CAPITULO 8.- APLICACONES A FILTROS Y...
30
1 CAPITULO 8.- APLICACONES A FILTROS Y ECUALIZADORES 8.1 Introducción. 8.2 Condiciones para la transmisión sin distorsión. 8.3 Filtros paso baja ideales. 8.4 Diseño de filtros. 8.5 Funciones de aproximación. 8.6 Transformaciones de frecuencia. 8.7 Filtros pasivos. 8.8 Filtros digitales. 8.9 Filtros digitales FIR. 8.10 Filtros digitales IIR. 8.11 Distorsión lineal. 8.12 Ecualización. 8.1 Introducción. Diseño utilizando las transformadas de Laplace y z. FILTROS: bloques funcionales para suprimir señales espurias. ECUALIZADORES: bloques funcionales para compensar la distorsión de la señal transmitida. Transmisión sin distorsión Marco de referencia para filtros ideales. Filtros anaógicos. Filtros digitales. Ecualización.
Transcript of CAPITULO 8.- APLICACONES A FILTROS Y...

1
CAPITULO 8.-APLICACONES A FILTROS Y
ECUALIZADORES8.1 Introducción.8.2 Condiciones para la transmisión sin distorsión.8.3 Filtros paso baja ideales.8.4 Diseño de filtros.8.5 Funciones de aproximación.8.6 Transformaciones de frecuencia.8.7 Filtros pasivos.8.8 Filtros digitales.8.9 Filtros digitales FIR.8.10 Filtros digitales IIR.8.11 Distorsión lineal.8.12 Ecualización.
8.1 Introducción.
Diseño utilizando las transformadas de Laplace y z.FILTROS: bloques funcionales para suprimir señales espurias.ECUALIZADORES: bloques funcionales para compensar la distorsión
de la señal transmitida.Transmisión sin distorsiónMarco de referencia para filtros ideales.Filtros anaógicos.Filtros digitales.Ecualización.
2
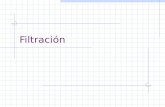
8.2 Condiciones para la transmisión sin distorsión.
)(tδ
)( ωjX )( ωjY
0
0
0
)(arg.2)(.1
)()()()()(
)()()()(
0
0
tjHKjH
ttKth
KejXjYjH
ejXKjYttxKty
tj
tjF
ωωω
δωωω
ωω
ω
ω
−=−
=−
−=
==
⇒=⎯→←−=
−
−
ω==
vKC
)(th
a) Continuo
8.2a
EJEMPLO 8.1Supongamos que :¿ Cuál es el efecto de esta modificación ?
ZkktjH ∈∀+−=− ,)(arg.2 0 πωω
parkimpark
e
KeeKeKejH
jk
tjjktjjktj
=+=−
=
±=== −−+−
,1,1
)(
000
π
ωπωπωω
0
0
)(arg.2
)(.1
)(
)()(][][0
0
teH
KeH
KeeH
eeKXeYnnKxny
j
j
tjj
tjjj
Ω−=−
⇐=−
=
=⎯→←−=
Ω
Ω
Ω−Ω
Ω−ΩΩb) Discreto

3
8.3 Filtros paso baja ideales.FILTROS : pasobajas, pasoaltas, pasobanda y supresor de banda.Respuesta en frecuencia de un filtro:
Banda de pasoBanda de rechazoBanda de transición/guarda
FILTRO PASOBAJAS ideal:
c
ctje
jHωωωω
ωω
>≤
=−
,0,
)(0
no causal
8.3a
⎟⎠⎞
⎜⎝⎛ −=
==
=
∫
∫
−
−
−
)()(
)(21)(
21)(
0
)( 0
ttsencth
ttsendetsenc
deth
cc
tj
ttjc
c
πω
πω
ππω
π
ωπ
π
π
ω
ω
ω
ω
Duración del lóbulo principal de la respuesta al impulso = 2π/ωc
Filtro NO CAUSAL

4
Figure 8.4 (p. 618)Time-shifted form of the sinc function, representing the
impulse response of an ideal (but noncausal) low-pass filter for ωc = 1 and t0 = 8.
8.3b Transmisión de un pulso rectangular a través de un filtro pasobajas ideal
⎥⎦⎤
⎢⎣⎡ −==
−−==⇒+=+−==⇒−=
−=−−=−−−−
=−==
−−
=⎟⎠⎞
⎜⎝⎛ −=
∫ ∫∫
∫∫ −
∞
∞−
a
o
ba
b
c
c
cc
T
Tc
cc
c
cccc
dsendsendsenty
TttbTTttaT
ddtt
dtt
ttsendthxthtxty
ttttsenttsencth
0
000
000
0
2/
2/0
0
0
00
11)(
)2/(2/)2/(2/
;)()(
))(()()()(*)()(
)())(()()(
0
0
λλλλ
λλ
πλ
λλ
π
ωλτωλτ
τωλτωλ
ττωτω
πωτττ
ωω
πω
πω
πω
2,02,1
)(0
0 Tt
Tttx
>
≤=
Comunicaciones digitales1: transmitir un pulso rectangular0: suprimir el pulso rectangular

5
8.3c [ ]
∫
∫ ∫∫
=⇒
−=⎥⎦⎤
⎢⎣⎡ −==
u
a
o
ba
b
dsenuSesenoIntegral
bSeaSedsendsendsenty
0
0
)(
)()(111)(
λλλ
πλ
λλλ
λλ
πλ
λλ
π
La integral seno Se(u):tiene simetría impar alrededor del origen u=0tiene máximos y mínimos en múltiplos de πtiende al valor límite de ± π para valores grandes de |u|
Figure 8.6 (p. 620)Pulse response of an ideal low-pass filter for input pulse of
duration T0 = 1 s and varying filter cutoff frequency ωc: (a) ωc = 4π rad/s; (b) ωc = 2π rad/s; and (c) ωc = 0.4π rad/s.
t0=0
pulso
0/2 Tc πω =0/4 Tc πω =
0/4.0 Tc πω =
Relación inversa entre 0Tc ↔ω

6
Figure 8.7 (p. 622)The Gibbs phenomenon, exemplified by the pulse response of an ideal low-pass filter. The overshoot remains essentially the same despite a significant increase in the cutoff frequency ωc: (a) ωcT0
= 10π rad and (b) ωcT0 = 40π rad. The pulse duration T0 is maintained constant at 1 s.
9 %
8.4 Diseño de filtros.ωδε
→→→
vde
ps
s
s
p
p
bandadeanchorechazodebandaladetoleranciadeparámetro
inaciónerechazodebandaladecortedefrecuenciaparajH
pasodebandaladetoleranciadeparámetro
pasodebandaladecortedefrecuencia
parajH
ωωδω
ωωδω
ε
ω
ωωωε
−=⇒
≥≤
≤≤≤≤−
transicióndeBanda
rechazodeBanda
pasodeBanda
:)lim(:
)(
:
:
01)(1
Filtros en tiempo continuo realdistorsionesdesviaciones

7
8.4a
DISEÑO DEL FILTRO (no único)Partiendo de un conjunto de especificaciones que describe las propiedades deseadas del filtro selector de frecuencias :1.- Aproximación de una respuesta en frecuencia preestablecida por
medio de una función de transferencia racional que presentan unsistema que es tanto causal como estable.
2.- Realización de la función de transferencia aproximada mediante un sistema físico.
Planteamientos para el diseño de filtros analógicos y digitales :1.- Método analógico2.- Método analógico-digita3.- Método digital directo
8.5 Funciones de aproximación.1 Conjunto de especificaciones específicas2 Estructura de filtro específica 3 Elección de la función de transferencia ( desempeño del filtro )
“No hay una solución única”La aproximación es un problema de optimizaciónCriterios de optimización : 1.- Respuesta en magnitud máximamente plana
Filtro pasobajas analógico de orden N
2.- Respuesta en magnitud de rizo uniformeFiltro pasobajas analógico
00)(12
12
==∂∂
−
−
ωωω
enjHN
N
)(11)( 22
2
ωδω
FjH
+=
(Filtros Butterworth)
(Filtros Chebyshev)
8
8.5a
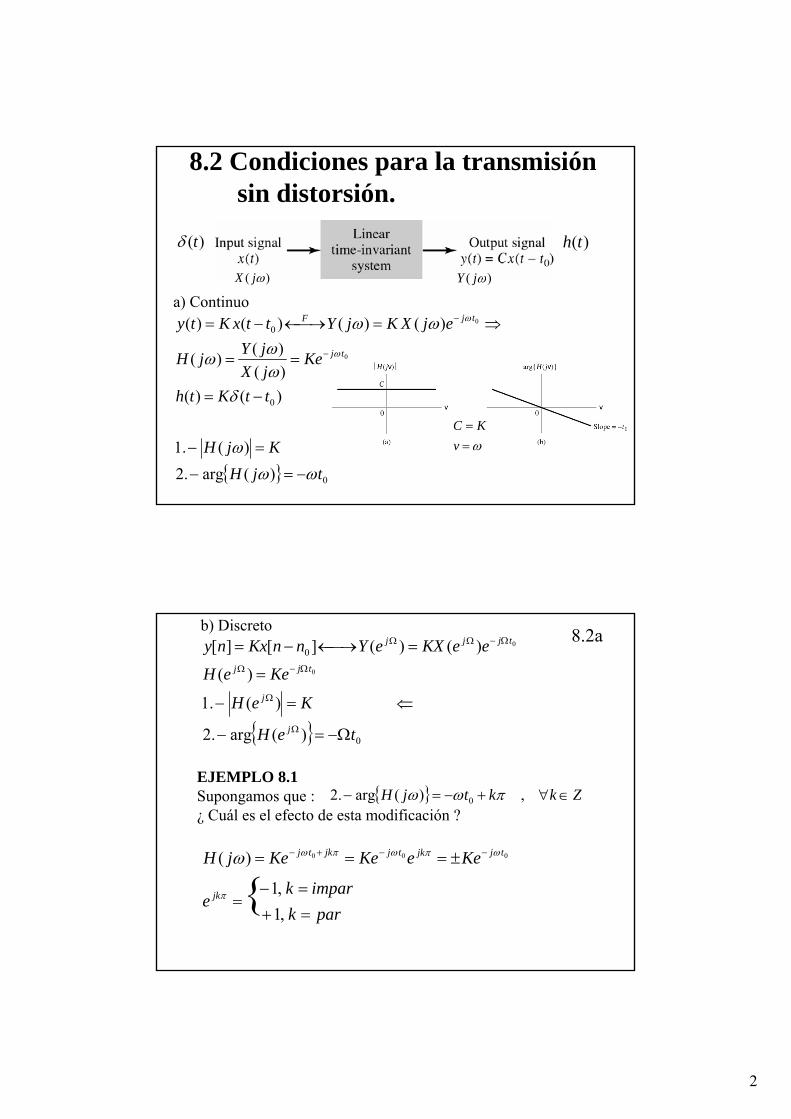
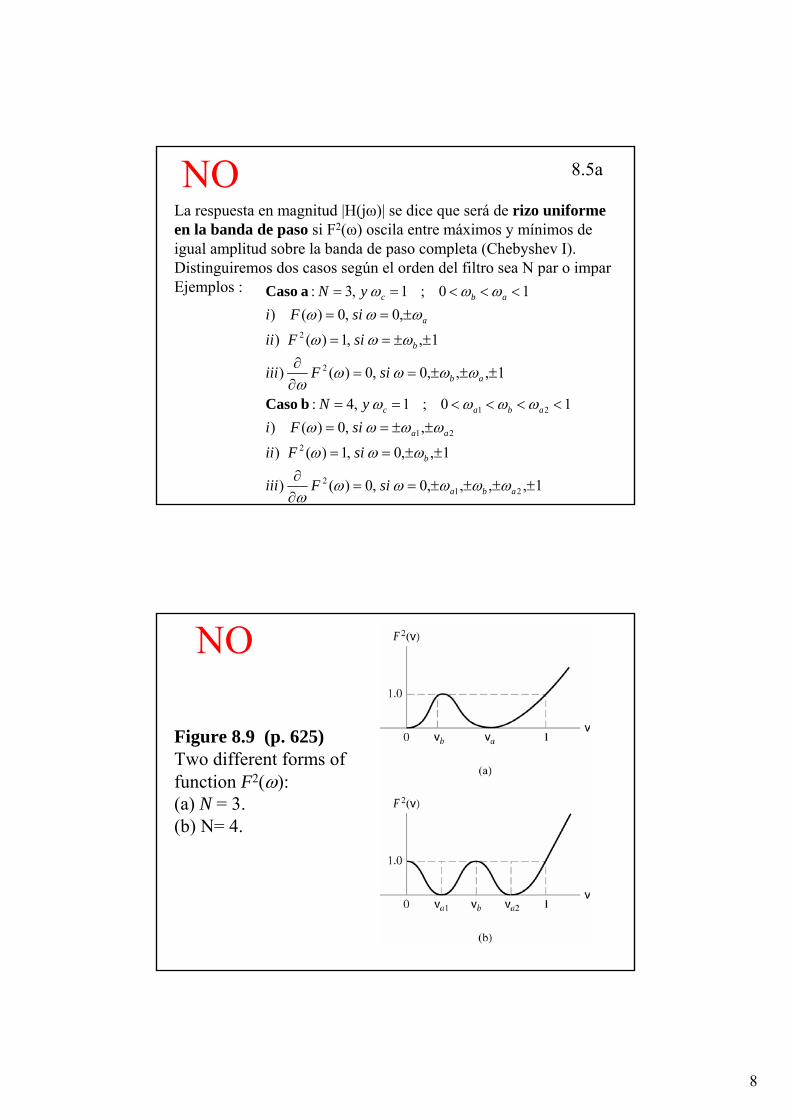
La respuesta en magnitud |H(jω)| se dice que será de rizo uniformeen la banda de paso si F2(ω) oscila entre máximos y mínimos de igual amplitud sobre la banda de paso completa (Chebyshev I).Distinguiremos dos casos según el orden del filtro sea N par o imparEjemplos :
1,,,,0,0)()
1,,0,1)()
,,0)()10;1,4:
1,,,0,0)()
1,,1)()
,0,0)()10;1,3:
212
221
21
2
2
±±±±==∂∂
±±==
±±==<<<<==
±±±==∂∂
±±==
±==<<<==
aba
b
aa
abac
ab
b
a
abc
siFiii
siFii
siFiyN
siFiii
siFii
siFiyN
ωωωωωω
ωωω
ωωωωωωωω
ωωωωω
ωωω
ωωωωωω
bCaso
aCaso
NO
Figure 8.9 (p. 625)Two different forms of function F2(ω): (a) N = 3. (b) N= 4.
NO
9
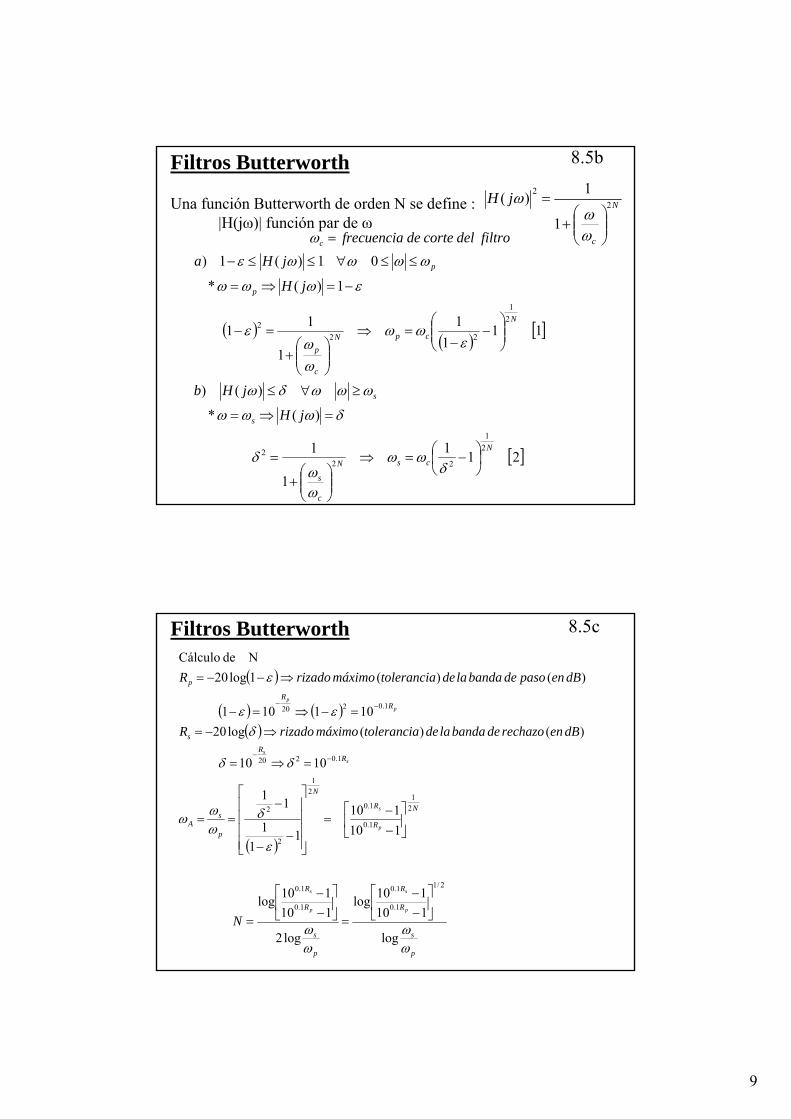
8.5bFiltros Butterworth
Una función Butterworth de orden N se define :|H(jω)| función par de ω
N
c
jH 22
1
1)(
⎟⎟⎠
⎞⎜⎜⎝
⎛+
=
ωω
ω
( )( )
[ ]
[ ]211
1
1
)(*
)()
111
1
1
11
1)(*
01)(1)
21
222
21
222
N
csN
c
s
s
s
N
cpN
c
p
p
p
c
jH
jHb
jH
jHafiltrodelcortedefrecuencia
⎟⎠⎞
⎜⎝⎛ −=⇒
⎟⎟⎠
⎞⎜⎜⎝
⎛+
=
=⇒=
≥∀≤
⎟⎟⎠
⎞⎜⎜⎝
⎛−
−=⇒
⎟⎟⎠
⎞⎜⎜⎝
⎛+
=−
−=⇒=
≤≤∀≤≤−
=
δωω
ωω
δ
δωωω
ωωωδω
εωω
ωω
ε
εωωω
ωωωωεω
8.5cFiltros Butterworth
( )
( ) ( )( )
( )
p
s
R
R
p
s
R
R
N
R
R
N
p
sA
RR
s
RR
p
p
s
p
s
p
s
s
s
p
p
N
dBenrechazodebandaladetoleranciamáximorizadoR
dBenpasodebandaladetoleranciamáximorizadoR
ωω
ωω
ε
δωωω
δδ
δεε
ε
log
110110log
log2
110110log
110110
11
1
11
1010
)()(log20101101
)()(1log20NdeCálculo
2/1
1.0
1.0
1.0
1.0
21
1.0
1.0
21
2
2
1.0220
1.0220
⎥⎦
⎤⎢⎣
⎡
−−
=⎥⎦
⎤⎢⎣
⎡
−−
=
⎥⎦
⎤⎢⎣
⎡
−−
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−
−==
=⇒=
⇒−==−⇒=−
⇒−−=
−−
−−
10
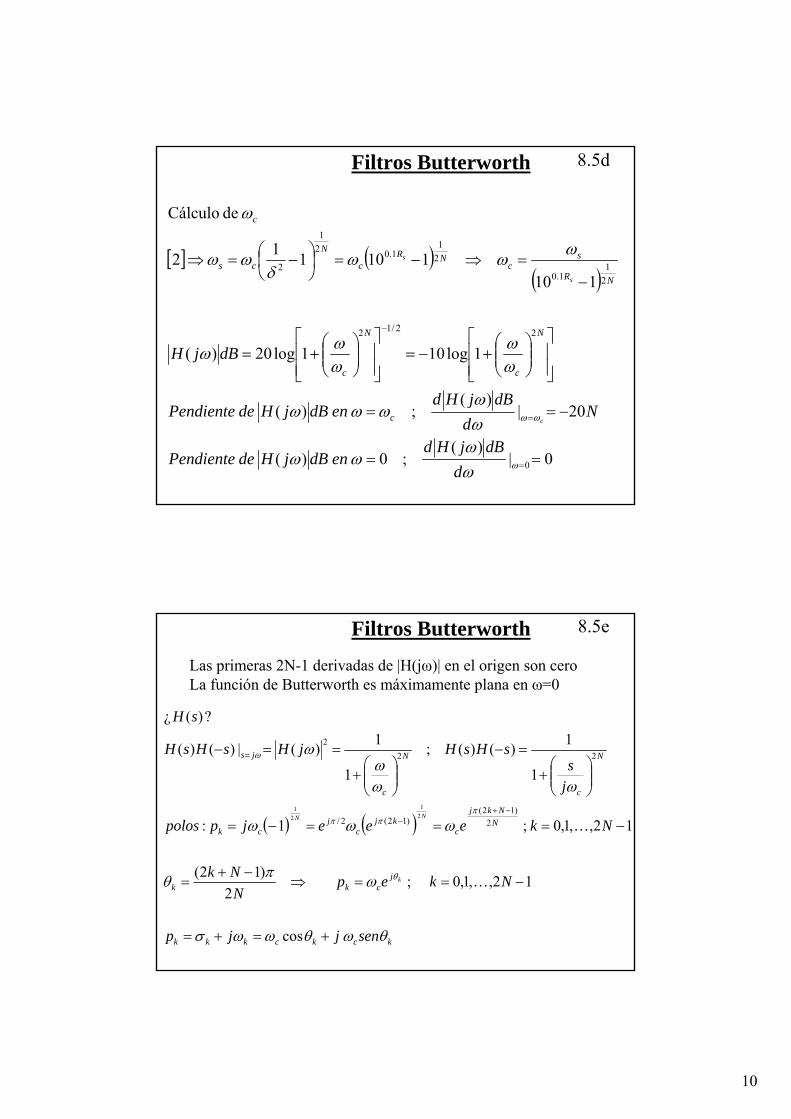
8.5dFiltros Butterworth
[ ] ( )( )
0|)(
;0)(
20|)(
;)(
1log101log20)(
110110112
deCálculo
0
22/12
21
1.0
21
1.021
2
==
−==
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+−=
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+=
−=⇒−=⎟
⎠⎞
⎜⎝⎛ −=⇒
=
=
−
ω
ωω
ωω
ωω
ωω
ωωω
ωω
ωωω
ωωωδ
ωω
ω
ddBjHd
endBjHdePendiente
Nd
dBjHdendBjHdePendiente
dBjH
c
s
s
c
N
c
N
c
NR
sc
NRc
N
cs
c
8.5eFiltros Butterworth
( ) ( )
kckckkk
jckk
NNkj
ckj
cj
ck
N
c
N
c
js
senjjp
NkepNNk
Nkeeejppolos
js
sHsHjHsHsH
sH
k
NN
θωθωωσ
ωπθ
ωωω
ωωω
ω
θ
πππ
ω
+=+=
−==⇒−+
=
−===−=
⎟⎟⎠
⎞⎜⎜⎝
⎛+
=−
⎟⎟⎠
⎞⎜⎜⎝
⎛+
==−
−+−
=
cos
12,,1,0;2
)12(
12,,1,0;1:
1
1)()(;
1
1)(|)()(
?)(¿
2)12(
)12(2/
222
21
21
K
K
Las primeras 2N-1 derivadas de |H(jω)| en el origen son ceroLa función de Butterworth es máximamente plana en ω=0

11
8.5fFiltros Butterworth
8817;
815;
813;
811
89;
87;
85;
834
26
12;3
56
10;3
46
86
6;3
26
4;36
23
:
12,,1,0;2
)12(;cos
7654
3210
543
210
ππθπθπθπθ
πθπθπθπθ
ππθππθππθ
ππθππθππθ
πθθωθω
=====
====
=
======
======
=
−=−+
=+=
N
NEJEMPLOS
NkNNksenjp kkckck K
Figure 8.11 (p. 628)Distribution of poles of H(s)H(–s) in the s-plane for two different filter orders: (a) K =N= 3 and (b) K =N= 4, for which the total number of poles is 6 and 8, respectively.
N polos H(s) N polos H(-s)
2N polos
N polos H(-s)N polos H(s)
2N polos

12
Figure 8.10 (p. 627)Magnitude response of Butterworth filter for varying
orders.
Ejemplo 8.3aDetermine la función de transferencia de un filtro de Butterworthde tipo pasobajas con orden N=3. Supongamos que la frecuenciade corte de 3dB es ωc=1.Solución : Para N=3, los 2N polos de H(s)H(-s) se localizan en uncírculo de radio unitario con espaciamiento angular de 60º. Asignando los polos del semiplano izquierdo H(s), tenemos
23
21
32
32cos
1cos23
21
32
32cos
34;;
32
:)(3;1;3
12,,1,0;2
)12(;cos
3
2
1
321
jjsenp
jsenp
jjsenp
splanodelizquierdosemiplanosHdepolosN
NkNNksenjp
c
kkckck
+−=+=
−=+=
+−=+=
===
==
−=−+
=+=
ππ
ππ
ππ
πθπθπθ
ω
πθθωθω K

13
Ejemplo 8.3b
122
1)(122
1)(
)1)(1(1
23
21
23
21)1(
1)(
23
21;1;
23
21
2323
2
321
+⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛=⇐
+++=
+++=
⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟⎟
⎠
⎞⎜⎜⎝
⎛−++
=
−−=−=+−=
ccc
ssssH
ssssH
sssjsjss
sH
jppjp
ωωω
8.5g
12361.32361.52361.52361.3516131.24142.36131.24
1223122
11
2345
234
23
2
+++++
++++
+++
++
+
sssssssss
sssss
s
Resumen de filtros de Butterworth: H(s)=1/Q(S)
Orde N del filtro Polinomio Q(s)

14
8.5hFiltros ChebyshevRespuesta en magnitud de rizo uniforme (0.5 dB) en la banda de paso.Funciones de aproximación de Chebyshev.Ancho de banda de transición reducido.Los polos yacen sobre una elipse en el plano s de una manera estrechamente relacionada a la del filtro de Butterworthcorrespondiente.Comportamiento monotónico en la banda de rechazo.
Filtros Chebyshev inversoComportamiento monotónico en la banda de paso.Respuesta en magnitud de rizo uniforme en la banda de rechazo.Tiene ceros sobre el eje jω del plano s.
Filtro elípticoRespuesta en magnitud de rizo uniforme en la banda de paso y de rechazo. Banda de transición estrecha.
Figure 8.12 (p. 629)Magnitude response of Chebyshev filter for order (a) K = 3
and (b) K = 4 and passband ripple = 0.5 dB. The frequencies ωb and ωa in case (a) and the frequencies ωa1 and ωb, and ωa2
in case (b) are defined in accordance with the optimality criteria for equiripple amplitude response.
NO

15
Figure 8.13 (p. 630)Magnitude response of inverse Chebyshev filter for order (a)
K = 3 and (b) K = 4 and stopband ripple = 30 dB.
NO
8.6 Transformaciones de frecuencia.No afectan a las tolerancias dentro de las cuales se aproxima lacaracterística de interés ideal
Transformación pasobajas a pasoaltas
j
cj
j
j
j
j
j
j
c
j
jcj
cj
c
dDDsd
s
ds
Dsd
s
ds
ds
sds
ds
dsss
ω
ωωωω
=−
−→
−
−
−=
−
−=
−=
−→
−⇒→
;1
11

16
8.6a
Ejemplo 8.4
)1)(1(1)( 2 +++
=sss
sHLa ecuación
define la función de transferencia de un filtro de Butterworth pasobajasde orden 3 y frecuencia de corte unitaria. Determine la función detransferencia del filtro pasoaltas correspondiente con frecuencia de corte unitaria.Solución:
)1)(1()(
111111)(
)1)(1(1)(
2
3
2
1
2
+++=
⎟⎠⎞
⎜⎝⎛ ++⎟⎠⎞
⎜⎝⎛ +
=⎯⎯⎯ →⎯+++
==→
sssssH
sss
sHsss
sH
pa
pass
s
pb
cω

17
8.6bTransformación pasobajas a pasobanda
Propiedades de un filtro pasobanda:1.- H(jω)=0 tanto en ω=0 como en ω=∞2.- |H(jω)|≈1 para una banda de frecuencias centrada en ω0
(frecuencia de banda media del filtro)Función de transferencia con :• Ceros en s=0 y s= ∞• Polos cerca de s=±jω0 sobre el eje jω en el plano s
B= ancho de banda
( )20
2221
2120
2
20
2
421,
))((1
ω
ωω
−±=
−−=
+−→
−⇒
+→
jj
jj
dBBdppdonde
pspsBs
sBdsBs
dsBsss
Ejercicio 8.6
Considere un filtro pasobajas cuya función de transferencia es
Determine la función de transferencia del filtro pasobandacorrespondiente con frecuencia de media banda ω0=1 y ancho debanda B=0.1
11.01.0)(1)( 2
1.012
++=⎯⎯→⎯
+=
+
ssssH
assH s
s
assH
+=
1)(

18
8.7 Filtros pasivos.
Figure 8.14 (p. 633)Low-pass Butterworth filters driven from ideal current source:
(a) order K = 1 and (b) order K = 3.
Elementos reactivos: inductores y capacitoresElementos resistivos : resistencia de fuente y/o de carga
Síntesis de red: a partir de H(s) determinar los elementos del filtro
1=cω
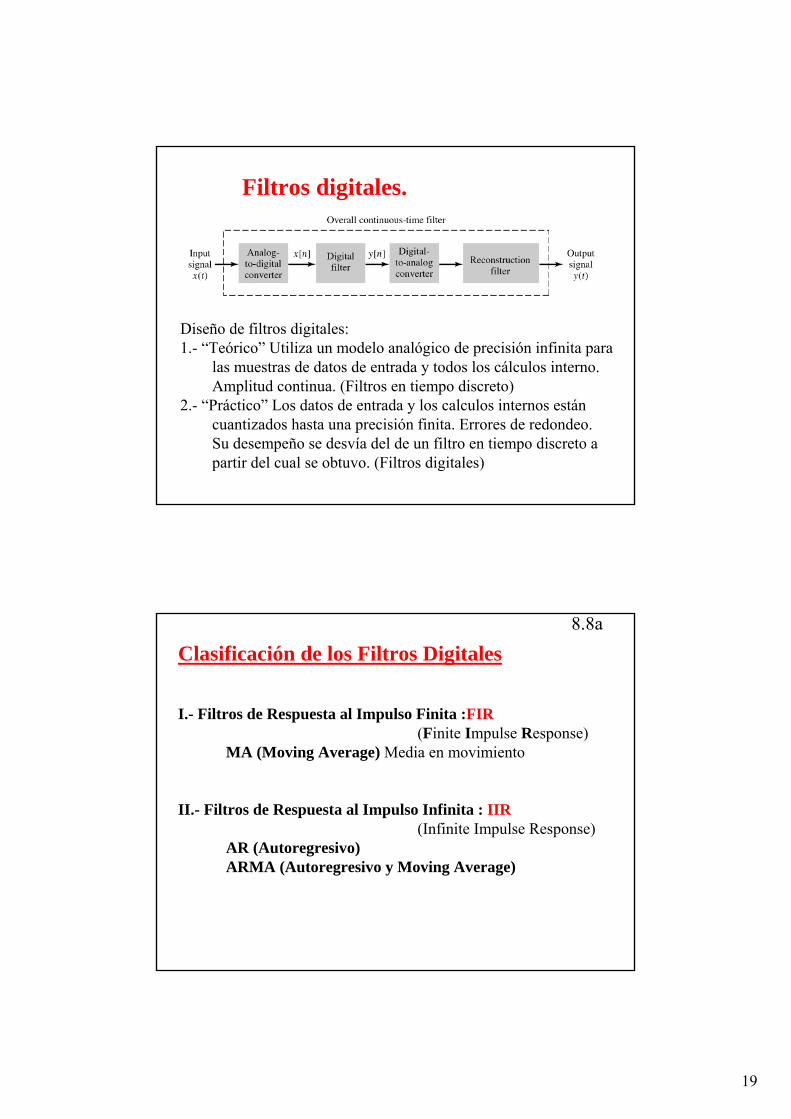
8.8 Filtros digitales.
• El término filtro digital lo entenderemos como cualquierprocesamiento realizado en una señal de entrada digital.
• Un filtro digital es la implementación en hardware o software de una ecuación diferencia.
• Ventajas de los filtros digitales• Alta precisión (limitada por los errores de redondeo en la
aritmética empleada)• Fácil modificación de las características del filtro• Muy bajo coste (y bajando)• Alta inmunidad al ruido
• Por estas razones, los filtros digitales están reemplazandorápidamente a los filtros analógicos.
19
Filtros digitales.
Diseño de filtros digitales:1.- “Teórico” Utiliza un modelo analógico de precisión infinita para
las muestras de datos de entrada y todos los cálculos interno.Amplitud continua. (Filtros en tiempo discreto)
2.- “Práctico” Los datos de entrada y los calculos internos están cuantizados hasta una precisión finita. Errores de redondeo. Su desempeño se desvía del de un filtro en tiempo discreto a partir del cual se obtuvo. (Filtros digitales)
8.8a
Clasificación de los Filtros Digitales
I.- Filtros de Respuesta al Impulso Finita :FIR(Finite Impulse Response)
MA (Moving Average) Media en movimiento
II.- Filtros de Respuesta al Impulso Infinita : IIR(Infinite Impulse Response)
AR (Autoregresivo)ARMA (Autoregresivo y Moving Average)

20
8.8b
][...]1[][][ 10 Mnxbnxbnxbny M −++−+=
kb
I.- Filtros de Respuesta al Impulso Finita : FIR MA(M), Moving Average
•Un filtro FIR de orden M se describe por la siguiente ecuacióndiferencia
•La función de transferencia es un polinomio en z-1
•La función de Transferencia tiene un denominador constante y sólotiene ceros.
•La secuencia son los coeficientes del filtro.•La respuesta es por tanto una suma ponderada de valores pasados y
presentes de la entrada. De ahí que se denomineMedia en Movimiento (Moving Average)
•Tienen memoria finita y en vista de ello ningún transitorio de inicio es de duración limitada
MM zbzbbzH −− +++= ...)( 1
10
8.8c
•Siempre son estables en sentido BIBO
•Pueden realizar una respuesta en magnitud deseada con exactamente respuesta en fase lineal (sin distorsión de fase)
•No hay recursión, es decir, la salida depende sólo de la entrada y no de valores pasados de la salida.
•La respuesta es de duración finita ya que si la entrada se mantiene en cero durante M periodos consecutivos, la salida será tambiéncero
21
8.8d
• Ecuaciones en diferencias lineales de coeficientes constantes deuna naturaleza recursiva.
• La función de transferencia es una función racional en z-1
• Longitud de filtro más corta, para una respuesta en frecuencia dada
• Distorsión de fase.
I.- Filtros de Respuesta al Impulso Infinita : IIR
a) AR (Autoregresivo)b) ARMA (Autoregresivo y Moving Average)
8.8e
][][...]2[]1[][ 21 nxNnyanyanyany N =−++−+−+•La ecuación diferencia que describe un filtro AR es
, lo que da lugar a una función de transferencia
•La función de transferencia contiene solo polos.•El filtro es recursivo ya que la salida depende no solo de la entrada
actual sino además de valores pasados de la salida(Filtros con realimentación).
•El término autoregresivo tiene un sentido estadístico en que la salida y[n] tiene una regresión hacia sus valores pasados.
•La respuesta al impulso es normalmente de duración infinita, de ahísu nombre.
I.- Filtros de Respuesta al Impulso Infinita : IIR a) AR (N), Autoregresivo
NN zaza
zH −− +++=
...11)( 1
1

22
8.8f
][...]1[][][...]1[][ 101 MnxbnxbnxbNnyanyany MN −++−+=−++−+
I.- Filtros de Respuesta al Impulso Infinita : IIRb) ARMA(N,M), Autoregresivo y Moving Average
NN
MM
zazazbzbbzH −−
−−
++++++
=...1...)( 1
1
110
• Es el filtro más general y es una combinación de los filtros MA y AR descritos anteriormente. La ecuación diferencia que descibe un filtro ARMA de orden N es
Y la función de transferencia
• Un filtro de este tipo se denota por ARMA(N,M), es decir es Autoregresivo de orden N y Media en Movimiento de orden M.
• Su respuesta a impulso es también de duración infinita y por tanto es un filtro del tipo IIR.
8.8e

23
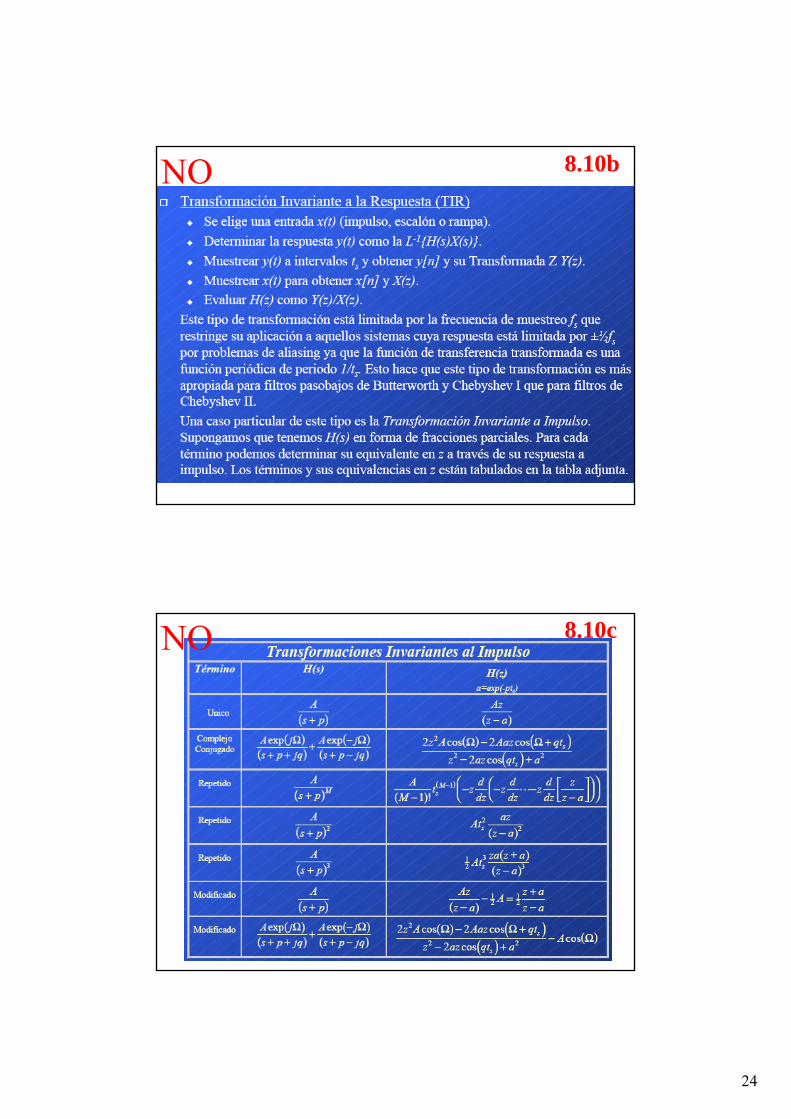
8.10 Filtros digitales IIR.
8.10aNO
24
8.10bNO
8.10cNO
25
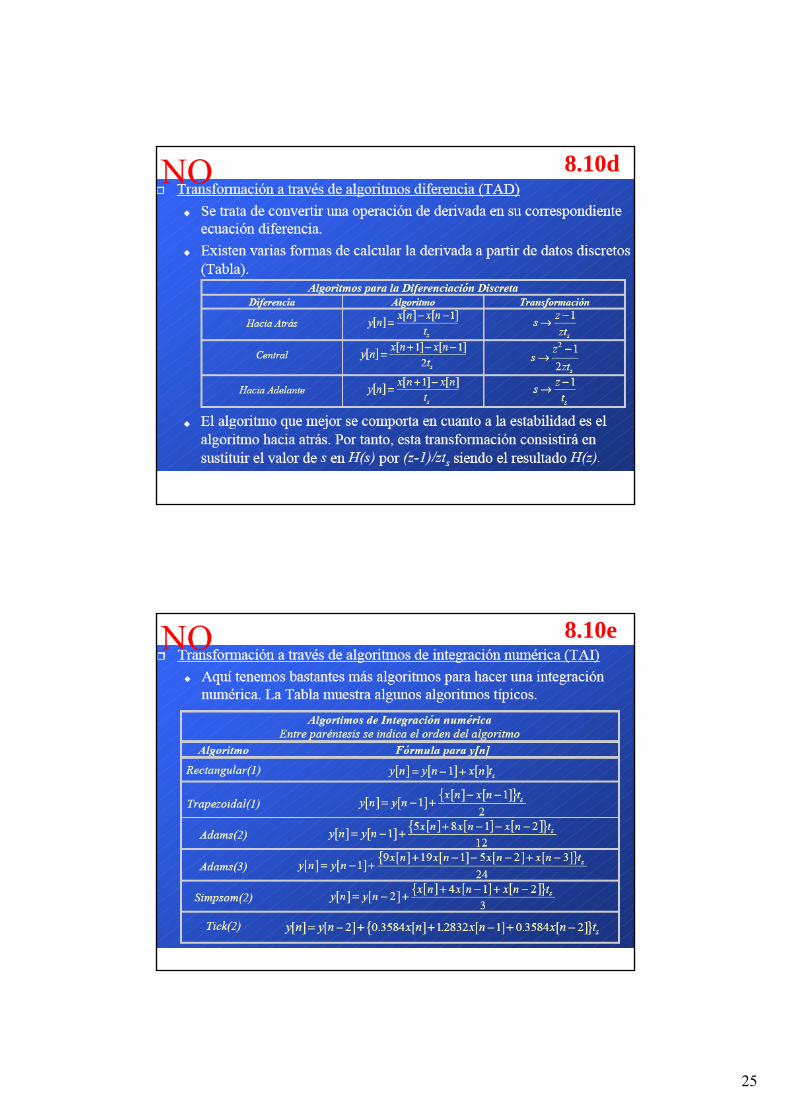
8.10dNO
8.10eNO
26
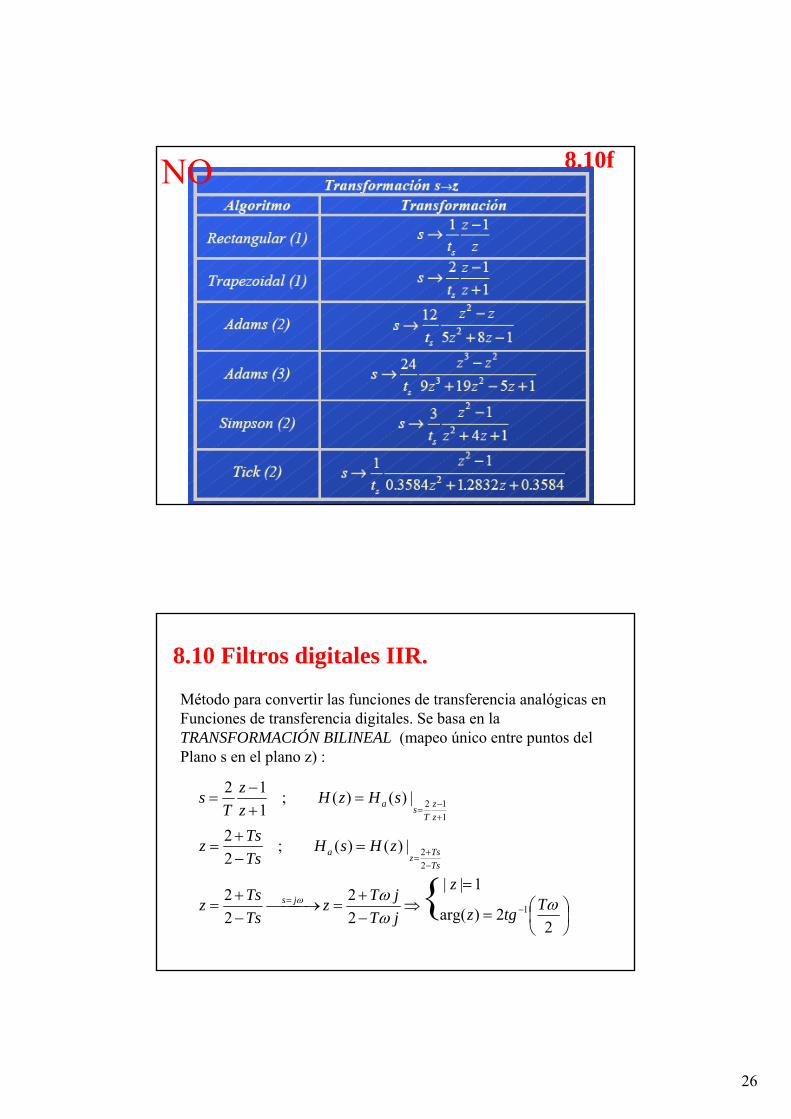
8.10fNO
8.10 Filtros digitales IIR.
Método para convertir las funciones de transferencia analógicas enFunciones de transferencia digitales. Se basa en la TRANSFORMACIÓN BILINEAL (mapeo único entre puntos del Plano s en el plano z) :
⎟⎠⎞
⎜⎝⎛=
=⇒
−+
=⎯⎯ →⎯−+
=
=−+
=
=+−
=
−=
−+
=
+−
=
22)arg(
1||
22
22
|)()(;22
|)()(;112
1
22
112
ωωωω Ttgz
z
jTjTz
TsTsz
zHsHTsTsz
sHzHzz
Ts
js
TsTsza
zz
Tsa

27
Figure 8.24 (p. 646)Illustration of the properties of the bilinear transform. The left half of the s-plane (shown on the left) is mapped onto the interior of the unit circle in the z-plane (shown on the right). Likewise, the right
half of the s-plane is mapped onto the exterior of the unit circle in the z-plane. The two corresponding regions are shown shaded.
Figure 8.25 (p. 647)Graphical plot of the relation between the frequency Ω pertaining to
the discrete-time domain and the frequency ω pertaining to the continuous-time domain: Ω = 2 tan-1 (ω).
aladeodedistorsión
tgtgT
tgT
TtgzeHzH jez j
⇒<Ω<−⇔∞<<∞−
Ω==Ω⇒=
Ω=⎟
⎠⎞
⎜⎝⎛==Ω⎯⎯ →⎯
−
−Ω= Ω
ππω
ωω
ωω
2;)(22
22;
22)arg(;)()(
1
1
28
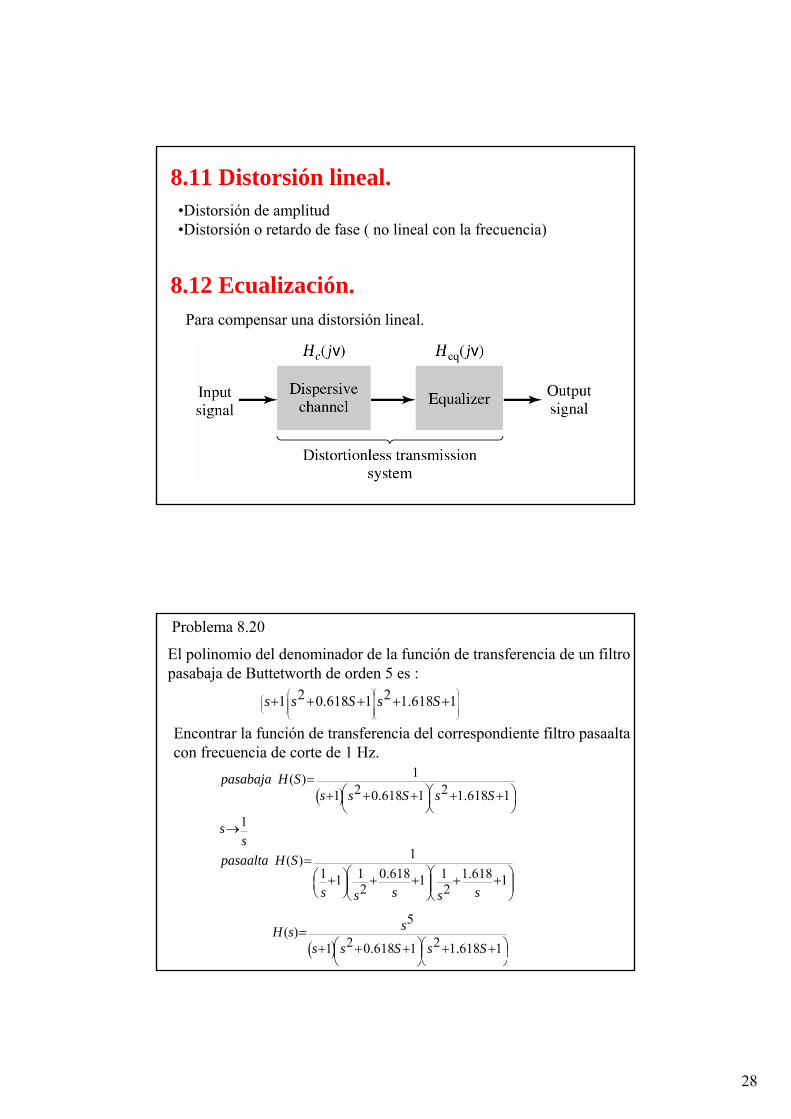
8.11 Distorsión lineal.•Distorsión de amplitud•Distorsión o retardo de fase ( no lineal con la frecuencia)
8.12 Ecualización.Para compensar una distorsión lineal.
Problema 8.20
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛ +++++ 1618.121618.021 SsSss
El polinomio del denominador de la función de transferencia de un filtropasabaja de Buttetworth de orden 5 es :
Encontrar la función de transferencia del correspondiente filtro pasaaltacon frecuencia de corte de 1 Hz.
( )
( ) ⎟⎠⎞⎜
⎝⎛ ++⎟⎠⎞⎜
⎝⎛ +++
=
⎟⎟⎠
⎞⎜⎜⎝
⎛ ++⎟⎟⎠
⎞⎜⎜⎝
⎛ ++⎟⎠⎞⎜
⎝⎛ +
=
→
⎟⎠⎞⎜
⎝⎛ ++⎟⎠⎞⎜
⎝⎛ +++
=
1618.121618.021
5)(
1618.1211618.0
2111
1)(
1
1618.121618.021
1)(
SsSss
ssH
sssss
SHpasaaltas
s
SsSssSHpasabaja

29
Problema 8.21
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛ +++++ 1618.121618.021 SsSss
El polinomio del denominador de la función de transferencia de un filtropasabaja de Buttetworth de orden 5 es :
con frecuencia de corte de 1 Hz, si queremos modificar dicha frecuencia de corte a cualquier valor , calcular la nueva función de transferencia H2
( )
( ) ⎟⎠⎞⎜
⎝⎛ ++⎟⎠⎞⎜
⎝⎛ +++
=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛++
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛++
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛+
=
⇒→⇒≠⎟⎠⎞⎜
⎝⎛ ++⎟⎠⎞⎜
⎝⎛ +++
=⇒=
2618.122618.02
5)(2
1618.122
1618.022
1
1)(2
1;1618.121618.021
1)(11
cScscScscscSH
c
s
c
s
c
s
c
s
c
sSH
c
sscSsSss
SHc
ωωωωω
ω
ωωωωω
ωωω
Problema 8.22
)11.001.21.0)(11.0(001.0)(
)01.01.01.012)(11.0(001.0)(
11.0
11.0
111.0
1
1)()1)(1(
1)(
2342
3
23242
3
2222
1.01
2
220
2
++++++=
+++++++=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
++
+⎟⎟⎠
⎞⎜⎜⎝
⎛ +⎟⎟⎠
⎞⎜⎜⎝
⎛+
+=⎯⎯⎯⎯⎯ →⎯
+++=
+=
+→
ssssssssH
sssssssssH
ss
ss
ss
sHsss
sH
pbanda
pbanda
pbandas
sBs
ss ω
Dada la función de transferencia H(s) de un filtros de Butterworthpasabaja de orden 3 y frecuencia de corte unitaria. Determinar lafunción de transferencia del correspondiente filtro pasabanda confrecuencia de media banda ω0=1 y ancho de banda B=0.1
30
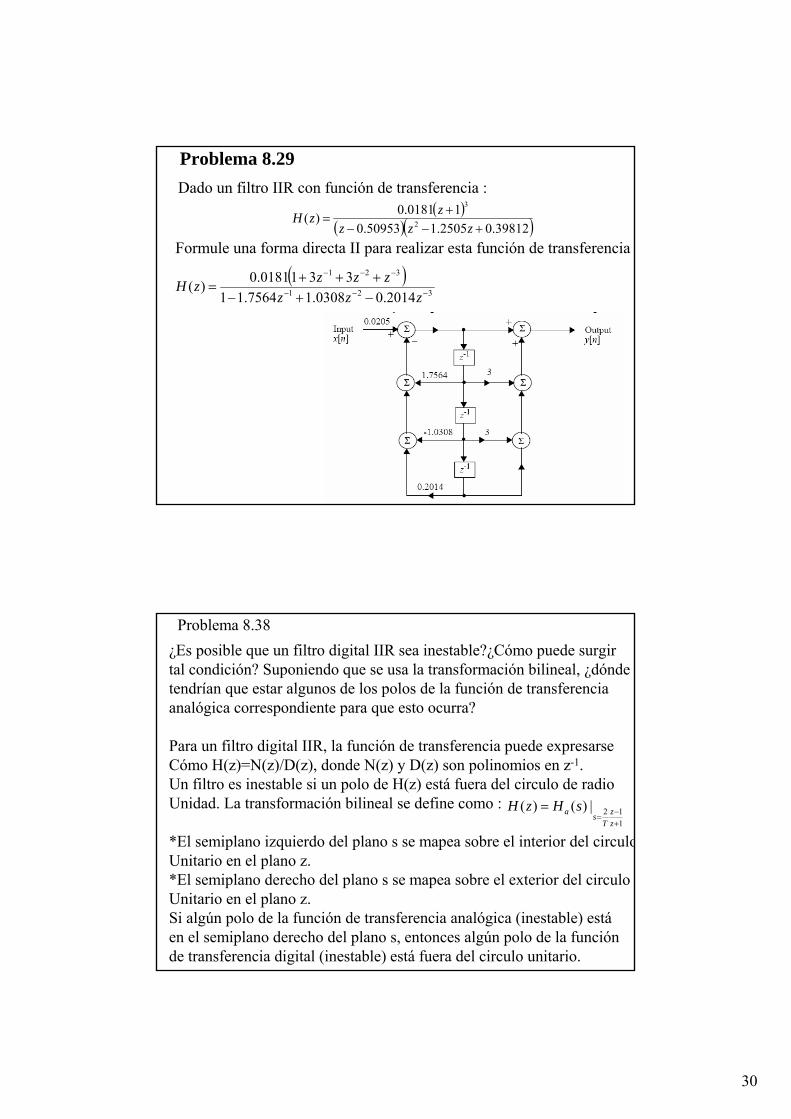
Problema 8.29
( )321
321
2014.00308.17564.113310181.0)( −−−
−−−
−+−+++
=zzz
zzzzH
Dado un filtro IIR con función de transferencia :
Formule una forma directa II para realizar esta función de transferencia
( )( )( )39812.02505.150953.0
10181.0)( 2
3
+−−+
=zzz
zzH
Problema 8.38¿Es posible que un filtro digital IIR sea inestable?¿Cómo puede surgirtal condición? Suponiendo que se usa la transformación bilineal, ¿dóndetendrían que estar algunos de los polos de la función de transferenciaanalógica correspondiente para que esto ocurra?
Para un filtro digital IIR, la función de transferencia puede expresarse Cómo H(z)=N(z)/D(z), donde N(z) y D(z) son polinomios en z-1.Un filtro es inestable si un polo de H(z) está fuera del circulo de radio Unidad. La transformación bilineal se define como :
*El semiplano izquierdo del plano s se mapea sobre el interior del circuloUnitario en el plano z.*El semiplano derecho del plano s se mapea sobre el exterior del circuloUnitario en el plano z.Si algún polo de la función de transferencia analógica (inestable) estáen el semiplano derecho del plano s, entonces algún polo de la funciónde transferencia digital (inestable) está fuera del circulo unitario.
112|)()(+−
==
zz
Tsa sHzH