Caracterizacion de Minimos y Maximos
35
REPUBLICA BOLIVARIANA DE VENEZUELA MINISTERIO DEL PODER POPULAR PARA LA DEFENSA UNIVERSIDAD NACIONAL EXPERIMENTAL POLITECNICA DE LA FUERZA ARMADA NACIONAL NUCLEO SAN TOME OPTIMIZACIÓN NO LINEAL Profesor: Edgardo Salazar Sección 7N01 Bachilleres: Hernández De Moreno María Higinia C.I: 17.746.165 Moreno Padrino Engelbert Leonardo C.I: 11.773.602 30 De Enero De 2014
Transcript of Caracterizacion de Minimos y Maximos

REPUBLICA BOLIVARIANA DE VENEZUELAMINISTERIO DEL PODER POPULAR PARA LA DEFENSA
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITECNICA DE LAFUERZA ARMADA NACIONAL
NUCLEO SAN TOME
OPTIMIZACIÓN NO LINEAL
Profesor: Edgardo Salazar
Sección 7N01
Bachilleres:
Hernández De Moreno María Higinia C.I: 17.746.165Moreno Padrino Engelbert Leonardo C.I: 11.773.602
30 De Enero De 2014

CARACTERIZACION DE MINIMOS Y MAXIMOS
Los máximos y mínimos de una función, conocidos colectivamente como extremos de una función, son los valores más grandes (máximos) o más pequeños (mínimos), que toma una función en un punto situado ya sea dentro de una región en particular de la curva (extremo local) o en el dominio de la función en su totalidad (extremo global o absoluto). De manera más general, los máximos y mínimos de un conjunto (como se define en teoría de conjuntos) son los elementos mayor y menor en el conjunto, cuando existen. El localizar valores extremos es el objetivo básico de la optimización matemática.
Una función puede tener más de un máximo o más de un mínimo locales.
Una condición necesaria pero no suficiente para que X0 sea un punto extremo, es que para una función con más de una variable, el gradiente — f(X0) = 0. Si es cierto esto entonces X0 será conocido como punto estacionario. Una condición suficiente para que un punto estacionario sea extremo es que la matriz Hessiana H obtenida en X0 del sistema de ecuaciones sea positiva cuando X0 es un punto extremo de mínimo. Y negativa cuando X0 es un punto extremo de máximo.
Un máximo débil implica un numero finito de máximos alternativos (ver figura 1) y se define como X0 es un máximo débil, si f(X0 + h) <= f(X0). Un análisis similar es para los mínimos débiles. Un punto de inflexión se encuentra cuando la evaluación del gradiente da cero y no es un extremo, esto es, se debe de cumplir la condición de la matriz Hessiana

Máximos Local
Un máximo local (o relativo) es un punto donde la función pasa de ser creciente a decreciente. Ese punto no tiene por qué ser el punto más alto de la gráfica de la función. Este último (si es que existe) se denomina máximo absoluto. De manera similar, en un punto donde la función pasa de decrecer a crecer se dice que hay un mínimo local. El punto del dominio donde la imagen es menor se denomina mínimo absoluto.
Definición 1: Máximo relativo (o local) de una función f definida en un intervalo I. f tiene un máximo
relativo en si (y sólo si) existe tal que, cada vez que y se cumple
.
Extremos relativos o locales
Si f es derivable en a, a es un extremo relativo o local si:1. Si f'(a) = 0.2. Si f''(a) ≠ 0.
Máximos relativos o locales
Si f y f' son derivables en a, a es un máximo relativo si se cumple:1. f'(a) = 02. f''(a) < 0
Mínimos relativos o locales
Si f y f' son derivables en a, a es un mínimo relativo si se cumple:1. f'(a) = 02. f''(a) > 0
Cálculo de máximos y mínimos
1. Hallamos la derivada primera y calculamos sus raíces.2. Realizamos la 2ª derivada, y calculamos el signo que toman en ella las raíces de derivada
primera y si:f''(a) < 0 es un máximo relativof''(a) > 0 es un mínimo relativo
3. Calculamos la imagen (en la función) de los extremos relativos.

Ejemplo
f(x) = x3 − 3x + 2
f'(x) = 3x2 − 3 = 0
f''(x) = 6x
f''(−1) = −6 Máximo
f''(1) = 6 Mínimo
f(−1) = (−1)3 − 3(−1) + 2 = 4
f(1) = (1)3 − 3(1) + 2 = 0
Máximo(−1, 4) Mínimo(1, 0)
Si ya hemos estudiado el crecimiento y decrecimiento de una función habrá:
1. Un máximo en el punto, de la función, en la que ésta pasa de creciente a decreciente.
2. Un mínimo en el punto, de la función, en la que ésta pasa de decreciente a creciente.
Ejemplo: Hallar los máximos y mínimos de:
Tenemos un mínimo en x = 3
Mínimo(3, 27/4)

Máximo (mínimo) global de una función escalar
Definiciones:
Dada una función escalar f:A⊆R n R⟶ y dado a∈A. Decimos que f presenta un máximo
global o absoluto en a∈A si ∀x∈Af(x)≤f(a)
Dada una función escalar f:A⊆R n R⟶ y dado a∈A. Decimos que f presenta un mínimo
global o absoluto en a∈A si ∀x∈Af(a)≤f(x)
Dada una función escalar f:A⊆R n R⟶ y dado a∈A. Decimos que f presenta un máximo
global estricto en a∈A si ∀x∈Af(x)<f(a)
Dada una función escalar f:A⊆R n R⟶ y dado a∈A. Decimos que f presenta un mínimo
global estricto en a∈A si ∀x∈Af(a)>f(x)
Ejemplo: Dada la función escalar f:A⊆R 2 R⟶ definida por z=f(x,y)=x2+y2−2x−4y+5. Probar
que f presenta un mínimo global en a=(1,2)∈A.
a. Calculamos la imagen de a=(1,2)∈A =R 2.f(1,2)=12+22−2 1−4 2+5=0⋅ ⋅
b. Calculamos la imagen de (x,y)∈R 2
z=f(x,y)=x2+y2−2x−4y+5=x2−2x+1+y2−4y+4=(x−1)2+(y−2)2≥0=f(1,2)∀(x,y)∈R2
La función f presenta un mínimo global en el punto a=(1,2)∈R 2. Se trata de un mínimo estricto, no
existe ningún punto de R 2 distinto del (1,2), cuya imagen sea 0, es decir, f(x,y)≠0∀(x,y)∈R2;(x,y)≠(1,2)
Matriz Hessiana de una función escalar
Descripción:
Dada la función escalar f:A⊆R n R⟶ si en el punto a∈A existen las derivadas parciales segundas,
definimos la matriz hessiana de f en el punto a∈A y la representamos por Hf(a), la matriz cuadrada n×n, donde cada fila es el vector gradiente de la correspondiente derivada parcial. primera, es decir:

, sea Se define (siempre que exista) como
matriz en la que el término
es cuadrada
Si es de clase , la matriz hessiana es simétrica.
Ejemplo
Definición
Forma cuadrática hessiana (de en )
donde es un vector arbitrario de componentes
Definición
La forma hessiana de dice definida positiva si
y

La forma hessiana se dice definida negativa si
y
Teorema
Sea de clase en
y sea punto crítico de ( )
es mínimo relativo de si es definida positiva y es máximo relativo de si es definida negativa
Teorema
[Para 2 variables]
Sea de clase en , con punto crítico ( ) Si:
i)
ii)
es definida positiva es mínimo relativo
Si:
i)
ii) es máximo relativo
Si es punto silla
En el caso
es el determinante de la partición
Es un mínimo relativo si
Es un máximo relativo si , , ...
Cuando en el punto crítico tengamos se denomina punto crítico degenerado Su carácter se decide por otros métodos.

Ejemplo
Sólo tiene un punto crítico:
Como y , es un mínimo relativo.Ejemplo
que tiene como única solución
es un punto silla
METODOS DE BUSQUEDA MAXIMOS Y MINIMOS
Método de Búsqueda de Fibonacci
El método de Fibonacci está considerado como el más eficiente entre los métodos de búsqueda. Difiere
del método de la sección áurea en el hecho de que el valor de α no permanece constante en cada
iteración. Además, el número de iteraciones viene predeterminado en base al nivel de exactitud
especificado por el usuario.

El método de Fibonacci debe su nombre a que se utiliza la sucesión de Fibonacci
F0 = F1 = 1, Fn = Fn−1 + Fn−2.
para determinar en cada iteración los nuevos valores yk y zk con los que evaluar el actual intervalo de incertidumbre. Como veremos, en el método de Fibonacci el (k + 1)-ésimo subintervalo se obtiene reduciendo la longitud del k-ésimo subintervalo por un factor
sera:
Para un valor de n suficientemente grande, la proporción tiende al número áureo, y por lo tanto el método de Fibonacci se aproxima al método de la sección áurea.
Función Unimodal

Un concepto más acabado del tipo de cuestiones que abordan estos métodos es el de búsqueda unidireccional que abarca tanto los problemas ya mencionados como la resolución de otros, de dos o más variables, en base a una estrategia basada en definir direcciones, según un determinado criterio, y sobre ellas buscar el óptimo de la función objetivo. Uno de los enfoques clásicos en métodos de búsqueda unidireccional es el concepto de eliminación de regiones, por el cual se procede a excluir del análisis subsiguiente espacios de búsqueda donde, se dice, no puede encontrarse el óptimo.
Esta idea está estrechamente asociada a la noción de unimodalidad cuyo significado es que en el ámbito de búsqueda solo debe existir un óptimo de la naturaleza buscada.
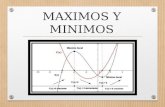
En la figura 1 la función es unimodal si se está buscando un máximo -existe uno solo, el punto c- pero no lo sería si se buscase mínimo, pues hay dos en la zona de soluciones admisibles, los puntos a y b, los extremos del intervalo. Nótese que la unimodalidad no se ve afectada por la discontinuidad -de la función y su derivada- que se presenta en el punto d.Simbólicamente, se puede decir que una función es unimodal si
siendo x1 < x2 y x* el punto óptimo
f (x1) es peor que f(x2) si x2 < x* y
f (x1) es mejor que f(x2) si x1 > x*
Si una función es unimodal se puede asegurar, calculándola solo en dos puntos, en que zona no puede encontrarse el óptimo y, por consiguiente, como ya quedara dicho, eliminarla del análisis. En la figura 2 los valores de la función calculados en x1 y x2
permiten presuponer comportamientos como los indicados en líneas de puntos, con lo que la zona x2-b deja de ser de interés. Nótese que los valores de la función podrían haberse encontrado en una situación inversa a la presentada ( f1 < f2 ) y en tal caso la zona excluida sería a-x1.
Puede observarse que:
1.- Se requieren, como mínimo, dos evaluaciones de la función objetivo para poder desechar una región;
Fig. 2
Fig. 1

2.- La ubicación de los puntos de cálculo debe ser simétrica respecto del punto medio del intervalo para que el porcentaje de región eliminada sea independiente de valores relativos de las evaluaciones;
3.- Siempre queda uno de los puntos dentro de la zona no eliminada, mientras que el restante queda en uno de los límites de la misma. Si bien el concepto de unimodalidad es muy simple de plantear y, como se verá, puede convertirse en una estrategia eficiente para la búsqueda de un óptimo, tiene un inconveniente básico y es que para asegurar su cumplimiento debería conocerse exactamente el comportamiento de la función objetivo, cuestión que, en la práctica, es imposible.
Más aún, sin este conocimiento, que es, se insiste, la situación normal, solo se está en condiciones de establecer cuando la función no es unimodal.En la figura 3, por ejemplo, se ha representado una situación posible luego de un segundo paso en la estrategia de eliminación de regiones.Otra vez se tienen dos puntos en el interior y ha quedado de la etapa anterior una evaluación sobre el borde de la zona, indicado como punto b. Resulta claro que si lo que se busca es un máximo de la función objetivo ésta no es unimodal en ese sentido (habría sendos máximos a izquierda
y derecha del punto x2).
Ahora bien, si no se detectase una situación de esta índole no habría que inferir, por ello, que la función es unimodal, pues solo podría ser una consecuencia de la particular ubicación de los puntos de análisis; aunque si se repitiese lo mismo una y otra vez habría fundamentos para estimar que la función se comporta como unimodal.
Búsqueda de la Sección Dorada
Pertenece a los métodos de búsqueda lineal basados en intervalos, además es una versión mejorada de la búsqueda de Fibonacci. Es uno de los más difundidos por la simplicidad de su programación y una notable eficiencia en el proceso de determinar el punto óptimo en una búsqueda unidireccional.
Fig 3

La idea básica se muestra en la figura 4. Allí se han ubicado, en una primera etapa, los dos puntos requeridos para lograr la eliminación de un cierto sector de la zona de búsqueda inicial, el entorno {a, b}, normalizado en {0, 1}.
En la figura se ha supuesto, además, que la zona eliminada es la ubicada entre x2 y b. De esta forma, el intervalo de búsqueda pasa a ser, ahora, {a' = a, b' = x2}. (Nótese que como ya quedó dicho, uno de los nuevos límites de la zona coincide con un punto de análisis). En la estrategia que se plantea el método del número de oro el punto que permanece en el interior del nuevo intervalo está ubicado en la posición relativa en la que se encontraba el otro punto, que ahora limita la zona; esto es, el anterior x 1 será el nuevo x2, indicado como x´2 en la figura.
Para ello deberá cumplirse que
Es a este número irracional al que el método debe su nombre, ya que en la Grecia clásica la cifra 1,6180339... era conocida como "relación áurea", íntimamente ligada a la secta pitagórica -en su emblema, una estrella regular de cinco puntas, todas sus líneas están divididas según esa proporción-. Tiene propiedades geométricas singulares, por lo que no es de extrañar que los griegos, tan racionales, le atribuyesen cualidades inasibles como la belleza y utilizaran la relación áurea al erigir los espléndidos edificios de la Acrópolis ateniense -con lo cual vino a resultar cierto que tal proporción es sinónimo de belleza-. Volviendo al método, la ubicación relativa de los puntos de una etapa de análisis hace posible que en la siguiente solo sea necesario el cálculo de un único punto nuevo, manteniendo siempre constante el factor de reducción de la zona de búsqueda (61,8 % del intervalo existente)
Al cabo de n etapas se habrán realizado n+1 cálculos de la función objetivo (en la primera deben realizarse, necesariamente, dos) y el factor de reducción global alcanzado (relación entre intervalo final e inicial) será de (0,618..) n. De esto surge que el número de cálculos que se requieren para lograr un determinado factor de reducción δ es
δ≥(0. 618 . . .)N - 1 ⇒ log δlog(0 . 618 . .)
+ 1 ≤ N
Fig. 4
x2
1=
x1
x2
=1−x2
x2
⇒ x22+x2−1=0 ⇒ x2=
√5−12
=0 , 6180339. . .

Como queda dicho, el proceso de eliminación de regiones va dejando puntos de análisis sobre las fronteras de las zonas que se van aislando. Este hecho permite instrumentar, en forma paralela, un esquema de control de unimodalidad para la función analizada.
En la figura 5 se muestran algunas posibles alternativas en la aplicación del método. Se ha supuesto allí que se conocen los valores de la función objetivo en los bordes de la zona (se trataría de anteriores puntos de análisis). La aplicación del criterio de eliminación de regiones a la situación expuesta hace que deba descartarse la zona comprendida entre x2 y b, con lo cual x2 pasa a ser el nuevo b (b'), x1 será x´2 y se requiere calcular el nuevo x1.
Al hacerlo, el valor de la función objetivo en ese punto puede ser más alto o no que el del extremo a (recuérdese que se está buscando un mínimo), siendo en la figura el valor de la función objetivo en a mayor que en x´2 .
Si la situación es la indicada como b se estaría en la condición normal y el proceso puede seguir su curso.; si, en cambio, el resultado fuese el indicado como a se puede afirmar que la función no presenta un
comportamiento unimodal y no se podría aplicar el método, al menos en la forma que se ha expuesto hasta aquí.
Con todo lo anterior es posible formular un algoritmo para el método que, en términos de un pseudocódigo, sería como el que se muestra en el Cuadro 4.1.
El siguiente algoritmo presupone el conocimiento exacto de los límites entre los que debe buscarse el óptimo. En la realidad puede suceder que a) estos límites sean tan amplios que es equivalente a no conocerlos o b) aunque conocidos, hay restricciones sobre las variables de estado que resultan más limitativas que las cotas explícitas de la variable de decisión; esto es
min FO ( x, y ) x∈ E1 ; y ∈En
con f ( x, y ) = 0 (1 ) f: En+1⇒ En
h( x, y )≤ 0 (2) h: En+1 ⇒Em
a ≤ x ≤ b
y puede ser que x esté dentro del entorno {a,b} y, sin embargo, no cumplirse totalmente las condiciones (2). En ambos casos el hecho coincidente es que no se conocen los valores de los verdaderos extremos entre los que debe efectuarse la búsqueda del óptimo, por lo cual el
Fig. 5

algoritmo anterior a) carecería de los datos iníciales o b) estos no serían los que corresponden.
Para el primero de los casos la cuestión es encontrar los valores de a y b que corresponden al problema. Sería deseable, claro está, que el esfuerzo realizado en tal búsqueda fuese aprovechado, luego, durante la optimización, al aplicar el método del número de oro.
Método de Interpolación Cuadrática


Métodos Multidimensionales
El principio del método aplicado fue el de favorecer la aparición de datos concretos: las realidades humanas en distintas dimensiones y revelar las características del terreno. La indagación está ligada al desarrollo y las ramificaciones del cuerpo de la hipótesis y de los instrumentos de investigación. La prospección y la reflexión no pueden estar separadas. Se trata entonces de encontrar el rigor, no la rigidez dentro de una estrategia de permanente adaptación. La investigación debe favorecer la aparición de datos concretos, debe ser flexible como para recoger los documentos en bruto (anotaciones de sucesos, registro de discusiones, entrevistas sobre los detalles). La investigación debe captar las diversas dimensiones del fenómeno estudiado y utilizar diversas vías de aproximación y debe permitir la corrección y la verificación durante el desarrollo de un pensamiento interpretativo
Algunos modelos son:
Eliminación multivariable
a) Downhill simplex
En el método downhill simplex, cada punto de un simplex representa una posible solución del problema. El simplex correspondiente a una función de N variables se representa por una matriz de (N+1)xN. Cada columna de la matriz contiene las N coordenadas de un vértice
El algoritmo consiste en la búsqueda de un mínimo siguiendo una sucesión de operaciones sobre el simplex: expansión, contracción, y reflexión. Primero se localiza el vértice nmax donde la función objetivo f toma el valor máximo, y se lo refleja respecto de la cara opuesta del simplex determinando un nuevo punto n prueba. Se evalúa la función en una serie de puntos que pertenezcan a la recta perpendicular a dicha cara y que contiene a n prueba.
Si en alguno de esos puntos, la función toma un valor menor que f(nmax), entonces ese punto reemplaza a nmax en el simplex. En caso contrario, se conserva el simplex original y se lo contrae en todas las direcciones alrededor del mínimo y se vuelve a ejecutar el algoritmo. El método invariablemente converge a un mínimo luego de una serie de contracciones.
b) Algoritmos genéticos
El método de optimización por algoritmos genéticos simula un proceso de evolución y selección natural en una población de individuos. Cada individuo de la población

representa una posible solución. Por otra parte, un cromosoma caracteriza a un individuo y está formado por un conjunto de genes, cada uno de los cuales es un parámetro de optimización. Métodos geométricos
El método geométrico consiste en suponer que el crecimiento de una comunidad es en todo instante proporcional a su población, es decir que responde a la ecuación:
Este método da resultados superiores, por lo que se califica de “optimista” y debe emplearse con mucha precaución. Tan sólo debe aplicarse a comunidades en plena dinámica de crecimiento, con grandes posibilidades de desarrollo y horizontes líbres.
Método de variable cíclica
Variaciones Cíclicas: (Serie temporales) se refiere a las oscilaciones de larga duración alrededor de la recta o curva de tendencia; estos ciclos, como se llaman a veces, pueden ser o no periódicos, es decir, puede seguir o no exactamente caminos analógicos después de intervalos de tiempo iguales.
Se caracterizan por tener lapsos de expansión y contracción. En general, los movimientos se consideran cíclicos solo si se produce en un intervalo de tiempo superior al año (3). En el Gráfico los movimientos cíclicos alrededor de la curva de tendencia están trazados en negrita.

Tratamos de hacer predicciones sobre esa magnitud, teniendo en cuenta sus características históricas o del pasado
Ejemplo para las variaciones cíclicas.
Supongamos que tenemos las ventas trimestrales de un supermercado en el período 1990-1994, expresadas en millones de pesetas constantes del año 1990.
Métodos para determinar la tendencia de las variaciones cíclicas
1º) METODO GRAFICO
a) Se efectúa la representación gráfica de la serie ordenada Ytb) Se unen mediante segmentos rectilíneos todos los puntos altos de la serie, obteniéndose una poligonal de cimasc) Se realiza lo mismo con los puntos bajos, obteniéndose la línea poligonal de fondosd) Se trazan perpendiculares al eje de abscisas por los puntos cimas y fondos.e) La tendencia viene dada por la línea amortiguada que une los puntos medios de los segmentos
2º) METODO DE LAS MEDIAS MOVILES
*** Empleando 3 observacionesa) Partimos de la serie temporal observada Yt.b) Se obtienen sucesivas medias aritméticas para cada Yt, con un número de observaciones anteriores y posteriores fijado de antemano- Si el número de observaciones es impar la media Yt, está centrada y coincide con el período tc) La serie formada por las medias de Yt, nos indica la línea amortiguada de la tendencia 6 .
Método de Newton
El encontrar la solución a un sistema de ecuaciones no lineal es mucho más difícil que el de un sistema lineal. El método de Newton es un procedimiento iterativo y permite la linealización de un sistema de ecuaciones no lineal, para posteriormente darle solución por cualquier método numérico de ecuaciones lineales simultáneas, este forma parte de los métodos conocidos como métodos de gradiente. Un sistema de n ecuaciones con n incógnitas (x1, x2, ... xn), se conoce como no lineal, si una o más de estas no es lineal.

De manera general, la solución de un sistema de n ecuaciones no lineal aplicando el método de Newton [Conte y Boor, 1987] se plantea como sigue:
El método de Newton es un eficiente algoritmo para encontrar aproximaciones de los ceros o raíces de una función real. También puede ser usado para encontrar el máximo o mínimo de una función, encontrando los ceros de su primera derivada. La idea de este método es la siguiente: se comienza con un valor razonablemente cercano al cero (denominado punto de arranque), entonces se reemplaza la función por la recta tangente en ese valor, se iguala a cero y se despeja (fácilmente, por ser una ecuación lineal). Este cero será, generalmente, una aproximación mejor a la raíz de la función. Luego, se aplican tantas iteraciones como se deseen.
Aplicación y DescripciónSupongamos una función f de una variable a ser minimizada y supongamos
que en x
k es posible evaluar
f(x
k ), f ’(x
k ) y f ”( x
k ). Entonces es posible construir una función cuadrática a partir del desarrollo de
Taylor:
Se puede estimar xk+1determinando el punto donde la derivada de q se hace cero.

Nótese que no depende de
El método puede ser visto como la resolución iterativa de ecuaciones de la forma g(x)=0, donde, cuando es aplicada a minimización, hacemos g(x) f ’(xk)
Implementación
Para la implementación de este método es necesario calcular la primera y segunda derivada de la función como derivadas direccionales, obteniendo un valor escalar, de la siguiente manera,
Donde d es el vector unitario de la dirección de descenso
Observaciones:1) La dirección del Método de Newton:
Es una dirección de descenso si y sólo si: ∇2 f ( xk )es definida positiva, es decir:
(−∇ f ( xk ))dk >0⇔∇2 f ( xk )Es definida positiva
2) El método de Newton en cada iteración, considera una aproximación cuadrática de la función objetivo, y define el nuevo punto de la sucesión minimizante como el óptimo de la aproximación cuadrática de la función objetivo. Cerca de un óptimo local de f, la aproximación exacta.

3) El punto inicial x0
no puede ser arbitrario, ya que para que el método converja, la
dirección dk
debe ser de descenso. Esta corresponde a la principal desventaja del método: su convergencia local. Sin embargo, su rapidez de convergencia es su mayor ventaja, posee convergencia de velocidad cuadrática, es decir:
||xk+1−x||≤ λ||xk−x||2 para λ<1
4) El principal problema del Método de Newton es que la matriz ∇2 f ( xk )debe ser
definida positiva. Si se parte de un punto x0
suficientemente cercano a un mínimo local, esto se verifica. En general se desconoce toda información acerca de la solución óptima del
problema, y por lo tanto no se tiene un buen criterio para escoger x0
.
5) Esto sugiere, que un buen método de minimización es una combinación delMétodo del Gradiente y del Método de Newton: Inicialmente se aplica elMétodo del Gradiente que tiene convergencia global de velocidad lineal y luego se aplica el Método del Newton que tiene convergencia local de velocidad cuadrática.
El método de Newton para Minimizar un f ( x ) tal que x∈ Rn
En el método de Newton la dirección de búsqueda se define como:
d ( x )=[∇ 2 f ( x )]−1∇ f t ( x )
La dirección de búsqueda se encuentra minimizando el problema:
Minimizar ~f ( x+d )
Donde ~f es la aproximación cuadrática de f en x .
Teorema: el método de Newton definido por la iteración xk+1=x k+d ( xk )Tiene
convergencia local con orden de convergencia p≥2 .
Minimizar f ( x )Tal que
x∈ Rn
f ( x )=x t Qx
Q=¿(1(1
(¿1
)10¿
)¿

x0=(10 , 1)t
Correcciones:1) Introducir búsqueda lineala) La dirección puede no ser de descenso.b) El orden de convergencia puede ser menor de 2.2) Modificar la matriz del sistema lineal.
Método de Newton para resolución de un sistema de ecuaciones no lineales
Resuelve iterativamente un sistema de ecuaciones no lineales
Aproxima la función no lineal por una función lineal en cada punto (iteración), utilizando la expansión en serie de Taylor de primer orden.
f ( xk+ pk )≈f (xk )+∇ f ( xk )t pk
f ( x∗)≈ f ( xk )+∇ f ( xk )t pk=0
pk=−∇ f ( xk )−T f ( xk )
xk+1=x k+ pk=xk−∇ f ( xk )−T f ( xk)
Jacobiano de la función
∇ f (x )T=(∇ f 1( x ) ∇ f 2( x ) … ∇ f n ( x )T )Este método converge cuadráticamente cuando el punto esta próximo a la solución
El Jacobiano de la función en cada punto debe ser no singular Para colocar un ejemplo tomamos las siguientes funciones:
f 1( x1 , x2 )=3 x1 x2+7 x1+2 x2−3=0f 2( x1 , x2)=5 x1 x2−9 x1−4 x2+6=0
∇ f (x1 , x2 )=¿( ∂ f 1
∂ x1
∂ f 2
∂ x1
¿)¿¿
¿¿
xk+1=x k−¿ (3x2+7 5 x2−9 ¿)¿¿
¿¿
f 1( x1 ,…; xn )=0f 2( x1 ,… , xn )=0
⋮f n( x1 ,… , xn )=0

Suponemos como punto inicial x0=¿ (1¿ )¿
¿¿¿
x1=x0−¿ (3x2+7 5 x2−9 ¿)¿¿
¿¿
Después de 8 iteraciones el punto toma el valor aproximado de
x8=¿ (0 ¿ ) ¿¿
¿¿Y las funciones toman el valor (0)
Ejemplos Del Método de Newton
Resolver la siguiente función
f ( x , y )=( x−2 )2+( y−1)2
∇ f (xk , yk )=¿ (2( xk−2) ¿)¿¿
¿¿
∇2 f ( xk , yk )=¿ (2 0¿ )¿¿
¿¿
∇2 f ( xk ) pk=−∇ f ( xk )
Tomaremos co0mo punto inicial xk=(0,0 )
Dirección de movimiento pk=(2,1)
pk=−¿ (2 ⋅¿ ) ¿¿
¿¿
Calculamos α k
minα
F (α )=(2 α−2)2+(α−1 )2=5α 2−10 α+5
F´(α )=010α -10=0α =1
El Siguiente punto xk+1=x k+α k pk=(2,1)
La dirección de Movimiento pk=(0,0)
Se ha llegado al optimo ya que el gradiente es (0)
Método de Programación Cuadrática
La programación cuadrática (QP) es un tipo especial en la matemática de optimización de problemas. Es el problema de optimizar (reduciendo al mínimo o

maximizando) una función cuadrática de varias variables conforme a apremios lineales en estas variables.
El problema de la programación cuadrática se puede formular como:
Asuma x pertenece a espacio. n×n matriz Q es simétrico, y c es cualquiera n vector ×1.
Reduzca al mínimo (con respecto a x)
Conforme a unos o más apremios de la forma:
(constreñimiento de la desigualdad)Ex = d (constreñimiento de la igualdad)
Si Q es a matriz semidefinite positiva, entonces f(x) es función convexa. En este caso el programa cuadrático tiene un minimizer global si existe por lo menos un vector x de satisfacción de los apremios y f(x) se limita abajo en la región factible. Si la matriz Q es definido positivo entonces este minimizer global es único. Si Q es cero, después el problema se convierte en a programa lineal. De teoría de la optimización, una condición necesaria para un punto x ser un minimizer global está para que satisfaga Karush-Kuhn-Tucker Condiciones (KKT). Las condiciones de KKT son también suficientes cuando f(x) es convexo.
La importancia de la programación cuadrática recae en que, como es un caso especial de la programación no lineal, se utiliza como una función modelo para aproximar funciones no lineales a través de modelos locales.
La programación cuadrática trabaja con una clase especial de problemas en el que una función cuadrática de variables de decisión sujeta a restricciones lineales de desigualdad requiere ser optimizada, bien sea, ser minimizada o maximizada.
Una función cuadrática, en notación matricial, es una función de la forma
f (x)= ½ xT Qx + cT x.
Es de gran importancia identificar o poder definir la característica de la matriz Hessiana, ya que a partir de ésta podemos determinar ciertas características del problema, que nos serán útiles para encontrar su solución.
Existen diferentes tipos de problemas de programación cuadrática, los cuales se pueden clasificar en:

Problemas cuadráticos de minimización sin restricciones, requieren minimizar la función cuadrática f (x) sobre el espacio completo.
Problemas cuadráticos de minimización sujetos a restricciones de igualdad, requieren minimizar la función objetivo f (x) sujeta a restricciones lineales de igualdad Ax = b.
Problemas cuadráticos de minimización sujetos a restricciones lineales de desigualdad. Requieren minimizar la función objetivo f (x) sujeta a restricciones lineales de desigualdad Ax = b, también puede contener restricciones de igualdad.
Problemas de optimización de redes cuadráticas. Son problemas cuadráticos en los que las restricciones son restricciones de baja conservación sobre una red pura o generalizada.
Problemas cuadráticos convexos. Son cualesquiera de los mencionados arriba, en el cual la función objetivo a ser minimizada, f (x) es convexa.
Problemas cuadráticos no convexos. Son cualesquiera de los mencionados arriba, en el cual la función objetivo a ser minimizada, f (x) es no convexa.
Problemas de complementariedad lineal. Son problemas especiales con un sistema de ecuaciones en variables no negativas, en el cual las variables están formadas en varios pares llamados pares complementarios.
Historicamente, las funciones cuadráticas fueron prominentes porque proveían modelos locales simples para funciones no lineales generales. Una función cuadrática, es la función no lineal más simple, y cuando es usada como una aproximación para una función no lineal general, esta puede capturar la información importante de la curvatura, lo que una aproximación lineal no puede.
El uso de aproximaciones cuadráticas para resolver problemas con funciones no lineales generales se remonta mucho tiempo atrás. Entre los métodos más destacados, tenemos al método de Newton y el método de gradiente conjugado.
Para la programación cuadrática se pueden encontrar mínimos locales, mínimos globales, puntos estacionarios o de KKT, (son los que satisfacen las condiciones de KKT del problema).
En problemas convexos de programación cuadrática, todo punto KKT o mínimo local, es un mínimo global.
- Ejemplo de su aplicación.

Resolver el siguiente problema de programación cuadrática por el método de Wolfe :
Aplicando los multiplicadores de Lagrange tenemos:
Las primeras derivadas parciales son:
El problema de programación lineal equivalente al original de acuerdo al método Wolfe es:
Con las siguientes restricciones de holgura complementaria:
Utilizando el método Simplex se tiene que la solución básica inicial es:
En la primera iteración entra y sale X1 ( es de aclarar que aunque el Simplex escoge 1 y 2 para entrar a la base antes que lo haga X2, 1 y 2 no son aceptables, ya que Y1 y Y2 son positivos). El punto extremo luego de recalcular es:

En la tercera iteración no pueden entrar a la base 1 y 2 y Y1 y Y2 son positivas; el Simplex toma como siguiente candidato a 1 y de salida Y1 ; el punto extremo después de iterar es:
En la última iteración (V1 = 0 y V2 = 0) debe entrar X1 pero no puede porque 1 es positivo; el siguiente elemento a entrar a la base es 1 el cual reemplaza a V2 Luego De recalcular ( pivotear) el punto extremo es:
La solución anterior corresponde al óptimo: