UPC - Capítulo Español del IEEE PELS - IESieee-pels-ies.es/Pels/Pdf/Tesis/Ramos_thesis.pdf ·...
246
UPC UPC Universitat Politècnica de Catalunya Departament d’Enginyeria Electrònica CONTROL EN MODO DE DESLIZAMIENTO DE UN SISTEMA MODULAR DE ONDULADORES CONECTADOS EN PARALELO. IMPLEMENTACIÓN CON FPGA Autor: Rafael Ramón Ramos Lara Directores: Francesc Guinjoan Gispert Domingo Biel Solé
-
Upload
duongtuyen -
Category
Documents
-
view
216 -
download
0
Transcript of UPC - Capítulo Español del IEEE PELS - IESieee-pels-ies.es/Pels/Pdf/Tesis/Ramos_thesis.pdf ·...

UPCUPC
Universitat Politècnica de Catalunya
Departament d’Enginyeria Electrònica
CONTROL EN MODO DE DESLIZAMIENTO DE UN SISTEMA MODULAR DE ONDULADORES
CONECTADOS EN PARALELO. IMPLEMENTACIÓN CON FPGA
Autor: Rafael Ramón Ramos Lara
Directores: Francesc Guinjoan Gispert
Domingo Biel Solé




UPCUPC
UNIVERSITAT POLITÈCNICA DE CATALUNYA DEPARTAMENT D’ENGINYERIA ELECTRÒNICA
CONTROL EN MODO DE DESLIZAMIENTO DE UN SISTEMA MODULAR DE ONDULADORES
CONECTADOS EN PARALELO. IMPLEMENTACIÓN CON FPGA
Tesis doctoral presentada para la obtención del título de doctor
Rafael Ramón Ramos Lara
Directores:
Francesc Guinjoan Gispert Domingo Biel Solé
Marzo 2006


A Paula y Marta A toda mi familia


AGRADECIMIENTOS
Quiero expresar mi más sincero agradecimiento a todas aquellas personas que me han alentado y ayudado en la realización de este trabajo, y muy especialmente a mis compañeros Domingo Biel, Francesc Guinjoan y Enric Fossas.
Rafael Ramón Ramos Lara Marzo 2006


FINANCIACIÓN El Ministerio de Ciencia y Tecnología ha contribuido a la financiación de esta Tesis que se ha realizado en el marco de los proyectos “Control en Modo de Deslizamiento Aplicado a Células de Conversión DC/AC Conectadas en Paralelo” (ref. DPI2000-1509-CO3-03) y “Procesado Modular de Potencia para Energías Renovables- Control” (ref. DPI2003-08887-CO3-01)


I
Índice
Capítulo 1. Introducción y objetivos
1.1. Motivación: arquitecturas modulares de conversión DC-AC..........................
1.2. Configuración y objetivos de control del sistema de conversión modular DC-AC....................................................................................................................
1.3. Estrategias de control en sistemas modulares: control de la tensión de salida y del reparto de potencia entre módulos.................................................................
1.3.1. Observaciones preliminares....................................................................
1.3.2. Estrategia “Master-Slave”.......................................................................
1.3.3. Estrategia “Central Limit Control”.........................................................
1.3.4. Estrategia “Circular Chain Control”......................................................
1.4. El módulo de conversión: topologías de conversión DC-AC..........................
1.5. Técnicas de diseño de los controladores. Alternativas y compromisos...........
1.5.1. Técnicas basadas en modelos promediados............................................
1.5.2. Técnicas basadas en modelos de estructura variable: control en modo de deslizamiento...............................................................................................
1.6. Políticas de gestión de potencia y de fiabilidad...............................................
1.7. Alternativas de implementación del control de sistemas modulares...............
1.8. Objetivos y estructura del trabajo....................................................................
1.1
1.3
1.5
1.5
1.6
1.7
1.8
1.9
1.11
1.11
1.12
1.15
1.15
1.17
Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo
2.1. Introducción.....................................................................................................
2.2. Procedimiento de diseño del control multivariable en modo de deslizamiento..........................................................................................................
2.3. Control en modo de deslizamiento en inversores reductores..........................
2.3.1. Control en modo de deslizamiento para el seguimiento de una señal de referencia AC en un inversor reductor de puente completo.........................
2.3.2. Control en modo de deslizamiento de un inversor reductor en puente completo con una señal de control de tres niveles............................................
2.3.3. Control en modo de deslizamiento de un sistema inversor modular para el seguimiento de una señal AC................................................................
2.1
2.2
2.6
2.6
2.13
2.14

II Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
2.4. Estrategias de distribución equitativa de corrientes y funciones de conmutación............................................................................................................
2.5. Diseño de la ley de control para sistemas multientrada...................................
2.5.1. Método de control jerárquico..................................................................
2.5.2. Método de diagonalización....................................................................
2.6. Diseño jerárquico de la ley de control para un sistema modular de 3 inversores................................................................................................................
2.6.1. Procedimiento general de diseño jerárquico para tres módulos convertidores.....................................................................................................
2.6.2. Diseño de la ley de control basado en el método jerárquico para la estrategia Master-Slave.....................................................................................
2.6.3. Diseño de la ley de control basado en el método jerárquico para la estrategia Circular Chain Control....................................................................
2.6.4. Diseño de la ley de control basado en el método jerárquico para la estrategia Central Limit Control.......................................................................
2.6.5. Ejemplo de diseño jerárquico de la ley de control para un sistema modular de 3 inversores....................................................................................
2.7. Diseño con el método de diagonalización de la ley de control para un sistema modular de 3 inversores.............................................................................
2.7.1. Diseño de la ley de control con tres módulos inversores activos...........
2.7.2. Diseño de la ley de control con dos módulos inversores activos............
2.7.3. Ejemplo de diseño de la ley de control para un sistema modular de 3 inversores con el método de diagonalización...................................................
2.8. Dinámica del sistema modular en régimen deslizante.....................................
2.9. Dominio de existencia de régimen deslizante y restricciones de diseño.........
2.9.1. Dominio de existencia del régimen deslizante con el método de diagonalización.................................................................................................
2.9.2. Dominio de existencia del régimen deslizante con el método jerárquico..........................................................................................................
2.10. Análisis de la estabilidad del régimen deslizante mediante el segundo método de Lyapunov...............................................................................................
2.11. Generalización a cargas no lineales y reactivas.............................................
2.11.1. Modelo del sistema...............................................................................
2.11.2. Función de conmutación.......................................................................
2.11.3. Dinámica del sistema modular en régimen deslizante..........................
2.11.4. Dominio de existencia de régimen deslizante para cargas no lineales.
2.11.5. Generalización del dominio de existencia de régimen deslizante para cargas reactivas.................................................................................................
2.12. Conclusiones..................................................................................................
2.21
2.25
2.25
2.28
2.30
2.30
2.35
2.37
2.40
2.42
2.45
2.45
2.48
2.49
2.51
2.54
2.54
2.56
2.60
2.69
2.70
2.71
2.72
2.74
2.75
2.75

Índice III
Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de onduladores conectados en paralelo
3.1. Introducción ....................................................................................................
3.2. Sistema modular de potencia...........................................................................
3.2.1. Etapa de potencia....................................................................................
3.2.2. Subsistema de gestión y control..............................................................
3.3. Acondicionador de señal y sistema de adquisición de datos...........................
3.4. Estructura general del diseño FPGA: bloques funcionales..............................
3.5. Bloque Funciones de Conmutación.................................................................
3.5.1. Funciones de conmutación......................................................................
3.5.2. Arquitectura del bloque Funciones de Conmutación.............................
3.6. Bloque de Gestión de Funcionamiento...........................................................
3.6.1. Arquitectura del bloque Gestión de Funcionamiento.............................
3.6.2. Sistema de Gestión de Potencia (SGP)...................................................
3.6.3. Sistema de Tolerancia a Fallos (STF)....................................................
3.6.4. Sistema de Rotación de Módulos Activos (SRMA).................................
3.7. Bloque Salidas de Control...............................................................................
3.8. Bloque Control Secuencial..............................................................................
3.9. Resultados de simulación y experimentales....................................................
3.9.1. Resultados del control en modo de deslizamiento..................................
3.9.2. Resultados del sistema de Gestión de Funcionamiento..........................
3.10. Conclusiones .................................................................................................
3.1
3.2
3.3
3.4
3.5
3.7
3.9
3.9
3.11
3.15
3.16
3.17
3.22
3.25
3.28
3.30
3.30
3.31
3.46
3.50
Capítulo 4. Inversor PWM basado en el algoritmo de control de promediado cero de la dinámica (ZAD)
4.1. Introducción ....................................................................................................
4.2. Algoritmo de promediado cero de la dinámica (ZAD)....................................
4.3. Implementación del algoritmo de control ZAD basada en una FPGA.............
4.3.1. Estructura general del subsistema de control..........................................
4.3.2. Acondicionador de señal y sistema de adquisición de datos..................
4.3.3. Diseño FPGA del algoritmo ZAD...........................................................
4.4. Bloque Algoritmo ZAD....................................................................................
4.1
4.1
4.4
4.4
4.5
4.6
4.7

IV Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
4.4.1. Estrategia de implementación del algoritmo ZAD..................................
4.4.2. Arquitectura del bloque Algoritmo ZAD.................................................
4.5. Bloques PWM Digital y Control Secuencial...................................................
4.5.1. Bloque PWM Digital..............................................................................
4.5.2. Bloque Control Secuencial.....................................................................
4.6. Simulación y resultados experimentales..........................................................
4.6.1. Resultados de simulación del algoritmo ZAD.........................................
4.6.2. Resultados experimentales del algoritmo ZAD.......................................
4.6.3. Comparación entre el algoritmo ZAD, el control en modo de deslizamiento a frecuencia libre y el control PWM clásico..............................
4.7. Conclusiones ...................................................................................................
4.7
4.10
4.12
4.12
4.14
4.15
4.15
4.16
4.18
4.21
Capítulo 5. Aplicación del algoritmo ZAD al control de onduladores conectados en paralelo. Operación en “interleaving”
5.1. Introducción.....................................................................................................
5.2. Algoritmo ZAD aplicado al control de estructuras onduladoras modulares................................................................................................................
5.3. Sistema modular de potencia con control a frecuencia fija.............................
5.4. Funciones de conmutación, acondicionador de señal y sistema de adquisición de datos................................................................................................
5.4.1. Funciones de conmutación......................................................................
5.4.2. Acondicionador de señal.........................................................................
5.4.3. Sistema de adquisición de datos.............................................................
5.5. Estructura general del diseño FPGA...............................................................
5.6. Bloques Control Inversor A, B y C..................................................................
5.7. Bloque Gestión de Potencia............................................................................
5.8. Técnica interleaving para convertidores conectados en paralelo....................
5.8.1. Implementación de la técnica interleaving para un sistema modular de potencia con M inversores conectados en paralelo...........................................
5.8.2. Implementación de la técnica interleaving para un sistema modular de 3 inversores.......................................................................................................
5.9. Simulación y resultados experimentales..........................................................
5.9.1. Resultados del control en modo de deslizamiento con el algoritmo ZAD a frecuencia fija......................................................................................
5.9.2. Resultados del sistema de Gestión de Potencia......................................
5.1
5.2
5.6
5.7
5.7
5.7
5.9
5.10
5.11
5.12
5.13
5.13
5.16
5.17
5.17
5.21

Índice V
5.9.3. Resultados del sistema modular de potencia con la técnica interleaving.......................................................................................................
5.10. Conclusiones..................................................................................................5.22
5.30
Capítulo 6. Conclusiones y líneas futuras
6.1. Conclusiones del trabajo..................................................................................
6.2. Líneas futuras de trabajo..................................................................................
6.1
6.3
Anexos
Anexo 1: Modelo MATLAB-SIMULINK del sistema modular inversor con control en modo de deslizamiento a frecuencia libre.............................................
Anexo 2: Modelo MATLAB-SIMULINK del sistema modular inversor con control basado en el algoritmo ZAD.......................................................................
A.1
A.8
Bibliografía


1.1
CAPÍTULO 1
Introducción y objetivos
1.1. Motivación: arquitecturas modulares de conversión DC-AC
La conversión continua-alterna o DC-AC tiene como misión fundamental la extracción, adaptación y transmisión de potencia eléctrica de una o varias fuentes de energía cuyas variables eléctricas son de naturaleza continua, a un receptor que consume esta energía mediante variables eléctricas de naturaleza alterna, receptor comúnmente referido como “carga de alterna”. De entre las diversas aplicaciones donde es necesaria esta conversión cabe destacar, entre otras, los sistemas de alimentación ininterrumpida (abreviados como SAI, o UPS en su versión anglosajona correspondiente a Uninterrumpible Power Supply); estos sistemas operan en caso de fallo de suministro de la red, y están destinados a restituir, a partir de un conjunto de baterías, la tensión en bornas de un conjunto de cargas conectadas a un bus de alterna, realizando así una conversión de tensión continua a tensión alterna.
Por otra parte, el aumento del rango de variación en las demandas de potencia de estos sistemas ha incrementado el interés por arquitecturas de conversión DC-AC modulares1 (también denominados sistemas modulares DC-AC) que permiten el reparto de la potencia a procesar entre módulos de conversión DC-AC2 interconectados en paralelo. Así por ejemplo, la conexión en paralelo de onduladores fue aplicada al diseño de SAIs con el objetivo de aumentar la potencia de salida y la disponibilidad del sistema en la alimentación de cargas críticas como ordenadores, sistemas de control de procesos, equipamiento hospitalario, sistemas de comunicación, etc [Holtz, 89], [Holtz, 90], [Siri, 92a].
1 Debe notarse que las arquitecturas modulares no son exclusivas de la conversión DC-AC, y pueden encontrarse en otros tipos de conversión. 2 A lo largo de este trabajo se utilizarán indistintamente los términos “ondulador”, “procesador DC-AC”, “módulo de conversión DC-AC” o “modulo inversor”para designar el circuito encargado de esta conversión.

1.2 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Con relación a una arquitectura de conversión centralizada, en la que un único ondulador debe procesar toda la potencia demandada por la carga, una arquitectura modular presenta las siguientes ventajas.
• La flexibilidad de diseño en términos de potencia:
Una de las características que hacen especialmente atractivos los sistemas modulares de potencia es su flexibilidad de diseño que se traduce en la capacidad de ampliar la potencia disponible de salida añadiendo módulos convertidores, en lugar de sustituir el sistema por otro de mayor potencia. De esta forma, se puede extender fácilmente el sistema modular para responder a futuros incrementos de la demanda energética con un coste relativamente bajo [Huth, 96].
• La posibilidad de incorporar módulos redundantes:
La redundancia del sistema modular implica la existencia de más módulos onduladores que el mínimo requerido para mantener las prestaciones de funcionamiento del sistema trabajando en condiciones de plena carga. Los módulos redundantes pueden entrar en funcionamiento en caso de fallo de algún módulo ondulador, por lo que su presencia en el sistema modular permite aumentar significativamente su fiabilidad global con respecto a sistemas de potencia individuales [Wu T., 91], [Mazumder, 2002]. Igualmente, la redundancia facilita la realización de operaciones de mantenimiento de módulos individuales sin que ello repercuta en la operatividad del sistema de potencia, asegurando de esta forma la alta disponibilidad exigida por cargas críticas [Holtz, 90], [Perkinson, 95]. Aparte de la posible introducción de módulos redundantes, existen otras medidas que permiten incrementar la fiabilidad de los sistemas modulares, como son las estrategias de ecualización del tiempo de funcionamiento de los módulos de conversión [Wu T., 91, 93].
• La posible mejora de la eficiencia de la conversión:
La flexibilidad inherente a la estructura modular permite mantener activos solo los módulos necesarios para obtener en todo momento la mejor eficiencia posible en cualquier condición de carga. De esta manera, no solo se mejora la eficiencia sino que además se incrementa el grado de redundancia del sistema y con ello la fiabilidad [Wu T., 91, 93].
• Un posible incremento de la relación potencia/tamaño del sistema de conversión:
El diseño modular de sistemas de potencia incrementa la relación potencia/tamaño, ya que cada módulo individual procesa menos potencia y puede trabajar por tanto a frecuencias de conmutación mayores lo que reduce el tamaño de los componentes de filtrado.
Este tipo de sistemas presenta asimismo un conjunto de desventajas en relación a sistemas con concepción centralizada entre las que cabe destacar:
• El mayor coste del sistema modular:
Es previsible que el sistema modular tenga un coste mayor que el correspondiente a una concepción centralizada, debido por ejemplo al mayor número de componentes del primero (si bien el rango de potencias de operación de estos componentes es evidentemente menor, siendo por tanto menor su coste por unidad). Sin embargo este aumento de coste puede justificarse por un aumento de prestaciones asociadas a la modularidad del sistema que se han detallado previamente.

Capítulo 1. Introducción y objetivos 1.3
• El aumento de complejidad del control de un sistema modular, y las dificultades de implementación asociadas:
Este aumento de complejidad deriva directamente de la necesidad de controlar varios módulos de conversión que interactúan entre sí: además de garantizar una conversión DC-AC, el control tiene que asumir otras tareas, siendo la principal el control del reparto de potencia entre módulos. En consecuencia, el número de variables a controlar aumenta lo que dificulta tanto el diseño a nivel analítico como una posterior implementación del control resultante.
• La robustez mejorable de los controles existentes:
Como se detallará posteriormente, la mayoría de controles propuestos para garantizar una conversión modular DC-AC con baja sensibilidad frente a perturbaciones, respuesta dinámica rápida y un reparto controlado de la potencia entre módulos, suelen ser controles lineales que adolecen de falta de robustez frente a variaciones paramétricas dado que se diseñan a partir de un modelo linealizado de los convertidores DC-AC.
De las observaciones anteriores se deduce que para aprovechar las ventajas asociadas a un sistema de conversión modular DC-AC, debe mejorarse la robustez de la dinámica del sistema y garantizar una implementación viable de su control. Esta es la motivación principal de este trabajo que pretende aplicar por una parte la técnica de control en modo de deslizamiento como alternativa a los controles lineales para mejorar la robustez del sistema, y aprovechar por otra tanto el avance en prestaciones como la disminución de precio de plataformas digitales programables que permiten hoy en día la implementación de controles complejos.
En cualquier caso la concepción de estos sistemas requiere fijar los siguientes aspectos de diseño:
• La configuración y los objetivos de control del sistema de conversión modular
• Las estrategias de control a aplicar (lazos de control y controladores)
• La topología de conversión DC-AC que implemente un módulo de conversión
• La(s) técnica(s) de control para el diseño de los controladores
• Las políticas de gestión de potencia y fiabilidad
• Las posibilidades de implementación de las estrategias de control
Los siguientes apartados revisan, a modo de estudio del estado del arte, todos estos aspectos de diseño incidiendo en las opciones escogidas. Estas opciones se resumen en el último apartado dedicado a especificar los objetivos concretos de este trabajo.
1.2 Configuración y objetivos de control del sistema de conversión modular DC-AC
Para facilitar la exposición de los siguientes subapartados, se supondrá un sistema modular genérico formado por N onduladores monofásicos notados como “DC-AC i” (i = 1,…,N) cuyas salidas están conectadas en paralelo. En general este sistema debe convertir un conjunto de N tensiones continuas E1,…,EN en una única tensión alterna de salida v0, cuya

1.4 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
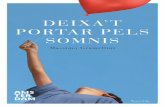
frecuencia w y amplitud A vienen definidos por el usuario3, según el diagrama de la figura 1.1 (a); nótese que este planteamiento genérico incluye el caso de un sistema modular con una única fuente de tensión de entrada, tal y como se detalla en la figura 1.1 (b).
CAR
GA
AC
+
vo=Asin(wt)
i1
iN
E1
EN
DC-AC 1
DC-AC N
CARG
A A
C
+
vo=Asin(wt)
i1
iN
E
DC-AC 1
DC-AC N
(a) (b)
Figura 1.1. Sistema de conversión DC-AC modular (a) con N fuentes de tensión de entrada (b) con una única fuente de tensión de entrada
El control de los sistemas de potencia formados por módulos convertidores conectados en paralelo es significativamente más complejo que el de los convertidores individuales. En efecto, los objetivos básicos del sistema de control de un convertidor DC-AC individual persiguen que su comportamiento en los terminales de carga se acerque lo más posible al de una fuente de tensión alterna ideal, a saber: baja sensibilidad frente a perturbaciones de línea y carga, respuesta dinámica rápida y bajo contenido armónico. Además de cumplir con los objetivos anteriores, el control de los sistemas modulares de potencia debe asegurar los siguientes objetivos adicionales:
• Garantizar un correcto reparto de potencia entre los módulos de conversión:
Para evidenciar la necesidad de este objetivo, supóngase el caso de un sistema modular como el representado en la figura 1.1 (b) en el que se asume que todos los módulos de conversión son “idénticos” desde un punto de vista de diseño (es decir, todos formados por la misma topología de conversión y con componentes del mismo valor nominal). Suponiendo asimismo que la tensión de salida está controlada, desde un punto de vista teórico todos los módulos deberían entregar la misma corriente a la carga (al ser “idénticos”), hecho que no sucede en la práctica debido a las tolerancias en el valor de los componentes, particularmente de los inductores [Donoso-García, 98], [Luo, 99]. Se genera en consecuencia un desequilibrio en la corriente que proporciona cada módulo de conversión, reduciendo su tiempo de vida aquellos módulos que entregan mayor corriente. Por tanto se evidencia la necesidad de controlar la corriente de cada módulo para aumentar la fiabilidad del sistema global [Siri, 90], [Lee, 91], [Donoso-García, 96].
• Establecer una política de gestión de potencia y de fiabilidad del sistema de conversión:
El control debe incorporar los mecanismos necesarios para poder hacer efectivas las ventajas asociadas a los sistemas modulares de potencia en relación a la flexibilidad, eficiencia, tolerancia a fallos y facilidad de mantenimiento [Wu T., 93]. Esto significa que el control debe ser capaz de detectar y de responder
3 En aplicaciones de SAI en un entorno europeo el valor de estos parámetros es: A = 220.√2 V y w=50 Hz

Capítulo 1. Introducción y objetivos 1.5
adecuadamente a diferentes situaciones, como puede ser el fallo de uno o más módulos convertidores, la variación de la potencia suministrada a la carga, la variación del número de convertidores que incorpora el sistema de potencia y debe además poseer una estructura dinámica, que le permita adaptarse a los cambios del régimen de funcionamiento del sistema modular.
• Garantizar un comportamiento poco sensible frente a variaciones paramétricas:
Además de las variaciones paramétricas que deben considerarse en el caso de un solo ondulador, a saber las perturbaciones de tensión de entrada y de carga, un sistema modular de potencia está sujeto a variaciones paramétricas debidas a cambios en la configuración del sistema, y en particular a la variación del número de convertidores activos consecuencia de una política de gestión de potencia y de fiabilidad. Por este motivo, es conveniente que el control diseñado sea robusto frente a todas estas variaciones.
1.3. Estrategias de control en sistemas modulares: control de la tensión de salida y del reparto de potencia entre módulos
1.3.1. Observaciones preliminares
Para conseguir los objetivos anteriores relacionados con el control de la tensión de salida y con el reparto de potencia entre módulos, existen diversas estrategias de control, entendiendo por “estrategia” de control el conjunto de lazos de realimentación y controladores correspondientes que pueden permitir la consecución de estos objetivos4. En cualquier caso, antes de describir y analizar las estrategias existentes, deben hacerse las siguientes observaciones:
• Control de la tensión de salida:
El control de la tensión de salida exige que el sistema de conversión modular tenga al menos un lazo de tensión, que realimente la tensión en la carga y cuya referencia sea la tensión sinusoidal de salida deseada (o una versión escalada de la misma).
• Control del reparto de potencia entre módulos:
Asumiendo la tensión de salida controlada, el reparto de potencia entre módulos se controla mediante el control de la corriente de cada módulo. A este respecto deben distinguirse dos estrategias de control dependiendo de la posibilidad de realimentar físicamente la información de la corriente de un módulo a otro, a saber [Luo, 99], [Chiang, 2001]:
a. Estrategias “droop”: en los cuales se asigna a alguna variable asociada al convertidor, una característica “droop” que permite evaluar indirectamente el parámetro que se desea ecualizar [Kawabata, 88], [Oshima, 91], [Luo, 99]. Estas estrategias se basan en utilizar exclusivamente variables que pueden ser medidas localmente evitando la interconexión entre los módulos más allá de la conexión en
4 La consecución de los objetivos se consigue mediante el diseño apropiado de los controladores.

1.6 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
paralelo de sus salidas, con las consiguientes ventajas de facilidad de implementación y expansión, alta fiabilidad y modularidad. En el caso de la conversión DC-AC, estas estrategias se basan en la ecualización de la potencia activa y reactiva a través de los módulos mediante el control de la frecuencia y la amplitud de la tensión de salida [Kawabata, 88], [Chandorkar, 93, 94]. Sin embargo, las características “droop” se obtienen, en general, degradando la regulación de carga. La ecualización de corrientes que se consigue es dependiente del nivel de carga del sistema de potencia [Siri, 94] y en general bastante pobre, siendo aceptables precisiones de ecualización del orden del 10% o mayores [Irving, 2000]. Asimismo, la efectividad de la mayoría de los controles propuestos está sujeta a severas restricciones como el ajuste preciso del valor inicial de la tensión de salida, o de la tensión de referencia, su estabilidad con el tiempo y la temperatura, etc. Además, a la deriva de la amplitud de la tensión de salida, se añade la desviación de su frecuencia y, por tanto, una reducción de la calidad de su forma de onda en función de la carga [Tuladhar, 97]. Finalmente, estas estrategias impiden establecer un algoritmo de optimización del rendimiento: en efecto, la ausencia de interconexión entre módulos no permite llevar a cabo una gestión global del número de onduladores activos para obtener la mejor eficiencia posible en cualquier condición de carga. Estas limitaciones hacen aconsejable el uso de estos estrategias solo en sistemas distribuidos donde la distancias entre los módulos dificulta la comunicación entre sí, o bien en sistemas donde el control imponga, por razones de implementación, el sensado de variables locales exclusivamente [Chandorkar, 93, 94].
b. Estrategias de ecualización activa de corriente: que consiguen el reparto de potencia entre módulos “idénticos” igualando las corrientes circulantes por cada módulo [Luo, 99], realimentando físicamente la corriente de un módulo a otro. En este caso, se requiere un lazo de corriente por módulo que realimente su corriente de salida, y cuya corriente de referencia depende de la estrategia de control utilizada.
Este trabajo se centra en estas últimas estrategias, que han surgido y han sido aplicadas tanto en el contexto de sistemas modulares de conversión DC-DC como DC-AC, dado que ambas conversiones comparten el objetivo de reparto controlado de potencia entre módulos. Los siguientes subapartados describen las tres estrategias más sobresalientes en la literatura y cuyo objetivo es alcanzar simultáneamente el control de la tensión de salida y el reparto de potencia entre módulos, o de forma equivalente la ecualización de sus corrientes.
1.3.2. Estrategia “Master-Slave”
En la estrategia Master-Slave (abreviada como M-S) los módulos convertidores conectados en paralelo utilizan un lazo de tensión común para obtener la regulación de tensión de salida, compartiendo de esta forma la misma tensión de referencia, la realimentación de tensión y el controlador correspondiente. La estrategia se basa en que uno de los módulos convertidores actúa de Master y el resto de convertidores tienen categoría de Slave. Cada convertidor Slave dispone de un lazo de corriente donde la referencia es la corriente de salida del convertidor que actúa de Master. Por tanto, en régimen estacionario la corriente de salida de cada ondulador sigue a la corriente de salida del Master [Siri, 90]. El diagrama de bloques de esta estrategia puede verse en la figura 1.2.

Capítulo 1. Introducción y objetivos 1.7
DC-ACSLAVE
iL2
iL N
iLMASTERv0(t)
CONTROLiL2 +
-
CONTROLV0AC +
-
vr(t) = Vr sin(wt)
+
+
CONTROLiL N +
-+
+
DC-ACSLAVE
DC-ACMASTER
Figura 1.2. Diagrama de bloques de la estrategia de control Master-Slave (M-S) con N módulos inversores conectados en paralelo
Esta estrategia se ha utilizado en numerosos trabajos para el control de sistemas modulares de conversión DC-DC operando en modulación por anchura de impulsos (abreviada PWM, de la denominación anglosajona Pulse Width Modulation), entre los que pueden citarse los de Siri, Lee et al. [Siri, 90, 92a, 92b], [Lee, 91].
1.3.3. Estrategia “Central Limit Control”
Al igual que en el caso anterior, los módulos convertidores conectados en paralelo utilizan un lazo de tensión común para obtener la regulación de tensión de salida, compartiendo de esta forma la misma tensión de referencia, la realimentación de tensión y el controlador correspondiente. La diferencia principal estriba en que en la estrategia Central Limit Control (abreviada como CLC) todos los módulos conectados en paralelo disponen de un lazo de control de corriente para ecualizar la corriente de carga, tomándose como corriente de referencia la media aritmética de las corrientes de salida de todos los convertidores [Siri, 90], [Lee, 91], o de parte de ellos como en la variante conocida como “Current Balance Controller” [Wu, 93], [Ninomiya, 93]. El diagrama de bloques correspondiente a esta estrategia puede verse en la figura 1.3.
Esta estrategia se ha aplicado tanto al control de sistemas modulares de conversión DC-DC [Siri, 90, 92a, 92b, 95], [Lee, 91], [Wu T., 93, 94], [Ninomiya, 93], como DC-AC [Holtz, 88], [Coelho 98].

1.8 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
iL2
iL N
iL1
+
+
ΣiLi
ΣiLi
+
-
CONTROLiL1
CONTROLiL2
CONTROLiL N
-
- CONTROLV0AC +
-
vr(t) = Vr sin(wt)
v0(t)
+
+
+
+
+
+
ΣiLi
DC-ACN
DC-AC1
DC-AC2
Figura 1.3. Diagrama de bloques de la estrategia de control Central Limit Control (CLC) con N módulos inversores conectados en paralelo
1.3.4. Estrategia “Circular Chain Control”
T. F. Wu et al. presentan en [Wu T., 98] una nueva estrategia de control denominada Circular Chain Control (abreviado como CCC o 3C), aplicada a la conexión en paralelo de inversores. En este caso, todos los módulos comparten, al igual que en las estrategias M-S y CLC, un lazo de control de tensión y además cada módulo incorpora un lazo de corriente interno que utiliza como corriente de referencia la corriente de inductor del módulo anterior. El diagrama de bloques correspondiente a esta estrategia puede verse en la figura 1.4.
La elección de una de las estrategias anteriores depende de múltiples factores, como se resume en el trabajo de T. F. Wu et al. [Wu T., 98]. Los autores establecen para un sistema modular DC-AC operando por modulación de anchura de pulso (PWM) y con controladores lineales, una comparativa entre las tres estrategias en términos de robustez, fiabilidad, redundancia así como en términos de comportamiento tanto estático como dinámico.
Atendiendo a su relevancia en la literatura, esta tesis se centrará en diseño e implementación de las tres estrategias anteriores con otra técnica de control, estableciendo asimismo una comparativa entre sus prestaciones.

Capítulo 1. Introducción y objetivos 1.9
iL2
iL N
iL1
+
+
iLN
iL1
+
-
CONTROLiL1
CONTROLiL2
CONTROLiL N
-
- CONTROLV0AC +
-
vr(t) = Vr sin(wt)
v0(t)
+
+
+
+
+
+
iL(N-1)
DC-ACN
DC-AC1
DC-AC2
Figura 1.4. Diagrama de bloques de la estrategia de control Circular Chain Control (CCC) con N
módulos inversores conectados en paralelo
1.4. El módulo de conversión: topologías de conversión DC-AC
El diseño de cualquiera de las tres estrategias de control anteriores debe elegir tanto la topología (o circuito) de conversión de potencia que implementará un módulo de conversión DC-AC, como las técnicas de control a aplicar en el diseño del controlador asociado a cada módulo. Con relación a las topologías de conversión, son numerosos los factores que pueden condicionar su elección entre los que pueden destacarse:
• Las características eléctricas tanto de la fuente como de la carga:
Ante todo debe recordarse que la aplicación de este trabajo está orientada a una conversión DC-AC del tipo tensión- tensión, por lo que la topología debe permitir la interconexión de dos elementos con características de fuente de tensión, a saber, la fuente de tensión DC de entrada y la carga de alterna cuya correcta operación exige una tensión sinusoidal regulada en sus bornes, de amplitud y frecuencia prefijadas.
• La necesidad de elevar tensión:
Otro aspecto que condiciona la elección de la topología es la necesidad o no de elevar tensión, estableciendo un ratio “amplitud de la tensión AC de salida - tensión DC de entrada” mayor que la unidad; esta necesidad conduce a topologías de conversión que incluyen en general una etapa elevadora DC-DC y una etapa reductora DC-AC y/o que incluyan un transformador elevador.
• La necesidad de aislamiento galvánico:
Los posibles requisitos de aislamiento galvánico de una aplicación determinada también condicionan la presencia de un transformador en la topología.

1.10 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
• El nivel de potencia a procesar:
Este factor es uno de los más importantes dado que condiciona el rendimiento de la etapa de conversión. Partiendo de que, en primera instancia, la conversión DC/AC se basa en la generación y posterior filtrado de una onda cuadrada mediante un puente completo o semi-puente de interruptores, pueden diferenciarse dos tipos de conversión:
a. Conversión de baja frecuencia: en este caso, la frecuencia fundamental de la onda cuadrada generada es igual a la frecuencia de la señal senoidal que se pretende obtener a la salida del convertidor. Este tipo de conversión es útil a altas potencias, con el objetivo de mejorar el rendimiento, evitando las pérdidas de conmutación de los interruptores. Sin embargo, esta filosofía presenta como dificultad el dimensionado de los componentes del filtro necesario para eliminar los armónicos superiores.
b. Conversión de alta frecuencia: la frecuencia de la onda cuadrada es mucho mayor que la frecuencia de la señal senoidal que se pretende obtener a la salida. Esta onda cuadrada presenta un armónico fundamental a la frecuencia de la señal AC deseada a la salida, mientras que el resto de armónicos están suficientemente alejados para poder ser filtrados con relativa facilidad. Además cabe señalar que si la aplicación requiere del uso de un transformador, éste puede ser de volumen y peso reducidos gracias a la operación en alta frecuencia. Este tipo de conversión suele ser más adecuada en la gama de bajas y medias potencias, y por tanto en la conversión modular debido al reparto inherente de potencia por módulo. En este sentido, para bajas potencias (del orden de la centena de Watts) las topologías basadas en un semi-puente o un puente completo suelen ser ventajosas tanto por su sencillez circuital y número reducido de variables de control, como por la posibilidad de conmutación de los interruptores de baja potencia a frecuencias elevadas (del orden de decenas o centenas de kHz), que redundan en una reducción de volumen y peso del ondulador. A medida que el nivel de potencia aumenta, los condicionantes de rendimiento obligan a recurrir a otras topologías que repartan la potencia a procesar entre un mayor número de interruptores, como en el caso de las topologías multinivel, con el consiguiente aumento de variables de control y por tanto de complejidad. Sin embargo cabe observar que, en operación a frecuencia fija, el mayor número de grados de libertad permite implementar políticas de control cooperativas, como la técnica de control en “interleaving” [Chang, 95a, 95b], [Perreault, 97], que mejoran ciertas características del ondulador, como por ejemplo el rizado de la tensión de salida y su contenido armónico.
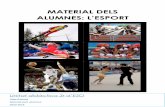
Dadas las condiciones de laboratorio en cuanto a la potencia de trabajo disponible (inferior a 1kW) este trabajo considerará que los módulos de conversión del sistema modular están constituidos por una topología reductora en puente completo operando a alta frecuencia de conmutación, mostrada en la figura 1.5.

Capítulo 1. Introducción y objetivos 1.11
Ei
Li/2
Li/2
rLi/2
rLi/2Ci
+
ui
+
Vo
-
iLi CARGA
Figura 1.5. Topología considerada para el módulo”i-ésimo” de conversión DC-AC: ondulador
reductor en puente completo
1.5. Técnicas de diseño de los controladores. Alternativas y compromisos
Una vez fijada la estrategia de control y la topología del módulo de conversión, el siguiente paso consiste en diseñar los controladores de cada lazo. En este sentido pueden distinguirse dos grandes alternativas en las técnicas de control que permiten el diseño tales controladores, técnicas que se describen en los siguientes subapartados:
1.5.1. Técnicas basadas en modelos promediados
El objetivo fundamental de estas técnicas es poder aplicar la teoría de control lineal para el diseño de los controladores, dado que es una teoría en general bien conocida que resulta en controladores lineales. Estas técnicas parten de una descripción dinámica promediada y lineal o linealizada del sistema de conversión modular, y presuponen una operación a frecuencia fija, que se garantiza mediante la inclusión de un PWM5 en cada lazo a diseñar.
Estas técnicas han sido ampliamente utilizadas en el control de inversores reductores individuales operando en modulación de anchura de pulso (PWM) de alta frecuencia de conmutación para obtener los beneficios propios del diseño a frecuencia fija [Capel, 83], [Kawamura, 84], [Gokale, 85], [Maussion, 89], [Jezernik, 89]. Asimismo, en el contexto de la conversión modular existen un buen número de referencias en la literatura de controladores lineales diseñados con estas técnicas y que implementan alguna de las estrategias descritas en el apartado 1.3 tanto para la conversión DC-DC como en la conversión DC-AC:
En general, la efectividad de estos controladores viene limitada por los siguientes factores: • La dinámica de las etapas de conversión:
La descripción de la dinámica de las etapas de conversión resulta en ecuaciones que relacionan las variables de estado y de control. Estas ecuaciones pueden ser lineales o no dependiendo de la topología, y así lo serán los modelos promediados obtenidos a
5 La portadora del modulador puede ser en diente de sierra o triangular, dependiendo de los condicionantes sobre el espectro de la señal de salida fijados por la aplicación.

1.12 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
partir de esta descripción. En la conversión DC-DC la linealización de un modelo promediado no lineal constituye una buena aproximación para el diseño del controlador cualquiera que sea la topología de conversión. Sin embargo no ocurre así en la conversión DC-AC si la topología de conversión tiene una descripción dinámica no lineal, dado que la señal de referencia requerida es una señal variante con el tiempo (senoidal en este caso). Esta referencia variable provoca grandes excursiones en las variables de estado, excursiones que se aproximan mal mediante un modelo promediado linealizado. Por ello, los controladores lineales aplicados a la conversión DC-AC resultan efectivos solo para etapas de conversión con descripción lineal de su dinámica, como por ejemplo los onduladores reductores en semi-puente o en puente completo.
• La robustez frente a variaciones paramétricas:
Los controladores lineales diseñados mediante técnicas de control lineal a partir de un modelo promediado lineal o linealizado dependen fuertemente de los parámetros de la etapa de conversión (es decir, del valor de los componentes que la componen). Así por ejemplo, el diseño de controles basados en el modelo promediado linealizado da lugar a controles, como el control PI clásico, que presentan buenos resultados siempre y cuando no se modifiquen las condiciones de diseño. Sin embargo, estos controles no tienen un buen comportamiento frente a las variaciones de configuración del sistema modular (como por ejemplo la variación del número de módulos) o variaciones en las condiciones de operación. Para aumentar la robustez del control frente a estas variaciones, Liaw y Chiang [Liaw, 93] como Garabandic [Garabandic, 98] aplican, en el contexto de la conversión DC-DC modular, la técnica de control robusto. Asimismo, Wu et al. [Wu T., 98] recurren a la técnica de control “H-infinito” (H∞) para solventar los problemas de desapareamiento de características de módulos, en un sistema de onduladores conectados en paralelo. Sin embargo, estas técnicas requieren el uso de algoritmos numéricos para ajustar los coeficientes de los controladores lineales, que además pueden resultar de orden elevado.
1.5.2. Técnicas basadas en modelos de estructura variable: control en modo de deslizamiento
Una alternativa de diseño de los controladores que mejora la robustez de la respuesta del sistema es considerar que los módulos de conversión pueden ser descritos dinámicamente como sistemas de estructura variable (“Variable Structure Systems”, o VSS), dado que presentan sucesivas topologías lineales en función del valor de la señal de control. En este caso puede aplicarse la técnica de control en modo de deslizamiento para diseñar los controladores, tal como ya la propuso Emelyanov et al. en la década de los 60 [Emelyanov, 67].
Las características más significativas del control en modo de deslizamiento son, por una parte, la reducción del orden de la dinámica cuando el sistema se encuentra en régimen deslizante y, por otra, la gran robustez frente a perturbaciones y variaciones paramétricas, dado que el sistema se comporta según la superficie de deslizamiento impuesta por el usuario [Utkin, 78, 92], [Sira-Ramírez, 88]. Estas características determinan que este tipo de control sea especialmente indicado en sistemas cuyos parámetros son indeterminados o variantes con el tiempo.

Capítulo 1. Introducción y objetivos 1.13
Esta técnica de control ha sido aplicada en el caso de la regulación conmutada DC-DC de tensión, como alternativa a las técnicas de control lineal utilizadas en la modulación por anchura de pulso (PWM). En este caso la señal de referencia es una tensión constante, y se aplica el control en modo de deslizamiento para mejorar la robustez de la tensión regulada de salida frente a perturbaciones de tensión de entrada y de carga, [Bilanovic, 83], [Sira-Ramírez, 87], [Venkataramanan, 85], [Martínez, 92].
Asimismo, y por los mismos motivos, esta técnica se ha aplicado a la conversión DC-AC en inversores reductores. En este caso, se fuerza la tensión de salida del ondulador a seguir una señal de referencia senoidal externa mediante la apropiada acción de control en modo de deslizamiento. En este sentido cabe detenerse en el trabajo de Carpita et al. [Carpita, 88], por ser uno de los primeros en proponer la aplicación de esta técnica de control a la conversión DC-AC, propuesta seguida posteriormente por otros autores [Boudjema, 89], [Jezernik, 90], [Biel, 2001a]. En su trabajo, Carpita et al. analizan las características del seguimiento de una señal senoidal de referencia mediante un control en modo de deslizamiento en un inversor en puente completo que opera con dos niveles de conmutación. En esta aplicación se propone una superficie de deslizamiento constituida por una combinación lineal de las variables de estado corriente y tensión en el condensador, que permite obtener una señal senoidal sobre la carga. Como resultado, la dinámica del sistema presenta una rápida respuesta transitoria y una regulación en régimen estacionario insensible a variaciones paramétricas y robusta frente a perturbaciones externas. Por otra parte, en [Carpita, 93, 94] se realiza un estudio comparativo entre la conmutación del puente a dos o a tres niveles y se pone de manifiesto que esta última mejora el rendimiento para la misma frecuencia de conmutación de la señal de control aunque la dinámica empeora ligeramente.
Por otra parte, el control en modo de deslizamiento constituye una alternativa a considerar en el ámbito de la conversión modular, dado que pueden aprovecharse las características de robustez de este control tanto frente a perturbaciones como frente a variaciones paramétricas debidas por ejemplo a variaciones del número de módulos conectados. Sin embargo, en sistemas modulares el diseño del control resulta significativamente más complejo dado que intervienen tantas variables de control como módulos presentes en el sistema. Desde un punto de vista dinámico, estas variables pueden influirse mutuamente, característica conocida como “acoplamiento entre variables”, dificultando con ello el diseño y requiriendo la aplicación de técnicas de diseño de control en modo de deslizamiento multivariable como por ejemplo el método jerárquico [DeCarlo, 88].
A nivel de antecedentes puede citarse el trabajo de Donoso-García et al. [Donoso-García, 96, 98], en el que propone un control en modo de deslizamiento aplicado a convertidores DC-DC conectados en paralelo para regular la tensión DC de salida y ecualizar las corrientes de salida de los módulos convertidores mediante la estrategia CLC. Asimismo, en el contexto de la conversión DC-AC modular y recogiendo estos trabajos, en [Coelho, 98] se aplica la técnica de control en modo de deslizamiento al control de inversores conectados en paralelo mediante la estrategia CLC. El diseño del control se realiza bajo los supuestos de régimen estacionario y frecuencia de conmutación elevada (idealmente infinita). Los resultados de simulación obtenidos en cuanto a tensión de salida y ecualización de corrientes confirman las buenas prestaciones de esta técnica de control pero este trabajo no aborda el caso de conexión-desconexión dinámica de módulos.
Sin embargo, los problemas esenciales del control en modo de deslizamiento se encuentran en el ámbito de su implementación física que no permite una frecuencia de conmutación infinita de las acciones de control tal y como supone esta teoría. Este es el motivo por el cual aparece un rizado o “chattering” en las variables de estado y el sistema alcanza una

1.14 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
dinámica denominada “quasi-sliding”. Existen en la literatura especializada diversas tentativas en aras de fijar o limitar el valor máximo de la frecuencia de conmutación, entre ellas pueden resaltarse:
• Aplicación del control equivalente: se define el control equivalente como el valor del control continuo que mantendría la dinámica del sistema “sobre” o “en” la superficie de deslizamiento. El conocimiento del control equivalente permite diseñar el ciclo de trabajo (d(x,t)) que proporciona conmutación a frecuencia fija en un modulador de anchura de pulsos. Como ejemplo, en el trabajo de Sira-Ramírez [Sira-Ramírez, 89] el ciclo de trabajo se define como el control equivalente al inicio del periodo de conmutación. El principal inconveniente de esta técnica reside en que requiere del conocimiento de los parámetros del sistema para ser evaluada, con la consecuente pérdida de robustez que ello conlleva.
• Actuación sobre el ciclo de histéresis: basadas en la adición de un ciclo de histéresis, en el comparador del control en modo de deslizamiento, que proporciona una frecuencia de conmutación acotada aunque variable cuando el control equivalente es variable en el tiempo [Bühler, 86], [Nicolas, 95], [Carpita, 96]. Asimismo, y en aras de fijar la frecuencia de conmutación, se ha propuesto la utilización de un ciclo de histéresis de anchura variable [Ruiz, 90], [Chiarelli, 93], [Malesani, 96] cuya implementación depende, sin embargo, de los parámetros del sistema y resulta excesivamente compleja.
• Adición de señal de sincronismo: en [Silva, 93], [Pinheiro, 94], [Nicolas, 96] se presentan realizaciones electrónicas mediante la adición de una señal externa que tiene por objetivo provocar conmutaciones forzadas a frecuencia fija. Entre sus problemas pueden destacarse el difícil ajuste del sistema de conmutación, la necesidad de una señal externa y el desconocimiento del efecto de la señal de sincronismo sobre la dinámica resultante.
Cabe observar finalmente que, frente a la acotación de la frecuencia de conmutación por ciclo de histéresis, la opción de conmutar a frecuencia fija permitiría implementar adicionalmente la técnica de “interleaving”, mejorando con ello ciertas características de la tensión de salida, como por ejemplo su rizado.
De todo lo anterior se deduce que, dada su robustez frente a perturbaciones y variaciones de parámetros, la técnica de control en modo de deslizamiento resulta particularmente adecuada para controlar sistemas modulares de conversión DC-AC, en la medida en que:
o Se utilicen técnicas de diseño de control en modo de deslizamiento multivariable, que solventen el problema de acoplo entre variables de control.
o Se mejoren las tentativas de fijar la frecuencia de conmutación para permitir, entre otras, la incorporación de la técnica “interleaving”.

Capítulo 1. Introducción y objetivos 1.15
1.6. Políticas de gestión de potencia y de fiabilidad
Aprovechando la arquitectura modular del sistema de conversión, pueden encontrarse en la literatura existente distintas propuestas que incorporan prestaciones adicionales en el control del sistema para mejorar su eficiencia y su fiabilidad. Así por ejemplo, en [Siri, 92a, 92b], las estrategias M-S y CLC de ecualización de corriente se complementan con un sistema de control de límite de corriente máxima que permite activar el mínimo número de convertidores necesario para suministrar la corriente de carga, aumentando con ello la eficiencia global del sistema. Por otra parte, para aumentar la fiabilidad del sistema distintos trabajos proponen incorporar un sistema de control que ecualice el tiempo de funcionamiento de los módulos de conversión [Wu T., 91], [Siri, 92a, 92b], [Wu T., 93]. Asimismo, para solventar el problema de la pérdida del control de corriente en la estrategia Master-Slave ante un fallo del convertidor Master, distintos autores proponen un sistema rotatorio de selección del Master, donde cualquier módulo de conversión puede realizar la función de Master [Siri, 90], [Petruzziello, 90], [Wu T., 91]. Con este sistema es posible sustituir automáticamente el Master en caso de fallo, mejorando de este modo la tolerancia a fallos del sistema modular de potencia.
De lo expuesto en este apartado se deduce que la incorporación de prestaciones adicionales en el control del sistema modular de conversión es deseable dado que permiten aumentar tanto su eficiencia como su fiabilidad.
1.7. Alternativas de implementación del control de sistemas modulares
La complejidad asociada al control y gestión de funcionamiento de un sistema modular de potencia es elevada, ya que no solo se deben conseguir buenas prestaciones en cuanto al control de la tensión de salida y respuesta frente a perturbaciones de tensión de entrada y de carga, sino que además el control debe asegurar una distribución uniforme de la potencia a través de los distintos módulos convertidores y debe incorporar las estrategias y mecanismos necesarios para poder hacer efectivas las ventajas asociadas a los sistemas modulares de potencia en cuanto a flexibilidad, eficiencia, fiabilidad y facilidad de mantenimiento [Wu T., 91, 93]. También debe tenerse en cuenta que en algunos casos la implementación del control implica la realización de operaciones aritméticas no lineales y la evaluación de múltiples casos posibles. Todo ello dificulta su realización analógica, siendo, por tanto, aconsejable su implementación mediante plataformas digitales basadas en microprocesadores de propósito general, microcontroladores, procesadores digitales de señal (DSP) o dispositivos lógicos programables de alta capacidad (FPGA, CPLD, ASIC) [Cha, 90], [Jung, 96, 97, 99], [Baker, 98a, 98b], [Bester, 98], [Espinoza, 98], [Botteron, 2001], [Ramos, 2003a].
En este sentido, la elección del dispositivo digital más adecuado dependerá básicamente de la frecuencia de conmutación de los módulos de conversión, de la frecuencia de muestreo necesaria para no perder información de entrada y del tiempo de proceso o cálculo del algoritmo de control, ya que un retardo excesivo en la salida puede ser causa de pérdida de información o puede hacer inestable el sistema [Ahmed, 97]. Se debe tener en cuenta además que para poder obtener las mejores prestaciones de funcionamiento es conveniente

1.16 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
que la evaluación de las leyes de control de cada módulo inversor así como las tareas de gestión del funcionamiento global del sistema modular se lleven a cabo de forma concurrente o paralela.
A este respecto, las plataformas digitales basadas en microprocesadores, microcontroladores o procesadores digitales de señal han sido ampliamente utilizadas para la realización de controles de inversores [Cha, 90], [Jung, 94, 96, 97], [Espinoza, 98], [Baker, 98a, 98b], [Botteron, 2001] y para la implementación de controles de sistemas modulares de potencia [Holtz, 90], [Wu T., 98]. Sin embargo, este tipo de dispositivos digitales presentan una arquitectura rígida y genérica que no está específicamente adaptada al algoritmo de control que deben resolver y su funcionamiento se basa en la ejecución secuencial de las instrucciones de un programa, lo que impide realizar tareas de forma concurrente. Estas características hacen que el tiempo de proceso sea del orden de decenas de µs [Cha, 90], [Jung, 94], [Espinoza, 98], [Botteron, 2001] lo que limita la frecuencia de conmutación. Igualmente, con el objetivo de minimizar el tiempo de proceso, la mayor parte de los recursos del procesador se utilizan en la implementación del algoritmo de control en detrimento de otras funciones [Jung, 99]. Debido a las limitaciones en la velocidad de proceso, es habitual que, en los sistemas modulares que incorporan este tipo de dispositivos, cada módulo disponga de su propio procesador o procesadores, ya que es inviable que un mismo procesador pueda controlar el funcionamiento de todos los módulos [Holtz, 90], [Wu T., 98]
A diferencia de las plataformas digitales anteriores, la estructura básica de los dispositivos FPGA (Field Programmable Gate Array) está compuesta por una matriz de bloques lógicos configurables interconectados entre sí por una red de conexiones programables. Estos dispositivos permiten diseñar de forma relativamente fácil y con un coste razonable arquitecturas hardware específicas para resolver aplicaciones concretas de alta velocidad difícilmente realizables mediante otro tipo de dispositivos digitales [Chan, 94], [Jenkins, 94], [Saucier, 94], [Skahill, 96], [Ashenden, 96], [Ramos, 2001b], [de Castro, 2003]. Las buenas prestaciones que presentan las FPGA’s y la flexibilidad y facilidad de diseño que proporcionan las herramientas de desarrollo [Ramos, 2001b] han impulsado su utilización en aplicaciones caracterizadas por la alta velocidad de proceso y la elevada complejidad de los algoritmos implicados [Jung, 99], [Ramos, 2000], [Ramos, 2001a]. A modo de ejemplo puede citarse la FPGA XC4VFX140 de Xilinx [Xilinx, 2004] que contiene 15.792 bloques lógicos configurables, 9.936 kbits de memoria RAM distribuida en 552 bloques, 192 bloques Xtreme DSP que contienen cada uno de ellos un multiplicador de 18x18 bits, un acumulador y un sumador; 2 procesadores RISC IBM PowerPC 405, 20 Digital Clock Manager (DCM), 1 convertidor analógico-digital de 20bits y 200kSPS, 4 módulos Ethernet Media Access Controller (MAC), 24 full-duplex serial transceivers capaces de alcanzar una velocidad de transmisión de hasta 11.1Gb/s y 896 pines de entrada/salida disponibles para el usuario.
De lo expuesto en este apartado se deduce que la elección de una plataforma FPGA resulta adecuada para la implementación del control de sistemas modulares, dado que permite, a un coste razonable, la ejecución concurrente de las funciones de control y gestión de cada módulo a la velocidad de proceso requerida.

Capítulo 1. Introducción y objetivos 1.17
1.8. Objetivos y estructura del trabajo
Tal y como se ha expuesto al principio del capítulo, el diseño del control de sistemas modulares de conversión DC-AC persigue como objetivos el control de la tensión AC de salida, la ecualización de potencias procesadas por cada módulo así como la gestión de funcionamiento global del sistema para mejorar su eficiencia, flexibilidad, y su fiabilidad. A este respecto, y recogiendo trabajos anteriores de otros autores en la literatura especializada, los apartados anteriores han puesto de manifiesto los siguientes aspectos:
• Las estrategias de control Master-Slave (M-S), Central-Limit-Control (CLC) y Circular-Chain- Control (CCC o 3C) permiten alcanzar, con buenas prestaciones, los objetivos de regulación de tensión de salida y ecualización de potencias entre módulos.
• Los controladores lineales que implementan las estrategias anteriores presentan una robustez mejorable frente a perturbaciones y variaciones paramétricas.
• La técnica de control en modo de deslizamiento multivariable para el diseño de los controladores puede resultar una buena alternativa que mejore su robustez, en la medida en que pueda controlarse la frecuencia de conmutación de los módulos de conversión.
• La elección de una plataforma digital FPGA permite implementar tanto las estrategias de control como la gestión del sistema global a la velocidad de proceso requerida en términos de la frecuencia de conmutación de los módulos de conversión.
La ausencia en la literatura de propuestas que diseñen, implementen y validen experimentalmente controles en modo de deslizamiento y políticas de gestión global en sistemas modulares de conversión DC-AC, da lugar a este trabajo que se plantea los siguientes objetivos:
a) Aplicando la técnica de control en modo de deslizamiento multivariable, diseñar controles que implementen las estrategias M-S, CLC y CCC para el control de sistemas modulares de conversión DC-AC realizados mediante onduladores reductores conectados en paralelo.
b) Proponer un algoritmo de control en modo de deslizamiento de frecuencia fija y aplicarlo al control del sistema modular.
c) Diseñar estrategias de gestión de funcionamiento del sistema modular para obtener mayor eficiencia, flexibilidad, fiabilidad y facilidad de mantenimiento.
d) Estudiar las prestaciones de los sistemas de control diseñados en cuanto a la estabilidad y robustez del conjunto frente a variaciones de carga y tensiones de entrada, conexión-desconexión de módulos y variación de las características de los mismos.
e) Realizar el diseño e implementación mediante dispositivos FPGA de las distintas estrategias de control propuestas, así como del sistema de gestión de funcionamiento del sistema modular.
f) Evaluar experimentalmente las prestaciones de los sistemas propuestos con cargas de tipo lineal y no lineal mediante la medida de la distorsión armónica total

1.18 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
(THD) y el cálculo de diversos factores de mérito derivados de la tensión de error y de las corrientes suministradas por los módulos inversores.
Para alcanzar estos objetivos el trabajo se organiza como se detalla a continuación:
En el capítulo 2 se formula, para las estrategias Master-Slave (M-S), Circular Chain Control (CCC) y Central Limit Control (CLC), el problema de control en modo de deslizamiento de un sistema modular genérico formado por N onduladores conectados en paralelo. Tras proponer un conjunto de superficies que cumplan con los requisitos de las estrategias anteriores, se deducen sistemáticamente, mediante la aplicación de la técnica de control en modo de deslizamiento multivariable, las leyes de control correspondientes y el conjunto de restricciones en el que son aplicables.
El capítulo 3 presenta la implementación digital de las estrategias de control propuestas así como de un sistema de gestión de funcionamiento del sistema modular, con un dispositivo lógico programable FPGA. Este capítulo incluye asimismo un conjunto de resultados experimentales obtenidos sobre un prototipo de laboratorio formado por tres onduladores reductores conectados en paralelo, cuyos componentes se han fijado a valores distintos expresamente para evaluar, entre otros, la respuesta del control frente al desapareamiento de módulos. Estos resultados muestran medidas de la tensión de salida, tensión de error, corriente en los inductores y respuesta a saltos de carga.
Con el objetivo de evitar los inconvenientes que la frecuencia de conmutación variable, tiene sobre los elementos de conmutación y sobre el diseño del convertidor, se propone en el capítulo 4 un algoritmo de control a frecuencia de conmutación fija. Asimismo, se describe la implementación del algoritmo mediante FPGA, y se presentan los resultados experimentales obtenidos sobre un módulo inversor. Estos resultados incluyen tanto medidas de la tensión de error y la respuesta a saltos de carga, como un estudio comparativo del mismo módulo controlado mediante un controlador lineal y una modulación PWM convencional.
En el capítulo 5 se estudia la aplicación del algoritmo de conmutación a frecuencia fija al control del sistema modular, y se propone una extensión del mismo que permita una operación en “interleaving”. Al igual que en los dos capítulos anteriores, se propone el diseño e implementación práctica de esta aplicación mediante una FPGA. El capítulo se complementa con los resultados experimentales obtenidos en el mismo prototipo de laboratorio constituido por tres onduladores reductores conectados en paralelo.
Finalmente, el capítulo 6 detalla las conclusiones de este trabajo y sugiere futuras líneas de investigación de cara a su continuación.

2.1
CAPÍTULO 2
Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo
2.1. Introducción
En este capítulo se presenta el diseño del control en modo de deslizamiento de un sistema modular de potencia formado por la conexión en paralelo de N inversores reductores de puente completo, teniendo en cuenta diferentes estrategias de ecualización de la corriente a través de los distintos módulos.
En el apartado 2.2 se presentan los conceptos básicos relacionados con el diseño y análisis de la técnica de control en modo de deslizamiento multivariable. El apartado 2.3 presenta, a modo de recordatorio, el diseño y análisis del control en modo de deslizamiento de un inversor reductor de puente completo para el seguimiento de una señal de referencia senoidal, en los casos de control de dos y tres niveles utilizando la función de conmutación propuesta por Carpita et al. en [Carpita, 88]. Este análisis tiene un doble objetivo: en primer lugar ilustrar la metodología de diseño del control en modo de deslizamiento aplicado a un inversor reductor en puente completo y, en segundo lugar, poner de manifiesto las buenas prestaciones que presenta esta técnica de control en cuanto a robustez frente a variaciones paramétricas y en cuanto al seguimiento preciso de la señal de referencia. Además, este análisis también permite obtener el comportamiento del sistema modular de potencia cuando sólo hay un inversor activo, así como las restricciones de diseño a tener en cuenta con relación a los parámetros del inversor y de la señal de referencia senoidal.
Posteriormente, el control presentado para un inversor reductor en puente completo se aplica al control de N inversores conectados en paralelo, evidenciando el desapareamiento de corrientes suministradas por cada módulo inversor cuando existen diferencias paramétricas entre los módulos. Este problema se resuelve introduciendo en el diseño del control en modo de deslizamiento las estrategias de ecualización de corriente Master-Slave

2.2 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
(MS), Central Limit Control (CLC) y Circular Chain Control (CCC). Estas estrategias junto con sus correspondientes funciones de conmutación se describen en el apartado 2.4.
Tras poner de manifiesto las dificultades de diseño del control en modo de deslizamiento de las estrategias anteriores debido al acoplamiento entre variables de control, en el apartado 2.5 se describen, como posibles alternativas que permiten evitar estas dificultades, los métodos de control jerárquico y de diagonalización [DeCarlo, 88].
En el diseño realizado se ha considerado también el caso particular de que haya sólo dos módulos inversores activos, situación que puede ocurrir cuando se desactiva un módulo por fallo o por que el bajo consumo de energía por parte de la carga así lo justifique. El proceso de diseño juntos con los resultados obtenidos se muestran en los apartados 2.6 y 2.7.
En los siguientes apartados se analizan las prestaciones y características de los controles diseñados en cuanto a la dinámica del sistema en régimen deslizante (apartado 2.8) y el dominio de existencia del régimen deslizante (apartado 2.9). En el apartado 2.10 se generaliza este análisis para cargas no lineales y reactivas, y finalmente, en el apartado 2.11 se comentan las conclusiones de este capítulo.
2.2. Procedimiento de diseño del control multivariable en modo de deslizamiento
Los convertidores conmutados se pueden considerar como un sistema de estructura variable (VSS) debido a que presentan varias topologías lineales en función del valor de la señal de control. La utilización en este tipo de sistemas del control en modo de deslizamiento (SMC) presenta indudables ventajas como puede ser una respuesta dinámica excelente, reducción del orden del sistema, insensibilidad frente a variaciones paramétricas, rechazo de perturbaciones y simplicidad de implementación.
Básicamente, el control de estructura variable o control en modo de deslizamiento utiliza una ley de control conmutada de alta velocidad para conducir la trayectoria de estado de un sistema hacia una superficie definida por el usuario en el espacio de estado, denominada superficie de conmutación o deslizamiento, y mantener la trayectoria del sistema sobre dicha superficie el resto del tiempo. De esta manera, la trayectoria se puede dividir en dos partes correspondientes a dos modos de funcionamiento: el modo de alcanzabilidad durante el cual la trayectoria de estado se mueve hacia la superficie de conmutación y la alcanza, y el modo de deslizamiento durante el cual del sistema se mantiene sobre dicha superficie. Cuando el sistema está sobre la superficie de deslizamiento se dice que se encuentra en régimen deslizante y su dinámica estará gobernada por los parámetros de dicha superficie. Por tanto, la elección adecuada de la superficie de deslizamiento nos permite obtener el comportamiento dinámico deseado del sistema a controlar.
Las nociones esenciales del procedimiento de diseño de un control en modo de deslizamiento y del análisis del comportamiento del sistema cuando se encuentra en régimen deslizante se pueden desglosar a través de las definiciones y pasos de diseño que se detallan a continuación [Utkin, 77], [Sira-Ramírez, 87], [DeCarlo, 88], [Hung, 93], [Gao, 93]:

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.3
• Descripción del sistema en lazo cerrado
Para detallar el procedimiento de diseño se va a considerar el caso general de un sistema de estructura variable (VSS) que presenta un modelo de estado no lineal en el vector de estado, x, y lineal en el vector de control, u, de la forma:
( ) ( ) ( ) ( )ttBtt uxxfx ,, +=& (2.1)
donde x(t) ∈ R n, f (x,t) ∈ R n, B(x,t) ∈ R n x m con n > m y cada entrada de control ui(t) del vector de control u(t) ∈ R m tiene la forma:
( ) ( ) ( )( ) ( )
mitsitutsitu
tuii
iii ,...,1
0,,0,,
, =
<>
=−
+
xxxx
xσσ
(2.2)
siendo las funciones σi (x,t) las componentes del vector σ (x,t) que se denomina función de conmutación y es de dimensión m.
La superficie definida por σ(x,t)=0 se denomina superficie de conmutación, es una superficie de dimensión (n-m) definida en R n y viene determinada por la intersección de las m superficies de conmutación σ i(x,t)=0 de dimensión (n-1).
• Elección de la superficie de conmutación
El primer paso del proceso de diseño es escoger una superficie de conmutación σ(x,t)=0 que garantice el comportamiento dinámico deseado del sistema cuando éste se encuentre en régimen deslizante. Habitualmente se consideran, por razones de simplicidad, superficies de conmutación lineales con respecto al vector de estado:
( ) ( ) ( ) ( )[ ] xxxxxσ Stttt Tm == ,,,, 21 σσσ L (2.3)
donde S es una matriz de dimensión m x n de coeficientes constantes.
• Diseño de la ley de control
El siguiente paso consiste en diseñar la ley de control u(x,t) del control de estructura variable (VSC) tal que conduzca la trayectoria de estado hacia la superficie de conmutación y la mantenga sobre ella.
El principal requisito en el diseño de la ley de control es que satisfaga la condición de alcanzabilidad, que es la condición según la cual el estado x del sistema se mueve hacia la superficie de conmutación y la alcanza. El cumplimiento de la condición de alcanzabilidad garantiza la existencia del modo de deslizamiento sobre la superficie de conmutación.
En la literatura existen diversas propuestas para especificar la condición de alcanzabilidad. Dos de ellas muy utilizadas habitualmente son [Gao, 93], [Hung, 93]:
a) Propuesta basada en la función de conmutación. Esta propuesta da lugar a un VSC donde cada superficie de conmutación individual y sus intersecciones son superficies de deslizamiento y viene dada por:

2.4 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
miconcuando
cuando
ii
ii
...10000
=<>><
σσσσ
&
& (2.4)
o de forma equivalente:
miconii ...10 =<σσ & (2.5)
Esta condición de alcanzabilidad es global pero no garantiza que la alcanzabilidad se consiga en un tiempo finito. Una condición similar pero de naturaleza local fue propuesta por Utkin [Utkin, 77]:
0lim0lim00
><−+ →→
iiii
y σσσσ
&& (2.6)
La condición (2.6) se conoce con el nombre de condición de existencia del modo de deslizamiento ya que constituye una condición suficiente para la existencia del régimen deslizante.
b) Propuesta basada en la función de Lyapunov. Esta propuesta da lugar a un VSC donde sólo la intersección de todas las superficies de conmutación es una superficie de deslizamiento y consiste en escoger V(x,t) = σTσ como función de Lyapunov, de forma que la condición de alcanzabilidad global viene dada por:
( ) 00, ≠< σx cuandotV& (2.7)
En este caso se puede garantizar un tiempo de alcanzabilidad finito modificando (2.7) [Hung, 93]:
( ) positivoesdondecuandotV εσεx ,0, ≠−<& (2.8)
• Deducción de la dinámica deslizante
Un punto importante en el diseño y análisis del control de estructura variable es definir la ecuación diferencial del sistema en los puntos de discontinuidad y con ello determinar el comportamiento de la planta cuando está en modo de deslizamiento.
En la literatura existen diversos métodos para definir la ecuación diferencial del sistema en los puntos de dinámica discontinua, uno de ellos es el método del control equivalente cuya justificación formal fue derivada por Filippov a principios de la década de los 60. El método del control equivalente fue propuesto por Utkin [Utkin, 78] y permite determinar de forma relativamente sencilla la dinámica de sistemas multientrada cuando se encuentran en régimen deslizante. El control equivalente ueq(x), es el valor de la entrada del sistema (2.1) tal que la trayectoria de estado, una vez interceptada la superficie de conmutación σ(x,t)=0 en t=to, se mantiene sobre ella para t ≥ to dando lugar al régimen deslizante. El control equivalente se puede interpretar como el valor medio que toma la variable de control u(x) en su conmutación entre los valores posibles que puede adquirir y se obtiene reconociendo que la existencia del modo de deslizamiento implica:
( ) ( ) ottparatyt ≥== 0,0, xσxσ & (2.9)
denominadas condiciones de invarianza [Sira-Ramirez, 87].

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.5
Diferenciando σ (x,t) con respecto al tiempo se obtiene:
( ) ( ) ( ) ( )[ ] 0,,, =∂∂
++
∂∂
=∂∂
+∂∂
∂∂
=t
tBttt
t σxuxxfxσσx
xσxσ eq& (2.10)
Para obtener ueq(x) se debe cumplir que la matriz [∂σ/∂x]B(x,t) sea no singular (det[∂σ/∂x]B(x,t)≠0) para todo t y x. Esta condición es conocida como condición de transversalidad [Sira-Ramírez, 87, 88]. Despejando ueq(x) de (2.10) se obtiene:
( ) ( ) ( )
∂∂
+∂∂
∂∂
−=−
tttB σxf
xσx
xσxueq ,,
1
(2.11)
Además, el control equivalente (2.11) debe respetar los límites impuestos por (2.2) [Bühler, 86], [Utkin, 92] es decir:
miconuuuuu iieqiii ...1,max,min =<< −+−+ (2.12)
Conociendo ueq(x), se puede obtener la dinámica del sistema sobre la superficie de deslizamiento σ (x,t)=0, también conocida como dinámica deslizante ideal [Sira-Ramirez, 87, 88], sustituyendo (2.11) en (2.1):
( ) ( ) ( ) ( ) ( )
∂∂
+∂∂
∂∂
−=−
tttBtBtt σxf
xσx
xσxxfx ,,,,
1
& (2.13)
Si se considera el caso particular de que la superficie de conmutación es lineal σ(x,t)=Sx=0, entonces ∂σ/∂x = S y la expresión (2.13) queda reducida a:
( ) ( ) ( )[ ][ ] ( ) ( ) ( )[ ]t
tBStBtStBStBIt∂∂
−−= −− σxxxfxxx 11 ,,,,,& (2.14)
Para superficies de conmutación invariantes con el tiempo ( 0=∂∂ tσ ) la expresión (2.14) queda:
( ) ( ) ( )[ ][ ] ( )tStBStBIt ,,, 1 xfxxx −−=& (2.15)
Cabe destacar que, en modo de deslizamiento, el sistema equivalente no sólo debe satisfacer la dinámica de estado n-dimensional (2.15) sino además las m ecuaciones algebraicas σi (x,t)=0 con i=1,...,m. Ambas restricciones reducen la dinámica del sistema en régimen deslizante de un modelo inicial de orden n a un modelo de orden (n-m) [DeCarlo, 88].

2.6 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
2.3. Control en modo de deslizamiento en inversores reductores
En este apartado se presenta en primer lugar el diseño y análisis del control en modo de deslizamiento de un inversor reductor en puente completo para el seguimiento de una señal de referencia senoidal, para los casos de señales de control de dos (apartado 2.3.1) y tres niveles (apartado 2.3.2), utilizando la función de conmutación propuesta por Carpita et al. en [Carpita, 88]. A través de este análisis se ilustrará la metodología de diseño del control en modo de deslizamiento aplicado a un inversor reductor en puente completo, poniéndose de manifiesto las buenas prestaciones que presenta esta técnica de control en cuanto a robustez frente a variaciones paramétricas y en cuanto al seguimiento preciso de la señal de referencia. Además, este análisis también permite obtener el comportamiento del sistema modular de potencia cuando sólo hay un módulo inversor activo, así como las restricciones de diseño a tener en cuenta con relación a los parámetros del inversor y de la señal de referencia senoidal. Posteriormente, en el apartado 2.3.3, el control diseñado para un sólo inversor reductor en puente completo se generaliza al control de N inversores conectados en paralelo, poniendo de manifiesto, en este caso, el desapareamiento de las corrientes suministradas por cada módulo inversor cuando existen diferencias paramétricas entre los módulos que componen el sistema inversor. La solución a este problema se pospone para el siguiente apartado.
2.3.1. Control en modo de deslizamiento para el seguimiento de una señal de referencia AC en un inversor reductor de puente completo
• Modelo del sistema
En la figura 2.1 se muestra el circuito eléctrico de la etapa de potencia de un inversor basado en un inversor reductor en puente completo. El convertidor está compuesto por un puente completo a la entrada, que permite obtener una tensión de salida bipolar, junto con un filtro de salida LC. El puente completo está formado por cuatro transistores S1, S2, S3 y S4 cuyo estado ON/OFF se gobierna individualmente con una señal de control binaria uHI, uLI, uHD, uLD cuya activación, a 1 lógico, pone en conducción, ON, al transistor correspondiente. El estado de los transistores del puente determinará el valor de la tensión de entrada Vin del filtro de salida.
E
LrL
C R+uHI
uLI
uHD
uLD
+
voAC
-
iL
iC iO
S1 S2
S4S3Vin
Figura 2.1. Esquema eléctrico del inversor reductor en puente completo

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.7
El comportamiento dinámico del inversor de la figura 2.1 está gobernado por la ecuación en el espacio de estado:
uBA += xx& (2.16)
donde A ∈ R 2x2 y B ∈ R 2x1 son las matrices de estado y entrada, respectivamente, de coeficientes reales y constantes, x es el vector de estado cuyas componentes son las variables de estado y, finalmente, u es la entrada de control que puede tomar dos posibles conjuntos de valores: u∈ -1,1 para realizar un control de dos niveles, o bien u∈ -1,0,1 en el caso de realizar un control de tres niveles. En la tabla 2.1 se indica la correspondencia entre el valor de la señal de control u, el valor de la tensión de entrada Vin del filtro de salida del convertidor y el estado de los transistores del puente completo S1, S2, S3 y S4.
u Vin S1 S2 S3 S4 1 E ON OFF OFF ON 0 0 ON ON OFF OFF 0 0 OFF OFF ON ON -1 -E OFF ON ON OFF
Tabla 2.1. Señal de control ‘u’ y estado de los interruptores del puente completo del inversor
Si se toman como variables de estado la tensión en el condensador (que coincide con la tensión de salida debido a que, a efectos de simplificación, no se considera la resistencia de pérdidas asociada a dicho elemento), vc, y su derivada cv& la ecuación de estado (2.16) puede ser escrita como:
uLCE
vv
CRLr
LCRRr
vv
c
cLL
c
c ⋅
+
⋅
−−
+−=
01
10
&&&
& (2.17)
• Función de conmutación
En [Carpita, 88, 93, 96], se propone la siguiente función de conmutación para realizar el seguimiento de una tensión AC en un inversor reductor en puente completo:
( ) [ ] [ ] ekekeekk TT && ⋅+⋅=== 2121ee xkxσ (2.18)
donde xe es el vector de estado de error definido como:
[ ] [ ]
[ ] ( )twsenVvyvvvvecon
ee
orrT
rrcr
TT
==−=
−==
&
&
r
re
x
xxx
, (2.19)
donde vr es la tensión de referencia a seguir. Teniendo en cuenta (2.19), se puede rescribir (2.18) como:
( ) ( ) ( )crcr vvkvvk && −+−= 21exσ (2.20)
En este caso, sólo se dispone de una superficie de conmutación descrita por la ecuación σ(xe) = 0, que representa un subespacio de orden uno del espacio de estado de error y que geométricamente se corresponde con una recta. Dado que xe representa el estado del error, el punto de operación deseado para el sistema (2.16) se corresponde con xe = 0.

2.8 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
• Ley de control
La ley de control se determina de modo que se cumpla la condición (2.5). Si se realiza un control de dos niveles, u∈ -1, 1, la ley de control vendrá dada por:
( )( )
<−>
=0101
e
e
xx
σsiσsi
u (2.21)
• Dinámica del sistema en régimen deslizante
El comportamiento estático y dinámico del sistema se puede analizar en función de las variables de estado del error:
BuAAr −−=−= xxxxx rre &&& (2.22)
donde Ar cumple la relación rr xx rA=& siendo [ ]rr vv &&&& =rx , por tanto:
−
=010
2o
r wA (2.23)
Cuando el sistema se encuentra en modo de deslizamiento se puede sustituir u por ueq para determinar la dinámica deslizante ideal del error. El control equivalente, ueq, se calcula considerando la condición de invarianza ( ) 0=exσ& , esto es:
( ) ( ) ( ) 0=−−=−==∂
∂∂∂
= eqrTTT BuAA
txxkxxkxkx
xx rre
e
ee &&&&
σσ (2.24)
Para que la expresión (2.24) se cumpla, el valor de la señal de control u, debe tomar un valor determinado ueq, dado por:
( ) ( )
++
++−⋅=
−=−
cl
cl
ro
rTT
eq
vCRL
rvLCR
Rrvwekk
ELC
AABu
&&12
2
1
1 xxkk r
(2.25)
Sustituyendo (2.25) en (2.22) se obtiene:
−
==210
10kk
AconA eeexxe& (2.26)
La expresión (2.26) es la ecuación diferencial del error de estado del sistema cuando éste se encuentra en régimen deslizante, y por tanto describe su comportamiento estático y dinámico sólo cuando se encuentra en dicho régimen. La matriz Ae es singular (det Ae = 0), por lo que el orden del sistema, en régimen deslizante, se ha reducido de dos a uno.
La expresión (2.26) es un sistema de ecuaciones lineales homogéneas con coeficientes constantes, por tanto se buscan soluciones de (2.26) de la forma: treξxe = , donde r es un valor propio y ξ un vector propio asociados a la matriz de coeficientes Ae [Boyce, 98]. Los

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.9
valores propios de la matriz Ae son r1 = -k1/k2 y r2 = 0, cuyos vectores propios correspondientes son ξ1 = [-k2/k1 1]T y ξ2 = [1 0]T. Por tanto, la solución general de (2.26) viene dada por:
( )cxe tψ= (2.27)
donde c es un vector de constantes c = [c1 c2]T y ψ(t) es una matriz fundamental1 para el sistema (2.26):
( ) ( ) ( )
( )
−=
−
−
01
21
2112
tkk
tkk
eekk
tψ (2.28)
La constante c2 se puede determinar teniendo en cuenta que en régimen deslizante se cumple:
( ) 021 =⋅+⋅= ekek &exσ (2.29)
La solución general de la ecuación diferencial (2.29) viene dada por:
( ) tkk
ecte 21
'1
−= (2.30)
Comparando ambas soluciones, (2.27) y (2.30), se obtiene que c2 = 0, mientras que el valor de la constante c1=-c1’(k1/k2) dependerá de las condiciones iniciales del sistema. De lo anterior se deduce que la solución de equilibrio de la ecuación diferencial (2.26) (también llamada punto de funcionamiento en régimen estacionario [Bühler, 86]), o sea los valores
∗ex que cumplen ,0== ∗
•∗
ee xx eA es única y se corresponde con el origen del espacio de
estado: [ ]T00=∗ex . Para que el punto de equilibrio del sistema (2.26) sea asintóticamente
estable, se debe cumplir que el valor propio r1 sea negativo [Boyce, 98], lo que da lugar a la condición de diseño k1/k2 > 0, o lo que es lo mismo, la pendiente de la recta de conmutación (2.20) sobre el plano de estado de error debe ser negativa. Se debe hacer notar que esta estabilidad tiene naturaleza local ya que sólo es válida cuando el sistema se encuentra en régimen deslizante.
• Dominio de existencia del régimen deslizante
El control equivalente es una herramienta útil no sólo para determinar el comportamiento del sistema cuando está en régimen deslizante, sino también para establecer una condición de existencia de dicho régimen. En efecto, para que exista localmente sobre la superficie de conmutación (2.20) un régimen en modo de deslizamiento del sistema definido por (2.17), es necesario y suficiente que el control equivalente (2.25) cumpla [Sira-Ramírez, 88], [Utkin, 92]:
( ) maxmin uuu eq << ex (2.31)
donde umin = -1 y umax = 1 son los dos posibles valores que, en nuestro caso, adquiere la variable de control u. 1 Matriz fundamental es aquella cuyas columnas son los vectores que forman un conjunto fundamental de soluciones para el sistema homogéneo eee A xx =&

2.10 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
El dominio de existencia del régimen deslizante está limitado por la condición (2.31). Geométricamente, los límites de este dominio se corresponden con dos puntos de la recta de conmutación (2.20) y dicho dominio puede ser representado como el segmento de la recta de conmutación incluido entre esos dos puntos. Los límites se determinan resolviendo (2.24) en términos de la variable de estado e para los dos posibles valores de la señal de control u∈ -1,1 [Carpita, 88, 96], de donde se obtiene:
( ) ( )( )
−⋅
++⋅
−
+⋅+
=LCEuv
CRLrvw
LRCRr
wkkkkue c
lco
l
o
&1
1, 2
2212
212x (2.32)
con u∈-1,1.
El dominio de existencia del régimen deslizante sobre la recta de conmutación (2.20) está delimitado por los valores extremos de (2.32):
( ) ( )1,,1, maxmin −==== ueeuee xx (2.33)
Siendo por tanto los puntos, xe1 y xe2, de la recta de conmutación que delimitan el dominio de existencia del régimen deslizante:
( )( ) ( )( )max21maxmin21min ,,, ekkeekke ⋅−=⋅−= e2e1 xx (2.34)
En la figura 2.2 está representada la recta de conmutación (2.29) en el espacio de estado de error, donde se ha especificado los dos puntos de la recta, xe1 y xe2, que delimitan el dominio de existencia de régimen deslizante.
•
e
e∗ex
e2x
1ex
( ) 0=exσ 1max == uueq
1min −== uueq
maxemine
( ) 10 =⇒> uexσ
( ) 10 −=⇒< uexσ
Figura 2.2. Representación del dominio de existencia del régimen deslizante sobre la recta de conmutación en el plano de estado de error
Lógicamente, para que exista régimen deslizante en el punto de equilibrio [ ]T00=∗ex , éste
debe pertenecer al dominio de existencia del régimen deslizante: e2ee1 xxx << ∗ . Esta condición se puede expresar también en términos de la variable de estado del error e: emin<0<emax, lo cual se traduce, teniendo en cuenta la expresión (2.32), en la siguiente condición:

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.11
EvRLrCvLCw
RRr
clcol <⋅
++⋅
−
+&2
(2.35)
Cuando el sistema se encuentra en régimen deslizante y en estado estacionario se cumple que vc = vr, con vr = Vr·sen(wot), por lo que la condición (2.35) se puede rescribir en términos de la señal de referencia vr:
( )
( )
⋅+
−+−=
<+⋅
⋅
++
−
+
ol
ol
roolo
l
wRLrCLCwRrarctgcon
VEtww
RLrCLCw
RRr
2
21
222
2
1
cos
φ
φ
(2.36)
El caso más restrictivo de la condición (2.36) se obtiene cuando cos (w0 t + φ ) = 1:
( )oww
ww
RLrCLCw
RRr
VE
olol
r =
=
⋅
++
−+
>γ
121
222
2 (2.37)
donde ( )wγ es el módulo de la respuesta frecuencial del filtro de salida del inversor
reductor en puente completo. En la figura 2.3 se muestra la representación de ( )wγ en función de la frecuencia para un inversor reductor en puente completo con los siguientes parámetros: C=20 µF, L=1.5 mH, rl=0.1 Ω y diferentes valores de resistencia de carga.
R=100ΩR=20ΩR=10ΩR=5Ω
Figura 2.3. Representación de ( )wγ para distintos valores de resistencia de carga R
La expresión (2.37) establece una condición en términos de los parámetros del convertidor (L, C, rl), de la resistencia de carga R y de los parámetros de la señal de referencia (amplitud y frecuencia) que asegura que el punto de equilibrio del sistema equivalente en régimen deslizante (2.26) está incluido dentro del dominio de existencia. Es decir, se alcanza régimen deslizante para todos los valores del cociente Vr/E que están por debajo de

2.12 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
la curva que representa el módulo de la respuesta frecuencial del inversor reductor en puente completo para una determinada resistencia de carga R. Por otra parte, dada una amplitud de tensión de salida para la cual existe régimen deslizante, el régimen deslizante se mantiene si aumenta la resistencia de carga, tal y como se observa en la figura 2.3. Es por este motivo que el diseño de parámetros para obtener la señal de salida deseada debe realizarse para el valor de resistencia de carga mínimo, ya que es éste el caso más restrictivo [Biel, 2001a].
De los resultados obtenidos del diseño y análisis del control en modo de deslizamiento de un inversor reductor en puente completo se pueden extraer, a modo de resumen, las siguientes conclusiones:
• En régimen deslizante el orden inicial del sistema, n = 2, se reduce a n-m =1, donde m =1 es la dimensión del vector función de conmutación.
• Si el sistema alcanza el régimen deslizante, entra en una dinámica transitoria regida por (2.29) y cuya duración dependerá del cociente k2/k1, después de la cual el error de seguimiento se cancela, entrado en un estado permanente caracterizado por el seguimiento preciso de la señal de referencia por parte del sistema En la figura 2.4 se representa un ejemplo de la evolución de la trayectoria de estado en el espacio de estado desde un estado inicial xe(t=0) hasta que alcanza el punto de equilibrio en régimen deslizante.
• El comportamiento dinámico y estático del sistema en régimen deslizante es independiente de los parámetros de la planta y depende exclusivamente de los parámetros del control, en concreto de la relación k2/k1.
• Una disminución de la relación k2/k1 permite aumentar la velocidad del régimen transitorio pero reduce el dominio de existencia del régimen deslizante.
•
e
e∗ex
maxuueq =
minuueq =
maxuu =
minuu =
A
B
C( )0=tex
Figura 2.4. Evolución de la trayectoria de estado en el espacio de estado de error. A: modo de alcanzabilidad; B: dinámica transitoria en régimen deslizante; C: estado permanente en régimen
deslizante

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.13
2.3.2. Control en modo de deslizamiento de un inversor reductor en puente completo con una señal de control de tres niveles
En la sección 2.3.1 se ha descrito el control en modo de deslizamiento aplicado a un inversor reductor en puente completo para el seguimiento de una señal de referencia AC utilizando una señal de control de dos niveles u ∈ -1,1. El puente completo que incorpora la estructura del inversor (ver figura 2.1) también permite realizar un control de tres niveles u ∈ -1,0,1. El control de tres niveles reduce a la mitad la frecuencia de conmutación de los interruptores del puente completo que incorpora el inversor y con ello las pérdidas correspondientes, manteniendo constante la frecuencia en la tensión de salida del puente.
Con un control de tres niveles, la señal de control u puede adquirir dos conjuntos de valores 0,1 ó 0,-1. La ley de control se determina de modo que se cumpla la condición (2.5): 0<σσ & , donde σ es la función de conmutación (2.18). La derivada de la función de conmutación se puede expresar en función del control equivalente (2.25):
( ) ( ) ( )eqeqT uu
LCEuuBt −−=−−= kx,σ& (2.38)
Para cumplir la condición (2.5), teniendo en cuenta (2.38), la variable de control u debe tomar el conjunto de valores 0, 1 cuando ueq es positivo y 0, -1 cuando es negativo [Carpita, 93], de forma que la ley de control vendrá dada por:
( )( )( )( )
<−=>=
<
<=>=
>
0100
0
0001
0
e
e
e
e
xxxx
σσσσ
siusiu
u
siusiu
u
eq
eq
(2.39)
donde ueq, en régimen deslizante y estado estacionario, viene dada por:
( )
⋅+
−+−=
++⋅
⋅
++
−
+⋅=
ol
ol
oololr
eq
wRLrCLCwRrarctgcon
twwRLrCLCw
RRr
EVu
2
21
222
2
1
2sin
φ
φπ
(2.40)
El control equivalente (2.40) depende de los parámetros de la planta y de la señal de referencia lo que dificulta su evaluación. Sin embargo, si se cumple que la impedancia que presenta la inductancia es mucho menor que la que presenta el paralelo entre la capacidad y la resistencia de carga, es posible obtener una simplificación del problema aproximando ueq por vr/E [Carpita, 93], de lo que resulta la siguiente ley de control:
( )( )( )( )
<−=>=
<
<=>=
>
0100
0
0001
0
e
e
e
e
xxxx
σσσσ
siusiu
Ev
siusiu
Ev
r
r
(2.41)

2.14 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Esta aproximación introduce una pequeña distorsión en la forma de onda de salida en torno al paso por cero de la señal de referencia, ya que en ese caso el signo de ueq es distinto al de vr/E [Carpita, 93].
Vistas las bases de diseño del control en modo de deslizamiento para un único inversor reductor en puente completo, los siguientes apartados abordan su generalización al caso de N módulos conectados en paralelo.
2.3.3. Control en modo de deslizamiento de un sistema inversor modular para el seguimiento de una señal AC
• Modelo del sistema
La figura 2.5 muestra el esquema eléctrico de un sistema modular de potencia formado por N inversores reductores en puente completo conectados en paralelo.
E1
L1/2
L1/2
rL1/2
rL1/2C1 R
+uHI1
uLI1
uHD1
uLD1
+
VoAC
-
EN
LN/2
LN/2
rLN/2
rLN/2CN
+uHIN
uLIN
uHDN
uLDN
iL1
iLN
Figura 2.5. Esquema eléctrico del sistema modular inversor
Cada módulo individual incorpora un puente completo de transistores y un filtro de salida LC que dispone de dos inductancias para evitar el cortocircuito que se produce cuando la señal de control que activa los transistores de la rama derecha no tiene el mismo valor para todos los módulos.
El comportamiento dinámico del sistema modular de potencia de la figura 2.5 está gobernado por la ecuación en el espacio de estado:
uxx BA +=& (2.42)
donde A ∈ R N+1xN+1 y B ∈ R N+1xN son las matrices de estado y entrada respectivamente de coeficientes reales y constantes, x ∈ R N+1 es el vector de estado cuyas componentes son las

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.15
variables de estado y finalmente u ∈ R N es el vector de control, cuyas componentes ui pueden tomar dos posibles conjuntos de valores: ui∈ -1, 1 para realizar un control de dos niveles, o bien ui∈ -1, 0, 1 en el caso de realizar un control de tres niveles.
Si se toman como variables de estado la tensión en el condensador vc, su derivada cv& y las corrientes de inductor iLi para i =2...N, el vector de estado x, y las matrices A, B vendrán dadas por:
[ ]
1
112
2
3
3
2
2
1
1
3
3
3
2
2
2
1
1
3
3
1
1
2
2
1
1
1
1
1
1
2
1
000
000
0000
0001
0001
0001
1100010
−
==
==
=
−−
−−
−−
−−−−−−−
=
=
∑∑N
i ieq
N
ii
N
N
N
N
N
lN
N
l
l
N
lNlllllll
eq
LNLcc
LLyCCcon
LE
LE
CLE
CLE
CLE
CLE
B
Lr
L
Lr
L
Lr
L
CLr
CLr
CLr
CLr
CLr
CLr
Lr
RCCRLr
CL
A
iivv
L
MLMMM
L
L
L
L
MLMMMM
L
L
L
L
L&x
(2.43)
• Función de conmutación
Para obtener las mismas prestaciones en cuanto al seguimiento de la tensión de salida que en el caso de un sólo inversor, se propone utilizar en cada uno de los convertidores la misma función de conmutación que en el apartado 2.3.1, esto es:
( ) ( ) ( ) ( )[ ] rxxxxxxσ rT
N BK +== σσσ L21 (2.44)
donde las matrices K ∈ R NxN+1, Br∈ R Nx2 y el vector de referencia xr vienen definidas por:
−−
−−−−−−
=
000
000000000
21
3231
2221
1211
L
MLMMMM
L
L
L
NN kk
kkkkkk
K ,
=
21
3231
2221
1211
NN
r
kk
kkkkkk
BMM
, [ ]Trr vv &=rx (2.45)
donde vr es la tensión de referencia a seguir.

2.16 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Por simplicidad se escoge ki1 = k1 y ki2 = k2 para i = 1,..., N. Esto quiere decir que todos los componentes del vector función de conmutación σ(x,t) son iguales, lo que permite realizar la siguiente simplificación:
( ) [ ] [ ][ ]
crcr
Trrr
T
vveyvveconekekvvkkkkBt
&&&&
&L
−=−=⋅+⋅=+−−=+=
,00,
21
2121 xxxkxσ r (2.46)
Igualmente se puede simplificar la matriz de entrada B y el vector de control u:
uuuji
LE
LE
CLEB
jiji
T
N
NN
i i
i
==⇒∀=
= ∑
=
,
02
2
1
σσ
L (2.47)
La simplificación definida por (2.46) y (2.47) se traduce en que el sistema multientrada definido por (2.42) pasa a estar controlado por un sólo lazo de tensión común a todos los módulos convertidores y dispone, por tanto, de una sola señal de control u.
• Ley de control
La ley de control se determina de modo que se cumpla la condición (2.5). Si se realiza un control de dos niveles, u∈ -1, 1, la ley de control vendrá dada por:
( )( )
<−>
=0101
e
e
xx
σsiσsi
u (2.48)
• Dinámica del sistema en régimen deslizante
Para determinar el sistema equivalente en régimen deslizante se calcula en primer lugar el control equivalente que viene dado por:
( ) ( ) [ ]rxxkkxxx
x rrTT
eq ABABtσAσBσu +−=
∂∂
+∂∂
∂∂
−=−
−1
1
(2.49)
donde la matriz Ar está definida por (2.23). Operando con la expresión (2.49) se obtiene finalmente:
( )
−−
++
++−⋅
= ∑∑
=
−
=
N
iLi
i
lilc
lc
l
eqro
N
i i
ieq i
Lr
Lr
Cv
CRLrv
CRLr
CLvwe
kk
CLEu
2 1
1
1
1
1
12
2
1
1
1
111&&x
(2.50)
Si se considera la misma tensión de entrada para todos los módulos: Ei = E con i = 1,..., N, la expresión (2.50) resulta:

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.17
( )
−−
++
++−⋅= ∑
=
N
iLi
i
lilc
lc
l
eqroeqeq i
Lr
Lr
Cv
CRLrv
CRLr
CLvwe
kkL
ECu
2 1
1
1
1
1
12
2
1 111&&x
(2.51)
Sustituyendo (2.51) en (2.42) se obtiene la ecuación de estado del sistema equivalente en régimen deslizante:
rxxx ∗∗ += wBA& (2.52)
donde ( ) ABBAA TT kk 1−∗ −= y ( ) rrT
w ABBBB 1−∗ −= k .
teniendo en cuenta (2.23), (2.43), (2.46) y (2.47) las matrices A* y Bw* vienen dadas por:
NiparaLLr
Lr
Aykk
Lr
RCLCMcon
ALL
rA
LA
LLML
LRLr
AL
ALL
rA
LLML
LRLr
AL
AL
ALL
rLML
LRLr
kk
A
eql
i
lii
Leq
NNN
lN
NNNeq
N
l
Nl
eql
Nl
eql
,...,21
111
111
111
000000010
1
1
2
1
1
1
321
1
33
33
32
3313
1
23
22
22
2
212
1
2
1
=
−=
−+=
+−
+−
+−
−
=∗
L
MMMMMM
L
L
L
L
(2.53a)
−
−
−
−
=∗
eqN
eqN
o
eqeqo
eqeqo
o
w
LLC
kk
LLCw
LLC
kkL
LCw
LLC
kkL
LCw
kk
w
B
2
12
32
1
3
2
22
1
2
2
2
12
00
MM
(2.53b)
Del sistema equivalente (2.52), definido por las matrices (2.53a,b), se obtiene que:
rrocc vkkvwv
kkv &&&&&
2
12
2
1 +−−= (2.54)
y por tanto:
ekkv
kkvwv
kkvwvve rrocrocr &&&&&&&&&&
2
1
2
12
2
12 −=
+−−−−=−= (2.55)

2.18 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
que es igual a la ecuación diferencial (2.26) que rige el comportamiento de un sólo convertidor en régimen deslizante. La ecuación (2.55), que define la dinámica de las variables de estado vc y cv& , se puede obtener igualmente a partir de las condiciones de invarianza (2.9). Ahora bien, para determinar la dinámica del resto de variables de estado será necesario resolver el sistema (2.52). La ecuación diferencial (2.55) junto con la superficie de conmutación (2.46) definen un único punto de equilibrio x*, del sistema (2.42) en régimen deslizante para las variables de estado tensión de error y derivada de la tensión de error:
[ ] [ ]00== ∗∗∗ ee &x (2.56)
El punto de equilibrio (2.56) será asintóticamente estable si se cumple que k1/k2 > 0.
• Dominio de existencia del régimen deslizante
El dominio de existencia del régimen deslizante está limitado por la condición ( ) maxmin uuu eq << x , donde umin = -1 y umax = 1 son los dos posibles valores que adquiere la
variable de control u. Como en el caso de un convertidor individual analizado en el apartado 2.3.1, los límites del dominio de existencia de régimen deslizante se determinan resolviendo ( ) 0=xσ& en términos de la variable de estado de error e para los dos posibles valores de la señal de control u∈ -1, 1, de donde se obtiene:
( ) ( )( )
1,11
111
,
2 1
1
1
12
1
122
12
212
−∈
−
−−
⋅
++⋅
−+
⋅+=
∑=
uconCL
EuiLr
Lr
C
vCRL
rvwCRL
rCLwkk
kkue
eq
N
iLi
i
lil
cl
col
eqo
&x
(2.57)
El dominio de existencia del régimen deslizante sobre la recta de conmutación (2.46) está delimitado por los valores extremos de (2.57):
( ) ( )1,,1, maxmin −==== ueeuee xx (2.58)
Siendo por tanto los puntos, x1 y x2, de la recta de conmutación que delimitan el dominio de existencia del régimen deslizante:
( )( ) ( )( )max21maxmin21min ,,, ekkeekke ⋅−=⋅−= 21 xx (2.59)
Para que exista régimen deslizante en el punto de equilibrio x*, éste debe pertenecer al dominio de existencia del régimen deslizante: 21 xxx << ∗ . Esta condición se puede expresar también en términos de la variable de estado del error e: emin < 0 < emax, lo cual se traduce, teniendo en cuenta la expresión (2.57), en la siguiente condición:
ELiLri
Lrv
RC
LrvCw
RLr
L eq
N
iLi
i
liN
iLi
lc
lco
l
eq
<+−⋅
++⋅
−+ ∑∑
== 221
1
1
12
1
1 11& (2.60)

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.19
Cuando el sistema se encuentra en régimen deslizante y en estado estacionario se cumple que vc= vr, con vr = Vr·sen(wot). Si además se considera despreciable la caída de tensión en la resistencia de pérdidas de los inductores frente a los otros términos de tensión, la expresión (2.60) se puede rescribir como:
( ) ( )
( )
⋅
−−=
<+⋅
⋅
+−
oeq
eqo
roo
eqeqo
wRLCLw
arctgcon
VEtww
RL
CLw
2
21
22
22
1
cos1
φ
φ
(2.61)
El caso más restrictivo de la condición (2.61) se obtiene cuando cos (w0 t + φ ) = 1:
( ) ( )oww
ww
RL
CLwVE
oeq
eqor =
=
⋅
+−>
γ11
21
22
22 (2.62)
donde ( )wγ es el módulo de la respuesta frecuencial del filtro de salida del sistema modular. Como en el caso de un sólo módulo convertidor, la expresión (2.62) establece una condición en términos de los parámetros de los módulos que interviene en el sistema modular y de la señal de referencia que asegura que el punto de equilibrio del sistema equivalente en régimen deslizante está incluido dentro del dominio de existencia.
Finalmente la derivada de la corriente de inductor de cada módulo convertidor, teniendo en cuenta la simplificación introducida en referencia a la resistencia de pérdidas de los inductores, viene dada por:
( ) NiconvwL
CLv
RLL
vvL
CLkki ro
i
eqc
i
eqcr
i
eqLi ,...,22
2
1 =−+−= &&&& (2.63)
Mientras que la expresión de 1Li& se puede obtener a partir de los componentes de x& :
( ) roeq
ceq
creqc
c
N
iLiL vw
LCL
vRLL
vvL
CLkk
RvvCii 2
1112
1
21 −+−=++−= ∑
=
&&&&
&&&& (2.64)
de (2.63) y (2.64) se obtiene la expresión de la corriente de inductor de cada módulo inversor:
( ) idtvwL
CLv
RLL
vvL
CLkki ro
i
eqc
i
eqcr
i
eqLi ∀−+−= ∫2
2
1 (2.65)

2.20 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
En régimen permanente se cumple que vr = vc, y la corriente de inductor iLi, con i =1,..., N, queda:
( ) ( )
−=
++
+
⋅=
−
o
ioori
eqLi
RCwarctgcon
CtwwCR
VLL
i
1
cos1 21
22
φ
φ
(2.66)
donde Ci es una constante.
Como se puede deducir de la expresión (2.66), un desapareamiento en el valor de las inductancias de los módulos inversores provoca un desequilibrio de las corrientes suministradas a la carga por cada módulo. A modo de ejemplo, se presenta en la figura 2.6 la medida de las corrientes de inductor de un sistema modular inversor formado por tres inversores con los siguientes parámetros: L1=1.5 mH, L2=1.22 mH, L3=0.9 mH, C1=C2=C3=20 µF. El valor de la tensión de entrada para esta prueba es E1=E2=E3=70V, siendo la tensión de referencia )502sin(50)( ttvr π⋅= y la resistencia de carga R=7 Ω. El valor de los coeficientes de la superficies de conmutación utilizados en la prueba son: k1=1 y k2=6·10-5.
El desbalance de la corriente suministrada a la carga por cada módulo inversor puede generar una situación de sobrecarga de uno ó más módulos inversores con el consiguiente riesgo de fallo del módulo afectado. Por tanto, se impone considerar un nuevo objetivo de control que consiste en obtener una distribución equitativa de corrientes a través de los módulos inversores. Con relación a este nuevo objetivo será necesario proponer funciones de conmutación adecuadas que garanticen su cumplimiento cuando el sistema se encuentre en régimen deslizante. En el siguiente apartado se presentan tres estrategias que se han considerado para conseguir una distribución equitativa de corrientes. Igualmente se presentan las funciones de conmutación derivadas de cada una de las estrategias consideradas.
iL1
iL2
iL3
Figura 2.6. Medida de la corriente de inductor de tres módulos inversores conectados en paralelo controlados con un lazo de tensión común a los tres módulos: iL1 [2 A/div], iL2 [2A/div],
iL3[2A/div]

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.21
2.4. Estrategias de distribución equitativa de corrientes y funciones de conmutación
Con el objetivo de conseguir una distribución equitativa de corrientes a través de los módulos inversores que intervienen en el sistema modular, se han considerado tres estrategias basadas en el método de ecualización activa de corrientes [Luo, 99], denominadas Master-Slave (M-S), Circular Chain Control (CCC) y Central Limit Control (CLC) presentadas en el capítulo 1. Estas estrategias se basan en el sensado de la corriente que suministra cada módulo convertidor a la carga, su comparación con la corriente de referencia y su ajuste mediante la adecuada acción de control para obtener una distribución equitativa de potencia a través de los módulos convertidores.
El primer paso de diseño del control en modo de deslizamiento es escoger las superficies de conmutación correspondientes a cada estrategia de ecualización de corrientes. En la figura 2.7 se muestra el diagrama de bloques de la estrategia de control en modo de deslizamiento Master-Slave, donde la regulación de tensión AC de salida se consigue mediante el diseño de un lazo de tensión que asegura el seguimiento de una señal de referencia senoidal.
Por otra parte, la distribución equitativa de corrientes se realiza diseñando un lazo de corriente para cada inversor Slave, donde la corriente del inversor Master actúa como corriente de referencia. Se debe hacer notar que cada módulo Slave incluye un lazo de tensión que asegura la regulación de tensión en caso de fallo del módulo Master.
SLAVEInversor N iL N
iLMASTER
vc(t)
+
-
vr(t) = Vr sin(wt)
+
-+
+
ekek &21 +
u1u1
σ1
uNuN
σNNβ
CA
RG
A
MASTERInversor
Figura 2.7. Estrategia Master-Slave (M-S) para N módulos inversores conectados en paralelo

2.22 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Para garantizar la regulación de la tensión de AC de salida se propone la superficie de conmutación (2.18) que controlará directamente al inversor Master. Por otra parte, la distribución equitativa de corrientes a través de los inversores Slaves así como su capacidad de regulación de tensión se consigue con la siguiente función de conmutación:
( )( ) ( )
( ) ( ))()()()(
)()()()()()(
1121
211212
211
tititektekt
tititektekttektekt
LNLNN
LL
−⋅+⋅+⋅=
−⋅+⋅+⋅=⋅+⋅=
−βσ
βσσ
&
M
&
&
(2.67)
donde e(t) = vr(t) - vc(t), σ1=0 es la superficie de conmutación asociada al Master y σi=0 (con i=2,...,N) es la superficie de conmutación asociada al Slave “i”.
A diferencia de la estrategia M-S, donde la ley de control del Master y de los Slaves es distinta, en un control distribuido como el CCC o el CLC las leyes de control incluyen lazos de tensión y de corriente para todos los inversores. En el caso de la estrategia Circular Chain Control, cuyo diagrama de bloques se muestra en la figura 2.8, la corriente de cada inversor debe seguir la corriente del módulo anterior.
iLN
iL1
vc(t)
+
-
vr(t) = Vr sin(wt)
u1u1
σ1
uNuN
σN
+
-1β++
iLN
+
-Nβ+
+iL(N-1)
CA
RG
A
Inversor 1
ekek &21 +
Inversor N
Figura 2.8. Estrategia Circular Chain Control (CCC) para N módulos inversores conectados en paralelo
Esta política de control se puede llevar a cabo mediante la siguiente función de conmutación:
( ) ( )( ) ( )
( ) ( ))()()()(
)()()()()()()()(
)1(21
212212
11211
tititektekt
tititektekttititektekt
LNNLNN
LL
LLN
−⋅+⋅+⋅=
−⋅+⋅+⋅=−⋅+⋅+⋅=
−βσ
βσβσ
&
M
&
&
(2.68)

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.23
Finalmente, en el caso de la estrategia Central Limit Control, cuyo diagrama de bloques se muestra en la figura 2.9, la corriente de cada módulo inversor sigue a la corriente media de todos los módulos. Esto se puede conseguir desde el punto de vista del control en modo de deslizamiento con la siguiente función de conmutación:
( ) ( ) NncontiNtitektekt LnLi
N
nii
nn ,...,1)(1)()()(1
21 =
⋅−−⋅+⋅+⋅= ∑
≠=
βσ & (2.69)
iLN
iL1
vc(t)
+
-
vr(t) = Vr sin(wt)
u1u1
σ1
uNuN
σN
+
-1β++
+
-Nβ+
+
CA
RG
A
Inversor 1
ekek &21 +
Inversor N
( )1−N
∑=
N
iLii
2
∑−
=
1
1
N
iLii
( )1−NiLN
iL1
vc(t)
+
-
vr(t) = Vr sin(wt)
u1u1
σ1
uNuN
σN
+
-1β++
+
-Nβ+
+
CA
RG
A
Inversor 1
ekek &21 +
Inversor N
( )1−N
∑=
N
iLii
2
∑−
=
1
1
N
iLii
( )1−N
Figura 2.9. Estrategia Central Limit Control (CLC) para N módulos inversores conectados en paralelo
De forma genérica, las funciones de conmutación propuestas para un sistema modular de potencia formado por N inversores conectados en paralelo, responden a la siguiente expresión general:
( ) ( ) ( ) ( )[ ] xxxxxxxσ r irvT
N KBKtttt ++== ,,,, 21 σσσ L (2.70)
La expresión (2.70) puede reformularse como:
( ) ( ) ( )ttt ,,, xσxσxσ iv += (2.71)
con:
( ) ( ) xxσxxxσ irv irv KtyBKt =+= ,, (2.72)
donde σv(x,t) es el vector que engloba los términos de tensión de las funciones de conmutación (2.67-2.69) comunes a todas las superficies y a todas las estrategias, σi(x,t) es el vector que contiene los términos de corriente dependientes de la estrategia considerada, xr es el vector de referencia que contiene la tensión de referencia y su derivada
[ ]rr vv &=rx , y x es el vector de estado del sistema modular de potencia de la figura 2.5, donde se ha tomado como variables de estado la tensión en el condensador vc, su derivada
cv& y las corrientes de inductor iLi para i=2,...,N:

2.24 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
[ ]TLNLcc iivv K& 2=x (2.73)
A partir de los términos de tensión comunes a las expresiones (2.67-2.69) se pueden determinar los coeficientes de las matrices Kv ∈ R NxN+1 y Br ∈ R Nx2:
=
−−
−−−−
=
21
21
21
21
21
21
,
00
0000
kk
kkkk
B
kk
kkkk
K rvMM
L
MMMMM
L
L
(2.74)
La matriz Ki depende de la estrategia considerada. Para la estrategia Master-Slave vendrá dada por:
( )
−−−
−−−−−−
=
−−−−−
−
11111
22222
11111
2
22
00000
NNNNN
SMi
CR
CRCR
K
βββββ
ββββββββββ
L
MMMMMM
L
L
L
(2.75)
Para la estrategia Circular Chain Control la matriz Ki viene dada por:
( )
−
−−−−−
−−
=
NN
CCCi
CRCR
K
ββ
ββββββββββββββ
L
MMMMMMM
L
L
L
0000
00002
2
33
222222
111111
(2.76)
Finalmente, para la estrategia Central Limit Control la matriz Ki viene dada por:
( )
−
−−
−−−−
=
NNN
CLCi
NCR
NCRNCR
NNNNCRN
K
βββ
ββββββ
βββββ
L
MMMMMM
L
L
L
00
0000
)1()1(
333
222
11111
(2.77)
donde N es el número de módulos que incorpora el sistema de potencia y los coeficientes βi, con i =1,...,N, que aparecen en las matrices (2.75), (2.76) y (2.77) son reales, constantes y positivos.

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.25
2.5. Diseño de la ley de control para sistemas multientrada
Una vez propuestas las superficies de conmutación, el siguiente paso es el diseño de la ley de control u(x,t) del control de estructura variable, que conduzca a la trayectoria de estado hacia la superficie de conmutación y la mantenga sobre ella.
El diseño de la ley de control es un problema relativamente simple para sistemas de una entrada, pero en el caso de sistemas multientrada requiere, en general, un gran esfuerzo computacional debido al acoplamiento de las variables de control. En efecto, la determinación de la ley de control u(x,t) ∈ R N con la condición de alcanzabilidad (2.4) implica la resolución de N pares de inecuaciones [Hung, 93] con 2N incógnitas correspondientes a los dos posibles valores de las señales de control ui(x) con i=1,...,N. La solución de este problema es simple sólo si la matriz ( ) ( )xxσ B∂∂ de la expresión (2.10) es triangular o diagonal [Gao, 93]. Si se utiliza la condición de alcanzabilidad (2.7) la solución también es compleja aunque más fácil que con la condición (2.4).
DeCarlo et al. exponen en [DeCarlo, 88] dos métodos que permiten simplificar el diseño de la ley de control: el método del control jerárquico y el método de diagonalización. En los apartados 2.5.1 y 2.5.2 se detalla el procedimiento de diseño de la ley de control con ambos métodos.
2.5.1. Método de control jerárquico
Sea n la dimensión del sistema a controlar y m la dimensión de la función de conmutación propuesta para su control. Con el método de control jerárquico se establece una jerarquía tal que, por ejemplo, el primer control u1 conduce al sistema desde su condición inicial hasta la superficie de conmutación σ1 =0, que tiene dimensión n-1. Entonces el segundo control conduce al sistema a la intersección de σ1=0 y σ2=0, mientras u1 mantiene el modo de deslizamiento sobre σ1 =0. El tercer control u3 conduce al sistema a través de la intersección de las superficies σ1 =0 y σ2 =0, que es una superficie de orden n-2, hacia la intersección de las tres primeras superficies de conmutación. Esta jerarquía de controles continúa hasta que el último control um conduce al sistema hacia el régimen deslizante sobre la intersección de las m superficies de conmutación, que es una superficie de orden n-m llamada por algunos autores superficie de conmutación eventual [Hung, 93], [Gao, 93]. En estas condiciones, el diseño de la entrada de control uk presupone, en primer lugar, la existencia de un régimen deslizante sobre σj =0 con j = 1,..., k-1 para cualquier valor posible de los controles desde uk hasta um, y, en segundo lugar, el conocimiento de la estructura del sistema (sistema equivalente) en esos regímenes deslizantes. Dado que todos los controles uk, k<m, dependen de los valores tomados por el control um, um debe preceder al diseño de um-1, um-2,..., u1.
A continuación se va a detallar paso a paso este método de diseño. El diseño del control u2, se realiza de acuerdo con el sistema equivalente Σ1, obtenido asumiendo que existe régimen deslizante sobre la superficie de deslizamiento σ1 =0. El sistema equivalente Σ1, se obtiene reemplazando u1 por el control equivalente u1eq. En primer lugar se debe determinar 01 =σ& , que, suponiendo un sistema descrito por la ecuación de estado (2.42), viene dado por:

2.26 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
( ) [ ] 0, 11111 =
∂∂
++
∂∂
=∂
∂+
∂∂
∂∂
=t
BAtt
t σσσσσ uxx
xx
x& (2.78)
despejando u1eq de (2.78) se obtiene:
[ ]
∂∂
+
∂∂
+
∂∂
∂∂
−=−
tu
ubbAbu
m
meq1
2
211
1
11
1σσσσ
MLx
xxx (2.79)
donde b1, b2, ..., bm son las columnas de la matriz B(x,t). Para obtener u1eq se debe cumplir que [∂σ1/∂x]b1 ≠ 0 (de hecho, es necesario asumir [∂σi/∂x]bi ≠ 0 para todo i). Sustituyendo (2.79) en (2.42) se obtiene el sistema equivalente Σ1:
[ ] 12
11 fxx ++= TmuuBA L& (2.80)
donde las matrices A1, B1 y f 1 vienen dadas por:
[ ] [ ]
tbb
bbbbbbB
AbbAA
mm
∂∂
∂∂
−=
∂∂
∂∂
−=
∂∂
∂∂
−=
−
−
−
1
1
11
11
21
1
11
121
1
1
11
11
σσ
σσ
σσ
xf
xx
xx
LL (2.81)
El diseño de u3 se realiza en base al sistema equivalente Σ2 obtenido suponiendo que existe régimen deslizante sobre la superficie de conmutación σ2 =0 para el sistema equivalente Σ1. Esto implica la existencia de régimen deslizante sobre la superficie σ1 =σ2 =0. El sistema equivalente Σ2 se obtiene reemplazando en Σ1 u2 por u2eq. En general, uk+1 se diseña suponiendo que existe régimen deslizante sobre σk =0 para el sistema equivalente Σk-1 y por tanto sobre σj =0 con j=1,...,k. El sistema equivalente Σk viene dado por la ecuación en el espacio de estado:
[ ] kTmk
kk uuBA fxx ++= + L& 1 (2.82)
donde las matrices Ak, Bk y f k vienen dadas por:
[ ] [ ]
tbb
bbbbbbB
AbbAA
kkkkk
kkm
kkkkkkkm
kk
kkkkkkk
∂∂
∂∂
−=
∂∂
∂∂
−=
∂∂
∂∂
−=
−
−−
−+−
−
−
−−−+−
−
−
−
−−−
σσ
σσ
σσ
11
11
1
11
12
11
11
11
11
2
11
11
11
1
xf
xx
xx
LL (2.83)

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.27
Antes de diseñar um es necesario determinar secuencialmente el conjunto de sistemas equivalentes 121 ,,, −∑∑∑ mL . Dado Σm-1, um se calcula para cumplir la condición de alcanzabilidad y existencia para un régimen deslizante sobre la superficie de conmutación σm=0. A continuación, se toma el sistema equivalente Σm-2 y se procede a diseñar um-1 para que exista régimen deslizante sobre σm-1 = 0, teniendo en cuenta um.
Para ver como se determinan las condiciones de existencia y alcanzabilidad en el paso de diseño k+1, debe notarse que un régimen deslizante existe y es alcanzable sobre la superficie de conmutación σk+1=0 siempre y cuando uk+1 se escoja tal que:
011 <++ kk σσ & para todos los valores de uk+2, ..., um (2.84)
La expresión 1+kσ& viene dada por:
t
ubA kkkkm
iik
ki
kkkk ∂
∂+
∂∂
+∂
∂+
∂∂
= ++−
=+
+++ ∑ 11
1
111
σσσσσ fxx
xx
& (2.85)
donde kib es la columna i-ésima de la matriz Bk. Para asegurar la existencia de un régimen
deslizante sobre σk+1 = 0, la condición (2.84) debe mantenerse para todos los posibles valores de ui, con i= k+2,..., m, definidos por (2.2). En concreto, esta condición tiene la forma:
0,min 111
2
11
,....,111
2
>
∂
∂−
∂∂
−∂
∂−
∂∂
−<∂
∂+
++
+=−
++++
+ ∑+
kkkk
m
kii
kki
kkk
uukkk si
tubAub
mk
σσσσσσ
fxx
xxx
(2.86a)
0,max 111
2
11
,....,111
2
<
∂
∂−
∂∂
−∂
∂−
∂∂
−>∂
∂+
++
+=−
++−+
+ ∑+
kkkk
m
kii
kki
kkk
uukkk si
tubAub
mk
σσσσσσ
fxx
xxx
(2.86b)
El valor máximo y mínimo en el segundo término de la inecuación (2.86) indica que 011 <++ kk σσ & sin importar cuál de los valores +
iu ó −iu toman las variables de control ui
(i=k+2,..., m).
Resumiendo, el método de diseño de control jerárquico introduce una jerarquía de controles donde u1 garantiza régimen deslizante sobre la superficie σ1 = 0 para cualquier valor de u2,..., um, y así sucesivamente, aunque ello no impide que, dependiendo de las condiciones iniciales, el sistema pueda realizar otro orden de ejecución diferente del régimen deslizante.
La figura 2.10 representa gráficamente, a modo de ejemplo, el comportamiento jerárquico de un sistema cuyo control está asociado a una función de conmutación σ(x,t) de orden dos definida sobre un espacio de estado de orden tres. Como se puede observar en dicha figura, en primer lugar el control u1 conduce al sistema desde su condición inicial xo hasta la superficie de conmutación σ1 =0, y a continuación el segundo control u2 conduce al sistema a la intersección de σ1 =0 y σ2 =0 (σ(x,t)=0), mientras u1 mantiene el modo de deslizamiento sobre σ1=0. Finalmente el sistema alcanza el punto de equilibrio xf situado en la superficie de conmutación σ(x,t)=0.

2.28 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
01 =σ
(xo,to)
(xf,tf)
02 =σ
0=σ
Figura 2.10. Evolución de la trayectoria de estado en el espacio de estado desde el punto inicial xo
hasta el valor final xf en un control jerárquico
2.5.2. Método de diagonalización
Como alternativa al método anterior, el método de diagonalización permite convertir un problema de diseño multivariable de orden m en m problemas de diseño de una variable de entrada. Este método se basa en el hecho de que el sistema equivalente es invariante a transformaciones no singulares de la función de conmutación y consiste en aplicar una transformación no singular a σ(x,t) dada por:
( ) ( ) ( )ttt ,,, xσxxσ Ω=∗ (2.87)
donde la matriz de transformación Ω(x,t) se determina de forma que sea diagonal la matriz Q(x,t) definida como:
( ) ( ) ( )tBttQ ,,, xxσxx
∂∂
Ω= (2.88)
De la expresión (2.88) se puede extraer Ω(x,t):
( ) ( ) ( )1
,,,−
∂∂
=Ω tBtQt xxσxx (2.89)
Para determinar la condición de existencia y alcanzabilidad es necesario calcular la derivada de ( )t,xσ ∗ como:
( )tt
t∂
∂+
∂∂
∂∂
=∗∗
∗• σx
xσxσ , (2.90)
con: ( ) ( ) ( ) ( )t
tttt
ytt∂∂
Ω+∂Ω∂
=∂
∂∂∂
Ω+∂Ω∂
=∂∂ ∗∗ σxxσσ
xσxxσ
xxσ ,,,, (2.91)
Teniendo en cuenta (2.91), la expresión (2.90) queda:
( ) ( ) ( ) ( ) ( ) ( )t
tttt
tBAtt∂∂
Ω+∂Ω∂
+∂∂
∂Ω∂
++∂∂
Ω=∗• σxxσxxσ
xux
xσxxσ ,,,,, (2.92)

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.29
Si se sustituye (2.89) en (2.92) se obtiene:
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )ttxQtt
ttt
ttBBtxQAtt
o ,,,,,
,,,,1
xσuxσσxxσ
xxσx
uxσ
xσx
xσxxσ
Ω
−∗
•
++≡∂∂
Ω+∂Ω∂
+
∂∂
∂Ω∂
+∂∂
∂∂
+∂∂
Ω= (2.93)
donde:
( ) ( ) ( ) ( ) ( ) ( )t
tttt
ttyAtto
∂∂
Ω+∂Ω∂
+∂∂
∂Ω∂
=∂∂
Ω= Ωσxxσxxσ
xxσx
xσxxσ ,,,,,, (2.94)
En la expresión (2.93) se puede observar que el único término que contiene el vector de control u, está multiplicado por la matriz diagonal Q(x,t), de forma que se produce un
desacoplo de controles en ( )t,xσ ∗•
que facilita el diseño de la ley de control. La condición
de alcanzabilidad y existencia de régimen deslizante requiere que ( )t,xσ ∗ y ( )t,xσ ∗•
tengan signo opuesto. Esto implica que se cumplan las siguientes inecuaciones:
( ) ( ) ( )( ) ( ) ( ) miconparatσtσutq
paratσtσutq
iioiii
iioiii
,...10,,,,
0,,,,
=<−−>
>−−<∗
Ω−
∗Ω
+
σ
σ
xxx
xxx (2.95)
donde σiΩ (x,t) es el componente i-ésimo del vector σΩ (x,t), σi o
(x,t) es el componente i-ésimo del vector σ o
(x,t) y qi(x,t) es el elemento “i” (i=1,...,m) de la matriz diagonal Q(x,t).
Como se ha indicado al inicio de este apartado, el sistema equivalente en régimen deslizante es invariante a transformaciones no singulares de la superficie de conmutación. En efecto, de la expresión (2.93) se puede obtener el control equivalente asociado a la superficie de conmutación transformada:
( ) ( ) ( ) ( ) ( ) ( ) 0,,,,, =∂∂
Ω+∂Ω∂
+∂∂
∂Ω∂
++∂∂
Ω= ∗∗•
ttt
tttBAtt eq
σxxσxxσx
uxxσxxσ (2.96)
Teniendo en cuenta que sobre la superficie de conmutación se cumple σ*(x,t)=0, la expresión (2.96) queda:
( ) ( ) ( ) 0,,, =∂∂
Ω+∂∂
Ω+∂∂
Ω ∗
ttBtAt eq
σxuxσxx
xσx (2.97)
Multiplicando todos los términos de (2.97) por Ω-1(x,t) se obtiene finalmente:
eqeq uσxxσ
xσu =
∂∂
+∂∂
∂∂
−=−
∗
tAB
1
(2.98)
La expresión (2.98) indica que el control equivalente asociado a la superficie transformada es el mismo que el de la superficie sin transformar. Se verifica de este modo que el sistema equivalente en régimen deslizante es invariante a transformaciones no singulares de la superficie de conmutación.

2.30 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
2.6. Diseño jerárquico de la ley de control para un sistema modular de 3 inversores
Para evidenciar y estudiar las implicaciones del método jerárquico se realiza en este apartado el diseño jerárquico de la ley de control de un sistema modular compuesto por tres módulos inversores conectados en paralelo y controlados mediante las funciones de conmutación indicadas en el apartado 2.4.
En el apartado 2.6.1 se deducen las condiciones que permiten el diseño de los controles u1, u2 y u3. En los apartados 2.6.2, 2.6.3 y 2.6.4 se muestran los resultados de diseño obtenidos al evaluar las condiciones generales del apartado 2.6.1 para las distintas estrategias de ecualización de corriente consideradas: Master-Slave, Circular Chain Control y Central Limit Control y para los distintos órdenes que se pueden establecer en la jerarquía de controles. Igualmente, se presentan en estos apartados los resultados de diseño para el caso particular en el que únicamente están activos dos inversores.
Finalmente, en el apartado 2.6.5 se desarrolla un ejemplo práctico de diseño jerárquico aplicado al sistema modular de potencia utilizado en las pruebas de laboratorio presentadas en el capítulo 3.
2.6.1. Procedimiento general de diseño jerárquico para tres módulos convertidores
• Modelo del sistema
Sea el sistema modular de potencia representado en la figura 2.5 con N=3. El comportamiento dinámico de este sistema modular de potencia está gobernado por la siguiente ecuación en el espacio de estado:
uxx BA +=& (2.99)
donde A ∈ R4x4 y B ∈ R4x3 son las matrices de estado y entrada respectivamente de coeficientes reales y constantes, x ∈ R4 es el vector de estado cuyas componentes son las variables de estado y finalmente u ∈ R3 es el vector de control, cuyas componentes ui pueden tomar dos posibles conjuntos de valores: ui∈ -1,1 para realizar un control de dos niveles, o bien ui∈ -1,0,1 en el caso de realizar un control de tres niveles.
Tomando como variables de estado la tensión en el condensador vc, su derivada cv& y las corrientes de inductor iLi para i =2, 3, las matrices A y B vendrán definidas por (2.43) con N=3.

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.31
• Función de conmutación
La función de conmutación propuesta viene dada por la expresión (2.70) para N=3:
( ) ( ) ( ) ( )[ ] ( ) rr xxxxxxxxσ rivrT BKKBKtttt ++=+== ,,,, 321 σσσ (2.100)
donde la matrices Kv ∈ R3x4 y Br ∈ R3x2 vienen dadas por (2.74) particularizando para N=3:
=
−−−−−−
=
21
21
21
21
21
21
,000000
kkkkkk
Bkkkkkk
K rv (2.101)
Finalmente, la matriz de coeficientes Ki∈ R3x4 depende de la estrategia de ecualización de corrientes considerada y vendrá dada por las expresiones (2.75), (2.76) y (2.77) con N=3:
( )
−−−−=−
2222
1111
22
0000
ββββββββ
CRCRK SMi (2.102a)
( )
−−−
−−=
33
2222
1111
002
2
ββββββββββ
CRCR
K CCCi (2.102b)
( )
−−
−−−−=
333
222
1111
00
)1()1(
ββββββ
ββββ
NCRNCR
NNCNRNK CLCi (2.102c)
En general la función de conmutación se expresará como:
( ) ( ) ( ) ( )[ ] ( )
rr
r
xxxx
xxxxxxσ
+
=+=
++==
3
2
1
3
2
1
321 ,,,,
r
r
r
r
rivT
BBB
KKK
BK
BKKtttt σσσ
(2.103)

2.32 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
• Sistemas y controles equivalentes
El primer paso consiste en calcular el sistema equivalente Σ1, que se obtiene reemplazando en (2.99) u1 por el control equivalente u1eq. Para obtener u1eq se debe determinar 01 =σ& , que viene dado por:
( ) [ ] [ ] 0, 1111111 =++=
∂∂
++
∂∂
=∂
∂+
∂∂
∂∂
= rxuxuxx
xx
x && rBBAKt
BAtt
t σσσσσ
(2.104)
donde K1 y Br1 son la primera fila de las matrices K y Br respectivamente.
La derivada del vector de referencia xr viene dada por rr xx rA=& donde la matriz Ar está definida por (2.23). De la expresión (2.104) se obtiene u1eq :
( ) [ ]
+
+−=
−
rxx rreq ABuu
bbKAKbKu 1
3
232
1111
11 (2.105)
donde b1, b2 y b3 son las columnas 1, 2 y 3 de la matriz B. Sustituyendo (2.105) en (2.99) se obtiene el sistema equivalente Σ1:
rxxx 1
3
211wB
uu
BA +
+=& (2.106)
donde las matrices A1, B1 y Bw1 vienen dadas por:
( )( )[ ] ( ) [ ]
( ) rrw ABbKbB
bbKbKbbbB
AKbKbIA
111
11
1
3211
11
1321
111
11
1
−
−
−
−=
−=
−=
(2.107)
A continuación se debe determinar el sistema equivalente Σ2, que se obtiene reemplazando en (2.106) u2 por el control equivalente u2eq. Para ello se debe determinar en primer lugar
02 =σ& , que viene dado por:
( ) [ ][ ] 0, 2132
112222 =+++=
∂∂
+∂∂
∂∂
= rr xxxxx
x rrwT
eq ABBuuBAKtt
t σσσ&
(2.108)
De la expresión (2.108) se obtiene u2eq :
( ) [ ][ ][ ]rr xxx rrweq ABBKubKAKbKu 2123
12
212111
22 +++−=
− (2.109)
donde b11 y b2
1 son las columnas 1 y 2 de la matriz B1. Sustituyendo (2.109) en (2.106) se obtiene el sistema equivalente Σ2:
rxxx 23
22wBuBA ++=& (2.110)

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.33
donde las matrices A2, B2 y Bw2 vienen dadas por:
( )( )( )( ) ( ) rrwww ABbKbBKbKbBB
bKbKbbB
AKbKbIA
2111
211
12111
211
12
12
2111
211
12
2
12111
211
2
−−
−
−
−−=
−=
−=
(2.111)
• Ley de control
Ahora que las matrices A1, A2, B1, B2, Bw1 y Bw
2 son conocidas, el siguiente paso es determinar la ley de control. Comenzando con k = 2, se tiene que un régimen deslizante existe y es alcanzable sobre la superficie de conmutación σ3 = 0 siempre y cuando u3 se escoja tal que:
033 <σσ & (2.112)
donde 3σ& viene dada, teniendo en cuenta (2.110), por:
( ) rr xxxxx
x rrw ABBKuBKAKtt
t 3233
2323333 , +++=
∂∂
+∂∂
∂∂
=σσσ& (2.113)
Las condiciones (2.86a) y (2.86b), que permiten determinar u3, quedan:
( )( ) 0,
0,
31323
31323
<>
><
σ
σ
parafuBK
parafuBK
r
r
xx
xx (2.114)
donde ( ) ( )rrr xxxxx rrw ABBKAKf 323231 , ++−= .
Para determinar el segundo control u2, se aplica de nuevo la condición (2.84) sobre la superficie de conmutación σ2=0. La expresión de 2σ& , obtenida teniendo en cuenta (2.106), y las condiciones de diseño para este caso son:
rr xxxxx rrw ABBKubKubKAK
t212
312
22
11
212222 ++++=
∂∂
+∂∂
=σσσ && (2.115)
( )[ ]( )[ ] 0,max
0,min
2312
22
32
11
2
2312
22
32
11
2
<−>
>−<
σ
σ
paraubKfubK
paraubKfubK
u
u
r
r
xx
xx (2.116)
donde ( ) ( )rrr xxxxx rrw ABBKAKf 212122 , ++−= y [ ] [ ]...max,...min
33 uu indica que el
contenido del corchete se minimiza o maximiza, respectivamente, respecto a la variable u3.

2.34 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Finalmente el control u1, se obtiene aplicando la condición (2.84) sobre la superficie de conmutación σ1 = 0. La expresión de 1σ& y las condiciones de diseño para este caso son:
rxx rr ABubKubKubKAK 133
122
111
111 ++++=σ& (2.117)
( )[ ]( )[ ] 0,max
0,min
1331
221
33,2
111
1331
221
33,2
111
<−−>
>−−<
σ
σ
paraubKubKfubK
paraubKubKfubK
uu
uu
r
r
xx
xx (2.118)
donde ( ) ( )rr xxxx rr ABAKf 113 , +−= .
Como se indicó en el apartado 2.5.1, el método de diseño de control jerárquico introduce una jerarquía de controles que garantiza la existencia de, al menos, un orden en la consecución del régimen deslizante sobre las superficies de conmutación y sus intersecciones, aunque cabe la posibilidad de que exista más de un orden de ejecución posible del régimen deslizante para un mismo diseño de la ley de control. En cualquier caso, las condiciones de diseño que se deben cumplir para que el sistema alcance el régimen deslizante dependen de la jerarquía de controles considerada y se deben determinar en cada caso siguiendo la metodología expuesta en este apartado. En concreto, para la función de conmutación de orden tres definida por (2.100) hay 3! = 6 posibles órdenes de control jerárquico que se indican a continuación:
000000000000000000000000
233
133
322
122
311
211
=⇒==⇒==⇒==⇒==⇒==⇒==⇒==⇒==⇒==⇒==⇒==⇒=
σσσσσσ
σσσσσσσσσσσσσσσσσσ
yyyyyy
(2.119)
Cada una de las seis jerarquías de control (2.119) dará lugar a un conjunto de condiciones de diseño a cumplir para alcanzar el régimen deslizante.
El análisis realizado para tres módulos inversores se puede aplicar a un sistema inversor con sólo dos módulos inversores activos. En este caso, los módulos inversores se controlan mediante una función de conmutación de orden dos dando lugar a dos posibles jerarquías de control:
000000
122
211
==⇒===⇒=
σσσσσσ
yy
(2.120)
Para cada una de estas dos jerarquías también es posible determinar las condiciones de diseño que se deben cumplir para alcanzar el régimen deslizante. En los siguientes apartados se obtienen las condiciones de diseño a cumplir para cada posible orden o jerarquía de ejecución del régimen deslizante y para cada estrategia de ecualización de corrientes tanto en el caso de dos como en el de tres inversores activos.

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.35
2.6.2. Diseño de la ley de control basado en el método jerárquico para la estrategia Master-Slave
En este apartado se determinan, en primer lugar, las condiciones de diseño deducidas en el apartado 2.6.1 para alcanzar el régimen deslizante en la jerarquía de control σ1 =0 ⇒ σ1 = 0 y σ2 = 0 ⇒ σ = 0 con la estrategia de ecualización de corrientes Master-Slave. A continuación se indican las condiciones de diseño a cumplir para alcanzar el régimen deslizante con los otros 5 órdenes jerárquicos posibles. Finalmente se indican las condiciones de diseño a cumplir para alcanzar régimen deslizante en el caso de dos inversores activos.
Sustituyendo la expresión de la superficie de conmutación asociada a la estrategia Master-Slave (2.101), (2.102a) y la ecuación de estado (2.99) en las expresiones (2.107) y (2.111) se obtiene las matrices B1 y B2 necesarias para determinar las condiciones de diseño (2.114) y (2.116):
=
3
3
2
21
0
00000
LE
LE
B ,
−=
3
3
3
32
2
00
LE
LE
B (2.121)
Una vez calculadas las matrices B1 y B2, y conocidas las matrices K= Kv+Ki(M-S) y B, el siguiente paso es determinar la ley de control ui ∈-1,1 para i=1,2,3. Comenzando con k=2, se tiene que un régimen deslizante existe y es alcanzable sobre la superficie de conmutación σ3 = 0 siempre y cuando u3 se escoja tal que cumpla la condición (2.114), que en este caso viene dada por:
( )
( ) 0,23
0,23
31323
3
31323
3
<>−
><−
σβ
σβ
parafuLE
parafuLE
r
r
xx
xx
(2.122)
Para cumplir la condición (2.122), dentro del dominio de atracción del régimen deslizante, se escoge la siguiente ley de control para u3:
( )( )
<−>
=0,1
0,1
3
33 tsi
tsiu
xx
σσ
(2.123)
Para determinar el segundo control u2, se aplica la condición (2.116), que en este caso viene dada por:
( )
( ) 0,max2
0,min2
2233
31
32
2
21
2233
31
32
2
21
<
+>−
>
+<−
σββ
σββ
parafuLE
uLE
parafuLE
uLE
u
u
r
r
xx
xx
(2.124)

2.36 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Para cumplir la condición (2.124), dentro del dominio de atracción del régimen deslizante, se debe escoger la siguiente ley de control para u2:
( )( )
<−>
=0,1
0,1
2
22 tsi
tsiu
xx
σσ
(2.125)
y además se debe cumplir la siguiente condición de diseño:
3
3
2
22LE
LE
> (2.126)
Finalmente, para determinar el control u1, se aplica la condición (2.118), que en este caso viene dada por:
( )
( ) 0,max
0,min
133
322
2
223
3,21
1
12
133
322
2
223
3,21
1
12
<
++>−
>
++<−
σ
σ
parauLE
Ck
uLE
Ck
fuLE
Ck
parauLE
Cku
LE
Ckfu
LE
Ck
uu
uu
r
r
xx
xx
(2.127)
Para cumplir la condición (2.127), dentro del dominio de atracción del régimen deslizante, se debe escoger la siguiente ley de control para u1:
( )( )
<−>
=0,1
0,1
1
11 tsi
tsiu
xx
σσ
(2.128)
y además se debe cumplir la siguiente condición de diseño:
3
3
2
2
1
1
LE
LE
LE
+> (2.129)
En la tabla 2.2 se indican las condiciones de diseño que se deben cumplir para alcanzar el régimen deslizante para cada posible orden jerárquico con tres inversores activos y estrategia Master-Slave.
En la primera columna de la tabla 2.2 se especifican los órdenes jerárquicos posibles, en la segunda columna se indica la condición de diseño a cumplir para que el sistema modular alcance el régimen deslizante sobre la primera superficie de conmutación del orden jerárquico y en la última columna se especifica la condición a cumplir para que el sistema alcance el régimen deslizante sobre la superficie de conmutación resultante entre la intersección de la primera y segunda superficie del orden jerárquico.
En la tabla 2.3 se indica las condiciones de diseño que se deben cumplir para alcanzar el régimen deslizante para cada posible orden de la jerarquía con la estrategia Master-Slave y dos inversores activos.

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.37
Orden de la jerarquía
Condición para alcanzar la 1ª superficie
Condición para alcanzar la 2ª superficie
σ1⇒σ2⇒σ3 3
3
2
2
1
1
LE
LE
LE
+> 3
3
2
22LE
LE
>
σ1⇒σ3⇒σ2 3
3
2
2
1
1
LE
LE
LE
+> 2
2
3
32LE
LE
>
σ2⇒σ1⇒σ3
−+
+>
1
112
3
32
122
2 1LE
CkLE
kCkL
Eβ
β 3
3
1
12LE
LE
>
σ2⇒σ3⇒σ1
−+
+>
1
112
3
32
122
2 1LE
CkLE
kCkL
Eβ
β 1
1
212221
212221
3
3 2LE
CkkCkk
LE
ββββββββ
++
++−>
σ3⇒σ1⇒σ2
−+
+>
1
122
2
22
223
3 1LE
CkLE
kCkL
Eβ
β 2
2
1
12LE
LE
>
σ3⇒σ2⇒σ1
−+
+>
1
122
2
22
223
3 1LE
CkLE
kCkL
Eβ
β 1
1
212221
212122
2
2 2LE
CkkCkk
LE
ββββββββ
++
++−>
Tabla 2.2. Condiciones a cumplir para alcanzar el régimen deslizante con tres convertidores activos y estrategia Master-Slave
Orden de lajerarquía
Condición para alcanzar la 1ª superficie
σ1⇒ σ2 2211 LELE >
σ2⇒ σ1 1
1
12
12
2
2
LE
CkCk
LE
ββ
+
−>
Tabla 2.3. Condiciones a cumplir para alcanzar régimen deslizante con dos inversores activos y estrategia Master-Slave
2.6.3. Diseño de la ley de control basado en el método jerárquico para la estrategia Circular Chain Control
Sustituyendo la expresión de la superficie de conmutación asociada a la estrategia Circular Chain Control (2.101), (2.102b) y la ecuación de estado (2.99) en las expresiones (2.107) y (2.111) se obtiene las matrices B1 y B2 necesarias para determinar las condiciones de diseño (2.114) y (2.116):
++=
33
22
3
3
12
1
2
2
12
11
00
200
LELE
LE
CkLE
CkB ββ
ββ
, ( )( ) ( )
+−−=
33
3321212
3
3212
2
30
LEmLECk
LE
mBββββ
ββ
(2.130)
donde m = 2k2β2 + k2β1 + β1β2C.

2.38 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Una vez calculadas las matrices B1 y B2, y conocidas las matrices K = Kv+Ki(CCC) y B, el siguiente paso es determinar la ley de control ui ∈-1,1 para i=1,2,3. Comenzando con k=2, se tiene que un régimen deslizante existe y es alcanzable sobre la superficie de conmutación σ3=0 siempre y cuando u3 se escoja tal que cumpla la condición (2.114), que en este caso viene dada por:
( )
( ) 0,2
3
0,2
3
31323
3
211222
323121
31323
3
211222
323121
<>++++
−
><++++
−
σββββββββββ
σββββββββββ
parafukLE
Ckk
parafukLE
Ckk
r
r
xx
xx
(2.131)
Para cumplir la condición (2.131), dentro del dominio de atracción del régimen deslizante, se escoge la siguiente ley de control para u3:
( )( )
<−>
=0,1
0,1
3
33 tsi
tsiu
xx
σσ
(2.132)
Para determinar el segundo control u2, se aplica la condición (2.116), que en este caso viene dada por:
( ) ( ) ( )
( ) ( ) ( ) 0,2
max2
0,2min2
2233
3
12
21221
32
2
2
12
21212
2233
3
12
21221
32
2
2
12
21212
<
+
++−
−>+
++−
>
+
++−
−<+
++−
σβ
βββββ
ββββ
σβ
βββββ
ββββ
parafuLE
CkkC
uLE
CkCk
parafuLE
CkkCu
LE
CkCk
u
u
r
r
xx
xx
(2.133)
Para cumplir la condición (2.133), dentro del dominio de atracción del régimen deslizante, se escoge la siguiente ley de control para u2:
( )( )
<−>
=0,1
0,1
2
22 tsi
tsiu
xx
σσ
(2.134)
siendo necesario cumplir, además, la siguiente condición de diseño:
( )
( ) 3
3
21212
21221
2
2
22
LE
CkkC
LE
ββββββββ
++
+−> (2.135)
Finalmente, para determinar el control u1, se aplica la condición (2.118), que en este caso viene dada por:
( )
( ) 0,max
0,min
133
3122
2
223
3,21
1
112
133
3122
2
223
3,21
1
112
<
−++>
+−
>
−++<
+−
σββ
σββ
parauLE
CCk
uLE
Ck
fuLE
CCk
parauLE
CCk
uLE
Ck
fuLE
CCk
uu
uu
r
r
xx
xx
(2.136)

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.39
Para cumplir la condición (2.136), dentro del dominio de atracción del régimen deslizante, se debe escoger la siguiente ley de control para u1:
( )( )
<−>
=0,1
0,1
1
11 tsi
tsiu
xx
σσ
(2.137)
y, además, se debe cumplir la siguiente condición de diseño:
−+
+>
3
312
2
22
121
1 1LE
CkLE
kCkL
Eβ
β (2.138)
En las tablas 2.4 y 2.5 se indica las condiciones de diseño que se deben cumplir para alcanzar el régimen deslizante para cada posible orden jerárquico con la estrategia Circular Chain Control y con tres y dos inversores activos, respectivamente.
Orden de la jerarquía
Condición para alcanzar la 1ª superficie
Condición para alcanzar la 2ª superficie
σ1⇒σ2⇒ σ3
−+
+>
3
312
2
22
121
1 1LE
CkLE
kCkL
Eβ
β( )
( ) 3
3
21212
21221
2
2
22
LE
CkkC
LE
ββββββββ
++
+−>
σ1⇒σ3⇒ σ2
−+
+>
3
312
2
22
121
1 1LE
CkLE
kCkL
Eβ
β( )
( ) 2
2
31312
32321
3
3
2 LE
CkkCk
LE
βββββββ
++
−−>
σ2⇒σ1⇒ σ3
−+
+>
1
122
3
32
222
2 1LE
CkLE
kCkL
Eβ
β( )
( ) 3
3
21212
21122
1
1
2 LE
CkkCk
LE
βββββββ
++
−−>
σ2⇒σ3⇒ σ1
−+
+>
1
122
3
32
222
2 1LE
CkLE
kCkL
Eβ
β( )
( ) 1
1
23322
32322
3
3
22
LE
CkkCk
LE
βββββββ
++
+−>
σ3⇒σ1⇒ σ2
−+
+>
2
232
1
12
323
3 1LE
CkLE
kCkL
Eβ
β( )( ) 2
2
31312
21123
1
1
22
LE
CkkCk
LE
βββββββ
++
+−>
σ3⇒σ2⇒ σ1
−+
+>
2
232
1
12
323
3 1LE
CkLE
kCkL
Eβ
β( )
( ) 1
1
23232
22223
2
2
2 LE
CkkCk
LE
βββββββ
++
−−>
Tabla 2.4. Condiciones a cumplir para alcanzar el régimen deslizante con tres inversores activos y estrategia Circular Chain Control
Orden de la
jerarquía Condición para alcanzar
la 1ª superficie
σ1⇒ σ2 2
2
12
12
1
1
LE
CkCk
LE
ββ
+
−>
σ2⇒ σ1 1
1
22
22
2
2
LE
CkCk
LE
ββ
+
−>
Tabla 2.5. Condiciones a cumplir para alcanzar el régimen deslizante con dos inversores activos y estrategia Circular Chain Control

2.40 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
2.6.4. Diseño de la ley de control basado en el método jerárquico para la estrategia Central Limit Control
Sustituyendo la expresión de la superficie de conmutación asociada a la estrategia Central Limit Control (2.101), (2.102c) y la ecuación de estado (2.99) en las expresiones (2.107) y (2.111) se obtiene las matrices B1 y B2 necesarias para determinar las condiciones de diseño (2.114) y (2.116):
++=
3
3
2
2
3
3
12
1
2
2
12
1
1
0
0
23
23
00
LE
LE
LE
CkLE
CkB
ββ
ββ
, ( )
−=
3
3
3
3221
3
321
2
30
LE
LE
mkCLE
mB ββ
ββ
(2.139)
donde m = k2β2 + k2β1 + β1β2C.
Una vez calculadas las matrices B1 y B2, y conocidas las matrices K = Kv+Ki(CLC) y B, el siguiente paso es determinar la ley de control ui ∈-1,1 para i=1,2,3. Comenzando con k=2, se tiene que un régimen deslizante existe y es alcanzable sobre la superficie de conmutación σ3 = 0 siempre y cuando u3 se escoja tal que cumpla la condición (2.114), que en este caso viene dada por:
( )
( ) 0,3
0,3
31323
3
212212
323121
31323
3
212212
323121
<>++++
−
><++++
−
σββββββββββ
σββββββββββ
parafukLE
Ckk
parafukLE
Ckk
r
r
xx
xx
(2.140)
Para cumplir la condición (2.140), dentro del dominio de atracción del régimen deslizante, se escoge la siguiente ley de control para u3:
( )( )
<−>
=0,1
0,1
3
33 tsi
tsiu
xx
σσ
(2.141)
Para determinar el segundo control u2, se aplica la condición (2.116), que en este caso viene dada por:
( ) ( ) ( )
( ) ( ) ( ) 0,2
3max2
3
0,2
3min2
3
2233
3
12
221
32
2
2
12
21212
2233
3
12
221
32
2
2
12
21212
<
+
+−
>+
++−
>
+
+−
<+
++−
σβββ
βββββ
σβββ
βββββ
confuLE
CkCk
uLE
CkCk
confuLE
CkCk
uLE
CkCk
u
u
r
r
xx
xx
(2.142)

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.41
Para cumplir la condición (2.142), dentro del dominio de atracción del régimen deslizante, se debe escoger la siguiente ley de control para u2:
( )( )
<−>
=0,1
0,1
2
22 tsi
tsiu
xx
σσ
(2.143)
y además se debe cumplir la condición de diseño:
( )
( ) 3
3
21212
221
2
2
LE
CkCk
LE
ββββββ++
−> (2.144)
Finalmente, para determinar el control u1, se aplica la condición (2.118), que en este caso viene dada por:
( )
( ) 0,max2
0,min2
133
3122
2
2123
3,21
1
112
133
3122
2
2123
3,21
1
112
<
−+
−+>
+−
>
−+
−+<
+−
σβββ
σβββ
siuLE
CCku
LE
CCkfu
LE
CCk
siuLE
CCku
LE
CCkfu
LE
CCk
uu
uu
r
r
xx
xx
(2.145)
Para satisfacer la inecuación (2.145), dentro del dominio de atracción del régimen deslizante, se debe escoger la siguiente ley de control para u1:
( )( )
<−>
=0,1
0,1
1
11 tsi
tsiu
xx
σσ
(2.146)
y además se debe cumplir la siguiente condición de diseño:
+
+
−>
3
3
2
2
12
12
1
1
2 LE
LE
CkCk
LE
ββ
(2.147)
En la tabla 2.6 se indica las condiciones de diseño que se deben cumplir para alcanzar el régimen deslizante para cada posible orden jerárquico con tres inversores activos y la estrategia Central Limit Control.
Orden de la jerarquía
Condición para alcanzar la 1ª superficie
Condición para alcanzar la 2ª superficie
σi⇒ σj ⇒ σk
i,j,k ∈ 1,2,3
+
+−
>k
k
j
j
i
i
i
i
LE
LE
CkCk
LE
ββ
22
2 ( )( ) k
k
jiji
ji
j
j
LE
kCCk
LE
ββββ
ββ
++
−>
2
2
Tabla 2.6. Condiciones a cumplir para alcanzar el régimen deslizante con tres inversores activos y estrategia Central Limit Control
Para el caso de dos convertidores activos la función de conmutación de la estrategia Central Limit Control coincide con la de la estrategia Circular Chain Control, por tanto, las condiciones de diseño son las mismas que para la estrategia Circular Chain Control (ver tabla 2.5).

2.42 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
2.6.5. Ejemplo de diseño jerárquico de la ley de control para un sistema modular de 3 inversores
En este apartado se va a desarrollar un ejemplo de diseño jerárquico de la ley de control para un sistema modular de 3 inversores. El valor de los parámetros del sistema modular y de los coeficientes de la función de conmutación son los mismos que los del prototipo experimental utilizado en las pruebas de laboratorio presentadas en el capítulo 3: L1=1.5mH, L2=1.22 mH, L3=0.9 mH, C1=C2=C3=20 µF, E1=E2=E3, βi = 0.5 (con i=1, 2, 3), k1=1, k2 = 6·10-5.
En este caso, la labor de diseño consiste básicamente en comprobar que se cumplen las condiciones de diseño que permiten alcanzar el régimen deslizante para al menos un orden jerárquico tanto para el caso de dos como de tres inversores activos. En los siguientes subapartados se evaluará el cumplimiento de esas condiciones de diseño para cada una de las estrategias de ecualización de corriente consideradas.
• Estrategia Master-Slave
En la tabla 2.2 se indican las condiciones de diseño que se deben cumplir para alcanzar el régimen deslizante para cada posible orden de la jerarquía con la estrategia Master-Slave y tres inversores activos. En la tabla 2.7 se concretan como quedan las condiciones de diseño de la tabla 2.2 teniendo en cuenta los valores escogidos para los coeficientes de la función de conmutación y los parámetros de sistema modular. Junto a cada condición de diseño se indica si se cumple dicha condición (V) o no (F).
Orden de la jerarquía
Condición para alcanzar la 1ª superficie Condición para alcanzar
la 2ª superficie
σ1⇒ σ2 ⇒ σ3 ( ) ( ) ( ) 13
12
11
−−− +> LLL F 232 LL > V
σ1⇒ σ3 ⇒ σ2 ( ) ( ) ( ) 13
12
11
−−− +> LLL F 322 LL > V
σ2⇒ σ1 ⇒ σ3 ( ) ( ) ( ) 11
13
12 23 −−− +⋅>⋅ LLL F 132 LL > V
σ2⇒ σ3 ⇒ σ1 ( ) ( ) ( ) 11
13
12 23 −−− +⋅>⋅ LLL F 315 LL > V
σ3⇒ σ1 ⇒ σ2 ( ) ( ) ( ) 11
12
13 23 −−− +⋅>⋅ LLL V 122 LL > V
σ3⇒ σ2 ⇒ σ1 ( ) ( ) ( ) 11
12
13 23 −−− +⋅>⋅ LLL V 215 LL > V
Tabla 2.7. Evaluación de las condiciones de diseño para tres inversores activos y estrategia Master-Slave
En la tabla 2.8 se indica la valoración (V ó F) de las condiciones de diseño de la tabla 2.3 para el caso de dos inversores activos.
Orden de lajerarquía
Condición para alcanzar la 1ª superficie
σ1⇒ σ2 12 LL > Fσ2⇒ σ1 213 LL > V
Tabla 2.8. Evaluación de las condiciones de diseño para dos inversores activos y estrategia Master-Slave

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.43
• Estrategia Circular Chain Control
En la tabla 2.9 se concretan las condiciones de diseño para cada posible orden jerárquico en el caso de la estrategia Circular Chain Control.
Orden de la jerarquía
Condición para alcanzar la 1ª superficie Condición para alcanzar
la 2ª superficie
σ1⇒ σ2 ⇒ σ3 ( ) ( ) ( ) 13
12
11 23 −−− +⋅>⋅ LLL F 23 57 LL > V
σ1⇒ σ3 ⇒ σ2 ( ) ( ) ( ) 13
12
11 23 −−− +⋅>⋅ LLL F 327 LL > V
σ2⇒ σ1 ⇒ σ3 ( ) ( ) ( ) 11
13
12 23 −−− +⋅>⋅ LLL F 137 LL > V
σ2⇒ σ3 ⇒ σ1 ( ) ( ) ( ) 11
13
12 23 −−− +⋅>⋅ LLL F 31 57 LL > V
σ3⇒ σ1 ⇒ σ2 ( ) ( ) ( ) 12
11
13 23 −−− +⋅>⋅ LLL V 12 57 LL > V
σ3⇒ σ2 ⇒ σ1 ( ) ( ) ( ) 12
11
13 23 −−− +⋅>⋅ LLL V 217 LL > V
Tabla 2.9. Evaluación de las condiciones de diseño para tres inversores activos y estrategia Circular Chain Control
En la tabla 2.10 se indica la valoración de las condiciones de diseño correspondientes a la tabla 2.5 para el caso de dos inversores activos.
Orden de lajerarquía
Condición para alcanzar la 1ª superficie
σ1⇒ σ2 123 LL > V
σ2⇒ σ1 213 LL > V
Tabla 2.10. Evaluación de las condiciones de diseño para dos inversores activos y estrategia Circular Chain Control
• Estrategia Central Limit Control
En la tabla 2.11 se indica la evaluación de las condiciones de diseño correspondientes a la estrategia Central Limit Control y tres inversores activos. Con dos inversores activos la función de conmutación coincide con la definida para la estrategia Circular Chain Control, por tanto, las condiciones de diseño y su valoración son las indicadas en las tablas 2.5 y 2.10, respectivamente.
Orden de la jerarquía
Condición para alcanzar la 1ª superficie Condición para alcanzar
la 2ª superficie
σi⇒ σj ⇒ σk
i,j,k ∈ 1,2,3 ( ) ( ) ( ) 1114 −−− +>⋅ kji LLL V jk LL >5 V
Tabla 2.11. Evaluación de las condiciones de diseño para tres inversores activos y estrategia Central Limit Control

2.44 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
• Ley de control
Tal y como se determinó en los apartados 2.6.2, 2.6.3 y 2.6.4 la ley de control vendrá dada por:
( )( ) 3,2,1
0,10,1
=
<−>
= iparatsi
tsiu
i
ii x
xσ
σ (2.148)
La ley de control (2.148) satisface la condición de alcanzabilidad (2.4) en los casos de uno, dos y tres inversores activos. Si se realiza un control de tres niveles, la ley de control vendrá dada por (2.41) [Carpita, 93]:
( )( )( )( )
=
<−=>=
<
<=>=
>3,2,1
0,10,0
0
0,00,1
0ipara
tsiutsiu
Ev
tsiutsiu
Ev
ii
iir
ii
iir
xxxx
σσσσ
(2.149)
donde vr es la tensión de referencia AC a seguir.
• Conclusiones
De los resultados obtenidos del ejemplo de diseño se puede indicar que, con los valores considerados para los coeficientes de la función de conmutación y para los parámetros de los inversores que intervienen en el sistema modular, existe al menos un orden jerárquico posible que permita al sistema modular alcanzar el régimen deslizante para todas las estrategias de ecualización de corriente consideradas para los casos de dos y tres módulos inversores activos.
En concreto, para la estrategia Master-Slave los posibles órdenes jerárquicos donde se cumplen las condiciones de diseño para alcanzabilidad del régimen deslizante son σ3⇒ σ1
⇒ σ2, σ3⇒ σ2 ⇒ σ1 para tres inversores activos y σ2⇒ σ1 para dos inversores activos. Para la estrategia Circular Chain Control los órdenes jerárquicos son los mismos que para la estrategia M-S más el orden σ1⇒ σ2. Finalmente, para la estrategia Central Limit Control se cumplen las condiciones de diseño en todos los posibles órdenes jerárquicos para dos y tres inversores activos.
Como comentario final de este apartado se indican las novedades aportadas por este trabajo al diseño de sistemas modulares de potencia:
• Se ha aplicado el control jerárquico al diseño de sistemas modulares de potencia.
• Se han obtenido las condiciones de diseño a cumplir para alcanzar el régimen deslizante en función de los parámetros del sistema y de los coeficientes de la función de conmutación para cada una de las tres estrategias de ecualización de corriente consideradas.

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.45
2.7. Diseño con el método de diagonalización de la ley de control para un sistema modular de 3 inversores
En este apartado se realiza el diseño con el método de diagonalización de la ley de control de un sistema modular compuesto por tres módulos inversores conectados en paralelo. En el apartado 2.7.1 se aplica esta metodología de diseño para el caso de tres módulos inversores activos. Se presentan también, en el apartado 2.7.2, los resultados de diseño para el caso particular de dos inversores activos.
2.7.1. Diseño de la ley de control con tres módulos inversores activos
Como se explicó en el apartado 2.5.2, el objetivo del método de diagonalización es desacoplar los controles realizando una transformación no singular sobre la superficie de conmutación. Para simplificar el proceso de diagonalización se propone una nueva función de conmutación derivada de la estrategia Master-Slave donde sólo el módulo Master dispone de un lazo de tensión. Teniendo en cuenta esto, la función de conmutación vendrá dada por la expresión (2.100) donde Ki es la matriz (2.102a), siendo las matrices Kv y Br :
=
−−=
0000,
0000000000 2121 kk
Bkk
K rv (2.150)
Para llevar a cabo la diagonalización se calcula una matriz Ω(x,t) tal que la matriz Q(x,t), definida por (2.88), sea diagonal. Para ello se plantea una matriz Ω genérica del tipo:
=Ω
333231
232221
131211
mmmmmmmmm
(2.151)
Teniendo en cuenta (2.151), y las expresiones de las matrices xσ
∂∂ y B:
=
−−−−
−−=
∂∂
3
3
2
2
3
3
2
2
1
1
2222
1111
21
00
00
000
,2
200
LE
LE
CLE
CLE
CLE
BCRCR
kk
ββββββββ
xσ
(2.152)
la matriz Q(x,t), vendrá dada por:

2.46 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
( )
+−
+−
++−
+−
+−
++−
+−
+−
++−
=
3
3233
231
2
2132
231
1
1233132
231
3
3223
221
2
2122
221
1
1223122
221
3
3213
211
2
2112
211
1
1213112
211
,
LEm
Ckm
LEm
Ckm
LEmm
Ckm
LEm
Ckm
LEm
Ckm
LEmm
Ckm
LEm
Ckm
LEm
Ckm
LEmm
Ckm
tQ
ββββ
ββββ
ββββ
x
(2.153)
Los coeficientes mij, con j≠i, de la matriz Ω se determinan de modo que hagan cero los componentes de la matriz Q(x,t) que no pertenezcan a su diagonal. Para ello se resuelve el siguiente sistema de ecuaciones:
1
23332
2
23331
132231
233132231
2
12223
2
12221
223221
223122221
2
21113213
211
1
21112112
211
2,
20
0
2,
20
0
0
0
βββ
β
ββ
βββ
β
ββ
ββ
ββ
mmkCmm
mC
km
mmC
km
mmkCmm
mC
km
mmC
kmC
kmmmC
kmC
kmmmC
km
−==⇒
=+
=++−
−==⇒
=+
=++−
−=⇒=+
−=⇒=+
(2.154)
Teniendo en cuenta el resultado del sistema de ecuaciones (2.154), la expresión de la matriz Ω(x,t) viene dada por:
−
−
−−
=Ω
331
233
2
233
2
12222
2
122
2
211
1
21111
22
22
mm
kCm
mmkCm
Ckm
Ckm
m
βββ
βββ
ββ
(2.155)
donde m11, m22 y m33 son constantes arbitrarias reales y positivas. Teniendo en cuenta (2.88) y (2.155), la matriz Q(x,t) viene dada por:
( )( )
( )( )
−−
−=
33233
22122
11211
23000230003
,LEm
LEmCLEkm
tQβ
βx (2.156)
La nueva función de conmutación resultante de aplicar la transformación (2.87) viene dada por:
( ) ( ) rr xxxxxσxσ ∗∗∗ +=⋅Ω+⋅Ω=⋅Ω= rr BKBKtt ,, (2.157)

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.47
siendo las matrices de coeficientes ∗K y ∗rB :
=⋅Ω=
−
−
−
−
−
+−
=⋅Ω=
∗
∗
2332
1233
1222
1122
211111
23312
2
233
12212
2
122
2112112111
211
21
2
21
2
2300
2
0230
2
3332
ββ
ββ
ββ
ββ
Cmk
kCm
Cmk
kCmkmkm
BB
mkCRk
kCm
mkCRk
kCm
Ckm
Ckmkmk
CRkm
KK
rr
(2.158)
El siguiente paso en el diseño de la ley de control es determinar ( )t,xσ∗•
, definida por la expresión (2.93), para poder evaluar el cumplimiento de la condición de existencia y
alcanzabilidad del régimen deslizante: 0<∗•
∗ σσ T . Teniendo en cuenta que ∂Ω/∂x = 0 y ∂Ω/∂t = 0 la expresión (2.93) queda:
( ) ( ) ( )
( ) ( ) ( ) ( )ttxQtABtQAK
ABtQAt
BBtxQAt
orrr
rr
,,,,
,,,1
xσuxσxuxx
xuxxxσσu
xσ
xσx
xσxσ r
Ω∗∗
−∗
•
++≡++=
Ω++∂∂
Ω=∂∂
Ω+∂∂
∂∂
+∂∂
Ω=
(2.159)
donde:
( ) ( ) rrro ABtyAKt xxσxxσ ∗
Ω∗ == ,, (2.160)
Teniendo en cuenta que la matriz Q(x,t) es diagonal, el problema de diseño del vector u a
partir de la condición 0<∗•
∗ σσ T se reduce al diseño de los controles individuales ui para
cumplir la condición 0<∗•
∗ii σσ con i =1,2,3, esto es:
( ) ( ) ( )( ) ( ) ( ) 3,2,10,,,,
0,,,,
=<−−>
>−−<∗
Ω−
∗Ω
+
iconparatσtσutq
paratσtσutq
iioiii
iioiii
σ
σ
xxx
xxx (2.161)
donde σiΩ (x,t) es el componente i-ésimo del vector σΩ (x,t), σi o(x,t) es el componente i-
ésimo del vector σ o(x,t) y qi(x,t) es el elemento “i” (i=1,2,3) de la matriz diagonal Q(x,t). Para cumplir la condición (2.161), dentro del dominio de atracción del régimen deslizante, se debe escoger la siguiente ley de control:
( )( )
3,2,10,1
0,1=
<−>
=∗
∗
iparatsi
tsiu
i
ii x
xσ
σ (2.162)

2.48 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
2.7.2. Diseño de la ley de control con dos módulos inversores activos
El diseño realizado para tres módulos inversores se puede aplicar al caso en que sólo hay dos módulos inversores activos. En este caso, la función de conmutación vendrá dada por la expresión:
( ) ( ) ( )[ ] rr xxxxxxxxσ rivrT BKKBKttt ++=+== ,,, 21 σσ (2.163)
donde las matrices Kv, Ki y Br vienen dadas por:
=
−
=
−−=
00,
2000
,0000 21
111
21 kkB
CRK
kkK riv βββ
(2.164)
Para llevar a cabo la diagonalización se plantea una matriz Ω ∈ R2x2 genérica del tipo:
=Ω
2221
1211
mmmm
(2.165)
Teniendo en cuenta (2.165), y las expresiones de las matrices xσ ∂∂ y B para N=2:
=
−
−−=
∂∂
22
2211111
21
0
00
20
LECLECLEB
CRkk
βββxσ (2.166)
la matriz Q(x,t), vendrá dada por:
( )
+−
+−
+−
+−
=
2
2122
221
1
1122
221
2
2112
211
1
1112
211
,
LEm
Ckm
LEm
Ckm
LEm
Ckm
LEm
Ckm
tQββ
ββx (2.167)
Los coeficientes m12 y m21 de la matriz (2.165) se calculan de modo que hagan cero los componentes de la matriz Q(x,t) que no pertenezcan a su diagonal. Para ello se resuelve el sistema de ecuaciones:
2
12221122
221
1
21112112
211
0
0
kCmmm
Ckm
Ckmmm
Ckm
ββ
ββ
=⇒=+−
−=⇒=+ (2.168)
Teniendo en cuenta el resultado (2.168), la expresión de la matriz Ω(x,t) viene dada por:
( )
−=Ω
222122
121111
mkCmCkmm
ββ
(2.169)
donde m11 y m22 son constantes arbitrarias, reales y positivas. Teniendo en cuenta (2.88) y (2.169), la matriz Q(x,t) viene dada por:

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.49
( ) ( )
−
−=
22221
11112
2002
,LEm
CLEmktQ
βx (2.170)
La nueva función de conmutación resultante de aplicar la transformación (2.87) a la superficie (2.163) viene dada por:
( ) ( ) rr xxxxxσxσ ∗∗∗ +=⋅Ω+⋅Ω=⋅Ω= rr BKBKtt ,, (2.171)
siendo las matrices de coeficientes ∗K y ∗rB :
=⋅Ω=
−
−
−
+−
=⋅Ω=
∗
∗
1222
1122
211111
12212
2
122
2112111
211
20
22
ββ
ββ
Cmk
kCmkmkm
BB
mkCRk
kCm
Ckmkmk
CRkm
KK
rr
(2.172)
La ley de control se determina aplicando el mismo procedimiento utilizado para el caso de tres módulos inversores activos, obteniéndose como resultado en este caso:
( )( ) 2,1
0,10,1
=
<−>
= iparatsi
tsiu
i
ii x
xσ
σ (2.173)
2.7.3. Ejemplo de diseño de la ley de control para un sistema modular de 3 inversores con el método de diagonalización
En este apartado se va a realizar un ejemplo de diseño del control de un sistema modular de potencia utilizando el método de diagonalización. El sistema modular considerado está formado por tres módulos inversores con los mismos parámetros que los utilizados en el ejemplo del apartado 2.6.5. La expresión de la función de conmutación asociada al control del sistema modular es la misma que la considerada en los apartados 2.7.1 y 2.7.2, siendo el valor de los coeficientes los mismos que los utilizados en las pruebas de laboratorio presentadas en el capítulo 5: βi = 1 (con i=1, 2), k1 = 1, k2 = 6·10-5 y C=60 µF.
• Función de conmutación transformada con tres inversores activos
Aplicando el método de diagonalización presentado en el apartado 2.7.1 para tres módulos inversores activos y teniendo en cuenta los valores escogidos para los coeficientes de la función de conmutación, la matriz de transformación (2.155) queda:
−−
−−=Ω
333333
222222
111111
2222
mmmmmm
mmm
(2.174)

2.50 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Para simplificar el diseño se ha realizado la siguiente elección de las constantes arbitrarias mii: m11 = m33 = 1 y m22=2. Con estos valores, la matriz (2.174) vendrá dada por:
−−−−
=Ω15.05.0121111
(2.175)
y finalmente, la función de conmutación transformada σ*(x,t), expresada en términos de los componentes del vector σ(x,t), queda:
( ) ( ) [ ]
−−−+
−−=⋅
−−−−
=⋅Ω=∗
321
321
321
321
5.05.02
15.05.0121111
,,σσσ
σσσσσσ
σσσ Ttt xσxσ
(2.176)
donde σ1, σ2 y σ3 están definidas por (2.100), (2.102a) y (2.150).
• Función de conmutación transformada con dos inversores activos
Aplicando el método de diagonalización presentado en el apartado 2.7.2 para el caso de dos módulos inversores activos y teniendo en cuenta los valores escogidos para los parámetros de la función de conmutación, la matriz de transformación (2.169) queda:
−=Ω
2222
1111
mmmm
(2.177)
donde m11 y m22 son constantes arbitrarias, reales y positivas. Para simplificar el diseño de la función de conmutación transformada se ha escogido las constantes m11 = m22 =1, de forma que la matriz de transformación vendrá dada por:
−=Ω
1111
(2.178)
La función de conmutación transformada σ*(x,t), expresada en términos de los componentes del vector σ(x,t), queda:
( ) ( ) ( ) ( )[ ]
+−
=⋅
−=⋅Ω=∗
21
2121 ,,
1111
,,σσσσ
σσ Ttttt xxxσxσ (2.179)
donde las superficies de conmutación σ1 y σ2 están definidas, en este caso, por (2.163) y (2.164).
• Ley de control
La ley de control viene dada por (2.162) para el caso de tres módulos inversores activos y por (2.173) para el caso de dos inversores activos.

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.51
• Conclusiones
Se ha aplicado el método de diagonalización al diseño de la ley de control del sistema modular de potencia para los casos de dos y tres módulos inversores activos. A diferencia del método del control jerárquico, el método de diagonalización no está sujeto a condiciones de diseño que condicionen el cumplimiento de la condición de alcanzabilidad, ni necesita el cálculo de sucesivos sistemas equivalentes, sino que únicamente precisa el cálculo de una matriz de transformación que permita realizar un desacoplo de los controles. Ahora bien, en la matriz de transformación intervienen parámetros del sistema modular por lo que la función de conmutación resultante de la transformación será dependiente de dichos parámetros, mientras que en el método de control jerárquico la función de conmutación considerada es independiente de los parámetros del sistema modular.
Debe indicarse que el diseño se ha realizado a fin de minimizar el número de parámetros que intervienen en la matriz de transformación (2.155) (ecuación (2.169) en el caso de 2 módulos activos). Esta matriz depende del valor de la capacidad C definido según (2.43), por tanto, el método de diseño seguido es viable siempre y cuando se mantenga constante el valor del parámetro C o bien la función de conmutación se adapte a los cambios de dicho valor. La primera opción condiciona la estructura del sistema modular que incorporaría un único condensador de salida común a todos los módulos inversores y éstos estarían formados por un puente completo más un inductor. La segunda opción implica que el valor del coeficiente k2 de la función de conmutación cambia con el valor del parámetro C de forma que se cumpla en todo momento k2/C=1. Esta segunda opción permite utilizar módulos inversores que incorporen en su topología un condensador de salida pero tiene una mayor dificultad de implementación práctica ya que implica el conocimiento del valor de la capacidad total de salida que varia en función del número N de inversores conectados en paralelo.
2.8. Dinámica del sistema modular en régimen deslizante
Se puede determinar la dinámica del sistema modular definido por la ecuación de estado (2.99) cuando se encuentra en régimen deslizante mediante el método del control equivalente. En régimen deslizante el comportamiento del sistema modular queda definido por la siguiente ecuación de estado:
rxxx eqweq BA +=& (2.180)
donde las matrices de coeficientes Aeq y Bw eq se pueden determinar de dos formas:
1.- Como extensión del método de diseño del control jerárquico, o sea, calculando el sistema equivalente Σ3 mediante la sustitución, en el sistema equivalente Σ2, de u3 por u3eq, de donde se obtiene:
( )( )rr xxx rrweq ABBKAKBKu 32323233 −−−= (2.181a)
( )( )
( ) ( ) rrwweqw
eq
ABBKBBKBKBBB
AKBKBIA312322312322
231232
−−
−
−−=
−= (2.181b)

2.52 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
2.- Calculando el control equivalente ueq(x) según (2.11) y sustituyendo en la ecuación de estado (2.99):
( ) ( ) [ ]rrr ABKAKBt
AB xxσxxσ
xσxueq +−=
∂∂
+∂∂
∂∂
−= −−
11
(2.182a)
( )( ) ( ) rreqweq ABKBBByAKKBBIA 11 −− −=−= (2.182b)
Independientemente del método de cálculo elegido, o de la estrategia de ecualización de corrientes considerada, las matrices Aeq y Bweq que definen el comportamiento del sistema modular en régimen deslizante, vienen dadas por:
−
−
−
=
001310
001310
0000010
2
1
2
1
21
kkC
R
kkC
R
kk
Aeq ,
−
−
−
=
2
12
2
12
212
331
331
00
kkCCw
kkCCw
kkw
B
o
o
o
eqw (2.183)
El sistema equivalente obtenido para el caso de tres módulos inversores y definido por las matrices (2.183) se puede generalizar fácilmente para el caso de un sistema modular formado por N módulos inversores conectados en paralelo:
−
−
−
=
00110
00110
0000010
2
1
2
1
21
L
MMMMM
L
L
L
kkC
RN
kkC
RN
kk
Aeq ,
−
−
−
=
2
12
2
12
212
1
1
00
kk
NCCw
N
kk
NCCw
N
kkw
B
o
o
o
eqw
MM (2.184)
donde Aeq ∈ R N+1xN+1 y Bw eq∈ R N+1x2.
Las matrices (2.184) definen en (2.180) un sistema lineal no homogéneo cuya solución general puede expresarse como:
( ) ( )tt vcx += ψ (2.185)
donde Ψ(t)c es la solución general del sistema homogéneo xx eqA=& y v(t) es una solución particular del sistema no homogéneo [Boyce, 98]. Los valores propios de la matriz Aeq son r1=-k1/k2 y ri = 0 con i=2,...,N+1, cuyos vectores propios ξi ∈ R N+1x1 correspondientes son:

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.53
=
=
=
−
−
−
= +
1
000
,,
0
100
,
0
001
,
11
11
1
132
2
1
2
1
21
1
M
L
MMMN
kkC
RN
kkC
RN
kk
ξξξξ (2.186)
Por tanto, la solución general del sistema definido por (2.184) viene dada por el producto del vector de constantes arbitrarias c = [c1 c2 ... cN+1]T y la matriz fundamental ψ(t) definida como:
( ) ( )[ ]13221
1 +−= N
tkket ξξξξ Lψ (2.187)
La solución particular v(t), del sistema (2.184) viene dada por:
( ) ( ) ( ) [ ]Trrrreqw iivvdtBttt L&== ∫ −rxv 1ψψ (2.188)
donde vr es la tensión de referencia y la corriente ir viene dada por:
[ ]rrr vCRvNR
i &+=1
(2.189)
Las constantes arbitrarias ci con i=1,...,N+1 se pueden determinar teniendo en cuenta que en régimen deslizante el vector de estado x también cumple σ(x,t)=0. Sustituyendo la solución general (2.185) en la superficie de conmutación σ(x,t)=0 se obtiene que el valor del coeficiente c1 es indeterminado mientras que ci=0 con i =2,...,N+1, para todas las estrategias de ecualización de corriente consideradas. El valor del coeficiente c1 se puede calcular a partir de las condiciones iniciales del vector de estado. De las expresiones (2.187-189) se puede determinar el valor de la tensión vc y de las corrientes de inductor iLi, con i =2,...,N, cuando el sistema se encuentra en régimen deslizante, que vienen dados por:
( ) ( ) ( )
( ) ( ) ( ) ( )( )twCRwtwsenNRVe
kkC
RNcti
twsenVectv
ooortkk
Li
ortkk
c
cos11 21
2
11
211
++
−=
+=
−
−
(2.190)
La corriente iL1 se puede obtener a partir de los componentes del vector de estado x:
Lic
cLiLic
c
N
iLiL i
RvvCiNi
RvvCii =++−=++−= ∑
=
&&2
1 (2.191)
De todo lo anterior se deduce que la solución de equilibrio de la ecuación diferencial (2.180) es única y se corresponde con x = v(t). Para que el punto de equilibrio del sistema (2.180) sea asintóticamente estable, se debe cumplir que el valor propio r1 sea negativo, lo que da lugar a la condición de diseño k1/k2 > 0.

2.54 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
2.9. Dominio de existencia de régimen deslizante y restricciones de diseño
Tal y como se ha presentado en el apartado 2.2 del presente capítulo, el diseño de control en modo de deslizamiento debe finalizarse evaluando el dominio de existencia del régimen deslizante sobre las superficies de conmutación. Del análisis del dominio de existencia se obtendrán un conjunto de restricciones paramétricas que deberán tenerse en cuenta en el procedimiento de diseño de las etapas inversoras.
Por su simplicidad resulta conveniente, en aras a una mejor comprensión, iniciar el análisis por el dominio de existencia asociado al control en modo de deslizamiento diseñado a partir de las superficies transformadas obtenidas mediante el método de diagonalización presentado en el apartado 2.5.2. A continuación, en el apartado 2.9.2, se realizará el análisis del dominio de existencia asociado al control en modo de deslizamiento diseñado a partir del método de control jerárquico.
2.9.1 Dominio de existencia del régimen deslizante con el método de diagonalización
La aplicación del método de diagonalización al control en modo de deslizamiento, tal y como se ha comentado en el apartado 2.5.2, permite transformar un problema de diseño multivariable de orden N en N problemas de diseño de una variable de entrada. En conclusión, las variables de control aparecen, tras la transformación que permite la diagonalización, desacopladas.
Para establecer el dominio de existencia se obtiene en primer lugar el control equivalente ueq(x), calculado según (2.182a), que para un sistema modular formado por N inversores, viene dado por:
( ) ( ) ( ) ( )[ ]TeqNeqeq uuu xxxxueq L21= (2.192)
donde ueqi con i=1,...,N, tiene la siguiente expresión:
+−+
−+= rroiLil
icc
ii
ieqi v
kkCvwCir
LNv
kkC
Rv
LN
NELu &&
2
12
2
11 (2.193)
Para que exista localmente sobre la superficie de conmutación (2.70) un régimen en modo de deslizamiento del sistema definido por (2.42), es necesario y suficiente que cada componente del vector control equivalente (2.192) satisfaga la siguiente inecuación [Bühler, 86], [Utkin, 92]:
( ) maxmin uuu eqi << x (2.194) donde umin = -1 y umax = 1 son los dos posibles valores que adquiere la variable de control u en nuestro caso.
El dominio de existencia del régimen deslizante está limitado por la condición (2.194). Cuando el sistema se encuentra en régimen deslizante y en estado estacionario se cumple que el vector de estado es igual a la solución particular del sistema (2.180): x = v(t) con

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.55
vr=Vr·sen(wot), por lo que la condición (2.194) se puede rescribir en términos de la señal de referencia vr:
( )( ) ( )[ ] ( )
( )( )
⋅+
−+−=
<+⋅⋅++−+
oili
ioli
r
iooiliioli
wRLrCCLwRNRrarctgcon
VE
twwRLrCCLwRNRrN
2
21
2222 cos1
φ
φ
(2.195)
El caso más restrictivo de la condición (2.195) se obtiene cuando cos (w0 t + φ ) = 1:
( )( ) ( )[ ] ( )oww
wwRLrCCLwRNRr
NVE
ioiliioli
r
i
=
=⋅++−+>γ
11 21
2222 (2.196)
donde ( )wiγ es el módulo de la respuesta frecuencial del filtro de salida del i-ésimo convertidor conectado en paralelo. Como resultado, el dominio de deslizamiento de la superficie σi se puede expresar como función de esta respuesta frecuencial y de los parámetros de la tensión de salida (amplitud Vr y frecuencia wo).
Tal y como se presenta en [Biel, 2000] el método de diseño de los parámetros del convertidor se reduce a analizar el módulo del diagrama de Bode de la respuesta frecuencial, del sistema sobre el que se pretende garantizar régimen deslizante, y asegurar que el factor Vr/Ei se encuentre por debajo de la curva de ( )wiγ .
La figura 2.11 muestra el módulo de la respuesta frecuencial γi(w) para un sistema inversor modular formado por tres inversores reductores conectados en paralelo con los siguientes parámetros L1=1.5 mH, L2=1.22 mH, L3=0.9 mH, C1=C2=C3=20 µF, RL=5 Ω junto con su respuesta individual cuando no están conectados en paralelo. La zona sombreada de la figura 2.11 se corresponde con los valores de Vr/E en función de w que garantizan el régimen deslizante.
Bo de Ma gnitude Dia gra m
Fre que ncy (ra d/s e c)
Mag
nitu
de (d
B)
1 03
104
105
-50
-40
-30
-20
-10
0
10
Inversor simple 3
Inversor simple 2
Inversor simple 1
Inversor 3 conectado en paralelo
Inversor 2 conectado en paralelo
Inversor 1 conectado en paralelo
Frecuencia (rad/sec)
Mód
ulo
(dB
)
Módulo del diagrama de Bode
Figura 2.11. Valores de Vr/E donde es posible alcanzar el estado estacionario en el sistema
modular formado por tres inversores reductores conectados en paralelo

2.56 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Se debe hacer notar que el análisis previo puede utilizarse para estudiar cual es el dominio de deslizamiento resultante al añadir o quitar módulos inversores. Efectivamente, de la expresión (2.196) se puede destacar que el factor de amortiguamiento siempre decrece cuando aumenta el número de convertidores conectados en paralelo y la frecuencia de resonancia depende tanto del número de convertidores como de la capacidad total C. Por ejemplo, si se parte de un sistema modular formado por −N módulos convertidores conectados en paralelo con una capacidad total −C , donde se ha alcanzado el régimen deslizante, se puede alcanzar de nuevo el régimen de deslizamiento ideal cuando se añaden o suprimen módulos si:
−−
++ < C
NNC (2.197)
donde +C es la capacidad final resultante y +N es el número final de módulos conectados al sistema modular.
2.9.2 Dominio de existencia del régimen deslizante con el método jerárquico
El método de control jerárquico aplicado al diseño de la ley de control u(x,t)∈RN del sistema modular de potencia, controlado mediante las funciones de conmutación indicadas en el apartado 2.4, considera que el sistema alcanza régimen deslizante sobre la superficie σ(x,t)=0 después de haber alcanzado sucesivos regímenes deslizantes sobre las N-1 superficies σ1=0, σ1=σ2=0, ..., σ1=σ2=σ3=...σi=0 (con i=1,...N-1). Es posible determinar el dominio de existencia para cada uno de los N sucesivos regímenes de deslizamiento a partir de los sucesivos controles equivalentes ukeq, con k=1,...,N, obtenidos según el método descrito en el apartado 2.5.1, esto es:
[ ]
∂∂
+
+
+
∂∂
∂
∂−= −
+−−−
−
−
tu
ubbAbu kk
N
kkN
kkkkkkeq
σσσ 11
112
11
11 fx
xxML (2.198)
donde las matrices Ak-1, Bk-1 y f k-1 se definen según (2.83) con m=N.
De este modo, los dominios de existencia de los sucesivos regímenes deslizantes vienen limitados por la condición:
( ) Nkconuuu Nkkeq ,...,11,...,,1 1 =<<− +x (2.199)
donde en la expresión anterior se explicita la dependencia funcional del control equivalente ukeq con los controles ui, con i=k+1,...,N y con el vector de estado.
Por ejemplo, para el caso particular de un sistema modular compuesto por tres módulos inversores conectados en paralelo, y controlado por las funciones de conmutación indicadas en el apartado 2.4, los controles equivalentes u1eq, u2eq y u3eq vienen dados por las expresiones (2.105), (2.109) y (2.181a) respectivamente, para el orden de control jerárquico σ1⇒σ2⇒σ3.
En general, la expresión de ukeq dependerá del orden jerárquico considerado, σs⇒σj⇒σt, con s,j,t∈1,2,3, en la consecución del régimen deslizante sobre la superficie σ(x,t)=0. El control equivalente asociado a la ley de control calculada en primer lugar useq, dependerá de los otros dos controles uj y ut, por lo que el dominio de existencia de régimen deslizante

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.57
sobre la primera superficie se verá condicionado por los valores discretos 1, -1 que tomen estas variables de control. Es fácil comprobar que el dominio de existencia sobre la primera superficie del orden será más restrictivo para los valores de uj y ut que maximicen useq.
Análogamente, el control equivalente asociado a la ley de control calculada en segundo lugar ujeq, dependerá del control ut, por lo que el dominio de existencia de régimen deslizante sobre la intersección de la primera y segunda superficie se verá condicionado por los valores discretos 1, -1 que tome ut. El dominio de existencia sobre la intersección de la primera y segunda superficie será más restrictivo para el valor de ut que maximice uteq.
Para ilustrar esta idea se va a realizar el estudio del dominio de existencia para el caso particular de un sistema modular controlado con la estrategia de ecualización de corrientes Master-Slave definida por la función de conmutación (2.100, 2.101, 2.102a), considerando la siguiente jerarquía de controles: σ1⇒σ2⇒σ3.
El dominio de existencia de régimen deslizante sobre la superficie σ1=0 está limitado por la condición:
( ) 1,,1 321 <<− uuu eq x (2.200)
donde u1eq viene dada por la expresión (2.105):
+−−−⋅
−+
⋅
−+
−++⋅
+=
rroLLL
LLL
cl
cL
eqeq
vkk
CvCwuLE
uLE
iLr
Lr
iLr
Lr
vkk
Lr
RCCv
RLr
LEL
u
&
&
2
123
3
32
2
23
1
1
3
3
21
1
2
2
2
1
1
1
1
1
1
11
11
(2.201)
El caso más restrictivo del dominio de existencia limitado por la condición (2.200), en términos de u2 y u3, es el que maximiza la función u1eq y viene dado por:
++−= 3
31
132
21
12132 , u
LELEu
LELEusignouu eq (2.202)
El dominio de existencia de régimen deslizante sobre la superficie σ1=σ2=0 está limitado por la condición:
( ) 1,1 32 <<− uu eq x (2.203)
donde u2eq viene dada por la expresión (2.109):
+−−+
+
−+⋅
+=
rroLL
LL
cceq
vkk
CvCwuLE
iLr
iLr
vCkk
Rv
LLEL
u
&
&
2
123
3
33
3
3
22
2
2
1
322
22
211221
(2.204)
El caso más restrictivo del dominio de existencia limitado por la condición (2.203), en términos de u3, es el que maximiza función u2eq y viene definido por:
+−= 3
32
2323 2
1 uLELEusignou eq (2.205)

2.58 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Finalmente, el dominio de existencia de régimen deslizante sobre la superficie σ1=σ2=σ3=0 está limitado por la condición:
( ) 11 3 <<− xequ (2.206)
donde u3eq viene dada por la expresión (2.181a) o bien por la expresión (2.193) para N=i=3:
+−+
−+= rroLlcceq v
kkCvwCir
Lv
kkC
Rv
LELu &&
2
1233
32
1
33
33
3133
(2.207)
Cuando el sistema se encuentra en régimen deslizante y en estado estacionario, las condiciones (2.200), (2.203) y (2.206) se pueden rescribir en términos de la señal de referencia vr:
( )
⋅
+
−+−=
<
−−
+⋅
⋅
++
−+
∑
∑
∑∑
=
=
==
oi i
li
oeqi i
li
r
rr
ooi i
lio
eqi i
li
wRL
LrCL
CLwLL
Lr
RL
arctgcon
VE
uLL
VEu
LL
VE
twwRL
LrCLCLw
LL
Lr
RL
13
11
121
3
1
1
1
1
33
132
2
12
1
21
22
13
11
2
121
3
1
1
3
33
cos33331
φ
φ
(2.208)
( )
⋅
+
+
−
++
+
−=
<
−
+⋅
⋅
+
++
−
++
+
oll
oll
r
r
o
oll
oll
wRL
Lr
LrCL
CLwLL
LLr
Lr
RL
arctgcon
VE
uLL
VE
tw
wRL
Lr
LrCL
CLwLL
LLr
Lr
RL
2
3
3
2
22
22
322
3
3
2
22
2
2
33
23
2
21
2
2
2
3
3
2
22
2
22
322
3
3
2
22
32
31232
21
cos32
31232
61
φ
φ
(2.209)
( ) ( )
( )( )
⋅+
−+−=
<+⋅
⋅++
−+
ol
iol
roolo
l
wRLrCCLwRRrarctgcon
VEtwwRLrCCLwR
Rr
33
23
3
33
21
2233
2
323
3
cos331
φ
φ
(2.210)

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.59
Si consideramos los mismos valores de parámetros para el sistema modular y para los coeficientes de la función de conmutación que los del prototipo experimental utilizado en las pruebas de laboratorio presentadas en el capítulo 3: L1=1.5mH, L2=1.22mH, L3=0.9mH, C1=C2=C3=20µF, E1=E2=E3=70V, βi = 0.5 (con i=1, 2, 3), k1=1, k2 = 6·10-5 y vr=55·sen(wo·t) con wo=2·π·50Hz, las condiciones (2.208), (2.209) y (2.210) devienen en las expresiones (2.211), (2.212) y (2.213) respectivamente:
( )5570
3370
6711050cos9154.3 321 <−−+⋅ uutwo φ (2.211)
( )5570
495427cos6868.1 32 <−+⋅ utwo φ (2.212)
( )5570cos0051.1 3 <+⋅ φtwo (2.213)
A partir de las expresiones (2.211), (2.212) y (2.213) se pueden extraer las siguientes conclusiones:
• La condición (2.213), que limita el dominio de existencia de régimen deslizante sobre la superficie σ1=σ2=σ3=0, se cumple, para los parámetros utilizados, en cualquier caso lo que garantiza la existencia de régimen deslizante sobre la superficie σ(x,t)=0.
• La condición (2.212), que limita el dominio de existencia de régimen deslizante sobre la superficie σ1=σ2=0, se cumple si u3=signo(cos(wo·t+φ2)) o bien [u3=-signo(cos(wo·t+φ2)) y cos(wo·t+φ2)<0.2431].
• La condición (2.211), que limita el dominio de existencia de régimen deslizante sobre la superficie σ1=0, se cumple si u2=u3=signo(cos(wo·t+φ1)) o bien [u2=signo(cos(wo·t+φ2)), u3=-u2 y cos(wo·t+φ2)<0.1822] o bien [u3=signo(cos(wo·t+φ2)), u2=-u3 y cos(wo·t+φ2)<0.4674].
El cumplimiento de estas condiciones permitiría asegurar la existencia de régimen de deslizamiento en orden jerárquico. Sin embargo, la validación de las condiciones depende del valor de los controles y ello dificulta su estudio incluso en régimen estacionario. Por este motivo, en el siguiente apartado se evaluará la convergencia del sistema a la superficie de conmutación σ(x,t)=0 mediante la aplicación del segundo método de Lyapunov.
Por otra parte, debe indicarse que pueden obtenerse resultados similares en el caso de considerar otros órdenes jerárquicos o utilizar otras estrategias de ecualización de corriente.
En cualquier caso, independientemente de la estrategia de ecualización de corrientes y del orden jerárquico considerado, la expresión del control equivalente asociada a la ley de control calculada en último lugar uteq (σs⇒σj⇒σt, con s,j,t∈1,2,3), se corresponde con la expresión (2.193) para i=t. Este resultado es previsible teniendo en cuenta que, tal y como se demuestra en el apartado 2.5.2, el control equivalente de las superficies de conmutación resultantes al aplicar la técnica de diagonalización coincide con el control equivalente en la intersección (superficie eventual) de las superficies de conmutación originales. En conclusión, el conjunto de restricciones de diseño que se obtuvieron en el apartado 2.9.1 debe aplicarse al control en modo de deslizamiento basado en el método jerárquico.

2.60 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
2.10. Análisis de la estabilidad del régimen deslizante mediante el segundo método de Lyapunov
Según se ha comprobado en el apartado anterior las condiciones de diseño, expresadas en términos del diagrama de Bode de la respuesta frecuencial del filtro de salida del sistema modular, garantiza únicamente existencia de régimen deslizante en el caso de realizar un diseño mediante el método de diagonalización. Cuando se utiliza el método jerárquico, el procedimiento de diseño presentado garantiza régimen deslizante sobre la superficie σt (orden jerárquico σs⇒σj⇒σt con s,j,t∈1,2,3) siempre y cuando exista previamente deslizamiento sobre σs y σj; sin embargo, tal y como se ha comprobado en el apartado anterior, este hecho depende de los valores discretos de los controles uj y ut. Por otra parte, debe indicarse, que las condiciones (2.211) y (2.212) se validan cuando todos los controles ui con i=1,2,3 adquieren los mismos valores.
Con el objetivo de evaluar los valores de los controles y observar el comportamiento de las diversas superficies de conmutación, se ha simulado el sistema modular para la estrategia Master-Slave con N=3 y con los mismos valores de parámetros para el sistema modular y para los coeficientes de la función de conmutación que los del prototipo experimental utilizado en las pruebas de laboratorio presentadas en el capítulo 3: L1=1.5mH, L2=1.22mH, L3=0.9mH, C1=C2=C3=20µF, E1=E2=E3=70V, βi = 0.5 (con i=1, 2, 3), k1=1, k2 = 6·10-5 y vr=55·sen(wot) con wo=2·π·50Hz. En la figura 2.12 se presentan la tensión de salida, los valores de las señales de control (adecuadamente escaladas para distinguirlas con claridad) y las superficies de conmutación. Tal y como se puede observar en dicha figura los controles ui con i=1,2,3 cumplen frecuentemente u1 = u2 = u3 y ello conlleva el cumplimiento de las condiciones que establecen la existencia de régimen deslizante sobre las superficies de conmutación. Puede comprobarse que este comportamiento es independiente de la estrategia de ecualización de corriente considerada. En conclusión, puede afirmarse, que según los resultados obtenidos, la superficie de conmutación σ(x,t)=0 (superficie eventual) es atractora del vector de estado.
0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
vc(t)(A)
(B)(C)
σ1, σ2, σ3
0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
vc(t)(A)
(B)(C)
σ1, σ2, σ3
4.94 4.95 4.96 4.97 4.98 4.99 5 5.01 5.02 5.03
x 10-3
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8 u1
u2
u3
4.94 4.95 4.96 4.97 4.98 4.99 5 5.01 5.02 5.03
x 10-3
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8 u1
u2
u3
(a) (b)

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.61
0.0101 0.0101 0.0101 0.0101 0.0101-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
u1
u2
u3
0.0101 0.0101 0.0101 0.0101 0.0101-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
u1
u2
u3
0.015 0.015 0.015 0.015 0.015 0.0151
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
u1
u2
u3
0.015 0.015 0.015 0.015 0.015 0.0151
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
u1
u2
u3
(c) (d)
Figura 2.12. Resultados de simulación del sistema modular de convertidores conectados en paralelo con la estrategia Master-Slave. (a) Tensión de salida [11 V/div], superficies σ1, σ2 y σ3.
Resultados de simulación de las superficies σ1, σ2 y σ3 y de las señales de control u1, u2 y u3 correspondientes a (b) la ampliación del área (A) de la figura 2.12.a; (c) la ampliación del área
(B) de la figura (2.12.a) y (d) la ampliación del área (C) de la figura (2.12.a)
El segundo método de Lyapunov [Slotine, 91], presentado por A. M. Lyapunov en 1892 para determinar la estabilidad de sistemas dinámicos, permite explicar este fenómeno. La aplicación del método posibilita conocer la estabilidad asintótica (alcanzabilidad) de la superficie σ(x,t)=0. Para ello se define como función de Lyapunov:
( ) σσx TtV 5.0, = (2.214)
donde σ(x, t) viene dada por (2.100).
La condición de alcanzabilidad, se puede definir en términos de la derivada de la función de Lyapunov [Gao, 93], [Hung, 93] como:
( ) 0, <tV x& cuando σ ≠ 0 (2.215)
La derivada de (2.214) viene dada por:
( ) ( ) ( )tGtGtV iioi
ii ,,,,, 13
1xxx σσσσ +== ∑
=&& (2.216)
donde,
( ) ( ) ux
xxx
x BtGyt
AtGi
iii
i
iiiio ∑∑
== ∂∂
=
∂
∂+
∂∂
=3
11
3
1,,,, σσσσσσσ (2.217)
Obsérvese que la función G0 depende del vector de estado y, a través del término ti
∂∂σ , del
vector de referencia, mientras que la función G1 contiene los términos del vector de control u. Esta última función ha sido evaluada para todas las estrategias consideradas en la presente tesis (M-S, CCC y CLC), así como para la función de conmutación transformada obtenida con el método de diagonalización.
En concreto, para las superficies de conmutación derivadas de la estrategia Master-Slave la expresión de G1 viene dada por:

2.62 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
( )
3322
22
12
3
3
232
212
12
2
2
1322
212
12
1
11 ,,
uCk
Ck
Ck
LE
uCk
Ck
Ck
LE
uCk
Ck
Ck
LE
tG i
+++−
+
++−
−+
−+−=
σβσσ
σσβσ
σβσβσσ x
(2.218)
Considerando β1=β2 la expresión (2.218) se puede rescribir como:
( ) ( )
( )
( ) 32132
32
3
3
23122
22
2
2
13212
12
1
11
23
23
223,,
uiiiCk
Ck
LE
uiiiCk
Ck
LE
uiiiCk
Ck
LE
tG
LLL
LLL
LLLi
−−+
+−
−−+
+−
−−
−+
−−=
βσβ
βσβ
ββσβσ x
(2.219)
Para las superficies de conmutación derivadas de la estrategia Circular Chain Control la expresión de G1 resulta:
( )
3332
22
112
3
3
2332
222
12
2
2
132
222
112
1
11 ,,
uCk
Ck
Ck
LE
uCk
Ck
Ck
LE
uCk
Ck
Ck
LE
tG i
+++
−−
−+
++−
+
−+
+−=
σβσσβ
σβσβσ
σσβσβσ x
(2.220)
Considerando β1=β2=β3 la expresión (2.220) se puede rescribir como:
( ) ( ) ( )
( ) ( )
( ) ( ) 32132
232
32
3
3
23122
122
22
2
2
13212
312
12
1
11
233
233
233,,
uiiiiiCk
Ck
LE
uiiiiiCk
Ck
LE
uiiiiiCk
Ck
LE
tG
LLLLL
LLLLL
LLLLLi
−−−−+−
−−−−+−
−−−−+−=
ββσ
ββσ
ββσσ x
(2.221)
Para las superficies de conmutación derivadas de la estrategia Central Limit Control la expresión de G1 viene dada por:

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.63
( )
3332
222
112
3
3
2332
222
112
2
2
1332
222
112
1
11
2
2
2,,
uCk
Ck
Ck
LE
uCk
Ck
Ck
LE
uCk
Ck
Ck
LE
tG i
++
−+
−−
−+
++
−−
−+
−+
+−=
σβσβσβ
σβσβσβ
σβσβσβσ x
(2.222)
Considerando β1=β2=β3 la expresión (2.222) se puede rescribir como:
( ) ( )
( )
( ) 32132
32
3
3
23122
22
2
2
13212
12
1
11
233
233
233,,
uiiiCk
Ck
LE
uiiiCk
Ck
LE
uiiiCk
Ck
LEtG
LLL
LLL
LLLi
−−
−+−
−−
−+−
−−
−+−=
ββσ
ββσ
ββσσ x
(2.223)
Por último, para la función de conmutación transformada (2.176) obtenida con el método de diagonalización la expresión G1 viene dada por:
( ) 333
323322
2
212211
1
12111 2
3233,, u
LEmu
LEmu
CLEkmtG i σβσβσσ −−−=x (2.224)
A partir de las expresiones (2.219), (2.221), (2.223) y (2.224), se pueden realizar las siguientes consideraciones con relación al cumplimiento de la condición de alcanzabilidad (2.215):
1. En el caso de aplicar el método de diagonalización y teniendo en cuenta la ley de control diseñada en el apartado 2.7 (ui=signo(σi)), la ecuación (2.216) resulta:
( ) ( ) 33
32332
2
21221
1
1211 2
3233,,, σβσβσσ
LEm
LEm
CLEkmtGtV io −−−= xx& (2.225)
lo cual garantiza, que existe una región en el espacio de estado que contiene a σ(x,t)=0 donde se cumple la condición de alcanzabilidad ( ) 0, <tV x& , y que define el dominio de atracción.
2. En el caso de aplicar el método jerárquico, la convergencia de la dinámica del sistema al régimen deslizante sobre σ(x,t)=0 depende de la relación existente entre el término dependiente de las corrientes de inductor de las ecuaciones (2.219), (2.221) y (2.223) y el término que depende de la superficie σi con i=1,2,3. De hecho puede garantizarse, con la ley de control diseñada en el apartado 2.6 (ui=signo(σi)), que existe una región en el espacio de estado que contiene a σ(x,t)=0 donde se cumple la condición de alcanzabilidad ( ) 0, <tV x& siempre y cuando:

2.64 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
• Para la estrategia Master-Slave:
( ) ( )
( ) ( )
( ) ( )32132
32
23122
22
13212
12
23
23
223
σβσβ
σβσβ
σββσβ
signoiiiCk
Cksigno
signoiiiCk
Cksigno
signoiiiCk
Ck
signo
LLL
LLL
LLL
=
−−+
+
=
−−+
+
=
−−
−+
−
(2.226)
• Para la estrategia Circular Chain Control:
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )32132
232
32
23122
122
22
13212
312
12
233
233
233
σββσ
σββσ
σββσ
signoiiiiiCk
Cksigno
signoiiiiiCk
Cksigno
signoiiiiiCk
Cksigno
LLLLL
LLLLL
LLLLL
=
−−−−+
=
−−−−+
=
−−−−+
(2.227)
• Para la estrategia Central Limit Control:
( ) ( )
( ) ( )
( ) ( )32132
32
23122
22
13212
12
233
233
233
σββσ
σββσ
σββσ
signoiiiCk
Cksigno
signoiiiCk
Cksigno
signoiiiCk
Ck
signo
LLL
LLL
LLL
=
−−
−+
=
−−
−+
=
−−
−+
(2.228)
Obsérvese que en las estrategias Master-Slave y Circular Chain Control no existe ninguna combinación de parámetros de diseño (en concreto ningún valor de β) para la cual se pueda anular el efecto del término de corrientes de inductor. Esto no es
así en el caso de la estrategia Central Limit Control si se considera Ck2=β , esta
estrategia conduce al mismo resultado que el obtenido al aplicar el método de diagonalización. A fin de estudiar la relevancia del término de corrientes de inductor sobre la convergencia del sistema a σ(x,t)=0, se ha procedido a simular el sistema modular para diferentes estrategias de ecualización de corrientes con N=3 y con los mismos valores de parámetros para el sistema modular y para los coeficientes de la función de conmutación que los del prototipo experimental utilizado en las pruebas de laboratorio presentadas en el capítulo 3: L1=1.5mH, L2=1.22mH, L3=0.9mH, C1=C2=C3=20µF, E1=E2=E3=70V, βi = 0.5 (con i=1, 2, 3), k1=1, k2 = 6·10-5 y vr=55·sen(wot) con wo=2·π·50Hz.
Los resultados obtenidos en las simulaciones realizadas corroboran que las expresiones (2.226), (2.227) y (2.228) se cumplen frecuentemente. En efecto, en la figura 2.13 se muestran los resultados de simulación obtenidos en régimen

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.65
estacionario con la estrategia Master-Slave de los términos dependientes de las corrientes y los términos dependientes de la superficie σi con i=1,2,3, extraídos de la expresión (2.219). En la figura 2.14 se representan los resultados de simulación análogos obtenidos en este caso con la estrategia Circular Chain Control a partir de la expresión (2.221) y en la figura 2.15 los obtenidos con la estrategia Central Limit Control a partir de la expresión (2.223).
En conclusión, y a partir de los resultados obtenidos, puede afirmarse que normalmente existe convergencia a σ(x,t)=0, debido a que ( ) 0, <tV x& se verifica, indicando que existe una región en el espacio de estado, denominada región de atracción, que contiene a σ(x,t)=0 donde se cumple la condición de alcanzabilidad.
0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-4
-3
-2
-1
0
1
2
3
4
(a) (b)
0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-4
-3
-2
-1
0
1
2
3
4
(c)
Figura 2.13. Resultados de simulación de los términos (2.219) asociados a la derivada de la función de Lyapunov para la estrategia Master-Slave. (a) u1⇒ (3k2/C-2β)σ1 [color azul], (k2/C-
β)β(2iL1-iL2-iL3) [color rojo], (b) u2⇒ (3k2/C+β)σ2 [color azul], βk2/C(2iL2-iL1-iL3) [color rojo], (c) u3⇒ (3k2/C+β)σ3 [color azul], βk2/C(2iL3-iL1-iL2) [color rojo]

2.66 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-3
-2
-1
0
1
2
3
0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-3
-2
-1
0
1
2
3
(a) (b)
0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-3
-2
-1
0
1
2
3
(c)
Figura 2.14. Resultados de simulación de los términos (2.221) asociados a la derivada de la función de Lyapunov para la estrategia Circular Chain Control. (a) u1⇒ (3k2/C)σ1 [color azul], (3k2/C)β(iL1-iL3)-β 2(2iL1-iL2-iL3) [color rojo], (b) u2⇒ (3k2/C)σ2 [color azul], (3k2/C)β(iL2-iL1)-
β2(2iL2-iL1-iL3) [color rojo], (c) u3⇒ (3k2/C)σ3 [color azul], (3k2/C)β(iL3-iL2)-β 2(2iL3-iL1-iL2) [color rojo]
0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-3
-2
-1
0
1
2
3
0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-3
-2
-1
0
1
2
3
(a) (b)

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.67
0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
-3
-2
-1
0
1
2
3
(c)
Figura 2.15. Resultados de simulación de los términos (2.223) asociados a la derivada de la función de Lyapunov para la estrategia Central Limit Control. (a) u1⇒ (3k2/C)σ1 [color azul],
3(k2/C-β)β(2iL1-iL2-iL3) [color rojo], (b) u2⇒ (3k2/C)σ2 [color azul], 3(k2/C-β)β(2iL2-iL1-iL3) [color rojo], (c) u3⇒ (3k2/C)σ3 [color azul], 3(k2/C-β)β(2iL3-iL1-iL2) [color rojo]
Esta misma conclusión puede obtenerse si se representa gráficamente la función
( ) ux
x BtGi
iii ∑
= ∂∂
−=−3
11 ,,
σσσ para las diversas estrategias de ecualización de corrientes
consideradas:
• Para la estrategia Master-Slave:
0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
0
1
2
3
4
5
6
x 105
8 8.01 8.02 8.03 8.04 8.05 8.06
x 10-3
0
1
2
3
4
5
6
x 105
(a) (b)
Figura 2.16. (a) Representación gráfica de la función –G1 obtenida a partir de los resultados de simulación para la estrategia de ecualización de corrientes Master-Slave. (b) Ampliación de la
figura (a)

2.68 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
• Para la estrategia Circular Chain Control:
0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
0
1
2
3
4
5
6
x 105
8 8.01 8.02 8.03 8.04 8.05 8.06
x 10-3
0
1
2
3
4
5
6
x 105
(a) (b)
Figura 2.17. (a) Representación gráfica de la función –G1 obtenida a partir de los resultados de simulación para la estrategia de ecualización de corrientes Circular Chain Control. (b)
Ampliación de la figura (a)
• Para la estrategia Central Limit Control:
0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
0
1
2
3
4
5
6
x 105
8 8.01 8.02 8.03 8.04 8.05 8.06
x 10-3
0
1
2
3
4
5
6
x 105
(a) (b)
Figura 2.18. (a) Representación gráfica de la función –G1 obtenida a partir de los resultados de simulación para la estrategia de ecualización de corrientes Central Limit Control. (b) Ampliación
de la figura (a)

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.69
• Para las superficies transformadas obtenidas mediante el método de diagonalización:
0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
0
1
2
3
4
5
6
x 105
8 8.01 8.02 8.03 8.04 8.05 8.06
x 10-3
0
1
2
3
4
5
6
x 105
(a) (b)
Figura 2.19. (a) Representación gráfica de la función –G1 obtenida a partir de los resultados de simulación para las superficies transformadas obtenidas mediante el método de diagonalización.
(b) Ampliación de la figura (a)
A partir de la observación de los resultados presentados en las figuras 2.16, 2.17, 2.18 y 2.19, puede concluirse que, tal y como ya se ha comentado anteriormente, ( ) 0, <tV x& se verifica normalmente, lo cual implica que el sistema converge a la superficie eventual σ(x,t)=0.
2.11. Generalización a cargas no lineales y reactivas
En este apartado se generaliza el estudio efectuado en los apartados 2.8 y 2.9 con relación a la dinámica del sistema y el dominio de existencia en régimen deslizante para extenderlos a los casos de cargas no lineales y reactivas. En primer lugar se establece, en el apartado 2.11.1, la ecuación de estado del sistema modular compuesto por N módulos inversores conectados en paralelo con una carga no lineal genérica. En el siguiente apartado se redefinen las funciones de conmutación del apartado 2.4 para expresarlas en función del vector de estado y de la corriente de carga genérica. En el apartado 2.11.3 se obtiene la ecuación de estado que define la dinámica del sistema en régimen deslizante para cargas no lineales mediante el método del control equivalente. Finalmente, en los apartados 2.11.4 y 2.11.5 se establece el dominio de existencia de régimen deslizante para cargas no lineales y cargas reactivas, respectivamente.

2.70 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
2.11.1. Modelo del sistema
En el caso de considerar una carga no lineal (figura 2.20), el comportamiento dinámico del sistema modular de la figura 2.5, formado por N módulos convertidores, estará gobernado por la siguiente ecuación en el espacio de estado:
dxuxx dBBA ++=& (2.229)
donde las matrices A ∈ R N+1xN+1 y B ∈ R N+1xN son las matrices de estado y entrada, respectivamente, de coeficientes reales y constantes, Bd ∈ R N+1x2 es la matriz de perturbación, x ∈ R N+1 es el vector de estado cuyas componentes son las variables de estado, [ ]Tzz ii &=dx es el vector de perturbación cuyas componentes son la corriente de carga iz, y su derivada zi& , y finalmente u ∈ R N es el vector de control.
C
+
voAC
-
iC iZSISTEMA MODULAR
DE POTENCIA
Figura 2.20. Sistema modular de potencia con carga no lineal
Tomando como variables de estado la tensión en el condensador vc, la derivada de la tensión en el condensador cv& , y las corrientes de inductor iLi para i =2,...,N, las matrices A, B y Bd vienen dadas por:
−−
−−
−−−−
=
N
LN
N
L
N
LNLLLL
eq
Lr
L
Lr
L
CLr
CLr
CLr
CLr
Lr
CL
A
L
MLMMM
L
L
L
001
001
10010
2
2
2
1
1
2
2
1
1
1
1
(2.230a)
=
N
N
N
N
LE
LE
CLE
CLE
CLE
B
L
MLMM
L
L
L
00
00
000
2
2
2
2
1
1
,
−−
=
00
00
100
1
1
MM
CCLr
B
l
d (2.230b)
con ∑=
=N
iiCC
1
y 1
1
1−
=
= ∑
N
i ieq L
L .

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.71
2.11.2. Función de conmutación
Las expresiones de las funciones de conmutación, asociadas a las tres estrategias de ecualización de corrientes, para el caso de cargas no lineales se determinan tomando las funciones de conmutación definidas en el apartado 2.4 y sustituyendo los términos que dependen de la resistencia de carga R por términos en función del vector de perturbación xd, obteniendo como resultado:
( ) ( ) ( ) ( )[ ] ( ) dSdrivdSdrT
N BBKKBBKtttt xxxxxxxxxxσ rr +++=++== ,,,, 21 σσσ L (2.231)
donde las matrices Kv ∈R NxN+1 y Br ∈ R Nx2 vienen definidas por (2.74), y las matrices Ki∈R NxN+1 y BSd ∈ R Nx2 dependen de la estrategia de ecualización de corrientes considerada.
Para la estrategia Master-Slave, las matrices Ki y BSd vienen dadas por:
( )
−−−
−−−−−−
=
−−−−
−
1111
2222
1111
20
2020
00000
NNNN
SMi
C
CC
K
ββββ
ββββββββ
L
MMMMMM
L
L
L
, ( )
=
−
−
0
0000
1
2
1
N
SMSdB
β
ββ
MM
(2.232)
Para la estrategia Circular Chain Control, las matrices Ki y BSd vienen dadas por:
( )
−
−−−−−
−
=
NN
CCCi
CC
K
ββ
ββββββββββββ
L
MMMMMMM
L
L
L
0000
000020
20
33
22222
11111
, ( )
−
=
00
0000
2
1
MM
ββ
CCCSdB (2.233)
Finalmente, para la estrategia Circular Limit Control, las matrices son:
( )
( )
( )
−−
=
−
−−
−−
=
0
0001
000
000000
)1(0
3
2
1
33
22
1111
N
CLCSd
NN
CLCi
N
B
NC
NCNC
NNNNC
K
β
ββ
β
ββ
ββββ
ββββ
MM
L
MMMMMM
L
L
L
(2.234)

2.72 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
2.11.3. Dinámica del sistema modular en régimen deslizante
La dinámica del sistema modular definido por la ecuación de estado (2.229) cuando se encuentra en régimen deslizante se determina a partir del control equivalente que en este caso viene dado por:
( ) [ ]
+++−= •
−drdeq xxxxxu
dSrrd BABKBKABK 1 (2.235)
donde el vector dxdS
B • se define como:
( )
==== •• 00
10SSSd
dSSSdSd
dSAyABBconABB
dtdB ddd xxx (2.236)
Sustituyendo el control equivalente (2.235) en el ecuación de estado (2.229) se obtiene el sistema equivalente en régimen deslizante definido como:
dr xxxx eqdeqweq BBA ++=& (2.237)
con:
( )( )
( )
+−=
−=
−=
•
−
−
−
dSddeqd
rreqw
eq
BKBKBBBB
ABKBBB
KAKBBAA
1
1
1
(2.238)
Independientemente de la estrategia de ecualización de corriente considerada, las matrices Aeq, Bweq y Bdeq vienen dadas por:
−
−
−
=
000
000
0000010
2
1
2
1
21
L
MMMMM
L
L
L
kk
NC
kk
NC
kk
Aeq ,
−
−
−
=
2
12
2
12
212
00
kk
NCw
NC
kk
NCw
NC
kkw
B
o
o
o
eqw
MM
,
=
N
NB eqd
10
100000
MM (2.239)
La solución general del sistema (2.237) puede expresarse como:
( ) ( )tt vcx += ψ (2.240)
donde Ψ(t)c es la solución general del sistema homogéneo xx eqA=& y v(t) es una solución particular del sistema no homogéneo. Los valores propios de la matriz Aeq son r1 = -k1/k2 y ri = 0 con i=2,...,N+1, cuyos vectores propios ξi ∈ R N+1x1 correspondientes son:

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.73
=
=
=
−
−
−
= +
1
000
,,
0
100
,
0
001
,
1
122
2
1
2
1
21
1
M
L
MMMN
kk
NC
kk
NC
kk
ξξξξ (2.241)
La solución general del sistema definido por (2.237) viene dada por el producto del vector de constantes arbitrarias c = [c1 c2 ... cN+1]T y la matriz fundamental ψ(t) definida en este caso como:
( )
( )
( ) ( )
( )
( )
−
−
−
=
−
−
−
−
100
010
000001
21
2
1
21
2
1
2121
21
L
MLMMM
L
L
L
tkk
tkk
tkk
tkk
ekk
NC
ekk
NC
ekke
tψ (2.242)
La solución particular v(t), del sistema (2.237) vendrá dada por:
( ) ( ) ( )[ ]∫ += − dtBBttt eqdeqw dr xxv 1ψψ (2.243)
La solución particular (2.243) se puede dividir en dos términos dependientes del vector de referencia xr, y del vector de perturbación xd, respectivamente:
( ) ( ) ( )ttt dr ,, dr xvxvv += (2.244)
donde vr(xr,t) y vd(xd,t) vienen dados por:
( ) ( ) ( ) [ ]( ) ( ) ( ) [ ]Tdddeqddd
Trrrreqwr
iidtBttt
iivvdtBttt
L
L&
00,
,1
1
==
==
∫∫
−
−
xxv
xxv rr
ψψ
ψψ (2.245)
donde vr es la tensión de referencia, y las corrientes ir e id vienen dadas por:
zdrr iN
ivNCi 1; == & (2.246)
Las constantes ci con i=1,...,N+1 se determinan sustituyendo la solución general (2.240) en la superficie de conmutación σ(x,t)=0 de donde se obtiene que el coeficiente c1 es indeterminado mientras que ci=0 con i=2,...,N+1, para todas las estrategias de ecualización de corriente consideradas. El valor concreto del coeficiente c1 se puede calcular a partir de las condiciones iniciales del vector de estado.

2.74 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
A partir de las expresiones (2.240-246) se puede determinar el valor de la tensión vc y de las corrientes de inductor iLi, con i =2,...,N , cuando el sistema se encuentra en régimen deslizante:
( ) ( ) ( )
( ) ( ) ( )zrtkk
Li
ortkk
c
ivCN
ekkCcti
twsenVectv
++−=
+=
−
−
&121
2
11
211
(2.247)
La corriente iL1 se puede obtener a partir de los componentes del vector de estado x:
( ) LizcLiLizcLizc
N
iLiL iivCiNiivCiNivCii =++−=++−−=++−= ∑
=
&&& 12
1
(2.248)
De lo anterior se deduce que la solución de equilibrio de la ecuación diferencial (2.237) es única y se corresponde con x = v(t). Como ocurre para el caso de cargas resistivas, para que el punto de equilibrio del sistema (2.237) sea asintóticamente estable, se debe cumplir que r1 <0, lo que da lugar a la condición de diseño k1/k2 > 0. Se debe hacer notar que la naturaleza de esta estabilidad es local ya que sólo es válida cuando el sistema se encuentra en régimen deslizante.
2.11.4. Dominio de existencia de régimen deslizante para cargas no lineales
Las componentes ueqi, con i =1,...,N, del vector control equivalente ueq(x) calculado según (2.235) vienen dadas, independientemente de la estrategia de ecualización de corriente considerada, por la siguiente expresión:
++−+−= zrroiLil
icc
ii
ieqi iv
kkCvwCir
LNv
kkCv
LN
NELu &&&
2
12
2
1 (2.249)
Cuando el sistema se encuentra en régimen deslizante y en estado estacionario se cumple que el vector de estado es igual a la solución particular del sistema (2.237), por lo que la expresión (2.249) se puede rescribir en términos de la señal de referencia vr y de la corriente de carga iz:
( )
+−++= zrozr
i
lir
ii
ieqi ivwCivC
Lrv
LN
NELu && 2
(2.250)
Del análisis de las expresiones (2.249) y (2.250) se debe hacer notar que se pierde el régimen deslizante, limitado por la condición –1 < ueqi < 1, para valores elevados de zi& . Sin embargo, el sistema es robusto frente a este tipo de cambios y conseguiría alcanzar de nuevo el régimen deslizante.

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.75
2.11.5. Generalización del dominio de existencia de régimen deslizante para cargas reactivas
El control equivalente en régimen deslizante y estado estacionario para el caso de una carga reactiva, definida por Z(s) = Vo(s)/Iz(s), se obtiene aplicando la transformada de Laplace con condiciones iniciales nulas sobre la expresión (2.250):
( ) ( ) ( )( ) ( ) ( )
( )
+−
++=
sZsvssvwC
sZsvsvsC
Lr
svLN
NEL
u rro
rr
i
lir
ii
ieqi
2 (2.251)
Para garantizar la existencia de régimen deslizante en régimen estacionario se debe cumplir –1 < ueqi < 1, por tanto se debe validar la siguiente inecuación:
( ) wLrwrjCwLCNjwZjwZN
EV
ijLiLiTiTi
r
+++−⋅
⋅<
2)()(
(2.252)
donde Z(jw) es la impedancia de carga. La expresión (2.252) indica que cuando el sistema modular está cargado con un carga reactiva se puede aplicar el proceso de diseño de los parámetros del convertidor basado en el análisis del diagrama de Bode de los filtros de salida incluyendo la impedancia de la carga reactiva conectada al convertidor.
2.12. Conclusiones
En este capítulo se ha presentado el diseño de un control en modo de deslizamiento de un sistema inversor modular formado por la conexión en paralelo de N inversores reductores en puente completo para conseguir regulación de tensión AC de salida y distribución equitativa de corrientes a través de los módulos inversores.
Se ha analizado el sistema modular controlado por la función de conmutación propuesta por Carpita et al. en [Carpita, 88]. Los resultados obtenidos en el análisis corroboran que dicha función de conmutación permite obtener un seguimiento perfecto de la señal de referencia en régimen permanente y demuestran que un desapareamiento en el valor de las inductancias de los módulos inversores provoca un desequilibrio de las corrientes suministradas a la carga por cada módulo.
Con el objetivo de lograr una distribución equitativa de potencia a través de los módulos convertidores, se ha considerado la utilización de tres estrategias de ecualización activa de corriente denominadas Master-Slave, Circular Chain Control y Central Limit Control. Para cada una de estas estrategias se ha deducido la función de conmutación correspondiente que permite obtener el comportamiento deseado en régimen permanente.
Se ha presentado el método jerárquico y de diagonalización para el diseño de la ley de control de sistemas multientrada. Ambos métodos permiten reducir la complejidad del diseño de la ley de control y se han aplicado al diseño de la ley de control de un sistema modular de potencia formado por tres inversores conectados en paralelo. A partir de los resultados obtenidos en el diseño de la ley de control se extraen las siguientes conclusiones:

2.76 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
• El método jerárquico presenta una carga computacional mayor ya que requiere el calculo de sucesivos sistemas equivalentes y por otra parte implica el cumplimiento de determinadas condiciones paramétricas para la consecución de la condición de alcanzabilidad.
• El método de diagonalización requiere únicamente el cálculo de la matriz de transformación que permita realizar un desacoplo de los controles. Una vez obtenida dicha matriz el problema del diseño del control de un sistema multientrada de orden m se reduce a m problemas de diseño de una sola entrada. Ahora bien, la función de conmutación resultante de la transformación puede ser dependiente de los parámetros del sistema.
Por otra parte, se ha obtenido el modelo equivalente del sistema modular de potencia en régimen deslizante tanto para cargas resistivas como para cargas no lineales y para todas las estrategias de ecualización de corriente consideradas. A partir de la ecuación de estado que define el modelo equivalente se ha calculado la solución general del sistema modular en régimen deslizante que determina su comportamiento tanto en el estado transitorio como en el régimen permanente. Del análisis de la ecuación de estado que define el comportamiento del sistema en régimen deslizante y de su solución general se han extraído las siguientes conclusiones:
• El comportamiento dinámico y estático del sistema modular en régimen deslizante es el mismo independientemente de la estrategia de ecualización de corrientes considerada.
• La dinámica deslizante ideal en régimen permanente tiene el comportamiento deseado en cuanto a la regulación de la tensión de salida AC caracterizándose por un seguimiento preciso de la señal de referencia por parte del sistema modular.
• También se ha podido comprobar que la dinámica deslizante ideal en régimen permanente tiene el comportamiento deseado en cuanto a la ecualización de corrientes de inductor.
• El comportamiento dinámico y estático del sistema en régimen deslizante no depende de los coeficientes βi que intervienen en los términos de la función de conmutación relacionados con la estrategia de ecualización de corriente.
• La estabilidad asintótica del punto de equilibrio que alcanza el sistema equivalente en estado estacionario cuando se encuentra en régimen deslizante depende exclusivamente de la condición de diseño k1/k2 > 0. Se debe hacer notar que la estabilidad del sistema en régimen deslizante no depende de los parámetros del sistema ni de los coeficientes βi y que dicha estabilidad tiene naturaleza local ya que sólo es valida cuando el sistema está en régimen deslizante.
Finalmente, se ha evaluado mediante el método del control equivalente el dominio de existencia del régimen deslizante estacionario, para los casos de diseño de la ley de control mediante el método jerárquico y mediante el método de diagonalización. Pueden extraerse las siguientes conclusiones de dicho estudio:
• Método de diagonalización
A partir del análisis de las expresiones del dominio de existencia en estado estacionario se han podido establecer restricciones de diseño de los parámetros del sistema modular, como por ejemplo la amplitud y frecuencia de la tensión de salida, en términos del módulo de la respuesta frecuencial del filtro de salida.

Capítulo 2. Aplicación del control en modo de deslizamiento a onduladores conectados en paralelo 2.77
• Método jerárquico
El estudio proporciona un conjunto de inecuaciones que limitan el dominio de deslizamiento sobre las diferentes superficies. La determinación del cumplimiento de estas inecuaciones en régimen deslizante estacionario representa un problema de difícil resolución debido a su dependencia respecto de las señales de control.
En este punto deben constatarse dos consideraciones importantes:
a) la aplicación del segundo método de Lyapunov para analizar la convergencia a la superficie intersección σ(x,t)=0 (superficie eventual) indica que para determinados valores de diseño la superficie de conmutación σ(x,t)=0 es atractora del vector de estado, y
b) el conjunto de restricciones de diseño que se obtienen a partir del estudio del domino de existencia del régimen deslizante en estado estacionario al aplicar el método de diagonalización pueden extenderse al caso jerárquico.
Por último, se ha determinado mediante el método del control equivalente el dominio de existencia del régimen deslizante estacionario para cargas resistivas, reactivas y no lineales.
Como resumen de las conclusiones se puede indicar que los resultados obtenidos en el presente capítulo demuestran la validez de la técnica de control en modo de deslizamiento junto con las estrategias de ecualización activa de corrientes para dar una respuesta adecuada al problema del control de un sistema modular inversor.


3.1
CAPÍTULO 3
Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de onduladores conectados en paralelo
3.1. Introducción
En este capítulo se presenta la implementación de los controles en modo de deslizamiento analizados y diseñados en el capítulo 2 para el caso de un sistema modular de potencia formado por la conexión en paralelo de tres módulos inversores y utilizando señales de control de dos y tres niveles. Asimismo, junto a los controles en modo de deslizamiento se presenta el diseño e implementación de un sistema de gestión del funcionamiento cuya función es la de mejorar la fiabilidad, flexibilidad, eficiencia y tolerancia a fallos del sistema modular de potencia.
Se ha optado por una implementación digital debido a las ventajas que aporta este tipo de solución, con respecto a la realización analógica, en cuanto a la facilidad para implementar controles complejos y para incorporar prestaciones adicionales orientadas a la decisión de la activación/desactivación de cada uno de los módulos inversores en función de unos determinados criterios de gestión del sistema. En la elección de la plataforma digital más adecuada se han tenido en cuenta diversos factores entre los que cabe destacar: la frecuencia de conmutación de los módulos inversores, la frecuencia de muestreo de las variables de estado, el tiempo de proceso o cálculo del algoritmo de control, la posibilidad de ejecución concurrente o paralelo y la facilidad de desarrollo de los diseños. Teniendo en cuenta estas consideraciones se ha optado por utilizar una plataforma digital programable de alta capacidad del tipo FPGA (Field Programmable Gate Array).
En el apartado 3.2 de este capítulo se describen las características generales del sistema modular de potencia utilizado en las pruebas de laboratorio. En los siguientes apartados se detallan los distintos bloques que componen el subsistema de gestión y control del sistema modular, prestando especial atención a la implementación mediante FPGA de los distintos

3.2 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
controles en modo de deslizamiento considerados en el capítulo 2 así como de los subsistemas que gestionan el funcionamiento del sistema modular de potencia.
Para comprobar la bondad del control en modo de deslizamiento de las diferentes estrategias de ecualización de corriente así como de los sistemas de gestión de funcionamiento, se han realizado pruebas experimentales del comportamiento estático y dinámico del sistema modular y se han medido diferentes parámetros relacionados con la calidad de la señal AC de salida y con la ecualización de las corrientes suministradas por los módulos inversores. Los resultados obtenidos mediante simulación y con el prototipo experimental se muestran en el apartado 3.9. Finalmente, en el apartado 3.10 se presentan las conclusiones de este capítulo.
3.2. Sistema modular de potencia
Para comprobar las prestaciones de los controles en modo de deslizamiento propuestos en el capítulo 2, se ha diseñado e implementado un sistema modular formado por una etapa de potencia compuesta por tres módulos inversores A, B y C, conectados en paralelo y un subsistema de gestión y control basado en un dispositivo lógico programable de alta capacidad del tipo FPGA (Field Programmable Gate Array). En la figura 3.1 se muestra el esquema general del sistema de potencia, donde iLA, iLB, iLC, uA, uB y uc son las corrientes de inductor y las señales de control de los módulos A, B y C, respectivamente; io y vc designan la corriente y tensión de salida y E es la tensión DC de entrada común a los tres módulos inversores. Los siguientes apartados describen los principales bloques del sistema modular.
Subsistemade gestión y
control
Inversor A
Inversor B
Inversor C
Etapa de potencia
E+
R
io vc
iLCiLBiLAiovc
vref
uC
uB
uA iC
Figura 3.1. Esquema general del sistema modular de potencia

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.3 onduladores conectados en paralelo
3.2.1. Etapa de potencia
En la figura 3.2 se muestra el circuito eléctrico de la etapa de potencia del módulo inversor “i” (con i = A, B, C) compuesto por un puente completo a la entrada y un filtro de salida LC. El puente completo está formado por cuatro transistores S1, S2, S3 y S4 cuyo estado ON/OFF se gobierna individualmente mediante las señales de control binarias uHIi, uLIi, uHdi y uLdi, cuya activación, a 1 lógico, pone en conducción (ON) el transistor correspondiente. El estado de los transistores del puente determinará el valor de la tensión de entrada Vin del filtro de salida LC.
E R+uHIi
uLIi
uHDi
uLDi
+
vo
-iC iR
S1 S2
S4S3Vini
Li/2
Li/2
rLi/2
rLi/2Ci
iLi
con i =A, B, C
Figura 3.2. Esquema eléctrico de la etapa de potencia del inversor reductor de puente completo
El estado de los transistores del puente de cada módulo inversor depende de la señal de control ui, con i = A, B ,C, que puede tomar dos posibles conjuntos de valores: u∈ -1, 1 para realizar un control de dos niveles, o bien u∈ -1, 0, 1 en el caso de realizar un control de tres niveles. En la tabla 3.1 se indica la correspondencia entre el valor de la señal de control ui, el valor de la tensión de entrada Vin del filtro de salida del inversor ‘i’ y el estado de los transistores del puente completo S1, S2, S3 y S4 junto con las señales de activación uHIi, uLIi, uHDi y uLDi, que los gobiernan.
ui Vin uHIi/S1 uHDi/S2 uLIi/S3 uLDi/S41 E 1/ON 0/OFF 0/OFF 1/ON 0 0 1/ON 1/ON 0/OFF 0/OFF0 0 0/OFF 0/OFF 1/ON 1/ON -1 -E 0/OFF 1/ON 1/ON 0/OFF
Tabla 3.1. Señal de control ‘ui’ y estado de los interruptores del puente completo del inversor “i”
El control individual de cada transistor del puente completo no solo permite realizar un control de dos o tres niveles, sino que facilita la implementación práctica del retardo de activación, también denominado tiempo muerto, que se define como el tiempo de espera imprescindible entre la desactivación y activación de los transistores que evita los cortocircuitos provocados por la conducción simultánea de los transistores de una misma rama del puente.
El filtro LC de salida dispone de dos inductores para evitar el cortocircuito en la fuente de alimentación E que se produce cuando las señales de control que activan los transistores de la rama derecha del puente no tienen los mismos valores para todos los módulos inversores conectados en paralelo.
El diseño ha considerado una potencia nominal para cada módulo inversor de 100 W, siendo los parámetros de los mismos: LA=1.5 mH, LB=1.22 mH, LC=0.9 mH,

3.4 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
CA=CB=CC=20 µF, rLA=94 mΩ, rLB=116 mΩ, rLC=100 mΩ. Se han escogido valores de inductancias deliberadamente distintos para provocar un desbalance en la corriente suministrada por cada módulo inversor a la carga y comprobar, sobre el prototipo experimental, la eficacia de las estrategias de ecualización de corriente consideradas en el capítulo 2.
3.2.2. Subsistema de gestión y control
En la figura 3.3 se muestra el esquema correspondiente a la implementación del subsistema de gestión y control basada en un dispositivo lógico programable FPGA. Este esquema incluye los siguientes bloques:
• Un acondicionador de señal cuya función es generar la superficie de conmutación (2.18) y adecuarla, junto con las variables de estado sensadas, a las características del sistema de adquisición.
• Un sistema de adquisición de datos compuesto de un multiplexor analógico dual de 8 canales MAX 307 y cuatro convertidores ADC MAX153 de 8 bits, de ±2.5 V de tensión de referencia y una frecuencia máxima de muestreo de 1 MS/s. Esta configuración permite muestrear simultáneamente hasta cuatro señales analógicas, pudiéndose adquirir, mediante el multiplexor analógico, un máximo de 18 señales.
• Una FPGA de Xilinx, en concreto el modelo XC2S100_5TQ144, que contiene 100.000 puertas lógicas equivalentes, 2400 flip-flops repartidos en 1200 Slices y 92 IOB (Input/Output Block). Se dispone también de una memoria EEPROM externa de 1 Mbit de capacidad utilizada para almacenar la configuración de la FPGA y de un reloj de 8 MHz que sincroniza el funcionamiento de los circuitos digitales implementados con la FPGA.
uLDC
uHDC
uHIC
uLDB
uHDB
uLIB
uHIB
uLDA
uHDA
uLIA
uHIA
FPGAXC2S100
Clock8MHz
8ADCMAX153
ADCMAX153
MX580+2.5V
MX580+2.5V
8ADCMAX153
8ADCMAX153
ADCMAX153
EEPROM1Mbits
EEPROM1Mbits
( )( )( )tititi
LC
LB
LA
( ) 10tvo
( ) 10tvrMX584-2.5V
MX584-2.5V
8ADCMAX153
8ADCMAX153
ADCMAX153
8ADCMAX153
8ADCMAX153
ADCMAX153
MUX
MAX307
8
8
1
1
1
1( )tic
uLIC( )tio
Aco
ndic
iona
dor
de se
ñal
Figura 3.3. Esquema general del subsistema de gestión y control
Las funciones básicas que lleva a cabo el subsistema de gestión y control del sistema modular de potencia se pueden clasificar en dos ámbitos de actuación:

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.5 onduladores conectados en paralelo
• Control de las variables de estado del sistema modular. Este ámbito de actuación hace referencia a la regulación de la tensión AC de salida y a la ecualización de las corrientes que suministran los módulos inversores a la carga, mediante las leyes de control propuestas en el capítulo 2. Para conseguir estos objetivos se ha llevado ha cabo la implementación, mediante la técnica de control en modo de deslizamiento, de las estrategias de distribución equitativa de corrientes denominadas Master-Slave (M-S), Circular Chain Control (CCC) y Central Limit Control (CLC) analizadas en el capítulo 2 y cuyas funciones de conmutación asociadas están especificadas en el apartado 2.4. También se han probado las superficies transformadas derivadas del método de diagonalización considerado en el apartado 2.7 del capítulo 2.
• Gestión del funcionamiento de sistema modular. La gestión del funcionamiento del sistema modular abarca todos los mecanismos necesarios para poder hacer efectivas las ventajas asociadas a los sistemas modulares de potencia con relación a la flexibilidad, fiabilidad, eficiencia, tolerancia a fallos y facilidad de mantenimiento. El propósito último de la gestión de funcionamiento del sistema modular es determinar qué módulos inversores deben estar en funcionamiento en cada instante con el objetivo de obtener el mejor rendimiento posible, una alta tolerancia a fallos y en definitiva aumentar la fiabilidad del sistema modular. Para poder cumplir estos objetivos se han implementado los sistemas de Gestión de Potencia (SGP), de Rotación de Módulos Activos (SRMA) y de Tolerancia a Fallos (STF).
Los siguientes apartados describen con detalle el diseño de los bloques de la figura 3.3.
3.3. Acondicionador de señal y sistema de adquisición de datos
El acondicionador de señal y el sistema de adquisición de datos realizan un papel importante en la implementación de las superficies de conmutación que controlan el funcionamiento del sistema modular de potencia y que responden a la siguiente expresión general:
( ) ( ) ( ) CBAiconiftektek Liiii ,,21 =++= βσ & (3.1)
donde ( )Liii if β es la combinación lineal de las corrientes de inductor que depende de la estrategia de ecualización de corrientes considerada, y ( ) ( )tektekv &21 +=σ es la superficie de conmutación propuesta por Carpita [Carpita, 88] para regular la tensión de salida.
Con relación a la implementación de las superficies (3.1), el acondicionador de señal tiene una doble función:
• Genera el término ( ) ( )tektekv &21 +=σ , común a todas las superficies de conmutación.
• Adapta los niveles de la superficie σv, de las corrientes de inductor y de la corriente de salida a las características del sistema de adquisición de datos.
El sistema de adquisición de datos toma muestras de σv, de las corrientes de inductor y de la corriente de salida y las transfiere a la FPGA para que genere las superficies de conmutación consideradas en el capítulo 2. A continuación se detalla la arquitectura del acondicionador de señal y del sistema de adquisición de datos.

3.6 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
• Acondicionador de señal
Las entradas del acondicionador de señal son la tensión y corriente de salida, vc(t) y io(t), la tensión de referencia vr(t), la corriente del condensador de salida ic(t), y las corrientes de inductor de los tres módulos inversores iLi (con i = A, B, C).
Las señales de salida del acondicionador de señal son la superficie de conmutación ( ) ( )tektekv &21 +=σ , las corrientes de inductor y la corriente de salida, con los niveles
convenientemente adaptados a las características del sistema de adquisición de datos.
En la figura 3.4 se muestra el esquema eléctrico del acondicionador de señal que incorpora básicamente amplificadores operaciones configurados como sumadores/restadores y derivadores para obtener la superficie de conmutación σv, así como los elementos necesarios para sensar las diferentes corrientes que se utilizan en el diseño del control.
_
+
10 kΩ
10 kΩ
100 kΩ
10 kΩ
-vc/10
vr/10
_
+
10 kΩ
60 kΩ
10 kΩ
vr/1010 nF
680 pF
ic·5e-3
Sensor de corriente LA25-NP, S=5 mA/A
_
+
10 kΩ
10 kΩ
10 kΩ
10 kΩ
10 kΩ
200 Ω
Vic=ic [V]
_
+
10 kΩ
10 kΩ
10 kΩ
σv10 kΩ
Gain41
iLi·5e-3
Sensor de corriente LA25-NP, S=5 mA/A 100 Ω
ViLi=0.5·iLi [V]
i=A, B, C
iLi·5e-3
Sensor de corriente LA25-NP, S=5 mA/A 100 Ω
ViLi=0.5·iLi [V]
i=A, B, C
io·1e-3
Sensor de corriente LA25-NP, S=1 mA/A R
Vio=0.001·R·io [V]io·1e-3
Sensor de corriente LA25-NP, S=1 mA/A R
Vio=0.001·R·io [V]
( )5
21
21
106,1 −
••
⋅==
−+−=
kkcon
vvkvvk crcrvσ
Figura 3.4. Esquema del bloque acondicionador de señal
Para generar la tensión de error e(t), se utiliza un amplificador operacional configurado como sumador inversor que suma la tensión de referencia vr/10, con la tensión de salida del sistema modular de potencia, -vc/10, sensada mediante el amplificador de aislamiento de Analog Device AD215BY. La derivada de la tensión de error se consigue a partir de la corriente del condensador, cc vCi &= , que se obtiene mediante un sensor de corriente LA25-NP configurado para tener una sensibilidad de 5 mA/A. Con un amplificador operacional configurado como sumador inversor se suman los términos de la tensión de error y su derivada. Finalmente, otro sumador inversor permite ajustar la ganancia de dicha suma para obtener como señal de salida la superficie de conmutación σv con los siguientes valores de los coeficientes: k1=1 y k2 =6·10-5.

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.7 onduladores conectados en paralelo
Por otra parte, el acondicionador de señal proporciona la corriente de inductor de cada módulo inversor multiplicada por el coeficiente β. La corriente de inductor se obtiene mediante un sensor de corriente LA25-NP, configurado con una sensibilidad de 5 mA/A. Aplicando la corriente de salida del sensor a una resistencia de 100 Ω se obtiene una tensión equivalente al producto β·iLi, con i=A, B, C, y β=0.5.
Se ha realizado este ajuste de parámetros k1, k2 y β para simplificar, en lo posible, el circuito acondicionador de señal y el diseño digital que calcula la función de conmutación, al mismo tiempo que se ajusta el rango dinámico de las señales de medida a las características del convertidor ADC.
La corriente de salida del sistema modular también se obtiene con un sensor LA25-NP configurado con una sensibilidad de 1 mA/A. La corriente de salida de este sensor se aplica a una resistencia variable R para obtener la tensión 0.001·R·io [V].
• Sistema de adquisición de datos
Las señales de salida del acondicionador de señal se aplican a la entrada del sistema de adquisición de datos compuesto por un multiplexor analógico dual de 8 canales MAX 307 y cuatro convertidores ADC MAX153 de 8 bits de resolución, con un margen dinámico de señal de entrada de ±2.5 V y una frecuencia máxima de muestreo de 1 MS/s. Dos de estos ADC digitalizan las dos señales de salida del multiplexor dual. Esta configuración permite hacer un muestreo simultáneo de hasta cuatro señales analógicas, pudiéndose adquirir, mediante el multiplexor analógico, un máximo de 18 señales.
El resultado binario de la conversión digital de estas señales se introduce en la FPGA de Xilinx, que está adecuadamente programada para realizar las funciones asociadas al subsistema de gestión y control.
3.4. Estructura general del diseño FPGA: bloques funcionales
Todas las funciones asociadas al subsistema de gestión y control del sistema modular de potencia se han implementado digitalmente mediante un dispositivo lógico programable FPGA de Xilinx modelo XC2S100_5TQ144. Este dispositivo contiene 100.000 puertas lógicas equivalentes, 2400 flip-flops repartidos en 1200 Slices y 92 IOB (Input/Output Block). De estos recursos disponibles se han utilizado para realizar el diseño 375 Slices (31%), 140 flip-flops (5%), 69 IOB (75%) y un total de 5642 puertas lógicas equivalentes. La frecuencia de reloj máxima a la que puede funcionar este diseño es de 37.676 MHz, lo que permitiría, con el diseño adecuado del control secuencial y utilizando convertidores ADC suficientemente rápidos, actualizar las salidas con una frecuencia de 37.676 MHz. En la práctica, la frecuencia máxima de actualización de las salidas está limitada por la frecuencia máxima de conversión que es de 1 MS/s. En las pruebas realizadas se ha utilizado un reloj de 8 MHz y un sistema secuencial diseñado para obtener una frecuencia de actualización de 333.333 kHz para todas las estrategias, siendo por tanto el periodo de actualización de las señales de control de 3 µs.
En la figura 3.5 se presenta el diagrama de bloques de las funciones implementadas mediante la FPGA, en el que se distinguen cuatro bloques funcionales que se describen a continuación.

3.8 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
( )( )( )ninini
LC
LB
LA
βββ 8
8
8
8
io(n)
SDA, UA
SDB, UB
SDC, UC
U1, U2, U3iL1(n), iL2(n), iL3(n) SD2, SD3
Gestión de Funcionamiento
CC CB CA signo (vr )
8
Funciones deConmutación
( )nvσ
TS1TS0
ST
RB
uLDCuHDC
uHIC
uLDBuHDB
uLIBuHIB
uLDAuHDA
uLIAuHIA
uLIC
Al inversor A
Al inversor B
Al inversor C
ControlSecuencial
FPGA XC2S100
Salid
as d
e C
ontro
l
Figura 3.5. Diagrama de bloques del diseño digital del subsistema de gestión y control
• Bloque Funciones de Conmutación: este bloque calcula el signo de las funciones de conmutación relacionadas con el diseño jerárquico y definidas por (2.67), (2.68) y (2.69), con N=2 para el caso de dos módulos inversores activos y N=3 para tres módulos inversores activos. Igualmente este bloque calcula las funciones de conmutación transformadas derivadas del método de diagonalización y definidas por las matrices (2.179) y (2.176) para el caso de dos y tres módulos inversores activos, respectivamente. En el apartado 3.5 se detalla el diseño de este bloque.
• Bloque de Gestión de Funcionamiento del sistema modular: este bloque implementa los elementos que realizan la gestión de funcionamiento del sistema modular cuya misión es determinar qué módulos inversores deben estar en funcionamiento en cada instante. Este bloque comprende los siguientes subsistemas cuya implementación práctica se detalla en el apartado 3.6:
o Sistema de Gestión de Potencia (SGP): tiene como función determinar el número de convertidores que deben estar activos en función de la demanda energética de la carga y del número de módulos inversores operativos en el sistema modular. Se pretende así obtener el mejor rendimiento posible para cada situación de carga controlando cada módulo para que opere cerca de su punto óptimo de rendimiento.
o Sistema de Rotación de Módulos Activos (SRMA): su función es establecer una rotación entre los módulos operativos con el objetivo de ecualizar el tiempo de funcionamiento de los módulos inversores.
o Sistema de Tolerancia a Fallos (STF): se encarga de gestionar y resolver las situaciones de no operatividad de uno o varios módulos inversores, de forma que, en lo posible, el fallo de un módulo inversor no suponga la interrupción del funcionamiento del sistema modular.
• Bloque Salidas de Control: genera las señales de control del puente completo de cada módulo inversor. La implementación de este bloque se describe en el apartado 3.7.
• Bloque Control Secuencial: genera las señales que controlan el funcionamiento del resto de bloques que incorpora la FPGA y del sistema de adquisición de datos. En el apartado 3.8 se detalla su realización práctica.

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.9 onduladores conectados en paralelo
3.5. Bloque Funciones de Conmutación
Este bloque implementa las superficies de conmutación que controlan el funcionamiento de los inversores del sistema modular de potencia. En primer lugar se indica, en el apartado 3.5.1, cuales son las funciones de conmutación que se calculan en este bloque en función de la estrategia de ecualización de corrientes seleccionada y del número de inversores activos. En el apartado 3.5.2 se detalla el diseño de este bloque.
3.5.1. Funciones de conmutación
La superficie de conmutación que controla cada módulo inversor dependerá del número, uno, dos ó tres, de convertidores que están funcionando y de la estrategia de ecualización de corrientes utilizada. En las tablas 3.2, 3.3 y 3.4 se indican las distintas superficies de conmutación, asociadas a cada inversor activo, para las estrategias Master-Slave, Circular Chain Control y Central Limit Control respectivamente, para los casos en los que están activos uno, dos o tres módulos inversores. Análogamente, en la tabla 3.5 se indican las superficies de conmutación transformadas, obtenidas con el método de diagonalización, para los casos en los que están activos uno, dos o tres módulos inversores.
Nº Inv. activos σ1 σ2 σ3
1 ekekv &21 +=σ - - 2 ekekv &21 +=σ ( )21 LLv ii −+ βσ - 3 ekekv &21 +=σ ( )21 LLv ii −+ βσ ( )31 LLv ii −+ βσ
Tabla 3.2. Superficies de conmutación para la estrategia Master-Slave
Nº Inv. Activos σ1 σ2 σ3
1 ekekv &21 +=σ - - 2 ( )12 LLv ii −+ βσ ( )21 LLv ii −+ βσ - 3 ( )13 LLv ii −+ βσ ( )21 LLv ii −+ βσ ( )32 LLv ii −+ βσ
Tabla 3.3. Superficies de conmutación para la estrategia Circular Chain Control
Nº Inv. activos σ1 σ2 σ3
1 ekekv &21 +=σ - - 2 ( )12 LLv ii −+ βσ ( )21 LLv ii −+ βσ - 3 ( )132 2 LLLv iii −++ βσ ( )231 2 LLLv iii −++ βσ ( )321 2 LLLv iii −++ βσ
Tabla 3.4. Superficies de conmutación para la estrategia Circular Limit Control

3.10 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Nº Inv. activos σ*
1 σ*2 σ*
3
1 1σ - - 2 21 σσ − 21 σσ + - 3 321 σσσ −− 321 2 σσσ −⋅+ 321 5.05.0 σσσ +⋅−⋅
Con: ekek &211 +=σ , ( )212 2 LL ii −= βσ , ( )313 2 LL ii −= βσ , y β = 0.5
Tabla 3.5. Superficies de conmutación transformadas
El bloque Funciones de Conmutación calcula todas las funciones de conmutación posibles para uno, dos y tres inversores activos (tablas 3.2-3.5), y entrega a su salida el signo de la superficie de conmutación seleccionada. Este resultado se envía al bloque Gestión de Funcionamiento que determina qué superficie de conmutación σ1, σ2 o σ3, gobierna a cada módulo inversor A, B o C. La correspondencia entre las superficies de conmutación y los módulos inversores la establece conjuntamente el Sistema de Rotación de Módulos Activos y el Sistema de Tolerancia a Fallos. Como resultado de esta correspondencia, cualquier módulo inversor, A, B o C, puede estar controlado, en un momento dado, por cualquier superficie, σ1, σ2 o σ3.
Para clarificar esta idea se va a considerar, a modo de ejemplo, cual seria la dinámica de asignación de superficies para el caso concreto de fallo del módulo inversor que ejerce de Master cuando el sistema modular inversor está controlado con la estrategia Master-Slave. En principio, cuando los tres inversores están activos y gobernados por la estrategia Master-Slave la correspondencia entre las superficies de conmutación y los módulos inversores es la siguiente:
( ) ( )( ) ( ) ( )( ) ( ) ( )2)()()()(
1)()()()()()(
312213
211212
211
SlaveCMódulotititektektSlaveBMódulotititektekt
MasterAMódulotektekt
LL
LL
↔−⋅+⋅+⋅=↔−⋅+⋅+⋅=
↔⋅+⋅=
βσβσ
σ
&
&
&
(3.2)
donde iL1=iLA es la corriente de inductor del módulo A que actúa de Master y que se toma como la corriente de referencia a seguir por el resto de inversores, iL2=iLB es la corriente de inductor del módulo B que actúa de Slave y finalmente iL3=iLC es la corriente de inductor del módulo C que también actúa de Slave. Si, por ejemplo, falla el módulo A, el Sistema de Tolerancia a Fallos se encarga de realizar la reasignación automática de superficies entre el resto de módulos operativos con el objetivo de mantener el funcionamiento del sistema modular. Como resultado de esta reasignación se obtiene una nueva correspondencia entre las superficies y los módulos inversores:
( ) ( )( ) ( ) ( )1)()()()(
)()(
211212
211
SlaveCMódulotititektektMasterBMódulotektekt
LL ↔−⋅+⋅+⋅=↔⋅+⋅=βσ
σ&
& (3.3)
En este caso la superficie σ1 gobierna al módulo B que deberá actuar de Master, mientras que la superficie σ2 gobierna al inversor C. Igualmente, se realiza una reasignación entre los términos de corriente iL1, iL2 y iL3, que intervienen en las superficies, y las corrientes de inductor iLA, iLB y iLC. En efecto, después del fallo del módulo A se obtiene la siguiente correspondencia entre corrientes: iL1=iLB y iL2=iLC, mientras que iLA queda, lógicamente, sin asignar.

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.11 onduladores conectados en paralelo
3.5.2. Arquitectura del bloque Funciones de Conmutación
• Entradas, salidas y funcionalidad
En la figura 3.6 está representado el bloque Funciones de Conmutación donde se pueden observar las siguientes entradas y salidas:
• Entradas de selección (TS1, TS0, /ST, SD2, SD3): se utilizan para seleccionar la estrategia de ecualización de corriente y para indicar el número de convertidores que están activos.
• Entradas de datos: se corresponden con las muestras, tomadas con una precisión de 8 bits, de la superficie de conmutación ( ) ( )tektekv &21 +=σ y de las corrientes de inductor de los módulos inversores ponderadas por el coeficiente β.
• Salidas de control U1, U2 y U3: se corresponden con el signo de la función de conmutación asociada a cada uno de los módulos inversores, de acuerdo con:
=<≥
= 3,2,10001
isisi
Ui
ii σ
σ (3.4)
( )( )( )ninini
L
L
L
3
2
1
βββ 88
88
88
88
Funcionesde
Conmutación( )nvσ
TS1TS0
STSD2
SD3
TS1TS0
STSD2
SD3
U1
U2
U3
Figura 3.6. Entradas y salidas del bloque Funciones de Conmutación
Las entradas binarias TS1, TS0 y /ST permiten seleccionar una estrategia de ecualización de corrientes entre cuatro posibles: Master-Slave (M-S), Circular Chain Control (CCC), Central Limit Control (CLC) y Superficies Transformadas (ST). En la tabla 3.6 se indica la correspondencia entre el valor de estas entradas y la estrategia de ecualización de corrientes seleccionada.
/ST TS1 TS0 Estrategia 1 0 0 1 0 1 1 1 0 0 X X
Master-Slave (M-S) Circular Chain Control (CCC) Central Limit Control (CLC)
Superficies Transformadas (ST) Tabla 3.6. Selección de la estrategia de ecualización de corrientes
Las entradas binarias SD2 y SD3 indican cuántos convertidores hay activos en el sistema modular. En la tabla 3.7 se muestra la correspondencia entre el número de inversores activos y el valor de las señales SD2, SD3.

3.12 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
SD3 SD2 Número de inversores activos 0 0 0 1 1 0 1 1
3 X 2
1 ó 0
Tabla 3.7. Números de inversores activos del sistema modular de potencia
La combinación de valores de las entradas de selección TS1, TS0, /ST, SD2, y SD3 determina qué superficies de conmutación (tablas 3.2-3.5) se utilizan para calcular las salidas de control U1, U2 y U3.
En cuanto a las entradas de datos, la entrada σv se obtiene directamente de la digitalización de la señal proporcionada por el acondicionador de señal, mientras que las entradas de corriente de inductor se obtienen a través del bloque Gestión de Funcionamiento. Este bloque recibe el resultado de la digitalización de las corrientes de inductor de los módulos inversores A, B y C: β iLA(n)=0.5·iLA(t), β iLB(n)=0.5·iLB(t), β iLC(n)=0.5·iLC(t), y establece una correspondencia entre las muestras β iLA(n), β iLB(n), β iLC(n), y los valores β iL1(n), βiL2(n), β iL3(n), que se suministran al bloque Funciones de Conmutación para calcular las superficies de conmutación. Esta correspondencia dependerá del Sistema de Rotación de Módulos Activos y del Sistema de Tolerancia a Fallos que se comentan mas adelante. Las salidas U1, U2 y U3 se suministran al bloque Gestión de Funcionamiento que establecerá una correspondencia entre estas señales y las señales de control UA, UB y UC, que se derivan finalmente a cada módulo inversor. Esta correspondencia es idéntica a la establecida para el caso de las corrientes.
• Arquitectura interna
En la figura 3.7 se muestra el esquema general del bloque Funciones de Conmutación donde se ha utilizado para su implementación sumadores/restadores y multiplexores, [Patterson, 94], [Parhi, 91], [Saglam, 2000].
β (iL1-iL2)β (iL1-iL3)β (iL2-iL3)
σv
β (iL2+iL3-2·iL1)β (iL1+iL3-2·iL2)β (iL1+iL2-2·iL3)
88β iL1
88β iL2
88β iL3
8σv88σv
88
99
99
99
1010
1010
1010
Superficieσ1
S1 S0
D0D1D2
O
S1 S0
D0D1D2
O
S1 S0
D0D1D2
O
S1 S0
D0D1D2
O
S1 S0
D0D1D2
O
S1 S0
D0D1D2
O
TS1 TS0
U1
1
U2
1
U3
1
Generador de Términos SD3 SD2
1
01
SO
1
1
0
SO
1
1
0
SO
1
1
1
STST
TS1 TS0 = 00TS1 TS0 = 01TS1 TS0 = 10
ST = 0, σ*1
TS1 TS0 = 00TS1 TS0 = 01TS1 TS0 = 10
ST = 0, σ*1
TS1 TS0 = 00TS1 TS0 = 01TS1 TS0 = 10
ST = 0, σ*2
TS1 TS0 = 00TS1 TS0 = 01TS1 TS0 = 10
ST = 0, σ*2
TS1 TS0 = 00TS1 TS0 = 01TS1 TS0 = 10
ST = 0, σ*3
TS1 TS0 = 00TS1 TS0 = 01TS1 TS0 = 10
ST = 0, σ*3
Superficieσ2
Superficieσ3
Figura 3.7. Esquema del bloque Funciones de Conmutación

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.13 onduladores conectados en paralelo
En el esquema de la figura 3.7 se puede observar un bloque denominado “Generador de Términos”, cuyo diseño se muestra en la figura 3.8 y que implementa los términos comunes que intervienen en el cálculo de las superficies de conmutación. También se puede observar en la misma figura tres bloques designados “Superficie σ1, σ2, y σ3”, que se encargan de evaluar el signo de las superficies de conmutación σ1, σ2, y σ3 respectivamente y cuyos esquemas se muestran en las figuras 3.9, 3.10 y 3.11. Las señales de control U1, U2 y U3, generadas por el bloque Funciones de Conmutación, pasan al bloque Gestión de Funcionamiento para ser reordenadas por los sistemas SRMA y STF y finalmente aplicadas a los módulos inversores A, B y C.
8σv[6:0]
σv7 σv7σv7
88
c.a.2 σv
8iL1[6:0]
iL17 iL17iL17
99
c.a.2 iL1
σv[7:0]
β iL1[7:0]
8i2[6:0]
iL27 iL27iL27
99β iL2[7:0]
c.a.2 iL2
8i3[6:0]
iL37 iL37iL37
99β iL3[7:0]
c.a.2 iL3
B[8:0]
A[8:0]
A-B
B[8:0]
A[8:0]
A+B
B[8:0]
A[8:0]
A+B
B[8:0]
A[8:0]
A+B
B[8:0]
A[8:0]
A-B
B[8:0]
A[8:0]
A-B
B[9:0]
A[9:0]
A-B
B[9:0]
A[9:0]
A-B
B[9:0]
A[9:0]
A-B
x2x2
x2x2x2
x2x2
β (iL2+iL3-2·iL1)10
β (iL1+iL3-2·iL2)10
β (iL1+iL3-2·iL2)10
β (iL1-iL2)
β (iL1-iL3)
β (iL2-iL3)
9
9
9
σv
Figura 3.8. Esquema del bloque Generador de Términos

3.14 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
σv
β (iL1-iL2)
β (iL1-iL3)
β (iL2+iL3-2·iL1)
B[9:0]
A[9:0]
A-B
B[10:0]
A[10:0]
A+B
B[9:0]
A[9:0]
A-B
[σv + β (iL2-iL1)]MSB1
1
1
[σv + β (iL3-iL1)]MSB
[σv + β (iL2+iL3-2·iL1)]MSB
[σv]MSB1
S1 S0D3D2D1D0
O
TS1 TS0 = 00
S1 S0D3D2D1D0
O
SD3 SD2
TS1 TS0 = 011
TS1 TS0 = 101
B[10:0]
A[10:0]
A-B
B[10:0]
A[10:0]
A-Bx 2
1SD2
SD3 SD2
x 21SD3
11
11
A[10:0]
B[10:0]
A>B
CLK
CLKIN
ST = 01
Figura 3.9. Esquema del bloque Superficie σ1
σv
β (iL1-iL2)
β (iL1+iL3-2·iL2)
B[9:0]
A[9:0]
A+B
B[10:0]
A[10:0]
A+B
[σv + β (iL1-iL2)]MSB1
1 [σv + β (iL1+iL3-2·iL2)]MSB
S1 S0D3D2D1D0
O
SD3 SD2
1 TS1 TS0 = 10
TS1 TS0 = 00
TS1 TS0 = 01
B[11:0]
A[11:0]
A-B
B[11:0]
A[11:0]
A-Bx 4
12
x 21SD3
12
12
A[11:0]
B[11:0]
A>B
CLK
CLKIN
ST = 01
0
1
SO
x 2
β (iL1-iL3)
SD3
Figura 3.10. Esquema del bloque Superficie σ2

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.15 onduladores conectados en paralelo
σv
β (iL1-iL3)
β (iL2-iL3)
β (iL1+iL2-2·iL3)
B[9:0]
A[9:0]
A+B
B[10:0]
A[10:0]
A+B
B[9:0]
A[9:0]
A+B
[σv + β (iL1-iL3)]MSB1
1
1
[σv + β (iL2-iL3)]MSB
[σv + β (iL1+iL2-2·iL3)]MSB
TS1 TS0 = 00
TS1 TS0 = 01
TS1 TS0 = 10
B[11:0]
A[11:0]
A-B
B[11:0]
A[11:0]
A-B
x 4
x 2
12A[11:0]
B[11:0]
A>B
CLK
CLKIN
ST = 01
iL1-iL2
Figura 3.11. Esquema del bloque Superficie σ3
3.6. Bloque de Gestión de Funcionamiento
El bloque Gestión de Funcionamiento tiene como función determinar qué módulos inversores deben estar en funcionamiento en cada instante y qué superficie de conmutación tiene asociada cada inversor activo. Esta función se realiza considerando la potencia que suministra el sistema modular a la carga, el número de inversores operativos y teniendo en cuenta además una estrategia de ecualización del tiempo que permanece en funcionamiento cada módulo inversor.
Para ello se han diseñado e implementado tres subsistemas:
• Sistema de Gestión de Potencia (SGP): determina el número de convertidores que deben permanecer activos para poder satisfacer la demanda energética de la carga.
• Sistema de Rotación de Módulos Activos (SRMA): su función es establecer una rotación entre los módulos operativos con el objetivo de ecualizar el tiempo que cada módulo permanece en funcionamiento.
• Sistema Tolerante a Fallos (STF): se encarga de gestionar y resolver las situaciones de no operatividad de uno o varios módulos inversores.
Los sistemas SRMA y STF establecen una correspondencia dinámica entre los inversores A, B y C y las superficies de conmutación σ1, σ2 y σ3 asociados a ellos. Esto quiere decir que

3.16 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
un inversor podrá estar gobernado en un momento dado por la superficie σ1, σ2 o σ3 dependiendo de la actuación de los sistemas SRMA y STF. Para poder llevar a cabo esto se deberá establecer la misma correspondencia entre los términos de corriente iL1, iL2 e iL3 que aparecen en las superficies σ1, σ2 o σ3 y las corrientes de inductor iLA, iLB e iLC que suministran los inversores A, B y C.
En el apartado 3.6.1 se detalla la arquitectura del bloque Gestión de Funcionamiento y se describen los subsistemas que lo componen. En los siguientes apartados se detalla la función y arquitectura de cada uno de estos subsistemas.
3.6.1. Arquitectura del bloque Gestión de Funcionamiento
En la figura 3.12 está representado el esquema del bloque Gestión de Funcionamiento donde se pueden observar las entradas y salidas que se detallan a continuación:
( )( )( )ninini
LC
LB
LA
βββ 88
88
88
8
STFinput
STFoutput
Sistema de Gestión de Potencia (SGP)
io(n)
SDA, UA
SDB, UB
SDC, UC
U1, U2, U3β iL1(n), β iL2(n), β iL3(n)
Al bloque Funciones de Conmutación
Al bloque Salidas de
Control
SD3
CC CB CA
Sistema de Rotación de Módulos Activos (SRMA)
SD2SD1
SD2, SD3
signo (vr )
Gestión de Funcionamiento
Figura 3.12. Esquema del bloque Gestión de Funcionamiento
Entradas externas
• Entradas de control (CA, CB y CC): su activación, a nivel bajo, indica que el inversor A, B o C está operativo y puede ser activado si es necesario.
• Entradas de corriente de inductor (iLA, iLB, iLC): se corresponden con las muestras de la corriente de inductor de cada módulo inversor ponderadas por el coeficiente β y tomadas con una precisión de 8 bits.
• Entrada de corriente de salida, io: se corresponde con la muestra de la corriente consumida por la carga tomada con una precisión de 8 bits.
• Entrada signo(vr): se corresponde con el signo de la tensión de referencia vr, y se activa a 1 lógico cuando vr ≥ 0, mientras que vale 0 lógico para vr < 0.

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.17 onduladores conectados en paralelo
Entradas /salidas de conexión con el bloque Funciones de Conmutación • Salidas de corriente de inductor (iL1, iL2, iL3): se corresponden con las corrientes de
inductor de cada módulo inversor. La asignación entre las corrientes iL1, iL2, iL3, y las corrientes iLA, iLB, iLC, se establece en los subsistemas de rotación de módulos activos y tolerancia a fallos.
• Salidas SD2 y SD3: indican el número de convertidores que deben estar activos en cada momento (ver tabla 3.7). Su valor lo establece el subsistema de gestión de potencia en función de la energía demandada por la carga y del número de inversores operativos.
• Entradas de control U1, U2 y U3: se corresponden con el signo de las superficies de conmutación σ1, σ2 y σ3, evaluadas por el bloque Funciones de Conmutación. Estas señales de control se reordenan adecuadamente en los subsistemas de rotación de módulos activos y tolerancia a fallos para obtener las señales de control correspondientes a cada módulo inversor A, B y C.
Salidas de conexión con el bloque Salidas de Control • Salidas de control UA, UB y UC: se corresponden con las señales de control U1, U2 y
U3 calculadas por el bloque Funciones de Conmutación después de ser reordenadas por los subsistemas de rotación de módulos activos y tolerancia a fallos. A partir de estas señales el bloque Salidas de Control genera la secuencia de control que gobierna el puente de interruptores de los inversores A, B y C.
• Salidas de control SDA, SDB y SDC: su activación, a cero lógico, activa el inversor correspondiente, A, B o C; en caso contrario se inhibe el funcionamiento de dicho inversor.
En los siguientes apartados se detalla la función y la arquitectura interna de los subsistemas que incorpora el bloque de Gestión de Funcionamiento, a saber: Sistema de Gestión de Potencia, Sistema de Rotación de Módulos Activos y Sistema de Tolerancia a Fallos.
3.6.2. Sistema de Gestión de Potencia (SGP)
El SGP determina el número N de inversores que deben estar activos en función de la corriente de carga y del número de inversores operativos que incorpora el sistema modular, lo que permite mejorar el rendimiento global en todo el margen de funcionamiento del sistema inversor y aumentar, con ello, su tiempo de vida medio. En general, si M es el número de inversores operativos que incorpora el sistema modular, el número N de inversores que deben activarse será el que satisfaga las siguientes inecuaciones:
( )
conexo
conexoconexodescon
IMIparaN
IMIparaINIIN
⋅>=
⋅≤⋅<<⋅−
max
maxmax
0
1 (3.5)
donde Io es la corriente de salida, Iconex es la corriente de salida máxima que puede proporcionar un solo módulo inversor e Idescon (Idescon≤ Iconex) es el umbral de corriente de salida de un módulo inversor que se toma como referencia para la desactivación de un convertidor. Cuando el número de inversores necesarios para responder a la demanda de la carga supera al número de convertidores operativos se procede a la parada de los módulos inversores como medida de protección contra sobrecorrientes.

3.18 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
• Diagrama de bloques del Sistema de Gestión de Potencia
En la figura 3.13 se muestra el diagrama de bloques del Sistema de Gestión de Potencia (SGP). Las entradas Ci con i = A, B, C, indican al SGP el número de inversores operativos, mientras que la muestra io(n) permite determinar el número N de convertidores que se deben activar para cubrir las necesidades energéticas de la carga. Con esta información de entrada el sistema SGP activa, si es posible, los inversores necesarios mediante las salidas de control SDi con i = 1, 2, 3. En caso de que no haya suficientes inversores operativos para satisfacer la demanda energética de la carga, el sistema SGP desactiva todos los inversores como medida de protección contra sobrecorrientes.
Para realizar estas funciones el SGP cuenta con los siguientes componentes:
• Detector de niveles de potencia: se encarga de detectar, a partir de las muestras de la corriente de carga io(n), que el nivel de potencia consumida por la carga supera los umbrales establecidos para la activación de los inversores.
• Memoria: este bloque tiene como función memorizar que la corriente de salida ha superado los umbrales establecidos para la activación de los inversores al menos una vez en un periodo de la tensión de salida. Esta información permanece registrada al menos durante un periodo de la tensión de salida.
• Activador de inversores: este bloque se encarga de activar el número de inversores necesarios para cumplir las necesidades energéticas de la carga teniendo en cuenta el nivel de potencia demandado y el número de inversores operativos.
SD3
CA CB CC
SD2
SD1
signo (vr)
Detector de niveles depotencia
P3
P2
P1io(n) 8 Memoria Activador de
inversores
P3
P2
P1
Figura 3.13. Esquema de la arquitectura del Sistema de Gestión de Potencia (SGP)
• Bloque Detector de niveles de potencia
El Detector de niveles de potencia se encarga de detectar que la corriente de salida io(n) supera los umbrales establecidos en (3.5) para la conexión y desconexión de módulos inversores. Para ello, en primer lugar se obtiene la corriente de salida io(t), mediante un sistema formado por un sensor de corriente LA25-NP, ajustado para tener una sensibilidad de 1 mA/A, y un potenciómetro de 500 Ω que generan, en conjunto, una tensión proporcional a la corriente de salida:
( ) [ ]VRtitV o ·001.0)( ⋅= (3.6)
El valor de la resistencia R del potenciómetro de sensado se puede variar para ajustar adecuadamente los niveles de conexión-desconexión. La tensión (3.6) se muestrea con un convertidor ADC MAX153 de 8 bits y ±2.5 V de margen dinámico de entrada, con una frecuencia de muestreo de 333.333 kHz, obteniéndose como resultado una combinación digital equivalente de 8 bits io(n), tal y como se muestra en la figura 3.14.

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.19 onduladores conectados en paralelo
io*1e-3
Sensorde corrienteLA25-NPS=1mA/A
R
V=io·0.001R[V]
V=io·0.001R
2.5V
-2.5V
ADC8-bitADC8-bit
io(n)FFH
00H
t t
Figura 3.14. Sistema de adquisición de la corriente de carga
La muestra de la corriente de salida io(n) se aplica al detector de nivel de potencia que incorpora los elementos necesarios para determinar si la corriente de salida supera los umbrales definidos por (3.5). En las pruebas realizadas sobre el prototipo experimental se han establecido los siguientes valores, expresados en hexadecimal y decimal, para los umbrales de conexión y desconexión:
( ) ( )( ) ( )( ) ( )
( ) ( )( ) ( )dHIdHBI
dHIdCHIdFHIdHEIdFHIdHCI
dFHIdHAI
descondescon
descondescon
conexconex
conexconex
conexconex
71472;184829963;1569
3113;224036332;19202
955;1600
=⋅−=⋅=−=
=⋅−=⋅=⋅−=⋅
=−=
(3.7)
Los umbrales de conexión y desconexión son diferentes para introducir de esta manera un ciclo de histéresis en la activación-desactivación de los distintos módulos inversores.
En la figura 3.15 aparecen representados gráficamente los umbrales (3.7).
io(n)FFH
00H
Iconex
-Iconex
2·Iconex
-2·Iconex
3·Iconex
-3·Iconex
Nº inversores activos
A0HC0HE0H
1FH3FH5FH
1 2 3
80H
io(n)FFH
00H
Iconex
-Iconex
2·Iconex
-2·Iconex
3·Iconex
-3·Iconex
Nº inversores activos
A0HC0HE0H
1FH3FH5FH
1 2 31 2 3
80H
io(n)FFH
00H
Idescon
-Idescon
2·Idescon
-2·Idescon
Nº inversores activos
9CHB8H
47H63H
1 2 3
80H
io(n)FFH
00H
Idescon
-Idescon
2·Idescon
-2·Idescon
Nº inversores activos
9CHB8H
47H63H
1 2 31 2 3
80H
(a) (b)
Figura 3.15. Representación gráfica de los umbrales de (a) conexión y (b) desconexión
Las salidas P1, P2 y P3 del bloque Detector de niveles de potencia (ver figura 3.13) se activan, a 1 lógico, cuando el valor de la corriente de salida io(n) supera los umbrales de conexión establecidos en (3.7):

3.20 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
( )( )
( ) HEIniFHIcuandoPHCIniFHIcuandoP
HAIniFHIcuandoP
conexoconex
conexoconex
conexoconex
031313023212
0511
=≥≥=−==≥≥=−=
=≥≥=−=
(3.8)
Una salida Pi con i=1,2,3, se desactiva sólo si la corriente io(n) no supera los umbrales de desconexión correspondientes, establecidos en (3.7), durante al menos un periodo de la tensión de salida vo(t). Esto permite asegurar que mientras se mantenga la carga actual, el bajo consumo de corriente de salida justifica la desconexión de un módulo inversor. A continuación se detalla las condiciones de desconexión concretas para cada salida Pi:
( )
( )( ) HEIniFHIcuandoPP
HBIniHIcuandoPPCHIniHIcuandoPP
conexoconex
deconexodeconex
deconexodeconex
03130313824720212
9630111
=<<=−=⇒==<<=−=⇒=
=<<=−=⇒=
(3.9)
Por tanto, el número de salidas Pi activas indica el número de inversores que deben permanecer en funcionamiento para satisfacer las demandas energéticas de la carga. De esta manera, si ninguna salida Pi está activa, ello quiere decir que solo es necesario tener un inversor en funcionamiento, ya que la amplitud máxima de la corriente de salida está por debajo del primer umbral de conexión. Si se activa P1 se deberá poner en marcha un segundo inversor, mientras que la activación de P2 indica que se debe poner en marcha un tercer inversor. Finalmente, la activación de P3 indica que para satisfacer las necesidades energéticas de la carga seria necesario la participación de cuatro módulos inversores. Teniendo en cuenta que el sistema solo dispone de tres módulos, en este último caso se desconectarían todos los módulos para protegerlos contra sobrecorrientes. En la figura 3.16 se muestra el esquema de la implementación práctica del bloque Detector de niveles de potencia.
8io(n)
≤ 3FH≤ 3FH
≥ C0H≥ C0H1
1
≤ 47H≤ 47H
≥ B8H≥ B8H1
1
≤ 1FH≤ 1FH
≥ E0H≥ E0H1
1
≤ 5FH≤ 5FH
≥ A0H≥ A0H1
1
≤ 63H≤ 63H
≥ 9CH≥ 9CH1
1
SD2
SD3
P1
P2
P3
Figura 3.16. Esquema del Detector de niveles de potencia

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.21 onduladores conectados en paralelo
• Bloque de Memoria
La activación de las salidas Pi del bloque Detector de niveles de potencia permanece registrada durante al menos un periodo de la tensión de salida gracias al bloque de Memoria.
En la figura 3.17 se muestra el esquema de la implementación práctica del bloque de Memoria.
D
CK
QD
CK
Q
D
CK
QPRE
D
CK
QD
CK
QPRE
D
CK
QPRE
D
CK
QD
CK
QPRE
D
CK
QPRE
D
CK
QD
CK
QPRE
D
CK
QPRE
D
CK
QD
CK
QPRE
D
CK
QPRE
D
CK
QD
CK
QPRE
D
CK
QPRE
D
CK
QD
CK
QPRE
D
CK
QD
CK
Q
D
CK
QD
CK
Q
D
CK
QD
CK
Q
P1
P2
P3
P1
P2
P3
CLKS2
signo(vr)
Figura 3.17. Esquema del bloque de Memoria
• Bloque Activador de inversores
El número de convertidores activos depende del nivel de corriente de carga y del número de inversores operativos. Ambas informaciones se procesan en el bloque Activador de inversores que decide finalmente cuantos inversores deben funcionar en cada instante. Para ello este bloque activa, a cero lógico, una salida SDi con i =1,2,3, por cada inversor que debe estar en funcionamiento.
La tabla 3.8 resume la estrategia de gestión del número de inversores activos que lleva a cabo el bloque Activador de inversores y en la figura 3.18 está representado el esquema de su implementación práctica. Básicamente esta estrategia consiste en que el número de inversores activos debe ser igual al número de señales Pi activas mas uno, excepto cuando el número de inversores necesarios para responder a la demanda energética de la carga supere al número de inversores operativos. En este último caso se procede a la parada de todos los módulos inversores como medida de protección contra sobrecorrientes.

3.22 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
#C P3 P2 P1 SD3 SD2 SD1 #A0 X X X 1 1 1 0 1 0 0 0 1 1 0 1 1 X X 1 1 1 1 0 2 0 0 0 1 1 0 1 2 0 0 1 1 0 0 2 2 X 1 1 1 1 1 0 3 0 0 0 1 1 0 1 3 0 0 1 1 0 0 2 3 0 1 1 0 0 0 3 3 1 1 1 1 1 1 0
Tabla 3.8. Estrategia de funcionamiento del bloque Activador de inversores. #C: números de inversores operativos.#A: número de inversores activos. (X=Don’t care)
S1 S0D3D2D1D0
O SD21
S1 S0D3D2D1D0
O SD31111
(P3+P2)
111
(P3+P2)
11
(P2+P1)(P3+P1)
11
(P2+P1)(P3+P1)
S1 S0D3D2D1D0
O SD11
CinAB
S0S1
Full Adder
CACBCC
CinAB
S0S1
Full Adder
CACBCC
#C: números de convertidores operativos
0: S1 S0 = 111: S1 S0 = 102: S1 S0 = 013: S1 S0 = 00
1P1P2P3
2 #C
Figura 3.18. Esquema del bloque Activador de inversores
3.6.3. Sistema de Tolerancia a Fallos (STF)
El Sistema de Tolerancia a Fallos (STF), monitoriza qué módulos convertidores no son operativos, por haber sufrido un fallo o por cualquier otra circunstancia, y realiza el proceso adecuado para que estos módulos no sean tenidos en cuenta por el control del sistema modular inversor. El sistema STF se divide en dos bloques: STF Input y STF Output, tal y como muestra la figura 3.12. Básicamente la tarea que llevan a cabo estos bloques se resume de la siguiente manera:
• STF Input: Procesa y ordena adecuadamente las corrientes de inductor de los módulos que son operativos, excluyendo las de los módulos no operativos.
• STF Output: Ordena y distribuye adecuadamente entre los módulos operativos la acción de control generada por el sistema de control después de calcular las distintas superficies de conmutación.

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.23 onduladores conectados en paralelo
• Bloque STF Input
En la figura 3.19 se muestran las entradas y salidas del bloque STF Input. Las entradas de este bloque son las muestras de corriente de inductor de cada módulo inversor y las señales CA y CB que indican si los módulos A y B, respectivamente, son operativos. A partir de la información suministrada por las entradas CA y CB, el bloque STF Input excluye las corrientes pertenecientes a módulos no operativos y reordena el resto. Como resultado se obtiene las corrientes de salida iLAin, iLBin e iLCin. En la figura 3.20 se muestra el esquema de la implementación práctica del bloque STF Input.
( )( )( )ninini
LC
LB
LA
βββ 8
88
8 β iLAin(n)
CACB
8 β iLBin(n)8 β iLCin(n)
STFInput
Figura 3.19. Entradas y salidas del bloque STF Input
00011011
( )( )( )ninini
LC
LB
LA
βββ 8
88
8
S1 S0
8 β iLAin(n)01
( )( )nini
LC
LB
ββ 8
8
S08 β iLBin(n)
CB CA
8 β iLCin(n)( )niLCβ
CB CA
Figura 3.20. Esquema de la implementación del bloque STF Input
En la tabla 3.9 se indica el ordenamiento de las corrientes de inductor realizado por el bloque STF Input para distintas situaciones de fallo de módulos inversores de un sistema modular formado por tres inversores.
Corriente de salida del bloque STF Input Módulos
operativos iLAin iLBin iLCin Todos iLA iLB iLC A, B iLA iLB X A, C iLA iLC X B, C iLB iLC X
A iLA X X B iLB X X C iLC X X
Ninguno X X X Tabla 3.9. Ordenación de las corrientes de inductor en el bloque STF Input

3.24 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
• Bloque STF Output
En la figura 3.21 se muestran las entradas y salidas del bloque STF Output. Las entradas de este bloque son las señales CA y CB que indican si los módulos A y B son operativos, las señales de desactivación de los módulos inversores SDAout, SDBout y SDCout, y las señales de control uAout, uBout y uCout. A partir del valor de la entradas CA y CB, el bloque STF Output procesa las señales de desactivación de los módulos convertidores SDiout con i=A, B, C, y las señales de control del puente completo uiout con i=A, B, C, distribuyéndolas ordenadamente entre los módulos apropiados en función de su operatividad. Las salidas de este bloque son las señales de control resultantes de la reordenación: SDA, uA, SDB, uB y SDC, uC. En la figura 3.22 se muestra el esquema de la implementación práctica del bloque STF Output.
En la tabla 3.10 se establece la distribución de señales de control ui y SDi realizada por el bloque STF Output para distintas situaciones de fallo de módulos inversores de un sistema modular formado por tres inversores.
SDAout, SDBout, SDCout
CA
CB
STFOutput
uAout, uBout, uCout SDA, SDB, SDC
uA, uB, uC
3
3 3
3
Figura 3.21. Entradas y salidas del bloque STF Output
00011011
22
2
2
S1 S0
2 SDCuCSDCout, uCout
SDBout, uBout
SDAout, uAout
01
22
S02
2 SDA, uA
SDBuB
SDAout, uAout
SDBout, uBout
SDAout, uAout
CB CA
CB CA
Figura 3.22. Esquema de la implementación del bloque STF output
Señales de control de los módulos inversores proporcionadas por el bloque STF Output Módulos operativos
SDA, uA SDB, uB SDC, uC Todos SDAout, uAout SDBout, uBout SDCout, uCout A, B SDAout, uAout SDBout, uBout X A, C SDAout, uAout X SDBout, uBout B, C X SDAout, uAout SDBout, uBout
A SDAout, uAout X X B X SDAout, uAout X C X X SDAout, uAout
Ninguno X X X Tabla 3.10. Distribución de las señales de control en el bloque STF output

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.25 onduladores conectados en paralelo
3.6.4. Sistema de Rotación de Módulos Activos (SRMA)
• Estrategia de ecualización de tiempo de funcionamiento
El sistema SRMA pretende ecualizar el tiempo que permanece en activo cada módulo operativo. Básicamente, este sistema funciona siguiendo una estrategia FIFO (First-In First-Out) establecida mediante las siguientes reglas:
1. Cuando la potencia de salida disminuye se desactiva en primer lugar el módulo que lleva más tiempo en funcionamiento.
2. Cuando la demanda energética de la carga aumenta se activa en primer lugar el módulo que lleva más tiempo desactivado.
Esta estrategia de funcionamiento de inversores implica que cada uno de los módulos que integran el sistema modular de potencia, A, B y C, puede estar gobernado por una de las superficies de conmutación σ1, σ2 ó σ3, estableciéndose una rotación entre las distintas superficies de conmutación y los módulos según la estrategia FIFO. Igualmente, se debe establecer la misma rotación en la correspondencia entre las corrientes de inductor de cada módulo, iLA, iLB e iLC, y los términos de corriente que aparecen en las distintas superficies de conmutación iL1, iL2 e iL3. La figura 3.23 ilustra un ejemplo de funcionamiento del sistema SRMA donde se muestra el proceso de rotación de superficies y corrientes entre los convertidores del sistema inversor modular a través de una secuencia de 7 pasos.
A B
C
σ1 σ2
σ3
iL1 = iLA iL2 = iLB
iL3 = iLC
(a)A B
C
iL1 = iLA iL2 = iLB
iL3 = iLC
(b)A B
C
iL1 = iLA iL2 = iLB
iL3 = iLC
(c)
A B
C
iL2 = iLA iL3 = iLB
iL1 = iLC
(f)A B
C
iL3 = iLA iL1 = iLB
iL2 = iLC
(d)A B
C
iL2 = iLA iL3 = iLB
iL1 = iLC
(e)
A B
C
iL1 = iLA iL2 = iLB
iL3 = iLC
(g)j
j
Inversor ON
Inversor OFF
σ1 σ2
σ3
σ1 σ2
σ3
σ3 σ1
σ2
σ2 σ3
σ1
σ1 σ2
σ3
j = A, B, C
σ1 σ2
σ3
Figura 3.23. Ejemplo de una secuencia de conexión-desconexión con el sistema SRMA

3.26 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
A continuación se detallan los pasos de dicha secuencia:
(a) Solo el inversor A está activo, controlado por la superficie de conmutación σ1, donde iL1 = iLA.
(b) La potencia de salida aumenta y el inversor B se pone en funcionamiento gobernado por la superficie de conmutación σ2, donde iL1 = iLA e iL2 = iLB.
(c) La potencia de salida aumenta y el inversor C se pone en funcionamiento gobernado por la superficie de conmutación σ3, con iL1 = iLA, iL2 = iLB y iL3 = iLC.
(d) La potencia de salida disminuye y se debe desactivar el inversor que lleva más tiempo funcionando, o sea el inversor A. Esto conlleva una rotación de las superficies de conmutación y de las corrientes de inductor. En efecto, ahora la superficie σ1 no controla al inversor A sino al B, mientras que la superficie σ2 ya no gobierna al inversor B sino al C. También se establece la misma rotación en la correspondencia entre las corrientes de inductor de cada módulo y los términos de corriente que aparecen en las distintas superficies de conmutación. De esta manera, en las superficies σ1 y σ2 se cumple que: iL1 = iLB e iL2 = iLC.
(e) La potencia de salida disminuye y se debe desactivar el siguiente inversor que lleve más tiempo funcionando, o sea, el B, lo que provoca la consiguiente rotación de las superficies de conmutación y de las corrientes de inductor. En efecto, ahora la superficie σ1 no controla al inversor B sino al C con iL1 = iLC.
(f) La potencia de salida aumenta y se activa el inversor que lleva más tiempo parado, o sea, el módulo A, gobernado por la superficie de conmutación σ2, con iL1= iLC y iL2 = iLA.
(g) La potencia de salida disminuye y se debe desactivar el inversor activo que lleve más tiempo funcionando, o sea, el C, lo que provoca una nueva rotación de las superficies de conmutación y de las corrientes de inductor. En efecto, ahora la superficie σ1 no controla al inversor C sino al A con iL1 = iLA.
• Entradas y salidas del Sistema de Rotación de Módulos Activos (SRMA)
En la figura 3.24 se muestran las entradas y salidas del Sistema de Rotación de Módulos Activos (SRMA).
( )( )( )ninini
LCin
LBin
LAin
βββ
88
88
88
SDAout, uAout
SDBout, uBout
SDCout, uCout
U1, U2, U3β iL1(n), β iL2(n), β iL3(n)
Al bloque Funciones de Conmutación
Al bloque STF Output
SD3
Sistema de Rotación de Módulos Activos (SRMA)
SD2SD1
2#C
Del bloque STF Input
Del bloque Gestión de Potencia Figura 3.24. Entradas y salidas del Sistema de Rotación de Módulos Activos (SRMA)

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.27 onduladores conectados en paralelo
Las entradas del SRMA son las corrientes de inductor ordenadas por el Sistema de Tolerancia a Fallos, las señales SDi que indican que módulos están activos, la señal #C que indica el número de módulos operativos y las señales resultantes de evaluar las funciones de conmutación U1, U2 y U3.
Las salidas que proporciona el bloque SRMA son las corrientes iLi con i =1, 2, 3, que se derivan al bloque Funciones de Conmutación, y las señales de control ui y SDi que se aplican al bloque STF Output para que las reordene teniendo en cuenta los módulos no operativos.
• Arquitectura interna del Sistema de Rotación de Módulos Activos
En las figuras 3.25 y 3.26 se pueden observar los esquemas asociados a la implementación práctica del sistema SRMA para el caso de un sistema de alimentación formado por tres módulos inversores.
000110S1S0
888
8
000110S1S0
888
8
000110S1S0
888
8
β iLAinβ iLBinβ iLCin
β iL1
β iL2
β iL3
000110S1S0
222
2 SDAoutuAout
SD1, u1SD2, u2SD3, u3
000110S1S0
222
2
000110S1S0
222
2
Detector dedesactivación
de módulo
Contador módulo #C
Q1Q0
SD1, SD2, SD3
CLKIN
CLKCOUNTER
#C 2
SDBoutuBout
SDCoutuCout
3
Figura 3.25. Esquema del sistema SRMA
Subb3 bitsSD1
SD2SD3
Adder3 bits
111
2
CLKIN
Delay2 Tclock
Co2
2
S0 S100
01
10
11
2
2
2
2
Q1, Q02
Contadormod. 3
Contadormod. 3
#C2
#C: números de convertidores operativos0: S1 S0 = 111: S1 S0 = 102: S1 S0 = 013: S1 S0 = 00
Detector de desactivación de módulo Contador módulo #C
Contadormod. 2
Contadormod. 2
Contadormod. 1
Contadormod. 1
Figura 3.26. Esquema del Detector de desactivación de módulo y del Contador módulo #C

3.28 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
3.7. Bloque Salidas de Control
El bloque denominado Salidas de Control (ver figura 3.5) se encarga de generar, a partir de las señales de control ui y SDi, proporcionadas por el bloque STF Output, las señales que controlan la activación de cada transistor del puente completo de cada módulo inversor: uLIi, uHii, uLDi y uHDi (ver figura 3.2), donde “i” representa el inversor A, B o C. El bloque Salidas de Control permite generar señales de control de dos y tres niveles, y además introduce un tiempo muerto, entre la desactivación y activación de los transistores del puente que evita el cortocircuito de la fuente de entrada.
• Entradas, salidas y descripción funcional del bloque Salidas de Control
En la figura 3.27 se muestra el esquema del bloque Salidas de Control. Las entradas/salidas de este bloque son:
• Entradas para el control con dos ó tres niveles (RB, signo(vr)): la señal de selección RB permite elegir entre un control de dos niveles (RB=0) o de tres niveles (RB=1). La señal binaria signo(vr), se corresponde con el signo de la tensión de referencia y permite determinar el valor de la señal de control en un control de tres niveles según la ley de control (2.149).
• Entradas de habilitación de los inversores (SDA, SDB y SDC): su activación, a 0 lógico, pone en funcionamiento el módulo inversor correspondiente.
• Entradas de control uA, uB y uC: se corresponden con el signo de la superficie evaluada por el bloque Funciones de Conmutación para cada módulo inversor según la estrategia seleccionada.
• Salidas de control uLIi, uHIi, uLDi y uHDi con i =A, B, C: controlan de forma individual cada uno de los transistores que componen el puente completo de cada módulo inversor.
uAuBuC
SDASDBSDC
RBsigno (vr)
uLDC
uHDC
uHIC
uLDB
uHDB
uLIB
uHIB
uLDA
uHDA
uLIA
uHIA
uLIC
Al inversor A
Al inversor B
Al inversor C
Salidasde
Control
Figura 3.27. Entradas y salidas del bloque Salidas de Control

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.29 onduladores conectados en paralelo
Las secuencia de control generada por el bloque Salidas de Control para cada módulo inversor depende de las señales de entrada. Si el módulo “i” (con i =A, B o C) está desactivado (SDi=1), las salidas de control correspondientes a dicho módulo uLIi, uHIi, uLDi, uHDi, estarán a cero lógico, de este modo los cuatro transistores del puente permanecerán en circuito abierto. Si por el contrario, el módulo “i” está activo, las salidas de control correspondientes tomarán los valores indicados en la tabla 3.1 según sea el valor de las entradas ui y RB, en cumplimiento de la ley de control establecida por las relaciones (2.148) y (2.149) para un control de dos y tres niveles, respectivamente.
• Arquitectura interna del bloque Salidas de Control
En la figura 3.28 se muestra el esquema de la implementación práctica del bloque Salidas de Control. En la figura 3.29 se muestra un ejemplo de una secuencia de activación de las salidas de control de la rama izquierda del puente para una conmutación de la señal de entrada uIi de 1 a 0 lógico y nuevamente a 1 lógico. En esta figura se puede observar el tiempo muerto entre la desactivación de un transistor y la activación de su complementario.
D QD QD QD Q
D QD QD QD Q
CKCK CKCK
CKCK CKCK
uIi
uHIi
Clocksystem
CLR CLR
CLR CLRSDi
D QD QD QD Q
D QD QD QD Q
CKCK CKCK
CKCK CKCK
uHDi
uLDi
CLR CLR
CLR CLRuLIi
uDi
01S0
11 1
RB
uDi
signo (vr)
Figura 3.28. Esquema del bloque Salidas de Control
Tiempomuerto
uIi
uLIi
uHIi
Clocksystem
Tiempomuerto
Figura 3.29. Evolución de las señales de entrada y salida del circuito de la figura 3.28 que activan los transistores de la rama izquierda del puente

3.30 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
3.8. Bloque Control Secuencial
El bloque Control Secuencial se encarga de generar las cinco señales de control que gestionan y secuencian el funcionamiento del resto de los bloques del diseño FPGA y de los convertidores A/D. Tal y como se observa en la figura 3.30, el sistema secuencial de control evoluciona a través de 12 estados, de S1 a S12, para pasar nuevamente a S1 en un proceso cíclico sin fin. La transición entre estados está sincronizada por una señal de reloj denominada Clock system cuya frecuencia es de 4 MHz.
La señal de control ADC controla la conversión de los cuatro convertidores. Mientras que la señal ADCA controla únicamente la conversión del primer ADC que se encarga de adquirir la superficie σv, y la corriente de salida io. La conversión se inicia cuando la señal ADC o ADCA pasa a cero lógico y el resultado de la conversión se mantiene hasta que la señal pasa de nuevo a 1 lógico.
Con el flanco de subida de la señal CLKOUT se actualiza el valor de las señales de control uA, uB y uC, de cada módulo inversor. La frecuencia de actualización es de 333.333 kHz. Con el flanco de subida de la señal CLKOUTA se carga el valor de la corriente de salida io, en un registro interno de la FPGA para ser posteriormente procesado por el Sistema de Gestión de Potencia. La señal MUXB actúa sobre el multiplexor analógico para seleccionar una de entre las dos posibles señales analógicas de entrada del primer ADC: σv ó io.
ADC
CLKOUT
Clocksystem
S1S0 S1 S2 S3 S4 S5 S6 S7 S8 S9 S10 S11 S12
ADCA
CLKOUTA
MUXB Figura 3.30. Señales de control generadas por el bloque Control Secuencial
3.9. Resultados de simulación y experimentales
Para probar las prestaciones del sistema modular de potencia presentado en los apartados anteriores se han realizado diversas simulaciones, con un modelo diseñado con el software MATLAB-SIMULINK que incluye el diseño FPGA (ver Anexo 1), y pruebas de laboratorio sobre un prototipo experimental. Se han tomado valores deliberadamente desapareados para los parámetros de los inversores que conforman la etapa de potencia del sistema modular: LA=1.5 mH, LB=1.22 mH, LC=0.9 mH, CA=CB=CC=20 µF, rLA=94 mΩ, rLB=116 mΩ, rLC=100 mΩ. Los valores de los coeficientes de las superficies de conmutación utilizados en las pruebas son: k1=1, k2=6·10-5, y βA=βB=βC =0.5 para las estrategias de ecualización de corrientes M-S, CCC y CLC (apartado 2.6.5), mientras que βB=βC=1 para las superficies transformadas obtenidas con el método de diagonalización (apartado 2.7.3).

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.31 onduladores conectados en paralelo
Los resultados conseguidos se han clasificado en función de los dos ámbitos de actuación del subsistema de gestión y control: el control de las variables de estado y la gestión del funcionamiento de sistema modular. En el apartado 3.9.1 se presentan los resultados con relación al control de las variables de estado mediante la técnica de control en modo de deslizamiento con las funciones de conmutación consideradas en el capítulo 2. Asimismo, en el apartado 3.9.2 se exponen los resultados obtenidos en las pruebas realizadas en relación con la gestión del funcionamiento del sistema modular.
3.9.1. Resultados del control en modo de deslizamiento
Para probar las prestaciones de la técnica de control en modo de deslizamiento y de las diferentes estrategias de ecualización de corriente consideradas, se ha sometido al sistema modular de potencia a diversas pruebas que permiten analizar su comportamiento en régimen estático y dinámico. También se han efectuado medidas cuantitativas de determinados índices de error que permiten realizar un análisis comparativo de las prestaciones de cada una de las estrategias consideradas con señales de control de dos y tres niveles. En todas las pruebas realizadas la tensión DC de entrada, común a todos los módulos inversores, es de 70 V, siendo la tensión de salida deseada
)502(55)( tsintvo π⋅= y la resistencia de carga RL=5 Ω en pruebas de carga lineal.
• Comportamiento en régimen estático
En las figuras 3.31 y 3.32 se muestran los resultados de simulación y experimentales respectivamente de la tensión de salida vo(t), de referencia vr(t) y de error ve(t), en régimen permanente para las estrategias Master-Slave, Circular Chain Control, Central Limit Control y superficies transformadas, utilizando señales de control de dos niveles. En todas las figuras se ha introducido un desfase de 180 grados entre la tensión de referencia y la tensión de salida para facilitar su distinción. Las figuras 3.33 y 3.34 muestran los resultados obtenidos con señales de control de tres niveles.
En las figuras 3.35, 3.36, 3.37 y 3.38 se muestran los resultados de simulación y experimentales de la corriente de inductor de los inversores A, B y C correspondientes a las estrategias y niveles de señal de control de las pruebas consideradas en las figuras 3.31, 3.32, 3.33 y 3.34, respectivamente.
0.02 0.022 0.024 0.026 0.028 0.03 0.032 0.034 0.036 0.038 0.04-4
-3
-2
-1
0
1
2
3
4
vo(t) vr(t)
ve(t)
0.02 0.022 0.024 0.026 0.028 0.03 0.032 0.034 0.036 0.038 0.04-4
-3
-2
-1
0
1
2
3
4
vo(t) vr(t)
ve(t)
0.02 0.022 0.024 0.026 0.028 0.03 0.032 0.034 0.036 0.038 0.04-4
-3
-2
-1
0
1
2
3
4
vo(t) vr(t)
ve(t)
0.02 0.022 0.024 0.026 0.028 0.03 0.032 0.034 0.036 0.038 0.04-4
-3
-2
-1
0
1
2
3
4
vo(t) vr(t)
ve(t)
(a) (b)

3.32 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
0.02 0.022 0.024 0.026 0.028 0.03 0.032 0.034 0.036 0.038 0.04-4
-3
-2
-1
0
1
2
3
4
vo(t) vr(t)
ve(t)
0.02 0.022 0.024 0.026 0.028 0.03 0.032 0.034 0.036 0.038 0.04-4
-3
-2
-1
0
1
2
3
4
vo(t) vr(t)
ve(t)
0.02 0.022 0.024 0.026 0.028 0.03 0.032 0.034 0.036 0.038 0.04-4
-3
-2
-1
0
1
2
3
4
vo(t) vr(t)
ve(t)
0.02 0.022 0.024 0.026 0.028 0.03 0.032 0.034 0.036 0.038 0.04-4
-3
-2
-1
0
1
2
3
4
vo(t) vr(t)
ve(t)
(c) (d) Figura 3.31. Resultados de la simulación de la tensión de referencia vr(t) [20 V/div], tensión de
salida vo(t) [20 V/div], y tensión de error ve(t) [500 mV/div], con control de dos niveles, RL = 5 Ω y estrategia (a) M-S, (b) CCC, (c) CLC y (d) superficies transformadas
vo(t) vr(t)
ve(t)
vo(t) vr(t)
ve(t)
(a) (b)
vo(t)
ve(t)
vr(t) vo(t)
ve(t)
vr(t)
(c) (d)
Figura 3.32. Resultados experimentales de la tensión de referencia vr(t) [20 V/div], tensión de salida vo(t) [20 V/div], y tensión de error ve(t) [500 mV/div], con control de dos niveles, RL = 5 Ω
y estrategia (a) M-S, (b) CCC, (c) CLC y (d) superficies transformadas

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.33 onduladores conectados en paralelo
0.02 0.022 0.024 0.026 0.028 0.03 0.032 0. 034 0.036 0. 038 0.04-4
-3
-2
-1
0
1
2
3
4
vo(t) vr(t)
ve(t)
0.02 0.022 0.024 0.026 0.028 0.03 0.032 0. 034 0.036 0. 038 0.04-4
-3
-2
-1
0
1
2
3
4
vo(t) vr(t)
ve(t)
0.02 0.022 0.024 0.026 0.028 0.03 0.032 0.034 0.036 0.038 0.04-4
-3
-2
-1
0
1
2
3
4
vo(t) vr(t)
ve(t)
0.02 0.022 0.024 0.026 0.028 0.03 0.032 0.034 0.036 0.038 0.04-4
-3
-2
-1
0
1
2
3
4
vo(t) vr(t)
ve(t)
(a) (b)
0.02 0.022 0.024 0.026 0.028 0.03 0.032 0.034 0.036 0.038 0.04-4
-3
-2
-1
0
1
2
3
4
vo(t) vr(t)
ve(t)
0.02 0.022 0.024 0.026 0.028 0.03 0.032 0.034 0.036 0.038 0.04-4
-3
-2
-1
0
1
2
3
4
vo(t) vr(t)
ve(t)
0.02 0.022 0.024 0.026 0.028 0.03 0.032 0.034 0.036 0.038 0.04-4
-3
-2
-1
0
1
2
3
4
vo(t) vr(t)
ve(t)
0.02 0.022 0.024 0.026 0.028 0.03 0.032 0.034 0.036 0.038 0.04-4
-3
-2
-1
0
1
2
3
4
vo(t) vr(t)
ve(t)
(c) (d) Figura 3.33. Resultados de la simulación de la tensión de referencia vr(t) [20 V/div], tensión de
salida vo(t) [20 V/div], y tensión de error ve(t) [500 mV/div], con control de tres niveles, RL = 5 Ω y estrategia (a) M-S, (b) CCC, (c) CLC y (d) superficies transformadas
vo(t) vr(t)
ve(t)
vo(t) vr(t)
ve(t)
(a) (b)

3.34 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
vo(t) vr(t)
ve(t)
vo(t) vr(t)
ve(t)
(c) (d)
Figura 3.34. Resultados experimentales de la tensión de referencia vr(t) [20 V/div], tensión de salida vo(t) [20 V/div], y tensión de error ve(t) [500 mV/div], con control de tres niveles, RL = 5 Ω
y estrategia (a) M-S, (b) CCC, (c) CLC y (d) superficies transformadas
(a) (b)0.02 0.025 0.03 0.035 0.04 0.045 0.05 0.055 0.06-4
-3
-2
-1
0
1
2
3
4
0. 02 0.025 0.03 0.035 0.04 0. 045 0.05 0.055 0.06-4
-3
-2
-1
0
1
2
3
4
iLA
iLB
iLC
iLA
iLB
iLC
(c) (d)0. 02 0 .025 0.03 0.035 0.04 0. 045 0.05 0.055 0. 06-4
-3
-2
-1
0
1
2
3
4
0. 02 0.025 0.03 0.035 0.04 0. 045 0.05 0.055 0.06-4
-3
-2
-1
0
1
2
3
4
iLA
iLB
iLC
iLA
iLB
iLC
Figura 3.35. Resultados de la simulación de la corriente de inductor de los convertidores
conectados en paralelo iLA [2 A/div], iLB [2 A/div] y iLC [2 A/div], con control de dos niveles, RL=5Ω y estrategia (a) M-S, (b) CCC, (c) CLC y (d) superficies transformadas

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.35 onduladores conectados en paralelo
iLA
iLB
iLC
iLA
iLB
iLC
(a) (b)
iLA
iLB
iLC
iLA
iLB
iLC
(c) (d)
Figura 3.36. Resultados experimentales de la corriente de inductor de los convertidores conectados en paralelo iLA [2 A/div], iLB [2 A/div] y iLC [2 A/div], con control de dos niveles,
RL=5Ω y estrategia (a) M-S, (b) CCC, (c) CLC y (d) superficies transformadas
(a) (b)
0.02 0.025 0.03 0.035 0.04 0. 045 0.05 0.055 0.06-4
-3
-2
-1
0
1
2
3
4
iLA
iLB
iLC
0.02 0.025 0.03 0.035 0.04 0. 045 0.05 0.055 0.06-4
-3
-2
-1
0
1
2
3
4
iLA
iLB
iLC
0. 02 0.025 0.03 0.035 0.04 0.045 0.05 0.055 0.06-4
-3
-2
-1
0
1
2
3
4
iLA
iLB
iLC
0. 02 0.025 0.03 0.035 0.04 0.045 0.05 0.055 0.06-4
-3
-2
-1
0
1
2
3
4
iLA
iLB
iLC

3.36 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
(c) (d)0. 02 0.025 0.03 0.035 0.04 0.045 0.05 0.055 0.06-4
-3
-2
-1
0
1
2
3
4
iLA
iLB
iLC
0. 02 0.025 0.03 0.035 0.04 0.045 0.05 0.055 0.06-4
-3
-2
-1
0
1
2
3
4
iLA
iLB
iLC
0.02 0.025 0.03 0.035 0.04 0. 045 0.05 0.055 0.06-4
-3
-2
-1
0
1
2
3
4
iLA
iLB
iLC
0.02 0.025 0.03 0.035 0.04 0. 045 0.05 0.055 0.06-4
-3
-2
-1
0
1
2
3
4
iLA
iLB
iLC
Figura 3.37. Resultados de la simulación de la corriente de inductor de los convertidores
conectados en paralelo iLA [2 A/div], iLB [2 A/div] y iLC [2 A/div], con control de tres niveles, RL=5Ω y estrategia (a) M-S, (b) CCC, (c) CLC y (d) superficies transformadas
iLA
iLB
iLC
iLA
iLB
iLC
(a) (b)
iLA
iLB
iLC
iLA
iLB
iLC
(c) (d)
Figura 3.38. Resultados experimentales de la corriente de inductor de los convertidores conectados en paralelo iLA [2 A/div], iLB [2 A/div] y iLC [2 A/div], con control de tres niveles,
RL=5Ω y estrategia (a) M-S, (b) CCC, (c) CLC y (d) superficies transformadas

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.37 onduladores conectados en paralelo
• Comportamiento para carga no lineal
Para realizar las pruebas de funcionamiento con carga no lineal se ha utilizado como carga un puente rectificador de onda completa en paralelo con un condensador de 29.3 mF y con una resistencia de 20Ω (ver figura 3.39), siendo la tensión de referencia vr(t)=48·sin(2π50t).
C
+
voAC
-
iC
iZ
SISTEMA MODULARDE POTENCIA
20 Ω29.3 mF
Figura 3.39. Sistema modular de potencia con carga no lineal
En las figuras 3.40, 3.41, 3.42 y 3.43 se muestran los resultados experimentales obtenidos. En la figura 3.40 se muestra la tensión de salida vo(t), la tensión de referencia vr(t), la tensión de error ve(t) y la corriente de carga io(t), para las estrategias Master-Slave, Circular Chain Control, Central Limit Control y superficies transformadas utilizando señales de control de dos niveles. La figura 3.41 muestra las mismas pruebas realizadas con señales de control de tres niveles, mientras que las figuras 3.42 y 3.43 muestran dos periodos de la corriente de inductor de cada módulo inversor para las estrategias y niveles de señal de control correspondientes a las pruebas consideradas en las figuras 3.40 y 3.41, respectivamente.
vo(t)
ve(t)
vr(t) vo(t)
io(t)
(a)
vo(t)
ve(t)
vr(t) vo(t)
io(t)
(b)

3.38 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
vo(t)
ve(t)
vr(t) vo(t)
io(t)
(c)
vo(t) vr(t)
ve(t)
vo(t)
io(t)
(d)
Figura 3.40. Resultados experimentales de la tensión de referencia vr(t) [15 V/div], tensión de salida vo(t) [15 V/div], tensión de error ve(t) [500 mV/div], y corriente de salida io(t) [5A/div], para
una carga no lineal, con control de dos niveles y estrategia (a) M-S, (b) CCC, (c) CLC y (d)superficies transformadas
vo(t) vr(t)
ve(t)
vo(t)
io(t)
(a)

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.39 onduladores conectados en paralelo
vo(t) vr(t)
ve(t)
vo(t)
io(t)
(b)
vo(t)
ve(t)
vr(t) vo(t)
io(t)
(c)
vo(t) vr(t)
ve(t)
vo(t)
io(t)
(d)
Figura 3.41. Resultados experimentales de la tensión de referencia vr(t) [15 V/div], tensión de salida vo(t) [15 V/div], tensión de error ve(t) [500 mV/div], y corriente de salida io(t) [5 A/div], para una carga no lineal, con control de tres niveles y estrategia (a) M-S, (b) CCC, (c) CLC y
(d)superficies transformadas

3.40 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
iLA
iLB
iLC
iLA
iLB
iLC
(a) (b)
iLA
iLB
iLC
iLA
iLB
iLC
(c) (d)
Figura 3.42. Resultados experimentales de la corriente de inductor de los módulos inversores conectados en paralelo iLA [2 A/div], iLB [2 A/div] y iLC [2 A/div], con control de dos niveles y
estrategia (a) M-S, (b) CCC, (c) CLC y (d) superficies transformadas
iLA
iLB
iLC
iLA
iLB
iLC
(a) (b)

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.41 onduladores conectados en paralelo
iLA
iLB
iLC
iLA
iLB
iLC
(c) (d)
Figura 3.43. Resultados experimentales de la corriente de inductor de los módulos inversores conectados en paralelo iLA [2 A/div], iLB [2 A/div] y iLC [2 A/div], con control de tres niveles y
estrategia (a) M-S, (b) CCC, (c) CLC y (d) superficies transformadas
• Índices de error para carga lineal y no lineal
Se han obtenido medidas cuantitativas de las prestaciones del control mediante las normas l1, l2 y l∞ definidas como sigue:
( )∑=
=n
kke
ne
11
1 (3.10)
( )∑=
=n
kke
ne
1
22
1 (3.11)
( )kemaxek
=∞ (3.12)
siendo e(k) las muestras de la señal de error definida como la diferencia entre la señal de referencia y la tensión de salida del sistema inversor. Los resultados se dan en porcentaje:
∞=× yiparaV
e
iref
i 2,1100 (3.13)
En las tablas 3.11 y 3.12 se presentan los índices de error para las distintas estrategias y niveles de la señal de control con carga lineal y no lineal, respectivamente. También se ha incluido la medida de la distorsión armónica total (THD) de la tensión y corriente de salida obtenida con el medidor de calidad de potencia Fluke 47B. En las tablas 3.13 y 3.14 se muestran los valores correspondientes a las medidas del valor eficaz de la corriente de inductor de los módulos A, B y C, para carga lineal y no lineal respectivamente, obtenidas con las diferentes estrategias de control. También se indica el valor del índice de error tomado como el percentil de la diferencia de valores eficaces dividido por el valor medio de la corriente de inductor, es decir:
( ) CBAkjconi
iii
Lmedio
LkrmsLjrmserror ,,,100% =×
−= (3.14)

3.42 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Estrategia Niveles L1 (%) L2 (%) L∞ (%) THD Vo(%)
THD Io(%)
Error Vrms
Master-Slave 0.7483 0.7520 0.9171 0.2 0.3 0.293 CCC 0.6180 0.6147 0.8276 0.2 0.3 0.240 CLC
Dos niveles 0.5707 0.5540 0.6396 0.2 0.3 0.214
Master-Slave 0.3397 0.3659 0.8782 0.2 0.3 0.147 CCC 0.2802 0.3160 0.8993 0.2 0.3 0.128 CLC
Tres niveles 0.3020 0.3328 0.8749 0.2 0.3 0.136
Dos niveles 0.6213 0.6056 0.7069 0.2 0.2-0.3 0.237 Superficies transformadas Tres niveles 0.4792 0.5409 1.0634 0.3-0.4 0.3 0.179
Tabla 3.11. Índices de error y THD del sistema modular para diferentes estrategias y niveles de la señal de control con carga lineal
Estrategia Niveles L1 (%) L2 (%) L∞ (%) THD Vo(%)
Error Vrms
Master-Slave 0.7017 0.7827 1.2883 0.2 0.265 CCC 0.6321 0.7042 1.1452 0.2 0.239 CLC
Dos niveles 0.5814 0.6232 0.9816 0.2 0.211
Master-Slave 0.3689 0.4292 0.8589 0.4-0.5 0.145 CCC 0.3429 0.3998 0.8180 0.4 0.135 CLC
Tres niveles 0.3505 0.4053 0.8384 0.4 0.137
Dos niveles 0.5906 0.6011 1.0020 0.2 0.204 Superficies transformadas Tres niveles 0.4304 0.4533 0.9633 0.5-0.6 0.183
Tabla 3.12. Índices de error y THD del sistema modular para diferentes estrategias y niveles de la señal de control con carga no lineal
Estrategia Niveles iLA (Arms)
iLB (Arms)
iLC (Arms)
iLA-iLB (%)
iLA-iLC (%)
iLB-iLC (%)
Suma error
Master-Slave 2.53 2.51 2.48 0.8 2 1.2 4 CCC 2.53 2.52 2.48 0.4 2 1.6 4 CLC
Dos niveles 2.53 2.51 2.50 0.8 1.2 0.4 2.4
Master-Slave 2.52 2.52 2.51 0 0.4 0.4 0.8 CCC 2.51 2.51 2.50 0 0.4 0.4 0.8 CLC
Tres niveles 2.52 2.51 2.51 0.4 0.4 0 0.8
Dos niveles 2.53 2.51 2.51 0.8 0.8 0 1.6 Superficies transformadas Tres niveles 2.53 2.52 2.52 0.4 0.4 0 0.8
Tabla 3.13. Valor eficaz de las corrientes de inductor e índices de error para diferentes estrategias y niveles de señal de control con carga lineal
Estrategia Niveles iLA (Arms)
iLB (Arms)
iLC (Arms)
iLA-iLB (%)
iLA-iLC (%)
iLB-iLC (%)
Suma error
Master-Slave 1.43 1.43 1.43 0 0 0 0 CCC 1.43 1.43 1.44 0 0.7 0.7 1.4 CLC
Dos niveles 1.42 1.43 1.43 0.7 0.7 0 1.4
Master-Slave 1.43 1.43 1.43 0 0 0 0 CCC 1.42 1.43 1.43 0.7 0.7 0 1.4 CLC
Tres niveles 1.43 1.43 1.43 0 0 0 0
Dos niveles 1.42 1.43 1.43 0.7 0.7 0 1.4 Superficies transformadas Tres niveles 1.43 1.43 1.43 0 0 0 0
Tabla 3.14. Valor eficaz de las corrientes de inductor e índices de error para diferentes estrategias y niveles de señal de control con carga no lineal

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.43 onduladores conectados en paralelo
Los buenos resultados experimentales se aproximan a los obtenidos mediante simulación y confirman los resultados teóricos con relación al comportamiento del sistema modular en régimen deslizante permanente. En efecto, se han alcanzado los dos objetivos de control previstos con el control en modo de deslizamiento propuesto en el capítulo 2:
En cuanto al seguimiento de la señal de salida:
• El valor eficaz de la tensión de error está comprendido entre el 0.33% y el 0.78% del valor eficaz de la tensión de referencia. Cabe indicar que se ha obtenido un mejor resultado de este parámetro, para todas las estrategias de ecualización de corriente consideradas, con la señal de control de tres niveles con respecto a la señal de control de dos niveles, tanto para carga lineal como para carga no lineal.
• La distorsión armónica total (THD) obtenida con carga lineal es de 0.2% para todas las estrategias de ecualización de corrientes con señales de control de 2 y 3 niveles, excepto en el caso de superficies transformadas con señal de control de tres niveles donde la THD es de 0.3-0.4%. Para el caso de carga no lineal, la THD es mejor cuando se utiliza señales de control de dos niveles (0.2%) y empeora, en todos las estrategias, cuando se utiliza señales de control de tres niveles (entre 0.4 y 0.6%).
En cuanto a la ecualización de corrientes:
• El desapareamiento de la corriente de los inductores de los módulos inversores oscila entre el 0 y el 2% de la corriente media de inductor. En general se han obtenido mejores resultados en la ecualización de corrientes utilizando una señal de control de tres niveles, tendencia que es más acusada en el caso de carga no lineal.
En todos los casos la eficiencia medida del sistema modular inversor está comprendida entre el 85 % y el 88%.
• Espectro de la señal de control
La figura 3.44 muestra el espectro de la señal de control del inversor A para la estrategia M-S y señales de control de dos y tres niveles, donde se evidencia el modo de operación a frecuencia variable.
(a) (b)
Figura 3.44. Medida del espectro de la señal de control del inversor A [10 dB/div, 50 kHz] para una resistencia de carga de 5 Ω con la estrategia M-S y control de (a) dos y (b) tres niveles

3.44 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
• Comportamiento en régimen dinámico
Para evaluar las prestaciones en régimen dinámico se ha sometido al sistema modular de potencia a saltos de carga. En las figuras 3.45 y 3.46 se muestran los resultados de simulación y experimentales de la tensión y corriente de salida para un salto de carga en escalón de circuito abierto a 5 Ω con las estrategias M-S, CCC y CLC, para una señal de control de dos niveles y tres niveles, respectivamente.
0.015 0.02 0.025 0.03 0.035-4
-3
-2
-1
0
1
2
3
4
vo(t)
io(t)
0.015 0.02 0.025 0.03 0.035-4
-3
-2
-1
0
1
2
3
4
vo(t)
io(t)
vo(t)
io(t)
(a)
0.015 0.02 0.025 0.03 0.035-4
-3
-2
-1
0
1
2
3
4
vo(t)
io(t)
0.015 0.02 0.025 0.03 0.035-4
-3
-2
-1
0
1
2
3
4
vo(t)
io(t)
0.015 0.02 0.025 0.03 0.035-4
-3
-2
-1
0
1
2
3
4
vo(t)
io(t)
vo(t)
io(t)
(b)
0.015 0.02 0.025 0.03 0.035-4
-3
-2
-1
0
1
2
3
4
vo(t)
io(t)
0.015 0.02 0.025 0.03 0.035-4
-3
-2
-1
0
1
2
3
4
vo(t)
io(t)
0.015 0.02 0.025 0.03 0.035-4
-3
-2
-1
0
1
2
3
4
vo(t)
io(t)
vo(t)
io(t)
(c)
Figura 3.45. Simulación y resultados experimentales de la tensión de salida vo(t) [20 V/div], y corriente de salida io(t) [5 A/div], para un salto de carga de circuito abierto a 5 Ω con señal de
control de dos niveles y estrategia (a) M-S, (b) CCC y (c) CLC

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.45 onduladores conectados en paralelo
0.015 0.02 0.025 0.03 0.03-4
-3
-2
-1
0
1
2
3
4
vo(t)
io(t)
0.015 0.02 0.025 0.03 0.03-4
-3
-2
-1
0
1
2
3
4
vo(t)
io(t)
vo(t)
io(t)
(a)
0.015 0.02 0.025 0.03 0.03-4
-3
-2
-1
0
1
2
3
4
vo(t)
io(t)
0.015 0.02 0.025 0.03 0.03-4
-3
-2
-1
0
1
2
3
4
vo(t)
io(t)
0.015 0.02 0.025 0.03 0.03-4
-3
-2
-1
0
1
2
3
4
vo(t)
io(t)
vo(t)
io(t)
(b)
0.015 0.02 0.025 0.03 0.03-4
-3
-2
-1
0
1
2
3
4
vo(t)
io(t)
0.015 0.02 0.025 0.03 0.03-4
-3
-2
-1
0
1
2
3
4
vo(t)
io(t)
0.015 0.02 0.025 0.03 0.03-4
-3
-2
-1
0
1
2
3
4
vo(t)
io(t)
vo(t)
io(t)
(c)
Figura 3.46. Simulación y resultados experimentales de la tensión de salida vo(t) [20 V/div], y corriente de salida io(t) [5 A/div], para un salto de carga de circuito abierto a 5 Ω, con señal de
control de tres niveles y estrategia (a) M-S, (b) CCC y (c) CLC
La corta duración del transitorio del salto de carga obtenida para todas las estrategias, menor del 6% del periodo de la tensión de salida, es atribuible a la robustez propia del control en modo de deslizamiento frente a perturbaciones paramétricas.

3.46 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
3.9.2. Resultados del sistema de Gestión de Funcionamiento
Para evaluar el comportamiento del sistema de Gestión de Funcionamiento se han realizado pruebas con los subsistemas que integran este bloque, a saber: Sistema de Gestión de Potencia, Sistema de Rotación de Módulos Activos y Sistema Tolerante a Fallos. Los resultados obtenidos se detallan en los siguientes párrafos.
• Resultados del Sistema de Gestión de Potencia
Para comprobar el funcionamiento del Sistema de Gestión de Potencia se ha sometido al sistema inversor modular a saltos sucesivos de tensión de referencia de 20 Vp, 30 Vp, 40Vp y 50 Vp con una resistencia de carga de 5 Ω. Se han fijado los umbrales de corriente de salida que provocan la activación de los sucesivos módulos convertidores en IO1=6.2 A y IO2=9 A. En estas condiciones el segundo convertidor se activa para una potencia de salida mayor de 96 W y el tercer convertidor se activa para potencias superiores a 202 W.
En la figura 3.47 se observa la evolución de la tensión de salida vo(t), y de las corrientes de inductor iLA, iLB y iLC, para esta prueba, realizada con un control de dos niveles y estrategia Master-Slave.
En la figura 3.48 se presentan los resultados experimentales de la tensión de salida y de la corriente de inductor de los tres módulos inversores para un salto de carga de 40 Vp a 50Vp que se corresponde con el entorno de activación del tercer inversor.
vo(t)
iLA
iLB
iLC
Figura 3.47. Tensión de salida vo(t) [100 V/div], y corriente de los inductores de los tres inversores iLA [4 A/div], iLB [4 A/div], y iLC [4 A/div], para saltos sucesivos de tensión de referencia
de 20 Vp, 30 Vp, 40 Vp y 50 Vp, con RL = 5 Ω y estrategia de control Master-Slave. El segundo convertidor se conecta cuando la potencia de salida supera los 96 W y el tercero cuando la
potencia de salida supera los 202 W

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.47 onduladores conectados en paralelo
vo(t)
iLA
iLB
iLC
Figura 3.48. Medida de la tensión de salida vo(t) [100 V/div], y corriente de los inductores de los tres inversores iLA [4 A/div], iLB [4A/div], y iLC [4 A/div], para un salto de tensión de referencia de
40 Vp a 50 Vp, con RL= 5 Ω y control de dos niveles con estrategia Master-Slave
Los resultados obtenidos en las pruebas realizadas con el Sistema de Gestión de Potencia validan el diseño de este sistema y confirman la robustez propia del control en modo de deslizamiento frente a perturbaciones.
• Resultados del Sistema de Rotación de Módulos Activos
Se ha comprobado experimentalmente el funcionamiento del Sistema de Rotación de Módulos Activos sometiendo al sistema modular inversor a sucesivos saltos crecientes y decrecientes de tensión de referencia de 30 Vp, 40 Vp, 50Vp, 40 Vp y 30 Vp. En la figura 3.49 se muestran las medidas de la tensión de salida vo(t), y la corriente de inductor de los tres módulos inversores iLA, iLB y iLC, obtenidas en esta prueba con la estrategia Master-Slave, donde se puede observar la secuencia de activación y desactivación de los módulos inversores en respuesta a la demanda variable de potencia de salida.
vo(t)
iLA
iLB
iLC
Figura 3.49. Resultados experimentales de la tensión de salida vo(t) [100 V/div], y corriente de
inductor de los tres inversores iLA [10 A/div], iLB [10 A/div], y iLC [10 A/div], para saltos sucesivos de tensión de referencia de 30 Vp - 40 Vp – 50 Vp – 40 Vp – 30 Vp, con RL = 5 Ω y estrategia de
control Master-Slave

3.48 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Asimismo, en la figura 3.50 se puede observar la diferencia entre el sistema FIFO (First-In-First-Out) y el LIFO (Last-In-First-Out) en cuanto al tiempo de activación de cada módulo inversor. El sistema FIFO ecualiza el tiempo de funcionamiento de los inversores. En cambio, con el sistema LIFO el inversor A está funcionando todo el tiempo, mientras que el tiempo de funcionamiento del resto de inversores es cada vez menor.
vo(t)
iLA
iLB
iLC
vo(t)
iLA
iLB
iLC
(a) (b)
Figura 3.50. Resultados experimentales de la evolución de la tensión de salida vo(t) [100 V/div], y corriente de inductor de los tres inversores iLA [10 A/div], iLB [10 A/div], y iLC [10 A/div], para
saltos sucesivos de tensión de referencia de 30 Vp - 40 Vp – 50 Vp – 40 Vp – 30 Vp, con RL = 5 Ω, estrategia M-S, y sistema de conexión-desconexión (a) FIFO y (b) LIFO
Los resultados experimentales obtenidos en las pruebas realizadas con relación al Sistema de Rotación de Módulos Activos corroboran el correcto funcionamiento del diseño realizado.
• Resultados del Sistema de Tolerancia a Fallos
Finalmente, para probar el funcionamiento del Sistema de Tolerancia a Fallos (STF) se ha actuado sobre las entradas del sistema de control CA, CB y CC que indican que módulos inversores están operativos. Se ha emulado el fallo de un módulo inversor imponiendo en su entrada de control correspondiente “Ci” el valor uno lógico.
En las figuras 3.51 (a) y (b) se muestran los resultados experimentales obtenidos en las pruebas realizadas utilizando la estrategia de control Master-Slave y con señales de control de dos niveles. En la figura 3.51 (a) se muestra el resultado experimental de un fallo repetido del inversor A que actúa como Master. En esta figura se monitoriza la señal de control CA, que permite detectar los instantes en que el módulo inversor A no está operativo, junto con las corrientes de inductor de todos los módulos inversores que permiten monitorizar a su vez el estado y condiciones de funcionamiento de cada inversor. En la figura 3.51 (a) se observa como el Sistema de Tolerancia a Fallos reacciona inmediatamente al fallo del Master adjudicando al primer esclavo la función de Master durante los intervalos en los que el Master no funciona (CA=1), mientras que los dos inversores que quedan operativos se encargan de suministrar a partes iguales la corriente demanda por la carga. En la figura 3.51 (b) se muestra el resultado de un fallo repetido del inversor B que actúa como primer esclavo, obteniéndose en este caso un comportamiento similar al mostrado en la figura 3.51 (a).

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.49 onduladores conectados en paralelo
En las figuras 3.52 (a) y (b) se observan una ampliación de la tensión de salida vo(t), la tensión de referencia vr(t), y la tensión de error ve(t), para las dos situaciones descritas en la figura 3.51. Finalmente, se ha realizado una prueba en la que solo están activos los inversores A y B, y falla el módulo A que actúa como Master. El Sistema de Tolerancia a Fallos detecta el fallo del Master y pone en funcionamiento inmediatamente el tercer módulo inversor que hasta ese momento estaba inactivo. Los resultados de esta prueba se muestran en la figura 3.53, donde se observa la señal de control de monitorización de fallo del inversor A, CA, junto con las corrientes de inductor de los tres módulos inversores.
CA
iLA
iLB
iLC
CB
iLA
iLB
iLC
(a) (b)
Figura 3.51. Medida de la señal de control de fallo del inversor A, CA (1-OFF, 0-ON) [5V/div], y corrientes de inductor de los tres módulos inversores iLA [10 A/div], iLB [10 A/div], y iLC [10 A/div],
con la estrategia M-S, control de dos niveles y vr= 55 Vp, para la simulación de fallo del (a) inversor A, CA e (b) inversor B, CB
vr(t) vo(t)
ve(t)
CA
vr(t)
ve(t)
vo(t)
CB
(a) (b)
Figura 3.52. Resultados experimentales de la tensión de salida vo(t) [20 V/div], tensión de referencia vr(t) [20 V/div], tensión de error ve(t) [2 V/div], y tensión de control de fallo del (a) inversor A, CA [5 V/div], e (b) inversor B, CB [5 V/div], con vr=48 Vp , RL=5 Ω y 3 inversores
inicialmente operativos

3.50 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
CA
iLA
iLB
iLC
CA
iLA
iLB
iLC
(a) (b)
Figura 3.53. Medida de (a) la señal de control de fallo del inversor A, CA (1-OFF, 0-ON) [5V/div], corrientes de inductor iLA [4 A/div], iLB [4 A/div], y iLC [4 A/div], para la simulación de fallo del
inversor A con vr= 30 Vp y RL=5 Ω. (b) Ampliación de la imagen de la figura 3.53 (a)
3.10. Conclusiones
Este capítulo ha presentado la implementación de un sistema modular de potencia que incorpora tres inversores conectados en paralelo detallando el diseño del sistema de control basado en una FPGA. El prototipo se ha utilizado para comprobar las prestaciones de las leyes de control en modo de deslizamiento consideradas en el capítulo 2, presentándose los resultados experimentales obtenidos con relación al control de las variables de estado y a la gestión del funcionamiento del sistema modular. En los siguientes puntos se comentan las conclusiones relacionadas con cada uno de estos aspectos.
• Conclusiones sobre la implementación del sistema de control basada en una FPGA
El sistema de control implementado mediante FPGA evalúa en paralelo todas las funciones de conmutación consideradas en el capítulo 2 para el caso de uno, dos y tres inversores activos pudiéndose seleccionar, mediante las señales de control adecuadas, la función de conmutación que gobierna el sistema modular en cada momento. Por otra parte, el bloque que se encarga de la gestión del funcionamiento se ejecuta de forma concurrente con el bloque de control. Esto permite dar una respuesta inmediata a cualquier modificación en el régimen de funcionamiento del sistema modular. El retardo máximo en la evaluación de las funciones de conmutación y en la ejecución de los algoritmos relacionados con la gestión del funcionamiento es de 26.5 ns, lo que supone una velocidad de proceso que difícilmente se puede alcanzar con dispositivos microprocesadores que presenten un coste similar a la FPGA utilizada (17.60$-2004).
De todo ello se puede concluir que los dispositivos FPGA proporcionan una solución eficaz y adecuada a los requisitos y exigencias de diseño del control de los sistemas modulares de potencia.

Capítulo 3. Implementación mediante FPGA de la gestión de potencia y el control en modo de deslizamiento de 3.51 onduladores conectados en paralelo
• Conclusiones sobre el control de las variables de estado
Para validar las prestaciones del control en modo de deslizamiento aplicado al control de sistemas modulares de potencia, así como las diferentes estrategias de ecualización de corriente consideradas en el capítulo 2, se han efectuado medidas cuantitativas de la distorsión armónica total de la tensión de salida, del valor eficaz de la tensión de error y del valor eficaz de la corriente de inductor de cada módulo inversor para todas las estrategias de ecualización de corrientes, con cargas lineales y no lineales y señales de control de 2 y 3 niveles.
Se ha podido observar que el control de dos niveles presenta, en general, una mejor THD mientras que con el control de tres niveles se consigue una tensión de error menor y una ecualización de corrientes ligeramente mejor. Cabe indicar, sin embargo, que estas diferencias no son significativas. Igualmente, los índices de error y THD para las distintas estrategias de ecualización de corriente son similares para un mismo tipo de señal de control (de dos o tres niveles), lo que permite concluir que todas las estrategias consideradas presentan el mismo buen comportamiento en régimen deslizante permanente.
Por otra parte, se ha sometido al sistema modular de potencia a saltos de carga para probar su comportamiento en régimen dinámico obteniendo una duración del transitorio del orden de 1 ms para todas las estrategias consideradas y señales de control de dos y tres niveles. El breve tiempo de recuperación conseguido frente a perturbaciones de carga es atribuible a la robustez propia del control en modo de deslizamiento.
Los resultados experimentales y de simulación obtenidos no permiten establecer conclusiones comparativas acerca del comportamiento de las diferentes estrategias de ecualización de corriente utilizadas. Un análisis matemático riguroso del régimen “quasi-sliding” que incluyera el efecto de la cuantificación, así como del sistema requerido para limitar la frecuencia de conmutación, permitiría determinar la dinámica resultante y evaluar comparativamente la bonanza de las estrategias de control usadas en este capítulo.
• Conclusiones sobre la gestión del funcionamiento del sistema modular
Se ha implementado un sistema de gestión del funcionamiento del sistema modular de potencia cuyo diseño y operación es independiente de la estrategia de ecualización de corrientes utilizada.
Se ha incluido un subsistema de tolerancia a fallos que detecta y resuelve situaciones de fallos de uno o varios módulos inversores aumentando con ello significativamente su fiabilidad global con respecto a sistemas de potencia individuales, así como un sistema de rotación de módulos activos que ecualiza el tiempo de funcionamiento de los módulos inversores.
La gestión del funcionamiento del sistema modular también incluye un sistema de gestión de potencia que mantiene activos solo los módulos necesarios para obtener en todo momento la mejor eficiencia posible para cualquier condición de carga.
Para validar todas las características del sistema de gestión diseñado se han realizado diversas pruebas que incluyen la variación de la potencia suministrada a la carga y la simulación de fallo de un módulo inversor. Las pruebas realizadas con el sistema de gestión del funcionamiento han permitido, por una parte, validar su correcto funcionamiento frente a variaciones de carga, situaciones de conexión-desconexión de

3.52 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
módulos activos y fallo de un módulo operativo, y por otra parte, comprobar la robustez del control en modo de deslizamiento frente a las variaciones paramétricas debidas a la variación del número de módulos activos.
Finalmente, cabe apuntar como conclusión general que los resultados obtenidos no solo validan la aplicación del control en modo de deslizamiento al control del sistema modular inversor, sino que además validan la propuesta de implementación práctica basada en dispositivos FPGA.

4.1
CAPÍTULO 4
Inversor PWM basado en el algoritmo de control de promediado cero de la dinámica (ZAD)
4.1. Introducción
Este capítulo aborda el problema de la limitación de la frecuencia de conmutación en un solo ondulador controlado en modo de deslizamiento. En el apartado 1.5.2 de este trabajo se han citado las distintas propuestas aparecidas en la literatura al respecto y sus principales inconvenientes. Como alternativa a estas soluciones se presenta, en el apartado 4.2, un nuevo algoritmo de control de frecuencia de conmutación fija en régimen estacionario basado en el promediado “cero” de la dinámica de la superficie de conmutación, que se abreviará como ZAD, de su denominación anglosajona “Zero Average Dynamics”. Este algoritmo, implementado mediante un dispositivo FPGA, se aplica al diseño de un inversor reductor de puente completo. En los apartados 4.3, 4.4 y 4.5 se describe detalladamente la implementación práctica de este algoritmo. Los resultados obtenidos mediante simulación y con un prototipo experimental se presentan en el apartado 4.6. Estos resultados incluyen además un estudio comparativo entre el control de frecuencia fija basado en el algoritmo ZAD, un control en modo de deslizamiento de frecuencia libre y un control PWM. Finalmente, en el apartado 4.7 se resumen las conclusiones de este capítulo.
4.2. Algoritmo de promediado cero de la dinámica (ZAD)
En este apartado se describe el algoritmo ZAD que consiste en una estrategia “quasi-sliding” cuyo objetivo es que, en régimen estacionario, el valor medio de la superficie de conmutación se anule en cada periodo de conmutación. El desarrollo analítico en el que se basa este algoritmo se describe a continuación.

4.2 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Sea un sistema no lineal, autónomo y SISO (single-input single-output) definido por:
u⋅+= )()( xgxfx& (4.1)
donde x, f y g son campos vectoriales definidos sobre nR , gobernado por una superficie de conmutación σ(x,t) y una ley de control en modo deslizante:
<>
=−
+
00
),(,t)( si u,t)( si u
tuxx
xσσ (4.2)
que adaptada a un modulador de anchura de pulsos da lugar a:
+<≤++<≤
=−
+
TKtTdKsiuTdKtKTsiu
tuK
K
)1()( )(
),(x (4.3)
donde T es el periodo de conmutación deseado y dK el ciclo de trabajo en el periodo K.
El método propuesto se basa en calcular el valor del ciclo de trabajo, dK, que permita conseguir un promediado cero de la dinámica en régimen permanente en la superficie de conmutación que controla el sistema:
( ) 0),(1,)1(
=⋅⋅= ∫+
ττσσ dT
tTK
KT
xx (4.4)
La figura 4.1 muestra la representación gráfica de la superficie de conmutación durante un periodo de conmutación que comienza y acaba en los instantes tK0 y t(K+1)0 respectivamente. Si se trabaja bajo la hipótesis de una superficie de conmutación con evolución lineal, sus derivadas, definidas como ( )+uK ,
σ& y ( )−uK ,σ& , pueden considerarse constantes durante todo el
periodo de conmutación y vienen dadas por:
[ ] [ ][ ]
[ ] [ ][ ])()(
)()(
00),(
00),(
kkuK
kkuK
tut
tut
xgxfx
xgxfx
⋅+⋅=
⋅+⋅=
−
+
−
+
∂∂σσ
∂∂σσ
&
&
(4.5)
T/2 T/2
periodo K
t0)1( +Kt
),( +uKσ&
),( txσ
TdK
0Kt),( −uK
σ&
Figura 4.1. Principio del algoritmo ZAD
Teniendo en cuenta (4.4) y (4.5), el algoritmo de control ZAD considera dos posibles casos para el valor de ciclo de trabajo:

Capítulo 4. Inversor PWM basado en el algoritmo de control de promediado cero de la dinámica (ZAD) 4.3
• Si σ[x(tK0),tK0] ≥ 0 y σ[x(tK0),tK0] + (T/2)· ( )+uK ,σ& ≥ 0 (condición que se verifica
durante el estado transitorio), el área rallada de la figura 4.1 será siempre mayor que el área correspondiente a la zona punteada. En esta caso, la expresión (4.4) no tiene solución en el periodo K, y la acción de control en el instante tK0, u(tK0)=u+, se mantiene durante todo el periodo, imponiendo de esta manera que decrezca el valor de la superficie σ(x,t). Por tanto, no hay conmutación en el periodo K, y el valor del ciclo de trabajo es dK = 1.
• Si σ[x(tK0),tK0] ≥ 0 y σ[x(tK0),tK0] + (T/2)· ( )+uK ,σ& < 0 (condición que se verifica en
el estado permanente) la zona punteada será siempre mayor que el área rallada. En este caso, la condición impuesta por la expresión (4.4) se puede cumplir dentro del periodo de conmutación K. En efecto, para ello basta que la acción de control en tK0, u(tK0)=u+, conmute a u- después del intervalo de tiempo dKT, donde:
[ ]
),(),(
00),(
),(2
1−+
+
+
⋅−−=
uKuK
KKuK
KT
tt
dσσ
σσ
&&
&x
(4.6)
Se puede aplicar un razonamiento similar en el caso de que el valor de la superficie de conmutación al comienzo del periodo de conmutación, σ[x(tK0),tK0], sea menor que cero. La tabla 4.1 muestra con detalle la totalidad de casos posibles que deben ser considerados en el algoritmo de control basado en el promediado cero de la dinámica.
De estos resultados se puede concluir que el valor del ciclo de trabajo dK, correspondiente al algoritmo de control ZAD, se puede determinar conociendo el valor de σ[x(tK0),tK0],
( )+uK ,σ& , ( )−uK ,
σ& , así como el periodo de conmutación T, fijado por el usuario.
[ ] [ ] 02
),(0),(),(0000 ≥+≥ +uKKKKK
Ttttt σσσ &x y x 1;)( 0 == +KK dutu
(sin conmutación)
[ ] [ ] 02
),(0),(),(0000 <+≥ +uKKKKK
Ttttt σσσ &x y x
+= utu K )( 0 , conmutación en Td K :
[ ]
),(),(
00),(
),(2
1−+
+
+
⋅−−=
uKuK
KKuK
KT
tt
dσσ
σσ
&&
&x
[ ] [ ] 02
),(y 0),(),(0000 ≤+< −uKKKKK
Ttttt σσσ &xx 1;)( 0 == −KK dutu
(sin conmutación)
[ ] [ ] 02
),(y 0),(),(0000 >+< −uKKKKK
Ttttt σσσ &xx
−= utu K )( 0 , conmutación en Td K :
[ ]
),(),(
00),(
),(2
1−+
−
+
⋅−−=
uKuK
KKuK
KT
tt
dσσ
σσ
&&
&x
Tabla 4.1. Algoritmo de control de promediado cero de la dinámica

4.4 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
4.3. Implementación del algoritmo de control ZAD basada en una FPGA
El algoritmo de control ZAD descrito en el apartado anterior, se ha aplicado al control en modo de deslizamiento de un inversor reductor de puente completo cuyo esquema eléctrico de la etapa de potencia se corresponde con el presentado en la figura 3.2 y su comportamiento viene definido por la ecuación de estado (2.17). En el apartado 4.3.1 se presenta el esquema general del subsistema de control de esta aplicación y se justifica la elección de un dispositivo FPGA para realizar la implementación digital del algoritmo ZAD. En el apartado 4.3.2 se detalla la estructura del acondicionador de señal y del sistema de adquisición de datos, mientras que el apartado 4.3.3 se dedica a la descripción del diseño FPGA que implementa el algoritmo ZAD.
4.3.1. Estructura general del subsistema de control
La complejidad del algoritmo de control presentado en el apartado anterior, debido a las operaciones aritméticas no lineales que intervienen y a la variedad de casos posibles que deben tomarse en consideración, dificulta su realización analógica, siendo, por tanto, la mejor solución una implementación digital.
Como en el caso de la implementación del subsistema de control del sistema modular de potencia presentado en el capítulo 3, se han evaluado diferentes tipos de realizaciones digitales: microprocesadores de propósito general, microcontroladores, procesadores digitales de señal (DSP) y dispositivos lógicos programables de alta capacidad (FPGA, CPLD).
En la selección final, aparte de los condicionantes habituales de coste, facilidad de diseño, capacidad del dispositivo, etc, se debe tener en cuenta principalmente la velocidad de proceso en el cálculo del algoritmo ZAD. En efecto, en un control PWM de frecuencia fija, las principales características en cuanto a velocidad de proceso para mantener la dinámica de lazo cerrado son: que se proporcione la acción de control al principio del periodo de conmutación y que en ningún caso el tiempo de cálculo exceda el tiempo durante el cual la acción de control se mantiene antes de conmutar. Si se cumplen ambos requisitos se puede considerar la realización del control como un control ciclo a ciclo. En este caso, el rango propuesto para la frecuencia de conmutación es de 20 a 40 kHz, con un valor mínimo del ciclo de trabajo del 10%. Para cumplir estas especificaciones es necesario que el sistema procesador calcule la acción de control en el rango de tiempo de 2.5 a 5 µs. Estas especificaciones de diseño descartan la utilización de microprocesadores de propósito general, microcontroladores o procesadores digitales de señal, debido a que estos sistemas poseen una arquitectura generalista y rígida, y basan su funcionamiento en la ejecución secuencial de las instrucciones de un programa lo que impide alcanzar la velocidad de proceso requerida por la aplicación. La opción más adecuada en este caso es, nuevamente, utilizar un dispositivo digital programable de alta capacidad del tipo FPGA. Con este tipo de dispositivos se puede diseñar a medida bloques de hardware específicos que realizan de forma óptima las diversas funciones asociadas al control, con lo que se consigue cumplir las especificaciones de diseño en cuanto a velocidad de proceso.

Capítulo 4. Inversor PWM basado en el algoritmo de control de promediado cero de la dinámica (ZAD) 4.5
La figura 4.2 presenta el diagrama de bloques de la realización digital del algoritmo ZAD basada en una FPGA. Los componentes principales del diagrama de bloques son:
• Un acondicionador de señal que calcula la superficie de conmutación que controla el funcionamiento del inversor.
• Un sistema de adquisición de datos que toma muestras de la superficie de conmutación. • Una FPGA de Xilinx, en concreto el modelo XC2S100_5TQ144, que calcula el
algoritmo ZAD a partir de las muestras de la función de conmutación. Se dispone también de una memoria EEPROM externa de 1 Mbit de capacidad utilizada para almacenar la configuración de la FPGA y de un reloj de 6 MHz que sincroniza el funcionamiento de los circuitos digitales implementados con la FPGA.
uLD
uHD
uLI
uHIFPGAXC2S100
Clock6 MHzClock6 MHz
MX580+2.5V
MX580+2.5V
EEPROM1 Mbit
EEPROM1 Mbit
MX584-2.5V
MX584-2.5V
8ADCMAX153
8ADCMAX153
ADCMAX153
Entradas digitalesEntradas digitalesA
cond
icio
nado
r de
seña
l
( ) 10tvc
( ) 10tvr
( )ticσ
Figura 4.2. Diagrama de bloques de la implementación digital del algoritmo ZAD
4.3.2. Acondicionador de señal y sistema de adquisición de datos
El acondicionador de señal se encarga de proporcionar al convertidor ADC el valor de la superficie de conmutación σ(x,t):
( ) ( )crcr vvkvvk && −+−= 21σ (4.7)
donde vr es la tensión de referencia y vc es la tensión en el condensador del inversor reductor en puente completo que coincide con la tensión de salida debido a que no se considera la resistencia de pérdidas asociada a dicho elemento.
En la figura 4.3 se muestra el esquema del acondicionador de señal basado en amplificadores operacionales. La tensión de salida del módulo inversor, vc(t), se sensa mediante el amplificador de aislamiento AD215BY, mientras que la corriente del condensador de salida se obtiene con el sensor de corriente LA25-NP.
La superficie de conmutación σ(x,t) se muestrea y digitaliza con el convertidor ADC MAX153 a frecuencia doble que la frecuencia de conmutación. En la elección del convertidor ADC MAX153 se han tenido en cuenta los siguientes aspectos:
• Frecuencia de muestreo: la máxima frecuencia de muestreo del ADC debe ser mayor que la frecuencia de muestreo usada en el diseño.
• Resolución del convertidor: el número de bits del convertidor afecta a la tensión de salida y al tiempo de proceso de la FPGA. Un mayor número de bits disminuye el error de cuantificación mejorando la forma de onda de la tensión de salida pero aumentado el tiempo de cómputo del algoritmo ZAD, que se ve incrementado por la mayor longitud

4.6 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
de los datos procesados. En la práctica se ha escogido una resolución de 8 bits. La decisión se ha tomado con base al análisis de los resultados de las simulaciones realizadas que incluyen el efecto de un cuantificador de N bits, y donde se ha tomado como índices de bondad la distorsión armónica total (THD) y el valor eficaz y máximo de la tensión de error.
El convertidor ADC MAX153 cumple los requisitos exigidos por la aplicación ya que posee 8 bits de resolución y una frecuencia máxima de conversión de 1 MSps.
_
+
10kΩ
10kΩ
R1
200kΩ
10kΩ
-vc/10
vr/10
_
+
10kΩ
R3200kΩ
10kΩ
10nF
680pF
ic*5e-3
Sensor de corriente LA25-NP, S=5mA/A
_
+
10kΩ
10kΩ
R2
50kΩ
10kΩ
10kΩ
σ(x,t)
200Ω
Vic=ic[V]
( ) ( )crcr vvkvvk && −+−= 21σ
vr/10
Figura 4.3. Esquema eléctrico del acondicionador de señal
4.3.3. Diseño FPGA del algoritmo ZAD
El algoritmo ZAD se ha implementado mediante un dispositivo lógico programable FPGA de Xilinx modelo XC2S100_5TQ144. Este dispositivo contiene 100.000 puertas lógicas equivalentes, 2400 flip-flops repartidos en 1200 Slices y 92 IOB (Input/Output Block) y 10 bloques de memoria RAM de 4096 bits de capacidad cada uno. De estos recursos se han utilizado en el diseño de esta aplicación 257 Slices (21% de los Slices disponibles), 110 flip-flops (5% de los flip-flops disponibles), 22 IOB (24% de los IOB disponibles) y un bloque de memoria RAM.
Al finalizar cada periodo de conmutación se inicia el cálculo del ciclo de trabajo del siguiente periodo de conmutación. El tiempo invertido en el cálculo del ciclo de trabajo, denominado tiempo de proceso, es de 3 a 4 periodos de señal de reloj, dependiendo del caso evaluado. Para una frecuencia de reloj de 6 MHz el tiempo de proceso es de 0.5 µs a 0.666 µs. El periodo de conmutación utilizado en las pruebas experimentales es de 42.5 µs (23 kHz), por tanto, el ciclo de trabajo se obtiene en un tiempo equivalente al 1.56% del

Capítulo 4. Inversor PWM basado en el algoritmo de control de promediado cero de la dinámica (ZAD) 4.7
periodo de conmutación en el peor caso. Este reducido tiempo de cálculo cumple las especificaciones iniciales del diseño, que fijaban un tiempo máximo para el cálculo del ciclo de trabajo equivalente al 10% del periodo de conmutación permitiendo, de este modo, considerar que el control diseñado es un control ciclo a ciclo.
En la figura 4.4 se muestra el diagrama de bloques del diseño FPGA que lleva a cabo el algoritmo ZAD, donde se pueden distinguir tres bloques principales:
• Bloque Algoritmo ZAD: su función es la de calcular el ciclo de trabajo, con una precisión de 8 bits, correspondiente al periodo de conmutación K+1 en base al algoritmo ZAD y a las muestras Si, de la superficie de conmutación obtenidas en el periodo de conmutación K.
• Bloque PWM Digital: genera la señal PWM con el valor del ciclo de trabajo calculado por el bloque Algoritmo ZAD y la frecuencia de conmutación deseada, así como las señales de control uLI, uHI, uLD y uHD que controlan de forma individual cada uno de los transistores del puente completo que incorpora la etapa de potencia del inversor.
• Bloque Control Secuencial: genera las señales de control que gobiernan el resto de bloques del diseño FPGA y el convertidor ADC externo.
8PWM Digital
FPGA XC2S100
AlgoritmoZAD
ControlSecuencial
ControlSecuencial
ControlADC
Si
uLDuHD
uLIuHI
Figura 4.4. Diagrama de bloques del diseño FPGA del algoritmo ZAD
4.4. Bloque Algoritmo ZAD
La parte más importante del diseño FPGA, representado en la figura 4.4, es la que implementa el algoritmo ZAD. En el apartado 4.4.1 se describe la estrategia seguida para realizar la implementación práctica de este algoritmo a partir de las muestras de la superficie de conmutación tomadas a una frecuencia doble de la frecuencia de conmutación. En el apartado 4.4.2 se detalla la arquitectura del bloque Algoritmo ZAD que implementa dicha estrategia.
4.4.1. Estrategia de implementación del algoritmo ZAD
El cálculo de ciclo de trabajo del periodo de conmutación K+1 comienza tomando 3 muestras, S1, S2 y S3, del valor de la superficie de conmutación durante el periodo K, con una frecuencia de muestreo el doble de la frecuencia de conmutación, tal y como se muestra en la figura 4.5:

4.8 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
[ ][ ][ ]0)1(0)1(3
002
001
),(2/),2/(
),(
++=++=
=
KK
KK
KK
ttSTtTtS
ttS
xxx
σσσ
(4.8)
T/2 T/2
t
S1
S2
S3 T
TdK),( txσTd K )1( +
T/2 T/2
periodo K
S1
S2
S3
Tiempo de proceso
periodo K+1
T
0Kt
0)1( +Kt
),( +uKσ&
),( −uKσ&
Figura 4.5. Muestreo de la superficie de conmutación
Los valores de S1 y S3 se obtienen tomando las muestras 833 ns antes del final del periodo de conmutación para evitar el error provocado por el ruido de conmutación.
Antes de proceder al cálculo del ciclo de trabajo, se determina en primer lugar el valor de la variable de control u al inicio del periodo de conmutación K+1 considerando, para ello, el signo de la muestra S3. En efecto, si S3 < 0 el periodo de conmutación comienza con una acción de control u = u-, para valores S3 ≥ 0 la acción de control es u = u+. El valor inicial del control se mantiene al menos durante el “Tiempo de proceso” de la figura 4.5 que se define como el tiempo que invierte el diseño FPGA en calcular el valor del ciclo de trabajo.
Asumiendo que se conoce el valor del ciclo de trabajo del periodo K, dK, el primer paso del cálculo del ciclo de trabajo en el periodo K+1, es determinar el parámetro D, definido como:
),(),( −+ +=uKuK
D σσ && (4.9)
que se corresponde con el denominador de la leyes de control presentadas en la tabla 4.1. Este parámetro se calcula a partir de las muestras S1, S2, S3 y dK . En efecto, si por ejemplo se considera S1 <0 y 2/1≤Kd (como se muestra en la figura 4.5) se obtiene que:
−++=
−=
+−
+
TdTdSST
SS
KuKKuK
uK
)1.(.
)(2
),(),(13
23),(
σσ
σ
&&
& (4.10)
siendo en este caso:
Td
SSSD
K
3122 −−= (4.11)
Igualmente, se pueden obtener el resto expresiones del parámetro D para todos los casos posibles dependiendo del signo de S1 y del valor de dK. En la tabla 4.2 se muestran estas expresiones normalizadas con respecto al valor del periodo de conmutación T.

Capítulo 4. Inversor PWM basado en el algoritmo de control de promediado cero de la dinámica (ZAD) 4.9
2/1>Kd 2/1≤Kd
S1≥0 ( )KdSSSD
−⋅−+
=1
2 231
KdSSSD 231 2 ⋅−+
=
S1<0 ( )KdSSSD
−−−⋅
=1
2 312
KdSSSD 3122 −−⋅
=
Tabla 4.2. Expresiones del parámetro D normalizadas con respecto al periodo de conmutación T
Cabe destacar que estas expresiones se pueden calcular si las dos derivadas que intervienen en (4.9) están definidas en el periodo K, lo que implica que la señal de control u conmuta durante dicho periodo. Sin embargo, durante el estado transitorio el algoritmo ZAD mantiene la acción de control y la superficie de conmutación puede ser positiva (o negativa) durante todo el periodo. En este caso, no está definida una de las dos derivadas de (4.9) y el parámetro D se debe deducir a partir de (4.5) y (4.9) como:
[ ] [ ]21)( kkconuuD −=−⋅⋅= +−
xxg
x ∂∂σ
∂∂σ (4.12)
o de modo equivalente, reemplazado la ecuación de estado que define el comportamiento de la etapa de potencia (2.17) y la superficie de conmutación (4.7) en (4.12):
LC
EkD 22= (4.13)
Si se conocen los valores de los parámetros del inversor reductor en puente completo y del coeficiente k2 de la superficie de conmutación, se puede calcular el valor del parámetro D, dado por (4.13), y almacenarse en la FPGA a través de las entradas digitales mostradas en el esquema de la figura 4.2, para ser utilizado cuando no se pueda determinar D con las expresiones de la tabla 4.2.
Una vez que el valor de D es conocido, el siguiente paso consiste en el cálculo de las derivadas de la superficie:
),( +uKσ& y
),( −uKσ& . El valor de estas derivadas, normalizado con
respecto a T, se puede obtener a partir del valor de S1, S2, S3 y D, tal y como se indica en la tabla 4.3.
2/1>Kd 2/1≤Kd
S3≥0 y S1≥0 ( )12),(20 SS
uK−⋅−=+σ& ( )23),(
2 SSDuK
−⋅−=+σ&
S3≥0 y S1<0 ( )12),(2 SSD
uK−⋅−=+σ& ( )23),(
20 SSuK
−⋅−=+σ&
S3<0 y S1≥0 ( )12),(2 SSD
uK−⋅+=−σ& ( )23),(
20 SSuK
−⋅+=−σ&
S3<0 y S1<0 ( )12),(20 SS
uK−⋅+=−σ& ( )23),(
2 SSDuK
−⋅+=−σ&
Tabla 4.3. Derivadas de la superficie de conmutación, normalizadas con respecto al periodo de conmutación T, en función de S1, S2, S3 y D

4.10 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
El valor de dK+1 se calcula asumiendo que las derivadas de la superficie de conmutación varían lentamente con respecto al periodo de conmutación, lo cual es lógico si se considera el bajo rizado de la tensión de salida. Teniendo en cuenta esto se realiza la siguiente aproximación:
),1(),(
),1(),(
−−
++
+
+
≈
≈
uKuK
uKuK
σσ
σσ
&&
&&
(4.14)
y el ciclo de trabajo se puede aproximar y calcular como:
[ ]
),(),(
0)1(0)1(
),(
1
),(2
1−+
+
+
⋅−−≅
++
+
uKuK
KK
uK
KT
tt
dσσ
σσ
&&
&x
(4.15)
El valor de 1-dK+1 puede ser rescrito en términos de S1, S2, S3 y dK, según las tablas 4.2 y 4.3.
4.4.2. Arquitectura del bloque Algoritmo ZAD
• Entradas, salidas y funcionalidad
En la figura 4.6 se muestra el bloque Algoritmo ZAD donde se pueden observar las siguientes entradas y salidas:
• Entrada de superficie de conmutación Si: se corresponde con la entrada de las muestras de la superficie de conmutación (4.8) tomadas con una precisión de 8 bits.
• Salida 1-d: se corresponde con el valor de 1-d dado con una precisión de 8 bits, donde d es el valor del ciclo de trabajo.
• Salida de control “signo de S3”: se corresponde con el signo de la muestra de la superficie de conmutación tomada al inicio del periodo de conmutación. El valor del signo de la muestra de S3 permite determinar la acción de control que se debe aplicar al inicio del periodo de conmutación.
AlgoritmoZAD
AlgoritmoZAD
Si1-d
8
signo de S3
8
Figura 4.6. Entradas y salidas del bloque Algoritmo ZAD
• Arquitectura interna
Dentro del diseño FPGA, el bloque Algoritmo ZAD es el encargado de realizar el cálculo del ciclo de trabajo, determinando para ello, de los distintos casos posibles indicados en las tablas 4.1, 4.2 y 4.3, cuál se debe aplicar en cada periodo de conmutación. Esto se lleva a

Capítulo 4. Inversor PWM basado en el algoritmo de control de promediado cero de la dinámica (ZAD) 4.11
cabo utilizando multiplexores, registros, sumadores, restadores, divisores y un circuito extractor de raíz cuadrada realizado mediante una memoria RAM inicializada con los valores de dicha función, [Patterson, 94], [Parhi, 91], [Saglam, 2000], [Majithia, 71].
En la figura 4.7 se muestra el esquema general del bloque Algoritmo ZAD.
10
8
S7,S7
10
2
S[7:0]
10-b
itre
gist
ro
CK CLR
D
QCK
D
QCK
XOR
MSB S3’
SIG1
A[9:0]+/-
B[9:0]
A/S1
A[9:0]+/-
B[9:0]
A/S1R4
8Si[7:0]8
S[6:0]
S7S7 8-bi
tre
gist
ro
CK
8-bi
tre
gist
ro8-
bit
regi
stro
CK
8-bi
tre
gist
ro8-
bit
regi
stro
CK
1
B[8:0]
A[8:0]
8
A7 1
A[7:0]
8
B7 1
B[7:0]9
SUB1
A-B
R1R3
8-bi
tre
gist
roCK
8-bi
tre
gist
ro8-
bit
regi
stro
CK
c.a.2 S 8R2
MUX1MUX11
0 SMUX1MUX1
1
0 S
MUX1MUX11
0 SMUX1MUX1
1
0 S
8
8
8
8
MSB S1
1
A[9:0]+/-
B[9:0]
A/S2
10
8
S7,S7 2
S[7:0]
10NUMK
1MSB NUMK
C4
2
38 2S3x2 9MSB (1-d)
CK1,2,3
CK4 C4
x210
A[9:0]+/-
B[9:0]
A[9:0]+/-
B[9:0]
B[9:0]+/-
A[9:0]
B[9:0]+/-
A[9:0]10
AN
D
1 10
4
10
10
3 10
XORMSB S3’
MSB S1
MSB (d-1)
MUX1MUX10
1 SMUX1MUX1
0
1 S
10MSB
1I3
2
MUX2MUX2
0
1 S
1010
10
XOR
1
LSB 1
MSB11
8
MSB (1-d)
8
AN
D
NA
ND
NA
ND
1
4 LSB
4
4 MSB
Detectorde 0000
5
4 1
MSB (1-d)
1
410
8
A/S3
A/S4
10-bit Divisor10-bit Divisor
Raíz cuadradaRAM8-bit
Raíz cuadradaRAM8-bit
[8:1]
1-d
8
CK
10
10-b
itre
gist
ro10
-bit
regi
stro
CK
5
MUX3MUX3
0
1MUX3MUX3
0
1 SKext
T0
10
OR1
10
10
Kint
10 4
R5
CLR
CK6 C6
CK5
COM11
MSB1
I2
ORMSB NUMK
1DCK
PRE
QCLRC4 1
1C6
DCK
PRE
QCLRC4 1
1C6
Figura 4.7. Esquema del bloque Algoritmo ZAD

4.12 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Los registros R1, R2 y R3, se encargan de almacenar las muestras de la superficie de conmutación S1, S2 y S3. Invirtiendo el valor del bit de mayor peso de estas muestras se obtiene su equivalente en complemento a 2 (c.a.2) necesario para realizar el resto de operaciones. Los sumadores/restadores A/S1 y A/S2 junto con el registro R4 se encargan de obtener el numerador de la expresión del parámetro D indicada en la tabla 4.2. El restador SUB1 calcula la diferencia S2 – S1 ó S3 – S2, que interviene en las expresiones incluidas en la tabla 4.3. Con el sumador/restador A/S3 se suma (o resta) el valor 2(S2 – S1) ó 2(S3 – S2) al valor D ó 0, para obtener el valor de la derivada indicada en la tabla 4.3. El sumador/restador A/S4 calcula el numerador del cociente que aparece en la expresión del ciclo de trabajo indicada en la tabla 4.1. Con el bit de mayor peso del resultado ofrecido por el sumador/restador A/S4, I3, se evalúa si se cumple la condición que permite obtener un valor de ciclo de trabajo d ≠ 1. El divisor tiene una doble función, por una parte, realiza el cociente asociado al cálculo del parámetro D cuyo resultado de 10 bits se almacena en el registro R5; por otra parte, determina, si es necesario, el cociente asociado al cálculo del ciclo de trabajo d. El resultado de este último cociente se aplica a las entradas de dirección de una memoria RAM de 256 x 8 bits de capacidad que implementa la función raíz cuadrada. En cada posición de la memoria RAM está almacenado, con una resolución de 8 bits, el valor de la raíz cuadrada de la dirección asociada a la posición. En la salida de datos de la memoria RAM se obtiene el valor de 1-d, que se aplica al bloque PWM Digital para generar la señal de control apropiada.
4.5. Bloques PWM Digital y Control Secuencial
El resto de bloques que conforman el diseño FPGA del algoritmo ZAD son el bloque PWM Digital, cuya arquitectura se detalla en el apartado 4.5.1, y el bloque Control Secuencial que se describe en el apartado 4.5.2.
4.5.1. Bloque PWM Digital
El bloque PWM Digital genera, a partir del ciclo de trabajo calculado por el bloque Algoritmo ZAD, las señales de control PWM que controlan la activación de los transistores del puente completo del inversor reductor.
• Entradas y salidas del bloque PWM Digital
En la figura 4.8 están representadas las entradas y salidas del bloque PWM Digital. Las entradas de este bloque son el ciclo de trabajo 1-d, calculado en el bloque Algoritmo ZAD y el valor del signo de la muestra de la superficie de conmutación (4.7) al inicio del periodo de conmutación. Las salidas de control uLI, uHI, uLD y uHD controlan de forma individual cada uno de los transistores del puente completo que incorpora el inversor.
1-d PWM Digital uLDuHD
uLIuHI
signo de S3
8
Figura 4.8. Entradas y salidas del bloque PWM Digital

Capítulo 4. Inversor PWM basado en el algoritmo de control de promediado cero de la dinámica (ZAD) 4.13
• Arquitectura interna
El bloque PWM Digital, implementado como se muestra en la figura 4.9, está compuesto básicamente por un comparador de 8 bits, un contador descendente de 8 bits, una báscula T y un bloque que genera las salidas de control del puente completo. El valor del ciclo de trabajo, 1-d, proporcionado por el bloque Algoritmo ZAD, y el valor de salida del contador se comparan con el comparador digital de 8 bits. La salida del comparador se aplica a la entrada de reloj de la báscula T, que conmuta cuando el valor 1-d supera al valor de salida del contador.
uLDuHD
uLIuHI
Comparador 8-bit A
BA>BContador
descendente8-bit
Signo de S3
8
1Clk
Finde cuenta
8
1 MSB
uc1-d
Relojdel sistema
+5V T QClk
RES SET
T QClk
RES SET1
1
COM2
COM1I1
I0Salidacontador
D QClk
D QClk
1
Relojdel sistema
Salid
asde
Con
trol
Figura 4.9. Esquema del bloque PWM Digital
El bloque denominado Salidas de Control de la figura 4.9 tiene una doble función: por una parte se encarga de generar, a partir de la señal de control PWM uc, proporcionada por la báscula T, las señales que controlan la activación de cada transistor del puente completo del inversor reductor; por otra parte, introduce un tiempo muerto equivalente a dos periodos de la señal de reloj en la conmutación de las señales de control para evitar un cortocircuito en la etapa de entrada del inversor. En la figura 4.10 se muestra el esquema de la implementación práctica del bloque Salidas de Control junto con un ejemplo de una secuencia de activación de las salidas de control de la rama izquierda del puente para una conmutación de la señal de entrada uc de 1 a 0 lógico y nuevamente a 1 lógico, donde se puede observar el tiempo muerto entre la desactivación del transistor alto de la rama izquierda del puente, controlado por la señal uHI, y el transistor bajo, controlado por la señal uLI.
D QD QD QD Q
D QD QD QD Q
CKCK CKCK
CKCK CKCK
uc
Relojdel sistema
D QD QD QD Q
D QD QD QD Q
CKCK CKCK
CKCK CKCK
uHI
uLI
uHD
uLD
(a)

4.14 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Tiempomuerto
uc
Relojdel sistema
Tiempomuerto
uLI
uHI
(b)
Figura 4.10. Bloque Salidas de Control: (a) diagrama de bloques y (b) diagrama de tiempo
4.5.2. Bloque Control Secuencial
Finalmente el bloque Control Secuencial genera las 10 señales de control que gestionan y secuencian el funcionamiento del resto de bloques del diseño FPGA y del convertidor ADC.
Tal y como se observa en la tabla 4.4, el sistema secuencial de control evoluciona a través de 15 estados, de S1 a S15, para pasar nuevamente a S1 en un proceso cíclico sin fin. El estado S0 se reserva como estado inicial de arranque después de efectuar un reset. El sistema secuencial dispone de unas entradas de control Ii, con i = 0,..., 4, que condicionan y controlan la transición entre estados. A continuación se detalla la función de estas entradas:
• I0: bit de mayor peso del contador descendente de 8 bits que establece la base de tiempos del bloque PWM Digital. Esta salida se activa a cero lógico cuando el contador llega a mitad de cuenta y permite sincronizar la captura de la muestra de la superficie de conmutación correspondiente a la mitad del periodo de conmutación (S2).
• I1: bit de final de cuenta del contador del bloque PWM Digital. Su activación, a 1 lógico, permite sincronizar la captura de la muestra de la superficie de conmutación al final del periodo de conmutación (S3).
• I2: este bit monitoriza el signo del resultado de la división asociada al cálculo del parámetro D. Un resultado negativo (I2=1) invalida el cálculo de este parámetro, que por definición debe ser siempre positivo. En este caso el valor de D no se actualiza y se mantiene el último valor calculado.
• I3: este bit monitoriza el signo del resultado de salida del sumador/restador A/S4. Un signo negativo en este resultado (I3=1) indica que no se puede calcular un ciclo de trabajo que satisfaga la expresión (4.4) y por tanto se toma d=1.
• I4: bit de control que se activa a cero lógico para indicar que el convertidor ADC MAX153 ha finalizado la conversión de la muestra de la superficie de conmutación.

Capítulo 4. Inversor PWM basado en el algoritmo de control de promediado cero de la dinámica (ZAD) 4.15
ESTADO ACTUAL S0 S1 S2 S3 S4 S5 S6 S7 S8 S9 S10 S11 S12 S13 S14 S15ESTADO SIGUIENTE S1 (1) (2) S4 S5 S6 (3) (4) (5) S10 (6) S12 S13 S1 S15 S1RDADC 1 1 0 0 1 1 1 0 0 1 1 1 1 1 1 1 CK1,2,3 0 0 0 1 0 0 0 0 1 0 0 0 0 0 0 0 CK4 0 1 0 0 1 0 1 0 0 0 0 0 0 0 0 0 SIG1 1 1 0 0 0 0 0 0 0 0 0 0 1 1 1 1 S, COM1 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 CK5 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 C4 0 0 0 0 0 0 0 0 0 0 0 0 1 0 1 0 CK6 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 1 C6 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 COM2 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 (1) S2 if I0=0 else S1, (2) S3 if I4=0 else S2, (3) S7 if I1=1 else S6, (4) S8 if I4=0 else S7,
(5) S10 if I2=1 else S9, (6) S14 if I3=1 else S11,
Tabla 4.4. Tabla de estados del sistema secuencial
4.6. Simulación y resultados experimentales
Este apartado muestra los resultados del algoritmo ZAD obtenidos mediante simulación y con un prototipo experimental. Estos resultados se han comparado con los obtenidos mediante un control PWM tradicional y un control en modo de deslizamiento de frecuencia libre. En las pruebas experimentales se ha utilizado un inversor reductor de puente completo, cuyo esquema se presenta en la figura 4.11, con los siguientes valores de parámetros:
• Superficie de conmutación: ( ) ( )crcr vvvv && −⋅+−= −4108.05.0σ .
• Parámetros definibles por el usuario: frecuencia de conmutación = 23 kHz, tensión de referencia vr(t) = 40·sin(2π50t).
E50 V
R20 Ω
+uHI
uLI
uHD
uLD
+
vo
-iC iR
S1 S2
S4S3Vini
L/20.75 mH
rL/247 mΩ
C60 µF
iL
L/20.75 mH
rL/247 mΩ
Figura 4.11. Esquema eléctrico del inversor reductor en puente completo
4.6.1. Resultados de simulación del algoritmo ZAD
Se han realizado simulaciones con un modelo del inversor reductor en puente completo controlado por el algoritmo ZAD realizado con el software MATLAB-SIMULINK que incluye el diseño FPGA (ver Anexo 2). En la figura 4.12 (a)-(c) se muestra el comportamiento de la tensión de salida en régimen permanente, la tensión de error, la corriente del condensador de salida y la superficie de conmutación, respectivamente. En la figura 4.12 (d) se muestra la tensión de salida y la corriente de carga para un salto de carga de circuito abierto a R=20 Ω. En esta figura se puede observar que el transitorio del salto

4.16 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
de carga tiene una duración corta (inferior a una veinteava parte del periodo de tensión de salida).
vo(t) vr(t)
ve(t)
vo(t) ic(t)
(a) (b)
vo(t)
σ
vo(t) io(t)
(c) (d)
Figura 4.12. Resultados de la simulación del algoritmo ZAD. (a) Tensión de salida en régimen estacionario, vo (t) [10 V/div], tensión de referencia desplazada 180º, vr (t) [10 V/div], y tensión de error, ve (t) [1 V/div]. (b) Tensión de salida en régimen estacionario, vo (t) [10 V/div], y corriente del condensador, ic (t) [0.5 A/div]. (c) Tensión de salida en régimen estacionario, vo (t) [10 V/div],
y valor de la superficie de conmutación, σ [1 V/div]. (d) Respuesta transitoria de la tensión de salida, vo (t) [10 V/div], y de la corriente de carga, io (t) [1 A/div], para un salto de carga de
circuito abierto a 20 Ω.
4.6.2. Resultados experimentales del algoritmo ZAD
Se han realizado pruebas de laboratorio con un prototipo experimental en las mismas condiciones que las simulaciones. En las figuras 4.13 (a)-(d) se presentan los resultados correspondientes al régimen permanente y al salto de carga. Como se puede observar en dichas figuras, los resultados experimentales son semejantes a los obtenidos mediante simulación, consiguiendo una tensión de error en régimen permanente del 2% de la tensión de referencia. La figura 4.13 (e) muestra la tensión de salida y la corriente de salida cuando el inversor se carga con un rectificador de onda completa. La distorsión armónica total (THD) medida en este caso es aproximadamente 0.3%. Finalmente, el espectro de la señal de control (ver figura 4.13 (f)) evidencia el modo de operación de frecuencia fija del inversor.

Capítulo 4. Inversor PWM basado en el algoritmo de control de promediado cero de la dinámica (ZAD) 4.17
vo(t) vr(t)
ve(t)
vo(t) ic(t)
(a) (b)
vo(t)
σ
vo(t) io(t)
(c) (d)
vo(t)
io(t)
(e) (f)
Figura 4.13. Resultados experimentales del algoritmo ZAD. (a) Tensión de salida en régimen estacionario, vo (t) [10 V/div], tensión de referencia desplazada 180º, vr (t) [10 V/div], y tensión de error, ve (t) [1 V/div]. (b) Tensión de salida en régimen estacionario, vo (t) [10 V/div], y corriente del condensador, ic (t) [0.5 A/div]. (c) Tensión de salida en régimen estacionario, vo (t) [10 V/div],
y valor de la superficie de conmutación, σ [1 V/div]. (d) Respuesta transitoria de la tensión de salida, vo (t) [10 V/div], y corriente de carga, io (t) [1 A/div] para un salto de carga de circuito abierto a 20 Ω. (e) Tensión de salida en régimen estacionario, vo (t) [10 V/div], y corriente de
carga, io (t) [2 A/div] con un rectificador de onda completa como carga. (f) Espectro de la señal de control [10 dB/div].

4.18 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
4.6.3. Comparación entre el algoritmo ZAD, el control en modo de deslizamiento a frecuencia libre y el control PWM clásico
Se han realizado pruebas experimentales con un control en modo de deslizamiento a frecuencia libre para comparar las prestaciones de éste con el control basado en el algoritmo ZAD, utilizando la misma superficie de conmutación y ley de control.
En la figura 4.14 (a)-(d) se muestra el resultado para el régimen permanente y para el salto de carga. En este caso el error en régimen estacionario (del 1.2% de la tensión de referencia en lugar del 2%), así como el tiempo de respuesta a transitorios de carga, son ligeramente inferiores al obtenido con el algoritmo ZAD. En la figura 4.14 (e) se muestra el espectro de la señal de control donde se evidencia el modo de operación de frecuencia variable típico del control en modo de deslizamiento.
vo(t) vr(t)
ve(t)
vo(t) ic(t)
(a) (b)
vo(t)
σ
vo(t) io(t)
(c) (d)

Capítulo 4. Inversor PWM basado en el algoritmo de control de promediado cero de la dinámica (ZAD) 4.19
(e)
Figura 4.14. Resultados experimentales con control sliding. (a) Tensión de salida en régimen estacionario, vo (t) [10 V/div], tensión de referencia desplazada 180º, vr (t) [10 V/div], y tensión de error, ve (t) [1 V/div]. (b) Tensión de salida en régimen estacionario, vo (t) [10 V/div], y corriente del condensador, ic (t) [0.5 A/div]. (c) Tensión de salida en régimen estacionario, vo (t) [10 V/div],
y valor de la superficie de conmutación, σ [5 V/div]. (d) Respuesta transitoria de la tensión de salida, vo (t) [10 V/div], y corriente de carga, io (t) [1 A/div], para un salto de carga de circuito
abierto a 20 Ω. (e) Espectro de la señal de control [10 dB/div, 50 kHz]. Para determinar experimentalmente las ventajas que presenta el algoritmo ZAD con relación a otros controles basados en el modo de operación a frecuencia fija, se han realizado pruebas con un control PWM clásico. Se ha utilizado el control PWM presentado en [Boudjema, 89], evaluando su comportamiento en términos de error en régimen estacionario y respuesta al salto de carga. En este trabajo, la ley de control PWM se deduce del modelo promediado del convertidor Buck a través de la técnica del polo dominante, y se puede expresar en términos del ciclo de trabajo como:
( ) ( )crDorPr vvkvvkvd && −+−+⋅⋅−= −31058.5 (4.16)
Se han realizado diferentes pruebas con el mismo convertidor ajustando adecuadamente los coeficientes de (4.16). En la figura 4.15 (a)-(c) se muestran los resultados en régimen permanente y salto de carga habiendo ajustado los parámetros kD y kP para obtener una optima respuesta en régimen transitorio ( 41097.0 ,39.1 −⋅== DP kk ). En este caso, el comportamiento en régimen transitorio es similar al obtenido con el algoritmo ZAD pero el error en régimen permanente, de 5 Vpp, es significativamente mayor.
vo(t) vr(t)
ve(t)
vo(t)
ic(t)
(a) (b)

4.20 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
vo(t) io(t)
(c) (d) Figura 4.15. Resultados experimentales con control PWM ajustado para una respuesta transitoria
óptima. (a) Tensión de salida en régimen estacionario, vo (t) [10 V/div], tensión de referencia desplazada 180º, vr (t) [10 V/div], y tensión de error, ve (t) [5 V/div]. (b) Tensión de salida en
régimen estacionario, vo (t) [10 V/div], y corriente del condensador, ic (t) [0.5 A/div]. (c) Respuesta transitoria de la tensión de salida, vo (t) [10 V/div], y corriente de carga, io (t) [1 A/div], para un
salto de carga de circuito abierto a 20 Ω. (d) Espectro de la señal de control [10 dB/div, 50kHz/div]
En la figura 4.16 se muestra la respuesta transitoria con el control PWM ajustado para reducir al mínimo el error en régimen permanente ( 41097.0 ,95.1 −⋅== DP kk ). Como cabía esperar, la reducción del error en régimen permanente degrada la respuesta transitoria.
vo(t) io(t)
Figura 4.16. Resultados experimentales con control PWM ajustado para una respuesta óptima en estado estacionario. Respuesta transitoria de la tensión de salida, vo (t) [10 V/div], y corriente de
carga, io (t) [1 A/div], para un salto de carga de circuito abierto a 20 Ω

Capítulo 4. Inversor PWM basado en el algoritmo de control de promediado cero de la dinámica (ZAD) 4.21
4.7. Conclusiones
En este capítulo se ha presentado el algoritmo de control en modo de deslizamiento de frecuencia fija basado en el promediado cero de la dinámica (ZAD) y su aplicación al diseño de un inversor reductor de puente completo. El algoritmo se obtiene bajo la hipótesis de una evolución lineal de la superficie de conmutación durante el periodo de conmutación. Mediante consideraciones geométricas se han obtenido un conjunto de leyes de control, en función del comportamiento de la superficie de conmutación, que son independientes de los parámetros de la etapa de potencia.
El algoritmo ZAD posee las ventajas del control en modo de deslizamiento en cuanto a la robustez frente a variaciones paramétricas al mismo tiempo que presenta los beneficios propios del funcionamiento en modo de frecuencia fija característicos del control PWM clásico.
Se ha presentado la descripción detallada de la implementación del algoritmo ZAD basada en un dispositivo FPGA XC2S100 de Xilinx, cuyas prestaciones permiten llevar a cabo las operaciones aritméticas relacionadas con dicho algoritmo con la suficiente velocidad de proceso para ejercer un control ciclo a ciclo.
Los resultados experimentales obtenidos con un inversor reductor de puente completo se aproximan a los conseguidos mediante simulación y ponen de manifiesto el buen comportamiento del algoritmo ZAD en términos de régimen permanente y de respuesta transitoria, así como una buena THD para cargas no lineales.
Se ha realizado un estudio comparativo del comportamiento del inversor con un control en modo de deslizamiento de frecuencia libre, de frecuencia fija basado en el algoritmo ZAD y con un control PWM clásico. Los resultados de dicho estudio evidencian que las prestaciones conseguidas con el algoritmo ZAD son similares a las obtenidas con un control en modo de deslizamiento de frecuencia libre y globalmente mejores que con un control PWM clásico tanto en el error en régimen estacionario como en la respuesta transitoria.


5.1
CAPÍTULO 5
Aplicación del algoritmo ZAD al control de onduladores conectados en paralelo. Operación en “interleaving”
5.1. Introducción
En este capítulo se aplica el control en modo de deslizamiento a frecuencia fija, basado en el algoritmo ZAD e implementado con un dispositivo FPGA, al control de la etapa de potencia del sistema modular presentado en el capítulo 3. En este caso, los objetivos del control son básicamente los mismos que los del control en modo de deslizamiento a frecuencia libre utilizado en el capítulo 3 pero operando a una frecuencia de conmutación fija, a saber: regulación de la tensión de salida, ecualización de corrientes a través de los módulos inversores y robustez frente a perturbaciones externas. Sin embargo, para poder aplicar el algoritmo ZAD a un sistema multientrada, como son los sistemas modulares de potencia, se deben cumplir determinados condicionantes que se analizan en el apartado 5.2. En el apartado 5.3 se describen las características generales del sistema modular de potencia utilizado en las pruebas experimentales indicando las analogías y diferencias con respecto al utilizado en el capítulo 3. Las funciones y el esquema eléctrico del acondicionador de señal y del sistema de adquisición de datos que forma parte del subsistema de control del sistema modular de potencia se detallan en el apartado 5.4. Los apartados 5.5-5.7 se dedican a descripción del diseño FPGA que incluye la implementación del algoritmo ZAD para tres módulos inversores y del sistema de gestión de potencia.
Por otra parte, con el objetivo de mejorar el comportamiento del sistema modular de potencia, y aprovechando la frecuencia de conmutación constante y la flexibilidad inherente de los dispositivos FPGA, se ha añadido en el diseño del control la técnica interleaving. Esta técnica consiste básicamente en desplazar la señal de control de los diferentes convertidores conectados en paralelo una fracción del periodo de conmutación a efectos de que el comienzo del periodo de conmutación de cada convertidor esté uniformemente distribuido dentro de dicho periodo. Entre los beneficios de la técnica

5.2 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
interleaving se puede destacar [Chang, 95a, 95b], [Perreault, 97], la reducción de la amplitud del rizado de la corriente de salida al mismo tiempo que aumenta su frecuencia lo que permite disminuir el tamaño de los componentes del filtro de salida, y la posibilidad de reducción de la frecuencia de conmutación con la consiguiente reducción de las pérdidas de conmutación. En anteriores trabajos [Klaassens, 88], [Miwa, 92], [Chang, 95a], [Perreault, 97], se han presentado implementaciones prácticas de la técnica interleaving que, sin embargo, no tienen en cuenta una variación del número de convertidores activos debida, por ejemplo, al fallo de módulos o bien a la conexión-desconexión de módulos realizada por el sistema de gestión de potencia. Como alternativa a estas implementaciones se presenta, en el apartado 5.8, una realización práctica de la técnica interleaving, basada en un dispositivo FPGA, para un sistema modular de potencia que tiene en cuenta un número variable de módulos activos sin límite de módulos. Esta solución no posee los inconvenientes de las anteriores implementaciones ya que permite realizar un verdadero interleaving para cualquier número de módulos y posee un tiempo de respuesta despreciable tanto en la puesta en marcha como en situaciones de variación del número de módulos activos por fallo o por conexión-desconexión. En el apartado 5.9 se presentan los resultados de simulación y experimentales, obtenidos con el prototipo de laboratorio, que incluyen el comportamiento del sistema en régimen permanente y transitorio, con un estudio comparativo del rizado de la tensión y corriente de salida, valor eficaz de la tensión de error y THD con y sin interleaving. Además, se ha incluido en este apartado pruebas de funcionamiento del sistema de gestión de potencia. Finalmente, en el apartado 5.10 se resumen las conclusiones de este capítulo.
5.2. Algoritmo ZAD aplicado al control de estructuras onduladoras modulares
En el apartado 4.3 del capítulo 4 se presentó el algoritmo de frecuencia fija basado en el promediado cero de la dinámica (ZAD) y aplicado a un sistema SISO (single-input single-output). Aunque, en principio, el algoritmo se ha definido para un sistema SISO donde sólo hay una variable de control cuyo valor depende de una sola superficie de conmutación, dicho algoritmo también se puede aplicar a sistemas multientrada, como son los sistemas modulares de potencia formados por N convertidores conectados en paralelo, siempre y cuando las dinámicas de las superficies de conmutación estén desacopladas entre sí.
Para ilustrar esta idea se va a considerar el caso concreto de un sistema modular de potencia formado por tres módulos inversores conectados en paralelo, cuyo comportamiento dinámico está gobernado por la ecuación en el espacio de estado (2.99) presentada en el apartado 2.6.1 del capítulo 2, y controlado por las superficies de conmutación:
( )
( ) ( )( ) ( ))()(
)()(
)()(
3123
2112
211
titittitit
dttdektekt
LL
LL
−⋅=−⋅=
⋅+⋅=
βσβσ
σ
(5.1)
Las superficies (5.1) corresponden a un control Master-Slave que no incluye, por sencillez, los lazos de tensión en los inversores esclavos. Estas superficies se pueden rescribir con notación matricial como:

Capítulo 5. Aplicación del algoritmo ZAD al control de onduladores conectados en paralelo. 5.3 Operación en “interleaving”
( ) ( ) ( ) ( )[ ] rr xxxxxxxxσ
+
=+==3
2
1
3
2
1
321 ,,,,
r
r
r
rT
BBB
KKK
BKtttt σσσ (5.2a)
T
rrr vvkk
BCRCR
kkKcon
=
=
−−−−
−−=
•
rx,0000,
22
00 21
2222
1111
21
ββββββββ (5.2b)
Teniendo en cuenta (2.99), las derivadas de las superficies de conmutación (5.2), ( )+iuli ,
σ& y
( )−iuli ,
σ& (con i =1,2,3 y l el periodo de conmutación), vienen definidas por:
( )
( )
++−+=
++−+=
−
+
−
+
33
32
2
21
1
12111
33
32
2
21
1
12111
1,
1,
uLEu
LEu
LE
CkBAK
uLEu
LEu
LE
CkBAK
r
r
ul
ul
r
r
xx
xx
&&
&&
σ
σ
( )
( )
−++=
−++=
−
+
−
+
22
21
1
11
222
22
21
1
11
222
2,
2,
uLEu
LEBAK
uLEu
LEBAK
r
r
ul
ul
βσ
βσ
r
r
xx
xx
&&
&&
(5.3)
( )
( )
−++=
−++=
−
+
−
+
33
31
1
12
333
33
31
1
12
333
3,
3,
uLEu
LEBAK
uLEu
LEBAK
r
r
ul
ul
βσ
βσ
r
r
xx
xx
&&
&&
Las derivadas (5.3) presentan un acoplamiento de controles de forma que el valor de las mismas puede cambiar dentro de un periodo de conmutación, lo que impide aplicar el algoritmo ZAD ya que éste se basa en considerar constantes las derivadas ( )+
iuli ,σ& y ( )−
iuli ,σ&
durante todo el periodo de conmutación. Este fenómeno está representado gráficamente en la figura 5.1 donde se muestra la medida de las superficies de conmutación (5.1) asociadas al sistema modular de potencia con los mismos valores de parámetros que los utilizados en el capítulo 3. En esta figura se pueden observar las distintas pendientes asociadas a la dinámica de las superficies de conmutación (5.1) debidas al acoplamiento entre las variables de control.

5.4 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
σ1
σ2
σ3
Figura 5.1. Resultados experimentales de la medida de las superficies de conmutación (5.1)
En la tabla 5.1 se indican, a modo de ejemplo, los cuatro posibles valores de las derivadas
( )+2,2 ulσ& , ( )−
2,2 ulσ& en función de los valores que puede tomar, a su vez, la señal de control
u1.
u1 = u1+ u1 = u1
-
( )+2,2 ukσ& ( )
−+ ++
22
21
1
11, u
LEu
LEβrxxf & ( )
−+ +−
22
21
1
11, u
LEu
LEβrxxf &
( )−2,2 ukσ& ( )
−+ −+
22
21
1
11, u
LEu
LEβrxxf & ( )
−+ −−
22
21
1
11, u
LEu
LEβrxxf &
Tabla 5.1. Valores de la derivada 2σ& , donde ( ) rr xxxxf && 22, rBAK +=
Para poder aplicar el algoritmo ZAD en cada una de las superficies de conmutación (5.1) es necesario que las dinámicas de las superficies de conmutación estén desacopladas entre sí. Esto se consigue desacoplando las variables de control con el método de diagonalización considerado en el apartado 2.5.2 del capítulo 2. Este método proporciona un conjunto de superficies cuyos controles están desacoplados lo que permite aplicar de forma individual el algoritmo ZAD a cada una de las superficies de conmutación resultantes de la transformación. Si se aplica la transformación no singular considerada en el apartado 2.7.3 a la función de conmutación (5.1), se obtiene una función de conmutación transformada, σ*(x,t), definida como:
( ) ( ) ( ) ( )[ ]
−−−+
−−== ∗∗∗∗
321
321
321
321
5.05.02,,,,
σσσσσσ
σσσσσσ
Ttttt xxxxσ (5.4)
donde σ1, σ2 y σ3 son las superficies de conmutación (5.1).
Las derivadas de las superficies de conmutación (5.4) en un periodo de conmutación l, vienen dadas por:

Capítulo 5. Aplicación del algoritmo ZAD al control de onduladores conectados en paralelo. 5.5 Operación en “interleaving”
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) rr
rr
rr
rr
xxxxg
xxgxxg
xxgxxg
xxgxxg
&&
&&&&
&&&&
&&&&
rBAKcon
uLEu
LE
uLEu
LE
uLE
Cku
LE
Ck
ulul
ulul
ulul
+=
−⋅Ω=−⋅Ω=
−⋅Ω=−⋅Ω=
−⋅Ω=−⋅Ω=
−∗+∗
−∗+∗
−∗+∗
−+
−+
−+
,23,;
23,
3,;3,
3,;3,
33
32
333
3
32
33
22
21
222
2
21
22
11
12111
1
1211
3,3,
2,2,
1,1,
βσβσ
βσβσ
σσ
(5.5)
donde Ω1, Ω2 y Ω3 son las filas 1, 2 y 3 respectivamente de la matriz de transformación (2.175).
En las derivadas (5.5) se puede comprobar analíticamente que las variables de control están desacopladas. Por tanto, el valor de estas derivadas permanece constante (bajo la hipótesis de una superficie de conmutación con evolución lineal) durante todo el periodo de conmutación y se puede aplicar el algoritmo ZAD de forma individual sobre cada una de las superficies transformadas (5.4).
En la figura 5.2 se presenta la medida de la dinámica de la función de conmutación transformada (5.4) aplicada al sistema modular de potencia donde se puede comprobar gráficamente el desacoplamiento de las variables de control entre las diferentes superficies.
σ*1
σ*2
σ*3
Figura 5.2. Resultados de la medida de la función de conmutación transformada (5.4)
En este apartado se ha demostrado que para poder aplicar el algoritmo ZAD en cada una de las superficies de conmutación asociadas al sistema modular de potencia es necesario que las dinámicas de las superficies de conmutación estén desacopladas entre sí. Esto se consigue a través del método de diagonalización que proporciona un conjunto de superficies, mediante la adecuada transformación no singular, cuyos controles están desacoplados lo que permite aplicar de forma individual el algoritmo ZAD a cada una de las superficies de conmutación resultantes de la transformación. Por este motivo, la expresión de la función de conmutación que se utilizará para controlar el sistema modular con el algoritmo ZAD será la obtenida mediante el método de diagonalización que para el caso tres convertidores activos viene dada por la expresión (5.4) y para dos convertidores activos viene dada por la expresión:
( ) ( ) 21*221
*1 ,;, σσσσ +=−= tσtσ xx (5.6)
donde σ1 y σ2 son las superficies de conmutación definidas por (5.1).

5.6 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
5.3. Sistema modular de potencia con control a frecuencia fija
El control en modo de deslizamiento de frecuencia fija basado en el algoritmo ZAD se ha aplicado al control del sistema modular de potencia presentado en el apartado 3.2 del capítulo 3, utilizando los mismos parámetros y topología de la etapa de potencia del sistema modular e introduciendo las modificaciones necesarias en el subsistema de gestión y control para poder incorporar el algoritmo ZAD. Las modificaciones introducidas respetan, sin embargo, la estructura general de bloques de dicho subsistema representada en la figura 3.3. A continuación se detallan las nuevas funciones de los bloques del subsistema de gestión y control para esta aplicación:
• Acondicionador de señal: se encarga de generar las superficies de conmutación a partir de las variables de estado y de la señal de referencia. El acondicionador de señal también se encarga de adaptar el nivel de las superficies de conmutación y de la corriente de salida del sistema modular de potencia al margen dinámico del sistema de adquisición de datos. Su realización práctica se detalla en el apartado 5.4.
• Sistema de adquisición de datos: se encarga de seleccionar y digitalizar las señales que se utilizan en el diseño FPGA. En el apartado 5.4 se describe la implementación de este sistema.
• Diseño FPGA: lleva a cabo las funciones básicas asociadas al subsistema de gestión y control del sistema modular de potencia. Estas funciones se pueden clasificar en tres ámbitos de actuación:
o Control de las variables de estado del sistema modular. Este ámbito de actuación hace referencia a la regulación de la tensión AC de salida y a la ecualización de las corrientes que suministran los módulos inversores a la carga mediante el control en modo de deslizamiento a frecuencia fija. Para ello, se ha implementado en la FPGA un diseño del algoritmo ZAD, para cada módulo inversor, que presenta algunas diferencias con respecto a la realización práctica descrita en los apartados 4.4 y 4.5 del capítulo 4. En el apartado 5.6 se comentan estas diferencias.
o Gestión de potencia. Como se indicó en el capítulo 3, el sistema de Gestión de Potencia tiene como función determinar los convertidores que deben estar activos en función de la demanda energética de la carga y del número de módulos inversores operativos que incorpora el sistema modular. El objetivo de este sistema es obtener la mejor eficiencia posible para cada carga al permitir que cada módulo opere en su punto óptimo de rendimiento, incrementando al mismo tiempo el grado de redundancia del sistema y con ello la fiabilidad. El diseño del sistema de Gestión de Potencia implementado en esta aplicación se corresponde básicamente con el presentado en el apartado 3.6.2 del capítulo 3. Las diferencias se detallan en el apartado 5.7.
o Técnica Interleaving. Esta técnica mejora las prestaciones de los sistemas modulares de potencia que trabajan con una frecuencia de conmutación fija en relación al dimensionado de componentes, frecuencia de conmutación y rizado de la corriente y tensión de salida. En el apartado 5.8 se describe la implementación propuesta de la técnica interleaving.

Capítulo 5. Aplicación del algoritmo ZAD al control de onduladores conectados en paralelo. 5.7 Operación en “interleaving”
5.4. Funciones de conmutación, acondicionador de señal y sistema de adquisición de datos
En este apartado se describe la implementación analógica de las superficies de conmutación utilizadas para los casos de uno, dos y tres módulos inversores activos, así como el sistema de adquisición de datos que se encarga de tomar las muestras necesarias de estas superficies para poder llevar a cabo el algoritmo ZAD. En primer lugar se indican en el apartado 5.4.1 las funciones de conmutación transformadas relacionadas con el control del sistema modular en modo de deslizamiento a frecuencia fija. Los detalles de la implementación de dichas funciones de conmutación se presentan en el apartado 5.4.2. Finalmente, en el apartado 5.4.3 se describe el sistema de adquisición de datos.
5.4.1. Funciones de conmutación
La función de conmutación que controla el sistema modular de potencia se corresponde con la propuesta por Carpita en el caso de un módulo inversor activo, mientras que para el caso de dos y tres módulos inversores activos las funciones de conmutación correspondientes son las indicadas en las expresiones (5.6) y (5.4) respectivamente. En la tabla 5.2 se muestran las superficies de conmutación para cada módulo inversor A, B y C, en función del número de inversores activos, donde los parámetros Gij con i,j =1, 2, 3, son las ganancias que permiten adaptar el margen dinámico de las superficies de conmutación a las características del sistema de adquisición de datos.
Inv. activos σA σB σC
A 11111 σσ ⋅=∗ G - - A, B ( )211212 σσσ −⋅=∗ G ( )212222 σσσ +⋅=∗ G -
A, B, C ( )3211313 σσσσ −−⋅=∗ G ( )3212323 2 σσσσ −+⋅=∗ G(
)32
13333
5.05.0
σσσσ
+−⋅=∗ G
Con: ekek &211 +=σ , ( )LBLA ii −= 12 βσ , ( )LCLA ii −= 23 βσ y β1=β2=1
Tabla 5.2. Superficies de conmutación asociadas al sistema modular para uno, dos y tres módulos inversores activos
5.4.2. Acondicionador de señal
El sistema acondicionador de señal implementa analógicamente las superficies de conmutación indicadas en la tabla 5.2 y adecua su margen dinámico a las características del sistema de adquisición. Las entradas del acondicionador de señal son la tensión de salida vc, y la corriente de salida io, del sistema modular de potencia, la tensión de referencia vr, la corriente del condensador de salida ic, y la corriente de inductor de los tres módulos inversores iLA, iLB y iLC.

5.8 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
En la figura 5.3 se muestra el esquema eléctrico del acondicionador de señal que incorpora básicamente amplificadores operaciones configurados como sumadores/restadores y derivadores para obtener las distintas superficies de conmutación. En concreto, el esquema de la figura 5.3 (a) genera las superficies σ1 y σ*
11 de la tabla 5.2; en la figura 5.3 (b) se presenta el esquema del circuito que implementa las superficies σ2 y σ3, mientras que en el resto de figuras se puede observar la implementación de las distintas superficies de conmutación resultantes de la transformación no singular: σ*
12 (figura 5.3 (c)), σ*13 (figura
5.3 (d)), σ*22 (figura 5.3 (e)), σ*
23 (figura 5.3 (f)) y σ*33 (figura 5.3 (g)).
_
+
10 kΩ
10 kΩ
100 kΩ
10 kΩ
-vc/10
vr/10
_
+
10 kΩ
60 kΩ
10 kΩ
vr/1010 nF
680 pF
ic·5e-3
Sensor de corriente LA25-NP, S=5 mA/A
_
+
10 kΩ
10 kΩ
10 kΩ
10 kΩ
10 kΩ
200 Ω
Vic=ic [V]
_
+
10 kΩ
50 kΩ
10 kΩ
σ*1110 kΩ
G11
( ) ( )5
21
211
106,1 −⋅==
−+−=
kkcon
vvkvvk crcr &&σ
σ1
(a)
iL1*5e-3
Sensor de corriente LA25-NP, S=5mA/A 100Ω
VL1=0.5iL1[V]
iL2*5e-3
Sensor de corriente LA25-NP, S=5mA/A 100Ω
VL2=0.5iL2[V]
_
+
20kΩ
10kΩ
20kΩ
10kΩ σ2
iL3*5e-3
Sensor de corriente LA25-NP, S=5mA/A 100Ω
VL3=0.5iL3[V]
_
+
20kΩ
10kΩ
20kΩ
10kΩ σ3
(b)
iL1*5e-3
Sensor de corriente LA25-NP, S=5mA/A 100Ω
VL1=0.5iL1[V]
iL2*5e-3
Sensor de corriente LA25-NP, S=5mA/A 100Ω
VL2=0.5iL2[V]
_
+
20kΩ
10kΩ
20kΩ
10kΩ σ2
iL3*5e-3
Sensor de corriente LA25-NP, S=5mA/A 100Ω
VL3=0.5iL3[V]
_
+
20kΩ
10kΩ
20kΩ
10kΩ σ3
iL1*5e-3
Sensor de corriente LA25-NP, S=5mA/A 100Ω
VL1=0.5iL1[V]
iL2*5e-3
Sensor de corriente LA25-NP, S=5mA/A 100Ω
VL2=0.5iL2[V]
_
+
20kΩ
10kΩ
20kΩ
10kΩ σ2
iL3*5e-3
Sensor de corriente LA25-NP, S=5mA/A 100Ω
VL3=0.5iL3[V]
_
+
20kΩ
10kΩ
20kΩ
10kΩ σ3
(b)
_
+
10kΩ
10kΩ
10kΩ
10kΩσ2- σ1
_
+
10kΩ 50kΩ
10kΩ
σ*12
G12
σ2
σ1
_
+
10kΩ
10kΩ 50kΩ
10kΩ
σ*13
σ3
σ2- σ1
G13
(c)
(d)
_
+
10kΩ
10kΩ
10kΩ
10kΩσ2- σ1
_
+
10kΩ 50kΩ
10kΩ
σ*12
G12
σ2
σ1
_
+
10kΩ
10kΩ 50kΩ
10kΩ
σ*13
σ3
σ2- σ1
G13
(c)
(d)

Capítulo 5. Aplicación del algoritmo ZAD al control de onduladores conectados en paralelo. 5.9 Operación en “interleaving”
_
+
10kΩ
50kΩ
10kΩ
σ*2210kΩ
G2210kΩ
σ1
σ2
(e)
_
+
10kΩ
50kΩ
10kΩ
σ*2210kΩ
G2210kΩ
σ1
σ2
_
+
10kΩ
50kΩ
10kΩ
σ*2210kΩ
G2210kΩ
σ1
σ2
(e)
_
+
10kΩ
10kΩ 50kΩ
10kΩ
σ*23
G23
_
+
10kΩ
5kΩ
10kΩ
10kΩ- σ1-2 σ2
σ1
σ2σ3
(f)
_
+
10kΩ
10kΩ 50kΩ
10kΩ
σ*23
G23
_
+
10kΩ
5kΩ
10kΩ
10kΩ- σ1-2 σ2
σ1
σ2σ3
_
+
10kΩ
10kΩ 50kΩ
10kΩ
σ*23
G23
_
+
10kΩ
5kΩ
10kΩ
10kΩ- σ1-2 σ2
σ1
σ2σ3
(f)
_
+
10kΩ
10kΩ
30kΩ0.5(σ2- σ1)- σ3
_
+
10kΩ 50kΩ
10kΩ
σ*33
G33
σ2- σ1
σ3
10kΩ
(g)
_
+
10kΩ
10kΩ
30kΩ0.5(σ2- σ1)- σ3
_
+
10kΩ 50kΩ
10kΩ
σ*33
G33
σ2- σ1
σ3
10kΩ
_
+
10kΩ
10kΩ
30kΩ0.5(σ2- σ1)- σ3
_
+
10kΩ 50kΩ
10kΩ
σ*33
G33
σ2- σ1
σ3
10kΩ
(g)
Figura 5.3. Esquema del bloque acondicionador de señal que implementa las superficies de conmutación: (a) σ1 y σ*
11, (b) σ2 y σ3, (c) σ*12, (d) σ*
13, (e) σ*22 (f) σ*
23 y (g) σ*33
5.4.3. Sistema de adquisición de datos
La función del sistema de adquisición de datos es la de adquirir las muestras necesarias de las superficies de conmutación para calcular el ciclo de trabajo de cada convertidor activo mediante algoritmo ZAD. Asimismo, también adquiere las muestras de la corriente de salida necesarias para el funcionamiento del sistema de gestión de potencia. Como se indicó en el apartado 3.3 del capítulo 3, el sistema de adquisición de datos está compuesto por un multiplexor analógico dual de 8 canales MAX307 y cuatro convertidores ADC modelo MAX153, de 8 bits de resolución que posee una frecuencia máxima de muestreo de 1 MSps. En la figura 5.4 se muestra la configuración adoptada para adquirir las señales de medida para los distintos casos posibles en función del número de inversores activos. El primer convertidor ADC junto con el Canal A del multiplexor analógico se encarga de adquirir el valor de la superficie de conmutación, σ*
11, σ*12 o σ*
13, que controla al inversor A dependiendo de si hay uno, dos o tres inversores activos respectivamente, tal y como se indica en la tabla 5.2. El segundo convertidor ADC junto con el Canal B del multiplexor toma muestras del valor de la superficie de conmutación σ*
22 o σ*23, que controla al
inversor B dependiendo de si hay dos o tres inversores activos respectivamente. Finalmente, el tercer y cuarto convertidor ADC toman muestras de la superficie σ*
33, que controla al inversor C, y de la corriente de salida io(t), respectivamente.
8
8
σ*33/ σC
3er ADCMAX153
io(t) 4o ADCMAX153
8
8
σ*33/ σC
3er ADCMAX153
io(t) 4o ADCMAX153
8
σ*11
σ*12
σ*13
σ*22
σ*23
Canal AMUX
MAX307
1er ADCMAX153
8Canal BMUX
MAX307
2o ADCMAX153
σB
σA 8
σ*11
σ*12
σ*13
σ*22
σ*23
Canal AMUX
MAX307
1er ADCMAX153
8Canal BMUX
MAX307
2o ADCMAX153
σB
σA
Figura 5.4. Esquema del sistema de adquisición de datos

5.10 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
5.5. Estructura general del diseño FPGA
La FPGA se encarga de implementar el algoritmo ZAD para cada módulo inversor, el sistema de gestión de potencia y la técnica interleaving. Se ha utilizado la misma FPGA de Xilinx que la empleada en los diseños presentados en los capítulos 3 y 4, en concreto el modelo XC2S100_5TQ144. Este dispositivo contiene 100.000 puertas lógicas equivalentes, 2400 flip-flops repartidos en 1200 Slices, 10 bloques de memoria RAM de 4096 bits y 92 IOB (Input/Output Block). De estos recursos disponibles se han utilizado para realizar el diseño 783 Slices (65%), 356 flip-flops (14%), 70 IOB (76%), 3 bloques de memoria RAM y un total de 62.563 puertas lógicas equivalentes. El retardo máximo asociado al diseño, de 155.3 ns, asegura su correcto funcionamiento para una frecuencia de reloj de 6 MHz.
En la figura 5.5 se presenta esquema del diseño FPGA que se puede organizar en los siguientes bloques funcionales:
• Bloques Control Inversor A, B, y C: estos tres bloques implementan el algoritmo ZAD que controlan a los inversores A, B y C respectivamente. En el apartado 5.6 se detalla su arquitectura.
• Bloque Gestión de Potencia: como en el diseño presentado en el capítulo 3, la función de este bloque es determinar los convertidores que deben estar activos en función de la demanda energética de la carga y del número de módulos inversores operativos que incorpora el sistema modular. También se encarga de generar las señales de control del sistema de adquisición de datos para seleccionar la superficie de conmutación adecuada al número de inversores activos. El diseño de este bloque se comenta en el apartado 5.7.
8
8
FPGA XC2S100
CA
σC
σA
σB
Control Inversor A uLIA, uHIA,,uLDA, uHDA
Control Inversor B
Control Inversor C
io(t)8
8
Gestión de Potencia
signo(vr)
4
uLIB, uHIB,,uLDB, uHDB4
uLIC, uHIC,,uLDC, uHDC4
SDA
SDB
SDC
CB CC Figura 5.5. Diagrama de bloques del diseño FPGA para la gestión y control en modo de
deslizamiento a frecuencia fija del sistema modular de potencia

Capítulo 5. Aplicación del algoritmo ZAD al control de onduladores conectados en paralelo. 5.11 Operación en “interleaving”
5.6. Bloques Control Inversor A, B y C
En la figura 5.6 se muestra el esquema de la arquitectura interna de los bloques denominados Control Inversor A, B y C. Como se puede observar en dicha figura, la estructura interna del bloque Control Inversor se corresponde, básicamente, con la descrita en los apartados 4.4 y 4.5 del capítulo 4. Las únicas diferencias consisten en dos modificaciones realizadas en el bloque PWM Digital de la figura 4.9 para compatibilizar su funcionamiento con el sistema de gestión de potencia y con la técnica interleaving. Estas modificaciones se detallan a continuación:
• Modificación del bloque Salidas de Control: a diferencia del esquema presentado en la figura 4.10 (a), en el diseño actual este bloque incorpora los mecanismos adecuados para realizar la función de conexión-desconexión propia del sistema de gestión de potencia. En concreto se ha añadido una entrada de control SDi, con i = A, B, C, que pone en funcionamiento, cuando está activa a 0 lógico, al inversor A, B o C respectivamente. El sistema de Gestión de Potencia se encarga de activar las señales SDi en función del valor de la corriente de salida io(t). En la figura 5.7 se muestra el esquema modificado del bloque Salidas de Control del PWM Digital.
• Modificación del generador de rampa: el diseño del contador descendente de 8 bits de la figura 4.9 se ha modificado adecuadamente para poder llevar a cabo la técnica interleaving. Esta modificación se detalla en el apartado 5.8.
Asimismo, cabe indicar que el bloque Control Secuencial, de la figura 5.6, correspondiente al inversor A no sólo se encarga de controlar el ADC que adquiere el valor de la superficie de conmutación asociada al dicho inversor sino que, al mismo tiempo, también controla el ADC que adquiere la corriente de salida io(t).
8PWM Digital
ControlSecuencial
ControlSecuencial
ControlADC
σi
uLDiuHDi
uLIiuHIi
AlgoritmoZAD
Control Inversor “i” con i =A, B C
Figura 5.6. Esquema del bloque Control Inversor A, B, C
D QD QD QD Q
D QD QD QD Q
CKCK CKCK
CKCK CKCK
uIi
uHIi
Reloj delsistema
CLR CLR
CLR CLRSDi
D QD QD QD Q
D QD QD QD Q
CKCK CKCK
CKCK CKCK
uHDi
uLDi
CLR CLR
CLR CLRuLIi
uDi
Figura 5.7. Esquema del bloque Salidas de Control del PWM Digital

5.12 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
5.7. Bloque Gestión de Potencia
El bloque Gestión de Potencia tiene una doble función:
• Conexión-desconexión de módulos inversores: determina qué inversores deben estar activos en función de la corriente demandada por la carga y del número de inversores operativos que incorpora el sistema modular.
• Selección de la superficie de conmutación: se encarga de controlar el funcionamiento del multiplexor que selecciona las superficies de conmutación que gobiernan los inversores A y B en función del número de inversores activos.
A continuación se describe la implementación de estas dos funciones.
• Conexión-desconexión de módulos inversores
En la figura 5.8 se presenta el diagrama de bloques del sistema de Gestión de Potencia. La estructura interna y funcionamiento de este sistema se corresponde con el presentado en el apartado 3.6.2 del capítulo 3. Las salidas SDA, SDB y SDC de este bloque se derivan a los bloques Control Inversor A, B y C respectivamente y ponen en funcionamiento, cuando están activas a cero lógico, al inversor correspondiente.
SDC
CA CB CC
SDB
SDA
signo (vr)
Detector de niveles depotencia
P3
P2
P1io(n) 8 Memoria Activador de
inversores
P3
P2
P1
Figura 5.8. Esquema del bloque Gestión de Potencia
• Selección de la superficie de conmutación
La selección de las superficies de conmutación que gobiernan a los inversores A y B depende del número de inversores activos, tal y como se indica en la tabla 5.2. De forma que, la superficie de conmutación asociada al inversor A, σA, puede ser σ*
11, σ*12 ó σ*
13 dependiendo de si hay 1, 2 ó 3 inversores activos, respectivamente. Igualmente, la superficie de conmutación asociada al inversor B, σB, puede ser σ*
22 ó σ*23 dependiendo
de si hay 2 ó 3 inversores activos, respectivamente. La selección de la superficie de conmutación adecuada para cada caso se realiza mediante el multiplexor dual de 8 canales MAX307 controlado mediante las señales SDA, SDB y SDC generadas por el sistema de Gestión de Potencia. En la tabla 5.3 se indica la correspondencia entre las entradas analógicas del multiplexor y las superficies de conmutación.
Entradas analógicas MUX MAX307Canal out 7 6 5 4 3 2 1 0
Out A - σ*11 - σ*
12 - - - σ*13
Out B - - - σ*22 - - - σ*
23 Tabla 5.3. Distribución de superficies de conmutación entre las entradas del multiplexor analógico

Capítulo 5. Aplicación del algoritmo ZAD al control de onduladores conectados en paralelo. 5.13 Operación en “interleaving”
5.8. Técnica interleaving para convertidores conectados en paralelo
En este apartado se presenta la implementación de la técnica interleaving basada en un dispositivo FPGA. En primer lugar se detalla, en el apartado 5.8.1, la implementación de la técnica interleaving para un sistema modular genérico formado por M inversores conectados en paralelo. El diseño propuesto tiene en cuenta un número variable de módulos activos sin límite de módulos y posee un tiempo de respuesta despreciable tanto en la puesta en marcha como en situaciones de variación del número de módulos activos debidas a la actuación del sistema de gestión de potencia. En el apartado 5.8.2 se particulariza el diseño presentado en el apartado 5.8.1 para el caso concreto de un sistema de potencia formado por tres módulos inversores conectados en paralelo.
5.8.1. Implementación de la técnica interleaving para un sistema modular de potencia con M inversores conectados en paralelo
Anteriores trabajos presentan diferentes implementaciones de la técnica interleaving basadas generalmente en la introducción de un desplazamiento en la señal de control PWM de cada célula conversora equivalente a un desfase de 2π/N [Klaassens, 88], siendo N el número de inversores conectados en paralelo. Se han llevado a cabo diferentes realizaciones prácticas de este desfase como es la utilización de un registro de desplazamiento de 8 bits [Miwa, 92] para iniciar la generación de la rampa PWM obteniéndose un desfase entre señales PWM de 2π/8. Otra solución, presentada en [Chang, 95a], es un generador de reloj escalonado construido con un NE555 y un contador Jonhson de 5 etapas MC14018 que permite producir las distintas señales de reloj equitativamente desfasadas dentro de un periodo de conmutación. Sin embargo, estas realizaciones están pensadas para un número fijo de módulos y no tienen en cuenta una variación del número de convertidores activos debida, por ejemplo, al fallo de módulos o bien a la conexión-desconexión de módulos realizada por el sistema de gestión de potencia.
En [Perreault, 97] se presenta una implementación de la técnica interleaving donde se utilizan PLL’s para generar señales desfasadas. Esta solución funciona para un número variable de módulos activos, sin embargo, sólo asegura interleaving entre subgrupos de convertidores cuando el número de convertidores conectados en paralelo es mayor de tres y, además, tiene el inconveniente añadido de que el PLL tarda unos segundos en alcanzar seguimiento cuando se pone en marcha.
Como alternativa, se presenta en este apartado una realización práctica de la técnica interleaving que tiene en cuenta un número variable de módulos activos sin límite de módulos y posee un tiempo de respuesta despreciable tanto en la puesta en marcha como en situaciones de variación del número de módulos activos por fallo o por conexión-desconexión.
El diseño realizado consiste básicamente en añadir un retardo adecuado en la señal PWM, generada por el bloque PWM Digital de la figura 5.6, de forma que el comienzo del periodo de conmutación de cada módulo inversor activo esté equitativamente repartido a lo largo de un periodo de conmutación. El retardo a introducir dependerá del número de inversores activos. En efecto, si el sistema modular de alimentación está formado por M

5.14 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
módulos de los cuales N están activos controlados por una señal PWM de periodo de conmutación T, el desfase o retardo, en términos del periodo de conmutación T, introducido en la señal PWM que controla el funcionamiento del inversor “j” vendrá dado por:
( ) NjconjNT ,...,11 =− (5.7)
El retardo (5.7) se puede conseguir desfasando entre sí las rampas negativas utilizadas en los generadores de señal PWM de cada módulo inversor. En las figuras 5.9 (a)-(b) se muestran las rampas generadas en el bloque PWM Digital de cada módulo inversor cuando no se utiliza la técnica interleaving y por tanto, el comienzo de las rampas están sincronizadas, junto con las rampas adecuadamente desfasadas según expresión (5.7). En las figuras 5.9 (c)-(b) se pueden comparar las señales PWM generadas en ambos casos.
t
Rampas PWM sin interleaving
T
Inversor1
Inversor2
InversorN
t
Rampas PWM con interleavingT
NT( ) NNT 1
Inversor 1
Inversor2
InversorN
(a) (b)
t
Señales PWM sin interleaving
T
TON1
TON2
TON N
Inversor1
Inversor2
InversorN
t
Señales PWM con interleaving
T
TON1
TON2
TON N
NT ( ) NNT 1−
Inversor1
Inversor2
InversorN
(c) (d)
Figura 5.9. Rampa PWM negativa aplicada a los generadores de señal PWM de los N módulos inversores activos en un sistema modular: (a) sin interleaving y (b) con interleaving. Señales PWM
generadas para N inversores: (c) sin interleaving y (d) con interleaving
La rampa negativa del bloque PWM Digital se genera con un contador descendente de 8 bits y la duración del periodo de conmutación, T, se corresponde con el tiempo que tarda el contador en alcanzar el valor final de cuenta, que es 0d, partiendo de un valor inicial igual a 255d (28-1). Ese tiempo viene dado por el producto entre el número de incrementos y el periodo de la señal de reloj:
clockTT ⋅= 82 (5.8) Se puede conseguir el desfase deseado en la generación de la rampa incorporando un contador independiente en el bloque PWM Digital de cada módulo inversor y ajustando

Capítulo 5. Aplicación del algoritmo ZAD al control de onduladores conectados en paralelo. 5.15 Operación en “interleaving”
adecuadamente el valor inicial de cuenta de cada contador según el desfase que se desee introducir.
Teniendo en cuenta (5.7) y (5.8) se pueden calcular los valores iniciales de cuenta asociados al contador del módulo “j” en función del número, N, de módulos activos. Estos valores iniciales, con una precisión de 8 bits, vienen dados por:
( )
≤=−⋅
=
MNyNjparajN
jparad
,...,212int
12558 (5.9)
donde M es el número total de módulos del sistema modular. Los valores (5.9) se almacenan en una memoria RAM de capacidad mínima igual a M-1 posiciones por 8 bits. Para cargar el valor inicial en cada contador se utiliza la señal de fin de cuenta del contador asociado al inversor 1, de forma que la carga se hace efectiva al comienzo de cada periodo de conmutación del inversor 1. En la figura 5.10 se muestra el diagrama de bloques del diseño que implementa la técnica interleaving para un sistema de potencia formado por M módulos inversores.
Contador descendente 8-bit
1
Clk
Fin decuenta
8Reloj delsistema
I1
Salidacontador Inversor 1
8Clk
DinL
8Clk
DinL
8Clk
DinL
DataAddress
RAM (M-1)x8bitsData
Address
RAM (M-1)x8bits8
8
8
m = int(log2(M-1))mN-2
Inversor 2
Inversor j
Inversor M
Salidacontador
Salidacontador
Contador descendente 8-bit
Contador descendente 8-bit
Salidacontador
Contador descendente 8-bit
ClkD
QClk
D
Q
DataAddress
RAM (M-1)x8bitsData
Address
RAM (M-1)x8bits
DataAddress
RAM (M-1)x8bitsData
Address
RAM (M-1)x8bits
Figura 5.10. Esquema del sistema generador de interleaving

5.16 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
5.8.2. Implementación de la técnica interleaving para un sistema modular de 3 inversores
La técnica interleaving se ha implementado para el sistema modular inversor compuesto por tres inversores reductores en puente completo utilizado en las pruebas de laboratorio. En la tabla 5.4 se indica el desfase, en radianes, asociado a la señal PWM de cada módulo inversor en función del número de módulos activos junto con el valor inicial, a cargar en el contador, correspondiente a dicho desfase.
Inversor A Inversor B Inversor C Inversores activos Desfase Valor inicial Desfase Valor inicial Desfase Valor inicial
1 0 255d X X X X 2 0 255d π 128d X X 3 0 255d 32π 85d 34π 170d
Tabla 5.4. Valores iniciales de carga de los contadores de los inversores del sistema modular
El esquema general presentado en la figura 5.10 se puede simplificar para el caso de M=3 sustituyendo los bloques de memoria RAM por la capacidad de inicialización síncrona y asíncrona de los contadores utilizados en el bloque PWM Digital tal y como se muestra en la figura 5.11.
8
1
Clk
I1
PWM DigitalInversor AAINIT
SINIT
8Clk
AINIT
SINIT
8Clk
AINIT
SINIT
SDC
0
0
0
PWM DigitalInversor B
PWM DigitalInversor C
SDC=0 cuando el inversor C está activo
Contador descendente 8-bit
Salidacontador
Fin decuenta
Salidacontador
Salidacontador
Contador descendente 8-bit
Contador descendente 8-bit
Reloj delsistema
ClkD
Q
Figura 5.11. Esquema de la implementación de la técnica interleaving para un sistema modular
compuesto por 3 módulos inversores

Capítulo 5. Aplicación del algoritmo ZAD al control de onduladores conectados en paralelo. 5.17 Operación en “interleaving”
5.9. Simulación y resultados experimentales
Para probar las prestaciones del sistema modular de potencia controlado mediante el algoritmo ZAD se han realizado diversas simulaciones, con un modelo diseñado con el software MATLAB-SIMULINK que incluye el diseño FPGA (ver Anexo 2), y pruebas de laboratorio con el prototipo experimental. Los valores de los coeficientes de las superficies de conmutación utilizados en las pruebas son: k1= 1, k2=6·10-5 y β1 = β2 =1, siendo la frecuencia de conmutación de 23 kHz.
Los resultados obtenidos se han clasificado en función de los tres ámbitos de actuación del subsistema de gestión y control: el control de las variables de estado, la gestión de potencia y la técnica interleaving. En el apartado 5.9.1 se presentan los resultados con relación al control de las variables de estado mediante la técnica de control en modo de deslizamiento con el algoritmo ZAD de frecuencia fija. En el apartado 5.9.2 se muestran los resultados obtenidos en las pruebas realizadas con relación a la gestión de potencia. Finalmente, en el apartado 5.9.3 se presentan los resultados obtenidos con el modo de operación en interleaving.
5.9.1. Resultados del control en modo de deslizamiento con el algoritmo ZAD a frecuencia fija
Con el objetivo de evaluar las prestaciones de la técnica de control en modo de deslizamiento con el algoritmo ZAD de frecuencia fija se ha sometido al sistema modular de potencia a diversas pruebas de funcionamiento que permiten analizar su comportamiento en régimen estático y dinámico. También se han efectuado medidas cuantitativas de determinados índices de error para realizar un análisis comparativo de las prestaciones que presenta el algoritmo de control de frecuencia fija con respecto al control en modo de deslizamiento a frecuencia variable considerado en el capítulo 3.
En todas las pruebas realizadas la tensión continua de entrada, común a todos los módulos inversores, es de 70 V, siendo la tensión de referencia en las pruebas con carga lineal de
)502sin(55)( ttv r π⋅= y la resistencia de carga RL=5 Ω.
• Comportamiento en régimen estático
En la figura 5.12 se presenta la simulación y la medida de la tensión de salida vo(t), la tensión de referencia vr(t) (desplazada 180º), y la tensión de error ve(t), del sistema modular de potencia con tres inversores activos. En la figura 5.13 está representada la simulación y la medida de las superficies σ1, σ2 y σ3. En la figura 5.14 se puede observar la simulación y la medida de las superficies de deslizamiento asociadas a los tres convertidores σA, σB y σC. En la figura 5.15 se muestra la simulación y la medida de dos periodos de la corriente de inductor de los tres módulos inversores.

5.18 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
vo(t) vr(t)
ve(t)
vo(t) vr(t)
ve(t)
(a) (b)
Figura 5.12. Tensión de salida en régimen estacionario, vo (t) [20 V/div], tensión de referencia, vr(t) [20 V/div], y tensión de error, ve (t) [500 mV/div], para (a) simulación y (b) con prototipo
experimental
σ1
σ2
σ3
σ1
σ2
σ3
(a) (b) Figura 5.13. (a) Simulación y (b) medida de las superficies σ1 [2 V/div], σ2 [2 V/div] y σ3 [2V/div]
σA
σB
σC
σA
σB
σC
(a) (b)
Figura 5.14. (a) Simulación y (b) medida de las superficies transformadas σA [1 V/div], σB [1V/div] y σC [1 V/div]

Capítulo 5. Aplicación del algoritmo ZAD al control de onduladores conectados en paralelo. 5.19 Operación en “interleaving”
iLA
iLB
iLC
iLA
iLB
iLC
(a) (b) Figura 5.15. (a) Simulación y (b) medida de la corriente de inductor de los inversores conectados
en paralelo iLA [2 A/div], iLB [2 A/div] y iLC [2 A/div]
En las pruebas realizadas se ha medido una distorsión armónica total (THD) de la tensión de salida del 0.3%, un valor eficaz de la tensión de error del 0.63% del valor eficaz de la tensión de referencia, un desapareamiento máximo de la corriente de inductor de 70 mA eficaces y una eficiencia del 85 %. Estos resultados, similares a los obtenidos con el control en modo de deslizamiento a frecuencia libre, confirman el buen comportamiento en régimen permanente del algoritmo ZAD aplicado al prototipo experimental.
• Comportamiento para carga no lineal
En la figura 5.16 se presenta la medida de tensión de salida vo(t), la tensión de referencia vr(t) (desplazada 180º), la tensión de error ve(t), y la corriente de salida io(t), realizada con una carga no lineal formada por un puente rectificador en paralelo con un condensador de 29.3 mF y un resistencia de carga de RL=20 Ω, siendo la tensión de entrada E=70 V y la tensión de referencia )502sin(50)( ttvr π⋅= .
vo(t)
ve(t)
vr(t) vo(t)
io(t)
(a) (b) Figura 5.16. Resultados experimentales del algoritmo ZAD con un rectificador de onda completa como carga. (a) Tensión de salida en régimen estacionario, vo (t) [15 V/div], tensión de referencia,
vr (t) [15 V/div], y tensión de error, ve (t) [500 mV/div]. (b) Tensión de salida en régimen estacionario, vo (t) [15 V/div], y corriente de salida, io (t) [5 A/div]
La THD medida en este caso es de 0.6-0.7%, mientras que el valor eficaz de la tensión de error es del 0.74% lo que indica un buen comportamiento para carga no lineal.

5.20 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
• Comportamiento en régimen dinámico
Con el objetivo de probar el comportamiento dinámico del sistema modular de potencia controlado mediante el algoritmo ZAD se ha realizado una prueba de salto de carga. En la figura 5.17 se observa la simulación y la medida de la tensión de salida vo(t), y corriente de salida io(t), para un salto de carga de circuito abierto a 5 Ω.
vo(t)
io(t)
vo(t)
io(t)
(a) (b) Figura 5.17. Respuesta transitoria de la tensión de salida, vo (t) [20 V/div], y corriente de salida,
io(t) [5 A/div], para un salto de carga de circuito abierto a 5 Ω: (a) simulación y (b) resultado experimental
En la figura 5.17 se puede observar que la corta duración del transitorio del salto de carga, menor del 6% del periodo de la tensión de salida, es sólo ligeramente superior a la obtenida con el control en modo de deslizamiento a frecuencia libre. Esto permite concluir que las prestaciones conseguidas en régimen dinámico con el algoritmo ZAD de frecuencia fija son similares a las conseguidas con el control a frecuencia variable.
• Espectro de la señal de control
En la figura 5.18 se observa la medida del espectro de la señal de control PWM del inversor A. La distribución de las componentes espectrales de la señal de control, claramente definidas a la frecuencia de conmutación y sus múltiplos, evidencia el modo de operación de frecuencia fija del inversor.
Figura 5.18. Espectro de la señal de control del inversor A [10 dB/div, 50 kHz/div]

Capítulo 5. Aplicación del algoritmo ZAD al control de onduladores conectados en paralelo. 5.21 Operación en “interleaving”
5.9.2. Resultados del sistema de Gestión de Potencia
Para comprobar el funcionamiento del sistema de Gestión de Potencia se ha sometido al sistema modular inversor a saltos sucesivos de tensión de referencia de 20 Vp, 30 Vp, 40Vp y 50 Vp con una resistencia de carga de 5 Ω, siendo el umbral de la corriente de salida que activa el segundo convertidor de IO1=6.2 A, y el que activa el tercero de IO2=9A. En estas condiciones el segundo convertidor se activa para una potencia de salida mayor de 96 W y el tercer convertidor se activa para potencias superiores a 202 W. En la figura 5.19 se observa la evolución de la tensión de salida vo(t), y de las corrientes de inductor iLA, iLB y iLC de cada módulo inversor para esta prueba.
En las figuras 5.20 (a)-(b) se muestra la simulación y la medida de la tensión de salida vo(t), y corrientes de inductor iLA, iLB y iLC, para un salto de tensión de referencia de 40 Vp a 50 Vp. Se puede observar en dichas figuras como el tercer convertidor se pone en marcha, cuando se produce el salto de tensión de referencia, en respuesta al incremento de potencia demandada por la carga. En las figuras 5.20 (c)-(d) se muestran los resultados para un salto de la tensión de referencia de 50 Vp a 40 Vp. En este caso, el tercer convertidor se desconecta, cuando se produce el salto de la tensión de referencia, en respuesta al menor consumo de potencia de la carga.
vo(t)
iLC
iLB
iLA
Figura 5.19. Resultados experimentales del sistema de Gestión de Potencia. Tensión de salida, vo(t) [100 V/div] y corriente de inductor de los tres módulos inversores iLA [5 A/div], iLB [5 A/div], y iLC [5 A/div], para saltos sucesivos de tensión de referencia de 20 Vp, 30 Vp, 40 Vp y 50 Vp, con
RL = 5 Ω . El segundo inversor se conecta cuando la potencia de salida supera los 96W y el tercero cuando la potencia de salida supera los 202W

5.22 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
vo(t)
iLA
iLB
iLC
vo(t)
iLA
iLB
iLC
(a) (b)
vo(t)
iLA
iLB
iLC
vo(t)
iLC
iLB
iLA
(c) (d)
Figura 5.20. (a) Simulación y (b) resultados experimentales del sistema de Gestión de Potencia. Tensión de salida, vo(t) [100 V/div], y corriente de inductor de los tres módulos inversores iLA
[5A/div], iLB [5 A/div], y iLC [5 A/div], para un salto de tensión de referencia de 40 Vp a 50 Vp, con RL = 5 Ω con los umbrales de potencia indicados en la figura 5.19. (c) Simulación y (d) resultados experimentales de la tensión de salida vo(t), [100 V/div], y corriente de los inductores iLA [5 A/div], iLB [5 A/div], y iLC [5 A/div], para un salto de tensión de referencia de 50 Vp a 40 Vp, con RL=5 Ω
Los resultados obtenidos en las pruebas realizadas con el sistema de Gestión de Potencia validan el buen comportamiento de este sistema, tanto en situaciones de conexión como desconexión de módulos inversores. Igualmente estos resultados han validado la compatibilidad del algoritmo ZAD con el sistema de Gestión de Potencia y el buen comportamiento de este algoritmo en los transitorios de conexión-desconexión.
5.9.3. Resultados del sistema modular de potencia con la técnica interleaving
Para probar las prestaciones de la técnica interleaving se ha efectuado un estudio comparativo del funcionamiento del sistema modular de potencia con y sin interleaving que incluyen medidas en el dominio temporal y frecuencial de la corriente de salida, junto con los índices de error considerados en el capítulo 3. Las pruebas se han realizado para los casos de dos y tres inversores activos con el objetivo de comprobar que el funcionamiento de la técnica interleaving es correcto independientemente del número de inversores activos.

Capítulo 5. Aplicación del algoritmo ZAD al control de onduladores conectados en paralelo. 5.23 Operación en “interleaving”
• Sistema modular con dos inversores activos
En primer lugar se ha probado el sistema modular con sólo dos inversores activos, siendo la tensión de entrada E=60 V, la tensión de referencia vr(t)=45sen(2·π·50·t) y la resistencia de carga RL = 5 Ω.
En la figura 5.21 se presenta la medida de la tensión de salida vo(t), la tensión de referencia vr(t) (desfasada 180º), y la tensión de error ve(t), del sistema modular de potencia (a) sin la técnica interleaving y (b) con ella. La figura 5.22 muestra el rizado de la corriente de salida io(t), tanto en el dominio temporal como en el frecuencial (a)-(c) sin interleaving y (b)-(d) con interleaving. En la figura 5.23 se puede observar la corriente de inductor del inversor A, iLA y del inversor B, iLB, (a) sin interleaving y (b) con interleaving. En la figura 5.24 se muestra con más detalle ambas corrientes junto con la señal de control correspondiente donde se puede observar la sincronía del comienzo de la señal PWM en el control sin interleaving (figura 5.24. (a)) y el desfase de T/2 en el caso de utilizar señales de control con interleaving (figura 5.24 (b)).
vo(t) vr(t)
ve(t)
vo(t) vr(t)
ve(t)
(a) (b)
Figura 5.21. Resultados experimentales de la tensión de salida en régimen estacionario vo(t) [20V/div], tensión de referencia vr(t) [20 V/div], y tensión de error ve(t) [500 mV/div], (a) sin
interleaving y (b) con interleaving
io(t)
io(t)
(a) (b)

5.24 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
io(f)
io(f)
(c) (d)
Figura 5.22. Resultados experimentales del rizado de la corriente de salida en régimen estacionario io(t) [1 A/div], (a) sin interleaving y (b) con interleaving. Espectro de la corriente de
salida en régimen estacionario io (f) [10 dB/div, 62.5kHz/div], (c) sin interleaving y (d) con interleaving
iLA
iLB
iLA
iLB
(a) (b)
Figura 5.23. Medida de la corriente de inductor del primer inversor iLA [2 A/div], y del segundo inversor iLB [2 A/div], (a) sin interleaving y (b) con interleaving
iLA
c1
c2
iLB
iLA
iLB
c2
c1
(a) (b)
Figura 5.24. Detalle de las corrientes de inductor iLA [2 A/div], e iLB [2 A/div], junto con la señal de control del inversor A, c1 [5 V/div] y del inversor B, c2 [5 V/div], (a) sin interleaving y (b) con
interleaving

Capítulo 5. Aplicación del algoritmo ZAD al control de onduladores conectados en paralelo. 5.25 Operación en “interleaving”
Los resultados obtenidos con dos módulos activos operando en interleaving no sólo validan el diseño realizado sino que confirman las previsiones respecto a la reducción del rizado de la corriente de salida. Además, el modo de operación en interleaving mejora la THD de la tensión de salida, que pasa del 0.36% al 0.27%, y reduce el valor eficaz de la tensión de error del 0.8% al 0.56% del valor eficaz de la tensión de referencia.
• Sistema modular con tres inversores activos
En segundo lugar se ha probado el sistema modular con los tres inversores activos, siendo la tensión de entrada E=70 V, la tensión de referencia vr(t) = 55sen(2·π·50·t) y el valor de la resistencia de carga RL=5 Ω. Con el aumento del número de inversores activos y el incremento del nivel de la corriente de salida, se puede apreciar más claramente las ventajas que introduce el modo de operación en interleaving con respecto al control síncrono.
En la figura 5.25 (a)-(b) se presenta la medida de la tensión de salida vo(t), la tensión de referencia vr(t) (desfasada 180º) y la tensión de error ve(t), del sistema modular de potencia con y sin la técnica interleaving.
En la figura 5.26 se muestra el rizado de la corriente de salida tanto en el dominio temporal como en el frecuencial (a)-(c) sin interleaving y (b)-(d) con interleaving. En concreto, en la figura 5.26 (d) se puede observar como la componente de la corriente de salida a la frecuencia de conmutación se ha reducido sensiblemente al introducir la técnica interleaving, mientras que el resto de componentes, excepto los que coinciden con el triple de la frecuencia de conmutación y sus múltiplos, prácticamente han desaparecido. Se confirma de este modo que la frecuencia del rizado de la corriente de salida del sistema modular es N veces la frecuencia del rizado de la corriente de salida de un solo módulo inversor, siendo N el número de convertidores activos conectados en paralelo.
En la figura 5.27 se puede observar la corriente de inductor de cada módulo inversor (a) sin interleaving y (b) con interleaving, donde se comprueba que con el modo de operación en interleaving el sistema modular presenta el mismo buen comportamiento frente a la distribución equitativa de corrientes que utilizando un control síncrono. En la figura 5.27 (c)-(d) se presenta una imagen ampliada de la corriente de inductor de cada módulo inversor sin y con interleaving respectivamente, donde se puede observar el desfase entre los periodos de conmutación que introduce la técnica interleaving. Dicho desfase se puede comprobar claramente en la figura 5.27 (f) donde se representan las señales PWM que controlan cada uno de los módulos inversores operando con la técnica interleaving.
En la figura 5.28 se comparan las distintas superficies que intervienen en el control del sistema modular (a) sin y (b) con interleving. Al comparar las superficies σ1, σ2 y σ3, con y sin interleaving se aprecian notables diferencias. En efecto, la superficie σ1 tiene un menor valor eficaz con interleaving debido a la disminución del rizado de la tensión de salida. Por otra parte, las superficies σ2 y σ3 lógicamente presentan un mayor valor eficaz con el interleaving ya que, al desfasar las corrientes de inductor, su diferencia es mas elevada.
En la figura 5.29 se presenta el resultado obtenido en una prueba de salto de carga de circuito abierto a 5 Ω, con y sin interleaving, observándose un comportamiento similar en ambos casos.

5.26 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
vo(t) vr(t)
ve(t)
vo(t)
ve(t)
vr(t)
(a) (b)
Figura 5.25. Resultados experimentales de la tensión de salida en régimen estacionario vo(t) [20V/div], tensión de referencia vr(t) [20 V/div], y tensión de error ve(t) [500 mV/div], (a) sin
interleaving y (b) con interleaving
io(t)
io(t)
(a) (b)
io(f)
io(f)
(c) (d)
Figura 5.26. Resultados experimentales del rizado de la corriente de salida en régimen estacionario io(t) [1 A/div], (a) sin interleaving y (b) con interleaving. Espectro de la corriente de
salida en régimen estacionario io (f) [10 dB/div, 62.5kHz], (c) sin interleaving y (d) con interleaving

Capítulo 5. Aplicación del algoritmo ZAD al control de onduladores conectados en paralelo. 5.27 Operación en “interleaving”
iLA
iLB
iLC
iLA
iLB
iLC
(a) (b)
iLA
iLB
iLC
iLA
iLB
iLC
(c) (d)
c1
c2
c3
c1
c2
c3
(e) (f)
Figura 5.27. Corrientes de inductor de los tres módulos inversores iLA [2 A/div], iLB [2 A/div], y iLC [2 A/div], (a) sin interleaving y (b) con interleaving. Detalle de las corrientes de inductor iLA [2A/div], iLB [2 A/div], y iLC [2 A/div], (c) sin interleaving y (d) con interleaving. Detalle de la
señal control PWM del módulo inversor A, c1 [2 V/div], del B, c2 [2 V/div], y del C, c3 [2 V/div], (e) sin interleaving y (f) con interleaving

5.28 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
σ 1
σ 2
σ 3
σA
σB
σC
(a)
σ1
σ2
σ3
σA
σB
σC
(b)
Figura 5.28. Superficies σ1 [2 V/div], σ2 [2V/div], σ3 [2 V/div], σA [1 V/div], σB [1 V/div] y σC [1 V/div], (a) sin interleaving y (b) con interleaving
vo(t)
io(t)
vo(t)
io(t)
(a) (b)
Figura 5.29. Respuesta transitoria de la tensión de salida vo (t) [20 V/div], y corriente de salida io(t) [5 A/div], para un salto de carga de circuito abierto a 5 Ω (a) sin interleaving y (b) con
interleaving

Capítulo 5. Aplicación del algoritmo ZAD al control de onduladores conectados en paralelo. 5.29 Operación en “interleaving”
Los resultados obtenidos con tres módulos activos operando en interleaving confirman de nuevo la validez del diseño realizado. Se ha obtenido una reducción del rizado de la corriente de salida y un aumento de su frecuencia. Análogamente a lo observado con dos módulos activos, el modo de operación en interleaving también ha mejorado en este caso la THD de la tensión de salida, que pasa del 0.3% para el modo de operación síncrono al 0.21% para el modo de operación en interleaving. Igualmente se observa una ligera mejora en el valor eficaz de la tensión de error que pasa del 0.63% al 0.56% del valor eficaz de la tensión de referencia.
• Índices de error con y sin interleaving
Para medir de forma cuantitativa la mejora que introduce la técnica del interleaving con respecto al control síncrono se han efectuado medidas cuantitativas en el dominio temporal y en el frecuencial. En el dominio temporal se han medido los índices de error l1, l2 y l∞ normas definidas según las expresiones (3.10)-(3.13). En la tabla 5.5 se muestran los resultados obtenidos en las medidas realizadas con y sin interleaving, incluyendo además el valor eficaz de la tensión de error y la distorsión armónica total, THD, de la tensión de salida, donde se puede observar la mejora que introduce el interleaving en cuanto a regulación de la tensión de salida. En la tabla 5.6 se muestran los valores correspondientes a las medidas del valor eficaz de la corriente de inductor de los módulos A, B y C con y sin interleaving. También se indica el valor del índice de error de corriente de inductor ierror(%), definido según la expresión (3.14).
Vr Nº inv. activos Sin interleaving Con interleaving
L1 (%)
L2 (%)
L∞ (%)
THD(%)
Verror(Vrms)
L1 (%)
L2 (%)
L∞ (%)
THD (%)
Verror(Vrms)
45Vp 2 0.822 0.784 0.909 0.36 0.254 0.588 0.564 0.818 0.27 0.180
55Vp 3 0.625 0.620 0.927 0.3 0.245 0.537 0.560 1.097 0.21 0.221
Tabla 5.5. Índices de error y THD de la tensión de salida con interleaving y con control síncrono
Vr Nº inv. activos Interleaving iL1
(Arms)iL2
(Arms)iL3
(Arms)iL1-iL2 (%)
iL1-iL3 (%)
iL2-iL3 (%)
NO 3.09 3.08 X 0.32 X X 45Vp 2
SI 3.08 3.07 X 0.32 X X
NO 2.51 2.58 2.56 2.74 1.96 0.78 55Vp 3
SI 2.52 2.56 2.58 1.57 2.35 0.78
Tabla 5.6. Valor eficaz de las corrientes de inductor e índices de error con y sin interleaving
Otra manera de evaluar cuantitativamente el efecto del interleaving es medir la reducción del rizado de tensión y corriente de salida que se obtiene con la técnica interleaving respecto al control síncrono. A partir del espectro de la tensión y la corriente de salida se puede obtener el valor eficaz del rizado de estas señales [Klaassens, 88]. En efecto, sea sX la señal, tensión o corriente, de la que se desea obtener el valor eficaz de su rizado. Esta señal se puede expresar como una serie de Fourier:

5.30 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
TconeCs o
n
tjnnx
oπωω 2
== ∑∞
−∞= (5.10)
siendo su valor eficaz:
∑∑∞
=
∞
−∞=
==1
22, 2
1n
nn
nrmsx ACs (5.11)
donde An es la amplitud del armónico “n”.
Si se aplica la expresión (5.11) sobre las componentes espectrales cuya frecuencia es múltiplo de la frecuencia de conmutación se obtiene el valor eficaz del rizado de la señal considerada. En la tabla 5.7 se muestra los resultados obtenidos en el cálculo del valor eficaz del rizado de la tensión y corriente de salida para el caso de dos inversores activos con una tensión de referencia de 45 Vp, y tres inversores activos con una tensión de referencia de 55 Vp.
Vr = 45 Vp Vr = 55 Vp Rizado Sin
interleavingCon
InterleavingSin
interleavingCon
interleaving vo (Vrms) 0.1426 0.0962 0.1463 0.0954
io (Arms) 0.0340 0.0227 0.0426 0.0190
Tabla 5.7. Valor eficaz del rizado de la tensión y corriente de salida con y sin interleaving para una tensión de referencia de 45 Vp con dos inversores activos, y 55 Vp con tres inversores activos
5.10. Conclusiones
En este capítulo se ha presentado la aplicación del algoritmo ZAD para el control en modo de deslizamiento a frecuencia fija de un sistema modular de potencia formado por tres módulos inversores conectados en paralelo. Se ha descrito el diseño del subsistema de control basado en una FPGA, presentándose los resultados de simulación y experimentales obtenidos en referencia al control de las variables de estado y a la gestión de potencia. Asimismo se ha presentado una nueva propuesta de implementación de la técnica de interleaving, basada en un dispositivo FPGA, realizándose un estudio sobre las mejoras que aporta dicha técnica en el funcionamiento del sistema modular. A continuación se comentan las conclusiones relacionadas con estos aspectos.
• Conclusiones sobre la implementación basada en una FPGA del algoritmo ZAD para sistema modulares
En la implementación práctica del algoritmo ZAD para el control del sistema modular de potencia se han confirmado las ventajas que supone utilizar dispositivos FPGA con respecto a otros componentes programables de arquitectura rígida como microprocesadores, microcontroladores o procesadores digitales de señal. En efecto, la posibilidad de ejecución concurrente que ofrece este tipo de componentes ha permitido implementar en una sola FPGA el control mediante el algoritmo ZAD de los tres inversores

Capítulo 5. Aplicación del algoritmo ZAD al control de onduladores conectados en paralelo. 5.31 Operación en “interleaving”
que conforman el sistema modular de potencia manteniendo la misma velocidad de proceso que la obtenida en el capítulo 4 con el control de un solo inversor. Esto es posible gracias a la ejecución en paralelo del control ZAD de cada inversor. Igualmente, el sistema de gestión de potencia, que determina los inversores que deben estar activos, ejecuta sus funciones en paralelo a los algoritmos ZAD, por lo que no introduce ningún retardo adicional.
• Conclusiones sobre el control de las variables de estado
Para validar las prestaciones del control en modo de deslizamiento a frecuencia fija basado en el algoritmo ZAD aplicado al control de sistemas modulares de potencia se han efectuado diversas pruebas y medidas cuantitativas de la distorsión armónica total de la tensión de salida, del valor eficaz de la tensión de error y de la corriente de inductor de cada módulo inversor. En cuanto a la distorsión armónica con carga lineal se ha obtenido un resultado de 0.2%-0.3%, similar al presentado en el capítulo 3 para una frecuencia de conmutación variable. Para carga no lineal la THD, entre 0.6 y 0.7%, es ligeramente superior a la obtenida con la frecuencia de conmutación libre.
Con respecto al valor eficaz de la tensión de error está comprendido entre el 0.56% y el 0.8% del valor eficaz de la tensión de referencia, lo cual está dentro del margen obtenido para las pruebas realizadas a frecuencia variable. En cuanto a la corriente de inductor de los módulos inversores se ha medido un desapareamiento de corrientes que oscila entre el 0.78 y el 2.74% de la corriente media de inductor, mientras que para frecuencia libre el margen está comprendido entre 0 y 2%. Por otra parte, las pruebas de salto de carga han dado como resultado un transitorio de duración parecida al obtenido con frecuencia de conmutación libre.
Los resultados obtenidos en la aplicación del algoritmo ZAD de frecuencia fija al control del sistema modular de potencia evidencian que las prestaciones conseguidas con dicho algoritmo son similares a las obtenidas con el control en modo de deslizamiento a frecuencia variable.
• Conclusiones sobre el sistema de Gestión de Potencia
Se ha probado el mismo sistema de Gestión de Potencia que el descrito en el capítulo 3. Los resultados obtenidos en las pruebas realizadas han permitido validar su correcto funcionamiento en este caso, así como comprobar la robustez del control en modo de deslizamiento a frecuencia fija basado en el algoritmo ZAD frente a las variaciones del número de módulos activos.
• Conclusiones sobre la implementación y prestaciones de la técnica interleaving
Se ha presentado una nueva propuesta de implementación práctica de la técnica interleaving basada en un dispositivo FPGA y aplicada a sistemas modulares inversores. La ventaja principal de esta implementación consiste en que tiene en cuenta la variación del número de convertidores activos sin límite de convertidores. Esta implementación es, por tanto, compatible con sistemas de gestión de potencia. La técnica interleaving se ha probado con un sistema inversor modular compuesto de tres inversores controlados

5.32 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
mediante el algoritmo de frecuencia fija ZAD. Se ha realizado un estudio comparativo del funcionamiento del sistema modular con y sin la técnica interleaving. Los resultados obtenidos, cualitativos y cuantitativos, en las pruebas realizadas, tanto en el dominio temporal como en el frecuencial, confirman las mejoras previstas en cuanto a la reducción de la amplitud y aumento de la frecuencia del rizado de la corriente de salida. Se han podido observar otros beneficios de la técnica interleaving como son la disminución de la THD de la tensión de salida (del 0.3% al 0.2%) y del valor eficaz de la tensión de error con respecto al control síncrono. Asimismo, la técnica interleaving ha sido probada con éxito en situaciones de conexión-desconexión de módulos inversores presentando el sistema un comportamiento dinámico similar al obtenido con el control síncrono. También se ha podido comprobar en las pruebas realizadas con saltos de carga que el empleo de la técnica interleaving no modifica la respuesta dinámica del sistema con respecto al control síncrono. Se puede concluir que los resultados obtenidos con relación a la técnica interleaving validan el diseño propuesto.

6.1
CAPÍTULO 6
Conclusiones y líneas futuras
6.1. Conclusiones del trabajo
En este apartado se presentan, de forma resumida, las conclusiones más importantes del presente trabajo:
• Se ha aplicado la metodología de diseño del control en modo de deslizamiento para sistemas multivariables a los sistemas modulares inversores y se han propuesto funciones de conmutación que implementan las estrategias de ecualización de corrientes Master-Slave, Circular Chain Control y Central Limit Control.
• El cálculo de la ley de control mediante los métodos jerárquico y de diagonalización ha permitido salvar las dificultades de diseño asociadas al acoplamiento de las variables de control y establecer restricciones de diseño, así como consideraciones a tener en cuenta sobre la estructura del sistema modular, para conseguir la alcanzabilidad y existencia del régimen deslizante.
• Igualmente, a partir del estudio del dominio de existencia del régimen deslizante en estado estacionario se han deducido limitaciones de diseño de los parámetros del sistema en términos del módulo de la respuesta frecuencial del filtro de salida para el caso del método de diagonalización que pueden aplicarse, igualmente, al caso jerárquico.
• La aplicación del segundo método de Lyapunov para analizar la convergencia a la superficie intersección σ(x,t)=0 (superficie eventual) indica que dicha superficie es atractora del vector de estado para todas las estrategias de ecualización de corriente consideradas.
• La dinámica ideal del sistema modular en régimen deslizante, obtenida mediante el método del control equivalente, permite concluir que el comportamiento dinámico y estático del sistema modular en régimen deslizante es el mismo independientemente de la estrategia de ecualización de corrientes considerada y

6.2 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
que, en régimen permanente, el sistema tiene el comportamiento esperado tanto en el seguimiento de la tensión AC de salida como en la ecualización de corrientes de inductor.
• Para validar el diseño del control en modo de deslizamiento del sistema modular inversor se ha realizado un prototipo de laboratorio implementando el control mediante un dispositivo lógico programable FPGA que ejecuta de forma concurrente las funciones de conmutación y la gestión de funcionamiento del sistema modular.
• Los resultados experimentales y por simulación obtenidos en las diferentes pruebas realizadas con un sistema modular formado por tres inversores deliberadamente desapareados muestran un buen comportamiento, tanto en el control de las variables de estado como en la gestión del sistema modular, validando con ello el diseño realizado.
• Se ha abordado el problema del control en modo de deslizamiento a frecuencia fija presentando un nuevo algoritmo basado en el promediado cero de la dinámica (ZAD). El algoritmo se obtiene bajo la hipótesis de una evolución lineal de la superficie de conmutación durante el periodo de conmutación y a través de consideraciones geométricas que permiten deducir el ciclo de trabajo en función del comportamiento de la superficie de conmutación.
• Se ha realizado el diseño e implementación basada en una FPGA del algoritmo ZAD. Los tiempos de proceso conseguidos con el diseño han permitido realizar un control ciclo a ciclo y confirman las ventajas de este tipo de componentes en la realización de diseños complejos.
• Aprovechando la frecuencia de conmutación fija obtenida con el algoritmo ZAD se ha propuesto e incorporado al diseño FPGA una nueva realización de la técnica de interleaving aplicada a sistemas modulares de potencia que tiene en cuenta un número variable de convertidores activos.
• Los resultados experimentales y de simulación obtenidos evidencian que las prestaciones conseguidas con el algoritmo ZAD son similares a las obtenidas con un control en modo de deslizamiento y globalmente mejores que con un control PWM clásico tanto en el error en régimen estacionario como en la respuesta transitoria. Por otra parte, se ha podido comprobar que la técnica interleaving introduce las mejoras previstas en cuanto a la reducción de la amplitud del rizado de la tensión y corriente de salida y, además, mejora la THD de la tensión de salida y el valor eficaz de la tensión de error. De todo ello se puede indicar las siguientes conclusiones:
o El algoritmo ZAD es una propuesta válida que posee las ventajas del control en modo de deslizamiento en cuanto a la robustez frente a variaciones paramétricas al mismo tiempo que presenta los beneficios propios del funcionamiento a frecuencia fija característicos del control PWM clásico.
o La técnica interleaving mejora las prestaciones de funcionamiento del sistema modular a frecuencia fija.
• Finalmente, cabe destacar que los resultados obtenidos en las implementaciones prácticas basadas en una FPGA de los controles en modo de deslizamiento de frecuencia libre, del algoritmo ZAD y de los sistemas de gestión de funcionamiento del sistema modular de potencia confirman las ventajas previstas en este tipo de

Capítulo 6. Conclusiones y líneas futuras 6.3
componentes, a saber: la alta velocidad de proceso con relación a la complejidad de las tareas realizadas, la flexibilidad de diseño y el bajo coste. Esto permite concluir que los dispositivos FPGA representan una solución eficaz y adecuada a los requisitos y crecientes exigencias de diseño del control de los sistemas de potencia.
6.2. Líneas futuras de trabajo
A partir del trabajo desarrollado y de las conclusiones extraídas se pueden apuntar las siguientes líneas de continuidad en la investigación:
• Estudio comparativo de dinámica cuasi-sliding (tanto a frecuencia variable como a frecuencia constante con el algoritmo ZAD) para las distintas estrategias de ecualización de corriente.
• Estudio de la influencia de la frecuencia de actualización de la señal de control y de la resolución de los convertidores A/D en el comportamiento del sistema modular inversor.
• Generalización de los diseños FPGA propuestos para sistemas que incorporen N módulos inversores.
• Evaluación de otras plataformas digitales para la implementación del sistema de control como pueden ser microprocesadores, microcontroladores o procesadores digitales de señal.
• Extensión del actual trabajo a sistemas modulares trifásicos con conexión a red.
• Evaluación y diseño del control en modo de deslizamiento multivariable aplicado a otras topologías de conversión DC/AC.
• Evaluación comparativa con otras técnicas de control aplicadas a sistemas modulares inversores.
• Estudio comparativo con las estrategias de ecualización de corriente derivadas del método “droop”.


A.1
ANEXOS
Anexo 1: Modelo MATLAB-SIMULINK del sistema modular inversor con control en modo de deslizamiento a frecuencia libre
En las siguientes figuras se muestra los esquemas de los diferentes bloques que componen el modelo MATLAB-SIMULINK utilizado para realizar las simulaciones del sistema inversor de potencia presentadas en el capítulo 3. En la figura A1.1 se muestra el esquema general del sistema modular inversor donde se puede observar los siguientes componentes:
• Etapa de potencia:
En la figura A1.2 se muestra con detalle la conexión en paralelo de los tres módulos onduladores que conforman la etapa de potencia del sistema inversor, mientras que en la figura A1.3 se observa el modelo de un módulo donde se ha tenido en cuenta las resistencias de pérdidas de los inductores y del condensador.
• Acondicionador de señal y adquisición de datos:
En la figura A1.4 se muestra el modelo SIMULINK del acondicionador de señal que incorpora la respuesta en frecuencia de los sensores de corriente y del amplificador de aislamiento que sensa la tensión de salida. En la figura A1.5 se muestra el sistema de adquisición de datos que modela el funcionamiento de los convertidores ADC MAX153.
• Diseño FPGA:
Una parte del diseño FPGA está modelado por los bloques que calculan las superficies de conmutación para la estrategia M-S (ver figura A1.6), para la estrategia CCC (ver figura A1.7), para la estrategia CLC (ver figura A1.8) y para la superficies transformadas (ver figura A1.9). En la figura A1.10 se muestra el sistema de multiplexores que permite seleccionar la estrategia a utilizar en cada momento, junto con el bloque de salida que se encarga de generar el tiempo muerto y el control de 2 ó 3 niveles. Los detalles del modelo de este último bloque se muestran en la figura A1.11. Otra parte importante del diseño FPGA es el sistema de gestión de potencia cuyo modelo SIMULINK se muestra en las figuras A1.12 y A1.13.

A.2 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Etapa depotencia
Acondicionador de señal y adquisición de datos
Diseño FPGA
Etapa depotencia
Acondicionador de señal y adquisición de datos
Diseño FPGA
Figura A1.1. Esquema general del modelo SIMULINK del sistema modular inversor
Figura A1.2. Etapa de potencia del sistema modular con tres módulos conectados en paralelo

Anexos A.3
Figura A1.3. Modelo SIMULINK de un modulo inversor
Figura A1.4. Modelo SIMULINK del acondicionador de señal
Figura A1.5. Sistema de adquisición de datos

A.4 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Figura A1.6. Modelo de la implementación de la estrategia Master-Slave
Figura A1.7. Modelo de la implementación de la estrategia Circular Chain Control
Figura A1.8. Modelo de la implementación de la estrategia Central Limit Control

Anexos A.5
Figura A1.9. Modelo de la implementación de las superficies transformadas
Figura A1.10. Selección de la estrategia de control y bloque generador de tiempo muerto

A.6 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Figura A1.11. Detalle del generador de tiempo muerto junto con el generador de tres niveles
Figura A1.12. Modelo SIMULINK del sistema de gestión de potencia

Anexos A.7
Figura A1.13. Modelo del bloque de memoria

A.8 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
Anexo 2: Modelo MATLAB-SIMULINK del sistema modular inversor con control basado en el algoritmo ZAD
En los siguientes apartados se muestran los esquemas del modelo MATLAB-SIMULINK utilizado para realizar las simulaciones presentadas en los capítulos 4 y 5. Se han expuesto únicamente los bloques que no aparecen o que han sido modificados con respecto al modelo presentado en el Anexo 1. En concreto en la figura A2.1 se muestra el esquema del modelo que genera las superficies de conmutación correspondientes a la tabla 5.2, en la figura A2.2 se observa el esquema general del modelo del algoritmo ZAD cuyos detalles se muestran en las figuras A2.3 y A2.4.
Figura A2.1. Generación de las superficies de conmutación transformadas para 1, 2 y 3
convertidores activos
Figura A2.2. Esquema general del algoritmo ZAD

Anexos A.9
Figura A2.3. Modelo del bloque “D y derivada S” de la figura A2.2
Figura A2.4. Modelo del bloque “calculo del ciclo de trabajo” de la figura A2.2


B.1
BIBLIOGRAFÍA
[Ahmed, 97] Irfan Ahmed, “Implementation of PID and Deadbeat Controllers with the TMS320
Family,” Application Report SPRA083 of Texas Instrument Inc. 1997.
[Ashenden, 96] Peter J. Ashenden, “The Designer`s Guide to VHDL,” Morgan Kaufmann Publishers, Inc., 1996.
[Baker, 98a] David M. Baker, Chan Whye Meng, Vassilios G. Agelidis, and Chem V. Nayar, “Quasi-Resonant Circuit DC-Link Inverter using a Zero Average Current Error Control Algorithm,” Proceedings of the IEEE International Symposium on Industrial Electronics (ISIE), pp. 456-461. 1998.
[Baker, 98b] D. M. Baker, V. G. Agelidis and C. V. Nayar, “Implementation of a Zero-Average Current error control algorithm for Inverters using a Digital Signal Processor,” Proceedings of the IEEE International Symposium on Industrial Electronics (ISIE), pp. 450-455. 1998.
[Bester, 98]
D. Bester, J. du Toit and J. Enslin, “High Performance DSP/FPGA Controller for Implementation of Computationally Intensive Algorithms,” Proceedings of the IEEE International Symposium on Industrial Electronics (ISIE), pp. 240-244. 1998.
[Biel, 98] Domingo Biel, Enric Fossas, Francesc Guinjoan and Rafael Ramos, “Sliding Mode Control of a Buck Converter for AC Signal Generation,” Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS), pp. 450-453. 1998.

B.2 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
[Biel, 99] Domingo Biel, Enric Fossas, Francesc Guinjoan and Rafael Ramos, “Sliding Mode Control of a Boost-Buck Converter for AC Signal Tracking Task,” Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS), pp. 242-245. 1999.
[Biel, 2000] Domingo Biel, Francesc Guinjoan, Enric Fossas and Rafael Ramos, “Master-Slave Sliding-Mode Control Design in Parallel-Connected Inverters,” International Conference Electrical Drives and Power Electronics (EDPE), pp.75-79. 2000.
[Biel, 2001a] D. Biel, E. Fossas, F. Guinjoan, E. Alarcón and A. Poveda, “Application of Sliding-mode control to the design of a Buck-based Sinusoidal Generator,” IEEE Transactions on Industrial Electronics, Vol. 48, nº 3, pp. 563-571. 2001.
[Biel, 2001b] Domingo Biel, Enric Fossas, Rafael Ramos and Antoni Sudrià, “Programmable Logic Device Applied to the Quasi-Sliding Control Implementation Based on Zero Averaged Dynamics,” IEEE Conference on Decision and Control (CDC), pp. 1825-1830. 2001.
[Bilanovic, 83] F. Bilanovic, O. Music and A. Sabanovic, “Buck converter regulator operating in the sliding mode,” Proceedings of 7th International PCI Conference on Power Conversion, pp. 251-258. 1983.
[Botteron, 2001] F. Botteron, H. Pinheiro, H.A. Grundling, J.R. Pinheiro, H.L. Hey, “Digital voltage and current controllers for three-phase PWM inverter for UPS applications,” Conference Record of the IEEE Industry Applications Conference, Vol. 4, pp. 2667 –2674. 2001.
[Boudjema, 89] F. Boudjema, M. Boscardin, P. Bidan, J.C. Marpinard, M. Valentin and J.L. Abatut, “VSS approach to a full bridge Buck converter used for AC sine voltage generation,” Proceedings of International Conference on Industrial Electronics Control and Instrumentation (IECON), pp. 82-89. 1989.
[Boyce, 98] William E. Boyce, Richard C. DiPrima, “Elementary differential equations and boundary value problems,” John Wiley & Sons, Inc. 1998.
[Bühler, 86]
H. Bühler, “Réglage par mode de glissement,” Presses Polytechniques Romandes, 1986.
[Capel, 83] A. Capel, J.C. Marpinard, J. Jalade and M. Valentin, “Large-Signal dynamic stability analysis of synchronized current-controlled modulators. Application to sine-wave power inverters,” ESA Journal, Vol. 7, pp. 63-74. 1983.

Bibliografía B.3
[Carpita, 88] Carpita M., Marchesoni M., Oberti M. y Puglisi L., “Power Conditioning System using Sliding Mode Control,” Proceedings of the IEEE Power Electronics Specialists Conference (PESC), pp. 626-633. 1988.
[Carpita, 93] Carpita M., Farina P. and Tenconi S., “A Single Phase, Sliding Mode controlled inverter with three levels output voltage for UPS or Power Conditioning Applications,” Proceedings of European Conference Power Electronics and Applications (EPE), pp. 272-277. 1993.
[Carpita, 94] Carpita M., “Sliding mode controlled inverter with switching optimization techniques,” European Power Electronics Journal, Vol. 4, nº 3, pp. 30-35. 1994.
[Carpita, 96] M. Carpita and M. Marchesoni, “Experimental study of a power conditioning using sliding mode control,” IEEE Transactions on Power Electronics, Vol. 11, nº 5, pp. 731-742. 1996.
[Cha, 90] H. Cha, S. Kim, M. Kang and Y. Chung, “Real-Time Digital control of PWM Inverter with PI Compensator for Uninterruptible Power Supply,” Proceedings of International Conference on Industrial Electronics Control and Instrumentation (IECON), pp. 1124-1128. 1990.
[Chan, 94] Pak K. Chan, Smiha Mourad, “Digital Design Using Field Programmable Gate Arrays,” Prentice Hall. 1994.
[Chandorkar, 93] Mukul C. Chandorkar, Deepakraj M. Divan and Rambabu Adapa, “Control of Parallel Connected Inverters in Standalone AC Supply Systems,” IEEE Transactions on Industry Applications, Vol. 29, nº 1, pp. 136-143. 1993.
[Chandorkar, 94] M. C. Chandorkar, D. M. Divan, Y. Hu and B. Banerjee, “Novel Architectures and Control for Distributed UPS Systems,” Proceedings of Applied Power Electronics Conference and Exposition (APEC), pp. 683- 689. 1994.
[Chang, 95a] Chin Chang and Mike A. Knights, “Interleaving Technique in Distributed Power Conversion Systems,” IEEE Trans. on Circuits and Systems-I: Fundamental Theory and Applications, Vol. 42, nº 5, pp. 245-251. 1995.
[Chang, 95b]
Chin Chang, “Current Ripple Bounds in Interleaved DC-DC Power Converters,” Proceedings of 1995 International Conference on Power Electronics and Drive Systems, pp. 738-743. 1995.

B.4 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
[Chiang, 2001] Chiang, S.J.; Chang, J.M., “Parallel control of the UPS inverters with frequency-dependent droop Scheme,” Proceedings of the IEEE Power Electronic Specialist Conference (PESC), pp. 957 – 961. 2001.
[Chiarelli, 93] C. Chiarelli, L. Malesani, S. Pirondini and P. Tomasin. “Single-Phase, three level, constant frequency current reference hysteresis control for UPS applications,” Proceedings of European Conference on Power Electronics and Applications (EPE), pp. 180-185. 1993.
[Coelho, 98] E. A. A. Coelho, B. R. Menezes, P. C. Cortizo, P. F. Donoso Garcia, “Sliding Mode Controller for Parallel Connected Inverters,” Proceedings of the IEEE International Power Electronics Congress (CIEP), pp. 96-102. 1998.
[DeCarlo, 88] R. A. DeCarlo, S. H. Zak and G. P. Matthews, “Variable Structure Control of Nonlinear Multivariable Systems: A Tutorial,” Proceedings of the IEEE, Vol. 76, nº 3, pp. 212-232. 1988.
[de Castro, 2003] Ángel de Castro, Pablo Zumel, Oscar García, Teresa Riesgo and Javier Uceda, “Concurrent and Simple Digital Controller of an AC/DC Converter With Power Factor Correction Based on an FPGA,” IEEE Transactions on Power Electronics, Vol. 18, nº 1, pp. 334-343. 2003.
[Donoso-García, 96] P. Donoso-García, P.R. Cortizo, B. de Menezes and M. A. Severo Mendes, “Sliding Mode control for current distribution in DC-to-DC conected in parallel,” Proceedings of the IEEE Power Electronic Specialist Conference (PESC), pp. 1513-1518. 1996.
[Donoso-García, 98] Pedro F. Donoso-García, Porfirio C. Cortizo, Benjamin R. de Menezes and Marcos A. Severo, “Sliding-Mode Control for Current Distribution in Parallel connected DC-DC Converters,” IEE Proceedings Electronic Power Applications, Vol. 145, nº 4, pp. 333-338. 1998.
[Emelyanov, 67] S. Emelyanov, “Variable Structure Control Systems,” Nauka, Moscú, 1967.
[Espinoza, 98] J. R. Espinoza, G. Joos, “DSP implementation of output voltage reconstruction in CSI-based converters,” IEEE Transactions on Industrial Electronics, Vol. 45 nº 6, pp. 895-904. 1998.
[Fossas, 92] Fossas, E., Martinez, L., Ordinas, J., “Sliding mode control reduces audiosusceptibility and load perturbation in the Cuk converter,” CAS-1. IEEE Trans. Circuits Syst. I, Vol. 39, nº 10, pp. 847-849. 1992.

Bibliografía B.5
[Gao, 93] Weibing Gao and James C. Hung, “Variable Structure Control of Nonlinear Systems: A New Approach,” IEEE Transactions on Industrial Electronics, Vol. 40, nº 1, pp. 45-55. 1993.
[Garabandic, 98] Djordje Garabandic, William Dunford and Trajko Petrovic, “Robust Decentralized Control of Parallel DC/DC Converters,” Proceedings of the IEEE Power Electronic Specialist Conference (PESC), pp. 911-915. 1998.
[Gokale, 85] K.P. Gokale, A. Kawamura and R.G. Hoft, “Dead-beat microprocessor control of PWM inverter for sinusoidal output waveform synthesis,” IEEE Trans. Ind. Applicat., Vol. IA-23, nº 5, pp. 901-910. 1985.
[Holtz, 88] Joachim Holtz, Wolfgang Lotzkat and Karl-Heinz Werner, “A High-Power Multitransistor-Inverter Uninterruptable Power Supply System,” IEEE Transactions on Power Electronics, Vol. 3, nº 3, pp. 278-285. 1988.
[Holtz, 89] Holtz, J., Werner, K.-H., “Multi-inverter UPS system with redundant load sharing control,” Proceedings of International Conference on Industrial Electronics Control and Instrumentation (IECON), pp. 159 – 164. 1989.
[Holtz, 90] Joachim Holtz and Karl-Heinz Werner, “Multi-Inverter UPS System with Redundant Load Sharing Control,” IEEE Transactions on Industrial Electronics, Vol. 37, nº 6, pp. 506-513. 1990.
[Hung, 93] John Y. Hung, Weibing Gao and James C. Hung, “Variable Structure Control: A Survey,” IEEE Transactions on Industrial Electronics, Vol. 40, nº 1, pp. 2-22. 1993.
[Huth, 96] Huth, S., ”DC/DC-converters in parallel operation with digital load distribution control,” Proceedings of the IEEE International Symposium on Industrial Electronics (ISIE), Vol. 2, pp. 808 – 813. 1996.
[Irving, 2000] Irving, B.T., Jovanovic, M.M., “Analysis, design, and performance evaluation of droop current-sharing method,” Proceedings of Applied Power Electronics Conference and Exposition (APEC), pp. 235 - 241. 2000.
[Jenkins, 94]
Jesse H. Jenkins, “Designing with FPGA and CPLDs,” Prentice Hall, 1994.

B.6 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
[Jezernik, 89] K. Jezernik, M. Milanovic and D. Zadravec, “Microprocessor control of PWM inverter for sinusoidal output,” Proceedings of Electrotechnical Conference 'Integrating Research, Industry and Education in Energy and Communication Engineering' (MELECON), pp. 47-51. 1989.
[Jezernik, 90] K. Jezernik and D. Zadravec, “Sliding mode controller for a single phase inverter,” Proceedings of Applied Power Electronic Conference and Exposition (APEC), pp. 185-190. 1990.
[Jung, 94] Shih-Liang Jung and Ying-Yu Tzou, “Discrete Feedforward Sliding Mode Control of a PWM Inverter for Sinusoidal Output Waveform Synthesis,” Proceedings of the IEEE Power Electronic Specialist Conference (PESC), pp. 552-559. 1994.
[Jung, 96] S. Jung and Y. Tzou, “Discrete Sliding-mode control of a PWM inverter for sinusoidal output waveform synthesis with optimal sliding curve,” IEEE Transactions on Power Electronics, Vol. 11, nº 4, pp. 567-577. 1996.
[Jung, 97] S. Jung, H. Huang, M. Chang and Y. Tzou, “DSP-based multiple-loop strategy for single-phase inverters used in ac power sources,” Proceedings of the IEEE Power Electronic Specialist Conference (PESC), pp. 706-712. 1997.
[Jung, 99] S. Jung, M. Chang, J. Jyang, L. Yeh and Y. Tzou, “Design and Implementation of an FPGA-Based Control IC for AC-Voltage Regulation,” IEEE Transactions on Power Electronics, Vol. 14, nº 3, pp. 522-532. 1999.
[Kawabata, 88] Takao Kawabata and Shigenori Higashino, “Parallel Operation of Voltage Source Inverters,” IEEE Transactions on Industry Applications, Vol. 24, nº 2, pp. 281-287. 1988.
[Kawamura, 84] A. Kawamura and R.G. Hoft, “Instantaneous feedback controlled PWM inverter with adaptative hysteresis,” IEEE Trans. Ind. Applicat., Vol. IA-20, pp. 706-712. 1984.
[Klaassens, 88] J. Ben Klaassens, W. L. F. H. A. Moize de Chateleux and M.P.N. Van Wesenbeeck, “Phase-Staggering Control of a Series-Resonant DC-DC Converter with Paralleled Power Modules,” IEEE Transactions on Power Electronics, Vol. 3, pp. 164-173. 1988.
[Lee, 91] C. Q. Lee, K. Siri and T. F. Wu, “Dynamic Current Distribution Controls of a Parallel Conneted Converter System,” Proceedings of the IEEE Power Electronic Specialist Conference (PESC), pp. 875-881. 1991.

Bibliografía B.7
[Liaw, 93] C. M. Liaw and S. J. Chiang, “Robust Control of Multimodule Current-Mode Controlled Converters,” IEEE Transactions on Power Electronics, Vol. 8, nº 4, pp. 455-465. 1993.
[Luo, 99] S. Luo, Z. Ye, R. Lin and F. Lee, “A classification and evaluation of paralleling methods for power supply modules,” Proceedings of the IEEE Power Electronic Specialist Conference (PESC), pp. 901-908. 1999.
[Majithia, 71] J. C. Majithia, “A cellular array for the nonrestoring extraction of square roots,” IEEE Trans. Comput., Vol. C-20, pp. 1671-1618. 1971.
[Malesani, 96] L. Malesani, L. Rossetto, G. Spiazzi and A. Zuccato, “An AC power supply with sliding-mode control,” IEEE Industry Applications Magazine, Vol. 2, nº 5, pp. 32-38. 1996.
[Maussion, 89] P. Maussion, M. Grandpierre, J. Faucher and J. C. Hapiot, “Instantaneous feedback control of a single-phase PWM inverter with non-linear loads by sine wave tracking,” Proceedings of International Conference on Industrial Electronics Control and Instrumentation (IECON), pp. 130-135. 1989.
[Mazumder, 2002] Mazumder, S.K., Shenai, K., “On the reliability of distributed power systems: a macro- to microlevel overview using a parallel DC-DC converter,” Proceedings of the IEEE Power Electronic Specialist Conference (PESC), Vol. 2, pp. 809-814. 2002.
[Miwa, 92] Brett A. Miwa, David M. Otten, Martin F. Schlecht, “High Efficiency Power Factor Correction Using Interleaving Techniques,” Proceedings of Applied Power Electronics Conference and Exposition (APEC), pp. 557-568. 1992.
[Nicolas, 95] B. Nicolas, M. Fadel and Y. Chéron, “Sliding mode control of DC-to-DC converters with input filter based on the Lyapunov-Function Approach,” Proceedings of European Conference on Power Electronics and Applications (EPE), pp. 1338-1343. 1995.
[Nicolas, 96] B. Nicolas, M. Fadel and Y. Chéron, “Fixed-frequency sliding mode control of a single-phase voltage source with input filter,” Proceedings of the IEEE International Symposium on Industrial Electronics (ISIE), pp. 470-475. 1996.
[Ninomiya, 93] Tamotsu Ninomiya, Ren-Hua Wu, Yuichi Kodera, Teruhiko Kohama and Fumiaki Ihara, “Novel Control Strategy for Parallel Operation of Power Supply Modules,” Power Conversion Conference, pp. 159-164. 1993.

B.8 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
[Oshima, 91] H. Oshima, Y. Miyazaya, A. Hirata, “Parallel redundant UPS with instantaneous PWM control,” Proceedings of the International Telecommunications Energy Conference (INTELEC), pp. 436-442. 1991.
[Panov, 97] Y. Panov, J. Rajagopalan and F.C. Lee, “Analysis and design of N paralleled DC-DC converters with with master-slave current-sharing control,” Proceedings of Applied Power Electronics Conference and Exposition (APEC), pp. 436-442. 1997.
[Parhi, 91] K. K. Parhi, “A Systematic Approach for Design of Digit-Serial Signal Processing Architectures,” IEEE Transactions on Circuits and Systems, Vol. 38, nº 4, pp. 358-375. 1991.
[Patterson, 94] D. A. Patterson and J. L. Hennessy, “Computer Organization & Design: The Hardware/Sofware Interface,” Ed. Morgan Kaufmann Publishers, Inc. 1994.
[Perkinson, 95] Joseph Perkinson, “Current Sharing of Redundant DC-DC Converters in High Availability Systems- A Simple Approach,” Proceedings of Applied Power Electronics Conference and Exposition (APEC), pp. 952-956. 1995.
[Perreault, 97] David J. Perreault and John G. Kassakian, “Distributed Interleaving of Paralleled Power Converters,” IEEE Trans. on Circuits and Systems-I, Vol. 44, nº 8, pp. 728-734. 1997.
[Petruzziello, 90] F. Petruzziello, P. D. Ziogas and G. Joos, “A Novel Approach to Paralleling of Power Converter Units with True Redundancy,” Proceedings of the IEEE Power Electronic Specialist Conference (PESC), pp. 808-813. 1990.
[Pinheiro, 94] H. Pinheiro, A.S. Martins and J.R. Pinheiro, “A sliding mode controller in single phase voltage source inverters,” Proceedings of International Conference on Industrial Electronics Control and Instrumentation (IECON), pp. 394-398. 1994.
[Ramos, 2000]
Rafael Ramos, Xavier Roset and Antonio Mànuel, “Implementation of Fuzzy Logic Controller for DC/DC Converters Using Field Programmable Gate Array (FPGA),” Proceedings of the IEEE Instrumentation & Measurement Technology Conference (IMTC), pp. 160-163. 2000.
[Ramos, 2001a]
Rafael Ramos, Antonio Mànuel, Gerard Olivar, Enric Trullols and Joaquín Del Rio, “Application by means of FPGA of an adaptive canceller 50 Hz interference in electrocardiography,” Proceedings of the IEEE Instrumentation & Measurement Technology Conference (IMTC), pp. 32-37. 2001.

Bibliografía B.9
[Ramos, 2001b] Rafael Ramos, Manuel Trujillo y Antonio Mànuel, “FPGA y herramientas de desarrollo,” Automática e Instrumentación, nº 321, pp. 96-103. 2001.
[Ramos, 2001c] Rafael Ramos, Domingo Biel, Francesc Guinjoan and Enric Fossas, “Master-Slave Sliding-Mode Control Design in Parallel-Connected Inverters,” Automatika, Vol. 42, nº 1-2, pp. 37-44. 2001.
[Ramos, 2002a] Rafael Ramos, Domingo Biel, Francesc Guinjoan and Enric Fossas, “Design Considerations in Sliding-Mode Controlled Parallel-Connected Inverters,” Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS), pp. IV 357-360. 2002.
[Ramos, 2002b] Rafael Ramos, Domingo Biel, Francesc Guinjoan and Enric Fossas, “Distributed Control Strategy for Parallel-Connected Inverters. Sliding Mode Control Approach and FPGA-Based Implementation,” Proceedings of International Conference on Industrial Electronics Control and Instrumentation (IECON), Vol. 1, pp. 111-116. 2002.
[Ramos, 2002c] Rafael Ramos, Domingo Biel, Francesc Guinjoan and Enric Fossas, “Sliding Mode Design of Distributed Central Limit Control Strategy for Parallel-Connected Inverters,” IEEE International Power Electronics Congress (CIEP), pp. 197-201. 2002.
[Ramos, 2002d] Rafael Ramos, Domingo Biel, Francesc Guinjoan and Enric Fossas, “Sliding-Mode Design of Distributed Circular Chain Control Strategy for Parallel-Connected Inverters,” Proceedings of International Power Electronics and Motion Control Conference (EPE-PEMC), 8 pag. 2002.
[Ramos, 2003a]
Rafael Ramos, Domingo Biel, Enric Fossas and Francesc Guinjoan, “A Fixed-Frequency Quasi-Sliding Control Algorithm: Application to Power Inverters Design by means of FPGA Implementation,” IEEE Transactions on Power Electronics, Vol. 18, nº 1, pp. 344-355. 2003.
[Ramos, 2003b]
Rafael Ramos, Domingo Biel, Enric Fossas and Francesc Guinjoan, “Control of Single-Phase Parallel-Connected Inverters: Fixed-Frequency Quasi-Sliding Mode Control Approach and FPGA-based Implementation,” Proceedings of the IEEE Power Electronic Specialist Conference (PESC), pp. 1426-1431. 2003.
[Ramos, 2003c]
Rafael Ramos, Domingo Biel, Enric Fossas and Francesc Guinjoan, “Control of Parallel-Connected Inverters: A Fixed-Frequency Quasi-Sliding Mode Control Approach,” Proceedings of European Conference Power Electronics and Applications (EPE), 8 pag. 2003.

B.10 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
[Ruiz, 90] J. M. Ruiz, S. Lorenzo, I. Lobo and J. Amigo. “Minimal UPS structure with sliding mode control and adaptative hysteresis band,” Proceedings of International Conference on Industrial Electronics Control and Instrumentation (IECON), Vol. 2, pp. 1063-1067. 1990.
[Saglam, 2000] B. E. Saglam, G. Gosgül and G. Dündar, “Comments on “A Systematic Approach for Design of Digit-Serial Signal Processing Architectures,” IEEE Transactions on Circuits Systems II, Vol.47, pp. 369-370. 2000.
[Saucier, 94] Grabiele Saucier, Anne Mignotte, “Logic and Architecture Synthesis,” Chapman & Hall. 1994.
[Silva, 93] J. F. Silva and S.S. Paulo, “Fixed frequency sliding modulator for current mode PWM inverters,” Proceedings of the IEEE Power Electronic Specialist Conference (PESC), pp. 623-629. 1993.
[Sira-Ramírez, 87] H. Sira-Ramirez, “Sliding motions in bilinear switched networks,” IEEE Transactions on Circuits and Systems, Vol. 34, nº 8, pp. 919-933. 1987.
[Sira-Ramírez, 88] H. Sira-Ramírez, “Differential geometric methods in variable-structure control,” Int. J. Control, Vol. 48, nº 4, pp. 1359-1390. 1988.
[Sira-Ramírez, 89] H. Sira-Ramirez, “A geometric approach to puse-width modulated control in nonlinear dynamical systems,” IEEE Transactions on Automatic Control, Vol. 34, nº 2, pp. 184-187. 1989.
[Siri, 90] K. Siri and C. Q. Lee, “Current Distribution Control of Converters Connected in Parallel,” Proceedings of the IEEE IAS Conference, pp. 1274-1280. 1990.
[Siri, 92a]
K. Siri, C. Q. Lee and T. F. Wu, “Current Distribution Control for Parallel Connected Converters: Part I,” IEEE Transactions on Aerospace and Electronic Systems, Vol. 28, nº 3, pp. 829-840. 1992.
[Siri, 92b] K. Siri, C. Q. Lee and T. F. Wu, “Current Distribution Control for Parallel Connected Converters: Part II,” IEEE Transactions on Aerospace and Electronic Systems, Vol. 28, nº 3, pp. 841-850. 1992.
[Siri, 94] Kasemsan Siri and Joe Banda, “Current Distribution for Parallel-Connected DC Power Sources Without Remote Sensing,” Proceedings of the International Telecommunications Energy Conference (INTELEC), pp. 196-203. 1994.

Bibliografía B.11
[Siri, 95] K. Siri, J. Banda, “Analysis and Evaluation of Current-Sharing Control for Parallel-Connected DC-DC Converters Taking into Account Cable Resistance,” Record of the IEEE Aerospace Applications Conference, pp. 29-48. 1995.
[Skahill, 96] Kevin Skahill, “VHDL for Programmable Logic,” Addison-Wesley. 1996.
[Slotine, 91] Jean-Jacques E. Stoline, Weiping Li, “Applied Nonlinear Control,” Prentice-Hall Inc. 1991.
[Tuladhar, 97] A. Tuladhar, H. Jin, T. Unger, K. Mauch, “Parallel Operation of Single Phase Inverter Modules With No Control Interconnections,” Proceedings of Applied Power Electronics Conference and Exposition (APEC), pp. 94-100. 1997.
[Utkin, 77] V. Utkin, “Variable structure systems with sliding modes,” IEEE Transactions on Automatic Control, Vol. 22, nº 2, pp. 212 – 222. 1977.
[Utkin, 78] V. I. Utkin, “Sliding mode and their applications in variable structure systems,” Moscow, Soviet Union, Mir Publishers. 1978.
[Utkin, 92] V. I. Utkin, “Sliding Modes in Control and Optimization,” Springer-Verlag, Berlín, Heidelberg. 1992.
[Venkataramanan, 85] R. Venkataramanan, A. Sabanovic and S. Cuk, “Sliding mode control of DC-to-DC converters,” Proceedings of International Conference on Industrial Electronics Control and Instrumentation (IECON), pp. 251-258. 1985.
[Wu, 93] Ren-Hua Wu, Teruhiko Kohama, Yuichi Kodera, Tamotsu Ninomiya and Fumiaki Ihara, “Load-Current-Sharing Control for Parallel Operation of DC-to-DC Converters,” Proceedings of the IEEE Power Electronic Specialist Conference (PESC), pp. 101-107. 1993.
[Wu T., 91]
T. F. Wu, K. Siri and C. Q. Lee, “Reliability improvement in parallel connected converter system,” Proceedings of International Conference on Industrial Electronics Control and Instrumentation (IECON), pp. 429-434. 1991.
[Wu T., 93] T. F. Wu, C. Y. Hung and C. Q. Lee, “Parallel Converter Systems with Maximum Current Limit Control Scheme for Reliability Improvement,” Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS), pp. 2343-2346. 1993.

B.12 Control en modo de deslizamiento de un sistema modular de onduladores conectados en paralelo. Implementación con FPGA
[Wu T., 94] T. F. Wu, K. Siri and J. Banda, “The Central-Limit Control and Impact of Cable Resistance in Current Distribution for Parallel-Connected DC-DC Converters,” Proceedings of the IEEE Power Electronic Specialist Conference (PESC), pp. 694-702. 1994.
[Wu T., 98] T. F. Wu, Y. H. Huang, Y. K. Chen and Z. R. Liu, “A 3C strategy for Multi-Module inverters in parallel operation to achieve and equal current distribution,” Proceedings of the IEEE Power Electronic Specialist Conference (PESC), pp. 186-192. 1998.
[Xilinx, 2004] Xilinx Company Inc., “Virtex-4 Family Overview,”. 2004.