UPIITA Sistema de Visión Panorámica basado en la visión ...
89
INSTITUTO POLITÉCNICO NACIONAL UNIDAD PROFESIONAL INTERDISCIPLINARIA EN INGENIERÍA Y TECNOLOGÍAS AVANZADAS UPIITA "Sistema de Visión Panorámica basado en la visión del Gigantocypris" Trabajo Terminal Que para obtener el Título de "Ingeniero en Biónica" Asesor M. en C. Alvaro Anzueto Ríos México D .F. Junio d e 2007
Transcript of UPIITA Sistema de Visión Panorámica basado en la visión ...

INSTITUTO POLITÉCNICO NACIONAL
UNIDAD PROFESIONAL INTERDISCIPLINARIA EN INGENIERÍA Y TECNOLOGÍAS AVANZADAS
U P I I T A
"Sistema de Visión Panorámica basado en la visión del Gigantocypris"
Trabajo Terminal
Que para obtener el Título de
"Ingeniero en Biónica"
Asesor M. en C. Alvaro Anzueto Ríos
M é x i c o D .F. Junio d e 2007


CONTENIDO
Resumen ........................................................................................................................................... III
OBJETIVOS ..................................................................................................................................... IV
Objetivos Generales ..................................................................................................................... IV
Objetivos Particulares .................................................................................................................. IV
INTRODUCCIÓN .............................................................................................................................. 1
Antecedentes .................................................................................................................................. 2
Imágenes Panorámicas obtenidas por el hombre ....................................................................... 2
Justificación ................................................................................................................................... 4
Aplicaciones .............................................................................................................................. 5
MARCO TEÓRICO ........................................................................................................................... 7
Varios tipos de ojos ........................................................................................................................ 7
Visión Panorámica ......................................................................................................................... 8
Estructura del ojo de los mamíferos ............................................................................................. 10
Los artrópodos ............................................................................................................................. 12
Clasificación de los artrópodos ............................................................................................... 13
La visión de los Arthropoda .................................................................................................... 13
Sistema de visión del Gigantocypris ........................................................................................... 16
La cámara fotográfica .................................................................................................................. 17
Espejos ......................................................................................................................................... 20
Espejos Planos ......................................................................................................................... 22
El espejo parabólico ................................................................................................................ 23
El espejo hiperbólico ............................................................................................................... 26
DESARROLLO ............................................................................................................................... 31
Descripción del Trabajo ............................................................................................................... 31
Sistema cámara-espejo hiperbólico ......................................................................................... 33
Análisis de la superficie reflejante en el ojo del gigantocypris .................................................... 35
Cálculos Adicionales al Modelo del Sistema de Visión Panorámico .......................................... 39
Campo de Visión del Sistema ................................................................................................. 39
Resolución de ima cámara catadióptrica ................................................................................. 40

Diseño Mecánico ......................................................................................................................... 41
Sistema de soporte del espejo ................................................................................................. 41
Montaje del dispositivo ............................................................................................................ 44
Construcción y Armado del dispositivo ....................................................................................... 47
Materiales ..................................................................................................................................... 52
Análisis matemático ..................................................................................................................... 54
Desdoblamiento de la Imagen ...................................................................................................... 60
Algoritmo de desdoblamiento .................................................................................................. 61
Programa de desdoblamiento ................................................................................................... 62
Reconocedor de Círculos ............................................................................................................. 66
Operadores de Prewitt ............................................................................................................. 67
Procedimiento .......................................................................................................................... 68
Código del detector de círculos ............................................................................................... 70
Etapa final .................................................................................................................................... 72
Propuesta de Aplicación .............................................................................................................. 74
Filtrado de Bordes ................................................................................................................... 76
Definición de Regiones ........................................................................................................... 77
Costo del Prototipo ...................................................................................................................... 78
Problemas encontrados ................................................................................................................ 78
CONCLUSIONES ........................................................................................................................... 79
BIBLIOGRAFÍA ............................................................................................................................. 81
CIBERGRAFÍA ...................................................................................................................... 82

Sistema de Visión Panorámica basado en la visión del Gigantocypris
Palabras clave: artrópode, visión panorámica, omnidireccional o visión de 360°, crustáceo,
phylum (filo), espejos convexos, ojos compuestos, reflexión de rayos de luz, catóptrico,
frente de onda.
Abstract. This work is focused to artificial vision area. It consists in the design of an
omnidirectional vision system based on the eyes of arthropods and especially of the
gigantocypris, a deep sea crustacean. The system captures 360° images using a hyperbolic
mirror and a regular digital camera arranged in front of the mirror so it can take pictures
containing information of all directions. Resumen
Un sistema de visión panorámico es aquel que puede obtener imágenes que aportan
información de todas las direcciones alrededor del sistema. Esta habilidad esta presente en
la naturaleza en los ojos de los crustáceos y de los insectos, entre otros seres. El hombre ha
desarrollado diversos sistemas para lograr una visión panorámica. Muchas veces, el sistema
se compone de varias cámaras o de varios espejos dispuestos de forma tal que se logren
apreciar los 360°. Otros métodos propuestos consisten en una sola cámara, la cuál es girada
sobre un eje. Estos sistemas panorámicos obtienen muchas imágenes, las cuales requieren
un tratamiento posterior para obtener una imagen cilindrica. Estos sistemas necesitan
mucho tiempo de procesamiento, un espacio grande para montar el sistema, una calibración
muy fina (para una reconstrucción correcta) y también representan un gran costo (cuando se
utilizan varias cámaras), por lo que se ha seguido estudiando cómo obtener imágenes de
360° con sistemas más baratos, eficientes, compactos y fáciles de construir.

OBJETIVOS
Objetivos Generales • Diseñar y construir un sistema de visión artificial basado en la visión de los
crustáceos, en particular del gigantocypris, por medio del cual se pueda obtener
imágenes de 360° (panorámicas). Todo esto mediante el uso de superficies
reflejantes (en este caso, espejos convexos) y cámaras digitales.
• Diseñar e implementar un algoritmo con el cuál convertir las imágenes panorámicas
en imágenes cilindricas (rectangulares continuas) de tal forma que sean útiles para
hacer análisis de visión artificial (segmentación y reconocimiento de formas,
búsqueda de trayectorias, etc.) y para trabajos posteriores donde se requiera una
visión panorámica, como puede ser en el campo de imagenología médica y
aplicaciones en robòtica.
Objetivos Particulares
• Modelado del sistema de visión del gigantocypris. Un estudio matemático del
sistema de visión de este crustáceo, enriquecido con una investigación de los tipos
de visión panorámica presentes en la naturaleza. Obtención de un modelo
matemático que describa el sistema de visión del gigantocypris y un marco teórico
sobre este tipo de visión.
• Modelado de los espejos convexos. Estudio de las características y propiedades de
los espejos convexos en general. Posteriormente, análisis del espejo hiperbólico y el
espejo parabólico. Obtención de un modelo que describa la forma en que trabajan
estos espejos. Esto sirve para el diseño de un algoritmo de desdoblamiento.
• Modelo de la cámara. Estudio del sistema de captura que utilizan las cámaras en
general, así como del modelo matemático que describe la relación entre puntos del
espacio y píxeles en la imagen. Esto sirve para proponer una disposición de las
partes del sistema.

• Diseño general del dispositivo. Obtener una idea concreta de cada etapa del proceso.
Plantear los requerimientos del sistema de visión: ubicación de la cámara con
respecto al espejo, modo de obtención de las imágenes, forma de transmitirlas a la
computadora, un pre-procesamiento en caso necesario, etc.
• Diseño del dispositivo destinado al soporte. Se refiere al diseño mecánico del
sistema de soporte del dispositivo, éste requiere de una base para la cámara y un
brazo que sostenga al espejo.
• Diseño mecánico general del prototipo. Esto incluye el diseño completo del soporte
en un paquete de dibujo asistido por computadora (CAD) y la selección de los
materiales a utilizar en la construcción.
• Diseño Mecánico enfocado a un sistema en particular: adaptación a un móvil.
• Construcción del soporte físico. Construcción de las partes del soporte del espejo y
del soporte de la cámara.
• Armado del dispositivo.
• Diseño del algoritmo. Se refiere a la parte matemática del procesamiento llevado a
cabo.
• Creación del algoritmo de desdoblamiento.
• Creación del Programa. Basándose en el algoritmo diseñado, creación del programa
de desdoblamiento. Este programa trabaja con las imágenes circulares para obtener
proyecciones cilindricas.
• Implementación del programa. Procesamiento de imágenes reales obtenidas por el
prototipo.
• Desarrollo de un algoritmo reconocedor de círculos, auxiliar en la búsqueda del
centro del espejo.
• Etapa final. Acoplamiento de todas las etapas del trabajo.

INTRODUCCIÓN
La ingeniería biónica tiene como objetivo el estudio de los principios de funcionamiento de
los sistemas biológicos, para su aplicación en la solución de problemas en cualquier campo.
Una de las áreas de trabajo y de estudio de la biònica es la visión artificial, que tiene como
finalidad la reproducción artificial (incluyendo sistemas no informáticos) del sentido de la
vista.
Se estima que el 75% de la información que maneja un ser humano es visual. Se sabe que
existen seres vivos cuya existencia gira casi exclusivamente alrededor de la percepción
visual; sin embargo, también es cierto que un ser humano desprovisto del sentido de la vista
puede desarrollar totalmente su capacidad mental y llevar una vida en plenitud, aunque esto
último le obligue a una dependencia estrecha de otros semejantes. No parece necesario, por
tanto, afirmar cuan vital es la visión en los seres vivos. [1, pag. 219 párrafo 3]
Existen seres vivos cuya existencia depende casi exclusivamente de su percepción visual.
Básicamente, el objetivo de la visión artificial es automatizar funciones de inspección
visual, tradicionalmente realizadas por el hombre u otros seres vivos. Así, parece natural
pensar que el objetivo de dotar a las máquinas del sentido de la vista supone un salto
cualitativo en sus capacidades de actuación.
La visión artificial también se denomina visión computacional, es decir, basada en
computadoras, puesto que es impensable otorgar a una máquina cierto grado del sentido de
la vista sin que se utilice una computadora, tanto para la etapa inicial (puramente sensorial)
como para la fase avanzada que demanda mayor complejidad de procesamiento.
En este trabajo se estudian los sistemas de visión omnidireccional presentes en la
naturaleza. Los animales pertenecientes al grupo de los artrópodos están dotados de esta
habilidad.

Los animales que poseen una visión omnidireccional pueden ubicarse a sí mismos y vigilar
todo su entorno con facilidad. Ésta es una capacidad muy deseable en sistemas de control
automático, en sistemas móviles y en general dentro de la visión artificial.
El trabajo esta dividido de la siguiente forma: primero se presentan los antecedentes de la
visión omnidireccional, esto es, cómo ha evolucionado y los trabajos presentes hasta el
momento; una justificación del trabajo y un marco teórico del que se parte para trabajar; se
plantea el problema de ingeniería que presenta el diseño del sistema de visión
omnidireccional; después se explica el desarrollo del trabajo, los puntos que debieron
considerarse para el diseño, las características del prototipo, los esquemas del diseño del
mismo y los puntos críticos (problemas); por último, se exponen las conclusiones del
trabajo y se presentan las referencias empleadas.
Antecedentes
Imágenes Panorámicas obtenidas por el hombre
El hombre, a partir de la observación de los diferentes sistemas de visión panorámica ha
implementado sistemas capaces de obtener imágenes panorámicas [2, 3]. El propósito es
tener una imagen de todo lo que se encuentra alrededor, proyectada sobre un plano
cilindrico. De aquí se origina una imagen cilindrica, la cual es en realidad una imagen
rectangular, pero cuyos extremos (derecho e izquierdo) coinciden, haciéndola "continua".
Una manera de obtener imágenes omnidireccionales es tomar una serie de fotos con una
cámara convencional que se gira sobre un soporte. Esto provee un alto número de
imágenes, pero el problema es que para obtener la imagen cilindrica se necesita esperar a
que la cámara haya dado toda la vuelta. Este sistema consume demasiado tiempo, aún sin
contar con el tiempo de procesamiento posterior para obtener la imagen cilindrica.
Otro método propuesto es el de tener varias cámaras puestas en diferente ángulo, de tal
forma que juntas abarquen los 360° del entorno. Hay trabajos en los que se han usado 8

cámaras dispuestas sobre una base y a partir de ellas se construye la imagen. Y ya que se
toma la foto simultáneamente, no hay mucha pérdida de tiempo, porque las cámaras están
fijas. El problema de este sistema es el costo de las cámaras y al igual que en el caso
anterior, el tiempo de procesamiento requerido para reconstruir la imagen panorámica.
Por medio de éste tipo de visión se pueden construir sistemas de realidad virtual, cuyo uso
ha ido aumentando últimamente.
Los sistemas de visión artificial se han utilizado para la implementación de autolocalización
y detección de objetos relevantes en robots futbolistas. Estos robots han participado en la
robo-copa llamada "The World Cup of Soccer Robots". [4]
La detección de movimiento es de gran importancia en la visión artificial. Por medio de
algoritmos de detección de cambio de fondo y cámaras omnidireccionales, en República
Checa han tenido muy buenos resultados usando imágenes cilindricas para obtener el fondo
de toda la habitación de manera inmediata y poder obtener toda la información con una
resolución aceptable. [5]

Justificación
Las imágenes panorámicas y en general la visión omnidireccional son un paso muy grande
en el campo de la robótica ya que permiten una apreciación completa del medio en el que
se está. Cuando se construye un robot que utiliza visión artificial, muchas veces el
problema es que tiene que procesar mucha información en poco tiempo, sobre todo si el
robot se encuentra en movimiento, si se quisiera una toma de todo el entorno y la única
forma de tomarla fuera rotar la cámara, sin importar qué tan rápido se hiciera, habría que
detenerse completamente' para que todas las tomas tuvieran la misma referencia. En
cambio, con un sistema como el propuesto, no se tiene este problema pues solo se toma una
fotografía en la que se captura todo al mismo tiempo.

Es importante también hacer notar que los sistemas que trabajan con varias cámaras y los
que rotan la cámara tienen el problema de requerir un procesamiento muy tardado para
acoplar todas las imágenes obtenidas (en el caso de rotación de la cámara la información
puede tomarse con tomas espaciadas o por medio de video, lo cual implica una gran
cantidad de cuadros). Es evidente que el procesamiento que pueda requerir una sola imagen
es mucho menor (en cuestión de tiempo) al del procesamiento de varias imágenes.
En el caso de los aparatos de laparoscopia se tienen varios problemas: el primero es que
obviamente no es posible darse el lujo de hacer del examen un proceso lento y complicado;
el espacio del que se dispone es muy pequeño como para poder introducir varias cámaras o
motores para manipular la(s) cámara(s); es importante tener una visión de las paredes de la
cavidad en donde se está realizando el examen, lo cual no puede lograrse con una cámara
convencional. Un sistema de visión panorámica en este tipo de estudios dará una mayor
eficiencia en el trabajo.
Aparte del ahorro de tiempo se debe hacer notar que también existe una ventaja económica
frente a los sistemas que utilizan varias cámaras. También debe tenerse en cuenta lo
sencillo del diseño propuesto en comparación con los otros sistemas que requieren del
montaje de varios dispositivos y muchas mediciones como son la distancia entre las
cámaras y la orientación en que se encuentra cada una.
La disposición física del sistema propuesto, a grandes rasgos, solo requiere del montaje de
un espejo y una cámara, alineados. Esto da la comodidad de tener un fácil mantenimiento y
un fácil armado.
Aplicaciones
En la naturaleza un sistema de visión panorámica es usado por algunos animales para poder
detectar amenazas a su alrededor. De igual manera este sistema puede ser instrumentado
para monitorear rápidamente el entorno en busca de peligros. Si se diseña un robot que
deba desempeñar su tarea en una zona de riesgo, este sistema es propicio para proveer al

robot de una alarma, o bien, como un sistema de alerta que puede ser acoplado a los
automóviles para evitar choques.
Con este sensor se puede hacer un sistema de visión para reconocimiento o seguimiento de
líneas. Esto puede servir más adelante para un seguidor de objetos o sistemas de visión
artificial más elaborados.
Al ser sensible a todo el espacio alrededor de él, este sistema puede hacer más eficiente a
un robot que deba encontrar la salida a un laberinto, esto es porque en una sola toma capta
la posición de los objetos en todas direcciones, esto permite que esté en movimiento al
momento de hacer el sensado del lugar en que se encuentra.
Sería también útil su implementación en robots encargados del transporte de mercancía en
grandes bodegas, ya sea para buscar algún producto o para llevarlo a un lugar para ser
almacenado. A un robot de este estilo se le puede dar un código para buscar una ubicación
específica o un paquete específico.
Puede utilizarse también para la recreación remota de un lugar, que puede usarse para
exploración. En el caso de robots exploradores, como los que se han mandado a la luna o a
Marte. En ellos, la implementación de un sistema de visión de 360° daría un gran campo de
visión, que podría aumentar la rentabilidad y utilidad de los exploradores e incluso de los
propios proyectos de exploración.
El uso de este tipo de visión se está popularizando en muchos lugares para hacer robots que
juegan foot-ball, ya que así pueden ubicar la pelota en cualquier parte de la cancha y a los
demás jugadores.
La construcción de este sensor en un tamaño reducido (del orden de cm.) daría la
oportunidad de implementarle en aparatos de laparoscopia.

MARCO TEORICO
Varios tipos de ojos
E n la naturaleza existen diversos tipos de ojos. A continuación se presentan algunos
aspectos de los principales:
Rana. Sus ojos son muy parecidos en su estructura básica a los de los mamíferos, pero el
método de acomodación es diferente. La rana enfoca los objetos cercanos mediante
movimientos del cristalino hacia delante, con lo que aumenta la distancia entre el cristalino
y la retina.
Mamíferos. El ojo de los mamíferos cambia de forma al enfocar. La cantidad de luz que
entra al ojo está controlada por los músculos lisos del iris dispuestos circular y radialmente
que contraen o dilatan la pupila. Este proceso es análogo al diafragma de una cámara
fotográfica o de un microscopio.
Artrópodos. Utilizan ojos compuestos, conformados por celdas alargadas llamadas
"omatidios", que funcionan como ojos completos, solo que están dirigidos hacía una
dirección específica. Aquí está incluida la visión de los camarones, los cangrejos, las
cucarachas, las moscas, abejas, etc.
En el caso de los artrópodos, el hecho de tener "muchos ojos", cada uno de los cuáles está
orientado en una dirección diferente, les permite poseer una visión panorámica. [6, 7]

Visión Panorámica
El hombre siempre ha tenido curiosidad por la naturaleza, y el hecho de que ciertos
animales posean una visión panorámica es particularmente intrigante. A lo largo de los
años, se han identificado 3 tipos de ojos compuestos que permiten esta habilidad especial.
Existen en los insectos diurnos y nocturnos y en algunas especies de crustáceos como las
langostas, camarones y cangrejos. Estos tipos de visión se basan en la forma y composición
de sus ojos. Pueden estar compuestos por celdas que captan la luz de una dirección
particular, valiéndose de cambios en las propiedades ópticas de las celdas. Otra forma de
visión que se ha encontrado, hace uso de superficies reflejantes.
Los ojos de los insectos diurnos están compuestos regularmente por un patrón de celdas
foto-receptivas que permiten la visión panorámica. De hecho, cada ojo de estos insectos
comprende una colección de pares de elementos lenticulares y sensores ópticos
elementales, cada uno de los cuales cubre una dirección específica.
En los insectos nocturnos, los elementos lenticulares se encuentran dispuestos en un
eficiente patrón hexagonal. El índice de refracción en cada lente varía radialmente de forma
tal que los rayos incidentes convergen en un punto focal sobre la retina. Esto provoca la
mejora de la vista nocturna.

Cada ojo en un crustáceo comprende un juego de superficies cuadradas parecidas a espejos
como parte de sus elementos lenticulares. Esto le permite a los rayos ser reflejados y
converger hacia puntos diferentes y únicos sobre la retina.
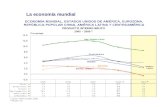
Un caso muy interesante es el del gigantocypris, un crustáceo de las profundidades marinas,
que tiene grandes ojos con reflectores, similares a la óptica de los telescopios. Estas
características le permiten ver bajo las oscuras condiciones de las profundidades, del orden
de cientos de metros. Aunque esta criatura roja-anaranjada tiene un largo de apenas media
pulgada, su cabeza ocupa la mitad de su cuerpo. Sus dos ojos están cubiertos por párpados
transparentes.

Todo esto permite aprender cómo es que los diferentes animales redirigen la luz al punto
donde mejor convenga para tener el campo de visión que cada uno requiere.
A partir de todas estas observaciones se ha creado el concepto de "visión panorámica", que
es el tener la capacidad de observar al mismo tiempo todo lo que está alrededor del sistema,
sin necesidad de girar la cabeza sobre su eje. Ya que ésta "toma" puede hacerse al rotar la
cabeza (o la cámara) en una revolución, o sea, 360°, a este tipo de visión se le llama visión
de 360 grados. Una visión más avanzada que se ha empezado a trabajar en muy pocos
lugares es la de obtención de imágenes esféricas, que se denomina como visión de 360° x
360°.
Estructura del ojo de los mamíferos
Cada globo ocular es un órgano de forma oval construido según los principios de una
simple cámara fotográfica (figura 7). En efecto, posee una pequeña abertura en la parte
anterior, la pupila, por la cual entra la luz; un cristalino, que enfoca las imágenes de los
objetos y una retina sensible a la luz, análoga a la película.
La pared del globo ocular, se compone de tres capas de tejido, la más extema se haya
formada por tejido conectivo fibroso denso que presta resistencia a la pared. Casi toda esta
capa es opaca y recibe el nombre de esclerótica, pero su porción anterior, por la cual pasa
la luz, es clara y se llama córnea. La superficie de la córnea está cubierta de una capa de
epitelio estratificado, la conjuntiva, que se continúa con la epidermis.
La siguiente capa de la pared del globo ocular pigmentada de oscuro y muy vascularizada
es denominada coroides. Su pigmentación absorbe los rayos luminosos, con lo que
disminuye los reflejos internos que podrían hacer borrosa la imagen, y sus vasos nutren la
retina. Delante del cristalino se extiende la porción anterior de la coroides, junto con una
porción no sensible de la retina y forman el iris, disco opaco con la pupila en su centro. El
iris impide que la luz penetre en el ojo salvo por el centro del cristalino o parte más eficaz
1

desde el punto de vista óptico. La cantidad de luz que entra al ojo está controlada por los
músculos lisos del iris dispuestos circular y radialmente que contraen o dilatan la pupila.
En este sentido, el iris es análogo al diafragma de una cámara fotográfica o de un
microscopio. La porción engrosada de la coroides en tomo a la base del iris es el cuerpo
ciliar. Cierto número de fibras de la zónula se extienden de dicho cuerpo al cristalino y
ayudan a sostenerlo en su lugar. Los músculos del cuerpo ciliar intervienen en la función
de enfoque del ojo.
La retina es la estructura más interna del globo ocular; consta de una capa pigmentaria,
íntimamente asociada con la coroides y de una capa nerviosa, que contiene millones de
células receptoras, los bastones y conos, y las neuronas que inician la elaboración de
señales luminosas y que transmiten la información al cerebro por medio del nervio óptico.
Los bastoncitos y los conos se encuentran en la superficie de la capa nerviosa que mira a la
coroides, y la luz debe atravesar casi toda la retina antes de poder estimularlos.
Las cavidades intraoculares están repletas de líquido. En efecto, un humor vitreo
gelatinoso ocupa la gran cámara situada entre el cristalino y la retina y ayuda a sostener el
primero de estos órganos en su lugar. Un humor acuoso llena la cámara posterior entre
el iris y el cristalino y la cámara anterior entre el iris y la córnea. Éste humor lleva a cabo

dos funciones. En primer lugar contribuye a nutrir la comea y el cristalino que carecen de
vasos sanguíneos y en segundo, al mantener la presión intraocular contribuye a conservar la
turgencia y forma del globo ocular. [9]
El campo visual humano. El campo visual, la zona del espacio que puede ser percibida
para una posición fijada del ojo, es muy amplio. Los límites son del orden de 60 grados
para el meridiano superior, 75 grados para el inferior, 60 grados para el nasal y 100 grados
para el temporal. [10]
Los artrópodos
Los artrópodos son animales segmentados cuya epidermis secreta un exoesqueleto de
fuertes anillos que se corresponden con los segmentos; estos anillos están unidos por
membranas flexibles que actúan como articulaciones. En muchos de los segmentos se
advierten apéndices laterales pareados, cada uno de los cuales posee un esqueleto quitinoso
similar de anillos articulados. El phylum (o filo) toma su nombre precisamente de estos
apéndices articulados (del griego arthron articulación y podos pie). El exoesqueleto es en
esencia un complejo químico que incluye quitina. El сuerpo está constituido por cabeza,
tórax y abdomen, cada uno está compuesto por varios segmentos que pueden fusionarse de
diferentes modos. La musculatura corporal se halla formada de gran número de pequeños
músculos que se extienden por las articulaciones para formar un mecanismo complicado
capaz de movimientos precisos y complejos. Su adaptación es tan precisa que con
frecuencia su distribución ecológica queda estrictamente limitada, lo que puede explicar el
enorme número de especies de artrópodos, pues muchas especies pueden coexistir en la
misma región geográfica si cada una posee diferentes requerimientos ecológicos. En la
actualidad, el número de especies conocidas de los demás filos suma 130 000, mientras que
los artrópodos suman unas 870 000. La mayor parte (800 000) son insectos, casi todos
terrestres. [9]

Clasificación de los artrópodos
Pueden dividirse en cuatro subfilos según la estructura de los apéndices de los seis primeros
segmentos. En todos los artrópodos el primer segmento aparece en el embrión pero nunca
se halla netamente definido en el adulto y jamás tiene apéndices. En la mayor parte de los
artrópodos, la boca se halla situada ventralmente entre el tercero y cuarto segmentos.
Los cuatro subfilos son: Trilobita, Chelicerata, Crustácea y Labiata. Los trilobita, única
clase de los trilobita (trilobites), han desaparecido. Dentro de los chelicerata (quelicerados)
se encuentran grupos vivientes y extintos como los límulos, euriptéridos, escorpiones o
alacranes, arañas y ácaros.
El subfilo crustácea (crustáceos) incluye como única clase la denominada crustácea,
formada por artrópodos dominantemente acuáticos que actualmente viven. El segundo y
tercer segmentos de estos animales posee cada uno un par de antenas. Los crustáceos han
invadido una gran variedad de hábitats acuáticos; algunos reptan sobre el fondo mientras
otros nadan o son arrastrados por la corriente. Muchas especies destacan por su abundancia.
Los crustáceos como grupo probablemente integren una masa más grande de material vivo
que la de cualquier otra clase de animales considerada aisladamente.
El cuarto subfilo, labiata (labiados), incluye milípedos, centípedos, e insectos. El segundo
segmento posee antenas, el tercero carece de apéndices y, sobre el sexto destacan apéndices
que se fusionan para formar un labio inferior, el labium.
Los crustáceos pueden encontrarse tanto en el océano, en aguas dulces y también existen
hoy crustáceos terrestres. [9, 11]
La visión de los Arthropoda
En cuanto al aparato visual, es muy diferente a través del phylum. Su origen es muy difícil
de aclarar. En general se puede decir que los ojos son de dos tipos, los ojos sencillos u

ocelos y los ojos compuestos. Los primero se encuentran en la mayor parte de los
crustáceos inferiores, en la larva nauplio de todos los crustáceos y en cuyo caso se le llama
ojo nauplio, además en una gran parte de los insectos adultos y sus larvas.
Los ojos compuestos (ver figura 8) están formados por unidades llamadas omatidias
(ommatidia) que son numerosas (En el cangrejo de río, hay 2500 omatidias por ojo).
Externamente cada omatidia está formada por una córnea o lente biconvexa, enseguida y
debajo, se encuentran dos células epidérmicas que secretan la lente y que están colocadas
una a cada lado del cono del cristalino, el cual está constituido por cuatro células arregladas
como una pirámide invertida; el ápice del cristalino descansa en las células sensoriales o
fotorreceptores, cuyo conjunto constituye la retina. En cada omatidia existen siete a ocho de
estas células fotorreceptoras colocadas en círculo, y sus superficies internas están
codificadas para la sensación visual, éstas forman el rabdoma (rhabdom). Cada omatidia
está separada de las otras por células pigmentarias que la rodean y que son de dos a ocho
distales por seis a diez proximales; estas células descansan sobre la membrana basal. A
cada una de las células sensoriales o fotorreceptoras, llega una fibra nerviosa que va a
formar parte del nervio óptico junto con las de las otras omatidias.

De acuerdo con la vision, se distinguen dos tipos de ojos compuestos, el primero, o de
visión por aposición (figura 9, A), en que cada omatidia está rodeada por un pigmento
continuo, de manera que un rayo luminoso no puede propagarse más que a través de una
sola omatidia; así que se formarán tantas imágenes como omatidias haya en el ojo, siendo
además muy poco luminosas también a causa de la cantidad de pigmento. Este tipo de ojos
se encuentra en los insectos diurnos, como odonatos, himenópteros y dípteros.
El Otro tipo, O de visión por superposición (figura 9, B) tiene como característica principal
la de presentar el pigmento localizado en las pociones distai o proximal de la omatidia y por
consiguiente los rayos luminosos pueden atravesar muchas omatidias, superponiéndose las
imágenes; además, éstas son, al contrario de las del primer tipo, muy luminosas. A tal tipo
pertenecen los ojos de artrópodos nocturnos, como lepidópteros y muchos crustáceos, en
los que los pigmentos emigran en relación con la luminosidad del medio ambiente. En un
lugar con luz intensa, el pigmento rodea toda la omatidia y el ojo se comporta como de
visión por aposición; en la penumbra los pigmentos emigran a la parte distai y proximal de
la omatidia y el ojo funciona como de visión por superposición. Aparte de los ocelos y ojos
compuestos que son típicos de los crustáceos e insectos y en otros grupos de artrópodos
como los Scutigera (Chilopoda), es posible considerar tres tipos más, comunes a los

arácnidos y a los paleostráceos, ellos son: ojos compuestos degenerados, más simples que
los de los insectos y crustáceos, son propios de los euriptéridos y xifosuros; según algunos
autores, también a este tipo corresponden los ojos laterales de alacranes; los ojos inversos,
comunes en los arácnidos, que por cierto no son homólogos a ningún otro ojo de los
artrópodos, y se forman por la presencia de tres capas de células originadas por una
invaginación lateral de los tegumentos; los ojos medianos dorsales, son característicos de
los xifosuros y parecen ser homólogos al ojo nauplio de los crustáceos. [9,12]
Sistema de visión del Gigantocypris
El gigantocypris (figuras 1 0 y l l ) e s u n crustáceo de las profimdidades del mar que tiene
grandes ojos con reflectores que son similares a la óptica de los telescopios. Estas
características le permiten ver bajo condiciones muy obscuras en profundidades del orden
de miles de pies (cientos de metros). Es un animal rojo-anaranjado de alrededor de media
pulgada de largo y su cabeza ocupa la mitad de su cuerpo. Sus dos ojos están cubiertos por
una túnica transparente. La óptica es de un ojo con reflexión: el fondo del ojo esta formado
por un espejo. A este tipo de visión se le llama sistema catóptrico, por que se vale del uso
de espejos. Un corte transversal horizontal del ojo del gigantocypris muestra que la forma
de los espejos en el fondo del ojo es parabólica con un punto focal situado a una pequeña
distancia del vértice del espejo. El espejo enfoca la luz reflejada sobre la retina y aunque la
imagen formada en la retina no es fina, es aproximadamente 17 veces más luminosa que la
formada en un ojo con elementos lenticulares. [8]

La cámara fotográfica
En el siguiente esquema, se presenta, la formación de una imagen en una cámara digital y la
relación de un punto en el espacio con los correspondientes píxeles en la imagen formada.
El sistema consiste de un plano imagen, que es donde se proyecta la imagen (o sea que
representa el sensor de la cámara, o la retina); el punto focal o centro de la cámara C que se
encuentra a una distancia "'f ' del plano imagen (distancia focal); el eje óptico, que es la

línea que pasa por el centro de la cámara y es pependicular al plano imagen; por último, el
punto principal "c", es la intersección del eje óptico con el plano imagen.
Es importante tomar en cuenta que la transformación necesaria para ir de xm punto en el
espacio a píxeles implica utilizar diversos sistemas coordenados Los sistemas coordenados existentes en este sistema son los siguientes:
1) El sistema coordenado de la cámara, con origen en el punto focal С y el eje z
colinear con el eje óptico. El sistema coordenado de la cámara tiene tres ejes y sus
unidades están dadas en milímetros.
Hay que tomar en cuenta que para comenzar se podría tomar el sistema coordenado
universal, que dice dónde se encuentra la cámara y su centro en el espacio, pero esto
se ignorará suponiendo se sabe en dónde se encuentra la cámara. También se puede
pensar que estos dos sistemas coordenados coinciden.
2) El sistema coordenado de la imagen, tiene solo 2 ejes { u y v } y origen en el punto
principal. Sus unidades están dadas en milímetros.
3) El sistema coordenado de píxeles, con 2 ejes {qu y qv} y origen en la esquina
superior izquierda del plano de imagen. Sus unidades están dadas en número de
píxeles.
Es muy importante considerar la diferencia de unidades entre los diferentes sistemas
coordenados.
Un punto P como el mostrado tiene coordenadas {x, y, z}, el punto correspondiente a P en
el sistema coordenado de pixeles tiene coordenadas {qu, qv}. Cada punto en el espacio se
proyecta sobre un punto en el sensor de la cámara, cada uno de estos puntos tiene
coordenadas en el sistema coordenado de la cámara y su correspondiente en píxeles. Cabe
mencionar que todos los puntos proyectados tendrán la misma componente z en el sistema
coordenado de la cámara y que al quitar esta coordenada, se puede cambiar directamente
entre el sistema coordenado de la cámara y el de la imagen. Este cambio no es válido

siempre, porque cualquier punto que en el sistema coordenado de la cámara tenga una
componente z diferente a "f no pertenece siquiera al plano de la imagen y no tiene
coordenadas en el sistema coordenado de la imagen.
Un punto cualquiera "U" en el sistema coordenado de la imagen tiene coordenadas (u, v).
La forma de pasar entre el sistema coordenado de la cámara y el sistema coordenado de la
imagen es la siguiente:
Aquí puede a hacerse un análisis de unidades y corroborar que las unidades de "U"
efectivamente son mm.
Para pasar de coordenadas en el sistema de la imagen a coordenadas en el sistema de
pixeles se debe hacer uso de un factor de traslación y de una constante de proporcionalidad
"k" como factor de acoplamiento de unidades, ya que éstas no son iguales para cada
sistema. El "factor de traslación" se refiere a las coordenadas del punto principal "c". Estas
coordenadas pueden estar tanto en mm. como en píxeles, pero en el caso de los mm. habría
que trasladar primero y luego ajustar las unidades; en caso contrario primero se ajustan
unidades y luego se traslada. Esto se entenderá mejor con las siguientes expresiones: Las coordenadas de un punto cualquiera en el sistema coordenado de pixeles son:

Es importante hacer notar que, en principio, los vectores qu y qv, no tienen porque ser
ortogonales, pero en éste análisis se considera, no sólo porque es más sencillo sino por que
las imágenes en una computadora tienen ejes ortogonales. Asimismo, el factor de
acoplamiento k, en principio, tampoco tiene por qué ser el mismo para cada eje. En caso de
presentarse una deformación de la imagen debe procederse a analizar estos dos puntos para
evitar cualquier posible error. [13]
Espejos
Un espejo puede ser simplemente un a pieza de vidrio negro o una superficie metálica
finamente pulida. En el pasado, los espejos se hacían generalmente recubriendo el vidrio
con plata. Hoy en día, los recubrimientos de aluminio al vacío sobre sustratos altamente
pulidos han quedado como el estándar para los espejos de calidad. A menudo se colocan
también capas protectoras de monóxido de silicio o fluoruro de magnesio sobre el aluminio.
En aplicaciones especiales (por ejemplo, en lasers).

La ley de la reflexión dice que "El ángulo de incidencia es igual al ángulo de reflexión"
y que "el rayo incidente, la perpendicular a la superfìcie y el rayo reflejado se
encuentran todos en un mismo plano que se denomina: plano de incidencia" (Hecht
pags. 99 y 100 [14]). La primer parte la esta ley se muestra en la figura 13 y su expresión
es:
Todos los espejos cumplen con esta ley en cada punto de su superficie y sus propiedades
cambian dependiendo de su forma.

Existen los siguientes tipos de espejos: planos, parabólicos, hiperbólicos y esféricos, entre
otros. Cada uno tiene propiedades específicas y ventajas dependiendo de la aplicación que
se busque.
Espejos Planos
Se encuentra el lugar donde se forman las imágenes en un espejo plano al analizar la figura
14. Se utiliza una fuente puntual ubicada en el punto S, que está a una distancia S0 para
examinar el recorrido de los rayos de luz y el lugar donde convergen. La imagen se forma
en el punto P, que se encuentra a una distancia Sj.
22

Espejos Convexos
Un espejo convexo es aquel que refleja en el lado convexo. Los espejos convexos tienen la
ventaja de dar un campo de visión muy amplio que permite la visión panorámica, esto es
que con solo una toma, se obtiene una imagen de 360°. Esta imagen obviamente se
consigue deformada, pero con el tratamiento adecuado se obtienen imágenes cilindricas
planas a partir de ella.
El espejo parabólico
Un espejo parabólico es aquel cuya superficie está regida por la ecuación de la parábola. La
ecuación que rige la forma del espejo obviamente está en tres dimensiones, a continuación
se da su definición general para dos dimensiones. Una vez que se tiene la ecuación plana de
la parábola es fácil expandir el concepto a tres dimensiones.
Una parábola es el lugar geométrico de un punto que se mueve en un plano de tal manera
que su distancia de una recta fija, situada en el plano, es siempre igual a su distancia de un
punto fijo del plano y que no pertenece a la recta. El punto fijo se llama foco y la recta fija
directriz de la parábola.

La recta que pasa por el foco (F) y es perpendicular al plano se llama eje de la parábola. Sea
A el punto de intersección del eje y la directriz. El punto V, punto medio del segmento AF,
está, por definición, sobre la parábola; este punto se llama vértice.

Propiedades de los espejos parabólicos
Sus propiedades son ideales desde algunos puntos de vista para los sistemas de visión
artificial y se cumplen tanto para espejos cóncavos como para espejos convexos (la
diferencia radica en la formación de imágenes reales o virtuales, respectivamente). Para un
espejo cóncavo todos los rayos que llegan paralelos al eje principal de la parábola son
reflejados pasando por el foco de ésta, es decir, convergen en el fòco. Asimismo, todo
rayo que llega a la superficie del espejo pasando por el foco, se reflejará paralelo al
eje. Análogamente, para un espejo convexo, los rayos que llegan paralelos al eje, divergen
del foco, formando una imagen virtual y los rayos que llegan en dirección al foco son
reflejados paralelos al eje. A continuación se muestra como llegar a la conclusión anterior.
Se trata de determinar la configuración que un espejo debe tener a fin de que una onda
plana (o sea, que todos los rayos de luz son paralelos) incidente se reforme bajo reflexión
en una onda esférica convergente (en la que todos los rayos de luz convergen a un punto).
Según Hecht [14], "Un frente de onda se transforma en otro, con tal que los caminos por los
que se propaga la energía sean todos «iguales», manteniendo de esta forma la fase del
frente de onda". Esto quiere decir que todos los rayos de luz que provienen de una fuente
recorren la misma distancia para formar la imagen, ya sea que terminen siendo paralelos,
diverjan o converjan.
Asumiendo esto último, si la onda plana debe converger, al final, a un punto F, las
distancias recorridas para todos los rayos deben ser iguales. Por lo tanto, para puntos
arbitrarios A1 y A2 (ver figura 16) la distancia recorrida es

Figura 16. Trayectorias recorridas por los rayos de luz en una superficie parabólica.
Ya que el plano Z es paralelo a los frentes de onda incidentes
W^A^ = W^A2 +A^D^ .(14)
Por lo consiguiente, la ecuación (13) queda satisfecha por una superficie para la cual
A^F = A^D^ y A^F = A^D-^ o, más generalmente, una donde AF = AD para cualquier
punto A en el espejo. Esta superficie es un paraboloide con foco y directriz F y S,
respectivamente. [14]
El espejo hiperbólico
El espejo hiperbólico es un espejo (en este caso, convexo) cuya forma es la de media
hipérbola. Una hipérbola es, por definición, el lugar geométrico de un punto que se mueve
en un plano de tal manera que el valor absoluto de la diferencia de sus distancias a dos
puntos fijos del plano, llamados focos, es siempre igual a una cantidad constante, positiva y
menor que la distancia entre los focos.

En la figura 17 se muestra una hipérbola plana con centro en el origen y cuyo eje focal
coincide con el eje "y". Entonces, los focos, F1 y F2 están sobre el eje "y", en (O, e) y (e, 0),
respectivamente, siendo "e" una constante positiva. Sea P(x, y) un punto cualquiera de la
hipérbola. Entonces, por la definición de la hipérbola, el punto P debe satisfacer la
condición geométrica siguiente, que expresa que el valor absoluto de la diferencia de las
distancias del punto a los focos es una cantidad constante.


Propiedades de la Hipérbola. Es sabido que las propiedades de reflexión son diferentes
para cada espejo, dependiendo de la forma que éste tenga. En el caso de un espejo
hiperbólico, se sabe que cualquier rayo que incide sobre su superfìcie en dirección al
punto focal "e" se reflejará directamente sobre el otro foco (ubicado en -e). Esta
propiedad aunada al proceso de formación de una imagen en una cámara será muy útil para
el desarrollo como podrá verse más adelante. Para llegar a esta conclusión se usa un
razonamiento como el utilizado en el espejo parabólico.
En este caso se trata de determinar la configuración que un espejo debe tener a fin de que
una onda esférica divergente (o sea, que todos los rayos de luz se originan en un punto) se
reforme bajo reflexión en otra onda esférica divergente, pero en un punto diferente. Cabe
mencionar que en este caso se analiza la formación de una imagen "virtual" y la superficie
es convexa (figura 18 a). El análisis para una superficie cóncava se desarrolla de una
manera similar y en tal caso arabas ondas son esféricas convergentes, como se ve en la
figura 18 b).
Como se ha dicho, las distancias recorridas por todos los rayos deben ser iguales. Todos los
rayos parten de F y terminan en F' pasando por un punto en la superficie del espejo. Por lo

El segundo término en cada expresión tiene un signo negativo ya que la trayectoria
recorrida desde un punto cualquiera A en la superficie del espejo hacia el punto F' tiene un
sentido contrario a la dirección de los rayos de luz reales. Este signo también muestra que
la imagen formada es virtual.
Si la distancia es igual para cualquier punto sobre el espejo, entonces se puede generalizar
de la siguiente forma
donde c es una constante arbitraria mayor que cero. Ésta última es la expresión geométricade la hipérbola. [14]

DESARROLLO
Descripción del Trabajo
Diseño de un sistema de visión artificial basado en los principios de ñincionamiento de la
visión del gigantocypris.
Este trabajo esta basado en el sistema de visión de los artrópodos, que han desarrollado la
capacidad de visión panorámica, el phylum arthropoda es muy extenso y esta formado por
los crustáceos, arácnidos, insectos, etc. Como modelo principal para el trabajo se ha
seleccionado al gigantocypris (miembro de la clase crustácea) ya que su sistema de visión
se basa en el uso de espejos, los cuales están presentes en el fondo de sus ojos, también se
escogió este crustáceo debido a la disposición de su retina con respecto al sistema entero
(su retina esta orientada hacia atrás), en general, su sistema de visión y el sistema propuesto
en el trabajo tienen muchos puntos en común.
La idea del trabajo es copiar la capacidad de los animales mencionados de dirigir las
imágenes a la retina de la forma que más les convenga. En el caso del gigantocypris se
aprecia que la retina está invertida, o sea que las células sensibles se encuentran de cara al
fondo del ojo. Cuando se utilizan cámaras fotográficas digitales, el sensor (normalmente
compuesto por foto diodos o fototransistores) hace las veces de la retina del ser vivo y se
encuentra de cara a la escena. En el caso de una cámara omnidireccional como la propuesta
la "retina esta de cara al espejo", como en el ojo del gigantocypris.
También se observa que la forma de su ojo sigue una curvatura parabólica, lo que le ayuda
a reflejar los rayos de luz de una manera sencilla de modelar. Para el prototipo diseñado se
optó por utilizar un espejo hiperbólico en vez de uno parabólico, ya que éste último no tiene
un punto único de reflexión y uno hiperbólico sí.

A partir de las observaciones hechas, se busca construir un sistema, con un bloque que
refleje los rayos de la zona de interés hacia el sensor, o sea, hacia la cámara. El sistema
constituye un análogo de la visión del gigantocypris en el cual la cámara hace las veces de
la retina y el espejo hiperbólico hace las veces del espejo parabólico en el fondo de ojo del
gigantocypris, siendo esta última analogía solamente funcional, es decir, se imitan las
propiedades de reflexión para redirigir la luz hacia la zona de recepción.
El sistema propuesto consiste en el arreglo de una cámara y un espejo puestos de frente. El
espejo proporciona la ventaja de captar los rayos de todo el entorno (360°). Los rayos son
reflejados de tal manera que se proyectan hacia abajo. Frente al espejo se coloca una
cámara encargada de captar la imagen, que contiene una escena de todo el entorno. La
imagen recibida por la cámara está distorsionada y se necesita un tratamiento para obtener
una imagen cilindrica y posteriormente trabajar con ella. El procesamiento de la imagen
necesita un reordenamiento espacial. Esto quiere decir que en la primer etapa sólo hay un
cambio de posición de los píxeles. El resultado esperado al procesar la imagen es
convertirla de una imagen circular (con proporciones distorsionadas) a una cilindrica.

Sistema cámara-espejo hiperbólico
Figura 20. Diagrama que muestra la disposición fisica de los elementos del sistema.
La cámara, con centro C, se encuentra abajo, y se hace coincidir al punto C con F' (el foco
inferior de la hipérbola). El espejo se encuentra alineado directamente sobre el centro de la
cámara, de esta forma, al tomar una fotografía, en realidad se captura todo el rededor del
sistema.
El espejo con el que se trabaja es de tipo hiperbólico, con un diámetro de 60 mm. La
desventaja que se tiene es que los mejores espejos que se pueden conseguir para estos
propósitos son importados, lo cual eleva su costo.
Al obtener información con este sistema, se podría tener una pérdida de resolución, pero la
gran ventaja que da es que en una sola toma se obtiene información de lo que hay delante,
detrás, a la izquierda y a la derecha del sistema.


Análisis de la superficie reflejante en el ojo de
gigantocypris
El ojo del gigantocypris contiene un espejo parabólico. Tomando en cuenta que la luz
puede venir desde cualquier punto del entorno (debido a que sus ojos permiten el paso de la
luz), todos los rayos que vengan de afuera y que pasen por el foco de la parábola se
reflejarán hacia delante sobre su retina. El hecho de que los rayos proyectados sobre la
retina sean paralelos evita que la retina tenga que estar a una distancia única del espejo. El
hecho de que la retina se encuentre más lejos del fondo de ojo se vería reflejada solamente
en una mínima pérdida de potencia de la luz reflejada, debida al trayecto más largo
recorrido. Considerando el tamaño del crustáceo y del ojo, la pérdida sería despreciable.
Este sistema es particularmente interesante para el estudio de sistemas de visión
omnidireccionales porque el punto donde convergen todos los rayos de luz reflejados se
encuentra ubicado en el infinito.
Para encontrar el lugar donde se reflejará un punto del espacio sobre la retina (o un sensor,
en el caso de una cámara) se considera:
• Que el sistema es plano, aprovechando la simetría del problema. Por lo tanto se
trabaja en coordenadas {x, y} en vez de trabajar en tres dimensiones, lo cual es
más complicado.
• Que el origen del sistema de coordenadas se encuentra en el origen de la
parábola.
• El foco de la parábola se encuentra en las coordenadas {0, p/2}.


El discriminante tiene dos partes y la selección del signo es sencilla: si x¡ es positiva, x es
negativa y viceversa.
Esto es debido a que el rayo cruza la "función" de la parábola 2 veces, como lo hace en la
imagen, pero no lo hace físicamente. Ya que en la figura 22 se grafica toda la parábola,
pero en realidad el espejo no tiene una altura tan grande. Por esto, los rayos que vengan de
la derecha se reflejan a la izquierda del eje y los que vienen de la izquierda harán lo
contrario.
Sin embargo, aunque podría pensarse que el espejo parabólico es la mejor opción para la
implementación del sistema panorámico, tiene algunas desventajas, como el alto costo de
maquinado del espejo y le necesidad de usar lentes diferentes a las convencionales en la
cámara. Esto último también aumenta el tamaño del dispositivo, ya que dichas cámaras son
más grandes. [6]
Aún así, la base del sistema es lo más interesante. Y aunque el sistema de que es objeto el
trabajo usa un espejo convexo en vez de uno cóncavo, la idea y los principios de
limcionamiento son los mismos. El sistema de visión del gigantocypris puede verse por
medio de un diagrama a bloques de la siguiente manera.


El prototipo ocupa un espejo hiperbólico que provee un único centro de reflexión (el foco
principal de la hipérbola) y los rayos redirigidos también tienen un punto al cual convergen
(el foco secundario) lo cual permite usar una cámara convencional.
Cálculos Adicionales al Modelo del Sistema de Visión
Panorámico

Resolución de una cámara catadíóptríca
Según [8], la resolución de una cámara catadióptrica depende del punto en el espejo donde
se esté formando la imagen y está dada por la siguiente expresión:
donde (r, z) son las coordenadas en el espacio del punto en el espejo donde se está
formando la imagen y el centro de la cámara "c", esta ubicado en (0, c). El punto (r, z) se obtiene de la ecuación de la forma del espejo, dependiendo del caso.
Se ve que la resolución de la cámara no es homogénea en todo el espejo y varía de manera
radial en la imagen.

Diseño Mecánico
El prototipo debe cumplir las especificaciones marcadas: la cámara y el espejo deben estar
alineados y a una distancia tal, que el foco secundario del espejo coincida con el punto
focal de la cámara. Para lograr esto, el prototipo contiene un tomillo sin-fin, que se atomilla
a un soporte para el espejo. Cada pieza será explicada en las siguientes secciones.
Sistema de soporte del espejo
Los sistemas de soporte propuestos en la literatura [8, 13] constan de cilindros y esferas de
plástico o cristal y se debe cumplir con dos condiciones:
• Eliminar reflexiones internas producidas por el aparato
• Una superficie lisa para adquirir imágenes no distorsionadas
Sin embargo, requieren consideraciones especiales y se optó por un sistema de soporte con
un brazo mecánico. El problema que presenta es que bloquea la visión en una región de la
imagen omnidireccional. Esto puede corregirse por medio del material del cuál esté hecho
el brazo (si el material es translúcido, la región puede ser reconstruida) o simplemente
puede ignorarse esta sección; en tal caso, el sistema tiene un punto muerto, abarcando
ciertos ángulos, dependiendo del grosor del brazo.
Otro problema que presenta el sistema de soporte es que puede producir errores en el
cómputo de las imágenes si desalinea los ejes del espejo y de la cámara. El algoritmo para
desdoblado de las imágenes tiene como parámetro el centro de la imagen circular y si este
cambia el resultado es una imagen desdoblada distorsionada. Un ligero cambio en las
coordenadas del centro de la imagen provoca una gran distorsión en la imagen de salida.
Este detalle se verá corregido en el procesamiento por medio de un algoritmo de búsqueda
de círculos previo al desdoblamiento de la imagen. Lo cual corregirá en parte un posible
error en la alineación del espejo y la cámara.

El sistema elegido para el soporte del espejo consta de una barra hexagonal de aluminio
(figura 27) que se atomilla en un sin-fin. Se añadió un par de tuercas (una arriba y una
abajo) que hacen presión a ambos lados para mantenerla a una altura fija.
Con la barra, que es gmesa (1.3 cm), se evita que tenga un movimiento hacia arriba y hacia
abajo del espejo.
La selección del aluminio se hizo principalmente porque es fácil de trabajar, sobre todo si
se toma en cuenta que se busca una pieza más gruesa que la anterior.
Para evitar algunos errores causados por las lámparas (pueden provocar una saturación de
los sensores) se añadió un disco de color negro sobre el espejo. Este disco tiene una doble
función: primero, obstruye la luz indeseable que puede haber sobre el móvil (fuera de la
zona de interés); segundo, ayuda a delimitar bien el área de la fotografía que pertenece al
espejo y lo que está fuera de éste. Ya que todo lo que la cámara capta alrededor del espejo
no es de importancia para el sistema de visión, es necesario "recortar" todo lo que esté
fuera de él. Al poner el disco, toda esta zona se vuelve negra o prácticamente negra.

volviendo más sencillo el filtrarla (con una umbralización, por ejemplo). Otra ventaja es
que se provoca un cambio brusco en los niveles de gris de la imagen en la orilla del espejo,
lo cuál ser/irá para encontrar el centro de la imagen.
El espejo es soportado por una placa de metal, como la que se muestra a continuación. A
ésta va atornillado el espejo. La placa tiene un orificio de tal forma que un tomillo sinfin
puede atomillarse a ella y puede hacerla subir o bajar.
El orificio que tiene un radio r = 0.48 cm es donde va a estar el tomillo sinfín. El otro es
donde se atornillará el espejo.
El espejo tiene un tomillo en su base como se muestra. También pueden verse sus
dimensiones.
El objetivo del tomillo sinfín es poder bajar y subir el espejo para hacer coincidir el centro
de la cámara con el foco del espejo. El tomillo sinfín está fijo al disco intemo de un balero

y el disco extemo está fijo. El balero puede soldarse o fijarse de otra manera al fijo
dependiendo del lugar donde se vaya implementar el dispositivo. En la figura 29 se muestra la configuración general del sistema de visión antes del montaje.
Montaje del dispositivo
La cámara seleccionada para el prototipo cuenta con dos tomillos laterales. Se diseñó una
base para poder sostenerla y a su vez poder fijarla al móvil mediante dos tomillos más, tal
como se muestra en las figuras 30 y 31. La base esta formada por dos piezas sujetas por un
tomillo, si este tomillo se afloja, permite girar la cámara, en caso necesario.

Se trata de una cámara inalámbrica de circuito cerrado. Su selección se hizo por dos
razones principales: la primera es su tamaño reducido (alrededor de 3 cm.); la otra razón es
que al ser inalámbrica, permite independizar el sistema de recepción, del área de
procesamiento.
En la figura 31 (lado derecho) puede verse que sobresalen tres tomillos y no solo dos. Esto
no es un problema ya que el móvil tiene un orificio en el centro y así el tornillo central no
estorba.

La base del tomillo sin-fin se fija al móvil con tres tomillos. Como el tomillo tiene que
moverse verticalmente (para poder ajustar la altura del espejo), una parte tiene que entrar y
salir del móvil, el cuál es hueco.
El tomillo entra y sale del móvil por otro orificio que tiene el móvil. Por dentro hay una
tuerca más que sirve para evitar que el tomillo gire, una vez que se haya elegido la altura
correcta.
Hay un cuarto orificio en la pieza de la figura 32. Este orificio sirve para poner un
prisionero y así fijar el balero extemo del sistema que permite subir y bajar el tomillo. Las
demás partes del sistema mecánico permanecen sin cambios. En la figura 33 se muestra el
prototipo completo.

Esquema del prototipo completo montado en el móvil:
Construcción y Armado del dispositivo
A continuación se muestran los pasos seguidos para la construcción del prototipo siguiendo
los esquemas presentados en la sección anterior. Los materiales se escogieron de manera
que la construcción del prototipo fuera económica, pero cuidando que se adecuaran a las
necesidades del proyecto.
En la figura 34 se puede ver la barra hexagonal que soporta el espejo. En la imagen también
puede verse el disco negro que fue colocado sobre el espejo para poder aislarlo en la
imagen. El material utilizado para construir el soporte es aluminio. El disco negro esta
hecho de plástico.

La base de la cámara se muestra a continuación con la cámara montada (figura 35), aquí
puede apreciarse el tomillo central de la base, que permite girar la cámara sobre su propio
eje. También pueden verse dos orificios a los lados de la base que sirven para sujetarla al
móvil.
La cámara a utilizar, vista de frente, se presenta en la figura 36. Tiene una antena por donde
envía la imagen utilizando radio frecuencia (RF).

En la figura 37 puede verse el móvil a ufilizar para el proyecto. Éste no es propiamente
parte del sistema de visión omnidireccional, solo es un ejemplo de los tipos de aplicación
en que se podría ufilizar un sistema como el propuesto. Éste carro tiene 2 servo-motores,
uno para cada llanta.

En la figura 37 se aprecian también los orificios por donde pasa el sin-fin y el tomillo de la
cámara, así como el resto de los puntos donde puede atornillarse algún otro elemento.
A continuación se muestran las partes del sistema de giro del soporte del espejo (figura 38).
Este sistema permite al tomillo sin-fin girar para que el espejo pueda colocarse más arriba o
más abajo.
El tomillo está fijo a la parte interna del balero con 2 tuercas. La siguiente pieza que se ve,
de abajo hacia arriba, da soporte al balero dentro de la última pieza. Ésta última es la que va
fija al móvil. El balero queda fijo por medio de dos prisioneros que van a los lados de la
pieza fija. En la figura 39 se muestra el móvil con el sistema de giro y la cámara montados.

En las figura 41 se muestra el prototipo terminado, visto de diferentes ángulos. La
alimentación de la cámara y el sistema de control para los servo-motores se ubican en el
espacio existente dentro del móvil.

Materiales
Para la obtención de las imágenes se cuenta con la siguiente cámara:
Mini-cámara para circuito cerrado de TV
Marca: Lloyds Modelo: CA-1035
Importado: Lloyd's electrónica SA de CV
Alimentación: 9Vcc batería
8Vcc 200mA y para la recepción se cuenta con el siguiente receptor:
Receptor para mini-cámara para circuito cerrado de TV
Marca: Llovds Modelo: CA-1035

Importado: Lloyd's electrónica SA de CV
Alimentación: 9Vcc batería
8Vcc 200mA
Para poder leer las imágenes en la computadora se usa una tarjeta de video: TV Capture
Card. Esta tarjeta tiene entrada de señal de televisión, super video y RCA. Esta última es la
que se usa.
El tomillo y las piezas que lo sujetan al fijo son de hierro, el soporte del espejo es de
aluminio, el disco es de plástico y el balero es de acero.
Los parámetros del espejo a utilizar son a = 28.0949 mm. y b = 23.4124 mm., siguiendo
(24). La figura 42 muestra el esquema del proveedor.
Las especificaciones completas del espejo pueden ser consultadas en la página delproveedor [20].

Análisis matemático
La figura 43 muestra un corte del sistema a escala. Pueden verse las dos hojas de la
hipérbola; la parte superior es el espejo real y la inferior es mostrada solamente como
auxiliar para entender mas fácilmente el procesamiento basándose en la geometría propia
de la curva.
Gracias a la simetría del espejo, éste puede ser dividido en sectores y trabajar en un plano,
en vez de trabajar cada punto en el espacio tridimensional. De esta forma, se puede trabajar
en dos dimensiones, después bastará con aplicar el mismo procedimiento de 0 a 360° para
tener toda la imagen.
Debido a esto, la ecuación de la hipérbola se simplifica, pasando de tres a dos dimensiones.
Para el desdoblamiento se trabajará con la siguiente ecuación:

El rayo 1 (r1) de la figura 43 pasa por un punto en la orilla del espejo y por el foco F de la
hipérbola, con su respectivo rayo reflejado hacia el otro foco F'.
El rayo representa la mayor apertura del espejo, esto quiere decir que viene del punto más
alto de la imagen cilindrica y que estará reflejado en la orilla de la imagen obtenida por la
cámara (imagen circular). La ecuación de la recta es:
donde z(30) es la función z evaluada en r = 30 (el radio físico del espejo).
Para poder desdoblar la imagen se harán algunas consideraciones:
a) La imagen que da la cámara será la imagen de entrada.
b) La imagen desdoblada será la imagen de salida.
c) Las imágenes de salida y entrada estarán ubicadas imaginariamente a una distancia
de L y h, respectivamente, de forma que sus proyecciones tengan el mismo tamaño
en mm y en píxeles. Las expresiones para calcular L y h se muestran mas adelante.
Al hacer este ajuste, la constante k, (ecuación (6), del modelo de la cámara), toma
un valor de 1, por lo cual puede ignorarse en las expresiones.
Punto más alto en la imagen de entrada
Se ha dicho que el punto que se encuentra en la orilla de la imagen corresponde al rayo de
luz que se refleja en el borde del espejo. También se dijo que la imagen se colocará a una
distancia conveniente para que coincida su tamaño en mm y en píxeles, como se muestra en
la figura 44.


Sección Ignorada (pixign)
Debido a las propiedades de reflexión de este espejo, el punto central de la imagen de
entrada proviene de una línea sobre el eje óptico que bien podría estar en uno de los focos o
en el infinito, lo cual complica el desdoblamiento total. Para el procesamiento se considera
que la imagen de salida es una proyección sobre un cilindro alrededor del espejo. La figura
45 muestra un corte radial del espejo y los rayos de los extremos.
La imagen de entrada esta contenida horizontalmente entre los rayos r3 y r4, mientras que
la de salida lo está verticalmente entre los rayos r l y r2 (considerando esto, se comprenderá
que la imagen de entrada con la que se trabajará es en realidad una dona y no un disco). Se
puede apreciar que entre más grande sea la pendiente de r4, la pendiente de r2 será cada vez
menor, con lo cual, la imagen de salida se hará más y más grande tendiendo a una altura
infinita. Para evitar esto, se tiene cierto porcentaje de pixeles ignorados, llamado "pixign"
que se da en porcentaje del radio de la imagen (R). El punto de la imagen de entrada que
coincide con este porcentaje se refleja sobre el espejo (ver la intersección entre el r4 y r2) y
marca el punto más bajo de la imagen de salida. La ecuación de r4 es la siguiente:

Criterio para escoger el signo en la raíz. Se debe tomar en cuenta primero que Inign
siempre es positivo. Una de sus soluciones es la intersección con la hoja inferior de la
hipérbola y la otra con el espejo (la hoja superior de la hipérbola). Se busca la intersección
con el espejo, o sea, el valor más alto posible de inign y ya que el producto m-e es positivo
en todos los casos, la forma en que la expresión es máxima es cuando se toma la parte
positiva de la raíz.
La imagen de salida está a una distancia "L" del eje del espejo. "L" también puede
considerarse el radio del cilindro sobre el cual se proyecta ésta imagen. La imagen tiene una
parte sobre e y una parte por debajo de e, como se ve en la figura 46. La altura de la parte
superior se llamará Isa y la de la inferior Isb.


Desdoblamiento de la Imagen
El procedimiento es recorrer la imagen de salida buscando el punto de donde proviene. Para
poder ir de la imagen de salida a la de entrada lo primero que se necesita es encontrar la
recta que pasa por ese punto y el punto F (punto focal superior del espejo, o foco principal).
Luego se encuentra la intersección de esa recta con la superficie del espejo. Por último se
encuentra el lugar en el que se proyecta sobre la imagen original. Éste punto es el que se
debe copiar en la posición que se está evaluando de la imagen de salida.
La pendiente de una recta que pasa por un punto de la imagen de salida y por el foco
principal es:






La última parte sirve para visualizar ambas imágenes (figura 47).
La lectura de las imágenes, como se verá más adelante, puede hacerse de manera cíclica,
cambiando la instrucción en la línea cuatro y poniendo todo el código anterior dentro de un
ciclo while.
Reconocedor de Círculos
El código de desdoblamiento tiene algunos parámetros de entrada que se toman como
conocidos. Las coordenadas, en píxeles, del centro del espejo, forman parte de estos
parámetros, sin embargo, en principio, son desconocidas. Al tener un detector de círculos,
se busca tener las coordenadas exactas del centro del espejo, en la imagen. Aunque
teóricamente el eje del espejo está alineado con el eje de la cámara, con lo cual las
coordenadas del centro del espejo coincidirían con el centro de la imagen,
experimentalmente esto no es así. Por esto se desarrolló el detector. A continuación se
explica el funcionamiento general.

El reconocedor consta principalmente de dos partes. Primero se tiene un filtro pasa-altas de
gradiente para resaltar el borde del espejo. Mismo que presenta un cambio brusco en los
niveles de gris de la imagen. Este cambio brusco es debido al disco oscuro colocado sobre
el espejo. Al aplicar este filtro a la imagen, se obtiene una segmentación parcial del espejo.
Parcial, porque se tienen sus bordes, pero aún no se conoce su centro con exactitud.
El filtro utilizado es un filtro de Prewitt de gradiente de primera derivada. Los operadores
de Prewitt son los mostrados a continuación.
Puede verse que las constantes de los operadores quedan intactas al calcular (50) y por lo
mismo no presentan un factor discriminante para el borde, por lo tanto pueden ignorarse
para un análisis cualitativo.
Finalmente, la imagen de gradiente obtenida con el filtro de gradiente de primera derivada
debe ser sometida a un filtro de umbral para obtener una nueva imagen, ahora binaria (ver
figura 49).

Procedimiento
Mora que se tiene una imagen binarizada se comienza la detección de círculos. Para
agilizar el procedimiento, primero se declara el tamaño de un área alrededor del centro de la
imagen (ver figura 50), dentro de la cual se espera que se encuentre el centro del espejo.
Mientras más pequeña sea ésta área más rápida será la localización, pero existe un mayor
riesgo de cometer un error, dejando el centro real del espejo fiaera de la zona de búsqueda.
La altura y ancho de esta zona se define como la y Ja, respectivamente.
En un principio, se esperaba que el radio (R) de la imagen circular fuera la mitad de la
altura de la imagen de entrada. Pero debe entenderse que éste valor del radio es aproximado
al real. En la práctica se encontró que el valor del radio debe multiplicarse por un factor de

0.96 ya que la imagen del espejo no abarca completamente la altura de la fotografía. Cabe
mencionar que se trabaja con imágenes rectangulares horizontales, en caso de trabajar con
imágenes verticales, el radio deberá tomarse a partir del ancho de la imagen de entrada.
A partir de los valores de la y Ja se crea una matriz vacia que funcionará como un
acumulador. Esto quiere decir que cada pixel dentro del área de búsqueda que tenga una
:^istancia euclidiana con un punto de la imagen binaria igual a "R" aportará un valor de "1"
a la celda que le corresponda en la matriz de búsqueda.
A continuación se recorre un "cuadro" de I (aproximadamente 2R) pixeles por lado,
centrado en la imagen de entrada, (ver figura 51). Cada punto dentro del área de búsqueda
que cumpla la condición antes mencionada aumentará su valor en uno.
Una vez que se ha recorrido toda la imagen se busca el valor máximo en la matriz de
búsqueda. Las coordenadas de este píxel, trasladadas a la imagen completa, son las
coordenadas del centro del espejo.
A continuación se muestra el resultado que se tiene en la matriz de búsqueda



desdoblamiento no podría darse. En la figura 53 se presenta una imagen desdoblada
haciendo uso del detector de círculos explicado.
Etapa final
El sistema de visión presentado consta de varias etapas. Una vez que cada etapa ftinciona
correctamente de manera independiente es necesario acoplarlas para tener un sistema
funcional. A continuación se explica cuáles son las etapas principales del sistema, seguidas
por una breve descripción de su funcionamiento. Entre cada etapa se encuentra una
explicación de la forma en que se lleva a cabo el acoplamiento. Después se da una reseña
de los problemas detectados en cada punto y la forma en que se les dio solución. El sistema de visión consta de las siguientes etapas principales:
• Sistema Cámara-espejo.
• Envió por RF.
• Lectura en la computadora.

• Procesamiento.
• Presentación de la imagen desdoblada.
Sistema Cámara-Espejo
El sistema cámara-espejo, como ya se ha dicho, esta basado en el sistema de visión del
gigantocypris. Consiste en un espejo hiperbólico que refleja todo lo que se encuentra
alrededor del sistema y en su superficie se crea una imagen "circular" que contiene
información de todo el entorno. Envío por RF
El espejo se encuentra situado sobre una cámara digital de radiofrecuencia (RF) que al ser
conectada envía de manera constante las imágenes en forma de video. De esta manera el
prototipo tiene envío inalámbrico de la escena. Lectura en la Computadora
Se cuenta con un receptor de RF que tiene salida tipo RCA. Para poder recibir las imágenes
se hace uso de una tarjeta digitalizadora. La tarjeta de adquisición de video es manejada
desde Matlab usando el comando "vcapg2", que permite visualizar la escena tal como la
percibe el robot y tomar cuadros (frames) con la sintaxis "a=vcapg2". De esta manera se
tiene acceso a las imágenes circulares obtenidas por el prototipo. La función vcapg2 no es
propiamente una función de Matlab aunque fue creada para su uso desde Matlab y puede
ser descargada de [21]. Procesamiento
Como ha sido explicado anteriormente, las imágenes circulares son entrada para el
algoritmo de desdoblamiento, que conforma, junto con los algoritmos de filtrado y
detección de círculos, todo el procesamiento.

Presentación de la Imagen Desdoblada
Una vez que la imagen fue desdoblada, ésta puede ser sometida a un procesamiento
específico, dependiendo de la aplicación buscada. También puede almacenarse en la
memoria de la computadora para hacer un procesamiento posterior, ya sea en ese equipo o
en otro. Si es necesario, esta imagen puede ser reenviada a un punto remoto o incluso
enviada por Internet. En este caso, para la presentación del sistema se despliega la imagen
en pantalla para apreciar el resultado del desdoblamiento.
Todo el proceso se encuentra dentro de un bucle que regresa al punto de la lectura para
tomar una nueva imagen circular con la función "vcapg2".
Propuesta de Aplicación
La aplicación seleccionada para probar el sistema de visión es un móvil. El móvil se
controla desde la computadora y el envío de imágenes por RF constituye una
retroalimentación del estado del móvil, por lo tanto el control se da en lazo cerrado. El
móvil es colocado en un ambiente controlado: un laberinto con obstáculos. El proceso se
muestra mediante el siguiente diagrama a bloques (figura 54).

En la aplicación, el sistema de visión manda las imágenes constantemente y estas son
maestreadas en la computadora después del envío por RF. Una vez en la computadora y ya
extraído el centro de las imágenes se aplican los filtros mencionados en el diagrama de
bloques y que son explicados a continuación.

Filtrado de Bordes
Para detectar los obstáculos presentes en la escena deben ser detectadas todas las líneas
verticales de la escena real. Por las propiedades del sistema de visión, las lineas verticales
reales se convierten en líneas radiales en las imágenes circulares. Por esto se hace una
búsqueda de las mismas.
La imagen es sometida a una umbralización para segmentar los obstáculos, después se le
aplica un filtro de gradiente de primera derivada para resaltar los bordes. Con esto se tiene
una imagen binarizada que contiene bordes radiales, bordes no radiales y ruido propio de la
imagen.
Una vez que la imagen esta binarizada, se recorren todas las posiciones y se calcula el
ángulo que tiene cada pixel de borde con el centro de la imagen. Todos los pixeles que
..üga al mismo ángulo con respecto al centro son parte de un posible borde radial en ese
ángulo. Se lleva a cabo una selección de los ángulos que contienen más pixeles y los demás
son eliminados. Al hacer esto se elimina ruido en la imagen y se tienen los bordes radiales
principales. Si una línea es radial pero contiene pocos pixeles (un valor debajo de un
umbral seleccionado) es ignorada, pero si el móvil se acerca, comienza a detectarse porque
su número de pixeles aumenta.

Definición de Regiones
Para comprobar que un borde radial es en verdad la orilla de un obstáculo se debe
comprobar que haya un cambio brusco de los niveles de gris a ambos lados. Esto se hace
con un muestreo de los pixeles alrededor del borde. Para facilitar la detección del área de
los obstáculos, éstos son de color negro.
Los bordes se clasifican como de entrada y de salida "a los objetos", es decir, si un borde
comienza en pasillo y después hay un objeto (en el sentido de las manecillas del reloj), será
un borde de entrada y viceversa.
Una vez que se tienen los bordes de los obstáculos se identifica de qué ángulo a qué ángulo
se tiene un objeto y de qué ángulo a qué ángulo se tiene pasillo. Esto se hace seleccionando
como objeto todo lo que se encuentre entre un borde de entrada y el siguiente de salida.
Todo lo que no se considera obstáculo es pasillo y una posible ruta a seguir.

A continuación se selecciona el pasillo más cercano yendo hacia adelante, siempre que sea
lo suficientemente amplio para que pase el móvil. Se calcula el ángulo que se debe girar, se
codifica en binario se envia por el puerto serial.
Costo del Prototipo
El espejo representa el gran gasto del sistema ya que prácticamente se debe mandar a hacer.
El precio del espejo como el que se utilizó en este trabajo (de 60 mm de diámetro y forma
hiperbólica) es de aproximadamente $1500. El trabajo incluye el armado de una base para
el espejo y un brazo que ayude a sostener la cámara sobre el primero. El costo de la
fabricación es de aproximadamente $200. Este costo cambia dependiendo del material
seleccionado para el prototipo y la forma de maquinado. La tarjeta digitalizadora tiene un
costo de $600. El costo aproximado de la cámara fue de $2200. Con esto se llega a un costo total aproximado de $4500.
Problemas encontrados
Alimentación de la cámara. La cámara de RF trabaja con una alimentación de 9Vdc que en
un principio era proporcionada por un adaptador. Esta alimentación fue reemplazada por
baterías, colocadas dentro del prototipo.
La tarjeta digitalizadora presentó algunos problemas a la hora de leer desde Matlab, ya que
incluye una aplicación especial para su manejo que debe deshabilitarse antes de comenzar
el procesamiento, de otra manera no es posible accesar a ella. Mediante los comandos
habituales de Matlab, el manejo de la tarjeta es complicado, es por esto que se recurrió a la
función vcpg2 para la lectura de imágenes.

El uso de un espejo parabólico, como en el caso del gigantocypris, fue cambiado en el
trabajo por el de uno hiperbólico, para aprovechar la propiedad que tiene la hipérbola de
contar con dos puntos focales, lo que permite dirigir la imagen entera hacia un punto
específico. Esto último permite que la cámara capture correctamente la imagen
omnidireccional.
El trabajo presenta un problema a la hora del diseño del sistema, por el hecho de necesitar
ubicar exactamente el centro de reflexión de la cámara (el punto en el espacio en el que se
encuentra el foco de la cámara) para hacer coincidir este punto con uno de los focos del
espejo hiperbólico. Las cámaras comerciales normalmente no incluyen ésta característica
en sus especificaciones,
Se cuenta con la ventaja de usar una cámara que permite ajustar la distancia focal, de tal
forma que el sistema puede ser recalibrado en caso necesario. Esta calibración también
puede realizarse por medio del soporte, donde se encuentra el espejo, alejándolo o
acercándolo de la cámara.
Se tuvieron varias propuestas para el soporte del espejo, la selección de la pieza usada se
hizo por tener xm grosor mayor al de las otras piezas, con lo cual se limitó el movimiento
vertical del soporte.
Un análisis del sistema revela que la resolución espacial de la imagen está en función del
radio. Por lo cual se tiene menor resolución en el centro de la imagen y mayor al alejarse
del eje óptico. Esto se puede aprovechar considerando que la información contenida en la
imagen en la zona central incluye la imagen reflejada de la cámara misma y de ángulos
superiores (cercanos a 90°) con respecto a la horizontal, siendo toda ésta, información de
poco interés.

La forma de transmisión escogida es por radio frecuencia (RF), utilizando una cámara para
circuito cerrado y un receptor con salida de TV. Para la obtención de la señal por la
computadora se consiguió una tarjeta de adquisición de señal de TV.
Al ver la imagen desdoblada desplegada en pantalla se puede apreciar la correspondencia
entre imagen de entrada e imagen de salida. Al analizar ambas imágenes se verifica el
modelo matemático propuesto para el sistema. Una vez que se tiene acceso a las imágenes
circulares y panorámicas que ofrece el sistema de visión se puede decidir trabajar con las
¡)rimeras o con las últimas. Una persona familiarizada con las imágenes circulares puede no
, „querir la visualización de la imagen panorámica, pero aún asi es una herramienta muy
".iiportante el poder hacer la conversión para análisis o para presentar datos de una manera
más clara para el entendimiento humano o para cierto proceso.
5n todo caso, si proceso de desdoblamiento puede omitirse si solamente se requiere un
análisis cualitativo, pero si se requiere un análisis más profundo de la escena, entiéndase
esto como la medición de distancias exactas o tamaño de los objetos, el desdoblamiento
será necesario para que la imagen tenga proporciones reales y se puedan hacer mediciones.
Para la aplicación propuesta no es necesario hacer el desdoblamiento de las imágenes. El
desdoblamiento puede hacerse con la única finalidad de presentar la escena al observador.
La imagen desdoblada no se utiliza en el procesamiento y no afecta la decisión tomada.
Desplegar la imagen en Matlab consume tiempo de procesamiento que podria ahorrarse en
otras aplicaciones o al trabajar en un lenguaje de bajo nivel.