
Ingeniería de Sistemaspegasus.javeriana.edu.co/.../TG_SaulMartinez_4.3.docx · Web...
146
CIS1030TK01 IMPLEMENTACIÓN DE UN MODELO DE ELECTROFISIOLOGÍA PARA EL SIMULADOR NEURONAL CORTEX 3D SAÚL FERNANDO MARTÍNEZ RUBIO PONTIFICIA UNIVERSIDAD JAVERIANA FACULTAD DE INGENIERIA CARRERA DE INGENIERIA DE SISTEMAS BOGOTÁ, D.C. 2011
Transcript of Ingeniería de Sistemaspegasus.javeriana.edu.co/.../TG_SaulMartinez_4.3.docx · Web...

CIS1030TK01IMPLEMENTACIÓN DE UN MODELO DE ELECTROFISIOLOGÍA
PARA EL SIMULADOR NEURONAL CORTEX 3D
SAÚL FERNANDO MARTÍNEZ RUBIO
PONTIFICIA UNIVERSIDAD JAVERIANAFACULTAD DE INGENIERIA
CARRERA DE INGENIERIA DE SISTEMASBOGOTÁ, D.C.
2011
CIS1030TK01IMPLEMENTACIÓN DE UN MODELO DE ELECTROFISIOLOGÍA
PARA EL SIMULADOR NEURONAL CORTEX 3D
Autor:SAÚL FERNANDO MARTÍNEZ RUBIO
MEMORIA DEL TRABAJO DE GRADO REALIZADO PARA CUMPLIR UNO DE LOS REQUISITOS PARA OPTAR AL TITULO DE
INGENIERO DE SISTEMAS
DirectorIng. Leonardo Flórez Valencia, PhD
Jurados del Trabajo de Grado
<Nombres y Apellidos Completos del Jurado >
<Nombres y Apellidos Completos del Jurado >
Página web del Trabajo de Grado
http://pegasus.javeriana.edu.co/~CIS1030TK01
PONTIFICIA UNIVERSIDAD JAVERIANAFACULTAD DE INGENIERIA
CARRERA DE INGENIERIA DE SISTEMASBOGOTÁ, D.C.
2011

PONTIFICIA UNIVERSIDAD JAVERIANAFACULTAD DE INGENIERIA
CARRERA DE INGENIERIA DE SISTEMAS
Rector Magnífico
Joaquín Emilio Sánchez García S.J.
Decano Académico Facultad de Ingeniería
Ingeniero Francisco Javier Rebolledo Muñoz
Decano del Medio Universitario Facultad de Ingeniería
Padre Sergio Bernal Restrepo S.J.
Director de la Carrera de Ingeniería de Sistemas
Ingeniero Luis Carlos Díaz Chaparro
Director Departamento de Ingeniería de Sistemas
Ingeniero César Julio Bustacara Medina

Artículo 23 de la Resolución No. 1 de Junio de 1946 “La Universidad no se hace responsable de los conceptos emitidos por sus alumnos en sus proyectos
de grado. Sólo velará porque no se publique nada contrario al dogma y la moral católica y porque no
contengan ataques o polémicas puramente personales. Antes bien, que se vean en ellos el anhelo de
buscar la verdad y la Justicia”.
AGRADECIMIENTOS
En esta sección quiero expresar mis más sinceros agradecimientos a todas aquellas personas que
colaboraron en algún momento en el desarrollo de este trabajo de grado. Inicialmente dar las gracias a
mi director de trabajo de grado Leonardo Flórez Valencia quien fue un guía durante toda la
investigación. A mi familia quienes me apoyaron y animaron a completar el trabajo de la mejor forma
posible. Finalmente a Angela Cariilo y Andrea Barraza quienes brindaron su apoyo incondicional para
la revisión y mejoramiento del trabajo de grado, con el fin de que este alcanzara un alto nivel de
calidad, pero a Andrea le agradezco y aprecio por apoyarme e impulsarme siempre para que yo crezca
como persona y que trabajos como este cada vez se muestren mejores resultados.

ABSTRACT
Neuroinformatics is an area that is relatively new, and that in recent years shown a very significant
growth. The reason why the neuroinformatics has grown so suddenly is due to the fact that studies on
neurons have been found in the computer a tool that allows them to carry out assessments that were
previously impossible to perform, one of these tests is as neurons behave according to different sets of
input data or stimulation. This project seeks to rely on a simulation tool of neurons to carry out a
module to simulate the interaction between neurons, the tool on which the work is called CORTEX 3D.
CORTEX 3D is able to carry out evolutionary simulations which allow a neuron grows up, but this
growth is affected by environmental characteristics, such as neurons or other substances that surround
it. Based on the current design of CORTEX 3D this work to develop a generic model which could
implement the various functions of the neuron. Once defined the generic model, this was used as
the basis for a specific model which allowed us to add electrical functions of a neuron. Finally we
developed a prototype to validate the proposed model for the electrophysiology.

RESUMEN
La neuroinformática es un área que es relativamente nueva, y que en los últimos años a mostrado un
crecimiento muy significativo. La razón por la que la neuroinformática ha crecido tan rápido se debe
al hecho de que los estudios realizados sobre las neuronas han encontrado en la computación una
herramienta que les permite llevar a cabo evaluaciones que antes eran imposibles de realizar, una de
estas pruebas es como las neuronas se comportan de acuerdo a diferentes conjuntos de datos de
entrada o una estimulación estimulación en términos biológicos. Este apoyarse en una herramienta de
simulación de neuronas, para desarrollar a un módulo que pueda simular la interacción entre neuronas,
la herramienta utilizada se denomina CORTEX 3D. CORTEX 3D es capaz de llevar a cabo
simulaciones evolutivas que permiten que una neurona crezca, pero este crecimiento se ve afectado
por las características ambientales, tales como las substancias o las neuronas que se encuentran al
rededor. Basado en el diseño actual de la CORTEX 3D este trabajo se enfoco en desarrollar un modelo
genérico que pudiera soportar la implementación de las diversas funciones de una neurona. Una vez
definido el modelo general, se utilizó como base para un modelo específico que nos permitió añadir
las funciones eléctricas de una neurona. Por último, se desarrollo un prototipo para validar el modelo
propuesto para la electrofisiología.

RESUMEN EJECUTIVO
La neuroinformática es un área que es relativamente nueva, y que en los últimos años ha mostrado un
crecimiento bastante importante. La razón por la cual la neuroinformática ha crecido tan
repentinamente es debido al hecho de que los estudios acerca las neuronas han encontrado en la
computación una herramienta que les permite llevar acabo análisis que antes eran imposibles de
realizarse. Uno de estos análisis permite observar cómo las neuronas se comportan según distintos
conjuntos de datos de entrada o estimulaciones eléctricas, determinadas por la electrofisiología de una
neurona. Sin embargo, para lograr esto, es necesario contar con aplicaciones que simulen cada una de
las características de las neuronas; esto quiere decir que tomen en cuenta las características físicas,
químicas y funcionales que una neurona posee. Este proyecto se apoyó en una herramienta de
simulación de neuronas para la realización de un módulo que permite simular la interacción entre
neuronas. La herramienta sobre la cual se trabajó se denomina CORTEX 3D. CORTEX 3D es capaz de
llevar a cabo simulaciones evolutivas las cuales permiten que una neurona crezca, pero este
crecimiento se ve afectado por las características del entorno, como otras neuronas o las substancias
que la rodean.
Con base en la idea de desarrollar una nueva funcionalidad, se decidió agregar un módulo el cual fuera
capaz de obtener las características actuales de una neurona en evolución, y sobre estos datos, llevar
acabo simulaciones de impulsos eléctricos (electrofisiología). Con esto en mente, el proyecto propuso
un modelo para ampliar el simulador CORTEX 3D dotándolo de una nueva capa en su diseño la cual
permitirá que desarrolladores puedan implementar nuevas funcionalidades. En el proyecto se utilizó
este modelo para agregar la electrofisiología .La electrofisiología son las características y funciones de
naturaleza eléctrica que se presentan en la neurona, en estas últimas específicamente la
electrofisiología está representada por los potenciales de acción, los cuales la neurona utiliza para
enviar mensajes otras células nerviosas vecinas. El fruto de este trabajo fue un módulo para agregar
funcionalidades de forma genérica a la neurona, para esto se llevó a cabo una investigación completa
acerca de las neuronas en general, y a partir de esto se agregó la funcionalidad de los potenciales de
acción, para lo cual se construyó un modelo especifico basado en el modelo genérico, y se implementó
un prototipo el cual se validó mediante pruebas con otros simuladores que actualmente ya
implementaban la electrofisiología pero que tenían un enfoque distinto al de CORTEX 3D. Una vez
analizado el comportamiento de una neurona, y de como un modelo matemático que la representa, se
realizó un modelo informático que permitiera llevar acabo un prototipo que simulara la transmisión de
un estímulo de un punto en la neurona hasta la siguiente.
Todo este trabajo va enfocado en brindar una herramienta que permita que estudiantes e investigadores
tengan la posibilidad de utilizar CORTEX 3D el cual es totalmente gratuito. A pesar de que la
implementación actual de el modulo para simular las características electrofisiológicas de la neurona
actualmente es solo un prototipo, ya que permite llevar a cabo investigaciones y análisis de los datos
acerca de cómo neuronas con distintas características responden a estímulos con magnitudes y
duraciones variables, Adicionalmente es posible entender cómo la longitud de las neuronas puede
afectar la propagación del impulso nervioso en toda la extensión de la misma.

TABLA DE CONTENIDO
1. INTRODUCCIÓN............................................................................................................................1
2. DESCRIPCIÓN DEL TRABAJO DE GRADO...............................................................................3
2.1. DESCRIPCIÓN GENERAL....................................................................................................3
2.2. FORMULACIÓN.....................................................................................................................4
2.3. JUSTIFICACIÓN.....................................................................................................................5
2.4. OBJETIVOS.............................................................................................................................5
2.4.1. OBJETIVO GENERAL.......................................................................................................5
2.4.2. OBJETIVOS ESPECÍFICOS...............................................................................................6
3. IMPACTO ESPERADO...................................................................................................................7
4. ALCANCE Y LIMITACIONES......................................................................................................8
4.1. LIMITACIONES......................................................................................................................8
4.2. ALCANCE...............................................................................................................................8
5. MARCO TEÓRICO.........................................................................................................................9
5.1. LA CÉLULA............................................................................................................................9
5.2. ELECTROFISIOLOGÍA........................................................................................................10
5.3. NEURONAS..........................................................................................................................11
5.4. NEUROCIENCIAS................................................................................................................14
5.5. NEUROINFORMÁTICA.......................................................................................................16
5.6. REDES NEURONALES ARTIFICIALES............................................................................16
5.7. SIMULACIONES NEURONALES.......................................................................................17
5.8. CIRCUITOS ELÉCTRICOS..................................................................................................18
5.8.1. LEY DE OHM....................................................................................................................21
5.8.2. ANÁLISIS NODAL...........................................................................................................22
5.8.3. CIRCUITOS DE PRIMER Y SEGUNDO ORDEN..........................................................23
5.9. MODELOS NEURONALES.................................................................................................23
5.9.1. MODELO LEAKY INTEGRATE AND FIRE..................................................................24
5.9.2. MODELO LEAKY INTEGRATE AND FIRE NO LINEAL............................................25
5.9.3. MODELO DE HODGKIN-HUXLEY...............................................................................26
5.9.4. MODELO MULTICOMPARTIMIENTOS.......................................................................29
5.9.5. TEORÍA DEL CABLE.......................................................................................................31
5.9.5.1. ECUACIÓN DEL CABLE EN UNA DIMENSIÓN.....................................................32
5.9.5.2. LA CONSTANTE DE TIEMPO Y DE LONGITUD....................................................34
5.10. MÉTODOS DE APROXIMACIÓN NUMÉRICA PARA MODELOS NEURONALES 35
5.10.1. MÉTODO DE LÍNEAS......................................................................................................36
5.10.2. MÉTODO DE EULER.......................................................................................................37
5.11. MATRICES Y SISTEMAS DE ECUACIONES...............................................................39
5.12. SÍNTESIS...........................................................................................................................40
5.12.1. LA NEURONA Y SU FUNCIONAMIENTO...................................................................40
5.12.2. ANÁLISIS DE MODELOS NEURONALES....................................................................40
5.12.3. OBJETIVO GENERAL DEL MARCO TEÓRICO...........................................................41
6. TRABAJOS RELACIONADOS....................................................................................................43
6.1. SIMULADORES NEURONALES........................................................................................43
6.1.1. GENESIS............................................................................................................................43
6.1.2. EDLUT...............................................................................................................................45
6.1.3. NEURON............................................................................................................................46
6.1.4. BLUE BRAIN PROJECT..................................................................................................47
6.1.5. CORTEX 3D......................................................................................................................48
6.2. DISCUSIÓN...........................................................................................................................50
7. DISEÑO DE CORTEX 3D............................................................................................................54
8. CONTRIBUCIONES.....................................................................................................................58
8.1. MODELO GENÉRICO PARA AGREGAR FUNCIONALIDAD A LA CÉLULA.............58
8.2. MODELO ELECTROFISIOLOGÍA PARA CORTEX 3D...................................................60
8.3. IMPLEMENTACIÓN DE UN PROTOTIPO INICIAL........................................................61
8.3.1. DISEÑO INICIAL DEL DESARROLLO.........................................................................61
8.3.2. SELECCIÓN DEL MODELO NEURONAL....................................................................62
8.3.3. SELECCIÓN DEL MÉTODO NUMÉRICO.....................................................................63
8.3.4. FUNCIONAMIENTO DEL PROTOTIPO........................................................................64
8.3.5. PRUEBAS DE VALIDACIÓN..........................................................................................67
8.3.6. PRUEBAS ESTADISTICAS.............................................................................................69
8.3.7. PRUEBAS DE PROPAGACIÓN......................................................................................72
9. CONCLUSIONES Y TRABAJOS FUTUROS.............................................................................74
10. REFERENCIAS.........................................................................................................................77
ANEXOS................................................................................................................................................81
DATOS DE SIMULACIÓN..............................................................................................................81

TABLA DE ILUSTRACIONES
No se encuentran elementos de tabla de ilustraciones.

TABLA DE ILUSTRACIONES
Tabla 1 Comparación de Trabajos Relacionados...................................................................................51Tabla 2 Datos de Simulación..................................................................................................................67Tabla 3 Datos NEURON vs CORTEX 3D.............................................................................................68

1. INTRODUCCIÓN
El ser humano siempre ha intentado comprender la naturaleza para aplicar los conocimientos
adquiridos. De esta forma, se ha evolucionado cada vez más llegando incluso a realizar todo tipo de
invenciones mucho más eficientes que las creadas por la naturaleza, todo esto a partir de lo que se ha
aprendido de la misma. Todo esto es posible gracias a las capacidades que posee el cerebro, las cuales
permiten razonar acerca de cada evento que se percibe y tratar de descifrarlo en términos de alguna de
las distintas ciencias, de tal forma que sea posible utilizar este nuevo conocimiento para el beneficio
propio ya sea para crear nuevas cosas o para poder llegar a entender conceptos más complejos. No
obstante, a pesar de todos los conocimientos adquiridos, no se ha logrado resolver algunas de las
cuestiones más fundamentales referentes a esta capacidad de analizar información, algunas de estas
son: ¿Cómo funciona el cerebro humano? ¿Qué mecanismos permiten que el cerebro logre procesar
tanta información de manera paralela, y aún más sorprendente, sin un gasto masivo de energía?
Los mayores avances en el tema del funcionamiento del cerebro se han logrado en las últimas dos
décadas. Esto se debe a que campos relacionados como biología molecular, genética y visualización
cerebral han logrado gran desarrollo gracias a la evolución computacional, y al desarrollo de un gran
número de hipótesis que podrían explicar cómo funciona el sistema nervioso. A pesar de estos
avances, dada la alta complejidad tanto del proceso de crecimiento de redes neuronales, así como el de
formación de conexiones sinápticas para llegar a formar redes neuronales complejas, este alto grado de
complejidad en su funcionamiento ha impedido estudiar el cerebro como un conjunto de pequeños
subsistemas que conforman un sistema global con una gran cantidad de funciones. Por esta razón, la
neuroinformática busca llevar a cabo un trabajo conjunto entre las ciencias de la computación y la
neurociencias, el cual se espera que conlleve al descubrimiento de nuevos conocimientos acerca del
cómo funciona el cerebro al verlo de manera global y realizar así análisis de grandes cantidades de
información por medio de sistemas computarizados.
Para lograr entender el cerbero como un sistema global es necesario entender el funcionamiento de
cada una de sus partes. Sin embargo, el entendimiento de cómo las neuronas interactúan entre sí a
penas está empezando a desvelarse, por lo cual el entendimiento de las características de cada una de
las neuronas y cómo éstas interactúan con otras es de gran importancia para comprender el cerebro.
En el cerebro existen distintos tipos de neuronas las cuales se clasifican según su morfología, en otras
palabras según sus características físicas su forma y tamaño. Esta diversidad se debe a que el cerebro
está distribuido en distintas secciones, donde cada una es encargada de una función, que interactúan
con otras partes para lograr así experiencias como la visión. Un ejemplo de esto es el córtex visual, el
cual se encarga del funcionamiento de la visión, dado que algunos estudios clínicos han demostrado

que no es un conjunto único de neuronas el que se utiliza para la visión. Esto quiere decir que existen
distintos conjuntos de neuronas para que el proceso de la visión se lleve a cabo: en algunos casos de
personas con daños en el córtex visual, daños que generalmente causarían ceguera, mantenían su
capacidad de ver pero el daño causaba que se volvieran incapaces de reconocer objetos. De esta
manera, serían capaces de caminar esquivando distintos tipos de objetos aún sin saber que son.
Casos como éste demuestran la importancia de entender cómo cada una de las clases de neuronas
interactúa entre sí para lograr un objetivo y qué factores son los que influyen para que un conjunto de
neuronas de un tipo específico puedan realizar una labor distinta a otro conjunto con otras
características. CORTEX 3D es una aplicación que se enfoca a la simulación de neuronas, teniendo en
cuenta sus características físicas y las características de su entorno. No obstante, aún es una aplicación
nueva y en proceso de desarrollo: actualmente tan sólo es capaz de construir neuronas y simular su
crecimiento, el cual se puede ver afectado por características en el ambiente pues también es posible
simular las substancias que rodean a la neurona.
Este proyecto realizó una investigación necesaria para adicionar al simulador CORTEX 3D la
posibilidad de generar la transmisión de mensajes a través de una neurona a lo cual se denomina
potenciales de acción. Estos, son impulsos eléctricos que se generan por un estímulo y se propagan
por toda la neurona. Estos impulsos se comportan de manera distinta dependiendo de la morfología
asociada a la neurona, y tienen como objetivo realizar cambios en los estados de la neurona los cuales
influyen en el aprendizaje de un sistema de neuronas; esto se realiza mediante un proceso llamado
plasticidad. Por tanto, el trabajo se inició realizando una investigación con el fin de entender la
naturaleza de la neurona, entendiendo sus partes y cómo éstas interactúan. Una vez entendido esto se
pasó al entendimiento de los modelos existentes, que debido a la naturaleza eléctrica del potencial de
acción, representan la actividad de la neurona mediante circuitos, de donde se obtuvo una
representación matemática de cada circuito asociado a cada uno de los modelos. Finalmente, se realizó
un modelo de software basado en el modelo matemático y se utilizaron los métodos numéricos para
aumentar la eficiencia de la aplicación, y resolver cada uno de las ecuaciones asociadas a los modelos
matemáticos.
Finalmente, en la última fase se realizó un prototipo funcional de la aplicación capaz de evaluar cada
una de las variables que intervienen en el momento de generar un potencial de acción. Esto con el fin
de evaluar que su comportamiento sea correcto y pueda ampliarse hasta simular el comportamiento de
una neurona en su totalidad.
En la siguiente sección se especificará como se realizó el proyecto cuáles son sus secciones y los
objetivos a ser cumplidos.

2. DESCRIPCIÓN DEL TRABAJO DE GRADO
En esta sección se describen las características del proyecto, cómo decidió realizarse y en qué forma
se llevó a cabo. Para esto, en las secciones siguientes se ofrecerá una descripción general del proyecto,
su formulación, justificación y cada uno de los objetivos que se cumplieron en la realización del
proyecto.
2.1. DESCRIPCIÓN GENERAL
Dados los grandes avances que se han producido gracias a la neuroinformática en los distintos campos
que componen las neurociencias y los nuevos conocimientos generados en estos campos, surge la
necesidad de crear nuevas herramientas para el estudio de las diferentes características de las
neuronas. Este proyecto busca realizar la investigación necesaria para entender, desarrollar e
implementar un modelo de electrofisiología neuronal que se acople al simulador CORTEX 3D. Para
esto, se tendrá en cuenta el enfoque del simulador que busca modelar la neurona, pero teniendo en
cuenta cómo ésta cambia con el tiempo, así como las interacciones con su medio y otras neuronas
vecinas.
Para cumplir con los objetivos de este proyecto, éste se dividirá en tres fases las cuales se realizan de
forma iterativa, y se retroalimentarán en cada iteración, estas fases son: fase documental, fase de
diseño del modelo y fase de implementación. En este documento la fase documental se puede ver en la
realización del marco teórico en la sección 5. La fase de diseño del modelo corresponde a la síntesis
del marco teórico y las contribuciones secciones 5.12 y 8. Finalmente la fase de implementación se ve
reflejada en la realización del prototipo en la sección 8.3.
En la fase documental se cubren los temas necesarios para el entendimiento del proyecto, como una
descripción de las neuronas, una aproximación a la electrofisiología y otros temas que se detallarán
más adelante. Otro aspecto relevante del marco teórico son los modelos neuronales, los cuales fueron
la base para llevar a cabo la implementación del proyecto, así como la sección de trabajos
relacionados, donde se estudiaron aplicaciones similares con el fin de identificar qué características
tiene cada una y cuales son importantes tener en cuenta para la realización de este proyecto.
La segunda fase describe los requerimientos que se definieron como necesarios para llevar acabo el
modelo, los cuales se definieron y refinaron a partir de las iteraciones de la primera fase. Por otro lado,
también se presenta el diseño resultante para implementar la electrofisiología en el simulador.
Finalmente, la última fase describe un prototipo funcional necesario para validar el modelo propuesto
para agregar la funcionalidad de electrofisiología al simulador según toda la teoría investigada. Es
preciso aclarar que se tuvieron recursos limitados tanto de tiempo como de expertos para la evaluación

de la herramienta, estas limitantes que influyeron en el proyecto y se verán más adelante con mayor
detalle.
Finalmente los resultados del proyecto pueden consultarse en la sección de contribuciones donde se
especifica el modelo base sobre el cual se realizó el prototipo. Allí, se encuentra una descripción
detallada de los componentes necesarios para el buen funcionamiento del simulador. En la siguiente
sección se abordará la problemática y cómo a partir de ésta se formuló el proyecto.
2.2. FORMULACIÓN
Debido a que actualmente no se comprende con exactitud la manera en la que las neuronas funcionan
y se desarrollan, muchas herramientas que han surgido se enfocan sólo en tomar las características más
relevantes conocidas de las neuronas y modelarlas en sistemas de simulación. Estos simuladores son
importantes pues permiten llevar a cabo pruebas para determinar qué aspectos influyen en el
comportamiento y desarrollo de las neuronas, y cómo al identificar dichas variables se puede
comprender la manera en la que las neuronas funcionan. Es interesante ver que la mayoría de los
simuladores nacieron como una herramienta para probar una característica específica como sucede en
herramientas como SNNAP y GENESIS [1, 2] y en algunos casos han evolucionado al integrar nuevas
funcionalidades como es el caso de CORTEX 3D, NEST y EDLUT [3, 4, 5]. Pero, ¿Qué aspectos se
tuvieron en cuenta a la hora de desarrollar simuladores neuronales? Esta pregunta es muy importante
dado que cada una de estas herramientas se concibió con el fin de describir los distintos aspectos de las
neuronas, como en el caso de GENESIS [6] la cual se enfocó en que debía ser muy flexible en todos
sus aspectos y describir la fisiología neuronal. Otro ejemplo es la herramienta CORTEX 3D [3], que se
encuentra enfocado en la morfología neuronal y los aspectos importantes para que las neuronas
produzcan una respuesta determinada. Entonces, ¿Qué aspectos son relevantes en el momento de
desarrollar una herramienta de este tipo, teniendo en cuenta que van dirigidas a un enfoque
específico?, y al conocer estos aspectos ¿Qué enfoque debe tomarse para apoyar una investigación
desde el área de la neuroinformática?
Entonces de la razones anteriormente descritas surge la problemática que busca responder a la
siguiente pregunta: ¿Cómo determinar qué aspectos son relevantes en el momento de realizar una
herramienta de simulación que busque apoyar el estudio de las neuronas teniendo en cuenta que la
herramienta debe estar enfocada a sus características morfológicas?
Para determinar qué aspectos son relevantes en el momento de construir una herramienta para la
simulación, este proyecto se realizó siguiendo las fases descritas a continuación.
Fase de documentación, esta fase consistió en obtener toda la información posible a medida que el
proyecto avanzaba con el fin de tener la mayor cantidad de información disponible. De esta manera se

logró garantizar que el resultado contuviera todas las características necesarias para apoyar la
enseñanza de estudiantes en el área de las neurociencias y la investigación por parte de expertos.
Fase de implementación, a medida que la fase de documentación se llevó a cabo, poco a poco se
avanzó en la implementación de pequeños prototipos que utilizaban el conocimiento adquirido. De
esta manera se pudieron realizar comprobaciones de que los conceptos se entendieron de manera
correcta y poco a poco se conformó la aplicación final.
Fase de validación, en esta fase se utilizó el resultado de las dos fases anteriores comparando la
implementación de prototipos contra lo teórico. Esto dio como resultado retroalimentación que
permitió conocer en qué temas se debía profundizar más, así como qué partes de la implementación
necesitaron correcciones para funcionar de acuerdo con lo esperado.
Para el final del proyecto se realizaron distintas iteraciones sobre cada una de las fases, lo que permitió
que la documentación realizada contuviera todos los temas necesarios para que pudiera llevarse a cabo
una implementación satisfactoria; también ayudó a determinar qué características eran las relevantes
para la realización de la primera versión del prototipo.
2.3. JUSTIFICACIÓN
A partir de la problemática que se en la sección 2.2, del hecho de que cada vez son más necesarias
nuevas herramientas en el campo de las neurociencias para el estudio y el entendimiento del sistema
nervioso, el presente trabajo se enfoca en responder: ¿Qué factores son relevantes a la hora de
desarrollar una implementación de la electrofisiología, la cual cumpla con las características
necesarias para apoyar a una herramienta como CORTEX 3D, teniendo en cuenta que está enfocado en
describir la morfología neuronal?. Además, se busca que la herramienta cumpla con los criterios
necesarios para ser de utilidad y de fácil entendimiento para los expertos en el área de las neurociencia
y que de esta forma pueda aportar al estudio y entendimiento del sistema nervioso.
Una vez realizado un análisis de las características de cada uno de los simuladores, en la sección 6 se
propone utilizar el simulador CORTEX 3D en el cual se busca implementar la electrofisiología. Esta es
una característica que actualmente no posee como puede notarse en su última publicación Zubler [3].
Es un proyecto de software libre el cual está a disposición de cualquier persona interesada en el tema y
con las habilidades para realizar un aporte a la herramienta.
2.4. OBJETIVOS
En esta sección se encuentran los objetivos que se estableció que se debía cumplir para la realización
del trabajo de grado.
2.4.1. OBJETIVO GENERAL
Implementar un prototipo a partir de un modelo informático que permita simular el comportamiento de
la electrofisiología en una neurona y realizar una visualización utilizando el simulador neuronal
biológico CORTEX 3D.
2.4.2. OBJETIVOS ESPECÍFICOS
1) Llevar a cabo una investigación del modelo biológico asociado al simulador CORTEX 3D.
2) Llevar a cabo una investigación acerca de los modelos matemáticos asociados a la
electrofisiología de las neuronas.
3) Realizar un proceso de selección para determinar qué modelo es el mejor para realizar la
electrofisiología para CORTEX 3D.
4) Implementar un modelo informático a partir del modelo seleccionado para la electrofisiología.
5) Implementar el sistema propuesto.
6) Validar el funcionamiento del sistema.
3. IMPACTO ESPERADO
Este proyecto busca contribuir al área tanto de enseñanza en las neurociencias, como al área de la
investigación. En el área de la enseñanza se busca incentivar el uso de herramientas informáticas con
el fin de que los nuevos estudiantes que deseen conocer acerca del comportamiento de las neuronas
puedan recurrir al simulador, el cual les brindará información desde distintos puntos de vista. En el
caso de este proyecto se espera que sean capaces de entender cómo la electrofisiología está ligada a
características físicas de la neurona así como también a características de su ambiente. Por otro lado en
el área de la investigación se busca que ésta sea una herramienta de ayuda a la hora de llevar a cabo
estudios sobre comportamientos neuronales cuando se aplican determinados estímulos o cuando la
neurona tiene unas características específicas.
Finalmente se espera que este sea el inicio del desarrollo de la actividad no sólo en una neurona como
se planteó en este proyecto sino que a futuro sea posible llevar el trabajo aquí realizado al ámbito de
redes de varias neuronas. Se busca que éstas interactúen mediante la formación de estímulos nerviosos
y puedan realizarse estudios acerca de la interacción entre neuronas en redes dinámicas en
crecimiento, para lo cual es muy importante el enfoque de este simulador.
4. ALCANCE Y LIMITACIONES
Esta sección describe el alcance del proyecto el cual se encuentra es limitado por una serie de
restricciones que se describirán de igual forma.
4.1. LIMITACIONES
Las limitaciones que se presentaron en este proyecto se dividen en dos principalmente. La primera
limitación fue el tiempo. Durante el transcurso del proyecto se le dio mayor prioridad a la
investigación pues sin unas buenas bases teóricas llevar a cabo un prototipo funcional no es viable. Es
importante resaltar que en el prototipo tan solo se implementaron las características necesarias para
modelar la electrofisiología de la neurona, aunque en la investigación se encontraron muchas otras
características y modelos que en un futuro se tiene planeado agregar.
La limitación fue la dificultad de acceder a personas expertas en el tema. Por un lado, para la
realización del proyecto se tuvo acceso a expertos en Medicina y Psicología. Sin embargo, estos tan
solo pudieron ofrecer un apoyo en la teoría acerca de cómo funciona una neurona desde una
perspectiva biológica. Por otro lado, para conocer más acerca de los aspectos eléctricos fue necesario
buscar ayuda de estudiantes de Ingeniería Electrónica, los cuales apoyaron a la teoría de circuitos pero
no tenían conocimientos de la parte biológica. En conclusión, no fue posible encontrar una persona
que pudiese entender el proyecto de una manera global. Por esta razón, la evaluación y validación se
realizó mediante la comparación con trabajos relacionados al tema y pruebas sobre las variables que
componen el modelo.
4.2. ALCANCE
El alcance del proyecto se definió gracias a una investigación que ayudó a determinar qué aspectos
eran los más relevantes para la implementación de la electrofisiología en una herramienta de
simulación. Adicionalmente, una vez se realizó la investigación se determinaron las limitaciones que
tendría el proyecto las cuales se especificaron en la sección 4.1 y a partir de esto se formularon los
objetivos descritos en la sección 2.4, los cuales enmarcan hasta dónde se espera avanzar en este
proyecto, qué metodología planea usarse y de qué manera se validarían los resultados.

5. MARCO TEÓRICO
En esta sección se presentan los temas principales asociados al proyecto. A continuación se tratarán
los siguientes temas: la neurona, la electrofisiología, las neurociencias y la neuroinformática. Además,
se abordarán los modelos con los que actualmente se describe el comportamiento eléctrico de las
neuronas. En la siguiente sección se abordará el tema de las células, esto con el fin de entender sus
características principales.
5.1. LA CÉLULA
La célula (ver Figura 1) es la unidad viva más pequeña en el organismo humano [7]. Existen
diferentes tipos de células, cada una con una función específica. Las neuronas, por ejemplo, son las
células que conforman el sistema nervioso y se encargan de la recepción y transmisión de estímulos.
Figura 1 La Célula
La mayoría de las células comparten algunos componentes primordiales para su funcionamiento, que
son:
Membrana Plasmática: separa el medio externo del medio interno de la célula. Su función
principal es regular las substancias que pasan del interior al exterior y viceversa, todo enfocado en
mantener un ambiente apropiado para garantizar el funcionamiento normal de la célula.
Citoplasma: El citoplasma está conformado por el citosol y los organelos. El citosol es la parte
liquida interna de la célula, y está conformada por agua, solutos disueltos y partículas en
suspensión. Por otra parte, los organelos son diferentes componentes que se encuentran rodeados
por el citosol, cada uno con una función específica para mantener el normal funcionamiento de la
célula. Algunos de los componentes que generalmente encontramos son:
Cito esqueleto.
Centrosoma.
Cilios y flagelos.
Ribosomas.

Retículo endoplasmático.
Aparato de Golgi.
Lisosomas.
Peroxisomas.
Proteasomas.
Mitocondrias.
Cada uno de estos componentes, así como algunos otros organelos presentes en células
especializadas, se encuentra descrito con mayor detalle en libros especializados como Gerard J.
[7].
El núcleo: Es un organelo que contiene la mayor parte del ADN. La mayoría de las células sólo
contienen un núcleo. En su interior se encuentra un organelo denominado nucléolo el cual se
encarga de la producción de ribosomas. Éstas son las encargadas del proceso de composición de
nuevas proteínas, a lo cual se denomina síntesis de proteínas: este proceso se describe de forma más
detallada en Gerard J. [7].
Existen algunos otros organelos en células especializadas las cuales cumplen funciones específicas,
como es el caso de las neuronas las cuales poseen componentes especializados que le permiten realizar
un proceso eléctrico que tiene como fin la transición de mensajes y cambio de estado en la neurona,
este proceso de denomina potencial de acción y se clasifica en dentro de la rama de la
electrofisiología. Para este proyecto, se enfocará en un conjunto especializado de células: éstas son las
neuronas. En la siguiente sección abordaremos el tema de la electrofisiología, la electrofisiología son
características de naturaleza eléctrica que se producen en el cuerpo de las neuronas.
5.2. ELECTROFISIOLOGÍA
En los animales la transmisión de mensajes entre células ha sido estudiada desde hace mucho tiempo.
La rama que estudia las propiedades eléctricas de estos mensajes se denomina electrofisiología. En
Lytton [8], en estos estudios se toman en cuenta cambios en la corriente eléctrica o en el potencial
eléctrico de la célula. Estas interacciones se generan en células presentes en órganos como el corazón,
el cerebro, músculos y algunos otros órganos.
Figura 2 Electrocardiograma

Por ejemplo, en el corazón es posible detectar la electrofisiología mediante un electrocardiograma (ver
Figura 2), el cual es un procedimiento que captura la actividad eléctrica del corazón y con ésta es
posible conocer detalles como el comportamiento del ciclo cardíaco.
Para el caso específico de este trabajo, se centrará en los potenciales de acción, los cuales describen la
electrofisiología de las células nerviosas y son utilizados por éstas con el fin de llevar a cabo tareas
como la transmisión de impulsos a través de los distintos sistemas de neuronas. Por esta razón, en
adelante se hablará de los potenciales de acción refiriéndose a la electrofisiología de las neuronas.
Los potenciales de acción se producen de manera externa e interna. Cuando se producen de forma
externa son causados por una estimulación a neuronas especializadas llamadas nociceptores. Estas
neuronas son capaces de percibir estímulos en receptores que se ubican directamente en la piel,
músculos, articulaciones y viseras. Cuando se produce un potencial de acción de forma interna se
debe a que una neurona estimula a otras neuronas adyacentes a ella, lo que normalmente desencadena
una reacción que trasmite un estímulo en un área específica. Esta última interacción se explica con
mayor detalle en la siguiente sección.
5.3. NEURONAS
Las neuronas (ver Figura 3) son células nerviosas que constituyen la unidad básica del sistema
nervioso. En Richard S. [9], las definen como "células excitables especializadas para la recepción de
estímulos y conducción del impulso nervioso". Las neuronas están compuestas de un cuerpo celular y
prolongaciones en forma de ramas las cuales se denominan neuritas. Éstas se clasifican en dendritas y
axón. Las neuritas son clasificadas según su tamaño y forma, además de las ramificaciones que
poseen. El cuerpo de la célula nerviosa, como el de otras células, está compuesto de una masa
citoplasmática las cual contiene el núcleo y limita la membrana plasmática (ver Figura 3).
Figura 3 Neurona
Al igual que en otras células, en las neuronas también se encuentran distintos tipos de organelos que
cumplen distintas funciones, en su mayoría para la síntesis y degradación de moléculas durante
procesos enfocados a la producción de energía. Además de los organelos que toda célula debe tener,

también encontramos otros especializados que contribuyen a la función principal de la neurona, y
otros componentes únicos.
El citoplasma está compuesto de distintos organelos, entre los cuales están:
Sustancia de Nissl: se encarga de la síntesis de proteínas que fluyen a lo largo de las dendritas
y el axón, así como también de reemplazar las proteínas que se degradan durante la actividad
celular.
Aparato de Golgi: cumple la función de almacenamiento de sustancias producidas por la
sustancia de Nissl. También se cree que es activo en la formación de lisosomas y síntesis de
membranas celulares.
Neurofibrillas: son haces de neurofilamentos que conforman el componente principal del
citoesqueleto.
Otro componente importante de la neurona es la membrana plasmática (ver Figura 4), la cual
conforma el límite externo del cuerpo celular y sus prolongaciones y es el lugar en el que se produce la
iniciación y la conducción del impulso nervioso. Esta membrana se compone de una capa interna y
otra externa de moléculas proteicas, cada una de estas capas está separada por una capa lipídica. Junto
con la membrana plasmática, existe una cubierta o recubrimiento fibrilar, que juntos forman una capa
semipermeable que permite la difusión de iones 1 a través de ella (ver Figura 4).
Figura 4 Membrana Plasmática en las Neuronas
La membrana plasmática presenta diferentes estados dependiendo de si la neurona se encuentra en un
estado excitado o no. Estos estados dependen de la concentración de iones tanto interna como externa
de la célula. Comúnmente los iones son el sodio N a+¿¿ y el potasio K+¿ ¿. Cuando la neurona se
encuentra en estado de reposo la permeabilidad de iones de potasio es mucho mayor a la de iones de
sodio, de manera que la salida de iones de sodio es mucho mayor a la de iones de potasio. Esto genera
una diferencia de potencial en el interior de la membrana debido a la carga de los iones de alrededor
de los -80mV. Cuando la neurona es estimulada ya sea por medios eléctricos, mecánicos o químicos,
1 Es una partícula cargada eléctricamente constituida por un átomo o molécula que no es eléctricamente neutra.
Compuertas de iones
Iones de Potasio
Iones de Sodio
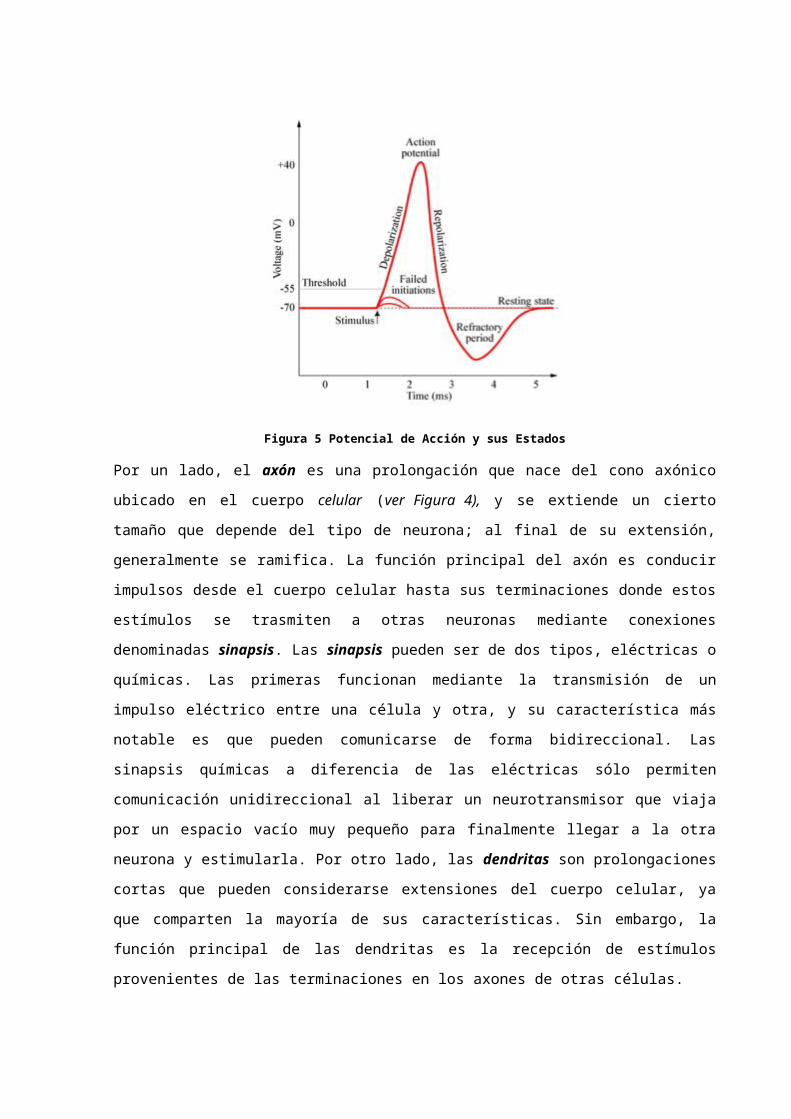
se produce un cambio en la membrana que permite el paso del sodio hacia el interior, lo que causa una
despolarización progresiva. Cuando la membrana se a despolarizado lo suficiente, se produce un
potencial de acción (ver Figura 5) el cual es un cambio en el estado eléctrico en la neurona que se ve
alterado debido a un estímulo. Tal estímulo produce el intercambio de iones entre el interior y el
exterior, lo que produce un cambio en el potencial eléctrico. Dicho potencial en el interior puede
alcanzar generalmente los +40mV pero que, sin embargo, dura muy poco; inmediatamente de nuevo
aumenta la permeabilidad a iones de potasio los cuales ingresan por la membrana. A este proceso se le
conoce como repolitización y continúa hasta llegar a un estado en el cual el potasio aumenta su
concentración y el potencial decrece aún más del estado de reposo de la célula. Luego de esto se
despolariza nuevamente hasta que alcanza el estado de reposo natural de la célula y se mantiene allí
hasta que se produzca un nuevo estimulo. El tiempo que toma desde que alcanza el estado de reposo,
sigue disminuyendo y se despolariza nuevamente hasta alcanzar el reposo de nuevo se conoce como
periodo de refracción. Mientras esto sucede, la neurona no puede producir un potencial de acción. El
potencial de acción es de gran importancia en las neuronas ya que este proceso permite que la
corriente viaje a través de la membrana hasta alcanzar sus terminaciones donde se encuentran las
sinapsis las cuales estimulan otras neuronas cercanas. Para que un impulso viaje a través de una
neurona, el proceso de cambio de estado de la membrana se produce por pequeños segmentos de la
misma y afecta de igual manera a los segmentos de membrana adyacentes; esto quiere decir que una
vez un pequeño segmento es estimulado, éste a su vez estimula los segmentos vecinos, provocando
una reacción en cadena.
Figura 5 Potencial de Acción y sus Estados
Por un lado, el axón es una prolongación que nace del cono axónico ubicado en el cuerpo celular (ver
Figura 4), y se extiende un cierto tamaño que depende del tipo de neurona; al final de su extensión,

generalmente se ramifica. La función principal del axón es conducir impulsos desde el cuerpo celular
hasta sus terminaciones donde estos estímulos se trasmiten a otras neuronas mediante conexiones
denominadas sinapsis. Las sinapsis pueden ser de dos tipos, eléctricas o químicas. Las primeras
funcionan mediante la transmisión de un impulso eléctrico entre una célula y otra, y su característica
más notable es que pueden comunicarse de forma bidireccional. Las sinapsis químicas a diferencia de
las eléctricas sólo permiten comunicación unidireccional al liberar un neurotransmisor que viaja por
un espacio vacío muy pequeño para finalmente llegar a la otra neurona y estimularla. Por otro lado, las
dendritas son prolongaciones cortas que pueden considerarse extensiones del cuerpo celular, ya que
comparten la mayoría de sus características. Sin embargo, la función principal de las dendritas es la
recepción de estímulos provenientes de las terminaciones en los axones de otras células.
Ahora que se conoce con más detalle las neuronas, la siguiente sección se enfocará en cómo los
conjuntos de neuronas conforman el sistema nervioso y qué ciencias hay dedicadas a su estudio. En
esta sección se explicó en detalle la neurona; la siguiente sección profundiza en el campo de la
neurociencias, la cuál es la disciplina encargada del estudio del sistema nervioso.
5.4. NEUROCIENCIAS
Según Zigmond M. [10], la neurociencia es una disciplina científica que se encarga del estudio del
sistema nervioso (ver Figura 6) desde lo conductual hasta lo molecular y desde diferentes puntos de
vista. Para realizar esta labor, un gran conjunto de expertos como biólogos, químicos, psicólogos,
entre otros se han unido para contribuir en este campo y avanzar hacia un mismo objetivo. Esto ha
conllevado al crecimiento rápido de la disciplina, aunque en algunos casos este crecimiento es un poco
desequilibrado pues en algunas de las áreas se ha avanzado más que en otras. En otras definiciones,
como la de MedicineNet [11] se expresan más formalmente definiéndola como: "Las neurociencias
son el estudio del cerebro y el sistema nervioso, ésta se divide en distintas ramas como la
neurociencia molecular, neurociencia celular, neurociencia cognitiva, modelamiento computacional y
enfermedades del sistema nervioso".
Figura 6 Sistema Nervioso Central
Algunas de las áreas que pertenecen o que podemos relacionar con las neurociencias son:
• Neuroanatomía
• Neurociencia aplicada
• Neurociencia cognitiva
• Neuroinformática
• Neuroeconomía
• Neurofisiología
• Neurolingüística
• Neurología
• Neuropsicología
• Neuropsiquiatría
• Psicofarmacología
En los últimos años se ha presentado un incremento significativo en la cantidad de trabajos en el área
de neurociencias, muchos de ellos adoptando herramientas informáticas para llevar a cabo las
investigaciones que antes debido a la complejidad de las interacciones en las neuronas era imposible.
En la siguiente sección se abordará el tema de la neuroinformática y cómo estas herramientas apoyan
el desarrollo de las neurociencias desde distintos aspectos.
5.5. NEUROINFORMÁTICA
Dada la complejidad de llevar a cabo proyectos en el campo de la neurociencias, se ha encontrado la
necesidad de utilizar herramientas que apoyen a expertos para llevar a cabo las investigaciones.
Específicamente, la necesidad surge del hecho de que la sola anatomía neuronal y su funcionalidad no
proveen información suficiente para llevar acabo análisis sobre el comportamiento de sistemas
neuronales completos.

La neuroinformática nace como un esfuerzo para abordar, en conjunto con varias disciplinas de las
neurociencias, desde un enfoque de las ciencias de la computación el estudio del sistema nervioso. Al
desarrollar diversas herramientas computacionales, la neuroinformática permite generar nuevo
conocimiento así como reafirmar mediante la experimentación teorías ya existentes. Como lo define
más formalmente Beltrame F. [12]: “Neuroinformatics is defined as a new field combining
neuroscience and informatics research to develop and apply advanced tools and approaches essential
for a major advancement in understanding the structure and function of the brain2”.
Tal vez el ejemplo más claro de esto sean las simulaciones neuronales, ya que a pesar de que se
conocía a partir de la observación cómo funcionaba una neurona específica es muy difícil entender del
todo como distintos tipos de neuronas presentaban distintos comportamientos. Uno de los principales
inconvenientes de esto es que debido a que las neuronas son unidades muy pequeñas de
funcionamiento, y se encuentran en un lugar tan crítico como el cerebro, tener acceso a ellas es muy
difícil más aún cuando el animal o la persona deben estar con vida y en un estado normal para
entender de qué manera se comportan cada una de las neuronas. Es por esto que la neuroinformática al
permitir realizar aplicaciones que simularán el comportamiento de las neuronas es un gran logro. En la
siguiente sección se abordara el tema de simulaciones neuronales artificiales, esto con el fin de poder
diferenciarlas de las simulaciones neuronales biológicas.
5.6. REDES NEURONALES ARTIFICIALES
Las redes neuronales artificiales surgieron como una abstracción matemática a la manera en la que
funciona el sistema nervioso; su objetivo principal es el aprendizaje de un sistema según su interacción
con su medio ambiente, es decir, que partir de experiencia almacenando es capaz de mostrar cambios
de comportamiento. Sin embargo en este caso el enfoque que poseen las redes neuronales artificiales
no es de utilidad para este proyecto, ya que no apuntan a simular las distintas características del
sistema nervioso sino a utilizar los conocimientos que se tienen del funcionamiento de las redes
neuronales biológicas y utilizarlo para modelar problemas del mundo real e intentar encontrar
soluciones por medio de las características de adaptación que este enfoque brinda.
En la siguiente sección profundizará en las simulaciones neuronales definiéndolas formalmente y
abordando sus características.
5.7. SIMULACIONES NEURONALES
Las simulaciones son herramientas computacionales, que normalmente son utilizadas para comprender
procesos complejos ya que permiten un análisis riguroso del comportamiento de un sistema bajo
condiciones controladas. En el caso particular de las simulaciones neuronales, se busca determinar
cómo las redes nerviosas se desarrollan y se comunican utilizando señales eléctricas así como
2 Neuroinformática se define como un nuevo campo que combina las neurociencias y la investigación informática para desarrollar y aplicar herramientas de avanzada y enfoques esenciales para un gran avance en la comprensión de la estructura y función del cerebro.

químicas. Esta comunicación involucra la formación de sistemas no lineales, esto quiere decir que su
comportamiento no está sujeto al principio de superposición, el cual define que el comportamiento de
un sistema puede ser expresado como la suma de sus partes, generalmente este tipo de sistemas toman
en cuenta variables temporales y espaciales entre muchos otros aspectos.
Figura 7 Simulación de una Neurona Detallada
Figura 8 Simulación de una Neurona Artificial
En las simulaciones neuronales es importante tener en cuenta el nivel de detalle que se considerará
acerca de la neurona en al cual cada una de las partes de la neurona se encuentra representada
mediante un componente los cuales interactúan entre sí para simular el comportamiento de la neurona
(ver Figura 7), sin embargo también es muy importante definir muy bien el objetivo de la simulación,
ya que si lo que se busca es imitar el comportamiento de las neuronas sin tener en cuenta todo sus
características es posible utilizar otros modelos menos detallados que representen la neurona en uno o
más componentes pero detallando sólo las características relevantes como en el caso de las neuronas
artificiales, las cuales buscan simular el comportamiento de una neurona pero sólo teniendo en cuenta
su comportamiento (ver Figura 8).
Además, se debe decidir qué factores se van a involucrar dado que existen un gran número de factores
de la fisionomía celular que deben tenerse en cuenta para que una simulación pueda ofrecer
información confiable y apta para ser analizada. Sin embargo, el nivel de detalle no debe ser
demasiado alto para llevar a cabo de manera correcta el uso de los recursos disponibles, los cuales
generalmente son limitados. La utilización de este tipo de simulaciones es muy útil en el momento de

realizar validaciones de datos cruzados, estimaciones experimentales y formación de nuevo
conocimiento a partir de observaciones.
Otro aspecto de gran importancia a mencionar es que no sólo es importante tener en cuenta los
aspectos físicos, como las partes de la neurona, sino también sus funciones, en el caso de la neurona la
transmisión de mensajes y el aprendizaje. Estos procesos se expresan mediante interacciones eléctricas
entre las distintas partes de la neurona, por este motivo, los modelos en los que se basan la
neuroinformática están fuertemente relacionados a circuitos que explican los comportamientos de la
neurona. Por este motivo en la siguiente sección se abordará el tema de circuitos de forma breve
explicando los conceptos más importantes para el entendimiento de este proyecto. Sin embargo para
una explicación más detallada es posible consultar Charles K. [13] en donde pueden consultarse
ejemplos y varios otros conceptos.
5.8. CIRCUITOS ELÉCTRICOS
Para la realización de este proyecto es fundamental tener algunos conocimientos básicos acerca de
circuitos eléctricos, por este motivo, esta sección abordará los temas más relevantes para el
entendimiento del proyecto. Sin embargo, es aconsejable que si el lector no se encuentra familiarizado
con los conceptos básicos de circuitos consulte Charles K. [13].
Figura 9 Representación gráfica de circuitos
Un circuito eléctrico se define como la interconexión de elementos eléctricos. Los circuitos eléctricos
se utilizan diariamente en elementos de trabajo, en computadoras incluso hasta en videojuegos, de allí
su importancia en la actualidad. En el caso de este proyecto, los circuitos eléctricos son de gran
importancia y por esta razón a continuación se introducirán algunos conceptos básicos.
La unidad básica que explica todos los fenómenos eléctricos es la carga (coliumbios); ésta se
representa con la letra q y se define en Paul A. [14], como una propiedad de las partículas atómicas de

las cuales está compuesta la materia. Esta propiedad produce interacciones entre las partículas, algunas
de atracción y otras de repulsión, esto dependiendo del tipo de carga que tienen; algunas partículas se
encuentran cargadas positivamente mientras que otras contienen una carga opuesta denominada
negativa. En estas interacciones cargas de igual signo se atraen, mientras que cargas de signos
opuestos se repelen.
La carga normalmente está distribuida según el tipo de elemento en el que se encuentra; esto se debe a
que existen distintos tipos de materiales, los cuales pueden ser conductores, y por esta razón tener la
propiedad de dejar fluir la carga a través de ellos con facilidad, o también hay materiales dieléctrico en
los cuales la carga no tiene libertad de movimiento. Otro aspecto de la carga es que no es estática, y
puede transferirse entre un objeto y otro con una velocidad de cambio dependiente del tiempo que se
denomina corriente (columbios/segundo). La ecuación matemática que describe éste fenómeno es:
(1) i≜ dqdt
Existen dos tipos de corriente: la corriente alterna la cual varía senoidalmente y la corriente directa la
cuál es constante en el tiempo y es la que se tendrá en cuenta en este proyecto.
El potencial en un punto es la energía que se necesitó para mover una carga unitaria a través de un
elemento hasta ese punto, la cual generalmente se representa mediante la letra V. Otro concepto
importante para el entendimiento de este proyecto es la diferencia de potencial (voltios), este
generalmente se representa mediante ∆ V y corresponde a la energía requerida para mover una carga
unitaria a través de un elemento de un punto a otro.
En los circuitos eléctricos existen dos tipos de elementos, todos los elementos tratados hasta el
momento pueden clasificarse como pasivos, ya que como los definen en Netto [15] “Los elementos
pasivos, son aquellos, que al circular corriente producen una diferencia de potencial entre sus bornes
y disipan potencia en forma de calor (consumen energía)”. Estos elementos incluyen las resistencias
tratadas en la sección 5.8.1. Por otro lado, existen también elementos activos los cuales son capaces de
generar corriente o potencia. De estos elementos nos interesa conocer dos específicamente: las fuentes
y los capacitores que son dos elementos usados para el proyecto.
Los capacitores (faradios) son elementos de almacenamiento, ya que guardan energía proveniente de
un campo eléctrico. Estos están compuestos por dos placas conductoras separadas por un material
aislante. Su funcionamiento consiste en almacenar energía mientras una fuente está conectada al
circuito. Una vez esta fuente se desconecta o deja de producir energía, el capacitor libera la energía
poco a poco de tal forma que es capaz de inducir una corriente en el circuito. La ecuación matemática
que representa este fenómeno es:
(2) q=C∗V
Donde C es la constante de capacitancia que depende de las dimensiones físicas del capacitor y no de
q ni de v. Esta constate de capacitancia se define como:
(3) C= εAd
La variable A corresponde al área superficial del capacitor, mientras que d es la distancia entre las
placas. Para este proyecto en particular nos interesa la relación existente entre la corriente y la
diferencia de potencial en el capacitor la cual está dada por la derivada de la ecuación con respecto al
tiempo de la carga y el potencial, la capacitancia al ser una constante no se ve afectada por la derivada.
La ecuación resultante es: (2):
(4) i=C∗dvdt
Esta relación es de gran importancia para los modelos neuronales que se trataran más adelante en esta
sección.
Por un lado, las fuentes se presentan de dos tipos de corriente y de voltaje, ambas son capaces de
producir energía a través del circuito. Las fuentes de voltaje provocan una diferencia de potencial en
el circuito, esto provoca un flujo de corriente a través del circuito, estas fuentes están compuestas por
una batería y una resistencia muy pequeña. Las fuentes de corriente por otro lado se diferencian de las
fuentes de voltaje en que poseen una resistencia muy grande lo cual provoca que la entrada de
corriente sea de un valor constante a diferencia de la fuente de voltaje en la cual como su resistencia es
muy pequeña deja pasar distintos flujos de corriente. En este proyecto las fuentes de voltaje son de
gran importancia ya que son las que en los modelos de la sección 5.9 son utilizadas para representar
como una neurona es estimulada.
Como se puede notar, las propiedades y funcionamiento de los circuitos están estrechamente
relacionados a este proyecto, ya que con estos se explica el funcionamiento de una neurona. La
representación gráfica de cada uno de los componentes tratados acá y algunos otros, se puede
encontrar en (ver Figura 9); para conocer más acerca de los demás componentes es posible dirigirse a
Paul A. [14] o a Charles K. [13], donde se encuentran ejemplos de cómo estos componentes
interactúan en conjunto.
Ahora que conocen los componentes que se utilizan para la representación de una neurona a través de
un circuito, se abordarán algunas leyes que permitirán entender el comportamiento del circuito y cómo
a partir del circuito se puede obtener un modelo matemático del funcionamiento de las neuronas.
1.
2.
3.
3.1.
3.2.
3.3.
3.4.
3.5.
3.6.
3.7.
5.8.1. LEY DE OHM
En la naturaleza todo material posee una característica intrínseca que se opone al paso de la corriente
denominada resistencia (ohmnios), la cual se representa con el símbolo R. La resistencia de un
material dado de área A generalmente depende de su longitud L, así como también de ρ que representa
la resistividad del material. En un circuito, los elementos que se utilizan para representar estas
resistencias se denominan resistores, donde cada uno tiene una resistencia R asociada.
George Simón Ohm fue un físico alemán que descubrió que existe una relación entre la corriente y el
potencial en un resistor dado Paul A. [14]. A esta propiedad se le denomina la ley de Ohm. En
Charles K. [13] se define que “La ley de Ohm establece que la tensión o potencial V a lo largo de un
resistor es directamente proporcional a la corriente i que fluye a través del resistor”, esto es:
(5) V=i∗R
Esta ley es de gran trascendencia pues permite realizar análisis sobre el comportamiento de circuitos
como podemos ver en la sección 5.9. En Charles K. [13] encontramos más detalles sobre esta ley y
ejemplos de su uso.
5.8.2. ANÁLISIS NODAL
El análisis nodal es una técnica utilizada en circuitos con el fin de hallar los cambios de potencial en
un circuito dado. Una definición más detallada se encuentra en Charles K. [13] que indica que “El
análisis nodal brinda un procedimiento general para el análisis de circuitos con el uso de tensiones de
nodo como variables de circuito”. Un nodo es un punto dado en un circuito en el cual convergen dos
caminos, en (la Figura 10), se puede apreciar un ejemplo del concepto de nodo.
La gran ventaja de este método es que utiliza los potenciales de un nodo en vez de las tensiones de un
elemento lo cual reduce el número de ecuaciones a solucionar. Para realizar este método es importante
conocer la ley de corriente de Kirchhoff (LCK), la cual establece que la suma algebraica de corrientes
en cualquier nodo es igual a cero, o en otras palabras la suma de corrientes que entran a un nodo del
circuito es igual a la suma de las corrientes que salen. Con esto claro, es posible hallar los potenciales
utilizando el método de análisis nodal el cual consta de tres pasos con los cuales se determina el
potencial en cada uno de los nodos del circuito:
1. Se selecciona un nodo de referencia, a partir de esto se asignan potenciales V 1 ,V 2 ,… .. ,V n−1
, a los n-1 nodos restantes.
2. Se aplica LCK a cada uno de los n-1 nodos, y se aplica la ley de Ohm para expresar las
corrientes en términos del potencial.
3. Se resuelve las ecuaciones resultantes de forma simultánea para obtener los potenciales en
cada uno de los nodos.
El análisis nodal es un concepto muy útil para el proyecto ya que permite a partir del circuito que
explica el comportamiento de las neuronas obtener un modelo matemático que pueda después llevarse
al modelo informático aquí propuesto. Es posible encontrar ejemplos y una explicación más detallada
en Charles K. [13]. En la siguiente sección se presentara una breve introducción a como todos los
conceptos vistos acerca de los componentes circuitos se utilizan para la realización de circuitos.
Figura 10 Análisis Nodal

5.8.3. CIRCUITOS DE PRIMER Y SEGUNDO ORDEN
Una vez que se han considerado cada uno de los componentes de los circuitos por separado, es
necesario considerar cómo las interacciones entre ellos dan como resultado comportamientos más
complejos. Inicialmente, se analizaron los circuitos de primer orden; entre estos se encuentran los
circuitos RC (Resistencia-Capacitor) y RL (Resistencia-Inductor). Este proyecto sólo se enfocará en
los circuitos RC. Sin embargo, si el lector desea saber más acerca de este tema puede dirigirse a
Charles K. [13].
La característica más importante de los circuitos RC es que las ecuaciones que describen su
comportamiento ya no dan como resultado una ecuación algebraica; en vez de esto, producen una
ecuación diferencial de primer orden. Esta ecuación es resultado de su comportamiento, el cual
depende de la carga y descarga del circuito, la cual está condicionada por el capacitor y la magnitud de
la resistencia. Este tipo de circuitos, al depender de dos elementos para producir su comportamiento,
puede tener distintos tiempos de carga y descarga. Esto conlleva a que los cambios en el potencial
eléctrico se comporten de manera distinta según los valores del capacitor y la resistencia. Para el
análisis de este tipo de circuitos, es posible utilizar las mismas leyes y definiciones de las secciones
5.8.1 y 5.8.2. Para encontrar ejemplos de aplicación de circuitos RC y comportamientos; se
recomienda consultar Charles K. [13]
Los circuitos de segundo orden son una combinación de tres elementos, y a diferencia de los de primer
orden los cuales sólo combinaban resistencias y capacitores o resistencias e inductores; en el caso de
los circuitos de segundo orden, se tienen circuitos compuestos de resistencias, capacitores e inductores
RCL. Circuitos de este tipo producen ecuaciones diferenciales de un orden mayor que involucran
derivadas de segundo orden, lo cual los hace difíciles de solucionar. Este tipo de circuito no es de
interés para este proyecto ya que no se presentan en los modelos neuronales que se verán más
adelante. No obstante, si el lector desea entender mucho más a fondo acerca de ellos puede dirigirse a
Charles K. [13].
La siguiente sección abordará los modelos neuronales, los cuales se basan en la información de la
sección actual. Por este motivo es de gran importancia que los conceptos de los componentes, así
como de las leyes aquí tratadas, estén muy claros antes de continuar con el siguiente capítulo.
5.9. MODELOS NEURONALES
A medida que se conocen las neuronas y se logran entender mejor sus características y
comportamiento, han surgido distintos modelos para poder describir cada uno de los procesos que las
neuronas llevan a cabo. Cada uno de los modelos aquí propuestos se basa en la teoría de circuitos; esto
se debe a la naturaleza eléctrica de los potenciales de acción. Luego a partir de los circuitos es posible

obtener un modelo matemático que exprese el comportamiento de la neurona en función de sus
diferentes características, y las características de un estímulo aplicado.
Los modelos aquí expuestos se comportan de forma evolutiva, esto quiere decir que los modelos más
actuales se basan en los modelos anteriores, cada vez aumentando el nivel en el cual se detallaba el
comportamiento. La gran ventaja de que el nivel de detalle aumentara era el hecho de que en el
momento de generarse los potenciales de acción estos describían mucho mejor cada una de sus fases
descritas en la sección 5.3 así como el tiempo que les tomaba propagarse a través de la neurona para
que ésta pasara de nuevo a un estado de reposo y pudiera generar un nuevo potencial de acción. Por
tanto, describían mejor el proceso de transición de impulsos.
No obstante, a pesar de este hecho, muchos de los primeros modelos neuronales aún son muy usados
dependiendo de qué tipo de estudio desee realizarse, tomando en cuenta que modelos más simples
utilizan una menor cantidad de recursos. En las subsecciones siguientes se dará una breve explicación
de los modelos neuronales más conocidos, yendo de los primeros modelos los cuales describían la
neurona de una forma muy general, hasta algunos más especializados los cuales describen el
funcionamiento de la neurona en detalle.
3.8.
5.9.1. MODELO LEAKY INTEGRATE AND FIRE
El modelo básico de integrare and fire Tuckwell [16] surge en 1907 de la mano de Louis Lapicque.
Este modelo consistía en un capacitor en paralelo con una resistencia (ver Figura 11). El circuito
representa la resistencia de la membrana junto con su capacitancia. Este modelo representaba los
cambios eléctricos de cada neurona mediante el circuito descrito anteriormente, por lo que no tenía en
cuenta su extensión, ni tampoco su topología cambiante.
Figura 11 Circuito del Modelo Integrate & Fire
Cada uno de estos circuitos recibe una inyección de corriente como entrada, la cual se divide en dos:
una que se dirige hacia la resistencia ( I R) y una segunda que carga el capacitor (I cap ¿. Estas dos
corrientes pueden calcularse utilizando la ley de Ohm descrita en la sección 5.8.1 y mediante la
definición de la capacitancia sección 5.8 a partir de esto se obtienen las siguientes formulas:

(6) I R=VR
(7) C=QV
→ I cap=C dVdt
(8) I ( t )=V (t )R
+C dVdt
Una vez que la diferencia de potencial producida por la inyección de corriente alcanza un umbral V th
se dispara un potencial de acción representado mediante una función delta o función de impulso; este
tipo de función representa un evento en un momento determinado y existen distintos tipos, algunos de
ellos pueden consultarse en Selik M. [17].
La función impulso unitario puede denominarse un choque aplicado el cual puede visualizarse en un
tiempo de corta duración; esta característica la hace muy útil para este modelo, debido a que permite
obtener un valor en el instante justo en el cual se produce un estímulo.
Esta función una vez que se produce pasa a un tiempo de refacción, para luego iniciar de nuevo el
potencial en su valor original. Este modelo tiene un problema dado que si la corriente de entrada no
alcanza el umbral el modelo falla en empezar a disminuir el potencial poco a poco lo cual es necesario
debido a que la membrana de las neuronas siempre tiende a volver a su estado de reposo. Lo que
realmente sucede en el modelo una vez se recibe una corriente de entrada y ésta no genera un cambio
de potencial lo suficientemente grande para que se alcance el umbral, es que el potencial no disminuye
sino que se mantiene constante. Este problema se solucionó al tomar en cuenta R en la ecuación, lo
cual introduce una constante de tiempo que genera que el potencial vuelva a su estado original de no
alcanzar el umbral.
(9) τ mdVdt
=−V (t )+RI (t)
5.9.2. MODELO LEAKY INTEGRATE AND FIRE NO LINEAL
En este modelo, la ecuación original de integrate and fire se remplazó por una nueva ecuación que a
diferencia de la anterior (la cual es dependiente al tiempo) este incluye una dependencia al voltaje. De
esta manera se representa mucho mejor el comportamiento eléctrico de la neurona, esto por qué podía
estimularse la neurona en cualquier momento que se deseara a diferencia del anterior en la cual al ser
sólo dependiente al tiempo la variación del voltaje se producía sólo en un momento especifico. El
nuevo modelo estaba representado por la siguiente ecuación:
(10) CdVdt
=q ( V−V th )−I th+ I s( t)

Esta ecuación de un orden mayor ya que trabaja con las de una variable es mucho más exacta y logra
mejoras considerables en algunos aspectos como describe Tonnelier A. [18] donde se destaca que el
modelo anterior tenía un comportamiento poco realista al momento que la neurona supera el umbral y
se produce un potencial de acción. En el modelo no lineal, V representa el voltaje de la membrana, C
la capacitancia de la membrana, q caracteriza la curva de respuesta a la frecuencia de corriente, I th es
el valor actual de la corriente actual y V th representa una entrada de corriente sináptico, o en términos
más sencillos son los estímulos que se aplican a la neurona.
5.9.3. MODELO DE HODGKIN-HUXLEY
En 1952, Alan Lloyd Hodgkin y Andrew Huxley [19] dieron origen a un modelo que describe la
dinámica de los iones, con la cual es posible la propagación de potenciales de acción en las células
nerviosas. Este modelo los hizo ganadores en 1963 del premio nobel en psicología y medicina, y aún
hoy en día es uno de los modelos más usados en la descripción de potenciales de acción. Su trabajo se
publicó en cinco artículos, los cuales los primeros cuatro son un resumen de sus procedimientos de
experimentación y de cómo definen las distintas características de la membrana en las células
nerviosas. Por otro lado, su último artículo expone los resultados de sus experimentos y de cómo con
estos desarrollaron un modelo que describiera el comportamiento de excitación en las neuronas
HODGKIN A. [19]. Su investigación se basó en experimentación sobre un axón de un calamar gigante,
el cual sólo posee dos conductancias dependientes del voltaje. Matemáticamente el modelo se
representa mediante un circuito el cual representa un segmento de membrana nerviosa. En este modelo
el flujo de la corriente posee dos componentes principales, uno asociado a la carga de la capacitancia
de la membrana, y otro asociado al movimiento de los iones a través de la membrana, estos se pueden
notar fácilmente (ver Figura 12) donde Cm produce un flujo de corriente, y cada una de las fuentes
que representan los iones producen otra. La corriente de iones presentes en este modelo se divide en
tres tipos, los cuales son: la concentración de iones de sodio ( I k), iones de Potasio (INa), y una
corriente de fuga (I L).

Figura 12 Circuito del Modelo Hodgkin-Huxley
El comportamiento de este circuito puede describirse mediante la siguiente ecuación diferencial:
(11) Cm
d V m
dt+ I ion=Iext
Donde Cm es la capacitancia de la membrana, V m es el potencial al interior de la membrana, I ion es la
corriente que fluye a través de la membrana y I ext es una corriente externa aplicada. Esta ecuación está
escrita de forma tal que, cuando una corriente externa es aplicada, tiende a despolarizar la membrana (
V m se >> 0) mientras que el flujo de corriente a través de la membrana causa una hyperpolarizacion (
V m << 0).
Otro aspecto importante del modelo son las corrientes de iones a través de la membrana los cuales en
el modelo esta representados por I ion, estos conforman la totalidad de corriente que fluye. Para calcular
este valor en el circuito (ver Figura 12) es necesario realizar un análisis nodal el cual se describe en la
sección 5.8.2 del circuito buscando conocer los valores de cada una de las corrientes y finalmente
sumarlas. Esto se define como:
(12) I ion=∑k
I k=Gk (V m−Ek)
El caso específico de Hodgkin-Huxley el cual posee tres tipos de iones definidos por:
(13) I ion=GNa (V m−ENa )+Gk (V m−E k )+GL(V m−EL)
En donde V m es el potencial de la membrana, ENa, Eky EL son los valores del potencial cuando la
neurona está en estado de reposo o potencial de reposo y GNa y Gk que cambian de forma dinámica
respecto al potencial de la membrana mientras que GL se mantiene contante. Esto se explica
fisiológicamente debido al hecho de que para cada uno de los iones existen compuertas específicas en

la membrana que pueden estar en un estado permisivo o no permisivo. La permisividad determina si se
permite la entrada o salida de iones o no se permite el flujo hacia ningún sentido.
Las compuertas que permiten la entrada o salida de iones son dependientes del potencial eléctrico, por
esta razón dependiendo del potencial de la membrana, se presenta una difusión de iones variable. En el
modelo de Hodgkin-Huxley estas compuertas dependientes del voltaje se representan mediante
funciones dependientes del voltaje, pero adicionalmente también son dependientes de una funcione
probabilística la cual retorna un valor entre 0 y 1 del cual depende que se abra una compuerta. Esto
está representado en el modelo como:
(14) dpi
dt=α i (V ) (1−p i )−β (V ) pi
Donde α i y β i representan una tasa constante dependiente del voltaje que describe la transición de
estado permisivo a no permisivo y viceversa. De esta manera si el valor del voltaje V se mantiene
constante, también pasa lo mismo con las compuertas, pero si el valor del voltaje varía de igual
manera las compuertas cambiaran de estado.
Cuando un canal o compuerta se encuentra en estado abierto o permisivo, este contribuye de forma
muy pequeña al valor total que toma la conductancia. En el caso de estar cerrado, el valor de la inversa
de le resistencia es cero, a este término se le llama conductancia. Basándonos en lo anterior, al ver la
conductancia de manera macroscópica, es posible entonces definirla de la siguiente manera: una
conductancia Gk de canales de tipo K , está constituida de compuertas de tipo i, es proporcional al
producto de cada una de las probabilidades de cada compuerta pi . Esto se define en la siguiente
ecuación:
(15) Gk=gk∏i
n
pi
Donde gk ( 1ohm ) es una constante de normalización que determina la conductancia máxima posible
(esto es cuando todos los canales se encuentran en estado permisivo). Ahora que hemos definido la
notación general para aplicar distintas conductancias al modelo, es posible escribir las ecuaciones para
el modelo genérico de Hodgkin-Huxley, aplicando la notación a la conductancia del sodio usando tres
canales los cuales denominaremos de tipo m por lo cual la variable estará elevada al cubo, y un canal
de tipo h . Entonces obtenemos la siguiente ecuación:
(16) GNa=gNa pm3 ph≡ gNa m3 h
De igual forma el canal de potasio es modelado con cuatro compuertas idénticas de tipo n:
(17) GNa=gK pn4 ≡ gK n4
Combinando todas las ecuaciones obtenemos:
(18) I ion=gNa m3 h (V m−ENa)+gK n4 (V m−EK )+gL(V m−EL)
(19) dmdt
=αm (V ) (1−m )−β (V ) m
(20) dhdt
=α h (V ) (1−h )−β (V ) h
(21) dndt
=α n (V ) (1−h )−β (V ) n
Ahora con cada una de las variables expresadas en términos del voltaje es posible realizar la
simulación de la neurona, tomando en cuenta los iones que actúan sobre ella y que son de gran
importancia en su comportamiento cuando se genera un potencial de acción. En el artículo de 1952 de
Hodgkin A. [19] se puede encontrar una descripción más detallada del método así como algunos
resultados experimentales. La siguiente sección abordará un modelo que se adapta a los modelos
vistos en las secciones anteriores y al modelo actual con el fin de lograr un comportamiento más
realista al tener en cuenta factores como la extensión de la neurona y su grosor.
5.9.4. MODELO MULTICOMPARTIMIENTOS
Cuando se desea llevar acabo simulaciones neuronales detalladas, es importante tener en cuenta la
complejidad de los potenciales de acción en una célula. Es por esta razón, y con el fin de acercarse lo
más posible al funcionamiento real de la neurona, que se ha estudiado en detalle el comportamiento de
la membrana. Una aproximación se lleva a cabo adoptando el modelo de multicompartimientos, el
cual consiste en dividir la neurona en un número finito de segmentos interconectados (ver Figura 13)
los cuales conforman las dendritas, un soma y finalmente un axón. Cada uno de los compartimientos
describe un circuito del tipo de Hodgkin-Huxley (ver Figura 12) al cual se le adiciona la interacción
entre un compartimiento y sus compartimientos vecinos.

Figura 13 Modelo Multicompartimientos
La gran ventaja de este modelo es su capacidad para adaptarse al tipo de simulación que se desee ya
que si la simulación posee pocas neuronas es posible crear varios compartimientos BOWER J. [6]. De
esta manera es posible describir el comportamiento de la neurona lo más exacto posible, siempre y
cuando el número de compartimientos sea lo suficientemente grande. Además, en el caso de que la
simulación se encuentre conformada por una gran cantidad de neuronas, entonces es posible lograr que
cada neurona tenga pocos compartimientos de tal forma que se ahorren recursos computacionales.
Para lograr el objetivo planteado, el modelo debe tener en cuenta algunos factores. En primera
instancia, cada uno de los compartimientos se considera un cilindro con isopotencial 3 de radio a i y
longitud Li. Cada uno de estos cilindros tiene un potencial V i que representa la membrana, la cual
también tiene una capacitancia C i y una resistencia asociada Rmi. Como segunda instancia, es
necesario suponer que cada uno de los compartimientos tiene un electrodo que induce corriente el cual
se denominará I ie y una resistencia intracelular RL.
La capacitancia y la corriente de iones deben estar balanceadas con la corriente longitudinal y la
corriente del electrodo. Esto es:
(22) I cap+ Iion=I long+ I e
(23) I capi =C i
d V i
dt
(24) I ioni =
V i
RMi
También es necesario determinar la resistencia longitudinal que se produce a medida que la longitud
del axón aumenta, y genera una atenuación en la señal como se describe en Abbott L. [20]. Esta se
3 El termino isopotencial se refiere a que todos tienen el mismo valor numérico en su potencial eléctrico.
puede determinar teniendo en cuenta que la resistencia presente entre dos compartimientos equivale a
la suma de dos resistencias de longitud las cuales son determinadas según el largo de cada
compartimiento. Se toma entonces la resistencia equivalente a medio cilindro o compartimiento.
Entonces la resistencia está dada por:
(25) Rlong=r L Li
2 π ai2 +
rL Li+1
2 π a i+12
Utilizando la ley de Ohm de la sección 5.8.1 es posible entonces determinar las corrientes de cada uno
de los compartimientos:
(26) I longi =gi , i+1(V i+ 1−V i)
(27) I longi+1 =gi+1 ,i (V i−V i+1 )
Agrupando los términos de las ecuaciones obtenemos:
(28) gi ,i+1=ai ai+1
2
rL Li(ai+12 Li+ai
2 Li+1)
(29) gi+1,2=ai+1a i+1
2
rL Li(ai+12 Li+ai
2 Li+1)
Finalmente I ei se distribuye en el cilindro, para esto se dividide la corriente en el área:
(30) Ai=2π ai Li
Con lo cual se obtiene:
(31) I ei =
I ei
A i=
I ei
2 π a i Li
Finalmente, hemos definido todos los componentes de cada una de las corrientes y las ecuaciones
resultantes de cada cilindro son:
(32) C idV i
dt+
V i
RMi=g i ,i+1 (V i+ 1−V i )+
I ei
A i
(33) C i+1dV i+1
dt+
V i+1
RMi+1=g i+1 ,i (V i−V i+1 )+
I ei+1
A i+1
El modelo de multicompartimientos realmente importante ya que dio paso al surgimiento de nuevos
tipos de modelos neuronales que toman en cuenta aspectos tales como la extensión de la neurona y sus
características físicas como el grosor del axón. En la siguiente sección se presentará un modelo que se
basa en los multicompartimientos pero que además los combina con la teoría del cable clásica la cual
busca explicar cómo se propaga una corriente a través de un cable.
5.9.5. TEORÍA DEL CABLE
Este modelo surge de la necesidad de tener en cuenta la morfología de la neurona y entender cómo
ésta afecta su comportamiento. Lo interesante de este modelo es que además de aplicar un método de
multicompartimientos como el explicado en la sección 5.9.4, también toma en cuenta que no todas las
neuronas tienen un mismo diámetro en sus prolongaciones. Otro aspecto muy importante que toma en
cuenta es la resistencia longitudinal que se presenta al momento de la propagación de una potencial de
acción. El mayor aporte que presenta la teoría del cable es que al ser de orden superior, lo cual quiere
decir que a diferencia del modelo de multicompartimientos visto en la sección anterior, la
aproximación de multicompartimientos con la teoría del cable tiene en cuenta no una sino dos
variables independientes, que le permiten discretizar la distancia. La discretizacion es de gran
importancia porque genera resultados mucho más exactos que otros modelos no pueden generar; sin
embargo, es importante mencionar que cuando otros modelos de multicompartimientos hacen que el
tamaño de cada compartimiento tienda a cero es posible alcanzar resultados muy similares a los que se
producen con la teoría del cable.
Figura 14 Teoría del Cable

Las neuronas presentan estructuras muy complejas en sus prolongaciones, las cuales se asemejan
mucho a árboles pues presentan ramificaciones constantes. Cuando un potencial de acción se genera,
el entender cómo la corriente cambia a medida que estas ramificaciones aparecen es de gran
importancia.
Cambios en la morfología afectan el comportamiento de los potenciales de acción generados, lo cual
se comprobó en estudios como por ejemplo el de Hutchin I. [21] que demostró que diferentes flujos de
iones influyen en como la neurona se desarrolla.
La teoría del cable fue desarrollada por Rall W. [22] con el propósito de entender el comportamiento
de potenciales de acción al propagarse en estructuras tan complejas como las dendritas y que además
se producen en distintos lugares de la neurona, así como en distintos momentos en el tiempo. En la
siguiente sección se desarrollará la idea de la teoría del cable la cual se comporta como una función en
una sola dimensión aún cuando un cable es una estructura tridimensional.
5.9.5.1. ECUACIÓN DEL CABLE EN UNA DIMENSIÓN
Las dendritas son bifurcaciones del axón de la neurona las cuales tienen un tamaño más pequeños que
se encuentran envueltos por la membrana plasmática. La membrana tiene propiedades aislantes muy
buenas a diferencia de la resistencia presente que existe tanto al interior de la membrana como en su
parte externa.
Debido a diferencias de potencial y el hecho de que la corriente viaja por el centro de la membrana, en
la teoría del cable la corriente eléctrica viaja de forma paralela al eje del cilindro así que sólo se
considera una dimensión como si sólo existiera movimiento sobre un eje. De esto se concluye que la
función que describe el movimiento de la corriente a través de la neurona sólo depende de una
posición en x y un tiempo t específica. En la teoría clásica de Rall W. [23] se toman en cuenta algunas
características necesarias para que el modelo funcione correctamente como:
La membrana se encuentra en un estado pasivo.
El núcleo del conductor tiene una sección transversal constante y el fluido intracelular se
representa mediante una resistencia.
La resistencia extracelular es muy pequeña.
Las entradas deben ser corrientes eléctricas.
Una vez se define esto, es posible definir la ecuación del cable para un segmento de membrana en
estado pasivo. Para esto primero es importante definir qué variables afectan el modelo. Se identifican
las siguientes variables: una corriente longitudinal ( I i) la cual se encuentra con una resistencia por
parte del citoplasma (ri). Entonces utilizando la ley de Ohm de la sección 5.8.1 se determina la
siguiente ecuación:

(34) 1r i
dVdt
=−I i
La corriente que viaja a través de la membrana también se encuentra con una resistencia de cada uno
de los canales presentes en la membrana (Rm) además de una capacitancia presente en la membrana (
Cm). Como se supone un estado de reposo, el cambio de la corriente (dI i
dx) debe ser igual a I m.
Entonces surge la siguiente ecuación:
(35) dI i
dx=−I m=−( V
Rm+Cm
∂ V∂ t
)
De las ecuaciones anteriores se obtiene:
(36) 1r i
∂2V∂ x2 =Cm
∂ V∂t
+ VRm
Ahora que se tiene la ecuación para un segmento de membrana se puede complementar el modelo de
multicompartimientos en el cual se tendría n segmentos de cable. También es posible variar la
estructura del segmento de membrana al tener en cuenta su diámetro y longitud, por lo cual la
capacitancia (Cm) de la membrana de diámetro d y longitud l es πdlCm. Además, es necesario definir
la resistencia en términos del diámetro y longitud, la cual estaría dada por:
(37) Rm=RM
πdl
Finalmente, se debe tener en cuenta la resistencia axial para lo cual al igual que la capacitancia y la
resistencia de la membrana, se define en términos del diámetro y longitud de la siguiente manera:
(38) 4 l RA
π d2
Para concluir es importante resaltar cómo con la teoría del cable y los modelos de
multicompartimientos se ha logrado detallar de manera muy específica la propagación de un potencial
de acción teniendo en cuenta todas las partes de la neurona, e incluso es posible tener en cuenta la
interacción con su medio externo mediante la implementación de los canales de iones en el modelo.
Por otro lado, no se debe olvidar que este modelo al trabajar con un orden mayor tiene un gran
consumo de recurso y por tanto no es aconsejable actualmente para la implementación de grandes
redes neuronales, en la siguiente sección examinaremos algunas características puntuales de la teoría
aquí expuesta acerca de la teoría del cable.

5.9.5.2. LA CONSTANTE DE TIEMPO Y DE LONGITUD
Existen dos constantes que son muy útiles y juegan un rol clave en el comportamiento de las neuronas
[24]. Estas son la constante de tiempo (τ m (s)) y la constante de longitud (λ). Por un lado, la
constante de tiempo ofrece información acerca de qué tan rápido cambia el potencial en respuesta a
una corriente y está definida como:
(39) τ m=Rm Cm
Esta relación de capacitancia con resistencia juega un papel clave en la velocidad de respuesta y
tiempo de memoria "esto se refiere a cuánto tiempo mantiene una entrada de corriente" [25, 13] a
valores pequeños de Rm la membrana mostrará una respuesta rápida, sin embargo la memoria no se
mantiene durante mucho tiempo. Cuando el valor de Rm es grande la membrana es capaz de mantener
una memoria en periodos más largos de tiempo. La constante de longitud la cual está definida como:
(40) λ=√(d /4)Rm
Ra
Esta constante, depende de las propiedades de la membrana y la resistencia longitudinal o resistencia
axial. Esta contante permite determinar qué tan lejos se extenderá una corriente a lo largo de una
neurona. Cuando el valor de λ es muy grande el voltaje se atenúa menos por lo que puede recorrer una
mayor distancia, y cuando se tiene un λ pequeño es más difícil para la corriente viajar a través de la
neurona por lo que a mayor λ menos distancia recorrerá la corriente. Para una explicación más amplia
y algunos ejemplos acerca de la constante de tiempo y de longitud el lector puede dirigirse a [24].
Ahora que se tiene las ecuaciones que describen la resistencia, la capacitancia y la resistencia actual, al
combinarlas se obtiene la ecuación del cable para un caso general:
(41) λ2 d2Vdx2 −τm
dVdt
−V =0
Ó
(42) d2V
dx2 −dVdt
−V =0
Con X= xλ y T= t
τm
Para entender con mayor detalle la ecuación del cable general es posible dirigirse a [23] donde se
especifica paso a paso cómo se deduce la ecuación y algunos ejemplos de su uso.
Debido a que la mayoría de estos métodos necesitan de una gran exactitud pero en ellos se tienen
derivadas de las cuales no se conoce su valor, es necesario utilizar métodos de aproximación y
truncamiento. Por este motivo, la siguiente sección se enfocará en explicar los métodos estudiados
para la realización de este proyecto y cómo cada uno de estos aportó a su desarrollo.
5.10. MÉTODOS DE APROXIMACIÓN NUMÉRICA PARA MODELOS
NEURONALES
Los métodos numéricos son una rama de la matemática encargada de dar solución a problemas
complejos a través de cálculos más simples para obtener como resultado un valor aproximado a la
solución exacta. En el caso de los modelos expuestos en la sección 5.9 se presentan dos tipos de
ecuaciones que se pueden solucionar mediante aproximaciones numéricas: ODEs (Ecuaciones
Diferenciales Ordinarias) y PDEs (Ecuaciones Diferenciales Parciales). Las ODEs son ecuaciones
diferenciales en las que la tasa de cambio es desconocida y depende sólo de una variable,
generalmente es el tiempo; sin embargo, pueden ser otras. Las PDEs a diferencia de las ODEs
dependen de dos variables, en este caso el tiempo y la distancia definida para cada uno de los
compartimientos.
Las aproximaciones utilizadas en los métodos neuronales consisten en el método de diferencias finitas.
Este método toma inicialmente el sistema en un estado inicial conocido (ej., t=0, x=0), y por medio de
una aproximación calcula los valores en el siguiente estado (ej., t=0+dt, x=0+dx). Para calcular la
aproximación al nuevo estado se define una función la cual relaciona las variables que intervienen. En
el caso de las neuronas, estas variables son las propiedades de la membrana como su diámetro,
resistencia, capacitancia, etc. Un ejemplo muy claro se puede encontrar en Mascagni [25].
La técnica usada para definir la aproximación se denomina método de las diferencias finitas. Este
método permite las aproximaciones de los valores de una derivada cuando estos son desconocidos
utilizando el teorema de Taylor para hallar los valores de la derivada en su siguiente estado.
Antes de empezar a tratar cómo solucionar los modelos mediante aproximaciones, se hablará de
algunos aspectos importantes para tener en cuenta en el momento de seleccionar un método de
aproximación y en principio para entender las posibles fuentes de error en cálculos de este tipo. La
naturaleza finita de los computadores conlleva a que estos no sean capaces de realizar cálculos
totalmente exactos. Por esta razón, siempre se producirá alguna pérdida de precisión en cálculos
matemáticos llevados a cabo con un computador.
Para entender la precisión de estos métodos es importante entender tres conceptos, estos son
estabilidad, consistencia y convergencia. La convergencia consiste en que el error que se produce, y
que simboliza la diferencia entre la solución continua y las aproximaciones, sea posible hacerlo tan
pequeño como sea deseado. En el caso de las diferencias finitas es posible demostrar la convergencia

al calcular la diferencia en la solución contra la solución continua calculando el límite cuando las
variables de la aproximación tienden a cero. En el caso de los modelos neuronales estas variables
serian el tiempo y la distancia.
El segundo concepto, la consistencia asegura que el resultado producido por las aproximaciones es
capaz de resolver el mismo problema que el sistema continuo. En el caso de las diferencias finitas la
consistencia puede asegurarse si la diferencia entre el valor resultante de la aproximación y de la
solución continua no supera un error máximo definido. A este valor se le conoce como truncamiento y
es definido al inicio de la simulación y generalmente tiende a cero. Es importante mencionar que un
método numérico puede ser consistente y aún así no convergente. Esto se debe a que para ser
consistente sólo se necesita que el valor final cumpla con las condiciones del valor de truncamiento.
Sin embargo, la convergencia es mucho más restrictiva al tener que garantizar que la exactitud de las
soluciones debe darse en cualquier punto.
Finalmente, el concepto de estabilidad se produce si las soluciones del método de diferencias finitas
permanecen acotadas por el conjunto de valores correctos para el sistema. En otras palabras, que los
valores que se generen en las aproximaciones no sean inconsistentes en cuanto a la simulación.
En este documento sólo se centrar en el método utilizado para la solución del modelo utilizado. Sin
embargo, en Mascagni [25] puede encontrarse información detallada de otros métodos, tanto para la
solución de ODEs como de PDEs. En la siguiente sección se analizará un método de aproximación el
cual busca obtener el valor de derivadas cuyo valor es desconocido, esto con el fin de solucionar las
ecuaciones de la sección 5.9.
3.9.
5.10.1. MÉTODO DE LÍNEAS
El método de líneas descrito en Antonio [26] utiliza la el teorema de Taylor para describir la fórmula
de una aproximación de un polinomio. Al llevar esto a un segundo orden es posible utilizar un punto
dado i+1 ,i−1para hallar el valor en un punto medioi, que representa la aproximación de primer
orden de la derivada, en este caso la derivada del voltaje con respecto al tiempo (dv /dy ); de esta
forma es posible generar N nuevos puntos ficticios que inicialmente no se tenían y los cuales se
pueden utilizar para hallar los valores que interesan a este trabajo.
Figura 15 Método de Líneas
Este método es muy útil cuando se tienen problemas que varían en el tiempo, ya que es posible a partir
de valores de frontera determinados inicialmente, obtener nuevos puntos que permitan calcular los
valores entre los valores de frontera que se especificaron inicialmente. En el caso de las simulaciones
neuronales, como por ejemplo en la ecuación del cable de la sección 5.9.5 la cual puede pasar a ser de
una PDE a un conjunto de ODEs mediante la aproximación de sus derivadas, lo cual es un problema
menos complejo de solucionar.
En la siguiente sección se explicarán los métodos de Euler los cuales nos permitirán obtener los
valores aproximados de la función en un tiempo futuro, todo esto utilizando los valores que se tienen
en el momento actual.
5.10.2. MÉTODO DE EULER
El método de Euler es un método para aproximación numérica, nombrado en honor a su creador
Leonhard Euler, utilizado para dar solución a ecuaciones diferenciales. Este método puede utilizarse
de dos formas distintas en el momento de realizar aproximaciones. Por un lado, es posible hacerlo de
manera explícita al utilizar las aproximaciones de Euler hacia adelante. En el método de Euler hacia
adelante, se realiza una aproximación al inicio del segmento de tiempo dt . Por otro lado, la segunda
forma es el método de Euler hacia atrás, la cual se lleva a cabo de manera implícita y calcula el valor
al final de cada intervalo de tiempo dt . Este método se denomina un método implícito dado que a
diferencia del método de Euler hacia adelante, en el cual es posible calcular la solución mediante
valores conocidos como se muestra en la ecuación (43), el método de Euler hacia atrás no define los
valores de la derivada de forma explícita (44). A diferencia de esto, el método de Euler hacia atrás está
en términos de una ecuación implícita, por lo que deberá resolver una ecuación implícita en cada
momento n en el tiempo.
(43) yn+1= yn+h∗f ( yn , tn )
(44) yn+1= yn+h∗f ( yn+1 ,t n+1)
Es fácil notar que los métodos implícitos son mucho más costosos en cuanto a recursos que los
métodos explícitos, entonces ¿por qué usarlos?: la respuesta es estabilidad. En [25] se puede notar
cómo los métodos explícitos son menos costosos; sin embargo, dependen de los valores iniciales para
mantener su estabilidad. En caso de que los valores no sean los correctos, el error crecerá en gran
medida dando valores muy alejados de la solución exacta a la que se busca aproximarse. En (ver
Figura 17) se puede encontrar un ejemplo que muestra claramente cómo el método de Euler hacia
atrás mantiene su estabilidad para distintos valores a diferencia de su contraparte (ver Figura 16).
Generalmente en la utilización de este método es posible saber cuál de los dos métodos es más
conveniente utilizar. Para esto se utiliza la variable σ definida en el caso de las simulaciones
neuronales en Mascagni [25] como:
(45) σ= a ∆ t2 RC (∆ x)2
Ésta nos dice si el método es estable o no dependiendo si σ < ½, en cuyo caso es estable. En el caso
que σ>½ puede que la solución no converja y presente valores inconsistentes. De esta forma será
posible saber qué método utilizar en un problema específico.
Figura 16 Método de Euler hacia adelante

Figura 17 Método de Euler hacia atrás
En casos en los que es necesario resolver más de una ecuación es muy útil recurrir a las matrices. En
este proyecto debido a que los modelos de multicompartimientos contienen un conjunto de n
ecuaciones y es necesario resolverlas por métodos numéricos para conocer su valor, se recurrirán a las
matrices. En la siguiente sección se tratara el tema de las matrices, ya que permiten resolver sistemas
de múltiples ecuaciones utilizando los métodos numéricos tratados en esta sección.
5.11. MATRICES Y SISTEMAS DE ECUACIONES
Los problemas matemáticos generalmente suelen expresarse en forma de ecuaciones. Sin embargo, no
siempre una sola ecuación es suficiente para describir un problema matemático. En estos casos es
necesario relacionar varias ecuaciones y para esto son útiles las matrices. Utilizando matrices se puede
representar un conjunto de ecuaciones relacionándolas. Estos conjuntos de ecuaciones se pueden
resolver mediante técnicas como la eliminación de Gauss Jordán, con lo cual se pueden obtener los
valores para cada una de las incógnitas (aún cuando éstas están relacionadas con otras ecuaciones).
Para entender los conceptos de matrices y los sistemas de ecuaciones se aconseja al lector dirigirse a
Grossman [27].
Figura 18 Sistema de ecuaciones en matrices
5.12. SÍNTESIS
Esta sección se concentra en ofrecerle al lector una explicación del cómo los temas tratados en la
sección 5 aportaron a la realización del proyecto actual. Además, se ofrece una breve conclusión de
qué aspectos se tomaron en cuenta para la realización del proyecto tomando en cuenta sus
características y los recursos disponibles.
3.10.
3.11.
5.12.1. LA NEURONA Y SU FUNCIONAMIENTO
Actualmente el conocimiento biológico de una neurona es muy completo, como se explica en la
sección 5.3 . Sin embargo, a pesar de que se entiende mucho del funcionamiento de una neurona aún
no ha sido posible entender cómo grandes conjuntos de estas células son capaces de realizar tareas tan
especializadas como son cada uno de los sentidos y más aún, la capacidad de los seres humanos para
razonar.
En muchos de los estudios comprender qué conjunto de neuronas se encarga de una función específica
es realmente complejo pues cada una de las funciones, como la visión o el almacenamiento de los
recuerdos, en realidad requiere de distintos conjuntos de neuronas. Cada neurona dentro del conjunto
es especializada para realizar tareas específicas de las cuales de sólo algunas se posee información.
Además de estos inconvenientes, el realizar mediciones concretas sobre un sistema de neuronas es
realmente complicado ya que métodos como MRI (resonancia magnética) generalmente sólo nos
permiten ver un área que se activa pero impide tomar mediciones.
Otro método usado son los electroencefalogramas, los cuales miden la actividad eléctrica del cerebro
mediante electrodos que se colocan directamente en el cuero cabelludo. El gran problema de este tipo
de mediciones es que capta señales pero no en un punto específico, sino en un área en general, es por
este motivo que no es realmente exacto en identificar de qué lugar provienen dichas señales. Además,
existen técnicas para captar con electrodos el funcionamiento exacto de las neuronas pero deben ser
plantados directamente en el cerebro y sólo funcionan de forma superficial.
Finalmente, están las simulaciones neuronales por computador. Desafortunadamente aún es un área
que se está desarrollando debido a que aunque actualmente es posible simular neuronas y algunas
redes de neuronas pequeñas, aún es imposible simular redes de neuronas de tamaño real. Por este
motivo, la investigación actual se enfocó en entender cómo las neuronas se comunican y cómo esto
influye en su aprendizaje, todo esto en pequeñas redes.
5.12.2. ANÁLISIS DE MODELOS NEURONALES
Los modelos neuronales tratados en la sección 5.9 son algunos de los más conocidos. Sin embargo, es
importante mencionar que existen otros modelos que tienen variaciones con respecto a los descritos.
Estas variaciones se llevan a cabo con el fin de adicionar algunas características o en el caso opuesto,
omiten algunos comportamientos con el fin de disminuir el uso de recursos. Estos modelos se basan en
un esquema de circuitos, del cual es posible obtener ecuaciones matemáticas que describan su
comportamiento. Una vez se tienen las ecuaciones es posible elaborar un modelo informático que
busca simular el comportamiento de una neurona que pasa de un estado de reposo a un estado
excitado. Esto es de gran importancia para el estudio del comportamiento neuronal, ya que es la base
de su funcionamiento.
En el momento de seleccionar qué modelo se utilizará para la realización de la simulación es muy
importante tener claros los objetivos a los cuales apunta el experimento. Por ejemplo, si se busca una
simulación en la cual no es importante la exactitud o no son importantes algunas de las variables
entonces se puede utilizar el Modelo Leaky Integrate and Fire (ver sección 5.9.1) porque no utiliza
muchos recursos y por tanto conllevará a un mejor desempeño de la simulación. Simulaciones de este
tipo, a pesar de que no contemplan muchas de las características de las neuronas, pueden usarse por
ejemplo para explicar el funcionamiento de redes de gran tamaño ya que para esto no es importante un
gran nivel de detalle sino el concepto de su funcionamiento en sí.
Por otro lado, si la simulación requiere una gran fidelidad a la estructura biológica de la neurona,
entonces es más deseable utilizar modelos como los de la sección 5.9.4 (Modelo de
multicompartimientos) o el de la sección 5.9.5 (Teoría del Cable).
En la siguiente sección se describirá el cómo todos los conceptos vistos aquí son de importancia y
cómo ellos están conectados. A partir de esto, se busca explicar cómo se tomaron las decisiones para
la selección e implementación del modelo.
5.12.3. OBJETIVO GENERAL DEL MARCO TEÓRICO
En esta sección se busca que el lector pueda obtener una visión global del funcionamiento de las
neuronas en un ámbito biológico y cómo es posible generar modelos que simulen el comportamiento
eléctrico de las neuronas (el cual debido a su naturaleza se representó mediante circuitos eléctricos).
Cada uno de estos modelos representa el comportamiento eléctrico de la neurona en distintos niveles
de detalle: desde una neurona que a partir de una entrada eléctrica genera un impulso y una salida,
hasta el modelo más complejo que representaba las interacciones de la membrana celular con su medio
y con secciones adyacentes de la membrana. Finalmente, se muestra cómo a partir de esto modelos es
posible expresar matemáticamente el comportamiento eléctrico el cual es de utilidad para el trabajo
actual ya que a partir de éste es posible crear un modelo informático. En algunos de los casos el

modelo, tanto de circuitos como matemático, es bastante complejo. Por esta razón, se abordaron
brevemente algunos temas como los componentes de los circuitos y algunos métodos numéricos con el
fin de ofrecerle una guía al lector de cómo se trabajó con estos modelos. Sin embargo, dada la
complejidad de algunos temas y la limitante de extensión del documento, se le aconseja al lector que
en caso de tener dudas acerca de alguno de los temas se apoye en las referencias las cuales brindan una
explicación más detallada de cada uno de los temas. En la siguiente sección se dará una breve revisión
a distintos trabajos con características similares al trabajo que se desarrolló con este proyecto.

6. TRABAJOS RELACIONADOS
La sección busca describir los resultados de una investigación cuyos objetivos eran realizar una
selección del simulador con el cual se trabajaría para el desarrollo de un proyecto enfocado a las
neurociencias. Un segundo objetivo fue llevar a cabo una investigación de las herramientas que ya
implementaron la electrofisiología neuronal, cuál era su enfoque y en qué tipo de modelo se basaron.
Las siguientes secciones contendrán un breve resumen del simulador y aspectos de cada uno referentes
al desarrollo de la electrofisiología en cada uno de ellos, con el fin de que pudieran generar
simulaciones de potenciales de acción. Es importante mencionar que se utilizaron estos simuladores ya
que proveen un entorno de desarrollo similar al cual se busca trabajar en este proyecto. Por otro lado,
las se encuentran muy pocas herramientas que se enfoquen solamente en electrofisiología; además es
válido mencionar que generalmente estas herramientas utilizan modelos con niveles de detalle bajo,
por lo cual se tomó la decisión de investigar más a fondo otros simuladores que brindaran la opción de
entender el cómo es posible manejar niveles de detalle variables a la hora de simular el
comportamiento eléctrico de las neuronas.
6.1. SIMULADORES NEURONALES
En esta sección se explicarán en detalle varios simuladores neuronales cada uno con características
distintas de tal manera que sea posible determinar sus fortalezas y debilidades y hacía qué tipo de
estudio están enfocados. Lo anterior con el fin de determinar las características más relevantes en cada
uno de ellos.
6.1.1. GENESIS
Génesis es un simulador desarrollado en el laboratorio Caltech desde 1985 como una extensión a un
modelo del córtex olfativo y continúa activo hasta hoy en día. Este fue modelado teniendo en cuenta
tres objetivos principales:
1. El simulador debe ser capaz de brindarle al usuario el nivel de detalle que el usuario requiera
para la simulación.
2. El sistema debe poder simular cualquier problema excepto algunos casos especiales.
3. El usuario debe poder desarrollar sus propios módulos o expandir los módulos ya existentes.
Para lograr estos objetivos el proyecto adquirió algunas características como:
Se desarrolló en un enfoque totalmente orientado a objetos, de esta manera las simulaciones se
construyen por módulos los cuales cada uno debe cumplir con ciertos estándares y debe ser
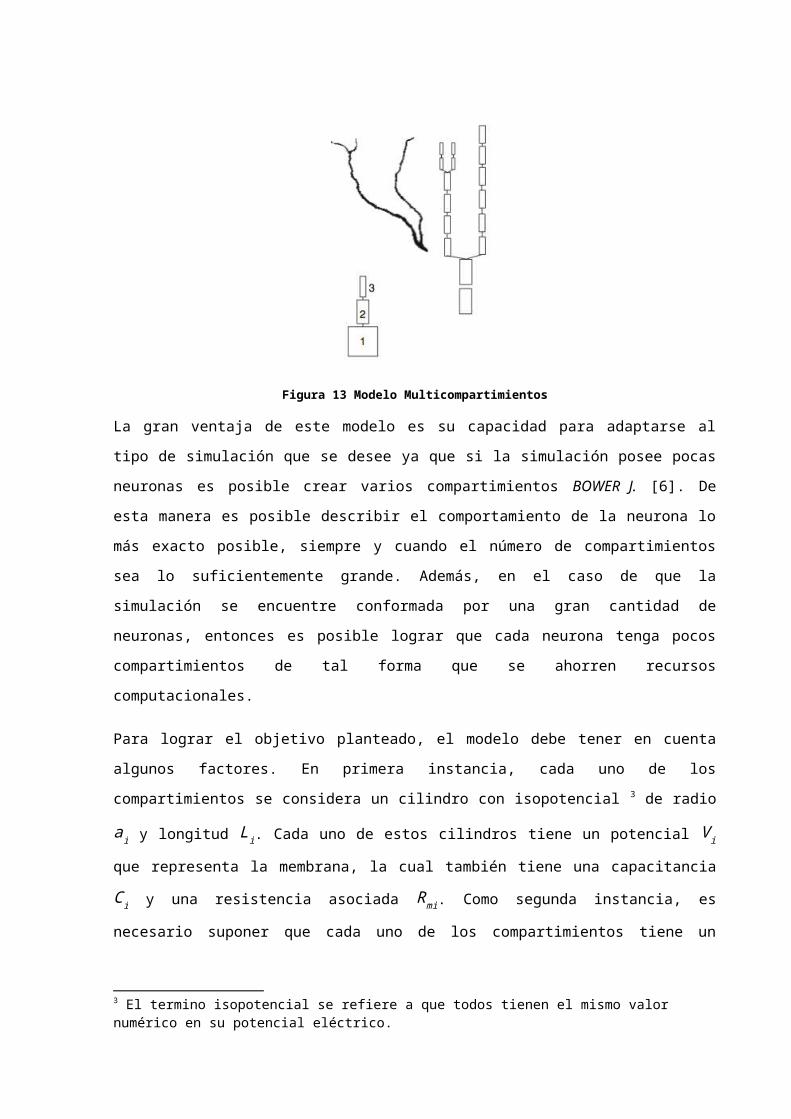
capaz de comunicarse con otros módulos. Así es posible que el usuario final dependiendo del
nivel de detalle que desee, podrá integrar más o menos módulos según sea necesario.
El simulador trabaja bajo un lenguaje de alto nivel basado en scripts, y de esta forma, el
usuario no tiene que tener amplios conocimientos de programación. Esta característica es de
gran importancia en el momento en el que el usuario necesite llevar acabo modificaciones en
GENESIS ya que le brinda gran facilidad y disminuye la curva de aprendizaje para nuevos
usuarios.
Para que el usuario se pudiera migrar fácilmente de sistema operativo el simulador se diseñó
para que pudiera correr en Unix y X- Windows (ver Figura 19). También se llevaron a cabo
pruebas en varios sistemas con distintas configuraciones para comprobar que podía migrar
entre varias máquinas.
Desde el inicio se pensó como un sistema distribuido que permitiera que la capacidad de
procesamiento fuese variable según el número de máquinas disponibles.
Figura 19 Interfaz Génesis
GENESIS es un proyecto que lleva bastante tiempo en desarrollo por lo cual tiene muchas
características que lo hacen uno de los simuladores más completos y flexibles a las necesidades del
usuario. En el caso de este proyecto en el cual nos interesa conocer sus características a la hora de
generar y evaluar impulsos nerviosos GENESIS provee una herramienta muy poderosa, además de que
pone a disposición del usuario varios manuales y guías de su uso y desarrollo.
Se puede establecer que GENESIS está totalmente enfocado en el análisis de potenciales de acción, ya
que implementa varios modelos, como el modelo de multicompartimientos, y un modelo de
multicompartimientos (ver sección 5.9.4) utilizando la teoría del cable (ver sección 5.9.5). Por este
motivo la utilización del BOWER J. [6], el libro que describe su funcionamiento y desarrollo fue de
gran utilidad al momento de desarrollar este proyecto. No obstante no toma en cuenta otras
características como el ambiente de la neurona o su desarrollo por lo que para el caso de este proyecto
sólo los métodos de simulación que utilizo serán de utilidad, y tendrán que adaptarse para poder
ofrecer la información de utilidad para CORTEX 3D .
6.1.2. EDLUT
EDLUT consiste en una aplicación que es capaz de llevar acabo simulaciones de redes neuronales de
un nivel de detalle medio sin necesidad de una gran cantidad de recursos. Esto es porque posee una
característica que lo hace especial, y es su forma de realizar las simulaciones en dos fases para
aumentar su rendimiento.
EDLUT se desarrolló en el departamento de arquitectura y tecnología de la universidad de Granada en
España. Su objetivo principal es la simulación de redes neuronales biológicas reales con la
característica de utilizar un enfoque que disminuyera los requerimientos de máquina en el momento de
la simulación.
Para lograr una disminución en el consumo de recursos se dividió el proceso de simulación en dos
fases y se enfocaron en ser capaces de simular una neurona muy detallada pero utilizando una baja
cantidad de recursos. La primera fase consistía en realizar una pre-compilación de las respuestas de
una neurona con unas características específicas pero cambiando el estímulo de entrada; con esto se
creaba una tabla que describía el comportamiento de cada tipo de neurona según una entrada
específica y cómo ésta respondía ante ese estímulo; una vez realizada la tabla con la información de
cada una de las neuronas se daba inicio a la segunda fase. Para la simulación se utilizaba un modelo
de multicompartimientos, por lo cual era posible crear neuronas en distintos niveles de detalle en la
simulación, o también se tenía la posibilidad de importarlas desde otros simuladores. Con este enfoque
el simulador evitaba tener que realizar cálculos iterativos utilizando métodos numéricos en la segunda
fase, y se remplazaba esto por una búsqueda en una tabla con los distintos resultados generados en la
primera fase.
La segunda fase consistía en utilizar como entrada la tabla generada en la fase anterior para llevar a
cabo la simulación sin necesidad de realizar demasiados cálculos.
Otra característica nueva que adoptó EDLUT es una simulación basada por eventos a diferencia de
otros simuladores que utilizan una simulación que toma en cuenta el tiempo para actualizar su estado.
Esta característica se utilizó para que al momento de que se consultara la tabla de estados de las
neuronas se generara un evento que actualizara el estado de la simulación y de esta manera utilizar
como unidad fundamental de actualización los eventos y no tener que actualizar continuamente la
simulación sino sólo cuando fuera necesario (ver Figura 20).

Figura 20 Modelo de EDLUT
EDLUT utiliza un interesante enfoque para la disminución de recursos, así como un modelo para la
descripción de la neurona que varía según el número de compartimientos. Estas características lo
hacen muy bueno para simulaciones las cuales tengan tipos de neuronas constantes que no varíen en el
tiempo. Por otro lado, su enfoque basado en eventos es de gran ayuda cuando el tiempo de simulación
no es un factor de interés, Sin embargo, debido al enfoque de CORTEX 3D, las dos características de
EDLUT no pueden aplicarse, ya que las neuronas varían en el tiempo, y por esta misma razón que el
tiempo sea una de las variables influyentes en la simulación es de gran importancia.
6.1.3. NEURON
NEURON es un simulador que provee un ambiente flexible y poderoso de desarrollo el cual es capaz
de recrear modelos biológicos teniendo en cuenta las características fisiológicas de una neurona o una
red de neuronas (ver Figura 21). Para esto NEURON se basó en varias fuentes incorporando distintos
elementos para permitir al usuario realizar simulaciones con distintos modelos y de distintas formas.
Para las simulaciones detalladas se base principalmente en GENESIS (ver sección 6.1.1), el cual se
basó en el modelo de multicompartimientos, utilizando el modelos como el de Hodgkin & Huxley (ver
sección 5.9.3) o la Teoría del Cable (ver Sección 5.9.5). Por otro lado, también permite ser flexible en
cuanto a si la simulación se desea basándose en eventos como lo hace EDLUT (ver sección 6.1.2 ) o
por tiempo de simulación en lo cual. También permite utilizar modelos simples de representación de
neuronas y algunos modelos estocásticos para la simulación de redes neuronales.

Figura 21 Potenciales de Acción en NEURON
NEURON se destaca por características como:
• El usuario no necesita saber otros lenguajes o algún concepto diferente al del dominio de las
neurociencias, ya que el simulador le brinda un lenguaje intuitivo, el cual le permitirá a
realizar simulaciones con una curva de aprendizaje bastante baja.
• NEURON trae incluidas librerías que le permitirán al usuario controlar la simulación de forma
fácil, mostrar los resultados e interactuar con estos.
NEURON es tal vez el simulador más versátil que actualmente puede ser usado para la simulación de
interacción entre neuronas ya que ha adoptado distintos enfoques y permite al usuario programar sus
propias simulaciones. Para este proyecto NEURON permitió ver la importancia de dar flexibilidad a la
simulación, esto ya que en muchos casos no es necesario una simulación altamente detallada, o no se
tiene los recursos para realizarla. En esto casos es importante darle al usuario la posibilidad de que
tome la decisión de qué algoritmo se debe utilizar o en caso de que el usuario no lo sepa el simulador
debería buscar la manera de manejar una simulación de la mejor forma posible.
6.1.4. BLUE BRAIN PROJECT
Blue Brain Project es un esfuerzo apoyado por IBM para realizar simulaciones con redes neuronales
biológicas a gran escala. Para su realización se utiliza actualmente el súper computador Blue Gene
creado en el 2005, el cual cuenta con la capacidad de 36,01 teraflops (ver Figura 22). Este proyecto
utiliza versiones modificadas de NEURON y GENESIS para que funcionen en el supercomputador de
tal manera que es capaz de recrear simulaciones tanto grandes como pequeñas. También incorporó la
capacidad de simular el crecimiento de redes neuronales y sus interacciones.
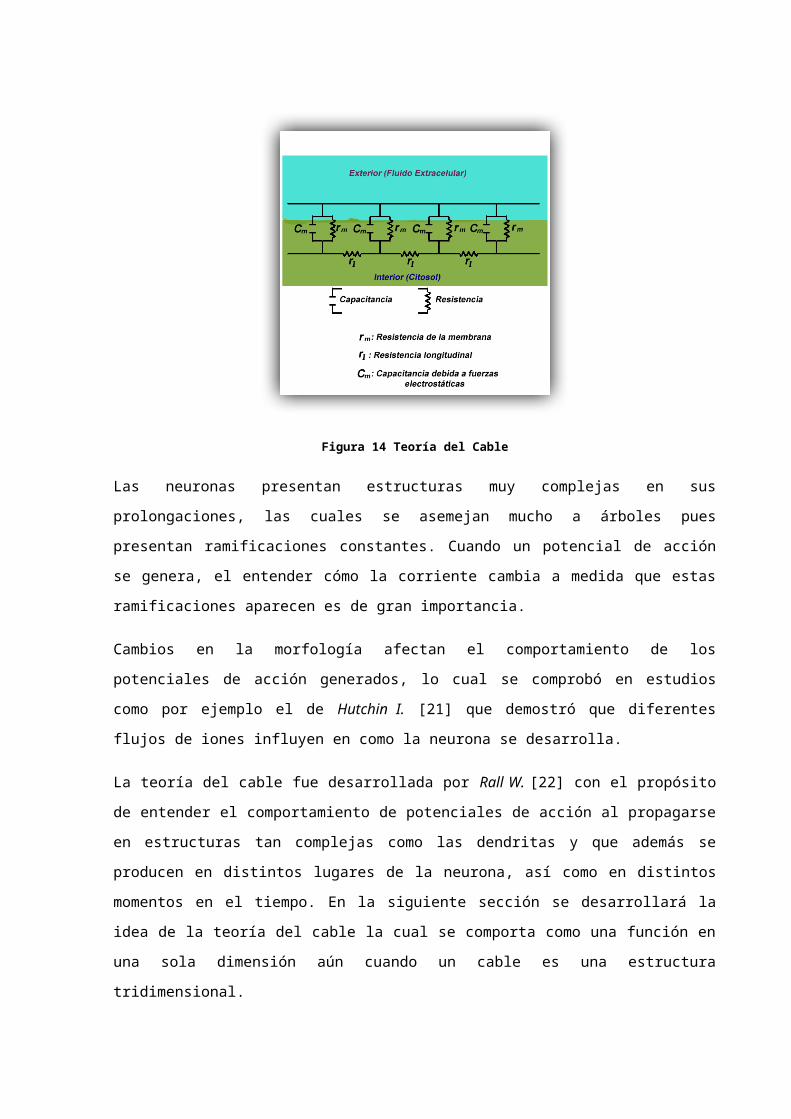
Figura 22 Estructura Blue Brain Project
Actualmente Blue Gene es capaz de recrear una red de aproximadamente el cerebro de un ratón, esto
es, aproximadamente una de red de 100.000 neuronas formadas. Este proyecto ha realizado grandes
avances en este campo de investigación. Blue Brain Project que a pesar de que no es un simulador
sino una modificación de otros simuladores presenta un nuevo enfoque muy similar al que propone
CORTEX 3D y es la posibilidad de simular neuronas en crecimiento, y al ser actualmente el mayor
esfuerzo por entender el comportamiento neuronal demuestra la gran importancia de entender las
neuronas como sistemas cambiantes. Por otro lado, en Blue Brain Project no se habla de tener en
cuenta el medio en el que se encuentran las neuronas, por lo que es un punto importante que CORTEX
3D toma en cuenta.
6.1.5. CORTEX 3D
CORTEX 3D es un simulador del crecimiento y formación de redes neuronales. Fue creado por el
instituto de neuroinformática de la universidad de Zürich y Eidgenossische Technische Hochschule
Zürich. Este simulador se realizó con la colaboración de SECO [28], el cual busca a partir de
herramientas informáticas poder realizar análisis del comportamiento de redes neuronales y utilizar los
resultados para generar avances en las diferentes áreas que componen a las neurociencias.
CORTEX 3D está enfocado en realizar un modelo de crecimiento que pueda generar redes neuronales
del córtex del cerebro, pero manteniendo un grado de detalle alto y enfocado en describir la
morfología de las neuronas, de tal manera que pueda tener en cuenta los aspectos más relevantes de la
fisiología de las neuronas y sus interacciones. Cada neurona se modeló teniendo en cuenta el soma el
cual contiene el citoplasma, los componentes que este contiene y se encuentra representado mediante
una superficie esférica en la simulación. Las neuritas son representadas mediante superficies
cilíndricas las cuales se unen para formarlas. Estos dos componentes (soma, neuritas) interactúan entre
sí para formar una neurona, sin embargo, también interactúan con otras células ya sea en la formación
de sinapsis o mediante fuerzas mecánicas que una neurona puede ejercer sobre otra. Para el modelado

de estas fuerzas mecánicas existe una correlación mediante una malla la cual constantemente evalúa
las fuerzas existentes a su alrededor y modifica la posición (ver Figura 23).
Figura 23 Neurona CORTEX 3D
Otros de sus aspectos más notables de CORTEX 3D son la replicación celular y la difusión de
partículas. La primera permite analizar la evolución de una red neuronal en crecimiento lo cual en
otros trabajos como GENESIS [6] y NEURON [29] es imposible debido a que no se tomaba en cuenta
esta característica, por lo tanto, sólo es posible simular una red neuronal ya formada. En cuanto a la
difusión celular permite que el medio también sea un factor influyente en cómo las neuronas
evolucionan (ver Figura 24).
Sin embargo, a pesar de todas estas características notables este simulador aún está en desarrollo por
lo cual algunas características como la electrofisiología actualmente no está implementada, lo cual
limita el simulador a sólo el análisis del crecimiento de una red neuronal sin interacciones, o cómo se
comportan los potenciales de acción en neuronas de distintas formas. Otra de las críticas que ha
recibido este simulador es que debido a que está desarrollado en una plataforma como java que
funciona sobre una máquina virtual, se limita las capacidades del simulador y no explota al máximo la
maquina en la que se ejecuta.

Figura 24 Crecimiento de una Neurona en un Medio
Actualmente, CORTEX 3D es un simulador que aún carece de algunas características importantes. Sin
embargo, es importante tener en cuenta que ha abordado nuevos aspectos en la simulación de redes
neuronales los cuales antes no se tenían en cuenta. También es importante el hecho de que sea un
simulador de código abierto lo que permite que cualquier persona con el conocimiento suficiente del
tema y de programación sea capaz de aportar y así cada vez hacer que el simulador sea más completo
o que mejore sus capacidad tanto en rendimiento como en cada una de las características que ya tiene
implementadas.
La siguiente sección realizará una comparación entre los distintos simuladores que se explicaron en
esta sección para determinar las características más relevantes de cada uno, especificar por qué se
utilizó CORTEX 3D y qué aspectos de los simuladores presentados influyeron en la realización del
proyecto.
6.2. DISCUSIÓN
En esta sección se realizará una comparación entre las características de los simuladores de la sección
6. Para esto la sección se dividirá en dos partes. La primera presenta un análisis acerca de las
características en cuanto a qué modelos maneja cada simulador. En la segunda parte se toman en
cuenta detalles referentes al desarrolló de cada uno de los simuladores encontrados. Estas
características fueron la base para la selección del simulador con el cual se desarrolló el proyecto.
Mientras que las primeras presentaron un apoyo para entender las características relevantes que debía
tener la electrofisiología al momento de implementarse.
CaracterísticasCORTEX
3DGENESIS EDLUT NEURON
BLUE BRAIN PROJECT
MODELO NEURONALLeaky Integrate And Fire NO SI NO SI SIHodgkin-Huxley NO SI SI SI SI

Multicompartimientos NO SI SI SI SITeoría Del Cable NO SI NO SI SI
CARACTERISTICAS DE LA SIMULACION
Crecimiento Celular SI NO NO NO SIFormación De Sinapsis SI SI SI SI SIMovimiento Celular SI NO NO NO NODifusión De Partículas En El Medio SI NO NO NO NO
CARACTERÍSTICAS DEL DESARROLLO
Lenguaje De Desarrollo JAVA C++ C++ C++ C++Distribuido NO SI NO NO SI
Para seleccionar un simulador al momento de iniciar el proyecto fue muy importante determinar las
características que tienen los simuladores en común. En la Error: Reference source not found se
incluyó dos secciones que muestran las características de simulación y las características de desarrollo.
Las características de simulación son aspectos que cada uno de los simuladores tiene en cuenta que
involucran más variables, lo cual puede hacer que cada una de las herramientas consuma más recursos.
Sin embargo, también hacen posible una simulación más realista del comportamiento de las neuronas.
En las características de simulación se puede observar como la mayoría de los simuladores se enfocan
sólo en el comportamiento eléctrico de las neuronas. Sin embargo, no toman en cuenta otras
características como el medio o cómo las neuronas evolucionan. Sólo CORTEX 3D y Blue Brain
Project toman en cuenta características como el crecimiento neuronal. Además, sólo CORTEX 3D
toma en cuenta aspectos como las fuerzas mecánicas sobre las neuronas o cómo el medio en el que se
encuentra una neurona influye en su formación. Por otro lado ya que Blue Brain Project es un
proyecto privado de IBM no es posible dar un aporte a este simulador, por los motivos anteriormente
expuestos en este trabajo se utilizará CORTEX 3D para llevar a cabo el proyecto. Algunas otras
características técnicas que influyeron en la selección del simulador fueron:
1. El proyecto está desarrollado en Java, lo cual lo hace portable a cualquier ambiente. Además,
gracias a la experiencia que se tiene en el lenguaje de programación y la alta cantidad de
documentación sobre éste que se tiene disponible, se facilitará la realización del proyecto y
mostrará mejores resultados en el corto tiempo que se posee para el desarrollo.
2. Con la implementación de la electrofisiología será posible abordar y obtener conclusiones que
respondan a la pregunta que se plantea en la problemática.
3. El nuevo enfoque de crecimiento y formación de redes neuronales biológicas que presenta
CORTEX 3D es muy interesante y vale la pena aportar al surgimiento del proyecto.
Tabla 1 Comparación de Trabajos Relacionados

4. El proyecto no está enfocado en generar redes neuronales de un tamaño real y su objetivo
principal es entender la morfología neuronal. Por estos motivos, no es necesario tener máquinas
con una gran cantidad de recursos de procesamiento. Sólo se necesita una máquina con la
suficiente capacidad para generar una red pequeña lo cual actualmente es posible realizarlo con un
computador personal.
En cuanto a los detalles referentes a cada simulador, en la Error: Reference source not found se puede
encontrar cada uno de los distintos modelos que implementa cada uno de los simuladores. Se puede
notar cómo cada uno de los simuladores tiene implementado varios modelos. Este hecho fue muy útil
para la investigación, ya que permitió entender mucho mejor cómo cada uno de los modelos es útil
según el tipo de simulación que se desee hacer. Por ejemplo, el caso de NEURON y de GENESIS los
cuales implementan una gran variedad de modelos para permitir que el usuario pueda realizar distintos
tipos de simulaciones. EDLUT. Por otro lado, se enfocaba en el buen uso de los recursos. Por este
motivo EDLUT permite simulaciones detalladas si el objetivo es la simulación de una sola neurona al
utilizar un modelo de multicompartimientos, o en caso de buscar simular una red puede utilizar el
modelo de Hodgkin & Huxley.
Dado que los simuladores deben poder utilizar varios niveles de detalle, al diseñar la electrofisiología
de CORTEX 3D se tuvo en cuenta que éste debía prestar una gran flexibilidad. Por esto se decidió que
el diseño debía contemplar la posibilidad de tener una gran variedad de algoritmos los cuales pudiera
usar según el tipo de simulación.
Por otro lado, los simuladores que existen actualmente y que se tratan en el documento en esta sección
tienen distintas características de desarrollo, aunque en general comparten el enfoque del simulador
NEURON (ver sección 6.1.3). Sin embargo también existen otros con un enfoque distinto como pasa
con CORTEX 3D (ver sección 6.1.5), al cual va enfocado el trabajo actual. NEURON tiene un enfoque
enteramente funcional y centrado en la electrofisiología de las neuronas dentro de lo cual están
enmarcados los potenciales de acción, tanto en neuronas individuales y redes. A diferencia de esto
CORTEX 3D busca simular neuronas teniendo en cuenta sus características funcionales al igual que
NEURON, pero teniendo en cuenta también características del entorno, lo cual incluye substancias en
el medio y fuerzas mecánicas de una neurona sobre otra, entre otras cosas. Otro aspecto que contempla
CORTEX 3D que actualmente ningún otro simulador posee, es que es capaz de generar simulaciones
de neuronas en crecimiento, con lo cual busca estudiarse cómo las neuronas evolucionan en el tiempo.
No obstante, es importante mencionar que para entender cómo se desenvuelve una neurona es su
medio también es importante abordar el tema de la electrofisiología neuronal, ya que en este proceso
hay un intercambio de substancias con el medio y más importante aún es un factor que se cree es clave
en como una neurona adopta una forma específica; por este motivo, este trabajo se enfoca en la
realización de un modelo y la implementación de un prototipo, el cual le permita a CORTEX 3D dar
sus primero pasos hacia la adopción de la electrofisiología dentro de sus simulaciones.
En la siguiente sección se puede encontrar un análisis más detallado del diseño de CORTEX 3D con el
fin de explicar con mayor detalle su funcionamiento, y cómo el diseño propuesto por este proyecto así
como su prototipo se acoplaron al simulador.

7. DISEÑO DE CORTEX 3D
En esta sección se describirá el simulador CORTEX 3D, enfocándose en qué desea lograr y qué
características tiene. Luego de esto se abordará su diseño para comprender de qué manera se llevó a
cabo este simulador y qué características aún le hacen falta.
Para el diseño de la electrofisiología de CORTEX 3D fue necesario realizar un análisis de la estructura
con la cual estaba construido el simulador. CORTEX 3D es un simulador enfocado en el desarrollo de
redes neuronales realistas en un ambiente en 3D. Para esto, CORTEX 3D tiene en cuenta diferentes
aspectos como el espacio que rodea a las neuronas, y substancias que puedan estar presente en este
espacio, así como también la fuerza física ejercida por otras neuronas cercanas.
Figura 25 Modelo de Córtex 3D
Para hacer esto posible cada una de las neuronas está modelada mediante la estructura descrita en la
Figura 25 la cual está divida en cuatro capas (ver Figura 26), que se denominan: Célula, Biología,
Física y Espacial.
Cell Module
Cell
LocalBiologyModule
NeuriteElement
CellElement
SomaElement
PhysicalCylinder
PhysicalSphere
PhysicalObject
PhysicalNode
Triangulation Package
SpaceNode
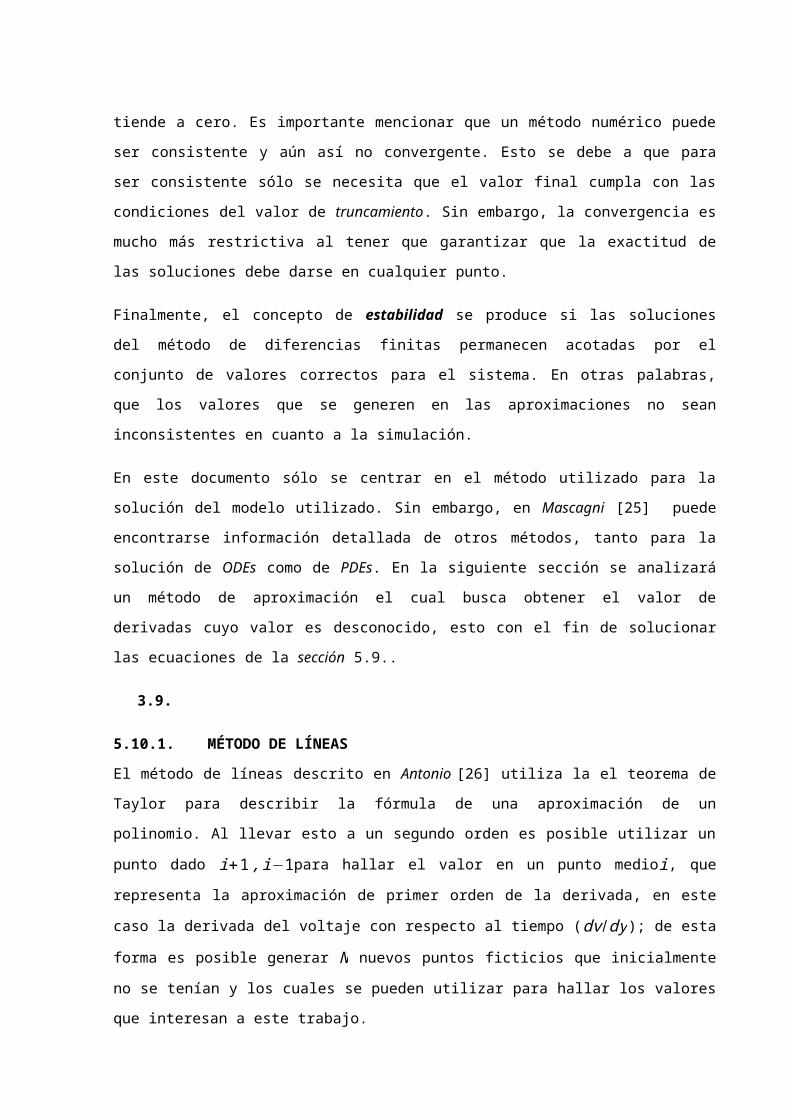
Figura 26 Capas de CORTEX 3D
La primera capa (Célula) está compuesta por la clase Cell, la cual describe una instancia única de una
célula y contiene sus propiedades biológicas. Las distintas partes de la célula se almacenan en un
conjunto de elementos Cell Element, la cual es una clase abstracta. Por otro lado, cada instancia de la
clase Cell tiene un objeto de tipo Cell Module el cual guarda propiedades globales de la célula.
La capa Biología representa cada uno de los elementos que componen una célula, como el soma
(“Soma Element”) y un conjunto de neuritas (“Neurite Element”). Las dos clases anteriores son
subclases de la clase abstracta Cell Element que está directamente ligada con la clase Cell (una capa
más arriba). Finalmente, se tiene un componente Local Biology Module, el cual se encarga de
mantener las variables de comportamiento como bifurcación, movimiento, etc. El Local Biology
Module contiene toda la información acerca del comportamiento de cada uno de los componentes,
como es el caso de su movimiento o las probabilidades de generar una dendrita; por este motivo, está
directamente ligado con la clase abstracta Cell Element. La clase Soma Element es de tipo Cell
Element y está ligada a la capa Célula con la clase Cell, esto último se debe a que cada célula sólo
debe tener un único Soma Element, pero el Soma Element puede tener varios Neurite Elements lo cual
tiene sentido ya que concuerda con cómo es una neurona.
Contiene un conjunto de elementos
Cell ModuleCell
Contiene solo un
Heredan de Heredan de
Contiene un conjunto de elementosLocal
Biology Module
Cell Element
Figura 27 Capa Célula
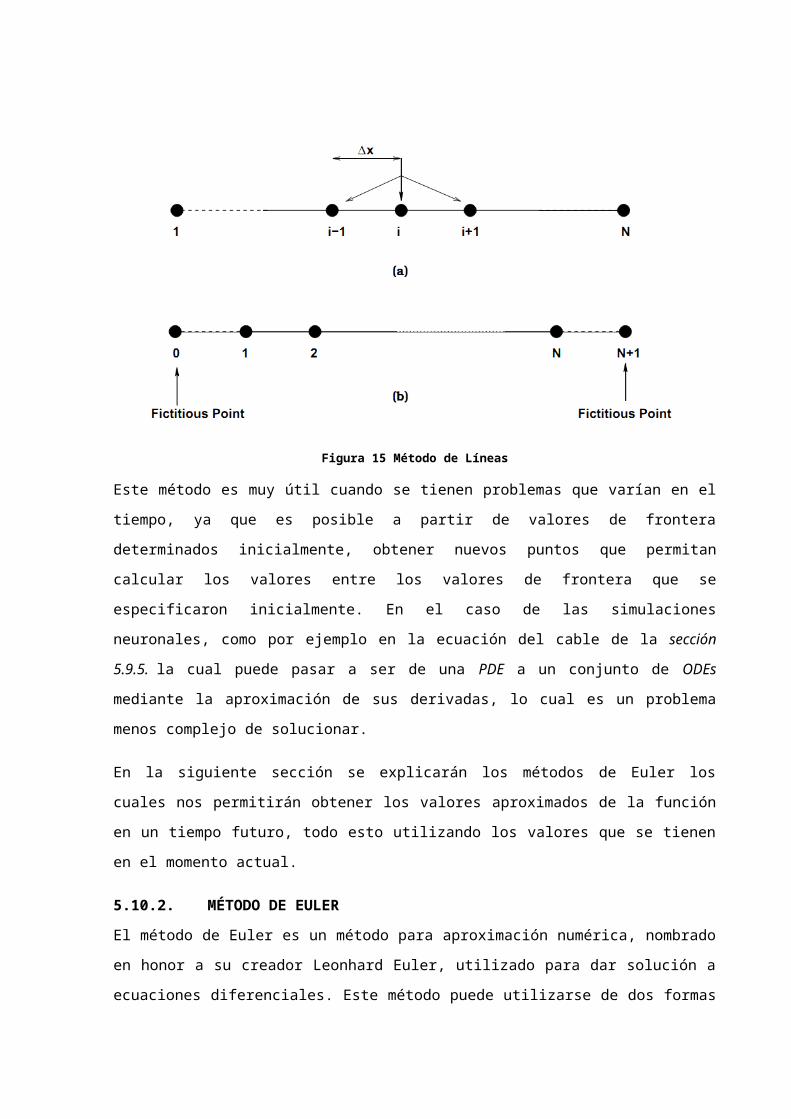
La capa Física contiene las características físicas de cada elemento de la neurona, como volumen,
elasticidad, entre otros. También tiene una función secundaria al realizar el trabajo de difusión de la
neurona con su ambiente; el proceso de difusión está claramente explicado en el artículo de Zubler F.
[30].
En esta capa se tienen dos elementos básicos que heredan de una misma clase abstracta
PhysicalObject. El primer elemento se denomina Physical Sphere, y está directamente vinculado con
un Soma Element. Este elemento contiene las propiedades de una esfera y representa el cuerpo celular
o Soma de la neurona. El segundo elemento se denomina Physical Cylinder, y cada uno representa
una sección de la membrana de la neurona. Al igual que el Physical Sphere, los elementos de tipo
Physical Cylinder se encuentran relacionados uno a uno con un elemento de la capa superior
(Biología). En el caso de un cada Physical Cylinder con cada Neurite Element. Finalmente, tanto el
Physical Sphere como el Physical Cylinder, heredan de una clase abstracta denominada Physical
Object. Physical Object hereda a su vez de Physical Node. El Physical Node representa un nodo en
una maya la cual conforma es espacio en el cual la simulación se desarrolla.
La cuarta capa (Espacial) representa las relaciones y límites entre cada uno de los distintos nodos que
se utilizan para realizar interacciones de una neurona tanto con su ambiente como con otras neuronas
presentes. La capa está constituida por dos clases. La primera clase se encarga de la definición de
límites entre dos objetos, y se denomina SpaceNode. La segunda se encarga del proceso de
triangulación mediante el cual los objetos son ubicados en el espacio y se denomina Triangulation
Package.
Contiene solo un
Contiene solo un
Heredan de
Heredan deHeredan de
Physical CylinderPhysical Sphere
Physical Object
Physical Node
Figura 29 Capa Física

CORTEX 3D contiene algunos otros paquetes dentro de su implementación. Sin embargo, estos no
aportan ninguna característica de la neurona como tal. Por ejemplo, el paquete de interfaz gráfico, el
cual sólo está encargado de los frames que se muestran al usuario, los cuales contienen los menús y
despliegan el ambiente visual en 3D. Entre estos paquetes adicionales se proveen las funcionalidades
de guardar y exportar, las cuales generan archivos externos con la información de la simulación actual.

8. CONTRIBUCIONES
En esta sección se detallará cada uno de los aportes de este proyecto, empezando por un modelo
genérico para agregar funcionalidad a la neurona, sobre el cual luego se diseñó la electrofisiología
neuronal. Finalmente se encontrará la validación mediante un prototipo funcional el cual se
implementó con base en el modelo de electrofisiología propuesto.
8.1. MODELO GENÉRICO PARA AGREGAR FUNCIONALIDAD A LA CÉLULA
En la fase de diseño se tuvo en cuenta el diseño actual de CORTEX 3D descrito en la sección 7. En
primer lugar, se observó la necesidad de agregar una capa asociada a la célula para la realización de
funciones dado que actualmente no existe. Esta capa, diseñada de manera genérica, se explicará en
esta sección y permite adicionar de forma genérica funcionalidades a la célula.
Figura 31 Diseño electrofisiología CORTEX 3D
La nueva capa se denominó capa Funcional, ya que es la encargada de simular las funciones de la
célula. La nueva capa está definida por tres componentes.
El primero se denomina Graph y es una clase que contiene un grafo el cual es la representación de la
neurona. Para esto la capa funcional se comunica con los componentes de la capa Física, de quienes
obtiene la información necesaria acerca de las características físicas de la neurona. En el caso de
necesitar información espacial puede por medio de la capa Física traer información de la capa
Espacial. La clase Graph contiene un conjunto de nodos los cuales cada uno contiene información
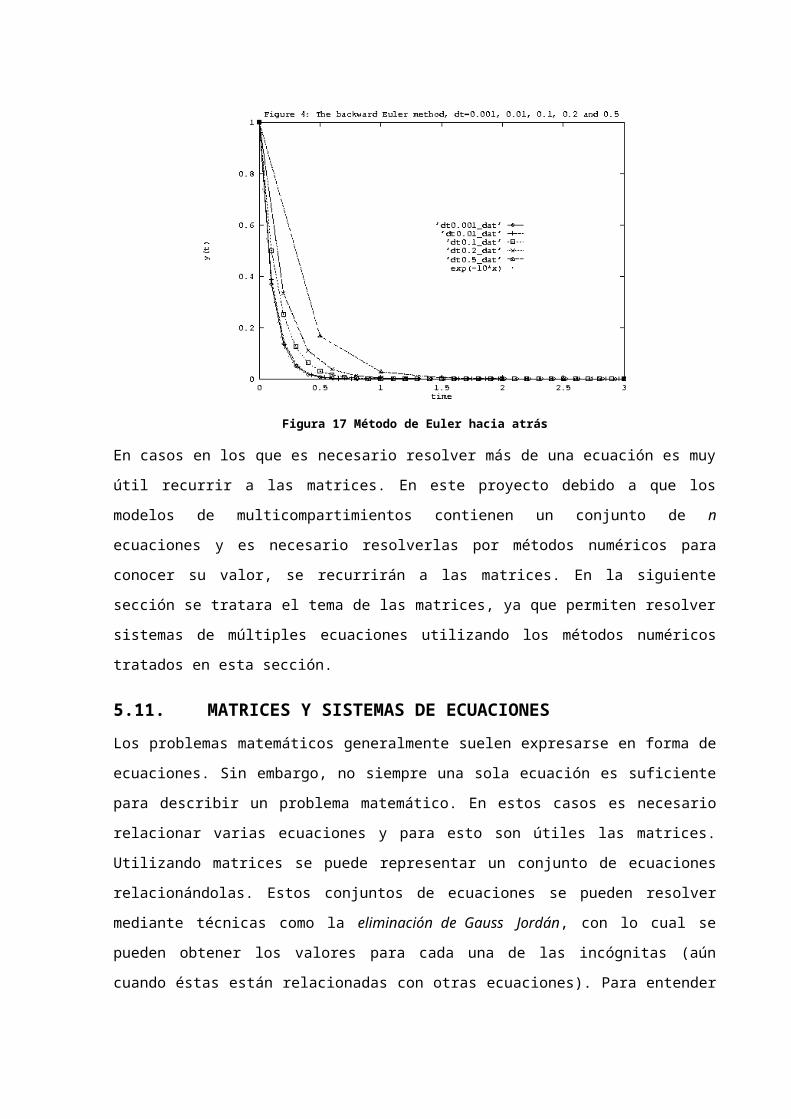
como longitud, radio y otra información relevante de la célula. Toda esta información es importante
mantenerla para poder utilizarla en el momento de realizar la simulación.
El segundo componente se denomina Model Control; éste es el núcleo del diseño ya que es el
encargado de tomar las decisiones mediante un sistema de reglas que definen qué debe hacer ante
determinadas condiciones. Estas decisiones utilizan las variables que se almacenan en la clase Graph
las cuales definen las características de la neurona. Además, todas las variables de la clase Graph son
necesarias para que el componente ModelControl sea capaz de determinar con qué características se
realizará la simulación para así tomar las mejores decisiones acerca de qué métodos numéricos deberá
usar.
El tercer componente denominado Modelo Algoritmo, contiene los algoritmos necesarios para cada
una de las funciones de la neurona. De esta manera, el Model Control tiene sólo que determinar qué
funcionalidades se necesitan simular y se envían los datos a cada uno de los algoritmos. Cada uno de
estos algoritmos funciona bajo un hilo lo que les permite trabajar de manera simultánea. Un claro
ejemplo para el cual es útil esto es la plasticidad en las neuronas. La plasticidad es la capacidad de las
neuronas de adaptarse y aprender a medida que son estimuladas por las distintas entradas de señales.
En este caso, el aprendizaje es una función de la neurona, que constantemente se estaría ejecutando.
Esto en el modelo estaría implementado como un algoritmo de aprendizaje que constantemente se
retroalimenta a sí mismo. No obstante, cuando llegan una o varias señales, la funcionalidad en el
simulador que lleva a cabo el proceso de cómo se comporta cada señal se debe hacer en paralelo sin
interrumpir el proceso de aprendizaje. Es por esto que es importante que cada una de las funciones se
ejecute de manera independiente a las demás, aunque entre ellas sea posible comunicarse.
Una vez que los algoritmos han generado algún resultado este es devuelto al Model Control, el cual
toma cada resultado y lo transmite a la clase Graph, donde se modifican los valores e inmediatamente
estos son modificados por la clase Graph de igual manera en las capas inferiores. Un ejemplo de esto
son las concentraciones de iones, los iones se encuentran tanto en el interior como en el exterior de la
célula y cuando una célula es estimulada se produce un intercambio en el medio. Utilizando todo este
Physical Sphere
Elementt
Model Algorithm
GraphModel Control
Cell
Figura 32 Capa Funcional

proceso es posible implementar distintas funcionalidades que pueden simularse y actualizarse en la
neurona, de tal manera que el resto de los componentes del simulador se mantengan actualizados de
igual manera. Una funcionalidad, además de la electrofisiología, que se puede implementar bajo este
modelo es la plasticidad como se mencionó anteriormente, o incluso, agregar funciones de los
organelos que puedan ser relevantes.
En la siguiente sección se especificará cómo a partir de la investigación de la sección 5 se
establecieron las características más relevantes para la implementación de un modelo de
electrofisiología en CORTEX 3D basado en el modelo genérico propuesto en esta sección.
8.2. MODELO ELECTROFISIOLOGÍA PARA CORTEX 3D
Para agregar la electrofisiología para CORTEX 3D se tuvieron en cuenta tres factores principalmente.
El primero fue la estructura biológica de una neurona, la cual está especificada en la sección 5.3, esto
teniendo en cuenta el enfoque morfológico del simulador lo cual quiere decir que es muy importante
mantener la mayor fidelidad posible a las características físicas y funcionales de una neurona. El
segundo aspecto importante fue la relación entre los modelos de la sección 5.9 y la forma en la que
CORTEX 3D diseñó las neuronas en el simulador, lo cual dio como resultado la selección de un
modelo. Finalmente, se tomó en cuenta el diseño actual del simulador con el fin de que el nuevo
módulo de la electrofisiología fuera coherente con la estructura que ya tenía este diseño.
Para que la realización de la electrofisiología fuera acorde se tomarán en cuenta características como:
• La simulación debería tener en cuenta de forma explícita las bombas de sodio y potasio ya
que son elementos presentes en el medio y en el interior de la neurona.
• Las características físicas de la neurona, tales como su forma, diferentes características
morfológicas como el grosor del axón, dendritas y su longitud la cual afecta el potencial de
acción.
Para la implementación de la electrofisiología en CORTEX 3D antes se realizó un modelo el cual
utiliza el diseño genérico propuesto en la sección 8.1. En esta sección se describirá cada uno de los
componentes propuestos para el diseño de la electrofisiología y cómo estos se acoplan al diseño.
El primer componente del diseño es el componente Graph, que se encarga de realizar un mapeo de las
diferentes características de la célula; esto incluye cada uno de los cilindros de los cuales se compone
la neurona así como de la esfera que representa el soma. De cada uno de estos componentes se
obtienen los datos necesarios para la simulación; en el caso de la electrofisiología es importante
conocer aspectos de la célula como su radio en cada cilindro así como en la esfera; también es de gran
importancia conocer la longitud de cada uno de estos componentes. Cada uno de estos datos se
almacena en cada uno de los nodos en la clase Graph; toda esta información deberá estar disponible

para el usuario, de tal forma que pueda establecer nuevos datos o modificar los actuales, con el fin de
darle total libertad en la simulación.
El componente de model control una vez que la clase Graph ha recolectado la información necesaria y
se ha iniciado la simulación por parte de un evento generado por el usuario, obtiene datos del grafo,
de información que determina el usuario y realiza un análisis de la información mediante reglas que le
permitan determinar cuál es algoritmo óptimo para el tratamiento de la neurona que se tiene, o también
es posible que el usuario haya determinado un algoritmo que desea usar. En caso de que llegue a un
resultado no concluyente, usará un algoritmo definido por el usuario que se usará por defecto.
Dependiendo del tipo de algoritmo utilizado se presentará un tiempo de procesamiento, y una vez
realizada la simulación, el algoritmo retornará los resultados al componente model control, el cual se
comunicará con uno de los paquetes de CORTEX 3D el cual es el encargado de mantener la interfaz
gráfica; este componente a partir de los valores generará una gráfica que muestre el comportamiento
del potencial de acción según los valores que el usuario definió en la simulación. Adicionalmente se
muestra una tabla de los datos que contiene los datos del potencial en cada momento dado en el
tiempo.
En casos en los que la interacción entre la simulación del potencial y la simulación general puede
actualizarse rápidamente. Generalmente estos casos se presentan con modelos que no consumen
muchos recursos; la simulación general podrá actualizar el intercambio de iones entre el interior y el
exterior de la membrana, lo cual se verá reflejado en el interfaz gráfico; de otra manera si no es posible
realizar esto, la simulación continuará general o entrara en un estado de pausa mientras se realiza el
procesamiento necesario que describa el potencial de acción.
8.3. IMPLEMENTACIÓN DE UN PROTOTIPO INICIAL
Otra de las contribuciones fue la implementación de un prototipo con el cual se pudiera probar el
funcionamiento del diseño propuesto; para este prototipo se trabajó en la parte final del proyecto y se
propuso como objetivo implementar uno de los modelos detallados para la simulación de potenciales
de acción.

4.
5.
5.1.
5.2.
5.3.
8.3.1. DISEÑO INICIAL DEL DESARROLLO
El prototipo realizado el cual va enfocado en la aplicación de la investigación realizada acerca de los
modelos neuronales, se implementó con el objetivo de probar el modelo genérico propuesto, así como
el modelo para la electrofisiología.
La implementación de uno de los modelos, y el acoplamiento a el simulador CORTEX 3D fueron los
objetivos que se establecieron para comprobar el funcionamiento del modelo de electrofisiología
propuesto. Para esto se estableció que fuera posible utilizar los datos generados en las simulaciones de
crecimiento neuronal, para generar un potencial que describa el comportamiento eléctrico de la
neurona según sus características.
Con el fin de cumplir con estos objetivos se plantearon los siguientes:
Selección de uno de los modelos de la sección 5.9 para llevar a cabo el prototipo.
Seleccionar un método numérico con el fin de implementar un modelo que describa la
electrofisiología neuronal, en este caso, el método seleccionado se describe en la sección 5.10.
Llevar a cabo una implementación del modelo junto con el método numérico seleccionado.
Realizar pruebas sobre las variables tenidas en cuenta en la implementación y que afectan el
potencial de acción.
Realizar unas conclusiones de los resultados obtenidos.
A continuación se explicará cómo se llevó a cabo la implementación del prototipo para el
cumplimiento de los objetivos expuestos; sin embargo, es importante tener en cuenta las limitaciones
que se nombran en la sección 4.1, las cuales limitaron la realización de algunas características del
prototipo que expondremos al final de esta sección.
8.3.2. SELECCIÓN DEL MODELO NEURONAL
Esta sección describe los criterios para la selección del modelo para implementar la electrofisiología
neuronas, y de esta manera permitir la simulación de potenciales de acción en el simulador neuronal
CORTEX 3D.

Para la selección del modelo a usarse se tomó en cuenta las características mencionadas en la sección
8.2; esto redujo la selección a dos modelos específicamente, un modelo utilizando
multicompartimientos (ver sección 5.9.4), y un modelo basado en la teoría del cable (ver sección
5.9.5).
Idealmente debería permitirse utilizar cualquiera de los dos dependiendo el enfoque que se quiera dar
a la simulación; esto quiere decir que si no es necesario un alto grado de detalle sea posible utilizar un
modelo multicompartimiento con un número pequeño de compartimientos y pocos pasos en el tiempo;
en caso contrario, puede usarse un modelo basado en la teoría del cable o un modelo
multicompartimiento con un número muy grande de compartimientos de manera que se aproxime a
una solución similar a la de la teoría del cable. Sin embargo, es importante mencionar que para la
realización del prototipo se utilizó un modelo de multicompartimientos, el cual definía en cada uno de
los compartimientos un circuito de Hodgkin-Huxley como el descrito en la sección 5.9.3. En la
siguiente sección se especificará el método numérico utilizado para la implementación de prototipo.
8.3.3. SELECCIÓN DEL MÉTODO NUMÉRICO
Para realizar la simulación se llevó a cabo una investigación en otros proyectos que generaban
potenciales de acción con distintos modelos algunos de ellos los trabajos mencionados en la sección 6,
a partir del modelo se destacaron tres algoritmos distintos, los primeros dos fueron los algoritmos de
Euler de la sección 5.10.1 los cuales el método de Euler hacia adelante era el que consumía menos
recursos; sin embargo, debido a que puede volverse inestable para algunos valores se decidió no usarlo
ya que por la naturaleza del simulador que construcción de neuronas de forma autónoma era difícil
saber si la simulación del potencial de acción se mantendría estable o no. El método de Euler hacia
atrás es mucho mejor ya que mantiene la estabilidad, pero requiere de un mayor consumo de recursos
debido a que los valores buscados se encontraban implícitos en las ecuaciones. Finalmente el tercer
método tomado en cuenta fue el método de Crank-Nicolson el cual se encuentra detallado en
Mascagni [25], este método calcula valores mucho más aproximados; sin embargo, al ser un método
de segundo orden la cantidad de recursos necesarios es mucho mayor. En la Figura 33 se puede
apreciar el sistema de matrices que conforma el método de Euler hacia atrás.
Figura 33 Método de Euler hacia atrás
Al analizar las características presentadas y debido a que por las limitaciones que se mencionan al
final de esta sección las cuales sólo permitieron la implementación de un método, se concluyó que el
método de Euler hacia atrás era el que se acoplaba mejor para la implementación del prototipo, esto ya
que era estable y su consumo de recursos era menor al del método de Crank-Nicolson; sin embargo, es
importante mencionar que en futuras versiones de la aplicación se busca tener estos tres métodos y
algunos otros de tal forma que la aplicación sea dinámica y pueda decir que método es mejor para un
problema específico, esto al analizar sus características y seleccionar un método que se aproxime lo
suficiente y no consuma demasiados recursos.
Ahora que se tenía que modelo se usaría y el método con el cual se manejaría el cálculo de los valores
y se truncaría en un grado de aproximación específica sólo se necesitaba poder despejar la derivada de
primer orden que presentaba la ecuación del modelo multicompartimiento, para poder realizar los
cálculos del valor del potencial, para esto se usó el método de líneas expuesto en la sección 5.10.1 con
el cual se obtenía una ecuación de la cual resultaba el valor aproximado de la derivada.
Con la utilización de los dos métodos y las ecuaciones del modelo seleccionado ahora es posible
calcular el valor del potencial en un compartimiento; sin embargo, ya que una neurona está compuesta
por n compartimientos, y cada uno de ellos con un valor en el tiempo el cual varía de tamaño según el
usuario defina su valor, es necesaria una matriz de n por m siendo m el total de pasos en el tiempo
necesarios para completar el tiempo dado de simulación. A partir de eso, se forma el sistema de
ecuaciones de la forma de (ver Figura 33), el cual representa el sistema que es necesario resolver para
el cálculo de los valores del potencial.
En este sistema se puede notar la presencia de dos variables las cuales define Mascagni [25]. Estas son
ƞ y Ɛ. La primera representa las características dadas de un segmentó de membrana en un tiempo, esto
es:
(46) ƞ= ∆ t2 πR(∆ x )2Cm

La segunda variable representa un valor dado por el segmento de tiempo dividido en el valor de la
capacitancia; este término es resultado de operaciones algebraicas para al final despejar el vector de
ecuaciones del lado izquierdo.
(47) Ɛ= ∆ tCm
Los demás vectores presentes en la matriz representan, al lado izquierdo el vector solución que
contendrá los valores del potencial para cada instante de tiempo, estos valores varían en cada iteración
de tal forma que se obtienen la totalidad de estados del potencial respecto al tiempo en cada uno de los
compartimientos. Al lado derecho se encuentran los vectores del potencial actual, la sumatoria de la
totalidad de iones presentes y finalmente un vector con los estímulos que se presentan en el tiempo.
Finalmente, es importante resaltar de este sistema de ecuaciones que es necesario tener unas
condiciones de frontera para que los resultados sean adecuados; en este caso se tiene que al inicio de la
solución la neurona debe estar en un estado de rasposo, lo que implica que sus valores deben cumplir
con estar en su estado normal. Esto se representa en el sistema de matrices en la matriz diagonal, en la
cual su primer valor y el último ubicado en la esquina inferior derecha representan estos valores de
frontera.
8.3.4. FUNCIONAMIENTO DEL PROTOTIPO
En esta sección se describirá el proceso mediante el cual el simulador genera los potenciales de acción
a partir de una neurona creada por una simulación de CORTEX 3D en un instante dado.
Para poder generar los potenciales de acción es necesario que se programe una simulación en
CORTEX 3D ingresando cada una de las características deseadas para la formación de la neurona, es
necesario hacer esto mediante código ya que actualmente el simulador no posee un módulo para la
construcción de simulaciones mediante interfaz gráfico. Una vez la simulación está preparada y se
tiene toda la información necesaria lista, la simulación puede empezarse.
A medida que la simulación avanza el sistema genera una neurona de mayor tamaño y bifurcaciones
definidas ya sea de forma explícita o puede definirse una probabilidad de bifurcación lo cual dará más
un crecimiento menos predecible.
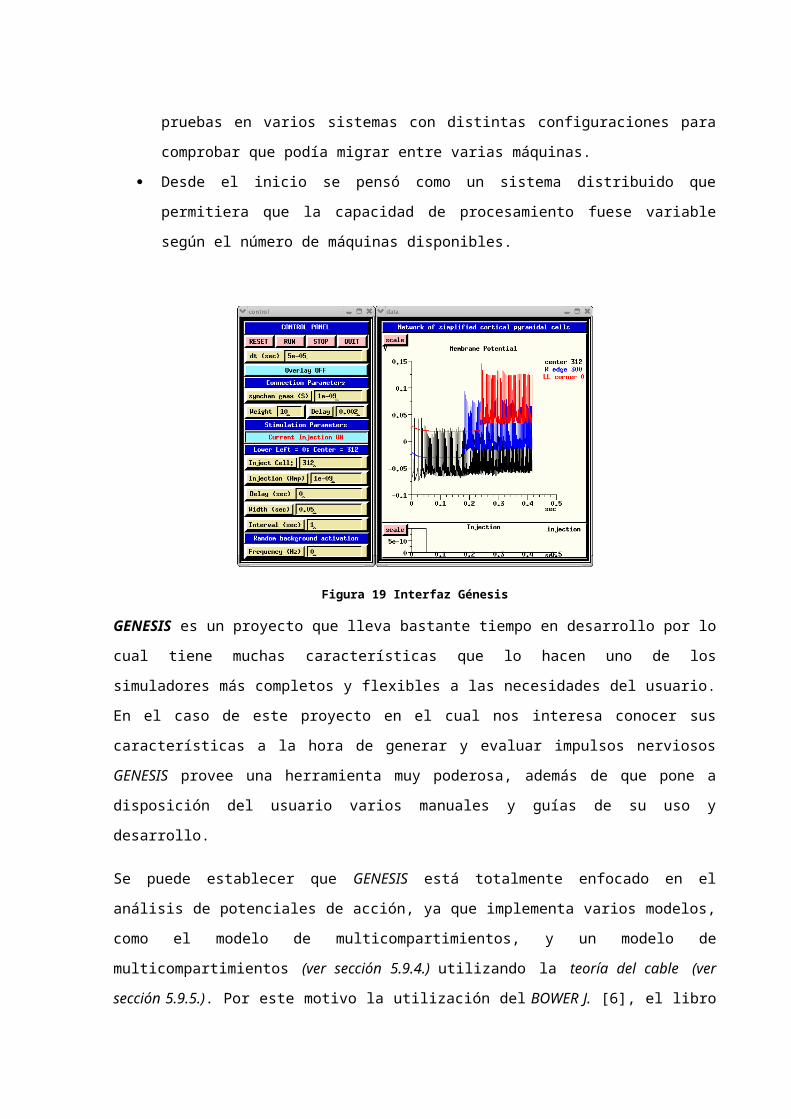
Figura 34 Neuronas en CORTEX 3D
En cualquiera de los instantes mientras que la simulación está activa es posible generar un potencial de
acción; sin embargo, debido a la gran cantidad de cálculos y recursos necesarios para realizar la
simulación y determinar el comportamiento del estímulo es imposible llevarlo a cabo en tiempo real,
por lo cual la capa funcional encargada de llevar a cabo la simulación del potencial de acción toma el
estado de la neurona en el momento exacto en el que se inició la simulación del potencial de acción;
esto quiere decir que si la simulación general del crecimiento neuronal no se coloca en un estado de
pausa, los nuevos cambio en la morfología neuronal no se tendrán en cuenta en la simulación del
potencial de acción una vez éste se allá iniciado.
Para generar la simulación en el estado en el que se encuentra la neurona en ese momento en el tiempo
se conforma el grafo mediante la clase Graph la cual utiliza la librería Jgraph capaz de manejar
estructuras de datos y mostrarlas en pantalla; este grafo contendrá la información de cada
compartimiento, o en este caso, de cada uno de los cilindros que conforma la neurona en la
simulación.

Figura 35 Grafo que representa una neurona
Una vez generado el grafo se pasa a establecer los valores para las variables de simulación, como el
potencial de reposo, y las concentraciones de cada uno de los iones mediante una clase en el paquete
GUI la cual se encarga de obtener estos valores y pasárselos al componente Model Control; los datos
obtenidos son datos generales como el valor de inicio del potencial, temperatura, estímulos en un
tiempo dado, etc. Una vez todos los valores han sido establecidos y el usuario genera un evento que da
inicio a la simulación, se produce una comunicación entre la clase que maneja la vista (GUI) y el
Model Control; cuando este evento se genera el Model Control se encarga de tomar la decisión de qué
algoritmo debe usar para los parámetros ingresados, basándose en cuál de ellos presentará mayor
estabilidad, el resultado más exacto y que consume la menor cantidad de recursos posible. Una vez
seleccionado el algoritmo se utilizan matrices que representan conjuntos de ecuaciones como se
explica en la sección 5.11 y se resuelve mediante un proceso iterativo con el fin de determinar los
valores del potencial en cada sección de la neurona en un momento de tiempo dado. Finalmente el
Model Control se encarga de enviar los resultados a la vista en el paquete GUI la cual muestra al
usuario los resultados de la simulación por pantalla. Estos resultados actualmente muestran el
potencial de acción en el primer y último compartimiento; esto con el fin de poder evaluar si el
comportamiento de la propagación es correcto. Adicionalmente puede consultarse la tabla de datos en
el punto inicial y final.
8.3.5. PRUEBAS DE VALIDACIÓN
Para la realización de un plan de pruebas sobre el prototipo, se decidió que estás deberían realizarse en
dos fases. La primera comprobaría el funcionamiento del prototipo frente a los resultados obtenidos
por Hodgkin A. [31], en el cual se realizó mediciones sobre el nervio de un calamar gigante, y a partir
de esto formularon todo su modelo.
Soma# compartimiento
Tamaño RadioLongitud
Axon 1# compartimiento
RadioLongitud
Axon 1.1# compartimiento
RadioLongitud
Axon 2# compartimiento
RadioLongitud
Axon 2.1# compartimiento
RadioLongitud

ConductanciasConcentración
Interna
Concentración
ExternaMembrana
GNa=120 mScm2 CNa
i=70.96 mmolL
CNao=460 mmol
L V=−60 mV
Gk=36 mScm2 CK
i=301.4 mmolL
CKo=10 mmol
L a=238 μm
GL=3 mScm2 CL
i=52 mmolL
Cm=1 μFcm2
Ri=0 Ohmscm
Ro=30 Ohmscm
Tabla 2 Datos de Simulación4
Se utilizó el modelo estándar de Hodgkin-Huxley con los datos propuestos en Sakshat virtual labs
[32], los cuales están en la Tabla 2. Los resultados se pueden observar en la Figura 36:
Figura 36 Prueba CORTEX 3D
4 Los índices i,o se refieren i a características internas a la membrana y o a características externas.
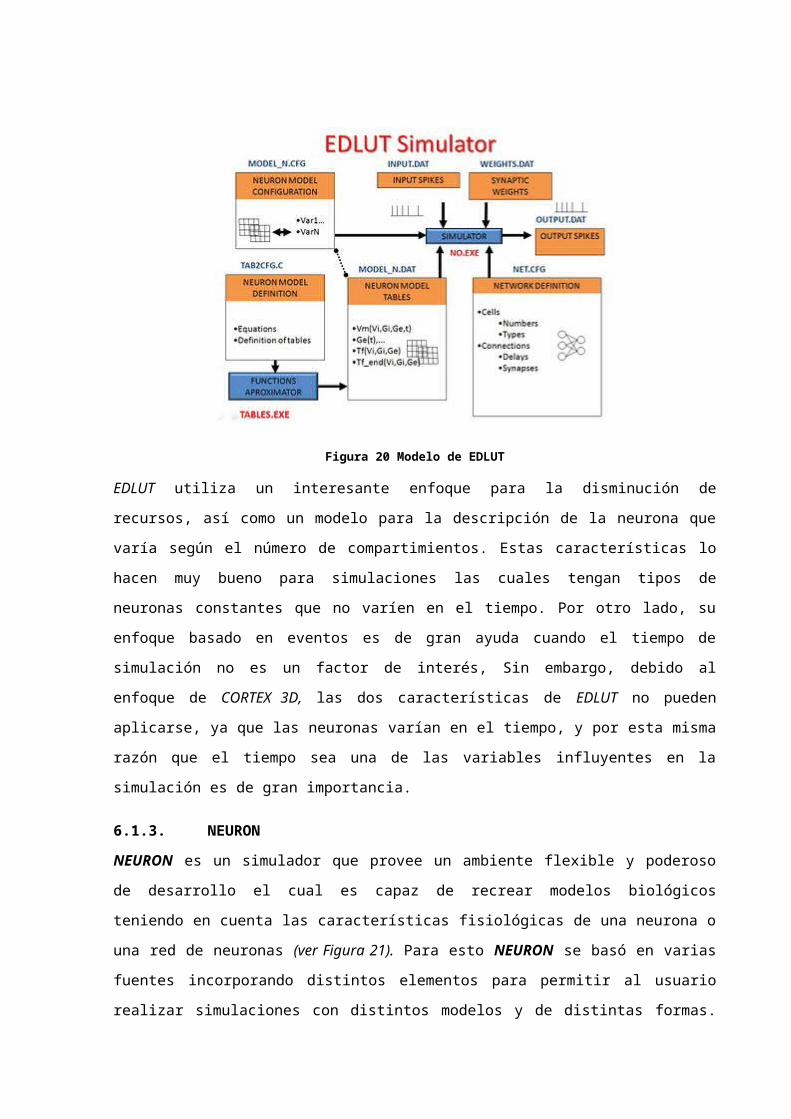
Figura 37 AMRITA SIMULATOR
En Sakshat virtual labs [32] se propone una aplicación web la cual permite realizar simulaciones
utilizando un modelo de Hodgkin-Huxley como el propuesto en la sección 5.9.3.
El simulador web de AMRITA trabaja con un bajo nivel de detalle y se realizó específicamente sólo
con el fin de demostrar cómo las distintas variables influyen en el potencial de acción, aún cuando
éste no es bastante detallado.
Para ambos simuladores se estimuló durante 0.03ms con un corriente de 10mA. Esta estimulación se
inició a los 2ms, y se produjo un potencial de acción el cual arrojó resultados similares, ya que
describía las distintas fases del potencial de acción descritas en la sección 5.3. Por otro lado, tanto la
amplitud como el periodo producido son similares. La amplitud alcanza entre los 40 y 50 mV en
ambos simuladores, y el periodo que le toma en polarizarse y despolarizarse está entre los 5 y 6 ms en
ambos, seguido del tiempo de refracción. También, es importante mencionar que el simulador de la
universidad de AMRITA es un modelo simple de Hodgkin-Huxley que no utiliza compartimientos, y
no alcanza el mismo detalle que el prototipo realizado para CORTEX 3D. Esto es notable en la etapa
de estimulación, la cual en CORTEX 3D es posible notar cómo su fase inicial está mucho más
detallada. Las gráficas resultantes de CORTEX 3D se encuentran en la Figura 36 y la de AMRITA en
(ver Figura 37).
ConductanciasConcentración
Interna de iones
Concentración
Externa de ionesMembrana
GNa=120 mScm2 CNa
i=50 mmolL
CNao=491 mmol
L V=−60 mV
Gk=36 mScm2 CK
i=400 mmolL
CKo=20.11 mmol
L a=238 μm
GL=3 mScm2 CL
i=52 mmolL
Cm=1 μFcm2
Ri=0 Ohmscm

Ro=35.4 Ohmscm
Tabla 3 Datos NEURON vs CORTEX 3D
Una vez probado con un simulador bastante simple se pasó a la comparación de los resultados con un
simulador mucha más avanzado y con una gran variedad de opciones. En este caso, se utilizó
NEURON, el cual se especifica en la sección 6.1.3. Para las pruebas frente a este simulador se utilizó
un modelo de Hodgkin-Huxley sin compartimientos, y uno con compartimientos. En este caso se tomó
en cuenta la temperatura como una nueva variable que influye en comportamiento del potencial de
acción. Los datos utilizados en la simulación se pueden observar en la Tabla 3.
En primeras pruebas se utilizaron los datos de la Tabla 3 realizadas con NEURON. En NEURON y que
utilizaron el modelo de Hodgkin-Huxley sin compartimientos, el potencial de reposo se estableció en -
60mV y se inició una estimulación a los 2ms de la simulación durante 0.4ms a una corriente de 10mA
y una temperatura de 20℃. Con esto el potencial alcanzó un pico de 48.22, y una amplitud en la
despolarización y re polarización de aproximadamente 1; esto se ve más explícito en la Figura 38. El
resultado utilizando CORTEX 3D tuvo un pico en 41.12, y la amplitud fue de 1 al igual que en la
simulación en NEURON.
Es notable que a pesar de que se utilizaron modelos distintos, los resultados son muy similares, con lo
cual podemos afirmar que los resultados simulados en CORTEX 3D son válidos y aportan información
útil a la persona que esté utilizando la herramienta.
8.3.6. PRUEBAS ESTADISTICAS
Por otro lado, dado que el modelo de multicompartimientos es mucho más detallado, es necesario
probarlo con un modelo que tenga en cuenta las mismas características; por esta razón, se realizó una
simulación utilizando un modelo de multicompartimientos utilizando la teoría del cable en el
simulador NEURON.
Figura 38 NEURON vs CORTEX 3D modelo H&H
Se utilizaron los mismos datos de la Tabla 3, pero esta vez se utilizó el módulo para crear células de
NEURON; éste nos permitió definir una neurona con un soma y un axón similares a las utilizadas en
las pruebas de CORTEX 3D.
Para las mediciones en ambas neuronas se tomaron en el soma donde se iniciaba el potencial de acción
a los 2ms de iniciada la simulación; en este punto se estimuló durante 0.3ms con una corriente de 5
mA. Para el simulador NEURON, se obtuvieron los resultados que se pueden ver en la Figura 39. En
estos resultados se puede notar cómo ambos inician en un potencial de -60 mV. Sin embargo,
NEURON disminuye, esto debido a que el potencial de reposo de la neurona se encuentra en -70 mV .
Una vez se alcanzan los 2 ms de la simulación se presenta la fase de despolarización en la cual ambos
simuladores inician un ascenso hasta alcanzar el pico los 2.20 ms en CORTEX 3D y a los 2.25 ms en
NEURON. Los valores en este pico son de entre de los 45 y 48 mV;. Además, en este punto la re-
polarización de la neurona inicia y alcanza su punto más bajo a los 2.75 ms en ambos simuladores,
donde finalmente inicial el periodo de refracción.

0 0.3 0.6 0.9 1.2 1.5 1.8 2.1 2.4 2.7 3 3.3 3.6 3.9 4.2 4.5 4.8
-80-70-60-50-40-30-20-10
01020304050607080
NEURON Vs CORTEX 3D
NEURONCORTEX3D
mS
mV
Figura 39 NEURON vs CORTEX 3D Multicompartimientos
Al ver que los resultados eran muy similares, se utilizó el error cuadrático medio con unos datos de
entrada similares para determinar el error probable, la varianza y la desviación estándar. Esto con el
fin de determinar qué tan similares eran los resultados de un simulador frente al otro. Para la prueba se
tomaron 200 segmentos de tiempo, cada uno de los simuladores iniciaron en un potencial de -60mV.
Los datos de las pruebas realizadas se encuentran en el anexo “Datos de simulación” y sus resultados
son los siguientes:
Desviación estándar:
0.338587794
Error Cuadrático Medio:
22.92833882
Error Probable:
1.625346845
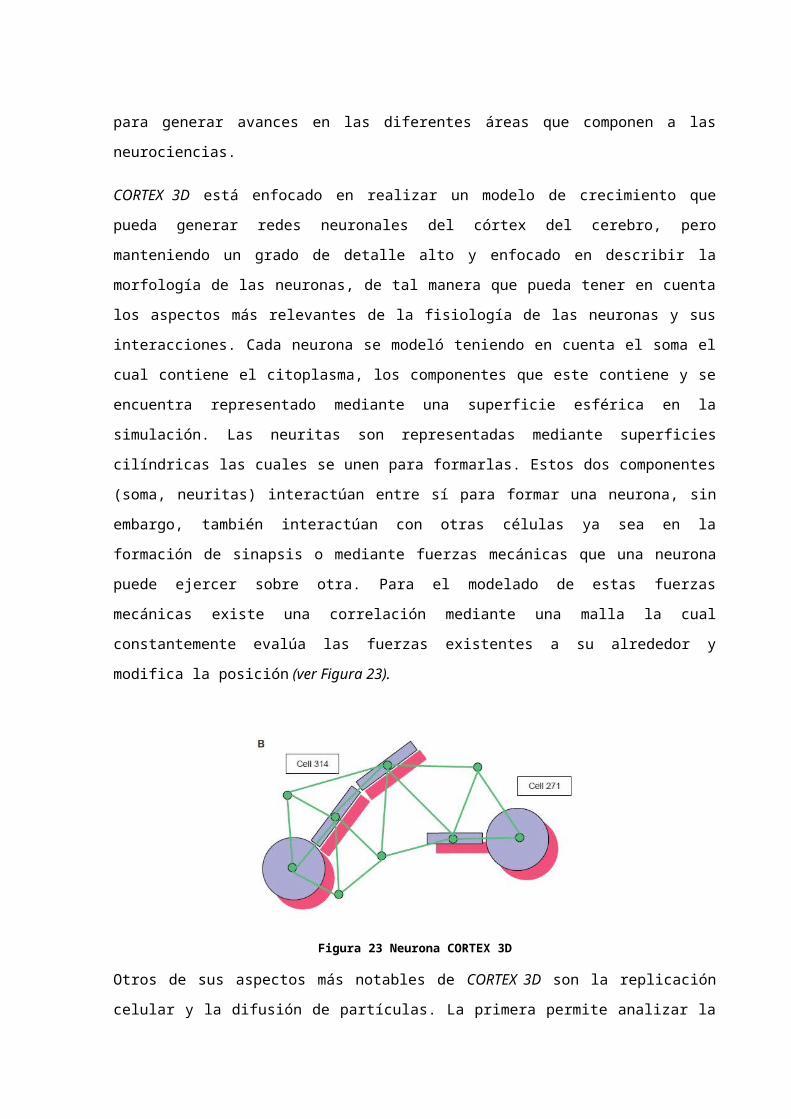
8.3.7. PRUEBAS DE PROPAGACIÓN
Finalmente, se realizaron pruebas de propagación del impulso a través del axón. Para esto, se buscó
demostrar cómo el tiempo y el impulso en movimiento afecta a cada uno de los compartimientos en la
neurona. En esta prueba se utilizó una simulación corta de 3 segundos (tiempo real, no de simulación)
de duración y otra más extensa la cual se desarrolló durante 20 segundos. Ambas en el simulador
CORTEX 3D. Los resultados obtenidos se pueden observar en la Figura 40. La imagen muestra el
compartimiento inicial de color rojo y el compartimiento final que se encuentra al final del axón de
color azul.
Figura 40 Neurona con axón corto
De estos resultados se puede observar que se tiene la neurona con un axón corto el cual sólo se
desarrolló durante 3 segundos, esto en tiempo real. Los resultados del potencial de acción muestran
cómo el inicio entre los dos potenciales es casi imperceptible ya que el axón es muy corto y la
propagación a través del axón es muy rápida. Por otro lado, en la fase de despolarización, es mucho
más notable cómo existe un retraso en el potencial de acción azul que se genera en el final del axón.
En una segunda prueba, en la cual se dejó que la neurona se desarrollara más con el objetivo de que
pudiera diferenciarse el potencial de acción mientras se propaga los resultados obtenidos, se pueden
observar los resultados que se presentan en la Figura 41.

Figura 41 Neurona con axón largo
En esta prueba es mucho más notable cómo neuronas con un axón mucho más largo tardan más en
comunicar el impulso. En esta prueba de propagación teniendo en cuenta la distancia, es importante
mencionar que actualmente no se tiene en cuenta la resistencia longitudinal, por lo cual el potencial al
propagarse se mantiene constante. Esto significa que en la realidad la señal se perdería poco a poco, ya
que a mayor longitud la atenuación de la señal es mucho mayor.
A partir de los resultados obtenidos en la simulación, es posible establecer que los resultados
producidos por el módulo implementado para CORTEX 3D presenta resultados acordes a los
generados por otros simuladores cuando se utiliza el mismo conjunto de datos. Adicionalmente, las
pruebas produjeron un error cuadrático medio pequeño, lo cual indica que los resultados producidos en
ambos simuladores (CORTEX 3D y NEURON) son similares; de esta forma se puede establecer
teóricamente cómo los resultados producidos por CORTEX 3D son válidos y por tanto cumplen con el
objetivo de validar tanto el diseño específico para la electrofisiología, como para probar que el diseño
genérico fue exitoso en la implementación de una funcionalidad para la neurona. Por otro lado, las
pruebas en cuanto a la propagación longitudinal demostraron cómo la simulación tiene en cuenta la
longitud de la neurona, aún cuando actualmente no se tiene en cuenta una resistencia longitudinal;
Para concluir, se considera que hasta el momento todas las características implementadas son exitosas
y permiten tener en cuenta una gran variedad de aspectos al momento de realizar la simulación.
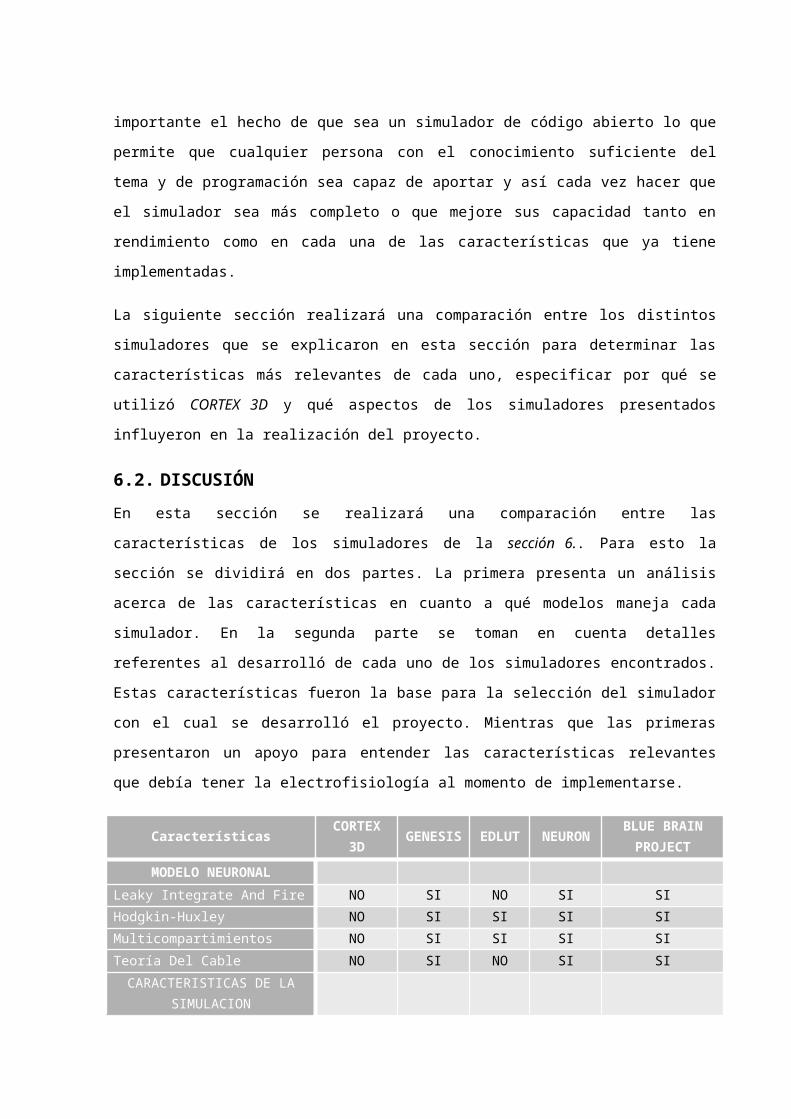
9. CONCLUSIONES Y TRABAJOS FUTUROS
Las simulaciones neuronales son herramientas que presentan una forma de estudiar las neuronas sin
necesidad de recurrir a peligrosos procedimientos y con el detalle que se desee realizar. Para estos
estudios poco a poco surgen distintos tipos de modelos, cada uno buscando mejorar alguno anterior, o
enfocándose en nuevos aspectos. Todas estas herramientas tienen como objetivo llegar a comprender
mucho mejor cómo las neuronas llevan a cabo sus procesos y funciones en nuestro organismo: desde
ayudar al movimiento muscular, hasta el funcionamiento de nuestros sentidos los cuales cada uno está
compuesto por un conjunto de funciones que se unen para llevar a cabo una tarea compleja.
El entendimiento de cómo funcionan las neuronas poco a poco nos ha llevado a entender cómo
funciona nuestro cerebro y sistema nervioso. También los estudios que se llevan a cabo en este campo
cada vez son más grandes e invierten gran cantidad de recursos. Sin embargo, aún falta mucho camino
e investigación para tener una visión de cómo órganos como el cerebro son capaces de almacenar gran
cantidad de información, como es el caso de los recuerdos. Por otro lado, actualmente los recursos
disponibles son insuficientes para realizar simulaciones realistas, pero aún así las simulaciones de
conjuntos de neuronas aportan al entendimiento de cómo neuronas de distintos tipos trabajan en
conjunto para realizar cada una de sus funciones.
CORTEX 3D es una herramienta que a pesar de que lleva poco tiempo en desarrollo propone un
modelo innovador el cual tiene muchas características que antes no se tenían en cuenta en el momento
de simular las redes de neuronas. Este nuevo enfoque nos permite entender cómo las neuronas se
desarrollan y se desenvuelven en un medio específico.
Sin embargo, la característica que hace que los simuladores neuronales sean de gran utilidad para la
investigación, es cómo las características fisiológicas de la neurona influyen cuando ésta genera un
potencial de acción. Esta funcionalidad no la posee el simulador CORTEX 3D.
Este proyecto se enfocó en la implementación de la electrofisiología para CORTEX 3D. Para esto el
proyecto propuso un modelo genérico el cual puede apoyar desarrollos futuros que buscan agregar
funcionalidades a la neurona. De esta forma, para trabajos futuros se tiene un diseño que es posible
utilizar para ampliar mucho más las funcionalidades del simulador. Para la realización de este modelo
se tomó en cuenta la estructura actual de CORTEX 3D, el cual toma en cuenta características físicas,
químicas, espaciales y biológicas. Por otro lado, también se utilizó como base todo el conocimiento
adquirido de la literatura consultada. Para determinar cómo se debía diseñar un modelo genérico para
una neurona fue necesario consultar la literatura acerca de la forma en la que una neurona biológica
genera los potenciales de acción y cómo su fisiología afecta este proceso. Con los conocimientos

acerca de cómo se comportan las neuronas, se realizó una comparación de la forma en la que está
estructurado el diseño de CORTEX 3D para determinar cómo debía realizarse una extensión que
permitiera la implementación de distintas funciones.
Una vez diseñado un modelo genérico que permitiera agregar diversas funcionalidades a la neurona se
desarrolló un diseño específico (basándose en el genérico) que permitiera la implementación de la
electrofisiología en el simulador. Es importante aclarar que debido a las limitaciones de tiempo del
proyecto fue necesario implementar sólo el prototipo de uno de los modelos neuronales. Sin embargo,
se espera que en las siguientes fases de desarrollo se puedan incluir muchos más algoritmos así como
nuevas funcionalidades al simulador. Por otro lado, a partir de la validación se comprobó de que a
pesar de que la herramienta en su estado actual es sólo una parte de la totalidad de la aplicación que
debe implementarse, ya es funcional y por tanto a este momento ya es posible realizar simulaciones de
potenciales de acción en neuronas de distintos tipos y con características fisiológicas distintas.
Actualmente, aún hay mucho trabajo que realizar para que el simulador contenga un módulo de
electrofisiología lo suficientemente completo como para poder permitirle al usuario realizar
simulaciones con una gran variedad de opciones que maximicen la utilidad del simulador. Con esto en
mente, se resaltan los siguientes trabajos futuros:
El simulador debe implementar una mayor variedad de algoritmos para la simulación de
potenciales de acción. Esto se debe a que dependiendo de las necesidades de la investigación
puede necesitarse un modelo más simple o en el caso contrario de un modelo más detallado.
En el último caso, se debería contar con un modelo de multicompartimientos basado en la
teoría del cable.
Es necesario llevar a cabo una investigación más profunda de los modelos para la simulación
de redes neuronales, ya que este trabajo se enfocó en profundizar en modelos que detallaban
una neurona. Sin embargo, aún existen métodos enfocados sólo a redes neuronales que son de
utilidad para la investigación.
Es muy importante que para trabajos futuros se tenga acceso a un experto que brinde una guía
en el tema. Además, es importante que sea un experto en el tema el cual tenga un visión más
global del proyecto, esto quiere decir que conozca el proceso tanto de manera biológica como
también su parte eléctrica.
Una investigación acerca de cómo llevar acabo la implementación de un módulo que permita
agregar distintos canales de iones diferentes a los que actualmente posee. Este módulo es de
gran utilidad ya que la neurona aquí modelada se basó en los canales fijos que especificaron
Hodgkin-Huxley en su investigación. No obstante, existen una gran variedad de neuronas que
contienen canales con distintos tipos de iones que se comportan de manera distinta.
Actualmente el prototipo simula potenciales de acción atreves de un axón. Sin embargo, es
necesario ampliar el modelo para que pueda simular el comportamiento cuando el potencial se
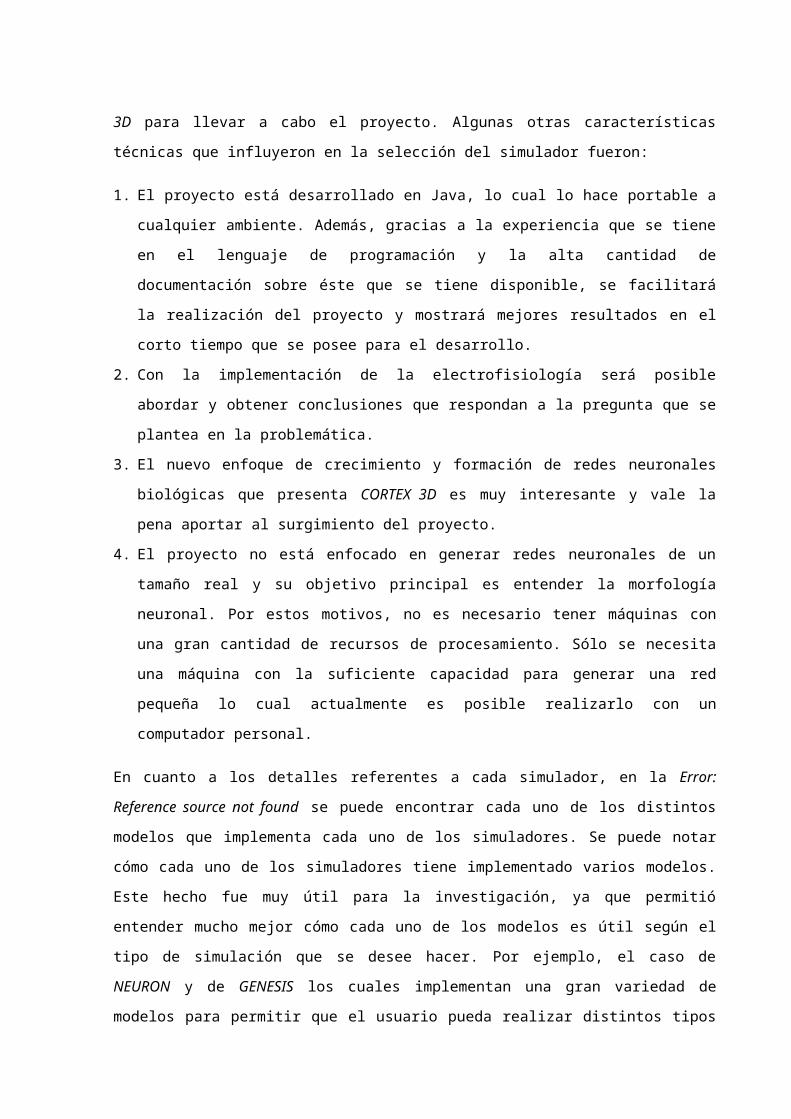
enfrenta a las dendritas, las cuales se forman en el axón y forman estructuras complejas a
través de la cuales viaja el potencial de acción.

10. REFERENCIAS
[1] SNNAP, SNNAP, The University of Texas-Houston Medical School, Enero 2003. [Online].
Available: http://snnap.uth.tmc.edu
[2] J. H. D. A. MCCORMICK, ELECTROPHYSIOLOGY OF THE NEURON, OXFORD
UNIVERSITY PRESS, 1994.
[3] D. R. Zubler F, “A framework for modeling the growth and development of neurons and
networks,” Frontiers in Computational Neuroscience, vol. 3, 2009.
[4] P. H. A. M. A. Gewaltig M, Markus Diesmann M, “Nest, a parallel and distributed simulator
for large networks of spiking neurons,” 2008.
[5] GarridoJ, “Edlut simulator,” 2009. [Online]. Available: http://edlut.googlecode.com
[6] B. B. BOWER J, The Book of GENESIS, 2003.
[7] B. D. Gerard J. Tortora, Anatomia y Fisiologia Humana. Panamericana, 2008.
[8] G. E. C.-R. L. Lemus-Aguilar I., Bargas J. ecuapetla F., “Diseño modular de instrumentación
virtual para la manipulación y el análisis de señales electrofisiológicas,” Revista Mexicana de
Ingeniería Biomédica, 2006.
[9] P. Richard S. Snell, MD, Neuroanatomía Clínica, D. S. Klajn, Ed. Editorial medica
panamericana, 2001.
[10] L. S. R. J. S. L. Zigmond M, Bloom F, “Fundamental neuroscience,” PSICOTHEMA,
vol. 11, pp. 699–702, 1999.
[11] MedicineNet. (2003) Definicion neurociencias. MedicineNet.com. MedicineNet.
[Online]. Available: http://www.medterms.com/script/main/art.asp?articlekey=25656
[12] K. S. Beltrame F, “Neuroinformatics as a megascience issue,” TRANSACTIONS ON
INFORMATION TECHNOLOGY IN BIOMEDICINE, vol. 3, pp. 239 – 240, 1999.
[13] M. N. O. S. Charles K. Alexander, Fundamentos de Circuitos Electricos. McGraw-
Hill, 2006.
[14] G. M. Paul A. Tipler, Física para la ciencia y la tecnología: Electricidad y
magnetismo, luz, física moderna, 2005.

[15] R. S. Netto. (2007) EspañolFísica - electrotécnia. Fisica Net. [Online]. Available:
http://www.fisicanet.com.ar/fisica/electrotecnia/ap01_circuito_electrico.php
[16] H. C. Tuckwell, Introduction to theoretical neurobiology, V. 1, Ed. Cambridge
University Press, 2006.
[17] R. B. Melissa Selik. (2005) EnglishThe impulse function. [Online]. Available: http://-
cnx.org/content/m12824/latest/
[18] D. M. A. Tonnelier, H. Belmabrouk, “Event-driven simulations of nonlinear integrate-
and-fire neurons,” MIT press, 2007.
[19] H. F. HODGKIN A, “A quantitative description of membrane current and its
application to conduction and excitation in nerve,” 1952.
[20] D. P. Abbott L, “Theoretical neuroscience: Computational and mathematical modeling
of neural systems,” Journal of Cognitive Neuroscience, vol. 15, pp. 154–155, 2001.
[21] K. K. B. Ian Hutchin, “Differential outgrowth of axons and their branches is regulated
by localized calcium transient,” The Journal of Neuroscience, pp. 143–153, 2008.
[22] RallW, “Branching dendritic trees and motoneuron membrane resistivity,” Neurol, pp.
491–527, 1959.
[23] ——, Methods in neuronal modeling. MIT Press Cambridge, 1989.
[24] A. Hodgkin and Rushton, “The electrical constants of a crustacean nerve fibre,” 1946.
[25] M. V. Mascagni, Numerical Methods for Neural Modeling. MIT Press, 1998.
[26] F. T. Antonio, “Method of lines for the numerical solution of partial diferential
equations,” Chemical Engineering Dpt, 2008.
[27] S. I. Grossman, Algebra Lineal, 5, Ed. McGraw-Hill Companies, 1999.
[28] SECO. (2010) Seco project. SECO. [Online]. Available: http://www.seco-project.eu/
[29] C. N. Hines M, “The neuron simulation environment,” Neural Computation, vol. 9,
1999.
[30] ZublerF, CORTEX 3D short tutorial, version 0.5 ed., CORTEX 3D Project, August 7
2009.
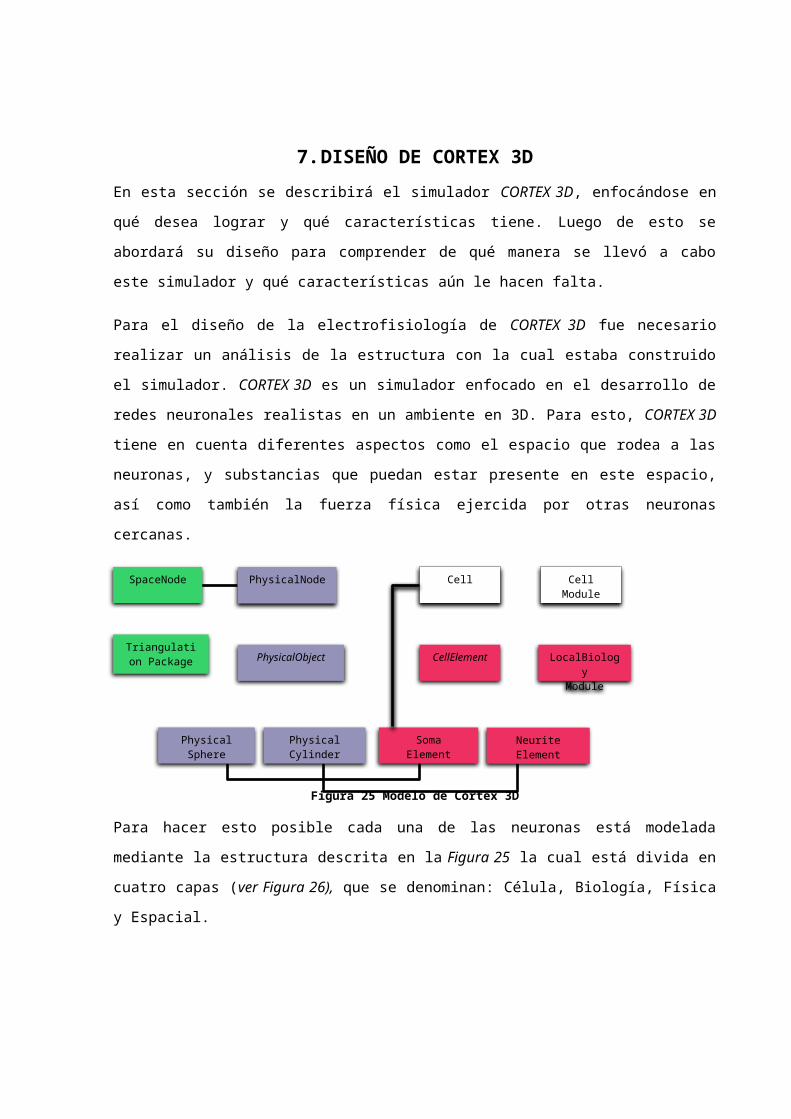
[31] A. Hodgkin, A.L. Huxley, “Currents carried by the sodium and potassium ion through
the membrane of the giant axon of loligo,” 1952.
[32] AMRITA. (2009) EnglishSakshat virtual labs. AMRITA University. [Online].
Available: http://amrita.vlab.co.in/index.php
[33] D. L. K. S. L. H. D. L. L. J. L. J. Anthony S. Fauci, Eugene Braunwald and
E. Joseph Loscalzo, Harrison Principios de Medicina Interna. McGraw-Hill, 2006.
[34] OjaE, “A simplified neural model as a principal model analyzer,” Journal
Matematical Biology, vol. 15, pp. 267 – 263, 1982.
[35] M. D. HUGUENARD J, ELECTROPHYSIOLOGY OF THE NEURON, A. C.
to Neurobiology, Ed. OXFORD UNIVERSITY PRESS, 1994.
[36] A. A. Diesmann M, Gewalting M, “Synod: An enviroment for neural system
simulation,” 1995.
[37] S. C. Izaurieta F, “Redes neuronales artificiales,” 2000.
[38] LernerE, “Analog model of neurons,” The Industrial Physicist, vol. 6, 2000.
[39] RobinsonC, “An overview of neural engineering,” no. 22, 2000.
[40] S. S. Demir, “Icell: An interactive web resource for simulation-based teaching and
learning in electrophysiology training,” 2003.
[41] O. P. S. T. S. S. E. S. I. C. P. S. B. P. S. E. C. M. A. C. E. C. S. J. K. M. S. D. F. M.
Gibson, Frank and P. Lord, “Minimum information about a neuroscience investigation (mini)
electrophysiology,” Available from Nature Precedings
<http://hdl.handle.net/10101/npre.2008.1720.1>, 2008.
[42] BeemanD, “Genesis modeling tutorial,” Electrical and Computer Engineering
Department, vol. 1, 2005.
[43] D. R. W. J. D. J. S. Y. Breau F, Maio-Cannon S, “The neuron emulator: An
undergraduate biomedical engineering design project,” 2005.
[44] K. R. Sporns O, Tononi G, “The human connectome: A structural description of the
human brain,” PLoS Comput Biol, 2005.
[45] LyttonW, “Neural query system: data-mining from within the neuron simulator,”
Neuroinformatics, 2006.
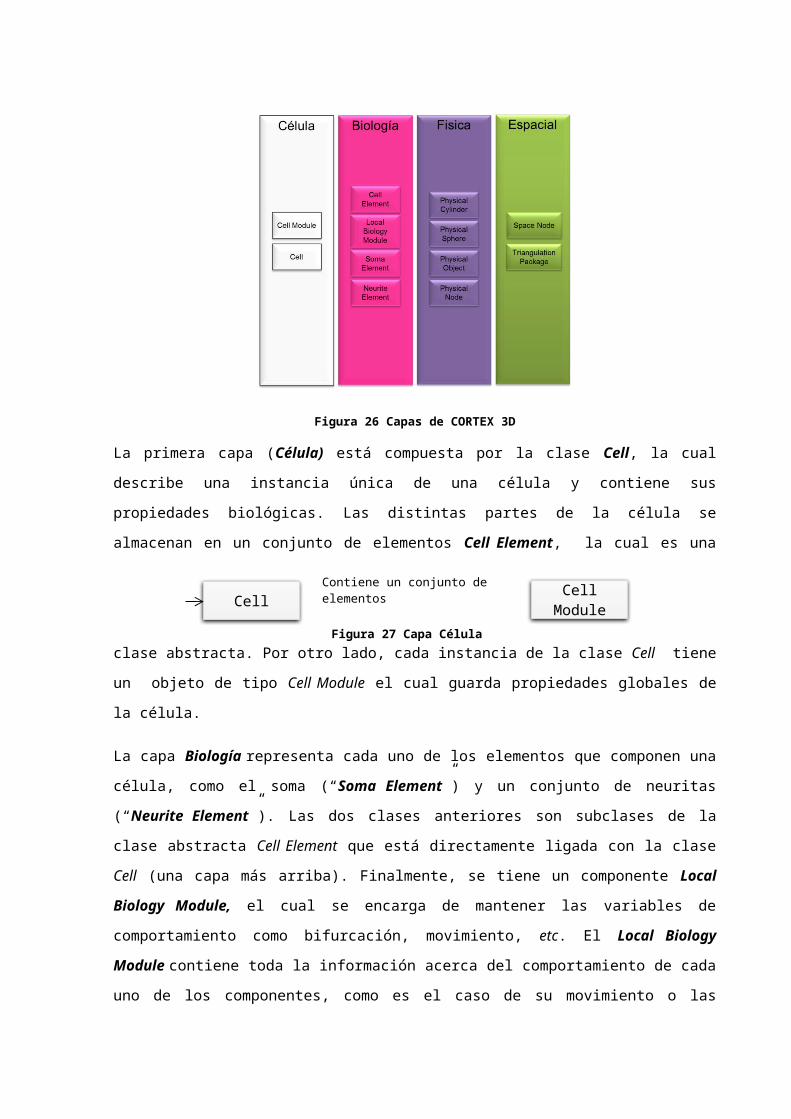
[46] MarkramH, “The blue brain project,” NATURE REVIEWS, vol. 7, 2006.
[47] G. P. B. U. C. H. H. M. H. F. M. E. S. J. W. S. S. E. Cannon R, Gewaltig M,
“Interoperability of neuroscience modeling software current status and future directions,”
Neuroinformatics, 2007.
[48] G. A. S. F. M. H. S. I. Druckmann S, Banitt Y, “A novel multiple objective
optimization framework for constraining conductance-based neuron models by experimental
data,” Frontiers in Neuroscience, vol. 1, 2007.
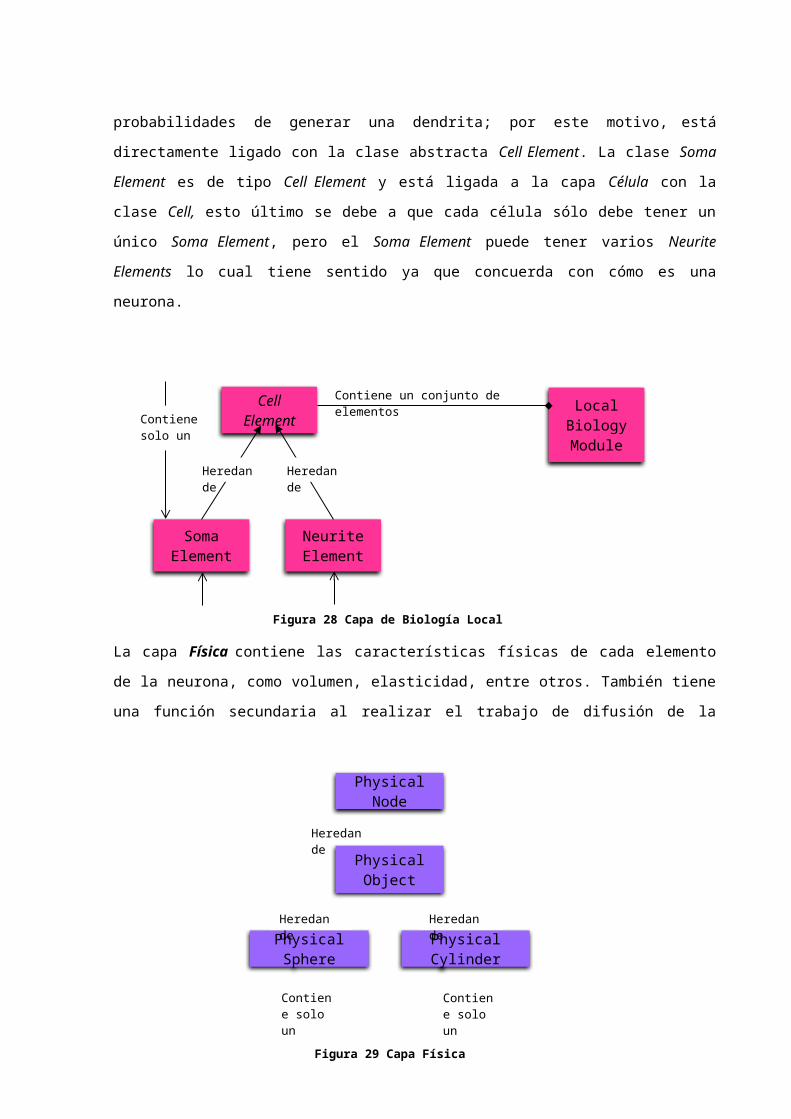
ANEXOS
DATOS DE SIMULACIÓN
Tiempos
Teórica Real Desviación Cuadrados Error
Chi o error medio
0 -60 -60 0 0 00.025 -60.2146 -
60.012388540.20221146 0.040889474 0.000204447
0.05 -60.4249 -60.02461583
0.40028417 0.160227416 0.000801137
0.075 -60.6322 -60.03670113
0.59549887 0.354618906 0.001773095
0.1 -60.8373 -60.04865556
0.78864444 0.621960058 0.0031098
0.125 -61.0405 -60.06048491
0.98001509 0.960429579 0.004802148
0.15 -61.2421 -60.07219152
1.16990848 1.36868584 0.006843429
0.175 -61.4416 -60.08377553
1.35782447 1.843687292 0.009218436
0.2 -61.6388 -60.09523566
1.54356434 2.382590881 0.011912954
0.225 -61.8336 -60.10656979
1.72703021 2.982633348 0.014913167
0.25 -62.0256 -60.11777532
1.90782468 3.639795017 0.018198975
0.275 -62.2145 -60.12884938
2.08565062 4.349938524 0.021749693
0.3 -62.4001 -60.139789 2.260311 5.109005839 0.0255450290.325 -62.582 -60.1505912 2.4314088 5.911748741 0.0295587440.35 -62.76 -
60.161253092.59874691 6.753485507 0.033767428
0.375 -62.934 -60.17177185
2.76222815 7.629904349 0.038149522
0.4 -63.1038 -60.18214481
2.92165519 8.53606903 0.042680345
0.425 -63.2692 -60.19236945
3.07683055 9.466886231 0.047334431
0.45 -63.4302 -60.20244339
3.22775661 10.41841272 0.052092064
0.475 -63.5866 -60.21236443
3.37423557 11.3854657 0.056927329
0.5 -63.7383 -60.22213051
3.51616949 12.36344788 0.061817239
0.525 -63.8854 - 3.65366024 13.34923316 0.066746166
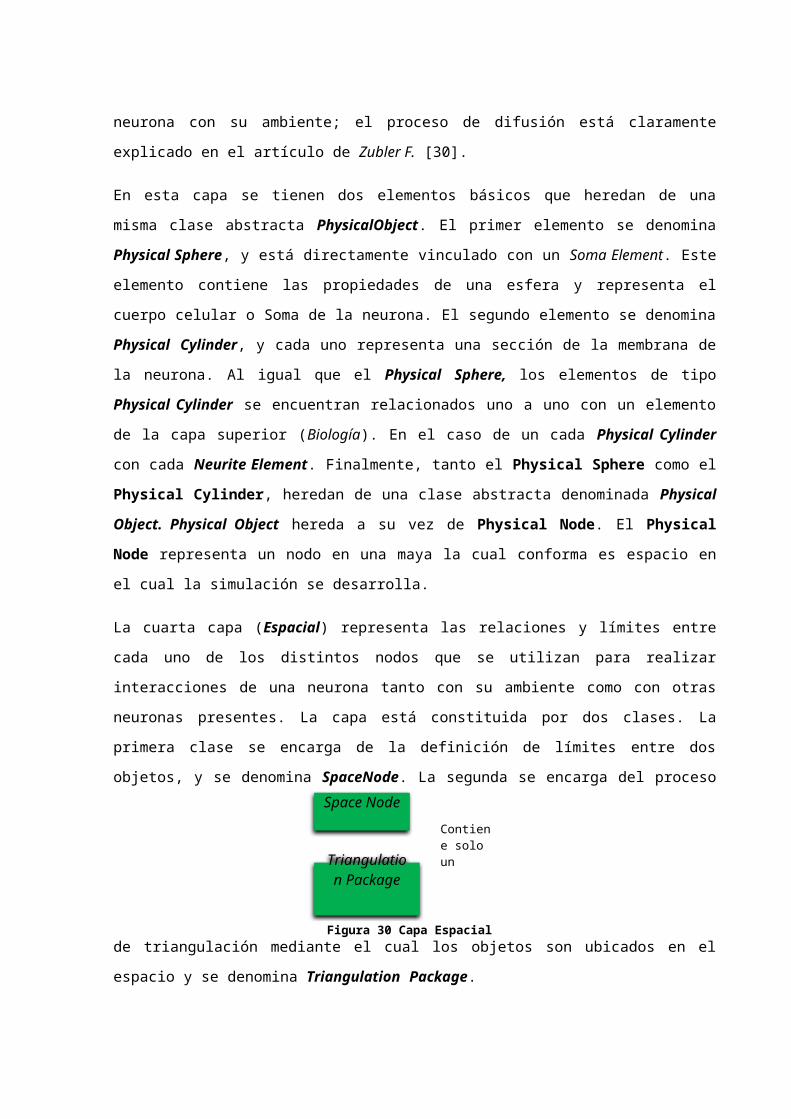
60.231739760.55 -64.0278 -
60.241190453.78660955 14.3384119 0.071692059
0.575 -64.1656 -60.25048102
3.91511898 15.32815664 0.076640783
0.6 -64.2986 -60.25961006
4.03898994 16.31343974 0.081567199
0.625 -64.4271 -60.26857632
4.15852368 17.29331919 0.086466596
0.65 -64.5509 -60.2773787 4.2735213 18.26298433 0.0913149220.675 -64.6702 -
60.286016234.38418377 19.22106735 0.096105337
0.7 -64.785 -60.2944881 4.4905119 20.16469712 0.1008234860.725 -64.8954 -
60.302793634.59260637 21.09203323 0.105460166
0.75 -65.0014 -60.31093229
4.69046771 22.00048737 0.110002437
0.775 -65.1033 -60.31890365
4.78439635 22.89044848 0.114452242
0.8 -65.201 -60.32670742
4.87429258 23.75872813 0.118793641
0.825 -65.2945 -60.33434345
4.96015655 24.60315296 0.123015765
0.85 -65.3841 -60.3418117 5.0422883 25.42467134 0.1271233570.875 -65.4698 -
60.349112225.12068778 26.22144335 0.131107217
0.9 -65.5518 -60.3562452 5.1955548 26.99378966 0.1349689480.925 -65.63 -
60.363210935.26678907 27.73906706 0.138695335
0.95 -65.7046 -60.37000981
5.33459019 28.4578525 0.142289263
0.975 -65.7757 -60.37664232
5.39905768 29.14982386 0.145749119
1 -65.8435 -60.38310905
5.46039095 29.81586935 0.149079347
1.025 -65.9079 -60.38941068
5.51848932 30.45372436 0.152268622
1.05 -65.9692 -60.39554799
5.57365201 31.06559674 0.155327984
1.075 -66.0274 -60.40152182
5.62587818 31.65050524 0.158252526
1.1 -66.0826 -60.40733313
5.67526687 32.20865406 0.16104327
1.125 -66.1349 -60.41298292
5.72191708 32.74033512 0.163701676
1.15 -66.1844 -60.41847228
5.76592772 33.24592249 0.166229612
1.175 -66.2311 -60.42380238
5.80729762 33.72470562 0.168623528
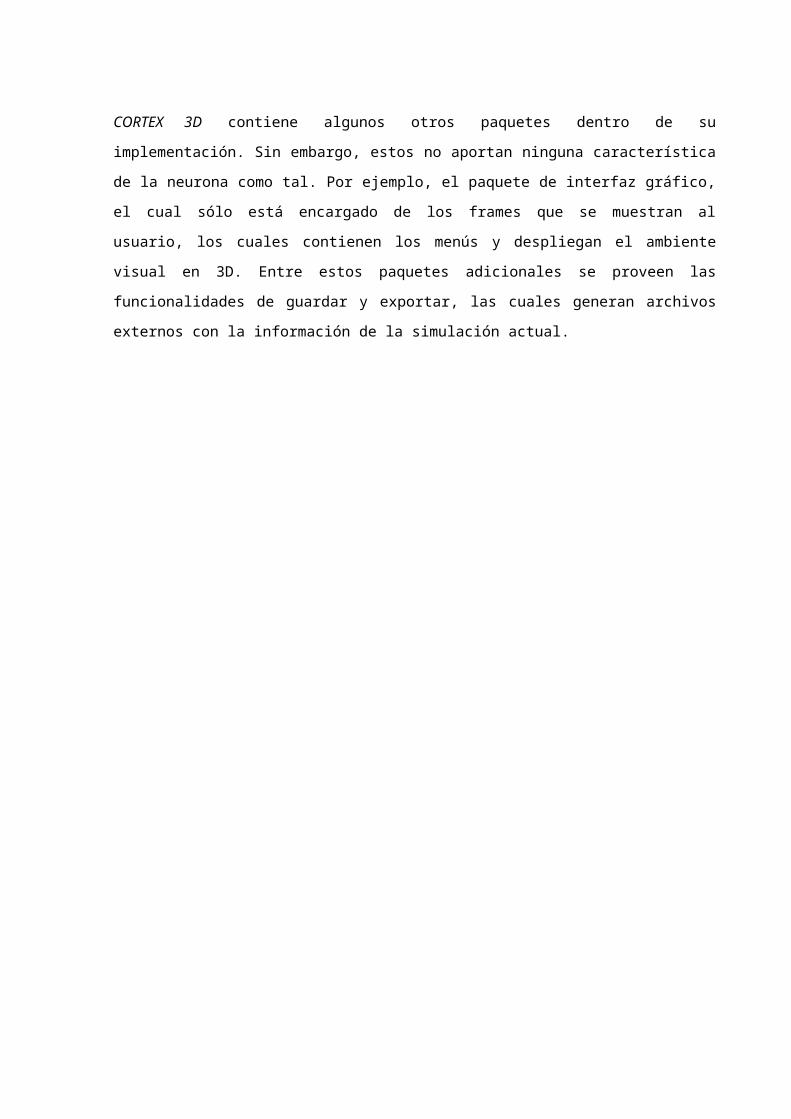
1.2 -66.2752 -60.42897446
5.84622554 34.17835306 0.170891765
1.225 -66.3167 -60.43398981
5.88271019 34.60627917 0.173031396
1.25 -66.3557 -60.4388498 5.9168502 35.00911634 0.1750455821.275 -66.3923 -
60.443555845.94874416 35.38755711 0.176937786
1.3 -66.4266 -60.44810941
5.97849059 35.74234969 0.178711748
1.325 -66.4587 -60.45251206
6.00618794 36.07429361 0.180371468
1.35 -66.4886 -60.45676535
6.03183465 36.38302925 0.181915146
1.375 -66.5165 -60.46087092
6.05562908 36.67064352 0.183353218
1.4 -66.5423 -60.46483045
6.07746955 36.93563608 0.18467818
1.425 -66.5662 -60.46864566
6.09755434 37.1801689 0.185900845
1.45 -66.5882 -60.47231831
6.11588169 37.40400887 0.187020044
1.475 -66.6083 -60.47585019
6.13244981 37.6069407 0.188034704
1.5 -66.6268 -60.47924314
6.14755686 37.79245541 0.188962277
1.525 -66.6435 -60.48249902
6.16100098 37.95793312 0.189789666
1.55 -66.6587 -60.48561973
6.17308027 38.10692006 0.1905346
1.575 -66.6723 -60.48860719
6.18369281 38.23805676 0.191190284
1.6 -66.6843 -60.49146336
6.19283664 38.35122564 0.191756128
1.625 -66.6949 -60.49419021
6.20070979 38.4488019 0.19224401
1.65 -66.7041 -60.49678974
6.20731026 38.53070072 0.192653504
1.675 -66.712 -60.49926395
6.21273605 38.59808918 0.192990446
1.7 -66.7185 -60.5016149 6.2168851 38.64966036 0.1932483021.725 -66.7239 -
60.503844626.22005538 38.68908892 0.193445445
1.75 -66.728 -60.50595519
6.22204481 38.71384167 0.193569208
1.775 -66.7309 -60.50794867
6.22295133 38.72512327 0.193625616
1.8 -66.7327 -60.50982716
6.22287284 38.72414642 0.193620732
1.825 -66.7334 - 6.22180725 38.71088547 0.193554427
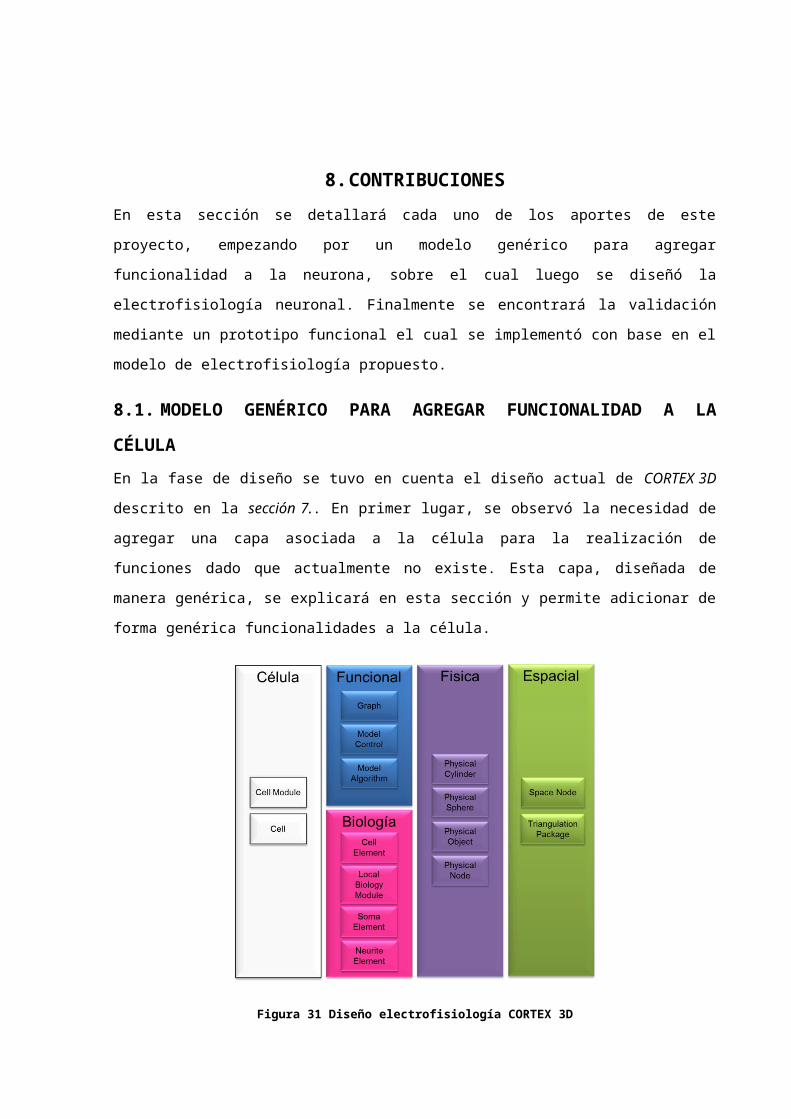
60.511592751.85 -66.7332 -
60.513247556.21995245 38.68780853 0.193439043
1.875 -66.7319 -60.51479366
6.21710634 38.65241126 0.193262056
1.9 -66.7296 -60.5162332 6.2133668 38.60592698 0.1930296351.925 -66.7265 -
60.517568296.20893171 38.55083299 0.192754165
1.95 -66.7224 -60.51880104
6.20359896 38.48464006 0.1924232
1.975 -66.7175 -60.51993357
6.19756643 38.40982963 0.192049148
2 -66.7118 -51.66952978
15.0422702 226.2698933 1.131349467
2.025 -54.4008 -39.58007306
14.8207269 219.653947 1.098269735
2.05 -42.2865 -26.35921089
15.9272891 253.6785385 1.268392692
2.075 -30.0947 -16.46294679
13.6317532 185.8246955 0.929123477
2.1 -16.7046 -3.735033484
12.9695665 168.2096556 0.841048278
2.125 -0.0744226 11.92354964 11.9979722 143.951338 0.719756692.15 19.182 30.45724657 11.2752466 127.1311851 0.635655926
2.175 35.1299 43.22483869 8.09493869 65.52803234 0.3276401622.2 44.0072 45.95044151 1.94324151 3.776187584 0.018880938
2.225 47.08 43.52890399 -3.55109601 12.61028288 0.0630514142.25 46.4869 39.51031267 -6.97658733 48.67277073 0.243363854
2.275 43.6296 34.77128156 -8.85831844 78.46980558 0.3923490282.3 39.3498 29.58207075 -9.76772925 95.40853476 0.477042674
2.325 27.1481 24.12773619 -3.02036381 9.12259757 0.0456129882.35 17.6003 18.55947317 0.95917317 0.920013169 0.004600066
2.375 9.64199 12.99454427 3.35255427 11.23962016 0.0561981012.4 2.70713 7.516305113 4.80917511 23.12816526 0.115640826
2.425 -3.52022 2.177851517 5.69807152 32.46801901 0.1623400952.45 -9.22411 -
2.9923518326.23175817 38.83480987 0.194174049
2.475 -14.5179 -7.984669256
6.53323074 42.68310396 0.21341552
2.5 -19.4772 -12.80375595
6.67344405 44.53485551 0.222674278
2.525 -24.1583 -17.46638537
6.69191463 44.78172138 0.223908607
2.55 -28.6096 -22.0021931 6.6074069 43.65782589 0.2182891292.575 -32.8815 -26.4566372 6.4248628 41.278862 0.20639431
2.6 -37.0289 -30.89338092
6.13551908 37.64459438 0.188222972
2.625 -41.1098 - 5.71888419 32.7056364 0.163528182

35.390915812.65 -45.1746 -
40.026258985.14834102 26.50541527 0.132527076
2.675 -49.2445 -44.83813481
4.40636519 19.41605414 0.097080271
2.7 -53.2849 -49.76936331
3.51553669 12.35899822 0.061794991
2.725 -57.1872 -54.61670358
2.57049642 6.607451855 0.033037259
2.75 -60.7849 -59.05788069
1.72701931 2.98259569 0.014912978
2.775 -63.9154 -62.79594909
1.11945091 1.25317033 0.006265852
2.8 -66.4933 -65.71270684
0.78059316 0.609325685 0.003046628
2.825 -68.5321 -67.8792694 0.6528306 0.426187791 0.0021309392.85 -70.1096 -
69.454414210.65518579 0.429268426 0.002146342
2.875 -71.321 -70.59607056
0.72492944 0.525522697 0.002627613
2.9 -72.2515 -71.42803244
0.82346756 0.678098826 0.003390494
2.925 -72.9691 -72.03902975
0.93007025 0.865030678 0.004325153
2.95 -73.5252 -72.4909308 1.0342692 1.069712781 0.0053485642.975 -73.9578 -
72.826795931.13100407 1.27917021 0.006395851
3 -74.2957 -73.07683541
1.21886459 1.485630878 0.007428154
3.025 -74.56 -73.26248562
1.29751438 1.683543558 0.008417718
3.05 -74.7668 -73.39914437
1.36765563 1.870481933 0.00935241
3.075 -74.9282 -73.49800814
1.43019186 2.045448759 0.010227244
3.1 -75.0534 -73.56731609
1.48608391 2.208445382 0.011042227
3.125 -75.1496 -73.61320121
1.53639879 2.360521239 0.011802606
3.15 -75.2223 -73.64027935
1.58202065 2.502789321 0.012513947
3.175 -75.2756 -73.65206153
1.62353847 2.635877165 0.013179386
3.2 -75.3131 -73.65124568
1.66185432 2.761759791 0.013808799
3.225 -75.3373 -73.63992543
1.69737457 2.881080428 0.014405402
3.25 -75.3505 -73.61974102
1.73075898 2.995526653 0.014977633
3.275 -75.3542 -73.59198944
1.76221056 3.10538607 0.01552693
3.3 -75.3498 -73.55770566
1.79209434 3.211602136 0.016058011
3.325 -75.3386 -73.51772302
1.82087698 3.315592984 0.016577965
3.35 -75.3213 -73.47271854
1.84858146 3.41725342 0.017086267
3.375 -75.2987 -73.42324718
1.87545282 3.517323284 0.017586616
3.4 -75.2715 -73.36976796
1.90173204 3.616584746 0.018082924
3.425 -75.2401 -73.31266402
1.92743598 3.715009446 0.018575047
3.45 -75.2051 -73.25225812
1.95284188 3.813591424 0.019067957
3.475 -75.1667 -73.18882467
1.97787533 3.911990803 0.019559954
3.5 -75.1252 -73.12259926
2.00260074 4.010409738 0.020052049
3.525 -75.081 -73.05378598
2.02721402 4.109596687 0.020547983
3.55 -75.0343 -72.98256341
2.05173659 4.209623054 0.021048115
3.575 -74.9853 -72.90908922
2.07621078 4.310651184 0.021553256
3.6 -74.9341 -72.83350399
2.10059601 4.412503589 0.022062518
3.625 -74.8809 -72.75593413
2.12496587 4.515479947 0.0225774
3.65 -74.8258 -72.67649435
2.14930565 4.619514794 0.023097574
3.675 -74.769 -72.59528958
2.17371042 4.725016988 0.023625085
3.7 -74.7105 -72.51241659
2.19808341 4.831570664 0.024157853
3.725 -74.6505 -72.42796525
2.22253475 4.939660729 0.024698304
3.75 -74.589 -72.34201956
2.24698044 5.048921119 0.025244606
3.775 -74.5262 -72.25465854
2.27154146 5.159900619 0.025799503
3.8 -74.462 -72.16595691
2.29604309 5.271813859 0.026359069
3.825 -74.3967 -72.07598568
2.32071432 5.38571496 0.026928575
3.85 -74.3302 -71.98481257
2.34538743 5.500842176 0.027504211
3.875 -74.2626 - 2.37009753 5.617362322 0.028086812
71.892502473.9 -74.194 -
71.799117662.39488234 5.735461417 0.028677307
3.925 -74.1244 -71.70471817
2.41968183 5.854860157 0.029274301
3.95 -74.0538 -71.60936192
2.44443808 5.975277544 0.029876388
3.975 -73.9824 -71.51310491
2.46929509 6.097418232 0.030487091
4 -73.9102 -71.4160014 2.4941986 6.22102665 0.0311051334.025 -73.8371 -
71.318103982.51899602 6.345340946 0.031726705
4.05 -73.7634 -71.21946369
2.54393631 6.471611928 0.03235806
4.075 -73.6889 -71.12013012
2.56876988 6.598578709 0.032992894
4.1 -73.6138 -71.02015142
2.59364858 6.727012946 0.033635065
4.125 -73.538 -70.91957443
2.61842557 6.856152449 0.034280762
4.15 -73.4617 -70.81844468
2.64325532 6.986798705 0.034933994
4.175 -73.3848 -70.71680642
2.66799358 7.118189752 0.035590949
4.2 -73.3074 -70.6147027 2.6926973 7.250618754 0.0362530944.225 -73.2296 -
70.512175362.71742464 7.384396652 0.036921983
4.25 -73.1513 -70.40926509
2.74203491 7.518755454 0.037593777
4.275 -73.0726 -70.3060114 2.7665886 7.654012465 0.0382700624.3 -72.9936 -
70.202452712.79114729 7.790503182 0.038952516
4.325 -72.9142 -70.09862632
2.81557368 7.927455161 0.039637276
4.35 -72.8344 -69.99456843
2.83983157 8.06464332 0.040323217
4.375 -72.7544 -69.89031421
2.86408579 8.202987402 0.041014937
4.4 -72.6742 -69.78589775
2.88830225 8.342289898 0.041711449
4.425 -72.5937 -69.68135211
2.91234789 8.481770227 0.042408851
4.45 -72.513 -69.57670935
2.93629065 8.621802763 0.043109014
4.475 -72.4321 -69.47200053
2.96009947 8.762188867 0.043810944
4.5 -72.3511 -69.36725572
2.98384428 8.903326678 0.044516633
4.525 -72.27 - 3.00749596 9.045031944 0.04522516

69.262504044.55 -72.1887 -
69.157773663.03092634 9.186514463 0.045932572
4.575 -72.1074 -69.05309183
3.05430817 9.328798367 0.046643992
4.6 -72.026 -68.9484849 3.0775151 9.471099183 0.0473554964.625 -71.9446 -
68.843978323.10062168 9.613854817 0.048069274
4.65 -71.8632 -68.73959667
3.12360333 9.756897745 0.048784489
4.675 -71.7818 -68.63536371
3.14643629 9.900061343 0.049500307
4.7 -71.7004 -68.53130233
3.16909767 10.04318002 0.0502159
4.725 -71.6191 -68.42743465
3.19166535 10.18672768 0.050933638
4.75 -71.5378 -68.32378198
3.21401802 10.32991182 0.051649559
4.775 -71.4566 -68.22036487
3.23623513 10.47321784 0.052366089
4.8 -71.3755 -68.1172031 3.2582969 10.61649869 0.0530824934.825 -71.2945 -
68.014315753.28018425 10.75960871 0.053798044
4.85 -71.2136 -67.91172118
3.30187882 10.90240374 0.054512019
4.875 -71.1329 -67.80943705
3.32346295 11.04540595 0.05522703
4.9 -71.0523 -67.70748038
3.34481962 11.18781832 0.055939092
4.925 -70.972 -67.6058675 3.3661325 11.33084804 0.056654244.95 -70.8918 -
67.504614133.38718587 11.47302809 0.05736514
4.975 -70.8118 -67.4037354 3.4080646 11.61490431 0.058074522


















