
02 Solucion Ec Equilibrio
37
Universidad Federico Santa María Departamento de Obras Civiles Dinámica de Estructuras (CIV–235) H. Jensen & M. Valdebenito Solución de la Ecuación de Equilibrio – Sistemas de 1 Grado de Libertad
description
02 Solucion Ec Equilibrio
Transcript of 02 Solucion Ec Equilibrio

Universidad Federico Santa María
Departamento de Obras Civiles
Dinámica de Estructuras (CIV–235)
H. Jensen & M. Valdebenito
Solución de la Ecuación de
Equilibrio – Sistemas de 1 Grado
de Libertad
Introducción
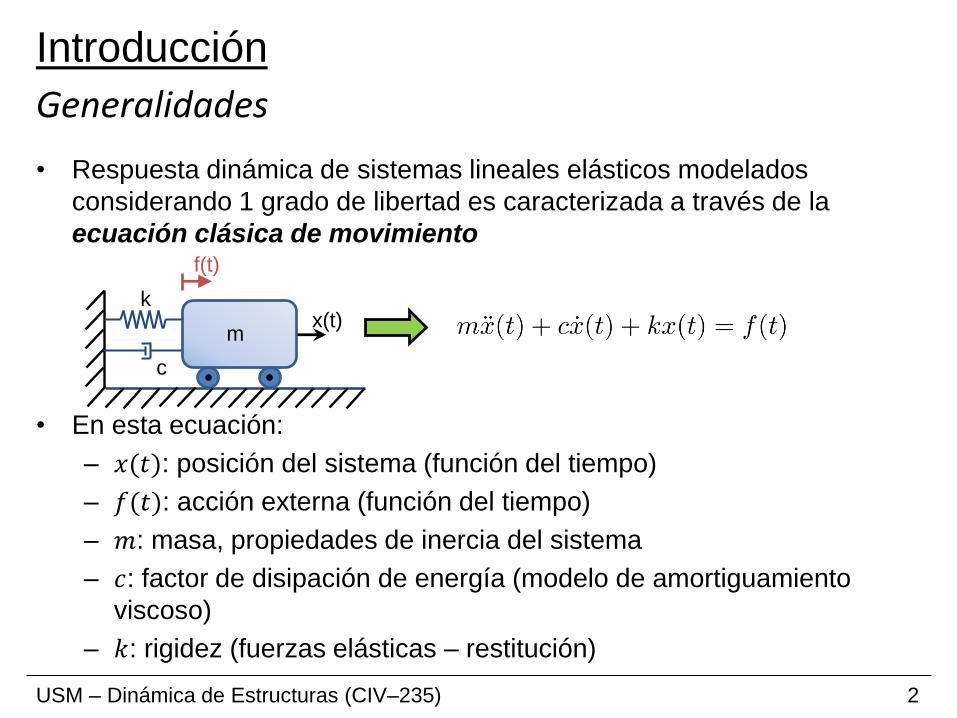
• Respuesta dinámica de sistemas lineales elásticos modelados
considerando 1 grado de libertad es caracterizada a través de la
ecuación clásica de movimiento
• En esta ecuación:
– 𝑥(𝑡): posición del sistema (función del tiempo)
– 𝑓(𝑡): acción externa (función del tiempo)
– 𝑚: masa, propiedades de inercia del sistema
– 𝑐: factor de disipación de energía (modelo de amortiguamiento
viscoso)
– 𝑘: rigidez (fuerzas elásticas – restitución)
USM – Dinámica de Estructuras (CIV–235) 2
Generalidades
f(t)
x(t)k
m
c

Introducción
• Estudiar la solución de la ecuación de movimiento para 2 casos
particulares
– Caso homogéneo (𝑓 𝑡 = 0), vibraciones libres
– Caso de cargas externas del tipo armónicas (por ejemplo, la fuerza
externa es 𝑓 𝑡 = 𝐹0 sin 𝜔𝑡 )
• Solución para otros casos de fuerzas más generales serán estudiados
en capítulos posteriores
USM – Dinámica de Estructuras (CIV–235) 3
Objetivo
Análisis del Caso Homogéneo
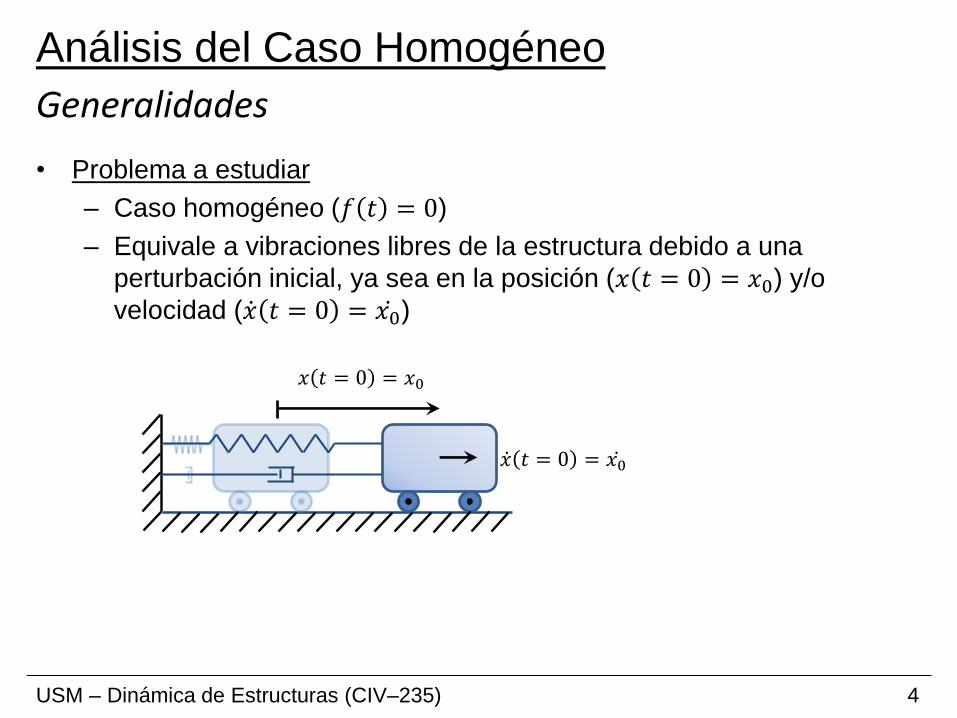
• Problema a estudiar
– Caso homogéneo (𝑓 𝑡 = 0)
– Equivale a vibraciones libres de la estructura debido a una
perturbación inicial, ya sea en la posición (𝑥 𝑡 = 0 = 𝑥0) y/o
velocidad ( 𝑥 𝑡 = 0 = 𝑥0)
USM – Dinámica de Estructuras (CIV–235) 4
Generalidades
𝑥 𝑡 = 0 = 𝑥0
𝑥 𝑡 = 0 = 𝑥0

Análisis del Caso Homogéneo
• Ecuación de movimiento
• Solución
• La ecuación característica debe ser igual a cero. Luego, los valores
característicos 𝜆1, 𝜆2 (o sea, las raíces de esta ecuación) son:
USM – Dinámica de Estructuras (CIV–235) 5
Generalidades
Al reemplazar solución
se determina que:
ecuación característica
asociada al problema
Análisis del Caso Homogéneo
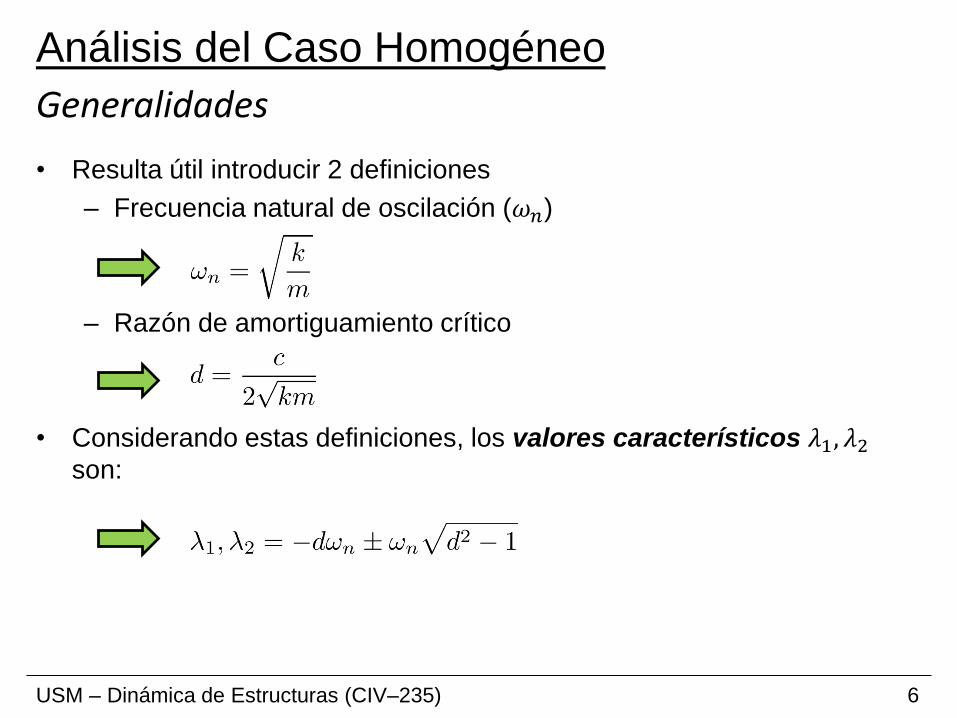
• Resulta útil introducir 2 definiciones
– Frecuencia natural de oscilación (𝜔𝑛)
– Razón de amortiguamiento crítico
• Considerando estas definiciones, los valores característicos 𝜆1, 𝜆2son:
USM – Dinámica de Estructuras (CIV–235) 6
Generalidades
Análisis del Caso Homogéneo
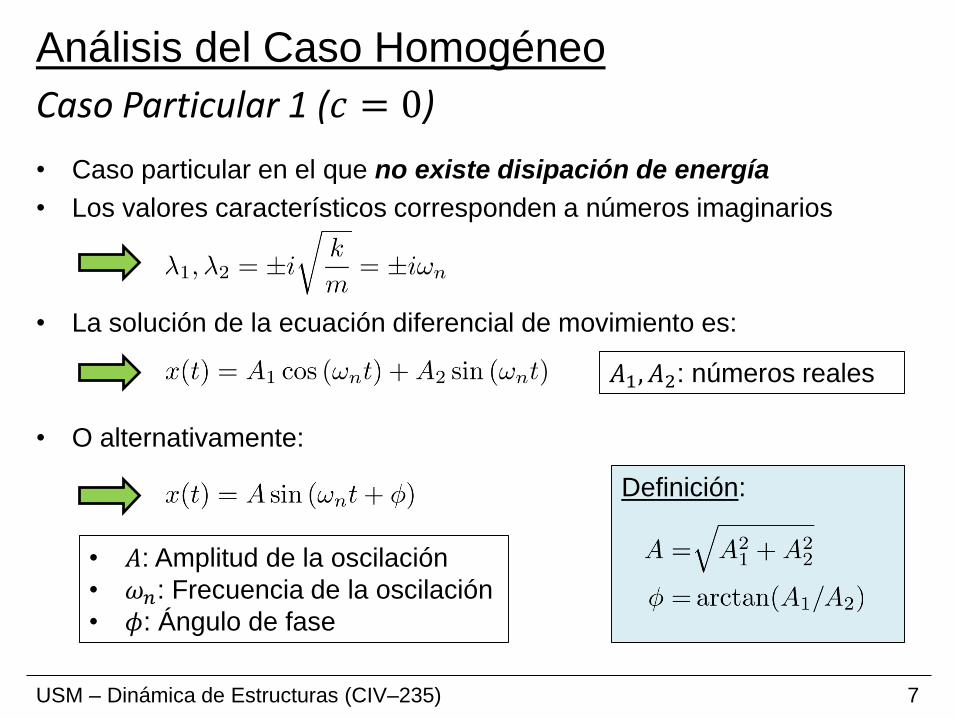
• Caso particular en el que no existe disipación de energía
• Los valores característicos corresponden a números imaginarios
• La solución de la ecuación diferencial de movimiento es:
• O alternativamente:
USM – Dinámica de Estructuras (CIV–235) 7
Caso Particular 1 (𝑐 = 0)
𝐴1, 𝐴2: números reales
• 𝐴: Amplitud de la oscilación
• 𝜔𝑛: Frecuencia de la oscilación
• 𝜙: Ángulo de fase
Definición:

Análisis del Caso Homogéneo
• Para determinar constantes de la solución, se requiere de las
condiciones iniciales 𝑥 𝑡 = 0 = 𝑥0 y 𝑥 𝑡 = 0 = 𝑥0 (ecuación diferencial
de movimiento de 2º orden)
• Se puede demostrar que la solución de la ecuación de movimiento
puede ser expresada como:
USM – Dinámica de Estructuras (CIV–235) 8
Caso Particular 1 (𝑐 = 0)

Análisis del Caso Homogéneo
• Es útil introducir las siguientes definiciones
USM – Dinámica de Estructuras (CIV–235) 9
Caso Particular 1 (𝑐 = 0)
Nombre Símbolo Definición Unidad
Frecuencia angular
𝜔𝑛 𝜔𝑛 =𝑘
𝑚[rad/s]
Frecuencia 𝑓𝑛 𝑓𝑛 =𝜔𝑛2𝜋
[hz]
Período natural
𝑇𝑛 𝑇𝑛 =2𝜋
𝜔𝑛=1
𝑓𝑛[s]
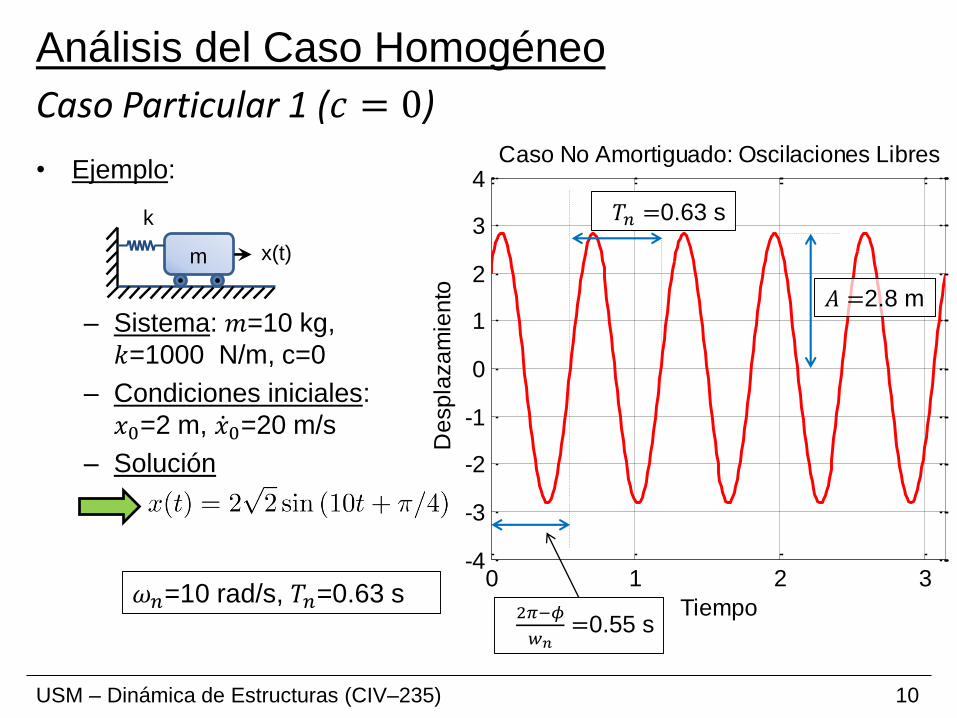
Análisis del Caso Homogéneo
• Ejemplo:
– Sistema: 𝑚=10 kg,
𝑘=1000 N/m, c=0
– Condiciones iniciales:
𝑥0=2 m, 𝑥0=20 m/s
– Solución
USM – Dinámica de Estructuras (CIV–235) 10
Caso Particular 1 (𝑐 = 0)
0 1 2 3-4
-3
-2
-1
0
1
2
3
4
Tiempo
De
sp
laza
mie
nto
Caso No Amortiguado: Oscilaciones Libres
x(t)
k
m
𝜔𝑛=10 rad/s, 𝑇𝑛=0.63 s2𝜋−𝜙
𝑤𝑛=0.55 s
𝑇𝑛 =0.63 s
𝐴 =2.8 m
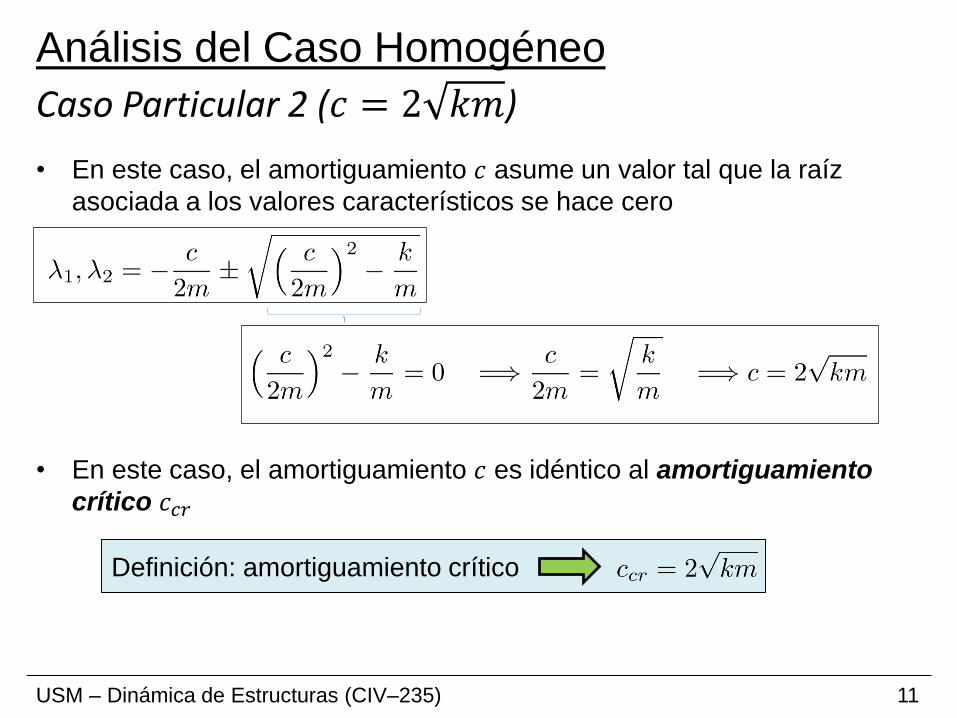
Análisis del Caso Homogéneo
• En este caso, el amortiguamiento 𝑐 asume un valor tal que la raíz
asociada a los valores característicos se hace cero
• En este caso, el amortiguamiento 𝑐 es idéntico al amortiguamiento
crítico 𝑐𝑐𝑟
USM – Dinámica de Estructuras (CIV–235) 11
Caso Particular 2 (𝑐 = 2 𝑘𝑚)
Definición: amortiguamiento crítico

Análisis del Caso Homogéneo
• Note que razón de amortiguamiento crítico 𝑑 adopta el valor 1 en este
caso
• Dado que 𝑐 = 𝑐𝑐𝑟, los valores críticos son idénticos, reales y negativos
• La solución de la ecuación de movimiento es:
USM – Dinámica de Estructuras (CIV–235) 12
Caso Particular 2 (𝑐 = 2 𝑘𝑚)
Note que esta solución
no es periódica

Análisis del Caso Homogéneo
• Ejemplo
– Sistema: 𝑚=10 kg,
𝑘=1000 N/m,
c=200 kg/s
– Condiciones
iniciales: 𝑥0=2 m,
𝑥0=80 m/s
– Solución
USM – Dinámica de Estructuras (CIV–235) 13
Caso Particular 2 (𝑐 = 2 𝑘𝑚)
0 1 2 30
1
2
3
4
5
Tiempo
D
esp
laza
mie
nto
Caso Amortiguamiento Critico: No hay Oscilación
x(t)
k
mc
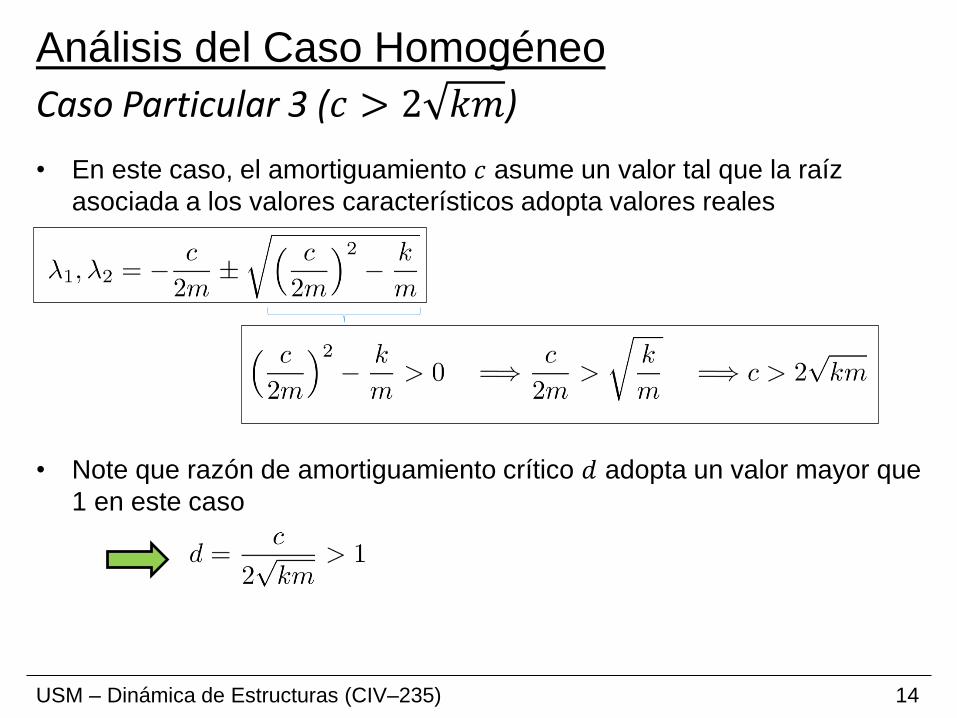
Análisis del Caso Homogéneo
• En este caso, el amortiguamiento 𝑐 asume un valor tal que la raíz
asociada a los valores característicos adopta valores reales
• Note que razón de amortiguamiento crítico 𝑑 adopta un valor mayor que
1 en este caso
USM – Dinámica de Estructuras (CIV–235) 14
Caso Particular 3 (𝑐 > 2 𝑘𝑚)

Análisis del Caso Homogéneo
• Dado que 𝑐 > 𝑐𝑐𝑟, los valores críticos son reales, distintos y negativos
• La solución de la ecuación de movimiento es:
USM – Dinámica de Estructuras (CIV–235) 15
Caso Particular 3 (𝑐 > 2 𝑘𝑚)
Note que esta solución
no es periódica

0 0.2 0.4 0.60
0.5
1
1.5
2
Tiempo
D
esp
laza
mie
nto
Caso SobreAmortiguado: No hay Oscilación
Análisis del Caso Homogéneo
• Ejemplo
– Sistema: 𝑚=10 kg,
𝑘=1000 N/m,
c=220 kg/s
– Condiciones
iniciales: 𝑥0=2 m,
𝑥0= –22 m/s
– Solución
USM – Dinámica de Estructuras (CIV–235) 16
Caso Particular 3 (𝑐 > 2 𝑘𝑚)
x(t)
k
mc
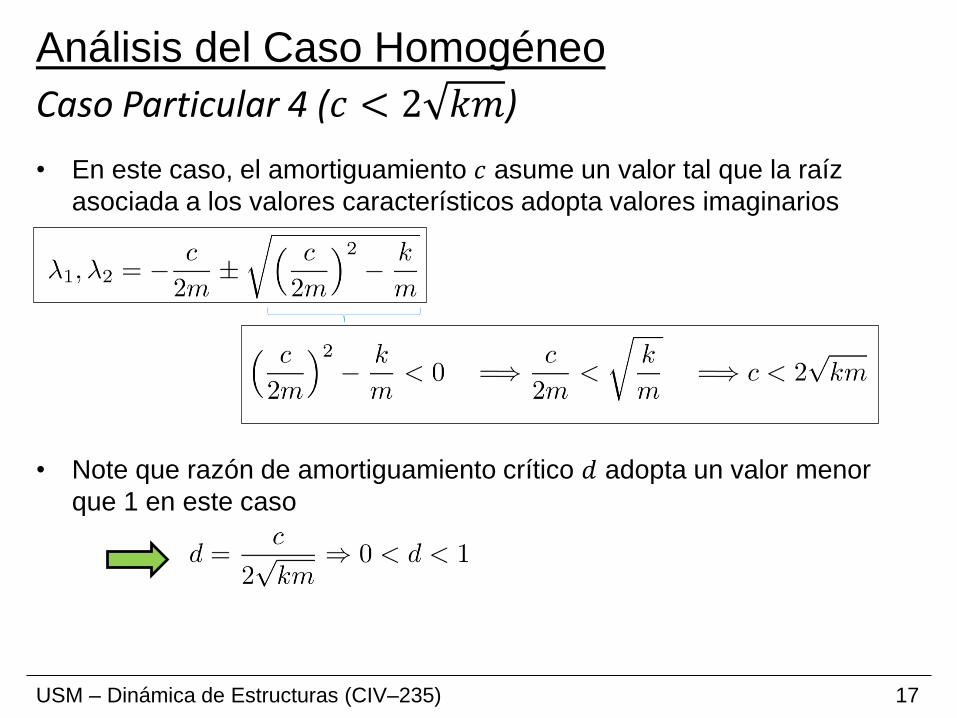
Análisis del Caso Homogéneo
• En este caso, el amortiguamiento 𝑐 asume un valor tal que la raíz
asociada a los valores característicos adopta valores imaginarios
• Note que razón de amortiguamiento crítico 𝑑 adopta un valor menor
que 1 en este caso
USM – Dinámica de Estructuras (CIV–235) 17
Caso Particular 4 (𝑐 < 2 𝑘𝑚)
Análisis del Caso Homogéneo
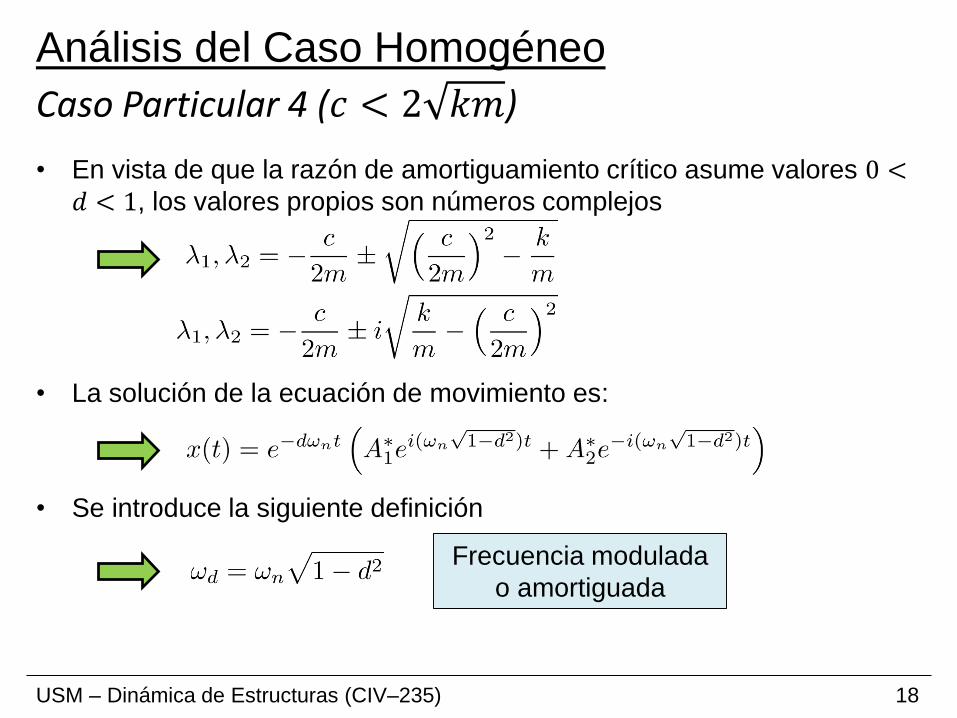
• En vista de que la razón de amortiguamiento crítico asume valores 0 <𝑑 < 1, los valores propios son números complejos
• La solución de la ecuación de movimiento es:
• Se introduce la siguiente definición
USM – Dinámica de Estructuras (CIV–235) 18
Caso Particular 4 (𝑐 < 2 𝑘𝑚)
Frecuencia modulada
o amortiguada
Análisis del Caso Homogéneo
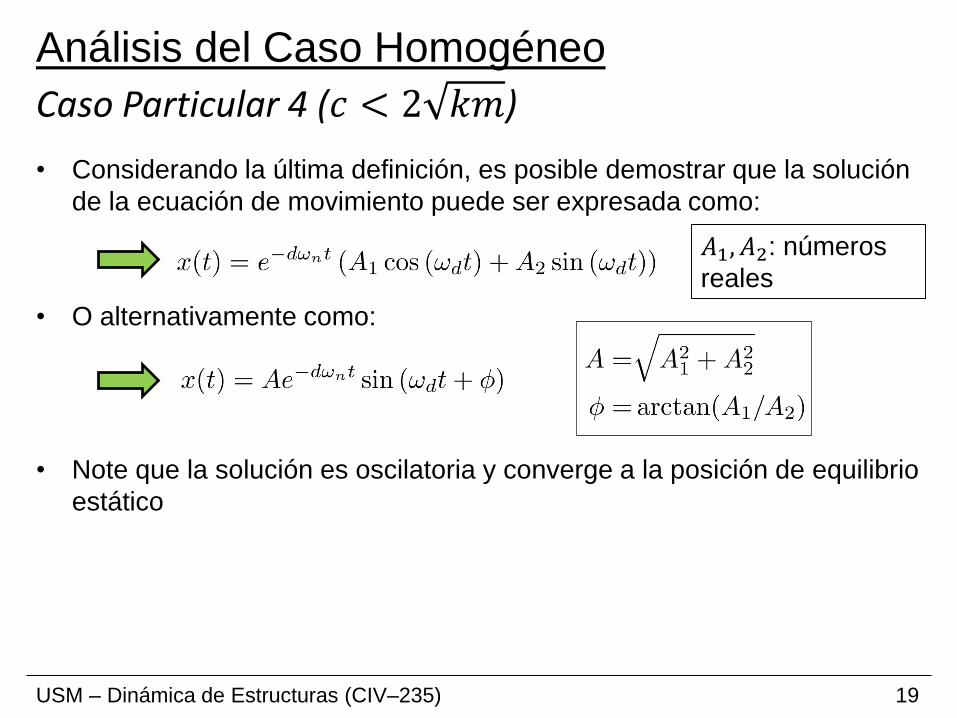
• Considerando la última definición, es posible demostrar que la solución
de la ecuación de movimiento puede ser expresada como:
• O alternativamente como:
• Note que la solución es oscilatoria y converge a la posición de equilibrio
estático
USM – Dinámica de Estructuras (CIV–235) 19
Caso Particular 4 (𝑐 < 2 𝑘𝑚)
𝐴1, 𝐴2: números
reales
Análisis del Caso Homogéneo
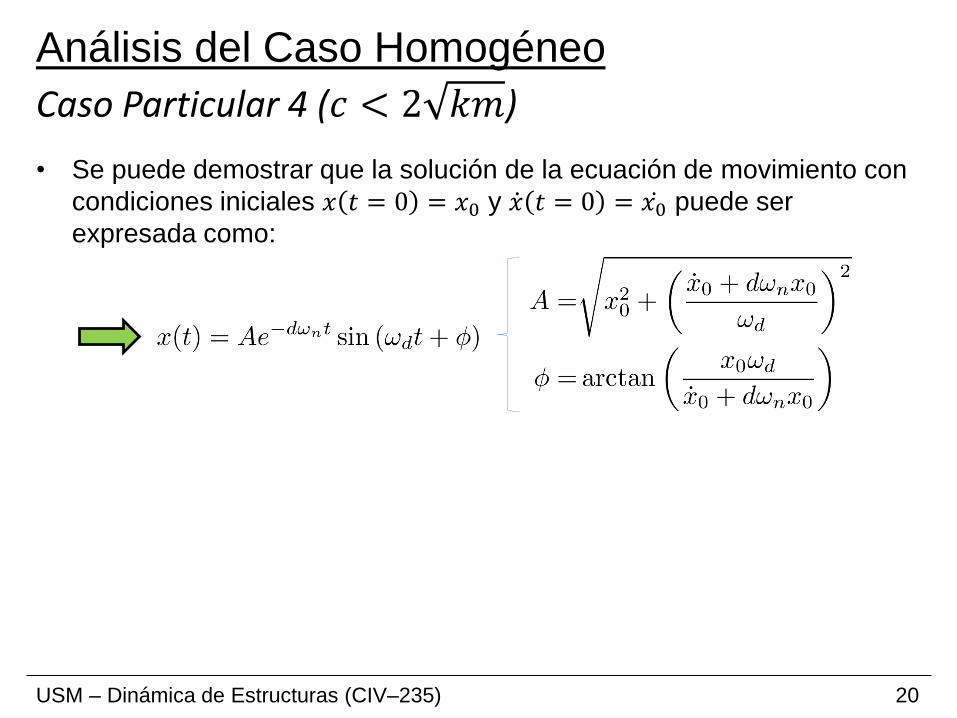
• Se puede demostrar que la solución de la ecuación de movimiento con
condiciones iniciales 𝑥 𝑡 = 0 = 𝑥0 y 𝑥 𝑡 = 0 = 𝑥0 puede ser
expresada como:
USM – Dinámica de Estructuras (CIV–235) 20
Caso Particular 4 (𝑐 < 2 𝑘𝑚)
Análisis del Caso Homogéneo
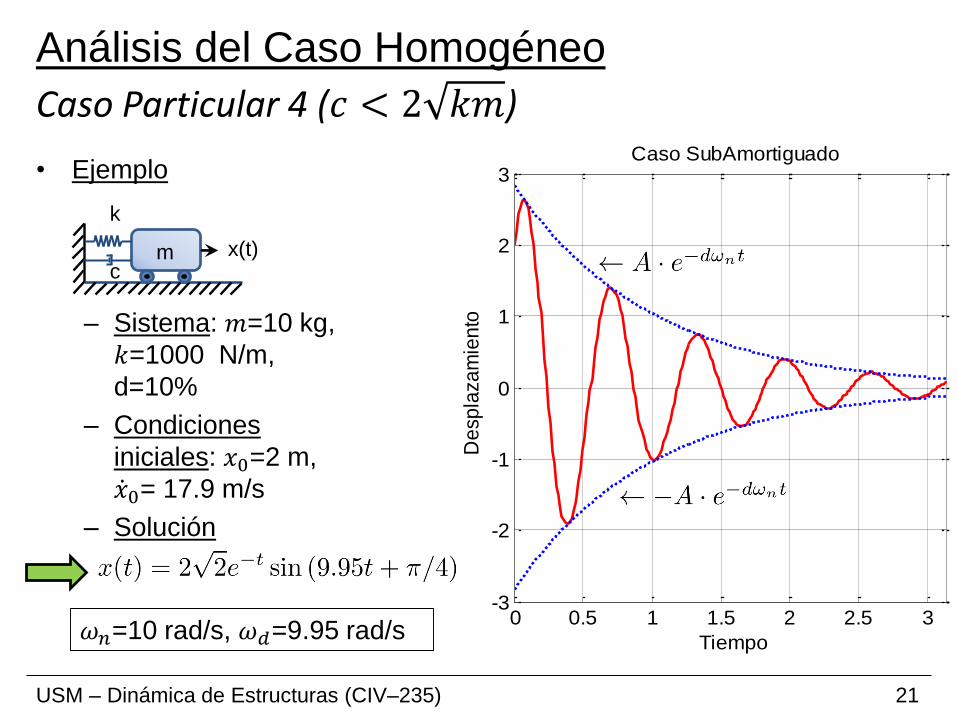
• Ejemplo
– Sistema: 𝑚=10 kg,
𝑘=1000 N/m,
d=10%
– Condiciones
iniciales: 𝑥0=2 m,
𝑥0= 17.9 m/s
– Solución
USM – Dinámica de Estructuras (CIV–235) 21
Caso Particular 4 (𝑐 < 2 𝑘𝑚)
0 0.5 1 1.5 2 2.5 3-3
-2
-1
0
1
2
3
Tiempo
D
esp
laza
mie
nto
Caso SubAmortiguado
x(t)
k
mc
𝜔𝑛=10 rad/s, 𝜔𝑑=9.95 rad/s
Análisis del Caso Homogéneo
• Se ha demostrado que el comportamiento del modelo físico depende
fundamentalmente de la razón de amortiguamiento crítico
• Valores típicos considerados para la razón de amortiguamiento crítico
– Estructuras de hormigón armado ⇒ 𝑑 ≈ 5%
– Estructuras de acero ⇒ 𝑑 ≈ 2%
USM – Dinámica de Estructuras (CIV–235) 22
Resumen

Análisis del Caso Homogéneo
• Ejemplos: casos sobre-, sin y sub- amortiguado
USM – Dinámica de Estructuras (CIV–235) 23
Resumen
0 0.5 1 1.5 2 2.5 30
5
Tiempo
SobreAmortiguado
d 1
0 0.5 1 1.5 2 2.5 3-5
0
5
Tiempo
D
espla
zam
iento
No Amortiguado
d = 0
0 0.5 1 1.5 2 2.5 3-5
0
5
Tiempo
SubAmortiguado
d < 1

Análisis del Caso Homogéneo
• Ejemplos: casos sobre-, sin y sub- amortiguado (superpuestos,
normalizados por desplazamiento máximo)
USM – Dinámica de Estructuras (CIV–235) 24
Resumen
0 0.5 1 1.5 2 2.5 3-1.5
-1
-0.5
0
0.5
1
1.5 Casos: Sobreamortiguado - No Amortiguado - Subamortiguado
Tiempo
d 1
d = 0
d < 1

Análisis del Caso Homogéneo
• Se asume que se dispone de mediciones de la oscilación libre de un
sistema estructural caracterizado por medio de 1 GL
USM – Dinámica de Estructuras (CIV–235) 25
Aplicación: Determinación de 𝑑
0 0.5 1 1.5 2 2.5 3-3
-2
-1
0
1
2
3 Determinación de Razón de Amortiguamiento (d)
Tiempo
D
esp
laza
mie
nto
En este caso, se asume
que la ecuación de
movimiento es de la
forma (para 𝑑 < 1):
Análisis del Caso Homogéneo
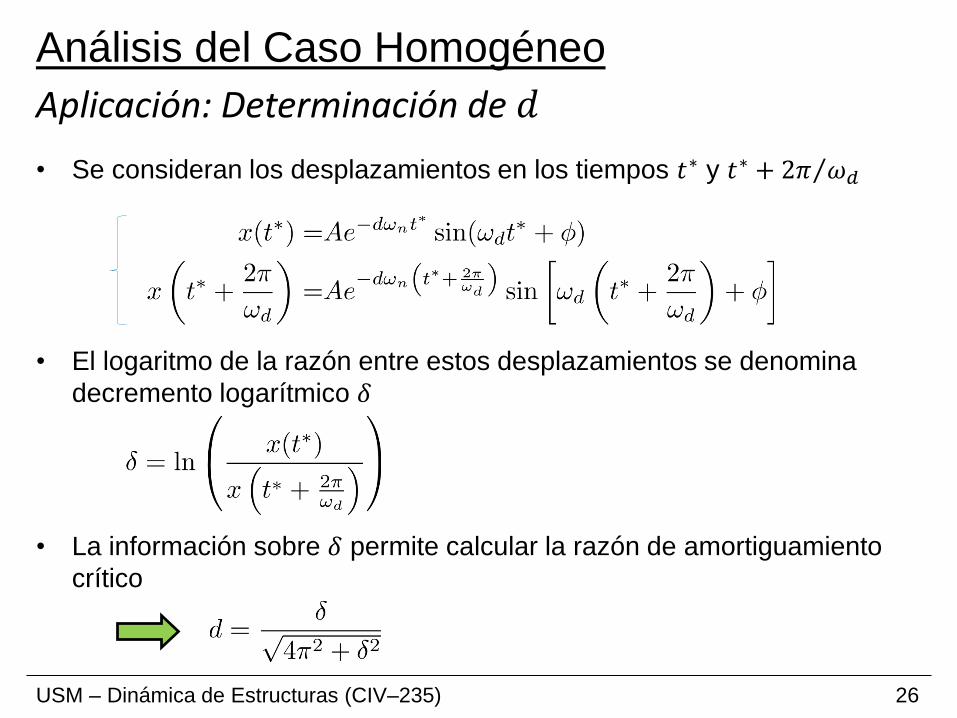
• Se consideran los desplazamientos en los tiempos 𝑡∗ y 𝑡∗ + 2𝜋 𝜔𝑑
• El logaritmo de la razón entre estos desplazamientos se denomina
decremento logarítmico 𝛿
• La información sobre 𝛿 permite calcular la razón de amortiguamiento
crítico
USM – Dinámica de Estructuras (CIV–235) 26
Aplicación: Determinación de 𝑑

Análisis del Caso Homogéneo
• En caso que los desplazamientos en los tiempos 𝑡∗ y 𝑡∗ + 2𝜋 𝜔𝑑 sean
similares, es posible considerar desplazamientos en los tiempos 𝑡∗ y
𝑡∗ + 𝑛 2𝜋 𝜔𝑑 (donde 𝑛 es un número natural mayor que 1)
USM – Dinámica de Estructuras (CIV–235) 27
Aplicación: Determinación de 𝑑
0 0.5 1 1.5 2 2.5 3-3
-2
-1
0
1
2
3 Determinación de Razón de Amortiguamiento (d)
Tiempo
D
esp
laza
mie
nto
• Luego, el decremento
logarítmico se define como:
• La razón de
amortiguamiento se estima
como:

Fuerzas Armónicas
• Se considera cargas descritas por funciones de tipo seno/coseno
• Alternativamente, las cargas pueden ser expresadas mediante notación
compleja
• Modelo considerado
USM – Dinámica de Estructuras (CIV–235) 28
Formulación
𝜔: Frecuencia de la señal
F0: Amplitud de la señal
k
c
m

Fuerzas Armónicas
• La ecuación de movimiento de este sistema es:
• De manera normalizada
• La solución de esta ecuación diferencial es:
USM – Dinámica de Estructuras (CIV–235) 29
Solución de la Ecuación de Movimiento
Note que la frecuencia 𝜔 no es
necesariamente igual 𝜔𝑛 o 𝜔𝑑 ya que
son totalmente independientes
𝑥𝐻 𝑡 : Respuesta libre
𝑥𝑃 𝑡 : Respuesta forzada
Fuerzas Armónicas
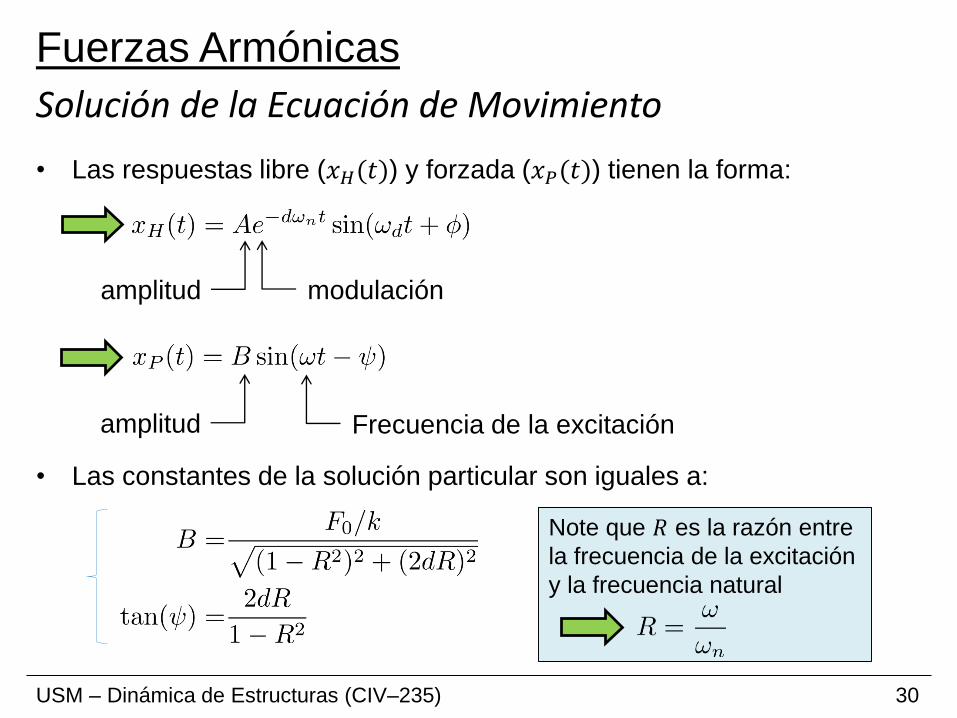
• Las respuestas libre (𝑥𝐻(𝑡)) y forzada (𝑥𝑃(𝑡)) tienen la forma:
• Las constantes de la solución particular son iguales a:
USM – Dinámica de Estructuras (CIV–235) 30
Solución de la Ecuación de Movimiento
amplitud modulación
amplitud Frecuencia de la excitación
Note que 𝑅 es la razón entre
la frecuencia de la excitación
y la frecuencia natural

Fuerzas Armónicas
1) Las constantes 𝐴 y 𝜙 dependen exclusivamente de las condiciones
iniciales
2) Si 𝑑 ≠ 0, 𝑥𝐻(𝑡) → 0 cuando 𝑡 → ∞ entonces para 𝑡 ≫ 𝑇𝑛, 𝑥 𝑡 se puede
aproximar como:
USM – Dinámica de Estructuras (CIV–235) 31
Observaciones
𝐴 y 𝜙
(solución estacionaria)
Fuerzas Armónicas
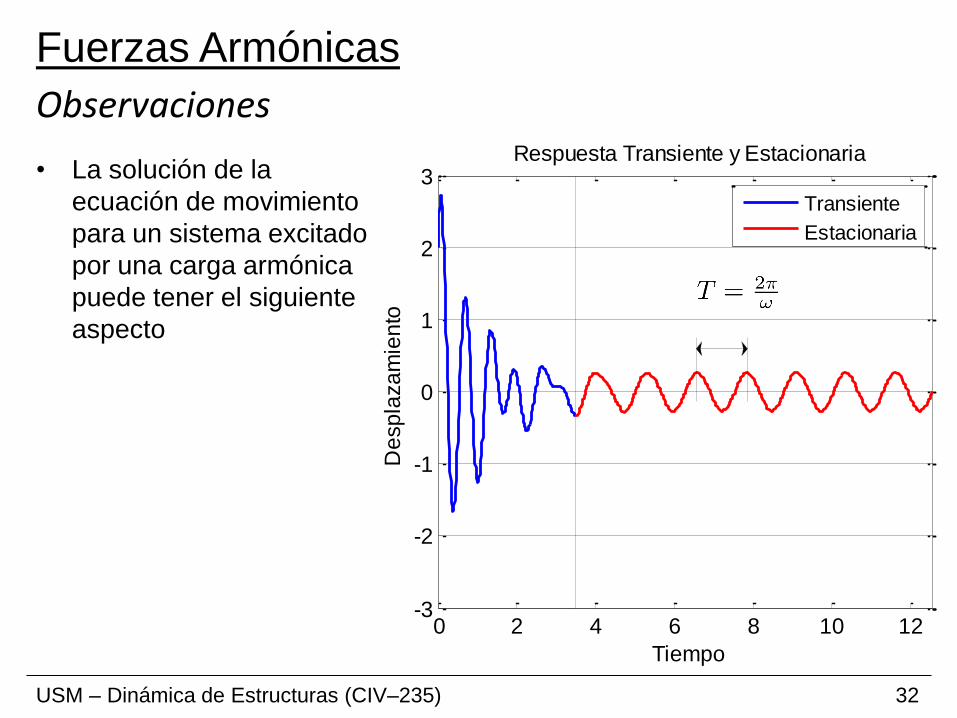
• La solución de la
ecuación de movimiento
para un sistema excitado
por una carga armónica
puede tener el siguiente
aspecto
USM – Dinámica de Estructuras (CIV–235) 32
Observaciones
0 2 4 6 8 10 12-3
-2
-1
0
1
2
3
Tiempo
D
esp
laza
mie
nto
Respuesta Transiente y Estacionaria
Transiente
Estacionaria

Fuerzas Armónicas
• Resulta de interés examinar la amplitud 𝐵 de la solución estacionaria
• Para estudiar esta amplitud, se define el factor de amplificación
dinámica (𝐹𝐴𝐷)
• Es posible demostrar que el factor de amplificación dinámica es:
USM – Dinámica de Estructuras (CIV–235) 33
Amplitud de la Solución Estacionaria
F(t)=F0km
Amplitud dinámica
“Amplitud” estática
Depende de la razón 𝑅entre frecuencias y la razón
de amortiguamiento crítico 𝑑

Fuerzas Armónicas
• Factor de amplificación
dinámica
USM – Dinámica de Estructuras (CIV–235) 34
Amplitud de la Solución Estacionaria
0 0.5 1 1.5 20
1
2
3
4
5
6
7
8 Factor de Amplificación Dinámica
F
AD
Amplif. Dinámica
d=0%
d=5%
d=10%
d=40%
d=100%
Para el caso en que
R = 1 y (teóricamente)
𝑑 = 0, 𝐹𝐴𝐷 tiende a
infinito (resonancia)

Fuerzas Armónicas
• El máximo del factor de amplificación dinámica puede ser determinado
al aplicar conceptos de cálculo diferencial
– Máximo de FAD = 𝐻 𝑅, 𝑑 ⟺ mínimo de g 𝑅, 𝑑 donde:
– Al minimizar la función 𝑔(𝑅, 𝑑) (asumiendo 𝑑 fijo), se encuentran 2
soluciones
• La solución 𝑅 = 0 es válida para 𝑑 > 1 2 ≈ 0.707
– El hecho que 𝑅 = 0 implica 𝜔 = 0
– Esto es equivalente al caso estático (𝜔 ≪ 𝜔𝑛)
USM – Dinámica de Estructuras (CIV–235) 35
Amplitud de la Solución Estacionaria
Fuerzas Armónicas
• La solución 𝑅 = 1 − 2𝑑2 es válida para 𝑑 < 1 2 ≈ 0.707
– En este caso el factor de amplificación dinámica máximo 𝐹𝐴𝐷𝑚𝑎𝑥es:
– En este caso, la amplitud de la solución estacionaria máxima es
igual a:
USM – Dinámica de Estructuras (CIV–235) 36
Amplitud de la Solución Estacionaria
Fuerzas Armónicas
– Para aplicaciones de ingeniería civil, es habitual que 𝑑 ≪ 1
El valor máximo del factor de amplificación dinámica se produce
para un valor 𝑅 tendiente a 1 (por izquierda)
Para el cálculo del valor máximo del factor de amplificación
dinámica, se considera la aproximación 2𝑑 1 − 𝑑2 ≈ 2𝑑. Luego,
la solución estacionaria máxima es:
Donde 𝑥𝑒𝑠𝑡: respuesta del sistema si la carga 𝐹0 es aplicada de
manera estática
USM – Dinámica de Estructuras (CIV–235) 37
Amplitud de la Solución Estacionaria


















