Conicas
87
Superficies Cuádricas Alojamiento ofrecido por el Grupo HispaVista HispaVista Definición: Una cuádrica es el lugar geométrico de los puntos del espacio (x,y,z) que verifican una ecuación de segundo grado del tipo La ecuación de una cuádrica se puede escribir en forma matricial como donde Denotaremos por la matriz que define la cuádrica y por A 00 la matriz adjunta del elemento a 00 en A. Prof. Antonio Syers e-mail :[email protected] .ve Prof. Ana Olalde e-mail: [email protected] .ve 1
-
Upload
fabiana-carnicelli -
Category
Documents
-
view
610 -
download
2
Transcript of Conicas

Superficies Cuádricas
Alojamiento ofrecido por el Grupo HispaVista HispaVista
Definición:
Una cuádrica es el lugar geométrico de los puntos del espacio (x,y,z) que verifican una ecuación de segundo grado del tipo
La ecuación de una cuádrica se puede escribir en forma matricial como
donde
Denotaremos por la matriz que define la cuádrica y por A00 la matriz adjunta del elemento a00 en A.
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
1

Superficies Cuádricas
Clasificación:
Las cuádricas se clasifican de acuerdo a su signaturaσ , es decir, el módulo de la diferencia entre el número de autovalores positivos y negativos de A00 . Sin embargo, para calcular la signatura de la cuádrica no es necesario diagonalizar la matriz. Ello es debido a la existencia de unas cantidades invariantes asociadas a A00 que permiten determinar σ sin necesidad de calcular explícitamente sus autovalores. Veámoslo: los autovalores son las raíces del polinomio característico, es
decir, las soluciones de la ecuación . Ahora bien,
con
Cuando los tres autovalores de A00 son no nulos , es decir det A00 ≠ 0, si escribimos la sucesión K, J, I, 1 y denotamos P y V al número de permanencias y variaciones de signo que hay en ella, respectivamente, entonces |P-V| = σ. I, J, K se conocen como invariantes de la cuádrica. De esta forma se tiene:
1. Si σ = 3 : 1. det A > 0 ---> elipsoide real 2. det A < 0 ---> elipsoide imaginario (no existen
puntos reales que verifican la ecuación)
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
2

Superficies Cuádricas
3. det A = 0 ---> cono imaginario 2. Si σ = 1 :
1. det A > 0 ---> hiperboloide hiperbólico (de una hoja)
2. det A < 0 ---> hiperboloide elíptico (de dos hojas)
3. det A = 0 ---> cono real
Si alguno de los autovalores es nulo (det A00 = 0) pero el determinante de A es distinto de cero, entonces;
1. Si J > 0 ---> paraboloide elíptico 2. Si J < 0 ---> paraboloide hiperbólico
Si det A = det A00 = 0 hay que introducir nuevos invariantes para completar la clasificación
donde Aii representa la matriz adjunta del elemento aii en A para i=1,2,3.
Con estos nuevos invariantes se tiene
1. J > 0 1. K' ≠ 0 y signo K' = signo I ---> cilindro
elíptico imaginario 2. K' ≠ 0 y signo K' ≠ signo I ---> cilindro
elíptico real 3. K' = 0 ---> par de planos imaginarios secantes
1. J < 0 1. K' ≠ 0 ----> cilindro hiperbólico 2. K' = 0 ----> par de planos reales secantes
1. J = 0 y I ≠ 0 1. K' ≠ 0 ----> cilindro parabólico
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
3
Superficies Cuádricas
2. K' = 0 y J' > 0 -- --> par de planos imaginarios paralelos distintos
3. K' = 0 y J' < 0 -----> par de planos reales paralelos distintos
4. K' = 0 y J' = 0 ----> par de planos coincidentes
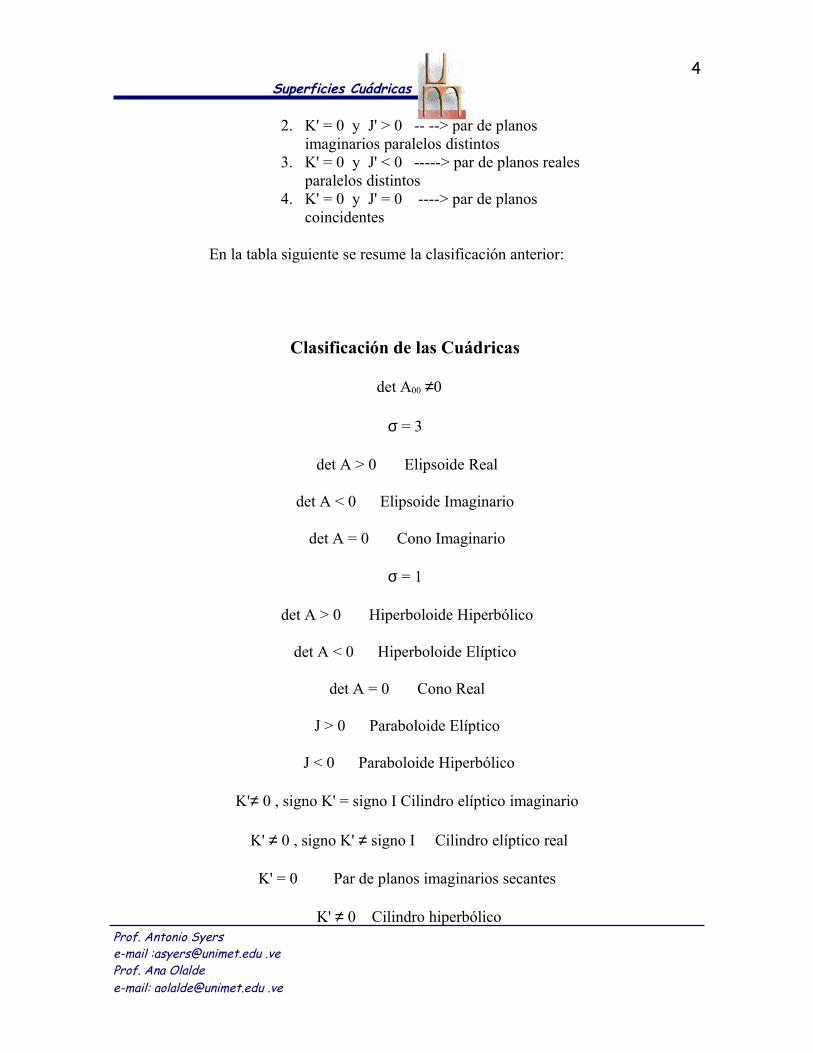
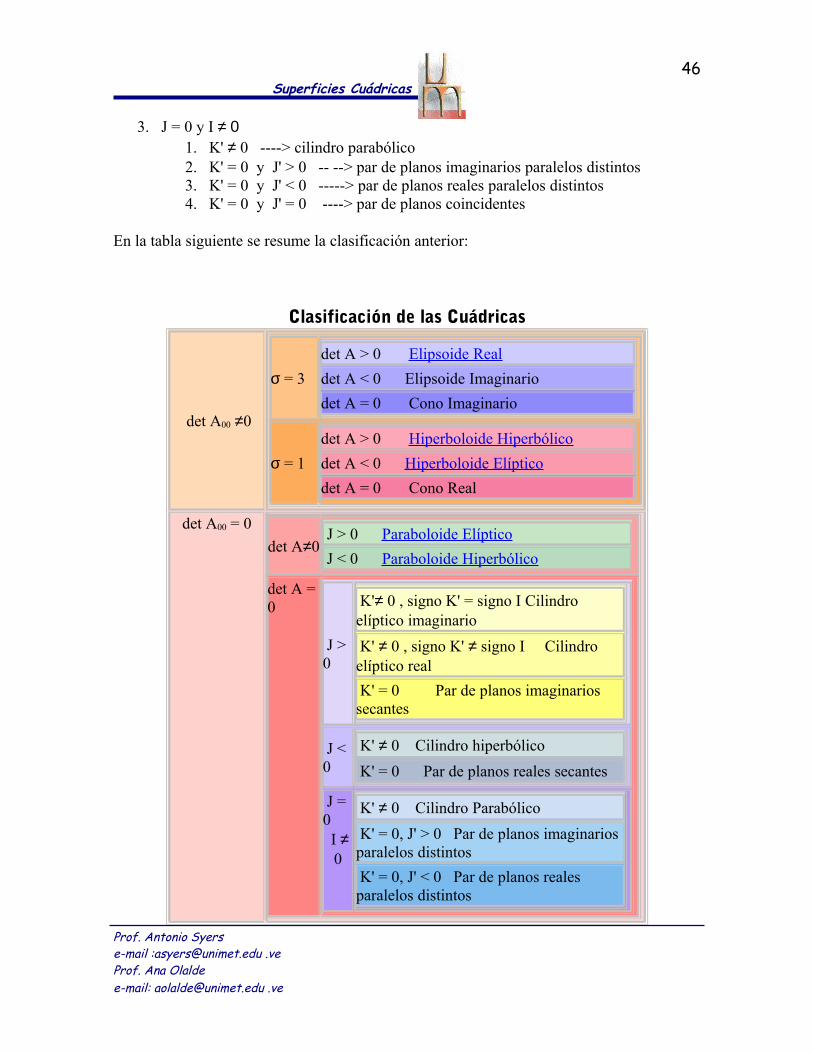
En la tabla siguiente se resume la clasificación anterior:
Clasificación de las Cuádricas
det A00 ≠0
σ = 3
det A > 0 Elipsoide Real
det A < 0 Elipsoide Imaginario
det A = 0 Cono Imaginario
σ = 1
det A > 0 Hiperboloide Hiperbólico
det A < 0 Hiperboloide Elíptico
det A = 0 Cono Real
J > 0 Paraboloide Elíptico
J < 0 Paraboloide Hiperbólico
K'≠ 0 , signo K' = signo I Cilindro elíptico imaginario
K' ≠ 0 , signo K' ≠ signo I Cilindro elíptico real
K' = 0 Par de planos imaginarios secantes
K' ≠ 0 Cilindro hiperbólicoProf. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
4

Superficies Cuádricas
K' = 0 Par de planos reales secantes
J = 0 I ≠ 0
K' ≠ 0 Cilindro Parabólico
K' = 0, J' > 0 Par de planos imaginarios paralelos distintos
K' = 0, J' < 0 Par de planos reales paralelos distintos
K' = 0, J' = 0 Par de planos coincidentes
Centro:
Plano polar: Dado un punto P = (x0,y0,z0) ∈ IR3 se define el plano polar de P respecto a cuádrica de matriz A como el plano de ecuación
Si P pertenece a la cuádrica, entonces el plano polar de P coincide con el plano tangente a dicha superficie en P.
No todos los puntos poseen plano polar. La condición para que un punto (x,y,z) no lo tenga es que verifique el sistema de ecuaciones
que geométricamente se interpreta como la intersección de tres planos.
Si det A00 ≠ 0€ entonces el sistema es compatible y tiene solución única. El punto solución se conoce como
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
5

Superficies Cuádricas
CENTROde la cuádrica. Si det A00 = 0, el sistema posee una recta de soluciones cuando det A=0 y los rangos de ambas matrices son iguales a 2, entonces se dice que la cuádrica tiene una recta de centros. Cuando el rango de ambas matrices es igual a 1 hay un plano de soluciones: la cuádrica tiene un plano de centros. Finalmente el sistema no tiene solución si los rangos difieren o det A ≠ 0; en tal caso la cuádrica carece de centro, recta o plano de centros.
Así se tiene: 1 Cuádricas con centro: elipsoides, hiperboloides y conos. 2 Cuádricas con eje de centros: cilindros elípticos e hiperbólicos y pares de planos secantes. 3 Cuádricas con plano de centros: pares de planos paralelos o coincidentes. 4 El resto de las cuádricas no posee centro (lo tiene en el infinito): paraboloides y cilindros parabólicos.
El centro es un punto de simetría de la cuádrica, el eje y el plano de centros son a su vez eje y plano de simetría.
Ejemplo:
Consideremos la cuádrica de ecuación
Esta cuádrica es un elipsoide (véase la tabla de clasificación). El plano polar por el punto (2,1,3) es el plano de ecuación
que corta a la superficie (nótese que (2,1,3) es exterior a la superficie (véase la figura).
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
6

Superficies Cuádricas
El centro de la cuádrica es la solución del sistema
que en este caso resulta ser el origen de coordenadas.
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
7
Superficies Cuádricas
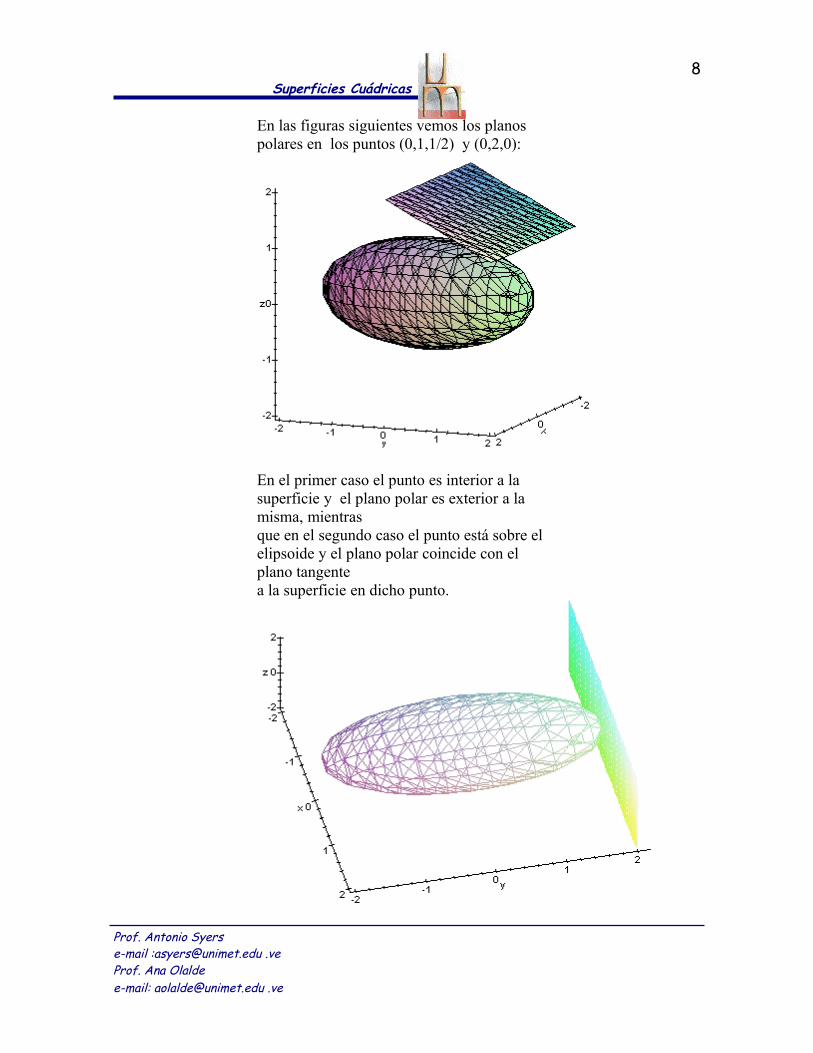
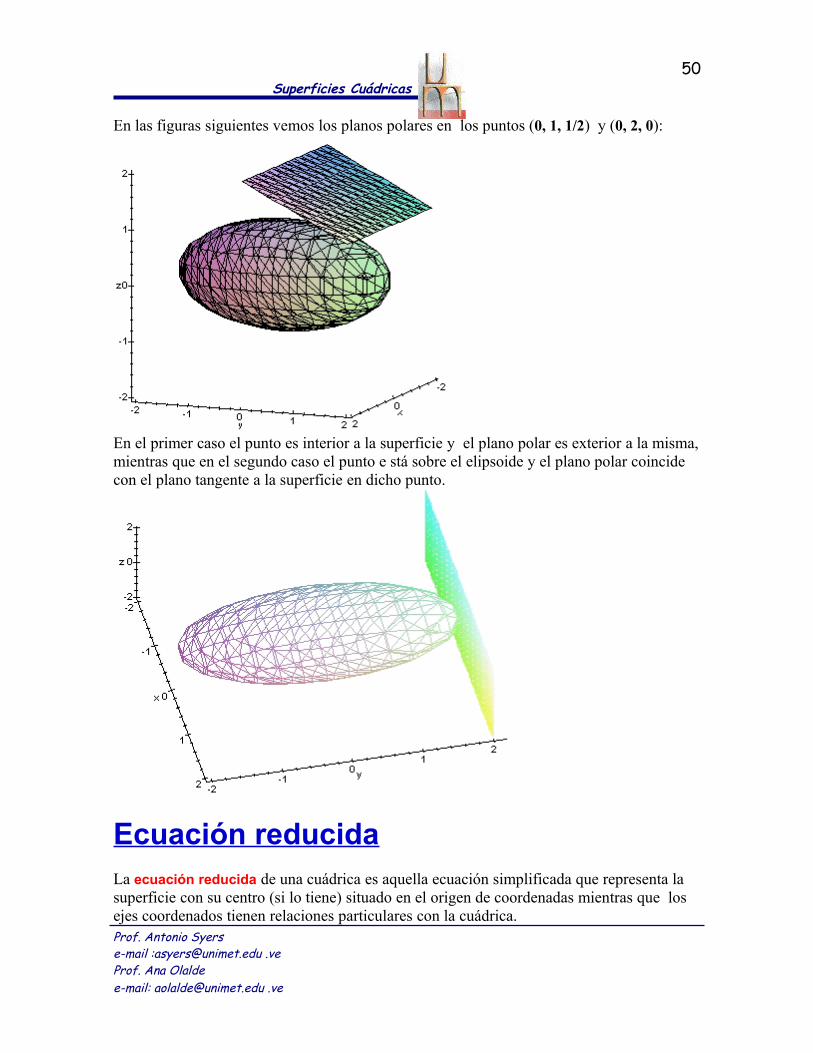
En las figuras siguientes vemos los planos polares en los puntos (0,1,1/2) y (0,2,0):
En el primer caso el punto es interior a la superficie y el plano polar es exterior a la misma, mientras que en el segundo caso el punto está sobre el elipsoide y el plano polar coincide con el plano tangente a la superficie en dicho punto.
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
8

Superficies Cuádricas
Ecuación reducida:
La ecuación reducida de una cuádrica es aquella ecuación simplificada que representa la superficie con su centro (si lo tiene) situado en el origen de coordenadas mientras que los ejes coordenados tienen relaciones particulares con la cuádrica.
Partiendo de la ecuación general de una cuádrica se puede llegar a su ecuación reducida aplicandole consecutivamente un giro y una translación de forma adecuada aunque en algunos casos especiales es necesario aplicar después de esta última un giro plano.
A continuación recogemos los tipos de ecuaciones reducidas y que cuádricas representan así como la forma de obtenerlas a partir de los invariantes.
Denotemos por , y las raíces
de entonces:
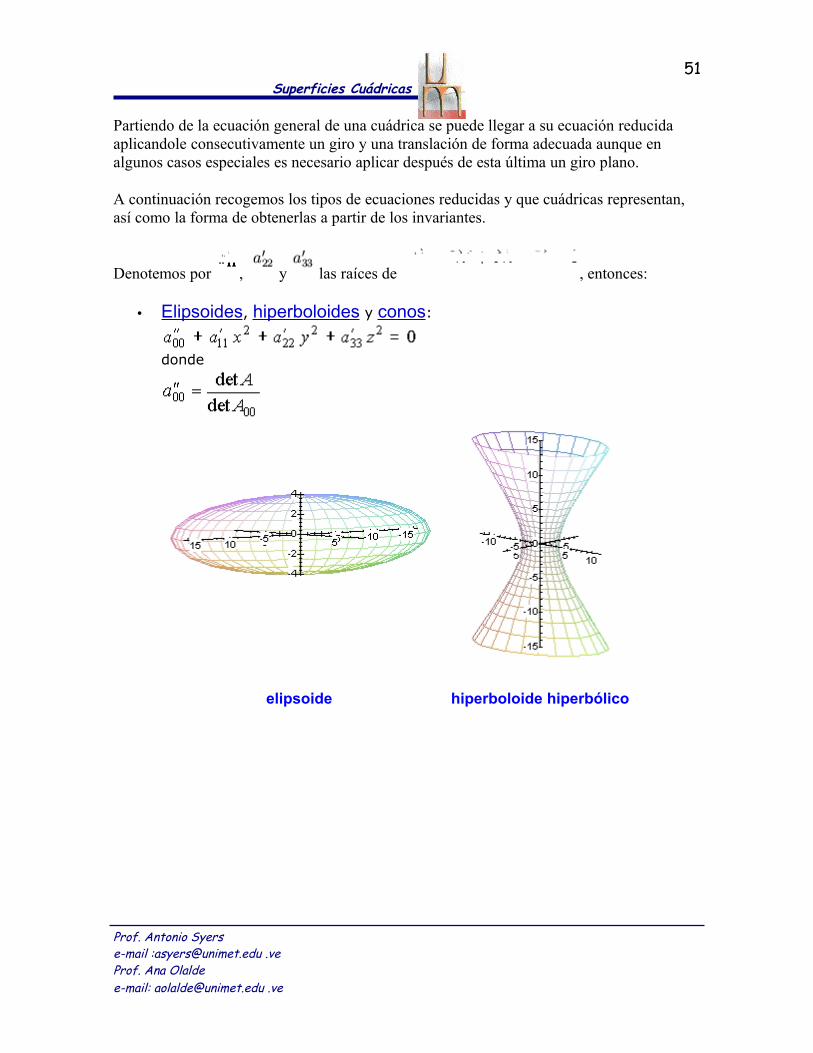
• Elipsoides, hiperboloides y conos:
donde
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
9
Superficies Cuádricas
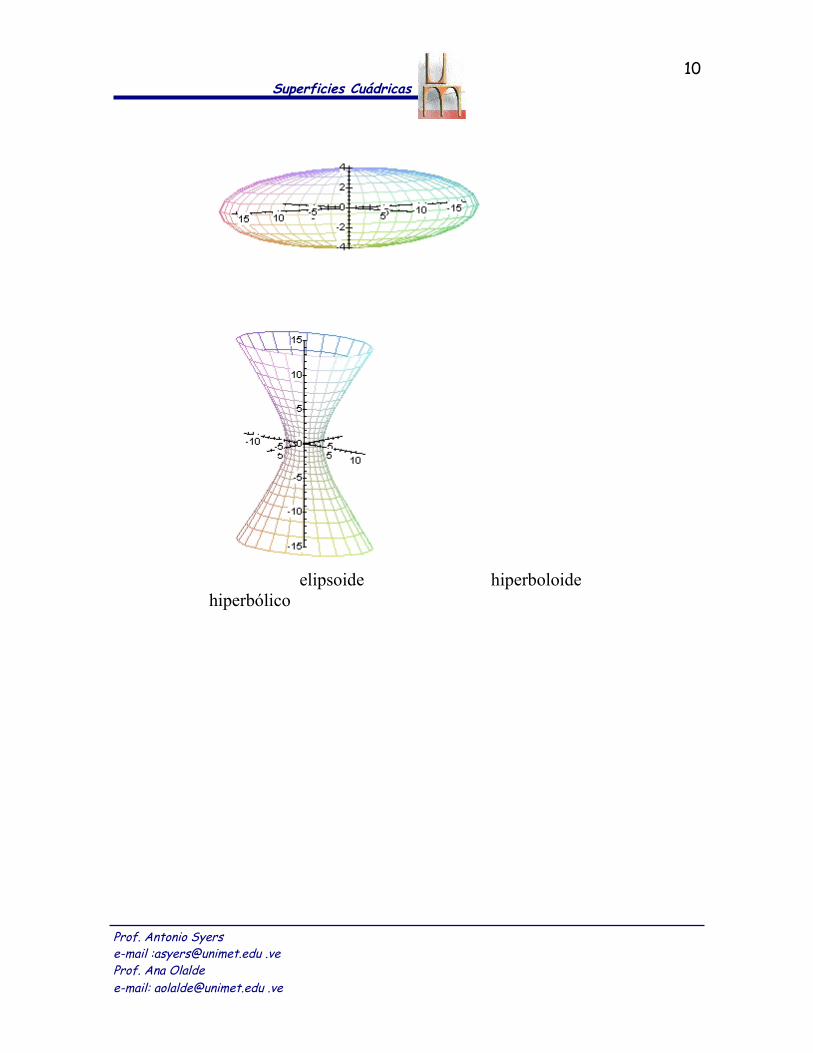
elipsoide hiperboloide hiperbólico
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
10

Superficies Cuádricas
cono hiperboloide elíptico
• Paraboloides:
donde
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
11

Superficies Cuádricas
paraboloide elíptico paraboloide hiperbólico
• Cilindro elíptico e hiperbólico y pares de planos secantes:
donde
cilindro elíptico cilindro hiperbólico
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
12

Superficies Cuádricas
par de planos secantes
• Cilindro parabólico:
donde
cilindro parabólico
• Pares de planos paralelos:
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
13
Superficies Cuádricas
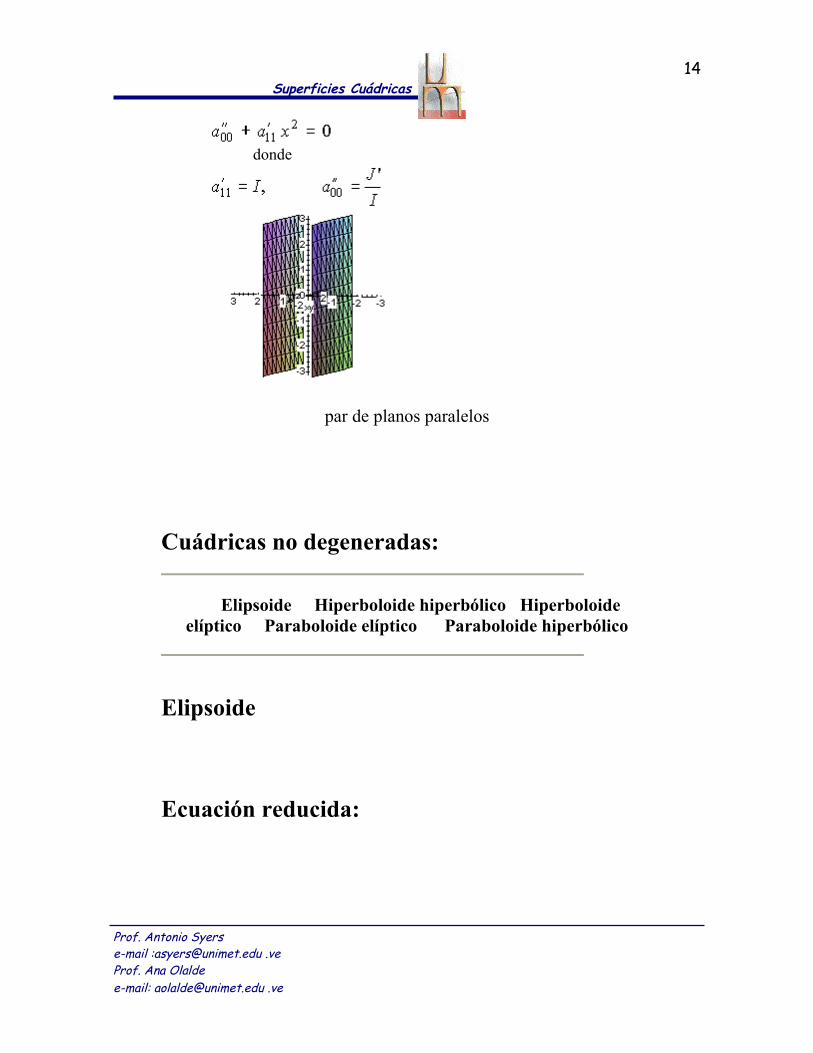
donde
par de planos paralelos
Cuádricas no degeneradas:
Elipsoide Hiperboloide hiperbólico Hiperboloide elíptico Paraboloide elíptico Paraboloide hiperbólico
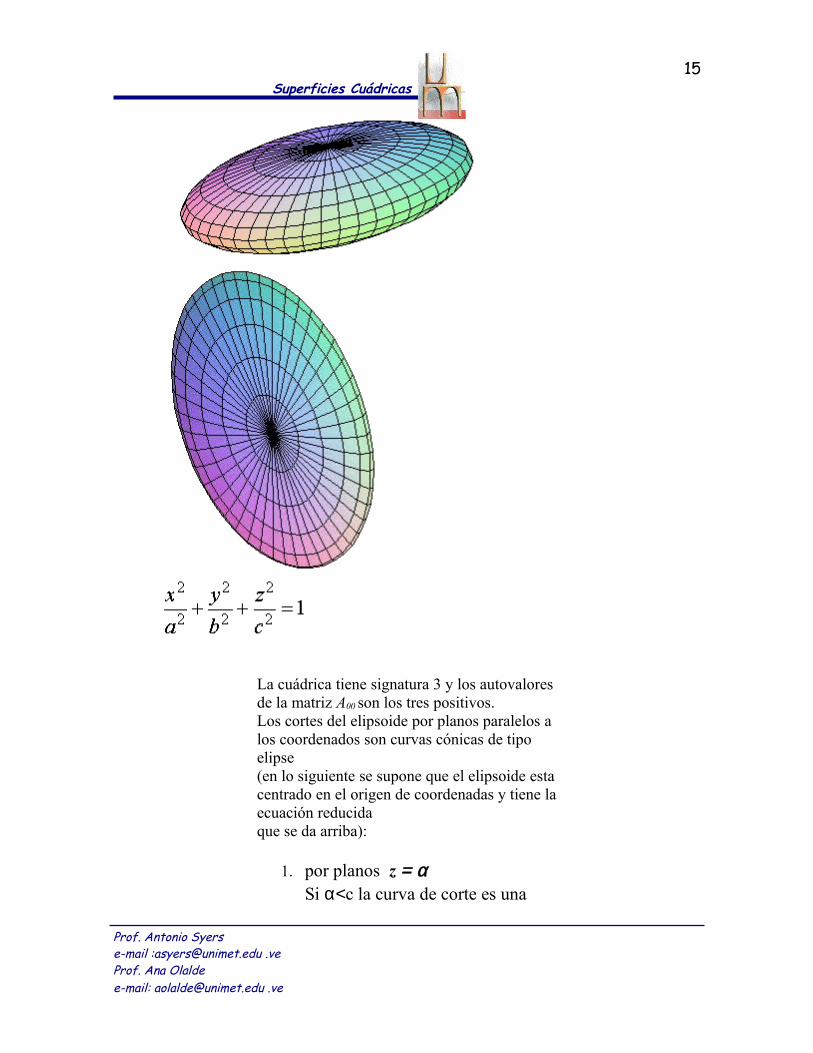
Elipsoide
Ecuación reducida:
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
14
Superficies Cuádricas
La cuádrica tiene signatura 3 y los autovalores de la matriz A00 son los tres positivos. Los cortes del elipsoide por planos paralelos a los coordenados son curvas cónicas de tipo elipse (en lo siguiente se supone que el elipsoide esta centrado en el origen de coordenadas y tiene la ecuación reducida que se da arriba):
1. por planos z = α
Si α<c la curva de corte es una
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
15

Superficies Cuádricas
elipse de ecuación
donde
Si α>c no hay intersección real, mientras que si α=c la intersección se reduce a un punto siendo el plano tangente a la superficie elíptica.
Para los planos de la forma y =α o x=α€ el resultado es análogo al anterior intercambiando el papel de las variables de forma adecuada.
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
16

Superficies Cuádricas
(corte por un plano y = α con 0<α< b)
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
17

Superficies Cuádricas
(corte por un plano x = α con 0<α< a)
Hiperboloide hiperbólico
Ecuación reducida:
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
18

Superficies Cuádricas
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
19

Superficies Cuádricas
La cuádrica tiene signatura 1 y los autovalores de la matriz A00 son dos positivos y uno negativo. Los cortes del hiperboloide por planos paralelos a los coordenados son curvas cónicas: (en lo siguiente se supone que el hiperboloide esta centrado en el origen de coordenadas y tiene la pimera de las ecuaciones reducidas dadas arriba):
• por planos z = α La curva de corte es una elipse de ecuación
donde
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
20

Superficies Cuádricas
€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€ ( α > 0 )
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
21

Superficies Cuádricas
€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€€ ( α = 0, elipse de garganta )
• por planos x=α .
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
22

Superficies Cuádricas
El corte es la hipérbola de
ecuación
donde
€€€€€€€ ( α = 0 )
( α > 0 )
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
23
Superficies Cuádricas
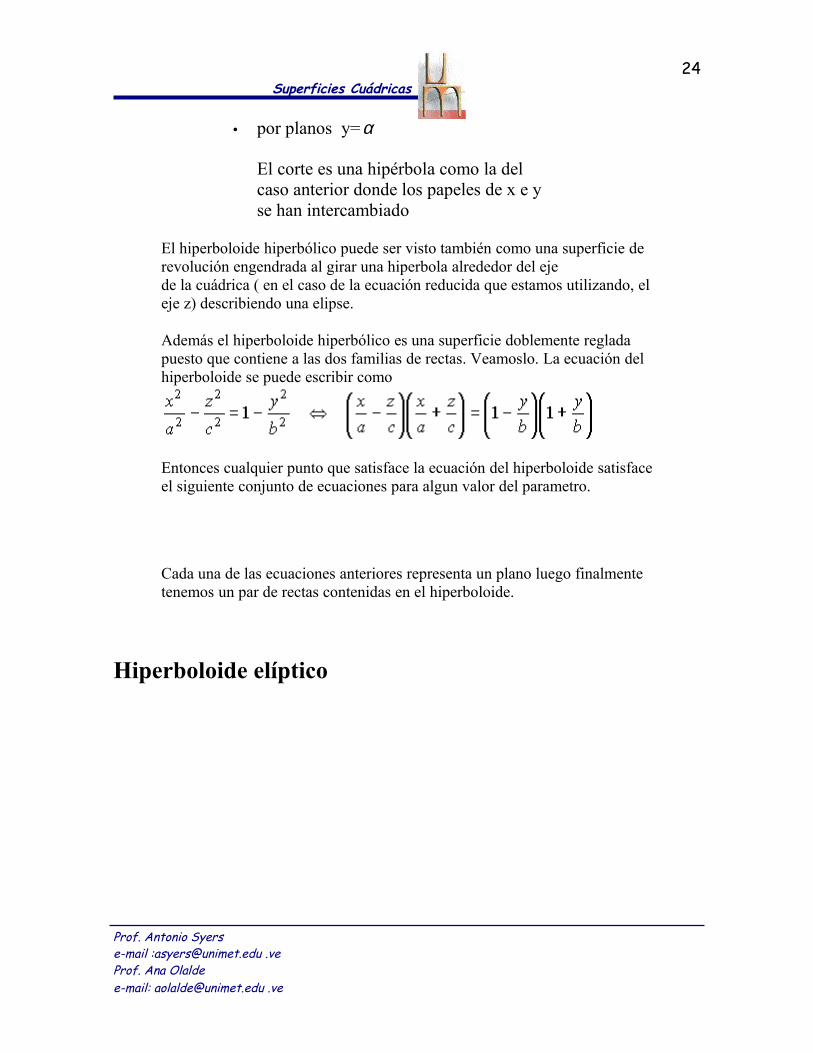
• por planos y=α
El corte es una hipérbola como la del caso anterior donde los papeles de x e y se han intercambiado
El hiperboloide hiperbólico puede ser visto también como una superficie de revolución engendrada al girar una hiperbola alrededor del eje de la cuádrica ( en el caso de la ecuación reducida que estamos utilizando, el eje z) describiendo una elipse.
Además el hiperboloide hiperbólico es una superficie doblemente reglada puesto que contiene a las dos familias de rectas. Veamoslo. La ecuación del hiperboloide se puede escribir como
Entonces cualquier punto que satisface la ecuación del hiperboloide satisface el siguiente conjunto de ecuaciones para algun valor del parametro.
Cada una de las ecuaciones anteriores representa un plano luego finalmente tenemos un par de rectas contenidas en el hiperboloide.
Hiperboloide elíptico
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
24

Superficies Cuádricas
Ecuación reducida:
En las figuras anteriores a=b=c
La cuádrica tiene signatura 1 y los autovalores de la matriz A00 son dos negativos y uno positivo. Los cortes del hiperboloide por planos paralelos a los coordenados son curvas cónicas: (El desarrollo que sigue se ha hecho utilizando la primera de las ecuaciones reducidas)
por planos z = α la intersección es una hipérbola de ecuación
donde
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
25
Superficies Cuádricas
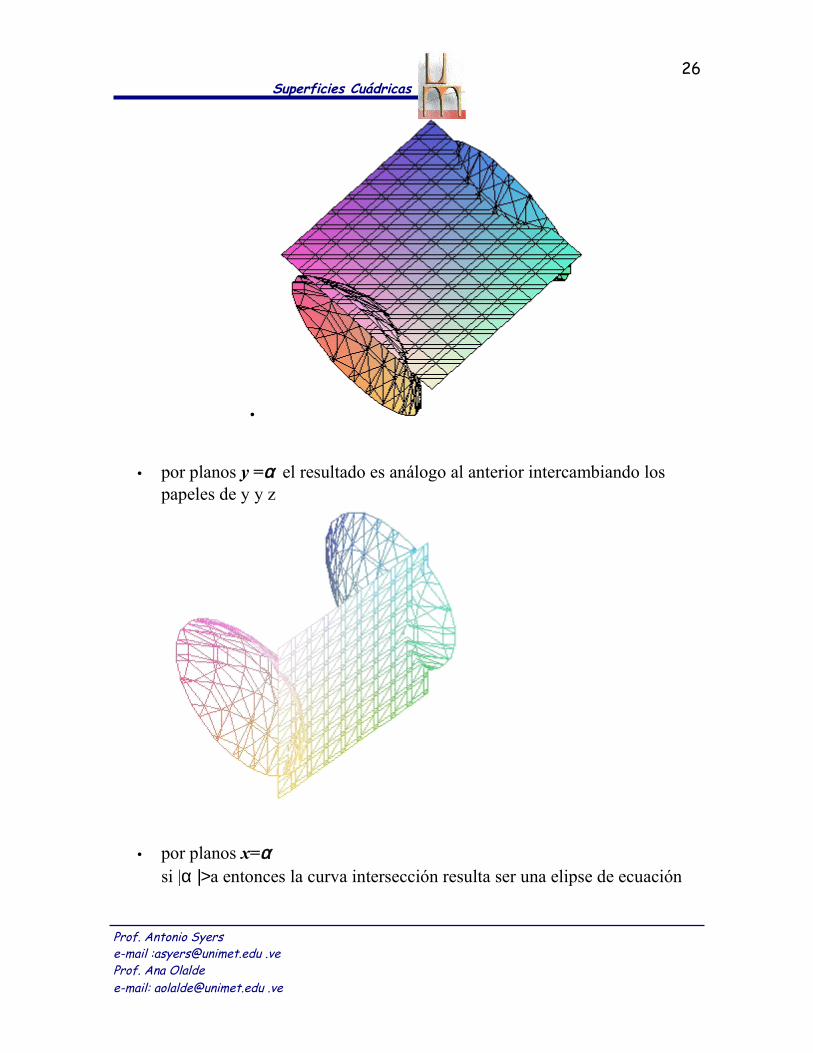
•
• por planos y =α el resultado es análogo al anterior intercambiando los papeles de y y z
• por planos x=α
si |α |>a entonces la curva intersección resulta ser una elipse de ecuación
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
26

Superficies Cuádricas
donde
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
27

Superficies Cuádricas
( los planos: x=α> a y x=-α< -a)
si |α |<a no hay intersección real mientras que si |α|=a entonces la intersección se reduce a un punto y el plano en cuestión es tangente a la superficie.
( a = 0 )
A continuación incluimos otros dibujos en los cuales el hiperboloide tiene la segunda ecuación reducida y los parámetros a,b y c son distintos
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
28

Superficies Cuádricas
( corte por plano z = a > c )
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
29

Superficies Cuádricas
( corte por plano y = α >0 )
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
30

Superficies Cuádricas
( corte por plano x = α >0 )
Paraboloide elíptico
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
31

Superficies Cuádricas
Ecuación reducida:
Los cortes del paraboloide por planos paralelos a los coordenados son curvas cónicas
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
32
Superficies Cuádricas
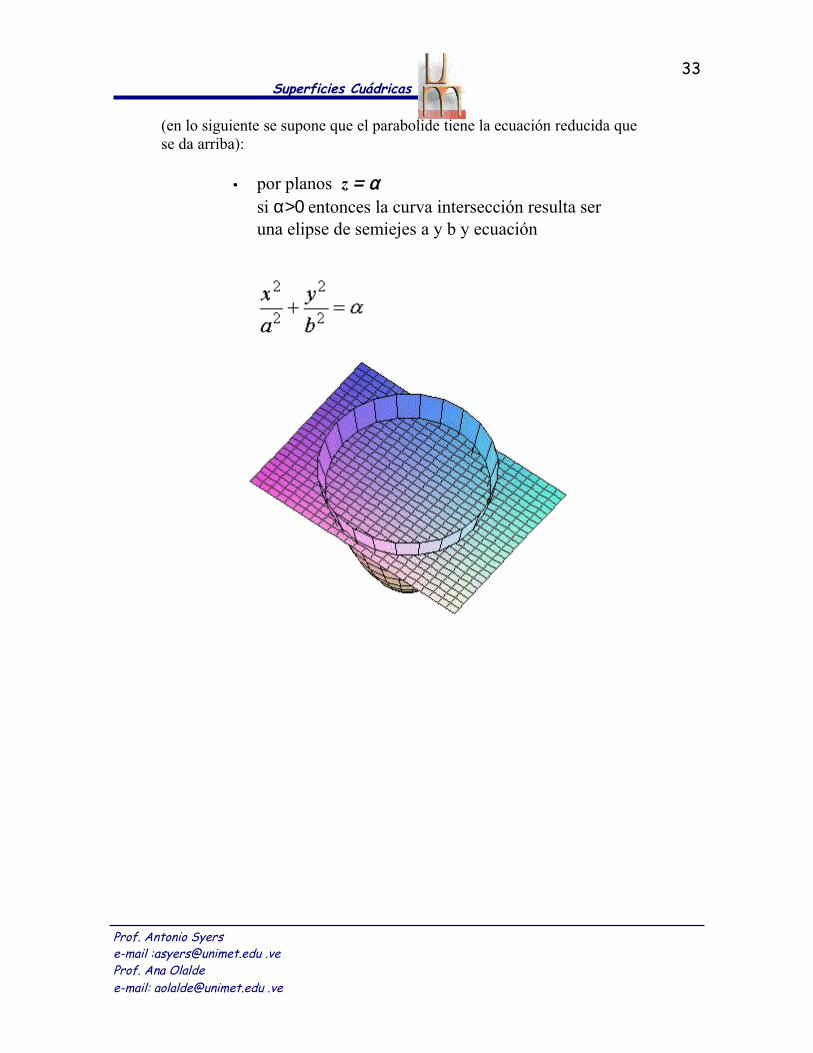
(en lo siguiente se supone que el parabolide tiene la ecuación reducida que se da arriba):
• por planos z = α
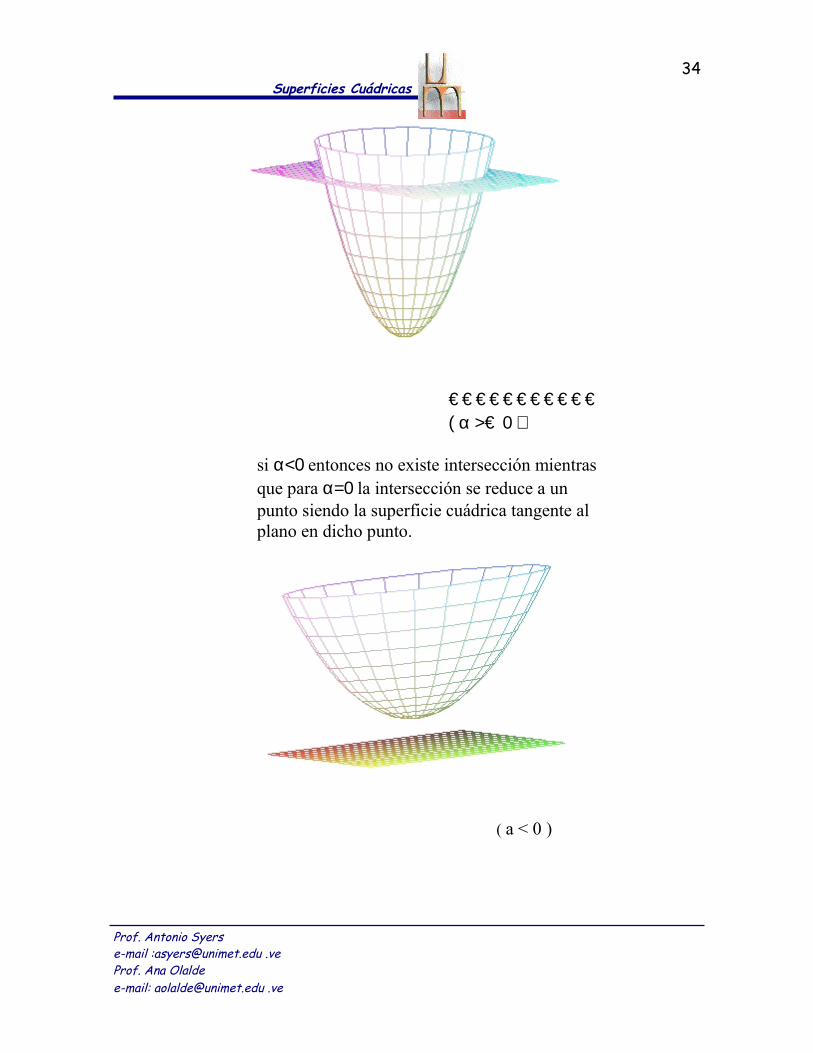
si α>0 entonces la curva intersección resulta ser una elipse de semiejes a y b y ecuación
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
33
Superficies Cuádricas
€€€€€€€€€€€ ( α >€ 0 )
si α<0 entonces no existe intersección mientras que para α=0 la intersección se reduce a un punto siendo la superficie cuádrica tangente al plano en dicho punto.
( a < 0 )
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
34
Superficies Cuádricas
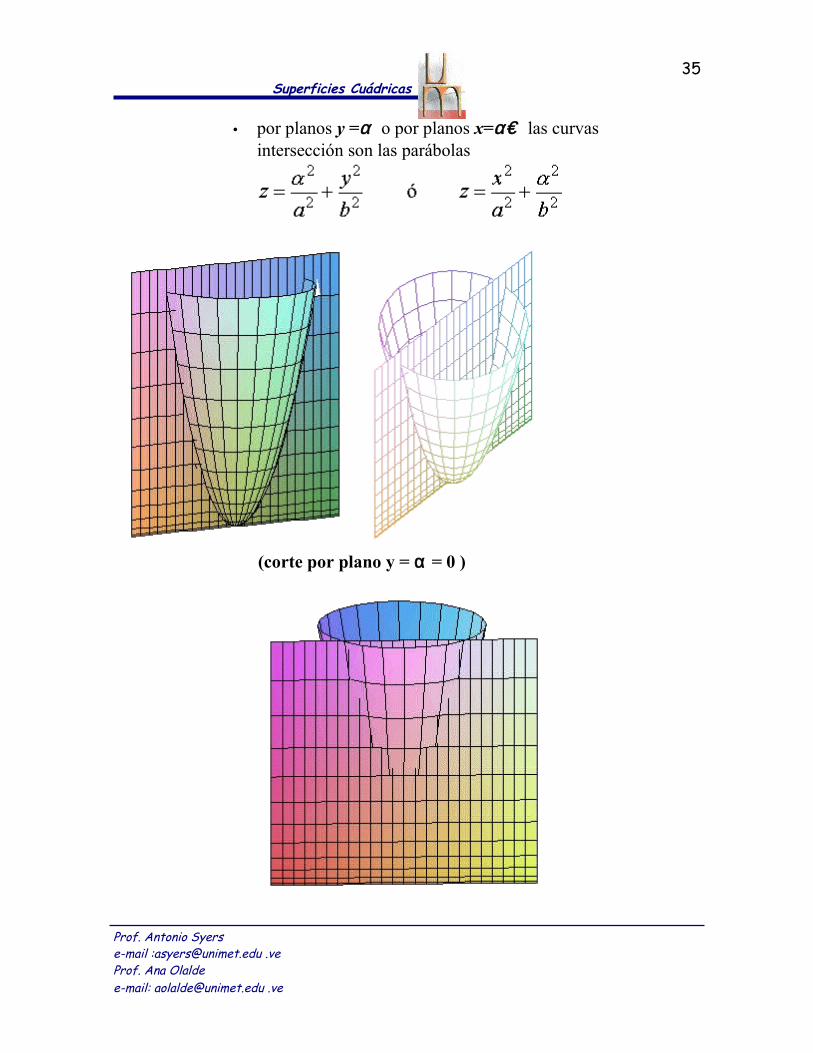
• por planos y =α o por planos x=α€ las curvas intersección son las parábolas
(corte por plano y = α = 0 )
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
35
Superficies Cuádricas
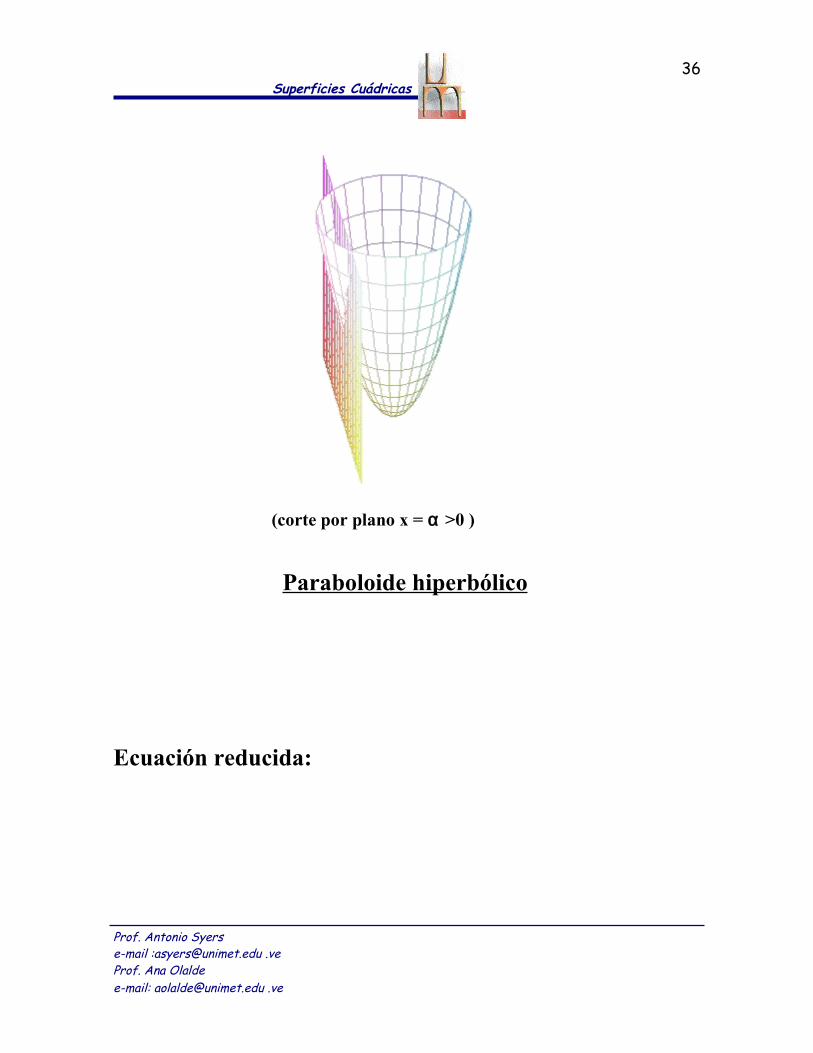
(corte por plano x = α >0 )
Paraboloide hiperbólico
Ecuación reducida:
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
36
Superficies Cuádricas
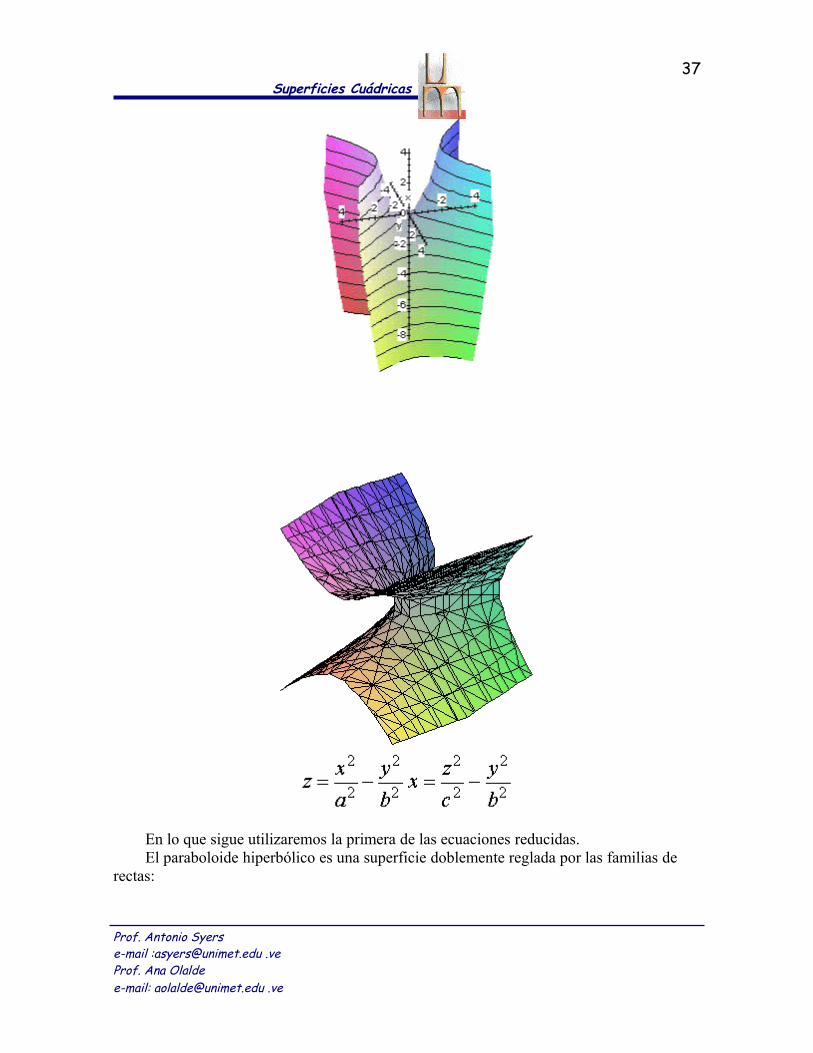
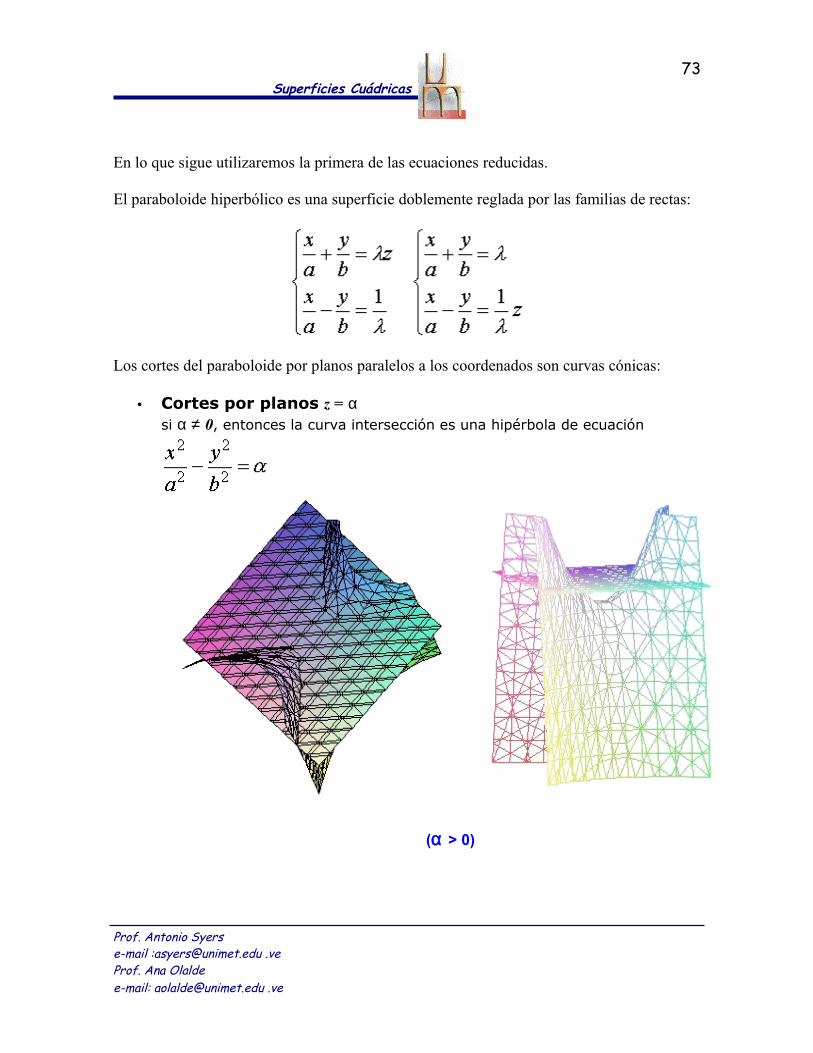
En lo que sigue utilizaremos la primera de las ecuaciones reducidas. El paraboloide hiperbólico es una superficie doblemente reglada por las familias de rectas:
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
37

Superficies Cuádricas
Los cortes del paraboloide por planos paralelos a los coordenados son curvas cónicas:
• por planos z = α
si α≠0 entonces la curva intersección es una hipérbola de ecuación
(α > 0)
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
38

Superficies Cuádricas
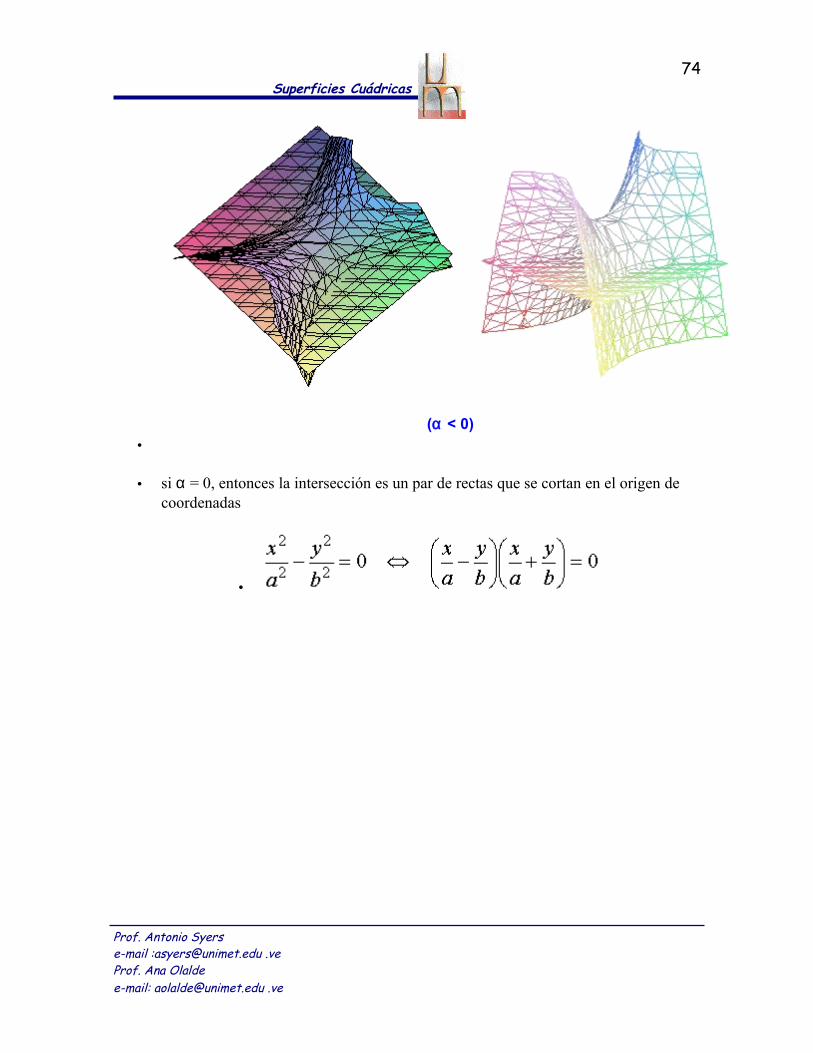
(α < 0)
si α=0 entonces la intersección es un par de rectas que se cortan en el origen de coordenadas
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
39

Superficies Cuádricas
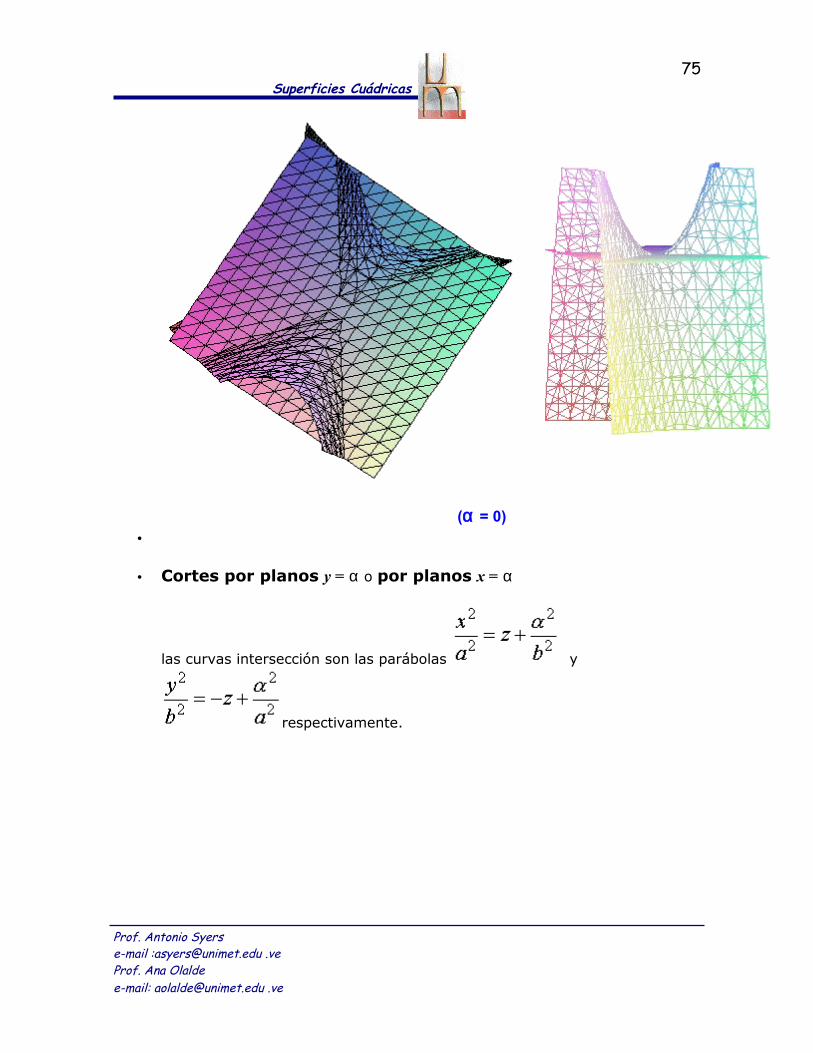
(α = 0)
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
40
Superficies Cuádricas
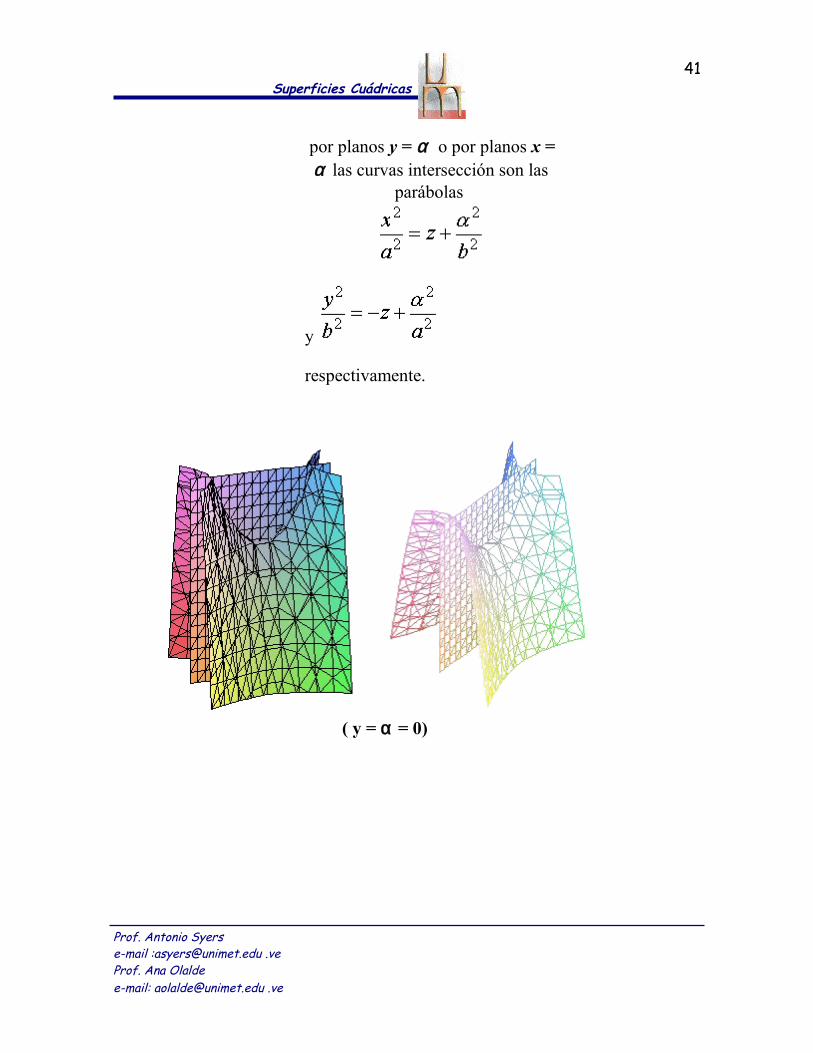
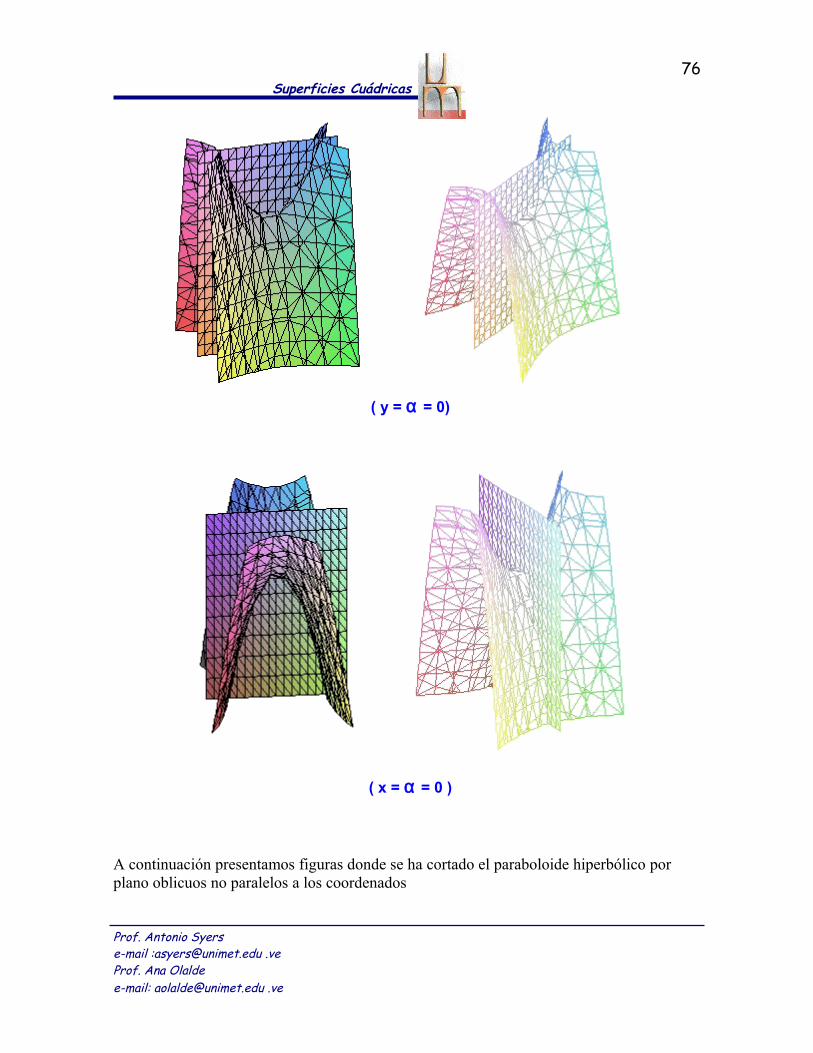
por planos y = α o por planos x = α las curvas intersección son las
parábolas
y
respectivamente.
( y = α = 0)
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
41

Superficies Cuádricas
(x = α = 0)
A continuación presentamos figuras donde se ha cortado el paraboloide hiperbólico por plano oblicuos no paralelos a los coordenados
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
42
Superficies Cuádricas
Click aqui para entrar en Todotarjetas.com
Búsqueda Google
Click aqui para entrar en Todotarjetas.com
Cuádricas
Volver a página principal
DefiniciónUna cuádrica es el lugar geométrico de los puntos del espacio (x,y,z) que verifican una ecuación de segundo grado del tipo
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
43

Superficies Cuádricas
La ecuación de una cuádrica se puede escribir en forma matricial como
donde
Denotaremos por la matriz que define la cuádrica y por A00 la matriz adjunta del elemento a00 en A.
ClasificaciónLas cuádricas se clasifican de acuerdo a su signatura σ , es decir, el módulo de la diferencia entre el número de autovalores positivos y negativos de A00. Sin embargo, para calcular la signatura de la cuádrica no es necesario diagonalizar la matriz, debido a la existencia de unas cantidades invariantes asociadas a A00 que permiten determinar σ sin necesidad de calcular explícitamente sus autovalores. Veámoslo: los autovalores son las raíces del polinomio característico, es decir, las soluciones de la
ecuación . Ahora bien,
con
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
44

Superficies Cuádricas
Cuando los tres autovalores de A00 son no nulos, es decir, det A00 ≠ 0, si escribimos la sucesión K, J, I, 1 y denotamos por P y V el número de permanencias y variaciones de signo que hay en ella, respectivamente, entonces |P-V| = σ . Los valores I, J, K se conocen como invariantes de la cuádrica. De esta forma se tiene:
1. Si σ = 3 : 1. det A > 0 ---> elipsoide real 2. det A < 0 ---> elipsoide imaginario (no existen puntos reales que verifican la
ecuación) 3. det A = 0 ---> cono imaginario
2. Si σ = 1 : 1. det A > 0 ---> hiperboloide hiperbólico (de una hoja) 2. det A < 0 ---> hiperboloide elíptico (de dos hojas) 3. det A = 0 ---> cono real
Si alguno de los autovalores es nulo (det A00 = 0) pero el determinante de A es distinto de cero, entonces;
1. Si J > 0 ---> paraboloide elíptico 2. Si J < 0 ---> paraboloide hiperbólico
Si det A = det A00 = 0, hay que introducir nuevos invariantes para completar la clasificación
donde Aii representa la matriz adjunta del elemento aii en A para i=1,2,3.
Con estos nuevos invariantes se tiene
1. J > 0 1. K' ≠ 0 y signo K' = signo I ---> cilindro elíptico imaginario 2. K' ≠ 0 y signo K' ≠ signo I ---> cilindro elíptico real 3. K' = 0 ---> par de planos imaginarios secantes
2. J < 0 1. K' ≠ 0 ----> cilindro hiperbólico 2. K' = 0 ----> par de planos reales secantes
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
45
Superficies Cuádricas
3. J = 0 y I ≠ 0 1. K' ≠ 0 ----> cilindro parabólico 2. K' = 0 y J' > 0 -- --> par de planos imaginarios paralelos distintos 3. K' = 0 y J' < 0 -----> par de planos reales paralelos distintos 4. K' = 0 y J' = 0 ----> par de planos coincidentes
En la tabla siguiente se resume la clasificación anterior:
Clasificación de las Cuádricas
det A00 ≠0
σ = 3
det A > 0 Elipsoide Real
det A < 0 Elipsoide Imaginario
det A = 0 Cono Imaginario
σ = 1
det A > 0 Hiperboloide Hiperbólico
det A < 0 Hiperboloide Elíptico
det A = 0 Cono Real
det A00 = 0
det A≠0 J > 0 Paraboloide Elíptico
J < 0 Paraboloide Hiperbólico
det A = 0
J > 0
K'≠ 0 , signo K' = signo I Cilindro elíptico imaginario
K' ≠ 0 , signo K' ≠ signo I Cilindro elíptico real
K' = 0 Par de planos imaginarios secantes
J < 0
K' ≠ 0 Cilindro hiperbólico
K' = 0 Par de planos reales secantes
J = 0 I ≠ 0
K' ≠ 0 Cilindro Parabólico
K' = 0, J' > 0 Par de planos imaginarios paralelos distintos
K' = 0, J' < 0 Par de planos reales paralelos distintos
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
46

Superficies Cuádricas
K' = 0, J' = 0 Par de planos coincidentes
CentroPlano polar: Dado un punto P = (x0,y0,z0) ∈ IR3 se define el plano polar de P respecto a la cuádrica de matriz A como el plano de ecuación
Si P pertenece a la cuádrica, entonces el plano polar de P coincide con el plano tangente a dicha superficie en P.
No todos los puntos poseen plano polar. La condición para que un punto (x, y, z) no lo tenga es que verifique el sistema de ecuaciones
que geométricamente se interpreta como la intersección de tres planos.
Si det A00≠ 0, entonces el sistema es compatible y tiene solución única. El punto solución se conoce como centro de la cuádrica. Si det A00 = 0 pueden ocurrir tres cosas, si det A=0 y los rangos de ambas matrices son iguales a 2 el sistema posee una recta de soluciones, entonces se dice que la cuádrica tiene una recta de centros. Por otro lado, si det A=0 y el rango de ambas matrices es igual a 1 existe un plano de soluciones, y se dice que la cuádrica tiene un plano de centros. Finalmente, si los rangos difieren o det A ≠ 0 el sistema no tiene solución, en tal caso la cuádrica carece de centro, recta o plano de centros.
Así, se tiene:
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
47

Superficies Cuádricas
• Cuádricas con centro: elipsoides, hiperboloides y conos. • Cuádricas con eje de centros: cilindros elípticos e hiperbólicos y
pares de planos secantes. • Cuádricas con plano de centros: pares de planos paralelos o
coincidentes. • El resto de las cuádricas no posee centro (lo tiene en el infinito):
paraboloides y cilindros parabólicos.
El centro es un punto de simetría de la cuádrica, el eje y el plano de centros son a su vez eje y plano de simetría.
Ejemplo:
Consideremos la cuádrica de ecuación
Esta cuádrica es un elipsoide (véase la tabla de clasificación). El plano polar por el punto (2, 1, 3) es el plano de ecuación
que corta a la superficie (nótese que (2, 1, 3) es exterior a la superficie como se ve en la figura siguiente).
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
48

Superficies Cuádricas
El centro de la cuádrica es la solución del sistema de ecuaciones
que en este caso resulta ser el origen de coordenadas.
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
49
Superficies Cuádricas
En las figuras siguientes vemos los planos polares en los puntos (0, 1, 1/2) y (0, 2, 0):
En el primer caso el punto es interior a la superficie y el plano polar es exterior a la misma, mientras que en el segundo caso el punto e stá sobre el elipsoide y el plano polar coincide con el plano tangente a la superficie en dicho punto.
Ecuación reducidaLa ecuación reducida de una cuádrica es aquella ecuación simplificada que representa la superficie con su centro (si lo tiene) situado en el origen de coordenadas mientras que los ejes coordenados tienen relaciones particulares con la cuádrica.Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
50
Superficies Cuádricas
Partiendo de la ecuación general de una cuádrica se puede llegar a su ecuación reducida aplicandole consecutivamente un giro y una translación de forma adecuada aunque en algunos casos especiales es necesario aplicar después de esta última un giro plano.
A continuación recogemos los tipos de ecuaciones reducidas y que cuádricas representan, así como la forma de obtenerlas a partir de los invariantes.
Denotemos por , y las raíces de , entonces:
• Elipsoides , hiperboloides y conos:
donde
elipsoide hiperboloide hiperbólico
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
51

Superficies Cuádricas
hiperboloide elíptico cono•
• Paraboloides :
donde
paraboloide elíptico paraboloide hiperbólico•
• Cilindro elíptico e hiperbólico y pares de planos secantes :
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
52

Superficies Cuádricas
donde
cilindro elíptico cilindro hiperbólico par de planos secantes•
• Cilindro parabólico :
donde
cilindro parabólico•
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
53

Superficies Cuádricas
• Pares de planos paralelos :
donde
par de planos paralelos
Cuádricas no degeneradas
ElipsoideHiperboloide hiperbólico
Hiperboloide elíptico
Paraboloide elíptico
Paraboloide hiperbólico
Elipsoide
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
54

Superficies Cuádricas
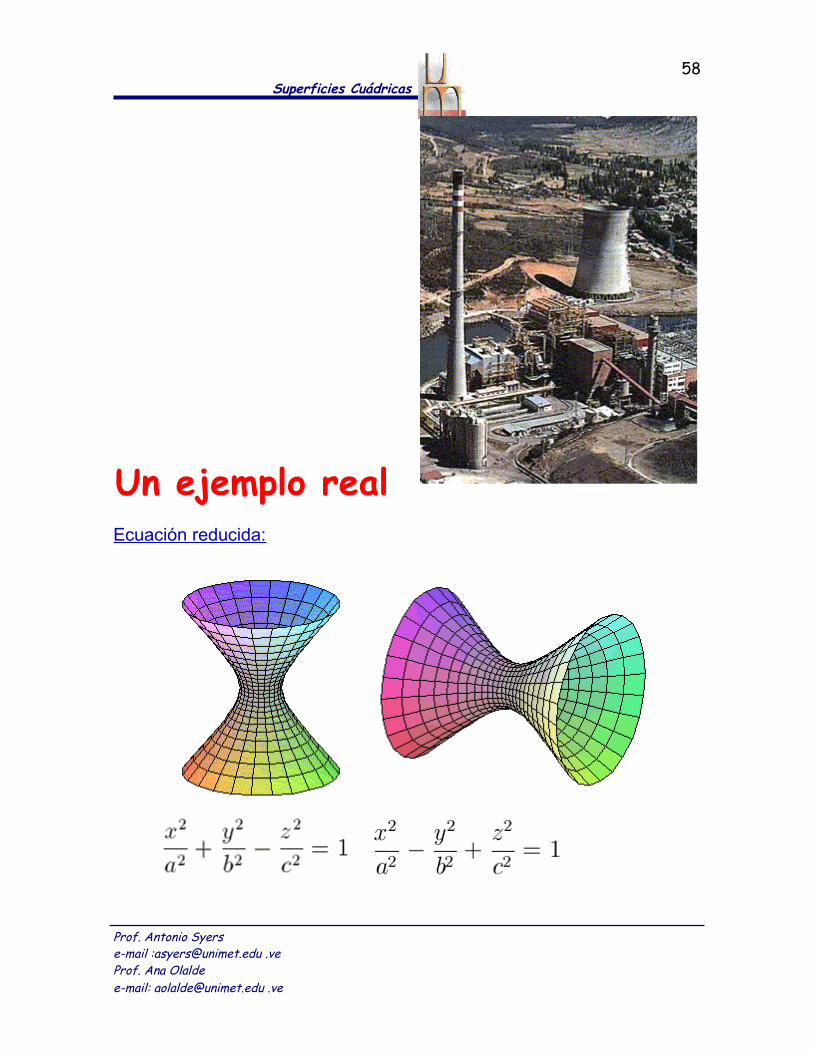
Un ejemplo real
Ecuación reducida:
La cuádrica tiene signatura 3 y los autovalores de la matriz A00 son los tres positivos. Los cortes del elipsoide por planos paralelos a los coordenados son curvas cónicas de tipo elipse (en lo siguiente se supone que el elipsoide esta centrado en el origen de coordenadas y tiene la ecuación reducida que se da arriba):
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
55

Superficies Cuádricas
• Cortes por planos z = α
Si α < c la curva de corte es una elipse de ecuación
donde
•
• Si α€> c no hay intersección real.Si α€= c la intersección se reduce a un punto, siendo el plano tangente a la superficie elíptica.
• Para cortes con planos de la forma y = α ó x = α el resultado es análogo al anterior intercambiando el papel de las variables de forma adecuada.
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
56

Superficies Cuádricas
(corte por un plano y = α con 0 < α < b)•
(corte por un plano x = α con 0 < α < a)
Hiperboloide hiperbólicoProf. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
57
Superficies Cuádricas
Un ejemplo real Ecuación reducida:
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
58

Superficies Cuádricas
La cuádrica tiene signatura 1 y los autovalores de la matriz A00 son dos positivos y uno negativo.Los cortes del hiperboloide por planos paralelos a los coordenados son curvas cónicas (en lo siguiente se supone que el hiperboloide esta centrado en el origen de coordenadas y tiene la pimera de las ecuaciones reducidas dadas arriba):
• Cortes por planos z = α
La curva de corte es una elipse de ecuación
donde
( α > 0 )
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
59
Superficies Cuádricas
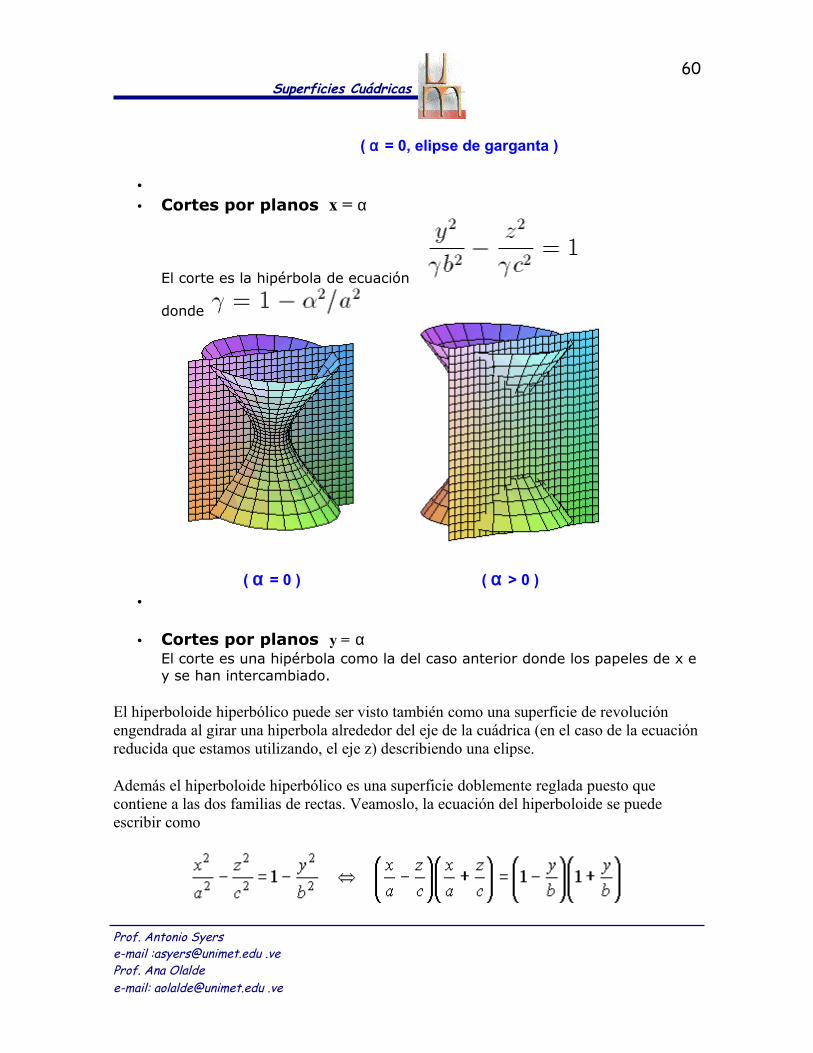
( α = 0, elipse de garganta )
• • Cortes por planos x = α
El corte es la hipérbola de ecuación
donde
( α = 0 ) ( α > 0 )•
• Cortes por planos y = αEl corte es una hipérbola como la del caso anterior donde los papeles de x e y se han intercambiado.
El hiperboloide hiperbólico puede ser visto también como una superficie de revolución engendrada al girar una hiperbola alrededor del eje de la cuádrica (en el caso de la ecuación reducida que estamos utilizando, el eje z) describiendo una elipse.
Además el hiperboloide hiperbólico es una superficie doblemente reglada puesto que contiene a las dos familias de rectas. Veamoslo, la ecuación del hiperboloide se puede escribir como
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
60

Superficies Cuádricas
Entonces cualquier punto que satisface la ecuación del hiperboloide satisface el siguiente conjunto de ecuaciones para algun valor del parametro.
Cada una de las ecuaciones anteriores representa un plano luego finalmente tenemos un par de rectas contenidas en el hiperboloide.
Hiperboloide elíptico
Un ejemplo real
Ecuación reducida:
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
61

Superficies Cuádricas
(En las figuras anteriores a = b = c)
La cuádrica tiene signatura 1 y los autovalores de la matriz A00 son dos negativos y uno positivo. Los cortes del hiperboloide por planos paralelos a los coordenados son curvas cónicas (El desarrollo que sigue se ha hecho utilizando la primera de las ecuaciones reducidas)
• Cortes por planos z = α
la intersección es una hipérbola de ecuación
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
62
Superficies Cuádricas
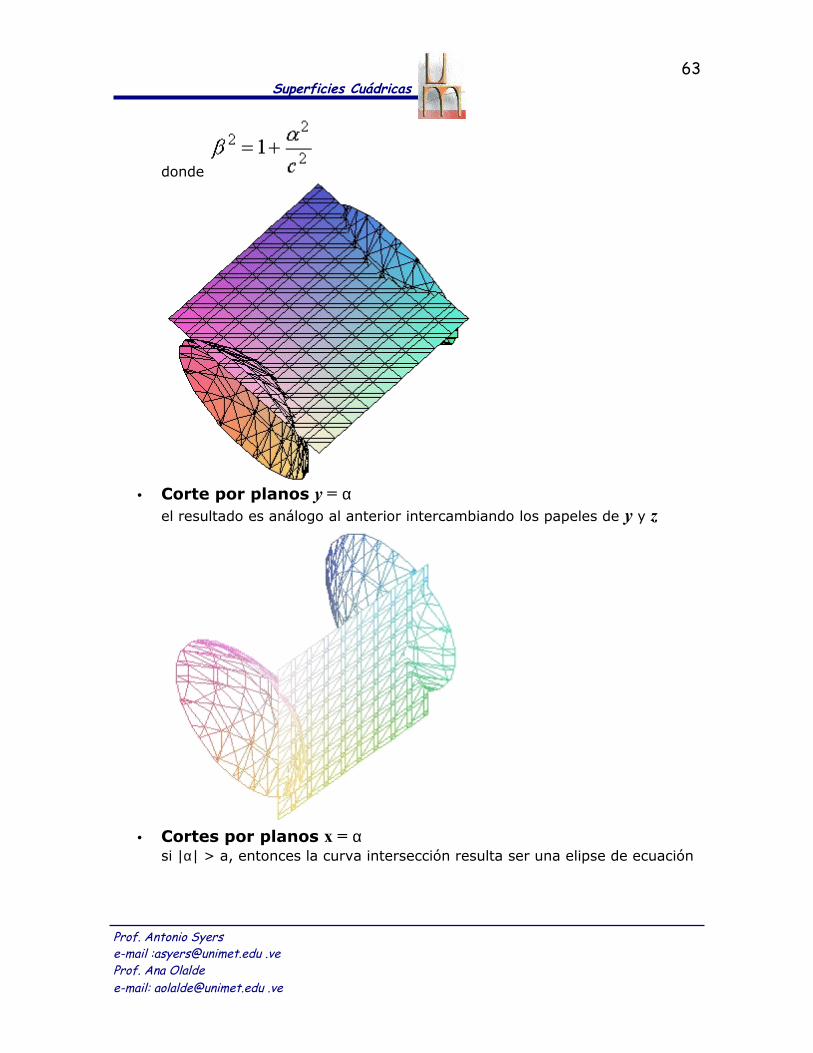
donde
• Corte por planos y = α
el resultado es análogo al anterior intercambiando los papeles de y y z
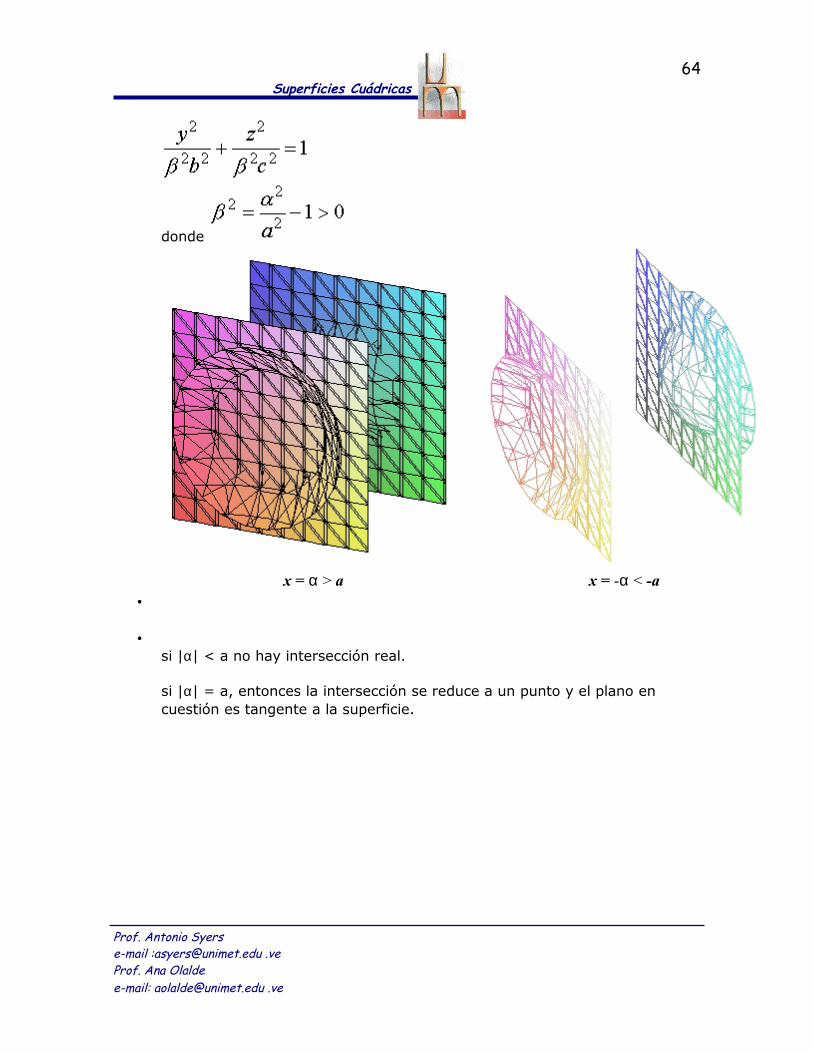
• Cortes por planos x = α si |α| > a, entonces la curva intersección resulta ser una elipse de ecuación
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
63
Superficies Cuádricas
donde
x = α > a x = -α < -a•
•si |α| < a no hay intersección real.
si |α| = a, entonces la intersección se reduce a un punto y el plano en cuestión es tangente a la superficie.
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
64

Superficies Cuádricas
( α = 0 )•
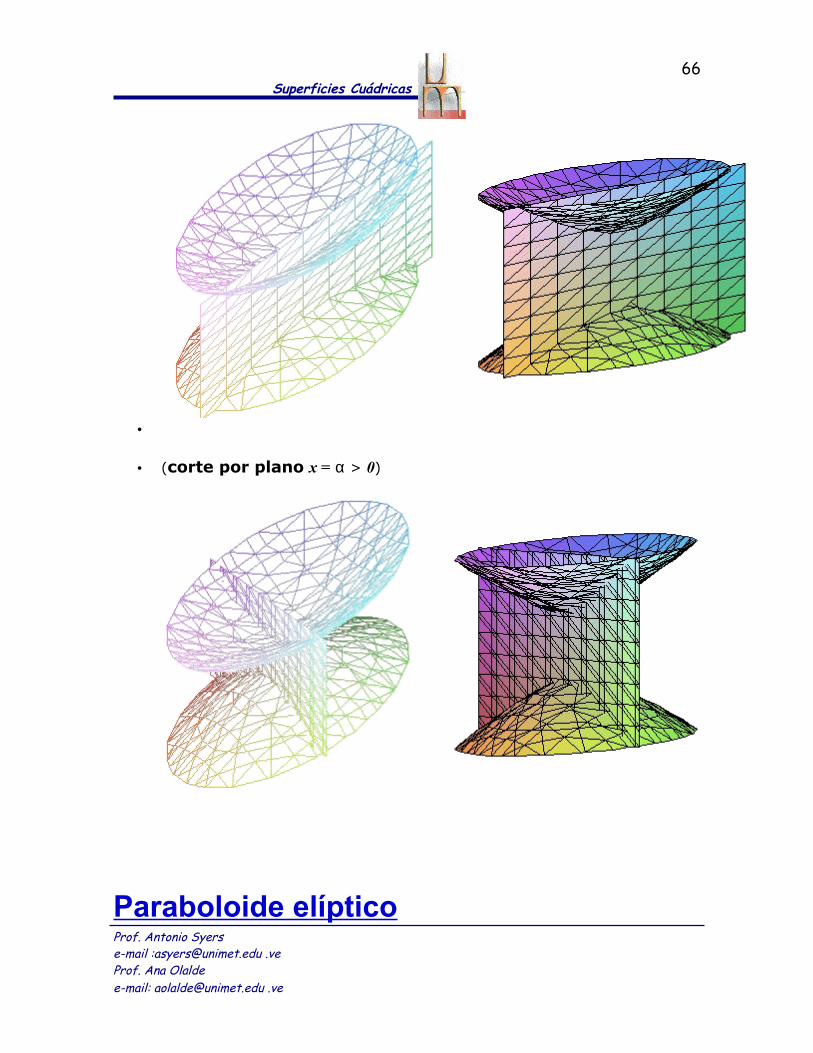
• A continuación incluimos otros dibujos en los cuales el hiperboloide tiene la segunda ecuación reducida y los parámetros a,b y c son distintos
• (corte por plano z = α > c)
•
• (corte por plano y = α > 0)
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
65
Superficies Cuádricas
•
• (corte por plano x = α > 0)
Paraboloide elípticoProf. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
66

Superficies Cuádricas
Un ejemplo real
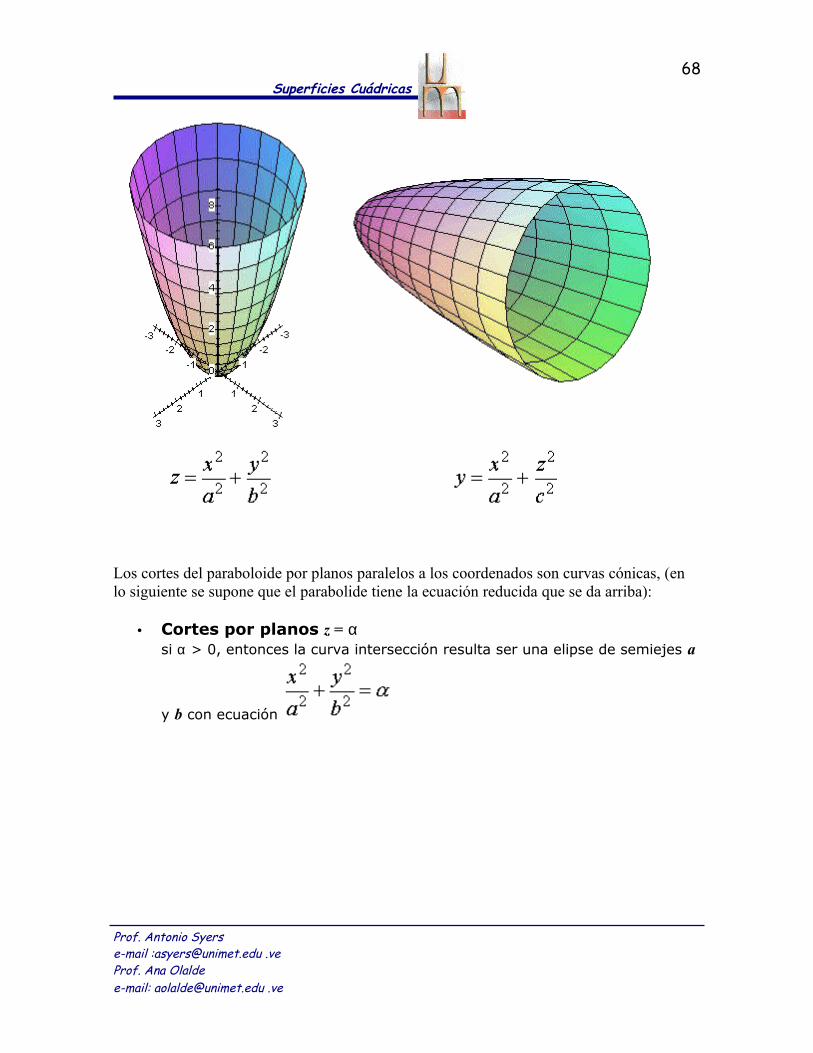
Ecuación reducida:
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
67
Superficies Cuádricas
Los cortes del paraboloide por planos paralelos a los coordenados son curvas cónicas, (en lo siguiente se supone que el parabolide tiene la ecuación reducida que se da arriba):
• Cortes por planos z = α si α > 0, entonces la curva intersección resulta ser una elipse de semiejes a
y b con ecuación
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
68

Superficies Cuádricas
( α > 0 )•
si α < 0, entonces no existe intersección.
si α = 0 la intersección se reduce a un punto, siendo la superficie cuádrica tangente al plano en dicho punto.
(α < 0)•
• Corte por planos y = α o por planos x = α las curvas intersección son las parábolas
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
69

Superficies Cuádricas
(corte por plano y = α = 0 )
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
70
Superficies Cuádricas
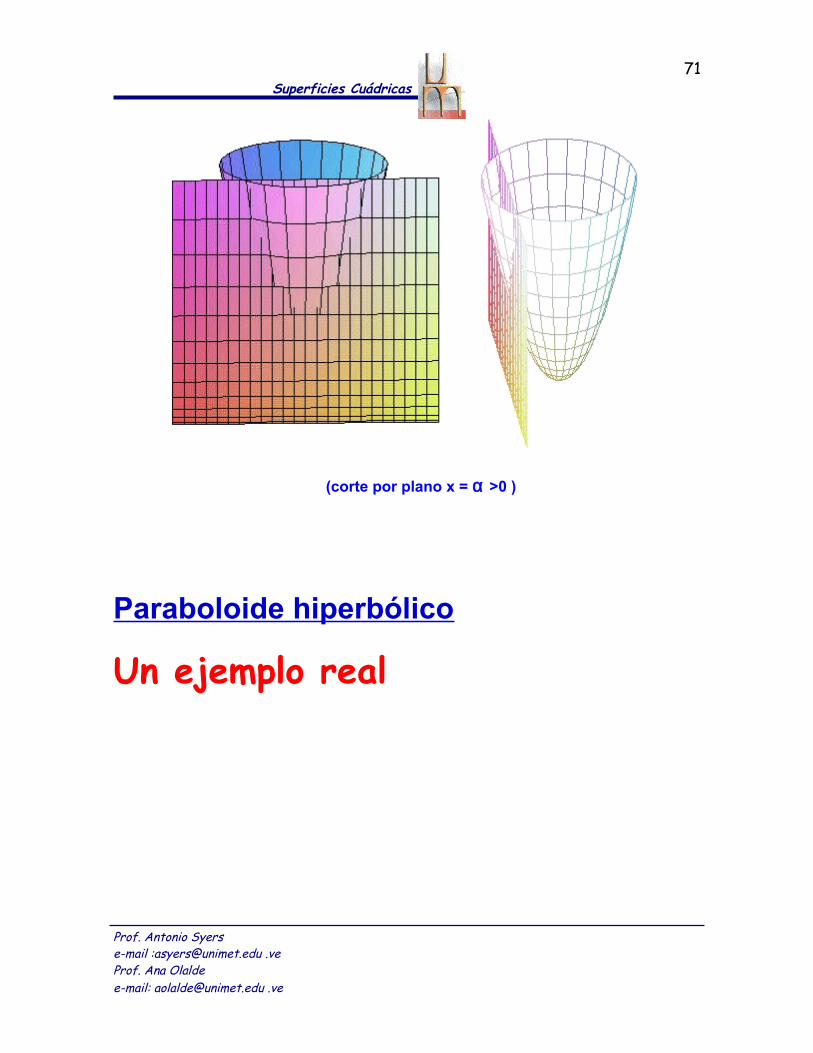
(corte por plano x = α >0 )
Paraboloide hiperbólico
Un ejemplo real
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
71

Superficies Cuádricas
(Foto cedida por el Prof. D. Juan M. Báez Mezquita)
Ecuación reducida:
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
72
Superficies Cuádricas
En lo que sigue utilizaremos la primera de las ecuaciones reducidas.
El paraboloide hiperbólico es una superficie doblemente reglada por las familias de rectas:
Los cortes del paraboloide por planos paralelos a los coordenados son curvas cónicas:
• Cortes por planos z = α si α ≠ 0, entonces la curva intersección es una hipérbola de ecuación
(α > 0)
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
73
Superficies Cuádricas
(α < 0)•
• si α = 0, entonces la intersección es un par de rectas que se cortan en el origen de coordenadas
•
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
74
Superficies Cuádricas
(α = 0)•
• Cortes por planos y = α o por planos x = α
las curvas intersección son las parábolas y
respectivamente.
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
75
Superficies Cuádricas
( y = α = 0)
( x = α = 0 )
A continuación presentamos figuras donde se ha cortado el paraboloide hiperbólico por plano oblicuos no paralelos a los coordenados
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
76
Superficies Cuádricas
Volver a página principal
Página elaborada por: M. Teresa Pérez y Miguel A. Martín
Sesión de Ejercicios 3
Superficies Cuadràticas
Definición:Una superficie cuadrática ( o cuàdrica ) es la gráfica de una ecuación de
segundo grado con tres variables x, y, z. La forma general de la ecuación es:0JIzHyGxFxzEyzDxyCzByAx 222 =+++++++++
donde A, B, C, …, J son constantes.
1. Elipsoide.Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
77

elipse 12b
2y2a
2x 0z Si =+⇒=
Superficies Cuádricas
Tiene por ecuación 1cz
by
ax
2
2
2
2
2
2=++
Las trazas del elipsoide son elipses, es decir, la intersección con planos paralelos a los planos coordenados es una elipse
2. Hiperboloide de una hoja.
Tiene por ecuación 1cz
by
ax
2
2
2
2
2
2=−+
Prof. Antonio Syerse-mail :[email protected] .veProf. Ana Olaldee-mail: [email protected] .ve
78
elipse 12c
2z2b
2y 0x Si =+⇒=elipse 12c
2z2a
2x 0 ySi =+⇒=

Las trazas del hiperboloide son hiperbolas en planos paralelos al plano XZ y al YZ, mientras que en planos paralelos al XY las trazas son elipses.
El eje por donde se abre el hiperboloide es por el eje cuya variable aparece en la ecuación negativa ( en este caso eje z). La diferencia fundamental entre el hiiperboloide de una hoja y el elipsoide es que tiene una variable con signo negativo.
3. Hiperboloide de dos hojas.
Tiene por ecuación 1cz
by
ax
2
2
2
2
2
2=+−−
Las trazas de esta superficies son :Para planos paralelos a XZ son hiperbolas al igual que para planos
paralelos al YZ.
Se diferencia de las otras superficies ya que tiene dos variables negativas .
Hiperbola 12c
2z2b
2y 0x Si =−⇒= Hiperbola 12c
2z2a
2x 0 ySi =−⇒=
Elipse 12b
2y2a
2x 0z Si =+⇒=
hiperbola 12b
2y2c
2z 0x si =−⇒=
hiperbola 12a
2x2c
2z 0 ysi =−⇒=
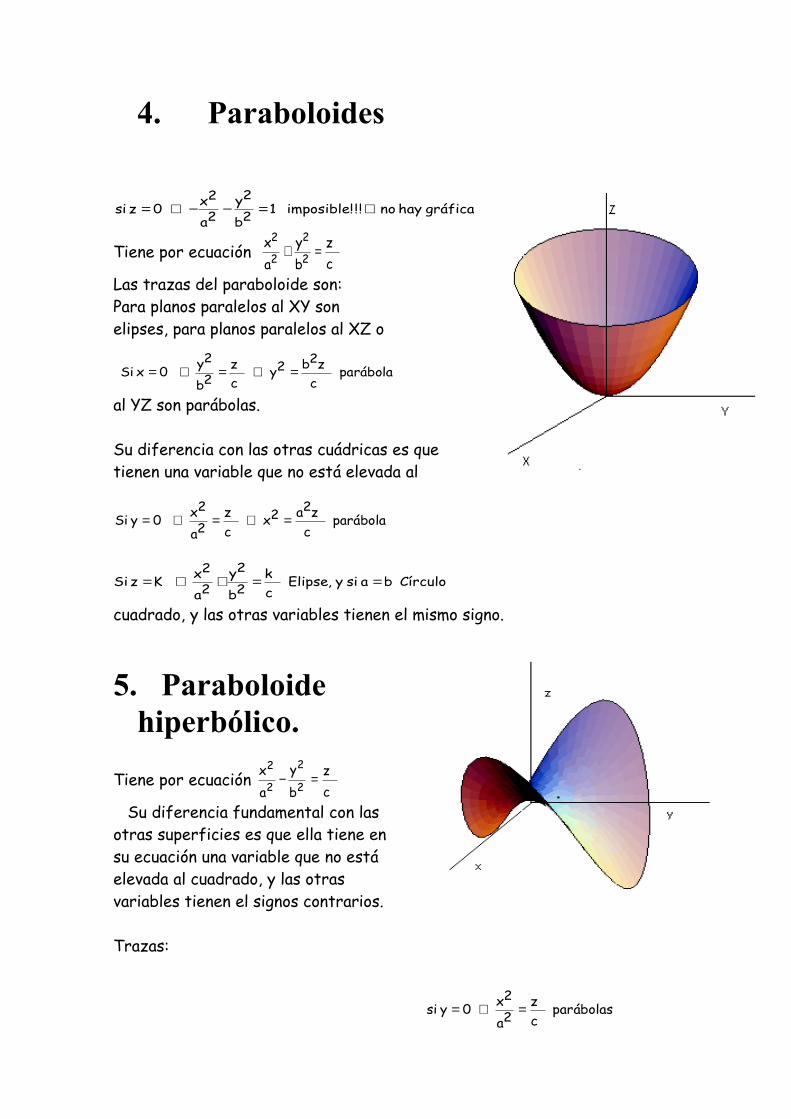
4. Paraboloides
Tiene por ecuación cz
by
ax
2
2
2
2=+
Las trazas del paraboloide son:Para planos paralelos al XY son elipses, para planos paralelos al XZ o
al YZ son parábolas.
Su diferencia con las otras cuádricas es que tienen una variable que no está elevada al
cuadrado, y las otras variables tienen el mismo signo.
5. Paraboloide hiperbólico.
Tiene por ecuación cz
by
ax
2
2
2
2=−
Su diferencia fundamental con las otras superficies es que ella tiene en su ecuación una variable que no está elevada al cuadrado, y las otras variables tienen el signos contrarios.
Trazas:
gráfica hay no !!imposible! 12b
2y2a
2x 0z si ⇒=−−⇒=
parábola cz2b2y
cz
2b
2y 0x Si =⇒=⇒=
parábola cz2a2x
cz
2a
2x 0 ySi =⇒=⇒=
Círculo ba si y,Elipse ck
2b
2y2a
2x K z Si ==+⇒=
parábolas cz
2a
2x 0 ysi =⇒=

6. Conos
La superficie cuádrica que tiene por ecuación
Se denomina Cono.
Las trazas del cono son:
7. Cilindro circular recto:
Cuando una de las variables x, y o z no aparece en la ecuación de la superficie, Entonces la superficie es un Cilindro. Por ejemplo:
Es un cilindro en el espacio ya que falta la variable z. Por lo tanto, la gráfica del cilindro se extenderá paralelo al eje z
parábolas cz
2b
2y 0x si =−⇒=
!rectas! Dos ybax 02b
2y2a
2x 0z si =⇒=−⇒=
2c
2z2b
2y2a
2x =+
rectas Dos zcb y 2c
2z2b
2y 0x Si =⇒=⇒=
rectas Dos zca x 2c
2z2a
2x 0 ySi =⇒=⇒=
b?a si ¿Y Elipse, 2c
2k2b
2y2a
2xK z si ==+⇒=
X
Y
Z
222 ayx =+
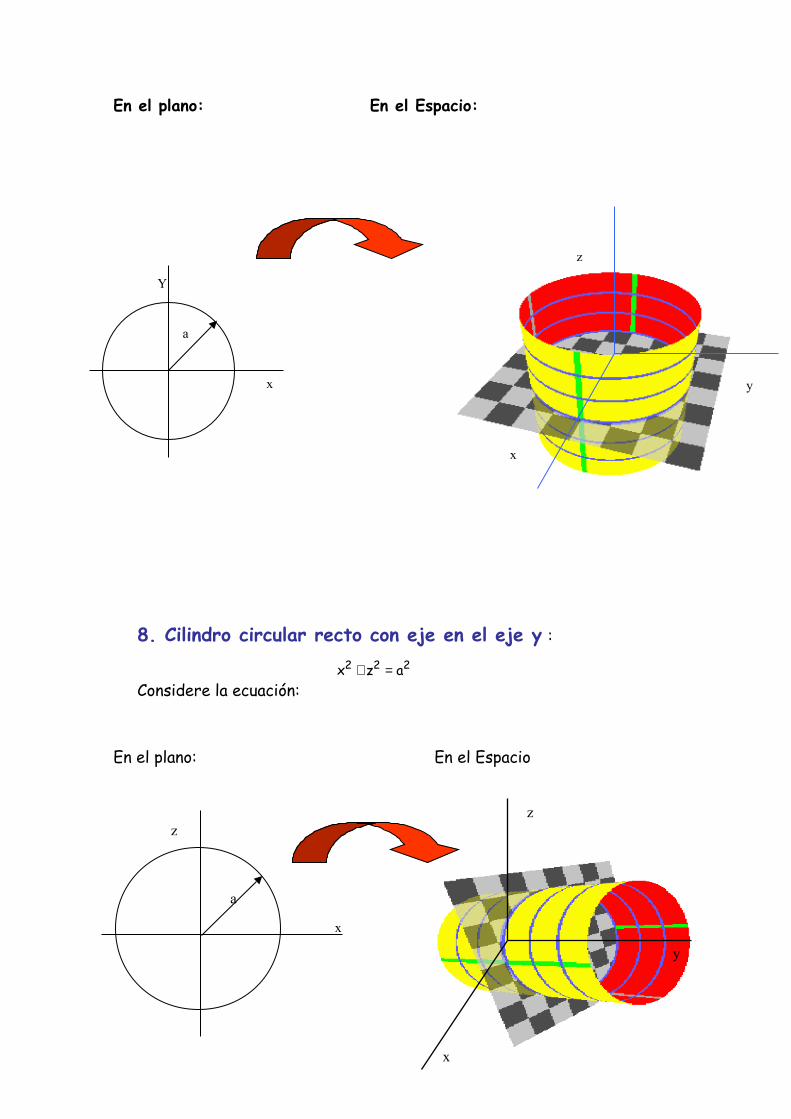
En el plano: En el Espacio:
8. Cilindro circular recto con eje en el eje y :
Considere la ecuación:
En el plano: En el Espacio
a
x
Y
x
y
z
222 azx =+
x
z
a
x
y
z

8. Cilindro parabólico:
Considere la ecuación 2 0x y+ = , que corresponde a una parábola en el plano xy, al variar z se obtiene la superficie
En el plano En el espacio
9. Cilindro elíptico con eje en el eje z:
Considere la ecuación de la elipse ( )2 24 4y z+ = en el plano yz , al recorrer el eje x se obtiene la superficie
En el espacio En el plano

10. Cilindro hiperbólico con eje en el eje z:
Considere la ecuación 2 2 1y x− = que corresponde a una hipérbola centrada en el ( 0,0) en el plano xy, al recorrer z se obtiene la superficie
En el espacio En el plano
EJERCICIOS PROPUESTOS
I. Para las ecuaciones siguientes, hacer un estudio completo: trazas, cortes con los ejes, identificar la superficie y hacer un gràfico aproximado.
1. 2 2 24 8 2 2 3 0x y z x y z− + − + + + = ( hiperboloide de una hoja con centro en ( 1,1,-1))2. 2 2 2 8 8 6 24 0x y z y z+ + − − − + =( esfera )3. 2 2 22 4 8x y z+ − =(cono elíptico de 2 hojas)4. 2 2 2 10 25 0x y z z− + − + =(cono circular)5. 2 236 36 9y x z+ + =(paraboloide elìptico)6. 2 2 5x z y− =(paraboloide hiperbólico)7. 2 2 24 4 6 16 16 5 0x y z x y z+ − − − − + =( hiperboloide de una hoja)8. 2 2 2 0y z x+ − =(paraboloide circular recto)9. 2 23 2 11z x y= + −( paraboloide )
10. 2 2 2
14 9 9
z y x− − =
( hiperboloide de dos hojas)12. 2 2 1x z+ = 15. 2 1x z+ = 13. 2 24 1x y− = 16. 2 24 36x y+ =14. 24x y= − 17. 2 24 16x z+ =( cilindros )

II. 1. Trace la región limitada por 2 2 2 22 1 2x y y z x y para z+ = = + ≤ ≤ 2. Obtener la curva de intersección de las superficies
2 2 2 2 2 22 3 1 2 4 2 5 0x y z x y x y z y+ − + = + − − = y hacer su gràfica3. Graficar :
a) La parte del hiperboloide 2 2 2 1x y z− − + = que se encuentra abajo del rectángulo [ ] [ ]1,1 3,3x− −
b) La parte del paraboloide elíptico 2 26 3 2x z y− − = que se encuentra a la derecha del plano xz
c) La parte de la esfera 2 2 2 4x y z+ + = que se encuentra arriba del cono 2 2z x y= +
d) La parte del cilindro 2 2 1x z+ = que se encuentra entre los planos y=-1 y y=3
e) La parte del plano z=5 que se encuentra dentro del cilindro 2 2 16x y+ =f) La parte del plano z=x+3 que se encuentra dentro del
cilindro 2 2 1x y+ =
g) La parte del plano x+2y+z=4 que se encuentra dentro del cilindro 2 2 1x y+ =h) La parte de la superficie 2z x y= + que se encuentra arriba
del triàngulo de vértices (0,0), (1,1) , y (0,1)i) La parte del paraboloide hiperbólico 2 2z y x= − que se
encuentra entre los cilindros 2 2 2 21 4y x y y x+ = + =
III. Graficar los sòlidos indicados, marcando los cortes con los ejes cordenados.
a) Sòlido limitado 2 2 1y x+ = , el plano z= y+3 y el plano xy
b) Sòlido limitado por 2 2 1z x+ = y los planos y=0 y x+y=2
c) El sòlido limitado por 2 24z x y y= − − z=0
d) El sòlido limitado por 2 2 2 1z y x y arriba de+ + = 2 2z x y= +
e) El sòlido limitado por el plano x+y+z=1 y los planos coordenados en el primer octante.
f) El sòlido limitado por 2 29z x y= − − − y z=-1
g) El sòlido limitado por 2 2 2 23 2 3z x y y z x y= − − = + −
h) El sòlido dentro del tetraedro de vértices (0,0,0), (1,0,0),(0,1,0) y (0,0,1).