CAPÍTULO 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE … · Capítulo 4.INTERPOLACIÓN POLINOMIAL Y...
48
CAPÍTULO 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL INTRODUCCIÓN En este capítulo trataremos básicamente dos problemas, el primero de los cuales es el siguiente: Problema 1: Dados n + 1 puntos de R 2 ( )( ) ( ) n n 1 1 0 0 y , x ,..., y , x , y , x en los cuales n 1 0 x ,..., x , x son números distintos, se quiere encontrar un polinomio () p x n de grado menor o igual que n tal que ( ) p x y, k 0,1,...,n n k k = = Probaremos que un tal polinomio () p x n siempre existe y además es único. A tal polinomio se le denomina polinomio de interpolación, polinomio interpolante o polinomio de colocación para los puntos (datos) dados. En este contexto los números n 1 0 x ,..., x , x son llamados nodos. Cuando n = 1, es decir, sólo tenemos dos puntos, el polinomio de interpolación correspondiente se denomina también polinomio de interpolación lineal. El caso de mayor interés para nosotros es aquel en el cual ( ) y fx k k = siendo f una cierta función de la que posiblemente no se conoce una fórmula explícita, o bien es muy complicada para evaluarla, derivarla, integrarla, hallarle ceros, etc. En este caso el polinomio de interpolación () p x n puede usarse como aproximación de la función f y, en particular, para aproximar valores de la función f en puntos intermedios entre los nodos n 1 0 x ,..., x , x . Nos referiremos a esta manera de aproximar una función dada, mediante un polinomio de interpolación, como interpolación polinomial; cuando usemos sólo dos nodos, nos referiremos a la correspondiente interpolación como interpolación lineal. En este contexto el polinomio de interpolación () p x n se dirá el polinomio que interpola a la función f en los nodos n 1 0 x ,..., x , x . El otro problema a tratar es: Problema 2: Dados n + 1 puntos de R 2 ( )( ) ( ) n n 1 1 0 0 y , x ,..., y , x , y , x en los cuales n 1 0 x ,..., x , x son números distintos, y dado un entero no-negativo m, con m n < , se trata de encontrar un polinomio () p x a ax ax m m m = + + + 0 1 ...
Transcript of CAPÍTULO 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE … · Capítulo 4.INTERPOLACIÓN POLINOMIAL Y...

CAPÍTULO 4. INTERPOLACIÓN POLINOMIAL Y AJUSTEPOLINOMIAL
INTRODUCCIÓN
En este capítulo trataremos básicamente dos problemas, el primero de los cuales es elsiguiente:
Problema 1: Dados n +1 puntos de R2
( ) ( ) ( )nn1100 y,x,...,y,x,y,x
en los cuales n10 x,...,x,x son números distintos, se quiere encontrar un polinomio ( )p xn degrado menor o igual que n tal que
( ) p x y , k 0,1,...,n n k k= =
Probaremos que un tal polinomio ( )p xn siempre existe y además es único. A tal polinomiose le denomina polinomio de interpolación, polinomio interpolante o polinomio decolocación para los puntos (datos) dados. En este contexto los números n10 x,...,x,x sonllamados nodos. Cuando n =1, es decir, sólo tenemos dos puntos, el polinomio deinterpolación correspondiente se denomina también polinomio de interpolación lineal.
El caso de mayor interés para nosotros es aquel en el cual ( )y f xk k= siendo f una ciertafunción de la que posiblemente no se conoce una fórmula explícita, o bien es muycomplicada para evaluarla, derivarla, integrarla, hallarle ceros, etc. En este caso el polinomiode interpolación ( )p xn puede usarse como aproximación de la función f y, en particular, paraaproximar valores de la función f en puntos intermedios entre los nodos n10 x,...,x,x . Nosreferiremos a esta manera de aproximar una función dada, mediante un polinomio deinterpolación, como interpolación polinomial; cuando usemos sólo dos nodos, nosreferiremos a la correspondiente interpolación como interpolación lineal. En este contextoel polinomio de interpolación ( )p xn se dirá el polinomio que interpola a la función f en losnodos n10 x,...,x,x .
El otro problema a tratar es:
Problema 2: Dados n +1 puntos de R2
( ) ( ) ( )nn1100 y,x,...,y,x,y,x
en los cuales n10 x,...,x,x son números distintos, y dado un entero no-negativo m, conm n< , se trata de encontrar un polinomio
( )p x a a x a xm mm= + + +0 1 ...

184 MÉTODOS NUMÉRICOS__________________________________________________________________________________
tal que la suma de cuadrados
( )( ) p x ym k kk
n
−=∑ 2
0
sea mínima.
El criterio mediante el cual se elige el polinomio ( )p xm es conocido como criterio de losmínimos cuadrados. Probaremos que tal polinomio ( )p xm existe y es único; se ledenomina polinomio de ajuste según mínimos cuadrados para los datos dados. Nóteseque esta vez, a diferencia de lo que ocurre con el polinomio de colocación, ( )p xm k no
necesariamente es igual a yk para todo k n= 01, ,..., . El polinomio ( )p xm lo que da es unajuste razonable a los datos dados.
Este tipo de aproximación mediante el polinomio de ajuste ( )p xm se conoce como ajustepolinomial. Aunque el ajuste polinomial según mínimos cuadrados es el caso más usado,también consideraremos el caso de ajuste exponencial, logarítmico y de potencia segúnmínimos cuadrados.
4.1 INTERPOLACIÓN POLINOMIAL
Teorema 4.1 (existencia y unicidad del polinomio interpolante) Dados los n +1 puntos( ) ( ) ( )nn1100 y,x,...,y,x,y,x de R2 , con n10 x,...,x,x números distintos, existe un únicopolinomio
( )p x a a x a x ... a xn 0 1 22
nn= + + + +
de grado menor o igual que n, que interpola los puntos dados, es decir, tal que
( ) p x y , k 0,1,...,nn k k= =
Demostración: Existe un único polinomio
( )p x a a x a x a xn nn= + + + +0 1 2
2 ...tal que
( ) p x y , k 0,1,...,nn k k= =
si y sólo si existen números reales únicos a a a an0 1 2, , ,..., tales que
a a x a x a x y
a a x a x a x y
a a x a x a x y
nn
nn
n n n nn
n
0 1 0 2 02
0 0
0 1 1 2 12
1 1
0 1 22
+ + + + =
+ + + + =
+ + + + =
......
...!

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 185__________________________________________________________________________________
El sistema anterior, de n +1 ecuaciones lineales en las n +1 incógnitas a a a an0 1 2, , ,..., ,escrito en forma matricial es
11
1
0 02
0
1 12
1
2
0
1
0
1
x x xx x x
x x xA
aa
aX
yy
yb
n
n
n n nn
n n
"
"
! ! ! !
"# $%%%%%% &%%%%%%
!
#$% &%
!
#$% &%
=
Ahora bien, como
( ) det A j i n
= = −≤ < ≤∏
11
1
0 02
0
1 12
1
2
0
x x xx x x
x x x
x x
n
n
n n nn
i j
"
"
! ! ! !
"
entonces det A ≠ 0 (porque si i j≠ , entonces x xi j≠ ), y por tanto el sistema en consideracióntiene solución única. Esto prueba la existencia de un único polinomio interpolante de gradomenor o igual que n para los n +1 datos dados. ∇∇∇∇
Una forma de encontrar el polinomio interpolante para los puntos ( ) ( ) ( )nn1100 y,x,...,y,x,y,xes resolviendo directamente el sistema AX b= que aparece en la prueba del teoremaanterior; pero este procedimiento no se acostumbra porque, por lo general, la matriz decoeficientes de este sistema resulta mal condicionada, lo que puede ocurrir si dos abscisasestán relativamente cerca. Lo que resta de esta sección lo dedicaremos a otras formas deencontrar el polinomio interpolante.
4.1.1 Forma de Lagrange del polinomio interpolante: Supongamos, para ilustración delmétodo de Lagrange, que se tienen los puntos ( ) ( ) ( )221100 y,x ,y,x ,y,x con x0 1 2, x y xnúmeros distintos y queremos encontrar el polinomio interpolante de grado menor o igual quedos
( ) p2 0 1 22x a a x a x= + +
para dichos puntos.
Como ( )p x yk k2 012= =, , , k , entonces

186 MÉTODOS NUMÉRICOS__________________________________________________________________________________
( )
( )
( )
p x a a x a x y
p x a a x a x y
p x a a x a x y
2 0 0 1 0 2 02
0
2 1 0 1 1 2 12
1
2 2 0 1 2 2 22
2
= + + =
= + + =
= + + =
que es un sistema de tres ecuaciones lineales cuyas incógnitas son a , a y a .0 1 2
Veamos que el determinante de la matriz de coeficientes de este sistema es, como ya sedijo, ( )( )( )x x x x x x1 0 2 0 2 1− − − . En efecto:
( )( )
( )( ) ( )( )( )
∆ = = − −− −
= − − ++
= − − +−
= − − − ≠
111
100
10 10 1
10 10 0
0
0 02
1 12
2 22
0 02
1 0 12
02
2 0 22
02
1 0 2 0
0 02
1 0
2 0
1 0 2 0
0 02
1 0
2 1
1 0 2 0 2 1
x xx xx x
x xx x x xx x x x
x x x xx x
x xx x
x x x xx x
x xx x
x x x x x x
(Así que el sistema tiene solución única).
De acuerdo con la regla de Cramer
a
0
0 0 02
1 1 12
2 2 22
=
y x xy x xy x x
∆de donde
( ) ∆ ⋅ = = − − − + −
a
y x xy x xy x x
y x x x x y x x x x y x x x x0
0 0 02
1 1 12
2 2 22
0 1 22
2 12
1 0 22
2 02
2 0 12
1 02
(Desarrollando el determinante por los cofactores de la primera columna)
Análogamente,
( ) y∆ ⋅ = = − − + − − −
a
y xy xy x
x x y x x y x x1
0 02
1 12
2 22
0 22
12
1 22
02
2 12
02
111
(Desarrollando el determinante por los cofactores de la segunda columna)
y

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 187__________________________________________________________________________________
( ) ( ) ( ) y∆ ⋅ = = − − − + −ax yx yx y
x x y x x y x x2
0 0
1 1
2 2
0 2 1 1 2 0 2 1 0
111
(Desarrollando el determinante por los cofactores de la tercera columna)
Por tanto
( )( ) ( ) ( )
( )( ) ( )( ) ( )( )[ ]( ) ( ) ( )[ ]
( ) ( )[ ] ( ) ( )[ ]( )
∆ ∆ ∆ ∆⋅ = ⋅ + ⋅ + ⋅
= − − − + −
+ − − + + − + − − +
+ − − − + −
= − − + + − − − + +
+ −
p x a a x a x
y x x x x y x x x x y x x x x
y x x x x y x x x x y x x x x x
y x x y x x y x x x
x x y x x x x x x x x y x x x x x x
x x y x
2 0 1 22
0 1 2 2 1 1 0 2 2 0 2 0 1 1 0
0 2 1 2 1 1 2 0 2 0 2 1 0 1 0
0 2 1 1 2 0 2 1 02
2 1 0 1 2 2 12
2 0 1 0 2 2 02
1 0 2 2( ) ( )[ ]− − + +x x x x x x x1 0 1 1 02
Total que( ) ( )( )( ) ( )( )( )
( )( )( )
∆ ⋅ = − − − + − − −
+ − − −
p x y x x x x x x y x x x x x x
y x x x x x x2 0 2 1 1 2 1 0 2 0 2
2 1 0 0 1
y entonces
( ) ( )( )( )( )
( )( )( )( )
( )( )( )( ) p2 0
1 2
0 1 0 21
0 2
1 0 1 22
0 1
2 0 2 1x y
x x x xx x x x
yx x x x
x x x xy
x x x xx x x x
=− −− −
+− −− −
+− −− −
Si definimos los polinomios de grado dos
( ) ( )( )( )( ) L0
1 2
0 1 0 2x
x x x xx x x x
=− −− −
( ) ( )( )( )( ) L1
0 2
1 0 1 2x
x x x xx x x x
=− −− −
( ) ( )( )( )( ) L2
0 1
2 0 2 1x
x x x xx x x x
=− −− −
entonces
( ) ( ) ( ) ( ) xLyxLyxLyxp 2211002 ++=
Observe que
( ) L x 1 si k j
0 si k j , j 0,1,2, k 0,1,2j k =
=
≠
= =
y que, como era de esperarse, ( )p x yk k2 012= =, , , k .

188 MÉTODOS NUMÉRICOS__________________________________________________________________________________
Los polinomios ( ) ( ) ( )xL y xL ,xL 210 , se denominan polinomios fundamentales deLagrange y el polinomio ( )p x2 , obtenido de la manera anterior, se denomina polinomio deinterpolación de Lagrange o forma de Lagrange del polinomio interpolante para losdatos dados.
En general se tiene que:
Dados n +1 puntos ( ) ( ) ( )nn1100 y,x,...,y,x,y,x con n10 x,...,x,x números distintos, elpolinomio de interpolación de Lagrange o la forma de Lagrange del polinomiointerpolante para los datos dados es el polinomio
( ) ( ) ( ) ( ) ( ) ( ) xLyxLy...xLy...xLyxLyxp n
0jjjnnjj1100n ∑
=
=+++++=
donde
( ) ( )( ) ( )( ) ( )( )( ) ( )( ) ( )
( )( ) L
x x x x ... x x x x ... x x
x x x x ... x x x x ... x x , j 0,1,...,n 0 1 j 1 j 1 n
j 0 j 1 j j 1 j j 1 j nj
k
j kkk j
n
xx xx x
=− − − − −
− − − − −=
−
−=− +
− + =≠
∏0
Los polinomios ( )L xj , anteriores, se denominan polinomios fundamentales de Lagrange.Nótese que si se trata de n +1 puntos, tales polinomios son de grado n.
Observe que
( ) L x 1 si k j
0 si k j , j 0,1,2,...,n, k 0,1,2,...,nj k =
=
≠
= =
y que para cada k 0,1,...,n,=
( ) ( ) ( ) ( ) ( ) p ... ...n k k k k k k n n k
k
x y L x y L x y L x y L x
y
= + + + + +
=
0 0 1 1
0 0 1 0#$& #$& #$& #$&
En el caso en que ( )y f x nk k= =, , ,..., k 01 , la expresión para el polinomio de interpolación deLagrange se convierte en
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )p x f x L x f x L x f x L x f x L xn j j n n= + + + + +0 0 1 1 ... ...
Caso particular: Calculemos el polinomio de interpolación lineal, correspondiente a lospuntos ( ) ( )x ,y , x ,y con x0 0 1 1 0 1≠ x , usando la forma de Lagrange:
En este caso, el polinomio de interpolación de Lagrange es

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 189__________________________________________________________________________________
( ) ( ) ( )xLyxLyxp 11001 +=siendo
( ) ( ) L y L 01
0 11
0
1 0x x x
x xx x x
x x=
−−
=−−
es decir,
( ) ( ) ( )
( ) ( )
( ) ( )( )
p1 0 0 1 1 01
0 11
0
1 0
0 1 1 0
1 0
0 1 0 1 1 0
1 0
0 1 0 0 0 0 0 1 1 0
1 0
0 1 0 1 0 0
1 0
x y L x y L x y x xx x
y x xx x
y x x y x xx x
y x y x y x y xx x
y x y x y x y x y x y xx x
y x x y y x xx x
= + =−−
+−−
=− + −
−=
− + −−
=− + − + −
−
=− + − −
−Luego
( ) ( )( ) ( ) p = y
1 01 0
1 00x
y yx x
x x+−−
−
Nótese que ( )y p x= 1 es la ecuación de la recta determinada por los puntos
( ) ( )x y x y0 0 1 1, , y . ∇∇∇∇
Ejemplo 4.1 Supongamos que queremos aproximar la función ( )f x = cosx sobre el intervalo
−
π π2 2
, mediante un polinomio de interpolación. Una forma razonable de hacerlo es
mediante un polinomio de interpolación de Lagrange de grado menor o igual que dos, ( )p x2 ,
usando como nodos los números x0 1 220
2= − = =π π, x y x .
Como( ) ( ) ( ) ( ) ( ) ( ) ( )xLxfxLxfxLxfxp 2211002 ++=
y
( ) ( ) ( ) f , f y fx x x0 1 220 0 1
20= −
= = = =
=cos cos cosπ π
entonces ( ) ( )p x L x2 1= , donde
( ) ( )( )( )( ) L1
0 2
1 0 1 2
22
2 222 2
2 2
4
4
1 4xx x x x
x x x x
x x xx=
− −− −
=+
−
−
=−
−= −
π π
π π
π
π π
Total que el polinomio de interpolación de Lagrange para la función ( )f x x= cos en los nodos
x0 1 220
2= − = =π π, x y x , es

190 MÉTODOS NUMÉRICOS__________________________________________________________________________________
( )p x x2 221 4= −
π
Observe que ( )p p2 2 220
20 1−
= =
=π π y p , como era de esperarse
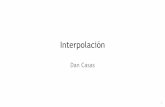
La FIGURA 4.1 siguiente, muestra las gráficas de y x= cos y del polinomio interpolante
obtenido ( )y p x x= = −2 221 4
π.
FIGURA 4.1
Si usamos el polinomio interpolante de Lagrange, ( )p x2 , para aproximar
f π π4 4
22
71=
= ≈cos . , obtenemos
cos π ππ
π4 4
1 44
1 14
34
752 2
2≈
= −
= − = =p .
Instrucción en DERIVE: Dados los n +1 datos [ ] [ ] [ ][ ]M x y x y x yn n:= 0 0 1 1, , , ,..., , :
POLY_INTERPOLATE(M x, ): Simplifica o aproXima en el polinomio interpolante de gradomenor o igual que n, ( )p xn , para los n +1 datos dados en la matriz M. Para el ejemplo
anterior, Simplifique la expresión POLY_INTERPOLATE( [ ]
π
π− x,0,
2,1,0,0,
2). ◊◊◊◊

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 191__________________________________________________________________________________
Nota: Con el propósito de comparar el polinomio ( )p x2 , obtenido en el ejemplo anterior, con
el polinomio de Taylor de grado dos para ( )f x x= cos , alrededor de cero (polinomio deMaclaurin), calculamos este último a continuación:Como
( ) ( )f x x= = =cos cos, f 0 0 1
( ) ( )′ = − ′ = − =f x x fsen sen, 0 0 0
( ) ( )′′ = − ′′ = − = −f x x fcos cos, 0 0 1
entonces el polinomio de Maclaurin, ya mencionado, es ( ) p x x= −12
2.
Si usamos el polinomio de Maclaurin ( )p x para aproximar el valor f π π4 4=
cos ,
obtenemos
cos π ππ
4 41 4
269
2
≈
= −
≈ p .
Nótese que, en este caso, la aproximación que da el polinomio de Maclaurin para cos π4
es
mejor que la que da el polinomio de interpolación. Como ejercicio compare los valores
p2 2 2π π
y p con el valor exacto cos π2
. ♦
En relación con el ejemplo anterior, tenemos que los otros dos polinomios fundamentales de
Lagrange de grado dos para f usando los nodos x0 1 220
2= − = =π π, x y x , son
( ) ( )( )( )( ) ( )
L01 2
0 1 0 2
2
2 222
2
2
2
2 1xx x x x
x x x x
x x x xx x=
− −− −
=−
−
−
=−
= −
π
π π
π
π π π
y
( ) ( )( )( )( ) L2
0 1
2 0 2 1
2
2 222
2
2
2
2 1xx x x x
x x x x
x x x xx x=
− −− −
=+
=+
= +
π
π π
π
π π π
Observe que
( ) ( ) ( ) L0 1 2 22
22
222 1 1 4 2 1 1x L x L x x x x x x+ + = − + − + + =
π π π π π

192 MÉTODOS NUMÉRICOS__________________________________________________________________________________
Instrucción en DERIVE: Dados los n +1 datos [ ] [ ] [ ][ ]M x y x y x yn n:= 0 0 1 1, , , ,..., , :LAGRANGE_POLY(M): Simplifica o aproXima en el polinomio de interpolación de Lagrangepara los datos dados en la matriz M.
LAGRANGE_POLYS(M ): Simplifica o aproXima en los n +1 polinomios fundamentales deLagrange de grado n, ( )L x j nj , , ,...,= 01 , para los datos dados en la matriz M, y vienen en la
expresión ( )[ ] ( )[ ] ( )[ ][ ]L x L x L xn0 1, ,..., . Para el ejemplo anterior, Simplifique la expresión
LAGRANGE_POLYS( [ ]−
π π2
0 0 12
0, , , , , ). ◊◊◊◊
En general, los polinomios fundamentales de Lagrange ( )L x nj , , ,..., j = 01 , correspondientes an +1 puntos dados, tienen la propiedad
( ) para todo xL xjj
n
=∑ =
0
1
A continuación nos referiremos al error involucrado en la interpolación polinomial.
Si ( )p xn es el polinomio que interpola a una función f en los números distintos x x xn0 1, ,..., , y
si x es un punto intermedio entre dichos números, entonces el error al aproximar ( )f xmediante ( )p xn es
( ) ( ) ( ) E x f x p xn= −
En relación con este error se tiene el siguiente resultado cuya demostración puede serconsultada en Burden, 1985, páginas 103 y 104:
Teorema 4.2 Sea f una función definida en un intervalo [ ]a b, y sea ( )p xn el polinomio queinterpola a f en los números distintos x x xn0 1, ,..., de dicho intervalo. Si f tiene sus primerasn +1 derivadas continuas en [ ]a b, , entonces para cada [ ]x a b∈ , , el error ( ) ( ) ( )E x f x p xn= −puede expresarse en la forma
( ) ( )( ) ( )( )
( ) ( )( ) E xx x x x x x
nf xn n=
− − −+
+0 1 1
1...!
ξ
donde ( )ξ x es un número que depende de x y ( ) ( )ξ x a b∈ , . ∇∇∇∇
Esta fórmula para el error es un resultado teórico importante, pues los polinomios deinterpolación se usan por ejemplo, para deducir fórmulas de integración numérica y a partirde dicha fórmula de error se pueden obtener cotas para el error en la integración; sinembargo, en la práctica la fórmula del error en la interpolación es de uso muy restringidopues sólo se puede aplicar a funciones que tengan derivadas fácilmente acotables.

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 193__________________________________________________________________________________
En relación con el ejemplo 4.1 tenemos que, si x ∈ −
π π2 2
, , entonces el error al aproximar
( )f x x= cos mediante el polinomio de interpolación ( )p x x2 221 4= −
π, obtenido usando los
nodos x0 1 220
2= − = =π π, x y x , es
( ) ( )( )( ) ( )( ) ( ) E con xx x x x x x
f x x=− − −
′′′ ∈ −
0 1 2
3 2 2!,ξ ξ π π
es decir,
( )( )
( )( ) ( )E xx x x
f x=+
− −
′′′ ∈ −
π π
ξ ξ π π20
26 2 2
con x ,
Como( ) ( ) ( ) ( ) f x x f x x f x x y f x x= ′ = − ′′ = − ′′′ =cos , sen , cos sen
entonces
( )( ) ( )( ) ( ) para toda ′′′ = ≤ ∈ −
f x x xξ ξ ξ π πsen ,12 2
y por tanto
( ) E x para todo xx x≤ −
∈ −
16 4 2 2
22π π π,
En particular, para x = π4
, se tiene que
E π π π π π π π4
16 4 16 4 24
316 128
242 2 2 3
≤ −
=
= ≈ .
Observe que el error real es
E π π π4 4 4
12
34
0432=
−
= − ≈cos p .
que está por debajo de la cota teórica de error, ya calculada. ♦
Ejercicio 4.1 Use el polinomio interpolante de Lagrange para la función ( )f x x= cos con
nodos x0 1 220
2= − = =π π, x y x , para estimar
i) cos xdx0
2π
∫ ii) ′
f π4 ♦

194 MÉTODOS NUMÉRICOS__________________________________________________________________________________
Ejemplo 4.2 Use los polinomios interpolantes de Lagrange de grados uno, dos y tres, másapropiados, para aproximar ( )f 2 5. , si ( )f 2 0 5103757. .= , ( )f 2 2 5207843. .= ,
( )f 2 4 5104147. .= , ( )f 2 6 4813306. .= y ( )f 2 8 4359160. .= .
Solución: Como [ ]2 5 2 4 2 6. . .∈ , , entonces el polinomio de interpolación de Lagrange degrado uno, más apropiado, es el que se obtiene tomando los nodos x0 12 4 2 6= =. . y x , yaque éstos son los dos nodos más cercanos a 2.5.
Así que( ) ( ) ( ) ( ) ( ) p1 0 0 1 1x f x L x f x L x= +
( ) ( )=
−−
+−−
f x x xx x
f x x xx x0
1
0 11
0
1 0
y entonces
( )
( )
p
1 2 5 5104147 2 5 2 62 4 2 6
4813306 2 5 2 42 6 2 4
2552074 24066534958727 2 5
. . . .. .
. . .. .
. .
. .
= −−
+ −−
= += ≈ f
Para el caso de grado dos, hay dos polinomios interpolantes igualmente apropiados:
Un primer polinomio se obtiene tomando los nodos x0 1 22 2 2 4 2 6= = =. . ., x y x , lo que nosda
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( )( )( )( ) ( ) ( )( )
( )( ) ( ) ( )( )( )( )
p x f x L x f x L x f x L x
f xx x x x
x x x xf x
x x x xx x x x
f xx x x x
x x x x
2 0 0 1 1 2 2
01 2
0 1 0 21
0 2
1 0 1 22
0 1
2 0 2 1
= + +
=− −− −
+− −− −
+− −− −
y entonces
( ) ( )( )( )( )
( )( )( )( )
( )( )( )( )
p2 2 5 52078432 5 2 4 2 5 2 62 2 2 4 2 2 2 6
51041472 5 2 2 2 5 2 62 4 2 2 2 4 2 6
48133062 5 2 2 2 5 2 42 6 2 2 2 6 2 4
. .. . . .. . . .
.. . . .. . . .
.. . . .. . . .
=− −− −
+− −− −
+− −− −
( )
= − + += − += ≈
. . .
. .. .
06509804 3828110 180499006509804 56331004982120 2 5
f
El otro polinomio interpolante se obtiene tomando x0 22 4 2 6 2 8= = =. . ., x y x1 , y se tieneque

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 195__________________________________________________________________________________
( ) ( )( )( )( )
( )( )( )( )
( )( )( )( )
p2 2 5 51041472 5 2 6 2 5 2 82 4 2 6 2 4 2 8
48133062 5 2 4 2 5 2 82 6 2 4 2 6 2 8
43591602 5 2 4 2 5 2 62 8 2 4 2 8 2 6
. .. . . .. . . .
.. . . .. . . .
.. . . .. . . .
=− −− −
+− −− −
+− −− −
( )
= + −= −= ≈
. . .
. .
. .
1914055 3609980 054489505524035 054489504979140 2 5f
Para grado tres el polinomio interpolante, más apropiado, se obtiene tomando los nodosx0 2 2= . , x1 2 4= . , x2 2 6= . y x3 2 8= . , ya que [ ]2 5 2 2 2 8. . .∈ , y 2.2, 2.4, 2.6 y 2.8 son losnodos más cercanos a 2.5. Así que
( ) ( ) ( )( )( )( )( )( ) ( ) ( )( )( )
( )( )( )
( ) ( )( )( )( )( )( ) ( ) ( )( )( )
( )( )( )
p3 01 2 3
0 1 0 2 0 31
0 2 3
1 0 1 2 1 3
20 1 3
2 0 2 1 2 33
0 1 2
3 0 3 1 3 2
x f xx x x x x x
x x x x x xf x
x x x x x xx x x x x x
f xx x x x x x
x x x x x xf x
x x x x x xx x x x x x
=− − −− − −
+− − −− − −
+− − −− − −
+− − −− − −
y entonces
( ) ( )( )( )( )( )( )
( )( )( )( )( )( )
( )( )( )( )( )( )
( )( )( )( )
p3 2 5 52078432 5 2 4 2 5 2 6 2 5 2 82 2 2 4 2 2 2 6 2 2 2 8
51041472 5 2 2 2 5 2 6 2 5 2 82 4 2 2 2 4 2 6 2 4 2 8
48133062 5 2 2 2 5 2 4 2 5 2 82 6 2 2 2 6 2 4 2 6 2 8
43591602 5 2 2 2 5 2 4 2 5 2 62 8 2 2 2 8
. .. . . . . .. . . . . .
.. . . . . .. . . . . .
.. . . . . .. . . . . .
.. . . . . .. . .
=− − −− − −
+− − −− − −
+− − −− − −
+− − −− −
( )( )2 4 2 8 2 6. . .−
( )
= − + + −= −= ≈
. . . .. .. .
03254902 2871083 2707485 027244755578568 05979774980630 2 5f
Cuál es la aproximación obtenida, mediante el polinomio de interpolación, usando los nodosx0 2 0= . , x1 2 2= . , x2 2 4= . y x3 2 6= . ? (ejercicio)
Cuál de todas las aproximaciones calculadas es la mejor ?
Como la cota para el error en la interpolación requiere conocer hasta la cuarta derivada de lafunción f (la función de donde provienen los datos), y no disponemos de esa información,pues no conocemos una fórmula explícita para f, no podemos decidir cuál de lasaproximaciones calculadas es la mejor. Sin embargo, de dos aproximaciones calculadas queutilicen el mismo número de nodos, se espera que sea mejor la que use los nodos máscercanos al dato a interpolar. ♦
Ejemplo 4.3 Suponga que se quiere construir una tabla para la función logaritmo natural,desde x =1 hasta x =10 , de tal manera que la interpolación lineal usando dos nodosconsecutivos de la tabla, tenga una precisión de seis cifras decimales exactas. Determine eltamaño de paso h más grande posible para dicha tabla.
Solución: Podemos suponer, sin pérdida de generalidad, que los nodos x0,x ,...,x1 n en elintervalo [1,10] están igualmente espaciados. Entonces el tamaño de paso es

196 MÉTODOS NUMÉRICOS__________________________________________________________________________________
h , k 0,1,...,n con x y x= − = − = =+x xk k n1 01 1 10
Por lo tanto x 1, x 1 h, x 1 2h,..., x 1 ..., x 1 nh 100 1 2 k n= = + = + = + = + =kh,
y entonces para x con x x xk k≤ ≤ +1 , se tiene que el error en la interpolación lineal, usandolos nodos xk k y x +1 , es
( ) ( ) ( )( )( ) ( )( )E x f x p x
f xx x x xk k= − =
′′− − +
ξ
2 1!para algún ( ) ( )ξ x x xk k∈ +, 1 .
Como ( )f x = lnx , entonces ( ) ( )′ = ′′ = −f xx
f xx
1 12, , y entonces para [ ]x x xk k∈ +, 1 , se tiene
( ) [ ] ( ) [ ] ( )( )
[ ] [ ] ( )( )1kk1kx,kxx2
1kx,kxx
1kk1kx,kxx1kx,kxx
xxxxMáxx1Máx
21
xxxxMáxxfMáx21xE
++∈+∈
++∈+∈
−−
=
−−′′≤
Si( ) ( )( ) ( )g x x x x x x x x x x xk k k k k k= − − = − + ++ + +1
21 1
entonces
( ) ( )′ = − + = ⇔ =+
++g x x x x x x x
k kk k2 0
211
Como ( ) ( )g x g xk k= = +0 1 , y
g x x x x x x x x x x x x h h hk k k kk
k kk
k k k k+
=
+−
+−
=
−
−
= −
= − ≠+ + +
++ +1 1 1
11 1
2
2 2 2 2 2 2 2 40
entonces
[ ] ( )( ) 1n,...,1,0k ,4
hxxxxMáx2
1kk1kx,kxx
−==−− ++∈
Por otro lado, como
[ ] ( )1n1,...,0,k ,
x1
x1Máx 2
k2
1kx,kxx−==
+∈
entonces para [ ]x x xk k∈ +, 1 , se tiene que
( )( )
E xx
h nk
≤ = −12
14
01 12
2, , ,..., k

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 197__________________________________________________________________________________
Finalmente, como [ ]x nk ∈ =110 01, , , ,..., k , entonces
( ) [ ]E x h h≤ = ∈12
11 4 8
1102
2 2 para todo x ,
Para encontrar el tamaño de paso h más grande para la tabla, basta entonces resolver ladesigualdad
h27
85 10≤ × − (porque se quieren 6 cifras decimales exactas)
lo que nos da h ≤ × =−2 10 0023 . .
De acuerdo con este resultado, el tamaño de paso más grande para construir la tabla esh = .002 . Así que si se toma, por ejemplo, el tamaño de paso h = .001 para construir latabla, la interpolación lineal correspondiente (para dos nodos consecutivos), será exacta enpor lo menos seis cifras decimales. Es claro que una tabla con estas características debe serescrita con por lo menos siete cifras decimales. ♦
Otra forma de obtener el polinomio interpolante de grado menor o igual que n para unafunción f, a partir de n +1 datos conocidos, ( )( ) ( )( ) ( )( )nn1100 xf,x,...,xf,x,xf,x , es la siguiente:
4.1.2 Forma de Newton del polinomio interpolante: Dados n +1 puntos( ) ( ) ( )nn1100 y,x,...,y,x,y,x con n10 x,...,x,x números distintos y ( )y f x nk k= =, , ,..., k 01 paraalguna función f definida en algún intervalo [a,b] que contiene a los nodos distintos
n10 x,...,x,x . El polinomio ( )p xn de grado menor o igual que n que interpola a f en los datosdados, puede expresarse en la forma
( ) ( ) ( )( ) ( )( ) ( ) p x b b x x b x x x x ... b x x x x ... x xn 0 1 0 2 0 1 n 0 1 n 1= + − + − − + + − − − −
para ciertas constantes n10 b,...,b,b .
Cómo determinar los coeficientes n10 b,...,b,b ?
Puesto que ( ) ( ) n,...,1,0k ,xfyxp kkkn === , entonces
( ) ( )p x b f xn 0 0 0= = , así que
( )b f x0 0=
( ) ( ) ( )p x b b x x f xn 1 0 1 1 0 1= + − = , así que
( ) ( )b
f x f xx x11 0
1 0=
−−
( ) ( ) ( )( ) ( )p x b b x x b x x x x f xn 2 0 1 2 0 2 2 0 2 1 2= + − + − − = , así que

198 MÉTODOS NUMÉRICOS__________________________________________________________________________________
( ) ( ) ( ) ( ) ( )( )( ) b2
2 01 0
1 02 0
2 0 2 1=
− −−−
−
− −
f x f xf x f x
x xx x
x x x x
y después de realizar algunas manipulaciones algebraicas se tiene que
( ) ( ) ( ) ( ) b2
2 1
2 1
1 0
1 0
2 0=
−−
−−−
−
f x f xx x
f x f xx x
x x
Los otros coeficientes n43 b,...,b,b se pueden obtener consecutivamente, siguiendo elmétodo anterior.
Para facilitar la escritura de los coeficientes n10 b,...,b,b , del polinomio interpolante obtenidode esta manera, se introduce la siguiente notación de diferencia dividida hacia adelante(progresiva) de Newton.
Definición 4.1 Dados n +1 puntos ( )( ) ( )( ) ( )( )x ,f x , x ,f x ,..., x ,f x0 0 1 1 n n con n10 x,...,x,xnúmeros distintos y f alguna función, definimos:
a) La diferencia dividida cero de f con respecto a xk es
[ ] ( ) f x f x , k 0,1,2,...,nk k= =
(Así que, con respecto al polinomio interpolante ( )p xn , se tiene que [ ]b f x0 0= )
b) La diferencia dividida uno de f con respecto a xk y 1kx + es
[ ] [ ] [ ] f x ,xf x f x
x x , k 0,1,...,n 1k k 1
k 1 k
k 1 k+
+
+=
−−
= −
Observe que las diferencias divididas uno dependen de las diferencias divididas cero yque, mientras hay n +1 diferencias divididas cero, hay n diferencias divididas uno.
(También observe que [ ] [ ] [ ]b f x xf x f x
x x1 0 11 0
1 0= =
−−
, )
c) La diferencia dividida dos de f con respecto a x xk k k, + +1 2 y x es
[ ] [ ] [ ] f x ,x ,xf x ,x f x ,x
x x , k 0,1,...,n 2 k k 1 k 2
k 1 k 2 k k 1
k 2 k+ +
+ + +
+=
−−
= −
Observe que las diferencias divididas dos dependen de las diferencias divididas uno yque, mientras hay n diferencias divididas uno, hay n −1 diferencias divididas dos.

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 199__________________________________________________________________________________
(También observe que [ ] [ ] [ ]b2 0 1 21 2 0 1
2 0f x ,x ,x
f x ,x f x ,xx x
= =−−
)
d) En general, conocidas las ( )n i n i− − + = − +1 1 2 diferencias divididas i −1 de f conrespecto a [ ] ( )1in,...,1,0k ,x,...,x,xf ,x,...,x,x 1ik1kk1ik1kk −−=−++−++ , se definen lasn i− +1 diferencias divididas i de f con respecto a ik1kk x,...,x,x ++ , así
[ ] [ ] [ ] f x ,x ,...,xf x ,x ,...,x f x ,x ,...,x
x x, k 0,1,...,nk k 1 k
k 1 k 2 k k k 1 k 1
k k+ +
+ + + + + −
+=
−−
= −ii i
ii ∇∇∇∇
Con esta notación de diferencia dividida se tiene que [ ]b fi = =x ,x ,...,x , i 0,1,...,n0 1 i y así elpolinomio interpolante toma la forma
( ) [ ] [ ] ( ) [ ]( )( )[ ]( )( ) ( )
p x f x f x ,x x x f x ,x ,x x x x x ...
f x ,x ,...,x x x x x ... x xn 0 0 1 0 0 1 2 0 1
0 1 n 0 1 n 1
= + − + − − +
+ − − − −
Esta forma del polinomio interpolante se conoce como fórmula de diferencia dividida(progresiva) interpolante de Newton o forma progresiva de Newton del polinomiointerpolante, y se usa en los cálculos numéricos cuando se interpola en un punto x que estámás cerca de x0 que de xn (suponemos ordenados los nodos n10 x,...,x,x ) . Si el punto xen el cual vamos a interpolar está más cerca de xn que de x0 se usa la fórmula dediferencia dividida (regresiva) interpolante de Newton:
( ) [ ] [ ] ( ) [ ]( )( )[ ]( )( ) ( )
p x f x f x ,x x x f x ,x ,x x x x x ...
f x ,x ,...,x x x x x ... x xn n n n n n 2 n 1 n n n 1
0 1 n n n 1 1
= + − + − − +
+ − − −− − − −
−
1
Es muy importante tener en cuenta que el polinomio progresivo y el polinomio regresivo deNewton son el mismo polinomio (siempre y cuando se usen los mismos datos); lo que ocurrees que en la fórmula progresiva el dato que más "pesa" es [ ]f x0 , mientras que en la
regresiva el que más "pesa" es [ ]f xn .
En el caso en que el dato a interpolar esté más cerca del nodo central (o los nodoscentrales), se recomiendan otras diferencias divididas llamadas centradas, que noestudiaremos aquí.
La forma de Newton del polinomio interpolante es más ventajosa que la forma de Lagrange,pues el cálculo de los coeficientes en la forma de Newton va usando la información anterior,lo que no sucede con la forma de Lagrange.
Observe que dados n +1 datos ( )( ) ( )( ) ( )( )nn1100 xf,x,...,xf,x,xf,x , la forma progresiva deNewton del polinomio interpolante tiene la propiedad

200 MÉTODOS NUMÉRICOS__________________________________________________________________________________
( ) ( ) [ ]( )( ) ( ) p ii i i ix p x f x x x x x x x x x n = + − − − =− −1 0 1 0 1 1 2 3, ,..., ... , , ,...,
Una propiedad análoga se tiene para la forma regresiva del polinomio interpolante deNewton.
La TABLA 4.1 siguiente, muestra las diferencias divididas que hay que calcular paradeterminar los coeficientes del polinomio interpolante de Newton.
K xk
Diferenciasdivididas 0
( ) [ ] f x f xk k=
Diferenciasdivididas 1
[ ] f x xk k, +1
… Diferencias divididasn
[ ] f x ,...,x0 n
0 x0 [ ] f x b0 0= [ ] f x ,x b0 1 1= … [ ] f x ,...,x b0 n n=
1 x1 [ ] f x1 [ ] f x ,x1 2 …
2 x2 [ ] f x2 [ ] f x ,x2 3 …
3 x3 [ ] f x3 !
! ! !
n −1 xn−1 [ ] f xn−1 [ ] f x ,xn 1 n−
n xn [ ] f xn
TABLA 4.1
Observe que en la misma tabla pueden leerse los coeficientes para la forma progresiva ypara la forma regresiva de Newton del polinomio interpolante.
En el caso particular n =1, la forma de Newton del polinomio interpolante es
( ) [ ] [ ] ( ) ( ) ( ) ( ) ( ) p x f x f x ,x x x f xf x f x
x xx x1 0 0 1 0 0
1 0
1 00= + − = +
−−
−
que coincide con la fórmula deducida para ( )p x1 en el caso de la forma de Lagrange del
polinomio interpolante. Recuerde que el polinomio de interpolación es único.
Con respecto al error en la interpolación al usar la forma de Newton, tenemos:

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 201__________________________________________________________________________________
Dada una función f definida en [ ]x ,x0 1 . Si f es continua en [ ]x ,x0 1 y ′f existe en ( )x ,x0 1 ,
entonces el teorema del valor medio implica que existe ( )x x ,x0 1∈ tal que ( ) [ ]′ =f x f x ,x0 1 .
En general, se tiene el siguiente resultado cuya demostración puede ser consultada enBurden, 1985, páginas 117 y 118:
Teorema 4.3 Si f es una función de valor real definida sobre el intervalo [ ]a,b , n veces
continuamente diferenciable en [ ]a,b y x x xn0 1, ,..., son números distintos en [ ]a b, ,
entonces existe [ ]ξ ∈ a b, tal que
[ ]( ) ( )
f x x xf
nn
n
0 1, ,...,!
=ξ
∇∇∇∇
Usando esta fórmula se puede llegar a una expresión para estimar el error al aproximar unafunción f mediante el polinomio interpolante de Newton, ( )p xn , a partir de los puntosx x x xn0 1, ,..., , , como se indica a continuación:
De la fórmula del error ( )E x , dada al estudiar la forma de Lagrange del polinomiointerpolante, tenemos que
( ) ( ) ( )( ) ( )( )
( ) ( )( )( )
f x p xx x x x x x
nf x
E x
nn n= +
− − −+
+0 1 1
1...!
ξ# $%%%%%%% &%%%%%%%
(4.1)
donde ( )ξ x es un número que depende de ( ) ( )x y x a bξ ∈ , .
De otro lado, usando la forma de Newton del polinomio interpolante de grado menor o igualque n +1 para f en los nodos x x x xn0 1, ,..., , , tenemos que
( ) ( ) ( ) [ ]( )( ) ( ) f x p x p x f x x x x x x x x x xn n n n= = + − − −+1 0 1 0 1, ,..., , ... (4.2)
Igualando las ecuaciones (4.1) y (4.2), concluimos que
( ) ( ) ( ) [ ]( )( ) ( ) E x f x p x f x x x x x x x x x xn n n= − = − − −0 1 0 1, ,..., , ... (4.3)
donde para calcular [ ]f x x x xn0 1, ,..., , usamos ( ) ( )p x f xn ≈ . ∇∇∇∇
La ecuación (4.3) nos da una fórmula alternativa para estimar el error al usar un polinomiointerpolante.
Ejemplo 4.4 Considere la siguiente tabla de datos

202 MÉTODOS NUMÉRICOS__________________________________________________________________________________
x ( )f x
2 0. .51037572 2. .52078432 4. .51041472 6. .48133062 8. .4359160
TABLA 4.2
Si queremos obtener una aproximación de ( )f 21. usando todos los datos dados, debemoselegir la forma progresiva del polinomio interpolante de Newton con todos los datos dados, yuna escogencia adecuada para los nodos es x0 2 0= . , x1 2 2= . , x2 2 4= . , x3 2 6= . yx4 2 8= . , ya que x = 2 1. está más cerca de x0 que de x4 .
Veamos qué resultados obtenemos si usamos los polinomios interpolantes de Newton másapropiados de grados uno, dos, tres y cuatro, para aproximar ( )f 21. .
Empezamos calculando las diferencias divididas que se muestran en la TABLA 4.3 siguiente,donde el valor correspondiente a la diferencia dividida cuatro es 8 34125 10 3
4. × =− b (que noaparece en la tabla).
k xk ( ) [ ]f x f xk k= Diferenciasdivididas 1
Diferenciasdivididas 2
Diferenciasdivididas 3
0 2.0 .5103757 0= b .052043 1= b − =.2597275 2b .04299367 3= b
1 2.2 .5207843 −.051848 −.2339313 .049666672 2.4 .5104147 −.1454205 −.20413133 2.6 .4813306 −.2270734 2.8 .4359160
TABLA 4.3
Instrucción en DERIVE: Dados los n +1 puntos ( )[ ] ( )[ ] ( )[ ][ ]M x f x x f x x f xn n:= 0 0 1 1, , , ,..., , :
DIFERENCIAS_DIV(M ): aproXima o Simplifica en las n +1 diferencias divididas progresivasde Newton, [ ] [ ] [ ][ ]f x f x x f x x xn0 0 1 0 1, , ,..., , ,..., , correspondientes a los n +1 puntos dados en lamatriz M. Para este ejemplo, tome la matriz
[ ] [ ] [ ] [ ] [ ][ ]M: . . . . . . . . . .= 2 0 0 5103757 2 2 0 5207843 2 4 0 5104147 2 6 0 4813306 2 8 0 4359160, , , , , , , , , yaproXime la expresión DIFERENCIAS_DIV(M). ◊◊◊◊
Entonces( ) [ ] [ ] ( )
( )p x f x f x x x x
x1 0 0 1 0
5103757 052043 2 0
= + −
= + −
,
. . .
así que( ) ( )
( )p
f1 21 5103757 052043 21 2 0
5155800 21
. . . . .. .
= + −
= ≈

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 203__________________________________________________________________________________
Si usamos el polinomio más apropiado de grado dos
( ) [ ] [ ] ( ) [ ]( )( )( ) [ ]( )( )
p x f x
x x x x2 0
0 1
= + − + − −
= + − −
f x ,x x x f x ,x ,x x x x x
p x f x ,x ,x0 1 0 0 1 2 0 1
1 0 1 2
obtenemos
( ) ( ) ( )( )
( )
p p
f
2 121 21 2597275 21 2 0 2 1 2 25155800 0025972755181773 21
. . . . . . .. .. .
= − − −
= += ≈
Si usamos el polinomio más apropiado de grado tres
( ) [ ] [ ] ( ) [ ]( )( )[ ]( )( )( )( ) [ ]( )( )( )
p , ,x ,
,x ,x ,
,x ,x ,
1
1 2
0 1 2
3 0 0 1 0 0 2 0 1
0 3 0 1 2
2 3 0 1 2
x f x f x x x x f x x x x x x
f x x x x x x x x
p x f x x x x x x x x
= + − + − −
+ − − −
= + − − −
entonces( ) ( ) ( )( )( )
( )
p p
f
3 24
2 1 21 04299367 21 2 0 2 1 2 2 2 1 2 4
5181773 1289810 105183063 21
. . . . . . . . .
. .
. .
= + − − −
= + ×= ≈
−
Finalmente, si usamos el polinomio de grado cuatro
( ) [ ] [ ] ( ) [ ]( )( )[ ]( )( )( )[ ]( )( )( )( )( ) [ ]( )( )( )( )
p x f x f x ,x x x f x ,x ,x x x x x
f x ,x ,x ,x x x x x x x
f x ,x ,x ,x ,x x x x x x x x x
p x f x ,x ,x ,x ,x x x x x x x x x
4 0 0 1 0 0 1 2 0 1
0 1 2 3 0 1 2
0 1 2 3 4 0 1 2 3
3 0 1 2 3 4 0 1 2 3
= + − + − −
+ − − −
+ − − − −
= + − − − −
obtenemos
( ) ( ) ( )( )( )( )
( )
p
4 33
3
21 21 8 341125 10 21 2 0 2 1 2 2 2 1 2 4 21 2 6
5183063 1251169 105182938 21
. . . . . . . . . . .
. .
. .
= + × − − − −
= − ×= ≈
−
−
p
f
Si estamos interesados en aproximar ( )f 2 7. mediante el polinomio interpolante másapropiado de grado menor o igual que tres, a partir de los datos dados en la TABLA 4.3,debemos usar la forma regresiva de Newton del polinomio interpolante con los nodosx4 2 8= . , x3 2 6= . , x2 2 4= . y x1 2 2= . , lo que nos da en este caso
( ) ( ) ( )( )( )( )( )
p x x x x
x x x3 4359160 227073 2 8 2041313 2 8 2 6
04966667 2 8 2 6 2 4
= − − − − −
+ − − −
. . . . . .. . . .
así que

204 MÉTODOS NUMÉRICOS__________________________________________________________________________________
( ) ( ) ( )( )( )( )( )
p3
3 4
4
2 7 4359160 227073 2 7 2 8 2041313 2 7 2 8 2 7 2 6
04966667 2 7 2 8 2 7 2 6 2 7 2 4
4359160 0227073 2 041313 10 1490000 10
4606646 1490000 104605156
. . . . . . . . . .. . . . . . .
. . . .
. .
.
= − − − − −
+ − − −
= + + × − ×
= − ×=
− −
−
Como un ejercicio encuentre el polinomio interpolante regresivo de grado menor o igual quecuatro para los datos dados, ( )p x4 , y úselo para estimar ( )f 2 7. . También estime ( )f 2 7.
usando el polinomio ( )p x4 y compare los valores ( )p4 2 7. y ( )p4 2 7. . Aproxime también
( )f 2 5. usando ( ) ( )52p y 52p 44 .. . ♦
Un algoritmo para encontrar los coeficientes n10 b,...,b,b de la forma de Newton del polinomiointerpolante es el siguiente.
Algoritmo 4.1 (Diferencias divididas progresivas) Para obtener los coeficientesn10 b,...,b,b de la forma de Newton del polinomio interpolante usando diferencias divididas
progresivas, conocidos n +1 puntos ( )( ) ( )( ) ( )( )nn1100 xf,x,...,xf,x,xf,x con n10 x,...,x,xnúmeros distintos:
Entrada: Los números n10 x,...,x,x , los valores ( ) ( ) ( )n10 xf,...,xf,xf .
Salida: Los coeficientes n10 b,...,b,b de la forma progresiva de Newton del polinomiointerpolante
( ) ( ) ( )( ) ( )( ) ( ) pn n nx b b x x b x x x x b x x x x x x= + − + − − + + − − − −0 1 0 2 0 1 0 1 1... ...
Paso 1: Tomar ( )b f x0 0= .
Paso 2: Para i n=12, ,..., , hacer:
( ) ( ) ( )Para k = tomar
f =
01
1
, ,..., ,n i
xf x f x
x xkk k
k i k
−−−
+
+
( )b f xi = 0
Paso 3: Salida: "Los coeficientes del polinomio interpolante progresivo de Newton sonb b bn0 1, ,..., ". Terminar.
Ejercicio 4.2 La siguiente tabla corresponde a la función ( )f x ex= :

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 205__________________________________________________________________________________
x 0 .5 1.0 2.0( )f x 1.00000 1.64872 2.71828 7.38906
a) Aproxime ( )f .25 usando interpolación lineal con x0 10 5= = y x . .
b) Aproxime ( )f .75 usando interpolación lineal con x0 15 10= =. . y x .
c) Aproxime ( )f .25 y ( )f .75 usando interpolación de grado menor o igual que dos conx0 1 20 10 2 0= = =, x y x. . .
d) Cuál de las aproximaciones calculadas es la mejor? Por qué?
e) Aproxime ( )f .25 usando el polinomio de interpolación de Newton de grado menor o igualque tres para los datos dados. ♦
Ejercicio 4.3 La siguiente tabla corresponde a la función ( )f x x= sen :
x .30 .32 .33 .35( )f x .29552 .31457 .32404 .34290
a) Encuentre una aproximación de ( )sen .34 , usando el polinomio de interpolación deLagrange de grado menor o igual que tres para los datos dados.
b) Encuentre una aproximación de ( )sen .34 , usando el polinomio de interpolación deNewton más apropiado de grado menor o igual que tres.
c) Encuentre una cota para el error en cada aproximación. Cuál de las aproximacionescalculadas en a) y b) es mejor? ♦
Hasta aquí se han construido polinomios de grado menor o igual n para interpolar entre n +1puntos dados. Como cuando n aumenta el polinomio interpolante ( )p xn tiene másoscilaciones y ocurre a menudo que no aproxima bien a la función f, esto sugiere que seintente la interpolación pero localmente, es decir, por subintervalos.
La idea es que el intervalo que se tiene para interpolar los datos se descompone en una seriede subintervalos y se usan aproximaciones separadas para cada subintervalo, sujetas a quelas aproximaciones deben coincidir, en algún sentido, en los extremos de los subintervalos.Este proceso de aproximación sobre subintervalos se conoce como interpolaciónsegmentaria o por segmentos.

206 MÉTODOS NUMÉRICOS__________________________________________________________________________________
4.2 INTERPOLACIÓN SEGMENTARIA CÚBICA (CUBIC SPLINES)
Dados n +1 puntos ( )( ) ( )( ) ( )( )nn1100 xf,x,...,xf,x,xf,x con n10 x,...,x,x números distintos y falguna función de valor real definida en un intervalo [a,b] que contiene a los nodos
n10 x,...,x,x , se trata de aproximar la función f por segmentos o tramos, como se indica acontinuación. Aquí se supone que
x 0 1< < <x xn...
Una primera forma es aproximar la función f en cada subintervalo [ ] 1n,...,1,0k ,x,x 1kk −=+ ,mediante un polinomio lineal, lo que se conoce como interpolación segmentaria lineal.Una segunda posibilidad es aproximar la función f en cada subintervalo[ ] 1n,...,1,0k ,x,x 1kk −=+ , mediante un polinomio cuadrático, lo que se conoce comointerpolación segmentaria cuadrática, esta vez imponiendo algunas condiciones sobre elcomportamiento de los polinomios aproximantes en cada segmento.
Finalmente tenemos la interpolación segmentaria cúbica, que es la más usada, la cualconsiste en lo siguiente:
Se aproxima la función f en cada subintervalo [ ]x xk k, +1 mediante un polinomio de gradomenor o igual que tres, el cual suponemos de la forma
( ) ( ) ( ) ( ) ( ) ( ) p k 32 3 01 1k
k k k k k k k kx p x a b x x c x x d x x n≡ = + − + − + − = −, , ,...,
FIGURA 4.2
Son n polinomios de grado menor o igual que tres y cada uno con cuatro coeficientesincógnitas, así que tenemos un total de 4n incógnitas por determinar.
Las condiciones que deben satisfacer tales polinomios son:
i) ( ) ( )( ) ( )
p x f x n
p x f xk k k
n n n
= = −
=
−
k, , ,...,0 1 1
1
(Condiciones de interpolación. Estas condiciones producen n +1 ecuaciones)

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 207__________________________________________________________________________________
ii) ( ) ( )p x p x nk k k k+ + += = −1 1 1 01 2 k, , ,...,
(Condiciones de continuidad en los nodos interiores. Estas condiciones producen n −1ecuaciones)
iii) ( ) ( )′ = ′ = −+ + +p x p x nk k k k1 1 1 01 2 k, , ,...,
(Condiciones de derivabilidad en los nodos interiores. Estas condiciones producen n −1ecuaciones)
iv) ( ) ( )′′ = ′′ = −+ + +p x p x nk k k k1 1 1 01 2 k, , ,...,
(Condiciones de continuidad de la primera derivada en los nodos interiores: se conservala concavidad en la vecindad del nodo interior, a no ser que la segunda derivada sea ceroen el nodo interior. Estas condiciones dan lugar a n −1 ecuaciones)
Hasta aquí tenemos ( )n n n+ + − = −1 3 1 4 2 condiciones.
v) Se satisface uno de los siguientes pares de condiciones de frontera:
a) ( ) ( )′′ = ′′ =−p x p xn n0 0 10 0 y
b) ( ) ( ) ( ) ( )′ = ′ ′ = ′−p x f x p x f xn n n0 0 0 1 y
Las condiciones dadas en a) se llaman de frontera libre (no dependen de condicionesadicionales sobre la función f ).
Observe que en el caso a), basta tener una lista de datos ( )x yk k, con n10 x,...,x,x númerosdistintos para poder realizar la interpolación segmentaria cúbica.
Las condiciones dadas en b) se llaman de frontera sujeta, requieren que se conozca( )′f x0 y ( )′f xn , y fijan al polinomio ( ) [ ]p x x x0 0 1, , x ∈ , en el punto extremo x0 , y al polinomio
( ) [ ]p x x xn n n− −∈1 1, , x , en el punto extremo xn ; como en este caso se usa más informaciónacerca de la función f las aproximaciones obtenidas suelen ser mas exactas. Si no sedispone de esta información sobre f se usarán las condiciones de frontera libre o unasbuenas aproximaciones para ( ) ( )′ ′f x f xn0 y .
Si definimos
[ ]( ) ( ) [ ]
T
x si x
: x x
T x p x x xn
k k k
0
1
,
, ,
→
→ = ∈ +
R

208 MÉTODOS NUMÉRICOS__________________________________________________________________________________
y ( ) 1n,...,1,0k ,xpk −= , satisfaciendo las condiciones i)-v), entonces T se dice un Trazadoro adaptador cúbico para f en [ ] x,x n0 . Si el Trazador cúbico satisface las condiciones v),a), se llama natural, y si satisface las condiciones v), b) se llama de frontera sujeta. ∇∇∇∇
Nota: Si no se da una tabla de datos correspondiente a una cierta función f, ni condicionesde frontera, se entiende que un Trazador cúbico es una función como se definió antes, perosatisfaciendo las condiciones ii), iii) y iv).
Una forma de construir un Trazador cúbico para una función f en [ ]x xn0, es la siguiente:
De acuerdo con la condición i)
( ) ( ) ( ) ( ) p k y pk k k k n n nx a f x n x f x= = = − =−, , ,...,01 1 1
y si aplicamos la condición ii), tenemos para k n= −01 2, ,..., ,
( ) ( )( ) ( ) ( )
a
k k k k k
k k k k k k k k k k
p x p x
a b x x c x x d x x
+ + + +
+ + +
= =
= + − + − + −
1 1 1 1
1 12
13
Si notamos 1n,...,1,0k ,xxh k1kk −=−= + , usamos que ( )a f xk k= , para k n= −01 1, ,..., y
definimos ( )a f xn n= , entonces
a kk k k k k k k ka b h c h d h n+ = + + + = −12 3 01 1, , ,..., (4.4)
(ya que ( ) ( )a f x p x a b h c h d hn n n n n n n n n n n= = = + + +− − − − − − − −1 1 1 1 1 12
1 13 )
De otro lado ( )′ = −p x bk k k para k = 0,1,...,n 1, y si aplicamos la condición iii), obtenemos
( ) ( ) b kk k k k k k k k k kp x p x b c h d h n+ + + += ′ = ′ = + + = −1 1 1 122 3 01 2, , ,...,
Si definimos ( )b p xn n n= ′ −1 , entonces
b kk k k k k kb c h d h n+ = + + = −122 3 01 1, , ,..., (4.5)
( ya que ( )′ = + +− − − − − −p x b c h d hn n n n n n n1 1 1 1 1 122 3 )
Ahora,( ) ( ) k′′ = + − = −p x c d x x nk k k k2 6 01 1, , ,...,
entonces( ) k′′ = = −p x c nk k k2 01 1, , ,...,

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 209__________________________________________________________________________________
y si aplicamos la condición iv), obtenemos( ) ( ) 2 2 61 1 1 1c p x p x c d hk k k k k k k k+ + + += ′′ = ′′ = +
o sea c kk k k kc d h n+ = + = −1 3 01 2, , ,...,
Si definimos ( )′′ =−p x cn n n1 2 , entonces
c kk k k kc d h n+ = + = −1 3 01 1, , ,..., (4.6)
( ya que ( )′′ = + = = +− − − − − − −p x c d h c c d hn n n n n n n n n n1 1 1 1 1 1 12 6 2 3 o sea c )
Despejando kd de la ecuación (4.6), obtenemos
d kkk k
k
c ch
n=−
= −+1
30 1 1, , ,..., (4.7)
y sustituyendo en las ecuaciones (4.4) y (4.5), obtenemos
ak k k k k kk k
kka b h c h c c
hh+
+= + + +−
12 1 3
3
o sea
( ) a kk k k kk
k ka b h h c c n+ += + + + = −1
2
132 0 1 1, , ,..., (4.8)
y
bk k k kk k
kkb c h c c
hh+
+= + +−
11 22 33
es decir,
( ) b kk k k k kb h c c n+ += + + = −1 1 01 1, , ,..., (4.9)
Despejando bk en (4.8), obtenemos
( ) b kk k k
k
kk k
a ah
h c c n=−
− + = −++
113
2 0 1 1, , ,..., (4.10)
y aumentando el índice en uno en la ecuación (4.10), se tiene que
( ) bkk k
k
kk k
a ah
h c c++ +
+
++ +=
−− +1
2 1
1
11 23
2
y sustituyendo en (4.9), se tiene que

210 MÉTODOS NUMÉRICOS__________________________________________________________________________________
( ) ( ) ( ) a ah
h c c a ah
h c c h c ck k
k
kk k
k k
k
kk k k k k
+ +
+
++ +
++ +
−− + =
−− + + +2 1
1
11 2
11 13
23
2
o sea
( ) ( ) a ah
a ah
h c c h c ck k
k
k k
k
kk k
kk k
+ +
+
++
++ +
−−
−= + + +2 1
1
11
11 23
23
2
lo que nos lleva finalmente a que
( ) ( ) ( ) h
para k
k k k k k k kk
k kk
k kc h h c h ch
a ah
a a
n
+ + + = − − −
= −
+ + + ++
+ + +2 3 3
0 1 2
1 1 1 21
2 1 1
, ,..., (4.11)
En este sistema final las incógnitas son c nk, , ,..., k = 01 , ya que ( ) n,...,1,0k ,xfa kk == , yh x xk k k= −+1 , 1n,...,1,0k −= , son conocidos.
Este sistema es de n −1 ecuaciones con n +1 incógnitas, pero si usamos las condicionesde frontera se introducen dos nuevas ecuaciones, con lo cual obtenemos un sistema den +1 ecuaciones con n +1 incógnitas. La pregunta que surge es si este sistema tienesolución y si la tiene saber si es única. La respuesta la dá el siguiente teorema.
Teorema 4.4 Si f es una función de valor real definida en un intervalo [a,b], entonces f tieneun único Trazador cúbico natural T en [a,b], o sea un trazador cúbico T que satisface lascondiciones ( ) ( )′′ = ′′ =T a T b0 0 y .
Demostración: Haciendo a x x x bn= < < < =0 1 ... y usando las condiciones de fronteralibre
( ) ( ) ( ) ( ) y 2 20 0 1c p a T a c p b T bn n= ′′ = ′′ = ′′ = ′′−
obtenemos c0 0= y cn = 0 .
Estas dos ecuaciones junto con las ecuaciones en (4.11) nos producen un sistema linealAX b= de n +1 ecuaciones con n +1 incógnitas, donde
( )( )
( )
A , X
=
++
+
=
− − − −
−
1 0 0 0 02 0 0
0 2 0
00 20 0 0 1
0 0 1 1
1 1 2 2
2 2 1 1
0
1
2
1
"
! !
"
" "
!
h h h hh h h h
h h h h
ccc
ccn n n n
n
n

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 211__________________________________________________________________________________
( ) ( )
( ) ( )
( ) ( )
b
ha a
ha a
ha a
ha a
ha a
ha a
nn n
nn n
=
− − −
− − −
− − −
−
−−
− −
03 3
3 3
3 3
0
12 1
01 0
23 2
12 1
11
21 2
!
Como se ve la matriz A de coeficientes de este sistema es tridiagonal estrictamentedominante diagonalmente por filas, en consecuencia el sistema dado tiene solución únicapara n10 c,...,c,c .
Conocidos los valores de n10 c,...,c,c , podemos obtener los valores 1n10 b,...b,b − usando lasecuaciones (4.10) y los valores de 1n10 d,...d,d − usando las ecuaciones (4.7), con lo cual seobtiene el único Trazador cúbico ( )T x . ∇∇∇∇
También se tiene el siguiente resultado:
Teorema 4.5 Si f está definida en [a,b], entonces f tiene un único Trazador cúbico T en [a,b],que satisface ( ) ( ) ( ) ( )′ = ′ ′ = ′T a f a f b y T b .
En este caso los valores de n10 c,...,c,c se determinan encontrando la única solución delsistema tridiagonal AX b ,= donde
( )( )
( )
A X
=
++
+
=
− − − −
− −
−
2 0 0 02 0 0
0 2 0
00 20 0 2
0 0
0 0 1 1
1 1 2 2
2 2 1 1
1 1
0
1
2
1
h hh h h h
h h h h
h h h hh h
ccc
ccn n n n
n n
n
n
"
! !
"
" "
!,
( ) ( )
( ) ( )
( ) ( )
( ) ( )
b
ha a f a
ha a
ha a
ha a
ha a
f bh
a an
n nn
n n
nn n
=
− − ′
− − −
− − −
′ − −
−−
−− −
−−
3 3
3 3
3 3
3 3
01 0
12 1
01 0
11
21 2
11
!

212 MÉTODOS NUMÉRICOS__________________________________________________________________________________
que tiene, como en el teorema anterior, matriz de coeficientes estrictamente dominantediagonalmente por filas. ∇∇∇∇
Conocidos los puntos ( )( ) ( )( ) ( )( )nn1100 xf,x,...,xf,x,xf,x , un algoritmo para encontrar un
Trazador cúbico para f en [ ]x xn0, , debe empezar por hacer: ( ) n,...,1,0k ,xfa kk == ,
calcular 1n,...,1,0k ,xxh k1kk −=−= + , resolver el sistema AX b= correspondiente y obtener 1n,...,1,0k ,d y c ,b ,a kkkk −= .
Recuerde que para cada 1n,...,1,0k −= ,
( ) ( ) ( ) ( )p x a b x x c x x d x xk k k k k k k k= + − + − + −2 3
es el polinomio interpolante para f en [ ]x xk k, +1 .
Ejemplo 4.5 Dada la función f definida por ( )f x xe ex x= −3 2 y la tabla siguiente:
k xk ( )f xk
0 1.00 2.7182821 1.05 3.2862992 1.07 3.5276093 1.10 3.905416
TABLA 4.4
Encontrar el Trazador cúbico natural T para f en [1.0,1.10] y usarlo para estimar ( )f 103. .
Solución: Como los nodos 3210 x y x ,x ,x no están igualmente espaciados, debemosempezar encontrando h0 1 2, h y h :
De acuerdo con los datos de la tabla, se tiene que
h , h , h 0 1 0 1 2 1 2 3 205 02 03= − = = − = = − =x x x x x x. . .
Ahora, como ( ) ( )′′ = = ′′ = =p x c p x c0 0 0 2 3 32 0 2 0 y , entonces c0 30 0= = y c , así quedebemos resolver el siguiente sistema:
( ) ( ) ( )
( ) ( ) ( )
=
−−−=++
−−−=++
=
0c
2862993527609302352760939054163
033c03c052c02
7182822286299305328629935276093
023 c02c072c05
0 c
3
321
210
0
...
...
...
...
...
...
La solución de este sistema es

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 213__________________________________________________________________________________
c , c , c , c0 1 2 30 13 22529 13 19694 0= = = =. .
Usando las ecuaciones (4.10), obtenemos
b , b , b0 1 21113992 1180118 12 32963= = =. . .
y usando las ecuaciones (4.7), obtenemos
d , d , d0 1 288 16863 4725490 146 6327= = − = −. . .
y comoa0 1 22 718282 3 286299 3 527609= = =. . ., a , a
(ya que ( ) n,...,1,0k ,xfa kk == ), entonces el Trazador cúbico natural T para f en [ ]x x0 3, es
[ ]( ) ( ) ( ) ( ) ( )
[ ]
T x ,x
x T x p x a b x x c x x d x x ,
si x x ,x , k 0,1,2
0 3
k k k k k k2
k k3
k k 1
: →
→ = = + − + − + −
∈ =+
R
siendo
( ) ( ) ( ) ( )p x x x x02 32 718282 1113992 100 0 100 88 16863 100= + − + − + −. . . . . . ,
( ) ( ) ( ) ( )p x x x x12 33 286299 1180118 105 13 22529 105 4725490 105= + − + − − −. . . . . . . ,
( ) ( ) ( ) ( )p x x x x22 33 527609 12 32963 107 13 19694 107 146 6327 107= + − + − − −. . . . . . .
Como [ ]x = ∈103 10105. . ., , entonces
( ) ( ) ( )( ) ( )
f
.
103 103 103
2 718282 1113992 103 100 88 16863 103 1003 054860
03
. . .
. . . . . . .
.
≈ =
= + − + −
=
T p
Instrucción en DERIVE: Dados los n +1 puntos [ ] [ ] [ ][ ]M x y x y x yn n:= 0 0 1 1, , , ,..., , :TRAZADOR(M ): Simplifica o aproXima en el Trazador cúbico natural correspondiente a losdatos dados en la matriz M. El resultado es la matriz ( )[ ] ( )[ ] ( )[ ][ ]x p x x p x x p xn, , , ,..., ,0 1 1− .
Después de aproximar el TRAZADOR(M ), se puede graficar el resultado, entrando losnúmeros xk y xk+1 , correspondientes a los extremos del dominio del polinomio ( )p xk , paracada k, cuando DERIVE le solicite los valores Min y Max. Para el ejemplo anterior, tome lamatriz [ ] [ ] [ ] [ ][ ]M:= 10 2 718282 105 3 286299 107 3 527609 110 3 905416. . . . . . . ., , , , , , , y aproXime laexpresión TRAZADOR (M ). ◊◊◊◊

214 MÉTODOS NUMÉRICOS__________________________________________________________________________________
Como ejercicio use el polinomio interpolante de Newton para f en los datos dados en elejemplo 4.5, para estimar ( )f 103. y compare el resultado con el obtenido usando el Trazadorcúbico natural. ♦
Dados cuatro o menos puntos, sabemos que existe un único polinomio de grado tres omenor que interpola a los datos dados, así que usaremos Trazadores cúbicos cuandotengamos cinco o más puntos.
Ejemplo 4.6 Determine todos los valores de a, b, c, d y e para los cuales la siguiente funciónes un Trazador cúbico
( )( ) ( ) ( ]( ) [ ]( ) ( ) [ )
+∞∈−+−
∈−
∞−∈−+−
=
,3x ,3xe2xd
3,1x ,2xc
1,x ,1xb2xa
xT 32
2
32
Además, determine los valores de los parámetros de modo que el trazador interpole lasiguiente tabla
x 0 1.0 4.0y 26.0 7.0 25.0
Solución: Para que ( )T x sea un trazador cúbico en ( )−∞ +∞, , debe satisfacer:
i) ( )T x debe ser continua en todo punto de ( )−∞ +∞, , y como lo es en ( )−∞,1 , (1,3) y ( )3,+∞ ,
por ser polinómica en cada uno de estos intervalos, debemos imponer condiciones paraque sea continua en los números 1 y 3. Debe tenerse que
( ) ( ) ( )lim T x T lim T xx x→ − → +
= =1 1
1 y ( ) ( ) ( )lim T x T lim T xx x→ − → +
= =3 3
1
es decir,
( ) ( ) ( ) ( )a b T c1 2 1 1 1 1 22 3 2− + − = = − y ( ) ( ) ( ) ( )c T d e3 2 3 3 2 3 32 2 3− = = − + −
o sea que debe tenerse a c= y c d= .
ii) ( )T x debe ser derivable en todo punto de ( )−∞ +∞, , y como lo es en ( )−∞,1 , (1,3) y
( )3,+∞ , por ser polinómica en cada uno de estos intervalos, debemos imponercondiciones para que sea derivable en los números 1 y 3, lo cual se tiene si
( ) ( )′ = ′− +T T1 1 y ( ) ( )′ = ′− +T T3 3es decir, si
( ) ( ) ( )2 1 2 3 1 1 2 1 22a b c− + − = − y ( ) ( ) ( )2 3 2 2 3 2 3 3 3 2c d e− = − + −

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 215__________________________________________________________________________________
o sea, si − = −2 2a c y 2 2c d= , o equivalentemente si a c= y c d ,= que como vemosson las mismas condiciones obtenidas en i).
iii) ( )T x debe tener primera derivada continua en todo punto de ( )−∞ +∞, , y como la derivada
es continua en ( )−∞,1 , (1,3) y ( )3,+∞ , por ser polinómica en cada uno de estos intervalos,sólo hay que considerar los casos x =1 y x = 3 , es decir, debe tenerse( ) ( )′′ = + − =T a b c1 2 6 1 1 2 y ( ) ( )′′ = + − =T d e c3 2 6 3 3 2 , o sea a c= y c d= .
Hasta aquí, sin condiciones de interpolar una tabla de datos dada, los coeficientes a, b, c, d ye del Trazador cúbico ( )T x , deben satisfacer a c d= = y b, e arbitrarios.
Para que el Trazador cúbico interpole la tabla de datos dada, los parámetros a, b, c, d y edeben satisfacer las siguientes ecuaciones
( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( )
T a b
T a b c
T d e
0 0 2 0 1 26
1 1 2 1 1 1 2 7
4 4 2 4 3 25
2 3
2 3 2
2 3
= − + − =
= − + − = − =
= − + − =
lo que nos conduce al siguiente sistema lineal
4 267
4 25
a ba c
d e
− == =+ =
cuya solución es
a c= = = = −7 2 3, b y e
Pero de las condiciones obtenidas antes, se tiene que a c d= = , así que en definitiva elTrazador cúbico que interpola la tabla de datos dada es
( )( ) ( ) ( ]( ) [ ]( ) ( ) [ )
T
, x ,
, ,
, x ,
x
x x
x x
x x
=
− + − ∈ −∞
− ∈
− − − ∈ +∞
7 2 2 1 1
7 2 13
7 2 3 3 3
2 3
2
2 3
Es el Trazador cúbico obtenido un Trazador cúbico natural?
Como ( )′′ = ≠T 1 14 0 , entonces el Trazador cúbico obtenido no es natural. ♦

216 MÉTODOS NUMÉRICOS__________________________________________________________________________________
4.3 AJUSTE DE UN POLINOMIO POR MÍNIMOS CUADRADOS (REGRESIÓNPOLINOMIAL)
Hasta ahora hemos estudiado el problema de aproximar una función ( )y f x= por unpolinomio interpolante a partir de una serie de datos conocidos
( )( ) ( )( ) ( )( )nn1100 xf,x,...,xf,x,xf,x .
En esta parte se estudiará el siguiente problema:
Supongamos que existe una relación funcional ( )y f x= entre dos cantidades x e y, con f
desconocida y se conocen valores yk que aproximan a ( )f xk , es decir,
( ) n,...,1,0k ,yxf kkk =∈+=con ∈ k desconocido.
Se trata de recuperar la función f a partir de los datos aproximados n,...,1,0k ,yk = .
Este problema se conoce como un problema de "ajuste de datos" o "ajuste de curvas"(caso discreto). Trabajaremos básicamente el caso en el que f es una función polinómica.
Si f es una función polinómica, digamos ( ) ( )f x p xm= , entonces el problema se convierte en:Dados 1n + puntos ( ) ( ) ( )nn1100 y,x,...,y,x,y,x con n10 x,...,x,x números reales distintos, setrata de encontrar un polinomio
( ) nm con ,xa...xaaxp mm10m <+++=
que "mejor se ajuste" a los datos. Lo de "mejor ajuste" se entenderá en el sentido de que
( )( )p x ym k kk
n
−
=
∑ 2
0
12
sea mínimo, es decir, que
( )( )p x ym k kk
n
−=∑ 2
0
sea mínimo.
Este criterio de mejor ajuste, como ya se mencionó antes, se conoce como mínimoscuadrados, y el método para obtener los polinomios que mejor se ajustan según mínimoscuadrados se llama Regresión polinomial.
4.3.1 Regresión polinomial: Supongamos que se conocen los datos( ) ( ) ( )nn1100 y,x,...,y,x,y,x , con n10 x,...,x,x números distintos y se desea encontrar unpolinomio

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 217__________________________________________________________________________________
( )p x a a x a x nm mm= + + + <0 1 ... , con m
tal que
( ) ( )( ) ( ) S a a a p x y a a x a x a x ym m k kk
n
k k m km
kk
n
0 12
00 1 2
2 2
0
, ,..., ...= − = + + + + −= =∑ ∑
sea mínima.
El grado m del polinomio ( )p xm se puede escoger previamente con base en algún resultadoteórico, alguna expectativa o por la aplicación que se le pretenda dar al polinomio. Encualquier caso estamos "libres" de elegir el grado que parezca mejor. En muchos casos elgrado será uno y el polinomio obtenido se llamará la recta que mejor se ajusta o la recta demínimos cuadrados para la tabla de datos.
Volviendo a la función ( )m10 a,...,a,aS , una condición necesaria para la existencia de unmínimo relativo de esta función es que las derivadas parciales de ( )m10 a,...,a,aS conrespecto a a mj, , ,..., j = 01 sean cero.
Resultan entonces las siguientes m +1 ecuaciones lineales en las incógnitas a a am0 1, ,..., :
( )∂∂
S a0
0 1 22
0
2 0= + + + + − ==∑ a a x a x a x yk k m k
mk
k
n
...
( )( )∂∂
S a1
0 1 22
0
2 0= + + + + − ==∑ a a x a x a x y xk k m k
mk k
k
n
...
( )( )
( )( )
( )( )
∂∂
∂∂
∂∂
S a
S a
S a
20 1 2
2 2
0
0 1 22
0
0 1 22
0
2 0
2 0
2 0
= + + + + − =
= + + + + − =
= + + + + − =
=
=
=
∑
∑
∑
a a x a x a x y x
a a x a x a x y x
a a x a x a x y x
k k m km
k kk
n
jk k m k
mk k
j
k
n
mk k m k
mk k
m
k
n
...
...
...
! !
! !
Si en las ecuaciones anteriores cancelamos el 2, desarrollamos los paréntesis y usamos que
( )a n ak
n
00
01=∑ = + , obtenemos

218 MÉTODOS NUMÉRICOS__________________________________________________________________________________
( )
n a x a x a y
x a x a x a x y
x a x
kk
n
km
k
n
m kk
n
kk
n
kk
n
km
k
n
m k kk
n
kj
k
n
kj
k
n
+ +
+ +
=
+
+ +
=
+
= = =
= =
+
= =
=
+
=
∑ ∑ ∑
∑ ∑ ∑ ∑
∑ ∑
1 00
10 0
00
2
01
1
0 0
00
1
0
...
...
!
+ +
=
+
+ +
=
+
= =
=
+
= = =
∑ ∑
∑ ∑ ∑ ∑
a x a x y
x a x a x a x y
km j
k
n
m kj
kk
n
km
k
n
km
k
n
km
k
n
m km
kk
n
10 0
00
1
01
2
0 0
...
...
!
Este es un sistema de m +1 ecuaciones lineales en las m +1 incógnitas m10 a,...,a,a , quese llama sistema de ECUACIONES NORMALES. Este sistema de ecuaciones normales sepuede escribir en forma simplificada como sigue:
ja x x y mii
m
ki j
k
n
kj
kk
n
=
+
= =∑ ∑ ∑= =
0 0 0
01, , ,...,
Estas ecuaciones se pueden reproducir a partir de
( ) pm k k m km
kx a a x a x y= + + + =0 1 ...
multiplicando a ambos lados por x mkj , , ,..., j = 01 ,
a0 11x a x a x x yk
jk
jm k
m jkj
k+ + + =+ +...
y luego sumando sobre k
a , j00
11
0 0 0
0 1x a x a x x y mkj
k
n
kj
k
n
m km j
k
n
kj
kk
m
=
+
=
+
= =∑ ∑ ∑ ∑+ + + = =... , ,...,
La matriz de coeficientes del sistema de ecuaciones normales es simétrica y no singular,siempre que las x nk, , ,..., k = 01 , sean distintas, por lo tanto el sistema tiene solución única.Aunque la matriz puede estar mal condicionada cuando m es grande.

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 219__________________________________________________________________________________
Para ver que la matriz A de coeficientes del sistema de ecuaciones normales es no-singular,mostraremos que la matriz
B =
11
1
0 02
0
1 12
1
2
x x xx x x
x x x
m
m
n n nm
"
"
! ! ! !
"
es tal que B B AT = y B tiene todas sus columnas linealmente independientes.
En efecto:
( ) ( ) ( ) ( )
B Bx x xx x x
x x x
x x xx x x
x x x
Tn
n
m mnm
m n
m
m
n n nm
n m
=
+ × ++ × +
1 1 111
1
0 1
02
12 2
0 1 1 1
0 02
0
1 12
1
21 1
"
"
"
! ! !
"
"
"
! ! ! !
"
( ) ( )
B B
n x x x
x x x x
x x x x
x x x x
AT
kk
n
kk
n
km
k
n
kk
n
kk
n
kk
n
km
k
n
kk
n
kk
n
kk
n
km
k
n
km
k
n
km
k
n
km
k
n
km
k
n
m m
=
+
=
= = =
= = =
+
=
= = =
+
=
=
+
=
+
= = + × +
∑ ∑ ∑
∑ ∑ ∑ ∑
∑ ∑ ∑ ∑
∑ ∑ ∑ ∑
10
2
0 0
0
2
0
3
0
1
0
2
0
3
0
4
0
2
0
0
1
0
2
0
2
0 1 1
"
"
"
! ! ! !
"
Ahora, las columnas de B son
X X X X con x distintos y m0 1
0
12
02
12
2
0
10 1
11
1
=
=
=
=
<! ! ! !
, , ,..., , ,...,
xx
x
xx
x
xx
x
x x n
n n
m
m
m
nm
n
Sean R∈m10 c,...,c,c tales que c X c X c Xm m0 0 1 1 0+ + + =... y veamos quec c cm0 1 0= = = =... .
Como

220 MÉTODOS NUMÉRICOS__________________________________________________________________________________
=
++++
++++++++
=
++
+
+
=++++
0
00
xc...xcxcc
xc...xcxccxc...xcxcc
x
xx
c...
x
xx
c
x
xx
c
1
11
cXc...XcXcXc
mnm
2n2n10
m1m
212110
m0m
202010
mn
m1
m0
m
2n
21
20
2
n
1
0
10mm221100
!!
!!!!
entoncesc c x c x c x
c c x c x c x
c c x c x c x
mm
mm
n n m nm
0 1 0 2 02
0
0 1 1 2 12
1
0 1 22
0
0
0
+ + + + =
+ + + + =
+ + + + =
...
...
...
! (4.12)
y si ( )q x c c x c x c xm mm= + + + +0 1 2
2 ... con m < n y no todos los coeficientes nulos,
entonces el sistema (4.12) dice que la ecuación polinómica ( )q xm = 0 tiene por lo menos nraíces distintas ( )x x xn0 1, ,...., m < n , lo cual es imposible.
Así que c c cm0 1 0= = = =... y entonces las columnas de la matriz B son linealmente
independientes, y usando el hecho de que rango de B BT =rango de B, entonces la matrizA B BT= es invertible, lo que implica que el sistema de ecuaciones normales tiene soluciónúnica. De este modo se garantiza la existencia de un único polinomio de ajuste segúnmínimos cuadrados, si x x xn0 1, ,..., son todos distintos. ∇∇∇∇
En el caso particular en que m =1, ( )p x a a x1 0 1= + es la recta de mínimos cuadradosdonde a0 1 y a se obtienen resolviendo el sistema lineal de dos ecuaciones con dosincógnitas
n+1
x a x a y
x a x a x y
kk
n
kk
n
kk
n
kk
n
kk
n
k kk
n
0
00
1
01
0
1
00
2
01
0
= = =
= = =
∑ ∑ ∑
∑ ∑ ∑
+
=
+
=
#$% &%
(No se recomienda usar la regla de Cramer para resolver el sistema anterior, porque la reglade Cramer es fuertemente inestable)

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 221__________________________________________________________________________________
Una manera de medir el error para estimar la bondad del ajuste según mínimos cuadrados,es a través de:
i) El error ( )( )E p x ym k kk
n
= −=∑ 2
0
, o
ii) El error cuadrático medio ( )( )
21
n
0k
2kkm
SMR 1n
yxpE
+
−=∑= .
Ejemplo 4.7 Dada la tabla siguiente
k xk yk
0 0 −11 2 02 3 23 5 1
TABLA 4.51) Encuentre:
a) La recta de mínimos cuadrados para la tabla y su error E y SMRE .b) La parábola de mínimos cuadrados para la misma tabla y su error E y SMRE .
2) Cuál será el polinomio cúbico de mínimos cuadrados para dicha tabla? Cuál es su error Ey SMRE ?
Solución: Para dar respuesta a la pregunta 1) debemos resolver dos sistemas deecuaciones lineales:
Para la parte a) la recta es ( )p x a a x1 0 1= + donde a0 1 y a se obtienen resolviendo elsistema
x a x a y
x a x a x y
kk
kk
kk
kk
kk
k kk
0
0
3
01
0
3
10
3
1
0
3
02
0
3
10
3
= = =
= = =
∑ ∑ ∑
∑ ∑ ∑
+
=
+
=
(4.13)
Para la parte b) la parábola es ( )p x b b x b x2 0 1 22= + + donde b b0 1 2, y b se determinan
resolviendo el sistema

222 MÉTODOS NUMÉRICOS__________________________________________________________________________________
x b x b x b y
x b x b x b x y
x b x b x
kk
kk
kk
kk
kk
kk
kk
k kk
kk
kk
kk
0
0
3
01
0
3
12
0
3
20
3
1
0
3
02
0
3
13
0
3
20
3
2
0
3
03
0
3
14
0
3
= = = =
= = = =
= = =
∑ ∑ ∑ ∑
∑ ∑ ∑ ∑
∑ ∑ ∑
+
+
=
+
+
=
+
+
=
=∑b x yk kk
22
0
3
(4.14)
Una manera conveniente de disponer todas las sumatorias necesarias para los dos sistemases como se muestra en la siguiente tabla
k xk xk2 xk
3 xk4 yk x yk k x yk k
2
0 0 0 0 0 -1 0 01 2 4 8 16 0 0 02 3 9 27 81 2 6 183 5 25 125 625 1 5 25
k=∑
0
3
10 38 160 722 2 11 43
TABLA 4.6
De modo que los sistemas (4.13) y (4.14) son
4 10 210 38 11
0 1
0 1
a aa a
+ =+ =
(4.13')
4 10 38 210 38 160 1138 160 722 43
0 1 2
0 1 2
0 1 2
b b bb b bb b b
+ + =+ + =+ + =
(4.14')
La solución del sistema (4.13') es a0 11726
613
= − =, a , y la solución del sistema (4.14') es
b0 1 21513
10178
16
= − = = −, b y b . Luego la recta de mínimos cuadrados para los datos dados
es ( )p x x11726
613
= − + , y el polinomio cuadrático de mínimos cuadrados para los datos dados
es ( )p x x x2215
1310178
16
= − + − .

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 223__________________________________________________________________________________
La TABLA 4.7 siguiente, muestra los valores de ( )p xk1 y ( )p xk2 , k = 012 3, , , , llamados datossuavizados, y las diferencias ( )y p xk k− 1 , ( )y p xk k− 2 .
xk 0 2 3 5
yk −1 0 2 1
( )p xk1 − .654 .269 .731 1.65
( )y p xk k− 1 − .346 − .269 1.27 − .65
( )p xk2 −115. .769 1.23 1.15
( )y p xk k− 2 .15 − .769 .77 − .15
TABLA 4.7
El error para la recta de mínimos cuadrados es
( )( ) ( ) ( ) ( ) ( ) E = − = − + − + + − ≈=∑ p x yk kk
12
0
32 2 2 2346 269 127 65 2 23. . . . .
y el error cuadrático medio es
.
( )( )747
4232
4
yxpE
21
21
3
0k
2kk1
SMR .. ≈
≈
−
=∑=
Análogamente, para la parábola de mínimos cuadrados se obtiene que
( )( )( )( )
555 4
yxpE y 231yxpE
3
0k
21
3
0k
2kk2
SMR2
kk2 .. ≈
−
=≈−=∑∑
=
=
Para la respuesta a la pregunta 2), recordemos que hay un único polinomio de grado menoro igual que tres que pasa por los cuatro puntos dados y es el polinomio de interpolación, asíque el polinomio cúbico de mínimos cuadrados debe ser este polinomio. El polinomio deinterpolación para los datos dados es
( )p x x x x32 310 2 1 11
64
15= − − + −. .
que se puede obtener usando, por ejemplo, diferencias divididas. Es claro que el errorE = 0 y el error ERMS = 0 .

224 MÉTODOS NUMÉRICOS__________________________________________________________________________________
Un dibujo de los puntos dados, la recta, la parábola y el polinomio cúbico según mínimoscuadrados, se muestra en la FIGURA 4.3 siguiente. ♦
FIGURA 4.3
4.3.2 Regresión exponencial, logarítmica y de potencia: Aunque la regresión polinomiales la más usada, también hay casos de interés en los cuales la relación funcional entre lasvariables x y y es de alguno de los tipos siguientes:
y = +a b x (ln Regresión logarítmica ) (4.15)
y ( Regresión exponencial )= aebx (4.16)( ) y Regresión de potencia= axb
(4.17)
Estos problemas se tratan como un problema de ajuste lineal, así: En el caso (4.15), linealentre las variables ln x e y; en el caso (4.16), como y ae y a bxbx= ⇔ = +ln ln , se trata comoun caso lineal entre las variables x y lny ; en el caso (4.17), como y ax y a b xb= ⇔ = +ln ln ln ,se trata como un caso lineal entre las variables ln x y ln y .
Las soluciones para a y b en el caso (4.15), para lna y b en los casos (4.16) y (4.17),pueden encontrarse modificando apropiadamente las ecuaciones obtenidas en el caso deregresión lineal. Debe tenerse en cuenta que la aproximación obtenida de esta manera noes la aproximación de mínimos cuadrados del problema inicial y que, incluso, estaaproximación puede, en algunos casos, diferir significativamente de la aproximación demínimos cuadrados del problema original.
Ejemplo 4.8 Encuentre la recta logarítmica y a b x= + ln para la siguiente tabla

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 225__________________________________________________________________________________
k xk yk
0 29 1.61 50 23.52 74 38.03 103 46.44 118 48.9
TABLA 4.8
y úsela para estimar el valor de y cuando x = 80 .
Solución: Para encontrar los valores de a y b , hacemos z xk k= =ln , , , , , k 012 3 4 , yresolvemos el siguiente sistema
50
4
0
4
0
42
0
4
0
4
a z b y
z a z b z y
kk
kk
kk
kk
k kk
+
=
+
=
= =
= = =
∑ ∑
∑ ∑ ∑
Para calcular los coeficientes a y b , modificamos los datos dados como se indica en laTABLA 4.9. Los datos suavizados, que aparecen en la última columna de la TABLA 4.9, seobtienen una vez que se conoce la recta logarítmica, que en este caso es
y = − +111123688 34 019025. . lnx
k xk z xk k= ln zk2 yk z yk k Datos suavizados
0 29 3.367296 11.338682 1.6 5.387674 3.4284331 50 3.912023 15.303924 23.5 91.932541 21.9595202 74 4.304065 18.524976 38.0 163.55447 35.296413 103 4.634729 21.480713 46.4 215.051426 46.5452734 118 4.770685 22.759435 48.9 233.286497 51.170352
k=∑
0
4
374 20.988798 89.40773 158.4 709.212608 ERMS ≈ 1907944.
TABLA 4.9
De acuerdo con la TABLA 4.9 el sistema a resolver es
5 20 988798 158 420 988798 89 40773 709 212608
a ba b+ =+ =
. .. . .
La solución del sistema esab= −=
11112368834 019025
..

226 MÉTODOS NUMÉRICOS__________________________________________________________________________________
así que la recta logarítmica es y = − +111123688 34 019025. . lnx . Si x = 80 , entoncesy = − + =111123688 34 019025 80 37 835394. . .ln . ♦
Ejercicio 4.4 Encuentre la curva y aebx= usando mínimos cuadrados para la TABLA 4.10siguiente. Úsela para calcular el valor de y cuando x =16 . Cuál es el error E?
xk 6.9 12.9 19.8 26.7 35.1
yk 21.4 15.7 12.1 8.5 5.2
TABLA 4.10
Ejercicio 4.5 Encuentre la curva y axb= usando mínimos cuadrados para la TABLA 4.11siguiente y úsela para calcular el valor de y cuando x = 36. Cuál es el error ?
xk 28 30 33 35 38
yk −2410 −3033 −3895 −4491 −5717
TABLA 4.11
TALLER 4.
1. Use la forma de Lagrange del polinomio interpolante para encontrar los polinomiosinterpolantes más apropiados de grados uno, dos y tres para aproximar ( )f .2 , a partir delos siguientes datos
x −.2 .1 .3 .7( )f x −.163746 .110517 .404958 1.40963
2. Use la forma de Lagrange del polinomio interpolante y todos los datos de la tabla siguiente,para aproximar ( )f 125. . La función que se está aproximando es ( )f x ex= −2 1 . Use estainformación para encontrar una cota teórica para el error en esta aproximación.
x 1.0 1.1 1.2 1.3 1.4( )f x 1.00000 1.23368 1.55271 1.99372 2.61170
3. Suponga que se desea construir una tabla de valores para la función ( )f x = senx , en el
dominio 02
,π
, con tamaño de paso h. Si se usa interpolación lineal con cada dos datos
consecutivos de la tabla, y suponemos que el error total, incluyendo el efecto de loserrores de redondeo en las entradas de la tabla, es a lo más de 10 6− . Cuál es el valor

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 227__________________________________________________________________________________
más grande posible para h, y cuántas cifras decimales se deben usar para los datos de latabla?
4. Demuestre que
( )L xjj
n
=∑ =
0
1 para toda x
donde cada ( )L xj es el polinomio fundamental de Lagrange de grado n, correspondientea n +1 números n10 x,...,x,x .
Sugerencia: Considere la forma de Lagrange del polinomio interpolante de grado menoro igual que n para la función ( )f x ≡1.
5. Sea ( ) ( )w x x xkk
n
= −=∏
0
. Demuestre que el polinomio interpolante de grado menor o igual
que n para una función f en los nodos n10 x,...,x,x , puede escribirse como
( ) ( ) ( )( ) ( ) pn
k
k kk
n
x w xf x
x x w x=
− ′=∑
0
6. Para la función ( )f xx
x=+
− ≤ ≤11
5 52 , , genere el polinomio interpolante ( )p xn usando
n +1 nodos igualmente espaciados en el intervalo [ ]−5 5, . Calcule ( )p xn para distintos
valores de n y grafíquelos junto con la función f. Es cierto que
[ ]( ) ( )Max x p x
x n∈ −
− → →∞5 5
0,
f cuando n ?
7. Encuentre un polinomio que tome los siguientes valores
x 1 2 0 3y 3 2 −4 5
8. Encuentre las formas de Lagrange y de Newton del polinomio interpolante para lossiguientes datos
x −2 0 1( )f x 0 1 −1
Escriba ambos polinomios en la forma a bx cx+ + 2 para verificar que éllos son idénticos.

228 MÉTODOS NUMÉRICOS__________________________________________________________________________________
9. Use la forma deLagrange y la forma de Newton del polinomio interpolante para encontrarlos polinomios interpolantes más apropiados de grado dos, para aproximar ( ) ( )f .4 y f 6. apartir de los siguientes datos, y calcule la aproximación en cada caso
x .1 .3 .5 .7 1.0( )f x 11.052 4.4995 3.2974 2.8768 2.7183
10. Demuestre que si ( )n10 z,...,z,z es una permutación de ( )n10 x,...,x,x , entonces
[ ] [ ]f z ,z ,...,z f x ,x ,...,x0 1 n 0 1 n= .
Sugerencia: Use la unicidad del polinomio interpolante.
11. Los siguientes datos son tomados de un polinomio de grado menor o igual que cinco.Cuál es dicho polinomio y cuál es su grado?
x −2 −1 0 1 2 3y −5 1 1 1 7 25
12. Verifique que el polinomio ( ) ( ) ( ) ( )( )p x x x x x x x= − + + + − + −2 1 1 2 1 1 interpola losprimeros cuatro puntos de la tabla siguiente:
x −1 0 1 2 3y 2 1 2 −7 10
Adicionando únicamente un término al polinomio ( )p x , encuentre un polinomio queinterpole la tabla completa.
13. Encuentre el polinomio de menor grado que pasa por los puntos ( )12, , ( )21, , ( )312, y
( )7146, .
14. Un vehículo que viaja en una carretera recta es cronometrado en algunos puntos. Losdatos de las observaciones se dan en la siguiente tabla donde el tiempo está dado ensegundos y la distancia en metros
Tiempo 0 3 5 8Distancia 0 225 383 623
Encuentre el polinomio que interpola estos datos y úselo para aproximar la distancia, lavelocidad y la aceleración del vehículo a los seis segundos.

Capítulo 4. INTERPOLACIÓN POLINOMIAL Y AJUSTE POLINOMIAL 229__________________________________________________________________________________
15. Determine todos los valores de a, b y c tales que
( ) [ ]( ) ( ) ( ) [ ]
∈−+−+−+
∈−+=
1,2x ,1xd1xc1xba
0,1x ,9xx3 xT
32
3
es un Trazador cúbico con nodos 0, 1, 2.
Ahora, determine el valor de d tal que
( )[ ]′′∫ T x dx2
0
2
sea mínima. Finalmente, encuentre el valor de d que haga de T un Trazador cúbiconatural en [ ]0 2, , y explique por qué este valor es distinto del obtenido previamente.
16. Determine si el Trazador cúbico natural que interpola la siguiente tabla
xk 0 1 2 3yk 1 1 0 10
es o no la función
( )[ ]
( ) ( ) ( ) [ ]( ) ( ) ( ) [ ]
T x
1 x x , x 0,1
1 2 x 1 3 x 1 4 x 1 , x 1,2
4 x 2 9 x 2 3 x 2 , x 2,3
3
2 3
2 3
=
+ − ∈
− − − − + − ∈
− + − − − ∈
17. Determine si la siguiente función es un Trazador cúbico natural
( )( ) ( ) [ ]
[ ]( ) ( ) ( ) [ ]
T
x
x
x
x
x x
x x
x x x
=
+ + + ∈ −
+ + ∈
+ − + − − − ∈
2 1 1 10
3 5 3 0 1
11 11 1 3 1 1 12
3
2
2 3
, ,
, ,
, ,
18. Cuáles propiedades de un Trazador cúbico natural posee la siguiente función y cuálesno?
( ) ( ) ( ) [ ]( ) ( ) [ ]
T xx x
x x x=
+ + + ∈ −
+ − + − ∈
x
1 1 10
4 1 1 0 1
3
3
, ,
, ,

230 MÉTODOS NUMÉRICOS__________________________________________________________________________________
19. Determine los coeficientes a, b, c y d tales que la función
( )( ][ ][ )
S
x
a x
x
x
x
bx cx dx
x
=
− ∈ −∞ −
+ + + ∈ −
− ∈ +∞
1 2 3
3 4
157 32 4
2 3
, ,
, ,
, ,
es un Trazador cúbico natural para el intervalo [ ]−3 4, .
20. Se pueden definir a y b de modo que la función
( )( ) ( ) ( ]( ) ( ) [ ]( ) ( ) [ )
T
x
x
x
x
x a x
x x
x b x
=
− + − ∈ −∞
− − − ∈
− + − ∈ +∞
2 1 2
2 3 2 3
3 2 3
3 2
3 2
3 2
, ,
, ,
, ,
sea un Trazador cúbico natural en ( )−∞ +∞, ? Por qué sí o por qué no?
21. Qué valores de a, b, c y d hacen de la siguiente función un Trazador cúbico?
( ) [ ][ ]
T x x
a xx
bx cx dx=
∈ −
+ + + ∈
3
2 3
10
0 1
, ,
, ,
22. Construya la aproximación de mínimos cuadrados de la forma y axb= para la siguientetabla, y calcule su error E.
xk 4.0 4.2 4.5 4.7
yk 102.56 113.18 130.11 142.05
23. Encuentre la curva y aebx= que mejor se ajusta según mínimos cuadrados a la siguientetabla de datos y calcule su error ERMS .
xk 1.0 2.0 2.5 3.0
yk −1108. −8190. −222 6. −605 1.