
L7 Manual de usuario - Biblioteca de diagramas...
301
VARISPEED L7 El variador de frecuencia para ascensores MANUAL DEL USUARIO Manual No. TOSPC71067605-03-OY
Transcript of L7 Manual de usuario - Biblioteca de diagramas...
VARISPEED L7El variador de frecuencia para ascensores
MANUAL DEL USUARIO
Manual No. TOSPC71067605-03-OY
Nota: Las especificaciones están sujetas a cambio sin previo aviso.Manual No. TOSPC71067605-03-OY
ESPAÑAOmron Electronics Iberia, S.A. c/Arturo Soria 95, E-28027 Madrid Tel: +34 913 777 900 Fax: +34 913 777 956 [email protected]
Madrid Tel: +34 913 777 913 Barcelona Tel: +34 932 140 600 Sevilla Tel: +34 954 933 250 Valencia Tel: +34 963 530 000 Vitoria Tel: +34 945 296 000
PORTUGALOmron Electronics Iberia, S.A. – Sucursal PortugalTorre Fernão MagalhãesAvenida D. João II, Lote 1.17.02, 6º Piso 1990 – 084 - Lisboa PortugalTel: +351 21 942 94 00Fax: +351 21 941 78 [email protected]
I
Contenido
Advertencias ..................................................................................................VIIPrecauciones de seguridad e instrucciones ................................................. VIIICompatibilidad EMC ...................................................................................... XFiltros de línea ...............................................................................................XIIMarcas registradas ....................................................................................... XIII
1 Manipulación de los convertidores ...................................... 1-1
Modelos Varispeed L7 .................................................................................1-2
Comprobaciones a la recepción ..................................................................1-3Comprobaciones ............................................................................................................1-3
Información de la placa ..................................................................................................1-3
Versión de software del convertidor ...............................................................................1-4Nombres de componentes .............................................................................................1-5
Dimensiones externas y una vez montado ..................................................1-7Convertidores IP00 ........................................................................................................1-7
Convertidores IP20 / NEMA 1 ........................................................................................1-7
Comprobación y control de la ubicación de instalación ....................................................................................................1-9
Ubicación de instalación ................................................................................................1-9
Control de la temperatura ambiente ..............................................................................1-9
Protección del convertidor de materiales extraños ........................................................1-9
Orientación y distancias de instalación ......................................................1-10
Desmontaje y montaje de la tapa de terminales ........................................1-11Desmontaje de la tapa de terminales .......................................................................... 1-11
Montaje de la tapa de terminales .................................................................................1-12
Desmontaje y montaje del Operador Digital/Monitor LED y tapa frontal ..............................................................1-13
Convertidores de 18,5 kW o menos ............................................................................1-13
Convertidores de 22 kW o más ...................................................................................1-15
2 Cableado ................................................................................. 2-1
Diagrama de conexión .................................................................................2-2Descripciones de los circuitos .......................................................................................2-3
Configuración del bloque de terminales ......................................................2-4
II
Cableado de los terminales del circuito principal ........................................ 2-5Secciones de cable y terminales de crimpar aplicables ................................................ 2-5Funciones de los terminales del circuito principal ......................................................... 2-9Configuraciones del circuito principal .......................................................................... 2-10Diagramas de conexión estándar ................................................................................ 2-11Cableado del circuito principal .................................................................................... 2-12
Cableado de los terminales del circuito de control .................................... 2-17Secciones de cable ..................................................................................................... 2-17Funciones de los terminales del circuito de control ..................................................... 2-18Conexiones de los terminales del circuito de control .................................................. 2-20
Cableado bajo cumplimiento de normativa EN81-1 con un contactor de motor ........................................................... 2-21
Precauciones para el cableado del circuito de control ................................................ 2-22
Comprobación del cableado ..................................................................... 2-23Comprobaciones ......................................................................................................... 2-23
Instalación y cableado de tarjetas opcionales ........................................... 2-24Modelos y especificaciones de tarjetas opcionales ..................................................... 2-24
Instalación ................................................................................................................... 2-24
Terminales y especificaciones de la tarjeta para el control de velocidad de realimentación (PG) .................................................................................................... 2-25Cableado de los bloques de terminales ...................................................................... 2-31
3 Monitor LED / Operador Digital y modos .............................3-1
Monitor LED JVOP-163 ............................................................................... 3-2Monitor LED .................................................................................................................. 3-2
Ejemplos de display de LED ......................................................................................... 3-2
Operador Digital JVOP-160-OY .................................................................. 3-3Display del Operador Digital .......................................................................................... 3-3
Teclas del Operador Digital ........................................................................................... 3-3Modos del convertidor ................................................................................................... 3-5Alternancia de modos .................................................................................................... 3-6Modo Drive .................................................................................................................... 3-7Modo Quick Programming ............................................................................................. 3-8Modo Advanced Programming ...................................................................................... 3-9Modo Verify ................................................................................................................. 3-11Modo Autotuning ......................................................................................................... 3-12
4 Procedimiento de arranque ...................................................4-1
Rutina de arranque general ........................................................................ 4-2Arranque ........................................................................................................................ 4-2
Encendido ................................................................................................... 4-3Antes del encendido ...................................................................................................... 4-3
Display después del encendido ..................................................................................... 4-3
Selección de modo de control ....................................................................................... 4-3
III
Autotuning ...................................................................................................4-4Selección de modo de autotuning .................................................................................4-4
Precauciones respecto al autotuning .............................................................................4-5
Procedimiento de autotuning con motores de inducción ...............................................4-6
Procedimiento de autotuning para motores de imán permanente .................................4-7
Ajuste de desplazamiento de encoder de motor de imán permanente .........................4-8
Precauciones respecto al autotuning con motores de inducción ...................................4-9Alarmas y fallos de autotuning .....................................................................................4-10
Optimización del rendimiento ....................................................................4-11
5 Parámetros de usuario .......................................................... 5-1
Descripciones de los parámetros de usuario ..............................................5-2Descripción de las tablas de parámetros de usuario .....................................................5-2
Funciones y niveles del display del Operador Digital ..................................5-3Parámetros de usuario disponibles en el modo Quick Programming ............................5-4
Tablas de parámetros de usuario ................................................................5-8Configuraciones de ajuste: A .........................................................................................5-8Parámetros de aplicación: b ........................................................................................5-10Parámetros de ajuste: C ..............................................................................................5-12Parámetros de referencia: d ........................................................................................5-18Parámetros del motor: E ..............................................................................................5-21Parámetros opcionales: F ............................................................................................5-26Parámetros de función de terminal: H .........................................................................5-32Parámetros de función de protección: L ......................................................................5-37Ajustes especiales: n2 / n5 ..........................................................................................5-43Ajustes del motor PM n8 / n9 .......................................................................................5-45Parámetros del Operador Digital/monitor LED: o ........................................................5-46Parámetros de función de elevación: S .......................................................................5-48Autotuning del motor: T ...............................................................................................5-54Parámetros de monitorización: U ................................................................................5-56Configuraciones que cambian con el modo de control (A1-02) ..................................5-62Configuraciones de fábrica que cambian con la capacidad del convertidor (o2-04) ...5-64
6 Configuraciones de parámetro según función ................... 6-1
Disminución de la frecuencia portadora y limitación de corriente ................6-2Configuración de la frecuencia portadora ......................................................................6-2
Limitación del nivel de corriente a bajas velocidades ....................................................6-2
Secuencia de control / freno ........................................................................6-3Comandos UP y DOWN ................................................................................................6-3Selección de fuente de referencia de velocidad ............................................................6-4Secuencia de selección de velocidad utilizando entradas digitales ..............................6-5Parada de emergencia ................................................................................................6-10Inspección RUN ...........................................................................................................6-11Secuencia de frenado ..................................................................................................6-13Operación Piso corto ...................................................................................................6-17

IV
Características de la aceleración y deceleración ...................................... 6-20Configuración de tiempos de aceleración y deceleración .......................................... 6-20
Configuraciones de aceleración y de Curva S ............................................................ 6-22
Mantenimiento de la velocidad de salida (Función Dwell) .......................................... 6-22
Prevención de bloqueo durante aceleración ............................................................... 6-23
Ajuste de señales de entrada analógicas ................................................. 6-25Ajuste de referencias de frecuencia analógicas .......................................................... 6-25
Detección de velocidad y limitación de velocidad ..................................... 6-26Función de velocidad alcanzada ................................................................................. 6-26
Limitación de la velocidad del elevador a la velocidad de nivelación (d1-17) ............. 6-28
Mejora del rendimiento de operación ........................................................ 6-29Reducción de la fluctuación de la velocidad del motor (Función de compensación del deslizamiento) ............................................................................................................. 6-29Ajustes de la función de compensación de par ........................................................... 6-30Función de compensación de par de arranque (C4-03 a C4-05) ................................ 6-32Regulador de velocidad automático (ASR) (sólo vectorial lazo cerrado) .................... 6-32
Velocidad de estabilización (Regulador de frecuencia automático) (Vectorial lazo abierto) ................................................................................................. 6-34Compensación de inercia (Sólo vectorial lazo cerrado) .............................................. 6-35
Ajuste del regulador de corriente automático (ACR) ................................................... 6-36Ajuste del tiempo de retardo de conversión A/D ......................................................... 6-37Mejora de la precisión de nivelación mediante compensación de deslizamiento de la velocidad de nivelación ............................................................................................... 6-37Sobreexcitación: .......................................................................................................... 6-38Ajuste de la corriente de inyección de c.c. .................................................................. 6-39Ajuste de los niveles de corriente de inyección de c.c. (S1-02/03) ............................. 6-39
Funciones de protección ........................................................................... 6-40Prevención del bloqueo del motor durante la operación ............................................. 6-40
Detección de par del motor / Detección de cabina atascada ...................................... 6-40
Limitación del par del motor (Función de limitación de par) ........................................ 6-43
Protección de sobrecarga del motor ........................................................................... 6-44Monitorización de corriente de salida .......................................................................... 6-46Detección de aceleración excesiva (“DV6” detección de fallo) ................................... 6-46
Protección del convertidor ......................................................................... 6-47Protección contra sobrecalentamiento del convertidor ................................................ 6-47
Protección de fase abierta de entrada* ....................................................................... 6-47Detección de fase abierta de salida ............................................................................ 6-48Detección de fallo de tierra .......................................................................................... 6-48Control del ventilador de refrigeración ........................................................................ 6-49Configuración de la temperatura ambiente ................................................................. 6-49
Funciones de terminal de entrada ............................................................. 6-50Deshabilitación de la salida de convertidor (Baseblock) ............................................. 6-50
Parada del convertidor por errores de dispositivos externos(Función de error externo) ........................................................................................... 6-51Utilización de la función de temporización .................................................................. 6-52
V
Detección de respuesta del contactor del motor .........................................................6-53
Cambio de la dirección del PG ....................................................................................6-54Selección motor 2 ........................................................................................................6-55
Funciones de terminal de salida ................................................................6-56
Configuración del motor y de la curva V/f ..................................................6-59Configuración de los parámetros del motor para motores de inducción(Motores 1 y 2) .............................................................................................................6-59Configuración de los parámetros del motor para motores PM ....................................6-62
Cambio de dirección de rotación del motor .................................................................6-63
Funciones del Operador Digital/Monitor LED ............................................6-64Configuración de las funciones del Operador Digital/Monitor LED ..............................6-64
Copia de parámetros (solamente JVOP-160-OY) .......................................................6-66
Prohibición de sobreescritura de parámetros ..............................................................6-70
Configuración de una contraseña ................................................................................6-70Visualización de parámetros de usuario solamente ....................................................6-71
Tarjetas opcionales de realimentación (PG) ..............................................6-72Configuración del PG ...................................................................................................6-72
Detección de fallos ......................................................................................................6-74
Función de copia de datos de máquina .......................................................................6-75
Sistema de rescate ....................................................................................6-77
Reset automático de fallo ..........................................................................6-81
Comunicaciones Memobus .......................................................................6-83Configuración de las comunicaciones MEMOBUS ......................................................6-83
Contenido del mensaje ................................................................................................6-83Códigos de error del convertidor .................................................................................6-92Comando ENTER ........................................................................................................6-92
Códigos de error de comunicaciones ..........................................................................6-93
7 Detección y corrección de errores ....................................... 7-1
Funciones de protección y diagnóstico .......................................................7-2Detección de fallos ........................................................................................................7-2Detección de alarma ......................................................................................................7-9Errores de programación del operador ........................................................................7-12Fallos de autotuning ....................................................................................................7-14Fallos de función de copia del Operador Digital ..........................................................7-16Función de copia de datos de máquina .......................................................................7-17
Detección y corrección de errores .............................................................7-18Si no puede configurarse un parámetro ......................................................................7-18Si el motor no opera adecuadamente. .........................................................................7-19Si el sentido de rotación es inverso .............................................................................7-19
Si el motor se bloquea o si la aceleración es lenta ......................................................7-19Si la deceleración del motor es baja ............................................................................7-20El par del motor es insuficiente. ...................................................................................7-20
Si el motor se sobrecalienta ........................................................................................7-20
VI
Si dispositivos periféricos se ven influenciados por el arranque o la marchadel convertidor ............................................................................................................. 7-21Si el seccionador diferencial opera cuando el convertidor está en marcha ................ 7-21
Si hay oscilación mecánica ......................................................................................... 7-21
8 Mantenimiento e inspecciones .............................................8-1
Mantenimiento e inspecciones .................................................................... 8-2Inspección periódica ...................................................................................................... 8-2Mantenimiento periódico de componentes .................................................................... 8-3Sustitución ventilador de refrigeración .......................................................................... 8-4Desmontaje y montaje de la tarjeta de terminales ........................................................ 8-6
9 Especificaciones ....................................................................9-1
Especificaciones del convertidor ................................................................. 9-2Especificaciones según modelo .................................................................................... 9-2Especificaciones comunes ............................................................................................ 9-4
Reducción (derating) ................................................................................... 9-6Reducción por temperatura ambiente ........................................................................... 9-6
Reducción por frecuencia portadora ............................................................................. 9-6Reducción por altitud ..................................................................................................... 9-7
Reactancias de c.a. para compatibilidad con EN 12015 ............................. 9-8
Certificado EN 954-1 / EN81-1 .................................................................... 9-9
10 Apéndice ...............................................................................10-1
Precauciones de aplicación del convertidor .............................................. 10-2Selección ..................................................................................................................... 10-2
Instalación ................................................................................................................... 10-2
Configuraciones .......................................................................................................... 10-2
Manipulación ............................................................................................................... 10-3
Precauciones de aplicación del motor ...................................................... 10-4Utilización del convertidor para un motor estándar existente ...................................... 10-4
Utilización del convertidor para motores especiales ................................................... 10-4
Constantes de usuario .............................................................................. 10-5
VII
Advertencias
PRECAUCIÓN
Mientras esté conectada la alimentación no deben ser conectados o desconectados cables, ni lleva-das a cabo pruebas de señal.
El condensador de bus de c.c. del convertidor L7 permanece cargado incluso una vez que la alimen-tación se ha desconectado. Para evitar el riesgo de descarga eléctrica desconecte el convertidor de frecuencia del circuito de alimentación antes de llevar a cabo trabajos de mantenimiento. Posterior-mente espere al menos durante 5 minutos hasta que todos los LEDs se hayan apagado.No realice pruebas de resistencia a la tensión en ninguna parte del convertidor. Contiene semicon-ductores que no están diseñados para soportar tan altas tensiones.
No quite el operador digital mientras la alimentación principal esté conectada. El panel de circuitos impresos tampoco debe ser tocado mientras el convertidor esté conectado a la alimentación.
Nunca conecte filtros de supresión de interferencias LC/RC, condensadores o dispositivos de protección contra sobretensiones a la entrada o a la salida del convertidor.
Para evitar que se visualicen fallos innecesarios de sobrecorriente, etc., los contactos de señal de cualquier contactor o conmutador instalado entre el convertidor y el motor deben estar integrados en la lógica de control del convertidor (por ejemplo, baseblock).
¡Esto es absolutamente imprescindible!
Este manual debe ser leído a conciencia y completamente antes de conectar y operar el convertidor. Deben seguirse todas las precauciones de seguridad e instrucciones de funcionamiento.
El convertidor debe ser operado con los filtros de línea apropiados siguiendo las instrucciones de instalación de este manual y con todas las cubiertas cerradas y los terminales cubiertos.Solamente entonces estará adecuadamente protegido. Por favor, no conecte u opere cualquier equi-pamiento que presente daños visibles o al que le falten componentes. La empresa operadora es res-ponsable de las lesiones a personas y de los daños al equipamiento derivados de la no observancia de las advertencias que contiene este manual.
VIII
Precauciones de seguridad e instrucciones
1. GeneralPor favor, lea detenidamente estas precauciones de seguridad e instrucciones de funcionamiento antes de ins-talar y operar este convertidor. Asimismo, lea todas las señales de advertencia que se encuentran en el conver-tidor y asegúrese de que nunca estén dañadas o falten.
Es posible que se pueda acceder a componentes activos y calientes durante la operación. Retirar componentesde la carcasa, el operador digital o las cubiertas de los terminales conlleva el riesgo de sufrir lesiones graves ode dañar el equipo en el caso de una instalación u operación incorrecta. El hecho de que los convertidores defrecuencia son utilizados para controlar componentes mecánicos rotativos de máquinas puede ser la causa deotros peligros.
Deben seguirse las instrucciones contenidas en este manual. La instalación, la operación y el mantenimientosolamente deben ser llevados a cabo por personal cualificado. En lo que se refiere a las precauciones de segu-ridad, el personal cualificado se define como aquellos individuos que están familiarizados con la instalación,el arranque, la operación y el mantenimiento de convertidores de frecuencia, y que cuentan con la cualifica-ción profesional adecuada para llevar a cabo estos trabajos. La operación segura de estas unidades solamentees posible si son utilizadas de manera apropiada y para aquel fin para el que fueron diseñadas.
Los condensadores de bus de c.c. pueden mantenerse activos durante aproximadamente 5 minutos una vez queel convertidor es desconectado de la alimentación. Por lo tanto es necesario esperar este tiempo antes de abrirsus cubiertas. Todos los terminales del circuito principal pueden estar sometidos aún a tensiones peligrosas.
No debe permitirse el acceso a estos convertidores a niños y personas no autorizadas.
Guarde estas Precauciones de seguridad e Instrucciones de funcionamiento en un lugar fácilmente accesible yhaga que todas las personas que tienen algún tipo de acceso a los convertidores puedan disponer de ellas.
2. Uso previstoLos convertidores de frecuencia están previstos para su instalación en sistemas o máquinas eléctricas. Los sis-temas y máquinas deben cumplir con las directivas y normativas relevantes. Las directrices importantes, comopor ejemplo las directrices de baja tensión, directrices de máquinas, directrices EMC, y otras, deben conser-varse.
El convertidor puede ponerse en funcionamiento si los sistemas y máquinas en los que está instalado cumplencon las directrices y leyes pertinentes.
El marcado CE se lleva a cabo de acuerdo a EN 50178 utilizando los filtros de línea especificados en estemanual y siguiendo las instrucciones de instalación apropiadas.
3. Transporte y almacenamientoLas instrucciones para el transporte, el almacenamiento y la manipulación adecuada deben ser seguidas deacuerdo a los datos técnicos.
4. InstalaciónInstale y refrigere los convertidores como se especifica en la documentación. El aire de refrigeración debe cir-cular en la dirección especificada. El convertidor, por lo tanto, solamente debe ser operado en la posiciónespecificada (es decir, en posición vertical). Mantenga las distancias especificadas. Proteja los convertidorescontra cargas no permitidas. Los componentes no deben ser doblados, y las distancias de aislamiento no debenser modificadas. Para evitar daños causados por electricidad estática no toque ningún componente electróniconi contacto.
5. Conexión eléctricaRealice cualquier trabajo en el equipo activo de acuerdo a las regulaciones nacionales de seguridad y preven-ción de accidentes correspondientes. Lleve a cabo la instalación eléctrica de acuerdo a las regulaciones rele-
IX
vantes. En particular, siga las instrucciones de instalación asegurando la compatibilidad electromagnética(EMC), p.ej. el apantallado, la conexión a tierra, la distribución de filtros y el tendido de cables. Esto tambiénes de aplicación para el equipamiento con marcado CE. Es responsabilidad del fabricante del sistema omáquina asegurar la conformidad con las limitaciones EMC.
Póngase en contacto con su distribuidor o representante Omron-Yaskawa Motion Control cuando utilice inte-rruptores automáticos diferenciales junto con convertidores de frecuencia.
En ciertos sistemas puede ser necesario utilizar dispositivos adicionales de control y seguridad de acuerdo alas regulaciones pertinentes sobre seguridad y prevención de accidentes. El hardware del convertidor de fre-cuencia no debe ser modificado.
6. Configuración del convertidorEste convertidor L7 puede accionar motores de inducción así como motores de imán permanente. Seleccione siempre el modo de control adecuado:
• Para los motores de inducción utilice V/f, control vectorial lazo abierto o cerrado (A1-01 = 0, 2 ó 3).• Para los motores de imán permanente no utilice otro modo de control que no sea el vectorial lazo cerrado
para imán permanente (A1-01 = 6).
Una selección errónea del modo de control puede dañar al convertidor y al motor.
Si se cambia un motor o se utiliza por primera, configure siempre los parámetros relevantes de control demotor según los datos de la placa o realice un autotuning. No cambie estos parámetros imprudentemente. Paragarantizar una operación segura con motores de imán permanente, configure siempre:
• los datos de motor correctos• los parámetros de detección de apertura de PG • los parámetros de detección de la desviación de velocidad • los parámetros de detección de aceleración excesiva
Una configuración incorrecta de los parámetros puede provocar un comportamiento peligroso o daños en elmotor y el convertidor.
Consulte en página 4-2, Arranque los detalles del procedimiento de arranque correcto.
7. NotasLos convertidores de frecuencia Varispeed L7 están certificados de acuerdo a CE, UL, y c-UL.
PRECAUCIÓN
Si un motor de imán permanente se activa por una fuerza externa, en los bobinados se genera alta tensión. • Durante el cableado, mantenimiento o inspección asegúrese de que el motor está parado y de que no se
puede activar.• Si el convertidor está desactivado y se tiene que activar el motor, asegúrese de que las salidas del motor y
del convertidor están desconectadas eléctricamente.
PRECAUCIÓN
Si se utiliza un motor de imán permanente, la corriente punta máxima que el motor puede soportar siempre tiene que ser mayor que la corriente de salida máxima del convertidor para así evitar una desmagnetización del motor.
X
Compatibilidad EMC
1. IntroducciónEste manual se ha compilado para ayudar a los fabricantes de sistemas que utilizan convertidores de frecuen-cia Omron-Yaskawa Motion Control a diseñar e instalar equipos eléctricos de conmutación. También describelas medidas a tomar necesarias para adecuarse a la Directiva EMC. Por lo tanto, deben seguirse las instruccio-nes de instalación y cableado de este manual.
Nuestros productos son probados por organizaciones autorizadas utilizando la normativa listada a continua-ción.
EN 61800-3:2004
2. Medidas para asegurar la conformidad de los convertidores de frecuencia Omron-Yaskawa Motion Control a la Directiva EMC
Los convertidores de frecuencia Omron-Yaskawa Motion Control no es necesario que sean instalados en unarmario de maniobra.
No es posible facilitar instrucciones detalladas para todos los tipos posibles de instalación. Por lo tanto, estemanual debe ser limitado a directrices generales.
Todo equipo eléctrico produce interferencias de radio y de línea en varias frecuencias. Los cables la transmitena la atmósfera como si fueran una antena.
La conexión de equipamiento eléctrico (p.ej. un drive) a una fuente de alimentación sin un filtro de líneapuede por lo tanto permitir que interferencias HF o LF se introduzcan en el circuito eléctrico.
Las contramedidas básicas son el aislamiento del cableado de los componentes de control y potencia, unaconexión a tierra adecuada y el apantallamiento de los cables.
Para la puesta a tierra de baja impedancia de interferencias HF es necesaria una amplia área de contacto La uti-lización de grapas de puesta a tierra en vez de cables es, por lo tanto, recomendada.
Además, los cables apantallados deben ser conectados mediante clips específicos para la puesta a tierra.
3. Tendido de cablesMedidas contra la interferencia de línea:
El filtro de línea y el convertidor de frecuencia deben ser montados sobre la misma placa metálica. Monteambos componentes tan cerca uno del otro como sea posible, manteniendo también el cableado lo más cortoposible.
Utilice un cable de potencia con apantallado con una buena puesta a tierra. Utilice un cable apantallado para elmotor cuya longitud no supere los 20 metros. Disponga todas las puestas a tierra de tal manera que sea maxi-mizada el área del extremo del conductor en contacto con el terminal de tierra (p.ej. una placa metálica).
Cable apantallado:
– Utilice un cable con protección trenzada.
– Ponga a tierra la mayor superficie posible del apantallado. Es recomendable poner a tierra el apantalladoconectando el cable a la placa de tierra con clips metálicos (véase la siguiente figura).

XI
Las superficies de puesta a tierra deben ser de metal desnudo altamente conductor. Elimine las capas de barnizy pintura que pudiera tener.
– Conecte a tierra el apantallado en ambos extremos.
– Conecte a tierra el motor de la máquina.
Instalación de convertidores y filtros EMCPara una instalación compatible con las normasEMC, tenga en cuenta los siguientes puntos:
• Utilice un filtro de línea.• Utilice cables apantallados para el motor.• Monte el convertidor y el filtro en una placa con-
ductora con toma de tierra.• Quite la pintura o la suciedad antes de montar las
piezas con el fin de lograr la mínima impedanciade tierra posible.
Clip de tierra Placa de tierra
Conexiones a masa Quite la pintura
PEL1
L2L3
PE
Línea
Filtro
Conexiones a masa Quite la pintura
CargaGND L1
L2L3 GNDU
VW
M~3
Cable de motor apantallado
Longitud del cablelo más corta posible
Placa metálicacon toma de tierra
Conver-tidor
XII
Filtros de línea
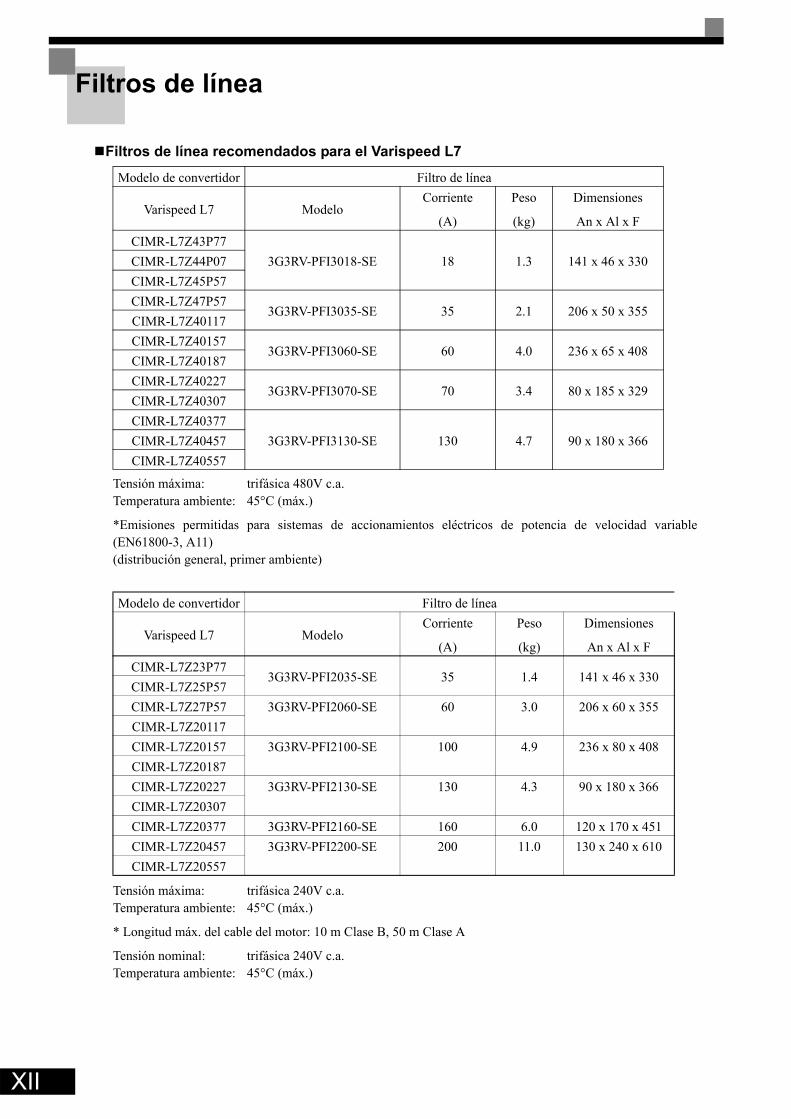
Filtros de línea recomendados para el Varispeed L7
Tensión máxima: trifásica 480V c.a.Temperatura ambiente: 45°C (máx.)
*Emisiones permitidas para sistemas de accionamientos eléctricos de potencia de velocidad variable(EN61800-3, A11) (distribución general, primer ambiente)
Tensión máxima: trifásica 240V c.a.Temperatura ambiente: 45°C (máx.)
* Longitud máx. del cable del motor: 10 m Clase B, 50 m Clase A
Tensión nominal: trifásica 240V c.a.Temperatura ambiente: 45°C (máx.)
Modelo de convertidor Filtro de línea
Varispeed L7 ModeloCorriente
(A)
Peso
(kg)
Dimensiones
An x Al x FCIMR-L7Z43P77
3G3RV-PFI3018-SE 18 1.3 141 x 46 x 330CIMR-L7Z44P07CIMR-L7Z45P57CIMR-L7Z47P57
3G3RV-PFI3035-SE 35 2.1 206 x 50 x 355CIMR-L7Z40117CIMR-L7Z40157
3G3RV-PFI3060-SE 60 4.0 236 x 65 x 408CIMR-L7Z40187CIMR-L7Z40227
3G3RV-PFI3070-SE 70 3.4 80 x 185 x 329CIMR-L7Z40307CIMR-L7Z40377
3G3RV-PFI3130-SE 130 4.7 90 x 180 x 366CIMR-L7Z40457CIMR-L7Z40557
Modelo de convertidor Filtro de línea
Varispeed L7 ModeloCorriente
(A)
Peso
(kg)
Dimensiones
An x Al x FCIMR-L7Z23P77
3G3RV-PFI2035-SE 35 1.4 141 x 46 x 330CIMR-L7Z25P57CIMR-L7Z27P57 3G3RV-PFI2060-SE 60 3.0 206 x 60 x 355CIMR-L7Z20117CIMR-L7Z20157 3G3RV-PFI2100-SE 100 4.9 236 x 80 x 408CIMR-L7Z20187CIMR-L7Z20227 3G3RV-PFI2130-SE 130 4.3 90 x 180 x 366CIMR-L7Z20307CIMR-L7Z20377 3G3RV-PFI2160-SE 160 6.0 120 x 170 x 451CIMR-L7Z20457 3G3RV-PFI2200-SE 200 11.0 130 x 240 x 610CIMR-L7Z20557

XIII
Marcas registradas
En el presente manual se utilizan las siguientes marcas registradas.• DeviceNet es una marca registrada de ODVA (Open DeviceNet Vendors Association, Inc.).• InterBus es una marca registrada de Phoenix Contact Co. • Profibus es una marca registrada de Siemens AG.
• Hiperfacey es una marca registrada de Sick Stegmann GmbH.
• Klaukey es una marca registrada de Klauke Textron

XIV
Manipulación de losconvertidores
Este capítulo describe las comprobaciones necesarias que deben llevarse a cabo al recibir o instalar unconvertidor.
Modelos Varispeed L7 ..............................................................................................1-2Comprobaciones a la recepción ...............................................................................1-3Dimensiones externas y una vez montado ...............................................................1-7Comprobación y control de la ubicación de instalación ............................................1-9Orientación y distancias de instalación...................................................................1-10Desmontaje y montaje de la tapa de terminales.....................................................1-11Desmontaje y montaje del Operador Digital/Monitor LED y tapa frontal ................1-13
1-2
1
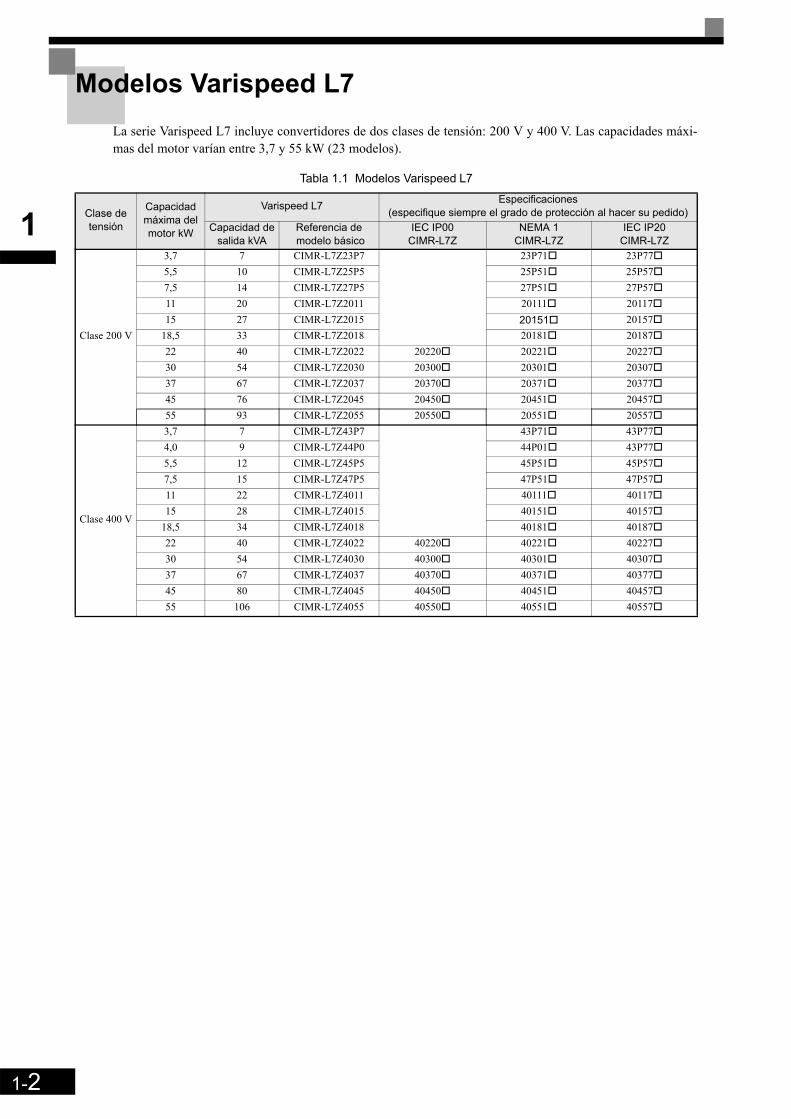
Modelos Varispeed L7La serie Varispeed L7 incluye convertidores de dos clases de tensión: 200 V y 400 V. Las capacidades máxi-mas del motor varían entre 3,7 y 55 kW (23 modelos).
Tabla 1.1 Modelos Varispeed L7
Clase de tensión
Capacidad máxima del motor kW
Varispeed L7 Especificaciones (especifique siempre el grado de protección al hacer su pedido)
Capacidad de salida kVA
Referencia de modelo básico
IEC IP00CIMR-L7Z
NEMA 1CIMR-L7Z
IEC IP20CIMR-L7Z
Clase 200 V
3,7 7 CIMR-L7Z23P7 23P71 23P775,5 10 CIMR-L7Z25P5 25P51 25P577,5 14 CIMR-L7Z27P5 27P51 27P5711 20 CIMR-L7Z2011 20111 2011715 27 CIMR-L7Z2015 20151 20157
18,5 33 CIMR-L7Z2018 20181 2018722 40 CIMR-L7Z2022 20220 20221 2022730 54 CIMR-L7Z2030 20300 20301 2030737 67 CIMR-L7Z2037 20370 20371 2037745 76 CIMR-L7Z2045 20450 20451 2045755 93 CIMR-L7Z2055 20550 20551 20557
Clase 400 V
3,7 7 CIMR-L7Z43P7 43P71 43P774,0 9 CIMR-L7Z44P0 44P01 43P775,5 12 CIMR-L7Z45P5 45P51 45P577,5 15 CIMR-L7Z47P5 47P51 47P5711 22 CIMR-L7Z4011 40111 4011715 28 CIMR-L7Z4015 40151 40157
18,5 34 CIMR-L7Z4018 40181 4018722 40 CIMR-L7Z4022 40220 40221 4022730 54 CIMR-L7Z4030 40300 40301 4030737 67 CIMR-L7Z4037 40370 40371 4037745 80 CIMR-L7Z4045 40450 40451 4045755 106 CIMR-L7Z4055 40550 40551 40557

1-3
1
Comprobaciones a la recepción
Comprobaciones
Compruebe los siguientes elementos inmediatamente después de la entrega del convertidor.
Si encuentra alguna irregularidad en los elementos anteriormente descritos, póngase en contacto con el distri-buidor en el que ha adquirido el convertidor o con su representante Omron Yaskawa Motion Control inmedia-tamente.
Información de la placa
La placa instalada en el lateral de cada convertidor muestra el número de modelo, las especificaciones,número de lote, número de serie y otras informaciones del convertidor.
Placa de ejemploLa siguiente placa es un ejemplo de un convertidor estándar europeo: trifásica, 400 Vc.a., 3,7 kW, normas IEC IP20
Fig. 1.1 Placa
Números de modelo de convertidorEl número de modelo del convertidor que se encuentra en la placa indica la especificación, la clase de tensióny la capacidad máxima del motor en códigos alfanuméricos.
Fig. 1.2 Números de modelo de convertidor
Tabla 1.2 Comprobaciones
Elemento Método
¿Le ha sido suministrado el modelo de convertidor correcto? Compruebe el número de modelo en la placa del lateral del convertidor.
¿Presenta el convertidor algún tipo de daños?
Inspeccione la totalidad del exterior del convertidor para comprobar la existencia de arañazos u otro tipo de daños derivados del envío.
¿Hay tornillos o componentes flojos? Compruebe la firmeza de las uniones y atornillamientos mediante un destornillador u otras herramientas.
MFABRICADO EN JAPÓN
Peso
Especificaciones del convertidor
YASKAWA ELECTRIC CORPORATION s
S/N PRG:
DOCUMENTO No E 131457
MODELO CIMR-L7Z43P7 SPEC : 43P77A
ENTRADA AC3PH 380-480V 50/60Hz 10,2A
SALIDA AC3PH 0-480V 0-120Hz 8,5A 3min. 50Hz%ED 8,5kVAO/N Peso: 4,0 kg
Modelo de convertidor
Especificación de entrada
Especificación de salidaNúmero de lote
Número de serie
Número doc. UL
CIMR – L7 Z 2 3P7 ConvertidorVarispeed L7
NºZ
EspecificaciónOYMC Normas Europeas
Nº Clase de tensión24
Entrada trifásica, 200 Vc.a.
Entrada trifásica, 400 Vc.a.
Nº Capacidad máx. del motor3P7 3,7 kW5P5 5,5 kWa a55 55 kW
“P” Indica la coma decimal.
1-4
1
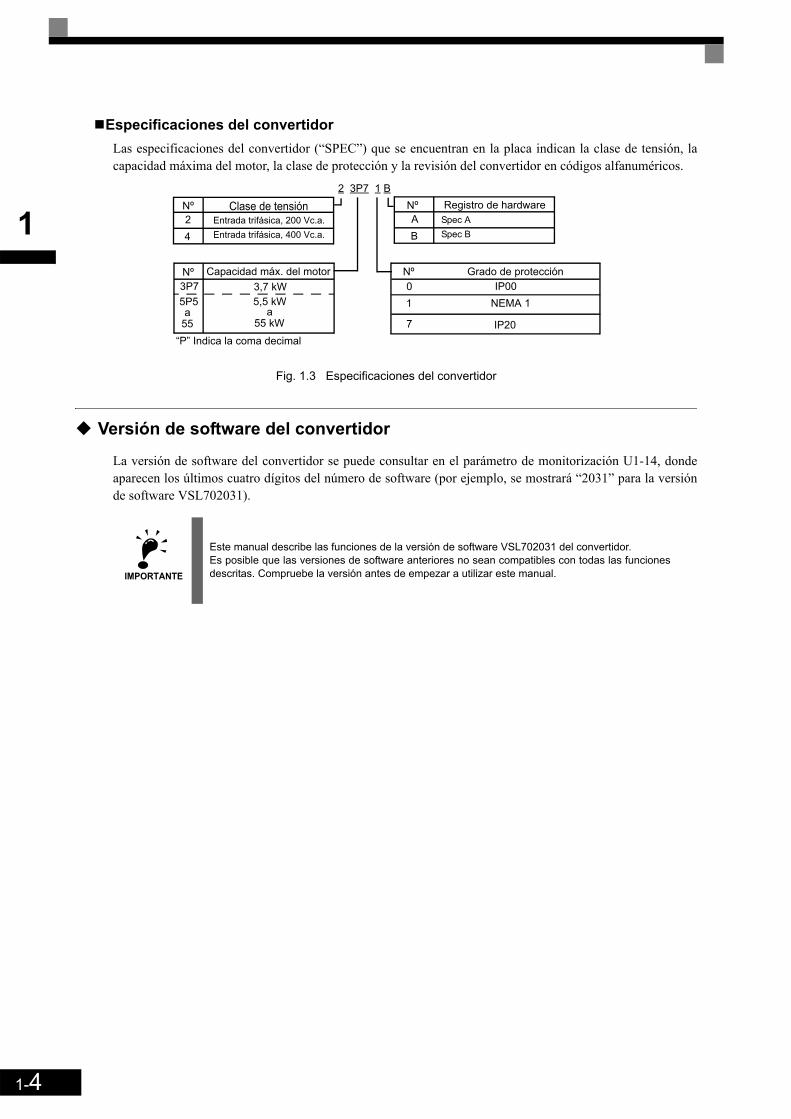
Especificaciones del convertidorLas especificaciones del convertidor (“SPEC”) que se encuentran en la placa indican la clase de tensión, lacapacidad máxima del motor, la clase de protección y la revisión del convertidor en códigos alfanuméricos.
Fig. 1.3 Especificaciones del convertidor
Versión de software del convertidor
La versión de software del convertidor se puede consultar en el parámetro de monitorización U1-14, dondeaparecen los últimos cuatro dígitos del número de software (por ejemplo, se mostrará “2031” para la versiónde software VSL702031).
IMPORTANTE
Este manual describe las funciones de la versión de software VSL702031 del convertidor.Es posible que las versiones de software anteriores no sean compatibles con todas las funcionesdescritas. Compruebe la versión antes de empezar a utilizar este manual.
2 3P7 1 BNº24
Clase de tensiónEntrada trifásica, 200 Vc.a.Entrada trifásica, 400 Vc.a.
Nº Capacidad máx. del motor3P7 3,7 kW5P5 5,5 kWa a
55 55 kW
Nº Grado de protección0 IP001 NEMA 1
“P” Indica la coma decimal7 IP20
NºAB
Registro de hardwareSpec ASpec B
1-5
1
Nombres de componentes
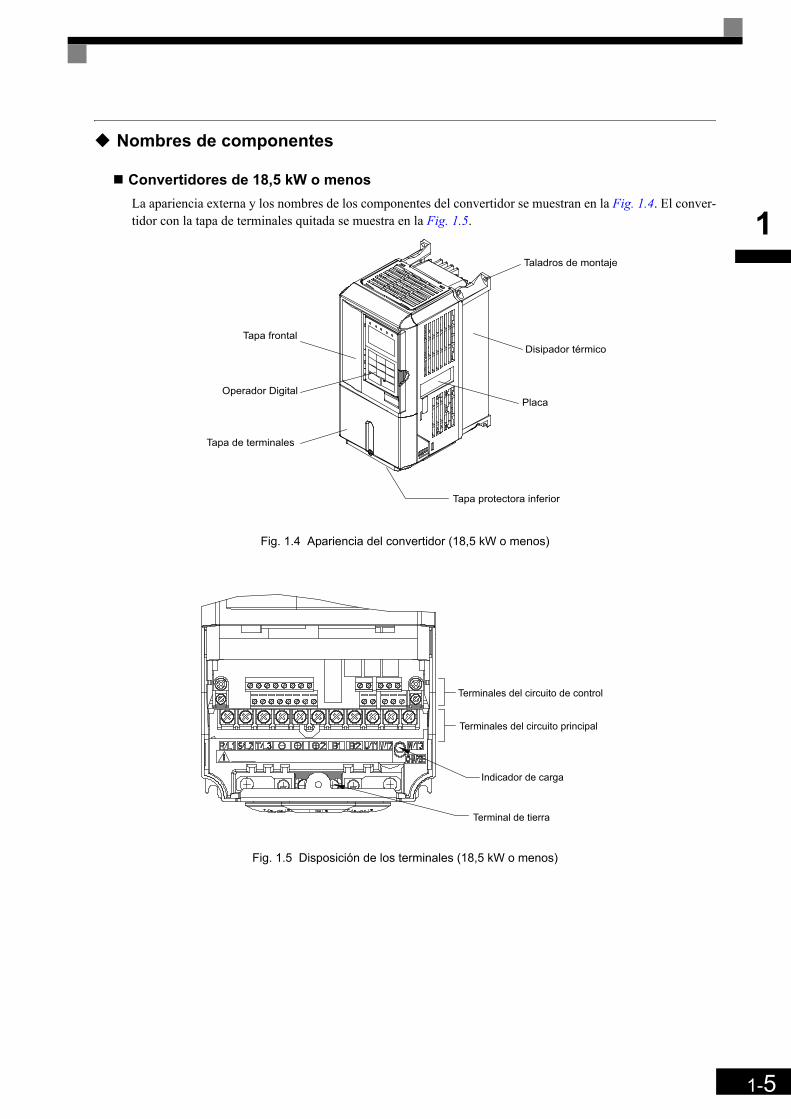
Convertidores de 18,5 kW o menosLa apariencia externa y los nombres de los componentes del convertidor se muestran en la Fig. 1.4. El conver-tidor con la tapa de terminales quitada se muestra en la Fig. 1.5.
Fig. 1.4 Apariencia del convertidor (18,5 kW o menos)
Fig. 1.5 Disposición de los terminales (18,5 kW o menos)
Taladros de montaje
Disipador térmico
Placa
Tapa protectora inferior
Tapa frontal
Operador Digital
Tapa de terminales
Terminales del circuito de control
Terminales del circuito principal
Indicador de carga
Terminal de tierra
1-6
1
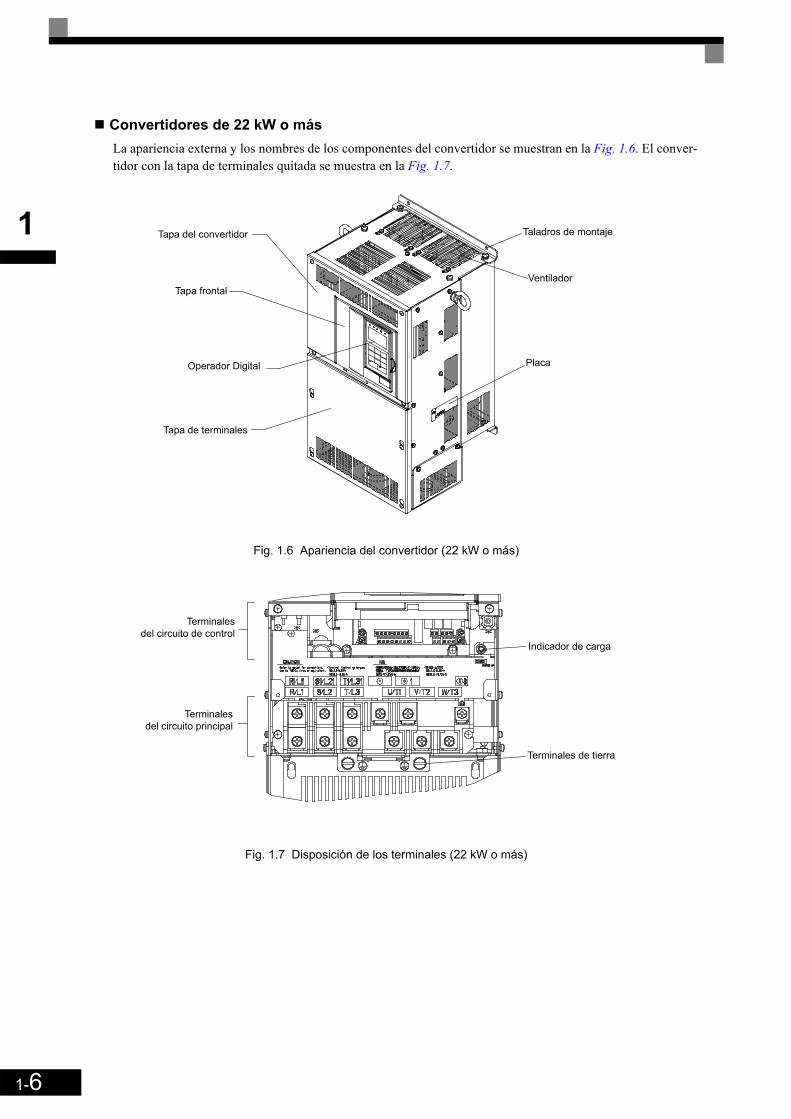
Convertidores de 22 kW o másLa apariencia externa y los nombres de los componentes del convertidor se muestran en la Fig. 1.6. El conver-tidor con la tapa de terminales quitada se muestra en la Fig. 1.7.
Fig. 1.6 Apariencia del convertidor (22 kW o más)
Fig. 1.7 Disposición de los terminales (22 kW o más)
Taladros de montaje
Ventilador
Placa
Tapa del convertidor
Tapa frontal
Operador Digital
Tapa de terminales
Terminalesdel circuito de control
Terminalesdel circuito principal
Indicador de carga
Terminales de tierra

1-7
1
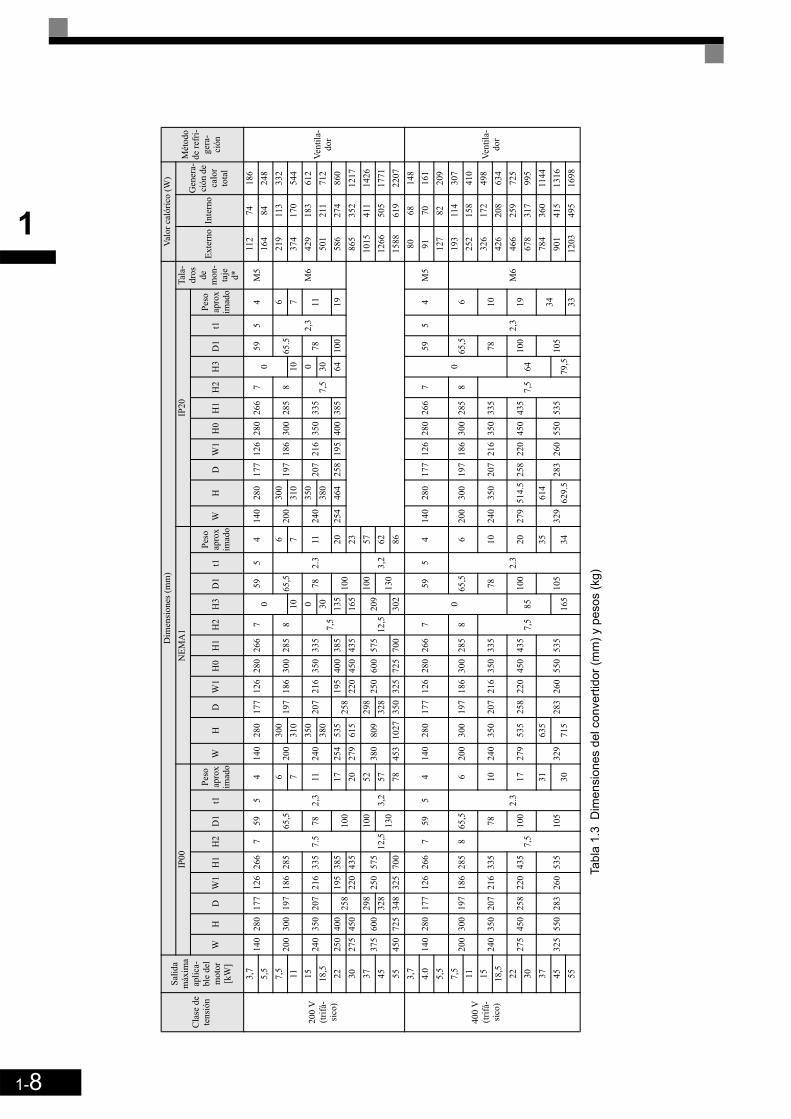
Dimensiones externas y una vez montado
Convertidores IP00
A continuación se muestran los diagramas exteriores de los convertidores IP00.
Fig. 1.8 Diagramas exteriores de convertidores IP00
Convertidores IP20 / NEMA 1
A continuación se muestran los diagramas exteriores de los convertidores IP20/NEMA1.
Fig. 1.9 Diagramas exteriores de convertidores IP20/NEMA1
W
W1
3
H1H
2
D
H
D1
4-d
t1
W
W1
H3
H0H1
H2
D1
D5
4-d
t1
10
H10
10 Máx.Máx.
Pieza aislante
Máx
.
Convertidores de clase 200 V de 22 ó 55 kWConvertidores de clase 400 V de 22 a 55 kW
Convertidores de clase 200 V/400 V de 0,55 a 18,5 kW
W
W1
3
H1
H2
D
H0
D1H3 4
H
4-d
t1
W
W1
H3
H0H1
H2
D1
D5
4-d
t1
10
H10
10 Máx.Máx.
Pieza aislante
Máx
.
Convertidores de clase 200 V/400 V de 3,7 a 18,5 kW Convertidores de clase 200 V de 22 ó 55 kW
Convertidores de clase 400 V de 22 ó 55 kW
1-8
1C
lase
de
tens
ión
Salid
a m
áxim
a ap
lica-
ble
del
mot
or[k
W]
Dim
ensi
ones
(mm
)Va
lor c
alór
ico
(W)
Mét
odo
de re
fri-
gera
-ci
ón
IP00
NEM
A1
IP20
Tala
-dr
os
de
mon
-ta
je
d*
Exte
rno
Inte
rno
Gen
era-
ción
de
calo
r to
tal
WH
DW
1H
1H
2D
1t1
Peso
ap
rox
imad
oW
HD
W1
H0
H1
H2
H3
D1
t1Pe
so
apro
xim
ado
WH
DW
1H
0H
1H
2H
3D
1t1
Peso
ap
rox
imad
o
200
V(tr
ifá-
sico
)
3,7
140
280
177
126
266
759
54
140
280
177
126
280
266
70
595
414
028
017
712
628
026
67
059
54
M5
112
7418
6
Vent
ila-
dor
5,5
164
8424
87,
520
030
019
718
628
5
7.5
65,5
2,3
620
030
019
718
630
028
58
65,5
2.3
620
030
019
718
630
028
58
65.5
2,3
6
M6
219
113
332
117
310
107
310
107
374
170
544
1524
035
020
721
633
578
1124
035
020
721
635
033
57,
5
078
1124
035
020
721
635
033
57,
50
7811
429
183
612
18,5
380
3038
030
501
211
712
2225
040
025
819
538
510
017
254
535
258
195
400
385
135
100
2025
446
425
819
540
038
564
100
1958
627
486
030
275
450
220
435
2027
961
522
045
043
516
523
865
352
1217
3737
560
029
825
057
512
,510
03,
252
380
809
298
250
600
575
12,5
209
100
3,2
5710
1541
114
2645
328
130
5732
813
062
1266
505
1771
5545
072
534
832
570
078
453
1027
350
325
725
700
302
8615
8861
922
07
400
V(tr
ifá-
sico
)
3,7
140
280
177
126
266
759
54
140
280
177
126
280
266
7
0
595
414
028
017
712
628
026
67
0
595
4M
580
6814
8
Vent
ila-
dor
4.0
9170
161
5,5
127
8220
97,
520
030
019
718
628
58
65,5
2.3
620
030
019
718
630
028
58
65,5
2.3
620
030
019
718
630
028
58
65,5
2,3
6
M6
193
114
307
1125
215
841
015
240
350
207
216
335
7,5
7810
240
350
207
216
350
335
7,5
7810
240
350
207
216
350
335
7,5
7810
326
172
498
18,5
426
208
634
2227
545
025
822
043
510
017
279
535
258
220
450
435
8510
020
279
514.
525
822
045
043
564
100
1946
625
972
530
678
317
995
3732
555
028
326
053
510
531
329
635
283
260
550
535
105
3532
961
428
326
055
053
510
534
784
360
1144
4530
715
165
3462
9.5
79,5
901
415
1316
5533
1203
495
1698
Tabl
a 1.
3 D
imen
sion
es d
el c
onve
rtido
r (m
m) y
pes
os (k
g)
1-9
1
Comprobación y control de la ubicación de instalación
Instale el convertidor en la ubicación descrita a continuación y mantenga unas condiciones óptimas.
Ubicación de instalación
Instale el convertidor de acuerdo a las siguientes condiciones en un ambiente con un grado de contaminación 2.
Las tapas de protección están instaladas en la parte superior e inferior del convertidor. Asegúrese de retirar lastapas protectoras antes de instalar un convertidor de clase 200 ó 400 V con una salida de 18,5 kW o menos enun panel.
Observe las siguientes precauciones al montar el convertidor.• Instale el convertidor en una ubicación limpia libre de vapores de grasa y polvo. Puede ser montado en un
panel totalmente cerrado que esté completamente protegido contra el polvo en suspensión.• Cuando instale u opere el convertidor tenga siempre especial cuidado de que no entre en el dispositivo
polvo metálico, grasa, agua o cualquier otro elemento extraño.• No instale el convertidor sobre materiales combustibles, como p.ej. madera.• Instale el convertidor en una ubicación libre de materiales radioactivos y de materiales combustibles.• Instale el convertidor en una ubicación libre de gases y fluidos dañinos.• Instale el convertidor en una ubicación sin excesiva oscilación.• Instale el convertidor en una ubicación libre de cloruros.• Instale el convertidor en una ubicación protegida de la luz solar directa.
Control de la temperatura ambiente
Con el fin de aumentar la seguridad de operación, el convertidor debe ser instalado en un ambiente libre deaumentos de temperatura extremos. Si el convertidor se instala en una ubicación cerrada, como p.ej. un arma-rio, utilice un ventilador o un sistema de aire acondicionado para mantener la temperatura interna de funciona-miento por debajo de 45 °C.
Protección del convertidor de materiales extraños
Coloque una cubierta protectora sobre el convertidor durante la instalación para protegerlo del polvo metálicoproducido al taladrar.
Después de finalizar la instalación, retire siempre la cubierta protectora del convertidor. En caso contrario severá reducida la ventilación, lo que causará un sobrecalentamiento del convertidor.
Tabla 1.4 Ubicación de instalación
Tipo Temperatura ambiente de servicio Humedad
NEMA1 / IP20 –10 a + 40 °C 95% de HR o menos (sin condensación)
IEC IP00 –10 a + 45 °C 95% de HR o menos (sin condensación)
1-10
1
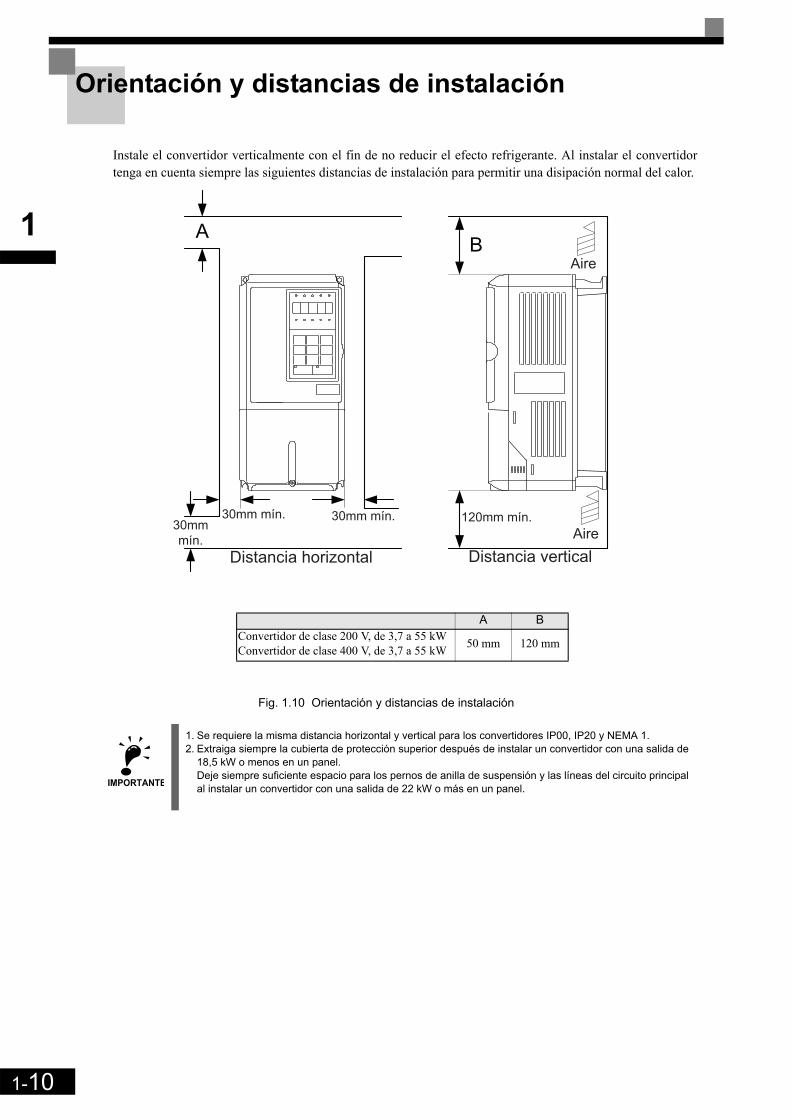
Orientación y distancias de instalación
Instale el convertidor verticalmente con el fin de no reducir el efecto refrigerante. Al instalar el convertidortenga en cuenta siempre las siguientes distancias de instalación para permitir una disipación normal del calor.
Fig. 1.10 Orientación y distancias de instalación
IMPORTANTE
1. Se requiere la misma distancia horizontal y vertical para los convertidores IP00, IP20 y NEMA 1.2. Extraiga siempre la cubierta de protección superior después de instalar un convertidor con una salida de
18,5 kW o menos en un panel.Deje siempre suficiente espacio para los pernos de anilla de suspensión y las líneas del circuito principalal instalar un convertidor con una salida de 22 kW o más en un panel.
AB
Distancia vertical
30mm mín.
Aire
Aire120mm mín.30mm mín.
30mm mín.
Distancia horizontal
A BConvertidor de clase 200 V, de 3,7 a 55 kWConvertidor de clase 400 V, de 3,7 a 55 kW 50 mm 120 mm
1-11
1
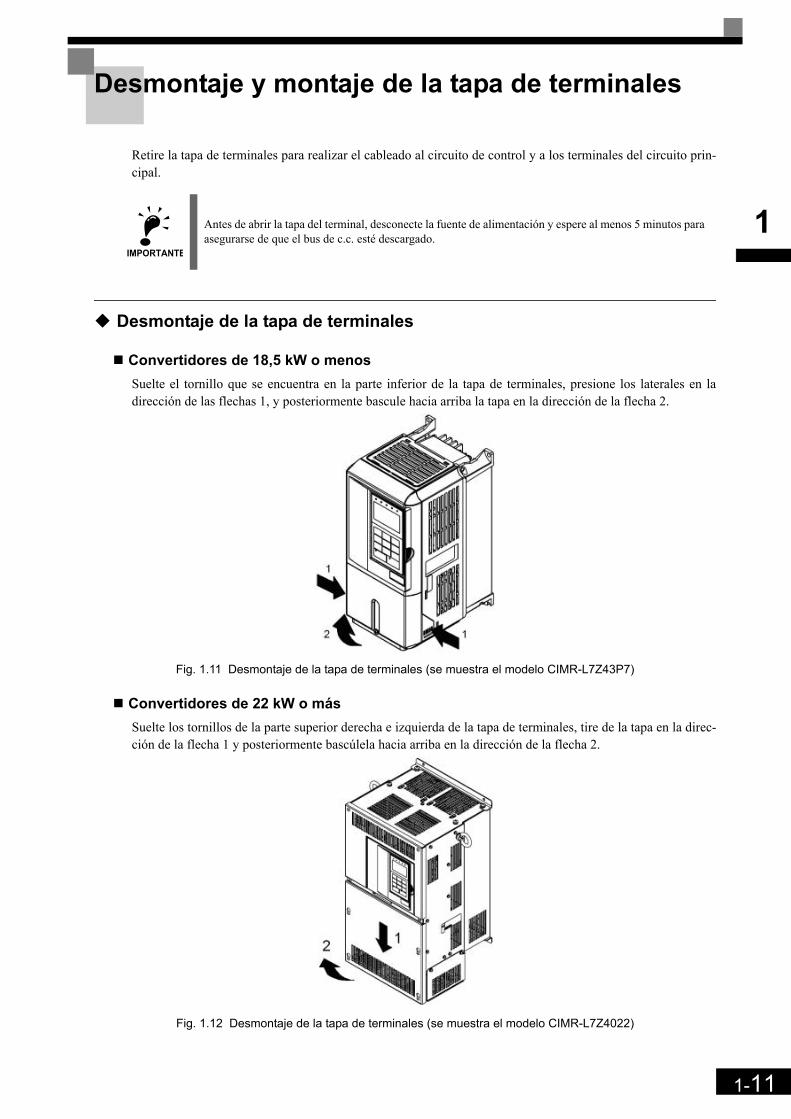
Desmontaje y montaje de la tapa de terminales
Retire la tapa de terminales para realizar el cableado al circuito de control y a los terminales del circuito prin-cipal.
Desmontaje de la tapa de terminales
Convertidores de 18,5 kW o menosSuelte el tornillo que se encuentra en la parte inferior de la tapa de terminales, presione los laterales en ladirección de las flechas 1, y posteriormente bascule hacia arriba la tapa en la dirección de la flecha 2.
Fig. 1.11 Desmontaje de la tapa de terminales (se muestra el modelo CIMR-L7Z43P7)
Convertidores de 22 kW o másSuelte los tornillos de la parte superior derecha e izquierda de la tapa de terminales, tire de la tapa en la direc-ción de la flecha 1 y posteriormente bascúlela hacia arriba en la dirección de la flecha 2.
Fig. 1.12 Desmontaje de la tapa de terminales (se muestra el modelo CIMR-L7Z4022)
IMPORTANTE
Antes de abrir la tapa del terminal, desconecte la fuente de alimentación y espere al menos 5 minutos para asegurarse de que el bus de c.c. esté descargado.
1-12
1
Montaje de la tapa de terminales
Cuando haya completado el cableado del bloque de terminales coloque la tapa de terminales siguiendo lospasos del procedimiento de desmontaje en sentido inverso.
Para convertidores con una salida de 18,5 kW o menos, inserte la lengüeta de la parte superior de la tapa determinales en la ranura del convertidor y presione sobre la parte inferior de la tapa hasta que ésta encaje con unchasquido.
1-13
1
Desmontaje y montaje del Operador Digital/Monitor LED y tapa frontal
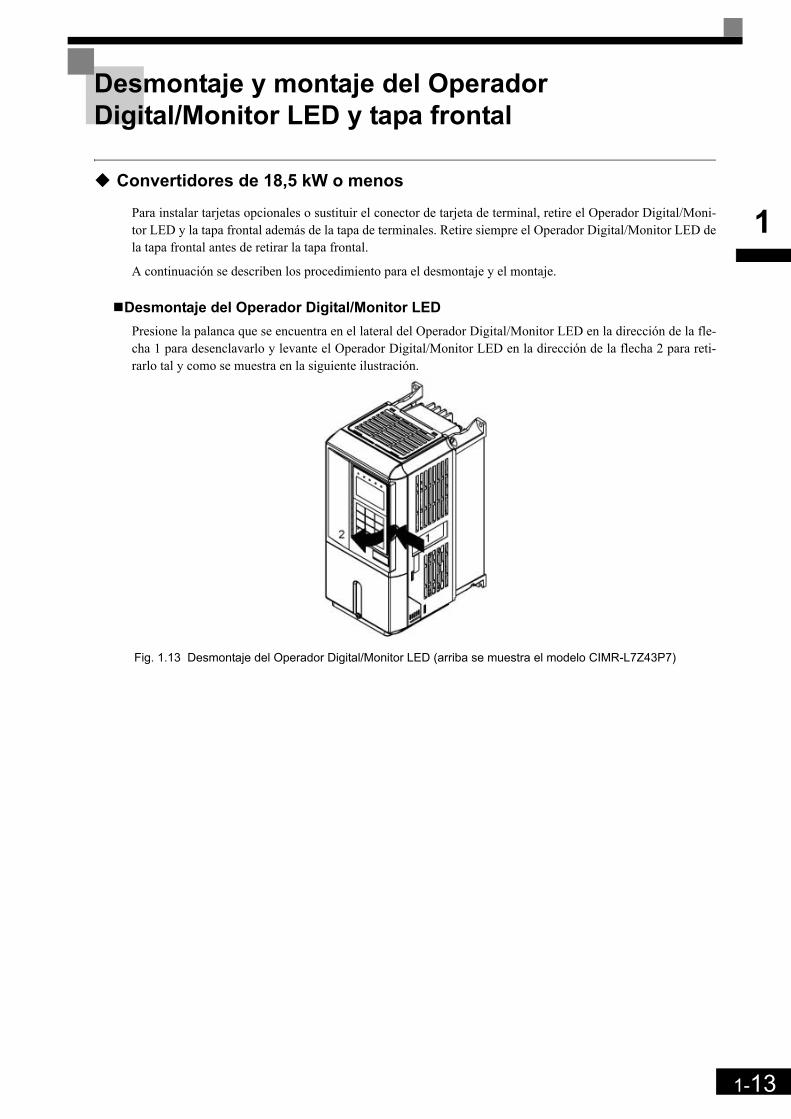
Convertidores de 18,5 kW o menos
Para instalar tarjetas opcionales o sustituir el conector de tarjeta de terminal, retire el Operador Digital/Moni-tor LED y la tapa frontal además de la tapa de terminales. Retire siempre el Operador Digital/Monitor LED dela tapa frontal antes de retirar la tapa frontal.
A continuación se describen los procedimiento para el desmontaje y el montaje.
Desmontaje del Operador Digital/Monitor LEDPresione la palanca que se encuentra en el lateral del Operador Digital/Monitor LED en la dirección de la fle-cha 1 para desenclavarlo y levante el Operador Digital/Monitor LED en la dirección de la flecha 2 para reti-rarlo tal y como se muestra en la siguiente ilustración.
Fig. 1.13 Desmontaje del Operador Digital/Monitor LED (arriba se muestra el modelo CIMR-L7Z43P7)
1-14
1
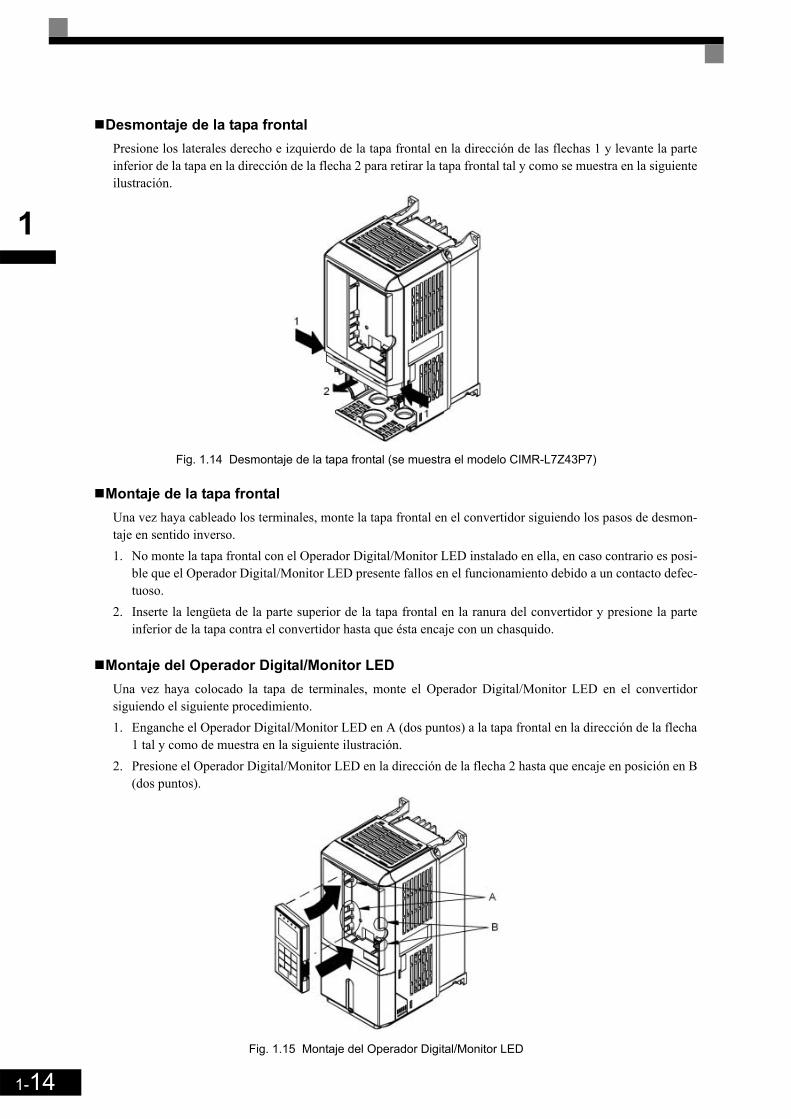
Desmontaje de la tapa frontalPresione los laterales derecho e izquierdo de la tapa frontal en la dirección de las flechas 1 y levante la parteinferior de la tapa en la dirección de la flecha 2 para retirar la tapa frontal tal y como se muestra en la siguienteilustración.
Fig. 1.14 Desmontaje de la tapa frontal (se muestra el modelo CIMR-L7Z43P7)
Montaje de la tapa frontalUna vez haya cableado los terminales, monte la tapa frontal en el convertidor siguiendo los pasos de desmon-taje en sentido inverso.1. No monte la tapa frontal con el Operador Digital/Monitor LED instalado en ella, en caso contrario es posi-
ble que el Operador Digital/Monitor LED presente fallos en el funcionamiento debido a un contacto defec-tuoso.
2. Inserte la lengüeta de la parte superior de la tapa frontal en la ranura del convertidor y presione la parteinferior de la tapa contra el convertidor hasta que ésta encaje con un chasquido.
Montaje del Operador Digital/Monitor LEDUna vez haya colocado la tapa de terminales, monte el Operador Digital/Monitor LED en el convertidorsiguiendo el siguiente procedimiento.1. Enganche el Operador Digital/Monitor LED en A (dos puntos) a la tapa frontal en la dirección de la flecha
1 tal y como de muestra en la siguiente ilustración.2. Presione el Operador Digital/Monitor LED en la dirección de la flecha 2 hasta que encaje en posición en B
(dos puntos).
Fig. 1.15 Montaje del Operador Digital/Monitor LED
1-15
1
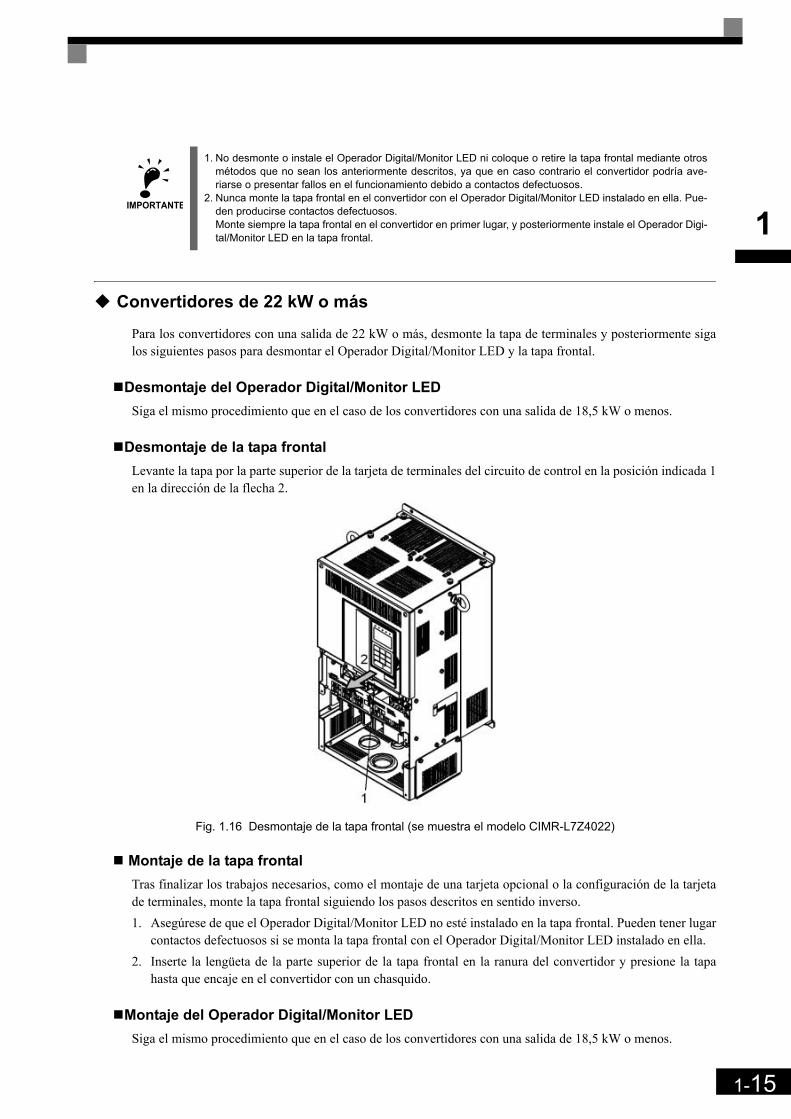
Convertidores de 22 kW o más
Para los convertidores con una salida de 22 kW o más, desmonte la tapa de terminales y posteriormente sigalos siguientes pasos para desmontar el Operador Digital/Monitor LED y la tapa frontal.
Desmontaje del Operador Digital/Monitor LEDSiga el mismo procedimiento que en el caso de los convertidores con una salida de 18,5 kW o menos.
Desmontaje de la tapa frontalLevante la tapa por la parte superior de la tarjeta de terminales del circuito de control en la posición indicada 1en la dirección de la flecha 2.
Fig. 1.16 Desmontaje de la tapa frontal (se muestra el modelo CIMR-L7Z4022)
Montaje de la tapa frontalTras finalizar los trabajos necesarios, como el montaje de una tarjeta opcional o la configuración de la tarjetade terminales, monte la tapa frontal siguiendo los pasos descritos en sentido inverso.1. Asegúrese de que el Operador Digital/Monitor LED no esté instalado en la tapa frontal. Pueden tener lugar
contactos defectuosos si se monta la tapa frontal con el Operador Digital/Monitor LED instalado en ella. 2. Inserte la lengüeta de la parte superior de la tapa frontal en la ranura del convertidor y presione la tapa
hasta que encaje en el convertidor con un chasquido.
Montaje del Operador Digital/Monitor LEDSiga el mismo procedimiento que en el caso de los convertidores con una salida de 18,5 kW o menos.
IMPORTANTE
1. No desmonte o instale el Operador Digital/Monitor LED ni coloque o retire la tapa frontal mediante otrosmétodos que no sean los anteriormente descritos, ya que en caso contrario el convertidor podría ave-riarse o presentar fallos en el funcionamiento debido a contactos defectuosos.
2. Nunca monte la tapa frontal en el convertidor con el Operador Digital/Monitor LED instalado en ella. Pue-den producirse contactos defectuosos.Monte siempre la tapa frontal en el convertidor en primer lugar, y posteriormente instale el Operador Digi-tal/Monitor LED en la tapa frontal.
1-16
1

CableadoEste capítulo describe los terminales, las conexiones de los terminales del circuito principal, las especificacionesdel cableado de los terminales del circuito principal, los terminales del circuito de control y las especificacionesdel cableado del circuito de control.
Diagrama de conexión ..............................................................................................2-2Configuración del bloque de terminales....................................................................2-4Cableado de los terminales del circuito principal......................................................2-5Cableado de los terminales del circuito de control .................................................2-17Cableado bajo cumplimiento de normativa EN81-1 con un contactor de motor..........2-21Comprobación del cableado ...................................................................................2-23Instalación y cableado de tarjetas opcionales ........................................................2-24
2-2
2
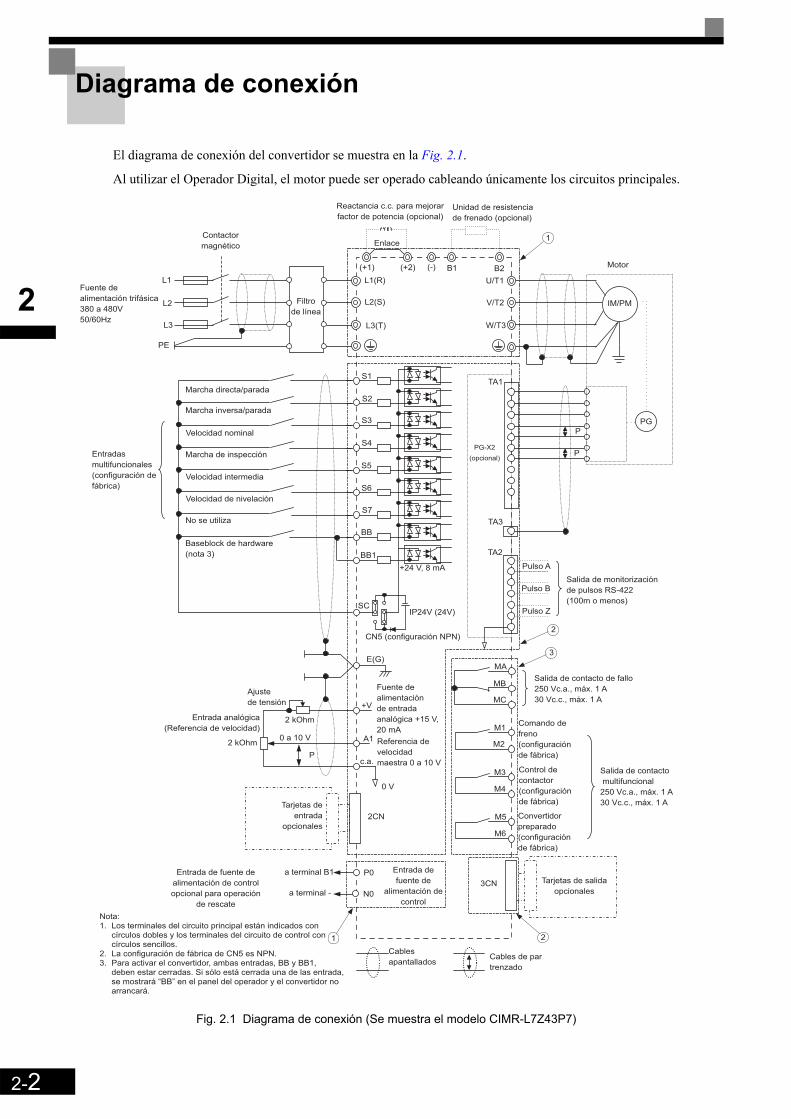
Diagrama de conexión
El diagrama de conexión del convertidor se muestra en la Fig. 2.1.
Al utilizar el Operador Digital, el motor puede ser operado cableando únicamente los circuitos principales.
Fig. 2.1 Diagrama de conexión (Se muestra el modelo CIMR-L7Z43P7)
1
3
2
1
Ajuste de tensión
Reactancia c.c. para mejorarfactor de potencia (opcional)
Unidad de resistenciade frenado (opcional)
EnlaceContactormagnético
Fuente de alimentación trifásica380 a 480V50/60Hz
L1
L2
L3
PE
Filtrode línea
L1(R)
L2(S)
L3(T)
(+1) (+2) (-) B1 B2U/T1
V/T2
W/T3
TA1
PG-X2(opcional)
Motor
IM/PM
TA3
TA2
P
P
PG
S1
S3
S2
S4
S5
S6
S7
BB
BB1
Entradas multifuncionales(configuración de fábrica)
Marcha directa/parada
Marcha inversa/parada
Velocidad nominal
Marcha de inspección
Velocidad intermedia
Velocidad de nivelación
No se utiliza
Baseblock de hardware (nota 3)
SC
+24 V, 8 mA
IP24V (24V)
CN5 (configuración NPN)
Pulso A
Pulso B
Pulso Z
Salida de monitorización de pulsos RS-422 (100m o menos)
E(G)MA
MB
MC
Salida de contacto de fallo250 Vc.a., máx. 1 A 30 Vc.c., máx. 1 A
M1
M2
M3
M5
M4
M6
Comando de freno(configuración de fábrica)
Control de contactor(configuración de fábrica)
Convertidor preparado(configuración de fábrica)
Salida de contacto multifuncional250 Vc.a., máx. 1 A 30 Vc.c., máx. 1 A
Fuente de alimentación de entrada analógica +15 V, 20 mAReferencia de velocidadmaestra 0 a 10 V
+V
A1
c.a.
0 V
P
2CN
2 kOhmEntrada analógica(Referencia de velocidad)
2 kOhm 0 a 10 V
Tarjetas de entrada
opcionales
Entrada de fuente de alimentación de controlopcional para operación
de rescate
a terminal B1
a terminal -
Entrada de fuente de
alimentación de control
P0
N0
Cables de partrenzado
Cablesapantallados
Nota:1. Los terminales del circuito principal están indicados con círculos dobles y los terminales del circuito de control con círculos sencillos.2. La configuración de fábrica de CN5 es NPN.3. Para activar el convertidor, ambas entradas, BB y BB1, deben estar cerradas. Si sólo está cerrada una de las entrada, se mostrará “BB” en el panel del operador y el convertidor no arrancará.
Tarjetas de salida opcionales
3CN
2
2-3
2
Descripciones de los circuitos
Consulte los números indicados en la Fig. 2.1.
1 Estos circuitos son peligrosos y están separados de las superficies accesibles mediante separacionesde protección
2 Estos circuitos están separados del resto de los circuitos mediante separaciones de protección con-sistentes en aislamiento doble y reforzado. Estos circuitos pueden ser interconectados con circuitosSELV* (o equivalentes) o no SELV*, pero no con ambos.
3 Convertidores alimentados por fuente con sistema de cuatro hilos (conexión a tierra neutra)Estos circuitos son circuitos SELV* y están alejados del resto de los circuitos mediante separacio-nes de protección consistentes en aislamiento doble y reforzado. Estos circuitos solamente puedenser interconectados con otros circuitos* (o equivalentes).
Convertidores alimentados por fuente con sistema de tres hilos (sin conexión a tierra o conconexión de esquina)Estos circuitos no están alejados de circuitos peligrosos mediante separaciones de protección, sinosolamente con aislamiento básico. Estos circuitos no deben ser interconectados con ningún circuitoque sea accesible, a menos que sean aislados de los circuitos accesibles con un aislamiento adicio-nal.
* Los circuitos SELV (Safety Extra Low Voltage, tensión extra baja de seguridad) no tienen conexión directa con la alimentación principal y son alimen-tados por un transformador o dispositivo de aislamiento equivalente. Los circuitos cuentan con un diseño y protección que les permite que, en condicio-nes normales y de fallo único, su tensión no exceda el valor de seguridad. (Consulte IEC 61010)
IMPORTANTE
1. Los terminales del circuito de control están dispuestos como sigue.
2. La capacidad de corriente de salida del terminal +V es de 20 mA.3. Los terminales del circuito principal están indicados con círculos dobles y los terminales del circuito de
control con círculos sencillos.4. Se muestra el cableado de las entradas digitales S1 a S7 y BB para la conexión de contactos o de tran-
sistores NPN (0V modo común y NPN). Esta es la configuración por defecto. Para conectar transistores PNP o para utilizar una fuente de alimentación externa de 24 V consulte laTabla 2.9.
5. Una reactancia de c.c es una opción solamente para convertidores de 18,5 kW o menos. Retire elpuente al conectar una reactancia de c.c.
+VSC SC SC BB A1 c.a.
E(G) S1 S2 S3 S4 S5 S6 S7 BB1
M5 M6
M3 M4
MA MB MC
M1 M2 E(G)
2-4
2
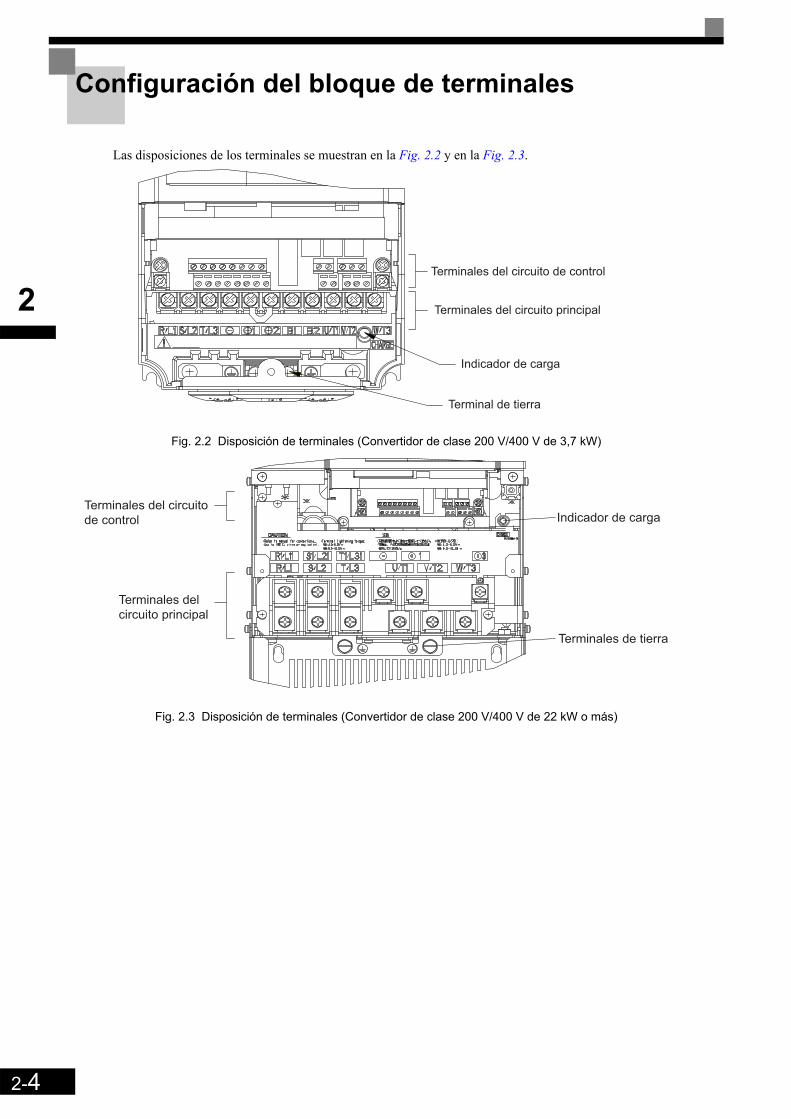
Configuración del bloque de terminales
Las disposiciones de los terminales se muestran en la Fig. 2.2 y en la Fig. 2.3.
Fig. 2.2 Disposición de terminales (Convertidor de clase 200 V/400 V de 3,7 kW)
Fig. 2.3 Disposición de terminales (Convertidor de clase 200 V/400 V de 22 kW o más)
Terminales del circuito de control
Terminales del circuito principal
Indicador de carga
Terminal de tierra
Terminales del circuitode control
Terminales del circuito principal
Indicador de carga
Terminales de tierra
2-5
2
Cableado de los terminales del circuito principal
Secciones de cable y terminales de crimpar aplicables
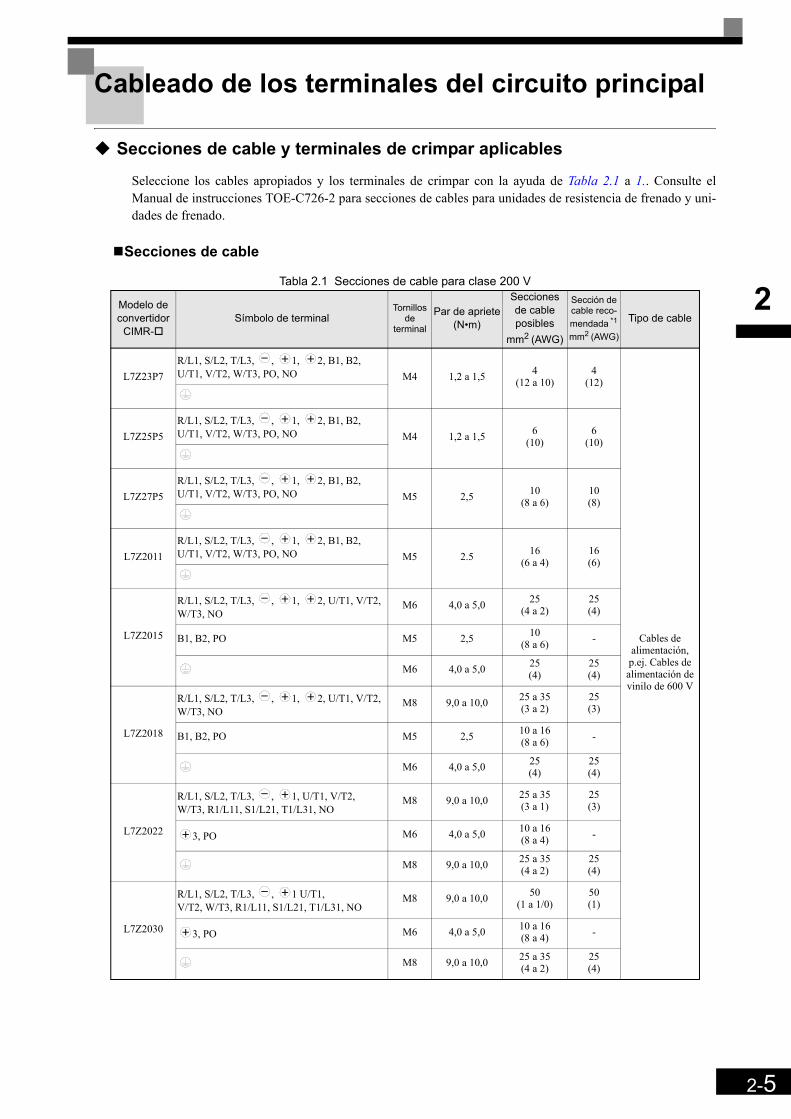
Seleccione los cables apropiados y los terminales de crimpar con la ayuda de Tabla 2.1 a 1.. Consulte elManual de instrucciones TOE-C726-2 para secciones de cables para unidades de resistencia de frenado y uni-dades de frenado.
Secciones de cable
Tabla 2.1 Secciones de cable para clase 200 V
Modelo de convertidor
CIMR-Símbolo de terminal
Tornillos de
terminal
Par de apriete(N•m)
Secciones de cableposibles
mm2 (AWG)
Sección de cable reco-mendada *1 mm2 (AWG)
Tipo de cable
L7Z23P7R/L1, S/L2, T/L3, , 1, 2, B1, B2, U/T1, V/T2, W/T3, PO, NO M4 1,2 a 1,5 4
(12 a 10)4
(12)
Cables dealimentación, p.ej. Cables de alimentación de vinilo de 600 V
L7Z25P5R/L1, S/L2, T/L3, , 1, 2, B1, B2, U/T1, V/T2, W/T3, PO, NO M4 1,2 a 1,5 6
(10)6
(10)
L7Z27P5R/L1, S/L2, T/L3, , 1, 2, B1, B2, U/T1, V/T2, W/T3, PO, NO M5 2,5 10
(8 a 6)10(8)
L7Z2011R/L1, S/L2, T/L3, , 1, 2, B1, B2, U/T1, V/T2, W/T3, PO, NO M5 2.5 16
(6 a 4)16(6)
L7Z2015
R/L1, S/L2, T/L3, , 1, 2, U/T1, V/T2, W/T3, NO
M6 4,0 a 5,0 25(4 a 2)
25(4)
B1, B2, PO M5 2,5 10(8 a 6) -
M6 4,0 a 5,0 25(4)
25(4)
L7Z2018
R/L1, S/L2, T/L3, , 1, 2, U/T1, V/T2, W/T3, NO
M8 9,0 a 10,0 25 a 35(3 a 2)
25(3)
B1, B2, PO M5 2,5 10 a 16(8 a 6) -
M6 4,0 a 5,0 25(4)
25(4)
L7Z2022
R/L1, S/L2, T/L3, , 1, U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31, NO
M8 9,0 a 10,0 25 a 35(3 a 1)
25(3)
3, PO M6 4,0 a 5,0 10 a 16(8 a 4) -
M8 9,0 a 10,0 25 a 35(4 a 2)
25(4)
L7Z2030
R/L1, S/L2, T/L3, , 1 U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31, NO
M8 9,0 a 10,0 50(1 a 1/0)
50(1)
3, PO M6 4,0 a 5,0 10 a 16(8 a 4) -
M8 9,0 a 10,0 25 a 35(4 a 2)
25(4)
2-6
2
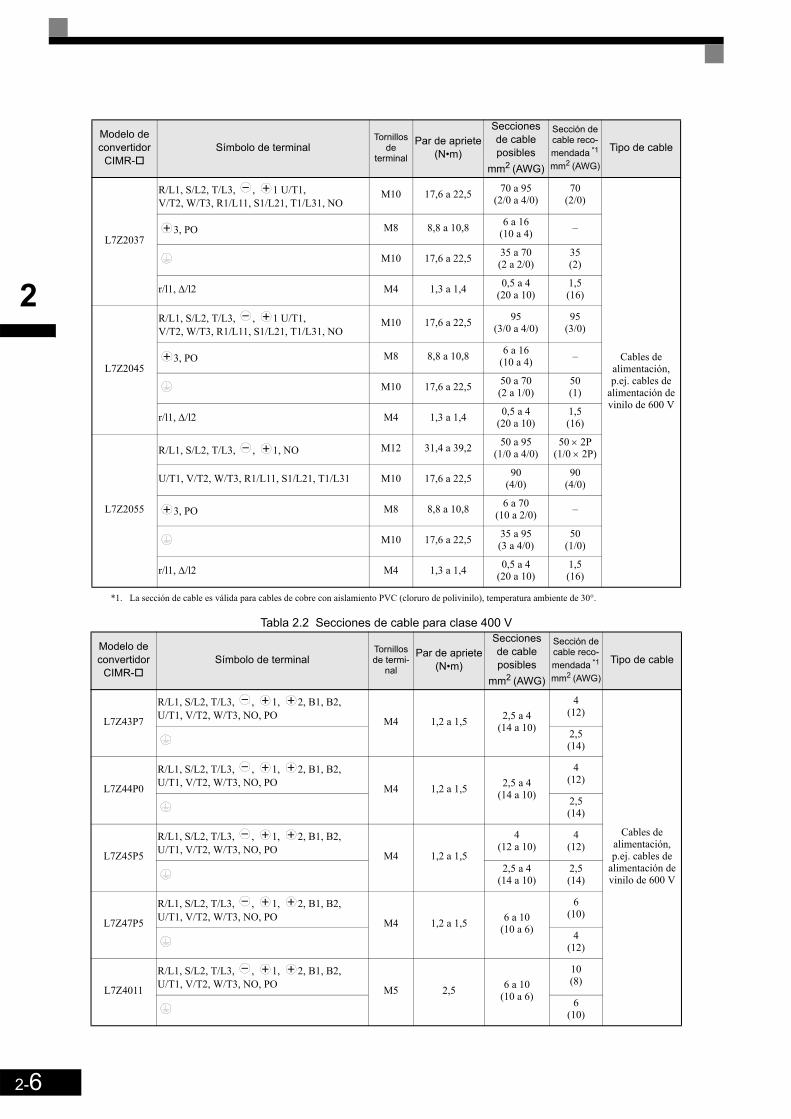
Tabla 2.2 Secciones de cable para clase 400 V
L7Z2037
R/L1, S/L2, T/L3, , 1 U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31, NO
M10 17,6 a 22,5 70 a 95(2/0 a 4/0)
70(2/0)
Cables dealimentación, p.ej. cables de
alimentación de vinilo de 600 V
3, PO M8 8,8 a 10,8 6 a 16(10 a 4) –
M10 17,6 a 22,5 35 a 70(2 a 2/0)
35(2)
r/l1, ∆/l2 M4 1,3 a 1,4 0,5 a 4(20 a 10)
1,5(16)
L7Z2045
R/L1, S/L2, T/L3, , 1 U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31, NO
M10 17,6 a 22,5 95(3/0 a 4/0)
95(3/0)
3, PO M8 8,8 a 10,8 6 a 16(10 a 4) –
M10 17,6 a 22,5 50 a 70(2 a 1/0)
50(1)
r/l1, ∆/l2 M4 1,3 a 1,4 0,5 a 4(20 a 10)
1,5(16)
L7Z2055
R/L1, S/L2, T/L3, , 1, NO M12 31,4 a 39,2 50 a 95(1/0 a 4/0)
50 × 2P(1/0 × 2P)
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31 M10 17,6 a 22,5 90(4/0)
90(4/0)
3, PO M8 8,8 a 10,8 6 a 70(10 a 2/0) –
M10 17,6 a 22,5 35 a 95(3 a 4/0)
50(1/0)
r/l1, ∆/l2 M4 1,3 a 1,4 0,5 a 4(20 a 10)
1,5(16)
*1. La sección de cable es válida para cables de cobre con aislamiento PVC (cloruro de polivinilo), temperatura ambiente de 30°.
Modelo de convertidor
CIMR-Símbolo de terminal
Tornillos de termi-
nal
Par de apriete(N•m)
Secciones de cable posibles
mm2 (AWG)
Sección de cable reco-mendada *1 mm2 (AWG)
Tipo de cable
L7Z43P7
R/L1, S/L2, T/L3, , 1, 2, B1, B2, U/T1, V/T2, W/T3, NO, PO M4 1,2 a 1,5 2,5 a 4
(14 a 10)
4(12)
Cables dealimentación, p.ej. cables de
alimentación de vinilo de 600 V
2,5(14)
L7Z44P0
R/L1, S/L2, T/L3, , 1, 2, B1, B2, U/T1, V/T2, W/T3, NO, PO M4 1,2 a 1,5 2,5 a 4
(14 a 10)
4(12)
2,5(14)
L7Z45P5
R/L1, S/L2, T/L3, , 1, 2, B1, B2, U/T1, V/T2, W/T3, NO, PO M4 1,2 a 1,5
4(12 a 10)
4(12)
2,5 a 4(14 a 10)
2,5(14)
L7Z47P5
R/L1, S/L2, T/L3, , 1, 2, B1, B2, U/T1, V/T2, W/T3, NO, PO M4 1,2 a 1,5 6 a 10
(10 a 6)
6(10)
4(12)
L7Z4011
R/L1, S/L2, T/L3, , 1, 2, B1, B2, U/T1, V/T2, W/T3, NO, PO M5 2,5 6 a 10
(10 a 6)
10(8)
6(10)
Modelo de convertidor
CIMR-Símbolo de terminal
Tornillos de
terminal
Par de apriete(N•m)
Secciones de cableposibles
mm2 (AWG)
Sección de cable reco-mendada *1 mm2 (AWG)
Tipo de cable

2-7
2
L7Z4015
R/L1, S/L2, T/L3, , 1, 2, B1, B2, U/T1, V/T2, W/T3, NO, PO
M5 2,5 10(8 a 6)
10(8)
Cables dealimentación, p.ej. cables de
alimentación de vinilo de 600 V
M5(M6)
2,5(4,0 a 5,0)
6 a 10(10 a 6)
6(10)
L7Z4018
R/L1, S/L2, T/L3, , 1, 2, U/T1, V/T2, W/T3, NO
M6 4,0 a 5,0 10 a 35(8 a 2)
10(8)
B1, B2, PO M5 2,5 10(8)
10(8)
M6 4,0 a 5,0 10 a 25(8 a 4)
10(8)
L7Z4022
R/L1, S/L2, T/L3, , 1, 3, U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31, NO, PO
M6 4,0 a 5,0 16(6 a 4)
16(6)
M8 9,0 a 10,0 16 a 35(6 a 2)
16(6)
L7Z4030
R/L1, S/L2, T/L3, , 1, 3, U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31, NO, PO
M6 4,0 a 5,0 25(4)
25(4)
M8 9,0 a 10,0 25 a 35(4 a 2)
25(4)
L7Z4037
R/L1, S/L2, T/L3, , 1, U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31, NO
M8 9,0 a 10,0 25 a 50(4 a 1/0)
35(2)
3, PO M6 4,0 a 5,0 10 a 16(8 a 4) -
M8 9,0 a 10,0 25 a 35(4 a 2)
25(4)
L7Z4045
R/L1, S/L2, T/L3, , 1, U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31, NO
M8 9,0 a 10,0 35 a 50(2 a 1/0)
35(2)
3, PO M6 4,0 a 5,0 10 a 16(8 a 4) -
M8 9,0 a 10,0 25 a 35(4 a 2)
25(4)
L7Z4055
R/L1, S/L2, T/L3, , 1, U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31, NO
M8 9,0 a 10,0 50(1 a 1/0)
50(1)
3, PO M6 4,0 a 5,0 10 a 16(8 a 4) -
M8 9,0 a 10,0 25 a 35(4 a 2)
25(4)
*1. La sección de cable es válida para cables de cobre con aislamiento PVC (cloruro de polivinilo), temperatura ambiente de 30°.
Modelo de convertidor
CIMR-Símbolo de terminal
Tornillos de termi-
nal
Par de apriete(N•m)
Secciones de cable posibles
mm2 (AWG)
Sección de cable reco-mendada *1 mm2 (AWG)
Tipo de cable
2-8
2
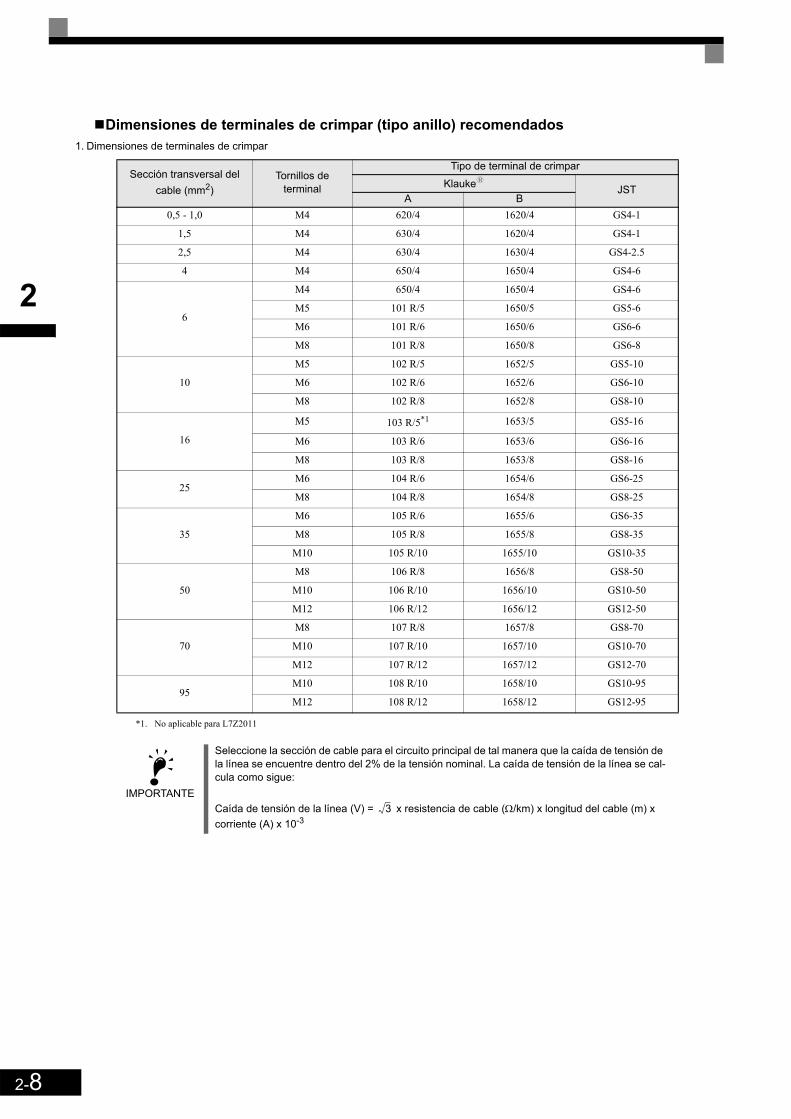
Dimensiones de terminales de crimpar (tipo anillo) recomendados1. Dimensiones de terminales de crimpar
Sección transversal del cable (mm2)
Tornillos determinal
Tipo de terminal de crimpar
Klaukey JSTA B
0,5 - 1,0 M4 620/4 1620/4 GS4-1
1,5 M4 630/4 1620/4 GS4-1
2,5 M4 630/4 1630/4 GS4-2.5
4 M4 650/4 1650/4 GS4-6
6
M4 650/4 1650/4 GS4-6
M5 101 R/5 1650/5 GS5-6
M6 101 R/6 1650/6 GS6-6
M8 101 R/8 1650/8 GS6-8
10
M5 102 R/5 1652/5 GS5-10
M6 102 R/6 1652/6 GS6-10
M8 102 R/8 1652/8 GS8-10
16
M5 103 R/5*1
*1. No aplicable para L7Z2011
1653/5 GS5-16
M6 103 R/6 1653/6 GS6-16
M8 103 R/8 1653/8 GS8-16
25M6 104 R/6 1654/6 GS6-25
M8 104 R/8 1654/8 GS8-25
35
M6 105 R/6 1655/6 GS6-35
M8 105 R/8 1655/8 GS8-35
M10 105 R/10 1655/10 GS10-35
50
M8 106 R/8 1656/8 GS8-50
M10 106 R/10 1656/10 GS10-50
M12 106 R/12 1656/12 GS12-50
70
M8 107 R/8 1657/8 GS8-70
M10 107 R/10 1657/10 GS10-70
M12 107 R/12 1657/12 GS12-70
95M10 108 R/10 1658/10 GS10-95
M12 108 R/12 1658/12 GS12-95
IMPORTANTE
Seleccione la sección de cable para el circuito principal de tal manera que la caída de tensión de la línea se encuentre dentro del 2% de la tensión nominal. La caída de tensión de la línea se cal-cula como sigue:
Caída de tensión de la línea (V) = x resistencia de cable (Ω/km) x longitud del cable (m) x corriente (A) x 10-3
3
2-9
2
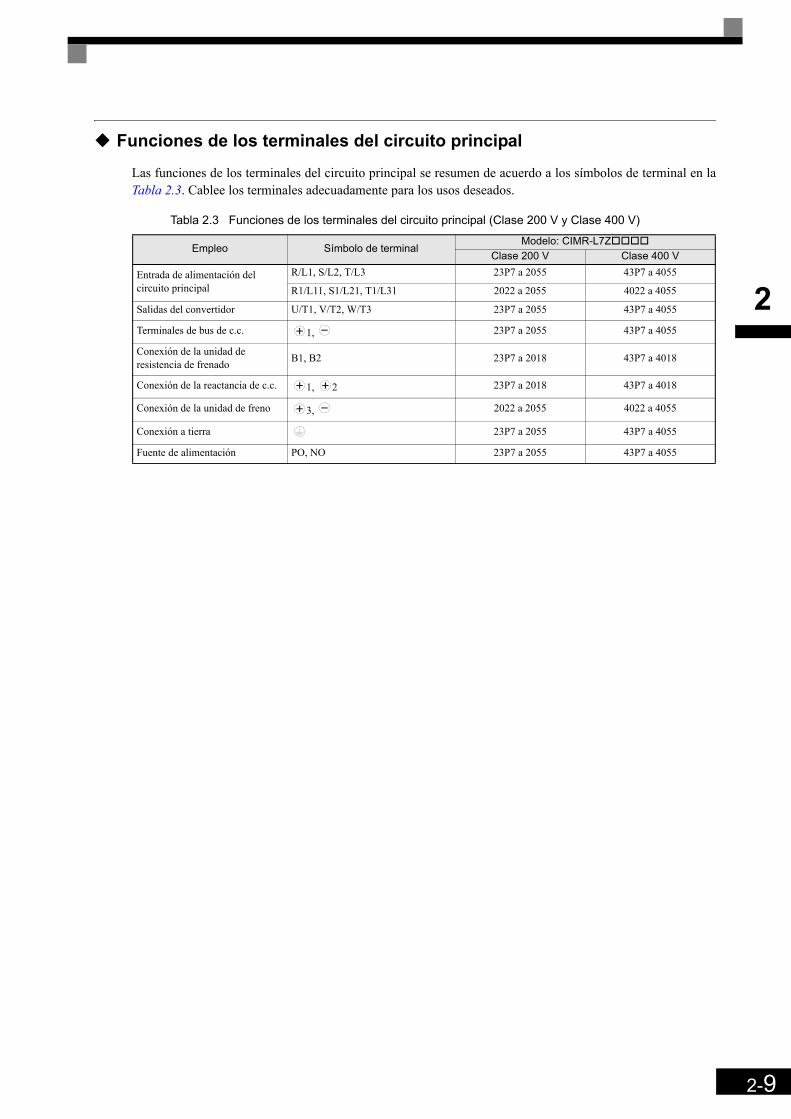
Funciones de los terminales del circuito principal
Las funciones de los terminales del circuito principal se resumen de acuerdo a los símbolos de terminal en laTabla 2.3. Cablee los terminales adecuadamente para los usos deseados.
Tabla 2.3 Funciones de los terminales del circuito principal (Clase 200 V y Clase 400 V)
Empleo Símbolo de terminalModelo: CIMR-L7Z
Clase 200 V Clase 400 V
Entrada de alimentación del circuito principal
R/L1, S/L2, T/L3 23P7 a 2055 43P7 a 4055
R1/L11, S1/L21, T1/L31 2022 a 2055 4022 a 4055
Salidas del convertidor U/T1, V/T2, W/T3 23P7 a 2055 43P7 a 4055
Terminales de bus de c.c. 1, 23P7 a 2055 43P7 a 4055
Conexión de la unidad de resistencia de frenado B1, B2 23P7 a 2018 43P7 a 4018
Conexión de la reactancia de c.c. 1, 2 23P7 a 2018 43P7 a 4018
Conexión de la unidad de freno 3, 2022 a 2055 4022 a 4055
Conexión a tierra 23P7 a 2055 43P7 a 4055
Fuente de alimentación PO, NO 23P7 a 2055 43P7 a 4055

2-10
2
Configuraciones del circuito principal
Las configuraciones del circuito principal del convertidor se muestran en la Tabla 2.4.
Tabla 2.4 Configuraciones del circuito principal del convertidor
Nota: Consulte con su representante Omron Yaskawa Motion Control antes de utilizar una rectificación de 12 pulsos.
Clase 200 V Clase 400 V
-
++
R/L1S/L2
T/L3
B1B2
U/T1
V/T2
W/T3
Circuito de control
Fuente dealimentación
N0 P0
CIMR - L7Z23P7 a 2018
1
2
-
++
CIMR-L7Z43P7 a 4018
B2B1
12
R/L1S/L2T/L3
Fuente dealimentación
Circuito de control
N0 P0
U/T1
V/T2
W/T3
+
R/L1S/L2T/L3
R1/L11S1/L21T1/L31
-
+ 3
U/T1
V/T2
W/T3
CIMR - L7Z2022,2030
1
N0 P
Fuente dealimentación
Circuito de control
+
R/L1S/L2T/L3
R1/L11S1/L21T1/L31
-
+ 3
U/T1
V/T2
W/T3
CIMR - L7Z4022,4055
1
N0 P
Fuente dealimentación
Circuito de control
+ 1
-
+ 3
r/l1∆200/l200
CIMR - L7Z2037 a 2055
R/L1S/L2T/L3
R1/L11S1/L21T1/L31
N0 P0
Fuente dealimentación
Circuito de control
U/T1
V/T2
W/T3
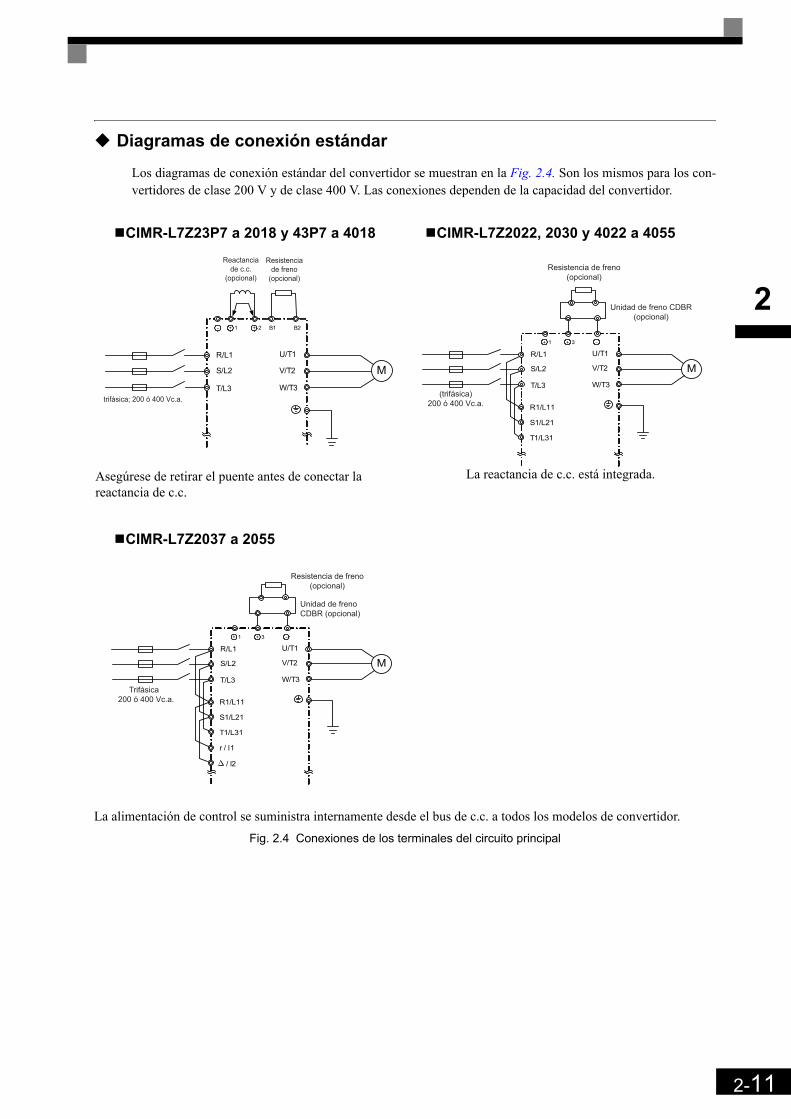
2-11
2
Diagramas de conexión estándar
Los diagramas de conexión estándar del convertidor se muestran en la Fig. 2.4. Son los mismos para los con-vertidores de clase 200 V y de clase 400 V. Las conexiones dependen de la capacidad del convertidor.
La alimentación de control se suministra internamente desde el bus de c.c. a todos los modelos de convertidor. Fig. 2.4 Conexiones de los terminales del circuito principal
CIMR-L7Z23P7 a 2018 y 43P7 a 4018
Asegúrese de retirar el puente antes de conectar lareactancia de c.c.
CIMR-L7Z2022, 2030 y 4022 a 4055
La reactancia de c.c. está integrada.
CIMR-L7Z2037 a 2055
+ 1- + 2 B1 B2
R/L1
S/L2
T/L3
U/T1
V/T2
W/T3
M
trifásica; 200 ó 400 Vc.a.
Reactancia de c.c.
(opcional)
Resistencia de freno
(opcional)
+ 1 -+ 3
R/L1
S/L2
T/L3
U/T1
V/T2
W/T3
M
R1/L11
S1/L21
T1/L31
(trifásica) 200 ó 400 Vc.a.
Resistencia de freno (opcional)
Unidad de freno CDBR (opcional)
+ 1 -+ 3
R/L1
S/L2
T/L3
U/T1
V/T2
W/T3
M
R1/L11
S1/L21
T1/L31
r / l1
/ l2
Trifásica 200 ó 400 Vc.a.
Resistencia de freno (opcional)
Unidad de freno CDBR (opcional)
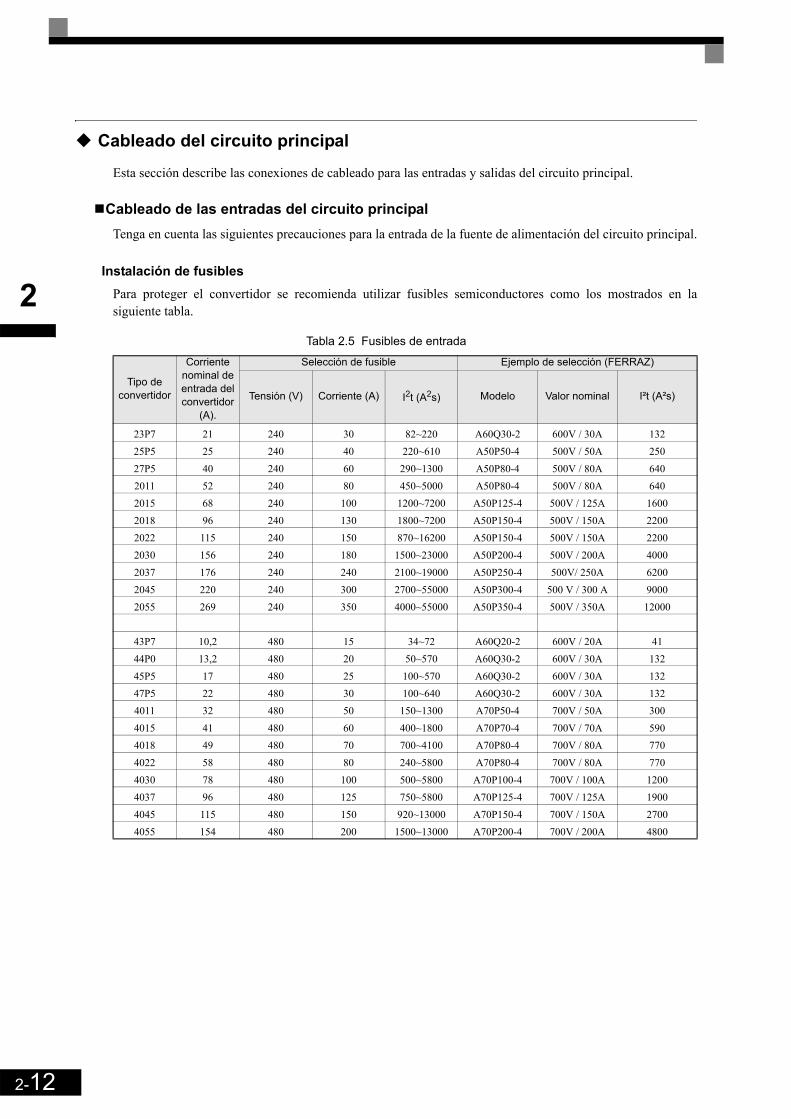
2-12
2
Cableado del circuito principal
Esta sección describe las conexiones de cableado para las entradas y salidas del circuito principal.
Cableado de las entradas del circuito principalTenga en cuenta las siguientes precauciones para la entrada de la fuente de alimentación del circuito principal.
Instalación de fusiblesPara proteger el convertidor se recomienda utilizar fusibles semiconductores como los mostrados en lasiguiente tabla.
Tabla 2.5 Fusibles de entrada
Tipo deconvertidor
Corriente nominal de entrada del convertidor
(A).
Selección de fusible Ejemplo de selección (FERRAZ)
Tensión (V) Corriente (A) I2t (A2s) Modelo Valor nominal I²t (A²s)
23P7 21 240 30 82~220 A60Q30-2 600V / 30A 13225P5 25 240 40 220~610 A50P50-4 500V / 50A 25027P5 40 240 60 290~1300 A50P80-4 500V / 80A 6402011 52 240 80 450~5000 A50P80-4 500V / 80A 6402015 68 240 100 1200~7200 A50P125-4 500V / 125A 16002018 96 240 130 1800~7200 A50P150-4 500V / 150A 22002022 115 240 150 870~16200 A50P150-4 500V / 150A 22002030 156 240 180 1500~23000 A50P200-4 500V / 200A 40002037 176 240 240 2100~19000 A50P250-4 500V/ 250A 62002045 220 240 300 2700~55000 A50P300-4 500 V / 300 A 90002055 269 240 350 4000~55000 A50P350-4 500V / 350A 12000
43P7 10,2 480 15 34~72 A60Q20-2 600V / 20A 4144P0 13,2 480 20 50~570 A60Q30-2 600V / 30A 13245P5 17 480 25 100~570 A60Q30-2 600V / 30A 13247P5 22 480 30 100~640 A60Q30-2 600V / 30A 1324011 32 480 50 150~1300 A70P50-4 700V / 50A 3004015 41 480 60 400~1800 A70P70-4 700V / 70A 5904018 49 480 70 700~4100 A70P80-4 700V / 80A 7704022 58 480 80 240~5800 A70P80-4 700V / 80A 7704030 78 480 100 500~5800 A70P100-4 700V / 100A 12004037 96 480 125 750~5800 A70P125-4 700V / 125A 19004045 115 480 150 920~13000 A70P150-4 700V / 150A 27004055 154 480 200 1500~13000 A70P200-4 700V / 200A 4800
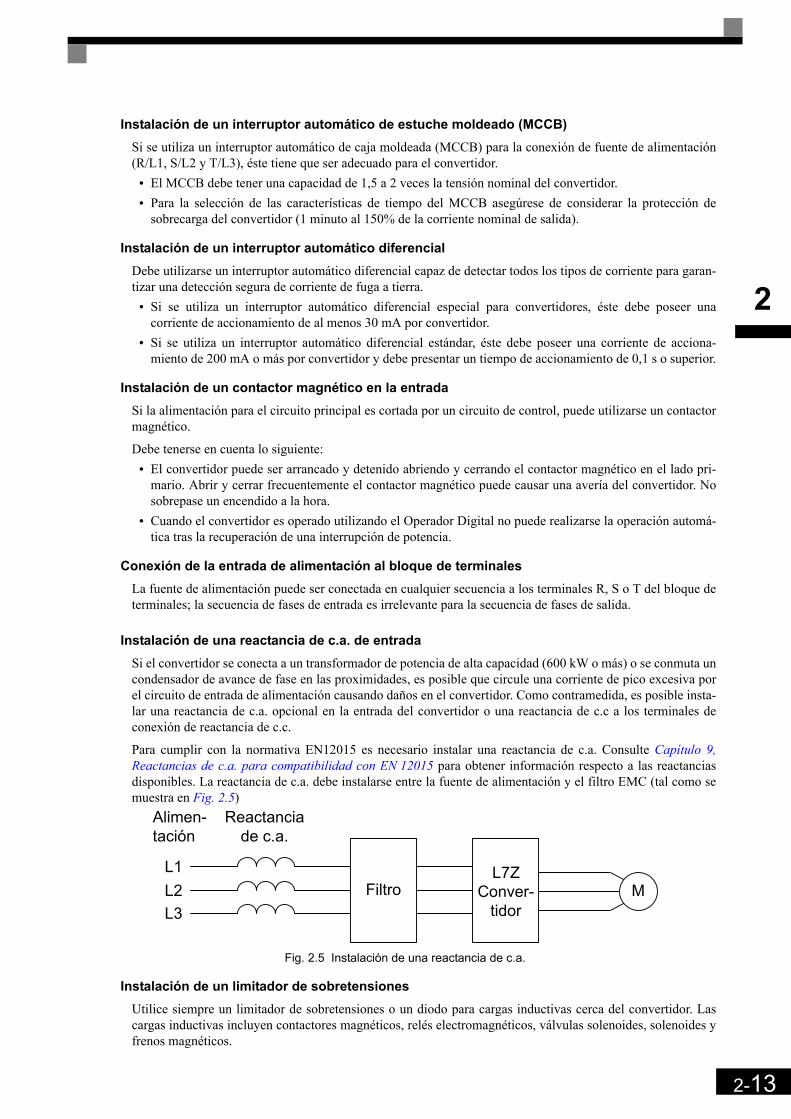
2-13
2
Instalación de un interruptor automático de estuche moldeado (MCCB)Si se utiliza un interruptor automático de caja moldeada (MCCB) para la conexión de fuente de alimentación(R/L1, S/L2 y T/L3), éste tiene que ser adecuado para el convertidor.
• El MCCB debe tener una capacidad de 1,5 a 2 veces la tensión nominal del convertidor.• Para la selección de las características de tiempo del MCCB asegúrese de considerar la protección de
sobrecarga del convertidor (1 minuto al 150% de la corriente nominal de salida).
Instalación de un interruptor automático diferencialDebe utilizarse un interruptor automático diferencial capaz de detectar todos los tipos de corriente para garan-tizar una detección segura de corriente de fuga a tierra.
• Si se utiliza un interruptor automático diferencial especial para convertidores, éste debe poseer unacorriente de accionamiento de al menos 30 mA por convertidor.
• Si se utiliza un interruptor automático diferencial estándar, éste debe poseer una corriente de acciona-miento de 200 mA o más por convertidor y debe presentar un tiempo de accionamiento de 0,1 s o superior.
Instalación de un contactor magnético en la entradaSi la alimentación para el circuito principal es cortada por un circuito de control, puede utilizarse un contactormagnético.
Debe tenerse en cuenta lo siguiente:• El convertidor puede ser arrancado y detenido abriendo y cerrando el contactor magnético en el lado pri-
mario. Abrir y cerrar frecuentemente el contactor magnético puede causar una avería del convertidor. Nosobrepase un encendido a la hora.
• Cuando el convertidor es operado utilizando el Operador Digital no puede realizarse la operación automá-tica tras la recuperación de una interrupción de potencia.
Conexión de la entrada de alimentación al bloque de terminalesLa fuente de alimentación puede ser conectada en cualquier secuencia a los terminales R, S o T del bloque determinales; la secuencia de fases de entrada es irrelevante para la secuencia de fases de salida.
Instalación de una reactancia de c.a. de entrada Si el convertidor se conecta a un transformador de potencia de alta capacidad (600 kW o más) o se conmuta uncondensador de avance de fase en las proximidades, es posible que circule una corriente de pico excesiva porel circuito de entrada de alimentación causando daños en el convertidor. Como contramedida, es posible insta-lar una reactancia de c.a. opcional en la entrada del convertidor o una reactancia de c.c a los terminales deconexión de reactancia de c.c.
Para cumplir con la normativa EN12015 es necesario instalar una reactancia de c.a. Consulte Capítulo 9,Reactancias de c.a. para compatibilidad con EN 12015 para obtener información respecto a las reactanciasdisponibles. La reactancia de c.a. debe instalarse entre la fuente de alimentación y el filtro EMC (tal como semuestra en Fig. 2.5)
Fig. 2.5 Instalación de una reactancia de c.a.
Instalación de un limitador de sobretensionesUtilice siempre un limitador de sobretensiones o un diodo para cargas inductivas cerca del convertidor. Lascargas inductivas incluyen contactores magnéticos, relés electromagnéticos, válvulas solenoides, solenoides yfrenos magnéticos.
FiltroL7Z
Conver-tidor
L1L2L3
M
Alimen-tación
Reactanciade c.a.
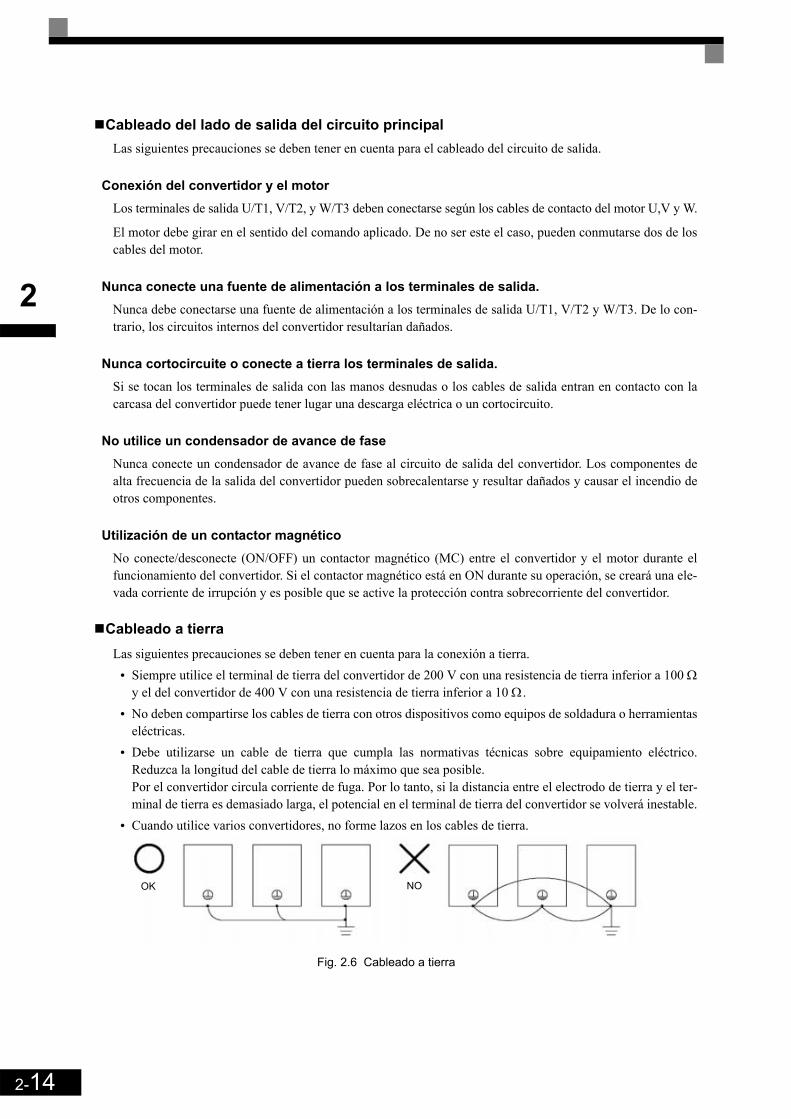
2-14
2
Cableado del lado de salida del circuito principalLas siguientes precauciones se deben tener en cuenta para el cableado del circuito de salida.
Conexión del convertidor y el motorLos terminales de salida U/T1, V/T2, y W/T3 deben conectarse según los cables de contacto del motor U,V y W.
El motor debe girar en el sentido del comando aplicado. De no ser este el caso, pueden conmutarse dos de loscables del motor.
Nunca conecte una fuente de alimentación a los terminales de salida.Nunca debe conectarse una fuente de alimentación a los terminales de salida U/T1, V/T2 y W/T3. De lo con-trario, los circuitos internos del convertidor resultarían dañados.
Nunca cortocircuite o conecte a tierra los terminales de salida.Si se tocan los terminales de salida con las manos desnudas o los cables de salida entran en contacto con lacarcasa del convertidor puede tener lugar una descarga eléctrica o un cortocircuito.
No utilice un condensador de avance de faseNunca conecte un condensador de avance de fase al circuito de salida del convertidor. Los componentes dealta frecuencia de la salida del convertidor pueden sobrecalentarse y resultar dañados y causar el incendio deotros componentes.
Utilización de un contactor magnéticoNo conecte/desconecte (ON/OFF) un contactor magnético (MC) entre el convertidor y el motor durante elfuncionamiento del convertidor. Si el contactor magnético está en ON durante su operación, se creará una ele-vada corriente de irrupción y es posible que se active la protección contra sobrecorriente del convertidor.
Cableado a tierraLas siguientes precauciones se deben tener en cuenta para la conexión a tierra.
• Siempre utilice el terminal de tierra del convertidor de 200 V con una resistencia de tierra inferior a 100 Ωy el del convertidor de 400 V con una resistencia de tierra inferior a 10 Ω .
• No deben compartirse los cables de tierra con otros dispositivos como equipos de soldadura o herramientaseléctricas.
• Debe utilizarse un cable de tierra que cumpla las normativas técnicas sobre equipamiento eléctrico.Reduzca la longitud del cable de tierra lo máximo que sea posible.Por el convertidor circula corriente de fuga. Por lo tanto, si la distancia entre el electrodo de tierra y el ter-minal de tierra es demasiado larga, el potencial en el terminal de tierra del convertidor se volverá inestable.
• Cuando utilice varios convertidores, no forme lazos en los cables de tierra.
Fig. 2.6 Cableado a tierra
OK NO

2-15
2
Conexión de una resistencia de freno y una unidad de freno (CDBR)Se puede conectar una resistencia de freno y una unidad de freno al convertidor como se muestra en la Fig. 2.7.
Para evitar el sobrecalentamiento de la unidad de freno/resistencia de freno, el funcionamiento del convertidordebe detenerse cuando se operen los contactos de sobrecarga.
Convertidores de clase 200 V y 400 V de 3,7 a 18,5 kW de capacidad de salida
Convertidores de clase 200 V y 400 V de 22 o más kW de capacidad de salida
Fig. 2.7 Conexión de la resistencia de freno y de la unidad de freno
Contacto de relé térmicode sobrecarga
Resistencia de freno
Convertidor
Resistencia de freno
Contacto de relé térmico de sobrecarga
Unidad de freno CDBR
Convertidor
Contacto de relé térmicode sobrecarga
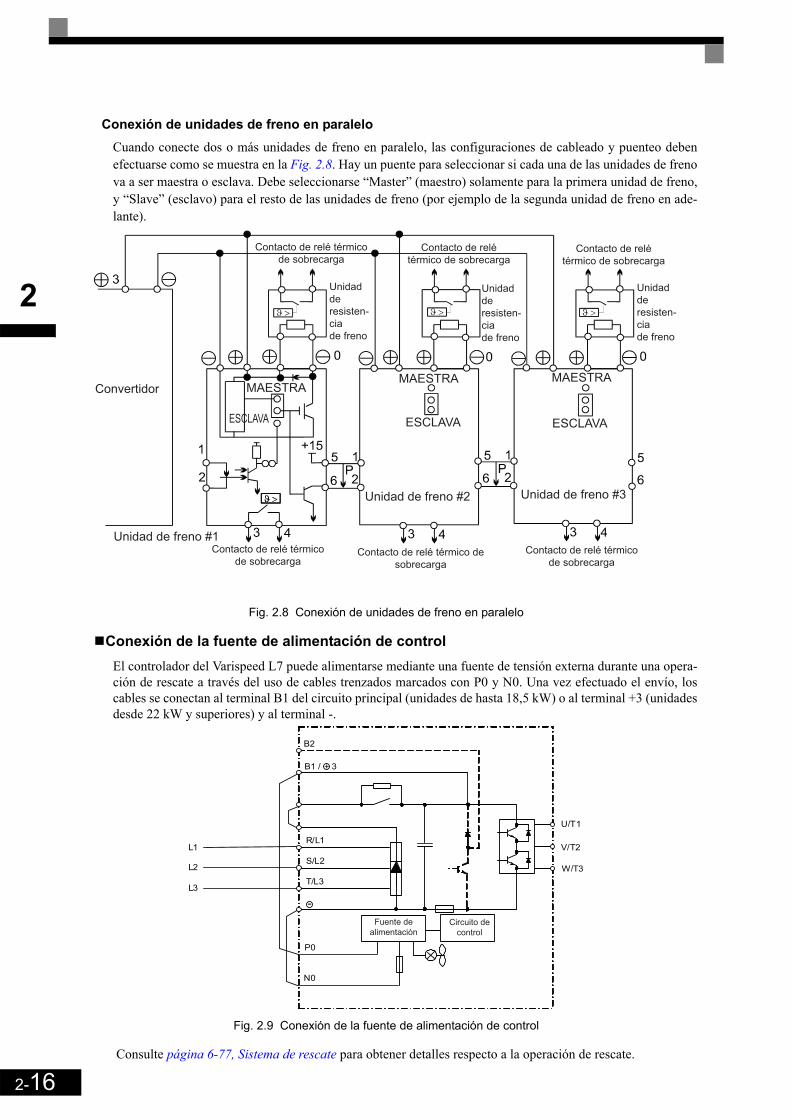
2-16
2
Conexión de unidades de freno en paraleloCuando conecte dos o más unidades de freno en paralelo, las configuraciones de cableado y puenteo debenefectuarse como se muestra en la Fig. 2.8. Hay un puente para seleccionar si cada una de las unidades de frenova a ser maestra o esclava. Debe seleccionarse “Master” (maestro) solamente para la primera unidad de freno,y “Slave” (esclavo) para el resto de las unidades de freno (por ejemplo de la segunda unidad de freno en ade-lante).
Fig. 2.8 Conexión de unidades de freno en paralelo
Conexión de la fuente de alimentación de controlEl controlador del Varispeed L7 puede alimentarse mediante una fuente de tensión externa durante una opera-ción de rescate a través del uso de cables trenzados marcados con P0 y N0. Una vez efectuado el envío, loscables se conectan al terminal B1 del circuito principal (unidades de hasta 18,5 kW) o al terminal +3 (unidadesdesde 22 kW y superiores) y al terminal -.
Fig. 2.9 Conexión de la fuente de alimentación de control
Consulte página 6-77, Sistema de rescate para obtener detalles respecto a la operación de rescate.
MAESTRA
ESCLAVA
MAESTRA
ESCLAVA
Unidad de freno #2 Unidad de freno #3
Unidad de resisten-cia de freno
Unidad de resisten-cia de freno
Unidad de freno #1Contacto de relé térmico
de sobrecargaContacto de relé térmico de
sobrecargaContacto de relé térmico
de sobrecarga
Contacto de relé térmico de sobrecarga
Contacto de relé térmico de sobrecarga
Contacto de relé térmico de sobrecarga
Convertidor
Unidad de resisten-cia de freno
MAESTRA
ESCLAVA
L1
L2
L3
R/L1
S/L2
T/L3
-
P0
N0
W/T3
V/T2
U/T1
B1 /
B2
+ 3
Fuente dealimentación
Circuito de control
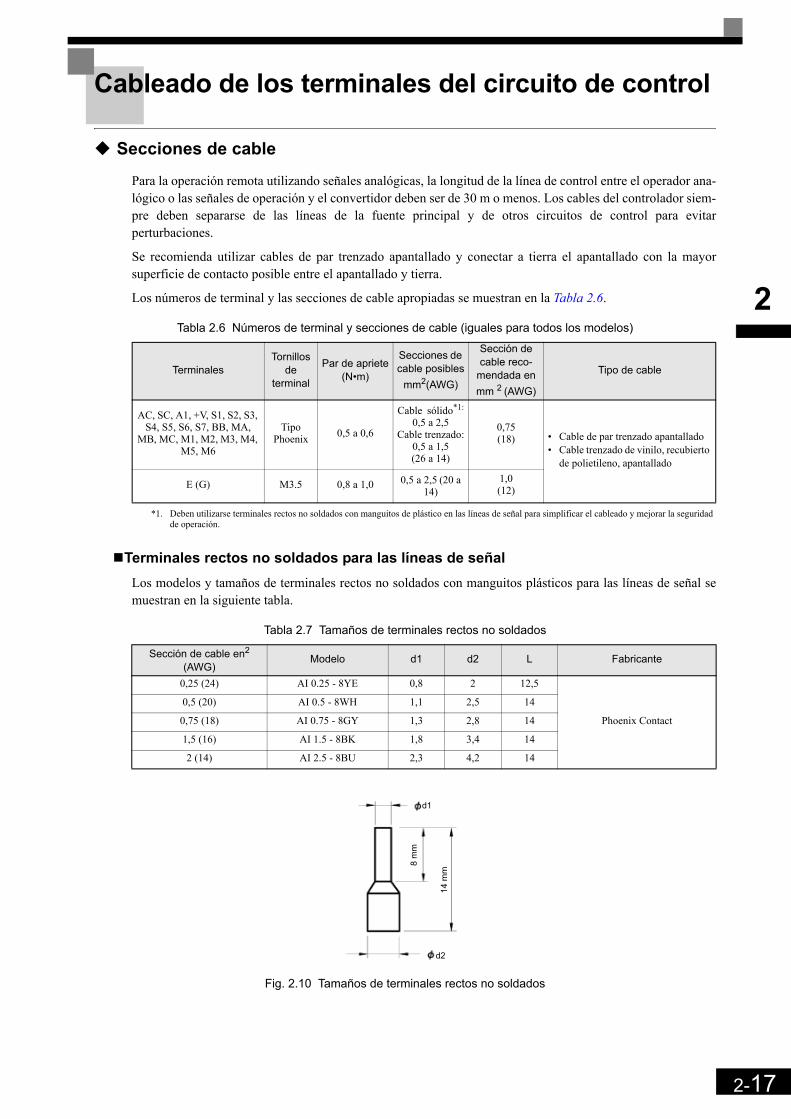
2-17
2
Cableado de los terminales del circuito de control
Secciones de cable
Para la operación remota utilizando señales analógicas, la longitud de la línea de control entre el operador ana-lógico o las señales de operación y el convertidor deben ser de 30 m o menos. Los cables del controlador siem-pre deben separarse de las líneas de la fuente principal y de otros circuitos de control para evitarperturbaciones.
Se recomienda utilizar cables de par trenzado apantallado y conectar a tierra el apantallado con la mayorsuperficie de contacto posible entre el apantallado y tierra.
Los números de terminal y las secciones de cable apropiadas se muestran en la Tabla 2.6.
Tabla 2.6 Números de terminal y secciones de cable (iguales para todos los modelos)
Terminales rectos no soldados para las líneas de señalLos modelos y tamaños de terminales rectos no soldados con manguitos plásticos para las líneas de señal semuestran en la siguiente tabla.
Tabla 2.7 Tamaños de terminales rectos no soldados
Fig. 2.10 Tamaños de terminales rectos no soldados
TerminalesTornillos
determinal
Par de apriete(N•m)
Secciones de cable posibles
mm2(AWG)
Sección de cable reco-
mendada en mm 2 (AWG)
Tipo de cable
AC, SC, A1, +V, S1, S2, S3, S4, S5, S6, S7, BB, MA,
MB, MC, M1, M2, M3, M4, M5, M6
Tipo Phoenix 0,5 a 0,6
Cable sólido*1:
0,5 a 2,5Cable trenzado:
0,5 a 1,5(26 a 14)
*1. Deben utilizarse terminales rectos no soldados con manguitos de plástico en las líneas de señal para simplificar el cableado y mejorar la seguridad de operación.
0,75(18) • Cable de par trenzado apantallado
• Cable trenzado de vinilo, recubierto de polietileno, apantallado
E (G) M3.5 0,8 a 1,0 0,5 a 2,5 (20 a 14)
1,0(12)
Sección de cable en2 (AWG)
Modelo d1 d2 L Fabricante
0,25 (24) AI 0.25 - 8YE 0,8 2 12,5
Phoenix Contact
0,5 (20) AI 0.5 - 8WH 1,1 2,5 14
0,75 (18) AI 0.75 - 8GY 1,3 2,8 14
1,5 (16) AI 1.5 - 8BK 1,8 3,4 14
2 (14) AI 2.5 - 8BU 2,3 4,2 14
d1
d2
8 m
m
14 m
m
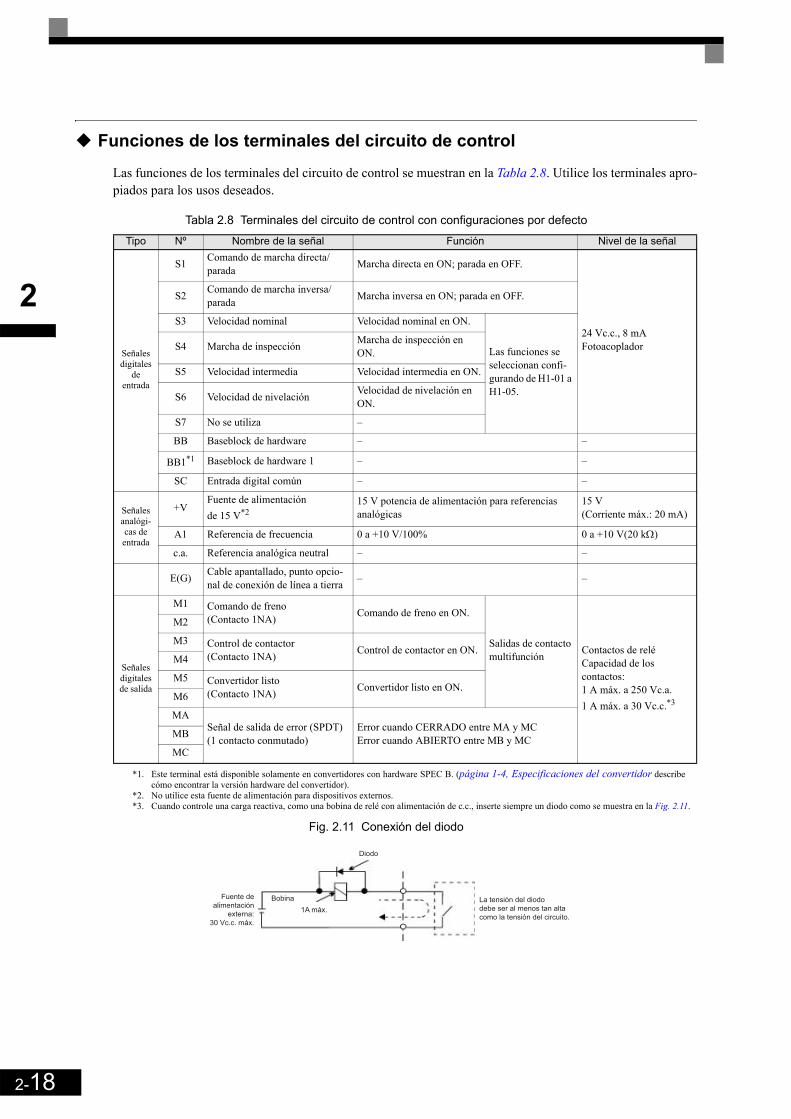
2-18
2
Funciones de los terminales del circuito de control
Las funciones de los terminales del circuito de control se muestran en la Tabla 2.8. Utilice los terminales apro-piados para los usos deseados.
Tabla 2.8 Terminales del circuito de control con configuraciones por defecto
Fig. 2.11 Conexión del diodo
Tipo Nº Nombre de la señal Función Nivel de la señal
Señales digitales
de entrada
S1 Comando de marcha directa/parada Marcha directa en ON; parada en OFF.
24 Vc.c., 8 mAFotoacoplador
S2 Comando de marcha inversa/parada Marcha inversa en ON; parada en OFF.
S3 Velocidad nominal Velocidad nominal en ON.
Las funciones se seleccionan confi-gurando de H1-01 a H1-05.
S4 Marcha de inspección Marcha de inspección en ON.
S5 Velocidad intermedia Velocidad intermedia en ON.
S6 Velocidad de nivelación Velocidad de nivelación en ON.
S7 No se utiliza –
BB Baseblock de hardware – –
BB1*1
*1. Este terminal está disponible solamente en convertidores con hardware SPEC B. (página 1-4, Especificaciones del convertidor describecómo encontrar la versión hardware del convertidor).
Baseblock de hardware 1 – –
SC Entrada digital común – –
Señales analógi-cas de entrada
+VFuente de alimentación de 15 V*2
*2. No utilice esta fuente de alimentación para dispositivos externos.
15 V potencia de alimentación para referencias analógicas
15 V (Corriente máx.: 20 mA)
A1 Referencia de frecuencia 0 a +10 V/100% 0 a +10 V(20 kΩ)
c.a. Referencia analógica neutral – –
E(G) Cable apantallado, punto opcio-nal de conexión de línea a tierra – –
Señales digitales de salida
M1 Comando de freno(Contacto 1NA) Comando de freno en ON.
Salidas de contacto multifunción Contactos de relé
Capacidad de los contactos: 1 A máx. a 250 Vc.a. 1 A máx. a 30 Vc.c.*3
*3. Cuando controle una carga reactiva, como una bobina de relé con alimentación de c.c., inserte siempre un diodo como se muestra en la Fig. 2.11.
M2
M3 Control de contactor(Contacto 1NA) Control de contactor en ON.
M4
M5 Convertidor listo(Contacto 1NA) Convertidor listo en ON.
M6
MASeñal de salida de error (SPDT)(1 contacto conmutado)
Error cuando CERRADO entre MA y MCError cuando ABIERTO entre MB y MCMB
MC
La tensión del diodo debe ser al menos tan alta como la tensión del circuito.
Diodo
1A máx.BobinaFuente de
alimentación externa:
30 Vc.c. máx.
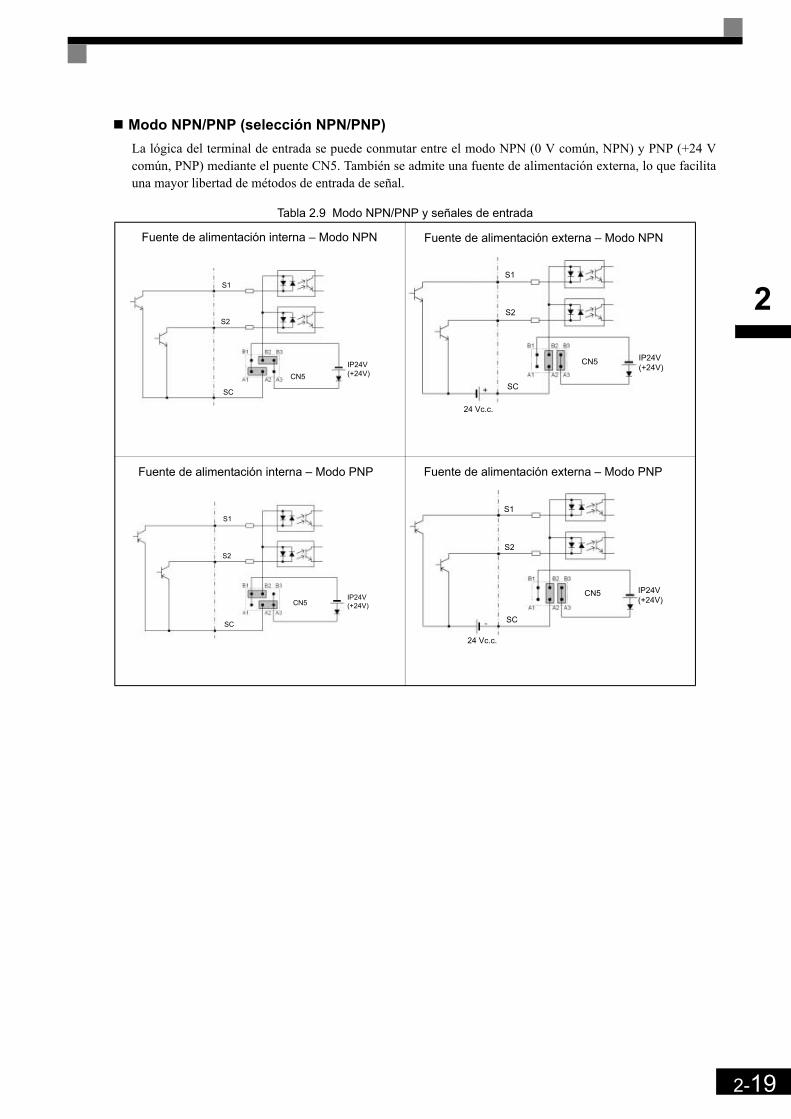
2-19
2
Modo NPN/PNP (selección NPN/PNP)La lógica del terminal de entrada se puede conmutar entre el modo NPN (0 V común, NPN) y PNP (+24 Vcomún, PNP) mediante el puente CN5. También se admite una fuente de alimentación externa, lo que facilitauna mayor libertad de métodos de entrada de señal.
Tabla 2.9 Modo NPN/PNP y señales de entrada
Fuente de alimentación interna – Modo NPN
S1
S2
SC
CN5IP24V(+24V)
Fuente de alimentación externa – Modo NPN
S1
S2
SC
CN5 IP24V(+24V)
24 Vc.c.
Fuente de alimentación interna – Modo PNP
S1
S2
SC
CN5IP24V(+24V)
Fuente de alimentación externa – Modo PNP
S1
S2
SC
CN5 IP24V(+24V)
24 Vc.c.
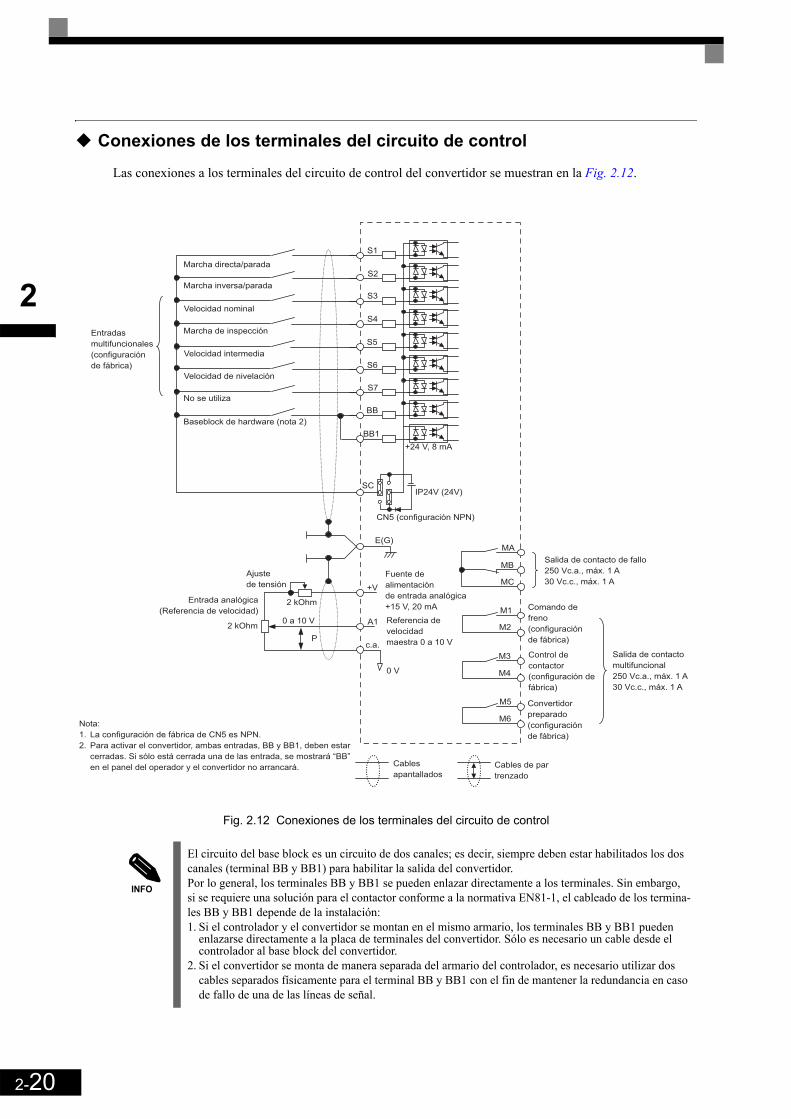
2-20
2
Conexiones de los terminales del circuito de control
Las conexiones a los terminales del circuito de control del convertidor se muestran en la Fig. 2.12.
Fig. 2.12 Conexiones de los terminales del circuito de control
INFO
El circuito del base block es un circuito de dos canales; es decir, siempre deben estar habilitados los dos canales (terminal BB y BB1) para habilitar la salida del convertidor.Por lo general, los terminales BB y BB1 se pueden enlazar directamente a los terminales. Sin embargo, si se requiere una solución para el contactor conforme a la normativa EN81-1, el cableado de los termina-les BB y BB1 depende de la instalación:1. Si el controlador y el convertidor se montan en el mismo armario, los terminales BB y BB1 pueden
enlazarse directamente a la placa de terminales del convertidor. Sólo es necesario un cable desde el controlador al base block del convertidor.
2. Si el convertidor se monta de manera separada del armario del controlador, es necesario utilizar dos cables separados físicamente para el terminal BB y BB1 con el fin de mantener la redundancia en caso de fallo de una de las líneas de señal.
Ajuste de tensión
S1
S3
S2
S4
S5
S6
S7
BB
BB1
Entradas multifuncionales(configuración de fábrica)
Marcha directa/parada
Marcha inversa/parada
Velocidad nominal
Marcha de inspección
Velocidad intermedia
Velocidad de nivelación
No se utiliza
Baseblock de hardware (nota 2)
SC
+24 V, 8 mA
IP24V (24V)
CN5 (configuración NPN)
E(G)MA
MB
MC
Salida de contacto de fallo250 Vc.a., máx. 1 A 30 Vc.c., máx. 1 A
M1
M2
M3
M5
M4
M6
Comando de freno(configuración de fábrica)
Control de contactor(configuración de fábrica)
Convertidor preparado(configuración de fábrica)
Salida de contactomultifuncional250 Vc.a., máx. 1 A 30 Vc.c., máx. 1 A
Fuente de alimentación de entrada analógica +15 V, 20 mA
Referencia de velocidadmaestra 0 a 10 V
+V
A1
c.a.
0 V
P
2 kOhmEntrada analógica(Referencia de velocidad)
2 kOhm 0 a 10 V
Cables de partrenzado
Cablesapantallados
Nota:1. La configuración de fábrica de CN5 es NPN.2. Para activar el convertidor, ambas entradas, BB y BB1, deben estar cerradas. Si sólo está cerrada una de las entrada, se mostrará “BB” en el panel del operador y el convertidor no arrancará.
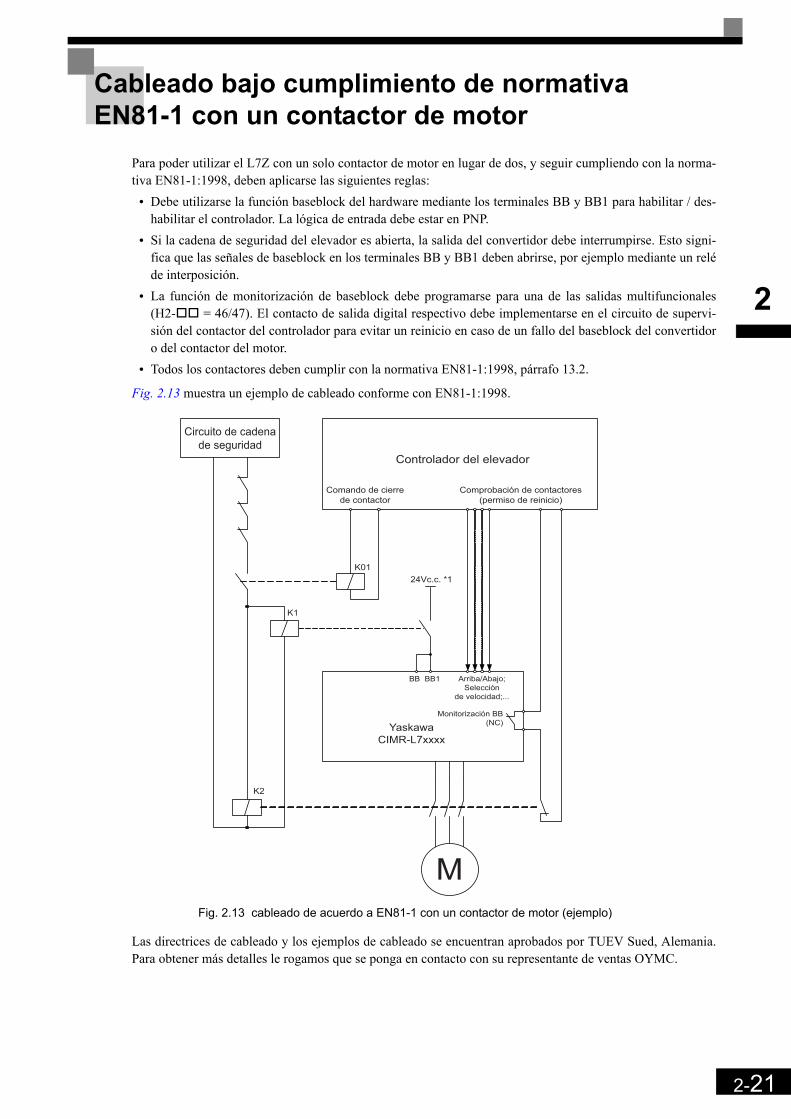
2-21
2
Cableado bajo cumplimiento de normativa EN81-1 con un contactor de motor
Para poder utilizar el L7Z con un solo contactor de motor en lugar de dos, y seguir cumpliendo con la norma-tiva EN81-1:1998, deben aplicarse las siguientes reglas:
• Debe utilizarse la función baseblock del hardware mediante los terminales BB y BB1 para habilitar / des-habilitar el controlador. La lógica de entrada debe estar en PNP.
• Si la cadena de seguridad del elevador es abierta, la salida del convertidor debe interrumpirse. Esto signi-fica que las señales de baseblock en los terminales BB y BB1 deben abrirse, por ejemplo mediante un reléde interposición.
• La función de monitorización de baseblock debe programarse para una de las salidas multifuncionales(H2- = 46/47). El contacto de salida digital respectivo debe implementarse en el circuito de supervi-sión del contactor del controlador para evitar un reinicio en caso de un fallo del baseblock del convertidoro del contactor del motor.
• Todos los contactores deben cumplir con la normativa EN81-1:1998, párrafo 13.2.
Fig. 2.13 muestra un ejemplo de cableado conforme con EN81-1:1998.
Fig. 2.13 cableado de acuerdo a EN81-1 con un contactor de motor (ejemplo)
Las directrices de cableado y los ejemplos de cableado se encuentran aprobados por TUEV Sued, Alemania.Para obtener más detalles le rogamos que se ponga en contacto con su representante de ventas OYMC.
Circuito de cadenade seguridad
Controlador del elevador
Comando de cierre de contactor
Comprobación de contactores(permiso de reinicio)
K0124Vc.c. *1
K1
BB BB1 Arriba/Abajo; Selección
de velocidad;...
Monitorización BB(NC)Yaskawa
CIMR-L7xxxx
K2
M
2-22
2
Precauciones para el cableado del circuito de control
Tenga en cuenta las siguientes precauciones para el cableado de los circuitos de control. • Separe el cableado del circuito de control del cableado del circuito principal (terminales R/L1, S/L2, T/L3,
B1, B2, U/T1, V/T2, W/T3, , 1, 2, y 3, PO, NO) y otras líneas de alta potencia.• Debe separarse el cableado para los terminales del circuito de control MA, MB, MC, M1, M2, M3, M4,
M5 y M6 (salidas de contacto) del cableado a otros terminales del circuito de control.• Si se utiliza una fuente de alimentación externa auxiliar, ésta deberá ser una fuente contenida en la lista UL
Clase 2.• Debe utilizarse cable de par trenzado o cable de par trenzado apantallado para los circuitos de control para
prevenir fallos en el funcionamiento. • Debe conectarse el blindaje (pantalla) de los cables a tierra con la mayor superficie de contacto posible.• El apantallado del cable debe ser conectado a tierra en ambos extremos del cable.

2-23
2
Comprobación del cableado
Comprobaciones
Compruebe todo el cableado una vez que esté totalmente instalado. No lleve a cabo pruebas de continuidad enlos circuitos de control. Realice las siguientes pruebas en el cableado.
• ¿Es todo el cableado correcto?• ¿Han quedado fragmentos de cable, tornillos u otros materiales extraños?• ¿Están todos los tornillos apretados?• ¿Hay extremos de cable en contacto con otros terminales?
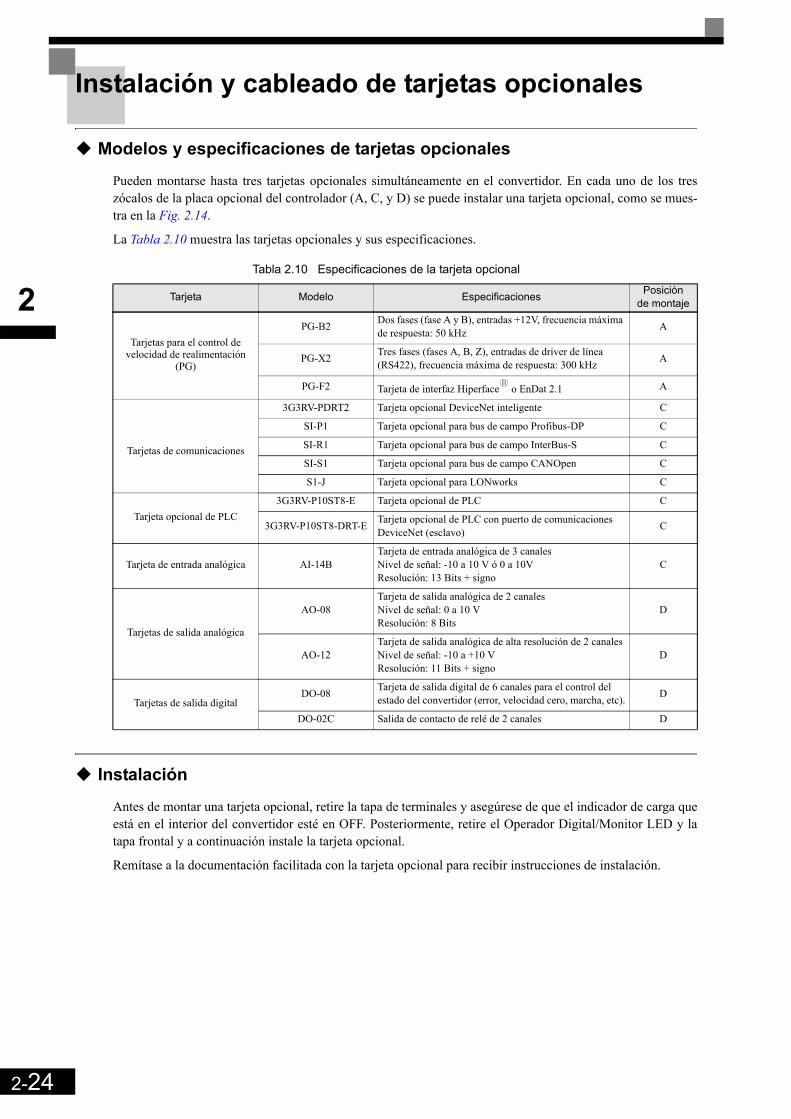
2-24
2
Instalación y cableado de tarjetas opcionales
Modelos y especificaciones de tarjetas opcionales
Pueden montarse hasta tres tarjetas opcionales simultáneamente en el convertidor. En cada uno de los treszócalos de la placa opcional del controlador (A, C, y D) se puede instalar una tarjeta opcional, como se mues-tra en la Fig. 2.14.
La Tabla 2.10 muestra las tarjetas opcionales y sus especificaciones.
Tabla 2.10 Especificaciones de la tarjeta opcional
Instalación
Antes de montar una tarjeta opcional, retire la tapa de terminales y asegúrese de que el indicador de carga queestá en el interior del convertidor esté en OFF. Posteriormente, retire el Operador Digital/Monitor LED y latapa frontal y a continuación instale la tarjeta opcional.
Remítase a la documentación facilitada con la tarjeta opcional para recibir instrucciones de instalación.
Tarjeta Modelo Especificaciones Posición de montaje
Tarjetas para el control develocidad de realimentación
(PG)
PG-B2 Dos fases (fase A y B), entradas +12V, frecuencia máxima de respuesta: 50 kHz A
PG-X2 Tres fases (fases A, B, Z), entradas de driver de línea (RS422), frecuencia máxima de respuesta: 300 kHz A
PG-F2 Tarjeta de interfaz Hiperfacey o EnDat 2.1 A
Tarjetas de comunicaciones
3G3RV-PDRT2 Tarjeta opcional DeviceNet inteligente C
SI-P1 Tarjeta opcional para bus de campo Profibus-DP C
SI-R1 Tarjeta opcional para bus de campo InterBus-S C
SI-S1 Tarjeta opcional para bus de campo CANOpen C
S1-J Tarjeta opcional para LONworks C
Tarjeta opcional de PLC3G3RV-P10ST8-E Tarjeta opcional de PLC C
3G3RV-P10ST8-DRT-E Tarjeta opcional de PLC con puerto de comunicaciones DeviceNet (esclavo) C
Tarjeta de entrada analógica AI-14BTarjeta de entrada analógica de 3 canalesNivel de señal: -10 a 10 V ó 0 a 10VResolución: 13 Bits + signo
C
Tarjetas de salida analógica
AO-08Tarjeta de salida analógica de 2 canalesNivel de señal: 0 a 10 VResolución: 8 Bits
D
AO-12Tarjeta de salida analógica de alta resolución de 2 canalesNivel de señal: -10 a +10 VResolución: 11 Bits + signo
D
Tarjetas de salida digitalDO-08 Tarjeta de salida digital de 6 canales para el control del
estado del convertidor (error, velocidad cero, marcha, etc). D
DO-02C Salida de contacto de relé de 2 canales D

2-25
2
Prevención de la elevación de los conectores de tarjeta opcional C y D Tras instalar la tarjeta opcional en la ranura C o D, inserte un clip opcional para evitar que el lateral que dis-pone del conector se levante. El clip opcional puede retirarse fácilmente tirando de él por su parte saliente.
Fig. 2.14 Montaje de las tarjetas opcionales
Terminales y especificaciones de la tarjeta para el control de velocidad de realimentación (PG)
Tarjeta opcional PG-B2
Especificaciones de entrada/salida
Tabla 2.11 Especificaciones de E/S de la tarjeta PG-B2
Terminal Nº Contenido Especificaciones
TA1
1 Fuente de alimentación para el generador de pulsos (encoder)
12 Vc.c. (±5%), 200 mA máx.
2 0 Vc.c. (GND para fuente de alimentación)
3Terminales de entrada de pulsos de fase A
H: +8 a 12 V (frecuencia máxima de entrada: 50 kHz)
4 Común de entrada de pulsos de fase A
5Terminales de entrada de pulsos de fase B
H: +8 a 12 V (frecuencia máxima de entrada: 50 kHz)
6 Común de entrada de pulsos de fase B
TA2
1 Terminales de salida de monitor de pulsos fase A Salida de colector abierta, 24Vc.c, 30 mA máx.
2
3 Terminales de salida de monitor de pulsos de fase B Salida de colector abierta, 24Vc.c, 30 mA máx.
4
TA3 (E) Terminal de conexión de apantallado -
Separador de montaje de la tarjeta opcional C
Tarjeta opcional C
Separador de montaje de la tarjeta opcional A
Tarjeta opcional A
Orificio para el separador de montaje de la tarjeta opcional A
Separador de montajede la tarjeta opcional A
(suministrado con latarjeta opcional A)
Conector de la tarjeta opcional A (CN4)
Conector de la tarjeta opcional C (CN2)
Clip opcional(para prevenir que se eleve la
tarjeta opcional C)
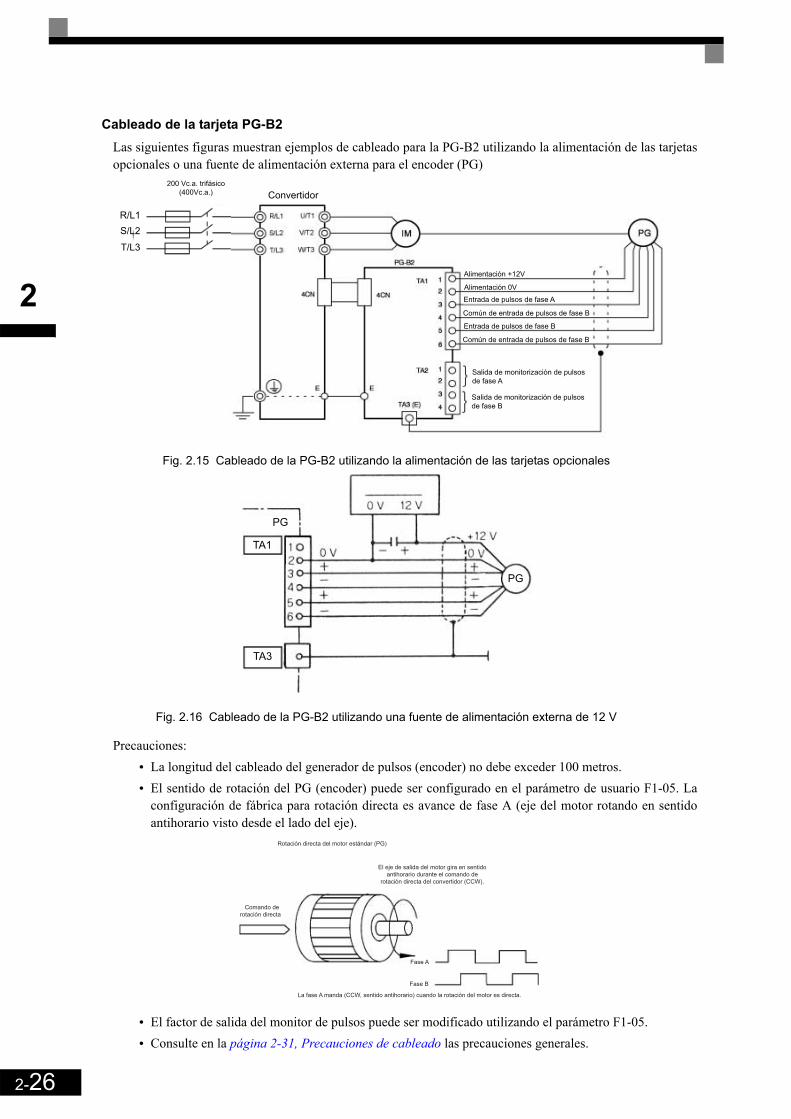
2-26
2
Cableado de la tarjeta PG-B2Las siguientes figuras muestran ejemplos de cableado para la PG-B2 utilizando la alimentación de las tarjetasopcionales o una fuente de alimentación externa para el encoder (PG)
Fig. 2.15 Cableado de la PG-B2 utilizando la alimentación de las tarjetas opcionales
Fig. 2.16 Cableado de la PG-B2 utilizando una fuente de alimentación externa de 12 V
Precauciones:• La longitud del cableado del generador de pulsos (encoder) no debe exceder 100 metros.• El sentido de rotación del PG (encoder) puede ser configurado en el parámetro de usuario F1-05. La
configuración de fábrica para rotación directa es avance de fase A (eje del motor rotando en sentidoantihorario visto desde el lado del eje).
• El factor de salida del monitor de pulsos puede ser modificado utilizando el parámetro F1-05.• Consulte en la página 2-31, Precauciones de cableado las precauciones generales.
R/L1S/L2
T/L3
Alimentación +12V
Alimentación 0V
Entrada de pulsos de fase A
Común de entrada de pulsos de fase B
Entrada de pulsos de fase B
Común de entrada de pulsos de fase B
Salida de monitorización de pulsos de fase A
Salida de monitorización de pulsos de fase B
200 Vc.a. trifásico (400Vc.a.) Convertidor
PG
TA1
TA3
PG
Comando de rotación directa
Fase A
Fase B
El eje de salida del motor gira en sentido antihorario durante el comando de
rotación directa del convertidor (CCW).
La fase A manda (CCW, sentido antihorario) cuando la rotación del motor es directa.
Rotación directa del motor estándar (PG)
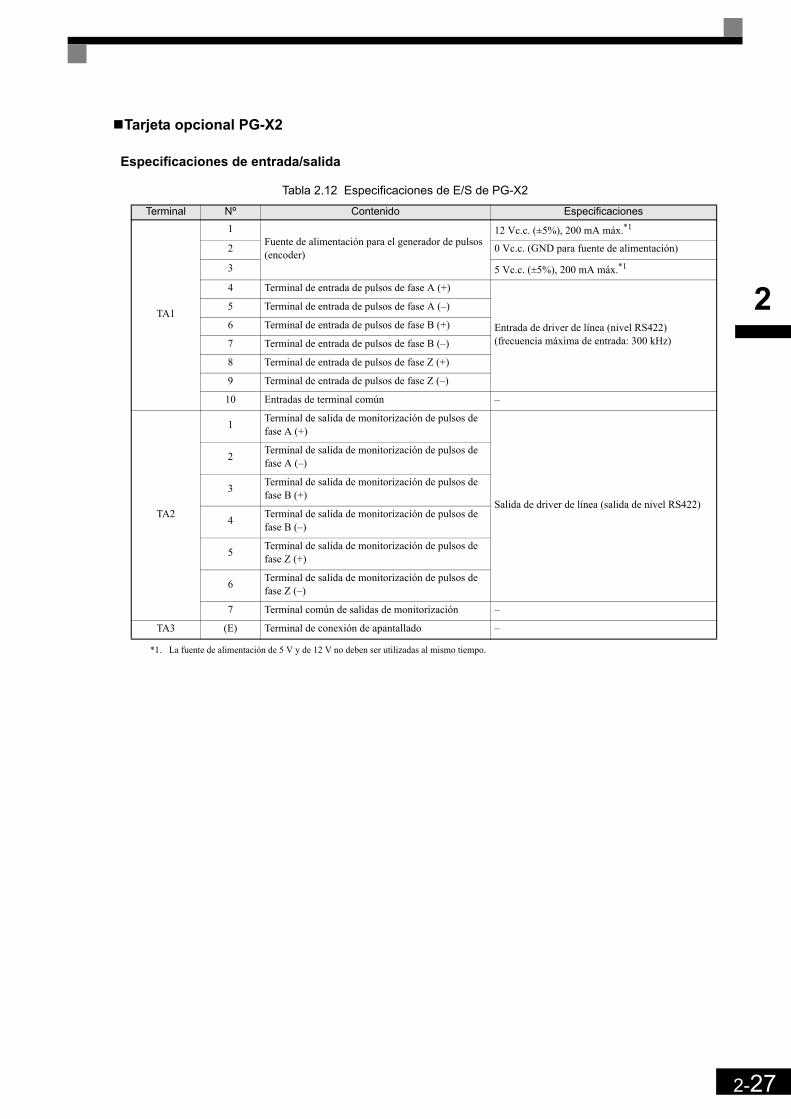
2-27
2
Tarjeta opcional PG-X2
Especificaciones de entrada/salida
Tabla 2.12 Especificaciones de E/S de PG-X2
Terminal Nº Contenido Especificaciones
TA1
1Fuente de alimentación para el generador de pulsos (encoder)
12 Vc.c. (±5%), 200 mA máx.*1
*1. La fuente de alimentación de 5 V y de 12 V no deben ser utilizadas al mismo tiempo.
2 0 Vc.c. (GND para fuente de alimentación)
3 5 Vc.c. (±5%), 200 mA máx.*1
4 Terminal de entrada de pulsos de fase A (+)
Entrada de driver de línea (nivel RS422)(frecuencia máxima de entrada: 300 kHz)
5 Terminal de entrada de pulsos de fase A (–)
6 Terminal de entrada de pulsos de fase B (+)
7 Terminal de entrada de pulsos de fase B (–)
8 Terminal de entrada de pulsos de fase Z (+)
9 Terminal de entrada de pulsos de fase Z (–)
10 Entradas de terminal común –
TA2
1 Terminal de salida de monitorización de pulsos de fase A (+)
Salida de driver de línea (salida de nivel RS422)
2 Terminal de salida de monitorización de pulsos de fase A (–)
3 Terminal de salida de monitorización de pulsos de fase B (+)
4 Terminal de salida de monitorización de pulsos de fase B (–)
5 Terminal de salida de monitorización de pulsos de fase Z (+)
6 Terminal de salida de monitorización de pulsos de fase Z (–)
7 Terminal común de salidas de monitorización –
TA3 (E) Terminal de conexión de apantallado –
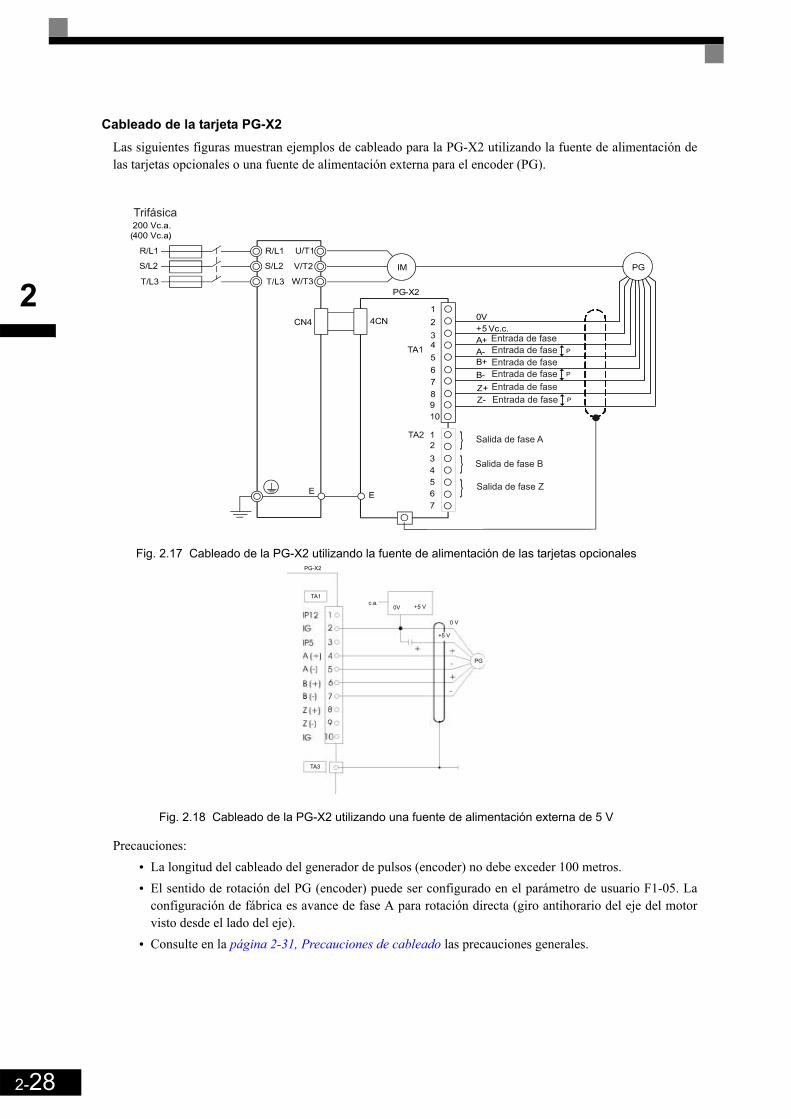
2-28
2
Cableado de la tarjeta PG-X2Las siguientes figuras muestran ejemplos de cableado para la PG-X2 utilizando la fuente de alimentación delas tarjetas opcionales o una fuente de alimentación externa para el encoder (PG).
Fig. 2.17 Cableado de la PG-X2 utilizando la fuente de alimentación de las tarjetas opcionales
Fig. 2.18 Cableado de la PG-X2 utilizando una fuente de alimentación externa de 5 V
Precauciones:• La longitud del cableado del generador de pulsos (encoder) no debe exceder 100 metros.• El sentido de rotación del PG (encoder) puede ser configurado en el parámetro de usuario F1-05. La
configuración de fábrica es avance de fase A para rotación directa (giro antihorario del eje del motorvisto desde el lado del eje).
• Consulte en la página 2-31, Precauciones de cableado las precauciones generales.
PG-X2
0V+5 Vc.c.A+ A-B+ B-Z+ Z-
200 Vc.a.(400 Vc.a.)
P
P
P
Trifásica
Entrada de faseEntrada de faseEntrada de fase
Entrada de faseEntrada de fase
Entrada de fase
Salida de fase B
Salida de fase A
Salida de fase Z
PG
TA1
TA3
PG-X2
c.a.0V +5 V
0 V
+5 V

2-29
2
Tarjeta opcional PG-F2
Encoders compatiblesLa tarjeta opcional PG-F2 puede utilizarse en combinación con los siguientes tipos de encoders:
• Hiperfacey: SRS60/70• EnDat 2.1: ECN1313, ECN113, ECN413
La velocidad máxima del encoder no debe ser superior a 1200 rpm.
Especificaciones de entrada/salida
Tabla 2.13 Especificaciones de E/S de PG-F2
Selección de tensión de la fuente de alimentación del encoderLa tensión de la fuente de alimentación del encoder debe ajustarse según el tipo de encoder mediante el inte-rruptor S1 en la tarjeta PG-F2. Mediante el potenciómetro RH1 es posible efectuar un ajuste fino de tensión dela fuente de alimentación del encoder. El ajuste de fábrica del interruptor S1 es de OFF (EnDat está preselec-cionado). La fuente de alimentación del encoder se encuentra preajustada a 5,0~5,25V con el envío.
Fig. 2.19 Selección de tensión de la fuente de alimentación del encoder PG-F2
Terminal NºContenido
EspecificacionesHiperfacey EnDat
TB1
1 Us 7-12V 5V UP y sensor UP EnDat: 5Vc.c. (±5%, máx. 250 mA) Hiperfacey: 8Vc.c. (±5%, máx. 150mA)
2 GND 0V UN y sensor 0V 0V
3 REFSIN B-
Entradas diferenciales4 +SIN B+5 REFCOS A-6 +COS A+7 DATA+ DATA Canal de datos RS-485,
Resistencia de terminación: 130 ohmios8 DATA- /DATA
TB21 - RELOJ
Salida diferencial, frecuencia de reloj: 100 kHz2 - /RELOJ
TB3
1 Monitorización de pulsos A+
Salidas de colector abiertomáx 24 Vc.c., 30 mA
2 Monitorización de pulsos A-3 Monitorización de pulsos B+4 Monitorización de pulsos B-
TB4 (E) Terminal de conexión con cubierta apantallada
I: 8V (US = 7.5 ~ 10.5 V), for HIPERFACEOFF: 5V (US = 5 V +-5%), for EnDat, (factory setting)
I
OFF
S1
RH1 S1 = I: 7.5 ~ 10.5 V, for HIPERFACE S1 = OFF: 4.85 ~ 6.5 V, for EnDat
(factory setting: 5.0 to 5.25V)
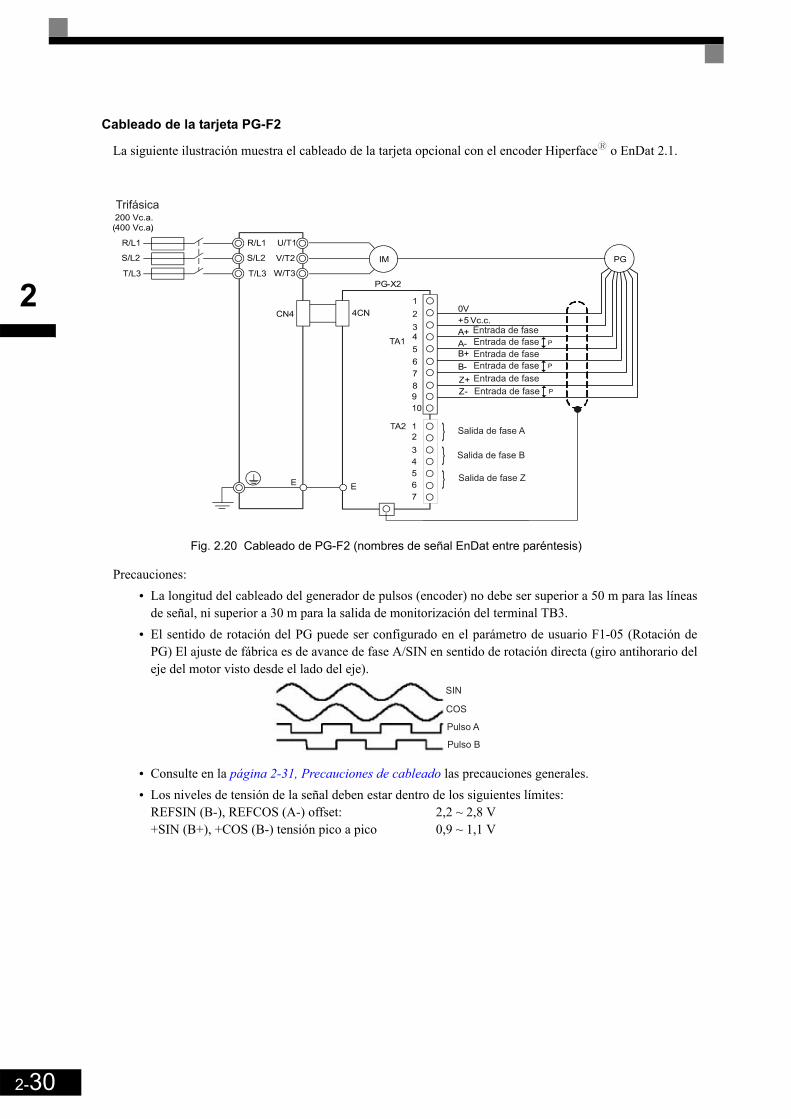
2-30
2
Cableado de la tarjeta PG-F2
La siguiente ilustración muestra el cableado de la tarjeta opcional con el encoder Hiperfacey o EnDat 2.1.
Fig. 2.20 Cableado de PG-F2 (nombres de señal EnDat entre paréntesis)
Precauciones:• La longitud del cableado del generador de pulsos (encoder) no debe ser superior a 50 m para las líneas
de señal, ni superior a 30 m para la salida de monitorización del terminal TB3.• El sentido de rotación del PG puede ser configurado en el parámetro de usuario F1-05 (Rotación de
PG) El ajuste de fábrica es de avance de fase A/SIN en sentido de rotación directa (giro antihorario deleje del motor visto desde el lado del eje).
• Consulte en la página 2-31, Precauciones de cableado las precauciones generales.• Los niveles de tensión de la señal deben estar dentro de los siguientes límites:
REFSIN (B-), REFCOS (A-) offset: 2,2 ~ 2,8 V+SIN (B+), +COS (B-) tensión pico a pico 0,9 ~ 1,1 V
PG-X2
0V+5 Vc.c.A+ A-B+ B-Z+ Z-
200 Vc.a.(400 Vc.a.)
P
P
P
Trifásica
Entrada de faseEntrada de faseEntrada de fase
Entrada de faseEntrada de fase
Entrada de fase
Salida de fase B
Salida de fase A
Salida de fase Z
COS
SIN
Pulso A
Pulso B
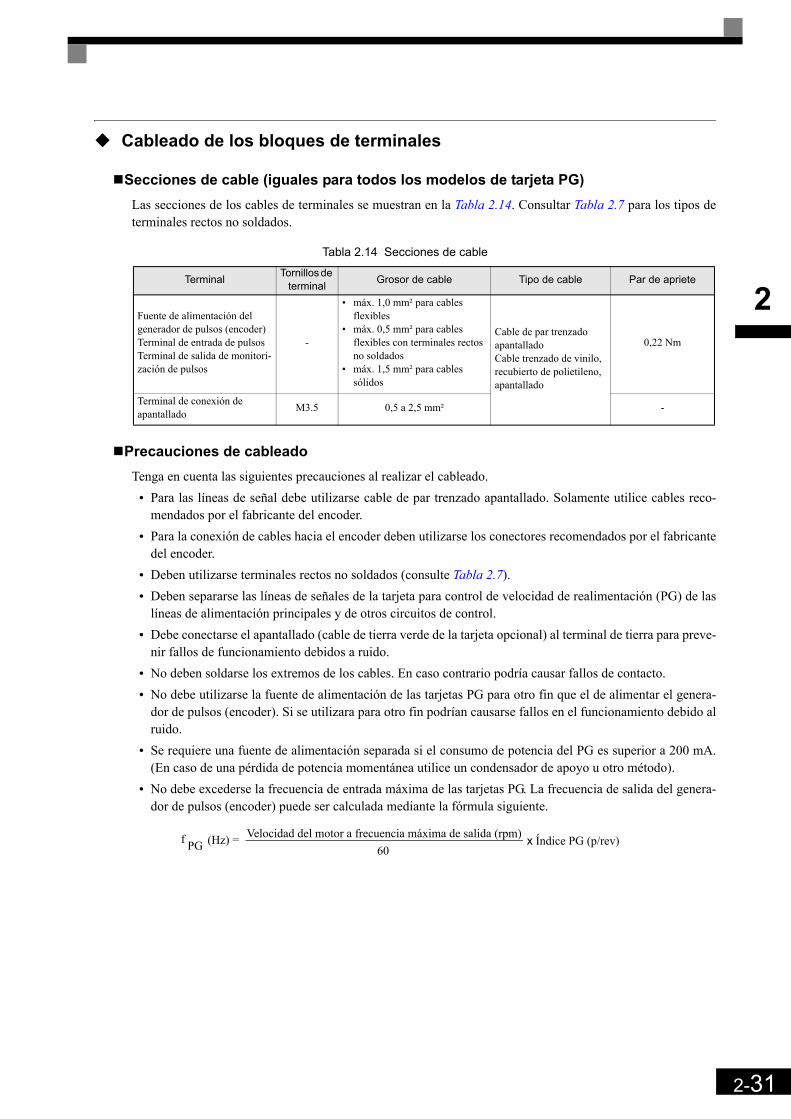
2-31
2
Cableado de los bloques de terminales
Secciones de cable (iguales para todos los modelos de tarjeta PG)Las secciones de los cables de terminales se muestran en la Tabla 2.14. Consultar Tabla 2.7 para los tipos determinales rectos no soldados.
Tabla 2.14 Secciones de cable
Precauciones de cableadoTenga en cuenta las siguientes precauciones al realizar el cableado.
• Para las líneas de señal debe utilizarse cable de par trenzado apantallado. Solamente utilice cables reco-mendados por el fabricante del encoder.
• Para la conexión de cables hacia el encoder deben utilizarse los conectores recomendados por el fabricantedel encoder.
• Deben utilizarse terminales rectos no soldados (consulte Tabla 2.7).• Deben separarse las líneas de señales de la tarjeta para control de velocidad de realimentación (PG) de las
líneas de alimentación principales y de otros circuitos de control.• Debe conectarse el apantallado (cable de tierra verde de la tarjeta opcional) al terminal de tierra para preve-
nir fallos de funcionamiento debidos a ruido.• No deben soldarse los extremos de los cables. En caso contrario podría causar fallos de contacto. • No debe utilizarse la fuente de alimentación de las tarjetas PG para otro fin que el de alimentar el genera-
dor de pulsos (encoder). Si se utilizara para otro fin podrían causarse fallos en el funcionamiento debido alruido.
• Se requiere una fuente de alimentación separada si el consumo de potencia del PG es superior a 200 mA.(En caso de una pérdida de potencia momentánea utilice un condensador de apoyo u otro método).
• No debe excederse la frecuencia de entrada máxima de las tarjetas PG. La frecuencia de salida del genera-dor de pulsos (encoder) puede ser calculada mediante la fórmula siguiente.
Terminal Tornillos de terminal Grosor de cable Tipo de cable Par de apriete
Fuente de alimentación del generador de pulsos (encoder)Terminal de entrada de pulsosTerminal de salida de monitori-zación de pulsos
-
• máx. 1,0 mm² para cables flexibles
• máx. 0,5 mm² para cables flexibles con terminales rectos no soldados
• máx. 1,5 mm² para cables sólidos
Cable de par trenzado apantalladoCable trenzado de vinilo, recubierto de polietileno, apantallado
0,22 Nm
Terminal de conexión de apantallado M3.5 0,5 a 2,5 mm² -
f PG (Hz) = Velocidad del motor a frecuencia máxima de salida (rpm)60
x Índice PG (p/rev)
2-32
2

Monitor LED /Operador Digital y
modosEl Varispeed L7 está equipado con el Monitor LED JVOP-163 que muestra el estado de funcionamiento. El Ope-rador Digital JVOP-160-OY opcional puede utilizarse para ajustar los parámetros requeridos.Este capítulo describe los displays y funciones del Operador Digital y facilita un resumen de los modos de opera-ción y de la conmutación entre modos.
Monitor LED JVOP-163 ........................................................................................... 3-2Operador Digital JVOP-160-OY............................................................................... 3-3
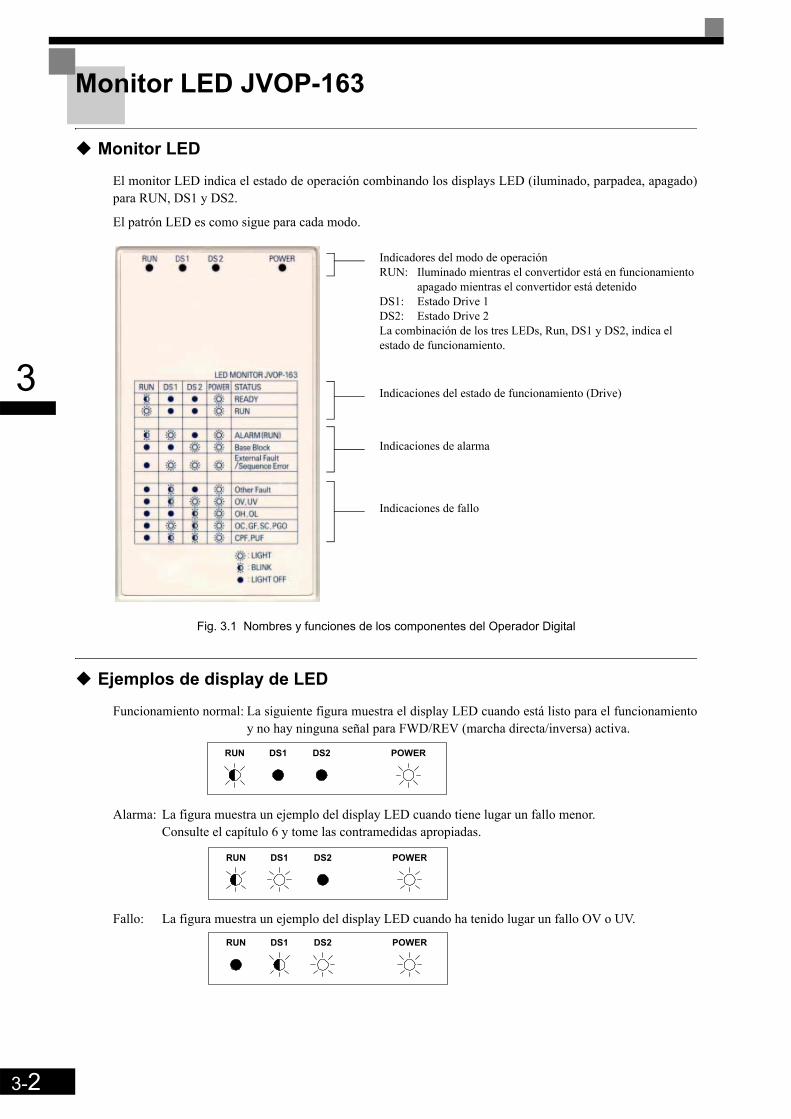
3-2
3
Monitor LED JVOP-163
Monitor LED
El monitor LED indica el estado de operación combinando los displays LED (iluminado, parpadea, apagado)para RUN, DS1 y DS2.
El patrón LED es como sigue para cada modo.
Fig. 3.1 Nombres y funciones de los componentes del Operador Digital
Ejemplos de display de LED
Funcionamiento normal: La siguiente figura muestra el display LED cuando está listo para el funcionamientoy no hay ninguna señal para FWD/REV (marcha directa/inversa) activa.
Alarma: La figura muestra un ejemplo del display LED cuando tiene lugar un fallo menor. Consulte el capítulo 6 y tome las contramedidas apropiadas.
Fallo: La figura muestra un ejemplo del display LED cuando ha tenido lugar un fallo OV o UV.
Indicadores del modo de operaciónRUN: Iluminado mientras el convertidor está en funcionamiento
apagado mientras el convertidor está detenidoDS1: Estado Drive 1DS2: Estado Drive 2La combinación de los tres LEDs, Run, DS1 y DS2, indica el estado de funcionamiento.
Indicaciones del estado de funcionamiento (Drive)
Indicaciones de alarma
Indicaciones de fallo
RUN DS1 DS2 POWER
RUN DS1 DS2 POWER
RUN DS1 DS2 POWER

3-3
3
Operador Digital JVOP-160-OY
Display del Operador Digital
Los nombres y funciones de las teclas del Operador Digital se describen más adelante
Fig. 3.2 Nombres y funciones de los componentes del Operador Digital
Teclas del Operador Digital
Los nombres y las funciones de las teclas del Operador Digital se describen en la Tabla 3.1..
Tabla 3.1 Funciones de las teclas
Tecla Nombre Función
Tecla LOCAL/REMOTE
Alterna entre la operación mediante el Operador Digital (LOCAL) y las configuraciones en b1-01 y b1-02 (REMOTE).Esta tecla puede ser habilitada o deshabilitada configurando el parámetro o2-01.
Tecla MENU Selecciona los elementos de menú (modos).
Tecla ESC Retorna al estado que existía antes de presionar la tecla DATA/ENTER.
Tecla JOG Inicia la operación jog cuando el convertidor se utiliza mediante el Operador Digital y d1-18 está configurado en 0.
Indicaciones del estado de funcionamiento (Drive)
FWD: Se ilumina cuando es introducido un comando demarcha directa.
REV: Se ilumina cuando es introducido un comando demarcha inversa.
SEQ: Se ilumina cuando se selecciona una fuente decomandos de marcha que no sea el Operador Digital.
REF: Se ilumina cuando se selecciona una fuente de referencia de frecuencia que no sea el Operador Digital.
ALARM:Se ilumina cuando ha tenido lugar un fallo o una alarma.
Display de datosMuestra los datos de monitorización, números de parámetros y configuración de parámetros.Display de modo (se visualiza en la parte superior izquierda del display de datos)DRIVE: Se ilumina en el modo Drive (Funcionamiento).QUICK: Se ilumina en el modo Quick Programming
(Programación rápida).ADV: Se ilumina en el modo Advanced Programming
(Programación avanzada).VERIFY: Se ilumina en el modo Verify (Verificación).A. TUNE:Se ilumina en el modo Autotuning (Autoajuste).TeclasEjecutan operaciones tales como la configuración de parámetros, la monitorización, la operación jog y el autoajuste.
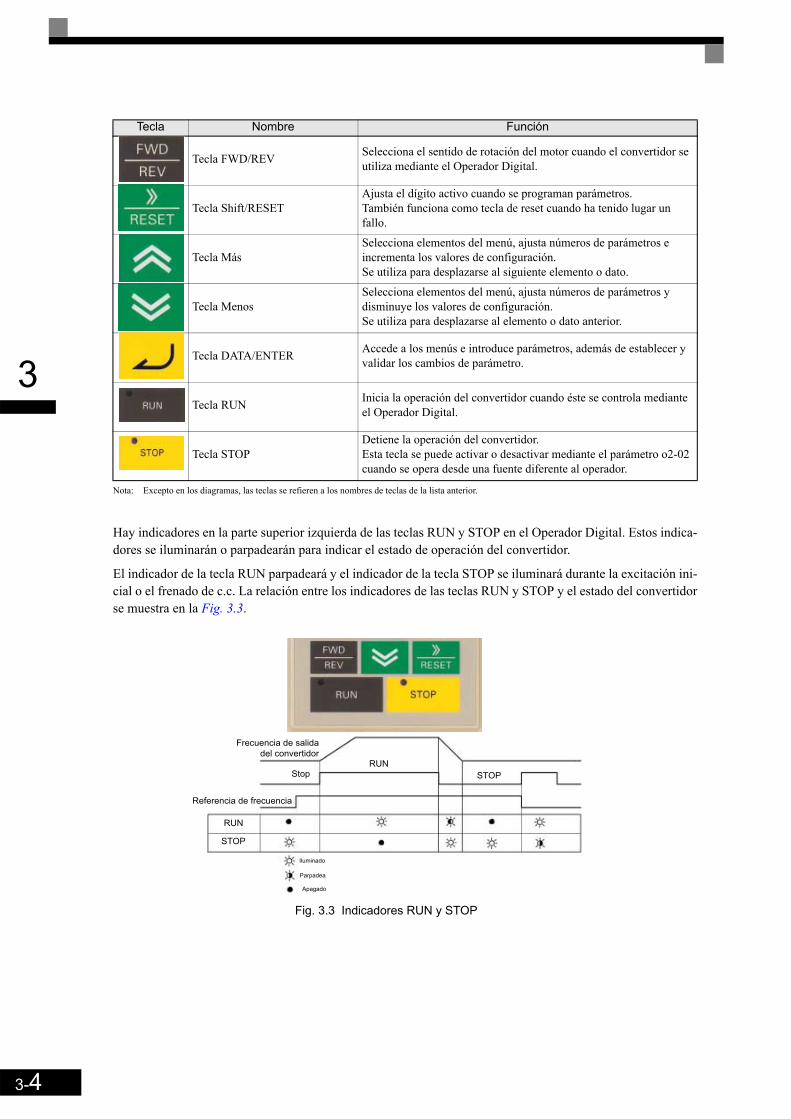
3-4
3
Nota: Excepto en los diagramas, las teclas se refieren a los nombres de teclas de la lista anterior.
Hay indicadores en la parte superior izquierda de las teclas RUN y STOP en el Operador Digital. Estos indica-dores se iluminarán o parpadearán para indicar el estado de operación del convertidor.
El indicador de la tecla RUN parpadeará y el indicador de la tecla STOP se iluminará durante la excitación ini-cial o el frenado de c.c. La relación entre los indicadores de las teclas RUN y STOP y el estado del convertidorse muestra en la Fig. 3.3.
Fig. 3.3 Indicadores RUN y STOP
Tecla FWD/REV Selecciona el sentido de rotación del motor cuando el convertidor se utiliza mediante el Operador Digital.
Tecla Shift/RESET Ajusta el dígito activo cuando se programan parámetros.También funciona como tecla de reset cuando ha tenido lugar un fallo.
Tecla Más Selecciona elementos del menú, ajusta números de parámetros e incrementa los valores de configuración. Se utiliza para desplazarse al siguiente elemento o dato.
Tecla MenosSelecciona elementos del menú, ajusta números de parámetros y disminuye los valores de configuración. Se utiliza para desplazarse al elemento o dato anterior.
Tecla DATA/ENTER Accede a los menús e introduce parámetros, además de establecer y validar los cambios de parámetro.
Tecla RUN Inicia la operación del convertidor cuando éste se controla mediante el Operador Digital.
Tecla STOPDetiene la operación del convertidor.Esta tecla se puede activar o desactivar mediante el parámetro o2-02 cuando se opera desde una fuente diferente al operador.
Tecla Nombre Función
Frecuencia de salida del convertidor
Stop
Referencia de frecuencia
STOP
Iluminado
Parpadea
Apagado
RUN
RUNSTOP
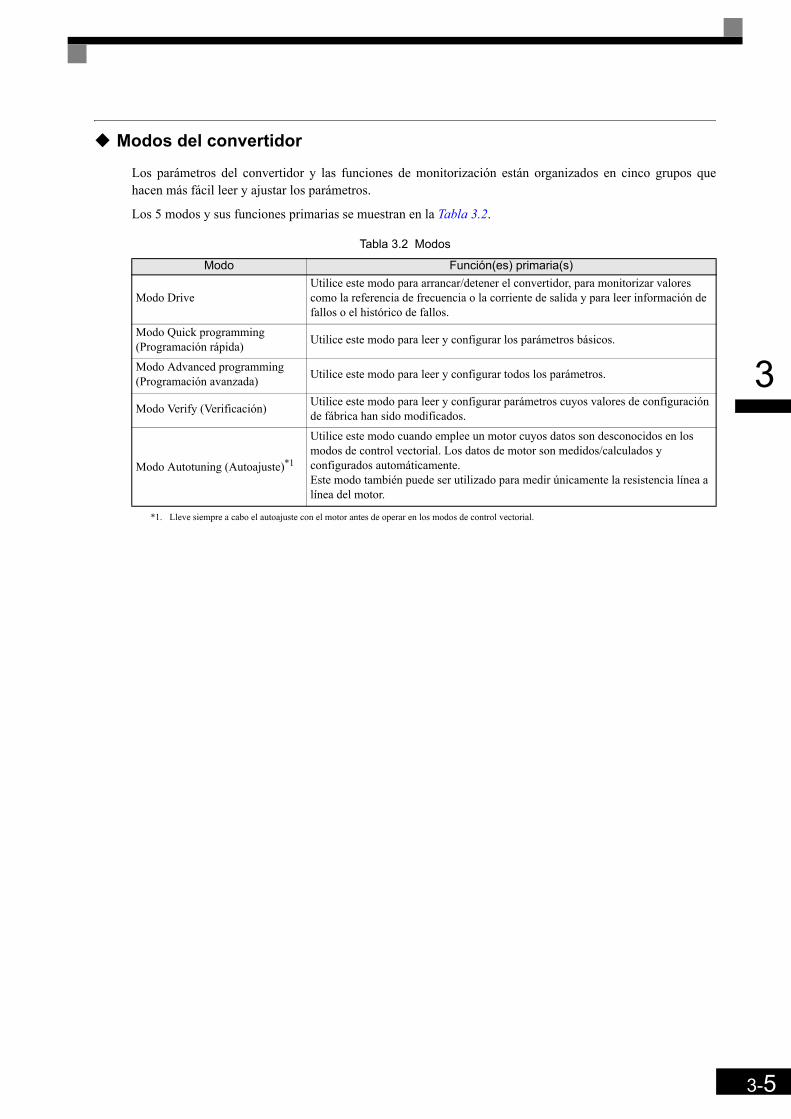
3-5
3
Modos del convertidor
Los parámetros del convertidor y las funciones de monitorización están organizados en cinco grupos quehacen más fácil leer y ajustar los parámetros.
Los 5 modos y sus funciones primarias se muestran en la Tabla 3.2.
Tabla 3.2 Modos
Modo Función(es) primaria(s)
Modo DriveUtilice este modo para arrancar/detener el convertidor, para monitorizar valores como la referencia de frecuencia o la corriente de salida y para leer información de fallos o el histórico de fallos.
Modo Quick programming(Programación rápida) Utilice este modo para leer y configurar los parámetros básicos.
Modo Advanced programming (Programación avanzada) Utilice este modo para leer y configurar todos los parámetros.
Modo Verify (Verificación) Utilice este modo para leer y configurar parámetros cuyos valores de configuración de fábrica han sido modificados.
Modo Autotuning (Autoajuste)*1
*1. Lleve siempre a cabo el autoajuste con el motor antes de operar en los modos de control vectorial.
Utilice este modo cuando emplee un motor cuyos datos son desconocidos en los modos de control vectorial. Los datos de motor son medidos/calculados y configurados automáticamente.Este modo también puede ser utilizado para medir únicamente la resistencia línea a línea del motor.
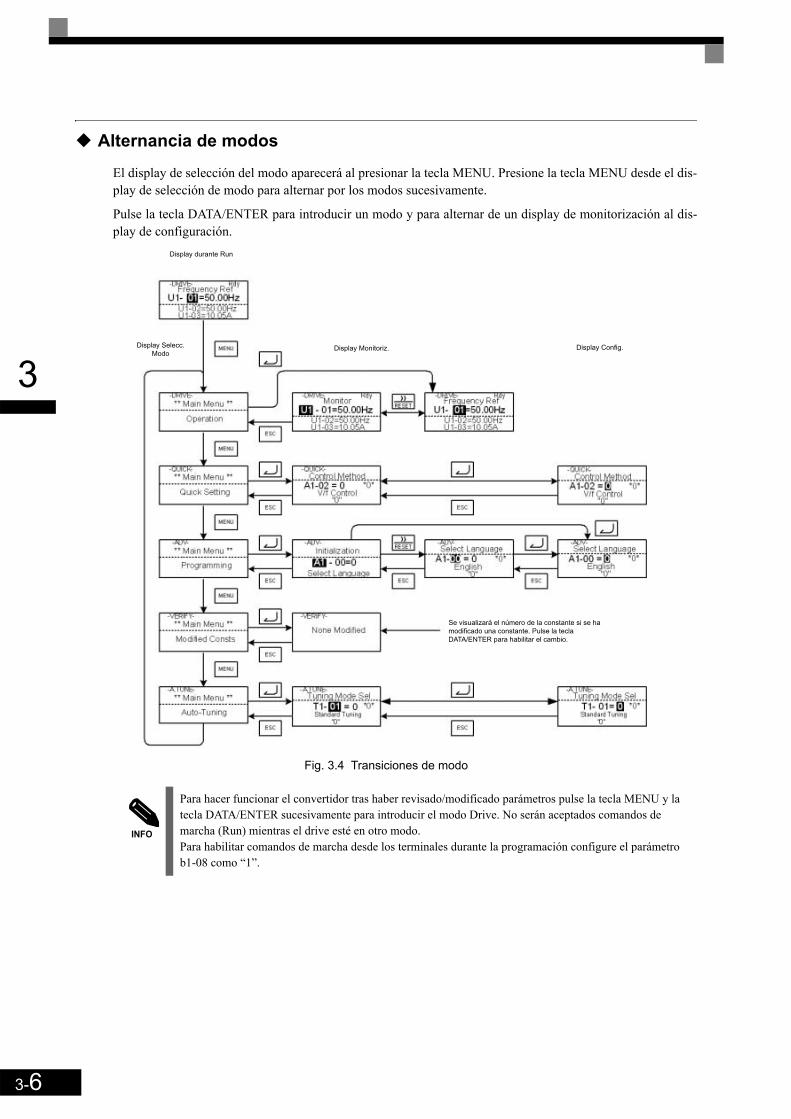
3-6
3
Alternancia de modos
El display de selección del modo aparecerá al presionar la tecla MENU. Presione la tecla MENU desde el dis-play de selección de modo para alternar por los modos sucesivamente.
Pulse la tecla DATA/ENTER para introducir un modo y para alternar de un display de monitorización al dis-play de configuración.
Fig. 3.4 Transiciones de modo
INFO
Para hacer funcionar el convertidor tras haber revisado/modificado parámetros pulse la tecla MENU y la tecla DATA/ENTER sucesivamente para introducir el modo Drive. No serán aceptados comandos de marcha (Run) mientras el drive esté en otro modo. Para habilitar comandos de marcha desde los terminales durante la programación configure el parámetro b1-08 como “1”.
Display Selecc.Modo
Display durante Run
Display Monitoriz. Display Config.
Se visualizará el número de la constante si se ha modificado una constante. Pulse la tecla DATA/ENTER para habilitar el cambio.

3-7
3
Modo Drive
El convertidor puede ser operado en el modo Drive. Todos los parámetros de monitorización (U1- ), asícomo las informaciones y el historial de fallos pueden ser visualizados con este modo.
Cuando se configura b1-01 (Selección de referencia) como 0, 1 ó 3 el valor de la referencia de frecuenciaseleccionado (d1- ) puede ser modificado en el display de configuración de frecuencia utilizando las teclasMás, Menos, Shift/RESET y Enter. Después de confirmar el cambio pulsando la tecla ENTER, la pantallavuelve al display de monitorización.
Ejemplos de operación La siguiente figura muestra ejemplos de operaciones con teclas en el modo Drive.
Fig. 3.5 Operaciones en el Modo Drive
Nota: Cuando se cambia el display con las teclas Más / Menos, después del último parámetro de monitorización, el display saltará de regreso al primer pará-metro de monitorización y viceversa (p. ej. U1-55 irá seguido de U1-01).El display para el primer parámetro de monitorización (referencia de frecuencia) será visualizado cuando la alimentación de potencia se conecte (ON). El elemento de monitorización visualizado durante el arranque puede ajustarse en o1-02 (selección de monitorización después del encendido).
Display durante Operac.
Display Selecc.Modo
Display Monitoriz. Display Config. Frecuencia
El display de configuración de frecuencia no se
visualizará cuando se utilice una referencia analógica.
El nombre del fallo se visualizará si se pulsa la tecla DATA/ENTER mientras se visualiza una constante para la que se visualiza un código de fallo.
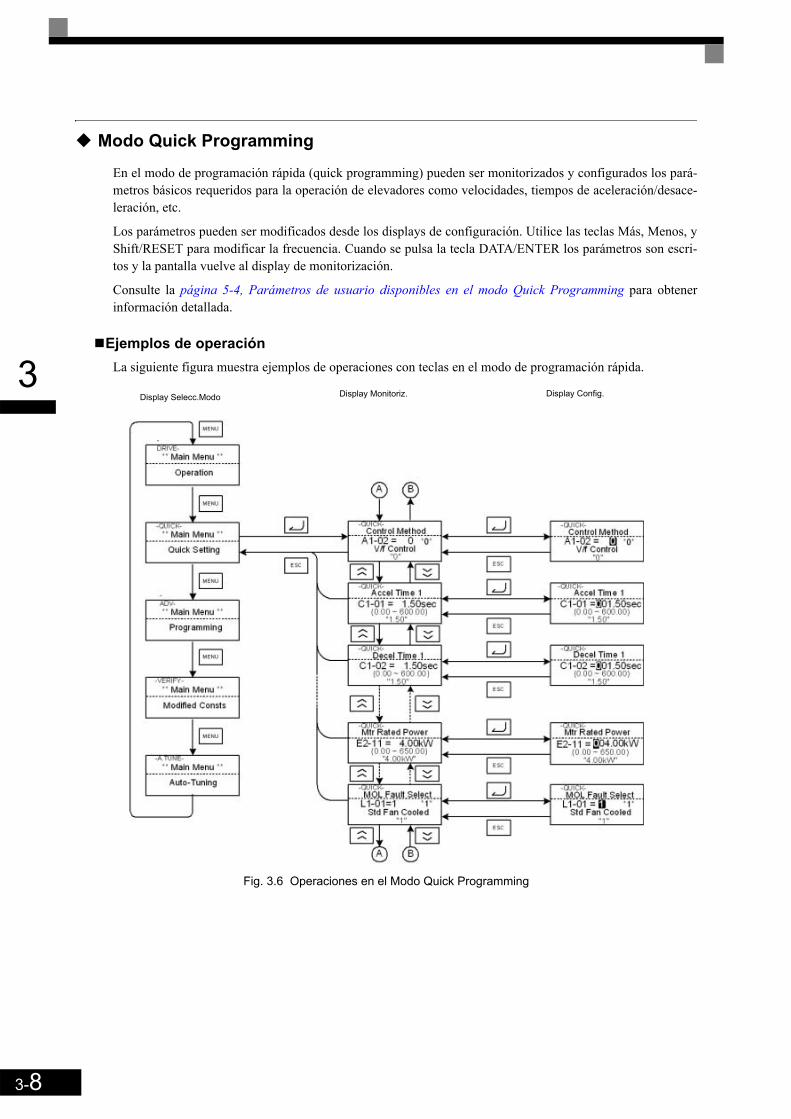
3-8
3
Modo Quick Programming
En el modo de programación rápida (quick programming) pueden ser monitorizados y configurados los pará-metros básicos requeridos para la operación de elevadores como velocidades, tiempos de aceleración/desace-leración, etc.
Los parámetros pueden ser modificados desde los displays de configuración. Utilice las teclas Más, Menos, yShift/RESET para modificar la frecuencia. Cuando se pulsa la tecla DATA/ENTER los parámetros son escri-tos y la pantalla vuelve al display de monitorización.
Consulte la página 5-4, Parámetros de usuario disponibles en el modo Quick Programming para obtenerinformación detallada.
Ejemplos de operación La siguiente figura muestra ejemplos de operaciones con teclas en el modo de programación rápida.
Fig. 3.6 Operaciones en el Modo Quick Programming
Display Selecc.Modo Display Monitoriz. Display Config.
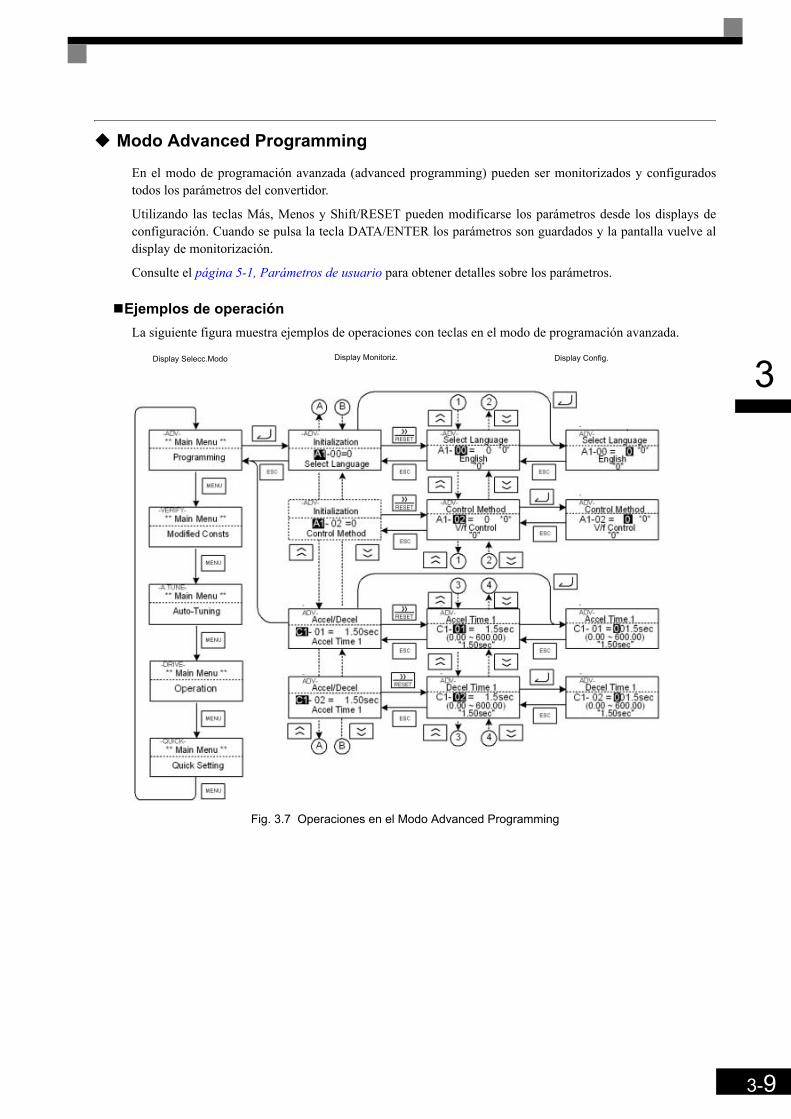
3-9
3
Modo Advanced Programming
En el modo de programación avanzada (advanced programming) pueden ser monitorizados y configuradostodos los parámetros del convertidor.
Utilizando las teclas Más, Menos y Shift/RESET pueden modificarse los parámetros desde los displays deconfiguración. Cuando se pulsa la tecla DATA/ENTER los parámetros son guardados y la pantalla vuelve aldisplay de monitorización.
Consulte el página 5-1, Parámetros de usuario para obtener detalles sobre los parámetros.
Ejemplos de operación La siguiente figura muestra ejemplos de operaciones con teclas en el modo de programación avanzada.
Fig. 3.7 Operaciones en el Modo Advanced Programming
Display Selecc.Modo Display Monitoriz. Display Config.
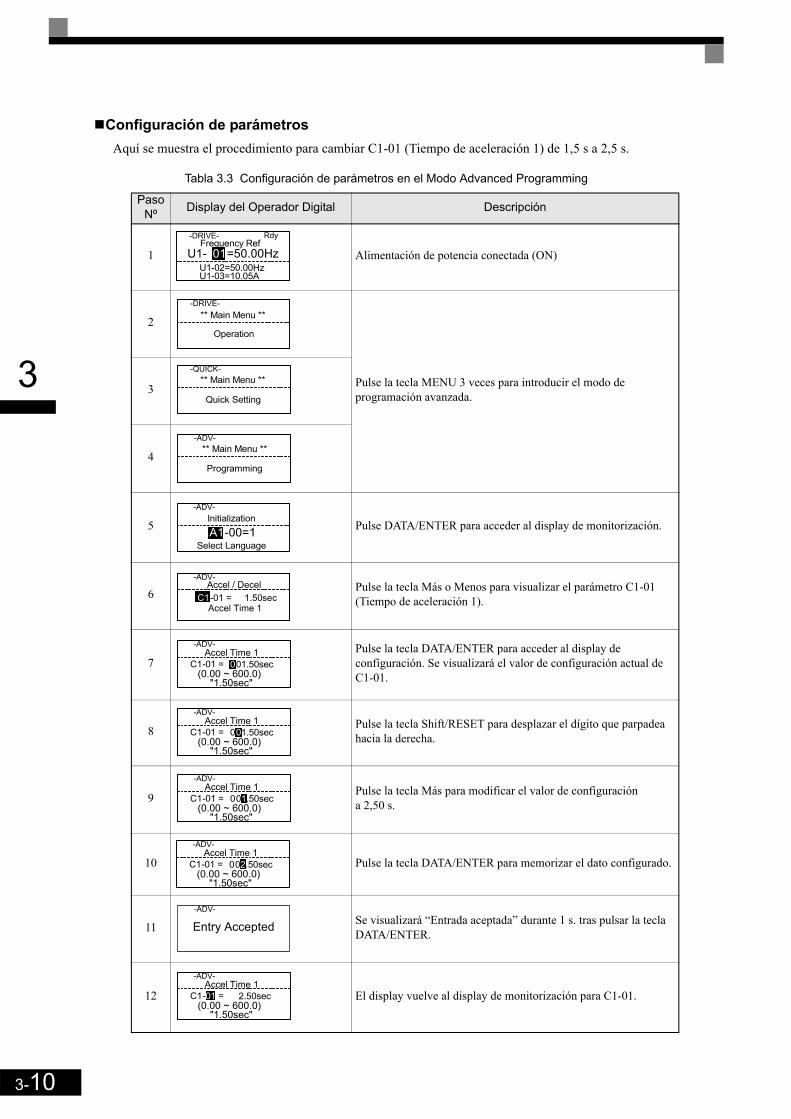
3-10
3
Configuración de parámetrosAquí se muestra el procedimiento para cambiar C1-01 (Tiempo de aceleración 1) de 1,5 s a 2,5 s.
Tabla 3.3 Configuración de parámetros en el Modo Advanced Programming
Paso Nº Display del Operador Digital Descripción
1 Alimentación de potencia conectada (ON)
2
Pulse la tecla MENU 3 veces para introducir el modo de programación avanzada.3
4
5 Pulse DATA/ENTER para acceder al display de monitorización.
6 Pulse la tecla Más o Menos para visualizar el parámetro C1-01 (Tiempo de aceleración 1).
7Pulse la tecla DATA/ENTER para acceder al display de configuración. Se visualizará el valor de configuración actual de C1-01.
8 Pulse la tecla Shift/RESET para desplazar el dígito que parpadea hacia la derecha.
9 Pulse la tecla Más para modificar el valor de configuración a 2,50 s.
10 Pulse la tecla DATA/ENTER para memorizar el dato configurado.
11 Se visualizará “Entrada aceptada” durante 1 s. tras pulsar la tecla DATA/ENTER.
12 El display vuelve al display de monitorización para C1-01.
Frequency Ref-DRIVE-
U1-02=50.00HzU1-03=10.05A
Rdy
U1- 01=50.00Hz
** Main Menu **-DRIVE-
Operation
** Main Menu **-QUICK-
Quick Setting
** Main Menu **-ADV-
Programming
Initialization-ADV-
A1-00=1Select Language
Accel / Decel-ADV-
Accel Time 1C1-01 = 1.50sec
Accel Time 1-ADV-
C1-01 = 0 01.50sec(0.00 ~ 600.0)
"1.50sec"
Accel Time 1-ADV-
C1-01 = 0 01.50sec(0.00 ~ 600.0)
"1.50sec"
Accel Time 1-ADV-
C1-01 = 0 01.50sec(0.00 ~ 600.0)
"1.50sec"
Accel Time 1-ADV-
C1-01 = 0 02.50sec(0.00 ~ 600.0)
"1.50sec"
Entry Accepted-ADV-
Accel Time 1-ADV-
C1-01 = 2.50sec(0.00 ~ 600.0)
"1.50sec"
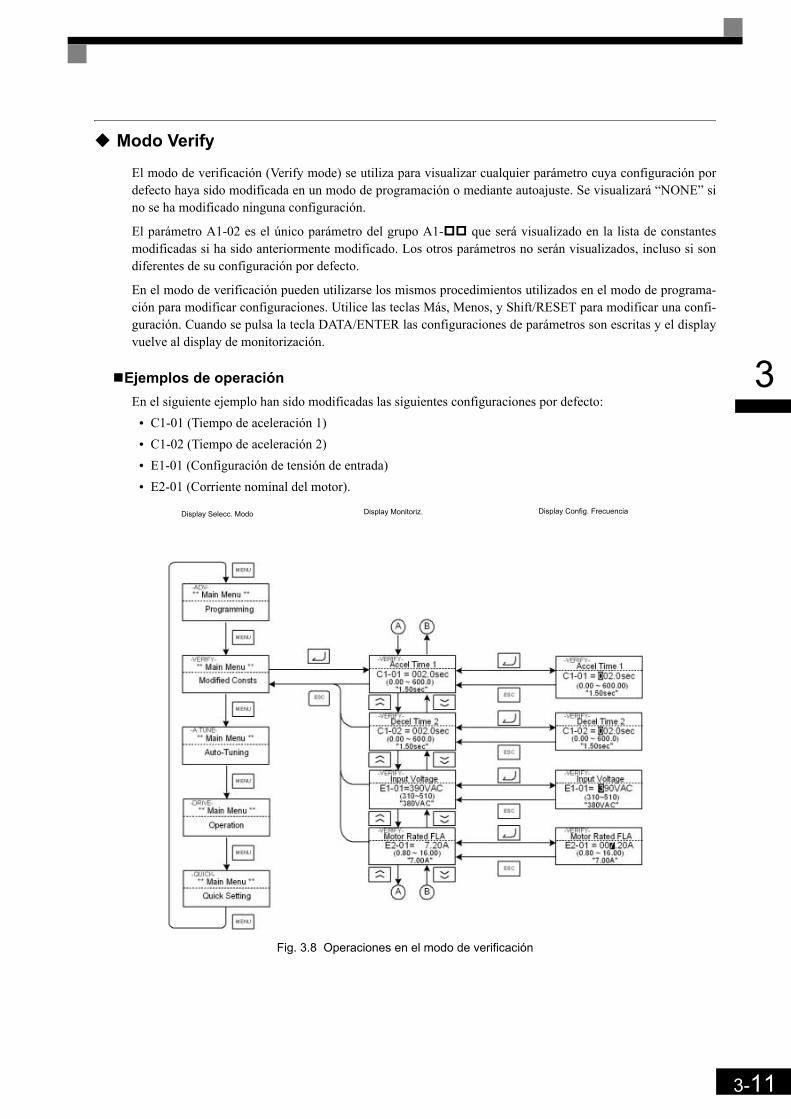
3-11
3
Modo Verify
El modo de verificación (Verify mode) se utiliza para visualizar cualquier parámetro cuya configuración pordefecto haya sido modificada en un modo de programación o mediante autoajuste. Se visualizará “NONE” sino se ha modificado ninguna configuración.
El parámetro A1-02 es el único parámetro del grupo A1- que será visualizado en la lista de constantesmodificadas si ha sido anteriormente modificado. Los otros parámetros no serán visualizados, incluso si sondiferentes de su configuración por defecto.
En el modo de verificación pueden utilizarse los mismos procedimientos utilizados en el modo de programa-ción para modificar configuraciones. Utilice las teclas Más, Menos, y Shift/RESET para modificar una confi-guración. Cuando se pulsa la tecla DATA/ENTER las configuraciones de parámetros son escritas y el displayvuelve al display de monitorización.
Ejemplos de operaciónEn el siguiente ejemplo han sido modificadas las siguientes configuraciones por defecto:
• C1-01 (Tiempo de aceleración 1)• C1-02 (Tiempo de aceleración 2)• E1-01 (Configuración de tensión de entrada)• E2-01 (Corriente nominal del motor).
Fig. 3.8 Operaciones en el modo de verificación
Display Config. FrecuenciaDisplay Selecc. Modo Display Monitoriz.
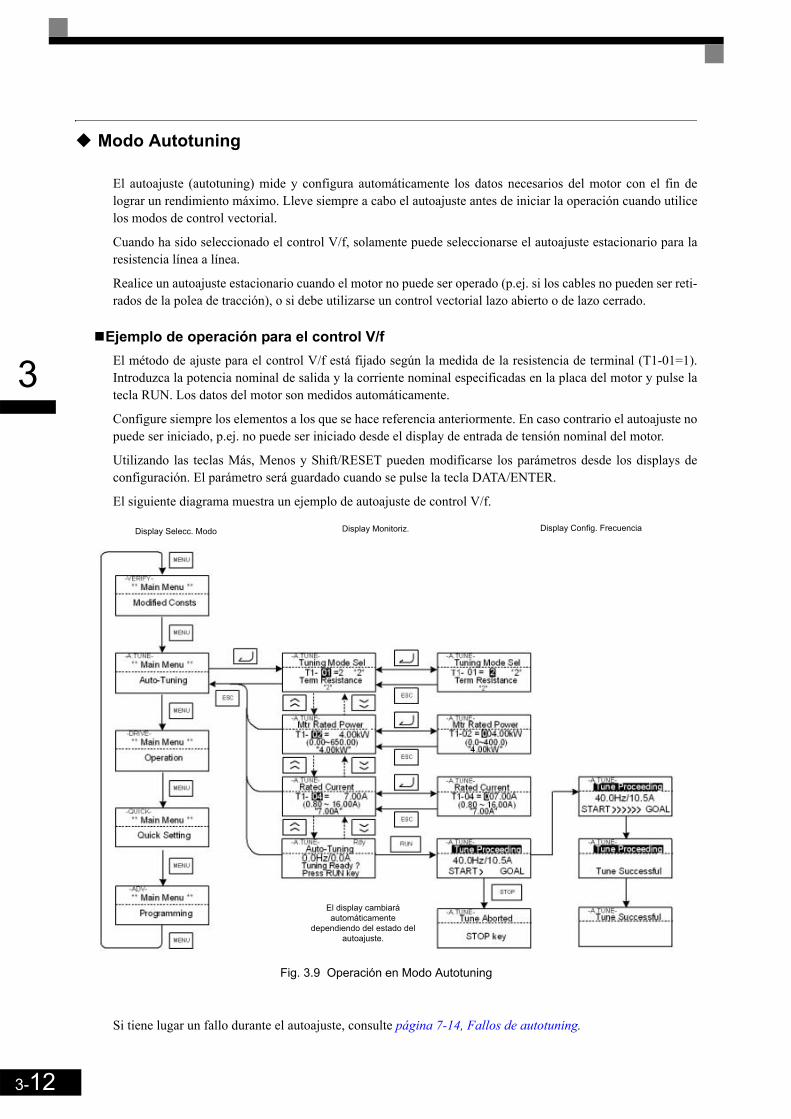
3-12
3
Modo Autotuning
El autoajuste (autotuning) mide y configura automáticamente los datos necesarios del motor con el fin delograr un rendimiento máximo. Lleve siempre a cabo el autoajuste antes de iniciar la operación cuando utilicelos modos de control vectorial.
Cuando ha sido seleccionado el control V/f, solamente puede seleccionarse el autoajuste estacionario para laresistencia línea a línea.
Realice un autoajuste estacionario cuando el motor no puede ser operado (p.ej. si los cables no pueden ser reti-rados de la polea de tracción), o si debe utilizarse un control vectorial lazo abierto o de lazo cerrado.
Ejemplo de operación para el control V/fEl método de ajuste para el control V/f está fijado según la medida de la resistencia de terminal (T1-01=1).Introduzca la potencia nominal de salida y la corriente nominal especificadas en la placa del motor y pulse latecla RUN. Los datos del motor son medidos automáticamente.
Configure siempre los elementos a los que se hace referencia anteriormente. En caso contrario el autoajuste nopuede ser iniciado, p.ej. no puede ser iniciado desde el display de entrada de tensión nominal del motor.
Utilizando las teclas Más, Menos y Shift/RESET pueden modificarse los parámetros desde los displays deconfiguración. El parámetro será guardado cuando se pulse la tecla DATA/ENTER.
El siguiente diagrama muestra un ejemplo de autoajuste de control V/f.
Fig. 3.9 Operación en Modo Autotuning
Si tiene lugar un fallo durante el autoajuste, consulte página 7-14, Fallos de autotuning.
El display cambiará automáticamente
dependiendo del estado del autoajuste.
Display Config. FrecuenciaDisplay Selecc. Modo Display Monitoriz.

Procedimiento dearranque
Este capítulo describe el procedimiento de arranque básico, el autotuning de los datos del motor para cada modode control y le ofrece un asesoramiento en caso de que se presenten problemas.
Rutina de arranque general ......................................................................................4-2Encendido .................................................................................................................4-3Autotuning.................................................................................................................4-4Precauciones respecto al autotuning........................................................................4-5Procedimiento de autotuning con motores de inducción ..........................................4-6Procedimiento de autotuning para motores de imán permanente ............................4-7Ajuste de desplazamiento de encoder de motor de imán permanente.....................4-8Optimización del rendimiento..................................................................................4-11
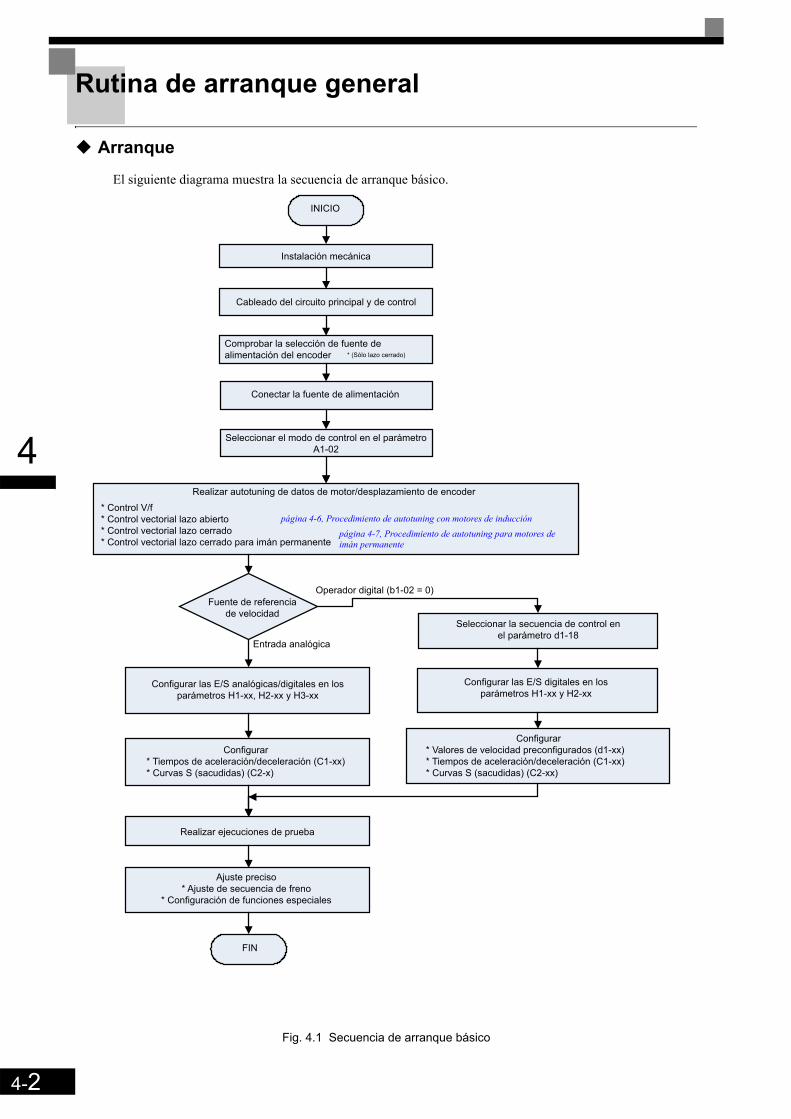
4-2
4
Rutina de arranque general
Arranque
El siguiente diagrama muestra la secuencia de arranque básico.
Fig. 4.1 Secuencia de arranque básico
* Control V/f* Control vectorial lazo abierto* Control vectorial lazo cerrado* Control vectorial lazo cerrado para imán permanente
INICIO
Instalación mecánica
Cableado del circuito principal y de control
Comprobar la selección de fuente de alimentación del encoder * (Sólo lazo cerrado)
Conectar la fuente de alimentación
Realizar autotuning de datos de motor/desplazamiento de encoder
Fuente de referencia de velocidad
Entrada analógica
Operador digital (b1-02 = 0)
Configurar las E/S analógicas/digitales en los parámetros H1-xx, H2-xx y H3-xx
Configurar* Tiempos de aceleración/deceleración (C1-xx)* Curvas S (sacudidas) (C2-x)
Realizar ejecuciones de prueba
Ajuste preciso* Ajuste de secuencia de freno
* Configuración de funciones especiales
FIN
Configurar* Valores de velocidad preconfigurados (d1-xx)* Tiempos de aceleración/deceleración (C1-xx)* Curvas S (sacudidas) (C2-xx)
Configurar las E/S digitales en los parámetros H1-xx y H2-xx
Seleccionar la secuencia de control en el parámetro d1-18
Seleccionar el modo de control en el parámetro A1-02
página 4-6, Procedimiento de autotuning con motores de inducciónpágina 4-7, Procedimiento de autotuning para motores de imán permanente
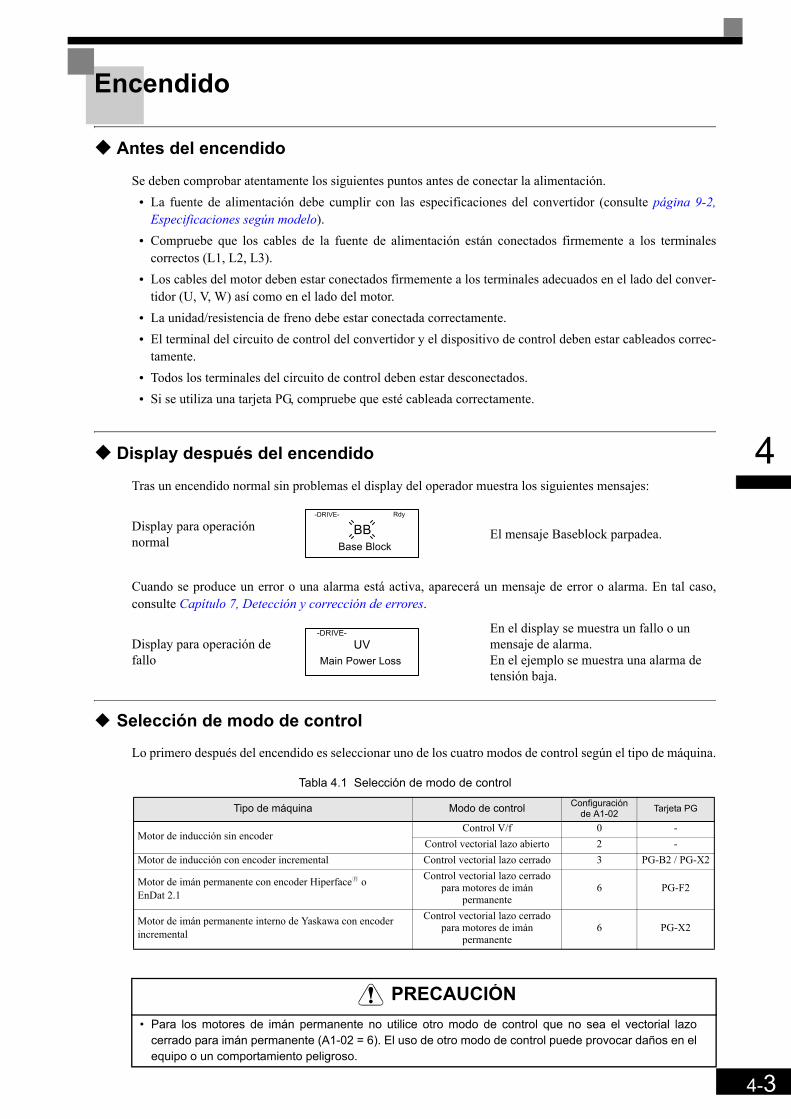
4-3
4
Encendido
Antes del encendido
Se deben comprobar atentamente los siguientes puntos antes de conectar la alimentación.• La fuente de alimentación debe cumplir con las especificaciones del convertidor (consulte página 9-2,
Especificaciones según modelo).• Compruebe que los cables de la fuente de alimentación están conectados firmemente a los terminales
correctos (L1, L2, L3).• Los cables del motor deben estar conectados firmemente a los terminales adecuados en el lado del conver-
tidor (U, V, W) así como en el lado del motor.• La unidad/resistencia de freno debe estar conectada correctamente.• El terminal del circuito de control del convertidor y el dispositivo de control deben estar cableados correc-
tamente.• Todos los terminales del circuito de control deben estar desconectados.• Si se utiliza una tarjeta PG, compruebe que esté cableada correctamente.
Display después del encendido
Tras un encendido normal sin problemas el display del operador muestra los siguientes mensajes:
Cuando se produce un error o una alarma está activa, aparecerá un mensaje de error o alarma. En tal caso,consulte Capítulo 7, Detección y corrección de errores.
Selección de modo de control
Lo primero después del encendido es seleccionar uno de los cuatro modos de control según el tipo de máquina.
Tabla 4.1 Selección de modo de control
Display para operación normal El mensaje Baseblock parpadea.
Display para operación de fallo
En el display se muestra un fallo o un mensaje de alarma.En el ejemplo se muestra una alarma de tensión baja.
Tipo de máquina Modo de control Configuración de A1-02 Tarjeta PG
Motor de inducción sin encoderControl V/f 0 -
Control vectorial lazo abierto 2 -Motor de inducción con encoder incremental Control vectorial lazo cerrado 3 PG-B2 / PG-X2
Motor de imán permanente con encoder Hiperfacey o EnDat 2.1
Control vectorial lazo cerrado para motores de imán
permanente6 PG-F2
Motor de imán permanente interno de Yaskawa con encoder incremental
Control vectorial lazo cerrado para motores de imán
permanente6 PG-X2
PRECAUCIÓN• Para los motores de imán permanente no utilice otro modo de control que no sea el vectorial lazo
cerrado para imán permanente (A1-02 = 6). El uso de otro modo de control puede provocar daños en elequipo o un comportamiento peligroso.
-DRIVE-
Base Block
Rdy
BB
-DRIVE-UV
Main Power Loss
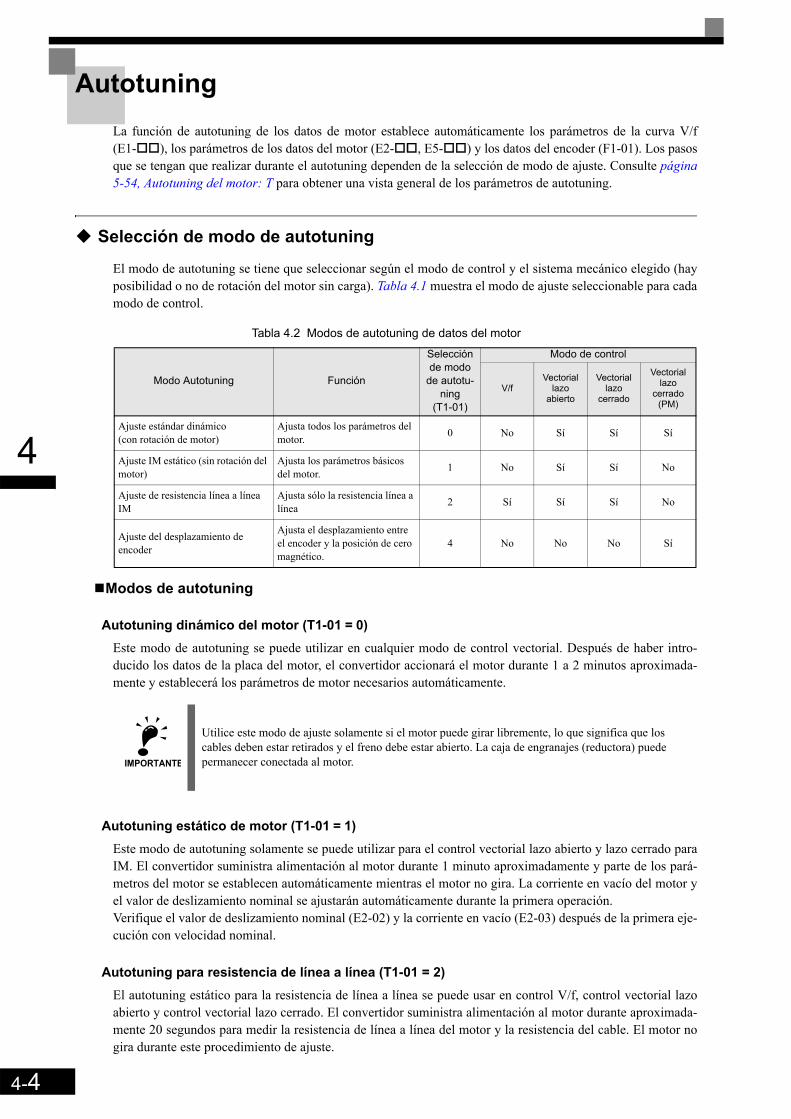
4-4
4
AutotuningLa función de autotuning de los datos de motor establece automáticamente los parámetros de la curva V/f(E1- ), los parámetros de los datos del motor (E2- , E5- ) y los datos del encoder (F1-01). Los pasosque se tengan que realizar durante el autotuning dependen de la selección de modo de ajuste. Consulte página5-54, Autotuning del motor: T para obtener una vista general de los parámetros de autotuning.
Selección de modo de autotuning
El modo de autotuning se tiene que seleccionar según el modo de control y el sistema mecánico elegido (hayposibilidad o no de rotación del motor sin carga). Tabla 4.1 muestra el modo de ajuste seleccionable para cadamodo de control.
Tabla 4.2 Modos de autotuning de datos del motor
Modos de autotuning
Autotuning dinámico del motor (T1-01 = 0)Este modo de autotuning se puede utilizar en cualquier modo de control vectorial. Después de haber intro-ducido los datos de la placa del motor, el convertidor accionará el motor durante 1 a 2 minutos aproximada-mente y establecerá los parámetros de motor necesarios automáticamente.
Autotuning estático de motor (T1-01 = 1)Este modo de autotuning solamente se puede utilizar para el control vectorial lazo abierto y lazo cerrado paraIM. El convertidor suministra alimentación al motor durante 1 minuto aproximadamente y parte de los pará-metros del motor se establecen automáticamente mientras el motor no gira. La corriente en vacío del motor yel valor de deslizamiento nominal se ajustarán automáticamente durante la primera operación.Verifique el valor de deslizamiento nominal (E2-02) y la corriente en vacío (E2-03) después de la primera eje-cución con velocidad nominal.
Autotuning para resistencia de línea a línea (T1-01 = 2)El autotuning estático para la resistencia de línea a línea se puede usar en control V/f, control vectorial lazoabierto y control vectorial lazo cerrado. El convertidor suministra alimentación al motor durante aproximada-mente 20 segundos para medir la resistencia de línea a línea del motor y la resistencia del cable. El motor nogira durante este procedimiento de ajuste.
Modo Autotuning Función
Selección de modo
de autotu-ning
(T1-01)
Modo de control
V/fVectorial
lazo abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado (PM)
Ajuste estándar dinámico (con rotación de motor)
Ajusta todos los parámetros del motor. 0 No Sí Sí Sí
Ajuste IM estático (sin rotación del motor)
Ajusta los parámetros básicos del motor. 1 No Sí Sí No
Ajuste de resistencia línea a línea IM
Ajusta sólo la resistencia línea a línea 2 Sí Sí Sí No
Ajuste del desplazamiento de encoder
Ajusta el desplazamiento entre el encoder y la posición de cero magnético.
4 No No No Sí
IMPORTANTE
Utilice este modo de ajuste solamente si el motor puede girar libremente, lo que significa que los cables deben estar retirados y el freno debe estar abierto. La caja de engranajes (reductora) puedepermanecer conectada al motor.
4-5
4
Ajuste del desplazamiento del encoder (T1-01=4)Este modo de ajuste está disponible solamente en el modo de control vectorial lazo cerrado para motores deimán permanente. Establece automáticamente el desplazamiento entre el polo magnético y la posición de ceromagnético. Se puede utilizar para volver a ajustar el desplazamiento después de un cambio de encoder sincambiar la configuración de datos del motor.
Precauciones respecto al autotuning
IMPORTANTE
Precauciones generales:1. Utilice autotuning dinámico siempre que se requiera alta precisión o para un motor que no esté
conectado a una carga.2. Utilice autotuning estático siempre que la carga no se pueda desconectar del motor (por ejemplo, si
no pueden retirarse los cables).3. Asegúrese de que el freno mecánico no esté abierto para el autotuning estático. 4. Durante el autotuning, los contactores del motor tienen que estar cerrados.5. Para el autotuning, las señales BB y BB1 deben estar en ON (el convertidor no debe estar en condi-
ción de baseblock).6. Confirme que el motor esté mecánicamente fijo y que no se puede mover.7. Durante el autotuning, se suministra alimentación aunque el motor no gire. No toque el motor hasta
que el autotuning haya finalizado.8. Retire la chaveta del eje del motor antes de realizar un ajuste dinámico con un motor (sin polea de
tracción o montado en engranaje).9. Para cancelar el autotuning pulse la tecla STOP del Operador Digital.
Precauciones para autotuning dinámico y desplazamiento de encoder:1. La carga se debe desconectar, lo que significa que los cables se tienen que retirar y el freno debe
estar abierto.2. Si la carga no se puede retirar, el ajuste se puede realizar con una cabina equilibrada. La precisión
del resultado del ajuste puede ser menor, lo que puede provocar una pérdida de rendimiento.3. Asegúrese de que el freno esté abierto durante el autotuning.4. Durante el autotuning, el motor puede arrancar y parar varias veces. Cuando termine el ajuste, se
mostrará “END” en el panel del operador. No toque el motor hasta que se muestre este display y elmotor se haya detenido por completo.
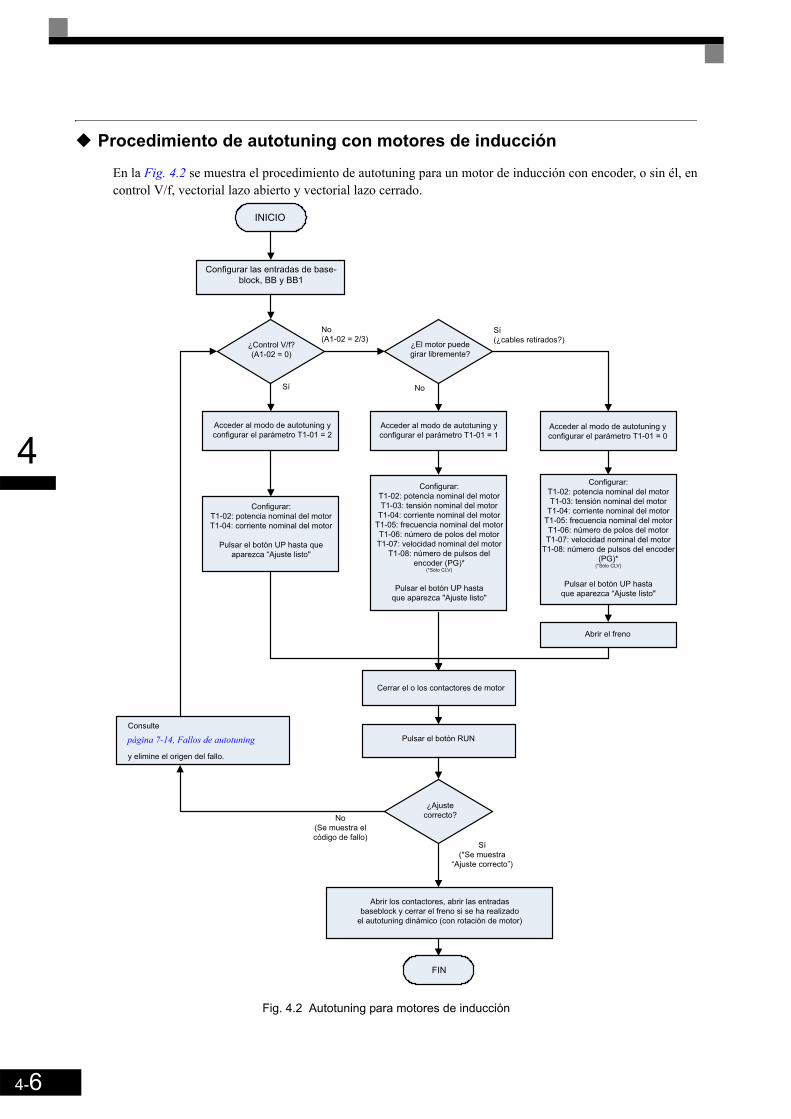
4-6
4
Procedimiento de autotuning con motores de inducción
En la Fig. 4.2 se muestra el procedimiento de autotuning para un motor de inducción con encoder, o sin él, encontrol V/f, vectorial lazo abierto y vectorial lazo cerrado.
Fig. 4.2 Autotuning para motores de inducción
Configurar:T1-02: potencia nominal del motorT1-03: tensión nominal del motor
T1-04: corriente nominal del motorT1-05: frecuencia nominal del motorT1-06: número de polos del motorT1-07: velocidad nominal del motor
T1-08: número de pulsos del encoder (PG)*
(*Sólo CLV)
Pulsar el botón UP hastaque aparezca “Ajuste listo"
Acceder al modo de autotuning y configurar el parámetro T1-01 = 0
INICIO
Configurar las entradas de base-block, BB y BB1
¿Control V/f?(A1-02 = 0)
¿El motor puedegirar libremente?
No(A1-02 = 2/3)
Sí
Acceder al modo de autotuning y configurar el parámetro T1-01 = 2
Configurar:T1-02: potencia nominal del motorT1-04: corriente nominal del motor
Pulsar el botón UP hasta queaparezca “Ajuste listo"
Configurar:T1-02: potencia nominal del motorT1-03: tensión nominal del motor
T1-04: corriente nominal del motorT1-05: frecuencia nominal del motorT1-06: número de polos del motorT1-07: velocidad nominal del motor
T1-08: número de pulsos del encoder (PG)*
(*Sólo CLV)
Pulsar el botón UP hastaque aparezca "Ajuste listo"
Acceder al modo de autotuning y configurar el parámetro T1-01 = 1
Abrir el freno
Cerrar el o los contactores de motor
Pulsar el botón RUN
No
Sí(¿cables retirados?)
Consulte
y elimine el origen del fallo.
¿Ajustecorrecto?No
(Se muestra elcódigo de fallo)
Sí(*Se muestra
“Ajuste correcto”)
Abrir los contactores, abrir las entradas baseblock y cerrar el freno si se ha realizado
el autotuning dinámico (con rotación de motor)
FIN
página 7-14, Fallos de autotuning
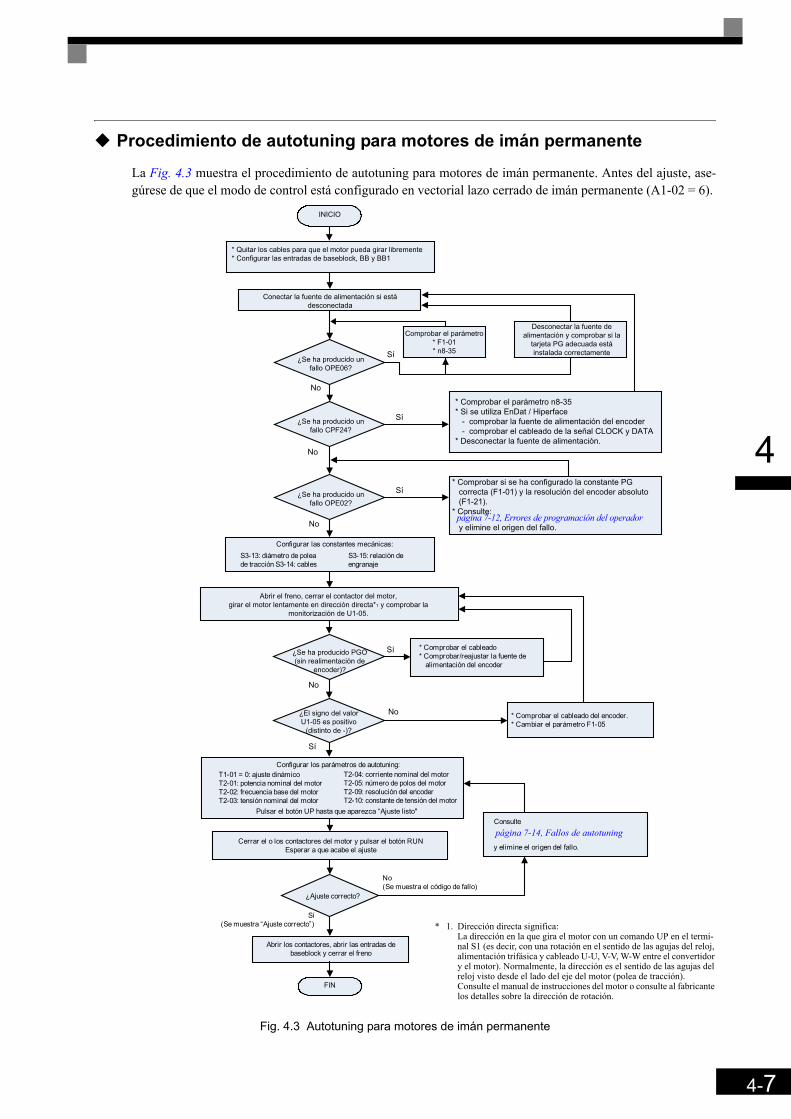
4-7
4
Procedimiento de autotuning para motores de imán permanente
La Fig. 4.3 muestra el procedimiento de autotuning para motores de imán permanente. Antes del ajuste, ase-gúrese de que el modo de control está configurado en vectorial lazo cerrado de imán permanente (A1-02 = 6).
Fig. 4.3 Autotuning para motores de imán permanente
T2-04: corriente nominal del motorT2-05: número de polos del motorT2-09: resolución del encoderT2-10: constante de tensión del motor
INICIO
* Quitar los cables para que el motor pueda girar libremente* Configurar las entradas de baseblock, BB y BB1
T1-01 = 0: ajuste dinámicoT2-01: potencia nominal del motorT2-02: frecuencia base del motorT2-03: tensión nominal del motor
Pulsar el botón UP hasta que aparezca “Ajuste listo"
Configurar los parámetros de autotuning:
Configurar las constantes mecánicas:S3-13: diámetro de polea de tracción S3-14: cables
S3-15: relación de engranaje
Cerrar el o los contactores del motor y pulsar el botón RUNEsperar a que acabe el ajuste
¿Ajuste correcto?
Sí(Se muestra “Ajuste correcto”)
No(Se muestra el código de fallo)
Abrir los contactores, abrir las entradas de baseblock y cerrar el freno
FIN
Consulte
y elimine el origen del fallo.
¿Se ha producido un fallo CPF24?
Conectar la fuente de alimentación si está desconectada
* Comprobar el parámetro n8-35* Si se utiliza EnDat / Hiperface - comprobar la fuente de alimentación del encoder - comprobar el cableado de la señal CLOCK y DATA* Desconectar la fuente de alimentación.
No
Sí
¿Se ha producido un fallo OPE06?
Comprobar el parámetro * F1-01* n8-35
Desconectar la fuente de alimentación y comprobar si la
tarjeta PG adecuada está instalada correctamenteSí
No
¿Se ha producido un fallo OPE02?
* Comprobar si se ha configurado la constante PG correcta (F1-01) y la resolución del encoder absoluto (F1-21).* Consulte:
y elimine el origen del fallo.No
Sí
* Comprobar el cableado* Comprobar/reajustar la fuente de alimentación del encoder
* Comprobar el cableado del encoder.* Cambiar el parámetro F1-05
¿Se ha producido PGO (sin realimentación de
encoder)?
¿El signo del valor U1-05 es positivo
(distinto de -)?
No
Sí
No
Sí
Abrir el freno, cerrar el contactor del motor,girar el motor lentamente en dirección directa*1 y comprobar la
monitorización de U1-05.
página 7-14, Fallos de autotuning
página 7-12, Errores de programación del operador
* 1. Dirección directa significa: La dirección en la que gira el motor con un comando UP en el termi-nal S1 (es decir, con una rotación en el sentido de las agujas del reloj, alimentación trifásica y cableado U-U, V-V, W-W entre el convertidor y el motor). Normalmente, la dirección es el sentido de las agujas del reloj visto desde el lado del eje del motor (polea de tracción).Consulte el manual de instrucciones del motor o consulte al fabricante los detalles sobre la dirección de rotación.
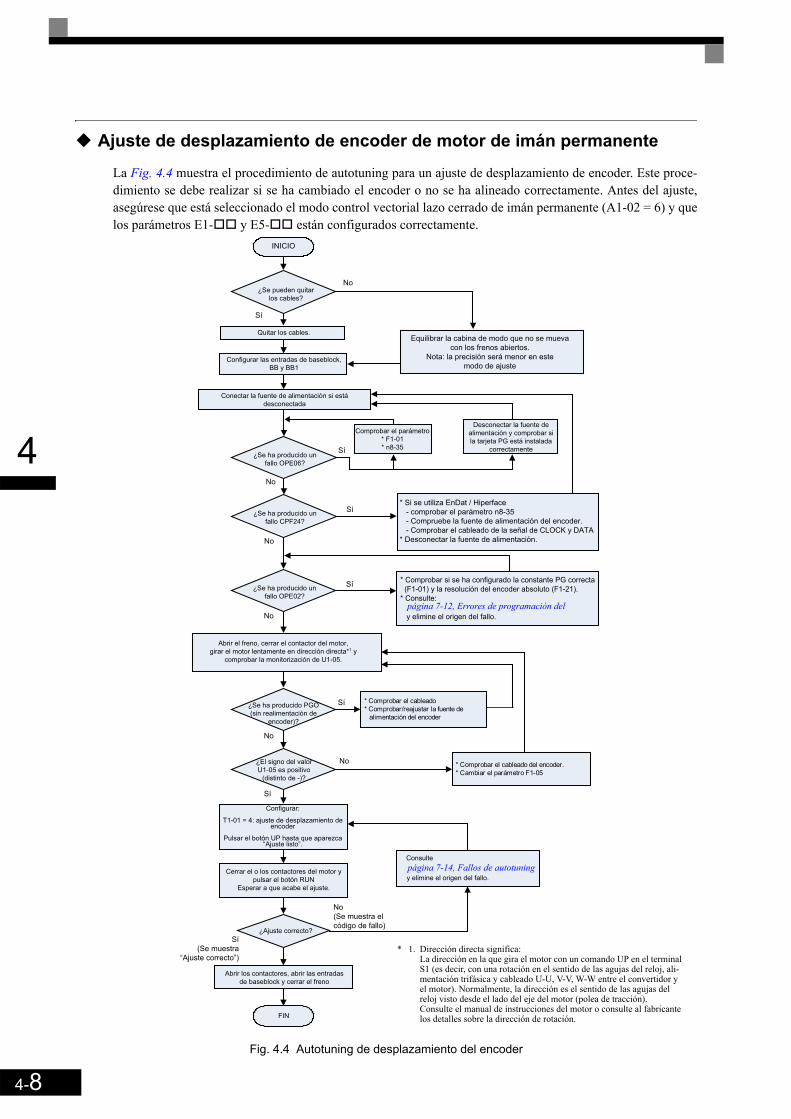
4-8
4
Ajuste de desplazamiento de encoder de motor de imán permanente
La Fig. 4.4 muestra el procedimiento de autotuning para un ajuste de desplazamiento de encoder. Este proce-dimiento se debe realizar si se ha cambiado el encoder o no se ha alineado correctamente. Antes del ajuste,asegúrese que está seleccionado el modo control vectorial lazo cerrado de imán permanente (A1-02 = 6) y quelos parámetros E1- y E5- están configurados correctamente.
Fig. 4.4 Autotuning de desplazamiento del encoder
* Comprobar el cableado* Comprobar/reajustar la fuente de alimentación del encoder
Sí
* Comprobar el cableado del encoder.* Cambiar el parámetro F1-05
INICIO
Quitar los cables.
¿Se ha producido PGO (sin realimentación de
encoder)?
Configurar las entradas de baseblock, BB y BB1
Abrir el freno, cerrar el contactor del motor,girar el motor lentamente en dirección directa*1 y
comprobar la monitorización de U1-05.
¿El signo del valor U1-05 es positivo
(distinto de -)?
No
Sí
No
Sí
Configurar:
T1-01 = 4: ajuste de desplazamiento de encoder
Pulsar el botón UP hasta que aparezca “Ajuste listo”.
Cerrar el o los contactores del motor y pulsar el botón RUN
Esperar a que acabe el ajuste.
¿Ajuste correcto?
No(Se muestra elcódigo de fallo)
Sí(Se muestra
“Ajuste correcto”)
Consulte
y elimine el origen del fallo.
Abrir los contactores, abrir las entradas de baseblock y cerrar el freno
FIN
¿Se pueden quitar los cables?
¿Se ha producido un fallo CPF24?
Equilibrar la cabina de modo que no se mueva con los frenos abiertos.
Nota: la precisión será menor en este modo de ajuste
* Si se utiliza EnDat / Hiperface - comprobar el parámetro n8-35 - Compruebe la fuente de alimentación del encoder. - Comprobar el cableado de la señal de CLOCK y DATA* Desconectar la fuente de alimentación.
No
No
Sí
¿Se ha producido un fallo OPE06?
Comprobar el parámetro * F1-01* n8-35
Desconectar la fuente de alimentación y comprobar si la tarjeta PG está instalada
correctamente Sí
No
¿Se ha producido un fallo OPE02?
* Comprobar si se ha configurado la constante PG correcta (F1-01) y la resolución del encoder absoluto (F1-21).* Consulte:
y elimine el origen del fallo.No
Sí
Conectar la fuente de alimentación si está desconectada
página 7-14, Fallos de autotuning
página 7-12, Errores de programación del
* 1. Dirección directa significa: La dirección en la que gira el motor con un comando UP en el terminal S1 (es decir, con una rotación en el sentido de las agujas del reloj, ali-mentación trifásica y cableado U-U, V-V, W-W entre el convertidor y el motor). Normalmente, la dirección es el sentido de las agujas del reloj visto desde el lado del eje del motor (polea de tracción).Consulte el manual de instrucciones del motor o consulte al fabricante los detalles sobre la dirección de rotación.
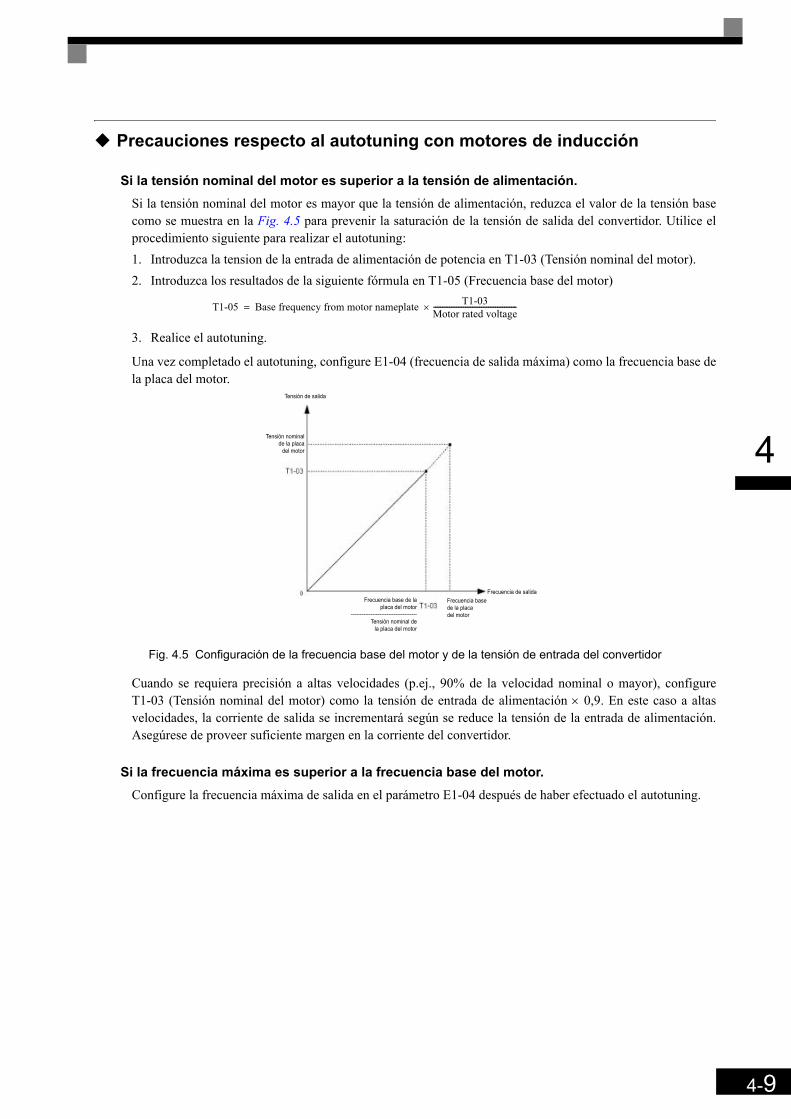
4-9
4
Precauciones respecto al autotuning con motores de inducción
Si la tensión nominal del motor es superior a la tensión de alimentación.Si la tensión nominal del motor es mayor que la tensión de alimentación, reduzca el valor de la tensión basecomo se muestra en la Fig. 4.5 para prevenir la saturación de la tensión de salida del convertidor. Utilice elprocedimiento siguiente para realizar el autotuning:1. Introduzca la tension de la entrada de alimentación de potencia en T1-03 (Tensión nominal del motor).2. Introduzca los resultados de la siguiente fórmula en T1-05 (Frecuencia base del motor)
3. Realice el autotuning.
Una vez completado el autotuning, configure E1-04 (frecuencia de salida máxima) como la frecuencia base dela placa del motor.
Fig. 4.5 Configuración de la frecuencia base del motor y de la tensión de entrada del convertidor
Cuando se requiera precisión a altas velocidades (p.ej., 90% de la velocidad nominal o mayor), configureT1-03 (Tensión nominal del motor) como la tensión de entrada de alimentación × 0,9. En este caso a altasvelocidades, la corriente de salida se incrementará según se reduce la tensión de la entrada de alimentación.Asegúrese de proveer suficiente margen en la corriente del convertidor.
Si la frecuencia máxima es superior a la frecuencia base del motor.Configure la frecuencia máxima de salida en el parámetro E1-04 después de haber efectuado el autotuning.
T1-05 Base frequency from motor nameplate T1-03Motor rated voltage-----------------------------------------------×=
Frecuencia base de laplaca del motor
-------------------------------------Tensión nominal de
la placa del motor
Frecuencia base de la placa del motor
Frecuencia de salida
Tensión de salida
Tensión nominalde la placa
del motor
4-10
4
Alarmas y fallos de autotuning
Errores de entrada de datosEl convertidor mostrará un mensaje de “dato no válido” y no realizará el autotuning si:
• la velocidad del motor, la frecuencia nominal y el número de pares de polos no se corresponden.
• la corriente nominal no se corresponde con el valor de potencia nominalEl convertidor calcula la potencia del motor mediante el valor de corriente de entrada y los datos de la tablainterna de datos del motor. El valor calculado debe estar entre el 50% y el 150% del valor de entrada parala potencia nominal.
Otras alarmas y fallos durante autotuningPara ver un resumen de las posibles alarmas o fallos de autotuning y las medidas correctivas, consultepágina 7-14, Fallos de autotuning.
Motor Speed Base Frequency 60⋅2 Motor pole⋅
-------------------------------------------------<
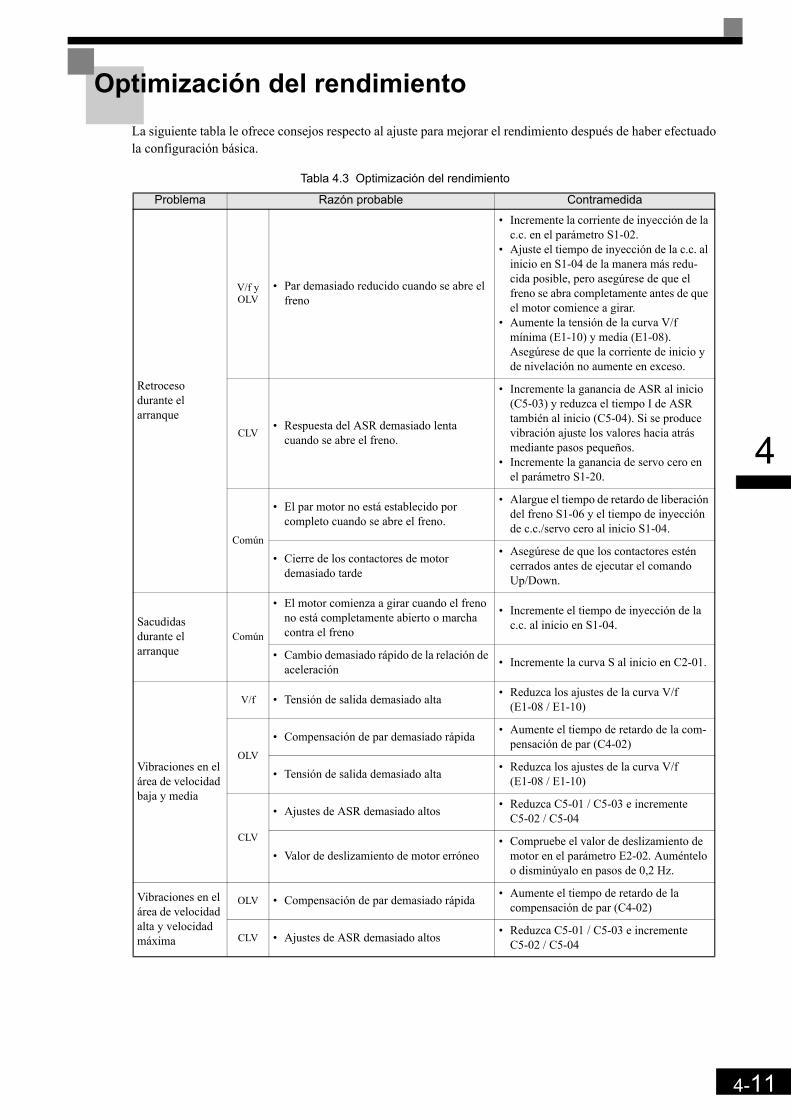
4-11
4
Optimización del rendimientoLa siguiente tabla le ofrece consejos respecto al ajuste para mejorar el rendimiento después de haber efectuadola configuración básica.
Tabla 4.3 Optimización del rendimiento
Problema Razón probable Contramedida
Retroceso durante el arranque
V/f y OLV
• Par demasiado reducido cuando se abre el freno
• Incremente la corriente de inyección de la c.c. en el parámetro S1-02.
• Ajuste el tiempo de inyección de la c.c. al inicio en S1-04 de la manera más redu-cida posible, pero asegúrese de que el freno se abra completamente antes de que el motor comience a girar.
• Aumente la tensión de la curva V/f mínima (E1-10) y media (E1-08). Asegúrese de que la corriente de inicio y de nivelación no aumente en exceso.
CLV• Respuesta del ASR demasiado lenta
cuando se abre el freno.
• Incremente la ganancia de ASR al inicio (C5-03) y reduzca el tiempo I de ASR también al inicio (C5-04). Si se produce vibración ajuste los valores hacia atrás mediante pasos pequeños.
• Incremente la ganancia de servo cero en el parámetro S1-20.
Común
• El par motor no está establecido por completo cuando se abre el freno.
• Alargue el tiempo de retardo de liberación del freno S1-06 y el tiempo de inyección de c.c./servo cero al inicio S1-04.
• Cierre de los contactores de motor demasiado tarde
• Asegúrese de que los contactores estén cerrados antes de ejecutar el comando Up/Down.
Sacudidas durante el arranque
Común
• El motor comienza a girar cuando el freno no está completamente abierto o marcha contra el freno
• Incremente el tiempo de inyección de la c.c. al inicio en S1-04.
• Cambio demasiado rápido de la relación de aceleración • Incremente la curva S al inicio en C2-01.
Vibraciones en el área de velocidad baja y media
V/f • Tensión de salida demasiado alta • Reduzca los ajustes de la curva V/f (E1-08 / E1-10)
OLV
• Compensación de par demasiado rápida • Aumente el tiempo de retardo de la com-pensación de par (C4-02)
• Tensión de salida demasiado alta • Reduzca los ajustes de la curva V/f (E1-08 / E1-10)
CLV
• Ajustes de ASR demasiado altos • Reduzca C5-01 / C5-03 e incremente C5-02 / C5-04
• Valor de deslizamiento de motor erróneo• Compruebe el valor de deslizamiento de
motor en el parámetro E2-02. Auméntelo o disminúyalo en pasos de 0,2 Hz.
Vibraciones en el área de velocidad alta y velocidad máxima
OLV • Compensación de par demasiado rápida • Aumente el tiempo de retardo de la compensación de par (C4-02)
CLV • Ajustes de ASR demasiado altos • Reduzca C5-01 / C5-03 e incremente C5-02 / C5-04

4-12
4
Sacudidas producidas por sobresaturación cuando se alcanza la velocidad máxima
OLV• Compensación de par o de deslizamiento
demasiado rápida
• Aumente el tiempo de retardo de la com-pensación de par C4-02
• Aumente el tiempo de retardo de la com-pensación de deslizamiento C3-02
CLV
• Parámetros del controlador ASR demasiado suaves o demasiado duros
• Reajuste la ganancia de ASR P (C5-01) y el tiempo de integral de ASR (C5-02).
• Datos de motor incorrectos
• Reajuste los datos de motor (E2- ), especialmente el deslizamiento (E2-02) y los valores de corriente en vacío (E2-03) o bien efectúe un autotuning.
Común• Modificación de la aceleración demasiado
brusca.• Incremente la curva S al final de la
aceleración C2-02.
El motor se detiene brevemente cuando se alcanza la velocidad de nivelación (subsaturación)
V/f • Par demasiado bajo a velocidad baja
• Aumente la tensión de la curva V/f mínima (E1-10) y media (E1-08). Asegúrese que la corriente de inicio y de nivelación no aumente en exceso.
OLV
• Par demasiado bajo a velocidad baja
• Aumente la tensión de la curva V/f mínima (E1-10) y media (E1-08). Asegúrese que la corriente de inicio y de nivelación no aumente en exceso.
• Datos de motor incorrectos• Sobrecompensación de deslizamiento
• Reajuste los datos de motor (E2- ), especialmente el deslizamiento (E2-02) y los valores de corriente en vacío (E2-03) o bien efectúe un autotuning.
CLV
• Datos de motor incorrectos
• Reajuste los datos de motor (E2- ), especialmente el deslizamiento (E2-02) y los valores de corriente en vacío (E2-03) o bien efectúe un autotuning.
• Controlador ASR demasiado lento• Aumente la ganancia P de ASR (C5-09) y
disminuya el tiempo de integral de ASR (C5-10).
Común• Cambio demasiado rápido de la relación de
desaceleración• Incremente la curva S al final de la
desaceleración C2-04.
Sacudidas durante la parada Común
• Cierre de freno demasiado pronto, de manera que el motor marcha contra el freno
• Aumente el tiempo de retardo de cierre del freno S1-07 y, de ser necesario, el tiempo de inyección de c.c. durante la parada S1-05.
• El contactor de motor se abre cuando el freno no se ha cerrado por completo.
• Compruebe la secuencia del contactor de motor.
Ruido de alta frecuencia del motor
Común • La frecuencia portadora es demasiado baja.
• Incremente la frecuencia portadora en el parámetro C6-02 ó C6-11. Si la frecuencia portadora aumenta en un grado mayor que la configuración de fábrica, debe considerarse una disminución de la corriente (consulte página 9-6, Reducción por frecuencia portadora)
Vibración que aumenta con la velocidad
CLV • El encoder vibra • Compruebe el montaje del encoder y la orientación del eje del motor
Común
• Problemas mecánicos • Comprobar los cojinetes y la caja de engranajes
• Partes dinámicas (inducido del motor, rueda de mano, disco/tambor de freno) están desequilibradas
• Equilibre las partes dinámicas
Problema Razón probable Contramedida
Parámetros deusuario
Este capítulo describe todos los parámetros de usuario que pueden ser configurados en el convertidor.
Descripciones de los parámetros de usuario ................................................................5-2Funciones y niveles del display del Operador Digital ....................................................5-3Tablas de parámetros de usuario..................................................................................5-8Configuraciones de ajuste: A ........................................................................................5-8Parámetros de aplicación: b........................................................................................5-10Parámetros de ajuste: C..............................................................................................5-12Parámetros de referencia: d........................................................................................5-18Parámetros del motor: E .............................................................................................5-21Parámetros opcionales: F ...........................................................................................5-26Parámetros de función de terminal: H.........................................................................5-32Parámetros de función de protección: L......................................................................5-37Ajustes especiales: n2 / n5..........................................................................................5-43Ajustes del motor PM n8 / n9 ......................................................................................5-45Parámetros de función de elevación: S.......................................................................5-48Autotuning del motor: T ...............................................................................................5-54Parámetros de monitorización: U ................................................................................5-56Configuraciones que cambian con el modo de control (A1-02) ..................................5-62Configuraciones de fábrica que cambian con la capacidad del convertidor (o2-04)...5-64

5-2
5
Descripciones de los parámetros de usuario
Descripción de las tablas de parámetros de usuario
Las tablas de parámetros de usuario están estructuradas como se detalla a continuación. Se utiliza b1-01(Selección de referencia de frecuencia) como ejemplo.
Número de pará-
metro
Nombre
Descripción
Rango de con-figura-ción
Confi-gura-
ción de fábrica
Modifi-cación durante la ope-ración
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
Display
b1-01 Selección de referencia
Configura el método de entrada de la referencia de frecuencia.0:Operador Digital1:Terminal de circuito de control
(entrada analógica)2:Comunicaciones MEMOBUS3:Tarjeta opcional
0 a 3 0 No Q Q Q Q 180H -
• Número de parámetro: El número del parámetro de usuario.• Nombre El nombre del parámetro de usuario.• Display El display visualizado en el Operador Digital JVOP-160-OY
• Descripción: Detalles sobre la función o las configuraciones del parámetro deusuario.
• Rango de configuración: El rango de configuración del parámetro de usuario.
• Configuración de fábrica:
La configuración de fábrica (cada método de control tiene su propia configuración de fábrica, por lo tanto la configuración de fábrica cam-bia al cambiar el método de control).Consulte en la página página 5-62, Configuraciones que cambian con el modo de control (A1-02) las configuraciones de fábrica que cambian al ajustar el método de control.
• Modificación durante la operación:
Indica si el parámetro puede ser cambiado o no mientras el convertidor se encuentra en operación.Sí: Pueden realizarse cambios durante la operación.No: No pueden realizarse cambios durante la operación.
• Métodos de control: Indica los métodos de control en los que el parámetro de usuario puede ser monitorizado o configurado.
Q:
El elemento puede ser monitorizado y configurado tantoen el modo Quick programming (programación rápida)como en el modo Advanced programming (programa-ción avanzada).
A:el elemento puede ser monitorizado y configuradoúnicamente en el modo Advanced programming(programación avanzada).
No: el elemento no puede ser monitorizado o configurado eneste método de control.
• Registro MEMOBUS: El número de registro utilizado para comunicaciones MEMOBUS.
• Página: La página de referencia para una información más detallada sobre el parámetro.
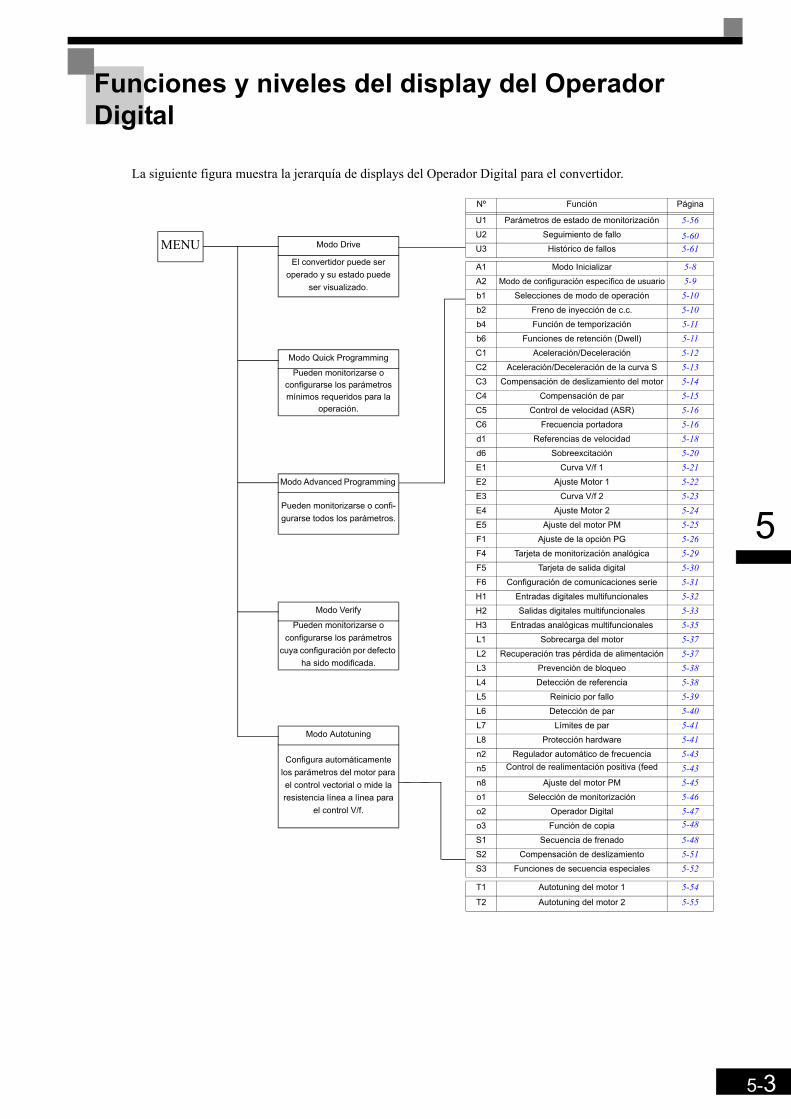
5-3
5
Funciones y niveles del display del Operador Digital
La siguiente figura muestra la jerarquía de displays del Operador Digital para el convertidor.
MENU Modo Drive
El convertidor puede ser operado y su estado puede
ser visualizado.
Modo Quick Programming
Pueden monitorizarse o configurarse los parámetros mínimos requeridos para la
operación.
Modo Advanced Programming
Pueden monitorizarse o confi-gurarse todos los parámetros.
Modo Verify
Pueden monitorizarse o configurarse los parámetros
cuya configuración por defecto ha sido modificada.
Modo Autotuning
Configura automáticamente los parámetros del motor para el control vectorial o mide la resistencia línea a línea para
el control V/f.
Nº Función Página
U1 Parámetros de estado de monitorización 5-56U2 Seguimiento de fallo 5-60U3 Histórico de fallos 5-61
A1 Modo Inicializar 5-8A2 Modo de configuración específico de usuario 5-9b1 Selecciones de modo de operación 5-10b2 Freno de inyección de c.c. 5-10b4 Función de temporización 5-11b6 Funciones de retención (Dwell) 5-11C1 Aceleración/Deceleración 5-12C2 Aceleración/Deceleración de la curva S 5-13C3 Compensación de deslizamiento del motor 5-14C4 Compensación de par 5-15C5 Control de velocidad (ASR) 5-16C6 Frecuencia portadora 5-16d1 Referencias de velocidad 5-18d6 Sobreexcitación 5-20E1 Curva V/f 1 5-21E2 Ajuste Motor 1 5-22E3 Curva V/f 2 5-23E4 Ajuste Motor 2 5-24E5 Ajuste del motor PM 5-25F1 Ajuste de la opción PG 5-26F4 Tarjeta de monitorización analógica 5-29F5 Tarjeta de salida digital 5-30F6 Configuración de comunicaciones serie 5-31H1 Entradas digitales multifuncionales 5-32H2 Salidas digitales multifuncionales 5-33H3 Entradas analógicas multifuncionales 5-35L1 Sobrecarga del motor 5-37L2 Recuperación tras pérdida de alimentación 5-37L3 Prevención de bloqueo 5-38L4 Detección de referencia 5-38L5 Reinicio por fallo 5-39L6 Detección de par 5-40L7 Límites de par 5-41L8 Protección hardware 5-41n2 Regulador automático de frecuencia 5-43n5 Control de realimentación positiva (feed 5-43n8 Ajuste del motor PM 5-45o1 Selección de monitorización 5-46o2 Operador Digital 5-47o3 Función de copia 5-48
S1 Secuencia de frenado 5-48S2 Compensación de deslizamiento 5-51S3 Funciones de secuencia especiales 5-52
T1 Autotuning del motor 1 5-54T2 Autotuning del motor 2 5-55
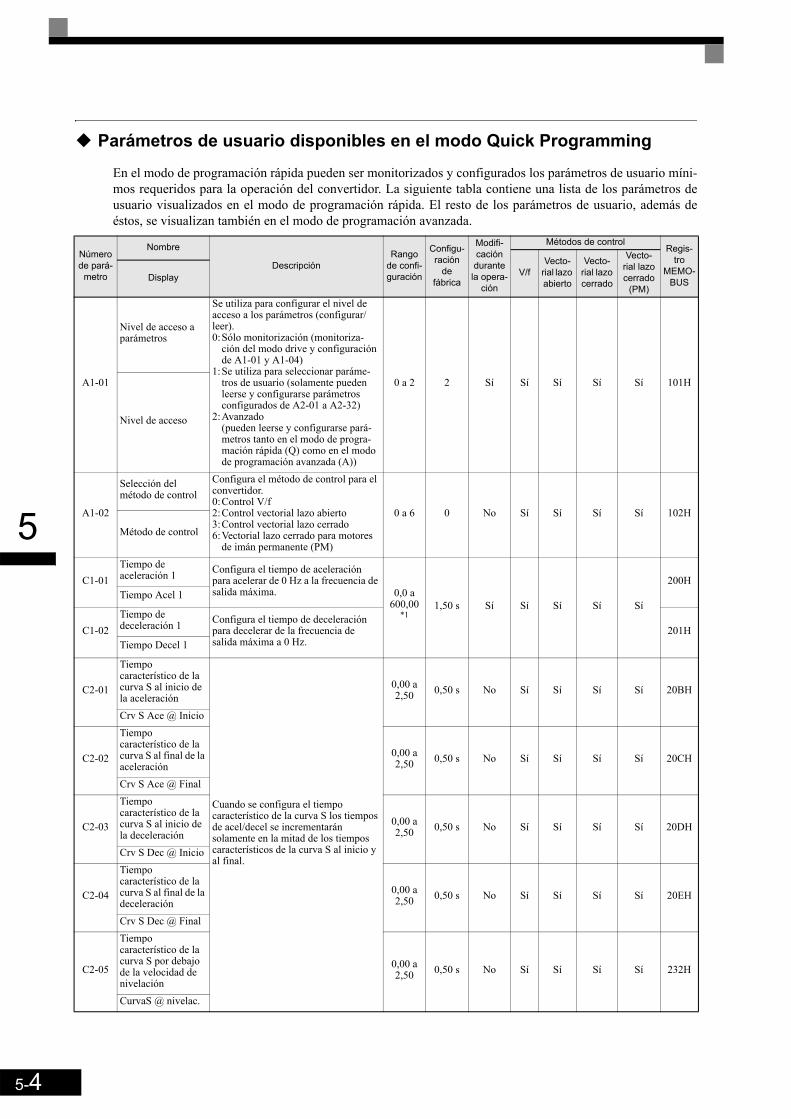
5-4
5
Parámetros de usuario disponibles en el modo Quick Programming
En el modo de programación rápida pueden ser monitorizados y configurados los parámetros de usuario míni-mos requeridos para la operación del convertidor. La siguiente tabla contiene una lista de los parámetros deusuario visualizados en el modo de programación rápida. El resto de los parámetros de usuario, además deéstos, se visualizan también en el modo de programación avanzada.
Número de pará-
metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante la opera-
ción
Métodos de controlRegis-
tro MEMO-
BUSV/f
Vecto-rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
A1-01
Nivel de acceso a parámetros
Se utiliza para configurar el nivel de acceso a los parámetros (configurar/leer).0:Sólo monitorización (monitoriza-
ción del modo drive y configuración de A1-01 y A1-04)
1:Se utiliza para seleccionar paráme-tros de usuario (solamente pueden leerse y configurarse parámetros configurados de A2-01 a A2-32)
2:Avanzado(pueden leerse y configurarse pará-metros tanto en el modo de progra-mación rápida (Q) como en el modo de programación avanzada (A))
0 a 2 2 Sí Sí Sí Sí Sí 101H
Nivel de acceso
A1-02
Selección del método de control
Configura el método de control para el convertidor.0:Control V/f2:Control vectorial lazo abierto3:Control vectorial lazo cerrado6:Vectorial lazo cerrado para motores
de imán permanente (PM)
0 a 6 0 No Sí Sí Sí Sí 102H
Método de control
C1-01Tiempo de aceleración 1 Configura el tiempo de aceleración
para acelerar de 0 Hz a la frecuencia de salida máxima. 0,0 a
600,00*1
1,50 s Sí Sí Sí Sí Sí
200HTiempo Acel 1
C1-02Tiempo de deceleración 1 Configura el tiempo de deceleración
para decelerar de la frecuencia de salida máxima a 0 Hz.
201HTiempo Decel 1
C2-01
Tiempo característico de la curva S al inicio de la aceleración
Cuando se configura el tiempo característico de la curva S los tiempos de acel/decel se incrementarán solamente en la mitad de los tiempos característicos de la curva S al inicio y al final.
0,00 a 2,50 0,50 s No Sí Sí Sí Sí 20BH
Crv S Ace @ Inicio
C2-02
Tiempo característico de la curva S al final de la aceleración
0,00 a 2,50 0,50 s No Sí Sí Sí Sí 20CH
Crv S Ace @ Final
C2-03
Tiempo característico de la curva S al inicio de la deceleración
0,00 a 2,50 0,50 s No Sí Sí Sí Sí 20DH
Crv S Dec @ Inicio
C2-04
Tiempo característico de la curva S al final de la deceleración
0,00 a 2,50 0,50 s No Sí Sí Sí Sí 20EH
Crv S Dec @ Final
C2-05
Tiempo característico de la curva S por debajo de la velocidad de nivelación
0,00 a 2,50 0,50 s No Sí Sí Sí Sí 232H
CurvaS @ nivelac.

5-5
5
C5-01
Ganancia proporcional (P) 1 del ASR Configura la ganancia proporcional 1 y
el tiempo integral 1 del lazo de control de la velocidad (ASR) para la frecuencia mínima.La configuración solamente se activa para la aceleración.
0,00 a 300,00 i Sí - -
40,00 -21BH
Gan.P 1 ASR - 12,00
C5-02
Tiempo integral 1 del ASR 0,000 a
10,000 i Sí - -0,500 s -
21CHTiempo I 1 ASR - 0,300 s
C5-03
Ganancia proporcional (P) 2 del ASR
Configura la ganancia proporcional 2 y el tiempo integral 2 del lazo de control de la velocidad (ASR) para la frecuencia máxima.
0,00 a 300,00 i Sí - -
20,00 -21DH
Gan.P 2 ASR - 6,00
C5-04Tiempo integral (I) 2 del ASR 0,000 a
10,000 0,500 s Sí - - Sí Sí 21EHTiempo I 2 ASR
C5-06
Tiempo de retardo del ASR
Configura la constante de tiempo de filtro; el tiempo desde el lazo de velocidad a la salida de comando de par. Normalmente no es necesario modificar esta configuración.
0,000 a 0,500 0,020 s No - - - Sí 220H
Tiempo retardo ASR
C5-07
Frecuencia de cambio de ASR Configura la frecuencia para el cambio
entre la ganancia proporcional 1, 2, 3 y el tiempo de integral 1, 2, 3.
0,0 a 50,0 Hz
i No - -0,0 Hz -
221HFrec Cambio Gan ASR
0,0 a 100,0 % - 2,0 %
C5-09
Ganancia proporcional (P) 3 del ASR Configura la ganancia proporcional 3 y
el tiempo integral 3 del lazo de control de la velocidad (ASR) para la frecuencia mínima.La configuración solamente se activa para la deceleración.
0,00 a 300,00 i Sí - -
40,00 -22EH
Gan.P 3 ASR - 12,00
C5-10
Tiempo integral (I) 3 del ASR 0,000 a
10,000 i Sí - -
0,500s -231H
Tiempo I 3 ASR - 0,300s
d1-09
Referencia de velocidad nominal Configura la referencia de frecuencia
cuando la velocidad nominal es seleccionada por una entrada digital.
0 a 120,00
i
Sí
50,00 Hz
50,00 Hz
50,00 Hz -
288HVeloc. Nomin. vn 0 a
100,00 - - - 100,00 %
d1-14
Referencia de velocidad de inspección
Configura la referencia de frecuencia cuando la velocidad de inspección es seleccionada por una entrada digital.
0 a 120,00
i
25,00 Hz
25,00 Hz
25,00 Hz -
28FH
Veloc. Inspecc. vi 0 a 100,00 - - - 50,00%
d1-17
Referencia de velocidad de nivelación
Configura la referencia de frecuencia cuando la velocidad de nivelación es seleccionada por una entrada digital.
0 a 120,00
i
4,00 Hz
4,00 Hz 4,00 Hz -
292H
Veloc. Nivel. vl 0 a 100,00 - - - 8,00%
E1-01
Configuración de la tensión de entrada
Configura la tensión de entrada del convertidor. El valor aquí configurado será la base para las funciones de protección.
310 a 510*2
400 V*2 No Sí Sí Sí Sí 300H
Tensiónde entrada
Número de pará-
metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegis-
tro MEMO-
BUSV/f
Vecto-rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
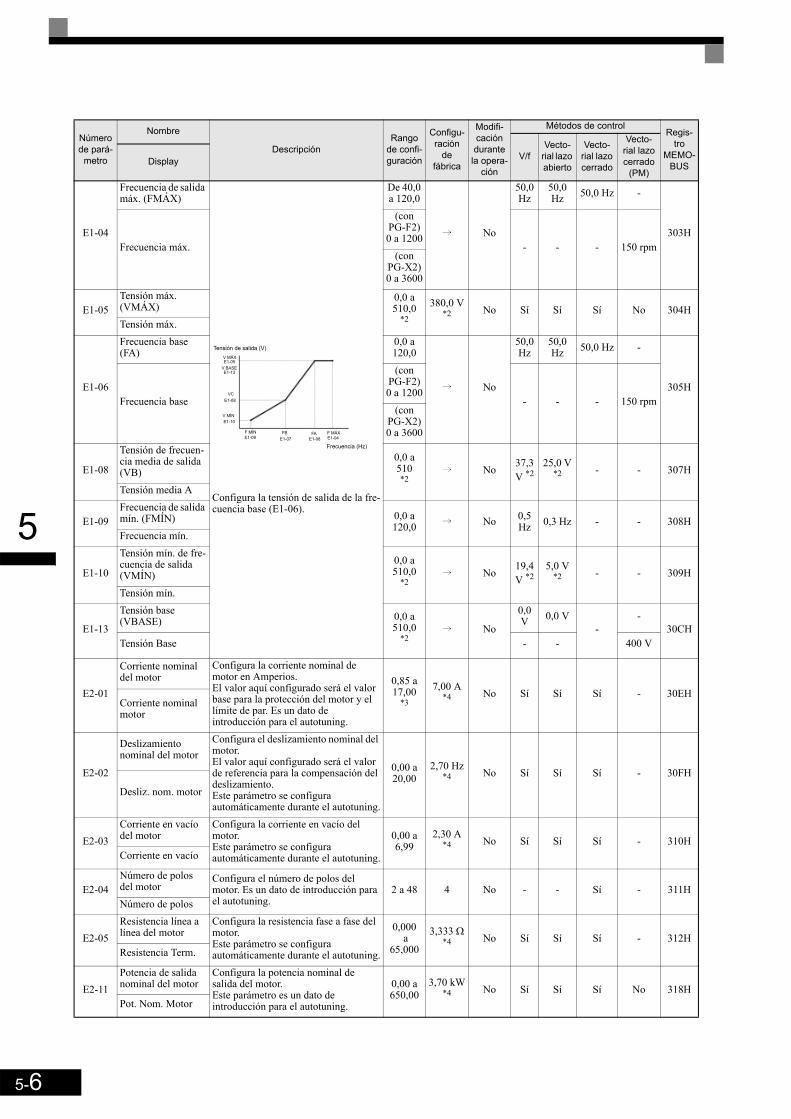
5-6
5
E1-04
Frecuencia de salida máx. (FMÁX)
Configura la tensión de salida de la fre-cuencia base (E1-06).
De 40,0 a 120,0
i No
50,0 Hz
50,0 Hz 50,0 Hz -
303HFrecuencia máx.
(con PG-F2)0 a 1200
- - - 150 rpm(con
PG-X2)0 a 3600
E1-05Tensión máx. (VMÁX)
0,0 a 510,0
*2
380,0 V*2 No Sí Sí Sí No 304H
Tensión máx.
E1-06
Frecuencia base (FA)
0,0 a 120,0
i No
50,0 Hz
50,0 Hz 50,0 Hz -
305HFrecuencia base
(con PG-F2)0 a 1200
- - - 150 rpm(con
PG-X2)0 a 3600
E1-08
Tensión de frecuen-cia media de salida (VB)
0,0 a 510 *2
i No37,3 V *2
25,0 V *2 - - 307H
Tensión media A
E1-09Frecuencia de salida mín. (FMÍN) 0,0 a
120,0 i No 0,5 Hz 0,3 Hz - - 308H
Frecuencia mín.
E1-10
Tensión mín. de fre-cuencia de salida (VMÍN)
0,0 a 510,0
*2i No
19,4 V *2
5,0 V *2 - - 309H
Tensión mín.
E1-13
Tensión base (VBASE) 0,0 a
510,0*2
i No
0,0 V 0,0 V
--
30CHTensión Base - - 400 V
E2-01
Corriente nominal del motor
Configura la corriente nominal de motor en Amperios.El valor aquí configurado será el valor base para la protección del motor y el límite de par. Es un dato de introducción para el autotuning.
0,85 a 17,00
*3
7,00 A*4 No Sí Sí Sí - 30EH
Corriente nominal motor
E2-02
Deslizamiento nominal del motor
Configura el deslizamiento nominal del motor.El valor aquí configurado será el valor de referencia para la compensación del deslizamiento.Este parámetro se configura automáticamente durante el autotuning.
0,00 a 20,00
2,70 Hz*4 No Sí Sí Sí - 30FH
Desliz. nom. motor
E2-03Corriente en vacío del motor
Configura la corriente en vacío del motor.Este parámetro se configura automáticamente durante el autotuning.
0,00 a 6,99
2,30 A*4 No Sí Sí Sí - 310H
Corriente en vacío
E2-04Número de polos del motor
Configura el número de polos del motor. Es un dato de introducción para el autotuning.
2 a 48 4 No - - Sí - 311HNúmero de polos
E2-05Resistencia línea a línea del motor
Configura la resistencia fase a fase del motor.Este parámetro se configura automáticamente durante el autotuning.
0,000 a
65,000
3,333 Ω*4 No Sí Sí Sí - 312H
Resistencia Term.
E2-11Potencia de salida nominal del motor
Configura la potencia nominal de salida del motor.Este parámetro es un dato de introducción para el autotuning.
0,00 a 650,00
3,70 kW*4 No Sí Sí Sí No 318H
Pot. Nom. Motor
Número de pará-
metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante la opera-
ción
Métodos de controlRegis-
tro MEMO-
BUSV/f
Vecto-rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
F MÍNE1-09
FBE1-07
FAE1-08
F MÁXE1-04
V MÁXE1-05
V BASEE1-13
V MÍNE1-10
VCE1-08
Tensión de salida (V)
Frecuencia (Hz)

5-7
5
E5-02Potencia de salida nominal del motor Configura la potencia nominal de
salida del motor.0,00 a 300,00
3,70 kW*4 No - - - Sí 0C2H
Potencia nominal
E5-03Corriente nominal del motor Configura la corriente nominal del
motor.0,00 a 200,00 7,31 A*4 No - - - Sí 0C3H
Corriente Nom.
E5-04Número de polos del motor Configura el número de polos del
motor. 4 a 48 4 No - - - Sí 0C4HNúmero de polos
E5-05Resistencia terminal de motor Configuración de resistencia línea a
línea del motor0,000 a 65,000
1,326 Ohm *4 No - - - Sí 0C5H
Resistencia term.
E5-06
Inductancia del eje d
Configura la inductancia del eje d. 0,00 a 300,00
19,11 mH*4
No - - - Sí 0C6HInductancia del eje d
E5-07
Inductancia del eje q
Configura la inductancia del eje q. 0,00 a 600,00
26,08 mH*4
No - - - Sí 0C7HInductancia del eje q
E5-09
Constante de tensión de motor Configura la constante de tensión del
motor.50,0 a 4000,0
478,6 mV*4
No - - - Sí 0C9HConstante de tensión
F1-01Constante PG
Configura el número de pulsos de encoder (PG) por revolución
0 a 60000 i No - -
Sí1024 -
380HPulsos/Rev del PG - Sí
2048
F1-05
Rotación del PG0:Fase A para comando de marcha
directa (Fase B para comando de marcha inversa).
1:Fase B para comando de marcha directa. (Fase A para comando de marcha inversa).
0 ó 1 i No - -
0 -
384H
Sel Rotación PG - 1
L1-01
Selección de protección del motor
Configurable para habilitar o deshabilitar la función de protección contra sobrecarga del motor utilizando el relé termoelectrónico.0:Deshabilitada1:Protección para motor de uso general
(refrigeración por ventilador)2:Protección para motor para
convertidor de frecuencia (refrigeración externa)
3:Protección para motor con control vectorial especial
5:Motor de imán permanente de par constante
0 a 3 1
No
Sí Sí Sí -
480H
Selec. MOL 0 ó 5 5 Sí
n8-35
Detección de posición de polo magnético
Establece el método de detección para la posición del polo magnético de un motor PM (de imán permanente).0:Detección automática (aplicable sólo
para motores IPM de Yaskawa)4:Datosy Hiperface5:Datos EnDat
0, 4 ó 5 5 No - - - Sí 192H
Sel det mag
*1. Los rangos de configuración para los tiempos de aceleración/desaceleración dependen de la configuración de C1-10 (Unidad de configuración de tiempo deaceleración/desaceleración). Si C1-10 está configurado como 0, el rango de configuración es de 0,00 a 600,00 (s).
*2. Los valores indicados son para un convertidor de clase 400 V.*3. El rango de configuración es desde el 10% al 200% de la corriente nominal de salida del convertidor Los valores dados son para un convertidor de clase
400 V, de 3,7 kW.*4. La configuración de fábrica depende de la capacidad del convertidor Se da el valor para un convertidor de clase 400 V, de 3,7 kW.
Número de pará-
metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegis-
tro MEMO-
BUSV/f
Vecto-rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display

5-8
5
Tablas de parámetros de usuario
Configuraciones de ajuste: A
Modo Inicializar: A1
Número de pará-
metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de control
Registro MEMO-
BUSPágina
V/fVecto-
rial lazo
abierto
Vecto-rial lazo
cerrado
Vecto-rial lazo
cerrado (PM)
Display
A1-00
Selección de idioma para el display del Operador Digital
Se utiliza para seleccionar el idioma visualizado en el Operador Digital (solamente JVOP-160-OY).0: Inglés1:Japonés2:Alemán3:Francés4: Italiano5:Español6:PortuguésEste parámetro no es modificado por la operación de inicialización.
0 a 6 0 Sí A A A A 100H –
Seleccione idioma
A1-01
Nivel de acceso a parámetros
Se utiliza para configurar el nivel de acceso a los parámetros (configurar/leer).0:Sólo monitorización
(monitorización del modo drive y configuración de A1-01 y A1-04)
1:Se utiliza para seleccionar parámetros de usuario (solamente pueden leerse y configurarse parámetros configurados de A2-01 a A2-32)
2:Avanzado(pueden leerse y configurarse parámetros tanto en el modo de programación rápida (Q) como en el modo de programación avanzada (A))
0 a 2 2 Sí Q Q Q Q 101H 6-706-71
Nivel de acceso
A1-02
Selección del método de control
Selecciona el método de control para el convertidor.0: Control V/f2: Vectorial lazo abierto3: Vectorial lazo cerrado6: Vectorial lazo cerrado para
motores PM (de imán permanente)
Este parámetro no es modificado por la operación de inicialización.
0 a 6 0 No Q Q Q Q 102H -
Método de control
A1-03
InicializarSe utiliza para inicializar los parámetros utilizando el método especificado.0: Sin inicialización1110: Inicializa con los
parámetros de usuario2220: Inicializa utilizando una
secuencia de dos hilos. (inicializa según la configuración de fábrica).
0 a 2220 0 No A A A A 103H -
Inic. Parámetros
A1-04
Contraseña
Introducción de contraseña cuando ha sido configurada una contraseña en A1-05. Esta función protege algunos parámetros del modo de inicialización contra escritura.Si se cambia la contraseña ya no podrán ser modificados los parámetros A1-01 a A1-03 y A2-01 a A2-32. (pueden modificarse los parámetros del modo de programación).
0 a 9999 0 No A A A A 104H 6-70
Intro.Contraseña
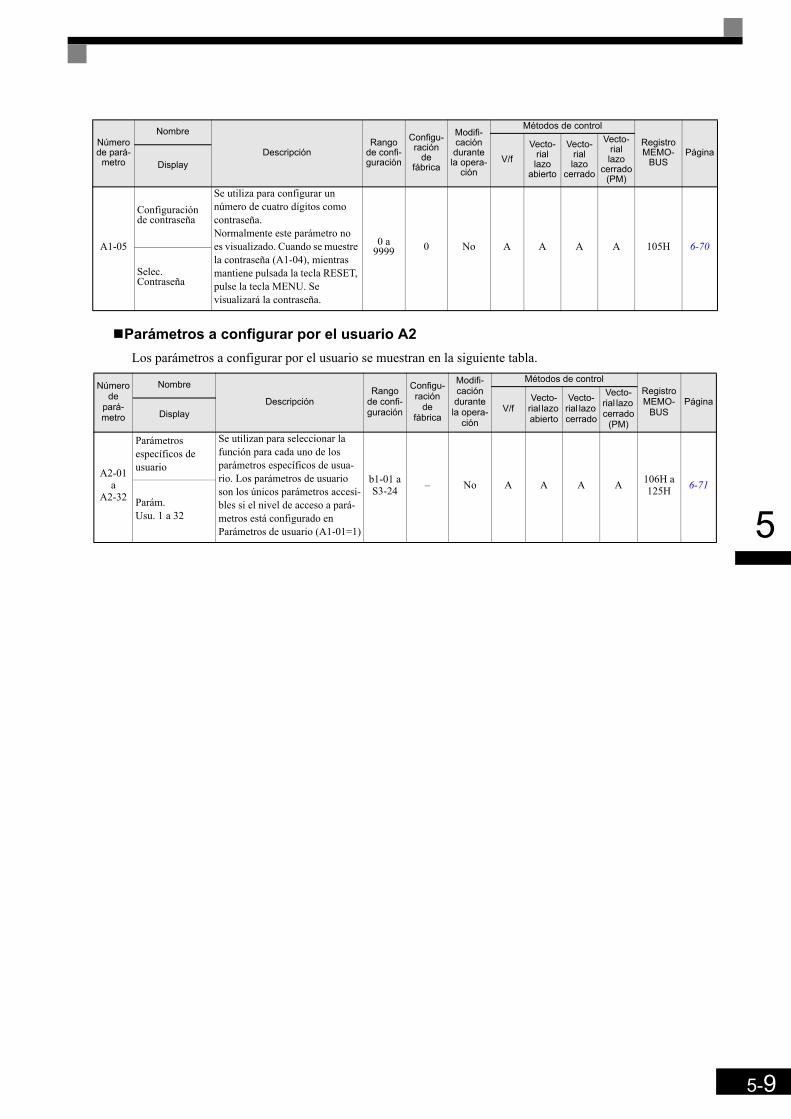
5-9
5
Parámetros a configurar por el usuario A2Los parámetros a configurar por el usuario se muestran en la siguiente tabla.
A1-05
Configuración de contraseña
Se utiliza para configurar un número de cuatro dígitos como contraseña.Normalmente este parámetro no es visualizado. Cuando se muestre la contraseña (A1-04), mientras mantiene pulsada la tecla RESET, pulse la tecla MENU. Se visualizará la contraseña.
0 a 9999 0 No A A A A 105H 6-70
Selec. Contraseña
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante la opera-
ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f Vecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
A2-01 a
A2-32
Parámetros específicos de usuario
Se utilizan para seleccionar la función para cada uno de los parámetros específicos de usua-rio. Los parámetros de usuario son los únicos parámetros accesi-bles si el nivel de acceso a pará-metros está configurado en Parámetros de usuario (A1-01=1)
b1-01 a S3-24 – No A A A A 106H a
125H 6-71Parám. Usu. 1 a 32
Número de pará-
metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de control
Registro MEMO-
BUSPágina
V/fVecto-
rial lazo
abierto
Vecto-rial lazo
cerrado
Vecto-rial lazo
cerrado (PM)
Display
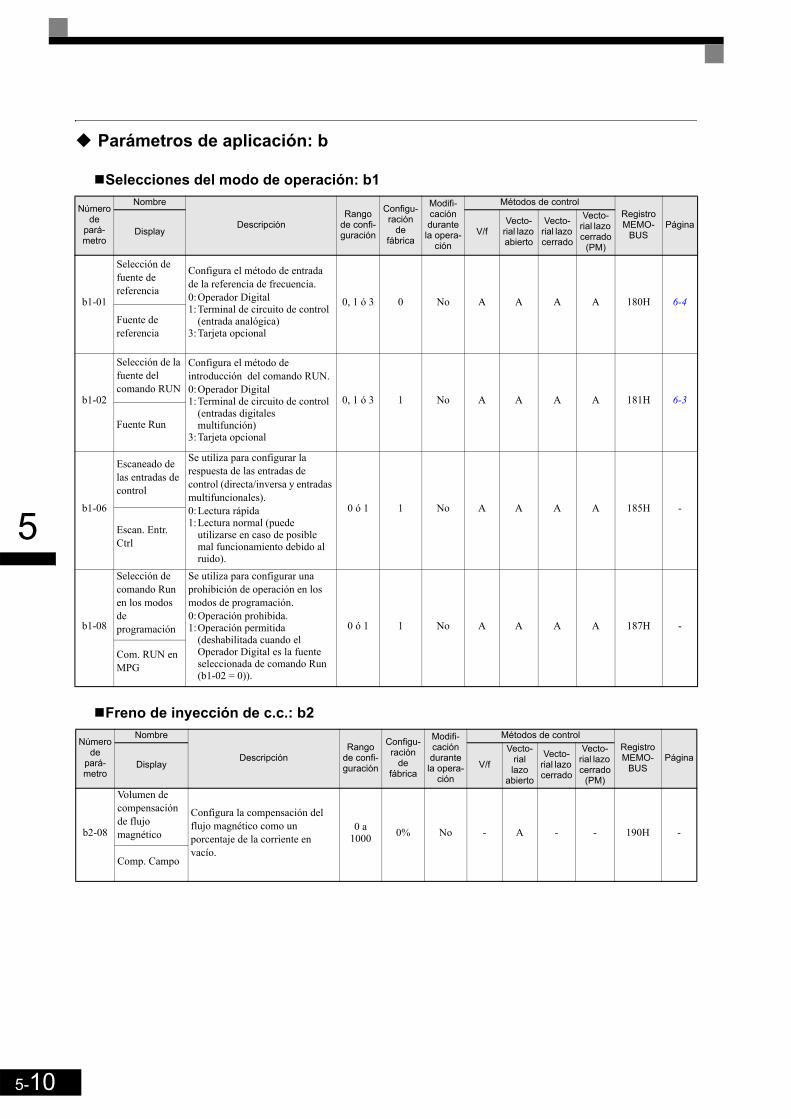
5-10
5
Parámetros de aplicación: b
Selecciones del modo de operación: b1
Freno de inyección de c.c.: b2
Númerode
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUSPágina
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
Display
b1-01
Selección de fuente de referencia
Configura el método de entrada de la referencia de frecuencia.0:Operador Digital1:Terminal de circuito de control
(entrada analógica)3:Tarjeta opcional
0, 1 ó 3 0 No A A A A 180H 6-4
Fuente de referencia
b1-02
Selección de la fuente del comando RUN
Configura el método de introducción del comando RUN.0:Operador Digital1:Terminal de circuito de control
(entradas digitales multifunción)
3:Tarjeta opcional
0, 1 ó 3 1 No A A A A 181H 6-3
Fuente Run
b1-06
Escaneado de las entradas de control
Se utiliza para configurar la respuesta de las entradas de control (directa/inversa y entradas multifuncionales).0:Lectura rápida1:Lectura normal (puede
utilizarse en caso de posible mal funcionamiento debido al ruido).
0 ó 1 1 No A A A A 185H -
Escan. Entr. Ctrl
b1-08
Selección de comando Run en los modos de programación
Se utiliza para configurar una prohibición de operación en los modos de programación.0:Operación prohibida.1:Operación permitida
(deshabilitada cuando el Operador Digital es la fuente seleccionada de comando Run (b1-02 = 0)).
0 ó 1 1 No A A A A 187H -
Com. RUN en MPG
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
Display
b2-08
Volumen de compensación de flujo magnético
Configura la compensación del flujo magnético como un porcentaje de la corriente en vacío.
0 a 1000 0% No - A - - 190H -
Comp. Campo
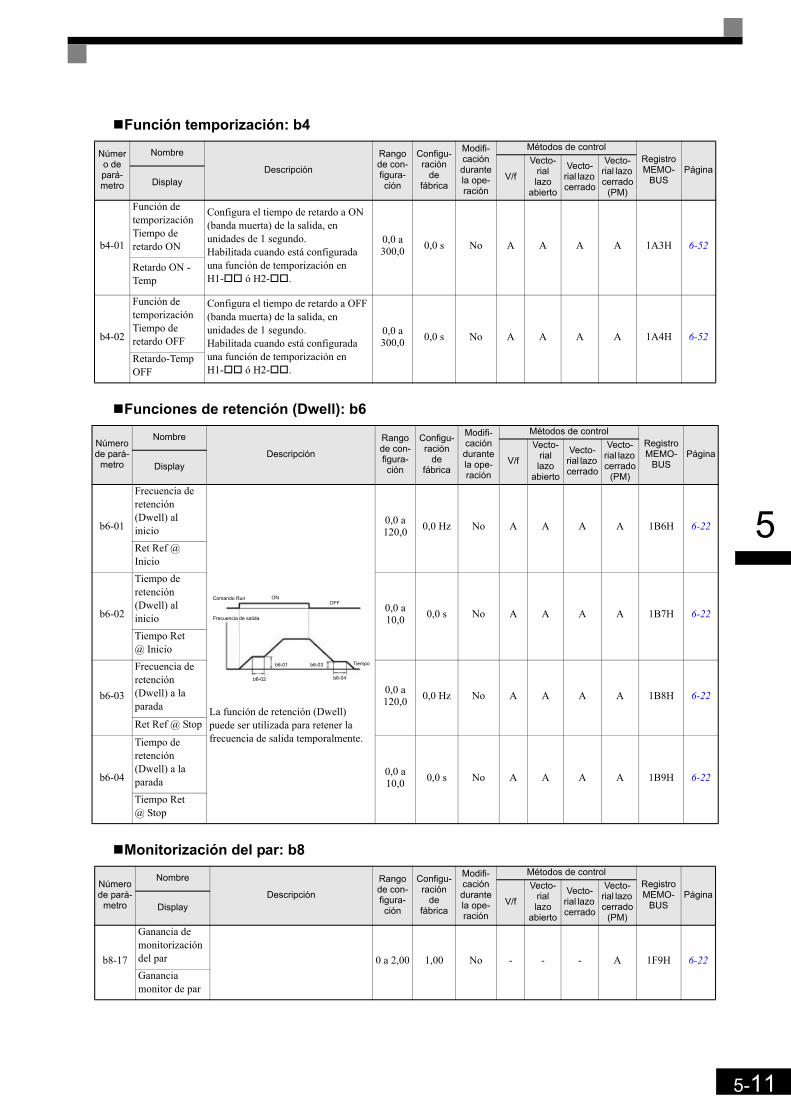
5-11
5
Función temporización: b4
Funciones de retención (Dwell): b6
Monitorización del par: b8
Número de pará-metro
Nombre
Descripción
Rango de con-figura-ción
Configu-ración
de fábrica
Modifi-cación durante la ope-ración
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
b4-01
Función de temporización Tiempo de retardo ON
Configura el tiempo de retardo a ON (banda muerta) de la salida, en unidades de 1 segundo.Habilitada cuando está configurada una función de temporización en H1- ó H2- .
0,0 a 300,0 0,0 s No A A A A 1A3H 6-52
Retardo ON -Temp
b4-02
Función de temporización Tiempo de retardo OFF
Configura el tiempo de retardo a OFF (banda muerta) de la salida, en unidades de 1 segundo.Habilitada cuando está configurada una función de temporización en H1- ó H2- .
0,0 a 300,0 0,0 s No A A A A 1A4H 6-52
Retardo-Temp OFF
Número de pará-
metro
Nombre
Descripción
Rango de con-figura-ción
Configu-ración
de fábrica
Modifi-cación durante la ope-ración
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
b6-01
Frecuencia de retención (Dwell) al inicio
La función de retención (Dwell) puede ser utilizada para retener la frecuencia de salida temporalmente.
0,0 a 120,0 0,0 Hz No A A A A 1B6H 6-22
Ret Ref @ Inicio
b6-02
Tiempo de retención (Dwell) al inicio
0,0 a 10,0 0,0 s No A A A A 1B7H 6-22
Tiempo Ret @ Inicio
b6-03
Frecuencia de retención (Dwell) a la parada
0,0 a 120,0 0,0 Hz No A A A A 1B8H 6-22
Ret Ref @ Stop
b6-04
Tiempo de retención (Dwell) a la parada
0,0 a 10,0 0,0 s No A A A A 1B9H 6-22
Tiempo Ret @ Stop
Número de pará-
metro
Nombre
Descripción
Rango de con-figura-ción
Configu-ración
de fábrica
Modifi-cación durante la ope-ración
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
b8-17
Ganancia de monitorización del par 0 a 2,00 1,00 No - - - A 1F9H 6-22Ganancia monitor de par
OFF
Tiempob6-01 b6-03
b6-04b6-02
Comando Run ON
Frecuencia de salida
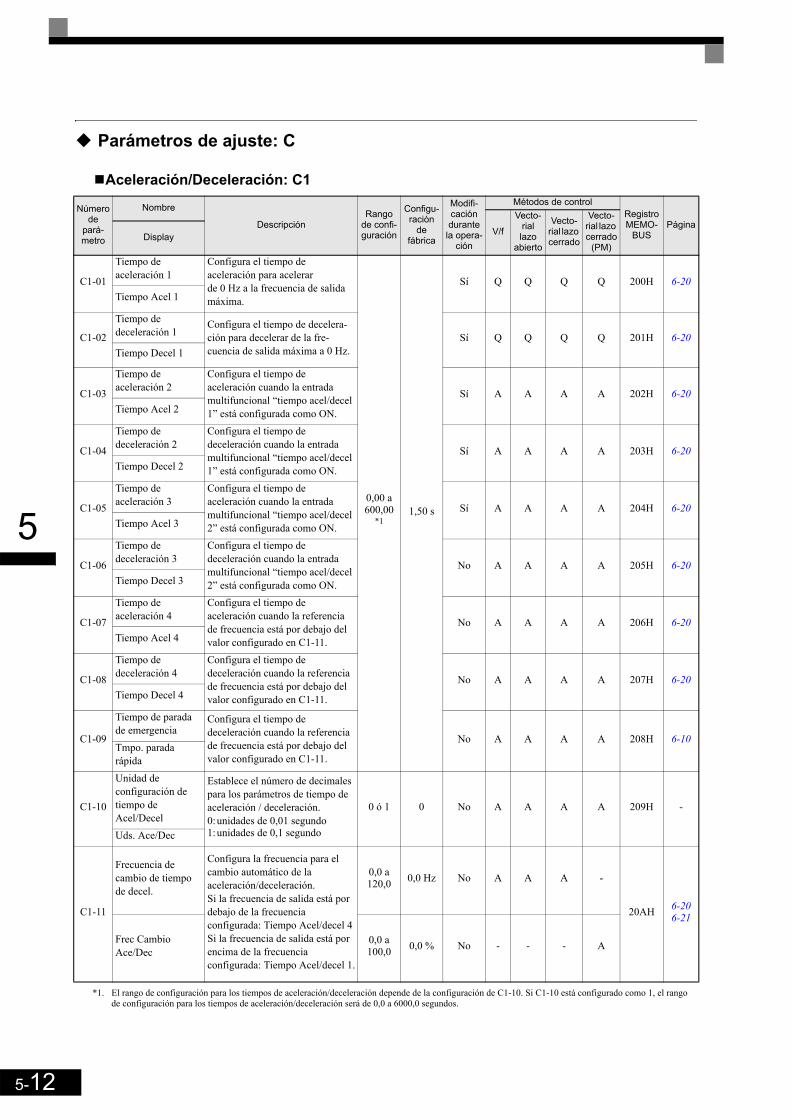
5-12
5
Parámetros de ajuste: C
Aceleración/Deceleración: C1
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
C1-01
Tiempo de aceleración 1
Configura el tiempo de aceleración para acelerar de 0 Hz a la frecuencia de salida máxima.
0,00 a 600,00
*1
*1. El rango de configuración para los tiempos de aceleración/deceleración depende de la configuración de C1-10. Si C1-10 está configurado como 1, el rangode configuración para los tiempos de aceleración/deceleración será de 0,0 a 6000,0 segundos.
1,50 s
Sí Q Q Q Q 200H 6-20Tiempo Acel 1
C1-02
Tiempo de deceleración 1
Configura el tiempo de decelera-ción para decelerar de la fre-cuencia de salida máxima a 0 Hz.
Sí Q Q Q Q 201H 6-20Tiempo Decel 1
C1-03
Tiempo de aceleración 2
Configura el tiempo de aceleración cuando la entrada multifuncional “tiempo acel/decel 1” está configurada como ON.
Sí A A A A 202H 6-20Tiempo Acel 2
C1-04
Tiempo de deceleración 2
Configura el tiempo de deceleración cuando la entrada multifuncional “tiempo acel/decel 1” está configurada como ON.
Sí A A A A 203H 6-20Tiempo Decel 2
C1-05
Tiempo de aceleración 3
Configura el tiempo de aceleración cuando la entrada multifuncional “tiempo acel/decel 2” está configurada como ON.
Sí A A A A 204H 6-20Tiempo Acel 3
C1-06
Tiempo de deceleración 3
Configura el tiempo de deceleración cuando la entrada multifuncional “tiempo acel/decel 2” está configurada como ON.
No A A A A 205H 6-20Tiempo Decel 3
C1-07
Tiempo de aceleración 4
Configura el tiempo de aceleración cuando la referencia de frecuencia está por debajo del valor configurado en C1-11.
No A A A A 206H 6-20Tiempo Acel 4
C1-08
Tiempo de deceleración 4
Configura el tiempo de deceleración cuando la referencia de frecuencia está por debajo del valor configurado en C1-11.
No A A A A 207H 6-20Tiempo Decel 4
C1-09
Tiempo de parada de emergencia
Configura el tiempo de deceleración cuando la referencia de frecuencia está por debajo del valor configurado en C1-11.
No A A A A 208H 6-10Tmpo. parada rápida
C1-10
Unidad de configuración de tiempo de Acel/Decel
Establece el número de decimales para los parámetros de tiempo de aceleración / deceleración.0:unidades de 0,01 segundo1:unidades de 0,1 segundo
0 ó 1 0 No A A A A 209H -
Uds. Ace/Dec
C1-11
Frecuencia de cambio de tiempo de decel.
Configura la frecuencia para el cambio automático de la aceleración/deceleración.Si la frecuencia de salida está por debajo de la frecuencia configurada: Tiempo Acel/decel 4Si la frecuencia de salida está por encima de la frecuencia configurada: Tiempo Acel/decel 1.
0,0 a 120,0 0,0 Hz No A A A -
20AH 6-206-21
Frec Cambio Ace/Dec
0,0 a 100,0 0,0 % No - - - A
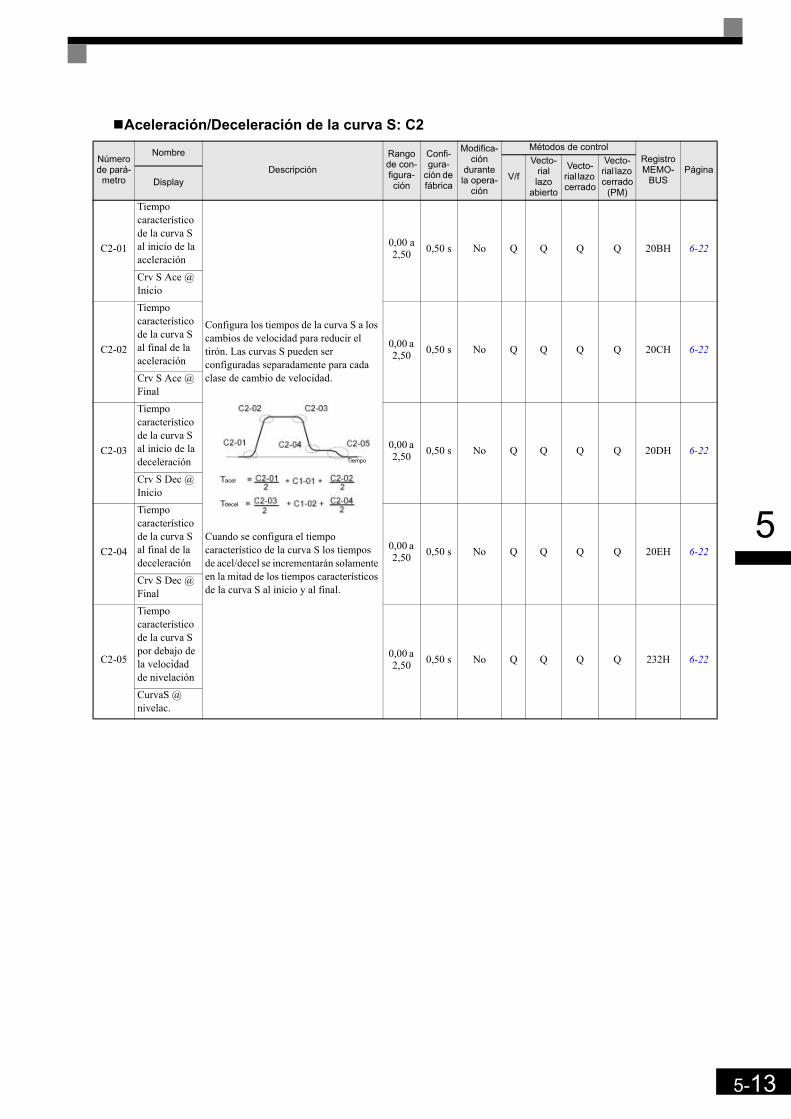
5-13
5
Aceleración/Deceleración de la curva S: C2
Número de pará-
metro
Nombre
Descripción
Rango de con-figura-ción
Confi-gura-
ción de fábrica
Modifica-ción
durante la opera-
ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
C2-01
Tiempo característico de la curva S al inicio de la aceleración
Configura los tiempos de la curva S a los cambios de velocidad para reducir el tirón. Las curvas S pueden ser configuradas separadamente para cada clase de cambio de velocidad.
Cuando se configura el tiempo característico de la curva S los tiempos de acel/decel se incrementarán solamente en la mitad de los tiempos característicos de la curva S al inicio y al final.
0,00 a 2,50 0,50 s No Q Q Q Q 20BH 6-22
Crv S Ace @ Inicio
C2-02
Tiempo característico de la curva S al final de la aceleración
0,00 a 2,50 0,50 s No Q Q Q Q 20CH 6-22
Crv S Ace @ Final
C2-03
Tiempo característico de la curva S al inicio de la deceleración
0,00 a 2,50 0,50 s No Q Q Q Q 20DH 6-22
Crv S Dec @ Inicio
C2-04
Tiempo característico de la curva S al final de la deceleración
0,00 a 2,50 0,50 s No Q Q Q Q 20EH 6-22
Crv S Dec @ Final
C2-05
Tiempo característico de la curva S por debajo de la velocidad de nivelación
0,00 a 2,50 0,50 s No Q Q Q Q 232H 6-22
CurvaS @ nivelac.
Tiempo
acel
decel
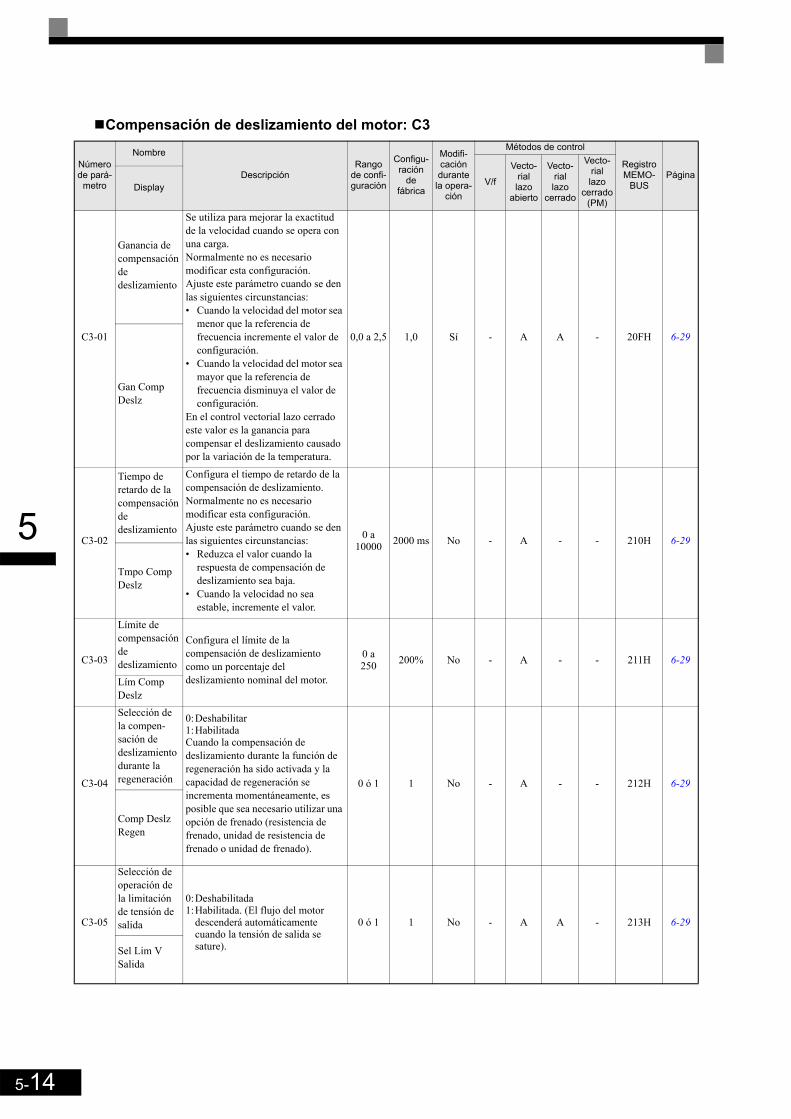
5-14
5
Compensación de deslizamiento del motor: C3
Número de pará-
metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de control
Registro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo
cerrado
Vecto-rial lazo
cerrado (PM)
Display
C3-01
Ganancia de compensación de deslizamiento
Se utiliza para mejorar la exactitud de la velocidad cuando se opera con una carga.Normalmente no es necesario modificar esta configuración.Ajuste este parámetro cuando se den las siguientes circunstancias:• Cuando la velocidad del motor sea
menor que la referencia de frecuencia incremente el valor de configuración.
• Cuando la velocidad del motor sea mayor que la referencia de frecuencia disminuya el valor de configuración.
En el control vectorial lazo cerrado este valor es la ganancia para compensar el deslizamiento causado por la variación de la temperatura.
0,0 a 2,5 1,0 Sí - A A - 20FH 6-29
Gan Comp Deslz
C3-02
Tiempo de retardo de la compensación de deslizamiento
Configura el tiempo de retardo de la compensación de deslizamiento.Normalmente no es necesario modificar esta configuración.Ajuste este parámetro cuando se den las siguientes circunstancias:• Reduzca el valor cuando la
respuesta de compensación de deslizamiento sea baja.
• Cuando la velocidad no sea estable, incremente el valor.
0 a 10000 2000 ms No - A - - 210H 6-29
Tmpo Comp Deslz
C3-03
Límite de compensación de deslizamiento
Configura el límite de la compensación de deslizamiento como un porcentaje del deslizamiento nominal del motor.
0 a 250 200% No - A - - 211H 6-29
Lím Comp Deslz
C3-04
Selección de la compen-sación de deslizamiento durante la regeneración
0:Deshabilitar1:HabilitadaCuando la compensación de deslizamiento durante la función de regeneración ha sido activada y la capacidad de regeneración se incrementa momentáneamente, es posible que sea necesario utilizar una opción de frenado (resistencia de frenado, unidad de resistencia de frenado o unidad de frenado).
0 ó 1 1 No - A - - 212H 6-29
Comp Deslz Regen
C3-05
Selección de operación de la limitación de tensión de salida
0:Deshabilitada1:Habilitada. (El flujo del motor
descenderá automáticamente cuando la tensión de salida se sature).
0 ó 1 1 No - A A - 213H 6-29
Sel Lim V Salida
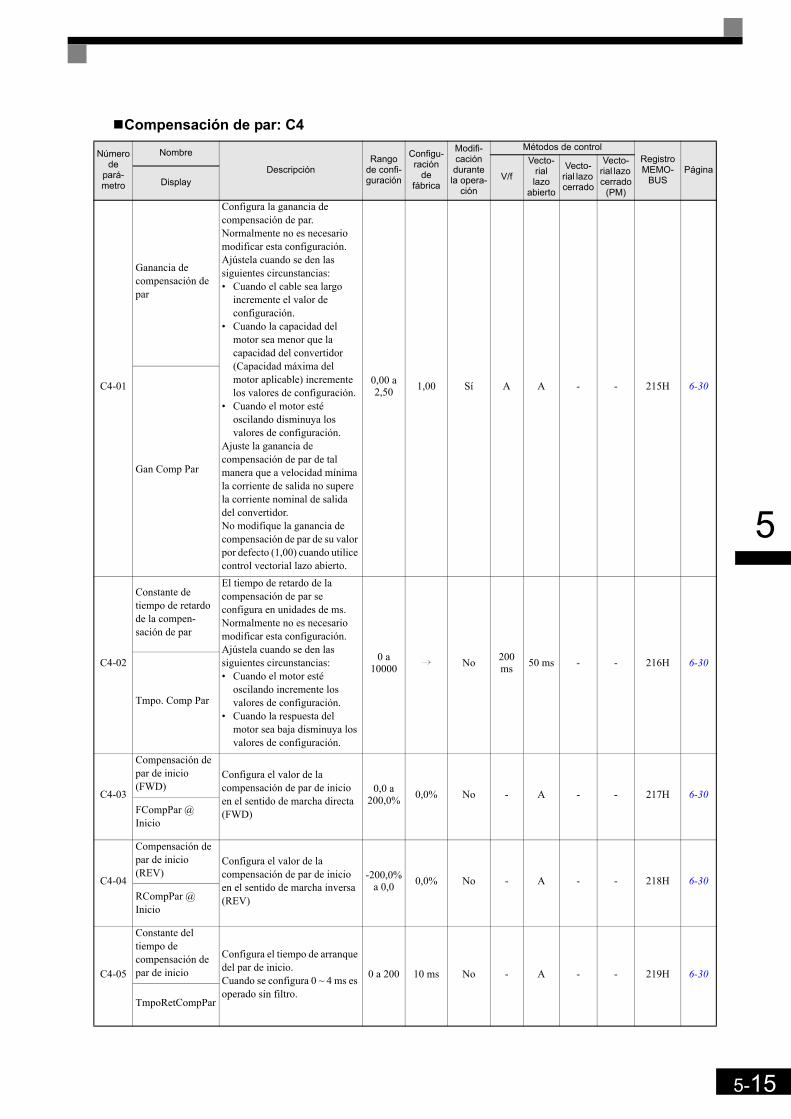
5-15
5
Compensación de par: C4
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
C4-01
Ganancia de compensación de par
Configura la ganancia de compensación de par.Normalmente no es necesario modificar esta configuración.Ajústela cuando se den las siguientes circunstancias:• Cuando el cable sea largo
incremente el valor de configuración.
• Cuando la capacidad del motor sea menor que la capacidad del convertidor (Capacidad máxima del motor aplicable) incremente los valores de configuración.
• Cuando el motor esté oscilando disminuya los valores de configuración.
Ajuste la ganancia de compensación de par de tal manera que a velocidad mínima la corriente de salida no supere la corriente nominal de salida del convertidor. No modifique la ganancia de compensación de par de su valor por defecto (1,00) cuando utilice control vectorial lazo abierto.
0,00 a 2,50 1,00 Sí A A - - 215H 6-30
Gan Comp Par
C4-02
Constante de tiempo de retardo de la compen-sación de par
El tiempo de retardo de la compensación de par se configura en unidades de ms.Normalmente no es necesario modificar esta configuración.Ajústela cuando se den las siguientes circunstancias:• Cuando el motor esté
oscilando incremente los valores de configuración.
• Cuando la respuesta del motor sea baja disminuya los valores de configuración.
0 a 10000 i No 200
ms 50 ms - - 216H 6-30
Tmpo. Comp Par
C4-03
Compensación de par de inicio (FWD)
Configura el valor de la compensación de par de inicio en el sentido de marcha directa (FWD)
0,0 a 200,0% 0,0% No - A - - 217H 6-30
FCompPar @ Inicio
C4-04
Compensación de par de inicio (REV)
Configura el valor de la compensación de par de inicio en el sentido de marcha inversa (REV)
-200,0% a 0,0 0,0% No - A - - 218H 6-30
RCompPar @ Inicio
C4-05
Constante del tiempo de compensación de par de inicio
Configura el tiempo de arranque del par de inicio.Cuando se configura 0 ~ 4 ms es operado sin filtro.
0 a 200 10 ms No - A - - 219H 6-30
TmpoRetCompPar
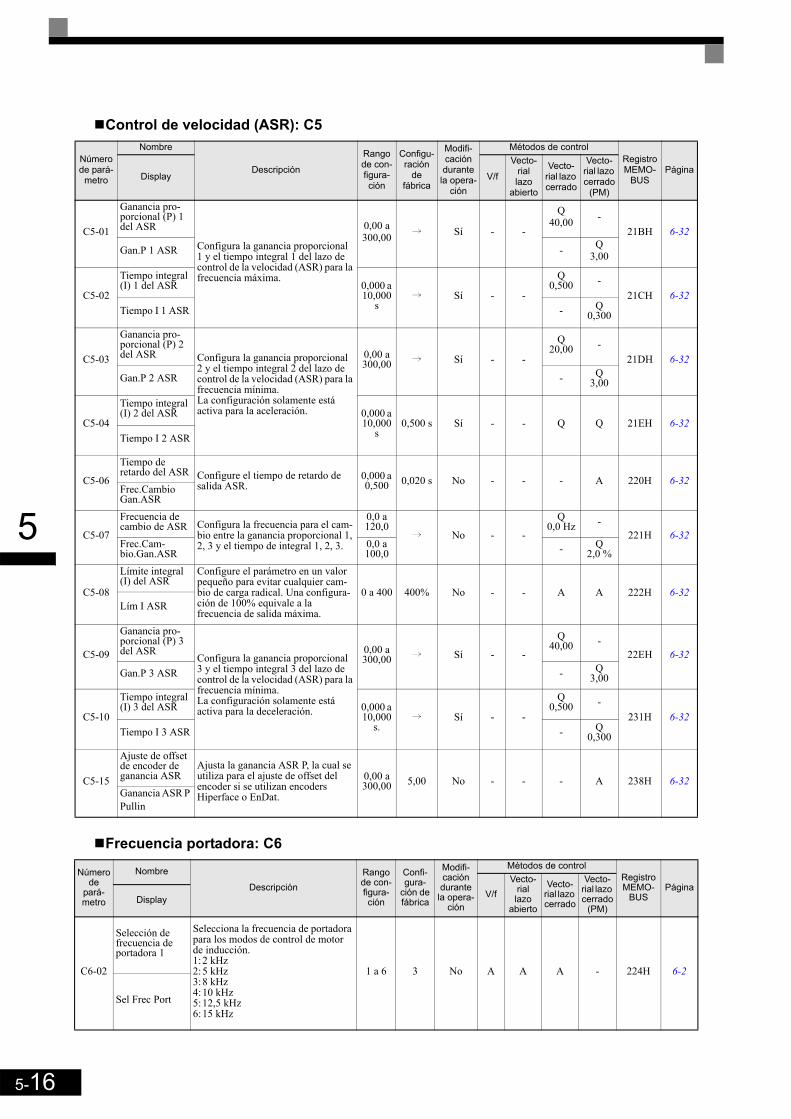
5-16
5
Control de velocidad (ASR): C5
Frecuencia portadora: C6
Número de pará-
metro
Nombre
Descripción
Rango de con-figura-ción
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
Display
C5-01
Ganancia pro-porcional (P) 1 del ASR
Configura la ganancia proporcional 1 y el tiempo integral 1 del lazo de control de la velocidad (ASR) para la frecuencia máxima.
0,00 a 300,00 i Sí - -
Q40,00 -
21BH 6-32
Gan.P 1 ASR - Q3,00
C5-02
Tiempo integral (I) 1 del ASR 0,000 a
10,000 s
i Sí - -
Q0,500 -
21CH 6-32Tiempo I 1 ASR - Q
0,300
C5-03
Ganancia pro-porcional (P) 2 del ASR Configura la ganancia proporcional
2 y el tiempo integral 2 del lazo de control de la velocidad (ASR) para la frecuencia mínima.La configuración solamente está activa para la aceleración.
0,00 a 300,00 i Sí - -
Q20,00 -
21DH 6-32
Gan.P 2 ASR - Q3,00
C5-04
Tiempo integral (I) 2 del ASR 0,000 a
10,000 s
0,500 s Sí - - Q Q 21EH 6-32Tiempo I 2 ASR
C5-06
Tiempo de retardo del ASR Configure el tiempo de retardo de
salida ASR.0,000 a 0,500 0,020 s No - - - A 220H 6-32
Frec.Cambio Gan.ASR
C5-07
Frecuencia de cambio de ASR Configura la frecuencia para el cam-
bio entre la ganancia proporcional 1, 2, 3 y el tiempo de integral 1, 2, 3.
0,0 a 120,0
i No - -
Q0,0 Hz -
221H 6-32Frec.Cam-bio.Gan.ASR
0,0 a 100,0 - Q
2,0 %
C5-08
Límite integral (I) del ASR
Configure el parámetro en un valor pequeño para evitar cualquier cam-bio de carga radical. Una configura-ción de 100% equivale a la frecuencia de salida máxima.
0 a 400 400% No - - A A 222H 6-32Lím I ASR
C5-09
Ganancia pro-porcional (P) 3 del ASR
Configura la ganancia proporcional 3 y el tiempo integral 3 del lazo de control de la velocidad (ASR) para la frecuencia mínima.La configuración solamente está activa para la deceleración.
0,00 a 300,00 i Sí - -
Q40,00 -
22EH 6-32
Gan.P 3 ASR - Q3,00
C5-10
Tiempo integral (I) 3 del ASR 0,000 a
10,000 s.
i Sí - -
Q0,500 -
231H 6-32Tiempo I 3 ASR - Q
0,300
C5-15
Ajuste de offset de encoder de ganancia ASR
Ajusta la ganancia ASR P, la cual se utiliza para el ajuste de offset del encoder si se utilizan encoders Hiperface o EnDat.
0,00 a 300,00 5,00 No - - - A 238H 6-32
Ganancia ASR P Pullin
Número de
pará-metro
Nombre
DescripciónRango de con-figura-ción
Confi-gura-
ción de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f Vecto-
rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
C6-02
Selección de frecuencia de portadora 1
Selecciona la frecuencia de portadora para los modos de control de motor de inducción.1:2 kHz2:5 kHz3:8 kHz4:10 kHz5:12,5 kHz6:15 kHz
1 a 6 3 No A A A - 224H 6-2
Sel Frec Port

5-17
5
C6-11
Selección de frecuencia de portadora 2
Selecciona la frecuencia de portadora para los modos de control de motor PM (de imán permanente).1:2 kHz2:4 kHz3:6 kHz4:8 kHz5:12 kHz6:15 kHz
1 a 6 4 No - - - A 22DH 6-2
Sel Frec Port
Número de
pará-metro
Nombre
DescripciónRango de con-figura-ción
Confi-gura-
ción de fábrica
Modifi-cación durante la opera-
ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f Vecto-
rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
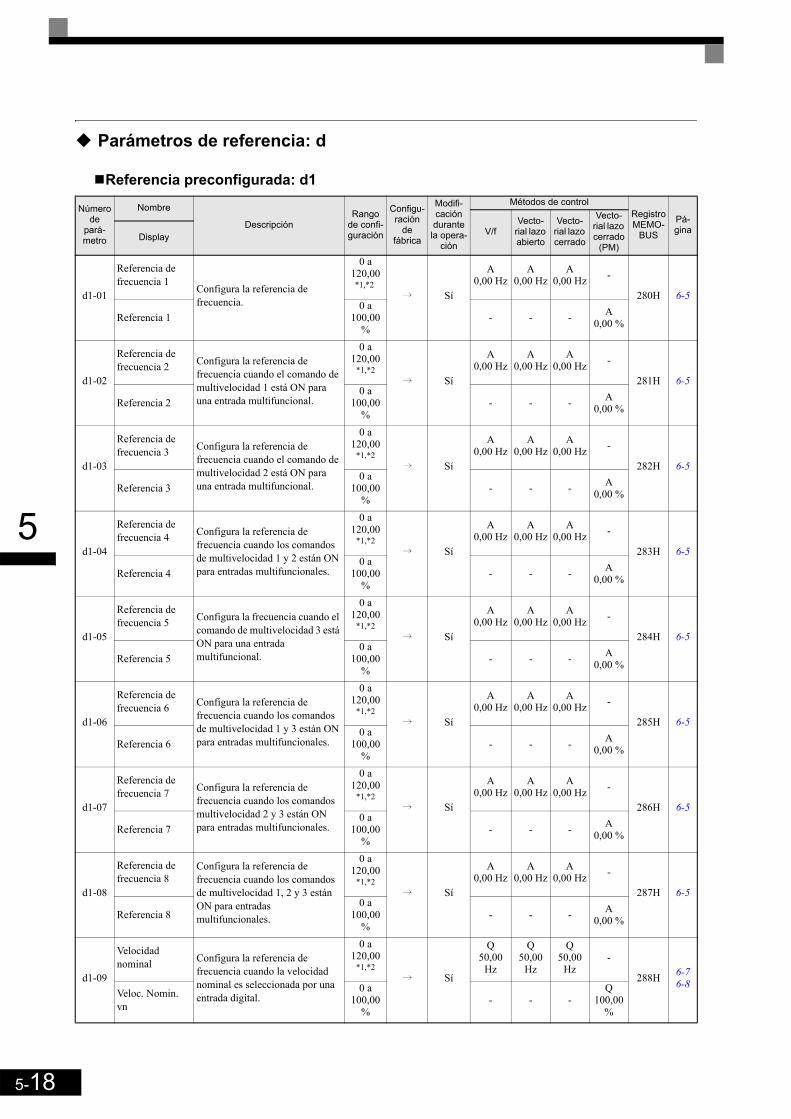
5-18
5
Parámetros de referencia: d
Referencia preconfigurada: d1
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
d1-01
Referencia de frecuencia 1
Configura la referencia defrecuencia.
0 a 120,00*1,*2
i Sí
A0,00 Hz
A0,00 Hz
A0,00 Hz -
280H 6-5
Referencia 10 a
100,00 %
- - - A0,00 %
d1-02
Referencia de frecuencia 2 Configura la referencia de
frecuencia cuando el comando de multivelocidad 1 está ON para una entrada multifuncional.
0 a 120,00
*1,*2i Sí
A0,00 Hz
A0,00 Hz
A0,00 Hz -
281H 6-5
Referencia 20 a
100,00 %
- - - A0,00 %
d1-03
Referencia de frecuencia 3 Configura la referencia de
frecuencia cuando el comando de multivelocidad 2 está ON para una entrada multifuncional.
0 a 120,00
*1,*2i Sí
A0,00 Hz
A0,00 Hz
A0,00 Hz -
282H 6-50 a
100,00 %
- - - A0,00 %Referencia 3
d1-04
Referencia de frecuencia 4 Configura la referencia de
frecuencia cuando los comandos de multivelocidad 1 y 2 están ON para entradas multifuncionales.
0 a 120,00
*1,*2i Sí
A0,00 Hz
A0,00 Hz
A0,00 Hz -
283H 6-5
Referencia 40 a
100,00 %
- - - A0,00 %
d1-05
Referencia de frecuencia 5 Configura la frecuencia cuando el
comando de multivelocidad 3 está ON para una entrada multifuncional.
0 a 120,00
*1,*2i Sí
A0,00 Hz
A0,00 Hz
A0,00 Hz -
284H 6-5
Referencia 50 a
100,00 %
- - - A0,00 %
d1-06
Referencia de frecuencia 6 Configura la referencia de
frecuencia cuando los comandos de multivelocidad 1 y 3 están ON para entradas multifuncionales.
0 a 120,00
*1,*2i Sí
A0,00 Hz
A0,00 Hz
A0,00 Hz -
285H 6-5
Referencia 60 a
100,00 %
- - - A0,00 %
d1-07
Referencia de frecuencia 7 Configura la referencia de
frecuencia cuando los comandos multivelocidad 2 y 3 están ON para entradas multifuncionales.
0 a 120,00
*1,*2i Sí
A0,00 Hz
A0,00 Hz
A0,00 Hz -
286H 6-5
Referencia 70 a
100,00 %
- - - A0,00 %
d1-08
Referencia de frecuencia 8
Configura la referencia de frecuencia cuando los comandos de multivelocidad 1, 2 y 3 están ON para entradas multifuncionales.
0 a 120,00
*1,*2i Sí
A0,00 Hz
A0,00 Hz
A0,00 Hz -
287H 6-5
Referencia 80 a
100,00 %
- - - A0,00 %
d1-09
Velocidad nominal Configura la referencia de
frecuencia cuando la velocidad nominal es seleccionada por una entrada digital.
0 a 120,00
*1,*2i Sí
Q50,00
Hz
Q50,00
Hz
Q50,00
Hz-
288H 6-76-8
Veloc. Nomin. vn
0 a 100,00
%- - -
Q100,00
%
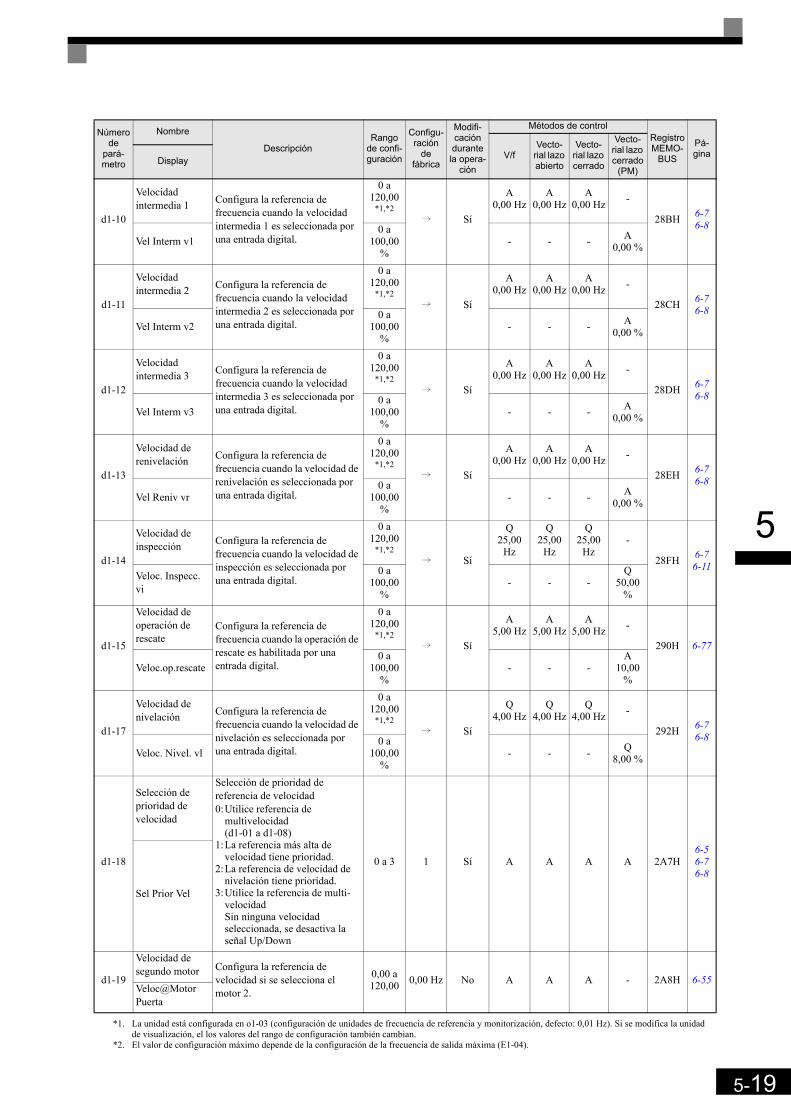
5-19
5
d1-10
Velocidad intermedia 1 Configura la referencia de
frecuencia cuando la velocidad intermedia 1 es seleccionada por una entrada digital.
0 a 120,00
*1,*2i Sí
A0,00 Hz
A0,00 Hz
A0,00 Hz -
28BH 6-76-8
Vel Interm v10 a
100,00 %
- - - A0,00 %
d1-11
Velocidad intermedia 2 Configura la referencia de
frecuencia cuando la velocidad intermedia 2 es seleccionada por una entrada digital.
0 a 120,00
*1,*2i Sí
A0,00 Hz
A0,00 Hz
A0,00 Hz -
28CH 6-76-8
Vel Interm v20 a
100,00 %
- - - A0,00 %
d1-12
Velocidad intermedia 3 Configura la referencia de
frecuencia cuando la velocidad intermedia 3 es seleccionada por una entrada digital.
0 a 120,00
*1,*2i Sí
A0,00 Hz
A0,00 Hz
A0,00 Hz -
28DH 6-76-8
Vel Interm v30 a
100,00 %
- - - A0,00 %
d1-13
Velocidad de renivelación Configura la referencia de
frecuencia cuando la velocidad de renivelación es seleccionada por una entrada digital.
0 a 120,00
*1,*2i Sí
A0,00 Hz
A0,00 Hz
A0,00 Hz -
28EH 6-76-8
Vel Reniv vr0 a
100,00 %
- - - A0,00 %
d1-14
Velocidad de inspección Configura la referencia de
frecuencia cuando la velocidad de inspección es seleccionada por una entrada digital.
0 a 120,00
*1,*2i Sí
Q25,00
Hz
Q25,00
Hz
Q25,00
Hz-
28FH 6-76-11
Veloc. Inspecc. vi
0 a 100,00
%- - -
Q50,00
%
d1-15
Velocidad de operación de rescate
Configura la referencia de frecuencia cuando la operación de rescate es habilitada por una entrada digital.
0 a 120,00
*1,*2i Sí
A5,00 Hz
A5,00 Hz
A5,00 Hz -
290H 6-77
Veloc.op.rescate0 a
100,00 %
- - -A
10,00 %
d1-17
Velocidad de nivelación Configura la referencia de
frecuencia cuando la velocidad de nivelación es seleccionada por una entrada digital.
0 a 120,00
*1,*2i Sí
Q4,00 Hz
Q4,00 Hz
Q4,00 Hz -
292H 6-76-8
Veloc. Nivel. vl0 a
100,00 %
- - - Q8,00 %
d1-18
Selección de prioridad de velocidad
Selección de prioridad de referencia de velocidad0:Utilice referencia de
multivelocidad (d1-01 a d1-08)
1:La referencia más alta de velocidad tiene prioridad.
2:La referencia de velocidad de nivelación tiene prioridad.
3:Utilice la referencia de multi-velocidadSin ninguna velocidad seleccionada, se desactiva la señal Up/Down
0 a 3 1 Sí A A A A 2A7H6-56-76-8
Sel Prior Vel
d1-19
Velocidad de segundo motor Configura la referencia de
velocidad si se selecciona el motor 2.
0,00 a 120,00 0,00 Hz No A A A - 2A8H 6-55
Veloc@Motor Puerta
*1. La unidad está configurada en o1-03 (configuración de unidades de frecuencia de referencia y monitorización, defecto: 0,01 Hz). Si se modifica la unidadde visualización, el los valores del rango de configuración también cambian.
*2. El valor de configuración máximo depende de la configuración de la frecuencia de salida máxima (E1-04).
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
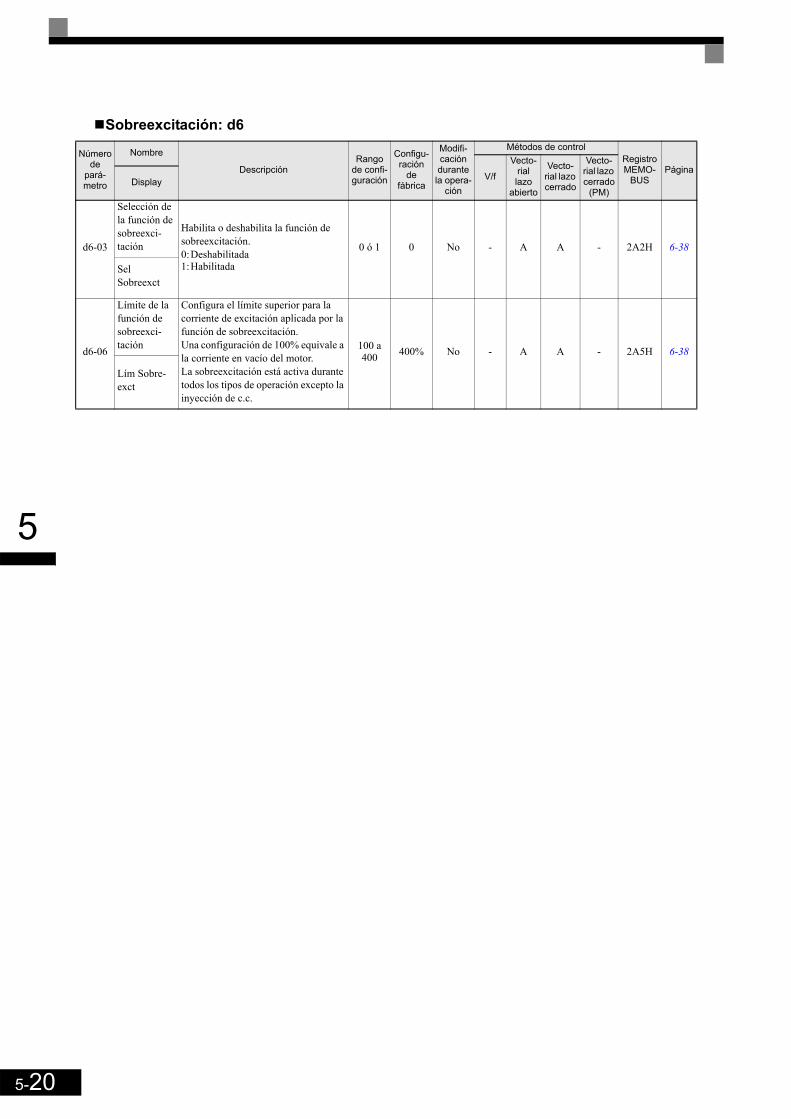
5-20
5
Sobreexcitación: d6
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante la opera-
ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
d6-03
Selección de la función de sobreexci-tación
Habilita o deshabilita la función de sobreexcitación.0:Deshabilitada1:Habilitada
0 ó 1 0 No - A A - 2A2H 6-38
Sel Sobreexct
d6-06
Límite de la función de sobreexci-tación
Configura el límite superior para la corriente de excitación aplicada por la función de sobreexcitación.Una configuración de 100% equivale a la corriente en vacío del motor.La sobreexcitación está activa durante todos los tipos de operación excepto la inyección de c.c.
100 a 400 400% No - A A - 2A5H 6-38
Lím Sobre-exct
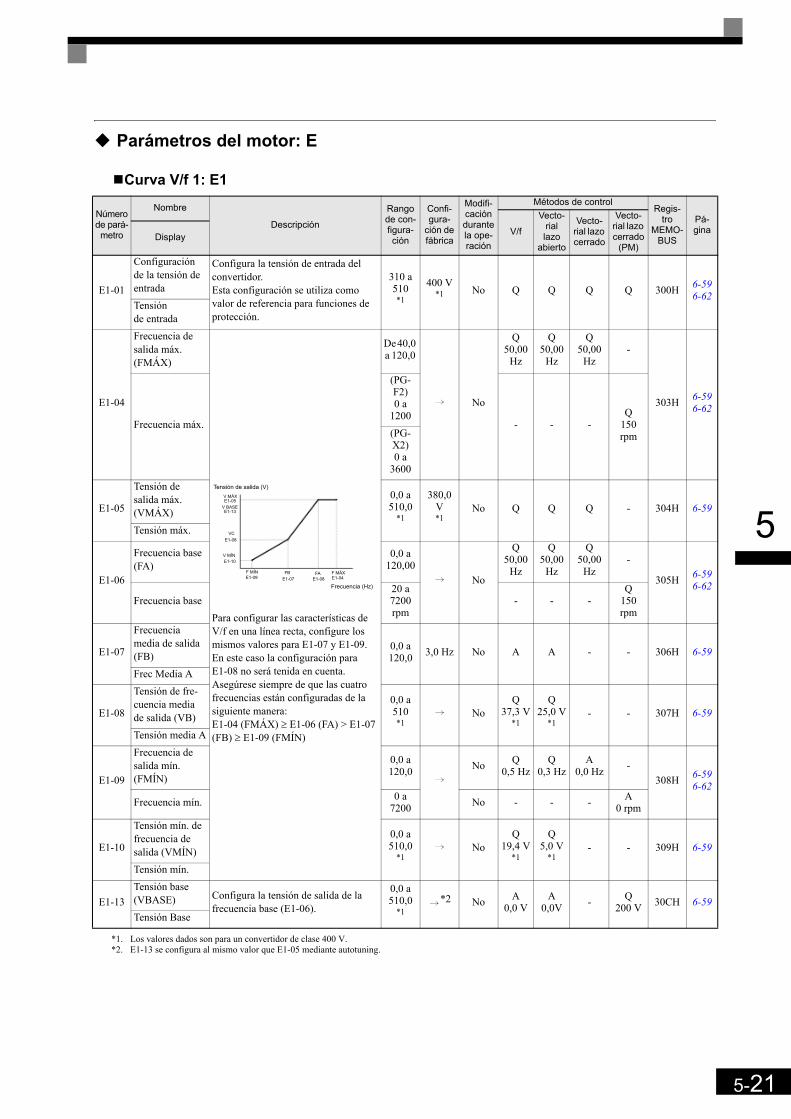
5-21
5
Parámetros del motor: E
Curva V/f 1: E1
Número de pará-metro
Nombre
Descripción
Rango de con-figura-ción
Confi-gura-
ción de fábrica
Modifi-cación durante la ope-ración
Métodos de controlRegis-
tro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
E1-01
Configuración de la tensión de entrada
Configura la tensión de entrada del convertidor. Esta configuración se utiliza como valor de referencia para funciones de protección.
310 a 510*1
*1. Los valores dados son para un convertidor de clase 400 V.
400 V*1 No Q Q Q Q 300H 6-59
6-62Tensiónde entrada
E1-04
Frecuencia de salida máx. (FMÁX)
Para configurar las características de V/f en una línea recta, configure los mismos valores para E1-07 y E1-09. En este caso la configuración para E1-08 no será tenida en cuenta.Asegúrese siempre de que las cuatro frecuencias están configuradas de la siguiente manera:E1-04 (FMÁX) ≥ E1-06 (FA) > E1-07 (FB) ≥ E1-09 (FMÍN)
De 40,0 a 120,0
i No
Q50,00
Hz
Q50,00
Hz
Q50,00
Hz-
303H 6-596-62
Frecuencia máx.
(PG-F2)0 a
1200- - -
Q150 rpm(PG-
X2)0 a
3600
E1-05
Tensión de salida máx. (VMÁX)
0,0 a 510,0
*1
380,0 V*1
No Q Q Q - 304H 6-59
Tensión máx.
E1-06
Frecuencia base (FA)
0,0 a 120,00
i No
Q50,00
Hz
Q50,00
Hz
Q50,00
Hz-
305H 6-596-62
Frecuencia base20 a 7200 rpm
- - -Q
150 rpm
E1-07
Frecuencia media de salida (FB)
0,0 a 120,0 3,0 Hz No A A - - 306H 6-59
Frec Media A
E1-08
Tensión de fre-cuencia media de salida (VB)
0,0 a 510 *1
i NoQ
37,3 V*1
Q25,0 V
*1- - 307H 6-59
Tensión media A
E1-09
Frecuencia de salida mín. (FMÍN)
0,0 a 120,0
iNo Q
0,5 HzQ
0,3 HzA
0,0 Hz -308H 6-59
6-62Frecuencia mín. 0 a
7200 No - - - A0 rpm
E1-10
Tensión mín. de frecuencia de salida (VMÍN)
0,0 a 510,0
*1i No
Q19,4 V
*1
Q5,0 V
*1- - 309H 6-59
Tensión mín.
E1-13Tensión base (VBASE) Configura la tensión de salida de la
frecuencia base (E1-06).
0,0 a 510,0
*1i*2
*2. E1-13 se configura al mismo valor que E1-05 mediante autotuning.
No A0,0 V
A0,0V - Q
200 V 30CH 6-59Tensión Base
F MÍNE1-09
FBE1-07
FAE1-08
F MÁXE1-04
V MÁXE1-05
V BASEE1-13
V MÍNE1-10
VCE1-08
Tensión de salida (V)
Frecuencia (Hz)
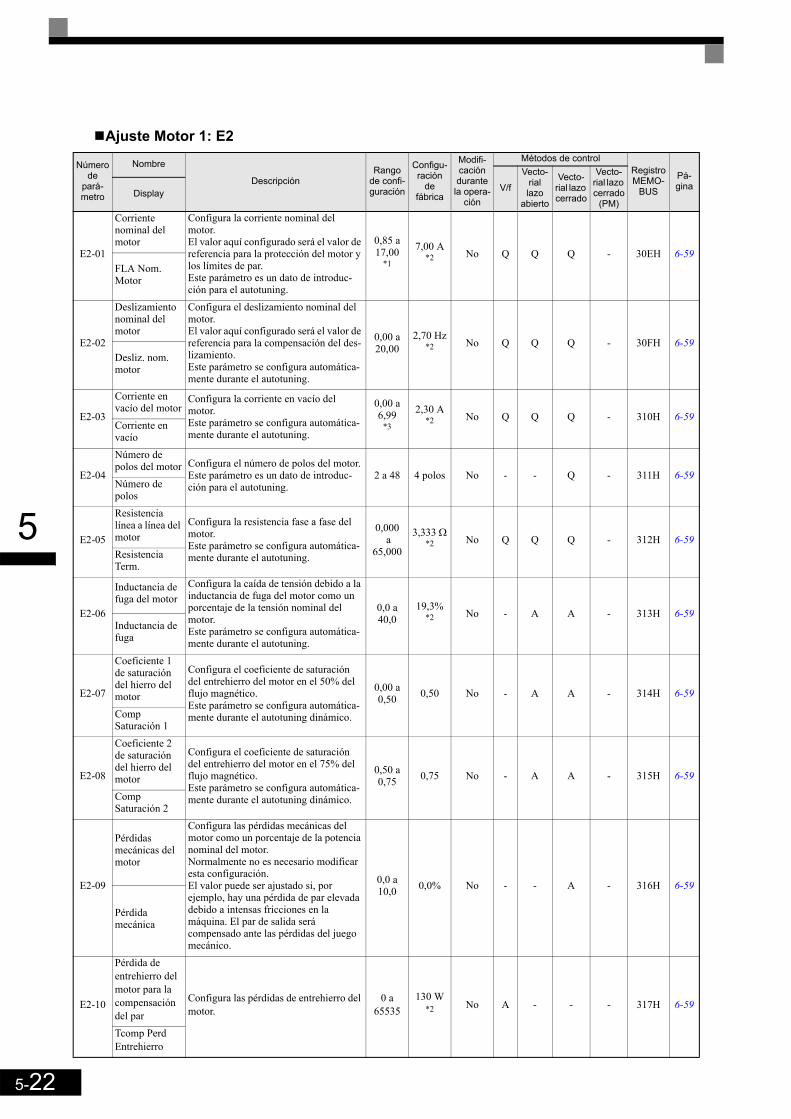
5-22
5
Ajuste Motor 1: E2
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante la opera-
ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
E2-01
Corriente nominal del motor
Configura la corriente nominal del motor.El valor aquí configurado será el valor de referencia para la protección del motor y los límites de par.Este parámetro es un dato de introduc-ción para el autotuning.
0,85 a 17,00
*1
7,00 A*2 No Q Q Q - 30EH 6-59
FLA Nom. Motor
E2-02
Deslizamiento nominal del motor
Configura el deslizamiento nominal del motor.El valor aquí configurado será el valor de referencia para la compensación del des-lizamiento.Este parámetro se configura automática-mente durante el autotuning.
0,00 a 20,00
2,70 Hz*2 No Q Q Q - 30FH 6-59
Desliz. nom. motor
E2-03
Corriente en vacío del motor
Configura la corriente en vacío del motor.Este parámetro se configura automática-mente durante el autotuning.
0,00 a 6,99
*3
2,30 A*2 No Q Q Q - 310H 6-59
Corriente en vacío
E2-04
Número de polos del motor Configura el número de polos del motor.
Este parámetro es un dato de introduc-ción para el autotuning.
2 a 48 4 polos No - - Q - 311H 6-59Número de polos
E2-05
Resistencia línea a línea del motor
Configura la resistencia fase a fase del motor.Este parámetro se configura automática-mente durante el autotuning.
0,000 a
65,000
3,333 Ω*2 No Q Q Q - 312H 6-59
Resistencia Term.
E2-06
Inductancia de fuga del motor
Configura la caída de tensión debido a la inductancia de fuga del motor como un porcentaje de la tensión nominal del motor.Este parámetro se configura automática-mente durante el autotuning.
0,0 a 40,0
19,3%*2 No - A A - 313H 6-59
Inductancia de fuga
E2-07
Coeficiente 1 de saturación del hierro del motor
Configura el coeficiente de saturación del entrehierro del motor en el 50% del flujo magnético.Este parámetro se configura automática-mente durante el autotuning dinámico.
0,00 a 0,50 0,50 No - A A - 314H 6-59
Comp Saturación 1
E2-08
Coeficiente 2 de saturación del hierro del motor
Configura el coeficiente de saturación del entrehierro del motor en el 75% del flujo magnético.Este parámetro se configura automática-mente durante el autotuning dinámico.
0,50 a 0,75 0,75 No - A A - 315H 6-59
Comp Saturación 2
E2-09
Pérdidas mecánicas del motor
Configura las pérdidas mecánicas del motor como un porcentaje de la potencia nominal del motor.Normalmente no es necesario modificar esta configuración.El valor puede ser ajustado si, por ejemplo, hay una pérdida de par elevada debido a intensas fricciones en la máquina. El par de salida será compensado ante las pérdidas del juego mecánico.
0,0 a 10,0 0,0% No - - A - 316H 6-59
Pérdida mecánica
E2-10
Pérdida de entrehierro del motor para la compensación del par
Configura las pérdidas de entrehierro del motor.
0 a 65535
130 W*2 No A - - - 317H 6-59
Tcomp Perd Entrehierro
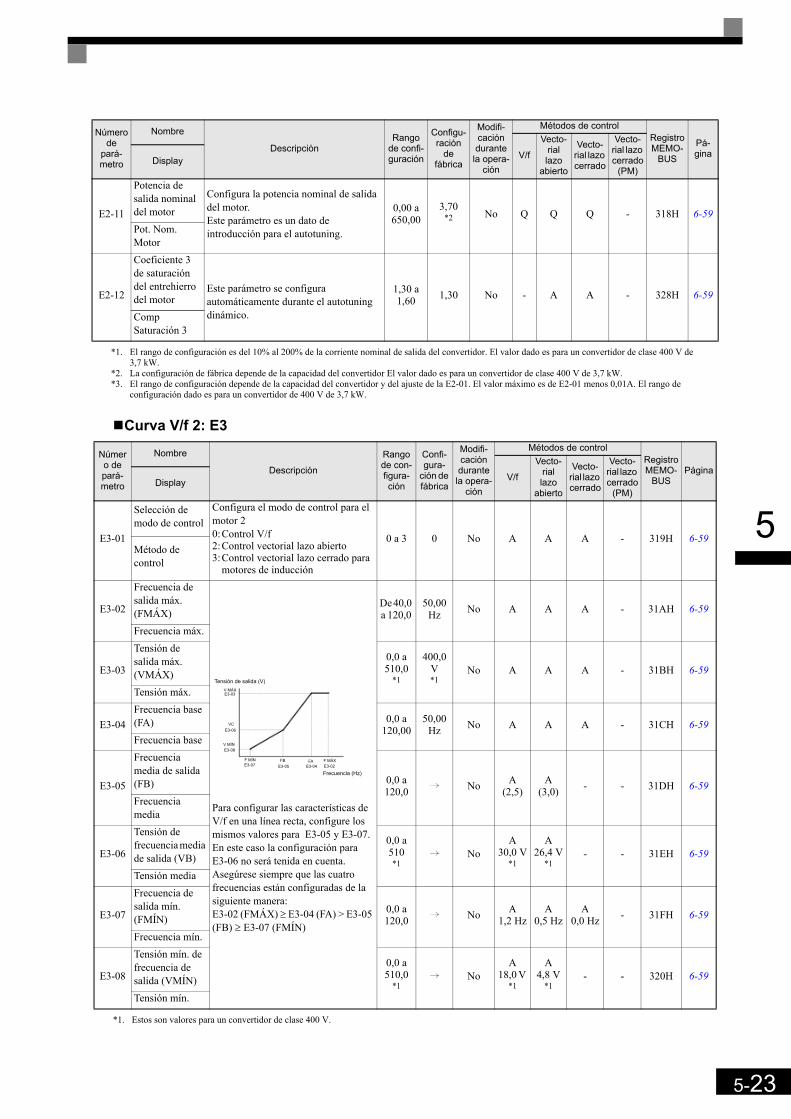
5-23
5
Curva V/f 2: E3
E2-11
Potencia de salida nominal del motor
Configura la potencia nominal de salida del motor.Este parámetro es un dato de introducción para el autotuning.
0,00 a 650,00
3,70*2 No Q Q Q - 318H 6-59
Pot. Nom. Motor
E2-12
Coeficiente 3 de saturación del entrehierro del motor
Este parámetro se configura automáticamente durante el autotuning dinámico.
1,30 a 1,60 1,30 No - A A - 328H 6-59
Comp Saturación 3
*1. El rango de configuración es del 10% al 200% de la corriente nominal de salida del convertidor. El valor dado es para un convertidor de clase 400 V de 3,7 kW.
*2. La configuración de fábrica depende de la capacidad del convertidor El valor dado es para un convertidor de clase 400 V de 3,7 kW.*3. El rango de configuración depende de la capacidad del convertidor y del ajuste de la E2-01. El valor máximo es de E2-01 menos 0,01A. El rango de
configuración dado es para un convertidor de 400 V de 3,7 kW.
Número de pará-metro
Nombre
Descripción
Rango de con-figura-ción
Confi-gura-
ción de fábrica
Modifi-cación durante la opera-
ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
E3-01
Selección de modo de control
Configura el modo de control para el motor 20:Control V/f2:Control vectorial lazo abierto3:Control vectorial lazo cerrado para
motores de inducción
0 a 3 0 No A A A - 319H 6-59Método de control
E3-02
Frecuencia de salida máx. (FMÁX)
Para configurar las características de V/f en una línea recta, configure los mismos valores para E3-05 y E3-07. En este caso la configuración para E3-06 no será tenida en cuenta.Asegúrese siempre que las cuatro frecuencias están configuradas de la siguiente manera:E3-02 (FMÁX) ≥ E3-04 (FA) > E3-05 (FB) ≥ E3-07 (FMÍN)
De 40,0 a 120,0
50,00 Hz No A A A - 31AH 6-59
Frecuencia máx.
E3-03
Tensión de salida máx. (VMÁX)
0,0 a 510,0
*1
*1. Estos son valores para un convertidor de clase 400 V.
400,0 V*1
No A A A - 31BH 6-59
Tensión máx.
E3-04Frecuencia base (FA) 0,0 a
120,00 50,00
Hz No A A A - 31CH 6-59Frecuencia base
E3-05
Frecuencia media de salida (FB) 0,0 a
120,0 i No A(2,5)
A(3,0) - - 31DH 6-59
Frecuencia media
E3-06
Tensión de frecuencia media de salida (VB)
0,0 a 510 *1
i NoA
30,0 V*1
A26,4 V
*1- - 31EH 6-59
Tensión media
E3-07
Frecuencia de salida mín. (FMÍN)
0,0 a 120,0 i No A
1,2 HzA
0,5 HzA
0,0 Hz - 31FH 6-59
Frecuencia mín.
E3-08
Tensión mín. de frecuencia de salida (VMÍN)
0,0 a 510,0
*1i No
A18,0 V
*1
A4,8 V
*1- - 320H 6-59
Tensión mín.
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
F MÍNE3-07
FBE3-05
FAE3-04
F MÁXE3-02
V MÁXE3-03
V MÍNE3-08
VCE3-06
Tensión de salida (V)
Frecuencia (Hz)
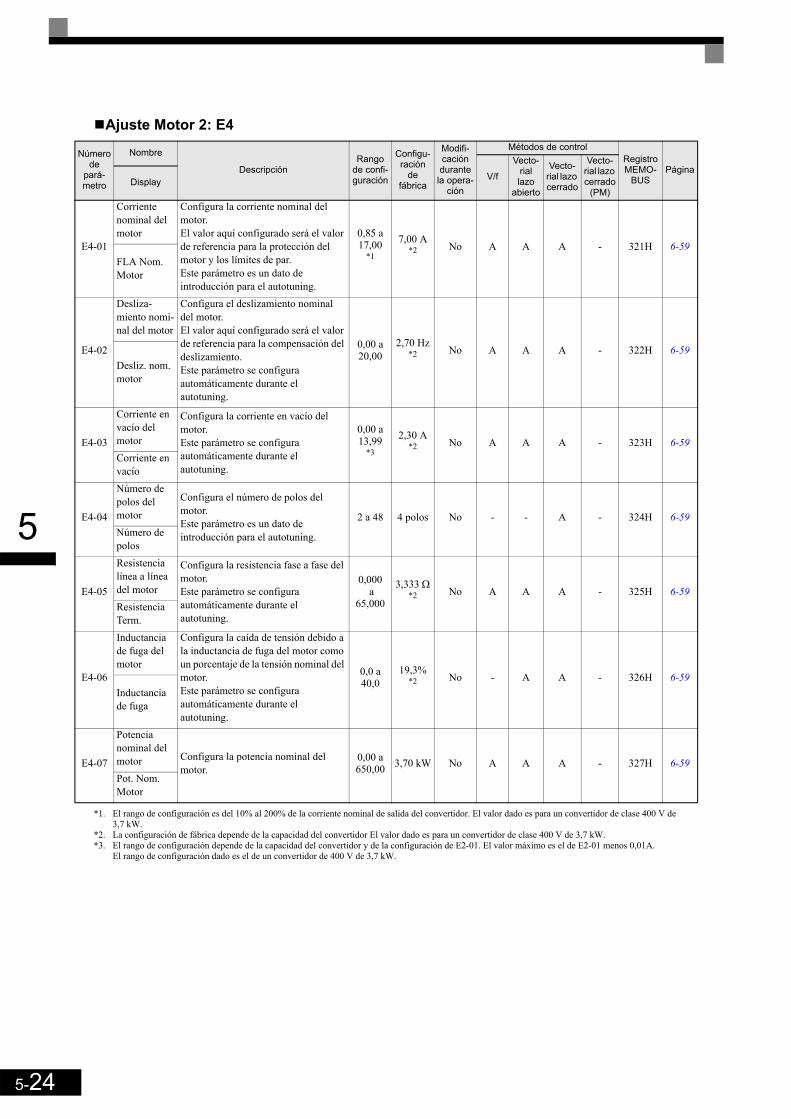
5-24
5
Ajuste Motor 2: E4
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
E4-01
Corriente nominal del motor
Configura la corriente nominal del motor.El valor aquí configurado será el valor de referencia para la protección del motor y los límites de par.Este parámetro es un dato de introducción para el autotuning.
0,85 a 17,00
*1
*1. El rango de configuración es del 10% al 200% de la corriente nominal de salida del convertidor. El valor dado es para un convertidor de clase 400 V de 3,7 kW.
7,00 A*2
*2. La configuración de fábrica depende de la capacidad del convertidor El valor dado es para un convertidor de clase 400 V de 3,7 kW.
No A A A - 321H 6-59FLA Nom. Motor
E4-02
Desliza-miento nomi-nal del motor
Configura el deslizamiento nominal del motor.El valor aquí configurado será el valor de referencia para la compensación del deslizamiento.Este parámetro se configura automáticamente durante el autotuning.
0,00 a 20,00
2,70 Hz*2 No A A A - 322H 6-59
Desliz. nom. motor
E4-03
Corriente en vacío del motor
Configura la corriente en vacío del motor.Este parámetro se configura automáticamente durante el autotuning.
0,00 a 13,99
*3
*3. El rango de configuración depende de la capacidad del convertidor y de la configuración de E2-01. El valor máximo es el de E2-01 menos 0,01A. El rango de configuración dado es el de un convertidor de 400 V de 3,7 kW.
2,30 A*2 No A A A - 323H 6-59
Corriente en vacío
E4-04
Número de polos del motor
Configura el número de polos del motor.Este parámetro es un dato de introducción para el autotuning.
2 a 48 4 polos No - - A - 324H 6-59Número de polos
E4-05
Resistencia línea a línea del motor
Configura la resistencia fase a fase del motor.Este parámetro se configura automáticamente durante el autotuning.
0,000 a
65,000
3,333 Ω*2 No A A A - 325H 6-59
Resistencia Term.
E4-06
Inductancia de fuga del motor
Configura la caída de tensión debido a la inductancia de fuga del motor como un porcentaje de la tensión nominal del motor.Este parámetro se configura automáticamente durante el autotuning.
0,0 a 40,0
19,3%*2 No - A A - 326H 6-59
Inductancia de fuga
E4-07
Potencia nominal del motor Configura la potencia nominal del
motor.0,00 a 650,00 3,70 kW No A A A - 327H 6-59
Pot. Nom. Motor
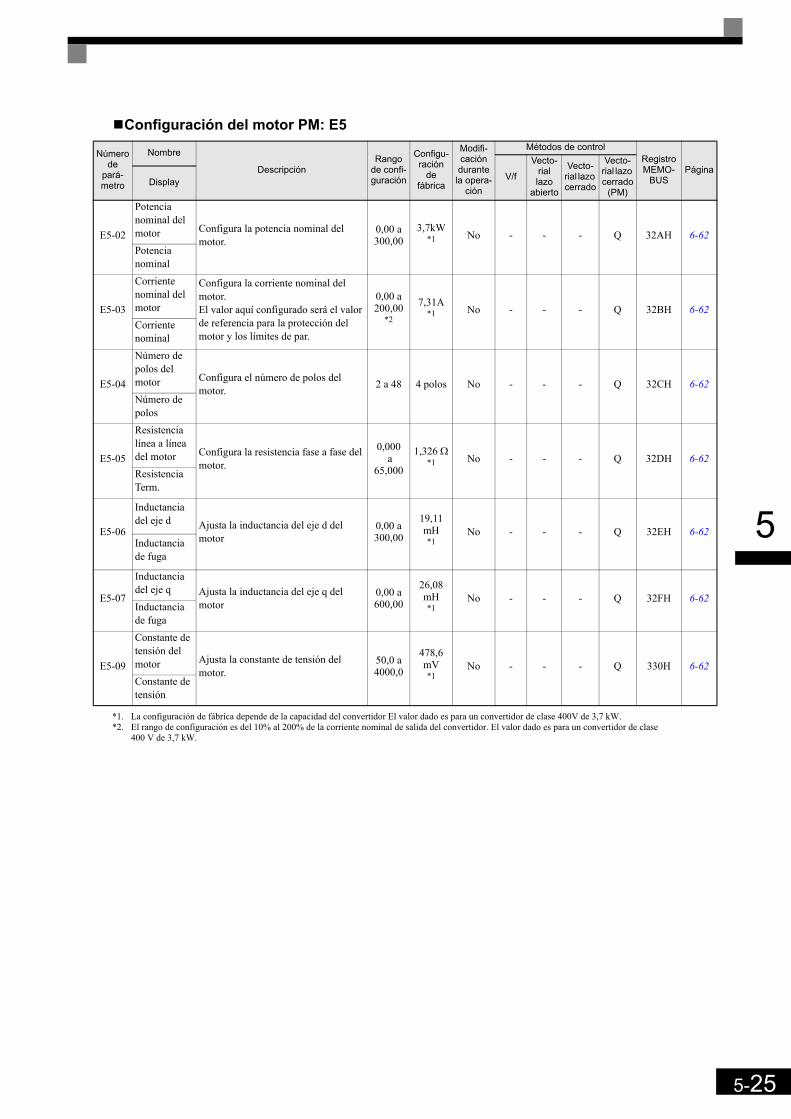
5-25
5
Configuración del motor PM: E5
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
E5-02
Potencia nominal del motor Configura la potencia nominal del
motor.0,00 a 300,00
3,7kW*1
*1. La configuración de fábrica depende de la capacidad del convertidor El valor dado es para un convertidor de clase 400V de 3,7 kW.
No - - - Q 32AH 6-62Potencia nominal
E5-03
Corriente nominal del motor
Configura la corriente nominal del motor.El valor aquí configurado será el valor de referencia para la protección del motor y los límites de par.
0,00 a 200,00
*2
*2. El rango de configuración es del 10% al 200% de la corriente nominal de salida del convertidor. El valor dado es para un convertidor de clase 400 V de 3,7 kW.
7,31A*1 No - - - Q 32BH 6-62
Corriente nominal
E5-04
Número de polos del motor Configura el número de polos del
motor. 2 a 48 4 polos No - - - Q 32CH 6-62Número de polos
E5-05
Resistencia línea a línea del motor Configura la resistencia fase a fase del
motor.
0,000 a
65,000
1,326 Ω*1 No - - - Q 32DH 6-62
Resistencia Term.
E5-06
Inductancia del eje d Ajusta la inductancia del eje d del
motor0,00 a 300,00
19,11 mH*1
No - - - Q 32EH 6-62Inductancia de fuga
E5-07
Inductancia del eje q Ajusta la inductancia del eje q del
motor0,00 a 600,00
26,08 mH*1
No - - - Q 32FH 6-62Inductancia de fuga
E5-09
Constante de tensión del motor Ajusta la constante de tensión del
motor.50,0 a 4000,0
478,6 mV*1
No - - - Q 330H 6-62Constante de tensión
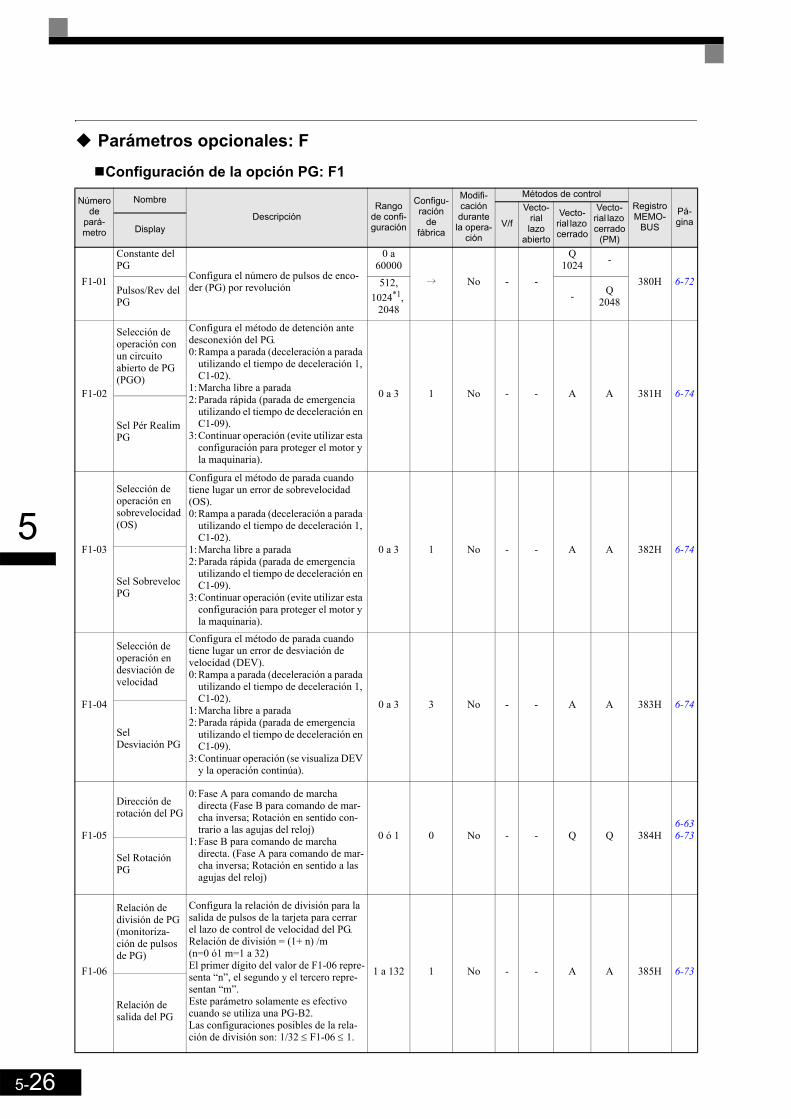
5-26
5
Parámetros opcionales: F
Configuración de la opción PG: F1
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante la opera-
ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
F1-01
Constante del PG
Configura el número de pulsos de enco-der (PG) por revolución
0 a 60000
i No - -
Q1024 -
380H 6-72Pulsos/Rev del PG
512, 1024*1,
2048- Q
2048
F1-02
Selección de operación con un circuito abierto de PG (PGO)
Configura el método de detención ante desconexión del PG.0:Rampa a parada (deceleración a parada
utilizando el tiempo de deceleración 1, C1-02).
1:Marcha libre a parada2:Parada rápida (parada de emergencia
utilizando el tiempo de deceleración en C1-09).
3:Continuar operación (evite utilizar esta configuración para proteger el motor y la maquinaria).
0 a 3 1 No - - A A 381H 6-74
Sel Pér Realim PG
F1-03
Selección de operación en sobrevelocidad (OS)
Configura el método de parada cuando tiene lugar un error de sobrevelocidad (OS).0:Rampa a parada (deceleración a parada
utilizando el tiempo de deceleración 1, C1-02).
1:Marcha libre a parada2:Parada rápida (parada de emergencia
utilizando el tiempo de deceleración en C1-09).
3:Continuar operación (evite utilizar esta configuración para proteger el motor y la maquinaria).
0 a 3 1 No - - A A 382H 6-74
Sel Sobreveloc PG
F1-04
Selección de operación en desviación de velocidad
Configura el método de parada cuando tiene lugar un error de desviación de velocidad (DEV).0:Rampa a parada (deceleración a parada
utilizando el tiempo de deceleración 1, C1-02).
1:Marcha libre a parada2:Parada rápida (parada de emergencia
utilizando el tiempo de deceleración en C1-09).
3:Continuar operación (se visualiza DEV y la operación continúa).
0 a 3 3 No - - A A 383H 6-74
Sel Desviación PG
F1-05
Dirección de rotación del PG
0:Fase A para comando de marcha directa (Fase B para comando de mar-cha inversa; Rotación en sentido con-trario a las agujas del reloj)
1:Fase B para comando de marcha directa. (Fase A para comando de mar-cha inversa; Rotación en sentido a las agujas del reloj)
0 ó 1 0 No - - Q Q 384H6-636-73
Sel Rotación PG
F1-06
Relación de división de PG (monitoriza-ción de pulsos de PG)
Configura la relación de división para la salida de pulsos de la tarjeta para cerrar el lazo de control de velocidad del PG.Relación de división = (1+ n) /m (n=0 ó1 m=1 a 32)El primer dígito del valor de F1-06 repre-senta “n”, el segundo y el tercero repre-sentan “m”.Este parámetro solamente es efectivo cuando se utiliza una PG-B2.Las configuraciones posibles de la rela-ción de división son: 1/32 ≤ F1-06 ≤ 1.
1 a 132 1 No - - A A 385H 6-73
Relación de salida del PG
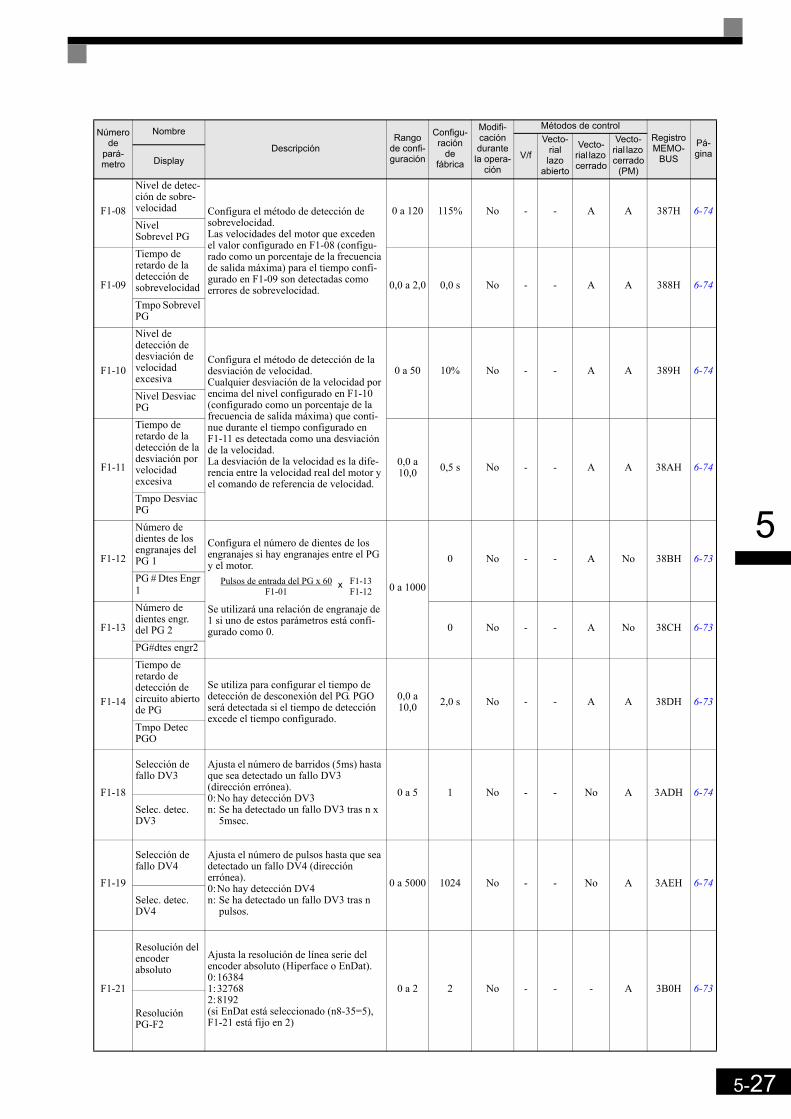
5-27
5
F1-08
Nivel de detec-ción de sobre-velocidad Configura el método de detección de
sobrevelocidad.Las velocidades del motor que exceden el valor configurado en F1-08 (configu-rado como un porcentaje de la frecuencia de salida máxima) para el tiempo confi-gurado en F1-09 son detectadas como errores de sobrevelocidad.
0 a 120 115% No - - A A 387H 6-74Nivel Sobrevel PG
F1-09
Tiempo de retardo de la detección de sobrevelocidad 0,0 a 2,0 0,0 s No - - A A 388H 6-74
Tmpo Sobrevel PG
F1-10
Nivel de detección de desviación de velocidad excesiva
Configura el método de detección de la desviación de velocidad.Cualquier desviación de la velocidad por encima del nivel configurado en F1-10 (configurado como un porcentaje de la frecuencia de salida máxima) que conti-nue durante el tiempo configurado enF1-11 es detectada como una desviación de la velocidad.La desviación de la velocidad es la dife-rencia entre la velocidad real del motor y el comando de referencia de velocidad.
0 a 50 10% No - - A A 389H 6-74
Nivel Desviac PG
F1-11
Tiempo de retardo de la detección de la desviación por velocidad excesiva
0,0 a 10,0 0,5 s No - - A A 38AH 6-74
Tmpo Desviac PG
F1-12
Número de dientes de los engranajes del PG 1
Configura el número de dientes de los engranajes si hay engranajes entre el PG y el motor.
Se utilizará una relación de engranaje de 1 si uno de estos parámetros está confi-gurado como 0.
0 a 1000
0 No - - A No 38BH 6-73
PG # Dtes Engr 1
F1-13
Número de dientes engr. del PG 2 0 No - - A No 38CH 6-73
PG#dtes engr2
F1-14
Tiempo de retardo de detección de circuito abierto de PG
Se utiliza para configurar el tiempo de detección de desconexión del PG. PGO será detectada si el tiempo de detección excede el tiempo configurado.
0,0 a 10,0 2,0 s No - - A A 38DH 6-73
Tmpo Detec PGO
F1-18
Selección de fallo DV3
Ajusta el número de barridos (5ms) hasta que sea detectado un fallo DV3 (dirección errónea).0:No hay detección DV3n: Se ha detectado un fallo DV3 tras n x
5msec.
0 a 5 1 No - - No A 3ADH 6-74Selec. detec. DV3
F1-19
Selección de fallo DV4
Ajusta el número de pulsos hasta que sea detectado un fallo DV4 (dirección errónea).0:No hay detección DV4n: Se ha detectado un fallo DV3 tras n
pulsos.
0 a 5000 1024 No - - No A 3AEH 6-74Selec. detec. DV4
F1-21
Resolución del encoder absoluto
Ajusta la resolución de línea serie del encoder absoluto (Hiperface o EnDat).0:163841:327682:8192(si EnDat está seleccionado (n8-35=5), F1-21 está fijo en 2)
0 a 2 2 No - - - A 3B0H 6-73
Resolución PG-F2
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
Pulsos de entrada del PG x 60F1-01
F1-13F1-12
x
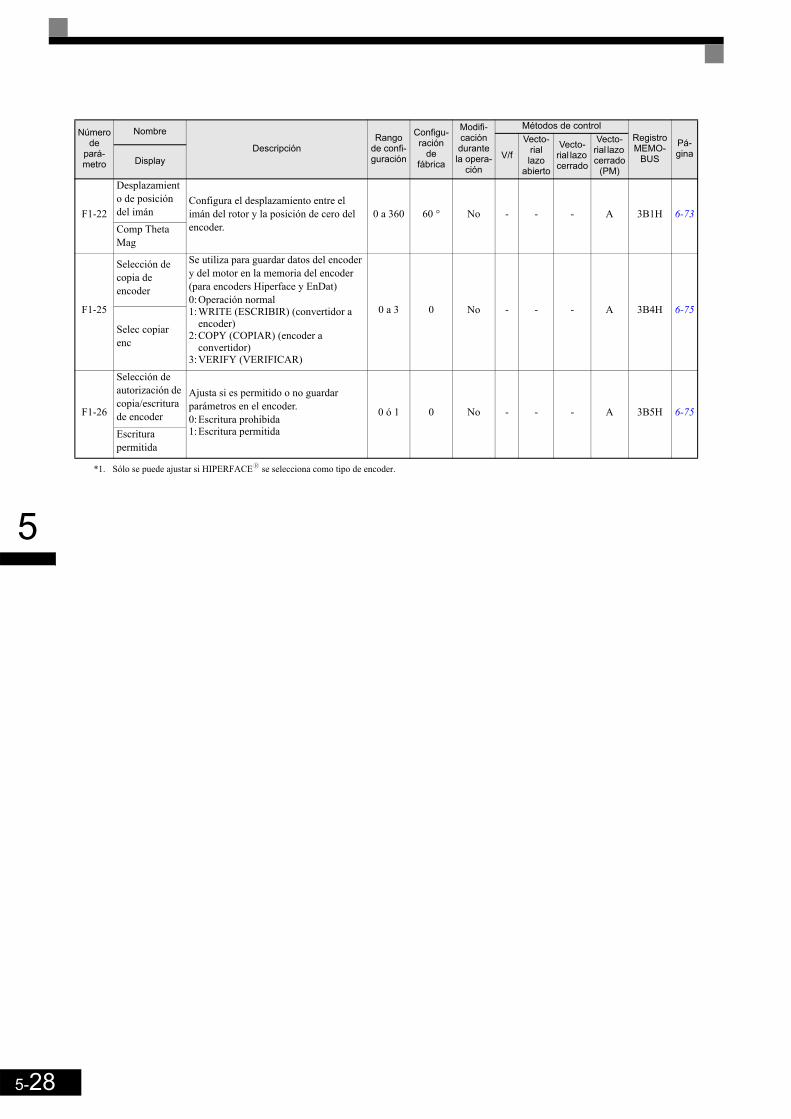
5-28
5
F1-22
Desplazamiento de posición del imán
Configura el desplazamiento entre el imán del rotor y la posición de cero del encoder.
0 a 360 60 ° No - - - A 3B1H 6-73Comp Theta Mag
F1-25
Selección de copia de encoder
Se utiliza para guardar datos del encoder y del motor en la memoria del encoder(para encoders Hiperface y EnDat)0:Operación normal1:WRITE (ESCRIBIR) (convertidor a
encoder)2:COPY (COPIAR) (encoder a
convertidor)3:VERIFY (VERIFICAR)
0 a 3 0 No - - - A 3B4H 6-75
Selec copiar enc
F1-26
Selección de autorización de copia/escritura de encoder
Ajusta si es permitido o no guardar parámetros en el encoder.0:Escritura prohibida1:Escritura permitida
0 ó 1 0 No - - - A 3B5H 6-75
Escritura permitida
*1. Sólo se puede ajustar si HIPERFACEy se selecciona como tipo de encoder.
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante la opera-
ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display

5-29
5
Tarjetas de monitorización analógica: F4
Número de pará-metro
Nombre DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante la ope-ración
Métodos de controlRegis-
tro MEMO-
BUS
PáginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
F4-01
Selección del canal 1 del monitor
Utilizando una tarjeta opcional AO-08 la señal de salida posible es solamente de 0 a +10V. La configuración de F4-07 y F4-08 no tiene efecto.Configura el bias de elemento del canal 1 a 100%/10 V cuando es utilizada la tarjeta de monitorización analógica.Esta función es habilitada cuando se utiliza la tarjeta de monitorización analógica.
Selección de monitorización: Establece el número del elemento de monitorización para la salida. (Parte numérica de U1- )4, 10, 11, 12, 13, 14, 25, 28, 34,35, 39 y 40 no pueden ser seleccionados.
Ganancia: Configura el porcen-taje del elemento de monitorización que es igual a 10V de salida.
Bias: Configura el porcentaje del elemento de monitorización que es igual a 0V de salida.
1 a 56i No
A2
A2
A2 -
391H 6-25Selec AO Cnl1 1 a 75 - - A
5
F4-02Ganancia del canal 1 0,0 a
1000,0 100,0% Sí A A A A 392H 6-25Ganan AO Cnl1
F4-03Selección del canal 2 del monitor 1 a 56
3 NoA A A -
393H 6-25Selec AO Cnl2 1 a 75 - - - A
F4-04Ganancia delcanal 2 0,0 a
1000,0 50,0% Sí A A A A 394H 6-25Ganan AO Cnl2
F4-05Bias del monitor de salida del canal 1 -110,0 a
110,0 0,0% Sí A A A A 395H 6-25Bias AO Cnl1
F4-06
Bias del monitor de salida del canal 2
-110,0 a 110,0 0,0% Sí A A A A 396H 6-25
Bias AO Cnl2
F4-07
Nivel de señal de salida analógica para el canal 1
Selecciona el nivel de la señal de salida analógica para el canal 1 (efectivo solamente para la tarjeta opcional AO-12).0: 0 a 10V1:–10 a +10Utilizando una tarjeta opcional AO-08 la señal de salida posible es solamente de 0 a +10V. La configuración de F4-07 y F4-08 no tiene efecto.
0 ó 1 0 No A A A A 397H 6-25
Sel Nivel AO Opc
F4-08
Nivel de señal de salida analógica para el canal 2
0 ó 1 0 No A A A A 398H 6-25
Sel Nivel AO Opc
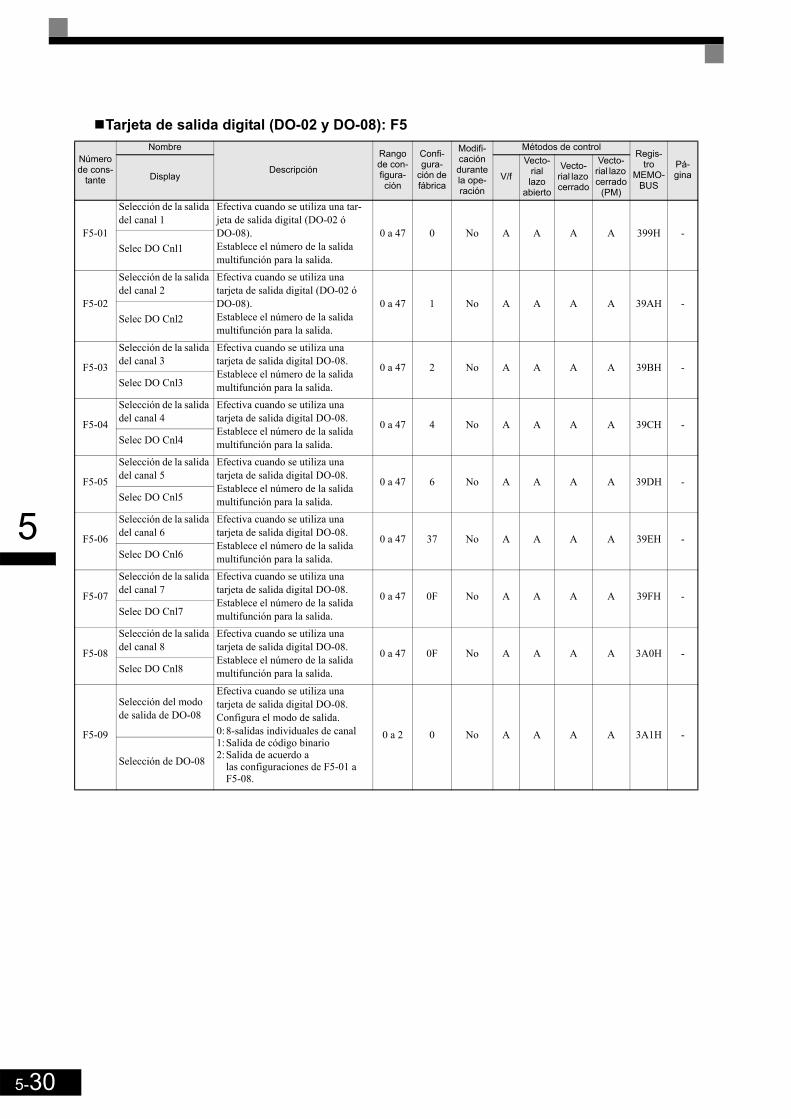
5-30
5
Tarjeta de salida digital (DO-02 y DO-08): F5
Número de cons-
tante
Nombre
Descripción
Rango de con-figura-ción
Confi-gura-
ción de fábrica
Modifi-cación durante la ope-ración
Métodos de controlRegis-
tro MEMO-
BUS
Pá-ginaDisplay V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
F5-01
Selección de la salida del canal 1
Efectiva cuando se utiliza una tar-jeta de salida digital (DO-02 óDO-08).Establece el número de la salida multifunción para la salida.
0 a 47 0 No A A A A 399H -Selec DO Cnl1
F5-02
Selección de la salida del canal 2
Efectiva cuando se utiliza una tarjeta de salida digital (DO-02 ó DO-08).Establece el número de la salida multifunción para la salida.
0 a 47 1 No A A A A 39AH -Selec DO Cnl2
F5-03
Selección de la salida del canal 3
Efectiva cuando se utiliza una tarjeta de salida digital DO-08.Establece el número de la salida multifunción para la salida.
0 a 47 2 No A A A A 39BH -Selec DO Cnl3
F5-04
Selección de la salida del canal 4
Efectiva cuando se utiliza una tarjeta de salida digital DO-08.Establece el número de la salida multifunción para la salida.
0 a 47 4 No A A A A 39CH -Selec DO Cnl4
F5-05
Selección de la salida del canal 5
Efectiva cuando se utiliza una tarjeta de salida digital DO-08.Establece el número de la salida multifunción para la salida.
0 a 47 6 No A A A A 39DH -Selec DO Cnl5
F5-06
Selección de la salida del canal 6
Efectiva cuando se utiliza una tarjeta de salida digital DO-08.Establece el número de la salida multifunción para la salida.
0 a 47 37 No A A A A 39EH -Selec DO Cnl6
F5-07
Selección de la salida del canal 7
Efectiva cuando se utiliza una tarjeta de salida digital DO-08.Establece el número de la salida multifunción para la salida.
0 a 47 0F No A A A A 39FH -Selec DO Cnl7
F5-08
Selección de la salida del canal 8
Efectiva cuando se utiliza una tarjeta de salida digital DO-08.Establece el número de la salida multifunción para la salida.
0 a 47 0F No A A A A 3A0H -Selec DO Cnl8
F5-09
Selección del modo de salida de DO-08
Efectiva cuando se utiliza una tarjeta de salida digital DO-08.Configura el modo de salida.0:8-salidas individuales de canal1:Salida de código binario2:Salida de acuerdo a
las configuraciones de F5-01 a F5-08.
0 a 2 0 No A A A A 3A1H -
Selección de DO-08

5-31
5
Configuraciones de la comunicación serie: F6
Número de
pará-metro
Nombre
Descripción
Rango de con-figura-ción
Confi-gura-
ción de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
F6-01
Selección de operación tras fallo en la comunicación
Configura el método de parada para los fallos de comunicación.0:Deceleración a parada
utilizando el tiempo de deceleración en C1-02
1:Marcha libre a parada2:Parada de emergencia
utilizando el tiempo de deceleración en C1-09
3:Continuar operación
0 a 3 1 No A A A A 3A2H -
Sel Fallo del bus de comunicaciones
F6-02
Nivel de entrada de fallo externo desde tarjeta opcional de comunicaciones
0:Detectar siempre1:Detectar durante la operación 0 ó 1 0 No A A A A 3A3H -
Detección EF0
F6-03
Método de parada para fallo externo desde tarjeta opcional de comunicaciones
0:Deceleración a parada utilizando el tiempo de deceleración en C1-02
1:Marcha libre a parada2:Parada de emergencia
utilizando el tiempo de deceleración en C1-09
3:Continuar operación
0 a 3 1 No A A A A 3A4H -
Acción de fallo EF0
F6-04Tempor Muestr Seg
- 0 a 60000 0 No A A A A 3A5H -
Tempor Muestr Seg
F6-05
Selección de unidad de monitor de corriente
Configura la unidad de monitor de corriente0:Amperios1:100%/8192
0 ó 1 0 No A A A A 3A6H -
Sel Unidad Corr
F6-06
Selección de referencia de par/límite de par desde tarjeta opcional de comunicaciones
0:Referencia de par/límite de par por opción de comunicaciones deshabilitado.
1:Referencia de par/límite de par por opción de comunicaciones habilitado.
0 ó 1 0 No - - A A 3A7H -
Selec Ref/Lím Par
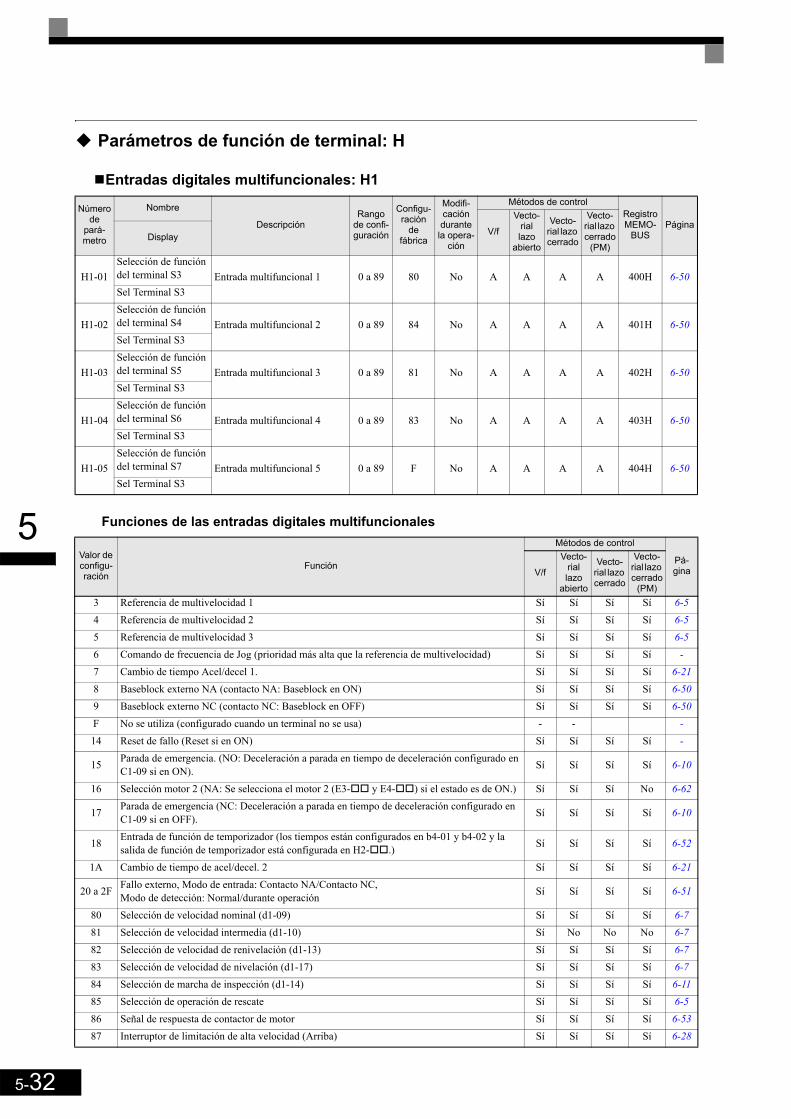
5-32
5
Parámetros de función de terminal: H
Entradas digitales multifuncionales: H1
Funciones de las entradas digitales multifuncionales
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante la opera-
ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
H1-01Selección de función del terminal S3 Entrada multifuncional 1 0 a 89 80 No A A A A 400H 6-50Sel Terminal S3
H1-02Selección de función del terminal S4 Entrada multifuncional 2 0 a 89 84 No A A A A 401H 6-50Sel Terminal S3
H1-03Selección de función del terminal S5 Entrada multifuncional 3 0 a 89 81 No A A A A 402H 6-50Sel Terminal S3
H1-04Selección de función del terminal S6 Entrada multifuncional 4 0 a 89 83 No A A A A 403H 6-50Sel Terminal S3
H1-05Selección de función del terminal S7 Entrada multifuncional 5 0 a 89 F No A A A A 404H 6-50Sel Terminal S3
Valor de configu-ración
Función
Métodos de control
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)3 Referencia de multivelocidad 1 Sí Sí Sí Sí 6-54 Referencia de multivelocidad 2 Sí Sí Sí Sí 6-55 Referencia de multivelocidad 3 Sí Sí Sí Sí 6-56 Comando de frecuencia de Jog (prioridad más alta que la referencia de multivelocidad) Sí Sí Sí Sí -7 Cambio de tiempo Acel/decel 1. Sí Sí Sí Sí 6-218 Baseblock externo NA (contacto NA: Baseblock en ON) Sí Sí Sí Sí 6-509 Baseblock externo NC (contacto NC: Baseblock en OFF) Sí Sí Sí Sí 6-50F No se utiliza (configurado cuando un terminal no se usa) - - -14 Reset de fallo (Reset si en ON) Sí Sí Sí Sí -
15 Parada de emergencia. (NO: Deceleración a parada en tiempo de deceleración configurado en C1-09 si en ON). Sí Sí Sí Sí 6-10
16 Selección motor 2 (NA: Se selecciona el motor 2 (E3- y E4- ) si el estado es de ON.) Sí Sí Sí No 6-62
17 Parada de emergencia (NC: Deceleración a parada en tiempo de deceleración configurado en C1-09 si en OFF). Sí Sí Sí Sí 6-10
18 Entrada de función de temporizador (los tiempos están configurados en b4-01 y b4-02 y la salida de función de temporizador está configurada en H2- .) Sí Sí Sí Sí 6-52
1A Cambio de tiempo de acel/decel. 2 Sí Sí Sí Sí 6-21
20 a 2F Fallo externo, Modo de entrada: Contacto NA/Contacto NC, Modo de detección: Normal/durante operación Sí Sí Sí Sí 6-51
80 Selección de velocidad nominal (d1-09) Sí Sí Sí Sí 6-781 Selección de velocidad intermedia (d1-10) Sí No No No 6-782 Selección de velocidad de renivelación (d1-13) Sí Sí Sí Sí 6-783 Selección de velocidad de nivelación (d1-17) Sí Sí Sí Sí 6-784 Selección de marcha de inspección (d1-14) Sí Sí Sí Sí 6-1185 Selección de operación de rescate Sí Sí Sí Sí 6-586 Señal de respuesta de contactor de motor Sí Sí Sí Sí 6-5387 Interruptor de limitación de alta velocidad (Arriba) Sí Sí Sí Sí 6-28

5-33
5
Salidas de contacto multifuncional: H2
Funciones de las salidas de contacto multifuncionales:
88 Interruptor de limitación de alta velocidad (Abajo) Sí Sí Sí Sí 6-2889 Conmutación de dirección del PG (0: Sentido horario, 1: Sentido antihorario) No No Sí No 6-54
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante la opera-
ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f V/f con PG
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
H2-01
Selección de función de ter-minal M1-M2 Salida de contacto
multifuncional 1 0 a 47 40 No A A A A A 40BH 6-56Sel Term M1-M2
H2-02
Selección de función de ter-minal M3-M4 Salida de contacto
multifuncional 2 0 a 47 41 No A A A A A 40CH 6-56Sel Term M3-M4
H2-03
Selección de función de ter-minal M5-M6 Salida de contacto
multifuncional 3 0 a 47 6 No A A A A A 40DH 6-56Sel Term M5-M6
Valor de configu-ración
Función
Métodos de control
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)0 Durante Run 1 (ON: el comando Run está en ON o hay salida de tensión) Sí Sí Sí Sí 6-561 Velocidad cero Sí Sí Sí Sí 6-56
2 fref/fout alcanzada 1 (utilizado ancho de detección L4-02). Sí Sí Sí Sí 6-26
3fref/fset alcanzada 1 (ON: Frecuencia de salida = ±L4-01, utilizado ancho de detección L4-02 y durante la frecuencia alcanzada).
Sí Sí Sí Sí 6-26
4 Detección de frecuencia 1 (ON: +L4-01 ≥ frecuencia de salida ≥ -L4-01, utilizado ancho de detección L4-02) Sí Sí Sí Sí 6-26
5 Detección de frecuencia 2 (ON: Frecuencia de salida ≥ +L4-01 ó frecuencia de salida ≤ -L4-01, utilizado ancho de detección L4-02) Sí Sí Sí Sí 6-26
6 Convertidor listo para operación; READY: Tras inicialización o sin fallos Sí Sí Sí Sí 6-577 Durante la detección de baja tensión del bus de c.c. (UV) Sí Sí Sí Sí 6-578 Durante baseblock (ON: durante baseblock) Sí Sí Sí Sí 6-57
9 Selección de fuente de referencia de frecuencia (ON: referencia de frecuencia desde Operador) Sí Sí Sí Sí 6-57
A Estado de selección de fuente de comando Run (ON: comando Run desde Operador) Sí Sí Sí Sí 6-57
B Cabina atascada/detección de bajo par 1 NA (contacto NA, ON: detección de sobrepar/bajo par) Sí Sí Sí Sí 6-40
E Fallo (ON: ha tenido lugar un error o fallo de comunicaciones del Operador digital/Monitor que no es CPF00 ni CPF01). Sí Sí Sí Sí 6-57
F No se utiliza. (Configurado cuando el terminal no se utiliza). Sí Sí Sí Sí -10 Fallo leve (ON: alarma visualizada) Sí Sí Sí Sí 6-5711 Comando de reset de fallo activo Sí Sí Sí Sí 6-5712 Salida de función de temporizador Sí Sí Sí Sí 6-52
13 fref/fset alcanzada 2 (utilizado ancho de detección L4-04) Sí Sí Sí Sí 6-26
Valor de configu-ración
Función
Métodos de control
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)

5-34
5
14fref/fset alcanzada 2 (ON: Frecuencia de salida = L4-03, utilizado ancho de detección L4-04 y durante la frecuencia alcanzada).
Sí Sí Sí Sí 6-26
15 Detección de frecuencia 3 (ON: Frecuencia de salida ≤ -L4-03, utilizado ancho de detección L4-04) Sí Sí Sí Sí 6-26
16 Detección de frecuencia 4 (ON: Frecuencia de salida ≥ -L4-03, utilizado ancho de detección L4-04) Sí Sí Sí Sí 6-26
17 Cabina atascada/detección de bajo par 1 NC (contacto NC, OFF: detección de par) Sí Sí Sí Sí 6-4018 Cabina atascada/detección de bajo par 2 NA (contacto NA, ON: detección de par) Sí Sí Sí Sí 6-4019 Cabina atascada/detección de bajo par 2 NC (contacto NC, OFF: detección de par) Sí Sí Sí Sí 6-401A Durante marcha inversa (ON: durante marcha inversa) Sí Sí Sí Sí 6-571B Durante baseblock 2 (OFF: durante baseblock) Sí Sí Sí Sí 6-571C Motor 2 seleccionado (ON: Motor 2 (E3- y E4- ) seleccionado) Sí Sí Sí No 6-621D Durante operación de regeneración No No Sí Sí 6-581E Rearranque habilitado (ON: habilitado rearranque por fallo automático) Sí Sí Sí Sí 6-811F Sobrecarga del motor (OL1, incluso OH3) prealarma (ON: 90% o más del nivel de detección) Sí Sí Sí Sí 6-44
20 Sobrecalentamiento del convertidor (OH) prealarma (ON: la temperatura supera la configuración en L8-02) Sí Sí Sí Sí 6-47
30 durante el límite de par (límite de corriente) (ON: durante el límite de par) No Sí Sí Sí 6-4333 Fin de servo cero (ON: servo cero completado) No No Sí Sí 6-16
37 Durante Run 2 (ON: Salida de frecuencia, OFF: Baseblock, freno de inyección de c.c, excitación inicial, parada de operación) Sí Sí Sí Sí 6-56
38 Ventilador de refrigeración en funcionamiento Sí Sí Sí Sí 6-58
40 Comando de liberación del freno Sí Sí Sí Sí 6-136-58
41 Comando de cierre de contactor de salida Sí Sí Sí Sí 6-136-58
42 Detección de velocidad en deceleración (zona de puerta) Sí Sí Sí Sí 6-5843 Velocidad no cero Sí Sí Sí Sí 6-5844 Salida de dirección de carga ligera (ON: directa, OFF: inversa) Sí Sí Sí Sí 6-80
45 Estado de detección de carga ligera (ON: Listo para prueba de carga ligera, OFF: Prueba de carga ligera en curso) Sí Sí Sí Sí 6-80
46 Monitorización 1 del baseblock hardware (ON: terminal BB y BB1 cerrado) Sí Sí Sí Sí 6-5847 Monitorización 2 del baseblock hardware (ON: terminal BB o BB1 off) Sí Sí Sí Sí 6-58
Valor de configu-ración
Función
Métodos de control
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
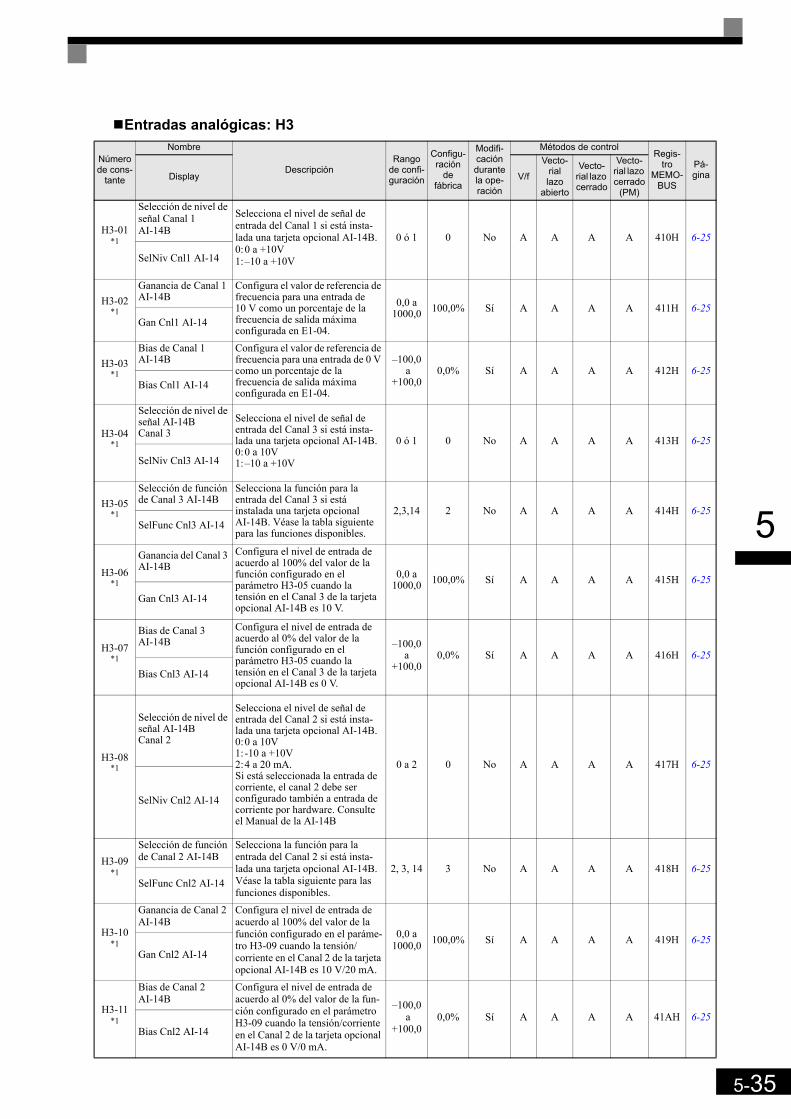
5-35
5
Entradas analógicas: H3
Número de cons-
tante
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante la ope-ración
Métodos de controlRegis-
tro MEMO-
BUS
Pá-ginaDisplay V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
H3-01*1
Selección de nivel de señal Canal 1 AI-14B
Selecciona el nivel de señal de entrada del Canal 1 si está insta-lada una tarjeta opcional AI-14B.0:0 a +10V 1:–10 a +10V
0 ó 1 0 No A A A A 410H 6-25
SelNiv Cnl1 AI-14
H3-02*1
Ganancia de Canal 1 AI-14B
Configura el valor de referencia de frecuencia para una entrada de 10 V como un porcentaje de la frecuencia de salida máxima configurada en E1-04.
0,0 a 1000,0 100,0% Sí A A A A 411H 6-25
Gan Cnl1 AI-14
H3-03*1
Bias de Canal 1 AI-14B
Configura el valor de referencia de frecuencia para una entrada de 0 V como un porcentaje de la frecuencia de salida máxima configurada en E1-04.
–100,0 a
+100,00,0% Sí A A A A 412H 6-25
Bias Cnl1 AI-14
H3-04*1
Selección de nivel de señal AI-14B Canal 3
Selecciona el nivel de señal de entrada del Canal 3 si está insta-lada una tarjeta opcional AI-14B.0:0 a 10V1:–10 a +10V
0 ó 1 0 No A A A A 413H 6-25
SelNiv Cnl3 AI-14
H3-05*1
Selección de función de Canal 3 AI-14B
Selecciona la función para la entrada del Canal 3 si está instalada una tarjeta opcional AI-14B. Véase la tabla siguiente para las funciones disponibles.
2,3,14 2 No A A A A 414H 6-25SelFunc Cnl3 AI-14
H3-06*1
Ganancia del Canal 3 AI-14B
Configura el nivel de entrada de acuerdo al 100% del valor de la función configurado en el parámetro H3-05 cuando la tensión en el Canal 3 de la tarjeta opcional AI-14B es 10 V.
0,0 a 1000,0 100,0% Sí A A A A 415H 6-25
Gan Cnl3 AI-14
H3-07*1
Bias de Canal 3 AI-14B
Configura el nivel de entrada de acuerdo al 0% del valor de la función configurado en el parámetro H3-05 cuando la tensión en el Canal 3 de la tarjeta opcional AI-14B es 0 V.
–100,0 a
+100,00,0% Sí A A A A 416H 6-25
Bias Cnl3 AI-14
H3-08*1
Selección de nivel de señal AI-14B Canal 2
Selecciona el nivel de señal de entrada del Canal 2 si está insta-lada una tarjeta opcional AI-14B.0:0 a 10V 1: -10 a +10V2:4 a 20 mA.Si está seleccionada la entrada de corriente, el canal 2 debe ser configurado también a entrada de corriente por hardware. Consulte el Manual de la AI-14B
0 a 2 0 No A A A A 417H 6-25
SelNiv Cnl2 AI-14
H3-09*1
Selección de función de Canal 2 AI-14B
Selecciona la función para la entrada del Canal 2 si está insta-lada una tarjeta opcional AI-14B. Véase la tabla siguiente para las funciones disponibles.
2, 3, 14 3 No A A A A 418H 6-25SelFunc Cnl2 AI-14
H3-10*1
Ganancia de Canal 2 AI-14B
Configura el nivel de entrada de acuerdo al 100% del valor de la función configurado en el paráme-tro H3-09 cuando la tensión/corriente en el Canal 2 de la tarjeta opcional AI-14B es 10 V/20 mA.
0,0 a 1000,0 100,0% Sí A A A A 419H 6-25
Gan Cnl2 AI-14
H3-11*1
Bias de Canal 2 AI-14B
Configura el nivel de entrada de acuerdo al 0% del valor de la fun-ción configurado en el parámetro H3-09 cuando la tensión/corriente en el Canal 2 de la tarjeta opcional AI-14B es 0 V/0 mA.
–100,0 a
+100,00,0% Sí A A A A 41AH 6-25
Bias Cnl2 AI-14

5-36
5Configuraciones H3-05, H3-09
H3-12*1
Constante de tiempo de filtro de entrada analógica
Configura la constante de tiempo de filtro de retardo para los tres canales de entrada analógica de la tarjeta opcional AI-14B.Efectivo para el control del ruido, etc.
0,00 a 2,00
0,03s No A A A A 41BH 6-25
TmpoFiltro Cnl1-3
H3-15
Selección de función del terminal A1
Configura la función de entrada analógica multifuncional para el terminal A1.0:Referencia de frecuencia1:Compensación de par
0 ó 1 0 No No No A A 434H 6-25Func terminal A1
H3-16
Ganancia de entrada del terminal A1
Configura el valor de referencia de frecuencia para una entrada de 10 V como un porcentaje de la fre-cuencia de salida máxima configu-rada en E1-04.
0,0 a 1000,0 100,0% Sí A A A A 435H 6-25
Gan Terminal A1
H3-17
Bias de entrada del terminal A1
Configura el valor de referencia de frecuencia para una entrada de 0 V como un porcentaje de la frecuen-cia máxima configurada en E1-04.
–100,0 a
+100,00,0% Sí A A A A 436H 6-25
Bias Terminal A1
*1. Este parámetro está disponible sólo si se encuentra instalada una tarjeta opcional de entrada analógica AI-14B.
Valor de configu-ración
Función Contenidos (100%)
Métodos de control
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
2 Referencia de frecuencia auxiliar (utilizada como referencia de multivelocidad 2)
Frecuencia de salida máxima (solamente utilizando AI-14B) Sí Sí Sí Sí 6-6
3 Referencia de frecuencia auxiliar (utilizada como referencia de multivelocidad 3)
Frecuencia de salida máxima (solamente utilizando AI-14B) Sí Sí Sí Sí 6-6
14 Compensación de par Par nominal del motor - - Sí Sí 6-13
Número de cons-
tante
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante la ope-ración
Métodos de controlRegis-
tro MEMO-
BUS
Pá-ginaDisplay V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)

5-37
5
Parámetros de función de protección: L
Sobrecarga del motor: L1
Configuraciones de pérdida de potencia: L2
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
L1-01
Selección de protección del motor
Configura si se habilita o no la función de protección del motor por sobrecarga térmica.0:Deshabilitada1:Protección general del motor
(motor refrigerado por ventilador)2:Protección del motor de convertidor
(motor refrigerado externamente)3:Protección de motor vectorial
Cuando la alimentación del convertidor se desconecta, se restablece el valor de temperatura, así que incluso si este parámetro se configura como 1 es posible que la protección no sea efectiva.
5:Protección de motor de par constante de imán permanente
0 a 3
i No
Q1
Q1
Q1 -
480H 6-44
MOL Fallo Selec. 0 ó 5 - - - A
5
L1-02
Constante de tiempo de protección del motor
Configura el tiempo de detección de temperatura eléctrica en unidades de segundo.Normalmente no es necesario modificar esta configuración.La configuración de fábrica es de 150% de sobrecarga en un minuto. Cuando se conoce la capacidad de sobrecarga del motor, configure asimismo el tiempo de protección por sobrecarga de resistencia para cuando el motor sea arrancado en caliente.
0,1 a 5,0 1,0 min. No A A A -A 481H 6-44
Const Tmpo MOL
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configura-ción de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
L2-05
Nivel de detección de baja tensión
Configura el nivel de detección de baja tensión (UV) del bus de c.c. (tensión del bus de c.c.)
150 a210*1
*1. Estos son valores para un convertidor de clase 200 V. Los valores para un convertidor de clase 400 V son el doble.
190 Vc.c.*1 No A A A A 489H -
Nivel Det PUV
L2-11
Tensión del bus de c.c. en operación de rescate
Ajusta la tensión del bus de c.c. durante la operación de rescate.
0 a 400*1 0 Vc.c. No A A A A 4CBH 6-77
Volt@batería

5-38
5
Prevención de bloqueo: L3
Detección de referencia: L4
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
L3-01
Selección de prevención de bloqueo durante aceleración
0:Deshabilitada (Aceleración como configurada. Con una carga dema-siado alta, el motor puede bloquearse).
1:Habilitada (la aceleración se detiene cuando se excede el nivel L3-02. La aceleración comienza de nuevo cuando la corriente cae por debajo del nivel de preven-ción de bloqueo).
2:Modo de aceleración inteligente (utilizando el nivel L3-02 como base la aceleración se ajusta auto-máticamente. El tiempo de acele-ración configurado no es tenido en cuenta).
0 a 2 1 No A A - - 48FH 6-23
Sel Acel PrBloq
L3-02
Nivel de pre-vención de bloqueo durante aceleración
Configura el nivel de corriente de la prevención de bloqueo durante la operación de aceleración como un porcentaje de la corriente nominal del convertidor.Efectivo cuando L3-01 está configu-rado como 1 ó 2.Normalmente no es necesario modi-ficar esta parámetro. Reduzca la configuración cuando se bloquee el motor.
0 a 200 150% No A A - - 490H 6-23
Niv PrBloq Acel
L3-05
Selección de prevención de bloqueo durante la marcha
Selecciona la prevención de bloqueo durante la marcha.0:Deshabilitada (marcha como
configurada. Con una carga alta, el motor puede bloquearse).
1:Deceleración utilizando el tiempo de deceleración 1 (C1-02).
2:Deceleración utilizando el tiempo de deceleración 2 (C1-04).
0 a 2 1 No A - - - 493H 6-40
Sel PrBloq Run
L3-06
Selección de nivel de preven-ción de bloqueo durante marcha
Configura el nivel de corriente de la prevención de bloqueo durante la operación de marcha como un por-centaje de la corriente nominal del convertidor.Efectivo cuando L3-05 es 1 ó 2.Normalmente no es necesario modificar este parámetro.Reduzca la configuración cuando se bloquee el motor.
30 a 200 150% No A - - - 494H 6-40
Niv PrBloq Run
Número de pará-
metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
L4-01
Nivel de detección de velocidad alcanzada
Efectivo cuando fout/fset alcanzada 1", “Detección de frecuencia 1” ó “Detección de frecuencia 2” está configurada para una salida multifuncional.
0,0 a 120,0
i No
A0,0Hz
A0,0Hz
A0,0Hz -
499H 6-26
Nivel Vel Alcanz 0,0 a 100,0 - - - A
0,0%
L4-02
Ancho de detección de velocidad alcanzada
Efectivo cuando fref/fout alcanzada 1", "fout/fset alcanzada 1", “Detección de frecuencia 1” o “Detección de frecuencia 2” está configurada para una salida multifuncional.
0,0 a 20,0
i No
A2,0Hz
A2,0Hz
A2,0Hz -
49AH 6-26
Ancho Vel Alcanz 0,0 a 40,0% - - - A
4,0%

5-39
5
Rearranque por fallo: L5
L4-03
Nivel de detección de velocidad alcanzada (+/-)
Efectivo cuando fout/fset alcanzada 2", “Detección de frecuencia 3” o “Detección de frecuencia 4” está configurada para una salida multifuncional.
–120,0 a +120,0
i No
A0,0Hz
A0,0Hz
A0,0Hz -
49BH 6-26
Niv+- Vel Alcanz –100,0 a +100,0 - - - A
0,0%
L4-04
Ancho de detección de velocidad alcanzada (+/-)
Efectivo cuando fref/fout alcanzada 2", "fout/fset alcanzada 2", “Detección de frecuencia 3” o “Detección de frecuencia 4” está configurada para una salida multifuncional.
0,0 a 20,0
i No
A2,0Hz
A2,0Hz
A2,0Hz -
49CH 6-26
Ancho+- Vel Alcanz 0,0 a 40,0% - - - A
4,0%
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
L5-01
Número de intentos de reinicio
Configura el número de intentos de rearranque automático.Los códigos de fallo autoreseteables son:OV, UV1, GF, OC, OL2, OL3, OL4, UL3, UL4, PF, LF, SE1, SE2, SE3
0 a 10 2 No A A A A 49EH 6-81
Núm. de rearranques
L5-02
Selección de operación de auto reinicio
Configura si una salida de contacto de fallo es activada durante el rearranque por fallo.0:Sin salida (contacto de fallo
no está activado)1:Salida (contacto de fallo está
activado)
0 ó 1 1 No A A A A 49FH 6-81
Sel Rearranque
L5-05
Selección de rearranque por fallo de baja tensión
Selecciona el método de reset para un fallo de UV1.0:Se efectúa un reset del fallo
UV1 tal como está ajustado en el parámetro L5-01
1:El fallo UV1 siempre seresetea automáticamente
0 ó 1 0 No A A A A 4CCH 6-81
Sel. Rearranque UV1
Número de pará-
metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display

5-40
5
Detección de par: L6
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
L6-01
Selección de detección de par 1
0:Detección de par deshabilitada.1:Detección de cabina atascada
sólo con velocidad alcanzada; la operación continúa (advertencia emitida en salida).
2:Detección de cabina atascada continuamente durante opera-ción; la operación continúa (advertencia emitida en salida).
3:Detección de cabina atascada sólo con velocidad alcanzada; salida detenida por detección.
4:Detección de cabina atascada continuamente durante opera-ción; salida detenida por detec-ción.
5:Detección de bajo par sólo con velocidad alcanzada; la opera-ción continúa (advertencia emitida en salida).
6:Bajo par detectado continua-mente durante operación; la ope-ración continúa (advertencia emitida en salida).
7:Detección de bajo par sólo con velocidad alcanzada; salida dete-nida por detección.
8:Bajo par detectado continua-mente durante operación; salida detenida por detección.
0 a 8 4 No A A A A 4A1H 6-40
Sel Det Par 1
L6-02
Nivel de detección de par 1
Control vectorial: El par nominal del motor está configurado como 100%.Control V/f: La corriente nominal del convertidor está configurada como 100%.
0 a 300 150% No A A A A 4A2H 6-40
Nivel Det Par 1
L6-03
Tiempo de detección de par 1 Configura el tiempo de detección
de sobrepar/bajo par.0,0 a 10,0 10,0 s No A A A A 4A3H 6-40
Tiempo Det Par 1
L6-04
Selección de detección de par 2
Véase la descripción en L6-01 a L6-03.
0 a 8 0 No A A A A 4A4H 6-40
Sel Det Par 2
L6-05
Nivel de detección de par 2 0 a
300 150% No A A A A 4A5H 6-40
Nivel Det Par 2
L6-06
Tiempo de detección de par 2 0,0 a
10,0 10,0 s No A A A A 4A6H 6-40Tiempo Det Par 2

5-41
5
Límites de par: L7
Número de pará-
metro
Nombre
Descripción
Rango de con-figura-ción
Confi-gura-
ción de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
L7-01Límite de par en marcha directa Configura el valor del límite de par
como un porcentaje del par nominal del motor.Pueden configurarse cuatro regiones individuales.
0 a 300 300% No - A A A 4A7H 6-43Lím Par Directa
L7-02Límite de par en marcha inversa 0 a 300 300% No - A A A 4A8H 6-43Lím Par Inversa
L7-03
Límite de par regenerativo en marcha directa 0 a 300 300% No - A A A 4A9H 6-43Lím Par Rgn Directa
L7-04
Límite de par regenerativo en marcha inversa 0 a 300 300% No - A A A 4AAH 6-43Lím Par Rgn Inversa
L7-06
Constante de tiempo de integral de límite de par
Configura la constante de tiempo de integración del límite de par
5 a 10000 200 ms No - A - - 4ACH 6-43
Tiempo de límite de par
L7-07
Selección de operación integral de límite de par durante acel/decel
Configura la operación de límite de par durante la aceleración y la deceleración.0:Control P (se añade control I en
operación de velocidad constante)1:Control INormalmente no es necesario modificar este parámetro. Si la exactitud de la limitación de par durante acel/decel tiene preferencia, debería ser seleccionado el control I. Esto puede resultar en un tiempo de acel/decel incrementado y en desviaciones de velocidad del valor de referencia.
0 ó 1 0 No - A - - 4C9H 6-44
Sel Límite Par
Estado regenerativo
Reservado
Estado regenerativo
Par de salida
Par positivo
Par negativo
Velocidad del motor
Directa
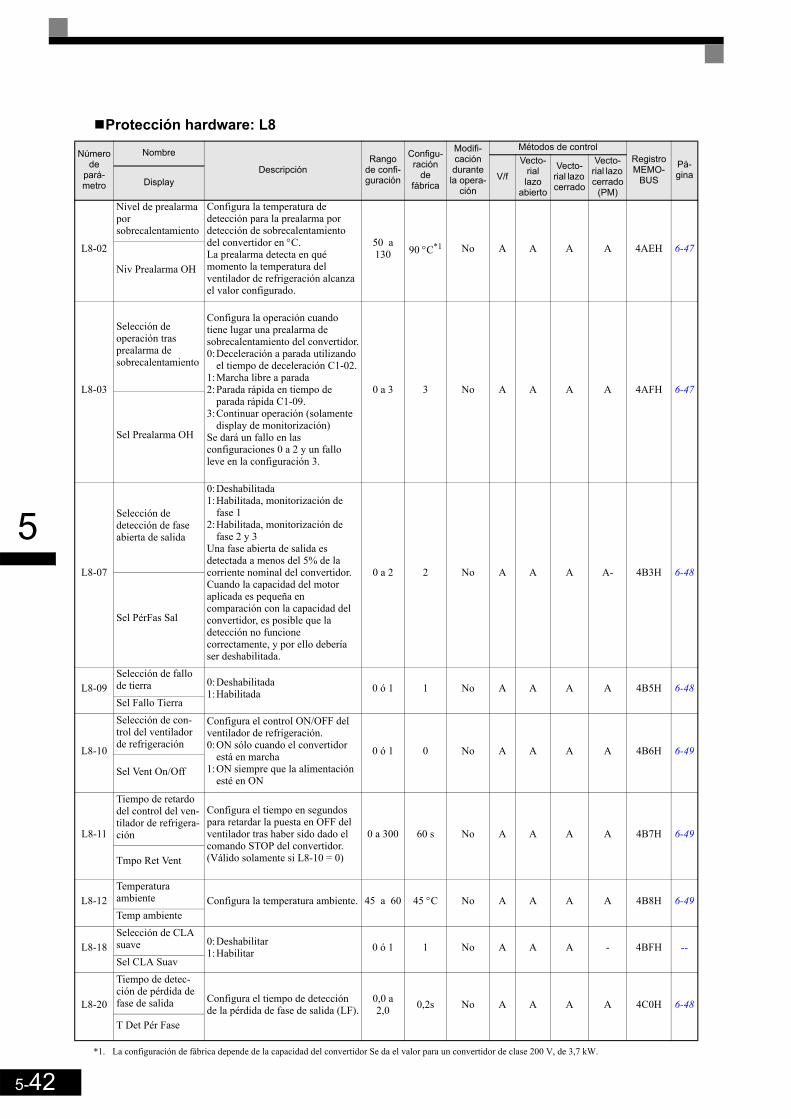
5-42
5
Protección hardware: L8
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
L8-02
Nivel de prealarma por sobrecalentamiento
Configura la temperatura de detección para la prealarma por detección de sobrecalentamiento del convertidor en °C.La prealarma detecta en qué momento la temperatura del ventilador de refrigeración alcanza el valor configurado.
50 a 130 90 °C*1
*1. La configuración de fábrica depende de la capacidad del convertidor Se da el valor para un convertidor de clase 200 V, de 3,7 kW.
No A A A A 4AEH 6-47
Niv Prealarma OH
L8-03
Selección de operación tras prealarma de sobrecalentamiento
Configura la operación cuando tiene lugar una prealarma de sobrecalentamiento del convertidor.0:Deceleración a parada utilizando
el tiempo de deceleración C1-02.1:Marcha libre a parada 2:Parada rápida en tiempo de
parada rápida C1-09.3:Continuar operación (solamente
display de monitorización)Se dará un fallo en las configuraciones 0 a 2 y un fallo leve en la configuración 3.
0 a 3 3 No A A A A 4AFH 6-47
Sel Prealarma OH
L8-07
Selección de detección de fase abierta de salida
0:Deshabilitada1:Habilitada, monitorización de
fase 1 2:Habilitada, monitorización de
fase 2 y 3Una fase abierta de salida es detectada a menos del 5% de la corriente nominal del convertidor.Cuando la capacidad del motor aplicada es pequeña en comparación con la capacidad del convertidor, es posible que la detección no funcione correctamente, y por ello debería ser deshabilitada.
0 a 2 2 No A A A A- 4B3H 6-48
Sel PérFas Sal
L8-09Selección de fallo de tierra 0:Deshabilitada
1:Habilitada 0 ó 1 1 No A A A A 4B5H 6-48Sel Fallo Tierra
L8-10
Selección de con-trol del ventilador de refrigeración
Configura el control ON/OFF del ventilador de refrigeración.0:ON sólo cuando el convertidor
está en marcha1:ON siempre que la alimentación
esté en ON
0 ó 1 0 No A A A A 4B6H 6-49
Sel Vent On/Off
L8-11
Tiempo de retardo del control del ven-tilador de refrigera-ción
Configura el tiempo en segundos para retardar la puesta en OFF del ventilador tras haber sido dado el comando STOP del convertidor. (Válido solamente si L8-10 = 0)
0 a 300 60 s No A A A A 4B7H 6-49
Tmpo Ret Vent
L8-12Temperatura ambiente Configura la temperatura ambiente. 45 a 60 45 °C No A A A A 4B8H 6-49Temp ambiente
L8-18Selección de CLA suave 0:Deshabilitar
1:Habilitar 0 ó 1 1 No A A A - 4BFH --Sel CLA Suav
L8-20
Tiempo de detec-ción de pérdida de fase de salida Configura el tiempo de detección
de la pérdida de fase de salida (LF).0,0 a 2,0 0,2s No A A A A 4C0H 6-48
T Det Pér Fase
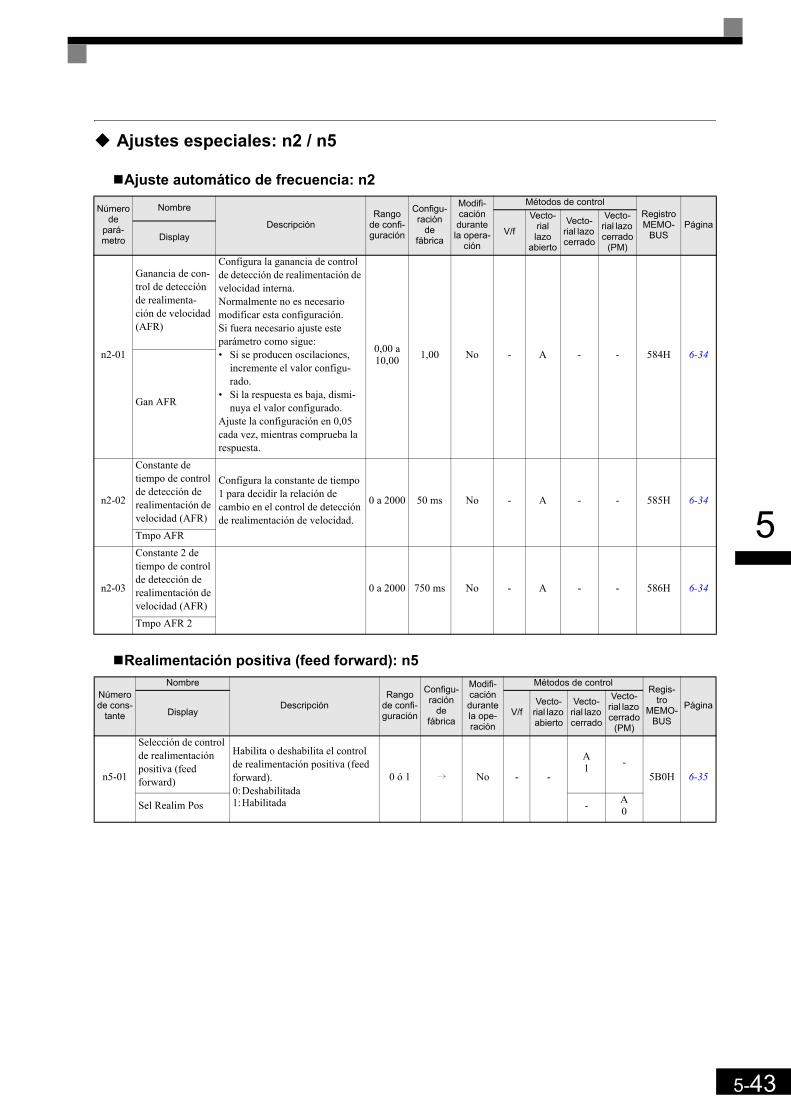
5-43
5
Ajustes especiales: n2 / n5
Ajuste automático de frecuencia: n2
Realimentación positiva (feed forward): n5
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
n2-01
Ganancia de con-trol de detección de realimenta-ción de velocidad (AFR)
Configura la ganancia de control de detección de realimentación de velocidad interna.Normalmente no es necesario modificar esta configuración.Si fuera necesario ajuste este parámetro como sigue:• Si se producen oscilaciones,
incremente el valor configu-rado.
• Si la respuesta es baja, dismi-nuya el valor configurado.
Ajuste la configuración en 0,05 cada vez, mientras comprueba la respuesta.
0,00 a 10,00 1,00 No - A - - 584H 6-34
Gan AFR
n2-02
Constante de tiempo de control de detección de realimentación de velocidad (AFR)
Configura la constante de tiempo 1 para decidir la relación de cambio en el control de detección de realimentación de velocidad.
0 a 2000 50 ms No - A - - 585H 6-34
Tmpo AFR
n2-03
Constante 2 de tiempo de control de detección de realimentación de velocidad (AFR)
0 a 2000 750 ms No - A - - 586H 6-34
Tmpo AFR 2
Número de cons-
tante
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante la ope-ración
Métodos de controlRegis-
tro MEMO-
BUS
PáginaDisplay V/f
Vecto-rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
n5-01
Selección de control de realimentación positiva (feed forward)
Habilita o deshabilita el control de realimentación positiva (feed forward).0:Deshabilitada1:Habilitada
0 ó 1 i No - -
A1 -
5B0H 6-35
Sel Realim Pos - A0

5-44
5
n5-02
Tiempo de acelera-ción del motor
Configura el tiempo requerido para acelerar el motor en el par requerido (T100) a la velocidad nominal (Nr).J: GO2/4, P: Salida nominal del motor
Sin embargo,
0,001 a 60,000
0,154 s*1
No - - A A 5B1H 6-35
Tmpo Acel Motor
n5-03
Ganancia proporcio-nal de realimenta-ción positiva (feed forward)
Configura la ganancia proporcio-nal para el control de la realimen-tación positiva (feed forward)La respuesta de referencia de velocidad se incrementará al incrementar la configuración de n5-03.
0,00 a 500,00 1,00 No - - A A 5B2H 6-35
Gan Realiment
n5-05
Ajuste de tiempo de aceleración del motor
Habilita o deshabilita el ajuste del tiempo de aceleración del motor N5-02.0:Deshabilitado1:Habilitado
0 ó 1 0 No - - A A 5B4H 6-35
Ajuste N5-02
*1. La configuración de fábrica depende de la capacidad del convertidor. Se da el valor para un convertidor de clase 200 V de 3,7 kW. Regulador automáticode frecuencia: n2
Número de cons-
tante
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante la ope-ración
Métodos de controlRegis-
tro MEMO-
BUS
PáginaDisplay V/f
Vecto-rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
ta2π J kgm2[ ] Nr rpm[ ]⋅ ⋅
60 T100 Nm[ ]⋅-----------------------------------------------------------=
100602π------ P kW[ ]
Nr rpm[ ]---------------------- 103 Nm[ ]⋅ ⋅=
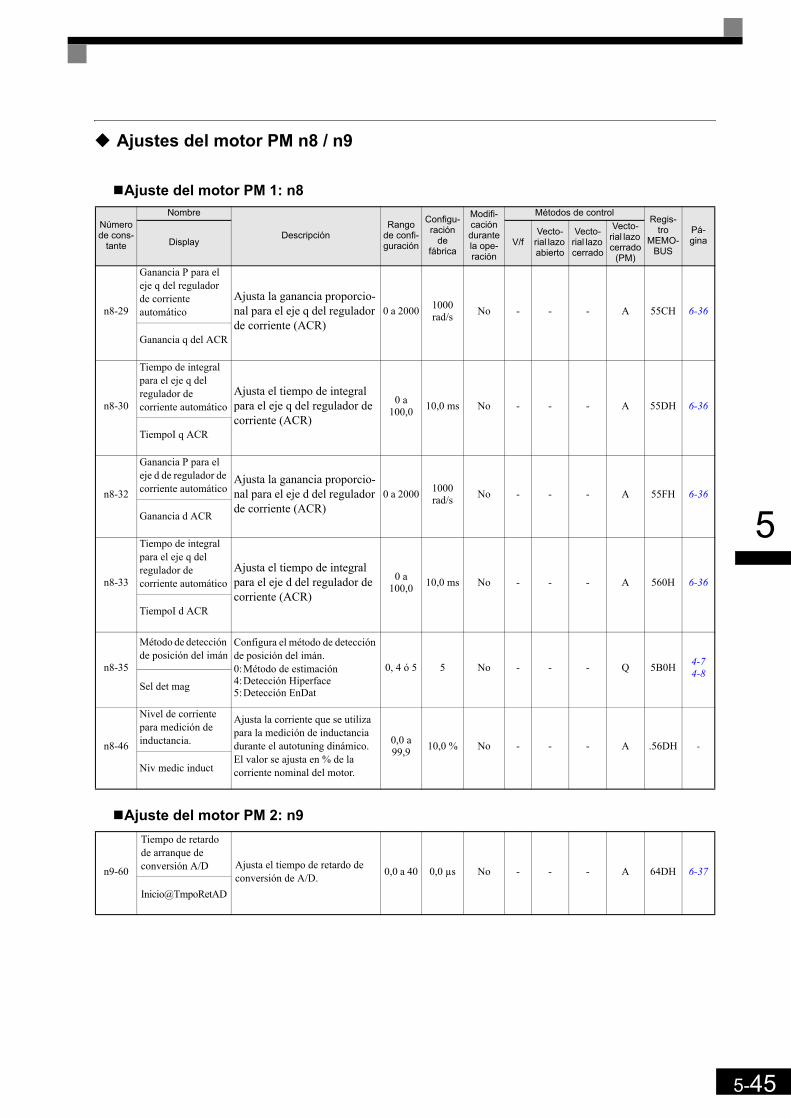
5-45
5
Ajustes del motor PM n8 / n9
Ajuste del motor PM 1: n8
Ajuste del motor PM 2: n9
Número de cons-
tante
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante la ope-ración
Métodos de controlRegis-
tro MEMO-
BUS
Pá-ginaDisplay V/f
Vecto-rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
n8-29
Ganancia P para el eje q del regulador de corriente automático
Ajusta la ganancia proporcio-nal para el eje q del regulador de corriente (ACR)
0 a 2000 1000 rad/s No - - - A 55CH 6-36
Ganancia q del ACR
n8-30
Tiempo de integral para el eje q del regulador de corriente automático
Ajusta el tiempo de integral para el eje q del regulador de corriente (ACR)
0 a 100,0 10,0 ms No - - - A 55DH 6-36
TiempoI q ACR
n8-32
Ganancia P para el eje d de regulador de corriente automático
Ajusta la ganancia proporcio-nal para el eje d del regulador de corriente (ACR)
0 a 2000 1000 rad/s No - - - A 55FH 6-36
Ganancia d ACR
n8-33
Tiempo de integral para el eje q del regulador de corriente automático
Ajusta el tiempo de integral para el eje d del regulador de corriente (ACR)
0 a 100,0 10,0 ms No - - - A 560H 6-36
TiempoI d ACR
n8-35
Método de detección de posición del imán
Configura el método de detección de posición del imán.0:Método de estimación4:Detección Hiperface5:Detección EnDat
0, 4 ó 5 5 No - - - Q 5B0H 4-74-8
Sel det mag
n8-46
Nivel de corriente para medición de inductancia.
Ajusta la corriente que se utiliza para la medición de inductancia durante el autotuning dinámico. El valor se ajusta en % de la corriente nominal del motor.
0,0 a 99,9 10,0 % No - - - A .56DH -
Niv medic induct
n9-60
Tiempo de retardo de arranque de conversión A/D Ajusta el tiempo de retardo de
conversión de A/D. 0,0 a 40 0,0 µs No - - - A 64DH 6-37
Inicio@TmpoRetAD
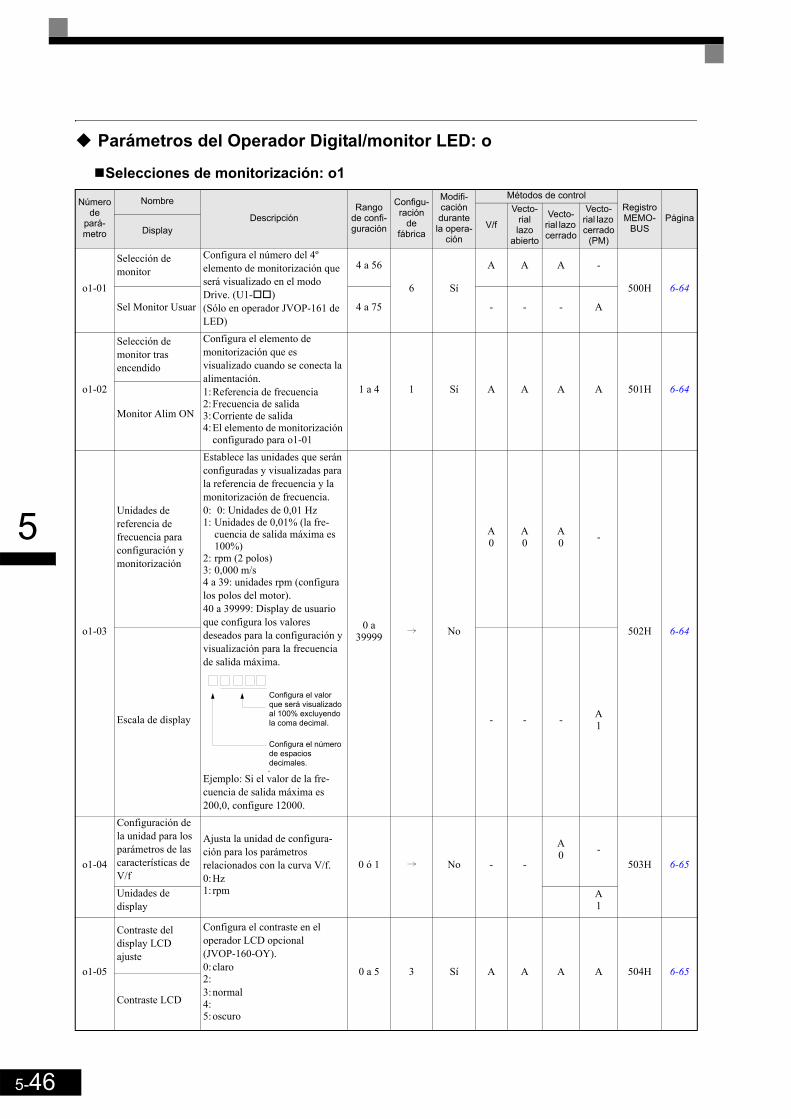
5-46
5
Parámetros del Operador Digital/monitor LED: o
Selecciones de monitorización: o1
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
o1-01
Selección de monitor
Configura el número del 4º elemento de monitorización que será visualizado en el modo Drive. (U1- )(Sólo en operador JVOP-161 de LED)
4 a 56
6 Sí
A A A -
500H 6-64
Sel Monitor Usuar 4 a 75 - - - A
o1-02
Selección de monitor tras encendido
Configura el elemento de monitorización que es visualizado cuando se conecta la alimentación.1:Referencia de frecuencia2:Frecuencia de salida3:Corriente de salida4:El elemento de monitorización
configurado para o1-01
1 a 4 1 Sí A A A A 501H 6-64
Monitor Alim ON
o1-03
Unidades de referencia de frecuencia para configuración y monitorización
Establece las unidades que serán configuradas y visualizadas para la referencia de frecuencia y la monitorización de frecuencia.0: 0: Unidades de 0,01 Hz1: Unidades de 0,01% (la fre-
cuencia de salida máxima es 100%)
2: rpm (2 polos)3: 0,000 m/s4 a 39: unidades rpm (configura los polos del motor).40 a 39999: Display de usuario que configura los valores deseados para la configuración y visualización para la frecuencia de salida máxima.
Ejemplo: Si el valor de la fre-cuencia de salida máxima es 200,0, configure 12000.
0 a 39999 i No
A0
A0
A0 -
502H 6-64
Escala de display - - - A1
o1-04
Configuración de la unidad para los parámetros de las características de V/f
Ajusta la unidad de configura-ción para los parámetrosrelacionados con la curva V/f.0:Hz1: rpm
0 ó 1 i No - -
A0 -
503H 6-65
Unidades de display
A1
o1-05
Contraste del display LCDajuste
Configura el contraste en el operador LCD opcional (JVOP-160-OY).0:claro2:3:normal4:5:oscuro
0 a 5 3 Sí A A A A 504H 6-65
Contraste LCD
Configura el valor que será visualizado al 100% excluyendo la coma decimal.
Configura el número de espacios decimales.
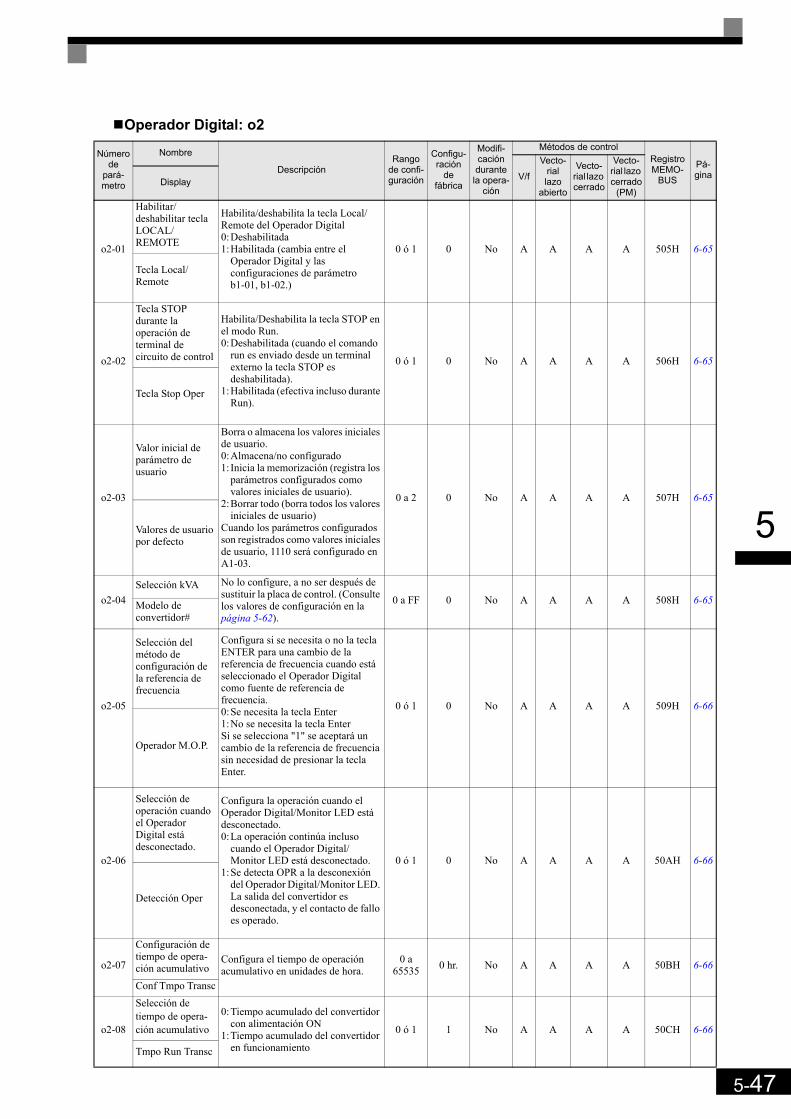
5-47
5
Operador Digital: o2
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
o2-01
Habilitar/deshabilitar tecla LOCAL/REMOTE
Habilita/deshabilita la tecla Local/Remote del Operador Digital0:Deshabilitada1:Habilitada (cambia entre el
Operador Digital y las configuraciones de parámetro b1-01, b1-02.)
0 ó 1 0 No A A A A 505H 6-65
Tecla Local/Remote
o2-02
Tecla STOP durante la operación de terminal de circuito de control
Habilita/Deshabilita la tecla STOP en el modo Run.0:Deshabilitada (cuando el comando
run es enviado desde un terminal externo la tecla STOP es deshabilitada).
1:Habilitada (efectiva incluso durante Run).
0 ó 1 0 No A A A A 506H 6-65
Tecla Stop Oper
o2-03
Valor inicial de parámetro de usuario
Borra o almacena los valores iniciales de usuario.0:Almacena/no configurado1: Inicia la memorización (registra los
parámetros configurados como valores iniciales de usuario).
2:Borrar todo (borra todos los valores iniciales de usuario)
Cuando los parámetros configurados son registrados como valores iniciales de usuario, 1110 será configurado en A1-03.
0 a 2 0 No A A A A 507H 6-65
Valores de usuario por defecto
o2-04Selección kVA No lo configure, a no ser después de
sustituir la placa de control. (Consulte los valores de configuración en la página 5-62).
0 a FF 0 No A A A A 508H 6-65Modelo de convertidor#
o2-05
Selección del método de configuración de la referencia de frecuencia
Configura si se necesita o no la tecla ENTER para una cambio de la referencia de frecuencia cuando está seleccionado el Operador Digital como fuente de referencia de frecuencia.0:Se necesita la tecla Enter1:No se necesita la tecla EnterSi se selecciona "1" se aceptará un cambio de la referencia de frecuencia sin necesidad de presionar la tecla Enter.
0 ó 1 0 No A A A A 509H 6-66
Operador M.O.P.
o2-06
Selección de operación cuando el Operador Digital está desconectado.
Configura la operación cuando el Operador Digital/Monitor LED está desconectado.0:La operación continúa incluso
cuando el Operador Digital/Monitor LED está desconectado.
1:Se detecta OPR a la desconexión del Operador Digital/Monitor LED. La salida del convertidor es desconectada, y el contacto de fallo es operado.
0 ó 1 0 No A A A A 50AH 6-66
Detección Oper
o2-07
Configuración de tiempo de opera-ción acumulativo
Configura el tiempo de operación acumulativo en unidades de hora.
0 a 65535 0 hr. No A A A A 50BH 6-66
Conf Tmpo Transc
o2-08
Selección de tiempo de opera-ción acumulativo
0:Tiempo acumulado del convertidor con alimentación ON
1:Tiempo acumulado del convertidor en funcionamiento
0 ó 1 1 No A A A A 50CH 6-66
Tmpo Run Transc

5-48
5
Función copiar: o3
Parámetros de función de elevación: S
Secuencia de frenado: S1
o2-10
Configuración de tiempo de opera-ción del ventilador
Configura el valor inicial del tiempo de operación del ventilador.El tiempo de operación es acumulado empezando desde este valor configurado.
0 a 65535 0 hr. No A A A A 50EH 6-66
ConfTmpoVent ON
o2-12
inicializar segui-miento de fallo
0:Sin inicialización1: Inicializar (= borrar a cero) tras
configuración “1” o2-12 volverá a ”0“
0 ó 1 0 No A A A A 510H 6-66Inic Seg Fallo
o2-15
Inicializar contador de número de viajes
Inicialización del contador de operación0:El contador de número de viajes es
mantenido1: Contador de número de viajes
limpiar monitor
0 ó 1 0 No A A A A 513H 6-66
Sel Inicializar
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
o3-01
Selección de función copiar
0:Operación normal1:READ (LEER) (Convertidor a
Operador)2:COPY (COPIAR) (Operador a
convertidor)3:Verify (comparar)
0 a 3 0 No A A A A 515H 6-66Sel Función Copiar
o3-02Selección de per-miso de lectura 0:READ prohibido
1:READ permitido 0 ó 1 0 No A A A A 516H 6-66Lectura Permitida
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante la opera-
ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
S1-01
Nivel de veloci-dad cero en parada
Ajusta el nivel de velocidad al que se inicia la operación de inyección de c.c. / operación de velocidad cero durante la parada.
0,0 a 10,0 i No A
1,2 HzA
0,5 HzA
0,1 HzA
0,5 Hz 680H 6-13Iny cc I @arranque
S1-02
Corriente de freno de inyección de c.c. al arranque
Configura la corriente de freno de inyección de c.c. como un porcentaje de la corriente nominal del convertidor.
0 a 100 50% No A A - - 681H 6-39
Iny cc I @arranque
S1-03
Corriente de freno de inyección de c.c. a la parada
Configura la corriente de freno de inyección de c.c. como un porcentaje de la corriente nominal del convertidor.
0 a 100 50% No A A - - 682H 6-39
Iny cc I @paro
S1-04
Tiempo de freno de inyección de c.c./velocidad cero al arrancar
Se utiliza para configurar el tiempo para realizar el freno de inyección de c.c. al arranque en unidades de 1 segundo.Se utiliza para detener el motor en marcha libre y rearrancarlo. Cuando el valor configurado es 0 no se realiza el freno de inyección de c.c al arranque.
0,00 a
10,000,40 s No A A A A 683H 6-13
T Iny cc@arranque
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
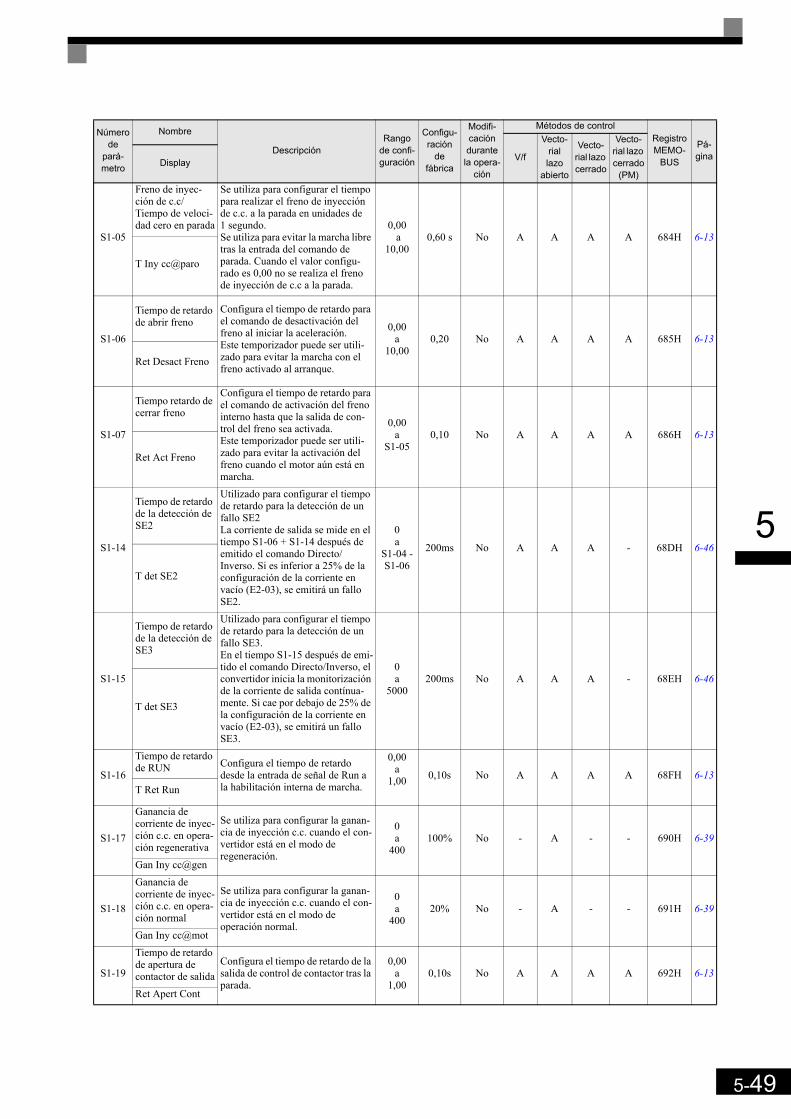
5-49
5
S1-05
Freno de inyec-ción de c.c/Tiempo de veloci-dad cero en parada
Se utiliza para configurar el tiempo para realizar el freno de inyección de c.c. a la parada en unidades de 1 segundo.Se utiliza para evitar la marcha libre tras la entrada del comando de parada. Cuando el valor configu-rado es 0,00 no se realiza el freno de inyección de c.c a la parada.
0,00 a
10,000,60 s No A A A A 684H 6-13
T Iny cc@paro
S1-06
Tiempo de retardo de abrir freno
Configura el tiempo de retardo para el comando de desactivación del freno al iniciar la aceleración.Este temporizador puede ser utili-zado para evitar la marcha con el freno activado al arranque.
0,00a
10,000,20 No A A A A 685H 6-13
Ret Desact Freno
S1-07
Tiempo retardo de cerrar freno
Configura el tiempo de retardo para el comando de activación del freno interno hasta que la salida de con-trol del freno sea activada.Este temporizador puede ser utili-zado para evitar la activación del freno cuando el motor aún está en marcha.
0,00a
S1-050,10 No A A A A 686H 6-13
Ret Act Freno
S1-14
Tiempo de retardo de la detección de SE2
Utilizado para configurar el tiempo de retardo para la detección de un fallo SE2La corriente de salida se mide en el tiempo S1-06 + S1-14 después de emitido el comando Directo/Inverso. Si es inferior a 25% de la configuración de la corriente en vacío (E2-03), se emitirá un fallo SE2.
0a
S1-04 -S1-06
200ms No A A A - 68DH 6-46
T det SE2
S1-15
Tiempo de retardo de la detección de SE3
Utilizado para configurar el tiempo de retardo para la detección de un fallo SE3.En el tiempo S1-15 después de emi-tido el comando Directo/Inverso, el convertidor inicia la monitorización de la corriente de salida contínua-mente. Si cae por debajo de 25% de la configuración de la corriente en vacío (E2-03), se emitirá un fallo SE3.
0a
5000200ms No A A A - 68EH 6-46
T det SE3
S1-16
Tiempo de retardo de RUN Configura el tiempo de retardo
desde la entrada de señal de Run a la habilitación interna de marcha.
0,00a
1,00 0,10s No A A A A 68FH 6-13T Ret Run
S1-17
Ganancia de corriente de inyec-ción c.c. en opera-ción regenerativa
Se utiliza para configurar la ganan-cia de inyección c.c. cuando el con-vertidor está en el modo de regeneración.
0a
400100% No - A - - 690H 6-39
Gan Iny cc@gen
S1-18
Ganancia de corriente de inyec-ción c.c. en opera-ción normal
Se utiliza para configurar la ganan-cia de inyección c.c. cuando el con-vertidor está en el modo de operación normal.
0a
40020% No - A - - 691H 6-39
Gan Iny cc@mot
S1-19
Tiempo de retardo de apertura de contactor de salida
Configura el tiempo de retardo de la salida de control de contactor tras la parada.
0,00a
1,000,10s No A A A A 692H 6-13
Ret Apert Cont
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display

5-50
5
S1-20
Ganancia de servo cero
Ajusta la fuerza de cierre de servo cero.Cuando se selecciona el control vectorial lazo cerrado se crea un lazo de control de posición en el arranque y en la parada. Al incre-mentar la ganancia de servo cero se incrementa la fuerza del cierre. Un incremento excesivo puede causar oscilación.
0 a 100 5 No - - A A 693H 6-13
Gan Servo Cero
S1-21
Ancho de finalización de servo cero
Configura el ancho de banda de la salida de finalización de servo cero.Habilitado cuando la “finalización de servo cero (final)” está configu-rada para una salida multifuncional. La señal de finalización de servo cero está ON cuando la posición actual está dentro del rango (la posición de servo cero + el ancho de finalización de servo cero).Configurar S1-21 en 4 veces la can-tidad de pulsos de desplazamiento permitida en el PG.
0 a 16383 10 No - - A A 694H 6-13
Contd Servo Cero
S1-22
Tiempo de incremento de compensación de par al arranque
Configura el tiempo de incremento para la señal de compensación de par de entrada analógica. Configura el tiempo que la referencia de par necesita para alcanzar el 300% de la referencia de par.
0a
5000500ms No - - A A 695H 6-13
T incr Par
S1-23
Ganancia de com-pensación de par durante descenso
Configura la ganancia de compen-sación de par en el descenso cuando se utiliza la compensación de par al inicio del funcionamiento.
0,500a
10,0001,000 No - - A A 696H 6-13
GanCom-pPar@descen
S1-24
Bias de compen-sación de par durante el ascenso
Configura el bias de compensación de par en el ascenso cuando se utiliza la compensación de par al inicio del funcionamiento.
–200,0a
+200,00,0% No - - A A 697H 6-13
BiasCom-pPar@asc
S1-25
Bias de compen-sación de par durante descenso
Configura el bias de compensación de par en el descenso cuando se utiliza la compensación de par al inicio del funcionamiento.
–200,0a
+200,00,0% No - - A A 698H 6-13
BiasCom-pPar@red
S1-26
Referencia de velocidad de retención (Dwell)
Mantiene la referencia de velocidad cuando la carga es pesada. La referencia de frecuencia sigue el tiempo configurado para aceleración 4 en C1-07.El tiempo de aceleración será modificado cuando la velocidad del motor exceda la frecuencia configurada en C1-11.
0,0a 120,0 0,0Hz No - - A A 699H 6-21
Vel RETENC
S1-27
Nivel de velocidad de zona de puerta
Configura el nivel de velocidad de zona de puerta.Si la velocidad del motor (en CLV y OLV) o la frecuencia de salida (en control V/f) cae por debajo de S1-27 y está configurada una salida multifuncional para la señal de “Zona de puerta”(H2- =42), esta salida se activará.
0,0a 120,0 0,0Hz No A A A A 69AH 6-58
Niv Zona Puerta
S1-28
Selección de detección de SE1
Ajuste cómo será el reset de un fallo SE1.0:Reset manual 1:Reset automático durante parada2:No hay detección SE1
0 a 2 0 No A A A A 69BH 6-53Selección SE1
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante la opera-
ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
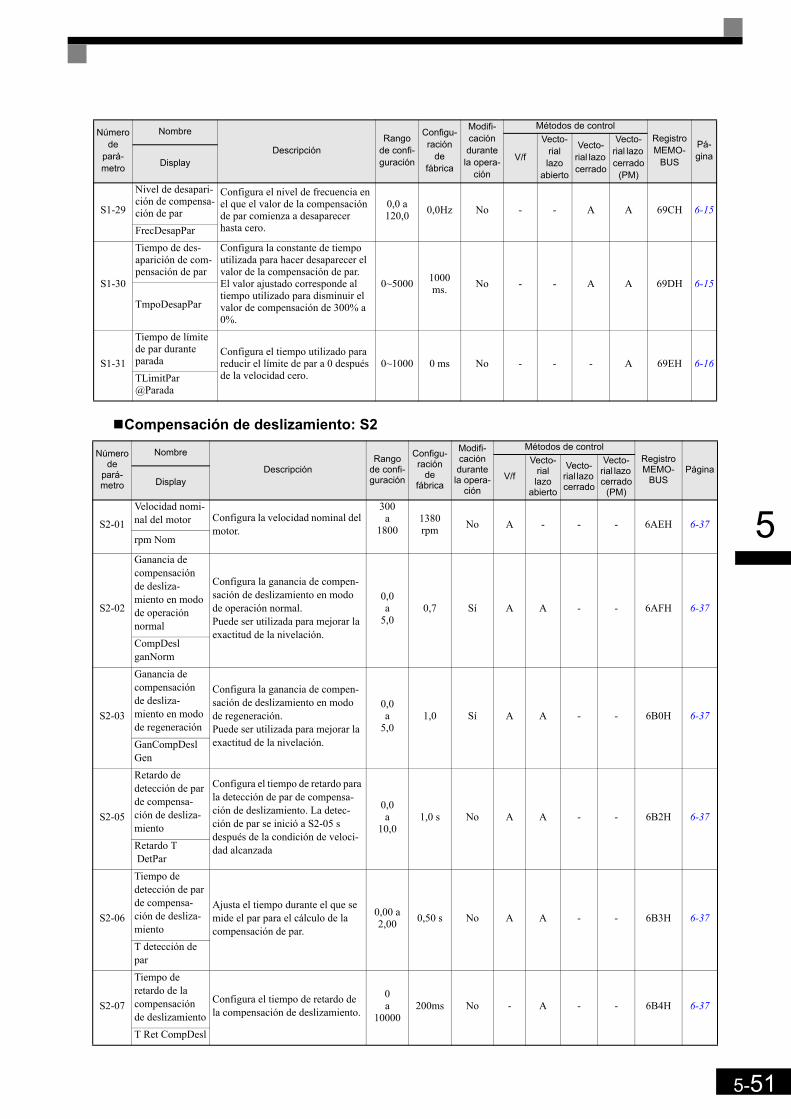
5-51
5
Compensación de deslizamiento: S2
S1-29
Nivel de desapari-ción de compensa-ción de par
Configura el nivel de frecuencia en el que el valor de la compensación de par comienza a desaparecer hasta cero.
0,0 a 120,0 0,0Hz No - - A A 69CH 6-15
FrecDesapPar
S1-30
Tiempo de des-aparición de com-pensación de par
Configura la constante de tiempo utilizada para hacer desaparecer el valor de la compensación de par.El valor ajustado corresponde al tiempo utilizado para disminuir el valor de compensación de 300% a 0%.
0~5000 1000 ms. No - - A A 69DH 6-15
TmpoDesapPar
S1-31
Tiempo de límite de par durante parada
Configura el tiempo utilizado para reducir el límite de par a 0 después de la velocidad cero.
0~1000 0 ms No - - - A 69EH 6-16TLimitPar @Parada
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
S2-01
Velocidad nomi-nal del motor Configura la velocidad nominal del
motor.
300a
18001380rpm No A - - - 6AEH 6-37
rpm Nom
S2-02
Ganancia de compensación de desliza-miento en modo de operación normal
Configura la ganancia de compen-sación de deslizamiento en modo de operación normal. Puede ser utilizada para mejorar la exactitud de la nivelación.
0,0a
5,00,7 Sí A A - - 6AFH 6-37
CompDesl ganNorm
S2-03
Ganancia de compensación de desliza-miento en modo de regeneración
Configura la ganancia de compen-sación de deslizamiento en modo de regeneración. Puede ser utilizada para mejorar la exactitud de la nivelación.
0,0a
5,01,0 Sí A A - - 6B0H 6-37
GanCompDesl Gen
S2-05
Retardo de detección de par de compensa-ción de desliza-miento
Configura el tiempo de retardo para la detección de par de compensa-ción de deslizamiento. La detec-ción de par se inició a S2-05 s después de la condición de veloci-dad alcanzada
0,0a
10,01,0 s No A A - - 6B2H 6-37
Retardo T DetPar
S2-06
Tiempo de detección de par de compensa-ción de desliza-miento
Ajusta el tiempo durante el que se mide el par para el cálculo de la compensación de par.
0,00 a 2,00 0,50 s No A A - - 6B3H 6-37
T detección de par
S2-07
Tiempo de retardo de la compensación de deslizamiento
Configura el tiempo de retardo de la compensación de deslizamiento.
0a
10000200ms No - A - - 6B4H 6-37
T Ret CompDesl
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
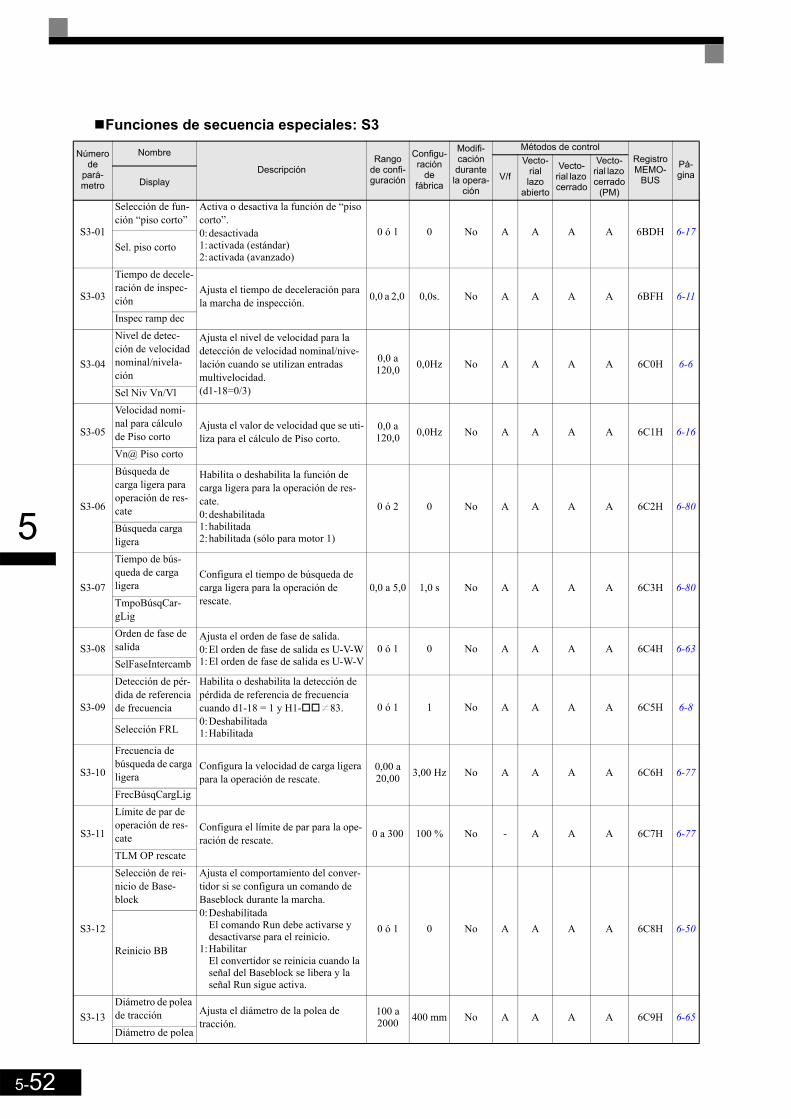
5-52
5
Funciones de secuencia especiales: S3
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante la opera-
ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
S3-01
Selección de fun-ción “piso corto”
Activa o desactiva la función de “piso corto”.0:desactivada1:activada (estándar)2:activada (avanzado)
0 ó 1 0 No A A A A 6BDH 6-17Sel. piso corto
S3-03
Tiempo de decele-ración de inspec-ción
Ajusta el tiempo de deceleración para la marcha de inspección. 0,0 a 2,0 0,0s. No A A A A 6BFH 6-11
Inspec ramp dec
S3-04
Nivel de detec-ción de velocidad nominal/nivela-ción
Ajusta el nivel de velocidad para la detección de velocidad nominal/nive-lación cuando se utilizan entradas multivelocidad.(d1-18=0/3)
0,0 a 120,0 0,0Hz No A A A A 6C0H 6-6
Sel Niv Vn/Vl
S3-05
Velocidad nomi-nal para cálculo de Piso corto
Ajusta el valor de velocidad que se uti-liza para el cálculo de Piso corto.
0,0 a 120,0 0,0Hz No A A A A 6C1H 6-16
Vn@ Piso corto
S3-06
Búsqueda de carga ligera para operación de res-cate
Habilita o deshabilita la función de carga ligera para la operación de res-cate.0:deshabilitada1:habilitada2:habilitada (sólo para motor 1)
0 ó 2 0 No A A A A 6C2H 6-80
Búsqueda carga ligera
S3-07
Tiempo de bús-queda de carga ligera
Configura el tiempo de búsqueda de carga ligera para la operación de rescate.
0,0 a 5,0 1,0 s No A A A A 6C3H 6-80TmpoBúsqCar-gLig
S3-08Orden de fase de salida
Ajusta el orden de fase de salida.0:El orden de fase de salida es U-V-W1:El orden de fase de salida es U-W-V
0 ó 1 0 No A A A A 6C4H 6-63SelFaseIntercamb
S3-09
Detección de pér-dida de referencia de frecuencia
Habilita o deshabilita la detección de pérdida de referencia de frecuencia cuando d1-18 = 1 y H1- K83.0:Deshabilitada1:Habilitada
0 ó 1 1 No A A A A 6C5H 6-8
Selección FRL
S3-10
Frecuencia de búsqueda de carga ligera
Configura la velocidad de carga ligera para la operación de rescate.
0,00 a 20,00 3,00 Hz No A A A A 6C6H 6-77
FrecBúsqCargLig
S3-11
Límite de par de operación de res-cate
Configura el límite de par para la ope-ración de rescate. 0 a 300 100 % No - A A A 6C7H 6-77
TLM OP rescate
S3-12
Selección de rei-nicio de Base-block
Ajusta el comportamiento del conver-tidor si se configura un comando de Baseblock durante la marcha.0:Deshabilitada
El comando Run debe activarse y desactivarse para el reinicio.
1:HabilitarEl convertidor se reinicia cuando la señal del Baseblock se libera y la señal Run sigue activa.
0 ó 1 0 No A A A A 6C8H 6-50
Reinicio BB
S3-13Diámetro de polea de tracción Ajusta el diámetro de la polea de
tracción.100 a 2000 400 mm No A A A A 6C9H 6-65
Diámetro de polea
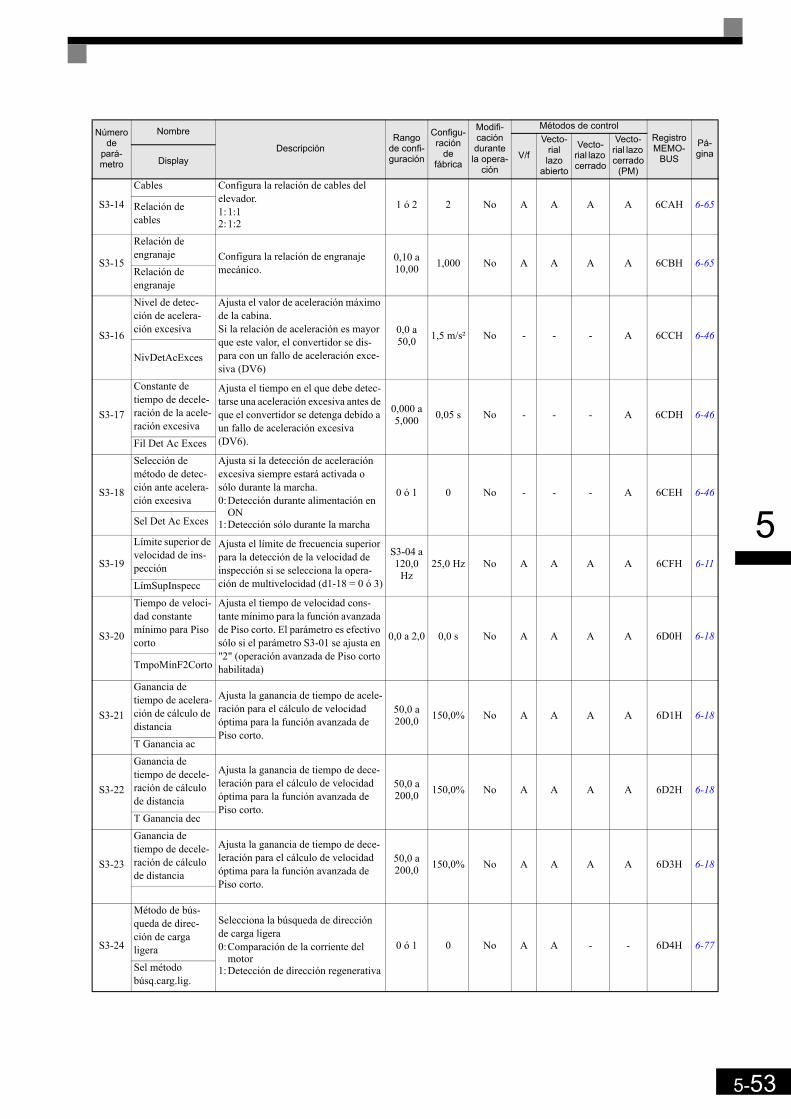
5-53
5
S3-14
Cables Configura la relación de cables del elevador.1:1:12:1:2
1 ó 2 2 No A A A A 6CAH 6-65Relación de cables
S3-15
Relación de engranaje Configura la relación de engranaje
mecánico.0,10 a 10,00 1,000 No A A A A 6CBH 6-65
Relación de engranaje
S3-16
Nivel de detec-ción de acelera-ción excesiva
Ajusta el valor de aceleración máximo de la cabina. Si la relación de aceleración es mayor que este valor, el convertidor se dis-para con un fallo de aceleración exce-siva (DV6)
0,0 a 50,0 1,5 m/s² No - - - A 6CCH 6-46
NivDetAcExces
S3-17
Constante de tiempo de decele-ración de la acele-ración excesiva
Ajusta el tiempo en el que debe detec-tarse una aceleración excesiva antes de que el convertidor se detenga debido a un fallo de aceleración excesiva (DV6).
0,000 a 5,000 0,05 s No - - - A 6CDH 6-46
Fil Det Ac Exces
S3-18
Selección de método de detec-ción ante acelera-ción excesiva
Ajusta si la detección de aceleración excesiva siempre estará activada o sólo durante la marcha.0:Detección durante alimentación en
ON1:Detección sólo durante la marcha
0 ó 1 0 No - - - A 6CEH 6-46
Sel Det Ac Exces
S3-19
Límite superior de velocidad de ins-pección
Ajusta el límite de frecuencia superior para la detección de la velocidad de inspección si se selecciona la opera-ción de multivelocidad (d1-18 = 0 ó 3)
S3-04 a 120,0
Hz25,0 Hz No A A A A 6CFH 6-11
LímSupInspecc
S3-20
Tiempo de veloci-dad constante mínimo para Piso corto
Ajusta el tiempo de velocidad cons-tante mínimo para la función avanzada de Piso corto. El parámetro es efectivo sólo si el parámetro S3-01 se ajusta en "2" (operación avanzada de Piso corto habilitada)
0,0 a 2,0 0,0 s No A A A A 6D0H 6-18
TmpoMinF2Corto
S3-21
Ganancia de tiempo de acelera-ción de cálculo de distancia
Ajusta la ganancia de tiempo de acele-ración para el cálculo de velocidad óptima para la función avanzada de Piso corto.
50,0 a 200,0 150,0% No A A A A 6D1H 6-18
T Ganancia ac
S3-22
Ganancia de tiempo de decele-ración de cálculo de distancia
Ajusta la ganancia de tiempo de dece-leración para el cálculo de velocidad óptima para la función avanzada de Piso corto.
50,0 a 200,0 150,0% No A A A A 6D2H 6-18
T Ganancia dec
S3-23
Ganancia de tiempo de decele-ración de cálculo de distancia
Ajusta la ganancia de tiempo de dece-leración para el cálculo de velocidad óptima para la función avanzada de Piso corto.
50,0 a 200,0 150,0% No A A A A 6D3H 6-18
S3-24
Método de bús-queda de direc-ción de carga ligera
Selecciona la búsqueda de dirección de carga ligera0:Comparación de la corriente del
motor1:Detección de dirección regenerativa
0 ó 1 0 No A A - - 6D4H 6-77
Sel método búsq.carg.lig.
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUS
Pá-ginaV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display

5-54
5
Autotuning del motor: T
T1: Autotuning 1
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
T1-01
Selección de modo Autotuning
Configura el modo de Autotuning.0:Autotuning dinámico1:Autotuning estático2:Autotuning estático solamente
para resistencia línea a línea4:Ajuste de desplazamiento de
encoder
0 a 2
i No
Sí(2)
Sí(1)
Sí(1) -
701H 4-4
Sel. Modo Tuning 0 ó 4 - - - Sí (4)
T1-02Potencia de salida del motor Configura la potencia de salida
del motor en kilowatios.0,00 a 650,00
3,70 kW*1
*1. La configuración de fábrica depende de la capacidad del convertidor (se da el valor para un convertidor de clase 200 V de 3,7 kW).
No Sí Sí Sí - 702H 4-4Pot. Nom. Motor
T1-03Tensión nominal del motor Configura la tensión nominal del
motor.
0 a 255,0
*2
*2. Estos son valores para un convertidor de clase 200 V. Los valores para un convertidor de clase 400 V son el doble.
190,0 V*2 No - Sí Sí - 703H 4-4
Tensión nominal
T1-04Corriente nomi-nal del motor Configura la corriente nominal
del motor.
1,75 a 35,00
*3
*3. El rango de configuración es desde el 10% al 200% de la corriente nominal de salida del convertidor (se da el valor para un convertidor de clase 200 V de0,4 kW).
14,00 A*1 No Sí Sí Sí - 704H 4-4
Corriente Nom.
T1-05Frecuencia nomi-nal del motor Configura la frecuencia nominal
del motor.0 a
120,0 50,0 Hz No - Sí Sí - 705H 4-4Frecuencia Nom
T1-06Número de polos del motor Configura el número de polos del
motor.2 a 48 polos 4 polos No - Sí Sí - 706H 4-4
Número de polos
T1-07Velocidad básica del motor Configura la velocidad básica del
motor en rpm.0 a
240001450 rpm No - Sí Sí - 707H -4-4
Vel Nom
T1-08Número de pulsos PG Configura el número de pulsos
por revolución del PG. 0 a
60000 1024 No - - Sí - 708H 4-4Pulsos/Rev PG
T1-09
Corriente en vacío Configura la corriente en vacío
del motor.
0,0 a 13,99
*1E2-03 No - Sí Sí - 709H 4-4
Corriente en vacío
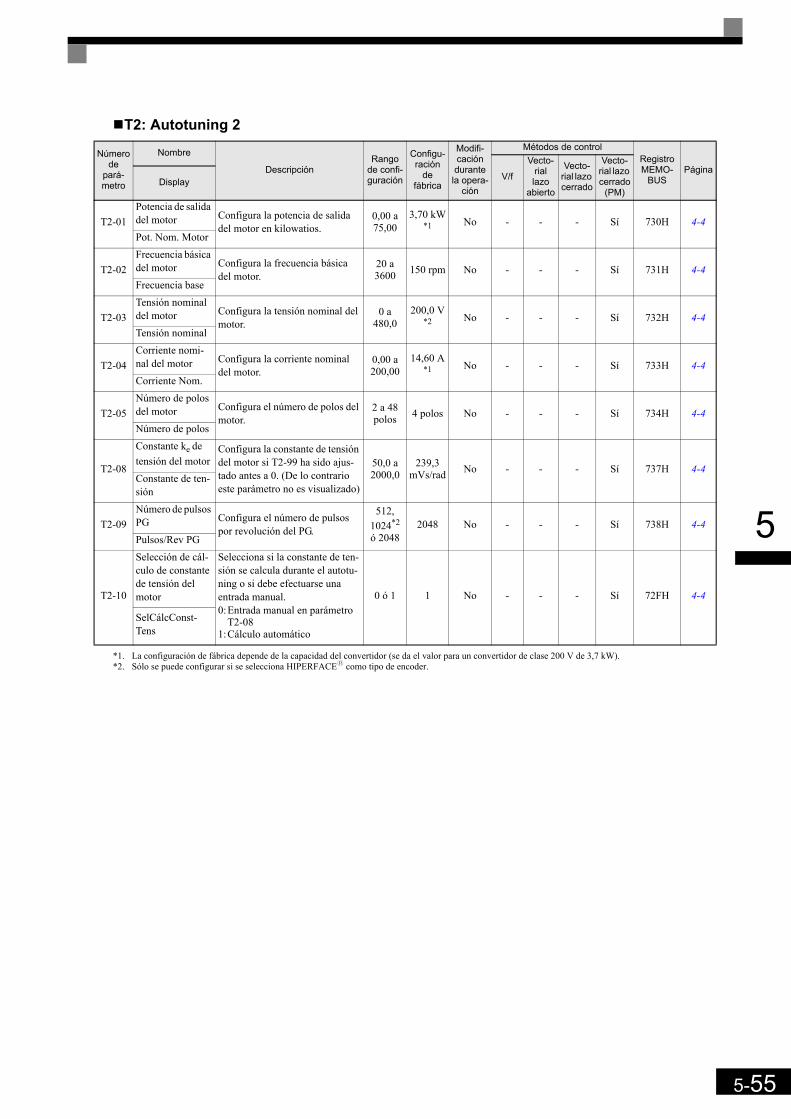
5-55
5
T2: Autotuning 2
Número de
pará-metro
Nombre
DescripciónRango
de confi-guración
Configu-ración
de fábrica
Modifi-cación durante la opera-
ción
Métodos de controlRegistro MEMO-
BUSPágina
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
T2-01Potencia de salida del motor Configura la potencia de salida
del motor en kilowatios.0,00 a 75,00
3,70 kW*1
*1. La configuración de fábrica depende de la capacidad del convertidor (se da el valor para un convertidor de clase 200 V de 3,7 kW).
No - - - Sí 730H 4-4Pot. Nom. Motor
T2-02Frecuencia básica del motor Configura la frecuencia básica
del motor.20 a 3600 150 rpm No - - - Sí 731H 4-4
Frecuencia base
T2-03Tensión nominal del motor Configura la tensión nominal del
motor.0 a
480,0200,0 V
*2 No - - - Sí 732H 4-4Tensión nominal
T2-04Corriente nomi-nal del motor Configura la corriente nominal
del motor.0,00 a 200,00
14,60 A*1 No - - - Sí 733H 4-4
Corriente Nom.
T2-05Número de polos del motor Configura el número de polos del
motor.2 a 48 polos 4 polos No - - - Sí 734H 4-4
Número de polos
T2-08
Constante ke de tensión del motor
Configura la constante de tensión del motor si T2-99 ha sido ajus-tado antes a 0. (De lo contrario este parámetro no es visualizado)
50,0 a 2000,0
239,3 mVs/rad No - - - Sí 737H 4-4
Constante de ten-sión
T2-09Número de pulsos PG Configura el número de pulsos
por revolución del PG.
512, 1024*2 ó 2048
*2. Sólo se puede configurar si se selecciona HIPERFACEy como tipo de encoder.
2048 No - - - Sí 738H 4-4Pulsos/Rev PG
T2-10
Selección de cál-culo de constante de tensión del motor
Selecciona si la constante de ten-sión se calcula durante el autotu-ning o si debe efectuarse una entrada manual.0:Entrada manual en parámetro
T2-081:Cálculo automático
0 ó 1 1 No - - - Sí 72FH 4-4
SelCálcConst-Tens
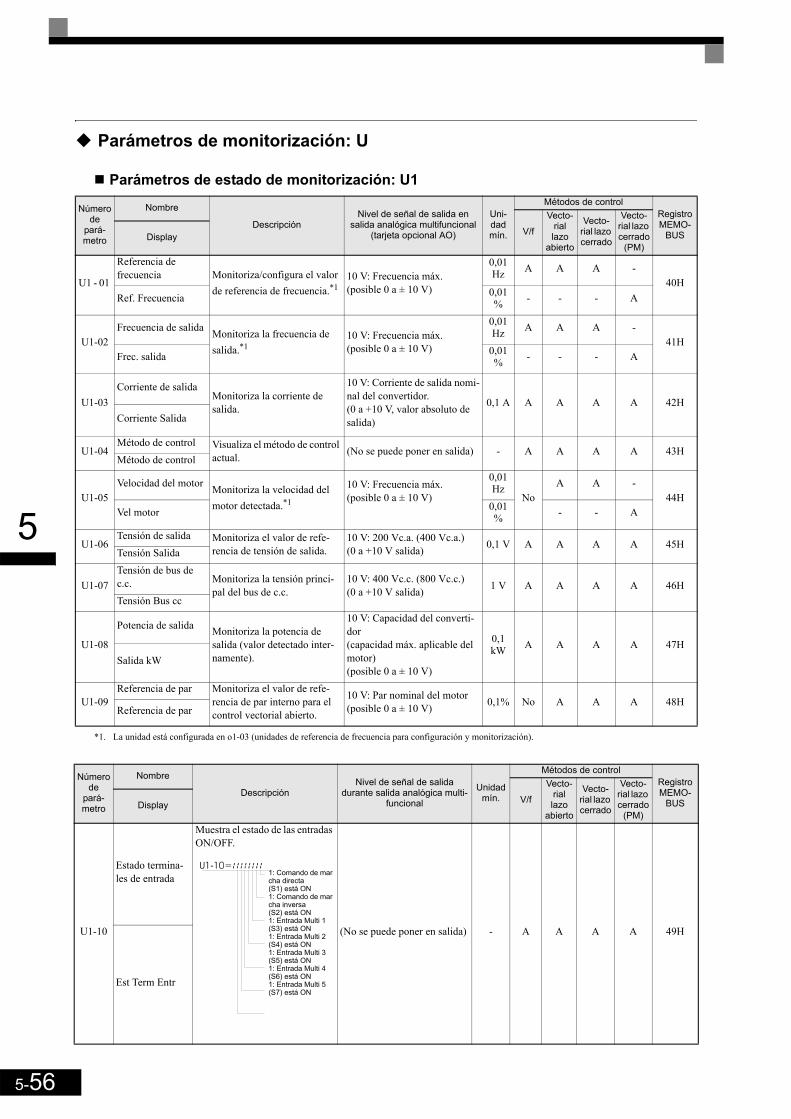
5-56
5
Parámetros de monitorización: U
Parámetros de estado de monitorización: U1
Número de
pará-metro
Nombre
DescripciónNivel de señal de salida en
salida analógica multifuncional (tarjeta opcional AO)
Uni-dad mín.
Métodos de controlRegistro MEMO-
BUSV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
U1 - 01
Referencia de frecuencia Monitoriza/configura el valor
de referencia de frecuencia.*1
*1. La unidad está configurada en o1-03 (unidades de referencia de frecuencia para configuración y monitorización).
10 V: Frecuencia máx. (posible 0 a ± 10 V)
0,01Hz A A A -
40HRef. Frecuencia 0,01
% - - - A
U1-02Frecuencia de salida Monitoriza la frecuencia de
salida.*110 V: Frecuencia máx. (posible 0 a ± 10 V)
0,01Hz A A A -
41HFrec. salida 0,01
% - - - A
U1-03Corriente de salida
Monitoriza la corriente de salida.
10 V: Corriente de salida nomi-nal del convertidor.(0 a +10 V, valor absoluto de salida)
0,1 A A A A A 42HCorriente Salida
U1-04Método de control Visualiza el método de control
actual. (No se puede poner en salida) - A A A A 43HMétodo de control
U1-05Velocidad del motor Monitoriza la velocidad del
motor detectada.*1
10 V: Frecuencia máx. (posible 0 a ± 10 V)
0,01Hz
NoA A -
44HVel motor 0,01
% - - A
U1-06Tensión de salida Monitoriza el valor de refe-
rencia de tensión de salida.10 V: 200 Vc.a. (400 Vc.a.)(0 a +10 V salida) 0,1 V A A A A 45H
Tensión Salida
U1-07Tensión de bus de c.c. Monitoriza la tensión princi-
pal del bus de c.c.10 V: 400 Vc.c. (800 Vc.c.)(0 a +10 V salida) 1 V A A A A 46H
Tensión Bus cc
U1-08
Potencia de salida Monitoriza la potencia de salida (valor detectado inter-namente).
10 V: Capacidad del converti-dor (capacidad máx. aplicable del motor)(posible 0 a ± 10 V)
0,1 kW A A A A 47H
Salida kW
U1-09Referencia de par Monitoriza el valor de refe-
rencia de par interno para el control vectorial abierto.
10 V: Par nominal del motor(posible 0 a ± 10 V) 0,1% No A A A 48H
Referencia de par
Número de
pará-metro
Nombre
DescripciónNivel de señal de salida
durante salida analógica multi-funcional
Unidad mín.
Métodos de controlRegistro MEMO-
BUSV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
U1-10
Estado termina-les de entrada
Muestra el estado de las entradas ON/OFF.
(No se puede poner en salida) - A A A A 49H
Est Term Entr
1: Comando de mar-cha directa(S1) está ON1: Comando de mar-cha inversa(S2) está ON1: Entrada Multi 1(S3) está ON1: Entrada Multi 2(S4) está ON1: Entrada Multi 3(S5) está ON1: Entrada Multi 4(S6) está ON1: Entrada Multi 5(S7) está ON
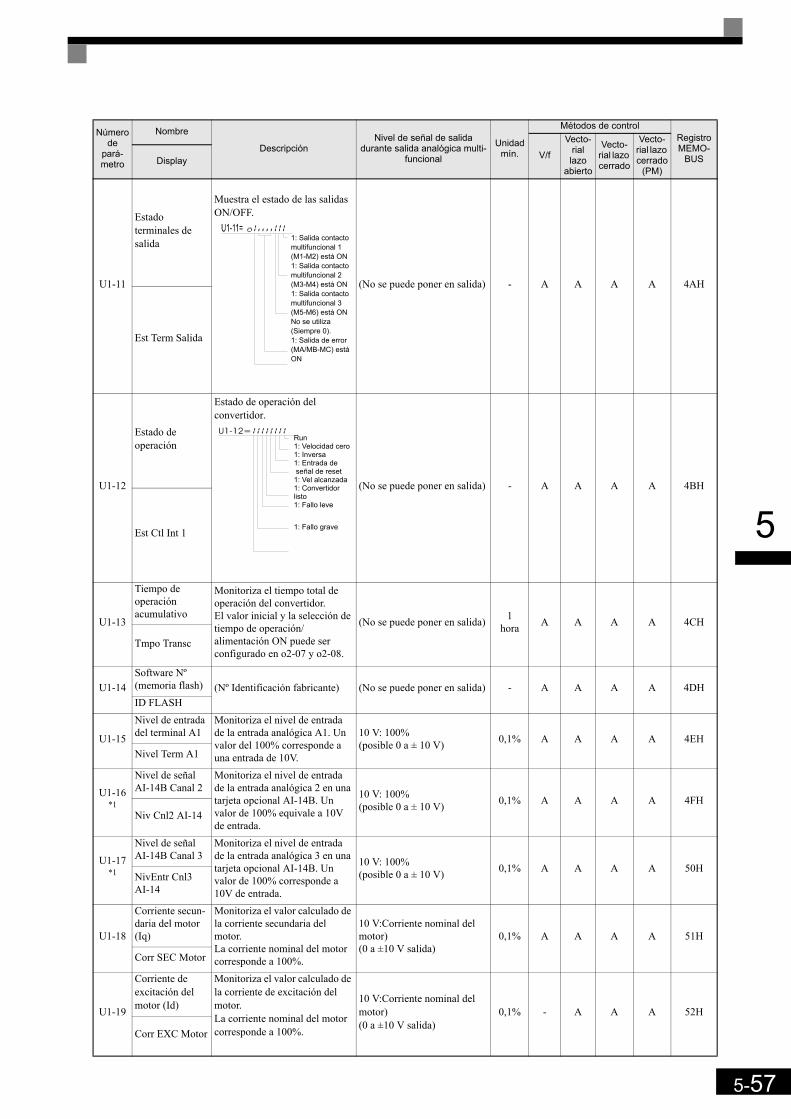
5-57
5
U1-11
Estado terminales de salida
Muestra el estado de las salidas ON/OFF.
(No se puede poner en salida) - A A A A 4AH
Est Term Salida
U1-12
Estado de operación
Estado de operación del convertidor.
(No se puede poner en salida) - A A A A 4BH
Est Ctl Int 1
U1-13
Tiempo de operación acumulativo
Monitoriza el tiempo total de operación del convertidor.El valor inicial y la selección de tiempo de operación/alimentación ON puede ser configurado en o2-07 y o2-08.
(No se puede poner en salida) 1hora A A A A 4CH
Tmpo Transc
U1-14Software Nº (memoria flash) (Nº Identificación fabricante) (No se puede poner en salida) - A A A A 4DHID FLASH
U1-15
Nivel de entrada del terminal A1
Monitoriza el nivel de entrada de la entrada analógica A1. Un valor del 100% corresponde a una entrada de 10V.
10 V: 100%(posible 0 a ± 10 V) 0,1% A A A A 4EH
Nivel Term A1
U1-16*1
Nivel de señal AI-14B Canal 2
Monitoriza el nivel de entrada de la entrada analógica 2 en una tarjeta opcional AI-14B. Un valor de 100% equivale a 10V de entrada.
10 V: 100%(posible 0 a ± 10 V) 0,1% A A A A 4FH
Niv Cnl2 AI-14
U1-17*1
Nivel de señal AI-14B Canal 3
Monitoriza el nivel de entrada de la entrada analógica 3 en una tarjeta opcional AI-14B. Un valor de 100% corresponde a 10V de entrada.
10 V: 100%(posible 0 a ± 10 V) 0,1% A A A A 50H
NivEntr Cnl3 AI-14
U1-18
Corriente secun-daria del motor (Iq)
Monitoriza el valor calculado de la corriente secundaria del motor.La corriente nominal del motor corresponde a 100%.
10 V:Corriente nominal del motor)(0 a ±10 V salida)
0,1% A A A A 51H
Corr SEC Motor
U1-19
Corriente de excitación del motor (Id)
Monitoriza el valor calculado de la corriente de excitación del motor.La corriente nominal del motor corresponde a 100%.
10 V:Corriente nominal del motor)(0 a ±10 V salida)
0,1% - A A A 52H
Corr EXC Motor
Número de
pará-metro
Nombre
DescripciónNivel de señal de salida
durante salida analógica multi-funcional
Unidad mín.
Métodos de controlRegistro MEMO-
BUSV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
1: Salida contactomultifuncional 1(M1-M2) está ON1: Salida contactomultifuncional 2(M3-M4) está ON1: Salida contactomultifuncional 3(M5-M6) está ONNo se utiliza (Siempre 0).1: Salida de error(MA/MB-MC) está ON
Run1: Velocidad cero1: Inversa1: Entrada de señal de reset1: Vel alcanzada1: Convertidor listo1: Fallo leve
1: Fallo grave
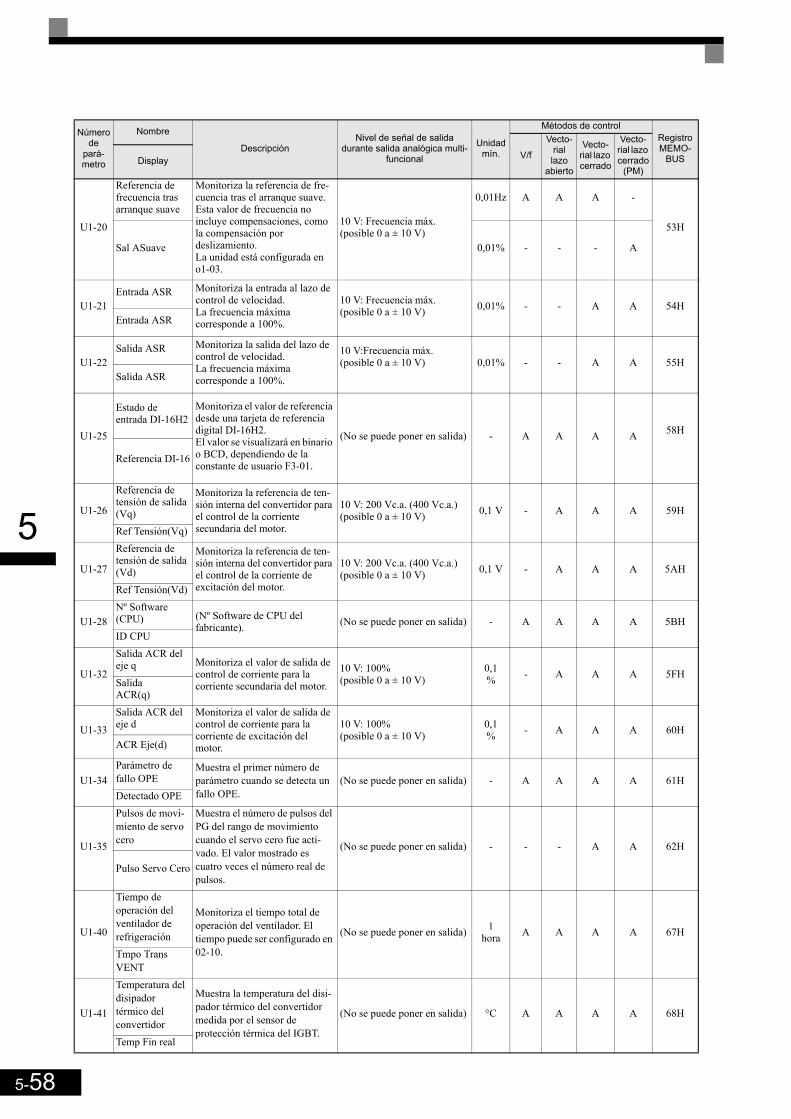
5-58
5
U1-20
Referencia de frecuencia tras arranque suave
Monitoriza la referencia de fre-cuencia tras el arranque suave.Esta valor de frecuencia no incluye compensaciones, como la compensación por deslizamiento.La unidad está configurada en o1-03.
10 V: Frecuencia máx. (posible 0 a ± 10 V)
0,01Hz A A A -
53H
Sal ASuave 0,01% - - - A
U1-21Entrada ASR Monitoriza la entrada al lazo de
control de velocidad.La frecuencia máximacorresponde a 100%.
10 V: Frecuencia máx. (posible 0 a ± 10 V) 0,01% - - A A 54H
Entrada ASR
U1-22Salida ASR Monitoriza la salida del lazo de
control de velocidad.La frecuencia máxima corresponde a 100%.
10 V:Frecuencia máx.(posible 0 a ± 10 V) 0,01% - - A A 55H
Salida ASR
U1-25
Estado de entrada DI-16H2
Monitoriza el valor de referencia desde una tarjeta de referencia digital DI-16H2.El valor se visualizará en binario o BCD, dependiendo de la constante de usuario F3-01.
(No se puede poner en salida) - A A A A 58H
Referencia DI-16
U1-26
Referencia de tensión de salida (Vq)
Monitoriza la referencia de ten-sión interna del convertidor para el control de la corriente secundaria del motor.
10 V: 200 Vc.a. (400 Vc.a.)(posible 0 a ± 10 V) 0,1 V - A A A 59H
Ref Tensión(Vq)
U1-27
Referencia de tensión de salida (Vd)
Monitoriza la referencia de ten-sión interna del convertidor para el control de la corriente de excitación del motor.
10 V: 200 Vc.a. (400 Vc.a.)(posible 0 a ± 10 V) 0,1 V - A A A 5AH
Ref Tensión(Vd)
U1-28Nº Software (CPU) (Nº Software de CPU del
fabricante). (No se puede poner en salida) - A A A A 5BHID CPU
U1-32
Salida ACR del eje q Monitoriza el valor de salida de
control de corriente para la corriente secundaria del motor.
10 V: 100%(posible 0 a ± 10 V)
0,1% - A A A 5FH
Salida ACR(q)
U1-33
Salida ACR del eje d
Monitoriza el valor de salida de control de corriente para la corriente de excitación del motor.
10 V: 100%(posible 0 a ± 10 V)
0,1% - A A A 60H
ACR Eje(d)
U1-34Parámetro de fallo OPE
Muestra el primer número de parámetro cuando se detecta un fallo OPE.
(No se puede poner en salida) - A A A A 61HDetectado OPE
U1-35
Pulsos de movi-miento de servo cero
Muestra el número de pulsos del PG del rango de movimiento cuando el servo cero fue acti-vado. El valor mostrado es cuatro veces el número real de pulsos.
(No se puede poner en salida) - - - A A 62H
Pulso Servo Cero
U1-40
Tiempo de operación del ventilador de refrigeración
Monitoriza el tiempo total de operación del ventilador. El tiempo puede ser configurado en 02-10.
(No se puede poner en salida) 1hora A A A A 67H
Tmpo Trans VENT
U1-41
Temperatura del disipador térmico del convertidor
Muestra la temperatura del disi-pador térmico del convertidor medida por el sensor de protección térmica del IGBT.
(No se puede poner en salida) °C A A A A 68H
Temp Fin real
Número de
pará-metro
Nombre
DescripciónNivel de señal de salida
durante salida analógica multi-funcional
Unidad mín.
Métodos de controlRegistro MEMO-
BUSV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
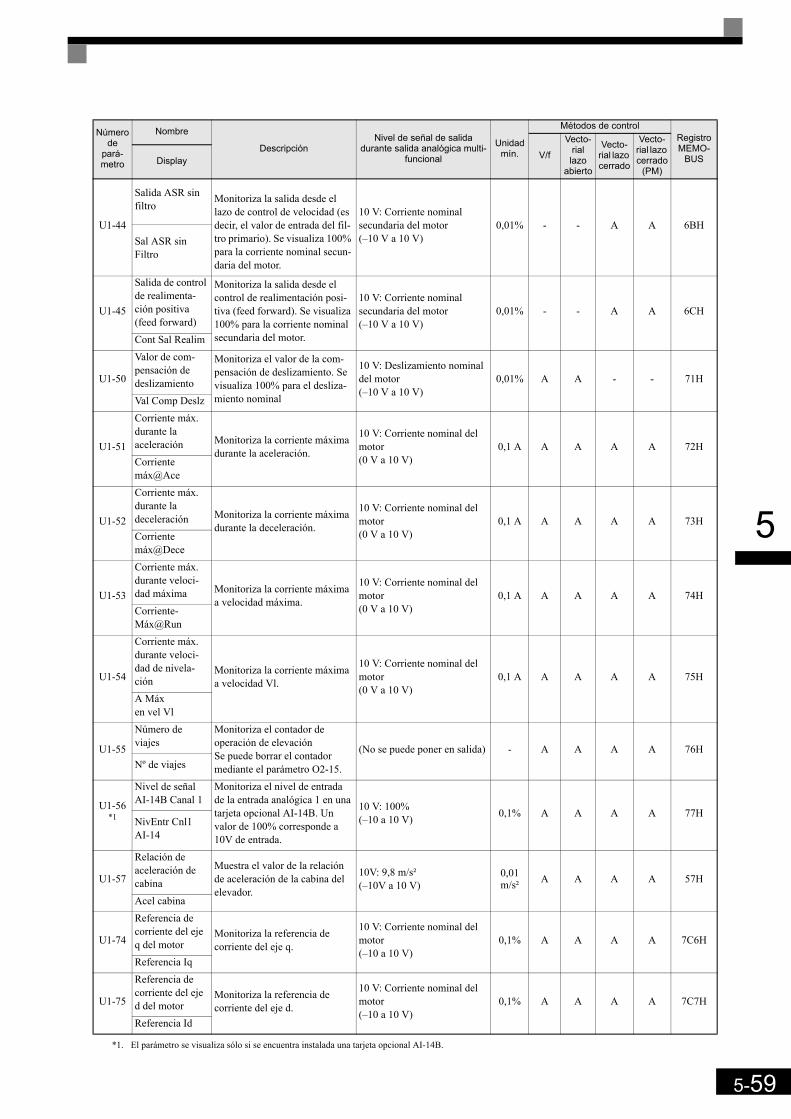
5-59
5
U1-44
Salida ASR sin filtro
Monitoriza la salida desde el lazo de control de velocidad (es decir, el valor de entrada del fil-tro primario). Se visualiza 100% para la corriente nominal secun-daria del motor.
10 V: Corriente nominal secundaria del motor(–10 V a 10 V)
0,01% - - A A 6BHSal ASR sin Filtro
U1-45
Salida de control de realimenta-ción positiva (feed forward)
Monitoriza la salida desde el control de realimentación posi-tiva (feed forward). Se visualiza 100% para la corriente nominal secundaria del motor.
10 V: Corriente nominal secundaria del motor(–10 V a 10 V)
0,01% - - A A 6CH
Cont Sal Realim
U1-50
Valor de com-pensación de deslizamiento
Monitoriza el valor de la com-pensación de deslizamiento. Se visualiza 100% para el desliza-miento nominal
10 V: Deslizamiento nominal del motor (–10 V a 10 V)
0,01% A A - - 71H
Val Comp Deslz
U1-51
Corriente máx. durante la aceleración Monitoriza la corriente máxima
durante la aceleración.
10 V: Corriente nominal del motor (0 V a 10 V)
0,1 A A A A A 72HCorriente máx@Ace
U1-52
Corriente máx. durante ladeceleración Monitoriza la corriente máxima
durante la deceleración.
10 V: Corriente nominal del motor (0 V a 10 V)
0,1 A A A A A 73HCorriente máx@Dece
U1-53
Corriente máx. durante veloci-dad máxima Monitoriza la corriente máxima
a velocidad máxima.
10 V: Corriente nominal del motor (0 V a 10 V)
0,1 A A A A A 74HCorriente-Máx@Run
U1-54
Corriente máx. durante veloci-dad de nivela-ción
Monitoriza la corriente máxima a velocidad Vl.
10 V: Corriente nominal del motor (0 V a 10 V)
0,1 A A A A A 75H
A Máxen vel Vl
U1-55
Número de viajes
Monitoriza el contador de operación de elevaciónSe puede borrar el contador mediante el parámetro O2-15.
(No se puede poner en salida) - A A A A 76HNº de viajes
U1-56*1
Nivel de señal AI-14B Canal 1
Monitoriza el nivel de entrada de la entrada analógica 1 en una tarjeta opcional AI-14B. Un valor de 100% corresponde a 10V de entrada.
10 V: 100%(–10 a 10 V) 0,1% A A A A 77H
NivEntr Cnl1 AI-14
U1-57
Relación de aceleración de cabina
Muestra el valor de la relación de aceleración de la cabina del elevador.
10V: 9,8 m/s²(–10V a 10 V)
0,01m/s² A A A A 57H
Acel cabina
U1-74
Referencia de corriente del eje q del motor
Monitoriza la referencia de corriente del eje q.
10 V: Corriente nominal del motor(–10 a 10 V)
0,1% A A A A 7C6H
Referencia Iq
U1-75
Referencia de corriente del eje d del motor
Monitoriza la referencia de corriente del eje d.
10 V: Corriente nominal del motor(–10 a 10 V)
0,1% A A A A 7C7H
Referencia Id
*1. El parámetro se visualiza sólo si se encuentra instalada una tarjeta opcional AI-14B.
Número de
pará-metro
Nombre
DescripciónNivel de señal de salida
durante salida analógica multi-funcional
Unidad mín.
Métodos de controlRegistro MEMO-
BUSV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display

5-60
5
Seguimiento de fallo: U2
Número de
pará-metro
Nombre
DescripciónNivel de señal de salida durante salida analógica
multifuncional
Uni-dad mín.
Métodos de controlRegistro MEMO-
BUSV/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)Display
U2-01Fallo Actual
El contenido del fallo actual.
(No se puede poner en salida)
- A A A A 80HFallo Actual
U2-02Último Fallo
El contenido del último fallo. - A A A A 81HÚltimo Fallo
U2-03Referencia de frecuencia en el fallo La referencia de frecuencia
cuando tuvo lugar el último fallo.0,01 Hz A A A A 82H
Ref. Frecuencia
U2-04Frecuencia de salida en el fallo Frecuencia de salida cuando tuvo
lugar el último fallo.0,01 Hz A A A A 83H
Frec. salida
U2-05Corriente de salida en el fallo La corriente de salida cuando tuvo
lugar el último fallo. 0,1 A A A A A 84HCorriente Salida
U2-06Velocidad del motor en el fallo La velocidad del motor cuando
tuvo lugar el último fallo.0,01 Hz - A A A 85H
Vel motor
U2-07
Referencia de tensión de salida en el fallo
La referencia de tensión de salida cuando tuvo lugar el último fallo. 0,1 V A A A A 86H
Tensión Salida
U2-08Tensión del Bus de c.c. en el fallo. La tensión principal de c.c.
cuando tuvo lugar el último fallo. 1 V A A A A 87HTensión Bus cc
U2-09Potencia de salida en el fallo La potencia de salida cuando tuvo
lugar el último fallo.0,1 kW A A A A 88H
Salida kW
U2-10
Referencia de par en el fallo
La referencia de par cuando tuvo lugar el último fallo. La par nominal del motor corresponde a 100%.
0,1% - - A A 89HReferencia de par
U2-11
Estado de los terminales de entrada en el fallo
Estado de los terminales de entrada cuando tuvo lugar el último fallo.El formato es el mismo que para U1-10.
- A A A A 8AH
Est Term Entr
U2-12
Estado de los terminales de salida en el fallo
Estado de los terminales de salida cuando tuvo lugar el último fallo. El formato es el mismo que para U1-11.
- A A A A 8BH
Est Term Salida
U2-13
Estado de operación en el fallo Estado de operación cuando tuvo
lugar el último fallo. El formato es el mismo que para U1-12.
- A A A A 8CHEstado del convertidor
U2-14
Tiempo de operación acumulativo en el fallo
Tiempo de operación cuando tuvo lugar el último fallo.
(No se puede poner en salida)
1hora A A A A 8DH
Tmpo Transc
IMPORTANTELos siguientes errores no están registrados en el registro de errores: CPF00, 01, 02, 03, UV1, y UV2.

5-61
5
Histórico de fallos: U3Número
de pará-metro
NombreDescripción Nivel de señal de salida durante
salida analógica multifuncionalUnidad
mín.
Registro MEMO-
BUSDisplay
U3-01Último Fallo
El contenido del último fallo.
(No se puede poner en salida)
- 90HÚltimo Fallo
U3-02Penúltimo fallo
El contenido del penúltimo fallo. - 91HMensaje Fallo 2
U3-03Antepenúltimo fallo
El contenido del antepenúltimo fallo. - 92HMensaje Fallo 3
U3-04Cuarto fallo
El contenido del cuarto fallo. - 93HMensaje Fallo 4
U3-05
Tiempo de operación acumulativo en el fallo Tiempo de operación total cuando tuvo lugar el
primer fallo anterior.1
hora 94HTmpo Transc 1
U3-06
Tiempo acumulado del segundo fallo Tiempo de operación total cuando tuvo lugar el
segundo fallo anterior.1
hora 95HTmpo Transc 2
U3-07
Tiempo acumulado del tercer fallo Tiempo de operación total cuando tuvo lugar el
tercer fallo anterior.1
hora 96HTmpo Transc 3
U3-08
Tiempo acumulado del cuarto fallo. Tiempo de operación total cuando tuvo lugar el
cuarto fallo. 1
hora 97HTmpo Transc 4
U3-09 –
U3-14
Quinto al décimo fallo
El contenido del quinto al décimo fallo –
804805H806H807H808H809H
Mensaje de fallo 5 a 10
U3-15 –
U3-20
Tiempo acumulado desde el quinto al décimo fallo
Tiempo de operación total cuando tuvo lugar desde el quinto al décimo fallo anterior. 1hr
806H80FH810H811H812H813H
Tmpo Transc 5 a 10
IMPORTANTELos siguientes errores no están registrados en el registro de errores: CPF00, 01, 02, 03, UV1, y UV2.
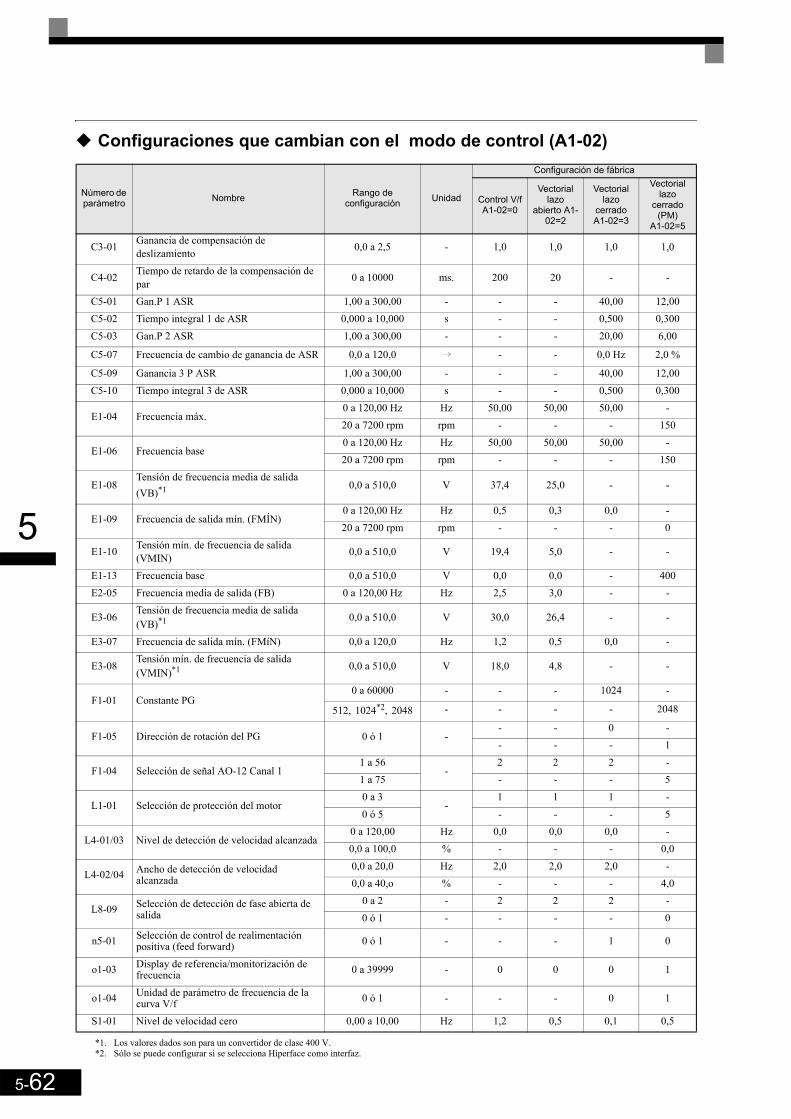
5-62
5
Configuraciones que cambian con el modo de control (A1-02)
Número de parámetro Nombre Rango de
configuración Unidad
Configuración de fábrica
Control V/fA1-02=0
Vectorial lazo
abierto A1-02=2
Vectorial lazo
cerrado A1-02=3
Vectorial lazo
cerrado (PM)
A1-02=5
C3-01 Ganancia de compensación de deslizamiento 0,0 a 2,5 - 1,0 1,0 1,0 1,0
C4-02 Tiempo de retardo de la compensación de par 0 a 10000 ms. 200 20 - -
C5-01 Gan.P 1 ASR 1,00 a 300,00 - - - 40,00 12,00C5-02 Tiempo integral 1 de ASR 0,000 a 10,000 s - - 0,500 0,300C5-03 Gan.P 2 ASR 1,00 a 300,00 - - - 20,00 6,00
C5-07 Frecuencia de cambio de ganancia de ASR 0,0 a 120,0 i - - 0,0 Hz 2,0 %
C5-09 Ganancia 3 P ASR 1,00 a 300,00 - - - 40,00 12,00C5-10 Tiempo integral 3 de ASR 0,000 a 10,000 s - - 0,500 0,300
E1-04 Frecuencia máx.0 a 120,00 Hz Hz 50,00 50,00 50,00 -20 a 7200 rpm rpm - - - 150
E1-06 Frecuencia base0 a 120,00 Hz Hz 50,00 50,00 50,00 -20 a 7200 rpm rpm - - - 150
E1-08Tensión de frecuencia media de salida (VB)*1
*1. Los valores dados son para un convertidor de clase 400 V.
0,0 a 510,0 V 37,4 25,0 - -
E1-09 Frecuencia de salida mín. (FMÍN)0 a 120,00 Hz Hz 0,5 0,3 0,0 -20 a 7200 rpm rpm - - - 0
E1-10 Tensión mín. de frecuencia de salida (VMIN) 0,0 a 510,0 V 19,4 5,0 - -
E1-13 Frecuencia base 0,0 a 510,0 V 0,0 0,0 - 400E2-05 Frecuencia media de salida (FB) 0 a 120,00 Hz Hz 2,5 3,0 - -
E3-06Tensión de frecuencia media de salida (VB)*1 0,0 a 510,0 V 30,0 26,4 - -
E3-07 Frecuencia de salida mín. (FMíN) 0,0 a 120,0 Hz 1,2 0,5 0,0 -
E3-08Tensión mín. de frecuencia de salida (VMIN)*1 0,0 a 510,0 V 18,0 4,8 - -
F1-01 Constante PG0 a 60000 - - - 1024 -
512, 1024*2, 2048
*2. Sólo se puede configurar si se selecciona Hiperface como interfaz.
- - - - 2048
F1-05 Dirección de rotación del PG 0 ó 1 -- - 0 -- - - 1
F1-04 Selección de señal AO-12 Canal 11 a 56
-2 2 2 -
1 a 75 - - - 5
L1-01 Selección de protección del motor0 a 3
-1 1 1 -
0 ó 5 - - - 5
L4-01/03 Nivel de detección de velocidad alcanzada0 a 120,00 Hz 0,0 0,0 0,0 -0,0 a 100,0 % - - - 0,0
L4-02/04 Ancho de detección de velocidad alcanzada
0,0 a 20,0 Hz 2,0 2,0 2,0 -0,0 a 40,o % - - - 4,0
L8-09 Selección de detección de fase abierta de salida
0 a 2 - 2 2 2 -0 ó 1 - - - - 0
n5-01 Selección de control de realimentación positiva (feed forward) 0 ó 1 - - - 1 0
o1-03 Display de referencia/monitorización de frecuencia 0 a 39999 - 0 0 0 1
o1-04 Unidad de parámetro de frecuencia de la curva V/f 0 ó 1 - - - 0 1
S1-01 Nivel de velocidad cero 0,00 a 10,00 Hz 1,2 0,5 0,1 0,5
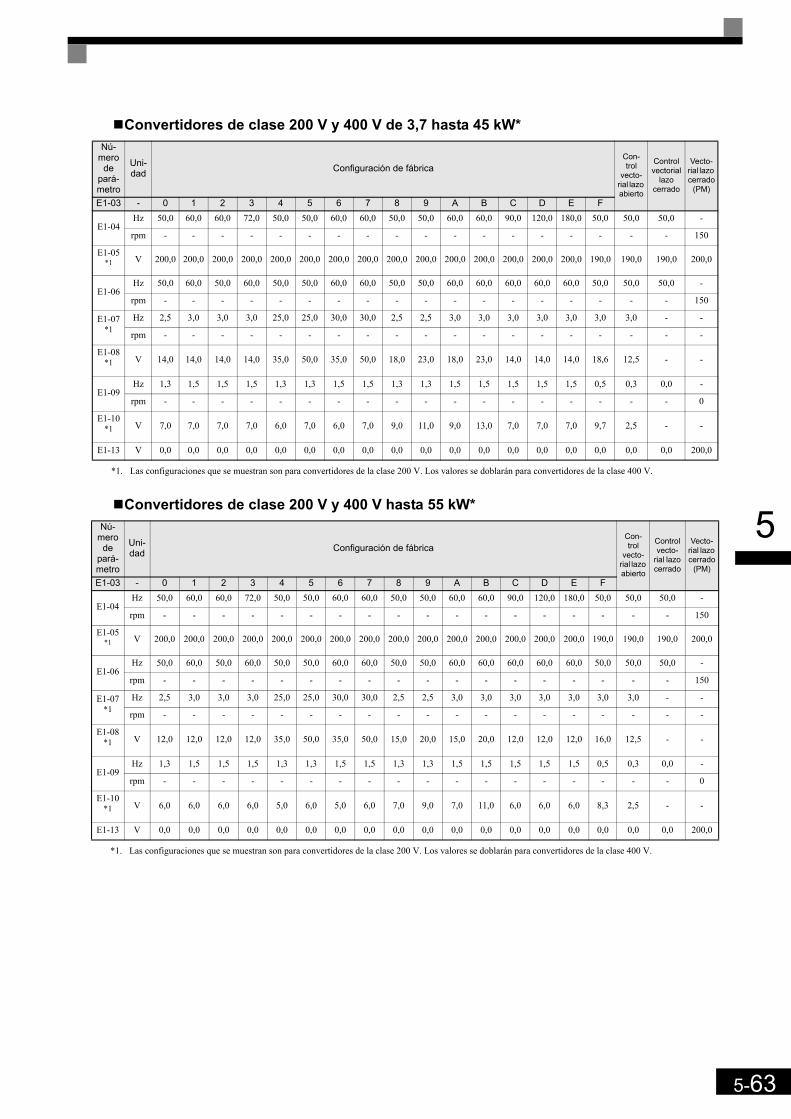
5-63
5
Convertidores de clase 200 V y 400 V de 3,7 hasta 45 kW*
Convertidores de clase 200 V y 400 V hasta 55 kW*
Nú-mero
de pará-metro
Uni-dad Configuración de fábrica
Con-trol
vecto-rial lazo abierto
Control vectorial
lazo cerrado
Vecto-rial lazo cerrado
(PM)
E1-03 - 0 1 2 3 4 5 6 7 8 9 A B C D E F
E1-04Hz 50,0 60,0 60,0 72,0 50,0 50,0 60,0 60,0 50,0 50,0 60,0 60,0 90,0 120,0 180,0 50,0 50,0 50,0 -
rpm - - - - - - - - - - - - - - - - - - 150
E1-05*1
*1. Las configuraciones que se muestran son para convertidores de la clase 200 V. Los valores se doblarán para convertidores de la clase 400 V.
V 200,0 200,0 200,0 200,0 200,0 200,0 200,0 200,0 200,0 200,0 200,0 200,0 200,0 200,0 200,0 190,0 190,0 190,0 200,0
E1-06Hz 50,0 60,0 50,0 60,0 50,0 50,0 60,0 60,0 50,0 50,0 60,0 60,0 60,0 60,0 60,0 50,0 50,0 50,0 -
rpm - - - - - - - - - - - - - - - - - - 150
E1-07*1
Hz 2,5 3,0 3,0 3,0 25,0 25,0 30,0 30,0 2,5 2,5 3,0 3,0 3,0 3,0 3,0 3,0 3,0 - -
rpm - - - - - - - - - - - - - - - - - - -
E1-08*1 V 14,0 14,0 14,0 14,0 35,0 50,0 35,0 50,0 18,0 23,0 18,0 23,0 14,0 14,0 14,0 18,6 12,5 - -
E1-09Hz 1,3 1,5 1,5 1,5 1,3 1,3 1,5 1,5 1,3 1,3 1,5 1,5 1,5 1,5 1,5 0,5 0,3 0,0 -
rpm - - - - - - - - - - - - - - - - - - 0
E1-10*1 V 7,0 7,0 7,0 7,0 6,0 7,0 6,0 7,0 9,0 11,0 9,0 13,0 7,0 7,0 7,0 9,7 2,5 - -
E1-13 V 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 200,0
Nú-mero
de pará-metro
Uni-dad Configuración de fábrica
Con-trol
vecto-rial lazo abierto
Control vecto-
rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
E1-03 - 0 1 2 3 4 5 6 7 8 9 A B C D E F
E1-04Hz 50,0 60,0 60,0 72,0 50,0 50,0 60,0 60,0 50,0 50,0 60,0 60,0 90,0 120,0 180,0 50,0 50,0 50,0 -
rpm - - - - - - - - - - - - - - - - - - 150
E1-05*1
*1. Las configuraciones que se muestran son para convertidores de la clase 200 V. Los valores se doblarán para convertidores de la clase 400 V.
V 200,0 200,0 200,0 200,0 200,0 200,0 200,0 200,0 200,0 200,0 200,0 200,0 200,0 200,0 200,0 190,0 190,0 190,0 200,0
E1-06Hz 50,0 60,0 50,0 60,0 50,0 50,0 60,0 60,0 50,0 50,0 60,0 60,0 60,0 60,0 60,0 50,0 50,0 50,0 -
rpm - - - - - - - - - - - - - - - - - - 150
E1-07*1
Hz 2,5 3,0 3,0 3,0 25,0 25,0 30,0 30,0 2,5 2,5 3,0 3,0 3,0 3,0 3,0 3,0 3,0 - -
rpm - - - - - - - - - - - - - - - - - - -
E1-08*1 V 12,0 12,0 12,0 12,0 35,0 50,0 35,0 50,0 15,0 20,0 15,0 20,0 12,0 12,0 12,0 16,0 12,5 - -
E1-09Hz 1,3 1,5 1,5 1,5 1,3 1,3 1,5 1,5 1,3 1,3 1,5 1,5 1,5 1,5 1,5 0,5 0,3 0,0 -
rpm - - - - - - - - - - - - - - - - - - 0
E1-10*1 V 6,0 6,0 6,0 6,0 5,0 6,0 5,0 6,0 7,0 9,0 7,0 11,0 6,0 6,0 6,0 8,3 2,5 - -
E1-13 V 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 200,0
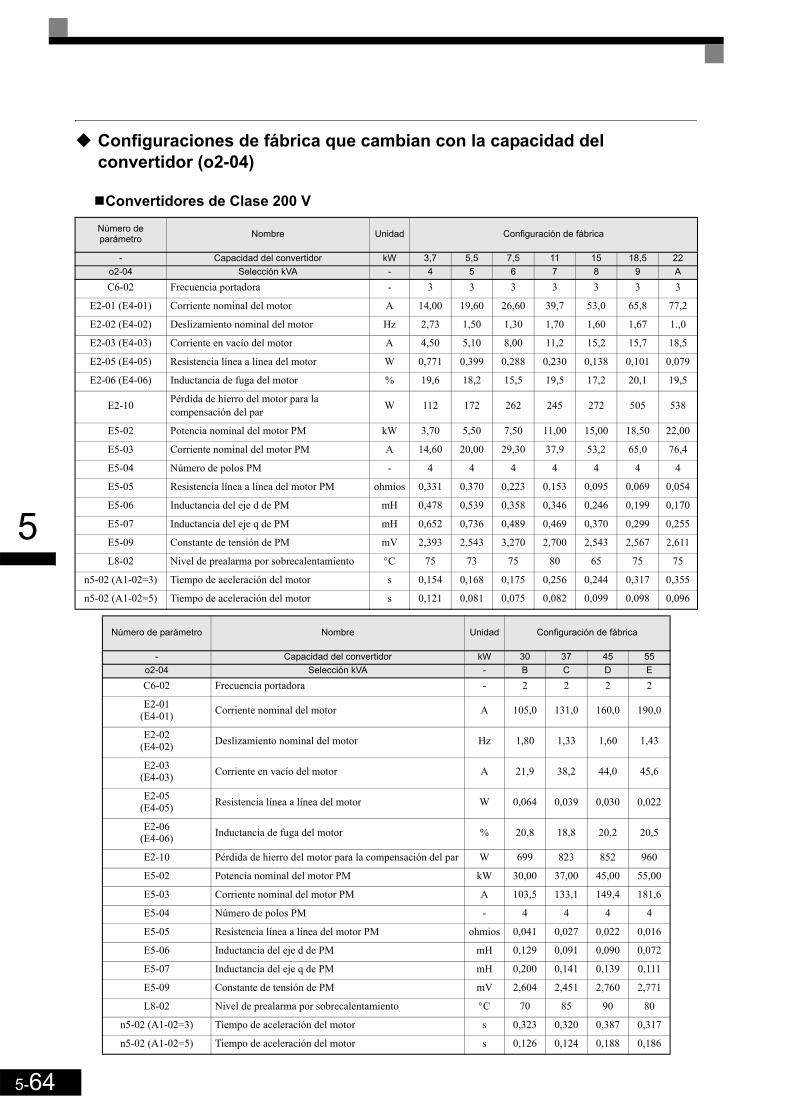
5-64
5
Configuraciones de fábrica que cambian con la capacidad del convertidor (o2-04)
Convertidores de Clase 200 V
Número de parámetro Nombre Unidad Configuración de fábrica
- Capacidad del convertidor kW 3,7 5,5 7,5 11 15 18,5 22o2-04 Selección kVA - 4 5 6 7 8 9 A
C6-02 Frecuencia portadora - 3 3 3 3 3 3 3
E2-01 (E4-01) Corriente nominal del motor A 14,00 19,60 26,60 39,7 53,0 65,8 77,2
E2-02 (E4-02) Deslizamiento nominal del motor Hz 2,73 1,50 1,30 1,70 1,60 1,67 1.,0
E2-03 (E4-03) Corriente en vacío del motor A 4,50 5,10 8,00 11,2 15,2 15,7 18,5
E2-05 (E4-05) Resistencia línea a línea del motor W 0,771 0,399 0,288 0,230 0,138 0,101 0,079
E2-06 (E4-06) Inductancia de fuga del motor % 19,6 18,2 15,5 19,5 17,2 20,1 19,5
E2-10 Pérdida de hierro del motor para la compensación del par W 112 172 262 245 272 505 538
E5-02 Potencia nominal del motor PM kW 3,70 5,50 7,50 11,00 15,00 18,50 22,00
E5-03 Corriente nominal del motor PM A 14,60 20,00 29,30 37,9 53,2 65,0 76,4
E5-04 Número de polos PM - 4 4 4 4 4 4 4
E5-05 Resistencia línea a línea del motor PM ohmios 0,331 0,370 0,223 0,153 0,095 0,069 0,054
E5-06 Inductancia del eje d de PM mH 0,478 0,539 0,358 0,346 0,246 0,199 0,170
E5-07 Inductancia del eje q de PM mH 0,652 0,736 0,489 0,469 0,370 0,299 0,255
E5-09 Constante de tensión de PM mV 2,393 2,543 3,270 2,700 2,543 2,567 2,611
L8-02 Nivel de prealarma por sobrecalentamiento °C 75 73 75 80 65 75 75
n5-02 (A1-02=3) Tiempo de aceleración del motor s 0,154 0,168 0,175 0,256 0,244 0,317 0,355
n5-02 (A1-02=5) Tiempo de aceleración del motor s 0,121 0,081 0,075 0,082 0,099 0,098 0,096
Número de parámetro Nombre Unidad Configuración de fábrica
- Capacidad del convertidor kW 30 37 45 55o2-04 Selección kVA - B C D E
C6-02 Frecuencia portadora - 2 2 2 2
E2-01(E4-01) Corriente nominal del motor A 105,0 131,0 160,0 190,0
E2-02(E4-02) Deslizamiento nominal del motor Hz 1,80 1,33 1,60 1,43
E2-03(E4-03) Corriente en vacío del motor A 21,9 38,2 44,0 45,6
E2-05(E4-05) Resistencia línea a línea del motor W 0,064 0,039 0,030 0,022
E2-06(E4-06) Inductancia de fuga del motor % 20,8 18,8 20,2 20,5
E2-10 Pérdida de hierro del motor para la compensación del par W 699 823 852 960
E5-02 Potencia nominal del motor PM kW 30,00 37,00 45,00 55,00
E5-03 Corriente nominal del motor PM A 103,5 133,1 149,4 181,6
E5-04 Número de polos PM - 4 4 4 4
E5-05 Resistencia línea a línea del motor PM ohmios 0,041 0,027 0,022 0,016
E5-06 Inductancia del eje d de PM mH 0,129 0,091 0,090 0,072
E5-07 Inductancia del eje q de PM mH 0,200 0,141 0,139 0,111
E5-09 Constante de tensión de PM mV 2,604 2,451 2,760 2,771
L8-02 Nivel de prealarma por sobrecalentamiento °C 70 85 90 80
n5-02 (A1-02=3) Tiempo de aceleración del motor s 0,323 0,320 0,387 0,317
n5-02 (A1-02=5) Tiempo de aceleración del motor s 0,126 0,124 0,188 0,186
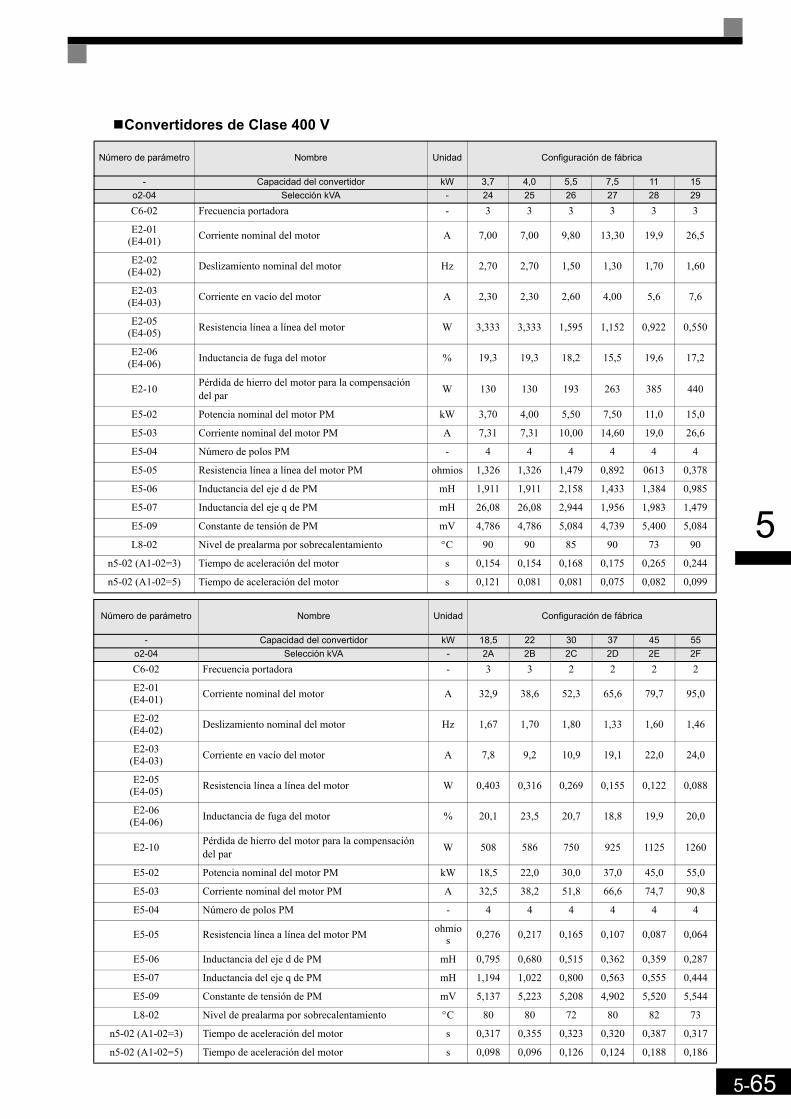
5-65
5
Convertidores de Clase 400 V
Número de parámetro Nombre Unidad Configuración de fábrica
- Capacidad del convertidor kW 3,7 4,0 5,5 7,5 11 15o2-04 Selección kVA - 24 25 26 27 28 29
C6-02 Frecuencia portadora - 3 3 3 3 3 3
E2-01(E4-01) Corriente nominal del motor A 7,00 7,00 9,80 13,30 19,9 26,5
E2-02(E4-02) Deslizamiento nominal del motor Hz 2,70 2,70 1,50 1,30 1,70 1,60
E2-03(E4-03) Corriente en vacío del motor A 2,30 2,30 2,60 4,00 5,6 7,6
E2-05(E4-05) Resistencia línea a línea del motor W 3,333 3,333 1,595 1,152 0,922 0,550
E2-06(E4-06) Inductancia de fuga del motor % 19,3 19,3 18,2 15,5 19,6 17,2
E2-10 Pérdida de hierro del motor para la compensación del par W 130 130 193 263 385 440
E5-02 Potencia nominal del motor PM kW 3,70 4,00 5,50 7,50 11,0 15,0
E5-03 Corriente nominal del motor PM A 7,31 7,31 10,00 14,60 19,0 26,6
E5-04 Número de polos PM - 4 4 4 4 4 4
E5-05 Resistencia línea a línea del motor PM ohmios 1,326 1,326 1,479 0,892 0613 0,378
E5-06 Inductancia del eje d de PM mH 1,911 1,911 2,158 1,433 1,384 0,985
E5-07 Inductancia del eje q de PM mH 26,08 26,08 2,944 1,956 1,983 1,479
E5-09 Constante de tensión de PM mV 4,786 4,786 5,084 4,739 5,400 5,084
L8-02 Nivel de prealarma por sobrecalentamiento °C 90 90 85 90 73 90
n5-02 (A1-02=3) Tiempo de aceleración del motor s 0,154 0,154 0,168 0,175 0,265 0,244
n5-02 (A1-02=5) Tiempo de aceleración del motor s 0,121 0,081 0,081 0,075 0,082 0,099
Número de parámetro Nombre Unidad Configuración de fábrica
- Capacidad del convertidor kW 18,5 22 30 37 45 55o2-04 Selección kVA - 2A 2B 2C 2D 2E 2F
C6-02 Frecuencia portadora - 3 3 2 2 2 2
E2-01(E4-01) Corriente nominal del motor A 32,9 38,6 52,3 65,6 79,7 95,0
E2-02(E4-02) Deslizamiento nominal del motor Hz 1,67 1,70 1,80 1,33 1,60 1,46
E2-03(E4-03) Corriente en vacío del motor A 7,8 9,2 10,9 19,1 22,0 24,0
E2-05(E4-05) Resistencia línea a línea del motor W 0,403 0,316 0,269 0,155 0,122 0,088
E2-06(E4-06) Inductancia de fuga del motor % 20,1 23,5 20,7 18,8 19,9 20,0
E2-10 Pérdida de hierro del motor para la compensación del par W 508 586 750 925 1125 1260
E5-02 Potencia nominal del motor PM kW 18,5 22,0 30,0 37,0 45,0 55,0
E5-03 Corriente nominal del motor PM A 32,5 38,2 51,8 66,6 74,7 90,8
E5-04 Número de polos PM - 4 4 4 4 4 4
E5-05 Resistencia línea a línea del motor PM ohmios 0,276 0,217 0,165 0,107 0,087 0,064
E5-06 Inductancia del eje d de PM mH 0,795 0,680 0,515 0,362 0,359 0,287
E5-07 Inductancia del eje q de PM mH 1,194 1,022 0,800 0,563 0,555 0,444
E5-09 Constante de tensión de PM mV 5,137 5,223 5,208 4,902 5,520 5,544
L8-02 Nivel de prealarma por sobrecalentamiento °C 80 80 72 80 82 73
n5-02 (A1-02=3) Tiempo de aceleración del motor s 0,317 0,355 0,323 0,320 0,387 0,317
n5-02 (A1-02=5) Tiempo de aceleración del motor s 0,098 0,096 0,126 0,124 0,188 0,186
5-66
5
Configuraciones deparámetro según
funciónDisminución de la frecuencia portadora y limitación de corriente.............................6-2Secuencia de control / freno .....................................................................................6-3Características de la aceleración y deceleración....................................................6-20Ajuste de señales de entrada analógicas ...............................................................6-25Detección de velocidad y limitación de velocidad...................................................6-26Mejora del rendimiento de operación......................................................................6-29Funciones de protección.........................................................................................6-40Protección del convertidor ......................................................................................6-47Funciones de terminal de entrada ..........................................................................6-50Funciones de terminal de salida .............................................................................6-56Configuración del motor y de la curva V/f ...............................................................6-59Funciones del Operador Digital/Monitor LED .........................................................6-64Tarjetas opcionales de realimentación (PG)...........................................................6-72Sistema de rescate .................................................................................................6-77Reset automático de fallo .......................................................................................6-81Comunicaciones Memobus.....................................................................................6-83
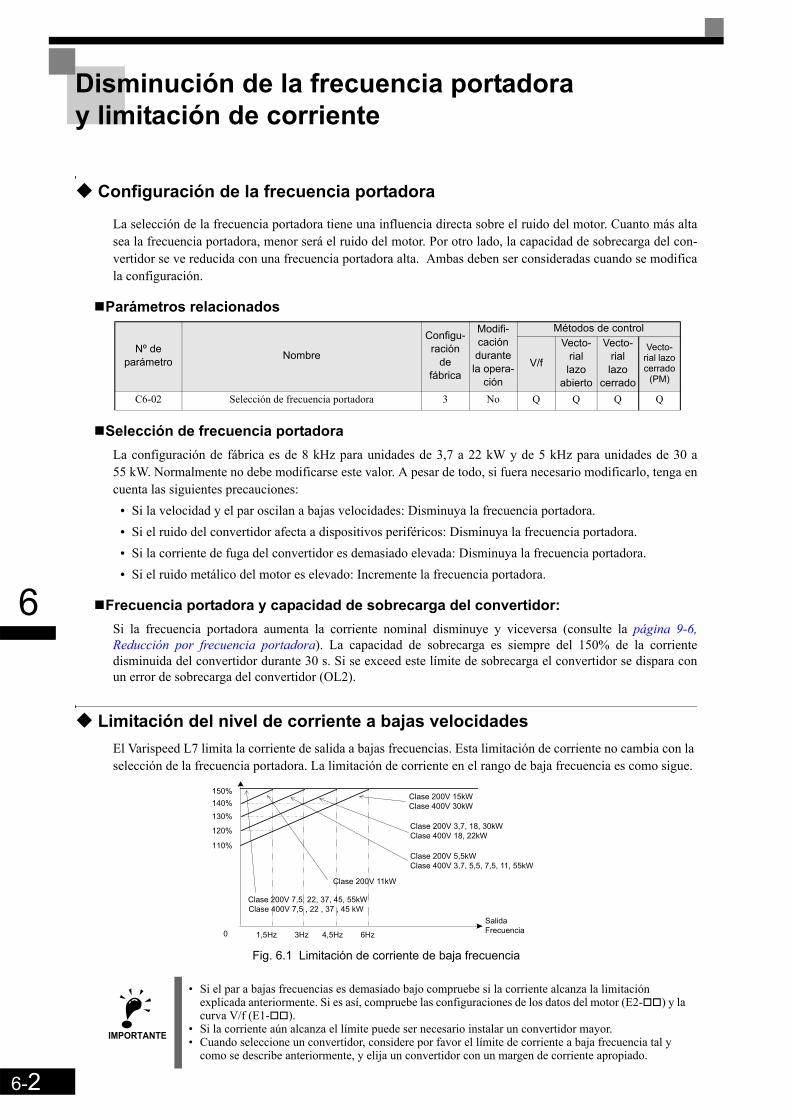
6-2
6
Disminución de la frecuencia portadora y limitación de corriente
Configuración de la frecuencia portadora
La selección de la frecuencia portadora tiene una influencia directa sobre el ruido del motor. Cuanto más altasea la frecuencia portadora, menor será el ruido del motor. Por otro lado, la capacidad de sobrecarga del con-vertidor se ve reducida con una frecuencia portadora alta. Ambas deben ser consideradas cuando se modificala configuración.
Parámetros relacionados
Selección de frecuencia portadoraLa configuración de fábrica es de 8 kHz para unidades de 3,7 a 22 kW y de 5 kHz para unidades de 30 a55 kW. Normalmente no debe modificarse este valor. A pesar de todo, si fuera necesario modificarlo, tenga encuenta las siguientes precauciones:
• Si la velocidad y el par oscilan a bajas velocidades: Disminuya la frecuencia portadora.• Si el ruido del convertidor afecta a dispositivos periféricos: Disminuya la frecuencia portadora.• Si la corriente de fuga del convertidor es demasiado elevada: Disminuya la frecuencia portadora.• Si el ruido metálico del motor es elevado: Incremente la frecuencia portadora.
Frecuencia portadora y capacidad de sobrecarga del convertidor:Si la frecuencia portadora aumenta la corriente nominal disminuye y viceversa (consulte la página 9-6,Reducción por frecuencia portadora). La capacidad de sobrecarga es siempre del 150% de la corrientedisminuida del convertidor durante 30 s. Si se exceed este límite de sobrecarga el convertidor se dispara conun error de sobrecarga del convertidor (OL2).
Limitación del nivel de corriente a bajas velocidadesEl Varispeed L7 limita la corriente de salida a bajas frecuencias. Esta limitación de corriente no cambia con la selección de la frecuencia portadora. La limitación de corriente en el rango de baja frecuencia es como sigue.
Fig. 6.1 Limitación de corriente de baja frecuencia
Nº de parámetro Nombre
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de control
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo
cerrado
Vecto-rial lazo cerrado
(PM)
C6-02 Selección de frecuencia portadora 3 No Q Q Q Q
IMPORTANTE
• Si el par a bajas frecuencias es demasiado bajo compruebe si la corriente alcanza la limitación explicada anteriormente. Si es así, compruebe las configuraciones de los datos del motor (E2- ) y la curva V/f (E1- ).
• Si la corriente aún alcanza el límite puede ser necesario instalar un convertidor mayor.• Cuando seleccione un convertidor, considere por favor el límite de corriente a baja frecuencia tal y
como se describe anteriormente, y elija un convertidor con un margen de corriente apropiado.
150%
6Hz0
140%130%
120%
110%
4,5Hz3Hz1,5Hz
Clase 200V 7,5, 22, 37, 45, 55kW Clase 400V 7,5 , 22 , 37 , 45 kW
Clase 200V 11kW
SalidaFrecuencia
Clase 200V 5,5kWClase 400V 3,7, 5,5, 7,5, 11, 55kW
Clase 200V 3,7, 18, 30kWClase 400V 18, 22kW
Clase 200V 15kWClase 400V 30kW
6-3
6
Secuencia de control / freno
Comandos UP y DOWN
Inicio de viaje en dirección ascendente o descendente.Los comandos UP y DOWN son la información para la dirección de desplazamiento.
Para que el elevador inicie un desplazamiento en la dirección UP o DOWN deben cumplirse las siguientescondiciones:
• Al menos una referencia de velocidad debe estar seleccionada si se utilizan entradas digitales para laselección de referencia de velocidad.
• La señal del base block dhardware debe estar configurada (no la condición del base block).• Cuando una entrada digital es configurada como entrada de confirmación de contactor, debe existir la señal
de confirmación de contactor antes de que se inicie la viaje.• Para iniciar el desplazamiento en dirección Up debe estar configurada la señal Up. Para iniciar el
desplazamiento en dirección Down debe estar configurada la señal Down
Parada de desplazamiento El convertidor puede ser detenido como sigue.
• Se retira la señal del comando de dirección (UP o DOWN).• La señal de selección de referencia de velocidad se quita si se utilizan entradas digitales para la selección
de referencia de velocidad.• Si d1-18 está configurado en 3 y todas las entradas de velocidad se han quitado
Selección de fuente de comando UP / DOWNLa fuente de entrada para la señal UP o DOWN puede ser seleccionada en el parámetro b1-02.
Parámetros relacionados
Comados UP/DOWN utilizando el Operador Digital (b1.02=0)Cuando se configura b1-02 como 0, el commando UP/DOWN debe ser introducido utilizando las teclas delOperador Digital (RUN, STOP y FWD/REV). Para más información sobre el Operador Digital consulte lapágina 3-1, Monitor LED / Operador Digital y modos. Esta operación puede ser utilizada para comprobacio-nes solamente.
Comandos UP/DOWN utilizando los terminales del circuito de control (b1-02=1, configuración de fábrica)
Cuando b1-02 se configura a 1 el comando Up/Down se introduce en los terminales del circuito de control S1y S2. Esta es la configuración de fábrica y la configuración más común.
Comando UP/DOWN utilizando una tarjeta opcional de entrada (b1-02=3)Cuando b1-02 está configurado como 2 el comando UP/DOWN puede ser configurado utilizando una tarjetaopcional de entrada, por ejemplo una tarjeta de comunicaciones de bus de campo.
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
b1-02 Fuente de selección comando RUN 1 No Q Q Q Q

6-4
6
Selección de fuente de referencia de velocidad
Selección de fuente de referencia de velocidadLa fuente de referencia de velocidad puede ser seleccionada utilizando el parámetro b1-01.
Parámetros relacionados
Introducción de la referencia de velocidad desde las entradas digitales (b1-01=0)Cuando b1-01 está configurado como 0, la referencia de velocidad puede ser seleccionada de entre velocida-des preconfiguradas utilizando las entradas digitales del convertidor. Consulte la página 6-5, Secuencia deselección de velocidad utilizando entradas digitales para obtener información detallada.
Introducción de la referencia de velocidad utilizando una señal de tensión (b1-01=1)Si b1-01 está configurado como 1, la referencia de velocidad puede introducirse en el terminal A1 como unaseñal de 0 a +10V. Si está instalada una tarjeta opcional AI-14B la señal A1 es reemplazada por la entradaCanal 1 de la tarjeta AI.La señal de referencia analógica puede usarse también como la 1ª velocidad si se selecciona operación de mul-tivelocidad (d1-18=0, consulte en la página 6-5, Secuencia de selección de velocidad utilizando entradas digi-tales más detalles).Si el parámetro d1-18 se configura en 0 y b1-01 como 1,el valor de entrada analógica sustituye a cualquiervelocidad seleccionada mediante las entradas digitales excepto la velocidad de servicio.
Introducción de la referencia de velocidad utilizando una tarjeta opcional de entrada (b1-01=3)Cuando b1-01 está configurado como 2 la referencia de velocidad puede ser introducida utilizando una tarjetaopcional de entrada, por ejemplo una tarjeta de comunicaciones de bus de campo.
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la opera-
ción
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
b1-01 Selección de fuente de referencia de frecuencia 0 No Q Q Q Q

6-5
6
Secuencia de selección de velocidad utilizando entradas digitales
Si se utilizan entradas digitales para la selección de velocidad, el método de selección de la velocidad y laprioridad de la velocidad dependen de la configuración del parámetro d1-18.
Operación en multivelocidad 1/2 (introducción binaria) (d1-18=0/3)
If d1-18 = 0Puede seleccionarse un máximo de 8 pasos de velocidad preconfigurados (definidos en los parámetros d1-01 ad1-08) utilizando 3 entradas digitales codificadas en binario. El comando UP/DOWN arranca el convertidor.Se detiene cuando se retira el comando UP/DOWN.
If d1-18 = 3Pueden seleccionarse 7 pasos de velocidad preconfigurados (definidos en los parámetros d1-02 a d1-08)usando 3 entradas digitales de codificación binaria. El comando Up/Down arranca el convertidor. Se paracuando se retira el comando UP/DOWN o cuando no hay velocidad seleccionada (todas las entradas digitalesestán desactivadas).
Parámetros relacionados
Configuraciones de entrada digital multifuncional (H1-01 a H1-05) (Ejemplo)
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
d1-18 Selección de prioridad de velocidad 1 No Q Q Q Q
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
d1-01 to d1-08 Valor de referencia 1 a 8 de multivelocidad
0,00 HzSí
A A A -
0,00% - - - A
Terminal Número de parámetro Valor configurado Descripción
S4 H1-02 3 Comando de multivelocidad 1
S5 H1-03 4 Comando de multivelocidad 2
S6 H1-04 5 Comando de multivelocidad 3
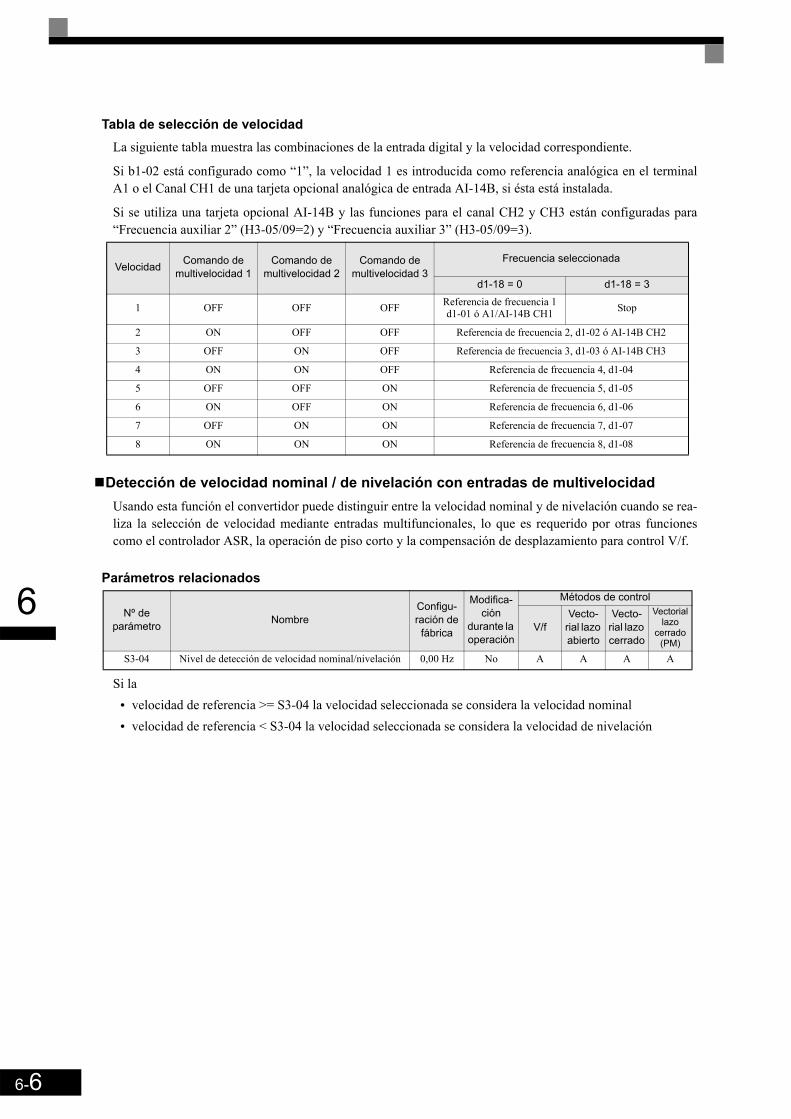
6-6
6
Tabla de selección de velocidadLa siguiente tabla muestra las combinaciones de la entrada digital y la velocidad correspondiente.
Si b1-02 está configurado como “1”, la velocidad 1 es introducida como referencia analógica en el terminalA1 o el Canal CH1 de una tarjeta opcional analógica de entrada AI-14B, si ésta está instalada.
Si se utiliza una tarjeta opcional AI-14B y las funciones para el canal CH2 y CH3 están configuradas para“Frecuencia auxiliar 2” (H3-05/09=2) y “Frecuencia auxiliar 3” (H3-05/09=3).
Detección de velocidad nominal / de nivelación con entradas de multivelocidadUsando esta función el convertidor puede distinguir entre la velocidad nominal y de nivelación cuando se rea-liza la selección de velocidad mediante entradas multifuncionales, lo que es requerido por otras funcionescomo el controlador ASR, la operación de piso corto y la compensación de desplazamiento para control V/f.
Parámetros relacionados
Si la• velocidad de referencia >= S3-04 la velocidad seleccionada se considera la velocidad nominal• velocidad de referencia < S3-04 la velocidad seleccionada se considera la velocidad de nivelación
Velocidad Comando de multivelocidad 1
Comando de multivelocidad 2
Comando de multivelocidad 3
Frecuencia seleccionada
d1-18 = 0 d1-18 = 3
1 OFF OFF OFF Referencia de frecuencia 1 d1-01 ó A1/AI-14B CH1 Stop
2 ON OFF OFF Referencia de frecuencia 2, d1-02 ó AI-14B CH2
3 OFF ON OFF Referencia de frecuencia 3, d1-03 ó AI-14B CH3
4 ON ON OFF Referencia de frecuencia 4, d1-04
5 OFF OFF ON Referencia de frecuencia 5, d1-05
6 ON OFF ON Referencia de frecuencia 6, d1-06
7 OFF ON ON Referencia de frecuencia 7, d1-07
8 ON ON ON Referencia de frecuencia 8, d1-08
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
S3-04 Nivel de detección de velocidad nominal/nivelación 0,00 Hz No A A A A
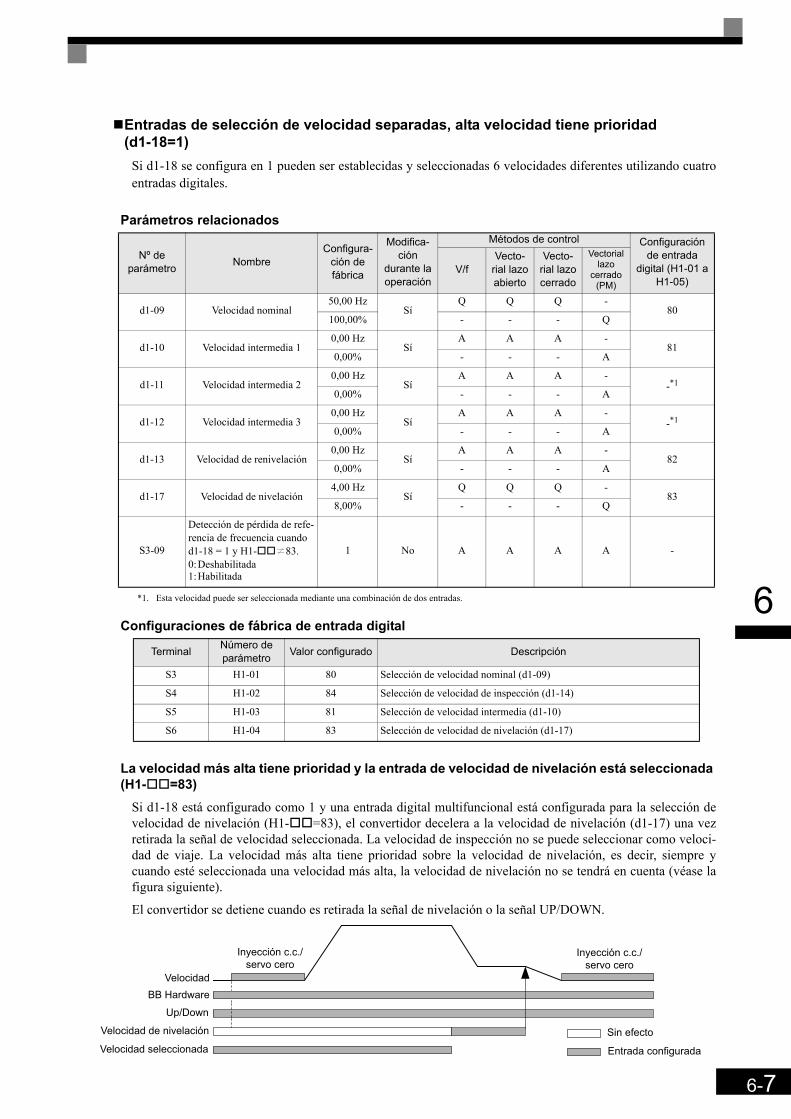
6-7
6
Entradas de selección de velocidad separadas, alta velocidad tiene prioridad(d1-18=1)
Si d1-18 se configura en 1 pueden ser establecidas y seleccionadas 6 velocidades diferentes utilizando cuatroentradas digitales.
Parámetros relacionados
Configuraciones de fábrica de entrada digital
La velocidad más alta tiene prioridad y la entrada de velocidad de nivelación está seleccionada (H1- =83)
Si d1-18 está configurado como 1 y una entrada digital multifuncional está configurada para la selección develocidad de nivelación (H1- =83), el convertidor decelera a la velocidad de nivelación (d1-17) una vezretirada la señal de velocidad seleccionada. La velocidad de inspección no se puede seleccionar como veloci-dad de viaje. La velocidad más alta tiene prioridad sobre la velocidad de nivelación, es decir, siempre ycuando esté seleccionada una velocidad más alta, la velocidad de nivelación no se tendrá en cuenta (véase lafigura siguiente).
El convertidor se detiene cuando es retirada la señal de nivelación o la señal UP/DOWN.
Nº deparámetro Nombre
Configura-ción de fábrica
Modifica-ción
durante la operación
Métodos de control Configuración de entrada
digital (H1-01 a H1-05)
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
d1-09 Velocidad nominal50,00 Hz
SíQ Q Q -
80100,00% - - - Q
d1-10 Velocidad intermedia 10,00 Hz
SíA A A -
810,00% - - - A
d1-11 Velocidad intermedia 20,00 Hz
SíA A A -
-*1
*1. Esta velocidad puede ser seleccionada mediante una combinación de dos entradas.
0,00% - - - A
d1-12 Velocidad intermedia 30,00 Hz
SíA A A -
-*10,00% - - - A
d1-13 Velocidad de renivelación0,00 Hz
SíA A A -
820,00% - - - A
d1-17 Velocidad de nivelación4,00 Hz
SíQ Q Q -
838,00% - - - Q
S3-09
Detección de pérdida de refe-rencia de frecuencia cuando d1-18 = 1 y H1- K83.0:Deshabilitada1:Habilitada
1 No A A A A -
Terminal Número de parámetro Valor configurado Descripción
S3 H1-01 80 Selección de velocidad nominal (d1-09)
S4 H1-02 84 Selección de velocidad de inspección (d1-14)
S5 H1-03 81 Selección de velocidad intermedia (d1-10)
S6 H1-04 83 Selección de velocidad de nivelación (d1-17)
Inyección c.c./servo cero
VelocidadBB Hardware
Up/Down
Velocidad de nivelación
Velocidad seleccionada
Inyección c.c./servo cero
Sin efecto
Entrada configurada
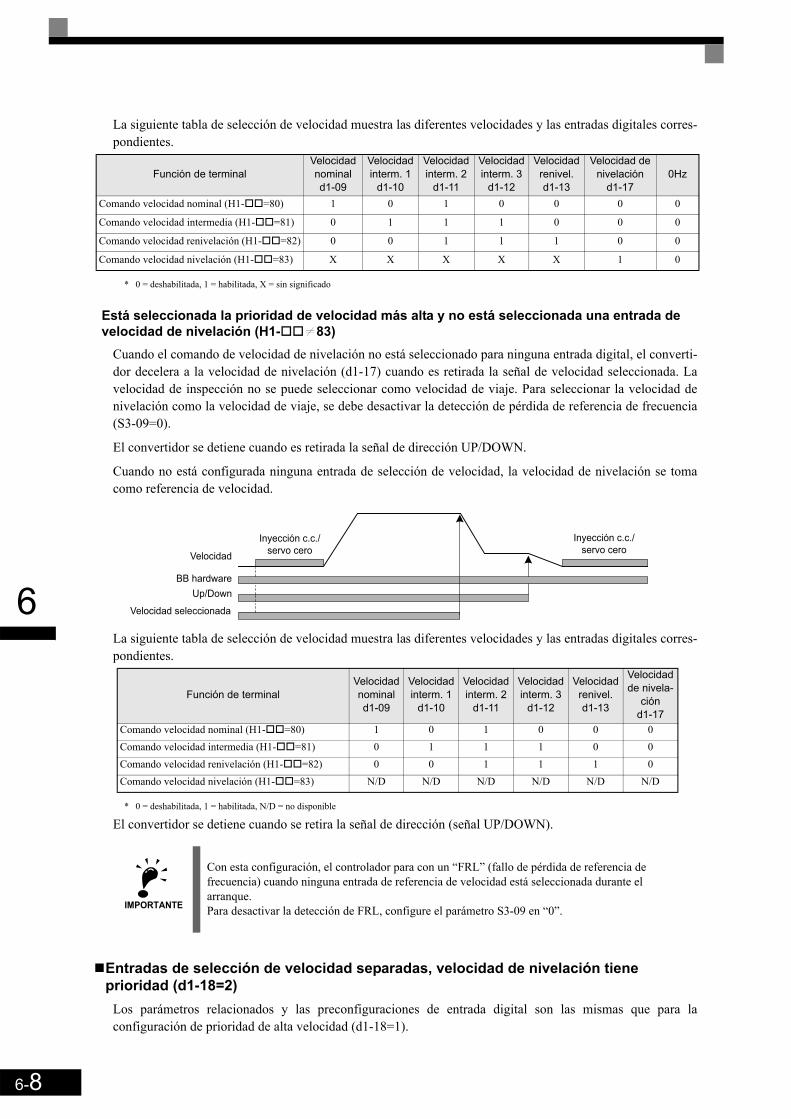
6-8
6
La siguiente tabla de selección de velocidad muestra las diferentes velocidades y las entradas digitales corres-pondientes.
* 0 = deshabilitada, 1 = habilitada, X = sin significado
Está seleccionada la prioridad de velocidad más alta y no está seleccionada una entrada de velocidad de nivelación (H1- K83)
Cuando el comando de velocidad de nivelación no está seleccionado para ninguna entrada digital, el converti-dor decelera a la velocidad de nivelación (d1-17) cuando es retirada la señal de velocidad seleccionada. Lavelocidad de inspección no se puede seleccionar como velocidad de viaje. Para seleccionar la velocidad denivelación como la velocidad de viaje, se debe desactivar la detección de pérdida de referencia de frecuencia(S3-09=0).
El convertidor se detiene cuando es retirada la señal de dirección UP/DOWN.
Cuando no está configurada ninguna entrada de selección de velocidad, la velocidad de nivelación se tomacomo referencia de velocidad.
La siguiente tabla de selección de velocidad muestra las diferentes velocidades y las entradas digitales corres-pondientes.
* 0 = deshabilitada, 1 = habilitada, N/D = no disponible
El convertidor se detiene cuando se retira la señal de dirección (señal UP/DOWN).
Entradas de selección de velocidad separadas, velocidad de nivelación tiene prioridad (d1-18=2)
Los parámetros relacionados y las preconfiguraciones de entrada digital son las mismas que para laconfiguración de prioridad de alta velocidad (d1-18=1).
Función de terminalVelocidad nominald1-09
Velocidad interm. 1
d1-10
Velocidad interm. 2
d1-11
Velocidad interm. 3
d1-12
Velocidad renivel.d1-13
Velocidad de nivelación
d1-170Hz
Comando velocidad nominal (H1- =80) 1 0 1 0 0 0 0
Comando velocidad intermedia (H1- =81) 0 1 1 1 0 0 0
Comando velocidad renivelación (H1- =82) 0 0 1 1 1 0 0
Comando velocidad nivelación (H1- =83) X X X X X 1 0
Función de terminalVelocidad nominald1-09
Velocidad interm. 1
d1-10
Velocidad interm. 2
d1-11
Velocidad interm. 3
d1-12
Velocidad renivel.d1-13
Velocidad de nivela-
ciónd1-17
Comando velocidad nominal (H1- =80) 1 0 1 0 0 0Comando velocidad intermedia (H1- =81) 0 1 1 1 0 0Comando velocidad renivelación (H1- =82) 0 0 1 1 1 0Comando velocidad nivelación (H1- =83) N/D N/D N/D N/D N/D N/D
IMPORTANTE
Con esta configuración, el controlador para con un “FRL” (fallo de pérdida de referencia de frecuencia) cuando ninguna entrada de referencia de velocidad está seleccionada durante el arranque.Para desactivar la detección de FRL, configure el parámetro S3-09 en “0”.
Inyección c.c./servo ceroVelocidad
BB hardwareUp/Down
Velocidad seleccionada
Inyección c.c./servo cero
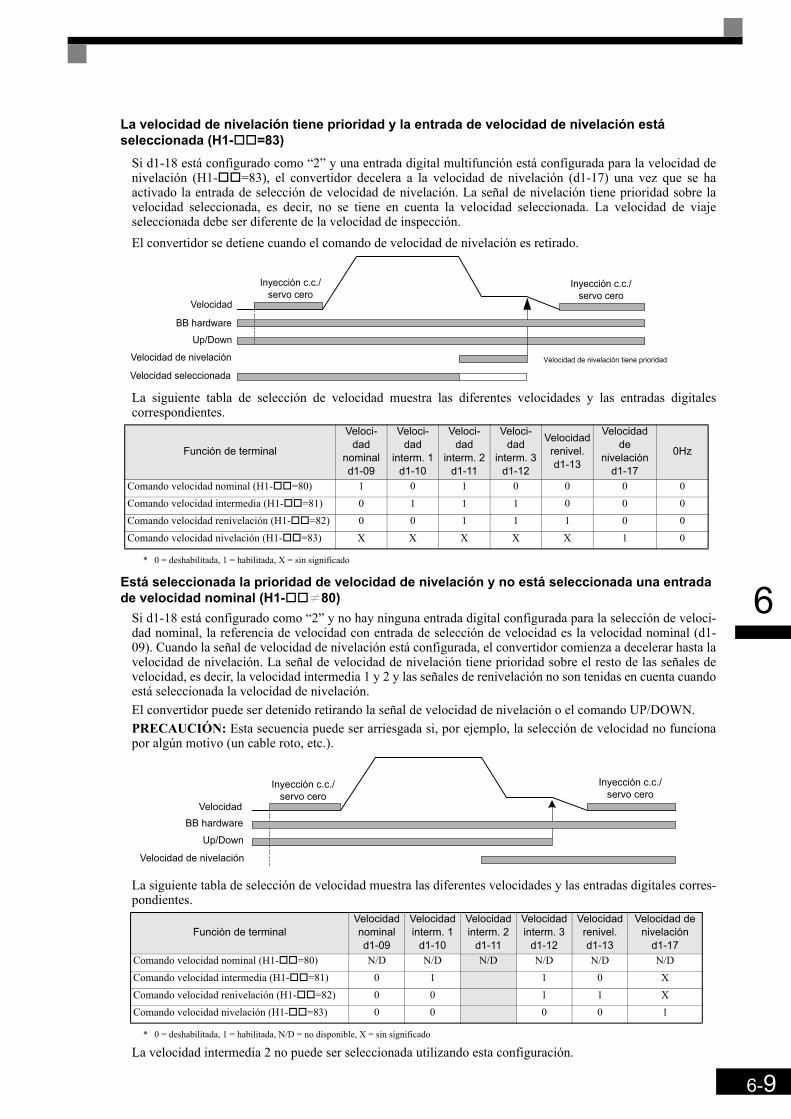
6-9
6
La velocidad de nivelación tiene prioridad y la entrada de velocidad de nivelación está seleccionada (H1- =83)
Si d1-18 está configurado como “2” y una entrada digital multifunción está configurada para la velocidad denivelación (H1- =83), el convertidor decelera a la velocidad de nivelación (d1-17) una vez que se haactivado la entrada de selección de velocidad de nivelación. La señal de nivelación tiene prioridad sobre lavelocidad seleccionada, es decir, no se tiene en cuenta la velocidad seleccionada. La velocidad de viajeseleccionada debe ser diferente de la velocidad de inspección.El convertidor se detiene cuando el comando de velocidad de nivelación es retirado.
La siguiente tabla de selección de velocidad muestra las diferentes velocidades y las entradas digitalescorrespondientes.
* 0 = deshabilitada, 1 = habilitada, X = sin significado
Está seleccionada la prioridad de velocidad de nivelación y no está seleccionada una entrada de velocidad nominal (H1- K80)
Si d1-18 está configurado como “2” y no hay ninguna entrada digital configurada para la selección de veloci-dad nominal, la referencia de velocidad con entrada de selección de velocidad es la velocidad nominal (d1-09). Cuando la señal de velocidad de nivelación está configurada, el convertidor comienza a decelerar hasta lavelocidad de nivelación. La señal de velocidad de nivelación tiene prioridad sobre el resto de las señales develocidad, es decir, la velocidad intermedia 1 y 2 y las señales de renivelación no son tenidas en cuenta cuandoestá seleccionada la velocidad de nivelación.El convertidor puede ser detenido retirando la señal de velocidad de nivelación o el comando UP/DOWN.PRECAUCIÓN: Esta secuencia puede ser arriesgada si, por ejemplo, la selección de velocidad no funcionapor algún motivo (un cable roto, etc.).
La siguiente tabla de selección de velocidad muestra las diferentes velocidades y las entradas digitales corres-pondientes.
* 0 = deshabilitada, 1 = habilitada, N/D = no disponible, X = sin significado
La velocidad intermedia 2 no puede ser seleccionada utilizando esta configuración.
Función de terminal
Veloci-dad
nominald1-09
Veloci-dad
interm. 1d1-10
Veloci-dad
interm. 2d1-11
Veloci-dad
interm. 3d1-12
Velocidad renivel.d1-13
Velocidad de
nivelaciónd1-17
0Hz
Comando velocidad nominal (H1- =80) 1 0 1 0 0 0 0Comando velocidad intermedia (H1- =81) 0 1 1 1 0 0 0Comando velocidad renivelación (H1- =82) 0 0 1 1 1 0 0Comando velocidad nivelación (H1- =83) X X X X X 1 0
Función de terminalVelocidad nominald1-09
Velocidad interm. 1
d1-10
Velocidad interm. 2
d1-11
Velocidad interm. 3
d1-12
Velocidad renivel.d1-13
Velocidad de nivelación
d1-17Comando velocidad nominal (H1- =80) N/D N/D N/D N/D N/D N/DComando velocidad intermedia (H1- =81) 0 1 1 0 XComando velocidad renivelación (H1- =82) 0 0 1 1 XComando velocidad nivelación (H1- =83) 0 0 0 0 1
Velocidad de nivelación tiene prioridad
Velocidad
BB hardware
Up/Down
Velocidad de nivelación
Velocidad seleccionada
Inyección c.c./servo cero
Inyección c.c./servo cero
VelocidadBB hardware
Up/Down
Velocidad de nivelación
Inyección c.c./servo cero
Inyección c.c./servo cero
6-10
6
Parada de emergencia
Si un terminal de entrada digital (H1- ) está configurado como 15 ó 17 (parada de emergencia), estaentrada puede ser utilizada para detener el convertidor rápidamente en caso de una emergencia. En este caso seutiliza el tiempo de deceleración de parada de emergencia configurado en C1-09. Si se cablea una entrada deparada de emergencia con un contacto NA, configure el terminal de entrada multifuncional (H1- ) como15, y si se hace con un contacto NC, configure el terminal de entrada multifuncional (H1- ) como 17.
Tras la introducción del comando de parada de emergencia la operación no puede ser reiniciada hasta que elconvertidor se haya detenido. Para cancelar la parada de emergencia, ponga el comando run y el comando deparada de emergencia en OFF.
Parámetros relacionados
Entradas digitales multifuncionales (H1-01 a H1-05)
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
C1-09 Tiempo de parada de emergencia 1,50 s No A A A A
Valor configu-
radoFunción
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
15 Parada de emergencia, contacto NA Sí Sí Sí Sí
17 Parada de emergencia, contacto NC Sí Sí Sí Sí

6-11
6
Inspección RUN
La marcha de inspección puede activarse de dos maneras distintas:1. Puede utilizarse una entrada digital si el parámetro d1-18 = 1 ó 2. Por lo tanto debe configurarse una velo-
cidad de inspección y debe configurarse alguna de las entradas digitales en “Selección de marcha de ins-pección” (H1- =84) (véase a continuación).
2. Un valor de comparación de referencia de velocidad (parámetro S3-19) decide si la marcha de inspecciónestá activada o no. Esta función funciona solamente si el parámetro d1-18 = 0 ó 3 y si el comando de velo-cidad de inspección no está asignado a ninguna entrada digital (H1- K84).
Parámetros relacionados
Entradas digitales multifuncionales (H1-01 a H1-05)
Selección de marcha de inspección mediante entrada digitalLa entrada digital de marcha de inspección debe ser activada antes de activar la señal UP/DOWN Durante elinicio de la marcha de inspección se utiliza la secuencia normal de freno y el convertidor acelera hasta la velo-cidad de inspección (d1-14). El método de parada depende de la configuración del parámetro S3-03.
Selección de velocidad de inspección mediante valor de comparaciónUsando esta función el convertidor puede detectar la velocidad de inspección por la referencia de velocidadseleccionada. La velocidad debe seleccionarse antes de activar la señal UP/DOWN Si S3-04 < velocidadseleccionada O S3-19 la velocidad seleccionada se considera la velocidad de inspección. Se utiliza la secuen-cia de arranque normal, el método de parada depende de la configuración del parámetro S3-03.
Comportamiento de parada de marcha de inspección
S3-03 = 0,0 s., parada sin rampa de deceleraciónEl convertidor se detiene cuando se retira el comando de marcha de inspección o el comando UP/DOWN. Eneste caso:
• La salida del convertidor es cortada por el baseblock inmediatamente• La señal de abrir freno es retirada inmediatamente• La salida de control de contactor es retirada inmediatamente
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
d1-14 Velocidad de inspección25,00 Hz
NoA A A -
50,00% - - - A
S3-03 Tiempo de deceleración en la inspección 0,0 s No A A A A
S3-19 Nivel superior de detección de velocidad de inspección 0,00 Hz No A A A A
Valor configu-
radoFunción
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
84 Selección de marcha de inspección Sí Sí Sí Sí
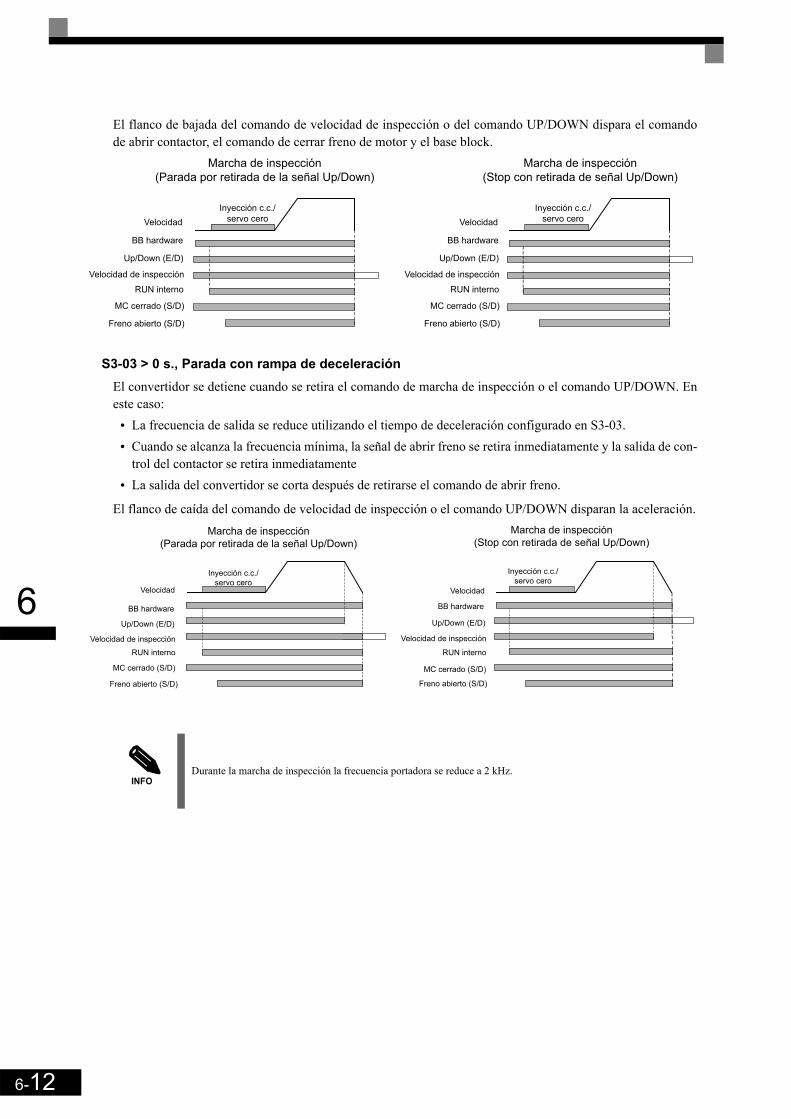
6-12
6
El flanco de bajada del comando de velocidad de inspección o del comando UP/DOWN dispara el comandode abrir contactor, el comando de cerrar freno de motor y el base block.
S3-03 > 0 s., Parada con rampa de deceleraciónEl convertidor se detiene cuando se retira el comando de marcha de inspección o el comando UP/DOWN. Eneste caso:
• La frecuencia de salida se reduce utilizando el tiempo de deceleración configurado en S3-03. • Cuando se alcanza la frecuencia mínima, la señal de abrir freno se retira inmediatamente y la salida de con-
trol del contactor se retira inmediatamente• La salida del convertidor se corta después de retirarse el comando de abrir freno.
El flanco de caída del comando de velocidad de inspección o el comando UP/DOWN disparan la aceleración.
INFODurante la marcha de inspección la frecuencia portadora se reduce a 2 kHz.
Velocidad
BB hardware
Up/Down (E/D)
Velocidad de inspección
RUN interno
MC cerrado (S/D)
Freno abierto (S/D)
Inyección c.c./servo cero
Marcha de inspección(Parada por retirada de la señal Up/Down)
Velocidad
BB hardware
Up/Down (E/D)
Velocidad de inspección
RUN interno
MC cerrado (S/D)
Freno abierto (S/D)
Inyección c.c./servo cero
Marcha de inspección(Stop con retirada de señal Up/Down)
Velocidad
BB hardware
Up/Down (E/D)
Velocidad de inspección
RUN interno
MC cerrado (S/D)
Freno abierto (S/D)
Inyección c.c./servo cero
Marcha de inspección(Parada por retirada de la señal Up/Down)
Velocidad
BB hardware
Up/Down (E/D)
Velocidad de inspección
RUN interno
MC cerrado (S/D)
Freno abierto (S/D)
Inyección c.c./servo cero
Marcha de inspección(Stop con retirada de señal Up/Down)
6-13
6
Secuencia de frenado
El L7 soporta dos tipos de secuencias de frenado, una con compensación de par al arranque utilizando un valorde entrada analógico y una sin compensación de par al arranque.
Parámetros relacionados
Entradas digitales multifuncionales (H1-01 a H1-05)
Salidas digitales multifuncionales (H2-01 a H2-03)
ParámetroNº Nombre
Configu-ración
de fábrica
Modificación durante la operación
Método de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
H3-15 Selección de función del terminal A1 0 No - - A A
S1-01 Nivel de velocidad cero i No A1,2 Hz
A0,5 Hz
A0,1 Hz
A0,5 Hz
S1-02 Corriente de freno de inyección de c.c. al arranque 50% No A A - -S1-03 Corriente de freno de inyección de c.c. a la parada 50% No A A - -
S1-04 Tiempo de freno de inyección de c.c./velocidad cero al arrancar 0,40 s No A A A A
S1-05 Tiempo de frenado de inyección de c.c/velocidad cero en parada 0,60 s No A A A A
S1-06 Tiempo retardo de abrir freno 0,20 s No A A A AS1-07 Tiempo retardo de cerrar freno 0,10 s No A A A AS1-16 Tiempo de retardo de Run 0,10 s No A A A AS1-17 Ganancia de corriente de inyección c.c. en regeneración 100% No - A - -
S1-18 Ganancia de corriente de inyección c.c. en operación normal 20% No - A - -
S1-19 Tiempo de retardo de apertura de contactor de salida 0,10 s No A A A AS1-20 Ganancia de servo cero 5 No - - A AS1-21 Ancho de finalización de servo cero 10 No - - A A
S1-22 Tiempo de incremento de compensación de par de arranque/tiempo de desaparición de par de arranque 500 ms No - - A A
S1-23 Ganancia de compensación de par en dirección DOWN 1,0 No - - A A
S1-24 Bias de compensación de par en dirección UP 0,0% No - - A AS1-25 Bias de compensación de par en dirección DOWN 0,0% No - - A AS1-29 Nivel de velocidad de desaparición de par 0,0 Hz No - - A AS1-30 Tiempo de compensación de desaparición par 1000 ms. No - - A AS1-31 Tiempo de desaparición de limite de par en parada 0 ms No - - - A
Valor configurado Función
Métodos de control
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo
cerrado
Vecto-rial lazo cerrado
(PM)
80 a 84 Entradas de selección de velocidad (consulte la página 6-5, Secuencia de selección de velocidad utilizando entradas digitales) Sí Sí Sí Sí
86 Señal de respuesta de Contactor Cerrado Sí Sí Sí Sí
Valor configurado Función
Métodos de control
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo
cerrado
Vecto-rial lazo cerrado
(PM)
33 Final de servo cero - - Sí Sí40 Comando de liberación del freno Sí Sí Sí Sí41 Comando de cierre de contactor de salida Sí Sí Sí Sí
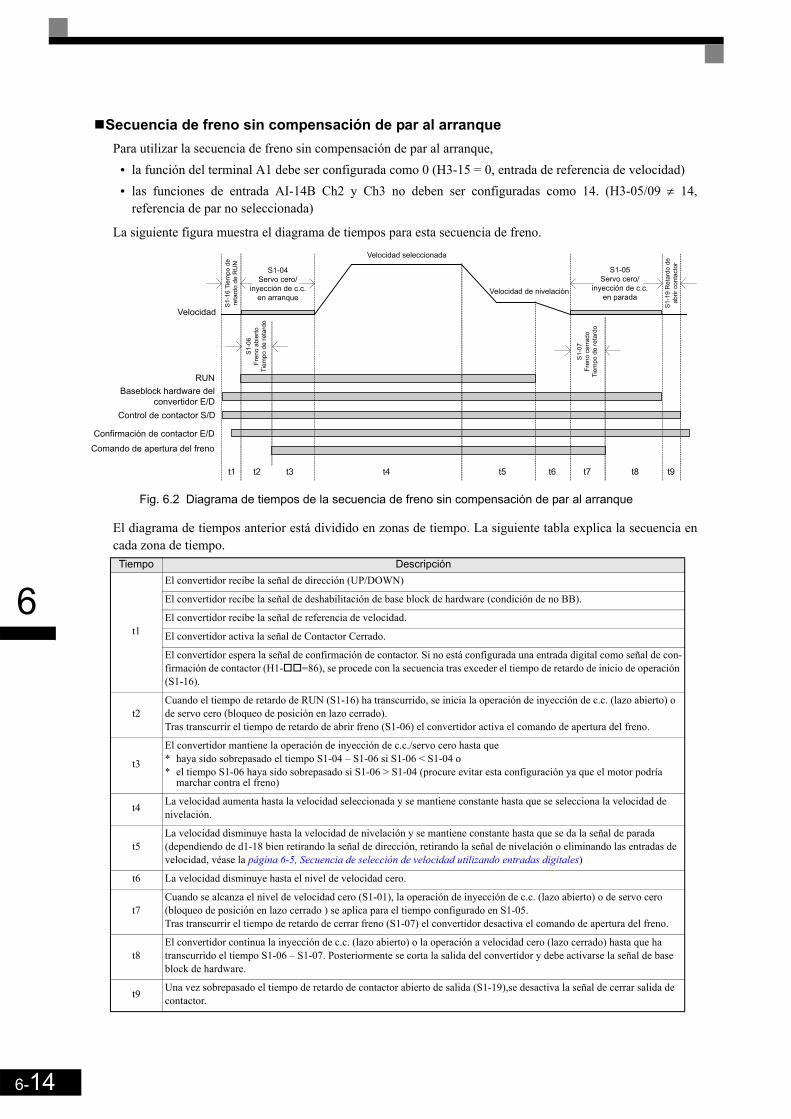
6-14
6
Secuencia de freno sin compensación de par al arranquePara utilizar la secuencia de freno sin compensación de par al arranque,
• la función del terminal A1 debe ser configurada como 0 (H3-15 = 0, entrada de referencia de velocidad)• las funciones de entrada AI-14B Ch2 y Ch3 no deben ser configuradas como 14. (H3-05/09 ≠ 14,
referencia de par no seleccionada)
La siguiente figura muestra el diagrama de tiempos para esta secuencia de freno.
Fig. 6.2 Diagrama de tiempos de la secuencia de freno sin compensación de par al arranque
El diagrama de tiempos anterior está dividido en zonas de tiempo. La siguiente tabla explica la secuencia encada zona de tiempo.Tiempo Descripción
t1
El convertidor recibe la señal de dirección (UP/DOWN)
El convertidor recibe la señal de deshabilitación de base block de hardware (condición de no BB).
El convertidor recibe la señal de referencia de velocidad.
El convertidor activa la señal de Contactor Cerrado.
El convertidor espera la señal de confirmación de contactor. Si no está configurada una entrada digital como señal de con-firmación de contactor (H1- =86), se procede con la secuencia tras exceder el tiempo de retardo de inicio de operación (S1-16).
t2Cuando el tiempo de retardo de RUN (S1-16) ha transcurrido, se inicia la operación de inyección de c.c. (lazo abierto) o de servo cero (bloqueo de posición en lazo cerrado).Tras transcurrir el tiempo de retardo de abrir freno (S1-06) el convertidor activa el comando de apertura del freno.
t3
El convertidor mantiene la operación de inyección de c.c./servo cero hasta que * haya sido sobrepasado el tiempo S1-04 – S1-06 si S1-06 < S1-04 o* el tiempo S1-06 haya sido sobrepasado si S1-06 > S1-04 (procure evitar esta configuración ya que el motor podría
marchar contra el freno)
t4 La velocidad aumenta hasta la velocidad seleccionada y se mantiene constante hasta que se selecciona la velocidad de nivelación.
t5La velocidad disminuye hasta la velocidad de nivelación y se mantiene constante hasta que se da la señal de parada (dependiendo de d1-18 bien retirando la señal de dirección, retirando la señal de nivelación o eliminando las entradas de velocidad, véase la página 6-5, Secuencia de selección de velocidad utilizando entradas digitales)
t6 La velocidad disminuye hasta el nivel de velocidad cero.
t7Cuando se alcanza el nivel de velocidad cero (S1-01), la operación de inyección de c.c. (lazo abierto) o de servo cero (bloqueo de posición en lazo cerrado ) se aplica para el tiempo configurado en S1-05.Tras transcurrir el tiempo de retardo de cerrar freno (S1-07) el convertidor desactiva el comando de apertura del freno.
t8El convertidor continua la inyección de c.c. (lazo abierto) o la operación a velocidad cero (lazo cerrado) hasta que ha transcurrido el tiempo S1-06 – S1-07. Posteriormente se corta la salida del convertidor y debe activarse la señal de base block de hardware.
t9 Una vez sobrepasado el tiempo de retardo de contactor abierto de salida (S1-19),se desactiva la señal de cerrar salida de contactor.
RUNBaseblock hardware del
convertidor E/DControl de contactor S/D
Confirmación de contactor E/D
Comando de apertura del freno
t1 t2 t3 t4 t5 t6 t7 t8 t9
Velocidad
S1-04Servo cero/
inyección de c.c.en arranque
S1-
16 T
iem
po d
e re
tard
o de
RU
N
Velocidad seleccionada
Velocidad de nivelación
S1-05Servo cero/
inyección de c.c.en parada
S1-
07Fr
eno
cerr
ado
Tiem
po d
e re
tard
o
S1-
19 R
etar
do d
e ab
rir c
onta
ctor
S1-
06Fr
eno
abie
rtoTi
empo
de
reta
rdo
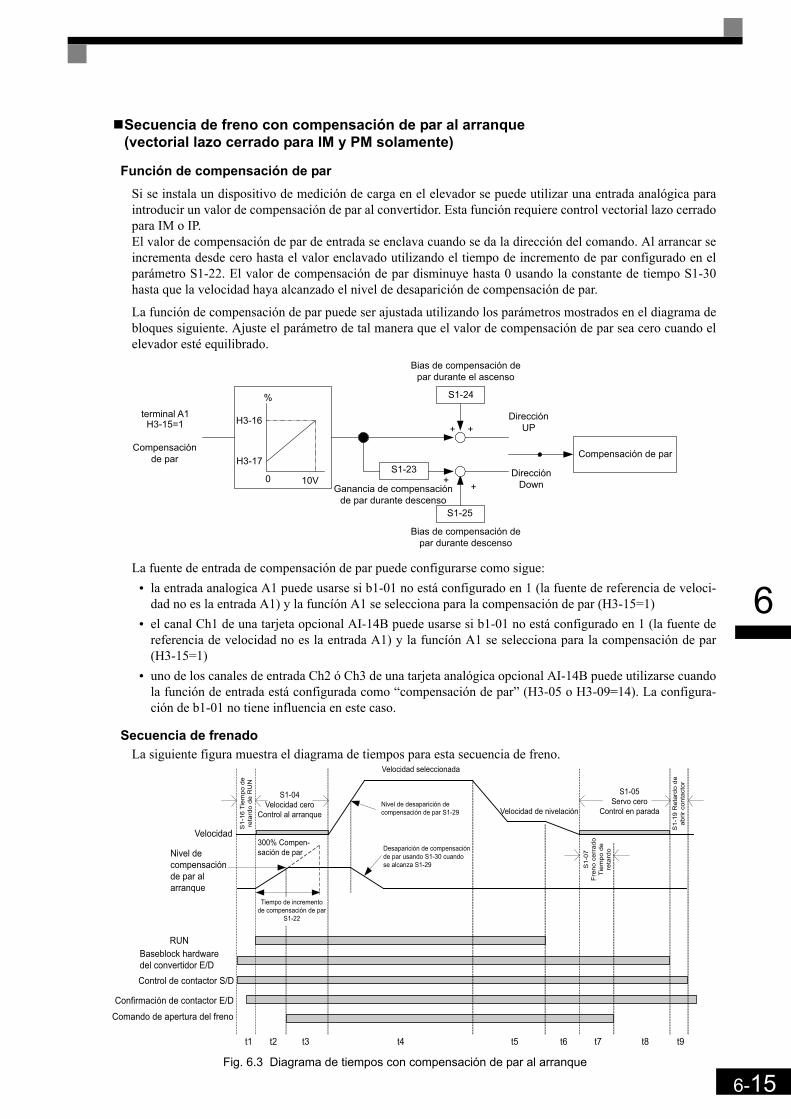
6-15
6
Secuencia de freno con compensación de par al arranque (vectorial lazo cerrado para IM y PM solamente)
Función de compensación de parSi se instala un dispositivo de medición de carga en el elevador se puede utilizar una entrada analógica paraintroducir un valor de compensación de par al convertidor. Esta función requiere control vectorial lazo cerradopara IM o IP.El valor de compensación de par de entrada se enclava cuando se da la dirección del comando. Al arrancar seincrementa desde cero hasta el valor enclavado utilizando el tiempo de incremento de par configurado en elparámetro S1-22. El valor de compensación de par disminuye hasta 0 usando la constante de tiempo S1-30hasta que la velocidad haya alcanzado el nivel de desaparición de compensación de par.
La función de compensación de par puede ser ajustada utilizando los parámetros mostrados en el diagrama debloques siguiente. Ajuste el parámetro de tal manera que el valor de compensación de par sea cero cuando elelevador esté equilibrado.
La fuente de entrada de compensación de par puede configurarse como sigue:• la entrada analogica A1 puede usarse si b1-01 no está configurado en 1 (la fuente de referencia de veloci-
dad no es la entrada A1) y la funcíón A1 se selecciona para la compensación de par (H3-15=1)• el canal Ch1 de una tarjeta opcional AI-14B puede usarse si b1-01 no está configurado en 1 (la fuente de
referencia de velocidad no es la entrada A1) y la funcíón A1 se selecciona para la compensación de par(H3-15=1)
• uno de los canales de entrada Ch2 ó Ch3 de una tarjeta analógica opcional AI-14B puede utilizarse cuandola función de entrada está configurada como “compensación de par” (H3-05 o H3-09=14). La configura-ción de b1-01 no tiene influencia en este caso.
Secuencia de frenadoLa siguiente figura muestra el diagrama de tiempos para esta secuencia de freno.
Fig. 6.3 Diagrama de tiempos con compensación de par al arranque
+ +
++
terminal A1H3-15=1
Compensaciónde par
H3-16
H3-17
Bias de compensación de par durante el ascenso
S1-24
S1-23
S1-25
DirecciónUP
DirecciónDown
Bias de compensación de par durante descenso
Compensación de par
0 10V
%
Ganancia de compensación de par durante descenso
RUNBaseblock hardware del convertidor E/DControl de contactor S/D
Confirmación de contactor E/D
Comando de apertura del freno
t1 t2 t3 t4 t5 t6 t7 t8 t9
Nivel de compensaciónde par al arranque
Velocidad
S1-04Velocidad cero
Control al arranque
S1-
16 T
iem
po d
e re
tard
o de
RU
N
300% Compen-sación de par
Velocidad seleccionada
Nivel de desaparición decompensación de par S1-29
Desaparición de compensación de par usando S1-30 cuando se alcanza S1-29
Velocidad de nivelación
S1-05Servo cero
Control en parada
S1-
07F
reno
cer
rado
Tiem
po d
ere
tard
o
S1-
19 R
etar
do d
e ab
rir c
onta
ctor
Tiempo de incrementode compensación de par
S1-22

6-16
6
El diagrama de tiempos anterior está dividido en zonas de tiempo. La siguiente tabla explica la secuencia encada zona de tiempo.
Función de desaparición de límite de par (vectorial lazo cerrado para PM)La función de desaparición de límite de par reduce suavemente el límite de par a 0 una vez haya transcurridoel tiempo de velocidad cero en parada. Así pueden prevenirse golpes o vibraciones cuando se detiene el motory se cierra el freno. La constante de tiempo utilizada puede configurarse en el parámetro S1-31. La funciónpuede usarse solamente en control vectorial lazo cerrado para motores PM (A1-02 = 6).
Control de velocidad cero / Servo cero (bloqueo de posición)En control vectorial lazo cerrado el convertidor utiliza la velocidad cero o el control de servo cero durante elprocedimiento de abrir o cerrar el freno.
Control de velocidad cero:El convertidor mantiene la velocidad del motor en cero, no se compensa un retroceso. Este método se usa parael arranque con un valor de compensación de par con entrada analógica. La intensidad o fuerza del controlpuede ajustarse usando los parámetros ASR C5- . Consulte en la página 6-32, Regulador de velocidadautomático (ASR) (sólo vectorial lazo cerrado) más detalles sobre el ajuste.
Control de servo cero:El convertidor intenta mantener la posición del rotor, es decir, se compensa un retroceso. Este método se usapara el arranque sin un valor de compensación de par y siempre durante la parada (con y sin compensación depar). Además de con los parámetros ASR C5- el control de servo cero puede ajustarse con el parámetroS1-20 (ganancia de servo cero).
• Incremente S1-20 si se produce un retroceso cuando abre el freno.• Disminuya S1-20 si se producen vibraciones cuando se active la función de servo cero.
Si se configura una salida digital como “Fin de servo cero” (H2- =33), esta salida se puede utilizar paraseñalizar que la posición del rotor está dentro de un cierto ancho de banda alrededor de la posición cero quepuede ajustarse en el parámetro S1-21 (el ancho de banda se configura en pulsos PG y debe configurarse como4 veces los pulsos PG admisibles actualmente).
Tiempo Descripción
t1
El convertidor recibe la señal de dirección (UP/DOWN)El convertidor recibe la señal de deshabilitación del baseblock hardware (condición de no BB).El convertidor recibe la señal de referencia de velocidad.El convertidor activa la señal de Contactor Cerrado.El convertidor espera la señal de confirmación de contactor. Si no está configurada una entrada digital com señal de confirma-ción de contactor (H1- =86), se procede con la secuencia tras exceder el tiempo de retardo de inicio de operación (S1-16).
t2
Se inicia la operación de control a velocidad cero.La entrada analógica de compensación de par se enclava y el valor de compensación de par se incrementa desde cero al valor de enclavamiento utilizando la constante de tiempo configurada en el parámetro S1-22.Tras alcanzar el nivel de compensación de par al arranque, el convertidor activa el comando de abrir el freno.
t3 El freno se abre y se continúa con la operación a velocidad cero (sin bloqueo de posición) hasta que haya transcurrido S1-04.
t4
La velocidad aumenta hasta la velocidad seleccionada y se mantiene constante hasta que se selecciona la velocidad de nivelación.Durante la aceleración, cuando se alcanza el nivel de velocidad de desaparición de par S1-29, el valor de compensación de par disminuye hasta 0 usando la constante de tiempo configurada en S1-22.
t5La velocidad disminuye hasta la velocidad de nivelación y se mantiene constante hasta que se da la señal de detención (depen-diendo de d1-18, bien retirando la señal de dirección, retirando la señal de nivelación o eliminando las entradas de velocidad, véase página 6-5, Secuencia de selección de velocidad utilizando entradas digitales).
t6 La velocidad disminuye hasta el nivel de velocidad cero.
t7Cuando se alcanza el nivel de velocidad cero (S1-01) se aplica la operación servo cero (bloqueo de posición en lazo cerrado) durante el tiempo configurado en S1-05. Cuando haya transcurrido el tiempo de retardo de cierre de freno (S1-07), se retira el commando de apertura de freno.
t8 El convertidor continúa la operación a velocidad cero hasta que haya transcurrido el tiempo S1-06 – S1-07. Posteriormente se corta la salida del convertidor y debe activarse la señal de base block de hardware.
t9 Una vez ha transcurrido el tiempo de retardo de apertura de contactor de salida (S1-19) se desactiva la señal de cerrar contactor de salida.
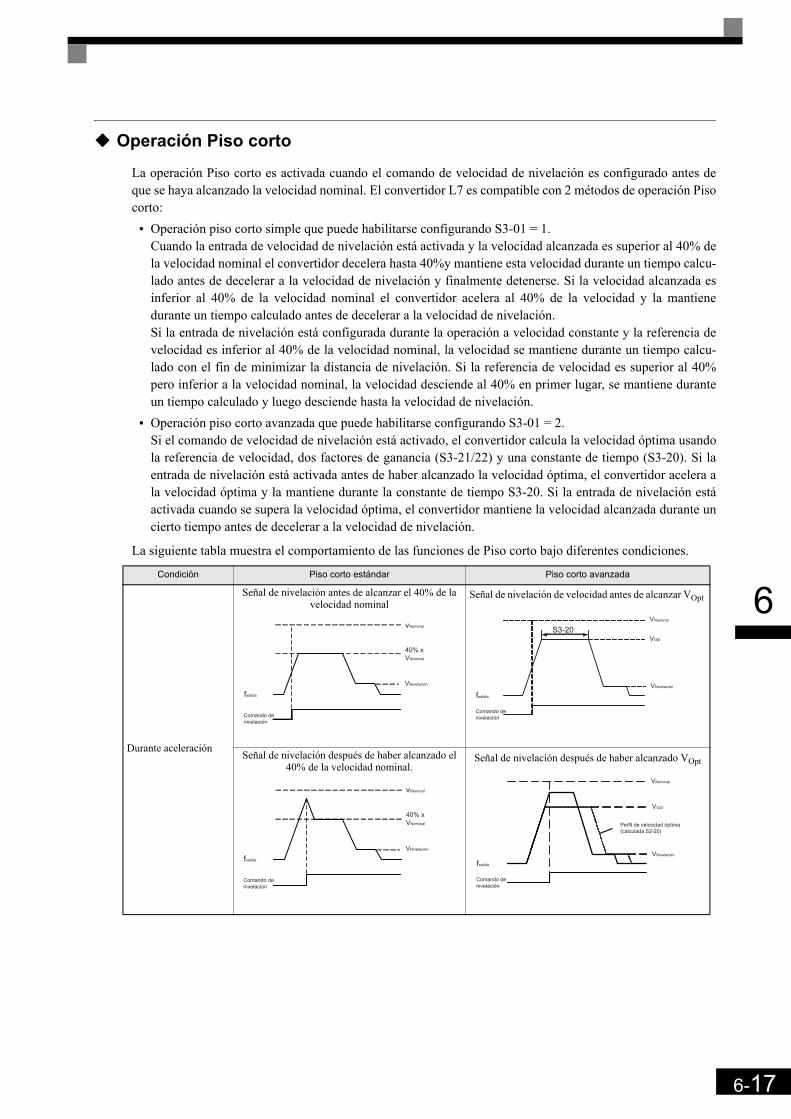
6-17
6
Operación Piso corto
La operación Piso corto es activada cuando el comando de velocidad de nivelación es configurado antes deque se haya alcanzado la velocidad nominal. El convertidor L7 es compatible con 2 métodos de operación Pisocorto:
• Operación piso corto simple que puede habilitarse configurando S3-01 = 1.Cuando la entrada de velocidad de nivelación está activada y la velocidad alcanzada es superior al 40% dela velocidad nominal el convertidor decelera hasta 40%y mantiene esta velocidad durante un tiempo calcu-lado antes de decelerar a la velocidad de nivelación y finalmente detenerse. Si la velocidad alcanzada esinferior al 40% de la velocidad nominal el convertidor acelera al 40% de la velocidad y la mantienedurante un tiempo calculado antes de decelerar a la velocidad de nivelación.Si la entrada de nivelación está configurada durante la operación a velocidad constante y la referencia develocidad es inferior al 40% de la velocidad nominal, la velocidad se mantiene durante un tiempo calcu-lado con el fin de minimizar la distancia de nivelación. Si la referencia de velocidad es superior al 40%pero inferior a la velocidad nominal, la velocidad desciende al 40% en primer lugar, se mantiene duranteun tiempo calculado y luego desciende hasta la velocidad de nivelación.
• Operación piso corto avanzada que puede habilitarse configurando S3-01 = 2.Si el comando de velocidad de nivelación está activado, el convertidor calcula la velocidad óptima usandola referencia de velocidad, dos factores de ganancia (S3-21/22) y una constante de tiempo (S3-20). Si laentrada de nivelación está activada antes de haber alcanzado la velocidad óptima, el convertidor acelera ala velocidad óptima y la mantiene durante la constante de tiempo S3-20. Si la entrada de nivelación estáactivada cuando se supera la velocidad óptima, el convertidor mantiene la velocidad alcanzada durante uncierto tiempo antes de decelerar a la velocidad de nivelación.
La siguiente tabla muestra el comportamiento de las funciones de Piso corto bajo diferentes condiciones.
Condición Piso corto estándar Piso corto avanzada
Durante aceleración
Señal de nivelación antes de alcanzar el 40% de la velocidad nominal
Señal de nivelación de velocidad antes de alcanzar VOpt
Señal de nivelación después de haber alcanzado el 40% de la velocidad nominal.
Señal de nivelación después de haber alcanzado VOpt
vNominal
VNivelación
40% xVNominal
fsalida
Comando de nivelación
S3-20VNominal
VOpt
VNivelación
fsalida
Comando denivelación
fsalida
Comando denivelación
vNominal
VNivelación
40% xVNominal
VNominal
VOpt
VNivelación
Perfil de velocidad óptima (calculada S2-20)
fsalida
Comando denivelación
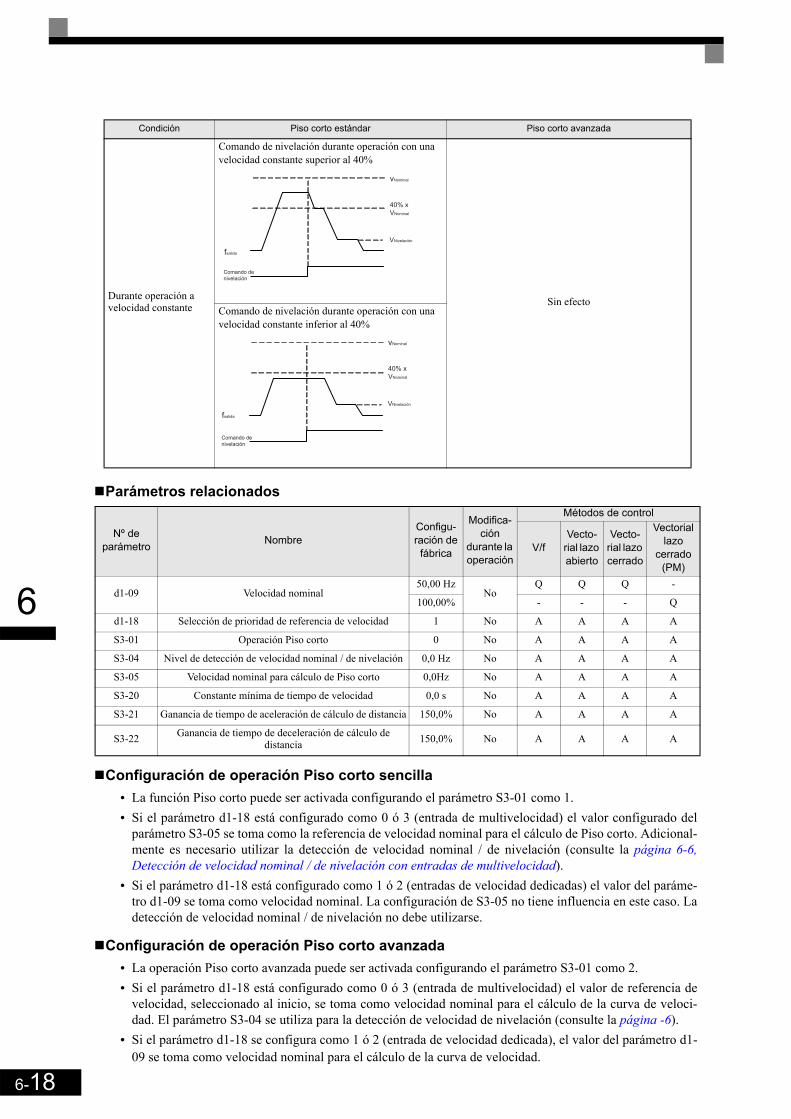
6-18
6
Parámetros relacionados
Configuración de operación Piso corto sencilla• La función Piso corto puede ser activada configurando el parámetro S3-01 como 1.• Si el parámetro d1-18 está configurado como 0 ó 3 (entrada de multivelocidad) el valor configurado del
parámetro S3-05 se toma como la referencia de velocidad nominal para el cálculo de Piso corto. Adicional-mente es necesario utilizar la detección de velocidad nominal / de nivelación (consulte la página 6-6,Detección de velocidad nominal / de nivelación con entradas de multivelocidad).
• Si el parámetro d1-18 está configurado como 1 ó 2 (entradas de velocidad dedicadas) el valor del paráme-tro d1-09 se toma como velocidad nominal. La configuración de S3-05 no tiene influencia en este caso. Ladetección de velocidad nominal / de nivelación no debe utilizarse.
Configuración de operación Piso corto avanzada• La operación Piso corto avanzada puede ser activada configurando el parámetro S3-01 como 2.• Si el parámetro d1-18 está configurado como 0 ó 3 (entrada de multivelocidad) el valor de referencia de
velocidad, seleccionado al inicio, se toma como velocidad nominal para el cálculo de la curva de veloci-dad. El parámetro S3-04 se utiliza para la detección de velocidad de nivelación (consulte la página -6).
• Si el parámetro d1-18 se configura como 1 ó 2 (entrada de velocidad dedicada), el valor del parámetro d1-09 se toma como velocidad nominal para el cálculo de la curva de velocidad.
Durante operación a velocidad constante
Comando de nivelación durante operación con una velocidad constante superior al 40%
Sin efectoComando de nivelación durante operación con una velocidad constante inferior al 40%
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado(PM)
d1-09 Velocidad nominal50,00 Hz
NoQ Q Q -
100,00% - - - Q
d1-18 Selección de prioridad de referencia de velocidad 1 No A A A A
S3-01 Operación Piso corto 0 No A A A A
S3-04 Nivel de detección de velocidad nominal / de nivelación 0,0 Hz No A A A A
S3-05 Velocidad nominal para cálculo de Piso corto 0,0Hz No A A A A
S3-20 Constante mínima de tiempo de velocidad 0,0 s No A A A A
S3-21 Ganancia de tiempo de aceleración de cálculo de distancia 150,0% No A A A A
S3-22 Ganancia de tiempo de deceleración de cálculo de distancia 150,0% No A A A A
Condición Piso corto estándar Piso corto avanzada
fsalida
vNominal
VNivelación
40% xVNominal
Comando denivelación
vNominal
VNivelación
40% xVNominal
fsalida
Comando denivelación
6-19
6
Configuración de la ganancia de aceleración y deceleración (S3-21, S3-22)Estos parámetros se utilizan para el cálculo de la velocidad óptima para compensar las curvas S (las curvas Sno se consideran en el cálculo de la velocidad óptima).
• Incremente las ganancias S3-21 y S3-22 si el tiempo de nivelación es demasiado corto o la velocidadóptima calculada es demasiado alta.
• Disminuya las ganancias S3-21 y S3-22 si el tiempo de nivelación es demasiado corto o la velocidadóptima calculada es demasiado baja.
IMPORTANTE
1. Las curvas S no se consideran en el cálculo de la velocidad óptima y deben ser compensadas porlas ganancias S3-21 y S3-22.
2. Una configuración de ganancia demasiado baja puede resultar en una velocidad óptima dema-siado alta y un tiempo de nivelación demasiado corto. Unas configuraciones muy bajas puedencausar desbordamiento. No configure valores por debajo del 100% (100% significa que la curva Sno se compensa.
3. Si el parámetro d1-18 está configurado como 0 ó 3 y la entrada de nivelación de velocidad selibera durante la operación Piso corto, el convertidor acelera o decelera hasta la velocidad dereferencia seleccionada.
4. Si la función Dwell (parámetros b6- ) se activa, esta se ejecuta durante la operación en pisocorto pero no se considera en el cálculo de la velocidad óptima. La influencia de la función Dwelldebe compensarse usando las ganancias S3-21 y S3-22.
5. La función de piso corto avanzada no funciona durante la operación de rescate y la marcha deinspección.
6. Si la referencia de velocidad se introduce usando una entrada analógica la función de piso cortoavanzada no debería ser utilizada.
7. Si se utiliza la función de piso corto avanzada las siguientes configuraciones de parámetros debe-rían encontarse en los siguientes rangos:9,6 Hz O E1-04 O 100 Hz4,8 Hz O d1-08 O 100Hz0,1 s. O C1- O 50 s.
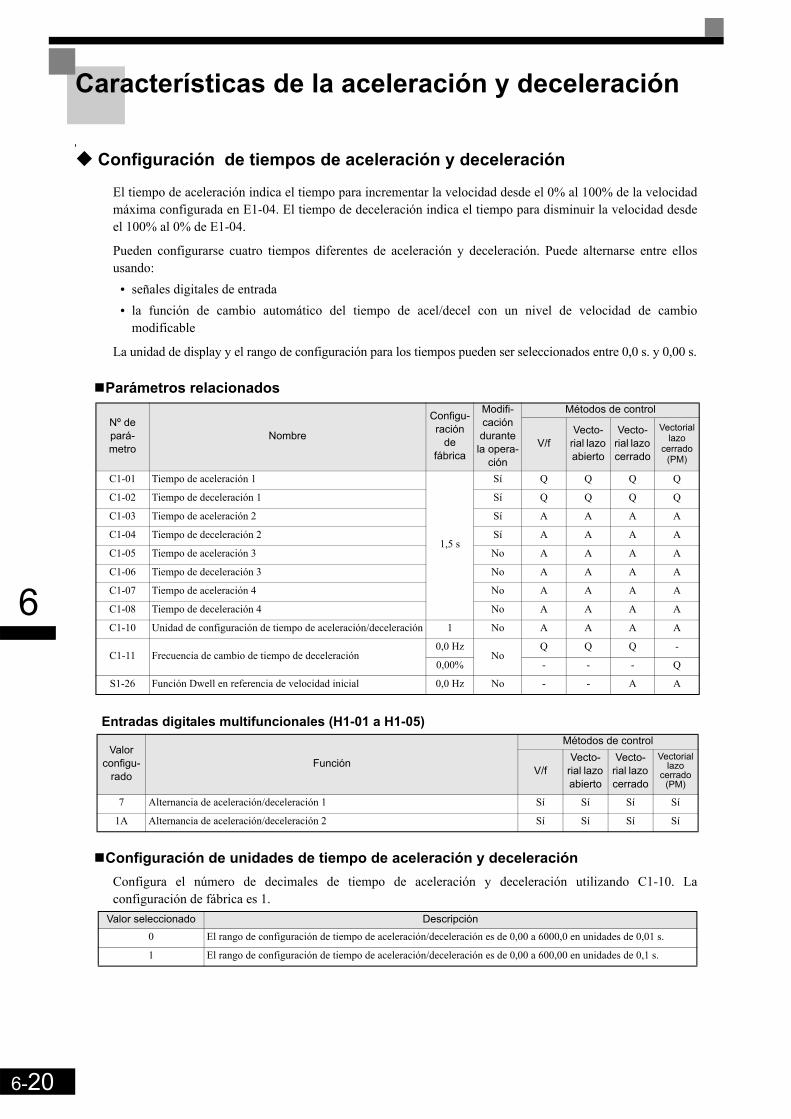
6-20
6
Características de la aceleración y deceleración
Configuración de tiempos de aceleración y deceleración
El tiempo de aceleración indica el tiempo para incrementar la velocidad desde el 0% al 100% de la velocidadmáxima configurada en E1-04. El tiempo de deceleración indica el tiempo para disminuir la velocidad desdeel 100% al 0% de E1-04.
Pueden configurarse cuatro tiempos diferentes de aceleración y deceleración. Puede alternarse entre ellosusando:
• señales digitales de entrada• la función de cambio automático del tiempo de acel/decel con un nivel de velocidad de cambio
modificable
La unidad de display y el rango de configuración para los tiempos pueden ser seleccionados entre 0,0 s. y 0,00 s.
Parámetros relacionados
Entradas digitales multifuncionales (H1-01 a H1-05)
Configuración de unidades de tiempo de aceleración y deceleraciónConfigura el número de decimales de tiempo de aceleración y deceleración utilizando C1-10. Laconfiguración de fábrica es 1.
Nº depará-metro
Nombre
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
C1-01 Tiempo de aceleración 1
1,5 s
Sí Q Q Q Q
C1-02 Tiempo de deceleración 1 Sí Q Q Q Q
C1-03 Tiempo de aceleración 2 Sí A A A A
C1-04 Tiempo de deceleración 2 Sí A A A A
C1-05 Tiempo de aceleración 3 No A A A A
C1-06 Tiempo de deceleración 3 No A A A A
C1-07 Tiempo de aceleración 4 No A A A A
C1-08 Tiempo de deceleración 4 No A A A A
C1-10 Unidad de configuración de tiempo de aceleración/deceleración 1 No A A A A
C1-11 Frecuencia de cambio de tiempo de deceleración0,0 Hz
NoQ Q Q -
0,00% - - - Q
S1-26 Función Dwell en referencia de velocidad inicial 0,0 Hz No - - A A
Valor configu-
radoFunción
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
7 Alternancia de aceleración/deceleración 1 Sí Sí Sí Sí
1A Alternancia de aceleración/deceleración 2 Sí Sí Sí Sí
Valor seleccionado Descripción0 El rango de configuración de tiempo de aceleración/deceleración es de 0,00 a 6000,0 en unidades de 0,01 s.
1 El rango de configuración de tiempo de aceleración/deceleración es de 0,00 a 600,00 en unidades de 0,1 s.
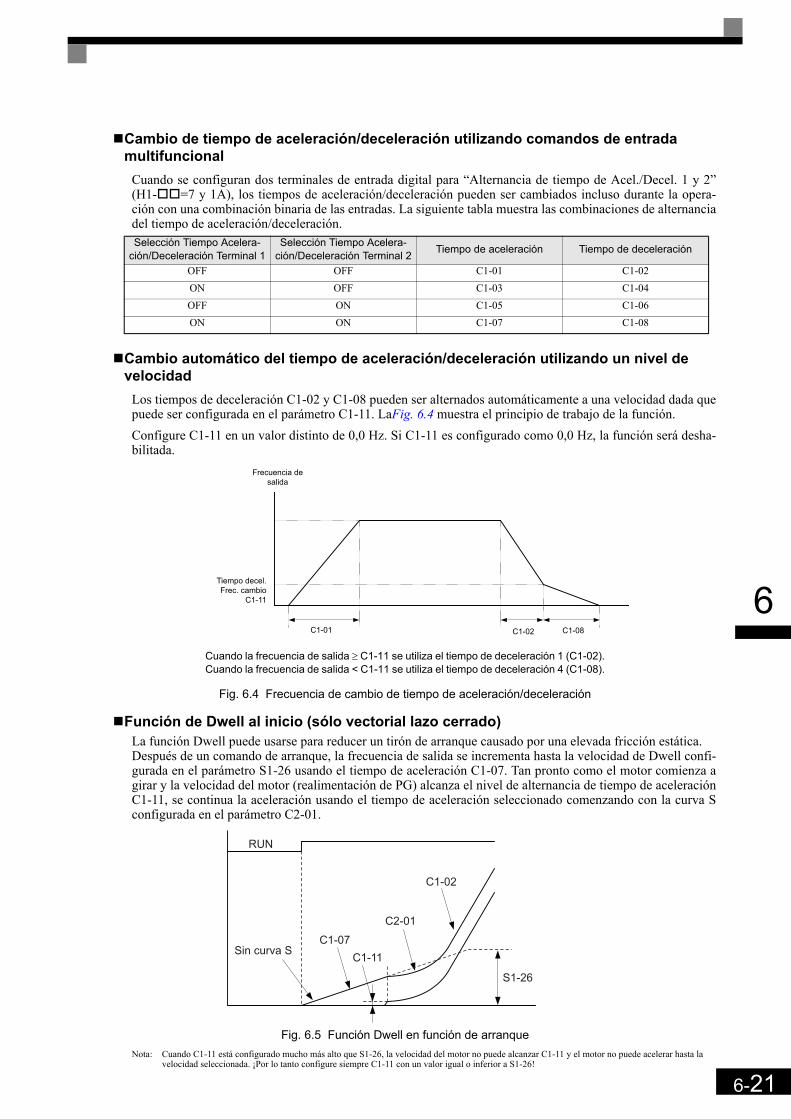
6-21
6
Cambio de tiempo de aceleración/deceleración utilizando comandos de entrada multifuncional
Cuando se configuran dos terminales de entrada digital para “Alternancia de tiempo de Acel./Decel. 1 y 2”(H1- =7 y 1A), los tiempos de aceleración/deceleración pueden ser cambiados incluso durante la opera-ción con una combinación binaria de las entradas. La siguiente tabla muestra las combinaciones de alternanciadel tiempo de aceleración/deceleración.
Cambio automático del tiempo de aceleración/deceleración utilizando un nivel de velocidad
Los tiempos de deceleración C1-02 y C1-08 pueden ser alternados automáticamente a una velocidad dada quepuede ser configurada en el parámetro C1-11. LaFig. 6.4 muestra el principio de trabajo de la función.Configure C1-11 en un valor distinto de 0,0 Hz. Si C1-11 es configurado como 0,0 Hz, la función será desha-bilitada.
Fig. 6.4 Frecuencia de cambio de tiempo de aceleración/deceleración
Función de Dwell al inicio (sólo vectorial lazo cerrado)La función Dwell puede usarse para reducer un tirón de arranque causado por una elevada fricción estática.Después de un comando de arranque, la frecuencia de salida se incrementa hasta la velocidad de Dwell confi-gurada en el parámetro S1-26 usando el tiempo de aceleración C1-07. Tan pronto como el motor comienza agirar y la velocidad del motor (realimentación de PG) alcanza el nivel de alternancia de tiempo de aceleraciónC1-11, se continua la aceleración usando el tiempo de aceleración seleccionado comenzando con la curva Sconfigurada en el parámetro C2-01.
Fig. 6.5 Función Dwell en función de arranqueNota: Cuando C1-11 está configurado mucho más alto que S1-26, la velocidad del motor no puede alcanzar C1-11 y el motor no puede acelerar hasta la
velocidad seleccionada. ¡Por lo tanto configure siempre C1-11 con un valor igual o inferior a S1-26!
Selección Tiempo Acelera-ción/Deceleración Terminal 1
Selección Tiempo Acelera-ción/Deceleración Terminal 2 Tiempo de aceleración Tiempo de deceleración
OFF OFF C1-01 C1-02ON OFF C1-03 C1-04OFF ON C1-05 C1-06ON ON C1-07 C1-08
Frecuencia desalida
Tiempo decel.Frec. cambio
C1-11
C1-01 C1-02 C1-08
Cuando la frecuencia de salida ≥ C1-11 se utiliza el tiempo de deceleración 1 (C1-02).Cuando la frecuencia de salida < C1-11 se utiliza el tiempo de deceleración 4 (C1-08).
C1-07C1-11
C2-01
C1-02
S1-26
Sin curva S
RUN
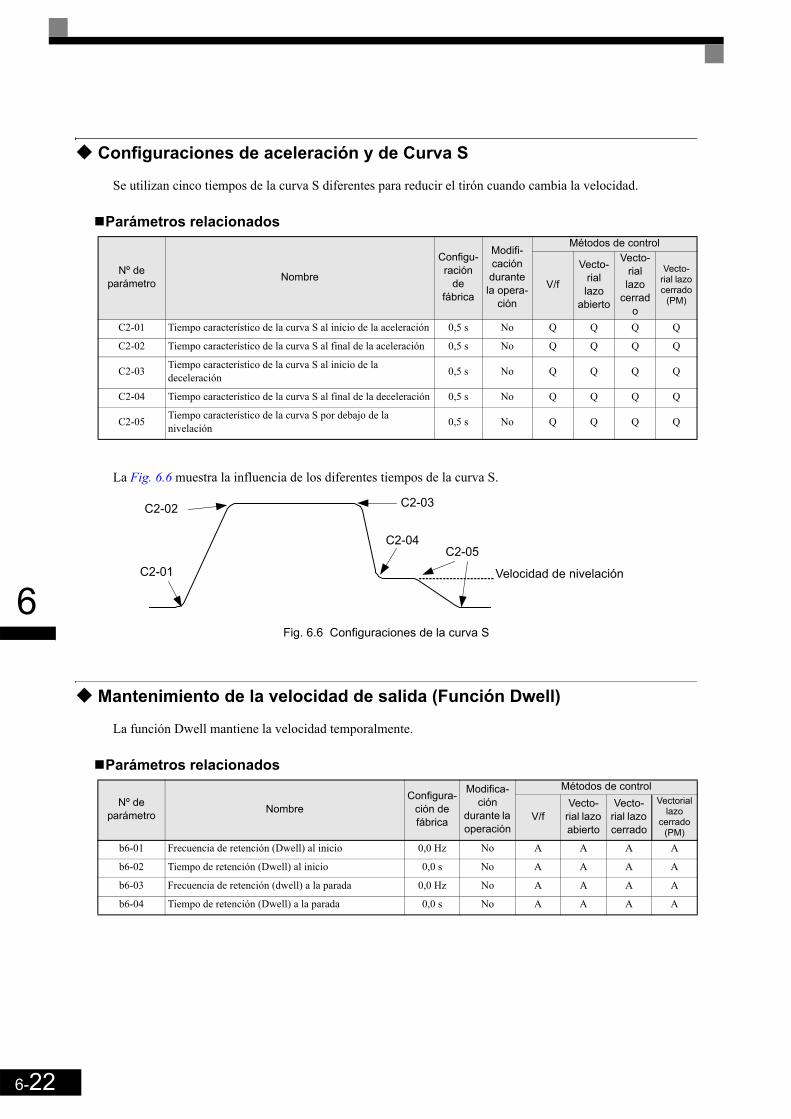
6-22
6
Configuraciones de aceleración y de Curva S
Se utilizan cinco tiempos de la curva S diferentes para reducir el tirón cuando cambia la velocidad.
Parámetros relacionados
La Fig. 6.6 muestra la influencia de los diferentes tiempos de la curva S.
Fig. 6.6 Configuraciones de la curva S
Mantenimiento de la velocidad de salida (Función Dwell)
La función Dwell mantiene la velocidad temporalmente.
Parámetros relacionados
Nº deparámetro Nombre
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de control
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo
cerrado
Vecto-rial lazo cerrado
(PM)
C2-01 Tiempo característico de la curva S al inicio de la aceleración 0,5 s No Q Q Q Q
C2-02 Tiempo característico de la curva S al final de la aceleración 0,5 s No Q Q Q Q
C2-03 Tiempo característico de la curva S al inicio de la deceleración 0,5 s No Q Q Q Q
C2-04 Tiempo característico de la curva S al final de la deceleración 0,5 s No Q Q Q Q
C2-05 Tiempo característico de la curva S por debajo de la nivelación 0,5 s No Q Q Q Q
Nº deparámetro Nombre
Configura-ción de fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
b6-01 Frecuencia de retención (Dwell) al inicio 0,0 Hz No A A A A
b6-02 Tiempo de retención (Dwell) al inicio 0,0 s No A A A A
b6-03 Frecuencia de retención (dwell) a la parada 0,0 Hz No A A A A
b6-04 Tiempo de retención (Dwell) a la parada 0,0 s No A A A A
C2-01
C2-02 C2-03
C2-04C2-05
Velocidad de nivelación
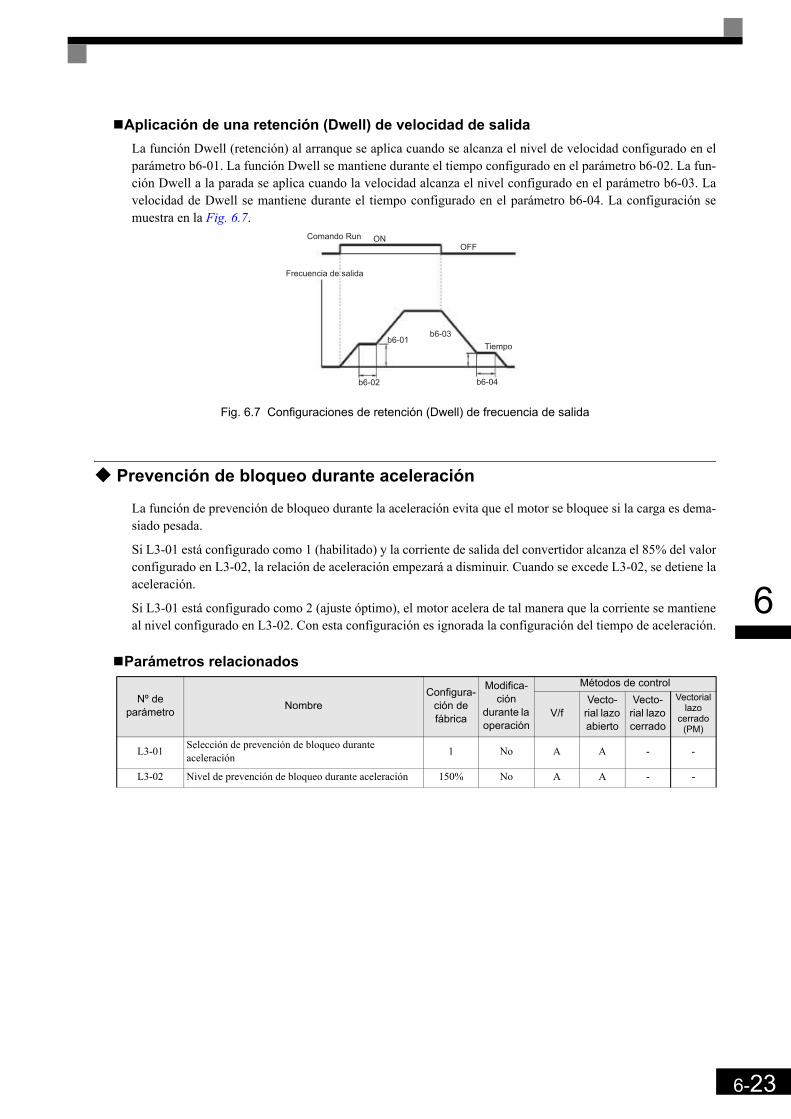
6-23
6
Aplicación de una retención (Dwell) de velocidad de salidaLa función Dwell (retención) al arranque se aplica cuando se alcanza el nivel de velocidad configurado en elparámetro b6-01. La función Dwell se mantiene durante el tiempo configurado en el parámetro b6-02. La fun-ción Dwell a la parada se aplica cuando la velocidad alcanza el nivel configurado en el parámetro b6-03. Lavelocidad de Dwell se mantiene durante el tiempo configurado en el parámetro b6-04. La configuración semuestra en la Fig. 6.7.
Fig. 6.7 Configuraciones de retención (Dwell) de frecuencia de salida
Prevención de bloqueo durante aceleración
La función de prevención de bloqueo durante la aceleración evita que el motor se bloquee si la carga es dema-siado pesada.
Si L3-01 está configurado como 1 (habilitado) y la corriente de salida del convertidor alcanza el 85% del valorconfigurado en L3-02, la relación de aceleración empezará a disminuir. Cuando se excede L3-02, se detiene laaceleración.
Si L3-01 está configurado como 2 (ajuste óptimo), el motor acelera de tal manera que la corriente se mantieneal nivel configurado en L3-02. Con esta configuración es ignorada la configuración del tiempo de aceleración.
Parámetros relacionados
Nº deparámetro Nombre
Configura-ción de fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
L3-01 Selección de prevención de bloqueo durante aceleración 1 No A A - -
L3-02 Nivel de prevención de bloqueo durante aceleración 150% No A A - -
b6-01
b6-04
b6-03
b6-02
Comando Run ONOFF
Frecuencia de salida
Tiempo
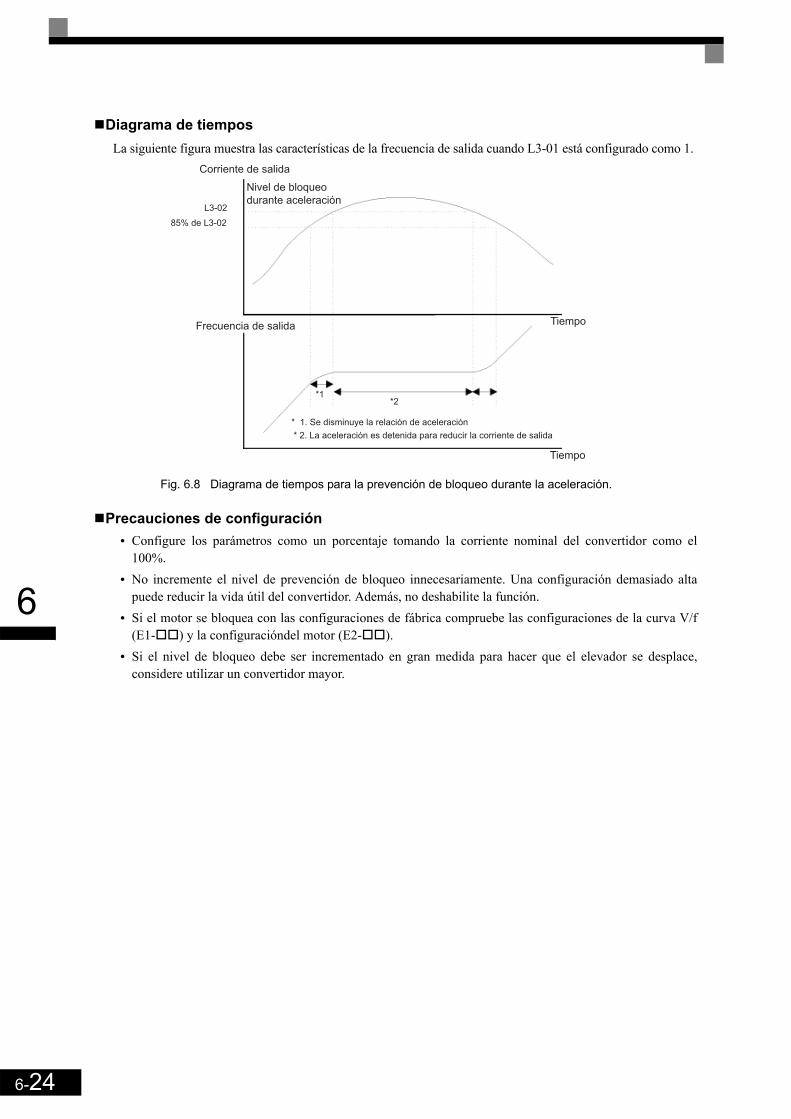
6-24
6
Diagrama de tiemposLa siguiente figura muestra las características de la frecuencia de salida cuando L3-01 está configurado como 1.
Fig. 6.8 Diagrama de tiempos para la prevención de bloqueo durante la aceleración.
Precauciones de configuración• Configure los parámetros como un porcentaje tomando la corriente nominal del convertidor como el
100%.• No incremente el nivel de prevención de bloqueo innecesariamente. Una configuración demasiado alta
puede reducir la vida útil del convertidor. Además, no deshabilite la función.• Si el motor se bloquea con las configuraciones de fábrica compruebe las configuraciones de la curva V/f
(E1- ) y la configuracióndel motor (E2- ).• Si el nivel de bloqueo debe ser incrementado en gran medida para hacer que el elevador se desplace,
considere utilizar un convertidor mayor.
Nivel de bloqueo durante aceleración
Corriente de salida
Frecuencia de salida
Tiempo
Tiempo
* 1. Se disminuye la relación de aceleración* 2. La aceleración es detenida para reducir la corriente de salida
L3-02
85% de L3-02
*2*1

6-25
6
Ajuste de señales de entrada analógicas
Ajuste de referencias de frecuencia analógicas
Con los parámetros H3- pueden ajustarse los valores de entrada analógica del terminal A1 o de los canales1 a 3 de la tarjeta analógica opcional AI-14B.
Parámetros relacionados
Ajuste de la señales de entrada analógicasLa referencia de frecuencia puede ser introducida desde los terminales del circuito de control utilizando ten-sión analógica. El nivel de tensión en el terminal A1 es 0 a+10V. Los canales de entrada analógica de la tarjetaopcional AI-14B pueden ser utilizados de 0 a +10V ó de-10 a +10V.
Los niveles de señal de entrada pueden ser seleccionados utilizando,• H3-01 para CH1 de AI-14B• H3-04 para CH3 de AI-14B• H3-08 para CH2 de AI-14B
Las señales pueden ajustarse usando los parámetros:• H3-02 (ganancia) y H3-03 (Bias) para Canal 1 (CH1) de la tarjeta opcional AI-14B• H3-06 (ganancia) y H3-07 (Bias) para Canal 3 (CH3) de la tarjeta opcional AI-14B• H3-10 (ganancia) y H3-11 (Bias) para Canal 2 (CH2) de la tarjeta opcional AI-14B• H3-16 (ganancia) y H3-17 (Bias) para la entrada analógica A1
La ganancia establece el nivel del valor de entrada seleccionado si se pone en entrada 10V. El bias establece elnivel del valor de entrada seleccionado si se pone en entrada 0V
Nº deparámetro Nombre
Configura-ción de fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
H3-01 Referencia de frecuencia: selección de nivel de señal de CH1 AI-14B 0 No A A A A
H3-02 Ganancia de la entrada de referencia de frecuencia CH1 de AI-14B 100,0% Sí A A A A
H3-03 Bias de la entrada de referencia de frecuencia CH1 de AI-14B 0,0% Sí A A A A
H3-04 Selección de nivel de señal CH3 de AI-14B 0 No A A A A
H3-05 Selección de función de CH3 de AI-14B 2 No A A A A
H3-06 Ganancia de la entrada CH3 de AI-14B 100,0% Sí A A A A
H3-07 Bias de la entrada CH3 de AI-14B 0,0% Sí A A A A
H3-08 Selección de nivel de la señal CH2 de AI-14B 3 No A A A A
H3-09 Selección de función de CH2 de AI-14B 0 No A A A A
H3-10 Ganancia de la entrada CH2 de AI-14B 100,0% Sí A A A A
H3-11 Bias de la entrada CH2 de AI-14B 0,0% Sí A A A A
H3-12 Constante de tiempo de filtro de la entrada analógica para AI-14B 0,03 s No A A A A
H3-15 Selección de función del terminal A1 0 No - - A A
H3-16 Ganancia de entrada del terminal A1 100,0% Sí A A A A
H3-17 Bias de entrada del terminal A1 0,0% Sí A A A A
6-26
6
Detección de velocidad y limitación de velocidad
Función de velocidad alcanzada
Hay ocho tipos diferentes de métodos de detección de frecuencia disponibles. Las salidas digitales M1 a M6pueden ser ajustadas para esta función y pueden ser utilizadas para indicar una detección de frecuencia o defrecuencia alcanzada para cualquier dispositivo externo.
Parámetros relacionados
Configuraciones de salida multifuncional: H2-01 a H2-03 (Selección de función M1 – M6)La siguiente tabla muestra la configuración necesaria de los parámetros H2-01 a H2-03 para cada una de lasfunciones de velocidad alcanzada. Consulte los diagramas de tiempos en la página siguiente para más detalles.
Precauciones de configuración• Con L4-01 se configura un nivel de velocidad alcanzada absoluto, es decir, se detecta una velocidad alcan-
zada en ambos sentidos (UP y DOWN).• Con L4-03 se configura un nivel de velocidad alcanzada, es decir, la velocidad alcanzada solamente se
detecta en el sentido configurado (nivel positivo → dirección Up, nivel negativo → dirección Down).
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifi-cación durante
la opera-ción
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
L4-01 Nivel de detección de velocidad alcanzada 0,0 Hz No A A A A
L4-02 Ancho de detección de velocidad alcanzada 2,0 Hz No A A A A
L4-03 Nivel de detección de velocidad alcanzada (+/-) 0,0 Hz No A A A A
L4-04 Ancho de detección de velocidad alcanzada (+/-) 2,0 Hz No A A A A
Función Configuraciónfref/fsalida Alcanz 1 2
fsalida/fset Alcanzada 1 3
Detección de frecuencia 1 4
Detección de frecuencia 2 5
fref/fsalida Alcanz 2 13
fsalida/fset Alcanzada 2 14
Detección de frecuencia 3 15
Detección de frecuencia 4 16
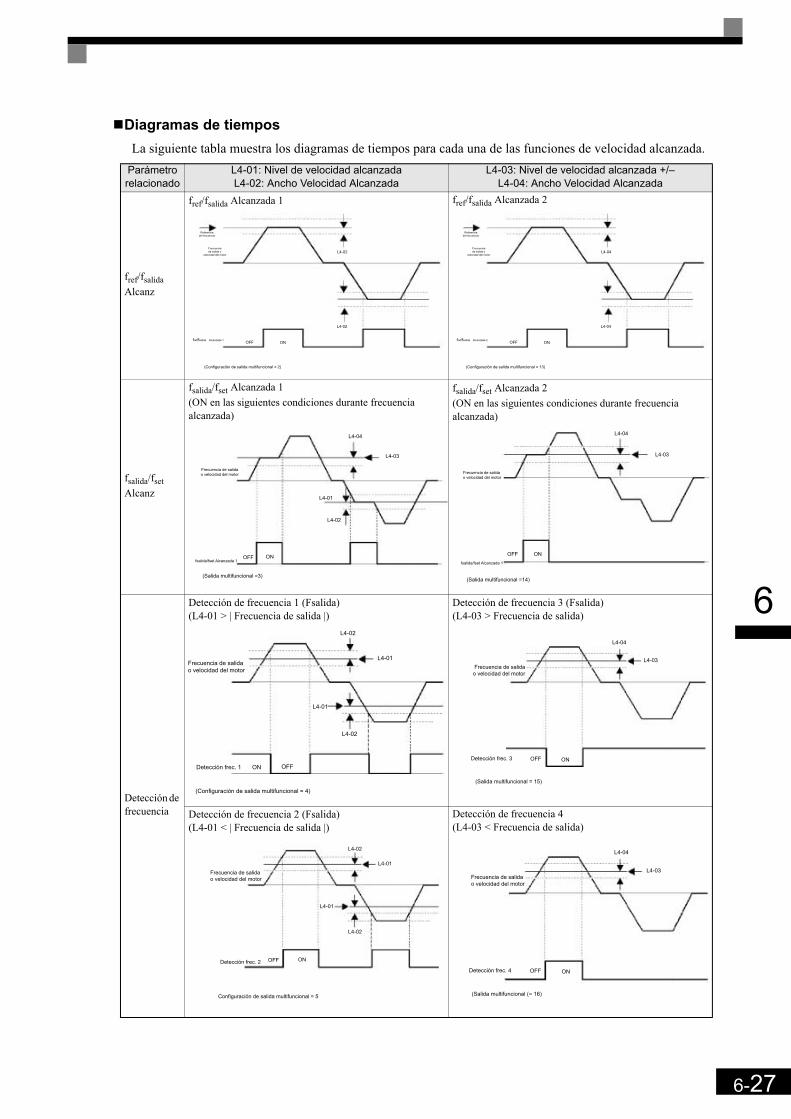
6-27
6
Diagramas de tiemposLa siguiente tabla muestra los diagramas de tiempos para cada una de las funciones de velocidad alcanzada.
Parámetro relacionado
L4-01: Nivel de velocidad alcanzadaL4-02: Ancho Velocidad Alcanzada
L4-03: Nivel de velocidad alcanzada +/–L4-04: Ancho Velocidad Alcanzada
fref/fsalida Alcanz
fref/fsalida Alcanzada 1 fref/fsalida Alcanzada 2
fsalida/fset Alcanz
fsalida/fset Alcanzada 1(ON en las siguientes condiciones durante frecuencia alcanzada)
fsalida/fset Alcanzada 2(ON en las siguientes condiciones durante frecuencia alcanzada)
Detección de frecuencia
Detección de frecuencia 1 (Fsalida)(L4-01 > | Frecuencia de salida |)
Detección de frecuencia 3 (Fsalida)(L4-03 > Frecuencia de salida)
Detección de frecuencia 2 (Fsalida)(L4-01 < | Frecuencia de salida |)
Detección de frecuencia 4(L4-03 < Frecuencia de salida)
L4-02
L4-02
Referencia de frecuencia
Frecuencia de salida o
velocidad del motor
fref/fsalida Alcanzada 1ON
(Configuración de salida multifuncional = 2)
OFF
L4-04
L4-04
Referencia de frecuencia
Frecuencia de salida o
velocidad del motor
fref/fsalida Alcanzada 2ON
(Configuración de salida multifuncional = 13)
OFF
L4-04
L4-01
L4-03
L4-02
Frecuencia de salida o velocidad del motor
fsalida/fset Alcanzada 1OFF ON
(Salida multifuncional =3)
L4-04
L4-03
Frecuencia de salida o velocidad del motor
fsalida/fset Alcanzada 1
OFF ON
(Salida multifuncional =14)
Detección frec. 1
L4-02
L4-02
L4-01
L4-01Frecuencia de salida o velocidad del motor
OFFON
(Configuración de salida multifuncional = 4)
L4-04
L4-03Frecuencia de salida
o velocidad del motor
Detección frec. 3
(Salida multifuncional = 15)
OFF ON
L4-02
L4-01
L4-01
L4-02
Frecuencia de salida o velocidad del motor
Detección frec. 2
Configuración de salida multifuncional = 5
OFF ON
Frecuencia de salida o velocidad del motor
L4-04
L4-03
Detección frec. 4
(Salida multifuncional (= 16)
OFF ON

6-28
6
Limitación de la velocidad del elevador a la velocidad de nivelación (d1-17)
Para utilizar un límite de alta velocidad en la dirección UP o en la dirección DOWN a la velocidad de nivela-ción, una de las entradas digitales debe configurarse para “Interruptor de limitación de alta velocidad UP” o“DOWN” (H1- = 87/88).
Entradas digitales multifuncionales (H1-01 a H1-05)
Interruptor de limitación de alta velocidad UPLa función del interruptor de limitación de alta velocidad UP es limitar la velocidad a la velocidad de nivela-ción cuando se aplica la señal de dirección UP. La dirección DOWN no tiene limitación de velocidad.
Interruptor de limitación de alta velocidad DOWNLa función del interruptor de limitación de alta velocidad DOWN es limitar la velocidad a la velocidad denivelación cuando es emitida la señal de dirección DOWN. La dirección UP no tiene limitación de velocidad.
Valorconfigurado Función
Métodos de control
V/fVectorial
lazo abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado (PM)
87 Interruptor de limitación de alta velocidad (dirección UP) Sí Sí Sí Sí
88 Interruptor de limitación de alta velocidad (dirección DOWN) Sí Sí Sí Sí

6-29
6
Mejora del rendimiento de operación
Reducción de la fluctuación de la velocidad del motor (Función de compensación del deslizamiento)
Cuando la carga es elevada, también aumenta el deslizamiento del motor y disminuye la velocidad. La funciónde compensación del deslizamiento mantiene la velocidad del motor constante, independientemente de loscambios que se produzcan en la carga. Cuando el motor está operando con la carga nominal, parámetro E2-02(deslizamiento nominal del motor) × el valor de la ganancia de la compensación del deslizamiento en el pará-metro C3-01, es añadido a la frecuencia de salida. La función puede ser utilizada en control V/f o en controlvectorial lazo abierto.
Parámetros relacionados
Ajuste de la ganancia de la compensación de deslizamiento (C3-01)Si C3-01 se configura como 1,0, el valor de compensación con una carga del 100% es igual al deslizamientonominal configurado en el parámetro E2-02.
Si es necesario (la velocidad del motor es demasiado alta o baja) ajuste la ganancia de compensación de desli-zamiento como sigue:1. Con control vectorial lazo abierto configure E2-02 (Deslizamiento nominal del motor) y E2-03 (Corriente
en vacío del motor). El deslizamiento nominal del motor puede ser calculado utilizando los valores queconstan en la placa del motor y la siguiente fórmula:
Los datos del motor pueden ser ajustados automáticamente utilizando la función de autotuning.2. Con el control V/f configure C3-01 como 1,0. 3. Aplique una carga y compare la referencia de velocidad y la velocidad real del motor durante el funciona-
miento a velocidad constante. Ajuste la ganancia de compensación de deslizamiento en 0,1 cada vez. Si lavelocidad es menor que el valor objetivo, incremente la ganancia de compensación de deslizamiento, y sila velocidad es mayor que el valor objetivo, reduzca la ganancia de compensación de deslizamiento.
4. La configuración de C3-01 como 0,0 deshabilita la función de compensación de deslizamiento.
Ajuste de la constante de tiempo de retardo primario de la compensación de desliza-miento (C3-02)
La constante de retardo de compensación de deslizamiento se configura en ms. El valor de configuración deC3-02 es 2000 ms. Normalmente no es necesario modificar esta configuración. Cuando la respuesta de lacompensación de deslizamiento es baja, reduzca el valor configurado. Cuando la velocidad sea inestable,incremente el valor de configuración.
Nº deparámetro Nombre
Configura-ción de fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
C3-01 Ganancia de compensación de deslizamiento 1,0 Sí A A - -
C3-02 Tiempo de retardo de la compensación de deslizamiento 2000 ms No A A - -
C3-03 Límite de compensación de deslizamiento 200% No A A - -
C3-04 Compensación de deslizamiento durante la regeneración 1 No - A - -
C3-05 Selección de operación de la limitación de tensión de salida 0 No - A A -
Motor rated slip (Hz) Motor rated frequency (Hz) Rated motor speed (rpm) Number of motor poles×120
----------------------------------------------------------------------------------------------------------------------------–=
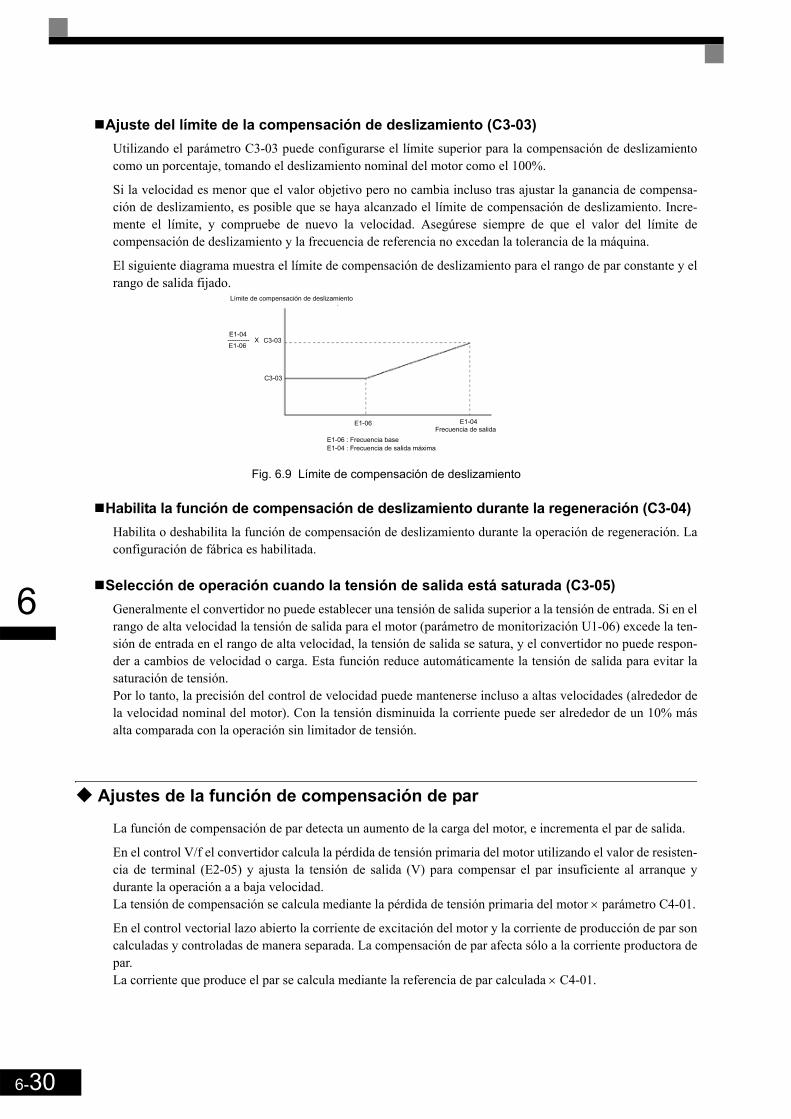
6-30
6
Ajuste del límite de la compensación de deslizamiento (C3-03)Utilizando el parámetro C3-03 puede configurarse el límite superior para la compensación de deslizamientocomo un porcentaje, tomando el deslizamiento nominal del motor como el 100%.
Si la velocidad es menor que el valor objetivo pero no cambia incluso tras ajustar la ganancia de compensa-ción de deslizamiento, es posible que se haya alcanzado el límite de compensación de deslizamiento. Incre-mente el límite, y compruebe de nuevo la velocidad. Asegúrese siempre de que el valor del límite decompensación de deslizamiento y la frecuencia de referencia no excedan la tolerancia de la máquina.
El siguiente diagrama muestra el límite de compensación de deslizamiento para el rango de par constante y elrango de salida fijado.
Fig. 6.9 Límite de compensación de deslizamiento
Habilita la función de compensación de deslizamiento durante la regeneración (C3-04)Habilita o deshabilita la función de compensación de deslizamiento durante la operación de regeneración. Laconfiguración de fábrica es habilitada.
Selección de operación cuando la tensión de salida está saturada (C3-05)Generalmente el convertidor no puede establecer una tensión de salida superior a la tensión de entrada. Si en elrango de alta velocidad la tensión de salida para el motor (parámetro de monitorización U1-06) excede la ten-sión de entrada en el rango de alta velocidad, la tensión de salida se satura, y el convertidor no puede respon-der a cambios de velocidad o carga. Esta función reduce automáticamente la tensión de salida para evitar lasaturación de tensión.Por lo tanto, la precisión del control de velocidad puede mantenerse incluso a altas velocidades (alrededor dela velocidad nominal del motor). Con la tensión disminuida la corriente puede ser alrededor de un 10% másalta comparada con la operación sin limitador de tensión.
Ajustes de la función de compensación de par
La función de compensación de par detecta un aumento de la carga del motor, e incrementa el par de salida.
En el control V/f el convertidor calcula la pérdida de tensión primaria del motor utilizando el valor de resisten-cia de terminal (E2-05) y ajusta la tensión de salida (V) para compensar el par insuficiente al arranque ydurante la operación a a baja velocidad.La tensión de compensación se calcula mediante la pérdida de tensión primaria del motor × parámetro C4-01.
En el control vectorial lazo abierto la corriente de excitación del motor y la corriente de producción de par soncalculadas y controladas de manera separada. La compensación de par afecta sólo a la corriente productora depar.La corriente que produce el par se calcula mediante la referencia de par calculada × C4-01.
E1-04----------E1-06
X C3-03
C3-03
E1-04E1-06
E1-06 : Frecuencia baseE1-04 : Frecuencia de salida máxima
Límite de compensación de deslizamiento
Frecuencia de salida
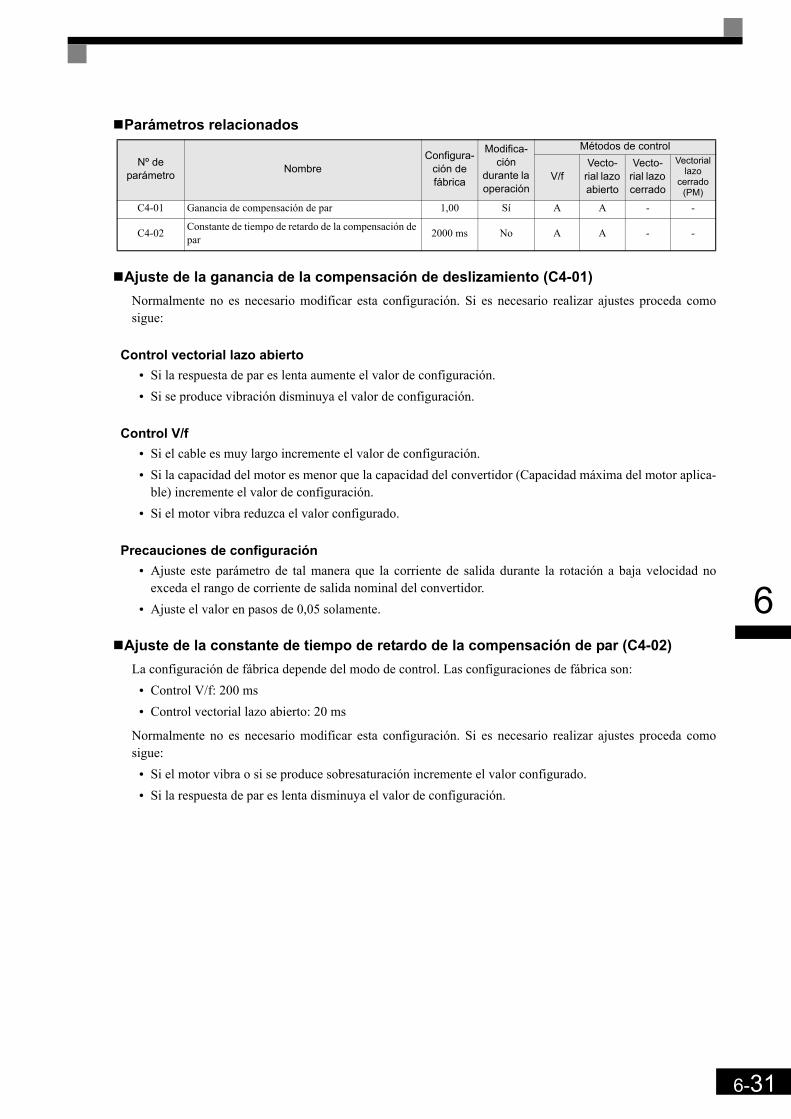
6-31
6
Parámetros relacionados
Ajuste de la ganancia de la compensación de deslizamiento (C4-01)Normalmente no es necesario modificar esta configuración. Si es necesario realizar ajustes proceda comosigue:
Control vectorial lazo abierto• Si la respuesta de par es lenta aumente el valor de configuración.• Si se produce vibración disminuya el valor de configuración.
Control V/f• Si el cable es muy largo incremente el valor de configuración.• Si la capacidad del motor es menor que la capacidad del convertidor (Capacidad máxima del motor aplica-
ble) incremente el valor de configuración.• Si el motor vibra reduzca el valor configurado.
Precauciones de configuración• Ajuste este parámetro de tal manera que la corriente de salida durante la rotación a baja velocidad no
exceda el rango de corriente de salida nominal del convertidor.• Ajuste el valor en pasos de 0,05 solamente.
Ajuste de la constante de tiempo de retardo de la compensación de par (C4-02)La configuración de fábrica depende del modo de control. Las configuraciones de fábrica son:
• Control V/f: 200 ms• Control vectorial lazo abierto: 20 ms
Normalmente no es necesario modificar esta configuración. Si es necesario realizar ajustes proceda comosigue:
• Si el motor vibra o si se produce sobresaturación incremente el valor configurado.• Si la respuesta de par es lenta disminuya el valor de configuración.
Nº deparámetro Nombre
Configura-ción de fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
C4-01 Ganancia de compensación de par 1,00 Sí A A - -
C4-02 Constante de tiempo de retardo de la compensación de par 2000 ms No A A - -

6-32
6
Función de compensación de par de arranque (C4-03 a C4-05)
Puede aplicarse una compensación de par de arranque para aumentar el par establecido al arranque en controlvectorial lazo abierto.
Parámetros relacionados
Funciona como se muestra en el siguiente diagrama.
Fig. 6.10 Diagrama de tiempos para frecuencia de par de arranque
Cuando se utiliza esta función debe tenerse en cuenta lo siguiente:• Ambos valores, C4-03 y C4-04 deben ser configurados.• La compensación trabaja solamente para operación en modo normal (motor). No puede ser utilizada para
operación regenerativa.• Si se utiliza compensación de par de arranque y se genera una gran sacudida al arrancar, incremente la
constante de tiempo de compensación de par de arranque.• La función no puede ser utilizada sin limitaciones para elevadores, ya que la carga no es conocida antes del
arranque.
Regulador de velocidad automático (ASR) (sólo vectorial lazo cerrado)En el control vectorial lazo cerrado, el regulador de velocidad automático (ASR) ajusta la referencia de parcon el fin de eliminar la desviación entre la referencia de velocidad y la velocidad medida (realimentación delPG). Las configuraciones ASR determinan la precision y estabilidad de la velocidad del motor. La Fig. 6.11muestra la estructura del ASR.
Fig. 6.11 Diagrama de bloques del ASR
Nº deparámetro Nombre
Configura-ción de fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
C4-03 Valor de compensación de par de arranque (rotación directa) 0,0 No - A - -
C4-04 Valor de compensación de par de arranque (rotación inversa) 0,0 No - A - -
C4-05 Constante del tiempo de compensación de par de arranque 1 ms No - A - -
ON
Constante de tiempo: C4-02C4-03 (directa)
C4-04 (inversa, polaridad negativa)
E1-09
Constante de tiempo C4-05
Volumen de compensación de par
E1-09Frecuencia de salida
OFF
C4-05 X 4
Comando Run de marcha directa (inversa)
+
-
+
+
Referenciade frecuencia
C5-01/03/09
Velocidaddel motor C5-02/04/10 C5-08
Límite I
P Tiempo de retardo
Límitesde par
Referenciade par
I
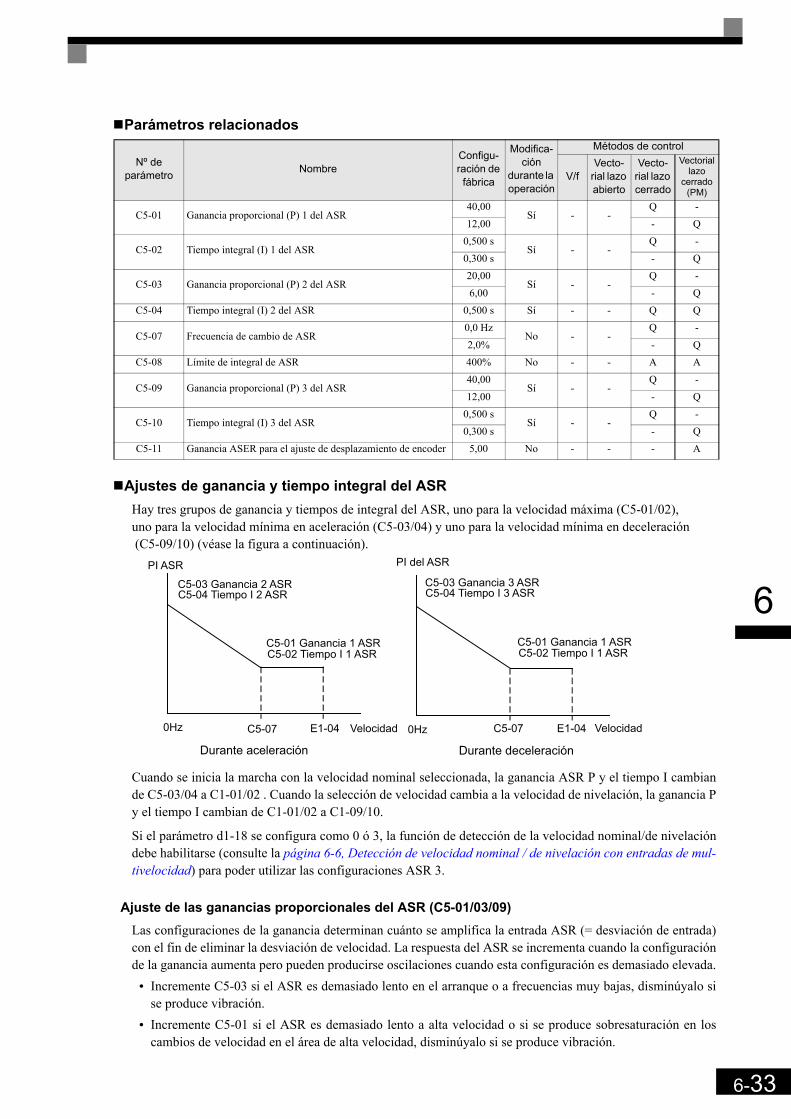
6-33
6
Parámetros relacionados
Ajustes de ganancia y tiempo integral del ASRHay tres grupos de ganancia y tiempos de integral del ASR, uno para la velocidad máxima (C5-01/02), uno para la velocidad mínima en aceleración (C5-03/04) y uno para la velocidad mínima en deceleración (C5-09/10) (véase la figura a continuación).
Cuando se inicia la marcha con la velocidad nominal seleccionada, la ganancia ASR P y el tiempo I cambiande C5-03/04 a C1-01/02 . Cuando la selección de velocidad cambia a la velocidad de nivelación, la ganancia Py el tiempo I cambian de C1-01/02 a C1-09/10.
Si el parámetro d1-18 se configura como 0 ó 3, la función de detección de la velocidad nominal/de nivelacióndebe habilitarse (consulte la página 6-6, Detección de velocidad nominal / de nivelación con entradas de mul-tivelocidad) para poder utilizar las configuraciones ASR 3.
Ajuste de las ganancias proporcionales del ASR (C5-01/03/09)Las configuraciones de la ganancia determinan cuánto se amplifica la entrada ASR (= desviación de entrada)con el fin de eliminar la desviación de velocidad. La respuesta del ASR se incrementa cuando la configuraciónde la ganancia aumenta pero pueden producirse oscilaciones cuando esta configuración es demasiado elevada.
• Incremente C5-03 si el ASR es demasiado lento en el arranque o a frecuencias muy bajas, disminúyalo sise produce vibración.
• Incremente C5-01 si el ASR es demasiado lento a alta velocidad o si se produce sobresaturación en loscambios de velocidad en el área de alta velocidad, disminúyalo si se produce vibración.
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
C5-01 Ganancia proporcional (P) 1 del ASR40,00
Sí - -Q -
12,00 - Q
C5-02 Tiempo integral (I) 1 del ASR0,500 s
Sí - -Q -
0,300 s - Q
C5-03 Ganancia proporcional (P) 2 del ASR20,00
Sí - -Q -
6,00 - QC5-04 Tiempo integral (I) 2 del ASR 0,500 s Sí - - Q Q
C5-07 Frecuencia de cambio de ASR 0,0 Hz
No - -Q -
2,0% - QC5-08 Límite de integral de ASR 400% No - - A A
C5-09 Ganancia proporcional (P) 3 del ASR40,00
Sí - -Q -
12,00 - Q
C5-10 Tiempo integral (I) 3 del ASR0,500 s
Sí - -Q -
0,300 s - QC5-11 Ganancia ASER para el ajuste de desplazamiento de encoder 5,00 No - - - A
PI ASR
C5-03 Ganancia 2 ASRC5-04 Tiempo I 2 ASR
C5-01 Ganancia 1 ASRC5-02 Tiempo I 1 ASR
0Hz C5-07 E1-04 Velocidad
Durante aceleración Durante deceleración
PI del ASR
C5-03 Ganancia 3 ASRC5-04 Tiempo I 3 ASR
C5-01 Ganancia 1 ASRC5-02 Tiempo I 1 ASR
0Hz C5-07 VelocidadE1-04
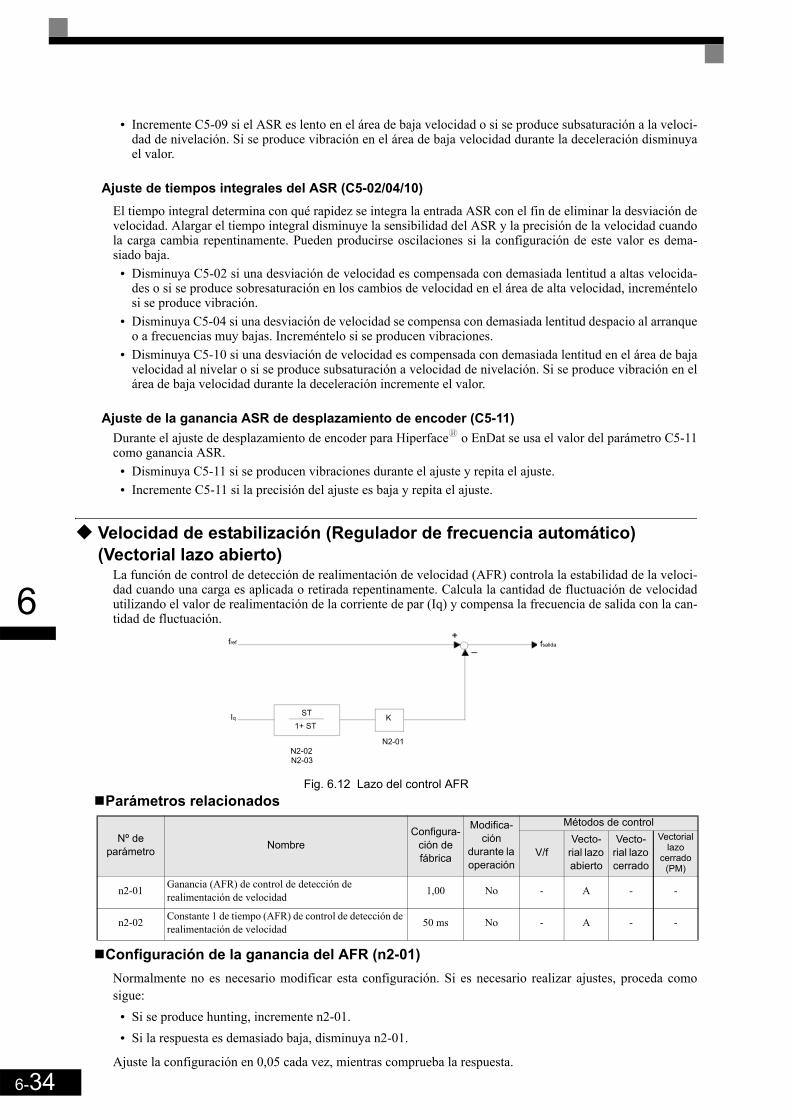
6-34
6
• Incremente C5-09 si el ASR es lento en el área de baja velocidad o si se produce subsaturación a la veloci-dad de nivelación. Si se produce vibración en el área de baja velocidad durante la deceleración disminuyael valor.
Ajuste de tiempos integrales del ASR (C5-02/04/10)El tiempo integral determina con qué rapidez se integra la entrada ASR con el fin de eliminar la desviación develocidad. Alargar el tiempo integral disminuye la sensibilidad del ASR y la precisión de la velocidad cuandola carga cambia repentinamente. Pueden producirse oscilaciones si la configuración de este valor es dema-siado baja.
• Disminuya C5-02 si una desviación de velocidad es compensada con demasiada lentitud a altas velocida-des o si se produce sobresaturación en los cambios de velocidad en el área de alta velocidad, increméntelosi se produce vibración.
• Disminuya C5-04 si una desviación de velocidad se compensa con demasiada lentitud despacio al arranqueo a frecuencias muy bajas. Increméntelo si se producen vibraciones.
• Disminuya C5-10 si una desviación de velocidad es compensada con demasiada lentitud en el área de bajavelocidad al nivelar o si se produce subsaturación a velocidad de nivelación. Si se produce vibración en elárea de baja velocidad durante la deceleración incremente el valor.
Ajuste de la ganancia ASR de desplazamiento de encoder (C5-11)Durante el ajuste de desplazamiento de encoder para Hiperfacey o EnDat se usa el valor del parámetro C5-11como ganancia ASR.
• Disminuya C5-11 si se producen vibraciones durante el ajuste y repita el ajuste.• Incremente C5-11 si la precisión del ajuste es baja y repita el ajuste.
Velocidad de estabilización (Regulador de frecuencia automático) (Vectorial lazo abierto)
La función de control de detección de realimentación de velocidad (AFR) controla la estabilidad de la veloci-dad cuando una carga es aplicada o retirada repentinamente. Calcula la cantidad de fluctuación de velocidadutilizando el valor de realimentación de la corriente de par (Iq) y compensa la frecuencia de salida con la can-tidad de fluctuación.
Fig. 6.12 Lazo del control AFRParámetros relacionados
Configuración de la ganancia del AFR (n2-01)Normalmente no es necesario modificar esta configuración. Si es necesario realizar ajustes, proceda comosigue:
• Si se produce hunting, incremente n2-01.• Si la respuesta es demasiado baja, disminuya n2-01.
Ajuste la configuración en 0,05 cada vez, mientras comprueba la respuesta.
Nº deparámetro Nombre
Configura-ción de fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
n2-01 Ganancia (AFR) de control de detección de realimentación de velocidad 1,00 No - A - -
n2-02 Constante 1 de tiempo (AFR) de control de detección de realimentación de velocidad 50 ms No - A - -
ST1+ ST
K
fsalidafref
Iq
N2-02N2-01
N2-03
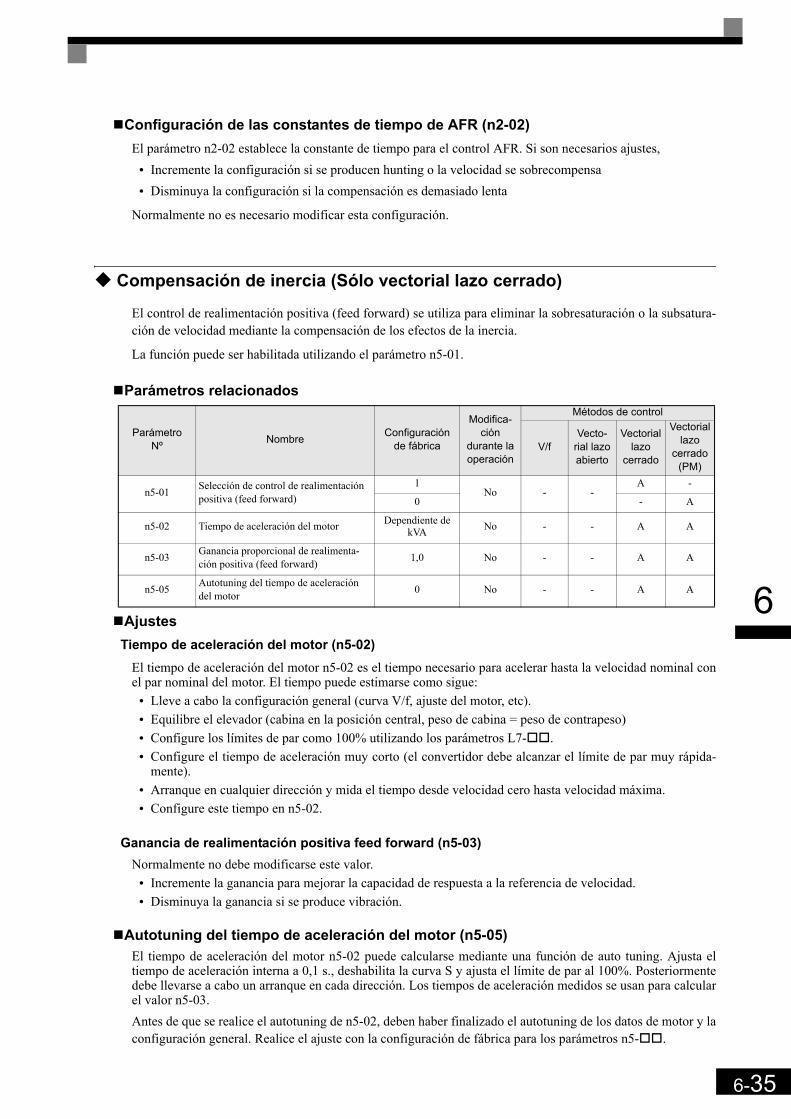
6-35
6
Configuración de las constantes de tiempo de AFR (n2-02)El parámetro n2-02 establece la constante de tiempo para el control AFR. Si son necesarios ajustes,
• Incremente la configuración si se producen hunting o la velocidad se sobrecompensa• Disminuya la configuración si la compensación es demasiado lenta
Normalmente no es necesario modificar esta configuración.
Compensación de inercia (Sólo vectorial lazo cerrado)
El control de realimentación positiva (feed forward) se utiliza para eliminar la sobresaturación o la subsatura-ción de velocidad mediante la compensación de los efectos de la inercia.
La función puede ser habilitada utilizando el parámetro n5-01.
Parámetros relacionados
AjustesTiempo de aceleración del motor (n5-02)
El tiempo de aceleración del motor n5-02 es el tiempo necesario para acelerar hasta la velocidad nominal conel par nominal del motor. El tiempo puede estimarse como sigue:
• Lleve a cabo la configuración general (curva V/f, ajuste del motor, etc).• Equilibre el elevador (cabina en la posición central, peso de cabina = peso de contrapeso)• Configure los límites de par como 100% utilizando los parámetros L7- .• Configure el tiempo de aceleración muy corto (el convertidor debe alcanzar el límite de par muy rápida-
mente).• Arranque en cualquier dirección y mida el tiempo desde velocidad cero hasta velocidad máxima.• Configure este tiempo en n5-02.
Ganancia de realimentación positiva feed forward (n5-03)Normalmente no debe modificarse este valor.
• Incremente la ganancia para mejorar la capacidad de respuesta a la referencia de velocidad.• Disminuya la ganancia si se produce vibración.
Autotuning del tiempo de aceleración del motor (n5-05)El tiempo de aceleración del motor n5-02 puede calcularse mediante una función de auto tuning. Ajusta eltiempo de aceleración interna a 0,1 s., deshabilita la curva S y ajusta el límite de par al 100%. Posteriormentedebe llevarse a cabo un arranque en cada dirección. Los tiempos de aceleración medidos se usan para calcularel valor n5-03. Antes de que se realice el autotuning de n5-02, deben haber finalizado el autotuning de los datos de motor y laconfiguración general. Realice el ajuste con la configuración de fábrica para los parámetros n5- .
ParámetroNº Nombre Configuración
de fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado (PM)
n5-01 Selección de control de realimentación positiva (feed forward)
1No - -
A -
0 - A
n5-02 Tiempo de aceleración del motor Dependiente de kVA No - - A A
n5-03 Ganancia proporcional de realimenta-ción positiva (feed forward) 1,0 No - - A A
n5-05 Autotuning del tiempo de aceleración del motor 0 No - - A A

6-36
6
Lleve a cabo el siguiente procedimiento:1. Configure n5-05 en “1” para activar el autotuning y volver al display de referencia de velocidad. 2. Configure la entrada de baseblock.3. Active la entrada de velocidad de inspección. “FFCAL” parpadeará en el display para señalar que el cál-
culo está activo.4. Aplique un comando UP. El convertidor acelerará el motor hasta la velocidad nominal. Cese de aplicar el
comando UP unos segundos después de que se haya alcanzado la velocidad máxima.5. Cuando el motor se haya parado, aplique un comando DOWN. El convertidor acelerará el motor en la
dirección opuesta hasta la velocidad nominal. Cese el comando DOWN unos segundos después de que sehaya alcanzado la velocidad nominal.
Para anular el ajuste, configure el parámetro n5-05 a “0”.
Ajuste del regulador de corriente automático (ACR)
El controlador ACR consiste en dos lazos de control PI, uno para la corriente del eje d y uno para la corrientedel eje q. A los parámetros ACR solamente puede accederse en el modo de control vectorial lazo cerrado paraPM.
Parámetros relacionados
AjustesNormalmente no es necesario modificar estos valores. No obstante, si se producen vibraciones de ciclo cortoque no pueden ser eliminadas mediante la configuración del controlador ASR es posible que ayude ajustar losvalores ACR como sigue:
• Si el motor genera un ruido de alta frecuencia muy extraño (no relacionado con la frecuencia portadora),reduzca ambas ganancias de ACR (n8-29 y n8-32) en el mismo valor. Si la ganancia se reduce excesiva-mente se verá reducido el rendimiento.
• Si se producen vibraciones reduzca ambos tiempos integral (n9-30 y n9-33) en el mismo valor.
IMPORTANTE
1. El orden de envío del comando UP o DOWN no tiene influencia.2. No se debe cambiar el valor de fábrica de n5-01 para el ajuste.3. Una vez terminada la marcha en ambas direcciones, el parámetro n5-05 se configura automática-
mente en “0”.4. El autotuning sólo se realizará si está configurada la entrada de velocidad de inspección.5. No cambie las constantes mecánicas (carga, inercia) entre las marchas.
ParámetroNº Nombre Ajuste de
fábrica
Modifica-ción
durante la operación
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
n8-29 Ganancia proporcional ACR del eje q 1000 rad/s No - - - A
n8-30 Tiempo integral de ASR del eje q 10,0 ms No - - - A
n8-32 Ganancia proporcional ACR del eje d 1000 rad/s No - - - A
n8-33 Tiempo de integral ACR del eje d 10,0 ms No - - - A
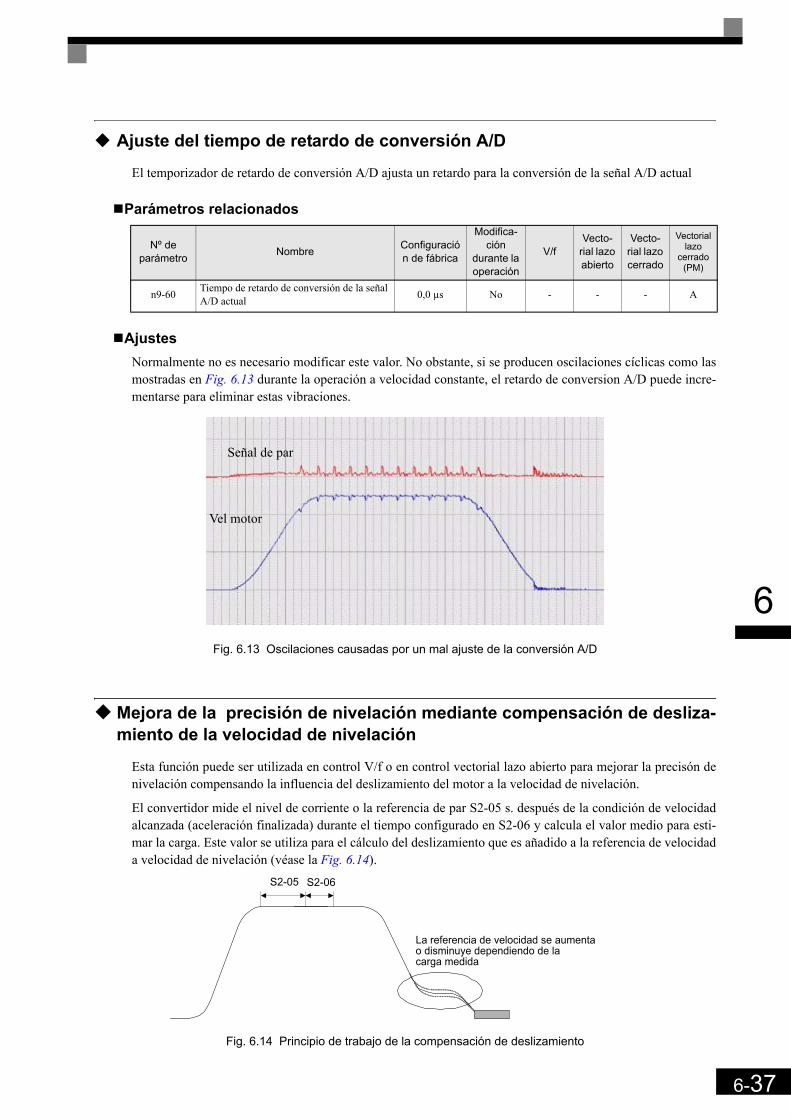
6-37
6
Ajuste del tiempo de retardo de conversión A/D
El temporizador de retardo de conversión A/D ajusta un retardo para la conversión de la señal A/D actual
Parámetros relacionados
AjustesNormalmente no es necesario modificar este valor. No obstante, si se producen oscilaciones cíclicas como lasmostradas en Fig. 6.13 durante la operación a velocidad constante, el retardo de conversion A/D puede incre-mentarse para eliminar estas vibraciones.
Fig. 6.13 Oscilaciones causadas por un mal ajuste de la conversión A/D
Mejora de la precisión de nivelación mediante compensación de desliza-miento de la velocidad de nivelación
Esta función puede ser utilizada en control V/f o en control vectorial lazo abierto para mejorar la precisón denivelación compensando la influencia del deslizamiento del motor a la velocidad de nivelación.
El convertidor mide el nivel de corriente o la referencia de par S2-05 s. después de la condición de velocidadalcanzada (aceleración finalizada) durante el tiempo configurado en S2-06 y calcula el valor medio para esti-mar la carga. Este valor se utiliza para el cálculo del deslizamiento que es añadido a la referencia de velocidada velocidad de nivelación (véase la Fig. 6.14).
Fig. 6.14 Principio de trabajo de la compensación de deslizamiento
Nº deparámetro Nombre Configuració
n de fábrica
Modifica-ción
durante la operación
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
n9-60 Tiempo de retardo de conversión de la señal A/D actual 0,0 µs No - - - A
Vel motor
Señal de par
S2-05 S2-06
La referencia de velocidad se aumentao disminuye dependiendo de la carga medida
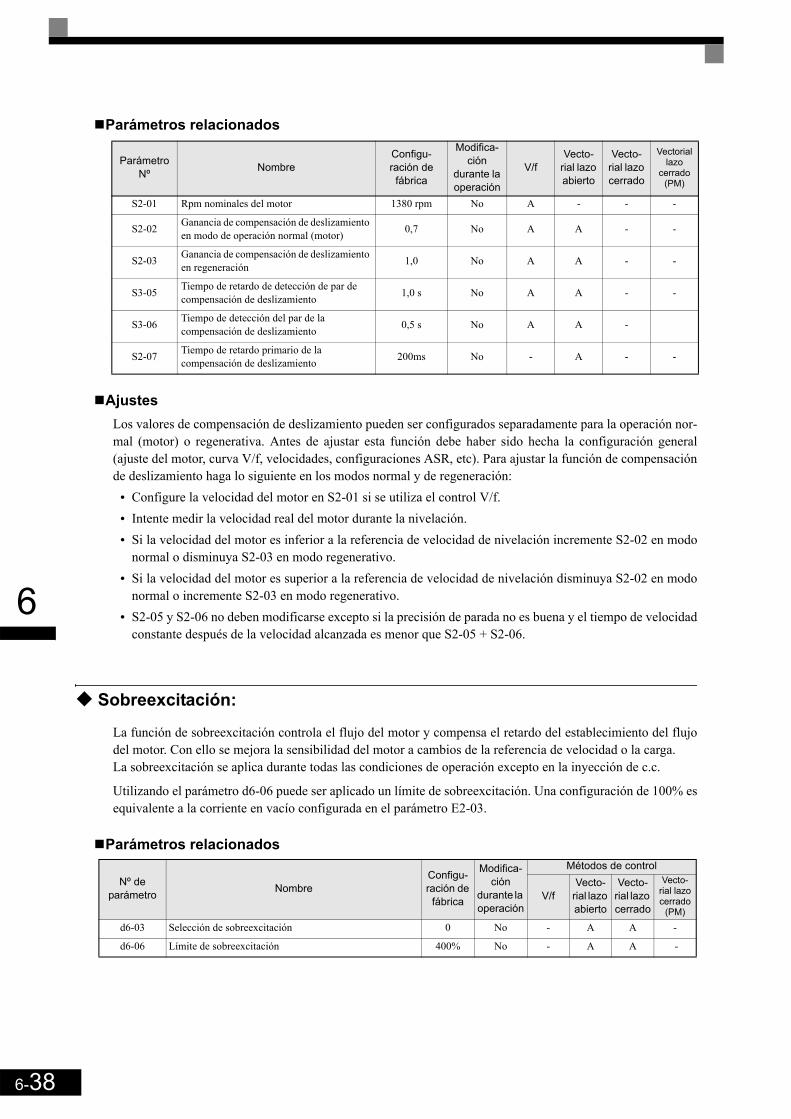
6-38
6
Parámetros relacionados
AjustesLos valores de compensación de deslizamiento pueden ser configurados separadamente para la operación nor-mal (motor) o regenerativa. Antes de ajustar esta función debe haber sido hecha la configuración general(ajuste del motor, curva V/f, velocidades, configuraciones ASR, etc). Para ajustar la función de compensaciónde deslizamiento haga lo siguiente en los modos normal y de regeneración:
• Configure la velocidad del motor en S2-01 si se utiliza el control V/f.• Intente medir la velocidad real del motor durante la nivelación.• Si la velocidad del motor es inferior a la referencia de velocidad de nivelación incremente S2-02 en modo
normal o disminuya S2-03 en modo regenerativo.• Si la velocidad del motor es superior a la referencia de velocidad de nivelación disminuya S2-02 en modo
normal o incremente S2-03 en modo regenerativo.• S2-05 y S2-06 no deben modificarse excepto si la precisión de parada no es buena y el tiempo de velocidad
constante después de la velocidad alcanzada es menor que S2-05 + S2-06.
Sobreexcitación:
La función de sobreexcitación controla el flujo del motor y compensa el retardo del establecimiento del flujodel motor. Con ello se mejora la sensibilidad del motor a cambios de la referencia de velocidad o la carga. La sobreexcitación se aplica durante todas las condiciones de operación excepto en la inyección de c.c.
Utilizando el parámetro d6-06 puede ser aplicado un límite de sobreexcitación. Una configuración de 100% esequivalente a la corriente en vacío configurada en el parámetro E2-03.
Parámetros relacionados
ParámetroNº Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
S2-01 Rpm nominales del motor 1380 rpm No A - - -
S2-02 Ganancia de compensación de deslizamiento en modo de operación normal (motor) 0,7 No A A - -
S2-03 Ganancia de compensación de deslizamiento en regeneración 1,0 No A A - -
S3-05 Tiempo de retardo de detección de par de compensación de deslizamiento 1,0 s No A A - -
S3-06 Tiempo de detección del par de la compensación de deslizamiento 0,5 s No A A -
S2-07 Tiempo de retardo primario de la compensación de deslizamiento 200ms No - A - -
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
d6-03 Selección de sobreexcitación 0 No - A A -
d6-06 Límite de sobreexcitación 400% No - A A -
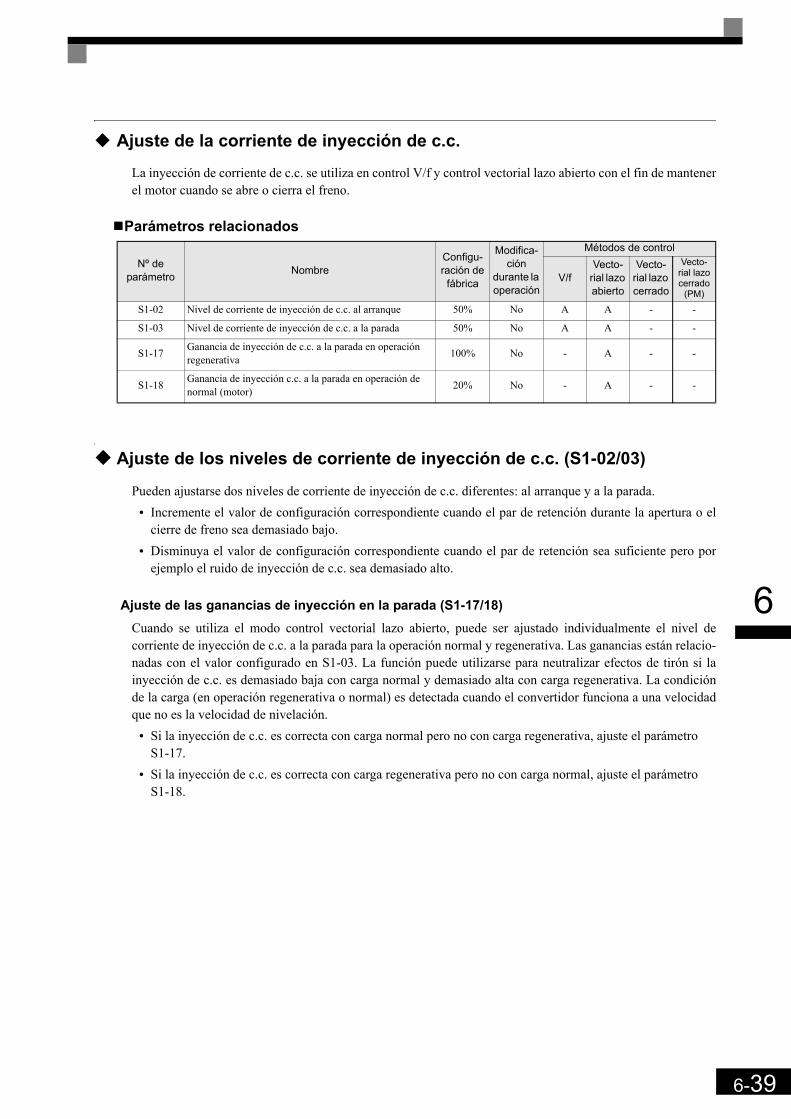
6-39
6
Ajuste de la corriente de inyección de c.c.
La inyección de corriente de c.c. se utiliza en control V/f y control vectorial lazo abierto con el fin de mantenerel motor cuando se abre o cierra el freno.
Parámetros relacionados
Ajuste de los niveles de corriente de inyección de c.c. (S1-02/03)
Pueden ajustarse dos niveles de corriente de inyección de c.c. diferentes: al arranque y a la parada.• Incremente el valor de configuración correspondiente cuando el par de retención durante la apertura o el
cierre de freno sea demasiado bajo.• Disminuya el valor de configuración correspondiente cuando el par de retención sea suficiente pero por
ejemplo el ruido de inyección de c.c. sea demasiado alto.
Ajuste de las ganancias de inyección en la parada (S1-17/18)Cuando se utiliza el modo control vectorial lazo abierto, puede ser ajustado individualmente el nivel decorriente de inyección de c.c. a la parada para la operación normal y regenerativa. Las ganancias están relacio-nadas con el valor configurado en S1-03. La función puede utilizarse para neutralizar efectos de tirón si lainyección de c.c. es demasiado baja con carga normal y demasiado alta con carga regenerativa. La condiciónde la carga (en operación regenerativa o normal) es detectada cuando el convertidor funciona a una velocidadque no es la velocidad de nivelación.
• Si la inyección de c.c. es correcta con carga normal pero no con carga regenerativa, ajuste el parámetroS1-17.
• Si la inyección de c.c. es correcta con carga regenerativa pero no con carga normal, ajuste el parámetroS1-18.
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
S1-02 Nivel de corriente de inyección de c.c. al arranque 50% No A A - -
S1-03 Nivel de corriente de inyección de c.c. a la parada 50% No A A - -
S1-17 Ganancia de inyección de c.c. a la parada en operación regenerativa 100% No - A - -
S1-18 Ganancia de inyección c.c. a la parada en operación de normal (motor) 20% No - A - -
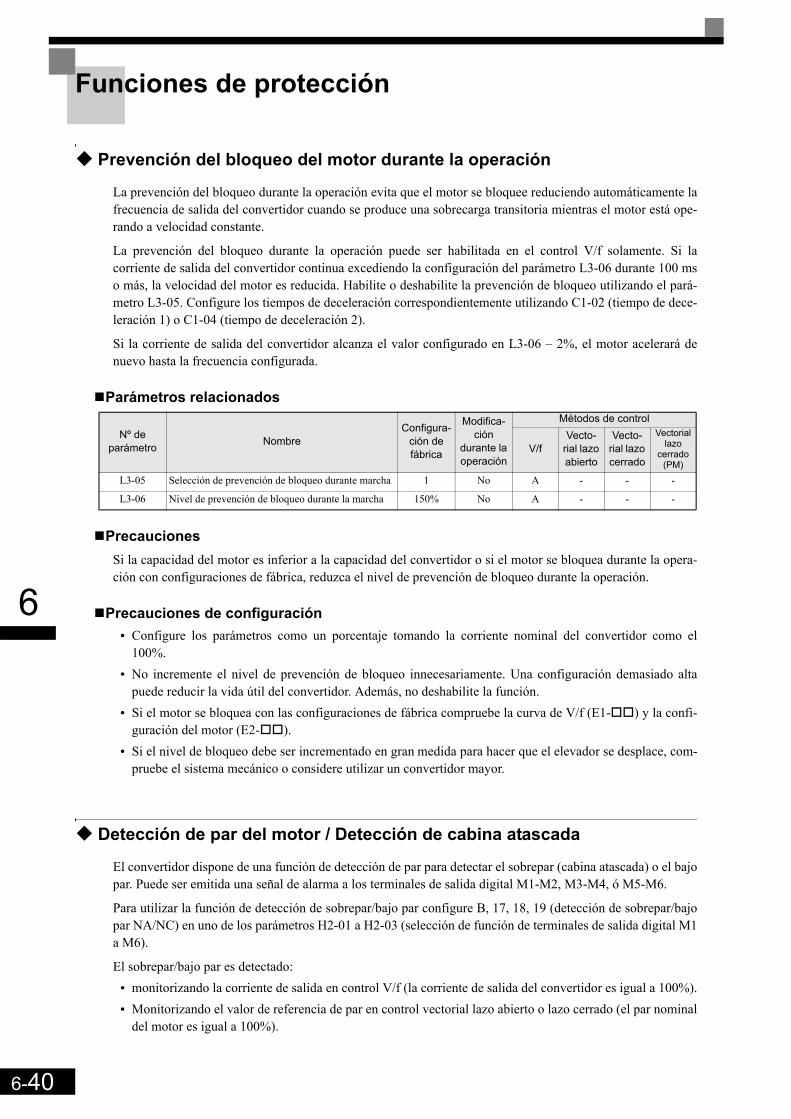
6-40
6
Funciones de protección
Prevención del bloqueo del motor durante la operación
La prevención del bloqueo durante la operación evita que el motor se bloquee reduciendo automáticamente lafrecuencia de salida del convertidor cuando se produce una sobrecarga transitoria mientras el motor está ope-rando a velocidad constante.
La prevención del bloqueo durante la operación puede ser habilitada en el control V/f solamente. Si lacorriente de salida del convertidor continua excediendo la configuración del parámetro L3-06 durante 100 mso más, la velocidad del motor es reducida. Habilite o deshabilite la prevención de bloqueo utilizando el pará-metro L3-05. Configure los tiempos de deceleración correspondientemente utilizando C1-02 (tiempo de dece-leración 1) o C1-04 (tiempo de deceleración 2).
Si la corriente de salida del convertidor alcanza el valor configurado en L3-06 – 2%, el motor acelerará denuevo hasta la frecuencia configurada.
Parámetros relacionados
PrecaucionesSi la capacidad del motor es inferior a la capacidad del convertidor o si el motor se bloquea durante la opera-ción con configuraciones de fábrica, reduzca el nivel de prevención de bloqueo durante la operación.
Precauciones de configuración• Configure los parámetros como un porcentaje tomando la corriente nominal del convertidor como el
100%.• No incremente el nivel de prevención de bloqueo innecesariamente. Una configuración demasiado alta
puede reducir la vida útil del convertidor. Además, no deshabilite la función.• Si el motor se bloquea con las configuraciones de fábrica compruebe la curva de V/f (E1- ) y la confi-
guración del motor (E2- ).• Si el nivel de bloqueo debe ser incrementado en gran medida para hacer que el elevador se desplace, com-
pruebe el sistema mecánico o considere utilizar un convertidor mayor.
Detección de par del motor / Detección de cabina atascada
El convertidor dispone de una función de detección de par para detectar el sobrepar (cabina atascada) o el bajopar. Puede ser emitida una señal de alarma a los terminales de salida digital M1-M2, M3-M4, ó M5-M6.
Para utilizar la función de detección de sobrepar/bajo par configure B, 17, 18, 19 (detección de sobrepar/bajopar NA/NC) en uno de los parámetros H2-01 a H2-03 (selección de función de terminales de salida digital M1a M6).
El sobrepar/bajo par es detectado:• monitorizando la corriente de salida en control V/f (la corriente de salida del convertidor es igual a 100%).• Monitorizando el valor de referencia de par en control vectorial lazo abierto o lazo cerrado (el par nominal
del motor es igual a 100%).
Nº deparámetro Nombre
Configura-ción de fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
L3-05 Selección de prevención de bloqueo durante marcha 1 No A - - -
L3-06 Nivel de prevención de bloqueo durante la marcha 150% No A - - -
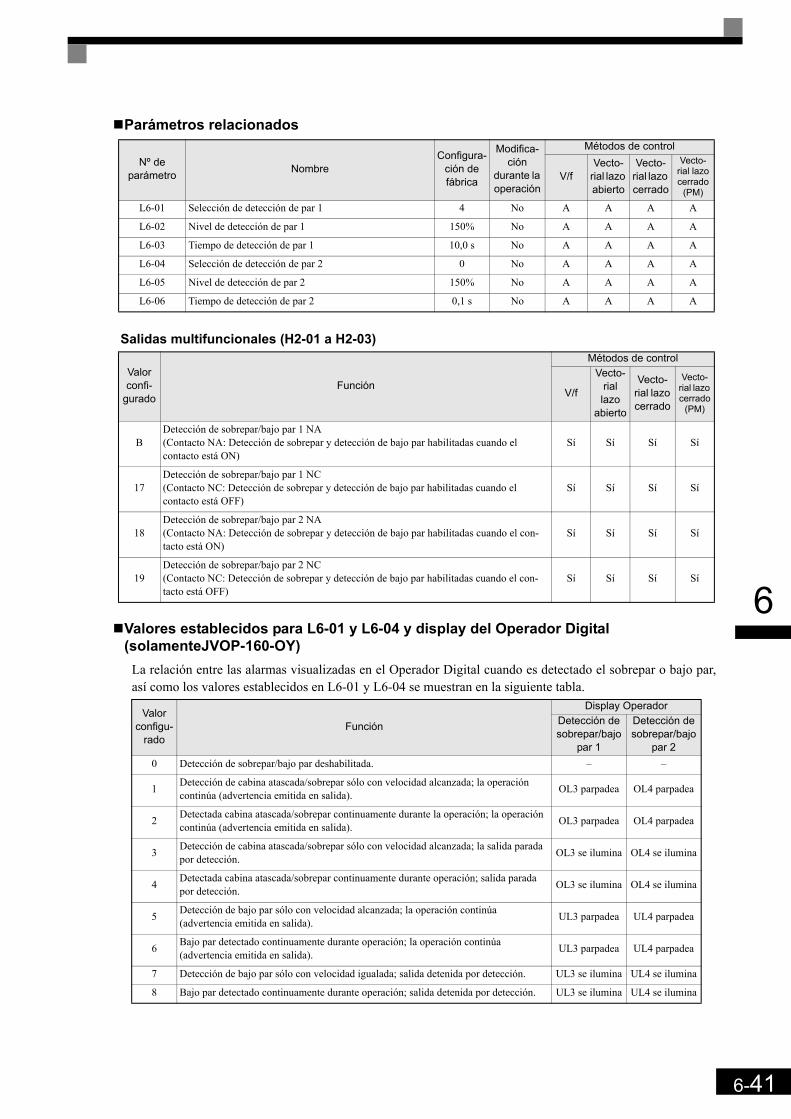
6-41
6
Parámetros relacionados
Salidas multifuncionales (H2-01 a H2-03)
Valores establecidos para L6-01 y L6-04 y display del Operador Digital (solamenteJVOP-160-OY)
La relación entre las alarmas visualizadas en el Operador Digital cuando es detectado el sobrepar o bajo par,así como los valores establecidos en L6-01 y L6-04 se muestran en la siguiente tabla.
Nº deparámetro Nombre
Configura-ción de fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
L6-01 Selección de detección de par 1 4 No A A A A
L6-02 Nivel de detección de par 1 150% No A A A A
L6-03 Tiempo de detección de par 1 10,0 s No A A A A
L6-04 Selección de detección de par 2 0 No A A A A
L6-05 Nivel de detección de par 2 150% No A A A A
L6-06 Tiempo de detección de par 2 0,1 s No A A A A
Valor confi-
guradoFunción
Métodos de control
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
BDetección de sobrepar/bajo par 1 NA(Contacto NA: Detección de sobrepar y detección de bajo par habilitadas cuando el contacto está ON)
Sí Sí Sí Sí
17Detección de sobrepar/bajo par 1 NC(Contacto NC: Detección de sobrepar y detección de bajo par habilitadas cuando el contacto está OFF)
Sí Sí Sí Sí
18Detección de sobrepar/bajo par 2 NA(Contacto NA: Detección de sobrepar y detección de bajo par habilitadas cuando el con-tacto está ON)
Sí Sí Sí Sí
19Detección de sobrepar/bajo par 2 NC(Contacto NC: Detección de sobrepar y detección de bajo par habilitadas cuando el con-tacto está OFF)
Sí Sí Sí Sí
Valor configu-
radoFunción
Display OperadorDetección de sobrepar/bajo
par 1
Detección de sobrepar/bajo
par 20 Detección de sobrepar/bajo par deshabilitada. – –
1 Detección de cabina atascada/sobrepar sólo con velocidad alcanzada; la operación continúa (advertencia emitida en salida). OL3 parpadea OL4 parpadea
2 Detectada cabina atascada/sobrepar continuamente durante la operación; la operación continúa (advertencia emitida en salida). OL3 parpadea OL4 parpadea
3 Detección de cabina atascada/sobrepar sólo con velocidad alcanzada; la salida parada por detección. OL3 se ilumina OL4 se ilumina
4 Detectada cabina atascada/sobrepar continuamente durante operación; salida parada por detección. OL3 se ilumina OL4 se ilumina
5 Detección de bajo par sólo con velocidad alcanzada; la operación continúa (advertencia emitida en salida). UL3 parpadea UL4 parpadea
6 Bajo par detectado continuamente durante operación; la operación continúa(advertencia emitida en salida). UL3 parpadea UL4 parpadea
7 Detección de bajo par sólo con velocidad igualada; salida detenida por detección. UL3 se ilumina UL4 se ilumina
8 Bajo par detectado continuamente durante operación; salida detenida por detección. UL3 se ilumina UL4 se ilumina
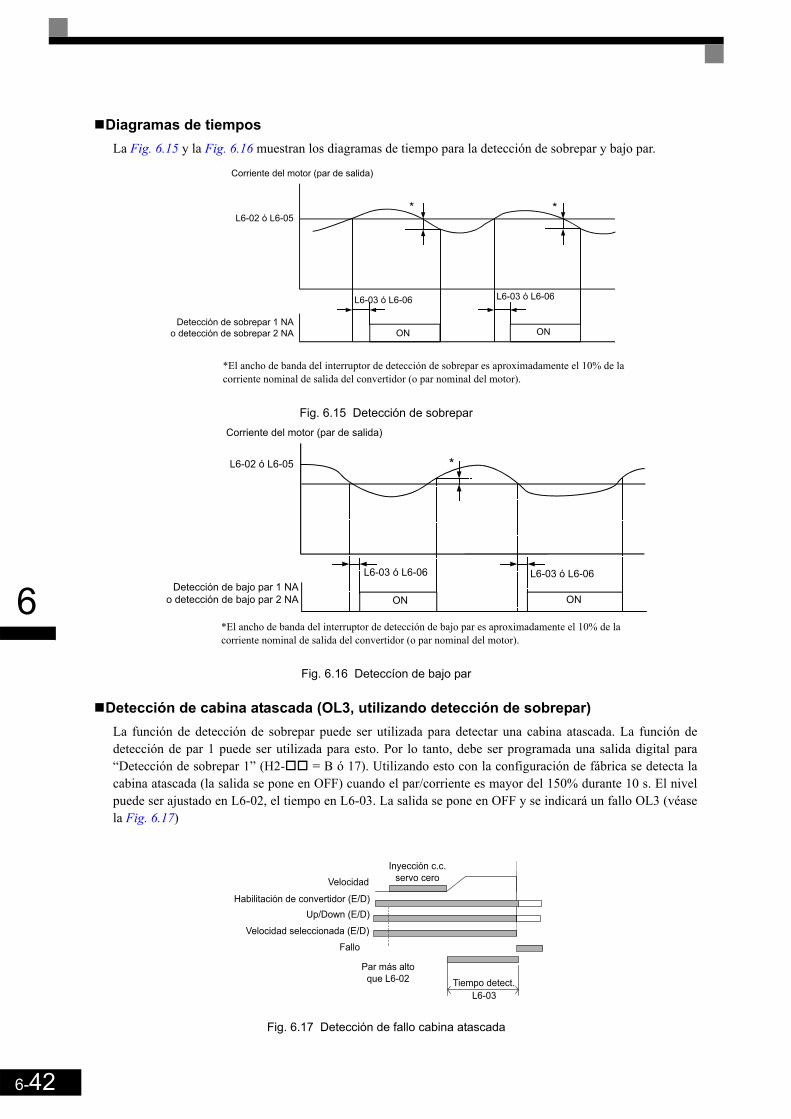
6-42
6
Diagramas de tiemposLa Fig. 6.15 y la Fig. 6.16 muestran los diagramas de tiempo para la detección de sobrepar y bajo par.
Fig. 6.15 Detección de sobrepar
Fig. 6.16 Deteccíon de bajo par
Detección de cabina atascada (OL3, utilizando detección de sobrepar)La función de detección de sobrepar puede ser utilizada para detectar una cabina atascada. La función dedetección de par 1 puede ser utilizada para esto. Por lo tanto, debe ser programada una salida digital para“Detección de sobrepar 1” (H2- = B ó 17). Utilizando esto con la configuración de fábrica se detecta lacabina atascada (la salida se pone en OFF) cuando el par/corriente es mayor del 150% durante 10 s. El nivelpuede ser ajustado en L6-02, el tiempo en L6-03. La salida se pone en OFF y se indicará un fallo OL3 (véasela Fig. 6.17)
Fig. 6.17 Detección de fallo cabina atascada
L6-02 ó L6-05
L6-03 ó L6-06 L6-03 ó L6-06
ON ONDetección de sobrepar 1 NA
o detección de sobrepar 2 NA
Corriente del motor (par de salida)
*El ancho de banda del interruptor de detección de sobrepar es aproximadamente el 10% de la corriente nominal de salida del convertidor (o par nominal del motor).
L6-02 ó L6-05
L6-03 ó L6-06 L6-03 ó L6-06
ON ON
Corriente del motor (par de salida)
Detección de bajo par 1 NAo detección de bajo par 2 NA
*El ancho de banda del interruptor de detección de bajo par es aproximadamente el 10% de la corriente nominal de salida del convertidor (o par nominal del motor).
Inyección c.c.servo ceroVelocidad
Habilitación de convertidor (E/D)Up/Down (E/D)
Velocidad seleccionada (E/D)Fallo
Par más altoque L6-02
Tiempo detect.
L6-03
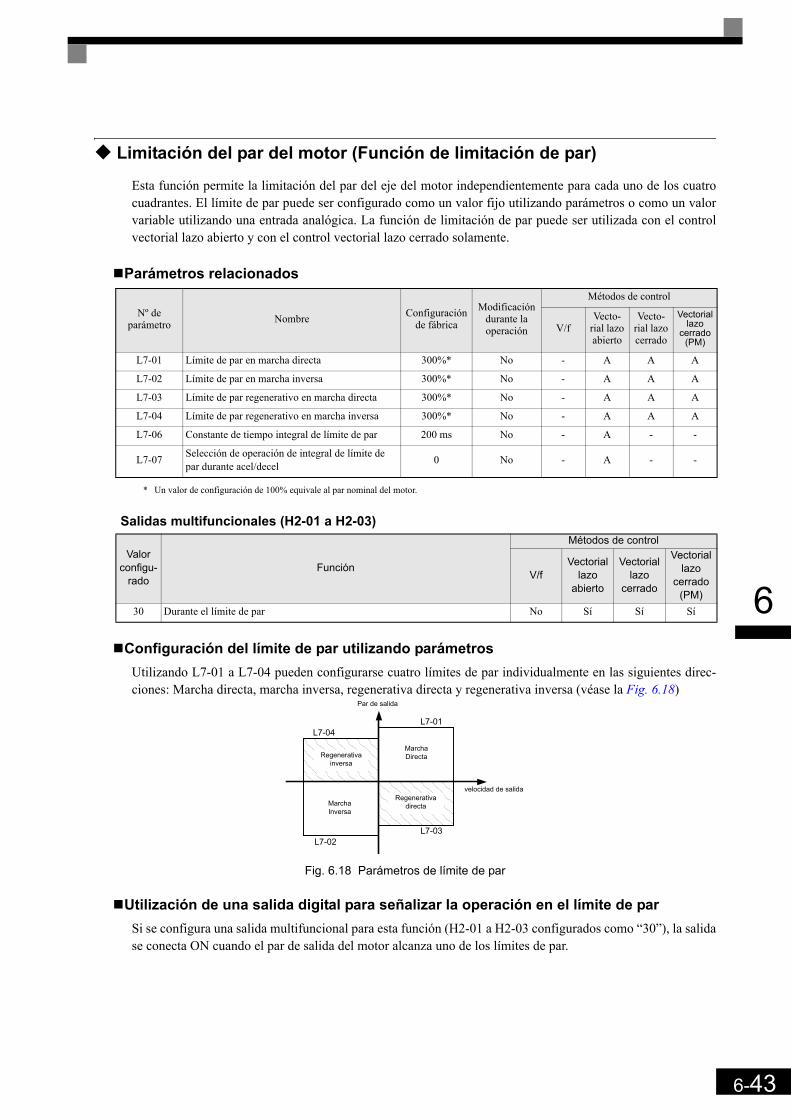
6-43
6
Limitación del par del motor (Función de limitación de par)
Esta función permite la limitación del par del eje del motor independientemente para cada uno de los cuatrocuadrantes. El límite de par puede ser configurado como un valor fijo utilizando parámetros o como un valorvariable utilizando una entrada analógica. La función de limitación de par puede ser utilizada con el controlvectorial lazo abierto y con el control vectorial lazo cerrado solamente.
Parámetros relacionados
* Un valor de configuración de 100% equivale al par nominal del motor.
Salidas multifuncionales (H2-01 a H2-03)
Configuración del límite de par utilizando parámetrosUtilizando L7-01 a L7-04 pueden configurarse cuatro límites de par individualmente en las siguientes direc-ciones: Marcha directa, marcha inversa, regenerativa directa y regenerativa inversa (véase la Fig. 6.18)
Fig. 6.18 Parámetros de límite de par
Utilización de una salida digital para señalizar la operación en el límite de parSi se configura una salida multifuncional para esta función (H2-01 a H2-03 configurados como “30”), la salidase conecta ON cuando el par de salida del motor alcanza uno de los límites de par.
Nº deparámetro Nombre Configuración
de fábrica
Modificación durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
L7-01 Límite de par en marcha directa 300%* No - A A A
L7-02 Límite de par en marcha inversa 300%* No - A A A
L7-03 Límite de par regenerativo en marcha directa 300%* No - A A A
L7-04 Límite de par regenerativo en marcha inversa 300%* No - A A A
L7-06 Constante de tiempo integral de límite de par 200 ms No - A - -
L7-07 Selección de operación de integral de límite de par durante acel/decel 0 No - A - -
Valor configu-
radoFunción
Métodos de control
V/fVectorial
lazo abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado (PM)
30 Durante el límite de par No Sí Sí Sí
L7-01
L7-03L7-02
L7-04
Regenerativainversa
MarchaDirecta
MarchaInversa
Regenerativadirecta
velocidad de salida
Par de salida
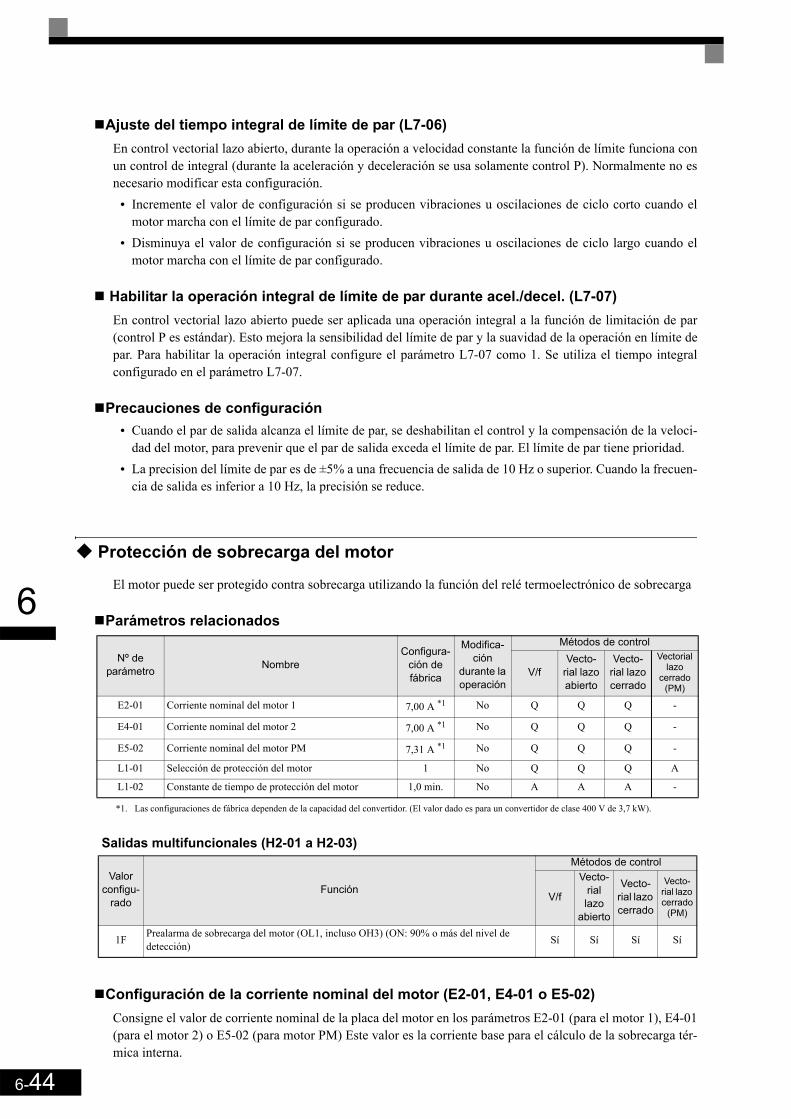
6-44
6
Ajuste del tiempo integral de límite de par (L7-06)En control vectorial lazo abierto, durante la operación a velocidad constante la función de límite funciona conun control de integral (durante la aceleración y deceleración se usa solamente control P). Normalmente no esnecesario modificar esta configuración.
• Incremente el valor de configuración si se producen vibraciones u oscilaciones de ciclo corto cuando elmotor marcha con el límite de par configurado.
• Disminuya el valor de configuración si se producen vibraciones u oscilaciones de ciclo largo cuando elmotor marcha con el límite de par configurado.
Habilitar la operación integral de límite de par durante acel./decel. (L7-07)En control vectorial lazo abierto puede ser aplicada una operación integral a la función de limitación de par(control P es estándar). Esto mejora la sensibilidad del límite de par y la suavidad de la operación en límite depar. Para habilitar la operación integral configure el parámetro L7-07 como 1. Se utiliza el tiempo integralconfigurado en el parámetro L7-07.
Precauciones de configuración• Cuando el par de salida alcanza el límite de par, se deshabilitan el control y la compensación de la veloci-
dad del motor, para prevenir que el par de salida exceda el límite de par. El límite de par tiene prioridad.• La precision del límite de par es de ±5% a una frecuencia de salida de 10 Hz o superior. Cuando la frecuen-
cia de salida es inferior a 10 Hz, la precisión se reduce.
Protección de sobrecarga del motor
El motor puede ser protegido contra sobrecarga utilizando la función del relé termoelectrónico de sobrecarga
Parámetros relacionados
Salidas multifuncionales (H2-01 a H2-03)
Configuración de la corriente nominal del motor (E2-01, E4-01 o E5-02)Consigne el valor de corriente nominal de la placa del motor en los parámetros E2-01 (para el motor 1), E4-01(para el motor 2) o E5-02 (para motor PM) Este valor es la corriente base para el cálculo de la sobrecarga tér-mica interna.
Nº deparámetro Nombre
Configura-ción de fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
E2-01 Corriente nominal del motor 1 7,00 A *1
*1. Las configuraciones de fábrica dependen de la capacidad del convertidor. (El valor dado es para un convertidor de clase 400 V de 3,7 kW).
No Q Q Q -
E4-01 Corriente nominal del motor 2 7,00 A *1 No Q Q Q -
E5-02 Corriente nominal del motor PM 7,31 A *1 No Q Q Q -
L1-01 Selección de protección del motor 1 No Q Q Q A
L1-02 Constante de tiempo de protección del motor 1,0 min. No A A A -
Valor configu-
radoFunción
Métodos de control
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
1F Prealarma de sobrecarga del motor (OL1, incluso OH3) (ON: 90% o más del nivel de detección) Sí Sí Sí Sí
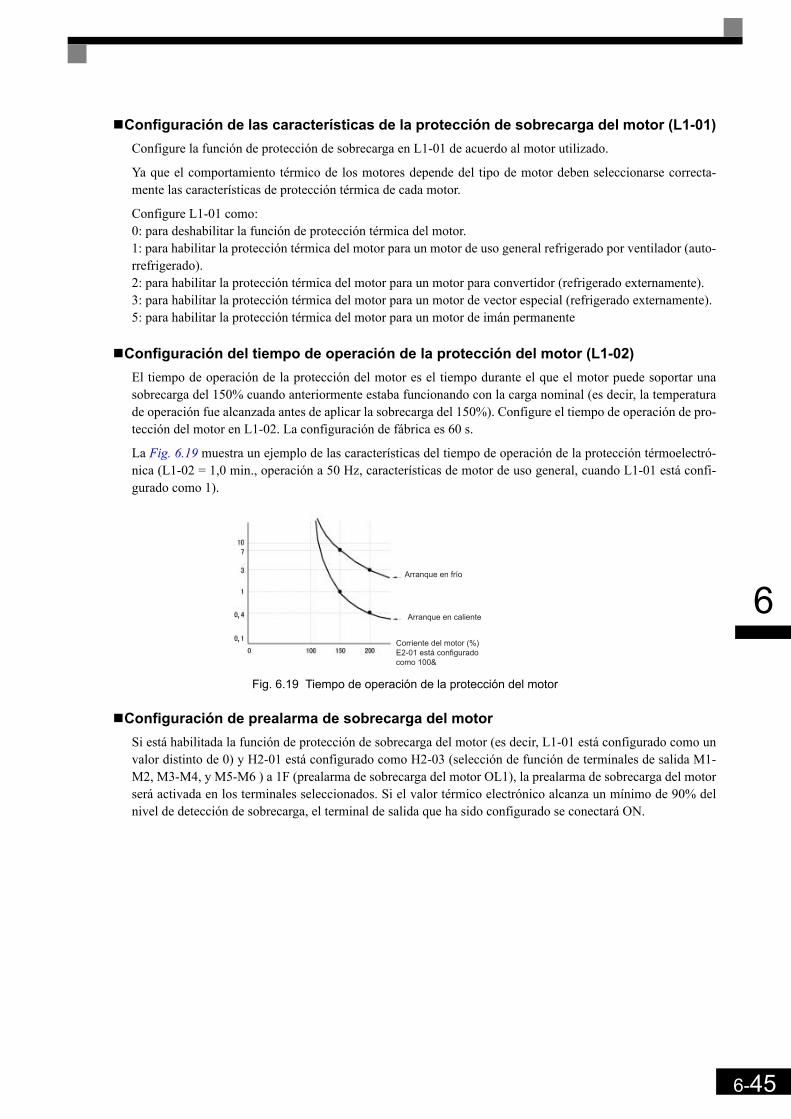
6-45
6
Configuración de las características de la protección de sobrecarga del motor (L1-01)Configure la función de protección de sobrecarga en L1-01 de acuerdo al motor utilizado.
Ya que el comportamiento térmico de los motores depende del tipo de motor deben seleccionarse correcta-mente las características de protección térmica de cada motor.
Configure L1-01 como:0: para deshabilitar la función de protección térmica del motor.1: para habilitar la protección térmica del motor para un motor de uso general refrigerado por ventilador (auto-rrefrigerado).2: para habilitar la protección térmica del motor para un motor para convertidor (refrigerado externamente).3: para habilitar la protección térmica del motor para un motor de vector especial (refrigerado externamente).5: para habilitar la protección térmica del motor para un motor de imán permanente
Configuración del tiempo de operación de la protección del motor (L1-02)El tiempo de operación de la protección del motor es el tiempo durante el que el motor puede soportar unasobrecarga del 150% cuando anteriormente estaba funcionando con la carga nominal (es decir, la temperaturade operación fue alcanzada antes de aplicar la sobrecarga del 150%). Configure el tiempo de operación de pro-tección del motor en L1-02. La configuración de fábrica es 60 s.
La Fig. 6.19 muestra un ejemplo de las características del tiempo de operación de la protección térmoelectró-nica (L1-02 = 1,0 min., operación a 50 Hz, características de motor de uso general, cuando L1-01 está confi-gurado como 1).
Fig. 6.19 Tiempo de operación de la protección del motor
Configuración de prealarma de sobrecarga del motorSi está habilitada la función de protección de sobrecarga del motor (es decir, L1-01 está configurado como unvalor distinto de 0) y H2-01 está configurado como H2-03 (selección de función de terminales de salida M1-M2, M3-M4, y M5-M6 ) a 1F (prealarma de sobrecarga del motor OL1), la prealarma de sobrecarga del motorserá activada en los terminales seleccionados. Si el valor térmico electrónico alcanza un mínimo de 90% delnivel de detección de sobrecarga, el terminal de salida que ha sido configurado se conectará ON.
Arranque en frío
Arranque en caliente
Corriente del motor (%)E2-01 está configurado como 100&
,
,
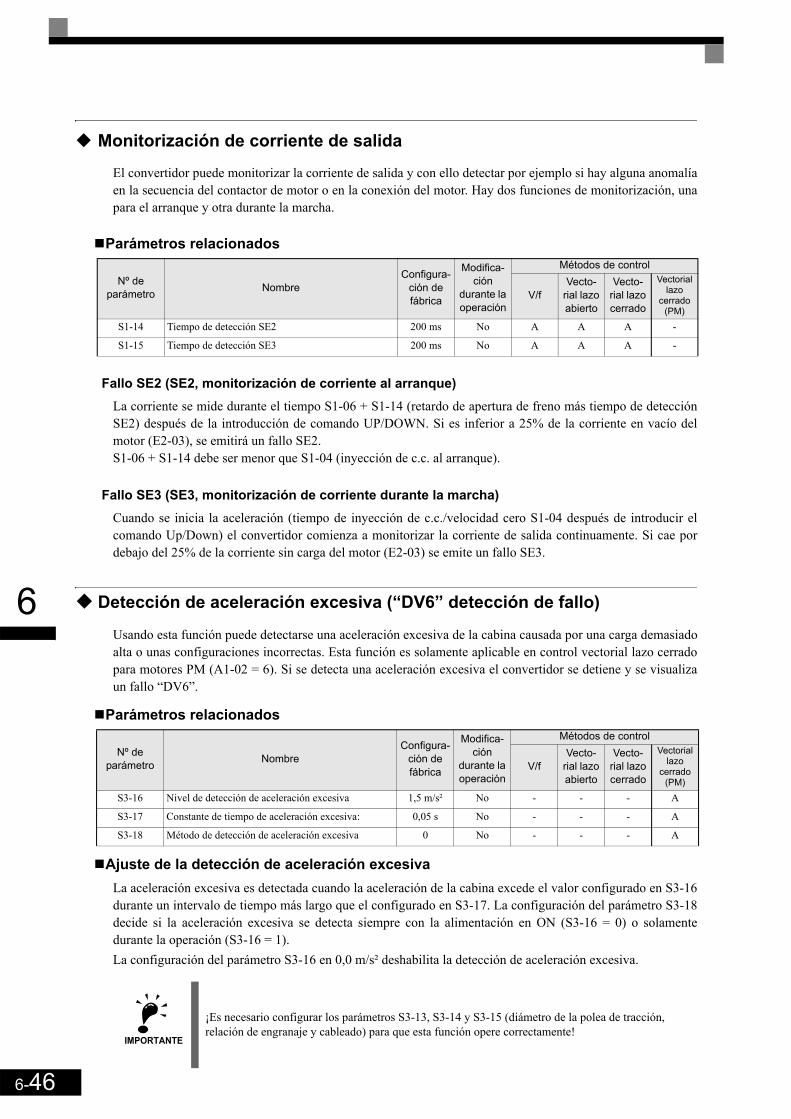
6-46
6
Monitorización de corriente de salida
El convertidor puede monitorizar la corriente de salida y con ello detectar por ejemplo si hay alguna anomalíaen la secuencia del contactor de motor o en la conexión del motor. Hay dos funciones de monitorización, unapara el arranque y otra durante la marcha.
Parámetros relacionados
Fallo SE2 (SE2, monitorización de corriente al arranque)La corriente se mide durante el tiempo S1-06 + S1-14 (retardo de apertura de freno más tiempo de detecciónSE2) después de la introducción de comando UP/DOWN. Si es inferior a 25% de la corriente en vacío delmotor (E2-03), se emitirá un fallo SE2. S1-06 + S1-14 debe ser menor que S1-04 (inyección de c.c. al arranque).
Fallo SE3 (SE3, monitorización de corriente durante la marcha)Cuando se inicia la aceleración (tiempo de inyección de c.c./velocidad cero S1-04 después de introducir elcomando Up/Down) el convertidor comienza a monitorizar la corriente de salida continuamente. Si cae pordebajo del 25% de la corriente sin carga del motor (E2-03) se emite un fallo SE3.
Detección de aceleración excesiva (“DV6” detección de fallo)
Usando esta función puede detectarse una aceleración excesiva de la cabina causada por una carga demasiadoalta o unas configuraciones incorrectas. Esta función es solamente aplicable en control vectorial lazo cerradopara motores PM (A1-02 = 6). Si se detecta una aceleración excesiva el convertidor se detiene y se visualizaun fallo “DV6”.
Parámetros relacionados
Ajuste de la detección de aceleración excesivaLa aceleración excesiva es detectada cuando la aceleración de la cabina excede el valor configurado en S3-16durante un intervalo de tiempo más largo que el configurado en S3-17. La configuración del parámetro S3-18decide si la aceleración excesiva se detecta siempre con la alimentación en ON (S3-16 = 0) o solamentedurante la operación (S3-16 = 1).La configuración del parámetro S3-16 en 0,0 m/s² deshabilita la detección de aceleración excesiva.
Nº deparámetro Nombre
Configura-ción de fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
S1-14 Tiempo de detección SE2 200 ms No A A A -
S1-15 Tiempo de detección SE3 200 ms No A A A -
Nº deparámetro Nombre
Configura-ción de fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
S3-16 Nivel de detección de aceleración excesiva 1,5 m/s² No - - - A
S3-17 Constante de tiempo de aceleración excesiva: 0,05 s No - - - A
S3-18 Método de detección de aceleración excesiva 0 No - - - A
IMPORTANTE
¡Es necesario configurar los parámetros S3-13, S3-14 y S3-15 (diámetro de la polea de tracción, relación de engranaje y cableado) para que esta función opere correctamente!
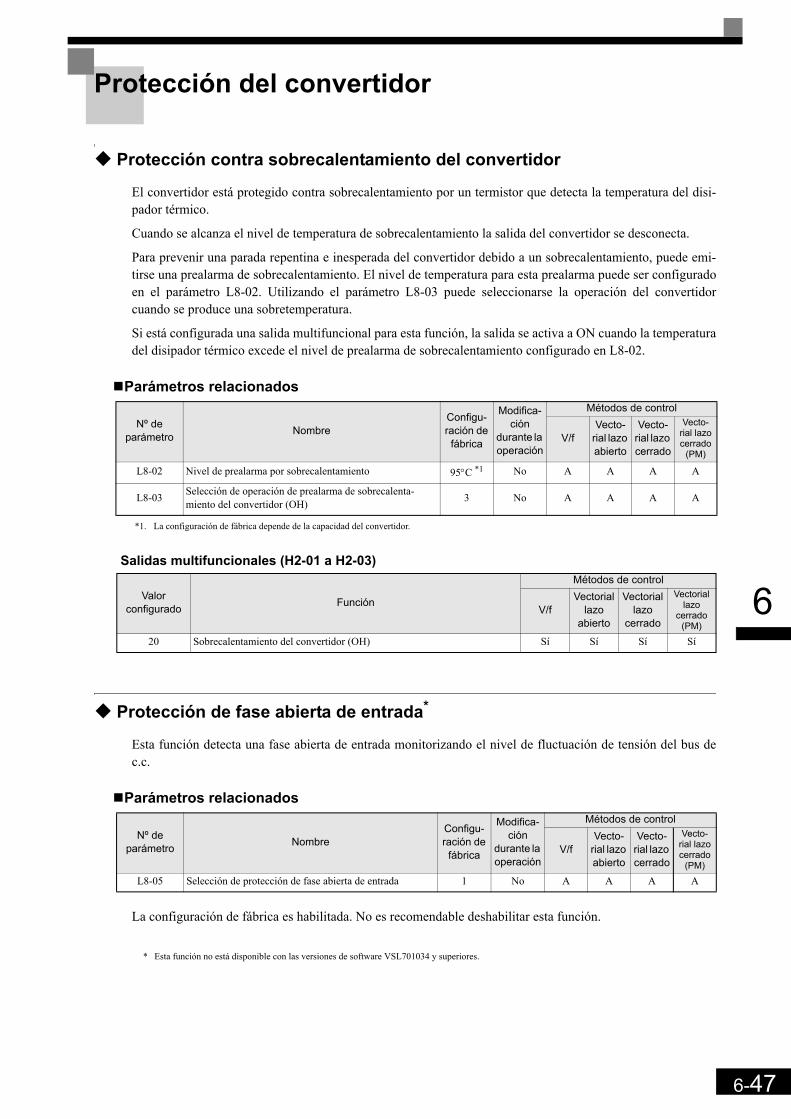
6-47
6
Protección del convertidor
Protección contra sobrecalentamiento del convertidor
El convertidor está protegido contra sobrecalentamiento por un termistor que detecta la temperatura del disi-pador térmico.
Cuando se alcanza el nivel de temperatura de sobrecalentamiento la salida del convertidor se desconecta.
Para prevenir una parada repentina e inesperada del convertidor debido a un sobrecalentamiento, puede emi-tirse una prealarma de sobrecalentamiento. El nivel de temperatura para esta prealarma puede ser configuradoen el parámetro L8-02. Utilizando el parámetro L8-03 puede seleccionarse la operación del convertidorcuando se produce una sobretemperatura.
Si está configurada una salida multifuncional para esta función, la salida se activa a ON cuando la temperaturadel disipador térmico excede el nivel de prealarma de sobrecalentamiento configurado en L8-02.
Parámetros relacionados
Salidas multifuncionales (H2-01 a H2-03)
Protección de fase abierta de entrada*
Esta función detecta una fase abierta de entrada monitorizando el nivel de fluctuación de tensión del bus dec.c.
Parámetros relacionados
La configuración de fábrica es habilitada. No es recomendable deshabilitar esta función.
* Esta función no está disponible con las versiones de software VSL701034 y superiores.
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
L8-02 Nivel de prealarma por sobrecalentamiento 95°C *1
*1. La configuración de fábrica depende de la capacidad del convertidor.
No A A A A
L8-03 Selección de operación de prealarma de sobrecalenta-miento del convertidor (OH) 3 No A A A A
Valorconfigurado Función
Métodos de control
V/fVectorial
lazo abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado (PM)
20 Sobrecalentamiento del convertidor (OH) Sí Sí Sí Sí
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
L8-05 Selección de protección de fase abierta de entrada 1 No A A A A

6-48
6
Detección de fase abierta de salida
Esta función detecta una fase abierta de salida comparando el valor de la corriente de salida de cada fase conun nivel de detección de fase abierta de salida (5% de la corriente nominal del convertidor). La detección nofuncionará cuando la frecuencia de salida sea inferior a 2% de la frecuencia base.
Hay tres configuraciones disponibles:• L8-07=0, sin detección de fase abierta de salida• L8-07=1, solamente es detectada la pérdida de una fase• L8-07=2, también se detecta la pérdida de 2 ó 3 fases
El tiempo de retardo de detección puede ser configurado en el parámetro L8-20.
Parámetros relacionados
Detección de fallo de tierra
Esta función detecta la corriente de fuga a tierra calculando la suma de las tres corrientes de salida. Normal-mente debería ser 0. Si la corriente de fuga a tierra aumenta demasiado, la salida del convertidor será puesta enOFF y se mostrará un fallo GF en el display. Se activa el contacto de fallo.
Parámetros relacionados
Precauciones• No es recomendable deshabilitar esta función.• También puede ser detectado un fallo de tierra si los contactores de la salida del convertidor se abren
cuando la salida aún está activa. Por lo tanto, para prevenir detecciones falsas de fallos de tierra compruebela secuencia y asegúrese de que la salida está desconectada o base blocked antes de abrir los contactores.
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
L8-07 Selección de detección de fase abierta de salida 2 No A A A A
L8-20 Tiempo de detección de pérdida de fase de salida 0,2 s No A A A A
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
L8-09 Selección de detección de tierra 1 No A A A A
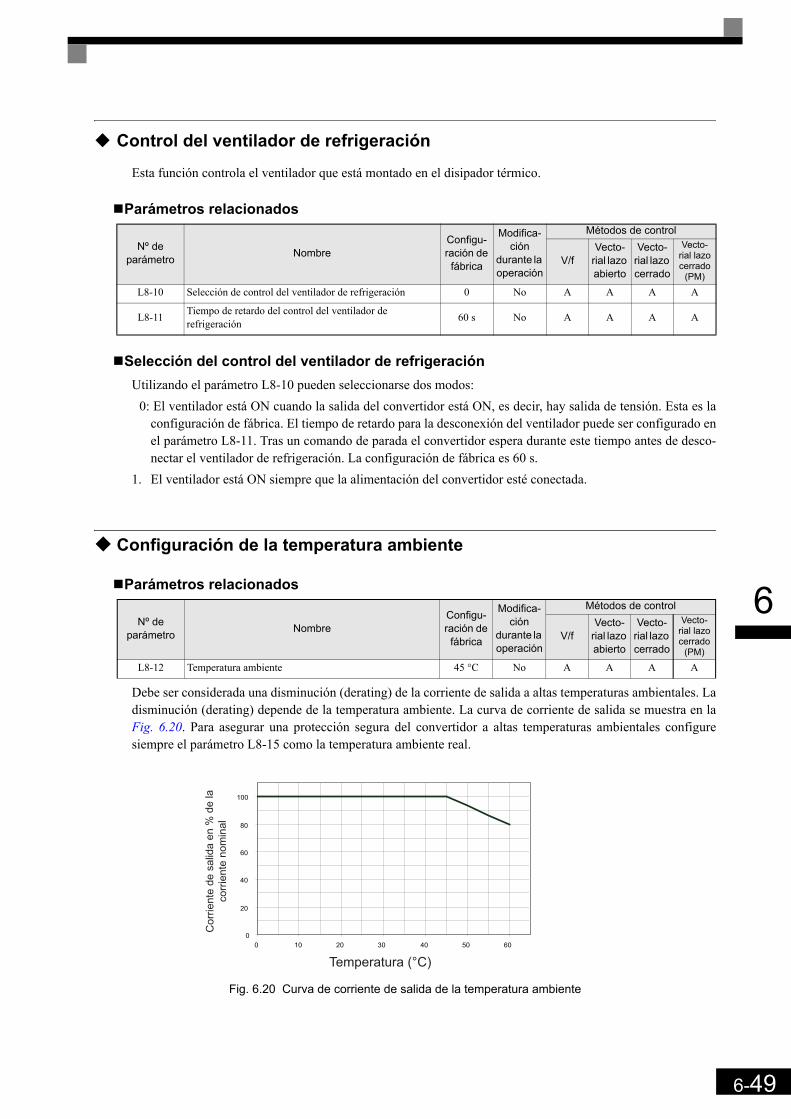
6-49
6
Control del ventilador de refrigeración
Esta función controla el ventilador que está montado en el disipador térmico.
Parámetros relacionados
Selección del control del ventilador de refrigeraciónUtilizando el parámetro L8-10 pueden seleccionarse dos modos:
0: El ventilador está ON cuando la salida del convertidor está ON, es decir, hay salida de tensión. Esta es laconfiguración de fábrica. El tiempo de retardo para la desconexión del ventilador puede ser configurado enel parámetro L8-11. Tras un comando de parada el convertidor espera durante este tiempo antes de desco-nectar el ventilador de refrigeración. La configuración de fábrica es 60 s.
1. El ventilador está ON siempre que la alimentación del convertidor esté conectada.
Configuración de la temperatura ambiente
Parámetros relacionados
Debe ser considerada una disminución (derating) de la corriente de salida a altas temperaturas ambientales. Ladisminución (derating) depende de la temperatura ambiente. La curva de corriente de salida se muestra en laFig. 6.20. Para asegurar una protección segura del convertidor a altas temperaturas ambientales configuresiempre el parámetro L8-15 como la temperatura ambiente real.
Fig. 6.20 Curva de corriente de salida de la temperatura ambiente
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
L8-10 Selección de control del ventilador de refrigeración 0 No A A A A
L8-11 Tiempo de retardo del control del ventilador derefrigeración 60 s No A A A A
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
L8-12 Temperatura ambiente 45 °C No A A A A
0
20
40
60
80
100
0 10 20 30 40 50 60
Temperatura (°C)
Cor
rient
e de
sal
ida
en %
de
laco
rrie
nte
nom
inal
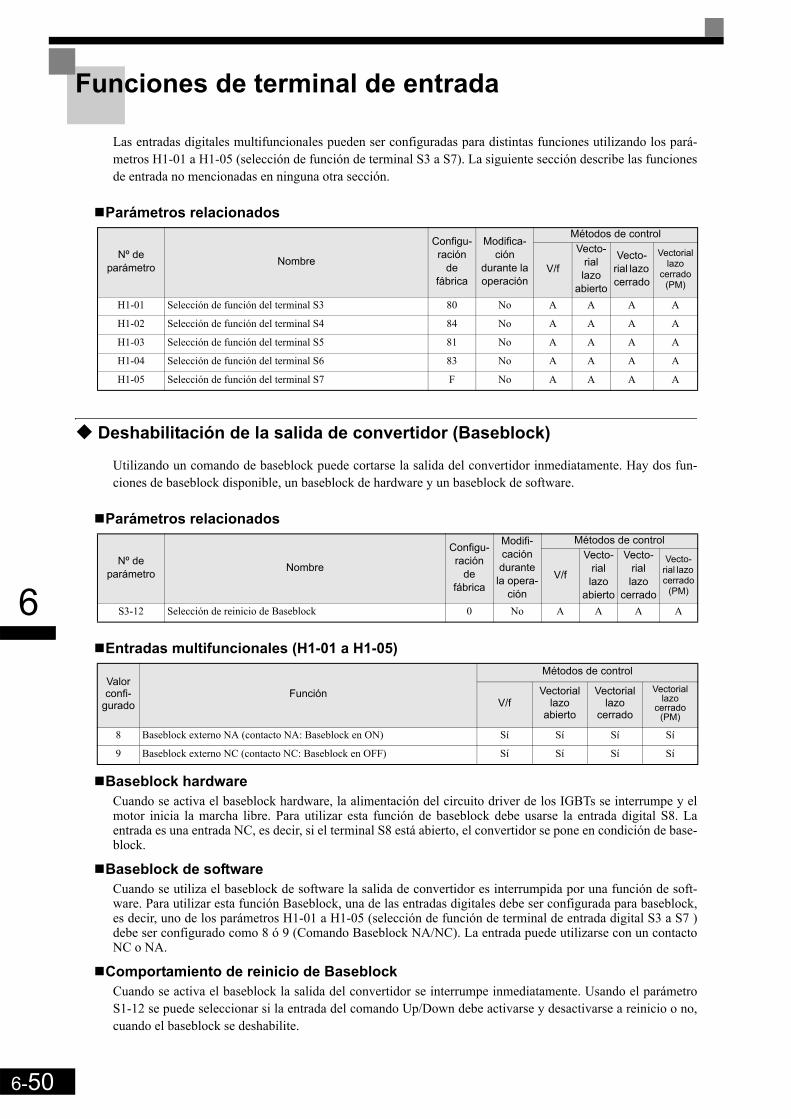
6-50
6
Funciones de terminal de entrada
Las entradas digitales multifuncionales pueden ser configuradas para distintas funciones utilizando los pará-metros H1-01 a H1-05 (selección de función de terminal S3 a S7). La siguiente sección describe las funcionesde entrada no mencionadas en ninguna otra sección.
Parámetros relacionados
Deshabilitación de la salida de convertidor (Baseblock)
Utilizando un comando de baseblock puede cortarse la salida del convertidor inmediatamente. Hay dos fun-ciones de baseblock disponible, un baseblock de hardware y un baseblock de software.
Parámetros relacionados
Entradas multifuncionales (H1-01 a H1-05)
Baseblock hardwareCuando se activa el baseblock hardware, la alimentación del circuito driver de los IGBTs se interrumpe y elmotor inicia la marcha libre. Para utilizar esta función de baseblock debe usarse la entrada digital S8. Laentrada es una entrada NC, es decir, si el terminal S8 está abierto, el convertidor se pone en condición de base-block.
Baseblock de softwareCuando se utiliza el baseblock de software la salida de convertidor es interrumpida por una función de soft-ware. Para utilizar esta función Baseblock, una de las entradas digitales debe ser configurada para baseblock,es decir, uno de los parámetros H1-01 a H1-05 (selección de función de terminal de entrada digital S3 a S7 )debe ser configurado como 8 ó 9 (Comando Baseblock NA/NC). La entrada puede utilizarse con un contactoNC o NA.
Comportamiento de reinicio de BaseblockCuando se activa el baseblock la salida del convertidor se interrumpe inmediatamente. Usando el parámetroS1-12 se puede seleccionar si la entrada del comando Up/Down debe activarse y desactivarse a reinicio o no,cuando el baseblock se deshabilite.
Nº deparámetro Nombre
Configu-ración
de fábrica
Modifica-ción
durante la operación
Métodos de control
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
H1-01 Selección de función del terminal S3 80 No A A A A
H1-02 Selección de función del terminal S4 84 No A A A A
H1-03 Selección de función del terminal S5 81 No A A A A
H1-04 Selección de función del terminal S6 83 No A A A A
H1-05 Selección de función del terminal S7 F No A A A A
Nº deparámetro Nombre
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de control
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo
cerrado
Vecto-rial lazo cerrado
(PM)
S3-12 Selección de reinicio de Baseblock 0 No A A A A
Valor confi-
guradoFunción
Métodos de control
V/fVectorial
lazo abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado (PM)
8 Baseblock externo NA (contacto NA: Baseblock en ON) Sí Sí Sí Sí
9 Baseblock externo NC (contacto NC: Baseblock en OFF) Sí Sí Sí Sí
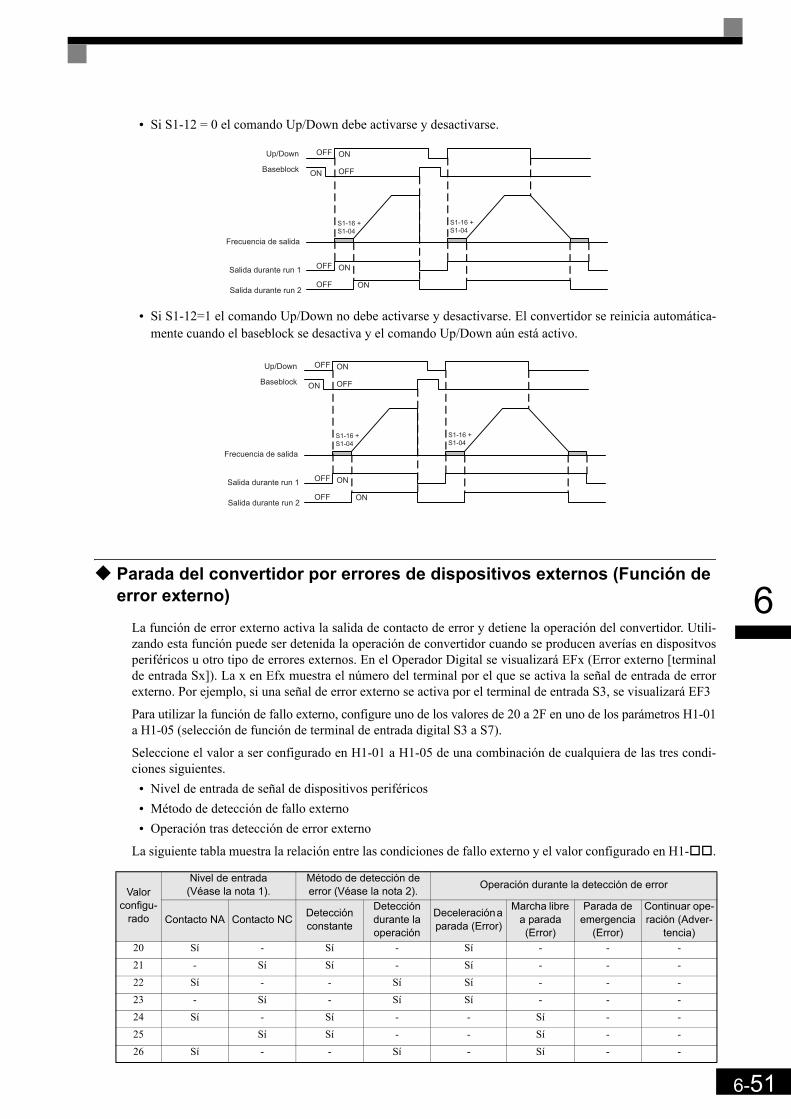
6-51
6
• Si S1-12 = 0 el comando Up/Down debe activarse y desactivarse.
• Si S1-12=1 el comando Up/Down no debe activarse y desactivarse. El convertidor se reinicia automática-mente cuando el baseblock se desactiva y el comando Up/Down aún está activo.
Parada del convertidor por errores de dispositivos externos (Función de error externo)
La función de error externo activa la salida de contacto de error y detiene la operación del convertidor. Utili-zando esta función puede ser detenida la operación de convertidor cuando se producen averías en dispositvosperiféricos u otro tipo de errores externos. En el Operador Digital se visualizará EFx (Error externo [terminalde entrada Sx]). La x en Efx muestra el número del terminal por el que se activa la señal de entrada de errorexterno. Por ejemplo, si una señal de error externo se activa por el terminal de entrada S3, se visualizará EF3
Para utilizar la función de fallo externo, configure uno de los valores de 20 a 2F en uno de los parámetros H1-01a H1-05 (selección de función de terminal de entrada digital S3 a S7).
Seleccione el valor a ser configurado en H1-01 a H1-05 de una combinación de cualquiera de las tres condi-ciones siguientes.
• Nivel de entrada de señal de dispositivos periféricos• Método de detección de fallo externo• Operación tras detección de error externo
La siguiente tabla muestra la relación entre las condiciones de fallo externo y el valor configurado en H1- .
Valor configu-
rado
Nivel de entrada (Véase la nota 1).
Método de detección de error (Véase la nota 2). Operación durante la detección de error
Contacto NA Contacto NC Detección constante
Detección durante la operación
Deceleración a parada (Error)
Marcha libre a parada (Error)
Parada de emergencia
(Error)
Continuar ope-ración (Adver-
tencia)20 Sí - Sí - Sí - - -21 - Sí Sí - Sí - - -22 Sí - - Sí Sí - - -23 - Sí - Sí Sí - - -24 Sí - Sí - - Sí - -25 Sí Sí - - Sí - -26 Sí - - Sí - Sí - -
Up/Down
Baseblock
OFF ON
ON OFF
Frecuencia de salida
Salida durante run 1
Salida durante run 2
OFF ON
OFF ON
S1-16 +S1-04
S1-16 +S1-04
Up/Down
Baseblock
OFF ON
ON OFF
Frecuencia de salida
Salida durante run 1
Salida durante run 2
OFF ON
OFF ON
S1-16 +S1-04
S1-16 +S1-04

6-52
6
* 1. Configura el nivel de entrada en el que se detectan los errores. (Contacto NA: Error externo cuando ON, contacto NC: Error externo cuando OFF).* 2. Configure el método de detección de errores utilizando, bien una detección constante o bien una detección durante la operación.
Detección constante: Detecta mientras se suministre alimentación al convertidor.Detección durante la operación: Detecta solamente durante la operación del convertidor.
Utilización de la función de temporización
Los terminales de entrada digital multifuncional S3 a S7 pueden ser utilizados como entrada de función detemporización, y los terminales de salida multifuncional M1-M2, M3-M4, y M5-M6 pueden ser utilizadoscomo salida de función de temporización.
Parámetros relacionados
Entradas digitales multifuncionales (H1-01 a H1-05)
Salidas multifuncionales (H2-01 a H2-03)
27 - Sí - Sí - Sí - -28 Sí - Sí - - - Sí -29 - Sí Sí - - - Sí -2A Sí - - Sí - - Sí -2B - Sí - Sí - - Sí -2C Sí - Sí - - - - Sí2D - Sí Sí - - - - Sí2E Sí - - Sí - - - Sí2F - Sí - Sí - - - Sí
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
b4-01 Tiempo de retardo a ON de la función detemporización 0,0 s No A A A A
b4-02 Tiempo de retardo a OFF de la función de temporización 0,0 s No A A A A
Valor confi-
guradoFunción
Métodos de control
V/fVectorial
lazo abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado (PM)
18 Entrada de función de temporización Sí Sí Sí Sí
Valor confi-
guradoFunción
Métodos de control
V/fVectorial
lazo abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado (PM)
12 Salida de función de temporización Sí Sí Sí Sí
Valor configu-
rado
Nivel de entrada (Véase la nota 1).
Método de detección de error (Véase la nota 2). Operación durante la detección de error
Contacto NA Contacto NC Detección constante
Detección durante la operación
Deceleración a parada (Error)
Marcha libre a parada (Error)
Parada de emergencia
(Error)
Continuar ope-ración (Adver-
tencia)
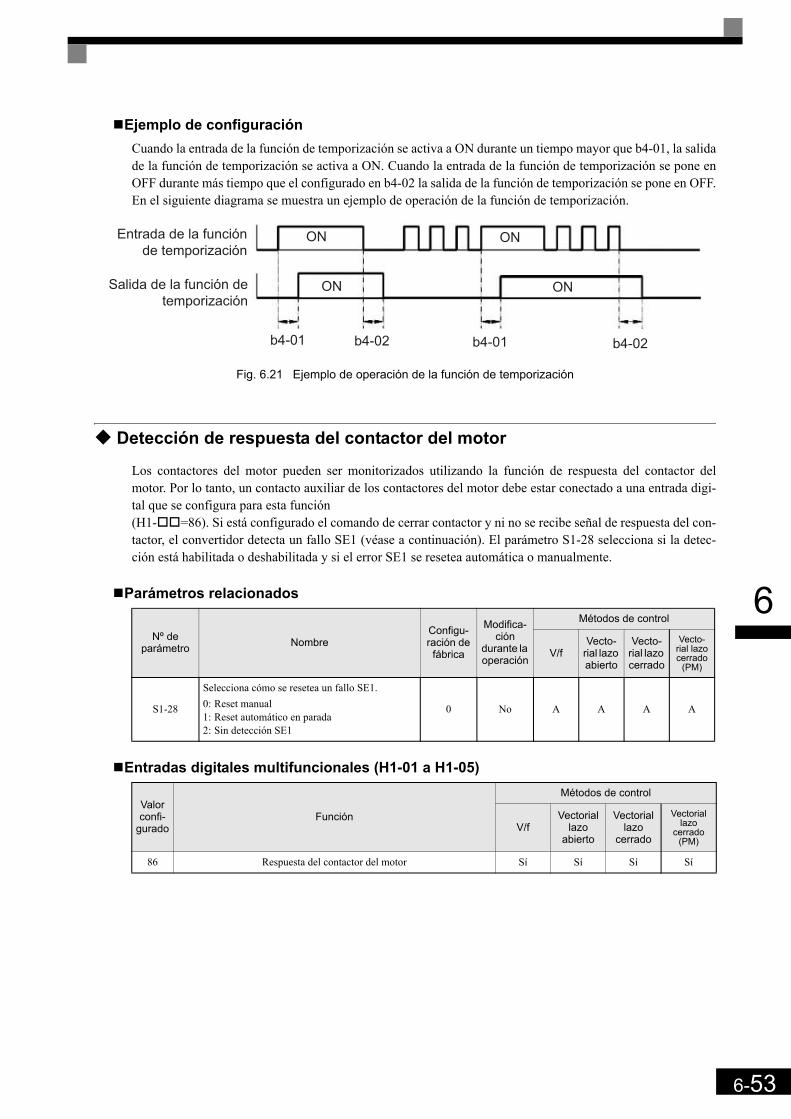
6-53
6
Ejemplo de configuraciónCuando la entrada de la función de temporización se activa a ON durante un tiempo mayor que b4-01, la salidade la función de temporización se activa a ON. Cuando la entrada de la función de temporización se pone enOFF durante más tiempo que el configurado en b4-02 la salida de la función de temporización se pone en OFF.En el siguiente diagrama se muestra un ejemplo de operación de la función de temporización.
Fig. 6.21 Ejemplo de operación de la función de temporización
Detección de respuesta del contactor del motor
Los contactores del motor pueden ser monitorizados utilizando la función de respuesta del contactor delmotor. Por lo tanto, un contacto auxiliar de los contactores del motor debe estar conectado a una entrada digi-tal que se configura para esta función (H1- =86). Si está configurado el comando de cerrar contactor y ni no se recibe señal de respuesta del con-tactor, el convertidor detecta un fallo SE1 (véase a continuación). El parámetro S1-28 selecciona si la detec-ción está habilitada o deshabilitada y si el error SE1 se resetea automática o manualmente.
Parámetros relacionados
Entradas digitales multifuncionales (H1-01 a H1-05)
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
S1-28
Selecciona cómo se resetea un fallo SE1.0: Reset manual1: Reset automático en parada2: Sin detección SE1
0 No A A A A
Valor confi-
guradoFunción
Métodos de control
V/fVectorial
lazo abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado (PM)
86 Respuesta del contactor del motor Sí Sí Sí Sí
ON ON
ONON
b4-01 b4-01 b4-02b4-02
Entrada de la función de temporización
Salida de la función de temporización

6-54
6
Fallo SE1 (SE1:Fallos de respuesta de contactor)Hay tres posibles condiciones de fallo.
Caso 1: El contactor del motor estaba cerrado (entrada de realimentación de contactor en ON) antes de activarel comando de cerrar contactor.
Caso 2: El contactor del motor no se puede cerrar dentro del tiempo de retardo de Contactor Cerrado.
Caso 3: El contactor del motor es abierto durante la marcha del convertidor.
Caso 4: La entrada de confirmación de contactor fue habilitada antes de activar la salida de cerrar contactor.
Cambio de la dirección del PG
Puede usarse una entrada digital para cambiar la dirección de la señal de realimentación del PG. Para ello, unode los parámetros H1- debe ser configurado como 89.
La dirección del PG es a derechas (CW) cuando la entrada está abierta y a izquierdas (CCW) cuando alentrada está cerrada. El parámetro F1-05 no tiene efecto si esta función está activada.
Entradas digitales multifuncionales (H1-01 a H1-05)
Valor confi-
guradoFunción
Métodos de control
V/fVectorial
lazo abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado (PM)
89 Cambio de dirección del PG No No Sí Sí
Control de contactor (S/D)
Velocidad
Velocidad Up/Down
Caso 1
firmación de contactor (E/D)
Selección de velocidadlitación de convertidor (E/D)
Caso 2Caso 3Caso 4
Retardo de Run
Inyección c.c./servo cero
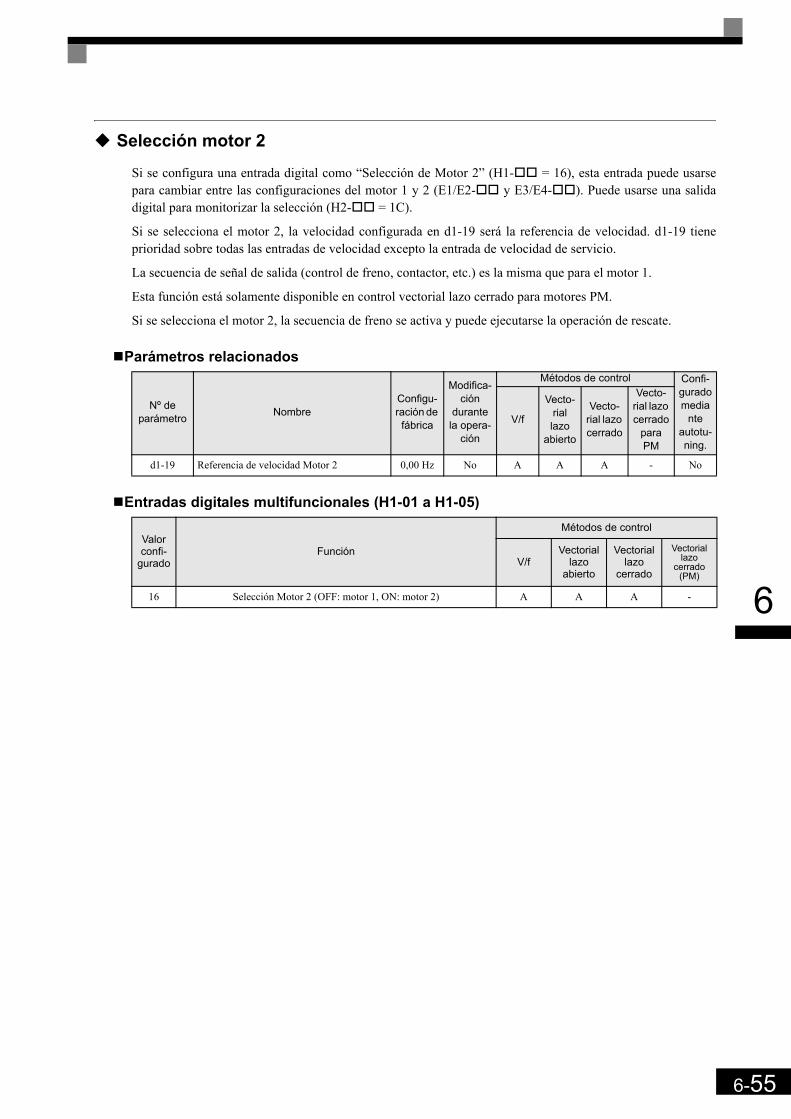
6-55
6
Selección motor 2
Si se configura una entrada digital como “Selección de Motor 2” (H1- = 16), esta entrada puede usarsepara cambiar entre las configuraciones del motor 1 y 2 (E1/E2- y E3/E4- ). Puede usarse una salidadigital para monitorizar la selección (H2- = 1C).
Si se selecciona el motor 2, la velocidad configurada en d1-19 será la referencia de velocidad. d1-19 tieneprioridad sobre todas las entradas de velocidad excepto la entrada de velocidad de servicio.
La secuencia de señal de salida (control de freno, contactor, etc.) es la misma que para el motor 1.
Esta función está solamente disponible en control vectorial lazo cerrado para motores PM.
Si se selecciona el motor 2, la secuencia de freno se activa y puede ejecutarse la operación de rescate.
Parámetros relacionados
Entradas digitales multifuncionales (H1-01 a H1-05)
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la opera-
ción
Métodos de control Confi-gurado media
nte autotu-ning.
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
para PM
d1-19 Referencia de velocidad Motor 2 0,00 Hz No A A A - No
Valor confi-
guradoFunción
Métodos de control
V/fVectorial
lazo abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado (PM)
16 Selección Motor 2 (OFF: motor 1, ON: motor 2) A A A -
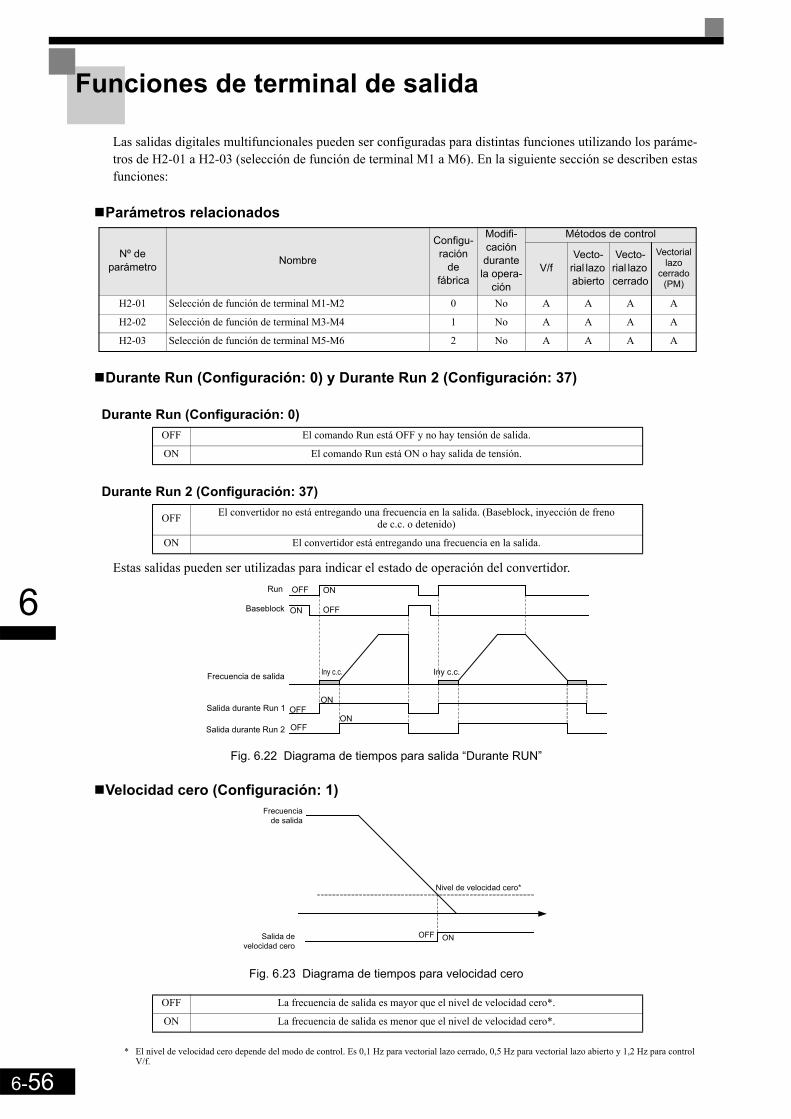
6-56
6
Funciones de terminal de salida
Las salidas digitales multifuncionales pueden ser configuradas para distintas funciones utilizando los paráme-tros de H2-01 a H2-03 (selección de función de terminal M1 a M6). En la siguiente sección se describen estasfunciones:
Parámetros relacionados
Durante Run (Configuración: 0) y Durante Run 2 (Configuración: 37)
Durante Run (Configuración: 0)
Durante Run 2 (Configuración: 37)
Estas salidas pueden ser utilizadas para indicar el estado de operación del convertidor.
Fig. 6.22 Diagrama de tiempos para salida “Durante RUN”
Velocidad cero (Configuración: 1)
Fig. 6.23 Diagrama de tiempos para velocidad cero
* El nivel de velocidad cero depende del modo de control. Es 0,1 Hz para vectorial lazo cerrado, 0,5 Hz para vectorial lazo abierto y 1,2 Hz para control V/f.
Nº deparámetro Nombre
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
H2-01 Selección de función de terminal M1-M2 0 No A A A A
H2-02 Selección de función de terminal M3-M4 1 No A A A A
H2-03 Selección de función de terminal M5-M6 2 No A A A A
OFF El comando Run está OFF y no hay tensión de salida.
ON El comando Run está ON o hay salida de tensión.
OFF El convertidor no está entregando una frecuencia en la salida. (Baseblock, inyección de freno de c.c. o detenido)
ON El convertidor está entregando una frecuencia en la salida.
OFF La frecuencia de salida es mayor que el nivel de velocidad cero*.
ON La frecuencia de salida es menor que el nivel de velocidad cero*.
Run OFF
ONBaseblock OFF
ON
Frecuencia de salida
Salida durante Run 1
Salida durante Run 2 OFF
ONOFF
ON
Iny c.c.Iny c.c.
Frecuenciade salida
Salida develocidad cero
OFF ON
Nivel de velocidad cero*
6-57
6
Operación del convertidor preparado (Configuración: 6)Si una salida multifuncional está configurada para esta función, la salida se pondrá en ON cuando la inicializa-ción del convertidor tras la alimentación inicial haya finalizado sin ningún fallo.
Durante baja tensión del bus de c.c. (Configuración: 7)Si una salida multifuncional está configurada para esta función, la salida se pondrá en ON siempre y cuando sedetecte baja tensión del bus de c.c.
Durante Baseblock (Configuración: 8)Si una salida multifuncional está configurada para esta función, la salida se pondrá en ON siempre y cuando elconvertidor esté en baseblock.
Selección de fuente de referencia de frecuencia (Configuración: 9)Si una salida multifuncional está configurada para esta función, la salida se pondrá en ON cuando cuando elOperador Digital esté seleccionado como fuente de referencia de frecuencia. Si está seleccionada otra fuentecualquiera de referencia de frecuencia la salida estará en OFF.
Estado de selección de comando Run (Configuración: A)Si una salida multifuncional está configurada para esta función, la salida se pondrá en ON cuando el OperadorDigital esté seleccionado como fuente de comando RUN. Si está seleccionada otra fuente cualquiera decomando RUN la salida estará en OFF.
Salida de fallo (Configuración: E)Si una salida multifuncional está configurada para esta función, la salida se pondrá en ON cuando tenga lugarun fallo distinto de CPF00 y CPF01. La salida tampoco se conecta en caso de fallos leves. (Consulte una listade fallos en la página 7-2, Detección de fallos).
Salida de fallo leve (Configuración: 10)Si una salida multifuncional está configurada para esta función, la salida se pondrá en ON cuando tenga lugarun fallo leve (consulte una lista de alarmas en la página 7-9, Detección de alarma).
Comando activo de reset de fallo (Configuración: 11)Si una salida multifuncional está configurada para esta función, la salida se pondrá en ON cuando se intro-duzca un comando de reset de fallo en una de las entradas digitales.
Salida de función de temporizador (Configuración: 12)Consulte la página 6-52, Utilización de la función de temporización.
Durante Run inversa (Configuración: 1A)Si una salida multifuncional está configurada para esta función, la salida se pondrá en ON cuando un comandoRUN de dirección inversa esté activo (también durante inyección de c.c. y baseblock). Se pondrá en OFFcuando se introduzca un comando RUN de dirección directa.
Durante Base Block 2 (Configuración: 1B)Si una salida multifuncional está configurada para esta función, la salida será puesta en OFF siempre que seaintroducido un comando Baseblock.
Motor 2 seleccionado (Configuración: 1C)Si una salida multifuncional está configurada para esta función,, la salida se pone en OFF cuando se selec-ciona el motor 1 y en ON cuando se selecciona el motor 2.

6-58
6
Durante operación regenerativa (Configuración: 1D)Si una salida multifuncional está configurada para esta función, la salida se pondrá en ON cuando el motor tra-baje en modo regenerativo, es decir, cuando se realimente la energía al convertidor.
Reinicio habilitado (configuración: 1E)Consulte la página 6-81, Reset automático de fallo.
Durante el límite de par (Configuración: 30)Consulte la página 6-43, Limitación del par del motor (Función de limitación de par).
Fin de servo cero (Configuración: 33)Consulte la página 6-16, Control de velocidad cero / Servo cero (bloqueo de posición).
Comando de liberación de freno (Configuración: 40)Esta señal de salida puede usarse para controlar el freno. La salida se cierra cuando el freno vaya a ser abierto.Consulte también la página 6-13, Secuencia de frenado.
Comando de control de contactor del motor (Configuración: 41)Esta señal de salida puede usarse para controlar los contactores del motor. La salida se cierra cuando los con-tactores vayan a cerrarse. Consulte también la página 6-13, Secuencia de frenado.
Operación de ventilador de refrigeración (Configuración: 38)Esta salida puede ser utilizada para indicar la operación del ventilador de refrigeración del disipador de losconvertidores. La salida está en ON si el / los ventiladores está / están a ON.
Detección de la velocidad en la deceleración (Zona de puerta) (Configuración: 42)Esta salida puede ser utilizada para detectar que la cabina está en la zona de puerta. La detección depende de lavelocidad.
Si se libera el comando UP/DOWN esta salida se pone en OFF.
Velocidad no cero (Configuración: 43)Esta función puede ser utilizada para indicar la condición inversa del estado de velocidad cero.
Fin de búsqueda de carga ligera (Configuración: 44/45)Consulte la página 6-80, Detección de dirección de carga ligera.
Monitor de Baseblock 1 y 2 (Configuración: 46/47)Si una salida multifuncional está programada para esta función, la salida se pondrá en ON si ambas entradasde baseblock (BB y BB1) están habilitadas.
Control V/f y control vectorial lazo abierto Control vectorial lazo cerrado
OFF La frecuencia de salida es menor que S1-27 durante la deceleración.
La velocidad del motor es menor que S1-27 durante la deceleración.
ON La frecuencia de salida es nayor que S1-27 durante la deceleración.
La velocidad del motor es mayor que S1-27 durante la deceleración.
OFF La frecuencia de salida es menor que el nivel de velocidad cero.
ON La frecuencia de salida es mayor que el nivel de velocidad cero.

6-59
6
Configuración del motor y de la curva V/f
Los convertidores L7 son compatibles con 2 configuraciones de motores (motor principal y motor de puerta,parámetros E2/E4- ) para control V/f, vectorial lazo abierto y vectorial lazo cerrado para IM. La configura-ción del motor activo puede seleccionarse mediante una entrada digital.
El control vectorial lazo cerrado para PM soporta la configuración del motor 1 (motor principal, parámetrosE5- ) solamente.
Configuración de los parámetros del motor para motores de inducción (Motores 1 y 2)
Con el fin de alcanzar un rendimiento máximo la curva V/f y los datos del motor deben configurarse correcta-mente.
El número de parámetros del motor que pueden configurarse depende del modo de control seleccionado.En los métodos de control vectoriales los parámetros del motor pueden configurarse automáticamente usandola función de autotuning (consulte la página 4-4, Autotuning). No obstante, si el autotuning no se completa normalmente, los parámetros deben configurarse manualmentecomo se describe a continuación.
Parámetros relacionados
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de controlConfi-gurado mediante auto-tuning.
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
para PM
d1-19 Referencia de velocidad Motor 2 0,00 Hz No A A A - No
E1-01 Configuración de la tensión de entrada 400 V *1 No Q Q Q Q No
E3-01 Selección de modo de control de Motor 2 0 No A A A A No
E1-04/E3-02 Frecuencia de salida máx. (FMAX) 50,0 Hz No Q/
AQ/A
Q/A
Q/A Sí
E1-05/E3-03 Tensión máx. (VMAX) 380,0 V *1 No Q/
AQ/A
Q/A
Q/A Sí
E1-06/E3-04 Frecuencia base (FA) 50,0 Hz No Q/
AQ/A
Q/A
Q/A Sí
E1-07/E3-05 Frecuencia media de salida (FB) 3,0 Hz *1 No A A - - Sí
E1-08/E3-06 Tensión de frecuencia media de salida (VB) 37,3 V
*1,*2No Q/
AQ/A - - Sí
E1-09/E3-07 Frecuencia de salida mínima. (FMIN) 0,5 Hz *2 No Q/
AQ/A A A Sí
E1-10/E3-08 Tensión mínima de frecuencia de salida (VMIN) 19,4 V
*1,*2 No Q/A
Q/A - - Sí
E1-13 Tensión base (VBASE) 0,0 V No A A - Q Sí
E2-01/E4-01 Corriente nominal del motor 7,00 A *3 No Q/
AQ/A
Q/A - Sí
E2-02E4-02 Deslizamiento nominal del motor 2,70 Hz *3 No A A A - Sí
Comando UP/DOWN
Entrada Baseblock(Term BB y BB1)
Monitorización BB 1
Monitorización BB 2

6-60
6Entradas digitales multifuncionales (H1-01 a H1-05)
Salidas digitales multifuncionales (H2-01 a H2-03)
Configuración de la tensión de entrada del convertidor (E1-01)Configure la tensión de entrada del convertidor correctamente en E1-01 de tal manera que coincida con la ten-sión de alimentación.
E2-03/E4-03 Corriente en vacío del motor 2,30 A *3 No A A A - Sí
E2-04/E4-04 Número de polos del motor (Número de polos) 4 polos No - Q/
AQ/A - Sí
E2-05/E2-05 Resistencia línea a línea del motor 3,333 Ω *3 No A A A - Sí
E2-06/E4-06 Inductancia de fuga del motor 19,3% No - A A - Sí
E2-07 Coeficiente 1 de saturación del hierro del motor 0,50 No - A A - Sí*4
E2-08 Coeficiente 2 de saturación del hierro del motor 0,75 No - A A - Sí*4
E2-09 Pérdidas mecánicas del motor 0,0% No - - A - No
E2-10 Pérdida de hierro del motor para la compensación del par 130 W *3 No A - - - No
E2-11/E4-07 Potencia de salida nominal del motor 3,70 kW*3 No Q/
AQ/A
Q/A - Sí
E2-12 Coeficiente 3 de saturación del entrehierro del motor 1,30 No - A A - Sí*4
F1-01 Constante de PG 1024 No - - Q Q Sí
*1. El valor es válido para un convertidor de Clase 400V, de 3,7 kW*2. El valor depende del modo de control. El valor dado es válido si se selecciona control V/f.*3. Todos los parámetros configurados de fábrica son para un motor Yaskawa estándar de 4 polos.
Las configuraciones de fábrica dependen de la capacidad del convertidor (los valores mostrados son para un convertidor de Clase 400 V, de 3,7 kW).*4. Sólo ajuste (tuning) dinámico
Valor confi-
guradoFunción
Métodos de control
V/fVectorial
lazo abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado (PM)
16 Selección Motor 2 (OFF: Motor 1, ON: Motor 2) A A A -
Valor confi-
guradoFunción
Métodos de control
V/fVectorial
lazo abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado (PM)
1C Selección Motor (OFF: Motor 1, ON: Motor 2) A A A -
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de controlConfi-gurado mediante auto-tuning.
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
para PM
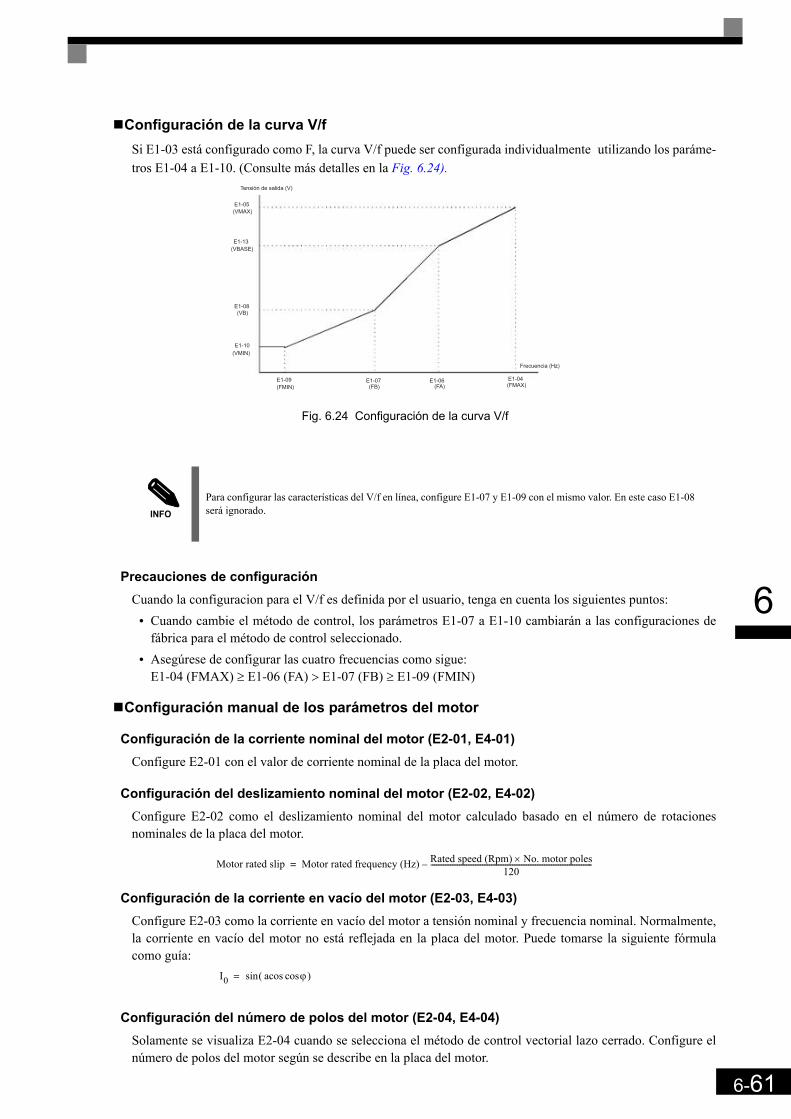
6-61
6
Configuración de la curva V/fSi E1-03 está configurado como F, la curva V/f puede ser configurada individualmente utilizando los paráme-tros E1-04 a E1-10. (Consulte más detalles en la Fig. 6.24).
Fig. 6.24 Configuración de la curva V/f
Precauciones de configuraciónCuando la configuracion para el V/f es definida por el usuario, tenga en cuenta los siguientes puntos:
• Cuando cambie el método de control, los parámetros E1-07 a E1-10 cambiarán a las configuraciones defábrica para el método de control seleccionado.
• Asegúrese de configurar las cuatro frecuencias como sigue:E1-04 (FMAX) ≥ E1-06 (FA) > E1-07 (FB) ≥ E1-09 (FMIN)
Configuración manual de los parámetros del motor
Configuración de la corriente nominal del motor (E2-01, E4-01)Configure E2-01 con el valor de corriente nominal de la placa del motor.
Configuración del deslizamiento nominal del motor (E2-02, E4-02)Configure E2-02 como el deslizamiento nominal del motor calculado basado en el número de rotacionesnominales de la placa del motor.
Configuración de la corriente en vacío del motor (E2-03, E4-03)Configure E2-03 como la corriente en vacío del motor a tensión nominal y frecuencia nominal. Normalmente,la corriente en vacío del motor no está reflejada en la placa del motor. Puede tomarse la siguiente fórmulacomo guía:
Configuración del número de polos del motor (E2-04, E4-04)Solamente se visualiza E2-04 cuando se selecciona el método de control vectorial lazo cerrado. Configure elnúmero de polos del motor según se describe en la placa del motor.
INFO
Para configurar las características del V/f en línea, configure E1-07 y E1-09 con el mismo valor. En este caso E1-08 será ignorado.
E1-05
E1-13
E1-08
E1-10
Tensión de salida (V)
(VMAX)
(VBASE)
(VB)
(VMIN)
E1-09 E1-04E1-06E1-07
Frecuencia (Hz)
(FMIN) (FB) (FA) (FMAX)
Motor rated slip Motor rated frequency (Hz) Rated speed (Rpm) No. motor poles×120
-------------------------------------------------------------------------------------------–=
I0 ϕcosacos( )sin=
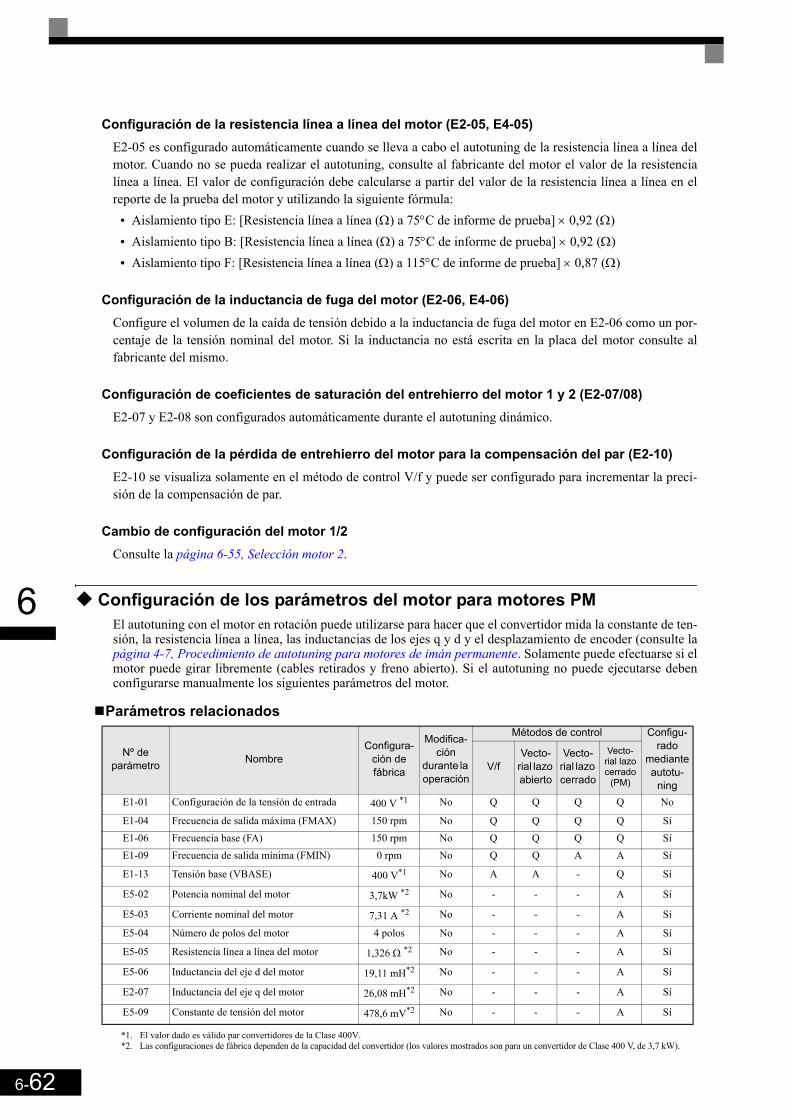
6-62
6
Configuración de la resistencia línea a línea del motor (E2-05, E4-05)E2-05 es configurado automáticamente cuando se lleva a cabo el autotuning de la resistencia línea a línea delmotor. Cuando no se pueda realizar el autotuning, consulte al fabricante del motor el valor de la resistencialínea a línea. El valor de configuración debe calcularse a partir del valor de la resistencia línea a línea en elreporte de la prueba del motor y utilizando la siguiente fórmula:
• Aislamiento tipo E: [Resistencia línea a línea (Ω) a 75°C de informe de prueba] × 0,92 (Ω)• Aislamiento tipo B: [Resistencia línea a línea (Ω) a 75°C de informe de prueba] × 0,92 (Ω)• Aislamiento tipo F: [Resistencia línea a línea (Ω) a 115°C de informe de prueba] × 0,87 (Ω)
Configuración de la inductancia de fuga del motor (E2-06, E4-06)Configure el volumen de la caída de tensión debido a la inductancia de fuga del motor en E2-06 como un por-centaje de la tensión nominal del motor. Si la inductancia no está escrita en la placa del motor consulte alfabricante del mismo.
Configuración de coeficientes de saturación del entrehierro del motor 1 y 2 (E2-07/08)E2-07 y E2-08 son configurados automáticamente durante el autotuning dinámico.
Configuración de la pérdida de entrehierro del motor para la compensación del par (E2-10)E2-10 se visualiza solamente en el método de control V/f y puede ser configurado para incrementar la preci-sión de la compensación de par.
Cambio de configuración del motor 1/2Consulte la página 6-55, Selección motor 2.
Configuración de los parámetros del motor para motores PMEl autotuning con el motor en rotación puede utilizarse para hacer que el convertidor mida la constante de ten-sión, la resistencia línea a línea, las inductancias de los ejes q y d y el desplazamiento de encoder (consulte lapágina 4-7, Procedimiento de autotuning para motores de imán permanente. Solamente puede efectuarse si elmotor puede girar libremente (cables retirados y freno abierto). Si el autotuning no puede ejecutarse debenconfigurarse manualmente los siguientes parámetros del motor.
Parámetros relacionados
Nº deparámetro Nombre
Configura-ción de fábrica
Modifica-ción
durante la operación
Métodos de control Configu-rado
mediante autotu-
ning
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
E1-01 Configuración de la tensión de entrada 400 V *1
*1. El valor dado es válido par convertidores de la Clase 400V.
No Q Q Q Q No
E1-04 Frecuencia de salida máxima (FMAX) 150 rpm No Q Q Q Q SíE1-06 Frecuencia base (FA) 150 rpm No Q Q Q Q SíE1-09 Frecuencia de salida mínima (FMIN) 0 rpm No Q Q A A Sí
E1-13 Tensión base (VBASE) 400 V*1 No A A - Q Sí
E5-02 Potencia nominal del motor 3,7kW *2
*2. Las configuraciones de fábrica dependen de la capacidad del convertidor (los valores mostrados son para un convertidor de Clase 400 V, de 3,7 kW).
No - - - A Sí
E5-03 Corriente nominal del motor 7,31 A *2 No - - - A Sí
E5-04 Número de polos del motor 4 polos No - - - A Sí
E5-05 Resistencia línea a línea del motor 1,326 Ω *2 No - - - A Sí
E5-06 Inductancia del eje d del motor 19,11 mH*2 No - - - A Sí
E2-07 Inductancia del eje q del motor 26,08 mH*2 No - - - A Sí
E5-09 Constante de tensión del motor 478,6 mV*2 No - - - A Sí
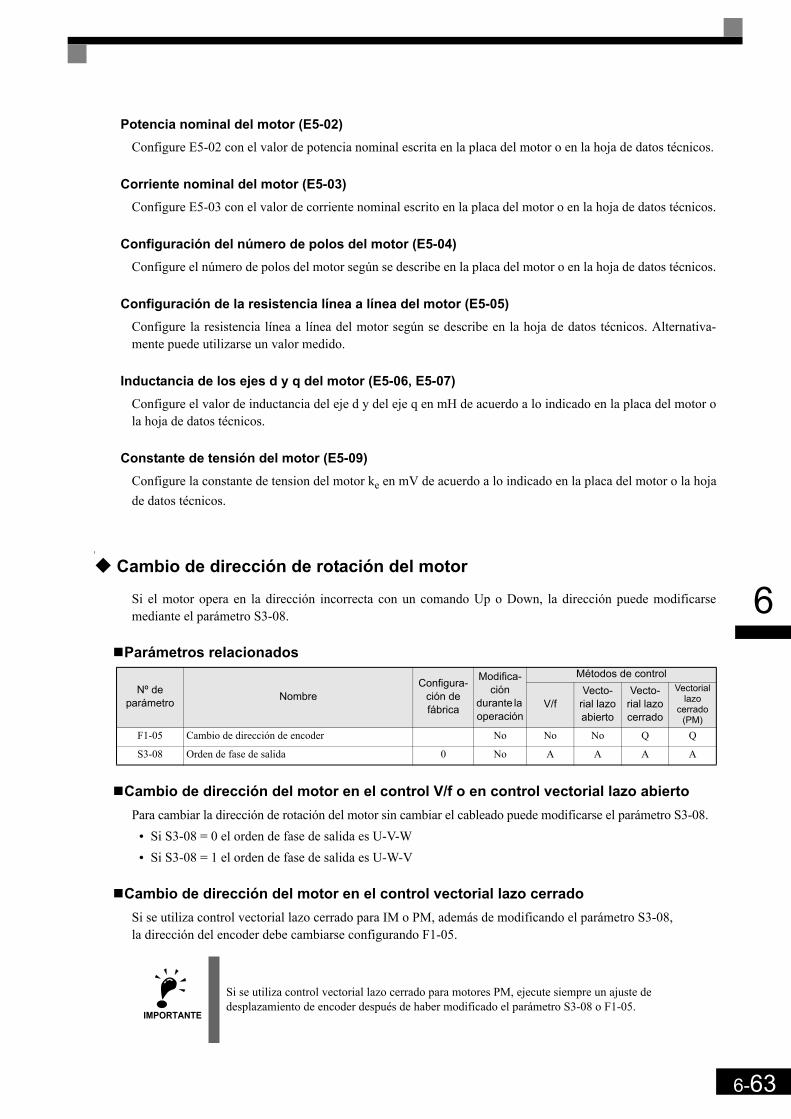
6-63
6
Potencia nominal del motor (E5-02)Configure E5-02 con el valor de potencia nominal escrita en la placa del motor o en la hoja de datos técnicos.
Corriente nominal del motor (E5-03)Configure E5-03 con el valor de corriente nominal escrito en la placa del motor o en la hoja de datos técnicos.
Configuración del número de polos del motor (E5-04)Configure el número de polos del motor según se describe en la placa del motor o en la hoja de datos técnicos.
Configuración de la resistencia línea a línea del motor (E5-05)Configure la resistencia línea a línea del motor según se describe en la hoja de datos técnicos. Alternativa-mente puede utilizarse un valor medido.
Inductancia de los ejes d y q del motor (E5-06, E5-07)Configure el valor de inductancia del eje d y del eje q en mH de acuerdo a lo indicado en la placa del motor ola hoja de datos técnicos.
Constante de tensión del motor (E5-09)Configure la constante de tension del motor ke en mV de acuerdo a lo indicado en la placa del motor o la hojade datos técnicos.
Cambio de dirección de rotación del motor
Si el motor opera en la dirección incorrecta con un comando Up o Down, la dirección puede modificarsemediante el parámetro S3-08.
Parámetros relacionados
Cambio de dirección del motor en el control V/f o en control vectorial lazo abiertoPara cambiar la dirección de rotación del motor sin cambiar el cableado puede modificarse el parámetro S3-08.
• Si S3-08 = 0 el orden de fase de salida es U-V-W• Si S3-08 = 1 el orden de fase de salida es U-W-V
Cambio de dirección del motor en el control vectorial lazo cerradoSi se utiliza control vectorial lazo cerrado para IM o PM, además de modificando el parámetro S3-08, la dirección del encoder debe cambiarse configurando F1-05.
Nº deparámetro Nombre
Configura-ción de fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vectorial lazo
cerrado (PM)
F1-05 Cambio de dirección de encoder No No No Q Q
S3-08 Orden de fase de salida 0 No A A A A
IMPORTANTE
Si se utiliza control vectorial lazo cerrado para motores PM, ejecute siempre un ajuste de desplazamiento de encoder después de haber modificado el parámetro S3-08 o F1-05.
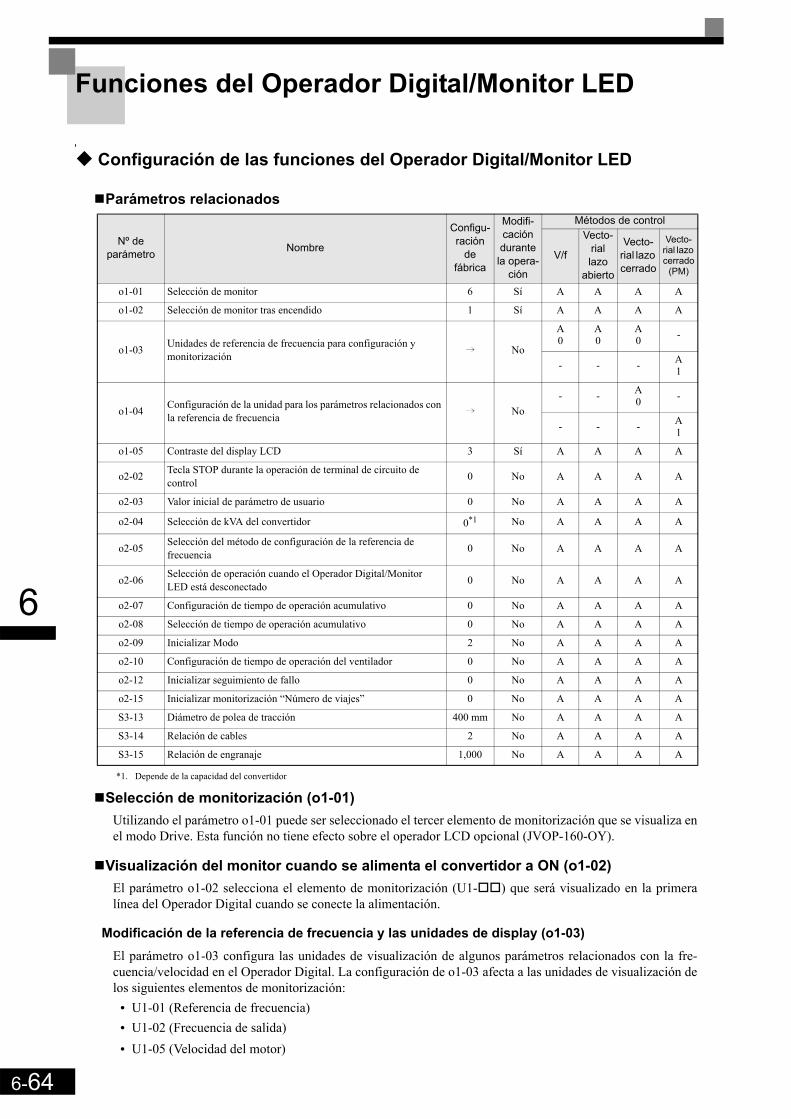
6-64
6
Funciones del Operador Digital/Monitor LED
Configuración de las funciones del Operador Digital/Monitor LED
Parámetros relacionados
Selección de monitorización (o1-01)Utilizando el parámetro o1-01 puede ser seleccionado el tercer elemento de monitorización que se visualiza enel modo Drive. Esta función no tiene efecto sobre el operador LCD opcional (JVOP-160-OY).
Visualización del monitor cuando se alimenta el convertidor a ON (o1-02)El parámetro o1-02 selecciona el elemento de monitorización (U1- ) que será visualizado en la primeralínea del Operador Digital cuando se conecte la alimentación.
Modificación de la referencia de frecuencia y las unidades de display (o1-03)El parámetro o1-03 configura las unidades de visualización de algunos parámetros relacionados con la fre-cuencia/velocidad en el Operador Digital. La configuración de o1-03 afecta a las unidades de visualización delos siguientes elementos de monitorización:
• U1-01 (Referencia de frecuencia)• U1-02 (Frecuencia de salida)• U1-05 (Velocidad del motor)
Nº deparámetro Nombre
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de control
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
o1-01 Selección de monitor 6 Sí A A A A
o1-02 Selección de monitor tras encendido 1 Sí A A A A
o1-03 Unidades de referencia de frecuencia para configuración y monitorización i No
A0
A0
A0 -
- - - A1
o1-04 Configuración de la unidad para los parámetros relacionados con la referencia de frecuencia i No
- - A0 -
- - - A1
o1-05 Contraste del display LCD 3 Sí A A A A
o2-02 Tecla STOP durante la operación de terminal de circuito de control 0 No A A A A
o2-03 Valor inicial de parámetro de usuario 0 No A A A A
o2-04 Selección de kVA del convertidor 0*1
*1. Depende de la capacidad del convertidor
No A A A A
o2-05 Selección del método de configuración de la referencia defrecuencia 0 No A A A A
o2-06 Selección de operación cuando el Operador Digital/Monitor LED está desconectado 0 No A A A A
o2-07 Configuración de tiempo de operación acumulativo 0 No A A A A
o2-08 Selección de tiempo de operación acumulativo 0 No A A A A
o2-09 Inicializar Modo 2 No A A A A
o2-10 Configuración de tiempo de operación del ventilador 0 No A A A A
o2-12 Inicializar seguimiento de fallo 0 No A A A A
o2-15 Inicializar monitorización “Número de viajes” 0 No A A A A
S3-13 Diámetro de polea de tracción 400 mm No A A A A
S3-14 Relación de cables 2 No A A A A
S3-15 Relación de engranaje 1,000 No A A A A
6-65
6
• U1-20 (Frecuencia de salida tras arranque suave)• d1-01 a d1-17 (Referencias de frecuencia)
Visualización en HzConfigure o1-03 como “0” para cambiar la unidad de visualización de los parámetros anteriormente mencio-nados a Hz.
Visualización en %Configure o1-03 como “1” para cambiar la unidad de visualización de los parámetros anteriormente mencio-nados a % relacionado con la frecuencia/velocidad máxima configurada en el parámetro E1-04.
Visualización en rpmConfigure o1-03 como el número polos del motor utilizado para visualizar los parámetros anteriormente men-cionados en rpm.
Visualización en m/sConfigure o1-03 como 3 para habilitar la visualización en m/s. El convertidor usa los parámetros S3-13 (diá-metro de la polea de tracción), S3-14 (relación de cables) y S3-15 (relación de engranaje) para calcular lavisualización en m/s. Para alcanzar un valor de visualización preciso estos parámetros deben configurarsetambién con precisión.
Modificación de las unidades para los parámetros de frecuencia relacionados con las configuraciones V/f (o1-04)
Utilizando el parámetro o1-04 puede configurarse la unidad para los parámetros de frecuencia relacionadoscon la configuración de V/f. Si o1-04 está configurado como 0 la unidad será “Hz”. Si o1-04 está configuradocomo 1 será “rpm”. El parámetro está disponible solamente en el modo de control vectorial lazo cerrado.
Modificación del contraste del display (o1-05)Utilizando o1-05 puede aumentarse o disminuirse el contraste del display LCD del Operador Digital. Dismi-nuir el valor de o1-05 disminuirá el contraste y viceversa.
Habilitación/Deshabilitación de la tecla LOCAL/REMOTE (o2-01)Configure o2-01 como 1 para habilitar la tecla LOCAL/REMOTE del Operador Digital.
Si la tecla está habilitada, la fuente de referencia de frecuencia y la fuente de comando RUN pueden ser alter-nadas entre LOCAL (Operador) y REMOTE (configuración b1-01/02).
Deshabilitación de la tecla STOP (o2-02)Este parámetro se utiliza para establecer si la tecla STOP del Operador está o no activa durante el controlremoto (b1-02 ≠ 0).
Si o2-02 está configurado como 1, se aceptará un comando STOP desde la tecla STOP del Operador. Si o2-02está configurado como 0 no será tenido en cuenta.
Memorización de los parámetros de usuario (o2-03)Los valores de configuración de parámetros del convertidor se pueden guardar como valores de parámetrodefinidos por el usuario configurando el parámetro o2-03 como 1.
Para inicializar el convertidor usando los valores iniciales configurados por el usuario, configure el parámetroA1-03 como 1110. Para borrar estos valores configúre o2-03 como 2.
Modificación de la configuración de la capacidad del convertidor (o2-04)La capacidad del convertidor puede ser configurada utilizando o2-04. Consulte la página 5-64, Configuracio-nes de fábrica que cambian con la capacidad del convertidor (o2-04) para ver los parámetros que dependende esta configuración.
Normalmente no es necesario modificar esta configuración, a no ser que se haya cambiado la tarjeta (placa) decontrol.
6-66
6
Configuración de la referencia de frecuencia utilizando las teclas Arriba y Abajo sin utilizar la tecla Enter (o2-05)
Esta función está activa cuando las referencias de frecuencia se introducen desde el Operador Digital. Cuandoo2-05 está configurado como 1, puede incrementar y disminuir la referencia de frecuencia seleccionada utili-zando las teclas Arriba y Abajo sin utilizar la tecla Enter. La función opera solamente si el parámetro b1-01está configurado como 0.
Selección de operación cuando el Operador Digital/Monitor LED está desconectado (o2-06)
Esta función selecciona la operación cuando el operador Digital/Monitor LED se desconecta mientras hay uncomando RUN activo.Si o2-06 se configura como 0 la operación continúa.Si o2-06 se configura como 1 la salida se detiene y el motor marcha libre hasta detenerse. Se opera el contactode fallo. Cuando el Operador es conectado de nuevo se visualiza OPR (Operador desconectado).
Tiempo de operación acumulativo (o2-07 y o2-08)El convertidor tiene una función que cuenta el tiempo de operación del convertidor acumulativamente.Con el parámetro o2-07 se puede modificar el tiempo de operación acumulativo, p.ej. tras la sustitución de laplaca de control. Si el parámetro o2-08 está configurado como 0 el convertidor acumula el tiempo siempre quela alimentación está conectada. Si o2-08 está configurado como 1 solamente se cuenta el tiempo que estéactivo un comando RUN. La configuración de fábrica es 0.
Tiempo de operación del ventilador de refrigeración (o2-10)Esta función cuenta el tiempo de operación del ventilador montado en el convertidor acumulativamente.
Con el parámetro o2-10 se puede resetear a 0 el contador, p.ej., cuando se ha sustituido el ventilador.
Inicializar seguimiento de fallo (o2-12)Esta función puede ser utilizada para inicializar el seguimiento de fallo configurando el parámetro o2-12 como 1.
Inicializar contador “Número de viajes” (o2-15)Con este parámetro se puede inicializar la monitorización del contador de operaciones del elevación (U1-55).
Copia de parámetros (solamente JVOP-160-OY)Pueden utilizarse las siguientes tres funciones del operador Digital para copiar/verificar configuraciones deparámetros:
• Almacenar valores de configuración de parámetros del convertidor, en el Operador Digital configurandoo3-01 como 1 (READ)
• Escribir valores de configuración de parámetros memorizados en el Operador Digital, en el convertidorconfigurando o3-01 como 2 (COPY)
• Comparar valores de configuración de parámetros memorizados en el Operador Digital, con configuracio-nes de parámetros del convertidor configurando o3-01 como 3 (VERIFY)
Los datos guardados en el Operador pueden ser protegidos contra sobreeescritura configurando el parámetroo3-02 como 0. En este caso un comando READ no puede ejecutarse. Si es realizado a pesar de todo, se visua-lizará “PrE” en el Operador.
Parámetros relacionados
Nº deparámetro Nombre
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)o3-01 Selección de función copiar 0 No A A A Ao3-02 Selección de permiso de lectura 0 No A A A A

6-67
6
Memorización de valores de configuración del convertidor en el Operador Digital (READ)
Utilice el siguiente método para almacenar valores de configuración del convertidor en el Operador Digital.
Si se visualiza un error, pulse cualquier tecla para cancelar el display de error y volver al display de o3-01.Consulte en la página 7-16, Fallos de función de copia del Operador Digital las acciones correctivas.
Escritura de valores de configuración de parámetros memorizados en Operador Digital, en el convertidor (COPY).
Utilice el siguiente método para escribir valores de configuración de parámetros almacenados en el OperadorDigital, en el convertidor.
Paso Nº Explicación Display del Operador Digital
1 Pulse la tecla Menú y seleccione el modo programación Avanzada (Advanced Programming).
2 Pulse la tecla DATA/ENTER.
3 Pulse las teclas Más y menos hasta que se visualice el parámetro o3-01 (selección de función Copy).
4 Pulse la tecla DATA/ENTER y seleccione el display de configuración de constantes.
5 Cambie el valor de configuración a 1 utilizando la tecla Más.
6 Configure los datos modificados utilizando la tecla DATA/ENTER. Se inicia la función READ.
7 Si la función READ finaliza con normalidad, se visualizará “End” en el operador Digital.
8 El display vuelve a o3-01 cuando se pulsa una tecla.
Paso Nº Explicación Visualización del Operador Digital
1 Pulse la tecla Menú y seleccione el modo programación Avanzada (Advanced Programming).
** Main Menu **-ADV-
Programming
Initialization-ADV-
A1 - 00=1Select Language
COPY Function-ADV-
o3 - 01=0Copy Funtion Sel
Copy Function Sel-ADV-
o3-01= 0COPY SELECT
*0*
Copy Function Sel-ADV-
o3-01= 1 *0*
INV OP READ
READ-ADV-
INV OP READING
READ-ADV-
READ COMPLETE
Copy Function Sel-ADV-
o3 - 01=0COPY SELECT
*0*
** Main Menu **-ADV-
Programming
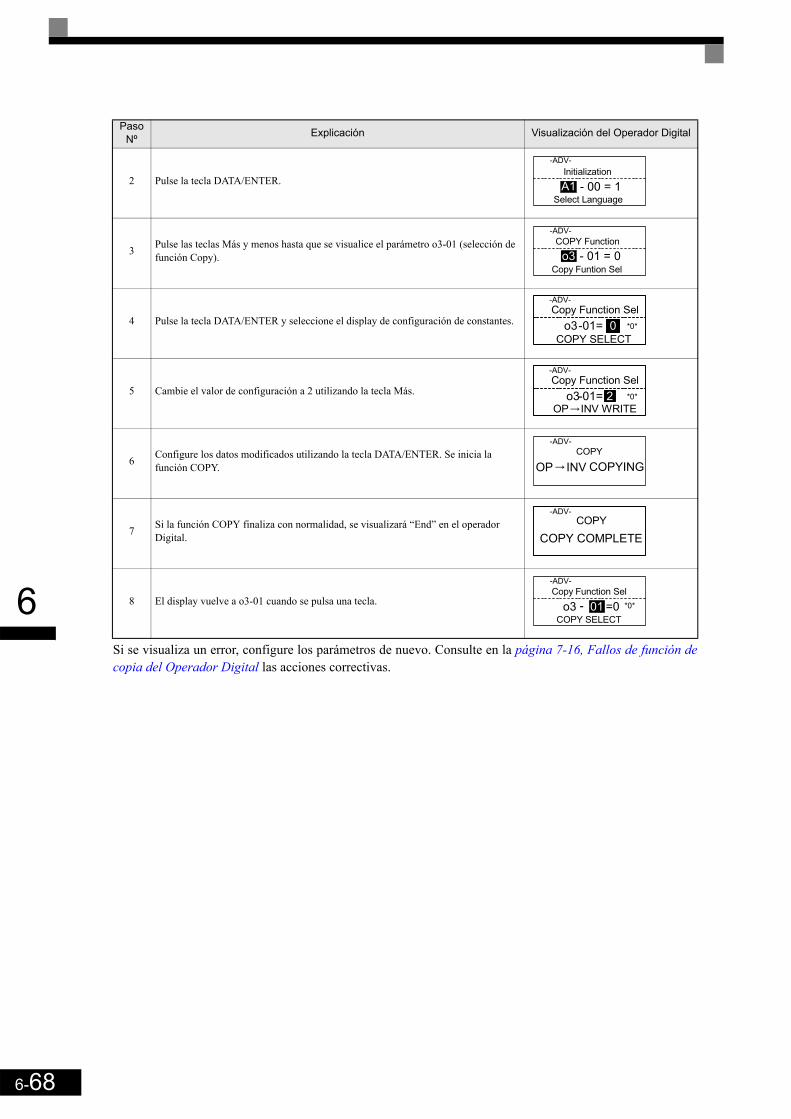
6-68
6Si se visualiza un error, configure los parámetros de nuevo. Consulte en la página 7-16, Fallos de función decopia del Operador Digital las acciones correctivas.
2 Pulse la tecla DATA/ENTER.
3 Pulse las teclas Más y menos hasta que se visualice el parámetro o3-01 (selección de función Copy).
4 Pulse la tecla DATA/ENTER y seleccione el display de configuración de constantes.
5 Cambie el valor de configuración a 2 utilizando la tecla Más.
6 Configure los datos modificados utilizando la tecla DATA/ENTER. Se inicia la función COPY.
7 Si la función COPY finaliza con normalidad, se visualizará “End” en el operador Digital.
8 El display vuelve a o3-01 cuando se pulsa una tecla.
Paso Nº Explicación Visualización del Operador Digital
Initialization-ADV-
A1 - 00 = 1Select Language
COPY Function-ADV-
o3 - 01 = 0Copy Funtion Sel
Copy Function Sel-ADV-
o3-01= 0COPY SELECT
*0*
Copy Function Sel-ADV-
o3-01= 2OP INV WRITE
*0*
COPY-ADV-
OP INV COPYING
COPY-ADV-
COPY COMPLETE
Copy Function Sel-ADV-
o3 - 01 =0COPY SELECT
*0*
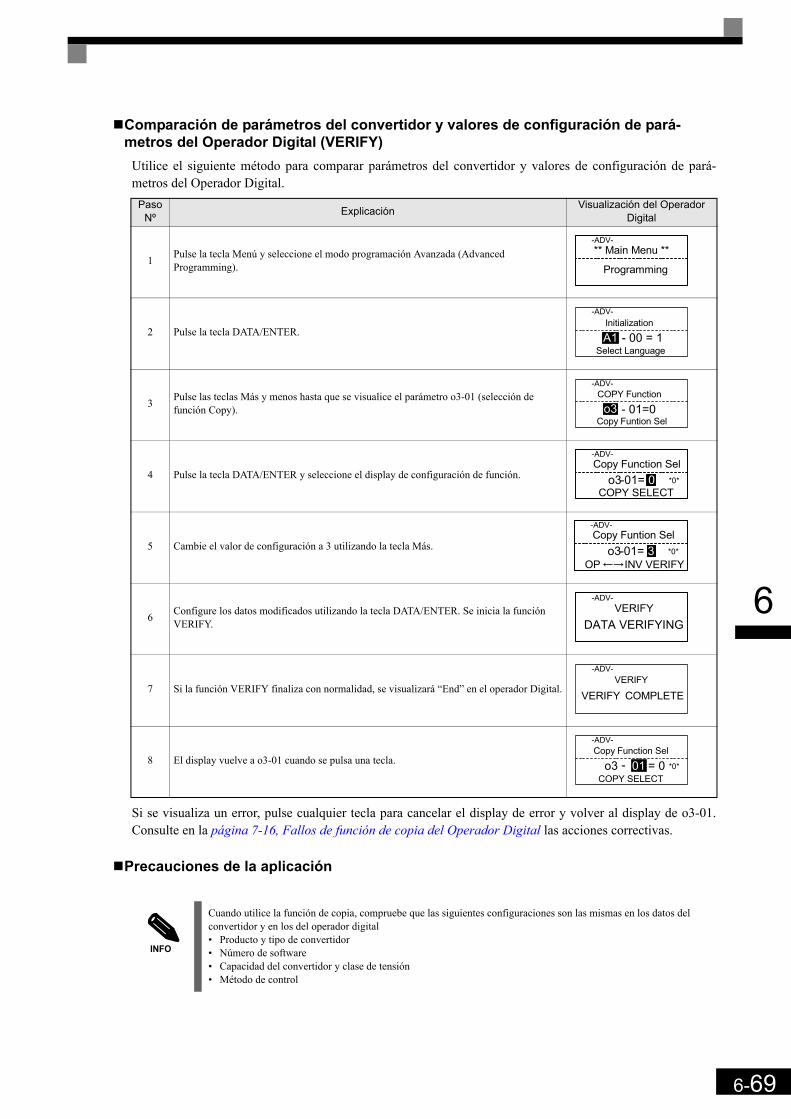
6-69
6
Comparación de parámetros del convertidor y valores de configuración de pará-metros del Operador Digital (VERIFY)
Utilice el siguiente método para comparar parámetros del convertidor y valores de configuración de pará-metros del Operador Digital.
Si se visualiza un error, pulse cualquier tecla para cancelar el display de error y volver al display de o3-01.Consulte en la página 7-16, Fallos de función de copia del Operador Digital las acciones correctivas.
Precauciones de la aplicación
Paso Nº Explicación Visualización del Operador
Digital
1 Pulse la tecla Menú y seleccione el modo programación Avanzada (Advanced Programming).
2 Pulse la tecla DATA/ENTER.
3 Pulse las teclas Más y menos hasta que se visualice el parámetro o3-01 (selección de función Copy).
4 Pulse la tecla DATA/ENTER y seleccione el display de configuración de función.
5 Cambie el valor de configuración a 3 utilizando la tecla Más.
6 Configure los datos modificados utilizando la tecla DATA/ENTER. Se inicia la función VERIFY.
7 Si la función VERIFY finaliza con normalidad, se visualizará “End” en el operador Digital.
8 El display vuelve a o3-01 cuando se pulsa una tecla.
INFO
Cuando utilice la función de copia, compruebe que las siguientes configuraciones son las mismas en los datos del convertidor y en los del operador digital• Producto y tipo de convertidor• Número de software• Capacidad del convertidor y clase de tensión• Método de control
** Main Menu **-ADV-
Programming
Initialization-ADV-
A1 - 00 = 1Select Language
COPY Function-ADV-
o3 - 01=0Copy Funtion Sel
Copy Function Sel-ADV-
o3-01= 0COPY SELECT
*0*
Copy Funtion Sel-ADV-
o3-01= 3 *0*
OP INV VERIFY
VERIFY-ADV-
DATA VERIFYING
VERIFY-ADV-
VERIFY COMPLETE
Copy Function Sel-ADV-
o3 - 01 = 0COPY SELECT
*0*
6-70
6
Prohibición de sobreescritura de parámetros
Si A1-01 está configurado como 0, todos los parámetros excepto A1-01 y A1-04 están protegidos contra escri-tura, se visualizarán U1- , U2- y U3- . Si A1-01 está configurado como 1, solamente pueden serleídos o escritos los parámetros A1-01, A1-04 y A2- , se visualizarán U1- , U2- y U3- . Elresto de los parámetros no serán visualizados.
Si configura uno de los parámetros H1-01 a H1-05 (selección de función de terminal de entrada digital S3 aS7) como 1B (permitido escribir parámetros), los parámetros pueden ser escritos desde el Operador Digitalcuando el terminal que ha sido configurado esté ON. Cuando el terminal configurado esté OFF, está prohibidoescribir parámetros que no sean la referencia de frecuencia. A pesar de todo, los parámetros pueden ser leídos.
Parámetros relacionados
Configuración de una contraseña
Cuando se configura una contraseña en A1-05 y si los valores configurados en A1-04 y A1-05 no coinciden,solamente pueden modificarse las configuraciones de los parámetros A1-01 a A1-03, ó A2-01 a A2-32.
Puede ser prohibida la configuración de todos los parámetros excepto A1-00 utilizando la función de contra-seña en combinación con la configuración de A1-01 como 0 (solamente monitorización).
Parámetros relacionados
Configuración de una contraseñaLa contraseña puede ser configurada en el parámetro A1-05. Normalmente no se visualiza A1-05. Para visua-lizar y modificar A1-05 deben pulsarse a la vez las teclas MENU y Reset en el display de A1-04.
Nº deparámetro Nombre
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
A1-01 Nivel de acceso a parámetros 2 Sí A A A A
Nº deparámetro Nombre
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
A1-01 Nivel de acceso a parámetros 2 No A A A A
A1-04 Contraseña 0 No A A A A
A1-05 Configuración de contraseña 0 No A A A A
6-71
6
Visualización de parámetros de usuario solamente
Los parámetros A2 (parámetros de configuración de usuario) y A1-01 (nivel de acceso de parámetro) puedenser utilizados para establecer un grupo de parámetros que contenga solamente los parámetros más importantes.
Configure el número de parámetro al que quiere referirse en A2- , y después configure A1-01 como 1. Uti-lizando el modo de programación Avanzada puede ahora leer y modificar A1-01 a A1-03 y los parámetrosconfigurados en A2-01 a A2-32 solamente.
Parámetros relacionados
Nº deparámetro Nombre
Configu-ración de
fábrica
Modifica-ción
durante la operación
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
A2-01a
A2-32Parámetros de configuración de usuario - No A A A
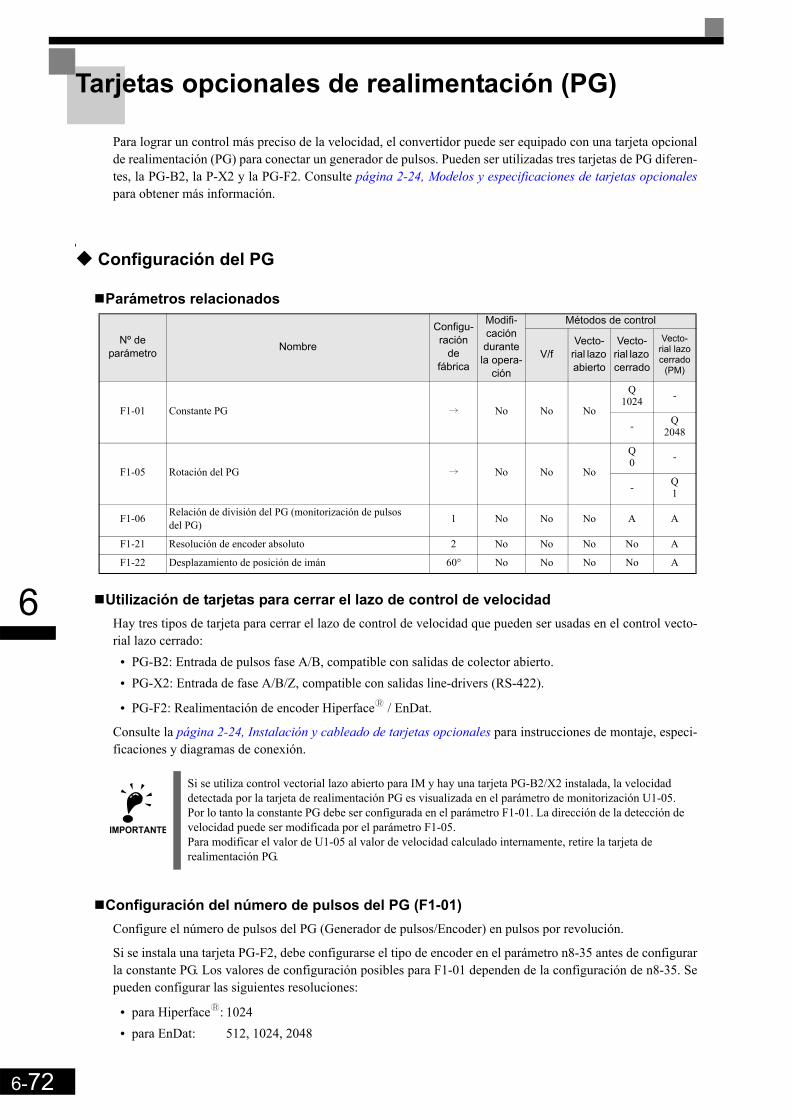
6-72
6
Tarjetas opcionales de realimentación (PG)
Para lograr un control más preciso de la velocidad, el convertidor puede ser equipado con una tarjeta opcionalde realimentación (PG) para conectar un generador de pulsos. Pueden ser utilizadas tres tarjetas de PG diferen-tes, la PG-B2, la P-X2 y la PG-F2. Consulte página 2-24, Modelos y especificaciones de tarjetas opcionalespara obtener más información.
Configuración del PG
Parámetros relacionados
Utilización de tarjetas para cerrar el lazo de control de velocidadHay tres tipos de tarjeta para cerrar el lazo de control de velocidad que pueden ser usadas en el control vecto-rial lazo cerrado:
• PG-B2: Entrada de pulsos fase A/B, compatible con salidas de colector abierto.• PG-X2: Entrada de fase A/B/Z, compatible con salidas line-drivers (RS-422).
• PG-F2: Realimentación de encoder Hiperfacey / EnDat.
Consulte la página 2-24, Instalación y cableado de tarjetas opcionales para instrucciones de montaje, especi-ficaciones y diagramas de conexión.
Configuración del número de pulsos del PG (F1-01)Configure el número de pulsos del PG (Generador de pulsos/Encoder) en pulsos por revolución.
Si se instala una tarjeta PG-F2, debe configurarse el tipo de encoder en el parámetro n8-35 antes de configurarla constante PG. Los valores de configuración posibles para F1-01 dependen de la configuración de n8-35. Sepueden configurar las siguientes resoluciones:
• para Hiperfacey: 1024• para EnDat: 512, 1024, 2048
Nº deparámetro Nombre
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
F1-01 Constante PG i No No No
Q1024 -
- Q2048
F1-05 Rotación del PG i No No No
Q0 -
- Q1
F1-06 Relación de división del PG (monitorización de pulsos del PG) 1 No No No A A
F1-21 Resolución de encoder absoluto 2 No No No No A
F1-22 Desplazamiento de posición de imán 60° No No No No A
IMPORTANTE
Si se utiliza control vectorial lazo abierto para IM y hay una tarjeta PG-B2/X2 instalada, la velocidad detectada por la tarjeta de realimentación PG es visualizada en el parámetro de monitorización U1-05. Por lo tanto la constante PG debe ser configurada en el parámetro F1-01. La dirección de la detección de velocidad puede ser modificada por el parámetro F1-05.Para modificar el valor de U1-05 al valor de velocidad calculado internamente, retire la tarjeta de realimentación PG.
6-73
6
Coincidencia de la dirección de rotación del PG y la dirección de rotación del motor (F1-05)
El parámetro F1-05 se puede utilizar para cambiar la dirección de la señal de encoder si ésta es incorrecta. • Si F1-05 se configura como 0, el convertidor espera que el canal A avance 90°por delante del canal B (el
canal Sin avanza 90° antes que el canal Cos de la tarjeta PG-F2) si se aplica un comando de marcha directa(FWD significa rotación a izquierdas vista desde el lado del eje).
• Si F1-05 se configura como 1, el convertidor espera que el canal B avance 90° por delante del canal A (elcanal Cos avanza 90° antes que el canal Sin de la tarjeta PG-F2) si se aplica un comando de marchadirecta.
Configuración de la relación de división de la salida de monitorización de pulsos del PG (F1-06)
Esta función solamente está habilitada cuando se utiliza una tarjeta de realimentación de velocidad PG-B2.Configure la relación de division para la salida de monitorización de pulsos del PG. El valor configurado seexpresa como n para el dígito superior, y como m para los dos dígitos inferiores. La relación de división se cal-cula como sigue:
La relación de división puede configurarse dentro del siguiente rango: 1/32 ≤ F1-06 ≤ 1. Por ejemplo, si larelación de división es 1/2 (valor configurado 2), la mitad del número de pulsos de PG, se monitoriza en lasalida / monitor de pulsos.
Configuración del número de dientes del engranaje entre el PG y el motor (F1-12 y F1-13)Si hay engranajes entre el motor y el PG, la relación de engranaje puede ser configurada en F1-12 y F1-13.
Cuando el número de dientes del engranaje ha sido configurado, se calcula el número de rotaciones del motoren el convertidor utilizando la siguiente fórmula:
Nº de rotaciones del motor (r/min.) = Nº de pulsos de entrada del PG × 60 / F1-01 × F1-13 (Nº de dientes deengranaje lado del PG) / F1-12 (Nº de dientes de engranaje lado del motor)
Configuración de la resolución de encoder absoluto (F1-21)
Si se utiliza un encoder Hiperfacey, debe seleccionarse la resolución de la línea serie mediante el F1-21 deacuerdo a la hoja de características del encoder. Los valores de configuración de resolución posibles dependende la selección de encoder (n8-35=5):
• Hiperfacey: 0, 1 ó 2 (16384, 32768, 8192)• EnDat: 2 (fijo en 8192)
Configuración del desplazamiento de posición del imán (F1-22)El parámetro F1-22 puede utilizarse para configurar el desplazamiento entre el imán y la posición cero delencoder. El valor se configura automáticamente durante el autotuning del motor PM o el autotuning de despla-zamiento de encoder (consulte la página 4-8, Ajuste de desplazamiento de encoder de motor de imán perma-nente).
IMPORTANTE
Si se usa control vectorial lazo cerrado para motores PM debe realizarse un autotuning de desplazamiento de encoder si se modifica el parámetro F1-05.
Relación de division = (1 + n)/m (rango de configuración) n: 0 ó 1, m: 1 a 32
F1-06 = n m
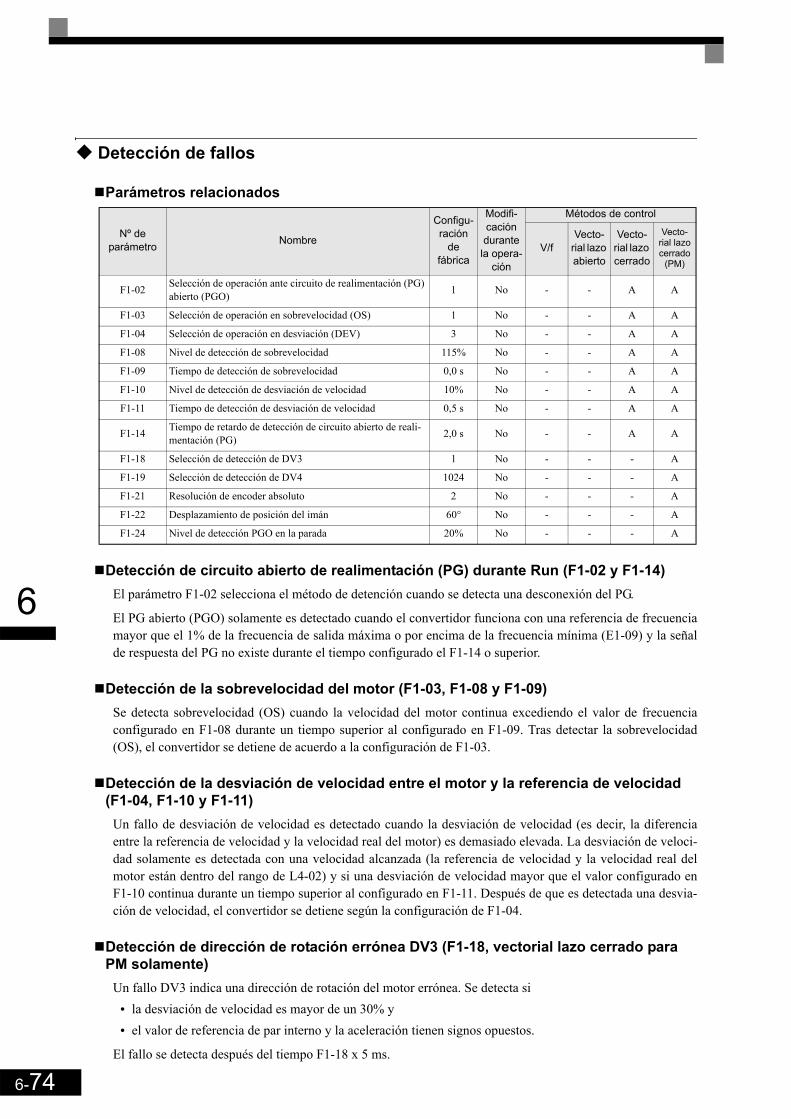
6-74
6
Detección de fallos
Parámetros relacionados
Detección de circuito abierto de realimentación (PG) durante Run (F1-02 y F1-14)El parámetro F1-02 selecciona el método de detención cuando se detecta una desconexión del PG.
El PG abierto (PGO) solamente es detectado cuando el convertidor funciona con una referencia de frecuenciamayor que el 1% de la frecuencia de salida máxima o por encima de la frecuencia mínima (E1-09) y la señalde respuesta del PG no existe durante el tiempo configurado el F1-14 o superior.
Detección de la sobrevelocidad del motor (F1-03, F1-08 y F1-09)Se detecta sobrevelocidad (OS) cuando la velocidad del motor continua excediendo el valor de frecuenciaconfigurado en F1-08 durante un tiempo superior al configurado en F1-09. Tras detectar la sobrevelocidad(OS), el convertidor se detiene de acuerdo a la configuración de F1-03.
Detección de la desviación de velocidad entre el motor y la referencia de velocidad (F1-04, F1-10 y F1-11)
Un fallo de desviación de velocidad es detectado cuando la desviación de velocidad (es decir, la diferenciaentre la referencia de velocidad y la velocidad real del motor) es demasiado elevada. La desviación de veloci-dad solamente es detectada con una velocidad alcanzada (la referencia de velocidad y la velocidad real delmotor están dentro del rango de L4-02) y si una desviación de velocidad mayor que el valor configurado enF1-10 continua durante un tiempo superior al configurado en F1-11. Después de que es detectada una desvia-ción de velocidad, el convertidor se detiene según la configuración de F1-04.
Detección de dirección de rotación errónea DV3 (F1-18, vectorial lazo cerrado para PM solamente)
Un fallo DV3 indica una dirección de rotación del motor errónea. Se detecta si • la desviación de velocidad es mayor de un 30% y • el valor de referencia de par interno y la aceleración tienen signos opuestos.
El fallo se detecta después del tiempo F1-18 x 5 ms.
Nº deparámetro Nombre
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
F1-02 Selección de operación ante circuito de realimentación (PG) abierto (PGO) 1 No - - A A
F1-03 Selección de operación en sobrevelocidad (OS) 1 No - - A A
F1-04 Selección de operación en desviación (DEV) 3 No - - A A
F1-08 Nivel de detección de sobrevelocidad 115% No - - A A
F1-09 Tiempo de detección de sobrevelocidad 0,0 s No - - A A
F1-10 Nivel de detección de desviación de velocidad 10% No - - A A
F1-11 Tiempo de detección de desviación de velocidad 0,5 s No - - A A
F1-14 Tiempo de retardo de detección de circuito abierto de reali-mentación (PG) 2,0 s No - - A A
F1-18 Selección de detección de DV3 1 No - - - A
F1-19 Selección de detección de DV4 1024 No - - - A
F1-21 Resolución de encoder absoluto 2 No - - - A
F1-22 Desplazamiento de posición del imán 60° No - - - A
F1-24 Nivel de detección PGO en la parada 20% No - - - A
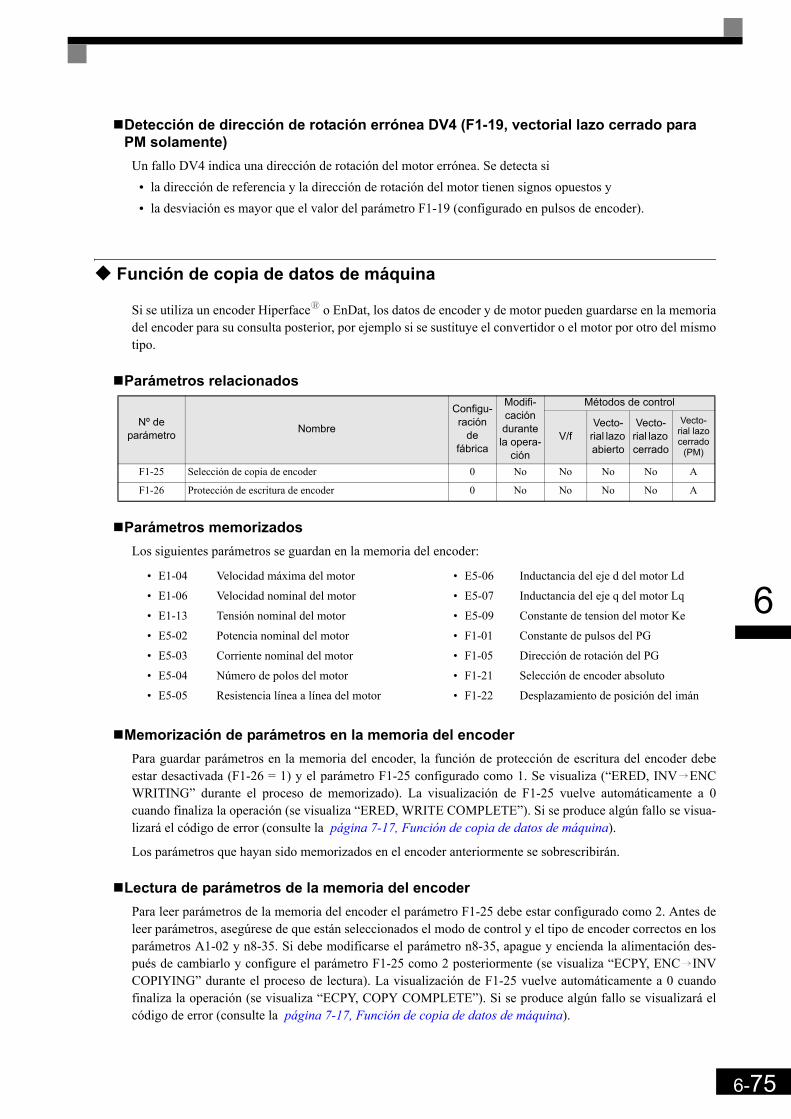
6-75
6
Detección de dirección de rotación errónea DV4 (F1-19, vectorial lazo cerrado para PM solamente)
Un fallo DV4 indica una dirección de rotación del motor errónea. Se detecta si • la dirección de referencia y la dirección de rotación del motor tienen signos opuestos y• la desviación es mayor que el valor del parámetro F1-19 (configurado en pulsos de encoder).
Función de copia de datos de máquina
Si se utiliza un encoder Hiperfacey o EnDat, los datos de encoder y de motor pueden guardarse en la memoriadel encoder para su consulta posterior, por ejemplo si se sustituye el convertidor o el motor por otro del mismotipo.
Parámetros relacionados
Parámetros memorizadosLos siguientes parámetros se guardan en la memoria del encoder:
Memorización de parámetros en la memoria del encoderPara guardar parámetros en la memoria del encoder, la función de protección de escritura del encoder debeestar desactivada (F1-26 = 1) y el parámetro F1-25 configurado como 1. Se visualiza (“ERED, INViENCWRITING” durante el proceso de memorizado). La visualización de F1-25 vuelve automáticamente a 0cuando finaliza la operación (se visualiza “ERED, WRITE COMPLETE”). Si se produce algún fallo se visua-lizará el código de error (consulte la página 7-17, Función de copia de datos de máquina).
Los parámetros que hayan sido memorizados en el encoder anteriormente se sobrescribirán.
Lectura de parámetros de la memoria del encoderPara leer parámetros de la memoria del encoder el parámetro F1-25 debe estar configurado como 2. Antes deleer parámetros, asegúrese de que están seleccionados el modo de control y el tipo de encoder correctos en losparámetros A1-02 y n8-35. Si debe modificarse el parámetro n8-35, apague y encienda la alimentación des-pués de cambiarlo y configure el parámetro F1-25 como 2 posteriormente (se visualiza “ECPY, ENCiINVCOPIYING” durante el proceso de lectura). La visualización de F1-25 vuelve automáticamente a 0 cuandofinaliza la operación (se visualiza “ECPY, COPY COMPLETE”). Si se produce algún fallo se visualizará elcódigo de error (consulte la página 7-17, Función de copia de datos de máquina).
Nº deparámetro Nombre
Configu-ración
de fábrica
Modifi-cación durante
la opera-ción
Métodos de control
V/fVecto-
rial lazo abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
F1-25 Selección de copia de encoder 0 No No No No A
F1-26 Protección de escritura de encoder 0 No No No No A
• E1-04 Velocidad máxima del motor • E5-06 Inductancia del eje d del motor Ld
• E1-06 Velocidad nominal del motor • E5-07 Inductancia del eje q del motor Lq
• E1-13 Tensión nominal del motor • E5-09 Constante de tension del motor Ke
• E5-02 Potencia nominal del motor • F1-01 Constante de pulsos del PG
• E5-03 Corriente nominal del motor • F1-05 Dirección de rotación del PG
• E5-04 Número de polos del motor • F1-21 Selección de encoder absoluto
• E5-05 Resistencia línea a línea del motor • F1-22 Desplazamiento de posición del imán
6-76
6
Verificación de los parámetros memorizadosPara comparar los parámetros memorizados en el convertidor y el encoder, el parámetro F1-23 debe configu-rarse como 3 (se visualiza “EVRFY, DATA VERIFYING” durante el proceso de verificación).Si los datos son idénticos se visualizará “EVRFY, VERIFY COMPLETE”.Si los datos no coinciden se visualizará “EVRFY, VERIFY ERROR”.
IMPORTANTE
Para llevar a cabo la función WRITE/COPY:• El motor no debe girar y el convertidor debe estar en condición de baseblock.• para EnDat debe estar disponible el área 1 OEM1 de la EEPROM (dirección 64 a 255)• para Hiperfacey debe estar disponible el campo de datos DF#0.• No debe estar activa una alarma CPF03/24.
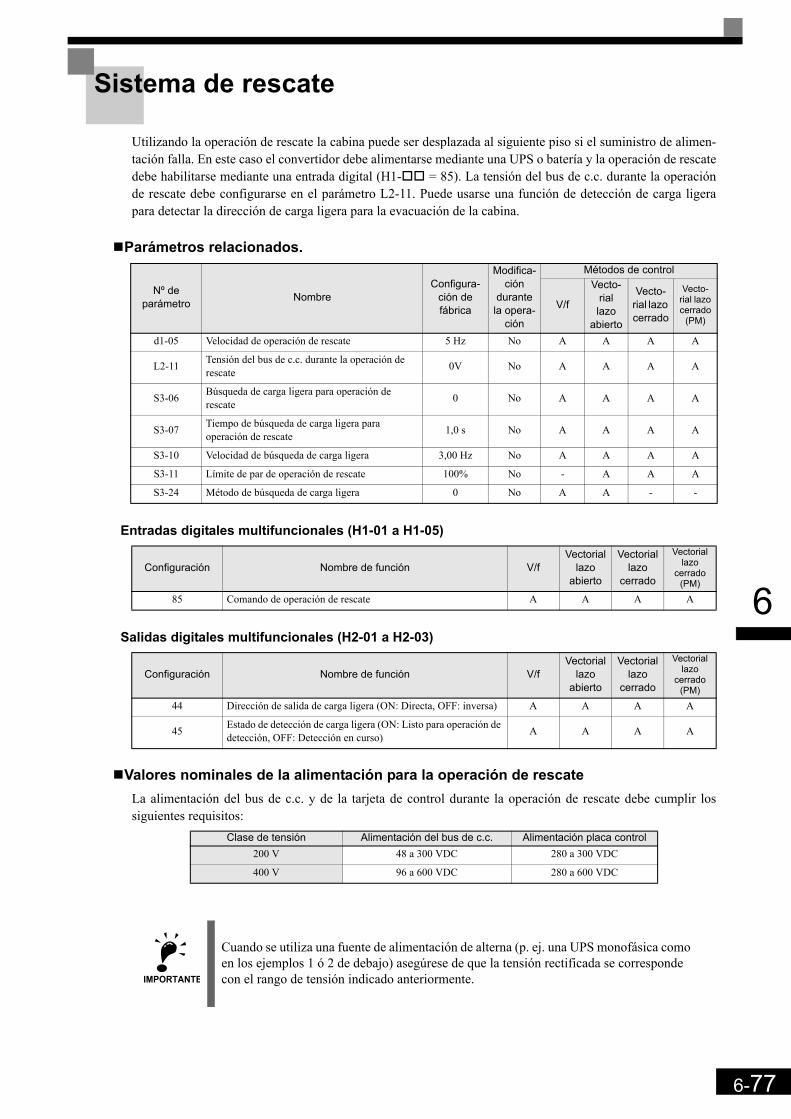
6-77
6
Sistema de rescate
Utilizando la operación de rescate la cabina puede ser desplazada al siguiente piso si el suministro de alimen-tación falla. En este caso el convertidor debe alimentarse mediante una UPS o batería y la operación de rescatedebe habilitarse mediante una entrada digital (H1- = 85). La tensión del bus de c.c. durante la operaciónde rescate debe configurarse en el parámetro L2-11. Puede usarse una función de detección de carga ligerapara detectar la dirección de carga ligera para la evacuación de la cabina.
Parámetros relacionados.
Entradas digitales multifuncionales (H1-01 a H1-05)
Salidas digitales multifuncionales (H2-01 a H2-03)
Valores nominales de la alimentación para la operación de rescateLa alimentación del bus de c.c. y de la tarjeta de control durante la operación de rescate debe cumplir lossiguientes requisitos:
Nº de parámetro Nombre
Configura-ción de fábrica
Modifica-ción
durante la opera-
ción
Métodos de control
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
d1-05 Velocidad de operación de rescate 5 Hz No A A A A
L2-11 Tensión del bus de c.c. durante la operación de rescate 0V No A A A A
S3-06 Búsqueda de carga ligera para operación de rescate 0 No A A A A
S3-07 Tiempo de búsqueda de carga ligera para operación de rescate 1,0 s No A A A A
S3-10 Velocidad de búsqueda de carga ligera 3,00 Hz No A A A A
S3-11 Límite de par de operación de rescate 100% No - A A A
S3-24 Método de búsqueda de carga ligera 0 No A A - -
Configuración Nombre de función V/fVectorial
lazo abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado (PM)
85 Comando de operación de rescate A A A A
Configuración Nombre de función V/fVectorial
lazo abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado (PM)
44 Dirección de salida de carga ligera (ON: Directa, OFF: inversa) A A A A
45 Estado de detección de carga ligera (ON: Listo para operación de detección, OFF: Detección en curso) A A A A
Clase de tensión Alimentación del bus de c.c. Alimentación placa control200 V 48 a 300 VDC 280 a 300 VDC
400 V 96 a 600 VDC 280 a 600 VDC
IMPORTANTE
Cuando se utiliza una fuente de alimentación de alterna (p. ej. una UPS monofásica como en los ejemplos 1 ó 2 de debajo) asegúrese de que la tensión rectificada se corresponde con el rango de tensión indicado anteriormente.

6-78
6
Ejemplos de cableado de operación de rescateEn el siguiente diagrama se muestran algunos ejemplos de operación de rescate.
Ejemplo 1: Fuente de alimentación monofásica UPS, 230 V
Los contactores deben operarse de tal manera que el contactor B se abra siempre antes de que se cierre A.Cuando la operación de rescate ha finalizado, el contactor A debe esta abierto antes de que se cierre B.
Si la potencia de la UPS es débil o no se utiliza la detección de carga ligera, es posible que el convertidor sedispare con un error UV2. En este caso incremente la potencia de la UPS, use la función de detección de cargaligera o use la configuración del ejemplo 2.
Ejemplo 2: Fuente de alimentación monofásica UPS, 230 V, UPS de baja potencia o sin utilizar detección de carga ligera
Los contactores deben operarse de tal manera que el contactor B se abra siempre antes de que se cierren A y C.El Contactor C puede cerrarse después de A, pero no antes. Cuando se deshabilita la operación de rescate, loscontactores A y C deben abrirse antes de que se cierre B.
L1
L2
L3
N
R/L1
S/L2
T/L3
-
P0
N0
Sx
SC
W/T3
V/T2
U/T1
B1
B2A
B
Secuencia de contactores
Contactor B
Contactor AConvertidor
Fuente de alimentación
Circuito de control
Operación de rescate Entrada de habilitación
Sistema de control
del elevador
Cableado
UPS1x230Vc.a.
L1
L2
L3
N
R/L1
S/L2
T/L3
-
P0
N0
Sx
SC
W/T3
V/T2
U/T1
B1
B2A
B
C
Circuito de control
Operación de rescateEntrada de habilitación
Diodo rectificadory capacidad
Alimentación
UPS1x230Vc.a.
CableadoConvertidor
Contactor A
Contactor C
Contactor B
Secuencia de contactores
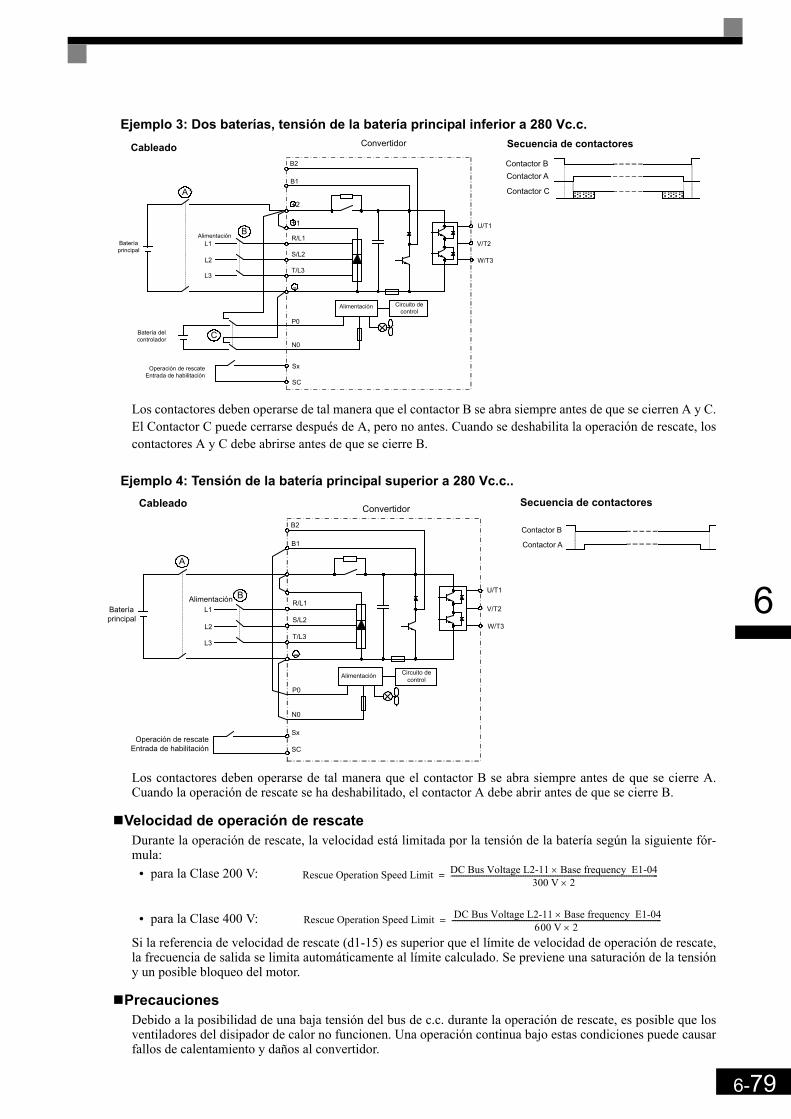
6-79
6
Ejemplo 3: Dos baterías, tensión de la batería principal inferior a 280 Vc.c.
Los contactores deben operarse de tal manera que el contactor B se abra siempre antes de que se cierren A y C.El Contactor C puede cerrarse después de A, pero no antes. Cuando se deshabilita la operación de rescate, loscontactores A y C debe abrirse antes de que se cierre B.
Ejemplo 4: Tensión de la batería principal superior a 280 Vc.c..
Los contactores deben operarse de tal manera que el contactor B se abra siempre antes de que se cierre A.Cuando la operación de rescate se ha deshabilitado, el contactor A debe abrir antes de que se cierre B.
Velocidad de operación de rescateDurante la operación de rescate, la velocidad está limitada por la tensión de la batería según la siguiente fór-mula:
• para la Clase 200 V:
• para la Clase 400 V:
Si la referencia de velocidad de rescate (d1-15) es superior que el límite de velocidad de operación de rescate,la frecuencia de salida se limita automáticamente al límite calculado. Se previene una saturación de la tensióny un posible bloqueo del motor.
PrecaucionesDebido a la posibilidad de una baja tensión del bus de c.c. durante la operación de rescate, es posible que losventiladores del disipador de calor no funcionen. Una operación continua bajo estas condiciones puede causarfallos de calentamiento y daños al convertidor.
R/L1
S/L2
T/L3
+1
-
P0
N0
Sx
SC
A
B
C
W/T3
V/T2
U/T1
B1
+2
B2
L1
L2
L3
Convertidor Secuencia de contactores
Contactor BContactor A
Contactor C
Circuito de control
Alimentación
Operación de rescateEntrada de habilitación
Batería del controlador
Bateríaprincipal
Cableado
Alimentación
B
A
R/L1
S/L2
T/L3
-
P0
N0
Sx
SC
W/T3
V/T2
U/T1
B1
B2
L1
L2
L3
Convertidor
AlimentaciónBatería principal
Operación de rescateEntrada de habilitación
Alimentación Circuito de control
Secuencia de contactores
Contactor B
Contactor A
Cableado
Rescue Operation Speed Limit DC Bus Voltage L2-11 Base frequency E1-04×300 V 2×
---------------------------------------------------------------------------------------------------------------------=
Rescue Operation Speed Limit DC Bus Voltage L2-11 Base frequency E1-04×600 V 2×
----------------------------------------------------------------------------------------------------------------------=
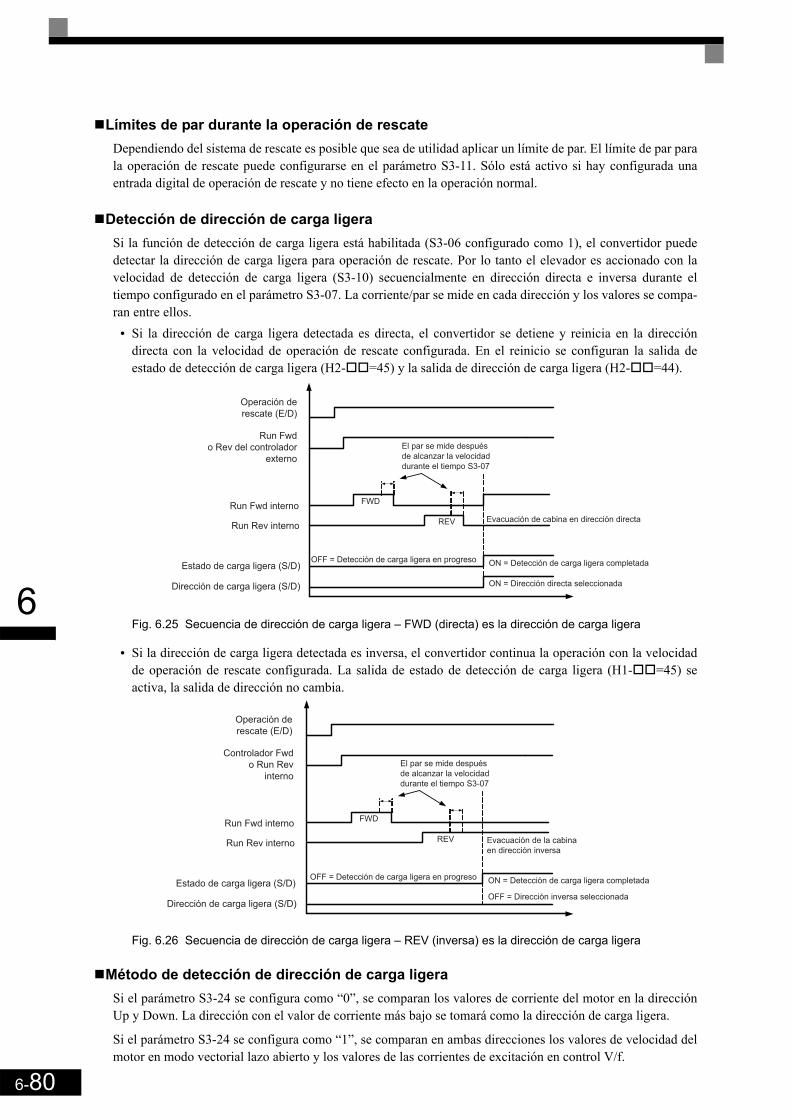
6-80
6
Límites de par durante la operación de rescateDependiendo del sistema de rescate es posible que sea de utilidad aplicar un límite de par. El límite de par parala operación de rescate puede configurarse en el parámetro S3-11. Sólo está activo si hay configurada unaentrada digital de operación de rescate y no tiene efecto en la operación normal.
Detección de dirección de carga ligeraSi la función de detección de carga ligera está habilitada (S3-06 configurado como 1), el convertidor puededetectar la dirección de carga ligera para operación de rescate. Por lo tanto el elevador es accionado con lavelocidad de detección de carga ligera (S3-10) secuencialmente en dirección directa e inversa durante eltiempo configurado en el parámetro S3-07. La corriente/par se mide en cada dirección y los valores se compa-ran entre ellos.
• Si la dirección de carga ligera detectada es directa, el convertidor se detiene y reinicia en la direccióndirecta con la velocidad de operación de rescate configurada. En el reinicio se configuran la salida deestado de detección de carga ligera (H2- =45) y la salida de dirección de carga ligera (H2- =44).
Fig. 6.25 Secuencia de dirección de carga ligera – FWD (directa) es la dirección de carga ligera
• Si la dirección de carga ligera detectada es inversa, el convertidor continua la operación con la velocidadde operación de rescate configurada. La salida de estado de detección de carga ligera (H1- =45) seactiva, la salida de dirección no cambia.
Fig. 6.26 Secuencia de dirección de carga ligera – REV (inversa) es la dirección de carga ligera
Método de detección de dirección de carga ligeraSi el parámetro S3-24 se configura como “0”, se comparan los valores de corriente del motor en la direcciónUp y Down. La dirección con el valor de corriente más bajo se tomará como la dirección de carga ligera.
Si el parámetro S3-24 se configura como “1”, se comparan en ambas direcciones los valores de velocidad delmotor en modo vectorial lazo abierto y los valores de las corrientes de excitación en control V/f.
.
Operación derescate (E/D)
Run Fwdo Rev del controlador
externo
Run Fwd interno
Run Rev interno
Estado de carga ligera (S/D)
Dirección de carga ligera (S/D)
OFF = Detección de carga ligera en progreso ON = Detección de carga ligera completada
ON = Dirección directa seleccionada
Evacuación de cabina en dirección directaREV
FWD
El par se mide despuésde alcanzar la velocidad durante el tiempo S3-07
.
Operación derescate (E/D)
Controlador Fwdo Run Rev
interno
Run Fwd interno
Run Rev interno
Estado de carga ligera (S/D)
Dirección de carga ligera (S/D)
OFF = Detección de carga ligera en progreso ON = Detección de carga ligera completada
OFF = Dirección inversa seleccionada
Evacuación de la cabina en dirección inversa
REV
FWD
El par se mide despuésde alcanzar la velocidad durante el tiempo S3-07
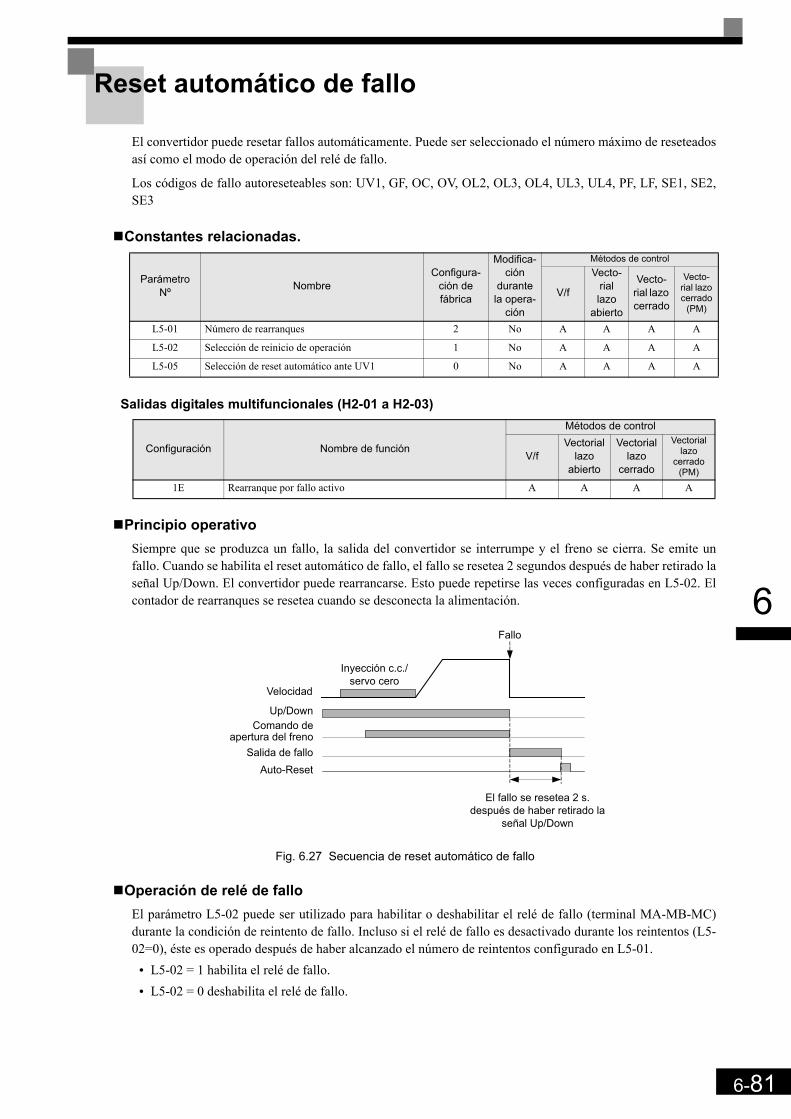
6-81
6
Reset automático de fallo
El convertidor puede resetar fallos automáticamente. Puede ser seleccionado el número máximo de reseteadosasí como el modo de operación del relé de fallo.
Los códigos de fallo autoreseteables son: UV1, GF, OC, OV, OL2, OL3, OL4, UL3, UL4, PF, LF, SE1, SE2,SE3
Constantes relacionadas.
Salidas digitales multifuncionales (H2-01 a H2-03)
Principio operativoSiempre que se produzca un fallo, la salida del convertidor se interrumpe y el freno se cierra. Se emite unfallo. Cuando se habilita el reset automático de fallo, el fallo se resetea 2 segundos después de haber retirado laseñal Up/Down. El convertidor puede rearrancarse. Esto puede repetirse las veces configuradas en L5-02. Elcontador de rearranques se resetea cuando se desconecta la alimentación.
Fig. 6.27 Secuencia de reset automático de fallo
Operación de relé de falloEl parámetro L5-02 puede ser utilizado para habilitar o deshabilitar el relé de fallo (terminal MA-MB-MC)durante la condición de reintento de fallo. Incluso si el relé de fallo es desactivado durante los reintentos (L5-02=0), éste es operado después de haber alcanzado el número de reintentos configurado en L5-01.
• L5-02 = 1 habilita el relé de fallo.• L5-02 = 0 deshabilita el relé de fallo.
ParámetroNº Nombre
Configura-ción de fábrica
Modifica-ción
durante la opera-
ción
Métodos de control
V/f
Vecto-rial lazo
abierto
Vecto-rial lazo cerrado
Vecto-rial lazo cerrado
(PM)
L5-01 Número de rearranques 2 No A A A A
L5-02 Selección de reinicio de operación 1 No A A A A
L5-05 Selección de reset automático ante UV1 0 No A A A A
Configuración Nombre de función
Métodos de control
V/fVectorial
lazo abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado (PM)
1E Rearranque por fallo activo A A A A
Inyección c.c./servo cero
Fallo
Velocidad
Up/DownComando de
apertura del frenoSalida de fallo
Auto-Reset
El fallo se resetea 2 s. después de haber retirado la
señal Up/Down

6-82
6
Indicación de rearranque por fallo Cuando se utiliza la función de reintento de fallo, el convertidor intenta resetear el fallo cada 5 ms. Si se pro-grama una salida digital para la función “Habilitar rearranque” (H2- =1E), la salida se activa mientras elconvertidor intenta resetear el fallo. Una vez se ha reseteado el fallo con éxito la salida se desactiva.
Selección de rearranque por fallo UV1Usando el parámetro L5-05 puede seleccionarse el método de auto reset para un fallo UV1 (baja tensión delbus de c.c.).
• Si L5-05 = 0 el fallo UV1 se trata como se haya configurado en el parámetro L5-01, es decir, el convertidorintenta resetear UV1 el número de veces configurado en L5-01 tal y como se describió anteriormente.
• Si L5-05 = 1 el fallo UV1 siempre se resetea automáticamente sin tener en cuenta la configuración deL5-01.
6-83
6
Comunicaciones Memobus
Configuración de las comunicaciones MEMOBUS
Pueden realizarse comunicaciones serie entre un PC y un convertidor con el fin de leer / escribir parámetros omonitorizar el estado del accionamiento. El convertidor no puede controlarse mediante comunicacionesMemobus.
Para usar el puerto de comunicaciones debe retirarse el operador digital del convertidor. El conector del opera-dor digital del convertidor debe conectarse al puerto serie RS-232 del PC/PLC.
Especificaciones de comunicacionesLas especificaciones de las comunicaciones MEMOBUS se muestran en la siguiente tabla.
Operaciones MemobusLas comunicaciones MEMOBUS pueden ejecutar las siguientes operaciones:
• Monitorización del estado del convertidor• Configuración y lectura de parámetros (para los números de registro de parámetro, consulte el manual
L7Z)
Contenido del mensaje
Formato del mensajeEn las comunicaciones MEMOBUS, el maestro envía comandos al esclavo, y el esclavo responde. El formatode mensaje se configura tanto para el envío como para la recepción como se muestra a continuación, y la lon-gitud de los paquetes de datos depende del contenido (función) del comando.
Dirección de esclavoLa dirección del esclavo no puede configurarse en el convertidor. El campo de la dirección del esclavo en elmensaje puede contener cualquier dirección de 0 a 31.
Elemento EspecificacionesInterfaz RS-232 (no aislada)
Parámetros de comunicaciones
Velocidad de transmisión: 9.600 bps
Longitud de datos: 8 bits fijosParidad: ningunaBits de stop: 1 bit fijo
Protocolo de comunicaciones MEMOBUSNúmero de unidades conectables 1
Dirección de esclavo
Código de función
Datos
Comprobación de errores
6-84
6
Código de funciónEl código de función especifica los comandos. Están disponibles los tres códigos de función incluidos en lasiguiente tabla.
DatosConfigure los datos consecutivos combinando la dirección del registro de memoria (código de prueba para unadirección de prueba de bucle) y los datos que contiene el registro. La longitud de los datos cambia depen-diendo de los detalles del comando.
Comprobación de errorLos errores durante las comunicaciones se detectan utilizando CRC-16 (control de redundancia cíclica,método de suma de control, checksum).
El resultado del cálculo de la suma de control se memoriza en una palabra de datos (16 bits), cuyo valor de ini-cio es FFFH. El valor de esta palabra es procesado utilizando operaciones OR Exclusiva y desplazamientos(SHIFT) junto con el paquete de datos que debe ser enviado (dirección de esclavo, código de función, datos) yel valor fijo A001H. Al final del cálculo la palabra de datos contiene el valor de la suma de control.
La suma de control se calcula de la siguiente manera:1. El valor de inicio de la palabra de datos de 16 bits que se utiliza para el cálculo debe ser configurado en
FFFFH.2. Debe ser realizada una operación OR exclusiva con el valor de inicio y la dirección del esclavo.3. El resultado debe ser desplazado a la derecha hasta que en bit de desbordamiento se convierta en 1.4. Cuando este bit se haya convertido en 1, debe realizarse una operación OR exclusiva con el resultado del
paso 3 y el valor fijo A001H.5. Después de 8 operaciones de desplazamiento (SHIFT) (cada vez que el bit de desbordamiento se convierta
en 1, debe realizarse una OR exclusiva como en el paso 4), realice una operación OR exclusiva con elresultado de las operaciones anteriores y el siguiente paquete de datos (código de función de 8 bits). Elresultado de esta operación debe ser desplazado 8 veces, y si es necesario, debe ser interconectado con elvalor fijo A001H utilizando una operación OR exclusiva.
6. Deben realizarse los mismos pasos con los datos, en primer lugar con el byte más alto, y después con elbyte más bajo, hasta que todos los datos hayan sido procesados.
7. El resultado de estas operaciones es la suma de control. Consiste en un byte alto y otro bajo.
Código de función (Hexadecimal) Función
Mensaje de comando Mensaje de respuesta
Mínimo (Bytes)
Máximo (Bytes)
Mínimo (Bytes)
Máximo (Bytes)
03H Leer contenidos de registro de memoria 8 8 7 3708H Prueba de bucle (test) 8 8 8 810H Escribir registros de memoria múltiples 11 41 8 8
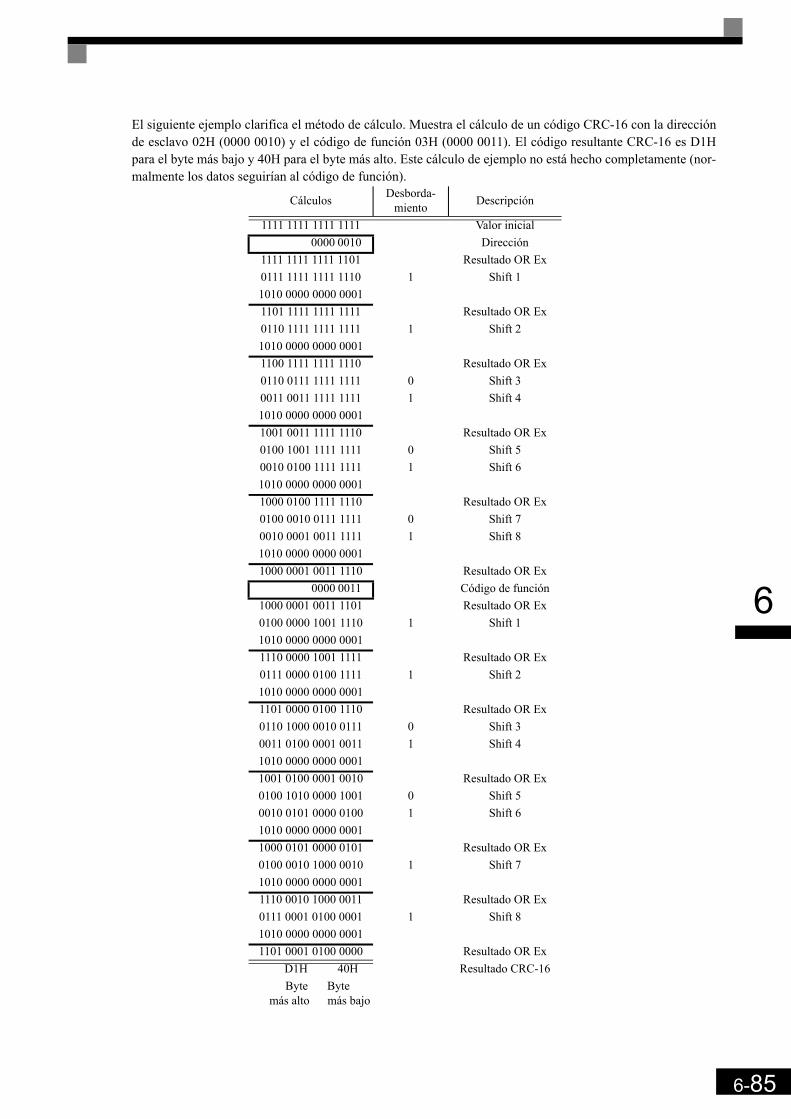
6-85
6
El siguiente ejemplo clarifica el método de cálculo. Muestra el cálculo de un código CRC-16 con la direcciónde esclavo 02H (0000 0010) y el código de función 03H (0000 0011). El código resultante CRC-16 es D1Hpara el byte más bajo y 40H para el byte más alto. Este cálculo de ejemplo no está hecho completamente (nor-malmente los datos seguirían al código de función).
Cálculos Desborda-miento Descripción
1111 1111 1111 1111 Valor inicial 0000 0010 Dirección
1111 1111 1111 1101 Resultado OR Ex0111 1111 1111 1110 1 Shift 11010 0000 0000 00011101 1111 1111 1111 Resultado OR Ex0110 1111 1111 1111 1 Shift 21010 0000 0000 00011100 1111 1111 1110 Resultado OR Ex0110 0111 1111 1111 0 Shift 30011 0011 1111 1111 1 Shift 41010 0000 0000 00011001 0011 1111 1110 Resultado OR Ex0100 1001 1111 1111 0 Shift 50010 0100 1111 1111 1 Shift 61010 0000 0000 00011000 0100 1111 1110 Resultado OR Ex0100 0010 0111 1111 0 Shift 70010 0001 0011 1111 1 Shift 81010 0000 0000 00011000 0001 0011 1110 Resultado OR Ex
0000 0011 Código de función1000 0001 0011 1101 Resultado OR Ex0100 0000 1001 1110 1 Shift 11010 0000 0000 00011110 0000 1001 1111 Resultado OR Ex0111 0000 0100 1111 1 Shift 21010 0000 0000 00011101 0000 0100 1110 Resultado OR Ex0110 1000 0010 0111 0 Shift 30011 0100 0001 0011 1 Shift 41010 0000 0000 00011001 0100 0001 0010 Resultado OR Ex0100 1010 0000 1001 0 Shift 50010 0101 0000 0100 1 Shift 61010 0000 0000 00011000 0101 0000 0101 Resultado OR Ex0100 0010 1000 0010 1 Shift 71010 0000 0000 00011110 0010 1000 0011 Resultado OR Ex0111 0001 0100 0001 1 Shift 81010 0000 0000 00011101 0001 0100 0000 Resultado OR Ex D1H 40H Resultado CRC-16 Byte Byte
más alto más bajo
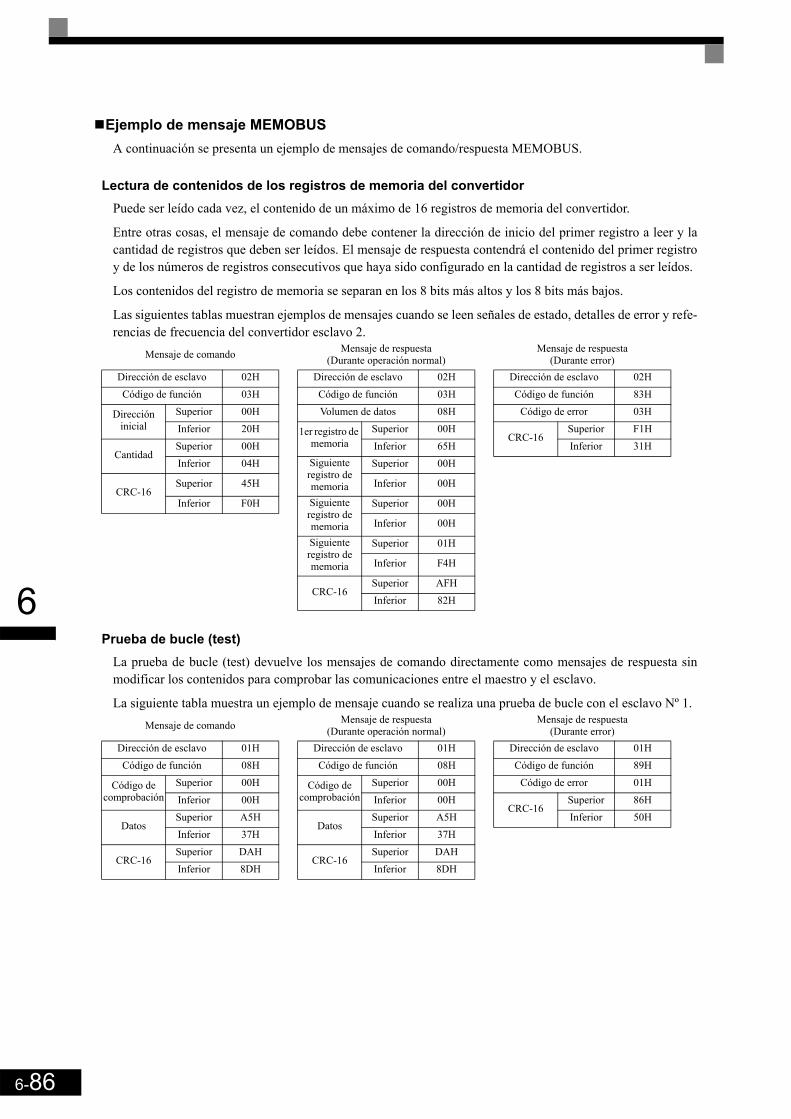
6-86
6
Ejemplo de mensaje MEMOBUSA continuación se presenta un ejemplo de mensajes de comando/respuesta MEMOBUS.
Lectura de contenidos de los registros de memoria del convertidorPuede ser leído cada vez, el contenido de un máximo de 16 registros de memoria del convertidor.
Entre otras cosas, el mensaje de comando debe contener la dirección de inicio del primer registro a leer y lacantidad de registros que deben ser leídos. El mensaje de respuesta contendrá el contenido del primer registroy de los números de registros consecutivos que haya sido configurado en la cantidad de registros a ser leídos.
Los contenidos del registro de memoria se separan en los 8 bits más altos y los 8 bits más bajos.
Las siguientes tablas muestran ejemplos de mensajes cuando se leen señales de estado, detalles de error y refe-rencias de frecuencia del convertidor esclavo 2.
Prueba de bucle (test)La prueba de bucle (test) devuelve los mensajes de comando directamente como mensajes de respuesta sinmodificar los contenidos para comprobar las comunicaciones entre el maestro y el esclavo.
La siguiente tabla muestra un ejemplo de mensaje cuando se realiza una prueba de bucle con el esclavo Nº 1.
Mensaje de comando Mensaje de respuesta (Durante operación normal)
Mensaje de respuesta (Durante error)
Dirección de esclavo 02H Dirección de esclavo 02H Dirección de esclavo 02HCódigo de función 03H Código de función 03H Código de función 83H
Dirección inicial
Superior 00H Volumen de datos 08H Código de error 03HInferior 20H 1er registro de
memoriaSuperior 00H
CRC-16Superior F1H
CantidadSuperior 00H Inferior 65H Inferior 31HInferior 04H Siguiente
registro de memoria
Superior 00H
CRC-16Superior 45H Inferior 00H
Inferior F0H Siguiente registro de memoria
Superior 00H
Inferior 00H
Siguiente registro de memoria
Superior 01H
Inferior F4H
CRC-16Superior AFHInferior 82H
Mensaje de comando Mensaje de respuesta (Durante operación normal)
Mensaje de respuesta (Durante error)
Dirección de esclavo 01H Dirección de esclavo 01H Dirección de esclavo 01HCódigo de función 08H Código de función 08H Código de función 89H
Código de comprobación
Superior 00H Código de comprobación
Superior 00H Código de error 01HInferior 00H Inferior 00H
CRC-16Superior 86H
DatosSuperior A5H
DatosSuperior A5H Inferior 50H
Inferior 37H Inferior 37H
CRC-16Superior DAH
CRC-16Superior DAH
Inferior 8DH Inferior 8DH
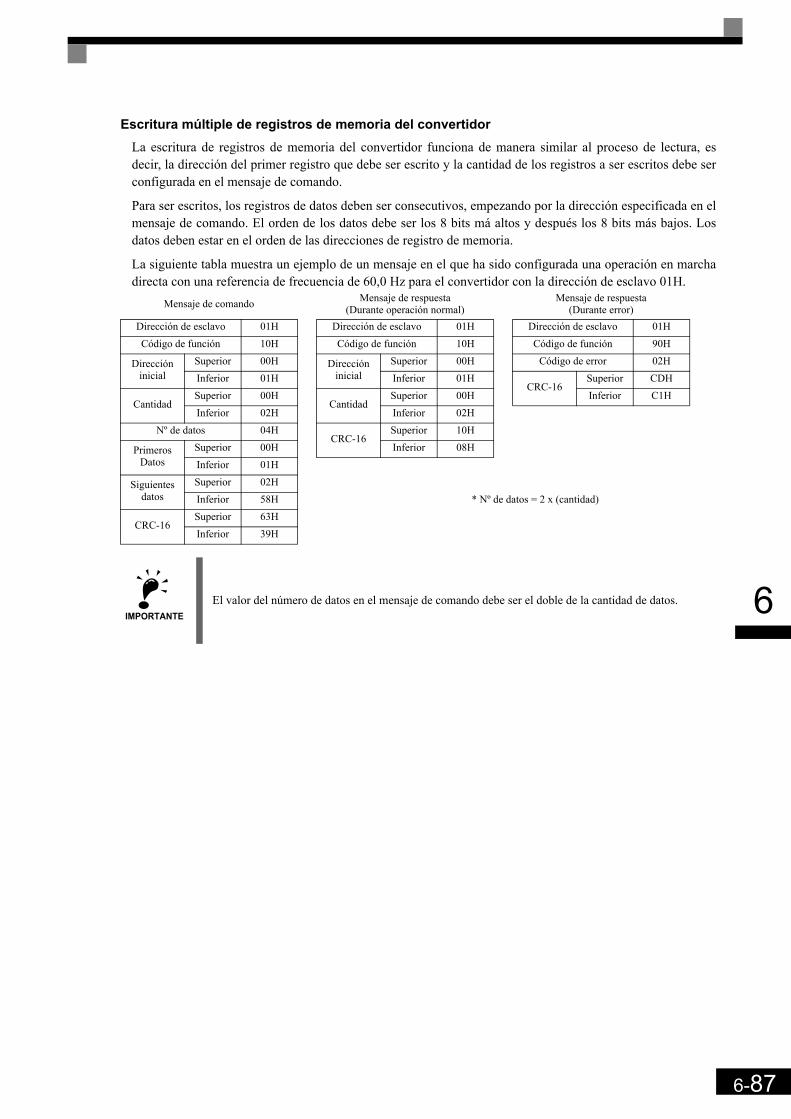
6-87
6
Escritura múltiple de registros de memoria del convertidorLa escritura de registros de memoria del convertidor funciona de manera similar al proceso de lectura, esdecir, la dirección del primer registro que debe ser escrito y la cantidad de los registros a ser escritos debe serconfigurada en el mensaje de comando.
Para ser escritos, los registros de datos deben ser consecutivos, empezando por la dirección especificada en elmensaje de comando. El orden de los datos debe ser los 8 bits má altos y después los 8 bits más bajos. Losdatos deben estar en el orden de las direcciones de registro de memoria.
La siguiente tabla muestra un ejemplo de un mensaje en el que ha sido configurada una operación en marchadirecta con una referencia de frecuencia de 60,0 Hz para el convertidor con la dirección de esclavo 01H.
Mensaje de comando Mensaje de respuesta (Durante operación normal)
Mensaje de respuesta (Durante error)
Dirección de esclavo 01H Dirección de esclavo 01H Dirección de esclavo 01HCódigo de función 10H Código de función 10H Código de función 90H
Direccióninicial
Superior 00H Direccióninicial
Superior 00H Código de error 02HInferior 01H Inferior 01H
CRC-16Superior CDH
CantidadSuperior 00H
CantidadSuperior 00H Inferior C1H
Inferior 02H Inferior 02HNº de datos 04H
CRC-16Superior 10H
Primeros Datos
Superior 00H Inferior 08HInferior 01H
Siguientes datos
Superior 02HInferior 58H * Nº de datos = 2 x (cantidad)
CRC-16Superior 63HInferior 39H
IMPORTANTE El valor del número de datos en el mensaje de comando debe ser el doble de la cantidad de datos.
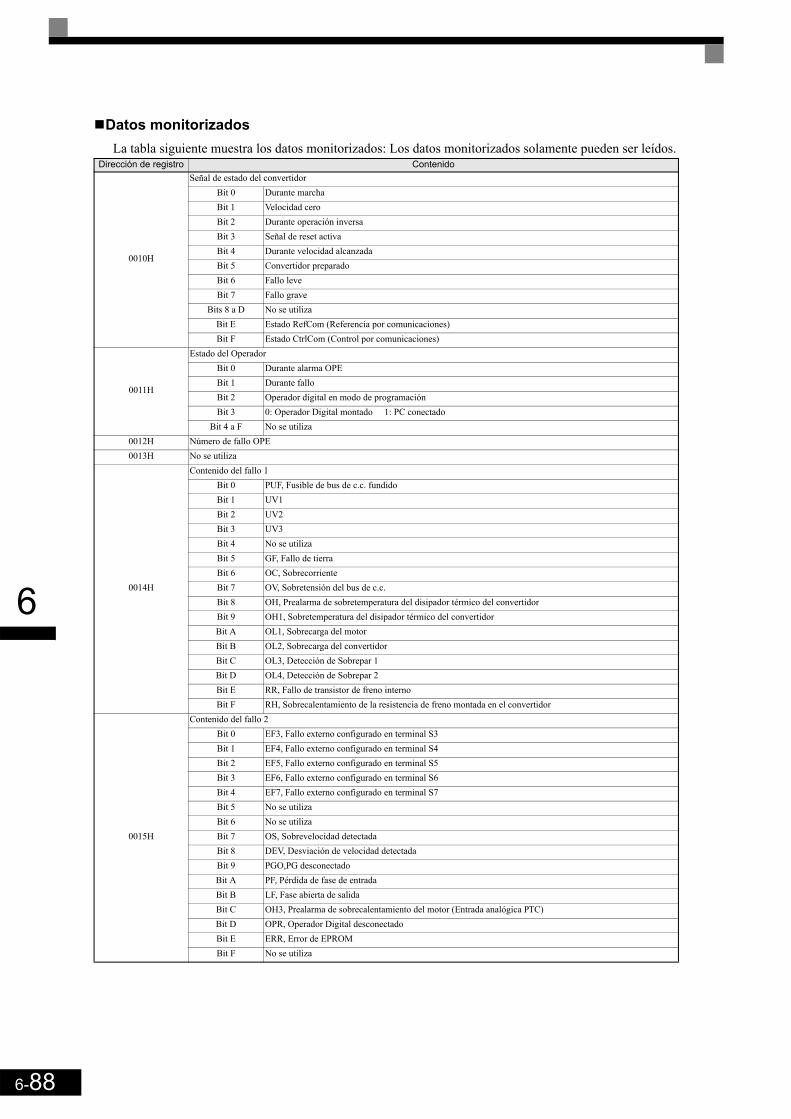
6-88
6
Datos monitorizadosLa tabla siguiente muestra los datos monitorizados: Los datos monitorizados solamente pueden ser leídos.
Dirección de registro Contenido
0010H
Señal de estado del convertidorBit 0 Durante marchaBit 1 Velocidad ceroBit 2 Durante operación inversaBit 3 Señal de reset activaBit 4 Durante velocidad alcanzadaBit 5 Convertidor preparadoBit 6 Fallo leveBit 7 Fallo grave
Bits 8 a D No se utilizaBit E Estado RefCom (Referencia por comunicaciones)Bit F Estado CtrlCom (Control por comunicaciones)
0011H
Estado del OperadorBit 0 Durante alarma OPEBit 1 Durante fallo Bit 2 Operador digital en modo de programaciónBit 3 0: Operador Digital montado 1: PC conectado
Bit 4 a F No se utiliza0012H Número de fallo OPE0013H No se utiliza
0014H
Contenido del fallo 1Bit 0 PUF, Fusible de bus de c.c. fundidoBit 1 UV1Bit 2 UV2Bit 3 UV3Bit 4 No se utilizaBit 5 GF, Fallo de tierraBit 6 OC, SobrecorrienteBit 7 OV, Sobretensión del bus de c.c.Bit 8 OH, Prealarma de sobretemperatura del disipador térmico del convertidorBit 9 OH1, Sobretemperatura del disipador térmico del convertidorBit A OL1, Sobrecarga del motorBit B OL2, Sobrecarga del convertidorBit C OL3, Detección de Sobrepar 1Bit D OL4, Detección de Sobrepar 2Bit E RR, Fallo de transistor de freno internoBit F RH, Sobrecalentamiento de la resistencia de freno montada en el convertidor
0015H
Contenido del fallo 2Bit 0 EF3, Fallo externo configurado en terminal S3Bit 1 EF4, Fallo externo configurado en terminal S4Bit 2 EF5, Fallo externo configurado en terminal S5Bit 3 EF6, Fallo externo configurado en terminal S6Bit 4 EF7, Fallo externo configurado en terminal S7Bit 5 No se utilizaBit 6 No se utilizaBit 7 OS, Sobrevelocidad detectadaBit 8 DEV, Desviación de velocidad detectadaBit 9 PGO,PG desconectadoBit A PF, Pérdida de fase de entradaBit B LF, Fase abierta de salidaBit C OH3, Prealarma de sobrecalentamiento del motor (Entrada analógica PTC)Bit D OPR, Operador Digital desconectadoBit E ERR, Error de EPROMBit F No se utiliza
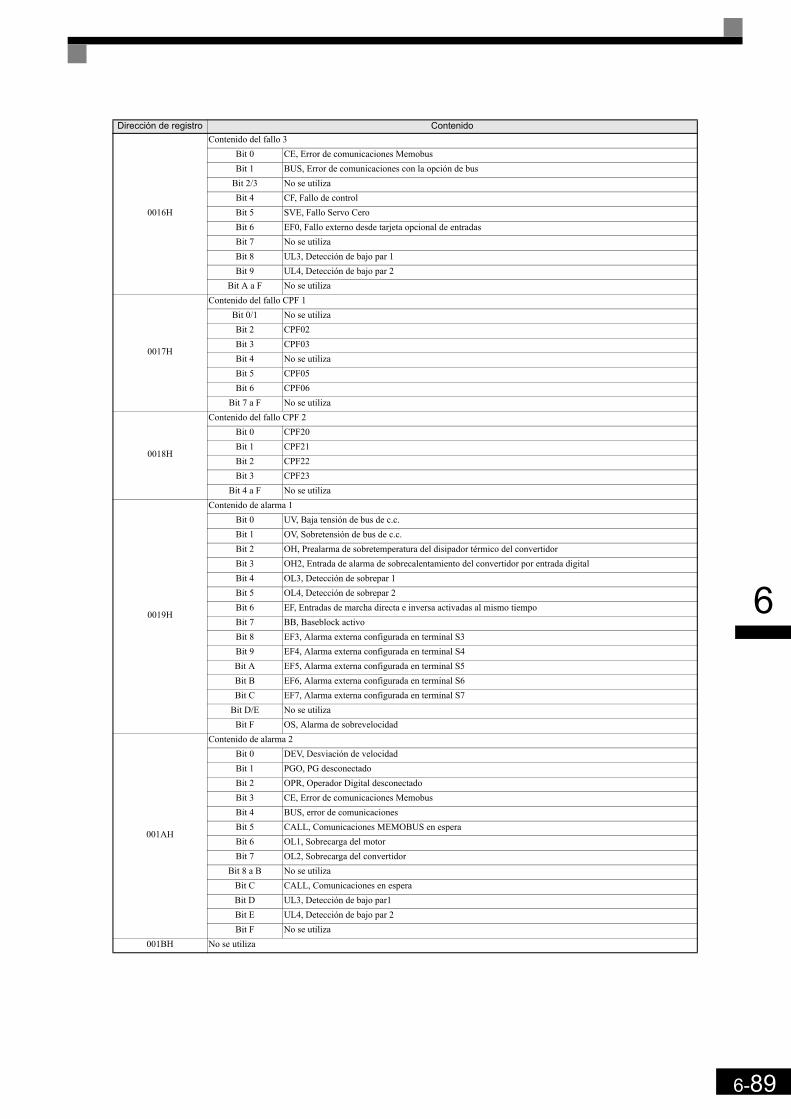
6-89
6
0016H
Contenido del fallo 3Bit 0 CE, Error de comunicaciones MemobusBit 1 BUS, Error de comunicaciones con la opción de bus
Bit 2/3 No se utilizaBit 4 CF, Fallo de controlBit 5 SVE, Fallo Servo CeroBit 6 EF0, Fallo externo desde tarjeta opcional de entradasBit 7 No se utilizaBit 8 UL3, Detección de bajo par 1Bit 9 UL4, Detección de bajo par 2
Bit A a F No se utiliza
0017H
Contenido del fallo CPF 1Bit 0/1 No se utilizaBit 2 CPF02Bit 3 CPF03Bit 4 No se utilizaBit 5 CPF05Bit 6 CPF06
Bit 7 a F No se utiliza
0018H
Contenido del fallo CPF 2Bit 0 CPF20Bit 1 CPF21Bit 2 CPF22Bit 3 CPF23
Bit 4 a F No se utiliza
0019H
Contenido de alarma 1Bit 0 UV, Baja tensión de bus de c.c.Bit 1 OV, Sobretensión de bus de c.c.Bit 2 OH, Prealarma de sobretemperatura del disipador térmico del convertidorBit 3 OH2, Entrada de alarma de sobrecalentamiento del convertidor por entrada digitalBit 4 OL3, Detección de sobrepar 1Bit 5 OL4, Detección de sobrepar 2Bit 6 EF, Entradas de marcha directa e inversa activadas al mismo tiempoBit 7 BB, Baseblock activoBit 8 EF3, Alarma externa configurada en terminal S3Bit 9 EF4, Alarma externa configurada en terminal S4Bit A EF5, Alarma externa configurada en terminal S5Bit B EF6, Alarma externa configurada en terminal S6Bit C EF7, Alarma externa configurada en terminal S7
Bit D/E No se utilizaBit F OS, Alarma de sobrevelocidad
001AH
Contenido de alarma 2Bit 0 DEV, Desviación de velocidadBit 1 PGO, PG desconectadoBit 2 OPR, Operador Digital desconectadoBit 3 CE, Error de comunicaciones MemobusBit 4 BUS, error de comunicacionesBit 5 CALL, Comunicaciones MEMOBUS en esperaBit 6 OL1, Sobrecarga del motorBit 7 OL2, Sobrecarga del convertidor
Bit 8 a B No se utilizaBit C CALL, Comunicaciones en esperaBit D UL3, Detección de bajo par1Bit E UL4, Detección de bajo par 2Bit F No se utiliza
001BH No se utiliza
Dirección de registro Contenido
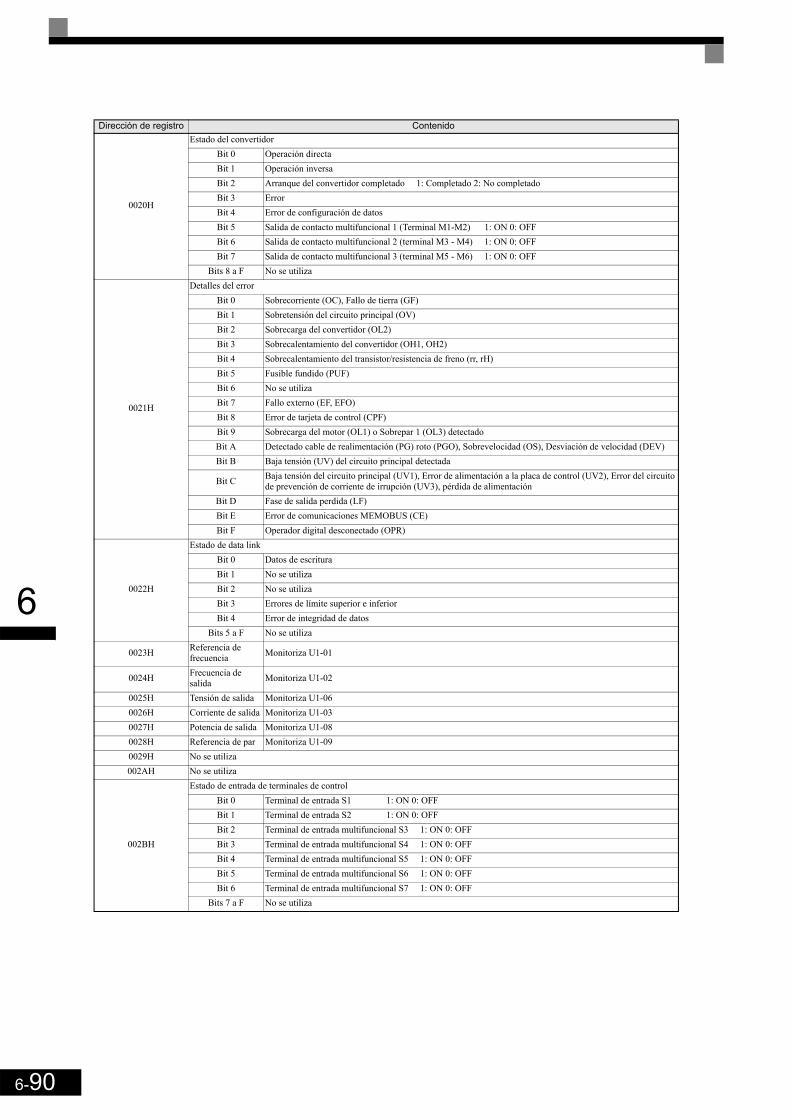
6-90
6
0020H
Estado del convertidorBit 0 Operación directaBit 1 Operación inversaBit 2 Arranque del convertidor completado 1: Completado 2: No completadoBit 3 ErrorBit 4 Error de configuración de datosBit 5 Salida de contacto multifuncional 1 (Terminal M1-M2) 1: ON 0: OFFBit 6 Salida de contacto multifuncional 2 (terminal M3 - M4) 1: ON 0: OFFBit 7 Salida de contacto multifuncional 3 (terminal M5 - M6) 1: ON 0: OFF
Bits 8 a F No se utiliza
0021H
Detalles del errorBit 0 Sobrecorriente (OC), Fallo de tierra (GF)Bit 1 Sobretensión del circuito principal (OV)Bit 2 Sobrecarga del convertidor (OL2)Bit 3 Sobrecalentamiento del convertidor (OH1, OH2)Bit 4 Sobrecalentamiento del transistor/resistencia de freno (rr, rH)Bit 5 Fusible fundido (PUF)Bit 6 No se utilizaBit 7 Fallo externo (EF, EFO)Bit 8 Error de tarjeta de control (CPF)Bit 9 Sobrecarga del motor (OL1) o Sobrepar 1 (OL3) detectadoBit A Detectado cable de realimentación (PG) roto (PGO), Sobrevelocidad (OS), Desviación de velocidad (DEV)Bit B Baja tensión (UV) del circuito principal detectada
Bit C Baja tensión del circuito principal (UV1), Error de alimentación a la placa de control (UV2), Error del circuito de prevención de corriente de irrupción (UV3), pérdida de alimentación
Bit D Fase de salida perdida (LF)Bit E Error de comunicaciones MEMOBUS (CE)Bit F Operador digital desconectado (OPR)
0022H
Estado de data linkBit 0 Datos de escrituraBit 1 No se utilizaBit 2 No se utilizaBit 3 Errores de límite superior e inferiorBit 4 Error de integridad de datos
Bits 5 a F No se utiliza
0023H Referencia de frecuencia Monitoriza U1-01
0024H Frecuencia de salida Monitoriza U1-02
0025H Tensión de salida Monitoriza U1-060026H Corriente de salida Monitoriza U1-030027H Potencia de salida Monitoriza U1-080028H Referencia de par Monitoriza U1-090029H No se utiliza002AH No se utiliza
002BH
Estado de entrada de terminales de controlBit 0 Terminal de entrada S1 1: ON 0: OFFBit 1 Terminal de entrada S2 1: ON 0: OFFBit 2 Terminal de entrada multifuncional S3 1: ON 0: OFFBit 3 Terminal de entrada multifuncional S4 1: ON 0: OFFBit 4 Terminal de entrada multifuncional S5 1: ON 0: OFFBit 5 Terminal de entrada multifuncional S6 1: ON 0: OFFBit 6 Terminal de entrada multifuncional S7 1: ON 0: OFF
Bits 7 a F No se utiliza
Dirección de registro Contenido
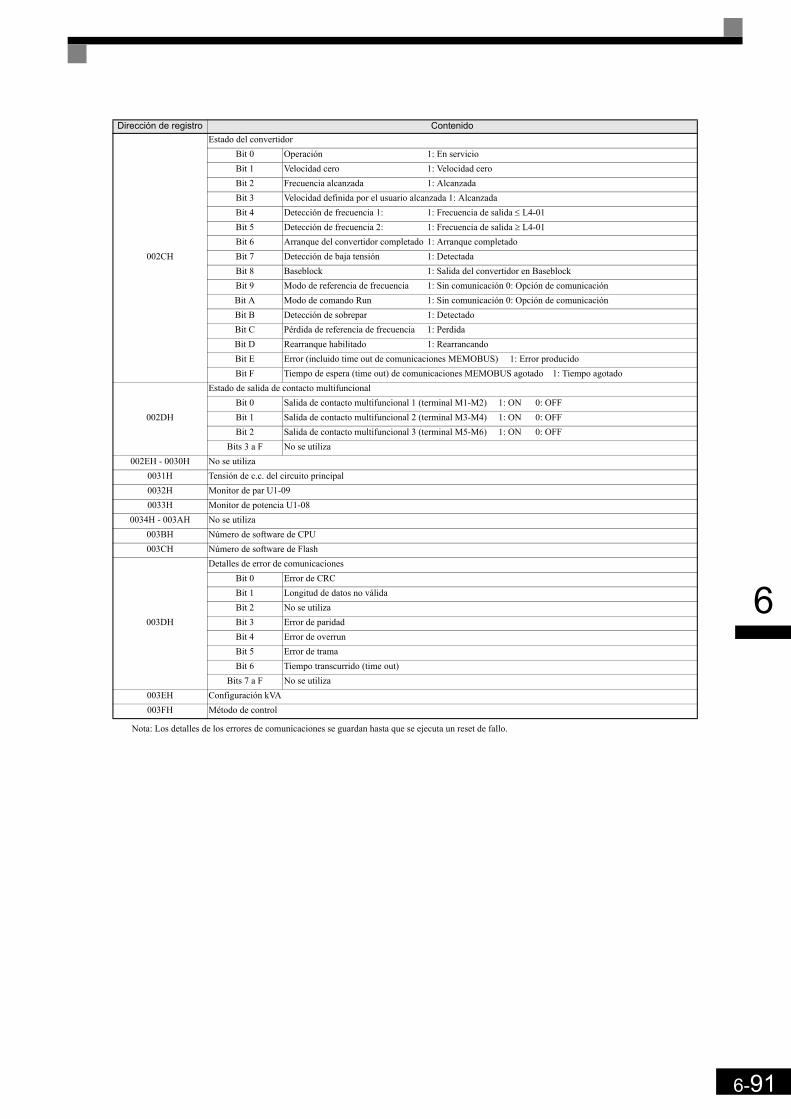
6-91
6
Nota: Los detalles de los errores de comunicaciones se guardan hasta que se ejecuta un reset de fallo.
002CH
Estado del convertidorBit 0 Operación 1: En servicioBit 1 Velocidad cero 1: Velocidad ceroBit 2 Frecuencia alcanzada 1: AlcanzadaBit 3 Velocidad definida por el usuario alcanzada 1: AlcanzadaBit 4 Detección de frecuencia 1: 1: Frecuencia de salida ≤ L4-01Bit 5 Detección de frecuencia 2: 1: Frecuencia de salida ≥ L4-01Bit 6 Arranque del convertidor completado 1: Arranque completadoBit 7 Detección de baja tensión 1: DetectadaBit 8 Baseblock 1: Salida del convertidor en BaseblockBit 9 Modo de referencia de frecuencia 1: Sin comunicación 0: Opción de comunicaciónBit A Modo de comando Run 1: Sin comunicación 0: Opción de comunicaciónBit B Detección de sobrepar 1: DetectadoBit C Pérdida de referencia de frecuencia 1: PerdidaBit D Rearranque habilitado 1: RearrancandoBit E Error (incluido time out de comunicaciones MEMOBUS) 1: Error producidoBit F Tiempo de espera (time out) de comunicaciones MEMOBUS agotado 1: Tiempo agotado
002DH
Estado de salida de contacto multifuncionalBit 0 Salida de contacto multifuncional 1 (terminal M1-M2) 1: ON 0: OFFBit 1 Salida de contacto multifuncional 2 (terminal M3-M4) 1: ON 0: OFFBit 2 Salida de contacto multifuncional 3 (terminal M5-M6) 1: ON 0: OFF
Bits 3 a F No se utiliza002EH - 0030H No se utiliza
0031H Tensión de c.c. del circuito principal0032H Monitor de par U1-090033H Monitor de potencia U1-08
0034H - 003AH No se utiliza003BH Número de software de CPU003CH Número de software de Flash
003DH
Detalles de error de comunicacionesBit 0 Error de CRCBit 1 Longitud de datos no válidaBit 2 No se utilizaBit 3 Error de paridadBit 4 Error de overrunBit 5 Error de tramaBit 6 Tiempo transcurrido (time out)
Bits 7 a F No se utiliza003EH Configuración kVA003FH Método de control
Dirección de registro Contenido
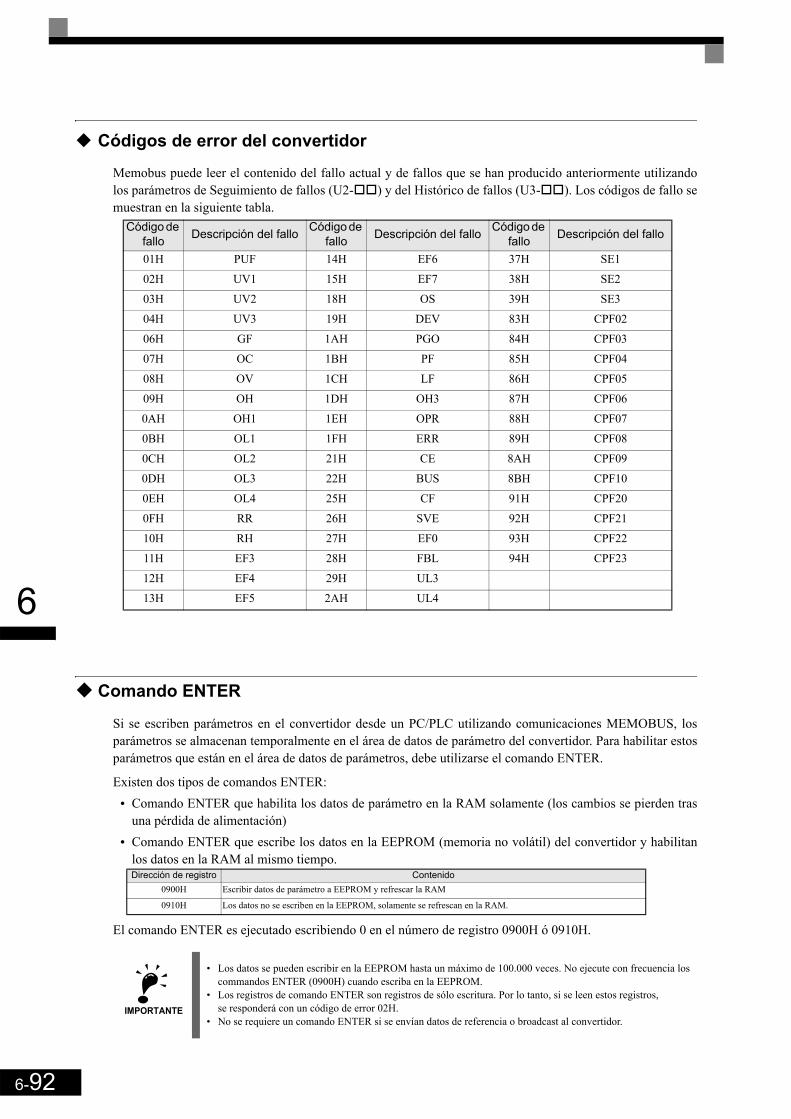
6-92
6
Códigos de error del convertidor
Memobus puede leer el contenido del fallo actual y de fallos que se han producido anteriormente utilizandolos parámetros de Seguimiento de fallos (U2- ) y del Histórico de fallos (U3- ). Los códigos de fallo semuestran en la siguiente tabla.
Comando ENTER
Si se escriben parámetros en el convertidor desde un PC/PLC utilizando comunicaciones MEMOBUS, losparámetros se almacenan temporalmente en el área de datos de parámetro del convertidor. Para habilitar estosparámetros que están en el área de datos de parámetros, debe utilizarse el comando ENTER.
Existen dos tipos de comandos ENTER: • Comando ENTER que habilita los datos de parámetro en la RAM solamente (los cambios se pierden tras
una pérdida de alimentación)• Comando ENTER que escribe los datos en la EEPROM (memoria no volátil) del convertidor y habilitan
los datos en la RAM al mismo tiempo.
El comando ENTER es ejecutado escribiendo 0 en el número de registro 0900H ó 0910H.
Código de fallo Descripción del fallo Código de
fallo Descripción del fallo Código de fallo Descripción del fallo
01H PUF 14H EF6 37H SE1
02H UV1 15H EF7 38H SE2
03H UV2 18H OS 39H SE3
04H UV3 19H DEV 83H CPF02
06H GF 1AH PGO 84H CPF03
07H OC 1BH PF 85H CPF04
08H OV 1CH LF 86H CPF05
09H OH 1DH OH3 87H CPF06
0AH OH1 1EH OPR 88H CPF07
0BH OL1 1FH ERR 89H CPF08
0CH OL2 21H CE 8AH CPF09
0DH OL3 22H BUS 8BH CPF10
0EH OL4 25H CF 91H CPF20
0FH RR 26H SVE 92H CPF21
10H RH 27H EF0 93H CPF22
11H EF3 28H FBL 94H CPF23
12H EF4 29H UL3
13H EF5 2AH UL4
Dirección de registro Contenido0900H Escribir datos de parámetro a EEPROM y refrescar la RAM
0910H Los datos no se escriben en la EEPROM, solamente se refrescan en la RAM.
IMPORTANTE
• Los datos se pueden escribir en la EEPROM hasta un máximo de 100.000 veces. No ejecute con frecuencia los commandos ENTER (0900H) cuando escriba en la EEPROM.
• Los registros de comando ENTER son registros de sólo escritura. Por lo tanto, si se leen estos registros, se responderá con un código de error 02H.
• No se requiere un comando ENTER si se envían datos de referencia o broadcast al convertidor.
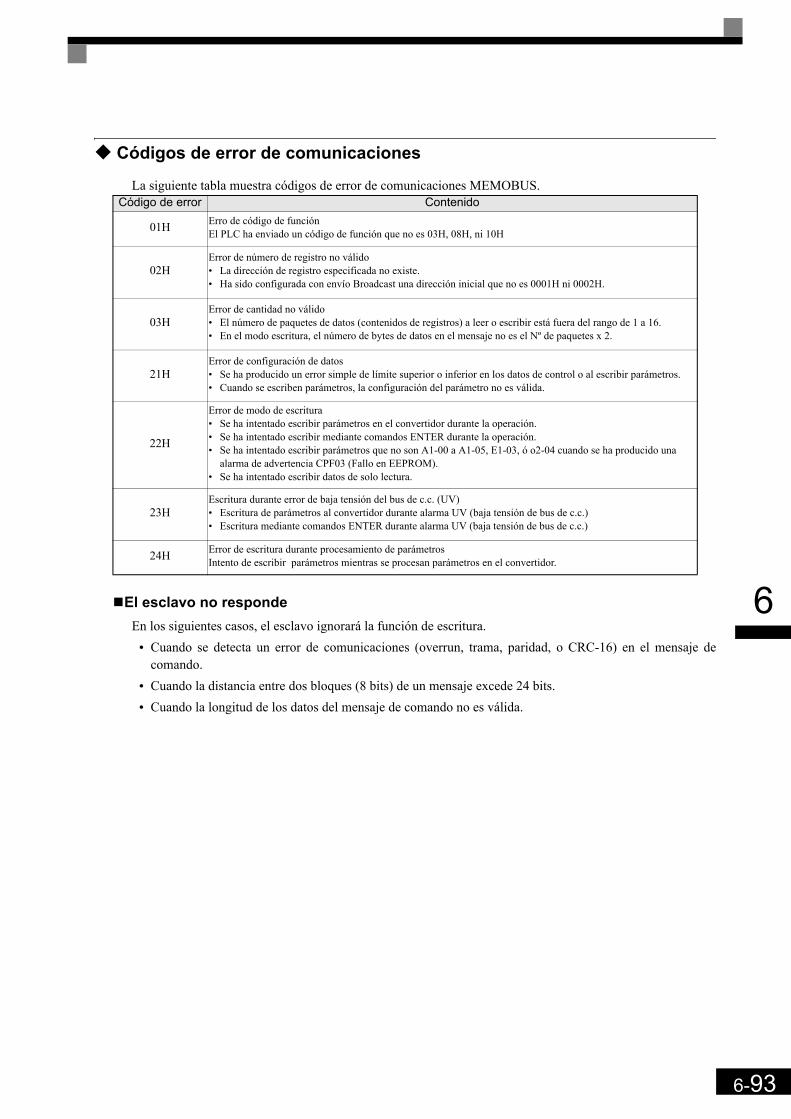
6-93
6
Códigos de error de comunicaciones
La siguiente tabla muestra códigos de error de comunicaciones MEMOBUS.
El esclavo no respondeEn los siguientes casos, el esclavo ignorará la función de escritura.
• Cuando se detecta un error de comunicaciones (overrun, trama, paridad, o CRC-16) en el mensaje decomando.
• Cuando la distancia entre dos bloques (8 bits) de un mensaje excede 24 bits.• Cuando la longitud de los datos del mensaje de comando no es válida.
Código de error Contenido
01H Erro de código de funciónEl PLC ha enviado un código de función que no es 03H, 08H, ni 10H
02HError de número de registro no válido• La dirección de registro especificada no existe.• Ha sido configurada con envío Broadcast una dirección inicial que no es 0001H ni 0002H.
03HError de cantidad no válido• El número de paquetes de datos (contenidos de registros) a leer o escribir está fuera del rango de 1 a 16.• En el modo escritura, el número de bytes de datos en el mensaje no es el Nº de paquetes x 2.
21HError de configuración de datos• Se ha producido un error simple de límite superior o inferior en los datos de control o al escribir parámetros.• Cuando se escriben parámetros, la configuración del parámetro no es válida.
22H
Error de modo de escritura• Se ha intentado escribir parámetros en el convertidor durante la operación.• Se ha intentado escribir mediante comandos ENTER durante la operación.• Se ha intentado escribir parámetros que no son A1-00 a A1-05, E1-03, ó o2-04 cuando se ha producido una
alarma de advertencia CPF03 (Fallo en EEPROM).• Se ha intentado escribir datos de solo lectura.
23HEscritura durante error de baja tensión del bus de c.c. (UV)• Escritura de parámetros al convertidor durante alarma UV (baja tensión de bus de c.c.)• Escritura mediante comandos ENTER durante alarma UV (baja tensión de bus de c.c.)
24H Error de escritura durante procesamiento de parámetrosIntento de escribir parámetros mientras se procesan parámetros en el convertidor.
6-94
6
Detección y corrección de errores
Este capítulo describe los displays de errores y las contramedidas para los problemas del convertidor y el motor.
Funciones de protección y diagnóstico.....................................................................7-2Detección y corrección de errores ..........................................................................7-18

7-2
7
Funciones de protección y diagnóstico
Esta sección describe las funciones de fallo y alarma del convertidor. Estas funciones incluyen la detección defallos, de alarmas, de errores de programación y de errores de autotuning.
Detección de fallos
Cuando el convertidor detecta un fallo, se activa la salida de contacto de fallo y la salida del convertidor separa, lo que causa que el motor marche libre hasta su detención. (Puede seleccionarse el método de detenciónpara algunos fallos). Se visualiza un código de error en el Operador Digital/Monitor LED.
Los fallos pueden ser categorizados en dos grupos.• Fallos que pueden ser reseteados utilizando una entrada o la tecla de reset del Operador Digital sin conectar/
desconectar la alimentación (fallos reseteables)• Fallos que requieren conectar/desconectar la alimentación (fallos no reseteables)
Cuando ocurra un fallo consulte la información que se muestra a continuación para identificar el fallo y corre-gir sus causas. Para resetear un fallo es necesario retirar la señal de RUN y corregir la razón del fallo. En caso contrario no seaceptará un reseteo y el convertidor se disparará de nuevo con el mismo error.
En las siguientes tablas se muestra una lista de fallos con sus acciones correctivas.
Tabla 7.1 Fallos reseteables
Display Significado Causas probables Acciones de corrección
GFFallo de tierra
Fallo de tierraLa corriente a tierra en la salida del convertidor ha excedido el 50% de la corriente nominal de salida del convertidor y L8-09 = 1 (habilitado).
Una salida del convertidor ha sido cortocircuitada a tierra o un DCCT está defectuoso.El contactor de salida se ha abierto cuando la salida del convertidor aún estaba activa.
Retire el motor y haga funcionar el convertidor sin el motor.
Compruebe la existencia de alguna fase del motor cortocircuitada a tierra.
Compruebe la corriente de salida con un amperímetro de pinza para verificar la lectura de DCCT.
Compruebe la existencia de señales de contactor de motor erróneas en la secuencia de control.
OCSobrecorriente
SobrecorrienteLa corriente de salida ha excedido el nivel de detección de sobrecorriente.
Salida del convertidor cortocircuitada fase a fase, motor cortocircuitado, motor bloqueado, carga demasiado pesada, tiempo de aceleración o deceleración demasiado corto, se ha abierto o cerrado un contactor en la salida del convertidor, se está usando un motor especial o un motor con una corriente nominal mayor que la corriente de salida del convertidor.
Retire el motor y haga funcionar el convertidor sin el motor.
Compruebe la existencia de cortocircuito fase a fase en el motor.
Verifique los tiempos de aceleración/deceleración(C1- ).
Compruebe la existencia de cortocircuito fase a fase en la salida del convertidor.
PUFFusible bus c.c abierto
Fusible de bus de c.c. fundido.El fusible del circuito principal está abierto.Advertencia: Nunca haga funcionar el convertidor tras sustituir el fusible del bus de c.c. sin comprobar la existencia de cortocircuito en los componentes de potencia.
Terminales o transistores de salida cortocircuitados.
Compruebe la existencia de cortocircuito o fallos de aislamiento en el motor y en los cables del motor (fase a fase).
Sustituya el convertidor tras solucionar el fallo.
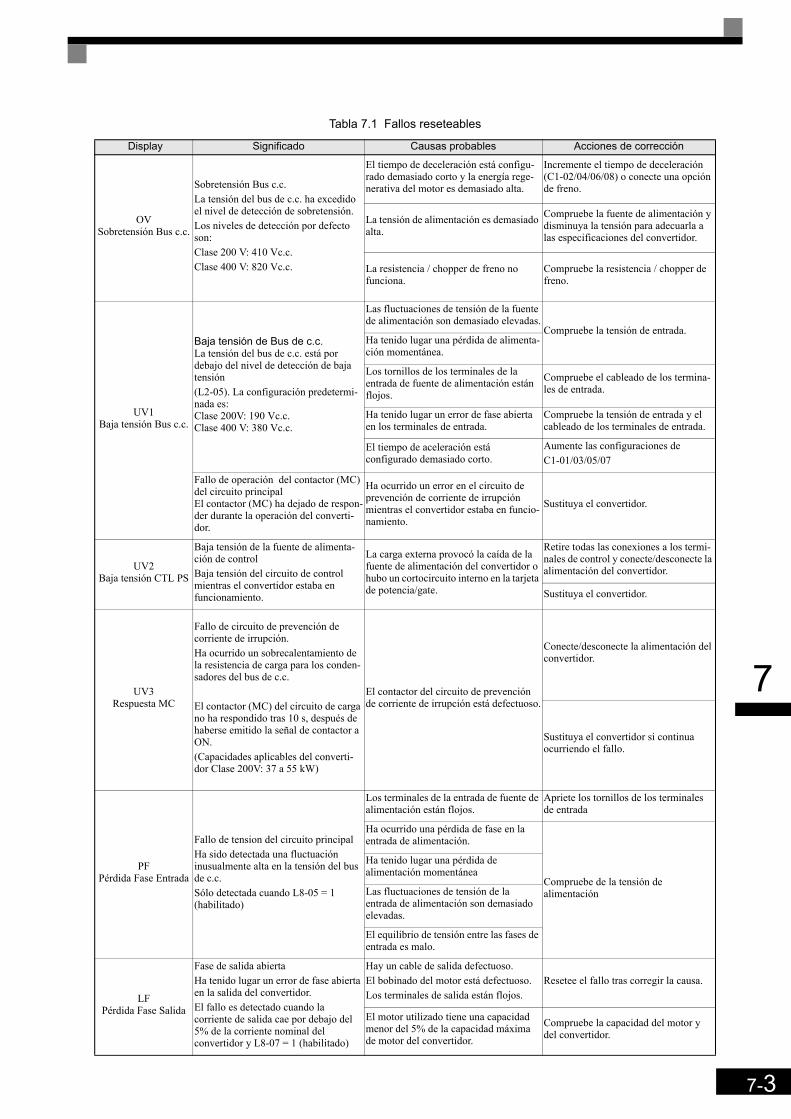
7-3
7
OVSobretensión Bus c.c.
Sobretensión Bus c.c.La tensión del bus de c.c. ha excedido el nivel de detección de sobretensión.Los niveles de detección por defecto son: Clase 200 V: 410 Vc.c.Clase 400 V: 820 Vc.c.
El tiempo de deceleración está configu-rado demasiado corto y la energía rege-nerativa del motor es demasiado alta.
Incremente el tiempo de deceleración (C1-02/04/06/08) o conecte una opción de freno.
La tensión de alimentación es demasiado alta.
Compruebe la fuente de alimentación y disminuya la tensión para adecuarla a las especificaciones del convertidor.
La resistencia / chopper de freno no funciona.
Compruebe la resistencia / chopper de freno.
UV1Baja tensión Bus c.c.
Baja tensión de Bus de c.c.La tensión del bus de c.c. está por debajo del nivel de detección de baja tensión (L2-05). La configuración predetermi-nada es:Clase 200V: 190 Vc.c.Clase 400 V: 380 Vc.c.
Las fluctuaciones de tensión de la fuente de alimentación son demasiado elevadas.
Compruebe la tensión de entrada. Ha tenido lugar una pérdida de alimenta-ción momentánea.
Los tornillos de los terminales de la entrada de fuente de alimentación están flojos.
Compruebe el cableado de los termina-les de entrada.
Ha tenido lugar un error de fase abierta en los terminales de entrada.
Compruebe la tensión de entrada y el cableado de los terminales de entrada.
El tiempo de aceleración está configurado demasiado corto.
Aumente las configuraciones deC1-01/03/05/07
Fallo de operación del contactor (MC) del circuito principalEl contactor (MC) ha dejado de respon-der durante la operación del converti-dor.
Ha ocurrido un error en el circuito de prevención de corriente de irrupción mientras el convertidor estaba en funcio-namiento.
Sustituya el convertidor.
UV2Baja tensión CTL PS
Baja tensión de la fuente de alimenta-ción de controlBaja tensión del circuito de control mientras el convertidor estaba en funcionamiento.
La carga externa provocó la caída de la fuente de alimentación del convertidor o hubo un cortocircuito interno en la tarjeta de potencia/gate.
Retire todas las conexiones a los termi-nales de control y conecte/desconecte la alimentación del convertidor.
Sustituya el convertidor.
UV3Respuesta MC
Fallo de circuito de prevención de corriente de irrupción.Ha ocurrido un sobrecalentamiento de la resistencia de carga para los conden-sadores del bus de c.c.
El contactor (MC) del circuito de carga no ha respondido tras 10 s, después de haberse emitido la señal de contactor a ON. (Capacidades aplicables del converti-dor Clase 200V: 37 a 55 kW)
El contactor del circuito de prevención de corriente de irrupción está defectuoso.
Conecte/desconecte la alimentación del convertidor.
Sustituya el convertidor si continua ocurriendo el fallo.
PFPérdida Fase Entrada
Fallo de tension del circuito principalHa sido detectada una fluctuación inusualmente alta en la tensión del bus de c.c. Sólo detectada cuando L8-05 = 1 (habilitado)
Los terminales de la entrada de fuente de alimentación están flojos.
Apriete los tornillos de los terminales de entrada
Ha ocurrido una pérdida de fase en la entrada de alimentación.
Compruebe de la tensión de alimentación
Ha tenido lugar una pérdida de alimentación momentánea
Las fluctuaciones de tensión de la entrada de alimentación son demasiado elevadas.
El equilibrio de tensión entre las fases de entrada es malo.
LFPérdida Fase Salida
Fase de salida abiertaHa tenido lugar un error de fase abierta en la salida del convertidor.El fallo es detectado cuando la corriente de salida cae por debajo del 5% de la corriente nominal del convertidor y L8-07 = 1 (habilitado)
Hay un cable de salida defectuoso.El bobinado del motor está defectuoso.Los terminales de salida están flojos.
Resetee el fallo tras corregir la causa.
El motor utilizado tiene una capacidad menor del 5% de la capacidad máxima de motor del convertidor.
Compruebe la capacidad del motor y del convertidor.
Tabla 7.1 Fallos reseteables
Display Significado Causas probables Acciones de corrección
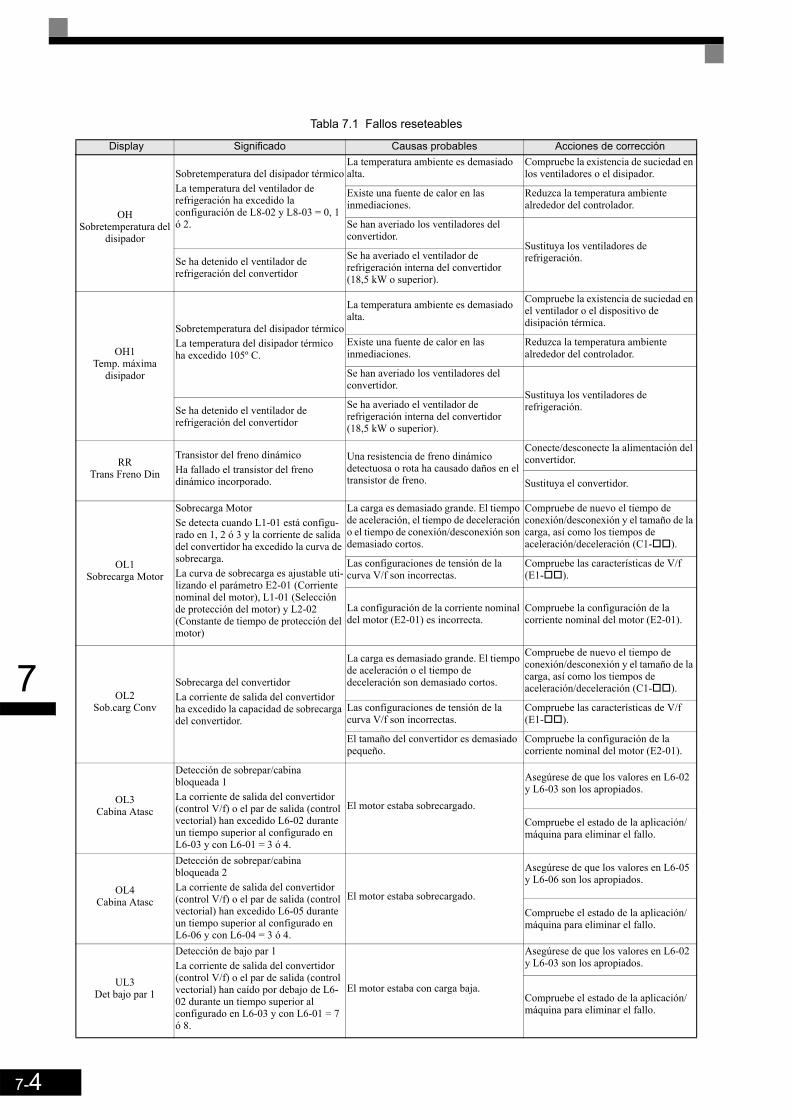
7-4
7
OH Sobretemperatura del
disipador
Sobretemperatura del disipador térmicoLa temperatura del ventilador de refrigeración ha excedido la configuración de L8-02 y L8-03 = 0, 1 ó 2.
La temperatura ambiente es demasiado alta.
Compruebe la existencia de suciedad en los ventiladores o el disipador.
Existe una fuente de calor en las inmediaciones.
Reduzca la temperatura ambiente alrededor del controlador.
Se han averiado los ventiladores del convertidor.
Sustituya los ventiladores de refrigeración.Se ha detenido el ventilador de
refrigeración del convertidor
Se ha averiado el ventilador de refrigeración interna del convertidor (18,5 kW o superior).
OH1Temp. máxima
disipador
Sobretemperatura del disipador térmicoLa temperatura del disipador térmico ha excedido 105º C.
La temperatura ambiente es demasiado alta.
Compruebe la existencia de suciedad en el ventilador o el dispositivo de disipación térmica.
Existe una fuente de calor en las inmediaciones.
Reduzca la temperatura ambiente alrededor del controlador.
Se han averiado los ventiladores del convertidor.
Sustituya los ventiladores de refrigeración.Se ha detenido el ventilador de
refrigeración del convertidor
Se ha averiado el ventilador de refrigeración interna del convertidor (18,5 kW o superior).
RRTrans Freno Din
Transistor del freno dinámicoHa fallado el transistor del freno dinámico incorporado.
Una resistencia de freno dinámico detectuosa o rota ha causado daños en el transistor de freno.
Conecte/desconecte la alimentación del convertidor.
Sustituya el convertidor.
OL1Sobrecarga Motor
Sobrecarga MotorSe detecta cuando L1-01 está configu-rado en 1, 2 ó 3 y la corriente de salida del convertidor ha excedido la curva de sobrecarga. La curva de sobrecarga es ajustable uti-lizando el parámetro E2-01 (Corriente nominal del motor), L1-01 (Selección de protección del motor) y L2-02 (Constante de tiempo de protección del motor)
La carga es demasiado grande. El tiempo de aceleración, el tiempo de deceleración o el tiempo de conexión/desconexión son demasiado cortos.
Compruebe de nuevo el tiempo de conexión/desconexión y el tamaño de la carga, así como los tiempos de aceleración/deceleración (C1- ).
Las configuraciones de tensión de la curva V/f son incorrectas.
Compruebe las características de V/f (E1- ).
La configuración de la corriente nominal del motor (E2-01) es incorrecta.
Compruebe la configuración de la corriente nominal del motor (E2-01).
OL2Sob.carg Conv
Sobrecarga del convertidorLa corriente de salida del convertidor ha excedido la capacidad de sobrecarga del convertidor.
La carga es demasiado grande. El tiempo de aceleración o el tiempo de deceleración son demasiado cortos.
Compruebe de nuevo el tiempo de conexión/desconexión y el tamaño de la carga, así como los tiempos de aceleración/deceleración (C1- ).
Las configuraciones de tensión de la curva V/f son incorrectas.
Compruebe las características de V/f (E1- ).
El tamaño del convertidor es demasiado pequeño.
Compruebe la configuración de la corriente nominal del motor (E2-01).
OL3Cabina Atasc
Detección de sobrepar/cabina bloqueada 1La corriente de salida del convertidor (control V/f) o el par de salida (control vectorial) han excedido L6-02 durante un tiempo superior al configurado en L6-03 y con L6-01 = 3 ó 4.
El motor estaba sobrecargado.
Asegúrese de que los valores en L6-02 y L6-03 son los apropiados.
Compruebe el estado de la aplicación/máquina para eliminar el fallo.
OL4Cabina Atasc
Detección de sobrepar/cabina bloqueada 2La corriente de salida del convertidor (control V/f) o el par de salida (control vectorial) han excedido L6-05 durante un tiempo superior al configurado en L6-06 y con L6-04 = 3 ó 4.
El motor estaba sobrecargado.
Asegúrese de que los valores en L6-05 y L6-06 son los apropiados.
Compruebe el estado de la aplicación/máquina para eliminar el fallo.
UL3Det bajo par 1
Detección de bajo par 1La corriente de salida del convertidor (control V/f) o el par de salida (control vectorial) han caído por debajo de L6-02 durante un tiempo superior al configurado en L6-03 y con L6-01 = 7 ó 8.
El motor estaba con carga baja.
Asegúrese de que los valores en L6-02 y L6-03 son los apropiados.
Compruebe el estado de la aplicación/máquina para eliminar el fallo.
Tabla 7.1 Fallos reseteables
Display Significado Causas probables Acciones de corrección
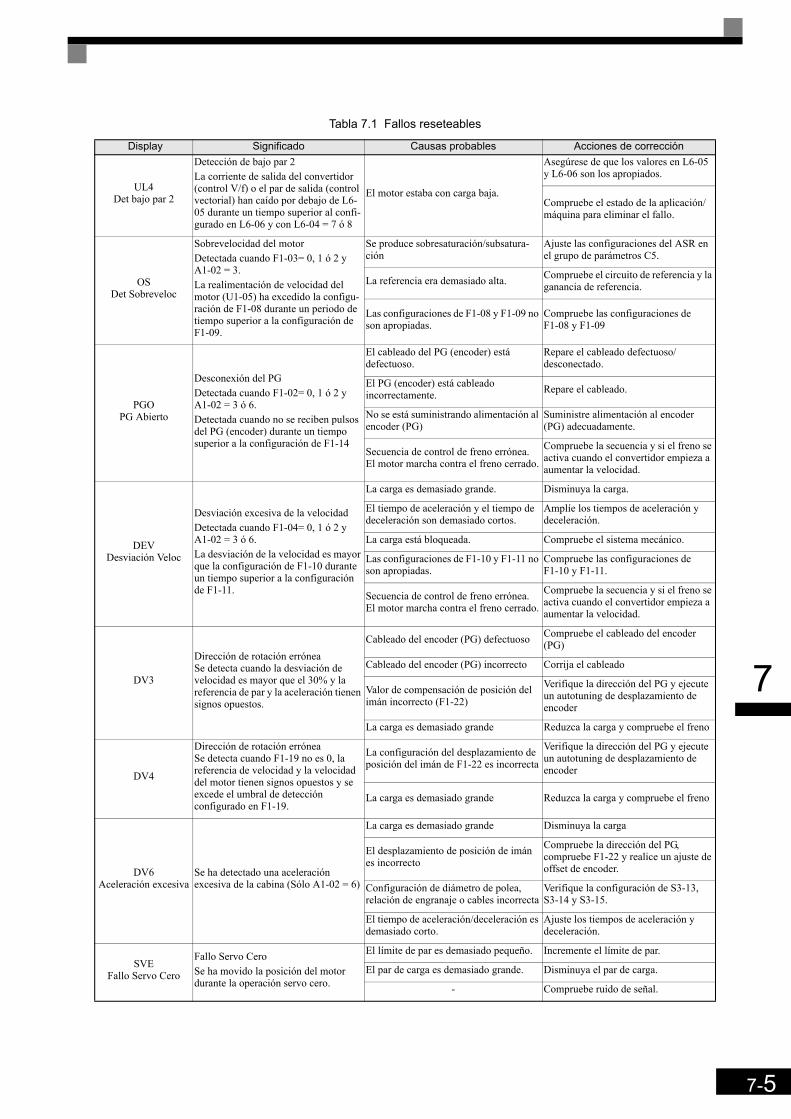
7-5
7
UL4Det bajo par 2
Detección de bajo par 2La corriente de salida del convertidor (control V/f) o el par de salida (control vectorial) han caído por debajo de L6-05 durante un tiempo superior al confi-gurado en L6-06 y con L6-04 = 7 ó 8
El motor estaba con carga baja.
Asegúrese de que los valores en L6-05 y L6-06 son los apropiados.
Compruebe el estado de la aplicación/máquina para eliminar el fallo.
OSDet Sobreveloc
Sobrevelocidad del motorDetectada cuando F1-03= 0, 1 ó 2 y A1-02 = 3.La realimentación de velocidad del motor (U1-05) ha excedido la configu-ración de F1-08 durante un periodo de tiempo superior a la configuración de F1-09.
Se produce sobresaturación/subsatura-ción
Ajuste las configuraciones del ASR en el grupo de parámetros C5.
La referencia era demasiado alta. Compruebe el circuito de referencia y la ganancia de referencia.
Las configuraciones de F1-08 y F1-09 no son apropiadas.
Compruebe las configuraciones de F1-08 y F1-09
PGOPG Abierto
Desconexión del PG Detectada cuando F1-02= 0, 1 ó 2 y A1-02 = 3 ó 6.Detectada cuando no se reciben pulsos del PG (encoder) durante un tiempo superior a la configuración de F1-14
El cableado del PG (encoder) está defectuoso.
Repare el cableado defectuoso/desconectado.
El PG (encoder) está cableado incorrectamente. Repare el cableado.
No se está suministrando alimentación al encoder (PG)
Suministre alimentación al encoder (PG) adecuadamente.
Secuencia de control de freno errónea. El motor marcha contra el freno cerrado.
Compruebe la secuencia y si el freno se activa cuando el convertidor empieza a aumentar la velocidad.
DEVDesviación Veloc
Desviación excesiva de la velocidadDetectada cuando F1-04= 0, 1 ó 2 y A1-02 = 3 ó 6.La desviación de la velocidad es mayor que la configuración de F1-10 durante un tiempo superior a la configuración de F1-11.
La carga es demasiado grande. Disminuya la carga.
El tiempo de aceleración y el tiempo de deceleración son demasiado cortos.
Amplíe los tiempos de aceleración y deceleración.
La carga está bloqueada. Compruebe el sistema mecánico.
Las configuraciones de F1-10 y F1-11 no son apropiadas.
Compruebe las configuraciones de F1-10 y F1-11.
Secuencia de control de freno errónea. El motor marcha contra el freno cerrado.
Compruebe la secuencia y si el freno se activa cuando el convertidor empieza a aumentar la velocidad.
DV3
Dirección de rotación erróneaSe detecta cuando la desviación de velocidad es mayor que el 30% y la referencia de par y la aceleración tienen signos opuestos.
Cableado del encoder (PG) defectuoso Compruebe el cableado del encoder (PG)
Cableado del encoder (PG) incorrecto Corrija el cableado
Valor de compensación de posición del imán incorrecto (F1-22)
Verifique la dirección del PG y ejecute un autotuning de desplazamiento de encoder
La carga es demasiado grande Reduzca la carga y compruebe el freno
DV4
Dirección de rotación erróneaSe detecta cuando F1-19 no es 0, la referencia de velocidad y la velocidad del motor tienen signos opuestos y se excede el umbral de detección configurado en F1-19.
La configuración del desplazamiento de posición del imán de F1-22 es incorrecta
Verifique la dirección del PG y ejecute un autotuning de desplazamiento de encoder
La carga es demasiado grande Reduzca la carga y compruebe el freno
DV6Aceleración excesiva
Se ha detectado una aceleración excesiva de la cabina (Sólo A1-02 = 6)
La carga es demasiado grande Disminuya la carga
El desplazamiento de posición de imán es incorrecto
Compruebe la dirección del PG, compruebe F1-22 y realice un ajuste de offset de encoder.
Configuración de diámetro de polea, relación de engranaje o cables incorrecta
Verifique la configuración de S3-13, S3-14 y S3-15.
El tiempo de aceleración/deceleración es demasiado corto.
Ajuste los tiempos de aceleración y deceleración.
SVEFallo Servo Cero
Fallo Servo CeroSe ha movido la posición del motor durante la operación servo cero.
El límite de par es demasiado pequeño. Incremente el límite de par.
El par de carga es demasiado grande. Disminuya el par de carga.
- Compruebe ruido de señal.
Tabla 7.1 Fallos reseteables
Display Significado Causas probables Acciones de corrección
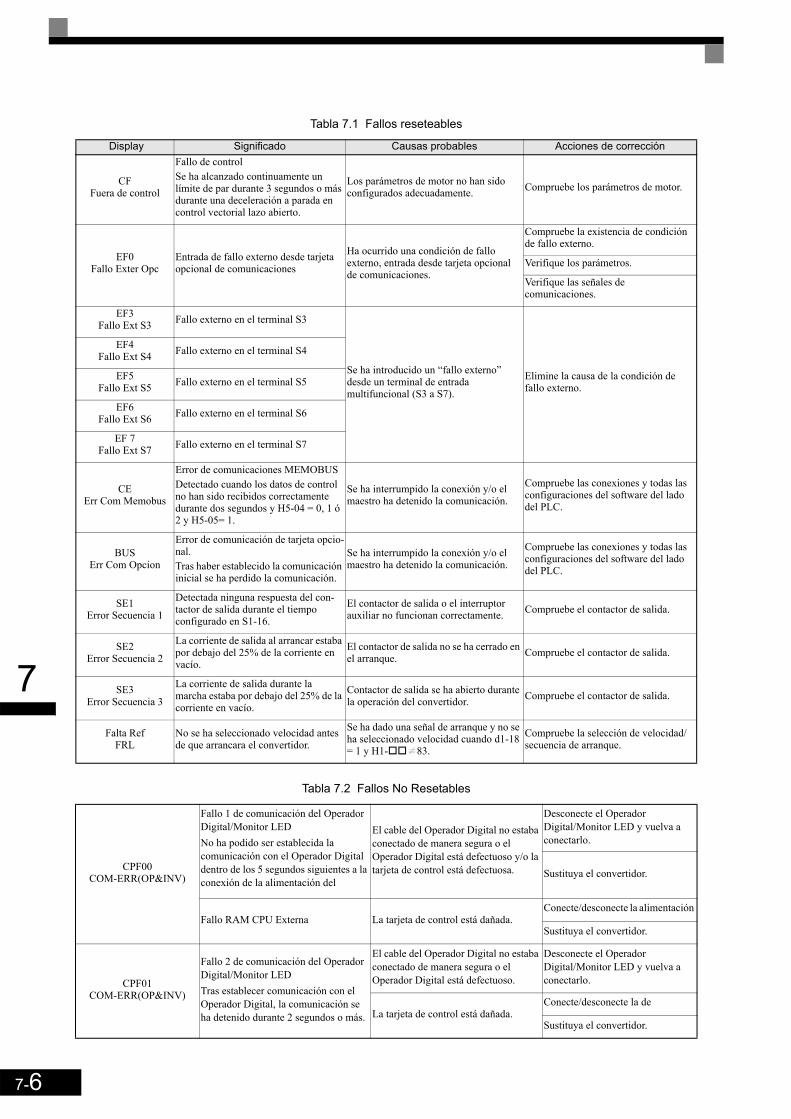
7-6
7
CFFuera de control
Fallo de controlSe ha alcanzado continuamente un límite de par durante 3 segundos o más durante una deceleración a parada en control vectorial lazo abierto.
Los parámetros de motor no han sido configurados adecuadamente. Compruebe los parámetros de motor.
EF0Fallo Exter Opc
Entrada de fallo externo desde tarjeta opcional de comunicaciones
Ha ocurrido una condición de fallo externo, entrada desde tarjeta opcional de comunicaciones.
Compruebe la existencia de condición de fallo externo.
Verifique los parámetros.
Verifique las señales de comunicaciones.
EF3Fallo Ext S3 Fallo externo en el terminal S3
Se ha introducido un “fallo externo” desde un terminal de entrada multifuncional (S3 a S7).
Elimine la causa de la condición de fallo externo.
EF4Fallo Ext S4 Fallo externo en el terminal S4
EF5Fallo Ext S5 Fallo externo en el terminal S5
EF6Fallo Ext S6 Fallo externo en el terminal S6
EF 7Fallo Ext S7 Fallo externo en el terminal S7
CEErr Com Memobus
Error de comunicaciones MEMOBUSDetectado cuando los datos de control no han sido recibidos correctamente durante dos segundos y H5-04 = 0, 1 ó 2 y H5-05= 1.
Se ha interrumpido la conexión y/o el maestro ha detenido la comunicación.
Compruebe las conexiones y todas las configuraciones del software del lado del PLC.
BUSErr Com Opcion
Error de comunicación de tarjeta opcio-nal.Tras haber establecido la comunicación inicial se ha perdido la comunicación.
Se ha interrumpido la conexión y/o el maestro ha detenido la comunicación.
Compruebe las conexiones y todas las configuraciones del software del lado del PLC.
SE1Error Secuencia 1
Detectada ninguna respuesta del con-tactor de salida durante el tiempo configurado en S1-16.
El contactor de salida o el interruptor auxiliar no funcionan correctamente. Compruebe el contactor de salida.
SE2Error Secuencia 2
La corriente de salida al arrancar estaba por debajo del 25% de la corriente en vacío.
El contactor de salida no se ha cerrado en el arranque. Compruebe el contactor de salida.
SE3Error Secuencia 3
La corriente de salida durante la marcha estaba por debajo del 25% de la corriente en vacío.
Contactor de salida se ha abierto durante la operación del convertidor. Compruebe el contactor de salida.
Falta RefFRL
No se ha seleccionado velocidad antes de que arrancara el convertidor.
Se ha dado una señal de arranque y no se ha seleccionado velocidad cuando d1-18 = 1 y H1- K83.
Compruebe la selección de velocidad/secuencia de arranque.
Tabla 7.2 Fallos No Resetables
CPF00COM-ERR(OP&INV)
Fallo 1 de comunicación del Operador Digital/Monitor LEDNo ha podido ser establecida la comunicación con el Operador Digital dentro de los 5 segundos siguientes a la conexión de la alimentación del
El cable del Operador Digital no estaba conectado de manera segura o el Operador Digital está defectuoso y/o la tarjeta de control está defectuosa.
Desconecte el Operador Digital/Monitor LED y vuelva a conectarlo.
Sustituya el convertidor.
Fallo RAM CPU Externa La tarjeta de control está dañada.Conecte/desconecte la alimentación
Sustituya el convertidor.
CPF01COM-ERR(OP&INV)
Fallo 2 de comunicación del Operador Digital/Monitor LEDTras establecer comunicación con el Operador Digital, la comunicación se ha detenido durante 2 segundos o más.
El cable del Operador Digital no estaba conectado de manera segura o el Operador Digital está defectuoso.
Desconecte el Operador Digital/Monitor LED y vuelva a conectarlo.
La tarjeta de control está dañada.Conecte/desconecte la de
Sustituya el convertidor.
Tabla 7.1 Fallos reseteables
Display Significado Causas probables Acciones de corrección
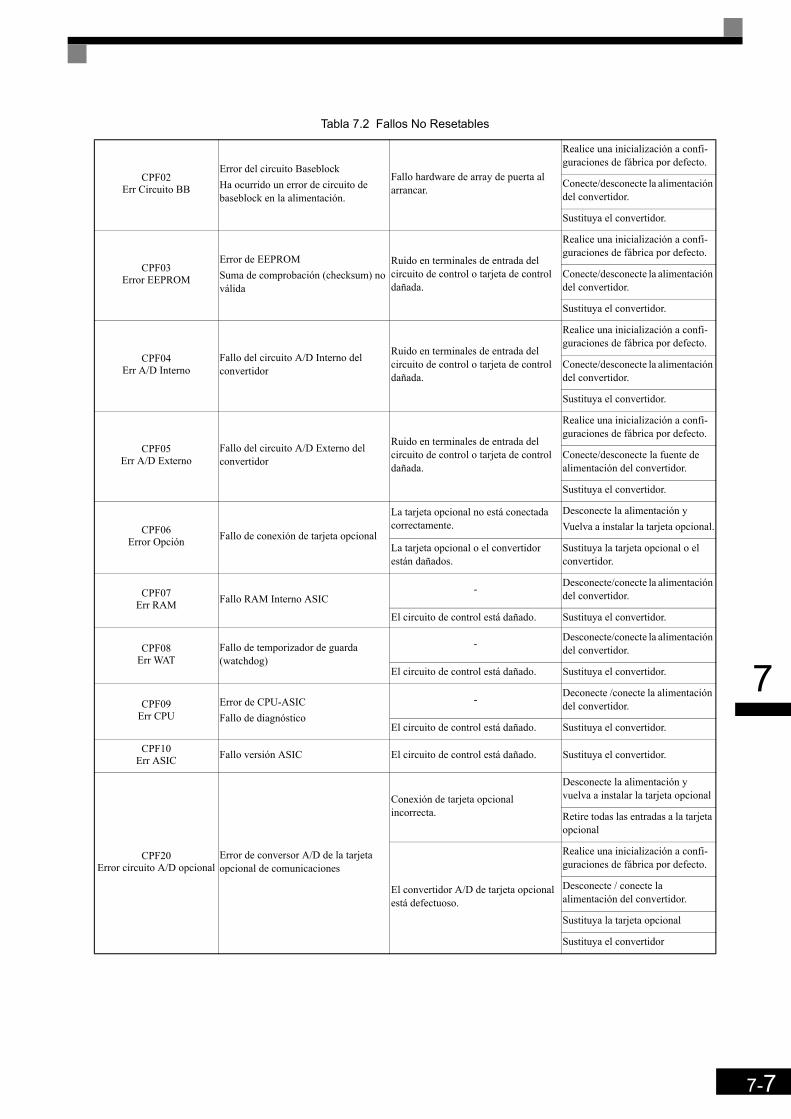
7-7
7
CPF02Err Circuito BB
Error del circuito BaseblockHa ocurrido un error de circuito de baseblock en la alimentación.
Fallo hardware de array de puerta al arrancar.
Realice una inicialización a confi-guraciones de fábrica por defecto.
Conecte/desconecte la alimentación del convertidor.
Sustituya el convertidor.
CPF03Error EEPROM
Error de EEPROMSuma de comprobación (checksum) no válida
Ruido en terminales de entrada delcircuito de control o tarjeta de control dañada.
Realice una inicialización a confi-guraciones de fábrica por defecto.
Conecte/desconecte la alimentación del convertidor.
Sustituya el convertidor.
CPF04Err A/D Interno
Fallo del circuito A/D Interno del convertidor
Ruido en terminales de entrada del circuito de control o tarjeta de control dañada.
Realice una inicialización a confi-guraciones de fábrica por defecto.
Conecte/desconecte la alimentación del convertidor.
Sustituya el convertidor.
CPF05Err A/D Externo
Fallo del circuito A/D Externo del convertidor
Ruido en terminales de entrada del circuito de control o tarjeta de control dañada.
Realice una inicialización a confi-guraciones de fábrica por defecto.
Conecte/desconecte la fuente de alimentación del convertidor.
Sustituya el convertidor.
CPF06Error Opción Fallo de conexión de tarjeta opcional
La tarjeta opcional no está conectada correctamente.
Desconecte la alimentación y Vuelva a instalar la tarjeta opcional.
La tarjeta opcional o el convertidor están dañados.
Sustituya la tarjeta opcional o el convertidor.
CPF07Err RAM Fallo RAM Interno ASIC
- Desconecte/conecte la alimentación del convertidor.
El circuito de control está dañado. Sustituya el convertidor.
CPF08Err WAT
Fallo de temporizador de guarda (watchdog)
- Desconecte/conecte la alimentación del convertidor.
El circuito de control está dañado. Sustituya el convertidor.
CPF09Err CPU
Error de CPU-ASIC Fallo de diagnóstico
- Deconecte /conecte la alimentación del convertidor.
El circuito de control está dañado. Sustituya el convertidor.
CPF10Err ASIC Fallo versión ASIC El circuito de control está dañado. Sustituya el convertidor.
CPF20Error circuito A/D opcional
Error de conversor A/D de la tarjeta opcional de comunicaciones
Conexión de tarjeta opcionalincorrecta.
Desconecte la alimentación y vuelva a instalar la tarjeta opcional
Retire todas las entradas a la tarjeta opcional
El convertidor A/D de tarjeta opcional está defectuoso.
Realice una inicialización a confi-guraciones de fábrica por defecto.
Desconecte / conecte la alimentación del convertidor.
Sustituya la tarjeta opcional
Sustituya el convertidor
Tabla 7.2 Fallos No Resetables
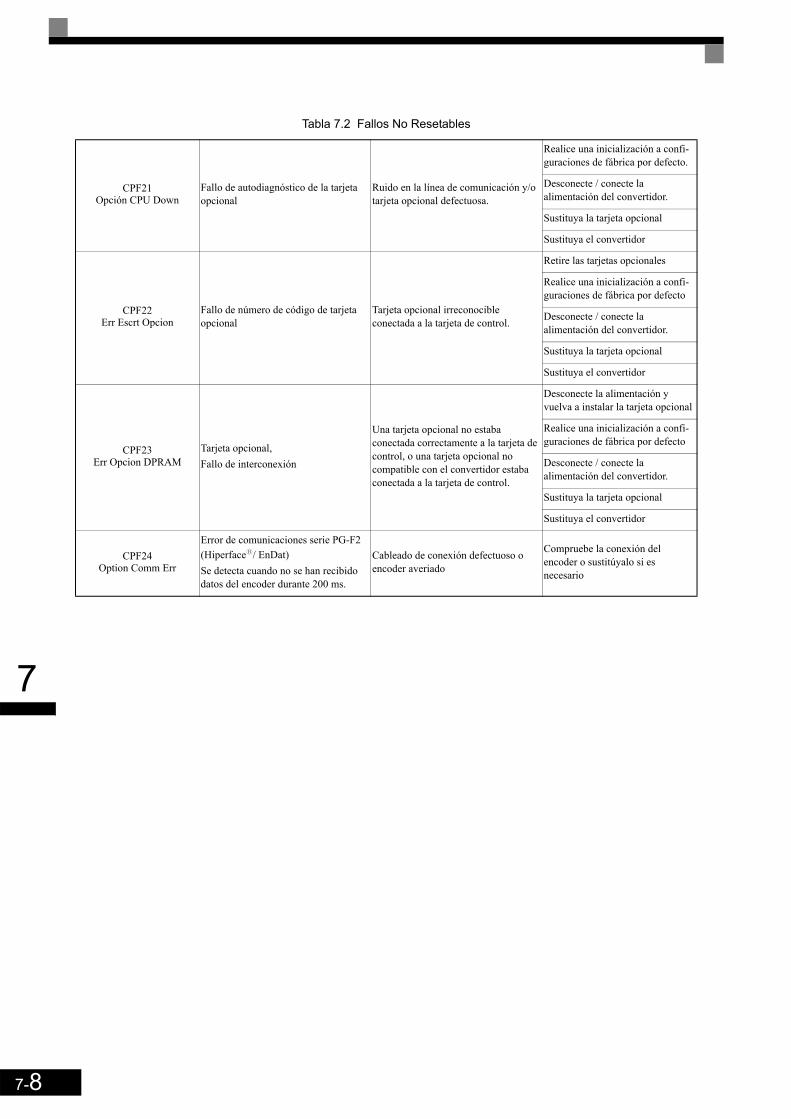
7-8
7
CPF21Opción CPU Down
Fallo de autodiagnóstico de la tarjeta opcional
Ruido en la línea de comunicación y/o tarjeta opcional defectuosa.
Realice una inicialización a confi-guraciones de fábrica por defecto.
Desconecte / conecte la alimentación del convertidor.
Sustituya la tarjeta opcional
Sustituya el convertidor
CPF22Err Escrt Opcion
Fallo de número de código de tarjeta opcional
Tarjeta opcional irreconocible conectada a la tarjeta de control.
Retire las tarjetas opcionales
Realice una inicialización a confi-guraciones de fábrica por defecto
Desconecte / conecte la alimentación del convertidor.
Sustituya la tarjeta opcional
Sustituya el convertidor
CPF23Err Opcion DPRAM
Tarjeta opcional,Fallo de interconexión
Una tarjeta opcional no estaba conectada correctamente a la tarjeta de control, o una tarjeta opcional no compatible con el convertidor estaba conectada a la tarjeta de control.
Desconecte la alimentación y vuelva a instalar la tarjeta opcional
Realice una inicialización a confi-guraciones de fábrica por defecto
Desconecte / conecte la alimentación del convertidor.
Sustituya la tarjeta opcional
Sustituya el convertidor
CPF24Option Comm Err
Error de comunicaciones serie PG-F2 (Hiperfacey/ EnDat) Se detecta cuando no se han recibido datos del encoder durante 200 ms.
Cableado de conexión defectuoso o encoder averiado
Compruebe la conexión del encoder o sustitúyalo si es necesario
Tabla 7.2 Fallos No Resetables
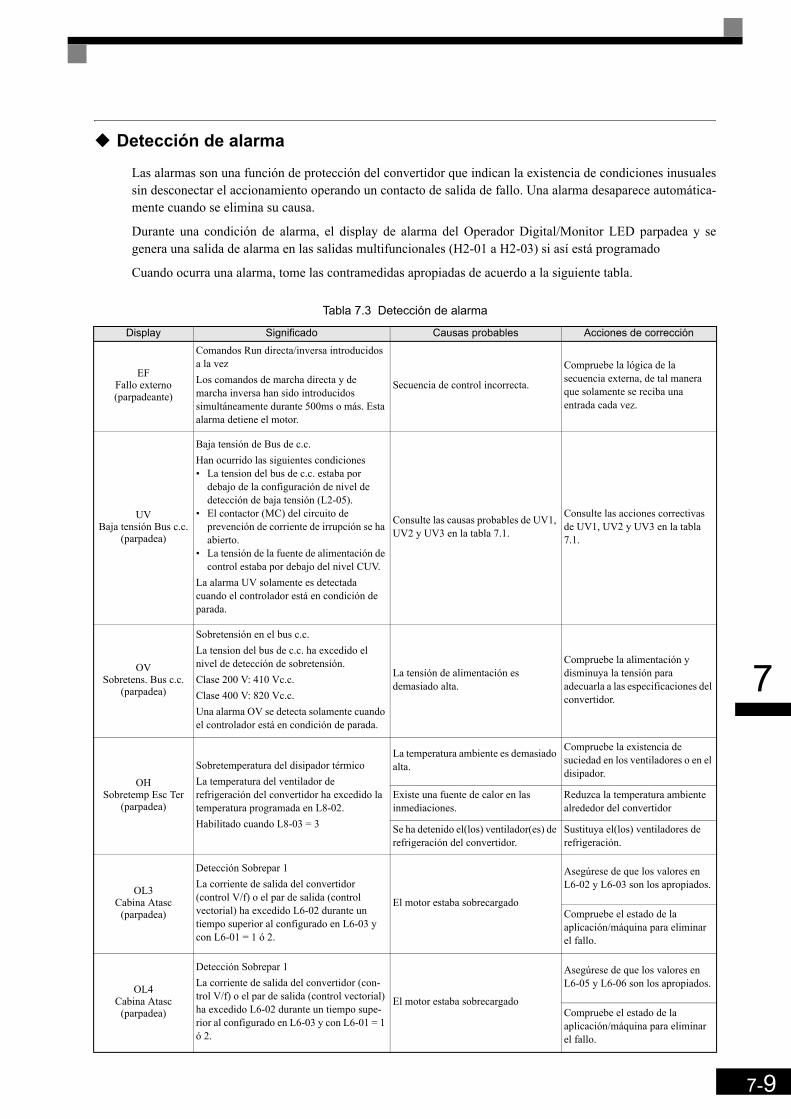
7-9
7
Detección de alarma
Las alarmas son una función de protección del convertidor que indican la existencia de condiciones inusualessin desconectar el accionamiento operando un contacto de salida de fallo. Una alarma desaparece automática-mente cuando se elimina su causa.
Durante una condición de alarma, el display de alarma del Operador Digital/Monitor LED parpadea y segenera una salida de alarma en las salidas multifuncionales (H2-01 a H2-03) si así está programado
Cuando ocurra una alarma, tome las contramedidas apropiadas de acuerdo a la siguiente tabla.
Tabla 7.3 Detección de alarma
Display Significado Causas probables Acciones de corrección
EFFallo externo (parpadeante)
Comandos Run directa/inversa introducidos a la vezLos comandos de marcha directa y de marcha inversa han sido introducidos simultáneamente durante 500ms o más. Esta alarma detiene el motor.
Secuencia de control incorrecta.
Compruebe la lógica de la secuencia externa, de tal manera que solamente se reciba una entrada cada vez.
UVBaja tensión Bus c.c.
(parpadea)
Baja tensión de Bus de c.c.Han ocurrido las siguientes condiciones • La tension del bus de c.c. estaba por
debajo de la configuración de nivel de detección de baja tensión (L2-05).
• El contactor (MC) del circuito de prevención de corriente de irrupción se ha abierto.
• La tensión de la fuente de alimentación de control estaba por debajo del nivel CUV.
La alarma UV solamente es detectada cuando el controlador está en condición de parada.
Consulte las causas probables de UV1, UV2 y UV3 en la tabla 7.1.
Consulte las acciones correctivas de UV1, UV2 y UV3 en la tabla 7.1.
OVSobretens. Bus c.c.
(parpadea)
Sobretensión en el bus c.c.La tension del bus de c.c. ha excedido el nivel de detección de sobretensión.Clase 200 V: 410 Vc.c.Clase 400 V: 820 Vc.c.Una alarma OV se detecta solamente cuando el controlador está en condición de parada.
La tensión de alimentación es demasiado alta.
Compruebe la alimentación y disminuya la tensión para adecuarla a las especificaciones del convertidor.
OH Sobretemp Esc Ter
(parpadea)
Sobretemperatura del disipador térmicoLa temperatura del ventilador de refrigeración del convertidor ha excedido la temperatura programada en L8-02.Habilitado cuando L8-03 = 3
La temperatura ambiente es demasiado alta.
Compruebe la existencia de suciedad en los ventiladores o en el disipador.
Existe una fuente de calor en lasinmediaciones.
Reduzca la temperatura ambiente alrededor del convertidor
Se ha detenido el(los) ventilador(es) de refrigeración del convertidor.
Sustituya el(los) ventiladores de refrigeración.
OL3Cabina Atasc
(parpadea)
Detección Sobrepar 1La corriente de salida del convertidor (control V/f) o el par de salida (control vectorial) ha excedido L6-02 durante un tiempo superior al configurado en L6-03 y con L6-01 = 1 ó 2.
El motor estaba sobrecargado
Asegúrese de que los valores en L6-02 y L6-03 son los apropiados.
Compruebe el estado de la aplicación/máquina para eliminar el fallo.
OL4Cabina Atasc
(parpadea)
Detección Sobrepar 1La corriente de salida del convertidor (con-trol V/f) o el par de salida (control vectorial) ha excedido L6-02 durante un tiempo supe-rior al configurado en L6-03 y con L6-01 = 1 ó 2.
El motor estaba sobrecargado
Asegúrese de que los valores en L6-05 y L6-06 son los apropiados.
Compruebe el estado de la aplicación/máquina para eliminar el fallo.
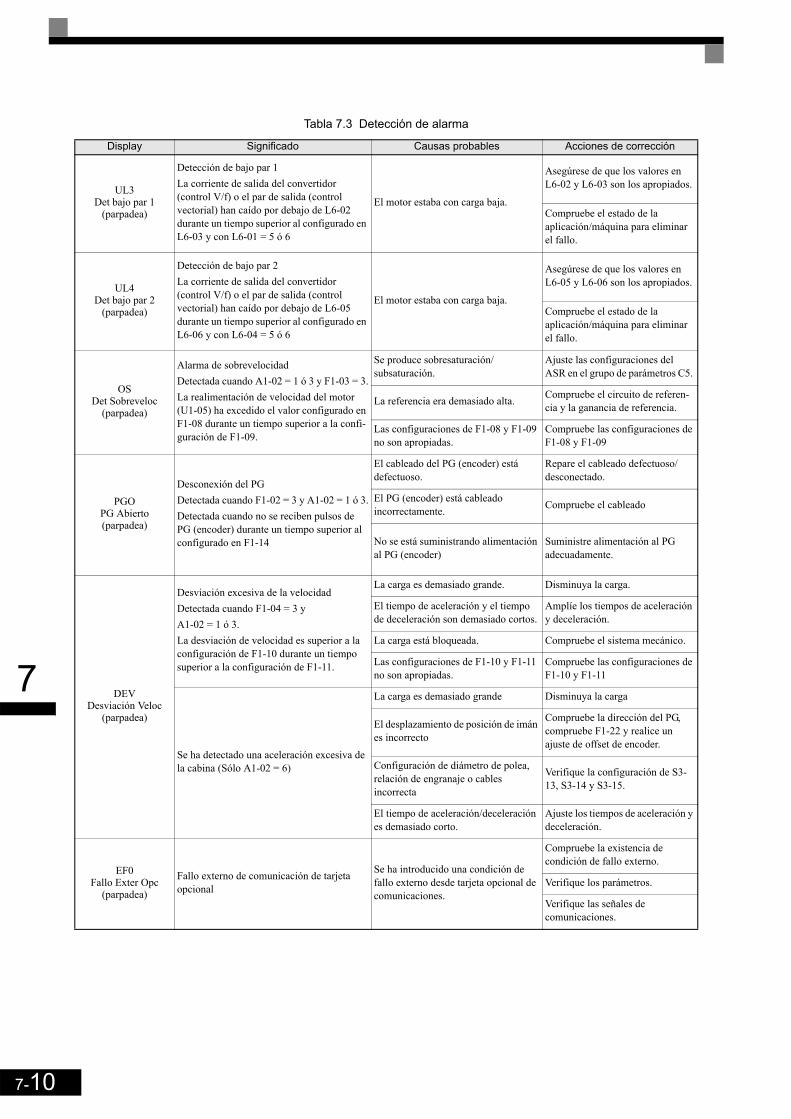
7-10
7
UL3Det bajo par 1
(parpadea)
Detección de bajo par 1La corriente de salida del convertidor (control V/f) o el par de salida (control vectorial) han caído por debajo de L6-02 durante un tiempo superior al configurado en L6-03 y con L6-01 = 5 ó 6
El motor estaba con carga baja.
Asegúrese de que los valores en L6-02 y L6-03 son los apropiados.
Compruebe el estado de la aplicación/máquina para eliminar el fallo.
UL4Det bajo par 2
(parpadea)
Detección de bajo par 2La corriente de salida del convertidor (control V/f) o el par de salida (control vectorial) han caído por debajo de L6-05 durante un tiempo superior al configurado en L6-06 y con L6-04 = 5 ó 6
El motor estaba con carga baja.
Asegúrese de que los valores en L6-05 y L6-06 son los apropiados.
Compruebe el estado de la aplicación/máquina para eliminar el fallo.
OSDet Sobreveloc
(parpadea)
Alarma de sobrevelocidadDetectada cuando A1-02 = 1 ó 3 y F1-03 = 3.La realimentación de velocidad del motor (U1-05) ha excedido el valor configurado en F1-08 durante un tiempo superior a la confi-guración de F1-09.
Se produce sobresaturación/subsaturación.
Ajuste las configuraciones del ASR en el grupo de parámetros C5.
La referencia era demasiado alta. Compruebe el circuito de referen-cia y la ganancia de referencia.
Las configuraciones de F1-08 y F1-09 no son apropiadas.
Compruebe las configuraciones de F1-08 y F1-09
PGOPG Abierto(parpadea)
Desconexión del PGDetectada cuando F1-02 = 3 y A1-02 = 1 ó 3.Detectada cuando no se reciben pulsos de PG (encoder) durante un tiempo superior al configurado en F1-14
El cableado del PG (encoder) está defectuoso.
Repare el cableado defectuoso/desconectado.
El PG (encoder) está cableado incorrectamente. Compruebe el cableado
No se está suministrando alimentación al PG (encoder)
Suministre alimentación al PG adecuadamente.
DEVDesviación Veloc
(parpadea)
Desviación excesiva de la velocidadDetectada cuando F1-04 = 3 y A1-02 = 1 ó 3.La desviación de velocidad es superior a la configuración de F1-10 durante un tiempo superior a la configuración de F1-11.
La carga es demasiado grande. Disminuya la carga.
El tiempo de aceleración y el tiempo de deceleración son demasiado cortos.
Amplíe los tiempos de aceleración y deceleración.
La carga está bloqueada. Compruebe el sistema mecánico.
Las configuraciones de F1-10 y F1-11 no son apropiadas.
Compruebe las configuraciones de F1-10 y F1-11
Se ha detectado una aceleración excesiva de la cabina (Sólo A1-02 = 6)
La carga es demasiado grande Disminuya la carga
El desplazamiento de posición de imán es incorrecto
Compruebe la dirección del PG, compruebe F1-22 y realice un ajuste de offset de encoder.
Configuración de diámetro de polea, relación de engranaje o cables incorrecta
Verifique la configuración de S3-13, S3-14 y S3-15.
El tiempo de aceleración/deceleración es demasiado corto.
Ajuste los tiempos de aceleración y deceleración.
EF0Fallo Exter Opc
(parpadea)
Fallo externo de comunicación de tarjeta opcional
Se ha introducido una condición de fallo externo desde tarjeta opcional de comunicaciones.
Compruebe la existencia de condición de fallo externo.
Verifique los parámetros.
Verifique las señales de comunicaciones.
Tabla 7.3 Detección de alarma
Display Significado Causas probables Acciones de corrección
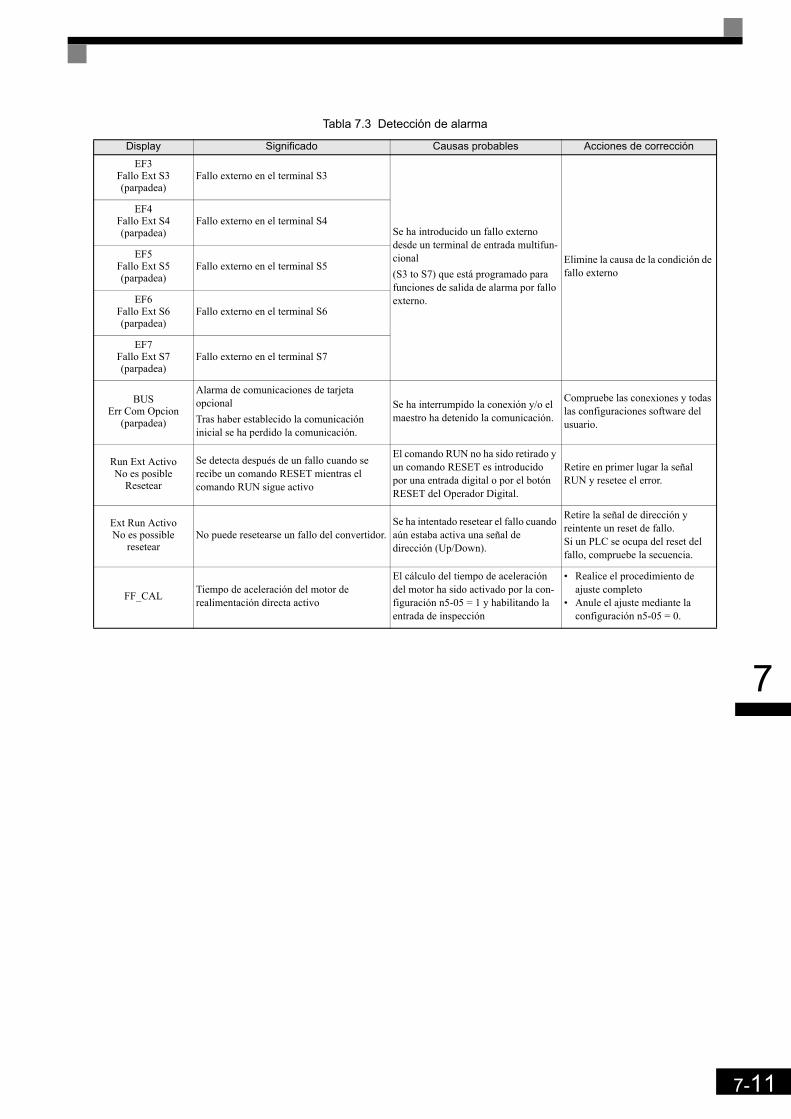
7-11
7
EF3Fallo Ext S3(parpadea)
Fallo externo en el terminal S3
Se ha introducido un fallo externo desde un terminal de entrada multifun-cional (S3 to S7) que está programado para funciones de salida de alarma por fallo externo.
Elimine la causa de la condición de fallo externo
EF4Fallo Ext S4(parpadea)
Fallo externo en el terminal S4
EF5Fallo Ext S5(parpadea)
Fallo externo en el terminal S5
EF6Fallo Ext S6(parpadea)
Fallo externo en el terminal S6
EF7Fallo Ext S7(parpadea)
Fallo externo en el terminal S7
BUSErr Com Opcion
(parpadea)
Alarma de comunicaciones de tarjeta opcionalTras haber establecido la comunicación inicial se ha perdido la comunicación.
Se ha interrumpido la conexión y/o el maestro ha detenido la comunicación.
Compruebe las conexiones y todas las configuraciones software del usuario.
Run Ext ActivoNo es posible
Resetear
Se detecta después de un fallo cuando se recibe un comando RESET mientras el comando RUN sigue activo
El comando RUN no ha sido retirado y un comando RESET es introducido por una entrada digital o por el botón RESET del Operador Digital.
Retire en primer lugar la señal RUN y resetee el error.
Ext Run Activo No es possible
resetearNo puede resetearse un fallo del convertidor.
Se ha intentado resetear el fallo cuando aún estaba activa una señal de dirección (Up/Down).
Retire la señal de dirección y reintente un reset de fallo.Si un PLC se ocupa del reset del fallo, compruebe la secuencia.
FF_CAL Tiempo de aceleración del motor derealimentación directa activo
El cálculo del tiempo de aceleración del motor ha sido activado por la con-figuración n5-05 = 1 y habilitando la entrada de inspección
• Realice el procedimiento de ajuste completo
• Anule el ajuste mediante laconfiguración n5-05 = 0.
Tabla 7.3 Detección de alarma
Display Significado Causas probables Acciones de corrección

7-12
7
Errores de programación del operador
Un error de programación del operador (OPE) se produce cuando se configuran incorrectamente dos o másparámetros relacionados entre sí o una configuración de parámetro individual es incorrecta. El convertidor noopera hasta que el valor del parámetro se configure correctamente; a pesar de todo, no se producirán otras sali-das de alarma o fallo. Si ocurre un OPE, cambie el parámetro relacionado comprobando la causa mostrada enla Tabla 7.4. Cuando se visualice un error OPE, pulse la tecla ENTER para ver U1-34 (OPE Detectado). Sevisualiza el parámetro que está causando el error OPE.
Tabla 7.4 Errores de programación del operador
Display Significado Causas probables Acciones de corrección
OPE01Selección kVA Error de configuración de kVA
La tarjeta de control ha sido sustituida y el parámetro kVA (O2-04) ha sido configurado incorrectamente.
Introduzca la configuración de kVA correcta consultando la página 5-64, Configuraciones de fábrica que cambian con la capacidad del convertidor (o2-04)
Se ha instalado un software no adecuado en el convertidor.
Compare U1-14 y el número de software de la placa de características. Sustituya el software si fuera necesario.
OPE02Límite
Configuración de parámetro fuera de rango
La configuración del parámetro estaba fuera del rango permitido.
Verifique las configuraciones de los parámetros.
Hiperfacey seleccionado (n8-35=4) y:• F1-01 es distinto de 512 ó 1024• F1-21 está configurado como 2
EnDat seleccionado (n8-35=5) y:• F1-01 es diferente de 512 ó 2048• F1-21 está configurado como 0 ó 1
S3-01 = 2 (piso corto avanzada) y:• E1-04 > 100Hz o• E1-04 < 6Hz o• d1-09 > 100Hz o• d1-09 < 4,8Hz o• C1-01 a C1-08 > 50 s o• C1-01 a C1-08 < 0,1 s.
OPE03Terminal
Entrada multifuncionalError Selección
Se ha comentido uno de los siguientes errores en las configuraciones de entrada multifuncional (H1-01 a H1-05):• Se han seleccionado funciones dupli-
cadas.• Se han seleccionado simultáneamente
External Baseblock NO (8) y External Baseblock NC (9).
• Se han configurado simultáneamente el comando de parada de emergencia NO (15) y NC(17).
Verifique las configuraciones de parámetro de H1-
OPE05Selección Secuen-
cia
RUN/Comando de referencia Error SelecciónLa selección de fuente de referencia b1-01 y/o el parámetro de selección de fuente RUN b1-02 están configurados como 3 (tarjeta opcional), pero no hay ningunatarjeta opcional instalada.
La tarjeta opcional no está instalada o está instalada incorrectamente
Verifique que la tarjeta está instalada. Desconecte la alimentación y vuelva a instalar la tarjeta opcional
Compruebe de nuevo la configuración de b1-01 y b1-02.
OPE06Falta PG Opcion Error de selección del método de control
Ha sido seleccionado uno de los métodos de control que necesitan realimentación de encoder (PG) (A1-02 =3/6), pero no hay instalada tarjeta opcional de PG.
Verifique la selección del método de control en el parámetro A1-02 y/o la instalación la tarjeta opcional del PG.
OPE08Selección Constante
Error de selección de función
Ha sido hecha una configuración que no es compatible con el método de control actual.Ejemplo: Se ha seleccionado una función utilizada solamente con control vectorial lazo abierto para control V/f.
Verifique el método de control y la función.

7-13
7
OPE10Conf Patrón V/f Error de configuración del parámetro V/f Las configuraciones de parámetro V/f
estaban fuera del rango.
Compruebe los parámetros (E1-). Un valor de frecuencia/tensión
puede ser configurado más alto que la fecuencia/tensión máxima.
ERRErr R/W EEPROM
Error de escritura de EEPROMLos datos De NV-RAM no coinciden con los datos de EEPROM.
Ha ocurrido una verificación de error al escribir EEPROM.
Conecte/desconecte la alimentación del convertidor.
Realice una inicialización de fábrica (A1-03)
Tabla 7.4 Errores de programación del operador
Display Significado Causas probables Acciones de corrección
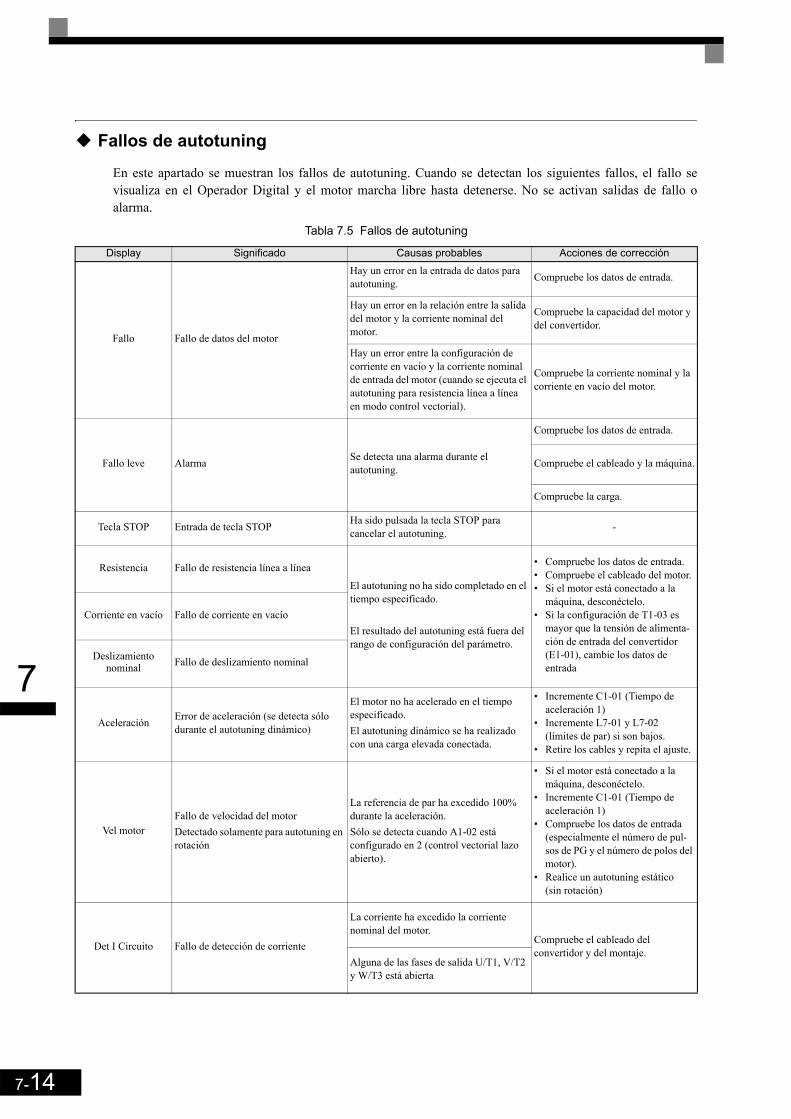
7-14
7
Fallos de autotuning
En este apartado se muestran los fallos de autotuning. Cuando se detectan los siguientes fallos, el fallo sevisualiza en el Operador Digital y el motor marcha libre hasta detenerse. No se activan salidas de fallo oalarma.
Tabla 7.5 Fallos de autotuning
Display Significado Causas probables Acciones de corrección
Fallo Fallo de datos del motor
Hay un error en la entrada de datos para autotuning. Compruebe los datos de entrada.
Hay un error en la relación entre la salida del motor y la corriente nominal del motor.
Compruebe la capacidad del motor y del convertidor.
Hay un error entre la configuración de corriente en vacío y la corriente nominal de entrada del motor (cuando se ejecuta el autotuning para resistencia línea a línea en modo control vectorial).
Compruebe la corriente nominal y la corriente en vacío del motor.
Fallo leve Alarma Se detecta una alarma durante el autotuning.
Compruebe los datos de entrada.
Compruebe el cableado y la máquina.
Compruebe la carga.
Tecla STOP Entrada de tecla STOP Ha sido pulsada la tecla STOP para cancelar el autotuning. -
Resistencia Fallo de resistencia línea a línea
El autotuning no ha sido completado en el tiempo especificado.
El resultado del autotuning está fuera del rango de configuración del parámetro.
• Compruebe los datos de entrada.• Compruebe el cableado del motor.• Si el motor está conectado a la
máquina, desconéctelo.• Si la configuración de T1-03 es
mayor que la tensión de alimenta-ción de entrada del convertidor (E1-01), cambie los datos de entrada
Corriente en vacío Fallo de corriente en vacío
Deslizamiento nominal Fallo de deslizamiento nominal
Aceleración Error de aceleración (se detecta sólo durante el autotuning dinámico)
El motor no ha acelerado en el tiempo especificado.El autotuning dinámico se ha realizado con una carga elevada conectada.
• Incremente C1-01 (Tiempo deaceleración 1)
• Incremente L7-01 y L7-02(límites de par) si son bajos.
• Retire los cables y repita el ajuste.
Vel motorFallo de velocidad del motorDetectado solamente para autotuning en rotación
La referencia de par ha excedido 100% durante la aceleración.Sólo se detecta cuando A1-02 está configurado en 2 (control vectorial lazo abierto).
• Si el motor está conectado a la máquina, desconéctelo.
• Incremente C1-01 (Tiempo de aceleración 1)
• Compruebe los datos de entrada (especialmente el número de pul-sos de PG y el número de polos del motor).
• Realice un autotuning estático(sin rotación)
Det I Circuito Fallo de detección de corriente
La corriente ha excedido la corriente nominal del motor.
Compruebe el cableado del convertidor y del montaje.
Alguna de las fases de salida U/T1, V/T2 y W/T3 está abierta

7-15
7
Fallo Inductanciade Fuga
La medida de inductancia de fuga ha provocado un error.
El autotuning no ha sido completado en el tiempo especificado. • Compruebe el cableado del motor.
• Compruebe el valor de entrada de la corriente nominal del motorEl resultado del autotuning está fuera del
rango de configuración del parámetro.
La corriente de ajuste de inductancia de fuga era demasiado alta o demasiado baja (vectorial lazo cerrado sólo para PM)
Reduzca o aumente el nivel de corriente para el ajuste de inductancia de fuga cambiando el parámetro n8-46.
Z_SRCH_ERR(sólo tuning del
motor PM)
Todos los encoders
La velocidad del motor ha superado 20 r.p.m. en el inicio de autotuning.El ajuste de posición de polo magnético no se ha podido realizar en el tiempo especificado. • Retire los cables y repita el ajuste
• Compruebe la dirección de rota-ción del encoder o cambie F1-05 si es necesario.Encoder con pulso Z:
La diferencia entre dos mediciones de la posición del polo magnético ha sido superior a 3°.
Encoders serie
La diferencia entre dos medidas de la posición del polo magnético era superior a 5°.
Se ha producido un error de comunicacio-nes serie durante el ajuste.
• Compruebe el cableado del encoder (orden, blindaje, etc.)
• Compruebe la fuente de alimenta-ción del encoder.
• Sustituya el encoder.
LD_ERR(sólo ajuste (tuning)
de motor PM)Error de inductancia
La inductancia no ha podido ser medida en el tiempo especificado durante la rota-ción del motor.
Compruebe el cableado del motor
RS_ERR(sólo ajuste (tuning)
de motor PM)Error de resistencia de línea a línea
La resistencia no ha podido ser medida en el tiempo especificado durante la rotación del motor o el valor calculado estaba fuera del rango.
• Compruebe el cableado del motor• Compruebe la datos de entrada del
motor
KE_ERR(sólo ajuste (tuning)
del motor PM)Error de constante de tensión
La constante de tensión no ha podido ser medida en el tiempo especificado durante la rotación del motor.
Compruebe el cableado del motor
End - 1Configuración excesiva de V/f
Alarma de configuraciones de V/fSe visualiza después de completado el autotuning
La referencia de par ha excedido el 100% y la corriente en vacío ha excedido el 70% durante el autotuning.
Compruebe y corrija las configuraciones del motor
Si el motor y la máquina están conectados, desconecte el motor de la máquina.
End -2Saturación
Fallo de saturación del núcleo del motorSe visualiza después de completado el autotuning Detectado solamente para autotuning en rotación
Durante el autotuning, los valores medidos del coeficiente 1 y 2 de saturación del núcleo de hierro del motor (E2-07 y E2-08) han excedido el rango de configuración.
Compruebe los datos de entrada.
Compruebe el cableado del motor.
Si el motor y la máquina estánconectados, desconecte el motor de la máquina.
End -3Alm FLA Nom
Alarma de configuración de corriente nominalSe visualiza después de completado el autotuning
Durante el autotuning, el valor medido de la corriente nominal del motor (E2-01) era mayor que el valor seleccionado.
Compruebe el valor de la corriente nominal del motor.
Tabla 7.5 Fallos de autotuning
Display Significado Causas probables Acciones de corrección
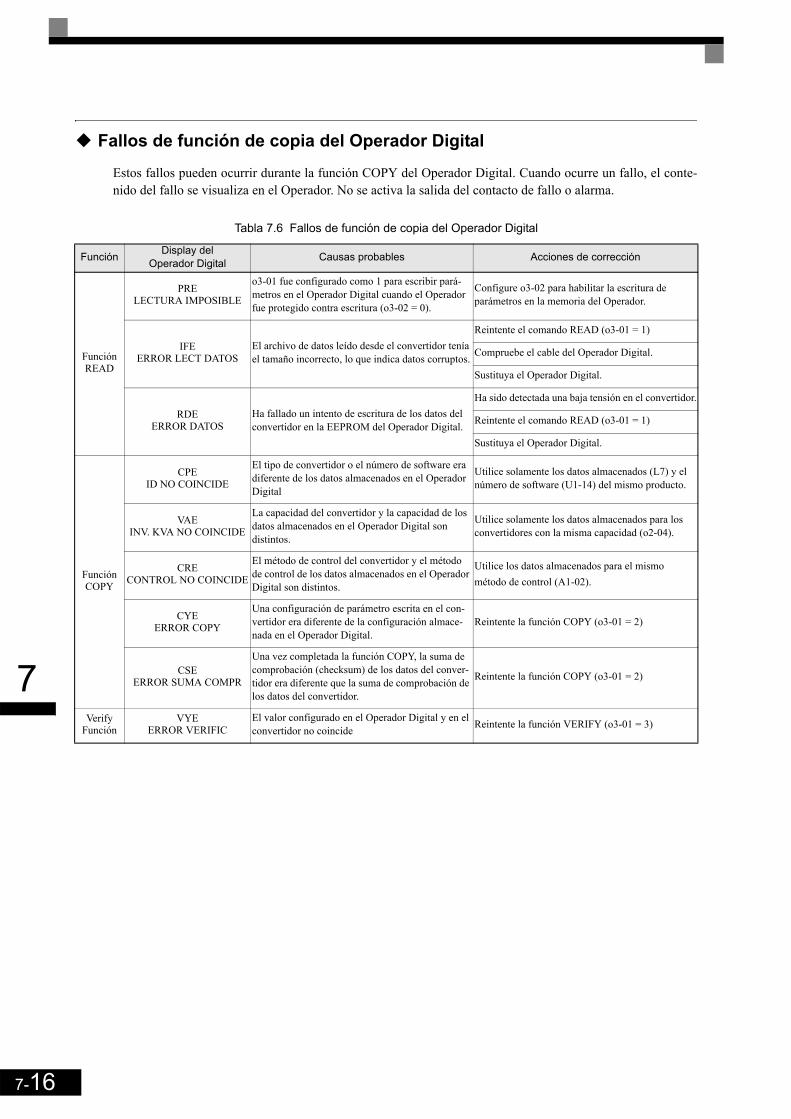
7-16
7
Fallos de función de copia del Operador Digital
Estos fallos pueden ocurrir durante la función COPY del Operador Digital. Cuando ocurre un fallo, el conte-nido del fallo se visualiza en el Operador. No se activa la salida del contacto de fallo o alarma.
Tabla 7.6 Fallos de función de copia del Operador Digital
Función Display del Operador Digital Causas probables Acciones de corrección
Función READ
PRELECTURA IMPOSIBLE
o3-01 fue configurado como 1 para escribir pará-metros en el Operador Digital cuando el Operador fue protegido contra escritura (o3-02 = 0).
Configure o3-02 para habilitar la escritura de parámetros en la memoria del Operador.
IFE ERROR LECT DATOS
El archivo de datos leído desde el convertidor tenía el tamaño incorrecto, lo que indica datos corruptos.
Reintente el comando READ (o3-01 = 1)
Compruebe el cable del Operador Digital.
Sustituya el Operador Digital.
RDEERROR DATOS
Ha fallado un intento de escritura de los datos del convertidor en la EEPROM del Operador Digital.
Ha sido detectada una baja tensión en el convertidor.
Reintente el comando READ (o3-01 = 1)
Sustituya el Operador Digital.
Función COPY
CPEID NO COINCIDE
El tipo de convertidor o el número de software era diferente de los datos almacenados en el Operador Digital
Utilice solamente los datos almacenados (L7) y el número de software (U1-14) del mismo producto.
VAE INV. KVA NO COINCIDE
La capacidad del convertidor y la capacidad de los datos almacenados en el Operador Digital son distintos.
Utilice solamente los datos almacenados para los convertidores con la misma capacidad (o2-04).
CRECONTROL NO COINCIDE
El método de control del convertidor y el método de control de los datos almacenados en el Operador Digital son distintos.
Utilice los datos almacenados para el mismo método de control (A1-02).
CYE ERROR COPY
Una configuración de parámetro escrita en el con-vertidor era diferente de la configuración almace-nada en el Operador Digital.
Reintente la función COPY (o3-01 = 2)
CSEERROR SUMA COMPR
Una vez completada la función COPY, la suma de comprobación (checksum) de los datos del conver-tidor era diferente que la suma de comprobación de los datos del convertidor.
Reintente la función COPY (o3-01 = 2)
VerifyFunción
VYEERROR VERIFIC
El valor configurado en el Operador Digital y en el convertidor no coincide Reintente la función VERIFY (o3-01 = 3)
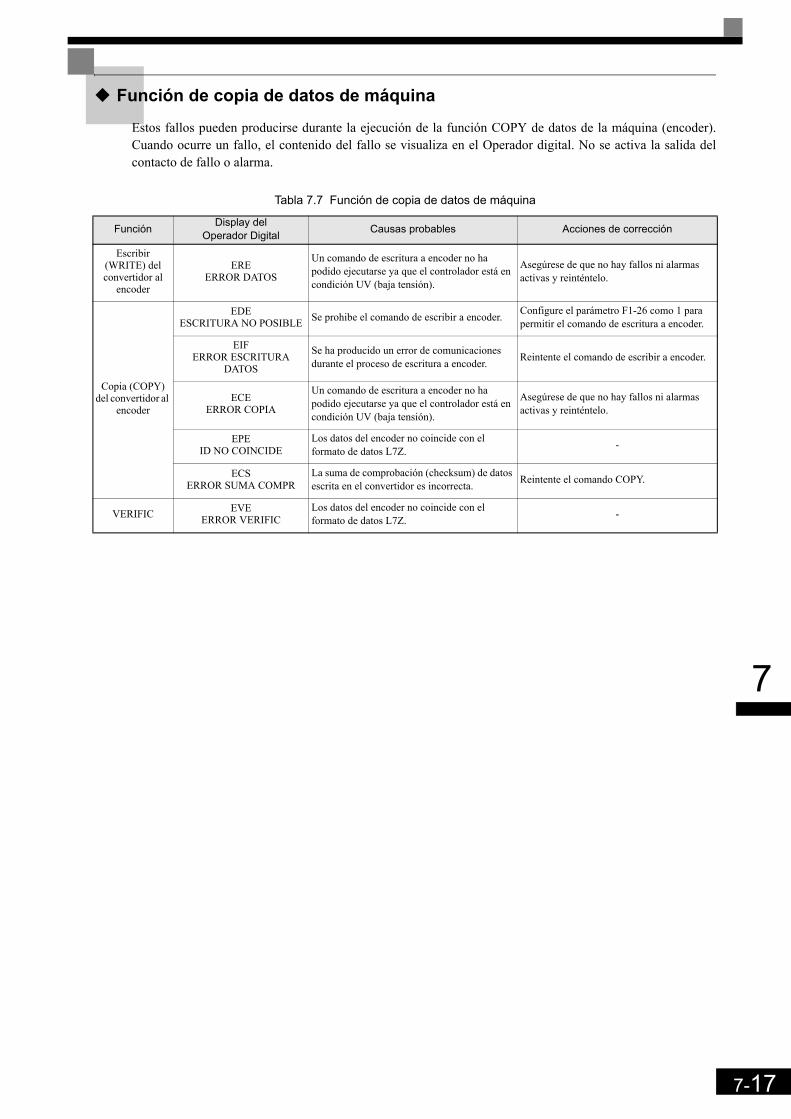
7-17
7
Función de copia de datos de máquina
Estos fallos pueden producirse durante la ejecución de la función COPY de datos de la máquina (encoder).Cuando ocurre un fallo, el contenido del fallo se visualiza en el Operador digital. No se activa la salida delcontacto de fallo o alarma.
Tabla 7.7 Función de copia de datos de máquina
Función Display del Operador Digital Causas probables Acciones de corrección
Escribir (WRITE) del convertidor al
encoder
ERE ERROR DATOS
Un comando de escritura a encoder no ha podido ejecutarse ya que el controlador está en condición UV (baja tensión).
Asegúrese de que no hay fallos ni alarmas activas y reinténtelo.
Copia (COPY) del convertidor al
encoder
EDE ESCRITURA NO POSIBLE Se prohibe el comando de escribir a encoder. Configure el parámetro F1-26 como 1 para
permitir el comando de escritura a encoder.
EIF ERROR ESCRITURA
DATOS
Se ha producido un error de comunicaciones durante el proceso de escritura a encoder. Reintente el comando de escribir a encoder.
ECE ERROR COPIA
Un comando de escritura a encoder no ha podido ejecutarse ya que el controlador está en condición UV (baja tensión).
Asegúrese de que no hay fallos ni alarmas activas y reinténtelo.
EPE ID NO COINCIDE
Los datos del encoder no coincide con el formato de datos L7Z. -
ECS ERROR SUMA COMPR
La suma de comprobación (checksum) de datos escrita en el convertidor es incorrecta. Reintente el comando COPY.
VERIFIC EVE ERROR VERIFIC
Los datos del encoder no coincide con el formato de datos L7Z. -
7-18
7
Detección y corrección de errores
Debido a errores de configuración de parámetro, cableado defectuoso, etc., el convertidor y el motor puedenno operar como se espera cuando se arranca el sistema. Si esto ocurriera, utilice esta sección como referenciay tome las contramedidas necesarias.
Si se visualiza un código de error, consulte la página 7-2, Funciones de protección y diagnóstico.
Si no puede configurarse un parámetro
Utilice la siguiente información si no puede configurar un parámetro.
El display no cambia cuando se pulsan las teclas Más y Menos.Son posibles las siguientes causas:
El convertidor está operando (modo Drive)Hay algunos parámetros que no pueden ser configurados durante la operación. Ponga el comando RUN enOFF y posteriormente configure los parámetros.
Las contraseñas no coinciden. (Sólo cuando está configurada una contraseña).Si las configuraciones del parámetro A1-04 (contraseña) y A1-05 (configuración de contraseña) son distintas,los parámetros para el modo de inicialización no pueden ser cambiados. Introduzca la contraseña correcta enA1-04.
Si no puede recordar la contraseña, compruebe el parámetro A1-05 (configuración de contraseña) pulsando latecla Shift/RESET y la tecla MENU simultáneamente mientras está en el display A1-04. Lea la contraseña yconfigúrela en el parámetro A1-04.
Se visualizan OPE01 a OPE11El valor configurado para el parámetro es incorrecto. Consulte la Tabla 7.4 en este capítulo y corrija las confi-guraciones.
Se visualiza CPF00 ó CPF01.Este es un error de comunicación del Operador Digital/Monitor LED. La conexión entre el Operador Digital/Monitor LED y el convertidor puede ser defectuosa. Retire el Operador Digital/Monitor LED y vuelva a insta-larlo.

7-19
7
Si el motor no opera adecuadamente.
Son posibles las siguientes causas:
El motor no opera cuando se introduce una señal de operación externa.La referencia de frecuencia es 0,00 Hz o las entradas digitales seleccionan una no- velocidad. Compruebe lasseñales de entrada y las configuraciones de referencia de frecuencia.Asegúrese de configurar también la señal de Baseblock. El convertidor no acepta ninguna entrada si está baseblock activo.
La carga es demasiado pesadaCompruebe la corriente del motor. Si está al límite de la corriente nominal del convertidor la carga puede serdemasiado alta. Compruebe el tamaño del convertidor y el sistema mecánico. Compruebe asimismo si el frenoestá funcionando o no con el fin de asegurarse de que el motor no funcione contra el freno cerrado.
Si el sentido de rotación es inverso
Si el motor gira en la dirección errónea, es posible que el cableado de salida del motor sea incorrecto.
El sentido de la rotación del motor puede ser invertido intercambiando dos de las fases de salida U, V y W. Sise utiliza un encoder, la polaridad también debe ser alternada. Si el convertidor opera en el modo V/f tambiénpuede ser usado el parámetro b1-04 para cambiar la dirección de rotación.
Si el motor se bloquea o si la aceleración es lenta
Se ha alcanzado el límite de par.Cuando ha sido configurado un límite de par en los parámetros L7-01 a L7-04, el par de salida será limitado deacuerdo a estas configuraciones. Por lo tanto es posible que el motor no desarrolle suficiente par para aceleraro que el tiempo de aceleración sea demasiado largo.
El nivel de prevención de bloqueo durante la aceleración es demasiado bajo.Si el valor configurado para L3-02 (Nivel de prevención de bloqueo durante la aceleración) es demasiadobajo, el tiempo de aceleración será incrementado. Compruebe que el valor configurado es adecuado y que lacarga no es demasiado grande para el motor.
El nivel de prevención de bloqueo durante la marcha es demasiado bajo.Si el valor configurado para L3-06 (Nivel de prevención de bloqueo durante la marcha) es demasiado bajo, lavelocidad del motor y el par serán limitados. Compruebe que el valor configurado es adecuado y que la cargano es demasiado grande para el motor.
No ha sido realizado el autotuning para control vectorialEl control vectorial no funciona apropiadamente si no ha sido realizado el autotuning. Realice el autotuning, oconfigure los parámetros del motor manualmente.

7-20
7
Si la deceleración del motor es baja
Son posibles las siguientes causas:
El tiempo de deceleración es demasiado largoSon posibles las siguientes causas:
La configuración del tiempo de deceleración es demasiado larga.Compruebe la configuración del tiempo de deceleración (parámetros C1-02, C1-04, C1-06, y C1-08).
El par del motor es insuficiente.
Si los parámetros son correctos y no hay un fallo pero el par es insuficiente, considere incrementar la capaci-dad del motor y del convertidor.
Se ha alcanzado el límite de par.Cuando se alcanza un límite de par (L7-01 a L7-04) el par del motor será limitado. Esto puede causar que seextienda el tiempo de deceleración. Compruebe los parámetros L7- para asegurarse de que los valores delímite de par son adecuados.
Si el motor se sobrecalienta
Son posibles las siguientes causas:
La carga es demasiado grande.Si la carga del motor es demasiado grande y el par excede el par nominal del motor, es posible que el motor sesobrecaliente. Reduzca la carga o incremente el tiempo de aceleración/deceleración. Considere también incre-mentar el tamaño del motor.
La temperatura ambiente es demasiado alta.La valoración del motor está determinada por un rango de temperatura ambiente de operación particular. Elmotor se sobrecalentará si es puesto en marcha continuamente con el par nominal en un ambiente en el que seexcede la temperatura ambiente de operación máxima. Disminuya la temperatura ambiente del motor hastaque esté dentro de un valor aceptable.
No ha sido realizado el autotuning para el control vectorialEs posible que no se logre un rendimiento adecuado del control vectorial si el autotuning no ha sido llevado acabo. Realice el autotuning, o configure los parámetros del motor manualmente. Para motores de inducción puede utilizarse alternativamente el modo de control V/f.
7-21
7
Si dispositivos periféricos se ven influenciados por el arranque o la marcha del convertidor
Son posibles las siguientes soluciones: • Cambie la selección de la frecuencia portadora del convertidor (C6-02) para disminuir la frecuencia porta-
dora. Esto ayudará a reducir la cantidad de ruido de conmutación de los transistores.• Instale un filtro de ruido de entrada en los terminales de entrada de alimentación del convertidor.• Instale un filtro de ruido de salida en los terminales del motor del convertidor.• Utilice cables apantallados o un conducto para el motor. El metal actúa como protección contra el ruido. • Compruebe la puesta a tierra del convertidor y del motor.• Separe el cableado del circuito principal del cableado del circuito de control.
Si el seccionador diferencial opera cuando el convertidor está en marcha
La salida del convertidor es modulada mediante pulsos, es decir, la tensión de salida consiste en pulsos de altafrecuencia (PWM). Esta señal de alta frecuencia causa una cantidad determinada de corriente de fuga quepuede causar que el seccionador diferencial opere y corte la alimentación. Cambie a un interruptor diferencialcon un alto nivel de detección de corriente de fuga (es decir, una sensibilidad de 200 mA o mayor, con untiempo de operación de 0,1 segundos o mayor) y a uno que incorpore contramedidas para altas frecuencias (esdecir, uno designado para su uso con convertidores). Disminuir la selección de frecuencia portadora (C6-02)de convertidor puede ayudar también, ya que la corriente de fuga aumenta con la longitud del cable.
Si hay oscilación mecánica
Utilice la siguiente información cuando haya vibración mecánica:
Se producen oscilaciones y hunting con control V/f.Las configuraciones de parámetro de compensación de par pueden ser incorrectas para la máquina. Ajuste losparámetros C4-01 (Ganancia de compensación de par) y C4-02 (Tiempo de retardo de compensación de par).Disminuya C4-01 cuidadosamente en pasos de 0,05 y/o incremente C4-02.
Además el tiempo de retardo de compensación de deslizamiento (C3-02) puede ser aumentado o disminuido.
Se producen oscilaciones y hunting con control vectorial lazo abierto. Las configuraciones de parámetro de compensación de par pueden ser incorrectas para la máquina. Ajuste losparámetros C4-01 (Ganancia de compensación de par), C4-02 (Parámetro de tiempo de retardo de compensa-ción de par) y C3-02 (Tiempo de retardo de compensación de deslizamiento) por este orden. Disminuya losparámetros de ganancia y aumente los parámetros de tiempo de retardo.
Si el autotuning no ha sido llevado a cabo, es posible que no se logre un rendimiento adecuado del control vec-torial. Realice el autotuning, o configure los parámetros del motor manualmente.
Se producen oscilaciones y hunting con control vectorial lazo cerrado para IM y PM.Es posible que el ajuste de la ganancia sea insuficiente. Ajuste el lazo de control de la velocidad (Reguladorautomático de velocidad, ASR) cambiando los parámetros C5- . Si los puntos de oscilación se solapan conlos de la máquina y no pueden ser eliminados, incremente el tiempo de retardo de ASR, y posteriormentereajuste las ganancias ASR.
Si el autotuning no ha sido llevado a cabo, es posible que no se logre un rendimiento adecuado del control vec-torial lazo cerrado. Realice el autotuning, o configure los parámetros del motor manualmente.

7-22
7
Mantenimiento einspecciones
Este capítulo describe el mantenimiento y las inspecciones básicas para el convertidor
Mantenimiento e inspecciones................................................................................. 8-2
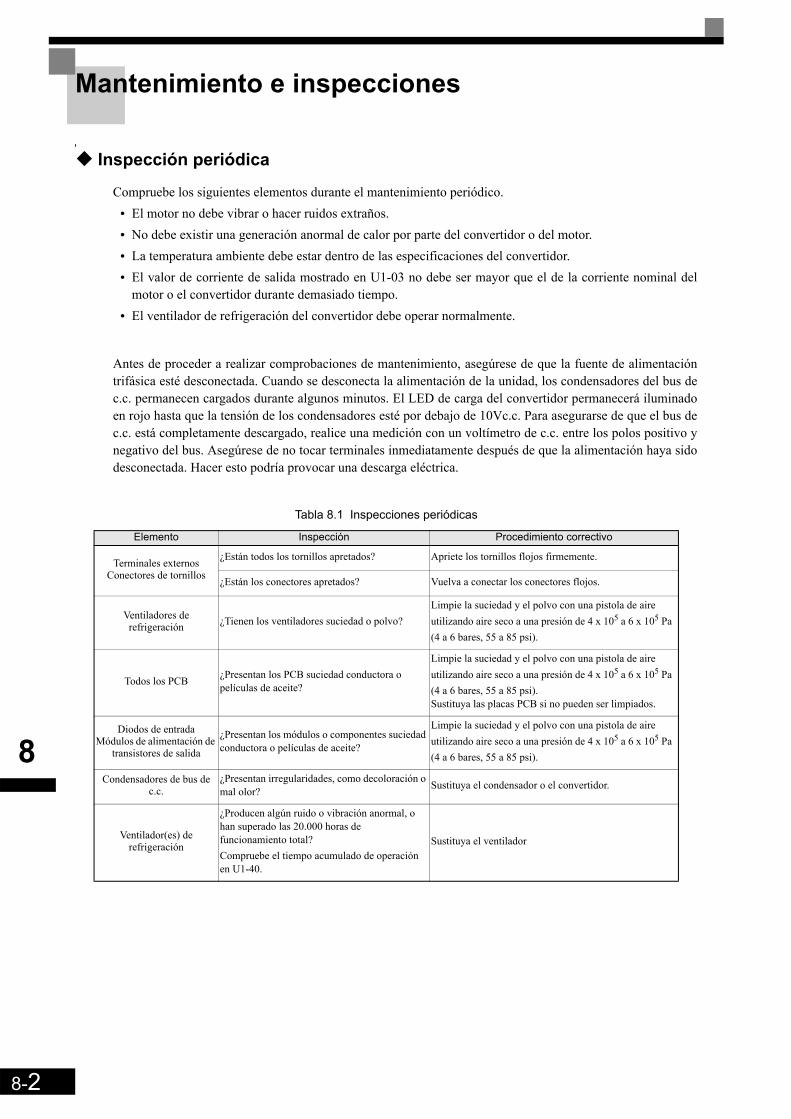
8-2
8
Mantenimiento e inspecciones
Inspección periódica
Compruebe los siguientes elementos durante el mantenimiento periódico.• El motor no debe vibrar o hacer ruidos extraños.• No debe existir una generación anormal de calor por parte del convertidor o del motor. • La temperatura ambiente debe estar dentro de las especificaciones del convertidor.• El valor de corriente de salida mostrado en U1-03 no debe ser mayor que el de la corriente nominal del
motor o el convertidor durante demasiado tiempo. • El ventilador de refrigeración del convertidor debe operar normalmente.
Antes de proceder a realizar comprobaciones de mantenimiento, asegúrese de que la fuente de alimentacióntrifásica esté desconectada. Cuando se desconecta la alimentación de la unidad, los condensadores del bus dec.c. permanecen cargados durante algunos minutos. El LED de carga del convertidor permanecerá iluminadoen rojo hasta que la tensión de los condensadores esté por debajo de 10Vc.c. Para asegurarse de que el bus dec.c. está completamente descargado, realice una medición con un voltímetro de c.c. entre los polos positivo ynegativo del bus. Asegúrese de no tocar terminales inmediatamente después de que la alimentación haya sidodesconectada. Hacer esto podría provocar una descarga eléctrica.
Tabla 8.1 Inspecciones periódicas
Elemento Inspección Procedimiento correctivo
Terminales externos Conectores de tornillos
¿Están todos los tornillos apretados? Apriete los tornillos flojos firmemente.
¿Están los conectores apretados? Vuelva a conectar los conectores flojos.
Ventiladores de refrigeración ¿Tienen los ventiladores suciedad o polvo?
Limpie la suciedad y el polvo con una pistola de aire utilizando aire seco a una presión de 4 x 105 a 6 x 105 Pa (4 a 6 bares, 55 a 85 psi).
Todos los PCB ¿Presentan los PCB suciedad conductora o películas de aceite?
Limpie la suciedad y el polvo con una pistola de aire utilizando aire seco a una presión de 4 x 105 a 6 x 105 Pa (4 a 6 bares, 55 a 85 psi).Sustituya las placas PCB si no pueden ser limpiados.
Diodos de entradaMódulos de alimentación de
transistores de salida
¿Presentan los módulos o componentes suciedad conductora o películas de aceite?
Limpie la suciedad y el polvo con una pistola de aire utilizando aire seco a una presión de 4 x 105 a 6 x 105 Pa (4 a 6 bares, 55 a 85 psi).
Condensadores de bus de c.c.
¿Presentan irregularidades, como decoloración o mal olor? Sustituya el condensador o el convertidor.
Ventilador(es) de refrigeración
¿Producen algún ruido o vibración anormal, o han superado las 20.000 horas de funcionamiento total? Compruebe el tiempo acumulado de operación en U1-40.
Sustituya el ventilador
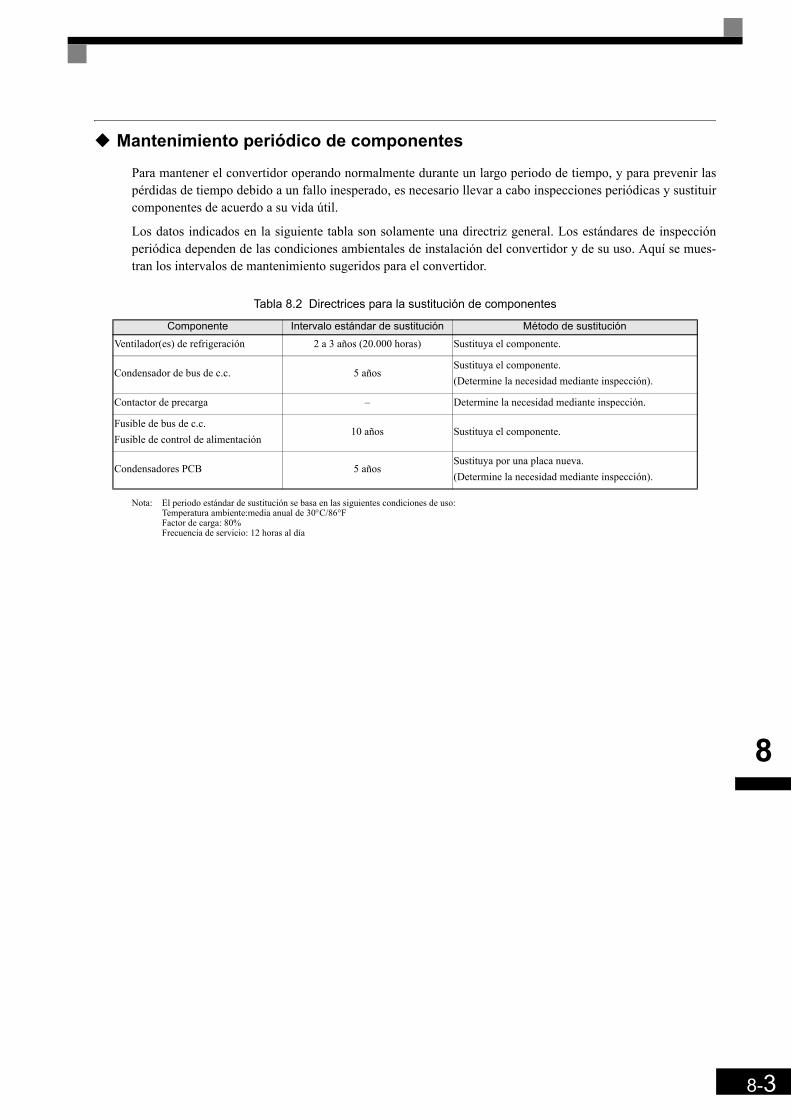
8-3
8
Mantenimiento periódico de componentes
Para mantener el convertidor operando normalmente durante un largo periodo de tiempo, y para prevenir laspérdidas de tiempo debido a un fallo inesperado, es necesario llevar a cabo inspecciones periódicas y sustituircomponentes de acuerdo a su vida útil.
Los datos indicados en la siguiente tabla son solamente una directriz general. Los estándares de inspecciónperiódica dependen de las condiciones ambientales de instalación del convertidor y de su uso. Aquí se mues-tran los intervalos de mantenimiento sugeridos para el convertidor.
Nota: El periodo estándar de sustitución se basa en las siguientes condiciones de uso:Temperatura ambiente:media anual de 30°C/86°FFactor de carga: 80%Frecuencia de servicio: 12 horas al día
Tabla 8.2 Directrices para la sustitución de componentes
Componente Intervalo estándar de sustitución Método de sustituciónVentilador(es) de refrigeración 2 a 3 años (20.000 horas) Sustituya el componente.
Condensador de bus de c.c. 5 añosSustituya el componente. (Determine la necesidad mediante inspección).
Contactor de precarga – Determine la necesidad mediante inspección.
Fusible de bus de c.c.Fusible de control de alimentación
10 años Sustituya el componente.
Condensadores PCB 5 añosSustituya por una placa nueva. (Determine la necesidad mediante inspección).
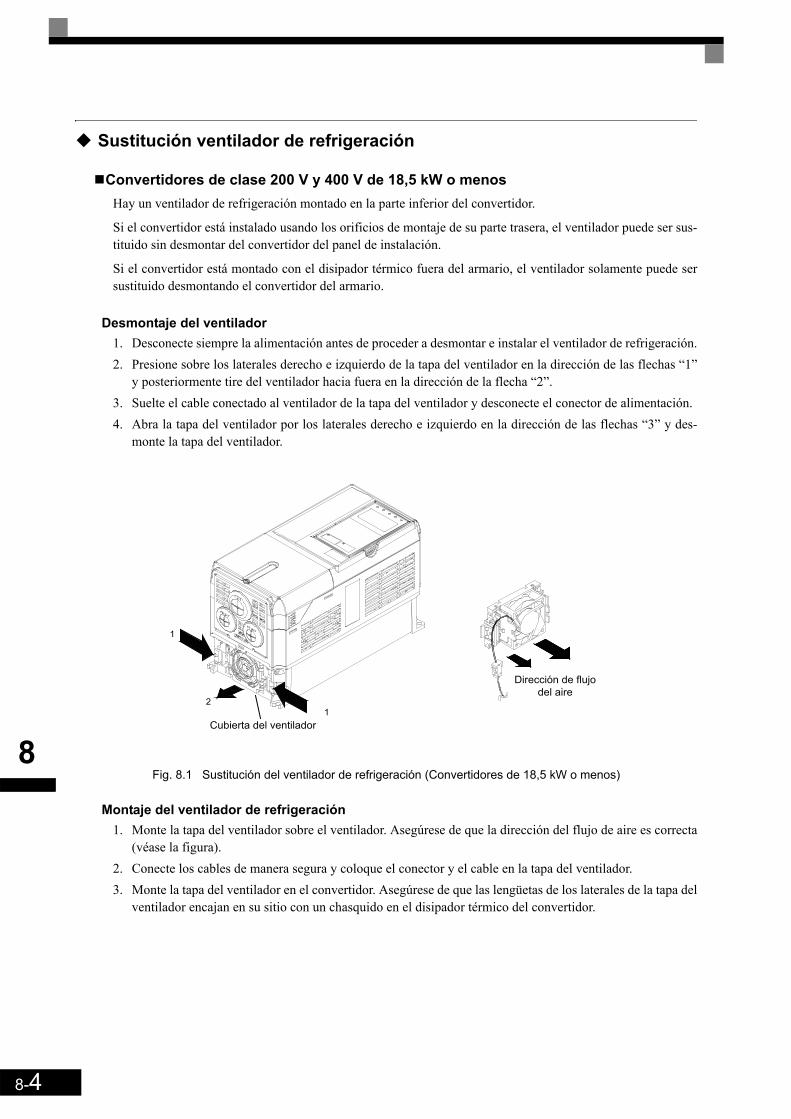
8-4
8
Sustitución ventilador de refrigeración
Convertidores de clase 200 V y 400 V de 18,5 kW o menosHay un ventilador de refrigeración montado en la parte inferior del convertidor.
Si el convertidor está instalado usando los orificios de montaje de su parte trasera, el ventilador puede ser sus-tituido sin desmontar del convertidor del panel de instalación.
Si el convertidor está montado con el disipador térmico fuera del armario, el ventilador solamente puede sersustituido desmontando el convertidor del armario.
Desmontaje del ventilador 1. Desconecte siempre la alimentación antes de proceder a desmontar e instalar el ventilador de refrigeración.2. Presione sobre los laterales derecho e izquierdo de la tapa del ventilador en la dirección de las flechas “1”
y posteriormente tire del ventilador hacia fuera en la dirección de la flecha “2”.3. Suelte el cable conectado al ventilador de la tapa del ventilador y desconecte el conector de alimentación.4. Abra la tapa del ventilador por los laterales derecho e izquierdo en la dirección de las flechas “3” y des-
monte la tapa del ventilador.
Fig. 8.1 Sustitución del ventilador de refrigeración (Convertidores de 18,5 kW o menos)
Montaje del ventilador de refrigeración1. Monte la tapa del ventilador sobre el ventilador. Asegúrese de que la dirección del flujo de aire es correcta
(véase la figura).2. Conecte los cables de manera segura y coloque el conector y el cable en la tapa del ventilador.3. Monte la tapa del ventilador en el convertidor. Asegúrese de que las lengüetas de los laterales de la tapa del
ventilador encajan en su sitio con un chasquido en el disipador térmico del convertidor.
1
1
2
Cubierta del ventilador
Dirección de flujo del aire
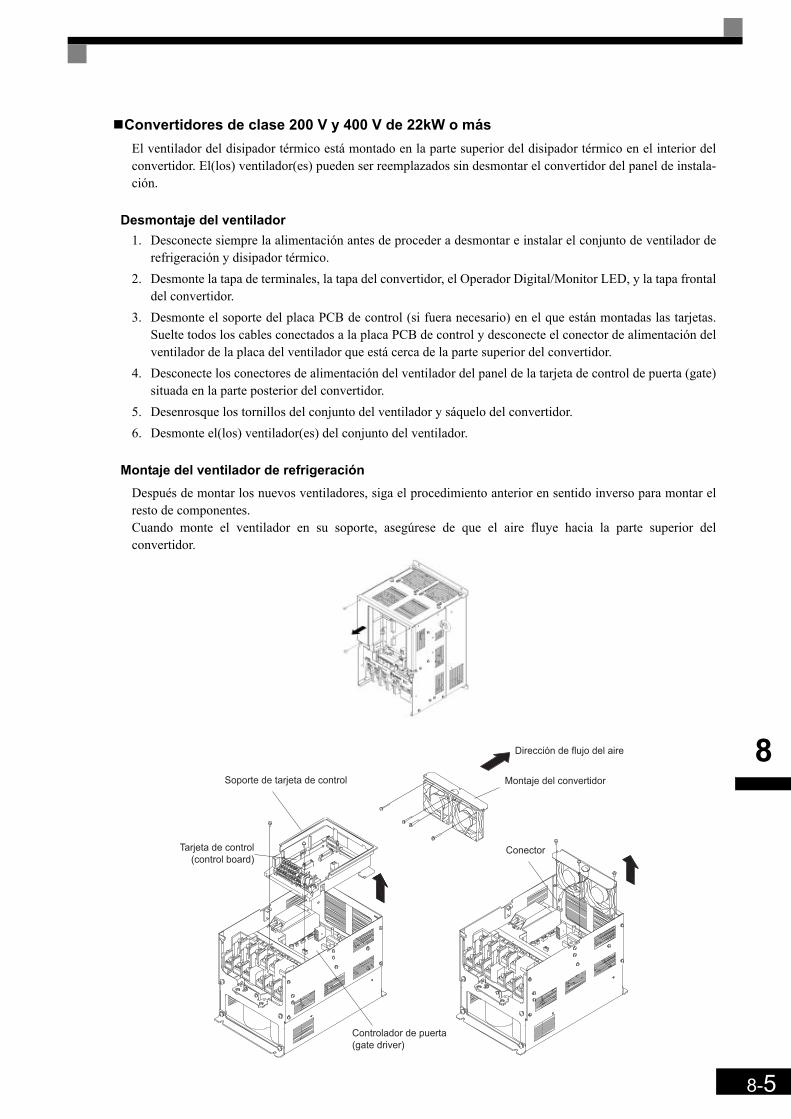
8-5
8
Convertidores de clase 200 V y 400 V de 22kW o másEl ventilador del disipador térmico está montado en la parte superior del disipador térmico en el interior delconvertidor. El(los) ventilador(es) pueden ser reemplazados sin desmontar el convertidor del panel de instala-ción.
Desmontaje del ventilador1. Desconecte siempre la alimentación antes de proceder a desmontar e instalar el conjunto de ventilador de
refrigeración y disipador térmico. 2. Desmonte la tapa de terminales, la tapa del convertidor, el Operador Digital/Monitor LED, y la tapa frontal
del convertidor.3. Desmonte el soporte del placa PCB de control (si fuera necesario) en el que están montadas las tarjetas.
Suelte todos los cables conectados a la placa PCB de control y desconecte el conector de alimentación delventilador de la placa del ventilador que está cerca de la parte superior del convertidor.
4. Desconecte los conectores de alimentación del ventilador del panel de la tarjeta de control de puerta (gate)situada en la parte posterior del convertidor.
5. Desenrosque los tornillos del conjunto del ventilador y sáquelo del convertidor.6. Desmonte el(los) ventilador(es) del conjunto del ventilador.
Montaje del ventilador de refrigeraciónDespués de montar los nuevos ventiladores, siga el procedimiento anterior en sentido inverso para montar elresto de componentes.Cuando monte el ventilador en su soporte, asegúrese de que el aire fluye hacia la parte superior delconvertidor.
Soporte de tarjeta de control
Controlador de puerta (gate driver)
Tarjeta de control (control board)
Conector
Montaje del convertidor
Dirección de flujo del aire
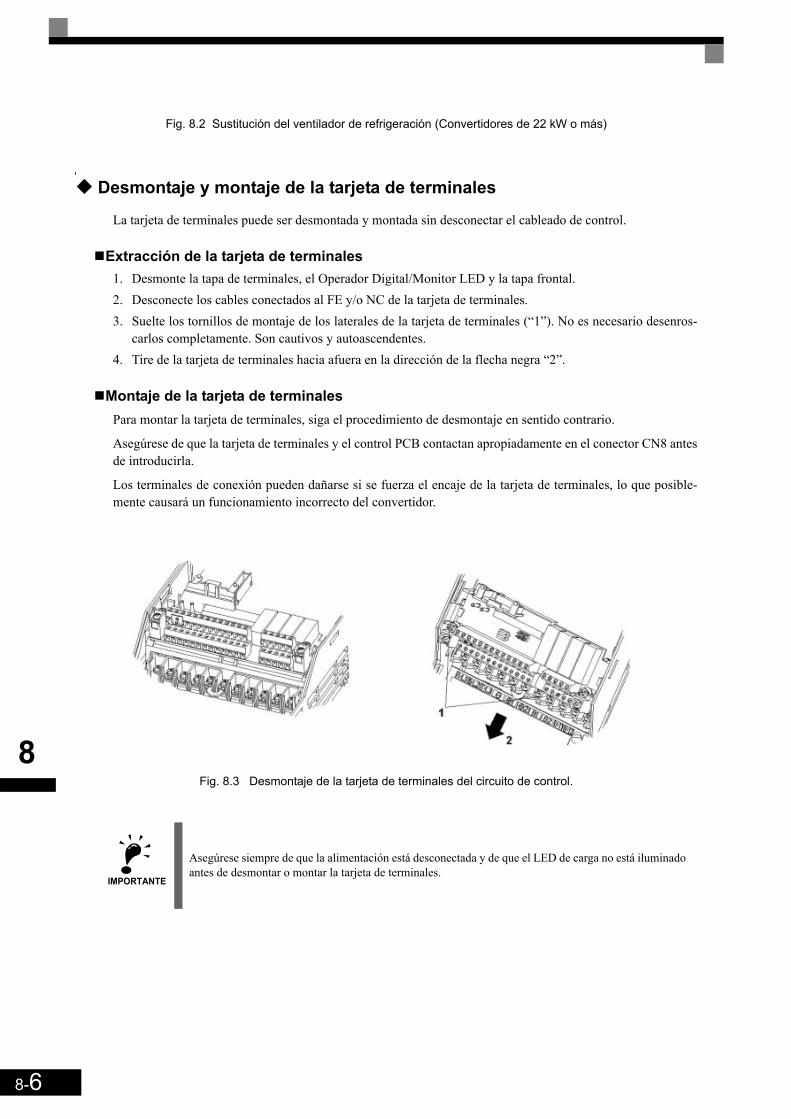
8-6
8
Fig. 8.2 Sustitución del ventilador de refrigeración (Convertidores de 22 kW o más)
Desmontaje y montaje de la tarjeta de terminales
La tarjeta de terminales puede ser desmontada y montada sin desconectar el cableado de control.
Extracción de la tarjeta de terminales1. Desmonte la tapa de terminales, el Operador Digital/Monitor LED y la tapa frontal.2. Desconecte los cables conectados al FE y/o NC de la tarjeta de terminales. 3. Suelte los tornillos de montaje de los laterales de la tarjeta de terminales (“1”). No es necesario desenros-
carlos completamente. Son cautivos y autoascendentes.4. Tire de la tarjeta de terminales hacia afuera en la dirección de la flecha negra “2”.
Montaje de la tarjeta de terminalesPara montar la tarjeta de terminales, siga el procedimiento de desmontaje en sentido contrario.
Asegúrese de que la tarjeta de terminales y el control PCB contactan apropiadamente en el conector CN8 antesde introducirla.
Los terminales de conexión pueden dañarse si se fuerza el encaje de la tarjeta de terminales, lo que posible-mente causará un funcionamiento incorrecto del convertidor.
Fig. 8.3 Desmontaje de la tarjeta de terminales del circuito de control.
IMPORTANTE
Asegúrese siempre de que la alimentación está desconectada y de que el LED de carga no está iluminado antes de desmontar o montar la tarjeta de terminales.
EspecificacionesEste capítulo describe las especificaciones básicas del convertidor.
Especificaciones según modelo................................................................................9-2Reducción (derating).................................................................................................9-6Reactancias de c.a. para compatibilidad con EN 12015 ..........................................9-8Certificado EN 954-1 / EN81-1 .................................................................................9-9
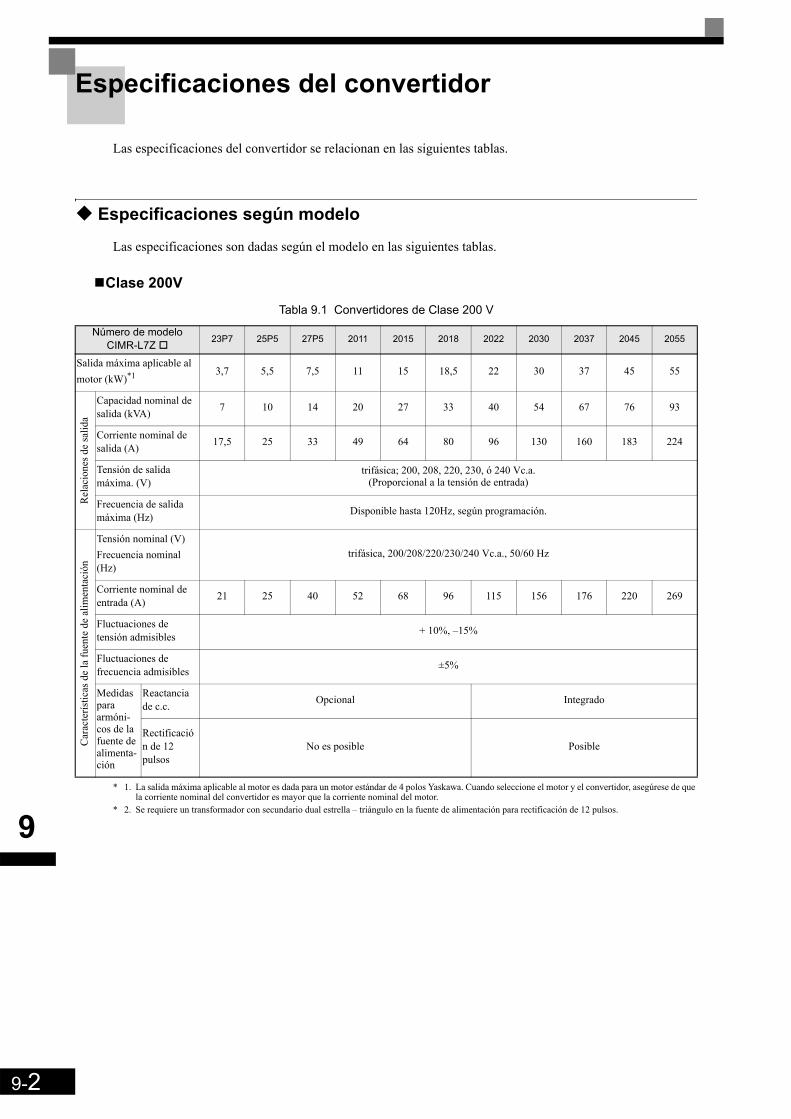
9-2
9
Especificaciones del convertidor
Las especificaciones del convertidor se relacionan en las siguientes tablas.
Especificaciones según modelo
Las especificaciones son dadas según el modelo en las siguientes tablas.
Clase 200V
* 1. La salida máxima aplicable al motor es dada para un motor estándar de 4 polos Yaskawa. Cuando seleccione el motor y el convertidor, asegúrese de que la corriente nominal del convertidor es mayor que la corriente nominal del motor.
* 2. Se requiere un transformador con secundario dual estrella – triángulo en la fuente de alimentación para rectificación de 12 pulsos.
Tabla 9.1 Convertidores de Clase 200 V
Número de modelo CIMR-L7Z 23P7 25P5 27P5 2011 2015 2018 2022 2030 2037 2045 2055
Salida máxima aplicable almotor (kW)*1 3,7 5,5 7,5 11 15 18,5 22 30 37 45 55
Rel
acio
nes d
e sa
lida
Capacidad nominal de salida (kVA) 7 10 14 20 27 33 40 54 67 76 93
Corriente nominal de salida (A) 17,5 25 33 49 64 80 96 130 160 183 224
Tensión de salida máxima. (V)
trifásica; 200, 208, 220, 230, ó 240 Vc.a. (Proporcional a la tensión de entrada)
Frecuencia de salida máxima (Hz) Disponible hasta 120Hz, según programación.
Car
acte
rístic
as d
e la
fuen
te d
e al
imen
taci
ón
Tensión nominal (V)Frecuencia nominal (Hz)
trifásica, 200/208/220/230/240 Vc.a., 50/60 Hz
Corriente nominal de entrada (A) 21 25 40 52 68 96 115 156 176 220 269
Fluctuaciones de tensión admisibles + 10%, –15%
Fluctuaciones de frecuencia admisibles ±5%
Medidas para armóni-cos de la fuente de alimenta-ción
Reactancia de c.c. Opcional Integrado
Rectificación de 12 pulsos
No es posible Posible
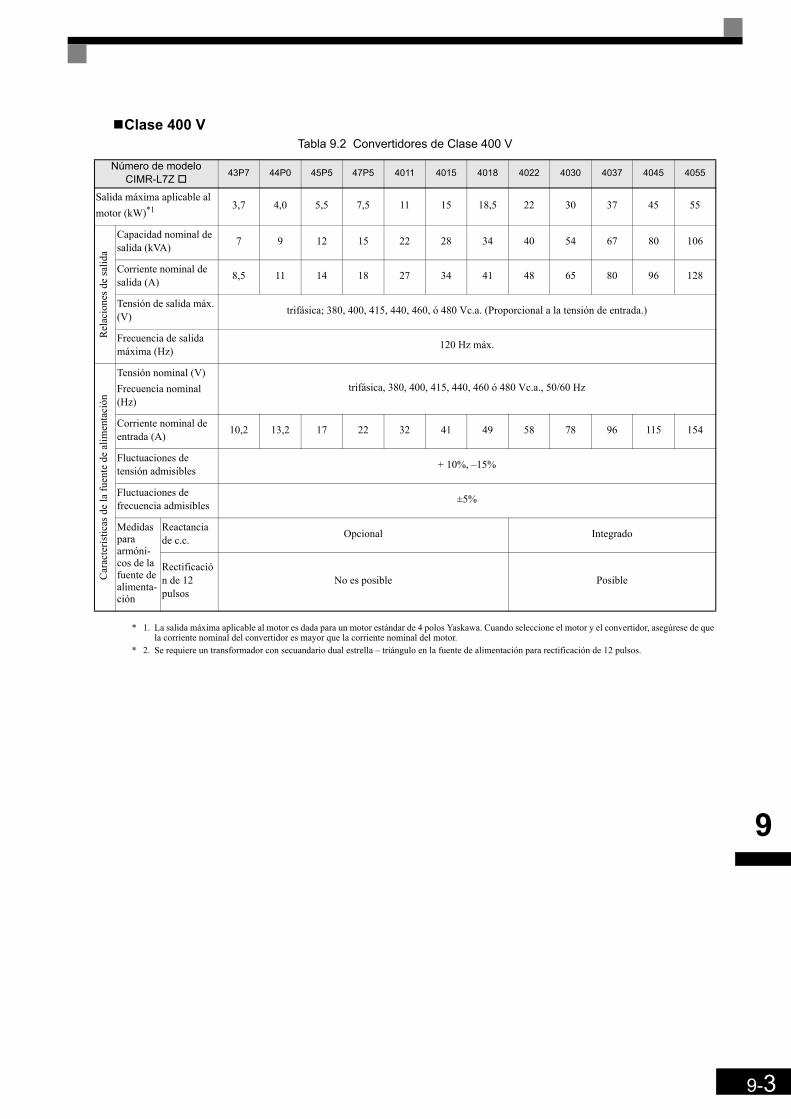
9-3
9
Clase 400 V
* 1. La salida máxima aplicable al motor es dada para un motor estándar de 4 polos Yaskawa. Cuando seleccione el motor y el convertidor, asegúrese de que la corriente nominal del convertidor es mayor que la corriente nominal del motor.
* 2. Se requiere un transformador con secuandario dual estrella – triángulo en la fuente de alimentación para rectificación de 12 pulsos.
Tabla 9.2 Convertidores de Clase 400 V
Número de modelo CIMR-L7Z 43P7 44P0 45P5 47P5 4011 4015 4018 4022 4030 4037 4045 4055
Salida máxima aplicable al motor (kW)*1 3,7 4,0 5,5 7,5 11 15 18,5 22 30 37 45 55
Rel
acio
nes d
e sa
lida
Capacidad nominal de salida (kVA) 7 9 12 15 22 28 34 40 54 67 80 106
Corriente nominal de salida (A) 8,5 11 14 18 27 34 41 48 65 80 96 128
Tensión de salida máx. (V) trifásica; 380, 400, 415, 440, 460, ó 480 Vc.a. (Proporcional a la tensión de entrada.)
Frecuencia de salida máxima (Hz) 120 Hz máx.
Car
acte
rístic
as d
e la
fuen
te d
e al
imen
taci
ón
Tensión nominal (V)Frecuencia nominal (Hz)
trifásica, 380, 400, 415, 440, 460 ó 480 Vc.a., 50/60 Hz
Corriente nominal de entrada (A) 10,2 13,2 17 22 32 41 49 58 78 96 115 154
Fluctuaciones de tensión admisibles + 10%, –15%
Fluctuaciones de frecuencia admisibles ±5%
Medidas para armóni-cos de la fuente de alimenta-ción
Reactancia de c.c. Opcional Integrado
Rectificación de 12 pulsos
No es posible Posible
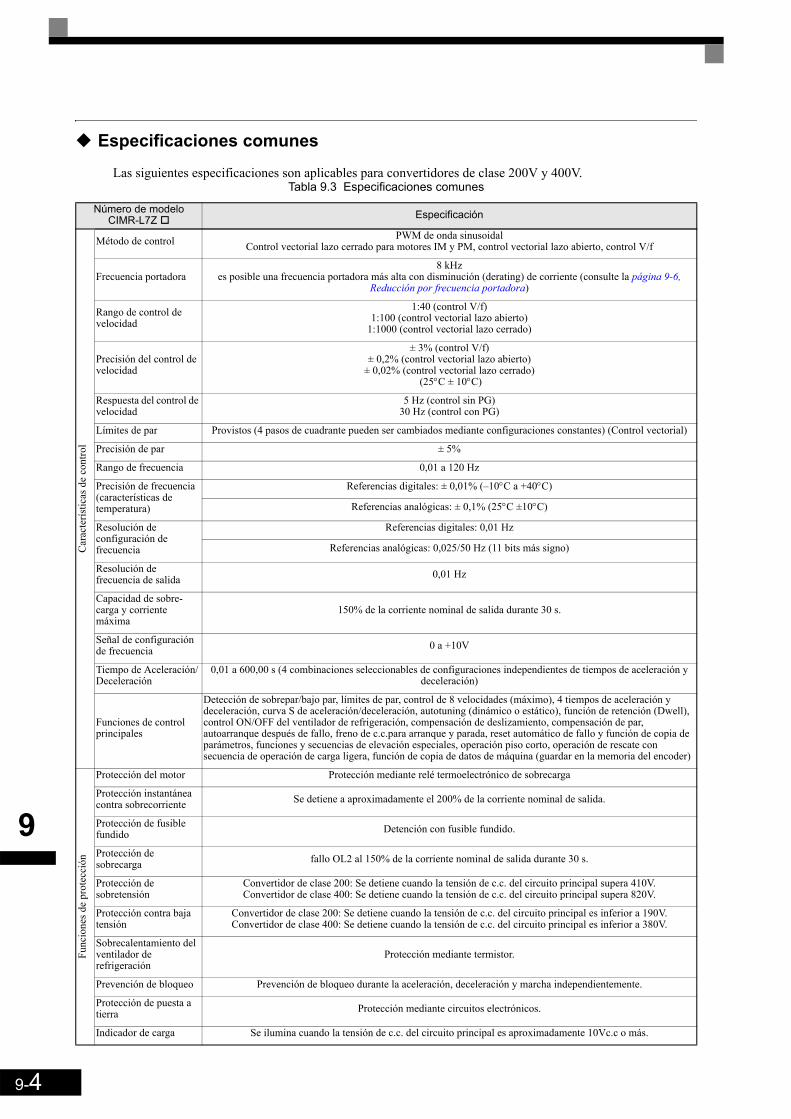
9-4
9
Especificaciones comunes
Las siguientes especificaciones son aplicables para convertidores de clase 200V y 400V.Tabla 9.3 Especificaciones comunes
Número de modeloCIMR-L7Z Especificación
Car
acte
rístic
as d
e co
ntro
l
Método de control PWM de onda sinusoidalControl vectorial lazo cerrado para motores IM y PM, control vectorial lazo abierto, control V/f
Frecuencia portadora8 kHz
es posible una frecuencia portadora más alta con disminución (derating) de corriente (consulte la página 9-6, Reducción por frecuencia portadora)
Rango de control de velocidad
1:40 (control V/f)1:100 (control vectorial lazo abierto)
1:1000 (control vectorial lazo cerrado)
Precisión del control de velocidad
± 3% (control V/f)± 0,2% (control vectorial lazo abierto)
± 0,02% (control vectorial lazo cerrado) (25°C ± 10°C)
Respuesta del control de velocidad
5 Hz (control sin PG)30 Hz (control con PG)
Límites de par Provistos (4 pasos de cuadrante pueden ser cambiados mediante configuraciones constantes) (Control vectorial)
Precisión de par ± 5%
Rango de frecuencia 0,01 a 120 Hz
Precisión de frecuencia (características de temperatura)
Referencias digitales: ± 0,01% (–10°C a +40°C)
Referencias analógicas: ± 0,1% (25°C ±10°C)
Resolución de configuración de frecuencia
Referencias digitales: 0,01 Hz
Referencias analógicas: 0,025/50 Hz (11 bits más signo)
Resolución de frecuencia de salida 0,01 Hz
Capacidad de sobre-carga y corriente máxima
150% de la corriente nominal de salida durante 30 s.
Señal de configuración de frecuencia 0 a +10V
Tiempo de Aceleración/Deceleración
0,01 a 600,00 s (4 combinaciones seleccionables de configuraciones independientes de tiempos de aceleración y deceleración)
Funciones de control principales
Detección de sobrepar/bajo par, límites de par, control de 8 velocidades (máximo), 4 tiempos de aceleración y deceleración, curva S de aceleración/deceleración, autotuning (dinámico o estático), función de retención (Dwell), control ON/OFF del ventilador de refrigeración, compensación de deslizamiento, compensación de par, autoarranque después de fallo, freno de c.c.para arranque y parada, reset automático de fallo y función de copia de parámetros, funciones y secuencias de elevación especiales, operación piso corto, operación de rescate con secuencia de operación de carga ligera, función de copia de datos de máquina (guardar en la memoria del encoder)
Func
ione
s de
prot
ecci
ón
Protección del motor Protección mediante relé termoelectrónico de sobrecarga
Protección instantánea contra sobrecorriente Se detiene a aproximadamente el 200% de la corriente nominal de salida.
Protección de fusible fundido Detención con fusible fundido.
Protección de sobrecarga fallo OL2 al 150% de la corriente nominal de salida durante 30 s.
Protección de sobretensión
Convertidor de clase 200: Se detiene cuando la tensión de c.c. del circuito principal supera 410V.Convertidor de clase 400: Se detiene cuando la tensión de c.c. del circuito principal supera 820V.
Protección contra baja tensión
Convertidor de clase 200: Se detiene cuando la tensión de c.c. del circuito principal es inferior a 190V.Convertidor de clase 400: Se detiene cuando la tensión de c.c. del circuito principal es inferior a 380V.
Sobrecalentamiento del ventilador de refrigeración
Protección mediante termistor.
Prevención de bloqueo Prevención de bloqueo durante la aceleración, deceleración y marcha independientemente.
Protección de puesta a tierra Protección mediante circuitos electrónicos.
Indicador de carga Se ilumina cuando la tensión de c.c. del circuito principal es aproximadamente 10Vc.c o más.
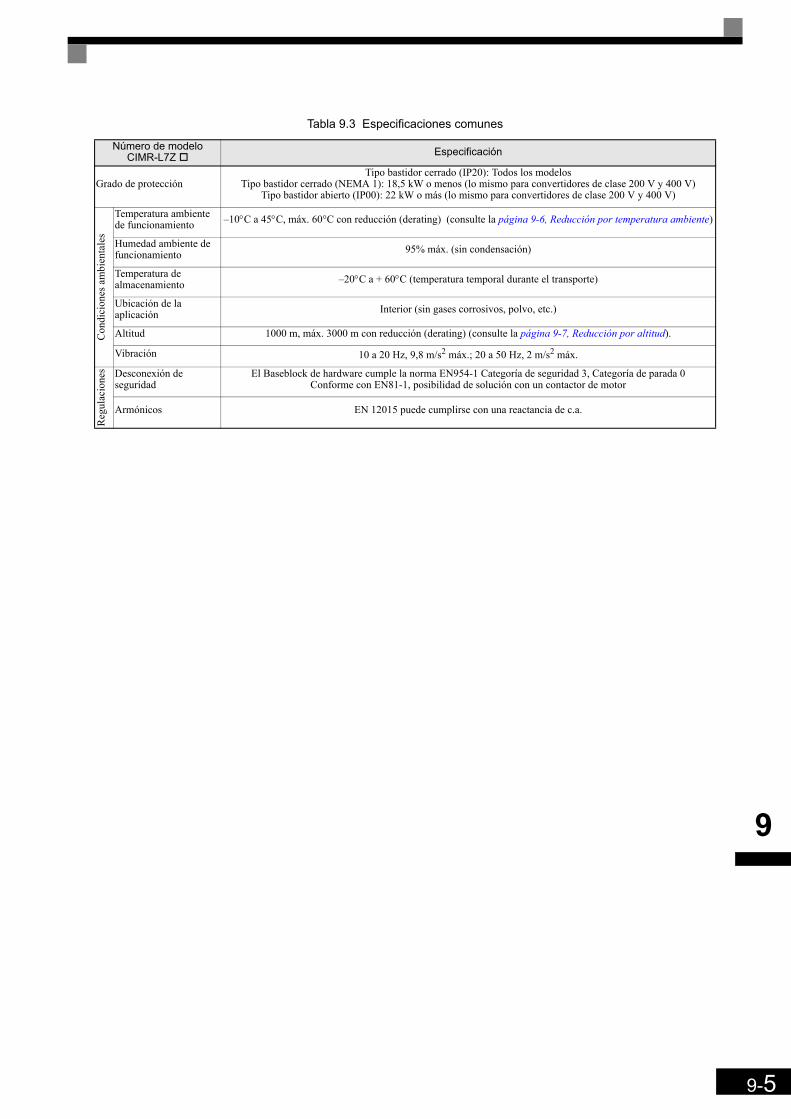
9-5
9
Grado de protecciónTipo bastidor cerrado (IP20): Todos los modelos
Tipo bastidor cerrado (NEMA 1): 18,5 kW o menos (lo mismo para convertidores de clase 200 V y 400 V)Tipo bastidor abierto (IP00): 22 kW o más (lo mismo para convertidores de clase 200 V y 400 V)
Con
dici
ones
am
bien
tale
s
Temperatura ambiente de funcionamiento –10°C a 45°C, máx. 60°C con reducción (derating) (consulte la página 9-6, Reducción por temperatura ambiente)
Humedad ambiente de funcionamiento 95% máx. (sin condensación)
Temperatura de almacenamiento –20°C a + 60°C (temperatura temporal durante el transporte)
Ubicación de laaplicación Interior (sin gases corrosivos, polvo, etc.)
Altitud 1000 m, máx. 3000 m con reducción (derating) (consulte la página 9-7, Reducción por altitud).
Vibración 10 a 20 Hz, 9,8 m/s2 máx.; 20 a 50 Hz, 2 m/s2 máx.
Reg
ulac
ione
s Desconexión de seguridad
El Baseblock de hardware cumple la norma EN954-1 Categoría de seguridad 3, Categoría de parada 0Conforme con EN81-1, posibilidad de solución con un contactor de motor
Armónicos EN 12015 puede cumplirse con una reactancia de c.a.
Tabla 9.3 Especificaciones comunes
Número de modeloCIMR-L7Z Especificación
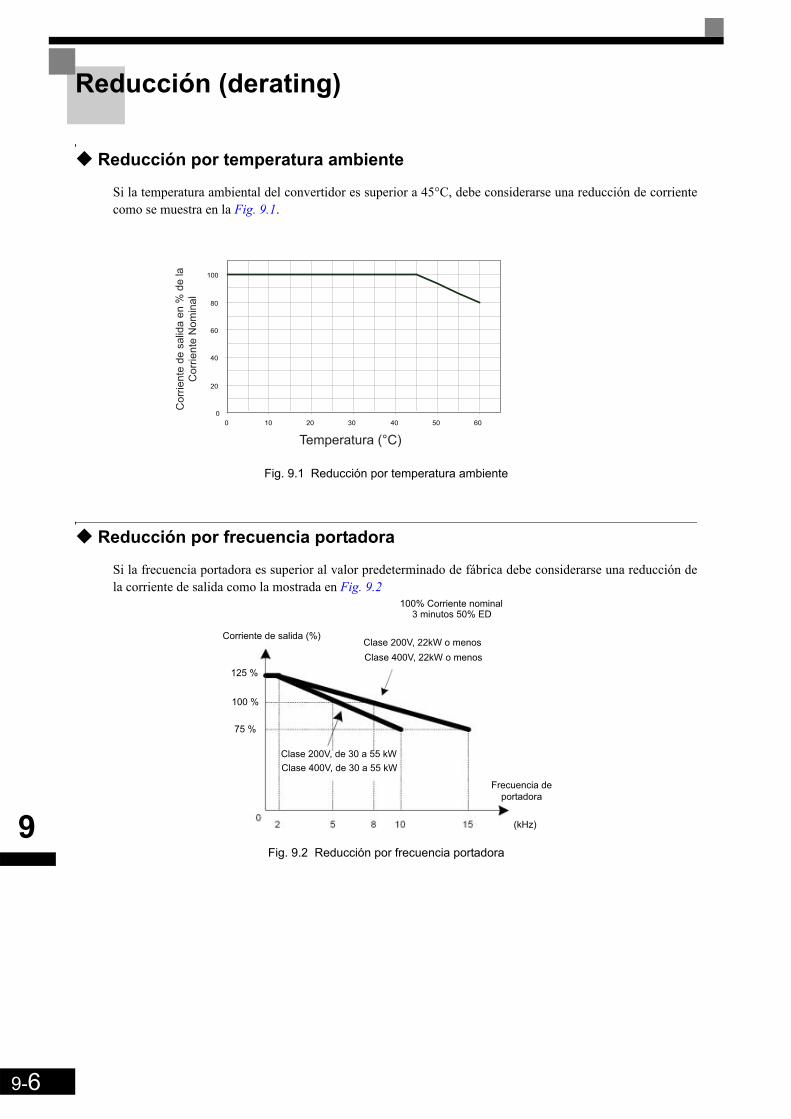
9-6
9
Reducción (derating)
Reducción por temperatura ambiente
Si la temperatura ambiental del convertidor es superior a 45°C, debe considerarse una reducción de corrientecomo se muestra en la Fig. 9.1.
Fig. 9.1 Reducción por temperatura ambiente
Reducción por frecuencia portadora
Si la frecuencia portadora es superior al valor predeterminado de fábrica debe considerarse una reducción dela corriente de salida como la mostrada en Fig. 9.2
Fig. 9.2 Reducción por frecuencia portadora
0
20
40
60
80
100
0 10 20 30 40 50 60
Temperatura (°C)
Cor
rient
e de
sal
ida
en %
de
laC
orrie
nte
Nom
inal
Frecuencia deportadora
(kHz)
100% Corriente nominal3 minutos 50% ED
Clase 200V, 22kW o menosClase 400V, 22kW o menos
Clase 200V, de 30 a 55 kWClase 400V, de 30 a 55 kW
Corriente de salida (%)
125 %
75 %
100 %

9-7
9
Reducción por altitud
La especificación estándar del convertidor es válida para altitudes de hasta 1000m por encima del nivel delmar. Si el convertidor se utiliza en regiones de elevada altitude, la tensión de entrada, la corriente de salida y latemperatura ambiental pemitidas se reducen como se muestra a continuación.
Tabla 9.4 Reducción por altitud
EjemploEl siguiente ejemplo muestra la reducción de un convertidor a 400V, de 7,5 kW (L7Z47P5).
Tabla 9.5 Ejemplo de reducción por altitud
Altitud Tensión Entrada Corriente Salida Temperatura ambiente máxima
1000 m como máximo 100% 100% 100%
1000 a 2000 m 90% de especificación estándar
90% de especificación estándar
95% de especificación estándar
2000 a 3000 m 80% de especificación estándar
80% de especificación estándar
90% de especificación estándar
IMPORTANTELa altitud máxima es 3000m por encima del nivel del mar.
Altitud Tensión Entrada Corriente Salida Temperatura ambiente
1000 m como máximo 480 Vc.a. como máximo 18 A como máximo –10 a 45 °C
1000 a 2000 m 432 Vc.a. como máximo 16,2 A como máximo –10 a 43 °C
2000 a 3000 m 384 Vc.a. como máximo 14,4 A como máximo –10 a 41 °C
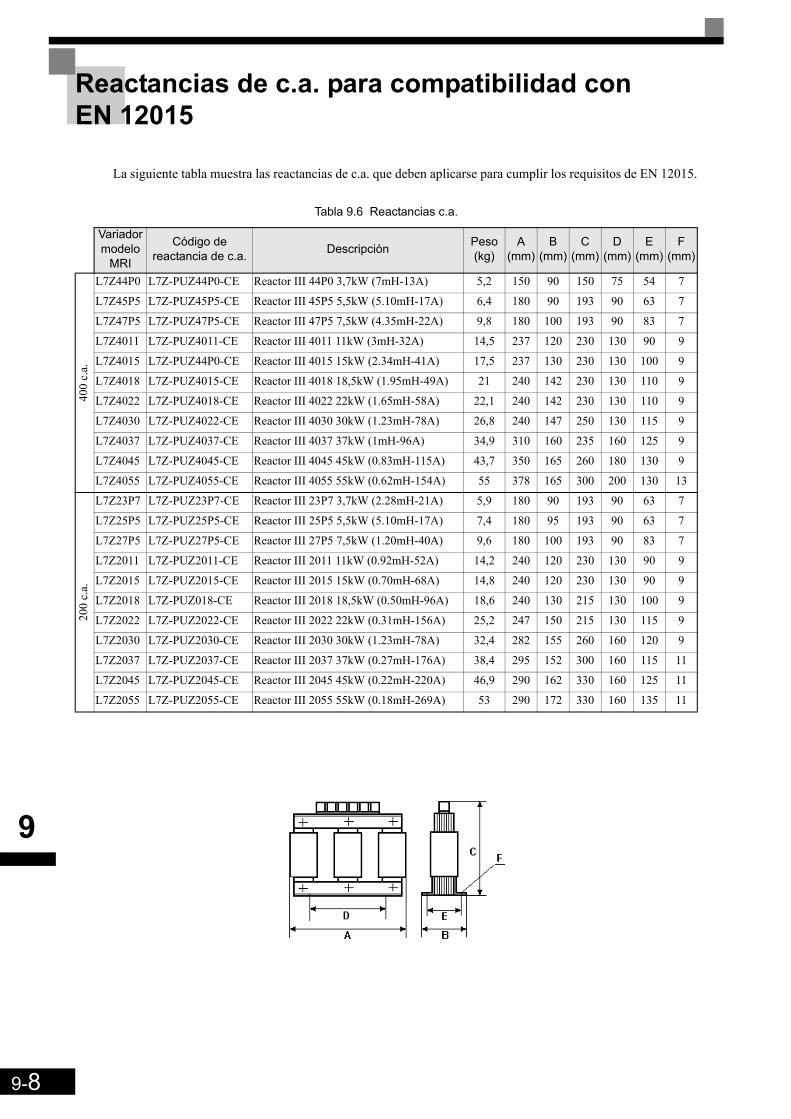
9-8
9
Reactancias de c.a. para compatibilidad con EN 12015
La siguiente tabla muestra las reactancias de c.a. que deben aplicarse para cumplir los requisitos de EN 12015.
Tabla 9.6 Reactancias c.a.
Variador modelo
MRI
Código de reactancia de c.a. Descripción Peso
(kg)A
(mm)B
(mm)C
(mm)D
(mm)E
(mm)F
(mm)
400
c.a.
L7Z44P0 L7Z-PUZ44P0-CE Reactor III 44P0 3,7kW (7mH-13A) 5,2 150 90 150 75 54 7
L7Z45P5 L7Z-PUZ45P5-CE Reactor III 45P5 5,5kW (5.10mH-17A) 6,4 180 90 193 90 63 7
L7Z47P5 L7Z-PUZ47P5-CE Reactor III 47P5 7,5kW (4.35mH-22A) 9,8 180 100 193 90 83 7
L7Z4011 L7Z-PUZ4011-CE Reactor III 4011 11kW (3mH-32A) 14,5 237 120 230 130 90 9
L7Z4015 L7Z-PUZ44P0-CE Reactor III 4015 15kW (2.34mH-41A) 17,5 237 130 230 130 100 9
L7Z4018 L7Z-PUZ4015-CE Reactor III 4018 18,5kW (1.95mH-49A) 21 240 142 230 130 110 9
L7Z4022 L7Z-PUZ4018-CE Reactor III 4022 22kW (1.65mH-58A) 22,1 240 142 230 130 110 9
L7Z4030 L7Z-PUZ4022-CE Reactor III 4030 30kW (1.23mH-78A) 26,8 240 147 250 130 115 9
L7Z4037 L7Z-PUZ4037-CE Reactor III 4037 37kW (1mH-96A) 34,9 310 160 235 160 125 9
L7Z4045 L7Z-PUZ4045-CE Reactor III 4045 45kW (0.83mH-115A) 43,7 350 165 260 180 130 9
L7Z4055 L7Z-PUZ4055-CE Reactor III 4055 55kW (0.62mH-154A) 55 378 165 300 200 130 13
200
c.a.
L7Z23P7 L7Z-PUZ23P7-CE Reactor III 23P7 3,7kW (2.28mH-21A) 5,9 180 90 193 90 63 7
L7Z25P5 L7Z-PUZ25P5-CE Reactor III 25P5 5,5kW (5.10mH-17A) 7,4 180 95 193 90 63 7
L7Z27P5 L7Z-PUZ27P5-CE Reactor III 27P5 7,5kW (1.20mH-40A) 9,6 180 100 193 90 83 7
L7Z2011 L7Z-PUZ2011-CE Reactor III 2011 11kW (0.92mH-52A) 14,2 240 120 230 130 90 9
L7Z2015 L7Z-PUZ2015-CE Reactor III 2015 15kW (0.70mH-68A) 14,8 240 120 230 130 90 9
L7Z2018 L7Z-PUZ018-CE Reactor III 2018 18,5kW (0.50mH-96A) 18,6 240 130 215 130 100 9
L7Z2022 L7Z-PUZ2022-CE Reactor III 2022 22kW (0.31mH-156A) 25,2 247 150 215 130 115 9
L7Z2030 L7Z-PUZ2030-CE Reactor III 2030 30kW (1.23mH-78A) 32,4 282 155 260 160 120 9
L7Z2037 L7Z-PUZ2037-CE Reactor III 2037 37kW (0.27mH-176A) 38,4 295 152 300 160 115 11
L7Z2045 L7Z-PUZ2045-CE Reactor III 2045 45kW (0.22mH-220A) 46,9 290 162 330 160 125 11
L7Z2055 L7Z-PUZ2055-CE Reactor III 2055 55kW (0.18mH-269A) 53 290 172 330 160 135 11
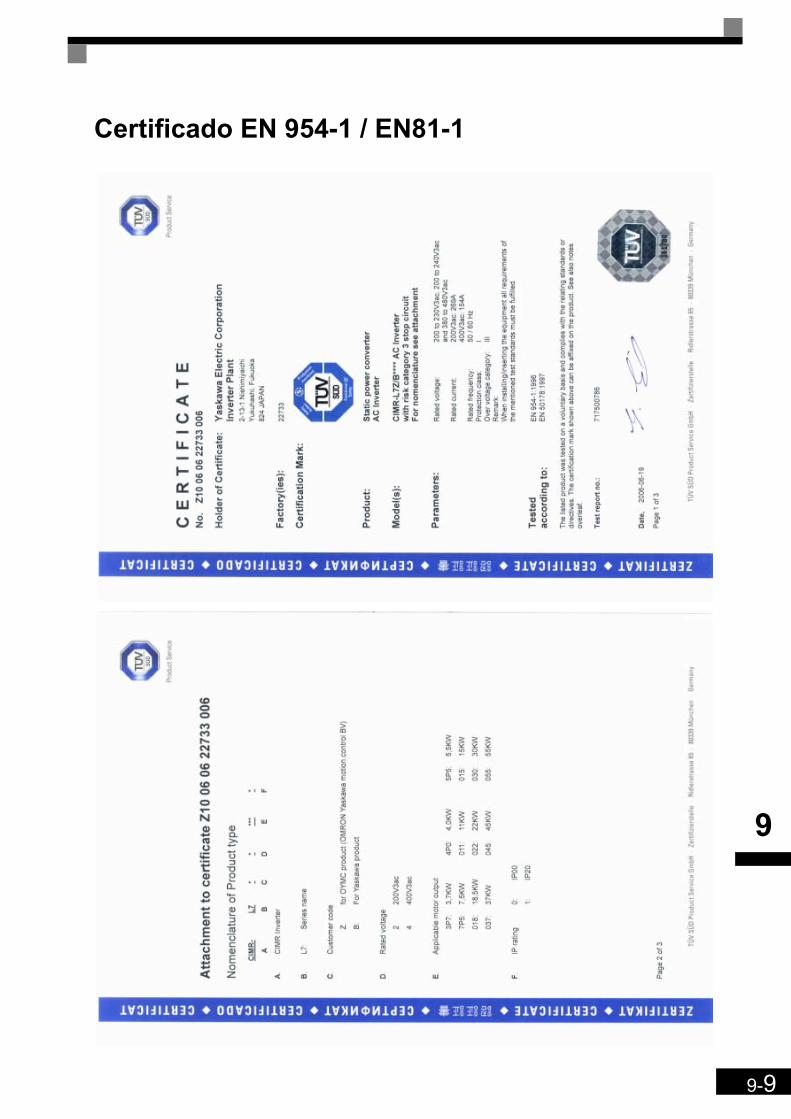
9-9
9
Certificado EN 954-1 / EN81-1
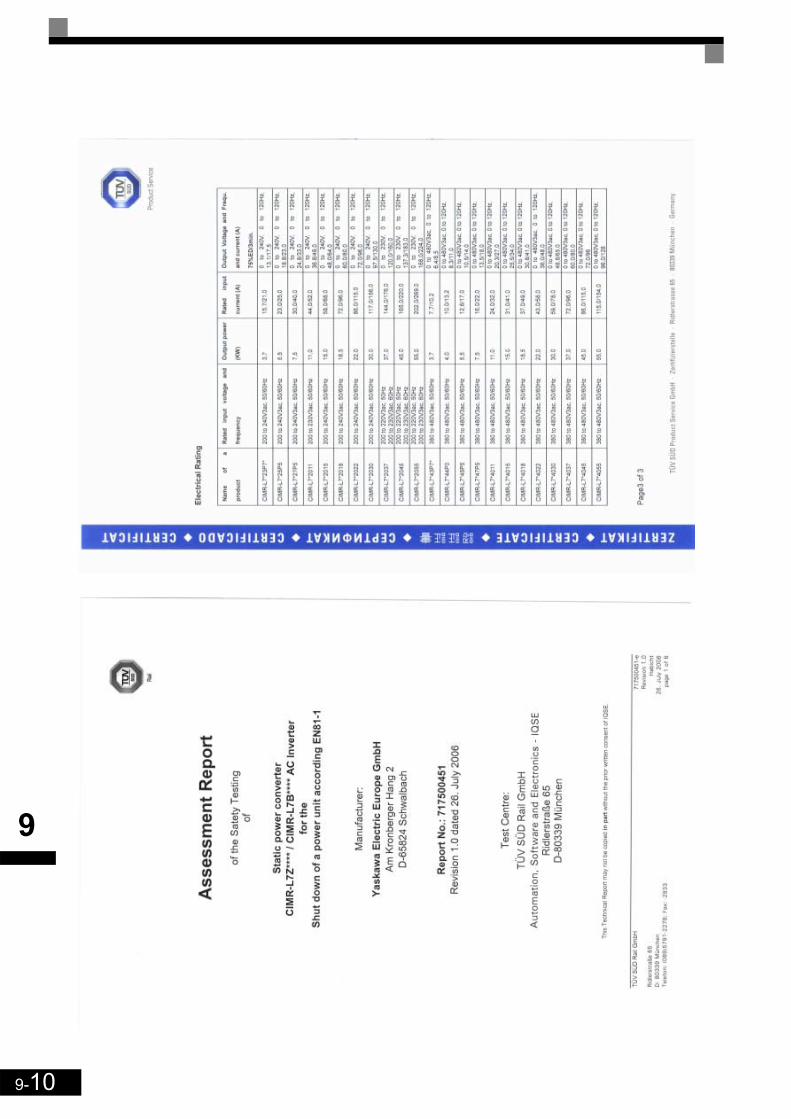
9-10
9
9-11
9
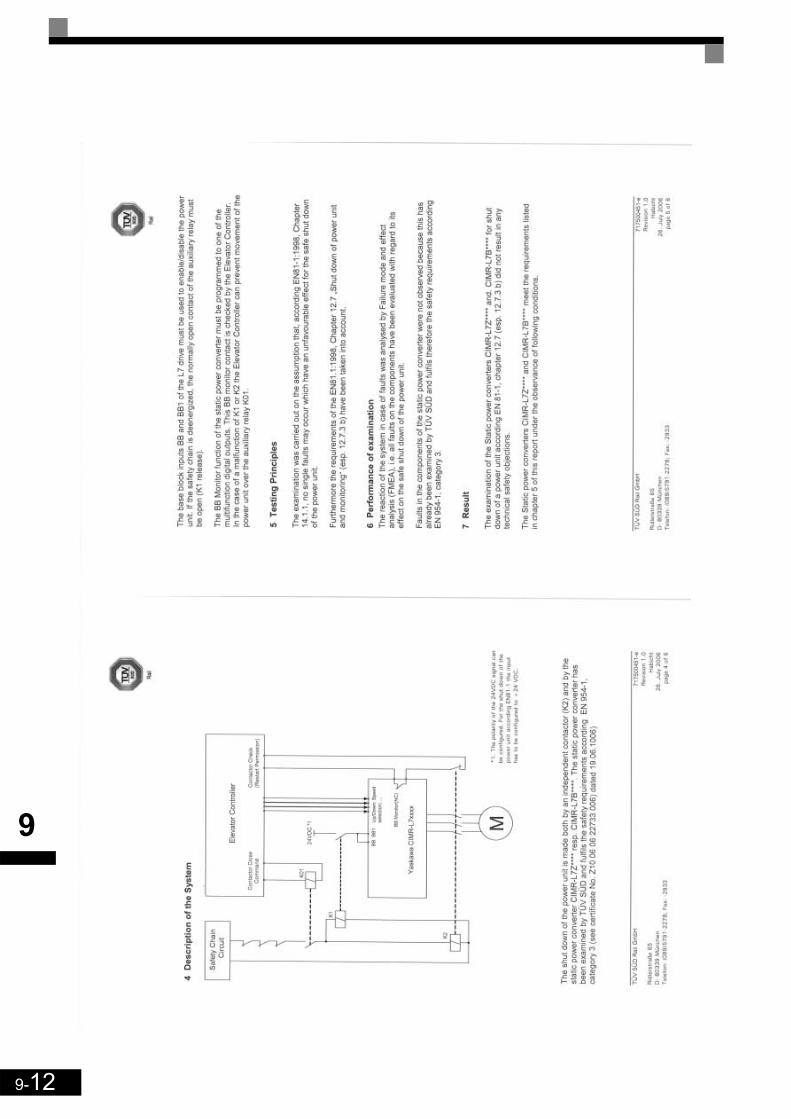
9-12
9
9-13
9
9-14
9
ApéndiceEste capítulo contiene precauciones a tener en cuenta relativas al convertidor, al motor y a los dispositivosperiféricos, y también facilita listas de constantes.
Precauciones de aplicación del convertidor............................................................10-2Precauciones de aplicación del motor ....................................................................10-4Constantes de usuario ............................................................................................10-5
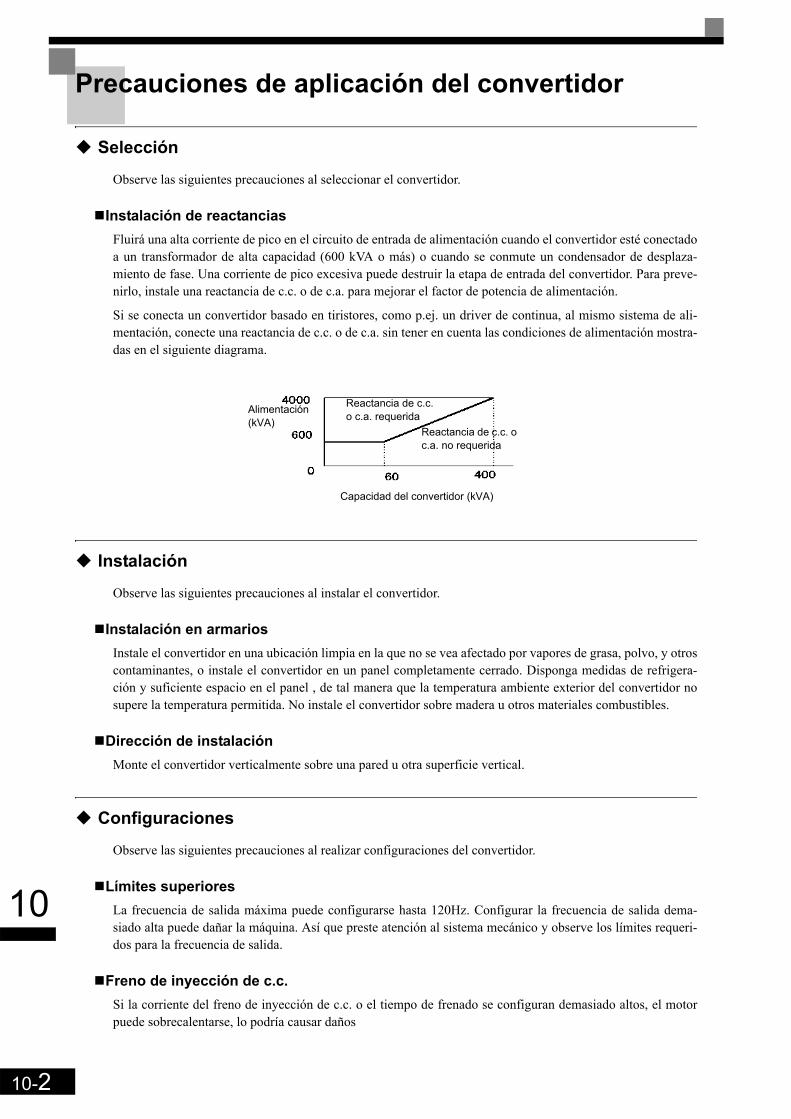
10-2
10
Precauciones de aplicación del convertidor
Selección
Observe las siguientes precauciones al seleccionar el convertidor.
Instalación de reactanciasFluirá una alta corriente de pico en el circuito de entrada de alimentación cuando el convertidor esté conectadoa un transformador de alta capacidad (600 kVA o más) o cuando se conmute un condensador de desplaza-miento de fase. Una corriente de pico excesiva puede destruir la etapa de entrada del convertidor. Para preve-nirlo, instale una reactancia de c.c. o de c.a. para mejorar el factor de potencia de alimentación.
Si se conecta un convertidor basado en tiristores, como p.ej. un driver de continua, al mismo sistema de ali-mentación, conecte una reactancia de c.c. o de c.a. sin tener en cuenta las condiciones de alimentación mostra-das en el siguiente diagrama.
Instalación
Observe las siguientes precauciones al instalar el convertidor.
Instalación en armariosInstale el convertidor en una ubicación limpia en la que no se vea afectado por vapores de grasa, polvo, y otroscontaminantes, o instale el convertidor en un panel completamente cerrado. Disponga medidas de refrigera-ción y suficiente espacio en el panel , de tal manera que la temperatura ambiente exterior del convertidor nosupere la temperatura permitida. No instale el convertidor sobre madera u otros materiales combustibles.
Dirección de instalaciónMonte el convertidor verticalmente sobre una pared u otra superficie vertical.
Configuraciones
Observe las siguientes precauciones al realizar configuraciones del convertidor.
Límites superioresLa frecuencia de salida máxima puede configurarse hasta 120Hz. Configurar la frecuencia de salida dema-siado alta puede dañar la máquina. Así que preste atención al sistema mecánico y observe los límites requeri-dos para la frecuencia de salida.
Freno de inyección de c.c.Si la corriente del freno de inyección de c.c. o el tiempo de frenado se configuran demasiado altos, el motorpuede sobrecalentarse, lo podría causar daños
Alimentación (kVA)
Reactancia de c.c. o c.a. requerida
Reactancia de c.c. o c.a. no requerida
Capacidad del convertidor (kVA)
10-3
10
Tiempos de Aceleración/DeceleraciónLos tiempos de aceleración y deceleración están determinados por el par generado por el motor, el par decarga, y el momento de inercia de la carga (GD2/4). Si las funciones de prevención de bloqueo son activadasdurante la aceleración o la deceleración, es posible que sea necesario incrementar el tiempo de aceleración odeceleración.
Para reducir los tiempos de aceleración o deceleración, incremente la capacidad del motor y del convertidor.
Manipulación
Observe las siguientes precauciones al realizar el cableado o el mantenimiento del convertidor.
Comprobación del cableadoEl convertidor sufrirá daños internos (en la etapa inversora) si la tensión de alimentación se aplica al terminalde salida U, V, o W. Compruebe la existencias de errores en el cableado antes de suministrar alimentación.Compruebe todo el cableado y las secuencias de control cuidadosamente.
Instalación de contactores magnéticos.Si se instala un contactor magnético en la línea de alimentación no exceda un arranque por hora. Si se conectamás a menudo puede resultar dañado el circuito de prevención de corriente de irrupción (circuito de precarga).
Mantenimiento e inspeccionesTras desconectar OFF la alimentación del circuito principal puede tardar varios minutos hasta que el bus dec.c. esté completamente descargado. El LED CHARGE, que indica que el bus de c.c. está cargado, se iluminasi la tensión sobrepasa los 10 Vc.c.
10-4
10
Precauciones de aplicación del motor
Utilización del convertidor para un motor estándar existente
Observe las siguientes precauciones cuando utilice el convertidor para un motor estándar existente.
Rangos de baja velocidadSi se utiliza un motor con refrigeración estándar a baja velocidad, los efectos de refrigeración se verándisminuidos. Si el motor se utiliza en aplicaciones de par constante en áreas de baja velocidad, el motor puedesobrecalentarse. Si se requiere un par completo a baja velocidad continuamente, debe utilizarse un motorrefrigerado externamente.
Instalación de resistencia a la tensiónSi el convertidor se utiliza con una tensión de entrada de 440V o más y cables del motor largos, pueden produ-cirse picos de tensión en los terminales del motor que pueden dañar los bobinados del motor. Asegúrese de quela clase de aislamiento del motor es suficiente.
RuidoEl ruido generado en el motor depende de la frecuencia portadora. Cuanto más alta sea la configuración,menor será el ruido generado.
Utilización del convertidor para motores especiales
Observe las siguientes precauciones cuando utilice un motor especial.
Motor de polos variablesLa corriente nominal de entrada de los motores con número de polos variables difiere de la de los motoresestándar. Seleccione un convertidor apropiado de acuerdo a la corriente máxima del motor.
Motor monofásicoNo utilice un convertidor para un motor monofásico. Estos motores están a menudo equipados concondensadores. Cualquier condensador directamente conectado a la salida del convertidor puede dañar elconvertidor.
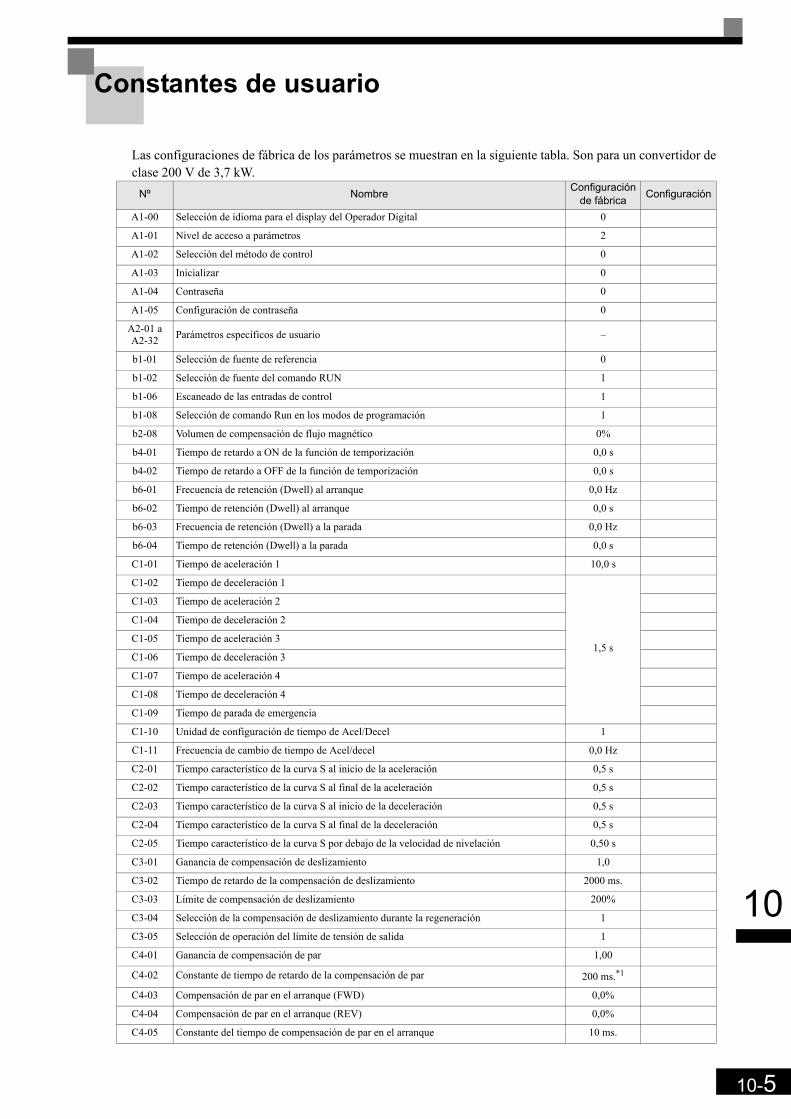
10-5
10
Constantes de usuario
Las configuraciones de fábrica de los parámetros se muestran en la siguiente tabla. Son para un convertidor declase 200 V de 3,7 kW.
Nº Nombre Configuración de fábrica Configuración
A1-00 Selección de idioma para el display del Operador Digital 0
A1-01 Nivel de acceso a parámetros 2
A1-02 Selección del método de control 0
A1-03 Inicializar 0
A1-04 Contraseña 0
A1-05 Configuración de contraseña 0
A2-01 a A2-32 Parámetros específicos de usuario –
b1-01 Selección de fuente de referencia 0
b1-02 Selección de fuente del comando RUN 1
b1-06 Escaneado de las entradas de control 1
b1-08 Selección de comando Run en los modos de programación 1
b2-08 Volumen de compensación de flujo magnético 0%
b4-01 Tiempo de retardo a ON de la función de temporización 0,0 s
b4-02 Tiempo de retardo a OFF de la función de temporización 0,0 s
b6-01 Frecuencia de retención (Dwell) al arranque 0,0 Hz
b6-02 Tiempo de retención (Dwell) al arranque 0,0 s
b6-03 Frecuencia de retención (Dwell) a la parada 0,0 Hz
b6-04 Tiempo de retención (Dwell) a la parada 0,0 s
C1-01 Tiempo de aceleración 1 10,0 s
C1-02 Tiempo de deceleración 1
1,5 s
C1-03 Tiempo de aceleración 2
C1-04 Tiempo de deceleración 2
C1-05 Tiempo de aceleración 3
C1-06 Tiempo de deceleración 3
C1-07 Tiempo de aceleración 4
C1-08 Tiempo de deceleración 4
C1-09 Tiempo de parada de emergencia
C1-10 Unidad de configuración de tiempo de Acel/Decel 1
C1-11 Frecuencia de cambio de tiempo de Acel/decel 0,0 Hz
C2-01 Tiempo característico de la curva S al inicio de la aceleración 0,5 s
C2-02 Tiempo característico de la curva S al final de la aceleración 0,5 s
C2-03 Tiempo característico de la curva S al inicio de la deceleración 0,5 s
C2-04 Tiempo característico de la curva S al final de la deceleración 0,5 s
C2-05 Tiempo característico de la curva S por debajo de la velocidad de nivelación 0,50 s
C3-01 Ganancia de compensación de deslizamiento 1,0
C3-02 Tiempo de retardo de la compensación de deslizamiento 2000 ms.
C3-03 Límite de compensación de deslizamiento 200%
C3-04 Selección de la compensación de deslizamiento durante la regeneración 1
C3-05 Selección de operación del límite de tensión de salida 1
C4-01 Ganancia de compensación de par 1,00
C4-02 Constante de tiempo de retardo de la compensación de par 200 ms.*1
C4-03 Compensación de par en el arranque (FWD) 0,0%
C4-04 Compensación de par en el arranque (REV) 0,0%
C4-05 Constante del tiempo de compensación de par en el arranque 10 ms.

10-6
10
C5-01 Ganancia proporcional (P) 1 del ASR 40 *1
C5-02 Tiempo integral (I) 1 del ASR 0,5 *1
C5-03 Ganancia proporcional (P) 2 del ASR 20 *1
C5-04 Tiempo integral (I) 2 del ASR 0,5 *1
C5-06 Tiempo de retardo del ASR 0,004 ms.
C5-07 Frecuencia de cambio de ASR 0,0 Hz
C5-08 Límite integral (I) del ASR 400%
C5-09 Ganancia proporcional (P) 3 del ASR 40,00
C5-10 Tiempo integral (I) 3 del ASR 0,500 s
C5-15 Ganancia (P) del ASR durante el ajuste de desplazamiento de encoder 5,00
C6-02 Selección de frecuencia portadora 1
C6-06 Método de selección PWM 0
C6-11 Frecuencia portadora para control de motor PM 4
d1-01 Referencia de frecuencia 1 0,00 Hz
d1-02 Referencia de frecuencia 2 0,00 Hz
d1-03 Referencia de frecuencia 3 0,00 Hz
d1-04 Referencia de frecuencia 4 0,00 Hz
d1-05 Referencia de frecuencia 5 0,00 Hz
d1-06 Referencia de frecuencia 6 0,00 Hz
d1-07 Referencia de frecuencia 7 0,00 Hz
d1-08 Referencia de frecuencia 8 0,00 Hz
d1-09 Referencia de frecuencia 9 Vn 50,00 Hz
d1-10 Referencia de frecuencia 10V1 0,00 Hz
d1-11 Referencia de frecuencia 11V2 0,00 Hz
d1-12 Referencia de frecuencia 12V3 0,00 Hz
d1-13 Referencia de frecuencia 13Vr 0,00 Hz
d1-14 Referencia de frecuencia 14 Inspección 25 Hz
d1-17 Referencia de frecuencia de jog / velocidad de nivelación 4,00 Hz
d1-18 Selección de prioridad de velocidad 1
d1-19 Velocidad de segundo motor 0,00 Hz
d6-03 Selección de la función de sobreexcitación 0
d6-06 Límite de la función de sobreexcitación 400%
E1-01 Configuración de la tensión de entrada *1
E1-04 Frecuencia de salida máxima (FMAX) 50,0 Hz
E1-05 Tensión de salida máxima (VMAX) *1
E1-06 Frecuencia base (FA) 50,0 Hz
E1-07 Frecuencia media de salida (FB) *1
E1-08 Tensión de frecuencia media de salida (VB) *1
E1-09 Frecuencia de salida mín. (FMIN) *1
E1-10 Tensión mínima de frecuencia de salida (VMIN) *1
E1-13 Tensión base (VBASE) 0,0 V
E2-01 Corriente nominal del motor *1
E2-02 Deslizamiento nominal del motor *1
E2-03 Corriente en vacío del motor *1
E2-04 Número de polos del motor 4 polos
E2-05 Resistencia línea a línea del motor *1
E2-06 Inductancia de fuga del motor *1
Nº Nombre Configuración de fábrica Configuración
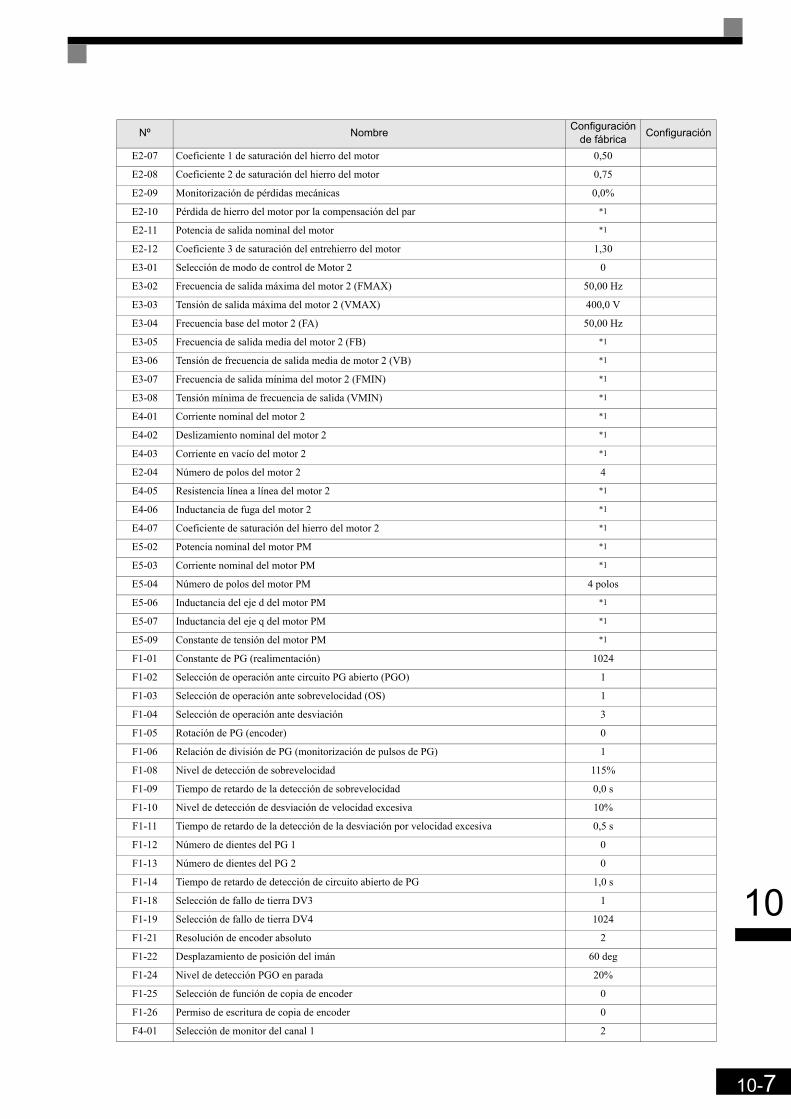
10-7
10
E2-07 Coeficiente 1 de saturación del hierro del motor 0,50
E2-08 Coeficiente 2 de saturación del hierro del motor 0,75
E2-09 Monitorización de pérdidas mecánicas 0,0%
E2-10 Pérdida de hierro del motor por la compensación del par *1
E2-11 Potencia de salida nominal del motor *1
E2-12 Coeficiente 3 de saturación del entrehierro del motor 1,30
E3-01 Selección de modo de control de Motor 2 0
E3-02 Frecuencia de salida máxima del motor 2 (FMAX) 50,00 Hz
E3-03 Tensión de salida máxima del motor 2 (VMAX) 400,0 V
E3-04 Frecuencia base del motor 2 (FA) 50,00 Hz
E3-05 Frecuencia de salida media del motor 2 (FB) *1
E3-06 Tensión de frecuencia de salida media de motor 2 (VB) *1
E3-07 Frecuencia de salida mínima del motor 2 (FMIN) *1
E3-08 Tensión mínima de frecuencia de salida (VMIN) *1
E4-01 Corriente nominal del motor 2 *1
E4-02 Deslizamiento nominal del motor 2 *1
E4-03 Corriente en vacío del motor 2 *1
E2-04 Número de polos del motor 2 4
E4-05 Resistencia línea a línea del motor 2 *1
E4-06 Inductancia de fuga del motor 2 *1
E4-07 Coeficiente de saturación del hierro del motor 2 *1
E5-02 Potencia nominal del motor PM *1
E5-03 Corriente nominal del motor PM *1
E5-04 Número de polos del motor PM 4 polos
E5-06 Inductancia del eje d del motor PM *1
E5-07 Inductancia del eje q del motor PM *1
E5-09 Constante de tensión del motor PM *1
F1-01 Constante de PG (realimentación) 1024
F1-02 Selección de operación ante circuito PG abierto (PGO) 1
F1-03 Selección de operación ante sobrevelocidad (OS) 1
F1-04 Selección de operación ante desviación 3
F1-05 Rotación de PG (encoder) 0
F1-06 Relación de división de PG (monitorización de pulsos de PG) 1
F1-08 Nivel de detección de sobrevelocidad 115%
F1-09 Tiempo de retardo de la detección de sobrevelocidad 0,0 s
F1-10 Nivel de detección de desviación de velocidad excesiva 10%
F1-11 Tiempo de retardo de la detección de la desviación por velocidad excesiva 0,5 s
F1-12 Número de dientes del PG 1 0
F1-13 Número de dientes del PG 2 0
F1-14 Tiempo de retardo de detección de circuito abierto de PG 1,0 s
F1-18 Selección de fallo de tierra DV3 1
F1-19 Selección de fallo de tierra DV4 1024
F1-21 Resolución de encoder absoluto 2
F1-22 Desplazamiento de posición del imán 60 deg
F1-24 Nivel de detección PGO en parada 20%
F1-25 Selección de función de copia de encoder 0
F1-26 Permiso de escritura de copia de encoder 0
F4-01 Selección de monitor del canal 1 2
Nº Nombre Configuración de fábrica Configuración

10-8
10
F4-02 Ganancia del canal 1 100,0%
F4-03 Selección de monitor del canal 2 3
F4-04 Ganancia del canal 2 50,0%
F4-05 Bias del monitor de salida del canal 1 0,0%
F4-06 Bias del monitor de salida del canal 2 0,0%
F4-07 Nivel de señal de salida analógica para el canal 1 0
F4-08 Nivel de señal de salida analógica para el canal 2 0
F5-01 Selección de la salida del canal 1 0
F5-02 Selección de la salida del canal 2 1
F5-03 Selección de la salida del canal 3 2
F5-04 Selección de la salida del canal 4 4
F5-05 Selección de la salida del canal 5 6
F5-06 Selección de la salida del canal 6 37
F5-07 Selección de la salida del canal 7 0F
F5-08 Selección de la salida del canal 8 0F
F5-09 Selección del modo de salida de DO-08 0
F6-01 Selección de operación tras fallo en la comunicación 1
F6-02 Nivel de entrada de fallo externo desde tarjeta opcional de comunicaciones 0
F6-03 Método de parada para fallo externo desde tarjeta opcional de comunicaciones 1
F6-04 Ejemplo de seguimiento desde la tarjeta opcional de comunicaciones 0
F6-05 Selección de unidad de monitor actual 0
F6-06 Selección de referencia de par/límite de par desde tarjeta opcional de comunicaciones 0
H1-01 Selección de función del terminal S3 80
H1-02 Selección de función del terminal S4 84
H1-03 Selección de función del terminal S5 81
H1-04 Selección de función del terminal S6 83
H1-05 Selección de función del terminal S7 F
H2-01 Selección de función de terminal M1-M2 40
H2-02 Selección de función de terminal M3-M4 41
H2-03 Selección de función de terminal M5-M6 6
H3-01 Selección de nivel del señal de CH1 AI-14B de referencia de frecuencia 0
H3-02 Ganancia de entrada de CH1 AI-14B de referencia de frecuencia 100,0%
H3-03 Bias de entrada de CH1 AI-14B de referencia de frecuencia 0,0%
H3-04 Selección de nivel de señal de CH3 AI-14B 0
H3-05 Selección de función de CH3 AI-14B 2
H3-06 Ganancia de entrada CH3 AI-14B 100,0%
H3-07 Bias de entrada CH3 AI-14B 0,0%
H3-08 Selección de nivel de señal CH2 AI-14B 0
H3-09 Selección de función de CH2 AI-14B 3
H3-10 Ganancia de entrada CH2 AI-14B 100,0%
H3-11 Bias de entrada CH2 AI-14B 0,0%
H3-12 Constante de tiempo de filtro de entrada analógica para la AI-14B 0,03 s
H3-15 Selección de función del terminal A1 0
H3-16 Ganancia de entrada del terminal A1 100,0%
H3-17 Bias de entrada del terminal A1 0,0%
L1-01 Selección de protección del motor 1
L1-02 Constante de tiempo de protección del motor 1,0 min.
L2-05 Nivel de deteción de baja tensión 190 V
Nº Nombre Configuración de fábrica Configuración

10-9
10
L2-11 Tensión de batería 0V
L3-01 Selección de prevención de bloqueo durante acel 1
L3-02 Selección de nivel de prevención de bloqueo durante acel 150%
L3-05 Selección de prevención de bloqueo durante la marcha 1
L3-06 Nivel de prevención de bloqueo durante la marcha 150%
L4-01 Nivel de detección de velocidad alcanzada 0,0 Hz
L4-02 Ancho de detección de velocidad alcanzada 2,0 Hz
L4-03 Nivel de detección de velocidad alcanzada (+/-) 0,0 Hz
L4-04 Ancho de detección de velocidad alcanzada (+/-) 2,0 Hz
L5-01 Número de intentos de reinicio 2
L5-02 Selección de operación de auto reinicio 0
L5-05 Selección de reinicio por fallo de baja tensión (UV1) 1
L6-01 Selección de detección de par 1 0
L6-02 Nivel de detección de par 1 150%
L6-03 Tiempo de detección de par 1 0,1 s
L6-04 Selección de detección de par 2 0
L6-05 Nivel de detección de par 2 150%
L6-06 Tiempo de detección de par 2 0,1 s
L7-01 Límite de par de marcha directa 300%
L7-02 Límite de par de marcha inversa 300%
L7-03 Límite de par regenerativo de marcha directa 300%
L7-04 Límite de par regenerativo de marcha inversa 300%
L7-06 Constante de tiempo de límite de par 200 ms
L7-07 Operación de límite de par durante acel/decel 0
L8-02 Nivel de prealarma por sobrecalentamiento 75 °C*1
L8-03 Selección de operación tras prealarma de sobrecalentamiento 3
L8-07 Selección de protección de fase abierta de salida 2
L8-09 Selección de protección de tierra 1
L8-10 Selección de control del ventilador de refrigeración 0
L8-11 Tiempo de retardo del control del ventilador de refrigeración 60 s
L8-12 Temperatura ambiente 45 °C
L8-18 Selección de CLA suave 1
L8-20 Tiempo de detección de LF 0,2 s
n2-01 Ganancia de control de detección de realimentación de velocidad (AFR) 1,00
n2-02 Constante de tiempo de control de detección de realimentación de velocidad (AFR) 50 ms.
n5-01 Selección de control de realimentación positiva (feed forward) 1
n5-02 Tiempo de aceleración del motor 0,178 s
n5-03 Ganancia proporcional de realimentación positiva (feedforward) 1,00
n5-05 Ajuste de tiempo de aceleración del motor 0
n8-29 Ganancia P del eje q del regulador de corriente 1000 rad/s
n8-30 Tiempo I del eje q del regulador de corriente 10,0 ms
n8-32 Ganancia P del eje d del regulador de corriente 1000 rad/s
n8-33 Ganancia I del eje d del regulador de corriente 10,0 ms
n8-35 Método de detección de posición del imán 5
n8-46 Nivel de corriente medida de inductancia 10,0%
n9-60 Tiempo de retardo de inicio de conversor A/D 0,0 µs
o1-01 Selección de monitor 6
o1-02 Selección de monitor tras encendido 1
Nº Nombre Configuración de fábrica Configuración

10-10
10
o1-03 Unidades de frecuencia de configuración y monitorización de referencia 0
o1-04 Unidad de configuración para parámetros de frecuencia relacionados con las características V/f 0
o1-05 Ajuste del contraste del display LCD 3
o2-01 Habilitar/deshabilitar tecla LOCAL/REMOTE 0
o2-02 Tecla STOP durante la operación de terminal de circuito de control 0
o2-03 Valor inicial de parámetro de usuario 0
o2-04 Selección kVA 0
o2-05 Selección del método de configuración de la referencia de frecuencia 0
o2-06 Selección de operación cuando el Operador Digital/Monitor LED está desconectado 0
o2-07 Configuración de tiempo de operación acumulativo 0 hr.
o2-08 Selección de tiempo de operación acumulativo 0
o2-09 Inicializar Modo 2
o2-10 Configuración de tiempo de operación del ventilador 0 hr.
o2-12 Inicializar seguimiento de fallo 0
o2-15 Inicializar monitorización “Nº de viajes” 0
o3-01 Selección de función copiar 0
o3-02 Selección de permiso de lectura 0
S1-01 Nivel de velocidad cero en parada 0,5 Hz
S1-02 Inyección de corriente c.c. de freno en el arranque 50%
S1-03 Inyección de corriente c.c. de freno en la parada 50%
S1-04 Tiempo de inyección de c.c. de freno al arranque 0,40 s
S1-05 Tiempo de inyección de c.c. de freno a la parada 0,60
S1-06 Tiempo de retardo de abrir freno 0,20
S1-07 Tiempo retardo de cerrar freno 0,10
S1-14 Tiempo de retardo de la detección de SE2 200 ms.
S1-15 Tiempo de retardo de la detección de SE3 200 ms.
S1-16 Tiempo de retardo de Run 0,10 s
S1-17 Ganancia de inyección de corriente c.c. en operación regenerativa 100%
S1-18 Ganancia de inyección de corriente c.c. en operación normal 20%
S1-19 Tiempo de retardo de apertura de contactor de salida 0,10 s
S1-20 Ganancia de servo cero 5
S1-21 Ancho de finalización de servo cero 10
S1-22 Tiempo de incremento de compensación de par al arranque 500 ms.
S1-23 Ganancia de compensación de par durante descenso 1,000
S1-24 Bias de compensación de par durante el ascenso 0,0%
S1-25 Bias de compensación de par durante descenso 0,0%
S1-26 Retención en referencia de velocidad inicial 0,0 Hz
S1-27 Nivel de velocidad de zona de puerta 0,0 Hz
S1-28 Selección de detección de SE1 0
S1-29 Nivel de desaparición de compensación de par 0,0 Hz
S1-30 Tiempo de compensación de desaparición de par 1000 ms.
S1-31 Tiempo de límite de par en parada 0 ms
S2-01 Velocidad nominal del motor 1380 rpm
S2-02 Ganancia de compensación de deslizamiento en modo de operación normal 0,7
S2-03 Ganancia de compensación de deslizamiento en modo de regeneración 1,0
S2-05 Tiempo de retardo de detección de par de compensación de deslizamiento 1,0 s
S2-06 Tiempo de detección de par de compensación de deslizamiento 0,5 s
Nº Nombre Configuración de fábrica Configuración

10-11
10
S2-07 Tiempo de retardo de la compensación de deslizamiento 200 ms.
S3-01 Selección de operación Piso corto 0
S3-03 Tiempo de rampa de deceleración de inspección 0,0 s
S3-04 Nivel de detección de velocidad nominal/nivelación 0,0 Hz
S3-05 Velocidad nominal para cálculo de Piso corto 0,0 Hz
S3-06 Búsqueda de dirección de carga ligera para operación de rescate 0
S3-07 Tiempo de búsqueda de carga ligera 1,0 s
S3-08 Orden de fase de salida 0
S3-09 Detección de fallo de falta de referencia de frecuencia (FRL) 1
S3-10 Frecuencia de búsqueda de carga ligera 3,00 Hz
S3-11 Límite de par de operación de rescate 100%
S3-12 Selección de reinicio de Baseblock 0
S3-13 Diámetro de polea de tracción 400 mm
S3-14 Cables 2
S3-15 Relación de engranaje 1,000
S3-16 Nivel de detección de aceleración excesiva 1,5 m/s²
S3-17 Constante de tiempo de aceleración/deceleración excesiva 0,05 s
S3-18 Selección de método de detección de aceleración excesiva 0
S3-19 Límite superior de velocidad de inspección 25,0 Hz
S3-20 Tiempo de velocidad constante mínimo para Piso corto 0,0 s
S3-21 Ganancia de tiempo de aceleración de cálculo de distancia 150,0%
S3-22 Ganancia de tiempo de deceleración de cálculo de distancia 150,0%
S3-24 Método de búsqueda de dirección de carga ligera 0
T1-01 Selección de modo Autotuning 0
T1-02 Potencia de salida del motor *1
T1-03 Tensión nominal del motor *1
T1-04 Corriente nominal del motor *1
T1-05 Frecuencia básica del motor 60,0 Hz
T1-06 Número de polos del motor 4 polos
T1-07 Velocidad básica del motor 1450 rpm
T1-08 Número de pulsos PG (encoder) 1024
T1-09 Corriente en vacío del motor Valor de E2-03
T2-01 Potencia de salida del motor *1
T2-02 Frecuencia básica del motor 1750 rpm
T2-03 Tensión nominal del motor *1
T2-04 Corriente nominal del motor *1
T2-05 Número de polos del motor 4
T2-08 Constante de tensión del motor *1
T2-09 Número de pulsos PG (encoder) 2048
T2-10 Selección de cálculo de constante de tensión del motor 1
*1. La configuración de fábrica depende del modelo del convertidor y del método de control.
Nº Nombre Configuración de fábrica Configuración
10-12
10


















