅 = 40.7 Ω
𝐼 = 196.56 𝑚𝐴 𝑃 = 1.57 𝑊
𝑉𝐼𝑁 = 16 𝑉
𝑉 = 16 𝑉 𝑅 = 40.7 Ω
𝐼 = 393.12 𝑚𝐴 𝑃 = 6.28 𝑊
El solenoide está soportado por una base que ayuda a regular la altura para asegurar que el impacto
en la muestra sea el más adecuado en superficie y magnitud, el diseño de esta base se fundamenta
en una pieza móvil sobre un riel vertical y al lado de este un potenciómetro el cual regula la
magnitud de la fuerza como se muestra en la Fig. 18.
Fig. 18. Modelo en AutoCAD de la base para el solenoide.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 45
Una vez medidas las respuestas al impulso para cada una de las frecuencias, se analizan las señales
obtenidas mediante la Transformada rápida de Fourier y se calculan las características mecánicas
utilizando las ecuaciones 14, 19, 20 ,24 y 28, todos estos procesos se hacen mediante un algoritmo
realizado con la herramienta MATLAB. El algoritmo consta de captar la señal generada por los 5
golpes del solenoide con una duración de 2 segundos cada uno, los cinco golpes están
automatizados mediante la interacción entre MATLAB y Arduino por medio del puerto serial, el
microcontrolador incluye un algoritmo que genera una señal en alto durante 20 milisegundos, la
cual se acciona mediante la recepción de un caracter transmitido desde el software MATLAB, cada
señal registrada se analiza mediante una Transformada rápida de Fourier con la función fft y se
obtienen los valores pico de cada una con la función findpeaks.
Para seleccionar la frecuencia fundamental flexural de cada golpe se escoge el valor con mayor
energía dentro de los picos encontrados, posterior a esto, se calcula el error porcentual que hay
entre las frecuencias escogidas, el cual debe ser menor al 1%, de ser así la primer frecuencia
fundamental flexural de la medición será el promedio de los 5 picos, si no cumple con esta
condición se debe volver a realizar la medición, el flujo de señal descrito se encuentra en la Fig.
19.
Fig. 19. Flujo de señal para medir la frecuencia de resonancia asociada al modo fundamental flexural.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 46
Para seleccionar la frecuencia fundamental torsional de cada golpe se realiza un proceso de
estimación el cual se observa en la Fig. 20, este proceso consiste en estimar la frecuencia torsional
usando la frecuencia fundamental flexural medida con anterioridad, primero se calcula el módulo
de Young con la ecuación 14 o 20 según corresponda la forma de la muestra, luego con el
coeficiente de Poisson inicial ingresado por el usuario se calcula el módulo de corte despejando 𝐺
de la ecuación 19, posterior a esto se calcula la frecuencia torsional estimada despejando 𝑓𝑡 de la
ecuación 24 o 28 según corresponda la forma de la muestra. Con el fin de conocer cual valor de los
picos de la señal registrada corresponde a la frecuencia torsional, se seleccionan los dos valores
más cercanos a la frecuencia torsional estimada y superiores al valor con mayor amplitud
(frecuencia fundamental flexural), posterior a esto se calcula el error porcentual que hay entre los
picos escogidos el cual debe ser menor al 1%, de ser así la frecuencia fundamental torsional de la
medición será el promedio de los 5 picos, si no cumple con esta condición se debe volver a realizar
la medición, el flujo de señal descrito se encuentra en la Fig. 21.
Fig. 20. Flujo de señal para calcular la frecuencia torsional estimada.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 47
Fig. 21. Flujo para medir la frecuencia de resonancia asociada al modo fundamental torsional.
Una vez se hallan medido las frecuencias flexural y torsional se procede a calcular las
características mecánicas de la muestra haciendo uso de las ecuaciones ya mencionadas, la masa y
la geometría. El flujo de señal de este procedimiento se encuentra en la Fig. 22.
Fig. 22. Flujo de señal para calcular las características mecánicas, módulo de Young, módulo de corte y la
estimación del coeficiente de Poisson.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 48
El algoritmo tiene la posibilidad de escoger de forma manual las frecuencias de resonancia flexural
y torsional, este se puede ejecutar después de haber realizado alguna medición, ya que usa uno de
los 5 golpes. En la Fig. 26 se observa la interfaz que ayuda a calcular de forma manual las
frecuencias flexural y torsional, acá se escoge una de las 5 señales de los golpes realizados en la
medición, se analiza mediante una Transformada rápida de Fourier con la función fft y se escoge
el valor de frecuencia que considere más adecuado para el cálculo de la características mecánicas,
su funcionamiento se explica detalladamente en la sección 3 del anexo 1. Manual de usuario del
dispositivo.
Fig. 23. Modelo en AutoCAD de todo el dispositivo físico de medición.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 49
IX. RESULTADOS
En la fabricación del diseño de la base del dispositivo se usó Pino cepillado pintado con aerosol y
cumple con las características planteadas en el diseño que se observa en la Fig. 11, el dispositivo
generador de impulsos se fabricó con balso pintado con aerosol y cumple con las características
planteadas en el diseño que se observa en la Fig. 18, además, se realizaron pruebas para asegurar
una desviación estándar menor al 10% en la magnitud de la fuerza de impacto, este procedimiento
se encuentra en el Anexo 3. Fuerza de impacto del generador de impulsos. El resultado final de la
construcción del dispositivo se observa en la Fig. 24. Para el procesamiento digital de las
mediciones realizas se diseñó una interfaz en MATLAB, la cual cumple con las características y
los algoritmos mencionados en la metodología y vistas en la Fig. 19, Fig. 20, Fig. 21 y Fig. 22, la
vista final de la interfaz que se implementó en este dispositivo se muestra en la Fig. 25 y su
funcionamiento se explica detalladamente en el Anexo 1. Manual de usuario del dispositivo.
Fig. 24. Construcción final del dispositivo (Izquierda) y ubicación de todos los dispositivos necesarios para realizar
las mediciones (derecha).
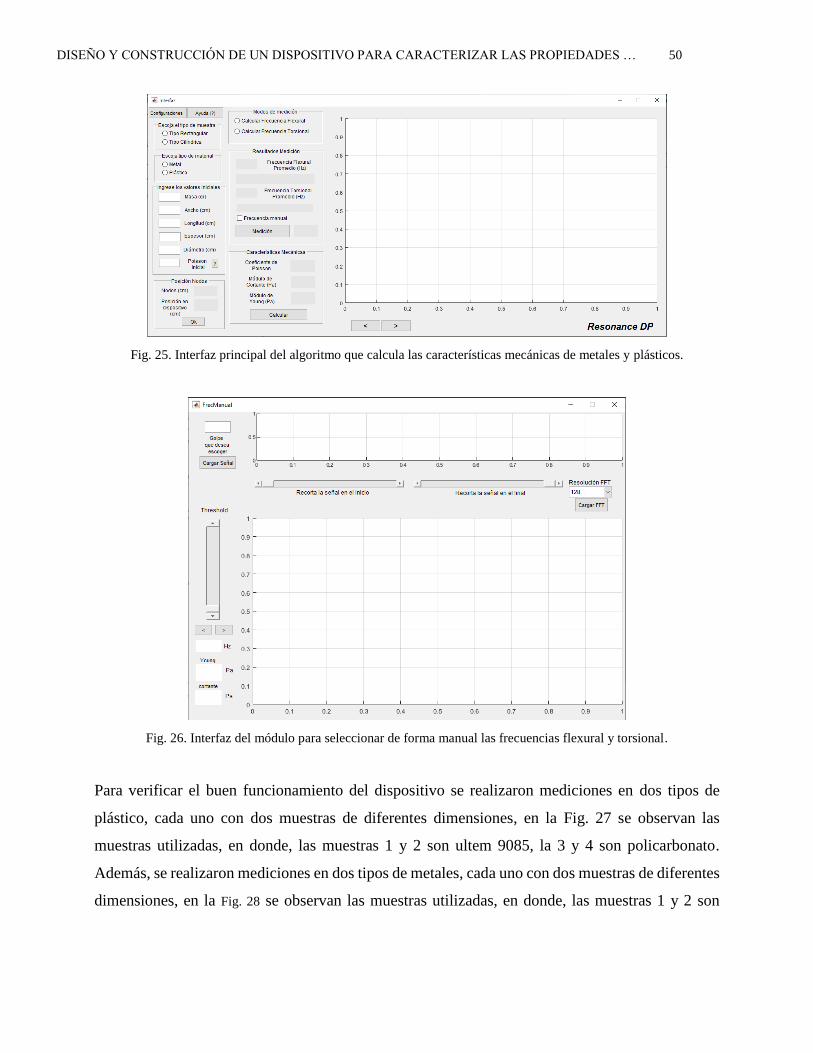
DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 50
Fig. 25. Interfaz principal del algoritmo que calcula las características mecánicas de metales y plásticos.
Fig. 26. Interfaz del módulo para seleccionar de forma manual las frecuencias flexural y torsional.
Para verificar el buen funcionamiento del dispositivo se realizaron mediciones en dos tipos de
plástico, cada uno con dos muestras de diferentes dimensiones, en la Fig. 27 se observan las
muestras utilizadas, en donde, las muestras 1 y 2 son ultem 9085, la 3 y 4 son policarbonato.
Además, se realizaron mediciones en dos tipos de metales, cada uno con dos muestras de diferentes
dimensiones, en la Fig. 28 se observan las muestras utilizadas, en donde, las muestras 1 y 2 son
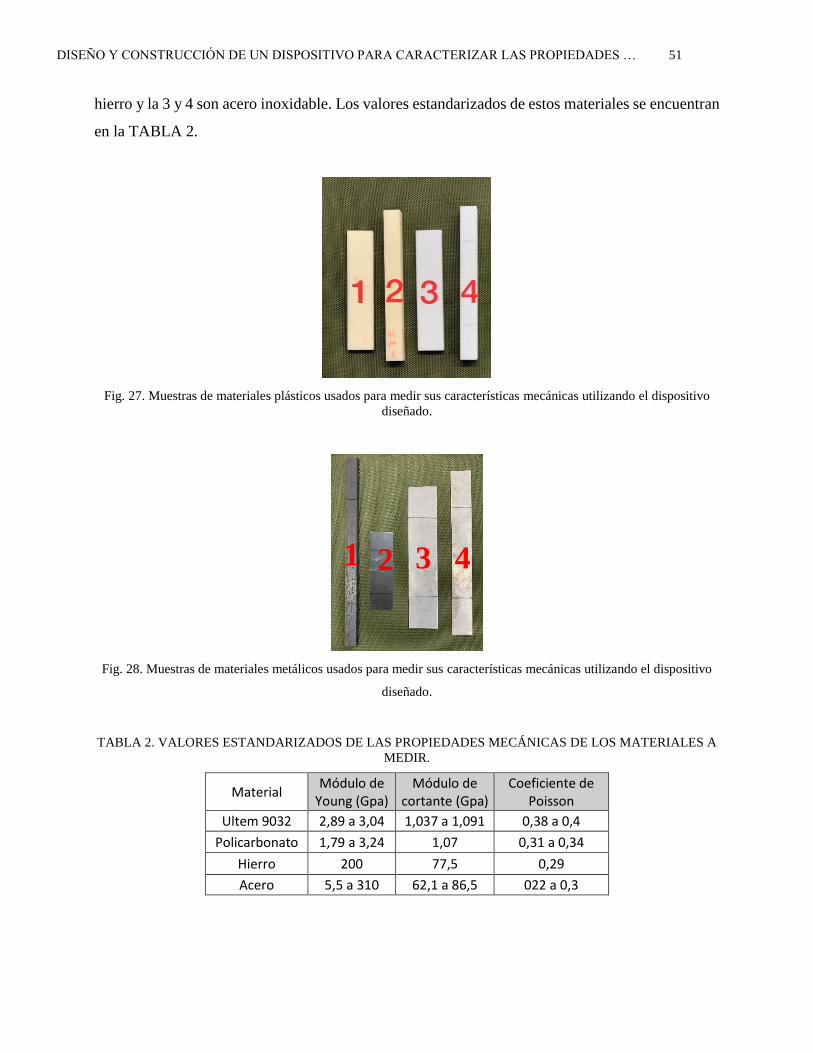
DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 51
hierro y la 3 y 4 son acero inoxidable. Los valores estandarizados de estos materiales se encuentran
en la TABLA 2.
Fig. 27. Muestras de materiales plásticos usados para medir sus características mecánicas utilizando el dispositivo
diseñado.
Fig. 28. Muestras de materiales metálicos usados para medir sus características mecánicas utilizando el dispositivo
diseñado.
TABLA 2. VALORES ESTANDARIZADOS DE LAS PROPIEDADES MECÁNICAS DE LOS MATERIALES A
MEDIR.
Material Módulo de
Young (Gpa) Módulo de
cortante (Gpa) Coeficiente de
Poisson
Ultem 9032 2,89 a 3,04 1,037 a 1,091 0,38 a 0,4
Policarbonato 1,79 a 3,24 1,07 0,31 a 0,34
Hierro 200 77,5 0,29
Acero 5,5 a 310 62,1 a 86,5 022 a 0,3
1 3 4 1 2

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 52
La medición de la masa y la geometría de las muestras debe tener un error de medida no superior
al 0.1% según recomienda el estándar ASTM E 1876-01. Para poder medir el grosor, el ancho y el
diámetro se debe tener en cuenta tres puntos de medición y cumplir con el 0.1% de error entre ellas,
y la longitud debe medirse en ambos lados y cumplir con el 0.1% de error entre ellas, para medir
el peso se usó una báscula analítica y para medir las longitudes se usó la herramienta pie de rey. La
TABLA 14 ilustra los errores de medida de los diferentes especímenes metálicos y la TABLA 13
ilustra los errores de medida de los especímenes plásticos medidos en el dispositivo, y muestra si
cumple o no con las recomendaciones del estándar, estas se encuentran en el Anexo 2.
Incertidumbre de la medida.
Se calcularon las frecuencias de resonancia asociadas a los primeros modos de vibración flexural
y torsional de las muestras mencionadas anteriormente haciendo uso del dispositivo y algoritmo
diseñados y se obtuvieron los siguientes resultados.
TABLA 3. VARIABLES INICIALES PARA EL CÁLCULO DE LAS CARACTERÍSTICAS MECÁNICAS Y
LOS VALORES DE FRECUENCIA FLEXURAL Y TORSIONAL DE LA MUESTRA 1 PLÁSTICA (ULTEM
9085).
Muestra 1 Plásticos Frecuencia
Flexural (Hz) Frecuencia
Torsional (Hz)
Masa (gr) 22,3732 875,5 2359,8333
ancho (cm) 2,4016 875,3333 2360,6667
largo (cm) 12,025 875,5 2360,3333
espesor (cm) 0,8083 875,6667 2360,1667
Poisson inicial 0,35 875,5 2360,6667
Frecuencia Promedio 875,5 2360,33334

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 53
TABLA 4. VARIABLES INICIALES PARA EL CÁLCULO DE LAS CARACTERÍSTICAS MECÁNICAS Y
LOS VALORES DE FRECUENCIA FLEXURAL Y TORSIONAL DE LA MUESTRA 2 PLÁSTICA (ULTEM
9085).
Muestra 2 Plásticos Frecuencia
Flexural (Hz) Frecuencia
Torsional (Hz)
Masa (gr) 32,9801 1045,1667 2708,8333
ancho (cm) 1,5233 1045,6667 2708,6667
largo (cm) 15,005 1045,8333 2709,3333
espesor (cm) 1,4983 1045,6667 2709,1667
Poisson inicial 0,35 1045,6667 2709
Frecuencia Promedio 1045,60002 2709
TABLA 5. VARIABLES INICIALES PARA EL CÁLCULO DE LAS CARACTERÍSTICAS MECÁNICAS Y
LOS VALORES DE FRECUENCIA FLEXURAL Y TORSIONAL DE LA MUESTRA 3 PLÁSTICA
(POLICARBONATO).
Muestra 3 Plásticos Frecuencia
Flexural (Hz)
Frecuencia Torsional
(Hz)
Masa (gr) 25,3704 739,1667 1994,5
ancho (cm) 2,4116 739,1667 1981,8333
largo (cm) 12,04 739,1667 1990,3333
espesor (cm) 0,804 739,1667 1992,5
Poisson inicial 0,3 739,1667 1992,8333
Frecuencia Promedio 739,1667 1990,39998
TABLA 6. VARIABLES INICIALES PARA EL CÁLCULO DE LAS CARACTERÍSTICAS MECÁNICAS Y
LOS VALORES DE FRECUENCIA FLEXURAL Y TORSIONAL DE LA MUESTRA 4 PLÁSTICA
(POLICARBONATO).
Muestra 4 Plásticos Frecuencia
Flexural (Hz) Frecuencia
Torsional (Hz)
Masa (gr) 37,2891 847,5 2213,1667
ancho (cm) 1,5516 847,5 2213,5
largo (cm) 15,0375 847,5 2213,5
espesor (cm) 1,5416 847,5 2213,5
Poisson inicial 0,3 847,5 2213,5
Frecuencia Promedio 847,5 2213,43334

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 54
TABLA 7. VARIABLES INICIALES PARA EL CÁLCULO DE LAS CARACTERÍSTICAS MECÁNICAS Y
LOS VALORES DE FRECUENCIA FLEXURAL Y TORSIONAL DE LA MUESTRA 1 METÁLICA (HIERRO).
Muestra 1 Metales Frecuencia
Flexural (Hz)
Frecuencia Torsional
(Hz)
Masa (gr) 326,35 2914,5 7052,8333
ancho (cm) 1,5633 2914,3333 7059,6667
largo (cm) 16,9350 2914,5 7059,3333
espesor (cm) 1,6650 2914,3333 7052,8333
Poisson inicial 0,29 2914,5 7053
Frecuencia Promedio 2914,43332 7055,53332
TABLA 8. VARIABLES INICIALES PARA EL CÁLCULO DE LAS CARACTERÍSTICAS MECÁNICAS Y
LOS VALORES DE FRECUENCIA FLEXURAL Y TORSIONAL DE LA MUESTRA 2 METÁLICA (HIERRO).
Muestra 2 Metales Frecuencia
Flexural (Hz) Frecuencia
Torsional (Hz)
Masa (gr) 113,9505 4195,5 7176,6667
ancho (cm) 2,8683 4195,5 7176,6667
largo (cm) 8,4275 4195,5 7176,6667
espesor (cm) 0,5950 4195,6667 7176,6667
Poisson inicial 0,29 4195,5 7176,6667
Frecuencia Promedio 4195,53334 7176,6667
TABLA 9. VARIABLES INICIALES PARA EL CÁLCULO DE LAS CARACTERÍSTICAS MECÁNICAS Y
LOS VALORES DE FRECUENCIA FLEXURAL Y TORSIONAL DE LA MUESTRA 3 METÁLICA (ACERO
INOXIDABLE).
Muestra 3 Metales Frecuencia
Flexural (Hz)
Frecuencia Torsional
(Hz)
Masa (gr) 76,3716 743,8333 14176,5
ancho (cm) 4,2333 6299,667 14166,333
largo (cm) 20,5750 3358,5 12470
espesor (cm) 0,1100 3813 14174,6667
Poisson inicial 0,29 3813 14169
Frecuencia Promedio 3605,60006 13831,29994

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 55
Fig. 29. Frecuencia flexural calculada con el módulo manual para la muestra 3 metálica (Acero
inoxidable).
TABLA 10. VARIABLES INICIALES PARA EL CÁLCULO DE LAS CARACTERÍSTICAS MECÁNICAS Y
LOS VALORES DE FRECUENCIA FLEXURAL Y TORSIONAL DE LA MUESTRA 4 METÁLICA (ACERO
INOXIDABLE).
Muestra 4 Metales Frecuencia
Flexural (Hz) Frecuencia
Torsional (Hz)
Masa (gr) 100,7570 930,1667 12588,1667
ancho (cm) 2,9133 2301,1667 13169,3333
largo (cm) 23,6500 930,1667 13169,3333
espesor (cm) 0,1900 930,1667 12588,3333
Poisson inicial 0,29 2301,3333 1541,6667
Frecuencia Promedio 1478,60002 10611,36666
La medición de las demás frecuencias de las muestras metálicas 3 y 4 no fueron válidas ya que su
error era mayor al 1% que exige el estándar ASTM E 1876-01, por lo que se usó el módulo del
algoritmo que calcula la frecuencia de forma manual y se obtuvieron los siguientes valores de
frecuencia.
Am
plit
ud
Frecuencia (Hz)
134.5 Hz

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 56
Fig. 30. Frecuencia torsional calculada con el módulo manual para la muestra 3 metálica (Acero
inoxidable).
Fig. 31. Frecuencia flexural calculada con el módulo manual para la muestra 4 metálica (Acero
inoxidable).
Los valores de frecuencia finales para la muetra 3 de los metales serán 137.5 Hz para la frecuencia
de resonacia flexural y 375 Hz para la frecuencia de resonancia flexural, halladas de manera manual
como se observa en las Fig. 29 y Fig. 30.
375 Hz
<
172 Hz
Am
plit
ud
Frecuencia (Hz)
Am
plit
ud
Frecuencia (Hz)

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 57
Fig. 32. Frecuencia torsional calculada con el módulo manual para la muestra 4 metálica (Acero
inoxidable).
Los valores de frecuencia finales para la muetra 4 de los metales serán 172 Hz para la frecuencia
de resonacia flexural y 930.5 Hz para la frecuencia de resonancia flexural, halladas de manera
manual como se observa en las Fig. 31 y Fig. 32.
Con los valores de las frecuencias flexural y torsional encontrados, el peso y las dimensiones de
cada material se calculan las características mecánicas haciendo uso de las ecuaciones 14, 19, 20
,24 y 28 vistas anteriormente y aplicadas al algoritmo, a su vez se calcula la incertidumbre de la
medida de cada valor usando las ecuaciones 16, 21, 25, 29, los resultados obtenidos se encuentran
en la TABLA 11.
Am
plit
ud
Frecuencia (Hz)
<
930.5 Hz

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 58
TABLA 11. CARACTERÍSTICAS MECÁNICAS DE LOS ESPECÍMENES DE PRUEBA CON SUS
RESPECTIVOS VALORES DE INCERTIDUMBRE.
Características mecánicas Módulo de Young (Gpa) Módulo de corte (Gpa) Coeficiente de Poisson
Plásticos
Muestra 1 2,30105 ± 1.0746 0,942621 ± 0.0071402 0,225
Muestra 2 2,40953 ± 1.1242 0,755985 ± 0.0029659 0,593
Muestra 3 1,89872 ± 1.8669 0,772663 ± 0.0058908 0,228
Muestra 4 1,63559 ± 1.76305 0,544888 ± 0.002909 0,501
Metales
Muestra 1 187,679 ± 10.7551 49,6373 ± 0.25227 0,89
Muestra 2 209,011 ± 2.6215 72,8887 ± 0.025464 0,434
Muestra 3 202,181 ± 1.9888 65,6675 ± 0.005632 0,5394
Muestra 4 186,846 ± 2.0654 74,9853 ± 0.004856 0,29
Una vez obtenidos los valores experimentales se calcula un porcentaje de error entre los valores
reales obtenidos de otras bibliografías y los encontrados con el dispositivo, a partir de esto se
obtuvo la siguiente tabla.
TABLA 12. PORCENTAJES DE ERROR DE LAS MUESTRAS MEDIDAS PARA LOS VALORES
EXPERIMENTALES DEL MÓDULO DE YOUNG, MÓDULO DE CORTE Y COEFICIENTE DE POISSON
CON RESPECTO A LOS VALORES ESTANDARIZADOS.
Porcentaje de Error Módulo de
Young Módulo de
cortante Coeficiente de Poisson
Plásticos
Muestra 1 20% 9% 40%
Muestra 2 16% 26% 56%
Muestra 3 6% 27% 27%
Muestra 4 8% 49% 62%
Metales
Muestra 1 6% 35% 206%
Muestra 2 4% 6% 49%
Muestra 3 0% 0% 86%
Muestra 4 0% 0% 0%

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 59
X. DISCUSIÓN
Dentro de los procedimientos realizados para diseñar y construir un dispositivo que ayude a
caracterizar materiales mecánicamente a través de la automatización, se busca que los valores
calculados de módulo de Young, módulo de corte y la estimación del coeficiente de Poisson sean
lo suficientemente cercanos a los valores estandarizados y obtenidos mediante otros métodos para
la validación del diseño del dispositivo y del algoritmo.
Dentro de los primeros factores a evaluar está el error en la medida de la masa y la geometría de
las muestras, y los efectos que tiene en el cálculo de las características mecánicas de un material.
Si observamos las ecuaciones 16, 21, 25 y 29, vemos que mientras más pequeño sea el error de
medida, se tendrá una incertidumbre menor en los resultados obtenidos de cada material, a su vez,
se evalúan los efectos de muestras que no son simétricas, con una tolerancia del 0.1% en cada una
de sus dimensiones, como recomienda el estándar ASTM E 1876-01. De los especímenes de
prueba, ninguno cumple en su totalidad con esta recomendación, como se observa en la TABLA 13 y la
TABLA 14, la muestra 1 metálica fue la única que no se pudo medir con la báscula analítica y el
pie de rey por superar los valores máximos de medida de estos instrumentos, por tanto, su
incertidumbre es la más grande de todas las muestras como se observa en la TABLA 11. Al evaluar
los resultados obtenidos de las características mecánicas de todas las muestras encontramos que
los factores antes mencionados no afectan el funcionamiento del dispositivo ya que los resultados
son cercanos a los valores reales y, simplemente, el cumplir con estos parámetros ayudará a tener
mayor precisión en el cálculo de las características mecánicas de cada material.
Si se comparan los resultados obtenidos entre muestras plásticas y metálicas, obtenemos mayor
rendimiento del algoritmo para materiales metálicos, debido a que muestran espectros de
frecuencia más definidos y con amplitudes pronunciadas, por otro lado, los materiales plásticos
excitan componentes frecuenciales cuyas amplitudes enmascaran y dificultan el proceso de
selección de la frecuencia adecuada. A su vez, si se comparan especímenes del mismo material con
diferente geometría, con todos aquellos que no se cumple la recomendación, propuesta en el
estándar ASTM E 1876 – 01, de conservar una relación mínima de cinco a uno entre el ancho y el

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 60
espesor de cada muestra, se obtiene un porcentaje de error mayor respecto a la muestra del mismo
material que cumple con dicha recomendación; estas muestras son la 2 y 4 de plástico y la 1
metálica. A pesar de que este parámetro puede afectar en el resultado de las características
mecánicas, en caso de no cumplirse se pueden llegar a resultados acertados.
El segundo factor es el algoritmo que detecta automáticamente, dentro del espectro, cual es la
frecuencia que corresponde al modo de vibración flexural y torsional. Para la frecuencia de
resonancia flexural, analizamos los resultados obtenidos para el módulo de Young, ya que es con
esta que se realiza el cálculo; si observamos la TABLA 12, vemos que el porcentaje de error para
el módulo de Young no supera el 20% y tiene un promedio de 10% de error, lo cual le da al
algoritmo validez en su ejecución. En este análisis no se tienen en cuenta las muestras metálicas 3
y 4 ya que su frecuencia flexural fue hallada con el módulo de frecuencia manual del algoritmo,
debido a que sus espectros tenían demasiada información de los armónicos y otras frecuencias que
fueron excitadas al momento de perturbar la muestra, además, su frecuencia flexural verdadera
tenía un amortiguamiento considerable, como muestra la Fig. 29 y Fig. 31, por tanto el algoritmo
escogía en cada golpe una frecuencia errónea diferente, como ser observa en la TABLA 9 y la
TABLA 10.
De igual forma, para la frecuencia de resonancia torsional, analizamos los resultados obtenidos
para el módulo de corte, ya que es con esta que se realiza el cálculo; si observamos la TABLA 12,
vemos que el porcentaje de error para el módulo de corte no es superior a un 40% y tiene un
promedio de 25.3% de error, lo cual le da al algoritmo planteado poca validez en ejecución. En
este análisis no se tienen en cuenta las muestras metálicas 3 y 4 ya que su frecuencia torsional fue
hallada con el módulo de frecuencia manual del algoritmo, debido a que sus espectros tenían
demasiada información de los armónicos y otras frecuencias que fueron excitadas al momento de
perturbar la muestra, por lo tanto, el algoritmo escogía en cada golpe una frecuencia diferente como
ser observa en la TABLA 9 y la TABLA 10.
El modo de frecuencia manual del algoritmo es una herramienta que permite al usuario interactuar
con los datos obtenidos y determinar, de forma manual y bajo su criterio, la frecuencia más
adecuada. Fue diseñado para suplir los errores presentados al momento de seleccionar las

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 61
frecuencias correctas en el modo automático de algoritmo, como es el caso de las muestras 3 y 4
metálicas con las cuales, al usar esta herramienta, se obtuvo un porcentaje de error del 0%.
La relación y estimación que se plantean en el estándar ASTM E 1876 – 01 para el coeficiente de
Poisson no son adecuadas, debido a que el error en los resultados obtenidos con los especímenes
de prueba supera el 27% y con un promedio del 65.7%, esto hace referencia a una estimación no
acertada respecto a los valores estandarizados y evaluados mediante otros métodos.
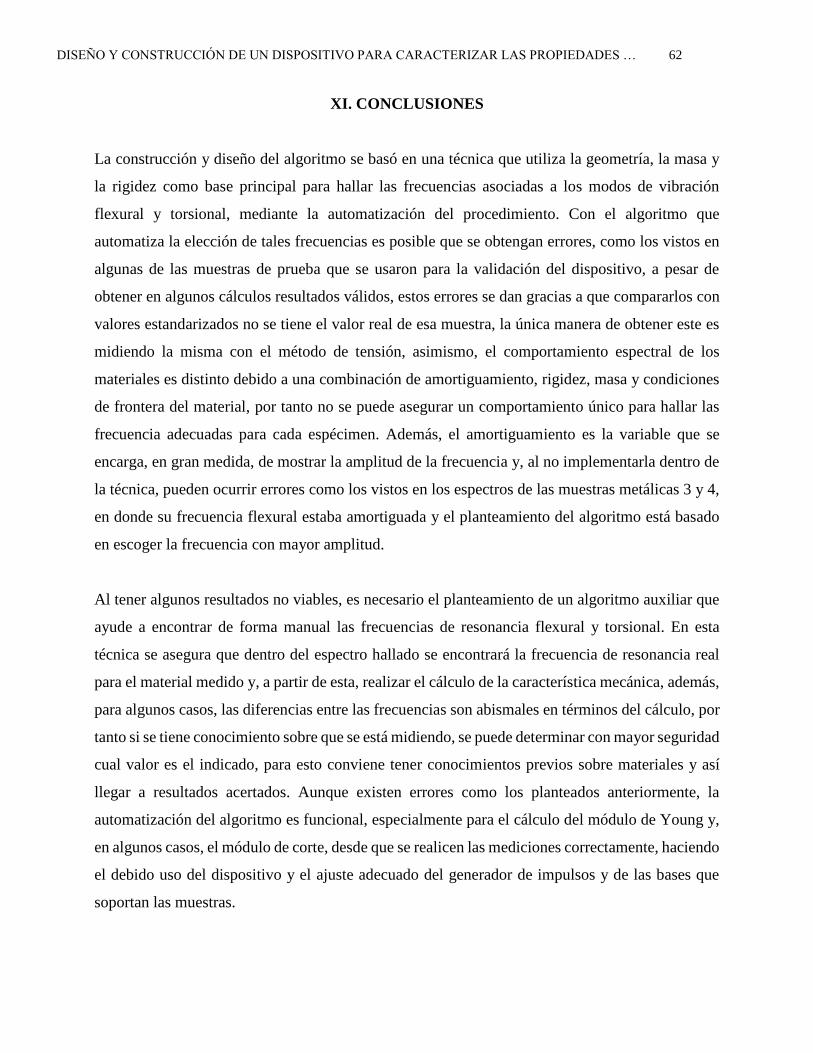
DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 62
XI. CONCLUSIONES
La construcción y diseño del algoritmo se basó en una técnica que utiliza la geometría, la masa y
la rigidez como base principal para hallar las frecuencias asociadas a los modos de vibración
flexural y torsional, mediante la automatización del procedimiento. Con el algoritmo que
automatiza la elección de tales frecuencias es posible que se obtengan errores, como los vistos en
algunas de las muestras de prueba que se usaron para la validación del dispositivo, a pesar de
obtener en algunos cálculos resultados válidos, estos errores se dan gracias a que compararlos con
valores estandarizados no se tiene el valor real de esa muestra, la única manera de obtener este es
midiendo la misma con el método de tensión, asimismo, el comportamiento espectral de los
materiales es distinto debido a una combinación de amortiguamiento, rigidez, masa y condiciones
de frontera del material, por tanto no se puede asegurar un comportamiento único para hallar las
frecuencia adecuadas para cada espécimen. Además, el amortiguamiento es la variable que se
encarga, en gran medida, de mostrar la amplitud de la frecuencia y, al no implementarla dentro de
la técnica, pueden ocurrir errores como los vistos en los espectros de las muestras metálicas 3 y 4,
en donde su frecuencia flexural estaba amortiguada y el planteamiento del algoritmo está basado
en escoger la frecuencia con mayor amplitud.
Al tener algunos resultados no viables, es necesario el planteamiento de un algoritmo auxiliar que
ayude a encontrar de forma manual las frecuencias de resonancia flexural y torsional. En esta
técnica se asegura que dentro del espectro hallado se encontrará la frecuencia de resonancia real
para el material medido y, a partir de esta, realizar el cálculo de la característica mecánica, además,
para algunos casos, las diferencias entre las frecuencias son abismales en términos del cálculo, por
tanto si se tiene conocimiento sobre que se está midiendo, se puede determinar con mayor seguridad
cual valor es el indicado, para esto conviene tener conocimientos previos sobre materiales y así
llegar a resultados acertados. Aunque existen errores como los planteados anteriormente, la
automatización del algoritmo es funcional, especialmente para el cálculo del módulo de Young y,
en algunos casos, el módulo de corte, desde que se realicen las mediciones correctamente, haciendo
el debido uso del dispositivo y el ajuste adecuado del generador de impulsos y de las bases que
soportan las muestras.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 63
Una aplicación útil para este dispositivo, sería asegurar en un lote de algún material un valor de
rigidez específico que se desee de acuerdo al planteamiento de una geometría rectangular o
cilíndrica y, con este, hacer un estándar o prototipo de la pieza para alguna producción industrial y
asegurar alta calidad al tener valores entre muestras más aproximados. Además, realizar un sistema
de filtrado en la línea de producción para descartar las piezas que no cumplan o tengan las
características mecánicas deseadas, debido a imperfecciones o huecos en la muestra que no sean
visibles, y así poderlas descartar antes de realizar procesos de manufactura que acarrean costos
adicionales.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 64
XII. RECOMENDACIONES
Como alternativa de mejora y buscando dar continuidad al presente proyecto de investigación, se
propone continuar con la automatización del dispositivo de medición. Específicamente, se propone
generar el desplazamiento y el posicionamiento de los componentes móviles del dispositivo, como
lo son las bases para la muestra y la base para el generador de impulsos, mediante componentes
mecánicos y electrónicos que obedezcan a las necesidades del usuario y las características
geométricas de cada muestra de material; se propone hacer uso de servomotores lineales y
servomotores de rotación continua, además que tenga dentro de su técnica la medición del
amortiguamiento para obtener mejores resultados. Además, realizar mejoras al algoritmo utilizado
en este proyecto para mejores resultados e implementarlo en más tipos de materiales, para realizar
un análisis más completo de los comportamientos frecuenciales de estos.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 65
REFERENCIAS
[1] L. C. Cossolino y A. H. Alves Pereira, Elastic moduli: Overview and, ATCP Physical
Engineering, 2010, pp. 3-24.
[2] ASTM E 1876-01, Standard Test Method for Dynamic Young’s Modulus, Shear Modulus,
and Poisson’s Ratio by Impulse Excitation of Vibration, West Conshohocken, PA: ASTM
International, 2005, pp. 1-10.
[3] D. Askeland, Ciencia e ingeniería de materiales, México D.F.: Cengage Learning, 2012, pp.
3-4.
[4] R. Hibbeler, Mecánica de materiales, Naucalpan de Juarez: Pearson Education (9a.ed.), 2017,
pp. 3-4;22-23;69-71;85-89;94-95.
[5] P. Martínez y M. Azuga, Medición del módulo de elasticidad de Young, Buenos Aires,
Argentina: Dpto Física, UBA, 1997, pp. 1-11.
[6] B. P. Ricardo M, «Determinación del módulo de elasticidad de la madera mediante
vibraciones transversales,» Maderas. Ciencia y tecnología, vol. 3, nº 1-2, pp. 44-51, 2001.
[7] J. A. Rayas y R. Rodriguez, «Medición del módulo de Young en el hule látex usando EPSI,»
Revista Mexicana de Física, nº 49, pp. 555-564, 2010.
[8] M. F. Serrano Guzmán y D. D. Peréz Ruiz, «Análisis de sensibilidad para estimar el módulo
de elasticidad estático del concreto,» Concreto y Cemento.Investigación y Desarrollo, vol. 2,
nº 1, pp. 17-23, 2010.
[9] L. Moreno Montoya, L. Osorio Serna y E. Trujillo de los Ríos, «Estudio de las propiedades
mecánicas de las haces de fibra de Guadua angustifolia,» Ingeniería y Desarrollo,
Universidad del Norte, nº 20, pp. 126-132, 2006.
[10] S. Tognana, A. Salgueiro y O. Toscano, «Medición de módulo de elasticidad mediante
excitaciíon por impulso en compuestos epoxy,» Anales Afa, vol. 18, pp. 180-183, 2006.
[11] S. Tognana, S. Montecinos y W. Salgueiro, «Medición del módulo de Young en metales
mediante la técnica de excitación por impulso,» Revista Matéria, vol. 23, nº 02, pp. 1-9, 2018.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 66
[12] J. Meza, E. Franco, M. Farias y J. Cruz, «Medición del módulo del módulo de elasticidad en
materiales de ingeniería utilizando la técnica de indentación instrumentada y de ultrasonido,»
Revista Metalurgia, vol. 44, nº 1, pp. 52-64, 2008.
[13] D. Soto Retamal, Comparación de dos métodos de vibraciones acústicas no destructivos y su
correlación con ensayos mecánicos para madera de pino ponderosa, (Pregrado en Ingeniería
Civil), Universidad Católica de la Santísima Concepción, Facultad de Ingeniería,
Concepción, 2017, pp. 1-4;21-33;95.
[14] S. Arrieta, O. Cruz, C. Bautista y I. Ortiz, Mecánica de materiales, Tuxpan: Ingeniería Civil.
Universidad Veracruzana, 2010, pp. 3-14.
[15] A. Ruiz Giraldo y D. Tascón Mosquera, Medición de propiedades elásticas de materiales
isotrópicos por ultrasonidos, (Pregrado en Ingeniería mecánica), Universida Autónoma de
Occidente, Facultad de Ingeniería, Santiago de Cali, 2013, pp. 19-21.
[16] A. French, J. Aguilar Peris y J. Rubia Pacheco, Vibraciones y Ondas, Barcelona : etc: Reverté,
2006.
[17] K. Hildebrandt, C. Schulz, K. Polthier y C. von Tycowicz, Interactive Surface Modeling
Using Modal Analysis, Berlin: Freie Universit¨at Berlin, 2011, p. 16.
[18] ASTM C215-14, Standard Test Method for Fundamental Transverse, Longitudinal, and
Torsional Resonant Frequencies of Concrete Specimens, West Conshohocken, PA: ASTM
International, 2014, pp. 1-2.
[19] T. Irvine , Longitudinal Natural Frequencies of rods, [email protected], 2009.
[20] A. Bewoor y . V. Kulkarni, Metrology & measurement, McGraw-Hill, 2009.
[21] ATCP Physical Engineering, Installation and Operation Manual Sonelastic, Brasil: ATCP
Physical Engineering, 2015.
[22] J. Besseling, A Theory of elastic, plastic and creep deformations of an initially isotropic
material showing anisotropic Strain-Hardening, creep recovery, and secondary creep,
Estados Unidos: Stanford University, 1959.
[23] S. Smith, The Scientist and Engineer’s Guide to Digital Signal, San Diego: California
Technical Publishing, 1999, pp. 141-145.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 67
[24] A. Oppenheim y R. Schafer, Tratamiento de señales en tiempo discreto, Madrid: Pearson
Educación, 2011, pp. 625-630.
[25] J. Proakis y D. Manolakis, Tratamiento digital de señales, Madrid: Pearson Educación, 2007,
pp. 403-407.
[26] R. A. Serway, Física para ciencias e ingeniería con Física moderna, México D.F.: Cengage
Learning, 2009, pp. 848-849.
[27] T. L. Floyd, Dispositivos electrónicos, México D.F.: Pearson Educación, 2008, pp. 396-399.
[28] J. Torres Viveros, Aplicación de técnica de grabación y mezcla binaural para audio comercial
y publicitario, (Pregrado en música con énfasis en Ingenería de Sonido),Pontificia
Universidad Javeriana, Facultad de Artes, Bogotá, Colombia, 2009, pp. 45-48.
[29] A. Morris, Principios de mediciones e instrumentación, México: Prentice Hall, 2002.
[30] PCB Piezotronics MTS SYSTEMS CORPORATION, «Product Summary Model 352C23,»
2019. [En línea]. Available: https://www.pcb.com/products?m=352C23. [Último acceso: 4
Nobiembre 2019].

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 68
ANEXOS
Anexo 1. Manual de Usuario del dispositivo.
TABLA DE CONTENIDO
Características generales ...................................................................................................... 69
Modos de Medición .............................................................................................................. 69
Características principales .................................................................................................... 70
Descripción del dispositivo Resonance DP .......................................................................... 71
1. Uso del dispositivo ........................................................................................................ 72
1.1. Interfaz principal Toolbox Resonance DP ............................................................. 73
1.2. Configuraciones ..................................................................................................... 76
1.3. Ayuda (?) ............................................................................................................... 77
2. Medición ....................................................................................................................... 77
3. Módulo de análisis espectral manual ............................................................................ 80

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 69
Características generales
El dispositivo Resonance DP, es un instrumento que ayuda caracterizar materiales metálicos y
plásticos con forma rectangular o cilíndrica en su sección transversal, con el método de excitación
por impulsos haciendo uso del estándar ASTM-E 1876-01. Es un instrumento versátil y fácil de
usar, el cual incluye una base para sostener los materiales, un dispositivo generador de impulsos y
un software para analizar los datos obtenidos en las mediciones, este modelo tiene un módulo de
análisis espectral de forma manual para buscar otros resultados.
*Los demás elementos necesarios para realizar la medición no vienen incluidos con el dispositivo
(micrófono de medición e interfaz de audio).
Modos de Medición
El dispositivo Resonance DP tiene dos modos de medición que sirven de igual manera para
materiales metálicos y plásticos con formas rectangulares o cilíndricas en su sección transversal y
la respuesta en frecuencia dependerá del micrófono e interfaz que se utilicen para la medición.
• Medición de la frecuencia de resonancia flexural
• Medición de la frecuencia de resonancia torsional
Estas dos funciones ayudarán a calcular las características mecánicas del material como el módulo
de Young, el módulo de corte y el coeficiente de Poisson. Para medir la frecuencia de resonancia
flexural debe cumplir con los siguientes parámetros.
1. La posición de micrófono y del dispositivo generador de impulsos debe ser en el centro de
la muestra.
2. La muestra se debe ubicar en los puntos nodales según sea la geometría, esta posición la
calcula el software Resonance DP para mayor facilidad.
3. Se debe especificar en el software Resonance DP el modo de medición para calcular la
frecuencia de resonancia flexural.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 70
Para medir la frecuencia de resonancia torsional debe cumplir con los siguientes parámetros.
1. La posición de micrófono y del dispositivo generador de impulsos debe ser en una de las
esquinas de la muestra.
2. La muestra se debe ubicar en los puntos nodales según sea la geometría, esta posición la
calcula el software Resonance DP para mayor facilidad.
3. Se debe especificar en el software Resonance DP el modo de medición para calcular la
frecuencia de resonancia torsional.
4. Para poder calcular esta frecuencia se debe OBLIGATORIMENTE medir primero la
frecuencia del primero modo de resonancia flexural.
Características principales
El dispositivo Resonance DP, es un medidor de frecuencias de resonancia, específicamente para
medir el primer modo de resonancia flexural y el primer modo de resonancia torsional, es de fácil
uso y comprensión ya que cuenta con un analizador de espectro para cada uno de los 5 golpes que
se deben hacer en la medición, este ayuda a calcular las características mecánicas como el módulo
de Young, el módulo de corte y el coeficiente de Poisson cumpliendo con el estándar ASTM- E
1876-01. Las siguientes son las características más importantes del dispositivo.
• El dispositivo Resonance DP ha sido diseñado para su fácil manejo y comprensión, usando
la automatización como base principal para agilizar el proceso de medición.
• El diseño de la base solo permite medir muestras con dimensiones menores o iguales a 40
cm de largo y 12 cm de ancho.
• Al dispositivo generador de impulsos se le puede graduar la magnitud de la fuerza de
impacto y graduar su altura según sea necesario o lo requiera la muestra.
• Se pueden cambiar las configuraciones de audio según sea necesario (Profundidad de bits
y frecuencia de muestreo) Ver sección 1.1.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 71
• La pantalla muestra el análisis espectral de la medición, además, muestra el resultado
numérico de selección de frecuencia resonancia y los resultados de los cálculos de las
características mecánicas.
Descripción del dispositivo Resonance DP
1. Rieles de la base Resonance DP.
2. Bloques o soportes de la muestra, los cuales se ajustan deslizando con los rieles según sea
necesario.
3. Tornillos hexagonales.
4. Clavijas reguladoras de tensión del nylon.
5. Nylon.
6. Generador de impulsos Resonance DP.
7. Caja reguladora de magnitud de la fuerza de impacto.
8. Riel para la altura del generador de impulsos.
9. Regla guía para ajustar la ubicación de los soportes.
10. Potenciómetro.
11. Led que indica conexión de fuente DC
12. Led que indica conexión entre el generador de impulsos y el computador.
13. Led que indica cuando se genera un impulso.
14. Conector mini Jack hembra
15. Conector mini USB
16. Conector de energía
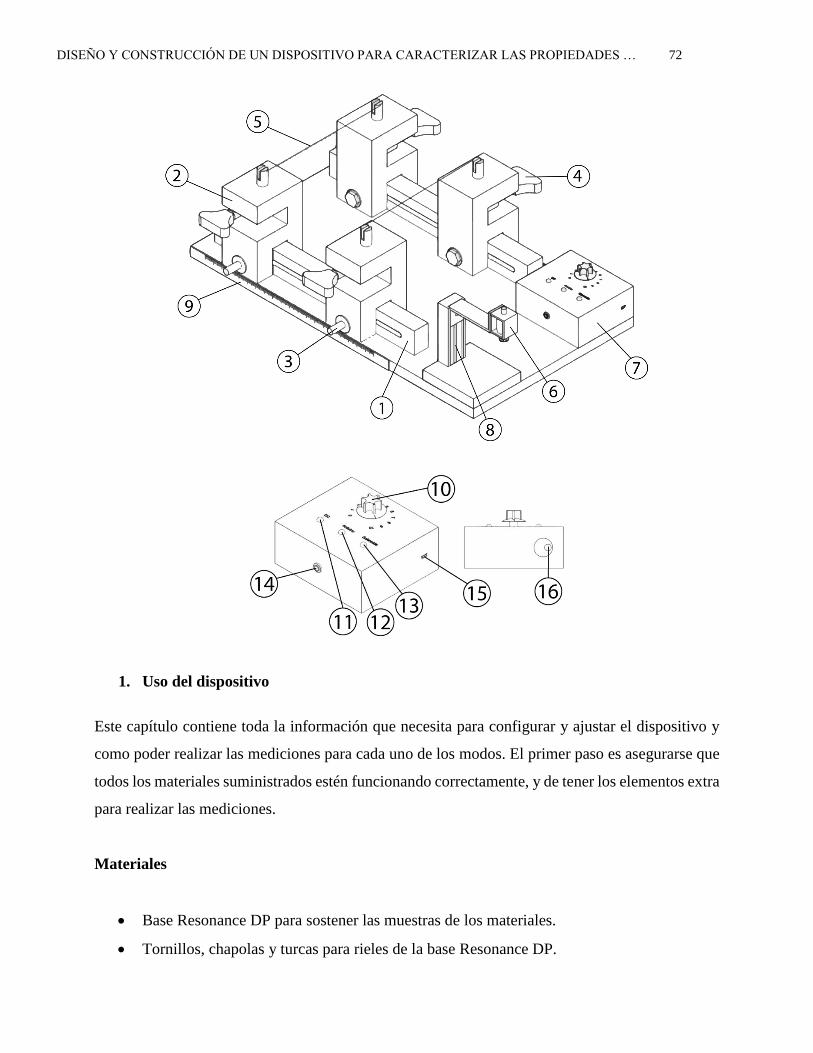
DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 72
1. Uso del dispositivo
Este capítulo contiene toda la información que necesita para configurar y ajustar el dispositivo y
como poder realizar las mediciones para cada uno de los modos. El primer paso es asegurarse que
todos los materiales suministrados estén funcionando correctamente, y de tener los elementos extra
para realizar las mediciones.
Materiales
• Base Resonance DP para sostener las muestras de los materiales.
• Tornillos, chapolas y turcas para rieles de la base Resonance DP.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 73
• Nylon.
• Generador de impulsos Resonance DP.
• Cable mini USB, mini Jack (Conector de audífonos 1/8) y Adaptador AC/DC de 19.5 V.
• Computador con Software Toolbox Resonance DP.
• Interfaz de Audio.
• Micrófono de medición.
• Cable XLR.
Una vez se ha verificado que todos los materiales están en buen estado y funcionamiento, se debe
conectar el micrófono a la interfaz de audio y la interfaz al computador1 y se verifica que esté
llegando señal, luego, se debe conectar la caja reguladora de magnitud de fuerza de impacto a la
red doméstica con el adaptador AC/DC y al computador con el cable mini USB, el generador de
impulsos se conecta a la caja reguladora de magnitud de la fuerza de impacto por el puerto del mini
Jack, después de tener todo conectado correctamente se abre el software Toolbox Resonance DP.
1.1. Interfaz principal Toolbox Resonance DP
El dispositivo Resonance DP viene con un software para medir las características mecánicas de
materiales metálicos y plásticos con geometrías rectangulares o cilíndricas en su sección
transversal. En esta sección se describen cada una de las herramientas que trae el Toolbox
Resonance DP.
Botones Generales
Configuraciones: Abre las configuraciones de
Audio y del generador de impulsos.
Ayuda (?): Abre ayudas generales para usar el
Toolbox Resonance DP.
Escoja el tipo de muestra: El Toolbox Resonance
DP solo permite medir muestras con geometrías
1 Se recomienda no abrir el software hasta tener la interfaz de audio conectada al computador.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 74
rectangulares o cilíndricas. Se debe indicar que tipo
de muestra se va a medir para usar correctamente el
algoritmo.
Escoja el tipo de material: El Toolbox Resonance
DP solo permite medir muestras metálicas o
plásticas. Se debe indicar que tipo de material que
se va a medir para usar correctamente el algoritmo.
Variables Iniciales
Se deben ingresar el peso en gramos y las
dimensiones de la muestra que se desea medir en
centímetros.
Poisson Inicial: Esta variable se debe ingresar para
hacer el cálculo de la estimación del Coeficiente
Poisson y debe ser un valor cercano al real.
? : Este botón sirve para obtener una ayuda en caso
de no saber qué valor poner en el Poisson Inicial,
aquí se abrirá la ayuda general del Software en
donde encontrará una tabla con algunos valores
para diferentes materiales.
Posición Nodos
Nodos: Aparece el valor de los nodos de la muestra
una vez ingresada su longitud, una vez oprimido el
botón OK, esta hace referencia a la distancia que
hay desde la esquina del material.
Posición en dispositivo: Aparece el valor en que se
deben posicionar los bloques que se deslizan, una
vez oprimido el botón OK, esta distancia hace
referencia a la regla que hay en la base del
Resonance DP.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 75
Proceso de medición
Modos de Medición: El Toolbox Resonance DP
solo permite medir frecuencia de resonancia flexural
y frecuencia de resonancia torsional. Se debe indicar
el modo de medición para el correcto
funcionamiento del algoritmo.
Medición: El botón de medición manda la señal al
generador de impulsos para realizar los 5 golpes e
indica el inicio de la grabación de la señal para cada
golpe.
Validez Medición: Este es un indicador para saber
si la medición se realizó correctamente según el
estándar ASTM-E 1876-01, en caso de que no sea
válida se debe volver a presionar el botón Medición.
Frecuencia Manual: Abre la ventana para el
módulo de análisis espectral manual (ver sección 3).
Indicador de Grabación: Muestra el momento del
estado actual de la grabación de cada golpe (REC o
STOP).
Frecuencia flexural y torsional promedio:
Muestra el resultado del promedio de las 5
frecuencias encontradas para cada golpe.
Características Mecánicas
Calcular: Este botón calcula los resultados de las
características mecánicas una vez se tengan los
valores de frecuencia flexural y torsional promedio.
Coeficiente de Poisson, Módulo de corte, Módulo
de Young: Muestra el resultado de cada uno a partir
de los resultados de frecuencia flexural y torsional
promedio.
Indicador de
grabación

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 76
1.1. Configuraciones
En esta ventana se pueden cambiar las configuraciones de audio y las configuraciones para el
dispositivo generador de impulsos y hacer pruebas para ir regulando la magnitud del golpe del
dispositivo.
Visualizador
de espectro de
frecuencia
Botones para moverse
entre el espectro
obtenido de cada golpe
Despliega un
menú con las
entradas de audio
disponibles
Permite escoger entre
8 bits o 16 bits de
profundidad. Por
defecto tendrá 16 bits
Permite escoger entre 3
diferentes frecuencias de
muestreo. Por defecto
tendrá 44.1 kHz
Despliega un menú
con los puertos
seriales disponibles
El generador de
impulsos vuelve a
su posición nominal
Se activa un
golpe impulsivo
Abre la ventana para
el módulo de análisis
espectral manual (ver
sección 3).
El generador de impulsos
va a su posición máxima
de altura

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 77
1.2. Ayuda (?)
Esta ventana traer dos ayudas principales, en la primera de estas puedes encontrar una ayuda visual
de como medir en cada uno de los modos de medición, es decir, como se deben posicionar el
micrófono de medición y el generador de impulsos Resonance DP, y la segunda una tabla con
algunos coeficientes de Poisson de diferentes materiales como guía para saber el valor que ingresar
en la variable Poisson Inicial.
2. Medición
En primera instancia se conectan todos los dispositivos y elementos necesarios para el buen
funcionamiento del Resonance DP (Ver Sección 1), una vez se haya cerciorado de conectar todo,
abra el Toolbox Resonance DP y oprima el botón de configuraciones (Ver Sección 1.1) y seleccione
la entrada de audio que corresponde a la interfaz que está usando, si desea puede cambiar las

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 78
opciones de profundidad de bits y frecuencia de muestreo según sea necesario, luego, seleccione
el puerto serial al que está conectado el generador de impulsos, una vez lo haya conectado utilice
el botón impulso de la sección de prueba para asegurarse que el dispositivo genera el golpe
impulsivo, debe parpadear el led rojo de la caja reguladora de magnitud de la fuerza de impacto
cada que oprima este botón.
Se debe ingresar la variable inicial de longitud de la muestra para calcular la posición de los nodos,
tanto en el material como en la base del dispositivo, para esto se oprime el botón OK de la sección
Posición Nodos, una vez se tengan ambos valores se ubican los bloques o soportes del dispositivo
con ayuda de la regla que hay a los costados de este (si es posible marcar los nodos en la muestra
para mayor exactitud). En las siguientes imágenes podrá ver un ejemplo para una muestra de
acrílico de 12 cm de lago.
Para el correcto funcionamiento del Toolbox Resonance DP se debe medir primero la frecuencia
de resonancia flexural, para esto, debe posicionar el dispositivo generador de impulsos en el centro
de la muestra, y de igual manera el micrófono de medición, oprima el botón Ayuda (?) para ver un
diagrama de cómo posicionar los elementos para realizar la medición (Ver Sección 1.2) o como se
observa en la Fig. 33 , regule la altura del dispositivo generador de impulso con ayuda del botón
3.312 cm 3.312 cm

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 79
configuraciones en “Prueba del generador de impulsos” (Ver Sección 1.1) y el riel que hay en este,
además, seleccione la magnitud de la fuerza de impacto con el potenciómetro de la caja reguladora
de magnitud, haga pruebas hasta que encuentre un golpe que no haga que se desplace la muestra
de su posición inicial.
Fig. 33. Vista isométrica (izquierda) y vista lateral (derecha) del esquema para medir la frecuencia de resonancia
flexural, el punto 𝑀𝑓 es la posición del micrófono y el punto 𝐼𝑓 es la posición del dispositivo generador de impulsos.
Ingrese los datos faltantes en el Toolbox Resonance DP como el tipo de muestra, tipo de material
y variables iniciales faltantes, seleccione el modo de medición “calcular frecuencia flexural” y
oprima el botón Medición, espere que se ejecuten los 5 golpes, después verá el resultado de la
frecuencia flexural promedio.
Una vez obtenido el resultado de la frecuencia, puede medir la frecuencia de resonancia torsional,
para esto, debe posicionar el dispositivo generador de impulsos en una de las esquinas de la
muestra, y de igual manera el micrófono de medición, debe ser la misma posición, oprima el botón
Ayuda (?) para ver un diagrama de cómo posicionar los elementos para realizar la medición (Ver
Sección 1.2) o como se observa en la Fig. 34, para la configuración del dispositivo generador de
impulsos realice los mismos pasos mencionados anteriormente. En el Toolbox Resonance DP
seleccione el modo de medición “calcular frecuencia torsional” y oprima el botón Medición, espere
que se ejecuten los 5 golpes, después verá el resultado de la frecuencia torsional promedio.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 80
Fig. 34. Vista isométrica (izquierda) y vista lateral (derecha) del esquema para medir la frecuencia de resonancia
torsional, el punto 𝑀𝑓 es la posición del micrófono y el punto 𝐼𝑓 es la posición del dispositivo generador de impulsos.
Finalmente oprima el botón Calcular y obtendrá el resultado de cada una de las características
mecánicas como el módulo e Young, el módulo de corte y el coeficiente de Poisson, si el resultado
es un N/A, significa que una o ambas de las mediciones no fue hecha correctamente y debe volver
a realizarlas.
3. Módulo de análisis espectral manual
El módulo de análisis espectral, está planteado para que los usuarios pueden tener la posibilidad de
calcular las características mecánicas a partir de otras frecuencias que se obtienen del espectro
medido en unos de los 5 golpes, es decir, para poder tener otros resultados posibles en caso de que
los obtenidos en el algorítmo automático no sean los acertados según el criterio del usuario. Para
el uso de este se debe tener en cuenta las características de la interfaz de este módulo las cuales se
muestran a continuación.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 81
Ingrese uno de los 5
golpes, este debe ser
el más adecuado para
realizar el análisis.
Visualizador de la señal a
analizar en función del tiempo.
Botón que carga
la señal del
golpe escogido.
Fader para cortar la
señal en el inicio,
aparecerá un punto rojo
en el visualizador que
servirá de guía.
Fader para cortar la
señal en el final,
aparecerá un punto rojo
en el visualizador que
servirá de guía.
Despliega un
menú con
diferentes
resoluciones
de fft.
Botón que carga la
fft en el
visualizador de
espectro de
frecuencia manual
Visualizador de
espectro de
frecuencia manual.
Fader para controlar el Threshold para la
cantidad de puntos que desea analizar.
Botones para
moverse entre las
frecuencias que están
por encima del
Threshold.
Muestra el valor de
frecuencia en la
cual está parada.
Muestra el valor de módulo de Young
de la frecuencia en la cual está parada.
Solo saldrá si en la Interfaz principal
tiene el modo de medición de frecuencia
flexural activado.
Muestra el valor de módulo de corte de
la frecuencia en la cual está parada. Solo
saldrá si en la Interfaz principal tiene el
modo de medición de frecuencia
torsional activado.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 82
Para el adecuad uso de este modo , primero se debe tener seleccionado en la interfaz principal cual
frecuencia es la que quiere hallar manualmente a partir de un espectro (flexural o torsional), una
vez seleccionado esto debe escoger de esa medición cuál de las 5 señales de los 5 golpes realizados
desea usar, tiene la opción de recortar la señal para quitar ruido incluidos que estén perjudicando
el análisis del espectro, luego selecciones la resolución de la Transformada de Fourier según
considere más apropiado y cárguela en el visualizador de espectro manual, luego, a su izquierda
encontrará una fader que controla la cantidad de puntos que desean analizar por encima de ese
límite y así poder escoger la frecuencia más adecuada para el cálculo de las características
mecánicas.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 83
Anexo 2. Incertidumbre de la medida
Para la realización de las mediciones de cada una de las muestras, se deben hacer diferentes
mediciones de la geometría y peso, tratando de cumplir con las sugerencias que se establecen en el
estándar ASTM E 1876-01, mencionadas con anterioridad en la metodología, para mejores
resultados en el cálculo de las características mecánicas como el módulo de Young, el módulo de
corte y el coeficiente de Poisson. A continuación, encontrará las tablas con tales valores medidos,
su correspondiente error en la medida y si cumple con el promedio que recomienda el estándar
ASTM E 1876-01.
TABLA 13. VALORES DE MEDIDA DE LAS MUESTRAS PLÁSTICAS CON SU RESPECTIVA
INCERTIDUMBRE DE MEDIDA.
Variable Medida
Error de medida
Error del promedio 0.1%
Muestra 1 Plásticos
Masa (gr) 22,3732 0,0001 -
ancho (cm) 2,4 2,4 2,405 0,005 No cumple
largo (cm) 12,025 12,025 0,005 Cumple
espesor (cm) 0,805 0,810 0,810 0,005 No cumple
Muestra 2 Plásticos
Masa (gr) 32,9801 0,0001 -
ancho (cm) 1,525 1,525 1,520 0,005 No cumple
largo (cm) 15 15,01 0,005 Cumple
espesor (cm) 1,495 1,5 1,5 0,005 No cumple
Muestra 3 Plásticos
Masa (gr) 25,3704 0,0001 -
ancho (cm) 2,415 2,405 2,415 0,005 No cumple
largo (cm) 12,03 12,05 0,005 Cumple
espesor (cm) 0,804 0,803 0,805 0,005 No cumple
Muestra 4 Plásticos
Masa (gr) 37,2891 0,0001 -
ancho (cm) 1,555 1,550 1,550 0,005 No cumple
largo (cm) 15,04 15,035 0,005 Cumple
espesor (cm) 1,550 1,535 1,540 0,005 No cumple

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 84
TABLA 14. VALORES DE MEDIDA DE LAS MUESTRAS METÁLICAS CON SU RESPECTIVA
INCERTIDUMBRE DE MEDIDA.
Variable Medida Error de medida
Error del promedio 0.1%
Muestra 1 Metales
Masa (gr) 326,35 0,1 -
ancho (cm) 1,57 1,56 1,56 0,005 No cumple
largo (cm) 16,97 16,90 0,005 No cumple
espesor (cm) 1,660 1,675 1,660 0,005 No cumple
Muestra 2 Metales
Masa (gr) 113,9505 0,0001 -
ancho (cm) 2,865 2,845 2,895 0,005 No cumple
largo (cm) 8,2 8,655 0,005 No cumple
espesor (cm) 0,595 0,595 0,595 0,005 Cumple
Muestra 3 Metales
Masa (gr) 76,3716 0,0001 -
ancho (cm) 4,215 4,235 4,25 0,005 No cumple
largo (cm) 20,55 20,6 0,1 No cumple
espesor (cm) 0,11 0,11 0,11 0,005 Cumple
Muestra 4 Metales
Masa (gr) 100,7570 0,0001 -
ancho (cm) 2,885 2,905 2,95 0,005 No cumple
largo (cm) 23,7 23,6 0,1 No cumple
espesor (cm) 0,19 0,19 0,005 Cumple

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 85
Anexo 3 Fuerza de impacto del generador de impulsos
Buscando cuantizar la variación en la magnitud de impacto producida por el dispositivo generador
de impulsos y basado en la segunda ley del movimiento de Newton (�⃑� = 𝑚�⃑�), se realizan nueve
mediciones, ubicando el potenciómetro del dispositivo en una posición fija, se mantiene la masa
constante y de cada golpe se registra la aceleración presente en el extremo superior del solenoide
con un acelerómetro 352C23 como se muestra en la Fig. 35, el acelerómetro tiene un peso de 0.2 g
y una sensibilidad de 6.076 mV/g. Las aceleraciones obtenidas se computan, se promedian y se
halla su desviación estándar (72.109 𝑚/𝑠2). Los datos de aceleración máxima obtenidos se
muestran en la TABLA 15 [26] [30].
Fig. 35. posición del potenciómetro para la medición de la aceleración (izquierda) y ubicación del acelerómetro
352C23 en el solenoide (derecha).
TABLA 15.ACELERACIÓN MÁXIMA EN EL EXTREMO DEL SOLENOIDE EN CADA MEDICIÓN.
Medición Aceleración [𝑚 𝑠2⁄ ]
1 2552.3420
2 2389.7250
3 2466.2590
4 2407.0850
5 2520.5700
6 2366.1270
7 2559.1800
8 2531.4200
9 2460.6790

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 86
El valor promedio de las mediciones de la TABLA 15 es 2472.5985 𝑚 𝑠2⁄ , este valor se utiliza
para calcular la varianza de cada valor respecto al promedio y, finalmente, conocer la desviación
estándar del conjunto de datos. Los valores máximos de aceleración de cada medición, su promedio
y los límites superior (2596.2284 𝑚 𝑠2⁄ ) e inferior (2348.9685 𝑚 𝑠2⁄ ), qué indican el rango de
valores para los cuales se obtiene una desviación estándar del 10% o inferior, se muestran en la
Fig. 36.
Fig. 36. Valor de aceleración máximo obtenido de cada medición (círculos negros), valor promedio de las
aceleraciones máximas (línea azul) y rango superior e inferior como indicadores de una desviación estándar del 10%
(líneas rojas).
Anexo 4. Ejecutable del algoritmo
Adjunto con el informe del proyecto se encuentra una carpeta llamada “Aplicativo”, que contiene
un archivo que permite la descarga e instalación del aplicativo que ejecuta el algoritmo diseñado,
para la cual se requiere una conexión estable de internet.

DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 87
Anexo 5. Algoritmo para automatizar un solenoide mediante MATLAB® e implementarlo
como un generador de impulsos
La comunicación entre el microcontrolador (Arduino) y MATLAB® se realiza mediante caracteres
enviados por puerto serial. Cuando el microcontrolador recibe un “1” por el puerto serial, el
solenoide genera un impulso cuya duración depende de la variable ImpulseTime, la cual se
recomienda que no supere los 25 ms; igualmente, cuando recibe un “0”, el solenoide se desactiva.
El algoritmo implementado se presenta a continuación.
/*
Notas:
- El pin PinSolenoid se conecta al gate del MOSFET.
- Se recomienda no poner la variable ImpulseTieme por encima de 25 ms
- Funcionamiento:
- Si se recibe un "1" por el puerto serial el solenoide genera un impulso
- Si se recibe un "0" por el puerto serial el solenoide se desactiva
*/
char SerialMonitorInput; // Declaración de la varaible que va a almacenar la entrada del Serial
Monitor
int PinSolenoid = 2; // Declarar el pin que va a controlar el solenoide
int PinSolenoidActive = 4;
int FreeRecTime = 500; // Declarar el tiempo que va a grabar antes de enviar el impulso [ms]
int ImpulseTime = 20; // Declarar la duracion del impulso [ms]
void setup()
{
Serial.begin(9600);
pinMode(PinSolenoid, OUTPUT);
pinMode(PinSolenoidActive, OUTPUT);
digitalWrite(PinSolenoid, LOW); // Estado HIGH del pin PinSolenoid para retraer el impulser
}
DISEÑO Y CONSTRUCCIÓN DE UN DISPOSITIVO PARA CARACTERIZAR LAS PROPIEDADES … 88
void loop()
{
while (Serial.available() > 0) {
SerialMonitorInput = Serial.read();
switch (SerialMonitorInput) {
case '0': // En caso de recibir un "0" desde el Serial Monitor
digitalWrite(PinSolenoid, LOW); // Estado LOW del pin PinSolenoid para retraer el impulser
digitalWrite(PinSolenoidActive, LOW); // Estado LOW del pin PinSolenoidActive
break;
case '1': // En caso de recibir un "1" desde el Serial Monitor
delay(FreeRecTime); // Pausa el algoritmo durante 500 ms para permitir que la grabación haya
iniciado
digitalWrite(PinSolenoid, HIGH); // Estado HIGH del pin PinSolenoid para extender el
impulser
digitalWrite(PinSolenoidActive, HIGH); // Estado HIGH del pin PinSolenoidActive
delay(ImpulseTime); // Tiempo que va a permanecer en LOW el pin PinSolenoid
digitalWrite(PinSolenoid, LOW); // Estado LOW del pin PinSolenoid para retraer el impulser
digitalWrite(PinSolenoidActive, LOW); // Estado LOW del pin PinSolenoid
break;
case '2': // En caso de recibir un "2" desde el Serial Monitor
digitalWrite(PinSolenoid, HIGH); // Estado HIGH del pin PinSolenoid para extender el
impulser
digitalWrite(PinSolenoidActive, HIGH); // Estado HIGH del pin PinSolenoid
break;
}
}
}


















