Interfaz virtual para rehabilitación de mano (muñeca y...
25
Interfaz virtual para rehabilitación de mano (muñeca y dedos) con el uso de un dispositivo háptico. 14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y dedos) con el uso de un dispositivo háptico. 1 Autor: Ing. Téllez Rodríguez Gloria Irene Asesor:MC Briseño Cerón Abraham MC Dora A. Rodriguez Vega MC Ismaylia Saucedo Ugalde
Transcript of Interfaz virtual para rehabilitación de mano (muñeca y...
Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico.
14/09/2012
Interfaz virtual para rehabilitación de mano (muñeca y dedos) con el uso de un dispositivo háptico. 1
Autor: Ing. Téllez Rodríguez Gloria Irene
Asesor:MC Briseño Cerón Abraham
MC Dora A. Rodriguez Vega
MC Ismaylia Saucedo Ugalde

Situación Actual
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 2
En México se pueden observar diferentes tipos
de discapacidades como son, auditivas, del
habla, de movimiento, mentales entre otras. A
través de los censos del INEGI, en el año 2010
más de 6 millones de habitantes en la república
mexicana presenta alguna discapacidad. Estas
discapacidades pueden ser provocadas por
problemas de nacimiento, de salud o
accidentes.
Propuesta
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 3
Desarrollar una plataforma experimental para
diagnóstico y rehabilitación de personas con
discapacidad motriz en mano, mediante protocolos
de escritura, audio y visuales.
Objetivo
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 4
General
Generar una interfaz virtual que sirva para la
rehabilitación de personas con discapacidad en
miembro superior mediante la aportación de una
plantilla para escritura y valoración, incluyendo
texturas o fondos para percepción a través del
dispositivo robótico para la interacción humano-
robot.
Objetivos
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 5
Específicos
Para lograr el objetivo general es necesario realizar lo siguiente:
Obtener modelos de los movimientos de personas sanas y discapacitadas.
Definir y validar la plantilla
Implementar y validar texturas en los objetos
Generar interfaz hombre-máquina para seguimiento y valoración de datos para texturas y entornos virtuales.
Generar reporte visual de resultados.
Planificar y desarrollar la interfaz gráfica virtual.
Metodología
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 6
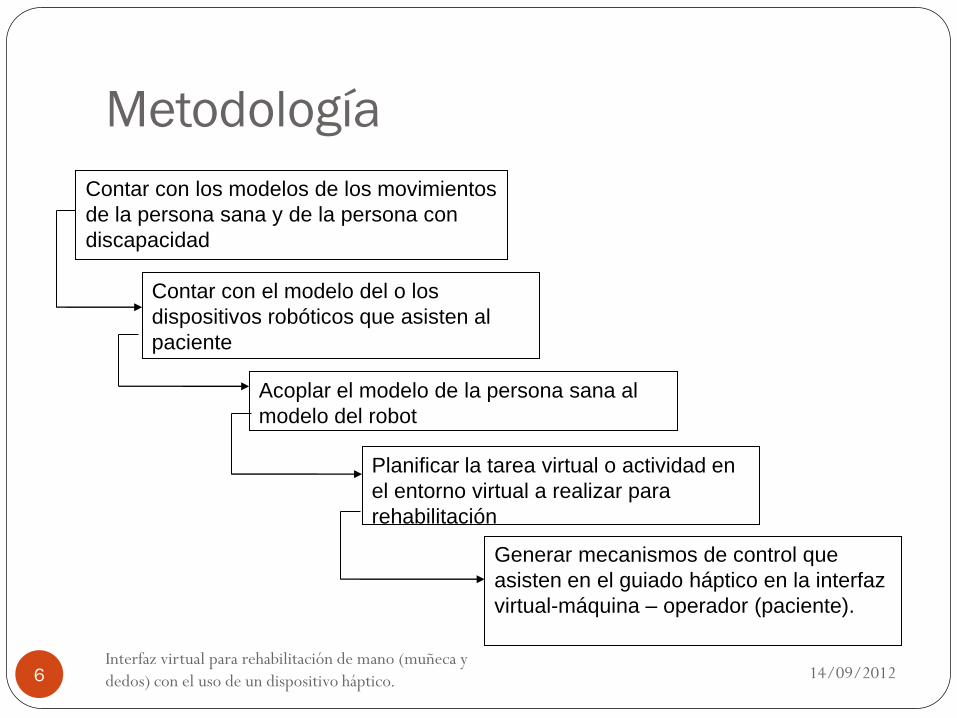
Contar con los modelos de los movimientos
de la persona sana y de la persona con
discapacidad
Contar con el modelo del o los
dispositivos robóticos que asisten al
paciente
Acoplar el modelo de la persona sana al
modelo del robot
Planificar la tarea virtual o actividad en
el entorno virtual a realizar para
rehabilitación
Generar mecanismos de control que
asisten en el guiado háptico en la interfaz
virtual-máquina – operador (paciente).
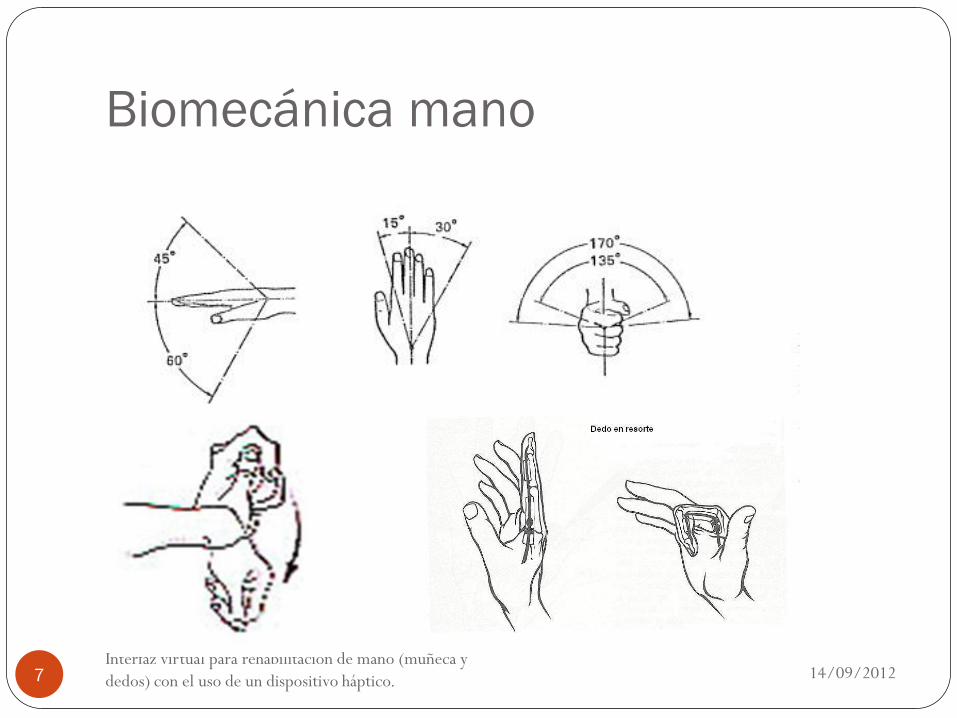
Biomecánica mano
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 7

Dispositivo Háptico: Phantom omni
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 8
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 9
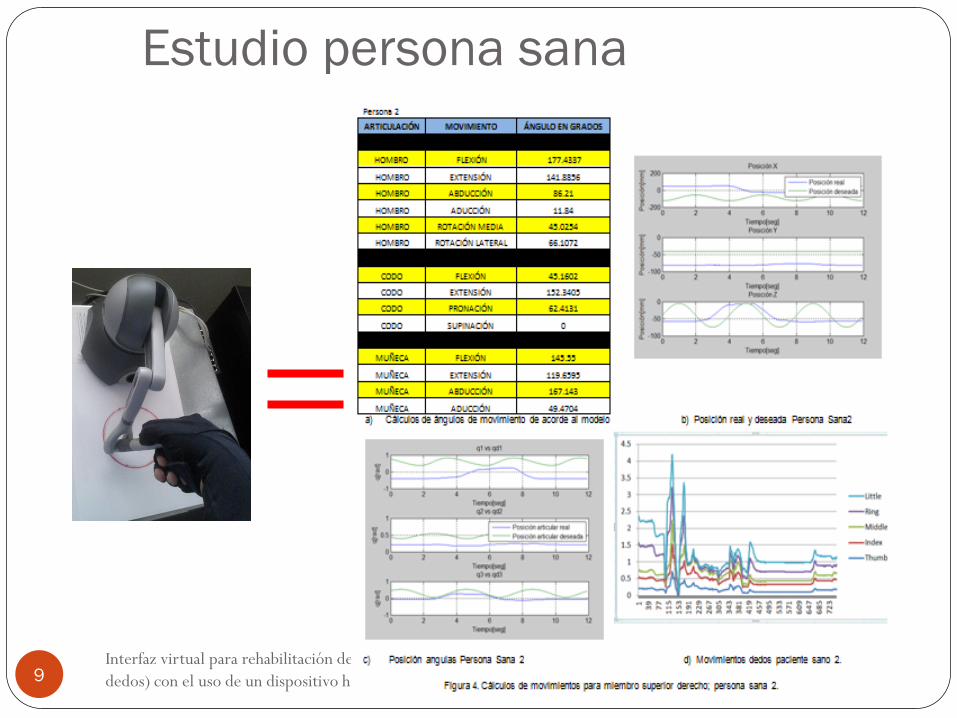
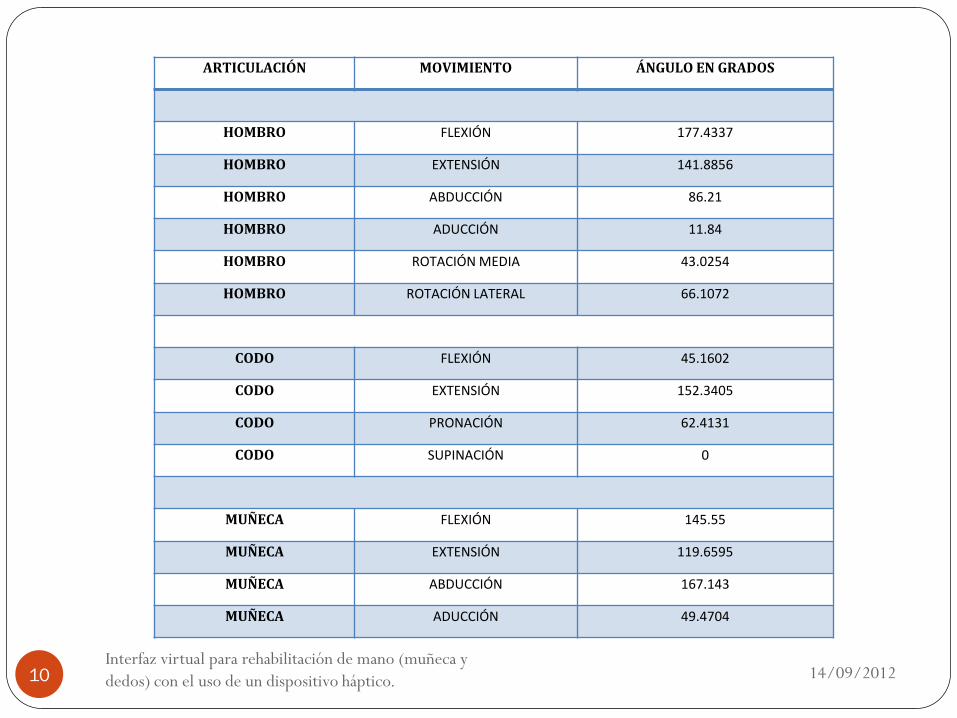
Estudio persona sana
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 10
ARTICULACIÓN MOVIMIENTO ÁNGULO EN GRADOS
HOMBRO FLEXIÓN 177.4337
HOMBRO EXTENSIÓN 141.8856
HOMBRO ABDUCCIÓN 86.21
HOMBRO ADUCCIÓN 11.84
HOMBRO ROTACIÓN MEDIA 43.0254
HOMBRO ROTACIÓN LATERAL 66.1072
CODO FLEXIÓN 45.1602
CODO EXTENSIÓN 152.3405
CODO PRONACIÓN 62.4131
CODO SUPINACIÓN 0
MUÑECA FLEXIÓN 145.55
MUÑECA EXTENSIÓN 119.6595
MUÑECA ABDUCCIÓN 167.143
MUÑECA ADUCCIÓN 49.4704

14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 11
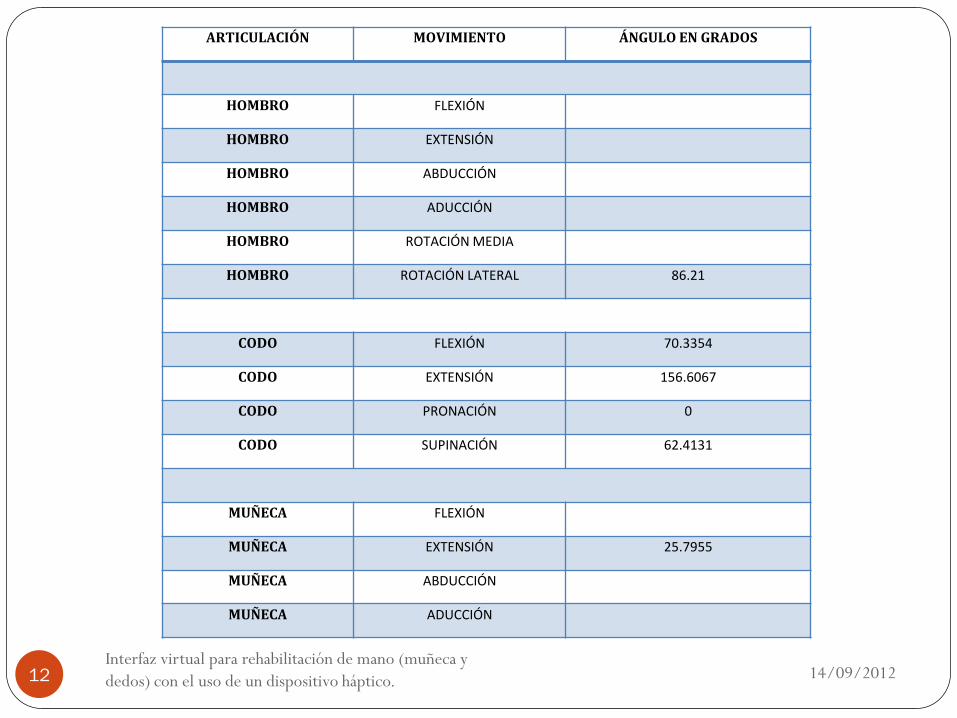
Estudio persona con discapacidad
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 12
ARTICULACIÓN MOVIMIENTO ÁNGULO EN GRADOS
HOMBRO FLEXIÓN
HOMBRO EXTENSIÓN
HOMBRO ABDUCCIÓN
HOMBRO ADUCCIÓN
HOMBRO ROTACIÓN MEDIA
HOMBRO ROTACIÓN LATERAL 86.21
CODO FLEXIÓN 70.3354
CODO EXTENSIÓN 156.6067
CODO PRONACIÓN 0
CODO SUPINACIÓN 62.4131
MUÑECA FLEXIÓN
MUÑECA EXTENSIÓN 25.7955
MUÑECA ABDUCCIÓN
MUÑECA ADUCCIÓN
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 13
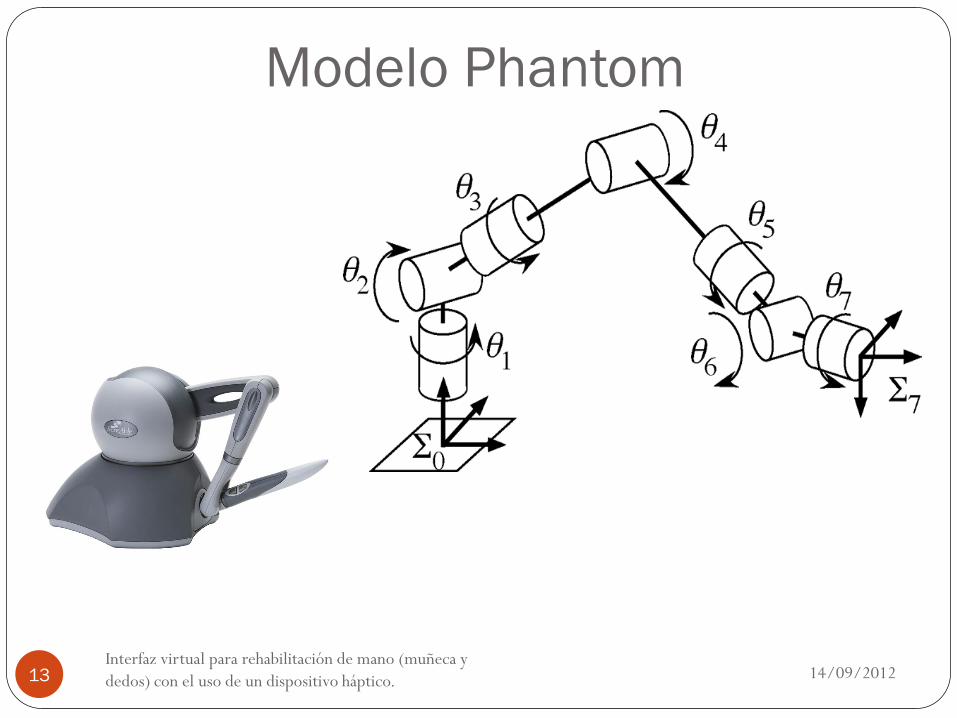
Modelo Phantom
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 14
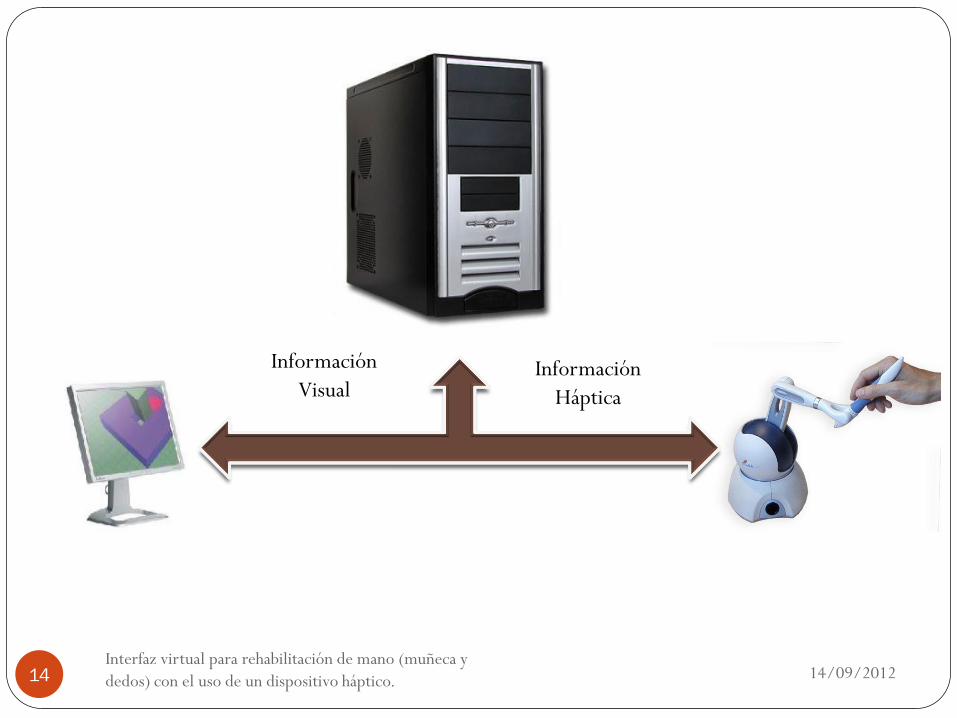
Información
Visual Información
Háptica

Movimientos
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 15

Desarrollo
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 16
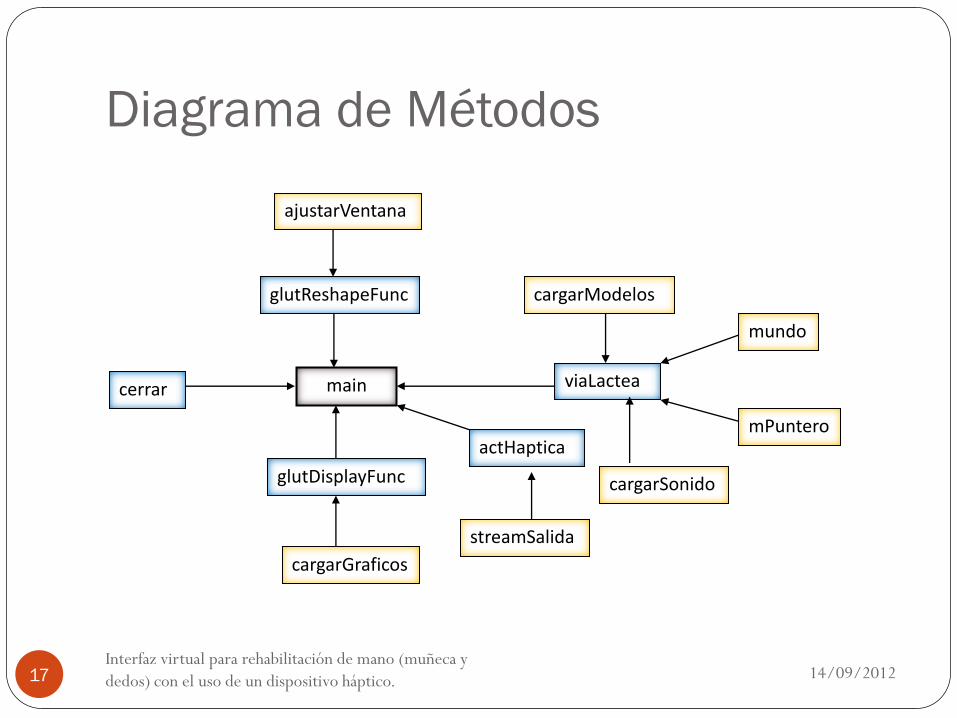
Diagrama de Métodos
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 17
viaLactea main
cargarGraficos
mPuntero actHaptica
ajustarVentana
mundo
cerrar
cargarSonido
cargarModelos
streamSalida
glutDisplayFunc
glutReshapeFunc
IRE
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 18
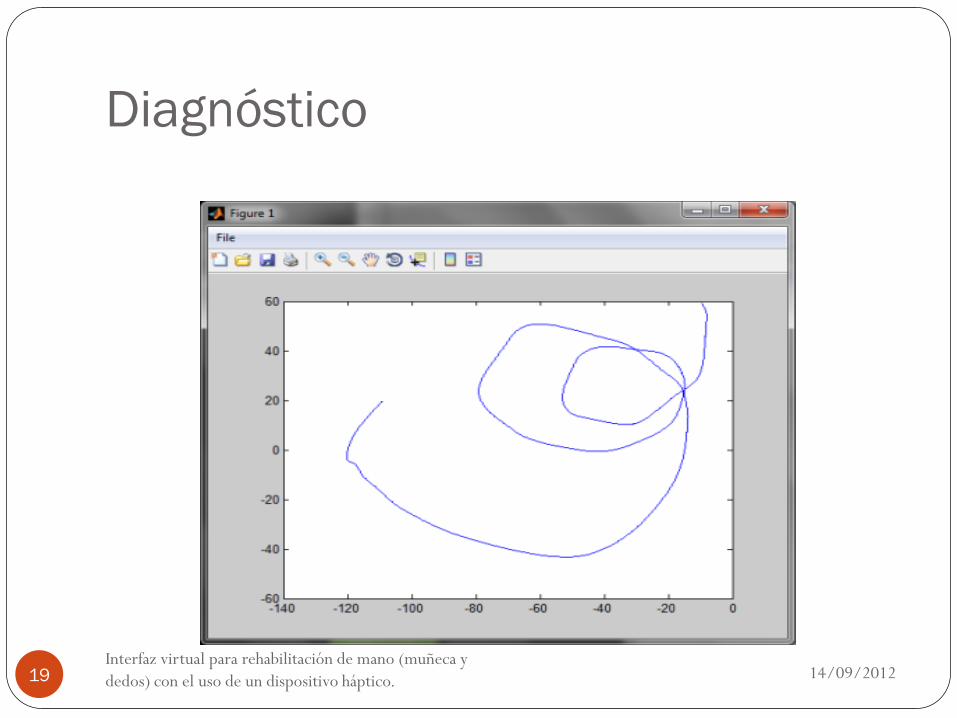
Diagnóstico
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 19
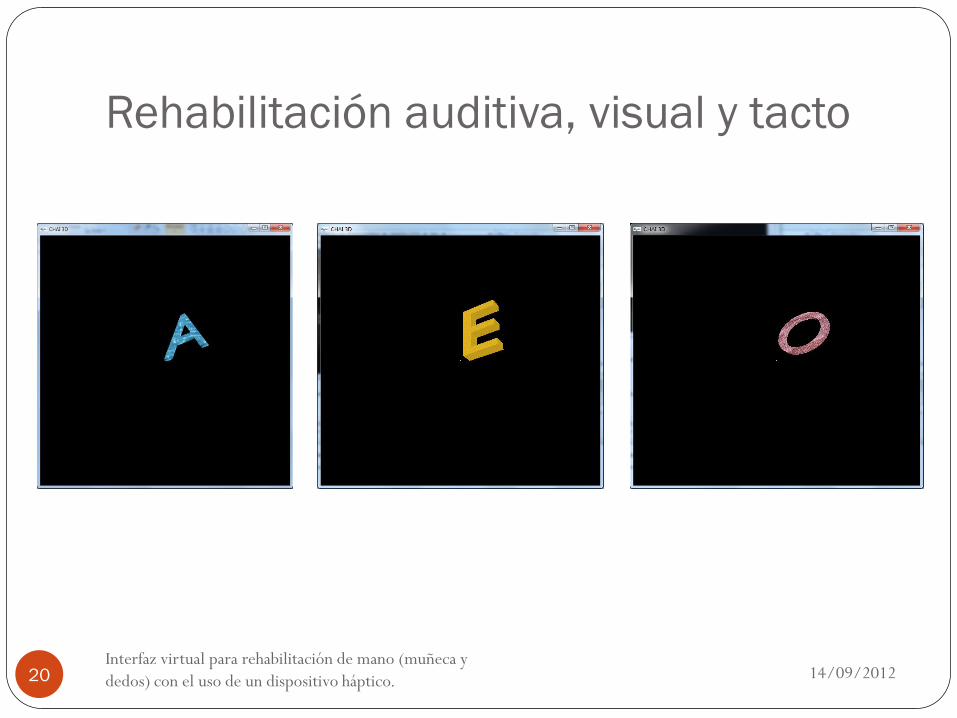
Rehabilitación auditiva, visual y tacto
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 20
Conclusiones
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 21
La interfaz háptica permite que el paciente tenga una
forma atractiva y divertida para rehabilitarse,
estimulando los movimientos mediante el juego,
además con la percepción visual mediante los objetos
virtuales y el tacto mediante la sensación de las
texturas vistas a través del dispositivo robótico.

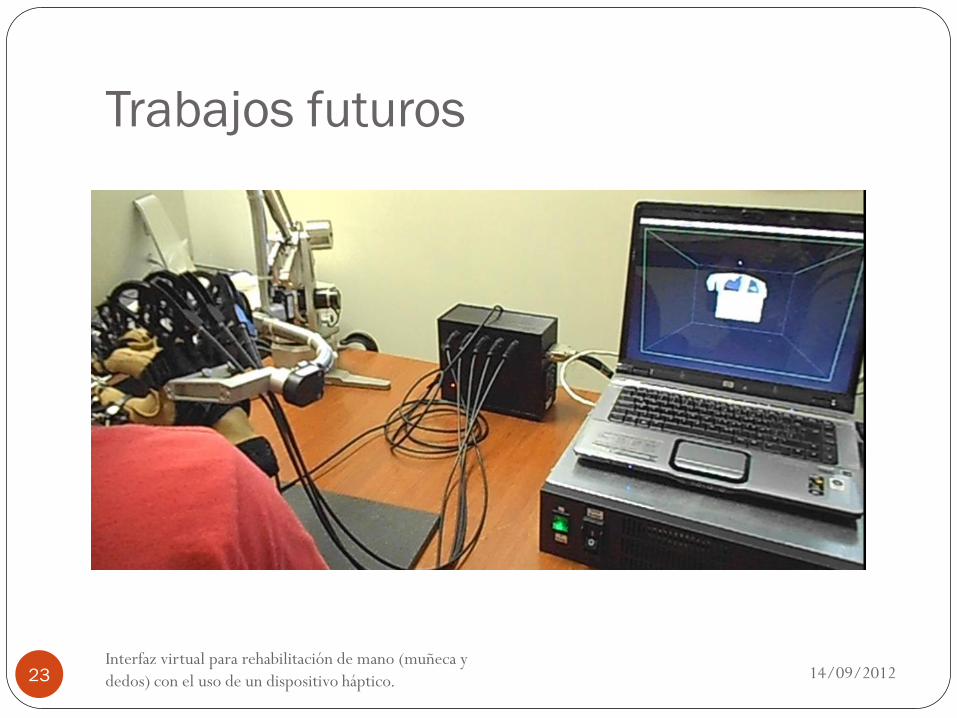
Trabajos futuros
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 22
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 23
Trabajos futuros
Referencias
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y
dedos) con el uso de un dispositivo háptico. 24
Bien, Z. Z., & Stefanov, D. (2004). Advances in Rehabilitation Robotics. New York: Springer Verlag.
Briseño, A., Dominguez, O., & Saucedo, I. (2012). El Uso de captura de movimiento corporal para el análisis de discapacidades en miembros superior o inferior: Caso de uso Hemipléjia.
INEGI. (2010). Discapacidad en México. México.
Jarillo Silva, A., Domínguez Ramírez, O., Parra Vega, V., & Ordaz Oliver, J. (2009). Cinemática y manipulabilidad del dispositivo háptico PHANToM OMNI. México.
Johnson, M. J. (2006). Recent trends in robot-assisted therapy environments to improve real-life functional performance after stroke. Journal of NeuroEngineering and Rehabilitation , 1-6.
Li, X., Wang, J., Fang, X., & Ji, W. (2011). The Study of Virtual Simulation for 5dof Upper-limb Rehabilitation Robot. 3rd International Conf erence on Advanced Computer Control (lCACC 2011) .
Pinto Salamanca, M. L. (30 de Julio de 2009). Análisis e Implementacion de una Interfaz Háptica en Entornos Virtuales. Bogotá.
Shuxiang, G., & Zhibin, S. (2008). VR-based a Novel Active Rehabilitation System for Upper Limbs. Proceedings of 2008 IEEE International Conference on Mechatronics and Automation .

Gracias por su atención
14/09/2012 Interfaz virtual para rehabilitación de mano (muñeca y dedos) con el uso de un dispositivo háptico.
25
Mexia Barraza Omar
Salas Castro Julio Andrés [email protected]
Gloria Irene Téllez Rodríguez [email protected]
Rosa Karina González Trigueros [email protected]
Abraham Briseño Cerón [email protected]
Universidad Politécnica de Sinaloa
Carretera a Higueras Km. 3, C.P. 82150
Mazatlán, Sinaloa, México.