






Idiomas
Páginas
Jurídico


DDIISSEEÑÑOO YY AANNÁÁLLIISSIISS DDEE SSIISSTTEEMMAASS DDEE CCOONNTTRROOLL CCOONN
VVIISSUUAALLIIZZAACCIIÓÓNN GGRRÁÁFFIICCAA

i
PPRREEFFAACCIIOO
El Control de Procesos es una disciplina de la Ingeniería Química de gran importancia en el diseño, operación y seguridad de plantas industriales. En esta disciplina se combinan los conocimientos del comportamiento dinámico de los procesos con el de los sistemas de control automático. Debido a la naturaleza dinámica de los procesos industriales es necesario que el estudiante conozca técnicas de control automático, que pueda utilizar en su vida profesional para poder llevar y/o mantener las variables importantes de los procesos en las condiciones de diseño. Por lo tanto es importante entender el comportamiento dinámico de los procesos para comprender el control del mismo.
La herramienta por excelencia para estudiar el comportamiento dinámico de
procesos es la simulación de modelos matemáticos dinámicos. Para desarrollar estas simulaciones los estudiantes universitarios deben utilizar programas de computación tales como EXCEL® de Microsoft® y Simulink® de MATLAB®. El paquete Excel permite programar de manera sencilla los métodos numéricos usados en la simulación de modelos matemáticos de procesos químicos. Este paquete tiene la ventaja adicional de contar con elementos gráficos integrados, lo cual facilita el análisis y comprensión de la respuesta dinámica de los procesos simulados. Adicionalmente, la popularidad y uso extensivo de la plataforma Windows a escala mundial, permite que este paquete esté disponible en cualquier ámbito laboral.
Una herramienta que ha cobrado creciente popularidad en el área de Control de
Procesos en los últimos años, es el programa de simulación SIMULINK, el cual cuenta con la plataforma de funciones generales de MATLAB®. Ambos Programas, así como también herramientas específicas desarrolladas para el diseño de sistemas de control, son de uso fundamental para el diseño y evaluación de estrategias de control.
El propósito general de este libro es que sirva como herramienta de apoyo para los
estudios universitarios de Control de Procesos de la carrera de Ingeniería Química. Se espera que mediante la aplicación del contenido de los estudiantes puedan lograr los siguientes objetivos: • Elaborar modelos matemáticos simples de sistemas de ingeniería química y
linealizar modelos no lineales. • Desarrollar simulaciones de modelos no lineales a lazo abierto con la hoja de
cálculo EXCEL y generar los gráficos de las variables de salida en función de tiempo para analizar la respuesta dinámica de los procesos modelados.
• Desarrollar simulaciones de modelos lineales o linealizados a lazo abierto con el programa SIMULINK, haciendo uso de las funciones de transferencia y los diagramas de bloque y generar gráficos de las variables de salida en función del

ii
tiempo y analizar la respuesta dinámica de los procesos modelados para diferentes formas de las variables de entrada (escalón, rampa, onda seno, pulso rectangular, etc.).
• Desarrollar simulaciones a lazo cerrado con el programa SIMULINK, haciendo uso de las funciones de transferencia, los diagramas de bloque y el controlador PID.
• Aplicar técnicas de ajuste de controladores PID. • Entender el funcionamiento de las estrategias de control básicas: Control por
adelanto, control en cascada, control de relación, control de rango dividido y control selectivo.
Contenido
Los temas centrales de este libro están enfocados hacia 1) Aprender a formular: (a) modelos matemáticos de procesos sencillos (b) objetivos de control de procesos y (c) las estrategias de control de un proceso; 2) Resolver los modelos matemáticos e interpretar las respuestas dinámicas de los procesos a lazo abierto y a lazo cerrado, y 3) Aplicar técnicas de ajuste de controladores PID.
El contenido general de los capítulos es el siguiente:
Capítulo 1. Modelado de procesos químicos
Capítulo 2. Simulación de procesos químicos
Capítulo 3. Control de procesos químicos
Capítulo 4. Estrategias de Control. El capítulo Modelado de Procesos Químicos incluye el desarrollo de modelos
matemáticos de procesos químicos a partir de las leyes fundamentales de conservación de masa y energía y de las ecuaciones de velocidad de transporte, ecuaciones de estado, relaciones de equilibrio y velocidad cinética de reacciones. Esta sección incluye la linealización de los modelos matemáticos con el fin de aplicar la teoría para el diseño de sistemas de control, la cual está basada en sistemas lineales. Los modelos linealizados pueden ser transformados con el operador de Laplace, cuyo uso ofrece un método simple de resolver las ecuaciones diferenciales linealizadas que resultan del modelado de un proceso químico. La función de transferencia resultante es ampliamente usada en el diseño de sistemas de control y permite analizar las respuestas de los procesos de una manera sencilla y directa.
El capítulo Simulación de Procesos Químicos explica el uso de Excel y Simulink
para resolver los modelos dinámicos en el computador aplicando técnicas de resolución numérica. Estas simulaciones permiten estudiar y analizar las relaciones

iii
causa efecto entre las variables involucradas en el proceso y comprender el comportamiento dinámico de los mismos. Para cada programa se detalla lo siguiente:
• EXCEL: A través de un ejemplo se explica el desarrollo de una simulación con este
programa. Se parte de la definición del modelo matemático del proceso, pasando por la introducción de datos y la aplicación del método de Euler para resolver ecuaciones diferenciales ordinarias de primer orden y la descripción de como representarlos de manera gráfica.
• SIMULINK: Se describe desde el acceso al paquete a través de MATLAB® y el
desarrollo de una simulación a través de un ejemplo. Se parte de la ecuación no lineal, la linealización de la misma, el cálculo de la función de transferencia y la construcción del diagrama de bloques. Luego se describe como construir el diagrama bloques en la ventana de trabajo de SIMULINK y como se corre la simulación.
El capítulo Control de Procesos Químicos, está relacionado con la descripción
funcional de los elementos que conforman un lazo de control por retroalimentación: sensor, transmisor, elemento final de control y controlador. Se hace especial énfasis en el elemento final de control y en el controlador PID y su influencia en la respuesta a lazo cerrado de los procesos químicos. También se presentan los procedimientos mediante los cuales se adecuan los parámetros de controlador PID para obtener una respuesta específica del circuito de control.
Finalmente, el capítulo Estrategias de Control, tiene que ver con técnicas de control tendientes a mejorar el desempeño del control por retroalimentación. Se describen y ejemplifican el enfoque de control feedforward, el control de relación, el control en cascada, el control selectivo y el control en rango dividido. Para el control feedforward se utilizan bloques de cálculo que son parte intrínseca de los controladores por computadora modernos. Se describen los bloques más utilizados para diseñar estrategias de control feedforward y los cálculos asociados a la implantación en el computador de dichas estrategias. Pautas para el Uso del Libro
Para aprovechar al máximo el material contenido en este libro se deben realizar las siguientes actividades:
• Discutir y comprender los objetivos de aprendizaje a cubrir en cada sección. • Completar los conocimientos teóricos a través de la bibliografía recomendada al
final de cada tema. • Realizar ejercicios de manera individual y consultar con el Profesor de la
asignatura para validar los conocimientos adquiridos y los resultados obtenidos.

iv
• Realizar los ejercicios del CD que acompaña al libro para reforzar las destrezas relacionadas con la simulación de procesos y la comprensión de la dinámica de los sistemas.
Requisitos
Para garantizar un buen resultado en el proceso de enseñanza y de aprendizaje de esta asignatura, el estudiante debe tener sólidos conocimientos en las siguientes áreas:
Matemática • Resolución numérica de sistemas de ecuaciones lineales y no lineales, algebraicas
y diferenciales. • Resolución analítica de ecuaciones diferenciales ordinarias (EDO) lineales. • Resolución numérica de EDO lineales y no lineales. • Transformadas de Laplace. • Variables complejas. Ingeniería Química • Principios de Ingeniería Química: Leyes fundamentales de conservación de masa y
energía en estado estacionario y transitorio. • Termodinámica: Ecuaciones de estado, propiedades termodinámicas de sistemas,
equilibrio de fases, equilibrio químico etc. • Mecánica de fluidos: flujo de fluidos, presión en sistemas hidráulicos, presión
estática, bombas, etc. • Cinética: Ley de acción de masas, dependencia de temperatura de Arrhenius. • Velocidad de transporte de masa y energía: leyes de transporte de calor y masa. Programación en computadora. EXCEL • Tener conocimientos básicos de la hoja de cálculo Excel de Microsoft y del entorno
de trabajo en ambiente Windows. SIMULINK • Comprender los conceptos y destrezas asociados al cálculo de funciones de
transferencia y diagrama de bloques.

CCAAPPIITTUULLOO 11
MMOODDEELLAADDOO DDEE PPRROOCCEESSOOSS QQUUÍÍMMIICCOOSS
)s(F
1s2.13e9.4
1s9.14e8.3
)s(S)s(R
1s4.14e4.19
1s9.10e6.6
1s21e8.18
1s7.16e8.12
)s(X)s(X
s4.3
s1.8
s3s7
s3s
B
D
+
++
+−
+
+−
+=
−
−
−−
−−
pii c
Q)TT(F
dtdT
Ahρ
+−=
LLooss TTeemmaass aa ttrraattaarr eenn eessttee ccaappííttuulloo iinncclluuyyeenn:: Necesidad del modelado para control de procesos Sistemas no lineales y linealización Funciones de transferencia Diagramas de bloque

MODELADO DE PROCESOS QUÍMICOS 1
¿¿PPOORR QQUUÉÉ SSEE NNEECCEESSIITTAA EELL MMOODDEELLAADDOO MMAATTEEMMÁÁTTIICCOO PPAARRAA CCOONNTTRROOLL DDEE PPRROOCCEESSOOSS?? Para controlar un proceso es necesario entender su funcionamiento, no sólo en términos de los fenómenos físico-químicos que en él ocurren, sino también en términos del tiempo de respuesta de las variables que se requiere mantener bajo control, en presencia de perturbaciones siempre cambiantes.
La meta del sistema de control es garantizar que los objetivos operacionales de un proceso sean satisfechos. Esto se hace compensando las perturbaciones de tal forma que la respuesta del controlador sea dinámicamente compatible con el tiempo de respuesta del proceso y garantizando que la magnitud de los cambios se hagan dentro de valores límites asociados a la seguridad del proceso y a los equipos e instrumentos involucrados en el sistema de control. Para alcanzar esta meta se necesita una descripción simple de cómo el proceso reacciona ante varias entradas y esto es lo que los modelos matemáticos pueden proporcionar al diseñador de control a bajo costo. Para caracterizar a un sistema de proceso y su comportamiento se necesita: Un conjunto de cantidades dependientes cuyos valores describan el estado natural del sistema dado.
Un conjunto de ecuaciones en las cuales las variables antes referidas, describan como cambia el estado natural del sistema en el tiempo.
Para la mayoría de los procesos hay sólo tres cantidades fundamentales: masa, energía y momento. Estas pueden ser caracterizadas por variables tales como densidad, concentración, temperatura, presión y flujo. Estas variables características son llamadas Variables de Estado y sus valores definen el estado del sistema. Las ecuaciones que relacionan a las variables de estado (variables dependientes) con varias variables independientes se derivan de la aplicación del principio de conservación de las cantidades fundamentales y son llamadas Ecuaciones de Estado. Las ecuaciones de estado y las variables de estado constituyen el modelo matemático de un proceso, el cual proporciona el comportamiento estático o dinámico del mismo.
La aplicación del principio de conservación generará un conjunto de ecuaciones diferenciales con las cantidades fundamentales como las variables dependientes y el tiempo como la variable independiente.
MODELADO DE PROCESOS QUÍMICOS 2
DDiiffiiccuullttaaddeess ddeell MMooddeellaaddoo
•
•
•
Para desarrollar descripciones significativas y realistas de los procesos químicos, se suelen enfrentar una serie de dificultades las cuales pueden clasificarse en tres categorías: Procesos no completamente entendidos. Entender completamente los
fenómenos físicos y químicos que ocurren en un proceso químico es virtualmente imposible. Aún un grado aceptable de conocimiento es a veces difícil. Ejemplos típicos son:
Sistemas de reacción multicomponente con interacciones poco conocidas entre diferentes componentes y cinéticas imprecisas.
Equilibrio termodinámico líquido-vapor o líquido-líquido para sistemas multicomponentes.
Interacciones en la transferencia de calor y masa en columnas de destilación con mezclas multicomponentes no ideales, mezclas azeotrópicas, etc.
Parámetros imprecisos. La disponibilidad de valores exactos para los
parámetros de un modelo es indispensable para cualquier análisis cuantitativo del comportamiento del proceso, sin embargo esto no es siempre posible. Ejemplos típicos incluyen: la constante pre-exponenecial de la expresión de velocidad cinética, orden de reacciones químicas, etc.
Adicionalmente, los parámetros no permanecen constantes durante largos períodos de tiempo. Por esta razón se necesita alguna descripción cuantitativa de cómo cambian los valores paramétricos con el tiempo. Ejemplos: Actividad de un catalizador y coeficiente global de transferencia de calor. El tiempo muerto es también un parámetro crítico cuyo valor no se conoce con precisión y además puede ser variable. Este hecho trae como consecuencia serios problemas de estabilidad para el proceso.
Tamaño y Complejidad del modelo. En el esfuerzo para desarrollar un
modelo matemático preciso y exacto, su tamaño y complejidad crece significativamente. Estas características no deben exceder ciertos niveles manejables, mas allá de los cuales el modelo pierde su valor y se hace menos atractivo.
MODELADO DE PROCESOS QUÍMICOS 3
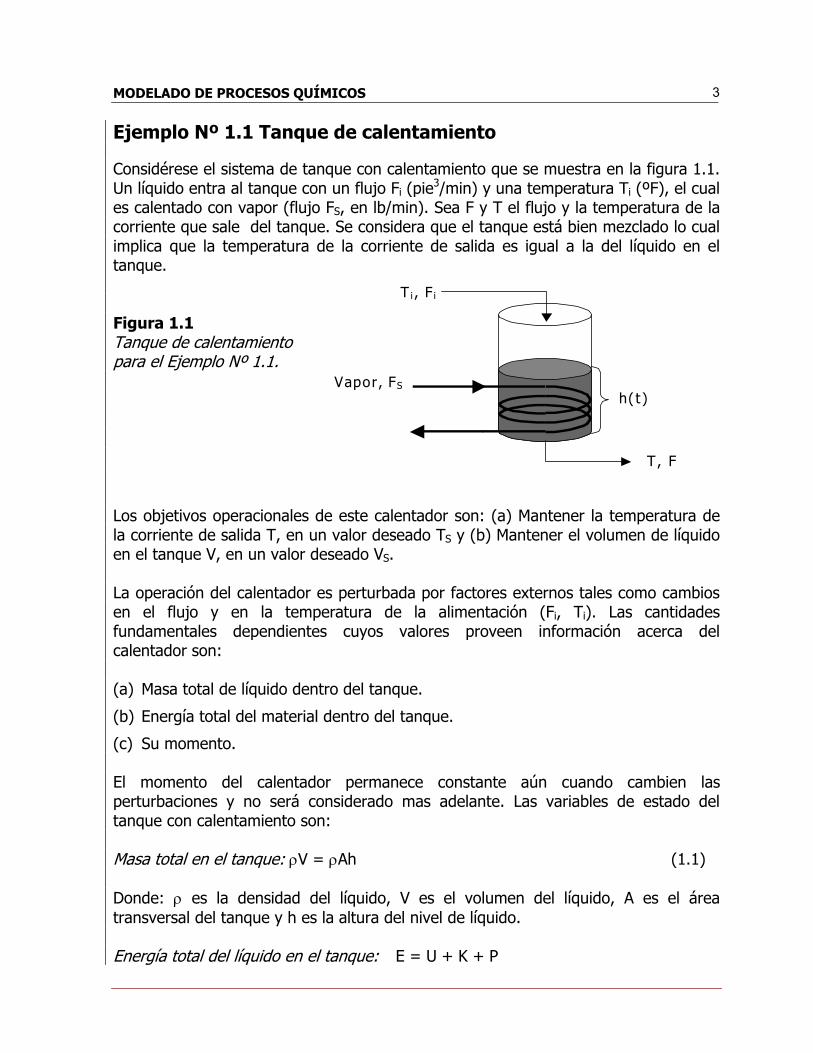
Ejemplo Nº 1.1 Tanque de calentamiento Considérese el sistema de tanque con calentamiento que se muestra en la figura 1.1. Un líquido entra al tanque con un flujo Fi (pie3/min) y una temperatura Ti (ºF), el cual es calentado con vapor (flujo FS, en lb/min). Sea F y T el flujo y la temperatura de la corriente que sale del tanque. Se considera que el tanque está bien mezclado lo cual implica que la temperatura de la corriente de salida es igual a la del líquido en el tanque. T i , Fi
Vapor, FS h(t)
T , F
Figura 1.1 Tanque de calentamiento para el Ejemplo Nº 1.1. Los objetivos operacionales de este calentador son: (a) Mantener la temperatura de la corriente de salida T, en un valor deseado TS y (b) Mantener el volumen de líquido en el tanque V, en un valor deseado VS. La operación del calentador es perturbada por factores externos tales como cambios en el flujo y en la temperatura de la alimentación (Fi, Ti). Las cantidades fundamentales dependientes cuyos valores proveen información acerca del calentador son: (a) Masa total de líquido dentro del tanque.
(b) Energía total del material dentro del tanque.
(c) Su momento. El momento del calentador permanece constante aún cuando cambien las perturbaciones y no será considerado mas adelante. Las variables de estado del tanque con calentamiento son: Masa total en el tanque: ρV = ρAh (1.1) Donde: ρ es la densidad del líquido, V es el volumen del líquido, A es el área transversal del tanque y h es la altura del nivel de líquido. Energía total del líquido en el tanque: E = U + K + P

MODELADO DE PROCESOS QUÍMICOS 4
Pero ya que el tanque no se mueve, dK/dt = dP/dt = 0 y dE/dt = dU/dt. Para sistemas líquidos:
dU/dt ≈ dH/dt donde: H es la entalpía total del líquido en el tanque.
H = ρVcp(T-Tref) = ρAhcp(T-Tref) (1.2)
Donde : cp es la capacidad calorífica del líquido en el tanque y Tref es la temperatura de referencia donde la entalpía específica del líquido es cero.
De las ecuaciones (1.1) y (1.2) se concluye que las variables de estado para el tanque con calentamiento son h y T. Mientras que los parámetros constantes ρ, A, cp, y Tref son característicos del sistema del tanque.
Balance de Masa Total:
FFdt
)Ah(dii ρρ
ρ−= (1.3)
Asumiendo densidad constante la ecuación (1.3) queda:
FFdtdh
A i −= (1.4)
Balance Total de Energía:
Q)TT(Fc)TT(cFdt
)TT(Ahc(d
Q)T(Fh)T(hFdtdH
refprefipirefp
iiii
+−−−=−
+−=
ρρρ
ρρ
(1.5)
Donde Q es la cantidad de calor suministrado por el vapor por unidad de tiempo. La ecuación (1.5) puede tomar una forma más simple si se asume que Tref = 0 y que ρ y cp son constantes en todo el rango de operación.
pii c
QFTTF
dt)hT(d
Aρ
+−= (1.6)

MODELADO DE PROCESOS QUÍMICOS 5
Manipulaciones algebraicas adicionales de la ecuación (1.6) llevan a:
pii c
Q)TT(F
dtdT
Ahρ
+−= (1.7)
Las ecuaciones (1.4) y (1.7) son las ecuaciones de estado y las variables de estas ecuaciones pueden ser clasificadas de la siguiente manera:
Variables de estado: h y T
Variables de salida: h y T (ambas medidas)
Variables de entrada:
Perturbaciones: Ti, Fi Variables manipuladas: Q, F (para control feedback) Fi (para control feedforward)
Parámetros: A, ρ, cp CCoonnssiiddeerraacciioonneess eenn eell mmooddeellaaddoo ppaarraa ccoonnttrrooll ddee pprroocceessooss El modelado matemático de los fenómenos físicos y químicos que se encuentran en un sistema de proceso, no obedece a reglas claramente definidas y recetas. Depende en gran medida de los antecedente educativos y de la experiencia práctica del modelador. Desde el punto del control de procesos y de sus necesidades el modelado se enfoca en los siguientes temas: 1. Desarrollar el modelo Entrada – Salida, el cual es muy conveniente para
propósitos de control.
2. Determinar los grados de libertad inherentes a el proceso e identificar el alcance del problema de control a ser resuelto.
MMooddeelloo EEnnttrraaddaa -- SSaalliiddaa Cualquier proceso químico a lazo abierto y sus variables asociadas puede ser descrito pictóricamente por:

MODELADO DE PROCESOS QUÍMICOS 6
EntradasEntradas
PerturbacionesPerturbaciones
ControladasControladas
......
ProcesoProcesoProceso
mm11
ManipuladasManipuladas
y = f(m, y = f(m, ll))
mm22
mmnn
yy11
ll11SPSP
ll22SPSP
llnnSPSP
......
yy22
yynn
......
SalidasSalidas Figura 1.2. Modelo de entrada y salida a lazo abierto para un proceso químico. El modelo tendría la forma general para cada salida:
Salida = f(Variables de Entrada)
yn = f(m1, m2, ..., mn; p1, p2, ..., pn) para n = 1, 2, 3, ..., m Esta representación tiene la ventaja de reflejar de manera gráfica las relaciones causa efecto entre las variables de entrada y las variables de salida. Ejemplo Nº 1.2. Modelo de entrada-salida Para el tanque de calentamiento de la figura 1.1 el modelo entrada–salida del proceso podría representarse pictóricamente como: EEnnttrraaddaass
MMaanniippuullaaddaass
hh == ff((FFii,, FF))
FFii
TT
SSaalliiddaass
PPeerrttuurrbbaacciioonneess
TT == ff((FFii,, TTii,, FF,, FFss))
TTaannqquuee
FF
TTii
FFss
hh
Figura 1.3. Modelo de entrada-salida para el tanque de calentamiento de la figura 1 En este modelo de entrada y salida pueden observarse claramente las relaciones causa efecto entre las variables de salida y las variables de entrada. La masa contenida en el tanque, caracterizada por el nivel (h), cambiará en función del flujo de entrada y de salida. La temperatura de la masa acumulada en el tanque (T) es función de los flujos de entrada y salida así como también del flujo de vapor al serpentín y de la temperatura de entrada.

MODELADO DE PROCESOS QUÍMICOS 7
GGrraaddooss ddee lliibbeerrttaadd yy ccoonnttrroollaaddoorreess ddee pprroocceessoo ������������������������������������������������
Para cualquier sistema de proceso descrito por un conjunto de E ecuaciones independientes (diferenciales y/o algebraicas) que contienen V variables, el número de grados de libertad está dado por:
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
�������������������
����������������
������
�������������������������������������������������������������������
����������������������������������������������������������������������������������������������������������������������������������������
������������
���
f = V – E
Si f = 0, se tiene igual número de ecuaciones y de variables. El proceso está exactamente especificado.
Si f > 0, hay más variables que ecuaciones y el conjunto de ecuaciones E tiene múltiples soluciones. Se pueden especificar arbitrariamente f de las variables. En este caso el proceso está sub-especificado por f ecuaciones.
Si f < 0, hay más ecuaciones que incógnitas y en general el sistema de ecuaciones E, no tiene solución. El sistema está sobre-especificado.
Un proceso modelado cuidadosamente tendrá uno o más grados de libertad y como f > 0 el proceso tendrá un número infinito de soluciones. Luego es necesario introducir f ecuaciones adicionales para especificar completamente al sistema de manera que tenga un comportamiento único. Hay dos fuentes que proveen las ecuaciones adicionales que se necesitan para reducir f a cero: 1) El mundo exterior, el cual especifica el valor de ciertas variables de entrada, p.e.:
Los alrededores que influyen en las condiciones de operación. Una unidad aguas arriba que alimenta al proceso. Una unidad aguas abajo: cuando el flujo de salida del proceso es un flujo manipulado de entrada para una unidad aguas abajo.
2) El sistema de control, el cual impone ciertas relaciones entre las salidas controladas y las entradas manipuladas (feedback) o entre las perturbaciones medibles y las entradas manipuladas (feedforward).
El máximo número de variables controladas en un sistema de proceso es igual al número de grados de libertad menos el número de variables especificadas externamente, esto es:
Nº de variables controladas = f – Nº entradas especificadas externamente
TIP
Durante la reducción de grados de libertad de un proceso químico debe ponerse especial cuidado en no especificar más objetivos de control de los posibles para un sistema en particular.

MODELADO DE PROCESOS QUÍMICOS 8
Ejemplo Nº 1.3 Reactor mezcla completa con enfriamiento circulante
Cuando las chaquetas de enfriamiento y los serpentines de enfriamiento interno no proveen suficiente área de transferencia de calor, se utiliza un sistema de enfriamiento circulante como el que se muestra en la figura 1.4.
h, CA, T
Intercambiador
FW, TW0
F0, CA0, T0
F, CA, TAgua de enfriamiento
FR, TR
FW, TW
Figura 1.4. Sistema de enfriamiento de un reactor mezcla completa para el ejemplo Nº 1.3. Una porción del fluido de proceso desde el reactor es bombeada a través de un intercambiador de calor externo y devuelto al reactor. Se añade agua de enfriamiento a la carcaza del intercambiador con flujo Fw. El flujo de circulación a través de intercambiador de calor debe permanecer constante. Asuma que el lado de la carcaza del intercambiador de calor puede ser representado por dos etapas perfectamente mezcladas colocadas en serie y que el flujo de proceso fluye en contracorriente al flujo de agua, también en dos etapas perfectamente mezcladas. La reacción es irreversible y de primer orden en el reactante A. El contenido del tanque está perfectamente mezclado. • Determine los grados de libertad de este sistema y el número de variables
controladas • •
Determine las variables controladas y las variables manipuladas Derive el modelo matemático dinámico de este sistema
GRADOS DE LIBERTAD Y NÚMERO DE VARIABLES CONTROLADAS Las variables asociadas al reactor, mostradas en la figura son: Variables: h, T, CA, CA0, F0, T0, F, TR, FR, FW,TW, y TW0 = 12 variables

MODELADO DE PROCESOS QUÍMICOS 9
Las ecuaciones fundamentales que relacionan a estas variables son: • •
1 Balance de masa global en el contenido del reactor para calcular h
• 1 Balance de masa por componente en el contenido del reactor para calcular CA
• 1 Balance de energía en el contenido del reactor para calcular T
• 1 Balance de energía en la carcaza del intercambiador para calcular TW 1 balance de energía en los tubos del intercambiador para calcular TR
Grados de libertad: F = V – E = 12 – 5 = 7 El mundo exterior provee cuatro variables: F0, CA0, T0 y TW0.
Número de variables controladas: 7 – 4 = 3 variables controladas. VARIABLES CONTROLADAS Y SUS RESPECTIVAS VARIABLES MANIPULADAS El reactor es un tanque integrante por lo que el nivel requiere ser controlado, además, el nivel en el reactor garantiza el tiempo de residencia adecuado para que la reacción se lleve a cabo en la extensión deseada. El flujo de recirculación debe permanecer constante como un requerimiento operacional y la conversión de la reacción es función directa de la temperatura. Por lo tanto h, FR y T son las tres variables controladas y medidas. Las variables manipuladas disponibles son: F, FW y FR. Las variables manipuladas se seleccionan de acuerdo a criterios de impacto directo y disponibilidad del sistema. A partir de los objetivos operacionales descritos en el enunciado las variables controladas y sus respectivas variables manipuladas serán:
Variable Controlada
Objetivo operacional Variable Manipulada
Justificación
T
Mantener la conversión deseada.
FW
Efecto indirecto sobre la temperatura del reactor
FR
Debe permanecer constante por requerimientos operacionales.
FR
Efecto directo sobre el flujo
h
Evitar que el tanque se seque o se derrame y mantener el tiempo de residencia en el reactor.
F
Efecto directo sobre el nivel.

MODELADO DE PROCESOS QUÍMICOS 10
MODELO MATEMÁTICO
Balance de masa global en el reactor: ssRR00 FFFdt
)V(dρρρ
ρ−+=
Donde: V=Ah Fs = FR + F ρ = ρ0 = ρR = constante
FFdtdh
A 0 −=
Balance de masa en el componente A: VCekFCFCFCdt
)VC(dA
)RT/E(0sARR00A
A −−−+=
De esta ecuación se aprecia que las variables de estado que se necesitan son: CA y V. La manipulación algebraica de esta ecuación lleva a:
dtdV
CVCekFCFCFCdt
dCV AA
RT/E0sARR00A
A −−−+= −
ART/E
0A0A0A Cek)CC(F
dtdC −−−=
Balance de energía en el reactor: kVCH)T(Fh)T(hF)T(hFdtdH
ARRRRRoooo ∆+−+= ρρρ
Esta ecuación de balance de energía está expresada en función de las entalpías tanto de la masa de reacción como de las corrientes que entran y salen del reactor. La entalpía de un sistema líquido es una función de la temperatura y de su composición. Aplicando las definiciones termodinámicas y rearreglando se obtiene:
ART/E
0p
rRR00 CeVk
cH
)TT(F)TT(FdtdT
V −∆+−+−=
ρ
Las ecuaciones de balance de energía en el intercambiador se determinan a partir de la representación definida para el mismo. Así:
FW, TW0
FR, TR FR, TR0 FR, T
FW, TW1 FW, TW

MODELADO DE PROCESOS QUÍMICOS 11
Balance de energía en los tubos (Flujo de recirculación al reactor). Asumiendo que la densidad y la capacidad calorífica permanecen constantes entre la entrada y la salida, se tiene:
)TT(Vc
UA)TT(
VF
dtdT
W0R0RpRR
I0R
0R
R0R −−−=ρ
)TT(Vc
UA)TT(
VF
dtdT
1WRRpRR
IIR0R
R
RR −−−=ρ
Balance de energía en la carcaza (Agua de enfriamiento). Asumiendo que la densidad y la capacidad calorífica permanecen constantes entre la entrada y la salida, se tiene:
)TT(Vc
UA)TT(
VF
dtdT
W0R1WpWW
IW1W
1W
WW −+−=ρ
)TT(Vc
UA)TT(
VF
dtdT
1WRWpWW
II1W0W
2W
W1W −+−=ρ
SSIISSTTEEMMAASS LLIINNEEAALLEESS,, NNOO LLIINNEEAALLEESS YY LLIINNEEAALLIIZZAACCIIÓÓNN
La teoría para el diseño de sistemas de control está basada en sistemas lineales, se han hecho pocos avances para desarrollar una teoría de control para sistemas no lineales. Por esta razón, es importante desarrollar modelos lineales que representen aproximadamente el comportamiento dinámico de un sistema no lineal en la vecindad de condiciones de operación específicas.
La linealización es el proceso mediante el cual se pueden aproximar funciones no lineales a funciones lineales. Es ampliamente usada en el estudio de dinámica de procesos y en el diseño de sistemas de control debido a las siguientes razones:
1. Se pueden obtener soluciones analíticas de sistemas lineales y así adquirir una visión completa y general del comportamiento del proceso, independientemente de los valores de los parámetros y variables de entrada. Para sistemas no lineales no es posible obtener la solución analítica y la simulación por computadora provee sólo el comportamiento del sistema para valores específicos de entradas y parámetros.
2. Los desarrollos significativos en el diseño efectivo de sistemas de control están limitados a sistemas lineales.

MODELADO DE PROCESOS QUÍMICOS 12
Para utilizar las técnicas matemáticas lineales se deben transformar las ecuaciones diferenciales NO LINEALES en ecuaciones diferenciales lineales. Estas últimas son aquellas en las que cada uno de sus términos está elevado a la primera potencia. En los sistemas de ingeniería química la mayoría de las ecuaciones diferenciales que los describen son no lineales. Por ejemplo:
Llenado/Vaciado de un tanque: 02/1 Fkh
dtdh
A =+
Reactor Mezcla Completa: 0A0nAA
A CF)t(C)t(kV)t(C)t(Fdt
)VC(d=++
Matemáticamente una ecuación diferencial lineal es aquella para la cual se cumplen las siguientes propiedades: 1. Si x(t) es una solución, entonces cx(t) también es una solución, donde c =
constante.
2. Si x1(t) es una solución y x2(t) es también una solución, entonces x1(t)+x2(t) es una solución (PRINCIPIO DE SUPERPOSICIÓN).
LLiinneeaalliizzaacciióónn La linealización de una función no lineal es relativamente sencilla. Todo lo que se hace es expandirla en Series de Taylor alrededor de un nivel operacional en estado estacionario y se desprecian todos los términos después de la primera derivada:
Para [ ] k)t(xFdt
)t(dx++ , donde F[x(t)] es una función no lineal y k una constante, la
linealización resulta:
)x)t(x(dt
)x(dF)x(F)x(f −+=
La barra representa el valor de la variable en el estado estacionario de referencia alrededor del cual se realiza la expansión de Taylor. La función se expandirá alrededor de los valores en estado estacionariox),( 21 xxf 1
yx2 y la linealización resulta:
)xx(x
)x(f)xx(
x)x(f
)x,x(f)x,x(f 222
111
2121 )2x,1x()2x,1x(−+−+=
∂∂
∂∂
La representación gráfica de la linealización se muestra en la figura 1.5.

MODELADO DE PROCESOS QUÍMICOS 13
F(x(t))
x
)(xF
x
dxxdF )(
xtxtX −= )()( xtxtX −= )()(
Error de AproximaciónError de Aproximación
Figura 1.5. Interpretación geométrica de la linealización. VVaarriiaabbllee ddee ddeessvviiaacciióónn Se define como la diferencia entre el valor de la variable en un instante de tiempo y el valor deseado en el estado estacionario (EE).
x)t(x)t(X −= Donde: X(t) = Variable de Desviación x(t) = Variable absoluta correspondiente x = valor de x(t) en un estado estacionario deseado Comox es un estado estacionario, las condiciones iniciales de las variables de desviación y sus derivadas son todas cero.
x(0) =x, X(0) = 0, 0dt
)0(Xdn
n
=
Y como x es constante, entonces:
n
n
n
n
dt)t(xd
dt)t(Xd
=
Si se examinan las expresiones del desarrollo en serie de Taylor de las funciones no lineales se observa que las funciones linealizadas están expresadas en variables de desviación.

MODELADO DE PROCESOS QUÍMICOS 14
Ejemplo Nº 1.4. Reactor mezcla completa a volumen constante En el reactor mezcla completa mostrado en la figura 1.6 se produce la reacción A → B la cual es exotérmica e irreversible. El volumen de reacción es constante al igual que el del agua en la chaqueta. El objetivo operacional es mantener la conversión en el reactor en el valor más alto permitido. Determine los grados de libertad y el número de variables controladas. Derive el modelo matemático que describe el comportamiento dinámico de este reactor y linealice las funciones no lineales.
CAi
FI TI
Fi Ti
TJ, FJ
TJ0, FJ
CAi, Ti, Fi
V, T, CA
Figura 1.6. Reactor mezcla completa para el ejemplo Nº 1.4. GRADOS DE LIBERTAD Y NÚMERO DE VARIABLES CONTROLADAS Las variables asociadas al reactor contenidas en la figura son: T, CA, CAi, Fi, Ti, FJ, TJ, y TJ0 = 8 variables Las ecuaciones fundamentales que relacionan a estas variables son:
• Balance en el componente A en el reactor (CA) • Balance de energía en la mezcla de reacción (T) • Balance de Energía en la chaqueta de enfriamiento (TJ)
Grados de libertad: F= V – E = 8 – 3 = 5 El mundo exterior provee cuatro variables: Fi, CAi, Ti y TJ0.
El número de variables controladas será: 5 – 4 = 1 variable controlada. VARIABLES CONTROLADAS Y SUS RESPECTIVAS VARIABLES MANIPULADAS A partir de los requerimientos operacionales se determina que T es la variable controlada y medida. La variable manipulada es: FJ. MODELO MATEMÁTICO

MODELADO DE PROCESOS QUÍMICOS 15
Balance de masa en el componente A:
ART/E
AiAiA Cke)CC(
VF
dtdC −−−=
Balance de energía en el reactor:
Vc
)TT(UACke
cH
)TT(VF
dtdT
p
JA
RT/E
p
ri
i
ρρ−
−∆
+−= −
Balance de energía en la chaqueta:
)TT(Vc
UA)TT(
VF
dtdT
JJpJJ
J0JJ
JJ −+−=ρ
FUNCIONES DE TRANSFERENCIA DE LAS VARIABLES CONTROLADAS
ART/E
AiAiA Cke)CC(
VF
dtdC −−−= (1.8)
Linealización de ke ART/E C−
2TR/E
A21TR/E
A
AAA
ATR/E
A
CeCRT
EkTf
CkeCf
)TT(Tf
)CC(Cf
Cke)T,C(f
==∂∂
==∂∂
−∂∂
+−∂∂
+=
−−
−
También debe linealizarse FiCAi y FiCA como:
FiCAi =FiCAi +Fi(CAi -CAi) +CAi(Fi -Fi)
FiCA =FiCA +Fi(CA -CA) +CA(Fi -Fi) Haciendo ACCC AA =− , TTT
)=− , IFFF ii =− , IAiAi ACCC =− yFi/V = C3,CAi/V
= C4 ,CA/V = C5, sustituyendo en la ecuación (1.8) y restando el estado estacionario inicial, se tiene:

MODELADO DE PROCESOS QUÍMICOS 16
TCAC)CC(IF)CC(ACCTCACCIFCACCIFCACCdt
dCA23154I321534I3 −+−−+=−−−−+=
)))
T)CC(
CIF
)CC()CC(
AC)CC(
CAC
dtAdC
)CC(1
31
2
31
54I
31
3
31 +−
+−
++
=++
))
331
232
31
541
31
31
31
K)CC(
CK
)CC()CC(
K)CC(
C)CC(
1=
+=
+−
=+
=+
τ
TKIFKACKACdt
AdC32I11 −+=+
)
τ
Vc)TT(UA
CkecH
)TT(VF
dtdT
p
JA
RT/E
p
ri
i
ρρ−
−∆
+−= − (1.9)
Se linealizan las funciones FiTi y FiT, como:
FiTi =FiTi +Fi(Ti -Ti) +Ti (Fi -Fi)
FiT =FiT +Fi(T -T) +T(Fi -Fi)
Haciendo ACCC AA =− , TTT)
=− , IFFF ii =− , ITTT II
)=− , JTTT JJ
)=− y Fi/V
= C3, Ti/V = C6 , T/V = C7 ∆H/ρcp = C8 y UA/ρcpV = C9, sustituyendo en la ecuación (1.9) y restando el estado estacionario inicial, se tiene:
JTCT)CCCC(AC)CC(ITCIF)CC(
JTCTCTCCACCCIFCTCIFCITCdtTd
99823813i76
9982817363
++−−++−=
+−++−−+=))
)
JT)CCCC(
CAC
)CCCC(CC
IT)CCCC(
CIF
)CCCC()CC(
TdtTd
)CCCC(1
9823
9
9823
81
9823
3
9823
76
9823
))
))
+−+
+−
++−
++−
−=+
+−
79823
96
9823
81
59823
34
9823
762
9823
K)CCCC(
CK
)CCCC(CC
K)CCCC(
CK
)CCCC()CC(
)CCCC(1
=+−
=+−
=+−
=+−
−=
+−τ

MODELADO DE PROCESOS QUÍMICOS 17
JTKACKITKIFKTdtTd
76542 +++=+)
)
τ
)TT(Vc
UA)TT(
VF
dtdT
JJpJJ
J0JJ
JJ −+−=ρ
(1.10)
Se linealizan las funciones FJTJ0 y FJTJ, como:
FJTJ0=FJTJ0 +FJ(TJ0 -TJ0) +TJ0 (FJ -FJ)
FJTJ =FJTJ +FJ(TJ -TJ) +TJ (FJ -FJ)
Haciendo 0JTTT 0J0J =− , JFFF JJ =− , JTTT JJ
)=− , TTTJ
)=− ,FJ/VJ=C10,TJ0/VJ =
C11,TJ/VJ = C12 y UA/ρJcpJVJ = C13, sustituyendo en la ecuación (1.10) y restando el estado estacionario inicial se tiene:
JTCTCJFCJTCJFC0JTCdt
JTd131312101110 −+−−+=
))
TCJF)CC(0JTCJT)CC(dt
JTd131211101310 +−+=++
))
T)CC(
CJF
)CC()CC(
0JT)CC(
CJT
dtJTd
)CC(1
1310
13
1310
1211
1310
10
1310 ++
+−
++
=++
))
101310
139
1310
12118
1310
103
1310
K)CC(
CK
)CC()CC(
K)CC(
C)CC(
1=
+=
+−
=+
=+
τ
TKJFK0JTKJTdt
JTd10983 ++=+
))
τ

MODELADO DE PROCESOS QUÍMICOS 18
FFUUNNCCIIOONNEESS DDEE TTRRAANNSSFFEERREENNCCIIAA YY DDIIAAGGRRAAMMAASS DDEE BBLLOOQQUUEE El uso de transformadas de Laplace ofrece un método simple y elegante de resolver las ecuaciones diferenciales lineales o linealizadas que resultan del modelado matemático de un proceso químico. Las transformadas de Laplace también permiten:
���������������������������
��������������
1. Desarrollo simple de modelos de Entrada – Salida.
Análisis cualitativo de cómo reacciona el proceso químico ante las influencias externas.
El uso de las transformadas de Laplace permite formar una representación muy simple, conveniente y significativa del proceso.
Es simple porque sólo usa ecuaciones algebraicas.
Es conveniente porque permite realizar un rápido análisis de la dinámica del proceso y finalmente,
Es significativa porque provee una relación directa entre las ENTRADAS (variables manipuladas y de perturbación) y las SALIDAS (variables controladas) de un proceso.
Para un sistema de procesamiento simple con una entrada y una salida el comportamiento dinámico del proceso está descrito por una ecuación diferencial lineal o linealizada de orden n:
Xb...XbXbyadtdy
a...dt
yda
dtyd
a 01m
1mm
m011n
1n
1nn
n
n +++=++++ −−−
−
−
Después de tomar la transformada de Laplace a ambos lados de la ecuación diferencial y para condiciones iniciales de la función y sus derivadas iguales a cero se tiene:
011n
1nn
n
011m
1mm
m
asa...sasabsb...sbsb
K)s(G)s(X)s(Y
++++
++++==
−−
−−

MODELADO DE PROCESOS QUÍMICOS 19
G(s) es la Función de Transferencia del sistema y es una forma algebraica simple que relaciona la salida del proceso con sus entradas. En las funciones de transferencia de los sistemas físicos reales se debe cumplir que n ≥ m. La función de transferencia relaciona los cambios en la variable de salida debido a cambios en la(s) variable(s) de entrada, expresadas en términos de transformadas de Laplace.
El nombre de función de transferencia proviene del hecho que con la solución de la ecuación, se "transfiere" la entrada o función forzadora X(s), a la salida o variable de respuesta Y(s). La representación gráfica de las funciones de transferencia se denomina diagrama de bloque y es especialmente útil para simbolizar los modelos de Entrada – Salida.
Los diagramas de bloques están constituidos por bloques operacionales interconectados en trayectorias hacia delante o hacia atrás. Los diagramas de bloque son una representación pictórica de las ecuaciones que describen un sistema, expresadas en transformadas de Laplace, a lazo abierto (sin control) o a lazo cerrado (con control). En cada bloque operacional se ubica la función de transferencia respectiva, tal como se muestra en la figura 1.7. Figura 1.7.
X(s)X(s)entradaentrada
Y(s)Y(s)salidasalida
G(s)G(s)Diagrama de bloque que relaciona las variables X y Y. Para un sistema descrito por la ecuación diferencial ordinaria de 1er orden de la forma:
)t(Kx)t(ydt
)t(dy=+τ
La función de transferencia es:
)s(X1s
K)s(Y
+=
τ
1+sK
τXX((ss)) YY((ss))Y el diagrama de bloques será:
Esta función de transferencia se conoce como atraso de 1er orden. La aplicación del principio de conservación de la masa y de la energía en equipos de proceso, genera un conjunto de ecuaciones diferenciales ordinarias de primer orden, no lineales. Al linealizar los sistemas de ecuaciones se pueden describir las relaciones entre las entradas y las salidas en forma de funciones de transferencia y diagrama de bloques.

MODELADO DE PROCESOS QUÍMICOS 20
La figura 1.8 muestra un tanque donde q1(t) q2(t)y q3(t) son las variables de entrada y h(t) es la variable de salida, con su respectivo diagrama de bloque a lazo abierto.
q1(t) q3(t)
h(t)
q2(t)
G1(s)
G2(s)
G3(s)H(s)
Q1(s) H’
H’’
H’’’
Q2(s)
Q3(s)
Figura 1.8. Diagrama de bloques para el nivel de un tanque y sus variables de entrada
EJEMPLO Nº 1.5. Máquina de pulpa de papel La figura 1.9 muestra una máquina de pulpa de papel. La pulpa entra a un tanque de alimentación con un flujo, F0. Al tanque también se le inyecta aire, con un flujo G0, con el propósito de promover la salida de la pulpa hacia la cinta transportadora de manera uniforme. El flujo de salida, F, debe ser mantenido tan constante como sea posible para no sobrecargar la cinta transportadora. El flujo F, es proporcional a la raíz cuadrada de la presión a la salida del tanque. El flujo de aire de venteo, G, es proporcional a la raíz cuadrada de la presión P en el tanque. El sistema es isotérmico.
Presión, P
Nivel, h
Flujo de Aire, G0 P0
Flujo de Salida,
Venteo, G
Flujo de Pulpa de Papel,
Figura 1.9. Máquina de pulpa de papel para el ejemplo Nº 1.5. (a) Determine los grados de libertad y el número de variables controladas de este
sistema.

MODELADO DE PROCESOS QUÍMICOS 21
(b) Defina las variables que deben ser controladas y sus respectivas variables manipuladas.
(c) Derive el modelo matemático dinámico que describe al sistema y encuentre las funciones de transferencia.
(d) Dibuje el diagrama de bloques.
GRADOS DE LIBERTAD Y NÚMERO DE VARIABLES CONTROLADAS Las variables asociadas a la máquina de pulpa de papel, mostradas en la figura son: F0, G0, P0, F, P, h, G = 7
Balance de masa en la pulpa de papel: FFdt
dmpp
p ρρ −= 0 (1.5.1)
Balance en el aire: GG
dtdm
aaa ρρ −= 00
(1.5.2)
Relaciones hidráulicas: ghPkF h ρ+= (1.5.3) PkG p= (1.5.4)
Total de ecuaciones: 4
Grados de libertad: 7 – 4= 3 El mundo exterior provee 1 variable: P0 (No pueden ser ni F0, ni G0, porque entonces no tendría variables manipuladas disponibles)
Nº de variables controladas es: 3 – 1 = 2 VARIABLES CONTROLADAS Y SUS RESPECTIVAS VARIABLES MANIPULADAS Para mantener el flujo de salida, F, razonablemente constante se debe controlar P y h, ya que F = f(P, h).
La presión se controla manipulando a G0 y el nivel manipulando a F0

MODELADO DE PROCESOS QUÍMICOS 22
MODELO MATEMÁTICO Balance de masa en la pulpa de papel (se asume densidad constante):
FFdt
dmp0p
p ρρ −= mp = Aρph ⇒ FFdtdh
A p0pp ρρρ −=
Sustituyendo la expresión de F y asumiendo densidad constante, se tiene:
ghPkFdtdh
A ph0 ρ+−= (1.11)
Balance de masa en el aire: GGdt
dma00a
a ρρ −=
Donde: RT
MPVm a
a = RT
MP00a =ρ
RTPM
a =ρ )AhV(V Ta −=
Sustituyendo en el balance se tiene:
PkRTPM
GRT
MPdtdh
PAdtdP
)AhV(RTM
dtdV
PdtdP
VRTM
dt)PV(d
RTM
p00
Ta
aa −=
−−=
+=
Simplificando se obtiene:
2/3p00T PkGP
dtdh
PAdtdP
)AhV( −=
−− (1.12)
FUNCIONES DE TRANSFERENCIA
Nivel de pulpa de papel en el tanque: ghPkFdtdh
A ph0 ρ+−= Ecuación (1.11)
Para obtener la función de transferencia se deben linealizar los términos no lineales de la ecuación (1.11), así:
)hh(hf
)PP(Pf
hgPghP)h,P(fh,Ph,P
pp −∂∂
+−∂∂
++≅+= ρρ
1
ph,P
ChgP2
1Pf
=+
=∂∂
ρ 2
ph,P
ChgP2
ghf
=+
=∂∂
ρ
ρ

MODELADO DE PROCESOS QUÍMICOS 23
Donde las variables de desviación se definen como: PP =−P y hhh =− Sustituyendo en la ecuación (1.11) y restando el estado estacionario inicial, se puede expresar el modelo en variables de desviación:
hCkPCkFdthd
A 2h1h0 −−=
Agrupando variables y dividiendo toda la expresión entre khC2, se obtiene:
PCC
FCk1
hdthd
CkA
2
10
2h2h
−=+ (1.13)
Donde: PCC
KCk1
KCkA
2
12
2h1
2h1 ===τ
Aplicando transformada de Laplace a cada término de la ecuación (1.13) se obtienen las funciones de transferencia:
P1s
KF
1sK
)s(1
20
1
1
+−
+=
ττh (1.14)
Presión del aire: 2/3p00T PkGP
dtdh
PAdtdP
)AhV( −=
−− (1.12)
Despejando el término diferencial de la presión de la ecuación (1.12) y sustituyendo la expresión del término diferencial del nivel de la ecuación (1.11) se tiene:
[ ]ghPkF)AhV(
P)AhV(
Pk)AhV(
GPdtdP
h0TT
2/3p
T
00 ρ+−−
+−
−−
= (1.15)
Para obtener la función de transferencia se deben linealizar los términos no lineales de la ecuación (1.15), así:
hhf
GGf
PPf
)hAV(GP
)AhV(GP
)h,G,P(fh.G,P
0h.G,P0
0h.G,P0T
00
T
0000
000000∂∂
+∂∂
+∂∂
+−
≅−
=
52T
00
h.F,P4
T
0
h.F,P03
T
0
h.G,P0C
)hAV(
FPAhf
C)hAV(
PPf
C)hAV(
GPf
0000
=−
=∂∂
=−
=∂∂
=−
=∂∂

MODELADO DE PROCESOS QUÍMICOS 24
hhf
PPf
)hAV(P
)AhV(P
)h,P(fh,Ph,PT
2/3
T
2/3
∂∂
+∂∂
+−
≅−
=
72T
2/3
h,P6
T
2/1
h.P
C)hAV(
PAhf
C)hAV(
P2
3Pf
=−
=∂∂
=−
=∂∂
hhf
FGf
PPf
)hAV(FP
)AhV(PF
)h,F,P(fh.F,P
0h.F,P0h.F,PT
0
T
00
000∂∂
+∂∂
+∂∂
+−
≅−
=
102T
0
h.F,P9
Th.F,P08
T
0
h.F,P
C)hAV(
FPAhf
C)hAV(
PFf
C)hAV(
FPf
000
=−
=∂∂
=−
=∂∂
=−
=∂∂
hhf
PPf
)hAV(hgPP
)AhV(ghPP
)h,P(fh,Ph,PTT ∂
∂+
∂∂
+−+
≅−+
=ρρ
122TTh,P
11TTh.P
C)hAV(hgPPA
)hAV(hgP2
Pghf
C)hAV(hgP
hgP)hAV(2
PPf
=−
++
−+=
∂∂
=−+
++−
=∂∂
ρ
ρ
ρ
ρ
ρ
Donde las variables de desviación se definen como:
)FF(F)hh(h)GG(G)PP(P 00000 −=−=−=−= Sustituyendo en la ecuación (1.15), se tiene:
hCkPCkhCFCPChCPCkhCGCPCdtPd
12h11h1009876p50403 −−+++−−++=
Agrupando términos, se obtiene:
h)CkCCkC(FCGCPCP)CkCCk(dtPd
12h107P509040311h86p −+−+++=+−+
Llamando C13 al término (kpC6 - C8 + C11) y C14 al término (C5 - kPC7 + C10 - khC12) y dividiendo toda la ecuación entre C13, se tiene:
hCC
FCC
GCC
PCC
PdtPd
C1
13
140
13
90
13
40
13
3
13
+++=+

MODELADO DE PROCESOS QUÍMICOS 25
Donde:13
146
13
95
13
44
13
33
132 C
CK
CC
KCC
KCC
KC1
=====τ
Aplicando transformada de Laplace a cada término de la ecuación se obtienen las funciones de transferencia:
h1s
KF
1sK
G1s
KP
1sK
)s(P2
60
2
50
2
40
2
3
++
++
++
+=
ττττ (1.16)
El diagrama de bloques a lazo abierto de este sistema se muestra en la figura 1.10:
+
+
+
-
G2
+ G1 F0
G5
G0 G4
P0
G6
G3
Figura 1.10. Diagrama de bloques para la máquina de pulpa de papel. P H
TIPS
• Comience a trazar el diagrama de bloques empezando con las variables de salida de derecha a izquierda.
• Si hay mas de una variable, haga cada diagrama de manera independiente y luego complételo con las interrelaciones entre variables de salida, si las hay.
• Coloque la variable manipulada alineada con la variable de salida.
FUNCIONES DE TRANSFERENCIA Y RESPUESTA DE LA VARIABLE DE SALIDA Otra propiedad importante de las funciones de transferencia es que a partir de las mismas se puede calcular el valor de la variable de salida en el estado estacionario para cambios en la(s) variables(s) de

MODELADO DE PROCESOS QUÍMICOS 26
entrada aplicando el teorema del valor final. Para sistemas estables este teorema establece que:
)s(sFlim)t(flim0st →∞→
=
De esta manera podemos calcular el valor de una función a medida que t → ∞. Para una función de trasferencia G(s) la relación entre el cambio en la variable de entrada X(s), y el cambio en la variable de salida para sistemas estables resulta:
)s(Glim0s→
Esto significa que el cambio en la variable de salida, después de un tiempo muy largo, se obtiene al multiplicar la función de transferencia con s=0 por la magnitud del cambio final d el variable de entrada Ejemplo Nº 1.6. Teorema del valor final Para un proceso representado por la función de transferencia:
)3s7)(2s5(1s
)s(G++
+=
El valor de la variable de salida para un cambio en escalón unitario de la variable de entrada será:
61
)30)(20(10
)s(Glim0s
=++
+=
→
Para un cambio en escalón de magnitud 5 se tiene
65
)30)(20(10
s5
s)s(sYlim0s
=++
+/
/=→
Ejemplo Nº 1.7 Para el tanque de calentamiento del Ejemplo Nº 1.1 el balance de energía, considerando al volumen y al flujo de entrada constantes, resulta:

MODELADO DE PROCESOS QUÍMICOS 27
qTcmTcmdtdT
cV pipip +−= &&ρ
Esta es una ecuación diferencial lineal la cual puede reordenarse en términos de la variable de salida, T, quedando:
QKTIKTdtdT
cmQ
TITdtdT
cmcV
21pp
p +=+⇒+=+//
τρ
&&
Donde τ=Vρ/m, K1= 1 y K2=1/mcp. Para V= 2 m3, T=130 ºC, Ti=100 ºC, ρ= 900 Kg/m3, cp= 1 cal/gr-ºC y un flujo constante de 1000 kg/hr, determine el valor de la entrada de calor en el estado estacionario inicial. Partiendo del balance de energía en estado estacionario se tiene que:
q=mcp(T-Ti)=1000 Kg/hr*1000g/Kg*1 cal/gr-ºC*(130-100)ºC=3x107 cal/h Si Q se incrementa 30% ¿Cuál será el valor de la temperatura en el nuevo estado estacionario? Para calcular el nuevo valor de T en el estado estacionario nuevo se aplica el teorema del valor final para lo cual se requiere el valor numérico de K2. Así:
K2=1/mcp=1/(106 gr/hr)*(1 cal/r/ºC)=10-6 ºC/(cal/h) El cambio de Q es de 30%, esto es: (3x107 cal/h)*0.3=9x106.
Cº9s10x9
.)10(
10s)s(sTlim
66
0s=
/+/=
−
→

MODELADO DE PROCESOS QUÍMICOS 28
RReessuummeenn Se espera que el lector tenga una idea general acerca de:
La necesidad del modelado y la simulación para control de procesos.
Las dificultades asociadas al desarrollo de modelos matemáticos de procesos químicos.
Los modelos de entrada-salida y su utilidad para control de procesos.
Los grados de libertad y su relación con los controladores de proceso.
Linealización de funciones y variables de desviación.
El desarrollo de funciones de transferencia y el uso de los diagramas de bloque.
Como representar procesos químicos con diagramas de bloque.
Como calcular la magnitud de cambio en el estado estacionario de una variable de salida respecto cambios en la(s) variable(s) de entrada.
CCoossaass eenn qquuee ppeennssaarr
o Cuando Ud. Maneja una bicicleta ¿Cuál es el objetivo de control?¿Cuáles son las mediciones que instintivamente Ud. hace cuando maneja y cuáles son las variables manipuladas disponibles?
o ¿Cuál criterio le permite determinar el máximo número de lazos de control que puede aplicar a un proceso?
o Un proceso representado por 15 ecuaciones diferenciales ordinarias ¿Cuántas variables independientes tiene?
o ¿Por qué los modelos linealizados son útiles para los propósitos de control de procesos?
o ¿Qué son las variables de desviación? ¿Cuál es el punto de linealización para definir las variables de desviación que es útil para propósitos de control de procesos?
o ¿Cuáles criterios aplica Ud. para seleccionar el punto de linealización de una variable?
o ¿Qué tipo de información suministra el diagrama de bloques de un sistema? o ¿Cuantas variables son necesarias para describir un proceso de una fase con N
componentes y cuantas ecuaciones puede plantear?

MODELADO DE PROCESOS QUÍMICOS 29
o ¿Qué representa una función de transferencia? ¿Incluye información sobre el comportamiento dinámico y estático de un sistema?
o ¿Qué pasaría desde el punto de vista de control si se eliminan todas las perturbaciones de un proceso?
o ¿Cuál es la función de transferencia mas comúnmente encontrada en los procesos químicos y por qué?
o ¿Cómo puede determinarse, para procesos estables, el nuevo valor de la variable de salida en el estado estacionario ante cambios en la variable de entrada a partir de la función de transferencia?
EEjjeerrcciicciiooss
1. Una mezcla de dos líquidos inmiscibles es alimentada a un decantador. El líquido
más pesado A, se deposita en el fondo del tanque. El líquido más liviano B, forma una capa en el tope. Las dos interfaces son detectadas por flotadores. El flujo total de alimentación es w0 (lbm/min). La fracción en peso de A en la alimentación es xA. Las densidades ρA y ρB (lbm/pie3) son constantes.
a) Determine las variables de entrada y salida de este sistema. b) Desarrolle el modelo matemático que describe el comportamiento dinámico de
este sistema y determine los grados de libertad para control de los cuales dispone el sistema.
c) ¿Cuáles variables controlaría y cuales serían las variables manipuladas correspondientes?
d) Obtenga las funciones de transferencia entre las variables de entrada y salida y dibuje los respectivos diagramas de bloque.
LI
LI w0
FB
F
hA
hB

MODELADO DE PROCESOS QUÍMICOS 30
2. Se le suministra calor a un tanque con agua a una velocidad q determinada por la ecuación diferencial:
)(1 01
1
1 TTs
Kq −+
=τ
Donde, K1 y τ1 son constantes, T1 es la temperatura de referencia y T0 es la temperatura real del agua en el tanque. El suministro de calor se suspende si T0 excede a T1.
El sistema tiene una capacidad térmica C y desprende calor a una velocidad igual a K2T0, donde K2 es una constante. Escriba la ecuación diferencial, expresando T0 en términos de T1, cuando se suministra calor al tanque.
Si τ1 = 5.86 min, C/K2 = 34.14 min, K1/K2 = 19 y la instalación funciona estacionariamente con T1 = 80º y T0 = 76º, determine el incremento en escalón más grande que puede ser aplicado en T1 sin que se corte el suministro de calor al tanque.
3. Haga un diagrama de bloques para el proceso siguiente indicando en cada bloque
la función de transferencia adecuada. Determine la función de transferencia que relaciona a R con A.
A
B D
C V
R G1 = B/A G2 = R/B G3 = R/V G4 = C/V G5 = C/B
4. La función de transferencia:
1s10
)s(X)s(Y
)s(G+
==
Representa el modelo de un proceso escrito en variables de desviación. Derive una expresión para la respuesta de y(t) a la entrada x(t) = 1 + t, para un valor inicial de y(0) = 2, correspondiente con un valor de x(0) = 1.

MODELADO DE PROCESOS QUÍMICOS 31
5. El dibujo muestra un sistema de almacenaje líquido cuyas condiciones normales de operación son: q1= 10 pie3/min, q2 = 5 pie3/min, h = 4 pie. El tanque es de 6 pie de diámetro y la densidad de cada corriente es 60 lb/pie3. Suponga que ocurre un cambio en forma de pulso en q1 como se muestra en el diagrama. a) ¿Cuál es la función de transferencia que relaciona a H con Q1? b) Derive una expresión de h(t) para este cambio en la entrada. c) ¿Cuál es el nuevo valor en estado estacionario del nivel del líquido h(t)? d) Repita (b) y (c) para un doblete rectangular. Los cambios en q1f son desde 10
hasta 15, hasta 5 y hasta 10 pie3/min
12 0
10 h(t)
q1 q2 15
Tiempo, min
6. La figura muestra dos sistemas de almacenaje de líquido. Cada tanque tiene 4
pies de diámetro. Para el sistema 1, la válvula actúa como una resistencia lineal con una relación flujo–nivel qs= 8.33h, donde qs esta en gpm y h en pie. Para el sistema 2 las variaciones en el nivel del líquido h no afectan al flujo de salida qs. Suponga que cada sistema está inicialmente en estado estacionario con h = 6 pie y qe = 50 gpm y que en el tiempo 0 el flujo de entrada sufre un cambio súbito desde 50 hasta 70 gpm
qe qe
qe h(t) h(t) qe
Para cada sistema, determine: a) La función de transferencia H(s)/QS(s), b) La respuesta transitoria h(t) y c) Los nuevos niveles en estado estacionario. Si cada tanque es de 8 pie de altura ¿Cuál tanque se derramará primero? ¿En qué tiempo?

MODELADO DE PROCESOS QUÍMICOS 32
7. Considere los dos tanques de calentamiento mostrados en la figura.
a) Identifique las variables de estado del sistema b) Determine los balances que se deben desarrollar c) Desarrolle el modelo que describe el comportamiento dinámico del sistema d) ¿Cómo puede Ud. expresar los calores dados por los flujos de vapor en
términos de otras variables?
T1
F1
T2
F2
T3
F3
TT
A1
A2
Vapor100 psi
Q1 (lb/min)
Vapor300 psi
Q2 (lb/min)
LLeeccttuurraass aaddiicciioonnaalleess
PPuueeddee eennccoonnttrraarr aallgguunnooss eejjeemmppllooss ddee ddeessaarrrroolllloo ddee mmooddeellooss ddee pprroocceessooss qquuíímmiiccooss eenn llooss ssiigguuiieenntteess tteexxttooss:: • CORRIPIO, A. y SMITH, C. (1991) Control Automático de Procesos - Teoría y
Práctica. México: LUMUSA. Capítulo 9: Modelos y simulación de los sistemas de control de procesos. Este capítulo incluye el desarrollo de los modelos dinámicos de una columna de destilación y un horno y la solución de ecuaciones diferenciales parciales.
• STEPHANOPUOLOS, G. (1984). Chemical Process Control: An Introduction to
Theory and Practice. Englewood Cliffs, New Jersey: Prentice Hall. Parte II, Capítulos 4 y 5. Estos capítulos incluyen el desarrollo de modelos de varios procesos químicos y las consideraciones para propósitos de control de procesos.
• SEBORG, D.E., T. F. EDGAR D.A. MELLICHAMP. (1994) Process Dynamics and
Control. New York: John Wiley & Sons. Capítulo 2 Modelado matemático de procesos químicos.

MODELADO DE PROCESOS QUÍMICOS 33
UUnn ttrraattaammiieennttoo mmaass ccoommpplleettoo yy pprrooffuunnddoo ssoobbrree mmooddeellaaddoo ddee ssiisstteemmaass ddee iinnggeenniieerrííaa qquuíímmiiccaa ppuueeddee eennccoonnttrraarrssee eenn llaass ssiigguuiieenntteess rreeffeerreenncciiaass:: • BEQUETTE, WAYNE B. (1998). Process dynamics modeling, analysis and
simulation. Upper Saddle River, New Jersey: Prentice Hall. Sección I. Modelado de procesos: Capítulos 1 y 2. Incluyen balances de masa y energía y modelado de reactores isotérmicos, tanque pulmón de gas y tanque de calentamiento. Sección IV. Módulos 5, 6, 7, 8, 9 y 10. Incluye el desarrollo detallado del modelo de: tanques de calentamiento, columna de absorción, reactor mezcla completa, reactores bioquímicos, reactor adiabático y columna de destilación binaria.
• LUYBEN, W. (1991). Process Modeling Simulation and Control for Chemical Engineers. 2da Edición. New York: Mc Graw Hill. Parte I. Modelos matemáticos de sistemas de ingeniería química: Capítulos 2 y 3. Incluye la aplicación de las leyes fundamentales de conservación de masa y energía y el modelado de reactores mezcla completa, tanques de calentamiento, tanques de gas, vaporizador, destilación binaria y multicomponente y sistemas de pH.
• FRANKS, R. (1972). Modeling and Simulation in Chemical engineering. USA: John Wiley & Sons, Inc. Capítulos 4 al 10. Incluyen modelos de procesos de mezclado, equilibrio líquido vapor de sistemas multicomponentes, cinética de reacciones, flujo de fluidos, operaciones por etapas y sistemas distribuidos
EEnn rreellaacciióónn ccoonn llaa lliinneeaalliizzaacciióónn ddee ssiisstteemmaass nnoo lliinneeaalleess yy ffuunncciioonneess ddee ttrraannssffeerreenncciiaa llooss ssiigguuiieenntteess tteexxttooss ccoonnttiieenneenn eexxcceelleennttee mmaatteerriiaall ppaarraa ssuu mmááss aammpplliioo eessttuuddiioo:: • CORRIPIO, A. y SMITH, C. (1991) Control Automático de Procesos - Teoría y
Práctica. México: LUMUSA. Capítulo 2. Matemáticas necesarias para e análisis de los sistemas de control: Sección 2-3. Linealización y variables de desviación. Capítulo 3. Sistemas dinámicos de primer orden: Sección 3-3 Funciones de transferencia y diagramas de bloque Pág. 104-105
• STEPHANOPUOLOS, G. (1984). Chemical Process Control: An Introduction to Theory and Practice. Englewood Cliffs, New Jersey: Prentice Hall. Parte III, Capítulo 9. Funciones de transferencia y modelos de entrada-salida.
• SEBORG, D.E., T. F. EDGAR D.A. MELLICHAMP. (1994) Process Dynamics and Control. New York: John Wiley & Sons. Capítulo 4: Funciones de transferencia.
• BEQUETTE, WAYNE B. (1998). Process dynamics modeling, analysis and simulation. Upper Saddle River, New Jersey: Prentice Hall. Sección III. Modelado de procesos, Capítulo 5. Linealización de modelos no lineales. Capítulos 8, 9 y 11. Funciones de transferencia y diagramas de bloque.
• LUYBEN, W. (1991). Process Modeling Simulation and Control for Chemical Engineers. 2da Edición. New York: Mc Graw Hill. Parte IV. Dinámica y Control en el dominio de Laplace: Capítulo 9, secciones 9.4, 9.5, 9.6 y 9.8.

MODELADO, SIMULACIÓN Y CONTROL DE PROCESOS 34
Top Related