
Masa equivalente
22
DINAMICA DE MAQUINARIA Material Didáctico de apoyo MASA EQUIVALENTES PROFESOR Dr. JOSE COLIN VENEGAS PROFESOR Dr. JOSE COLIN VENEGAS TRIMESTRE DE PRIMAVERA VERANO TRIMESTRE DE PRIMAVERA VERANO J. E. Shigley and J. J. Uicker Jr., THEORY OF MECHANISMS AND MACHINES, McGraw‐ Hill. Hamilton H. Mabie, Charles F. Reinholtz, MECHANISMS AND DYNAMICS OF MACHINERY FOURTH EDITION ED. JOHN WILEY & SONS 1987
-
Upload
octavio-chay-sierra -
Category
Documents
-
view
248 -
download
1
description
analisis de masas equivalentes
Transcript of Masa equivalente
DINAMICA DE MAQUINARIA
Material Didáctico de apoyo
MASA EQUIVALENTES
PROFESOR Dr. JOSE COLIN VENEGASPROFESOR Dr. JOSE COLIN VENEGAS
TRIMESTRE DE PRIMAVERA VERANO TRIMESTRE DE PRIMAVERA VERANO J. E. Shigley and J. J. Uicker Jr., THEORY OF MECHANISMS AND MACHINES, McGraw‐
Hill.Hamilton H. Mabie, Charles F. Reinholtz, MECHANISMS AND DYNAMICS OF MACHINERY FOURTH EDITION ED. JOHN WILEY & SONS 1987
Introducción
Al analizar las fuerzas de inercia debidas a la biela de un motor, conf i i ió d l l d dfrecuencia conviene concentrar una porción de la masa en el pasador dela manivela A y la porción restante en el pasador de articulación B. Larazón de esto es que el pasador de la manivela se mueve sobre uncírculo y normalmente a velocidad constate y el pasador de articulacióny y pen el pistón en línea recta. Estos dos movimientos son muy fáciles deanalizar.
Nota: Es muy necesario que el alumno tome nota en clases y tenga esteNota: Es muy necesario que el alumno tome nota en clases y tenga estematerial de apoyo.
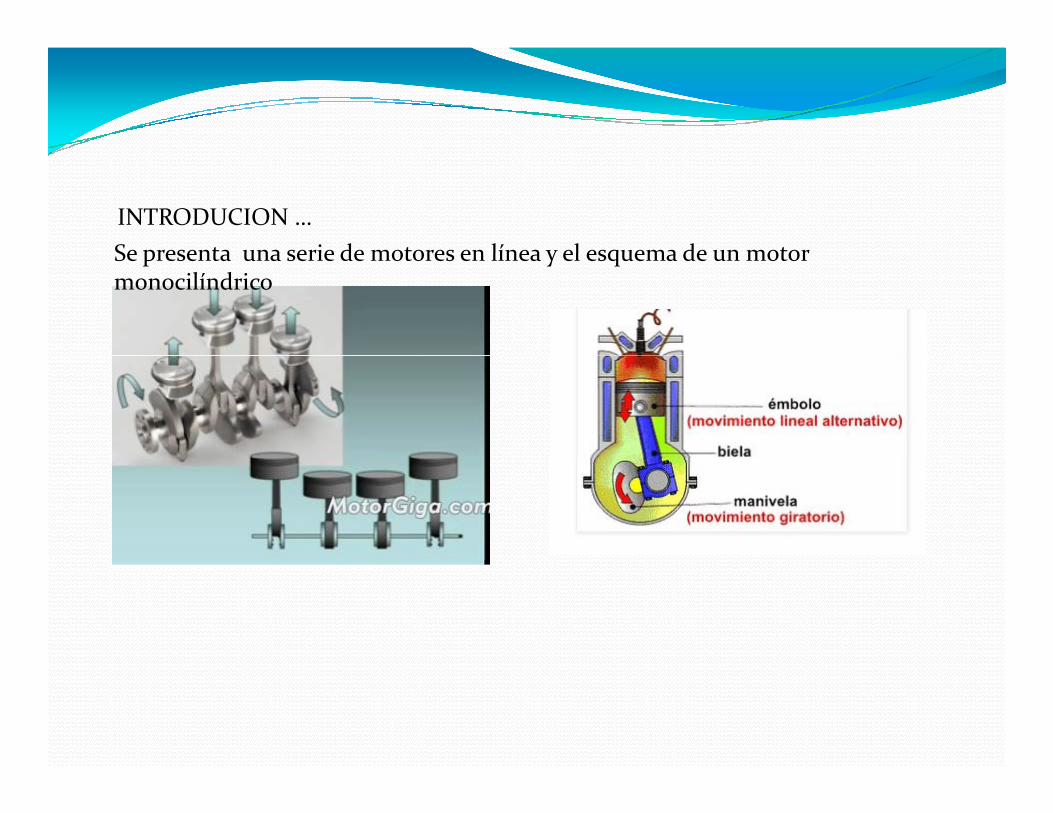
INTRODUCION …Se presenta una serie de motores en línea y el esquema de un motor Se presenta una serie de motores en línea y el esquema de un motor monocilíndrico
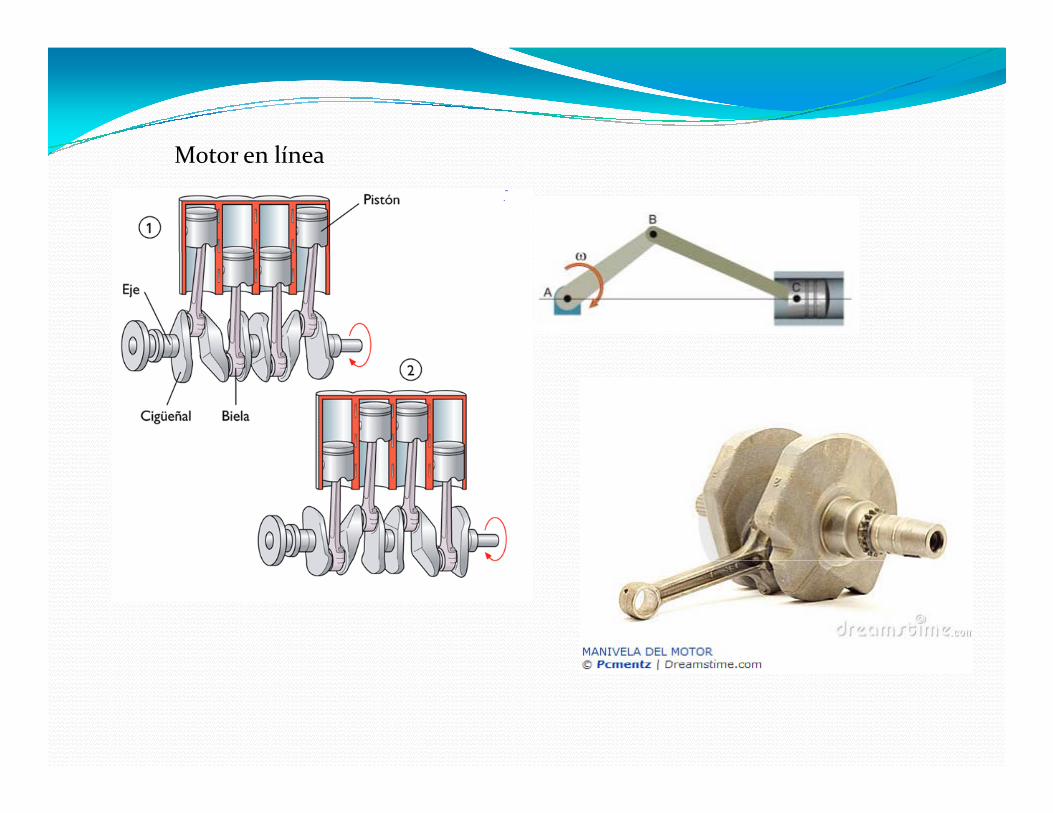
M t líMotor en línea

Motores en V
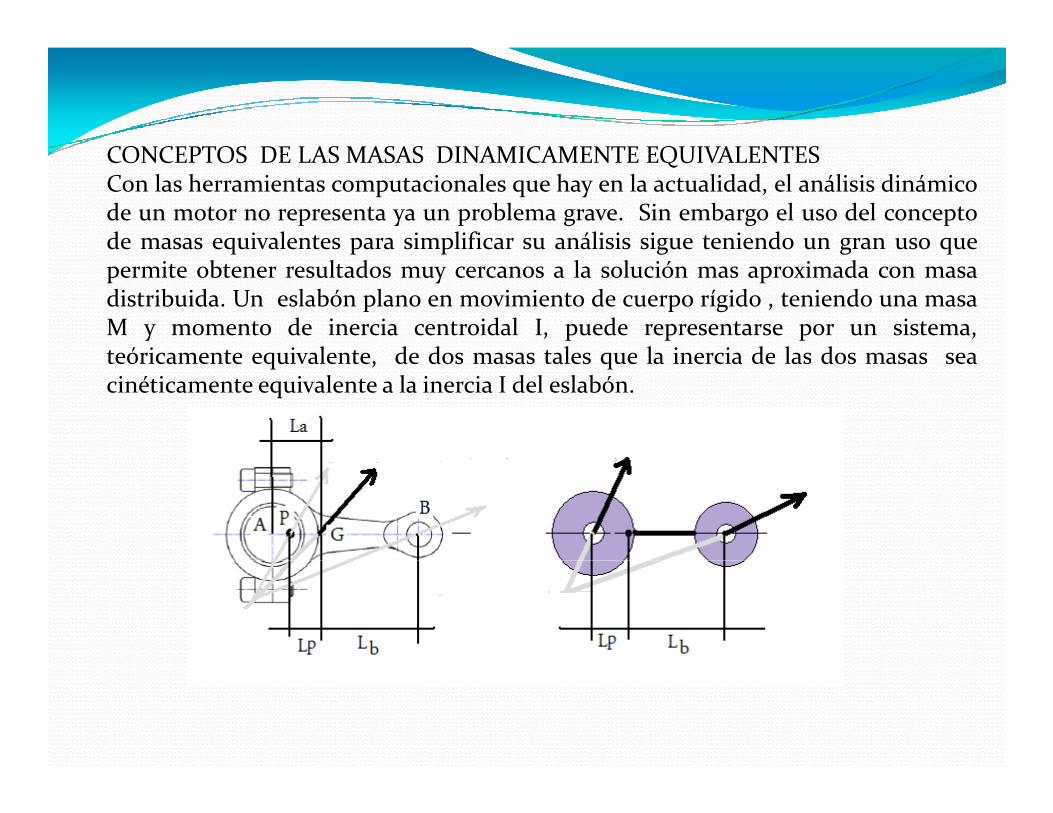
CONCEPTOS DE LAS MASAS DINAMICAMENTE EQUIVALENTESCONCEPTOS DE LAS MASAS DINAMICAMENTE EQUIVALENTESCon las herramientas computacionales que hay en la actualidad, el análisis dinámicode un motor no representa ya un problema grave. Sin embargo el uso del conceptode masas equivalentes para simplificar su análisis sigue teniendo un gran uso queq p p g g qpermite obtener resultados muy cercanos a la solución mas aproximada con masadistribuida. Un eslabón plano en movimiento de cuerpo rígido , teniendo una masaM y momento de inercia centroidal I, puede representarse por un sistema,teóricamente equivalente de dos masas tales que la inercia de las dos masas seateóricamente equivalente, de dos masas tales que la inercia de las dos masas seacinéticamente equivalente a la inercia I del eslabón.

MpMB
Equivalencia de Equivalencia de Equivalencia de
BP MMM += BBPP LMLM = GBBPP ILMLM =+ 22
qmasas
qCentro de masa
qMomento Másico de inercia
L L ILML
Si se hacen simultaneas las primeras dos ecuaciones se obtiene a Mp y Mb; si después se sustituyen en la tercera ecuación se obtiene una relación con IG :
BP
BP LL
LMM+
=BP
PB LL
LMM+
= GBP ILML =
BP
BP LL
LMM+
=BP
PB LL
LMM+
= GBP ILML =
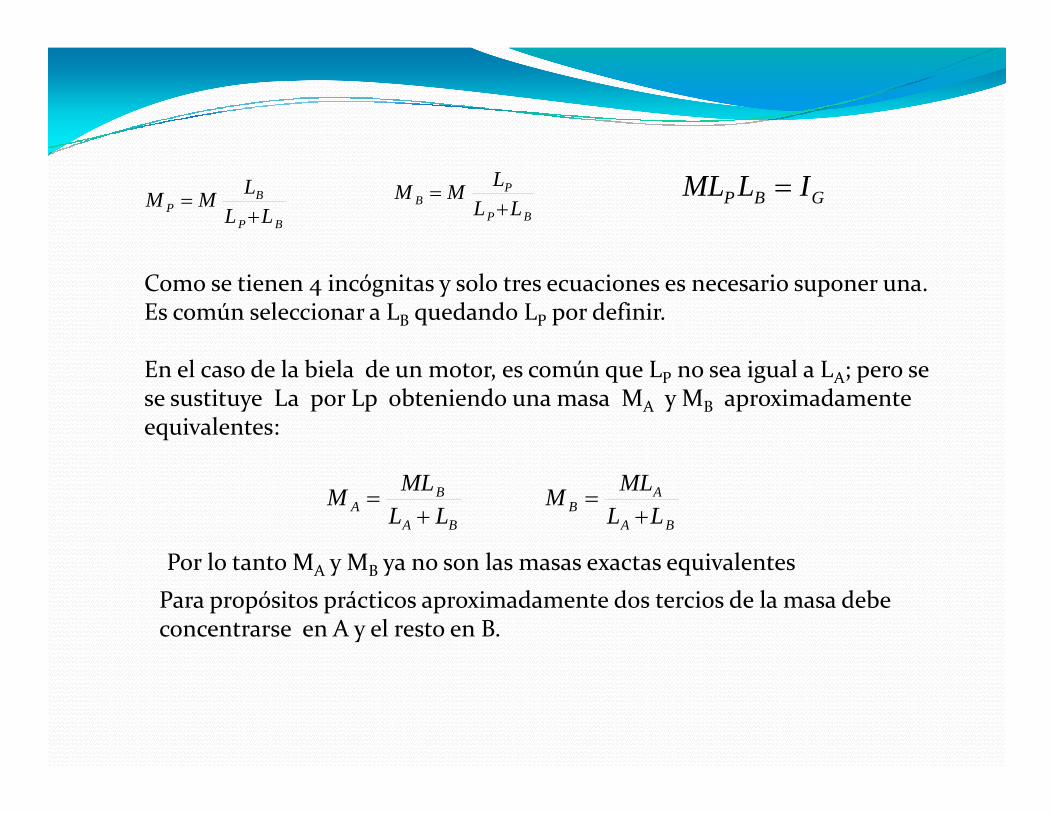
Como se tienen 4 incógnitas y solo tres ecuaciones es necesario suponer una. Es común seleccionar a LB quedando LP por definir.
En el caso de la biela de un motor, es común que LP no sea igual a LA; pero se se sustituye La por Lp obteniendo una masa MA y MB aproximadamente equivalentes:
BA
AB
BA
BA LL
MLMLL
MLM+
=+
=
Por lo tanto M y M ya no son las masas exactas equivalentesPara propósitos prácticos aproximadamente dos tercios de la masa debe concentrarse en A y el resto en B.
Por lo tanto MA y MB ya no son las masas exactas equivalentes
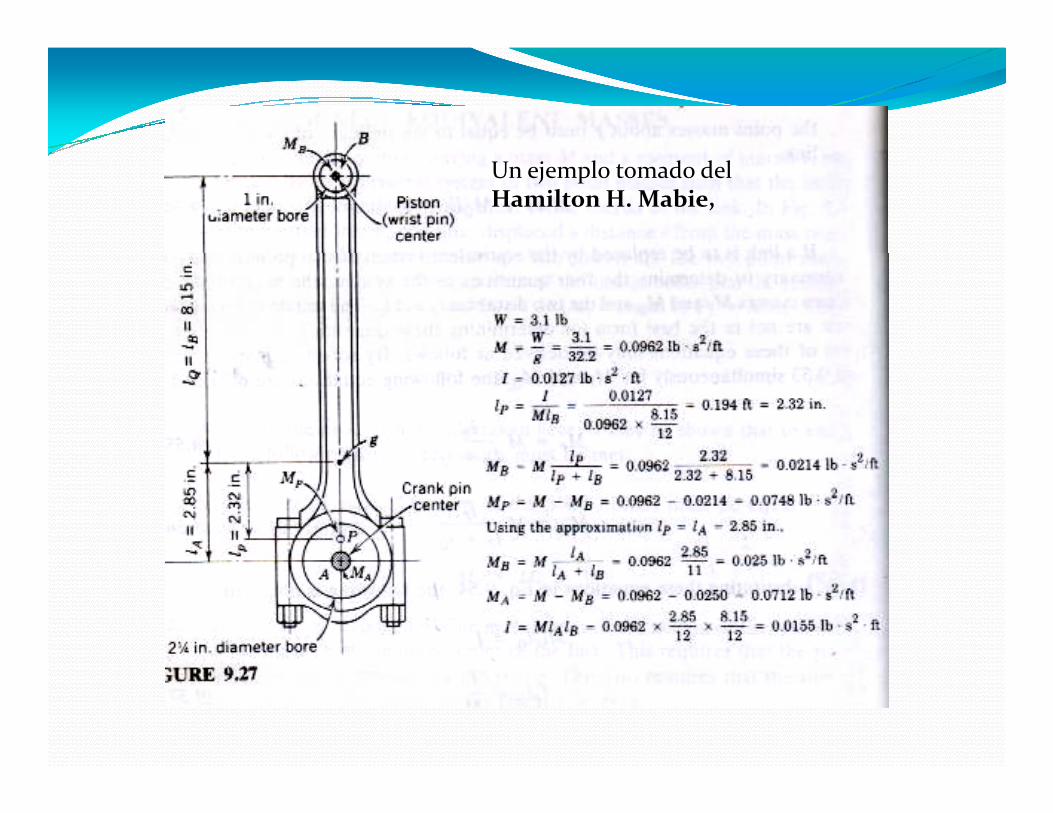
Un ejemplo tomado del Hamilton H. Mabie,

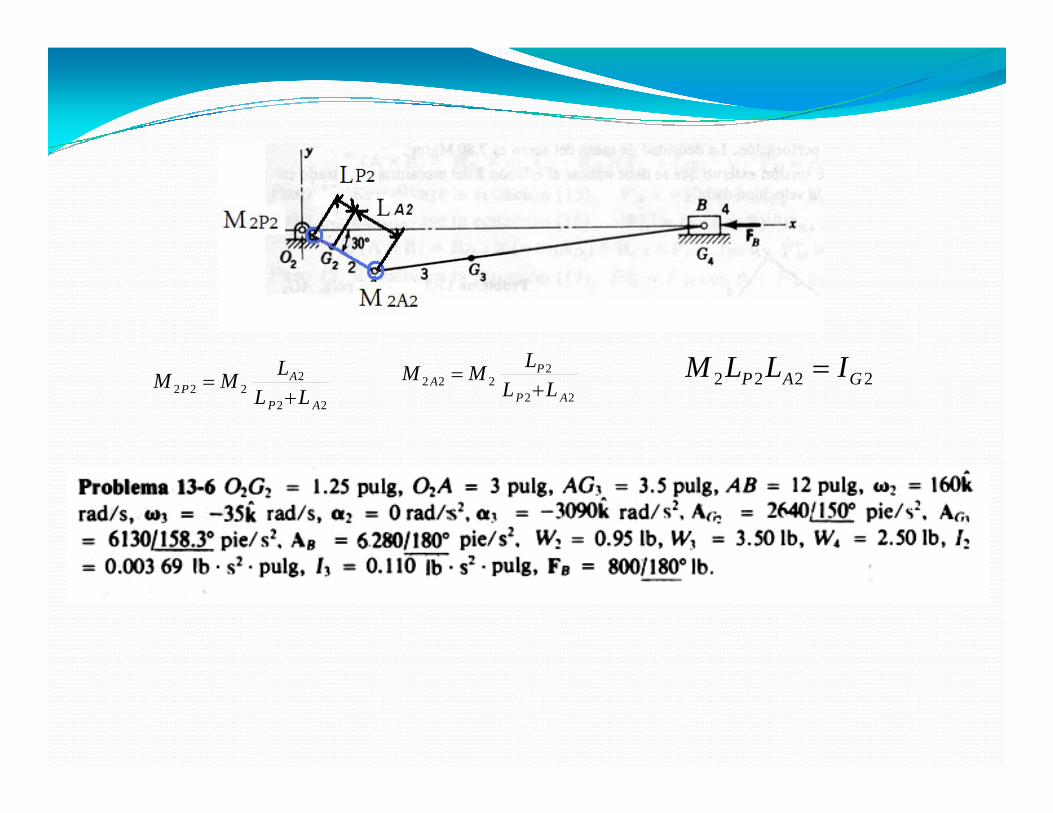
CONCEPTOS DE LAS MASA DINAMICAMENTE EQUIVALENTESCONCEPTOS DE LAS MASA DINAMICAMENTE EQUIVALENTESEl alumno debe encontrar para cada eslabón el sistema de masas equivalente exactas y aproximado y al final el mecanismo con sus masa equivalentes.
L
M2B2
22
2222
AP
AP LL
LMM+
=22
2222
AP
PA LL
LMM+
= 2222 GAP ILLM =
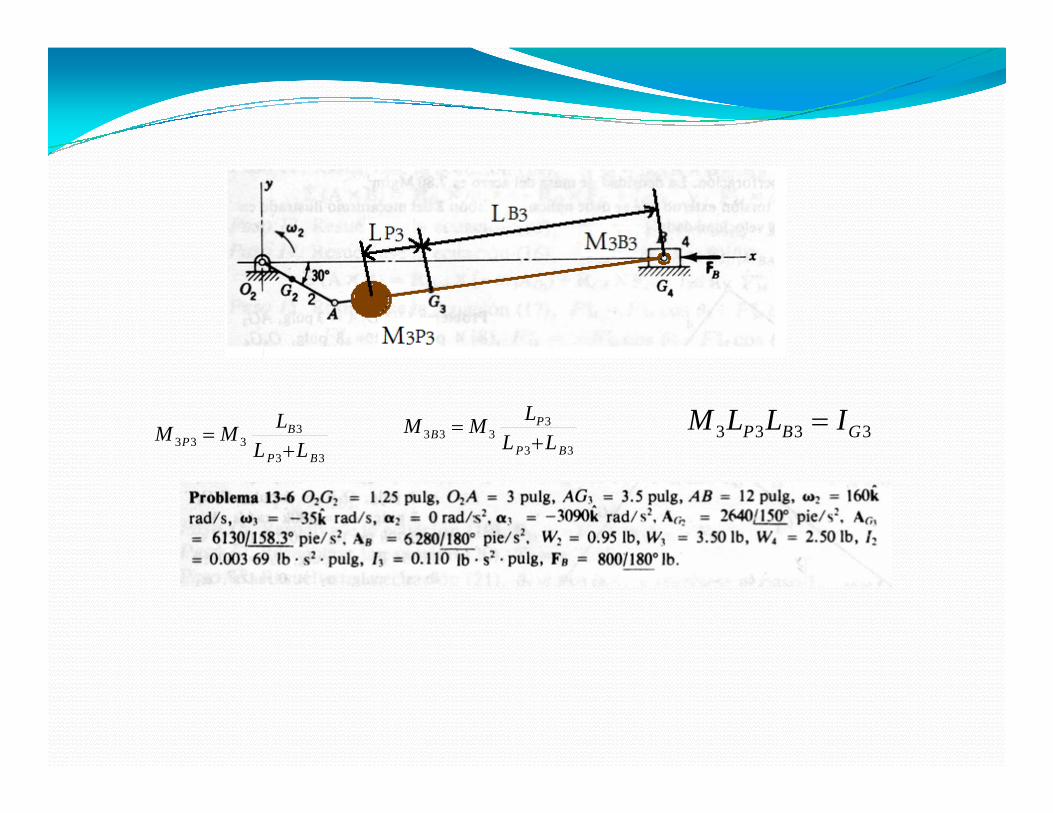
33
3333
BP
BP LL
LMM+
=33
3333
BP
PB LL
LMM+
= 3333 GBP ILLM =33 BP
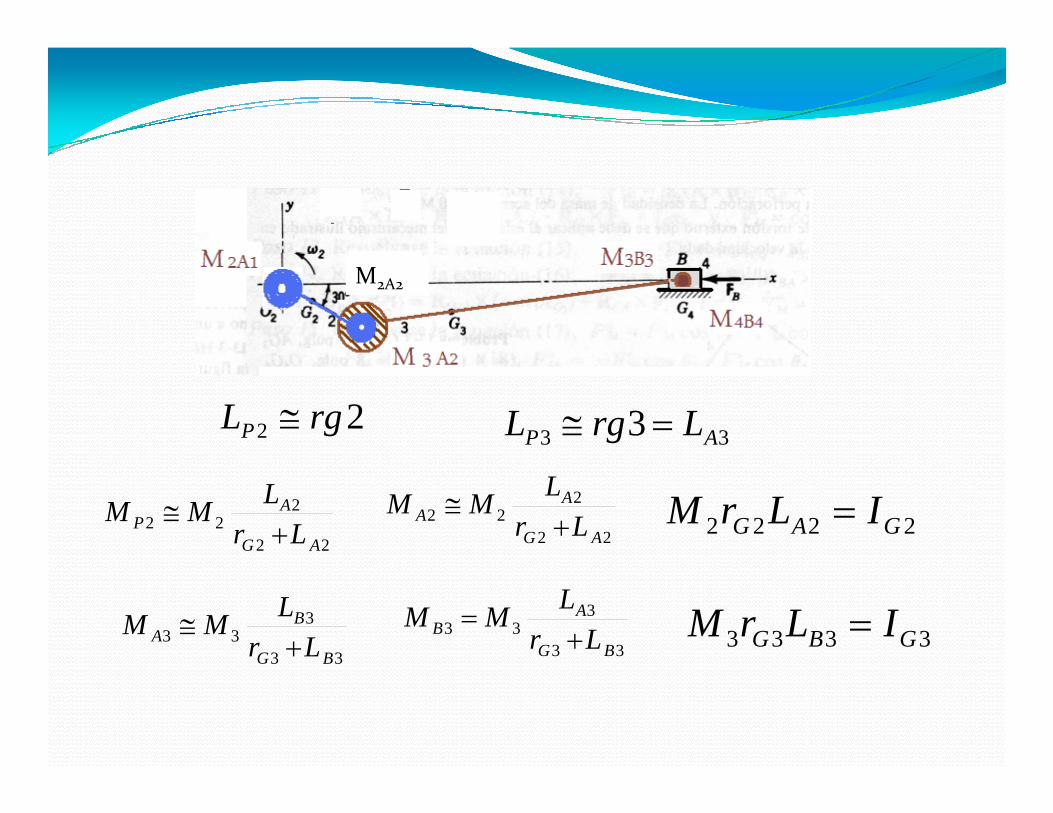
M2A2
22 rgLP ≅33 3 AP LrgL =≅
22
222
AG
AP Lr
LMM+
≅22
222
AG
AA Lr
LMM+
≅2222 GAG ILrM =
33
333
BG
BA Lr
LMM+
≅33
333
BG
AB Lr
LMM+
=3333 GBG ILrM =
33 BG
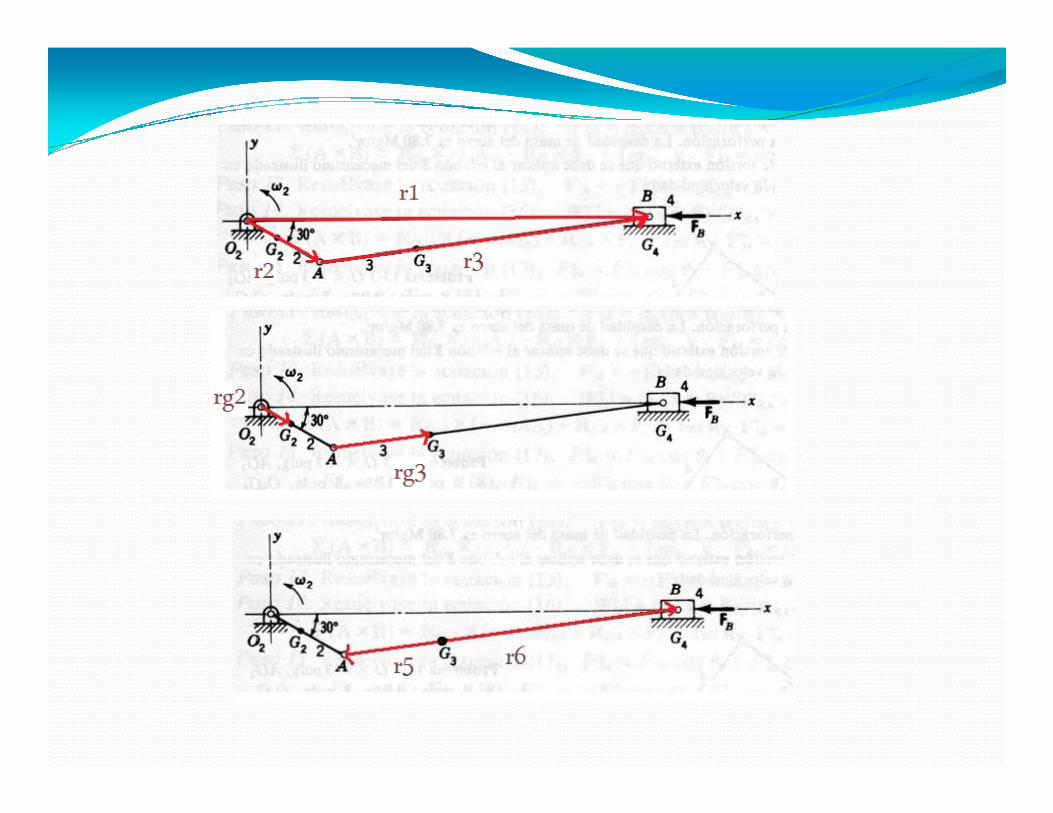

La suma de momentos en la manivela siempre se tomará con respecto La suma de momentos en la manivela siempre se tomará con respecto al punto fijo O2.
En una solución la suma de momentos en la biela se tomará con t l t Brespecto al punto B
En otra solución la suma de momentos en la biela se tomará con respecto al centro de masap
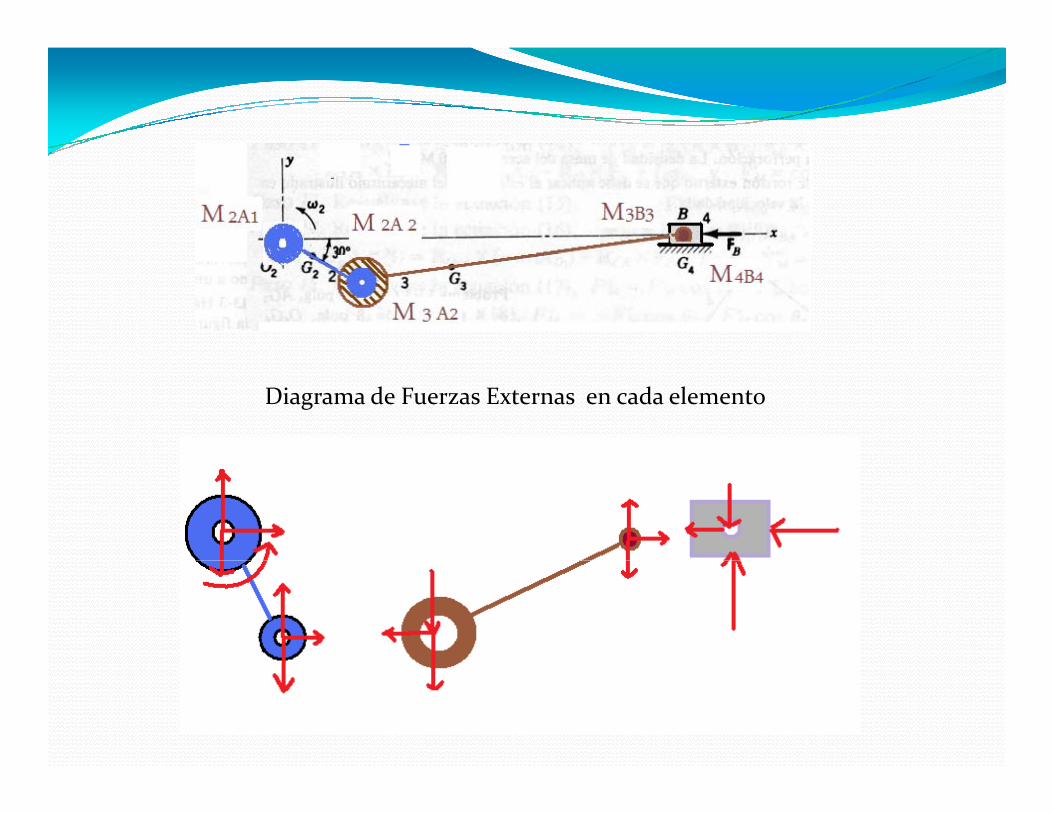
Diagrama de Fuerzas Externas en cada elemento
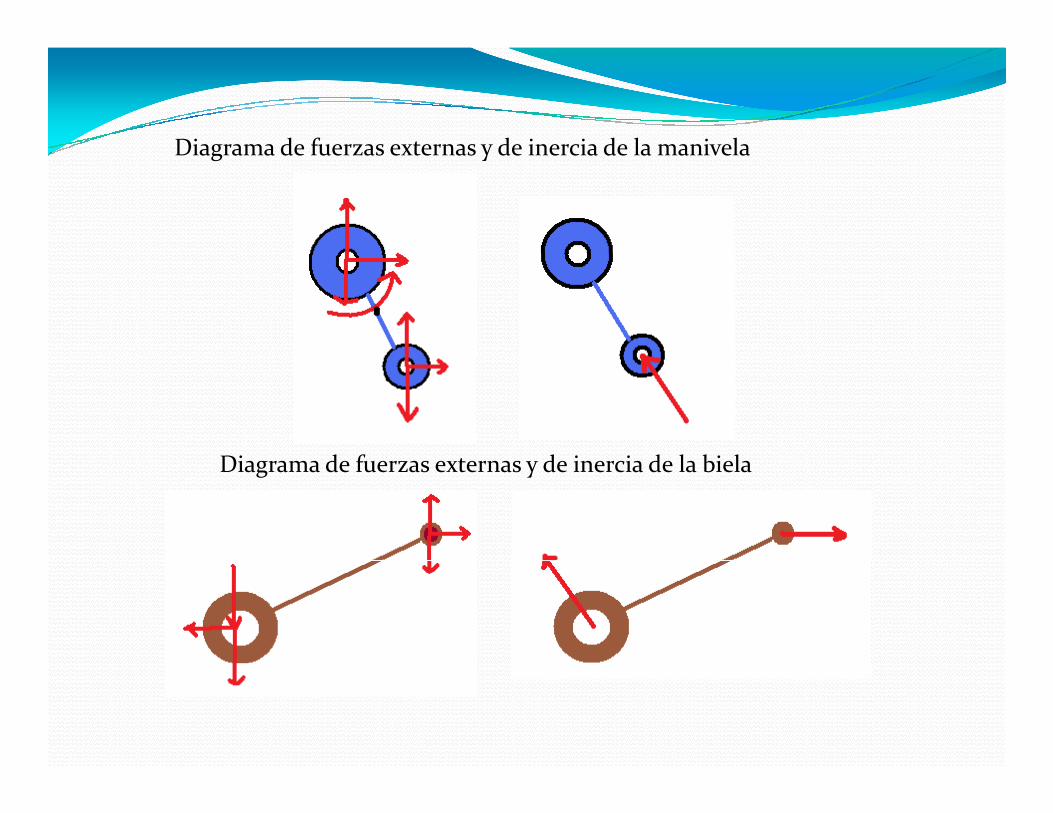
Diagrama de fuerzas externas y de inercia de la manivelaDiagrama de fuerzas externas y de inercia de la manivela
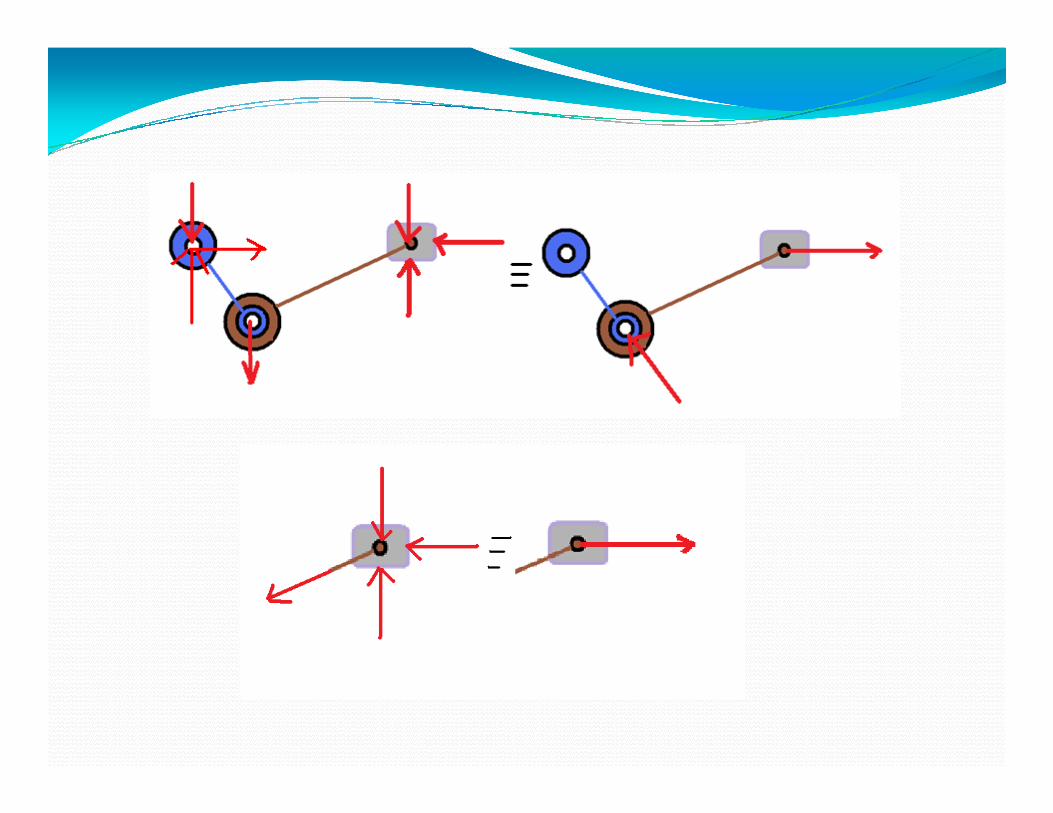
Di d f d i i d l bi lDiagrama de fuerzas externas y de inercia de la biela

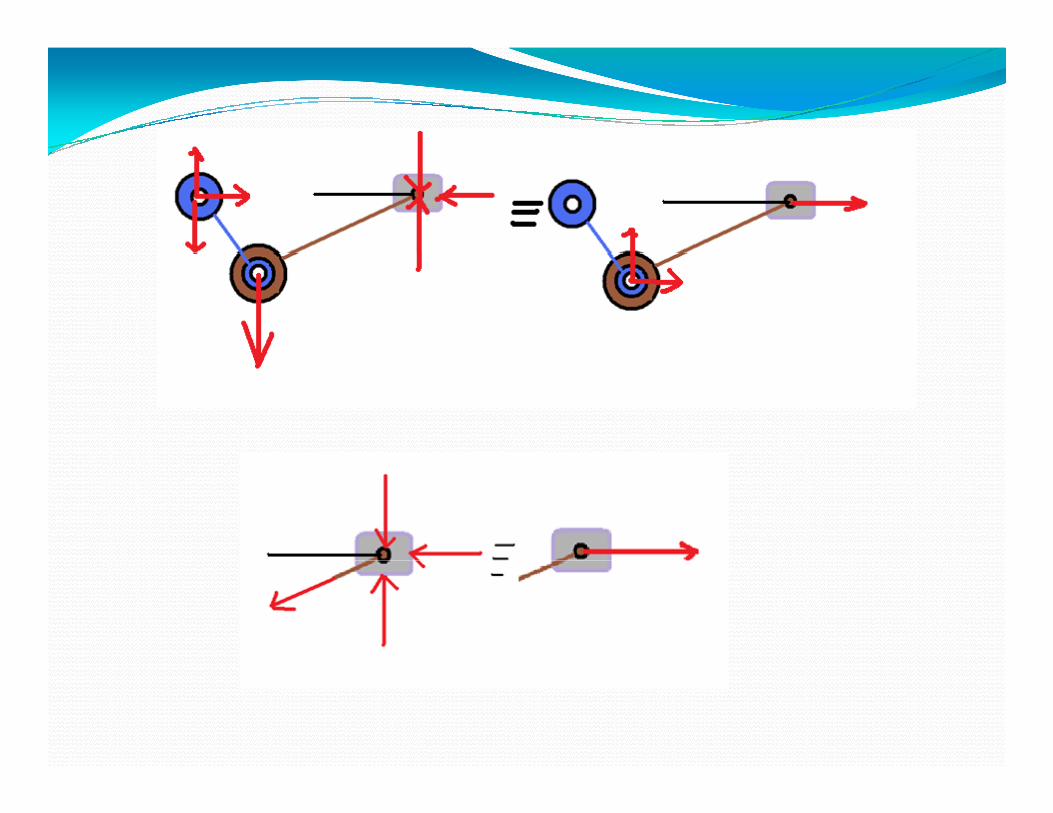
Diagrama de fuerzas externas y de inercia del pistóng y p
Diagrama de fuerzas externas y de inercia de todo el mecanismo
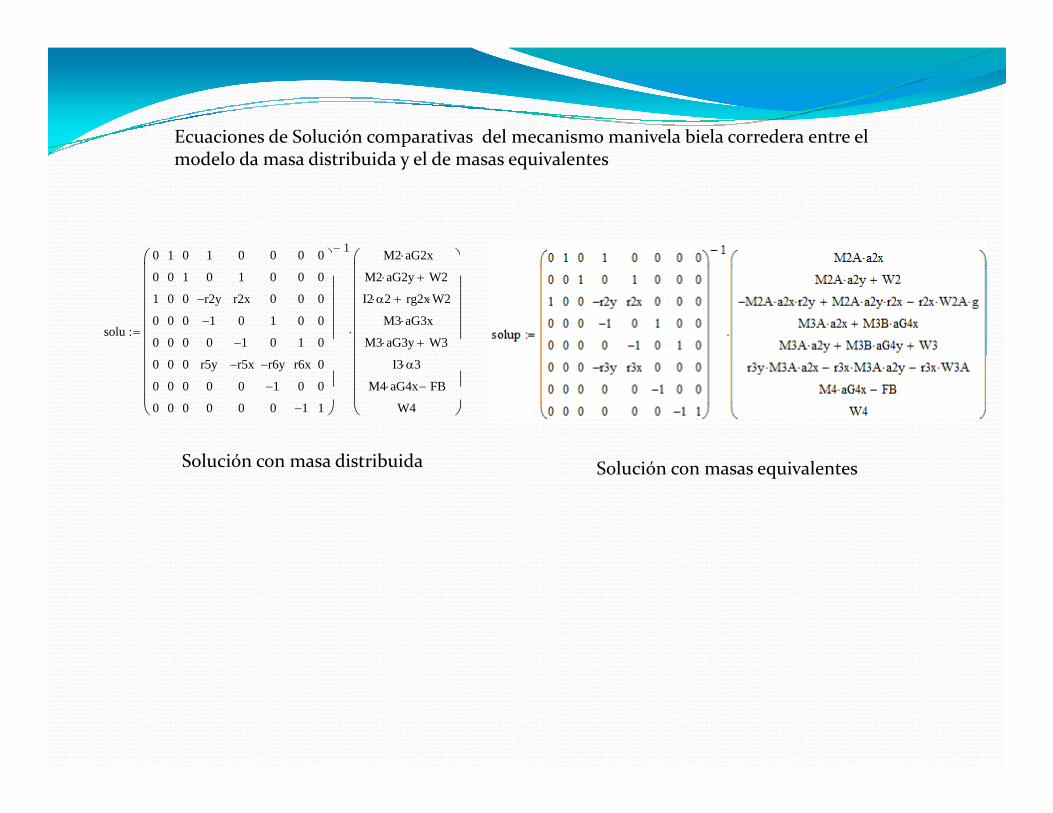
Ecuaciones de Solución comparativas del mecanismo manivela biela corredera entre el
0 1 0 1 0 0 0 0⎛ ⎞1− M2 G2⎛ ⎞
modelo da masa distribuida y el de masas equivalentes
solu
0
0
1
0
0
1
0
0
0
0
0
1
0
0
0
1
0
r2y−
1−
0
0
1
r2x
0
1−
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
⎛⎜⎜⎜⎜⎜⎜⎜
⎞
⎟⎟⎟⎟
M2 aG2x⋅
M2 aG2y⋅ W2+
I2 α2⋅ rg2x W2⋅+
M3 aG3x⋅
M3 aG3y⋅ W3+
⎛⎜⎜⎜⎜⎜⎜⎜
⎞
⎟⎟⎟⎟⋅:=
0
0
0
0
0
0
0
0
0
r5y
0
0
r5x−
0
0
r6y−
1−
0
r6x
0
1−
0
0
1
⎜⎜⎜⎝
⎟
⎠
I3 α3⋅
M4 aG4x⋅ FB−
W4
⎜⎜⎜⎝
⎟
⎠
S l ió di t ib idSolución con masa distribuida Solución con masas equivalentes

Ecuaciones para las velocidades y aceleraciones del piston conociendo la velocidad angular de la manivela
Para r2 /r3 muy pequenos


















