La Recta Teoria
3
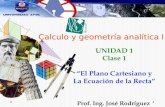
LA RECTA 1. Definición Se llama vector director de una recta a todo vector diferente de cero, tal que sea paralelo a la recta Nota: Decir que v es paralelo a , indica cualesquiera de las dos cosas: v ⊂ o que v / ¿ L, siendo que v está contenido en otra recta. ECUACION VECTORIAL DE LA RECTA La ecuación vectorial de una recta , que pasa por el punto P 0 (x 0 , y 0 , z 0 ) y con un vector director v= (a 1 , a 2 , a 3 ), es P = P 0 + t v, t ∊ IR Demostración: 1 Sea P un punto variable de 2 Como P 0 es un punto fijo de v el vector director de ; en el triángulo OP 0 P se tiene la siguiente suma vectorial: OP = OP 0 + P 0 P …….. (2*) 3 Pero OP =P−O ¿ ( x,y,z ) −( 0 , 0 , 0) ¿ ( x−0 ,y−0 ,z−0 )=( x,y,z) =P OP 0 =P 0 −0 ¿ ( x 0 ,y 0 ,z 0 ) −( 0 , 0 , 0 ) = ( x 0 − 0 ,y 0 −0 ,z 0 −0 ) = ( x 0 ,y 0 ,z 0 ) =P 0 4 Sustituir (3) en (2*), obtenemos la ecuación vectorial:
-
Upload
omar-palacios -
Category
Documents
-
view
219 -
download
0
description
rew
Transcript of La Recta Teoria

LA RECTA1. DefiniciónSe llama vector director de una recta a todo vector diferente de cero, tal que sea paralelo a la recta
Nota: Decir que v⃗ es paralelo a 𝓛, indica cualesquiera de las dos cosas: v⃗ ⊂ 𝓛 o que v⃗ /¿L ,siendo que v⃗ está contenido en otra recta.ECUACION VECTORIAL DE LA RECTALa ecuación vectorial de una recta 𝓛, que pasa por el punto P0 (x0, y0, z0) y con un vector director v⃗= (a1, a2, a3), es P = P0 + tv⃗, t ∊ IRDemostración:1 Sea P un punto variable de 𝓛 2 Como P0 es un punto fijo de 𝓛 v⃗ el vector director de 𝓛; en el triángulo OP0P se tiene la siguiente suma vectorial:O⃗P=O⃗ P0+ P⃗0 P…….. (2*)3 Pero O⃗P=P−O
¿ ( x , y , z )−(0 ,0 ,0)
¿ ( x−0 , y−0 , z−0 )=( x , y , z )=P
OP0=P0−0 ¿ (x0 , y0, z0 )−(0 ,0 ,0 )=(x0−0 , y0−0 , z0−0 )=(x0 , y0 , z0 )=P04 Sustituir (3) en (2*), obtenemos la ecuación vectorial:

P = P0 + tv⃗, t ∊ IRLa ecuación de la recta queda bien definida (bien determinado), si:a) Se conocen un punto P0 y su vector director v⃗.b) Se conocen dos puntos P0 y P1. En este caso el vector director se halla por la diferencia entre P1 y P0: v⃗ = P1 – P0ECUACIÓN PARAMETRICA Si en la ecuación P = P0 + tv⃗, reemplazamos los puntos P, P0 y el vector v⃗ por sus componentes:{ P=(x , y , z )P0=(x0 , y0 , z0)v⃗=(a1 , a2 ,a3)
Obtenemos: ( x , y , z )=(x0 , y0 , z0)+ t (a1 , a2 , a3 )
¿ (x0 , y0 , z0)+ (t a1 , t a2 , t a3 )
¿ (x0+t a1 , y0+t a2 , z0+t a3 )
ECUACION DE SIMETRIADespejando la ecuación paramétrica tenemos:t=x−x0a1
t=x−x0a2
t=x−x0a3
x−x0a1
=x−x0a2
=x−x0a3FORMA GENERAL DE LAS ECUACIONES DE LA RECTAEn este caso afirmamos que una recta 𝓛 queda bien definida si se intersecan dos planos diferentes cualesquiera, cuyas ecuaciones en forma general son:
L {A1 x+B1 y+C1 z+D1=0A2 x+B2 y+C2 z+D2=0DISTANCIA ENTRE RECTAS PARALELAS EN R3

Sean L1: P = P0 + sa⃗ y L2: P = Q0 + sa⃗ dos rectas paralelas.Entonces:d (L1 , L2 )=√‖⃗P0Q0‖2‖a⃗‖2−(⃗P0Q0 . a⃗)
2
‖a⃗‖Demostración:‖⃗P0Q0‖
2=d2 (L1 L2 )+‖Proy a⃗⃗P0Q0‖
2
d2 (L1L2 )=‖⃗P0Q0‖2−‖Proya⃗ P⃗0Q 0‖
2
d2 (L1L2 )=‖⃗P0Q0‖2−|Compa⃗ P⃗0Q 0|
2
d2 (L1L2 )=‖⃗P0Q0‖2−
( P⃗0Q0 . a⃗)2
‖a⃗‖2
d (L1 , L2 )=√‖⃗P0Q0‖2‖a⃗‖2−(⃗P0Q0 . a⃗)2
‖a⃗‖