L158 - Apunte Curso Avanzado de Programacion en Control Numerico
Upload
andrea-riveraCategory
view
35download
3description
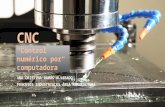
CONTROL NUMERICO COMPUTARIZADO (CNC)
RESUMENEs una mquina que te permite elaborar piezas mecnicas mediante un diseo previo, es decir, introduces un cdigo que la mquina interpretar, en las coordenadas ""X"" y ""Y"" y la mquina comenzar a elaborar la pieza fsicamente. El cdigo lo elabora la persona, dependiendo del diseo que se quiera de la pieza, tomando en cuenta la longitud, altura, profundidad (para perforaciones en general) y ancho del material. Una vez que la persona coloc el material en el cual se har la pieza, la mquina va cambiando el tipo de herramienta de forma automtica y no parar, hasta que todas las instrucciones que se le dieron, estn completadas al pie de la letra. Tanto el tipo de herramienta que utilizar, como las coordenadas para elaborar la pieza, son especificadas por la persona que elabor el cdigo.
1. INTRODUCCIN
Control Numrico (CN) es el trmino original de esta tecnologa. Actualmente es intercambiable con el trmino Control Numrico por Computadora (CNC)El CN ha sido uno de los ms importantes desarrollos en manufactura en los ltimos 50 aos, al desarrollar:
Nuevas tcnicas de produccin Incrementar la calidad de los productos Reduccin de costos
2. MARCO TEORICOPIC 18F4550Los micro controladores se programan en Assembler y cada microcontrolador vara su conjunto de instrucciones de acuerdo a su fabricante y modelo. De acuerdo al nmero de instrucciones que el microcontrolador maneja se le denomina de arquitectura RISC o CISC .Se denomina microcontrolador a un dispositivo programable capaz de realizar diferentes actividades que requieran del procesamiento de datos digitales y del control y comunicacin digital de diferentes dispositivos.
Algunas de estas caractersticas se muestran a continuacin: Soporta modo de comunicacin serial, posee dos pines para ello. Amplia memoria para datos y programa. Memoria reprogramable: La memoria en este PIC es la que se denomina FLASH; este tipo de memoria se puede borrar electrnicamente (esto corresponde a la "F" en el modelo). MOTORES PAPLos motores paso a paso son ideales para la construccin de mecanismos en donde se requieren movimientos muy precisos. La caracterstica principal de estos motores es el hecho de poder moverlos un paso a la vez por cada pulso que se le aplique. Este paso puede variar desde 90 hasta pequeos movimientos de tan solo 1.8, es decir, que se necesitarn 4 pasos en el primer caso (90) y 200 para el segundo caso (1.8), para completar un giro completo de 360.
DISPOSITIVO DE INTERFAZ HUMANAUn dispositivo de interfaz humana es un tipo de dispositivo de la computadora que interacta directamente con, y ms a menudo toma la entrada de los humanos y puede entregar la salida a los seres humanos. El trmino "HID" ms comnmente se refiere a la especificacin USB-HID. En la actualidad, el ms usado es el interfaz USB
VENTAJAS PRINCIPALES DE UN EQUIPO DE CN
Permite una mejor planeacin de las operaciones Se incrementa la flexibilidad de maquinado Reduccin en tiempo de programacin Mejor control del proceso y tiempos de maquinado Disminucin en los costos por herramientas Se incrementa la Seguridad para el usuario Reduccin del tiempo de flujo de material Reduccin del manejo de la pieza de trabajo Aumento de productividad Aumento en precisin
APLICACIONES
Fresado Torneado Taladrado Esmerilado Doblado Punzonado Maquinado por descarga elctrica (EDM) Inspeccin (Mquina de coordenadas)
3. DISEO DE UN CNCA. DIAGRAMA DE BLOQUE COMPLETO DEL SISTEMA HARDWARE Y SOFTWAREEl esquema de bloques del sistema es el siguiente:
FIGURE: DIAGRAMA DE BLOQUES
B. MORFOLOGA DEL SISTEMAEl diseo inicial del la estructura fue diseado con el software Sketchup, ello nos permiti hacer el modelamiento mas adecuado de la estructura. Como ya se haba definido el diseo del graficador seria del tipo Mesas Deslizables Horizontales, es decir el eje X y el eje Y estaran horizontales y serian mviles, mientras que el puntero que contiene el lpiz sera fijo, como podemos ver en la figura
4. IMPLEMENTACIN
a. MATERIALES Plancha de MDF # 14 Tornillos sin fin Pernos Motores DC Soportes de alumnio Grasa de auto Otrosb. ARMADO DE LA ESTRUCTURA Para el movimiento de los ejes utilizaremos un motor DC y un motor PAP El motor Dc trabajara en el eje x que estar en la base de la estructura. Para la transmisin del movimiento utilizaremos un espiral de tornillo sin fin de de pulgada. Como trabajaremos con el motor Dc, requerimos de un reductor de velocidad, hay la posibilidad de hacerlo con caja reductora de engranajes o con un sistemas de poleas, nosotros optamos por trabajar con un reductor de engranaje con transmisin por faja o correa, con lo cual podemos reducir la velocidad de aprox. 1 a 10 y ganar fuerza. En las pruebas realizadas comprobamos que el sistema es resistente y posee bastante fuerza, con lo que nuestro motor DC es alimentado con 12V. En la imagen podemos ver el motor DC El motor DC posee una rueda segmentada y con un opto - acoplador conforman un encoder bsico que nos permitir controlar la velocidad del motor y las RMP, que irn a la tarjeta de control. El espiral de tornillo sin fin es fijado a la estructura de la base mediante unos cojinetes o rodamientos estos rodamientos son fijados mediante una cazoleta hecha de aluminio
c. DISEO DE LAS PLACAS PCB DEL PROYECTO
Para el proyecto se utilizo el programa de diseo EAGLE Diseo del driver para los motores PAP, se tuvo dificultades con el uso del motor Dc, por lo que se opto por usar slo motores PAP
FIGURE: DISEO DEL PCB CON LAS DIMENSIONES EN MILMETROS
FIGURE: UBICACIN DE COMPONENTES 5. SOFTWAREProgramacin CNC
Un programa es una lista secuencial de instrucciones de maquinado que sern ejecutadas por la mquina
DIAGRAMA DE FLUJO PARA PROGRAMAR
SOFTWARE INSTALACIN, CONFIGURACIN, ALGORITMOS DE CONTROL, EJECUCIN NORMAL MANUAL Y TAREASAhora describiremos el software que utilizaremos para controlar el funcionamiento del CNC.Para la comunicacin con la PC, utilizaremos el PIC 18F4550, gracias a su capacidad de implementar una conexin USB.El programa que utilizaremos para crear el interface ser Visual Basic.La programacin del PIC la realizaremos en lenguaje C, para esto utilizaremos el compilador PROTON Compiler.
INTERFAZ CREADO EN VISUAL BASIC
Visual Basic nos permite crear nuestro entorno de manera fcil y practica, para nuestro entorno crearemos botones de acciones instantneas, una ventana de mensajes, tres ventanas para introducir texto (en estas ventanas introduciremos el lado del cuadrado, triangulo y radio del circulo en (mm).Despus de crear las funciones anteriores nuestro entorno nos queda as:
6. PRUEBASGraficador puede graficar imagenes son preestablecidas como el cuadrado y el triangulo
7. CONCLUSIONES
Se logro implementar la comunicacin va USB gracias a un entrono de trabajo creado en Visual Basic con el cual es posible mandar y recibir datos del PIC hacia la PC y viceversa. El PIC 18F4550 es ideal para una aplicacin que necesite una interfaz va USB, pues cuenta con un mdulo para este uso. La precisin se logro calculando el nmero de pasos del motor PAP al que equivale un milmetro de recorrido para el eje angular. La precisin lograda funciona perfectamente bien, esto hace que nuestro proyecto se asemeje aun ms a otros con acabados mucho ms comerciales y de aplicaciones industriales.8. BIBLIOGRAFIA
Prototipo de maquinado para fabricacin de circuitos impresos con fresadora, Hctor Hernn Rangel Cubides y Luis Carlos Sevilla Heredia Robot cartesiano xy, Gua aplicativa, Schneider Electric Diseo De Un Sistema Robtico Cartesiano Para Aplicaciones Industriales, JORGE ROJAS, A. GERARDO MUOZ, DANIEL CASTRO Http://www.iearobotics.com http://www.x-robotics.com http://es.wikipedia.org/wiki/puerto_usb http://www.cpr2valladolid.com/tecno/cyr_01/control/puerto usb.htm http://www.globu.net/pp/pp/pp.htm