![La teor´ıa de supercuerdas arXiv:1412.5717v1 [physics.pop ... · arXiv:1412.5717v1 [physics.pop-ph] 18 Dec 2014 La teor´ıa de supercuerdas Herbert Morales∗ Escuela de F´ısica](https://static.fdocuments.es/doc/165x107/5e7fba05c2f14b6931177088/la-teora-de-supercuerdas-arxiv14125717v1-arxiv14125717v1-18-dec.jpg)
Introduccion a la F´ısica Experimental Gu´ıa de la experiencia … · 2005-03-01 ·...
9
Introducci´ on a la F´ ısica Experimental Gu´ ıa de la experiencia Oscilaciones libres, amortiguadas y forzadas. P´ endulo de Pohl. Departamento de F´ ısica Aplicada. Universidad de Cantabria. Febrero 28, 2005 Tenga en cuenta que la lectura previa de esta gu´ ıa y la comprobaci´ on de las ecuaciones le llevar´ a del orden de tres horas, incluyendo la consulta de las palabras clave, y que la lectura de la bibliograf´ ıa espec´ ıfica en ingl´ es le llevar´ a entre una y dos horas. Resumen Se describe c´ omo medir las oscilaciones libres, amortiguadas y forzadas de baja frecuencia producidas mediante un p´ endulo de torsi´ on de Pohl. Un freno electromagn´ etico simula diferentes medios viscosos. Un motor el´ ectrico suministra al oscilador una fuerza peri´ odica que permite observar los fen´ omenos de resonancia cuando la frecuencia impulsora se aproxima a la frecuencia natural del os- cilador. Introducci´ on Se entiende por oscilaci´ on libre de una part´ ıcula (o sistema de part´ ıculas) un movimiento peri´ odico de vaiv´ en a uno y otro lado de una cierta posici´ on central de equilibrio que, una vez iniciado, y caso de no haber rozamiento, nunca cesar´ ıa, manteni´ endose siempre con la misma amplitud 1 . En las oscilaciones libres y sin rozamiento la energ´ ıa mec´ anica total no var´ ıa. Las oscilaciones libres son, obviamente, un caso ideal, ya que en las os- cilaciones reales siempre existe una cierta p´ erdida de energ´ ıa mec´ anica, de modo que la amplitud de las oscilaciones va disminuyendo con el tiempo hasta que, finalmente, el oscilador se detiene. Se habla entonces de oscilaciones amortiguadas. Cuando se somete un sistema oscilante a amortiguamiento 1 Consulte y escriba la definici´ on de todos los conceptos que aparecen en letra cursiva en este texto y que no est´ en previamente definidos. 1
Transcript of Introduccion a la F´ısica Experimental Gu´ıa de la experiencia … · 2005-03-01 ·...
Introduccion a la Fısica Experimental
Guıa de la experiencia
Oscilaciones libres, amortiguadas y forzadas.
Pendulo de Pohl.
Departamento de Fısica Aplicada.Universidad de Cantabria.
Febrero 28, 2005
Tenga en cuenta que la lectura previa de esta guıa y la comprobacion delas ecuaciones le llevara del orden de tres horas, incluyendo la consultade las palabras clave, y que la lectura de la bibliografıa especıfica en inglesle llevara entre una y dos horas.
Resumen
Se describe como medir las oscilaciones libres, amortiguadas yforzadas de baja frecuencia producidas mediante un pendulo detorsion de Pohl. Un freno electromagnetico simula diferentes mediosviscosos. Un motor electrico suministra al oscilador una fuerzaperiodica que permite observar los fenomenos de resonancia cuandola frecuencia impulsora se aproxima a la frecuencia natural del os-cilador.
Introduccion
Se entiende por oscilacion libre de una partıcula (o sistema de partıculas) unmovimiento periodico de vaiven a uno y otro lado de una cierta posicion centralde equilibrio que, una vez iniciado, y caso de no haber rozamiento, nuncacesarıa, manteniendose siempre con la misma amplitud 1. En las oscilacioneslibres y sin rozamiento la energıa mecanica total no varıa.
Las oscilaciones libres son, obviamente, un caso ideal, ya que en las os-cilaciones reales siempre existe una cierta perdida de energıa mecanica, demodo que la amplitud de las oscilaciones va disminuyendo con el tiempo hastaque, finalmente, el oscilador se detiene. Se habla entonces de oscilacionesamortiguadas. Cuando se somete un sistema oscilante a amortiguamiento
1Consulte y escriba la definicion de todos los conceptos que aparecen en letra cursiva en estetexto y que no esten previamente definidos.
1
(cualquiera que sea el mecanismo de amortiguacion), se observa una disminu-cion progresiva de la amplitud, disminucion que sera mas o menos acentuadadependiendo de la intensidad del amortiguamiento.
Se puede compensar el amortiguamiento de un sistema oscilante aportandoleenergıa adicional . Se habla, entonces, de oscilaciones forzadas. Se entiendepor oscilador forzado aquel que se encuentra sometido a la accion de una fuerzaexterna que le aporta energıa neta. Si la fuerza externa es una fuerza impulsoray periodica (se puede tomar como ejemplo al nino en el columpio movido porpequenos impulsos), su efecto es suministrar energıa al sistema oscilante con elfin de compensar las perdidas por rozamiento o frenado, de modo que la ampli-tud de la oscilacion permanezca constante o que incluso aumente, dependiendode si la energıa disipada es igual o inferior a la aportada, respectivamente.
El pendulo de torsion de Pohl permite estudiar todas estas modalidades deoscilacion. Esta constituido por tres elementos basicos.
(i) Un sistema oscilante, el pendulo de torsion propiamente dicho, es decir,un volante de cobre, con una escala graduada en unidades arbitrarias,unido a un resorte espiral de acero.
(ii) Un freno electromagnetico, colocado en la base del pendulo, que per-mite simular un medio viscoso (amortiguamiento) en cuyo seno oscilael pendulo. Esta constituıdo por dos bobinas con nucleo y alimentadaspor la fuente (1) de la figura (2) (electroiman). El funcionamiento deeste freno esta basado en la generacion de corrientes de Foucault sobre elvolante de cobre debidas al campo magnetico que crea el electroiman.
(iii) Un motor electrico que permite aplicar una fuerza periodica de frecuenciavariable al pendulo, a traves de una excentrica y una palanca que loconecta al resorte.
a) Oscilaciones libres. Al desplazar el volante (disco) un cierto angulo, φ,respecto de su posicion de equilibrio, aplicandole un momento (de fuerza)externo, y dejarlo libre, actua sobre el un momento de reaccion elasticaque obedece la ley de Hooke,
~M = −Dφ, (1)
siendo D la constante elastica del resorte. Este momento tiende a lle-var el disco, de nuevo, a su posicion inicial de equilibrio, estableciendoseası un movimiento oscilatorio. Si se considera despreciable la fuerza derozamiento con el aire y si no actua ninguna fuerza de frenado (freno elec-tromagnetico desconectado), el momento recuperador, de acuerdo con lasegunda ley de Newton para el movimiento de rotacion, se puede escribircomo
~M = Id2 φ
d t2, (2)
2

siendo I el momento de inercia del disco respecto del eje de giro y t eltiempo. Igualando Ec. (1) y Ec. (2) , se obtiene la ecuacion diferencialdel movimiento,
d2 φ
d t2+
D
Iφ = 0 , (3)
caracterıstica de un movimiento armonico simple. La solucion de laecuacion (3) es de la forma
φ(t) = φ0 cos(ω0 · t + ϕ) , (4)
donde φ0 es la amplitud –maximo desplazamiento angular del disco res-pecto a su posicion de equilibrio– y (ω0 · t + ϕ) es la fase. ϕ es la faseinicial, es decir, el valor del angulo cuando t = 0 y ω0 es la frecuenciaangular caracterıstica, o recuencia angular propia del resorte que viene
dada por la expresion ω0 =√
D/I. Ademas, ω0 = 2π/T0, siendo T0 elperıodo propio del resorte.
b) Oscilaciones amortiguadas. Cuando el sistema oscilante esta amortiguado,se debe introducir en la Ec. (3) un termino que de cuenta del amor-tiguamiento. Para velocidades pequenas, este termino se puede conside-rar que es proporcional a la velocidad angular 2, d φ/d t, es decir,
MA = −2γId φ
d t, (5)
siendo γ la constante de amortiguamiento. Ası la nueva ecuacion dife-rencial del movimiento es,
d2 φ
d t2+ 2γ
d φ
d t+ ω0
2φ = 0 (6)
La solucion de la ecuacion (6) viene dada por la funcion
φ(t) = φ0 · exp(−γt)cos(ωA · t + ϕ) , (7)
donde la frecuencia angular amortiguada es
ωA =√
ω20 − γ2 . (8)
c) Oscilaciones forzadas. Si se aplica al oscilador amortiguado un mo-mento externo M(t), tal que M(t) = M0cos(ωt), que le comunica energıaperiodicamente, la ecuacion de movimiento es ahora,
d2 φ
d t2+ 2γ
d φ
d t+ ω2
0φ =M0
Icos(ωt) . (9)
2En otras situaciones fısicas se considera que el rozamiento es proporcional al cuadrado de lavelocidad. En ambos casos, estos terminos disipativos de la energıa mecanica no se pueden justificarcompletamente utilizando solo las ecuaciones de Newton.
3

(a)
(b)
(c)
(d)
Figura 1: Oscilaciones forzadas. La frecuencia propia del oscilador es de 3,16 rad s−1. Laconstante de rozamiento es 0,200. (a) Frecuencia forzante aplicada ;
4

La solucion de esta ecuacion, en el estado estacionario, es de la formaφ(t) = φMcos(ωt − δ). Los valores de la amplitud φM y de δ, que esel desfase entre el momento impulsor que actua sobre el sistema y lavelocidad de este, vienen dados, respectivamente, por las expresiones
φM =M0/I√
(ω2 − ω20)
2+ 4ω2γ2
; tan δ =2γω
ω20 − ω2
, (10)
y son funcion de la frecuencia angular ω del momento externo aplicado.
Figura 2: Resonancia. La frecuencia propia del oscilador es de 3,16 rad s−1 y la constantede rozamiento es 0,0. Frecuencia forzante aplicada 3,16 rad s−1.
La amplitud φM alcanza su valor maximo para la frecuencia del momentoexterno
ωR =√
ω20 − 2γ2 . (11)
En estas condiciones se dice que existe resonancia en la amplitud.
Reflexiones previas a la realizacion del experimento
Antes de llevar a cabo las experiencias, considere las siguientes cuestiones:
1.- Defina: movimiento periodico, movimiento oscilatorio, movimiento armo-nico simple, frecuencia, oscilacion de torsion, constante recuperadora.
2.- ¿Que es el momento de un par?
3.- Distinga entre oscilaciones libre, amortiguada y forzada. Exprese mate-maticamente las ecuaciones diferenciales del movimiento en los tres casos(consulte la bibliografıa). ¿Que se entiende por fenomeno de resonancia?¿y por frecuencia de resonancia?
4.- ¿Cuantos tipos de energıa puede identificar en un movimiento oscilatorio,por ejemplo, de un pendulo? ¿Y en un pendulo de torsion?
5
5.- De acuerdo con el principio de conservacion de la energıa, la energıatotal de un pendulo amortiguado se debe conservar. Entonces, la energıamecanica que se pierde en las oscilaciones reales debido al rozamiento,¿en que tipo de energıa se transforma?
6.- Ademas de utilizando la Ec. (8), tambien se puede obtener γ a partirde la amplitud de dos oscilaciones sucesivas φn y φn+1 ocurridas en lostiempos t y t + T , respectivamente, donde T es el periodo. Explıquelo.
(a) (b)
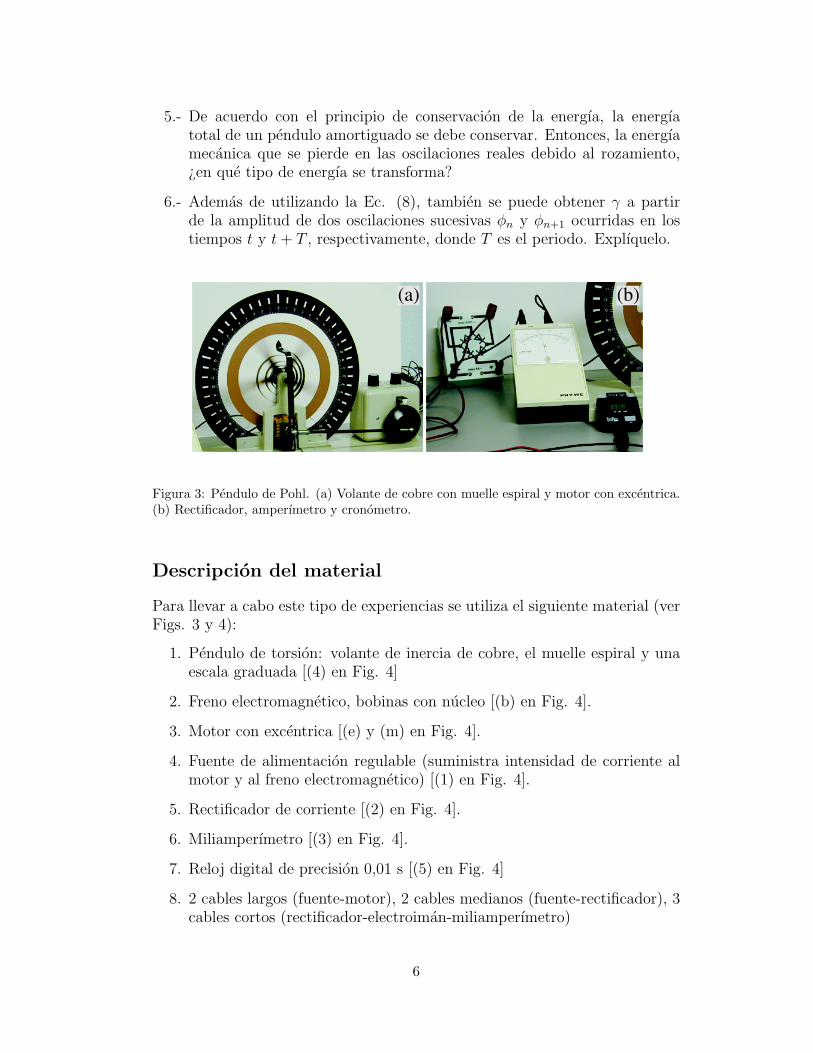
Figura 3: Pendulo de Pohl. (a) Volante de cobre con muelle espiral y motor con excentrica.(b) Rectificador, amperımetro y cronometro.
Descripcion del material
Para llevar a cabo este tipo de experiencias se utiliza el siguiente material (verFigs. 3 y 4):
1. Pendulo de torsion: volante de inercia de cobre, el muelle espiral y unaescala graduada [(4) en Fig. 4]
2. Freno electromagnetico, bobinas con nucleo [(b) en Fig. 4].
3. Motor con excentrica [(e) y (m) en Fig. 4].
4. Fuente de alimentacion regulable (suministra intensidad de corriente almotor y al freno electromagnetico) [(1) en Fig. 4].
5. Rectificador de corriente [(2) en Fig. 4].
6. Miliamperımetro [(3) en Fig. 4].
7. Reloj digital de precision 0,01 s [(5) en Fig. 4]
8. 2 cables largos (fuente-motor), 2 cables medianos (fuente-rectificador), 3cables cortos (rectificador-electroiman-miliamperımetro)
6
(1)(2)
(3)
(4)
(5)
(m)
(e)
(rm)(re)
(b)
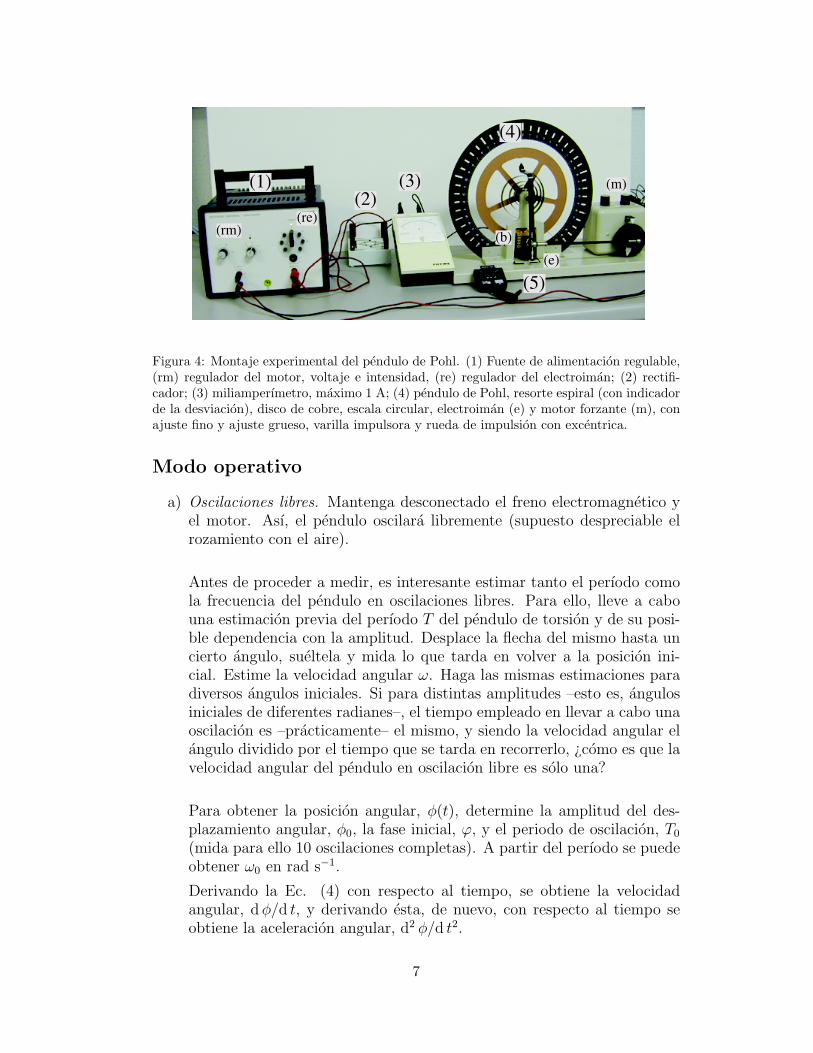
Figura 4: Montaje experimental del pendulo de Pohl. (1) Fuente de alimentacion regulable,(rm) regulador del motor, voltaje e intensidad, (re) regulador del electroiman; (2) rectifi-cador; (3) miliamperımetro, maximo 1 A; (4) pendulo de Pohl, resorte espiral (con indicadorde la desviacion), disco de cobre, escala circular, electroiman (e) y motor forzante (m), conajuste fino y ajuste grueso, varilla impulsora y rueda de impulsion con excentrica.
Modo operativo
a) Oscilaciones libres. Mantenga desconectado el freno electromagnetico yel motor. Ası, el pendulo oscilara libremente (supuesto despreciable elrozamiento con el aire).
Antes de proceder a medir, es interesante estimar tanto el perıodo comola frecuencia del pendulo en oscilaciones libres. Para ello, lleve a cabouna estimacion previa del perıodo T del pendulo de torsion y de su posi-ble dependencia con la amplitud. Desplace la flecha del mismo hasta uncierto angulo, sueltela y mida lo que tarda en volver a la posicion ini-cial. Estime la velocidad angular ω. Haga las mismas estimaciones paradiversos angulos iniciales. Si para distintas amplitudes –esto es, angulosiniciales de diferentes radianes–, el tiempo empleado en llevar a cabo unaoscilacion es –practicamente– el mismo, y siendo la velocidad angular elangulo dividido por el tiempo que se tarda en recorrerlo, ¿como es que lavelocidad angular del pendulo en oscilacion libre es solo una?
Para obtener la posicion angular, φ(t), determine la amplitud del des-plazamiento angular, φ0, la fase inicial, ϕ, y el periodo de oscilacion, T0
(mida para ello 10 oscilaciones completas). A partir del perıodo se puedeobtener ω0 en rad s−1.
Derivando la Ec. (4) con respecto al tiempo, se obtiene la velocidadangular, d φ/d t, y derivando esta, de nuevo, con respecto al tiempo seobtiene la aceleracion angular, d2 φ/d t2.
7
Represente graficamente las tres funciones, posicion, velocidad y acel-eracion angulares en funcion de t. ¿Cual es la caracterıstica mas desta-cable de las graficas φ(t), ω(t) y α(t)?
b) Oscilaciones amortiguadas. Conecte, ahora, el freno electromagneticocon ayuda del profesor. De esta manera podra simular diferentes mediosviscosos en los cuales oscila el pendulo.
Determine ωA, para obtener, con ayuda de la Ec. (8), la constante deamortiguamiento γ.Cada intensidad i impuesta al motor dara lugar a unvalor de la constante de amortiguamiento γ diferente. Realice el experi-mento para valores 4, 6, 8 y 10 V (voltios) del potencial V de la fuentede alimentacion y anote las correspondientes lecturas de la intensidad i.Para cadapar de valores (V , i), determine el perıodo de oscilacion TA
que puede relacionar con ωA (ωA = 2π/TA). Anote los resultados y hagauna representacion grafica de la amplitud de la oscilacion en funcion deltiempo. Esto permitira obtener la constante de amortiguamiento, γ.
c) Oscilaciones forzadas. Manteniendo activado el amortiguamiento comoen la parte b), conecte el motor a la salida DC de la fuente de ali-mentacion (consulte con el profesor) con el fin de aplicar un momentoexterno periodico M(t) = M0 cos(ωt), que compense la perdida de en-ergıa. La frecuencia ω puede controlarse actuando sobre los botones decontrol grueso y fino del motor.
De nuevo, antes de medir, proceda a estimar la posicion de la frecuen-cia forzante, de tal forma que la medida experimental de la misma nole sorprenda. Puesto que ya conoce la frecuencia propia del pendulo, simide el numero de vueltas que da la rueda del mecanismo forzante porsegundo en diversas posiciones, ¿como podrıa estimar en que posicion vaa encontrar la frecuencia de resonancia?
Determine, ahora, experimentalmente, el valor de la frecuencia de reso-nancia ωR para cada valor del amortiguamiento que se ha determinado,es decir, para cada par de valores (V , i), utilizado en el apartado b).Los valores obtenidos deberan coincidir con los hallados a traves de laEc. (11). Para ello, debe encontrar la frecuencia del motor utilizandoun cronometro y contando el numero de vueltas del motor. Comiencepor una frecuencia pequena e incrementela mediante el potenciometroacoplado al motor. En las proximidades de la frecuencia de resonancia,controle la variacion la frecuencia mediante el ajuste fino (fine). Las lec-turas, en cualquier caso, debe realizarlas cuando la amplitud del pendulose estabilice. Las curvas que representan la amplitud del oscilador enfuncion de la frecuencia del momento periodico aplicado se denominancurvas de resonancia.
8

Para los valores anteriores de i, represente graficamente la amplitud φM
frente a la frecuencia del motor ω. Compare estos resultados con los resul-tados obtenidos a partir de la Ec. (11). Elabore las tablas, los graficos y elcalculo de errores segun las normas. Elabore el informe correspondientea este experimento segun las normas.
Preguntas adicionales relacionadas con la experiencia
1.- El cobre no es un material magnetico. ¿Como funciona el mecanismo deamortiguacion entre el electroiman de nucleo de hierro y el disco de cobreunido al resorte espiral?
2.- ¿Que sucede cuando la frecuencia del motor coincide con la de resonanciay la constante γ = 0?
3.- ¿Que diferencia se observa en el comportamiento del pendulo para valoresgrandes y pequenos de γ?
4.- Indique algunos ejemplos en los que el fenomeno de la resonancia se pongade manifiesto.
Referencias
[1] R.A. Serway y J.W. Jewett, Jr., Ed. Thomson, Fısica 1, 3a Edicion, Madrid,pag. 419 y ss.
[2] R.A. Serway, Ed. McGraw-Hill, Fısica 1, 2a Edicion, Mexico, pag. 348 yss.
[3] P.A. Tipler, Fısica para la ciencia y la tecnologıa, 4a Edicion, Barcelona,Vol. 1, pag. 403 y ss.
[4] E. C. Crittenden, Jr., An advanced laboratory experiment on force dampedoscillations, Am. J. Phys. 11, 282-286 (1943).
[5] G Wilkering, J Hesse, Electrical pendulum for educational purpose, Am.J. Phys. 49, 90-92 (1981).
9





![Introduccion a la F´ısica Experimental Gu´ıa de la ...€¦ · Referencias [1] F. W. Sears, M. W. Zemansky, H. D. Young y R. A. Freeman, F´ısica Universitaria, Ed. Addison Wesley](https://static.fdocuments.es/doc/165x107/60673388cb4e4c1aae7d7ff8/introduccion-a-la-fsica-experimental-gua-de-la-referencias-1-f-w.jpg)












