
INTEGRACION NUMÉRICA DE PROBLEMAS DE MECÁNICA DE ...
27
PROBLEMAS COMPUTACIONALES DE MECÁNICA DE FLUIDOS EN GEOMETRÍAS COMPLEJAS
Transcript of INTEGRACION NUMÉRICA DE PROBLEMAS DE MECÁNICA DE ...
PROBLEMAS COMPUTACIONALES DE MECÁNICA DE FLUIDOS EN GEOMETRÍAS COMPLEJAS
Modelización del problema fluido.
• Problemas físicos: •Cálculo estacionario de fuerzas en una aeronave.•Cálculos no estacionarios: acoplamiento fluido-estructura.•Problemas de estabilidad en capas límites fluidas: turbulencia.•Inestabilidad de flujos laminares y turbulentos: aeroacústica.• etc.
•Modilización matemática: •Ecuaciones de Navier-Stokes. Imposibles de resolver salvo en geometrías y condiciones de contorno muy sencillas.
•Modelización numérica:•Discretización del dominio geométrico: mallas computacionales.•Discretización numérica de las ecuaciones matématicas: técnicas numéricas de CFD (mecánica de fluidos computacional):
•Resolución de sistemas no-lineales de orden ~ número de puntos en la malla.•Problemas de autovalores.
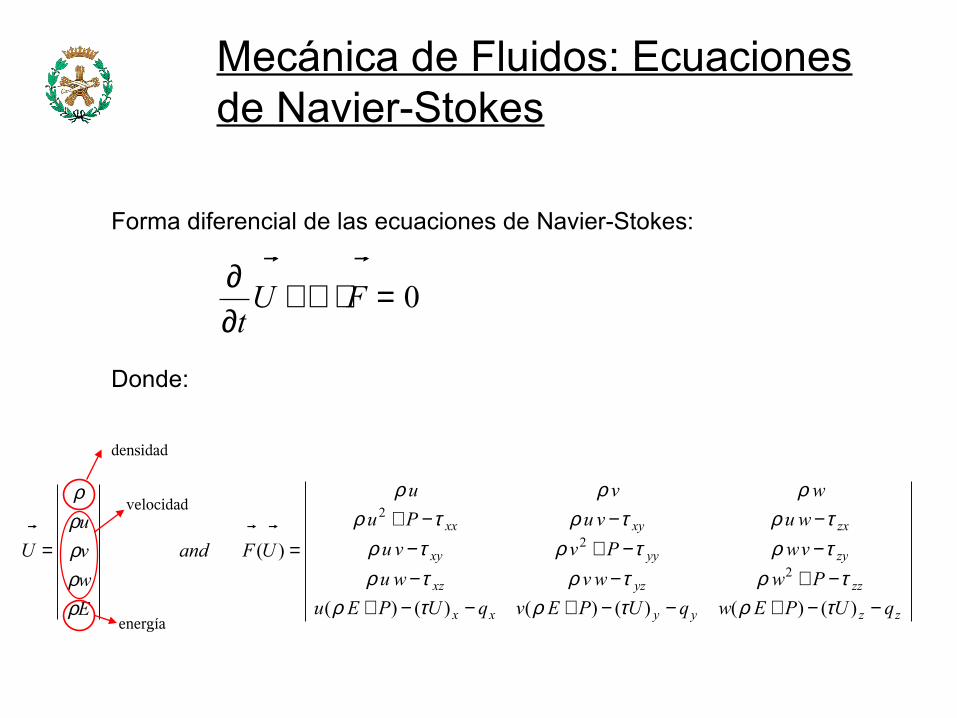
Mecánica de Fluidos: Ecuaciones de Navier-Stokes
0=⋅∇+∂∂
FUt
zzyyxx
zzyzxz
zyyyxy
zxxyxx
qUPEwqUPEvqUPEu
Pwwvwu
vwPvvu
wuvuPu
wvu
UFand
E
w
v
u
U
−−+−−+−−+−+−−
−−+−−−−+
==
)()()()()()(
)(2
2
2
τρτρτρτρτρτρ
τρτρτρτρτρτρ
ρρρ
ρρρρρ
Forma diferencial de las ecuaciones de Navier-Stokes:
Donde:
densidad
velocidad
energía
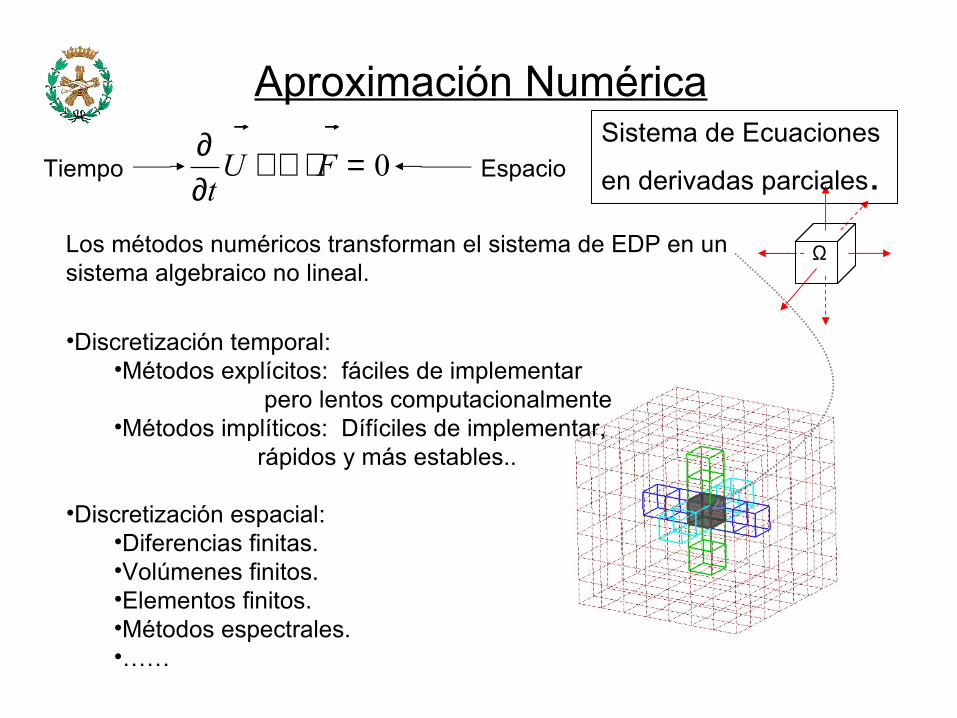
Aproximación Numérica
Ω
0=⋅∇+∂∂
FUt
Tiempo Espacio
•Discretización temporal:•Métodos explícitos: fáciles de implementar
pero lentos computacionalmente•Métodos implíticos: Dífíciles de implementar,
rápidos y más estables..
•Discretización espacial:•Diferencias finitas.•Volúmenes finitos.•Elementos finitos.•Métodos espectrales.•……
Los métodos numéricos transforman el sistema de EDP en un sistema algebraico no lineal.
Sistema de Ecuaciones
en derivadas parciales.

Fx∂
∂
0x 1x
)( 0xf
)( 1xf
01
010
' )()(lim)(
01 xx
xfxfxf
xx −−=
→
0x 1x)( 0xf
)( 1xf
ix1−ix 1+ix)1()(
)()()(
1
1' OxErrorxx
xfxfxf
ii
iii =∆≈
−−≈
+
+
ix1−ix 1+ix)1()( OxError =∆≈
ix1−ix 1+ix)2()( 2 OxError =∆≈
•Regresivas
•Progresivas
•Centradas
•…………..
Aproximación Numérica:
Cálculo de derivadas.
Diferencias finitas:
Método de diferencias finitas: Aproximan las derivadas mediante fórmulas de diferencias.
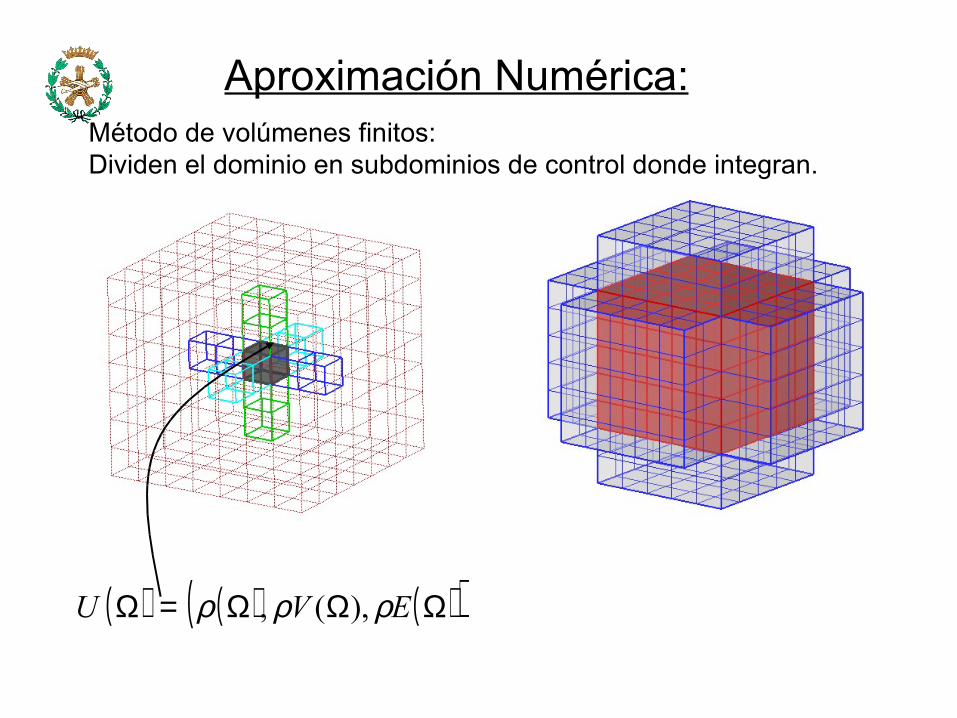
( ) ( ) ( )( )ΩΩΩ=Ω EVU ρρρ ),(,
Aproximación Numérica:Método de volúmenes finitos: Dividen el dominio en subdominios de control donde integran.
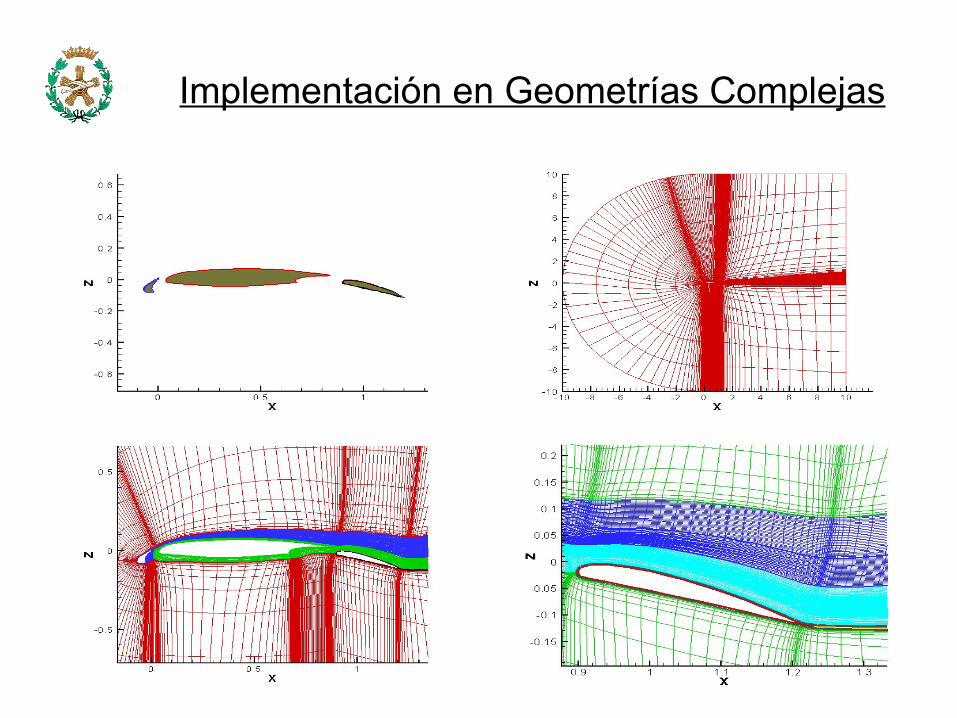
Implementación en Geometrías Complejas
Implementación en Geometrías Complejas
Órdenes de magnitud (tiempo de computación y memoria RAM):
•Número de ecuaciones no lineales ~ Número de puntos de la malla.
N=N_puntos*N_incónitas_punto.
•Problemas 2D: N_puntos ~ 10^4-10^5 ~ pocos Mb. (explícito). muchos Mb (implítico).Tiempos de computación del orden de horas.
•Problemas 3D: N_puntos ~ 10^5-10^7 ~ muchos Mb (explícitos) Gb (implíticos)
Tiempos de computación del orden de días.
Elevado coste computacional.
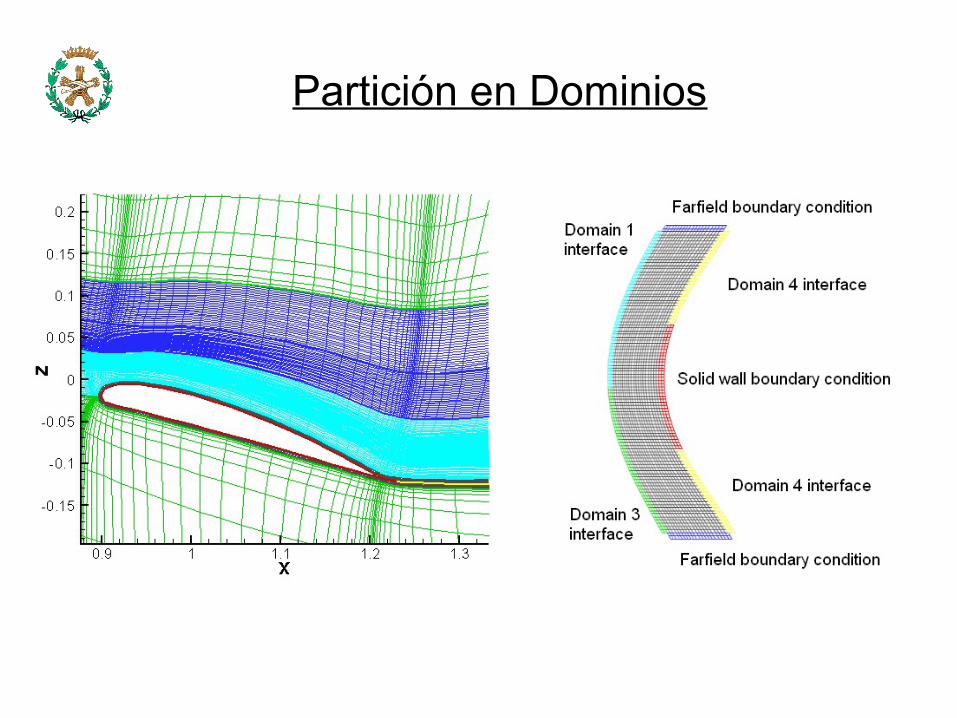
Partición en Dominios
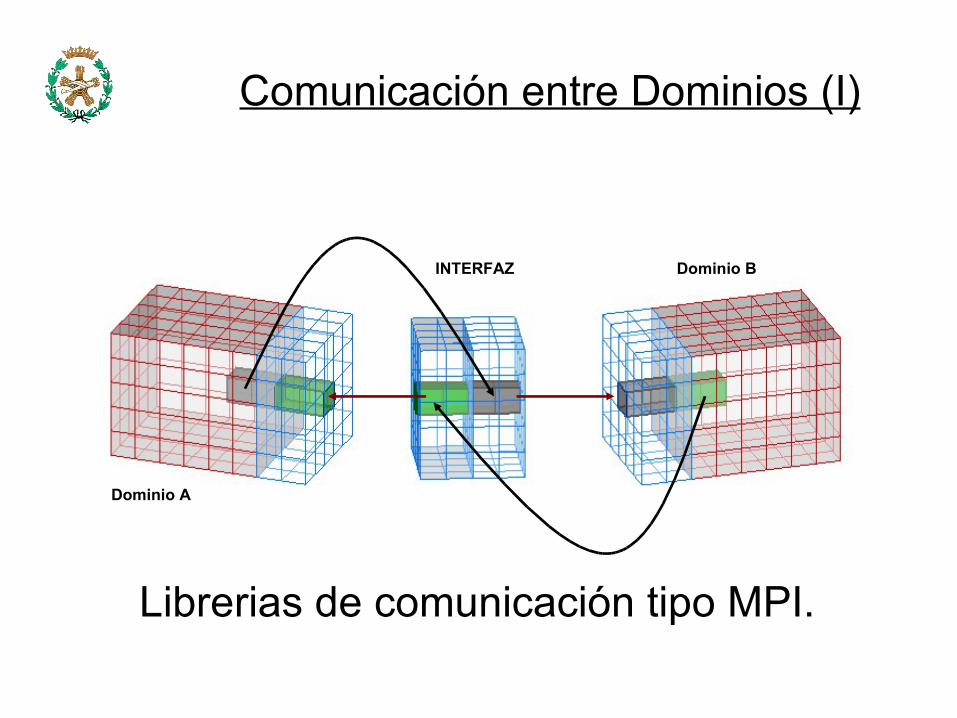
Comunicación entre Dominios (I)
Dominio A
Dominio BINTERFAZ
Librerias de comunicación tipo MPI.

Comunicación entre Dominios (II)
Interface array
Domain 1
Domain 2
Domain 3
Interface array
Domain 3Domain
2
Domain 1
Cargar Valores Iniciales
Cargar Celdas Auxiliares
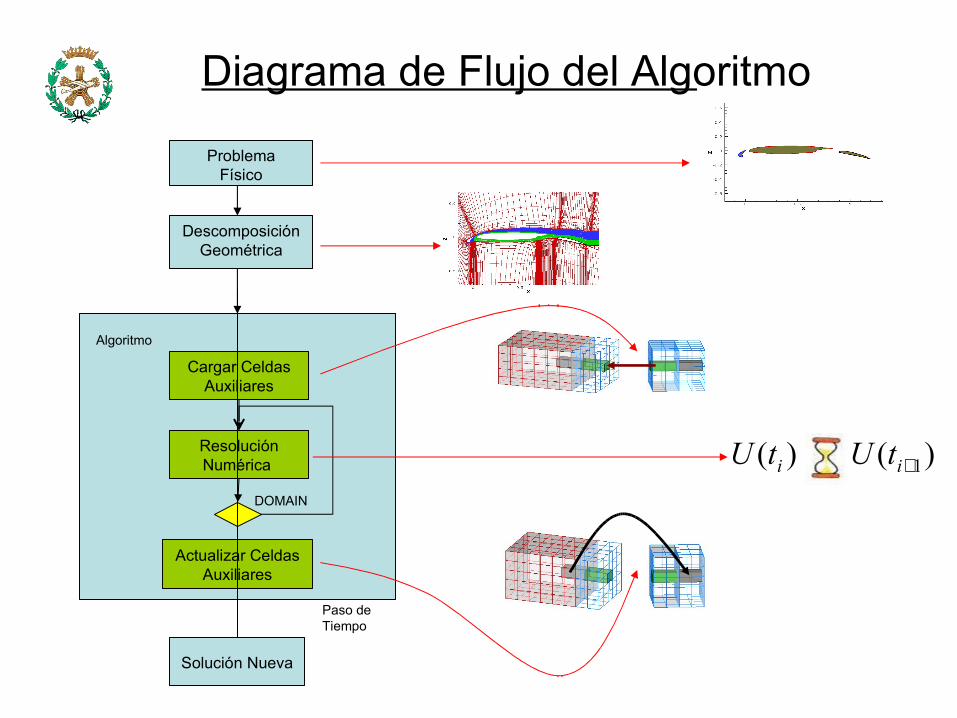
Diagrama de Flujo del Algoritmo
Solución Nueva
Resolución Numérica
Actualizar Celdas Auxiliares
Cargar Celdas Auxiliares
DOMAIN
Algoritmo
Paso de Tiempo
Problema Físico
Descomposición Geométrica
)( itU
)( 1+itU
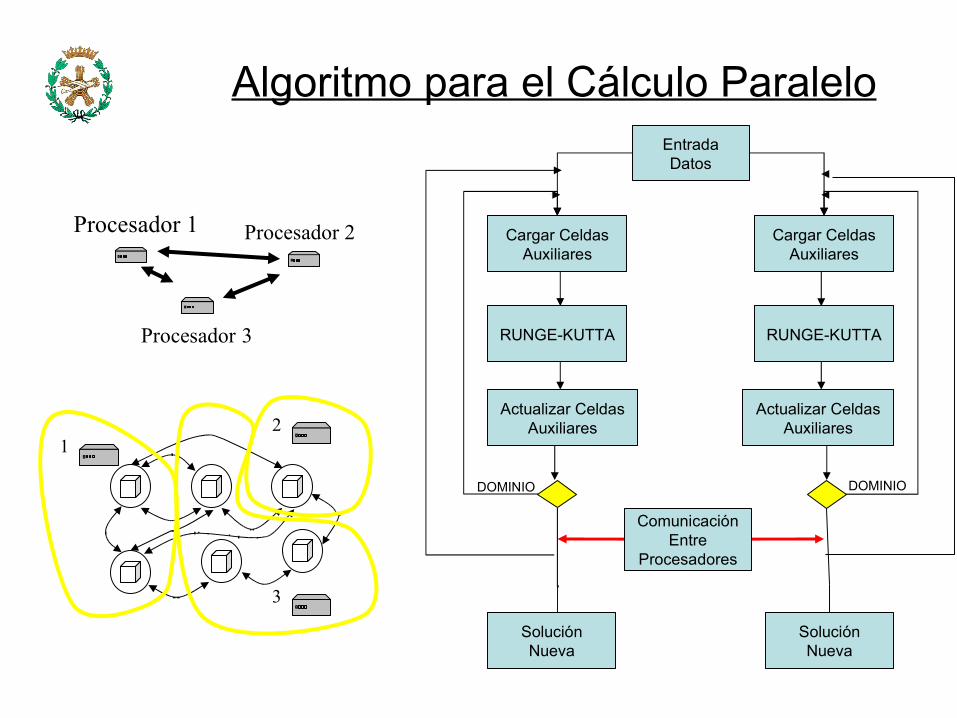
Algoritmo para el Cálculo Paralelo
1
3
2
Procesador 1 Procesador 2
Procesador 3
ComunicaciónEntre
Procesadores
Solución Nueva
RUNGE-KUTTA
Actualizar Celdas Auxiliares
Cargar Celdas Auxiliares
DOMINIO
RUNGE-KUTTA
Actualizar Celdas Auxiliares
Cargar Celdas Auxiliares
Solución Nueva
DOMINIO
Entrada Datos
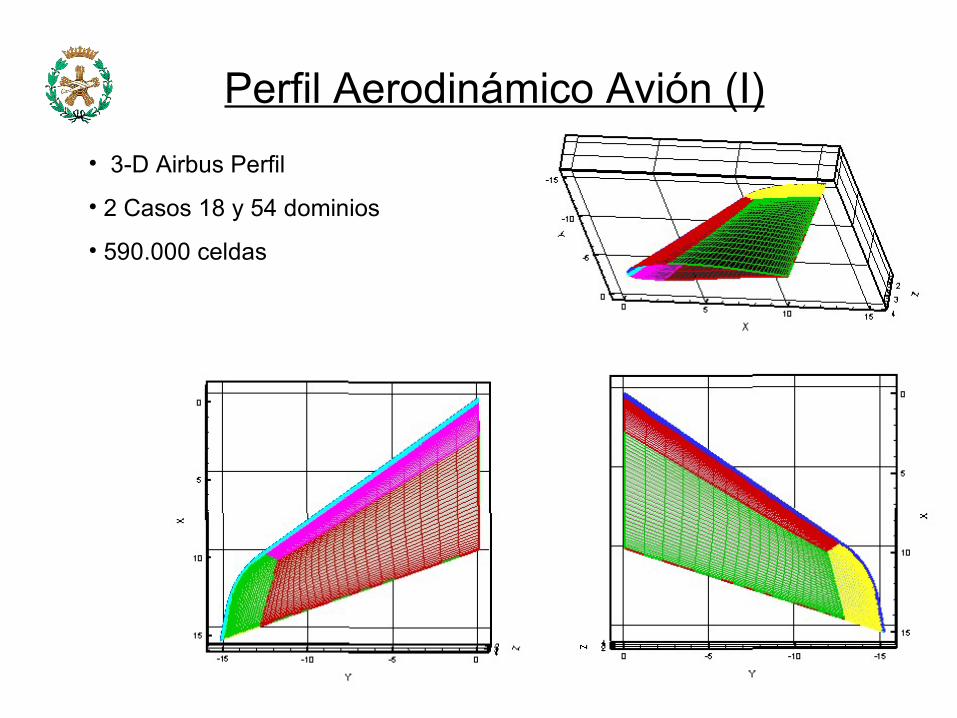
• 3-D Airbus Perfil
• 2 Casos 18 y 54 dominios
• 590.000 celdas
Perfil Aerodinámico Avión (I)
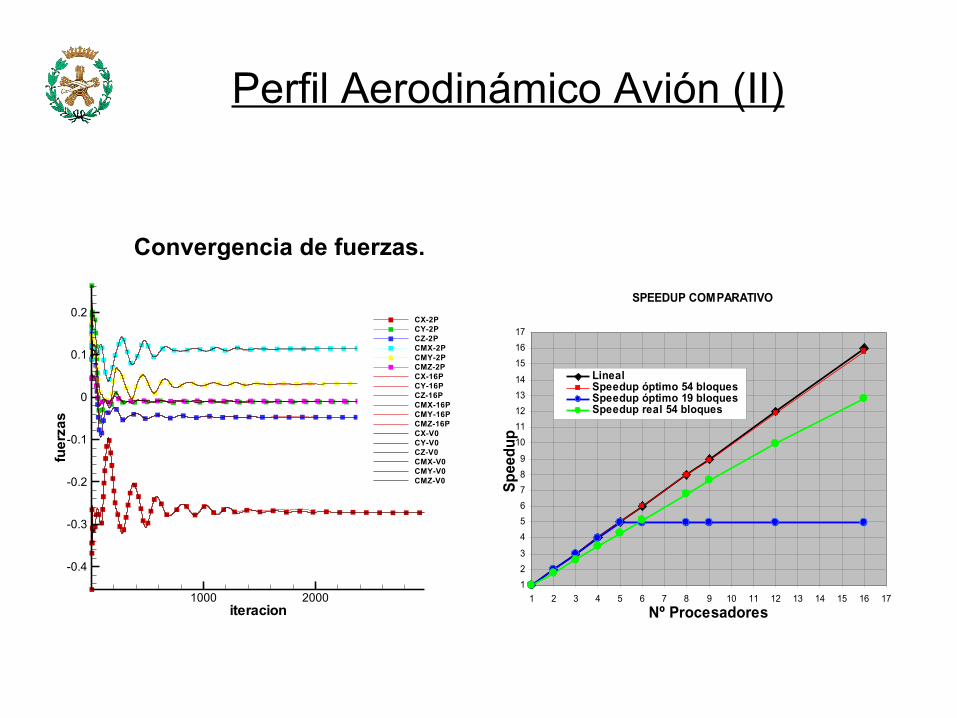
Perfil Aerodinámico Avión (II)
iteracion
fue
rza
s
1000 2000
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2CX-2PCY-2PCZ-2PCMX-2PCMY-2PCMZ-2PCX-16PCY-16PCZ-16PCMX-16PCMY-16PCMZ-16PCX-V0CY-V0CZ-V0CMX-V0CMY-V0CMZ-V0
SPEEDUP COMPARATIVO
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
Nº Procesadores
Sp
eed
up
LinealSpeedup óptimo 54 bloquesSpeedup óptimo 19 bloquesSpeedup real 54 bloques
Convergencia de fuerzas.
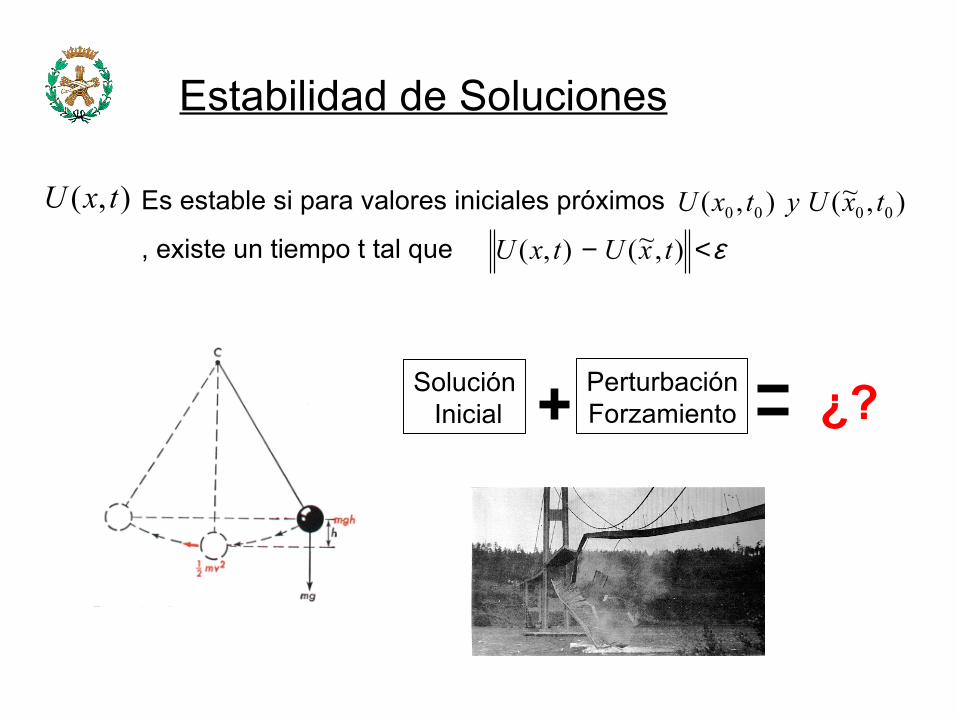
Estabilidad de Soluciones
),( txU
Es estable si para valores iniciales próximos
, existe un tiempo t tal que
),~(),( 0000 txUytxU
ε<− ),~(),( txUtxU
Solución Inicial
PerturbaciónForzamiento ¿?
[ ]
∑=
−+− ===
==
==
j
jjjjj
n
tj
tIAtj
IttIAj
jtA
j
tA
exeexex
xxAxex
xetxxAdt
xd
αλλλλλ
λ
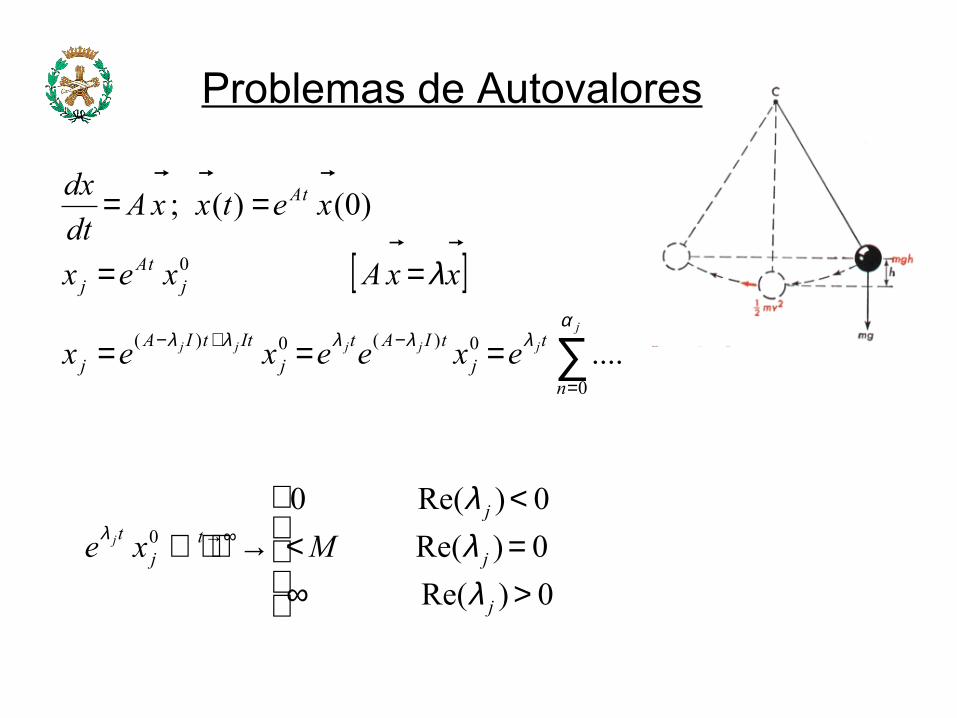
0
0)(0)(
0
....
)0()(;
>∞=<<
→ ∞→
0)Re(
0)Re(
0)Re(00
j
j
jt
jt Mxe j
λλλ
λ
Problemas de Autovalores
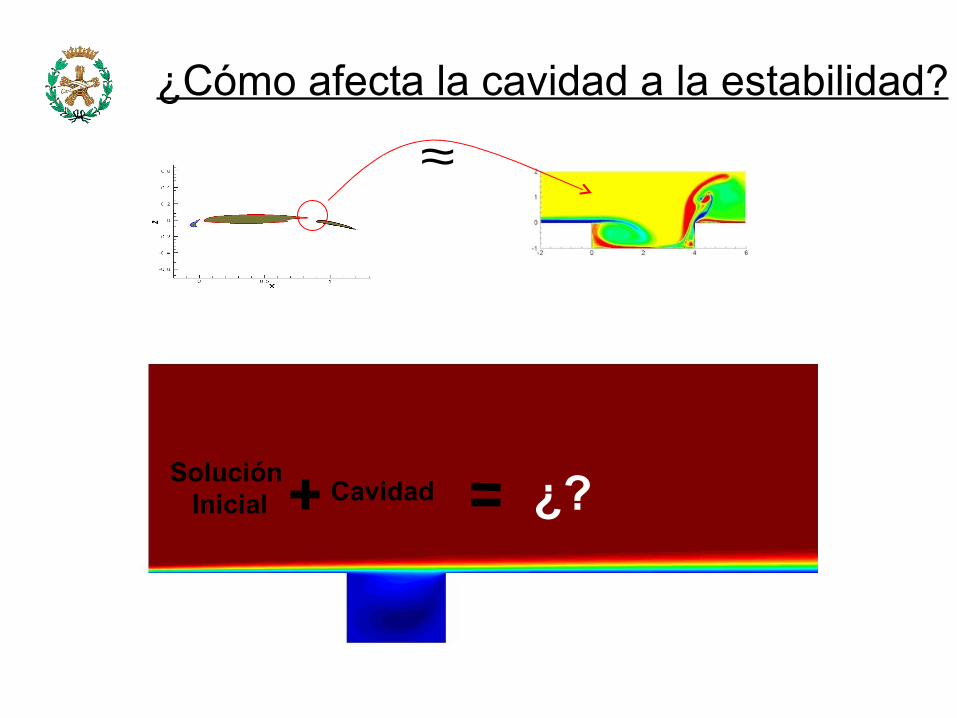
¿Cómo afecta la cavidad a la estabilidad?
Solución Inicial Cavidad ¿?
≈
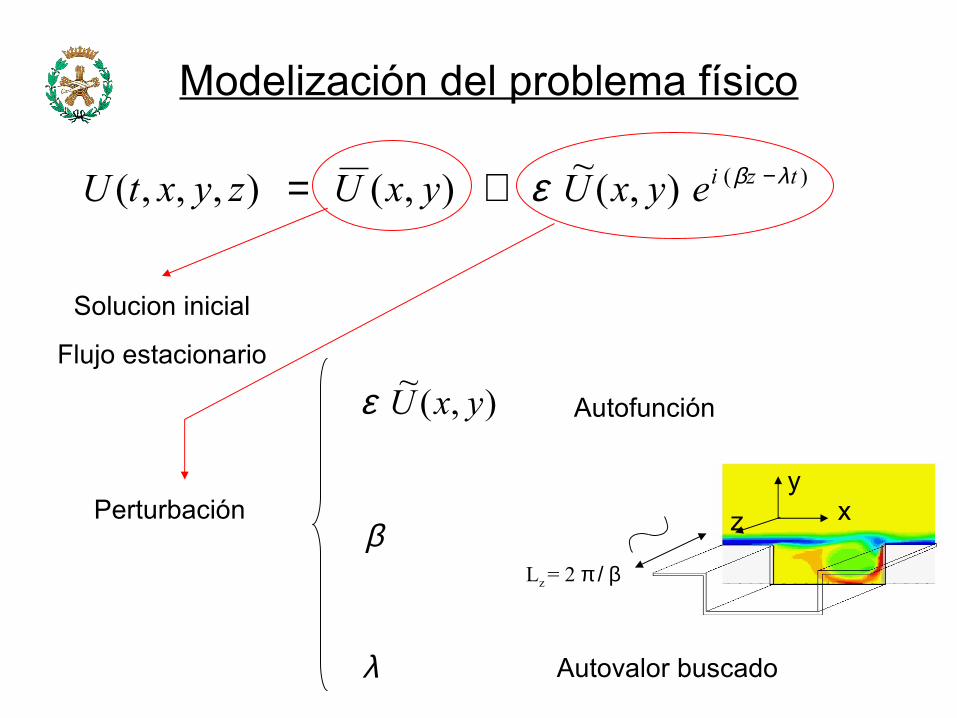
Modelización del problema físico
)(),(~
),(),,,( tzieyxUyxUzyxtU λβε −+=
Solucion inicial
Flujo estacionario
Perturbación
Lz = 2 π / β
yxzβ
Autovalor buscadoλ
),(~
yxUε Autofunción
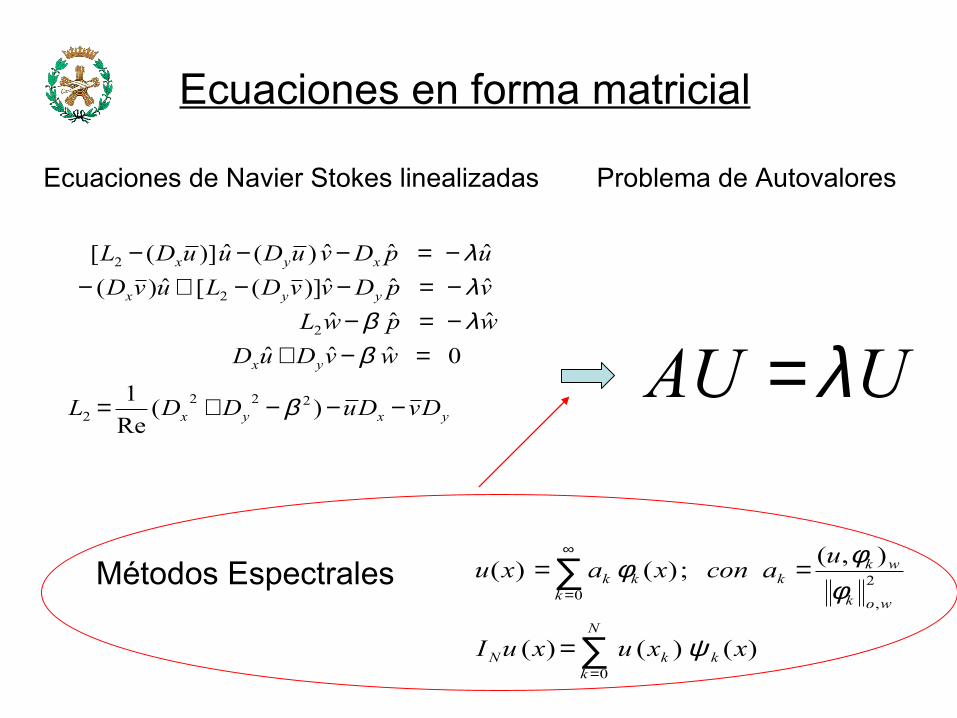
Ecuaciones en forma matricial
yxyx
yx
yyx
xyx
DvDuDDL
wvDuD
wpwL
vpDvvDLuvD
upDvuDuuDL
−−−+=
=−+−=−−=−−+−−=−−−
)(Re
1
0ˆˆˆ
ˆˆˆ
ˆˆˆ)]([ˆ)(
ˆˆˆ)(ˆ)]([
2222
2
2
2
β
βλβλλ
UUA
λ=
Ecuaciones de Navier Stokes linealizadas Problema de Autovalores
∑
∑
=
∞
=
=
==
N
kkkN
wok
wkk
kkk
xxuxuI
uaconxaxu
0
2
,0
)()()(
),(;)()(
ψ
φφφMétodos Espectrales
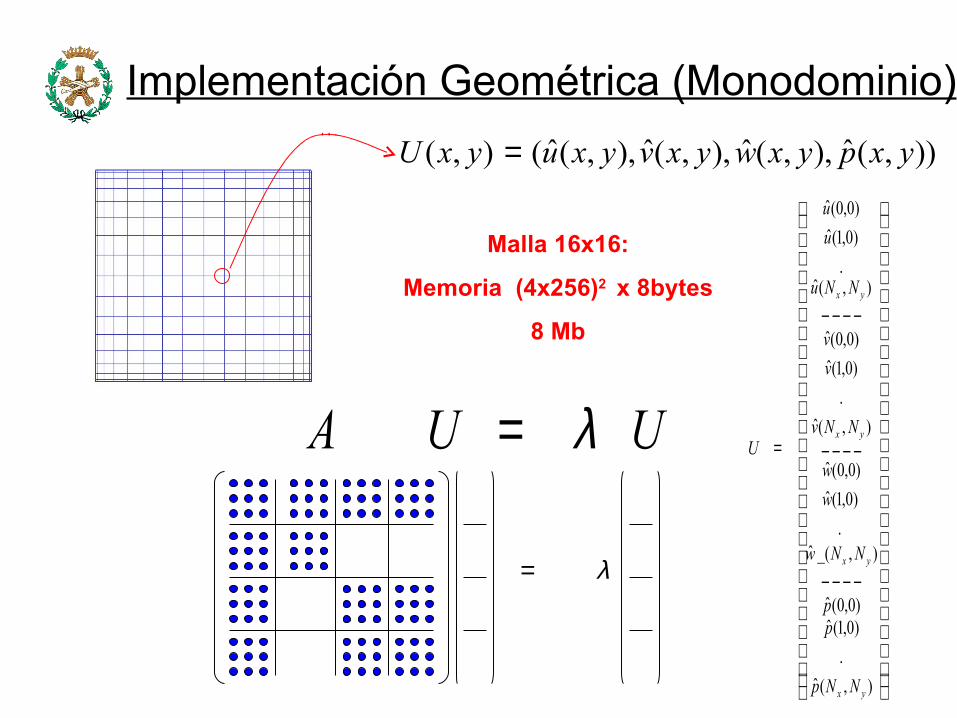
Implementación Geométrica (Monodominio) )),(ˆ),,(ˆ),,(ˆ),,(ˆ(),( yxpyxwyxvyxuyxU =
−−−−
−−−−
−−−−
=
),(ˆ
.
)0,1(ˆ)0,0(ˆ
),_(ˆ.
)0,1(ˆ
)0,0(ˆ
),(ˆ
.
)0,1(ˆ
)0,0(ˆ
),(ˆ.
)0,1(ˆ
)0,0(ˆ
yx
yx
yx
yx
NNp
pp
NNw
w
w
NNv
v
v
NNu
u
u
U
λ=
UUA
λ=
Malla 16x16:
Memoria (4x256)2 x 8bytes
8 Mb
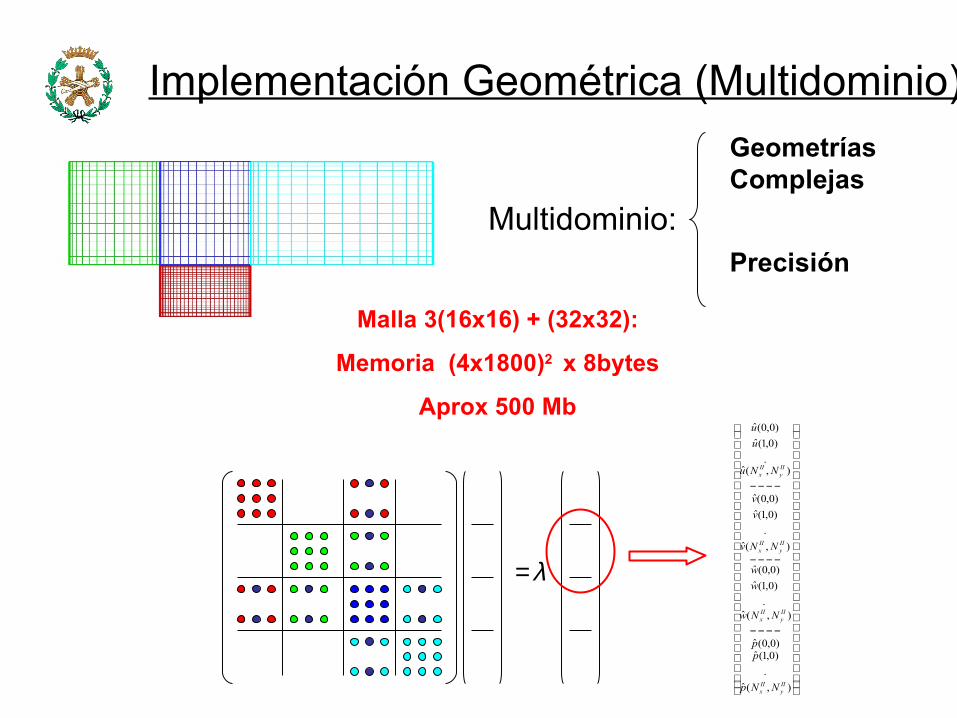
Implementación Geométrica (Multidominio)
Multidominio:
Geometrías Complejas
Precisión
−−−−
−−−−
−−−−
),(ˆ
.
)0,1(ˆ)0,0(ˆ
),(ˆ.
)0,1(ˆ
)0,0(ˆ
),(ˆ
.
)0,1(ˆ
)0,0(ˆ
),(ˆ.
)0,1(ˆ
)0,0(ˆ
IIy
IIx
IIy
IIx
IIy
IIx
IIy
IIx
NNp
pp
NNw
w
w
NNv
v
v
NNu
u
u
λ=
Malla 3(16x16) + (32x32):
Memoria (4x1800)2 x 8bytes
Aprox 500 Mb
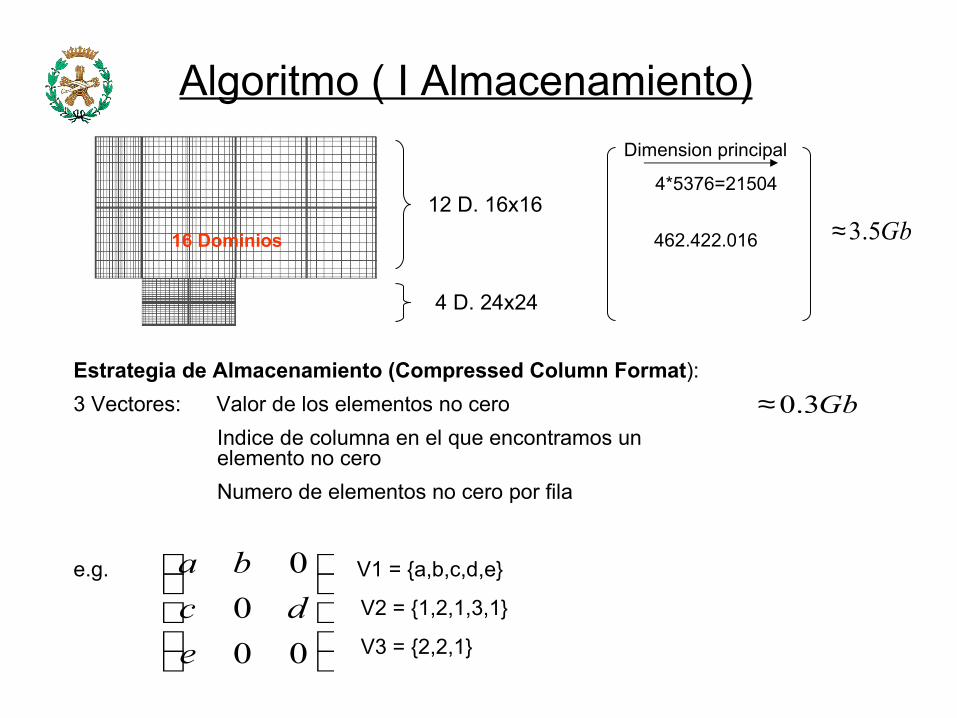
Algoritmo ( I Almacenamiento)
16 Dominios
12 D. 16x16
4 D. 24x24
Dimension principal
4*5376=21504
462.422.016 Gb5.3≈
Estrategia de Almacenamiento (Compressed Column Format):
3 Vectores: Valor de los elementos no cero
Indice de columna en el que encontramos un elemento no cero
Numero de elementos no cero por fila
e.g. V1 = a,b,c,d,e
V2 = 1,2,1,3,1
V3 = 2,2,1
Gb3.0≈
00
0
0
e
dc
ba
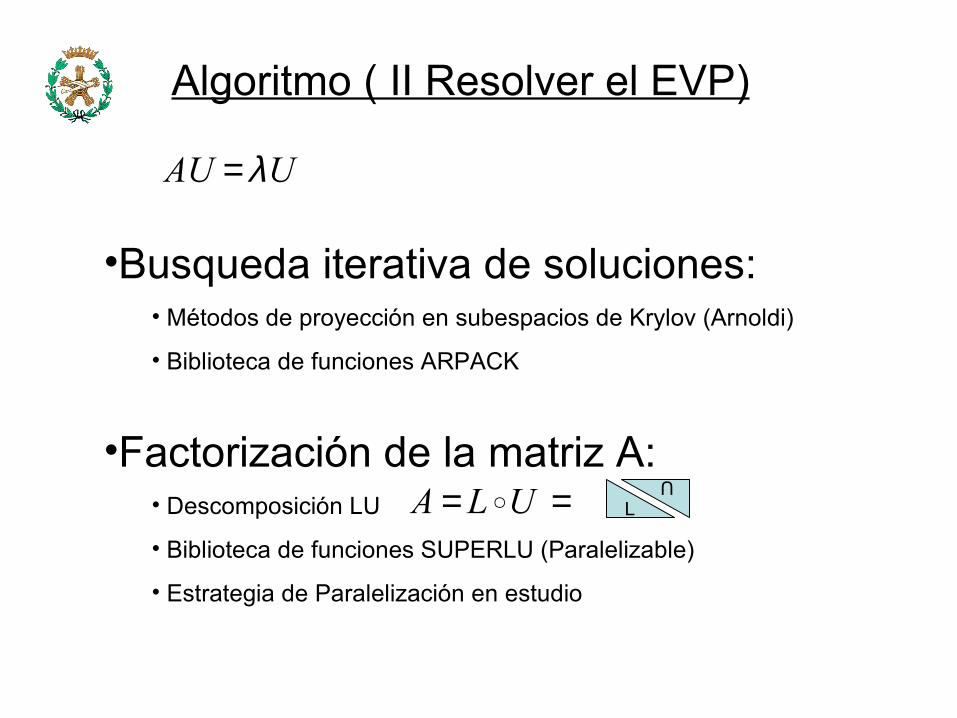
Algoritmo ( II Resolver el EVP)
•Busqueda iterativa de soluciones: • Métodos de proyección en subespacios de Krylov (Arnoldi)
• Biblioteca de funciones ARPACK
•Factorización de la matriz A: • Descomposición LU
• Biblioteca de funciones SUPERLU (Paralelizable)
• Estrategia de Paralelización en estudio
== ULA L
U
UAU λ=
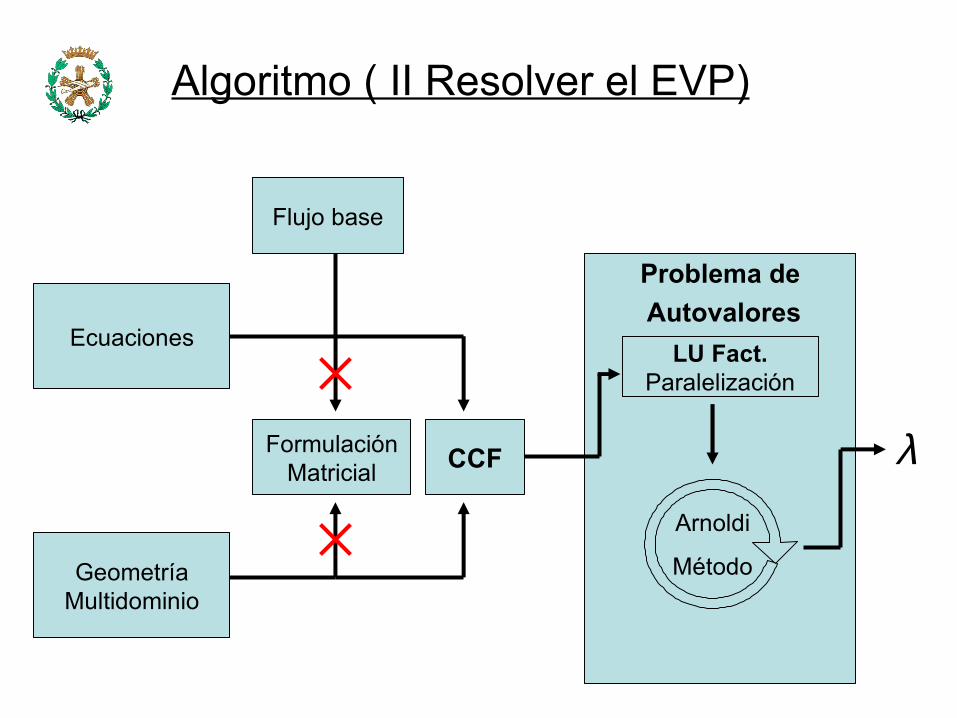
Algoritmo ( II Resolver el EVP)
Flujo base
Ecuaciones
GeometríaMultidominio
FormulaciónMatricial
Problema de
Autovalores
LU Fact.Paralelización
Arnoldi
Método
λCCF
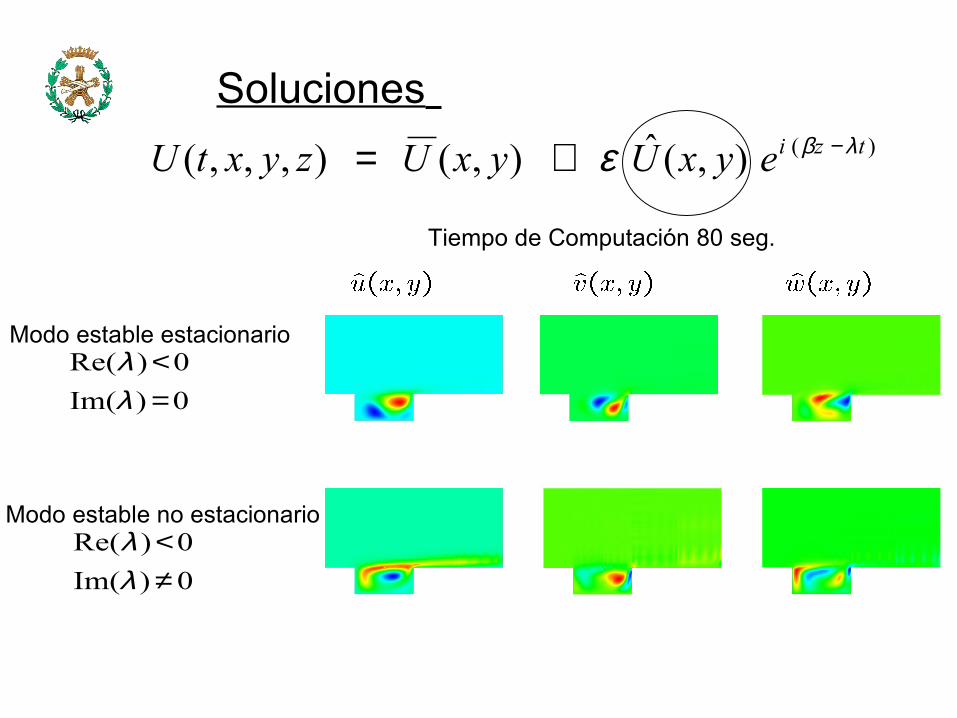
Soluciones
Modo estable estacionario
0)Im(
0)Re(
=<
λλ
Modo estable no estacionario
0)Im(
0)Re(
≠<
λλ
Tiempo de Computación 80 seg.
)(),(ˆ),(),,,( tzieyxUyxUzyxtU λβε −+=
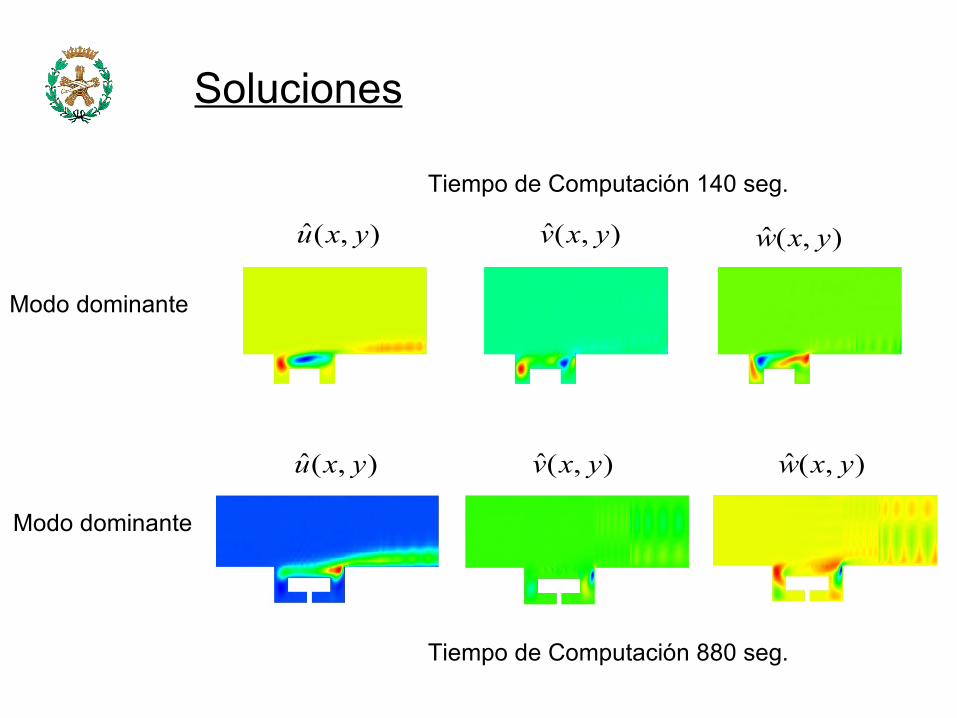
),(ˆ yxv),(ˆ yxu ),(ˆ yxw
),(ˆ yxw),(ˆ yxv),(ˆ yxu
Soluciones
Tiempo de Computación 140 seg.
Tiempo de Computación 880 seg.
Modo dominante
Modo dominante


















