GEOMETRÍA DESCRIPTIVA
38
SISTEMA DE PROYECCIÓN REPÚBLICA BOLIVARIANA DE VENEZUELA MINISTERIO DEL PODER POPULAR PARA LA EDUCACIÓN UNIVERSITARIA INSTITUTO UNIVERSITARIO POLITÉCNICO “SANTIAGO MARIÑO” EXTENSIÓN PUERTO ORDAZ INGENIERÍA CIVIL SECCIÓN 42 J
-
Upload
jorge-luis-martinez -
Category
Documents
-
view
604 -
download
0
Transcript of GEOMETRÍA DESCRIPTIVA

SISTEMA DE PROYECCIÓN
Y EL PUNTO
REPÚBLICA BOLIVARIANA DE VENEZUELA
MINISTERIO DEL PODER POPULAR PARA LA EDUCACIÓN UNIVERSITARIA
INSTITUTO UNIVERSITARIO POLITÉCNICO “SANTIAGO MARIÑO”
EXTENSIÓN PUERTO ORDAZ
INGENIERÍA CIVIL
SECCIÓN 42 J
Prof: Carrio Madeline Integrantes:
Yunetzy Andrade CI 23.504.160Eilen Guzman CI 21.384.652Luisana Yépez CI 24.702.106
CIUDAD GUAYANA- MAYO -2013

ÍNDICE
Pág.
INTRODUCCIÓN……………………………………………………………………………………………… 03
GEOMETRÍA, GEOMETRÍA DESCRIPTIVA………………………………………………………… 04
GEOMETRÍA ANALÍTICA…………………………………………………………………………………. 05
GEOMETRÍA PLANA, GEOMETRÍA MÉTRICA…………………………………………………… 06
GEOMETRÍA PROYECTIVA………………………………………………………………………………. 07
GEOMETRÍA EUCLÍDEA…………………………………………………………………………………… 08
SISTEMAS DE PROYECCIÓN……………………………………………………………………………. 10
PROYECCIÓN PARALELA ORTOGONAL, PROYECCIÓN PARALELA OBLICUA,
PROYECCIÓN CENTRAL O CÓNICA…………………………………………………………………. 13
SISTEMA DIEDRICO………………………………………………………………………………………… 14
SISTEMA DE PLANOS ACOTADOS…………………………………………………………………… 15
SISTEMA AXONOMÉTRICO, SISTEMA DE PERSPECTIVA CABALLERA……………….. 16
SISTEMA DE PERSPECTIVA CÓNICA………………………………………………………………… 17
NOMENCLATURA PARA EL SISTEMA DIÉDRICO……………………………………………… 18
REPRESENTACIÓN DE UN PUNTO…………………………………………………………………. 20
DISTANCIA DE UN PUNTO EN EL ESPACIO A DOS PLANOS DE PROYECCIÓN
CONOCIDOS…………………………………………………………………………………………………….. 22
CONCLUSIÓN…………………………………………………………………………………………………… 26
BIBLIOGRAFÍA………………………………………………………………………………………………….. 27
2

INTRODUCCIÓN
La representación gráfica del espacio, en tanto que necesaria para la
definición del diseño, posee un origen tan antiguo como diverso en su desarrollo y
aplicación.
Dado el carácter meramente introductorio de este apartado, no vamos a
abundar en referencias históricas ni en citas explicativas de esta cuestión. Si
admitimos que el diseño gráfico tiene como principal campo de actividad el proyecto
y la ejecución de realidades espaciales, tomando al medio gráfico como su cauce de
comunicación, es fácil comprender la importancia de una sólida formación en la
correcta expresión de los pensamientos abarcados dentro de la geometría.
Como parte integrante del área de conocimiento, se puede definir a la
Geometría Descriptiva como a la disciplina que, mediante la expresión gráfica, es
capaz de precisar una realidad espacial de manera exhaustiva, no ambigua y no
contradictoria. Así entendida, la Geometría Descriptiva tiene como fin el aportar el
rigor y la exactitud necesarios al dibujo para que este sea de aplicación en la ciencia
y en la técnica. Para la consecución de ese fin, es necesario alcanzar una capacidad
de percepción racional del espacio, imprescindible para operar gráficamente con
rigor. A esta circunstancia se la ha llamado tradicionalmente "ver el espacio", y
constituye una cualidad del conocimiento humano que no se posee, generalmente,
sin un aprendizaje previo. La Geometría Descriptiva no solo proporciona exactitud al
lenguaje gráfico que transmite el pensamiento del diseñador, sino que aporta el
rigor espacial a ese mismo pensamiento.
3

GEOMETRÍA
La geometría (del latín geometrĭa, que proviene del idioma griego γεωμετρία,
geo tierra y metria medida), es una rama de la matemática que se ocupa del estudio
de las propiedades de las figuras en el plano o el espacio, incluyendo: puntos, rectas,
planos, politopos (que incluyen paralelas, perpendiculares, curvas, superficies,
polígonos, poliedros, etc.). Es la base teórica de la geometría descriptiva o del dibujo
técnico. También da fundamento a instrumentos como el compás, el teodolito, el
pantógrafo o el sistema de posicionamiento global (en especial cuando se la
considera en combinación con el análisis matemático y sobre todo con las
ecuaciones diferenciales).
Sus orígenes se remontan a la solución de problemas concretos relativos a
medidas. Tiene su aplicación práctica en física aplicada, mecánica, arquitectura,
cartografía, astronomía, náutica, topografía, balística, etc. Y es útil en la preparación
de diseños e incluso en la elaboración de artesanía.
GEOMETRÍA DESCRIPTIVA
La Geometría Descriptiva es la ciencia de representación gráfica, sobre
superficies bidimensionales, de los problemas del espacio donde intervengan,
puntos, líneas y planos. La Geometría Descriptiva es para el dibujo como la
gramática es para el lenguaje. El matemático francés Gaspar Monge (1746-1818)
organizó y desarrollo la ciencia de la Geometría Descriptiva a finales del siglo
XVII. Con posterioridad a su muerte, en su homenaje por los aportes que brindó
en este campo, la Geometría Descriptiva también se conoce como Método Monge.
4

Cumple dos objetivos principales: el primero facilitar el método para
representar sobre un papel que posee dos dimensiones longitud y latitud; todos los
cuerpos de la naturaleza, que tienen tres dimensiones, longitud, latitud y
profundidad.
El segundo objetivo es dar a conocer por medio de una exacta
descripción la forma de los cuerpos, y deducir todas las verdades que resultan,
bien sean de sus formas, bien de sus posiciones respectivas.
GEOMETRÍA ANALÍTICA
La geometría analítica estudia las figuras geométricas mediante técnicas
básicas del análisis matemático y del álgebra en un determinado sistema de
coordenadas. Su desarrollo histórico comienza con la geometría cartesiana, continúa
con la aparición de la geometría diferencial de Carl Friedrich Gauss y más tarde con
el desarrollo de la geometría algebraica. Actualmente la geometría analítica tiene
múltiples aplicaciones más allá de las matemáticas y la ingeniería, pues forma parte
ahora del trabajo de administradores para la planeación de estrategias y logística en
la toma de decisiones. Las dos cuestiones fundamentales de la geometría analítica
son:
Dado el lugar geométrico en un sistema de coordenadas, obtener su
ecuación.
Dada la ecuación en un sistema de coordenadas, determinar la gráfica o lugar
geométrico de los puntos que verifican dicha ecuación.
5

GEOMETRÍA PLANA
Es la rama de la geometría elemental que estudia las propiedades de
superficies y figuras planas, como el triángulo o el círculo. Esta parte de la geometría
también se conoce como geometría euclídea, en honor al matemático griego
Euclides, el primero en estudiarla en el siglo IV a.C. Su extenso tratado Elementos de
geometría se mantuvo como texto autorizado de geometría hasta la aparición de las
llamadas Geometría no euclideas en el siglo XIX.
La geometría plana es una parte de la geometría que trata de aquellos
elementos cuyos puntos están contenidos en un plano. La geometría plana está
considerada parte de la geometría euclídea, pues ésta estudia los elementos
geométricos a partir de dos dimensiones.
GEOMETRÍA MÉTRICA
Geometría métrica es aquella que considera las figuras cuyos puntos están
todos en un plano. También se la define como la que cumple los cinco postulados de
Euclides.
Además de estudiar los problemas afines de los objetos geométricos
(incidencia, intersección y paralelismo) se ocupa de los problemas geométricos de
medida, tales como el cálculo de longitudes, distancias, áreas y volúmenes y
medición de ángulos. Para ello es preciso un instrumento algebraico el producto
escalar, lo que equivale geométricamente al uso del compás, además de la escuadra
y el cartabón. También se la denomina geometría plana, geometría euclídea,
planimetría o geometría 2D.
6

GEOMETRÍA PROYECTIVA
Se llama geometría proyectiva a la rama de la matemática que estudia las
propiedades de incidencia de las figuras geométricas, pero abstrayéndose
totalmente del concepto de medida. A menudo se usa esta palabra también para
hablar de la teoría de la proyección llamada geometría descriptiva.
Desde el punto de vista sintético, la geometría proyectiva es una geometría
que parte de los siguientes principios:
Dos puntos definen una recta.
Todo par de rectas se cortan en un punto (cuando dos rectas son paralelas
decimos que se cortan en un punto del infinito conocido como punto impropio).
El quinto postulado de Euclides, de las paralelas, está implícito en estos dos
principios ya que, dada una recta y un punto exterior, existirá una única paralela (el
punto dado y el del infinito definen la paralela por el primer axioma. Nótese que en
la geometría proyectiva, dos rectas paralelas por definición comparten un punto y
esto no excluye que sean isomorfas con las paralelas euclídeas).
Como los axiomas de los que se parte son simétricos, si en cualquier teorema
proyectivo se intercambian las palabras recta y punto se obtiene otro teorema
igualmente válido. A estos teoremas se les llama duales.
El principio antes expuesto se conoce como Principio de Dualidad y fue
enunciado por Poncelet en el siglo XIX. Muchos teoremas anteriores, como los de
7
Pascal y Brianchon, son duales, aunque ningún matemático lo había notado hasta
entonces.
Los teoremas de Pascal y Brianchon, aunque completamente válidos, se
demostraron inicialmente en geometría euclidiana, basándose en los teoremas de
Pappus y Menelao, que utilizan una métrica y por tanto no son válidos en
geometrías de incidencia, como la proyectiva.
En principio se intentó buscar demostraciones alternativas de estos teoremas
sin usar congruencia de segmentos. Hilbert demostró en 1899 que tal cosa es
imposible y desde entonces suele incluirse el teorema del hexágono de Pappus
como un axioma de la geometría proyectiva. Ello permite demostrar en proyectiva
todo lo demostrable en euclídea sin tener que recurrir a una métrica.
Por no usar métricas en sus enunciados, se dice que la geometría proyectiva
es una Geometría de incidencia.
Finalmente, hay que destacar que desde el punto de vista sintético, un
espacio proyectivo consiste en un espacio afín al que hemos añadido un conjunto de
puntos infinitos, de modo que cada par de rectas paralelas se cortan en uno de estos
puntos.
GEOMETRÍA EUCLÍDEA
La geometría euclídea (o geometría parabólica) es el estudio de las
propiedades geométricas de los espacios euclídeos. Es aquella que estudia las
propiedades geométricas del plano afín euclídeo real y del espacio afín euclídeo
8

tridimensional real mediante el método sintético, introduciendo los cinco
postulados de Euclides.
También es común (abusando del lenguaje) decir que una geometría
es euclídea si no es no euclídea, es decir, si en dicha geometría se verifica el quinto
postulado de Euclides. Ésta denominación está cada vez más en desuso, debido a la
pérdida de interés que va teniendo el tema de la posibilidad de trazar paralelas a
una recta desde un punto exterior a la misma.
En ocasiones los matemáticos usan el término para englobar geometrías de
dimensiones superiores con propiedades similares. Sin embargo, con frecuencia,
geometría euclídea es sinónimo de geometría plana y de geometría clásica.
Desde un punto de vista historiográfico, la geometría euclídea es aquella
geometría que postuló Euclides, en su libro Los elementos, dejando al margen las
aportaciones que se hicieron posteriormente desde Arquímedes hasta Jakob Steiner.
Según la contraposición entre método sintético y método algebraico-
analítico, la geometría euclídea sería, precisamente, el estudio por métodos
sintéticos de los invariantes de un espacio vectorial real de dimensión 3 dotado de
un producto escalar muy concreto (el frecuentemente denominado «producto
escalar habitual»). Según la filosofía del programa de Erlangen (propuesto por el
matemático Félix Klein), la geometría euclídea sería el estudio de los invariantes de
las isometrías en un espacio euclídeo (espacio vectorial real de dimensión finita,
dotado de un producto escalar), al aplicarles transformaciones ortogonales.
SISTEMAS DE PROYECCIÓN
9

Un sistema de proyección es aquel conjunto de métodos gráficos
bidimensionales que permiten presentar un objeto tridimensional. Uno de estos
sistemas es la Proyección Diédrica y que consiste en la utilización de dos planos
de proyección que reflejan dos “vistas” diferentes de un objeto tridimensional.
Estos dos planos de proyección son perpendiculares entre sí, es decir
ortogonales, y por lo general son suficientes para representar las dimensiones de un
objeto en el espacio.
Los elementos que intervienen en el sistema son los siguientes:
Planos de proyección: Son planos ortogonales entre sí (vertical o PV y horizontal o
PH) sobre los cuales se realizan las proyecciones. Su intersección se llama Línea de
Tierra (LT).
Se usan dos planos como mínimo para determinar una forma.
Proyecciones: nos referimos a la “sombra” de los elementos sobre los planos de
proyección. Por ejemplo, el punto p se proyecta en p1 y p2, también llamados p´ y
p” (Figura 1).
Líneas de referencia: Las líneas pp1 y pp2 determinan un plano que se corta
con los de proyección en p2 p0 y p1p0 (Figura 2). Estas rectas son perpendiculares
a la línea de tierra.
Trazas: llamamos de esta manera, a la intersección de cualquier entidad (punto,
recta, plano, cuerpo) con los planos de proyección.
10

Figura 1 Figura 2
En todos los sistemas de representación, la proyección de los objetos sobre el
plano del cuadro o de proyección, se realiza mediante los rayos proyectantes, estos
son líneas imaginarias, que pasando por los vértices o puntos del objeto,
proporcionan en su intersección con el plano del cuadro, la proyección de dicho
vértice o punto.
Si el origen de los rayos proyectantes es un punto del infinito, lo que se
denomina punto impropio, todos los rayos serán paralelos entre sí, dando lugar a la
que se denomina, proyección cilíndrica. Si dichos rayos resultan perpendiculares al
plano de proyección estaremos ante la proyección cilíndrica ortogonal, en el caso de
resultar oblicuos respecto a dicho plano, estaremos ante la proyección cilíndrica
oblicua.
Si el origen de los rayos es un punto propio, estaremos ante la proyección
céntralo cónica.
Todos los sistemas empleados en el dibujo técnico utilizan en su propia
definición el concepto de proyección como idea básica del conjunto de sus reglas.
11

La Proyección de un objeto es la figura que se obtiene al dirigir todas las líneas
proyectantes desde dicho objeto hasta un plano, llamado plano del cuadro o plano
de proyección.
Si orientamos un foco luminoso hacia una pantalla e intercalamos entre ambos
un determinado objeto, se verá en la pantalla una silueta. Esa silueta recibe el
nombre de proyección. La proyección de los objetos sobre el plano del cuadro, se
efectúa mediante rayos proyectantes, que son líneas imaginarias, que pasando por
los vértices o puntos del objeto proporcionan, en su intersección con el plano del
cuadro, la proyección de dicho vértice o punto.
Los sistemas de proyección que usa la geometría descriptiva son dos:
Proyección cónica o central. Proyección paralela o cilíndrica. Proyección paralela o
cilíndrica.
En este sistema de proyección las rectas o rayos proyectantes son paralelas a
la dirección de proyección y tenemos dos tipos de proyecciones.
Proyección paralela ortogonal y proyección paralela oblicua.
Proyección paralela ortogonal.
12
La dirección de proyección es ortogonal al plano de proyección es decir
perpendicular al plano.
Proyección paralela oblicua.
La dirección de proyección es
oblicua al plano de proyección.
Proyección central o cónica.
Las rectas o rayos proyectantes
parten todas de un punto propio, que
es el punto de vista.
Los sistemas de representación
de la geometría descriptiva utilizan el siguiente sistema de proyección.
13

Sistema diédrico Proyección paralela ortogonal
Sistema de planos acotados Proyección paralela ortogonal
Sistema axonométrico Proyección paralela ortogonal
Sistema de perspectiva caballera Proyección paralela oblicua
Sistema de perspectiva cónica Proyección central o cónica
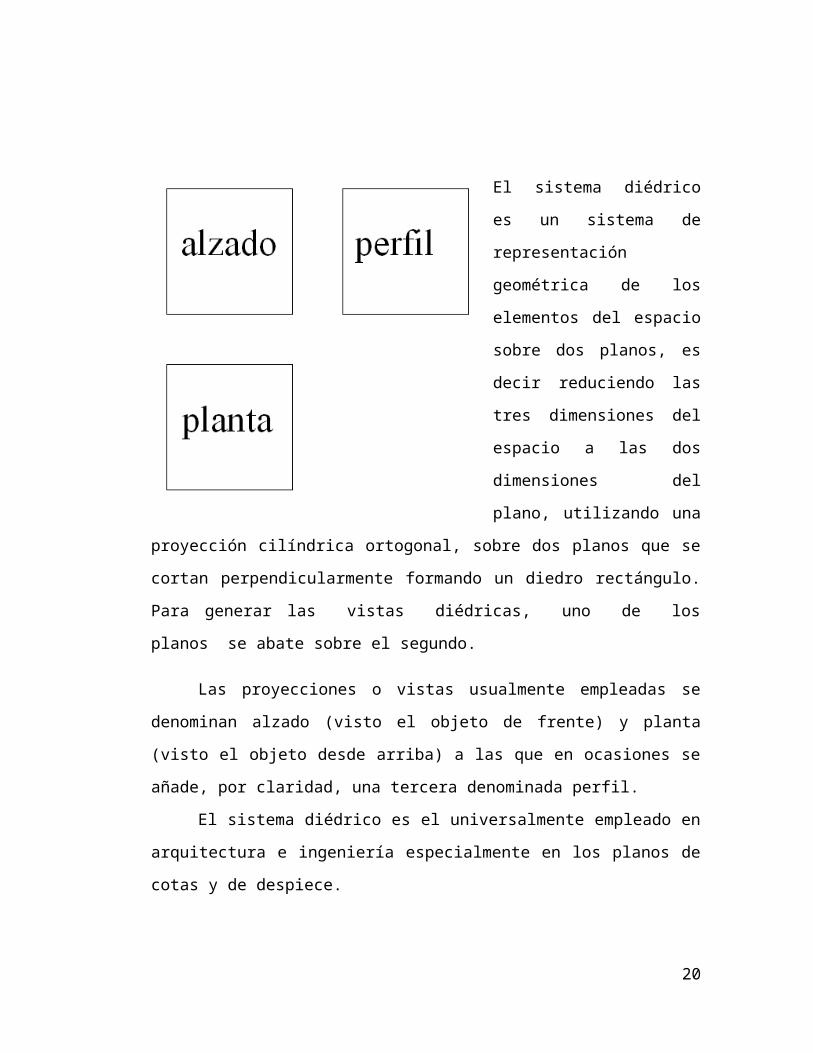
SISTEMA DIEDRICO.
El sistema diédrico es un
sistema de representación
geométrica de los elementos
del espacio sobre dos planos, es
decir reduciendo las tres
dimensiones del espacio a las
dos dimensiones del plano,
utilizando una proyección
cilíndrica ortogonal, sobre dos
planos que se cortan
perpendicularmente formando
un diedro rectángulo. Para
generar las vistas diédricas, uno de los planos se abate sobre el segundo.
Las proyecciones o vistas usualmente empleadas se denominan alzado (visto
el objeto de frente) y planta (visto el objeto desde arriba) a las que en ocasiones se
añade, por claridad, una tercera denominada perfil.
El sistema diédrico es el universalmente empleado en arquitectura e
ingeniería especialmente en los planos de cotas y de despiece.
14

SISTEMA DE PLANOS ACOTADOS.
Está basado en la proyección cilíndrica
ortogonal de los objetos sobre un plano
horizontal de proyección. Al lado de la
proyección de cada punto se indica su cota
entre paréntesis. En la figura como que se
representa sobre el plano un cuadrado.
Este sistema es el utilizado en
topografía para la ejecución de planos
topográficos.
Para representar la superficie
terrestre como esta es desigual se supone
seccionada por una serie de planos paralelos
acotados (de aquí el nombre del sistema),
que producen unas líneas llamadas curvas de nivel que se indican por la cota del
plano que las produce.
SISTEMA AXONOMÉTRICO.
Los sistemas axonométricos
están basados en la proyección cilíndrica de los objetos sobre tres planos de
15

proyección que forman un triedro trirrectángulo y la proyección del objeto y sus tres
proyecciones sobre un plano llamado plano del cuadro. Por lo tanto cada objeto
tiene cuatro proyecciones, la directa y las proyecciones sobre el plano horizontal y
los dos verticales. Además esto implica la aparición de coeficientes de reducción que
son razón entre la magnitud del segmento proyectado en cada plano y la del
segmento real.
Los sistemas axonométricos ortogonales se basan en la proyección cilíndrica
ortogonal. Son las axonometrías isométricas, dimétricas y trimétricas.
SISTEMA DE PERSPECTIVA CABALLERA.
Este sistema es el unico que utiliza la
proyección cilindrica oblicua.
Los objetos se proyecta
ortogonalmente sobre tres planos de
proyección que forman un triedro
trirrectángulo y a continuación la proyección
oblicua del objeto y sus tres proyecciones
sobre un plano llamado plano del cuadro,
que es paralelo a uno de los planos del triedro. Por lo tanto todo lo que sea paralelo
a ese plano, aparecerá sin deformarse en proyección.
Dos ejes de proyección, forman un angulo recto lo que no ocurre en el
sistema axonometrico.
16

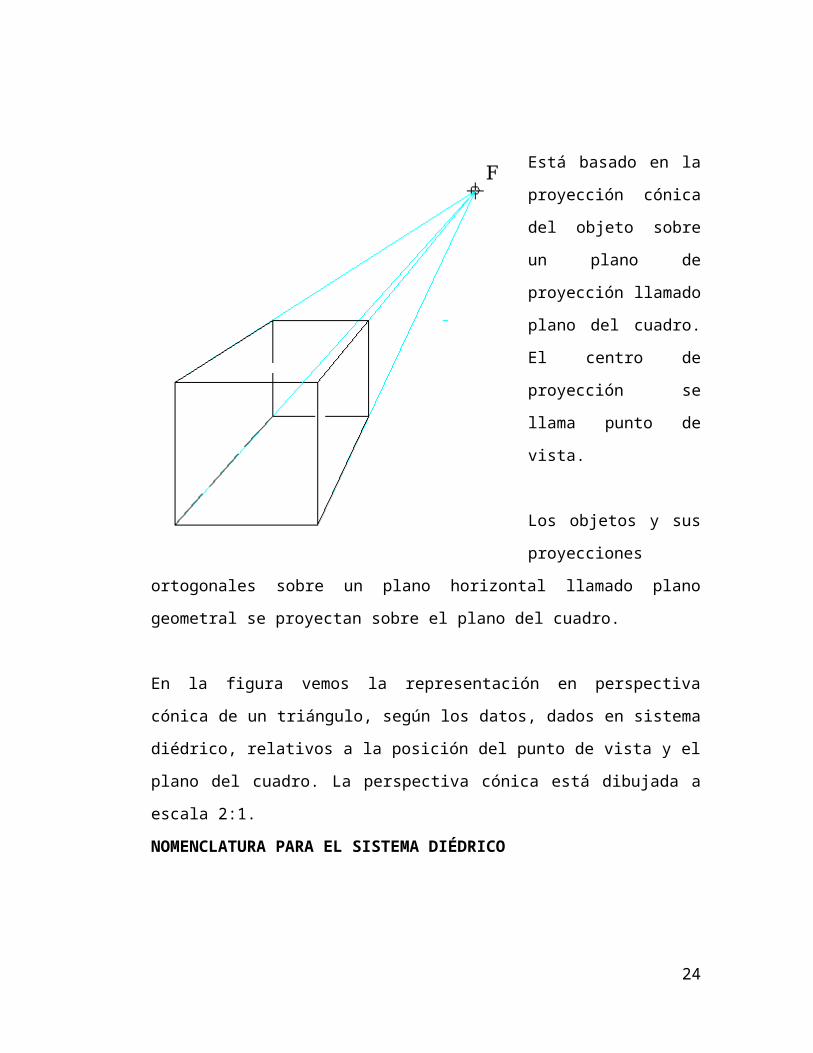
SISTEMA DE PERSPECTIVA CÓNICA.
Está basado en la
proyección cónica del
objeto sobre un plano de
proyección llamado plano
del cuadro. El centro de
proyección se llama punto
de vista.
Los objetos y sus
proyecciones ortogonales
sobre un plano horizontal
llamado plano geometral
se proyectan sobre el
plano del cuadro.
En la figura vemos la representación en perspectiva cónica de un triángulo, según los
datos, dados en sistema diédrico, relativos a la posición del punto de vista y el plano
del cuadro. La perspectiva cónica está dibujada a escala 2:1.
NOMENCLATURA PARA EL SISTEMA DIÉDRICO
Punto: se usarán preferentemente las vocales y, en su defecto, los números
naturales. Para nombrar el punto en el espacio se emplearán las mayúsculas, A. La
proyección horizontal se nombrará con las minúsculas, a. La proyección vertical con
el apóstrofe (prima), a´. El perfil o tercera vista se definirá con el doble apóstrofe
(segunda), a´´.
17

Recta: Se usarán preferentemente las consonantes. Para nombrar la recta en el
espacio se emplearán las mayúsculas, R. La proyección horizontal se nombrará con
las minúsculas, r. La proyección vertical con el apóstrofe (prima), r´. El perfil o
tercera vista se diferenciará con el doble apóstrofe (segunda), r´´.
Plano: Se usarán preferentemente las consonantes. Para nombrar un plano en el
espacio se utilizarán las mayúsculas, P. La traza horizontal se nombrará con la
mayúscula, P. La traza vertical se diferenciará con el apóstrofe (prima), P´. En los
cambios de planos, y por consiguiente en terceras vistas se usará el doble apóstrofe
(segunda), P´´.
Elementos abatidos: se nombrarán con la correspondiente letra mayúscula entre
paréntesis; punto (A); recta (R); trazas del plano (P) o (P´).
Giros: a las proyecciones de los elementos girados se les colocará un subíndice, el 1
para el primer giro, el 2 para el segundo y así sucesivamente.
Cambios de plano de proyección: a las proyecciones de los elementos cambiados de
plano de proyección se les colocará un subíndice, el 1 para el primer cambio de
plano, el 2 para el segundo cambio y así sucesivamente. Para indicar a su vez los
cambios de plano realizados, a la nueva línea de tierra del primer cambio se le
colocarán dos trazos, a la segunda tres y así sucesivamente, y en todas ellas, en el
margen derecho se indicará a que planos corresponde (H-V), colocando el subíndice
correspondiente en el que se haya cambiado.
EL ESPACIO
18

Planos proyectantes principales.
Los dos planos proyectantes principales son el Horizontal y el Vertical. Su
intersección se denomina Línea de tierra.
• Plano Horizontal (PH): contiene la proyección horizontal o planta. Está subdividido
por la Línea de tierra (LT) en: Plano Horizontal Posterior (detrás) y Plano Horizontal
Anterior (delante).
• Plano Vertical (PV): contiene la proyección vertical o alzado. Está subdividido por la
Línea de Tierra en: Plano Vertical Superior (arriba) y Plano Vertical Inferior (abajo).
Las tres proyecciones ortogonales principales: frontal, superior y lateral (alzado,
planta y perfil).
Normalmente, sólo se usan los planos PH y PV, que se cortan en la Línea de tierra
(LT) dando origen a una subdivisión del espacio en cuatro ángulos diedros o
cuadrantes.
También se utiliza, como plano auxiliar, el denominado:
• Plano de Perfil (PP): contiene la proyección lateral izquierda (o derecha).
Planos bisectores.
Los dos planos bisectores son aquellos que dividen a los cuadrantes en dos octantes
19
de 45º cada uno. El primer bisector está en el primero y tercer cuadrante y el
segundo bisector en el segundo y cuarto cuadrante.
Para representar en dos dimensiones (sobre un papel) las vistas principales en el
sistema diédrico, se realiza un abatimiento, que consiste en girar, tumbar, o abatir
un plano principal de tal manera que el Plano Horizontal (PH) se superponga al Plano
Vertical (PV).
REPRESENTACIÓN DE UN PUNTO
Un punto situado en el espacio se representa mediante sus dos proyecciones (a
modo de sombras) sobre los planos principales: proyección horizontal y proyección
vertical.
Cota
Se denomina cota de un punto del espacio a la distancia entre él y su proyección en
el plano horizontal, o lo que es lo mismo la distancia entre la proyección vertical y la
línea de Tierra (LT).
Alejamiento
Se denomina alejamiento de un punto del espacio a la distancia entre él y su
proyección en el plano vertical, que equivale a la distancia entre la proyección
horizontal y la línea de Tierra (LT).
20

Determinación por coordenadas
Un punto puede determinarse por coordenadas. El origen de este sistema será la
intersección de los planos principales: horizontal, vertical y de perfil.
• El eje X está determinado por la recta intersección de los planos horizontal y
vertical, es decir, sobre la Línea de tierra.
• El eje Y está determinado por la recta intersección de los planos horizontal y de
perfil.
• El eje Z está determinado por la recta intersección de los planos vertical y de perfil.
PUNTO
El punto es el elemento geométrico más simple. No tiene dimensiones, es
inmaterial. Solo tiene posición. Dos puntos definen una línea recta (un segmento).
Tres puntos forman un plano (un triángulo).
DISTANCIA DE UN PUNTO EN EL ESPACIO A DOS PLANOS DE PROYECCIÓN
CONOCIDOS.
Todo punto en el espacio del Sistema Diédrico genera automáticamente dos
proyecciones en forma de dos puntos. Una proyección vertical, en el plano de
21

proyección Vertical, y otra proyección horizontal, en el plano de proyección
Horizontal.
A la distancia que hay desde el punto al Plano Horizontal se la denomina Cota.
A la distancia que hay desde el punto al Plano Vertical se la denomina Alejamiento.
La representación en el Sistema Diédrico de un punto cualquiera se hace a partir de
una línea perpendicular a la LT, midiendo en la proyección vertical la cota del punto
y en la proyección horizontal el alejamiento del punto.
Alejamiento
A2 A A2
V
Cota Cota
A1
H Alejamiento
A1
Representación por coordenadas:
Para simplificar, existe otra forma de definir un punto en Diédrico por medio de
coordenadas.
22

Si imaginamos un sistema de coordenadas X, Y, Z situados en los Planos de
Proyección, tal como se muestra en la figura siguiente:
+Z
V +X
-Y +Y
H
-X
-Z
Podemos trabajar en el papel de acuerdo con el siguiente esquema:
-Y +Z
-X 0 +X
+Y +Z
23
Punto que está en el primer cuadrante Punto que está en el segundo cuadrante
Punto que está en el tercer cuadrante Punto que está en el cuarto cuadrante
A la vista de las siguientes figuras, se pueden establecer las siguientes propiedades e
indicaciones:
La proyección de perfil (tercera proyección), está siempre en la paralela a la LT
dibujada desde la proyección vertical (segunda proyección).
24

Desde la proyección horizontal (primera proyección) se dibuja una línea paralela a la
LT, hasta llegar a la línea Z (intersección del PV-vertical de proyección y el PP-perfil
de proyección), para después, con centro en O y girando en el sentido positivo
(contrario al de las agujas del reloj) llevar el punto obtenido sobre la LT o su
prolongación, para terminar obteniendo la proyección de perfil (tercera proyección).
3. En los dibujos mostrados arriba, las flechas muestran el proceso para obtener la
proyección de perfil a partir de las otras dos. En caso de que falte alguna de las
proyecciones, horizontal o vertical, teniendo la de perfil, el proceso para obtener la
proyección que falta, consiste en cambiar el sentido de las flechas.
A modo de resumen:
• Para pasar de las proyecciones horizontales a las proyecciones de perfil, el arco se
hace en sentido positivo.
• Para pasar de las proyecciones de perfil a las proyecciones horizontales, el arco se
hace en sentido negativo (a favor de las agujas del reloj).
25

CONCLUSIÓN
Todos los objetos creados por el hombre, desde un simple alfiler hasta la más
compleja maquinaria, planta industrial, obra civil, etc., son concebidos inicialmente
en forma mental, y antes de su fabricación deben ser descritos con toda precisión
para resolver con exactitud cualquier problema relacionado con su forma, tamaño y
funcionalidad. En respuesta a esta necesidad surge la Geometría Descriptiva, la cual
se encarga de definir correctamente las técnicas de la representación plana
(proyección) de los objetos tridimensionales antes o después de su existencia real.
De manera que estudiar Geometría Descriptiva es estudiar el mundo que nos
rodea, es describir la forma de: tornillos, resortes, engranajes; relojes; sillas; mesas;
televisores; carros; casas; urbanizaciones, carreteras, represas, planetas, galaxias, en
fin, todos los objetos físicos que nos rodean pueden ser concebidos por el hombre
mediante representaciones planas de los mismos, y es la Geometría Descriptiva la
que define las reglas que rigen la elaboración de estas proyecciones.
26
BIBLIOGRAFÍA
1. Asensi, Izquierdo. Geometría Descriptiva.
2. Noriega, Francisco. Geometría Descriptiva y Grafismo Arquitectónico.
3. Osers, Harry. Estudio de la Geometría Descriptiva.
4. Geometría descriptiva (Donato Di Pietro)
5. www.ieshuarte.com/dibujo (Francisco Molina)
6. Método Monge: Proyecciones Ortogonales Concertadas. (D.I. Patricia
Muñoz)
7. Universidad Centroamericana “José Simeón Cañas” (UCA)
8. Facultad de Ingeniería y Arquitectura - Departamento de Organización del
Espacio (Herbert
9. Ernesto Granillo Dubón).
10. www.tododibujo.com
11. http://www.educacionplastica.net
27