Universidad Nacional Autónoma de México Facultad de ... duro.pdf · cabeza a una pista...
15
Universidad Nacional Autónoma de México Facultad de Ingeniería Dispositivos de Almacenamiento y de Entrada/Salida Disco Duro Becerril López Sergio Andrés Pantaleón Martínez Jorge Entrega: 12 de Septiembre de 2008
-
Upload
duongthuan -
Category
Documents
-
view
214 -
download
0
Transcript of Universidad Nacional Autónoma de México Facultad de ... duro.pdf · cabeza a una pista...

Universidad Nacional Autónoma de México
Facultad de Ingeniería
Dispositivos de Almacenamiento y de Entrada/Salida
Disco Duro
Becerril López Sergio AndrésPantaleón Martínez Jorge
Entrega: 12 de Septiembre de 2008

Vista general
El término 'disco duro' es una referencia a dispositivos de almacenamiento magnético no volátil, de gran capacidad y velocidad intermedia a alta (para dispositivos de almacenamiento masivo), cuya estructura física general es aquella compuesta por el medio de almacenamiento – representado por los platos – y el sistema de control, compuesto por tantas cabezas de lectura-escritura como platos haya en el dispositivo, un brazo mecánico que moviliza a cada cabeza, y el llamado actuador, que está conectado a la circuitería de control de movimiento (figura 1). El adjetivo de 'duro' viene del hecho de que los platos (como se discutirá más adelante) están manufacturados de forma rígida, por materiales como aluminio o vidrio, a diferencia de los discos flexibles. Asímismo, existe la referencia a ellos como discos fijos, debido a que los platos (en la aplastante mayoría de los modelos) no son removibles; esta característica, sin embargo, era relativamente común en algunos modelos pioneros.
A nivel lógico, los discos duros subdividen cada plato en 'pistas' y 'sectores'; a grosso modo, en anillos y rebanadas de pastel. Cada anillo representa una pista, y las subdivisiones causadas por las rebanadas generan los sectores, de tal forma que cada sector almacenará la cantidad de 512 bytes (por estándar) (figura 2). El conjunto de anillos en cada uno de los platos forma un 'cilindro'; de esta forma, debido al estándar de 512 bytes por sector, podemos calcular la capacidad de un disco duro a partir de su información de sectores, pistas y/o cilindros (figura 3).
Figura 1: Estructura general del disco duro

Por su parte, el mecanismo de lectura/escritura es realizado por las cabezas anteriormente descritas, que en realidad no hacen contacto per se con el plato físico, sino que flotan sobre ellos debido a la ligera repulsión magnética que causa el material magnético del que están recubiertos (Figura 4). La cabeza lectora puede ser una de diversas opciones, pero en general siempre hace las veces de un electroimán que, en la lectura, percibe los cambios de polaridad entre sectores como picos de voltaje en una u otra dirección, mientras que en la escritura utiliza los diversos voltajes que se le administran para generar una polarización en los platos.
Figura 2: Pistas y sectores de un disco duro
Figura 3: Cilindros en un disco duro
Figura 4: Cabeza lectora y proceso de lectura/escritura
Por último, y no menos importante, es la interfaz a utilizar. Actualmente existen, a grandes rasgos, dos vertientes principales: la familia ATA/ATAPI/IDE (PATA y SATA) y la familia SCSI (SPI y SAS). Se estudiará cada interfaz a más detalle en porciones subsecuentes del presente texto.
A continuación se estudiará a detalle cada uno de los puntos anteriormente mencionados.
Composición física
Aunque existen muchos tipos de discos duros en el mercado, todos comparten los componentes básicos necesarios para el funcionamiento de los mismos:
● Platos● Tarjeta lógica● Cabezas de lectura/escritura● Cables y conectores● Mecanismo actuador de la cabeza● Elementos para configuración (jumpers, interruptores, etc.)● Motor de eje.
De estos dispositivos, usualmente se genera un solo componente sellado a partir de los platos, el motor de eje, las cabezas y el mecanismo actuador, conocido como Conjunto de la Cabeza del Disco (HDA, Head Disk Assemble). El HDA, para propósitos prácticos y utilitarios, se trata como un solo componente, y se abre solo en muy raras ocasiones (en algunos modelos, el sellado es tal que es imposible su apertura sin comprometer la integridad de los componentes internos).
En cuanto a los platos, es típico de los discos duros tener múltiples platos de lectura, los cuales están recubiertos por ambos lados de material magnético. Esto significa que, de haber 4 platos, existen 8 superficies de lectura, etc. Existen platos de diferentes medidas, para diferentes tamaños de discos:
– 5 ¼ pulgadas (130 mm)– 3 ½ pulgadas (95 mm)– 2 ½ pulgadas (65 mm)– 1 pulgada (34 mm)
Aunque no son utilizados en computadoras personales, se pueden llegar a encontrar discos duros más grandes, de 8 pulgadas, 14 pulgadas, etc. Usualmente, los de 3 ½ pulgadas se utilizan más frecuentemente en computadoras personales, mientras que los de 2 ½ pulgadas o menores son utilizados en las computadoras portátiles. Un ejemplo curioso de un disco menor es el MicroDrive de IBM, un pequeño disco duro (1 pulgada cuadrada) que se conecta directamente a un slot CompactFlash Type II. Como máximo, los discos duros llegan a tener hasta 11 platos, aunque a nivel comercial se ven usualmente alrededor de 6 platos.
Los platos son recubiertos por una fina capa de sustancia magnética retentiva; esto es, que retienen su polarización. A esta capa se le denomina el medio. Usualmente se aplica uno de dos tipos de medio magnético: medio de óxido y medio de película fina. El primero está compuesto de varios materiales que contienen óxido de hierro como ingrediente principal. La capa magnética se crea en el disco recubriendo el plato de aluminio con una mezcolanza de partículas de óxido, esparciéndola en el disco haciendo girar los platos a una alta velocidad; esto crea una capa uniforme sobre el plato, de
aproximadamente 15 millonésimas de centímetro, lo que le da al plato un color café o ámbar característico. A mayor densidad, más delgada es esta capa, y su terminado más pulido. Este medio es cada vez menos utilizado, aunque es increíblemente barato.
El medio de película delgada, por su parte, es más delgado, más resistente y de mejor terminado que el medio de óxido; se aplican depositando un medio magnético en el disco por medio de mecanismos de electrodeposición (baño químico que aplica cargas eléctricas para la adhesión del medio al sustrato), lo que genera una película de aleación de cobalto de aproximadamente 1 pulgada de espesor.
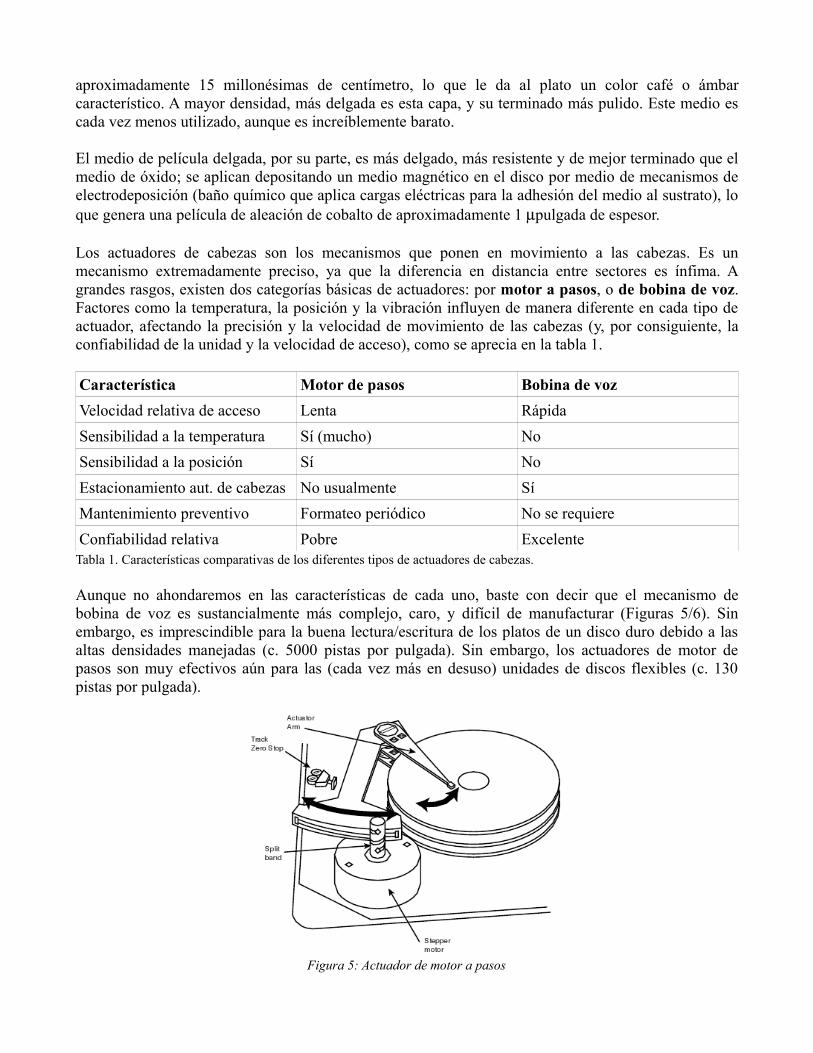
Los actuadores de cabezas son los mecanismos que ponen en movimiento a las cabezas. Es un mecanismo extremadamente preciso, ya que la diferencia en distancia entre sectores es ínfima. A grandes rasgos, existen dos categorías básicas de actuadores: por motor a pasos, o de bobina de voz. Factores como la temperatura, la posición y la vibración influyen de manera diferente en cada tipo de actuador, afectando la precisión y la velocidad de movimiento de las cabezas (y, por consiguiente, la confiabilidad de la unidad y la velocidad de acceso), como se aprecia en la tabla 1.
Característica Motor de pasos Bobina de voz
Velocidad relativa de acceso Lenta Rápida
Sensibilidad a la temperatura Sí (mucho) No
Sensibilidad a la posición Sí No
Estacionamiento aut. de cabezas No usualmente Sí
Mantenimiento preventivo Formateo periódico No se requiere
Confiabilidad relativa Pobre ExcelenteTabla 1. Características comparativas de los diferentes tipos de actuadores de cabezas.
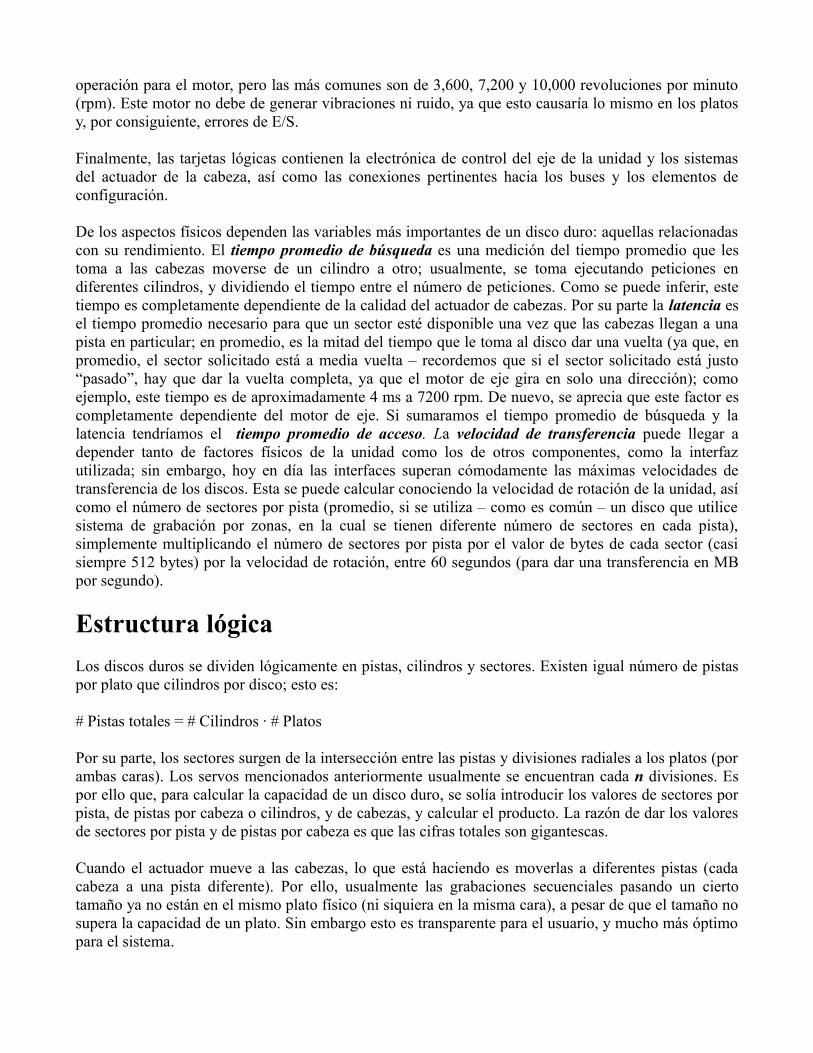
Aunque no ahondaremos en las características de cada uno, baste con decir que el mecanismo de bobina de voz es sustancialmente más complejo, caro, y difícil de manufacturar (Figuras 5/6). Sin embargo, es imprescindible para la buena lectura/escritura de los platos de un disco duro debido a las altas densidades manejadas (c. 5000 pistas por pulgada). Sin embargo, los actuadores de motor de pasos son muy efectivos aún para las (cada vez más en desuso) unidades de discos flexibles (c. 130 pistas por pulgada).
Figura 5: Actuador de motor a pasos

Los actuadores de bobina de voz (llamados así porque utilizan un mecanismo similar a una bocina, donde un imán fijo mueve a la bobina según esta recibe voltaje, sobre un eje fijo) cuentan con un auxiliar para saber donde se encuentra el inicio de cada sector, conocido como servo. Los servos son marcas lógicas creadas en el plato, ya sea uno por cilindro (servo de cuña), uno por cilindro cada n sectores (servo incrustado), o uno por cilindro Y por sector (servo dedicado); este último requiere la dedicación de un lado de un plato completo para las marcas del servo. La información almacenada en el servo (que no es más que una marca lógica, con un código especial) es escrita durante la manufactura con una escritora separada, y el diseño de los actuadores es tal que es imposible accesar en modo escritura a estas secciones (deshabilitando magnéticamente la escritura al sensar la presencia de estas marcas). El servo más utilizado es el incrustado (Figura 7).
El motor de eje es el que se encarga de la rotación de los platos; por la construcción de los dscos duros, este pone en movimiento a todos los platos al mismo tiempo. Existen diferentes velocidades de
Figura 6: Actuador lineal de bobina de voz
Figura 7: Servo incrustado
operación para el motor, pero las más comunes son de 3,600, 7,200 y 10,000 revoluciones por minuto (rpm). Este motor no debe de generar vibraciones ni ruido, ya que esto causaría lo mismo en los platos y, por consiguiente, errores de E/S.
Finalmente, las tarjetas lógicas contienen la electrónica de control del eje de la unidad y los sistemas del actuador de la cabeza, así como las conexiones pertinentes hacia los buses y los elementos de configuración.
De los aspectos físicos dependen las variables más importantes de un disco duro: aquellas relacionadas con su rendimiento. El tiempo promedio de búsqueda es una medición del tiempo promedio que les toma a las cabezas moverse de un cilindro a otro; usualmente, se toma ejecutando peticiones en diferentes cilindros, y dividiendo el tiempo entre el número de peticiones. Como se puede inferir, este tiempo es completamente dependiente de la calidad del actuador de cabezas. Por su parte la latencia es el tiempo promedio necesario para que un sector esté disponible una vez que las cabezas llegan a una pista en particular; en promedio, es la mitad del tiempo que le toma al disco dar una vuelta (ya que, en promedio, el sector solicitado está a media vuelta – recordemos que si el sector solicitado está justo “pasado”, hay que dar la vuelta completa, ya que el motor de eje gira en solo una dirección); como ejemplo, este tiempo es de aproximadamente 4 ms a 7200 rpm. De nuevo, se aprecia que este factor es completamente dependiente del motor de eje. Si sumaramos el tiempo promedio de búsqueda y la latencia tendríamos el tiempo promedio de acceso. La velocidad de transferencia puede llegar a depender tanto de factores físicos de la unidad como los de otros componentes, como la interfaz utilizada; sin embargo, hoy en día las interfaces superan cómodamente las máximas velocidades de transferencia de los discos. Esta se puede calcular conociendo la velocidad de rotación de la unidad, así como el número de sectores por pista (promedio, si se utiliza – como es común – un disco que utilice sistema de grabación por zonas, en la cual se tienen diferente número de sectores en cada pista), simplemente multiplicando el número de sectores por pista por el valor de bytes de cada sector (casi siempre 512 bytes) por la velocidad de rotación, entre 60 segundos (para dar una transferencia en MB por segundo).
Estructura lógica
Los discos duros se dividen lógicamente en pistas, cilindros y sectores. Existen igual número de pistas por plato que cilindros por disco; esto es:
# Pistas totales = # Cilindros · # Platos
Por su parte, los sectores surgen de la intersección entre las pistas y divisiones radiales a los platos (por ambas caras). Los servos mencionados anteriormente usualmente se encuentran cada n divisiones. Es por ello que, para calcular la capacidad de un disco duro, se solía introducir los valores de sectores por pista, de pistas por cabeza o cilindros, y de cabezas, y calcular el producto. La razón de dar los valores de sectores por pista y de pistas por cabeza es que las cifras totales son gigantescas.
Cuando el actuador mueve a las cabezas, lo que está haciendo es moverlas a diferentes pistas (cada cabeza a una pista diferente). Por ello, usualmente las grabaciones secuenciales pasando un cierto tamaño ya no están en el mismo plato físico (ni siquiera en la misma cara), a pesar de que el tamaño no supera la capacidad de un plato. Sin embargo esto es transparente para el usuario, y mucho más óptimo para el sistema.

Mecanismo de lectura/escritura
El principio básico de almacenamiento en el disco duro (así como en discos flexibles, cintas, etc.) es simplemente el del electromagnetismo. Como se sabe, cuando se hace fluir una corriente eléctrica a través de un conductor, se genera un campo magnético asociado; si este conductor está formando lo que se conoce como una bobina, entonces el campo magnético producido es mucho mayor. Por supuesto, este efecto es reversible; si afectamos un conductor sin carga con un campo magnético, generaremos en él una corriente eléctrica, con una polaridad dependiente de la polaridad del campo magnético (y lo mismo ocurre en sentido contrario).
Las cabezas de lectura/escritura de cualquier dispositivo magnético son piezas de material conductor en forma de U, con los extremos de la U situados directamente encima de la superficie del medio de almacenamiento de datos. La cabeza en forma de U está envuelta con bobinas, a través de las cuales fluye la corriente eléctrica (figura 8). Cuando los circuitos lógicos de la unidad magnética hacen pasar una corriente eléctrica a través de estas bobinas, se genera un campo magnético en la cabeza de la unidad; al invertir la polaridad de la corriente eléctrica, también se invierte la polaridad del campo magnético. En esencia, las cabezas son electroimanes cuyo voltaje puede cambiar de polaridad muy rápidamente. El disco o la cinta que constituye el medio de almacenamiento están formados por algún material (en este caso, aluminio o vidrio) en el cual se ha depositado una capa de material magnetizable (esto ya se discutió en la sección de características físicas). Cada una de las partículas magnéticas en el medio de almacenamiento tiene su propio campo magnético. Cuando el medio está en blanco, las polaridades de esos campos magnéticos normalmente se encuentran en un estado de desorden. Debido a que los campos de partículas apuntan en direcciones aleatorias, cada campo magnético es cancelado por algún otro que apunte en la dirección opuesta; el efecto acumulado de esto es una superficie con una polaridad de campo no detectable. Cuando se tienen muchos campos orientados aleatoriamente, el efecto resultante neto es que no se observa un campo unificado o polaridad.
Cuando las cabezas de lectura/escritura generan un campo magnético, el campo salta el espacio entre las puntas del núcleo en forma de U. Debido a que un campo magnético pasa con mayor facilidad a través de un conductor que a través del aire, el campo se desvía hacia afuera de la división en la cabeza, utilizando el medio de almacenamiento contiguo como camino, el de menor resistencia, para “saltar” el entrehierro hacia la otra punta del núcleo. Cuando el campo pasa a través del medio directamente debajo del entrehierro, polariza las partículas magnéticas, dejándolas alineadas con el campo. La
Figura 8: Cabeza magnética de lectura/escritura

polaridad del campo o dirección, y por lo tanto la polaridad o dirección del campo inducido en el medio magnético, están determinadas por la dirección del flujo de la corriente eléctrica a través de las bobinas.Cualquier cambio en la dirección del flujo de la corriente produce un cambio en la dirección del campo magnético. Esto, por supuesto, casua que las partículas en el área debajo del espacio libre del núcleo se alineen en la misma dirección de las emanaciones del campo del entrehierro, efectivamente obteniendo un campo magnético detectable para la cabeza en modo de lectura.
Es sencillo entender, pues, como funciona el proceso. Al aplicar un voltaje a la bobina (y, por consiguiente, generar un campo magnético al núcleo) estamos generando campos magnéticos en el medio de almacenamiento. Según la polaridad de nuestro voltaje, tendremos campos magnéticos de una u otra polaridad; estos son nuestros 0s y 1s. Al dejar de aplicar voltaje a la bobina, dejaremos a nuestra cabeza ser influenciada por los campos magnéticos presentes en el medio, de esta forma generando corriente en la bobina. A pesar de la creencia popular, no estamos leyendo la polaridad del voltaje generado; en vez de ello, lo que hacemos notar son los cambios de polaridad (observados como picos de voltaje positivos o negativos); cada pico nos hace entender que estamos ante un cambio de 0 a 1 o viceversa. Esto se debe a que el voltaje generado por el campo magnético es relativamente bajo, y lo único detectable consistentemente son los cambios de polaridad.
Interfaces
De las muchas interfaces existentes en la historia de la computación, solo dos se siguen utilizando de manera consistente para la conexión de los dispositivos de almacenamiento masivo a una computadora: la interfaz ATA/ATAPI, y la interfaz SCSI. Hablaremos un poco de cada una de ellas.
La interfaz ATA/ATAPI (Advanced Technology Attachment/AT Attachment Interface) es un estándar que data de 1986, como una evolución directa de la interfaz IDE (Integrated Drive Electronics) de la compañía Western Digital. Es por ello que, aún hoy día, los términos IDE, ATA y ATAPI se usan de forma indistinta para nombrar a esta interfaz.
La interfaz ATA se ve hoy en dos presentaciones: la 'estándar', más antigua, de 40 pines, y una nueva interfaz de 7 pines, conocida como Serial ATA, o SATA (esto llevo a renombrar de forma retroactiva a la vieja interfaz como Parallel ATA, o PATA). La interfaz paralela curiosamente está definida para un total de 44 pines (ver tabla 2), a pesar de que la vasta mayoría de las unidades utiliza conexiones de 40 pines (Figura 9). Los 4 pines restantes se llegan a utilizar en unidades más pequeñas (como de computadoras portátiles), ya que estas unidades no tienen un conector adicional de poder, y estos pines se los proveen.
Figura 9: Detalle del conector ATA a 40 pines

Señal Pin Señal Pin Señal Pin Señal Pin
Reset 1 Data 12 12 I/O (write) 23 DMA66_d 34
GND 2 Data 2 13 GND 24 A0 35
Data 7 3 Data 13 14 I/O (read) 25 A2 36
Data 8 4 Data 1 15 GND 26 CE 1P 37
Data 6 5 Data 14 16 IOCHRYD 27 CE 3P 38
Data 9 6 Data 0 17 CS 28 DA/SP 39
Data 5 7 Data 15 18 DDACK 29 GND 40
Data 10 8 GND 19 GND 30 +5 VL 41
Data 4 9 Key/VCC 20 IRQ 31 +5 VM 42
Data 11 10 DDRQ 21 NC 32 GND 43
Data 3 11 GND 22 A1 33 /TYPE 44
Este es el cable “clásico” de 40 pines, con 40 alambres; existe una versión mejorada, de 40 pines pero 80 alambres, que se utiliza para reducir interferencias y mejorar por ende la calidad de la conexión. Esto es importante cuando se utilizan velocidades de reloj elevadas, de 66, 100 y 133 Mhz; los 40 alambres adicionales son tierras que le permiten a cada una de las señales enviadas tener una referencia cerca para atenuar el efecto de las interferencias externas.
Nótese que los 4 últimos pines son los voltajes respectivos para la interfaz lógica y el motor. Estos pines se conectan por separado en la mayoría de las interfaces de escritorio.
Originalmente la interrupción 13 administraba la comunicación con estos dispositivos; debido a sus limitantes en direccionamiento (10 bits para cilindro, 8 bits para cabeza, 6 bits para sector) se tenía un límite de almacenamiento (1024 cil * 256 hd * 63 sect) de ~ 8.4 Gb (a 512 byte/sector, estándar). Paralelamente, la especificación ATA cuenta con limitantes (16, 4 y 8 bits respectivamente) que generan un tamaño máximo direccionable de ~ 127 Gb. Ya que la limitante de bits por cabeza es menor en la interfaz ATA, tenemos que crear (para no quedarnos con una limitante combinada de 528 Mb) una traducción lógica entre los bits direccionables por la interrupción y aquellos definidos por el estándar: tradicionalmente, LBA (Logical Block Address). Esto se implementaba, generalmente, en el BIOS. LBA ayudó también a romper la barrera de los 8.4 GB, desechando completamente el esquema CHS por aquél utilizado en LBA. Esta solución fue originalmente diseñada por Phoenix Technologies en 1994, y se convirtió en estándar a principios de 1998.
Los problemas inherentes a la utilización de un bus paralelo (interferencias, problemas de frecuencia en el reloj utilizado, límites de direccionamiento posible, calor generado por múltiples líneas paralelas, tamaño de la interfaz – y su correspondiente influencia en la capacidad de integrar múltiples conectores en una sola tarjeta madre, etc.) se dejaron ver desde finales de los 90s; por ello, se iniciaron múltiples iniciativas y diseños de interfaces que solucionaran el problema. Aunque muchas se dirigieron a corregir el estándar existente ATA (desde ATA-3 hasta ATA-5), una de estas mejoras, ATA-7, implementó un bus serial de 7 pines para la intercomunicación de dispositivos ATA, conocido coloquialmente como Serial-ATA. SATA es compatible en software con los estándares ATA anteriores, lo que significa que todas las instrucciones y especificaciones de software y comunicación de versiones

anteriores son utilizables en la nueva implementación.
SATA implementa frecuencias de reloj de 1500, 3000 y 6000 Mhz, al menos 10 veces superiores a las frecuencias más altas implementadas en los estándares ATA paralelos más avanzados. La razón de implementar frecuencias de reloj tan altas es que la transmisión se da un bit a la vez; el conector de datos de 7 pines utiliza 4 datos (V+ y V-, para envío y para recepción) y 3 tierras. Por su parte, el conector de poder utiliza 15 pines (3 pines cada uno de 3V, 5V, 12 V y tierras intermedias). Debido a que los conectores Molex tradicionales (de 4 pines) no implementan voltajes a 3V, estas líneas se han dejado, en su mayoría, sin utilizar; sin embargo, esto puede significar que una de las características más importantes de SATA (hotplugging) quede también deshabilitada. Debido a la habilidad de conectar dispositivos con hotplugging, los conectores de tierras siempre son más extendidos que los de los voltajes, tanto para el cable de datos como para el cable de poder.
Las frecuencias de 1500, 3000 y 6000 Mhz implementan una tasa de transferencia de 150, 300 y 600 Mbps, respectivamente. Para mantener compatibilidad con los buses ATA anteriores, el sistema hace una corrección en el envío, efectivamente reenviando la información, si se utiliza el modo de compatibilidad con ATA.
Al igual que la familia IDE, la familia SCSI cuenta con dos iteraciones: el bus paralelo (el que la gente tradicionalmente entiende como SCSI) hoy en día conocido como SPI, y el bus serial, SAS (Serial Attached SCSI).
Como se aprecia en la tabla, el bus SCSI paralelo cuenta con muchas iteraciones, que progresivamente
Figura 10: Detalle de los conectores (poder y datos) del bus SATA

han aumentado la tasa de transferencia máxima soportada. El máximo disponible hoy es de 640 Mbps, que supera las velocidades más ágiles del bus SATA. Nótese que conforme aumenta la tasa de transferencia, la distancia máxima del cable de conexión disminuye dramáticamente.
Para poder conectarse al bus SCSI, un dispositivo debe tener un ID asociado, único en la cadena de dispositivos conectados. El ancho de nuestro bus de datos determinará el tamaño en bits del ID (3 para 8 bits, 4 para 16 bits) y por lo tanto, el número de dispositivos posibles a conectar (8/16).
El bus SCSI paralelo requiere terminadores de señal en ambos extremos (para evitar reflecciones de la señal), análogo al funcionamiento de una línea de cable coaxial en conexiones de red. Los terminadores son circuitos reguladores lineales, de 3.3 V+, y se venden generalmente por separado.
Los conectores para los dispositivos SCSI incluyen los conectores de poder en el mismo cable. Existen, para los conectores de 50 pines, versiones conocidas como ID (internas) y Centronics (externas). Los conectores de 68 pines solo vienen en la configuración HD.
Tabla 1: Iteraciones del bus SCSI a lo largo de los años (c.f. Wikipedia)
Figura 11: Terminador del bus SCSI paralelo

Serial Attached SCSI es más que un bus: es una arquitectura completa de conexión de dispositivos, de forma serial, a un bus centralizado de datos. El estándar SAS define, incluso, una arquitectura, compuesta de seis niveles:
Como se aprecia, esto nos permite independizar el conector físico de los demás niveles que SAS define; por ello, es posible conectar una gran variedad de dispositivos a una arquitectura SAS, incluyendo dispositivos SATA y avanzados, como interfaces InfiniBand (IB). La flexibilidad de esta
Figura 12: Conector ID50 (hembra/macho)
Figura 13: Centronics 50p (hembra/macho)
Figura 14: Conector HD68 (macho/hembra)
Figura 15: Capas de la arquitectura SAS

arquitectura la ha popularizado en la creación de centros masivos de almacenamiento, conocidos como NAS (Network Attached Storage). De hecho, los discos SAS son casi exclusivamente comercializados en el área de servidores, cómputo de alto rendimiento, y generación de dispositivos NAS.
Los conectores SAS tradicionalmente utilizados son el SFF 8484, de alta densidad (32 pines, incluyendo poder) con soporte para hasta 4 dispositivos en línea, y (a futuro) el SFF 8087/88, una versión “mini”, también de 32 pines (interna y externa).
Este documento está disponible online en http://sergiobecerril.homelinux.com/unam/discoduro.pdf
Figura 16: Conector SAS de 32 pines (SFF 8484)
Figura 17: Conector SFF 8087 Figura 18: Conector SFF 8088

Referencias
Mueller, Scott. Manual de Actualización y Reparación de PCs. 12ª ed. Pearson Educación. México, 2001. [Diagramas obtenidos del PDF de la versión original en inglés.]
Wikipedia: Advanced Technology Attachment, Serial ATA, SCSI, Parallel SCSI, Serial Attached SCSI, IBM Microdrive, los demás. Documentos electrónicos revisados por la comunidad.