Lego mindstorms hardware
20
COLEGIO NACIONAL NICOLAS ESGUERRA EDIFICAMOS FUTURO Diego Alejandro Gonzalez cod:12 Luis Felipe Galvis cod:11
-
Upload
diego-alejandro-sdvsf -
Category
Documents
-
view
125 -
download
1
Transcript of Lego mindstorms hardware

COLEGIO NACIONAL NICOLAS ESGUERRAEDIFICAMOS FUTURO
Diego Alejandro Gonzalez cod:12Luis Felipe Galvis cod:11

Introducción
Cualquier estudiante puede diseñar, construir, programar y poner a prueba el robot LEGO MINDSTROMS con el fin de desarrollar la creatividad y las habilidades para resolver problemas, mas comunicación , organización y investigación que los ayuda a prepararse en niveles mas altos de educación y el entorno laboral.
LEGO MINDSTROMS contiene un avanzado ladrillo NTX de 32 bits controlado por un ordenador tiene sensores de sonidos bluetooth, múltiples funciones de descargas contiene registros de datos.

CONSTRUIR, PROGRAMAR, PONER A PRUEBA
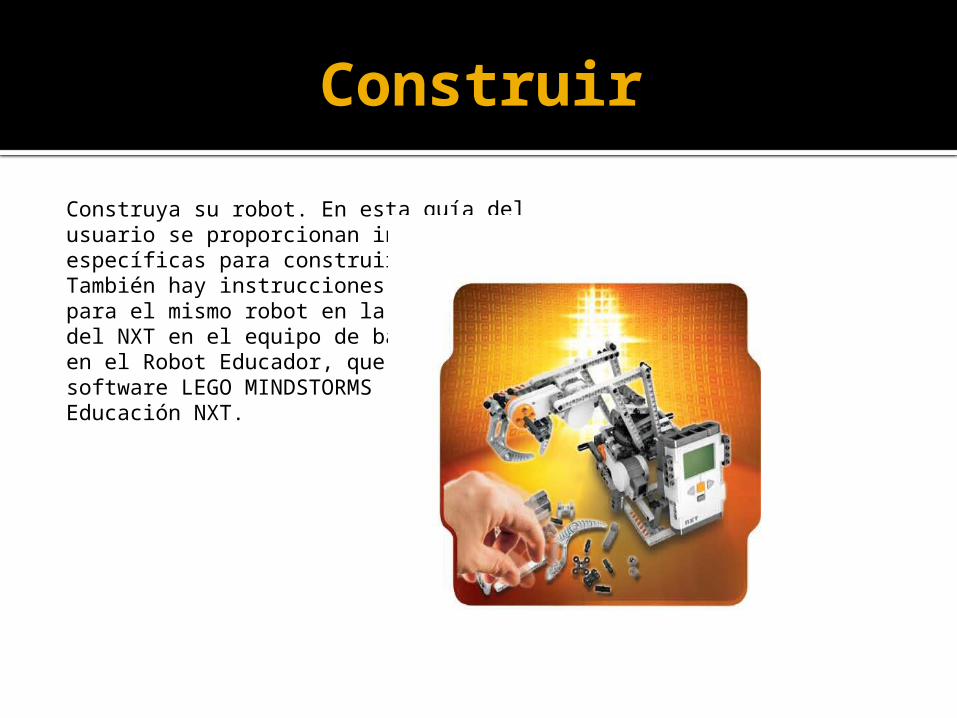
Construir
Construya su robot. En esta guía delusuario se proporcionan instruccionesespecíficas para construir un robot.También hay instrucciones de construcciónpara el mismo robot en la Guía de montajedel NXT en el equipo de base n.º 9797 yen el Robot Educador, que es parte delsoftware LEGO MINDSTORMSEducación NXT.

Programar
Programe su robot utilizando el softwareLEGO MINDSTORMS Education NXT. Seincluyen muchos ejemplos en la parteRobot Educador del software. Descarguesu pro grama al ladrillo NXT con la conexióninalámbrica Bluetooth o con el cable USB

Poner a prueba
Ejecute su programa. ¿Qué ocurre? ¿Surobot actuó como lo esperaba? Si no lohizo, ajuste su robot o su programa einténtelo nuevamente.
Comience aquí:Si usted prefiere comenzar por construir y programar con lapantalla del ladrillo NXT sin un ordenador, consulte la Guía demontaje del NXT.

LADRILLO NXT -es un ladrillo inteligente de LEGO controlado por un ordenador, es el cerebro del robot
SENSORES TACTILES -le permiten al robot responder a obstáculos en el entorno
SENSOR ACUSTICO -le permite al robot responder a los niveles del sonido
SENSOR FOTOSENSIBLE –le permite al robot responder a las variaciones del nivel de luz y color
SENSOR ULTRASONICO -le permite al robot medir la distancia hacia un objeto y responder al movimiento
componentes

Baterías
Batería recargable: La batería recargable encaja en la parte inferior del NXT. Para instalar la batería recargable, mueva la pestaña de plástico del lado con su pulgar para abrir la parte trasera. El NXT viene con una cobertura extra que se usa cuando se utilizan 6 baterías tamaño AA. (Consulte los detalles en la página siguiente). Sosteniendo la batería recargable, presione hacia adentro la pestaña de plástico y coloque la batería en su lugar.
Otros tipos de baterías: El NXT también funciona usando seis baterías AA/LR6. Se recomiendan las baterías alcalinas. Se pueden utilizar baterías recargables de tipoAA/LR6. Sin embargo, puede que disminuya el rendimiento de la potencia del NXT.

CONEXIÓN DE LOS MOTORES Conecte un extremo de un cable negro al motor, conecte el otro extremo a uno d los puertos de salida A B C
CONEXIÓN DE LOS SENSORESConecte un extremo de un cable negro al sensor y el otro a uno de los puertos de entrada 1 2 3 4
CARGA Y DESCARGA DE ARCHIVOSCon el puerto USB inalámbrico se utilizan para cargar y descargar datos entre su ordenador y el NXT.
conexiones
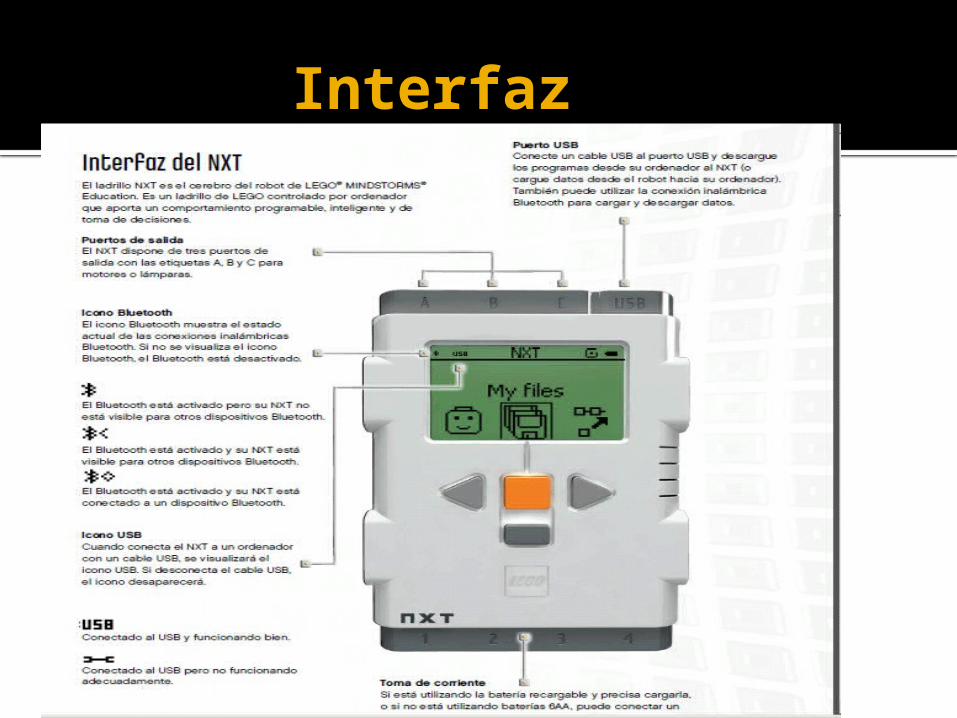
Interfaz

Ladrillo NTX

Especificaciones
Microprocesador ARM7 de 32 bits FLASH de 256 kb, RAM de 64 Kb Microprocesador de 8 bits FLASH de 4Kb, RAM de 512 byte Comunicación Inalámbrica, Blueetoth, compatible con
Bluetooth clase II V2.0 Puerto USB 2.0 Cuatro puertos de entrada Tres puertos de salida Pantalla matrix de puntos 50 x 100 pixeles Altavoz calidad de sonido 8 KHz Fuente de alimentación: batería litio recargable o seis
batearías AA Toma de adaptador corriente EUA: 120VAC 60Hz

SENSORES

Sensor táctil
El sensor táctil es un interruptor: puede presionarse o liberarse.
Ver: Observe la respuesta actual del sensor táctil en la pantalla utilizando Ver [View]. Un cero [0] significa que no está presionado el botón del sensor táctil. Un uno [1] en la pantalla significa que está presionado el botón del sensor táctil.
Presione y retenga el botón del sensortáctil mientras observa la pantalla del NXT.Deberá observar un uno (1) en la pantalla
Ahora libere el botón del sensor táctil.Deberá observar un cero (0) en la pantalla.

Sensor acústico
El sensor acústico detecta el nivel de decibeles: la suavidad o intensidad de un sonido. El sensor acústico detecta dB y dBA. dBA: sonidos que el oído humano es capaz de oír.
dB: todos los sonidos existentes, incluyendo los sonidos demasiado altos o bajos para el oído humano.
Seleccione Ver [View] en la pantalladel NXT.Seleccione el icono Sonido dB.Seleccione el puerto 2.
Haga sonidos en el micrófono (sensor acústico) y observe las lecturasen el NXT. Pruebe también obtener la lectura de los sonidos a sualrededor: ¿Qué tan fuertes son las voces más cercanas?

Sensor fotosensible
El sensor fotosensible le permite al robot distinguir entre luminosidad y oscuridad, para obtener la lectura de la intensidad de luminosidad en una habitación y para medir la intensidad de luminosidad sobre superficies de colores. Esto es lo que ven sus ojos.
Esto es lo que su robot ve utilizando elsensor fotosensible.
Seleccione el icono de la luzreflejada. Seleccione el puerto en el cual ha colocado el sensor.
Coloque el sensor fotosensible cerca de los diferentes colores a su alrededor y observe las diferentes lecturas. Puede utilizar la tabla de colores en la página 80 de esta guía o en la página 69 de la guía de montaje del NXT.

Sensor ultrasónico
El sensor ultrasónico le permite al robot ver y reconocer objetos, evitar obstáculos, medir distancias y detectar movimiento. El sensor ultrasónico utiliza el mismo principio científico que los murciélagos: mide la distancia calculando el tiempo que demora una onda de sonido en golpear un objeto y volver, al igual que un eco.
Seleccione el icono del sensorultrasónico. Seleccione el puertoen el cual ha colocado el sensor.
Pruebe medir la distancia a un objeto. Mueva el objeto más cerca y vea las diferentes lecturas.
servomotor
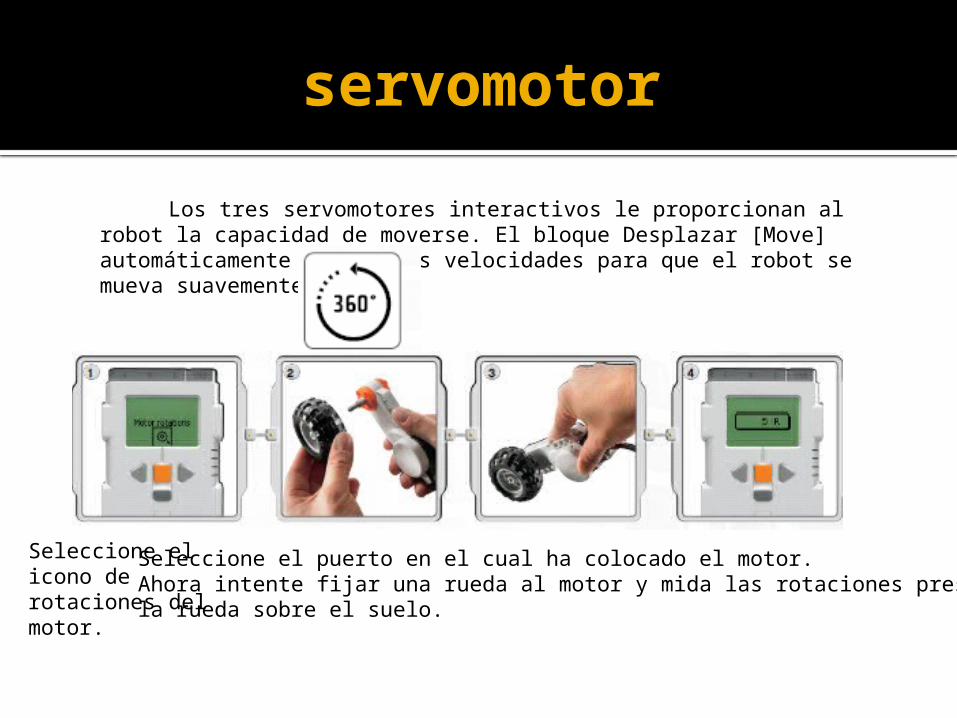
Los tres servomotores interactivos le proporcionan al robot la capacidad de moverse. El bloque Desplazar [Move] automáticamente alinea sus velocidades para que el robot se mueva suavemente.
Seleccione el icono de rotaciones del motor.
Seleccione el puerto en el cual ha colocado el motor.Ahora intente fijar una rueda al motor y mida las rotaciones presionandola rueda sobre el suelo.

Lámparas
Se puede encender y apagar las lámparas, para crear patrones intermitentes de luz. También pueden utilizarse para activar el sensor fotosensible, para mostrar que un motor está encendido o para indicar el estado de un sensor. También puede utilizarlas para darle vitalidad a los “ojos” de su robot u otras funciones. Utilice los cables conversores para conectar las lámparas a los puertos de salida A, B o C. Se incluyen tres lámparas y tres cables conversores.
Utilice las lámparas paraactivar el sensor fotosensible.Seleccione la luz ambiental.
Haga brillar la lámpara cerca del sensor fotosensible.
Note que la lectura cambia.

Bluetooth
El Bluetooth es una tecnología de comunicación que hace posible el envío y la recepción de datos sin cables. Utilizando las funciones del Bluetooth, puede instalar una conexión inalámbrica entre su NXT y otros dispositivos Bluetooth, como otras unidades NXT, teléfonos móviles y ordenadores. Una vez que está instalada la conexión Bluetooth, la puede utilizar para estas funciones:
Descargar programas desde su ordenador sin la utilización de un cable USB. Enviar programas desde otros dispositivos además de su ordenador, incluyendo su propio NXT. Enviar programas a varias unidades NXT individualmente o en grupos. Un grupo puede contener hasta tres dispositivos NXT.