DESARROLLO DE APLICACIONES DE MEDIDA Y TEST …
64
DESARROLLO DE APLICACIONES DE MEDIDA Y TEST MEDIANTE INSTRUMENTACION GPIB OSCAR FABIAN BULLA LEAL UNIVERSIDAD DE LOS ANDES DEPARTAMENTO DE INGENIERIA ELECTRICA Y ELECTRONICA BOGOTA, ENERO DE 2004
Transcript of DESARROLLO DE APLICACIONES DE MEDIDA Y TEST …

DESARROLLO DE APLICACIONES DE MEDIDA Y TEST
MEDIANTE INSTRUMENTACION GPIB
OSCAR FABIAN BULLA LEAL
UNIVERSIDAD DE LOS ANDES
DEPARTAMENTO DE INGENIERIA ELECTRICA Y ELECTRONICA
BOGOTA, ENERO DE 2004

IEL1-03-II-04
2
DESARROLLO DE APLICACIONES DE MEDIDA Y TEST
MEDIANTE INSTRUMENTACION GPIB
OSCAR FABIAN BULLA LEAL
Asesor Jordi Prat Tasias
UNIVERSIDAD DE LOS ANDES
DEPARTAMENTO DE INGENIERIA ELECTRICA Y ELECTRONICA
BOGOTA, ENERO DE 2004
IEL1-03-II-04
3
AGRADECIMIENTO
Quiero manifestar mi agradecimiento a todas aquellas personas
que me apoyaron en el transcurso de mi carrera, en especial a mis
padres quienes han sido una gran guía en mi largo camino.
También quiero agradecer al asesor de este proyecto Jordi Prat
Tasias por su invaluable orientación y apoyo.

IEL1-03-II-04
4
DESARROLLO DE APLICACIONES DE MEDIDA Y TEST MEDIANTE INSTRUMENTACION GPIB
TABLA DE CONTENIDO
1. INTRODUCCIÓN.................................................................................................9 1.1 Antecedentes..................................................................................................9 1.2 Introducción....................................................................................................9 1.3 Justificación..................................................................................................10 1.4 Alcance.........................................................................................................10
2. INSTRUMENTACIÓN GPIB...............................................................................11 2.1 Introducción Estándar IEEE-488 ..................................................................11 2.2 Estándar IEEE-488.1....................................................................................11
2.2.1 Objetivos................................................................................................11 2.2.2 Características generales ......................................................................12 2.2.3 Especificaciones funcionales .................................................................13 2.2.4 Especificaciones eléctricas ....................................................................22 2.2.5 Especificaciones mecánicas ..................................................................22
2.3 INSTRUMENTOS GPIB UTILIZADOS .........................................................23 2.3.1 Voltímetro HP 3437A .............................................................................23 2.3.2 Voltímetro Fluke 8500A .........................................................................25 2.3.3 Generador de funciones HP 3325A .......................................................28 2.3.4 Tarjeta PCMCIA GPIB ...........................................................................30
3. SOFTWARE UTILIZADO EN EL CONTROL DE INSTRUMENTACIÓN Y CREACIÓN DE INSTRUMENTOS VIRTUALES....................................................32
3.1 LabView........................................................................................................32 3.1.1 Programación en LabView.....................................................................33 3.1.2 Control de instrumentos.........................................................................36
4. APLICACIONES REALIZADAS .........................................................................38 4.1 Respuesta en frecuencia de filtros y amplificadores.....................................38
4.1.1 Introducción ...........................................................................................38 4.1.2 Descripción del programa realizado en LabView...................................38 4.1.3 Respuesta en frecuencia de un filtro pasa bajas ...................................42 4.1.4 Respuesta en frecuencia de varios amplificadores................................44
4.2 Osciloscopio virtual.......................................................................................53 4.2.1 Introducción ...........................................................................................53 4.2.2 Descripción del programa realizado en LabView...................................53
5. GUÍAS REALIZADAS.........................................................................................56 5.1 introducción ..................................................................................................56

IEL1-03-II-04
5
5.2 Objetivo ........................................................................................................56 5.3 Como obtener la respuesta en frecuencia de un sistema mediante el bus GPIB...................................................................................................................56 5.4 Como crear un osciloscopio con tan solo un voltímetro utilizando la interfaz GPIB...................................................................................................................60
6. Conclusiones y recomendaciones .....................................................................62 6.1 Ventajas .......................................................................................................62 6.2 Limitaciones .................................................................................................62 6.3 Trabajo futuro ...............................................................................................63
7. BIBLIOGRAFIA ..................................................................................................64

IEL1-03-II-04
6
DESARROLLO DE APLICACIONES DE MEDIDA Y TEST
MEDIANTE INSTRUMENTACION GPIB
LISTADO DE FIGURAS
Figura 2-1 Bus GPIB..............................................................................................15
Figura 2-2 Líneas de sincronización del bus GPIB ................................................16
Figura 2-3 Conexión de los equipos GPIB.............................................................22
Figura 2-4 Conector Estándar GPIB ......................................................................23
Figura 2-5 Voltímetro HP 3437A............................................................................23
Figura 2-6 Voltímetro Fluke 8500A ........................................................................25
Figura 2-7 Generador de funciones HP 3325A......................................................28
Figura 2-8 Tarjeta PCMCIA GPIB ..........................................................................30
Figura 2-9 Transferencia de datos máxima............................................................31
Figura 2-10 Respuesta a transferencias mayores a 35 Kb/seg .............................31
Figura 4-11 Programa de la primera aplicación con el Fluke 8500A......................39
Figura 4-12 Panel Frontal de la primera aplicación con el Fluke 8500A ................40
Figura 4-13 Programa de la primera aplicación con el HP 3437A .........................41
Figura 4-14 Panel Frontal de la primera aplicación con el HP 3437A....................42
Figura 4-15 Filtro pasa bajas RC ...........................................................................43
Figura 4-16 Respuesta típica de un filtro pasa bajas RC.......................................43
Figura 4-17 Simulación en Matlab del filtro utilizado..............................................44
Figura 4-18 Respuesta obtenida con el programa realizado..................................44
Figura 4-19 Configuración de amplificador inversor...............................................45
Figura 4-20 Respuesta en frecuencia del LM741 en lazo abierto ..........................46
Figura 4-21 Respuesta en frecuencia del LM741 con ganancia unitaria ...............46
Figura 4-22 Respuesta en frecuencia del LM741 con ganancia 2.12 ....................47
Figura 4-23 Respuesta en frecuencia del LM741 con ganancia 4.7 ......................47
Figura 4-24 Respuesta en frecuencia del LM741 con ganancia 10 .......................48

IEL1-03-II-04
7
Figura 4-25 Respuesta en frecuencia del LM318 en lazo abierto ..........................48
Figura 4-26 Respuesta en frecuencia del LM318 con ganancia unitaria ...............49
Figura 4-27 Respuesta en frecuencia del LM318 con ganancia 2.12 ....................49
Figura 4-28 Respuesta en frecuencia del LM318 con ganancia 4.7 ......................50
Figura 4-29 Respuesta en frecuencia del LM318 con ganancia 10 .......................50
Figura 4-30 Respuesta en frecuencia del LM1458 en lazo abierto ........................51
Figura 4-31 Respuesta en frecuencia del LM1458 con ganancia unitaria .............51
Figura 4-32 Respuesta en frecuencia del LM1458 con ganancia 2.12 ..................52
Figura 4-33 Respuesta en frecuencia del LM1458 con ganancia 4.7 ....................52
Figura 4-34 Respuesta en frecuencia del LM1458 con ganancia 10 .....................53
Figura 4-35 Panel frontal del osciloscopio virtual...................................................54
Figura 4-36 Programa del Osciloscopio Virtual en LabView ..................................55
Figura 4-37 Modulo GPIB Read de LabView .........................................................57
Figura 4-38 Modulo GPIB Write de LabView .........................................................57
Figura 4-39 Programación de una fuente GPIB .....................................................57
Figura 4-40 Programa de respuesta en frecuencia en LabView ............................58
Figura 4-41 Panel frontal del programa en LabView..............................................59
Figura 4-42 Programa para el osciloscopio virtual en LabView .............................60
Figura 4-43 Panel frontal del osciloscopio virtual en LabView ...............................61
IEL1-03-II-04
8
DESARROLLO DE APLICACIONES DE MEDIDA Y TEST
MEDIANTE INSTRUMENTACION GPIB
LISTADO DE TABLAS
Tabla 2-1 Comandos enviados por el controller.....................................................18
Tabla 2-2 Códigos de Programación para el HP 3437A ........................................24
Tabla 2-3 Códigos de Programación para el Fluke 8500A.....................................25
Tabla 2-4 Códigos de Programación para el HP 3325A ........................................28
Tabla 4-5 Ganancias empleadas en los amplificadores.........................................45

IEL1-03-II-04
9
1. INTRODUCCIÓN
1.1 Antecedentes
La instrumentación se manifestó tal y como la vemos hoy a comienzos de 1900 cuando se empezaron a usar tubos al vació para la telemetría en trenes de carga, la instrumentación naval y aeronáutica entre otros, desde ese entonces la instrumentación a evolucionado notoria y rápidamente a tal punto que en el mundo actual es esencial el manejo de dispositivos en tiempo real por computador ya que esto hace mas fácil la interfaz con las maquinas y ayuda a solucionar múltiples problemas.
En la industria el uso de computadores para facilitar las tareas es algo cotidiano, ejemplos claros de esto son las cadenas de producción, los laboratorios de investigación, los sistemas de medida y las comunicaciones entre otros. Trabajar con la instrumentación virtual puede hacer las tareas mucho más sencillas y productivas. La instrumentación virtual es un área con múltiples aplicaciones que involucra el procesamiento, análisis, almacenamiento, distribución y despliegue de los datos e información relacionados con la medición de una o varias señales específicas. Es decir, la instrumentación virtual también involucra las funciones de análisis y procesamiento de señales, las rutinas de almacenamiento de datos y la comunicación con otros equipos.
1.2 Introducción
Para realizar las aplicaciones primero se reviso la bibliografía disponible para el estudio del bus GPIB, el software (LabView), los instrumentos GPIB disponibles (dos voltímetros y un generador de funciones) y la tarjeta PCMCIA GPIB, luego se procedió a diseñar las aplicaciones, las cuales debían contener los parámetros necesarios para dar una fácil percepción del manejo de los instrumentos mediante el computador por esto se decidió que la primera aplicación debía ser una en la que se obtuviera la respuesta en frecuencia de un sistema, para validarlo se obtuvieron las respuestas en frecuencia de un filtro pasa bajas y de varios amplificadores operacionales, para esta aplicación se realizaron dos programas, uno para cada voltímetro, pues las ordenes para cada uno de ellos son distintas.
La segunda y ultima aplicación que se decidió fue la de crear con un voltímetro y el generador un osciloscopio el cual tiene las funciones básicas, se escogió el voltímetro HP3437A ya que el muestreo de este voltímetro es mejor que el del

IEL1-03-II-04
10
Fluke 8500A. Al finalizar las aplicaciones se crearon unas guías con las cuales se explica paso a paso la creación de los programas para cada una de las aplicaciones para hacer que los estudiantes tengan una base sólida para realizar las mismas aplicaciones con programas más eficientes
1.3 Justificación
Debido a la necesidad de controlar instrumentos por computador en la industria, a la gran variedad de aplicaciones de la instrumentación virtual, es necesario darle la importancia que se merece en la actualidad, para esto es necesario conocerla, manejarla y practicarla; la instrumentación virtual nos ofrece la flexibilidad, el bajo costo de mantenimiento, la reusabilidad, la personalización de cada instrumento, la rápida incorporación de nuevas tecnologías, el bajo costo por función, el bajo costo por canal, entre otros, que son grandes beneficios a la hora de manejar los diferentes dispositivos por computador.
Un instrumento virtual puede realizar las tres funciones básicas de un instrumento convencional que son adquisición, análisis y presentación de datos. Sin embargo, el instrumento virtual permite personalizar el instrumento, y agregarle mucha más funcionalidad sin incurrir en costos adicionales. El instrumento virtual se basa en la flexibilidad y poder del computador, este ultimo mediante el software que lo acompaña hace que el nivel de adaptabilidad y personalización del instrumento virtual sea casi ilimitado.
1.4 Alcance
Para el desarrollo de este proyecto de grado se planteó la realización de dos aplicaciones con los instrumentos GPIB para tener un manejo adecuado del bus, software e instrumentos disponibles.
Habiendo realizado tales aplicaciones se realizara una guía con un enfoque educativo para que los estudiantes puedan desarrollar las mismas aplicaciones de este proyecto, teniendo las ya desarrolladas como guías, esta guía estará realizada con una metodología clara para que el estudiante tenga buenas bases para generar nuevos programas mas eficientes. Con esto se pretende dar una herramienta para facilitar el estudio de la instrumentación virtual y en particular del manejo de instrumentos por medio del bus GPIB teniendo como software para el control de los instrumentos y del bus al programa Labview.
IEL1-03-II-04
11
2. INSTRUMENTACIÓN GPIB
2.1 Introducción Estándar IEEE-488
De los diferentes buses existentes, el más utilizado actualmente, es el bus GPIB (General Purpose Instrument Bus). Este fue originariamente desarrollado por Hewlett Packard bajo el nombre de HPIB (Hewlett-Packard Interface Bus). Su mayor difusión se debe a que posteriormente adoptado por la organización IEEE, que en 1978 lo definió mediante el estándar IEEE 488 - 1978. La funcionalidad del estándar GPIB ha evolucionado a lo largo del tiempo y se encuentra descrito en las siguientes especificaciones:
• IEEE 488.1 (1975): Especificación que define las características de nivel físico mecánico y eléctrico, así como sus características funcionales básicas.
• IEEE 488.2 (1987): Especificación que define las configuraciones mínimas, los comandos y formatos de datos básicos y comunes a todos los equipos y los protocolos que se siguen en las comunicaciones.
• SCPI (Standar Commands for Programmable Instrumentation): Especificación construida sobre el estándar IEEE 488.2 que define una estructura de comandos estándar aceptados por múltiples instrumentos de muchos fabricantes.
• VISA (Virtual Instrument Estándar Architecture): Especificación definida por Agilent y National Instrument es una librería que puede ser usada para desarrollar aplicaciones y drivers de I/O de forma que el software de diferentes empresas puedan trabajar conjuntamente sobre el mismo sistema y que pueden ser instalados en conjunción con drivers VXI plug & play utilizando simultáneamente varios medios de comunicación (GPIB, VXI, RS232, LAN, etc) y en aplicaciones desarrolladas con diferentes lenguajes (C, C++, VisualBasic, etc.).
2.2 Estándar IEEE-488.1
2.2.1 Objetivos
La norma IEEE-488 busca alcanzar los siguientes objetivos:
• Definir un sistema de instrumentación de propósito general de utilización en aplicaciones donde los instrumentos se sitúan cerca.
• Especificar los requerimientos mecánicos, eléctricos y funcionales que tienen que cumplir los instrumentos con el fin de poder interconectarse a través de un bus común.
• Especificar la terminología y las definiciones relacionadas con los sistemas.

IEL1-03-II-04
12
• Permitir la interconexión de instrumentos de diferentes fabricantes. • Permitir la comunicación directa entre dos equipos sin necesidad que todos
los mensajes pasen por el controlador. • Definir un sistema con las mínimas restricciones en las características de
funcionamiento interno del instrumento conectado al bus. • Definir un sistema de comunicación asíncrona que permita la transferencia
de información entre equipos muy rápidos y lentos. • Definir un sistema de bajo costo.
2.2.2 Características generales
El bus presenta las siguientes características básicas:
• Permite la interconexión de hasta 15 equipos, de los que uno de ellos es el controlador, que establece la función que debe ejercer cada uno de los otros.
• Un dispositivo conectado al bus, puede enviar o recibir información hacia o desde cualquiera de los otros 14 equipos. A veces, la propia naturaleza de un equipo hace que solo esté capacitado para recibir (p.e. una impresora), o solo capacitado para enviar (p.e. un contador), o ambas cosas ( p. e. un osciloscopio, o un computador).
• El límite práctico de velocidad de intercambio de datos es de 500 Kbytes/s (o lo que es lo mismo 4 Mbits/s).
• La interconexión entre equipos se realiza utilizando cables de 25 hilos, finalizados en conectores de doble boca (macho por un lado y hembra por el otro), que permite la interconexión de los equipos en cualquier configuración (estrella, línea, o cualquier combinación de ellas).
• Las longitudes máximas permitidas en los cables es de 20 metros. Los cables que se comercializan son de 1, 2, 4 y 8 metros.
• Como método de transferencia de mensajes utiliza la transferencia asíncrona “bytes en serie y bits en paralelo” controlada por las tres líneas de handshake. La comunicación asíncrona permite establecer la velocidad de transferencia de datos adecuada en cada momento en el instrumento más lento. Así podemos interconectar instrumentos con velocidades de transferencia muy diferentes.
• Tiene diez funciones de interfaz en total, cinco primarias de comunicación y cinco especializadas. Pero no todos los instrumentos conectados tienen que tener la misma capacidad funcional.
• Como transferencia de control cuando hay sistemas de mas de un controlador, tiene que haber solo uno activo al mismo tiempo, que es el denominado controler in charge.
IEL1-03-II-04
13
2.2.3 Especificaciones funcionales
Toda la comunicación se realiza mediante mensajes enviados y recibidos, que son clasificados como mensajes dependientes del dispositivo y mensajes de interfaz. Los mensajes dependientes de dispositivo son los que no interaccionan directamente con la interfaz lógica, como por ejemplo, ordenes de programación, resultados en las medidas, información sobre el estado de los dispositivos, mientras que los mensajes de la interfaz son los que no interaccionan con el proceso de medida, sino que están destinados al control de la interfaz de comunicación. Modos de operación de un equipo En cada momento, un equipo conectado al bus GPIB puede estar seleccionado como uno o varios de los siguientes modos de comportamiento:
• Controller: Con capacidad de establecer quien envía o recibe datos y el modo de operación del bus (solo un equipo puede ser controller.
• Talker: Con capacidad de enviar datos a otros equipos. • Listener: Con capacidad de recibir datos de otros equipos.
CONTROLLER: Entre los equipos conectados al bus existen dos tipos de controladores: el system controller y los active controllers. En un bus, solo puede existir un único system controller con capacidad de poder tomar control del bus en todo momento. Este equipo tiene exclusividad en el control de las líneas IFC y REN. Cada sistema debe disponer de uno o mas dispositivos capaces de asumir la función de active controller, aunque en cada momento, solo uno de esos equipos puede operar como tal. El controlador activo tiene la capacidad de seleccionar los equipos que deben operar como listener o como talker a efecto de la transferencia de datos, de enviar los comandos de bus, y de supervisar mediante encuestas el status de los equipos. En una situación estándar, es un computador el que actúa a la vez como system controller y como único active controller. Algún sistema diferente, podrá en un momento dado requerir del controlador del sistema su interés en convertirse en controlador activo, a fin de llevar a cabo una operación compleja, tal como transferir unos datos al plotter, o almacenar un fichero en un disco, etc.. Como respuesta a este requerimiento el controlador de sistema, transferirá el control al equipo que lo ha solicitado, el cual pasa a constituirse en controlador activo del

IEL1-03-II-04
14
bus. Cuando concluye su operación, retorna de nuevo el control del bus, al controlador de sistema. Obsérvese que las capacidades propias de controlador de sistema no pueden ser transferidas. Un sistema construido sobre el bus GPIB puede ser configurado en uno de los siguientes tres modos: - Sin controller: En esta configuración uno de los equipos debe solo tener capacidad para actuar solo como talker, y los restantes solo como listener. La transferencia de datos posibles es desde el talker a todos los listener simultáneamente. - Con controller único: En esta configuración las transferencias de datos posibles son: Desde el controller a los equipos en modo comando y datos, de un equipo al controller solo en modo datos, y de un equipo a otro equipo solo en modo datos. - Con múltiples controller: En este caso tiene las mismas capacidades que la configuración anterior, solo que en esta también es posible la transferencia entre equipos de la capacidad de operar como controller activo. TALKER: En cada configuración pueden existir uno o varios equipos con capacidad de enviar datos a otros equipos. Cuando el controller ejecuta un comando talk con la dirección de uno de estos equipos, este pasa a ser active talker, y a partir de ese instante tienen capacidad para enviar datos por el bus, controlando la línea DAV, siempre que todos los equipos que han de recibir los datos (listener) se encuentren dispuestos a ello (línea NRFD a valor lógico "0"). LISTENER: En cada configuración pueden existir uno o varios equipos con capacidad de recibir datos desde el bus. Cuando el controller ejecuta un comando Listen utilizando la dirección de uno de estos equipos, este pasa a ser un active listener, y a partir de este momento recibe y lee cada uno de los datos que cualquier talker envíe por el bus. Es frecuente que en una configuración existan múltiples equipos en estado "active listener, y todos ellos reciben en paralelo y simultáneamente todos los datos que sean transferidos por el bus. El bus GPIB está basado en 16 líneas activas, además de la tierra. Estas 16 líneas se organizan en tres buses:

IEL1-03-II-04
15
Bus de Datos (DIO1-DIO8) (Data input/output): Es un bus bidireccional de 8 líneas orientado a la transferencia de byte o de caracteres ASCII. Bus de sincronización de la transferencia de datos: Es un conjunto de tres líneas (DAV: Data valid, NRFD: Not Ready For Data y NDAC: Not Data ACcepted) que se utilizan de forma coordinada para asegurar la transferencia de datos entre los equipos. Bus de control: Está constituido por 5 líneas (ATN: ATteNtion, IFC: InterFace Clear, RQ: Service ReQuest, REN: Remote ENable, y EOI: End Or Identify) que se utilizan para transferir comandos entre los equipos relativos al modo de interpretar los datos que se transfieren o comandos básicos de gobierno de la interfaz del bus.
Figura 2-1 Bus GPIB
SIGNIFICADO DE LAS LINEAS DEL BUS GPIB. DATA LINE (DIO1 - DIO8): Las 8 líneas de datos permiten que el único equipo establecido como talker (o en otros casos el controller) envíe un byte en paralelo hacia todos aquellos equipos que en ese instante estén definidos como listener.
IEL1-03-II-04
16
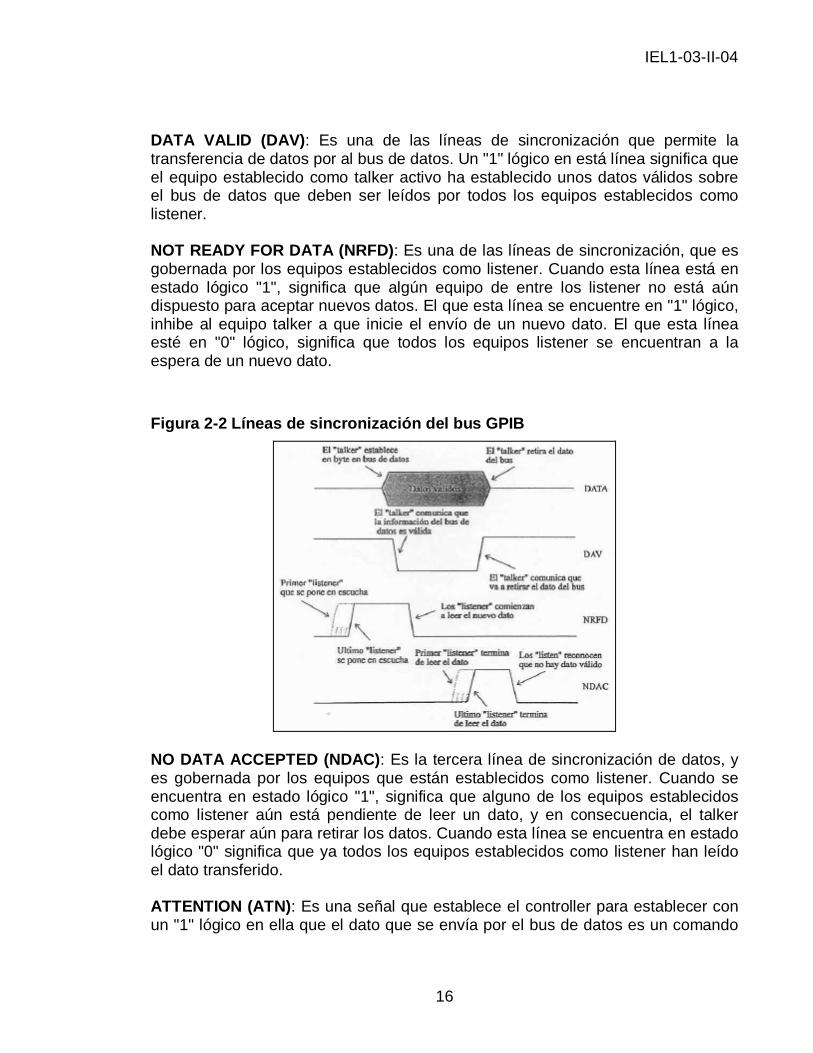
DATA VALID (DAV): Es una de las líneas de sincronización que permite la transferencia de datos por al bus de datos. Un "1" lógico en está línea significa que el equipo establecido como talker activo ha establecido unos datos válidos sobre el bus de datos que deben ser leídos por todos los equipos establecidos como listener. NOT READY FOR DATA (NRFD): Es una de las líneas de sincronización, que es gobernada por los equipos establecidos como listener. Cuando esta línea está en estado lógico "1", significa que algún equipo de entre los listener no está aún dispuesto para aceptar nuevos datos. El que esta línea se encuentre en "1" lógico, inhibe al equipo talker a que inicie el envío de un nuevo dato. El que esta línea esté en "0" lógico, significa que todos los equipos listener se encuentran a la espera de un nuevo dato. Figura 2-2 Líneas de sincronización del bus GPIB
NO DATA ACCEPTED (NDAC): Es la tercera línea de sincronización de datos, y es gobernada por los equipos que están establecidos como listener. Cuando se encuentra en estado lógico "1", significa que alguno de los equipos establecidos como listener aún está pendiente de leer un dato, y en consecuencia, el talker debe esperar aún para retirar los datos. Cuando esta línea se encuentra en estado lógico "0" significa que ya todos los equipos establecidos como listener han leído el dato transferido. ATTENTION (ATN): Es una señal que establece el controller para establecer con un "1" lógico en ella que el dato que se envía por el bus de datos es un comando

IEL1-03-II-04
17
enviado por el controller. Cuando esta línea toma el valor "0" lógico indica que el byte del bus de datos debe ser considerado como un dato. INTERFACE CLEAR (IFC): Está bajo el exclusivo control del system controller. Cuando es establecido en esta línea un "1" lógico, todos los equipos conectados al bus deben ser reseteados, y todos ellos deben pasar a su estado base. SERVICE REQUEST (SRQ): Es utilizado por los equipos conectados al bus para comunicar al controller que requieren ser atendidos por alguna causa (ha concluido una actividad, se ha producido un error, existe algún dato para transferir, etc.). Cuando el controller detecta un "1" lógico en esta línea, debe iniciar una encuesta (polling) para determinar que equipo causó el requerimiento, y en el caso de que proceda, satisfacer su demanda. REMOTE ENABLE (REN): Es una línea con la que el controller al establecerla a un "1" lógico, habilita a todos los equipos conectados al bus para que reciban datos, o comandos. END OR IDENTIFY (EOI): Esta línea tiene las siguientes funciones: - En primer lugar, el talker puede comunicar, poniendo a "1" lógico esta línea, que concluye su envío de datos. - En segundo lugar, esta línea es utilizada por el controller para iniciar una encuesta paralela. En este caso el controller debe poner simultáneamente a "1" lógico las señales ATN y EOI, y como respuesta a ello, los equipos que previamente hayan sido configurados para participar en la encuesta paralela transfieren su bit de status sobre el bus. COMANDOS DEL BUS Los dispositivos conectados al bus GPIB pueden potencialmente enviar o recibir datos de cualquier otro equipo. Antes de que se produzca una transferencia de datos, el controller debe establecer cual es el equipo (solo uno) que debe actuar como talker, y cuales van a actuar como listener (uno o varios equipos). Además de esta operación básica relacionada con la transferencia de datos, el controller y los otros equipos conectados al bus pueden realizar otras muchas operaciones no específicamente relacionada con el intercambio de datos entre equipos, sino con la gestión y organización de los diferentes equipos. A estas operaciones se las denomina genéricamente Comandos de Bus. En los comandos de bus se envían datos por el bus de datos (si la operación lo requiere) de igual modo en la transferencia de datos, solo que en estos casos la señal ATN es establecida a 1 lógico por el controller, para indicar que es un comando, y en este caso, todos los equipos con independencia de que sean talker o listener reciben el comando manteniendo el protocolo con el controller.

IEL1-03-II-04
18
El controller puede enviar cinco tipos de comandos de bus a los otros equipos: addressed, listen, talk, universal y secondary. Solo los 7 bits menos significativos del bus son utilizados en los comandos de bus. Los tres bit b7, b6 y b5 definen la naturaleza de cada comando: Tabla 2-1 Comandos enviados por el controller
B7 B6 B5 TIPO COMANDO
0 0 0 Addressed 0 0 1 Universal 0 1 X Listen 1 0 X Talk 1 1 X Secondary
Los equipos conectados al bus GPIB tienen asignado un código o dirección de bus comprendido entre 0-30. Este código debe ser establecido en cada equipo, bien estableciendo un conmutador hardware presente en su panel trasero, o bien en algunos casos programando el equipo mediante su software interno. Normalmente, los cinco bit menos significativos de la línea de datos b5, b4, b3, b2, b1 se utilizan en un comando para establece a que equipos hace referencia un comando. COMANDOS TALK/LISTEN Comandos My Talk Address (MTA) o (también llamado TAG Take Address Group): Es un comando destinado a establecer un equipo del bus como talker. El formato de este comando es:
0 1 0 d5 d4 d3 d2 d1 Cuando se ejecuta este comando, todos los equipos reciben el comando, y solo aquel cuya dirección sea el presente en el comando, pasa a modo talker. Tras finalizar este comando, el equipo que ha sido establecido como talker puede enviar datos a otros equipos. Comando Untalk (UNT): Es un comando que cuando es establecido por el controller requiere de todos los dispositivos que se encuentran en modo talker, para que abandonen ese estado y pasen a su estado base. El formato de este comando es: 0 1 0 1 1 1 1 1

IEL1-03-II-04
19
Comando My Listen Adrress (MLA) (o también llamada LAG Listener Address Group): Es un comando que establece un equipo del bus como listener. El formato de este comando es: 0 0 1 d5 d4 d3 d2 d1
Cuando se ejecuta este comando, todos los equipos reciben el comando, y solo aquel cuya dirección sea el presente en el comando, pasa a modo listener. A partir de ese momento, el equipo recibe todos los datos que transmita cualquier talker. Comando Unlisten (UNL): Es un comando que cuando es establecido por el controller requiere de todos los dispositivos que se encuentran en modo Listener para que abandonen ese estado y pasen a un estado base. El formato de este comando es: 0 0 1 1 1 1 1 1
COMANDOS UNIVERSALES (UGC) Es un conjunto de comando que ejecuta el controller con destino a todos los dispositivos del bus. Comando Local Lockout (LLO): Se utiliza para deshabilitar los paneles de control propios de cada uno de los equipos conectados al bus. Con esta deshabilitación, se evita que se produzcan conflictos entre las instrucciones recibidas por el bus, y las realizadas a través de los controles manuales del panel. El formato de esta instrucción es: 0 0 0 1 0 0 0 1
Comando Device Clear (DCL): Es un comando que resetea todos los equipos disponibles sobre el bus. 0 0 0 1 0 1 0 0
Comando Parallel Poll Unconfigure (PPU): Es un comando que se utiliza para resetear la programación realizada sobre los diferentes equipos a fin de que respondan en las encuestas paralelas (parallel poll). El formato de este comando es 0 0 0 1 0 1 0 1
Comando Serial Poll Enable (SPE): Este comando habilita a todos los equipos para que respondan en modo de encuesta serie (serial poll). Cuando se habilita el

IEL1-03-II-04
20
modo de encuesta serie, cada vez que se envía un comando talk a un equipo presente en el bus, este contesta enviando su estatus. El formato de este comando es:
0 0 0 1 1 0 0 0 Comando Serial Poll Disable (SPD): Deshabilita el modo de encuesta serie en todos los equipos conectados al bus y pasan a modo normal. El formato de este comando es: 0 0 0 1 1 0 0 1
COMANDOS ADDRESSED (ACG) Los comandos de este grupo van destinados únicamente a aquellos equipos que previamente han sido establecidos en listener. Estos comandos solo afectan a los equipos a los que va destinado. Comando Go To Local (GTL): Cuando se envía este comando, todos los equipos que se encuentran en modo listener vuelven el control a sus paneles locales. Este comando cancela el efecto establecido por el comando universal Local LockOut (LLO). El formato de este comando es: 0 0 0 0 0 0 0 1
Comando Selected Device Clear (SDC): Este comando resetea de forma selectiva a aquellos equipos que están en modo listener. El formato de este comando es: 0 0 0 0 0 1 0 0
Comando Parallel Poll Configure (PPC): Este comando pone a todos los equipos que se encuentran en modo listener en modo para ser programados a efecto de responder a una encuesta paralela ("parallel poll"). El formato de este comando es: 0 0 0 0 0 1 0 1
El controller ejecuta una encuesta paralela estableciendo las líneas de control ATN y EOI a 1 lógico. Cuando los equipos conectados al bus reciben este estado de las líneas, responden situando un bit de estatus sobre la línea del bus de datos que se le haya asignado en el comando PPC. El controller puede leer el estado del

IEL1-03-II-04
21
conjunto de las líneas del bus de datos, y obtener información global sobre todos los equipos que fueron programados para la encuesta paralela. El comando PPC se usa para especificar por que líneas del bus de datos debe responder cada equipo, y si el dispositivo debe responder con un "0" o un "1" lógico el requerimiento de servicio. Tras ser transmitido el comando PPC todos los equipos que se encontraba en modo listener se ponen a la espera de recibir un comando secundario ("My Secondary Adrees" (MSA) o también llamado "Secondary Address Group (SAD)") con el que queda programada su respuesta a una encuesta paralela. Los cuatro bits más bajos del comando secundario contienen la siguiente información: 0 1 1 - b4 b3 b2 b1
b4: Indica la forma como debe responde por la línea asignada. Si b4 =0 indica que el equipo debe indicar durante la encuesta paralela, que requiere servicio estableciendo un "0" lógico en la línea que le ha sido asignada. b4=1 significa que el equipo debe indica el requerimiento de servicio poniendo un "1" lógico sobre la línea. b3b2b1: Indica la línea entre 0 y 7 por la que deben responder los equipos que están siendo programados. Varios equipos pueden ser programados para que respondan en una encuesta paralela respondiendo sobre una misma línea. Dado la lógica wire-or utilizada para el control de la línea, y las dos posibilidades de modo de respuesta a la encuesta paralela que puede establecerse, caben la posibilidad de determinar si alguno de los equipos que responden pos la misma línea requiere servicio, o si todos esos equipos requieren simultáneamente servicio. Comando Group Trigger (GET): Permite sincronizar la operación de un conjunto de equipo que previamente han sido programados para que se encuentre a la espera del comando. El formato de este comando es 0 0 0 0 1 0 0 0
Comando Take Control (TCT): Con este comando el controller transfiere su función como controlador a otro equipo capacitado para ello. Para ello, primero debe establecer el equipo que va a ser establecido como nuevo controller a modo listener, y posteriormente enviar este comando TCT para convertirlo en el controller del bus. El formato de este comando es: 0 0 0 0 1 0 0 1

IEL1-03-II-04
22
2.2.4 Especificaciones eléctricas
Los dispositivos están unidos por la interfaz a través de de un cable blindado de 24 conductores con un conector a cada lado. Una forma de conectar los dispositivos se muestra en la figura 2-3. Los circuitos eléctricos de los emisores (drivers) y receptores (receivers) tienen que ser compatibles con TTL y utilizan lógica negativa. Figura 2-3 Conexión de los equipos GPIB
2.2.5 Especificaciones mecánicas
CONECTOR ESTANDAR DE ACCESO AL BUS GPIB: El conector tiene que ser trapezoide de tipo Ribbon de 24 contactos, en la figura 2-4 se muestra la asignación de los contactos de las líneas.

IEL1-03-II-04
23
Figura 2-4 Conector Estándar GPIB
2.3 INSTRUMENTOS GPIB UTILIZADOS
2.3.1 Voltímetro HP 3437A
Figura 2-5 Voltímetro HP 3437A
El voltímetro 3437A que aparece en la figura 2-5 esta controlado por un microprocesador y tiene 3 ½ dígitos, trabaja con aproximaciones sucesivas capaz de tomar 5700 muestras por segundo, tiene capacidad de tomar muestras con intervalos, tiene tres rangos de medida que son 0.1, 1 y 10 Voltios, es compatible con el estándar IEEE-488. Para programar el voltímetro se usan los siguientes códigos de programación:

IEL1-03-II-04
24
Tabla 2-2 Códigos de Programación para el HP 3437A
CODIGOS DE PROGRAMACIÓN
Código de Programación
Descripción
D Delay N NRDGS E Enable RQS S Store
R1 R2 R3
Rango 0.1Voltios 1Voltios 10Voltios
T1 T2 T3
Trigger Interno Externo Hold/Man
F1 F2
Formato ASCII Packet
B Binary Program Con los códigos anteriores se puede programar el voltímetro, enviándole un string con los comandos necesarios para la programación que se requiere. A continuación vemos un ejemplo del string necesario para configurar los siguientes parámetros: DELAY 2.5ms NRDGS 100 ENAB RQS 0 Range 10 Volts Trigger Externo Formato ASCII El string es: D.0025S,N100S,EOS,R3,T2,F1 De esta forma se puede cambiar su configuración en un instante por medio del bus GPIB.

IEL1-03-II-04
25
2.3.2 Voltímetro Fluke 8500A
Figura 2-6 Voltímetro Fluke 8500A
El voltímetro digital Fluke 8500A que aparece en la figura 2-6 tiene seis dígitos y medio para la visualización de los datos, emplea un microprocesador para el control y tiene una estructura de bus. Todos los componentes activos están contenidos en módulos que se insertan en una tarjeta madre. La construcción modular provee al voltímetro de una gran versatilidad, además en caso de algún daño los módulos son muy fáciles de reemplazar. Tabla 2-3 Códigos de Programación para el Fluke 8500A
CODIGOS DE PROGRAMACIÓN Código de
Programación Descripción
V VA C I
IA Z
Z1
DC Volts AC Volts DC Coupled AC Volts DC Current AC Current Ohms Fast Ohms
S0 S1 S2 S3 S4 S5 S6 S7 H0 H1 H2
1 Muestra/Lectura 2 Muestras/Lectura 4 Muestras/Lectura 8 Muestras/Lectura 16 Muestras/Lectura 32 Muestras/Lectura 64 Muestras/Lectura 128 Muestras/Lectura 256 Muestras/Lectura 512 Muestras/Lectura 1024 Muestras/Lectura

IEL1-03-II-04
26
H3 H4 H5 H6 H7 H8 H9
2048 Muestras/Lectura 4096 Muestras/Lectura 8192 Muestras/Lectura 16384 Muestras/Lectura 32768 Muestras/Lectura 65536 Muestras/Lectura 131072 Muestras/Lectura
F F0 F1 F2 F3
Slow Filter Fast Filter Bypass Filter Slow Filter Fast Filter
T T0 T1 T2
Continuous reading (Synchronized) Single reading (Synchronized) Continuous reading (Asynchronous) Single reading (Asynchronous)
P P0
Offset subtracted (ON) Offset not subtracted (OFF)
X X0 X1
External Reference On, Scaling Off External Reference Off, Scaling Off External Reference Off, Scaling On
U U0 U1
Limit Testing On Disable Limits and peak Save Highest and Lowest values
B B0 B1 B2
Single Byte binary format Single Byte ASCII format Binary 16-bit parallel 16-bit Parallel
D D0
Display Off Display On
L L0
Local Lockout On Local Lockout Off
Y Y0
ECHO ON ECHO OFF
J J0 J1
Suppress Line Feed Character Transmit Line Feet Character Suppress Output of Readings
M M0
Inhibit Calibration Memory Factors Enable Calibration Memory Factors
Q Q0 Q1
Active External Triggering Mode Desactive External Triggering Mode Active External Triggering Mode, Transmit when Ready

IEL1-03-II-04
27
W W0 W1 W2 W3 W4 W5 W6 W7 W8 W9
W10 W11 W12 W13 W14 W15
No Delay 2.083 ms 4.166 ms 8.332 ms 16.66 ms 33.33 ms 66.66 ms 133.3 ms 266.6 ms 533.2 ms 1.066 s 2.133 s 4.266 s 8.532 s 17.06 s 34.13 s 68.26 s
K K0 K1
Store Last Reading as Offset Store Last Volt Taken as VCD Zero Store Last Reading as Ohms Zero
G G0 G1
Recall Previous Reading and Send on Next Trigger. Recall DC Zero and Send on Next Trigger. Recall Status and Send on Next Trigger.
Para programar este voltímetro mediante el bus es necesario enviarle un string con los parámetros requeridos por nuestra medición A continuación vemos un ejemplo del string necesario para configurar los siguientes parámetros: FUNCION DC VOLTS TRIGGER MODE INTERNAL, CONTINUOUS FILTER MODE SLOW NO DELAY RANGE AUTORANGE MUESTRAS/LECTURA 128 El string es: %P0X0U0B0J0WM0VRS7FT? Así se envían cada uno de los parámetros al voltímetro para cambiar su configuración en un instante por medio del bus GPIB.

IEL1-03-II-04
28
2.3.3 Generador de funciones HP 3325A
Figura 2-7 Generador de funciones HP 3325A
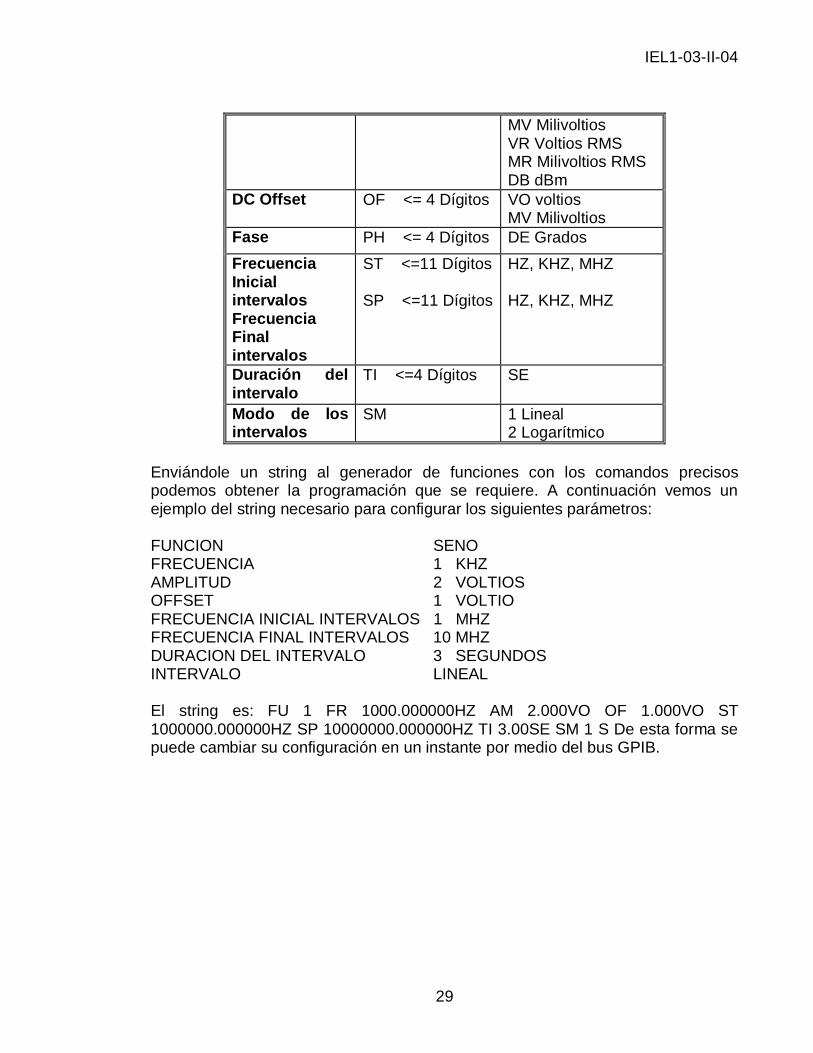
El generador de funciones HP3325A que aparece en la figura 2-7 es un instrumento de fines generales agradable e ideal para trabajos electrónicos. Tiene opciones interesantes como la opción de alto voltaje que ideal al probar un amplificador de potencia sin necesidad de usar un preamplificador, además es compatible con el estándar IEEE-488. Este instrumento puede generar señales con un mínimo de frecuencia de 1µHz y con las siguientes máximas frecuencias: Onda Senosoidal 20MHZ Onda Cuadrada 10MHZ Onda Triangular 10KHZ Rampa Positiva 10KHZ Rampa Negativa 10 KHZ La amplitud puede ser escogida entre 1mV y 10V pico a pico, también se puede aplicar offset a la señal de +-4.5 Voltios. Para programar el voltímetro se usan los siguientes códigos de programación: Tabla 2-4 Códigos de Programación para el HP 3325A
CODIGOS DE PROGRAMACIÓN Parámetro Código de
Programación Descripción
Función FU 0 DC Only 1 Seno 2 Cuadrada 3 Triangulo 4 Rampa Positiva 5 Rampa Negativa
Frecuencia FR <= 11 Dígitos
HZ Herz KHZ KiloHerz MHZ MegaHerz
Amplitud AM <= 4 Dígitos VO Voltios pico-pico
IEL1-03-II-04
29
MV Milivoltios VR Voltios RMS MR Milivoltios RMS DB dBm
DC Offset OF <= 4 Dígitos VO voltios MV Milivoltios
Fase PH <= 4 Dígitos DE Grados Frecuencia Inicial intervalos Frecuencia Final intervalos
ST <=11 Dígitos SP <=11 Dígitos
HZ, KHZ, MHZ HZ, KHZ, MHZ
Duración del intervalo
TI <=4 Dígitos SE
Modo de los intervalos
SM 1 Lineal 2 Logarítmico
Enviándole un string al generador de funciones con los comandos precisos podemos obtener la programación que se requiere. A continuación vemos un ejemplo del string necesario para configurar los siguientes parámetros: FUNCION SENO FRECUENCIA 1 KHZ AMPLITUD 2 VOLTIOS OFFSET 1 VOLTIO FRECUENCIA INICIAL INTERVALOS 1 MHZ FRECUENCIA FINAL INTERVALOS 10 MHZ DURACION DEL INTERVALO 3 SEGUNDOS INTERVALO LINEAL El string es: FU 1 FR 1000.000000HZ AM 2.000VO OF 1.000VO ST 1000000.000000HZ SP 10000000.000000HZ TI 3.00SE SM 1 S De esta forma se puede cambiar su configuración en un instante por medio del bus GPIB.

IEL1-03-II-04
30
2.3.4 Tarjeta PCMCIA GPIB
Figura 2-8 Tarjeta PCMCIA GPIB
La tarjeta PCMCIA GPIB que aparece en la figura 2-8 es una tarjeta muy versátil, ya que puede ser utilizada en computadores portátiles por eso son muy útiles para hallar fallas en sistemas que utilicen el estándar IEEE-488. El software incluido configura la tarjeta automáticamente en el encendido o cuando esta última se inserta en la ranura PCMCIA. La tarjeta PCMCIA-GPIB fue diseñada para un bajo consumo de energía y de fácil portabilidad, características especialmente importantes para ser usada en equipos portátiles. El consumo de energía típico es solamente 65 mA. La tarjeta PCMCIA GPIB tiene una capacidad llamada “Insert hot” que consiste en poder cambiar de tarjeta, insertarla o quitarla del portátil sin necesidad de reiniciar o apagar el sistema Las tasas de transferencia dadas por el software y el hardware de la tarjeta proporcionan un funcionamiento óptimo, incluso cuando el bloque de datos es pequeño. La figura 2-9 ilustra el funcionamiento máximo de la transferencia de datos del PCMCIA-GPIB en las transferencias por debajo de 1Kbyte, la figura 2-10 muestra la respuesta para transferencias por encima de 35Kbyte, las transferencias de datos reales obtenibles dependen del ordenador, configuración del sistema y de la capacidad del dispositivo.

IEL1-03-II-04
31
Figura 2-9 Transferencia de datos máxima
Figura 2-10 Respuesta a transferencias mayores a 35 Kb/seg
Característica FIFO Primero en entrar, primero en salir: Un buffer FIFO de 32 Bytes protege los datos enviados o recibidos en el bus, Almacenando los datos el bus PCMCIA y el GPIB pueden turnar sus accesos al buffer FIFO que es mejor a que un bus espere al otro para terminar el ciclo, este proceso aumenta la transferencia de datos

IEL1-03-II-04
32
3. SOFTWARE UTILIZADO EN EL CONTROL DE
INSTRUMENTACIÓN Y CREACIÓN DE INSTRUMENTOS
VIRTUALES
3.1 LabView.
LabView es un entorno de programación destinado al desarrollo de aplicaciones, similar a los sistemas de desarrollo comerciales que utilizan el lenguaje C o BASIC. Sin embargo, LabView se diferencia de dichos programas en un importante aspecto: los citados lenguajes de programación se basan en líneas de texto para crear el código fuente del programa, mientras que LabView emplea la programación gráfica o lenguaje G para crear programas basados en diagramas de bloques. Por eso se puede decir que LabView es un sistema de programación de propósito general con extensas librerías de funciones y subrutinas para hacer tareas de programación; además se puede decir que es un software de programación grafica, donde se pueden encontrar todas las estructuras básicas para la programación; por otra parte, LabView ofrece un número de librerías con aplicaciones específicas para la gestión de tarjetas de datos para el control de instrumentos a través de GPIB, VXI entre otras. Este software permite analizar, presentar y almacenar datos. Para la depuración de errores, Labview incluye un tipo de herramientas convencionales de desarrollo de programas, de manera que se pueden colocar puntos de ruptura y animar la ejecución para ver como se pasan los datos paso a paso. Entre las librerías de Labview se pueden observar las siguientes-. - File I/O: Esta librería sirve para guardar y recuperar los datos de los soportes
físicos. - Analysis: En esta librería se encuentra específicamente Measurement: la cual
permite realizar todo tipo de medidas; Signal Generation: esta permite simular todo tipo de señales posibles; Signal Processing: se encarga del tratamiento de las señales, de la transformada rápida de Fourier, convoluciones, etc,; Filters: Contiene todo los tipos de filtros digitales.
- DAC: Ofrece la opción de actuar sobre las tarjetas de adquisición. - Instrument I/O: En esta librería se encuentran las opciones para las
comunicaciones ya sea por via GPIB o VXI, entre otras. - VI: Esta librería permite utilizar otros programas realizados en otras
aplicaciones.

IEL1-03-II-04
33
3.1.1 Programación en LabView.
Los programas utilizados en LabView son denominados Instrumentos Virtuales, ya que imitan instrumentos reales; sin embargo son análogos a las funciones creadas con los lenguajes de programación convencionales. Estos programas son una interfaz interactiva para el usuario la cual acepta parámetros procedentes de Instrumentos Virtuales de niveles superiores. Todos los Instrumentos Virtuales tienen un panel frontal y un diagrama de bloques. Las paletas contienen las opciones que se emplean para crear y modificar los Vis (Instrumentos Virtuales). Panel Frontal Se trata de la interfaz gráfica del Instrumento Virtual con el usuario. Esta interfaz recoge las entradas procedentes del usuario y representa las salidas proporcionadas por el programa. Un panel frontal está formado por una serie de botones, pulsadores, potenciómetros, gráficos, etc. Cada uno de ellos puede estar definido como un control o un indicador. Los primeros sirven para introducir parámetros al Instrumento Virtual, mientras que los indicadores se emplean para mostrar los resultados producidos, ya sean datos adquiridos o resultados de alguna operación. Diagrama de bloques El diagrama de bloques constituye el código fuente del Instrumento Virtual. En este se realiza la implementación del programa del Instrumento Virtual para controlar o realizar cualquier procesado de las entradas y salidas que se crearon en el panel frontal. El diagrama de bloques incluye funciones y estructuras integradas en las librerías que incorpora LabView. En el lenguaje G las funciones y las estructuras son nodos elementales; son análogas a los operadores o librerías de funciones de los lenguajes convencionales. Los controles e indicadores que se colocaron previamente en el Panel Frontal, se materializan en el diagrama de bloques mediante los terminales. El diagrama de bloques se construye conectando los distintos objetos entre sí, como si de un circuito se tratara. Los cables unen terminales de entrada y salida con los objetos correspondientes, y por ellos fluyen los datos. LabView posee una extensa biblioteca de funciones, entre ellas, aritméticas, comparaciones, conversiones, funciones de entrada/salida, de análisis, etc.

IEL1-03-II-04
34
Paletas Las paletas de LabView proporcionan las herramientas que se requieren para crear y modificar tanto el panel frontal como el diagrama de bloques. Existen las siguientes paletas: Paleta de herramientas (Tools palette): Se emplea tanto en el panel frontal como en el diagrama de bloques. Contiene las herramientas necesarias para editar y depurar los objetos tanto del panel frontal como del diagrama de bloques. Las opciones que se presentan en esta paleta son: Operating tool: Cambia el valor de los controles. Positioning tool: Desplaza, cambia de tamaño y selecciona los objetos. Labeling tool: Edita texto y crea etiquetas. Wiring tool: Une los objetos en el diagrama de bloques. Object Pop-up Menu tool: Abre el menú desplegable de un objeto. Scroll tool: Desplaza la pantalla sin necesidad de emplear las barras de desplazamiento. Breakpoint tool: Fija puntos de interrupción de la ejecución del programa en Instrumentos Virtuales, funciones y estructuras. Probe tool: Crea puntos de prueba en los cables, en los que se puede visualizar el valor del dato que fluya por dicho cable en cada instante. Color Copy tool: Copia el color para después establecerlo mediante la siguiente herramienta. Color tool: Establece el color de fondo y el de los objetos

IEL1-03-II-04
35
Select a Control: Para seleccionar cualquier control. Al seleccionar objetos desde el menú Controls estos aparecen sobre el panel frontal, pueden colocarse donde convenga, y además tienen su propio menú desplegable que permite la configuración de algunos parámetros específicos de cada tipo de control... Paleta de funciones (functions palette): Se emplea en el diseño del diagrama de bloques. La paleta de funciones contiene todos los objetos que se emplean en la implementación del programa del Instrumento Virtual, ya sean funciones aritméticas, de entrada/salida de señales, entrada/salida de datos a fichero, adquisición de señales, temporización de la ejecución del programa. Para seleccionar una función o estructura concretas, se debe desplegar el menú Functions y elegir entre las opciones que aparecen. A continuación se enumeran todas ellas: Structures: Muestra las estructuras de control del programa, junto con las variables locales y globales. Numeric: Muestra funciones aritméticas y constantes numéricas. Boolean: Muestra funciones y constantes lógicas. String: Muestra funciones para manipular cadenas de caracteres, así como constantes de caracteres. Array: Contiene funciones útiles para procesar datos en forma de vectores, así como constantes de vectores. Cluster: Contiene funciones útiles para procesar datos procedentes de gráficas y destinados a ser representados en ellas, así como las correspondientes constantes. Comparison: Muestra funciones que sirven para comparar números, valores booleanos o cadenas de caracteres. Time & Dialog: Contiene funciones para trabajar con cuadros de diálogo, introducir contadores y retardos, etc. File I/O: Muestra funciones para operar con ficheros. Communication: Muestra diversas funciones que sirven para comunicar varios ordenadores entre sí, o para permitir la comunicación entra distintos programas. Instrument I/O: Muestra un submenú de VIs, que facilita la comunicación con instrumentos periféricos que siguen la norma ANSI/IEEE 488.2-1987, y el control del puerto serie. Data Acquisition: Contiene a su vez un submenú donde puede elegirse entre distintas librerías referentes a la adquisición de datos. Analysis: Contiene un submenú en el que se puede elegir entre una amplia gama de funciones matemáticas de análisis. Tutorial: Incluye un menú de VIs que se utilizan en el manual LabVIEW Tutorial. Advanced: Contiene diversos submenús que permiten el control de la ayuda, de los VIs, manipulación de datos, procesado de eventos, control de la memoria, empleo de programas ejecutables o incluidos en librerías DLL, etc. Instrument drivers: En él se muestran los drivers disponibles de distintos instrumentos.

IEL1-03-II-04
36
User Libraries: Muestra as librerías definidas por el usuario. En este caso, la librería mostrada contiene los drivers de la tarjeta de adquisición de datos de Advantech. Aplication control: Contiene varias funciones que regulan el funcionamiento de la propia aplicación en ejecución. Select a VI: Permite seleccionar cualquier VI para emplearlo como subVI.
3.1.2 Control de instrumentos
Control GPIB La generación de un programa de control de un instrumento mediante un lenguaje de programación convencional implica una serie de problemas, como son denominar todos los comandos del lenguaje, los comandos del instrumento y trabajar en un entorno en que la interfaz con el usuario es poco intuitiva. Con Labview gran parte de estos problemas quedan resueltos, ya que no se necesita escritura de código. La parte de control y comunicación con Bus GPIB es posible gracias a una librería GPIB, mientras que la realización de la interfaz lo es gracias a las librerías de controles, indicadores, etc. Labview posee una librería GPIB que nos permite controlar y comunicarnos con el instrumento a través del Bus GPIB. Las operaciones que se utilizan con más frecuencia son las de leer y escribir datos desde o hacia el instrumento mediante el ordenador. Dentro de la librería GPIB de Labview, en el menú Functions, hay dos íconos que se encarga de realizar estas operaciones. Como parámetros típicos podemos destacar el address string que indica la dirección del instrumento GPIB con el cual queremos realizar la comunicación, y el status o array booleano, con el cual se indica el estado del controlador GPIB. Cambiando estos parámetros del Instrumento Virtual de la librería de Labview pueden efectuarse operaciones de inicialización, escritura, lectura, espera, borrado, etc. Con instrumentos GPIB. Comunicación serie Labview también permite la comunicación por el puerto serie mediante la librería “Serial”; así pueden prefijarse parámetros de comunicación serie como la entrada y la salida de datos o la paridad de estos.
IEL1-03-II-04
37
Adquisición de datos El driver NI-DAQ es una librería dinámica de intercambio de datos en Windows (DDL) que Labview proporciona con un interfaz de alto nivel con las tarjetas de adquisición. Con esta aplicación se pueden configurar las tarjetas de la librería DAQ de Labview de una manera simple y efectiva, desde NI-DAQ se puede escoger el tipo de señal que quiere adquirirse, el canal, fijar el contador y el temporizador, y otras posibilidades. VENTAJAS: • Se reduce el tiempo de desarrollo de las aplicaciones al menos de 4 a 10
veces, ya que es muy intuitivo y fácil de aprender. • Dota de gran flexibilidad al sistema, permitiendo cambios y actualizaciones
tanto del hardware como del software. • Da la posibilidad a los usuarios de crear soluciones completas y complejas. • Con un único sistema de desarrollo se integran las funciones de adquisición,
análisis y presentación de datos. • El sistema está dotado de un compilador gráfico para lograr la máxima
velocidad de ejecución posible. • Tiene la posibilidad de incorporar aplicaciones escritas en otros lenguajes.

IEL1-03-II-04
38
4. APLICACIONES REALIZADAS
4.1 Respuesta en frecuencia de filtros y amplificadores
4.1.1 Introducción
Para familiarizarnos con los equipos y el programa de LabView se creo un programa el cual hace un barrido de frecuencia y nos da la respuesta del sistema bajo prueba en el rango de frecuencias especificado. Este programa es muy útil para ver como LabView por medio del computador recibe datos y envía órdenes a los instrumentos GPIB
4.1.2 Descripción del programa realizado en LabView.
La estructura del programa es sencilla gracias al entorno grafico de LabView, la idea del programa es hacer un barrido de frecuencia donde el usuario puede ingresar el tamaño de los intervalos y la cantidad de intervalos para el barrido, así se tiene un programa mucho mas versátil pues no hay un tamaño de intervalo justo para todos los sistemas, dependiendo de cada sistema los rangos de frecuencia y tamaños de los intervalos varían para poder obtener una grafica de la respuesta en frecuencia del sistema adecuada. La metodología para obtener la grafica es la siguiente, inicialmente se programa el generador de funciones con un voltaje de un voltio como entrada y se escoge la onda seno a frecuencia mínima, luego dentro de un ciclo se empieza a incrementar proporcionalmente la frecuencia del generador seguido de la medición por parte del voltímetro, al tener el voltaje RMS de la respuesta del sistema se procede a enviar los datos a un segmento matemático de donde se obtiene el veinte logaritmo del valor absoluto de la salida sobre la entrada, como ya habíamos escogido como parámetro inicial un voltio en el generador, no es necesario hacer la medición en la entrada al sistema, únicamente se necesita medir la salida para obtener la respuesta. Así se obtiene un dato por cada intervalo de frecuencia en el que se mide la salida y con la ayuda de las herramientas graficas de LabView se obtiene la grafica de la respuesta en frecuencia del sistema bajo prueba al finalizar el ciclo. Se realizaron dos programas, uno para cada uno de los voltímetros disponibles, cada uno con sus limitaciones y ventajas, el primer programa fue el diseñado para el voltímetro HP 3437A el cual toma los datos rápidamente pero no proporciona el valor RMS de la señal, así que para obtener tal medición se tomaron muchos datos y con la herramienta de LabView para calcular el valor promedio de la señal RMS se obtuvo tal valor, el problema se presentaba al obtener los datos para frecuencias muy pequeñas, pues los datos no eran los correctos.

IEL1-03-II-04
39
El segundo programa fue el creado para el voltímetro Fluke 8500A el cual era mas sencillo, pues este voltímetro si proporciona el valor RMS de la señal censada pero la debilidad de este es el tiempo que demora en proporcionar cada dato, pues es significativamente mas lento que el voltímetro HP. A continuación se mostraran los diagramas de cada uno de los programas. La figura 4-11 muestra el programa para obtener la respuesta en frecuencia con el voltímetro Fluke 8500A, se ve claramente la forma secuencial del programa, con esto se busca un correcto funcionamiento del mismo, en el momento de obtener el valor a la salida del sistema se divide entre 0.707 para que esta medida sea proporcional con la entrada al sistema y la grafica de la respuesta en frecuencia sea correcta. Figura 4-11 Programa de la primera aplicación con el Fluke 8500A

IEL1-03-II-04
40
La figura 4-12 muestra la interfaz del programa con el usuario con el voltímetro Fluke 8500A, antes de correr el programa debemos ingresar el numero de ciclos y el tamaño de los intervalos, es necesario tener un conocimiento mínimo del sistema a censar para saber que tipo de grafica esperar y así escoger los parámetros correctamente, también podemos ver la respuesta que tiene el sistema en el tiempo. Figura 4-12 Panel Frontal de la primera aplicación con el Fluke 8500A
La figura 4-13 nos muestra el programa para obtener la respuesta en frecuencia con el voltímetro HP 3437A, en este programa la conversión de los datos obtenidos del voltímetro es mas compleja que con el voltímetro Fluke 8500A pues el voltímetro HP no nos da el valor del voltaje directamente, por esto se debe hacer un programa para obtener la conversión del dato proporcionado por el voltímetro para convertirlo en el valor de voltaje deseado.

IEL1-03-II-04
41
Figura 4-13 Programa de la primera aplicación con el HP 3437A

IEL1-03-II-04
42
La figura 4-14 es la interfaz del programa con el usuario utilizando el voltímetro HP 3437A, la diferencia con el anterior es que en este hay que darle al voltímetro el numero de datos que debe tomar por cada intervalo de frecuencia para poder estimar el valor RMS de la señal censada. Figura 4-14 Panel Frontal de la primera aplicación con el HP 3437A
4.1.3 Respuesta en frecuencia de un filtro pasa bajas
Como primer sistema a medir se uso un filtro pasa bajos el cual estaba construido por un condensador y una resistencia como se muestra en la figura 4-15.

IEL1-03-II-04
43
Figura 4-15 Filtro pasa bajas RC
Para construir este tipo de filtro es necesario diseñar el circuito de forma que el valor de la resistencia y el condensador cumplan con las siguientes ecuaciones:
El tipo de respuesta de este circuito se puede ver en la figura 4-16; la frecuencia de corte se obtiene en el valor de la frecuencia donde el voltaje de salida es 1/√2 el voltaje de entrada.
Figura 4-16 Respuesta típica de un filtro pasa bajas RC
Este sistema fue utilizado para probar el programa creado debido a la sencillez de su respuesta, se uso una resistencia de 100 ohms y un condensador de 4.7 micro faradios la figura 4-17 nos muestra la respuesta en frecuencia bajo simulación en Matlab:

IEL1-03-II-04
44
Figura 4-17 Simulación en Matlab del filtro utilizado
Al comparar la respuesta simulada en Matlab con la respuesta del programa (figura 4-18), se comprobó la funcionalidad del programa pues la respuesta obtenida fue la esperada. Figura 4-18 Respuesta obtenida con el programa realizado
4.1.4 Respuesta en frecuencia de varios amplificadores
Como fase final del programa que fue creado para obtener respuestas en frecuencia de diferentes sistemas, se usaron varios amplificadores operacionales y con cada uno de ellos se probaron varias configuraciones con diferentes ganancias, los amplificadores escogidos fueron el LM741, LM318 y el LM1458 los cuales tienen diferentes características una de ellas y para este caso la mas importante es el ancho de banda. Las configuraciones probadas fueron en lazo
IEL1-03-II-04
45
abierto y con diferentes ganancias. Para las configuraciones de ganancia se utilizo la forma del amplificador inversor como se muestra en la figura 4-19: Figura 4-19 Configuración de amplificador inversor
Con esta configuración la ganancia es obtenida en función de las resistencias R1 y R2 como A = - R2/R1. Para cada uno de los amplificadores se probaron las siguientes ganancias con las resistencias que se indican en la siguiente tabla: Tabla 4-5 Ganancias empleadas en los amplificadores
GANANCIA R2 (OHMS) R1 (OHMS)

IEL1-03-II-04
46
Figura 4-20 Respuesta en frecuencia del LM741 en lazo abierto
Respuesta del LM741 con ganancia de Unitaria Para esta respuesta en la figura 4-21 se ve como disminuyo el ancho de banda con respecto a la anterior medición, esto debido a que ya se encuentra en configuración de lazo cerrado con la configuración de seguidor inversor. Figura 4-21 Respuesta en frecuencia del LM741 con ganancia unitaria
Respuesta del LM741 con ganancia 2.12 En la grafica de la figura 4-22 se ve como aumentan los decibeles de ganancia a medida que se aumenta la ganancia en la configuración seguidor inversor, cuando se pasa el umbral de los cero decibeles la curva se hace mas recta y por tanto se vuelve un poco menos efectivo pues abarca menor frecuencia que a ganancias mas bajas.

IEL1-03-II-04
47
Figura 4-22 Respuesta en frecuencia del LM741 con ganancia 2.12
Respuesta del LM741 con ganancia 4.7 En la figura 4-23 se observa la respuesta del amplificador para una ganancia de 4.7, la ganancia máxima es de 13dB y se observa desde la frecuencia mínima hasta los 15 KHZ. Luego tiene una clase de discontinuidad cerca de los 100 KHZ con la cual abarca más sectores de frecuencia. Figura 4-23 Respuesta en frecuencia del LM741 con ganancia 4.7
Respuesta del LM741 con ganancia 10 La respuesta para el LM741 con ganancia 10 es mostrada en la figura 4-24, se puede ver claramente que a medida que aumenta la configuración de ganancia la curva es mas cerrada y abarca menos área pus en la medición de ganancia de 4.7 la ganancia máxima llegaba a los 15 KHZ mientras que en esta configuración se llega máximo a los 8 KHZ.

IEL1-03-II-04
48
Figura 4-24 Respuesta en frecuencia del LM741 con ganancia 10
RESPUESTAS DEL AMPLIFICADOR LM318 Respuesta del LM318 en lazo abierto En la figura 4-25 se ve que la ganancia de este amplificador es mucho mayor que la del LM741 pues para el caso de lazo abierto teníamos una ganancia muy baja y ahora es cercana a los 20 dB, también se observa que es mucho mas estable pues su respuesta es prácticamente un escalón. Figura 4-25 Respuesta en frecuencia del LM318 en lazo abierto
Respuesta con ganancia Unitaria Para este amplificador el ancho de banda aumenta a 10 MHZ por lo cual su respuesta abarca mucho más frecuencias, en esta configuración la curva que se muestra en la figura 4-26 tiene un comportamiento muy parecido a la del LM741.

IEL1-03-II-04
49
Figura 4-26 Respuesta en frecuencia del LM318 con ganancia unitaria
Respuesta con ganancia 2.12 En la figura 4-27 se muestra la respuesta en frecuencia del LM318 con ganancia de 2.12, en esta configuración la curva volvió a tomar forma de escalón y llega a los 5MHZ además presenta un pico cerca de los 2 MHZ el cual no se presento con otros amplificadores del mismo tipo por lo cual se dedujo que el pico esta definido por las características de funcionamiento propias del amplificador usado en esta practica. Figura 4-27 Respuesta en frecuencia del LM318 con ganancia 2.12
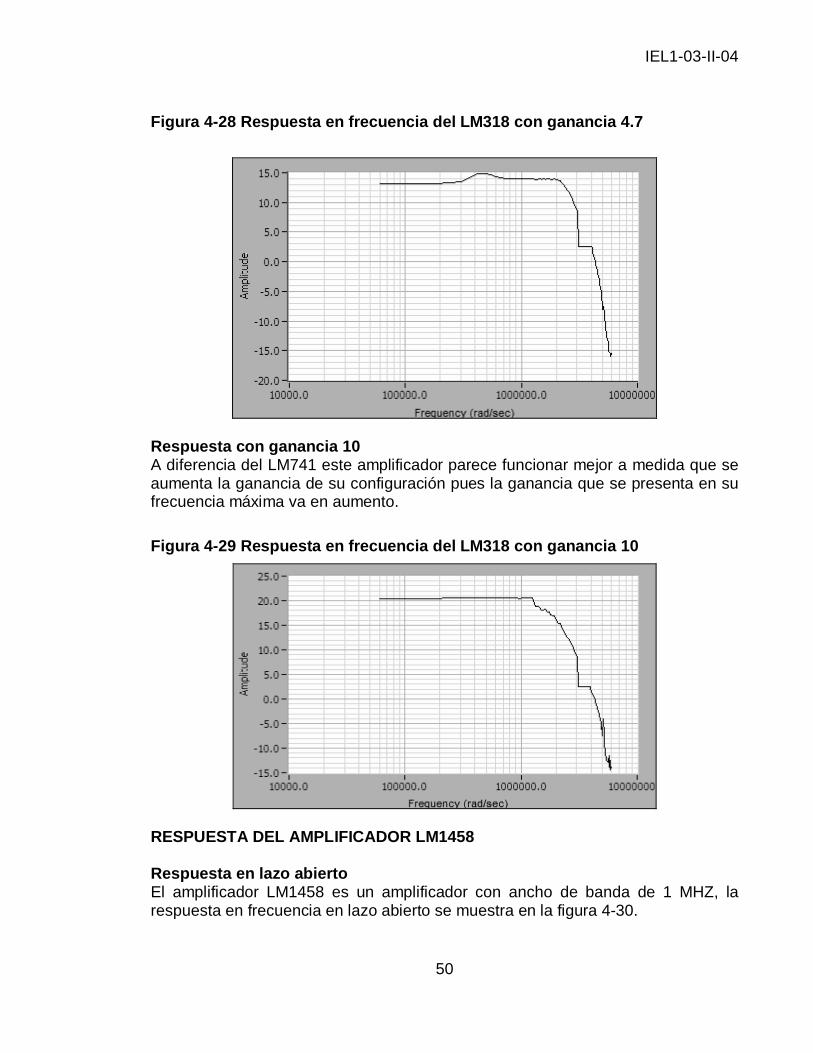
Respuesta con ganancia 4.7 La respuesta en frecuencia del amplificador LM318 en modo seguidor inversor a ganancia de 4.7 se muestra en la figura 4-28, la curva tiene un comportamiento mucho mas escalonado que la del LM741 lo cual es mejor además su ganancia es la misma pero abarca un rango de frecuencias mas extenso.
IEL1-03-II-04
50
Figura 4-28 Respuesta en frecuencia del LM318 con ganancia 4.7
Respuesta con ganancia 10 A diferencia del LM741 este amplificador parece funcionar mejor a medida que se aumenta la ganancia de su configuración pues la ganancia que se presenta en su frecuencia máxima va en aumento. Figura 4-29 Respuesta en frecuencia del LM318 con ganancia 10
RESPUESTA DEL AMPLIFICADOR LM1458 Respuesta en lazo abierto El amplificador LM1458 es un amplificador con ancho de banda de 1 MHZ, la respuesta en frecuencia en lazo abierto se muestra en la figura 4-30.

IEL1-03-II-04
51
Figura 4-30 Respuesta en frecuencia del LM1458 en lazo abierto
Respuesta con ganancia Unitaria El comportamiento de la curva que nos muestra la figura 4-31 es muy similar al comportamiento del LM741 en configuración seguidor inversor con ganancia unitaria.
Figura 4-31 Respuesta en frecuencia del LM1458 con ganancia unitaria
Respuesta con ganancia 2.12 La respuesta que se muestra en la figura 4-32 nos muestra que el amplificador LM1458 tiene muy similares las características de frecuencia con el LM741 y las de ganancia con el LM318.

IEL1-03-II-04
52
Figura 4-32 Respuesta en frecuencia del LM1458 con ganancia 2.12
Respuesta con ganancia 4.7 La figura 4-33 nos muestra la respuesta con ganancia 4.7, comparándola con las curvas de los otros amplificadores se ve que este amplificador es un poco mas estable que el LM741 pero menos que el LM318 pues mantiene la ganancia estable por un rango de frecuencias relativamente alto.
Figura 4-33 Respuesta en frecuencia del LM1458 con ganancia 4.7
Respuesta con ganancia 10 La curva de la respuesta en frecuencia del amplificador LM1458 se muestra en la figura 4-34, en ella podemos observar como se redujo la ganancia para frecuencias mayores a 2 KHZ, además presenta las mismas discontinuidades que el amplificador LM741 cundo la curva se acerca a los 0 dB.

IEL1-03-II-04
53
Figura 4-34 Respuesta en frecuencia del LM1458 con ganancia 10
4.2 Osciloscopio virtual
4.2.1 Introducción
Esta es la segunda aplicación práctica de este proyecto de grado, donde se busca desarrollar un osciloscopio a partir del voltímetro disponible de alta velocidad (HP3437A), el generador de funciones (HP3325A), la tarjeta GPIB-PCMCIA y el programa LabView. Esta aplicación nos proporcionará una idea más clara de lo que es un instrumento virtual, ya que en el osciloscopio veremos los controles que posee un osciloscopio real.
4.2.2 Descripción del programa realizado en LabView
Para crear el osciloscopio solo podemos usar el voltímetro HP3437A ya que el Fluke 8500A toma mediciones con intervalos de tiempo muy largos, por lo cual no es adecuado para crear un osciloscopio. Este programa esta constituido de varias partes, una que se encarga de la adquisición de los datos que tiene la misma estructura del programa usado en la etapa anterior, otras dos partes que son las encargadas de generar la escala requerida en tiempo y amplitud y por ultimo una que esta encargada de el trigger. La figura 4-35 nos muestra la interfaz grafica del programa con el usuario en LabView, es prácticamente igual a un osciloscopio real, en el vemos los botones para seleccionar la escala de tiempo, escala de voltaje, ajuste de nivel en el tiempo y un switch para visualizar la señal con rampa positiva o negativa.

IEL1-03-II-04
54
Figura 4-35 Panel frontal del osciloscopio virtual
La figura 4-36 nos muestra el programa que fue desarrollado en LabView para el osciloscopio, este primero envía los parámetros de medida al voltímetro tales como escala de voltaje, delay, numero de medidas por ciclo y el formato de los datos, luego mediante una secuencia se convierten los datos obtenidos a un voltaje numérico real, estos datos se envían a un subprograma que es el encargado de realizar el trigger, luego esta es enviada a un waveform que es el encargado de mostrar los datos al usuario, sus escalas de tiempo y amplitud están definidas por el programa, por ejemplo para cada escala de tiempo hay diferentes parámetros los cuales son enviados al waveform por un case según la selección realizada por el usuario. Debido a la tasa de transferencia de los datos del voltímetro el programa se encuentra limitado a frecuencias menores a 1KHZ pues para señales de mayor frecuencia el voltímetro toma pocos datos por ciclo y la señal aparece distorsionada.

IEL1-03-II-04
55
Figura 4-36 Programa del Osciloscopio Virtual en LabView

IEL1-03-II-04
56
5. GUÍAS REALIZADAS
5.1 introducción
Para iniciarnos en la instrumentación virtual trabajaremos con el bus GPIB el cual fue desarrollado para conectar y controlar instrumentos programables los cuales sirven para realizar adquisición de datos o test automático empleando técnicas de implementación híbrida Hardware – Software. Las siguientes guías tienen dos aplicaciones para estudiar el bus GPIB, la primera de ellas consiste en obtener la respuesta de un sistema en frecuencia mediante un programa en LabView, el cual será el encargado de manejar los instrumentos GPIB. La segunda aplicación consiste en diseñar un osciloscopio empleando tan solo un voltímetro, para esto es necesario crear otro programa en LabView el cual recibirá, procesara y mostrara los datos obtenidos del voltímetro como un osciloscopio real.
5.2 Objetivo
El objetivo de estas guías es familiarizar al estudiante con el bus GPIB, darle a conocer sus principales características y su funcionalidad. Para alcanzar estos objetivos, el estudiante deberá seguir unos pasos, los cuales lo llevaran a obtener varias aplicaciones prácticas las cuales se desarrollaran en el programa LabView y varios equipos GPIB tales como una tarjeta PCMCIA, un voltímetro y un generador de funciones.
5.3 Como obtener la respuesta en frecuencia de un sistema mediante el bus GPIB
Instrumentos necesarios para la práctica: - Voltímetro Fluke 8500A. - Generador de funciones HP3325A. - Tarjeta PCMCIA GPIB. - Un computador portátil. - LabView. Para desarrollar esta práctica usted debe: - Tener claro la respuesta de un sistema en frecuencia. - Tener conocimientos mínimos sobre el programa LabView. - Estudiar los parámetros de programación del generador y voltímetro GPIB. LabView cuenta con una librería muy práctica para el manejo del bus GPIB, los iconos que utilizaremos son los GPIB read y GPIB write los cuales son muy fáciles de usar, se encuentran en el menú Functions y se explican a continuación:
IEL1-03-II-04
57
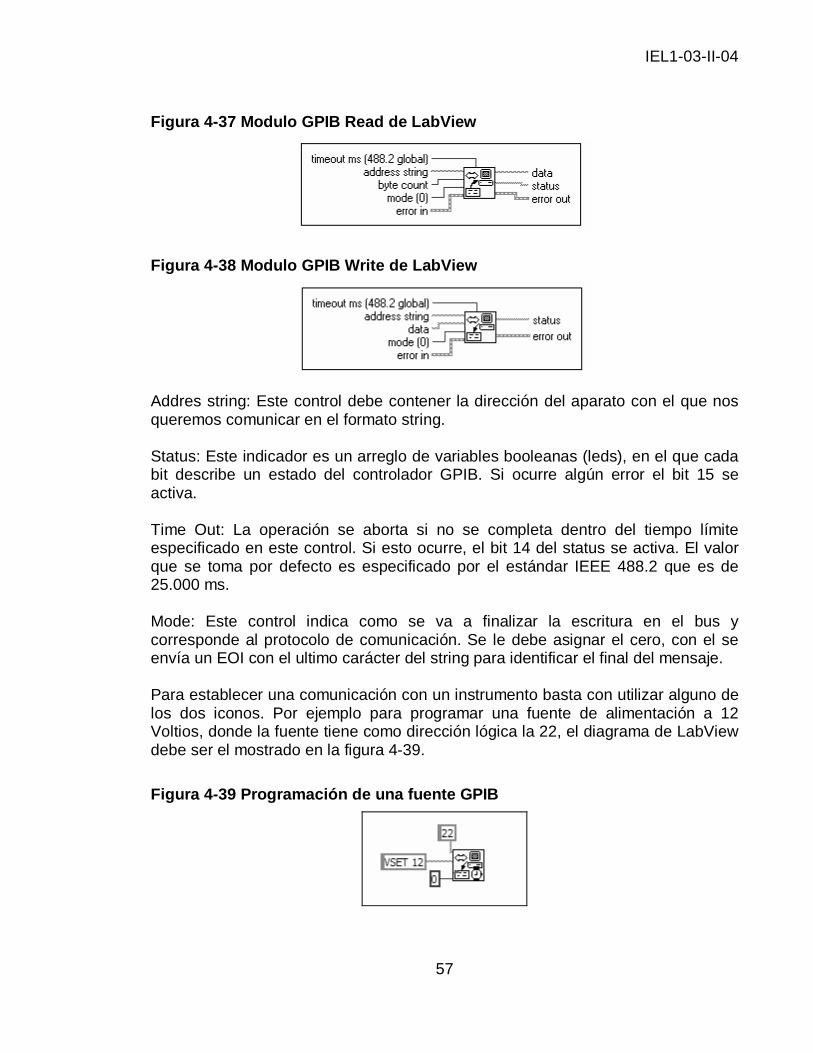
Figura 4-37 Modulo GPIB Read de LabView
Figura 4-38 Modulo GPIB Write de LabView
Addres string: Este control debe contener la dirección del aparato con el que nos queremos comunicar en el formato string. Status: Este indicador es un arreglo de variables booleanas (leds), en el que cada bit describe un estado del controlador GPIB. Si ocurre algún error el bit 15 se activa. Time Out: La operación se aborta si no se completa dentro del tiempo límite especificado en este control. Si esto ocurre, el bit 14 del status se activa. El valor que se toma por defecto es especificado por el estándar IEEE 488.2 que es de 25.000 ms. Mode: Este control indica como se va a finalizar la escritura en el bus y corresponde al protocolo de comunicación. Se le debe asignar el cero, con el se envía un EOI con el ultimo carácter del string para identificar el final del mensaje. Para establecer una comunicación con un instrumento basta con utilizar alguno de los dos iconos. Por ejemplo para programar una fuente de alimentación a 12 Voltios, donde la fuente tiene como dirección lógica la 22, el diagrama de LabView debe ser el mostrado en la figura 4-39. Figura 4-39 Programación de una fuente GPIB

IEL1-03-II-04
58
Teniendo más claros los conceptos necesarios para manejar un bus GPIB programando en LabView, se mostrara en la figura 4-40 el programa diseñado para obtener la respuesta en frecuencia de un sistema:
Figura 4-40 Programa de respuesta en frecuencia en LabView
El programa tiene una estructura cíclica, en el, primero se establecen los valores iniciales del generador de funciones, tales como tipo de función, voltaje y la frecuencia inicial, luego al entrar al ciclo se va aumentando gradualmente la frecuencia del generador en intervalos iguales definidos por el usuario al mismo tiempo se programa el voltímetro para obtener el voltaje del sistema bajo prueba en cada uno de los ciclos este voltaje se divide por 0.707 para obtener el voltaje

IEL1-03-II-04
59
RMS medido, luego a este valor le sacamos el logaritmo y por ultimo lo multiplicamos por 20. Al finalizar los ciclos estos datos son graficados en LabView. Debemos tener en cuenta que para obtener la grafica de la respuesta en frecuencia de un sistema debemos obtener el voltaje tanto a la entrada como a la salida para poder obtener la siguiente expresión: GdB = 20 Log Vo/Vi. Debido a que poseemos solo un voltímetro GPIB debemos hacer que el voltaje a la entrada sea siempre conocido para poder obtener tal expresión. La figura 4-41 muestra la interfaz con el usuario del programa creado, solo son proporcionados al programa los datos básicos tales como número de intervalos y tamaño de los intervalos de frecuencia. Figura 4-41 Panel frontal del programa en LabView
Teniendo el anterior programa como base, cree un nuevo programa para obtener la respuesta en frecuencia de un sistema y grafique también la fase.

IEL1-03-II-04
60
5.4 Como crear un osciloscopio con tan solo un voltímetro utilizando la interfaz GPIB
Materiales necesarios para desarrollar esta práctica: - Voltímetro HP 3437A. - Tarjeta PCMCIA GPIB. - Un computador portátil. - LabView. Para desarrollar esta práctica usted debe: - Comprender las características básicas de un osciloscopio - Tener conocimientos mínimos sobre el programa LabView. - Estudiar los parámetros de programación del voltímetro GPIB. La figura 4.42 muestra un programa en LabView que simula un osciloscopio utilizando tan solo un voltímetro GPIB. Figura 4-42 Programa para el osciloscopio virtual en LabView
El anterior programa también tiene estructura cíclica, en cada ciclo se toman dos mil valores de la señal bajo prueba, luego se llevan a una secuencia donde se obtienen los valores decimales de los datos tomados por el voltímetro debido a

IEL1-03-II-04
61
que el voltímetro entrega los datos en formato texto; en seguida estos datos son llevados a un Waveform al cual se le definen las escalas de tiempo y amplitud por los valores seleccionados por el usuario en el panel frontal que se ve en la figura 4-43. Figura 4-43 Panel frontal del osciloscopio virtual en LabView
Cree un programa similar en el que se tengan dos canales para el osciloscopio virtual, la adquisición de los datos del nuevo canal pueden ser realizados con el voltímetro Fluke 8500A.
IEL1-03-II-04
62
6. Conclusiones y recomendaciones
Se comprobó que la instrumentación virtual brinda una herramienta de automatización de gran flexibilidad, muy bajo costo de mantenimiento y también permite una rápida incorporación de nuevas tecnologías. El trabajo que se realizó tiene un gran número de ventajas que se enuncian a continuación:
6.1 Ventajas
• Los programas creados son muy útiles para comprender la funcionalidad de la interfaz GPIB, las guías de cada una de las aplicaciones ofrecen una forma de guiar al estudiante en el aprendizaje del bus GPIB.
• A partir de los resultados de los programas realizados se puede observar
que la interfaz GPIB es una herramienta muy valiosa. • Gracias al entorno grafico de LabView y el bus se obtienen programas con
una gran funcionalidad y robustez. • La implementación de estas aplicaciones ofrece un camino de aprendizaje
para profundizar en los estudios del estándar IEEE 488 y la instrumentación virtual.
• El estándar IEEE 488 brinda a la industria una herramienta de
automatización de gran flexibilidad y muy bajo costo de mantenimiento también permite una rápida incorporación de nuevas tecnologías.
6.2 Limitaciones
Al desarrollar este proyecto de grado se tuvieron varias limitaciones una de ellas la cantidad de equipos disponibles con puerto GPIB integrado, además de esto, los equipos no son actualizados pues trabajan con el estándar IEEE 488-1 que es primer estándar creado en 1975, ahora el estándar mas usado es el SCPI (Standar Commands for Programmable Instrumentation) que es una especificación construida sobre el estándar IEEE 488.2 que define una estructura de comandos estándar aceptados por múltiples instrumentos de muchos fabricantes. Otra limitación que se tuvo fue el contar con solo una tarjeta controladora que fue la National Instruments PCMCIA GPIB, la cual fue compartida para el desarrollo de otro proyecto. Debido a los puntos anteriormente expuestos fue difícil implementar en este proyecto aplicaciones más interesantes.
IEL1-03-II-04
63
6.3 Trabajo futuro
Es importante continuar los estudios del estándar IEEE 488 ya que este es muy utilizado en la industria, además trabajar con la instrumentación virtual hace los trabajos más sencillos y productivos. Para futuros proyectos se deberían buscar trabajos con algunas empresas que busquen desarrollos en este campo para crear instrumentos virtuales que sean útiles a la industria. Para esto es necesario aumentar el número de equipos disponibles con el estándar IEEE 488.
IEL1-03-II-04
64
7. BIBLIOGRAFIA
[1] Manuel A, Prat J, Biel D, Olivé J, Sanchez F. Instrumentación virtual.
Adquisición, procesado y análisis de la señales. 2001. [2] Lázaro M. LabView 6i. Programación grafica para el control de instrumentación.
2001. [3] HPIB Tutorial. Agilent Technologies http://www.laas.fr/PROSAFE [4] La instrumentación virtual. Web site de National Instruments http://digital.ni.com/worldwide/latam.nsf/web/all/01E4BFF8EC93532086256B6000669953 [5] Filtros activos. http://www.uco.es/dptos/electro/electronica/ documentos/electema13.pdf [6] Respuesta en lazo abierto del amplificador. http://www.sec.upm.es/docencia/plan_92/ ea/descarga_EA/tema4_parte2.PDF [7] Respuesta en frecuencia de amplificadores. http://cq-ing.tij.uabc.mx/docentes/jjesuslg/Tema8.pdf [8] Fu-Kwun Hwang, Dept. of physics, National Taiwan Normal University. Funciones básicas de un osciloscopio. http://www.edu.aytolacoruna.es/aula/fisica/applets/Hwang/ntnujava/oscilloscope/oscilloscope_s.html