Capítulo 7. Teorías de falla y ruptura - UNAM
27
Capítulo 7. Teorías de falla y ruptura 1 CAPÍTULO 7 TEORÍAS DE FALLA Y RUPTURA Introducción En el capítulo dos se estableció que las fuerzas aplicadas a un medio continuo generan estados de esfuerzos en los diferentes puntos del medio y éstos a su vez producen estados de deformación (capítulo 3). Para ligar los esfuerzos con las deformaciones fue necesario involucrar las propiedades del material, lo cual como una primera aproximación al comportamiento real de los materiales, dicha liga se hizo mediante la teoría de los materiales elásticos lineales homogéneos e isótropos (capítulo 4). Es claro que la falla o ruptura de un material deberá estar ligada a los esfuerzos o a las deformaciones que experimente éste cuando se le somete a ciertas solicitaciones, o bien, a un concepto que involucre tanto los esfuerzos como las deformaciones, tal es el caso de la energía de deformación. Normalmente la falla de un material se asocia a una condición límite que no necesariamente involucre la pérdida de continuidad del material, condición bajo la cual estaríamos hablando de una franca ruptura del medio, en cuyo caso deja de ser aplicable la mecánica del medio continuo. En este capítulo se establecen criterios de falla y ruptura, algunos aplicables a materiales dúctiles y otros a frágiles. Si bien la temperatura es una variable que influye de manera notable en el comportamiento de los materiales, ésta no se toma en cuenta en ninguno de los criterios de falla y ruptura que se expondrán más adelante. Cabe señalar que históricamente las primeras teorías de falla desarrolladas fueron para el caso del comportamiento de metales y es hasta una época más reciente que se han establecido teorías de falla para otros materiales involucrados en el diseño de las obras civiles, como ha sido el caso del concreto, los suelos y las rocas. Normalmente la condición de falla en un material se establece al comparar el estado de esfuerzos o deformaciones que generan las cargas aplicadas en el medio con su resistencia, determinada ésta en una prueba de laboratorio representativa del fenómeno estudiado. En el caso de los metales cuyo comportamiento a tensión o compresión es muy similar, la prueba representativa que se emplea en laboratorio para determinar su resistencia es la prueba de tensión que se ejecuta en una probeta del material en estudio y la cual se denominará en adelante S f . Cuando se aplican esfuerzos superiores a S f , el material puede fluir o se rompe,
Transcript of Capítulo 7. Teorías de falla y ruptura - UNAM

Capítulo 7. Teorías de falla y ruptura
1
CAPÍTULO 7
TEORÍAS DE FALLA Y RUPTURA
Introducción
En el capítulo dos se estableció que las fuerzas aplicadas a un medio continuo generan estadosde esfuerzos en los diferentes puntos del medio y éstos a su vez producen estados dedeformación (capítulo 3). Para ligar los esfuerzos con las deformaciones fue necesarioinvolucrar las propiedades del material, lo cual como una primera aproximación alcomportamiento real de los materiales, dicha liga se hizo mediante la teoría de los materialeselásticos lineales homogéneos e isótropos (capítulo 4).
Es claro que la falla o ruptura de un material deberá estar ligada a los esfuerzos o a lasdeformaciones que experimente éste cuando se le somete a ciertas solicitaciones, o bien, a unconcepto que involucre tanto los esfuerzos como las deformaciones, tal es el caso de la energíade deformación. Normalmente la falla de un material se asocia a una condición límite que nonecesariamente involucre la pérdida de continuidad del material, condición bajo la cualestaríamos hablando de una franca ruptura del medio, en cuyo caso deja de ser aplicable lamecánica del medio continuo.
En este capítulo se establecen criterios de falla y ruptura, algunos aplicables a materialesdúctiles y otros a frágiles. Si bien la temperatura es una variable que influye de manera notableen el comportamiento de los materiales, ésta no se toma en cuenta en ninguno de los criteriosde falla y ruptura que se expondrán más adelante.
Cabe señalar que históricamente las primeras teorías de falla desarrolladas fueron para el casodel comportamiento de metales y es hasta una época más reciente que se han establecidoteorías de falla para otros materiales involucrados en el diseño de las obras civiles, como hasido el caso del concreto, los suelos y las rocas.
Normalmente la condición de falla en un material se establece al comparar el estado deesfuerzos o deformaciones que generan las cargas aplicadas en el medio con su resistencia,determinada ésta en una prueba de laboratorio representativa del fenómeno estudiado.
En el caso de los metales cuyo comportamiento a tensión o compresión es muy similar, laprueba representativa que se emplea en laboratorio para determinar su resistencia es la pruebade tensión que se ejecuta en una probeta del material en estudio y la cual se denominará enadelante Sf. Cuando se aplican esfuerzos superiores a Sf , el material puede fluir o se rompe,

por lo que asumiremos en lo que sigue que Sf representa el límite de aplicabilidad de la teoríaelástica (comportamiento inelástico) para el estado de esfuerzos aplicado a la probeta. Estevalor límite se le conoce también como límite elástico y no necesariamente representa elesfuerzo de fluencia del material bajo el cual éste puede alcanzar la ruptura. Materiales comoel concreto, el suelo y la roca, cuya resistencia a la tensión es muy limitada en comparacióncon su resistencia a la compresión, es usual que el valor límite Sf se establezca en una pruebade compresión que tome en cuenta las diferentes variables que influyen en el comportamientodel material.
Para un medio continuo sometido a un estado de esfuerzos principales, la función que define laregión donde el material tiene un comportamiento elástico, se puede expresar como
f (1, 2, 3) = 0 (7.1)En los párrafos siguientes se describirán algunas teorías de falla y ruptura comúnmenteempleados para establecer bajo qué condiciones se alcanza la falla o ruptura de un materialsometido a ciertas solicitaciones (superficies de fluencia). Como ya se hizo ver conanterioridad la mayoría de estas teorías tienen su aplicación principal en el comportamiento demetales y permiten establecer la condición límite de falla del material (comportamientoinelástico) y no tanto la condición de ruptura o pérdida de continuidad. Para estudiar estaúltima condición se presentarán las teorías de Mohr-Coulomb, ampliamente utilizada en lamecánica suelos y rocas así como la de Griffith, ésta última con mayores aplicaciones a lamecánica de rocas.
7.1 Teoría de Rankine
Esta teoría establece que en un material sometido a un estado de esfuerzos principales segenera fluencia cuando cualquiera de los esfuerzos principales alcanza el valor límite Sf , enuna probeta representativa del mismo material sometida a una prueba de tensión en ellaboratorio. Matemáticamente estas condiciones quedan expresadas por
1 fS = (7.2)
2 fS = (7.3)
3 fS = (7.4)
Las condiciones anteriores se pueden representar gráficamente en un sistema de referencia
donde los ejes corresponden a los esfuerzos 1, 2 y 3.
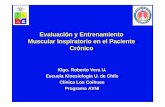
De esta manera, el límite de aplicabilidad de la teoría elástica queda definido por seissuperficies planas que conforman a un cubo de lado 2Sf (figura 7.1).

3
FIGURA 7.1 Volumen de fluencia. Teoría de Rankine
Cuando un punto P (1, 2, 3), que representa a un estado tridimensional de esfuerzos, seubica en el sistema de referencia establecido, se tendrá una condición de fluencia si P seencuentra fuera del cubo o en las caras. Si P se localiza dentro del cubo, el material tiene uncomportamiento elástico.
Para un estado de esfuerzo plano, con 3 = 0, se obtendrá la superficie límite o de fluencia quese muestra en la figura (7.2), delimitada por las siguientes ecuaciones:
1 fS = ± ; 2 fS = ± (7.5)
Un punto en este plano representaría a un estado de esfuerzo plano. Cuando el punto está dentrodel cuadrado, el material tiene un comportamiento elástico, mientras que si está fuera o en losbordes del cuadrado, el material habrá dejado de ser elástico.
La teoría de Rankine es aplicable sobre todo a materiales frágiles, esto es, aquellos materialesque presentan bajos niveles de deformación antes de alcanzar la condición de fluencia.
FIGURA 7.2 Superficie de fluencia para el estado de esfuerzo plano. Teoría de Rankine
3
2
1
2Sf
2Sf
2Sf
1
Sf
Sf
Sf Sf
2

7.2 Teoría de Coulomb-Tresca
El material deja de ser elástico cuando el esfuerzo cortante máximo generado por un estado deesfuerzos principales, en un punto cualquiera del cuerpo, iguala al esfuerzo cortante máximoque se engendra en una probeta sometida a tensión.
Para un estado tridimensional de esfuerzos, el esfuerzo cortante máximo queda definido por:
1 2
2 2fS −
= (7.6)
1 3
2 2fS −
= (7.7)
2 3
2 2fS −
= (7.8)
Si cualquiera de las condiciones anteriores es satisfecha, se tendría la condición límite paraque el medio deje de ser elástico.
Para un estado de esfuerzo plano con 3=0, las condiciones matemáticas que indicaniniciación de fluencia serían:
De la ecuación (7.6),
1 2 fS − = ⇒ 1 2 fS − = + ; 1 2 fS − = − (7.9)
De la ecuación (7.7),
1 fS = ⇒ 1 fS = + ; 1 fS = − (7.10)
De la ecuación (7.8),
2 fS = ⇒ 2 fS = + ; 2 fS = − (7.11)
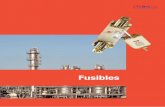
Representando gráficamente estas condiciones en el plano 1, 2, se obtendrían seis líneasrectas límites que definen la superficie de fluencia (figura 7.3).

5
FIGURA 7.3 Superficie de fluencia para el estado de esfuerzo plano. Teoría de Coulomb-Tresca
De acuerdo con la teoría del esfuerzo cortante máximo, si se agregan esfuerzos hidróstaticosde tensión o de compresión, no es posible predecir ningún cambio en la respuesta del material.La suma de estos esfuerzos simplemente desplaza el círculo de Mohr a lo largo del eje peromáx permanece constante.
Cuando los esfuerzos principales 1 y 2, son del mismo signo, se tienen dos condiciones paraalcanzar la fluencia del material:
FIGURA 7.4 Estado de esfuerzo plano; tensión
FIGURA 7.5 Estado de esfuerzo plano; compresión
2
1
Sf
Sf
Sf
Sf
1
2 Tensión
σ 3= 0 2 1
τ
= 03σ
1
2 Compresión
12

Para el estado de esfuerzos de tensión que se muestra en la figura (5.4), se debe cumplir:
1 2 1 fS ⟩ ⇒ ≤ (7.12)
Para el estado de esfuerzos de compresión, figura 5.5, se tiene:
2 1 2 fS ⟩ ⇒ ≤ (7.13)
Por lo tanto, podemos concluir que, cuando los esfuerzos principales 1 y 2 son del mismosigno, las teorías de Rankine y Coulomb-Tresca coinciden.
Si 1 y 2 son de signo contrario, se tiene que
( )1 21 22 2
ff
SS
−≤ ⇒ − ≤ ± (7.14)
Por lo tanto, cuando 1 y 2 son de signo contrario, las teorías de Rankine y Coulomb-Trescadifieren.
7.3 Teoría de Saint Venant
El material deja de ser elástico cuando una de las deformaciones principales, 1 2 3, , o ,alcanza el valor de la deformación principal, f , que se genera en una probeta sometida atensión.
Para un estado uniaxial de esfuerzos, dicha deformación se puede expresar como
ff
S
E = (7.15)
Para un estado de esfuerzos tridimensional, las deformaciones principales quedan definidas por
( )1 1 2 3
1( ) fv
E = − + = (7.16)
( )2 2 1 3
1( ) fv
E = − + = (7.17)
( )3 3 1 2
1( ) fv
E = − + = (7.18)
Para un estado de esfuerzo plano, con 3 = 0, las condiciones de fluencia resultarían ser:
De la ecuación (7.16),
1 2 1 2f fv S v S − = ⇒ − =
1 2 fv S − = − (7.19)
De la ecuación (7.17),

7
2 1 2 1f fv S v S − = ⇒ − =
2 1 fv S − = − (7.20)
De la ecuación (5.18),
( ) ( )1 2 1 2f fv S v S − + = ⇒ + =
( )1 2 fv S + = − (7.21)
Reordenando términos, las ecuaciones de las seis rectas límites resultan ser:
12
fS
v v
= − ; 1
2fS
v v
= + (7.22)
2 1 fv S = + ; 2 1 fv S = − (7.23)
2 1fS
v = − + ; 2 1
fS
v = − − (7.24)
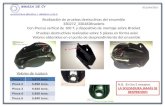
La región que estas ecuaciones definen se muestra en la figura (7.6), en la que se puedeobservar que la teoría de Saint Venant permite lograr niveles de esfuerzos mayores antes dealcanzar la falla, que los que definen las teorías de Rankine y Tresca.
FIGURA 7.6 Superficie de fluencia, criterio de Saint Venant
σ1
fS /ν fS /ν
fS /ν
fS /νfS
fS
2σ

7.4 Teoría de Nadai
Esta teoría es aplicable principalmente a materiales dúctiles, y establece que la fluencia en unapartícula de un medio continuo se inicia cuando se aplica a ésta una energía de deformaciónigual a la energía de deformación que se genera en una partícula de una probeta sometida atensión.
La energía de deformación elástica por unidad de volumen, o densidad de energía, para unestado uniaxial de esfuerzos, tal como se definió en el capítulo 4, resulta igual a
1 1
2U
=
Esta ecuación representa el área bajo la curva esfuerzo-deformación.De acuerdo con esta teoría, la probeta dejará de ser elástica cuando
2
2 2 2f f f f f
prob
S S S SU
E E
= = = (7.25)
Para un estado tridimensional de esfuerzos, la densidad de energía puede expresarse como
2 2 21 2 3 1 2 1 3 2 3
1[ 2 ( )]
2U v
E = + + − + + (7.26)
Entonces, la fluencia se presentará cuando2
2 2 21 2 3 1 2 1 3 2 3
1[ 2 ( )]
2 2fS
vE E
= + + − + + (7.27)
Por lo tanto, la condición de fluencia queda representada como
2 2 2 21 2 3 1 2 1 3 2 32 ( )fS v = + + − + + (7.28)
Para un estado de esfuerzo plano, con 3 = 0, la condición de fluencia queda definida por
2 2 21 2 1 22fS v = + − (7.29)
La representación geométrica de la región que define la ecuación (7.29) se muestra en lafigura (7.7).

9
FIGURA 7.7 Superficie de fluencia; teoría de Nadai
7.5 Teoría de Von Mises Hencky (VMH)
Se alcanza la fluencia en una partícula de un medio continuo cuando la energía de deformacióndistorsional en un estado de esfuerzos cualquiera, igual a la energía de deformación distorsionalen una probeta sometida a tensión.
[ ]o o probU U=
Para evaluar Uo empleamos la siguiente relación:
total vol oU U U= +De donde:
o total volU U U= −
La energía de deformación total (ecuación 4.60) se puede expresar como2 2 21 2 3 1 2 1 3 2 3
1[ 2 ( )]
2totalU vE = + + − + +
El esfuerzo y la deformación volumétricos son iguales a
1 2 3
3V
+ += ; 1 2 3v = + +
De esta manera, la energía de deformación volumétrica resulta igual a
2v v
volU =
Dado que
Para = 0.5
1
2
Sf
Sf
Sf

3(1 2 )V v v
EK
v =
−Despejando ,
3(1 2 )v V v
E = −
De esta manera, la energía de deformación volumétrica resulta igual a
2v v
volU =
Dado que
3(1 2 )V v v
EK
v =
−
Despejando ,3
(1 2 )v V vE
= −
Sustituyendo esta última expresión en Uvol , se tiene:
23(1 2 )
2vol v
vU
E−=
Desarrollando:
( )2
1 2 33(1 2 )
2 9vol
vU
E
+ +−=
( )2
1 2 3
1 2
6vol
vU
E −= + +
Dado que:
( )2 2 2 21 2 3 1 2 3 1 2 1 3 2 32( ) + + = + + + + +
La energía de deformación volumétrica queda como
{ }2 2 21 2 3 1 2 1 3 2 3
1 22( )
6vol
vU
E −= = + + + + + (7.30)
La energía de deformación distorsional resulta:
{ }2 2 21 2 3 1 2 1 3 2 3
12 ( )
2oU vE
= = + + − + +
{ }2 2 21 2 3 1 2 1 3 2 3
1 22( )
6
v
E −− + + + + +
Desarrollando se tiene:

11
{ }2 2 21 2 3 1 2 1 3 2 3
1( )
3o
vU
E += + + − + + (7.31)
En una probeta sometida a tensión: 2 = 3 = 0
21
1
3prob
vU
E+= (7.32)
Se alcanza la falla del material cuando: Uprob = Uo , por lo tanto:
{ }2 2 2 21 2 3 1 2 1 3 2 3
1 1( )
3 3f
v vS
E E + += + + − + +
De donde resulta2 2 2 2
1 2 3 1 2 1 3 2 3( )fS = + + − + + (7.33)
Esta última ecuación representa la condición de fluencia de VMH. De la ecuación (7.28) sepuede ver que cuando 0.5 = el criterio de fluencia de VMH se vuelve un caso particular delde Nadai.
Para el estado de esfuerzo plano.
2 2 21 2 1 2fS = + − (7.34)
De manera experimental se ha demostrado que la teoría de VMH es la que más se apega a losvalores experimentales si 1 y 2 son positivos o si alguno de los dos es positivo.
Si ambos esfuerzos principales son negativos, VMH da resultados conservadores.
Esta teoría es aplicable sobre todo a metales.
La teoría de VMH puede ser expresada en términos de los invariantes del tensor esfuerzo,como sigue.
Para un estado de esfuerzo principal se tiene que:( )1 1 2 3I = + + (7.35)
2 1 2 1 3 2 3( )I = + + (7.36)
Elevando la ecuación (5.35) al cuadrado:
( )2 2 2 21 1 2 3 1 2 1 3 2 32 2 2I = + + + + + (7.37)
Multiplicando la ecuación (5.36) por 3:
2 1 2 1 3 2 33 3 3 3I − = − − − (7.38)
Sumando las ecuaciones (5.37) y (5.38), se tiene:2 2 2 2
1 2 1 2 3 1 2 1 3 2 33I I − = + + − − −lo cual indica que existe fluencia en un material si

2 21 23 fI I − = (7.39)
Esta última expresión puede ser aplicada para cualquier sistema de referencia.
7.6 Teoría de Mohr-Coulomb
La teoría de Mohr-Coulomb establece que se alcanza la ruptura del material cuando elcociente del esfuerzo cortante al esfuerzo normal, asociados a un plano que pasa por un puntodel medio continuo, donde se conoce el tensor esfuerzo provocado por las cargas aplicadas,alcanza un valor máximo. Para un estado general de esfuerzos principales, esta condición sealcanza en el punto de tangencia de los círculos de Mohr correspondientes. La resistencia delmaterial queda expresada como:= + (7.40)
siendo c y ϕ los parámetros de resistencia del material, conocidos como cohesión y ángulo defricción interna, respectivamente. En el plano de Mohr (s-τ) el parámetro c representa laordenada al origen de la recta tangente al círculo de esfuerzos principales asociado con laruptura del material y el parámetro ϕ representa la pendiente de dicha recta.
La superficie de fluencia para un estado de esfuerzo plano (con s3=0), puede ser definida a
partir de la ecuación (5.40), sustituyendo los valores de τ y s, asociados a cada circulo defalla. Por lo tanto la falla del material se alcanza bajo la condición siguiente:
á | − |2 − − +2 ; | |2 − − 2 ; | |2 − − 2 (7.41)
Siendo k=tanϕ.
Obsérvese que la ecuación (7.8) representa seis rectas cuya intersección define la superficie defluencia correspondiente (Figura 7.8). En este caso los valores límite de los esfuerzos RT y RC
que se indican en la figura (7.8) dependen de los parámetros de resistencia c y ϕ.

13
FIGURA 7.8. Criterio de falla de Mohr-Coulomb
7.7 Teoría de Griffith
Esta teoría de ruptura se estableció en un principio para estudiar el comportamiento del vidrio,pero posteriormente se aplicó a las rocas con resultados razonables. Se asume la existencia dediscontinuidades dentro de la masa del material, como es el caso de las rocas fisuradas.
Se analizará el caso ideal de una masa de roca sometida a un estado de esfuerzosbidimensional dado por 1 y 3 , en la que se encuentra una grieta o discontinuidad.
3
1
x
y
x
x
zy
y
y
xy
xy
zy
idaddiscontinu
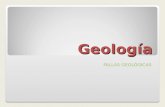
FIGURA 5.9 Estado de esfuerzos en una grieta presente en un macizo rocoso
Se considerará en un primer análisis que =cte, siendo b el ángulo que forma la dirección del
esfuerzo principal mayor s1 y el eje longitudinal de la grieta. Este caso correspondería porejemplo al de una probeta de roca sedimentaria con planos de sedimentación paralelos entre sí.
Para realizar el análisis, supondremos que sólo existe una discontinuidad y ésta tiene formaelíptica muy achatada, según se muestra en la figura (7.9).
1
3
3
1

•b
b
a
by 1P
2P
3P
4Px x
x
yPlano
oconsiderad
idaddiscontinu
xy
xyy
cosax =senby =
tancos
msen
a
b
x
y ==
tantan;tan mx
y ==
FIGURA 5.10 Esquema para determinar el esfuerzo normal sb en una grieta de un macizo rocoso
En una prueba triaxial dada, se conocen 1 y 3 , y, mediante el uso del círculo de Mohr de
esfuerzos, se pueden determinar xx , yy , y xy .
Se desea determinar la magnitud del esfuerzo normal b en términos de los esfuerzos xx ,
yy , y xy y de la geometría de la discontinuidad. Este problema ha sido resuelto en el marco
de la teoría de la elasticidad y el esfuerzo b se expresa mediante la siguiente fórmula:
( ) ( ) ( )2 2 2 2 2 2
2 2 2
2 cos 1 2 cos 2 1 cos
cos
yy xx xy
b
m m sen m sen m m sen
m sen
+ − + + − − + =+
(7.42)
Siendoa
bm = la excentricidad de la elipse.
La falla del material está asociada con el valor máximo de b , siendo éste un esfuerzo de
tensión que ocurre en los labios de la discontinuidad.
Analicemos los estados de esfuerzos en la vecindad de la cúspide de la elipse, (punto P4), esdecir, para el caso en que 0 = , suponiendo además una grieta o discontinuidad infinita deespesor pequeño, o sea m=0. En estas condiciones:
cosα≈1 y senα≈α
y la expresión anterior queda:
( ) ( )2 2 2 2 2
2 2
2 1 2 2 1yy xx xy
b
m m m m m
m
+ − + + − − + =+
(7.43)

15
Despreciando los términos de segundo orden, por ser muy pequeños comparados con los deprimer orden, obtendremos:
( ) ( )2 2
2 2yy xyb
m
m
−
=+
Es decir,
2 2
2 yy xy
b
m
m
− =
+
(7.44)
A partir de esta expresión podremos encontrar el valor máximo de “ b ” en la vecindad delpunto P4.
Sí:⟨maxb Resistencia a la tensión de la matriz rocosa, la falla no se presenta.
=maxb Resistencia a la tensión de la matriz rocosa, hay equilibrio límite.
⟩maxb Resistencia a la tensión de la matriz rocosa, se presenta la falla.
Para conocer en qué punto de la elipse se presenta esta condición, obtendremos el máximoesfuerzo de tensión, para ello hagamos:
0=
d
d b , suponiendo m constante
( ) ( )( )
2 2
22 2 2 2
2 42 0
xy yy xyyy xym mmd
d m m
− + − −− = = + +
(7.45)
es decir:
( )2 22 4xy yy xym m + = − −
2 2
2 2yy xyxy b
m
m
− = − = − +
xy
b
−
∴ =(7.46)
Sustituyendo (5.46) en (5.45) queda:2
2 21
2 2 2 22
2
22 2
xyyy
b b xy bb
xy b xy
b
mm
mm
+ + = =
++
2 2 2 22 2b xy yy b xym m + = +2 2 22 0b yy b xym m ∴ − − =
resolviendo la ecuación de segundo grado obtenemos:

( )2 2 2b yy yy xym − = + (7.47)
( )1
2 2 2b yy y xym = ± +
(7.48)
Para el caso particular en que los ejes “ x ” y “ y ” coincidan con las direcciones de losesfuerzos principales, se tiene: 0xy yy ty = = , siendo t la resistencia a la tensión del
material. Sustituyendo esta condición en la ecuación (5.48), se tiene que tbm 2= . Por lo
tanto el esfuerzo de falla se puede expresar como:m
tb
2= .
FIGURA 7.10. Esfuerzos en la discontinuidad elíptica
Cuando tbm 2= , la expresión (7.48) queda como.
2 22 t yy yy xy = ± +
Despejando 2xy de esta ecuación, se obtiene
2 4 ( )xy t t yy = − (7.49)
Matemáticamente la ecuación (5.49) representa una parábola en el plano xy yy − y constituye
la envolvente de resitencia de Mohr para una falla de tipo frágil, es decir:2 2
yy yy xy cte ± + =
Donde la constante es igual a dos veces la resistencia a la tensión del material determinadaexperimentalmente en el laboratorio.

17
FIGURA 7.11. Envolvente de falla.
Este criterio de falla explica el porqué se relaciona la curvatura de la envolvente de falla con lapresencia de fisuras en la roca.
Obtengamos ahora una expresión que relacione directamente al esfuerzo máximo de tensióncon 1 y 3 . De la Teoría de la Elasticidad se tiene que:
( ) ( )1 3 1 32 cos 2yy = + − − (7.50)
( )1 32 2xy sen = − (7.51)
Sustituyendo las ecuaciones (7.50) y (7.51) en la ecuación (7.48), se tiene.
( ) ( )[ ]
( ) ( ) ( ) ( ) 2
1
2231
22313
21
2231
3131
241
2cos41
2cos21
41
2cos21
−+−+−−+±
−−+=
sen
m b
Así obtenemos finalmente:
( ) ( ) ( ) ( )2 2 2 21 3 1 3 1 3 1 3
1 1cos2 cos2
2 2bm = − − − ± + − − (7.52)
Ahora analicemos el caso general cuando el ángulo b es variable (figura 7.12).
FIGURA 7.12. Discontinuidades con diferente inclinación

Encontremos el b máximo “maximorum” haciendo variar la expresión (7.48) con respecto a
a (lo que ya se hizo con anterioridad), y con respecto a b.
Para obtener el b máximo “maximorum”, derivemos la ecuación (7.52) con respecto a e
igualemos a cero, así:
( )( )
( ) ( )[ ]0
2cos21
2221
21
2221
23
21
23
21
23
21
31 =−−+
−±−=
sen
send
d b
( )( ) ( )[ ]
0
2cos212
112
23
21
23
21
3131 =
−−+
+±−
sen
( ) ( )[ ]0
2cos212
11
23
21
23
21
31 =−−+
+=
d
d b
( ) ( ) ( )2 2 2 21 3 1 3 1 3
1 1cos2
2 2 + − − = ± +
(7.53)
Desarrollando esta última ecuación, se tiene
( ) ( )[ ] ( )231
23
21
23
21 4
12cos
21 +=−−+
( ) ( ) ( )231
23
21
23
21 4
121
2cos21 +−+=−
23
21
3123
21 2
121
2cos
−
−+=
( )( )( )3131
231
22cos
+−−=
( )1 3
1 3
cos22
−=+
(7.54)

19
La ecuación (7.54) permite calcular el valor del ángulo que conduce al máximo valor del
bm .
Si hacemos que:1
3
=k
( )k
k
+−=
121
2cos
Conocidos 1 y 3 se puede evaluar el plano donde se va a presentar la falla del material.
Sustituyendo las ecuaciones (7.53) y (7.54) en la (7.52), se obtiene.
( ) ( ) ( ) ( )3131
313131 2
122
1 +−
+−−−+=bm
( )( )
2
1 3
1 3
24b tm
−= − =
+
(7.55)
Esta es la expresión de la envolvente general de Griffith para un material de con fisuramientoisotrópico.
En una prueba de compresión simple s3=0, 01 ≠ , y la ecuación (7.55) se reduce a:2
1 18 0t + =
1 8 t = − (7.56)
De la ecuación anterior puede observarse que la resistencia a la compresión simple ( )Rc es 8
veces la resistencia de la roca a la tensión ( )t . En la práctica se ha encontrado que la cR es
del orden de 10 veces la resistencia a la tensión.
t2
t
t8
( )2 4xy t t y = −
FIGURA 7.13. Representación gráfica de la ecuación (5.56).
La ecuación de la parábola que se muestra en la figura (7.13), tiene como ecuación.

( )2 4xy t t yy = − (7.57)
Si 0=y , se obtiene la cohesión de la roca:
txyc 2==
De lo anterior puede concluirse que la cohesión de la roca es la cuarta parte de su resistencia ala compresión simple.
La falla de la muestra se va a presentar por insuficiencia de resistencia a la tensión en la matrizrocosa, en un punto cercano a la cúspide de la elipse representativa de la discontinuidad másdesfavorable para su estabilidad. Las fisuras se propagan en un principio con un ángulo 2bcon respecto al eje de la discontinuidad, y posteriormente tienden a tomar la dirección paralelaal esfuerzo 1 , no siendo ya peligrosas cuando llegan a este punto, debido a que el esfuerzo de
confinamiento 3 no deja progresar la grieta.
Problemas resueltos
PROBLEMA 7.1
El tensor esfuerzo en la viga, que se muestra en la figura (5.8), está dado por
2 2
2 2
3
2 03
0 04
0 0 0ij
xy c yP
T c yc
− = −
Siendo c el semiperalte de la sección transversal de la viga y P una carga puntual aplicada en suextremo.
FIGURA 5.8 Barra prismática sometida a una carga puntual P en su extremo libre
Determine, aplicando el criterio de VMH, el valor límite de la fuerza P, de tal forma que la viga semantenga dentro del rango elástico.
1
c
cP
L
yx
z

21
SOLUCIÓN:
La teoría del medio continuo será aplicable si 2 21 23 fI I S− ⟨ , en todos los puntos del medio.
Si en algún punto 2 21 23 fI I S− = , se establecería el límite del tensor Tij hasta donde sería aplicable la
mecánica del medio continuo.
Si en algunas regiones 22
21 3 fSII ⟩− , la teoría de la mecánica del medio continuo no será aplicable.
Si P se aplica al medio, se busca de definir la región del medio continuo en el cual sea aplicable lateoría elástica.
Llamando:3
3
4
Pk
c=
Entonces los invariantes valen:
1 2I xyk=
2 2 2 22 ( )I c y k= − −
Sustituyendo los valores de I1 e I2 en la ecuación (5.39) existirá fluencia cuando
2 2 2 2 4 2 2 4 24 3 ( 2 ) fx y k k c c y y S+ − + =
Desarrollando:2 2 2 2 4 2 2 2 2 4 24 3 6 3 fx y k k c k c y k y S+ − + =
22 2 4 2 2 4
24 3( 2 ) fS
x y c c y yk
+ − + =
Esta última ecuación representa la condición de fluencia de VMH.
La elasticidad sería aplicable mientras no se plastifique algún punto. Los puntos más esforzados sona (L, −c) y b (L, +c).
Se iniciará la fluencia en el medio en el instante en que las coordenadas de los puntos a y bsatisfagan la condición de VMH.
Sustituyendo las coordenadas de los puntos en la condición de fluencia, se tiene:
22 2 4 4 4
24 3( 2 ) fL c c c c
k
+ − + =
22 2
24 fL c
k
= ∴
22
2 24fk
L c
=
22
6 2 2
9
16 4fP
c L c
=
4 2 4 22
2 2
16 4
36 9f fc c
PL L
= =

22
3fc
PL
= ±
Si la fuerza P del extremo está comprendida entre los límites2 22 2
3 3f fc c
PL L
− ⟨ ⟨ , el medio es
elástico.
Si22
3fc
PL
≥ , el material deja de ser elástico.
PROBLEMA 7.2
El tensor esfuerzo en la viga que se muestra en la figura (5.9) está dado por:
0 0 0
0 0
0 0 0
zij
z
MT x
I
=
Siendo Mz el momento flexionante aplicado en los extremos de la viga e Iz el momento de la inerciacentroidal de la misma. Determine, aplicando el criterio de VMH, el momento de fluencia Mf de laviga.
FIGURA 7.9 Viga sometida a flexión pura
SOLUCIÓN:
Existirá plastificación si 2 21 23 fI I S− ⟩
2
2zf
z
Mx S
I
=
;
2
zf
z
M xS
I
=
zf
z
Ix S
M=
Las rectas límites pasan por el borde del medio siz f
f
I Sc
M= , por lo tanto Mz = Mf .
Así zf f
IM S
c=
Mz Mzy
c
c
x

23
Si zf f
IM S
c⟨ , todo el medio es elástico.
Si zf f
IM S
c⟩ , el medio deja de ser elástico y sólo una porción próxima al eje y
permanecerá elástica.
Esta distribución de esfuerzos aparecerá cuando la sección se ha plastificado completamente, y seráengendrada por un momento plástico total Mp , tal que
p fM M⟩
Por estática se puede afirmar que el Mp es la resultante de la distribución de esfuerzos en la seccióntransversal completamente plastificada.
p cM F=
2p fM S bc=
Por otra parte,3(2 )1
12f f
b cM S
c=
22
3f fM bc S= ⇒ 2
3f pM M=
Si el material que forma la pieza tiene el diagrama supuesto, se puede incrementar el momento queprovoca la primera fluencia en 50% para alcanzar el momento que provoca fluencia en toda la seccióntransversal.
3
2p fM M=
La relación que existe entre el momento de la fluencia y el momento de plastificación total, p
f
M
M,
depende de la forma de la sección transversal y puede oscilar entre 1 y 2.5.
FIGURA 7.10 Relación Mp /Mf para diferentes secciones
Mp
Mf1.07 < < 1.17
Mp
Mf= 1.5
Mp
Mf> 1.5

PROBLEMA 7.3
Para el estado de esfuerzo:
0 0 0
0 0
0 0 0
zij
z
MT x
I
=
siendo y constantes
Determine el esfuerzo de fluencia empleando los criterios de Coulomb-Tresca y VMH.
Los esfuerzos principales se obtienen resolviendo la ecuación característica, y resulta:
1 = +
2 =
3 = −Así, el tensor esfuerzo queda como
( )
( )
0 0
0 0
0 0ijT
+ = −
Condición de fluencia de VMH:
2 21 23 fI I S− =
Los invariantes del tensor esfuerzo son:
I1 = 3
( )( )
( )( )2
0 00
0 00I
−+= + +
− +
( ) ( ) ( ) ( )2I = + + − + − +
2 2 2 22I = + + − + + − −
2 22 3I = −
Por lo que, aplicando la condición de fluencia de VMH, se tiene:
( ) ( )2 2 2 23 3 3 fS − − =
2 2 2 29 9 3 fS − + =
2 23fS = ⇒ 2 3fS = ±
1.73fS = ±

25
Utilizando el criterio de Coulomb-Tresca:
1 3m 2 2
f
áx
S
−= =
( ) ( )2 2
f + − −=
2f ⇒ =
Obsérvese que este último criterio permite un mayor esfuerzo de fluencia comparado con la teoría deVMH.
PROBLEMA 5.4
Una muestra cilíndrica de un material deformable está confinado por un molde rígido que no le permitedeformarse lateralmente, bajo una presión constante p . Aplicando el criterio de VMH, diga si elmaterial alcanza la condición de fluencia.
Para establecer el estado de esfuerzos y deformaciones suponga que el cuerpo deformable es elásticolineal, homogéneo e isótropo. Suponga además que no se producen esfuerzos cortantes en el contactomolde-muestra.
FIGURA 7.11 Muestra cilíndrica en un molde rígido,a) alzado, b) planta
Datos:
E = 2.1 × 108 kPa = 0.2Sf = 4000 × 102 kPa
p = 1000 × 102 kPa
b)
a)rígido
muestra
molde x
y
molde
z
P

5.5 TEORÍA DE VON MISES HENCKY
26
SOLUCIÓN:
Las ecuaciones constitutivas de los materiales elásticos lineales, homogéneos e isótropos son:
xx = 2Gεxx + λJ1
yy = 2Gεyy + λJ1
zz = 2Gεzz + λJ1
Cálculo de las constantes elásticas.
882.1 10
0.875 10 kPa(1 2 ) 2(1 0.2)
EG
×= = = ×
− +
880.2 2.1 10
0.583 10 kPa(1 )(1 2 ) (1 0.2)(1 2 0.2)
E
× ×= = = ×+ − + − ×
De los datos del problema, se pueden establecer las siguientes condiciones:
xx = −p ; εxx ≠ 0
yy ≠ 0 ; εyy ≠ 0
zz ≠ 0 ; εzz = 0
Para yy se tiene:yy = λJ1
Para zz se tiene:zz = λJ1 ⇒ yy = zz
Para xx se tiene:xx = −1000 = 2Gxx + λJ1(xx + yy + zz)
−1000×102 = 2Gxx + λxx = xx (2G + λ)
2 2
8 8
1000 10 1000 10
(2 ) (2 0.875 10 0.583 10 )xx G
− × − ×= =
+ × × + ×
310.428 10xx J −= − × =
3 3 20.583 10 0.428 10 249.5 10 kPayy− −= × × − × = − ×
2249.5 10yy zz kPa = = − ×
Por lo tanto, el tensor esfuerzo resulta igual a
2
1000 0 0
0 249.5 0 10 kPa
0 0 249.5ijT
− = − × −
Aplicando el criterio de VMH, se tiene:
2 21 23fS I I= −

27
Cálculo del primer invariante I1.
2 2 21 1000 10 249.5 10 249.5 10xx yy zzI = + + = − × − × − ×
= −1499.0 × 102 kPa
( ) ( ) ( ){ } 42 1000 249.5 249.5 249.5 249.5 1000 10I = − × − + − × − + − × − ×
42 561250 10I = ×
2 2 4 41499.0 3 561250 10 563251 10fS = − × × = ×
4750.5 10 kPafS = × (esfuerzo de fluencia calculado)
Dado que 4 4750.5 10 kPa 4000 10 kPa× ⟨ × , no se presenta fluencia en el material.