Cap 6 Metodo Inclinación CHURCH
11
Autor: Ing° RYarihuaman A. 1 CAPITULO 6 I. METODO: DETERMINACIÓN DE LA INCLINACIÓN (t) 1. GENERALIDADES Durante la solución del problema fundamental de la fotogrametría, entendida como la obtención de coordenadas de los puntos del terreno a través de las coordenadas de sus imágenes, el valor de la inclinación de la aerofotografía es obtenida directa o indirectamente. Los métodos de determinación de inclinación, pueden ser clasificados en exactos y aproximados, en ambos se requiere conocer: - La distancia principal del fotograma y - Las coordenadas de por lo menos tres (03) puntos de apoyo y sus imágenes. Con estos, es posible calcular los valores de los parámetros de Orientación Espacial: - Ángulo de inclinación (t) - Ángulo de orientación (s) - Acimut de la línea principal () - Coordenadas del centro de perspectiva-CP en el sistema del terreno, incluye la altura de vuelo (Z). Los métodos aproximados actualmente no son empleados. 2. METODO DE CHURCH Es un método exacto, que da solución al problema de la Resección y Orientación Espacial, es decir, se obtiene las coordenadas tridimensionales del CP y los parámetros de orientación de la aerofotografía en relación al terreno, respectivamente. Ofrece una solución completa al problema fotogramétrico, sin embargo a pesar de su poca flexibilidad, es útil en el cálculo de la inclinación por su simplicidad en el proceso y precisión. El método tiene como base, la propiedad perspectiva de los ángulos: “Los ángulos formados por dos rayos (rectas) son invariables, independiente de la inclinación del plano de la imagen en relación al plano datum del terreno.” Ver figura 1. Geometría de la resección espacial. Datos de entrada, necesarios: a. Las coordenadas de por lo menos tres (03) puntos de apoyo en un determinado sistema del terreno (por ejemplo, UTM). b. Las coordenadas de las imágenes de los puntos de apoyo en el sistema de la foto con origen en el CP y los ejes XX´ y YY´ , paralelos a los sistemas de la marcas. c. Las coordenadas aproximadas del CP, en el sistema del terreno escogido para los puntos de apoyo. La obtención de estas coordenadas son aproximadas, la Z la altura de vuelo nominal de acuerdo al datum vertical referido, las coordenadas (Xo, Yo) pueden ser obtenida, identificando el punto principal de la foto en una carta topográfica, o identificando e interceptando, líneas radiales en la foto y/o carta.
description
1234
Transcript of Cap 6 Metodo Inclinación CHURCH
-
Autor: Ing RYarihuaman A.
1
CAPITULO 6
I. METODO: DETERMINACIN DE LA INCLINACIN (t)
1. GENERALIDADES Durante la solucin del problema fundamental de la fotogrametra, entendida como la obtencin de coordenadas de los puntos del terreno a travs de las coordenadas de sus imgenes, el valor de la inclinacin de la aerofotografa es obtenida directa o indirectamente. Los mtodos de determinacin de inclinacin, pueden ser clasificados en exactos y aproximados, en ambos se requiere conocer:
- La distancia principal del fotograma y - Las coordenadas de por lo menos tres (03) puntos de apoyo y sus
imgenes. Con estos, es posible calcular los valores de los parmetros de Orientacin Espacial:
- ngulo de inclinacin (t) - ngulo de orientacin (s)
- Acimut de la lnea principal () - Coordenadas del centro de perspectiva-CP en el sistema del terreno,
incluye la altura de vuelo (Z).
Los mtodos aproximados actualmente no son empleados.
2. METODO DE CHURCH
Es un mtodo exacto, que da solucin al problema de la Reseccin y Orientacin Espacial, es decir, se obtiene las coordenadas tridimensionales del CP y los parmetros de orientacin de la aerofotografa en relacin al terreno, respectivamente. Ofrece una solucin completa al problema fotogramtrico, sin embargo a pesar de su poca flexibilidad, es til en el clculo de la inclinacin por su simplicidad en el proceso y precisin. El mtodo tiene como base, la propiedad perspectiva de los ngulos: Los ngulos formados por dos rayos (rectas) son invariables, independiente de la inclinacin del plano de la imagen en relacin al plano datum del terreno. Ver figura 1. Geometra de la reseccin espacial.
Datos de entrada, necesarios: a. Las coordenadas de por lo menos tres (03) puntos de apoyo en un determinado
sistema del terreno (por ejemplo, UTM). b. Las coordenadas de las imgenes de los puntos de apoyo en el sistema de la foto
con origen en el CP y los ejes XX y YY , paralelos a los sistemas de la marcas. c. Las coordenadas aproximadas del CP, en el sistema del terreno escogido para los
puntos de apoyo. La obtencin de estas coordenadas son aproximadas, la Z la altura de vuelo nominal de acuerdo al datum vertical referido, las coordenadas (Xo, Yo) pueden ser obtenida, identificando el punto principal de la foto en una carta topogrfica, o identificando e interceptando, lneas radiales en la foto y/o carta.
-
Autor: Ing RYarihuaman A.
2
El problema es resuelto por aproximaciones sucesivas, de tal forma que las coordenadas aproximadas del CP se ajusten a la propiedad de la perspectiva que es base del mtodo. Obtenindose: a. El valor del ngulo de inclinacin (t) b. El valor del ngulo de orientacin (s)
c. El valor del acimut de la lnea principal ()
3. SECUENCIA DEL CALCULO:
a. DATOS: - Xi, Yi, Zi : coordenadas de por lo menos tres (03) puntos de apoyo. - Xo, Yo, Zo : coordenadas aproximadas iniciales del CP - xi, yi, zi, :coordenadas imgenes en la foto, de los puntos de apoyo, observar
que zi = -f.
b. CALCULO DE LAS DISTANCIAS DEL CP A LAS IMGENES DE LOS PUNTOS DE APOYO:
iiii zyxd2222
-
Autor: Ing RYarihuaman A.
3
c. CALCULO DE LOS COSENOS DIRECTORES DE LOS RAYOS PERSPECTIVOS
EN EL SISTEMA DE LA FOTO:
i
i
id
xl ;
i
i
id
ym ;
i
i
id
zn
Verificar el clculo: iii nml2221
d. CALCULO DE LOS ANGULOS ENTRE LOS RAYOS PERSPECTIVOS: Con base en la ecuacin del ngulo entre dos rectas, se tiene:
212121 coscoscoscoscoscoscos
, donde 1,2 ; 1,2; 1,2, corresponden a los ngulos que cada recta forma con los ejes del sistema de coordenadas. ki , es el coseno del ngulo comprendido entre dos rayos perspectivos con origen en el CP, al plano de la foto.
jijijii nnmmllk ... , donde j = i + 1..... Identifican los puntos de apoyo en las imgenes. Este clculo de ki, debe realizarse con mucha atencin, por cuanto, no existen valores aproximados, no tiene ningn control, por lo tanto es definitivo el valor que se obtiene.
e. CALCULO DE DISTANCIAS INICIALES DEL CP A PTOS. DE APOYO:
222
0
2 )()()( oioiii ZZYYXXD
f. CALCULO DE LOS COSENOS DIRECTORES DE LOS RAYOS PERSPECTIVOS EN
EL SISTEMA DEL TERRENO:
i
oi
iD
XXL
)( ;
i
oi
iD
YYM
)( ;
i
oi
iD
ZZN
)(
g. CALCULO DE LOS ANGULOS ENTRE LOS RAYOS PERSPECTIVOS:
Ki , es el coseno del ngulo comprendido entre dos rayos perspectivos desde el CP al terreno.
jijijii NNMMLLK ... ; Donde j = i + 1,...son los puntos en el terreno Si las coordenadas aproximadas del CP, coincidieran con las verdaderas del sistema del terreno, de acuerdo con la propiedad fundamental del mtodo, el coseno del ngulo entre los rayos perspectivos sobre el terreno y el correspondiente en las imgenes, tambin coincidiran.
ii kK h. CALCULO DE LAS CORRECCIONES PARA XO, YO, ZO Como las coordenadas iniciales del CP son aproximadas, entonces:
ii kK
iii KkK
-
Autor: Ing RYarihuaman A.
4
, para determinar las correcciones Xo, Yo, Zo, que causan las discrepancias ki , obtendremos la diferencial total de ki , teniendo como variables XO, YO, ZO. Como los incrementos son pequeos, las ecuaciones de correccin tendrn la forma siguiente:
)(.)(.)(. ZCYBXAK iiii
, los coeficientes A, B, C, se obtienen a travs de variables auxiliares, que llamaremos Ii, Ji :
ji
iiDD
kI11
.
ij
iiDD
kJ11
.
Observar que el uso de ki, debido a que su calculo es definitivo, independiente de las coordenadas del CP. Se tiene que:
ijiii JLILA
ijiii JMIMB
ijiii JNINC
Las tres ecuaciones de correccin (Ki) se resuelven por la Regla de Cramer, si hubiera mas de tres puntos de apoyo, tendramos superabundancia de ecuaciones, por lo tanto, el sistema tendra que solucionarse mediante un proceso de ajuste.
Los valores de las incgnitas Xo, Yo, Zo , son sumados a las coordenadas iniciales del CP, obteniendo de esta forma los primeros valores corregidos, los mismos que son utilizados en el recalculo de los ngulos entre los rayos perspectivos, repitiendo lo
actuado en las letras e, f, g, h se obtendr el nuevo Ki. Si este no es satisfactorio de
acuerdo a la tolerancia propuesta, se repite el clculo de los nuevos Xo, Yo, Zo. Para tal efecto se utiliza los mismos coeficientes de Ai, Bi, Ci, por cuanto las variaciones son mnimas, salvo que las coordenadas del CP contengan errores muy groseros. El procedimiento se repite hasta alcanzar la tolerancia, conseguido, se usan los ltimos csenos directores Li, Mi, Ni, para el clculo de los parmetros de orientacin espacial (t, s, ), mediante la formacin de 3 conjuntos de 3 ecuaciones simultaneas, que contienen las nueve incgnitas:
3131313
2121212
1111111
Lwnvmul
Lwnvmul
Lwnvmul
;
3232323
2222222
1212121
Mwnvmul
Mwnvmul
Mwnvmul
;
3333333
2323232
1313131
Nwnvmul
Nwnvmul
Nwnvmul
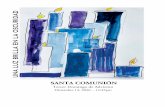
Ver figura 2-23: Computo del Mtodo de Church, reseccin y orientacin espacial.
-
Autor: Ing RYarihuaman A.
5
COSENO DIRECTOR DE LA RECTA. Ejemplo: P1 P2
Parametros Orientacion Externa: t, s,
-
Autor: Ing RYarihuaman A.
6
-
Autor: Ing RYarihuaman A.
7
-
Autor: Ing RYarihuaman A.
8
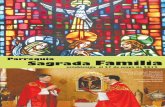
FIGURA 3: VALORES DE LOS PARMETROS DE ORIENTACIN.- t, s ,
-
Autor: Ing RYarihuaman A.
9
i. CALCULO DE LOS PARMETROS DE ORIENTACIN ESPACIAL: Sea ui, vi, wi , los csenos directores de los ejes x,y,z (sistema paralelo al sistema
de las marcas, con origen CP) con relacin a los ejes del sistema del terreno X,Y,Z. wvu ,, .... se refieren a los ejes x, y, z
i (1, 2, 3) ....se refieren a los ejes X, Y, Z Por lo tanto:
1u Coseno del ngulo entre x X
2u Coseno del ngulo entre x Y
3u Coseno del ngulo entre x Z
1v Coseno del ngulo entre y X
2v Coseno del ngulo entre y Y
3v Coseno del ngulo entre y Z
1w Coseno del ngulo entre z X
2w Coseno del ngulo entre z Y
3w Coseno del ngulo entre z Z
Como observamos son nueve los parmetros, a travs de ellos es posible calcular los
ngulos t, s, (parmetros de orientacin). Ver figura 3.: Valores de los parmetros de orientacin.
cos t = w3 .....(1) tan s = -u3 / -v3 .....(2)
tan = -w1 / -w2 .....(3)
Como realizar el calculo? Los parmetros ui, vi, wi, pueden ser calculados tambin, a travs del ngulo formado por dos rectas, ejemplo la recta OA con X, as tendremos:
1cos A Coseno del ngulo entre la recta OA y eje X.
11cos a Coseno del ngulo entre la recta OA y eje x.
11cos b Coseno del ngulo entre la recta OA y eje y.
11cos c Coseno del ngulo entre la recta OA y eje z.
12cos u Coseno del ngulo entre eje X y eje x.
12cos v Coseno del ngulo entre eje X y eje y.
12cos w Coseno del ngulo entre eje X y eje z. Por lo tanto, el coseno del ngulo entre la recta OA y eje X, ser:
1111111 ... wcvbuaA ...... (4)
, con las rectas OB y OC, tendremos:
1212122 ... wcvbuaA .......(5)
1313133 ... wcvbuaA .......(6)
-
Autor: Ing RYarihuaman A.
10
Las expresiones (4), (5) y (6) en forma matricial:
1
1
1
333
222
111
3
2
1
w
v
u
cba
cba
cba
A
A
A
Donde: M
cba
cba
cba
333
222
111
y xO
w
v
u
1
1
1
Si, tenemos en consideracin los ejes Y y Z, se obtendrn las otras seis (06) ecuaciones. En forma abreviada matricial, las nueve (09) ecuaciones, serian expresadas de la manera siguiente: A = M Ox .......... (7) B = M Oy .......... (8)
C = M Oz .......... (9) A = Matriz, csenos directores del ngulo de las rectas OA, OB, OC con eje X. B = Matriz, csenos directores del ngulo de las rectas OA, OB, OC con eje Y C = Matriz, csenos directores del ngulo de las rectas OA, OB, OC con eje Z M = Matriz, csenos directores, ngulo de rectas OA, OB, OC con ejes x,y,z; para los clculos considerar los csenos de las rectas Oa, Ob, Oc Ox = Matriz, csenos directores, ngulo de rectas eje X con ejes x,y,z Oy = Matriz, csenos directores, ngulo de rectas eje Y con ejes x,y,z Oz = Matriz, csenos directores, ngulo de rectas eje Z con ejes x,y,z Con la finalidad de encontrar los parmetros de orientacin, se resuelven las ecuaciones (7), (8) y (9); mediante la regla de Cramer u otros mtodos se soluciona el sistema: Ox = M
-1 A
Oy = M-1
B Oz = M
-1 C
La ltima relacin incluye el valor w3, ver (1), posibilita el calculo de la inclinacin (t), de la misma forma las otras dan solucin al problema de la orientacin espacial.
cos t = w3 tan s = -u3 / -v3
tan = -w1 / -w2
-
Autor: Ing RYarihuaman A.
11
EJERCICIO 1: Las imgenes de tres puntos de control aparecen sobre la aerofoto inclinada tomada con una cmara que tiene una distancia focal de 150,0 mm. Las coordenadas fotogramtricas y los correspondientes valores de los puntos de control de campo son los siguientes:
Empleando el mtodo de Church, solucin matricial, calcular los seis elementos de orientacin exterior de la foto. EJERCICIO 2: En trabajos individuales, programar en hoja de calculo Excell, el formato de computacin del mtodo de Church, que indica la fig 2.3 Computation form for the Church Method of space resection and space orientation. Identificar los datos de ingreso, clculos, resultados.
Coordenadas Fotogramtricas Puntos de campo
Puntos X (mm) Y (mm) X (pies) Y (pies) Elevacin (pies)
A -100.78 71.11 1,531,367.3 500,413.2 611.7
B 106.19 76.02 1,528,225.0 501,830.2 934.4
C 2.23 -91.47 1,530,737.5 503,649.0 799.1