







Idiomas
Páginas
Jurídico


Universidad Nacional Del Nordeste - UNNE
Facultad de Ingeniería
MECÁNICA COMPUTACIONAL APLICADA AL ESTUDIO DE
MATERIALES COMPUESTOS DE MATRIZ FRÁGIL REFORZADO CON FIBRAS CORTAS
UBERTI BRUNO
Resistencia, Chaco 2012
AGRADECIMENTOS A Dios. Por estar conmigo en cada paso que doy, por fortalecer mi corazón e iluminar mi mente y por haber puesto en mi camino a aquellas personas que han sido mi soporte y compañía durante todo el periodo de estudio. Debo agradecer de manera especial al Ingeniero Magister Ricardo Barrios D´ambra por aceptarme para realizar este trabajo bajo su dirección. Su apoyo y confianza en mi trabajo y su capacidad para guiar mis ideas ha sido un aporte invaluable. Le agradezco también el haberme facilitado siempre los medios suficientes para llevar a cabo todas las actividades propuestas durante el desarrollo de este trabajo. Quiero expresar también mi más sincero agradecimiento al Dr. Ignacio Iturrioz por su im-portante aporte y participación en el desarrollo de este trabajo. No cabe duda que su partici-pación ha enriquecido el trabajo realizado. A todos los miembros y amigos del Departamento de Mecánica Aplicada: Ricardo, Juan Ma-nuel, Javier, Ariel, Pablo y Hector por el apoyo constante durante gran parte de la carrera. A mi familia. Sin su apoyo, colaboración e inspiración habría sido imposible llevar a cabo esta dura carre-ra. A mis padres, Patricia y Enrique, por ser el pilar fundamental en todo lo que soy, en toda mi educación, tanto académica, como de la vida, por su incondicional apoyo perfectamente mantenido a través del tiempo; a mis hermanas Agostina y Fiorenza por su paciencia y acompañamiento. Mis abuelos Irma, Coco, Nely y Edgar, por quererme y apoyarme siempre. ¡Gracias a ustedes! Y a todos mis amigos por compartir los buenos y malos momentos!

RESUMEN Los materiales compuestos han surgido como respuesta a las cada vez más exigentes condi-ciones de proyecto. Los mismos consisten en la combinación de dos o más materiales distin-tos con el objetivo de conseguir un nuevo material cuyas propiedades resulten superiores (más fuertes, tenaces o durables) que las de cada uno de sus componentes en forma individual. Estos materiales, encuentran constantemente nuevas aplicaciones en el campo de reparaciones y readaptaciones de estructuras en la construcción civil, y también son ampliamente usados en otros campos como ser el automotriz, naval, aeronáutico, aero-espacial, industrias eólicas, e incluso en aplicaciones recreativas. En este marco, el desarrollo de la capacidad de prever la falla de los materiales compuestos, se ha convertido en una tarea prioritaria. Existen dos motivaciones principales para el desarrollo de modelos computacionales que rela-cionen los parámetros microestructurales con el comportamiento mecánico del compuesto. Una de ellas es conducir la optimización del comportamiento de materiales por medio del ajuste de tipos y formas de los componentes constituyentes, y la otra es predecir la respuesta mecánica final de los productos fabricados con dichos materiales Trabajos recientes demuestran las limitaciones que en muchos casos presentan los criterios de falla clásicos, y la necesidad de avanzar en el desarrollo de nuevas propuestas de criterios de falla que involucren nuevas variables macro mecánicas que los mecanismos de falla a nivel micro mecánico revelen como representativas. Alineado con lo aquí expuesto en el presente trabajo se estudia el comportamiento mecánico de un material compuesto formado por fibras cortas distribuidas aleatoriamente, para ello se utiliza una versión del método de los elementos discretos formados por barras ( Discrete Ele-ment Method DEM). Este método permite simular el comportamiento mecánico hasta la rup-tura de sistemas que fallen en forma frágil o cuasi-frágil. Utilizando el DEM, en este trabajo se obtiene la respuesta de un sistema constituido por una única fibra que vincula una matriz fisurada para diferentes ángulos entre la fibra y la fisura y la orientación de la carga aplicada. Estas respuestas son posteriormente superpuestas con la metodología presentada originalmen-te por otros autores. Posteriormente se discuten las conclusiones sobre los resultados obtenidos así como las po-tencialidades de la metodología empleada.

ÍNDICE
CAPITULO 1 - INTRODUCCIÓN................................................................................... 1
Objetivos: ................................................................................................................................ 4
Objetivos generales: ................................................................................................................ 4
Objetivos particulares: ............................................................................................................ 4
CAPITULO 2 - REVISIÓN BIBLIOGRÁFICA ........................................................... 5
Introducción ............................................................................................................................ 5
2.1 Mecanismos de aumento de tenacidad.............................................................................. 6
2.1.1 Aumento de tenacidad por microfisuras ........................................................................ 6
2.1.2 Compuestos reforzados por partículas ........................................................................... 7
2.1.2.1 Compuestos reforzados con partículas grandes .......................................................... 7
2.1.2.2 Compuestos reforzados por dispersión ....................................................................... 7
2.1.3 Compuestos reforzados por whiskers ............................................................................ 7
2.1.4 Compuestos reforzados por fibras ................................................................................. 8
2.2 Aumento de la tenacidad de materiales compuestos reforzados por fibras ...................... 8
2.3 Modelos matemáticos para calcular el aumento de la tenacidad de materiales
compuestos reforzados por fibras ......................................................................................... 11
2.4 Procesos de ruptura de materiales compuestos ............................................................... 14
2.5 FUNDAMENTOS TEORICOS DE MECÁNICA DE FRACTURA ............................ 16
2.5.1 Introducción a la mecánica de fractura ........................................................................ 16
2.5.2 Mecánica de fractura lineal elástica (MFLE) .............................................................. 17
2.5.3 Balance energético de Griffith ..................................................................................... 18
2.5.4 Tasa de energía liberada, G.......................................................................................... 20
2.5.5 Análisis de tensiones en las proximidades del extremo de una fisura ......................... 20
2.5.6 Factor de intensidad de tensiones ................................................................................ 22
2.5.7 Relación entre K y G ................................................................................................... 24
CAPÍTULO 3 - MATERIALES Y MÉTODOS ........................................................... 26
3.1. Modelo teórico del problema estudiado – PROPUESTA DE Li et al [33] ................... 26
3.1.1 Fisura .......................................................................................................................... 26
3.1.2 Fibras ........................................................................................................................... 26
3.1.3 Delimitación de las dimensiones y funciones de distribución de fibra ....................... 27
3.1.4 Layout de la fibra en relación a la superficie de la fisura ........................................... 28
3.1.5 Fibra sin deformación ................................................................................................. 28
3.1.6 Tensión de puente proveniente de las fibras en el plano de la fisura .......................... 30
3.1.7 Aumento de energía de fratura Gc ............................................................................. 30
3.2. METODO DE LOS ELEMENTOS DISCRETOS ........................................................ 31
3.2.1. Características de la formulación del método utilizada en este trabajo. ..................... 32
3.2.1.1. Rigidez de las barras equivalentes al continuo. ....................................................... 32
3.2.1.2. Masas nodales. ......................................................................................................... 37
3.2.1.3. Solución de la ecuación de equilibrio. ..................................................................... 37
3.2.1.4. Relación constitutiva de la barra para modelar la rotura del material. .................... 38
3.2.2. Integración por diferencias finitas .............................................................................. 40
3.2.3. Metodología utilizada para obtener el tensor de tensiones ......................................... 41
3.2.3.1. Tensiones normales ................................................................................................. 42

3.2.3.2. Tensiones tangenciales ............................................................................................ 43
3.2.4. Problemas verificados con el MED ............................................................................ 44
CAPÍTULO 4 - PROBLEMA EN ESTUDIO - MODELO FÍSICO ....................... 45
CAPITULO 5 - METODOLOGIA – .............................................................................. 49
IMPLEMENTACIÓN EN EL MED .............................................................................. 49
5.1 Configuración geométrica............................................................................................... 49
5.2 Discretización con el MED – MODELO NUMÉRICO ................................................. 50
CAPITULO 6 - RESULTADOS ..................................................................................... 53
6.1 Relación entre la fuerza de puente y apertura de fisura .................................................. 54
6.2 Tensión en el compuesto y tenacidad a la fractura. ........................................................ 62
6.3 Análisis de los procesos de ruptura en materiales compuestos ...................................... 63
CAPITULO 7 - CONCLUSIONES ............................................................................... 68
CAPITULO 8 - REFERENCIAS BIBLIOGRÁFICAS .......................................... 70

1
CAPITULO 1 - INTRODUCCIÓN
La aplicación industrial de materiales compuestos ha crecido ampliamente en los últi-
mos 40 años, debido principalmente a las excelentes propiedades mecánicas que presentan.
En el mismo período, un gran esfuerzo teórico se ha invertido en la modelización numérica de
materiales compuestos y en el desarrollo de una base matemática para una descripción de sus
complejas propiedades micro y macro mecánicas, produciéndose por tanto, una gran cantidad
de literatura científica sobre modelos cuantitativos para estos materiales.
El diseño industrial de piezas estructurales realizadas con materiales compuestos requie-
re formulaciones teóricas y herramientas informáticas que modelen adecuadamente el com-
portamiento de estos materiales.
Durante la década de 1960 se presentaron un conjunto de métodos de cálculo alternati-
vos, que no utilizaron ecuaciones diferenciales o integrales para describir el problema en su
dominio espacial. Diferentes métodos surgieron dependiendo del elemento individual introdu-
cido, tales como partículas o barras. En el proceso, surgió un método que fue denominado por
Munjiza (2009) "la mecánica computacional del discontinuo ", y ahora es una parte integral
de la investigación de vanguardia en diferentes campos de estudio de la mecánica de sóli-
dos. En este contexto, específicamente el problema de la fractura dinámica en diferentes mate-
riales, sigue siendo un reto para los investigadores.
Hoy en día se pueden encontrar en la literatura varias deducciones analíticas que nos
permiten predecir la velocidad de avance de la fisura y describir el proceso de cinemática en
casos sencillos. Entre los autores clásicos en relación con este tema, puede citarse a: Freund
(1998) y Nishioka (1998). Pruebas experimentales llevadas a cabo con sumo cuidado por Ra-
vi-Chandar y Knauss (1984a, b, c, d), y Kalthoff y Winkler (1987) entre otros nos permiten
calibrar la aplicabilidad de las soluciones analíticas y numéricas.

2
En este contexto, los métodos numéricos son útiles para simular la propagación dinámi-
ca de fisuras en sólidos, pero también es posible encontrar soluciones a diferentes tipos de
problemas utilizando distintos tipos de métodos numéricos. Entre otros se pueden mencionar:
- La simulación dinámica molecular usada por Gao (1996), Abraham et al.(1997), Furuya
y Noguchi (1998).
- Los métodos de elementos finitos extendidos aplicados por Belytschko et al.(2003).
- El método Meshfree aplicado en las fisuras del modelo presentado en Belytschko
et al. (1994), Belytschko et al. (1995).
- El MEF (Método de Elementos Finitos) y el BEM (Boundary Elements Method), mode-
los que utilizan la interfaz cohesiva, técnicas propuestas por Needleman (1987), se
utilizan en Aliabadi y Saleh (2002), Falk et al. (2001), Oliver et al. (2001) y Huespe
et al. (2006).
- Modelos compuestos por el método de partículas discretas propuesto originalmente por
Cundall y Hart (1989), son aplicados en Munjiza et al. (2004), Brara et al. (2001),
Rabczuk y Belytschko (2004, 2007) y Rabczuk et al. (2007, 2009). Y,
- Algunas versiones de los modelos de reticulado. Entre otros, es importante mencionar el
trabajo de Chiaia et al. (1997), y Rinaldi y Lai (2007), Rinaldi et al. (2008), estos
métodos presentan una manera muy interesante de simular el continuo y presentan
información cualitativa para comprender el comportamiento a fractrura de cuerpos
cuasi-frágiles como el hormigón o rocas.
La formulación del modelo de malla o reticulado tridimensional utilizado en este trabajo
se basa en estudios realizados por Nayfeh y Hefzy (1978). El objetivo de dicho trabajo fue
determinar las propiedades de un continuo elástico ortotrópico equivalente para modelar pane-
les compuestos de un gran número de barras pequeñas interconectadas. Utilizando el enfoque
opuesto, es decir, representar un continuo ortotrópico por medio de un reticulado espacial, los
resultados debidos a Nayfeh y Hefzy (1978) se utilizaron para desarrollar el MED para pro-
blemas de la mecánica sólidos.
Este enfoque fue propuesto por Riera (1984) para determinar la respuesta dinámica de
placas y láminas en caso de cargas de impacto cuando la falla se presenta principalmente por
tracción, que es generalmente el caso en estructuras de hormigón.
Riera y otros investigadores han llevado a cabo varias aplicaciones del MED para mo-
delar estructuras de hormigón y hormigón armado sometidas a cargas impulsivas (Riera y
Iturrioz 1995, 1998); fractura de fundaciones de suelo cemento apoyadas sobre un lecho de
arena suelta (Schnaid et al 2004); Fractura dinámica (Miguel et al. 2010); generación y propa-
3
gación de los sismos (Dalguer et al. 2001); efecto de escala en el hormigón (Ríos y Riera
2004).
Los autores Barrios D'Ambra y Kosteski han utilizado la versión de MED originalmente
propuesta por Riera para calcular parámetros fractomecánicos estáticos y dinámicos y simular
el problema de propagación de fisuras. Algunos trabajos publicados en esta área por los auto-
res son: Barrios D'Ambra et al. (2007) y Kosteski et al. (2008, 2009).
El MED se muestra como una herramienta apta para el cálculo del factor de intensidad
de tensiones dinámico y estático utilizando diferentes metodologías, así como también para
determinar la tenacidad a la fractura. En Kosteski et al. (2011) se presentan tres ejemplos de
aplicaciones del MED.
4
Objetivos:
Objetivos generales:
El objetivo principal de este trabajo es mostrar las posibilidades del MED en la deter-
minación de la tenacidad a la fractura de materiales compuestos, que servirá para determi-
nar dicha condición en un material bifásico. Es necesario remarcar que a través de la deter-
minación de la tenacidad a la fractura del material compuesto se pretende determinar la in-
fluencia de la segunda fase, fibras, sobre la propagación de fisuras.
Se utiliza como segunda fase fibras de Spectra 900. Las cuales poseen una de las más
elevadas relaciones deformabilidad/peso entre las fibras hechas por el hombre. Su elevada
tenacidad lo hace 15 veces más fuerte que el acero, siendo más durable que el poliester.
Caracteísticas de las fibras de Spectra 900:
suficientemente ligero para flotar (0,97 g / cc densidad).
alta resistencia a la luz los productos químicos, el agua y la luz ultravioleta
excelente amortiguación de vibraciones
muy resistente a la fatiga por flexión
Bajo coeficiente de fricción
Buena resistencia a la abrasión
Constante dieléctrica baja hace que sea prácticamente transparente a los radares
Aplicaciones de Spectra 900:
cuerdas marinas
redes de pesca comercial
seguridad en redes y productos de barrera
cuerdas y eslingas industriales
cascos militares
paneles de protección contra las tormentas
Objetivos particulares:
Desarrollo de modelos numéricos computacionales para el estudio de los micro
mecanismos de falla de materiales compuestos.
Determinar la tenacidad a la fractura del material compuesto.
Determinar la fuerza de puente (bridging force) en el compuesto.
Identificar los fenómenos conocidos como debonding, snubbing y spalling.

5
CAPITULO 2 - Revisión Bibliográfica
En el presente capítulo se presenta una breve reseña del estado del conocimiento acerca
de algunos aspectos de la mecánica de materiales compuestos, sobre la modelización matemá-
tica aplicable a estos materiales, procesos de ruptura en dichos materiales, así como también
sobre el método utilizado en este trabajo
Introducción
Los materiales compuestos han experimentado un gran aumento en su utilización.
Generalmente, los materiales compuestos se emplean para mejorar la relación resistencia/peso
o rigidez/peso de los elementos estructurales.
Un material compuesto está constituido por distintas fases o componentes. Cada una
de estas fases puede considerarse uniforme, con propiedades cuantitativas conocidas. A pesar
de que el número de constituyentes puede ser muy grande, en el campo de la ingeniería mecá-
nica los materiales compuestos suelen estar formados por un material, llamado refuerzo, in-
merso dentro de otro, llamado matriz.
Hay dos aspectos que determinan las propiedades de un material compuesto, las
geometrías de las fases y las propiedades físicas de cada una de estas fases. Si consideramos
la geometría de las fases, los materiales compuestos se pueden clasficar en materiales particu-
lados, en los que la fase de refuerzo se encuentra en forma de partículas, o en materiales fibro-
sos, en los que el refuerzo se encuentra en forma de fibras. Estas fibras pueden ser cortas y
tener una orientación aleatoria o pueden ser largas y tener una orientación específica. En este
trabajo se tratará principalmente los materiales compuestos reforzados con fibras cortas.

6
2.1 Mecanismos de aumento de tenacidad
En los últimos años se ha perfeccionado de manera considerable una nueva genera-
ción de materiales destinados a sustituir a los materiales convencionales ya existentes; estos
nuevos materiales son llamados materiales compuestos, los cuales, se constituyen por la ac-
ción combinada de dos o más elementos distintos, que permiten mejorar la combinación de
características mecánicas tales como la rigidez, fragilidad, tenacidad, capacidad de absorción
de energía de deformación, dureza, comportamiento post-fisuración, la resistencia a las condi-
ciones ambientales y a altas temperaturas. Para poder desarrollar estos nuevos materiales, es
necesario conocer las propiedades mecánicas, constitución física y química de los materiales y
la forma en que se pueden combinar.
Según WILLIAM Y CALLISTER [55] los materiales compuestos son una alternati-
va efectiva en diversos escenarios y están formados por matriz frágil reforzada con fibra
dúctil, y las combinaciones de polímeros, vidrios cerámicos, materiales cerámicos con la adi-
ción de cristales, mortero reforzado con fibras de polipropileno y hormigón reforzado con
fibras.
La utilización de fibras para refuerzo de hormigones de alta resistencia ha tenido re-
sultados muy satisfactorios al ser sometidos a altas temperaturas, y permiten obtener una ma-
yor eficiencia en los resultados económicos de grandes obras de la ingeniería. Esta nueva tec-
nología de construcción permite que el hormigón pueda aumentar considerablemente su cali-
dad en muy poco tiempo, cuestión que no se logra con ningún otro material estructural.
Muchos compuestos están formados por sólo dos fases en el que uno se denomina
matriz, que es continua y rodea a la otra fase que es la fase dispersa. Estos compuestos se ba-
san en las propiedades de las fases que lo constituyen, asi como también en la cantidad relati-
va y la geometría de la fase dispersa. Los mecanismos fundamentales de aumento de tenaci-
dad son por microfisuras, por partículas y por fibras, siendo estas últimas las que mayor efec-
tividad generan en la mejora de resistencia a la fractura, durabilidad, ductibilidad, resistencia
al impacto y resistencia a la tracción en flexión, siempre que el tipo de fibra utilizada sea
apropiada y en dosis adecuadas.
2.1.1 Aumento de tenacidad por microfisuras
Si bien es evidente que al formarse grietas en los materiales estas llevan al daño de
dicho material, a menudo las microfisuras aumentan la tenacidad del mismo. Pero para que
este procedimiento sea efectivo se debe considerar un crecimiento estable de las microfisuras,
cuestión que no sucede en materiales frágiles.
7
El grado de endurecimiento de las microfisuras depende de la temperatura; además,
los bajos esfuerzos residuales no pueden impedir que las microfisuras se vuelven inestables y
se propaguen. Todas estas cuestiones hacen que este proceso no sea efectivo.
2.1.2 Compuestos reforzados por partículas
De acuerdo con WILLIAM y CALLISTER [55], en los compuestos reforzados por
partículas la fase dispersa tiene aproximadamente el mismo tamaño en todas las direcciones.
El refuerzo por partículas se puede diferenciar en: materiales reforzados por partículas de gran
tamaño y materiales compuestos reforzados por dispersión.
2.1.2.1 Compuestos reforzados con partículas grandes
El mecanismo de aumento de tenacidad por medio de estas partículas consiste en res-
tringir el movimiento en las proximidades de la fase matriz, de esta manera, estas partículas
soportan una porción de la carga que es tranferida por la matriz. Aquí la fase es más dura y
más rígida que la matriz. Mientras más fuerte sea la unión de la interfaz matriz-partícula, ma-
yor será el grado de refuerzo logrado.
Las partículas pueden tener una amplia variedad de geometría, pero deben poseer
aproximadamente las mismas dimensiones en todas las direcciones (ejes iguales), por
ejemplo, mortero de cemento compuesto de cemento (la matriz) y arena (partículas).
2.1.2.2 Compuestos reforzados por dispersión
El mecanismo de aumento de tenacidad es similar al que ocurre con el endurecimien-
to por precipitación, en el cual el aumento de tenacidad se debe a la interacción entre las
partículas y discordancias dentro de la matriz. En la fabricación de estos materiales compues-
tos, es necesario mantenerlos a elevadas temperaturas durante períodos prolongados, ya que
las partículas dispersas son elegidas para ser reactivas con la fase matriz.
2.1.3 Compuestos reforzados por whiskers
Los whiskers son monocristales muy delgados (pequeños filamentos) que tienen un
cociente longitud-diámetro muy grande. Como consecuencia de su tamaño pequeño, tienen
alto grado de perfección cristalina y virtualmente están libres de defectos, lo que explica su
resistencia excepcionalmente alta.
Estos materiales presentan elevada resistencia y de elevado costo. Su dificultad radi-
ca en que es difícil e impracticable incorporar whiskers dentro de una matriz. Aunque este
8
tipo de refuerzo ha sido de uso frecuente, su utilización se ha visto restringida en algunos paí-
ses a causa de su carácter nocivo para la salud humana.
La falla en estos compuestos se debe a la falta de conexión entre sus superficies y
matriz y pueden producir el desvio de la fisura, lo cual puede aumentar también la tenacidad
del material.
2.1.4 Compuestos reforzados por fibras
Al utilizar fibras dúctiles con elevada resistencia a la tracción, así como también po-
seer gran fuerza de conexión entre las fibras y la matriz, estos compuestos poseen alta resis-
tencia y son el mecanismo más eficiente. Esto contribuye al aumento de la en todos procesos,
desde el despegue hasta la ruptura de la fibra.
2.2 Aumento de la tenacidad de materiales compuestos reforzados por fibras
El aumento de la tenacidad está directamente relacionado con la relación de tensión
proveniente de las fibras y con la apertura de las fisuras, basadas en diversos procesos y efec-
tos tales como debonding (despegue) de interfaz de fibra-matriz, pull-out (fibra siendo extraí-
da de la matriz) o slip (deslizamiento), spalling (fragmento de la matriz en la región de salida
de la fibra de la matriz) y al aparent strength (tensión de ruptura de la fibra) soportada antes
de la ruptura.
Para sustituir a los materiales convencionales, los materiales compuestos consisten
en la acción combinada de dos o más materiales diferentes, es decir, dos fases en las que una
se denomina matriz y la otra es la fase dispersa.
Los materiales compuestos son utilizados en muchos ámbitos de la vida cotidiana y
también se ha expandido en la consrtucción civil. Algunas aplicaciones que podemos mencio-
nar son: placas de fibrocemento, plásticos reforzados con fibra de vidrio, estructuras de hor-
migón, pavimentos rígidos, etc. La figura 2.1 muestra la incorporación de fibras a los com-
puestos de cemento.

9
(a) (b)
Fig.2.1: CHODOUNSKY [7]: (a) Adición de fibras al cemento; (b) Fibras aumen-tando la resistencia al corte del hormigón
El mecanismo de aumento de tenacidad consiste en que la matriz transfiere parte de
la tensión aplicada a las fibras, que resisten una porción de la carga; por lo tanto el grado de
refuerzo, entonces, dependerá de un enlace fuerte en la interfaz fibra-matriz. La figura 2.2
muestra las fibras Wirand® agregadas al concreto, en calidad de una armadura tridimensional
que redistribuye las tensiones aplicada al elemento estructural que restringe la propagación de
grietas y aumentando la resistencia después de la fisuración del elemento estructural aumen-
tando la resistencia.
Fig.2.2: MACCAFERRI [8]. Fibras de acero reforzando hormigón.

10
La figura 2.3 muestra algunas aplicaciones de hormigón reforzado con fibra.
Pisos y Pavimentos Túneles y Galerías
Elementos pre-fabricados Recuperación Estructural
Fig.2.3: MACCAFERRI [8]. Aplicaciones de hormigón reforzado con fibras.
Para lograr que el compuesto fibra-matriz tenga un rendimiento estructural mayor
que la matriz, será necesario que el módulo de elasticidad de la fibra sea mayor que el de la
matriz, por lo tanto tendrá una resistencia a la tracción elevada. Esto último hace necesario
que la adherencia entre ambos materiales sea alta para evitar el arrancamiento de las fibras
antes de que la resistencia sea movilizada.
El efecto de la orientación de la fibra y la distribución en la matriz también debe
ser considerado. La orientación de una fibra relativa al plano de ruptura o fisura, influ-
ye fuertemente en su capacidad de transmitir cargas. Una fibra colocada en paralelo al
plano de ruptura no tiene ningún efecto, mientras que una fibra perpendicular a la ruptura
tiene un efecto máximo.
La fase fibra sirve como una barrera contra la propagación de grietas, aunque
algunas fibras individuales pueden llegar a fallar, la fractura total del compuesto no se
produce hasta que un gran número de fibras han fallado. Es esencial una alta resistencia
de unión entre la fibra y la matriz, ya que la resistencia final del material compuesto
depende de la magnitud de esta conexión.

11
2.3 Modelos matemáticos para calcular el aumento de la tenacidad de materiales com-
puestos reforzados por fibras
Muchos investigadores han encontrado fundamental interés en el estudio de los efec-
tos de la adición de fibras en materiales compuestos cuando una grieta principal se propaga.
En la literatura podemos encontrar varios modelos que tienen como objetivo predecir el com-
portamiento de estos ateriales.
LI, WANG Y BACKER [33], desarrollaron tests de pull-out con fibras reforzando
compuestos de cemento (FRC). Dichos ensayos tuvieron en cuenta la orientación y la distri-
bución de las fibras dentro de la matriz, así como tambien la linealidad y la fuerza elástica de
las fibras para permitir un completo pull-out sin romper. En el modelado propuesto por estos
autores se tuvo en cuenta la variación en la tensión de conexión de fricción en la interfaz fi-
bra-matriz con la distancia de deslizamiento de la fibra, observando resultados muy satisfacto-
rios en el comportamiento pull-out para fibras de nylon o polipropileno, observando que en
estas fibras sintéticas la tensión de unión aumenta con la distancia de deslizamiento durante el
proceso de pull-out. En cambio, para las fibras de acero, la tensión de conexión disminuye
con la distancia de deslizamiento. No obstante, estas fibras también se comportan de manera
razonablemente buena.
LEUNG Y LI [26] pusieron énfasis en el análisis de los efectos de la inclinación de
las fibras y tensión de puente de las fibras que atraviezan la fisura, para fibras reforzando
compuestos de matriz frágil. Se tuvieron en cuenta el efecto snubbing (flexión de la fibra a la
salida de la matriz), debonding y spalling (rotura de matriz a la salida de la fibra), pudiendo
determinar que la mejora en los materiales en los que se incorporan fibras se puede derivar
por el análisis cuantitativo de la propagación de las tensiones para una fisura que se está
abriendo. La fuerza de puente producida debido a este acontecimiento se puede determinar en
dos partes: una parte producida por la tensión de la interfaz matriz-fibra (figura 2.4 (a)) y otra
parte debido a las reacciones que ocurren por la flexión de la fibra dentro de la matriz (figura
2.4 (b)). La fuerza total se determina mediante una suma vectorial de las dos fuerzas antes
descriptas; entonces, la tensión se obtiene mediante el núemro de fibras por unidad de área y
la fuerza de puente producida por cada una de estas fibras.

12
(a) (b)
Fig.2.4: LEUNG e LI [26]: (a) Fibra flexada en la intersección de la fisura; Componentes de fuerza de puente en la sección de la fisura.
Diferentes fenómenos fueron determinados a partir del estudio de fibras frágiles re-
forzando compuestos de matriz frágil, como ser: la flexión y o corte pueden conducir a roturas
y la fuerza que actúa sobre la matriz en la fibra pueden conducir al spalling en la matriz en el
punto de salida de la fibra, el spalling puede conducir a la relajación de las fibras y el retraso
en la rotura de la fibra tiene un fuerte efecto sobre la tensión en el compuesto. Hallaron nota-
ble incidencia de la tensión de las fibras inclinadas en el plano de la fisura, lo cual afecta no-
tablemente en el comportamiento mecánico de compuestos de mtariz frágil, de manera que
tanto la flexión de la fibra y la rotura de la matriz son factores que intervienen en la tensión de
una fisura que se está abriendo.
La capacidad del material en la resistencia a la propagación de la fisura, la cantidad
de energía absorbida para la producción de la fisura en el elemento y la extensión evidente de
la fisura, fueron estudiados por BRANDT [2], determinando que la selección de parámetros
como la calidad de la fibra y matriz son factores fundamentales que influyen en la absorción
más baja o más alta de energía.
ZHANG y LI [61] analizaron matriz de cemento con fibras de carbono y la influen-
cia del ángulo de inclinación de dichas fibras en la fisura, cuando se somete a cargas dichos
compuestos. Pudieron observar una caída en la tensión de ruptura de la fibra a medida que el

13
ángulo aumenta, lo cual también está influenciado por la elasticidad de la fibra y de la matriz
y la fuerza de corte en la interfaz fibra-matriz.
Fig.2.5: Ilustración del efecto snubbing.
KATZ y LI [24] modelaron analíticamente compuestos reforzados por fibra de car-
bono, con el fin de predecir el resultado de carga y tensión de dichas fibras, carga de puente y
tensión de frágiles inclinadas y cruzando una fisura, teniendo en cuenta el efecto de spalling y
concentración de fricción en el punto donde la fibra se curva por encima de la matriz. A partir
de experimentos, pudieron determinar que un aumento en el módulo de las fibras conlleva a
una esperada mejoría en las propiedades del material, ya que la resistencia de ligación en el
módulo de la matriz incrementa la tensión en las fibras, para un ancho de fisura determinado,
lo cual produce una menor falla de las fibras y esto lleva a una disminución en la carga de
puente.
Existen también muchos otros trabajos sobre compuestos de cemento que merecen
atención como LI y WU [30], KATZ LI y KAZMER [19], LI y MAALEJ [28], MOBASHER,
OUYANG y SHAH [33], LI y CHAN [23], SHAH y OUYANG [43], NELSON, LI y KA-
MADA [37], WANG y LI [49], LIU, TAO y GUO [31].

14
2.4 Procesos de ruptura de materiales compuestos
El estudio del proceso de ruptura de materiales compuestos permite entender los proce-
sos que ocurren en diversas escalas del problema estudiado. El efecto de aumento de la tena-
cidad (toughening) que fibras cortas producen en cerámicos es conocido y aplicado en varios
campos de ingeniería, y conocer con profundidad como es la interacción de esfuerzos que se
presentan en la fibra y matriz durante este proceso permite mejorar este efecto como lo mues-
tran trabajos clásicos en el área, Brandt (1985), Brebbia et al. (1984), Budiansky et al. (1986)
y Cao et al. (1990).
Mecanismos típicos ya identificados se suceden durante el proceso de ruptura del con-
junto fibra-matriz, conocidos como debonding, snubbing y spalling los cuales producen que la
descripción del aumento de tenacidad, conocido como toughening, sea complejo. Describimos
brevemente los fenómenos antes citados: Cuando una fisura atravesada por una fibra tiende a
abrirse, la fibra antes de despegarse de la matriz ejerce una presión intensa sobre la matriz.
Antes de que ocurra el despegue (debonding), las tensiones generadas por esta presión alcan-
zan un máximo. Es posible que las tensiones debajo de la fibra inclinada cerca del punto
dónde la fibra sale de la matriz, sean mayores que la resistencia de la matriz, entonces se pro-
duce la ruptura de la matriz cercana al punto de salida de la fibra, este efecto se conoce como
spalling y es indicado en la Fig. 2.6. Si la extensión del spalling sobrepasa la longitud embe-
bida de la fibra, la misma pierde su contribución en el aumento de tenacidad; si la extensión
es menor, las tensiones liberadas eliminan la posibilidad de la fibra de romperse, en otras pa-
labras, la fibra permanece intacta y puede contribuir al aumento de tenacidad. Después de que
se produce el despegue (debonding), la fibra comienza a ser extraída fuera de la matriz, avan-
ce indicado como Sf en la Fig. 2.7. La superficie despegada de la fibra puede deslizar con
respecto a la matriz, comenzando un proceso de fricción entre fibra y matriz. En el punto de
salida, dónde la fibra comienza a sobresalir de la cara de la fisura, se produce un pliegue de la
fibra que se puede observar en la Fig. 2.7. En este punto, la matriz actúa como una polea con
fricción, este efecto es denominado snubbing.

15
Figura 2.6: Efecto de Spalling en la interacción entre Fibra-Matriz
Li (2003) lo explica como una cuerda alrededor de una polea dónde la fricción se in-
crementa exponencialmente. La combinación de los efectos de spalling y snubbing hacen que
el aumento de tenacidad debido a la interacción fibra-matriz sea complejo.
El efecto de snubbing se presenta únicamente cuando el ángulo entre la dirección de la
fibra y la fuerza aplicada no están alineadas, este fenómeno muestra como la fuerza ejercida
por la fibra se incrementa en esta nueva configuración, es decir a mayor ángulo, indicado co-
mo φf en la Fig. 2.7 mayor será la fuerza que actúa sobre la parte de la fibra que continúa
embebida en la matriz Psf.
Aunque el efecto de spalling es bastante importante en el análisis del aumento de la te-
nacidad, los investigadores no le han dado mucha importancia, existiendo muy pocas publica-
ciones sobre dicho efecto.
Figura 2.7: Ilustración del efecto de snubbing
16
2.5 FUNDAMENTOS TEORICOS DE MECÁNICA DE FRACTURA
2.5.1 Introducción a la mecánica de fractura
Usualmente, en los problemas de ingeniería, para verificar la seguridad de una estructu-
ra se calcula la tensión máxima equivalente dada por alguna teoría de resistencia (Von Mises,
Tresca, Rankine entre otras) a la que está sometida máx eq. Esta es comparada con el valor de
la tensión de rotura equivalente, que caracteriza la ruptura de una probeta del mismo material
que tendrá una geometría simple normalizada, la cual será sometida a un valor de tensión
también simple y normalizada rot eq. La tensión máxima equivalente, máx eq, es una función
de la geometría, las condiciones de contorno y las cargas aplicadas (), mientras que la ten-
sión de rotura equivalente, rot eq, depende del material y de las condiciones en que se realizó
el ensayo para obtenerla (temperatura T, velocidad de aplicación de la carga ).
El suceso de la aplicación de este procedimiento tradicional de cálculo depende del uso de un
coeficiente de seguridad () que sea lo suficientemente alto como para evitar fallas provoca-
das por cualquier aspecto que no se haya tenido en cuenta en el cálculo y suficientemente bajo
como para evitar peso exagerado y consumo de material innecesario, para que el costo no sea
excesivo. Estos coeficientes se eligen entonces en base a la experiencia acumulada. (Anderson
2005, Kaninnen y Popelar 1985)
Se tiene entonces:
γσT,material,σσ contorno, de Cond. Geometría,σ eqrot eqmáx 2-1
Si la estructura analizada posee defectos, para valores de cargas relativamente pequeñas,
el valor de la tensiones equivalentes en las proximidades de las puntas de estos defectos serán
muy altas, pero esto no implica el colapso de la misma. Por lo tanto, evaluar piezas con defec-
tos utilizando la inecuación 2-1 se torna inviable. La comparación de parámetros del material
y de la estructura que no sean directamente tensiones equivalentes se presenta como una sali-
da para evaluar la integridad de estructuras con defectos
Los resultados de la Mecánica de Fractura originan nuevas filosofías de proyecto, en
que se asume que la estructura tiene defectos (fisuras), como consecuencia por ejemplo, del
proceso constructivo utilizado o de cualquier pequeño accidente durante la vida útil de la es-
tructura. Básicamente el problema consiste en obtener el comportamiento estimativo de la
fisura observada o de la que se sospecha su existencia. Es necesario saber si la fisura perma-
necerá con dimensiones pequeñas durante el período de servicio, aunque aumente establemen-
te de dimensiones durante este período, o se propagará inestablemente, siendo en este caso
necesario tomar recaudos preventivos.

17
Si consideramos entonces que en la estructura en análisis existe una fisura, las tensiones en
los extremos de la misma serán elevadas, por más bajo que sea el nivel de las cargas aplica-
das. Aun así, está comprobado que las estructuras con defectos resisten, aunque en este caso
no es posible utilizar la ecuación 2-1 para dimensionar las mismas, pues siempre se verificará
que eqrot eqmáx σσ . Por esta razón tenemos que buscar una inecuación de dimensionamiento
que no esté en función de las tensiones. Esta inecuación tendrá que ser función de un paráme-
tro alternativo que llamaremos Z. En la estructura en análisis, Z será función de las condicio-
nes de contorno aplicadas, geometría y tamaño de la fisura, el cual compararemos con el valor
de este parámetro Zmat medido en el momento de su colapso en una probeta de geometría y
condiciones de contorno simples.
De esta forma, la inecuación de dimensionamiento equivalente a la 2-1 pero considerando
un cuerpo con fisuras, será:
/σT,material,ZGeometria contorno, de Cond. a,Z mat 2-2
Cuando la inecuación 2-2 se verifica, se considera que la fisura no propaga en forma ines-
table.
Existen varias propuestas de parámetros para Z, dos válidas dentro de lo que se llama la
mecánica de la fractura lineal elástica (MFLE): la tasa de energía liberada (G), que fue pro-
puesta por Griffith en 1920 que es considerada como un parámetro global ya que envuelve el
balance energético de la estructura como un todo, y el factor de intensidad de tensiones (K),
propuesto por Irwin en 1957, el cual es un parámetro local, pues solamente considera la dis-
tribución de tensiones en un entorno de la punta de la fisura.
Dentro de la mecánica de fractura no lineal, la cual considera la interacción de la propa-
gación inestable de una fisura con la plasticidad, existen también dos parámetros: la integral J
(Rice, 1968) que es un parámetro energético, considerado también global y el COD o abertura
de la punta de la fisura, que fue introducido por Wells en 1961 y es considerado un parámetro
local. Se pueden encontrar más detalles sobre estos parámetros en Anderson 2005.
2.5.2 Mecánica de fractura lineal elástica (MFLE)
Los conceptos de la mecánica de fractura elástica-lineal son aplicables a aquellos mate-
riales con fisuras que obedecen la ley de Hooke y cuyo comportamiento global tiene carácter
lineal y elástico. Para ellos la teoría establece una descripción cuantitativa de la criticidad del
defecto analizado proporcionando una predicción acerca de la vida útil de las estructuras.
En la MFLE existen dos maneras de encarar el estudio:

18
Criterio energético de Griffith o Criterio Global: se basa en la determinación de la energía
disponible para el avance o extensión inestable de la fisura preexistente, que se obtiene al
hacer un balance energético en toda la estructura.
Criterio del factor de intensidad de tensiones de Irwin o criterio local: se basa en la deter-
minación del estado tensional de la estructura en las proximidades del extremo de la fisu-
ra.
2.5.3 Balance energético de Griffith
Según este criterio la extensión de la fisura ocurre cuando la energía disponible para el
desarrollo de la fisura es suficiente para superar la resistencia del material. La resistencia del
material puede incluir la energía superficial, el trabajo plástico u otro tipo de energía de disi-
pación asociado con la propagación de la fisura.
El balance energético de Griffith para un incremento diferencial del área de la fisura (dA)
en una placa sujeta a una tensión remota, , que contiene una fisura de longitud 2a, puede ser
expresado de la siguiente manera:
0dA
dW
dA
d
dA
dE ST
2-3
ó
dA
dW
dAd S
2-4
Dónde ET es la energía total, es la energía potencial suministrada por la energía de
deformación interna y las fuerzas exteriores, y WS es el trabajo requerido para crear nuevas
superficies de la fisura.

19
B
2a
Figura 2.8: Placa de espesor constante y dimensiones infinitas con una fisura pa-sante longitud 2a.
Para la placa fisurada mostrada en la figura 2.8, Griffith llegó a (Anderson 2005):
a
E2 sf
2-5
Dónde f es la tensión de fractura, a es la semilongitud de fisura, E es el módulo de
elasticidad y s la energía de superficie del material.
El criterio de Griffith se puede aplicar a otros tipos de configuraciones fisuradas. Por
ejemplo, la tensión de fractura en un cuerpo que tiene una fisura de sección circular (figura
2.9) está dada por:
a)1(2
E2
sf
2-6
Dónde a es el radio de la fisura y el coeficiente de Poisson. (Anderson 2005)
a
Figura 2.9: Cuerpo de dimensiones infinitas con una fisura de sección circular
sometido a una tensión remota de tracción .

20
2.5.4 Tasa de energía liberada, G
En 1956, Irwin (citado en Anderson 2005) definió la tasa de energía liberada, G, como
una medida de la energía disponible para el incremento de la extensión de la fisura:
dAd
G
2-7
G es la razón de cambio de la energía potencial con el área de la fisura. Es también llamada
driving force, fuerza guía de la fisura o fuerza que dirige la fisura, es importante notar que su
dimensión es la de energía por unidad de superficie.
La fisura comienza a propagar cuando G alcanza un valor crítico:
dA
dWG S
C 2-8
Dónde GC (tasa crítica de energía liberada) es una medida de la tenacidad del material.
La energía potencial para un cuerpo elástico (), para un proceso cuasiestático, es defi-
nido de la siguiente manera:
WU 2-9
Siendo U es la energía de deformación almacenada en el cuerpo y W es la energía potencial
producida por las fuerzas externas.
2.5.5 Análisis de tensiones en las proximidades del extremo de una fisura
Para ciertas configuraciones fisuradas sujetas a fuerzas externas, es posible describir me-
diante expresiones cerradas la tensión en el cuerpo, asumiendo un comportamiento del mate-
rial lineal elástico e isotrópico. Westwrgaard e Irwin (citados en Anderson 2005) fueron algu-
nos de los primeros en publicar estas soluciones. Si se define el origen de coordenadas polares
en la punta de la fisura (figura 2.10), se puede demostrar que el campo de tensiones en un
cuerpo elástico lineal fisurado es dado por:
....r OrOrOfr
k 23
3/22
01ijij
2-10
Dónde ij es el tensor de tensiones, r y se definen en la figura 2.10, k es un constante, fij es
una función adimensional de y los coeficientes Oi son dependientes de la geometría y con-
diciones de borde de la estructura. Cuando r tiende a cero, el primer término tiende a infinito,
pero los términos restantes permanecen finitos o tienden a cero. Por lo tanto la forma de la
distribución de tensiones en las proximidades de la punta de la fisura es independiente de la

21
geometría y condiciones de contorno del componente estudiado. También se puede demostrar
que los desplazamientos cercanos a la punta de la fisura varían con r .
Eje en la punta de la fisura
zx
yx xz
yz
zy
xy
x z
y
z
x
y
r
Figura 2.10: Definición de las coordenadas con los ejes en la punta de la fisura.
Existen tres tipos de solicitaciones que la fisura puede experimentar, como se ilustra en la
figura 2.11:
Modo de apertura o Modo I, en el cual las caras de la fisura se separan casi paralelamente
entre sí. La solicitación actúa normal al plano de la fisura, ésta tiende a abrir la misma.
Modo de deslizamiento o Modo II, en el cual las caras de la fisura se deslizan una sobre la
otra. Corresponde a una solicitación de cizalla en el plano de la fisura.
Modo de torsión o Modo III, donde las caras de una fisura se deslizan lateralmente una
respecto de la otra. Corresponde a una solicitación de cizalla fuera del plano de la fisura.
Un cuerpo fisurado puede ser solicitado en cualquiera de estos tres modos, o con una
combinación de dos o de los tres modos.

22
Modo IModo de apertura
Modo IIModo de deslizamiento
Modo IIIModo de torsión
Figura 2.11: Modos de carga que se pueden aplicar a una fisura.
2.5.6 Factor de intensidad de tensiones
Cada tipo de carga produce en la punta de la fisura una singularidad en función de r1 ,
pero la constante de proporcionalidad k y fij dependen del modo de carga. Es conveniente re-
emplazar k por el factor de intensidad de tensiones, K, siendo 2kK . Este factor de
intensidad de tensiones es usualmente dado denotando el modo de carga con un subíndice en
número romano, es decir, KI, KII o KIII. Entonces el campo de tensiones delante de la punta de
la fisura en un material elástico lineal isotrópico puede ser escrito como:
Iij
IIij
0rf
r2
Klim 2-11-a
IIij
IIIIij
0rf
r2
Klim 2-11-b
IIIij
IIIIIIij
0rf
r2
Klim 2-11-c
Consideremos un campo singular de Modo I en una placa fisurada donde = 0. La ten-
sión en la dirección "x" y en la dirección "y" son iguales:
r2
KIyyxx 2-12
Cuando = 0, la tensión de corte es nula, lo que significa que el plano de la fisura es un
plano de tensiones principales para el modo I de carga. La figura 2.12 es una gráfica esquemá-
tica de las tensiones yy, tensión normal al plano de la fisura, versus la distancia a la punta de
la fisura. La ecuación 2-12 es válida solamente en las cercanías de la punta de la fisura, donde

23
la singularidad r1 domina el campo de tensiones. Las tensiones lejos de la punta de la fisu-
ra son gobernadas por las condiciones de borde remotas. Por ejemplo, si la estructura fisurada
es sometida a una tensión remota uniforme, yy se aproxima a ese valor constante oo.
rZona dominada por la singularidad
2 rKI
yy
= 0
Figura 2.12: Tensiones normales al plano de la fisura en el Modo I.
El factor de intensidad de tensiones define la amplitud de la singularidad en la punta de
la fisura. Esto quiere decir que las tensiones en las cercanías de la punta de la fisura aumentan
proporcionalmente a K. Es más, el factor de intensidad de tensiones define completamente las
condiciones en la punta de la fisura. Si K es conocido, es posible calcular todas las componen-
tes de las tensiones, deformaciones y desplazamientos en función de r y . Una posibilidad
sería tomar este factor K como el parámetro Z presentado en la inecuación 2-2. Este simple
parámetro de descripción de las condiciones en la punta de la fisura se transforma en uno de
los conceptos más importantes en la mecánica de fractura.
En el gráfico anterior queda implícito que las tensiones en la punta de la fisura son infi-
nitas. En materiales reales, sin embargo, las tensiones en la punta de la fisura son finitas. De-
formaciones inelásticas en el material, como plasticidad en metales y crazing en polímeros,
conducen a una relajación adicional de las tensiones en la punta de la fisura.
Por esto, existen correcciones simples a la mecánica de fractura lineal elástica (MFLE) cuan-
do ocurre una fluencia moderada en la punta de la fisura. Para una fluencia más extensa, se
deben aplicar parámetros alternativos que tienen en cuenta el comportamiento no lineal del
material.

24
Cuando ocurre la fluencia, las tensiones se tienen que redistribuir para satisfacer el equi-
librio. La zona rayada en la figura 2.13 representa las fuerzas que estarían presentes en un
material elástico ideal pero no existen en el material elasto-plástico porque las tensiones no
pueden exceder la tensión de fluencia. La zona plástica debe aumentar de tamaño para absor-
ber estas fuerzas. Un simple balance de fuerzas conduce a una estimación de segundo orden
del tamaño de la zona plástica, rp, que es el doble de ry, la estimación de primer orden. Donde
ry es el radio de zona singular considerando el material elástico (ideal).
r
yy
= 0
YS
rp
ry
Elástico
Elásto-plástico
Figura 2.13: Estimación del tamaño de la zona plástica de primer y segundo or-
den. El área rayada representa las cargas que deben ser redistribuidas, lo que resulta en un aumento de la zona plástica.
2.5.7 Relación entre K y G
Para una placa infinita con fisura pasante sujeta a una tracción uniforme (figura 2.8), se
llega a la siguiente relación entre G y K para estado plano de tensiones (capítulo 2 de Ander-
son 2005):
E
KG
2I 2-13
Para un estado de deformación plana E debe ser reemplazado por )1(E 2 . Para evitar
escribir separadamente las expresiones para estado plano de tensiones y estado plano de de-
formaciones, se adopta la siguiente nomenclatura:
E'E para estado plano de tensiones
)1(E
'E 2 para estado plano de deformaciones
Entonces la relación entre G y K para ambos será:

25
'E
KG
2I 2-14
Se puede encontrar en Anderson 2005 análisis realizados por Irwin donde se prueba que
esta ecuación es la relación general entre G y K que se aplica a toda configuración.
La ecuación 2-14 es la relación general entre G y K para el Modo I. Cuando los tres
modos de carga están presentes, la tasa de liberación de energía está dada por:
2
K
'E
K
'E
KG
2III
2II
2I 2-15
La contribución de los tres modos es aditiva porque la tasa de energía liberada, al igual
que la energía, es un escalar.
26
CAPÍTULO 3 - MATERIALES y MÉTODOS En el siguiente capítulo se describe el modelo matemático utilizado en este trabajo para
el estudio del material compuesto. También se detalla el método numérico utilizado para el
modelado del problema en estudio.
3.1. Modelo teórico del problema estudiado – PROPUESTA DE Li et al [33]
3.1.1 Fisura
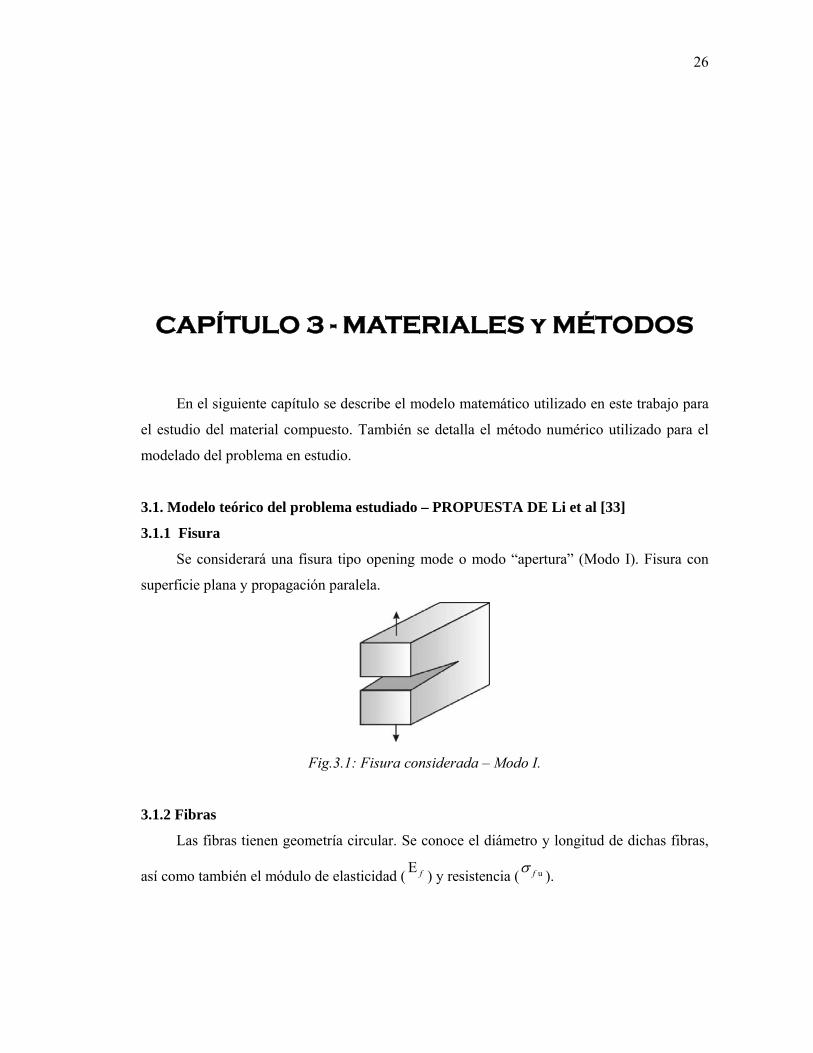
Se considerará una fisura tipo opening mode o modo “apertura” (Modo I). Fisura con
superficie plana y propagación paralela.
Fig.3.1: Fisura considerada – Modo I.
3.1.2 Fibras
Las fibras tienen geometría circular. Se conoce el diámetro y longitud de dichas fibras,
así como también el módulo de elasticidad (E f ) y resistencia ( uf
).
27
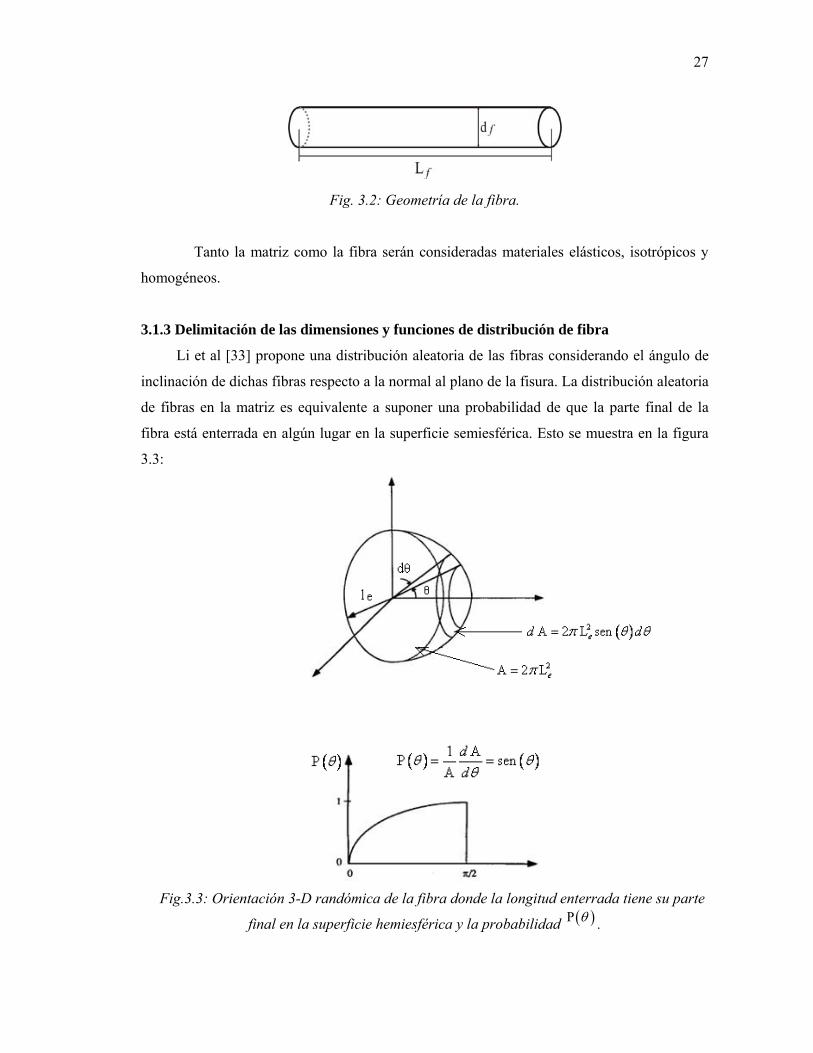
Fig. 3.2: Geometría de la fibra.
Tanto la matriz como la fibra serán consideradas materiales elásticos, isotrópicos y
homogéneos.
3.1.3 Delimitación de las dimensiones y funciones de distribución de fibra
Li et al [33] propone una distribución aleatoria de las fibras considerando el ángulo de
inclinación de dichas fibras respecto a la normal al plano de la fisura. La distribución aleatoria
de fibras en la matriz es equivalente a suponer una probabilidad de que la parte final de la
fibra está enterrada en algún lugar en la superficie semiesférica. Esto se muestra en la figura
3.3:
Fig.3.3: Orientación 3-D randómica de la fibra donde la longitud enterrada tiene su parte
final en la superficie hemiesférica y la probabilidad P .

28
3.1.4 Layout de la fibra en relación a la superficie de la fisura
Se puede observar en la figura 3.4 la inclinación de la fibra respecto al vector normal
a la superficie de la fisura. La longitud enterrada de dicha fibra en la matriz está representada
por el .
Fig. 3.4: Fibra inclinada y con parte enterrada en la matriz.
3.1.5 Fibra sin deformación
En la figura de abajo se grafica una fibra antes de la deformación debido a la propaga-
ción de la fisura. La longitud libre inicial se puede considerar como .2 ol
Fig. 3.5: Configuración de la fibra antes de la apertura de la fisura.
Claramente, por la geometría, se tiene que la longitud enterrada de la fibrainicialmente
está dada por:
Superficie de fisura
fisura

29
of
e lzL
L cos2 3-1
Observando 0l en la figura, tenemos que:
ol
r )90tan( 3-2
Por relaciones trigonométricas:
0 tanl r 3-3
2
tan
cos2
.
ffe
dzLL 3-4
Para L 0e , obtenemos
2cos
20
.
sendLz ff 3-5
Donde z es la distancia desde el centro de la fibra hasta el plano de la fisura.
De 0 tanl r , tenemos
22tan f
of
Lld 3-6
LI et al [33], sugiere que
2
Más Observando la figura, verificamos que el ángulo de inclinación de la fibra que re-
almente contribuirá con la tenacidad se ve limitado por:
f
f
d
Larctan 3-7
Así las probabilidades de que el ángulo y la distancia z acontezcan está dada por

30
3-8
L cos sen2z para 0 z
L 2f f
f
dp
3.1.6 Tensión de puente proveniente de las fibras en el plano de la fisura
De acuerdo con Li et al [33] la tensión de puente está relacionada con la apertura w con
la fuerza de puente N de cada fibra, que es esencial para calcular el aumento de la tenacidad a
la fractura según la ecuación
)/arctan(
02/))()cos((
0)()(),,()( fdfL senfdfL
f
fc dzdzpzw
Vw
3-9
Donde N , , zw es la fuerza axial en la fibra en su respectivo eje.
3.1.7 Aumento de energía de fratura Gc
El aumento de la energia de fratura Gc , o sea, el aumento de la tenacidad, con unidades
J/m2, se obtiene a través del área bajo la curva c w , o sea:
*
0G
w
c c w dw 3-10
Donde *w es la abertura suficiente para que todas las tensiones en las fibras sean cero
(fibras quebradas o fuera de la matriz).

31
3.2. METODO DE LOS ELEMENTOS DISCRETOS
En el Método de los Elementos Discretos se considera al medio modelado como un sis-
tema de partículas discretas, generalmente de forma esférica y masa conocida. En el método
cada partícula es identificada separadamente y sus posiciones instantáneas son determinadas a
partir de las ecuaciones de movimiento.
Cundall aparece como uno de los principales precursores del método (Cundall, 1971 y
1979). El método que propuso se basa en realizar una integración explícita de las ecuaciones
de movimiento de una estructura formada por partículas rígidas con masas conectadas entre
si, mediante resortes y amortiguadores.
El MED fue aplicado con gran éxito en el modelado numérico de procesos que envuel-
ven un comportamiento discontinuo predominante, relacionado con sólidos no cohesivos.
También ha sido aplicado con suceso en el estudio de materiales susceptibles de fracturar,
dónde la hipótesis de medio continuo, base de los métodos numéricos tradicionales (elemen-
tos finitos y de contorno) es violada.
Como ejemplos se pueden citar el transporte de sedimentos en un fluido (Goth e Sakai,
1997 e Ching-Jang Lin, 2000), modelado de filtros con capas granulares (C.S. Chou, 2000).
También se utilizó en el modelado de procesos de degradación y fractura en sólidos cohesi-
vos, entre los cuales pueden ser citados: simulación de explosión en rocas (Ladislav, 2003,
Procházka, 2004), fractura de materiales compuestos como el hormigón, por ejemplo (Sawa-
moto, 1998, Camborde, 2000, Brara 2001, Wittel, 2003).
Particularmente, a través de la formulación del MED utilizada en este trabajo, fueron
modelados procesos de fractura dinámica en rocas, producto de terremotos (Dalguer y otros,
2003), impacto en concreto armado (Riera, 1980, 1984), procesos de fractura en hormigón y
hormigón armado (Iturrioz y Riera, 1998), simulación del comportamiento de suelos frente a
cargas explosivas (Iturrioz y Riera 2001), simulación de propagación dinámica de fisuras
(Spellmeyer y otros 2001), problemas de impacto en materiales compuestos poliméricos (Ba-
rrios D'Ambra y otros 2002 y 2003), fenómenos de fractura por impacto en polímeros (Ba-
rrios y otros, 2004). También existen trabajos previos en los cuales se presenta la determina-
ción de parámetros fractomecánicos con el MED publicados por Tech y otros en 2003. Parte
de los trabajos de Kosteski y otros 2004 y 2006, y Barrios D'Ambra y otros 2006, pertenecen
al trabajo realizado para esta disertación.
32
En otro abordaje, algunos trabajos combinan el método de los elementos discretos con
el método de los elementos finitos (Gethin, 2001, Munjiza, 2002, 2004, entre otros).
3.2.1. Características de la formulación del método utilizada en este trabajo.
La formulación original fue propuesta por Nayfeh y Hefzy en 1978 (citado por Hayashi)
que reemplazaron una estructura reticulada espacial por un continuo equivalente, para dismi-
nuir la cantidad de grados de libertad y disminuir así el esfuerzo computacional.
El modelo de discretización empleado en este trabajo fue desenvuelto por Hayashi 1982
y verificado también por Rocha 1989 e Iturrioz 1995.
El Método de los Elementos Discretos consiste esencialmente en la discretización espa-
cial del continuo por medio de un reticulado espacial formado por la repetición de un módulo
regular. Las rigideces de las barras que componen el reticulado son equivalentes a la del con-
tinuo que se quiere representar. Como se consideran barras de reticulado espacial, por cada
nudo se tienen tres grados de libertad. La masa del modelo es discretizada y concentrada en
los nodos del reticulado espacial ya mencionado.
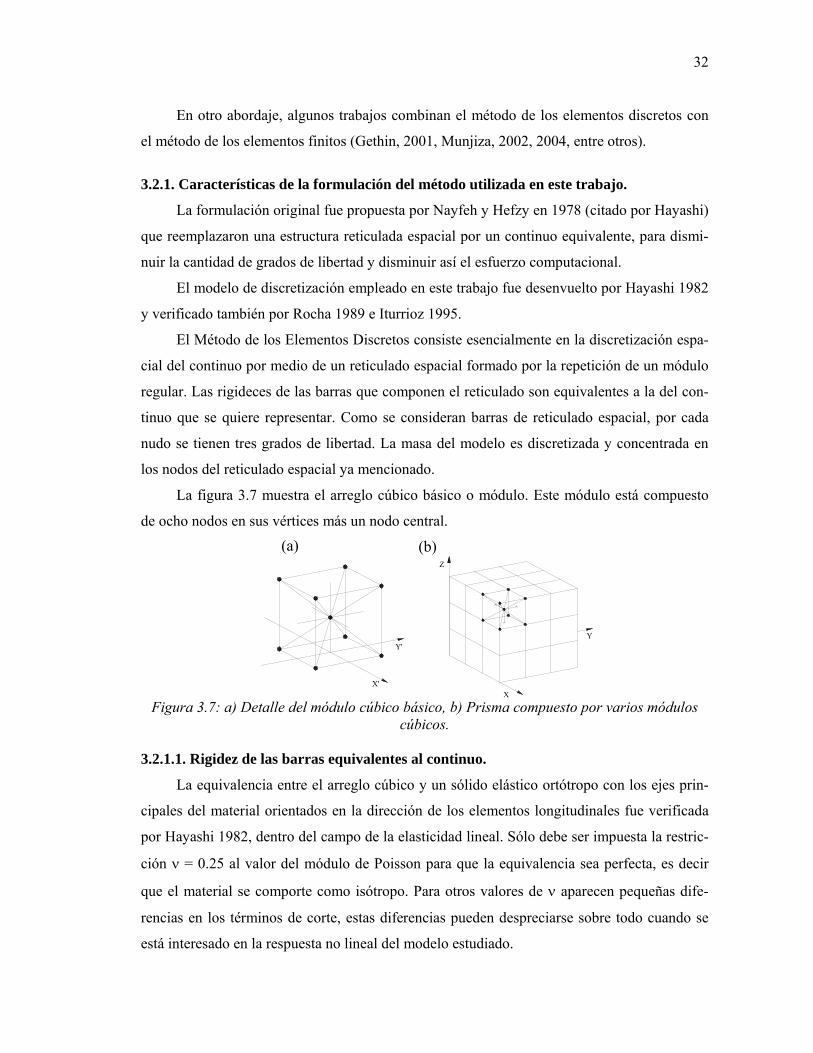
La figura 3.7 muestra el arreglo cúbico básico o módulo. Este módulo está compuesto
de ocho nodos en sus vértices más un nodo central.
(b)(a)
X'
X
Y'
Z
Y
Figura 3.7: a) Detalle del módulo cúbico básico, b) Prisma compuesto por varios módulos
cúbicos. 3.2.1.1. Rigidez de las barras equivalentes al continuo.
La equivalencia entre el arreglo cúbico y un sólido elástico ortótropo con los ejes prin-
cipales del material orientados en la dirección de los elementos longitudinales fue verificada
por Hayashi 1982, dentro del campo de la elasticidad lineal. Sólo debe ser impuesta la restric-
ción = 0.25 al valor del módulo de Poisson para que la equivalencia sea perfecta, es decir
que el material se comporte como isótropo. Para otros valores de aparecen pequeñas dife-
rencias en los términos de corte, estas diferencias pueden despreciarse sobre todo cuando se
está interesado en la respuesta no lineal del modelo estudiado.

33
A continuación se presenta en forma resumida las deducciones que permiten llegar a las
constantes elásticas de un sólido y a las rigideces equivalentes de las barras para el módulo
cúbico presentado en la figura 3-1, las cuales fueron desenvueltas en las tesis de Hayashi 1982
e Iturrioz 1995 y en el trabajo de Nayfeh y Hefzy 1978.
La relación constitutiva de un cuerpo elástico arbitrario, en notación indicial, se puede
escribir de la siguiente forma:
6...1j,iC jiji 3-11
En el caso del cuerpo anisótropo y elástico la matriz de las constantes elásticas, Cij, que-
da definida conociendo 21 parámetros independientes. Si el material es isótropo, es posible
realizar simplificaciones que permiten expresar la matriz Cij en función apenas de dos cons-
tantes independientes. En este último caso, se puede escribir Cij como sigue:
44
44
44
111212
121112
121211
ij
C00000
0C0000
00C000
000CCC
000CCC
000CCC
C 3-12
Donde C11, C12, C44 son funciones del módulo de elasticidad longitudinal E y del coeficiente
de Poisson .
Como se están analizando estructuras reticuladas a partir de elementos unidireccionales
es de esperar que cada elemento contribuya a la rigidez global de la estructura y la suma de
las contribuciones medias de cada barra forme la matriz final.
Como todas las barras poseen el mismo módulo de elasticidad E, cada conjunto de ba-
rras paralelas define un continuo con una propiedad unidireccional efectiva, que será llamada
Q11. Como Q11 es tomado como un valor medio ponderado con relación al área de influencia
de la barra en un determinado conjunto de barras paralelas, su valor dependerá de la separa-
ción entre estas barras.
El elemento cúbico de la figura 3-1 posee dos valores diferentes para Q11, uno corres-
pondiente a las columnas que son normales a las caras del cubo y otro correspondiente a las
barras diagonales. Estas propiedades serán diferenciadas respectivamente por Qn11 y Qd
11.
Para una estructura cúbica el valor del parámetro Qn11 puede ser fácilmente determinado pro-
yectando el área de las barras en una cara del cubo como se muestra en la figura 3-2 a).
Entonces en cada cara del módulo cúbico de área Lc2 se tiene una contribución de dos
barras normales enteras. De esta forma, cada elemento tiene un área efectiva de contribución
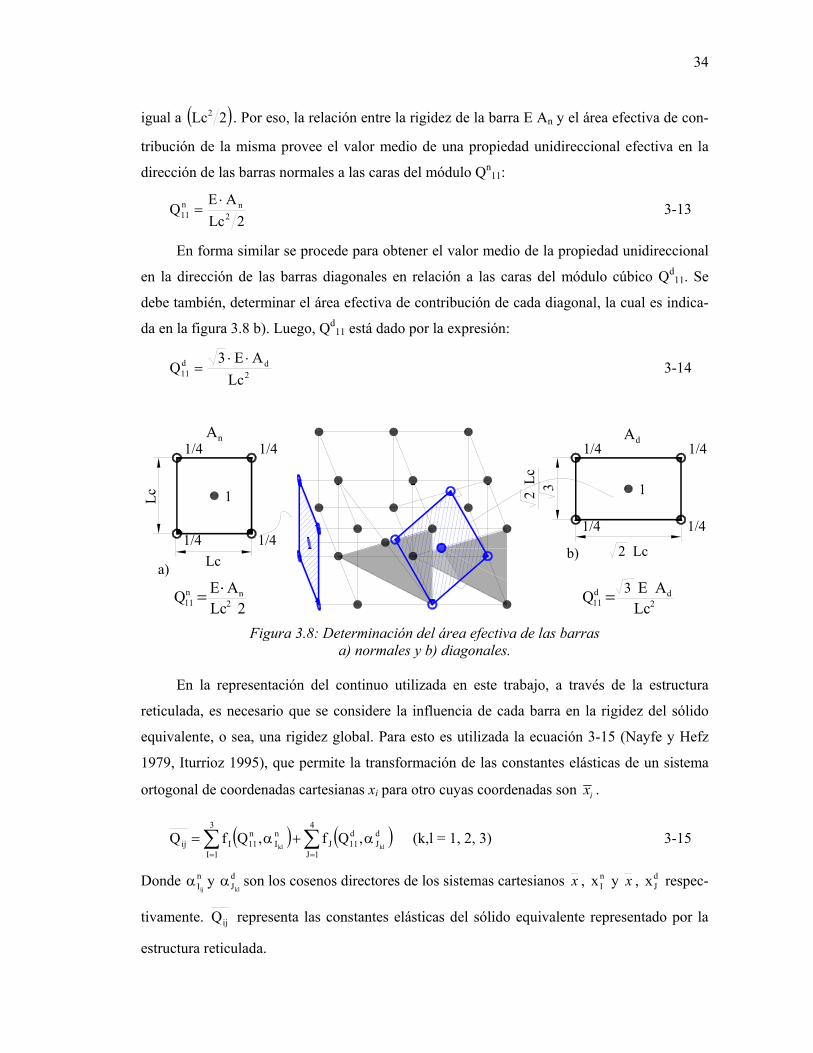
34
igual a 2Lc2 . Por eso, la relación entre la rigidez de la barra E An y el área efectiva de con-
tribución de la misma provee el valor medio de una propiedad unidireccional efectiva en la
dirección de las barras normales a las caras del módulo Qn11:
2Lc
AEQ
2nn
11
3-13
En forma similar se procede para obtener el valor medio de la propiedad unidireccional
en la dirección de las barras diagonales en relación a las caras del módulo cúbico Qd11. Se
debe también, determinar el área efectiva de contribución de cada diagonal, la cual es indica-
da en la figura 3.8 b). Luego, Qd11 está dado por la expresión:
2
dd11 Lc
AE3Q
3-14
1
1/41/4
1/4 1/4
2LcAE
Q 2nn
11
An
LcAE
Q 2dd
11
Ad
2 Lc
3a)
b)
1
1/41/4
1/4 1/4
Lc
Lc
2 L
c3
Figura 3.8: Determinación del área efectiva de las barras
a) normales y b) diagonales.
En la representación del continuo utilizada en este trabajo, a través de la estructura
reticulada, es necesario que se considere la influencia de cada barra en la rigidez del sólido
equivalente, o sea, una rigidez global. Para esto es utilizada la ecuación 3-15 (Nayfe y Hefz
1979, Iturrioz 1995), que permite la transformación de las constantes elásticas de un sistema
ortogonal de coordenadas cartesianas xi para otro cuyas coordenadas son ix .
4
1J
dJ
d11J
3
1I
nI
n11Iij klkl
,Qf,QfQ (k,l = 1, 2, 3) 3-15
Donde nIij
y dJkl
son los cosenos directores de los sistemas cartesianos x , nIx y x , d
Jx respec-
tivamente. ijQ representa las constantes elásticas del sólido equivalente representado por la
estructura reticulada.

35
El primer término corresponde a la contribución de las barras normales a las caras del
módulo cúbico y el segundo termino corresponde a las cuatro direcciones de las diagonales
del cubo.
Trabajando con las ecuaciones 3-13 a 3-15 se obtiene:
9
4QC
9
4QC
9
41QC
n1144
n1112
n1111
3-16
Dónde:
n
dn11
d11
A
A
2
3
Q
Q 3-17
Sustituyendo las expresiones de Cij en la matriz (3-12) se obtiene:
9
400000
09
40000
009
4000
0009
41
9
4
9
4
0009
4
9
41
9
4
0009
4
9
4
9
41
Lc
AE2C
2n
ij 3-18
Que es la expresión propuesta por Nayfeh y Hefzy 1978, dónde An y Ad son datos del
problema. En el trabajo de Nayfeh y Hefzy 1978 se aclara que la ecuación 3-18 es equivalente
a la matriz de rigidez de un material isótropo y homogéneo sólo en el caso en que = 9/8 (lo
que implica que = 0.25). Para otros valores de la equivalencia no es perfecta y las diferen-
cias se concentran en los términos de corte (Iturrioz 1995).
Las constantes elásticas E, y pueden ser obtenidas para el continuo equivalente a
partir de los correspondientes Cij de la expresión anterior, como sigue:

36
44
1211
12
1211
212
11
C2
1
CC
C
CC
C2CE
3-19
Considerándose las ecuaciones 3-18 y 3-19, es obtenida la relación entre las constantes
elásticas E, y y las constantes elásticas del sólido equivalente de la estructura reticulada,
ecuación 3-20.
2n
2n
Lc9
AE889
4
89Lc
129AE2E
3-20
Como lo que interesa es obtener las rigideces de las barras (E An) y (E Ad) en función de
las propiedades elásticas del sólido que representa, E, , simplemente reemplazamos estos
valores en la ecuación 3-17 obteniendo:
3
AE2AE
E1292
89LcAE
84
9
nd
2
n
3-21
Estas expresiones son válidas si el módulo o arreglo básico de barras es cúbico, como el
mostrado en la figura 3-2 a).
Para una célula básica de forma diferente, se deben obtener nuevas relaciones. Bush y
otros 1977 y Noor y Mikulas 1988 (citados por Hayashi 1983 e Iturrioz 1995) presentan estas
relaciones para tetraedros, en cuanto otros autores proponen realizar el cálculo de las rigideces
de las barras directamente por calibración numérica. Schlangem 1993 realizó una revisión
bibliográfica de varios tipos de arreglos utilizados en el modelado de estructuras de hormigón.
Ostoja y Starzenski 1995 también presentan el cálculo de propiedades equivalentes de barras
para el caso en que existe ortotropía utilizando células tetraédricas.

37
3.2.1.2. Masas nodales.
Como se comentó anteriormente, la masa del cuerpo simulado se discretiza y se la colo-
ca en los nudos del reticulado, y el valor de la misma depende del volumen de influencia del
nudo. Considerándose el módulo cúbico básico de las figuras 3-1 a) o 3-2, se puede observar
que en el volumen de dicho módulo (Lc3) están comprendidos dos nudos, el central y la suma
de la octava parte que aporta cada nudo de las aristas del módulo.
Como la masa del continuo comprendida dentro de ese volumen elemental es 3Lc ,
siendo la densidad del material, la masa de cada nudo completo deberá ser la mitad
( 2Lc3 ).
Los nudos del vértice del modelo global tienen solamente un octavo de la masa de un
nudo completo, por lo tanto su masa será de 16Lc3 . Los nudos de las aristas del modelo
global tendrán un cuarto de la masa del nudo completo ( 8Lc3 ) y los nudos pertenecientes
a las caras o superficies del modelo global la mitad ( 4Lc3 ).
3.2.1.3. Solución de la ecuación de equilibrio.
Como se explicó anteriormente se consiguió representar el continuo por un sistema tri-
dimensional de n grados de libertad.
Para cada nudo de masa m es considerado el sistema de fuerzas representado en el dia-
grama de cuerpo libre mostrado en la figura 3.9. Quedando la ecuación de movimiento para el
sistema completo:
0tPtFxCxM
3-22
Donde x
representa el vector de desplazamientos nodales, M la matriz de masa nodal (diago-
nal), C es una matriz de amortiguamiento, también considerada diagonal, y tPtF
repre-
senta la diferencia entre el vector de fuerzas internas tF
y el vector de fuerzas externas tP
.
Se considera que estas fuerzas actúan sobre los nudos del modelo.
(t)P(t)F
xcxm
Figura 3.9: Diagrama de cuerpo libre para un nudo.

38
Para cada nodo i del modelo se verifica que:
k
1b
bi FtF
3-23
Siendo k el número de barras que concurren al nudo i. La fuerza interna en cada barra, bF
, es
obtenida a partir de una ecuación constitutiva elemental, que se puede expresar como sigue:
bbb ,F
3-24
Siendo que bb y representan la deformación y la velocidad de deformación de la barra b y
será una función que dependerá del tipo de material a modelar (relación constitutiva).
La ecuación de equilibrio 3-22 es integrada en el tiempo valiéndose de un esquema de
integración explícita, utilizando el método de diferencias finitas centrales, de manera de obte-
ner la coordenada actual del nudo en cada paso de integración.
En relación a la matriz de amortiguamiento C, se adoptó la hipótesis simplificativa de
considerar el amortiguamiento proporcional a la masa M (Iturrioz, 1995).
fDMC 3-25
Siendo Df una constante vinculada al coeficiente de amortiguamiento crítico n.
nnf f2D 3-26
Dónde fn es la frecuencia natural de vibración de modo n (Hz). De un modo general el modo n
es adoptado como siendo igual al modo fundamental de vibración de la estructura (Iturrioz
1995).
3.2.1.4. Relación constitutiva de la barra para modelar la rotura del material.
Rocha 1989 propuso una ley constitutiva bilineal para los elementos que permite captu-
rar el comportamiento de materiales hasta la ruptura, la misma se presenta en figura 3.10.
Como menciona Rocha, esta ley fue propuesta originariamente por Hilleborg en 1978.
La relación constitutiva de cada barra tiene la siguiente forma:
Fuerza = función (deformación de la barra) 3-27
El comportamiento a compresión de la barra es lineal elástico, la ruptura del modelo
global cuando está comprimido, deberá ocurrir por tracción indirecta (efecto de Poisson).
En la figura, Pcr representa la fuerza máxima de tracción transmitida por la barra, p es
la deformación asociada a Pcr, EA es la rigidez de las barras del modelo reticulado y kr es la
ductilidad, parámetro que permite calcular la deformación para la cual la barra no transmite
más esfuerzos de tracción, r.

39
F
b)
Pcr
p r = kr p
EA
r = kr p p
Pcr
F
1 1
1krEA
LAfGf
a)
Figura 3.10: Relación Constitutiva Elemental de las barras del reticulado – a) Diagrama
constitutivo adoptado con sus parámetros de control; b) Esquema para la carga y descarga. (Rocha 1989).
La deformación límite r es elegida para satisfacer la condición de que cuando un ele-
mento falla y la fisura se abre, se disipa una cierta cantidad de energía. Esta energía es igual al
producto del área de la superficie fracturada, Af, la cual está relacionada con Lc, por el valor
de la tasa de energía superficial Gf , que es una propiedad del material.
Las propiedades del material pueden ser modeladas como campos aleatorios, lo que im-
plica que las mismas pueden variar de elemento a elemento siguiendo una ley estadística esta-
blecida.
Es importante destacar que Pcr, p, r , Gf , y Rf son propiedades exclusivas del mate-
rial, Af y Lc son propiedades exclusivas del modelo, los parámetros EA y kr dependen tanto
del modelo como del material.
Considerando que el material en estudio tiene comportamiento frágil, puede ser aplicada
la mecánica lineal de fractura. El factor de intensidad de tensiones para el modo de falla I
(KI), presentado en Anderson 2005, puede ser escrito como:
afK tI 3-28
Siendo un parámetro que depende de la geometría del problema y de la longitud de la fisura.
Considerando el comportamiento lineal hasta la ruptura (ft = p E) y estado plano de de-
formaciones, la deformación crítica es dada por:
)1(E
GfRfcp
2 3-29
Dónde:
22
I 1E
KGf 3-30

40
Rfc es un “factor de falla” definido como:
a
1Rfc
3-31
La relación entre p y Gf fue establecida como criterio de falla a tracción y su deduc-
ción está basada en la mecánica de fractura lineal elástica (Rocha 1989).
Como cita Iturrioz 1995, es posible introducir mejoras sobre el comportamiento del mo-
delo en función de investigaciones realizadas por varios autores; entre ellos, cabe destacar los
trabajos de Vonk 1993 y de Borst y Feenstra 1993. También puede ser cuestionada la forma
por la cual se realiza la descarga. Linde 1993 propone una ley más sofisticada, basada en los
ensayos realizados por Curbach 1987, que fue probada en casos de excitaciones impulsivas
sin obtener ventajas en los resultados obtenidos. Presumiblemente, en problemas donde el
comportamiento cíclico de la excitación sea dominante, cargas sísmicas por ejemplo, su utili-
zación traerá ventajas.
Observaciones sobre la implementación del criterio de rotura utilizado
Es importante precisar que p, E, Pcr, Rf y Gf son considerados propiedades exclusivas
del material, mientras que Af y Lc son propiedades exclusivas del modelo. kr y EA depen-
den tanto del material como del modelo.
Se puede demostrar que el criterio constitutivo utilizado es objetivo frente a la discretiza-
ción del modelo.
Una condicionante del modelo en la definición de Lc es la siguiente:
Cuando un elemento rompe, toda la energía de deformación acumulada en él, es consumi-
da en el proceso de fractura. Esto no es lo que sucede en realidad, pues parte de la energía
de deformación se preserva con la forma de energía cinética (vibraciones inducidas) y
energía elástica, en las dos partes en las que el elemento se divide. Como no es posible te-
ner en cuenta esta subdivisión para un elemento aislado (porque las masas están concen-
tradas en los nudos, y no a lo largo de su longitud), esto resulta una restricción en términos
de un valor máximo para la longitud de Lc.
3.2.2. Integración por diferencias finitas
La integración explícita presenta la gran ventaja de realizar un balance energético du-
rante todo el proceso, constituyendo una información de gran utilidad para comprender los

41
fenómenos estudiados. Esta evaluación de la respuesta en el tiempo permite no perder de vista
el problema físico que a veces se pierde en las dificultades de índole numéricas.
Otra ventaja es que la integración explícita no requiere del montaje y armado de la ma-
triz de rigidez. Esto es especialmente conveniente para el análisis dinámico no lineal, en don-
de en cada paso de integración en el tiempo la matriz de rigidez debe ser modificada. (Riera
1980). Esto también facilita el estudio de estructuras que no estén totalmente vinculadas, co-
mo por ejemplo, seguir la trayectoria de los fragmentos en que se rompe una estructura.
Debido a la utilización de un método de integración explícita en la integración de las
ecuaciones de movimiento, el intervalo de tiempo Δt se ve restringido, por condiciones de
estabilidad numérica, a un valor crítico Δtcrítico. El método de las diferencias finitas centrales
presenta el menor intervalo crítico en comparación con los otros métodos explícitos. Para este
modelo se ha adoptado un Δtcrítico en función de la longitud de las barras (Lc) y de la veloci-
dad de propagación de la onda de compresión VP:
P
critico V
Lc6,0t 3-32
Con EVP .
El proceso de integración básicamente consiste en:
Dada una configuración deformada en el instante j
Se obtienen las fuerzas internas, en esta configuración, en el instante j.
Conocidas las otras fuerzas actuantes en el instante j
Se determina la configuración deformada en el instante j+1.
Se pueden encontrar detalles de la implementación de diferencias finitas en libros de métodos
numéricos (Burden y Faires 1996, Bathe 1996).
3.2.3. Metodología utilizada para obtener el tensor de tensiones
A continuación se explica como fueron calculadas las componentes del tensor de ten-
siones y de deformaciones para cada módulo básico. Los resultados fueron adecuados para
poder ser visualizados en el programa de elementos finitos ANSYS (Batista y otros 2003).

42
Toda la descripción realizada a continuación esta basada en un módulo cúbico orientado
siguiendo las coordenadas globales presentadas en la figura 3.11 (Batista y otros 2003, y Ba-
tista 2007).
X
Z
Y
Figura 3.11: Módulo cúbico utilizado como referencia para la explicación de la obtención
del tensor de tensiones, orientado con el sistema de coordenadas global. 3.2.3.1. Tensiones normales
La tensión normal en cualquiera de las direcciones ortogonales al módulo está determi-
nada por una fuerza equivalente dividida por el área de la sección transversal del módulo. Esta
fuerza equivalente está compuesta por:
a) El promedio de las fuerzas correspondientes a las barras de las aristas en la dirección
analizada.
b) El promedio de los valores correspondientes a suma de las fuerzas en las barras diago-
nales de uno y otro lado proyectadas según la dirección analizada.
c) El promedio de las fuerzas en las barras centrales en la dirección analizada.
F1
F2
F4F3
F1F2
F3F4
F1
F2
F3 F4 F1 F2
Figura 3.12: Componentes de la fuerza equivalente para el cálculo de la tensión normal.
4
FFFFF 4321a
4321
2b FFFFF 4321
1b FFFFF 2FF
F 21c

43
En la figura aparece el valor que es la tangente del ángulo formado por las barras y la
dirección ortogonal analizada. Este valor es de 0.577.
La fuerza equivalente se obtiene como la suma de las fuerzas descritas en la figura 3-6.
cbaeequivalent normal FFFF 3-33
3.2.3.2. Tensiones tangenciales
Las tensiones tangenciales solamente incluyen las barras diagonales, y son determinadas
también por una fuerza equivalente dividida por el área de la sección transversal del módulo.
A continuación se describe a modo de ejemplo como se obtiene la fuerza equivalente en la
dirección “x” global en un plano perpendicular a la dirección “y” (Fxy). Esta fuerza equiva-
lente está formada por:
a) El promedio de la diferencia entre la fuerza de la barra superior y la inferior de un la-
do.
b) El promedio de la diferencia entre la fuerza de la barra superior e inferior del otro la-
do.
F1F2
F3F4
F1
F2
F3 F4
Figura 3.13: Componentes de la fuerza equivalente para el cálculo de la tensión tangencial.
De la misma forma que en la figura 3.13, el valor es la tangente del ángulo de las ba-
rras diagonales y la dirección ortogonal analizada.
Realizando la sumatoria de las fuerzas se obtiene que Fxy está dado por:
2
FFF
ba
xy
3-34
De la misma manera que se analizó la fuerza equivalente Fxy, siguiendo el misma pro-
cedimiento se pueden calcular Fyz y Fxz (Batista y otros 2003).
Batista y otros 2003 realizaron la comprobación del correcto funcionamiento de la for-
ma de calcular el tensor de tensiones verificando los resultados obtenidos con el MED de pro-
blemas cuya solución era conocida.
2
FFF
FFF
FFF
2a1aa
242a
131a
2
FFF
FFF
FFF
2b1bb
242b
131b
44
3.2.4. Problemas verificados con el MED
En forma de resumen se presentan a continuación los distintos tipos de problemas que
fueron analizados con el MED con la formulación presentada anteriormente y para los cuales
demostró ser apto.
Problemas con no linealidad geométrica. (Hayashi 1982)
Problemas con no linealidad física y geométrica. (Hayashi 1982)
Impacto sobre una placa elástica. (Hayashi 1982)
Aplicaciones en problemas básicos de la MELF. (Rocha1989)
Simulación de materiales no homogéneos con propiedades aleatorias. (Rocha1989)
Aplicaciones al Hormigón. Corroboración de la teoría de banda de fisuración de BA-ZANT. (Rocha1989)
Aplicación del DEM a estructuras elastoplásticas. Iturrioz (1995)
Análisis de estructuras de Hormigón Armado sometido a cargas de impacto e impulsivas. Iturrioz (1995).
Con los ejemplos presentados en esta disertación se demuestra que el MED también es apto para:
Medir el factor de intensidad de tensiones estático para modos de falla simples o mixtos, en 2 y 3 dimensiones. Aplicando la tasa de energía liberada y el COD.
Medir el factor de intensidad de tensiones dinámico para modos de falla simples o mixtos, en 2 y 3 dimensiones. Aplicando el COD.
Calcular la velocidad y camino de propagación de una fisura.
Captar la propagación de ondas de tensión y la influencia de los bordes o contornos libres en esta distribución de tensiones.
Reproducir configuraciones de rotura complejas (como las de impacto del disco) y los mecanismos de fractura producidos.

45
CAPÍTULO 4 - PROBLEMA EN ESTUDIO - MODELO FÍSICO
Se realiza el estudio de un material compuesto de matriz frágil reforzado por fibras cor-
tas. La matriz se encuentra fisurada y es solicitada por una excitación perpendicular a la di-
rección de la fisura. Dicha matriz es cortada en dos partes por la fisura mencionada y las fi-
bras tienen la misión de unir ambas partes de la matriz.
Se conoce el porcentaje volumétrico de fibras en el compuesto ( Vf =1%) y módulo de
elasticidad de la matriz ( Em ).
Las fibras tienen una distribución aleatoria, con un ángulo 0 90º respecto de la
normal del plano de la fisura y distintas longitudes enterradas, como se puede observar en la
figura 4.1.
a)

46
b)
figura 4.1: a) Material compuesto reforzado con fibras cortas; b) Fibras aisladas
dentro del material compuesto.
Entonces, para poder determinar el aumento en la tenacidad del compuesto que generan
estas fibras, tomamos cada una de ellas en forma individual y obteniendo la fuerza de Puente
que cada una toma en forma aislada (figura 4.2), para luego sumar todas esas fuerzas indivi-
duales y obtener la fuerza de puente total debido al aporte de todas las fibras que cruzan la
fisura. A continuación se determina la tensión en el compuesto debido a dicha fuerza de puen-
te total, para finalmente hallar el área bajo la curva c w que representa la energía de fractu-
ra del compuesto.
Fuerza de Puente
w
Fuerza de Puente
figura 4.2: Fuerza de puente de una fibra aislada dentro de la matriz.
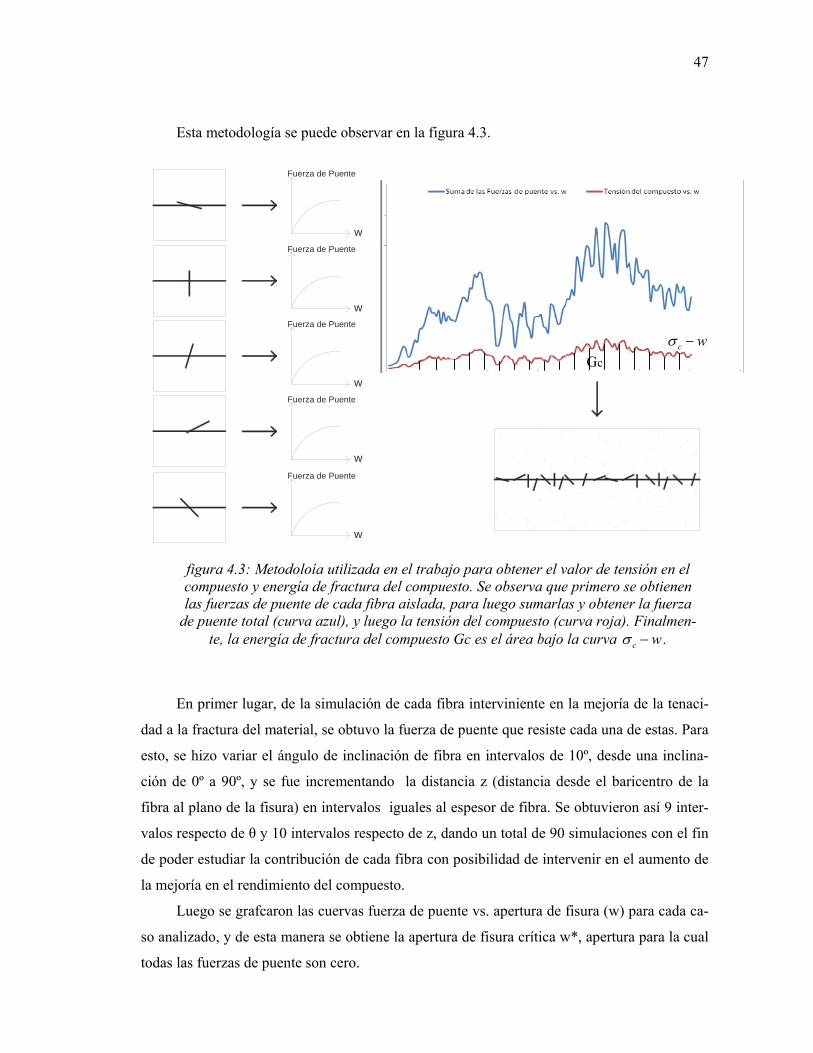
47
w
Fuerza de Puente
w
w
w
w
Fuerza de Puente
Fuerza de Puente
Fuerza de Puente
Fuerza de Puente
Esta metodología se puede observar en la figura 4.3.
c w
figura 4.3: Metodoloía utilizada en el trabajo para obtener el valor de tensión en el compuesto y energía de fractura del compuesto. Se observa que primero se obtienen las fuerzas de puente de cada fibra aislada, para luego sumarlas y obtener la fuerza
de puente total (curva azul), y luego la tensión del compuesto (curva roja). Finalmen-te, la energía de fractura del compuesto Gc es el área bajo la curva c w .
En primer lugar, de la simulación de cada fibra interviniente en la mejoría de la tenaci-
dad a la fractura del material, se obtuvo la fuerza de puente que resiste cada una de estas. Para
esto, se hizo variar el ángulo de inclinación de fibra en intervalos de 10º, desde una inclina-
ción de 0º a 90º, y se fue incrementando la distancia z (distancia desde el baricentro de la
fibra al plano de la fisura) en intervalos iguales al espesor de fibra. Se obtuvieron así 9 inter-
valos respecto de θ y 10 intervalos respecto de z, dando un total de 90 simulaciones con el fin
de poder estudiar la contribución de cada fibra con posibilidad de intervenir en el aumento de
la mejoría en el rendimiento del compuesto.
Luego se grafcaron las cuervas fuerza de puente vs. apertura de fisura (w) para cada ca-
so analizado, y de esta manera se obtiene la apertura de fisura crítica w*, apertura para la cual
todas las fuerzas de puente son cero.
Gc

48
Se realiza la sumatoria de todas las fuerzas de puente que cada fibra aporta individual-
mente.
A continuación, se aplica la fórmula 3.9 del modelo matemático propuesto por Li et al
[33] y se obtiene la tensión de puente en relación a la apertura de fisura w. En dicha fórmula,
N(w,θ,z) es la suma de todas las fuerzas de puente de cada fibra individual. P(θ) es la función
de probabilidad de densidad de ocurrencia de una cierta inclinación θ en la distribución 3D
que LI et al [33] propone en su modelo matemático. Como se puede observar en la figura 4.3,
P(θ)= seno(θ) para θ variando entre 0º y 90º. Luego, p(z) es la probabilidad de densidad de
que el baricentro de las fibras se encuentren a una distancia z desde su centro de gravedad
hasta el plano de la fisura considerada. Para z variando entre 0 y Lf/2, el valor de p(z) es una
constante que vale p(z)= 2/Lf.
Por último, se aplica la ecuación 3.10 y se obtiene el aumento de la energía de fractura
Gc del compuesto. Dicho valor no es más que el área bajo la curva c w . De esta manera,
fue necesario aplicar algún método de integración para hallar dicho valor Gc, utilizando el
método de integración por trapecios.

49
CAPITULO 5 - METODOLOGIA –
IMPLEMENTACIÓN EN EL MED
Serán considerados y aplicados conceptos típicos de la Elasticidad y Mecánica de Frac-
tura, proponiendo un modelo mecánico que pueda calcular las fuerzas y tensiones a las que las
fibras están sometidas cuando una fisura principal aparece en la matriz frágil, y la contribu-
ción de esas fibras para la tenacidad del material compuesto
5.1 Configuración geométrica
La geometria y las condiciones de borde del problema se presentan en la Fig. 5.1.
FIBRA
INTERFAZ
MATRIZMATRIZ
Figura 5.1: Configuración geométrica del conjunto fibra-matriz fisurada para uno de
los casos estudiados en el MED.
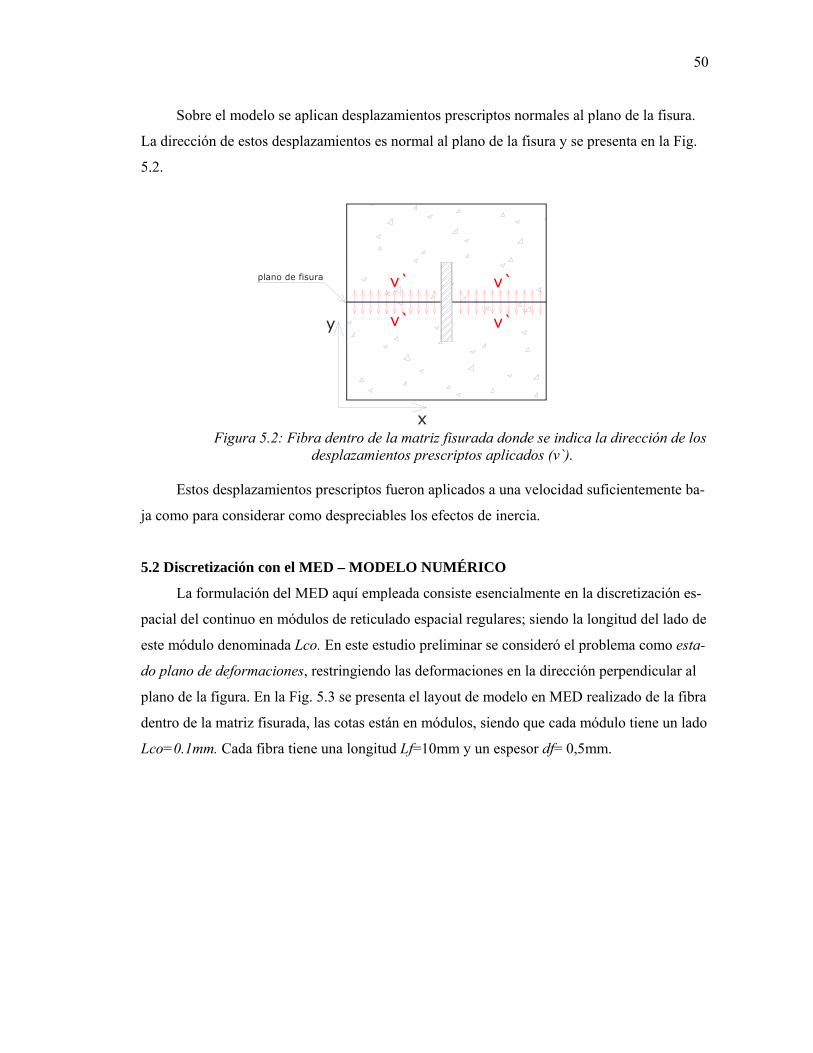
50
Sobre el modelo se aplican desplazamientos prescriptos normales al plano de la fisura.
La dirección de estos desplazamientos es normal al plano de la fisura y se presenta en la Fig.
5.2.
v`
v`
v`
v`
plano de fisura
y
x Figura 5.2: Fibra dentro de la matriz fisurada donde se indica la dirección de los
desplazamientos prescriptos aplicados (v`).
Estos desplazamientos prescriptos fueron aplicados a una velocidad suficientemente ba-
ja como para considerar como despreciables los efectos de inercia.
5.2 Discretización con el MED – MODELO NUMÉRICO
La formulación del MED aquí empleada consiste esencialmente en la discretización es-
pacial del continuo en módulos de reticulado espacial regulares; siendo la longitud del lado de
este módulo denominada Lco. En este estudio preliminar se consideró el problema como esta-
do plano de deformaciones, restringiendo las deformaciones en la dirección perpendicular al
plano de la figura. En la Fig. 5.3 se presenta el layout de modelo en MED realizado de la fibra
dentro de la matriz fisurada, las cotas están en módulos, siendo que cada módulo tiene un lado
Lco=0.1mm. Cada fibra tiene una longitud Lf=10mm y un espesor df= 0,5mm.

51
Figura 5.3: Layout de la fibra dentro de la matriz fisurada, indicando la discreti-zación adoptada para uno de los casos estudiados en el modelo de MED, longitudes
medidas en módulos (1M=Lco=0.1mm).
Para modelar la interfaz fibra-matriz, se utilizó un tercer material dentro del conjunto.
Este material adicional tiene un espesor de dos módulos. Para determinar las propiedades
mecánicas de este material que simula la interfaz fueron adoptados valores medios entre los
de la matriz y la fibra.
En la Fig. 5.4 se muestra un detalle del mallado, donde se puede apreciar las barras y
nudos del modelo discretizado. Las barras graficadas en color gris (A) representan a la matriz
y sus propiedades mecánicas; las barras azules (C) a la fibra; y por último las barras amarillas
(B) a la interface.
B C A
Figura 5.4: Detalle de la modelación de la interface en el modelo elaborado en MED.
5

52
Las flechas rojas en figura 5.4 corresponden a los desplazamientos prescriptos aplicados
en el modelo y como se puede observar en la figura, dichos desplazamientos se aplizan a uno
y otro lado del plano de la fisura.
Cabe aclarar que la fisura llega hasta el contorno de la interfaz. En la Tabla 1 se indican
los parámetros utilizados en la simulación.
Material E (N/m²) Gc (N/m) Roh (Kg/m³) εp
Matriz (mortero) 3,0 e10 24 2500 0,00126 Fibra (Spectra 900) 1,17 e11 18000 970 0,02222
Interfaz 7,35 e10 9012 2800 0,01795
Tabla 1: Parámetros utilizados en el modelo del MED, considerando una discretización de Lco=0,1mm

53
CAPITULO 6 - RESULTADOS
Se presentan los resultados obtenidos del estudio paramétrico. Definiendo los paráme-
tros como:
z : distancia desde el eje baricéntrico de la fibra al plano de la fisura
θ : ángulo de inclinación de la fibra respecto a un plano normal al plano de la
fisura
Gf : baricentro de la fibra
Lf : longitud de fibra
ef : espesor de fibra
En la figura 6.1 se presentan las variables definidas:
ef
z
Lf ?
Gf
Figura 6.1: Esquema con las variables utilizadas en la modelación del material
compuesto.
θ

54
Gf
60º
6.1 Relación entre la fuerza de puente y apertura de fisura
Aplicando desplazamientos prescriptos, la fisura comienza a abrirse y se computa la
fuerza de puente en el baricentro de cada fibra. El proceso finaliza cuando la energía elástica
del modelo presenta una caída en su valor, como lo muestra la figura 6.2:
a)
b)
Fue
rza
de p
uent
e (N
w)
Apertura de fisura “w” (metros)
Ene
rgóa
s (N
*met
ros)

55
c)
Punto A Punto B Punto C
Figura 6.2: a) Esquema del modelo analizado y modelación en el DEM. θ = 60º - z = 0mm. b) Relación entre fuerza de puente y apertura de fisura w. También se grafican las energías de daño en las distintas fases del compuesto, así como también la energía cinética y elástica
del modelo analizado. c) Proceso de rotura del modelo analizado.
Se puede observar que a medida que la fisura comienza a abrirse, la fibra resiste dicha
apertura y la fuerza de puente comienza a aumentar, hasta que llegamos al punto B, instante
en el cual el modelo rompe, por lo tanto la energía elástica cae y la energía cinética comienza
a tomar valores distintos de cero. La apertura registrada en el punto B es la apertura de fisura
crítica para el modelo analizado.
Haciendo el mismo procedimiento para los 90 casos corridos, la apertura de fisura
máxima registrada será nuestro valor w*, apertura de fisura para la cual todas las fuerzas de
puente son nulas, que para nuestro caso w*=4.89e-5 mts.
Analizando los resultados obtenidos en el estudio de las fuerzas de puente en relación
con la apertura de la fisura “w” de cada fibra en forma aislada, se pueden mencionar algunas
observaciones:
A mayor distancia “z”, se necesita menor apertura de fisura para llegar a la
rotura del modelo.
Las fibras experimentan una mayor fuerza de puente con el aumento de la dis-
tancia “z” al plano de fisura, debido a una mayor longitud enterrada de la fi-
bra.

56
θ = 60º - z = 0mm – w*=4.10e-5 mts
0,00E+00
1,00E‐04
2,00E‐04
3,00E‐04
4,00E‐04
5,00E‐04
6,00E‐04
0,00E+00
2,00E‐02
4,00E‐02
6,00E‐02
8,00E‐02
1,00E‐01
1,20E‐01
1,40E‐01
1,60E‐01
1,80E‐01
0,00E+00 1,00E‐05 2,00E‐05 3,00E‐05 4,00E‐05 5,00E‐05 6,00E‐05 7,00E‐05
Fuerza de puente
Energía elástica
Energía cinética
θ = 60º - z = 1mm – w*=4.05e-5 mts
0,00E+00
5,00E‐05
1,00E‐04
1,50E‐04
2,00E‐04
2,50E‐04
3,00E‐04
0,00E+00
5,00E‐02
1,00E‐01
1,50E‐01
2,00E‐01
2,50E‐01
3,00E‐01
0,00E+00 1,00E‐05 2,00E‐05 3,00E‐05 4,00E‐05 5,00E‐05 6,00E‐05 7,00E‐05
Fuerza de puente
Energía elástica
Energía cinética
Fue
rza
de p
uent
e (N
w)
Apertura de fisura “w” (metros)
Ene
rgóa
s (N
*met
ros)
Fue
rza
de p
uent
e (N
w)
Apertura de fisura “w” (metros)
Ene
rgóa
s (N
*met
ros)

57
θ = 60º - z = 2mm – w*=4.05e-5 mts
0,00E+00
5,00E‐05
1,00E‐04
1,50E‐04
2,00E‐04
2,50E‐04
0,00E+00
5,00E‐02
1,00E‐01
1,50E‐01
2,00E‐01
2,50E‐01
3,00E‐01
0,00E+00 1,00E‐05 2,00E‐05 3,00E‐05 4,00E‐05 5,00E‐05 6,00E‐05 7,00E‐05
Fuerza de puente
Energía elástica
Energía cinética
θ = 60º - z = 3mm – w*=2.96e-5 mts
0,00E+00
2,00E‐05
4,00E‐05
6,00E‐05
8,00E‐05
1,00E‐04
1,20E‐04
1,40E‐04
1,60E‐04
0,00E+00
5,00E‐02
1,00E‐01
1,50E‐01
2,00E‐01
2,50E‐01
3,00E‐01
3,50E‐01
0,00E+00 1,00E‐05 2,00E‐05 3,00E‐05 4,00E‐05 5,00E‐05 6,00E‐05 7,00E‐05
Fuerza de puente
Energìa elàstica
Energìa cinètica
Fue
rza
de p
uent
e (N
w)
Apertura de fisura “w” (metros)
Ene
rgóa
s (N
*met
ros)
Fue
rza
de p
uent
e (N
w)
Apertura de fisura “w” (metros)
Ene
rgóa
s (N
*met
ros)

58
θ = 60º - z = 4mm – w*=6.12e-6 mts
0,00E+00
5,00E‐06
1,00E‐05
1,50E‐05
2,00E‐05
2,50E‐05
3,00E‐05
0,00E+00
2,00E‐02
4,00E‐02
6,00E‐02
8,00E‐02
1,00E‐01
1,20E‐01
0,00E+00 2,00E‐06 4,00E‐06 6,00E‐06 8,00E‐06 1,00E‐05 1,20E‐05
Fuerza de puente
Energía elástica
Energía cinética
Para un mismo valor de z, se ha podido observar que cuanto mayor sea la in-
clinación θ de la fibra mayor será la fuerza de puente que toma la fibra debido
al fenómeno snubbing, ya que en el punto de salida de la fibra, la matriz se
comporta como una polea con fricción generando una mayor fuerza de puente
por la aparición de tensiones tangenciales.
Fue
rza
de p
uent
e (N
w)
Apertura de fisura “w” (metros)
Ene
rgóa
s (N
*met
ros)

59
θ = 90º - z = 0.5mm – w*= 1.79e-5 mts
0,00E+00
1,00E‐05
2,00E‐05
3,00E‐05
4,00E‐05
5,00E‐05
6,00E‐05
7,00E‐05
8,00E‐05
9,00E‐05
1,00E‐04
0,00E+00
5,00E‐02
1,00E‐01
1,50E‐01
2,00E‐01
2,50E‐01
3,00E‐01
3,50E‐01
4,00E‐01
4,50E‐01
5,00E‐01
0,00E+00 5,00E‐06 1,00E‐05 1,50E‐05 2,00E‐05 2,50E‐05
Fuerza de puente
Energía elástica
Energía cinética
θ = 70º - z = 0.5mm – w*= 3.62e-5 mts
0,00E+00
5,00E‐05
1,00E‐04
1,50E‐04
2,00E‐04
2,50E‐04
3,00E‐04
3,50E‐04
4,00E‐04
0,00E+00
5,00E‐02
1,00E‐01
1,50E‐01
2,00E‐01
2,50E‐01
3,00E‐01
3,50E‐01
4,00E‐01
4,50E‐01
5,00E‐01
0,00E+00 5,00E‐06 1,00E‐05 1,50E‐05 2,00E‐05 2,50E‐05 3,00E‐05 3,50E‐05 4,00E‐05 4,50E‐05
Fuerza de puente
Energía elástica
Energía cinética
Fue
rza
de p
uent
e (N
w)
Apertura de fisura “w” (metros)
Ene
rgóa
s (N
*met
ros)
Fue
rza
de p
uent
e (N
w)
Apertura de fisura “w” (metros)
Ene
rgóa
s (N
*met
ros)

60
θ = 50º - z = 0.5mm – w*= 4.37e-5 mts
0,00E+00
5,00E‐05
1,00E‐04
1,50E‐04
2,00E‐04
2,50E‐04
3,00E‐04
3,50E‐04
4,00E‐04
0,00E+00
5,00E‐02
1,00E‐01
1,50E‐01
2,00E‐01
2,50E‐01
3,00E‐01
3,50E‐01
4,00E‐01
4,50E‐01
5,00E‐01
0,00E+00 5,00E‐06 1,00E‐05 1,50E‐05 2,00E‐05 2,50E‐05 3,00E‐05 3,50E‐05 4,00E‐05 4,50E‐05 5,00E‐05
Fuerza de puente
Energía elástica
Energía cinética
θ = 30º - z = 0.5mm – w*= 4.89e-5 mts
0,00E+00
5,00E‐05
1,00E‐04
1,50E‐04
2,00E‐04
2,50E‐04
3,00E‐04
3,50E‐04
4,00E‐04
0,00E+00
2,00E‐01
4,00E‐01
6,00E‐01
8,00E‐01
1,00E+00
1,20E+00
0,00E+00 1,00E‐05 2,00E‐05 3,00E‐05 4,00E‐05 5,00E‐05 6,00E‐05 7,00E‐05
Fuerza de puente
Energía elástica
Energía cinética
Fue
rza
de p
uent
e (N
w)
Apertura de fisura “w” (metros)
Ene
rgóa
s (N
*met
ros)
Fue
rza
de p
uent
e (N
w)
Apertura de fisura “w” (metros)
Ene
rgóa
s (N
*met
ros)

61
Cabe aclarar que para una fibra que tenga orientación paralela al plano de la
fisura, la fuerza de puente resistida será nula y no particpa en el aumento en la
tenacidad del material compuesto.

62
6.2 Tensión en el compuesto y tenacidad a la fractura.
Para hallar la curva c w para el compuesto, se computan las tracciones transmitidas a
través de la fisura de la matriz integrando las fuerzas que contribuyen aquellas fibras que
están activas en la acción de puenteo. Así, para cada apertura de fisura w, la tensión σc del
compuesto se obtiene según la fórmula 3.9.
0,00E+00
5,00E‐02
1,00E‐01
1,50E‐01
2,00E‐01
2,50E‐01
3,00E‐01
3,50E‐01
4,00E‐01
4,50E‐01
5,00E‐01
0,00E+00 5,00E‐06 1,00E‐05 1,50E‐05 2,00E‐05 2,50E‐05 3,00E‐05 3,50E‐05 4,00E‐05 4,50E‐05
Tensión del compuesto vs. w
Figura 6.3: Tensión en el compuesto en función de la apertura de fisura.
Integrando el área bajo la curva c w , el valor de la tenacidad a la fractura del metrial
compuesto reforzado por el conjunto de fibras analizadas es de:
Gc = 74,2 KN/m = 7420 N/m
Como el Gf del mortero tiene un valor de alrededor de 100 N/m, se ha podido aumentar la te‐
nacidad de la matriz en el orden de 700 veces mediante la incorporación de fibras de Spectra 900.
Fue
rza
de p
uent
e (N
w)
- T
ensi
òn d
el c
ompu
esto
(M
Pa)
Apertura de fisura “w” (metros)

63
6.3 Análisis de los procesos de ruptura en materiales compuestos
A continuación se detallan los procesos de ruptura para uno de los casos analizados en
este trabajo.
Tomando una fibra con un ángulo de inclinación θ = 60º y z=0mm (es decir que el bari-
centro de la fibra coincide con el plano de la fisura), se han podido observar los siguientes
procesos de ruptura:
Gf
60º
Figura 6.4: Esquema del modelo analizado; θ = 60º - z=0mm.
En los primeros instantes de carga, la fibra antes de despegarse de la matriz ejerce una
presión intensa sobre la matriz que hace que las tensiones generadas por esta presión alcancen
un máximo, valor mayor que la resistencia de la matriz, produciéndose spalling (ruptura de la
matriz cercana al punto de salida de la fibra). Este efecto se puede observar en la figura 6.5:
figura 6.5: Efecto Spalling para uno de los casos analizados. θ = 60º - z=0mm
Spalling
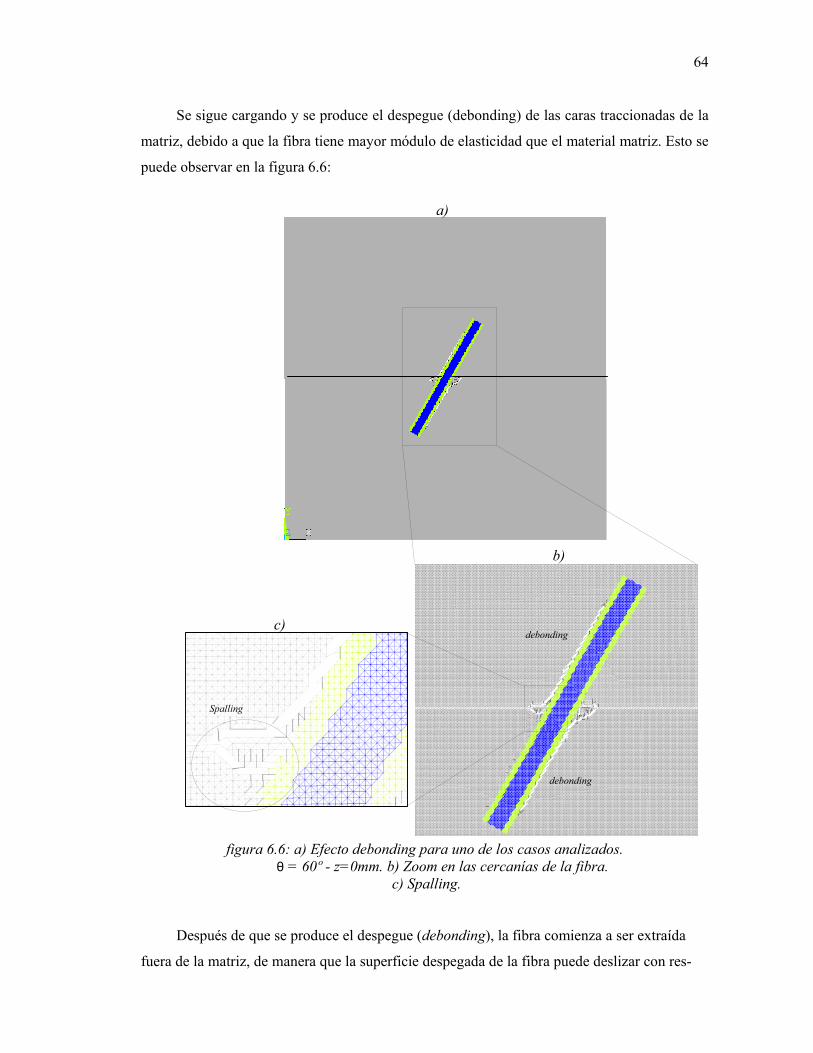
64
Se sigue cargando y se produce el despegue (debonding) de las caras traccionadas de la
matriz, debido a que la fibra tiene mayor módulo de elasticidad que el material matriz. Esto se
puede observar en la figura 6.6:
a)
b)
c)
figura 6.6: a) Efecto debonding para uno de los casos analizados. θ = 60º - z=0mm. b) Zoom en las cercanías de la fibra.
c) Spalling.
Después de que se produce el despegue (debonding), la fibra comienza a ser extraída
fuera de la matriz, de manera que la superficie despegada de la fibra puede deslizar con res-
debonding
debonding
Spalling

65
pecto a la matriz, comenzando un proceso de fricción entre ambas fases. Se produce entonces
un pliegue de la fibra y en ese punto se produce el efecto snubbing, efecto mediante el cual la
matriz se comporta como una polea con fricción, generando tensiones tangenciales entre fi-
bra-matriz. Esto último se grafica en la figura 6.7.
Figura 6.7: Fin del proceso de despegue (debonding), inicio de snubbing. θ = 60º - z=0mm
snubbing snubbing
snubbing
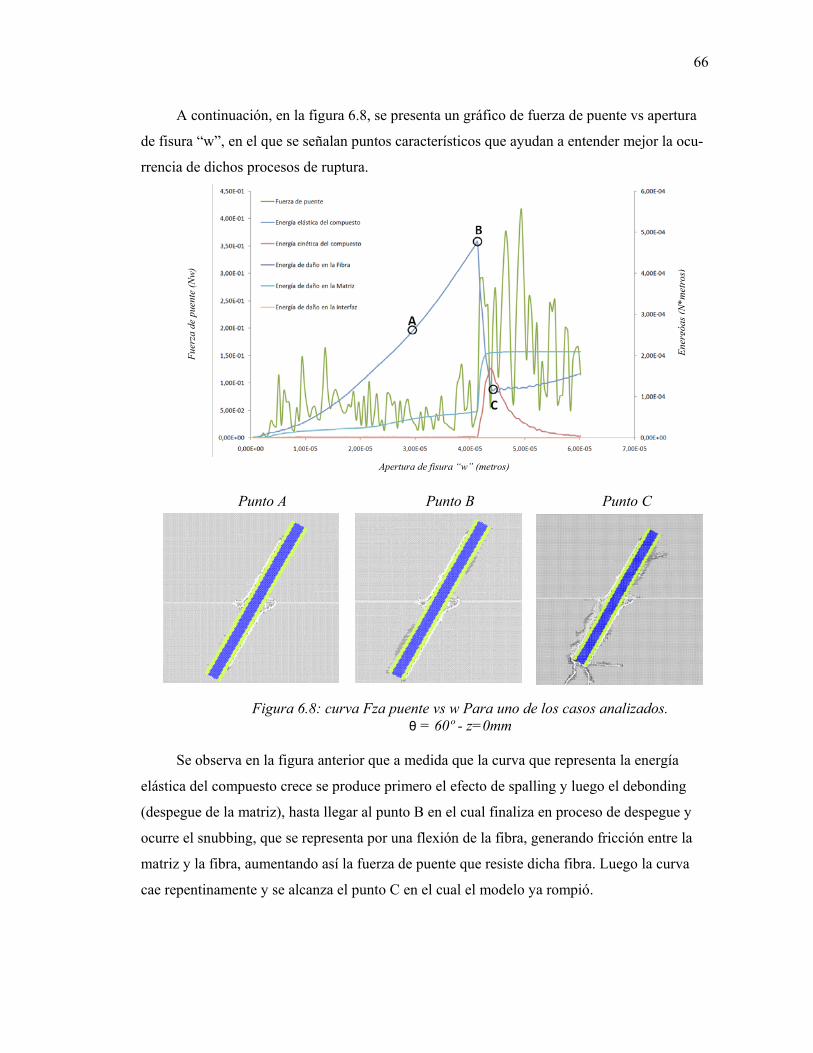
66
A continuación, en la figura 6.8, se presenta un gráfico de fuerza de puente vs apertura
de fisura “w”, en el que se señalan puntos característicos que ayudan a entender mejor la ocu-
rrencia de dichos procesos de ruptura.
Punto A Punto B Punto C
Figura 6.8: curva Fza puente vs w Para uno de los casos analizados. θ = 60º - z=0mm
Se observa en la figura anterior que a medida que la curva que representa la energía
elástica del compuesto crece se produce primero el efecto de spalling y luego el debonding
(despegue de la matriz), hasta llegar al punto B en el cual finaliza en proceso de despegue y
ocurre el snubbing, que se representa por una flexión de la fibra, generando fricción entre la
matriz y la fibra, aumentando así la fuerza de puente que resiste dicha fibra. Luego la curva
cae repentinamente y se alcanza el punto C en el cual el modelo ya rompió.
Fue
rza
de p
uent
e (N
w)
Apertura de fisura “w” (metros)
Ene
rgóa
s(N
*met
ros)

67
Observaciones pertinentes:
Se puede observar en la curva de daño de la matriz (curva celeste) cómo di-
cha curva va subiendo durante el proceso de DEBONDING, es decir, la
matriz se va despegando y esto se representa como daño en la matriz, has-
ta que llega al punto B en el cual la curva pega un salto pq terminó el
proceso de despegue y ocurre una rotura de la matriz y ya no se daña más
pq el modelo se rompió.
Se puede observar en en la curva Fuerza de puente vs w, que en instantes
antes de llegar al punto B (punto hasta donde el modelo es válido) la fuer-
za de puente presenta picos más elevados. Esto se debe a que ocurre el
efecto snubbing que aumenta dicha furza de puente.
ENCN: durante el proceso elástico la energía cinética del compuesto es ce-
ro, hasta que termina el debonding y la fisura propaga, por lo tanto la
curva pega un salto y la engergía cinética comienza a tomar valor. En ese
momento, nosotros determinamos el fin de nuestro modelo.
ENGDI: durante todo el proceso de carga, la energía de daño en la interfaz
es nula, es decir que la interfaz no se daña en ningún momento.
ENDF: la fibra tampoco se daña durante el proceso de carga. Así lo refleja
la curva de energía de daño en la fibra, y esto es correcto ya que la misión
de cada fibra es impedir que ambas partes de la matriz se separen entre sí.

68
CAPITULO 7 - CONCLUSIONES
En este trabajo, fueron propuestos modelos mecánicos y matemáticos para calcular el
aumento de la tenacidad de la matriz frágil contribuído por la adición de fibras. Se
analizaron también los procesos de rotura que se producen en los materiales compuestos. A
través de la implementación de programación numérica, se analizó la contribución que
aporta cada fibra interviniente en la acción de puenteo en el aumento en la tenacidad del
material compuesto. Por los resultados obtenidos y los observaciones realizadas podemos
concluir puntos importantes:
Cuanto mayor es la distancia desde el baricentro de la fibra al plano de la fi-
sura, es necesaria una menor apertura de la fisura para poder alcanzar la
máxima fuerza de puenteo de la fibra.
La fuerza de puente alcanzada por una fibra se reduce en cuanto la distancia
desde el baricentro de la fibra al plano de la fisura aumenta
Para un mismo valor de z, se ha podido observar que cuanto mayor sea la in-
clinación θ de la fibra mayor será la fuerza de puente que toma la fibra al
fenómeno snubbing.
Para una fibra con orientación paralela al plano de la fisura, la fuerza de
puente resistida será nula y no participa en el aumento en la tenacidad del
material compuesto.

69
Para fibras con orientación no perpendicular al plano de la fisura, se produ-
ce snubbing durante el proceso de ruptura. No ocurre esto en el caso de fi-
bras que tienen orientación perpendicular al plano de la fisura.
Para todos los casos analizados en este trabajo se produce debonding o des-
pegue de la matriz.
Se verifica el aumento en la tenacidad del material compuesto al reforzarlo
con este tipo de fibras.

70
CAPITULO 8 - REFERENCIAS BIBLIOGRÁFICAS
1. París, F, Marzo 2001. “A Study of Failure Criteria of Fibrous Composite
Materials”, NASA Report CR/2001-210661.
2. BRANDT, A. M., 1985. On the optimal direction of short metal fibers in
brittle matrix composites. J. of Materials Science; 20:3831-3841.
3. Daniel I.M. y Ishai O., 1994, “Engineering Mechanics of Composite Ma-
terials”, Oxford University Press, Oxford.
4. Berdin C., Dong M.J. and Prioul C., 2001, “Local Approach of Damage
and Fracture Toughness for Nodular Cast Iron”, Engineering Fracture
Mechanics, 68, 1107-1117
5. Ortiz J., Cisilino A.P. y Otegui J.L., 2001, “Boundary Element Analysis of
Fatigue Crack Propagation Micromechanisms in Ductile Iron” , Engi-
neering Analysis with Boundary Elements, 25, 467-473
6. Ortiz J., Cisilino A.P. y Otegui J.L., 2001,”Effect of Microcracking on the
Micromechanics of Fatigue Crack Growth in Austempered Ductile Iron”,
Fatigue and Fracture of Engineering Materials and Structures, 24/9, 591-
606
7. CHODOUNSKY, Marcel A. 2008. Revista Pisos Industriais. Ed. VI. Trima
Engenharia e Consultoria.
8. MACCAFERRI. 2002-2007; Empresa do Grupo Industrial Maccaferri.
Maccaferri América Latina.
11. Brebbia C.A., Telles J.C.F. y Wrobel L.C., 1983, "Boundary Element
Techniques", Springer Verlag, Berlín.

71
16. A.P.Cisilino y M.H.Aliabadi, 1999. Three-dimensional Boundary Element
Analysis of Fatigue Crack Growth in Linear and Non-linear Fracture Me-
chanics, , Engineering Fracture Mechanics, Vol. 63, pp. 713-733.
17. A.P.Cisilino, M.H.Aliabadi y J.L.Otegui, 1998. A Three-Dimensional Dual
Boundary Element Formulation for the Elastoplastic Analysis of Cracked
Bodies, International J. of Numerical Methods in Engineering, Vol. 42,
pp.237-256.
18. A.P.Cisilino y M.H.Aliabadi, 1998. A Boundary Element Method for Three-
Dimensional Elastoplastic Problems, Engineering Computations, Vol. 15,
No. 8, pp. 1011-1030.
19. IRWIN, G. R. Berlin, 1958. Fracture in handbuch der physic springer-
verlag. v.6. p.551.
20. A.P.Cisilino y M.H.Aliabadi, 1999, Elastoplastic BEM Implementation of
the Energy Domain Integral for the Analysis of 3D Fracture Problems, In-
ternational Journal of Fracture, Vol. 96, pp. 229-245.
21. Iturrioz I. Y Riera J.D., 1998. Discrete elements model for evaluating im-
pact and impulsive response of reinforced concrete plates and shells. In-
ternational Journal Of Nuclear Engeneering And Design.
22. Iturrioz I., Spinelli L. y Schnaid F., 2000. Aplicación del método de los
Elementos discretos en el análisis de Estructuras formadas por Materiales
Frágiles,: IV Coloquio Latinoamericano de Fractura y Fatiga, 2000, Neu-
quen. Jornadas Sam 2000.
23. KATZ, A. LI V.C, KAZMER, A., 1995. Bond properties of carbon fibers in
cementitious matrix. ASCE Journal of Materials in Civil Engineering,
1995; 2:125-128.
24. KATZ, Amnon; LI, Victor C., 1995. Inclination angle effect of carbon fi-
bers in cementations composites. ASCE Journal of Engineering Mechan-
ics, 1995;12:1340-1348.
25. Energy Domain Integral Applied to Solve Centre and Double-Edge Crack
Problems in Three Dimensions , A.P.Cisilino, M.H.Aliabadi y J.L.Otegui,
1998. Theoretical and Applied Fracture Mechanics, Vol. 29, pp. 181-194.
26. LEUNG, Christopher K. Y.; LI, Victor C., 1992. Effect of fiber inclination
on crack bridging stress in brittle fiber reinforced brittle matrix compo-
sites. J. Mech. Phys. Solids, 1992; 40[6]: 1333-1362.
72
27. Bittencourt, E., Needleman, A., Gurtin, M., Van der Giessen, E. "A compar-
ison of nonlocal continuum and discrete dislocation plasticity predictions"
Journal of Mechanics and Physics of Solids. No prelo.
28. LI, H. 1980. Mecânica da fratura. Sandong: Ciência e Tecnologia, (em
chinês).
29. Fedrigo F., 2001. Aplicação de Interfaçes coesivas na mecânica da Fratu-
ra Via Método dos Elementos Finitos , Porto Alegre , Dissertação (Mes-
trado), Curso de Pós-Graduação em Engenharia Civil, Universidade Fer-
deral de Rio Grande Do Sul.
30. LI, N. Z.; KANDA, T.; LI, V. C. On interface property characterization and
performance of fiber-reinforced cementations composites. Concrete
Science and Engineering, 1999; 1:173-174.
31. LI, Victor C.; LEUNG, C. K.Y., 1988. "Ceramics for construction", J.
Construction and Building Materials, V.2, No.2, pp. 59-68.
32. Modelado Mediante Funciones de Peso del Cierre Parcial de Fisuras De-
bido a Tensiones Residuales por Granallado, H.L.Montenegro,
A.P.Cisilino y J.L.Otegui, Jornadas SAM-CONAMET 2001, Posadas,
Septiembre 2001.
33. LI Victor. C.; WANG, Youjiang.; BACKER, 1991, Stanley. A microme-
chanical model of tension softening and bridging toughening of short
random fiber reinforced brittle matrix composites. J. Mech Phys. Solids,
1991; 39[5]:607- 625.
41. R. Barrios D'Ambra, L. Kosteski, J.M. Podestá, B. Uberti, I. Iturrioz,
(2009). “Estudio del comportamiento de placas delgadas sometidas a
cargas de impacto utilizando el Método de los Elementos Discretos
(MED)”. Mecánica Computacional Vol XXVIII, págs. 973-984.
43. PAGANI, C.; MIRANDA, C. B.; BOTTINO, M. C. 1995. Avaliação da te-
nacidade à fratura de diferentes sistemas cerâmicos.
44. R. Barrios D’ambra, L. Kosteski, I. Iturrioz, A. Cisilino, P. Frontini, L.
Fasce, V. Pettarín. 2010. “Application of the Truss-Like Discrete Element
Method to Model the Impact Test of Circular Thin Polymer Plates” IV Eu-
ropean conference on Computational Mechanics Palais des Congres, Par-
is, France. May 16-21.
46. Claudia A. Morel, Héctor D. Cóceres, Ricardo J. Barrios D'Ambra. 2010.

73
“APLICACIÓN DEL METODO DE LOS ELEMENTOS DISCRETOS AL
PROCESO DE SEPARACIÓN FIBRA-MATRIZ CON UN MODELO DE
INTERFACES COHESIVAS” Mecánica Computacional Vol XXIX, págs.
5369-5380 (artículo completo). Eduardo Dvorkin, Marcela Goldschmit,
Mario Storti (Eds.). Buenos Aires, Argentina, 15-18 Noviembre 2010.
47. Ricardo Barrios D’ambra , Juan Manuel Podestá , Bruno Uberti, Ignacio
Iturrioz,Wang Chong. 2010. “The matrix fiber interaction: Numerical si-
mulation using Truss like Discrete Element method”. Mecánica Computa-
cional Vol XXIX, págs. 5145-5162 (artículo completo). Eduardo Dvorkin,
Marcela Goldschmit, Mario Storti (Eds.). Buenos Aires, Argentina, 15-18
Noviembre 2010.
49. STAINER, Daniel.; ALVES. Hugo L. R.; BERGMANN. Carlos P. Ava-
liação da viabilidade de fabricação de componente em cerâmica avançada
aplicado como cabeça femoral em próteses de quadril. Laboratório de
Materiais Cerâmicos – LACER, Departamento de Materiais, Universidade
Federal do Rio Grande do Sul (UFRGS).
55. WILLIAM, D.; CALLISTER, JR. ,2002. Ciência e engenharia de materiais:
uma introdução. 5a ed. LTC. Rio de Janeiro.
61. ZHANG, Jun.; LI, Victor C. Effect of inclination angle on fiber rupture
load in fiber reinforced cementations composites. Composites Science and
Technology, 2002; 62:775-781.
62. NEIVA, Filippini Piaceski. Modelagem matemática do efeito de spalling à
tenacificação de materiais compostos reforçados por fibras. UNIVERSI-
DADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE DO
SUL – UNIJUÍ. DeFEM – DEPARTAMENTO DE FÍSICA, ESTATÍSTICA
E MATEMÁTICA. DeTEC – DEPARTAMENTO DE TECNOLOGIA.
Top Related