estimacion de estados

of 8
-
Upload
rogeliochc -
Category
Documents
-
view
215 -
download
0
Transcript of estimacion de estados
-
8/3/2019 estimacion de estados
1/8
UNA INTRODUCCION A LA ESTIMACION DE ESTADOS EN SISTEMAS DE POTENCIA
Palabras clave: Estimacin de estados, Sistemas de Potencia, Mnimos Cuadrados Ponderados,SCADA.
RESUMEN.El presente artculo describe un mtodo bastante conocido para la estimacin de estados en
sistemas de potencia como es el de los mnimos cuadrados ponderados. El artculo es producto
de una revisin y recopilacin de la literatura citada e intenta mostrar de una forma sencilla, el
significado de la estimacin de estados.
1.0LA ESTIMACION DE ESTADOS.Tradicionalmente la estimacin de estados est relacionada con la teora de control /2/ donde
el diseo de estimadores de estado est basado en un modelo en el espacio de estados que
describe el proceso fsico de la aplicacin. El diseo de un estimador de estado est tambin
basado en un modelo de medidas que describe como los datos obtenidos a partir de un
sistema de medida o de un sistema de sensores dependen de las variables de estado.
Usualmente, el problema de estimacin est enfocado a tres reas:
- Estimacin en lnea o filtrado ptimo.- Prediccin.- Retrodiccin o Estimacin fuera de lnea.
La estimacin en lnea significa la estimacin del estado presente utilizando todas las medidas
que estn disponibles. La prediccin significa estimar estados futuros. La retrodiccin es la
estimacin de estados pasados o bien es un proceso que explica un hecho que ha sucedido en
el pasado.
Los estimadores de estados ejecutan un anlisis estadstico empleando un conjunto de m
datos redundantes e imperfectos que son medidos del sistema de potencia para determinar el
estado del sistema /3/. El estado del sistema es una funcin de n variables de estado: voltajes
de bus, ngulos de fase relativos, posiciones de tap en transformadores. La solucin obtenida
de una estimacin de estado, no es la verdadera representacin del sistema, es la mejor
representacin posible basada en medidas. Para el proceso de estimacin, es necesario tener
un nmero de medidas m mayor que el nmero de estados (m > n) esto de modo a tener una
representacin completa del estado en el sistema.
Como concepto introductorio acerca de la estimacin de estados en sistemas de potencia,
adoptaremos el concepto sealado en /4/, el cual dice que la estimacin de estados es el
proceso de asignar un valor a una variable de estado de un sistema desconocido basado enmedidas a partir del sistema y de acuerdo a un criterio. Usualmente el proceso involucra
mediciones imperfectas que son redundantes y el proceso de estimar los estados del sistema
est basado en un criterio estadstico que estima el verdadero valor de las variables de estado
de modo a minimizar o maximizar el criterio elegido. Un criterio comn y familiar empleado es
aquel de minimizar la suma de los cuadrados de las diferencias entre los valores estimados y
verdaderos de una funcin. En sistemas de potencia, las variables de estado son las
magnitudes de tensin y los ngulos de fase relativos en los nodos del sistema.
2.0UN BOSQUEJO DE CMO OPERA LA ESTIMACION DE ESTADOS.De acuerdo con /3/, la estimacin de estados es ejecutada en forma peridica (por ejemplo
cada 5 minutos), sobre demanda, o debido a un cambio en la configuracin del sistema talcomo el aislamiento de una seccin de lnea.
-
8/3/2019 estimacion de estados
2/8
En sistemas grandes, la administracin de la energa se produce en centros de control o EMS
conformadas por sistemas computarizados denominados Sistemas de Administracin de
Energa (EMS: Energy Management Systems). La adquisicin y el control remoto es ejecutada
por otros sistemas de computadoras denominados Control Supervisorio y Adquisicin de Datos
SCADA (SCADA: Supervisory Control and Data Acquisition) /5/. Estos ltimos sistemas pueden
ser instalados en una variedad de sitios incluyendo centros de control. Un sistema deadministracin de energa tpicamente incluye un SCADA atreves del cual se comunica con
plantas de generacin, subestaciones y otros dispositivos remotos.
Un sistema SCADA consiste de una estacin maestra que se comunica con unidades remotas o
RTUs (RTU: Remote Terminal Unit) con el propsito de permitir a los operadores observar y
controlar plantas fsicas. Los RTUs transmiten el estado del dispositivo, envan y reciben
seales de control y datos desde los puntos de operacin hacia y desde la estacin maestra.
Las comunicaciones se realizan generalmente va circuitos dedicados con la RTU respondiendo
a requisiciones peridicas desde la estacin maestra (mediante polling o consulta)
aproximadamente cada 2 a 10 segundos dependiendo la criticidad del dato.
Algunas de las funciones tradicionales de un sistema SCADA son:
- Adquisicin de datos: proporciona datos medidos remotamente e informacin del estado aloperador.
- Control supervisorio: Permite al operador controlar remotamente dispositivos de control, porejemplo abrir y cerrar interruptores.
- Marcado: Identifica un dispositivo para restricciones de operacin especficas y previeneoperacin no autorizada.
- Alarmas: informa al operador eventos no planeados y condiciones de operacin no deseables.- Proporciona al operador la posibilidad de disparos automticos o iniciados en respuesta a
emergencias del sistema.- Tendencias: Grafica mediciones sobre escalas de tiempo elegidas.
3.0 MODELO DE MEDIDAS Y EL METODO DE LOS MINIMOS CUADRADOS PONDERADOS.
Considere el conjunto de medidas dadas por el vector zr
/1/:
-
8/3/2019 estimacion de estados
3/8
)1()(
),...,,(
),...,,(
),...,,(
2
1
21
212
211
2
1
exh
e
e
e
xxxh
xxxh
xxxh
z
z
z
z
mnm
n
n
m
rrr
MMM
r+=
+
=
=
Donde:
)(xhrr
es una funcin vectorial de variable vectorial, no lineal que relaciona las medidas con el
vector de estados xr
.
zr
= [z1, z2, ,zn]T
es el vector de mediciones en el sistema.
xr
=[x1, x2, ,xn]T
es el vector de estados del sistema.
er
=[e1, e2, ,en]T
es el vector de medidas de error.
Como en la mayora de los sistemas de medicin, los datos medidos estn contaminados con
ruido aleatorio el cual distorsiona los valores reales /3/. Afortunadamente las propiedades
estadsticas asociadas con las medidas permiten ciertas presunciones para estimar el valormedido. Primero se asume que el ruido medido tiene un valor esperado o promedio de cero;
ello implica que el error en cada medida tiene igual probabilidad de tomar un valor positivo o
negativo. Tambin se asume que el valor esperado para el cuadrado de la medida de error es
normal y tiene una desviacin estndar adems de una correlacin entre medidas cero. Una
variable se dice que es normal si su funcin de densidad de probabilidad tiene la forma:
2
2
2
2
1)(
v
evf
=
El grfico de esta distribucin es conocida como la campana de Gauss. La desviacin estndar
es una medida de la dispersin de la distribucin normal alrededor de la media y
proporciona un indicador de cmo muchas muestras caen dentro de un intervalo dado
alrededor de la media. Una gran desviacin estndar implica que existe una alta probabilidad
de que el ruido medido tomar valores grandes. Contrariamente, una desviacin estndar
pequea implica que existe una alta probabilidad de que el ruido medido tome pequeos
valores.
En consecuencia, en atencin a las propiedades estadsticas de las medidas de error,
comnmente se asume lo siguiente:
- E[ei]=0, i=1, 2, , m.- Las mediciones de error son independientes, E[ei , ej] = 0. Por lo tanto,
},...,,{][)(22
2
2
1 m
T
diagReeEeCov === o
La desviacin estndar i de cada medida es calculada para reflejar la precisin expectada de la
medida correspondiente empleada.
El estimador de mnimos cuadrados ponderados asume la siguiente funcin objetivo:
)2()]([)]([)( 1 xhzRxhzxJ Trrrrrrr
=
Para que esta funcin tenga un mnimo, se deben satisfacer las condiciones de optimabilidad
de primer orden, lo cual puede ser expresado de la siguiente forma:
0)]([)()(
)(1
==
=
xhzRxHx
xJ
xg
T rrrr
r
rr
-
8/3/2019 estimacion de estados
4/8
=
=
n
mm
n
n
x
h
x
h
x
h
x
h
x
h
x
h
x
h
x
h
x
h
x
xhxHdonde
...
............
...
...
])(
[)(
2
2
1
2
2
2
1
2
1
2
1
1
1
r
rrr
Expandiendo la funcin no lineal )(xgrr
) en serie de Taylor alrededor del vector de estado
kxr
tendremos:
0...))(()()( =++= kkk xxxGxgxgrrrrrrr
Despreciando los trminos de orden elevado, se obtendr una solucin iterativa conocida con
el nombre de Gauss-Newton.
)()]([11 kkkk
xgxGxxrrrrr +
=
Donde k es el ndice de iteracin ykx
res el vector solucin para la iteracin k. Adems,
)4())(()()(
)3()()()(
)(
1
1
kkTk
kkTk
k
xhzRxHxg
xHRxHx
xgxG
rrrrrr
rrr
rrr
=
=
=
G(x) se denomina matriz Ganancia, la cual es dispersa positiva definida y simtrica.
Como resumen, la (k+1)esima
solucin puede ser obtenida a partir de la kesima
con la ecuacin:
)5())(()())()((
1111 kkTkkTkk
xhzRxHxHRxHxx
rrrrrrrr+=
+
Para conocer si la solucin converge, se puede recurrir a una ecuacin de la forma:
)6()max( 1 + kk xx
rr
Aunque otro criterio de convergencia vlido tambin podra ser:
)7(1 + kk xx
rr
Donde es un factor de convergencia predefinido.
4.0 EL ALGORITMO DE LOS MINIMOS CUADRADOS PONDERADOS.
La estimacin de estados por mnimos cuadrados ponderados involucra resolver
iterativamente la ecuacin (5), con lo que se requiere de una estimacin inicial0
xr
. Luego la
solucin iterativa directa es bastante sencilla y ser:
1) Iniciar las iteraciones haciendo k=0.2) Inizializar el vector de estados kxr .3) Calcular la matriz de ganancias G( kxr ), con la ecuacin (3) y obtener su inversa.4) Calcular la funcional g( kxr ), con la ecuacin (4).5) Calcular 1+kxr = kxr - [G( kxr )]-1g( kxr ), o bien emplear la ecuacin (5).6) Efectuar la prueba de convergencia mediante (6) o (7).
-
8/3/2019 estimacion de estados
5/8
7) Si no cumple la prueba de convergencia, incrementar k en una unidad e ir al paso (3);caso contrario detener las iteraciones.
5.0 OBSERVABILIDAD.
Recordemos que en teora de control, la observabilidad es una propiedad importante que
define la existencia de una solucin de control ptimo. Un sistema es observable en un tiempot0 si con el sistema en un estado inicial x(t0) es posible determinar este estado a partir de
observaciones de la salida y(t) durante un intervalo finito de tiempo.
El estimador de estados para sistemas de potencia emplea un conjunto de mediciones
efectuadas en el sistema de modo a estimar su estado. Dado ese conjunto de mediciones junto
a sus ubicaciones, el anlisis de observabilidad de la red determinar si se puede encontrar
una nica estimacin para el estado del sistema. Este anlisis puede ser ejecutado fuera de
lnea, durante la fase inicial de la instalacin del estimador de estados de modo a ver si la
configuracin de medidas existentes es la adecuada. Si el sistema es no observable entonces se
deber ubicar mediciones adicionales en lugares particulares. El anlisis de observabilidad
tambin se lo puede hacer en lnea, antes de ejecutar el estimador de estados. Ello asegura
que el estado estimado pueda ser obtenido mediante las medidas recibidas del ltimoescaneo. Fallos en las comunicaciones, los cambios de topologa, o fallas en las mediciones
podran causar que el estado del sistema entero, no sea estimado.
En /1/ se puede encontrar la teora necesaria para efectuar ste anlisis; sin embargo, por el
carcter introductorio del presente artculo nos conformaremos con la idea general planteada
en /3/ que dice que una variable de estado es inobservable si no puede ser estimada. La
inobservabilidad ocurre cuando el criterio de observabilidad es violado (m
-
8/3/2019 estimacion de estados
6/8
Figura 1. Sistema de ejemplo /3/
Siendo la barra 1 de referencia, el primer paso en el proceso de estimacin es identificar los
estados desconocidos los cuales son:
=
=
5
4
3
2
1
3
2
1
3
2
x
x
x
xx
V
V
Vx
r
El siguiente paso es determinar las funciones )(xhrr
que corresponde a cada una de las
mediciones:
=
)cos(55
)sin(7
)cos(1010
)sin(10)(
2154
2
4
253
143
2
3
143
5
4
3
xxxxx
xxx
xxxx
xxxx
x
x
xhrr
La matriz de derivadas parciales es:
=
)cos(5)cos(5100)sin(5)sin(5
)sin(70)sin(7)cos(70
0)cos(10)cos(10200)sin(10
0)sin(10)sin(100)cos(10
10000
01000
00100
))((
214215421542154
2325253
13143143
1314143
xxxxxxxxxxxxxxx
xxxxxxx
xxxxxxxx
xxxxxxx
x
xhr
rr
La matriz de covarianzas es:
=
2
2
2
2
2
2
2
1.000000001.000000
001.00000
0001.0000
000005.000
0000005.00
00000005.0
R
-
8/3/2019 estimacion de estados
7/8
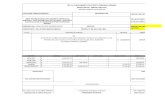
De modo a tener una idea de la influencia de asumir un estado inicial en la estimacin final, en
la tabla 2 se resume los resultados obtenidos para tres estados iniciales diferentes,
mostrndose tambin el nmero de iteracin y la norma del error obtenido en cada itreracin.
1 2 3 4 5 6 7
x1= 0 -0.1471 -0.1472 -0.1472
x2= 0 -0.1415 -0.1429 -0.1429
x3= 1.02 1.0227 1.0159 1.0158
x4= 1 1.0032 1.0068 1.0069
x5= 0.99 0.9842 0.9874 0.9874
0.2042 0.0085 0.00006
1 2 3 4 5 6 7
x1= 0.6 -0.2821 -0.1373 -0.1469 -0.1472
x2= 0.5 -0.2299 -0.1362 -0.1427 -0.1429x3= 1.02 1.1939 1.0483 1.0167 1.0158
x4= 1 0.8696 0.9926 1.0063 1.0069
x5= 0.99 0.8592 0.9738 0.9869 0.9874
1.1726 0.2814 0.0386 0.0012
1 2 3 4 5 6 7
x1= 0.8 -0.3545 -0.0715 -0.1436 -0.1472 -0.1472
x2= 0.9 -0.5054 -0.0123 -0.1379 -0.1429 -0.1429
x3= 1.02 1.2524 1.0847 1.0214 1.0158 1.0158
x4= 1 0.7086 0.9827 1.0045 1.0068 1.0069
x5= 0.99 0.7038 0.9577 0.9844 0.9874 0.9874
1.8785 0.7006 0.1618 0.0091 0.00004
VECTOR INICIALITERACION
NORMA ERROR
Tabla 2. Resultados para tres diferentes condiciones iniciales
ITERACIONVECTOR INICIAL
NORMA ERROR
VECTOR INICIALITERACION
NORMA ERROR
El anexo posee un programa bsico en MATLAB con el cual se elabor la tabla 2.
7.0 CONCLUSIONES.
El presente artculo mostr de forma introductoria, el problema de estimacin de estados en
sistemas de potencia. Se describi el mtodo tradicional de los mnimos cuadrados
ponderados mediante el cual, bsicamente se pudo ver que el estado de un sistema de
potencia es una funcin de las variables de estado (ngulos y tensiones) y las mediciones
realizadas. El mtodo presentado es bsico y de fcil implementacin para sistemas de
pequeo orden.
ANEXO.Programa en MATLAB para la obtencin de resultados.
x=zeros(5,1);xa=zeros(5,1);e=zeros(5,1);xm1=zeros(5,1);zx=zeros(7,1);hx=zeros(7,1);xx=zeros(7,1);HHx=zeros(7,5);R=zeros(7,7);A1=zeros(5,1);A2=zeros(5,5);
zx(1)=1.02;zx(2)=1;
zx(3)=0.99;zx(4)=1.5;zx(5)=0.2;zx(6)=1;zx(7)=0.1;
-
8/3/2019 estimacion de estados
8/8
x(1)=0.8;x(2)=0.9;x(3)=1.02;x(4)=1;x(5)=0.99;
R=[0.0025 0 0 0 0 0 0;0 0.0025 0 0 0 0 0;...
0 0 0.0025 0 0 0 0;0 0 0 0.01 0 0 0;...0 0 0 0 .01 0 0;0 0 0 0 0 .01 0;...0 0 0 0 0 0 .01];
clc
for i=1:30xa=x;hx=[x(3);x(4);x(5);-10*x(3)*x(4)*sin(x(1));...
10*x(3)*x(3)-10*x(3)*x(4)*cos(x(1));... -7*x(3)*x(5)*sin(x(2));...5*x(4)*x(4)-5*x(4)*x(5)*cos(x(1)-x(2))];
HHx=[0 0 1 0 0;0 0 0 1 0;0 0 0 0 1;...-10*x(3)*x(4)*cos(x(1)) 0 -10*x(4)*sin(x(1)) -
10*x(3)*sin(x(1)) 0;...10*x(3)*x(4)*sin(x(1)) 0 20*x(3)-10*x(4)*cos(x(1)) -
10*x(3)*cos(x(1)) 0;...0 -7*x(3)*x(5)*cos(x(2)) -7*x(5)*sin(x(2)) 0 -
7*x(3)*sin(x(2));...5*x(4)*x(5)*sin(x(1)-x(2)) -5*x(4)*x(5)*sin(x(1)-x(2)) 0
10*x(4)-5*x(5)*cos(x(1)-x(2)) -5*x(4)*cos(x(1)-x(2))];
A1=(HHx.')*(inv(R))*(zx-hx);A2=(HHx.')*(inv(R))*HHx;xx=(inv(A2))*A1;iteracion=i %numero de iteracinxm1=x+xx %calculo de la nueva iteracinx=xm1; %actualizando iteracine=x-xa; %calculo del errornorma=norm(e) %norma del error
end
BIBLIOGRAFIA.
/1/ Power System State Estimation, Ali Abur, Marcel Dekker Inc., 2004, ISBN: 0-8247-5570-7
/2/ Classification, Parameter Estimation and State Estimation, F. Van der Heijden, R.P.W. Duin,
D. de Ridder, D.M.J Tax, John Wiley and Sons Inc., 2004, ISBN 0-470-09013-8.
/3/ Power System Stability and Control, Leonard Grigsby, CRC Press, 2007, ISBN 13: 978-0-
8493-9291-7.
/4/ Power Generation, Operation, and Control, Allen J. Wood, Bruce F. Wollenberg, John Wiley
and Sons Inc. 1996, ISBN: 0-471-58699-4.
/5/ The Electrical Engineering Handbook, Richard C. Dorf, CRC PRESS, 1993, ISBN 0 8493
0185 8.
/6/ Power systems, Leonard Grigsby, CRC PRESS, 2007 ISBN - 0-8493-9288-8.
/xx/ Estimacion de estado en sistemas elctricos de potencia: parte 1 deteccin de errores
grandes, Mauricio Granada, Scientia et Technica Ao IX, No 22, Octubre 2003. UTP. ISSN 0122-
1701.