
INTRODUCCIÓN A LAS VIBRACIONES LUZ DEL … · universidad central del ecuador facultad de...
159
UNIVERSIDAD CENTRAL DEL ECUADOR FACULTAD DE INGENIERÍA, CIENCIAS FÍSICAS Y MATEMÁTICA INSTITUTO DE INVESTIGACIÓN Y POSGRADO (IIP) INTRODUCCIÓN A LAS VIBRACIONES LUZ DEL CARMEN CELI CARRIÓN TUTOR: MAT. BENJAMÍN VALAREZO PALACIOS Trabajo presentado como requisito parcial para la obtención del grado de: MAGÍSTER EN DOCENCIA MATEMÁTICA Quito-Ecuador 2015
-
Upload
hoangkhuong -
Category
Documents
-
view
215 -
download
0
Transcript of INTRODUCCIÓN A LAS VIBRACIONES LUZ DEL … · universidad central del ecuador facultad de...

UNIVERSIDAD CENTRAL DEL ECUADOR
FACULTAD DE INGENIERÍA, CIENCIAS FÍSICAS Y MATEMÁTICA
INSTITUTO DE INVESTIGACIÓN Y POSGRADO (IIP)
INTRODUCCIÓN A LAS VIBRACIONES
LUZ DEL CARMEN CELI CARRIÓN
TUTOR:
MAT. BENJAMÍN VALAREZO PALACIOS
Trabajo presentado como requisito parcial para la obtención del grado de:
MAGÍSTER EN DOCENCIA MATEMÁTICA
Quito-Ecuador
2015

ii
DEDICATORIA
A mi familia por su apoyo y paciencia
Luz del Carmen Celi Carrión

iii
AGRADECIMIENTO
A los docentes de la Universidad Central del Ecuador en
especial al Mat. Benjamín Valarezo por su apoyo en la
culminación de este trabajo.
Luz del Carmen Celi Carrión

iv
v
vi
CONTENIDO
CAPÍTULO 1 ....................................................................................................................... 1
INTRODUCCIÓN ............................................................................................................... 1
1.1 JUSTIFICACIÓN DEL PROYECTO .................................................................... 1
1.2 OBJETIVOS ........................................................................................................... 1
1.3 METODOLOGÍA ................................................................................................... 1
CAPÍTULO 2 ....................................................................................................................... 3
2 ESPACIOS VECTORIALES ...................................................................................... 3
2.1 CONCEPTOS BÁSICOS ....................................................................................... 3
2.1.1 FUNCIONES ................................................................................................... 3
2.1.2 OPERACIONES .............................................................................................. 5
2.1.3 OPERACIONES EN LOS REALES ............................................................... 6
2.1.4 COMPOSICIÓN DE FUNCIONES ................................................................ 7
2.1.5 OPERACIÓN DE NÚMEROS COMPLEJOS ............................................... 8
2.1.6 MATRICES (Benalcazar, 2012)...................................................................... 8
2.2 DEFINICIÓN DE ESPACIO VECTORIAL ........................................................ 10
2.2.1 EJEMPLOS DE ESPACIOS VECTORIALES ............................................. 11
2.2.1.1 ESPACIO VECTORIAL DE LOS REALES Rn. .................................. 11
2.2.1.2 ESPACIO VECTORIAL DE MATRICES Mmxn[R] ........................... 12
2.2.1.3 ESPACIO VECTORIAL DE FUNCIONES F(Ω, V) ............................. 13
2.3 SUBESPACIOS VECTORIALES ....................................................................... 14
2.4 COMBINACIONES LINEALES ......................................................................... 15
2.5 DEPENDENCIA E INDEPENDENCIA LINEAL (Grossman, 2008; Lay, 2006)
17
2.6 ESPACIO GENERADO (Castro, 2008) ............................................................... 18
2.6.1 CONJUNTO GENERADOR ........................................................................ 18
2.6.2 ESPACIO GENERADO POR UN CONJUNTO DE VECTORES (Grossman,
2008) 18
2.7 BASE Y DIMENSIÓN ......................................................................................... 19
2.8 PRODUCTO ESCALAR ...................................................................................... 20
2.8.1 LONGITUD Y NORMA DE UN VECTOR (Benalcazar, 2012) ................. 21
vii
2.9 APLICACIONES LINEALES DE Rn en Rm (Grossman, 2008) ........................ 22
2.9.1 NÚCLEO E IMAGEN DE UNA TRANSFORMACIÓN LINEAL (Grossman,
2008) 23
2.10 VALORES Y VECTORES PROPIOS (Benalcazar, 2012) .................................. 23
2.10.1 PROPIEDADES DE LOS VALORES PROPIOS (Castro, 2008) (Lay, 2006)
25
2.10.2 CÁLCULO DE VALORES Y VECTORES PROPIOS(Castro, 2008) (Lay,
2006) 25
2.10.3 DIAGONALIZACIÓN DE MATRICES, POTENCIAS Y RAÍCES DE
MATRICES (Lay, 2006) .............................................................................................. 28
CAPÍTULO 3 ..................................................................................................................... 30
3 SISTEMAS DE ECUACIONES DIFERENCIALES LINEALES ........................ 30
3.1 ECUACIONES DIFERENCIALES (Edwards & Penney, 2001) ......................... 30
3.2 SOLUCION DE ECUACIONES DE PRIMER ORDEN ..................................... 32
3.2.1 INTRODUCCIÓN A LA SOLUCIÓN DE ECUACIONES DE PRIMER
ORDEN 32
3.2.2 PROCEDIMIENTO PARA LA SOLUCIÓN POR VARIABLES
SEPARABLES (Spiegel, 1994) ................................................................................... 33
3.2.3 TRANSFORMACION DE VARIABLES .................................................... 34
3.3 ECUACIONES DIFERENCIALES LINEALES ................................................. 35
3.3.1 ECUACIONES DE PRIMER ORDEN (SAFF & SNIDER, 2005) .............. 35
3.3.2 ECUACIONES DE SEGUNDO ORDEN (SAFF & SNIDER, 2005)
(EDWARDS & PENNEY, 2001) ................................................................................ 35
3.3.3 ECUACIONES HOMOGÉNEAS (Edwards & Penney, 2001) .................... 35
3.3.4 ECUACIONES NO HOMOGÉNEAS .......................................................... 37
3.3.4.1 MÉTODO DE VARIACIÓN DE PARÁMETROS (LARA, 2007)
(ESPINOZA, 2007) .................................................................................................. 38
3.3.4.2 MÉTODO DEL ANULADOR O COEFICIENTES
INDETERMINADOS (ESPINOZA, 2007) ............................................................. 38
3.4 SISTEMAS DE ECUACIONES DIFERENCIALES LINEALES HOMOGÉNEOS
DE PRIMER ORDEN (Lara, J. 2007) ............................................................................. 41

viii
3.4.1 SOLUCIÓN DE ECUACIONES DIFERENCIALES ORDINARIAS DE
PRIMER ORDEN CON COEFICIENTES CONSTANTES HOMOGÉNEOS .......... 43
3.4.1.1 SOLUCIÓN DE ECUACIONES LINEALES POR VALORES Y
VECTORES PROPIOS ............................................................................................ 44
3.4.1.2 SOLUCIÓN POR MÉTODO DE ELIMINACIÓN(Edwards & Penney,
2001) 48
3.5 SISTEMAS DE ECUACIONES DIFERENCIALES LINEALES NO
HOMOGÉNEOS DE PRIMER ORDEN ........................................................................ 49
CAPÍTULO 4 ..................................................................................................................... 51
4 SISTEMAS FÍSICOS DE UNO Y DOS GRADOS DE LIBERTAD ..................... 51
4.1 CONCEPTOS BÁSICOS (Serway & Jewett, 2008) ............................................ 51
4.2 PRINCIPIOS BÁSICOS DE LA MECÁNICA (Serway & Jewett, 2008) ........... 52
4.2.1 SISTEMA DE REFERENCIA ESPACIO - TIEMPO .................................. 52
4.2.2 PRIMERA LEY DE NEWTON .................................................................... 53
4.2.3 SEGUNDA LEY DE NEWTON ................................................................... 54
4.2.4 TERCERA LEY DE NEWTON ................................................................... 55
4.3 SEGUNDA LEY DE NEWTON APLICADA A UN SISTEMA MASA -
RESORTE HORIZONTAL Y VERTICAL (Nagle & Saff, s. f.; Rao, 2011) ................. 55
4.3.1 COMBINACIÓN DE RESORTES ( Rao, 2011) .......................................... 58
4.4 PÉNDULOS (Serway & Jewett, 2008; Spiegel, 1994; Zill & Cullen, 2006) ....... 60
4.5 EFECTO DE FRICCIÓN EN LOS SISTEMAS MASA – RESORTE Y
PÉNDULOS (Serway & Jewett, 2008) ............................................................................ 62
4.6 CONSERVACIÓN DE ENERGÍA (RESNICK, HALLIDAY, & KRANE, 2006)
(NAGLE & SAFF, S. F.) ................................................................................................. 63
4.7 PLANO FASE DE OSCILADORES LINEALES(RESNICK, HALLIDAY, &
KRANE, 2006) (NAGLE & SAFF, S. F.) ....................................................................... 64
4.8 PERIODO DE UN PÉNDULO NO LINEAL (Spiegel, 1994) ............................ 65
4.9 CARACTERÍSTICAS DE VIBRACIONES LIBRES DE SISTEMAS DE DOS
GRADOS DE LIBERTAD (Rao, 2011) .......................................................................... 66
4.10 APLICACIONES DE ECUACIONES DIFERENCIALES ................................. 67
4.10.1 INTRODUCCIÓN ......................................................................................... 67
4.10.2 CAÍDA LIBRE .............................................................................................. 68

ix
4.10.3 RESORTE VIBRANTE MOVIMIENTO ARMÓNICO SIMPLE ............... 72
4.10.3.1 Problema 1.............................................................................................. 72
4.10.3.2 Problema 2.............................................................................................. 78
4.10.3.3 Problema 3.............................................................................................. 84
4.10.3.4 Problema 4.............................................................................................. 88
4.10.3.5 Problema 5.............................................................................................. 95
CAPÍTULO 5 ..................................................................................................................... 97
5 METODOLOGÍA PARA LA ENSEÑANZA DE TEORÍA DE VIBRACIONES 97
5.1 GENERALIDADES EN EL PROCESO EDUCATIVO (me) ............................. 97
5.2 MODELO PEDAGÓGICO .................................................................................. 99
5.2.1 BASES PEDAGÓGICAS DEL DISEÑO CURRICULAR ........................ 100
Figura 5.2 Aprendizajes productivos y significativos ......................................... 101
5.2.2 ELEMENTOS DEL CURRÍCULO: ........................................................... 102
5.2.3 CRITERIOS DEL AREA DE MATEMÁTICA ......................................... 103
5.2.3.1 ENFOQUE E IMPORTANCIA DE LA MATEMÁTICA .................. 103
5.2.3.2 OBJETIVOS DEL ÁREA DE MATEMÁTICA ................................. 104
5.3 MODELACIÓN MATEMÁTICA COMO METODOLOGÍA DE APRENDIZAJE
105
5.3.1 MODELACIÓN MATEMÁTICA .............................................................. 105
5.3.2 PROCESO DE ENSEÑANAZA APRENDIZAJE PLANTEADO ............ 106
5.4 MODELO de GUÍA TALLER DE APRENDIZAJE para modelamiento
matematico de vibraciones ............................................................................................. 109
5.4.1 MODELO MATEMÁTICO DE VIBRACIONES – GUÍA TALLER DE
APRENDIZAJE ......................................................................................................... 111
6 CONCLUSIONES Y RECOMENDACIONES ..................................................... 125
6.1 CONCLUSIONES .............................................................................................. 125
6.2 RECOMENDACIONES ..................................................................................... 126
7 GLOSARIO DE TERMINOS ................................................................................. 128
8 8. BIBLIOGRÁFIA ................................................................................................. 130
9 ANEXOS ................................................................................................................... 132

x
9.1 ANEXO I ............................................................................................................ 133
9.1.1 Problema 1 - CAÍDA LIBRE POSICIÓN ................................................... 133
9.1.2 Problema 2 – RESORTES .......................................................................... 133
9.2 ANEXO II ........................................................................................................... 135
9.2.1 GUÍA DE TRABAJO PARA APRENDER ECUACIONES
DIFERENCIALES LINEALES DE SEGUNDO ORDEN Y COEFICIENTES
CONSTANTES. ......................................................................................................... 135
9.2.2 GUÍA DE TRABAJO PARA APRENDER A RESOLVER PROBLEMAS DE
VIBRACIONES DE UN SISTEMA MASA RESORTE. ......................................... 142
10 BIOGRAFÍA ............................................................................................................. 147
xi
RESUMEN
INTRODUCCIÓN A LAS VIBRACIONES
El presente trabajo se enmarca en la modelación de vibraciones mediante
ecuaciones diferenciales ordinarias para lo cual se introduce al lector en breves
referencias al Algebra lineal y Ecuaciones Diferenciales Ordinarias.
En la parte medular se hace referencia a los fenómenos vibratorios básicos y a la
enseñanza a nivel de bachillerato de los mismos.
En el proceso de análisis de las vibraciones se incluyen problemas resueltos de
aplicaciones del sistema masa resorte, en los cuales se detalla el planteamiento del
problema, su resolución, además de las gráficas representativas del movimiento de
los cuerpos que se generan en el software Matlab de las cuáles se detalla su
análisis de acuerdo a los cambios que se proponen en los valores de los
componentes que intervienen en el movimiento.
El ámbito de enseñanza aprendizaje se aborda desde la propuesta educativa del
Ministerio de Educación del Ecuador y se expone un sistema de trabajo para que
sea trabajado en la enseñanza del proceso de modelamiento del fenómeno físico a
partir del experimento.
ALGEBRA LINEAL/ ECUACIONES DIFERENCIALES ORDINARIAS/ LEYES DE
NEWTON/ VIBRACIONES EN UN SISTEMA MASA-RESORTE/ APLICACIONES
DE SEGUNDA LEY DE NEWTON/ MODELAMIENTO MATEMATICO/ PROCESO
ENSEÑANZA APRENDIZAJE/ GUIA DE TALLER SOBRE VIBRACIONES.

xii
SUMMARY
INTRODUCTION TO VIBRATIONS
In this document vibration modeling using ordinary differential equations is studied,
for which the reader is introduced at some references about Linear Algebra and
Ordinary Differential Equations. The main part of the project consist of basic
vibrational phenomena and teaching at the undergraduate level this topics. In
addition, vibrations are analyzed by solving problems about mass – spring system
applications, in these problems are contained the detailed statement of the problem,
resolution, and a graph representing the movement of the system. The graphs are
generated in Matlab software. Also, for each graphic the changes that occur in the
components involved in the movement are analyzed. In the field of teaching and
learning is approached from the educational proposal of the Education Ministry of
Ecuador, so this project presents a working system to be used on teaching the
process of modeling a physical phenomenon from an experiment.
LINEAR ALGEBRA / ORDINARY DIFFERENTIAL EQUATIONS / NEWTON’S
LAWS / VIBRATIONS OF MASS-SPRING SYSTEM / APPLICATIONS OF
NEWTON'S SECOND LAW / MATHEMATICAL MODELING / TEACHING -
LEARNING PROCESS / WORKSHOP VIBRATIONS GUIDE.

1
CAPÍTULO 1
INTRODUCCIÓN
1.1 JUSTIFICACIÓN DEL PROYECTO
Relevar la importancia de la matemática y especialmente de las Ecuaciones
Diferenciales Ordinarias para el modelamiento dinámico de fenómenos vibratorios
mecánicos.
1.2 OBJETIVOS
- Identificar ecuaciones diferenciales ordinarias que permitan modelar
fenómenos dinámicos.
- Modelar matemáticamente vibraciones mecánicas mediante ecuaciones
diferenciales ordinarias.
- Determinar una guía de enseñanza aprendizaje de modelamiento de
vibraciones y ecuaciones diferenciales.
1.3 METODOLOGÍA
Se propone el desarrollo de cuatro capítulos en el que se incluye una propuesta de
elaboración de una metodología de estudio y la construcción de material didáctico
que ayude a comprender algunos problemas físicos como péndulos, sistemas
masa-resorte.
En el presente trabajo se utilizará un conjunto de métodos de acuerdo a las fases
del proyecto.
En primer lugar se realizará una investigación bibliográfica para documentar los
fundamentos científicos de la temática a desarrollar en los 2 primeros capítulos,
con ello se establecerán los prerrequisitos en Algebra Lineal y Ecuaciones
Diferenciales.
2
Una vez que se establecen los prerrequisitos en Matemática se abordan los
conocimientos de los fenómenos físicos relacionados con las vibraciones y
oscilaciones mediante investigación bibliográfica.
A continuación se establecerá una etapa de experimentación del
comportamiento de los fenómenos físicos con sus respectivos resultados ante
los diferentes estímulos y cambios de elementos, los cuales serán llevados a
una modelación matemática.
Finalmente se realizará una propuesta del desarrollo de la temática para llevarla
al aula y sea trabajada por estudiantes de bachillerato y universitarios.
3
CAPÍTULO 2
2 ESPACIOS VECTORIALES
2.1 CONCEPTOS BÁSICOS
En espacios vectoriales se define función y operación como conceptos
fundamentales de la matemática.
2.1.1 FUNCIONES
Definición 1
Sean 𝐴, 𝐵 dos conjuntos no vacíos cualquiera. Una función 𝑓 de 𝐴 en 𝐵 es una regla
de asignación que hace corresponder a cada elemento 𝑥 de 𝐴 un único elemento 𝑦
de 𝐵, tal que 𝑦 = 𝑓(𝑥)
A la función 𝑓 se nota 𝑓: 𝐴 → 𝐵
𝑥 → 𝑦 = 𝑓(𝑥).
Donde:
𝐴 Conjunto de salida
B Conjunto de llegada
x Elementos del Dominio (Dom), 𝐷𝑜𝑚 = 𝑥/𝑥 ∈ 𝐴 en
donde 𝐷𝑜𝑚(𝑓) ⊂ 𝐴
𝑦 Imagen de 𝑥 por 𝑓 que conforma el conjunto
Recorrido (𝑅𝑒𝑐)
El conjunto 𝑅𝑒𝑐(𝑓) = 𝑓(𝑥) / 𝑥 ∈ 𝐴 se llama recorrido de f, se tiene
además que. 𝑅𝑒𝑐(𝑓) ⊂ 𝐵.

4
Sean A y B conjuntos no vacíos, el producto cartesiano de 𝐴 con 𝐵 se escribe 𝐴 ×
𝐵 = (𝑥, 𝑦)|𝑥 ∈ 𝐴, 𝑦 ∈ 𝐵, pero si particularmente 𝐴 = 𝐵, Se tendrá 𝐴2 en lugar de
𝐴 × 𝐴, esto es 𝐴2 = (𝑥, 𝑦)|𝑥 ∈ 𝐴, 𝑦 ∈ 𝐴.
Definición 2
Sea 𝐴 un conjunto no vacío, se define la igualdad de pares ordenados como: Para
todo (𝑎, 𝑏), (𝑥, 𝑦) ∈ 𝐴2, (𝑎, 𝑏) = (𝑥, 𝑦) si y solo si 𝑎 = 𝑥 𝑦 y 𝑏 = 𝑦.
Una función puede ser de diferente tipo como:
Definición 3
Sean 𝐴, 𝐵 conjuntos no vacíos, 𝑓 una función de 𝐴 en 𝐵
i. Se dice que 𝑓 es inyectiva si y solo si se verifica:
∀ 𝑥, 𝑦 ∈ 𝐴, 𝑥 ≠ 𝑦 ⇒ 𝑓(𝑥) ≠ 𝑓(𝑦).
ii. Se dice que 𝑓 es sobreyectiva si y solo si se tiene: 𝑅𝑒𝑐(𝑓) = 𝐵
iii. Se dice que 𝑓 es biyectiva si 𝑓 es inyectiva y sobreyectiva a la vez.
𝑓 𝑒𝑠 𝑏𝑖𝑦𝑒𝑐𝑡𝑖𝑣𝑎 ⇔ 𝑓 𝑒𝑠 𝑖𝑛𝑦𝑒𝑐𝑡𝑖𝑣𝑎 y 𝑓 𝑒𝑠 𝑠𝑜𝑏𝑟𝑒𝑦𝑒𝑐𝑡𝑖𝑣𝑎
Las funciones que cumplen con la característica de ser biyectiva permite encontrar
una función inversa que se define a continuación:
Definición 4
Sean 𝐴, 𝐵 conjuntos no vacíos, 𝑓 una función de 𝐴 en 𝐵 biyectiva. La función 𝑓−1
de 𝐵 en 𝐴 definida como:
𝑦 = 𝑓(𝑥) ⇔ 𝑥 = 𝑓−1(𝑦) 𝑥 ∈ 𝐴, 𝑦 ∈ 𝐵,
Se llama función inversa.

5
Definición 5
Sea 𝐴 un conjunto no vacío cualquiera. Toda función 𝑓 de 𝐴 𝑥 𝐴 en 𝐴 se llama
operación en 𝐴.
2.1.2 OPERACIONES
A una operación 𝑓, se nota con ∗ y se escribe 𝑥 ∗ 𝑦 cuyo resultado se obtiene al
realizar la operación *,
∗: 𝐴 × 𝐴 → 𝐴(𝑥, 𝑦) → 𝑥 ∗ 𝑦
Sea * una operación en 𝐴.
i. Se dice que * es asociativa si y solo si se satisface la propiedad:
𝑥 ∗ (𝑦 ∗ 𝑧) = (𝑥 ∗ 𝑦) ∗ 𝑧 ∀ 𝑥, 𝑦, 𝑧 ∈ 𝐴.
ii. Se dice que * es conmutativa si y solo si se verifica:
𝑥 ∗ 𝑦 = 𝑦 ∗ 𝑥 ∀ 𝑥, 𝑦 ∈ 𝐴.
iii. Se dice que en la operación * existe un elemento neutro de 𝐴 si y solo si se
verifica:
𝑥 ∗ 𝑒 = 𝑒 ∗ 𝑥 ∀ 𝑥 ∈ 𝐴.
iv. Al existir un elemento neutro 𝑒, se dice que la operación ∗ admite un
elemento inverso, si y solo si se verifica la siguiente condición: para cada 𝑥 ∈
𝐴, existe 𝑦 ∈ 𝐴 tal que:
𝑥 ∗ 𝑦 = 𝑒 = 𝑦 ∗ 𝑥 ∀ 𝑥, 𝑦 ∈ 𝐴.
Si una operación * es conmutativa y asociativa se escribe 𝑥 ∗ 𝑦 ∗ 𝑧 en vez de 𝑥 ∗
(𝑦 ∗ 𝑧). Note que * tiene varias formas de operar estos tres elementos, así por
ejemplo:
𝑥 ∗ (𝑦 ∗ 𝑧) = (𝑥 ∗ 𝑦) ∗ 𝑧 = 𝑧 ∗ (𝑦 ∗ 𝑥) = 𝑦 ∗ (𝑧 ∗ 𝑥) =x*y*z
Las operaciones entre funciones más importantes son: la adición “+”, producto “x”
y la composición de funciones “o”.

6
Así, si V es un conjunto no vacío, la adición está definida como
+: 𝑉 × 𝑉 → 𝑉
(𝑥, 𝑦) → 𝑥 + 𝑦, donde 𝑥 + 𝑦 es la suma de 𝑥 con 𝑦.
Los conjuntos importantes relacionados con las operaciones de adición son: los
naturales ℕ, los enteros ℤ, los racionales ℚ, los números reales ℝ y los complejos ℂ.
Es necesario definir el término subconjunto en el conjunto de los números, lo que
implica que los conjuntos como los naturales, enteros, racionales, irracionales están
incluidos o son parte de otro conjunto más grande, así se tiene que: ℕ ℤ ℚ ℝ
ℂ. Los ℝ también cuentan con dos operaciones de adición + y producto ×.
2.1.3 OPERACIONES EN LOS REALES
Adición
La operación de adición está definida como +: ℝ × ℝ → ℝ(𝑥, 𝑦) → 𝑥 + 𝑦
, donde se verifican
las siguientes propiedades:
i. Se dice que * es asociativa si y solo si se satisface la propiedad:
𝑥 + (𝑦 + 𝑧) = (𝑥 + 𝑦) + 𝑧 ∀ 𝑥, 𝑦, 𝑧 ∈ ℝ.
ii. Se dice que * es conmutativa si y solo si se verifica:
𝑥 + 𝑦 = 𝑦 + 𝑥 ∀ 𝑥, 𝑦 ∈ ℝ.
iii. Se dice que en la operación * existe un elemento neutro de ℝ si y solo si se
verifica:
𝑥 + 𝑒 = 𝑒 + 𝑥 ∀ 𝑥 ∈ ℝ.
iv. Al existir un elemento neutro 𝑒, se dice que la operación ∗ admite un elemento
inverso, si y solo si se verifica la siguiente condición: para cada 𝑥 ∈ 𝐴, existe 𝑦 ∈ 𝐴
tal que
𝑥 + 𝑦 = 𝑒 = 𝑦 + 𝑥 ∀ 𝑥, 𝑦 ∈ ℝ.

7
Producto
La operación producto está definida como ×: ℝ × ℝ → ℝ(𝑥, 𝑦) → 𝑥 × 𝑦
, donde se verifican las
siguientes propiedades:
i. Se dice que ∗ es asociativa si y solo si se satisface la propiedad:
𝑥 × (𝑦 × 𝑧) = (𝑥 × 𝑦) × 𝑧 ∀ 𝑥, 𝑦, 𝑧 ∈ ℝ.
ii. Se dice que ∗ es conmutativa si y solo si se verifica:
𝑥 × 𝑦 = 𝑦 × 𝑥 ∀ 𝑥, 𝑦 ∈ ℝ.
iii. Se dice que en la operación ∗ existe un elemento neutro de ℝ si y solo si se
verifica:
𝑥 × 𝑒 = 𝑒 × 𝑥 ∀ 𝑥 ∈ ℝ.
iv. Al existir un elemento neutro 𝑒, se dice que la operación ∗ admite un elemento
inverso, si y solo si se verifica que para cada 𝑥 ∈ ℝ, existe 𝑦 ∈ ℝ,
𝑥 × 𝑦 = 𝑒 = 𝑦 × 𝑥 ∀ 𝑥, 𝑦 ∈ ℝ
Con estas dos operaciones en ℝ que satisfacen las propiedades enumeradas
anteriormente se dice que tiene estructura de cuerpo o campo y se lo llama cuerpo
de los números reales.
2.1.4 COMPOSICIÓN DE FUNCIONES
Se denota con 𝐹(𝐴) al conjunto de funciones de 𝐴 en 𝐴, la operación composición
está definida como:
𝜊 ∶ 𝐹(𝐴) × 𝐹(𝐴) → 𝐹(𝐴)
(𝑓, 𝑔) → 𝑓𝜊𝑔 ,
Donde f o g es la función en A definida como:
(𝑓 𝜊 𝑔)(𝑥) = 𝑓(𝑔(𝑥) ) ∀𝑥 ∈ 𝐴.

8
La composición entre una función y su inversa genera las siguientes propiedades:
𝑓 𝑜 𝑓−1 = 𝐼𝐵,
𝑓−1 𝑜 𝑓 = 𝐼𝐴,
Si 𝑓 , 𝑔 son biyectivas,
(𝑓 𝑜 𝑔)−1 = 𝑔−1 𝑜 𝑓−1
2.1.5 OPERACIÓN DE NÚMEROS COMPLEJOS
Otro conjunto importante son los números complejos (ℂ). Toda expresión en la
forma 𝑎 + 𝑏𝑖 donde 𝑎 y 𝑏 son números reales e 𝑖 es la unidad imaginaria es un
número complejo.
Se verifican las operaciones de igualdad, adición y multiplicación.
Dados 𝑢, 𝑣 ∈ ℂ se tiene:
Igualdad: para todo 𝑢 = 𝑎 + 𝑖𝑏; 𝑣 = 𝑐 + 𝑖𝑑, donde se dice que
𝑎 + 𝑖𝑏 = 𝑐 + 𝑖𝑑 ⇔ 𝑎 = 𝑐^𝑏 = 𝑑
Adición: para todo 𝑢 = 𝑎 + 𝑖𝑏; 𝑣 = 𝑐 + 𝑖𝑑, se dice que
𝑢 + 𝑣 = 𝑎 + 𝑖𝑏 + 𝑐 + 𝑖𝑑 = 𝑎 + 𝑐 + 𝑖(𝑏 + 𝑑)
Producto: para todo 𝑢 = 𝑎 + 𝑖𝑏; 𝑣 = 𝑐 + 𝑖𝑑, se dice que
𝑢𝑣 = (𝑎 + 𝑖𝑏)(𝑐 + 𝑖𝑑) = 𝑎𝑐 − 𝑏𝑑 + 𝑖(𝑎𝑑 + 𝑏𝑐)
Un elemento importante a incluir es el conjugado de un número complejo, que es
otro número complejo que tiene sus afijos simétricos con respecto al eje imaginario,
por lo tanto, si se tiene 𝑠 = 𝑎 + 𝑖𝑏 entonces = 𝑎 − 𝑖𝑏 es su conjugado.
2.1.6 MATRICES (BENALCAZAR, 2012)
Definición 6
Es un conjunto ordenado en una estructura de filas y columnas. Los elementos de
este conjunto pueden ser objetos matemáticos de muy variados tipos.

9
En este proyecto únicamente se trabajará con matrices cuyos elementos son
números reales y estas son designadas por letras mayúsculas. En una matriz
existen 𝑚 filas y 𝑛 columnas, es decir, de dimensión 𝑚 × 𝑛, se puede representar
de la forma siguiente: 𝐴 = 𝑎𝑖𝑗𝑚×𝑛
𝐴 = (
𝑎11 𝑎12 𝑎13𝑎21 𝑎22 𝑎23𝑎31 𝑎32 𝑎33
)
Como se observa en la matriz 𝐴 de 3 × 3, cada uno de los elementos de ésta se los
nota como 𝑎𝑖𝑗 donde se tienen dos subíndices. El primero i indica la fila a la que
pertenece y el segundo j indica la columna. Por ejemplo:
𝐴 = (1 2 3−2 1 21 4 7
) 𝑒𝑛𝑡𝑜𝑛𝑐𝑒𝑠 𝑎11 = 1, 𝑎12 = 2,… , 𝑎23 = 2,…𝑎33 = 7
Dos matrices son iguales si son de igual dimensión y coincide cada valor de los
elementos que ocupan la misma posición en ambas.
𝐴 = (
𝑎11 𝑎12 𝑎13𝑎21 𝑎22 𝑎23𝑎31 𝑎32 𝑎33
)
𝑚𝑥𝑛
𝐵 = (
𝑏11 𝑏12 𝑏13𝑏21 𝑏22 𝑏23𝑏31 𝑏32 𝑏33
)
𝑚𝑥𝑛
La matriz 𝐴 es igual a la matriz 𝐵 puesto que: 𝐴𝑚×𝑛 = 𝐵𝑚×𝑛 y para cada elemento
𝑎𝑖𝑗 = 𝑏𝑖𝑗.
Adición:
Dadas las matrices 𝐴 y 𝐵 de orden 𝑚𝑥𝑛, se tiene:
𝐴 = (
𝑎11 𝑎12 𝑎13𝑎21 𝑎22 𝑎23𝑎31 𝑎32 𝑎33
)
𝑚𝑥𝑛
𝐵 = (
𝑏11 𝑏12 𝑏13𝑏21 𝑏22 𝑏23𝑏31 𝑏32 𝑏33
)
𝑚𝑥𝑛
𝐴 + 𝐵 = (
𝑎11 + 𝑏11 𝑎12 + 𝑏12 𝑎13 + 𝑏13𝑎21 + 𝑏21 𝑎22 + 𝑏22 𝑎23 + 𝑏23𝑎31 + 𝑏31 𝑎32 + 𝑏32 𝑎33 + 𝑏33
)
𝑚𝑥𝑛
Para sumar matrices es necesario que sean del mismo orden
10
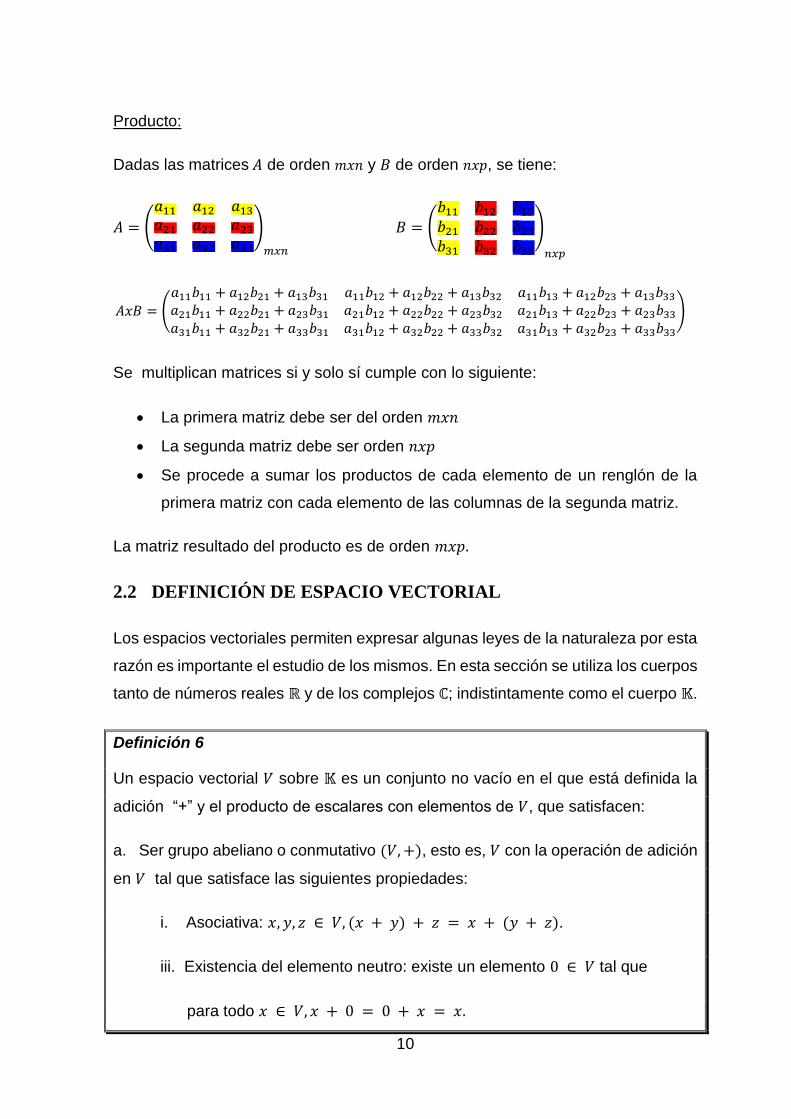
Producto:
Dadas las matrices 𝐴 de orden 𝑚𝑥𝑛 y 𝐵 de orden 𝑛𝑥𝑝, se tiene:
𝐴 = (
𝑎11 𝑎12 𝑎13𝑎21 𝑎22 𝑎23𝑎31 𝑎32 𝑎33
)
𝑚𝑥𝑛
𝐵 = (
𝑏11 𝑏12 𝑏13𝑏21 𝑏22 𝑏23𝑏31 𝑏32 𝑏33
)
𝑛𝑥𝑝
𝐴𝑥𝐵 = (
𝑎11𝑏11 + 𝑎12𝑏21 + 𝑎13𝑏31 𝑎11𝑏12 + 𝑎12𝑏22 + 𝑎13𝑏32 𝑎11𝑏13 + 𝑎12𝑏23 + 𝑎13𝑏33𝑎21𝑏11 + 𝑎22𝑏21 + 𝑎23𝑏31 𝑎21𝑏12 + 𝑎22𝑏22 + 𝑎23𝑏32 𝑎21𝑏13 + 𝑎22𝑏23 + 𝑎23𝑏33𝑎31𝑏11 + 𝑎32𝑏21 + 𝑎33𝑏31 𝑎31𝑏12 + 𝑎32𝑏22 + 𝑎33𝑏32 𝑎31𝑏13 + 𝑎32𝑏23 + 𝑎33𝑏33
)
Se multiplican matrices si y solo sí cumple con lo siguiente:
La primera matriz debe ser del orden 𝑚𝑥𝑛
La segunda matriz debe ser orden 𝑛𝑥𝑝
Se procede a sumar los productos de cada elemento de un renglón de la
primera matriz con cada elemento de las columnas de la segunda matriz.
La matriz resultado del producto es de orden 𝑚𝑥𝑝.
2.2 DEFINICIÓN DE ESPACIO VECTORIAL
Los espacios vectoriales permiten expresar algunas leyes de la naturaleza por esta
razón es importante el estudio de los mismos. En esta sección se utiliza los cuerpos
tanto de números reales ℝ y de los complejos ℂ; indistintamente como el cuerpo 𝕂.
Definición 6
Un espacio vectorial 𝑉 sobre 𝕂 es un conjunto no vacío en el que está definida la
adición “+” y el producto de escalares con elementos de 𝑉, que satisfacen:
a. Ser grupo abeliano o conmutativo (𝑉,+), esto es, 𝑉 con la operación de adición
en 𝑉 tal que satisface las siguientes propiedades:
i. Asociativa: 𝑥, 𝑦, 𝑧 ∈ 𝑉, (𝑥 + 𝑦) + 𝑧 = 𝑥 + (𝑦 + 𝑧).
iii. Existencia del elemento neutro: existe un elemento 0 ∈ 𝑉 tal que
para todo 𝑥 ∈ 𝑉, 𝑥 + 0 = 0 + 𝑥 = 𝑥.

11
iv. Existencia de inverso aditivos: para cada x ϵ V existe un
elemento – 𝑥 ∈ 𝑉 tal que 𝑥 + (−𝑥) = − 𝑥 + 𝑥 = 0.
v. Conmutativa: para todo 𝑥, 𝑦 ∈ 𝑉, 𝑥 + 𝑦 = 𝑦 + 𝑥.
b. Producto de escalares por elementos de 𝑉 o sea una operación 𝕂 × 𝑉 en 𝑉
i. Para todo 𝑥 ∈ 𝑉, existe 𝒆 ∈ 𝕂 tal que, 𝒆. 𝑥 = 𝑥
ii. ∀ 𝛼, 𝛽 ∈ 𝕂, 𝑥 ∈ 𝑉, 𝛼(𝛽𝑥) = (𝛼𝛽)𝑥.
iii. Para todo 𝛼 ∈ 𝕂, 𝑥, 𝑦 ∈ 𝑉, 𝛼(𝑥 + 𝑦) = 𝛼𝑥 + 𝛼𝑦.
iv. Para todo 𝛼, 𝛽 ∈ 𝕂, 𝑥 ∈ 𝑉, (𝛼 + 𝛽)𝑥 = 𝛼𝑥 + 𝛽𝑥.
2.2.1 EJEMPLOS DE ESPACIOS VECTORIALES
Se tienen tres tipos de espacios vectoriales que son ampliamente utilizados: ℝ𝐧,
ℳ𝒎𝒙𝒏[ℝ] y ℱ(Ω,𝑉) que se tratan a continuación.
2.2.1.1 ESPACIO VECTORIAL DE LOS REALES ℝ𝐧.
Este se define como el producto cartesiano de ℝ× ℝ ×… × ℝ, 𝑛 veces, donde sus
elementos se definen como: ∈ ℝ𝑛 si y solo si existen 𝑥1, … , 𝑥𝑛 ∈ ℝ𝑛 tales que =
(𝑥1, … , 𝑥𝑛). Para demostrar que ℝn es un espacio vectorial debe cumplirse las
propiedades mencionadas en la definición 6.
Igualdad: Sean ∧ ∈ ℝ𝑛 se tiene que = si y solo si 𝑥𝑖 = 𝑦𝑖 para todo 𝑖 =
1,… , 𝑛.
Adición: Sean = (𝑥1, … , 𝑥𝑛), = (𝑦1, … , 𝑦𝑛) ∈ ℝ𝑛, + = (𝑥1 + 𝑦1, … , 𝑥𝑛 +
𝑦𝑛).
Se verifica que si , ∈ ℝ𝑛 , + ∈ ℝ𝑛.
Producto por escalares: Sea ∈ ℝ𝑛 y 𝛼 ∈ ℝ, se nota con 𝛼 al elemento de ℝ
que se define como sigue a continuación:
𝛼 = 𝛼(𝑥1, … , 𝑥𝑛) = (𝛼𝑥1, … , 𝛼𝑥𝑛).
Existe el elemento neutro 0 = (01, … , 0n) y el inverso aditivo = − tal que +
(−) = 0 , donde − = (−𝑥1 , … , −𝑥𝑛).

12
Por lo expuesto anteriormente se puede concluir que (ℝn, +) es un grupo
conmutativo.
Las propiedades del producto de escalares por elementos de ℝ𝑛 son las siguientes:
i) Sea 1 ∈ 𝕂 , para todo = (𝑥1, … , 𝑥𝑛) ∈ ℝ𝑛 se tiene que
1 = 1(𝑥1, … , 𝑥𝑛) = (1. 𝑥1, … ,1. 𝑥𝑛) = (𝑥1, … , 𝑥𝑛) = .
ii) Para todo 𝛼, 𝛽 ∈ 𝕂 y para todo = (𝑥1, … , 𝑥𝑛) ∈ ℝ𝑛 se tiene que
𝛼(𝛽) = 𝛼[𝛽(𝑥,… , 𝑥𝑛)] = 𝛼(𝛽𝑥1, … , 𝛽𝑥𝑛) = 𝛼𝛽𝑥1, … , 𝛼𝛽𝑥𝑛
= (𝛼𝛽)((𝑥1, … , 𝑥𝑛) = (𝛼𝛽).
iii) Para todo 𝛼 ∈ 𝕂, para todo = (𝑥1, … , 𝑥𝑛), = (𝑦1, … , 𝑦𝑛) ∈ ℝ𝑛 se
tiene que + = (𝑥1, … , 𝑥𝑛) + (𝑦1, … , 𝑦𝑛) = ( 𝑥1 + 𝑦1, … , 𝑥𝑛 + 𝑦𝑛) luego
𝛼( + ) = 𝛼(𝑥1 + 𝑦1, … , 𝑥𝑛 + 𝑦𝑛) = (𝛼 (𝑥1 + 𝑦1), … , 𝛼(𝑥𝑛 + 𝑦𝑛))
= (𝛼𝑥1 + 𝑎𝑦1 , … , 𝛼𝑥𝑛 + 𝛼𝑦𝑛) = (𝛼𝑥1, … , 𝛼𝑥𝑛 ) + (𝛼𝑦1, … , 𝛼𝑦𝑛)
= 𝛼 (𝑥1, … , 𝑥𝑛) + 𝛼(𝑦1, … , 𝑦𝑛) = 𝛼 + 𝛼.
iv) Para todo 𝛼, 𝛽 ∈ 𝕂, para todo = (𝑥1, … , 𝑥𝑛) ∈ ℝ𝑛se tiene que
(𝛼 + 𝛽) = ( (𝛼 + 𝛽)𝑥1, … , (𝛼 + 𝛽)𝑥𝑛 ) = (𝛼𝑥1 + 𝛽𝑥1, … , 𝛼𝑥𝑛 + 𝛽𝑥𝑛 )
= (𝛼𝑥1, … , 𝛼𝑥𝑛) + (𝛽𝑥1, … , 𝛽𝑥𝑛)
= 𝛼(𝑥1, … , 𝑥𝑛) + 𝛽(𝑥1+,… ,+𝑥𝑛)
= 𝛼 + 𝛽.
Demostradas las propiedades se concluye que ℝn es un espacio vectorial.
2.2.1.2 ESPACIO VECTORIAL DE MATRICES 𝓜𝒎𝒙𝒏[ℝ]
Se definen las matrices 𝐴𝑚×𝑛 y 𝐵𝑚×𝑛
A = [
𝒂𝟏𝟏 … 𝒂𝟏𝒏⋮ … ⋮𝒂𝒎𝟏 … 𝒂𝒎𝒏
]
𝒎𝐱𝒏
𝑩 = [𝒃𝟏𝟏 … 𝒃𝟏𝒏⋮ … ⋮𝒃𝒎𝟏 … 𝒃𝒎𝒏
]
𝒎𝐱𝒏
Igualdad: Se define como sigue: sean 𝐴 , 𝐵 ∈ ℳ𝒎𝒙𝒏[ℝ], se tiene que 𝐴 = 𝐵 si y
solo si
(𝑎𝑖𝑗)𝑚×𝑛 = (𝑏𝑖𝑗)𝑚×𝑛.

13
Adición: Se define a continuación: sean 𝐴, 𝐵 ∈ ℳ𝒎𝒙𝒏[ℝ] entonces
𝐴 + 𝐵 = (𝑎𝑖𝑗)𝒎×𝒏 + (𝑏𝑖𝑗)𝒎×𝒏 = (𝑎𝑖𝑗 + 𝑏𝑖𝑗)𝒎×𝒏.
Producto por escalar: Sean 𝐴 ∈ ℳ𝒎𝒙𝒏[ℝ] y 𝛼 ∈ 𝕂
𝛼𝐴 = 𝛼(𝑎𝑖𝑗)𝒎×𝒏 = (𝛼𝑎𝑖𝑗)𝒎×𝒏.
Existe el elemento neutro O = (0,… , 0) ∈ ℳ𝒎𝒙𝒏[ℝ] en donde, si 𝐴 = 0 ∈ 𝑀𝑚𝑥𝑛
entonces
(𝑎𝑖𝑗)𝒎×𝒏 = 0.
Además existe el opuesto aditivo 𝐵 ∈ ℳ𝒎𝒙𝒏[ℝ] tal que 𝐵 = − 𝐴 .
(𝑎𝑖𝑗)𝒎×𝒏 + (−𝑎𝑖𝑗)𝒎×𝒏 = O ∈ ℳ𝒎𝒙𝒏[ℝ].
Las propiedades del producto de escalares por elementos de ℳ𝒎𝒙𝒏[ℝ] se
mostraran a continuación:
i) Sea 1 ∈ 𝕂 , para todo 𝐴 ∈ ℳ𝒎𝒙𝒏[ℝ] , tal que 𝐴 = (𝑎𝑖𝑗) 𝒎×𝒏 se tiene que:
1(𝑎𝑖𝑗)𝒎×𝒏= (𝑎𝑖𝑗)𝒎×𝒏
.
ii) Para todo 𝛼 ∈ 𝕂, para todo 𝐴 = (𝑎𝑖𝑗) 𝒎×𝒏 ∈ ℳ𝒎𝒙𝒏[ℝ] , se tiene que:
𝛼((𝑎𝑖𝑗)𝒎×𝒏 + )(𝑏𝑖𝑗)𝒎×𝒏 = 𝛼(𝑎𝑖𝑗)𝒎×𝒏 + 𝛽(𝑏𝑖𝑗)𝒎×𝒏.
iii) Para todo 𝛼, 𝛽 ∈ 𝕂, para todo 𝐴 ∈ ℳ𝒎𝒙𝒏[ℝ] , tal que 𝐴 = (𝑎𝑖𝑗) 𝒎×𝒏 se tiene que:
(𝛼 + 𝛽)(𝑎𝑖𝑗)𝒎×𝒏 = α(𝑎𝑖𝑗)𝒎×𝒏 + 𝛽(𝑎𝑖𝑗)𝒎×𝒏.
Demostradas las propiedades se concluye que ℳmxn[ℝ] es un espacio vectorial.
2.2.1.3 ESPACIO VECTORIAL DE FUNCIONES 𝑭(Ω,𝑽)
Sean 𝕂1, 𝕂2 dos cuerpos, 𝐺 un grupo abeliano o un espacio vectorial sobre 𝕂, Ω ⊂
G con Ω ≠ 0, 𝑉 un espacio vectorial sobre 𝕂, se designará
ℱ(Ω,𝑉) = 𝑓: Ω → 𝑉 |∀𝑥 ∈ Ω, 𝑓(𝑥) ∈ 𝑉 ,
Se lee: conjunto de todas las funciones de Ω en V.
14
En ℱ(Ω,𝑉), se define la igualdad, adición y producto por escalares como a
continuación se indica.
Igualdad: Se define como sigue: Sean 𝑓 y 𝑔 ∈ 𝐹(Ω, 𝑉), se tiene que 𝑓 = 𝑔 si y
solo si, para todo 𝑥 ∈ Ω,
𝑓(𝑥) = 𝑔(𝑥).
Adición: Se define como sigue 𝑓 , 𝑔 es el conjunto de 𝐹(Ω, 𝑉) definido por:
(𝑓 + 𝑔)(𝑥) = 𝑓(𝑥) + 𝑔(𝑥) ∀𝑥 ∈ Ω.
De las operaciones heredadas del espacio vectorial V, resulta que (𝐹(Ω, 𝑉), +)
es un grupo conmutativo, se tiene que para cada 𝑥 Ω,
𝑓(𝑥), 𝑔(𝑥) ∈ V, en consecuencia 𝑓(𝑥) + 𝑔(𝑥) ∈ 𝑉.
Por otro lado, si 𝛼 ∈ 𝕂 y 𝑓 ∈ 𝐹(Ω, 𝑉); para cada 𝑥 ∈ Ω, 𝑓(𝑥) ∈ 𝑉 y 𝛼𝑓(𝑥) ∈ 𝑉, ya
que 𝑉 es un espacio vectorial sobre 𝕂.
El elemento nulo 𝐹(Ω, 𝑉) es la función 𝑓0 definida por
𝑓0(𝑥) = 0 ∀𝑥 ∈ Ω, donde 0 ∈ 𝑉.
El opuesto aditivo de 𝑓 ∈ 𝐹(Ω, 𝑉) se denota con – 𝑓, esto es,
(−𝑓 )(𝑥) = −𝑓(𝑥), ∀𝑥 ∈ Ω, donde −𝑓(𝑥) es el opuesto aditivo de 𝑓(𝑥).
2.3 SUBESPACIOS VECTORIALES
Definición 7
Dado el espacio vectorial 𝑉, y el conjunto 𝑊 ⊂ 𝑉, se dice que 𝑊 es un subespacio
de 𝑉 si y solo si 𝑊 es un espacio vectorial.
Es condición suficiente para que el subconjunto 𝑊, sea un subespacio de 𝑉, que
cumpla con las siguientes propiedades.
i. Existe el 0 vector en el subconjunto 𝑊.
15
ii. 𝑊 es cerrado respecto de la suma en 𝑉, esto es para
𝑤1, 𝑤2 ∈ 𝑊 se tiene que 𝑤1 + 𝑤2 ∈ 𝑊.
iii. 𝑊 es cerrado respecto a la multiplicación por escalares, esto es, para
𝑤1 , 𝑤2 ∈ 𝑊 y 𝛼, 𝛽 ∈ ℝ se tiene que 𝛼𝑤1 , 𝛼𝑤2 ∈ 𝑊, con lo que se cumple
que 𝛼 𝑤1 + 𝛽𝑤2 ∈ 𝑊.
Cualquiera que sea el espacio vectorial, se tienen dos subespacios llamados
triviales que son el vector 0 y el mismo espacio vectorial, de existir otros
subespacios se denominan subespacios propios. Se verifican varios casos
ejemplos de subespacios como son:
1. Subespacio en ℝ𝟐 es una recta que pase por el origen
2. Subespacio en ℳ𝑚𝑥𝑛[ℝ] es el conjunto de las matrices simétricas ℳ𝑚𝑥𝑛[ℝ]
3. Subespacio en las funciones 𝐹(Ω, 𝑉), es la función impar 𝑓 𝜖 ([−𝑎, 𝑎], ℝ), de
forma que se cumple 𝑓(−𝑥) = −𝑓(𝑥).
2.4 COMBINACIONES LINEALES
Definición 8
Sea 𝑉 un espacio vectorial sobre 𝕂, 𝐴 un subconjunto de 𝑉.
Se dice que 𝑥 ∈ 𝑉 y es una combinación lineal de elementos de 𝐴 si existen un
número finito 𝑥1, … , 𝑥𝑛 ∈ 𝐴 𝑦 𝛼1, … , 𝛼𝑛 ∈ 𝕂 tales que:
𝑥 =∑𝛼𝑖𝑥𝑖 = 𝛼𝑖𝑥𝑖 + …+ 𝛼𝑛𝑥𝑛.
𝑛
𝑖=1
Sea 𝑉 = 𝑉(𝐾), 𝐴 un subconjunto de 𝑉. Con 𝐴 ≠ ∅ . 𝑊 contiene todas las
combinaciones lineales de 𝐴, entonces 𝑊 es un subespacio de 𝑉
Demostración:

16
Por la definición de 𝑊 se sigue que: 𝑥 ∈ 𝑊 si y solo si existen 𝑥1 , … , 𝑥𝑛 ∈ 𝐴 y
α1, … , αn ∈ 𝕂 tal que
𝑥 =∑𝛼𝑖𝑥𝑖 .
𝑛
𝑖=1
Entonces se verifica el cumplimiento de las tres propiedades que son suficientes
para determinar un subespacio.
i. 0 ∈ W ya que 0x = 0 ∀x ∈ A
ii. Sean 𝑥, 𝑦 ∈ 𝑊, existen 𝑥1 , . . . , 𝑥𝑛, 𝑦1 , . . . , 𝑦𝑚 ∈ 𝐴 y 𝛼1 , . . . , 𝛼𝑛, 𝛽1 ,
. . . , 𝛽𝑚 ∈ 𝕂 tales que 𝑥 = ∑ 𝛼𝑗𝑥𝑗 𝑛𝑗=1 , 𝑦 = ∑ 𝛽𝑘𝑦𝑘
𝑚𝑘=1 ,consecuentemente
𝑥 + 𝑦 = ∑ 𝛼𝑗𝑥𝑗 𝑛𝑗=1 + ∑ 𝛽𝑘𝑦𝑘
𝑚𝑘=1 ∈ W.
iii. Sean 𝑥 ∈ 𝑊, 𝛼 ∈ 𝐾 tal que 𝑥 = ∑ 𝛼𝑗𝑥𝑗 𝑛𝑗=1 , entonces
𝛼𝑥 =∑(𝛼𝛼𝑗)𝑥𝑗 ∈
𝑛
𝑗=1
𝑊.
Luego se concluye que 𝑊 es subespacio de 𝑉.
Definición 9
i. El subespacio 𝑊 de 𝑉 de todas las combinaciones lineales de elementos de 𝐴
se llama subespacio generado por 𝐴 y el conjunto 𝐴 se llama generador de 𝑊.
Se escribirá 𝑊 = 𝐿(𝐴).
ii. Si 𝐿(𝐴) = 𝑉, se dirá que 𝐴 genera a 𝑉.
En el literal ii) de la definición 9 anterior se debe tener presente que: 𝐿(𝐴) = 𝑉 ⇔ 𝐿(𝐴)⊂ 𝑉 ∧ 𝑉 ⊂ 𝐿(𝐴). Como se demostró anteriormente si 𝑊 es un
subespacio de 𝑉 y 𝐿(𝐴) son las combinaciones lineales de 𝐴 que generan 𝑊 se
tiene que 𝐿(𝐴) ⊂ 𝑉.
Para 𝑉 ⊂ 𝐿(𝐴) se debe demostrar que la implicación 𝑥 ∈ 𝑉 ⟹ 𝑥 ∈ 𝐿(𝐴) es
verdadera. Además,
17
𝑥 ∈ 𝐿(𝐴) ⟺ ∃𝑥1 , . . . , 𝑥𝑛 ∈ 𝐴 y 𝛼1 , . . . , 𝛼𝑛 ∈ 𝕂 tales que ∑ 𝛼𝑖𝑛𝑖=1 𝑥𝑖 = 𝑥
Por lo tanto, la implicación 𝑥 ∈ 𝑉 ⟹ 𝑥 ∈ 𝐿(𝐴) es equivalente a la siguiente
𝑥 ∈ 𝑉 ⟹ ∃𝑥1 , . . . , 𝑥𝑛 ∈ 𝐴 y 𝛼1 , . . . , 𝛼𝑛 ∈ 𝕂 tales que ∑ 𝛼𝑖𝑛𝑖=1 𝑥𝑖 = 𝑥
Consecuentemente de la igualdad 𝐿(𝐴) = 𝑉 se deduce la siguiente equivalencia:
𝑉 ⇔ ∃𝑥1 , . . . , 𝑥𝑛 ∈ 𝐴, 𝛼1 , . . . , 𝛼𝑛 ∈ 𝕂 tales que ∑ 𝛼𝑖
𝑛𝑖=1 𝑥𝑖 = 𝑥
2.5 DEPENDENCIA E INDEPENDENCIA LINEAL (GROSSMAN,
2008; LAY, 2006)
Definición 10
Sea 𝑉 un espacio vectorial sobre 𝕂, 𝐴 un subconjunto no vacío de 𝑉.
i. Se dice que 𝐴 es linealmente independiente si satisface la condición:
𝛼1 , … , 𝛼𝑛 ∈ 𝐾, ∀ 𝑥1, … , 𝑥𝑛 ∈ 𝐴,
∑𝛼𝑘𝑥𝑘 = 0 ⟹ 𝛼𝑘 = 0
𝑛
𝑘=1
∀ 𝑘 = 1 , . . . , 𝑛.
ii. Se dice que 𝐴 es linealmente dependiente, si 𝐴 no es linealmente independiente.
Sean 𝑥1 + 𝑥2 +⋯+ 𝑥𝑛, 𝑛 vectores en un espacio vectorial 𝑉, entonces se dice que
los vectores son linealmente dependientes si existen 𝑛 escalares, 𝛽1, … , 𝛽𝑛 no todos
cero tales que 𝛽1𝑥1 +⋯+ 𝛽𝑛𝑥𝑛 = 0. Es decir que si existe un escalar diferente de
cero se tendrá que 𝑣1, … , 𝑣𝑛 son linealmente dependientes si y solamente si alguno
de dichos vectores puede expresarse como combinación lineal de los demás.
Sean 𝑥1, … , 𝑥𝑛, 𝑛 vectores en un espacio vectorial 𝑉, se dice que los vectores son
linealmente independientes si la ecuación
𝛼1𝑥1 +⋯+ 𝛼𝑛𝑥𝑛 = 0 se cumple únicamente para 𝛼𝑖 = 0 𝑖 = 1,… , 𝑛.
Estos son algunos resultados con respecto a la dependencia e independencia
lineal.
18
1. Tres vectores en ℝ𝟑 son linealmente dependientes si y solo sí están en el
mismo plano.
2. Un conjunto de n vectores en ℝm es siempre linealmente dependiente si 𝑛 >
𝑚.
3. Un conjunto de vectores linealmente independientes en ℝn contiene a lo más n
vectores.
4. En una matriz 𝐴 se consideran las columnas como vectores, y son linealmente
dependientes si y solo el sistema que se puede escribir como 𝐴𝑐 = 0, tiene
soluciones no triviales, donde 𝑐 es vector de soluciones y son infinitas.
5. Sean 𝑥1, 𝑥2, . . . , 𝑥𝑛 , 𝑛 vectores en ℝn y sea 𝐴 una matriz 𝑛 𝑥 𝑛 cuyas columnas
son 𝑥1, 𝑥2, . . . , 𝑥𝑛. Entonces 𝑥1, 𝑥2, . . . , 𝑥𝑛 son linealmente independientes si y
solo si la única solución al sistema homogéneo 𝐴𝑥 = 0 es la solución trivial
𝑥 = 0.
6. Sea 𝐴 una matriz de 𝑛 𝑥 𝑛. Entonces 𝑑𝑒𝑡 𝐴 ≠ 0 si y solo sí las columnas de 𝐴
son linealmente independientes.
7. Cualquier conjunto de 𝑛 vectores linealmente independiente en ℝn genera a ℝn
2.6 ESPACIO GENERADO (CASTRO, 2008)
2.6.1 CONJUNTO GENERADOR
Definición 11
Se dice que los vectores 𝑣1, … , 𝑣𝑛 ∈ 𝐴 generan al espacio 𝑉, si todo vector en 𝑉 se
puede escribir como una combinación lineal de los vectores de 𝐴, es decir que para
todo 𝑣 ∈ 𝑉, existen escalares 𝛼1, … , 𝛼𝑛 ∈ 𝕂 tales que: 𝑣 = 𝛼1𝑣1 +∙∙∙ +𝛼𝑛𝑣𝑛.
2.6.2 ESPACIO GENERADO POR UN CONJUNTO DE VECTORES
(GROSSMAN, 2008)
Definición 12
Sean 𝑛 ϵ ℤ+, 𝑣1, … , 𝑣𝑛 vectores de un espacio vectorial 𝑉. El espacio generado por
𝑣1, … , 𝑣𝑛 es el conjunto de combinaciones lineales 𝑣1, … , 𝑣𝑛, es decir

19
𝐺𝑒𝑛𝑣1, … , 𝑣𝑛 = |∑𝛼𝑖𝑣𝑖
𝑛
𝑖=1
| 𝛼 ∈ ℝ , 𝑖 = 1, … , 𝑛
Es el espacio generado por 𝑣1, … , 𝑣𝑛 se lo puede notar como 𝐺(𝑣1, … , 𝑣𝑛) a este
espacio.
2.7 BASE Y DIMENSIÓN
Definición 13
Un conjunto finito de vectores 𝑣1, 𝑣2, … , 𝑣𝑛 es una base para un espacio vectorial
𝑉 si:
𝑖. 𝑣1, 𝑣2, … , 𝑣𝑛 son linealmente independientes, y
𝑖𝑖. 𝑣1, 𝑣2, … , 𝑣𝑛 genera a 𝑉.
Los vectores 𝑖 = (1,0), 𝑗 = (0.1) de ℝ2 forman una base de ℝ2 conocida como
𝐵 = 𝑖 , , Esta base se conoce como base canónica que en otros textos aparece
como 𝑒1 , 𝑒2. Así los vectores 𝑒1 = (1, 0, 0), 𝑒2 = (0, 1, 0), 𝑒3 = (0, 0, 1) forman
una base para ℝ3, por lo tanto el conjunto de vectores 𝑒1, 𝑒2, 𝑒3 se llama base
natural, base estándar o base canónica ℝ3.
La dimensión de un espacio vectorial no nulo 𝑉 es el número de vectores
independientes en una base para 𝑉 y es un espacio vectorial de dimensión finita.
Si 𝑉 = 0 es de dimensión cero, caso contrario de tener un número infinito de
vectores independientes se tiene un espacio vectorial de dimensión infinita.
Ejemplos:
1. La dimensión de ℝ𝐧
Toda base de ℝn tiene exactamente 𝑛 vectores independientes por lo tanto
𝐝𝐢𝐦(ℝ𝐧) = 𝒏
2. La dimensión de M2x2
El conjunto de matrices
,10
00,
01
00,
00
10,
00
01

20
genera a ℳ2𝑥2[ℝ] Por ejemplo la matriz
𝐴 = (
2 −13 5
) = 2 (1 00 0
) − 1 (0 10 0
) + 3 (0 01 0
) + 5 (0 00 1
)
Entonces se tiene que dim M2x2 = 2 x 2 de manera general 𝑑𝑖𝑚 𝑀𝑚𝑥𝑛 = 𝑚 𝑥 𝑛.
2.8 PRODUCTO ESCALAR
Definición 14
Sea 𝑉 un espacio vectorial real.
Un producto escalar es una función de 𝑉 × 𝑉 en ℝ que se nota , y que satisface
las propiedades siguientes:
i. ⟨𝑋, 𝑌⟩ =
⟨𝑌, 𝑋⟩ 𝑥, 𝑦 ∈ 𝑉,
ii. ⟨𝑋, 𝑌 + 𝑍⟩ =
⟨𝑋, 𝑌⟩ + ⟨𝑋, 𝑍⟩ 𝑥, 𝑦, 𝑧 ∈ 𝑉,
iii. 𝛼⟨, ⟩ = ⟨𝛼, ⟩
⟨, 𝛼⟩ 𝛼 ∈ ℝ, 𝑥, 𝑦 ∈ 𝑉,
iv. ⟨𝑋, 𝑋⟩ = 0
si y solo si 𝑥 = 0, 𝑥 ∈ 𝑉,
⟨𝑋, 𝑋⟩ > 0
si y solo si 𝑥 ≠ 0, 𝑥 ∈ 𝑉.
Si 𝑉 es un espacio vectorial complejo, la propiedad i. se describe como sigue
⟨, ⟩ = ⟨, ⟩
𝑥, 𝑦 ∈ 𝑉,
Siendo el lado derecho de la igualdad, el conjugado de un número complejo se
tiene
𝑧 = 𝑎 + 𝑏𝑖 ∈ ℂ se tiene 𝑧 = 𝑎 – 𝑏𝑖.
Las demás propiedades se cumplen en el conjunto de los números complejos de
igual forma que en ℝ.
En el caso 𝑉 = ℝ2 el producto escalar de dos elementos = (𝑥1, 𝑦1), (𝑥2, 𝑦2) se
designa como ∙ y se define como:
∙ = 𝑥1 ∙ 𝑥2 + 𝑦1 ∙ 𝑦2 .
De manera similar En el caso 𝑉 = ℝ3 el producto escalar de dos elementos
= (𝑥1, 𝑦1, 𝑧1), (𝑥2, 𝑦2, 𝑧2)se designa como ∙ y se define como:
∙ = 𝑥1 ∙ 𝑥2 + 𝑦1 ∙ 𝑦2 + 𝑧1 ∙ 𝑧2.

21
Un espacio vectorial 𝑉 provisto de un producto escalar se llama espacio vectorial
euclideo o espacio con producto escalar o espacio con producto punto o espacio
prehilbertiano.
Ejemplos:
1. En ℝ𝑛 , sean = (𝑥1, … , 𝑥𝑛), = (𝑦1, … , 𝑦𝑛) ∈ ℝ𝑛 , un producto escalar está
definido como:
⟨, ⟩ = 𝑥1𝑦1 + …+ 𝑥𝑛𝑦𝑛 =∑𝑥𝑖𝑦𝑖
𝑛
𝑖
2. En el espacio de matrices 𝑀𝑚𝑥𝑛[ℝ], se define el producto escalar como sigue:
se define como traza de la matriz el resultado de sumar los elementos de la
diagonal principal y se denota 𝑡𝑟(𝐴).
𝑡𝑟(𝐴) = 𝑎11 + 𝑎22 + 𝑎33
Se define como la traspuesta de la matriz al resultado de intercambiar las filas
a columnas en la matriz y se nota 𝐴𝑇 . Así el elemento 𝑎𝑖𝑗 de la matriz se traslada
a ser el elemento 𝑎𝑗𝑖
Sean 𝐴, 𝐵 matrices 𝑀𝒎𝒙𝒏[ℝ]; su
producto escalar está dado por:
⟨𝐴, 𝐵⟩ = 𝑡𝑟(𝐵𝑇. 𝐴)
3. En el espacio vectorial de funciones continuas 𝐶([𝑎; 𝑏]), se define el producto
escalar como:
⟨𝑓, 𝑔⟩ = ∫𝑓(𝑥)𝑔(𝑥) 𝑑𝑥
𝑏
𝑎
∀ 𝑓, 𝑔 ∈ 𝐶([𝑎, 𝑏])
2.8.1 LONGITUD Y NORMA DE UN VECTOR (BENALCAZAR, 2012)
Definición 15
Sea 𝑋 ∈ 𝑉, la longitud o norma se designa con ‖𝑋‖ , que se lee “norma del vector
𝑋” está dada por:
‖𝑋‖ = √⟨𝑋, 𝑋⟩
,
333231
232221
131211
bbb
bbb
bbb
B ,
aaa
aaa
aaa
A
333231
232221
131211

22
El resultado del cálculo de la norma de un vector es un número real no negativo.
Para todo par de vectores 𝑋 y 𝑌 en 𝑉 y para todo 𝛼 ∈ ℝ se cumplen las siguientes
propiedades:
1. ‖𝑋‖ = 0 ⟺ 𝑋 = 0
2. ‖𝑋‖ > 0 ⟺ 𝑋 ≠ 0
3. ‖𝛼𝑋‖ = |𝛼|‖𝑋‖
4. ‖𝑋 ∙ 𝑌‖ ≤ ‖𝑋‖‖𝑌‖ Desigualdad de Cauchy – Schwartz
5. ‖𝑋 + 𝑌‖ ≤ ‖𝑋‖ + ‖𝑌‖ Desigualdad Triangular
2.9 APLICACIONES LINEALES DE ℝ𝐧 EN ℝ𝐦 (GROSSMAN, 2008)
Definición 16
Sea 𝑉 y 𝑊 espacios vectoriales reales. Una transformación lineal 𝑇 de 𝑉 en 𝑊 es
una función que asigna a cada vector 𝑣 ∈ 𝑉 un vector único 𝑇𝑣 ∈ 𝑊 y que satisface,
para cada 𝑢 y 𝑣 en 𝑉 y cada escalar 𝛼.
i. 𝑇(𝑢 + 𝑣) = 𝑇𝑢 + 𝑇𝑣.
ii. 𝑇(𝛼𝑣) = 𝛼𝑇𝑣
Ejemplos
Transformación de reflexión
Sea 𝑇: ℝ2 → ℝ2 definida por 𝑇 (𝑥𝑦) = (
−𝑥𝑦 )
Sea 𝑇: ℝ2 → ℝ2 definida por 𝑇 (𝑥𝑦) = (
𝑥−𝑦)
Transformación de rotación
Sea 𝑇: ℝ2 → ℝ2 definida por 𝑇𝑣 = 𝐴𝜃 (𝑥𝑦) = (
𝑥′𝑦′) siendo 𝐴𝜃 la matriz definida como
𝐴𝜃 = (𝑐𝑜𝑠 𝜃 −𝑠𝑒𝑛 𝜃𝑠𝑒𝑛 𝜃 cos 𝜃
), con 𝜃 ∈ ℝ.
23
2.9.1 NÚCLEO E IMAGEN DE UNA TRANSFORMACIÓN LINEAL
(GROSSMAN, 2008)
Definición 17
Se denomina núcleo de una transformación lineal 𝑇: 𝑉 → 𝑊 que se notara como
𝑁𝑢𝑐(𝑇) al conjunto de todos los elementos de 𝑉 cuya imagen es el vector nulo de
𝑊; es decir
𝑁𝑢𝑐(𝑇) = 𝑥 ∈ 𝑉: 𝑇(𝑥) = 0
El conjunto constituido por todas las imágenes de los elementos de V se denomina
imagen por 𝑇 y se notara como 𝐼𝑚 (𝑇); es decir que:
𝐼𝑚(𝑇) = 𝑦 ∈ 𝑊 𝑦 = 𝑇(𝑥), 𝑝𝑎𝑟𝑎 𝑎𝑙𝑔ú𝑛 𝑥 ∈ 𝑉.
2.10 VALORES Y VECTORES PROPIOS (BENALCAZAR, 2012)
Los valores y vectores característicos tienen muchas aplicaciones tanto en la rama
de las matemáticas como física, algunos temas en donde también se pueden
emplear: orbitales moleculares, análisis factorial, tensor de inercia, tensor de
tensión y valores propios de un grafo, En ecuaciones lineales, matrices, etc.
Algunos de estos campos de aplicación son:
1. Ecuaciones diferenciales
2. Estabilidad de sistemas lineales
3. Sistemas eléctricos (componentes simétricas)
4. Polos y ceros de funciones transferencia
5. Diagonalización de matrices
Para tratar los valores y vectores propios se definen diferentes elementos que
intervienen en su cálculo.
24
Definición 18
Se define el polinomio característico de una matriz como sigue: Sea 𝐴 ∈ 𝑀𝑛𝑥𝑛 y
𝜆𝜖 ℝ tal que
𝑃(𝑥) = det(𝐴 − 𝜆𝐼) 𝜆 ∈ ℝ
Se llama polinomio característico de 𝐴.
Definición 19
Se define la ecuación característica de la matriz A como sigue:
Sea 𝐴 ∈ 𝑀𝑛𝑥𝑛 y 𝜆 ∈ ℝ tal que
det(𝐴 − 𝜆𝐼) = 0
Definición 20
El escalar se llama valor propio de 𝐴 si 𝜆 es la raíz del polinomio característico
de 𝐴. Existen tantos valores propios como la dimensión de la matriz.
Definición 21
Un vector propio de una matriz 𝐴 de 𝑛 𝑥 𝑛 es un vector diferente de cero en ℝ𝑛 tal
que 𝐴 = 𝜆, donde 𝜆 es valor propio de 𝐴. Los vectores propios también se llaman
vectores característicos, autovectores, vectores latentes o eigenvectores.
Un espacio propio, autoespacio o eigenespacio es el conjunto de vectores propios
con un valor propio común.
Las transformaciones lineales del espacio como la rotación, la reflexión, el
ensanchamiento y otras transformaciones pueden interpretarse mediante el efecto
que producen en los vectores.
Formalmente, se definen los vectores propios y valores propios de la siguiente
manera:

25
Definición 22
Si 𝐴: 𝑉 → 𝑉 es un operador lineal en un cierto espacio vectorial 𝑉, 𝑣 es un vector
diferente de cero en 𝑉 y 𝑐 es un escalar (posiblemente cero) tales que 𝐴𝑣 = 𝑐𝑣
entonces se dice que 𝑣 es un vector propio del operador 𝐴, y su valor propio
asociado es 𝑐.
2.10.1 PROPIEDADES DE LOS VALORES PROPIOS (CASTRO, 2008) (LAY,
2006)
1. Dos matrices 𝑛 × 𝑛, 𝐴 ∧ 𝐵, se dicen semejantes si existe una matriz invertible
𝑃 tal que 𝐴 = 𝑃−1𝐵𝑃.
2. Dos matrices semejantes tienen el mismo polinomio característico y, por
consiguiente, los mismos valores propios.
3. Una matriz 𝐴 se dice diagonalizable (por semejanza), si es semejante a una
matriz diagonal.
4. Una matriz 𝐴, 𝑛 × 𝑛 es diagonalizable si y sólo si tiene 𝑛 vectores propios
linealmente independientes.
5. La suma de los valores propios de una matriz 𝐴 es igual a la traza de la
matriz, es decir ∑ 𝜆𝑖𝑛𝑖=1 = 𝑡𝑟(𝐴)
6. El producto de los valores propios de una matriz 𝐴 es igual al determinante
de la matriz.
7. Los valores propios de una matriz triangular son los coeficientes de su
diagonal principal.
8. Una matriz 𝐴 es singular si y solo si tiene un valor propio igual a cero.
9. Los valores propios de las potencias de una matriz 𝐴 son las
correspondientes potencias de sus valores propios.
10. Si 𝑝(𝑥) es un polinomio con coeficientes reales y 𝑧 = 𝑎 + 𝑏𝑖 es una raíz,
entonces 𝑧 = 𝑎 − 𝑏𝑖 también es raíz de 𝑝(𝑥).
2.10.2 CÁLCULO DE VALORES Y VECTORES PROPIOS(CASTRO, 2008)
(LAY, 2006)
26
Para realizar el cálculo de valores propios de una matriz de dimensiones pequeñas,
se puede calcular simbólicamente usando el polinomio característico. Sin embargo,
a menudo resulta imposible para matrices extensas, caso en el que se debe usar
un método numérico.
Para encontrar valores propios de matrices cuadradas se debe iniciar con encontrar
los valores propios del polinomio característico, decir que es un valor propio de 𝐴
es equivalente a decir que el sistema de ecuaciones lineales (𝐴 − 𝜆𝐼) 𝑣 = 0
(donde 𝐼 es la matriz identidad) tiene una solución no nula 𝑣 (un vector propio), y
de esta forma es equivalente al determinante: 𝑑𝑒𝑡(𝐴 – 𝜆𝐼𝑛) = 0
La función 𝑝(𝐴) = 𝑑𝑒𝑡(𝐴 − 𝜆𝐼) es un polinomio de 𝐴 pues los determinantes se
definen como sumas de productos. Éste es el polinomio característico de 𝐴: los
valores propios de una matriz son los ceros de su polinomio característico. Todos
los valores propios de una matriz 𝐴 pueden calcularse resolviendo la ecuación
𝑝(𝐴) = 0.
Si 𝐴 es una matriz 𝑛 × 𝑛, entonces 𝑝(𝐴) tiene grado 𝑛 y 𝐴 tiene al menos 𝑛 valores
propios.
El teorema fundamental del álgebra dice que esta ecuación tiene exactamente 𝑛
raíces (ceros), teniendo en cuenta su multiplicidad. Todos los polinomios reales de
grado impar tienen un número real como raíz, así que para 𝑛 impar toda matriz real
tiene al menos un valor propio real. En el caso de las matrices reales, para 𝑛 par e
impar, los valores propios no reales son pares conjugados.
Matemáticamente, 𝑣 es un vector propio y 𝜆 el valor propio correspondiente de una
transformación 𝑇 si verifica la ecuación: 𝑇(v𝜆) = 𝜆𝑣𝜆 donde 𝑇(𝑣) es el vector
obtenido al aplicar la transformación 𝑇 a 𝑣.
Supóngase que 𝑇 es una transformación lineal lo que significa que:
𝑇(𝑎𝑣 + 𝑏𝑤) = 𝑎𝑇(𝑣) + 𝑏𝑇(𝑤),
para todos los escalares 𝑎 ∧ 𝑏 y los vectores 𝑣 ∧ 𝑤. Considérese una base en ese
espacio vectorial. Entonces, 𝑇 y 𝑣 pueden representarse en relación a esa base
mediante una matriz 𝐴𝑇 y un vector columna 𝑣 que es un vector vertical

27
unidimensional. La ecuación de valor propio en esta matriz es de la siguiente forma:
𝐴𝑇𝑣𝜆 = 𝜆𝑣𝜆 donde la yuxtaposición es un producto de matrices. Dado que en esta
circunstancia la transformación 𝑇 y su representación matricial 𝐴𝑇 son equivalentes,
a menudo se puede emplear sólo 𝑇 para la representación matricial y la
transformación. Esto es equivalente a un conjunto de 𝑛 combinaciones lineales,
donde 𝑛 es el número de vectores de la base. En esta ecuación, tanto el valor propio
y las 𝑛 componentes de 𝑣 son desconocidos. Sin embargo, a veces es poco natural
o incluso imposible escribir la ecuación de vector propio en forma matricial. Esto
ocurre, por ejemplo, cuando el espacio vectorial es de dimensión infinita.
El procedimiento a seguir para obtener los vectores propios se resume en:
1. Se encuentra 𝑝(𝜆) = 𝑑𝑒𝑡(𝐴 – 𝜆𝐼).
2. Se encuentran las raíces 𝜆1 , 𝜆1, . . . , 𝜆1 𝑑𝑒 𝑝(𝜆) = 0
3. Se resuelve el sistema homogéneo (𝐴 – 𝜆𝑖𝐼)𝑣 = 0, correspondiente a cada
valor característico 𝜆𝑖.
Dependiendo de la naturaleza de la transformación 𝑇 y el espacio al que se aplica,
puede ser ventajoso representar la ecuación de valor propio como un conjunto de
ecuaciones diferenciales, donde los vectores propios reciben a menudo el nombre
de funciones propias del operador diferencial que representa a 𝑇. Por ejemplo, la
derivación misma es una transformación lineal, ya que si 𝑓(𝑡) y 𝑔(𝑡) son funciones
derivables y 𝑎 ∧ 𝑏 son constantes
𝑑
𝑑𝑡(𝑎𝑓 + 𝑏𝑔) = 𝑎
𝑑𝑓
𝑑𝑡+ 𝑏
𝑑𝑔
𝑑𝑡
En la práctica, los valores propios de las matrices extensas no se calculan usando
el polinomio característico. Calcular el polinomio resulta muy costoso, y extraer las
raíces exactas de un polinomio de grado alto puede ser difícil de calcular y expresar:
el teorema de Abel-Ruffini implica que las raíces de los polinomios de grado alto (5
o superior) no pueden expresarse usándose simplemente raíces enésimas. Existen
algoritmos eficientes para aproximar raíces de polinomios, pero pequeños errores
en la estimación de los valores propios pueden dar lugar a errores grandes en los
vectores propios. En consecuencia, los algoritmos generales para encontrar
vectores propios y valores propios son iterativos. La manera más fácil es el método
28
de las potencias, que escoge un vector aleatorio 𝑣 y se calcula una secuencia de
vectores unitarios:
𝐴𝑣‖𝐴𝑣‖
,𝐴𝑣2
‖𝐴𝑣2‖,𝐴𝑣3
‖𝐴𝑣3‖,… ,
𝐴𝑣𝑛
‖𝐴𝑣𝑛‖.
Esta secuencia casi siempre convergerá a un vector propio correspondiente al
mayor valor propio.
2.10.3 DIAGONALIZACIÓN DE MATRICES, POTENCIAS Y
RAÍCES DE MATRICES (LAY, 2006)
Para expresar una matriz de una forma sencilla se debe realizar la diagonalización
que consiste en encontrar una matriz invertible 𝑃 y una diagonal 𝐷 tales que:
𝐴 = 𝑃𝐷𝑃−1 (1)
La relación anterior entre las matrices 𝐴 y 𝐷 es importante y aparece en muchos
contextos, donde la matriz 𝑃 se llama matriz de paso.
Dado que las matrices suelen usarse para representar aplicaciones lineales, la
expresión anterior puede verse como un cambio de base de la aplicación
representada por 𝐴; entonces al escribirla de la forma (1) significa que hay una
base en la que la aplicación lineal 𝐴 tiene una forma diagonal, en la que puede ser
explicada.
Esto es útil, por ejemplo, para clasificar una aplicación lineal y estudiar sus
propiedades. Las matrices se usan para representar otro tipo de aplicaciones como
cónicas, cuadráticas o formas bilineales, y en estos casos también resulta útil
expresarla de la forma (1).
Cuando dos matrices cuadradas 𝐴 y 𝐷 verifican que 𝐴 = 𝑃𝐷𝑃−1 para cierta, matriz
cuadrada 𝑃 (invertible) se dice que 𝐴 y 𝐷 son semejantes.
Una matriz es diagonalizable cuando se puede encontrar una matriz diagonal y una
invertible de manera que se pueda expresar de la forma (1). Dicho de otra forma,
una matriz es diagonalizable cuando es semejante a una matriz diagonal.
29
Si se escribe una matriz 𝐴 como 𝐴 = 𝑃 𝐷 𝑃−1, entonces también 𝐴 𝑃 = 𝑃 𝐷. Si 𝐷
es diagonal y la columna 𝑖 de esta última igualdad se tiene que 𝐴 𝑥𝑖 = λ𝑖 𝑥𝑖 (donde
𝑥𝑖 es la columna 𝑖 de 𝐴 y λ𝑖 es el número en el lugar 𝑖 de la diagonal de 𝐷.
Diagonalizar una matriz 𝐴 de tamaño 𝑛 × 𝑛 es lo mismo que encontrar 𝑛 vectores
propios linealmente independientes asociados a valores propios reales, entonces
se colocan por columnas y conseguir así la matriz 𝑃. Para diagonalizar una matriz
se buscar 𝑛 vectores propios linealmente independientes asociados a valores
propios reales.
Sea 𝐴 = [𝑎𝑖𝑗] una matriz de orden 𝑛 ≥ 1. Se dice que 𝐴 es una matriz diagonal si
𝑎𝑖𝑗𝑖,𝑗=1,…,𝑛 = 0 para todo 𝑖 ≠ 𝑗.
Sea 𝑇: 𝑉 → 𝑉 una transformación lineal de un espacio 𝑉 de dimensión finita 𝑛 ≥ 1.
Se dice que 𝑇 es diagonalizable si existe una base 𝑋 en 𝑉 tal que 𝑚𝑋(𝑇) es una
matriz diagonal. Una matriz 𝐴 de orden 𝑛 ≥ 1 se dice que es diagonalizable si 𝐴 es
similar a una matriz diagonal. Teniendo en cuenta que matrices que representen la
misma transformación lineal son similares, se tiene el siguiente resultado.
Sea 𝑇: 𝑉 → 𝑉 una transformación lineal de un espacio 𝑉 de dimensión finita 𝑛 ≥ 1 y
sea 𝑋 una base cualquiera de 𝑉. Entonces, 𝑇 es diagonalizable si y sólo si 𝑚𝑋(𝑇)
es diagonalizable.
En términos de vectores propios se tiene el siguiente criterio obvio de
diagonalización.
Sea 𝑇: 𝑉 → 𝑉 una transformación lineal de un espacio 𝑉 de dimensión finita 𝑛 ≥ 1. 𝑇
es diagonalizable si y sólo si 𝑉 tiene una base constituida por vectores propios
linealmente independientes, así como también se cumple que si 𝐴 tiene 𝑛 valores
propios diferentes, entonces 𝐴 es diagonalizable.
30
CAPÍTULO 3
3 SISTEMAS DE ECUACIONES DIFERENCIALES
LINEALES
3.1 ECUACIONES DIFERENCIALES (EDWARDS & PENNEY, 2001)
Las ecuaciones diferenciales sirven para describir una variedad de problemas de
física, economía, ingeniería, ciencias sociales, entre otros, y aparecieron como una
herramienta para describir fenómenos naturales que implican cambios los cuales
se dan por medio de las relaciones entre las cantidades que cambian, siendo ésta
la principal diferencia con el álgebra cuyas ecuaciones se utiliza para resolver
problemas estáticos, esto implica que las ecuaciones diferenciales al describir una
situación física, tienen una solución apropiada la misma que debe ser interpretada.
Los parámetros encontrados al solucionar ecuaciones diferenciales permiten
encontrar una familia de curvas 𝑛_paramétricas, para las cuales existe una
ecuación diferencial de orden 𝑛 de la cual es solución, en general, esta ecuación
diferencial se dice que representa a la familia dada.
Hay que tener en cuenta que las constantes arbitrarias o parámetros están
presentes en la ecuación de la familia, pero la correspondiente ecuación diferencial
no tiene constantes arbitrarias.
Es necesario definir una ecuación diferencial para continuar con lo desarrollando
en este capítulo. (Zill & Cullen, 2006)
Definición 1
Una ecuación que contiene las derivadas o diferenciales de una variable
dependiente, se denomina ecuación diferencial.
Se escribe
𝑓(𝑡, 𝑢(𝑡), 𝑢’(𝑡)) = 0
Una ecuación diferencial se denomina ordinaria si depende de una sola variable y
si su dependencia es de más de una variable independiente se denomina ecuación

31
diferencial parcial. En adelante se nota como: 𝑥 variable independiente, y variable
dependiente y se usarán los dos tipos de notaciones para las derivadas ordinarias.
En una ecuación de orden n se tendrá la forma genérica:
𝐹(𝑥, 𝑦, 𝑦′, 𝑦′′, … , 𝑦(𝑛)) = 0
Algunos ejemplos de ecuaciones diferenciales ordinarias:
No. Notación de Leibniz Notación de Lagrange Notación de Newton
1. 𝑑𝑦
𝑑𝑥 + 5𝑦 = 0 𝑦’ + 5𝑦 = 0 + 5𝑦 = 0
2. 𝑑2𝑦
𝑑𝑥2 + 5
𝑑𝑦
𝑑𝑥+ 5 = 0 𝑦’’ + 5𝑦’ + 5 = 0 + 5 + 5 = 0
Algunos ejemplos de ecuaciones diferenciales parciales:
1. 𝜕2𝑢
𝜕𝑥2+𝜕2𝑢
𝜕𝑦2= 0 2.
𝜕2𝑢
𝜕𝑥2+ 2
𝜕2𝑢
𝜕𝑦2= 𝑢 3.
𝜕𝑢
𝜕𝑡= 4
𝜕2𝑢
𝜕𝑥2+𝜕𝑢
𝜕𝑦
En los ejemplos de ecuaciones diferenciales ordinarias se tiene que el primero es
de primer orden, el segundo de segundo orden; así mismo en los ejemplos de
derivadas parciales los tres ejemplos son de segundo orden.
Definición 3
El orden de la más alta derivada que aparece en una ecuación diferencial se
llama el orden de la ecuación diferencial.
Definición 4
Si una ecuación diferencial ordinaria 𝐹(𝑥, 𝑦, 𝑦′, 𝑦′′, … , 𝑦(𝑛)) = 0 puede escribirse
en la forma:
𝑎𝑛(𝑥)𝑦(𝑛) + 𝑎𝑛−1(𝑥)𝑦
(𝑛−1) +⋯+ 𝑎1(𝑥)𝑦′ + 𝑎0(𝑥)𝑦 = ℎ(𝑥)
Se dice que es lineal, siendo 𝑎0, … , 𝑎𝑛 funciones conocidas y definidas en 𝐼.
32
De acuerdo a esta definición se tiene que, para que la ecuación diferencial sea
lineal, la variable dependiente y todas sus derivadas deben ser de grado uno y los
coeficientes deben depender solo de la variable independiente.
3.2 SOLUCION DE ECUACIONES DE PRIMER ORDEN
3.2.1 INTRODUCCIÓN A LA SOLUCIÓN DE ECUACIONES DE PRIMER
ORDEN
Solucionar ecuaciones diferenciales significa encontrar la función que verifica la
igualdad, sin embargo no siempre se la obtendrá sino que se tendrá una relación o
expresión que implique una solución, así tendremos soluciones explícitas e
implícitas:
Definición 5
Sean una función 𝑦 = 𝑦(𝑥) definida en algún intervalo 𝐼. Se dice que es solución
explicita de la ecuación diferencial en el intervalo 𝐼, si sustituida en la ecuación,
la transforma en una identidad, es decir:
𝐹 (𝑥, 𝑦(𝑥), 𝑦′(𝑥), 𝑦′′(𝑥),… , 𝑦(𝑛)(𝑥)) = 0, ∀𝑥 ∈ 𝐼
Definición 6
Se dice que una relación 𝐺(𝑥, 𝑦) = 0 es solución implícita de la ecuación
diferencial 𝐹 (𝑥, 𝑦(𝑥), 𝑦′(𝑥), 𝑦′′(𝑥),… , 𝑦(𝑛)(𝑥)) = 0en el intervalo 𝐼, si define una o
más soluciones explicitas en 𝐼
Para ecuaciones diferenciales ordinarias se pueden deducir establecer una
solución general la misma que corresponde a la solución de cuando la ecuación es
homogénea y agregada una solución particular que surge a partir de seleccionar
valores para las constantes arbitrarias.
En la mayoría de las aplicaciones con ecuaciones diferenciales no es de interés la
solución general, sino una solución particular que satisfaga ciertas condiciones

33
dadas, es lo que da origen a los problemas de valor inicial o de frontera, que se
definen a continuación:
Definición 7
Un problema de valor inicial o de Cauchy consta de una ecuación diferencial de
orden 𝑛 y de 𝑛 condiciones iniciales impuestas a la función desconocida y a sus
𝑛 − 1 primeras derivadas en un valor específico de la variable independiente,
llamadas condiciones iniciales, es decir, es de la forma: hallar 𝑦 = 𝑦(𝑥) tal que
satisfaga:
𝑦(𝑛) = 𝑓(𝑥, 𝑦, 𝑦′, … , 𝑦(𝑛−1)),
𝑦(𝑥0) = 𝑦0,
𝑦′(𝑥0) = 𝑦1,
…
𝑦(𝑛−1)(𝑥0) = 𝑦𝑛−1.
Definición 8
Un problema de valores de frontera o de Dirichlet consta de una ecuación
diferencial de orden 𝑛 definida en ]𝑎, 𝑏[ y de 𝑛 condiciones de frontera impuestas
sobre la función desconocida en 𝑛 valores de la variable independiente, es decir:
𝑦(𝑛) = 𝑓(𝑥, 𝑦, 𝑦′, … , 𝑦(𝑛−1)),
𝑦(𝑎) = 𝑦𝑎,
𝑦(𝑏) = 𝑦𝑏 .
3.2.2 PROCEDIMIENTO PARA LA SOLUCIÓN POR VARIABLES
SEPARABLES (SPIEGEL, 1994)
Las ecuaciones de primer orden de la forma 𝑑𝑥
𝑑𝑦= 𝑓(𝑥, 𝑦) que se puede
escribir de forma separada de tal forma que antes del igual deben estar todos
los términos que corresponde a una variable y la expresión de la deriva y
luego del igual de manera debe estar lo que corresponde a la segunda
variable, de tal forma que

34
𝑝(𝑦)𝑑𝑦 = 𝑔(𝑥)𝑑𝑥
Es decir la ecuación será separable cuando 𝑑𝑦
𝑑𝑥= 𝑔(𝑥)𝑝(𝑦).
El procedimiento para resolver estas ecuaciones es el siguiente:
Separar 𝑔(𝑥)𝑑𝑥 = 𝑝(𝑦)𝑑𝑦
Integrar cada lado ∫𝑔(𝑥)𝑑𝑥 = ∫𝑝(𝑦)𝑑𝑦
Se obtiene 𝐺(𝑥) + 𝐶 = 𝑃(𝑦) + 𝐶
Como existen 2 constantes se puede las puede juntar en una sola C.
Se obtiene la solución implícita: 𝐺(𝑥) = 𝑃(𝑦) + 𝐶
3.2.3 TRANSFORMACION DE VARIABLES
Transformar variables es un artificio algebraico que se usa con el fin de transformar
una ecuación diferencial a otro tipo de ecuación que permita solucionarlo por un
método conocido, en este caso se trata del cambio de la ecuación de manera que
se obtenga la ecuación de variables separables.
Un caso que se presenta es
𝑑𝑦
𝑑𝑥= 𝑓 (
𝑦
𝑥)
Se usa la variable 𝑣 =𝑦
𝑥, ó 𝑦 = 𝑣𝑥 luego al reemplazar en la ecuación dada se
obtiene
𝑑𝑦
𝑑𝑥= 𝑣 + 𝑥
𝑑𝑣
𝑑𝑥
Que se convierte en
𝑓(𝑣) = 𝑣 + 𝑥𝑑𝑣
𝑑𝑥
De donde se obtiene
𝑓(𝑣) − 𝑣 = 𝑥𝑑𝑣
𝑑𝑥
𝑑𝑥
𝑥=
𝑑𝑣
𝑓(𝑣) − 𝑣
Lo que significa que se tiene la ecuación diferencial por variables separables y una
vez resulta la ecuación se procede con el reemplazo de la equivalencia original.

35
3.3 ECUACIONES DIFERENCIALES LINEALES
3.3.1 ECUACIONES DE PRIMER ORDEN (SAFF & SNIDER, 2005)
Para resolver ecuaciones de diferenciales lineales de primer orden se utilizará el
método estándar que consisten en:
a. Escribir la ecuación en su forma canónica
𝑑𝑦
𝑑𝑥+ 𝑃(𝑥) = 𝑄(𝑥)
b. Calcular el factor integrante 𝑢(𝑥) = 𝑒∫𝑃(𝑥)𝑑𝑥
c. Multiplicar los dos miembros de la ecuación diferencial por 𝑢(𝑥) cuyo lado
izquierdo queda 𝑑
𝑑𝑥[𝑢(𝑥)𝑦] y se obtiene:
𝑑
𝑑𝑥[𝑢(𝑥)𝑦] = 𝑢(𝑥)𝑄(𝑥)
d. Integrar la última ecuación y determine 𝑦 dividiendo entre 𝑢(𝑥) la ecuación.
3.3.2 ECUACIONES DE SEGUNDO ORDEN (SAFF & SNIDER, 2005)
(EDWARDS & PENNEY, 2001)
Las ecuaciones diferenciales lineales de orden dos es la función y(x) de la forma
𝐺(𝑥, 𝑦, 𝑦′, 𝑦′′), que se dice lineal si lo es en la variable independiente de 𝑦 y en sus
derivadas 𝑦′ y 𝑦′′ cuya forma es
𝐴(𝑥)𝑦′′ + 𝐵(𝑥)𝑦′ + 𝐶(𝑥)𝑦 = 𝐹(𝑥),
Donde 𝐴(𝑥), 𝐵(𝑥), 𝐶(𝑥), 𝐹(𝑥) son funciones dadas y continuas en el intervalo I,
con 𝐴(𝑥) ≠ 0 así que se puede dividir la ecuación para 𝐴(𝑥).
En el caso que 𝐹(𝑥) = 0 la ecuación es homogénea y cuando 𝐹(𝑥) ≠ 0 la ecuación
no es homogénea.
3.3.3 ECUACIONES HOMOGÉNEAS (EDWARDS & PENNEY, 2001)
Si las funciones 𝑦1 y 𝑦2 son soluciones de la ecuación diferencial y son linealmente
independientes si existen constantes 𝑐1 , 𝑐2 arbitrarias se tiene que la combinación
lineal de las soluciones individuales también se constituye en una solución.
𝑦(𝑥) = 𝑐1𝑦1(𝑥) + 𝑐2𝑦2(𝑥)

36
Con las funciones 𝑦1, 𝑦2, … , 𝑦𝑛 que son continuas en I, al diferenciarlas
sucesivamente y calcular su determinante permite establecer la dependencia o
independencias de sus funciones, este determinante se denomina Wronskiano que
se nota por 𝑊[𝑦1, 𝑦2, … , 𝑦𝑛] que se generaliza para ecuaciones de grado superior.
𝑊[𝑦1(𝑥), 𝑦2(𝑥), … , 𝑦𝑛(𝑥)] == |
|
𝑦1(𝑥) 𝑦2(𝑥) ⋯ 𝑦𝑛(𝑥)
𝑦1′(𝑥) 𝑦2
′(𝑥) ⋯ 𝑦𝑛′ (𝑥)
𝑦1′′(𝑥) 𝑦2
′′(𝑥) ⋯ 𝑦𝑛′′(𝑥)
⋮ ⋮ ⋮ ⋮
𝑦1(𝑛−1)
(𝑥) 𝑦2(𝑛−1)
(𝑥) … 𝑦𝑛(𝑛−1)
(𝑥)
|
|
De acuerdo al resultado del determinante se tiene que si:
1. Si el resultado del determinante del 𝑊[𝑦1, 𝑦2, … , 𝑦𝑛] ≠ 0 las funciones son
linealmente independientes y es una base para el espacio solución.
2. Si el resultado de 𝑊[𝑦1, 𝑦2, … , 𝑦𝑛] = 0 las funciones son linealmente
dependientes.
Para solucionar las ecuaciones lineales homogéneas, se considera el polinomio
característico, así en la ecuación diferencial
𝐴(𝑥)𝑦𝑛 + 𝐵(𝑥)𝑦𝑛−1 +⋯+ 𝐶(𝑥)𝑦 = 0
El polinomio característico o ecuación característica es 𝑃(𝑥) = 𝐷𝑛 +
𝑎𝑛−1𝐷𝑛−1+ . . . 𝑎1𝐷 + 𝑎0 = 0, para cuya solución se procede como en el álgebra
elemental, con sus raíces 𝜆1, 𝜆2 , … , 𝜆𝑛 las cuales pueden ser: reales y distintas,
reales con multiplicidad y complejas.
En el caso que las raíces sean reales y distintas 𝜆1 ≠ 𝜆1 ≠ ⋯ . 𝜆𝑛 entonces
𝑦1(𝑡) = 𝑒𝜆1𝑡 y 𝑦2(𝑡) = 𝑒
𝜆2𝑡 son soluciones por lo tanto se tiene que la solución
general de la ecuación diferencial está dada por:
𝑦𝑔 = 𝑐1 + 𝑐2𝑒𝜆1𝑥 + 𝑐2𝑒
𝜆2𝑥 +⋯+ 𝑐𝑛𝑒𝜆𝑛𝑥 =∑𝑐𝑘𝑒
𝜆𝑘𝑥
𝑛
𝑘=1
En el caso que las raíces sean reales y algunas de multiplicidad 𝜆1 = 𝜆2 = ⋯ 𝜆𝑛
con soluciones 𝑦1(𝑡) = 𝑒𝜆1𝑡 , 𝑦2(𝑡) = 𝑡𝑒
𝜆2𝑡 cuya solución general de la ecuación

37
diferencial está dada por:
𝑦𝑔 = 𝑐1𝑒𝜆1𝑥 + 𝑐2𝑥𝑒
𝜆2𝑥 +⋯+ 𝑐𝑛𝑥𝑛𝑒𝜆𝑛𝑥
Las raíces también pueden ser en el conjunto de los números complejos 𝜆1 =
𝛼 + 𝑖𝛽, 𝜆2 = 𝛼 − 𝑖𝛽, con 𝑦1(𝑥) = 𝑐1𝑒(𝛼+𝑖𝛽)𝑥 y 𝑦2(𝑥) = 𝑐2𝑒
(𝛼+𝑖𝛽)𝑥, cuando se tiene
una ecuación diferencial de orden dos por lo cual se tiene la solución general.
𝑦𝑔 = 𝑐1𝑒(𝛼+𝑖𝛽)𝑥 + 𝑐2𝑒
(𝛼−𝑖𝛽)𝑥
𝑦𝑔 = 𝑐1𝑒𝛼𝑥𝑐𝑜𝑠𝛽𝑥 + 𝑐2𝑒
𝛼𝑥𝑠𝑒𝑛𝛽𝑥
𝑦𝑔 = 𝑒𝛼𝑥(𝑐1𝑐𝑜𝑠𝛽𝑥 + 𝑐2𝑠𝑒𝑛𝛽𝑥)
Los tipos de raíces no siempre serán únicos cuando se soluciona una ecuación
diferencial, sino que se podrán obtener al mismo tiempo por lo menos dos de ellas
en cuyo caso se deben establecer de acuerdo a los tipos de soluciones antes
tratadas.
En los problemas de valor inicial, de la forma.
𝑦′′ + 𝐵(𝑥)𝑦′ + 𝐶(𝑥)𝑦 = ℎ(𝑥)
𝑦(𝑥0) = 𝑡0𝑦′(𝑥0) = 𝑡0
′
Al tratar de ecuaciones con coeficientes constantes se toma a 𝑎1(𝑥) = 𝛼 y 𝑎0(𝑥) =
𝛽, entonces se considerará la ecuación diferencial lineal de coeficientes constantes
de la forma:
𝑦′′ + 𝐵𝑦′ + 𝐶𝑦 = 𝐹(𝑥). (1)
Junto con las condiciones iniciales:
𝑦(𝑥0) = 𝑡0 y 𝑦′(𝑥0) = 𝑡0′ .
Las ecuaciones que se utilizarán en la práctica son las de segundo orden y de
coeficientes constantes.
3.3.4 ECUACIONES NO HOMOGÉNEAS
La solución general (𝑦𝑔) de una ecuación diferencial no homogénea está dada por
la solución cuando dicha ecuación es homogénea (𝑦ℎ) y la solución particular para
la ecuación no homogénea (𝑦𝑝).
38
𝑦𝑔 = 𝑦ℎ + 𝑦𝑝
Para el caso de la ecuación homogénea, se conoce como proceder para encontrar
las soluciones y en el caso de la solución particular de la ecuación no homogénea
se procederá por dos métodos: Variación de parámetros y el del anulador o
coeficientes indeterminados.
3.3.4.1 MÉTODO DE VARIACIÓN DE PARÁMETROS (LARA, 2007)
(ESPINOZA, 2007)
Para detallar el método de variación de parámetros se considera una ecuación
diferencial de segundo orden para explicar el proceso de encontrar las soluciones
de las ecuaciones diferenciales no homogéneas que consiste en:
1. Encontrar la solución de la ecuación diferencial homogénea asociada (𝑦ℎ)
𝑦ℎ = 𝑐1𝑦1 + 𝑐2𝑦2…𝑐𝑛𝑦𝑛
2. Reemplazar 𝑐1 , 𝑐2 , … , 𝑐𝑛 por funciones incógnitas 𝑢1 , 𝑢2 , … , 𝑢𝑛
obteniendo la solución particular (𝑦𝑝)
𝑦𝑝 = 𝑢1𝑦1 + 𝑢2𝑦2…𝑢𝑛𝑦𝑛
3. Formar el sistema
𝑢1′𝑦1 + 𝑢2
′ 𝑦2…𝑢𝑛′ 𝑦𝑛 = 0
𝑢1′𝑦1′ + 𝑢2
′ 𝑦2′ …𝑢𝑛
′ 𝑦𝑛′ = 0
𝑢1′𝑦1′′ + 𝑢2
′ 𝑦2′′…𝑢𝑛
′ 𝑦𝑛′′ = 0
⋮
𝑢1′𝑦1𝑛−1 + 𝑢2
′ 𝑦2𝑛−1…𝑢𝑛
′ 𝑦𝑛𝑛−1 = 𝐹(𝑥)
Resolver el sistema para encontrar los valores de 𝑢1′ , 𝑢2
′ , … , 𝑢𝑛′
4. Obtener 𝑢1 , 𝑢2 , … , 𝑢𝑛 por medio de integración.
3.3.4.2 MÉTODO DEL ANULADOR O COEFICIENTES INDETERMINADOS
(ESPINOZA, 2007)
Si 𝐿(𝑦) se asocia a una ecuación diferencial se tiene es homogénea cuando 𝐿(𝑦) =
0 y no homogénea cuando 𝐿(𝑦) = 𝐹(𝑥).
El método del anulador consiste en buscar un operador diferencial a coeficiente
constantes que anule la función 𝐹(𝑥), en caso de existir, así si 𝐿1 es el anulador se
tendría 𝐿1(𝐹(𝑥)) = 0.
39
Así si se aplica el operador anulador a la ecuación inicial se tendría una igualdad a
cero.
𝐿1𝐿(𝑦) = 0
Como 𝐿(𝑦) = 𝐹(𝑥) se tiene 𝐿1(𝐹(𝑥)) = 0
Partiendo de lo anterior se procede a resolver de la siguiente manera:
1. Se extrae la solución para la ecuación diferencial homogénea (𝑦ℎ)
2. Se aplica el operador que anulará 𝐹(𝑥) con lo que se obtiene una solución
particular (𝑦𝑝).
3. Se determinan los coeficientes 𝑐1, 𝑐2, … , 𝑐𝑛 de 𝑦𝑝 a partir de
𝐿(𝑦𝑝) = 𝐹(𝑥)
4. Se establece la solución general 𝑦𝑔 = 𝑦ℎ + 𝑦𝑝
Mayor detalle de este procedimiento se encuentra en el texto [Lara]
Este método permite optar por otras alternativas teniendo en cuenta la forma de la
función 𝐹(𝑥) como lo muestra en el texto (Espinoza, 2007) en este documento se
utilizará 𝐹(𝑥) en lugar de 𝑅(𝑥) que utiliza el autor.
Caso 1: Cuando 𝐹(𝑥) = 𝑃𝑛(𝑥)
a. Si ninguna de las raíces de la ecuación característica asociada a la ecuación
diferencial homogénea es igual a cero (𝜆 ≠ 0) la solución particular tiene la
siguiente forma:
𝑦𝑝 = 𝑃(𝑥).
b. Si alguna de las raíces de la ecuación característica asociada a la ecuación
diferencial homogénea es igual a cero, (𝜆 = 0) la solución particular tiene la
siguiente forma:
𝑦𝑝 = 𝑥𝑠𝑃(𝑥)
donde 𝑠 es la multiplicidad de la raíz 𝜆 = 0.
Caso 2: Cuando 𝐹(𝑥) = 𝑒𝛼𝑥𝑃𝑛(𝑥)
a. Si ninguna de las raíces de la ecuación característica asociada a la ecuación
diferencial homogénea es igual a 𝛼, (𝜆 ≠ 𝛼) la solución particular tiene la
siguiente forma:
40
𝑦𝑝 = 𝑒𝛼𝑥𝑃(𝑥)
b. Si alguna de las raíces de la ecuación característica asociada a la ecuación
diferencial homogénea es igual a 𝛼, (𝜆 ≠ 𝛼) la solución particular tiene la
siguiente forma:
𝑦𝑝 = 𝑥𝑠𝑒𝛼𝑥𝑃(𝑥)
donde 𝑠 es la multiplicidad de la raíz 𝜆 = 𝛼.
Caso 3: Cuando 𝐹(𝑥) = 𝑃𝑛(𝑥) cos 𝛽𝑥 + 𝑄𝑚(𝑥)𝑠𝑒𝑛 𝛽𝑥 donde 𝑃𝑛(𝑥) y 𝑄𝑚(𝑥) son
funciones polinómicas de grado n y m respectivamente.
a. Si ninguna de las raíces de la ecuación característica asociada a la ecuación
diferencial homogénea es igual a ±𝑖𝛽, (𝜆 ≠ ±𝑖𝛽) la solución particular tiene
la siguiente forma:
𝑦𝑝 = 𝑃(𝑥) cos 𝛽𝑥 + 𝑄(𝑥)𝑠𝑒𝑛 𝛽𝑥
donde los valores máximos de 𝑘 son 𝑛,𝑚.
b. Si alguna de las raíces de la ecuación característica asociada a la ecuación
diferencial homogénea es igual a ±𝑖𝛽, (𝜆 = ±𝑖𝛽) la solución particular tiene
la forma:
𝑦𝑝 = 𝑥𝑠[𝑃(𝑥) cos 𝛽𝑥 + 𝑄(𝑥)𝑠𝑒𝑛 𝛽𝑥]
donde los valores máximos de 𝑘 son 𝑛,𝑚 y 𝑠 es la multiplicidad de 𝜆.
Caso 4: Cuando 𝐹(𝑥) = 𝑒𝛼𝑥[𝑃𝑛(𝑥) cos 𝛽𝑥 + 𝑄𝑚(𝑥)𝑠𝑒𝑛 𝛽𝑥] donde 𝑃𝑛(𝑥) y 𝑄𝑚(𝑥) son
funciones polinómicas de grado n y m respectivamente.
a. Si ninguna de las raíces de la ecuación característica asociada a la ecuación
diferencial homogénea es igual a 𝛼 ± 𝑖𝛽, (𝜆 ≠ 𝛼 ± 𝑖𝛽) la solución particular
tiene la siguiente forma:
𝑦𝑝 = 𝑒𝛼𝑥[𝑃(𝑥) cos 𝛽𝑥 + 𝑄(𝑥)𝑠𝑒𝑛 𝛽𝑥]
donde los valores máximos de 𝑘 son 𝑛,𝑚.
b. Si alguna de las raíces de la ecuación característica asociada a la ecuación
diferencial homogénea es igual a 𝛼 ± 𝑖𝛽, (𝜆 = 𝛼 ± 𝑖𝛽) la solución particular
tiene la forma:
𝑦𝑝 = 𝑥𝑠𝑒𝛼𝑥[𝑃(𝑥) cos 𝛽𝑥 + 𝑄(𝑥)𝑠𝑒𝑛 𝛽𝑥]
donde los valores máximos de 𝑘 son 𝑛,𝑚 y 𝑠 es la multiplicidad de 𝜆.
41
3.4 SISTEMAS DE ECUACIONES DIFERENCIALES LINEALES
HOMOGÉNEOS DE PRIMER ORDEN (LARA, J. 2007)
Un sistema de 𝑛 ecuaciones diferenciales de primer orden se expresa de la forma
𝐹(𝑥, 𝑦(𝑥), 𝑦′(𝑥)) = 0 y se denomina lineal cuando la función 𝐹 es una función lineal
respecto a 𝑦(𝑥) y 𝑦′(𝑥).
Se tiene un sistema en el cual es fácil despejar 𝑦′, el sistema se escribe de la forma:
𝑦1′(𝑥) = 𝐹1(𝑥, 𝑦1, … , 𝑦𝑛)
…𝑦𝑛′(𝑥) = 𝐹𝑛(𝑥, 𝑦1, … , 𝑦𝑛)
donde 𝐹1, 𝐹2, … , 𝐹𝑛 son funciones lineales respecto a las variables 𝑦1, 𝑦2, … , 𝑦𝑛, es
decir, que también se puede expresar como: (Edwards & Penney, 2001)
𝑦1′(𝑥) = 𝑎11(𝑥)𝑦1 +⋯+ 𝑎1𝑛(𝑥)𝑦𝑛 = 𝑓1(𝑥)
…𝑦𝑛′ (𝑥) = 𝑎𝑛1(𝑥)𝑦1 +⋯+ 𝑎𝑛𝑛(𝑥)𝑦𝑛 = 𝑓𝑛(𝑥)
, (1)
donde se tiene que 𝑎𝑖𝑗(𝑥) y 𝑏𝑖(𝑥) son funciones definidas sobre el intervalo 𝐼, para
todo 𝑖, 𝑗 = 1,2, … , 𝑛.
El sistema de la forma (1) se puede expresar de la forma vectorial:
𝒀′(𝑥) = 𝑨(𝑥)𝒀(𝑥) + 𝑭(𝑥),
siendo 𝑨(𝑥) una matriz cuadrada de orden 𝑛, formada por las funciones 𝑎𝑖𝑗(𝑥) y
𝑭(𝑥), 𝒀′(𝑥), 𝒀(𝑥) funciones vectoriales de dimensión 𝑛 definidas en el intervalo 𝐼.
Proposición 1
Si una ecuación diferencial de orden 𝑛 es lineal también es lineal el sistema
asociado de 𝑛 ecuaciones diferenciales de primer orden y recíprocamente si el
sistema es lineal también lo es su ecuación diferencial asociada.
Ahora se define el caso cuando el sistema de ecuaciones diferenciales lineales
tiene coeficientes constantes.

42
El caso del sistema mencionado anteriormente si para todo 1 ≤ 𝑖 ≤ 𝑛, se tiene
𝑓𝑖(𝑥) = 0, ∀𝑥 ∈ ℝ, se dice que el sistema es homogéneo. Las equivalentes
ecuaciones matriciales son:
Para el sistema no homogéneo 𝒀′(𝑥) = 𝑨𝒚(𝑥) + 𝑭(𝑥), y
Para el sistema homogéneo 𝒀′(𝑥) = 𝑨𝒚(𝑥)
Un sistema lineal con Y, A(x) y F(x) que representan las matrices, se escribe de la
siguiente forma.
𝑌 = (𝑦1(𝑥)⋮
𝑦𝑛(𝑥)), 𝐴(𝑥) = (
𝑎11(𝑥) ⋯ 𝑎11(𝑥)⋮ ⋯ ⋮
𝑎11(𝑥) ⋯ 𝑎11(𝑥)), 𝐹(𝑥) = (
𝑓1(𝑥)⋮
𝑓𝑛(𝑥)).
El sistema de ecuaciones diferenciales se expresa como sigue:
𝑑
𝑑𝑥(𝑦1(𝑥)⋮
𝑦𝑛(𝑥)) = (
𝑎11(𝑥) ⋯ 𝑎11(𝑥)⋮ ⋯ ⋮
𝑎11(𝑥) ⋯ 𝑎11(𝑥))(𝑦1(𝑥)⋮
𝑦𝑛(𝑥)) + (
𝑓1(𝑥)⋮
𝑓𝑛(𝑥))
Para un sistema homogéneo se escribe
𝑑
𝑑𝑥(𝑦1(𝑥)⋮
𝑦𝑛(𝑥)) = (
𝑎11(𝑥) ⋯ 𝑎11(𝑥)⋮ ⋯ ⋮
𝑎11(𝑥) ⋯ 𝑎11(𝑥))(𝑦1(𝑥)⋮
𝑦𝑛(𝑥))
La solución de un sistema es una matriz columna cuyos elementos son funciones
diferenciales que satisfacen a 𝒀′ = 𝑨𝒚(𝑥) + 𝐹(𝑥) en un intervalo 𝐼.
𝑌 =𝑑
𝑑𝑥(𝑦1(𝑥)⋮
𝑦𝑛(𝑥)),
que se escribe como:
𝑌 = (𝑘1⋮𝑘𝑛
) 𝑒𝜆𝑡 = 𝐾𝑒𝜆𝑡

43
3.4.1 SOLUCIÓN DE ECUACIONES DIFERENCIALES ORDINARIAS DE
PRIMER ORDEN CON COEFICIENTES CONSTANTES
HOMOGÉNEOS
Para el estudio de éste tipo de soluciones, se supone un sistema de 𝑛
ecuaciones diferenciales lineales de primer orden expresado en forma vectorial
𝒚′(𝑥) = 𝐴(𝑥)𝒚(𝑥) siendo 𝐴(𝑥) una función matricial cuadrada de orden 𝑛,
continua en el intervalo 𝐼, y donde 𝒚′(𝑥), 𝒚(𝑥) funciones vectoriales de ℝ𝑛 en ℝ.
Teorema 3.-
Sean 𝑦1, 𝑦2, … , 𝑦𝑛 soluciones linealmente independientes del sistema 𝒚′(𝑥) =
𝐴(𝑥)𝒚(𝑥) en el intervalo 𝐼. Entonces, dadas 𝑛 constantes 𝑐1, 𝑐2, … , 𝑐𝑛, la función:
∑𝑐𝑘𝑦𝑘
𝑛
𝑘=1
,
es también solución del sistema en el intervalo 𝐼.
Observación: Si las funciones 𝑦1, 𝑦2, … , 𝑦𝑛 son soluciones linealmente
independientes, en el intervalo 𝐼, del sistema 𝒚′(𝑥) = 𝐴(𝑥)𝒚(𝑥) entonces su
wronskiano no se anula en ningún punto de ese intervalo.
Corolario 1.-
Si las funciones 𝑦1, 𝑦2, … , 𝑦𝑛 son soluciones del sistema lineal homogéneo de
ecuaciones diferenciales 𝒚′(𝑥) = 𝐴(𝑥)𝒚(𝑥) en el intervalo 𝐼, las tres condiciones
siguientes son equivalentes:
a) Las funciones 𝑦1, 𝑦2, … , 𝑦𝑛 son linealmente independientes en 𝐼.
b) Existe un 𝑥 ∈ 𝐼 tal que 𝑊[𝑦1, … , 𝑦𝑛](𝑥) es distinto de cero.
c) Para todo 𝑥 ∈ 𝐼 se verifica que 𝑊[𝑦1, … , 𝑦𝑛](𝑥) es distinto de cero.
Ahora se tiene que definir el sistema fundamental de soluciones del sistema lineal
homogéneo a cualquier conjunto de 𝑛 soluciones linealmente independientes. Y
además siempre existe un sistema fundamental de soluciones del sistema lineal
homogéneo de primer orden 𝒚′(𝑥) = 𝐴(𝑥)𝒚(𝑥), en el intervalo 𝐼.
44
Teorema 4.-
Si 𝑦1, 𝑦2, … , 𝑦𝑛 es un sistema fundamental de soluciones del sistema lineal
homogéneo de primer orden 𝒚′(𝑥) = 𝐴(𝑥)𝒚(𝑥), en el intervalo 𝐼, entonces toda
solución 𝝋(𝑥) = (𝜑1(𝑥),… , 𝜑𝑛(𝑥)) del sistema se puede expresar de la forma
𝝋(𝑥) = ∑𝑐𝑘𝑦𝑘(𝑥)
𝑛
𝑘=1
,
donde 𝑐1, 𝑐2, … , 𝑐𝑛 son constantes.
Del teorema anterior se tiene que si φ es el conjunto de soluciones del sistema
lineal homogéneo de primer orden 𝒚′(𝑥) = 𝐴(𝑥)𝒚(𝑥) en el intervalo 𝐼. Entonces φ
tiene estructura de espacio vectorial de dimensión 𝑛.
Si 𝑦1, 𝑦2, … , 𝑦𝑛 un sistema fundamental de soluciones del sistema lineal homogéneo
𝒚′(𝑥) = 𝐴(𝑥)𝒚(𝑥) en el intervalo 𝐼. La solución general de este sistema se puede
expresar de la forma:
𝝋(𝑥) = ∑𝑐𝑘𝑦𝑘(𝑥) = 𝑐1(𝑦11(𝑥)⋮
𝑦1𝑛(𝑥)
) +⋯+ 𝑐𝑛 (𝑦𝑛1(𝑥)⋮
𝑦𝑛𝑛(𝑥)
)
𝑛
𝑘=1
.
Teorema 2 (Existencia y Unicidad).-
Sea 𝐴(𝑥) una función matricial cuadrada de orden 𝑛, 𝑭(𝑥) una función vectorial,
continua en un intervalo 𝐼 ∈ ℝ, y sea 𝒀′(𝑥) = 𝐴(𝑥)𝒚(𝑥) + 𝑭(𝑥) un sistema lineal de
ecuaciones diferenciales de primer orden. Sean 𝑥0 ∈ 𝐼, si se impone la condición
inicial 𝒚(𝑥0) = (𝑦1(𝑥0), … , 𝑦𝑛(𝑥0)) = (𝑦01, … , 𝑦0𝑛), entonces existe una única función
vectorial 𝝋(𝑥) = (𝜑1(𝑥),… , 𝜑𝑛(𝑥)) que es solución del sistema y verifica las
condiciones iniciales.
3.4.1.1 SOLUCIÓN DE ECUACIONES LINEALES POR VALORES Y
VECTORES PROPIOS
Para la solución de un sistema de ecuaciones diferenciales homogéneo 𝑌′ = 𝐴𝑌
se procede de la siguiente manera: (Spiegel, 1994)

45
Encontrar una solución complementaria para ello se asume 𝑌 = 𝐾𝑒𝜆𝑡,
donde 𝑌 es un vector columna de las variables dependientes, v es un vector
columna constante, y 𝜆 es una constante.
Se tiene que 𝐾𝜆𝑒𝜆𝑡 = 𝐴𝐾𝑒𝜆𝑡 si se divide para 𝑒𝜆𝑡 se obtiene 𝐾𝜆 = 𝐴𝐾 o 𝐴𝐾 −
𝐾𝜆 = 0 como 𝐾 = 𝐾𝐼 que es 𝐾(𝐴 − 𝜆𝐼) = 0, esta ecuación es la ecuación
característica de la matriz A.
Se resuelve 𝑑𝑒𝑡(𝐴 − 𝜆𝐼) y se encuentran los valores propios o
eigenvalores(𝜆),
Se encontrar los vectores propios (𝐾) diferentes de cero para cada valor de
𝜆.
Al resolver la ecuación característica se pueden tener diferentes resultados que
pueden ser: valores propios distintos, valores propios repetidos y valores propios
complejos y por lo que las soluciones se detallan a continuación.
Valores propios reales distintos.- en una matriz A de orden nxn, se pueden
obtener n vectores propios linealmente independientes 𝐾1, … , 𝐾𝑛 para los valores
propios 𝜆1, … , 𝜆𝑛, que permite obtener n soluciones linealmente independientes
𝑌1(𝑡) = 𝑐1𝐾1𝑒𝜆1𝑡
𝑌2(𝑡) = 𝑐2𝐾2𝑒𝜆2𝑡
…
𝑌𝑛(𝑡) = 𝑐𝑛𝐾𝑛𝑒𝜆𝑛𝑡
lo que permite obtener la solución general en el intervalo ]-∞,∞[ que es:
𝑌(𝑡) = 𝑐1𝐾1𝑒𝜆1𝑡, +⋯+ 𝑐𝑛𝐾𝑛𝑒
𝜆𝑛𝑡.
Valores propios reales repetidos.- En una matriz A de orden 𝑛𝑥𝑛, sus valores
propios no siempre son distintos, por lo tanto se puede obtener como solución un
solo valor propio repetido (multiplicidad m) o por lo menos uno de ellos repetido, lo
que significa que:
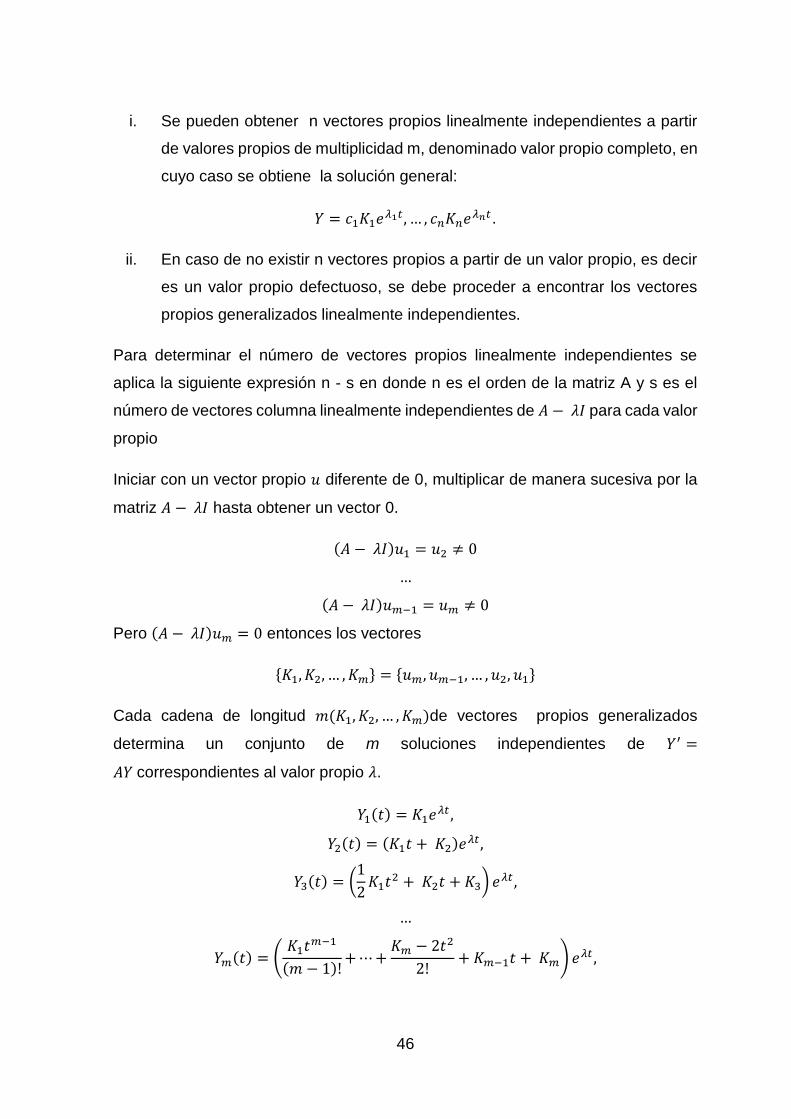
46
i. Se pueden obtener n vectores propios linealmente independientes a partir
de valores propios de multiplicidad m, denominado valor propio completo, en
cuyo caso se obtiene la solución general:
𝑌 = 𝑐1𝐾1𝑒𝜆1𝑡, … , 𝑐𝑛𝐾𝑛𝑒
𝜆𝑛𝑡.
ii. En caso de no existir n vectores propios a partir de un valor propio, es decir
es un valor propio defectuoso, se debe proceder a encontrar los vectores
propios generalizados linealmente independientes.
Para determinar el número de vectores propios linealmente independientes se
aplica la siguiente expresión n - s en donde n es el orden de la matriz A y s es el
número de vectores columna linealmente independientes de 𝐴 − 𝜆𝐼 para cada valor
propio
Iniciar con un vector propio 𝑢 diferente de 0, multiplicar de manera sucesiva por la
matriz 𝐴 − 𝜆𝐼 hasta obtener un vector 0.
(𝐴 − 𝜆𝐼)𝑢1 = 𝑢2 ≠ 0
…
(𝐴 − 𝜆𝐼)𝑢𝑚−1 = 𝑢𝑚 ≠ 0
Pero (𝐴 − 𝜆𝐼)𝑢𝑚 = 0 entonces los vectores
𝐾1, 𝐾2, … , 𝐾𝑚 = 𝑢𝑚, 𝑢𝑚−1, … , 𝑢2, 𝑢1
Cada cadena de longitud 𝑚(𝐾1, 𝐾2, … , 𝐾𝑚)de vectores propios generalizados
determina un conjunto de m soluciones independientes de 𝑌′ =
𝐴𝑌 correspondientes al valor propio 𝜆.
𝑌1(𝑡) = 𝐾1𝑒𝜆𝑡 ,
𝑌2(𝑡) = (𝐾1𝑡 + 𝐾2)𝑒𝜆𝑡,
𝑌3(𝑡) = (1
2𝐾1𝑡
2 + 𝐾2𝑡 + 𝐾3) 𝑒𝜆𝑡 ,
…
𝑌𝑚(𝑡) = (𝐾1𝑡
𝑚−1
(𝑚 − 1)!+⋯+
𝐾𝑚 − 2𝑡2
2!+ 𝐾𝑚−1𝑡 + 𝐾𝑚) 𝑒
𝜆𝑡 ,

47
Valores propios complejos.- Otra solución de la ecuación característica se puede
dar en el conjunto de los números complejos cuyos valores propios se dan en
parejas complejas conjugadas.
Entonces 𝜆1 = 𝛼 + 𝛽𝑖 y 𝜆2 = 𝜆1 = 𝛼 − 𝛽𝑖 , 𝛽 > 0, 𝑖2 = −1, de esto se espera que
los vectores propios correspondientes a los valores propios contengan elementos
complejos.
Si 𝑣 es un vector propio asociado con 𝜆 de modo que
(𝐴 − 𝜆𝐼)𝐾 = 0
Aplicando los conjugados complejos en la ecuación anterior se tiene:
(𝐴 − 𝐼) = 0
El conjugado de 𝐾 𝑒𝑠 para el valor propio , así
𝐾 =
[ 𝑎1 + 𝑏1𝑖𝑎2 + 𝑏2𝑖
.
.
.𝑎𝑛 + 𝑏𝑛𝑖
]
=
[ 𝑎1𝑎2...𝑎𝑛
]
+
[ 𝑏1𝑏2...𝑏𝑛
]
𝑖 = 𝑎 + 𝑏𝑖
El conjugado
𝐾 =
[ 𝑎1 + 𝑏1𝑖𝑎2 + 𝑏2𝑖
.
.
.𝑎𝑛 + 𝑏𝑛𝑖
]
=
[ 𝑎1𝑎2...𝑎𝑛
]
−
[ 𝑏1𝑏2...𝑏𝑛
]
𝑖 = 𝑎 − 𝑏𝑖
La solución asociada a los números complejos es:
𝑌(𝑡) = 𝐾𝑒𝜆𝑡 = 𝐾𝑒(𝛼+𝛽𝑖)𝑡 = (𝑎 + 𝑏𝑖)𝑒𝛼𝑡(cos 𝛽𝑡 + 𝑖 𝑠𝑒𝑛𝛽𝑡)
𝑌(𝑡) = 𝑒𝛼𝑡(𝑎 cos 𝛽𝑡 − 𝑏 𝑠𝑒𝑛𝛽𝑡) + 𝑖𝑒𝛼𝑡(𝑏 cos 𝛽𝑡 + 𝑎 𝑠𝑒𝑛𝛽𝑡)
La parte real e imaginaria también son soluciones, se obtiene dos soluciones con
valores reales.
𝑦1(𝑡) = 𝑅𝑒(𝑦(𝑡) = 𝑒𝑝𝑡(𝑎 cos 𝑞𝑡 − 𝑏 𝑠𝑒𝑛 𝑞𝑡)
𝑦2(𝑡) = 𝐼𝑚(𝑦(𝑡) = 𝑒𝑝𝑡(𝑏 cos 𝑞𝑡 − 𝑎 𝑠𝑒𝑛 𝑞𝑡)

48
3.4.1.2 SOLUCIÓN POR MÉTODO DE ELIMINACIÓN(Edwards & Penney,
2001)
Este método consiste en despejar la variable 𝑦 en una de las ecuaciones, a este
valor se lo reemplaza en la otra ecuación y al simplificar se obtiene una ecuación
de orden 𝑛 que se resuelve por los métodos antes expuestos, tiene un proceso
similar al de los sistemas de ecuaciones de primer grado del álgebra elemental cuyo
principio es la eliminación de variables, en este caso es muy útil recurrir al uso del
Operador diferencial 𝐷.
Se define al operador 𝐷 como una aplicación que está definida sobre 𝐹 en 𝐹 tal que
∀𝑓 ∈ 𝐹, 𝐷(𝑓) =𝑑𝑓
𝑑𝑥, siendo 𝐹 la familia de funciones reales de variable real
infinitamente derivables en un intervalo 𝐼.
Si se toma el sistema:
𝑏11𝑦1
′(𝑥) + ⋯+ 𝑏1𝑛𝑦𝑛′(𝑥) = 𝑎11𝑦1(𝑥) + ⋯+ 𝑎1𝑛𝑦𝑛(𝑥)
…𝑏𝑛1𝑦1
′(𝑥) + ⋯+ 𝑏𝑛𝑛𝑦𝑛′(𝑥) = 𝑎𝑛1𝑦1(𝑥) + ⋯+ 𝑎𝑛𝑛𝑦𝑛(𝑥)
Si se aplica el operador 𝐷(𝑦) = 𝑦′ se puede expresar:
(𝑎11 − 𝑏11𝐷)𝑦1(𝑥) + ⋯+ (𝑎1𝑛 − 𝑏1𝑛𝐷)𝑦𝑛(𝑥) = 0
…(𝑎𝑛1 − 𝑏𝑛1𝐷)𝑦1(𝑥) + ⋯+ (𝑎𝑛𝑛 − 𝑏𝑛𝑛𝐷)𝑦𝑛(𝑥) = 0
o también se puede expresar de la forma:
(𝑎11 − 𝑏11𝐷 ⋯ 𝑎1𝑛 − 𝑏1𝑛𝐷
⋮ ⋱ ⋮𝑎𝑛1 − 𝑏𝑛1𝐷 ⋯ 𝑎𝑛𝑛 − 𝑏𝑛𝑛𝐷
)(𝑦1(𝑥)…
𝑦𝑛(𝑥)) = (
0…0).
Donde el operador ∆(𝐷) = (𝑎11 − 𝑏11𝐷 ⋯ 𝑎1𝑛 − 𝑏1𝑛𝐷
⋮ ⋱ ⋮𝑎𝑛1 − 𝑏𝑛1𝐷 ⋯ 𝑎𝑛𝑛 − 𝑏𝑛𝑛𝐷
), que se supone esta
función distinta de cero, además se tiene que el operador ∆(𝐷) es polinómico de
grado 𝑛.
Si se considera ∆(𝐷) = 𝑟0 + 𝑟1𝐷 +⋯+ 𝑟𝑛𝐷𝑛, entonces

49
∆(𝐷)(𝑦𝑘(𝑥)) = 𝑟0𝑦𝑘(𝑥) + 𝑟1𝑦𝑘′ (𝑥) + ⋯+ 𝑟𝑛𝑦𝑘
(𝑛)(𝑥)
para todo 𝑘, 1 ≤ 𝑘 ≤ 𝑛 se resuelve la ecuación diferencial homogénea de grado 𝑛:
𝑟0𝑦𝑘(𝑥) + 𝑟1𝑦𝑘′ (𝑥) + ⋯+ 𝑟𝑛𝑦𝑘
(𝑛)(𝑥) = 0.
Una vez obtenidas cada una de las funciones 𝑦𝑘(𝑥) en función de 𝑛 constantes, se
tienen en total 𝑛2 constantes que se eliminan hasta dejar sólo 𝑛 sustituyéndolas en
el sistema.
3.5 SISTEMAS DE ECUACIONES DIFERENCIALES LINEALES NO
HOMOGÉNEOS DE PRIMER ORDEN
Se estudian distintos métodos de resolver los sistemas lineales no homogéneos,
como por ejemplo: el método de variación de constantes, el método de coeficientes
indeterminados y utilizando el operador diferencial 𝐷. Éstos métodos son válidos
en ciertas condiciones, como el método de variación de constantes que es válido
para cualquier sistema lineal completo y también el operador diferencial 𝐷 que
únicamente pueden utilizarse cuando el sistema lineal homogéneo asociado tiene
los coeficientes constantes y la función 𝑏(𝑥) adopta determinadas formas.
Se tiene un sistema lineal no homogéneo de primer orden de la forma
𝑥′(𝑡) = 𝐴𝑥 + 𝑓(𝑡)
Donde 𝐴 es una matriz de orden 𝑛 𝑥 𝑛 y el término no homogéneo es 𝑓(𝑥), la
solución general está dada por:
𝑥(𝑡) = 𝑥ℎ(𝑡) + 𝑥𝑝(𝑡)
Con 𝑥ℎ(𝑡) solución general asociada al sistema homogéneo y 𝑥𝑝(𝑡) solución
particular del sistema original.
Los métodos para solucionar sistemas diferenciales lineales no homogéneos tienen
relación con los métodos expuestos anteriormente es así que cualquiera sea el
caso la solución se procede con las soluciones de la ecuación diferencial

50
homogénea asociada y luego se obtiene la solución particular por el método de
coeficientes indeterminados o variación de parámetros.
51
CAPÍTULO 4
4 SISTEMAS FÍSICOS DE UNO Y DOS GRADOS DE
LIBERTAD
4.1 CONCEPTOS BÁSICOS (SERWAY & JEWETT, 2008)
Definición 12.-
La mecánica se encarga del estudio de los cuerpos en su estado de equilibrio, así
como en movimiento y de las causas que producen el mismo.
Las tres teorías principales de la mecánica existentes en la actualidad son: la
mecánica clásica, la mecánica relativista y la mecánica cuántica, que permiten
desde siglos anteriores interpretar los diferentes aspectos que actúan en el
movimiento de los cuerpos que se encuentran en nuestro entorno, a grandes
distancia como también de partículas minúsculas que responden a algún fenómeno
físico.
Los fenómenos físicos que se dan en la naturaleza permiten apreciar un sinnúmero
de situaciones que suceden sobre objetos o cuerpos.
Al hablar de objetos o cuerpos físicos se trata de manifestar lo que nuestros ojos
son capaces de ver o lo que nuestras manos pueden tocar sin embargo en la
naturaleza y en el universo existen infinidad de objetos que no pueden ser
apreciados por el ojo humano y si embargo están allí. A continuación se incluye la
concepción expresada en el diccionario de la academia.
Definición 13.-
Cuerpo u objeto es “todo lo que puede ser materia de conocimiento o sensibilidad
de parte del sujeto
Los objetos se encuentran en constante relación con otros o son sometidos a
acciones que actúan sobre el para producir cambios, en un cuerpo pueden
interactuar diferentes factores que permiten predecir resultados como es el caso de

52
la mecánica clásica que si un cuerpo está en movimiento se puede predecir su
posición o velocidad en cualquier instante.
Los cuerpos u objetos están formados de materia y puede presentarse de distintas
maneras o estados. Además dependiendo de las condiciones, los cuerpos pueden
cambiar de estado o manera en que se presentan, en la materia se pueden
identificar propiedades generales como volumen, tamaño y peso que no permiten
diferenciar una substancia de otra y las propiedades específicas que permiten
diferenciarlas.
El concepto básico sobre el cual gira la mecánica es el movimiento
Definición 14.-
Movimiento es el fenómeno por el cual un cuerpo cambia de posición con respecto
a otros luego de transcurrir un tiempo.
4.2 PRINCIPIOS BÁSICOS DE LA MECÁNICA (SERWAY &
JEWETT, 2008)
4.2.1 SISTEMA DE REFERENCIA ESPACIO - TIEMPO
Los fenómenos mecánicos se describen mediante _sistemas de referencia, _
basados en los conceptos de espacio y tiempo. Por su importancia conviene
enunciar los postulados que asume la mecánica clásica para estos conceptos.
El espacio, y por tanto su métrica, tiene las propiedades siguientes.
1. Independencia de los objetos en él inmersos. (La métrica del espacio no se
ve afectada por los mismos.)
2. Constancia a lo largo del tiempo.
3. Homogeneidad: es igual en todos los puntos, no existiendo puntos
privilegiados.
4. Isotropía: es igual en todas las direcciones, no existiendo direcciones
privilegiadas.

53
El espacio se caracteriza por una métrica Euclídea, lo que lo convierte en un
espacio puntual Euclídeo en 3 dimensiones, R3.
El tiempo se caracteriza a su vez por las siguientes propiedades.
1. Homogeneidad, al no existir instantes privilegiados.
2. Fluye constantemente en un sentido, por lo que no se puede retroceder ni
volver al pasado (desgraciadamente para algunos). Asimismo, los
fenómenos futuros no pueden condicionar los presentes. No se cumple por
tanto la isotropía, existiendo un único sentido en el que puede discurrir el
tiempo.
3. Simultaneidad absoluta: Los fenómenos considerados simultáneos para
dos observadores en sendos sistemas de referencia, lo son así mismo para
cualquier otro observador ligado a cualquier otro sistema de referencia.
En mecánica clásica, el tiempo se considera una variable de naturaleza distinta de
las variables espaciales y la métrica elucídela no está influenciada por él.
Las magnitudes de tiempo, espacio, masa, volumen, entre otras, se expresan
mediante cantidades, las mismas son las mediciones del comportamiento de un
cuerpo en determinadas circunstancias que pueden cambiar si cambian las
propiedades. Las medidas son expresiones matemáticas que expresan un atributo
físico en forma numérica.
La mecánica tiene como uno de sus aspectos importantes las leyes de Newton que
se enuncian a continuación.
4.2.2 PRIMERA LEY DE NEWTON
Esta ley constituye el llamado principio de la inercia. Admitiendo también el principio
de Galileo, nos permite definir los llamados sistemas inerciales, como aquellos en
los que se cumple dicho principio. Las leyes de la mecánica se formulan en un
sistema inercial de referencia. Por el principio de Galileo, admitiendo que existe al
menos un tal sistema inercial, existirán infinitos sistemas inerciales en los que se
cumplen las mismas leyes mecánicas y en concreto la ley primera de Newton.
54
Todo cuerpo persevera en su estado de reposo o movimiento rectilíneo y uniforme
a no ser en tanto que sea obligado por fuerzas impresas a cambiar su estado.’
Este principio nos permite también definir, como condiciones iniciales del
movimiento, las que caracterizan a un movimiento estacionario o constante: la
posición 𝑟 y la velocidad 𝑣 constante.
Conviene observar también que Newton emplea el término _cuerpo_para referirse
en realidad a una partícula, o punto material, caracterizada por la posición y
velocidad de un solo punto.
4.2.3 SEGUNDA LEY DE NEWTON
Esta ley indica claramente una relación lineal (_proporcional_) entre fuerzas y
variaciones de la cantidad de movimiento, de tipo vectorial (_según la línea recta_).
Se denomina en ocasiones ley fundamental de la dinámica, permitiendo obtener las
ecuaciones básicas de la misma. Expresada como ecuación, equivale a:
Este principio permite aclarar que sucede con un cuerpo cuando actúan sobre él
diferentes fuerzas visto desde un marco de referencia inercial.
La aceleración de un objeto es directamente proporcional a la fuerza neta que actúa
sobre él e inversamente proporcional a su masa.
𝛼 ∑
𝑚
Relacionar masa, fuerza y aceleración cuando la constante de proporcionalidad se
elige en uno se llega al enunciado matemático de la Ley de Newton ∑ = 𝑚
siempre y cuando la rapidez del objeto sea bastante menor que la rapidez de la luz.
Observaciones:
La aceleración, derivada segunda del vector posición, es asimismo un vector.
La ecuación tiene por tanto carácter vectorial, lo que identifica a las fuerzas
impulsiónmovdecan
tFvm
..
55
como vectores, e implícitamente supone la actividad vectorial para las
mismas (ley del paralelogramo de fuerzas).
La expresión da lugar a ecuaciones diferenciales de segundo orden, ya que
intervienen derivadas segundas de la incógnita 𝑟 respecto al tiempo.
4.2.4 TERCERA LEY DE NEWTON
Se trata del llamado principio de acción y reacción. Todas las fuerzas deben de
tener contrapartida, siendo imposible ejercer una fuerza desde el vacío, sin apoyo.
Es siempre necesario apoyarse en algún cuerpo o medio material que absorba la
reacción (modificando a su vez el movimiento de este otro cuerpo, según la
segunda ley).
Con toda acción ocurre siempre una reacción igual y contraria. O sea, las acciones
mutuas de los cuerpos siempre son iguales y dirigidas en direcciones opuestas.
Las leyes de Newton son de interés cuando se aplican fuerzas a un objeto,
permiten solucionar muchos problemas sin embargo en algunos casos son muy
complejos en la práctica por lo que se realizan planteamientos diferentes como es
la energía, que en la vida cotidiana se asocia con combustible, calor, electricidad,
alimentos entre otros y sin embargo no es fácil definirla.
4.3 SEGUNDA LEY DE NEWTON APLICADA A UN SISTEMA MASA
-RESORTE HORIZONTAL Y VERTICAL (NAGLE & SAFF, S. F.;
RAO, 2011)
Movimiento oscilatorio es el movimiento que se repite parcial o totalmente cerca de
la posición de equilibrio estable de un cuerpo. Si la oscilación se caracteriza por el
cambio de magnitudes mecánicas, como el desplazamiento, la velocidad, la
aceleración, la presión, etc., dicho movimiento se denomina oscilación mecánica.
Si cada valor de la magnitud que cambia durante la oscilación se repite a iguales
intervalos de tiempo, tal oscilación se denomina periódica. El intervalo de tiempo T
necesario para la realización de una oscilación completa se denomina período de
la oscilación y la magnitud inversa al período, se denomina frecuencia de la
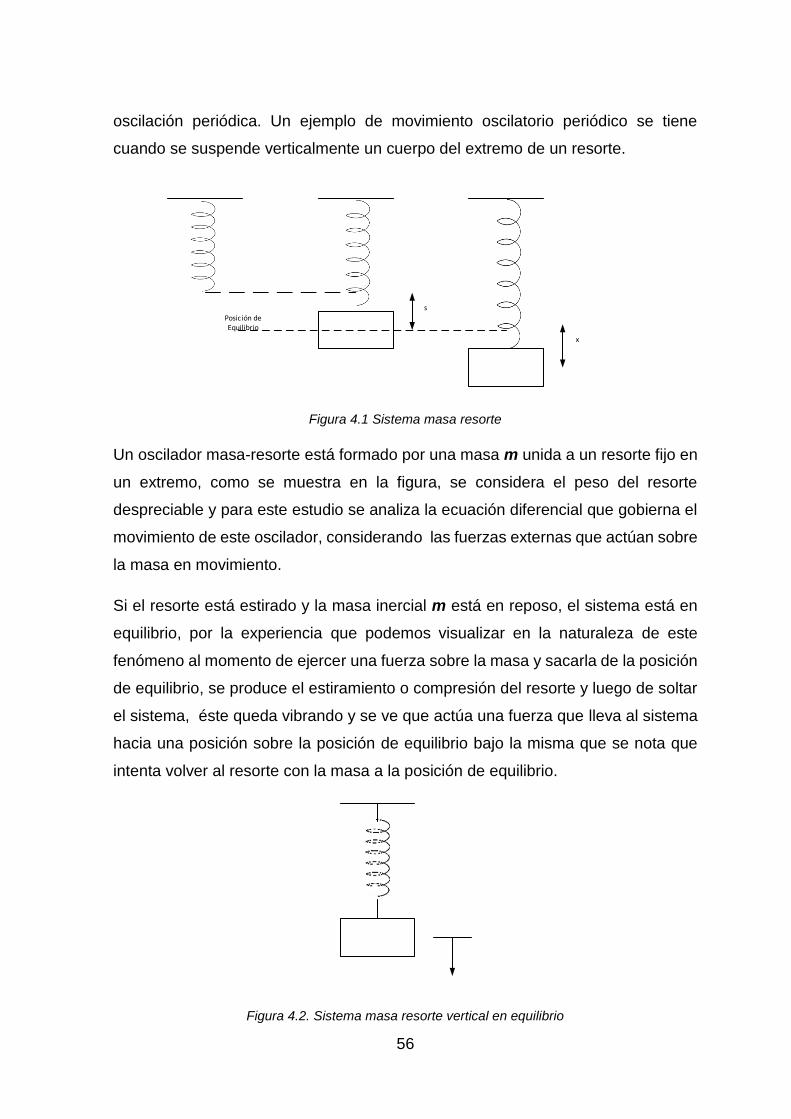
56
oscilación periódica. Un ejemplo de movimiento oscilatorio periódico se tiene
cuando se suspende verticalmente un cuerpo del extremo de un resorte.
Figura 4.1 Sistema masa resorte
Un oscilador masa-resorte está formado por una masa m unida a un resorte fijo en
un extremo, como se muestra en la figura, se considera el peso del resorte
despreciable y para este estudio se analiza la ecuación diferencial que gobierna el
movimiento de este oscilador, considerando las fuerzas externas que actúan sobre
la masa en movimiento.
Si el resorte está estirado y la masa inercial m está en reposo, el sistema está en
equilibrio, por la experiencia que podemos visualizar en la naturaleza de este
fenómeno al momento de ejercer una fuerza sobre la masa y sacarla de la posición
de equilibrio, se produce el estiramiento o compresión del resorte y luego de soltar
el sistema, éste queda vibrando y se ve que actúa una fuerza que lleva al sistema
hacia una posición sobre la posición de equilibrio bajo la misma que se nota que
intenta volver al resorte con la masa a la posición de equilibrio.
Figura 4.2. Sistema masa resorte vertical en equilibrio
s
x
Posición de Equilibrio

57
De acuerdo a la segunda Ley de Newton –fuerza igual a masa por aceleración (𝐹 =
𝑚𝑎) se tiene la ecuación diferencial ordinaria de segundo orden para la
aceleración, ésta es la segunda derivada de la posición 𝒚 con respecto del tiempo.
𝑎 =𝑑2𝑥
𝑑𝑡2
Al desplazar la masa 𝒎 con respecto del equilibrio, el resorte se estira o se
comprime y aparece la fuerza restauradora que resiste al desplazamiento. Para la
mayor parte de resortes, esta fuerza es directamente proporcional al
desplazamiento 𝒚, por lo que está dada por
𝐹𝑟𝑒𝑠𝑜𝑟𝑡𝑒 = − 𝑘𝑥 (𝐿𝑒𝑦 𝑑𝑒 𝐻𝑜𝑜𝑘𝑒)
En donde:
𝑘 Rigidez, es constante positiva llamada constante del resorte.
− Signo negativo, Indica la naturaleza de oposición de la
fuerza.
Al colocar una masa en el extremo del resorte ésta lo estira una longitud 𝑥 y llega
a una posición en la que permanece estática o en equilibrio en la que el peso
(P=mg) es igual al estiramiento por la constante de elasticidad (𝑘𝑥), así 𝑚𝑔 = 𝑘𝑥
que es 𝑚𝑔 – 𝑘𝑥 = 0. Cuando se produce el estiramiento luego de la posición de
equilibrio existe un recorrido del resorte fuera de la posición de equilibrio de longitud
𝑥, el mismo que responde a la fuerza de restitución del resorte 𝑘(𝑠 + 𝑥).
Figura 4.3. Sistema masa resorte vertical con estiramiento del resorte
s

58
Suponiendo que no hay fuerzas de retardo que actúen sobre el sistema y la masa
está libre de fuerzas externas se puede igualar la segunda ley de Newton con la
fuerza neta, fuerza de restitución y el peso:
𝑚𝑑2𝑥
𝑑𝑡2= −𝑘(𝑠 + 𝑥) + 𝑚𝑔 = −𝑘𝑥 +𝑚𝑔 − 𝑘𝑦⏟
𝑐𝑒𝑟𝑜
= −𝑘𝑥.
En un sistema masa resorte ubicado en forma horizontal como se observa en la
figura se tiene que:
Figura 4.4. Sistema masa resorte horizontal
La mayoría de resortes que se utilizan en sistemas prácticos presentan una relación
no lineal, en particular cuando las deflexiones son grandes.
4.3.1 COMBINACIÓN DE RESORTES ( RAO, 2011)
Resortes en paralelo: Si se tiene n resortes con constantes 𝑘1, 𝑘2, 𝑘3,... 𝑘𝑛 la
constante del resorte equivalente es:
𝑘𝑒𝑞 = 𝑘1 + 𝑘2 +⋯+ 𝑘𝑛
Resortes en serie: Si se tiene n resortes con constantes 𝑘1, 𝑘2, 𝑘3,... 𝑘𝑛 en serie la
constante del resorte equivalente es:
1
𝑘𝑒𝑞= 1
𝑘1+1
𝑘2+⋯+
1
𝑘𝑛

59
Las vibraciones libres de una masa m que satisface la función de posición 𝑥(𝑡) está
dada por la ecuación diferencial 𝑚𝑥´´ + 𝑏𝑥´ + 𝑘𝑥 = 0, que puede ser no amortiguado
si 𝑏 = 0 y amortiguado si 𝑏 > 0.
Las vibraciones forzadas de una masa 𝑚 que está influenciada por una fuerza
externa 𝐹(𝑡) está dada por la ecuación diferencial lineal no homogénea siguiente
𝑚𝑥´´ + 𝑏𝑥´ + 𝑘𝑥 = 0 = 𝐹(𝑡).
Una masa se puede sostener en un resorte que se encuentra en forma vertical
desde un soporte fijo, en este caso el peso 𝑊 = 𝑚𝑔 de la masa que alargaría el
resorte una longitud 𝑠0 determinada por 𝐹𝑆 = −𝑊 y 𝑥 = 𝑠0. Es decir 𝑚𝑔 = 𝑘𝑠0, y
𝑠0 =𝑚𝑔
𝑘 define la posición de equilibrio estático de la masa. La ecuación que define
el movimiento de la masa es
𝑚𝑦´´ + 𝑏𝑦´ + 𝑘𝑦 = 0 = 𝐹(𝑡)
Donde 𝑦 denota el desplazamiento de la masa.
En las maquinas con componentes giratorios por lo común incluyen sistemas masa
- resorte cuya fuerza externa es armónica simple:
𝐹(𝑡) = 𝐹0 cos 𝑤𝑡 ó 𝐹(𝑡) = 𝐹0 sen 𝑤𝑡.
En la que la constante 𝐹0 es la amplitud de la fuerza periódica y 𝑤 es su frecuencia
angular.
Las oscilaciones forzadas no amortiguadas bajo la influencia de fuerzas externas
𝐹(𝑡) = 𝐹0 cos 𝑤𝑡 se tiene que 𝑏 = 0 por lo que la ecuación queda
𝑚𝑥′′ + 𝑘𝑥 = 𝐹0 cos 𝑤𝑡
La solución general 𝑥(𝑡) = 𝑥𝑝 + 𝑥𝑐
𝑥𝑐 = 𝐶 cos(𝑤0𝑡 − 𝛼)
𝑥𝑝 = 𝐴 cos𝑤𝑡
Donde 𝐴 =𝐹0𝑚
𝑤02−𝑤2
por lo tanto

60
𝑥𝑝 =
𝐹0𝑚
𝑤02 − 𝑤2
cos𝑤𝑡.
Por lo tanto la solución general es
𝑥(𝑡) = 𝐶 cos(𝑤0𝑡 − 𝛼) +
𝐹0𝑚
𝑤02 − 𝑤2
cos𝑤𝑡
Donde la resultante está dado por dos tipos de oscilaciones una con frecuencia
angular natural 𝑤0 y otra frecuencia angular 𝑤 de la fuerza externa.
𝐴 = ±𝜌𝐹0𝑘.
𝜌 =1
|1 − (𝑤 𝑤0⁄ )2|.
Las oscilaciones cuando 𝑤0 → 𝑤 y su 𝜌 →∞ se produce el fenómeno de resonancia
cuya amplitud crece sin límite cuando sus frecuencias son muy cercanas y en el
caso de ser iguales se tienen una resonancia pura.
Existen algunos antecedentes de catástrofes que se relaciona con resonancia pura
debido al muy poco amortiguamiento y al haber logrado que la frecuencia de
vibración externa coincida con una de las frecuencias naturales de vibración.
4.4 PÉNDULOS (SERWAY & JEWETT, 2008; SPIEGEL, 1994; ZILL
& CULLEN, 2006)
Un péndulo simple consiste de una cuerda de largo 𝑙 soportada en un punto fijo en
un extremo y en el otro una partícula con una masa 𝑚. La cuerda cuya masa se
considera despreciable y se encuentra libre para vibrar.
Si la partícula se desplaza a una posición 𝑣 (ángulo que hace el hilo con la vertical)
y luego se suelta, el péndulo comienza a oscilar.

61
El péndulo describe una trayectoria circular,
un arco de una circunferencia de radio l. Se
estudia el movimiento en la dirección
tangencial y en la dirección normal.
Las fuerzas que actúan sobre la partícula de
masa m son dos
el peso mg
La tensión T del hilo
Figura 4.5. Péndulo
Se descompone el peso en la acción simultánea de dos componentes, 𝑚𝑔. 𝑠𝑒𝑛𝜃 en
la dirección tangencial y 𝑚𝑔. 𝑐𝑜𝑠𝜃 en la dirección radial.
Cuando 𝜃 > 0, la fuerza resultante está a la izquierda, y cuando 𝜃 < 0, la fuerza
resultante está a la derecha. La fuerza neta en magnitud y dirección está así dada
por –𝑚𝑔. 𝑠𝑒𝑛𝜃. Puesto que la longitud del arco está dado por 𝑠 = 𝑙. 𝜃, de modo
que la velocidad de la masa es 𝑣 =𝑑𝑠
𝑑𝑡= 𝑙(
𝑑𝜃
𝑑𝑡) y por lo tanto su energía cinética es:
𝑇 =1
2𝑚𝑣2 =
1
2𝑚(
𝑑𝑠
𝑑𝑡)2
=1
2𝑚𝑙2 (
𝑑𝜃
𝑑𝑡)2
.
Con el movimiento de la masa llega al punto de referencia más bajo en 0. La
energía potencial 𝑉 es el producto de su peso 𝑚𝑔 y su altura vertical
ℎ = 𝑙(1 − cos 𝜃) por arriba de 0, así 𝑉 = 𝑚𝑔𝑙(1 − 𝑐𝑜𝑠𝜃). Si se suma 𝑇 y 𝑉 se tiene
una constante
1
2𝑚𝑙2 (
𝑑𝜃
𝑑𝑡)2
+𝑚𝑔𝑙(1 − 𝑐𝑜𝑠𝜃) = 𝐶
Al derivar con respecto a 𝑡
𝑚𝑙2 (𝑑𝜃
𝑑𝑡) (
𝑑𝜃
𝑑𝑡)2
+𝑚𝑔𝑙(𝑠𝑒𝑛 𝜃)𝑑𝜃
𝑑𝑡= 0;
Se divide para el factor común 𝑚𝑙2𝑑𝜃
𝑑𝑡 y se obtiene la ecuación
l
0

62
𝑑2𝜃
𝑑𝑡2+𝑔
𝑙𝑠𝑒𝑛𝜃 = 0.
Cuando el ángulo 𝜃 es pequeño, no mayor a 15o se tiene que 𝑠𝑒𝑛 𝜃 = 𝜃 y 𝑘 = 𝑔/𝑙
la igualdad anterior queda 𝜃′′ + 𝑘𝜃 = 0.
Al tener en cuenta el medio circundante se inserta el término 𝑐𝜃′ en la ecuación
anterior por la resistencia de fricción y se expresa de la siguiente manera:
𝜃′′ + 𝑏𝜃′ + 𝑘𝜃 = 0.
Dada la igualdad que se asume 𝑠𝑒𝑛 𝜃 = 𝜃 es previsible que la ecuación anterior
no sea efectiva para periodos largos de oscilación.
4.5 EFECTO DE FRICCIÓN EN LOS SISTEMAS MASA – RESORTE
Y PÉNDULOS (SERWAY & JEWETT, 2008)
Prácticamente todos los sistemas mecánicos experimentan la fuerza de fricción;
por lo general, para el movimiento de vibración, esta fuerza se modela mediante un
término proporcional a la velocidad:
𝐹𝑓𝑟𝑖𝑐𝑐𝑖ó𝑛 = −𝑏𝑑𝑦
𝑑𝑡= −𝑏𝑦´
En donde:
b ≥ 0 Coeficiente de amortiguamiento
− Signo negativo, Indica la naturaleza de oposición de la
fuerza.
Las otras fuerzas que actúan sobre el oscilador se consideran por lo general como
externas al sistema, que pueden ser gravitacionales, eléctricas o magnéticas. Se
reúnen todas las fuerzas externas en una sola función conocida
𝐹𝑒𝑥𝑡𝑒𝑟𝑛𝑎(𝑡) = 𝐹𝑒𝑥𝑡(𝑡)
La Ley de Newton proporciona entonces la ecuación diferencial para el oscilador
masa-resorte:
𝑚𝑦′′ = −𝑘𝑦 − 𝑏𝑦′ + 𝐹𝑒𝑥𝑡(𝑡)
63
𝑚𝑦′′ + 𝑏𝑦′ + 𝑘𝑦 = 𝐹𝑒𝑥𝑡(𝑡)
𝐹𝑒𝑥𝑡(𝑡) = [𝑖𝑛𝑒𝑟𝑐𝑖𝑎]𝑑2𝑦
𝑑𝑡2+ [𝑎𝑚𝑜𝑟𝑡𝑖𝑔𝑢𝑎𝑚𝑖𝑒𝑛𝑡𝑜]
𝑑𝑦
𝑑𝑡+ [𝑟𝑖𝑔𝑖𝑑𝑒𝑧]𝑦
4.6 CONSERVACIÓN DE ENERGÍA (RESNICK, HALLIDAY, &
KRANE, 2006) (NAGLE & SAFF, S. F.)
El principio de la conservación de energía es útil cuando se realiza el diseño de
estructuras especialmente para el caso de vibraciones de resonancia destructiva.
Sea anotan las siguientes fórmulas:
1. Energía cinética: 𝐾 =1
2𝑚𝑣2 para la traslación de una masa con velocidad 𝑣.
2. Energía cinética: 𝐾 =1
2𝐼𝑤2 para rotación de un cuerpo con momento de
inercia 𝐼 y velocidad angular 𝑤.
3. Energía potencial: 𝑈 =1
2𝑘𝑥2 para un resorte con constante 𝑘 y que esta
estirado o comprimido una distancia 𝑥.
4. Energía potencial: 𝑈 = 𝑚𝑔ℎ para la energía potencial gravitacional de una
masa 𝑚, que está a una altura h por encima del nivel de referencia (el nivel
en el que 𝑉 = 0), con tal que 𝑔 puede ser considerada esencialmente como
constante.
5. 𝑊𝑛𝑒𝑡𝑜 = ∆𝐾 = 𝐾𝑓 − 𝐾𝑖 representación matemática del teorema trabajo
energía.
6. La energía mecánica total se logra uniendo los literales1 y 3 y queda:
𝐸 =1
2𝑚𝑣2 +
1
2𝑘𝑥2
Es necesario tomar en cuenta el siguiente teorema:
Teorema 3
El trabajo neto realizado por las fuerzas que actúan sobre un cuerpo, es igual al
cambio de su energía cinética.
64
La ley de la conservación de la energía mecánica está dada por la siguiente
expresión.
𝐸𝑖 = 𝐸𝑓 𝑜 𝐾𝑖 +𝑈𝑖 = 𝐸𝑓 + 𝑈𝑓
Definición 1
La energía mecánica total permanece constante en un sistema aislado donde solo
intervienen fuerzas conservativas.
Las fuerzas que operan dentro del sistema masa resorte pueden transformar la
energía cinética en potencial y viceversa, pero la energía potencial permanece
constante, en caso de actuar otras fuerzas como la fricción que es no conservativa
la energía total no permanece constante.
4.7 PLANO FASE DE OSCILADORES LINEALES(RESNICK,
HALLIDAY, & KRANE, 2006) (NAGLE & SAFF, S. F.)
Un vector solución de la ecuación 𝑋′ = 𝐴𝑋 + 𝐹 equivale a 𝑛 ecuaciones escalares
𝑋1 = ∅1(𝑡), … , 𝑋𝑛 = ∅𝑛(𝑡) y tiene la interpretación geométrica de un conjunto de
ecuaciones paramétricas de una curva en el espacio. Para 𝑛 = 2, las ecuaciones
𝑋1 = ∅1(𝑡), 𝑋2 = ∅2(𝑡) representan una curva en el plano 𝑥1𝑥2. Se acostumbra
llamar trayectoria a una curva en el plano y plano fase al plano 𝑋1𝑋2.
El plano fase es el plano 𝑥𝑦 en donde hipotéticamente se mueve una partícula.
El plano fase posición velocidad de un sistema mecánico no lineal resultado de un
sistema masa resorte en donde los resortes no son lineales, el modelo matemático
a considerar es el siguiente:
𝐹(𝑥) = −𝑘𝑥 + 𝛽𝑥3
La ecuación del movimiento de masa es
𝑚𝑥′ = −𝑘𝑥 + 𝛽𝑥3
Se introduce La velocidad
𝑦(𝑡) = 𝑥′(𝑡)

65
De la masa con posición 𝑥(𝑡),
𝑑𝑥
𝑑𝑡= 𝑦
𝑚𝑑𝑦
𝑑𝑡= −𝑘𝑥 + 𝛽𝑥3
Una trayectoria en este sistema en el plano fase es una gráfica posición-velocidad
que ilustra el movimiento de la masa con el resorte.
La ecuación de una trayectoria típica es
1
2𝑚𝑦2 +
1
2𝑘𝑥2 −
1
4𝛽𝑥4 = 𝐸
El comportamiento de la masa depende del signo del término no lineal. El resorte
es
Duro si 𝛽 < 0
Blando si 𝛽 > 0.
Si 𝛽 < 0 entonces el punto crítico es (0,0). Cada trayectoria es
1
2𝑚𝑦2 +
1
2𝑘𝑥2 +
1
4|𝛽|𝑥4 = 𝐸 > 0
Sus gráficas de retrato fase y curvas solución.
Si 𝛽 > 0 entonces los puntos críticos son: (0,0) y (±√𝑘
𝛽 , 0) . Cada trayectoria es
1
2𝑚𝑦2 +
1
2𝑘𝑥2 −
1
4𝛽𝑥4 = 𝐸 < 0
4.8 PERIODO DE UN PÉNDULO NO LINEAL (SPIEGEL, 1994)
Los movimientos del péndulo para ángulos de valores grandes de 𝜃 y el movimiento
del péndulo por arriba así como la posibilidad de la resistencia proporcional a la
velocidad se consideran en la ecuación general del péndulo no lineal.
𝑑2𝜃
𝑑𝑡2+ 𝑐
𝑑𝜃
𝑑𝑡+ 𝑤2𝑠𝑒𝑛𝜃 = 0
66
El periodo de oscilación no amortiguada para cuando el péndulo se libera desde el
reposo con las condiciones iniciales 𝑥(0) = 𝜃(0) = 𝛼, 𝑦(0) = 𝜃′(0) = 0 está dado
por la siguiente fórmula
𝑇 =2𝜋
𝑤[1 +∑(
1.3… (2𝑛 − 1)
2.4… (2𝑛))
2
𝑘2𝑛∞
𝑛=1
]
= 𝑇0 [1 + (1
2)2
𝑘2 + (1.3
2.4)2
𝑘4 + … ]
Para el periodo T del péndulo no lineal en términos del periodo linealizado 𝑇0 =2𝜋
𝑤
y 𝑘 = 𝑠𝑒𝑛𝛼
2. La serie infinita proporciona el factor
𝑇
𝑇0 mediante el cual el periodo no
lineal T es mayor que el periodo linealizado.
4.9 CARACTERÍSTICAS DE VIBRACIONES LIBRES DE SISTEMAS
DE DOS GRADOS DE LIBERTAD (RAO, 2011)
La teoría de la vibración incluye los movimientos vibratorios y las fuerzas asociadas
con ellos.
En los sistemas vibratorios los grados de libertad se determinan de acuerdo al
número de coordenadas independientes que participan en el movimiento siendo así
se tiene que:
𝑛ú𝑚𝑒𝑟𝑜 𝑑𝑒 𝑔𝑟𝑎𝑑𝑜𝑠 𝑑𝑒 𝑙𝑖𝑏𝑒𝑟𝑡𝑎𝑑 = 𝑛ú𝑚𝑒𝑟𝑜 𝑑𝑒 𝑚𝑎𝑠𝑎𝑠 𝑑𝑒𝑙 𝑠𝑖𝑠𝑡𝑒𝑚𝑎 𝑥 𝑐𝑎𝑛𝑡𝑖𝑑𝑎𝑑 𝑑𝑒
𝑝𝑜𝑠𝑖𝑏𝑙𝑒𝑠 𝑚𝑜𝑣𝑖𝑚𝑖𝑒𝑛𝑡𝑜𝑠 𝑑𝑒 𝑐𝑎𝑑𝑎 𝑚𝑎𝑠𝑎
Se tendrá una ecuación por cada grado de libertad que generalmente son de la
forma acoplada, al tratarse de un sistema de dos grados de libertad con vibración
libre sin amortiguamiento y sin fuerza externa, se tiene que sus ecuaciones son:
𝑚1𝑑2𝑡
𝑑𝑡2+ (𝑘1 + 𝑘2)𝑥1(𝑡) − 𝑘2𝑥2(𝑡) = 0
𝑚2𝑑2𝑡
𝑑𝑡2− 𝑘2𝑥1(𝑡)(𝑘2 + 𝑘3)𝑥2(𝑡)−= 0
Al igual que en los sistemas de un grado de libertad se tienen los elementos:
a. Resorte es un medio para almacenar energía potencial es decir es el medio
que posee elasticidad.
b. Masa e inercia es un medio que conserva la energía cinética.

67
c. Amortiguador que es el medio por el cual la energía vibratoria se convierte
gradualmente en calor o sonido y luego se pierde.
Amortiguamiento viscoso.- Es el mecanismo de amortiguamiento
que es ofrecido por un medio fluido como aire, agua, gas o aceite al
movimiento de un cuerpo en vibración.
Amortiguamiento e Coulomb o de fricción en seco.- La fuerza de
amortiguamiento está dada por una constante pero en dirección
contraria a la del movimiento del cuerpo vibratorio. No es otra cosa
que la fricción entre superficies.
Amortiguamiento debido a un material o sólido.- Se produce
cuando un cuerpo se deforma por efecto de la fricción entre los planos
internos.
4.10 APLICACIONES DE ECUACIONES DIFERENCIALES
4.10.1 INTRODUCCIÓN
Antes de iniciar con la aplicación se recuerda que cuando se libera un cuerpo desde
una altura sobre el suelo, éste cae por la fuerza gravitacional que es la que atrae
todo cuerpo hacia la superficie terrestre. De
acuerdo a la segunda Ley de Newton
establece que la masa de un cuerpo
multiplicado por su aceleración es igual a la
Fuerza que actúa sobre él.
𝐹 = 𝑚𝑎,
en este caso como la aceleración que actúa
es la gravedad y se tiene:
𝐹 = 𝑚𝑔
Figura 4.6. Caída Libre
Si la función de posición de una partícula en un determinado tiempo está dada por
𝑥 = 𝑓(𝑡) y su velocidad se define 𝑣(𝑡) = 𝑓′(𝑡).

68
(1)
(2)
Entonces 𝑑𝑥
𝑑𝑡= 𝑣, y su aceleración es 𝑎 =
𝑑𝑣
𝑑𝑡=𝑑2𝑥
𝑑𝑡2= 𝑔, así se tiene
𝐹 = 𝑚𝑔 = 𝑚𝑑𝑣
𝑑𝑡= 𝑚
𝑑
𝑑𝑡(𝑑𝑥
𝑑𝑡) = 𝑚
𝑑2𝑥
𝑑𝑡2
4.10.2 CAÍDA LIBRE
Problema:
Una masa de 25 g cae desde el reposo bajo la influencia de la gravedad. a)
Establezca el modelo matemático y condiciones para el movimiento, b) utilizando
el modelo establecido encuentre la distancia viajada y la velocidad conseguida 3 s
después de empezar su movimiento.
Modelo Matemático
Para modelar una solución al problema se analizan las condiciones del problema
así:
El cuerpo parte del reposo se tiene que su 𝑣 = 𝑣0 = 0, 𝑡 = 0
𝑔 =𝑑𝑣
𝑑𝑡
Integrando ∫𝑔 𝑑𝑡 = ∫𝑑𝑣
𝑑𝑡 se tiene 𝑣 = 𝑣(𝑡) = 𝑔𝑡 + 𝐶1, dado que 𝑣 = 0 y 𝑡 = 0 se
tendrá que 𝐶1 = 𝑣0, lo que significa que 𝑑𝑥
𝑑𝑡= 𝑔𝑡 + 𝑣0 y al integrar nuevamente se
tiene ∫𝑣 (𝑡)𝑑𝑡 = ∫(𝑔𝑡 + 𝑣0)𝑑𝑡 que resulta 𝑥(𝑡) =1
2𝑔𝑡2 + 𝑣0𝑡 + 𝐶2, así mismo
considerando que 𝑡 = 0 y 𝑣0 = 0 y reemplazando se tiene 𝑥0 = 𝐶2. Por lo tanto
𝑥(𝑡) =1
2𝑔𝑡2 + 𝑣0𝑡 + 𝑥0.
Planteamiento del problema
Datos:
m =25g

69
𝑚 = 25 𝑔 𝑚 → masa
𝑔 = 9.8 𝑚
𝑠
𝑔 → aceleración de la
gravedad
𝑡 = 3 𝑠 𝑡 → tiempo
Determinar:
Literal a)
La ecuación del desplazamiento de la masa
Las condiciones del movimiento
Literal b)
Luego de 3 seg de empezar el movimiento
o Cuál es la velocidad 𝑣(3) = ?
o Cuál es el desplazamiento 𝑥(3) = ?
Solución:
Literal a)
Se utiliza la ecuación (2) para determinar la ecuación
𝑥(𝑡) =1
2𝑔𝑡2 + 𝑣0𝑡 + 𝑥0
Condiciones iniciales 𝑣0 = 0 y 𝑡 = 0
Literal b)
𝑥(𝑡) =1
2𝑔𝑡2
𝑥(𝑡) =1
2(9.8
𝑚
𝑠2(3𝑠)2
𝑥(𝑡) =1
2(9.8
𝑚
𝑠2(9𝑠2))
𝑥(𝑡) = 44.1𝑚.
𝑣(𝑡) = 𝑔𝑡 + 𝑣0
𝑣(𝑡) = 9,8𝑚
𝑠2(3𝑠)
𝑣(𝑡) = 29,4𝑚
𝑠
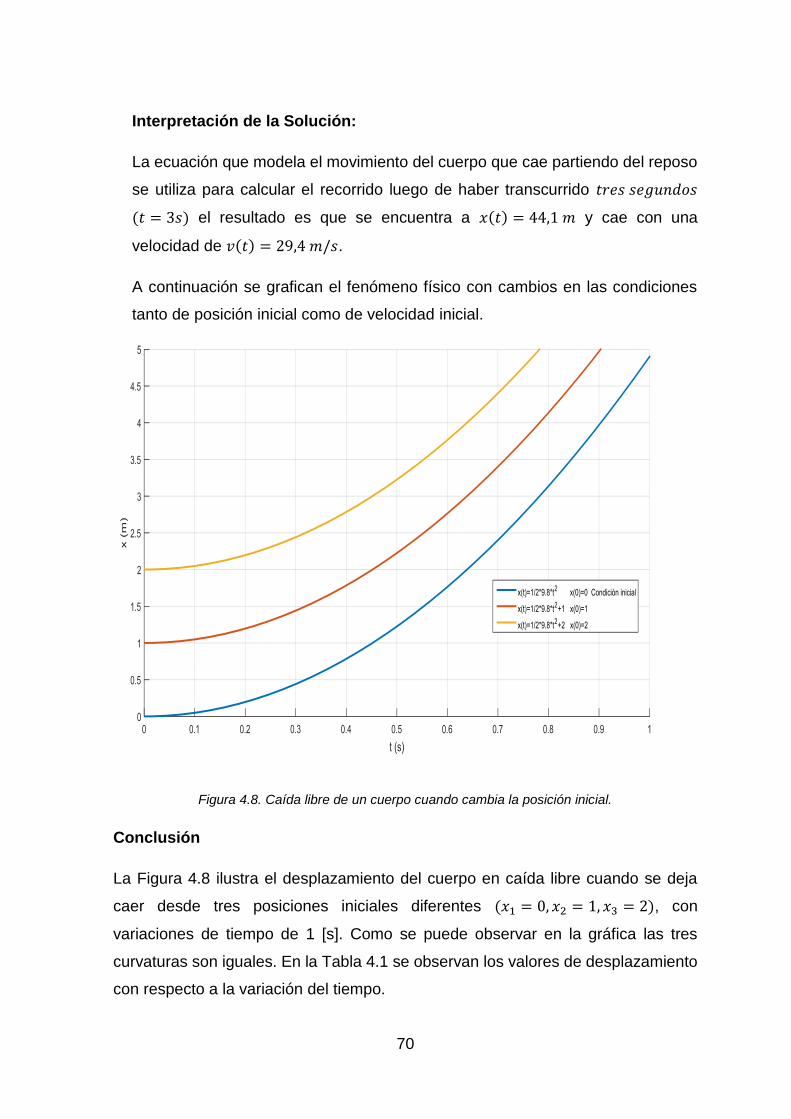
70
Interpretación de la Solución:
La ecuación que modela el movimiento del cuerpo que cae partiendo del reposo
se utiliza para calcular el recorrido luego de haber transcurrido 𝑡𝑟𝑒𝑠 𝑠𝑒𝑔𝑢𝑛𝑑𝑜𝑠
(𝑡 = 3𝑠) el resultado es que se encuentra a 𝑥(𝑡) = 44,1 𝑚 y cae con una
velocidad de 𝑣(𝑡) = 29,4 𝑚/𝑠.
A continuación se grafican el fenómeno físico con cambios en las condiciones
tanto de posición inicial como de velocidad inicial.
Figura 4.8. Caída libre de un cuerpo cuando cambia la posición inicial.
Conclusión
La Figura 4.8 ilustra el desplazamiento del cuerpo en caída libre cuando se deja
caer desde tres posiciones iniciales diferentes (𝑥1 = 0, 𝑥2 = 1, 𝑥3 = 2), con
variaciones de tiempo de 1 [s]. Como se puede observar en la gráfica las tres
curvaturas son iguales. En la Tabla 4.1 se observan los valores de desplazamiento
con respecto a la variación del tiempo.
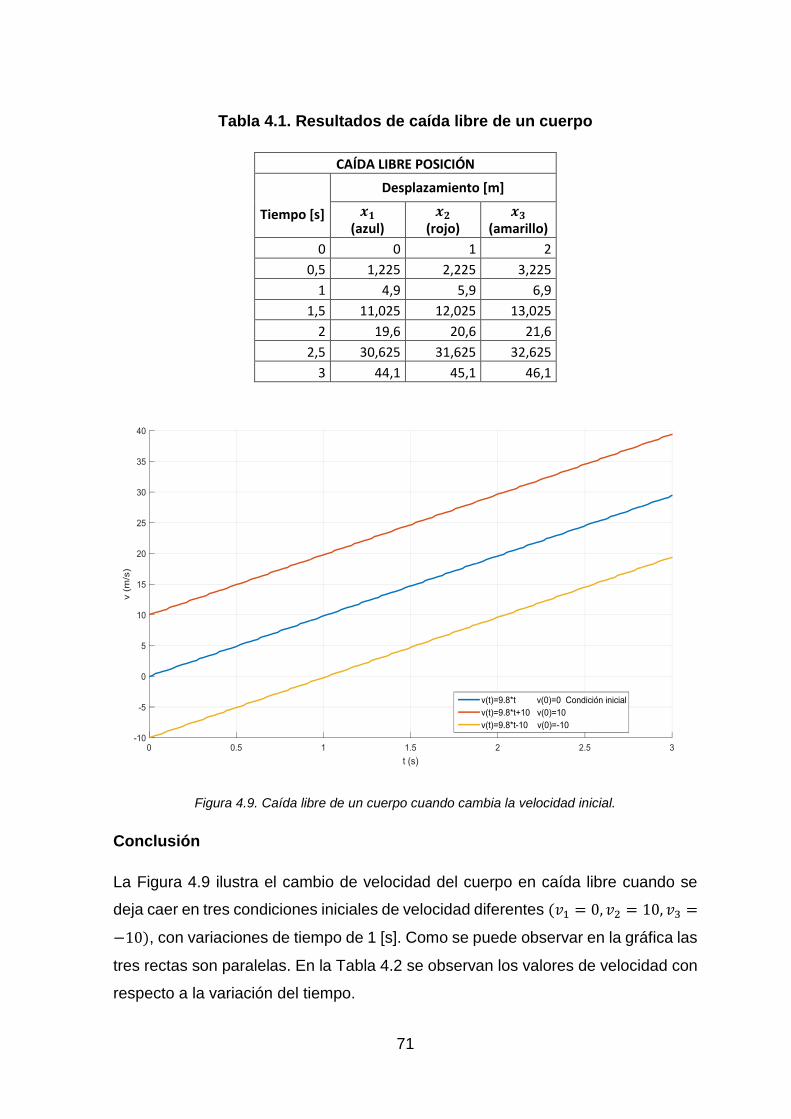
71
Tabla 4.1. Resultados de caída libre de un cuerpo
CAÍDA LIBRE POSICIÓN
Tiempo [s]
Desplazamiento [m]
𝒙𝟏 (azul)
𝒙𝟐 (rojo)
𝒙𝟑 (amarillo)
0 0 1 2
0,5 1,225 2,225 3,225
1 4,9 5,9 6,9
1,5 11,025 12,025 13,025
2 19,6 20,6 21,6
2,5 30,625 31,625 32,625
3 44,1 45,1 46,1
Figura 4.9. Caída libre de un cuerpo cuando cambia la velocidad inicial.
Conclusión
La Figura 4.9 ilustra el cambio de velocidad del cuerpo en caída libre cuando se
deja caer en tres condiciones iniciales de velocidad diferentes (𝑣1 = 0, 𝑣2 = 10, 𝑣3 =
−10), con variaciones de tiempo de 1 [s]. Como se puede observar en la gráfica las
tres rectas son paralelas. En la Tabla 4.2 se observan los valores de velocidad con
respecto a la variación del tiempo.

72
(1)
(2)
Tabla 4.2. Resultados de velocidad de caída libre de un cuerpo
Caída libre –Velocidad
Tiempo [s]
Velocidad [m/s]
𝒗𝟏 (azul)
𝒗𝟐 (rojo)
𝒗𝟑 (amarillo)
0 0 10 -10
1 9,8 19,8 -0,2
2 19,6 29,6 9,6
3 29,4 39,4 19,4
4 39,2 49,2 29,2
5 49 59 39
6 58,8 68,8 48,8
4.10.3 RESORTE VIBRANTE MOVIMIENTO ARMÓNICO SIMPLE
4.10.3.1 Problema 1
Un cuerpo cuya masa es de 2 kg suspendido de un resorte lo estira 5 centímetros,
si el peso se estira 25 centímetros hacia abajo de su posición de equilibrio y se
suelta: a) Establezca el modelo matemático y condiciones que describan el
movimiento b) Utilizando el modelo matemático del literal anterior encuentre la
velocidad y posición del cuerpo como una función del tiempo c) Encuentre la
amplitud, periodo, frecuencia del movimiento d) Determine la posición, velocidad,
aceleración, 𝜋
64𝑠𝑒𝑔 después de soltar el peso.
Modelo Matemático
|𝐹| = 𝑘|𝑥|
𝑚𝑑2𝑥
𝑑𝑡2= −𝑘𝑥
Planteamiento del problema
Datos:
𝑠 = 10 𝑐𝑚 𝑠 → desplazamiento del resorte debido
a la masa
𝑚 = 2 𝑘𝑔 𝑚 → masa 𝑥 s
x

73
𝑥 = 25 𝑐𝑚 𝑥 → desplazamiento del resorte debido
al estiramiento.
Determinar:
Literal a)
La ecuación del desplazamiento de la masa
Las condiciones del movimiento
Literal b)
Velocidad, y
Posición en un instante
Literal c)
Amplitud
Frecuencia
Periodo
Literal d)
En el instante 𝜋
6
Cuál es la posición 𝑥 (𝜋
6) = ?
Cuál es el velocidad 𝑣 (𝜋
6) = ?
Cuál es el aceleración 𝑣 (𝜋
6) = ?
Solución
Literal a)
Para determinar el valor de 𝑘 elasticidad del resorte con (1).
|𝐹| = 𝑘|𝑥|
2 = 𝑘1
0,1
𝑘 =2
10
Se aplica (2), se tiene la ecuación diferencial en su forma:

74
(3)
𝑚𝑑2𝑥
𝑑𝑡2= −𝑘𝑥
2 ∙𝑑2𝑥
𝑑𝑡2= −
2
10𝑥
𝑑2𝑥
𝑑𝑡2+4
10𝑥 = 0
Las condiciones iniciales son que 𝑡 = 0, 𝑣 =𝑑𝑥
𝑑𝑡= 0, 𝑥 =
1
4𝑚
Literal b)
Dado que la ecuación auxiliar es 𝑟2 +4
10= 0, al solucionarla se tiene que 𝑟
tiene raíces ±√10
5𝑖, que al ser números complejos la solución es de la
siguiente forma, por lo tanto la posición en un instante 𝑡 es:
𝑥(𝑡) = 𝐴 cos√10
5𝑡 + 𝐵𝑠𝑒𝑛
√10
5𝑡
Así mismo en las condiciones iniciales se determinó que 𝑣 = 0 cuando 𝑡 =
0 por lo tanto se calcula el valor de 𝑣 en 𝑑𝑥
𝑑𝑡.
𝑥 = 𝐴 cos√10
5𝑡 + 𝐵𝑠𝑒𝑛
√10
5𝑡
𝑑𝑥
𝑑𝑡= −𝐴(
√10
5) 𝑠𝑒𝑛
√10
5𝑡 +√10
5𝐵 cos
√10
5𝑡
0 = −𝐴(√10
5) 𝑠𝑒𝑛
√10
5(0) + (
√10
5)𝐵 cos
√10
5(0)
𝐵 = 0
Quedando la solución para encontrar la distancia en un tiempo 𝑡:
𝑥 =1
4cos√10
5𝑡
Para determinar la velocidad se tiene que 𝑣 =𝑑𝑥
𝑑𝑡

75
𝑥 =1
4cos√10
5𝑡
𝑣(𝑡) =𝑑𝑥
𝑑𝑡= −
1
4(√10
5) 𝑠𝑒𝑛
√10
5𝑡
𝑣(𝑡) = −√10
20𝑠𝑒𝑛
√10
5𝑡
Literal c)
Dadas las condiciones iniciales 𝑡 = 0 se calcula el valor de A en la ecuación
de 𝑥 así:
1
4= 𝐴𝑐𝑜𝑠
√10
5(0) + 𝐵𝑠𝑒𝑛
√10
5(0)
𝐴 =1
4
La amplitud es el máximo desplazamiento que tiene la masa a partir de la
posición de equilibrio, por lo tanto en este problema se tiene que 𝐴𝑚𝑝𝑙𝑖𝑡𝑢𝑑 =
25 𝑐𝑒𝑛𝑡í𝑚𝑒𝑡𝑟𝑜𝑠, correspondiente al valor de A.
El periodo es el tiempo que tarda en dar un ciclo completo, este tiene relación
con la frecuencia angular, así:
Frecuencia angular:
𝑤 = √𝑘
𝑚=√2102= √
1
10
Frecuencia:
𝑓 =𝑤
2𝜋=
√ 110
6.28= 0,4967 𝑐/𝑠
Periodo:
𝑇 =2𝜋
𝑤=6,28
√ 110
= 2,013 𝑠
Literal d)
Cuando ha pasado el tiempo 𝑡 =𝜋
16 se aplica (3) y se tiene que la masa se
encuentra a:
(4)

76
𝑥(𝑡) =1
4cos√10
5(𝜋
16) =
1
4cos(7,12°)
𝑥(𝑡) =1
4(0.9923) = 0,2481 𝑚
Cuando ha pasado el tiempo 𝑡 =𝜋
16 se aplica (4) y se tiene que la velocidad
en ese instante encuentra a:
𝑣(𝑡) =𝑑𝑥
𝑑𝑡= −(
√10
20) sen
√10
5𝑡 = −(
√10
20) sen
√10
5(𝜋
64) = −(
√10
20) sen (1,779°)
𝑣(𝑡) = −(√10
20) (0.031) = −0,0498 𝑚 𝑠⁄
Para el cálculo de la aceleración se realiza a partir de la velocidad:
𝑎(𝑡) =𝑑𝑣
𝑑𝑡=1
10𝑐𝑜𝑠
√10
5𝑡
𝑎(𝑡) =1
10𝑐𝑜𝑠
√10
5𝑡 =
1
10𝑐𝑜𝑠
√10
5(𝜋
64) =
1
10cos(1,779°)
𝑎(𝑡) = 0.0999 𝑚 𝑠2⁄
Interpretación de resultados
Los resultados anteriores indican que cuando ha transcurrido 𝜋
16 la masa se
encuentra a 24,8 centímetros hacia abajo del punto de equilibrio y de regreso
viajando hacia arriba a una velocidad de 0,0498𝑚
𝑠 con aceleración de 0,099
𝑚
𝑠2.
A continuación se muestran las gráficas correspondientes a las condiciones
iniciales del problema y cambios en las mismas.
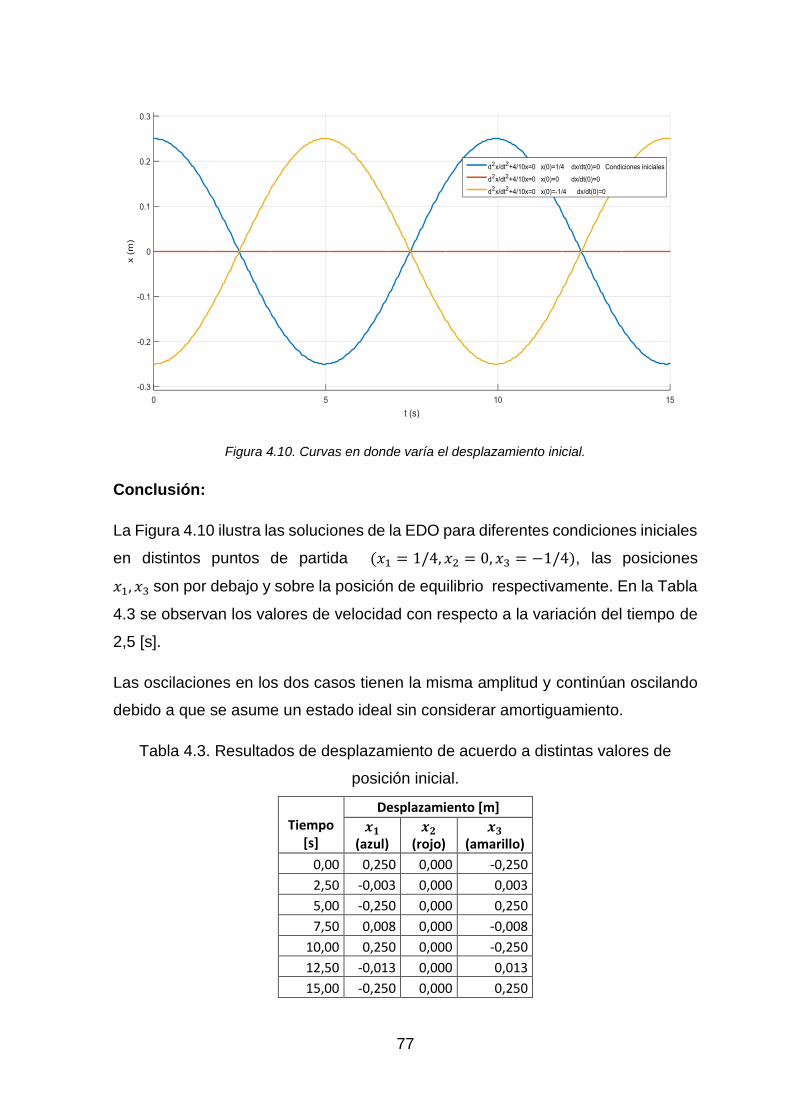
77
Figura 4.10. Curvas en donde varía el desplazamiento inicial.
Conclusión:
La Figura 4.10 ilustra las soluciones de la EDO para diferentes condiciones iniciales
en distintos puntos de partida (𝑥1 = 1/4, 𝑥2 = 0, 𝑥3 = −1/4), las posiciones
𝑥1, 𝑥3 son por debajo y sobre la posición de equilibrio respectivamente. En la Tabla
4.3 se observan los valores de velocidad con respecto a la variación del tiempo de
2,5 [s].
Las oscilaciones en los dos casos tienen la misma amplitud y continúan oscilando
debido a que se asume un estado ideal sin considerar amortiguamiento.
Tabla 4.3. Resultados de desplazamiento de acuerdo a distintas valores de
posición inicial.
Tiempo
[s]
Desplazamiento [m]
𝒙𝟏 (azul)
𝒙𝟐 (rojo)
𝒙𝟑 (amarillo)
0,00 0,250 0,000 -0,250
2,50 -0,003 0,000 0,003
5,00 -0,250 0,000 0,250
7,50 0,008 0,000 -0,008
10,00 0,250 0,000 -0,250
12,50 -0,013 0,000 0,013
15,00 -0,250 0,000 0,250

78
(1)
(3)
(2)
(5)
(4)
(6)
(7)
4.10.3.2 Problema 2
Una masa de 3 𝑘𝑔. está unida a un resorte con rigidez 𝑘 = 48𝑁/𝑚. La masa se
desplaza ½ 𝑚 a la izquierda del punto de equilibrio y recibe una velocidad de
2𝑚/𝑠𝑒𝑔 hacia la derecha. La fuerza de amortiguamiento es despreciable.
Determine el modelo matemático para el movimiento de la masa, junto con su
amplitud, periodo y frecuencia. ¿Cuánto tiempo después de la liberación del resorte
pasa la masa por la posición de equilibrio?
Modelo Matemático
Como se ha venido trabajando en los ejercicios anteriores se tiene que la
ecuación para vibraciones libres sin amortiguamiento es:
𝑃
𝑔
𝑑2𝑥
𝑑𝑡2= −𝑘𝑥
O lo que es lo mismo
𝑚𝑑2𝑥
𝑑𝑡2= −𝑘𝑥
Si se divide la ecuación para 𝑚 nos queda
𝑑2𝑥
𝑑𝑡2= −
𝑘
𝑚𝑥
Dado que 𝑤 = √𝑘
𝑚, se tiene
𝑑2𝑥
𝑑𝑡2= −𝑤2𝑥
Solución de ecuaciones diferenciales: Raíces en los números complejos
𝑥(𝑡) = 𝐶1 cos𝑤𝑡 + 𝐶2 𝑠𝑒𝑛 𝑤𝑡
Que se puede expresar de forma alternativa
𝑥(𝑡) = 𝐴 𝑠𝑒𝑛(𝑤𝑡 + 𝜙)

79
Planteamiento del problema
Datos:
𝑘 = 48𝑁
𝑚 𝑘 → elasticidad del resorte
𝑚 = 3 𝑘𝑔 𝑚 → masa
𝑥 =1
2 𝑚 𝑥 → desplazamiento
𝑣 = 2𝑚
𝑠 𝑣 → velocidad
Determinar
Literal a)
La ecuación del desplazamiento de la masa
Amplitud
Frecuencia
Periodo
Literal b)
En el instante 𝑡 cuando 𝑥(𝑡) = 0 luego de liberar el resorte
𝑡 = ?
Solución:
Literal a)
Con (4) se encuentra el valor de la frecuencia angular
𝑤 = √𝑘
𝑚= √
48
3= 4
𝑟𝑎𝑑
𝑠
Entonces según (5) la ecuación del movimiento queda de la siguiente
manera:
𝑑2𝑥
𝑑𝑡2= −42𝑥
𝑑2𝑥
𝑑𝑡2+ 16𝑥 = 0

80
En este caso la ecuación auxiliar es de la forma 𝑟2 + 𝑤2 = 0 se tendrá raíces
±𝑤𝑖 que implica la solución de ±4𝑖, cuya solución es de acuerdo a (6)
𝑥(𝑡) = 𝐶1 cos 4𝑡 + 𝐶2 𝑠𝑒𝑛 4𝑡
Ahora se calculan los valores de 𝐶1 y 𝐶2.
Las condiciones iniciales son 𝑥(0) = −0,5𝑚 puesto se desplaza a la
izquierda del punto de equilibrio.
Con 𝑥(0) = −0,5
𝑥(𝑡) = 𝐶1 cos 4𝑡 + 𝐶2 𝑠𝑒𝑛 4𝑡
−0,5 = 𝐶1 cos 4(0) + 𝐶2 𝑠𝑒𝑛 4(0)
−0,5 = 𝐶1
Si se tiene 𝑣(𝑡) = 𝑥’ =𝑑𝑥
𝑑𝑡= 2𝑚/𝑠, cuando 𝑡 = 0
𝑣(𝑡) = −𝐶1(4) sen 4𝑡 + 𝐶2(4) 𝑐𝑜𝑠 4𝑡
2 = −𝐶1(4) sen 4(0) + 𝐶2(4) 𝑐𝑜𝑠 4(0)
2 = 𝐶2(4) 𝑐𝑜𝑠 4(0)
4𝐶2 = 2
𝐶2 =1
2
Por lo tanto la ecuación del movimiento en un instante 𝑡 es la siguiente:
𝑥(𝑡) = −1
2cos 4𝑡 +
1
2 𝑠𝑒𝑛 4𝑡
Según (7), se puede expresar de forma alternativa
𝑥(𝑡) = 𝐴 𝑠𝑒𝑛(𝑤𝑡 + 𝜙)
En donde 𝐴 = √𝐶12 + 𝐶2
2 = √(−1
2)2
+ (1
2)2
= √2
4=√2
2

81
𝜙 Corresponde al ángulo fase y se calcula:
tan𝜙 =𝐶1𝐶2=−1212
= −1
Dado que 𝐶1 es negativo y 𝐶2 es positivo se tiene que 𝜙 está en el segundo
cuadrante, por lo tanto 𝜙 = 𝑡𝑎𝑛−1(−1) = −45°, en radianes sería 𝜙 = −𝜋
4 y
como corresponde al segundo cuadrante se tiene 135° que en radianes
significa 𝜙 =3
4𝜋
Quedando
𝑥(𝑡) =√2
2 𝑠𝑒𝑛 (4𝑡 −
𝜋
4) =
√2
2 𝑠𝑒𝑛 (4𝑡 +
3𝜋
4)
𝐴 Representa la Amplitud que tiene ya se calculó y su valores 𝐴 =√2
2
El periodo es igual a
𝑇 =2𝜋
𝑤=2𝜋
4=𝜋
2
La frecuencia es:
𝑓 =1
𝑇=1𝜋2
=2
𝜋
Literal b)
Para saber cuándo pasa por la posición de equilibrio se tiene que 𝑥(𝑡) = 0
𝑥(𝑡) =√2
2 𝑠𝑒𝑛 (4𝑡 +
3𝜋
4)
Resolviendo en términos de t se tiene que esta ecuación siempre se
satisface cuando
4𝑡 + 𝜙 = 𝑛𝜋
82
Por lo tanto
4𝑡 +3𝜋
4= 𝑛𝜋
4𝑡 = 𝑛𝜋 −3𝜋
4
4𝑡 =4𝑛𝜋 − 3𝜋
4
𝑡 =4𝑛𝜋 − 3𝜋
16
Haciendo n = 1 que sería la primera vez que pasa por la posición de equilibrio
se tiene:
𝑡 =4𝜋 − 3𝜋
16=𝜋
16
Interpretación de resultados
La ecuación para calcular el desplazamiento está dado por 𝑥(𝑡) =
𝐴 𝑠𝑒𝑛(𝑤𝑡 + 𝜙) la amplitud es de √2
2, la frecuencia
2
𝜋, el periodo
𝜋
2 para las
condiciones iniciales dadas.
Luego de liberar el resorte cuando 𝑡 =𝜋
16𝑠𝑒𝑔 el cuerpo pasa por la posición
de equilibrio.
A continuación se presentan las gráficas correspondientes al problema y
cambios en la posición inicial.
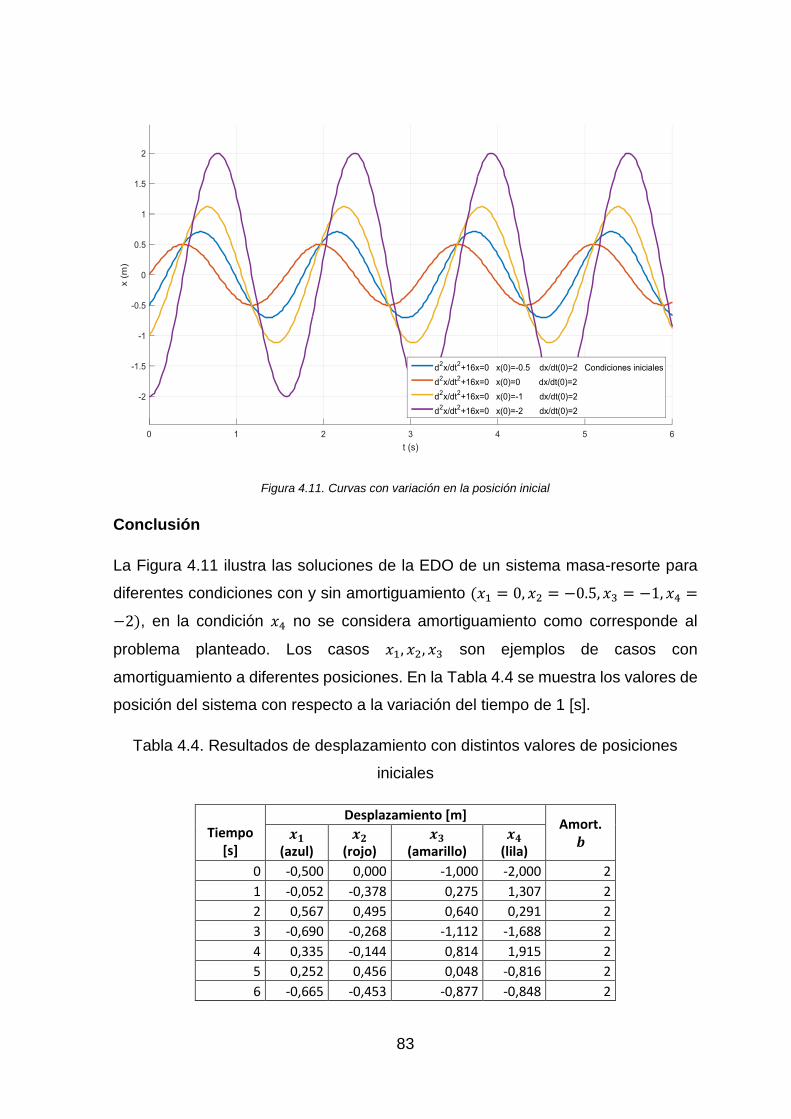
83
Figura 4.11. Curvas con variación en la posición inicial
Conclusión
La Figura 4.11 ilustra las soluciones de la EDO de un sistema masa-resorte para
diferentes condiciones con y sin amortiguamiento (𝑥1 = 0, 𝑥2 = −0.5, 𝑥3 = −1, 𝑥4 =
−2), en la condición 𝑥4 no se considera amortiguamiento como corresponde al
problema planteado. Los casos 𝑥1, 𝑥2, 𝑥3 son ejemplos de casos con
amortiguamiento a diferentes posiciones. En la Tabla 4.4 se muestra los valores de
posición del sistema con respecto a la variación del tiempo de 1 [s].
Tabla 4.4. Resultados de desplazamiento con distintos valores de posiciones
iniciales
Tiempo
[s]
Desplazamiento [m] Amort. 𝒃
𝒙𝟏 (azul)
𝒙𝟐 (rojo)
𝒙𝟑 (amarillo)
𝒙𝟒 (lila)
0 -0,500 0,000 -1,000 -2,000 2
1 -0,052 -0,378 0,275 1,307 2
2 0,567 0,495 0,640 0,291 2
3 -0,690 -0,268 -1,112 -1,688 2
4 0,335 -0,144 0,814 1,915 2
5 0,252 0,456 0,048 -0,816 2
6 -0,665 -0,453 -0,877 -0,848 2

84
(1)
(2)
4.10.3.3 Problema 3
Del siguiente modelo de un resorte en vibración con amortiguamiento. Determine
la ecuación que modela el movimiento para el resorte en vibración considerando
amortiguamiento. Además, de acuerdo a los siguientes datos calcule la frecuencia
de oscilación para el sistema masa – resorte.
Modelo Matemático
Ecuación diferencial que modela el sistema masa resorte
𝑚𝑥’’ + 𝑏𝑥′ + 𝑘𝑦 = 01
Solución a la ecuación diferencial
𝑥(𝑡) = 𝐶1𝑒𝛼𝑡𝑐𝑜𝑠𝛽𝑡 + 𝐶2𝑒
𝛼𝑡𝑠𝑒𝑛𝐵𝑡|
Planteamiento del problema
Datos:
𝑘 = 250𝑘𝑔
𝑠2 𝑘 → elasticidad del resorte
𝑚 = 10 𝑘𝑔 𝑚 → masa
𝑏 = 60 𝑘𝑔
𝑠𝑒𝑔 𝑏 → amortiguamiento
𝑥(0) = 0,3𝑚 𝑥(0) → desplazamiento inicial
𝑥′(0) = −0,1𝑚
𝑠 𝑥′(0) → velocidad inicial
Determinar:
𝒂) 𝑥(𝑡): ?
𝒃) 𝑓: ?
Solución
Literal a)
La ecuación que modela este caso de sistema según (1) es:
10𝑥’’ + 60𝑥′ + 250𝑦 = 0
𝑥’’ + 6𝑥′ + 25𝑦 = 0
1 Notación de Leibetz

85
El polinomio característico equivalente es 𝑟2 + 6𝑟 + 25 = 0, cuya solución es
𝑟1 = −3 + 4𝑖 y 𝑟2 = −3 − 4𝑖, luego al remitirnos nuevamente a la ecuación
diferencial tiene como solución:
𝑥(𝑡) = 𝐶1𝑒−3𝑡𝑐𝑜𝑠4𝑡 + 𝐶2𝑒
−3𝑡𝑠𝑒𝑛4𝑡
Se determinar la ecuación del movimiento para los valores iniciales
𝑥(0) = 0,3𝑚 y luego con 𝑥’(0) = 0,1 𝑚/𝑠.
𝑥(𝑡) = 𝐶1𝑒−3𝑡𝑐𝑜𝑠4𝑡 + 𝐶1𝑒
−3𝑡𝑠𝑒𝑛4𝑡
𝑥(0) = 0,3 𝑚
0,3 = 𝐶1𝑒−3(0)𝑐𝑜𝑠4(0) + 𝐶1𝑒
−3(0)𝑠𝑒𝑛4(0)
0,3 = 𝐶1
𝑥′(𝑡) = −3𝐶1𝑒−3𝑡𝑐𝑜𝑠4𝑡 − 4𝐶1𝑒
−3𝑡𝑠𝑒𝑛4𝑡 − 3𝐶2𝑒−3𝑡𝑠𝑒𝑛4𝑡 + 4𝐶2𝑒
−3𝑡𝑠𝑒𝑛4𝑡
= 𝑒−3𝑡𝑐𝑜𝑠4𝑡(−3𝐶1 + 4𝐶2) + 𝑒−3𝑡𝑠𝑒𝑛4𝑡(−4𝐶1 − 3𝐶2)
Como 𝑥′(𝑡) = −0,1 cuando 𝑡 = 0 entonces se tiene
𝑒−3𝑡𝑐𝑜𝑠4𝑡(−3𝐶1 + 4𝐶2) + 𝑒−3𝑡𝑠𝑒𝑛4𝑡(−4𝐶1 − 3𝐶2) = 0,1
𝑒−3𝑡𝑐𝑜𝑠4𝑡(−3𝐶1 + 4𝐶2) = 0,1
Reemplazando 𝐶1 se tiene que:
−3(0,3) + 4𝐶2 = −0,1
−0,9 + 4𝐶2 = −0,1
4𝐶2 = −0,1 + 0,9
𝐶2 = 0,4
Por lo tanto la ecuación de 𝑥(𝑡) para las condiciones iniciales dadas es:
𝑥(𝑡) = 0,3𝑒−3𝑡𝑐𝑜𝑠4𝑡 + 0,2𝑒−3𝑡𝑠𝑒𝑛4𝑡
Literal b)
Para calcular la frecuencia de oscilación se aplica la fórmula
𝑓 =𝐵
2𝜋
Se calcula el valor de B y se obtiene:
𝐵 =√4𝑚𝑘 − 𝑏2
2𝑚=√4(10)(250) − (602)
2(10)=√10000 − 3600
20
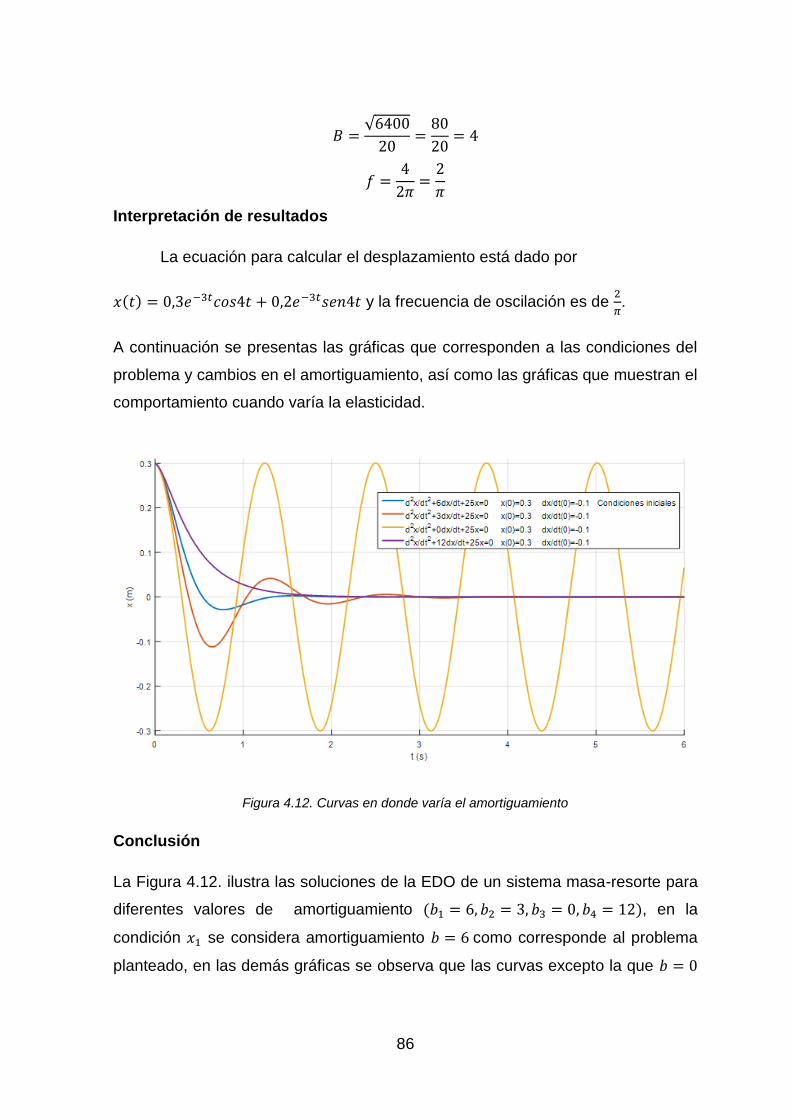
86
𝐵 =√6400
20=80
20= 4
𝑓 =4
2𝜋=2
𝜋
Interpretación de resultados
La ecuación para calcular el desplazamiento está dado por
𝑥(𝑡) = 0,3𝑒−3𝑡𝑐𝑜𝑠4𝑡 + 0,2𝑒−3𝑡𝑠𝑒𝑛4𝑡 y la frecuencia de oscilación es de 2
𝜋.
A continuación se presentas las gráficas que corresponden a las condiciones del
problema y cambios en el amortiguamiento, así como las gráficas que muestran el
comportamiento cuando varía la elasticidad.
Figura 4.12. Curvas en donde varía el amortiguamiento
Conclusión
La Figura 4.12. ilustra las soluciones de la EDO de un sistema masa-resorte para
diferentes valores de amortiguamiento (𝑏1 = 6, 𝑏2 = 3, 𝑏3 = 0, 𝑏4 = 12), en la
condición 𝑥1 se considera amortiguamiento 𝑏 = 6 como corresponde al problema
planteado, en las demás gráficas se observa que las curvas excepto la que 𝑏 = 0

87
decaen hasta que llegan a cero. En la Tabla 4.5 se muestra los valores de posición
del sistema con respecto a la variación del tiempo de 1 [s].
Tabla 4.5. Resultados de desplazamiento con distintas valores de
amortiguamiento.
Tiempo [s]
Desplazamiento 𝒙(𝒕) [m]
𝒙𝟏para 𝑏 = 6 (azul)
𝒙𝟐 para 𝑏 = 3 (rojo)
𝒙𝟑 para 𝑏 = 0 (amarillo)
𝒙𝟒para 𝑏 = 12 (violeta)
0 0,3 0,3 0,3 0,3
1 -0,0172987 -0,01251242 0,10427714 0,02775274
2 0,00038228 -0,01525594 -0,24084104 0,00189706
3 1,80E-05 0,00023302 -0,24091213 0,00012963
4 -2,12E-06 0,0007655 0,10416571 8,86E-06
5 9,33E-08 7,96E-06 0,30000788 6,05E-07
6 -8,20E-10 -3,79E-05 0,06603607 4,14E-08
Figura 4.13. Curvas en donde varía la constante de elasticidad
Conclusión
La Figura 4.13 ilustra las soluciones de la EDO de un sistema masa-resorte para
diferentes valores de elasticidad (𝑘1 = 25, 𝑘2 = 10, 𝑘3 = 5, 𝑘4 = 50), con una misma
condición de amortiguamiento b=6 para todos los casos. Para una elasticidad
mayor el resorte oscila más antes de llegar nuevamente a su posición equilibrio. En
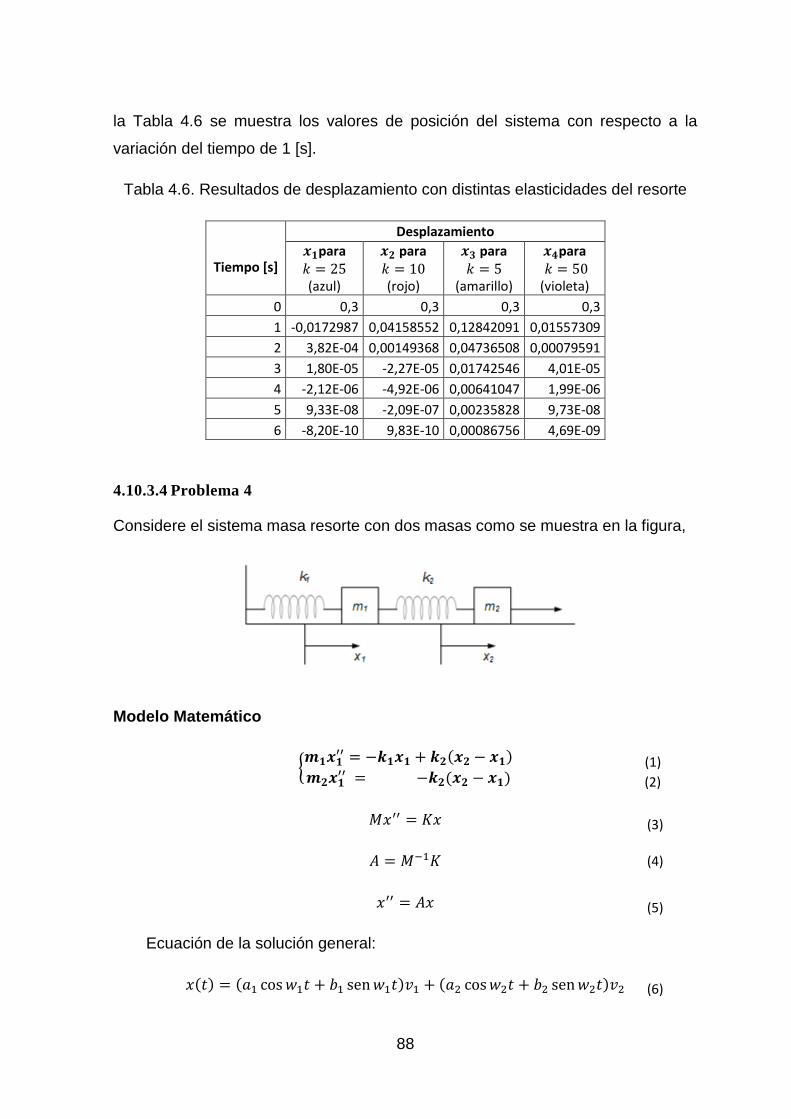
88
(1)
(3)
(2)
(4)
(5)
(6)
la Tabla 4.6 se muestra los valores de posición del sistema con respecto a la
variación del tiempo de 1 [s].
Tabla 4.6. Resultados de desplazamiento con distintas elasticidades del resorte
Tiempo [s]
Desplazamiento
𝒙𝟏para 𝑘 = 25 (azul)
𝒙𝟐 para 𝑘 = 10 (rojo)
𝒙𝟑 para 𝑘 = 5
(amarillo)
𝒙𝟒para 𝑘 = 50 (violeta)
0 0,3 0,3 0,3 0,3
1 -0,0172987 0,04158552 0,12842091 0,01557309
2 3,82E-04 0,00149368 0,04736508 0,00079591
3 1,80E-05 -2,27E-05 0,01742546 4,01E-05
4 -2,12E-06 -4,92E-06 0,00641047 1,99E-06
5 9,33E-08 -2,09E-07 0,00235828 9,73E-08
6 -8,20E-10 9,83E-10 0,00086756 4,69E-09
4.10.3.4 Problema 4
Considere el sistema masa resorte con dos masas como se muestra en la figura,
Modelo Matemático
𝒎𝟏𝒙𝟏
′′ = −𝒌𝟏𝒙𝟏 + 𝒌𝟐(𝒙𝟐 − 𝒙𝟏)
𝒎𝟐𝒙𝟏′′ = −𝒌𝟐(𝒙𝟐 − 𝒙𝟏)
𝑀𝑥′′ = 𝐾𝑥
𝐴 = 𝑀−1𝐾
𝑥′′ = 𝐴𝑥
Ecuación de la solución general:
𝑥(𝑡) = (𝑎1 cos𝑤1𝑡 + 𝑏1 sen𝑤1𝑡)𝑣1 + (𝑎2 cos𝑤2𝑡 + 𝑏2 sen𝑤2𝑡)𝑣2

89
Planteamiento del Problema
Datos:
𝑘1 = 100𝑁
𝑚 𝑘1 → elasticidad del resorte 1
𝑚1 = 2 𝑘𝑔 𝑚1 → masa del cuerpo 1
𝑘2 = 50 𝑁
𝑚 𝑘2 → elasticidad del resorte 1
𝑚2 = 1 𝑘𝑔 𝑚2 → masa del cuerpo 1
Determinar:
Las ecuaciones soluciones del sistema planteado
𝑥(𝑡): ?
Solución
A partir de (1) y (2) se obtiene la matriz 𝑀 y la Matriz 𝐾:
𝑀 = [2 00 1
], 𝐾 = [−150 5050 −50
]
De acuerdo al modelo en (3) se tiene
[2 00 1
] 𝑥′′ = [−150 5050 −50
] 𝑥
Para determinar 𝐴 se trabaja con (4)
𝑀−1 =𝐴𝑑𝑗(𝑀)
|𝑀|=[1 00 2
]
2= [1
20
0 1
]
Por lo tanto:𝐴 = [1
20
0 1] [−150 5050 −50
] = [−75 2550 −50
]
Por (5) se tiene:
𝑥′′ = [−75 2550 −50
] 𝑥

90
𝐴 − 𝜆𝐼 = [−75 2550 −50
] − [𝜆 00 𝜆
] = [−75 − 𝜆 2550 −50 − 𝜆
]
Resolviendo
|𝐴 − 𝜆𝐼| = |−75 − 𝜆 2550 −50 − 𝜆
| = (−75 − 𝜆)(−50 − 𝜆) − 50(25)
= 𝜆2 + 125𝜆 + 2500
= (𝜆 + 25)(𝜆 + 100) = 0
Los valores propios son: 𝜆1 = −25 , 𝜆2 = −100
Dado que los valores propios son negativos se tienen soluciones con frecuencias
circulares.
Para 𝜆1 = −25 se calcula el vector propio (𝐴 − 𝜆𝐼)𝑣1 = 0
[−75 + 25 2550 −50 + 25
] [𝑥1𝑦1] = [
00]
[−50 2550 −25
] [𝑥1𝑦1] = [
00]
Se tiene
−50𝑥1 + 25𝑦1 = 0 50𝑥1 − 25𝑦1 = 0
Las ecuaciones del sistema son dependientes lo que permite asignar un valor a 𝑥1,
en este caso 𝑥1 = 1, calculando 𝑦1 en la primera ecuación se tiene:
−50𝑥1 + 25𝑦1 = 0
−50(1) + 25𝑦1 = 0
25𝑦1 = 50
𝑦1 = 2
Por lo tanto el vector propio asociado al valor propio 𝜆 = −25 es
𝑣1 = [1,2]
Para 𝜆1 = −100 se calcula el vector propio (𝐴 − 𝜆𝐼)𝑣2 = 0
[−75 + 100 25
50 −50 + 100] [𝑥2𝑦2] = [
00]
[25 2550 50
] [𝑥2𝑦2] = [
00]

91
Se tiene
25𝑥2 + 25𝑦2 = 0 50𝑥2 − 25𝑦2 = 0
Las ecuaciones del sistema son dependientes lo que permite asignar un valor a 𝑥,
en éste caso 𝑥2 = 1, calculando 𝑦 en la primera ecuación se tiene:
25𝑥2 + 25𝑦2 = 0
25(1) + 25𝑦2 = 0
25𝑦2 = −25
𝑦2 = −1
Por lo tanto el vector propio asociado al valor propio 𝜆 = −100 es
𝑣2 = [1,−1]
La solución general está dada por:
𝑥(𝑡) = (𝑎1 cos 5𝑡 + 𝑏1 sen 5𝑡)𝑣1 + (𝑎2 cos 10𝑡 + 𝑏2 sen 10𝑡)𝑣2
𝑥(𝑡) = (𝑎1 cos 5𝑡 + 𝑏1 sen 5𝑡) [12] + (𝑎2 cos 10𝑡 + 𝑏2 sen 10𝑡) [
1,−1]
Si 𝐶1 = √𝑎12 + 𝑏1
2 y cos 𝛼1 =𝑎1
𝐶1 y sen𝛼1 =
𝑏1
𝐶1
𝑥1(𝑡) = (𝑎1 cos 5𝑡 + 𝑏1 sen 5𝑡) [12] = 𝐶1𝑐𝑜𝑠(5𝑡 − 𝛼1) [
12]
𝑥2(𝑡) = (𝑎2 cos 5𝑡 + 𝑏2 sen 10𝑡) [1−1] = 𝐶2𝑐𝑜𝑠(10𝑡 − 𝛼2) [
1−1]
Interpretación de los resultados:
La oscilación con frecuencia 𝑤 = 5 es en el mismo sentido y la amplitud del
movimiento de la segunda masa es el doble de la primera.
La oscilación con frecuencia 𝑤 = 10 es en sentido contrario y la amplitud del
movimiento de la segunda masa es el mismo de la primera.
A continuación se muestra las gráficas generadas por el sistema del problema y
con cambios en posición inicial

92
Figura 4.14. Curvas en donde varía la posición inicial de las masas
Conclusión
La Figura 4.14 ilustra las soluciones de la EDO de un sistema de dos masas-
resortes acoplados para diferentes condiciones de posición inicial (𝑥1 = 10, 𝑥2 =
20). La oscilación con frecuencia 𝑤 = 5 es en el mismo sentido y la amplitud del
movimiento de la segunda masa es el doble de la primera.
En la Tabla 4.7 se muestra los valores de posición del sistema con respecto a la
variación del tiempo de 1 [s].
Tabla 4.7. Resultados de sistema masas acopladas con condiciones de
desplazamiento diferentes
Tiempo [s]
Desplazamiento Sistema
𝒙𝟏 Masa 1 (azul)
𝒙𝟏 Masa 2 (rojo)
0 10 20
1 -8,01143616 -16,0228723
2 2,83662185 5,67324371
3 3,46635318 6,93270636
4 -8,39071529 -16,7814306
5 9,97798279 19,9559656
6 -7,59687913 -15,1937583
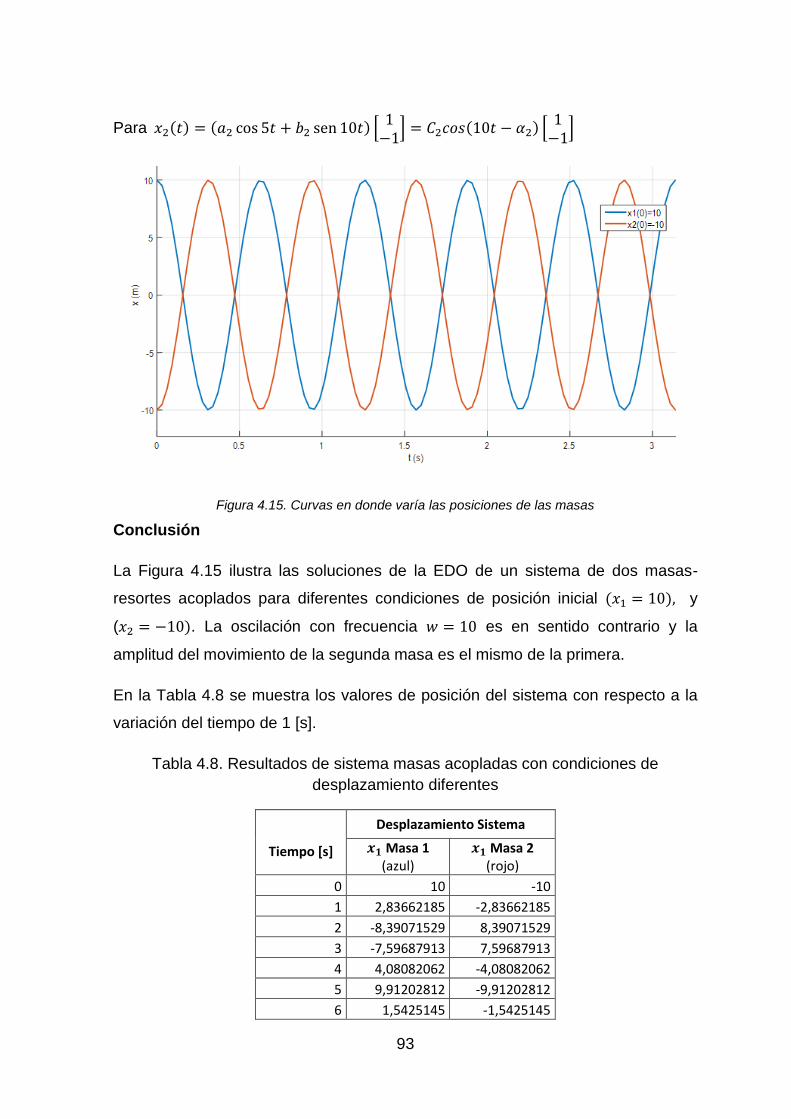
93
Para 𝑥2(𝑡) = (𝑎2 cos 5𝑡 + 𝑏2 sen 10𝑡) [1−1] = 𝐶2𝑐𝑜𝑠(10𝑡 − 𝛼2) [
1−1]
Figura 4.15. Curvas en donde varía las posiciones de las masas
Conclusión
La Figura 4.15 ilustra las soluciones de la EDO de un sistema de dos masas-
resortes acoplados para diferentes condiciones de posición inicial (𝑥1 = 10), y
(𝑥2 = −10). La oscilación con frecuencia 𝑤 = 10 es en sentido contrario y la
amplitud del movimiento de la segunda masa es el mismo de la primera.
En la Tabla 4.8 se muestra los valores de posición del sistema con respecto a la
variación del tiempo de 1 [s].
Tabla 4.8. Resultados de sistema masas acopladas con condiciones de
desplazamiento diferentes
Tiempo [s]
Desplazamiento Sistema
𝒙𝟏 Masa 1 (azul)
𝒙𝟏 Masa 2 (rojo)
0 10 -10
1 2,83662185 -2,83662185
2 -8,39071529 8,39071529
3 -7,59687913 7,59687913
4 4,08082062 -4,08082062
5 9,91202812 -9,91202812
6 1,5425145 -1,5425145
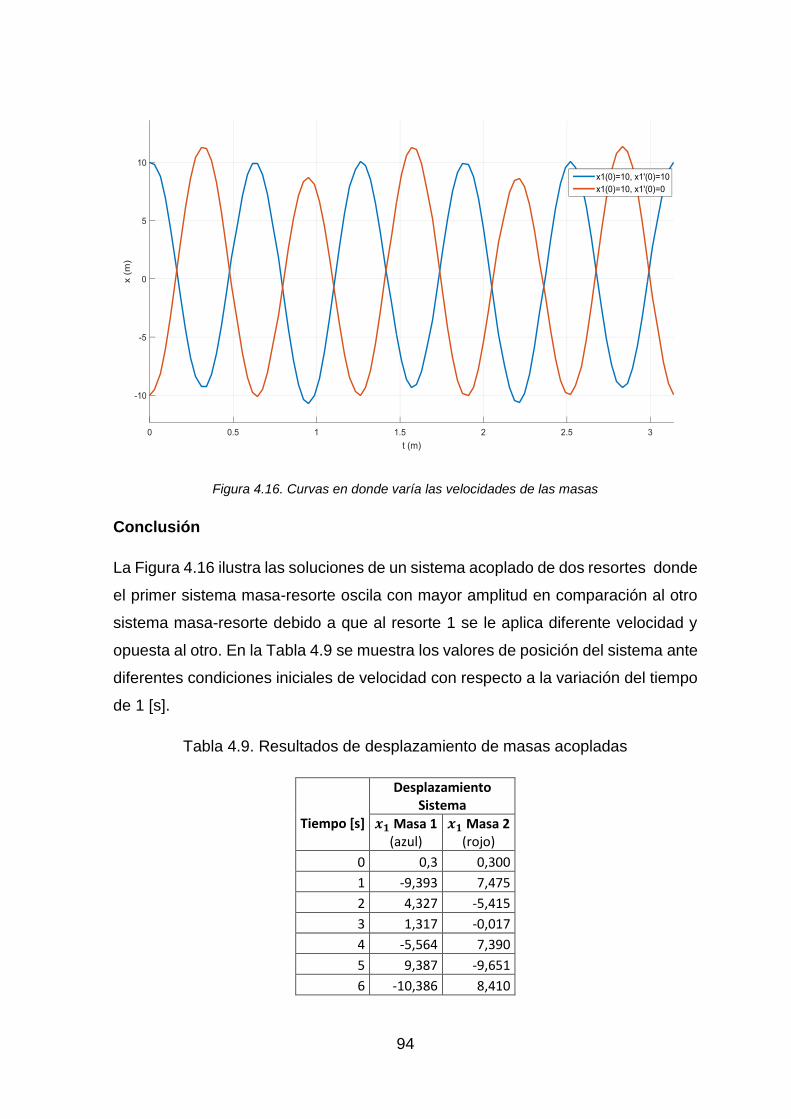
94
Figura 4.16. Curvas en donde varía las velocidades de las masas
Conclusión
La Figura 4.16 ilustra las soluciones de un sistema acoplado de dos resortes donde
el primer sistema masa-resorte oscila con mayor amplitud en comparación al otro
sistema masa-resorte debido a que al resorte 1 se le aplica diferente velocidad y
opuesta al otro. En la Tabla 4.9 se muestra los valores de posición del sistema ante
diferentes condiciones iniciales de velocidad con respecto a la variación del tiempo
de 1 [s].
Tabla 4.9. Resultados de desplazamiento de masas acopladas
Tiempo [s]
Desplazamiento Sistema
𝒙𝟏 Masa 1 (azul)
𝒙𝟏 Masa 2 (rojo)
0 0,3 0,300
1 -9,393 7,475
2 4,327 -5,415
3 1,317 -0,017
4 -5,564 7,390
5 9,387 -9,651
6 -10,386 8,410
95
4.10.3.5 Problema 5
Un objeto de 10 𝑘𝑔 está suspendido por dos muelles idénticos de constante elástica
𝐾 = 500 𝑁/𝑚 asociados en serie, y un amortiguador de tipo viscoso de constante
𝑏 = 90 𝑁 · 𝑠/𝑚.
Modelo Matemático
𝑤𝑛′ = 𝑤𝑛√1 − (
𝑐
𝑐𝑐𝑟)2
Datos:
𝑘 = 500𝑁
𝑚 𝑘 → elasticidad del resorte
𝑚 = 10 𝑘𝑔 𝑚 → masa
𝑏 = 90 𝑁𝑠
𝑚 𝑏 → amortiguamiento
Determinar:
a. Coeficiente de amortiguamiento crítico
b. Factor de frecuencias (Ω)
c. Valor del pseudoperiodo justificando su existencia
d. Si, inicialmente, se separa de su posición de equilibrio estable 5𝑐𝑚,
calcular la energía total en ese instante
e. Indicar el principio de conservación de la energía que cumple
Solución
a. Calculo del coeficiente de amortiguamiento. Como los resortes están
acoplados en serie se tiene que,
1
𝐾𝑒𝑞=1
𝐾1+1
𝐾2=
1
500𝑁 𝑚⁄+
1
500𝑁 𝑚⁄=
2
500𝑁 𝑚⁄=
1
250𝑁 𝑚⁄
Por lo tanto la 𝑲𝒆𝒒 = 𝟐𝟓𝟎 𝑵/𝒎
b. Para calcular el factor de frecuencias se calcula el coeficiente de
amortiguamiento crítico y frecuencia natural.
𝑐𝑐𝑟 = 2√𝑘𝑚 = 2√2500 = 100𝑁.𝑠
𝑚,
96
𝑤𝑛 = √𝐾𝑒𝑞
𝑚= 5
𝑟𝑎𝑑
𝑠
𝑓 =𝑐
𝑐𝑐𝑟=90
100= 0.9
c. El Pseudoperiodo se calcula puesto que existe un amortiguamiento subcritico,
siendo necesario el cálculo de la frecuencia libre amortiguada.
𝑤𝑛′ = 𝑤𝑛√1 − (
𝑐
𝑐𝑐𝑟)2
= 5√1 − (90
100)2
= 2,18𝑟𝑎𝑑
𝑠
𝑇´ =2𝜋
𝑤′=2𝜋
2,18= 2,88 𝑠
d. El principio de la conservación de la energía total no se cumple puesto que
existe una fuerza amortiguadora que disipa la energía.
Interpretación de resultados
Se pueden acoplar varios resortes y según su forma se opera con los valores de la
elasticidad para obtener la del sistema completo.

97
CAPÍTULO 5
5 METODOLOGÍA PARA LA ENSEÑANZA DE TEORÍA
DE VIBRACIONES
5.1 GENERALIDADES EN EL PROCESO EDUCATIVO (ME)
La educación es una actividad compleja, donde intervienen actores y factores de
variada índole; sociales, económicos políticos, tecnológicos y fundamentalmente
de aprendizaje y conocimiento.
Para impartir conocimientos no solo se requiere de la destreza científica sino del
adiestramiento pedagógico del docente.
En el proceso de enseñanza aprendizaje o interaprendizaje al momento no se
puede decir que se sigue una corriente pedagógica pura puesto que es necesario
recurrir a diferentes propuestas pedagógicas que incentiven al estudiante y
enlazar con la realidad en la que se desenvuelve, es necesario partir con ese
conocimiento base para avanzar con los nuevos y se vaya produciendo ese
enlace o conexión que por mucho tiempo ha sido la principal problemática
educativa, la falta de secuencia y constante rompimiento de lo que se aprende;
también es necesario que el estudiante sea partícipe de la construcción de su
propio conocimiento, de manera que sea significativo y perdure, es cuando el
docente cambia su rol y se convierte en un ente que dinamiza el proceso de
aprendizaje, deja ser el que enseña conocimientos sino que impulsa al
estudiante a ser quien trabaje en el logro y desarrollo de sus capacidades, que
le permitirá aprender a aprender, lo hace un ente autónomo, indagador, curioso
y propositivo, si el estudiante debe alcanzar esos niveles implica que el docente
adapte su trabajo del aula de tal manera que lleve al logro de los estudiantes de
disponer conocimientos y destrezas que le permitan desempeñarse eficiente y
eficazmente fuera de las aulas por lo tanto es necesario un trabajo
interdisciplinario y que las instituciones educativas promuevan la adquisición y
pongan a disposición de docentes y estudiantes los materiales, instrumentos y
equipamiento necesario para el planteamiento y logro de desempeños
auténticos.

98
Lo anterior es muy significativo, sin embargo el estudiante debido al sistema
debe recibir diariamente parcelas de conocimiento puesto que el sistema
ecuatoriano al igual que otros en el mundo intenta llenar de muchísimo
conocimiento dividido en no menos de 12 asignaturas semanales con un
máximo de 4 periodos para las asignaturas de formación en ciencias, siendo el
idioma extranjero la única asignatura que dispone de 5 horas a la semana en el
bachillerato, situación que no permite un proceso coherente con lo propuesto,
sin embargo el docente al igual que el estudiante debe responder a éste sistema
y recurrir a muchas propuestas de otros docentes y a su ingenio para el trabajo
diario, es necesario trabajar de forma coherente desde que el niño inicia su
proceso educativo para al final lograr los perfiles en cada uno, es necesario
repensar la inclusión, es necesaria la convivencia sin embargo en grupos
numerosos con conflictos individuales y de grupo se ve interferido, sin embargo
se obligan a los docentes a realizar un trabajo diferenciado que sin la
capacitación adecuada es dificultoso puesto que atender capacidades diferentes
al mismo tiempo no hace posible un trabajo efectivo.
Los sistemas de enseñanza responden a las formas de gobierno y a las
tendencias políticas del momento que se vive, nuestro país no es ajeno a las
influencias externas y ha tenido varios intentos de implementar una política que
represente nuestra realidad sin embargo siempre se ha visto una marcada
influencia de países y realidades externas que no tuvieron resultados positivos.
Actualmente se cumple con el plan decenal de educación 2008 y al incluir en la
nueva constitución el buen vivir entre otros elementos que guían el proceso
educativo se ha dado un impulso por mejorar la infraestructura educativa,
proveer a las instituciones de equipamiento básico, promover un sistema de
capacitación para los docentes, sin embargo el nuevo modelo de gestión hasta
el momento no se concreta claramente las responsabilidades de las autoridades
de las instituciones educativas con sus responsabilidades y ofertas lo que implica
que no todos los establecimientos educativos han sido intervenidos para su
mejoramiento.
En nuevo sistema educativo está en marcha y apunta al cambio de la educación
en función de las potencialidades e identidad de quienes somos. Ecuador, un
99
país mega diverso con características climáticas, hidrográficas y orográficas
significativas y diferentes en sus pueblos, con tradiciones ancestrales que se
deben respetar y conservar, con recursos naturales que permiten el desarrollo
de nuestro país, con una lucha por cambiar nuestra historia de ser un país
exportador de materia prima y talentos a ser generadores de cambio y evidenciar
que es posible exportar productos elaborados con valor agregado y sello
ecuatoriano gracias a que nuestro compromiso es evidenciar propuestas que
generen la aplicación y aprovechamiento del talento y potencial natural que se
posee.
La matemática recibe un abordaje en los tres años de bachillerato dividida en
cuatro bloques: Numérico y funciones, algebra y geometría, matemática discreta
y estadística; en cada bloque se plantean las destrezas con criterio de
desempeño su mapa de conocimiento y sus indicadores de evaluación, lo que
permite al docente y estudiantes saber cuál es el camino y hacia dónde vamos.
En cuanto a la física que implica el estudio de los fenómenos naturales la nueva
propuesta enfatiza en un año el estudio de los fenómenos físicos y en el segundo
año se plantea como físico química para visualizar y comprender la relación entre
fenómenos físicos que responden a fenómenos químicos y éstos a su vez que
responden a fenómenos físicos.
Así mismo se plantea en el tercer año la opción para especializarse y fortalecer
la capacidad de deducción y abstracción de los estudiantes al profundizar en los
estudios en la matemática y en la física con las optativas de especialidad que se
les ha dado la categoría de superior. En Matemática Superior se contempla los
bloques de Números y Funciones y Algebra y Geometría.
5.2 MODELO PEDAGÓGICO
El país a través del Ministerio de Educación ha planteado los cambios en el
sistema educativo el mismo que se encuentra en los documentos legales y
pedagógicos que son la directriz de todo el accionar educativo, a continuación
se transcribe la información base que se encuentra en la página web del
ministerio.
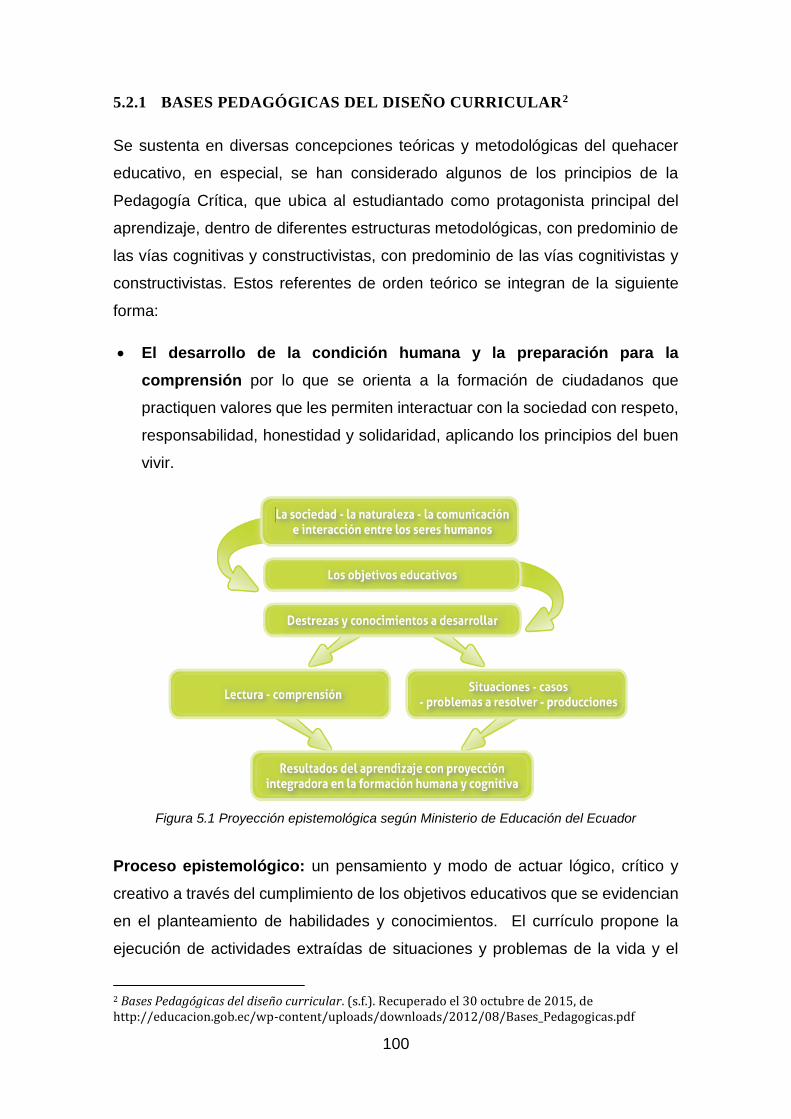
100
5.2.1 BASES PEDAGÓGICAS DEL DISEÑO CURRICULAR2
Se sustenta en diversas concepciones teóricas y metodológicas del quehacer
educativo, en especial, se han considerado algunos de los principios de la
Pedagogía Crítica, que ubica al estudiantado como protagonista principal del
aprendizaje, dentro de diferentes estructuras metodológicas, con predominio de
las vías cognitivas y constructivistas, con predominio de las vías cognitivistas y
constructivistas. Estos referentes de orden teórico se integran de la siguiente
forma:
El desarrollo de la condición humana y la preparación para la
comprensión por lo que se orienta a la formación de ciudadanos que
practiquen valores que les permiten interactuar con la sociedad con respeto,
responsabilidad, honestidad y solidaridad, aplicando los principios del buen
vivir.
Figura 5.1 Proyección epistemológica según Ministerio de Educación del Ecuador
Proceso epistemológico: un pensamiento y modo de actuar lógico, crítico y
creativo a través del cumplimiento de los objetivos educativos que se evidencian
en el planteamiento de habilidades y conocimientos. El currículo propone la
ejecución de actividades extraídas de situaciones y problemas de la vida y el
2 Bases Pedagógicas del diseño curricular. (s.f.). Recuperado el 30 octubre de 2015, de http://educacion.gob.ec/wp-content/uploads/downloads/2012/08/Bases_Pedagogicas.pdf
101
empleo de métodos participativos de aprendizaje para ayudar al estudiantado a
alcanzar los logros de desempeño que propone el perfil de salida. Esto implica
Observar, analizar, comparar, ordenar y graficar las ideas esenciales y
secundarias interrelacionadas, buscando aspectos comunes relaciones
lógicas y generalizaciones de ideas.
Reflexionar, valorar, criticar y argumentar acerca de conceptos, hechos y
procesos de estudio.
Indagar y producir soluciones novedosas y diversas a los problemas, desde
los diferentes niveles de pensamiento.
Una visión crítica de la Pedagogía: aprendizaje productivo y significativo. Esta
visión epistemológica tiene sustento teórico en ciertas visiones de la Pedagogía
Crítica, que se fundamenta en lo esencial, en el incremento del protagonismo de
los estudiantes en el proceso educativo, en la interpretación y solución de
problemas, participando activamente en la transformación de la sociedad. En
esta perspectiva pedagógica el aprendizaje debe desarrollarse esencialmente
por vías productivas y significativas que dinamicen la metodología de estudio,
para llegar a la metacognición por procesos tales como:
Figura 5.2 Aprendizajes productivos y significativos3
3 http://educacion.gob.ec/wp-content/uploads/downloads/2012/08/Bases_Pedagogicas.pdf
102
5.2.2 ELEMENTOS DEL CURRÍCULO4:
Conocimientos.- El proceso educativo en el aula también ha sido influenciado
por los cambios, se deja de trabajar contenidos y se propone un avance en
trabajar destrezas se enfoca en el desarrollo de capacidades, que los estudiantes
dejen de ser receptores de contenidos sino que sean partícipes de la
construcción del conocimiento y los contenidos se convierten en el medio para
logro de su aprendizaje.
El empleo de las tecnologías de la información y la comunicación es otro
referente significativo dentro del proceso educativo es el uso de videos,
televisión, computadoras, internet, aulas virtuales y otras alternativas para
apoyar la enseñanza y aprendizaje.
Evaluación integradora de los resultados de aprendizajes: los docentes
deben evaluar de forma sistemática el desempeño de los estudiantes mediante
diferentes técnicas que permitan determinar en qué medida hay avances en el
dominio de las destrezas con criterios de desempeño en la evaluación se debe
incluir indicadores esenciales como la producción escrita de los estudiantes, la
argumentación de sus opiniones, la expresión oral y escrita de sus ideas, la
interpretación de lo estudiado, las relaciones que establecen con la vida cotidiana
y otras disciplinas afines de la manera como solucionan problemas reales a partir
de lo aprendido.
Se recomienda que en todo momento se aplique una evaluación integradora
de la formación intelectual con la formación de valores humanos, lo que debe
expresarse en las calificaciones o resultados que se registran oficialmente y que
se deben dar a conocer a los estudiantes durante el desarrollo de las actividades
y al final del proceso.
Como se puede evidenciar el proceso educativo está integrado que permite al
docente y estudiante mantener una interacción continua y en este punto es vital
trabajar y acercarse a la propuesta para que se haga realidad y se puedan
evidenciar los cambios.
4 Bases Pedagógicas del diseño curricular. (s.f.). Recuperado el 30 octubre de 2015, de http://educacion.gob.ec/wp-content/uploads/downloads/2012/08/Bases_Pedagogicas.pdf
103
Con respecto a la Matemática hay que puntualizar algunos elementos que guían
el trabajo del docente para el aprendizaje de los estudiantes.
5.2.3 CRITERIOS DEL AREA DE MATEMÁTICA5
5.2.3.1 ENFOQUE E IMPORTANCIA DE LA MATEMÁTICA
La sociedad tecnológica que está cambiando constantemente, requiere de
personas que puedan pensar de manera cuantitativa para resolver problemas
creativa y eficientemente.
Los estudiantes requieren desarrollar su habilidad matemática, obtener
conocimientos fundamentales y contar con destrezas que les servirán para
comprender analíticamente el mundo y ser capaces de resolver los problemas
que surgirán en sus ámbitos profesional y personal. Por ello, la tarea
fundamental del docente es proveer un ambiente que integre objetivos,
conocimientos, aplicaciones, perspectivas, alternativas metodológicas y
evaluación significativa para que el estudiante desarrolle, a más de confianza en
su propia potencialidad matemática, gusto por la Matemática.
La Matemática es una de las asignaturas que, por su esencia
misma(estructura, lógica, formalidad, la demostración como su método, lenguaje
cuantitativo preciso y herramienta de todas las ciencias), facilita el desarrollo
del pensamiento y posibilita al sujeto conocedor integrarse a equipos de
trabajo interdisciplinario para resolver los problemas de la vida real, los
mismos que, actualmente, no pueden ser enfrentados a través de una sola
ciencia. Además, la sociedad tecnológica e informática en que se vive
requiere de individuos capaces de adaptarse a los cambios que ésta
fomenta; así, las destrezas matemáticas son capacidades fundamentales
sobre las cuales se cimientan otras destrezas requeridas en el mundo
laboral.
Eje curricular integrador del área.- Adquirir conceptos e instrumentos
matemáticos que desarrollen el pensamiento lógico, matemático y crítico para
5 Lineamientos Curriculares para el Bachillerato <General Unificado (s.f.). Recuperado el 30 octubre de 2015, de http://educacion.gob.ec/wp-content/uploads/downloads/2013/09/Lineamientos_Curriculares_Matematica_3_300913.pdf
104
resolver problemas mediante la elaboración de modelos.
Ejes de aprendizaje.- Incluye las siguientes macrodestrezas:
Abstracción, generalización, conjetura y demostración;
integración de conocimientos;
Comunicación de las ideas matemáticas; y
Uso de las tecnologías en la solución de los problemas.
El área de Matemática propone la elaboración de modelos como el mecanismo
para resolver problemas. Esta labor puede ser desarrollada por el docente en
algunas fases.
1. El problema.- Se plantearán problemas o situaciones cuya representación
matemática utilizará los conceptos matemáticos principales que se quieran
estudiar en dicho tema.
2. Experimentación. El docente propondrá diversas actividades a los
estudiantes para que se familiaricen con el problema o la situación. A partir
de estas representaciones, los estudiantes podrán conjeturar soluciones o
descubrir algunas “no soluciones”. El docente, en cambio, contará con el
material y el vocabulario suficientes para introducir los conceptos objetos de
estudio, y que serán indispensables para resolver el problema o explicar la
situación.
3. Modelar.- De los datos se pasa a una representación de los elementos del
problema y de las relaciones existentes entre ellos mediante conceptos
matemáticos; en otras palabras, se elabora un modelo del problema, con lo
cual se obtiene, a su vez, un problema matemático.
4. Interpretación y Generalización.- Una vez obtenido el modelo, se resuelve
el problema matemático, se interpreta la solución matemática para dar
solución al problema original.
5.2.3.2 OBJETIVOS DEL ÁREA DE MATEMÁTICA
1. Comprender la modelización y utilizarla para la resolución de problemas.
2. Desarrollar una compresión integral de las funciones elementales: su
concepto, sus representaciones y sus propiedades. Adicionalmente,
identificar y resolver problemas que pueden ser modelados a través de las
funciones elementales.
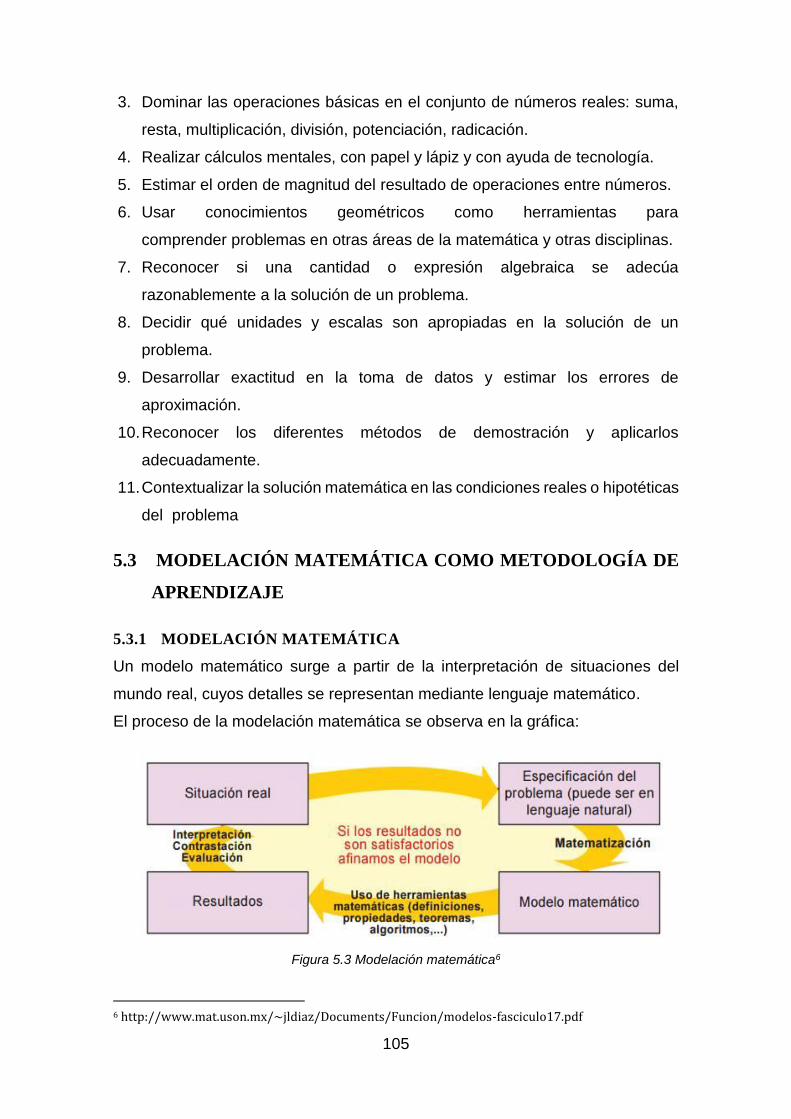
105
3. Dominar las operaciones básicas en el conjunto de números reales: suma,
resta, multiplicación, división, potenciación, radicación.
4. Realizar cálculos mentales, con papel y lápiz y con ayuda de tecnología.
5. Estimar el orden de magnitud del resultado de operaciones entre números.
6. Usar conocimientos geométricos como herramientas para
comprender problemas en otras áreas de la matemática y otras disciplinas.
7. Reconocer si una cantidad o expresión algebraica se adecúa
razonablemente a la solución de un problema.
8. Decidir qué unidades y escalas son apropiadas en la solución de un
problema.
9. Desarrollar exactitud en la toma de datos y estimar los errores de
aproximación.
10. Reconocer los diferentes métodos de demostración y aplicarlos
adecuadamente.
11. Contextualizar la solución matemática en las condiciones reales o hipotéticas
del problema
5.3 MODELACIÓN MATEMÁTICA COMO METODOLOGÍA DE
APRENDIZAJE
5.3.1 MODELACIÓN MATEMÁTICA
Un modelo matemático surge a partir de la interpretación de situaciones del
mundo real, cuyos detalles se representan mediante lenguaje matemático.
El proceso de la modelación matemática se observa en la gráfica:
Figura 5.3 Modelación matemática6
6 http://www.mat.uson.mx/~jldiaz/Documents/Funcion/modelos-fasciculo17.pdf

106
Un modelo matemático consiste en una lista de variables que describe la
situación dada, junto con una o más ecuaciones que relacione estas variables
que son conocidas o se supone son válidas.
Un modelo matemático satisfactorio está sujeto a dos requisitos contradictorios.
Debe ser suficientemente detallado para representar la situación del
mundo real con relativa exactitud.
Debe ser sencillo para hacer práctico el análisis matemático.7
Los modelos matemáticos se consolidan gradualmente por lo que permite
obtener resultados precisos.
5.3.2 PROCESO DE ENSEÑANAZA APRENDIZAJE PLANTEADO
El proceso de aprendizaje propuesto tiene un acercamiento al modelo
constructivista con énfasis en el desarrollo del pensamiento crítico, es necesario
que el estudiante sea el gestor de su nuevo conocimiento y basado en
desempeños auténticos, no se trata de un conocimiento por el conocimiento sino
de dotar al estudiante de las herramientas para que pueda utilizar estas
capacidades en las actividades de su vida estudiantil o profesional.
Al tener un carácter integrador, formación personal y en las ciencias debe
considerarse todos los aspectos que promuevan el Buen Vivir en todos los
aspectos de la vida de los estudiantes.
La propuesta de trabajo para el aula implica tres momentos básicos:
1. Anticipación
2. Construcción del conocimiento
3. Consolidación
El trabajo en el aula se complementa con las tareas extraclase que tiene la
finalidad de reforzar lo aprendido.
Anticipación.- Es el primer momento que involucra el espacio de impacto para
generar las expectativas en los estudiantes, de establecer las pautas para el
trabajo colaborativo, en sí de abrir el camino para el nuevo conocimiento porque
7 EDWARS, PENNEY, Ecuaciones Diferenciales, Cuarta Edición, Página 5
107
en este momento es cuando se debe recurrir a la memoria selectiva del
estudiante o como explica Vygotsky es en la zona de desarrollo potencial en
donde se encuentra los conocimientos significativos y se deben activar para el
trabajo inmediato.
Durante este proceso se tendrá aspectos que son considerados como
elementos de la didáctica en el proceso de aprendizaje como son:
Motivación
Conocimientos previos
Experiencia concreta
Construcción del Conocimiento.- Luego que el estudiante se ha “enganchado”
con el nuevo tema y tiene la expectativa por el nuevo aprendizaje es necesario
que el docente facilite el andamiaje para que el estudiante vaya construyendo el
nuevo aprendizaje a partir de la comprensión, del análisis, síntesis, aplicación y
evaluación que se deben realizar cuando se desarrollan estrategias como la
lectura de documentos, elaboración de resúmenes, estudios de casos,
elaboración de organizadores gráficos, proyectos y la resolución de
problemas, siendo en este momento en el que al estudiante le surgen dudas,
inquietudes que propicia el nuevo conocimiento y que al ser compartidas entre
pares y con el docente se va desarrollando el nuevo conocimiento y es cuando
el docente debe fortalecer los aspectos que son necesarios abordar.
Durante este momento se desarrollan procesos o más bien actividades de
acuerdo al tema que generalmente debe incluir un momento de:
Lectura
Extraer ideas principales
Plantearse inquietudes
Recurrir a los conocimientos previos
Validar el nuevo conocimiento
Graficar el nuevo conocimiento
Aplicar el nuevo conocimiento
108
Consolidación.- Esta etapa es muy importante puesto que es la etapa en donde
se consolida el aprendizaje y es el momento en que el estudiante debe hacerse
una autoevaluación de ¿qué aprendí?, ¿cómo aprendí? ¿con qué aprendi? y
¿para qué aprendí?, en este momento se considera el apropiado para realizar
trabajos en grupos con la finalidad de que entre pares puedan aportar de acuerdo
a su nivel y conocimiento y se aproveche para hacer aplicaciones y generar
problemas e interrogantes que permitan que este nuevo conocimiento no se
quede en la zona de desarrollo próximo.
En este momento se deben tomar aspectos como:
Retomar el conocimiento y realizar una estructura
Evaluación
Autoevaluación
Trabajo Extraclase.- Consiste en actividades que permitan al estudiante
retomar lo aprendido, hacer una retrospección a que conocimientos son parte de
si y como debe actuar con ellos, que debe hacer y cómo hacerlo, generalmente
en este espacio se dejara trabajos para que sean realizados fuera del aula y se
encontrarán los siguientes elementos:
Elaborar un informe del trabajo en el aula
Plantearse interrogantes del tema
Plantearse ejercicios
Resolver ejercicios planteados de tarea.
109
5.4 MODELO DE GUÍA TALLER DE APRENDIZAJE PARA
MODELAMIENTO MATEMATICO DE VIBRACIONES
La estructura del modelo de guía se realiza con finalidad de que se puedan
presentar ejemplificaciones de cómo trabajar cualquier tema:
1. RESUMEN
Se establece una metodología de aprendizaje que contempla:
palabras claves que hacen referencia al experimento de vibraciones y
las ecuaciones diferenciales ordinarias que se utilizan para la
modelación y sus soluciones.
las ecuaciones diferenciales que modelan el problema
Planteamiento de un problema específico de vibraciones
La solución del problema.
2. PROBLEMA
Se plantea un problema específico que permita desarrollar todo el
proceso de modelamiento matemático mediante EDOs8.
3. TEORIA
i. Solución Analítica
Se debe hacer referencia a los conceptos y fórmulas que se utilizan para
dar solución, en este caso EDOS.
4. MODELAMIENTO
i. Experimento.- En este punto se dará las instrucciones básicas para que
el estudiante sea quien realice el proceso de experimentación y registro
de datos de la experiencia.
ii. Gráfico del fenómeno vibratorio
Una vez realizado el experimento, el estudiante realizará un diagrama
que muestre el proceso de experimentación.
iii. Planteamiento del problema
Es necesario identificar los datos que se dispone y que es lo que se
8 EDOs: Ecuaciones Diferenciales Ordinarias
110
quiere determinar para dar solución al problema y organizar el proceso
de solución del problema.
iv. Solución del Problema
Partiendo del planteamiento del problema con los datos e incógnitas
identificadas se procede a dar solución al problema, se detalla el proceso
de cómo se desarrolla la obtención, en este caso, del modelo matemático
y luego como se lo aplica para dar la solución al problema específico
planteado.
v. Representación gráfica
En este apartado se debe plantear el uso de software de aplicaciones
matemáticas para graficar el comportamiento que tiene el fenómeno
físico en este caso las vibraciones y realizar análisis y comparaciones de
acuerdo a condiciones iniciales.
vi. Interpretación de la Solución
Se debe dar respuesta al problema planteado y es necesario explicar
cuáles son los valores significativos y que representan en el fenómeno
estudiado de las vibraciones.
5. CONCLUSIONES
Es necesario realizar una autoevaluación del trabajo realizado y los
resultados obtenidos con los que se puede concretar las ventajas del mismo
y hacia donde lleva los conocimientos adquiridos.
6. RECOMENDACIONES.
Se dará a conocer los cambios que serán necesarios hacer para mejorar o
reforzar el proceso de trabajo o el tratamiento del problema y buscar logros
significativos que permitan obtener resultados positivos del trabajo realizado.
7. EVALUACION
Las instituciones educativas deben incluir en su organización de clase el
proceso de evaluación y acreditación por lo que en este apartado deben
constar las técnicas e instrumentos que utilice para este fin.
111
5.4.1 MODELO MATEMÁTICO DE VIBRACIONES – GUÍA TALLER DE
APRENDIZAJE
1. RESUMEN
La guía detalla el procedimiento que usted debe realizar para lograr el
aprendizaje de modelar sistemas masa resorte. Se toma en cuenta las
siguientes palabras clave:
Experimento.- Es una acción que consiste en provocar un fenómeno en
unas condiciones determinadas que permite determinar
cualidades o verificar resultados, tiene la particularidad que
se puede repetir en condiciones similares y específicas.
Oscilación o Vibración.- Movimiento oscilatorio es el movimiento que se
repite parcial o totalmente cerca de la posición de equilibrio
estable. Si la oscilación se caracteriza por el cambio de
magnitudes mecánicas, como el desplazamiento, la
velocidad, la aceleración, la presión, etc., dicho movimiento
se denomina oscilación mecánica. Si cada valor de la
magnitud que cambia durante la oscilación se repite a
iguales intervalos de tiempo, tal oscilación se denomina
periódica. El intervalo de tiempo T necesario para la
realización de una oscilación completa se denomina período
de la oscilación y la magnitud inversa al período, se
denomina frecuencia de la oscilación periódica. Un ejemplo
de movimiento oscilatorio periódico se tiene cuando se
suspende verticalmente un cuerpo del extremo de un
resorte.
Ecuación diferencial ordinaria Una ecuación que contiene las derivadas o
diferenciales de una variable dependiente, se denomina
ecuación diferencial. 𝑓(𝑡, 𝑢(𝑡), 𝑢’(𝑡)) = 0
Una ecuación diferencial se denomina ordinaria si depende
de una sola variable y si su dependencia es de más de una
variable independiente se denomina ecuación diferencial

112
parcial. En adelante notaremos como: 𝑥 variable
independiente, y variable dependiente y se usarán los dos
tipos de notaciones para las derivadas ordinarias.9
Solución de Ecuaciones Diferenciales:
𝑦 = 𝑘 𝑒−∫ 𝑎(𝑠)𝑑𝑠𝑡0 + 𝑒−∫ 𝑎(𝑠)𝑑𝑠
𝑡0 ∫ 𝑒∫ 𝑎(𝑠)𝑑𝑠
𝑡0 𝑓(𝑡)𝑑𝑡
𝑡
0
2. PROBLEMA
Una masa de 100 𝑔𝑟 estira un resorte 10cm, determine la ecuación que
modele el movimiento si se estira 5 cm por debajo de la posición de equilibrio
y luego se suelta, considere el medio en que oscila el resorte en su estado
ideal.
3. TEORIA
a) Solución Analítica
𝑚𝑦′′ + 𝑏𝑦′ + 𝑘𝑦 = 𝐹𝑒𝑥𝑡(𝑡)
𝐹𝑒𝑥𝑡(𝑡) = [𝑖𝑛𝑒𝑟𝑐𝑖𝑎]𝑑2𝑦
𝑑𝑡2+ [𝑎𝑚𝑜𝑟𝑡𝑖𝑔𝑢𝑎𝑚𝑖𝑒𝑛𝑡𝑜]
𝑑𝑦
𝑑𝑡+ [𝑟𝑖𝑔𝑖𝑑𝑒𝑧]𝑦
En el caso que 𝐹(𝑥) = 0 la ecuación es homogénea y cuando 𝐹(𝑥) ≠ 0 la
ecuación no es homogénea.
𝑚𝑦′′ + 𝑏𝑦′ + 𝑘𝑦 = 0 Homogénea
𝑚𝑦′′ + 𝑏𝑦′ + 𝑘𝑦 = 𝐹𝑒𝑥𝑡(𝑡) No homogénea
Soluciones de EDOs homogeneas cuando el polinomio característico es:
En el caso que las raíces sean reales y distintas 𝜆1 ≠ 𝜆1 ≠ ⋯ . 𝜆𝑛
entonces 𝑦1(𝑡) = 𝑒𝜆1𝑡 y 𝑦2(𝑡) = 𝑒
𝜆2𝑡 son soluciones por lo tanto se tiene
que la solución general de la ecuación diferencial está dada por:
𝑦𝑔 = 𝑐1 + 𝑐2𝑒𝜆1𝑥 + 𝑐2𝑒
𝜆2𝑥 +⋯+ 𝑐𝑛𝑒𝜆𝑛𝑥 =∑𝑐𝑘𝑒
𝜆𝑘𝑥
𝑛
𝑘=1
9 MURRAY, R. SPIEGEL, Ecuaciones diferenciales aplicadas, Tercera edición (1994), Página 3.

113
En el caso que las raíces sean reales y algunas de multiplicidad 𝜆1 =
𝜆2 = ⋯ 𝜆𝑛 con soluciones 𝑦1(𝑡) = 𝑒𝜆1𝑡 , 𝑦2(𝑡) = 𝑡𝑒
𝜆2𝑡 cuya solución
general de la ecuación diferencial está dada por:
𝑦𝑔 = 𝑐1𝑒𝜆1𝑥 + 𝑐2𝑥𝑒
𝜆2𝑥 +⋯+ 𝑐𝑛𝑥𝑛𝑒𝜆𝑛𝑥
Las raíces también pueden ser en el conjunto de los números
complejos 𝜆1 = 𝛼 + 𝑖𝛽, 𝜆2 = 𝛼 − 𝑖𝛽, con 𝑦1(𝑥) = 𝑐1𝑒(𝛼+𝑖𝛽)𝑥 y 𝑦2(𝑥) =
𝑐2𝑒(𝛼+𝑖𝛽)𝑥, cuando se tiene una ecuación diferencial de orden dos por lo
cual se tiene la solución general.
𝑦𝑔 = 𝑐1𝑒(𝛼+𝑖𝛽)𝑥 + 𝑐2𝑒
(𝛼−𝑖𝛽)𝑥
𝑦𝑔 = 𝑐1𝑒𝛼𝑥𝑐𝑜𝑠𝛽𝑥 + 𝑐2𝑒
𝛼𝑥𝑠𝑒𝑛𝛽𝑥
𝑦𝑔 = 𝑒𝛼𝑥(𝑐1𝑐𝑜𝑠𝛽𝑥 + 𝑐2𝑠𝑒𝑛𝛽𝑥)
Los tipos de raíces no siempre serán únicos cuando se soluciona una
ecuación diferencial, sino que se podrán obtener al mismo tiempo por lo
menos dos de ellas en cuyo caso será necesario integrar las mismas de
acuerdo a las características de cada solución como se establecen en los
tipos de soluciones antes tratadas.
4. MODELAMIENTO
a) Experimento.- Gráfico del fenómeno vibratorio
Conforme realice los experimentos registre la información obtenida en la
tabla dispuesta para el registro de datos:
Figura 1.- Sistema con resortes y masas físicas.
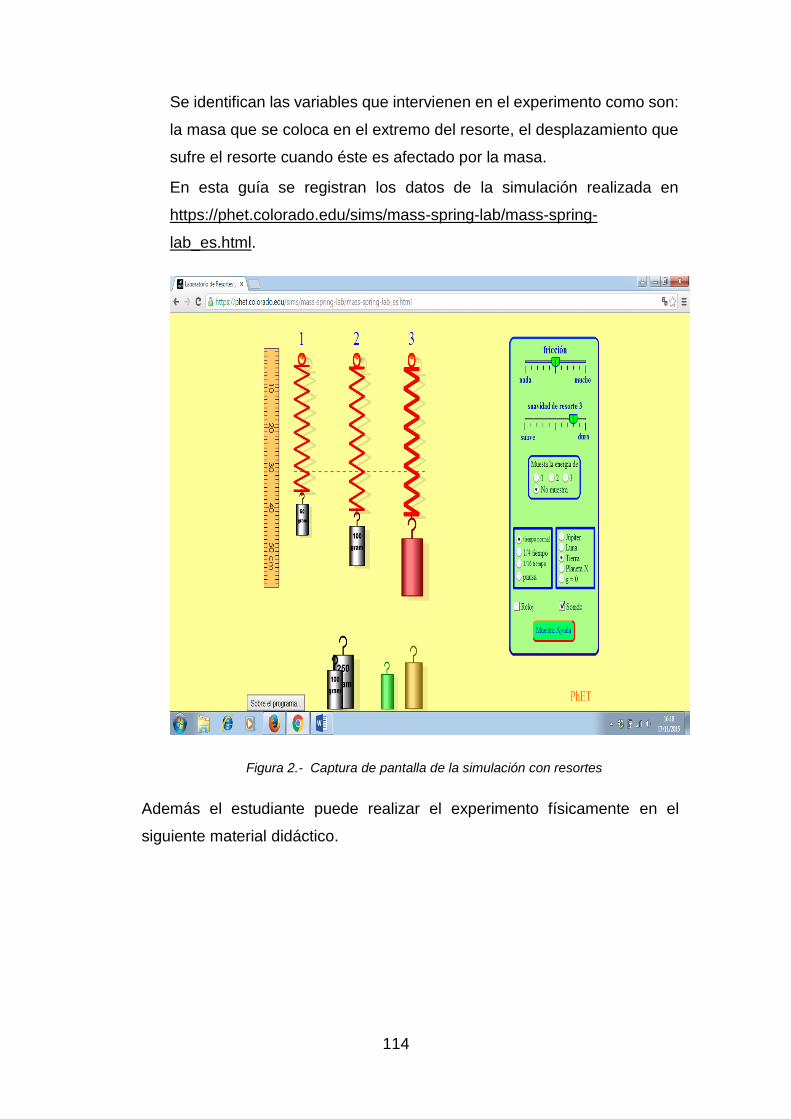
114
Se identifican las variables que intervienen en el experimento como son:
la masa que se coloca en el extremo del resorte, el desplazamiento que
sufre el resorte cuando éste es afectado por la masa.
En esta guía se registran los datos de la simulación realizada en
https://phet.colorado.edu/sims/mass-spring-lab/mass-spring-
lab_es.html.
Figura 2.- Captura de pantalla de la simulación con resortes
Además el estudiante puede realizar el experimento físicamente en el
siguiente material didáctico.
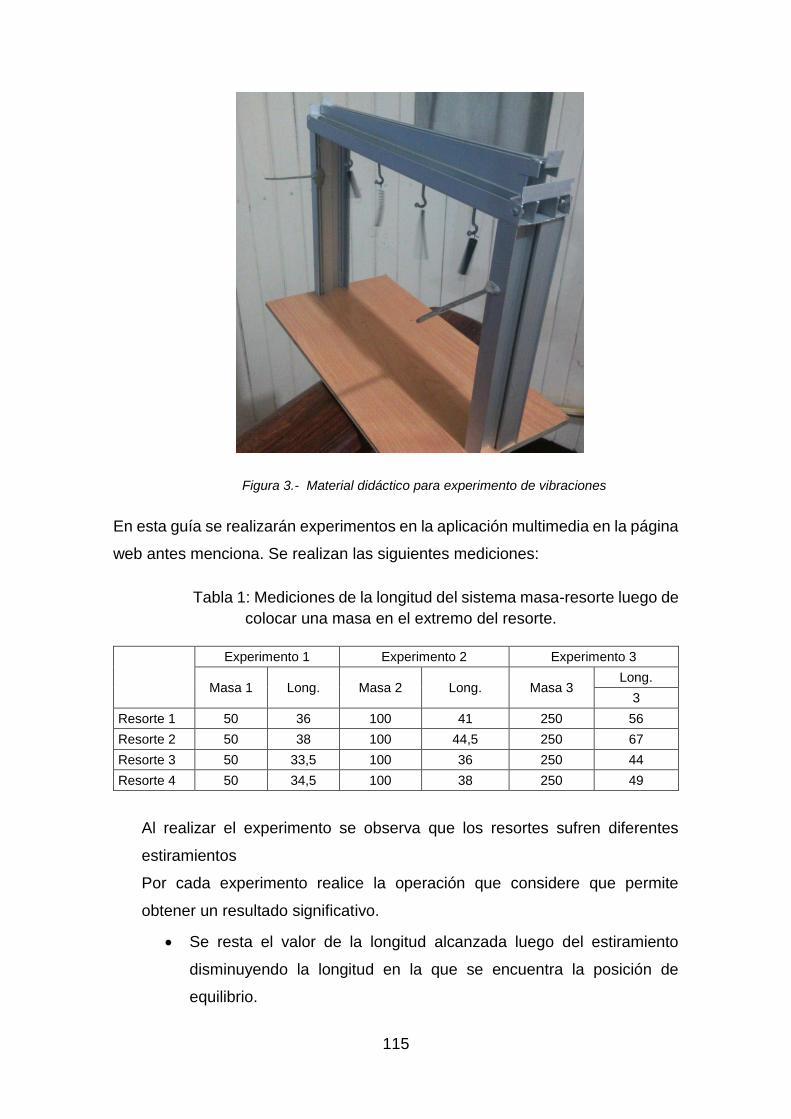
115
Figura 3.- Material didáctico para experimento de vibraciones
En esta guía se realizarán experimentos en la aplicación multimedia en la página
web antes menciona. Se realizan las siguientes mediciones:
Tabla 1: Mediciones de la longitud del sistema masa-resorte luego de
colocar una masa en el extremo del resorte.
Experimento 1 Experimento 2 Experimento 3
Masa 1 Long. Masa 2 Long. Masa 3 Long.
3
Resorte 1 50 36 100 41 250 56
Resorte 2 50 38 100 44,5 250 67
Resorte 3 50 33,5 100 36 250 44
Resorte 4 50 34,5 100 38 250 49
Al realizar el experimento se observa que los resortes sufren diferentes
estiramientos
Por cada experimento realice la operación que considere que permite
obtener un resultado significativo.
Se resta el valor de la longitud alcanzada luego del estiramiento
disminuyendo la longitud en la que se encuentra la posición de
equilibrio.

116
Tabla 2: Estiramiento con cada masa
Experimento 1 Experimento 2 Experimento 3
Masa 1 Estiramiento Masa 2 Estiramiento Masa 3 Estiramiento
Resorte 1 50 5 100 10 250 25
Resorte 2 50 7 100 13,5 250 36
Resorte 3 50 2,5 100 5 250 13
Resorte 4 50 3,5 100 7 250 18
Se realiza la operación de la división entre la masa y el
desplazamiento.
Tabla 3: Cuadro del resultado de dividir masa/estiramiento
Experimento 1 Experimento 2 Experimento 3
Resorte 1 10 10 10
Resorte 2 7 7 7
Resorte 3 20 20 19
Resorte 4 14 14 14
Mediciones del desplazamiento teniendo en cuenta cambios en el medio en
que se produce el desplazamiento, las mediciones anteriores se hacen en el
aire ahora se probarán los cambios cuando se simula el vacío y cuando se
simula un medio muy denso.
Tabla 4: Mediciones del desplazamiento teniendo en cuenta cambio en el amortiguamiento.
Experimento 1 Experimento 2 Experimento 3
Masa
1
Long.
1
Masa
2
Long.
2
Masa
3
Long.
3
Resorte 1 50 36 100 41 250 55
Resorte 2 50 38 100 45 250 66
Resorte 3 50 33,5 100 36 250 49
Resorte 4 50 34,5 100 38 250 43
Al observar el comportamiento del sistema en las nuevas condiciones se
extrae las siguientes características:
117
En un medio denso se puede observar que el desplazamiento varía
muy poco en algunos casos sin embargo al visualizar la simulación se
puede notar que el tiempo de vibración es corto.
En un medio que no existe amortiguamiento se puede observar que
la vibración es indefinida independiente de la masa que se ubique en
el resorte, lo que sí se puede observar es que cambia el tamaño del
estiramiento
La dureza del resorte incide en el desplazamiento y vibración del
sistema.
b) Planteamiento del problema
Datos:
𝑚𝑎𝑠𝑎: 𝑚 = 100𝑔𝑟
𝑎𝑚𝑜𝑟𝑡𝑖𝑔𝑢𝑎𝑚𝑖𝑒𝑛𝑡𝑜: 𝑏 = 0
𝑥(0) = 5 𝑐𝑚
Condiciones iniciales:
𝑡(0) = 0
𝑣(0) = 0
Determinar:
La ecuación que modela el espacio en cualquier instante 𝑡.
𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒 𝑑𝑒 𝑒𝑙𝑎𝑠𝑡𝑖𝑐𝑖𝑑𝑎𝑑: 𝑘
𝑥(𝑡) =?
c) Solución del Problema
La posición de la masa luego de cada medición es igual a 𝑙𝑜 +
𝛿𝑒𝑠𝑡donde 𝑙𝑜 es la longitud del resorte y 𝛿𝑒𝑠𝑡 es el alargamiento
producido por el peso de la masa y que produce el desplazamiento.
Los resultados muestran que al realizar la división entre la masa y el
desplazamiento existe un valor constante que se repite en los
experimentos realizados con el mismo resorte y diferentes masas.

118
Por lo que se puede decir que cuando se coloca una masa en el extremo
de un resorte el valor de la masa es igual al producto del desplazamiento
por una constante:
𝑚 = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒 ∙ 𝑑𝑒𝑠𝑝𝑙𝑎𝑧𝑎𝑚𝑖𝑒𝑛𝑡𝑜
Por lo anterior se deduce que el valor de la constante (𝑘) cambia de
acuerdo al resorte, así se puede observar con la misma masa que cuanto
más se estira un resorte el valor de la constante es menor y cuando
menos se estira la constante es mayor.
Por lo tanto se tiene que si un peso actúa sobre un resorte, se produce
una vibración hasta el momento que la masa queda en un equilibrio
estático que no es otra cosa que existen dos fuerzas una que atrae hacia
abajo que corresponde a la gravedad (𝑃 = 𝑚𝑔) y la otra que corresponde
al resorte que actúa en forma contraria (𝑘𝑥).
𝑃 = 𝑚𝑔 = 𝑘𝜹𝒆𝒔𝒕
Según la segunda ley de Newton se tiene que en un cuerpo la suma
algebraica de las fuerzas que actúan sobre él y es igual a la masa por el
vector aceleración, 𝐹 = 𝑚𝑎 que al considerar la igualdad del peso se
tiene 𝑎 = 𝑔
𝑚𝑑𝑣
𝑑𝑡= 𝑚𝑎 = 𝐹(𝑡, 𝑥, 𝑣)
Donde 𝑎 =𝑑𝑣
𝑑𝑡 es la aceleración del cuerpo en el instante t, como 𝑣 =
𝑑𝑥
𝑑𝑡
se tiene que 𝑎 =𝑑2𝑥
𝑑𝑡2
Si la masa deflexiona una distancia +𝑥 con respecto a la posición de
equilibrio estático, entonces la fuerza del resorte es – 𝑘(𝑥 + 𝛿𝑒𝑠𝑡). Ahora
se tiene
𝑚𝑎 = −𝑘(𝑥 + 𝜹𝒆𝒔𝒕) +𝑊
Como se dijo antes 𝑊 = −𝑘𝜹𝒆𝒔𝒕 por lo tanto
𝑚𝑎 = −𝑘𝑥

119
Reemplazando el valor de 𝑎 se tiene:
𝑚𝑑2𝑥
𝑑𝑡2= −𝑘𝑥
Que se escribirá 𝑚𝑥′′ = −𝑘𝑥 y se obtiene el modelo matemático:
𝑚𝑥′′ + 𝑘𝑥 = 0
Otra fuerza que interviene en el experimento es la del medio en donde
se da el movimiento, generalmente se hace con el aire en la simulación
se pudo observar que el cambio entre la oscilación en un medio al vacío
continua oscilando permanentemente y en el caso de un medio denso
se estira de igual forma que la anterior con cambio en el tiempo de
vibración por lo que la resistencia que se presenta es otra fuerza
presente:
𝐹𝑢𝑒𝑟𝑧𝑎 𝑑𝑒𝑙 𝑚𝑒𝑑𝑖𝑜 = 𝑏𝑣(𝑡)
Por lo anterior se tiene que las fuerzas que actúan durante el
experimento al colocar un peso en el extremo de un resorte son:
𝐹 = 𝑃 = 𝑚𝑔
𝐹 = 𝑘𝑥
𝐹 = 𝑏𝑣(𝑡)
Al establecer las relaciones entre las fuerzas se tiene que para que el
sistema esté en equilibrio existe una fuerza que mueve el objeto hacia
abajo y otras fuerzas que hacen que el objeto recupere la posición de
equilibrio por lo tanto la fuerza del resorte es contraria por lo tanto – 𝑘𝑥 y
la resistencia del medio (aire) también actúa en sentido contrario – 𝑏𝑣(𝑡),
por lo tanto
𝑚𝑔 = −𝑘𝑥 − 𝑏𝑣(𝑡)
que se escribe
𝑚𝑎 + 𝑘𝑥 + 𝑏𝑣(𝑡) = 0

120
Por lo tanto la ecuación que modela el movimiento de un sistema masa
resorte es:
𝑚𝑑2𝑥
𝑑𝑡2+ 𝑏
𝑑𝑥
𝑑𝑡+ 𝑘𝑥 = 0
Escrito en otra notación:
𝑚𝑥′′ + 𝑏𝑥′ + 𝑘𝑥 = 0
Siendo la anterior una ecuación diferencial, se debe recurrir a los
procedimientos conocidos para resolver las ecuaciones diferenciales
homogéneas de segundo orden, para ello se puede recurrir al
polinomio característico: 𝑟2 + 𝑟𝑥 + 𝑞 = 0
Ahora se utiliza el modelo matemático desarrollado para solucionar el
problema planteado:
Como no se conoce el valor de la constante 𝑘 se debe calcular su valor:
𝐹 = 𝑘𝑥
100
10= 𝑘
𝑘 = 10
Reemplazando los valores se tiene:
𝑚𝑥′′ + 𝑏𝑥′ + 𝑘𝑥 = 0
100𝑥′′ + 0𝑥′ + 10𝑥 = 0
10𝑥′′ + 𝑥 = 0
10𝑟2 + 1 = 0
Resolviendo se tiene que la solución es 𝑟 = ±√−1
10= ±
√10
10𝑖
Como las raíces son elementos de los números complejos se tiene que
la solución de la ecuación diferencial es:

121
𝑥(𝑡) = 𝐶1 cos√10
10𝑡 +𝐶2 sen
√10
10𝑡
De acuerdo a las condiciones iniciales: 𝑥(𝑡) = 5 y 𝑡 = 0 se tiene:
5 = 𝐶1 cos√10
10(0) +𝐶2 sen
√10
10(0)
5 = 𝐶1 cos√10
10(0)
𝐶1 = 5𝑐𝑚.
Además la 𝑣 = 0 cuando 𝑡 = 0
𝑥(𝑡) = 𝐶1 cos√10
10𝑡 +𝐶2 sen
√10
10𝑡
𝑥′(𝑡) = −𝐶1√10
10sen
√10
10𝑡 +𝐶2
√10
10cos√10
10𝑡
𝑥′(0) = 𝐶2√10
10cos√10
10(0)
0 = 𝐶2√10
10(1)
𝐶2 = 0
d) Representación gráfica
Figura guia_3.- Vibración del sistema en condiciones iniciales a diferentes distancias
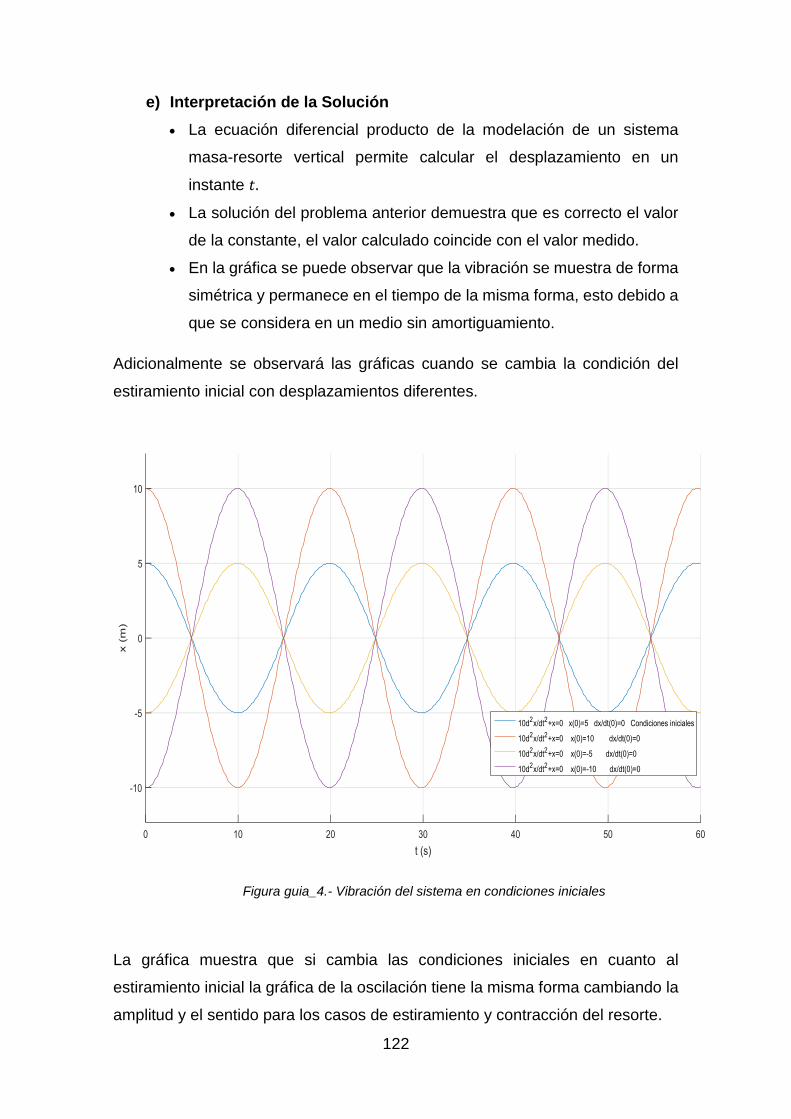
122
e) Interpretación de la Solución
La ecuación diferencial producto de la modelación de un sistema
masa-resorte vertical permite calcular el desplazamiento en un
instante 𝑡.
La solución del problema anterior demuestra que es correcto el valor
de la constante, el valor calculado coincide con el valor medido.
En la gráfica se puede observar que la vibración se muestra de forma
simétrica y permanece en el tiempo de la misma forma, esto debido a
que se considera en un medio sin amortiguamiento.
Adicionalmente se observará las gráficas cuando se cambia la condición del
estiramiento inicial con desplazamientos diferentes.
Figura guia_4.- Vibración del sistema en condiciones iniciales
La gráfica muestra que si cambia las condiciones iniciales en cuanto al
estiramiento inicial la gráfica de la oscilación tiene la misma forma cambiando la
amplitud y el sentido para los casos de estiramiento y contracción del resorte.

123
8. CONCLUSIONES
La realización de un experimento permite al estudiante simular el
fenómeno real de vibraciones.
La utilización de software que simule el fenómeno muestra su
comportamiento.
El modelo matemático del fenómeno de vibraciones permite analizar el
problema ya que la Matemática es el soporte base de la física.
El fenómeno de vibraciones representado matemáticamente, puede ser
resuelto en forma directa, mediante métodos numéricos o recurriendo a
un software específico disponible en la academia.
9. RECOMENDACIONES.
Identificar el fenómeno vibratorio
Modelar Matemáticamente
Resolver problemas mediante software
Ilustrar gráficamente el fenómeno, su comportamiento y su solución
Revisar el tema en textos de Ecuaciones Diferenciales Ordinarias de
Nagle, Edwards, Lara, entre otros.
10. EVALUACION
La rúbrica para valorar el trabajo en el aula es la siguiente:
Estudiantes
TRABAJO DE GRUPO TRABAJO EN CLASE
PA
RTI
CIP
A C
ON
IDEA
S
DEM
UES
TRA
C
ON
OC
IMIE
NTO
SE IN
TEG
RA
AL
EQU
IPO
TRA
BA
JA E
N S
U R
EPO
RTE
PR
OM
UEV
E EL
TRA
BA
JO
REA
LIZA
AC
TIV
IDA
D
PR
OP
UES
TA
ENTR
EGA
AC
TIV
IDA
D
REA
LIZA
PR
EGU
NTA
S
AP
OYA
A S
US
CO
MP
AÑ
ERO
S
2 2 2 2 2 3 3 2
XX
YY
ZZ

124
Una vez entregado el trabajo grupal los estudiantes deben realizar una
autoevaluación del trabajo en clase, la misma que constará en lo siguiente:
Preguntas de autoevaluación de la clase: 1. Luego del trabajo realizado en clase usted está en capacidad de:
Identificar: ____________________________________________________________ Operar : ____________________________________________________________ Proponer: ____________________________________________________________ Realizar: ____________________________________________________________ Cambiar: ____________________________________________________________ Otros: ____________________________________________________________
2. El tiempo dedicado para aprender es suficiente o cuánto cree que le hace falta ____________________________________________________________
3. Como hizo hoy en la clase para aprender. ____________________________________________________________ ____________________________________________________________ ____________________________________________________________
4. Considera que hizo falta algo para que usted aprenda mejor ____________________________________________________________
El estudiante debe hacer un trabajo extraclase para afianzar sus conocimientos,
el mismo se plantea de la siguiente forma:
Proceso de Refuerzo:
1. Para completar el estudio realice un informe de su trabajo en clase.
2. Plantee interrogantes del tema y dé sus respuestas.
3. De ser el caso plantee ejemplos, revise| notas y analice qué
características tienen y si está de acuerdo a lo aprendido.
4. Resuelva ejercicios propuestos por el docente
5. Recuerde la pregunta de la final de la clase y respóndala nuevamente y
haga un análisis de la respuesta dada por usted durante la clase.
125
CAPÍTULO 6
6 CONCLUSIONES Y RECOMENDACIONES
6.1 CONCLUSIONES
En el trabajo se evidencia que es necesario conocer los fundamentos de
la matemática en temas como el Algebra Lineal, Derivadas, Integrales,
Ecuaciones Diferenciales y Vibraciones.
Las ecuaciones diferenciales son una herramienta matemática muy
significativa para representar fenómenos físicos que se presentan en la
naturaleza.
Los textos en su gran mayoría desarrollan los procesos de solución a las
diferentes tipos de ecuaciones y sistemas, dando al lector una variedad
de ejercicios modelos, sin embargo el desarrollo de problemas en
determinados temas como la aplicación en sistemas de ecuaciones
diferenciales lineales es limitado.
En el presente documento se desarrolla los temas elementales de
ecuaciones diferenciales para que se puedan resolver aplicaciones
sencillas del sistema masa resorte.
El uso de las herramientas tecnológicas facilitan encontrar las soluciones
a ecuaciones diferenciales y la demostración de cómo actúa un sistema
masa resorte.
Plantear un proceso de clase implica un proceso que permita al estudiante
ser el actor principal de su aprendizaje.
El docente es un ente principal, responsable de generar el andamiaje
necesario para que el proceso de aprendizaje de los estudiantes sea de
calidad, promoviendo el desarrollo de pensamiento crítico cuando se
incentiva el aprendizaje autónomo.
126
En la actualidad es necesario involucrar la tecnología en el aula para
generar espacios atractivos y que despierten la curiosidad de los
estudiantes haciendo referencias.
6.2 RECOMENDACIONES
Los docentes de bachillerato deben trabajar Algebra Lineal para que los
estudiantes aprendan el manejo de valores y vectores propios, los temas
de derivada, integrales y avanzar a ecuaciones diferenciales sencillas.
Incentivar a los estudiantes que durante el proceso de su formación tienen
como prioridad aprender para la vida y uno de los campos en los que se
debe formar es el conocimiento de la naturaleza, en este caso destacan
las vibraciones, sus aplicaciones y comportamiento básico.
Los docentes de Física y Matemática deberían coordinar el trabajo para
que los estudiantes dispongan de los conocimientos Matemáticos que es
la herramienta basé, para la solución de problemas de la Física luego de
conocer el fenómeno físico.
Los textos que se preparan para trabajar con los estudiantes de
bachillerato deben incluir sistemas sencillos y detallados para su
comprensión.
Debe incentivarse a los docentes para su preparación y capacitación en el
manejo de software con herramientas matemáticas que proveen de
procesos para: solucionar ecuaciones diferenciales como Scientific,
MatLab y Geogebra entre otros; simular fenómenos físicos como los
expuestos en https://phet.colorado.edu/es/simulation.
Que los estudiantes dispongan de forma anticipada del material necesario
para realizar el proceso de aprendizaje de forma que el proceso de
anticipación sea dinámico y cumpla con los objetivos de preparar al
estudiante para el nuevo conocimiento.
127
Para el proceso de modelación se debe realizar en lo posible los
experimentos en forma directa o por simuladores con la finalidad de
conectar el aprendizaje con la vida real, es decir que el nuevo aprendizaje
tenga sentido y transcendencia para el estudiante.
La guía general propuesta sea utilizada para trabajar modelación
matemática y en caso específico para vibraciones la guía desarrollada en
el presente documento.

128
7 GLOSARIO DE TERMINOS
Diagonalización.- Consiste en el proceso de encontrar una matriz
diagonal a partir de los valores propios de tal forma que se cumpla la
igualdad A=PDP-1.
Ecuaciones Diferenciales Ordinarias (EDO).- Son igualdades en las que
aparecen derivadas o diferenciales.
Currículo.- Es la integración de diferentes elementos que forman parte del
proceso educativo, como metodología, planes, contenidos, evaluación que
promueven la formación integral de un estudiante que cursa dicho proceso.
Destreza con criterio de desempeño.- Es un elemento del currículo
Nacional de Educación que integra: destreza + conocimiento + nivel de
complejidad.
Epistemología. La epistemología en general es una rama filosófica que estudia el
conocimiento científico, en cuanto a los conceptos y métodos que usa, y las leyes
que formula10.
Evaluación.- Proceso por el cual se tiene herramientas para verificar el
avance o resultados de un acto, en educación permite monitorear el
desarrollo del aprendizaje del estudiante con la finalidad de intervenir de
forma oportuna y llegar al aprendizaje.
Experimentar.- Proceso que permite acercarse a la realidad de un
fenómeno y que se puede repetir con diferentes condiciones para obtener
conclusiones.
10 Epistemología de la Educación.9 de noviembre de 2011. Hilda Firgenman. Recuerado de http://educacion.laguia2000.com/general/epistemologia-de-la-educacion#ixzz3uOA5pyUz
129
Modelamiento.- Es traducir a código matemático una situación o
fenómeno que se produce en la vida real, para ello es necesario someterlo
a pruebas, validar e interpretar los resultados.
Operación.- En matemática es la relación básica que se da entre dos
conjuntos.
Orden en EDO.- Es l número de derivada a la que se encuentra una
variable en la ecuación diferencial
Pedagogía Crítica.- Es una forma de enseñanza aprendizaje que
promueve en el estudiante la criticidad a través del cuestionamiento de las
situaciones tratadas.
Valor Propio.- Es un valor que corresponde a una raíz de la ecuación
característica. El mismo puede ser un número real o complejo y permite
una transformación a un vector sin cambiar su dirección.
Vector Propio.- Es el vector no nulo de una matriz asociado a un valor
propio que verifica la igualdad:
𝑀𝑎𝑡𝑟𝑖𝑧 𝑥 𝑣𝑒𝑐𝑡𝑜𝑟 𝑝𝑟𝑜𝑝𝑖𝑜 = 𝑣𝑎𝑙𝑜𝑟 𝑝𝑟𝑜𝑝𝑖𝑜. 𝑣𝑒𝑐𝑡𝑜𝑟 𝑝𝑟𝑜𝑝𝑖𝑜 .
130
8 8. BIBLIOGRÁFIA
1. Benalcazar, H. (2012). Algebra Lineal y aplicaciones (Primera). Quito.
2. Castro, A. (2008). Algebra lineal con hoja de cálculo/ Linear Algebra with
Calculus Sheet. Editorial Trillas Sa De Cv.
3. Edwards, C. H., & Penney, D. E. (2001). Ecuaciones diferenciales. Pearson
Educación.
4. Espinoza, E. (2007). Análisis Matemático (Primera, Vol. IV). Lima, Perú.
5. Grossman, S. I. (2008). Álgebra lineal. McGraw-Hill Interamericana de
España S.L.
6. Lara, J. (2007). Ecuaciones Diferenciales Ordinarias (Tercera). Quito.
7. Lay, D. C. (2006). Álgebra Lineal y sus aplicaciones. Pearson/Addison-
Wesley.
8. Nagle, K., & Saff. (s. f.). Ecuaciones Diferenciales y problemas con valores
en la frontera.
9. Rao, S. S. (2011). Vibraciones Mecánicas. Prentice Hall.
10. Saff, E. B., & Snider, A. D. (2005). Ecuaciones diferenciales y problemas
con valores en la frontera. Pearson Educación.
11. Serway, R. A., & Jewett, J. W. (2008). Fisica Para Ciencias e Ingenieria
(Séptima, Vol. I). Cengage Learning.
12. Spiegel, M. (1994). Ecuaciones Diferenciales Aplicadas (Cuarta). México:
Prentice Hall Hispanoamerica.
13. Zill, D. G., & Cullen, M. R. (2006). Ecuaciones diferenciales con problemas
de valores en la frontera. International Thomson.

131
14. Ministerio de Educación: http://educacion.gob.ec/wp-
content/uploads/downloads/2012/08/Bases_Pedagogicas.pdf.
15. Ministerio de Educación, http://educacion.gob.ec/wp-
content/uploads/downloads/2013/09/Lineamientos_Matematica_090913.p
df.pdf. 2015.
16. Ministerio de Educación, http://educacion.gob.ec/wp-
content/uploads/downloads/2014/10/Matematica-Guia.pdf,2015.
132
9 ANEXOS

133
9.1 ANEXO I
CÓDIGOS PARA GRÁFICAS DE VIBRACIONES EN
MATLAB
9.1.1 PROBLEMA 1 - CAÍDA LIBRE POSICIÓN
clc, clear all, close all syms t
y1(t)=1/2*9.8*t^2 y2(t)=1/2*9.8*t^2+1 y3(t)=1/2*9.8*t^2+2 figure hold on grid on ezplot(y1(t)) ezplot(y2(t)) ezplot(y3(t)) legend('x(t)=1/2*9.8*t^2 x(0)=0 Condición
inicial','x(t)=1/2*9.8*t^2+1 x(0)=1',... 'x(t)=1/2*9.8*t^2+2 x(0)=2','Location','Best')
xlabel('t (s)') ylabel('x (m)') title('')
ax=gca ax.YLim=[0,50]; ax.XLim=[0,3]; ax.FontSize=12; ax.LineWidth=0.5;
9.1.2 PROBLEMA 2 – RESORTES
clc, clear all, close all syms x(t) Dx=diff(x); x1(t)=dsolve(diff(x,2)==-16*x, x(0)==-0.5, Dx(0)==2); x2(t)=dsolve(diff(x,2)==-16*x, x(0)==0, Dx(0)==2); x3(t)=dsolve(diff(x,2)==-16*x, x(0)==-1, Dx(0)==2); x4(t)=dsolve(diff(x,2)==-16*x, x(0)==-2, Dx(0)==0);
figure hold on grid on ezplot(x1(t)) ezplot(x2(t)) ezplot(x3(t))
134
ezplot(x4(t)) legend('d^2x/dt^2+16x=0 x(0)=-0.5 dx/dt(0)=2 Condiciones
iniciales',... 'd^2x/dt^2+16x=0 x(0)=0 dx/dt(0)=2','d^2x/dt^2+16x=0
x(0)=-1 dx/dt(0)=2',... 'd^2x/dt^2+16x=0 x(0)=-2 dx/dt(0)=0','Location','Best')
xlabel('t (s)') ylabel('x (m)') title('')
ax=gca ax.XLim=[0,10]; ax.FontSize=12;

135
9.2 ANEXO II
PLANIFICACIONES DE CLASE PARA ECUACIONES
DIFERENCIALES ORDINARIAS Y VIBRACIONES
9.2.1 GUÍA DE TRABAJO PARA APRENDER ECUACIONES
DIFERENCIALES LINEALES DE SEGUNDO ORDEN Y COEFICIENTES
CONSTANTES.
Objetivo: Resolver ecuaciones diferenciales lineales de segundo orden
ANTICIPACION
Para iniciar con el tema se plantea establecer las características y diferencias que
existen entre el grupo de expresiones planteadas
1) 𝑥 + 3 = 0 2)𝑥2 + 2𝑥 + 1 = 0 3) 𝑥(𝑥 − 6) = 9 4) 4𝑥 = 7
Es importante recordar las características de las ecuaciones tratadas con
anterioridad entre ellas, las ecuaciones lineales, donde se destaca su variable de
primer grado.
Las ecuaciones diferenciales ordinarias que como se trabajó antes son igualdades
que contienen derivadas de una o más variables dependientes con respecto a una
sola variable independiente.
A partir de este momento se establece que el tema de estudio son las Ecuaciones
diferenciales lineales de primer orden.
Una vez que los estudiantes conocen el tema ahora tienen la inquietud de cómo
resuelven estas nuevas ecuaciones.

136
CONSTRUCCION DEL CONOCIMIENTO
Se presenta un documento con la información básica de ecuaciones diferenciales
lineales.
Conforme realizan la lectura del documento los estudiantes en primer lugar
diferencian e identifican las ecuaciones diferenciales lineales.
𝑎𝑛(𝑥)𝑑𝑛𝑦
𝑑𝑥𝑛+ 𝑎𝑛−1(𝑥)
𝑑𝑛−1𝑦
𝑑𝑥𝑛−1+⋯+ 𝑎1(𝑥)
𝑑𝑦
𝑑𝑥+𝑎0(𝑥)
𝑦
𝑥= 𝑔(𝑥)
Según la forma general los estudiantes deben determinar las características:
Y es la variable dependiente
Todas las derivadas tienen exponente uno
Los coeficientes 𝑎0(𝑥), 𝑎𝑛−1(𝑥),… 𝑎𝑛(𝑥), 𝑔(𝑥) dependen solo de x
Para aclarar el tema se presentan ejemplos para que determinen si son lineales
o no lo son.
Ejemplos:
i. 𝑥2𝑑3𝑦
𝑑𝑥3+ 𝑐𝑜𝑠𝑥
𝑑2𝑦
𝑑𝑥2+ 𝑠𝑒𝑛𝑥
𝑑𝑦
𝑑𝑥+ 𝑥2𝑦 = 𝑐2
ii. 𝑦2𝑑2𝑦
𝑑𝑥2+ 𝑦
𝑑𝑦
𝑑𝑥+ 𝑥𝑦 = 𝑥
iii. 𝑎1(𝑥)𝑑𝑦
𝑑𝑥+ 𝑎0(𝑥)𝑦 = 𝑏(𝑥)
Luego se procederá a trabajar con la ecuación diferencial lineal homogénea
𝐴(𝑥)𝑦𝑛 + 𝐵(𝑥)𝑦𝑛−1 +⋯+ 𝐶(𝑥)𝑦 = 0
Se solicita a los estudiantes escribir la ecuación como en el álgebra elemental
teniendo en cuenta las características de la variable independiente que se tiene
y a partir de allí se observa la cualidad de polinomio característico al polinomio
obtenido de la forma de escritura.
Como al inicio de la clase se refresco estas ideas de las ecuaciones de diferentes
grados, los estudiantes recurrirán a cualquier método para la resolución de la
137
ecuación y determinar las soluciones y se hará hincapié en los tipos de
soluciones que solíamos encontrar y lo que significaban.
Caso 1.- Dos números reales (Raíces reales y diferentes)
Caso 2.- Un número real (Raíces reales e iguales)
Caso 3.- Dos número complejos conjugados (Raíces imaginarias.)
Ahora es necesario el desarrollo de un ejercicio práctico que se plantea y se
procede a su solución con el aporte de los estudiantes.
Ejercicio:
1) Hallar la solución general de 𝟐𝒚’’ − 𝟓𝒚′ − 𝟑𝒚 = 𝟎
Los estudiantes deben plantear el polinomio característico que queda
2𝑥2 − 5𝑥 − 3 = 0 y luego se procede a resolver quedando las soluciones son:
𝑥1 = 3 y 𝑥2 = −1
2
Al analizar las soluciones se observa que son del primer caso raíces reales, el
estudiante con el apoyo del documento analizarán el tipo de solución que
corresponde a este caso y procederán a escribir la solución, en este caso es:
𝑦 = 𝐶1𝑒3𝑥 + 𝐶2𝑒
−1
2𝑥
2) Hallar la solución general de 𝟒𝒚’’ − 𝟒𝒚′ + 𝒚 = 𝟎
Como en el caso anterior los estudiantes proceden a encontrar el polinomio
característico y resolverlo.
En este caso el polinomio tiene como solución (2𝑥 − 1)2 lo que significa que se
tiene una raíz que se encuentra repetida dos veces, así:
𝑥1 =1
2, 𝑥2 =
1
2 entonces se tiene que 𝑥 =
1
2 con 𝑚𝑢𝑙𝑡𝑖𝑝𝑙𝑖𝑐𝑖𝑑𝑎𝑑 2
Al analizar las soluciones se observa que son del segundo caso raíces reales, el
estudiante con el apoyo del documento analizarán el tipo de solución que

138
corresponde a este caso y procederán a escribir la solución, en este caso es:
𝑦 = 𝐶1𝑒1
2𝑥 + 𝐶2𝑥𝑒
1
2𝑥
3) Hallar la solución general de 𝒚’’ − 2𝑦′ + 3𝑦 = 𝟎
Como en el caso anterior los estudiantes proceden a encontrar el polinomio
característico y resolverlo.
En este caso el polinomio tiene como solución 𝑥1 = 1 + √2𝑖 y 𝑥1 = 1 − √2𝑖 lo que
significa que se tiene como raíz un número complejo y su conjugado.
Al analizar las soluciones se observa que son del tercer caso raíces reales, el
estudiante con el apoyo del documento analizarán el tipo de solución que
corresponde a este caso y procederán a escribir la solución, en este caso es:
𝑦 = 𝐶1 cos √2𝑥 + 𝐶2𝑠𝑒𝑛 √2𝑥
Se planteará un nuevo problema al que los estudiantes propondrán una solución de
acuerdo a las condiciones solicitadas.
Hallar la solución general de: 𝒚’’ − 𝟔𝑦′ + 9𝑦 = 𝟎
CONSOLIDACIÓN
Con la finalidad de consolidar el trabajo y con fines de acreditación, se propone a
los estudiantes:
Realizar un trabajo grupal, los grupos estarán integrados hasta por 3 estudiantes
reunidos por afinidad, el mismo consiste en explicar los casos que se pueden
presentar en la solución de ecuaciones diferenciales lineales de segundo orden y la
resolución de 3 ejercicios prácticos.
Uso de la tecnología
Con el uso de software matemático podemos diagramar los resultados de las
ecuaciones diferenciales haciendo la gráfica teniendo en cuenta los posibles
cambios que se den y como varía la gráfica y por ende su ecuación con nuevos
valores por lo que se puede generalizar que al resolver este tipo de ecuaciones

139
conocidos los valores de amortiguamiento, constante de elasticidad se pueden
cambiar y en forma inmediata vemos el comportamiento en la gráfica respectiva,
luego se procede con escritura de las ecuaciones.
Figuras 8.1 Familia de curvas de la solución de ecuaciones diferenciales
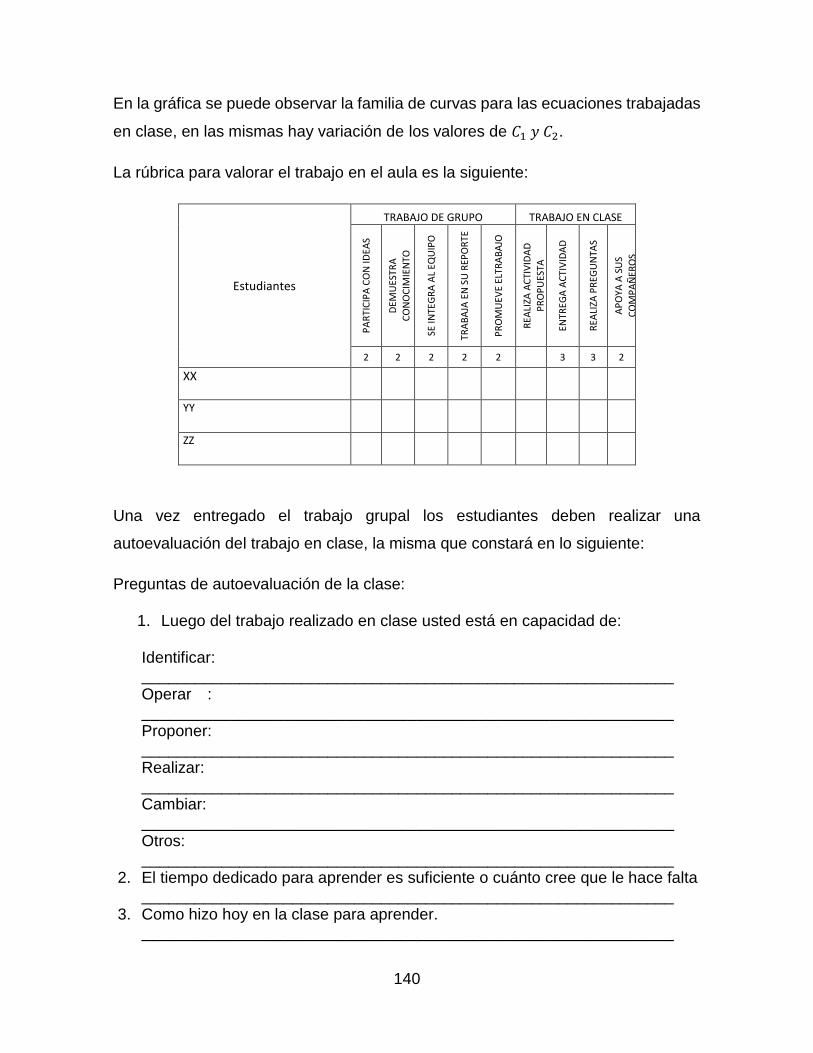
140
En la gráfica se puede observar la familia de curvas para las ecuaciones trabajadas
en clase, en las mismas hay variación de los valores de 𝐶1 𝑦 𝐶2.
La rúbrica para valorar el trabajo en el aula es la siguiente:
Estudiantes
TRABAJO DE GRUPO TRABAJO EN CLASE
PA
RTI
CIP
A C
ON
IDEA
S
DEM
UES
TRA
CO
NO
CIM
IEN
TO
SE IN
TEG
RA
AL
EQU
IPO
TRA
BA
JA E
N S
U R
EPO
RTE
PR
OM
UEV
E EL
TRA
BA
JO
REA
LIZA
AC
TIV
IDA
D
PR
OP
UES
TA
ENTR
EGA
AC
TIV
IDA
D
REA
LIZA
PR
EGU
NTA
S
AP
OYA
A S
US
CO
MP
AÑ
ERO
S
2 2 2 2 2 3 3 2
XX
YY
ZZ
Una vez entregado el trabajo grupal los estudiantes deben realizar una
autoevaluación del trabajo en clase, la misma que constará en lo siguiente:
Preguntas de autoevaluación de la clase:
1. Luego del trabajo realizado en clase usted está en capacidad de: Identificar: ____________________________________________________________ Operar : ____________________________________________________________ Proponer: ____________________________________________________________ Realizar: ____________________________________________________________ Cambiar: ____________________________________________________________ Otros: ____________________________________________________________
2. El tiempo dedicado para aprender es suficiente o cuánto cree que le hace falta ____________________________________________________________
3. Como hizo hoy en la clase para aprender. ____________________________________________________________
141
____________________________________________________________ ____________________________________________________________
4. Considera que hizo falta hoy algo para que usted aprenda mejor ____________________________________________________________
El estudiante debe hacer un trabajo extraclase para afianzar sus conocimientos, el
mismo se plantea de la siguiente forma:
Proceso de Refuerzo:
1. Para completar el estudio realice un informe de su trabajo en clase.
2. Plantee interrogantes del tema y dé sus respuestas.
3. De ser el caso plantee ejemplos, revise| notas y analice qué características
tienen y si está de acuerdo a lo aprendido.
4. Resuelva ejercicios propuestos por el docente
5. Recuerde la pregunta de la final de la clase y respóndala nuevamente y haga
un análisis de la respuesta dada por usted durante la clase.

142
9.2.2 GUÍA DE TRABAJO PARA APRENDER A RESOLVER PROBLEMAS DE
VIBRACIONES DE UN SISTEMA MASA RESORTE.
Objetivo: Aplicar la segunda ley de Newton para determinar la ecuación diferencial
que solucione un ejemplo de sistema masa-resorte.
ANTICIPACION
Se muestra a los estudiantes el siguiente video:
https://www.youtube.com/watch?v=UdMRgTF6IxY
Una vez concluido el video se plantean un interrogatorio y conversatorio sobre de
las características que pudieron observar en el video y que parte de la matemática
será objeto de estudio, como se relacionan con objetos que están en su entorno.
A partir de este momento se establece que el tema de estudio son las Ecuaciones
Diferenciales y sus aplicaciones en sistemas masas-resortes.
Una vez que los estudiantes conocen el tema ahora tienen la inquietud de cómo
realizar los cálculos que corresponden a los movimientos de los resortes.
CONSTRUCCION DEL CONOCIMIENTO
Se presenta un documento con la información básica de las vibraciones, que son,
que tipos se puede encontrar, sus características, como se estructura un sistema

143
resorte, como se transforma al diagrama plano, cuál es el modelo matemático que
rige el movimiento.
Conforme realizan la lectura del documento los estudiantes realizarán un
organizador gráfico que incluya los temas tratados y trasladarán a una forma de
expresión diferente de lo que se ha comprendido.
Por ejemplo
Una vez identificado los elementos de un sistema masa-resorte se relaciona con el
gráfico de idealización.
Enseguida el estudiante identificará la ecuación para calcular las soluciones al
sistema, para este caso debe relacionar la ecuación diferencial con lo que conoce
para solucionar las ecuaciones de segundo grado, puesto que se verificará que la
ecuación auxiliar tiene dicha forma.
𝑚𝑑2𝑥
𝑑𝑥2= −𝑘𝑥
A continuación se aplicará la metodología del estudio de casos en donde los
estudiantes analizarán el ejemplo resuelto, en el mismo el estudiante detallará el
Resorte
Puede comprimirse
Puede expandirse
Tiene una Ctte. de
elasticidad (k)
Suave (k<0)
Lineal (k=0)
Duro (k>0) Masa
Soporte Idealización
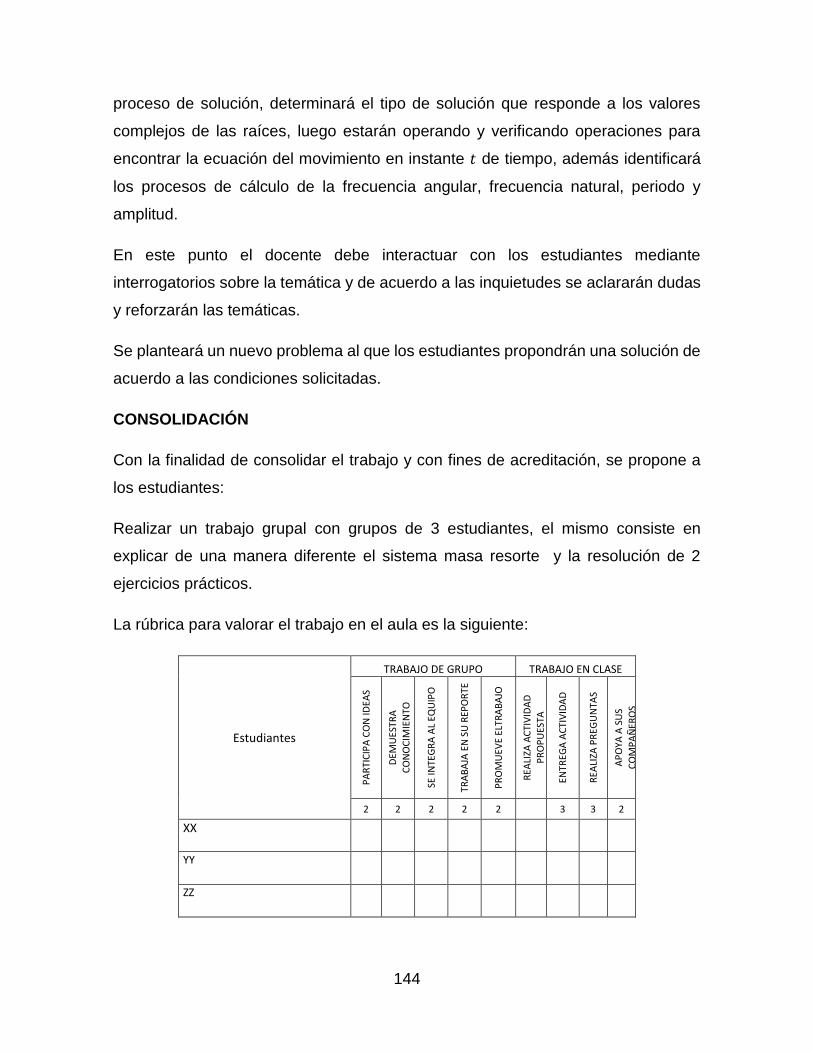
144
proceso de solución, determinará el tipo de solución que responde a los valores
complejos de las raíces, luego estarán operando y verificando operaciones para
encontrar la ecuación del movimiento en instante 𝑡 de tiempo, además identificará
los procesos de cálculo de la frecuencia angular, frecuencia natural, periodo y
amplitud.
En este punto el docente debe interactuar con los estudiantes mediante
interrogatorios sobre la temática y de acuerdo a las inquietudes se aclararán dudas
y reforzarán las temáticas.
Se planteará un nuevo problema al que los estudiantes propondrán una solución de
acuerdo a las condiciones solicitadas.
CONSOLIDACIÓN
Con la finalidad de consolidar el trabajo y con fines de acreditación, se propone a
los estudiantes:
Realizar un trabajo grupal con grupos de 3 estudiantes, el mismo consiste en
explicar de una manera diferente el sistema masa resorte y la resolución de 2
ejercicios prácticos.
La rúbrica para valorar el trabajo en el aula es la siguiente:
Estudiantes
TRABAJO DE GRUPO TRABAJO EN CLASE
PA
RTI
CIP
A C
ON
IDEA
S
DEM
UES
TRA
CO
NO
CIM
IEN
TO
SE IN
TEG
RA
AL
EQU
IPO
TRA
BA
JA E
N S
U R
EPO
RTE
PR
OM
UEV
E EL
TRA
BA
JO
REA
LIZA
AC
TIV
IDA
D
PR
OP
UES
TA
ENTR
EGA
AC
TIV
IDA
D
REA
LIZA
PR
EGU
NTA
S
AP
OYA
A S
US
CO
MP
AÑ
ERO
S
2 2 2 2 2 3 3 2
XX
YY
ZZ
145
Una vez entregado el trabajo grupal los estudiantes deben realizar una
autoevaluación del trabajo en clase, la misma que constará en lo siguiente:
Preguntas de autoevaluación de la clase: Luego del trabajo realizado en clase usted está en capacidad de:
Identificar: ____________________________________________________________ Operar : ____________________________________________________________ Proponer: ____________________________________________________________ Realizar: ____________________________________________________________ Cambiar: ____________________________________________________________ Otros:_______________________________________________________ ____________________________________________________________
5. El tiempo dedicado para aprender es suficiente o cuánto cree que le hace falta ____________________________________________________________
6. Como hizo hoy en la clase para aprender. ____________________________________________________________ ____________________________________________________________ ____________________________________________________________
7. Considera que hizo falta hoy algo para que usted aprenda mejor ____________________________________________________________
El estudiante debe hacer un trabajo extraclase para afianzar sus conocimientos, el
mismo se plantea de la siguiente forma:
Proceso de Refuerzo:
6. Para completar el estudio realice un informe de su trabajo en clase.
7. Plantee interrogantes del tema a las que usted pueda dar respuesta
8. De ser el caso plantee ejemplos, revise notas y analice qué características
tienen y si está de acuerdo a lo aprendido.
9. Resuelva ejercicios propuestos por el docente
10. Recuerde la pregunta de la final de la clase y respóndala nuevamente y haga
un análisis de la respuesta dada por usted durante la clase.
146
En el proceso enseñanza aprendizaje el docente requiere de la elaboración de
guías que:
1. Proporcione la información conceptual básica del experimento
2. Proporcione la metodología del experimento
3. Registrar la información del experimento
4. Realizar la ilustración
5. Modelar matemáticamente
6. Resolución del modelo matemático
7. Interpretación del resultado
8. Evaluación de resultados
9. Conclusiones
10. Recomendaciones.

147
10 BIOGRAFÍA
Luz del Carmen Celi Carrión, nace el 29 de mayo de 1967 en la parroquia Malacatos
Cantón y provincia de Loja, su formación básica ocurre en la Escuela María
Montesori y Colegio Manuel José Rodríguez de su parroquia natal, culmina el
bachillerato en el colegio Beatriz Cueva de Ayora de la ciudad de Loja.
Los estudios Universitarios realiza en la Universidad Nacional de Loja obteniendo el
título de Profesora de Segunda Educación y posteriormente la Licenciatura en la
Especialidad de Físico Matemática.
Otro interés profesional le permite obtener el título de Técnico Superior en Análisis
de Sistemas que posteriormente amplia al obtener el título de pregrado de Doctora
en Ciencias de la Educación mención Informática Educativa en la Escuela
Politécnica del Chimborazo.
Siempre interesada en el ámbito educativo obtiene el Diploma Superior en Currículo
y Didáctica en la Universidad Tecnológica América y actualmente concluyendo la
Maestría en Docencia Matemática en la Universidad Central del Ecuador.
Adicionalmente participa en cursos de formación continua en diferentes ámbitos
entre los que se menciona: Formación de docentes de Matemática ofertado por la
Organización de Estados Iberoamericanos, Formación de Directivos, Formación de
Asesores y Auditores Educativos, Pedagogía y Didáctica de la Enseñanza,
Formación en TICs, Competencias Laborales del Bachillerato Técnico promovidos
por el Ministerio de Educación del Ecuador.
En el ámbito laboral ha sido diversa como: Docente de Computación en el Colegio
Emiliano Ortega y en el Colegio de Bachillerato 27 de Febrero; Docente de
Matemática en el Colegio Beatriz Cueva de Ayora, Colegio Particular Juan
Montalvo, Colegio de Bachillerato 27 de Febrero, Instituto Tecnológico Superior
Juan Montalvo; Gerente y Presidente de la Cooperativa de Servicios Educacionales
Juan Montalvo en la ciudad de Loja.


















