Apuntes Automatica Upv
133
Automática (Ing. Químico) Introducción • Horario: Electrónica: Martes de 10:15 a 12:15 Automática: Miércoles de 10:15 a 12:15 • Profesores: 2.6 cred. Marta Monserrat (DIE) Teoría y Problemas 1 Grupo 2.6 cred. Enric Picó (DISA) 0.6 cred. Marta Monserrat (DIE) Prácticas 3 Grupos 0.6 cred. Carlos Ricolfe (DISA) • Tutorias: Enric Picó i Marco [email protected] Dep. Ing. de Sistemas y Automática Despacho 22 - Lunes y Miércoles de 15:30 a 17:30 - Viernes 9:30 a 11:30 • Prácticas de Automática: 2 prácticas de 2 horas Laboratorio de Tabarca (EUITI - 3º Piso - Ala Norte) Práctica 1 Jueves 23-Mayo de 12:30-2:30 o Viernes 24-Mayo de 8-10 o 15-17 Práctica 2 Jueves 30-Mayo de 12:30-2:30 o Viernes 31-Mayo de 8-10 o 15-17 • Evaluación: 50%Prácticas+50%Trabajo Tema 1: Introducción 1
Transcript of Apuntes Automatica Upv
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 1/133
Automática (Ing. Químico)
Introducción
• Horario: Electrónica: Martes de 10:15 a 12:15 Automática: Miércoles de 10:15 a 12:15
• Profesores:2.6 cred. Marta Monserrat (DIE)Teoría y Problemas
1 Grupo 2.6 cred. Enric Picó (DISA)
0.6 cred. Marta Monserrat (DIE)Prácticas
3 Grupos 0.6 cred. Carlos Ricolfe (DISA)
• Tutorias: Enric Picó i Marco
Dep. Ing. de Sistemas y Automática Despacho 22
- Lunes y Miércoles de 15:30 a 17:30
- Viernes 9:30 a 11:30
• Prácticas de Automática:2 prácticas de 2 horas
Laboratorio de Tabarca (EUITI - 3º Piso - Ala Norte)
Práctica 1Jueves 23-Mayo de 12:30-2:30 o
Viernes 24-Mayo de 8-10 o 15-17
Práctica 2Jueves 30-Mayo de 12:30-2:30 o
Viernes 31-Mayo de 8-10 o 15-17
• Evaluación: 50%Prácticas+50%Trabajo
Tema 1: Introducción 1

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 2/133
Automática (Ing. Químico)
OBJETIVOS
I. Conocer los tipos de Señales y Sistemas.
II. Conceptos básicos de lógica binaria.
III. Conceptos básicos de Automática.
IV. Conceptos básicos de sistemas de eventos discretos:
autómatas.
V. Programación de sistemas de control mediante el GRAFCET.
VI. Conceptos básicos relacionados con los sistemas de
producción automatizados.
• PROGRAMA
Automática Horas
Tema 1: Introducción 2
Tema 2: Sistemas y Señales 2
Tema 3: Algebra binaria 2
Tema 4: Sistemas de Eventos Discretos 4
Tema 5: Automatismos Combinacionales y Secuenciales 4
Tema 6: Diseño de Automatismos mediante GRAFCET 10
Tema 7: Arquitecturas hardware y software de un
sistema de control 2
TOTAL 26
Tema 1: Introducción 2
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 3/133
Automática (Ing. Químico)
• INTRODUCCIÓN
• ¿Qué estudia la asignatura?
- Sistemas, procesos.
- La automatización de procesos industriales.
• SISTEMAS: Una definición informal.
“Entidad que mantiene su existencia gracias a la interacción mutua
de sus partes constituyentes.”
• La evolución del sistema puede deberse a:
- Que sobre el sistema hay influencias, ’ACTUACIONES’,
externas (algo que le afecta).- Evolución propia, ‘LIBRE’, ‘NO FORZADA’, a partir de
unas condiciones iniciales, hasta un punto de equilibrio.
• La teoría de sistemas intenta analizar, caracterizar, el
comportamiento de los sistemas dinámicos. Es decir, aquellos
cuya evolución futura depende de las influencias externas en el
presente y de la evolución pasada.
• Para ello, utiliza características genéricas de las ecuaciones
matemáticas que definen dicho comportamiento. Se obtiene unmodelo matemático del sistema.
• Fundamentalmente los sistemas que trataremos de controlar serán
procesos industriales.
Tema 1: Introducción 3
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 4/133
Automática (Ing. Químico)
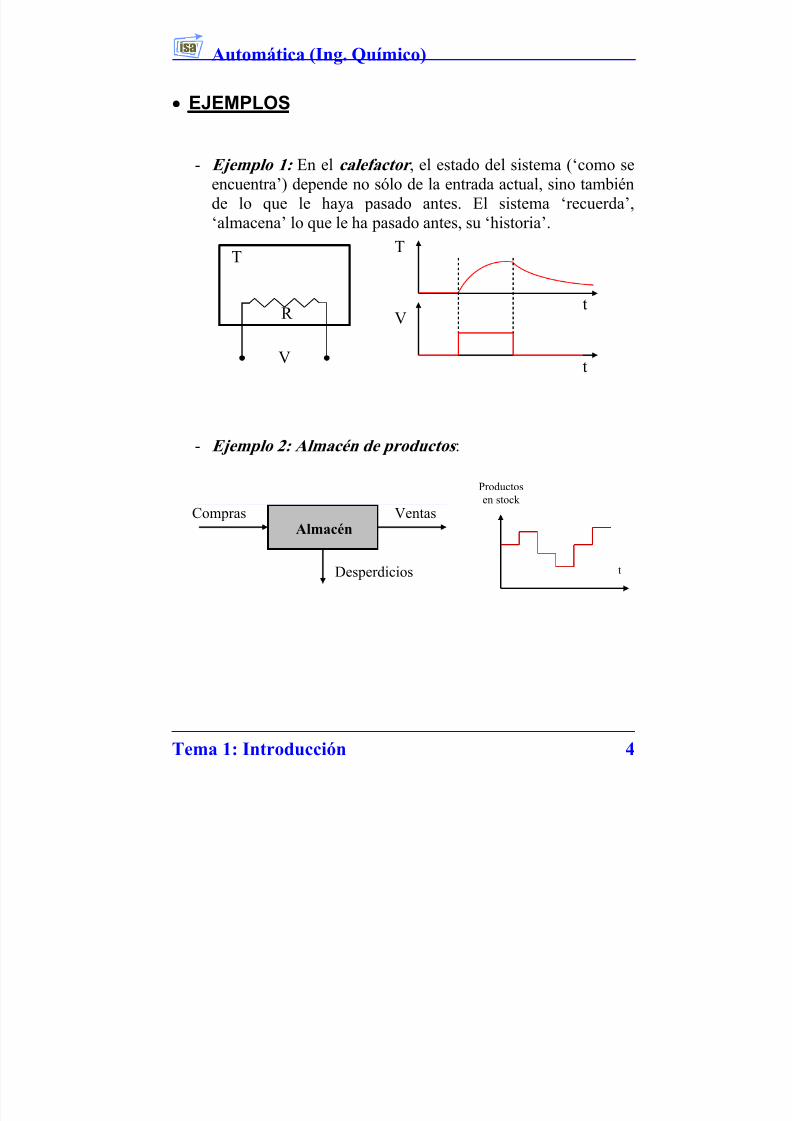
• EJEMPLOS
- Ejemplo 1: En el calefactor , el estado del sistema (‘como se
encuentra’) depende no sólo de la entrada actual, sino también
de lo que le haya pasado antes. El sistema ‘recuerda’,
‘almacena’ lo que le ha pasado antes, su ‘historia’.
V
T
t
t
V
R
T
- Ejemplo 2: Almacén de productos :
tDesperdicios
AlmacénCompras Ventas
Productos
en stock
Tema 1: Introducción 4
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 5/133
Automática (Ing. Químico)
Tema 1: Introducción 5
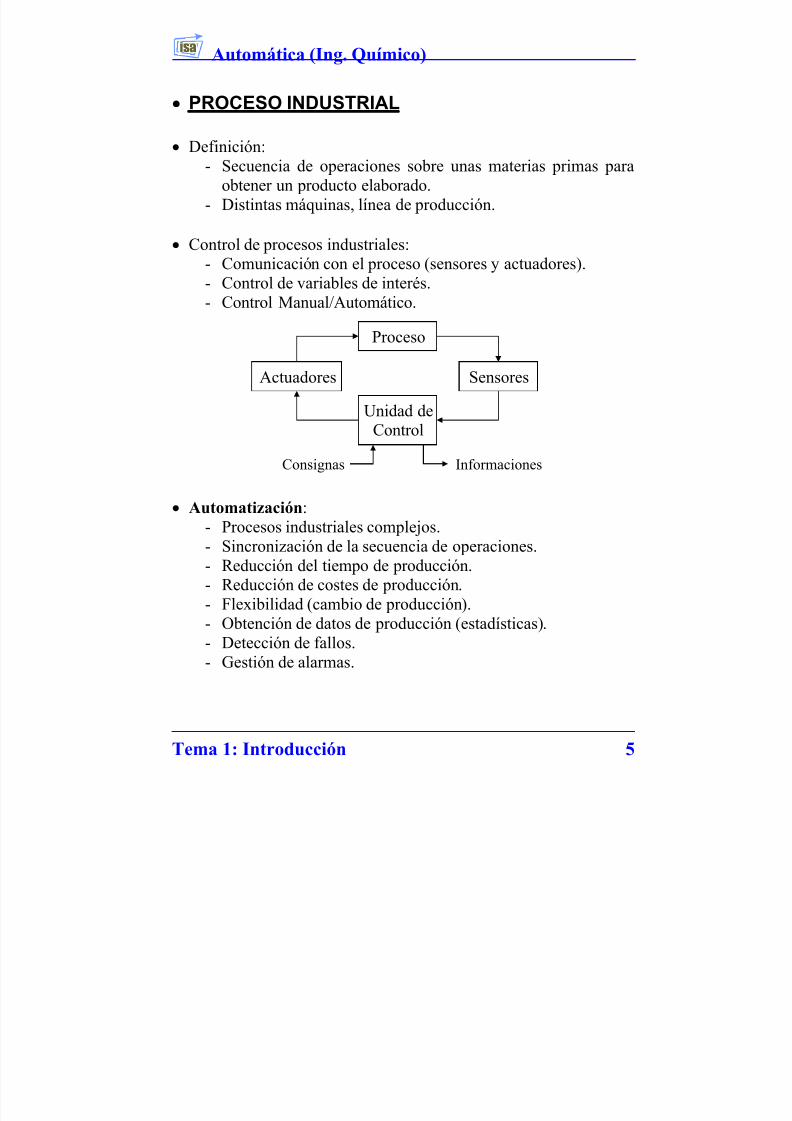
• PROCESO INDUSTRIAL
• Definición:
- Secuencia de operaciones sobre unas materias primas para
obtener un producto elaborado.
- Distintas máquinas, línea de producción.
• Control de procesos industriales:- Comunicación con el proceso (sensores y actuadores).
- Control de variables de interés.
- Control Manual/Automático.
Consignas Informaciones
Actuadores Sensores
Unidad deControl
Proceso
• Automatización:
- Procesos industriales complejos.
-
Sincronización de la secuencia de operaciones.- Reducción del tiempo de producción.
- Reducción de costes de producción.- Flexibilidad (cambio de producción).
- Obtención de datos de producción (estadísticas).
- Detección de fallos.
- Gestión de alarmas.
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 6/133
Automática (Ing. Químico)
Tema 2:
Sistemas y Señales
1. Concepto de señal.
1.1. Tipos de señales.
2. Características de las señales.
3. Señales básicas.
4. Definición de sistema.4.1. Clasificación.
5. Caracterización de un sistema.
6. Ejemplos.
Tema 2: Sistemas y Señales 1
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 7/133
Automática (Ing. Químico)
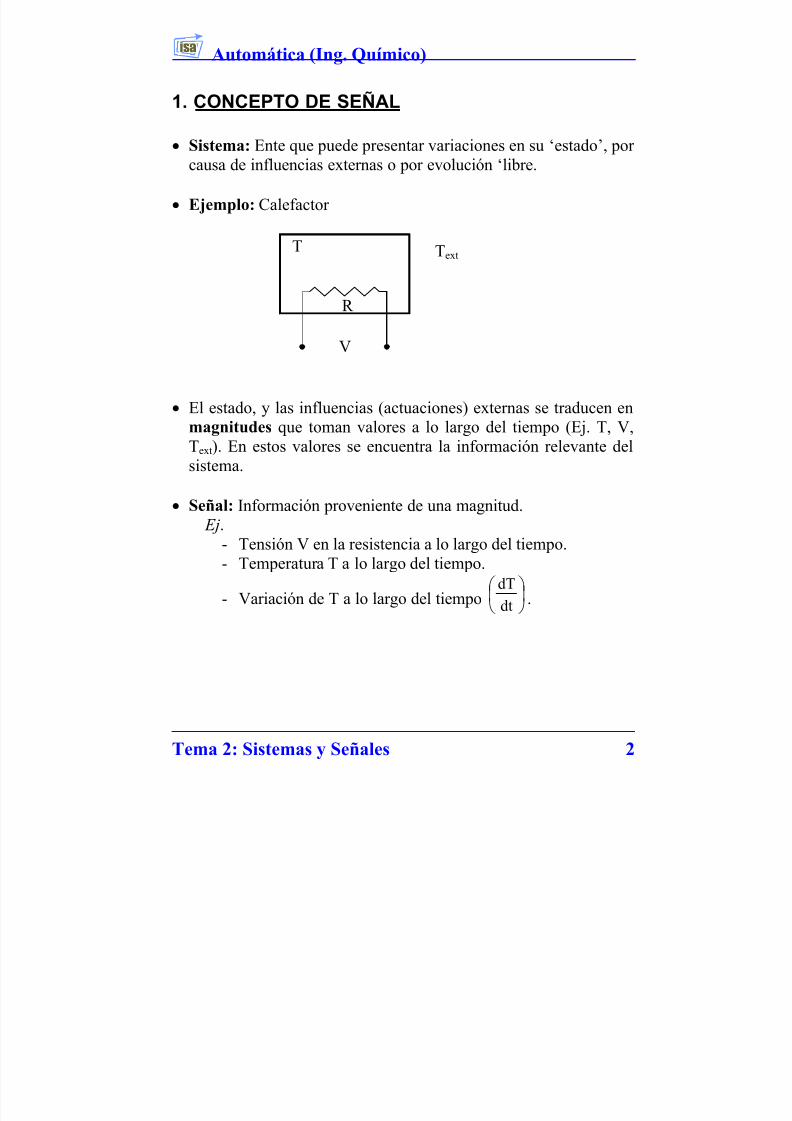
1. CONCEPTO DE SEÑAL
• Sistema: Ente que puede presentar variaciones en su ‘estado’, por causa de influencias externas o por evolución ‘libre.
• Ejemplo: Calefactor
V
R
T Text
•
El estado, y las influencias (actuaciones) externas se traducen enmagnitudes que toman valores a lo largo del tiempo (Ej. T, V,Text). En estos valores se encuentra la información relevante delsistema.
• Señal: Información proveniente de una magnitud. Ej.
-
Tensión V en la resistencia a lo largo del tiempo.- Temperatura T a lo largo del tiempo.
- Variación de T a lo largo del tiempo
dt
dT.
Tema 2: Sistemas y Señales 2

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 8/133
Automática (Ing. Químico)
Tema 2: Sistemas y Señales 3
1.1. Tipos de señal:
aCualitativ
taDeterminis)(aleatoriaaEstocástic
Binaria
dacuantificaDiscreta,
Real
magnitudladedominioelSegúnB)
Muestreada
Discreta
Continua
temporaldominioelSegúnA)
A) Dominio temporal:
• Continuas: existen para todo el tiempo
T
t
t
Ej: Temperatura en elcalefactor
S ← No continua en magnitud, pero si en el tiempo
• Discretas: existe valor sólo en instantes determinados (y puntuales) del tiempo.
t
S Ej: Medida provenientedel laboratorio
Da lugar a secuencias de números.
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 9/133
Automática (Ing. Químico)
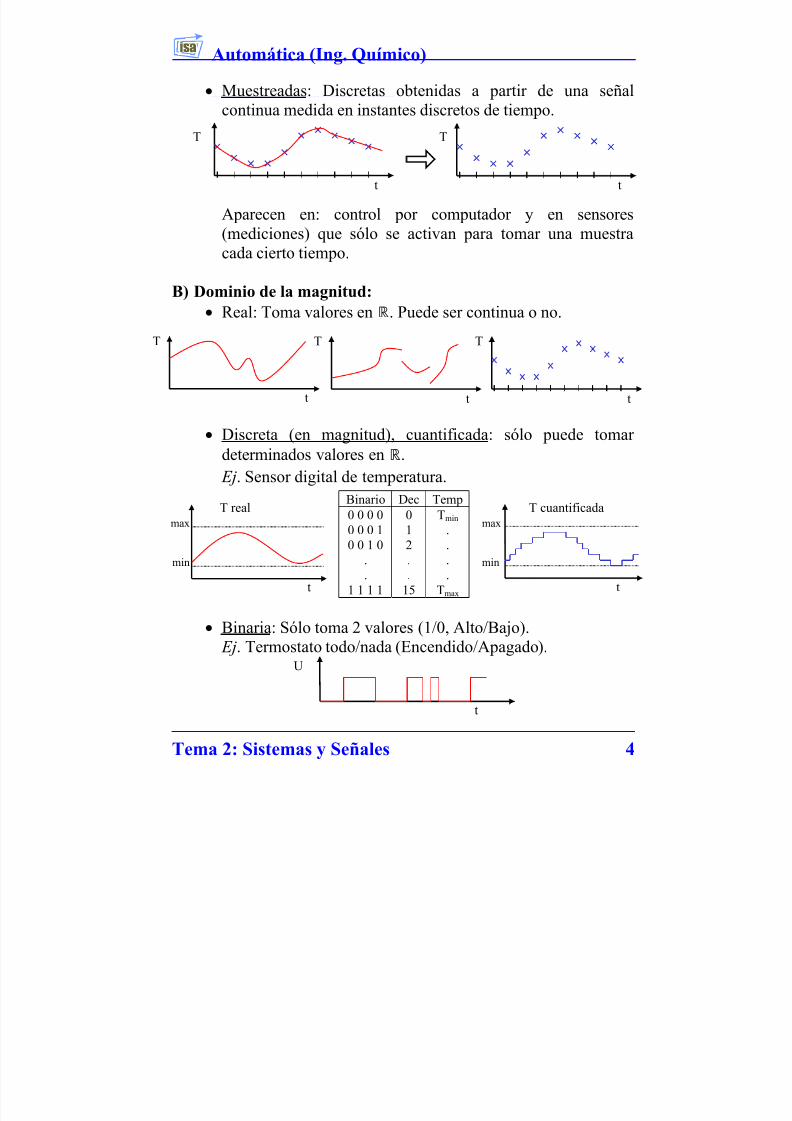
• Muestreadas: Discretas obtenidas a partir de una señalcontinua medida en instantes discretos de tiempo.
T
tt
T
Aparecen en: control por computador y en sensores(mediciones) que sólo se activan para tomar una muestracada cierto tiempo.
B) Dominio de la magnitud:
• Real: Toma valores en ℝ. Puede ser continua o no.
T T
t
T
tt
• Discreta (en magnitud), cuantificada: sólo puede tomar determinados valores en ℝ. Ej. Sensor digital de temperatura.
Binario Dec Temp0 0 0 00 0 0 10 0 1 0
.
.1 1 1 1
012..
15
Tmin ....
Tmax
min
maxT real
t
min
maxT cuantificada
t
• Binaria: Sólo toma 2 valores (1/0, Alto/Bajo). Ej. Termostato todo/nada (Encendido/Apagado).
U
t
Tema 2: Sistemas y Señales 4
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 10/133
Automática (Ing. Químico)
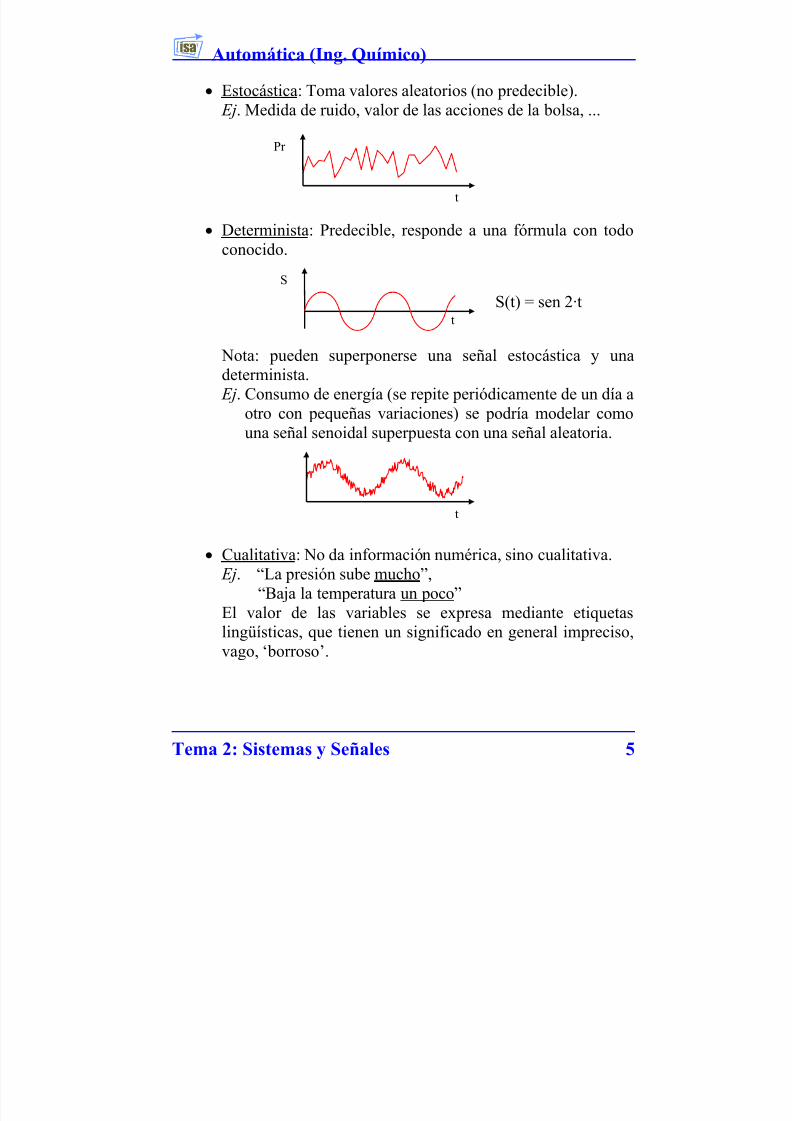
• Estocástica: Toma valores aleatorios (no predecible). Ej. Medida de ruido, valor de las acciones de la bolsa, ...
Pr
t
• Determinista: Predecible, responde a una fórmula con todoconocido.
t
S
S(t) = sen 2·t
Nota: pueden superponerse una señal estocástica y unadeterminista. Ej. Consumo de energía (se repite periódicamente de un día a
otro con pequeñas variaciones) se podría modelar comouna señal senoidal superpuesta con una señal aleatoria.
t
• Cualitativa: No da información numérica, sino cualitativa. Ej. “La presión sube mucho”,
“Baja la temperatura un poco”El valor de las variables se expresa mediante etiquetaslingüísticas, que tienen un significado en general impreciso,vago, ‘borroso’.
Tema 2: Sistemas y Señales 5
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 11/133
Automática (Ing. Químico)
2. CARACTERÍSTICAS DE LAS SEÑALES
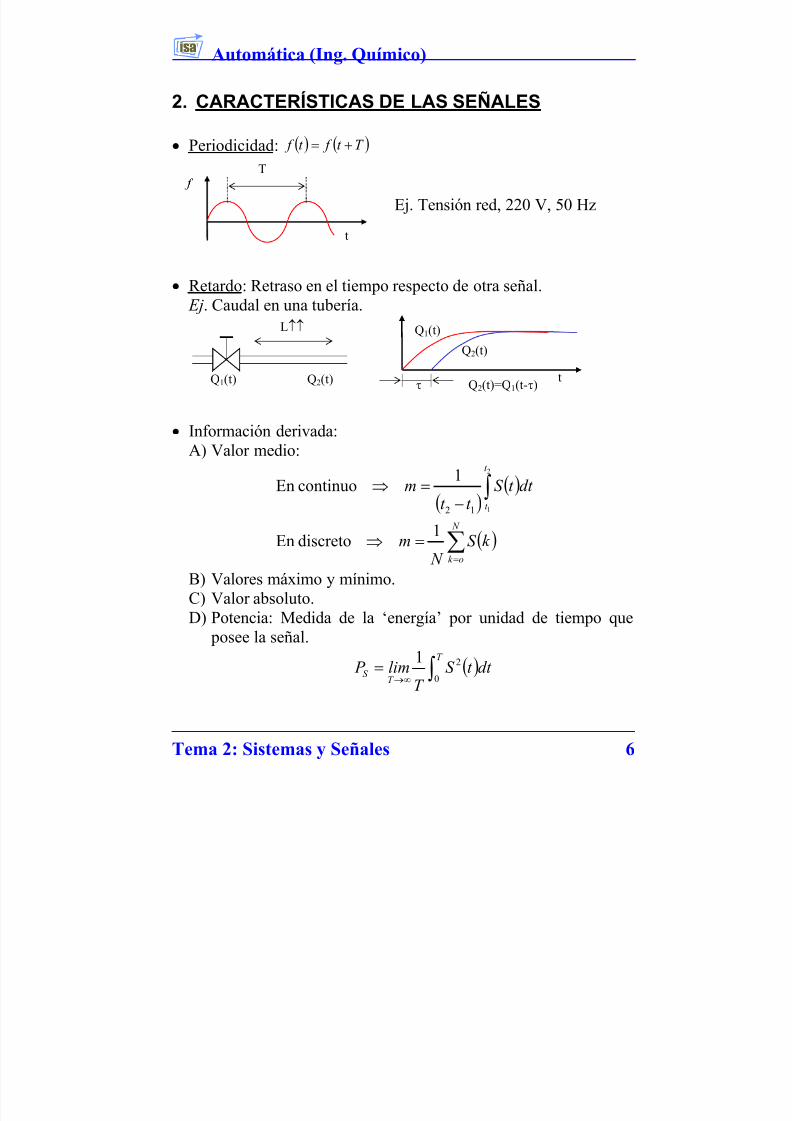
• Periodicidad: ( ) ( )T t f t f +=
T
t
Ej. Tensión red, 220 V, 50 Hz
• Retardo: Retraso en el tiempo respecto de otra señal. Ej. Caudal en una tubería.
Q2(t)
Q1(t)
Q2(t)=Q1(t-τ)τ t
L↑↑
Q2(t)Q1(t)
• Información derivada:A) Valor medio:
( )( )
( )
∑
∫
=
=⇒
−=⇒
N
ok
t
t
k S N
m
dt t S t t
m
1discretoEn
1continuoEn
2
112
B) Valores máximo y mínimo.C) Valor absoluto.D) Potencia: Medida de la ‘energía’ por unidad de tiempo que
posee la señal.
( )∫ →∞=T
T S dt t S
T
lim P 0
21
Tema 2: Sistemas y Señales 6
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 12/133
Automática (Ing. Químico)
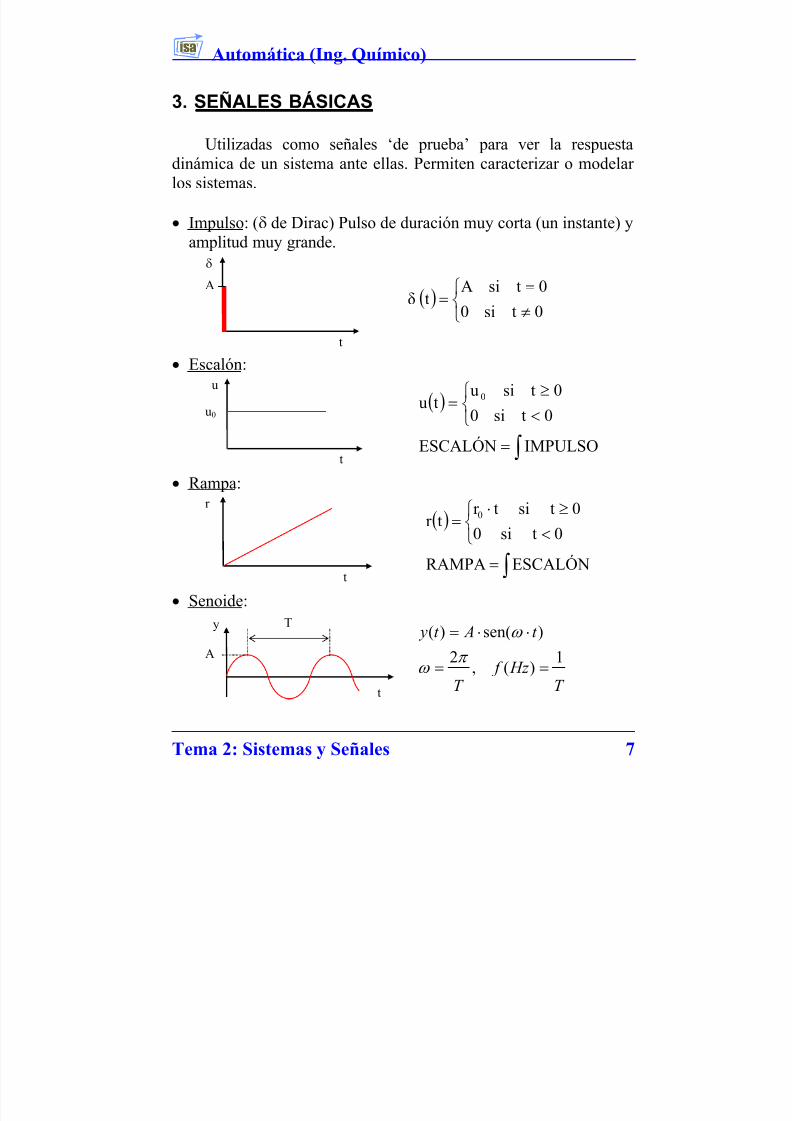
3. SEÑALES BÁSICAS
Utilizadas como señales ‘de prueba’ para ver la respuestadinámica de un sistema ante ellas. Permiten caracterizar o modelar los sistemas.
• Impulso: (δ de Dirac) Pulso de duración muy corta (un instante) yamplitud muy grande.
( )≠
==
0tsi0
0tsiAtδ
A
δ
t
• Escalón:u
( )
∫ =
<
≥=
IMPULSOESCALÓN0tsi0
0tsiutu 0
t
u0
• Rampa:r
( )
∫ =
<
≥⋅=
ESCALÓNRAMPA
0tsi0
0tsitr tr 0
t
• Senoide:y T
t T
Hz f
T
t At y
1)(,
2
)sen()(
==
⋅⋅=
π
ω
ω
A
Tema 2: Sistemas y Señales 7

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 13/133
Automática (Ing. Químico)
4. DEFINICIÓN DE SISTEMA
• Un Sistema es cualquier ente en el que:A) Existen unas variables (cuyo valor a lo largo del tiempo
hemos definido antes como una ‘señal’) que nos indicanqué pasa con el sistema, cómo está.
B) Esas variables evolucionan en el tiempo:1) Como consecuencia de las señales externas que actúan
sobre el sistema.
2) Porque, no actuando ninguna señal externa, el sistemaevoluciona a partir de unas condiciones iniciales dadas.
• Desde el punto de vista de la información el sistema puedeentenderse como un ‘procesador’ de señales.
• Ejemplo: Depósito
q2
xe
xs
qe
qs
SISTEMA
h
sss ·xh·K q =
qe = K e·xe
h
xe
q2 (lluvia)
xs
• Se distinguen:- Señales de entrada
- Manipulables: xe, xs - No manipulables, perturbaciones: q2
- Señales de salida: h (variable cuya evolución interesa analizar).- Señales internas: qe, qs
- Parámetros: K e, K s
Tema 2: Sistemas y Señales 8
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 14/133
Automática (Ing. Químico)
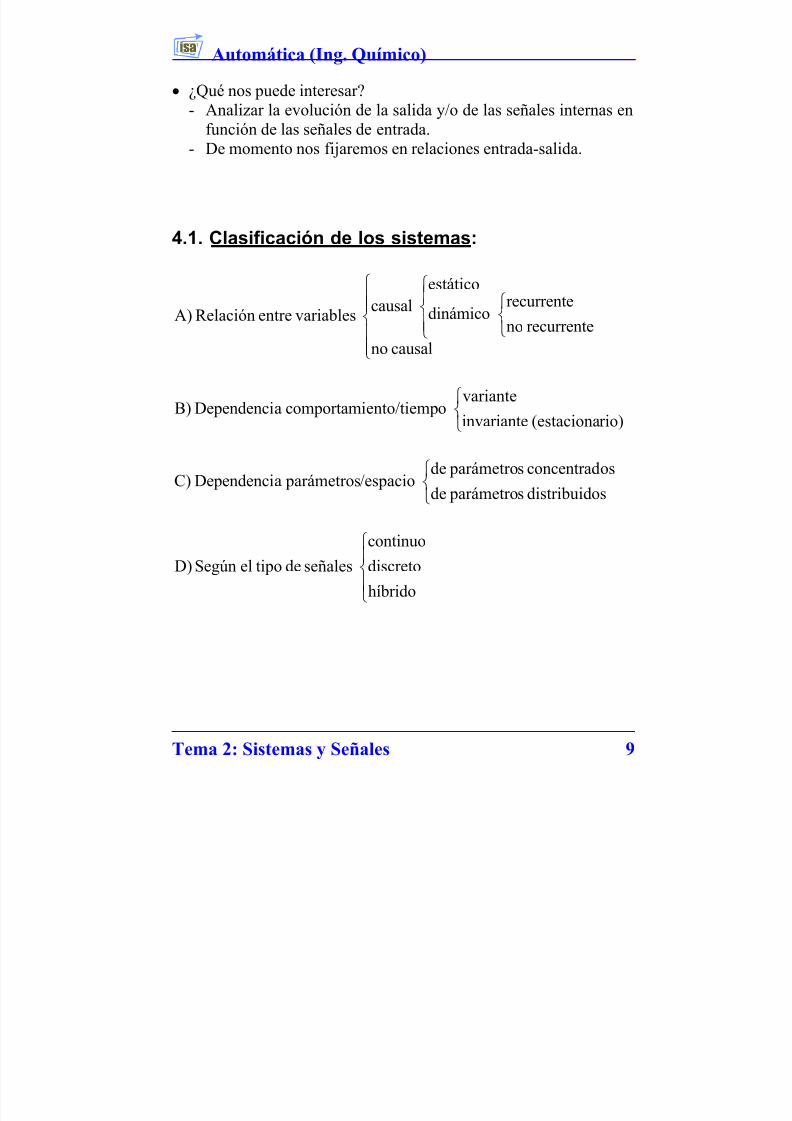
• ¿Qué nos puede interesar?- Analizar la evolución de la salida y/o de las señales internas en
función de las señales de entrada.- De momento nos fijaremos en relaciones entrada-salida.
4.1. Clasificación de los sistemas:
híbrido
discreto
continuo
señalesdetipoelSegúnD)
osdistribuid parámetrosde
osconcentrad parámetrosde /espacio parámetrosaDependenciC)
rio)(estacionainvariante
variante
oento/tiempcomportamiaDependenciB)
causalnorecurrenteno
recurrente dinámico
estático causal
variablesentreRelaciónA)
Tema 2: Sistemas y Señales 9
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 15/133
Automática (Ing. Químico)
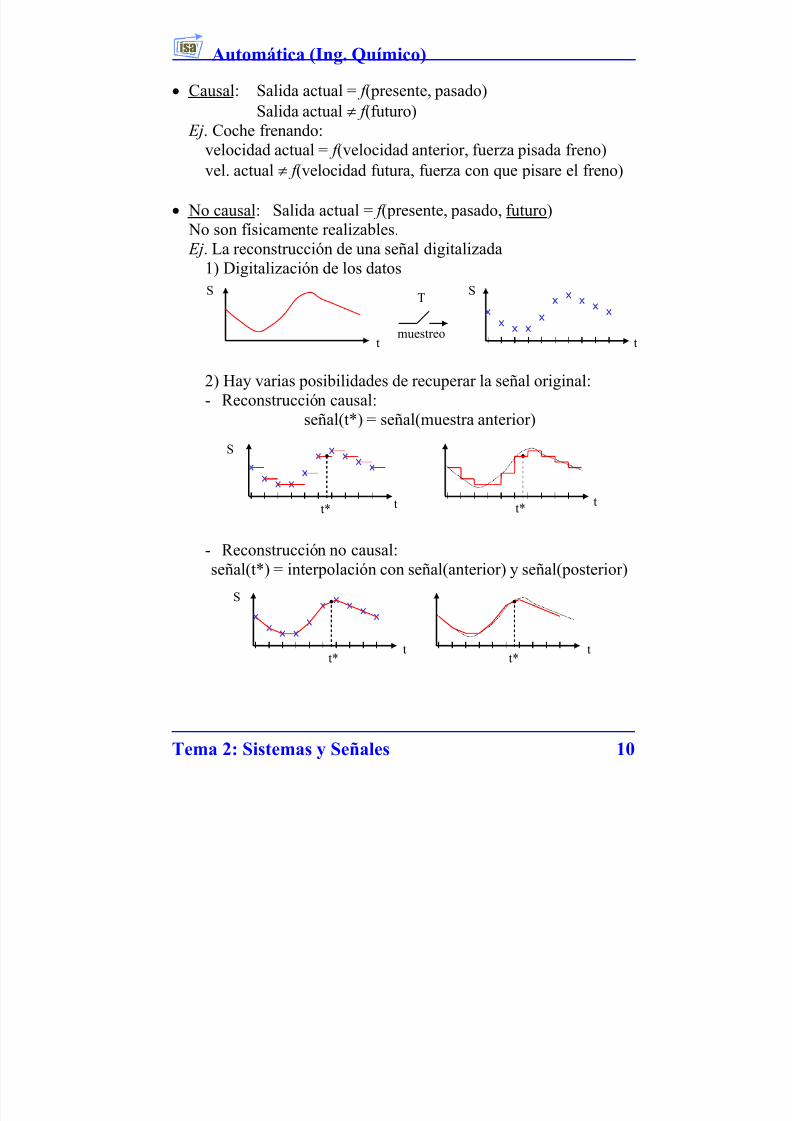
• Causal: Salida actual = f (presente, pasado)Salida actual ≠ f (futuro)
Ej. Coche frenando:velocidad actual = f (velocidad anterior, fuerza pisada freno)vel. actual ≠ f (velocidad futura, fuerza con que pisare el freno)
• No causal: Salida actual = f (presente, pasado, futuro) No son físicamente realizables. Ej. La reconstrucción de una señal digitalizada
1) Digitalización de los datosS
t
T
muestreo
S
t
2) Hay varias posibilidades de recuperar la señal original:- Reconstrucción causal:
señal(t*) = señal(muestra anterior)
S
t t*t*t
- Reconstrucción no causal:señal(t*) = interpolación con señal(anterior) y señal(posterior)
S
tt*
tt*
Tema 2: Sistemas y Señales 10

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 16/133
Automática (Ing. Químico)
- Interpolación usando más muestras hacia atrás y haciadelante.
S
tt* t*
t
En la práctica: para reconstruir bien la señal se usan muestras pasadas y futuras. Por tanto habrá que esperar a tener el número
de muestras futuras que en cada instante se necesitan parareconstruir la señal correspondiente a ese instante; es decir, para poder construir este sistema hay que introducir un retardoque lo haga causal.
• Estático: Salida actual = f (Entrada actual)
Ej. Intensidad a través de una resistencia
( )( ) R
t V t I =
I
V R No hay ‘memoria’
• Dinámico: Salida actual = f (Ent. actual, Ent/Sal pasadas)La salida del sistema depende de lo que la haya pasado antes. Elsistema ‘recuerda’ su ‘historia’. Ej. El nivel de un depósito, depende de:
- lo que había antes (información pasada)- lo haya entrado y salido (información actual)
Tema 2: Sistemas y Señales 11

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 17/133
Automática (Ing. Químico)
Ej. Enfriamiento de un sólido.Si el calor que desprende por unidad de tiempo es proporcionala su temperatura, y como el calor interno en un cuerpo es:
Q = m·Ce·T
Tm·C
K
dt
dTK·T
dt
dT·m·C
K·Tdt
o)desprendidd(calor dtdQ
ee −=⇒−=
−=−=
- La variación de temperatura en un instante dado depende de
la temperatura en ese instante.- La variación de temperatura nos dará la temperatura siguiente(futura). La derivada, ‘pendiente’, indica hacia donde semueve la temperatura y con que ‘velocidad’.
dt
dTTT 1
12 +=
- Conclusión: la temperatura en un instante T(t) dependerá de
las temperaturas por las que ‘ha pasado’ el sólido antes.
• Recurrente: Salida actual = f (Sal. anterior, Ent. actual y pasadas)Puede ser o no función de entradas actual y/o pasadas pero si esfunción de salidas pasadas. Ej. Los ejemplos dinámicos anteriores.
Ej. Sistemas discretos como:( ) ( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) recurrente No2k u b1k u bk y
1k 7u1k 2yk y
nk ya2k ya1k yak y
21
n21
⇒−+−=
−+−−=
−−−−−−−= K
• No recurrente: Salida actual = f (Ent. Act/pasad) ≠ f (Sal. pasadas)
Ej. El sistema discreto: ( ) ( ) ( 2k u b1k u bu(k) bk y 210 )−+−+=
Tema 2: Sistemas y Señales 12

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 18/133
Automática (Ing. Químico)
• Invariante en el tiempo: Si el valor de los parámetros es constantea lo largo del tiempo, el sistema siempre responde de la misma
manera, igual, ante las mismas señales. Ej.
( ) ( ) ( )( ) ( ) ( )
−−⇒−+−−=
⇒−=
1111
e
b ,a :Parámetros
1k u,1k y,k y:Variables1k u b1k yak y
C m, K, :Parámetros
T,dtdT
:Variables·
T C m
K
dt
dT
e
• Variante en el tiempo: El valor de los parámetros puede variar alo largo del tiempo. Ej. El amortiguador de un coche:
Con el tiempo el amortiguador se desgasta y tendrá distintocoeficiente de elasticidad.
• Parámetros concentrados (o distribuidos): el valor de los parámetros permanece constante (o varía) a lo largo del espacio.
• Continuo: trata con señales continuos. Ej: Sistemas con sensores continuos.
• Discreto: trata con señales discretas. Ej: Sistemas con sensores digitales.
• Híbrido: aparecen señales continuas y discretas dentro delsistema. Ej: Sistemas de eventos discretos o automatismos.
Tema 2: Sistemas y Señales 13
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 19/133
Automática (Ing. Químico)
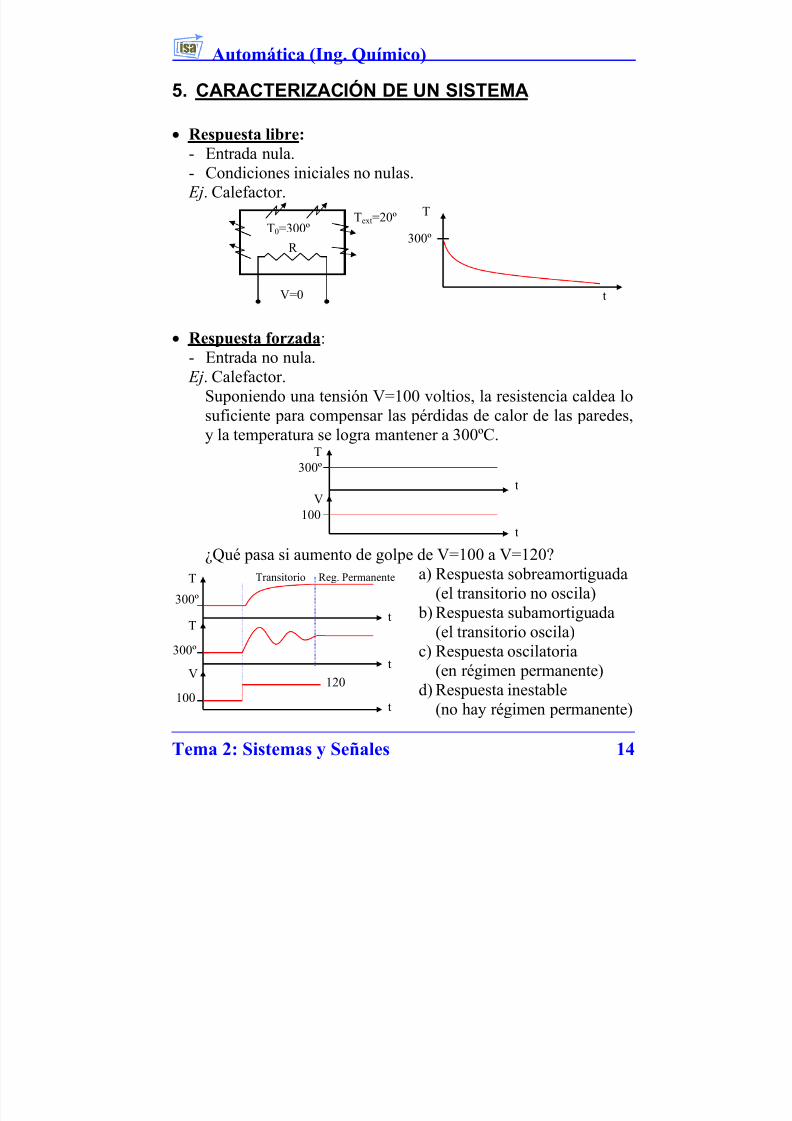
5. CARACTERIZACIÓN DE UN SISTEMA
• Respuesta libre:- Entrada nula.- Condiciones iniciales no nulas. Ej. Calefactor.
300º
T
t
Text=20º
V=0
R
T0=300º
• Respuesta forzada:- Entrada no nula. Ej. Calefactor.
Suponiendo una tensión V=100 voltios, la resistencia caldea lo
suficiente para compensar las pérdidas de calor de las paredes,y la temperatura se logra mantener a 300ºC.
V100
T300º
t
t
¿Qué pasa si aumento de golpe de V=100 a V=120?a) Respuesta sobreamortiguadaTransitorio Reg. Permanente
120
t
300º
T
t
100
V
300º
T
t
(el transitorio no oscila) b) Respuesta subamortiguada
(el transitorio oscila)c) Respuesta oscilatoria
(en régimen permanente)
d) Respuesta inestable(no hay régimen permanente)
Tema 2: Sistemas y Señales 14
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 20/133
Automática (Ing. Químico)
Tema 2: Sistemas y Señales 15
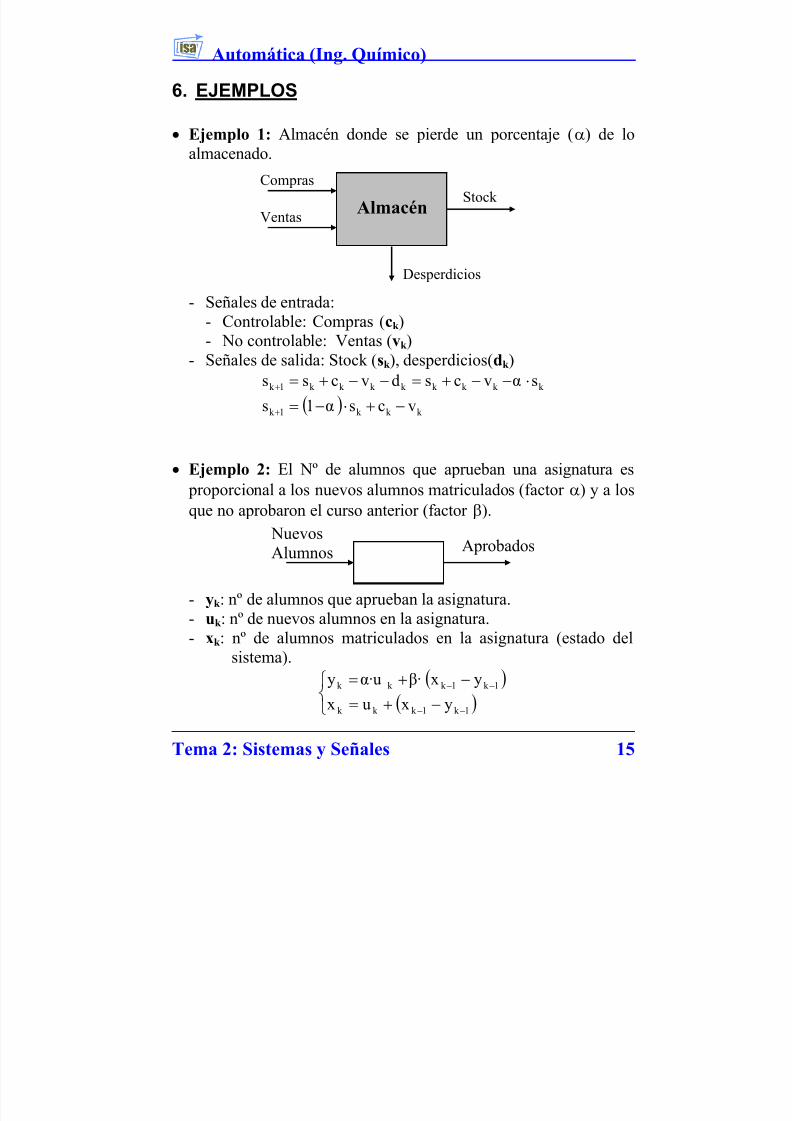
6. EJEMPLOS
• Ejemplo 1: Almacén donde se pierde un porcentaje (α) de loalmacenado.
Compras
VentasAlmacén
Stock
Desperdicios- Señales de entrada:
- Controlable: Compras (ck )- No controlable: Ventas (vk )
- Señales de salida: Stock (sk ), desperdicios(dk )
( ) k k k 1k
k k k k k k k k 1k
vcsα1s
sαvcsdvcss
−+⋅−=
⋅−−+=−−+=
+
+
• Ejemplo 2: El Nº de alumnos que aprueban una asignatura es proporcional a los nuevos alumnos matriculados (factor α) y a losque no aprobaron el curso anterior (factor β).
Nuevos
Alumnos Aprobados
- yk : nº de alumnos que aprueban la asignatura.- uk : nº de nuevos alumnos en la asignatura.- xk : nº de alumnos matriculados en la asignatura (estado del
sistema).( )
( )
−+=
−+=
−−
−−
1k 1k k k
1k 1k k k
yxux
yxβ·α·uy
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 21/133
Automática (Ing. Químico)
Tema 3:
Álgebra Binaria
1. Sistemas numéricos.
1.1. Equivalencias.1.2. Conversiones.1.3. Otros códigos.
2. Aritmética binaria.
3. Álgebra de Boole.3.1. OR.3.2. AND.3.3. NOT.3.4. OR exclusiva.3.5. Propiedades.
Tema 3: Álgebra Binaria 1

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 22/133
Automática (Ing. Químico)
1. SISTEMAS NUMÉRICOS
• En los sistemas electrónicos y automáticos es más útil emplear
otros sistemas de numeración más sencillos.
• Tipos de sistemas de numeración:
Sistema Base EstadosDecimal 10 0 1 2 3 4 5 6 7 8 9
Binario 2 0 1Octal 8 0 1 2 3 4 5 6 7
Hexadecimal 16 0 1 2 3 4 5 6 7 8 9 A B C D E F
• El sistema decimal emplea 10 dígitos diferentes para expresar cualquier cantidad, teniendo en cuenta que la posición de cada
uno le confiere un peso, correspondiente a las distintas potencias
de 10:76080030001071061081033867 0123
10 +++=⋅+⋅+⋅+⋅=
• El sistema binario está basado en la utilización exclusiva de dos
números (0 y 1) para expresar cualquier magnitud, teniendo en
cuenta que la posición de cada uno tiene un peso derivado de las
distintas potencias de 2:
100123
2 111208212120211011 =+++=⋅+⋅+⋅+⋅=
• La sencillez de las reglas aritméticas binarias hace que sea idóneo
para el uso en computadores y dispositivos digitales.
• El 0 y 1 binario se puede interpretar como estados lógicos
opuestos: ON/OFF, VERDADERO/FALSO.
Tema 3: Álgebra Binaria 2

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 23/133
Automática (Ing. Químico)
1.1. Equivalencias:
Bin. Dec. Oct. Hex. Bin. Dec. Oct. Hex.0 0 0 0 100000 32 40 20
1 1 1 1 100001 33 41 21
10 2 2 2 100010 34 42 22
11 3 3 3 100011 35 43 23
100 4 4 4 100100 36 44 24
101 5 5 5 100101 37 45 25
110 6 6 6 100110 38 46 26
111 7 7 7 100111 39 47 271000 8 10 8 101000 40 50 28
1001 9 11 9 101001 41 51 29
1010 10 12 A 101010 42 52 2A
1011 11 13 B 101011 43 53 2B
1100 12 14 C 101100 44 54 2C
1101 13 15 D 101101 45 55 2D
1110 14 16 E 101110 46 56 2E
1111 15 17 F 101111 47 57 2F
10000 16 20 10 110000 48 60 30
10001 17 21 11 110001 49 61 31
10010 18 22 12 110010 50 62 32
10011 19 23 13 110011 51 63 33
10100 20 24 14 110100 52 64 34
10101 21 25 15 110101 53 65 35
10110 22 26 16 110110 54 66 3610111 23 27 17 110111 55 67 37
11000 24 30 18 111000 56 70 38
11001 25 31 19 111001 57 71 39
11010 26 32 1A 111010 58 72 3A
11011 27 33 1B 111011 59 73 3B
11100 28 34 1C 111100 60 74 3C
11101 29 35 1D 111101 61 75 3D
11110 30 36 1E 111110 62 76 3E11111 31 37 1F 111111 63 77 3F
Tema 3: Álgebra Binaria 3

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 24/133
Automática (Ing. Químico)
1.2. Conversiones:
• De Decimal a Binario: divisiones sucesivas por la base 2. Los
restos de las divisiones y el último cociente formarán el número
binario en sentido ascendente.
175 2
15 87 2
1 07 43 2
1 03 21 21 1 10 2
0 5 2
1 2 2
0 1
210 10101111175 =
La parte fraccionaria de un número decimal se obtiene tomando
las partes enteras de las sucesivas multiplicaciones por 2.
210 011,0375,0
000,12500,0
500,12750,0
750,02375,0
=
=×
=×
=×
• De Binario a Decimal: suma ponderada de cada dígito con sucorrespondiente potencia de 2.
10
0123
2 151248212121211111 =+++=⋅+⋅+⋅+⋅=
La parte fraccionaria de un número binario se obtiene mediante la
suma ponderada de cada dígito por su correspondiente potencia
negativa de 2.
10
321
2 625,0125,005,0212021101,0 =++=⋅+⋅+⋅= −−−
Tema 3: Álgebra Binaria 4

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 25/133
Automática (Ing. Químico)
• De Decimal a Octal: Divisiones sucesivas por la base 8. Losrestos de las divisiones y el último cociente formarán el número
octal en sentido ascendente.6534 8
134 816 8
54 16 102 8
6 0 22 12 8
6 4 1
810 146066534 =
• De Octal a Decimal: suma ponderada de cada dígito con su
correspondiente potencia de 8.
10
012
8 213516192858283325 =++=⋅+⋅+⋅=
• De Binario a Octal: agrupar de tres en tres dígitos binarios
añadiendo los ceros necesarios a la derecha y hacer la conversión
directa a la cifra octal.
82 1651011100011110101 ==
• De Octal a Binario: convertir directamente cada dígito octal a suequivalente binario de 3 dígitos.
28 11000111111000011307 ==
Binario Octal Binario Octal
000 0 100 4
001 1 101 5
010 2 110 6
011 3 111 7
Tema 3: Álgebra Binaria 5

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 26/133
Automática (Ing. Químico)
• De Hexadecimal a Decimal: suma ponderada de cada dígito consu correspondiente potencia de 16.
10
012
16 1375158012801615165165F55 =++=⋅+⋅+⋅=
• De Decimal a Hexadecimal: divisiones sucesivas por la base 16.
Los restos de las divisiones y el último cociente formarán el
número hexadecimal en sentido ascendente.
932 16
132 58 16
4 10 3
1610 4A3932 =
• De Binario a Hexadecimal: agrupar de cuatro en cuatro dígitos binarios añadiendo los ceros necesarios a la derecha y hacer la
conversión directa a la cifra hexadecimal.
162 B17101101110001101111011 ==
• De Hexadecimal a Binario: convertir directamente cada dígitohexadecimal a su equivalente binario de 4 dígitos.
216 011110101101100101001117AC ==
Bin Hex Bin Hex Bin Hex Bin Hex
0000 0 0100 4 1000 8 1100 C
0001 1 0101 5 1001 9 1101 D
0010 2 0110 6 1010 A 1110 E
0011 3 0111 7 1011 B 1111 F
Tema 3: Álgebra Binaria 6

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 27/133
Automática (Ing. Químico)
1.3. Otros códigos:
• Sistema BCD (Decimal Codificado en Binario):- Sirve para representar números decimales.
- Cada dígito decimal se expresa con 4 bits.
- Sólo se usan los diez primeros números binarios.
Dec BCD Dec BCD
0 0000 5 0101
1 0001 6 01102 0010 7 0111
3 0011 8 1000
4 0100 9 1001
010000001001904
001010000111782
→
→
• Código Gray:
- El paso de un dígito al siguiente se efectúa cambiando un solo
bit cada vez.- Empleado en elementos de tipo electromagnético o mecánico
para evitar el disparo de varios relés sincronizados cuando se
cambia de un número al siguiente.
- Complicado para operaciones algebraicas.
Dec GRAY Dec GRAY Dec GRAY Dec GRAY
0 0000 4 0110 8 1100 12 1010
1 0001 5 0111 9 1101 13 1011
2 0011 6 0101 10 1111 14 1001
3 0010 7 0100 11 1110 15 1000
Tema 3: Álgebra Binaria 7

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 28/133
Automática (Ing. Químico)
2. ARITMÉTICA BINARIA
• Las reglas son similares a la aritmética decimal, pero al existir
sólo dos números (0 y 1) son muchos más simples.
• Las reglas fundamentales de las cuatro operaciones son:
Suma Resta Producto División
0 + 0 = 0 0 – 0 = 0 0 × 0 = 0 0 : 0 = 0
0 + 1 = 1 0 – 1 = 1(y me prestan 1)
0 × 1 = 0 0 : 1 = 0
1 + 0 = 1 1 – 0 = 1 1 × 0 = 0 1 : 0 = ∞
1 + 1 = 0(y llevo 1)
1 – 1 = 0 1 × 1 = 1 1 : 1 = 1
• Ejemplos
1 1 1 ← Acarreos o arrastres1 0 1 1 0 1
+ 1 1 0 0 1
1 0 0 0 1 1 0
-1 -1 ← Prestado
1 0 0 1 0
− 1 0 0 10 1 0 0 1
1 1 0 1
× 1 0 1
1 1 0 1
0 0 0 0
1 1 0 11 0 0 0 0 0 1
Tema 3: Álgebra Binaria 8
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 29/133
Automática (Ing. Químico)
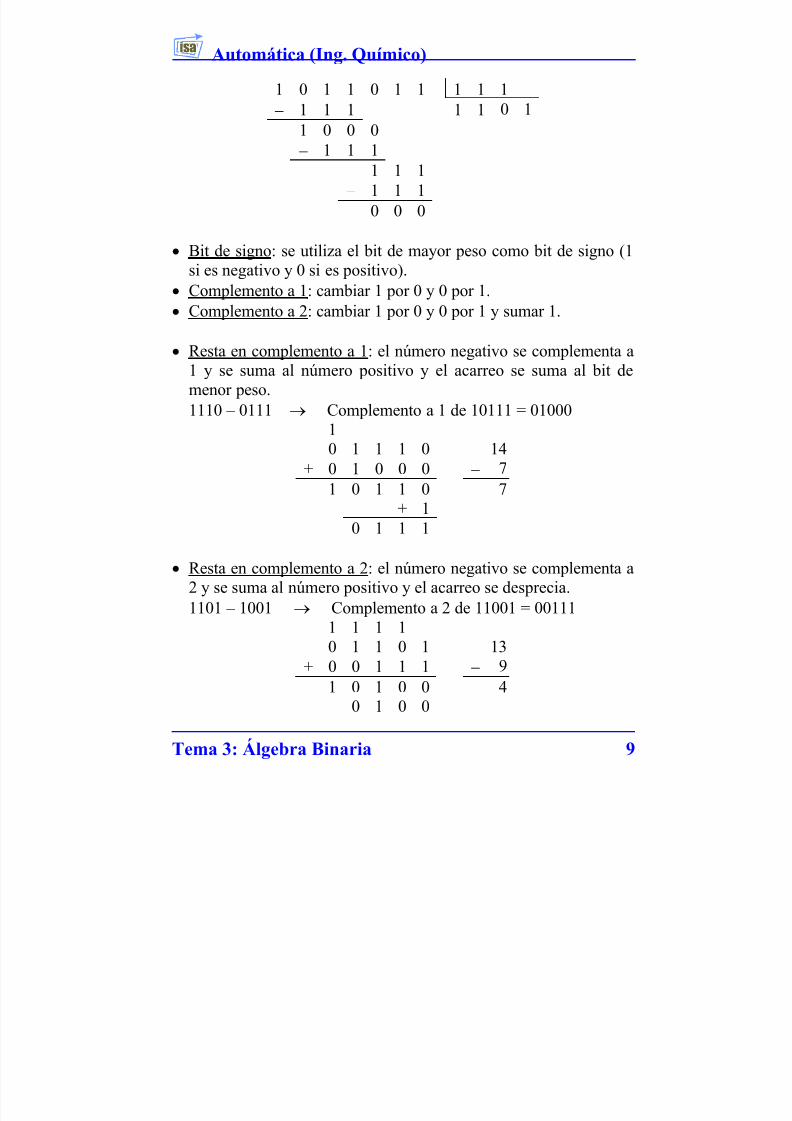
1 0 1 1 0 1 1 1 1 1
− 1 1 1 1 1 0 1
1 0 0 0− 1 1 1
1 1 1
− 1 1 1
0 0 0
• Bit de signo: se utiliza el bit de mayor peso como bit de signo (1
si es negativo y 0 si es positivo).• Complemento a 1: cambiar 1 por 0 y 0 por 1.
• Complemento a 2: cambiar 1 por 0 y 0 por 1 y sumar 1.
• Resta en complemento a 1: el número negativo se complementa a
1 y se suma al número positivo y el acarreo se suma al bit de
menor peso.
1110 – 0111 → Complemento a 1 de 10111 = 010001
0 1 1 1 0 14
+ 0 1 0 0 0 − 7
1 0 1 1 0 7
+ 1
0 1 1 1
• Resta en complemento a 2: el número negativo se complementa a2 y se suma al número positivo y el acarreo se desprecia.
1101 – 1001 → Complemento a 2 de 11001 = 00111
1 1 1 1
0 1 1 0 1 13
+ 0 0 1 1 1 − 9
1 0 1 0 0 40 1 0 0
Tema 3: Álgebra Binaria 9
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 30/133
Automática (Ing. Químico)
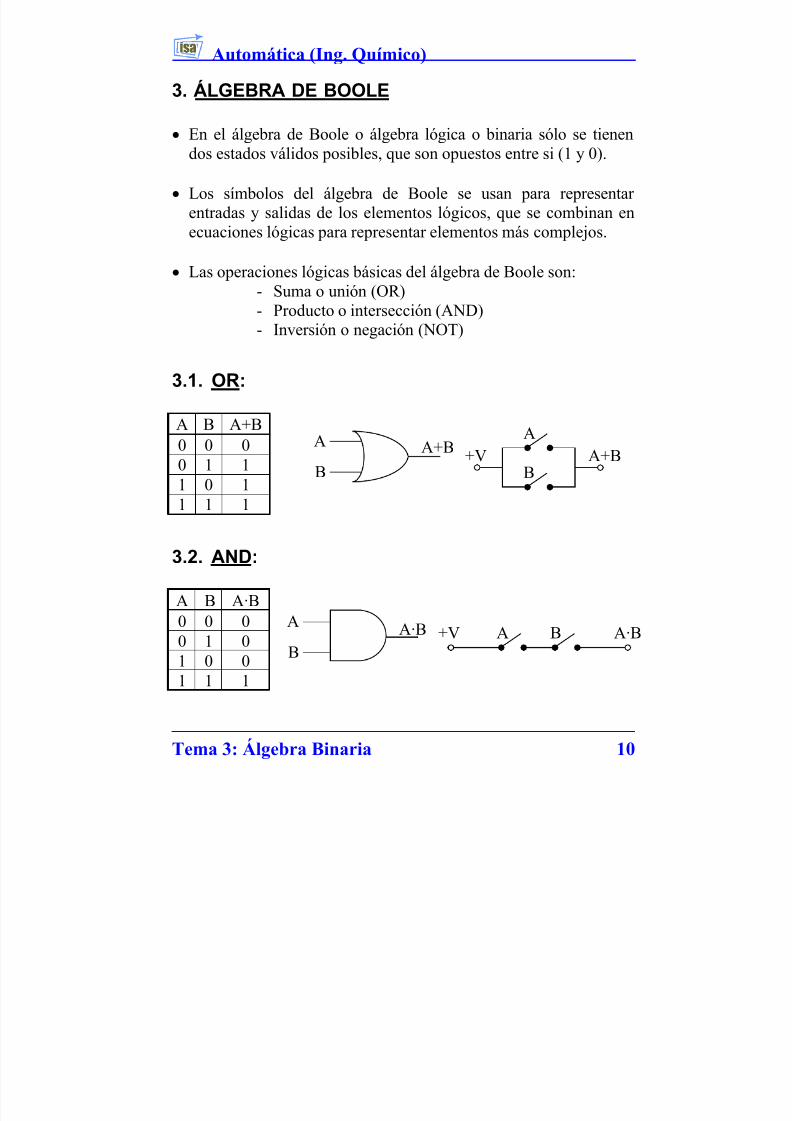
3. ÁLGEBRA DE BOOLE
• En el álgebra de Boole o álgebra lógica o binaria sólo se tienendos estados válidos posibles, que son opuestos entre si (1 y 0).
• Los símbolos del álgebra de Boole se usan para representar
entradas y salidas de los elementos lógicos, que se combinan enecuaciones lógicas para representar elementos más complejos.
• Las operaciones lógicas básicas del álgebra de Boole son:- Suma o unión (OR)
- Producto o intersección (AND)- Inversión o negación (NOT)
3.1. OR:
A B A+B
0 0 0
0 1 1
1 0 1
1 1 1
A
BA+B+V
B
AA+B
3.2. AND:
A B A·B
0 0 0
0 1 0
1 0 0
1 1 1
A·B+V BAA·B
B
A
Tema 3: Álgebra Binaria 10
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 31/133
Automática (Ing. Químico)
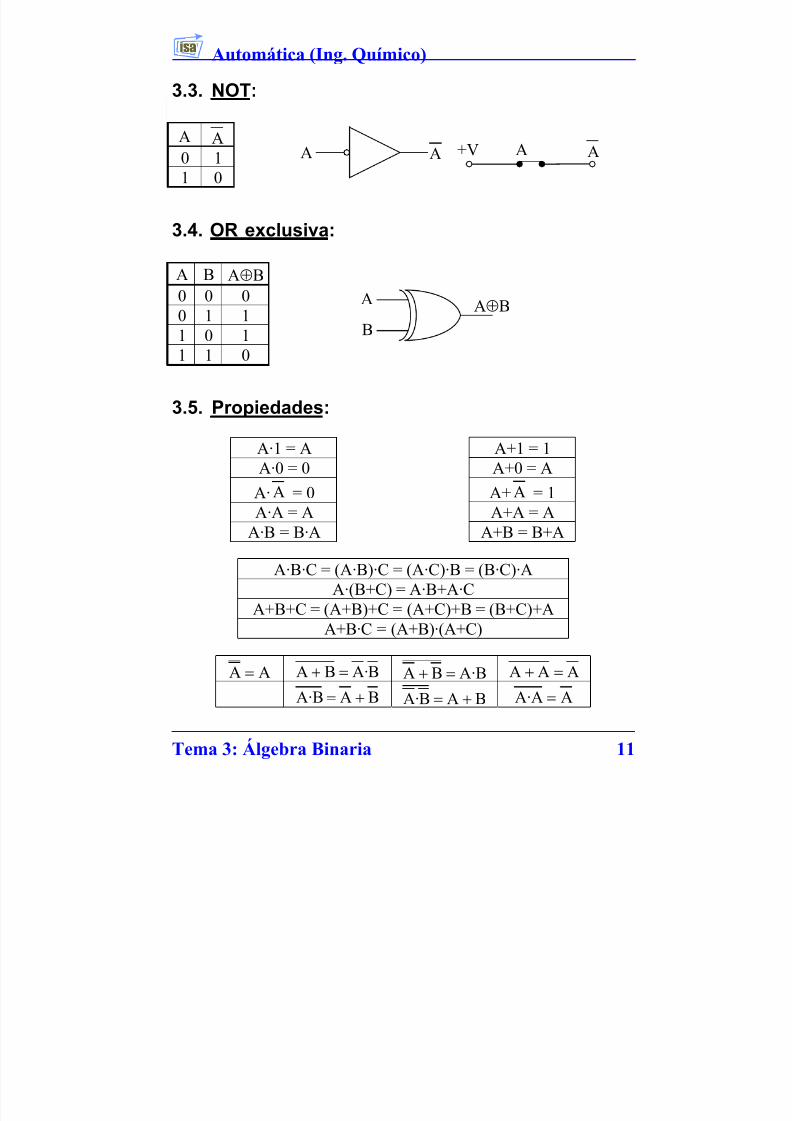
3.3. NOT:
A A 0 1
1 0
A A A+V A
3.4. OR exclusiva:
A B A⊕B0 0 0
0 1 1
1 0 1
1 1 0
A A⊕B
B
3.5. Propiedades:A·1 = A A+1 = 1
A·0 = 0 A+0 = A
A· A = 0 A+ A = 1
A·A = A A+A = A
A·B = B·A A+B = B+A
A·B·C = (A·B)·C = (A·C)·B = (B·C)·A
A·(B+C) = A·B+A·C
A+B+C = (A+B)+C = (A+C)+B = (B+C)+A
A+B·C = (A+B)·(A+C)
AA = B·ABA =+ A·BBA =+ AAA =+
BAA·B += BAB·A += AA·A =
Tema 3: Álgebra Binaria 11
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 32/133
Automática (Ing. Químico)
Tema 3: Álgebra Binaria 12
4. RESOLUCIÓN DE PROBLEMAS LÓGICOS
• Para resolver problemas basados en el álgebra de Boole esconveniente seguir un proceso metódico, que consta de las
siguientes fases:
1) Identificar entradas y salidas y sus posibles estados.
2) Formulación de la tabla de verdad.
3) Obtención de las ecuaciones lógicas.
4) Simplificación de las ecuaciones lógicas.5) Implementación del esquema lógico o eléctrico.
Las simplificaciones se basan en la siguiente identidad:
( ) A·BA·B·1CCA·B·CA·B·A·B·C ==+=+
5. PROBLEMAS
• Ejemplo 1: Simplificar la ecuación: C B AC B AC B AS ······ ++=
• Ejemplo 2: Simplificar:
DC A DC B A DC AC B AS ········· +++=
• Ejemplo 3: Diseñar un sistema que gobierne una máquina Mdesde 3 interruptores, A, B y C, de forma que se active M siempre
que A y B estén pulsados y también si A está pulsado y los otros
dos no.

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 33/133
Automática (Ing. Químico)
Tema 4:
Automatismos
1. Introducción a los Automatismos.
1.1. Concepto de automatismo.1.2. Estructura de un automatismo.1.3. Implementación de automatismos.1.4. Métodos de diseño y análisis de
automatismos.1.5. Opciones tecnológicas.
2. Sistemas de Eventos Discretos.
3. Modelado de Sistemas de Eventos Discretos.3.1. Diagrama de Transición de Estados.
4. Ejemplo.
Tema 4: Automatismos 1

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 34/133
Automática (Ing. Químico)
1. INTRODUCCIÓN A LOS AUTOMATISMOS
1.1. Concepto de Automatismo
• Los automatismos son dispositivos que permiten a las máquinas o
a las instalaciones funcionar de forma automática.
• Ventajas de automatizar:
- Simplificar considerablemente el trabajo del hombre, a quienlibera de la necesidad de estar permanentemente situado frente
a la máquina.
- Eliminar las tareas complejas, repetitivas, peligrosas, pesadas o
indeseadas, haciendo que las realice una máquina.
- Facilitar el cambio en los procesos de fabricación, tanto de
nivel de producción como de tipo de producción (flexibilidad).
- Mejorar la calidad de los productos al supervisar la propiamáquina los criterios de fabricación y las tolerancias que se
deben respetar.
- Incrementar la producción y la productividad.
- Ahorrar materiales y energía.
- Aumentar la seguridad de los operarios.
- Controlar y proteger las instalaciones y las máquinas.
• Los automatismos están presentes en todas las etapas de unaindustria (compras, fabricación, ventas, ...); y en todo tipo de
empresas incluidas las de servicios.
Tema 4: Automatismos 2
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 35/133
Automática (Ing. Químico)
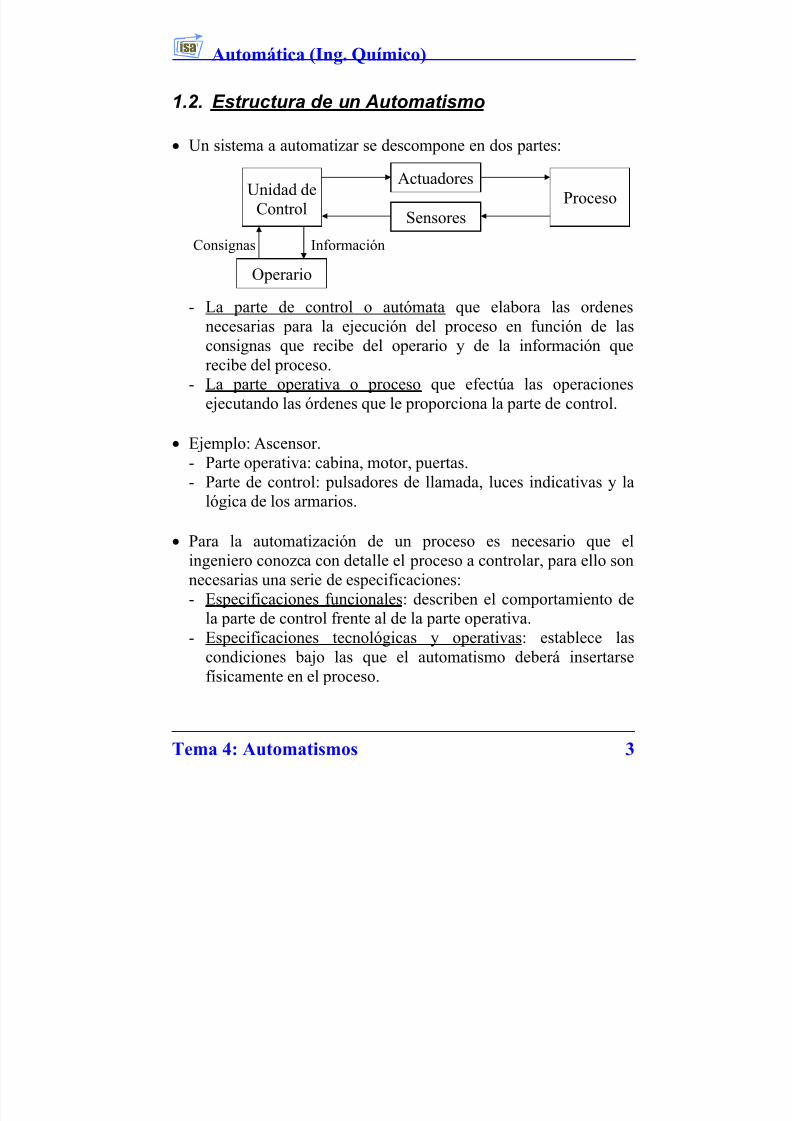
1.2. Estructura de un Automatismo
• Un sistema a automatizar se descompone en dos partes:
Operario
InformaciónConsignas
Actuadores
Sensores
Unidad de
ControlProceso
- La parte de control o autómata que elabora las ordenes
necesarias para la ejecución del proceso en función de las
consignas que recibe del operario y de la información que
recibe del proceso.
- La parte operativa o proceso que efectúa las operacionesejecutando las órdenes que le proporciona la parte de control.
• Ejemplo: Ascensor.
- Parte operativa: cabina, motor, puertas.
- Parte de control: pulsadores de llamada, luces indicativas y la
lógica de los armarios.
• Para la automatización de un proceso es necesario que el
ingeniero conozca con detalle el proceso a controlar, para ello son
necesarias una serie de especificaciones:
- Especificaciones funcionales: describen el comportamiento dela parte de control frente al de la parte operativa.
- Especificaciones tecnológicas y operativas: establece las
condiciones bajo las que el automatismo deberá insertarse
físicamente en el proceso.
Tema 4: Automatismos 3

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 36/133
Automática (Ing. Químico)
• Especificaciones funcionales:
Lo que el automatismo debe hacer frente a las diferentes
situaciones que pueden presentarse. Cuál será el papel de la parte de control a construir.
Las condiciones de seguridad de funcionamiento previstas.
• Especificaciones tecnológicas:
Tipos de sensores y actuadores empleados.
Condiciones ambientales de funcionamiento (temperatura,
humedad, polvo).
Riesgos de explosiones.
Tensiones de alimentación, ...
Radiaciones electromagnéticas.
• Especificaciones operativas:
Fiabilidad.
Ausencia de fallos.
Disponibilidad.
Flexibilidad de modificación de la parte operativa.
Facilidad de mantenimiento (cambios de componentes).
Comunicación con el operario.
Tema 4: Automatismos 4

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 37/133
Automática (Ing. Químico)
1.3. Implementación de un Automatismo
• La implementación de todo sistema automatizado requiere la
realización de una serie de etapas sucesivas e interrelacionadas.
1. Estudio previo de viabilidad.
1.1. Establecimiento de especificaciones.1.1.1. Especificaciones funcionales.
1.1.2. Especificaciones tecnológicas.
1.1.3. Especificaciones operativas.1.2. Análisis técnico económico.
1.2.1. Estudio de las opciones tecnológicas.
1.2.2. Estudio económico.
1.2.3. Toma de decisión.
2. Estudio y preparación.
Diseño del automatismo.
3. Fabricación y pruebas.
3.1. Montaje o carga del programa.
3.2. Cableado.
3.3. Pruebas.
4. Explotación.
4.1. Puesta en servicio.
4.2. Explotación.4.3. Mantenimiento.
4.4. Reparación.
Tema 4: Automatismos 5
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 38/133
Automática (Ing. Químico)
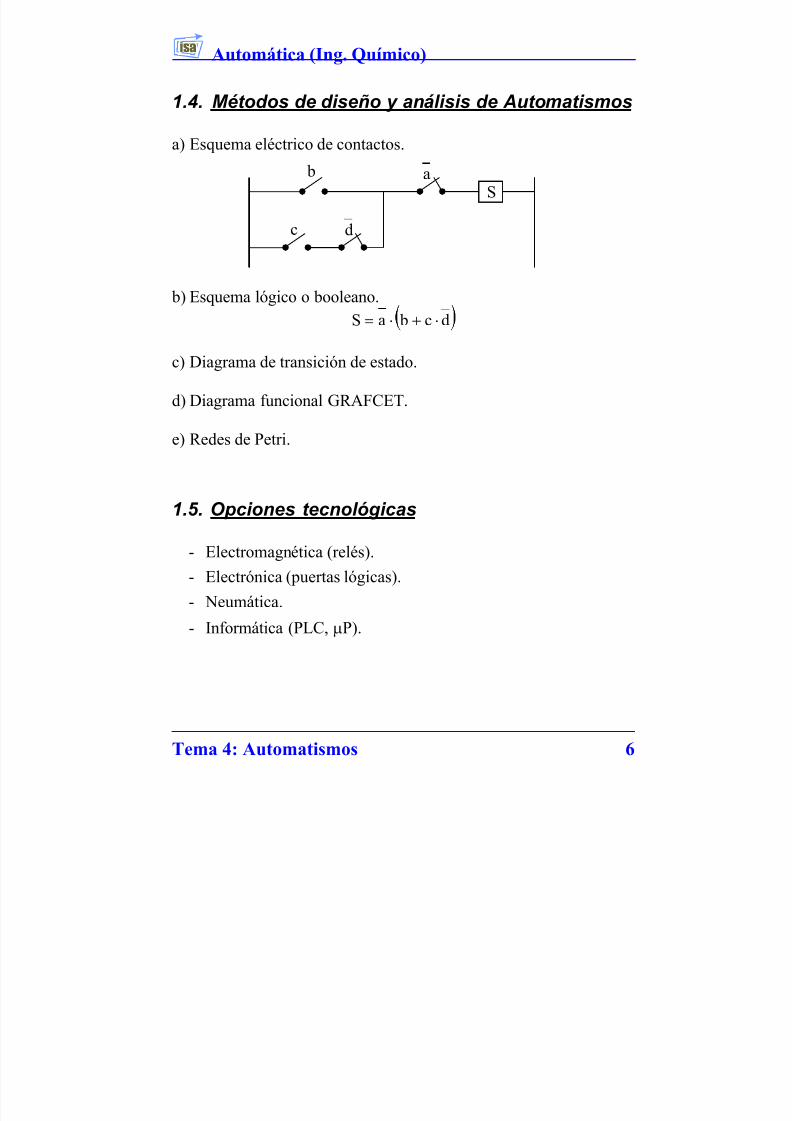
1.4. Métodos de diseño y análisis de Automatismos
a) Esquema eléctrico de contactos.
b
d
a
c
S
b) Esquema lógico o booleano.
dc baS ⋅+⋅=
c) Diagrama de transición de estado.
d) Diagrama funcional GRAFCET.
e) Redes de Petri.
1.5. Opciones tecnológicas
- Electromagnética (relés).- Electrónica (puertas lógicas).
- Neumática.
- Informática (PLC, µP).
Tema 4: Automatismos 6

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 39/133
Automática (Ing. Químico)
2. SISTEMAS DE EVENTOS DISCRETOS
• Los automatismos se conocen también con el nombre de sistemas
de eventos o estados discretos.
• Variables de estado: son las variables cuyos valores definen elestado del sistema.
• Variables de estado discretas: son variables de estado del
sistema que sólo pueden adoptar un conjunto limitado de valores.
Algunos ejemplos son:
- Variables binarias: {0, 1}- Variables lógicas: {On, Off}, {Activado, Desactivado}
- Piso donde se encuentra un ascensor: {1, 2, 3, 4, 5}
- Semáforo: {Rojo, Ambar, Verde}
- Bus de datos: {Libre, Ocupado}
• Evento: es un cambio en el estado del sistema. Ejemplos:- Pulsar un botón de llamada en un ascensor.
- Pulsar el botón de arranque de un motor.
- Cumplimiento de una temporización en un semáforo.
- Llegada de una pieza a una máquina.
- Activación de una alarma.
• Modelo de Eventos Discretos o de Estados Discretos: cuando
las variables de estado son discretas y las transiciones entre
estados están motivadas por la ocurrencia de eventos.
- Control de acceso a un recurso (una máquina-herramienta, unacinta transportadora, un bus de datos, ...).
- Procesos industriales complejos.
Tema 4: Automatismos 7
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 40/133
Automática (Ing. Químico)
• La ocurrencia de eventos puede darse en cualquier instante detiempo. Lo que se discretiza es la magnitud, no el tiempo.
• Sistema de Eventos Discreto Síncrono: los eventos sólo puedenocurrir en determinados instantes de tiempo, marcados
generalmente por los tics de un reloj. En realidad pueden ocurrir
en cualquier instante de tiempo, pero el modelo sólo los computa
cuando se cumple el ciclo.
• Sistema de Eventos Discretos Dinámico: el comportamiento del
sistema varía con el tiempo.
• Sistema de Eventos Discretos no determinista: el mecanismo
de transiciones puede ser alterado. Habrá selección de transición
por el propio sistema mediante algún mecanismo de cambio o
bien por alguien ajeno al sistema. El comportamiento del sistema
no es predecible, dependerá de la ocurrencia de unos u otros
eventos.
• Las ecuaciones en diferencia no son válidas para modelar este
tipo de sistemas regidos por eventos.
Tema 4: Automatismos 8
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 41/133
Automática (Ing. Químico)
3. MODELADO DE ST. DE EVENTOS DISCRETOS
3.1. Diagrama de Transición de Estados
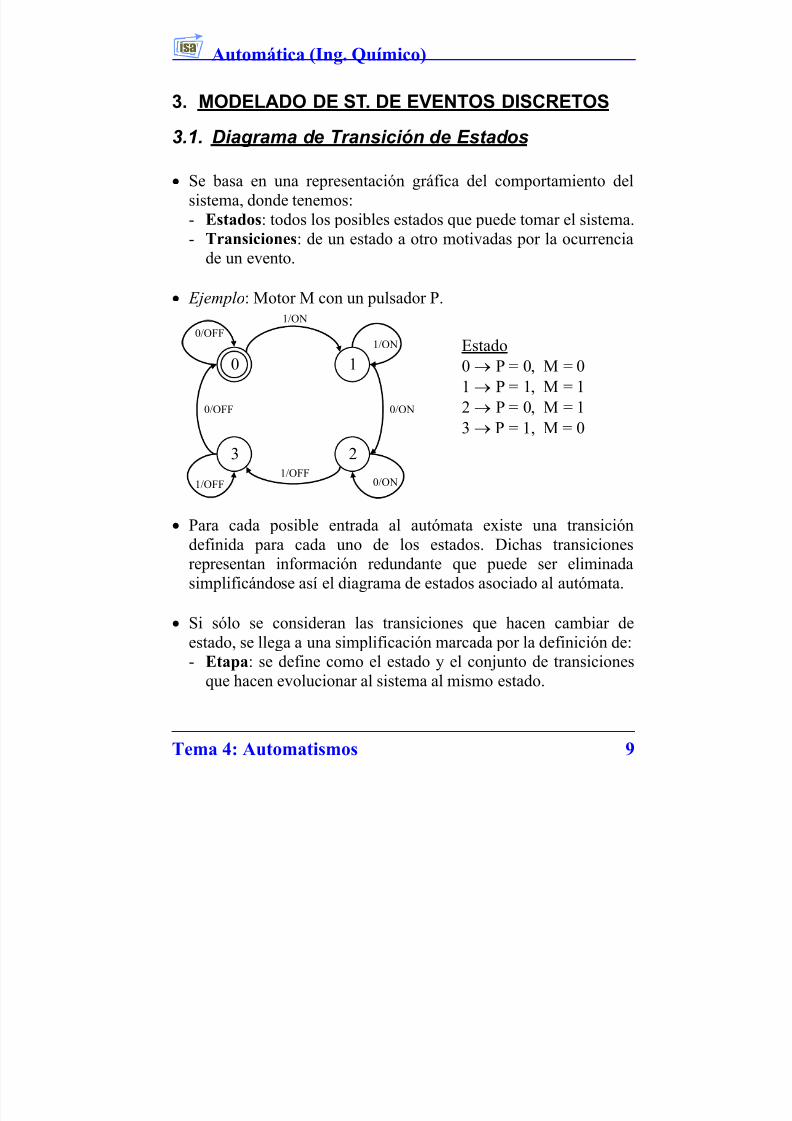
• Se basa en una representación gráfica del comportamiento del
sistema, donde tenemos:
- Estados: todos los posibles estados que puede tomar el sistema.
- Transiciones: de un estado a otro motivadas por la ocurrenciade un evento.
• Ejemplo: Motor M con un pulsador P.
1
0/OFF
0/OFF
1/OFF1/OFF
0/ON
0/ON
1/ON
1/ON
3 2
0 Estado
0 → P = 0, M = 0
1 → P = 1, M = 1
2 → P = 0, M = 13 → P = 1, M = 0
• Para cada posible entrada al autómata existe una transición
definida para cada uno de los estados. Dichas transicionesrepresentan información redundante que puede ser eliminadasimplificándose así el diagrama de estados asociado al autómata.
• Si sólo se consideran las transiciones que hacen cambiar de
estado, se llega a una simplificación marcada por la definición de:
- Etapa: se define como el estado y el conjunto de transicionesque hacen evolucionar al sistema al mismo estado.
Tema 4: Automatismos 9

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 42/133
Automática (Ing. Químico)
Tema 4: Automatismos 10
+=
+=
+=
+=
+=
++=
)(
)(
··
··
··
2··
21
30
3023
2312
1201
0130
ON E E M
OFF E E M
E E P E E
E E P E E
E E P E E
SM E E P E E
- Receptividad: se define como las condiciones que hacen salir al sistema de un estado.
• Así se dice que un sistema es receptivo a una determinada
combinación de los valores de las variables de entrada, si hace
evolucionar el estado del mismo.
• Para la implementación hay que tener en cuenta que tendremos
variables de:
- Entrada.
- Salida.
- Estado (memorias).
• Para representan la evolución del sistema se utilizan las
ecuaciones lógicas de activación/desactivación de cada etapa, y
las ecuaciones lógicas de activación de las operaciones de mando.
ióndesactivacdecondiciónlaesR
activacióndecondiciónlaesS:donde·
+= X RS X
- Condición de activación de una etapa: que este activada la
etapa precedente y que se cumplan su receptividad.
- Condición de desactivación de una etapa: que se active la etapa
posterior.
- Condición de activación de una salida: que esté activada alguna
de las etapas donde esa salida se active.
P=1
OFF ON
0 1
P=0 P=0
3 2
P=1OFF ON
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 43/133
Automática (Ing. Químico)
• Estas ecuaciones se pueden implementar mediante:
- Circuitos de puertas lógicas (AND, OR).- Diagramas de contactos (relés).
- Lenguajes específicos de programación de autómatas.
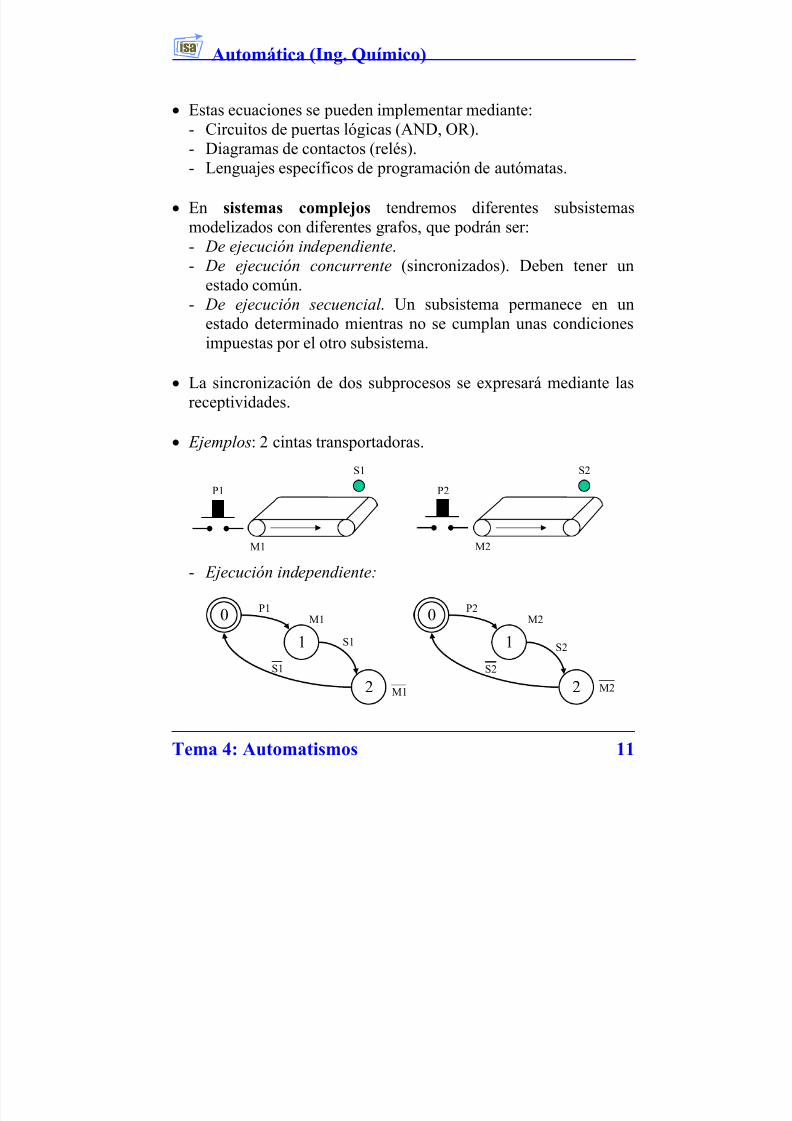
• En sistemas complejos tendremos diferentes subsistemasmodelizados con diferentes grafos, que podrán ser:
- De ejecución independiente.
- De ejecución concurrente (sincronizados). Deben tener un
estado común.
- De ejecución secuencial . Un subsistema permanece en unestado determinado mientras no se cumplan unas condiciones
impuestas por el otro subsistema.
• La sincronización de dos subprocesos se expresará mediante las
receptividades.
• Ejemplos: 2 cintas transportadoras.
S2S1
P2P1
M2M1
- Ejecución independiente:
1
0
2
S1
M1
M1
S1
P1
1
0
2 M2
S2
S2
M2P2
Tema 4: Automatismos 11
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 44/133
Automática (Ing. Químico)
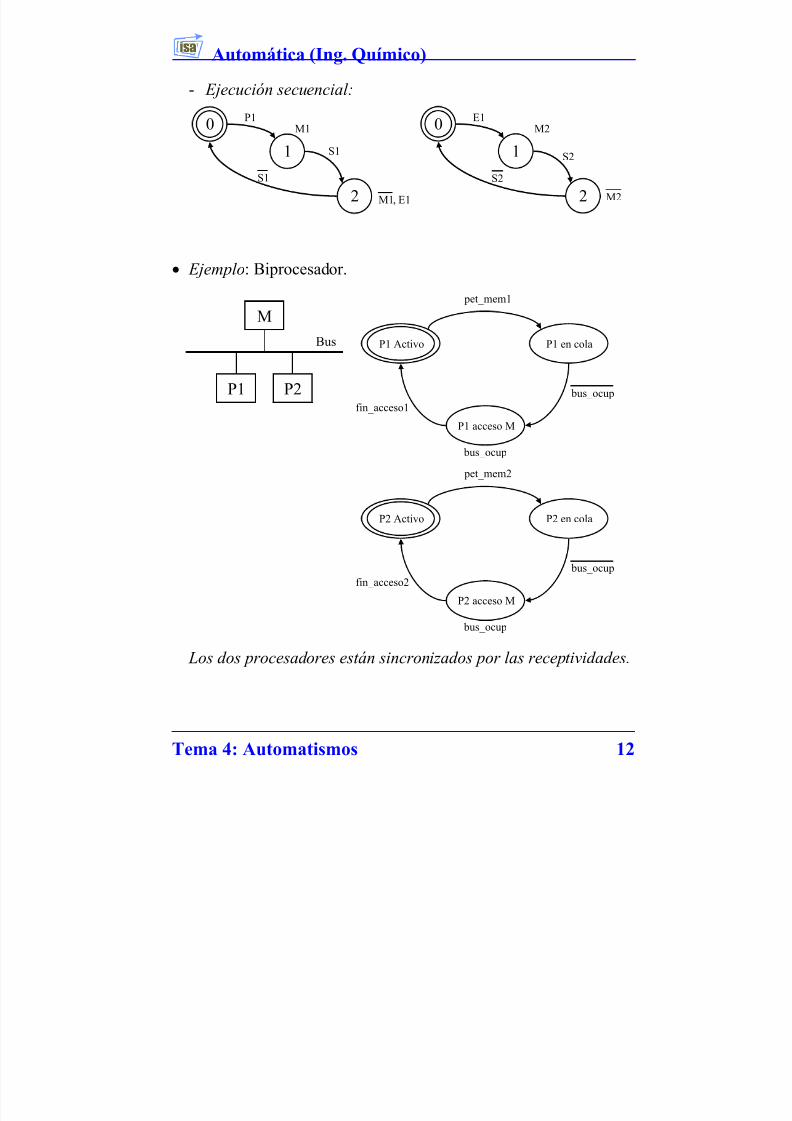
- Ejecución secuencial:
1
S1
E1,M1 M2
S2
S2
M2E1
2
0
1
M1
S1
P1
2
0
• Ejemplo: Biprocesador.
M
P1 P2 bus_ocup
bus_ocup
fin_acceso2
bus_ocup
pet_mem2
P2 acceso M
P2 en colaP2 Activo
fin_acceso1
bus_ocup
P1 acceso M
P1 en colaP1 ActivoBus
pet_mem1
Los dos procesadores están sincronizados por las receptividades.
Tema 4: Automatismos 12
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 45/133
Automática (Ing. Químico)
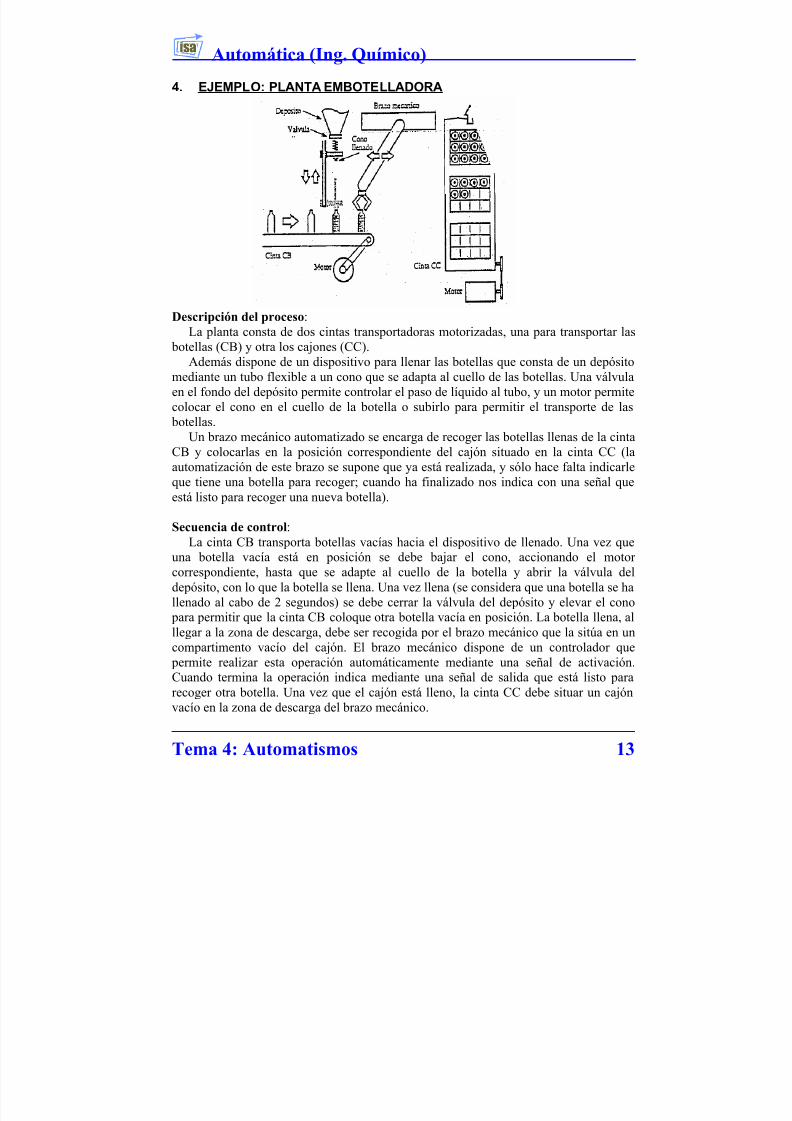
4. EJEMPLO: PLANTA EMBOTELLADORA
Descripción del proceso:
La planta consta de dos cintas transportadoras motorizadas, una para transportar las
botellas (CB) y otra los cajones (CC).
Además dispone de un dispositivo para llenar las botellas que consta de un depósito
mediante un tubo flexible a un cono que se adapta al cuello de las botellas. Una válvula
en el fondo del depósito permite controlar el paso de líquido al tubo, y un motor permite
colocar el cono en el cuello de la botella o subirlo para permitir el transporte de las
botellas.
Un brazo mecánico automatizado se encarga de recoger las botellas llenas de la cinta
CB y colocarlas en la posición correspondiente del cajón situado en la cinta CC (la
automatización de este brazo se supone que ya está realizada, y sólo hace falta indicarle
que tiene una botella para recoger; cuando ha finalizado nos indica con una señal que
está listo para recoger una nueva botella).
Secuencia de control:
La cinta CB transporta botellas vacías hacia el dispositivo de llenado. Una vez que
una botella vacía está en posición se debe bajar el cono, accionando el motor correspondiente, hasta que se adapte al cuello de la botella y abrir la válvula del
depósito, con lo que la botella se llena. Una vez llena (se considera que una botella se ha
llenado al cabo de 2 segundos) se debe cerrar la válvula del depósito y elevar el cono
para permitir que la cinta CB coloque otra botella vacía en posición. La botella llena, al
llegar a la zona de descarga, debe ser recogida por el brazo mecánico que la sitúa en un
compartimento vacío del cajón. El brazo mecánico dispone de un controlador que
permite realizar esta operación automáticamente mediante una señal de activación.
Cuando termina la operación indica mediante una señal de salida que está listo para
recoger otra botella. Una vez que el cajón está lleno, la cinta CC debe situar un cajónvacío en la zona de descarga del brazo mecánico.
Tema 4: Automatismos 13
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 46/133
Automática (Ing. Químico)
Solución:
División en subprocesos:1. Transporte de botellas, compuesto por la cinta CB y su motor.2. Llenado de botellas, compuesto por el depósito, la válvula de
salida, el cono que se adapta a la botella y el motor deposicionamiento del mismo.
3. Llenado de cajones, compuesto por el brazo mecánico.4. Transporte de cajones, compuesto por la cinta CC y su motor.
Interacción entre los subprocesos:- El subproceso de transporte de botellas opera de forma secuencial
con los de llenado de botellas y llenado de cajones.- La ejecución de los dos procesos de llenado de botellas y de
cajones es concurrente.- Los subprocesos de llenado de botellas y cajones están a la
espera de que el subproceso de transporte de botellas las sitúe en
las zonas requeridas. Cuando la botella está en posición, la cintase detiene y pueden comenzar los procesos de llenado. Cuandoterminan, la cinta de transporte de botellas continúa su marcha.
- El funcionamiento del subproceso de transporte de cajones essecuencial con el de llenado de cajones e independiente de losdemás.
Variables de entrada al proceso:
- MOTOR_CB: señal de activación del motor de la cinta CB.- MOTOR_CC: señal de activación del motor de la cinta CC.- ABRIR: señal de apertura de la válvula del depósito.- SUBIR_CONO: señal para subir el cono de llenado.- BAJAR_CONO: señal para bajar el cono de llenado.- ACTIVAR_BRAZO: orden al brazo para recoger la botella.
Tema 4: Automatismos 14

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 47/133
Automática (Ing. Químico)
Tema 4: Automatismos 15
Variables de salida del proceso:- cono_arriba: sensor para detectar que el cono está en la posición
superior.
- cono_abajo: sensor para detectar que el cono está en la posicióninferior.
- fin_brazo: señal que activa el proceso de llenado de cajones paraindicar que ha colocado la botella en el cajón.
- llenar: señal que activa el proceso de transporte de botellascuando ha situado la botella en la posición de llenado.
Temporizadores:
- T1: para medir el tiempo de llenado de la botella (2 sg).- T2: para medir el tiempo de arrastre de la cinta de botellas, para
situar la siguiente botella en posición.- T3: para medir el tiempo de arrastre de la cinta de cajones, para
situar el siguiente cajón en posición.Estos temporizadores permiten realizar un control en bucle abierto
de los distintos subprocesos sin información de sí se realizancorrectamente. Pero los podemos sustituir por sensores que detecten
la botella llena, la botella bajo el depósito y el cajón en la posición dellenado respectivamente; con lo que tendríamos un control en buclecerrado de estos subprocesos que garantizarían el funcionamientoante perturbaciones como: desigualdad de distancia entre las botellasy entre los cajones, obturación del cono de llenado.
Contador :Se necesita un contador en el proceso de llenado de cajones, que
cuente el número de botellas depositas en el cajón para determinar cuando está lleno (12 botellas) y poder colocar otro cajón vacío.
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 48/133
Automática (Ing. Químico)
Tema 5:
AutomatismosCombinacionales ySecuenciales
1. Introducción.
2. Automatismos combinacionales.
3. Automatismos secuenciales.3.1. Diagrama de etapa/transición.
Tema 5: Automatismos Combinacionales/Secuenciales 1
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 49/133
Automática (Ing. Químico)
1. INTRODUCCIÓN
• Los automatismos pueden ser de dos tipos:
- Automatismos combinacionales.
- Automatismos secuenciales.
• En los automatismos combinacionales las salidas en un instante
de tiempo determinado sólo dependen de las entradas (variables
de medida) en ese mismo instante (ecuaciones lógicas estáticas).
• En los automatismos secuenciales las salidas en un instante de
tiempo determinado dependen de las entradas y de variablesinternas que recogen el estado del proceso en ese instante
(ecuaciones dinámicas).
Tema 5: Automatismos Combinacionales/Secuenciales 2
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 50/133
Automática (Ing. Químico)
2. AUTOMATISMOS COMBINACIONALES
• Las variables de salida sólo dependen de las entradas (variables
de medida) en el instante actual.
• Su descripción se realiza mediante tablas de verdad, dondeaparecen todas las posibles combinaciones de las entradas y el
valor correspondiente de las salidas en cada caso.
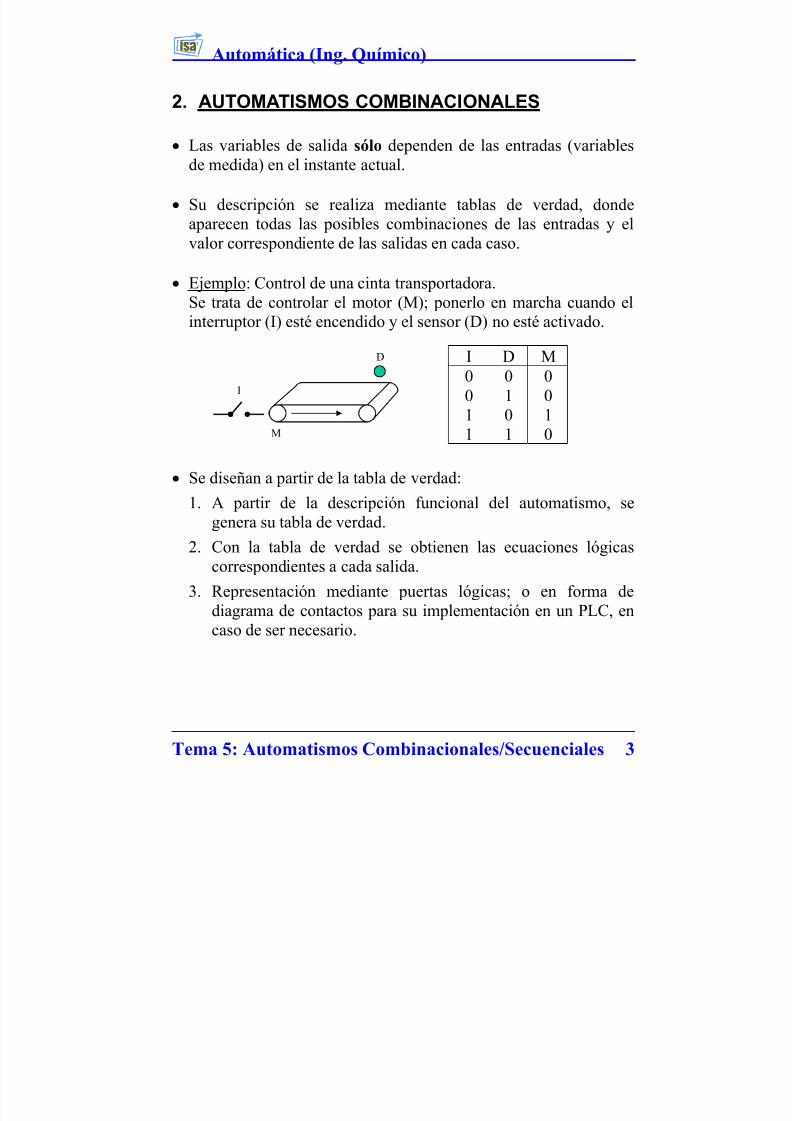
• Ejemplo: Control de una cinta transportadora.
Se trata de controlar el motor (M); ponerlo en marcha cuando el
interruptor (I) esté encendido y el sensor (D) no esté activado.
I D M
0 0 0
0 1 0
1 0 11 1 0
I
M
D
• Se diseñan a partir de la tabla de verdad:
1. A partir de la descripción funcional del automatismo, se
genera su tabla de verdad.
2.
Con la tabla de verdad se obtienen las ecuaciones lógicascorrespondientes a cada salida.
3. Representación mediante puertas lógicas; o en forma de
diagrama de contactos para su implementación en un PLC, en
caso de ser necesario.
Tema 5: Automatismos Combinacionales/Secuenciales 3

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 51/133
Automática (Ing. Químico)
• Ejemplo 1: Clasificador de piezas
ProcesoAutomatismo¿?
S1
S2
AB
C
Der (Tipo 3)
D3 Izq (Tipos 1 y 2)
D2 D1
Generar 3 variables T 1, T 2 y T 3 activas cuando el tipo de pieza es:
- Tipo 1: sensor D1 activo.
- Tipo 2: Sensores D1 y D2 activos.
- Tipo 3: sensores D1, D2 y D3 activos.La variable M indica si el motor está en marcha (M=1).
Generar una señal de error que se active cuando estando el motor parado no se active ni T 1 ni T 2 ni T 3.
Para T 1 y T 2 activas, accionar ' Izq'.
Para T 3 activa accionar ' Der '.
Tema 5: Automatismos Combinacionales/Secuenciales 4
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 52/133
Automática (Ing. Químico)
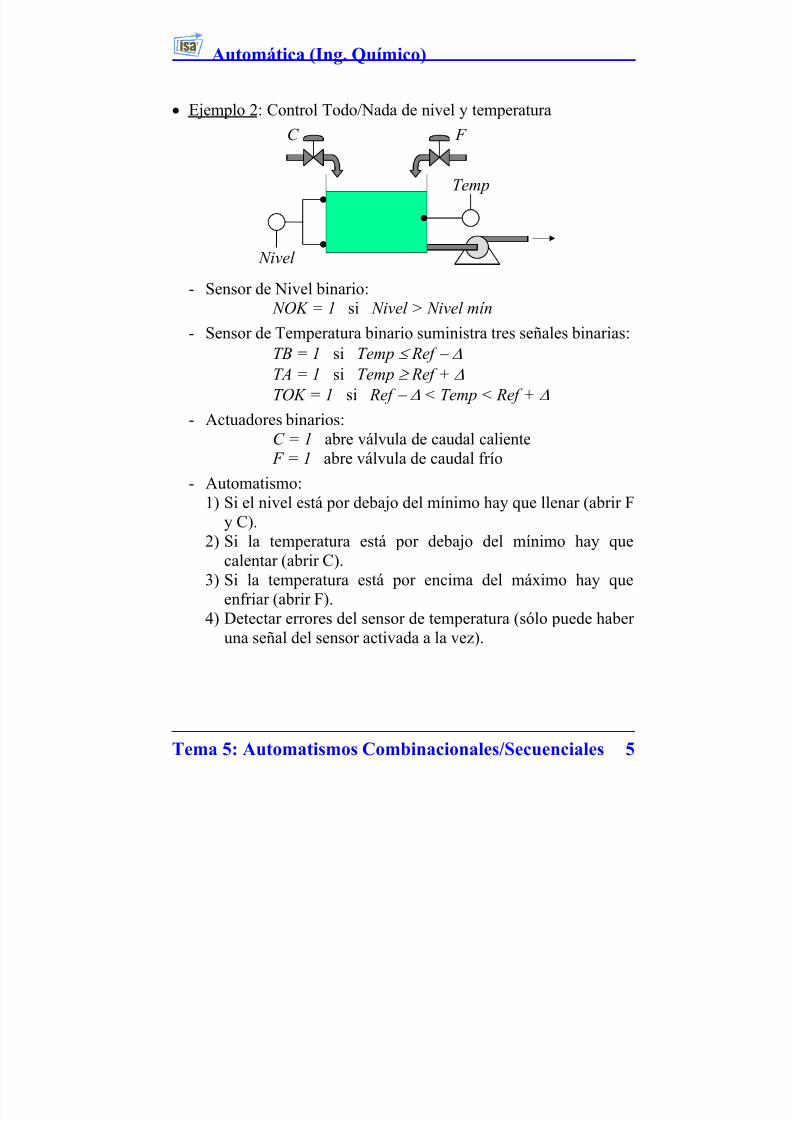
• Ejemplo 2: Control Todo/Nada de nivel y temperatura
Nivel
Temp
F C
- Sensor de Nivel binario:
NOK = 1 si Nivel > Nivel mín
- Sensor de Temperatura binario suministra tres señales binarias:
TB = 1 si Temp ≤ Ref − ∆
TA = 1 si Temp ≥ Ref + ∆
TOK = 1 si Ref − ∆ < Temp < Ref + ∆
- Actuadores binarios:C = 1 abre válvula de caudal caliente
F = 1 abre válvula de caudal frío
- Automatismo:
1) Si el nivel está por debajo del mínimo hay que llenar (abrir F
y C).
2) Si la temperatura está por debajo del mínimo hay que
calentar (abrir C).
3) Si la temperatura está por encima del máximo hay queenfriar (abrir F).
4) Detectar errores del sensor de temperatura (sólo puede haber
una señal del sensor activada a la vez).
Tema 5: Automatismos Combinacionales/Secuenciales 5

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 53/133
Automática (Ing. Químico)
3. AUTOMATISMOS SECUENCIALES
• Las salidas (Y) dependen de las variables medidas (U) y de las
variables internas (E) que recogen el estado del proceso en ese
instante.
• Es necesaria la incorporación de unas variables (binarias) para
almacenar el estado. Estas variables hacen la función de
memoria, representan lo que ha ocurrido hasta ese instante.
• El automatismo estará formado por un conjunto de ecuaciones
lógicas que debe incluir unas funciones lógicas para obtener lassalidas, y también otras funciones lógicas para actualizar el
estado.
- Ecuaciones de estado: ( ) ( ) ( )( )t U t E f t E ,1 =+
-
Ecuaciones de salida:( ) ( ) ( )( )t U t E g t Y ,=
• Ejemplo: Máquina pulidora
D I
f=1
f=0
f 1 f 2
La herramienta debe ir de f 1 a f 2 y viceversa indefinidamente
(hasta que se apague la máquina).
Para controlar este movimiento se dispone de las medidas de los
finales de carrera f 1
y f 2, y se actúa sobre D e I .
Tema 5: Automatismos Combinacionales/Secuenciales 6

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 54/133
Automática (Ing. Químico)
f 1 f 2 I D
0 0 ¿? ¿?
0 1 1 01 0 0 1
1 1 ! !
No se puede obtener I y D
únicamente con los valores
de los sensores
Esta combinación no
es posible
No se puede resolver como un automatismo combinacional, es
necesaria la inclusión de variables de estado.
• Resolución como automatismo secuencial:
Se define un estado que almacena la dirección en la que se mueve
la máquina:
E = 1 ⇒ Hacia la izquierda.
E = 0 ⇒ Hacia la derecha.
Es necesario obtener la ecuación de estado y las ecuaciones de
salida. Por ejemplo planteando las tablas de verdad.
E actual f 1 f 2 E futuro I D
0 0 0 0 0 10 0 1 1 1 0
0 1 0 ! ! !
0 1 1 ! ! !
1 0 0 1 1 01 0 1 ! ! !
1 1 0 0 0 1
1 1 1 ! ! !
Estas combinaciones se
suponen no posibles.
Tema 5: Automatismos Combinacionales/Secuenciales 7

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 55/133
Automática (Ing. Químico)
Tema 5: Automatismos Combinacionales/Secuenciales 8
3.1. Diagrama de etapa/transición
• Una forma bastante intuitiva de representar la secuencia de
operaciones que debería seguir el proceso se obtiene de la
representación gráfica etapa/transición (GRAFCET).
• A partir de esta representación se puede obtener el conjunto de
ecuaciones lógicas que forman el automatismo secuencial.
• La evolución del proceso se representa mediante una serie de
etapas o estados del sistema.
• Las condiciones de evolución de una etapa a otra esta indicada
por las transiciones.
• Una etapa puede tener una serie de acciones asociadas a ella, que
se ejecutarán cuando el sistema alcance dicha etapa.
• Ejemplo: Máquina pulidora
D I
Ir a la
derecha
Ir a la
izquierda
Tr1 = f 1
Tr0 = f 2
E0
E1
f=1
f=0
f 1 f 2

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 56/133
Automática (Ing. Químico)
Tema 6:
Diseño de Automatismosmediante el GRAFCET
1. Introducción.
2. Definición de elementos gráficos.2.1. Etapa.2.2. Acción asociada.2.3. Transición y Receptividad.2.4. Arco.2.5. Trazos paralelos.
3. Condiciones evolutivas.3.1. Implementación del GRAFCET en un PLC.
4. Estructuras en el GRAFCET.
4.1. Estructuras básicas.4.2. Estructuras lógicas.4.3. Saltos condicionales.4.4. Macroetapas.
5. Ciclos de ejecución.
6. Ejemplo.
Tema 6: Diseño de automatismos mediante Grafcet 1
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 57/133
Automática (Ing. Químico)
1. INTRODUCCIÓN
• El GRAFCET es un método de análisis y diseño de
automatismos.
• En los automatismos intervienen un elevado número de variablesde entrada, lo que hace que sea un problema intratable para el
diseño clásico con puertas lógicas.
• En la implementación de dispositivos basados en Lógica
Programada no resulta ya rentable buscar una ley de mando con
un número mínimo de “puertas lógicas”. El coste de dicha búsqueda excede al de la memoria disponible en el dispositivo
programable, ya que esta experimenta abaratamientos constantes
debido al alto nivel de integración alcanzados con los avances
tecnológicos en la microelectrónica.
• El GRAFCET no busca la minimización de las funciones lógicasque representan la dinámica del sistema, bien al contrario su
potencia radica precisamente en que impone una metodología
rigurosa y jerarquizada de solución de problemas, evitando así las
incoherencias, los bloqueos o los conflictos durante el
funcionamiento del automatismo.
• Las principales características del GRAFCET son:
- Claridad, legibilidad y presentación sintética.
- Ofrece una metodología de programación estructurada, “top-
down” (de forma descendente) que permite el desarrolloconceptual de lo general a lo particular.
- Introduce un concepto de “tarea” de forma jerarquizada.
Tema 6: Diseño de automatismos mediante Grafcet 2
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 58/133
Automática (Ing. Químico)
2. DEFINICIÓN DE ELEMENTOS GRÁFICOS
• Se definen los siguientes elementos gráficos en el GRAFCET:
- Etapa.
- Acción asociada.
- Transición y Receptividad.- Arco.
- Trazos paralelos.
2.1. Etapa
• Se define como la situación del sistema que representa un estado
invariante con respecto a las entradas y salidas del sistema
automatizado.
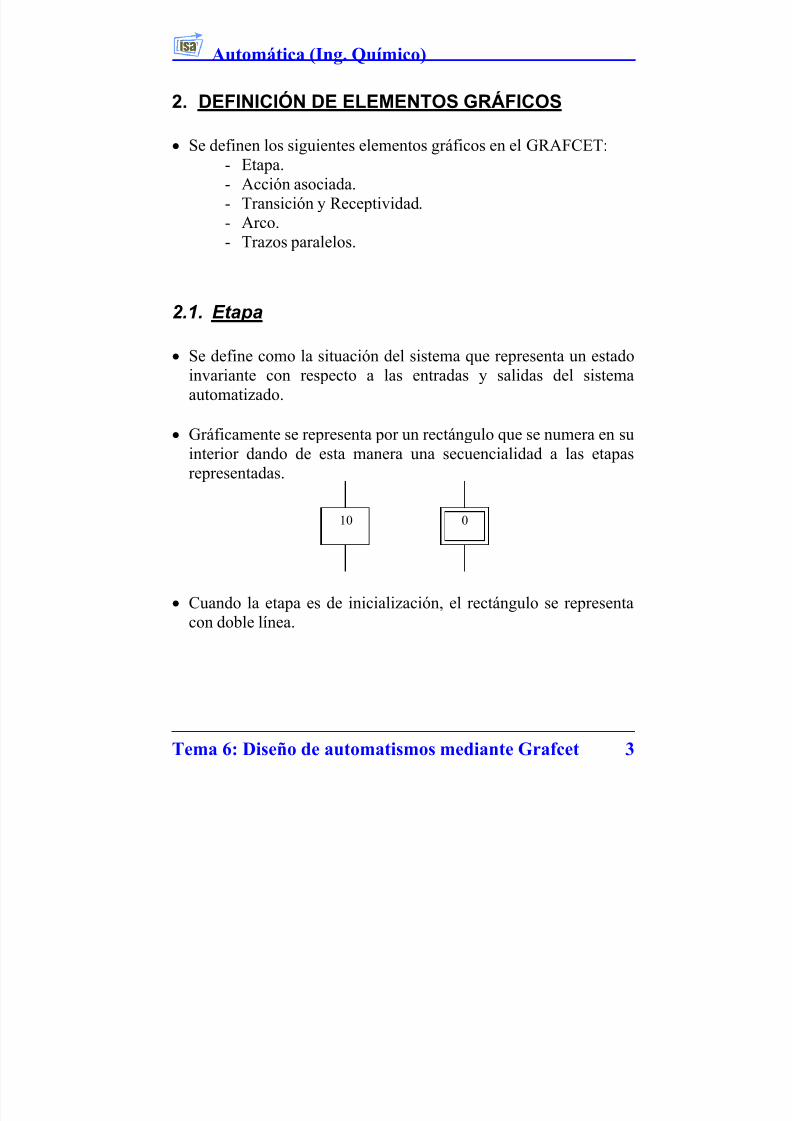
• Gráficamente se representa por un rectángulo que se numera en su
interior dando de esta manera una secuencialidad a las etapas
representadas.
10 0
• Cuando la etapa es de inicialización, el rectángulo se representacon doble línea.
Tema 6: Diseño de automatismos mediante Grafcet 3

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 59/133
Automática (Ing. Químico)
2.2. Acción asociada
• La acción o acciones elementales a realizar durante una etapa,
vienen indicadas mediante etiquetas.
• Se representan mediante rectángulos conectados a las etapascorrespondientes y situados a la derecha de las mismas.
Abrir válvula10
•
• Se dice que la etapa está activa, cuando se ejecutan sobre el
proceso las tareas elementales programadas.
• Las acciones asociadas se pueden clasificar como:
- Reales: acciones concretas que se producen en el automatismo:
- Internas: acciones que se producen en el interior del
dispositivo de control, tales como temporizaciones, contéos.- Externas: acciones que se producen sobre el proceso en si,
tales como abrir/cerrar una válvula, arrancar/parar un motor.
- Virtuales: no se realiza ninguna acción sobre el sistema, suelenutilizarse como situaciones de espera a que se produzcan
determinados eventos (activación de determinadas señales) que
permitan la evolución del proceso. En estas etapas la etiqueta
está vacía o no hay.
Tema 6: Diseño de automatismos mediante Grafcet 4

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 60/133
Automática (Ing. Químico)
- Incondicionales: acciones que se producen con solo quedar activada la etapa correspondiente.
- Condicionales: acciones que requieren el cumplimiento de unacondición adicional además de la propia activación de la etapa
correspondiente.
10 Abrir válvula nº1 Abrir válvula nº2
x
• Puede haber diferentes tipos de acciones asociadas a una mismaetapa.
• El estado de activación de una etapa, se indica gráficamente,
mediante la colocación de una señal testigo (token) en el interior
de la etapa. Dicho testigo irá avanzando por las etapas conformevaya ejecutándose el automatismo.
• Una etapa no activa puede ser a su vez activable o inactiva
dependiendo de si la etapa precedente está activa o no.
Tema 6: Diseño de automatismos mediante Grafcet 5
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 61/133
Automática (Ing. Químico)
2.3. Transición y Receptividad
• El concepto de transición se asocia a la barrera existente entre
dos etapas consecutivas y cuyo franqueo hace posible la
evolución lógica del automatismo.
• A toda transición le corresponde una receptividad, que es la
condición lógica necesaria para que se produzca el paso de una
etapa a la siguiente; si bien este se producirá siempre que además
la etapa precedente esté activa.
• La condición lógica viene expresada mediante una función lógica booleana.
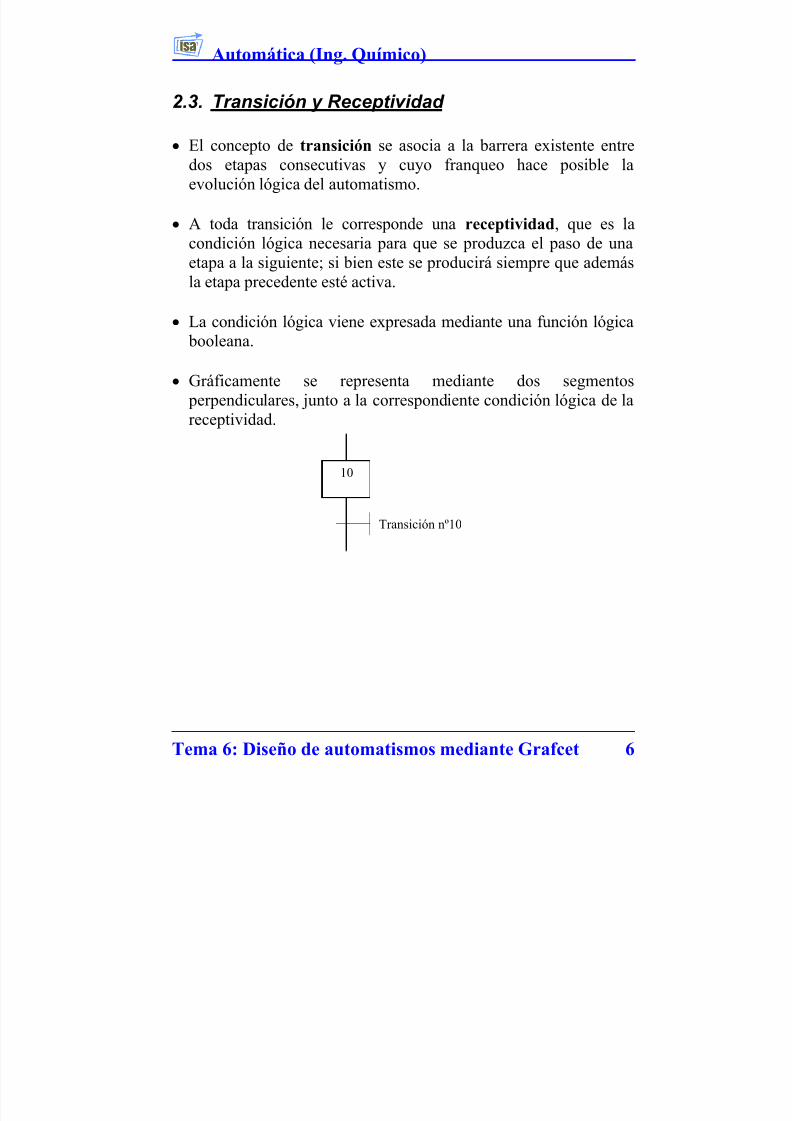
• Gráficamente se representa mediante dos segmentos
perpendiculares, junto a la correspondiente condición lógica de la
receptividad.
10
Transición nº10
Tema 6: Diseño de automatismos mediante Grafcet 6
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 62/133
Automática (Ing. Químico)
2.4. Arco
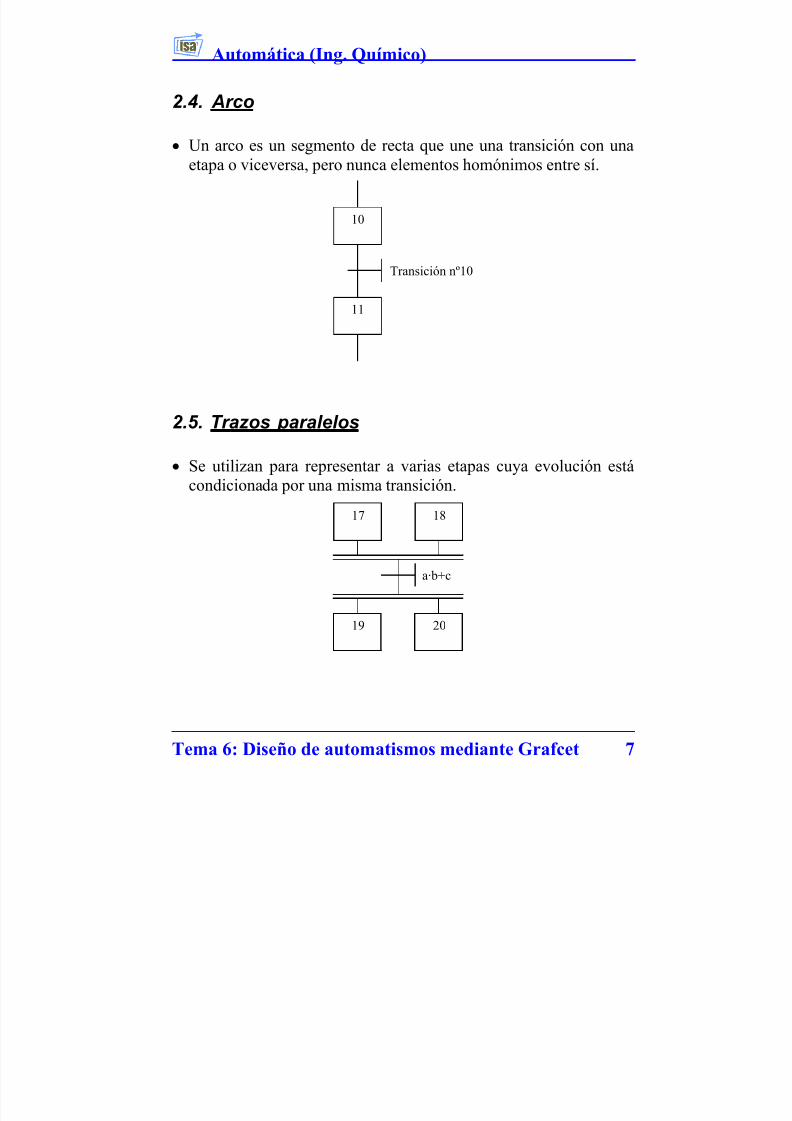
• Un arco es un segmento de recta que une una transición con una
etapa o viceversa, pero nunca elementos homónimos entre sí.
2.5. Trazos paralelos
• Se utilizan para representar a varias etapas cuya evolución estácondicionada por una misma transición.
a·b+c
2019
1817
11
Transición nº10
10
Tema 6: Diseño de automatismos mediante Grafcet 7
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 63/133
Automática (Ing. Químico)
3. CONDICIONES EVOLUTIVAS
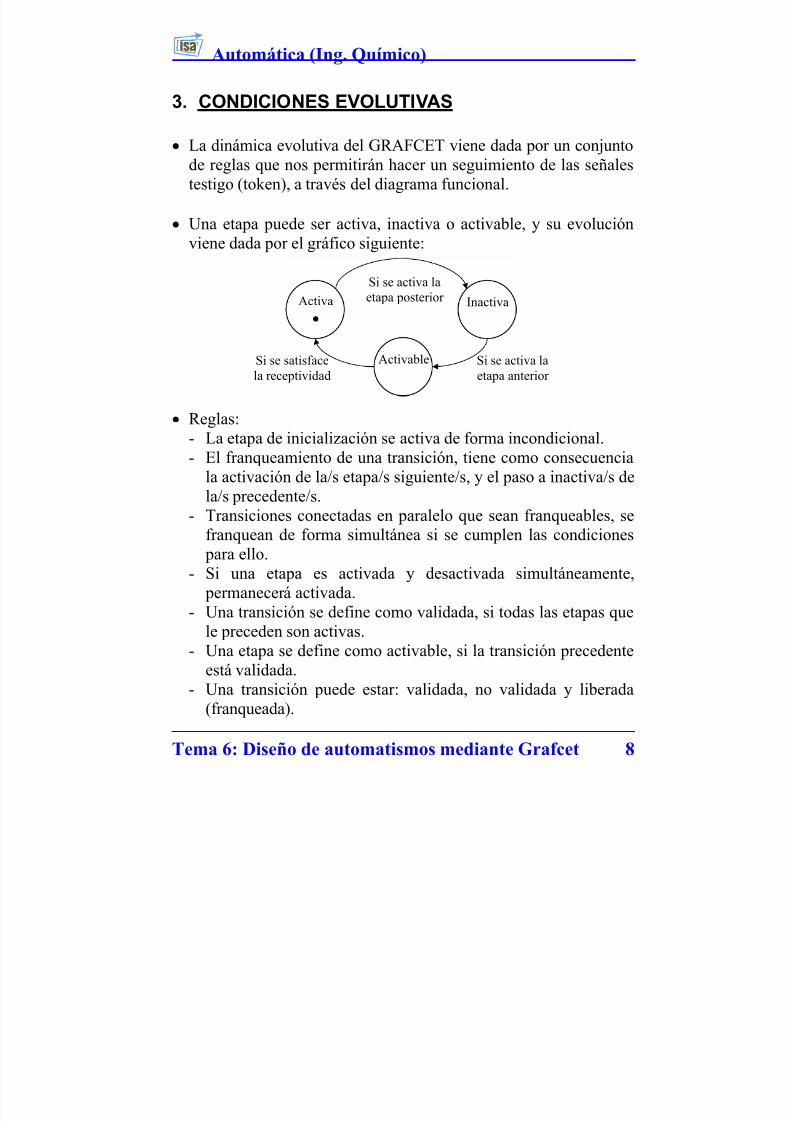
• La dinámica evolutiva del GRAFCET viene dada por un conjunto
de reglas que nos permitirán hacer un seguimiento de las señales
testigo (token), a través del diagrama funcional.
• Una etapa puede ser activa, inactiva o activable, y su evolución
viene dada por el gráfico siguiente:
Activa
•
Si se activa la
etapa anterior
Si se satisface
la receptividad
Si se activa la
etapa posterior
Activable
Inactiva
• Reglas:- La etapa de inicialización se activa de forma incondicional.
- El franqueamiento de una transición, tiene como consecuencia
la activación de la/s etapa/s siguiente/s, y el paso a inactiva/s de
la/s precedente/s.
- Transiciones conectadas en paralelo que sean franqueables, sefranquean de forma simultánea si se cumplen las condiciones
para ello.- Si una etapa es activada y desactivada simultáneamente,
permanecerá activada.
- Una transición se define como validada, si todas las etapas que
le preceden son activas.
- Una etapa se define como activable, si la transición precedente
está validada.
- Una transición puede estar: validada, no validada y liberada(franqueada).
Tema 6: Diseño de automatismos mediante Grafcet 8

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 64/133
Automática (Ing. Químico)
3.1. Implementación del GRAFCET en un PLC
• La implementación de un autómata programable (PLC) consisteen la programación de las ecuaciones lógicas del automatismo
(mediante diagrama de contactos o en lenguajes propios del PLC).
• Puesto que el PLC ejecuta una tras otra las ecuaciones, para sucorrecta ejecución de deben programar en un orden determinado.
La ejecución del programa en un PLC consiste en:
1. Leer las variables de entrada.2. Evaluar las ecuaciones de actualización de los estados.
3. Evaluar las ecuaciones de salida.
4. Fin de ciclo (volver al paso 1).
• Ecuaciones de activación de cada una de las etapas:
nnnn Reset·ESetE +=
- : Condición de activación de la etapa n (que este activadala etapa o etapas precedentes y se cumplan sus receptividades).
nSet
- : Condición de desactivación de la etapa n (que se active
la etapa o etapas precedentes).nReset
• Ecuaciones de activación de las salidas: una salida estará activada
si está activada alguna de las etapas donde aparezca dicha salida
como acción asociada. Si además la acción asociada es
condicional, además se multiplicará la etapa por dicha condición
para activar dicha salida.
• Activación de la etapa inicial (E0): Los PLC’s disponen de unaseñal de Start (SM2) que sólo se activa durante el primer ciclo de
ejecución permitiendo la inicialización del automatismo.
StartReset·ESetE 0000 ++=
Tema 6: Diseño de automatismos mediante Grafcet 9

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 65/133
Automática (Ing. Químico)
4. ESTRUCTURAS EN EL GRAFCET
4.1. Estructuras básicas
• Permiten realizar el análisis del sistema mediante su
descomposición en subprocesos.
• Secuencia única: está compuesta de un conjunto de etapas que
van siendo activadas una tras otra, sin interacción con ningunaotra estructura.
- A cada etapa le sigue una sola transición y cada transición es
validada por una sola etapa.
- La secuencia estará activa, si una de sus etapas lo está. Y estará
inactiva si todas sus etapas lo están.
Tema 6: Diseño de automatismos mediante Grafcet 10

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 66/133
Automática (Ing. Químico)
• Secuencias paralelas: son aquellas secuencias únicas que sonactivadas de forma simultánea por una misma transición. Después
de la activación de las distintas secuencias su evolución se produce de forma independiente.
Tema 6: Diseño de automatismos mediante Grafcet 11

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 67/133
Automática (Ing. Químico)
4.2. Estructuras lógicas
• Divergencia en OR : nos permite optar por secuencias
alternativas cuando el automatismo así lo requiere.
1n1n1n1n
nn1nn
1nn1n1n1n
ResetE bEE
ResetEaEE
EEESetE
++−+
−
+−−−
⋅+⋅=
⋅+⋅=
+⋅+=
n+1n
ba
n−1
- La etapa n pasa a ser activa si, estando activa la etapa n− 1 se
satisface la receptividad de la transición a.
- La etapa n+1 pasa a ser activa si, estando activada la etapa n− 1
se satisface la receptividad de la transición b.
• Convergencia en OR : se utiliza cuando se puede llegar a una
misma etapa desde diferentes situaciones.
n−2n−1
c
nnn
n
2n1nn
n2n2n2n
n1n1n1n
ResetE
Set
dEcEE
EESetE
EESetE
⋅+⋅+⋅=
⋅+=
⋅+=
−−
−−−
−−−
4 4 4 34 4 4 21
d
- La etapa n pasa a ser activa, si estando activa la etapa n− 1 se
satisface la receptividad de la transición c, o si estando activada
la etapa n− 2 se satisface la receptividad de la transición d .
Tema 6: Diseño de automatismos mediante Grafcet 12

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 68/133
Automática (Ing. Químico)
• Divergencia en AND: se utiliza para activar simultáneamente dos
o más secuencias paralelas.
2n2nn2n
1n1nn1n
2n1nnnn
ResetEf EE
ResetEf EE
EEESetE
+++
+++
++
⋅+⋅=
⋅+⋅=
⋅⋅+=
n+2n+1
n
f
- Las etapas n+1 y n+2 pasan al estado activo, si estando activala etapa n se satisface la receptividad de la transición f .
• Convergencia en AND: permite la convergencia de dos o más
secuencias paralelas.
nn2n1nn
n2n2n2n
n1n1n1n
ResetEf EEE
EESetE
EESetE
⋅+⋅⋅=
⋅+=
⋅+=
−−
−−−
−−−
n−2n−1
f
n
- La etapa n pasa al estado activo, si estando las etapas n− 1 y
n− 2 activas, se satisface la receptividad de la transición f .
Tema 6: Diseño de automatismos mediante Grafcet 13
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 69/133
Automática (Ing. Químico)
4.3. Saltos condicionales
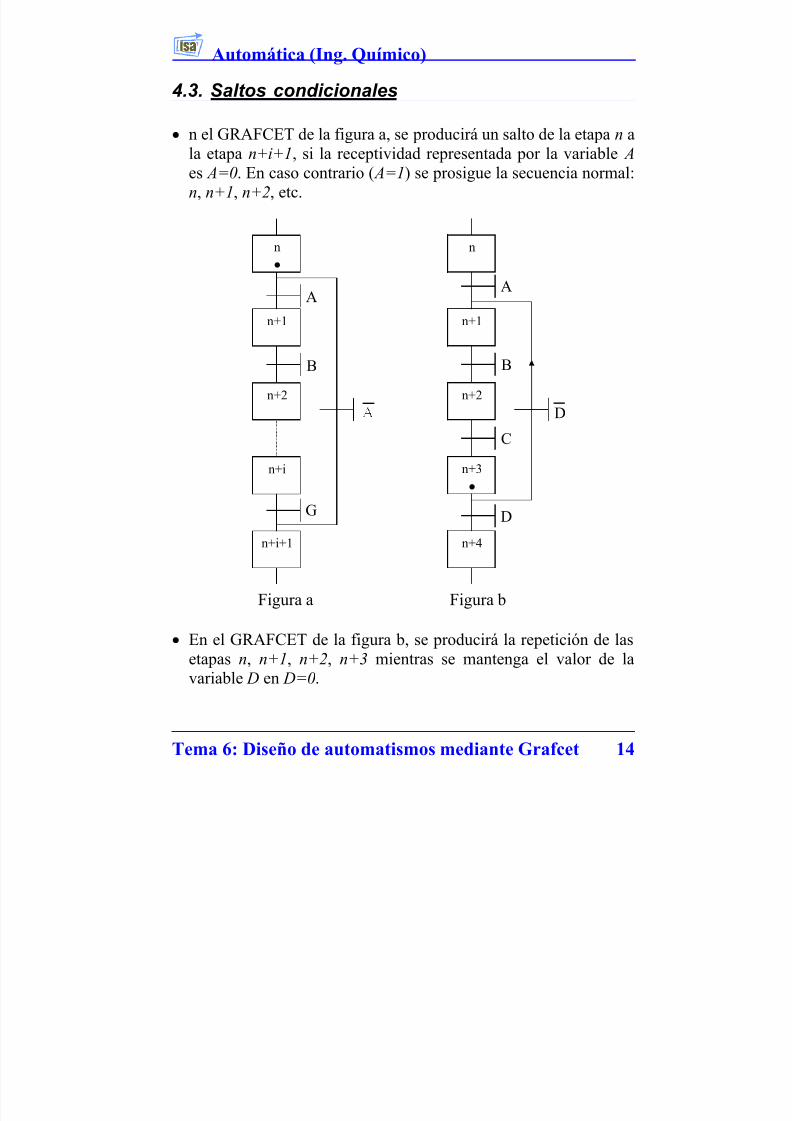
• n el GRAFCET de la figura a, se producirá un salto de la etapa n ala etapa n+i+1, si la receptividad representada por la variable A
es A=0. En caso contrario ( A=1) se prosigue la secuencia normal:n, n+1, n+2, etc.
n+1
n+2
n+4
n+3
•
D
C
A
B
n
B
n+2
n+i
G
n+i+1
A
n+1
n
•
D
Figura a Figura b
• En el GRAFCET de la figura b, se producirá la repetición de las
etapas n, n+1, n+2, n+3 mientras se mantenga el valor de la
variable D en D=0.
Tema 6: Diseño de automatismos mediante Grafcet 14

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 70/133
Automática (Ing. Químico)
4.4. Macroetapa
• Un conjunto de etapas cuya aparición puede repetirse a lo largodel diagrama GRAFCET, puede ser representado mediante una
macroetapa. De esta forma sólo habrá que detallar de forma
explícita la secuencia una sola vez.
• Una macroetapa se representa con un rectángulo con bordes
verticales de doble trazo y conteniendo los números de la etapa
inicial y final.
15-209
d
10
e
b
15-206
5
a
8
7
c
Tema 6: Diseño de automatismos mediante Grafcet 15

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 71/133
Automática (Ing. Químico)
5. CICLOS DE EJECUCIÓN
• Dependiendo de las características del automatismo, éste
requerirá distintas modalidades de ejecución de ciclo, de tal forma
que podemos tener ciclos ininterrumpidos, ciclos interrumpidos bajo determinadas condiciones al principio de su ejecución, etc.
• Atendiendo a diversos criterios los ciclos de ejecución pueden
clasificarse en:
5.1. Marcha ciclo a ciclo
• Para cada nueva ejecución, se requiere la inicialización del mismo por parte del operario que está al cargo del sistema.
Ciclo
fin
Visor de encendido
Ac·Ci
0
•
n
1
Ac = Arranque del ciclo
Ci = Condiciones iniciales
Tema 6: Diseño de automatismos mediante Grafcet 16

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 72/133
Automática (Ing. Químico)
5.2. Ciclo único
• Se ejecuta una sola vez, aunque se mantenga accionada la ordende arranque.
Ciclo
Ac
n+1
fin
Visor de encendido
Ac·Ci
0
•
n
1
Ac = Arranque del ciclo
Ci = Condiciones iniciales
Tema 6: Diseño de automatismos mediante Grafcet 17
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 73/133
Automática (Ing. Químico)
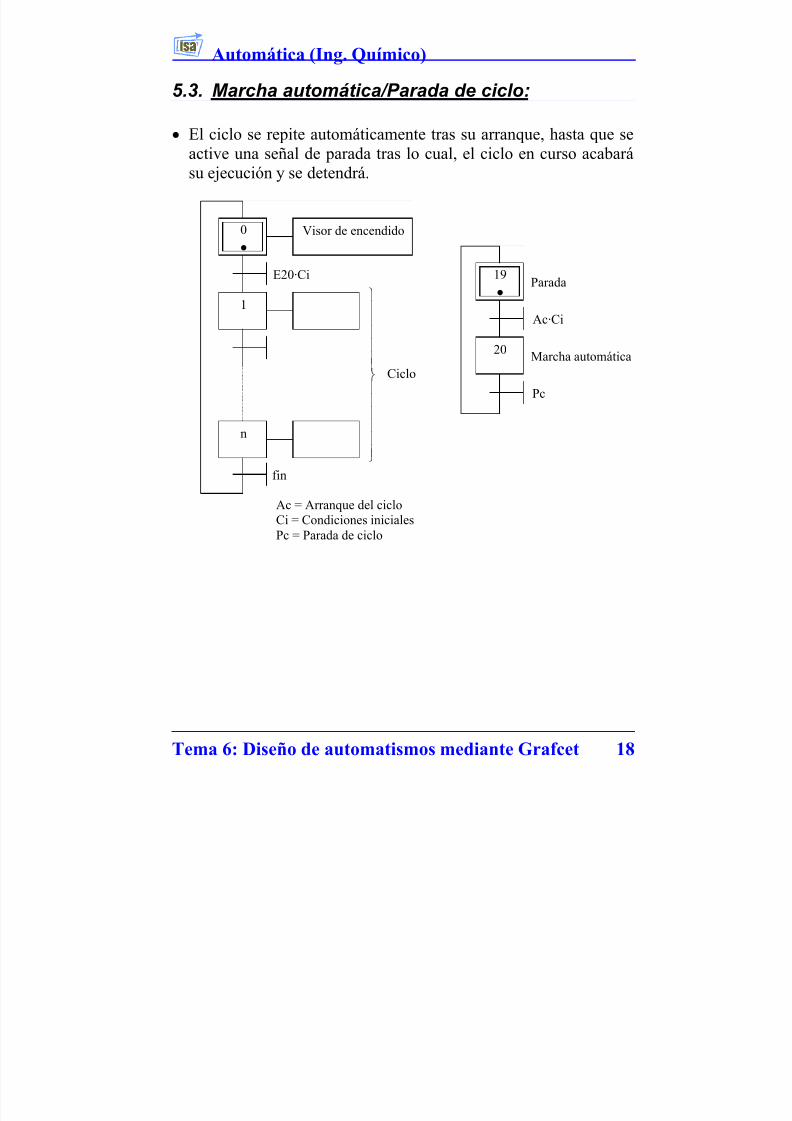
5.3. Marcha automática/Parada de ciclo:
• El ciclo se repite automáticamente tras su arranque, hasta que seactive una señal de parada tras lo cual, el ciclo en curso acabará
su ejecución y se detendrá.
Ciclo
fin
Visor de encendido
E20·Ci
0
•
n
1
19•
20
Parada
Ac·Ci
Marcha automática
Pc
Ac = Arranque del ciclo
Ci = Condiciones iniciales
Pc = Parada de ciclo
Tema 6: Diseño de automatismos mediante Grafcet 18
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 74/133
Automática (Ing. Químico)
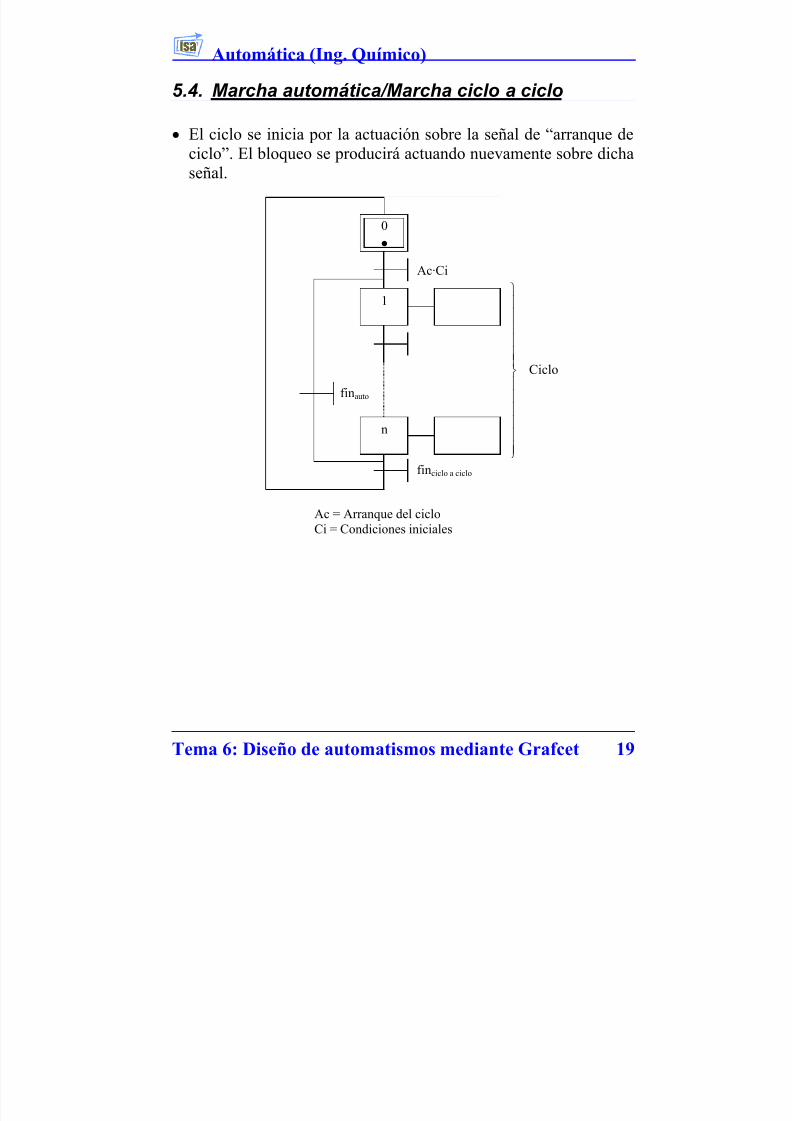
5.4. Marcha automática/Marcha ciclo a ciclo
• El ciclo se inicia por la actuación sobre la señal de “arranque deciclo”. El bloqueo se producirá actuando nuevamente sobre dicha
señal.
Ciclo
finauto
finciclo a ciclo
Ac·Ci
0
•
n
1
Ac = Arranque del ciclo
Ci = Condiciones iniciales
Tema 6: Diseño de automatismos mediante Grafcet 19
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 75/133
Automática (Ing. Químico)
6. EJEMPLOS
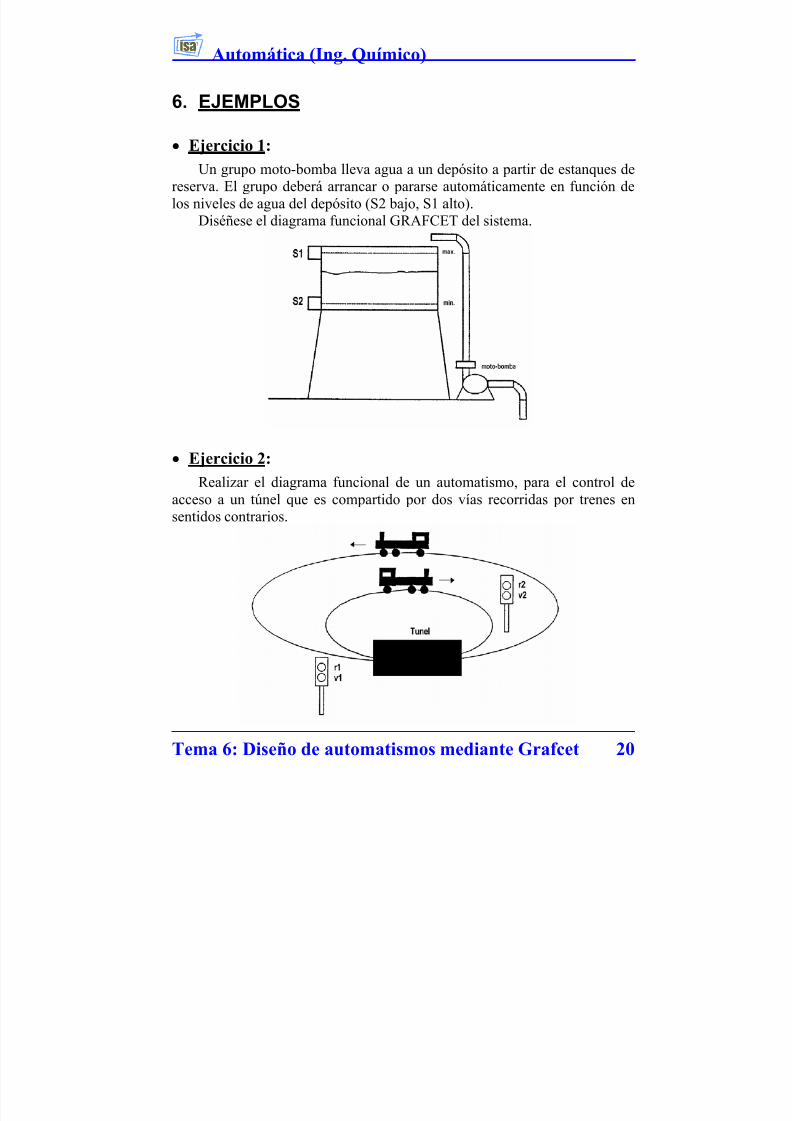
• Ejercicio 1:
Un grupo moto-bomba lleva agua a un depósito a partir de estanques de
reserva. El grupo deberá arrancar o pararse automáticamente en función de
los niveles de agua del depósito (S2 bajo, S1 alto).
Diséñese el diagrama funcional GRAFCET del sistema.
• Ejercicio 2:
Realizar el diagrama funcional de un automatismo, para el control de
acceso a un túnel que es compartido por dos vías recorridas por trenes en
sentidos contrarios.
Tema 6: Diseño de automatismos mediante Grafcet 20
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 76/133
Automática (Ing. Químico)
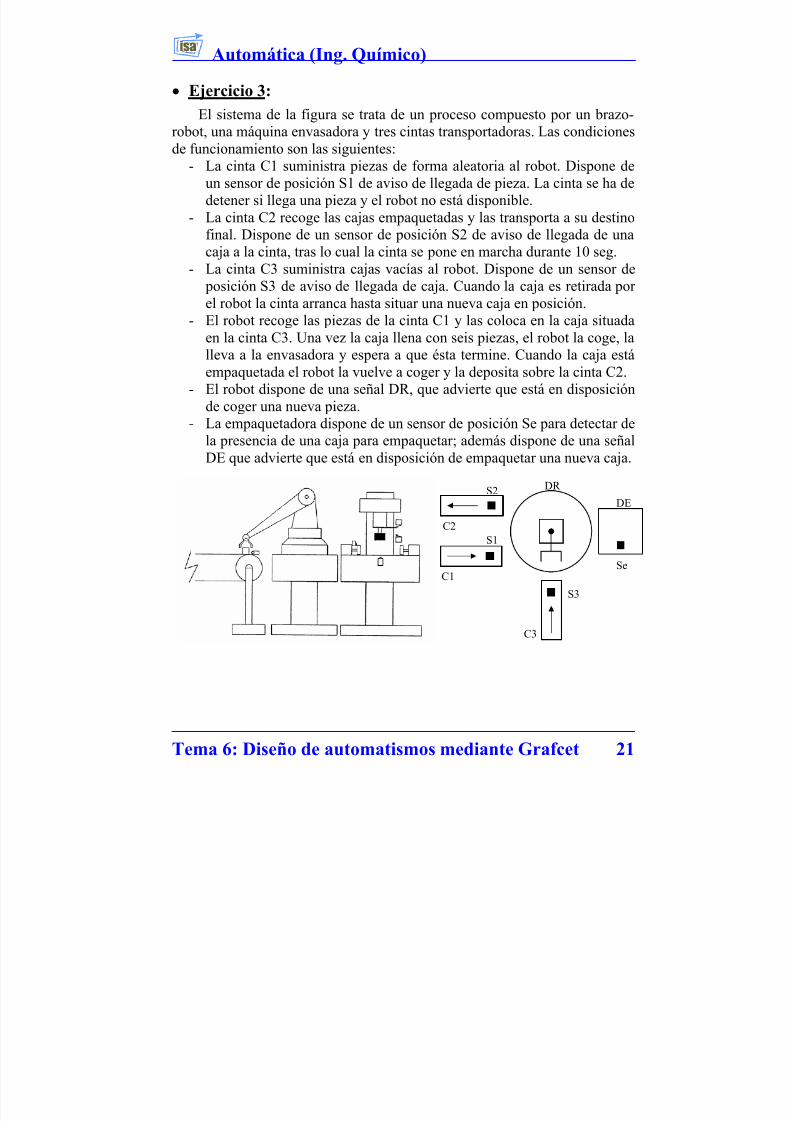
• Ejercicio 3:
El sistema de la figura se trata de un proceso compuesto por un brazo-
robot, una máquina envasadora y tres cintas transportadoras. Las condicionesde funcionamiento son las siguientes:
- La cinta C1 suministra piezas de forma aleatoria al robot. Dispone de
un sensor de posición S1 de aviso de llegada de pieza. La cinta se ha de
detener si llega una pieza y el robot no está disponible.
- La cinta C2 recoge las cajas empaquetadas y las transporta a su destino
final. Dispone de un sensor de posición S2 de aviso de llegada de una
caja a la cinta, tras lo cual la cinta se pone en marcha durante 10 seg.
-
La cinta C3 suministra cajas vacías al robot. Dispone de un sensor de posición S3 de aviso de llegada de caja. Cuando la caja es retirada por
el robot la cinta arranca hasta situar una nueva caja en posición.
- El robot recoge las piezas de la cinta C1 y las coloca en la caja situada
en la cinta C3. Una vez la caja llena con seis piezas, el robot la coge, la
lleva a la envasadora y espera a que ésta termine. Cuando la caja está
empaquetada el robot la vuelve a coger y la deposita sobre la cinta C2.
- El robot dispone de una señal DR, que advierte que está en disposición
de coger una nueva pieza.
- La empaquetadora dispone de un sensor de posición Se para detectar de
la presencia de una caja para empaquetar; además dispone de una señal
DE que advierte que está en disposición de empaquetar una nueva caja.
DR
DE
Se
S3
C3
S1
S2
C1
C2
Tema 6: Diseño de automatismos mediante Grafcet 21

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 77/133
Automática (Ing. Químico)
• Ejercicio 4: Túnel de pintado
- Sensores:
F1: Sensor de peso instalado en la grúa (F1=1 si el Peso > Peso
mínimo). F2 ... F8: Sensores de posición (Fx=1, si se detecta presencia).
- Accionadores:
Motor 1: (MS=1 sube la grúa, MB=1 baja la grúa, MS=MB=0
parado).
Motor 2: (MA=1 avanza la grúa, MR=1 retrocede la grúa,
MR=MA=0 parado).
- Automatismo:El proceso comienza, estando la grúa en F2 y F4 (posición inicial en la
zona de carga), se detecta peso de una pieza en el sensor F1. La pieza
tiene que pasar por todos los tanques sucesivamente. Para pasar de un
tanque a otro la grúa debe subir, avanzar hasta el siguiente tanque y
bajar. Cuando se llega a la zona de descarga (F2 y F8) la grúa debe
esperar a que le desenganchen la pieza, cuando el sensor F1 ya no
detecta peso la grúa debe regresar a la zona de carga (subir, retroceder
y bajar) volviendo al estado inicial.
Tema 6: Diseño de automatismos mediante Grafcet 22

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 78/133
Automática (Ing. Químico)
Tema 6: Diseño de automatismos mediante Grafcet 23
• Ejercicio 5: Control de un tanque
- Sensores:
Tok = 1 (si la temperatura está en el rango correcto).
Nok = 1 (si el nivel está `por encima de un nivel máximo).
Nmin = 1(si el nivel está por encima de un nivel mínimo).
- Accionadores: V1 y V2 = 1 (Válvulas abiertas).
PIDon = 1 (Control PID de temperatura en marcha).
Ag = 1 (Agitador en marcha).
- Funcionamiento del proceso:
Si Nmin=0 no debe funcionar el PID ni el agitador ( para prevenir
averias).
El punto de operación normal del proceso consiste en V1=V2=1
(válvulas abiertas) y el control de temperatura activado.
Para modificar los niveles se pueden utilizar V1 y V2.
Si la temperatura no es la correcta no debe abrirse V2.

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 79/133
Automática (Ing. Químico)
Tema 7:
Diseño Estructurado deAutomatismos
1. Introducción.
2. Modos de marcha.2.1. Marchas automáticas.
2.1.1 Funcionamiento semiautomático:Marcha ciclo a ciclo – Ciclo único.
2.1.2 Funcionamiento automático: Marchaciclo automático – Ciclos continuos.
2.2. Marchas de intervención.
3. La seguridad.3.1. Tratamiento de alarmas y emergencias.
4. Diseño estructurado.4.1. Diagramas jerarquizados y forzado desituaciones.
4.2. Reglas de forzado.
Tema 7: Diseño estructurado de automatismos 1

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 80/133
Automática (Ing. Químico)
1. INTRODUCCIÓN
• Hasta el momento, se ha realizado el diseño del automatismo
atendiendo sólo al control del funcionamiento normal del
automatismo sin otras consideraciones.
• Sin embargo las necesidades de altos niveles de automatización,
así como la dedicación a tareas de seguridad, vigilancia y
autodiagnóstico, imponen una complejidad creciente a los
automatismos.
• Por tanto para un análisis más adecuado y una mejor comprensióndel modelo global, es conveniente realizar el diseño del
automatismo de forma estructurada.
• La estructuración en diversos submodelos, permite realizar un
diseño más detallado de cada una de las tareas, a la vez quefacilita una posterior revisión.
• La jerarquía entre los diversos aspectos de un automatismo viene
dada por este orden: seguridad, modos de marcha y
funcionamiento normal.
Tema 7: Diseño estructurado de automatismos 2

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 81/133
Automática (Ing. Químico)
2. MODOS DE MARCHA
• Se describen los diversos modos de funcionamiento que pueden
presentar los automatismos.
• El funcionamiento normal del automatismo es generalmentecíclico, pudiendo funcionar de las siguientes formas:
- Ejecutando el ciclo de forma indefinida a partir de una
autorización del operador.
- Ejecutando el ciclo uno a uno con requerimiento deautorización por parte del operador en cada ocasión.
- Ejecutando por parte del operador un control permanente
permitiendo la activación de una o más etapas en cada
autorización.
• A partir de estos modos de funcionamiento, se pueden realizar
diversas combinaciones, pero en general los modos defuncionamiento se clasifican en:
- Marchas Automáticas.
- Marchas de Intervención.
2.1. Marchas automáticas
• Se trata del modo de funcionamiento normal, para el cual el
automatismo ha sido diseñado.
• Las marchas automáticas a su vez se pueden clasificar en:- Funcionamiento Semiautomático.
- Funcionamiento Automático.
Tema 7: Diseño estructurado de automatismos 3
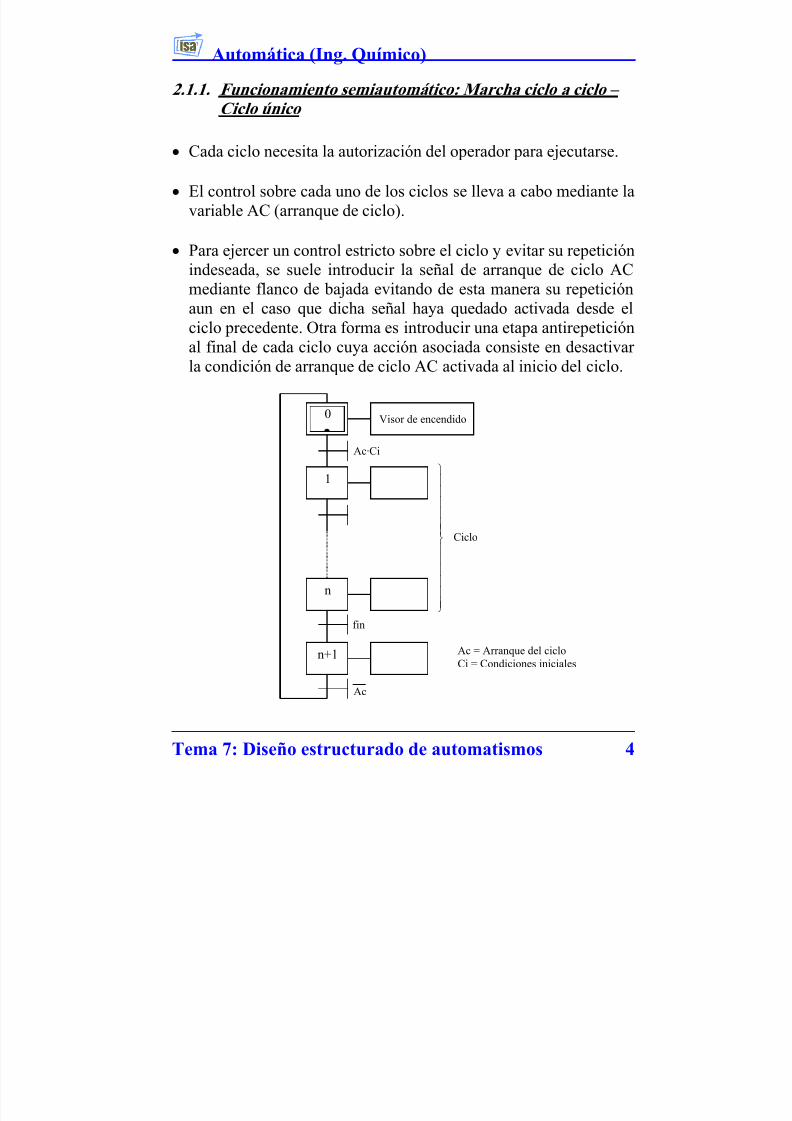
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 82/133
Automática (Ing. Químico)
2.1.1. Funcionamiento semiautomático: Marcha ciclo a ciclo –
Ciclo único
• Cada ciclo necesita la autorización del operador para ejecutarse.
• El control sobre cada uno de los ciclos se lleva a cabo mediante la
variable AC (arranque de ciclo).
• Para ejercer un control estricto sobre el ciclo y evitar su repetición
indeseada, se suele introducir la señal de arranque de ciclo ACmediante flanco de bajada evitando de esta manera su repetición
aun en el caso que dicha señal haya quedado activada desde el
ciclo precedente. Otra forma es introducir una etapa antirepetición
al final de cada ciclo cuya acción asociada consiste en desactivar
la condición de arranque de ciclo AC activada al inicio del ciclo.
Ac = Arranque del ciclo
Ci = Condiciones iniciales
Ac
Ciclo
n+1
fin
Visor de encendido
Ac·Ci
0
n
1
Tema 7: Diseño estructurado de automatismos 4
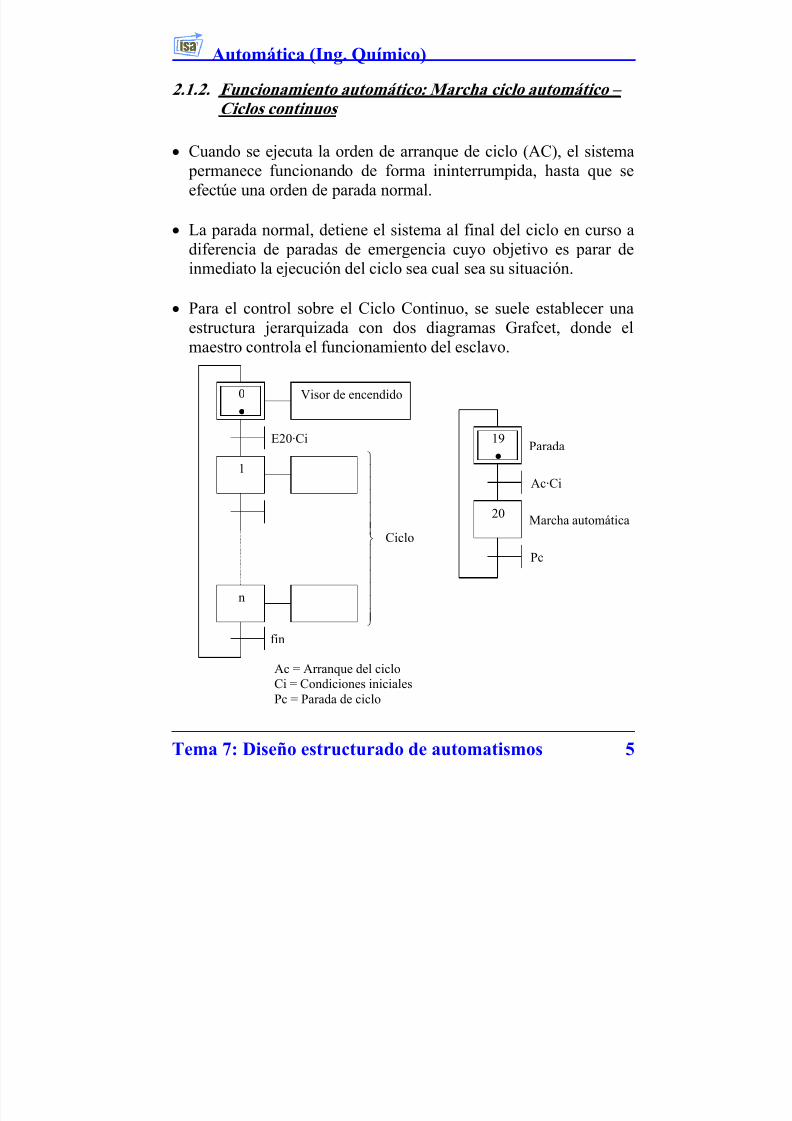
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 83/133
Automática (Ing. Químico)
2.1.2. Funcionamiento automático: Marcha ciclo automático –
Ciclos continuos
• Cuando se ejecuta la orden de arranque de ciclo (AC), el sistema permanece funcionando de forma ininterrumpida, hasta que se
efectúe una orden de parada normal.
• La parada normal, detiene el sistema al final del ciclo en curso a
diferencia de paradas de emergencia cuyo objetivo es parar de
inmediato la ejecución del ciclo sea cual sea su situación.
• Para el control sobre el Ciclo Continuo, se suele establecer una
estructura jerarquizada con dos diagramas Grafcet, donde el
maestro controla el funcionamiento del esclavo.
Ciclo
fin
Visor de encendido
E20·Ci
0
•
n
1
19
•
20
Parada
Ac·Ci
Marcha automática
Pc
Ac = Arranque del ciclo
Ci = Condiciones iniciales
Pc = Parada de ciclo
Tema 7: Diseño estructurado de automatismos 5

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 84/133
Automática (Ing. Químico)
2.2. Marchas de intervención
• Se trata de modos de funcionamiento especiales, utilizados
generalmente en los periodos de ajuste y puesta a punto del
funcionamiento de los automatismos.
• En este modo de funcionamiento se ejerce un control estricto no
ya sobre la ejecución de un ciclo, sino sobre la ejecución de una o
varias etapas en un mismo ciclo.
• Permite la corrección de funcionamientos imprevistos, fallos,
averías o correcciones precisas en el funcionamiento de lasmáquinas o del dispositivo de control.
• En este modo se requiere frecuentemente la parada del sistema,
bien por inhibición de las acciones asociadas a las etapas, o bien
por congelación del automatismo impidiendo el franqueo dedeterminadas transiciones.
Ciclo
Ac = Arranque del cicloCi = Condiciones iniciales
finauto
finciclo a ciclo
Ac·Ci
0
•
n
1
Tema 7: Diseño estructurado de automatismos 6

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 85/133
Automática (Ing. Químico)
3. LA SEGURIDAD
• Los dispositivos de control han de contar con los recursos
necesarios dedicados al objetivo de garantizar el buen
funcionamiento del sistema en caso de situaciones imprevistas,
averías o emergencias.
• Bajo el concepto de seguridad se engloba la capacidad del
automatismo para minimizar la probabilidad de aparición de
fallos en su funcionamiento así como sus defectos.
• El estudio de la seguridad debe abordarse teniendo en cuenta lossiguientes conceptos:
- Seguridad: Ausencia de peligro para las personar e
instalaciones.
- Disponibilidad: Ausencia de paradas como consecuencia de
fallos en el sistema.
• A continuación se citan algunas de las soluciones que se adoptande forma combinada y con carácter general para conseguir la
seguridad de los automatismos.
Tema 7: Diseño estructurado de automatismos 7

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 86/133
Automática (Ing. Químico)
3.1. Tratamiento de Alarmas y Emergencias
• Atendiendo al grado de afectación las alarmas pueden ser:
- Alarmas Locales: sólo afectarán parcialmente al sistema, de
forma que su efecto solo debe repercutir sobre un conjunto
delimitado de dispositivos.- Alarmas Generales: afectarán a la totalidad del sistema y por
lo general can a disponer de prioridad frente a las alarmas
locales.
• Las alarmas pueden implementarse en un automatismo mediante
la introducción de una nueva variable asociada según los
siguientes casos:
- Introducción de la variable asociada en las condiciones dedesactivación de la función lógica de activación/desactivación
de la etapa.
11 +− ⋅+⋅⋅⋅= nnnnG Ln E E T E A A E
- Introducción de la variable asociada en las funciones lógicas
asociadas a las receptividades; lo que permite de forma
relativamente fácil, hacer evolucionar el sistema a
determinadas situaciones de parada o secuencias de
emergencia.
- Introducción de la variable asociada como condición adicional
a la ejecución de las acciones asociadas a las etapas, lo que
permite inhabilitar las acciones en caso de producirse la alarma.
• Clasificación del tratamiento de alarmas:
- Sin secuencia de emergencia.
- Inhibición de acciones.
- Congelación del automatismo.
- Con secuencia de emergencia.
Tema 7: Diseño estructurado de automatismos 8
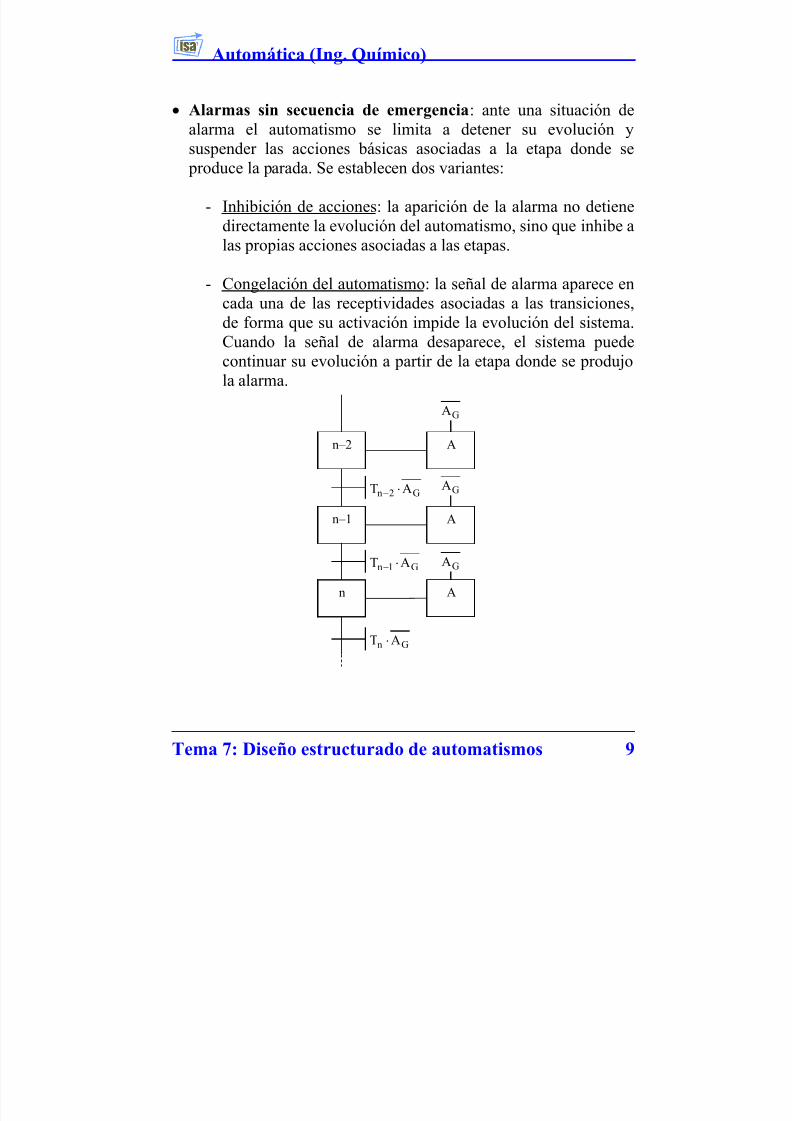
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 87/133
Automática (Ing. Químico)
• Alarmas sin secuencia de emergencia: ante una situación de
alarma el automatismo se limita a detener su evolución ysuspender las acciones básicas asociadas a la etapa donde se
produce la parada. Se establecen dos variantes:
- Inhibición de acciones: la aparición de la alarma no detienedirectamente la evolución del automatismo, sino que inhibe a
las propias acciones asociadas a las etapas.
- Congelación del automatismo: la señal de alarma aparece en
cada una de las receptividades asociadas a las transiciones,
de forma que su activación impide la evolución del sistema.
Cuando la señal de alarma desaparece, el sistema puede
continuar su evolución a partir de la etapa donde se produjo
la alarma.
G2n AT ⋅−
Gn AT ⋅
G1n AT ⋅−
GA
GA
GA
A
A
A
n
n–1
n–2
Tema 7: Diseño estructurado de automatismos 9
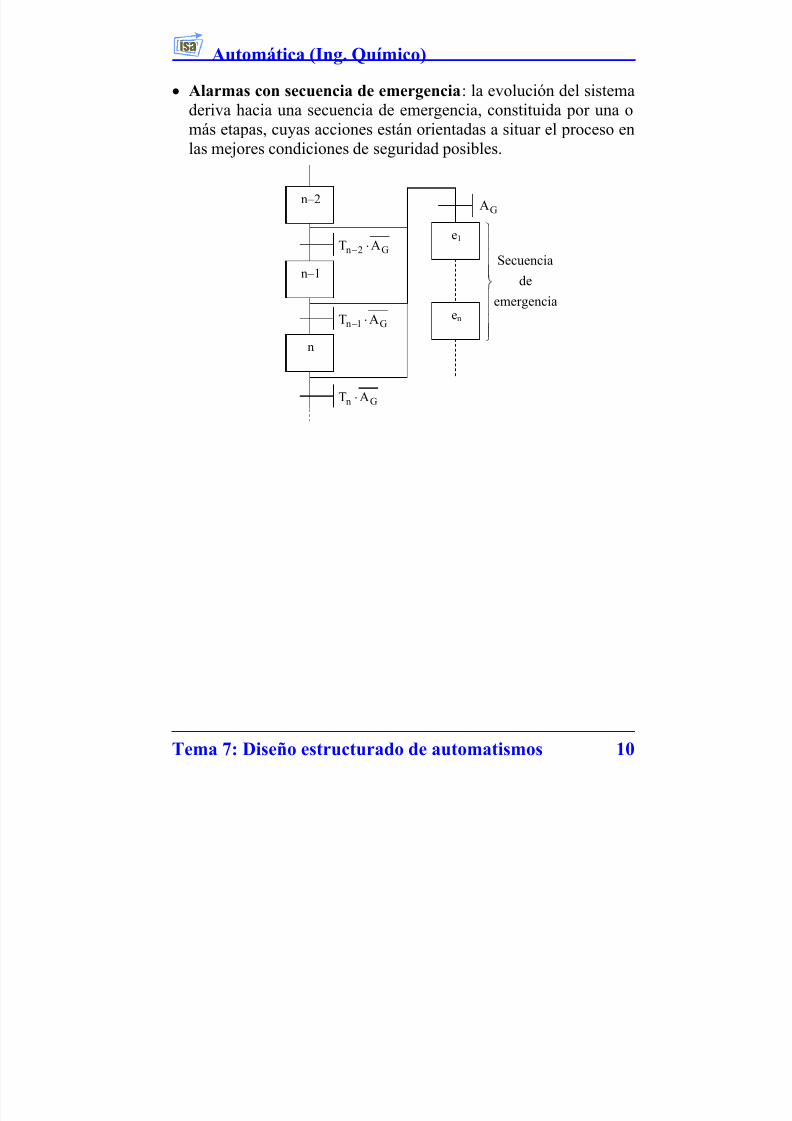
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 88/133
Automática (Ing. Químico)
• Alarmas con secuencia de emergencia: la evolución del sistemaderiva hacia una secuencia de emergencia, constituida por una o
más etapas, cuyas acciones están orientadas a situar el proceso enlas mejores condiciones de seguridad posibles.
G2n AT ⋅−
Gn AT ⋅
n–2
n–1
n
G1n AT ⋅−
e1
en emergencia
de
Secuencia
GA
Tema 7: Diseño estructurado de automatismos 10

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 89/133
Automática (Ing. Químico)
4. DISEÑO ESTRUCTURADO
• Realizar un diseño estructurado del automatismo, consiste en
realizar en la medida de lo posible, una representación separada
de los diversos aspectos del modelo del sistema, tales como
funcionamiento normal de producción, distintos modos de marcha posibles, paradas de emergencia asociadas a la seguridad, etc.,
mediante la utilización de diagramas funcionales parciales.
4.1. Diagramas jerarquizados y forzado desituaciones
• Cada Grafcet parcial debe modelar el funcionamiento del sistemateniendo en cuenta el aspecto en cada momento considerado.
• Puesto que todos los aspectos del funcionamiento del sistema
están estrechamente interrelacionados es preciso garantizar dicha
interrelación entre todos y cada uno de los diagramas parciales, altiempo que hay que establecer las condiciones de dependencia y
relación de jerarquía entre los diagramas en orden de importancia
de las funciones asociadas a los mismos.
4.2. Reglas de forzado
• La relación entre diagramas parciales diferentes, se lleva a cabomediante las denominadas ordenes de forzado, ejecutadas en un
diagrama parcial jerárquicamente superior.
Tema 7: Diseño estructurado de automatismos 11

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 90/133
Automática (Ing. Químico)
Tema 7: Diseño estructurado de automatismos 12
• Las ordenes de forzado se efectúan en un diagrama jerárquicosuperior, y su efecto se produce en uno inferior.
• Las ordenes de forzado permiten modificar el conjunto de etapasactivadas en un instante determinado, en función de la activación
de una o más variables que intervienen en la receptividad de
alguna transición
• Reglas de forzado:
1) El forzado es una orden interna, como resultado de una
evolución. Para una situación que comporta una o variasordenes de forzado, los grafcets forzados tomarán de inmediato
y directamente la o las situaciones impuestas.
2) A toda aparición de una nueva situación, la aplicación del
forzado es prioritaria con relación a toda actividad del modelo
(evolución, afectado de las salidas, etc.).
3) Las reglas de evolución no se aplican más que en una situación
por la cual el grafcet parcial forzado está en la situaciónimpuesta por el grafcet forzante.
4) Los grafcets forzados se mantienen en la situación impuesta
mientras sean válidas las órdenes de forzado.
5) Si un grafcet fuerza a otro lo recíproco será imposible.
6) En todo momento del funcionamiento, un grafcet solo puede
ser forzado por un único grafcet.
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 91/133
Roger Ciscar VillacortaDiagrama Tema 5.Electónica. 4º Curso Ingeniería Química
ACTUADOR ACONDICIONADOR
Fuente DeAlimentación
PROCESO
CONTROLA
DOR
SENSOR ACONDICIONADORACONDICIONADORACONDICIONADOR
ACONDICIONADOR(COMPONENTES)
PASIVOS
Potenciómetro:
Tiene 3 terminales y es unaResistencia cuyo valor esmodificable.
Bobina:
Hilo conductor arrollado a unmaterial aislante.
Resistencia:
Posee un código de colores paraconocer el valor numérico.
Condensador:
2 placas de metal separadas por un material dieléctrico.
SEMICONDUCTO
Diodo:
Sólo permite el paso de en el sentido de la flecha
Transistor:
Funcionamiento:
-lineal-Saturación-Corte
Circuito integrado:
Placas de plástico con pcobre y con componenteforman un circuito.
N
P
ACONDICIONADOR(FUNCIONES
BÁSICAS)
OBTENCIÓN DE LA SEÑAL ELECTRICA
p
S R R
U +
=
0
0α
Puente de wheatstone:
Escogiendo el valor adecuado de las
resistencias:T VR
IR1 Rp
VR2 R
Amplificador operacional
+
uS=A·ui ui -
+
+ R L
AMPLIFICADOR NO INVERSOR
R 2R 1
1
21 R
RG +=
AMPLIFICADOR INVER
R 2 R 1
G =
TIPOS DE AMPLIFICADORES
AMPLIFICACIÓN
WS>We
ue A uS
uS=G·ue
REGLAS DE ORO: (c0==→∞=−+
I I z e−+
=V V

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 92/133
Trabajo automática 2002-2003 Opción 3
-1-
PROCESO
ε ⋅1m
ε ⋅ sT 50/1
ε ⋅⋅ 12 mm
ε ⋅ sT 60/3
ε ⋅ sT 40/4ε ⋅ sT 50/2
ε ⋅+ )( max5 T T
min N
ε
ε
ε
ε
ε
ε ⋅min N
0
1 VA T1 VA T311
2 VA T1 VB T412
3 R T5
5 VC
4 VD BD

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 93/133
Trabajo automática 2002-2003 Opción 3
ECUACIONES LÓGICAS
1110min5min40 E E E N E N E E ⋅⋅+⋅⋅+⋅= ε
521101 E E E M E E ⋅⋅+⋅⋅= ε
532112 E E E T E E ⋅⋅+⋅⋅= ε
5121112011 E E E M M E E ⋅⋅+⋅⋅⋅= ε
5121131112 E E E T E E ⋅⋅+⋅⋅= ε
1143412223 E E E T E T E E ⋅⋅+⋅⋅+⋅⋅= ε ε
04max534 )( E E T T E E ⋅+⋅+⋅= ε
0512113215 )( E E E E E E E E ⋅+++++⋅= ε
-2-
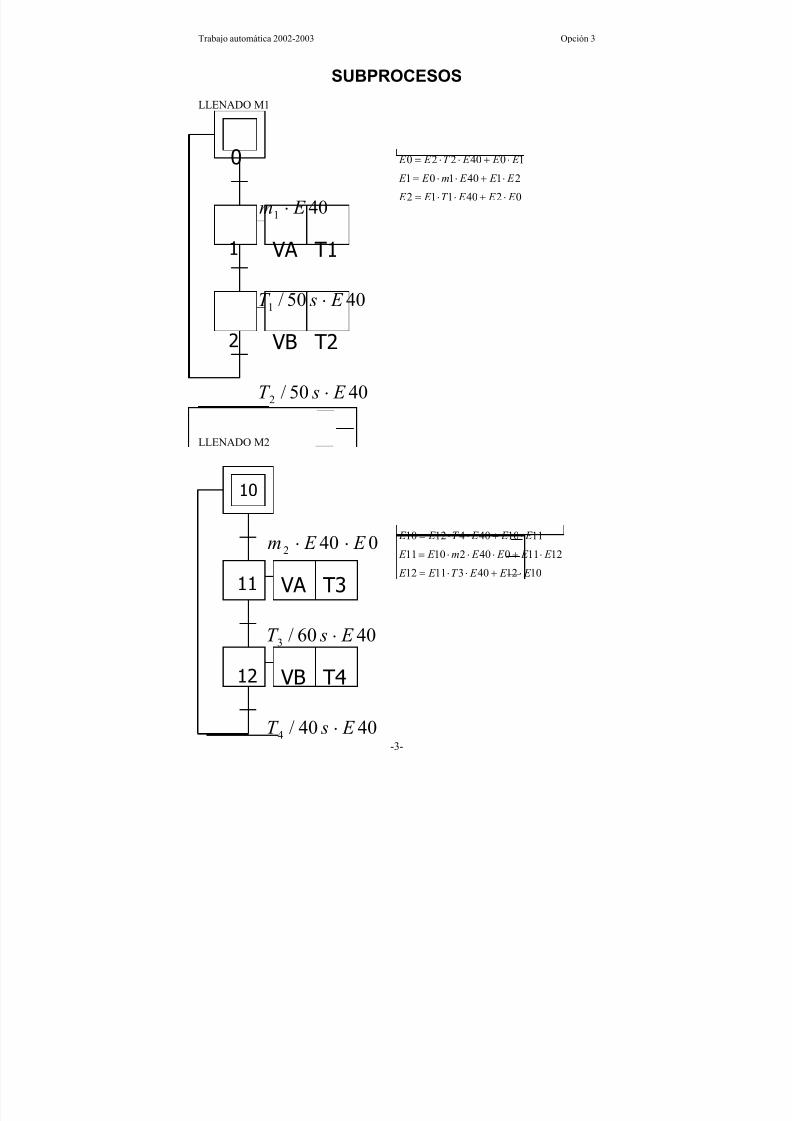
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 94/133
Trabajo automática 2002-2003 Opción 3
SUBPROCESOS
LLENADO M1
0240112
2140101
1040220
E E E T E E
E E E m E E
E E E T E E
⋅+⋅⋅=
⋅+⋅⋅=
⋅+⋅⋅=
401 E m ⋅
4050/1 E sT ⋅
4050/2 E sT ⋅
0
2 T2 VB
1 T1 VA
LLENADO M2
10124031112
121104021011
11104041210
E E E T E E
E E E E m E E
E E E T E E
⋅+⋅⋅=
⋅+⋅⋅⋅=
⋅+⋅⋅=
-3-
0402E E m ⋅⋅
4060/3 E sT ⋅
4040/4 E sT ⋅
10
12 T4 VB
11 T3 VA
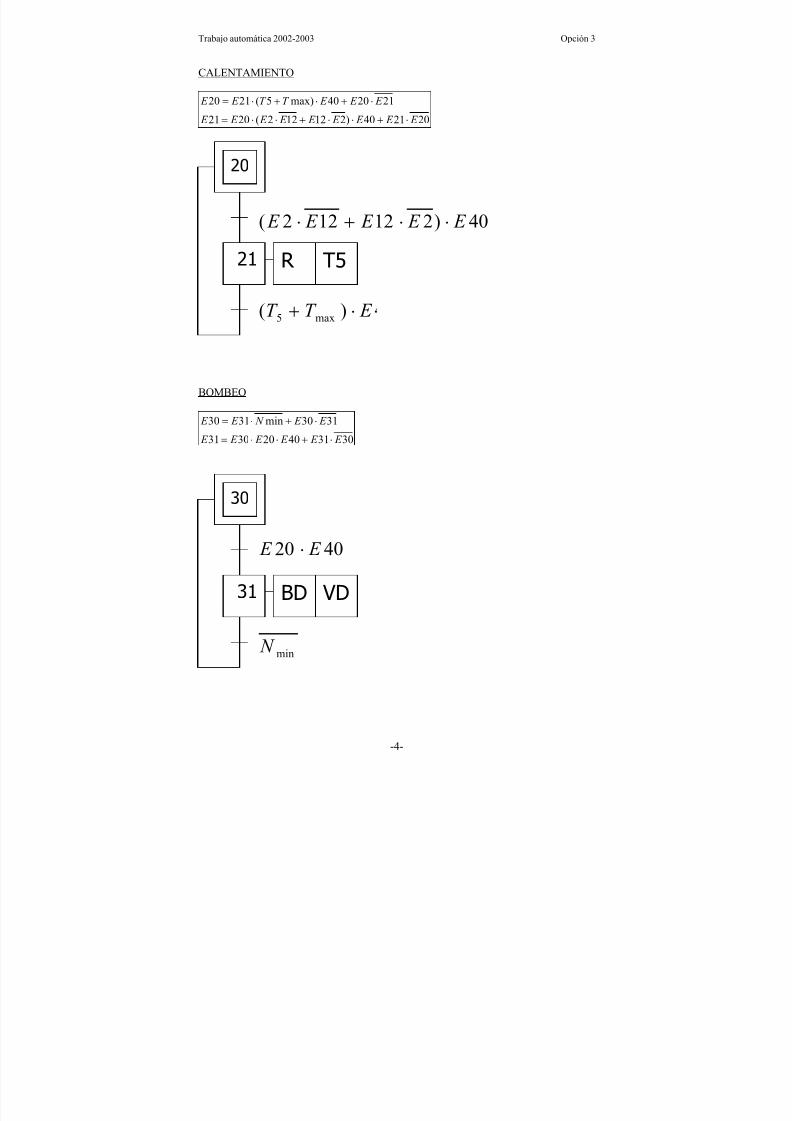
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 95/133
Trabajo automática 2002-2003 Opción 3
CALENTAMIENTO
202140)212122(2021
212040max)5(2120
E E E E E E E E E
E E E T T E E
⋅+⋅⋅+⋅⋅=
⋅+⋅+⋅=
)( max5 E T T ⋅+
40)212122( E E E E E ⋅⋅+⋅
21 T5R
20
BOMBEO
303140203031
3130min3130
E E E E E E
E E N E E
⋅+⋅⋅=
⋅+⋅=
min N
4020 E E ⋅
31 VDBD
30
-4-
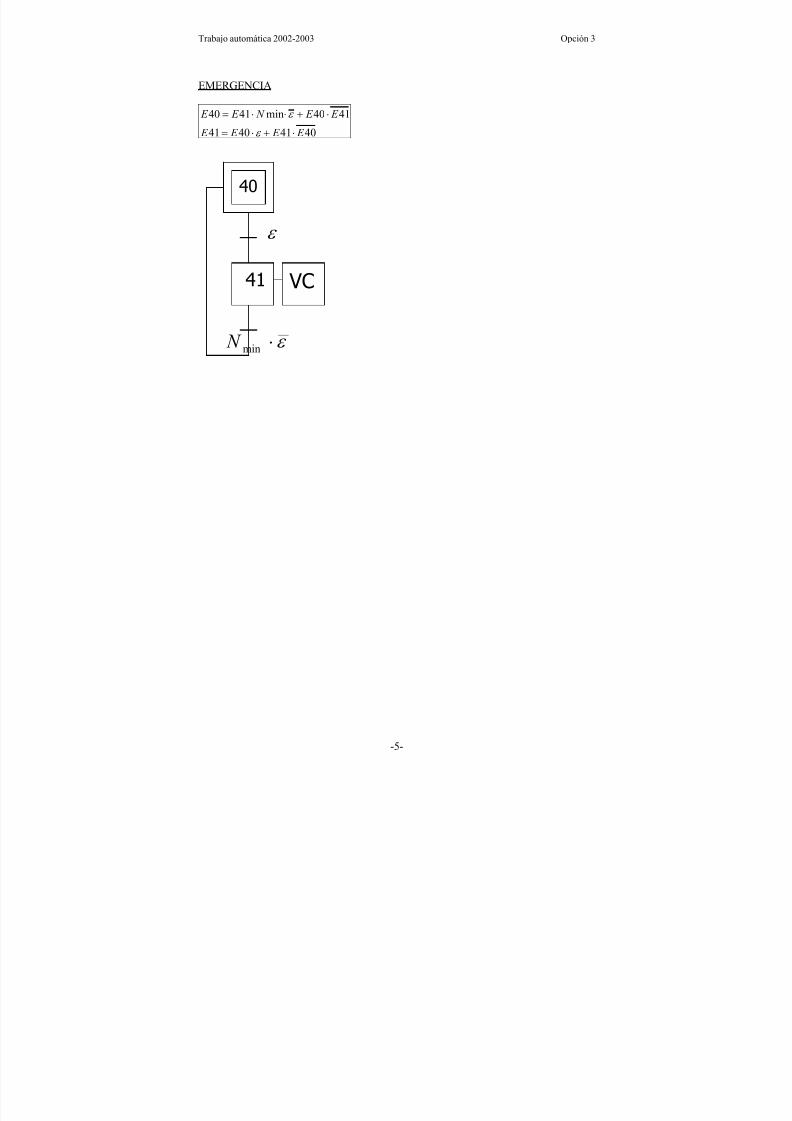
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 96/133
Trabajo automática 2002-2003 Opción 3
-5-
EMERGENCIA
40414041
4140min4140
E E E E
E E N E E
⋅+⋅=
⋅+⋅⋅=
ε
ε
ε ⋅min N
40
ε
41 VC
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 97/133
A
B
Descripción del software PL7
Descripción detallada de las instrucciones y funciones
Manual de
referencia

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 98/133
Generalidades PL7 1
___________________________________________________________________________
1/1
A
• un lenguaje booleano, el lenguaje de lista de instrucciones, que es un lenguaje
"máquina" con escritura de tratamientos lógicos y numéricos.
(1) En la siguiente documentación se utilizará PL7 para designar indistintamente PL7
Junior, PL7 Micro, PL7 Pro o PL7 Prodyn.
1.1 Presentación del programa PL7
1.1-1 Presentación
El programa PL7 Junior es un software de programación, diseñado para los autómatas
TSX 37 y TSX/PMX/PCX 57, que funcionan en Windows. El PL7 Micro permite
programar únicamente los autómatas TSX 37.
El software PL7 Pro ofrece, además de las funcionalidades PL7 Junior, la posibilidad
de crear bloques de función de usuario DFB (Derived Function block) y pantallas de
explotación.
EL software PL7 Prodyn es una herramienta de explotación (conducción, diagnóstico,
mantenimiento) para los autómatas TSX 37 y TSX/PMX/PCX 57. No permite crear o
modificar aplicaciones.
Capítulo 11 Generalidades
El programa PL7 (1) propone:
• un lenguaje gráfico, el lenguaje de contactos con transcripción de esquemas de
relés, que está adaptado al tratamiento combinatorio. Ofrece dos símbolos gráficos
de base: contactos y bobinas. La escritura de cálculos numéricos puede efectuarse
en de los bloques de operación.

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 99/133
1/2
___________________________________________________________________________
A
• un lenguaje literal estructurado, que es un lenguaje de tipo "informática" con una
escritura estructurada de tratamientos lógicos y numéricos.
• un lenguaje Grafcet que permite representar gráficamente y de forma estructurada
el funcionamiento de un automatismo secuencial.
Estos lenguajes formulan bloques de función predefinidos (temporizadores,
contadores,...) que las funciones específicas (analógica, comunicación, contaje ...) y las
funciones particulares (gestión de tiempo, cadena de caracteres ...) pueden completar.
Los objetos del lenguaje pueden simbolizarse.
El programa PL7 es conforme a la norma IEC 1131-3. Los anexos contienen las tablas
de conformidad: véase la sección B, capítulo 6.

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 100/133
1/8
___________________________________________________________________________
A
1.2 Objetos direccionables
1.2-1 Definición de los principales objetos booleanos
Bits de entradas/salidas
son las "imágenes lógicas" de los estados eléctricos de las entradas/salidas. Se
almacenan en la memoria de datos y se actualizan en cada exploración de la tarea
en la que están configurados.
Bits internos
Los bits internos %Mi permiten almacenar estados intermediarios durante la ejecución
del programa.Nota: los bits de entradas/salidas no utilizados no pueden emplearse como bits internos.
Bits sistema
Los bits sistema de %S0 a %S127 supervisan el buen funcionamiento del autómata
así como la ejecución del programa de aplicación. El propósito y el uso de estos bits
se describen en el apartado 3.1 de la sección B.
Bits de bloques de función
Los bits de bloques de función corresponden a las salidas de los bloques de función
estándar o instancia DFB. Estas salidas pueden cablearse directamente o utilizarse
como objeto.
Bits extraídos de palabras
El programa PL7 ofrece la posibilidad de extraer uno de los 16 bits de un objeto palabra.
Bits de estado de las etapas y macroetapas Grafcet
Los bits Grafcet de estado de las etapas %Xi , de las macroetapas %XMjy de las etapasde macroetapas %Xj.i (Xj.IN y Xj.OUT para las etapas de entradas y salidas de
macroetapas) permiten de conocer el estado de la etapa i, de la macroetapa o de laetapa i de la macroetapa j del Grafcet.
Lista de operandos de bits
La tabla siguiente contiene la lista de todos los tipos de operandos booleanos.
Tipo Dirección Acceso en Véase
(o valor) escritura(1) Cap. Secc.
Valor inmediato 0 ó 1 (False o True) – 1.2-4 A
Bits de entradas %Ix.i o %IXx.i no 1.2-2 Ade salidas %Qx.i o %QXx.i sí 1.2-3
Bits internos %Mi o %MXi sí –
Bits de sistema %Si según i 3.1 B
Bits de bloques ej.: %TMi.Q no 1.2-5 Ade función %DRi.F.....
Bits Grafcet %Xi , %XMj, %Xj.i... sí 5.2 A
Bitsextraídos de pals. ej.: %MW10:X5 según tipo de palabra 1.2-4 A
(1) escritura desde el programa o en modo de ajuste desde el terminal.

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 101/133
Generalidades PL7 1
___________________________________________________________________________
1/9
A
N°vía
i= 0 a 127
o MOD
Posición
x= Número de
posición en
el rack
Formato
X = booleano
W = palabra
D = doble palabra
Símbolo Tipo de objeto
I = entrada
Q = salida
8
7 9
06
5
10
TSX 37-10 TSX 37-21/22
ExtensiónBaseBase Extensión
6 8
5 7
2
1
4
3
2
1
4
3
1.2-2 Direccionamiento de objetos de módulos entradas/salidas del TSX 37
Los caracteres siguientes definen el direccionamiento de los principales objetos bits
y palabras de módulos de entradas/salidas:
% I o Q X, W o D x . i
• Tipo de objetoI y Q: para las entradas y salidas físicas de módulos. Esta información se intercambia
implícitamente en cada ciclo de la tarea asociada.
Observación: también pueden intercambiarse a solicitud de la aplicación otro tipo
de información (palabras de estado, de comando ...).
• Formato (tamaño)
Para los objetos de formato booleano, se puede omitir la X. Los demás tipos de
formato (byte, palabra, doble palabra) se definen en el apartado1.2-4.
• Posición y número de víaLa modularidad de base del TSX 37 es de semiformato. Las esquemas siguientes
indican las posiciones de cada tipo de autómata TSX 37 (base y extensión).
Los módulos de formato estándar se direccionan como 2 módulos de semiformato
superpuestos (véase la tabla siguiente).
Por ejemplo, un módulo de 64 E/S se ve como 2 módulos de semiformato:un módulo de semiformato de 32 entradas situado en la posición 5 y un módulo de
semiformato de 32 salidas situado en el alojamiento 6.

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 102/133
1/10
___________________________________________________________________________
A
Módulo Semiformato Formato estándar
4 S 8 S 12 E 28 E/S 32 E 32 S 64 E/S
Número de vía: i 0 a 3 0 a 7 0 a 11 0 a 15 0 a 15 0 a 15 0 a 31
0 a 11 0 a 15 0 a 15 0 a 31
Posición y N° vía x.0 x.0 x.0 x.0 x.0 x.0 x.0(x = posición) a a a a a a a
x.3 x.7 x.11 x.15 x.15 x.15 x.31
(x+1).0 (x+1).0 (x+1).0 (x+1).0a a a a
(x+1).11 (x+1).15 (x+1).15 (x+1).31
Nota
Es posible reemplazar el número de vía por "MOD" para acceder a la información general sobre
el módulo.
• Rango: este sufijo opcional puede agregarse al número de vía. Permite marcar
objetos del mismo tipo asociados a una misma vía.
ERR: indica uno fallo de módulo o de vía.
Ejemplos: %I4.MOD.ERR: información de fallo del módulo 4,
%I4.3.ERR: información de fallo de la vía 3, módulo 4.
Nota
En el direccionamiento a través de la red o de entradas/salidas remotas, se agrega al número de
posición en el rack la ruta completa de acceso a la estación.
Ejemplos
%I1.5 vía de entrada n°5 del módulo
situado en la posición n°1.
%I3.8 vía de entrada n°8 del módulo de
formato estándar situado en las
posiciones n°3 y 4.
%Q4.5 vía de salida n°5 del módulo de
formato estándar situado en las
posiciones n°3 y 4.%I5.MOD.ERR información sobre el fallo
del módulo situado en la posición
n°5.
%IW8.0 vía de entrada n°0 del módulo de
semiformato situado en la posición
n°8.
Extensión
6 8
5 7
Base
%IW8.0TSX 37-10
%Q4.5
%I5.MOD.ERR%I3.8%I1.5
2
1
4
3

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 103/133
Generalidades PL7 1
___________________________________________________________________________
1/17
A
R
S
CU
CD F
D
E
%Ci
C.P : 9999
MODIF : Y
1.2-5 Objetos de bloques de función
Los bloques de función implantan objetos bits y palabras específicos.
• Objetos bits
Corresponden a salidas de bloques.
Las instrucciones booleanas de
comprobación permiten acceder a estos
bits.
• Objetos palabrasCorresponden:
- a parámetros de configuración del
bloque. El programa permite acceder
a ellos (ej.: parámetro de preselección)
o no (ej.: base de tiempo).
- a valores actuales (ej.: %Ci.V valor de
contaje en curso).
Lista de objetos bits y palabras de bloques de función accesibles desde el programa
Bloques funci ón Palabras y bits asociados Dirección Acceso enV éase
predefinidos (2) escritura secc. B
Temporizador Palabra Valor actual %TMi.V No 1.3-2%TMi (i=0 a 63) Valor de preselección %TMi.P Sí
(1) Bit Salida temporizador %TMi.Q No
Contador/ Palabra Valor actual %Ci.V No 1.3-3descontador Valor de preselección %Ci.P Sí%Ci (i=0 a 31) Bit Salida desbord. (vacío) %Ci.E No
Salida preselección alcanz. %Ci.D NoSalida desbord. (lleno) %Ci.F No
Monoestable Palabra Valor actual %MNi.V No 2.2-1%MNi (i=0 a 7) Valor de preselección %MNi.P Sí
Bit Salida monoestable en curso %MNi.Q No
Registro palabra Palabra Acceso al registro %Ri.I Sí 2.2-2%Ri (i= 0 a 3) Salida del registro %Ri.O Sí
Bit Salida registro lleno %Ri.F NoSalida registro vacío %Ri.E No
Programador Palabra Número de paso en curso %DRi.S Sí 2.2-3cíclico Estados del paso j %DRi.Wj No%DRi (i=0 a 7) Tiempo de actividad del paso %DRi.V No
Bit Ult. paso definido en curso %DRi.F No
Temporizador Palabra Valor actual %Ti.V No 2.2-4serie 7 Valor de preselección %Ti.P Sí%T (i=0 a 63) (1) Bit Salida en curso %Ti.R No
Salida temporizador transc. %Ti.D No
(1) El número total de temporizadores %TMi y %Ti se limita a 64 para un TSX 37 y a 255 para un TSX/PMX/PCX 57.
(2)Número máximo para el TSX 37; para el TSX/PMX/PCX 57, i=0 a 254 para todos los bloques de función.
Bloque contador/descontador

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 104/133
Lenguaje de contactos 2
___________________________________________________________________________
2/1
A
2.1 Presentación del lenguaje de contactos
2.1-1 Principio
Un programa escrito en lenguaje de contactos se compone de una serie de redes
ejecutadas secuencialmente por el autómata.
Trazada entre dos barras de potencial, una red es un conjunto de elementos gráficos
que representan:
• las entradas/salidas del autómata (botones pulsadores, detectores, relés,
indicadores...),
• funciones de automatismos (temporizadores, contadores...),
• operaciones aritméticas, lógicas y específicas,
• las variables internas del autómata.
Estos elementos gráficos están vinculados entre sí mediante conexiones horizontales
y verticales.
Cada red así constituida
contiene un máximo de
16líneas y 11 columnas
(para los autómatas TSX/
PMX/PCX 57) ó 7 líneas y
11 columnas (para los
autómatas TSX 37).
Se divide en 2áreas:• el área de prueba, en la
que figuran las
condiciones necesarias
para una acción,
• el área de acción, que
presenta el resultado de
un encadenamiento de
pruebas.
MAIN
EVT
SR
FAST
PRE
MAST
POST
AUX
CHART
%L
%I1.0 %M12 %Q2.5 %I3.7
%TM4.Q %M17
%MW4<50
%MW15 : = %MW18+500 %TM0 %I3.10 %Q4.3
IN
TYP : TP TB : 100ms
TM.P : 200 MODIF : Y
Q
SR1
C
%I1.2 %I1.4
%M27 %M25 %MW0:X5
Formulario de programación
Esquema de contactos
Capítulo 2
2 Lenguaje de contactos
Espera de secado
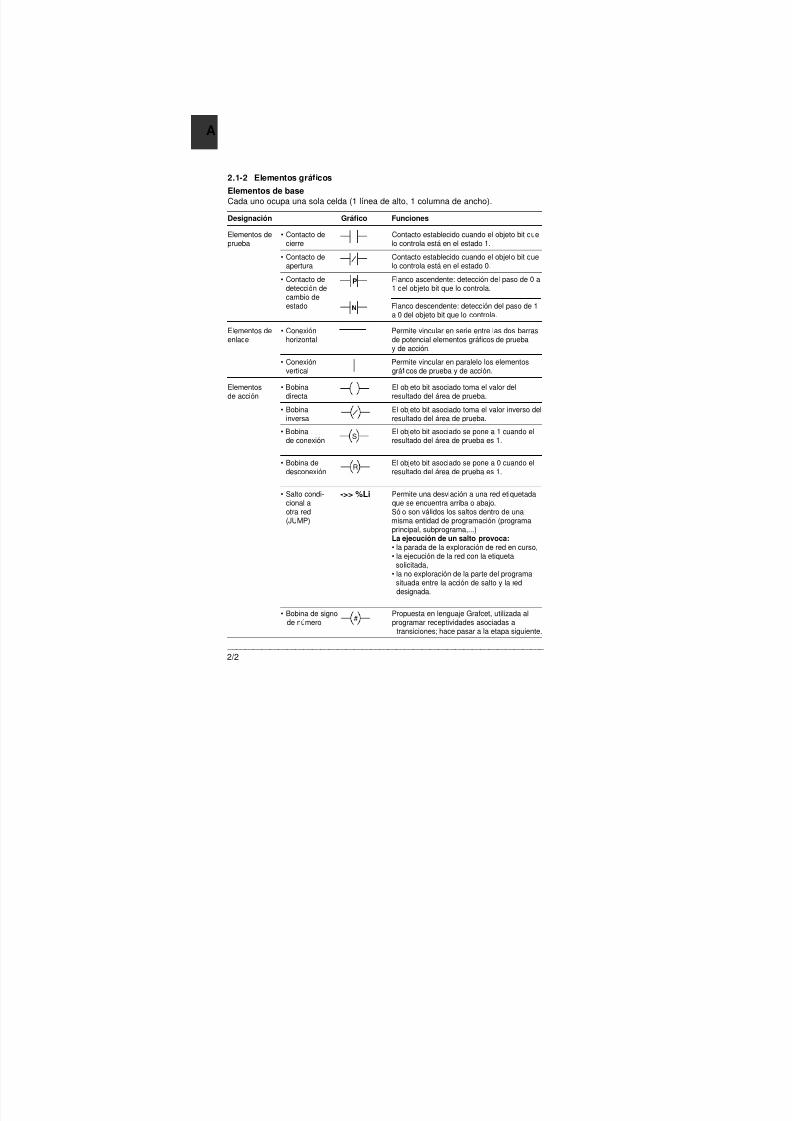
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 105/133
2/2
___________________________________________________________________________
A
2.1-2 Elementos gráficos
Elementos de base
Cada uno ocupa una sola celda (1 línea de alto, 1 columna de ancho).
Designación Gráfico Funciones
Elementos de • Contacto de Contacto establecido cuando el objeto bit queprueba cierre lo controla está en el estado 1.
• Contacto de Contacto establecido cuando el objeto bit queapertura lo controla está en el estado 0.
• Contacto de Flanco ascendente: detección del paso de 0 adetección de 1 del objeto bit que lo controla.cambio deestado Flanco descendente: detección del paso de 1
a 0 del objeto bit que lo controla.
Elementos de • Conexión Permite vincular en serie entre las dos barrasenlace horizontal depotencial elementos gráficos de prueba
y de acción.
• Conexión Permite vincular en paralelo los elementosvertical gráficos de prueba y de acción.
Elementos • Bobina El objeto bit asociado toma el valor delde acción directa resultado del área de prueba.
• Bobina El objeto bit asociado toma el valor inverso delinversa resultado del área de prueba.
• Bobina El objeto bit asociado se pone a 1 cuando elde conexión resultado del área de prueba es 1.
• Bobina de El objeto bit asociado se pone a 0 cuando eldesconexión resultado del área de prueba es 1.
• Salto condi- Permite una desviación a una red etiquetadacional a que se encuentra arriba o abajo.otra red Sólo son válidos los saltos dentro de una(JUMP) misma entidad de programación (programa
principal, subprograma,...)La ejecución de un salto provoca:• la parada de la exploración de red en curso,• la ejecución de la red con la etiqueta
solicitada,• la no exploración de la parte del programasituada entre la acción de salto y la reddesignada.
• Bobina de signo Propuesta en lenguaje Grafcet, utilizada alde número programar receptividades asociadas a
transiciones; hace pasar a la etapa siguiente.
->> %Li
S
N
P
R
#
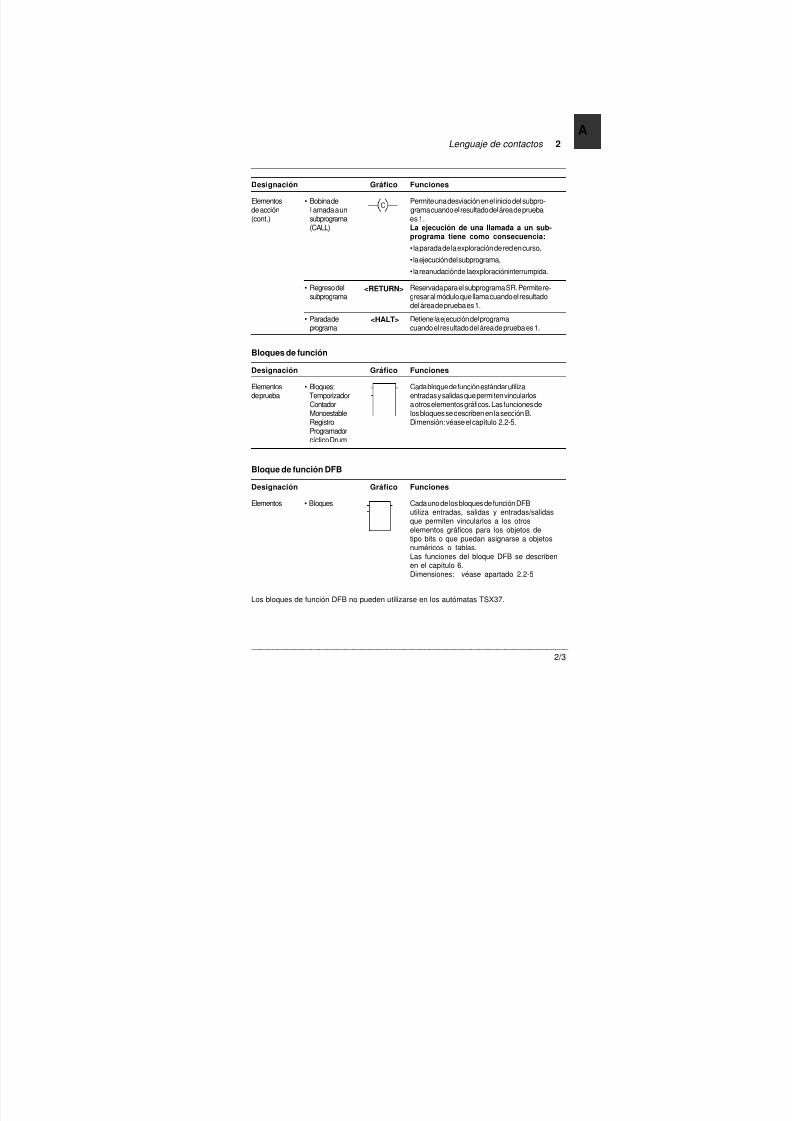
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 106/133
Lenguaje de contactos 2
___________________________________________________________________________
2/3
A
Bloque de función DFB
Designación Gráfico Funciones
Elementos • Bloques Cada uno de los bloques de función DFButiliza entradas, salidas y entradas/salidasque permiten vincularlos a los otroselementos gráficos para los objetos detipo bits o que puedan asignarse a objetosnuméricos o tablas.Las funciones del bloque DFB se describenen el capítulo 6.Dimensiones: véase apartado 2.2-5
Los bloques de función DFB no pueden utilizarse en los autómatas TSX37.
Designación Gráfico Funciones
Elementos • Bobina de Permite una desviación en el inicio del subpro-de acción llamada a un grama cuando el resultado del área de prueba(cont.) subprograma es 1.
(CALL) La ejecución de una llamada a un sub-programa tiene como consecuencia:
• la parada de la exploración de red en curso,
• la ejecución del subprograma,
• la reanudaciónde laexploracióninterrumpida.
• Regreso del Reservada para el subprograma SR. Permite re-subprograma gresar al módulo que llama cuando el resultado
del área de prueba es 1.
• Parada de Detiene la ejecución del programaprograma cuando el resultado del área de prueba es 1.
Bloques de función
Designación Gráfico Funciones
Elementos • Bloques: Cada bloque de función estándar utilizade prueba Temporizador entradas y salidas que permiten vincularlos
Contador a otros elementos gráficos. Las funciones de
Monoestable los bloques se describen en la sección B.Registro Dimensión: véase el capítulo 2.2-5.Programadorcíclico Drum
C
<RETURN>
<HALT>

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 107/133
2/4
___________________________________________________________________________
A
Bloques de operación
Designación Gráfico Funciones
Elementos • Bloque de Permite comparar 2 operandos; según elde prueba comparación resultado, la salida correspondiente pasa a 1.
verticalDimensión: 2 columnas/4 líneas
• Bloque de Permite comparar 2 operandos; la salida pasacomparación a 1 cuando se ha verificado el resultado. (Un
horizontal bloque puede contener hasta 4096 caracteres.)
Dimensión: 2 columnas/1 línea
Elemento • Bloque de Realizan las operaciones aritméticas, lógicas…
de acción operación utilizando la sintaxis del lenguaje literal. (Unbloque puede contener hasta 4096 caracteres.)Dimensión: 4 columnas/1 línea
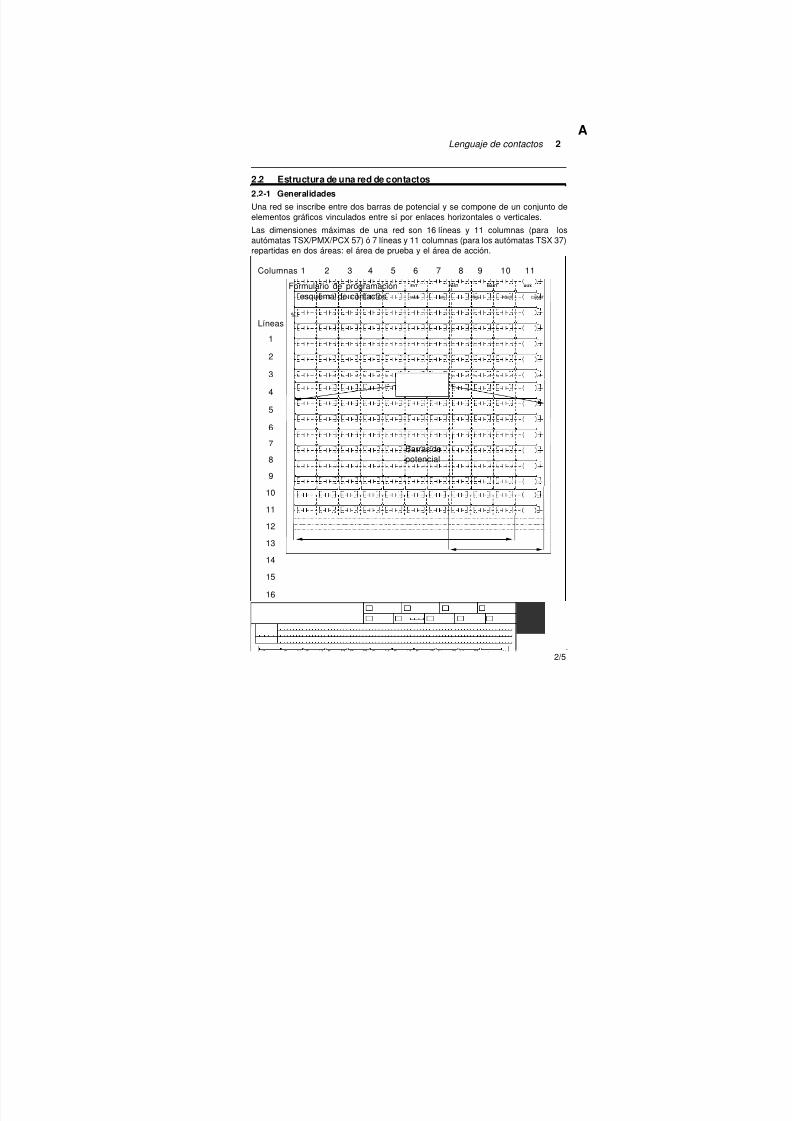
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 108/133
Lenguaje de contactos 2
___________________________________________________________________________
2/5
A
MAIN
EVT
SR
FAST
PRE
MAST
POST
AUX
CHART
%L
2.2 Estructura de una red de contactos
2.2-1 Generalidades
Una red se inscribe entre dos barras de potencial y se compone de un conjunto de
elementos gráficos vinculados entre sí por enlaces horizontales o verticales.
Las dimensiones máximas de una red son 16líneas y 11 columnas (para los
autómatas TSX/PMX/PCX 57) ó 7 líneas y 11 columnas (para los autómatas TSX 37)
repartidas en dos áreas: el área de prueba y el área de acción.
1 2 3 4 5 6 7 8 9 10 11
Líneas
1
2
3
4
56
7
8
9
10
11
12
13
14
15
16
Columnas
Area de prueba
Area de acción
Barras de
potencial
Formulario de programación
esquema de contactos
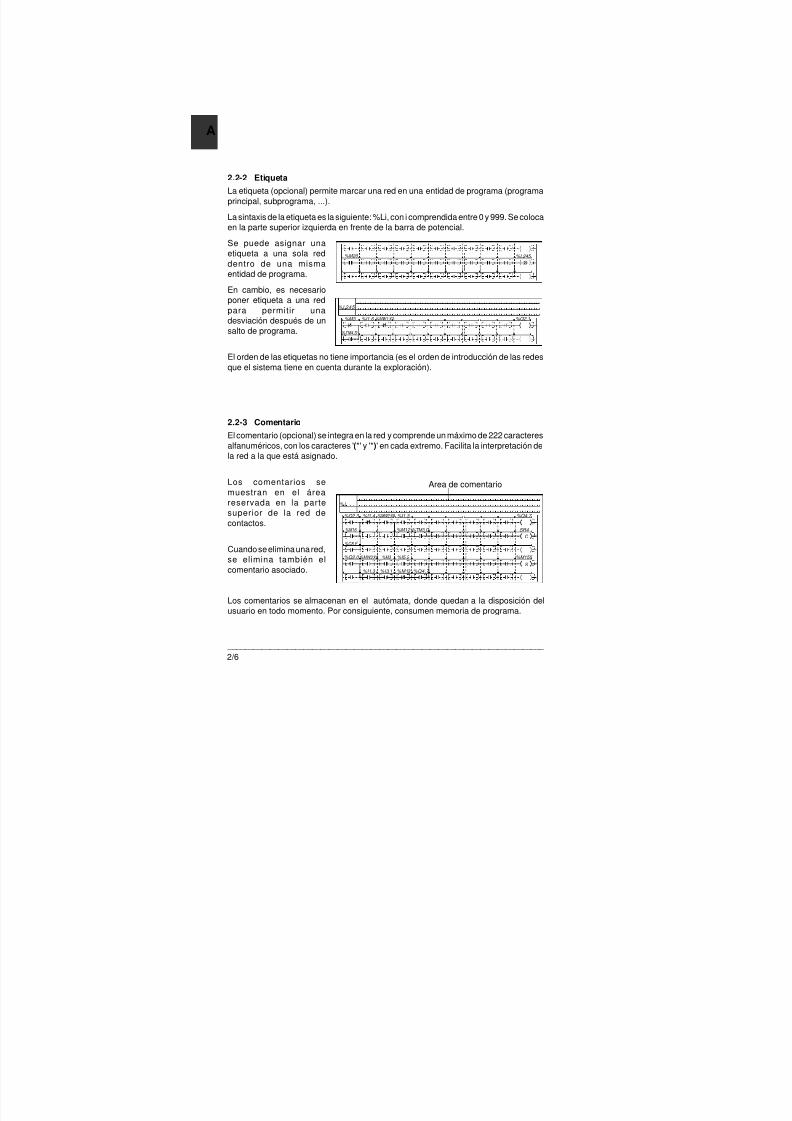
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 109/133
2/6
___________________________________________________________________________
A
2.2-2 Etiqueta
La etiqueta (opcional) permite marcar una red en una entidad de programa (programa
principal, subprograma, ...).
La sintaxis de la etiqueta es la siguiente: %Li, con i comprendida entre 0 y 999. Se coloca
en la parte superior izquierda en frente de la barra de potencial.
Se puede asignar una
etiqueta a una sola red
dentro de una misma
entidad de programa.
En cambio, es necesario
poner etiqueta a una red
para permitir una
desviación después de un
salto de programa.
El orden de las etiquetas no tiene importancia (es el orden de introducción de las redes
que el sistema tiene en cuenta durante la exploración).
2.2-3 Comentario
El comentario (opcional) se integra en la red y comprende un máximo de 222 caracteres
alfanuméricos, con los caracteres '(*' y '*)' en cada extremo. Facilita la interpretación de
la red a la que está asignado.
Los comentarios se
muestran en el área
reservada en la parte
superior de la red de
contactos.
Cuando se elimina una red,se elimina también el
comentario asociado.
Los comentarios se almacenan en el autómata, donde quedan a la disposición del
usuario en todo momento. Por consiguiente, consumen memoria de programa.
%L
%Q2.3 %Q4.7 %I1.4 %MW2:X9
%M16
%I1.3
SR4
C
%M12 %TM3.Q
%C8.E
%Q2.0 %M155 %MW3:X0 %M3 %I5.2
S
%I1.3 %I3.1 %M13 %Q4.7
%L2 4 5
%M3 %Q2.1%I1.6 %MW1:X2
%TM4.D
%L245 %M20
Area de comentario
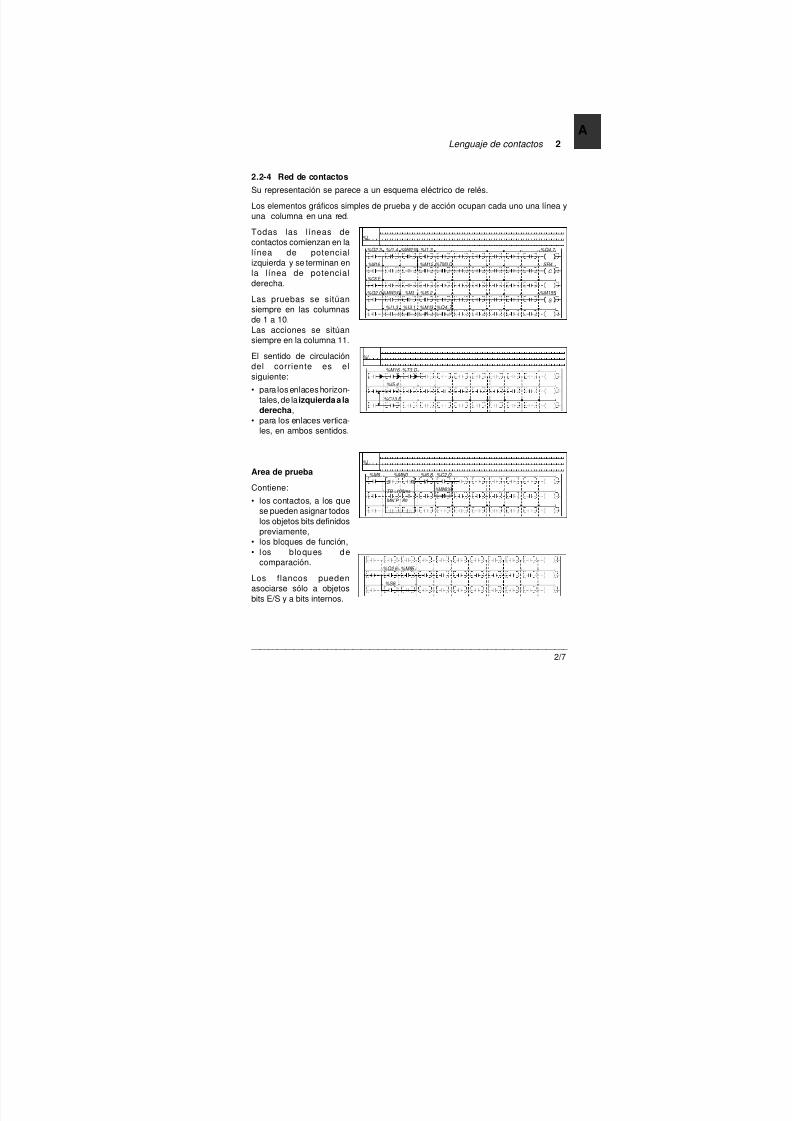
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 110/133
Lenguaje de contactos 2
___________________________________________________________________________
2/7
A
2.2-4 Red de contactos
Su representación se parece a un esquema eléctrico de relés.
Los elementos gráficos simples de prueba y de acción ocupan cada uno una línea y
una columna en una red.
Todas las líneas de
contactos comienzan en la
línea de potencial
izquierda y se terminan en
la línea de potencialderecha.
Las pruebas se sitúan
siempre en las columnas
de 1 a 10.
Las acciones se sitúan
siempre en la columna 11.
El sentido de circulación
del corriente es el
siguiente:
• para los enlaces horizon-
tales, de la izquierda a la
derecha,• para los enlaces vertica-
les, en ambos sentidos.
Area de prueba
Contiene:
• los contactos, a los que
se pueden asignar todos
los objetos bits definidos
previamente,
• los bloques de función,
• los b loques decomparación.
Los flancos pueden
asociarse sólo a objetos
bits E/S y a bits internos.
%L
%Q2.3 %Q4.7 %I1.4 %MW2:X9
%M16
%I1.3
SR4
C
%M12 %TM3.Q
%C8.E
%Q2.0 %M155 %MW3:X0 %M3 %I5.2
S
%I1.3 %I3.1 %M13 %Q4.7
%L
%M16 %T3.D
%I5.4
%C13.E
%L
%I6.8
S
TB : 100ms
MN.P : 80
%C2.D
%MW8:X4
%MN0 %M9
R
%Q2.6 %M85
%S6

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 111/133
2/8
___________________________________________________________________________
A
Area de acciónContiene:
• las bobinas directas, in-
versas, de conexión y
desconexión, que
pueden asignarse a
todos los objetos bits que
el usuario puede escribir,
• los b loques de
operación,• las demás "bobinas":
Call, Jump, Halt, Return.
Red simpleControl de una bobina
condicionada por un
contacto.
Se utiliza un máximo de 10
contactos en serie en una
línea.
Es posible probar 16
contactos (7 contactos
para TSX37) máximo enparalelo en una columna y
colocar 16 bobinas (7 bo-
binas para TSX37) en
paralelo.
%I1.3 %Q4.12
%L
%M52
%MW2 := %MW0+1
%MW8:X10 %MW8:X1
/
%Q6.5 %M8
S
%M12
R
%M1 %Q6.3 %I3.2 %MW18:X4 %Q4.2 %M15 %TM2.Q %I3.4 %MW1:X5 %M5 %C0.D
/
%L
%M5 %Q6.2
%M25
%MW8:X0
SR9
%L20
%M12
%Q2.6
S
R
C
/
%I6.9
%MW15:X5
%C6.E
%Q5.2
%I3.7
%S4
%M8 %M30
%M31
%M32
%M33
%M34
%M35
%M36
S
R
C
/
%M9
%M10
%M11
%M12
%M13
%M14
%M15 %M37
%M38 %M16

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 112/133
Lenguaje de contactos 2
___________________________________________________________________________
2/9
A
Red que utiliza varias cadenas de contactos
Una red puede dividirse
en varias cadenas de
contactos independientes
que controlan bobinas
independientes.
16 líneas (7 líneas paraTSX37) de contactos
independientes.
Redes que utilizan los
diferentes principios
enunciados.
Están rodeados los
elementos que seencuentran en el estado
lógico 1. La corriente
puede pasar de los
elementos A y C hacia la
bobina F, pero no puede
pasar del elemento C hacia
los elementos D y E. Por
consiguiente, no se activa
la bobina G.
%L
F A C
G
B D
E
%L
%I3.2 %L12
SRØ
%Q3.2
%Q3.3
%MW3:X6
%M27
%M68
S
/
%C2.E
%S4
%I6.5
%M53
%MW8:X4
%M12
%MW6:X10 %M88
P
C
%M30
%M31
%M32
% M33
%M34
%M35
S
/
%M8
%M9
%M10
%M11
% M12
%M13
P
C
%M36
%M37
%M38
/
%M14
%M15
%M16
P
C

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 113/133
2/10
___________________________________________________________________________
A
Observación:
Las entradas no cableadas de los bloques de función estándar se ponen a 0.
2.2-5 Red de contactos con bloques de función y de operación
• Los bloques de función se posicionan en el área de prueba y se insertan en una red
de contactos.
Existen cuatro dimensiones de grafismo que representan todos los bloques de
función del lenguaje PL7.
Contador/Descontador 2 columnas
Comparador "vertical" 4 líneas
Temporizadores 2 columnasMonoestable 3 líneas
Registro
Programador cíclico
Comparador "horizontal" 2 columnas
1 línea
%TM10
%C4
COMPARE

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 114/133
Lenguaje de contactos 2
___________________________________________________________________________
2/11
A
• Los bloques de función DFB se posicionan en el área de prueba y se insertan en
una red de contactos.
Las dimensiones del grafismo dependen del número de entradas, salidas y de
entradas/salidas utilizadas:
EL ancho es fijo y es igual a 3 columnas.
La altura es igual al más mayor de los 2 números
siguientes más 1:
• número de entradas y de entradas/salidas
o
• número de salidas y de entradas/salidas
Ejemplo:
El número de entradas y de entradas/salidas es de 4,
el número de salidas y de entradas/salidas es de 3, la
altura del bloque es 4+1=5 columnas.
La altura máxima de un bloque de función DFB es de
16 líneas.
Observaciones:
• Un bloque de función DFB debe tener por lo menos
una entrada booleana cableada.
• Las entradas, salidas o entradas/salidas
numéricas del bloque no están cableadas. En
estos puntos se asocian objetos mencionados en
la celda colocada frente al punto.
• Las entradas no cableadas de los bloques de
función DFB conservan el valor anterior a la llamada
o el valor de inicialización si el bloque jamás ha
sido llamado con esta entrada introducida o
cableada.
• Los bloques de operación se posicionan siempre en el área de acción. Utilizan 1
línea y 4 columnas y el lenguaje literal. Se conectan siempre directamente a la barra
de potencial derecha.
%MW22 : = %MW1+%MW9
%MW10:X5
DFB

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 115/133
2/12
___________________________________________________________________________
A
Bloques de función en cascada
Igual que para los elementos gráficos del tipo contacto, es posible realizar combinaciones
de bloques de función.
Serielización de bloques de función:
Combinaciones de bloques de función y de operación
Otras posibilidades de bloques de funciónTodos los tipos de bloques de función deben conectarse obligatoriamente en entrada
a la barra de potencial izquierda, o directamente o a través de otros elementos gráficos.
• Salidas "sueltas":no es necesario conectar las salidas de bloques de función a otros
elementos gráficos.
• Salidas que se pueden probar: el usuario accede a las salidas de los bloques
función bajo forma de objetos bits.
Las variables internas de bloques y las salidas gráficas son objetos que pueden ser
explotados a distancia desde otra parte del programa.
%L
%MN1
S
TB : 100ms
MN.P : 80
R
%TM12
IN
TYP : TP
TB : 100ms
TM.P : 200
MODIF : Y
Q
%I3.6 %Q6.3
%L
%MW1>100
%TM10
IN
TYP : TP
TB : 1s
TM.P : 50
MODIF : Y
Q
%I1.5 %M28
%MW2>500
%I1.2
%TM2.P := 3450
%TM12.Q %Q4.12 %C5.E

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 116/133
Lenguaje de contactos 2
___________________________________________________________________________
2/13
A
2.3 Reglas de ejecución de una red de contactos
2.3-1 Principio de ejecución de una red
Una red se ejecuta red conexa por red conexa, y luego, dentro de la red conexa, de la
izquierda a la derecha.
Una red conexa contiene elementos gráficos vinculados entre sí por elementos de
enlace (fuera de la barra de potencial), pero independientes de los demás elementos
gráficos de la red (en el límite de la red conexa, sin enlaces verticales hacia arriba o
abajo).
La primera red conexa evaluada es la cuya esquina izquierda se encuentra lo más arriba
a la izquierda.
Una red conexa se evalúa en el sentido de la ecuación: de arriba abajo, línea por línea
y cada línea de la izquierda a la derecha.
Si se encuentra un enlace vertical de convergencia, se evalúa la subred asociada
(según la misma lógica) antes de continuar la evaluación de la red que la engloba.
Respetando este orden de ejecución, el sistema:
• evalúa el estado lógico de cada contacto, según el valor actual de los objetos internos
de la aplicación o del estado de las entradas de los módulos E/S adquiridas en el inicio
del ciclo,
• ejecuta los tratamientos asociados a funciones, a bloques de función y a subprogramas,
• actualiza los objetos bits asociados a bobinas (las salidas de los módulos E/S se
actualizan al final del ciclo),
• desvía hacia otra red etiquetada del mismo módulo de programa (salto a otra red -
>>%Li), regresa al módulo que llama <RETURN> o detiene el programa <HALT>.
Nota
Una red de contactos no debe contener redes conexas imbricadas.
Red
conexa 1
Redconexa 2
%Q2.5 %M0 %M8
%I2.5 %TM1
IN Q
%MØ INIT
%Q2.6 %MØ
Red
conexa 3
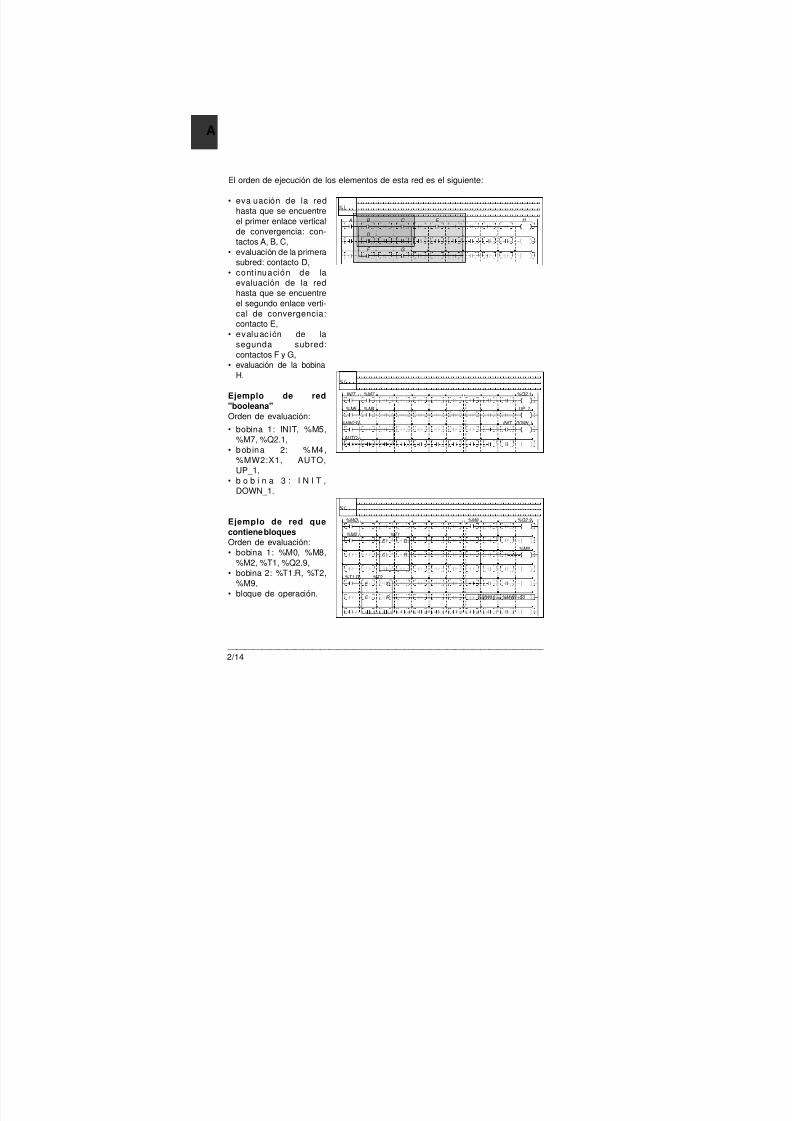
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 117/133
2/14
___________________________________________________________________________
A
El orden de ejecución de los elementos de esta red es el siguiente:
• evaluación de la red
hasta que se encuentre
el primer enlace vertical
de convergencia: con-
tactos A, B, C,
• evaluación de la primera
subred: contacto D,
• cont inuación de laevaluación de la red
hasta que se encuentre
el segundo enlace verti-
cal de convergencia:
contacto E,
• evaluación de la
segunda subred:
contactos F y G,
• evaluación de la bobina
H.
Ejemplo de red
"booleana"
Orden de evaluación:
• bobina 1: INIT, %M5,
%M7, %Q2.1,
• bob ina 2: %M4,
%MW2:X1, AUTO,
UP_1,
• b o b i n a 3 : I N I T ,
DOWN_1.
Ejemplo de red que
contiene bloques
Orden de evaluación:
• bobina 1: %M0, %M8,%M2, %T1, %Q2.9,
• bobina 2: %T1.R, %T2,
%M9,
• bloque de operación.
%L
A H B C E
D
F G
%L
INIT %Q2.1%M7
UP_1
DOWN_1
%M5 %M4
%MW2:X1
AUTO
INIT
%L
%Q2.9 %MØ %M8
%M9
%M2 %T1
E
C
D
R
%T2
D
R
%T1.D
E
C %MW10 := %MW1+50

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 118/133
Descripción de las instrucciones de base 1
___________________________________________________________________________
1/1
B1.1 Presentación de las instrucciones de base
1.1-1 Generalidades
Las instrucciones descritas en este capítulo son conformes a las instrucciones de base
principales definidas en la norma IEC 1131.3.
El lenguaje utilizado no tiene importancia: estas instrucciones tienen siempre el mismo
efecto. Sólo cambia su presentación en el programa.
Ejemplo de ecuación booleana:
en Lista de instrucciones: LD %I1.0ST %Q2.0
en lenguaje de contactos:
en lenguaje Literal estructurado: %Q2.0 := %I1.0 ;
Estas tres ecuaciones booleanas son equivalentes. El objeto bit %Q2.0 asume el valor
(instrucción de asignación) del objeto bit %I1.0 (instrucción de carga).
Las instrucciones de base comprenden:
• las instrucciones booleanas (tratamientos en bits),• los bloques de función predefinidos de automatismo temporizador y contador,
• las instrucciones numéricas para enteros (tratamientos en palabras y dobles
palabras),
• las instrucciones de programa.
Las demás instrucciones se detallan en el capítulo 2 "Descripción de las instrucciones
avanzadas".
%I1.0 %Q2.O
Capítulo 1
1 Descripción de las instrucciones de base

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 119/133
1/2
___________________________________________________________________________
B1.2 Instrucciones booleanas
1.2-1 Presentación de las instrucciones booleanas
Las instrucciones booleanas actúan sobre todas las informaciones del tipo bit (bits de
entradas/salidas, bits internos...).
• Elementos de prueba, ejemplo: contacto de cierre
Contacto establecido cuando el objeto bique lo controla está en el estado 1.
LD %I1.0 %I1.0
• Elementos de acción, ejemplo: bobina directa.
El objeto bit asociado toma el valor lógico del resultado del elemento de prueba.
ST %Q2.0 %Q2.0 :=
• Ecuación booleana:El resultado booleano de los elementos de prueba se aplica al elemento de acción.
LD %I1.0
AND %I1.1 %Q2.0 := %I1.0 AND %I1.1 ;
ST %Q2.0
Flancos ascendente y descendenteLas instrucciones de prueba permiten detectar el flanco ascendente o descendente
en los bits de entradas y salidas de autómatas o en los bits internos.
Contacto de detección de flanco asc.: Contacto de detección de flanco desc.:
LDR %I1.0 RE %I1.0 LDF %I1.0 FE %I1.0
• Para todas las entradas (TON, contaje, ...): un flanco se detecta cuando el estado
del bit ha cambiado entre el ciclo n-1 y el ciclo n en curso; permanece detectado
durante el ciclo en curso (véase la sección A, capítulo 1.3-2).
Flanco ascendente: detección del pasoFlanco descendente: detección del paso
de 0 a 1 de la entrada que lo controla. de 1 a 0 de la entrada que lo controla.
• Para las salidas o los bits internos: la detección de un flanco es independiente
del ciclo de tarea; se detecta uno en el bit interno %Mi cuando su estado ha cambiado
entre 2 lecturas. El flanco permanece detectado mientras no se explore %Mi en el
área de acción.
• El usuario no debe efectuar un SET o RESET de un objeto cuyo flanco está probando
(en lenguaje de contactos y Lista de instrucciones).
%I1.0%I1.0
%I1.0
N
%I1.0
P
%I1.0 %I1.1 %Q2.0
%Q2.0
%I1.0
Result.booleano
tiempo
tiempo
1 ciclo de tarea 1 ciclo de tarea
tiempo
tiempo
Resultadobooleano

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 120/133
Descripción de las instrucciones de base 1
___________________________________________________________________________
1/3
B
%Q2.3
%I1.1
LD
1.2-2 Descripción de las instrucciones
Las instrucciones booleanas se describen del modo siguiente.
Instrucciones de cargaEstas instrucciones corresponden a:
• contactos de cierre: contacto cuando el objeto bit que lo controla está en el estado 1,
• ...
Lenguaje de contactos Lenguaje Lista de instrucciones
LD %I1.1ST %Q2.3LDN %M0ST %Q2.2
Lenguaje Literal estructurado
%Q2.3 := %I1.1 ;%Q2.2 := NOT %M0 ;
Operandos autorizados Cronograma
Código Operando
LD %I,%Q,%M,%S,%BLK,%•:Xk, %Xi
LDN %I,%Q,%M,%S,%BLK,%•:Xk, %Xi
%Q2.3
%I1.1
LD
%M0
LDN
%Q2.2
%M0
%I1.1 %Q2.3
%Q2.2
Cronograma de
la instrucción LD
Cronograma
Estado de la entrada
Estado de la
salida
Los 4 cronogramas están agrupados.Lista de operandos
0/1 valor inmediato 0 (false) o 1 (true)
%I entrada autómata %Ix.i
%Q salida autómata %Qx.i
%M bit interno %Mi
%S bit sistema %Si
%BLK bit bloque función (ej.: %TMi.Q)
o de instancia DFB
%•:Xk bit extr. de pal., ej.: %MWi:Xk
%Xi bit de etapa, macroetapa (%XMi)
o etapa de macroatapa (%Xj.i)
La instrucción descrita se presenta en negrita.
Cada ecuación se ilustra en todos los
lenguajes.

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 121/133
1/4
___________________________________________________________________________
B
%Q2.3
%I1.1
LD
%M0 %I1.2 %I1.3
LDN LDR LDF
%Q2.2 %Q2.4 (2) %Q2.5 (2)
NP
1.2-3 Instrucciones de carga
Estas instrucciones corresponden a:
• contactos de cierre: se establecen cuando el objeto bit que los controla = estado 1,
• contactos de apertura: se establecen cuando el objeto bit que los controla = estado
0,
• contactos de flanco ascendente: detección del paso de 0 a 1 del objeto bit que los
controla,
• contactos de flanco descendente: detección del paso de 1 a 0 del objeto bit que los
controla.Lenguaje de contactos Lenguaje Lista de instrucciones
LD %I1.1ST %Q2.3LDN %M0ST %Q2.2LDR %I1.2ST %Q2.4LDF %I1.3ST %Q2.5
Lenguaje Literal estructurado
%Q2.3 := %I1.1 ;%Q2.2 := NOT %M0 ;%Q2.4 := RE %I1.2 ;%Q2.5 := FE %I1.3 ;
Operandos autorizados Cronograma
Código Operando
L D %I,%Q,%M,%S,%BLK,%•:Xk, %Xi (1)
LDN %I,%Q,%M,%S,%BLK,%•:Xk, %Xi (1)
LDR %I,%Q,%M
LD F %I,%Q,%M
(1) True (1) / False (0) en lenguaje Lista
de instrucciones o Literal estructurado
(2) Puesto a 1 durante1 ciclo
%M0
%I1.1 %Q2.3
%I1.2
%Q2.2
%Q2.4
%I1.3 %Q2.5
P
N
P
N

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 122/133
Descripción de las instrucciones de base 1
___________________________________________________________________________
1/5
B1.2-4 Instrucciones de asignación
Estas instrucciones corresponden a:
• bobinas directas: el objeto bit asociado toma el valor del resultado de la ecuación,
• bobinas inversas: el objeto bit asociado toma el valor de inverso del resultado de la
ecuación,
• bobinas de conexión: el objeto bit asociado se pone a 1 cuando el resultado de la
ecuación = 1,
• bobinas de desconexión: el objeto bit asociado se pone a 0 cuando el resultado de
la ecuación = 1.
Lenguaje de contactos Lenguaje Lista de instrucciones
LD %I1.1ST %Q2.3
STN %Q2.2
S %Q2.4
LD %I1.2R %Q2.4
Lenguaje Literal estructurado
%Q2.3 := %I1.1 ;%Q2.2 := NOT %I1.1 ;IF %I1.1 THEN
SET %Q2.4 ;END_IF ;IF %I1.2 THEN
RESET %Q2.4 ;END_IF ;
Operandos autorizados Cronograma
Código Operando
ST %I,%Q,%M,%S,%•:Xk
STN %I,%Q,%M,%S,%•:Xk
S %I,%Q,%M,%S,%•:Xk, %Xi (1)
R %I,%Q,%M,%S,%•:Xk, %Xi (1)
(1) Unicamente en el tratamiento preliminar.%Q2.3
%I1.1
ST
%I1.1 %I1.1 %I1.2
STN S R
%Q2.2 %Q2.4
S R
%I1.1 %Q2.3
%Q2.2
%Q2.4
%I1.2 %Q2.4
S
R
S
R
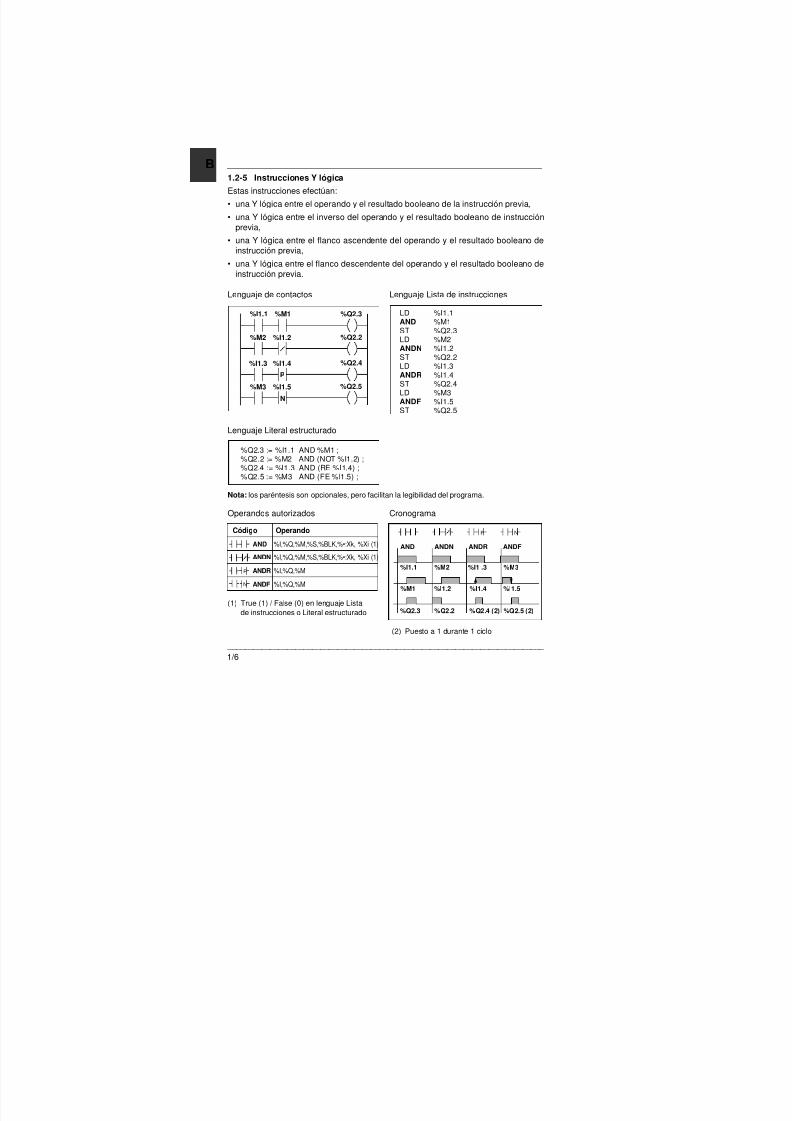
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 123/133
1/6
___________________________________________________________________________
B1.2-5 Instrucciones Y lógica
Estas instrucciones efectúan:
• una Y lógica entre el operando y el resultado booleano de la instrucción previa,
• una Y lógica entre el inverso del operando y el resultado booleano de instrucción
previa,
• una Y lógica entre el flanco ascendente del operando y el resultado booleano de
instrucción previa,
• una Y lógica entre el flanco descendente del operando y el resultado booleano de
instrucción previa.
Lenguaje de contactos Lenguaje Lista de instrucciones
LD %I1.1AND %M1ST %Q2.3LD %M2ANDN %I1.2ST %Q2.2LD %I1.3ANDR %I1.4ST %Q2.4LD %M3ANDF %I1.5
ST %Q2.5
Lenguaje Literal estructurado
%Q2.3 := %I1.1 AND %M1 ;%Q2.2 := %M2 AND (NOT %I1.2) ;%Q2.4 := %I1.3 AND (RE %I1.4) ;%Q2.5 := %M3 AND (FE %I1.5) ;
Nota: los paréntesis son opcionales, pero facilitan la legibilidad del programa.
Operandos autorizados Cronograma
Código Operando
AND %I,%Q,%M,%S,%BLK,%•:Xk, %Xi (1)
ANDN %I,%Q,%M,%S,%BLK,%•:Xk, %Xi (1)
ANDR %I,%Q,%M
ANDF %I,%Q,%M
(1) True (1) / False (0) en lenguaje Lista
de instrucciones o Literal estructurado
(2) Puesto a 1 durante 1 ciclo
N
P
%M2
%I1.1 %Q2.3
%I1.3
%Q2.2
%Q2.4
%M3 %Q2.5
%I1.2
%M1
%I1.4
%I1.5
P
N
%Q2.3
%I1.1
AND
%M2 %I1 .3 %M3
ANDN ANDR ANDF
%Q2.2 %Q2.4 (2) %Q2.5 (2)
%M1 %I1.2 %I1.4 %I1.5
P N

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 124/133
Descripción de las instrucciones de base 1
___________________________________________________________________________
1/7
B1.2-6 Instrucciones O lógica
Estas instrucciones efectúan:
• una O lógica entre el operando y el resultado booleano de la instrucción previa,
• una O lógica entre el inverso del operando y el resultado booleano de la instrucción
previa,
• una O lógica entre el flanco ascendente del operando y el resultado booleano de la
instrucción previa,
• una O lógica entre el flanco descendente del operando y el resultado booleano de la
instrucción previa.
Lenguaje de contactos Lenguaje Lista de instrucciones
LD %I1.1OR %M1ST %Q2.3
LD %M2ORN %I1.2ST %Q2.2
LD %I1.3ORR %I1.4ST %Q2.4
LD %M3ORF %I1.5ST %Q2.5
Lenguaje Literal estructurado
%Q2.3 := %I1.1 OR %M1 ;%Q2.2 := %M2 OR (NOT %I1.2) ;%Q2.4 := %I1.3 OR (RE %I1.4) ;%Q2.5 := %M3 OR (FE %I1.5) ;
Nota: los paréntesis son opcionales, pero facilitan la legibilidad del programa.
Operandos autorizados Cronograma
Código Operando
OR %I,%Q,%M,%S,%BLK,%•:Xk,%Xi (1)
ORN %I,%Q,%M,%S,%BLK,%•:Xk,%Xi (1)
ORR %I,%Q,%M
ORF %I,%Q,%M
(1) True (1) / False (0) en lenguaje Lista de instrucciones o Literal estructurado
%Q2.3
%I1.1
OR
%M2 %I1.3 %M3
ORN ORR ORF
%Q2.2 %Q2.4 %Q2.5
%M1 %I1.2 %I1.4 %I1.5
NP
P
N
%I1.1
%M1
%Q2.3
%M2
%I1.2
%Q2.2
%I1.3
%I1.4
%Q2.4
%M3
%I1.5
%Q2.5
P
N

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 125/133
1/8
___________________________________________________________________________
B
%Q2.3
%I1.1
XOR
%M2 %I1.3 %M3
XORN XORR XORF
%Q2.2 %Q2.4 %Q2.5
%M1 %I1.2 %I1.4 %I1.5
1.2-7 Instrucciones O exclusiva
Estas instrucciones efectúan:
• una O exclusiva entre el operando y el resultado booleano de la instrucción previa,
• una O exclusiva entre el inverso del operando y el resultado booleano de la instrucción
previa,
• una O exclusiva entre el flanco ascendente del operando y el resultado booleano de
la instrucción previa,
• una O exclusiva entre el flanco descendente del operando y el resultado booleano de
la instrucción previa.
Nota
En el lenguaje de contactos, no hay elementos gráficos específicos para la O exclusiva. Sin
embargo, la O exclusiva puede ser programada utilizando una combinación de contactos de
apertura y cierre (véase el ejemplo siguiente).
Lenguaje de contactos Lenguaje Lista de instrucciones
LD %I1.1XOR %M1ST %Q2.3
LD %M2XORN %I1.2ST %Q2.2
LD %I1.3XORR %I1.4ST %Q2.4
LD %M3XORF %I1.5ST %Q2.5
Operandos autorizados Cronograma
Código Operando
XOR %I,%Q,%M,%S,%BLK,%•:Xk, %Xi
XORN %I,%Q,%M,%S,%BLK,%•:Xk, %Xi
XORR %I,%Q,%M
XORF %I,%Q,%M
Lenguaje Literal estructurado
%Q2.3 := %I1.1 XOR %M1 ;%Q2.2 := %M2 XOR (NOT %I1.2) ;%Q2.4 := %I1.3 XOR (RE %I1.4) ;%Q2.5 := %M3 XOR (FE %I1.5) ;
Nota: los paréntesis son opcionales, pero facilitan la legibilidad del programa.
%I1.1
%M1
%Q2.3
%M2
%I1.2
%Q2.2
%M 1
%I1.1
%I1.2
%M2

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 126/133
Descripción de las instrucciones de base 1
___________________________________________________________________________
1/9
B1.3 Bloques de función predefinidos
1.3-1 Principio de programación de bloques de función predefinidos
Los bloques de función implantan objetos bits y palabras específicas.
Los bloques de función se preprograman
en el autómata y ocupan pues un área
particular en la memoria de usuario.
A fin de optimizar el espacio de memoria
ocupado, es necesario definir
previamente el tipo y el número de losbloques de función utilizados, dentro de
los límites impuestos por el sistema
(mediante los editores de configuración y
de datos).
Existen 6 tipos de bloques de función:
Tipo de bloque Máx. TSX 37 Máx. TSX 57 Véase cap.
Temporizador (Timer) %TMi 64 (1) 255 (1) 1.3-2
Contaje/descontaje %Ci 32 255 1.3-3
Monoestable %MNi 8 255 2.2-1
Registro %Ri 4 255 2.2-2
Programador cíclico (Drum) %DRi 8 255 2.2-3
Temporizador (Timer série 7) %Ti 64 (1) 255 (1) 2.2-4
(1) el número total de temporizadores %TMi + %Ti debe ser inferior o igual a 64 en el TSX 37 e
inferior o igual a 255 en el TSX 57.
Cada bloque contiene:
• entradas (ej.: IN) que permiten
controlarlo,
• salidas (Ej.: Q) que indican su estado. A
cada salida se asocia un bit de salida
(ej.: %TM1.Q) que puede ser probado
por el programa de usuario. Además,
cada salida puede controlar una
ovariasbobinas (ej.: %Q2.3 y SR2),
• parámetros que permiten adaptarlo a la
aplicación (preselección, base de
tiempo...).
Los parámetros de los bloques de función (preselección, valor actual...) se visualizan
dentro del bloque. En el lenguaje Lista de instrucciones, las instrucciones programan
los bloques predefinidos (véase la sección A, capítulo 3.2-6).
Bloque contaje/descontaje
R
S
CU
CD F
D
E
%Ci
C.P : 9999
MODIF : Y
%Q2.3%I1.1
IN Q
%TM1
SR2
c

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 127/133
1/10
___________________________________________________________________________
B1.3-2 Bloque de función temporizador %TMi (Timer)
El temporizador tiene 3 modos de
funcionamiento:
• TON: permite administrar retardos a la
conexión. El retardo es programable y
puede ser modificado o no desde el
terminal.
• TOF: permite administrar retardos a la
desconexión. El retardo es programable
y puede ser modificado o no desde elterminal.
• TP: permite elaborar un impulso de una
duración precisa. La duración es
programable y puede ser modificada o
no desde el terminal.
Características
Número de temporizador %TMi 0 a 63 para un TSX 37, 0 a 254 para un TSX 57
Modo TON • retardo a la conexión(predeterminado)TOF • retardo a la desconexiónTP • monoestable
Base de tiempo TB 1 min (valor predeterminado), 1 s, 100 ms, 10ms. Cuanto más pequeña la base de tiempo,tanto mayor será la precisión del temporizador.
Valor actual %TMi.V Palabra que aumenta de 0 a %TMi.P al transcurreel temporizador. Puede ser leída yprobada, pero no escrita por el programa (1).
Valor de preselección %TMi.P 0%TMi.P9999. Palabra que puede ser leída,probada y escrita por el programa. De formapredeterminada, se pone a 9999. La duracióno el retardo elaborado es igual a %TMi.P x TB.
Ajuste desde Y/N Y: posibilidad de modificar el valor de pre-el terminal selección %TMi.P en modo ajuste.(MODIF) N: sin acceso en modo ajuste.
Entrada (instrucción) IN En el flanco ascendente (modo TON o TP) o
"Activación" descendente (modo TOF), activa el temporizador.
Salida "Temporizador" Q Bit asociado %TMi.Q. Su puesta a 1 dependede la función realizada TON, TOF o TP.
(1) %TMi.V puede ser modificado desde el terminal.
IN
MODE:TON
MODIF:Y
Q
%TMi
TB: 1mn
TM.P:9999
Bloque temporizador

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 128/133
Descripción de las instrucciones de base 1
___________________________________________________________________________
1/11
BTemporización con retardo a la conexión: modo TON
El temporizador se activa en un flanco
ascendente de la entrada IN: su valor
actual %TMi.V toma el valor 0. Luego, el
valor actual aumenta hacia %TMi.P en
una unidad a cada impulso de la base de
tiempo TB. El bit de salida %TMi.Q pasa a
1 cuando el valor actual alcanza %TMi.P y
permanece a 1mientras la entrada está en
el estado 1.Cuando la entrada IN pasa al estado 0, el
temporizador se detiene aun cuando
estaba en curso de evolución: %TMi.V
toma el valor 0.
Temporización con retardo a la desconexión: modo TOF
El valor actual %TMi.V toma el valor0 en
un flanco ascendente de la entrada IN
(aun cuando el temporizador está en curso
de evolución). El temporizador se activa
en un flanco descendente de la entrada
IN.
Luego, el valor actual aumenta hacia%TMi.P en una unidad a cada impulso de
la base de tiempo TB. El bit de salida
%TMi.Q pasa a 1 cuando se detecta un
flanco ascendente en la entrada IN y el
temporizador se pone a 0 cuando el valor
actual alcanza %TMi.P.
Monoestable: modo TP
El temporizador se activa en un flanco
ascendente de la entrada IN: su valor
actual %TMi.V toma el valor 0 (si el
temporizador no está en curso de
evolución). Luego el valor actual aumentahacia %TMi.P en una unidad a cada
impulso de la base de tiempo TB. El bit de
salida %TMi.Q pasa a 1 cuando el
temporizador se activa y se pone a 0
cuando el valor actual alcanza %TMi.P.
Cuando la entrada IN y la salida %TM.iQ
están a 0, TMi.V toma el valor 0.
Este monoestable no puede reactivarse.
IN
Q
%TMi.V
%TMi.P
IN
Q
%TMi.V
%TMi.P
IN
Q
%TMi.V
%TMi.P
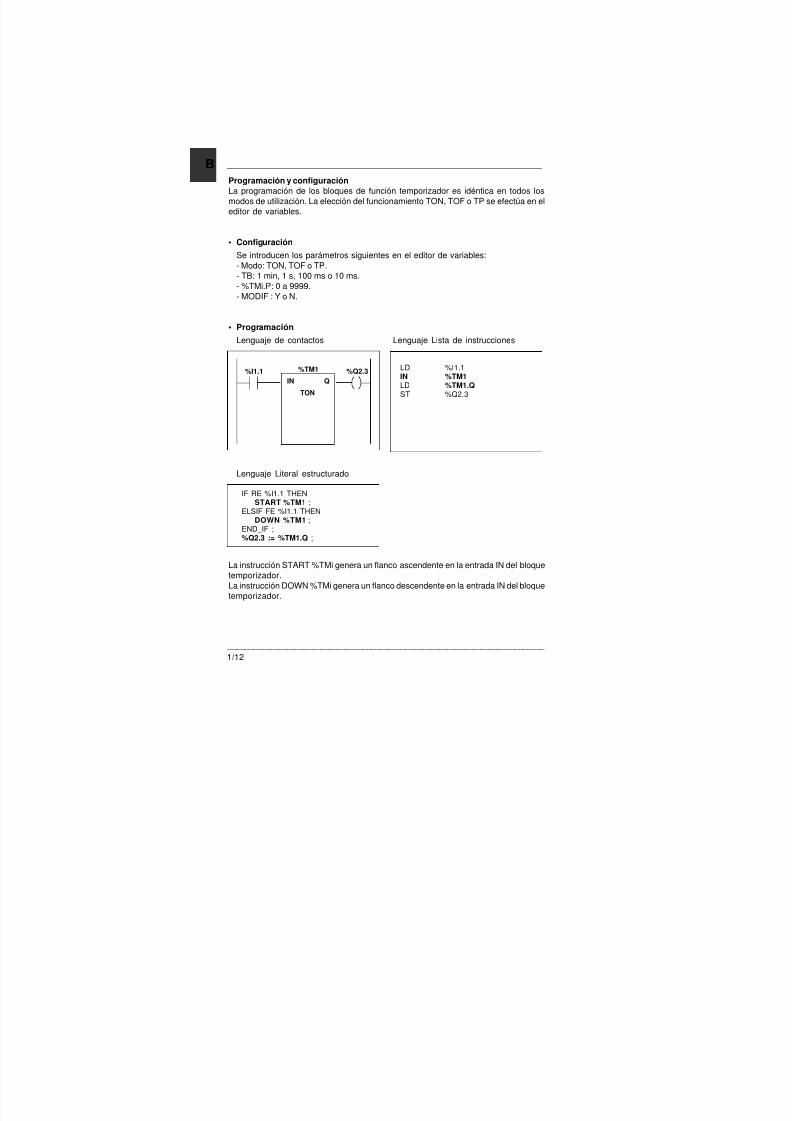
5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 129/133
1/12
___________________________________________________________________________
BProgramación y configuraciónLa programación de los bloques de función temporizador es idéntica en todos los
modos de utilización. La elección del funcionamiento TON, TOF o TP se efectúa en el
editor de variables.
• Configuración
Se introducen los parámetros siguientes en el editor de variables:
- Modo: TON, TOF o TP.
- TB: 1 min, 1 s, 100 ms o 10 ms.- %TMi.P: 0 a 9999.
- MODIF : Y o N.
• Programación
Lenguaje de contactos Lenguaje Lista de instrucciones
Lenguaje Literal estructurado
IF RE %I1.1 THENSTART %TM1 ;
ELSIF FE %I1.1 THENDOWN %TM1 ;
END_IF ;%Q2.3 := %TM1.Q ;
La instrucción START %TMi genera un flanco ascendente en la entrada IN del bloque
temporizador.
La instrucción DOWN %TMi genera un flanco descendente en la entrada IN del bloque
temporizador.
LD %I1.1IN %TM1LD %TM1.QST %Q2.3TON
%Q2.3%I1.1
IN Q
%TM1

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 130/133
Descripción de las instrucciones de base 1
___________________________________________________________________________
1/13
BCasos específicos
• Incidencia de un arranque en frío: (%S0=1) tiene como consecuencia la puesta a
0 del valor actual y la puesta a 0 de la salida %TMi.Q. El valor de preselección se
reinicializa al valor definido en la configuración.
• Incidencia de un rearranque en caliente: (%S1=1) no tiene incidencia en el valor
actual del temporizador, ni en el valor de preselección. El valor actual no evoluciona
durante el corte de corriente.
• Incidencia de un paso a STOP, una desactivación de tarea o una ejecución depunto de parada: no inmoviliza el valor actual.
• Incidencia de un salto de programa: el hecho de no explorar las instrucciones
donde se programa el bloque temporizador no inmoviliza el valor actual %TMi.V que
sigue aumentando hacia %TMi.P. Asimismo, el bit %TMi.Q asociado a la salida Q
del bloque temporizador conserva su funcionamiento normal y, por consiguiente,
puede ser probado por otra instrucción. En cambio, no se activa la salida cableada
directamente a la salida del bloque, puesto que no la explora el autómata.
• Prueba del bit %TMi.Q: se aconseja probar el bit %TMi.Q una sola vez en el
programa.
• Incidencia de la modificación de la preselección %TMi.P: la modificación del valor
de preselección, mediante una instrucción o en modo de ajuste, se acepta sólo
cuando se activa el temporizador por próxima vez; la modificación del valor de
preselección en el editor de variables se acepta sólo después de un arranque en
frío (%S0=1).

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 131/133
1/14
___________________________________________________________________________
B1.3-3 Bloque de función contaje/descontaje %Ci
El bloque de función contaje/descontaje
permite contar o descontar sucesos. Es-
tas dos operaciones pueden ser
simultáneas.
Caracteristicas
Número de contador %Ci 0 a 31 para un TSX 37, 0 a 254 para un TSX 57
Valor actual %Ci.V Palabra aumentada o disminuida en función de lasentradas CU y CD.Puede ser leída y probada, pero no escrita porel programa (1).
Valor de preselección %Ci.P 0%Ci.P9999. Palabra que puede ser leída,probada y escrita (valor predeterminado: 9999).
Ajuste desde Y/N S: posibilidad de modificar el valor de pre-el terminal selección en modo de ajuste.
(MODIF) N: sin acceso en modo de ajuste.Entrada (instrucción) R En el estado 1 : %Ci.V = 0.puesta a cero
Entrada (instrucción) S En el estado1: %Ci.V = %Ci.P.preselección
Entrada (instrucción) CU Aumenta %Ci.V en el flanco ascendente.contaje
Entrada (instrucción) CD Disminuye %Ci.V en el flanco ascendente.descontaje
Salida rebasamiento E(Empty) El bit asociado %Ci.E=1, cuando el descontaje%Ci.V pasa de 0 a 9999 (se pone a 1 cuando%Ci.V alcanza 9999; se pone a 0 si el contadorsigue descontado).(2)
Salida preselección D(Done) El bit asociado %Ci.D=1, cuando %Ci.V=%Ci.P.alcanzada
Salida rebasamiento F (Full) El bit asociado %Ci.F =1 cuando %Ci.V pasa de9999 a 0 (se pone a 1 cuando %Ci.V alcanza 0;se pone a 0 si el contador sigue contando).
(1) %Ci.V puede ser modificado desde el terminal.
(2) cuando se produce un rebasamiento en el contaje o descontaje, el bit %S18 pasa a 1.
R
S
CU
CD F
D
E
%Ci
C.P : 9999
MODIF : Y
Bloque contaje/descontaje

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 132/133
Descripción de las instrucciones de base 1
___________________________________________________________________________
1/15
BFuncionamiento
• Contaje: al aparecer un flanco ascendente en la entrada de contaje CU, el valor
actual se aumenta en una unidad. Cuando este valor alcanza el de preselección
%Ci.P, el bit de salida %Ci.D "preselección alcanzada" asociado a la salida D pasa
al estado 1. El bit de salida %Ci.F (rebasamiento de contaje) pasa al estado 1 cuando
%Ci.V pasa de 9999 a 0; se pone a 0 si el contador sigue contando.
• Descontaje: al aparecer un flanco ascendente en la entrada de descontaje CD, el
valor actual %Ci.V se disminuye en una unidad. El bit de salida %Ci.E (rebasamiento
de descontaje) pasa al estado 1 cuando %Ci.V pasa de 0 a 9999; se pone a 0 si el
contador sigue descontando.
• Contaje/Descontaje: para utilizar simultáneamente las funciones contaje y
descontaje, es necesario controlar las dos entradas correspondientes (CU y CD),
que se exploran sucesivamente. Si ambas entradas están simultáneamente en el
estado 1, el valor actual permanece sin cambiar.
• Puesta a cero: cuando la entrada R se pone 1, el valor actual %Ci.V se fuerza a 0.
Las salidas %Ci.E, %Ci.D y %Ci.F están en el estado 0. La entrada "puesta a cero"
es prioritaria.
• Preselección: si la entrada S "preselección" está en el estado 1 y la entrada R
"puesta a cero" en el estado 0, el valor actual %Ci.V toma el valor %Ci.P y la salida
%Ci.D el valor1.
Observación
Al poner a cero (entrada R o instrucción R):
• en el lenguaje de contactos, los historiales de las entradas CU y CD se actualizan
con los valores cableados,
• en el lenguaje Lista de instrucciones y en el Literal estructurado, los historiales
de las entradas CU y CD no se actualizan; cada uno conserva el valor anterior
a la llamada.
Casos específicos
• Incidencia de un arranque en frío: (%S0=1)
- puesta a 0 del valor actual %Ci.V.
- puesta a 0 de los bits de salida %Ci.E, %Ci.D y %Ci.F.
- inicialización del valor de preselección por el definido en la configuración.
• Incidencia de un rearranque en caliente (%S1=1), un paso a STOP, unadesactivación de tarea o una ejecución de punto de parada: no tiene incidencia
en el valor actual del contador (%Ci.V).
• Incidencia de la modificación de la preselección %Ci.P: la modificación del valor
de preselección, mediante una instrucción o en modo de ajuste, se acepta durante
la gestión del bloque por la aplicación (activación de una de las entradas).

5/9/2018 Apuntes Automatica Upv - slidepdf.com
http://slidepdf.com/reader/full/apuntes-automatica-upv 133/133
1/16
___________________________________________________________________________
BConfiguración y programación
Contaje de un número de piezas = 5000. Cada impulso en la entrada %I1.2 (cuando el
bit interno %M0 = 1) incrementa el contador %C8 hasta el valor de preselección final
del contador %C8 (bit %C8.D=1). La entrada %I1.1 pone el contador a cero.
• ConfiguraciónSe deben introducir los parámetros siguientes mediante el editor de variables:
- %Ci.P, definido como 5000 en este ejemplo,
- MODIF : Y.
• Programación
Lenguaje de contactos Lenguaje Lista de instrucciones
LD %I1.1R %C8LD %I1.2AND %M0CU %C8LD %C8.DST %Q2.0
Lenguaje Literal estructurado
IF %I1.1 THENRESET %C8 ;
END_IF ;%M1 := %I1.2 AND %M0 ;IF RE %M1 THEN
UP %C8 ;END_IF ;%Q2.0 := %C8.D;
En el lenguaje Literal estructurado, 4 instrucciones permiten programar los bloquesde función contaje/descontaje:
• RESET %Ci : puesta a cero del valor actual,
• PRESET %Ci : carga del valor de preselección en el valor actual,
• UP %Ci : aumenta el valor actual,
• DOWN %Ci : disminuye el valor actual.
En el caso del lenguaje Literal estructurado, el historial de las entradas CU y CD se
pone a cero al utilizar las instrucciones UP y DOWN. Es pues el usuario que debe
efectuar la gestión de los flancos ascendentes para estas dos instrucciones.
%I1.2
%C8.D
%I1.1
%Q2.0
%M0
R
S
CU
CD F
D
E
%C8
C.P : 5000
MODIF : Y