DESARROLLO E IMPLEMENTACIÓN DE ULTRASONIDO …148.206.53.84/tesiuami/UAMI13199.pdf · Ultrasonido...
49
DESARROLLO E IMPLEMENTACIÓN DE ULTRASONIDO PORTÁTIL EN MODO A PARA USO VETERINARIO. MEJIA RODRÍGUEZ ALDO RODRIGO 201319496 RIVERA NAVA ERICK 201322766 Licenciatura en Ingeniería Biomédica Asesor: Dipl. Ing. Enrique Hernández Matos Laboratorio de Instrumentación Médica. TRIMESTRE 06-P 2006 22
-
Upload
nguyendung -
Category
Documents
-
view
213 -
download
0
Transcript of DESARROLLO E IMPLEMENTACIÓN DE ULTRASONIDO …148.206.53.84/tesiuami/UAMI13199.pdf · Ultrasonido...
DESARROLLO E IMPLEMENTACIÓN DE
ULTRASONIDO PORTÁTIL EN MODO A PARA USO
VETERINARIO.
MEJIA RODRÍGUEZ ALDO RODRIGO 201319496
RIVERA NAVA ERICK 201322766
Licenciatura en Ingeniería Biomédica
Asesor:
Dipl. Ing. Enrique Hernández Matos
Laboratorio de Instrumentación Médica.
TRIMESTRE 06-P 2006
22

INDICE
INTRODUCCIÓN..........................................................................................................................2 Desarrollo Histórico..........................................................................................................2 Definición de Ultra Sonido (US).......................................................................................3 Ultrasonido Médico..........................................................................................................3 Sistemas de Imágenes Pulso-Eco...................................................................................3 US en Modo “A”...............................................................................................................4 OBJETIVOS.................................................................................................................................4 DESARROLLO.............................................................................................................................5 Búsqueda Bibliográfica....................................................................................................5 Descripción del Equipo....................................................................................................5 Desarrollos previos.............................................................................................5 Composición Estructural.....................................................................................5 Funcionamiento...............................................................................................................6 Diseño del Equipo............................................................................................................7 Generador de Pulsos de Sincronía.....................................................................7 Generador de Pulsos de Alto Voltaje..................................................................9 Circuito Transmisor / Excitador..........................................................................11 Generador de Base de Tiempo.........................................................................12 Limitador............................................................................................................12 Circuito de Ganancia Compensada en el Tiempo.............................................13 Amplificador de Radio Frecuencia (RF).............................................................14 Demodulador......................................................................................................15 Convertidor Analógico / Digital (CAD)................................................................15 Pantalla de Cristal Líquido (LCD) Gráfica..........................................................16 Transmisión Serial..............................................................................................17 RESULTADOS............................................................................................................................18
Instrumentación Analógica.............................................................................................19 Instrumentación Digital...................................................................................................19 Circuito Impreso..............................................................................................................23 DISCUSIONES Y CONCLUSIONES...........................................................................................25 APÉNDICE A: Programación del PIC..........................................................................................27 APENDICE B: Generador de Pulsos de Sincronía con PIC10F200............................................31 APENDICE C: Implementación del CAD con el PIC18F452 e Implementación de una Comunicación Serial con MATLAB..............................................................................................33 APENDICE D: Modulo de Control del LCD Gráfico......................................................................37 APÉNDICE E: Configuración del LCD12864A STN LED.............................................................41 APÉNDICE F: Comunicación Serial con el PIC............................................................................45 BIBLIOGRAFÍA.............................................................................................................................46
1Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
INTRODUCCION
DESARROLLO HISTORICO.
Los primeros intentos para localizar objetos sumergidos con ultrasonido, datan probablemente de la época del hundimiento del Titanic en 1912. Langevin y colaboradores trataron de emplear el ultrasonido durante la Primera Guerra Mundial. En 1914 reportaron la construcción de un generador de ultrasonido que empleaba el efecto piezoeléctrico recíproco. El desarrollo de esta tecnología condujo a los primeros sistemas de S.O.N.A.R. ("Sound Navigation and Ranging") y a las primeras aplicaciones a nivel industrial, como los detectores de figuras en piezas de metal fundido.
La primera aplicación del ultrasonido en el campo médico data de 1937, año en que Dussik visualizó los ventrículos cerebrales.
El mayor estímulo que recibió el diagnóstico por ultrasonido, se debió a la -
Segunda Guerra Mundial, época en la que se perfeccionaron las tecnologías del radar y del sonar. En efecto, la utilización de circuitos avanzados de radar, mejoró considerablemente la calidad de los instrumentos ultrasónicos.[4]
Utilizando desechos de equipos de guerra, así como algunos equipos para aplicaciones industriales disponibles, varios grupos de científicos iniciaron el estudio de la aplicación del ultrasonido al diagnóstico médico. En 1952, el grupo del Dr. Douglass Howry y el Ing. John T. Wild publicó sus primeros resultados sobre la obtención de una imagen bidimensional empleando ultrasonido. Se montó un transductor en una guía circular dentro de un tanque, y se sentaba al paciente sumergido hasta el cuello en el centro del tanque, mientras el transductor emitía haces ultrasónicos radiales.
En Dinamarca, la Dra. lnge Edler fue pionera en la cardiografía por ultrasonido o
ecocardiografía. En 1958, Grenwood y Baum obtuvieron la primera imagen bidimensional del ojo. Por su
parte, e l D r . Ian Donald de Glasgow, fue el primero en aplicar el ultrasonido en el campo de la Gineco-obstetricia.
En Suecia, el Dr. Lars Leksell realizó los primeros intentos para localizar Ia línea media
cerebral por ultrasonido.
En 1962, William L. Wright diseñó en la Universidad de Colorado, E.U.A. el primer sistema de rastreo de imágenes, por contacto directo, el cual más tarde fuera desarrollado comercialmente por Picker Corp.[4]
La contribución clínica, tal vez más importante se debe al Ing. John T. Wild quien demostró que el ultrasonido es capaz de diferenciar entre tejido normal, tumores benignos y tumores malignos de cáncer.
Estos son sólo algunos de los investigadores más destacados en el campo. Actualmente
se continúa investigando en todos los aspectos del desarrollo de instrumentación ultrasónica: construcción de nuevos transductores, diseño de circuitos electrónicos más confiables y procesamiento digital de imágenes. En conclusión, el ultrasonido constituye una herramienta básica en el diagnóstico clínico.
2Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
DEFINICIONES
Una onda sonora o de ultrasonido consiste de una perturbación mecánica de un medio (gas, liquido o sólido) la cual atraviesa el medio a una velocidad fija [1].
Las ondas sonoras consisten de perturbaciones de las moléculas de aire, las vibraciones
pasan molécula a molécula desde el parlante hasta el oído del escucha [8]. Hay que notar que las moléculas no se mueven del parlante al escucha por si mismo
(solamente la perturbación). El ritmo al cual las partículas del medio vibran en la perturbación, es la frecuencia o nivel del sonido y es medido en Hertz (ciclos/segundo). Conforme la frecuencia aumenta se acerca a una frecuencia de aproximadamente 20 Khz en la cual el sonido no es audible y por encima de esta frecuencia las perturbaciones son conocidas como ultrasonido.[3] ULTRASONIDO MÉDICO
En el ultrasonido médico, la perturbación; la cual está caracterizada por el cambio de presión local o distancia de movimiento de las partículas de un medio con respecto a sus posiciones iniciales, es originada en un transductor electromecánico localizado sobre la superficie de la piel. El transductor (operando como un transmisor) cambia las señales eléctricas a movimientos mecánicos. Las vibraciones mecánicas pueden ser cambiadas a señales eléctricas mediante el mismo transductor trabajando en forma opuesta (como un receptor). Las frecuencias de ultrasonido usadas son altas (en la región de 1-20 MHz) y son usadas para lograr pulsos cortos y destellos estrechos para ser utilizados en la localización exacta de los ecos.[3]
Las perturbaciones se propagan a través de un medio a una velocidad, la cual depende
sobre la densidad y compresibilidad del medio. Las velocidades en diferentes tejidos suaves varían ligeramente pero son aproximadamente de 1540 m/s; lo cual conduce a un tiempo de paso de 6.5 µs/cm.[5] SISTEMAS DE IMÁGENES PULSO-ECO.
Al incidir una onda de ultrasonido en una frontera entre dos tejidos, una parte del ultrasonido atraviesa ésta y otra parte del ultrasonido es reflejada. El grado de reflexión depende de las impedancias acústicas de los tejidos (las cuales dependen de la densidad y compresibilidad).
Una gran diferencia en las impedancias acústicas ocasiona un alto grado de reflexión (por
ejemplo en interfaces tejido suave-hueso y tejido suave-aire. En la frontera entre dos diferentes tipos de tejido suave (por ejemplo músculo-grasa) el grado de reflexión es pequeño. Si el ultrasonido está incidiendo sobre una superficie áspera o sobre objetos pequeños el ultrasonido es entonces dispersado en mayor proporción que la porción reflejada.
En imagenología con ultrasonido el transductor es excitado periódicamente por un pulso
eléctrico, ocasionando la transmisión de un pulso de ultrasonido el cual es recibido posteriormente en el transductor después de su reflexión o dispersión en las interfaces de tejido. El tiempo de arribo del eco desde una interfase dada depende de la profundidad de esa interfase y el instrumento puede usar el tiempo de arribo de un eco después de la transmisión como un indicador de la profundidad de la interfase.[3]
3Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.

MODO “A”
El instrumento de pulso-eco más simple es el de modo “A", figura 1, el cual despliega la amplitud del eco recibido como una gráfica contra el tiempo.
La profundidad de cada reflector está indicada por el tiempo de arribo de su eco.
Figura 1. Principio de US Modo A
OBJETIVOS Los objetivos a cumplir, para este Seminario de Proyectos, son los siguientes:
Revisar la bibliografía existente para familiarizarse y obtener un mayor conocimiento sobre el US en modo A.
•
•
•
•
•
•
Revisión bibliográfica de los componentes eléctricos a utilizar en los diseños de los diferentes circuitos que conforman el equipo de ultrasonido.
Diseño e implementación de toda la circuitería analógica en tablillas de experimentación para pruebas de funcionamientos de los circuitos.
Realizar la programación, con sus respectivas pruebas de funcionamiento, para la Circuitería Digital, correspondiente al funcionamiento del Convertidor Analógico/Digital (CAD).
Realizar la programación, con sus respectivas pruebas de funcionamiento, para la Circuitería Digital, correspondiente a la Pantalla de Cristal Líquido (LCD).
Integración de la instrumentación analógica y digital, en dos etapas:
o A nivel Tablilla de experimentación “protobord” o En tablillas de circuito impreso
4Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
Realización de la documentación necesaria para la descripción del avance del proyecto. •
DESARROLLO BUSQUEDA BIBLIOGRÁFICA
La primera etapa de este seminario de proyectos consistió en buscar en la bibliografía todos y cada uno de los circuitos de los cuales se conforma el equipo de US. En la parte de la bibliografía están los títulos bibliográficos que se estudiaron para poder realizar el diseño de nuestros circuitos, así como de algunas fuentes de la red de donde también se obtuvo información referente a las hojas de especificaciones e implementación de circuitos.
También debemos mencionar que se obtuvo información de los apuntes de los cursos que
se han cursado; tales como Instrumentación Médica III, Instrumentación Médica IV, Electrónica V, Circuitos Digitales, Arquitectura de Microprocesadores, Aplicación de Microprocesadores e Interfaces, entre otras. DESCRIPCION DEL EQUIPO. DESARROLLOS PREVIOS
Dado que estamos hablando de un equipo portátil, esto implica que además de la circuitería analógica necesaria, el equipo tendrá que contar con su propia fuente de alimentación regulada a + 15 Volts y + 5 Volts para la polarización de la instrumentación en general.
Dicha fuente de polarización fue implementada en base a tomar el voltaje proveniente de la
batería de alimentación del US portátil para poder alimentar unos circuitos integrados LM7805, LM7905, LM7815 y LM7915. En donde los dispositivos 78XX son reguladores de voltaje positivo y los 79XX son reguladores de voltaje negativo. COMPOSICION ESTRUCTURAL
El diagrama a bloques de nuestro instrumento en modo "A" es mostrado en la figura 2, y se compone de los siguientes dispositivos:
Generador de pulsos de sincronía. • • • • • •
Generador de pulsos de alto voltaje. Generador de base de tiempo. Ganancia compensada en el tiempo. Amplificador de radiofrecuencia. Demodulador de AM.
5Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
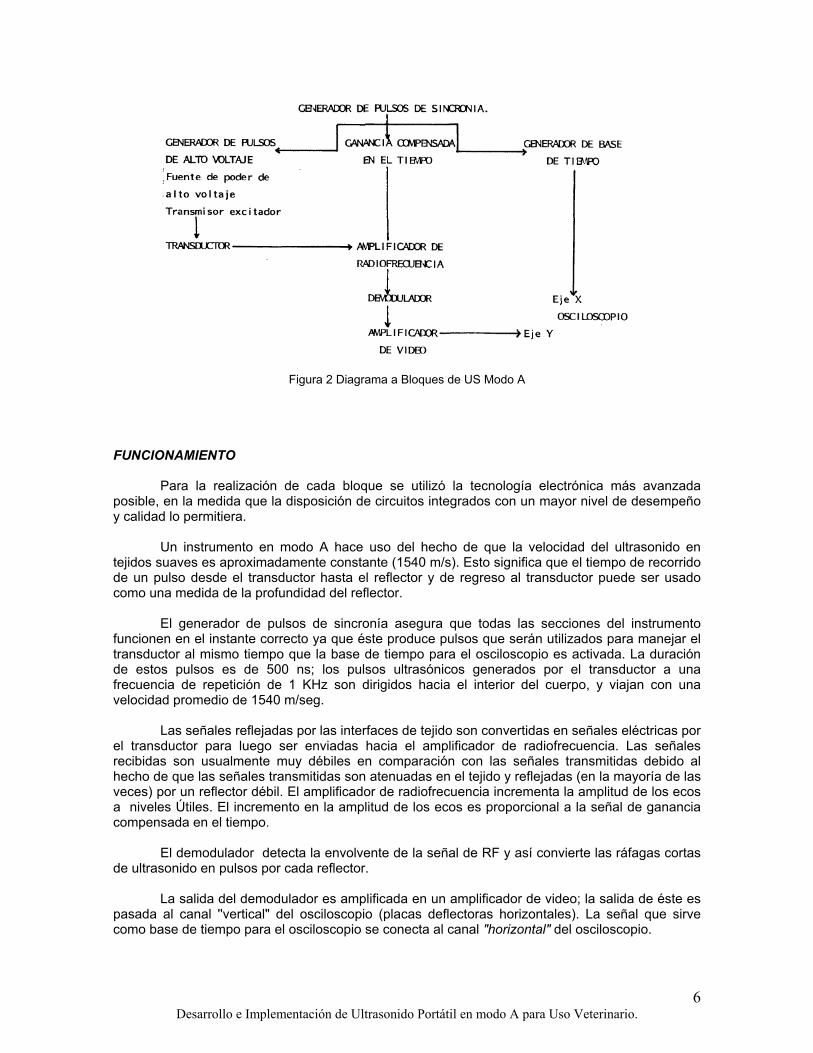
Figura 2 Diagrama a Bloques de US Modo A
FUNCIONAMIENTO
Para la realización de cada bloque se utilizó la tecnología electrónica más avanzada posible, en la medida que la disposición de circuitos integrados con un mayor nivel de desempeño y calidad lo permitiera.
Un instrumento en modo A hace uso del hecho de que la velocidad del ultrasonido en
tejidos suaves es aproximadamente constante (1540 m/s). Esto significa que el tiempo de recorrido de un pulso desde el transductor hasta el reflector y de regreso al transductor puede ser usado como una medida de la profundidad del reflector.
El generador de pulsos de sincronía asegura que todas las secciones del instrumento
funcionen en el instante correcto ya que éste produce pulsos que serán utilizados para manejar el transductor al mismo tiempo que la base de tiempo para el osciloscopio es activada. La duración de estos pulsos es de 500 ns; los pulsos ultrasónicos generados por el transductor a una frecuencia de repetición de 1 KHz son dirigidos hacia el interior del cuerpo, y viajan con una velocidad promedio de 1540 m/seg.
Las señales reflejadas por las interfaces de tejido son convertidas en señales eléctricas por
el transductor para luego ser enviadas hacia el amplificador de radiofrecuencia. Las señales recibidas son usualmente muy débiles en comparación con las señales transmitidas debido al hecho de que las señales transmitidas son atenuadas en el tejido y reflejadas (en la mayoría de las veces) por un reflector débil. El amplificador de radiofrecuencia incrementa la amplitud de los ecos a niveles Útiles. El incremento en la amplitud de los ecos es proporcional a la señal de ganancia compensada en el tiempo.
El demodulador detecta la envolvente de la señal de RF y así convierte las ráfagas cortas
de ultrasonido en pulsos por cada reflector. La salida del demodulador es amplificada en un amplificador de video; la salida de éste es
pasada al canal ''vertical" del osciloscopio (placas deflectoras horizontales). La señal que sirve como base de tiempo para el osciloscopio se conecta al canal "horizontal" del osciloscopio.
6Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
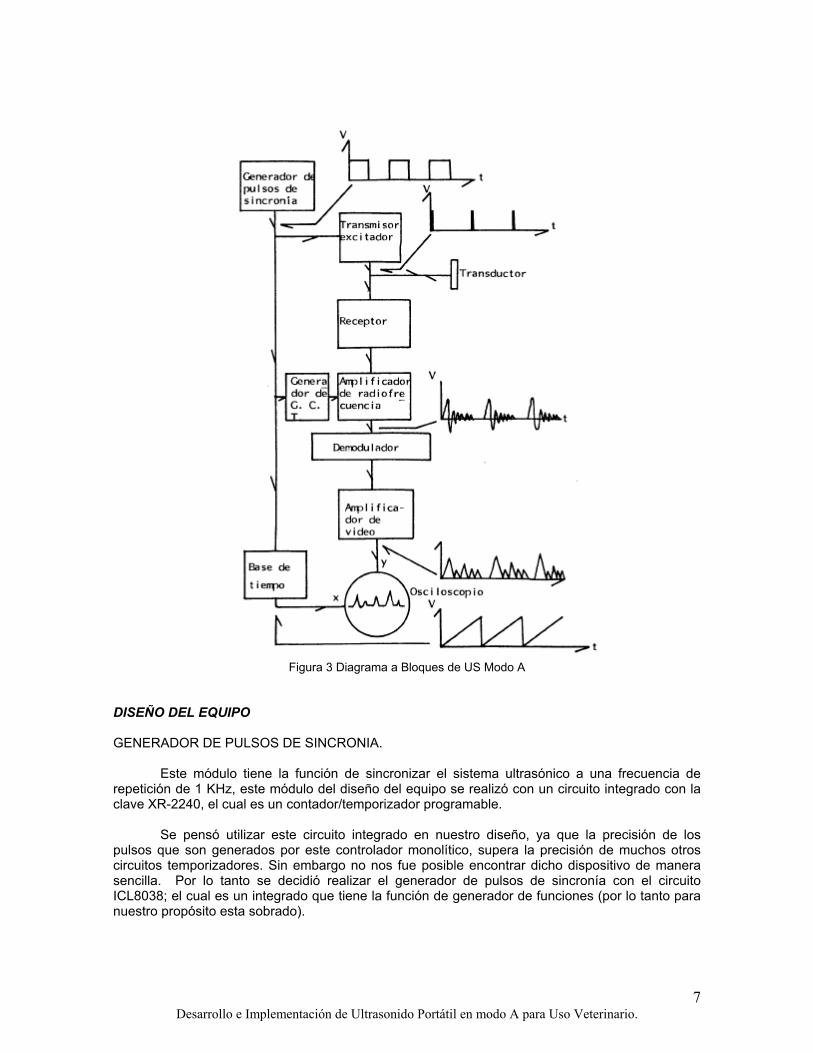
Figura 3 Diagrama a Bloques de US Modo A
DISEÑO DEL EQUIPO GENERADOR DE PULSOS DE SINCRONIA.
Este módulo tiene la función de sincronizar el sistema ultrasónico a una frecuencia de repetición de 1 KHz, este módulo del diseño del equipo se realizó con un circuito integrado con la clave XR-2240, el cual es un contador/temporizador programable.
Se pensó utilizar este circuito integrado en nuestro diseño, ya que la precisión de los
pulsos que son generados por este controlador monolítico, supera la precisión de muchos otros circuitos temporizadores. Sin embargo no nos fue posible encontrar dicho dispositivo de manera sencilla. Por lo tanto se decidió realizar el generador de pulsos de sincronía con el circuito ICL8038; el cual es un integrado que tiene la función de generador de funciones (por lo tanto para nuestro propósito esta sobrado).
7Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.

La figura 4 muestra la forma de conexión del circuito, la cual se realizó para que el circuito operara de forma estable. El circuito de la figura está diseñado para una operación continua a una frecuencia de 1 KHz., éste se dispara automáticamente cuando la alimentación es proporcionada.
Figura 4 Circuito generador de onda cuadrada en base al ICL8038
Otra de las opciones manejadas para el diseño del Generador de Pulsos de sincronía fue
el de realizarlo por medio de programación e implementarlo en un PIC. Lo anterior fue pensado en términos de mejor el diseño del US portátil, ya que de manera
general el ICL8038 consume más corriente y espacio que un PIC; específicamente un PIC10F200 (ver fig. 5), ya que este dispositivo solo necesita de conexiones a 5V y tierra para su funcionamiento y es un Circuito Integrado de solo 8 pines, que es obviamente más pequeño que todo el circuito generado por el ICL8038.
Figura 5. Diagrama de pines del PIC10F200
Ocupando este microcontrolador, es posible simular el Generador de Pulsos de Sincronía
por medio de Software, a pesar de las prestaciones mínimas que presenta esta familia de PIC´s en particular. El programa de simulación del generador de pulsos de sincronía se puede revisar en el apéndice B.
Una vez implementados ambas opciones de un Generador de pulsos de sincronía, se
realizó una comparación con la finalidad de poder ver cual seria el más adecuado.
8Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
En términos de consumo de corriente y espacio, las mayores ventajas son para el PIC, pero la calidad de la señal de salida que entregaba no era muy buena y era necesario una etapa de adecuación de la señal para poder ser entregada a todos los otros submódulos del US portátil; cosa que no era necesario con la salida entregada por el ICL8038, ya que se obtiene a la salida una señal de muy buena calidad en comparación con la entregada por el PIC10F200. Por esta razón se optó por seguir trabajando con el ICL8038.
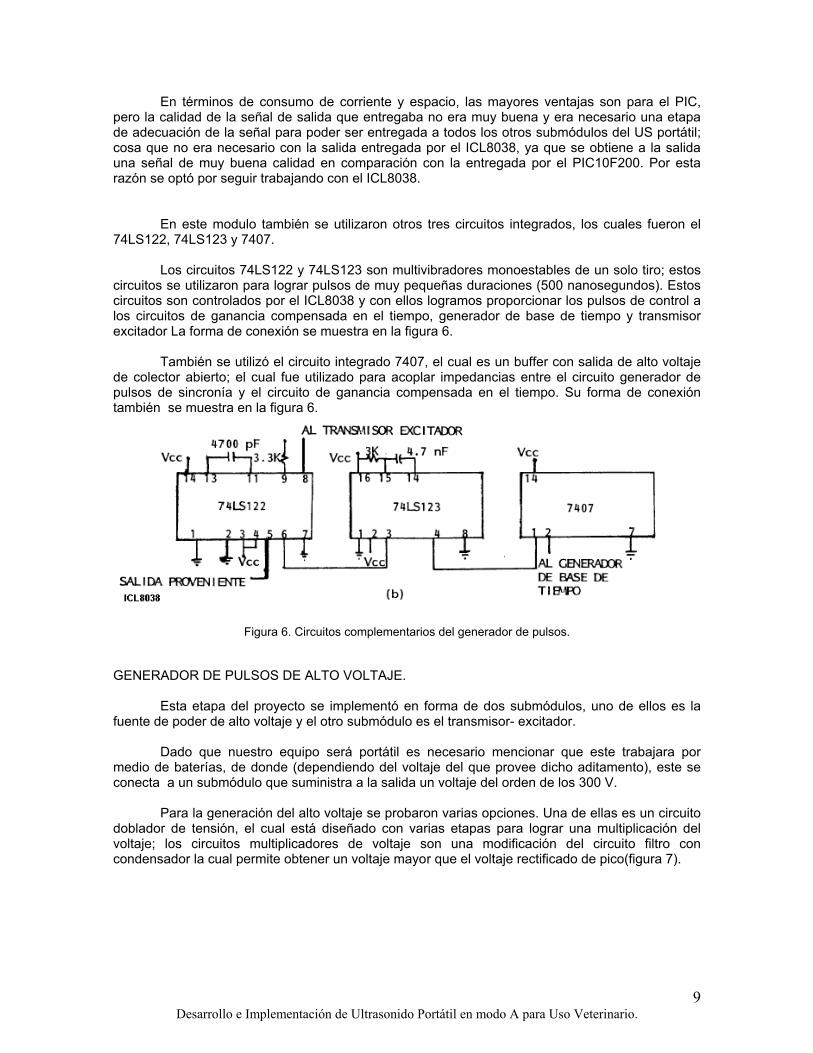
En este modulo también se utilizaron otros tres circuitos integrados, los cuales fueron el
74LS122, 74LS123 y 7407. Los circuitos 74LS122 y 74LS123 son multivibradores monoestables de un solo tiro; estos
circuitos se utilizaron para lograr pulsos de muy pequeñas duraciones (500 nanosegundos). Estos circuitos son controlados por el ICL8038 y con ellos logramos proporcionar los pulsos de control a los circuitos de ganancia compensada en el tiempo, generador de base de tiempo y transmisor excitador La forma de conexión se muestra en la figura 6.
También se utilizó el circuito integrado 7407, el cual es un buffer con salida de alto voltaje
de colector abierto; el cual fue utilizado para acoplar impedancias entre el circuito generador de pulsos de sincronía y el circuito de ganancia compensada en el tiempo. Su forma de conexión también se muestra en la figura 6.
Figura 6. Circuitos complementarios del generador de pulsos.
GENERADOR DE PULSOS DE ALTO VOLTAJE.
Esta etapa del proyecto se implementó en forma de dos submódulos, uno de ellos es la fuente de poder de alto voltaje y el otro submódulo es el transmisor- excitador.
Dado que nuestro equipo será portátil es necesario mencionar que este trabajara por
medio de baterías, de donde (dependiendo del voltaje del que provee dicho aditamento), este se conecta a un submódulo que suministra a la salida un voltaje del orden de los 300 V.
Para la generación del alto voltaje se probaron varias opciones. Una de ellas es un circuito
doblador de tensión, el cual está diseñado con varias etapas para lograr una multiplicación del voltaje; los circuitos multiplicadores de voltaje son una modificación del circuito filtro con condensador la cual permite obtener un voltaje mayor que el voltaje rectificado de pico(figura 7).
9Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.

Figura 7. Generación de alto Voltaje
El problema con esta manera de generar el alto voltaje es que es muy voluminosa para el
US portátil, ya que requiere de un gran número de componentes para generar el alto voltaje. Por esta razón otra de las opciones fue la de tratar de construir un Convertidor de DC/DC basado en un núcleo de ferrita. Por otra parte también se realizaron cotizaciones para la adquisición de un convertidor de DC/DC de alto voltaje, específicamente con aquellos que presentaban la característica de tener a la entrada 12V y que a la salida nos producirán alto voltaje a muy baja corriente (no mas de 500mA). De esta manera se realizo la requisición de adquirir un Convertidor de DC/DC, específicamente el R12-350 S 07 P|1; el cual permite la generación de un voltaje de 350 V a partir de 12 V DC. Este componente fue pedido a la empresa alemana RECOM INTERNATIONAL POWER GmbH y se intento realizar la adquisición de una muestra gratis. Al parecer dicha cotización tuvo éxito, pero desafortunadamente la entrega del componente tarda aproximadamente 8 semanas. Este es la razón por la que se decidió, para no atrasar el trabajo, implementar la generación de alto voltaje vía un circuito Doblador de Tensión de Línea (figura 8). Este circuito nos rectifica y dobla el voltaje que se presenta en la línea, entregando a la salida un voltaje de 360 V DC.
Figura 8. Circuito Doblador de Voltaje de Línea
El funcionamiento del "duplicador" es; el primer semiciclo el diodo D1 es polarizado directamente, es decir que el diodo está conduciendo, cuando "a" sea positivo (+) respecto a "b" (-). Cargando al capacitor C1 con un voltaje máximo de entrada (Vmax), después de que el primer diodo conduce se pone en corto circuito.
10Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
En el segundo semiciclo, el diodo D1 queda polarizado inversamente, debido a que "a" es negativo (-) con respecto a "b" siendo este positivo (+), cargando a C2 con el voltaje máximo (Vmax), con esto cerrando el circuito en D2.
Su funcionamiento para el primer semiciclo es la siguiente: D1 se polariza directamente quedando como cortocircuito, por tal motivo el diodo conduce, esto es cuando "a" es positivo (+) con respecto de "b" (-), cargando a C1 con un voltaje igual al voltaje aplicado (Vmax), después de eso el diodo D1 se queda como circuito abierto.
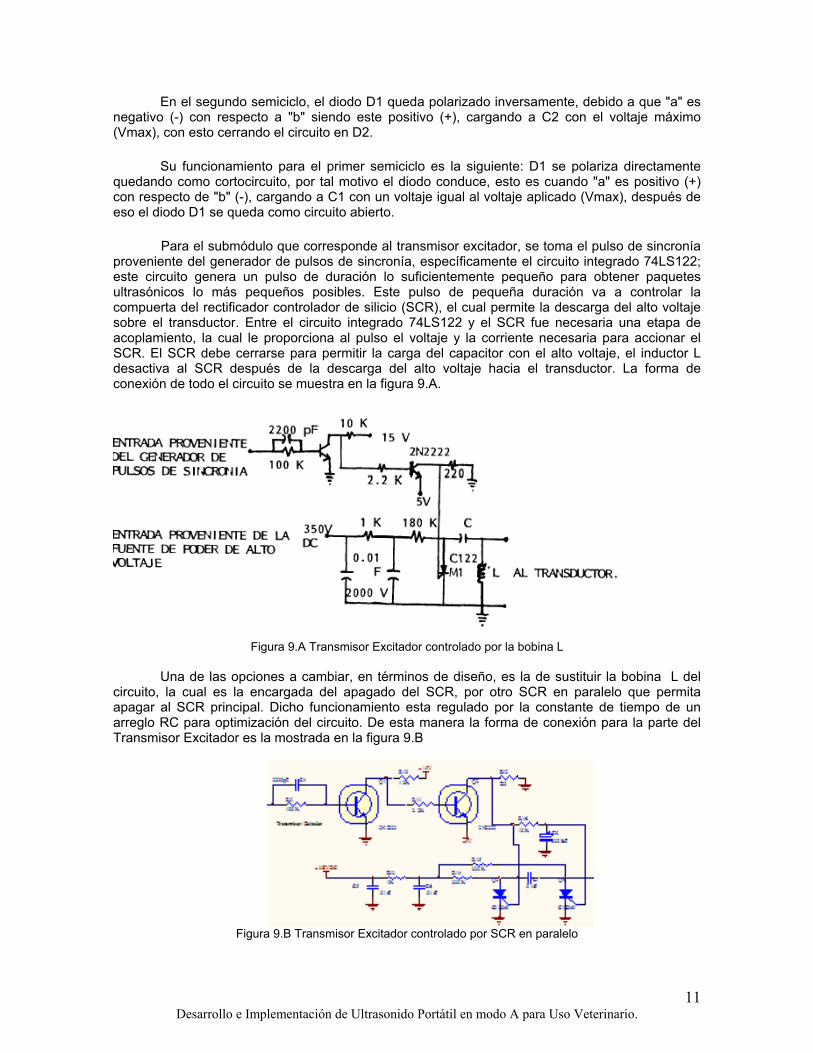
Para el submódulo que corresponde al transmisor excitador, se toma el pulso de sincronía proveniente del generador de pulsos de sincronía, específicamente el circuito integrado 74LS122; este circuito genera un pulso de duración lo suficientemente pequeño para obtener paquetes ultrasónicos lo más pequeños posibles. Este pulso de pequeña duración va a controlar la compuerta del rectificador controlador de silicio (SCR), el cual permite la descarga del alto voltaje sobre el transductor. Entre el circuito integrado 74LS122 y el SCR fue necesaria una etapa de acoplamiento, la cual le proporciona al pulso el voltaje y la corriente necesaria para accionar el SCR. El SCR debe cerrarse para permitir la carga del capacitor con el alto voltaje, el inductor L desactiva al SCR después de la descarga del alto voltaje hacia el transductor. La forma de conexión de todo el circuito se muestra en la figura 9.A.
Figura 9.A Transmisor Excitador controlado por la bobina L
Una de las opciones a cambiar, en términos de diseño, es la de sustituir la bobina L del
circuito, la cual es la encargada del apagado del SCR, por otro SCR en paralelo que permita apagar al SCR principal. Dicho funcionamiento esta regulado por la constante de tiempo de un arreglo RC para optimización del circuito. De esta manera la forma de conexión para la parte del Transmisor Excitador es la mostrada en la figura 9.B
Figura 9.B Transmisor Excitador controlado por SCR en paralelo
11Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.

GENERADOR DE BASE DE TIEMPO
Para el desarrollo de este submódulo se utilizó un circuito que genera una onda en forma de diente de sierra de alta linealidad. Utiliza un transmisor NPN que sirve como amplificador separador de salida, mientras RC y C1 actúan como red integradora que provee la compensación de segundo orden para la linealidad de la forma de onda.
El circuito se muestra en la siguiente figura 10:
Figura 10 Generador de base de tiempo.
Se tiene que mencionar que este circuito en particular es simplemente para la visualización
del funcionamiento del US desplegado en el osciloscopio; es decir que para la implementación final del US no será contemplado; al igual que los circuitos 74LS132 Y 7404, ya que la generación de la base de tiempo será vía software. LIMITADOR.
Este módulo fue desarrollado con un circuito limitador retroalimentado, el cual restringe una señal al estar debajo (o arriba) de un valor específico particular (punto de ruptura) . La señal de salida es proporcional a la entrada por debajo (o por arriba) de este punto de ruptura y permanece constante para entradas por arriba (o por debajo) de este valor.
La figura 11 muestra la forma de conexión del circuito de ganancia compensada en el
tiempo. Este circuito utiliza la señal proveniente del Generador de base de tiempo para su
funcionamiento. Esta señal es amplificada e invertida antes de entrar al circuito limitador, esto se realiza con un amplificador operacional cuya clave de circuito integrado es TL082, el cual se conecta con una configuración de amplificador inversor. El circuito limitador se implementó con un circuito integrado LM741, el cual es un amplificador operacional; la salida de este circuito es amplificada con otro LM741, y esta señal será conectada al amplificador de radiofrecuencia.
12Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
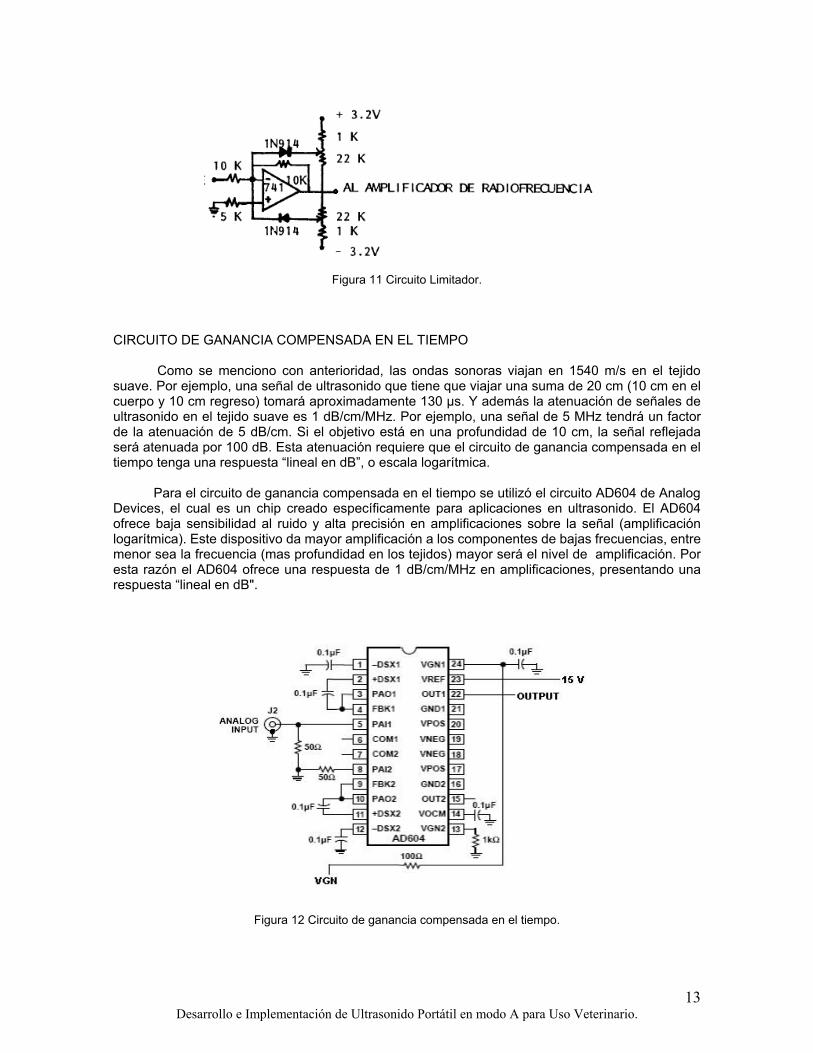
Figura 11 Circuito Limitador.
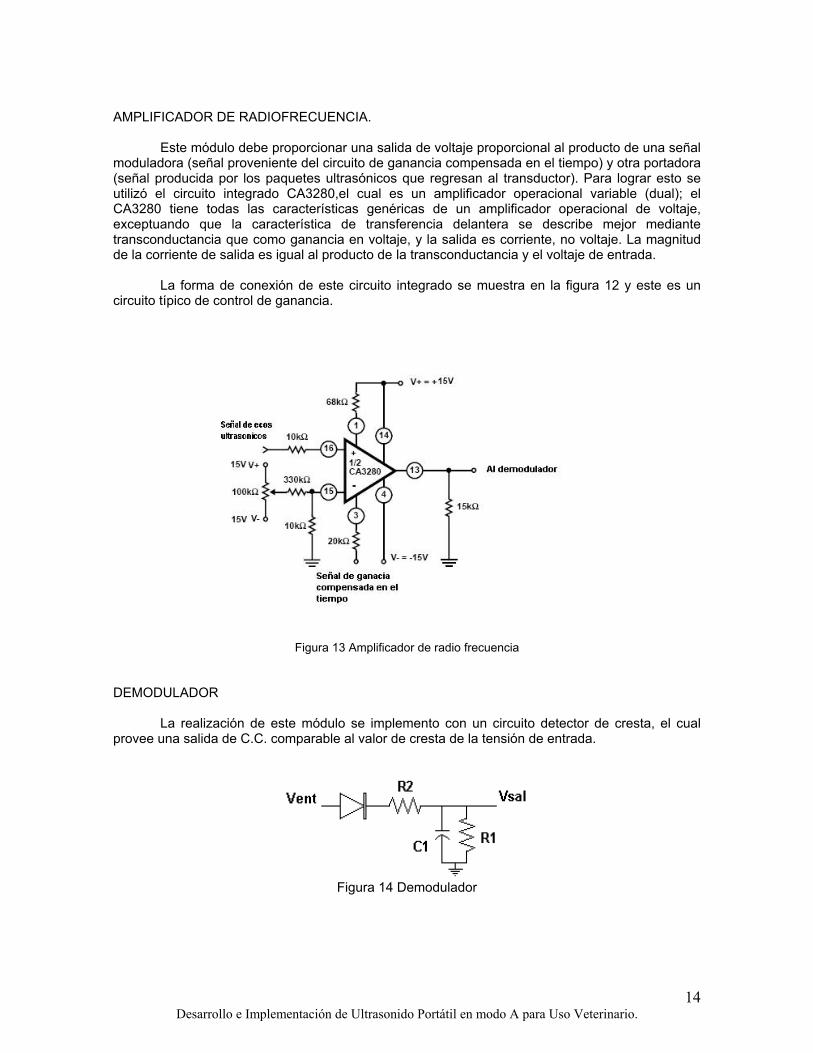
CIRCUITO DE GANANCIA COMPENSADA EN EL TIEMPO Como se menciono con anterioridad, las ondas sonoras viajan en 1540 m/s en el tejido suave. Por ejemplo, una señal de ultrasonido que tiene que viajar una suma de 20 cm (10 cm en el cuerpo y 10 cm regreso) tomará aproximadamente 130 µs. Y además la atenuación de señales de ultrasonido en el tejido suave es 1 dB/cm/MHz. Por ejemplo, una señal de 5 MHz tendrá un factor de la atenuación de 5 dB/cm. Si el objetivo está en una profundidad de 10 cm, la señal reflejada será atenuada por 100 dB. Esta atenuación requiere que el circuito de ganancia compensada en el tiempo tenga una respuesta “lineal en dB”, o escala logarítmica.
Para el circuito de ganancia compensada en el tiempo se utilizó el circuito AD604 de Analog Devices, el cual es un chip creado específicamente para aplicaciones en ultrasonido. El AD604 ofrece baja sensibilidad al ruido y alta precisión en amplificaciones sobre la señal (amplificación logarítmica). Este dispositivo da mayor amplificación a los componentes de bajas frecuencias, entre menor sea la frecuencia (mas profundidad en los tejidos) mayor será el nivel de amplificación. Por esta razón el AD604 ofrece una respuesta de 1 dB/cm/MHz en amplificaciones, presentando una respuesta “lineal en dB".
Figura 12 Circuito de ganancia compensada en el tiempo.
13Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
AMPLIFICADOR DE RADIOFRECUENCIA.
Este módulo debe proporcionar una salida de voltaje proporcional al producto de una señal moduladora (señal proveniente del circuito de ganancia compensada en el tiempo) y otra portadora (señal producida por los paquetes ultrasónicos que regresan al transductor). Para lograr esto se utilizó el circuito integrado CA3280,el cual es un amplificador operacional variable (dual); el CA3280 tiene todas las características genéricas de un amplificador operacional de voltaje, exceptuando que la característica de transferencia delantera se describe mejor mediante transconductancia que como ganancia en voltaje, y la salida es corriente, no voltaje. La magnitud de la corriente de salida es igual al producto de la transconductancia y el voltaje de entrada.
La forma de conexión de este circuito integrado se muestra en la figura 12 y este es un circuito típico de control de ganancia.
Figura 13 Amplificador de radio frecuencia
DEMODULADOR
La realización de este módulo se implemento con un circuito detector de cresta, el cual provee una salida de C.C. comparable al valor de cresta de la tensión de entrada.
Figura 14 Demodulador
14Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.

CONVERTIDOR ANALÓGICO / DIGITAL (CAD) El CAD es la parte del equipo que nos brinda la información que podemos manejar para desplegar la información, de nuestro rastreo en modo A. Dicha información es obtenida de los paquetes ultrasónicos obtenidos por nuestro transductor, en este caso el SKI C-12A 132A, que en realidad son voltajes analógicos, los cuales serán transformados por el CAD en paquetes de información digital que, por medio de software, puede ser manejada para el despliegue de la información. La implementación del CAD es en base a un Microcontrolador, que es un dispositivo que nos permite realizar una tarea para resolver algún problema de propósito específico. Para el proyecto se seleccionó el PIC 18F452. La selección del PIC es debida a sus características particulares y analizando los tipos de elementos con los que cuenta, tales como:
Convertidores D/A y A/D • • • •
Temporizadores Capacidad de memoria Facilidad para el manejo de LCD, entre otras.
En la figura 15 podemos apreciar un diagrama esquemático del PIC seleccionado.
Figura 15. PIC 18F452
Para la implementación de cualquier solución en un PIC, es necesario el uso del software MPLab de Microchip. Para conocer mas acerca de este software se recomienda revisar el apéndice A de este documento.
Para verificar el funcionamiento adecuado del CAD implementado en el PIC, se realizó una prueba en donde además de realizar la conversión analógica/digital de los datos, se transmitiera esta información de manera serial para poder ver los datos, de manera grafica en un PC, teniendo una interfaz grafica de usuario (GUI) en MATLAB. El programa en donde se encuentra implementado lo anterior descrito, tanto el archivo .asm de MPLab como el .m de MATLAB, se encuentra localizado en el apéndice C de este documento. Para la verificación del CAD se colocó como entrada una señal producida por el generador de funciones y se fue variando en amplitud y frecuencia para ver los cambios desplegados en la GUI en MATLAB.
15Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.

PANTALLA DE CRISTAL LÍQUIDO (LCD) GRÁFICO
Para poder observar el rastreo en modo “A” la opción manejada para este proyecto es trabajar con un LCD gráfico que permitiera manejar la información entregada por el PIC de la conversión A/D.
Esta pantalla, nos permite desplegar la información en una matriz de led´s de 128 x 64
puntos; los cuales pueden tener solo dos estados lógicos, 0 para apagado y 1 para encendido. En la figura 16 se puede apreciar una vista real del componente.
Figura 16. LCD Gráfico JHD12864A STN LED, de 128 x 64
No. De niveles de gris en cada píxel = 2.
Dicha pantalla posee es un diagrama de 20 pines para su conexión, dentro de las cuales se, mencionando algunas de mayor importancia, tiene un bus de datos de 8 bits y tres líneas de control para el manejo de la información. Para una descripción mas completa de la configuración y especificaciones de la pantalla se recomienda revisar el Apéndice E de este documento.
Figura 17. Diagrama de LCD JHD12864
16Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
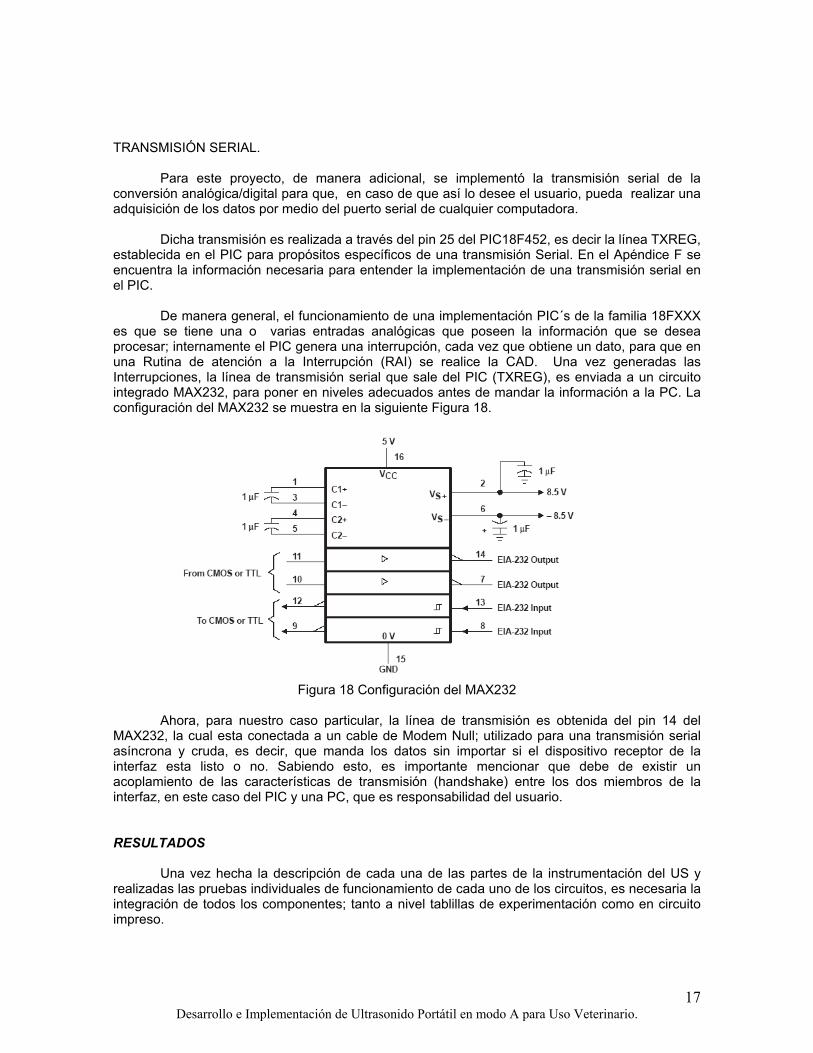
TRANSMISIÓN SERIAL. Para este proyecto, de manera adicional, se implementó la transmisión serial de la conversión analógica/digital para que, en caso de que así lo desee el usuario, pueda realizar una adquisición de los datos por medio del puerto serial de cualquier computadora. Dicha transmisión es realizada a través del pin 25 del PIC18F452, es decir la línea TXREG, establecida en el PIC para propósitos específicos de una transmisión Serial. En el Apéndice F se encuentra la información necesaria para entender la implementación de una transmisión serial en el PIC. De manera general, el funcionamiento de una implementación PIC´s de la familia 18FXXX es que se tiene una o varias entradas analógicas que poseen la información que se desea procesar; internamente el PIC genera una interrupción, cada vez que obtiene un dato, para que en una Rutina de atención a la Interrupción (RAI) se realice la CAD. Una vez generadas las Interrupciones, la línea de transmisión serial que sale del PIC (TXREG), es enviada a un circuito integrado MAX232, para poner en niveles adecuados antes de mandar la información a la PC. La configuración del MAX232 se muestra en la siguiente Figura 18.
Figura 18 Configuración del MAX232
Ahora, para nuestro caso particular, la línea de transmisión es obtenida del pin 14 del
MAX232, la cual esta conectada a un cable de Modem Null; utilizado para una transmisión serial asíncrona y cruda, es decir, que manda los datos sin importar si el dispositivo receptor de la interfaz esta listo o no. Sabiendo esto, es importante mencionar que debe de existir un acoplamiento de las características de transmisión (handshake) entre los dos miembros de la interfaz, en este caso del PIC y una PC, que es responsabilidad del usuario. RESULTADOS Una vez hecha la descripción de cada una de las partes de la instrumentación del US y realizadas las pruebas individuales de funcionamiento de cada uno de los circuitos, es necesaria la integración de todos los componentes; tanto a nivel tablillas de experimentación como en circuito impreso.
17Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
En al figura 19, podemos apreciar el diseño completo del circuito correspondiente a este proyecto. En esta figura, el diagrama electrónico, se pueden apreciar cada una de las entradas y salidas correspondientes a cada bloque de instrumentación. En este proyecto se tienen contemplados el diseño y desarrollo de dos secciones del US portátil; dichas partes son: • Instrumentación Analógica • Instrumentación Digital
Esto significa que existe una tarjeta PCB para la parte que compromete toda la instrumentación analógica y otra tarjeta, completamente diferente, para la parte de la instrumentación digital. La intención de hacer el proyecto en dos partes es debido al problema de acoplamiento que regularmente se tiene al tratar de implementar una misma tierra para circuitos analógicos y digitales. CIRCUITO IMPRESO DE INSTRUMENTACIÓN ANALÓGICA
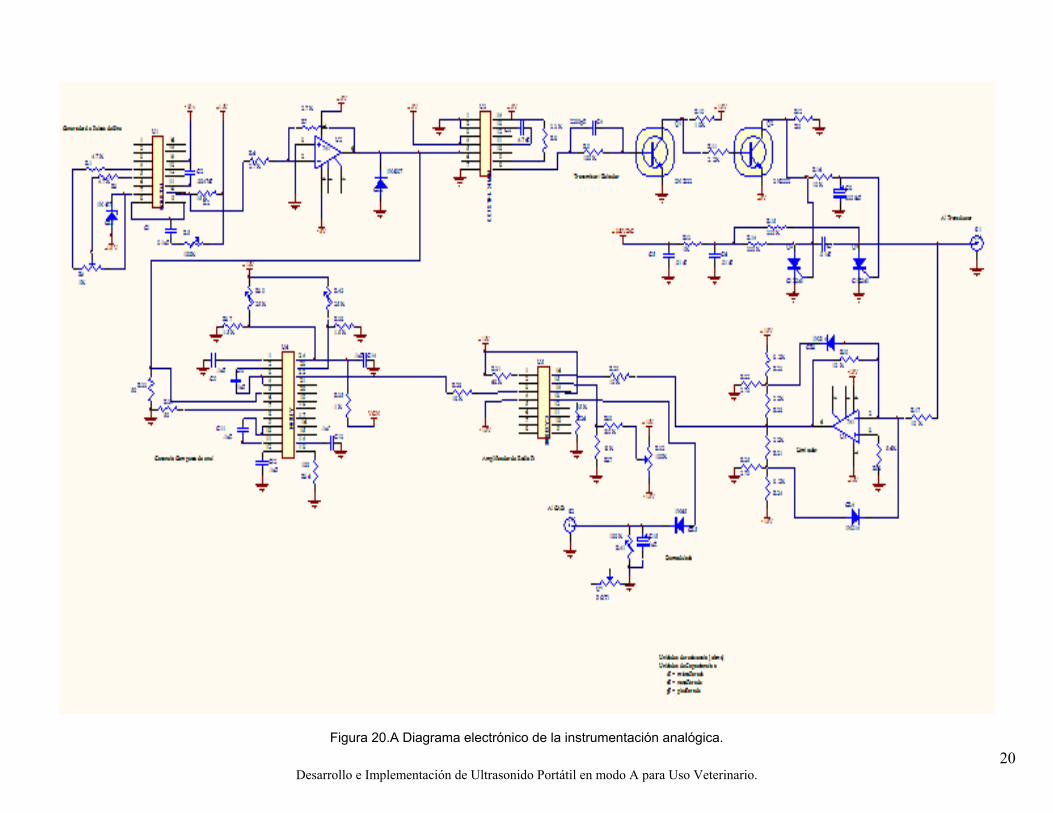
Para esta sección, los circuitos que se implementan en la tarjeta son los siguientes: • Circuito Generador de pulsos de Sincronía. • Circuito Transmisor / Excitador. • Circuito de Ganancia Compensada en el Tiempo. • Amplificador de Radio Frecuencia. • Demodulador.
Es importante mencionar que en esta tarjeta se tiene dos salidas: 1. Una referente a la salida que va al Transductor (en la salida del Circuito Transmisor /
Excitador). 2. Y otra que sirve como entrada del Convertidor Analógico / Digital (CAD), que se encuentra en
la tarjeta de la instrumentación Digital.
Y tan bien posee una entrada, que es del transductor al equipo; esta entrada se encuentra específicamente en el circuito Transmisor / Excitador) y de hecho es el mismo punto que la salida 1 arriba mencionada.
En la Figura 20.A se puede apreciar el diagrama electrónico de la sección correspondiente a la instrumentación Analógica. INSTRUMENTACIÓN DIGITAL.
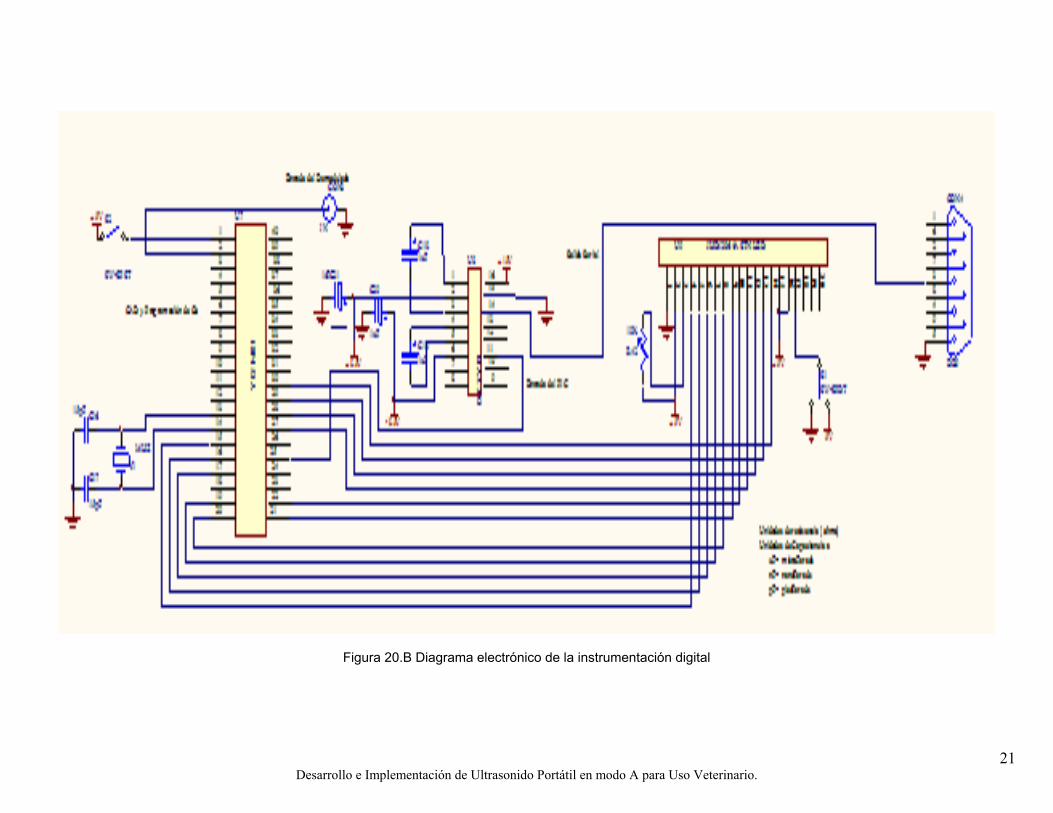
Los circuitos que conforman esta tarjeta son los aquí mencionados: • Convertidor Analógico / Digital (CAD). • Bloque de control de LCD Gráfico. • Despliegue de LCD Gráfico. • Implementación de Transmisión Serial.
Esta tarjeta cuenta con una entrada (proveniente del Demodulador), la cual alimenta al CAD y proporciona dos salidas:
18Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.

1. Una, que se encuentra a la salida del MAX232 para la implementación de la Transmisión Serial de los datos.
2. La segunda para la conexión de la Pantalla de Cristal Líquido (LCD), que despliega la información del Rastreo en Modo A del US portátil.
En la Figura 20.B, se puede apreciar el diagrama electrónico de esta sección del proyecto
arriba mencionada.
Para la prueba y visualización del funcionamiento del circuito se requirió del circuito Generador de Base de Tiempo para poder realizar la visualización del US en el osciloscopio, pero dicho circuito no esta ubicado en la figura 20. Dicha prueba de visualización se puede apreciar en la figura 19; en donde se utilizó un Osciloscopio Digital.
Figura 19. Prueba de funcionamiento del Equipo vista desde un Osciloscopio Digital
19Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
20Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
Figura 20.A Diagrama electrónico de la instrumentación analógica.
21Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
Figura 20.B Diagrama electrónico de la instrumentación digital
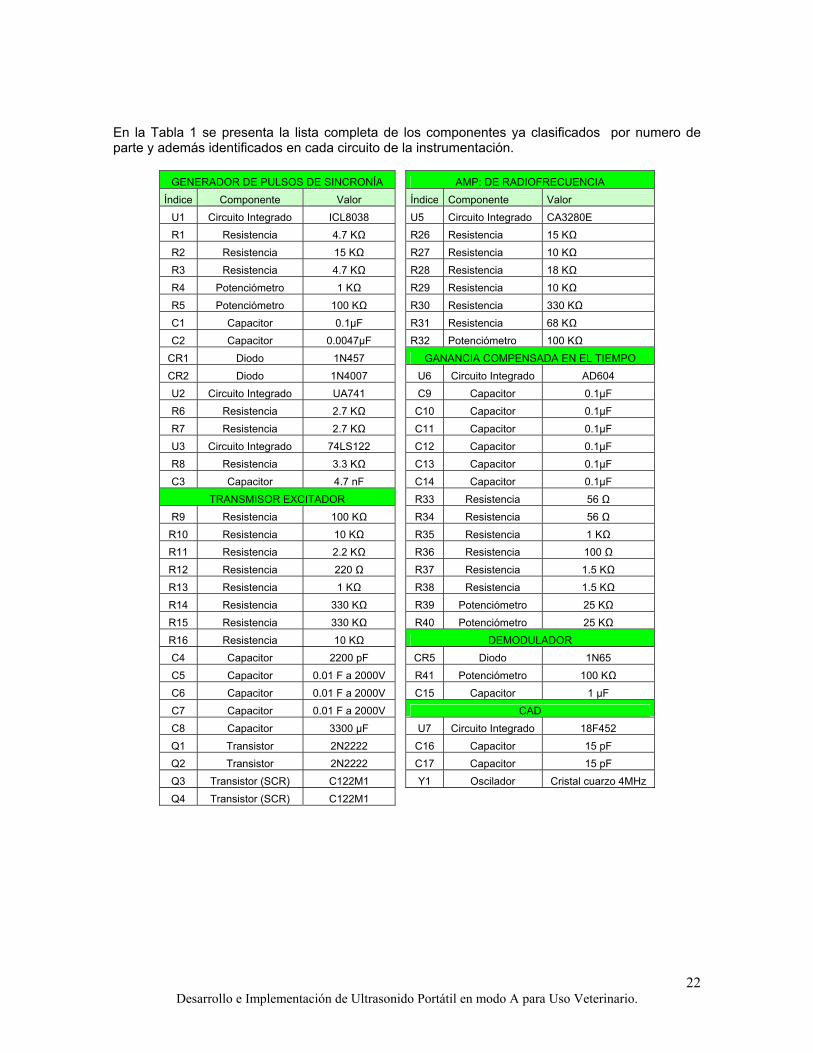
En la Tabla 1 se presenta la lista completa de los componentes ya clasificados por numero de parte y además identificados en cada circuito de la instrumentación.
GENERADOR DE PULSOS DE SINCRONÍA AMP: DE RADIOFRECUENCIA Índice Componente Valor Índice Componente Valor
U1 Circuito Integrado ICL8038 U5 Circuito Integrado CA3280E R1 Resistencia 4.7 KΩ R26 Resistencia 15 KΩ R2 Resistencia 15 KΩ R27 Resistencia 10 KΩ R3 Resistencia 4.7 KΩ R28 Resistencia 18 KΩ R4 Potenciómetro 1 KΩ R29 Resistencia 10 KΩ R5 Potenciómetro 100 KΩ R30 Resistencia 330 KΩ C1 Capacitor 0.1µF R31 Resistencia 68 KΩ C2 Capacitor 0.0047µF R32 Potenciómetro 100 KΩ
CR1 Diodo 1N457 GANANCIA COMPENSADA EN EL TIEMPO CR2 Diodo 1N4007 U6 Circuito Integrado AD604 U2 Circuito Integrado UA741 C9 Capacitor 0.1µF R6 Resistencia 2.7 KΩ C10 Capacitor 0.1µF R7 Resistencia 2.7 KΩ C11 Capacitor 0.1µF U3 Circuito Integrado 74LS122 C12 Capacitor 0.1µF R8 Resistencia 3.3 KΩ C13 Capacitor 0.1µF C3 Capacitor 4.7 nF C14 Capacitor 0.1µF
TRANSMISOR EXCITADOR R33 Resistencia 56 Ω R9 Resistencia 100 KΩ R34 Resistencia 56 Ω
R10 Resistencia 10 KΩ R35 Resistencia 1 KΩ R11 Resistencia 2.2 KΩ R36 Resistencia 100 Ω R12 Resistencia 220 Ω R37 Resistencia 1.5 KΩ R13 Resistencia 1 KΩ R38 Resistencia 1.5 KΩ R14 Resistencia 330 KΩ R39 Potenciómetro 25 KΩ R15 Resistencia 330 KΩ R40 Potenciómetro 25 KΩ R16 Resistencia 10 KΩ DEMODULADOR C4 Capacitor 2200 pF CR5 Diodo 1N65 C5 Capacitor 0.01 F a 2000V R41 Potenciómetro 100 KΩ C6 Capacitor 0.01 F a 2000V C15 Capacitor 1 µF C7 Capacitor 0.01 F a 2000V CAD C8 Capacitor 3300 µF U7 Circuito Integrado 18F452 Q1 Transistor 2N2222 C16 Capacitor 15 pF Q2 Transistor 2N2222 C17 Capacitor 15 pF Q3 Transistor (SCR) C122M1 Y1 Oscilador Cristal cuarzo 4MHz Q4 Transistor (SCR) C122M1
22 Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
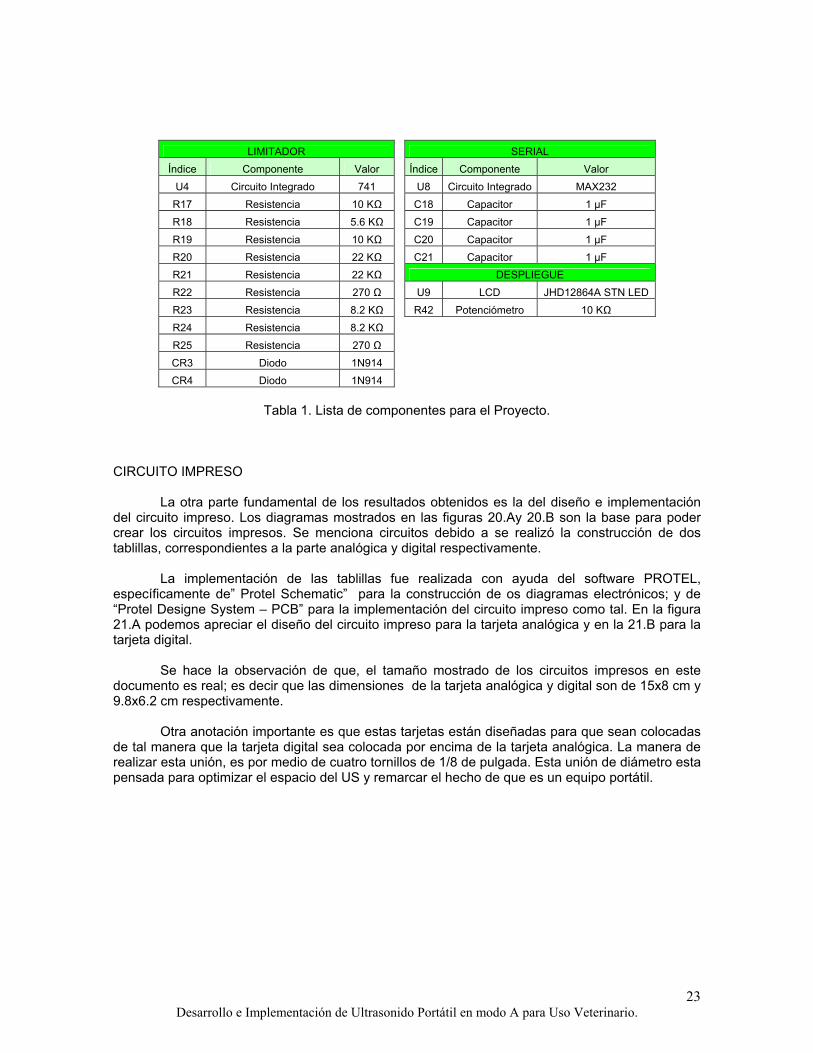
LIMITADOR SERIAL Índice Componente Valor Índice Componente Valor
U4 Circuito Integrado 741 U8 Circuito Integrado MAX232 R17 Resistencia 10 KΩ C18 Capacitor 1 µF R18 Resistencia 5.6 KΩ C19 Capacitor 1 µF R19 Resistencia 10 KΩ C20 Capacitor 1 µF R20 Resistencia 22 KΩ C21 Capacitor 1 µF R21 Resistencia 22 KΩ DESPLIEGUE R22 Resistencia 270 Ω U9 LCD JHD12864A STN LED R23 Resistencia 8.2 KΩ R42 Potenciómetro 10 KΩ R24 Resistencia 8.2 KΩ R25 Resistencia 270 Ω CR3 Diodo 1N914 CR4 Diodo 1N914
Tabla 1. Lista de componentes para el Proyecto.
CIRCUITO IMPRESO La otra parte fundamental de los resultados obtenidos es la del diseño e implementación del circuito impreso. Los diagramas mostrados en las figuras 20.Ay 20.B son la base para poder crear los circuitos impresos. Se menciona circuitos debido a se realizó la construcción de dos tablillas, correspondientes a la parte analógica y digital respectivamente. La implementación de las tablillas fue realizada con ayuda del software PROTEL, específicamente de” Protel Schematic” para la construcción de os diagramas electrónicos; y de “Protel Designe System – PCB” para la implementación del circuito impreso como tal. En la figura 21.A podemos apreciar el diseño del circuito impreso para la tarjeta analógica y en la 21.B para la tarjeta digital.
Se hace la observación de que, el tamaño mostrado de los circuitos impresos en este documento es real; es decir que las dimensiones de la tarjeta analógica y digital son de 15x8 cm y 9.8x6.2 cm respectivamente.
Otra anotación importante es que estas tarjetas están diseñadas para que sean colocadas de tal manera que la tarjeta digital sea colocada por encima de la tarjeta analógica. La manera de realizar esta unión, es por medio de cuatro tornillos de 1/8 de pulgada. Esta unión de diámetro esta pensada para optimizar el espacio del US y remarcar el hecho de que es un equipo portátil.
23Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
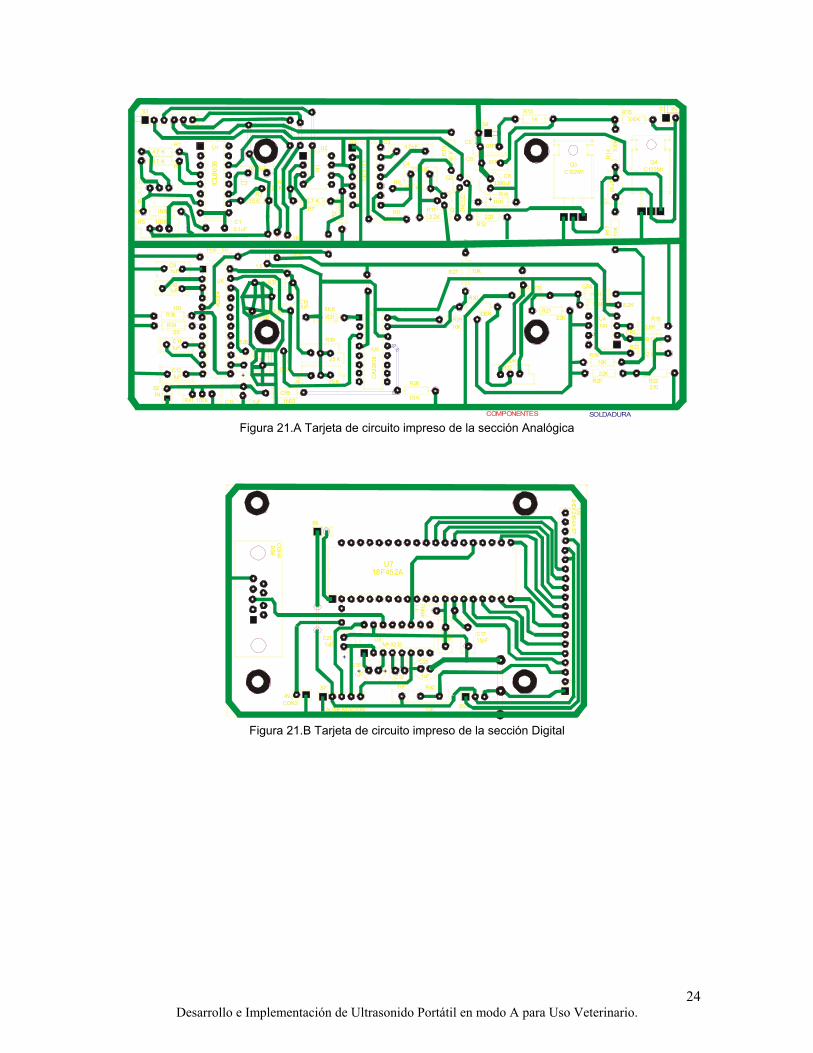
COMPONENTES SOLDADURA
R25 270
R2122K
R32100K
R40
25 K
CR1 IN567
C10.1uF
R5 100K
R3450
R36100
C10.1uF
C9.1uF
U6
AD60
4
R33 50
R39
25 K
R3168 K
R2818 K
C13.1uf
CR51N65C15 1uF.
C11.1uF.
C12.1uF
R41 100K
R26
15 K
U5
CA3
280E
R22270
S1 INS3
U1
ICL8
038
R14.7 K
R34.7 K
R4
1K
R215 K
C2
.0047uF
CR
21N
4007
U2
741
U3
74LS
122
C34.7nF
R9100 K
R83.3K
C42200pF.
Q1 2N22
22
Q2
R112.2K
R10
10 K
R12220
R1610 K
C83300uF
S4
C5.01F
R131K
C6 .01F
R15330K
R14 33
0K
C7
.01u
F
Q3C122M1
Q4C122M1
R17
10K
CR41N914
CR31N914
R185.6K
R238.2 KR19
10K
R2022K
R72.7 K
R62.7K
R2910K
R30
330K
R24 8.2K
U4741
R27 10K
S2IN
R381.5K
C14.1uF
R37
1.5 K
R35
1K
+
+
Figura 21.A Tarjeta de circuito impreso de la sección Analógica
C1615pF
C1715pF
S7
ALIMENTACIONCON3IN
C211uF
C18
1uF
R42
10K
C19
1uF
C20
1uF
U8MAX232
Y1
4MH
z
S5
U9
JHD12864A ST
S6
CO
N4
DB9
U718F452A
+
+ + +
Figura 21.B Tarjeta de circuito impreso de la sección Digital
24Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.

DISCUSIONES Y CONCLUSIONES. En términos de los objetivos de este proyecto, se puede concluir que los objetivos fueron logrados satisfactoriamente; tanto en términos teóricos como prácticos. Por una parte algunos de los objetivos fueron logrados gracias a la teoría impartida en las materias tomadas durante la Licenciatura (como Instrumentación Medica III y IV, Electrónica V, entre otras), con las que se obtuvo una idea general del US en Modo “A”, tanto en la parte teórica como en la parte instrumental. Además se trabajo la búsqueda bibliografía con la ayuda y supervisión del Asesor de este proyecto. Lo anterior brindo las bases para poder comenzar el trabajo práctico hasta lograr tener el equipo funcionando tanto individualmente (cada uno de los circuitos), como en conjunto a nivel de tablillas de experimentación. Se debe de considerar que la figura 20, tanto 20.A como 20.B, corresponde solo al diseño de la instrumentación del US, y que de hecho la parte de polarización es una tarea diferente. Para nuestras pruebas en el camino se presentaron algunos problemas, principalmente con la generación de alto voltaje, debido a que se buscó tener un voltaje de DC del orden de los 350 V en el menor espacio posible. Finalmente se consiguió la especificación de un componente adecuado, en términos de espacio y facilidad de manejo, un Convertidor de DC / DC de alto voltaje que permite colocar en la entrada 12 VDC y entrega a la salida 350 VDC. Sin embargo para las pruebas de funcionamiento se implemento el circuito Doblador de Voltaje de Línea.
Figura 22. US portátil Final.
Otro de los inconvenientes que se presentaron en el desarrollo del proyecto fue la de solucionar el apagado del SCR, ya que requirió de mucho trabajo y sobre todo tiempo. En un principio la solución inicial de apagar el dispositivo con una Bobina presento varias complicaciones ya que el valor de la inductancia de L no fue posible de medir para verificar que lo realizado teóricamente fuera lo adecuado y que en la práctica el dispositivo fuera apagado en realidad.
25Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
Afortunadamente se encontró una solución en la que se puede corroborar el apagado del SCR y el control de esta acción es regulado por algo conocido como el valor de una constante de tiempo de un arreglo RC (ζ = 1 / RC). Otro de los problemas con los que se presentaron durante el desarrollo fue en la etapa del diseño de los circuitos impresos, ya que se requirió tiempo que no estaba contemplado para el uso de los programas necesarios para que esto fuera posible (Protel) y que de hecho esto no esta contemplado dentro de las acciones a cumplir en las clases; con lo anterior lo que se trata de hacer entender es que la construcción de las tarjetas fue realizada por los alumnos implicados en este proyecto. Se considera importante resaltar el hecho de que el desarrollo de este proyecto no fue solo de dos Seminarios de Proyecto, sino que fue el trabajo de todo un año en el que se aplicaron los conocimientos adquiridos durante el proceso que duró la Licenciatura de Ingeniería Biomédica y que el resultado final es un conjunto de todos los conocimientos y experiencias adquiridas pero que es tangible.
Finalmente se puede mencionar que, en general, las expectativas fueron cumplidas de manera adecuada y es posible mencionar que la adición de un punto que no estaba contemplado en el inicio del proyecto, como fue la implementación de poder acceder a los datos de manera serial, puede ser de utilidad en futuros proyectos y/o trabajos académicos.
26Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
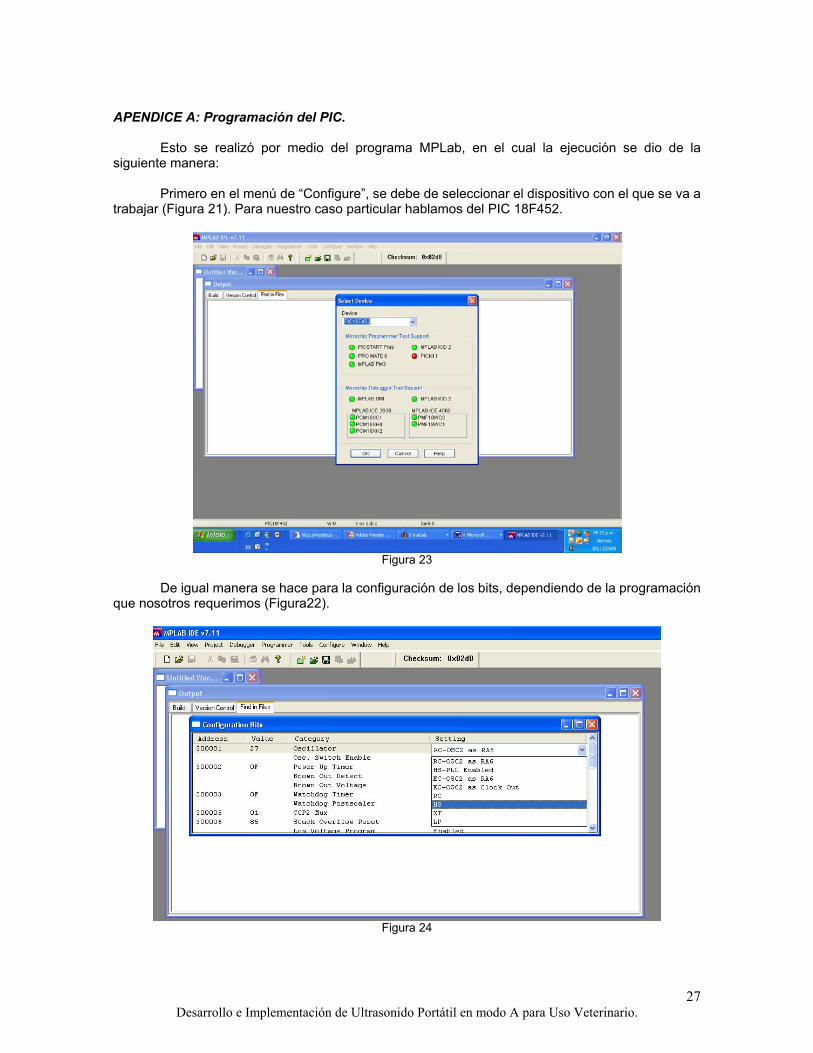
APENDICE A: Programación del PIC.
Esto se realizó por medio del programa MPLab, en el cual la ejecución se dio de la siguiente manera:
Primero en el menú de “Configure”, se debe de seleccionar el dispositivo con el que se va a trabajar (Figura 21). Para nuestro caso particular hablamos del PIC 18F452.
Figura 23
De igual manera se hace para la configuración de los bits, dependiendo de la programación
que nosotros requerimos (Figura22).
Figura 24
27Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
En esta ventana es en donde nosotros configuramos con que tipo de oscilador trabajara el PIC; particularmente nosotros trabajamos con una configuración HS “HighSpeed”, con la que se establece que el oscilador será un cristal de cuarzo de 4MHz.
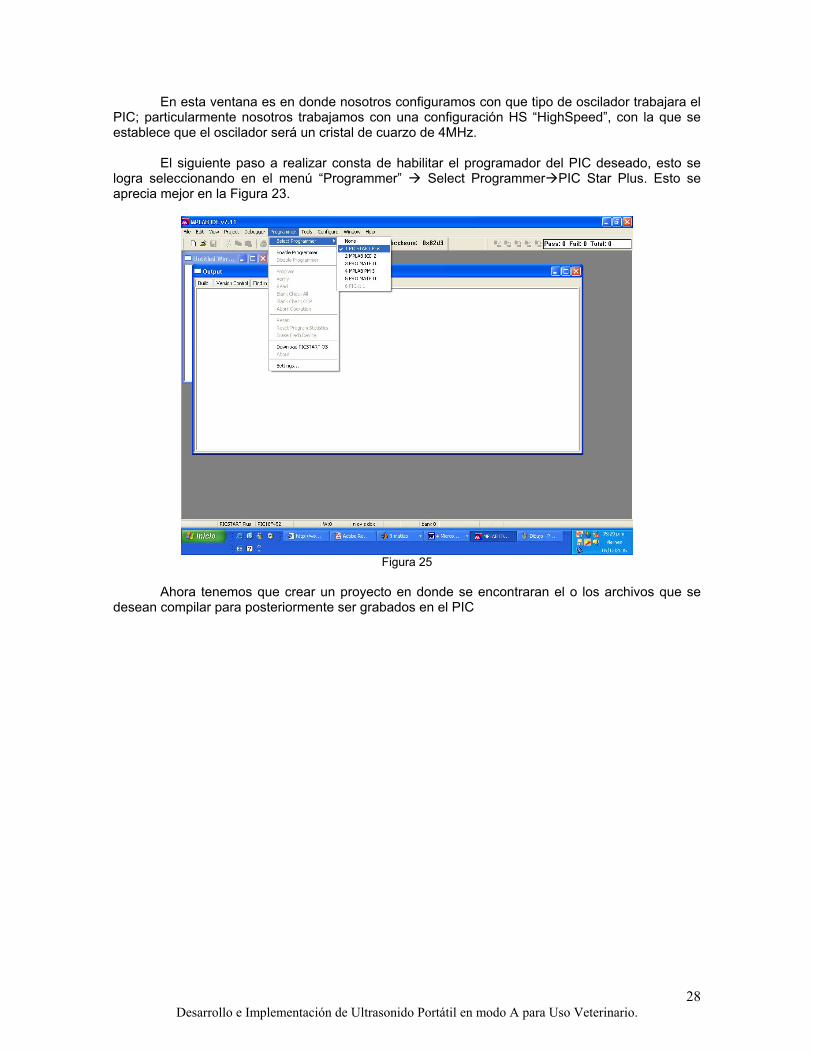
El siguiente paso a realizar consta de habilitar el programador del PIC deseado, esto se logra seleccionando en el menú “Programmer” Select Programmer PIC Star Plus. Esto se aprecia mejor en la Figura 23.
Figura 25
Ahora tenemos que crear un proyecto en donde se encontraran el o los archivos que se
desean compilar para posteriormente ser grabados en el PIC
28Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.

Figura 26
En este proyecto se adjuntaran los archivos .asm deseados para la programación del PIC,
así como las librerías adecuadas especificas de cada PIC. Al finalizar con la ventanilla de “Proyect Wizard”, esto es lo que se genera:
Figura 27
En la figura 25 podemos apreciar un listado de los archivos fuente necesarios para la
programación, además de el lugar en donde se debe de adjuntar el archivo .lkr, correspondiente a la librería.
29Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.

Cuando ya se tiene el programa corriendo de manera adecuada, esto se puede apreciar de
manera gráfica (Figura 26); apareciendo un mensaje de BUILD SUCCEEDED, en la ventana de Output
Figura 28
Al hacer esto se generan varios archivos dentro del fólder del proyecto, los cuales son
necesarios para la programación del PIC. Dichos archivos generados son: .COD, .HEX y .lst.
Cuando se comprueba que se tienen estos archivos, es posible programar el PIC por medio del grabador. Para lograrlo se realiza por medio del menú Programer Program y de igual manera en la ventana de Output aparecerá que la programación del PIC ha sido exitosa.
30Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
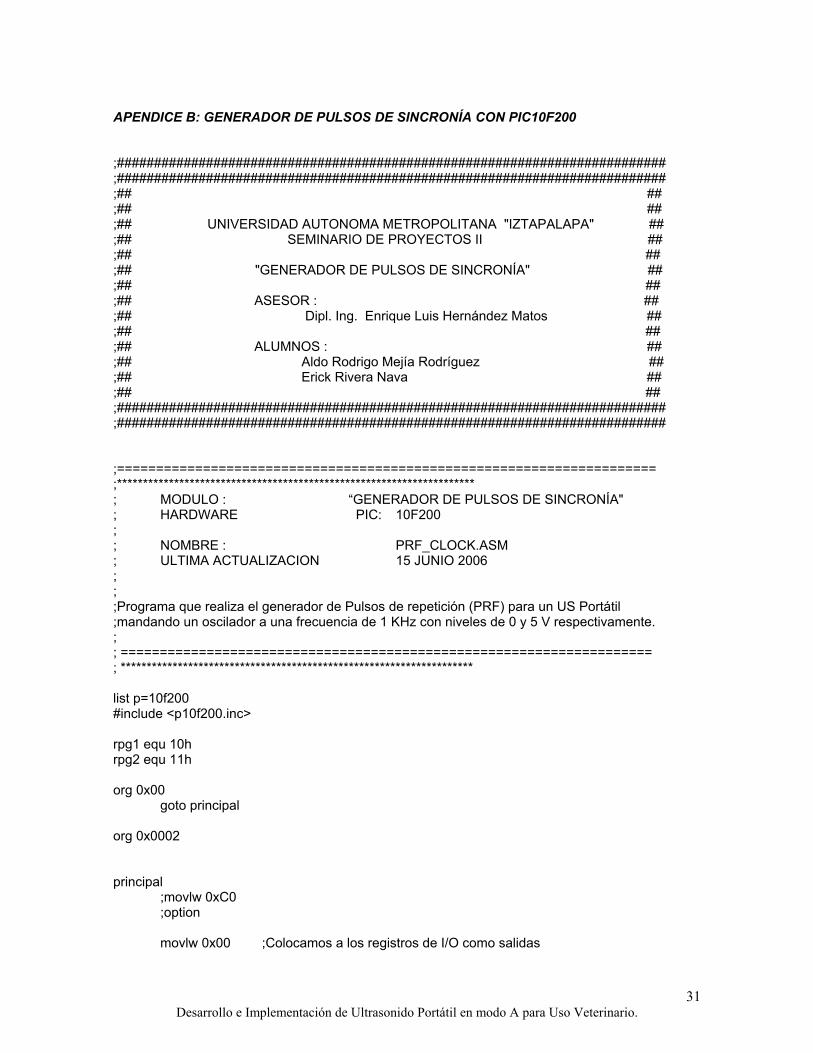
APENDICE B: GENERADOR DE PULSOS DE SINCRONÍA CON PIC10F200 ;########################################################################## ;########################################################################## ;## ## ;## ## ;## UNIVERSIDAD AUTONOMA METROPOLITANA "IZTAPALAPA" ## ;## SEMINARIO DE PROYECTOS II ## ;## ## ;## "GENERADOR DE PULSOS DE SINCRONÍA" ## ;## ## ;## ASESOR : ## ;## Dipl. Ing. Enrique Luis Hernández Matos ## ;## ## ;## ALUMNOS : ## ;## Aldo Rodrigo Mejía Rodríguez ## ;## Erick Rivera Nava ## ;## ## ;########################################################################## ;########################################################################## ;===================================================================== ;********************************************************************* ; MODULO : “GENERADOR DE PULSOS DE SINCRONÍA" ; HARDWARE PIC: 10F200 ; ; NOMBRE : PRF_CLOCK.ASM ; ULTIMA ACTUALIZACION 15 JUNIO 2006 ; ; ;Programa que realiza el generador de Pulsos de repetición (PRF) para un US Portátil ;mandando un oscilador a una frecuencia de 1 KHz con niveles de 0 y 5 V respectivamente. ; ; ==================================================================== ; ******************************************************************** list p=10f200 #include <p10f200.inc> rpg1 equ 10h rpg2 equ 11h org 0x00 goto principal org 0x0002 principal ;movlw 0xC0 ;option movlw 0x00 ;Colocamos a los registros de I/O como salidas
31Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
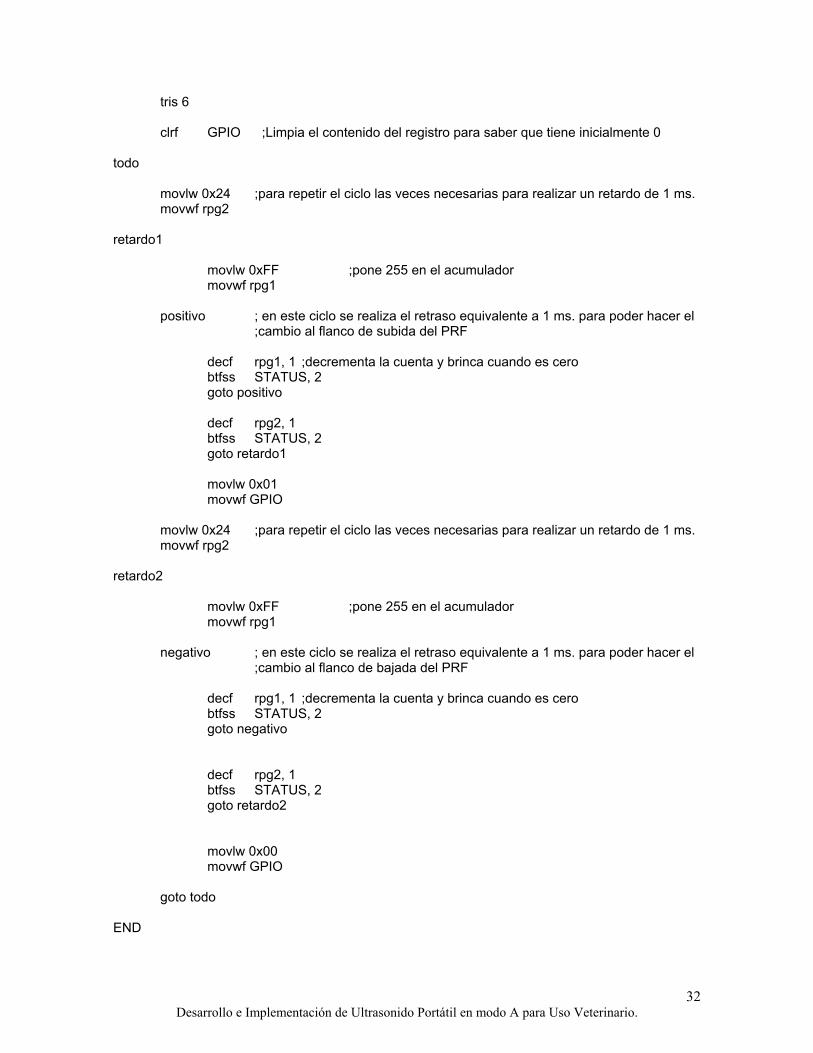
tris 6 clrf GPIO ;Limpia el contenido del registro para saber que tiene inicialmente 0 todo movlw 0x24 ;para repetir el ciclo las veces necesarias para realizar un retardo de 1 ms. movwf rpg2 retardo1 movlw 0xFF ;pone 255 en el acumulador movwf rpg1 positivo ; en este ciclo se realiza el retraso equivalente a 1 ms. para poder hacer el
;cambio al flanco de subida del PRF decf rpg1, 1 ;decrementa la cuenta y brinca cuando es cero btfss STATUS, 2 goto positivo decf rpg2, 1 btfss STATUS, 2 goto retardo1 movlw 0x01 movwf GPIO movlw 0x24 ;para repetir el ciclo las veces necesarias para realizar un retardo de 1 ms. movwf rpg2 retardo2 movlw 0xFF ;pone 255 en el acumulador movwf rpg1 negativo ; en este ciclo se realiza el retraso equivalente a 1 ms. para poder hacer el
;cambio al flanco de bajada del PRF decf rpg1, 1 ;decrementa la cuenta y brinca cuando es cero btfss STATUS, 2 goto negativo decf rpg2, 1 btfss STATUS, 2 goto retardo2 movlw 0x00 movwf GPIO goto todo END
32Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.

APENDICE C: IMPLEMENTACIÓN DEL CAD CON EL PIC18F452 ;########################################################################## ;########################################################################## ;## ## ;## ## ;## UNIVERSIDAD AUTONOMA METROPOLITANA "IZTAPALAPA" ## ;## SEMINARIO DE PROYECTOS II ## ;## ## ;## "CONVERTIDOR ANALÓGICO/DIGITAL" ## ;## ## ;## ASESOR : ## ;## Dipl. Ing. Enrique Luis Hernández Matos ## ;## ## ;## ALUMNOS : ## ;## Aldo Rodrigo Mejía Rodríguez ## ;## Erick Rivera Nava ## ;## ## ;########################################################################## ;########################################################################## ;===================================================================== ;********************************************************************* ; MODULO : “CONVERTIDOR ANALÓGICO / DIGITAL ; CON TRANSMISIÓN SERIAL" ; HARDWARE PIC: 18F452 ; ; NOMBRE : CAD_US.ASM ; ULTIMA ACTUALIZACION 16 MAYO 2006 ; ; ; ;Aquí se presenta el archivo principal CAD_US.asm específicamente para el PIC18F452, en donde ;se pretende realizar la Conversión A/D y una transmisión serial para la visualización de la información ;en el monitor de una PC, teniendo como software de interfaz a MATLAB. ; ==================================================================== ; ******************************************************************** list p=18f452 #include <p18f452.inc> rpg1 equ 01h ;etiqueta proporcionada para crear un registro de propósito
; especifico en la dirección de memoria 01h ;************************************************************ org 0x00 goto principal ;************************************************************ org 0x0018 ;para el PIC esta es la dirección donde se encuentran las interrupciones movf ADRESH,W,0 ;W indica que ahí se guardara el resultado de la conversión
33Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.

movwf PORTD movwf TXREG ;Envío del dato bcf PIR1,ADIF,0 call retardo ;un pequeño retardo bsf ADCON0,GO ;(B0) HABILITA EL MODULO DE CONVERSION retfie ; instrucción para regresa de una interrupción, retfie=return
;interrupt enable ;************************************************************ ;Programa principal donde se mandan a llamar la funciones de configuración de los puertos, ;el modulo de conversión analógico digital y la trasmisión serial org 0x0060 principal clrf TRISD, 0 ;TRISD es un rpe que nos permite indicar que el puerto D es de
;entrada o de salida (0=salida, 1=entrada) movlw 0x00 movwf PORTD, 0 ;inicializamos al puerto D clrf TRISA, 1 ;TRISA es un rpe que nos permite indicar que el puerto A es de
;entrada o de salida (0=salida, 1=entrada) movlw 0x00 movwf PORTA, 0 ;inicializamos al puerto A call config_serial ;Llamada de la función call conf_conversion ;Llamada de la función para la conversion Analogica-Digital call retardo ;un pequeño retardo bsf ADCON0,GO ;(B0) HABILITA EL MODULO DE CONVERSION espera nop goto espera ;********************************************************************** ;configuración del puerto serie para la transmisión de los datos ;*********************************************************************** config_serial movlw d'25' ;Cuenta a cargar para generar un baud rate de 9600 movwf SPBRG banksel TXSTA ;Habilita la transmisión asincrónica movlw 0x24 movwf TXSTA banksel RCSTA ;Habilita el puerto serial bsf RCSTA,SPEN bcf PIR1,TXIF ;habilita interrupción de transmisión return ;************************************************************ ;configuracion de la conversion ananalogica digital ;Seleccionando las entradas analogicas AN0
34Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
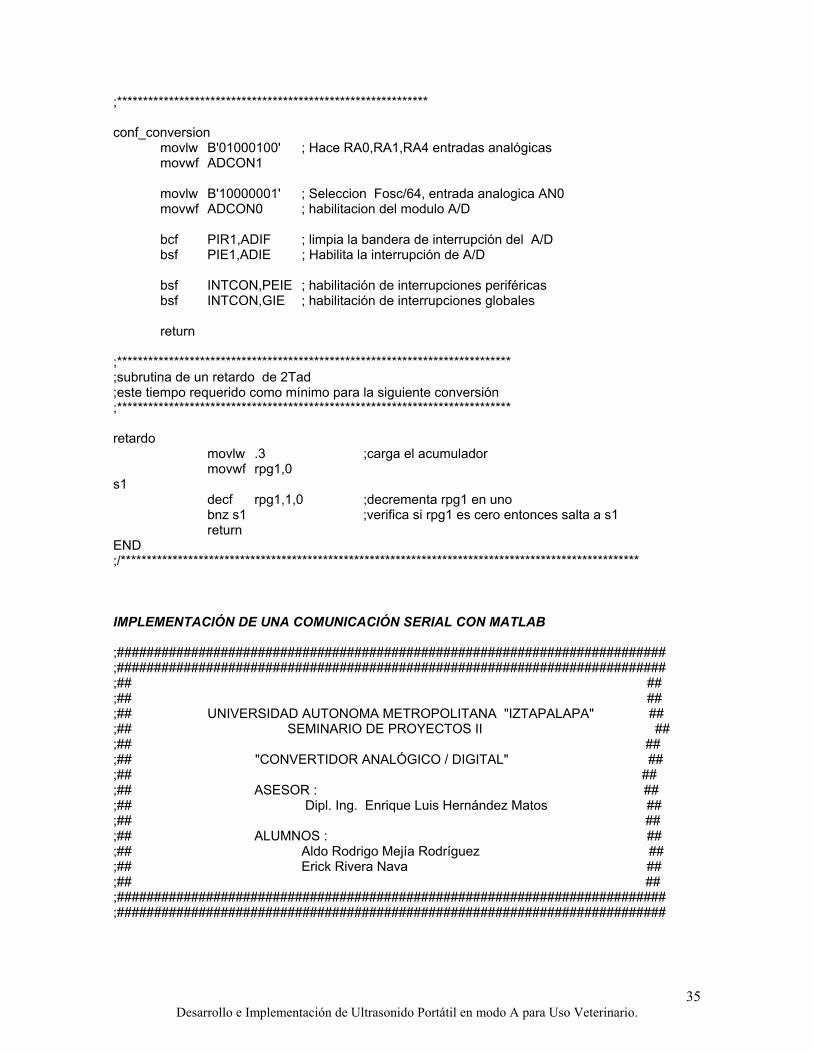
;************************************************************ conf_conversion movlw B'01000100' ; Hace RA0,RA1,RA4 entradas analógicas movwf ADCON1 movlw B'10000001' ; Seleccion Fosc/64, entrada analogica AN0 movwf ADCON0 ; habilitacion del modulo A/D bcf PIR1,ADIF ; limpia la bandera de interrupción del A/D bsf PIE1,ADIE ; Habilita la interrupción de A/D bsf INTCON,PEIE ; habilitación de interrupciones periféricas bsf INTCON,GIE ; habilitación de interrupciones globales return ;**************************************************************************** ;subrutina de un retardo de 2Tad ;este tiempo requerido como mínimo para la siguiente conversión ;**************************************************************************** retardo movlw .3 ;carga el acumulador movwf rpg1,0 s1 decf rpg1,1,0 ;decrementa rpg1 en uno bnz s1 ;verifica si rpg1 es cero entonces salta a s1 return END ;/**************************************************************************************************** IMPLEMENTACIÓN DE UNA COMUNICACIÓN SERIAL CON MATLAB ;########################################################################## ;########################################################################## ;## ## ;## ## ;## UNIVERSIDAD AUTONOMA METROPOLITANA "IZTAPALAPA" ## ;## SEMINARIO DE PROYECTOS II ## ;## ## ;## "CONVERTIDOR ANALÓGICO / DIGITAL" ## ;## ## ;## ASESOR : ## ;## Dipl. Ing. Enrique Luis Hernández Matos ## ;## ## ;## ALUMNOS : ## ;## Aldo Rodrigo Mejía Rodríguez ## ;## Erick Rivera Nava ## ;## ## ;########################################################################## ;##########################################################################
35Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.

;===================================================================== ;********************************************************************* ; MODULO : “CONVERTIDOR ANALÓGICO/DIGITAL ; CON TRANSMISIÓN SERIAL" ; HARDWARE PIC: 18F452 ; ; NOMBRE : adquiere.m ; ULTIMA ACTUALIZACION 16 MAYO 2006 ; ; ; ;Aquí se presenta el archivo que permite la recepción de datos de una transmisión serial para la ;visualización de la información en el monitor de una PC, teniendo como software de interfaz a ;MATLAB. ; ==================================================================== ; ******************************************************************** ;/****************************************************************************************************
%adquisición de datos i=0; s=serial('COM1'); %con ésto se crea un objeto virtual que esta
%asignado a un Puerto serial de la computadora, en %este caso se llama “s”
set(s, 'InputBufferSize', 5000); %se crea un buffer de entrada de 5000 %datos
tiempo=(0:4999)'; %creamos un vector de tiempo para %poder realizar la graficación de los datos con %respecto al tiempo
fopen(s); %abrimos el objeto serial para la comunicación fprintf(s,'w') for i=1:10 %este ciclo nos permite graficar la información y
%actualizar la gráfica 10 veces para poder %analizar de manera visual el funcionamiento del %convertidor
datos=fread(s); plot(tiempo,datos); drawnow; end close(s); %cerramos el objeto serial para poder
%deshabilitarlo del Puerto físico de la PC
36Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.

APENDICE D: MODULO DE CONTROL DEL LCD GRÁFICO ;########################################################################## ;########################################################################## ;## ## ;## ## ;## UNIVERSIDAD AUTONOMA METROPOLITANA "IZTAPALAPA" ## ;## SEMINARIO DE PROYECTOS II ## ;## ## ;## "MODULO DE CONTROL LCD GRÁFICO ## ;## ## ;## ASESOR : ## ;## Dipl. Ing. Enrique Luis Hernández Matos ## ;## ## ;## ALUMNOS : ## ;## Aldo Rodrigo Mejía Rodríguez ## ;## Erick Rivera Nava ## ;## ## ;########################################################################## ;########################################################################## ;===================================================================== ;********************************************************************* ; MODULO : MANEJO PANTALLA LCD" ; HARDWARE LCD : JHD12864 ASTN LED ; LCD Gráfico de 128 x 64 ; ; NOMBRE : LCD_.ASM ; ULTIMA ACTUALIZACION 20 JUNIO 2006 ; ; El conjunto de rutinas que se presentan a continuación permiten realizar ; las tareas básicas de control del módulo de visualización LCD ; ; NOTA: LOS TIEMPOS DE DURACION DE LAS INSTRUCCIONES SON MUY APROXIMADOS ; A LOS QUE MARCAN LOS DISTINTOS MANUALES DE LAS PANTALLAS Y ESTOS SE ; COMPROBARON PONIENDO UN PIN EN 1 ANTES DE UNA INSTRUCCION Y DESPIUES DE ;OTRA ; ; ==================================================================== ; ******************************************************************** ; ========================================================================== ; FUNCIONES IMPLEMENTADAS EN ESTE ARCHIVO ; UP_LCD ; DELAY_5MS ; AGUANTA_15MS ; LCD_BUSY ; LCD_REG ; LCD_REG2 ; LCD_DATO ; LCD_INI ; ==========================================================================
37Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
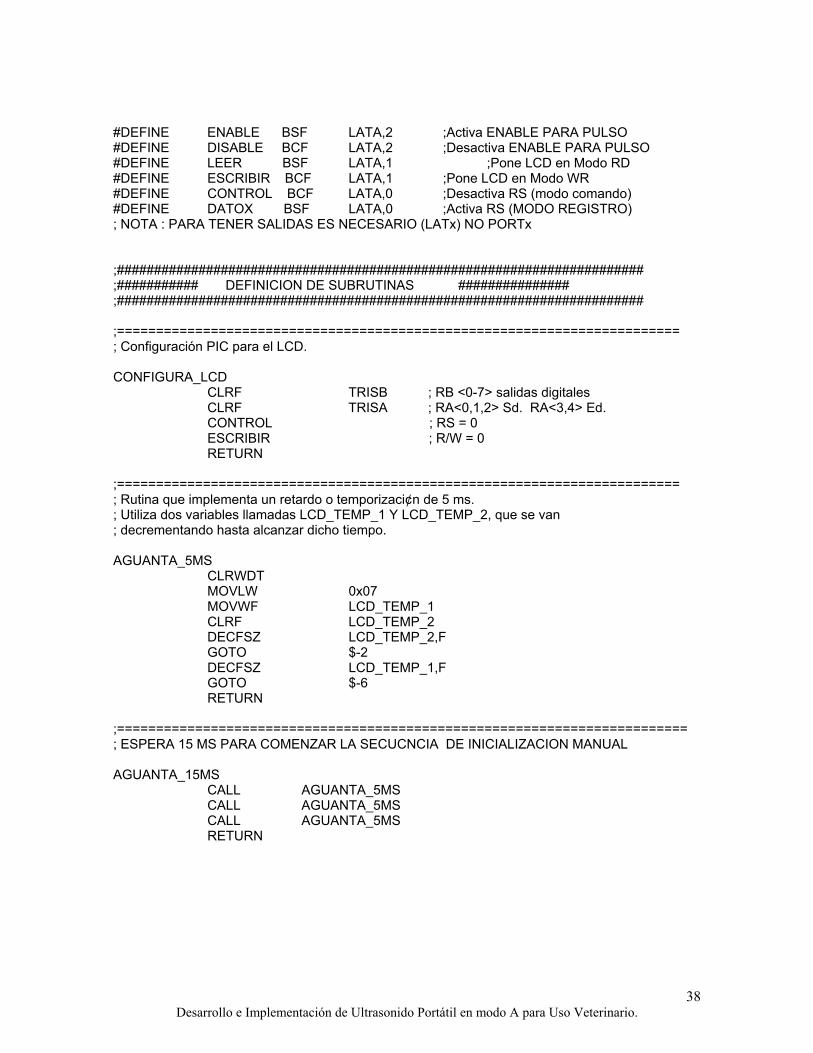
#DEFINE ENABLE BSF LATA,2 ;Activa ENABLE PARA PULSO #DEFINE DISABLE BCF LATA,2 ;Desactiva ENABLE PARA PULSO #DEFINE LEER BSF LATA,1 ;Pone LCD en Modo RD #DEFINE ESCRIBIR BCF LATA,1 ;Pone LCD en Modo WR #DEFINE CONTROL BCF LATA,0 ;Desactiva RS (modo comando) #DEFINE DATOX BSF LATA,0 ;Activa RS (MODO REGISTRO) ; NOTA : PARA TENER SALIDAS ES NECESARIO (LATx) NO PORTx ;####################################################################### ;########### DEFINICION DE SUBRUTINAS ############### ;####################################################################### ;======================================================================== ; Configuración PIC para el LCD. CONFIGURA_LCD CLRF TRISB ; RB <0-7> salidas digitales CLRF TRISA ; RA<0,1,2> Sd. RA<3,4> Ed. CONTROL ; RS = 0 ESCRIBIR ; R/W = 0 RETURN ;======================================================================== ; Rutina que implementa un retardo o temporizaci¢n de 5 ms. ; Utiliza dos variables llamadas LCD_TEMP_1 Y LCD_TEMP_2, que se van ; decrementando hasta alcanzar dicho tiempo. AGUANTA_5MS CLRWDT MOVLW 0x07 MOVWF LCD_TEMP_1 CLRF LCD_TEMP_2 DECFSZ LCD_TEMP_2,F GOTO $-2 DECFSZ LCD_TEMP_1,F GOTO $-6 RETURN ;========================================================================= ; ESPERA 15 MS PARA COMENZAR LA SECUCNCIA DE INICIALIZACION MANUAL AGUANTA_15MS CALL AGUANTA_5MS CALL AGUANTA_5MS CALL AGUANTA_5MS RETURN
38Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.

;========================================================================= ; Lectura del Flag Busy (ESPERA A QUE SE FINALICE COMANDO ANTERIOR) LCD_BUSY SETF TRISB ; PTO IN LEER CONTROL ENABLE ; LINEAS DE CONTROL ; BSF LATC,3 ; PARA TENER CONTROL DEL TIEMPO DE BUSY NOP ; PARA QUE SE ESTABILICE BTFSC PORTB, 7 ;LEE bit de Busy GOTO $-2 DISABLE ; BCF LATC,3 RETURN ;========================================================================= ; LCD_REG: Escritura de comandos del LCD ; W= Código de comando para el LCD ; W ==> portb LCD_REG CLRF TRISB ;Puerto B salida CONTROL ; RS = 0 ESCRIBIR ; R/W = 0 ENABLE MOVWF LATB ;Código de comando. NOP DISABLE CALL LCD_BUSY ;LCD libre ? RETURN ;========================================================================= ; Escritura de datos en DDRAM o CGRAM W-> PANTALLA LCD_DATO CLRF TRISB ;Puerta B salida DATOX ; RS = 1 ESCRIBIR ; R/W = 0 ENABLE MOVWF LATB ;Valor ASCII a sacar por portb NOP DISABLE CALL LCD_BUSY ;Espera a que se libere el LCD RETURN
39Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
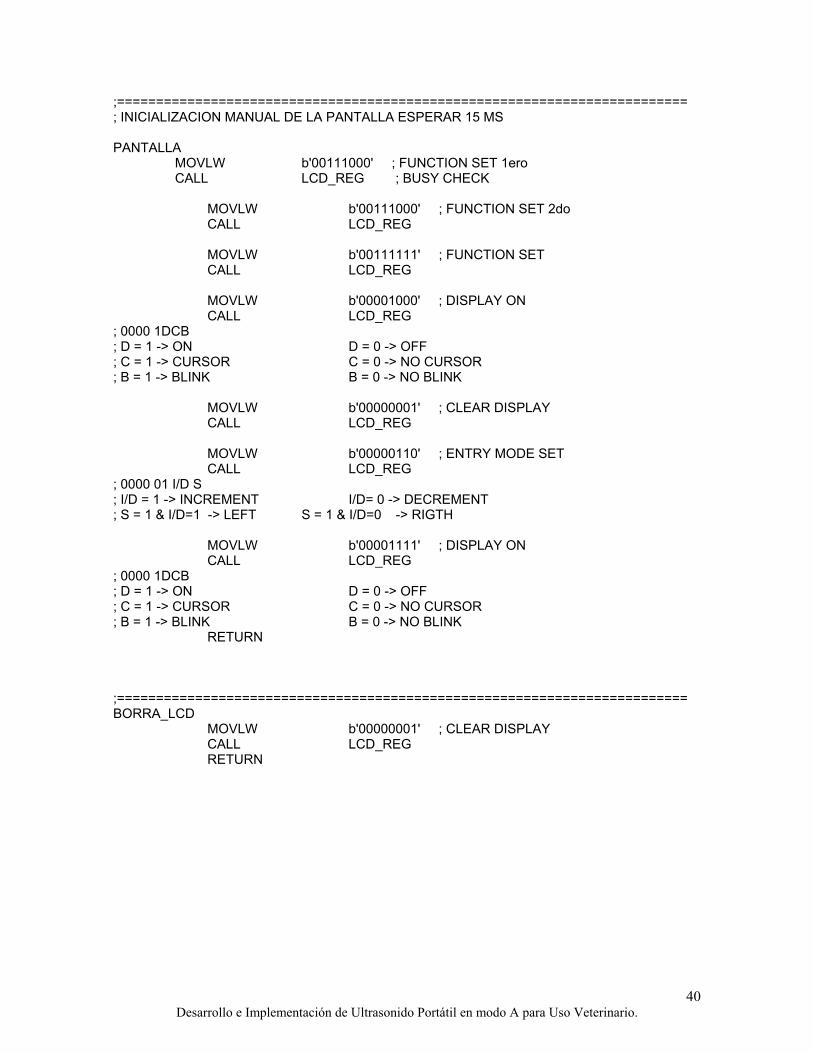
;========================================================================= ; INICIALIZACION MANUAL DE LA PANTALLA ESPERAR 15 MS PANTALLA MOVLW b'00111000' ; FUNCTION SET 1ero CALL LCD_REG ; BUSY CHECK MOVLW b'00111000' ; FUNCTION SET 2do CALL LCD_REG MOVLW b'00111111' ; FUNCTION SET CALL LCD_REG MOVLW b'00001000' ; DISPLAY ON CALL LCD_REG ; 0000 1DCB ; D = 1 -> ON D = 0 -> OFF ; C = 1 -> CURSOR C = 0 -> NO CURSOR ; B = 1 -> BLINK B = 0 -> NO BLINK MOVLW b'00000001' ; CLEAR DISPLAY CALL LCD_REG MOVLW b'00000110' ; ENTRY MODE SET CALL LCD_REG ; 0000 01 I/D S ; I/D = 1 -> INCREMENT I/D= 0 -> DECREMENT ; S = 1 & I/D=1 -> LEFT S = 1 & I/D=0 -> RIGTH MOVLW b'00001111' ; DISPLAY ON CALL LCD_REG ; 0000 1DCB ; D = 1 -> ON D = 0 -> OFF ; C = 1 -> CURSOR C = 0 -> NO CURSOR ; B = 1 -> BLINK B = 0 -> NO BLINK RETURN ;========================================================================= BORRA_LCD MOVLW b'00000001' ; CLEAR DISPLAY CALL LCD_REG RETURN
40Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
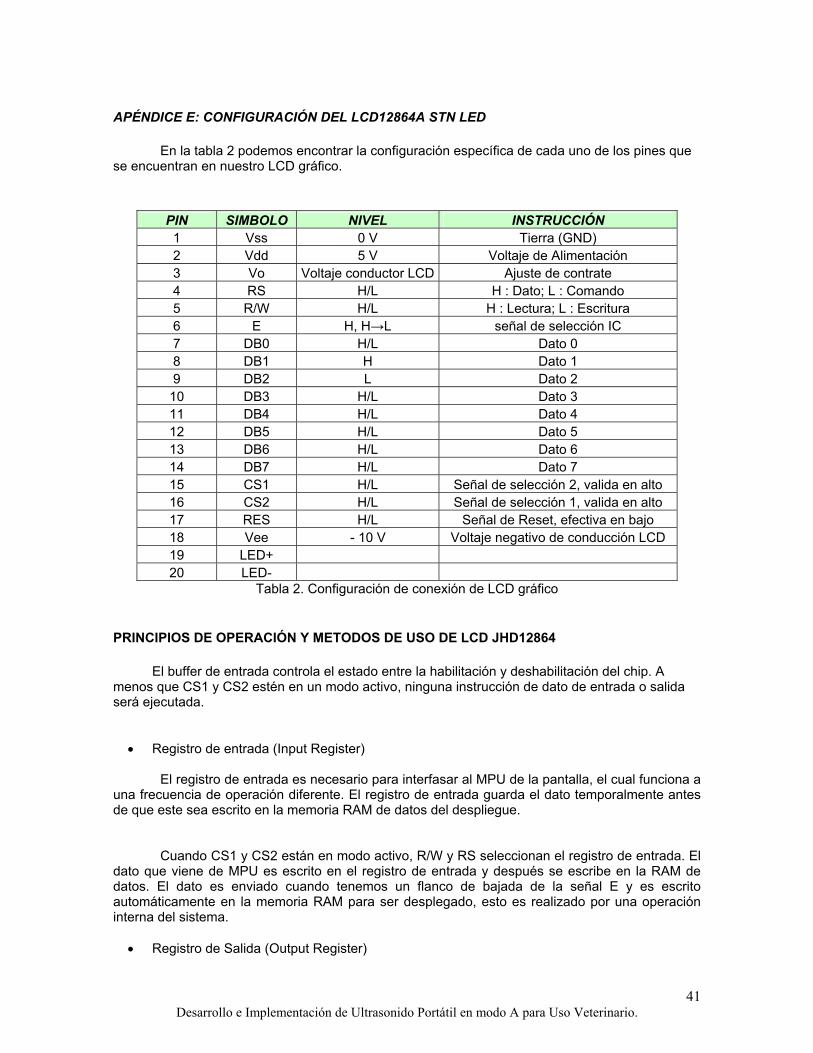
APÉNDICE E: CONFIGURACIÓN DEL LCD12864A STN LED En la tabla 2 podemos encontrar la configuración específica de cada uno de los pines que se encuentran en nuestro LCD gráfico.
PIN SIMBOLO NIVEL INSTRUCCIÓN 1 Vss 0 V Tierra (GND) 2 Vdd 5 V Voltaje de Alimentación 3 Vo Voltaje conductor LCD Ajuste de contrate 4 RS H/L H : Dato; L : Comando 5 R/W H/L H : Lectura; L : Escritura 6 E H, H→L señal de selección IC 7 DB0 H/L Dato 0 8 DB1 H Dato 1 9 DB2 L Dato 2
10 DB3 H/L Dato 3 11 DB4 H/L Dato 4 12 DB5 H/L Dato 5 13 DB6 H/L Dato 6 14 DB7 H/L Dato 7 15 CS1 H/L Señal de selección 2, valida en alto 16 CS2 H/L Señal de selección 1, valida en alto 17 RES H/L Señal de Reset, efectiva en bajo 18 Vee .- 10 V Voltaje negativo de conducción LCD 19 LED+ 20 LED-
Tabla 2. Configuración de conexión de LCD gráfico
•
•
PRINCIPIOS DE OPERACIÓN Y METODOS DE USO DE LCD JHD12864
El buffer de entrada controla el estado entre la habilitación y deshabilitación del chip. A menos que CS1 y CS2 estén en un modo activo, ninguna instrucción de dato de entrada o salida será ejecutada.
Registro de entrada (Input Register)
El registro de entrada es necesario para interfasar al MPU de la pantalla, el cual funciona a una frecuencia de operación diferente. El registro de entrada guarda el dato temporalmente antes de que este sea escrito en la memoria RAM de datos del despliegue. Cuando CS1 y CS2 están en modo activo, R/W y RS seleccionan el registro de entrada. El dato que viene de MPU es escrito en el registro de entrada y después se escribe en la RAM de datos. El dato es enviado cuando tenemos un flanco de bajada de la señal E y es escrito automáticamente en la memoria RAM para ser desplegado, esto es realizado por una operación interna del sistema.
Registro de Salida (Output Register)
41Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
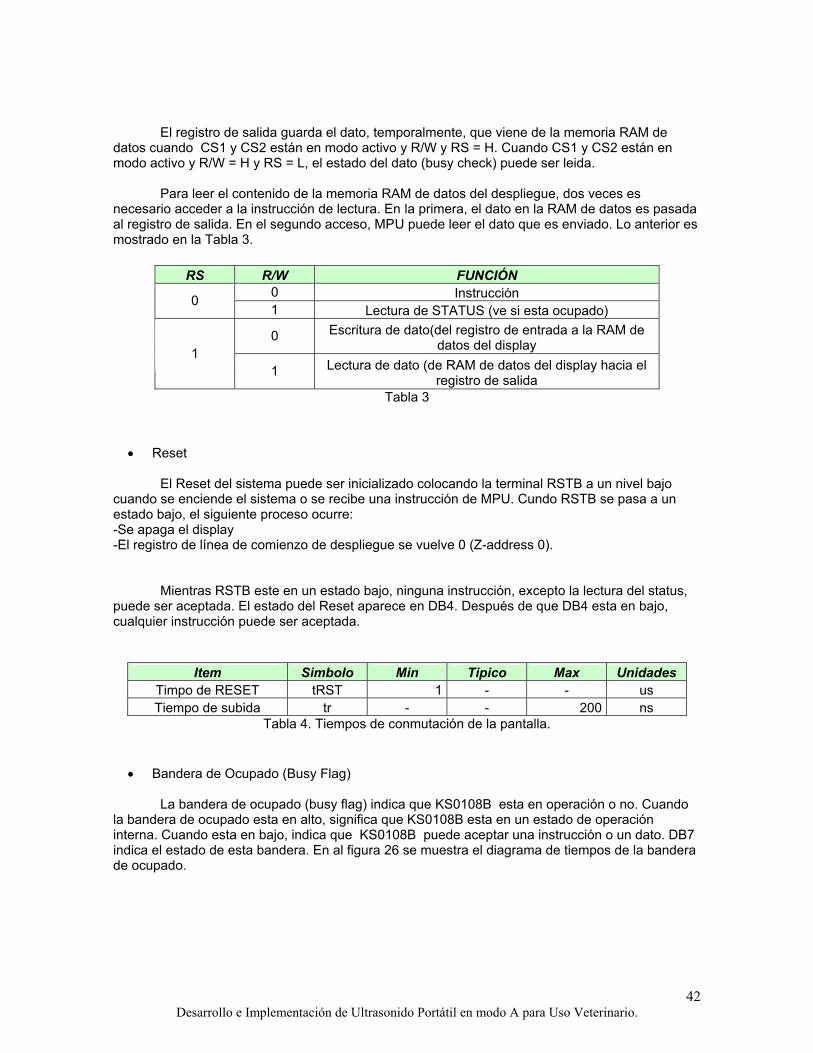
El registro de salida guarda el dato, temporalmente, que viene de la memoria RAM de datos cuando CS1 y CS2 están en modo activo y R/W y RS = H. Cuando CS1 y CS2 están en modo activo y R/W = H y RS = L, el estado del dato (busy check) puede ser leida. Para leer el contenido de la memoria RAM de datos del despliegue, dos veces es necesario acceder a la instrucción de lectura. En la primera, el dato en la RAM de datos es pasada al registro de salida. En el segundo acceso, MPU puede leer el dato que es enviado. Lo anterior es mostrado en la Tabla 3.
RS R/W FUNCIÓN 0 Instrucción 0 1 Lectura de STATUS (ve si esta ocupado)
0 Escritura de dato(del registro de entrada a la RAM de datos del display 1
1 Lectura de dato (de RAM de datos del display hacia el registro de salida
Tabla 3
Reset • El Reset del sistema puede ser inicializado colocando la terminal RSTB a un nivel bajo cuando se enciende el sistema o se recibe una instrucción de MPU. Cundo RSTB se pasa a un estado bajo, el siguiente proceso ocurre: -Se apaga el display -El registro de línea de comienzo de despliegue se vuelve 0 (Z-address 0). Mientras RSTB este en un estado bajo, ninguna instrucción, excepto la lectura del status, puede ser aceptada. El estado del Reset aparece en DB4. Después de que DB4 esta en bajo, cualquier instrucción puede ser aceptada.
Item Simbolo Min Tipico Max Unidades Timpo de RESET tRST 1 - - us Tiempo de subida tr - - 200 ns
Tabla 4. Tiempos de conmutación de la pantalla.
• Bandera de Ocupado (Busy Flag) La bandera de ocupado (busy flag) indica que KS0108B esta en operación o no. Cuando la bandera de ocupado esta en alto, significa que KS0108B esta en un estado de operación interna. Cuando esta en bajo, indica que KS0108B puede aceptar una instrucción o un dato. DB7 indica el estado de esta bandera. En al figura 26 se muestra el diagrama de tiempos de la bandera de ocupado.
42Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
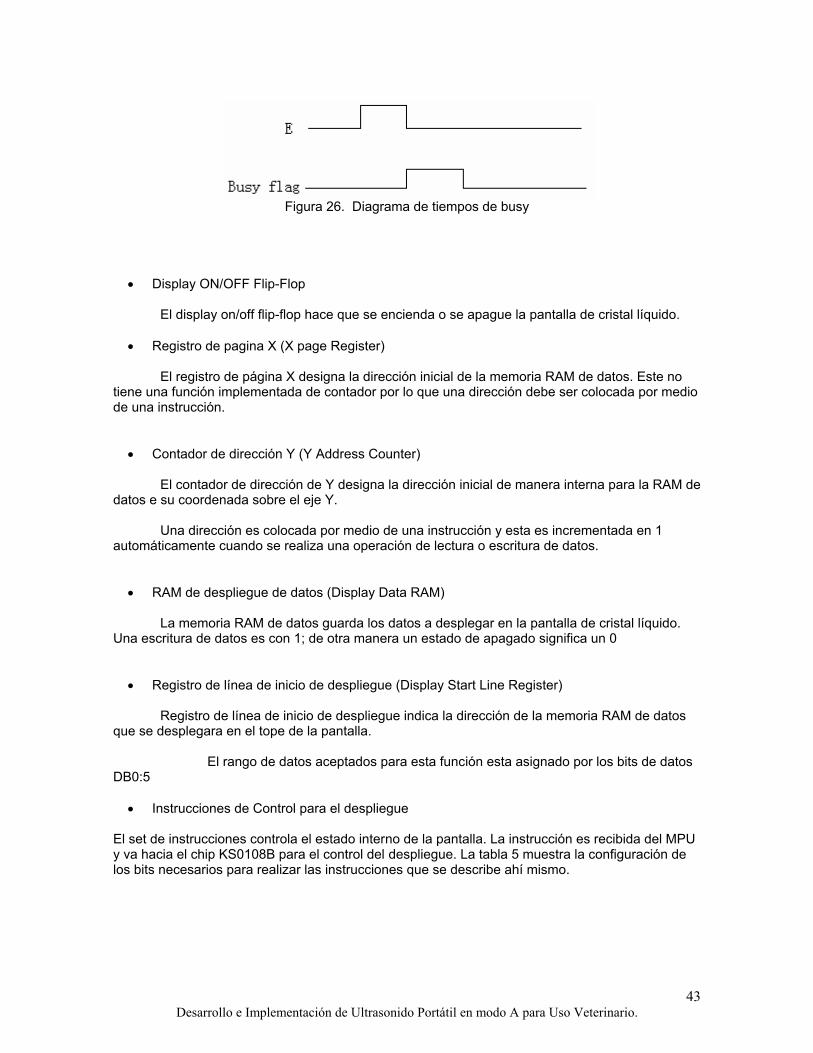
Figura 26. Diagrama de tiempos de busy
Display ON/OFF Flip-Flop •
•
El display on/off flip-flop hace que se encienda o se apague la pantalla de cristal líquido.
Registro de pagina X (X page Register)
•
El registro de página X designa la dirección inicial de la memoria RAM de datos. Este no tiene una función implementada de contador por lo que una dirección debe ser colocada por medio de una instrucción.
Contador de dirección Y (Y Address Counter) El contador de dirección de Y designa la dirección inicial de manera interna para la RAM de datos e su coordenada sobre el eje Y.
•
Una dirección es colocada por medio de una instrucción y esta es incrementada en 1 automáticamente cuando se realiza una operación de lectura o escritura de datos.
RAM de despliegue de datos (Display Data RAM)
•
La memoria RAM de datos guarda los datos a desplegar en la pantalla de cristal líquido. Una escritura de datos es con 1; de otra manera un estado de apagado significa un 0
Registro de línea de inicio de despliegue (Display Start Line Register)
Registro de línea de inicio de despliegue indica la dirección de la memoria RAM de datos que se desplegara en el tope de la pantalla.
•
El rango de datos aceptados para esta función esta asignado por los bits de datos DB0:5
Instrucciones de Control para el despliegue
El set de instrucciones controla el estado interno de la pantalla. La instrucción es recibida del MPU y va hacia el chip KS0108B para el control del despliegue. La tabla 5 muestra la configuración de los bits necesarios para realizar las instrucciones que se describe ahí mismo.
43Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.

Instrucción RS R/W DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0 Función
Display ON/OFF 0 0 0 0 1 1 1 1 1 0/1
Controla el encendido y apagado del
display. STATUS interno y RAM de datos del display no son afectados. 0 : OFF; 1 : ON
Selección de dirección 0 0 0 1 coordenada Y (0 - 63)
Selecciona la coordenada Y en
el contador de dirección Y
Selección de página
(coordenada X) 0 0 1 0 1 1 1 Página (0 - 7)
Selecciona la coordenada X en
el registro de dirección X
Inicio de línea del Display 0 0 1 1 Linea de inicio de diplay (0 - 63)
Indica la dirección de memoria de la RAM de datos que sera desplegada en el tope de la
pantalla
Estado (STATUS) de
Lectura 0 1 BU-
SY 0 ON/ OFF RESET 0 0 0 0
Estado de Lectura. BUSY 0 : Listo; 1 : En operación. ON/OFF 0 : Display encendido; 1 : Display apagado. RESET 0 : Normal; 1 : RESET
Escritura de dato en el
display 1 0 DATO
Escritura del dato (DB0-DB7) en la
RAM de datos del Display. Despues de la escritura de una instrucción, la dirección de Y se
incrementa automáticamente
en 1
Lectura de dato en el display 1 1 DATO
Lectura de dato (DB0 - DB7) de la RAM de datos al
bus de datos Tabla 5 Set de instrucciones para el control de la pantalla.
APÉNDICE F: COMUNICACIÓN SERIALCON EL PIC
44Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.

Para realizar la comunicación entre la CPU y el PIC, este ultimo dispone de un modulo
USART, que es el adaptador de comunicación serie sincronía y asíncrona. Para su implementación es necesario elegir alguno de los puertos del PIC (excepto el C)
como entrada analógica, en el canal 0. El puerto C tiene dos pines encargados de la comunicación con el dispositivo externo MAX232: TX (para la transmisión serial de los datos) y el RX (par la recepción de datos vía serial). Las características de configuración entre los dos módulos que serán comunicados para tener una buena interfaz son:
1. Elegir el tamaño del bus de datos (8 bits de datos). 2. Elección del número de bits de paro (1 bit de paro). 3. Elección del utilización de bit de paridad (Ningún bit de Paridad). 4. Modo de transmisión (Transferencia asíncrona o síncrona). 5. Velocidad de transmisión de datos (9600 baudios).
Los pasos necesarios para configurar la transmisión serie asíncrona serían:
El manejo de la conversión analógica digital es por medio del manejador de interrupciones, por lo tanto cada vez que se tenga uno o varios datos a convertir, se acceder a una rutina de atención a la interrupción para realizar la conversión hasta la espera de otro dato a convertir. Como el propósito del sistema es enviar un dato cuando una ocurra una interrupción, es necesario configurar el PIC para el manejo de interrupciones; esto se logra de la siguiente manera:
Primero se crea una rutina de atención a la interrupción (RAI) • •
• • •
• •
•
•
Con la instrucción bcf INTCON, INT0IF, 0 se deshabilitan las interrupciones y con incf PORTD, 1, 0, se incrementa el valor del Puerto D. Posteriormente con la instrucción movf PORTD, W, 0 se manda este valor al contador. Con movwf TXREG se envía el dato. Finalmente con la instrucción retfie, regresar de la interrupción.
Para el desarrollo de la programación de las interrupciones se realizo lo siguiente:
Con la instrucción bsf INTCON, 4, 0 se habilita la interrupción externa. Se procede a habilitar globalmente las interrupciones con bsf INTCON, GIE, 0, y guardar el entorno. Finalmente con call config_serial , se llama a la función config_serial que es la encargada de la comunicación serial en el caso del PIC. Con las instrucciones espera nop , goto espera, el PIC se queda en un estado de espera de una interrupción.
Cuando una interrupción externa sucede se atiende la RAI y se activa la transmisión a partir de TXEN. El dato a enviar se carga en el buffer, es decir, el registro TXREG y se envía.
45Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
B I B L I O G R A F I A
1. CHRISTENSEN DOUGLAS A., "ULTRASONIC BIOINSTRUMENTATION", JOHN WILEY E
SONS INC., 1988, 235 PP.
2. DRISCOLL F. FREDERICK, AMPLIFICADORES OPERACIONALES Y CIRCUITOS INTEGRADOS LINEALES, 4a. ED. PRENTICE HALL HISPANO AMERICANA, 1993.
3. FISH PETER, "PHYSICS AND INSTRUMENTATION OF DIAGNOSTIC MEDICAL
ULTRASOUND", JOHN WILEY E SONS INC., 1990, 250 PP.
4. VALDÉS CRISTERNA, RAQUEL, HERNANDEZ M.E., “IMAGENOLOGÍA MÉDICA, COLECCIÓN DE LIBROS”, UAM-I, 1995.
5. MACDICKEN W.N., "DIAGNOSTIC ULTRASONICS PRINCIPLES AND USE OF
INSTRUMENTS". 2nd. ED. JOHN WILEY AND SONS INC. NEW YORK, 1981, 381 PP.
6. SAVANT C.J., DISEÑO ELECTRONIC0 (CIRCUITOS - Y SISTEMAS), 2a. ED.ADDISON-WESLEY, IBEROAMERICANA, 1992, 880 PP.
7. SHILLING DONALD, CIRCUITOS ELECTRONICOS, MEXICO, MARCOMBO, 1981, 628
PP.
8. WELLS P.N.T., "BIOMEDICAL ULTRASONICS", ACADEMIC PRESS, LONDON 1977, 635 PP.
9. http://www.sc.ehu.es/sbweb/electronica/elec_basica/tema4/Paginas/Pagina17.htm#Doblad
or%20de%20tensión
10. http://www.analog.com/library/analogDialogue/archives/33-05/ultrasound/ultrasound.pdf
11. http://www.upei.ca/~vca341/usphysics/US%20Physics%20Complete.html
12. http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=64
13. http://www.datasheetarchive.com/index.html
46Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.
DESARROLLO E IMPLEMENTACIÓN DE ULTRASONIDO
PORTÁTIL EN MODO A PARA USO
VETERINARIO.
Mejía Rodríguez Aldo Rodrigo Rivera Nava Erick
Licenciatura en Ingeniería Biomédica
_________________________ ________________________ Dipl. Ing. L. Enrique Hernández Matos Ing. Gerardo Edmundo Urbina Medal
Asesor. Coordinador de Licenciatura
en Ing. Biomédica
47Desarrollo e Implementación de Ultrasonido Portátil en modo A para Uso Veterinario.