Índice - UNAMprofesores.dcb.unam.mx/users/aideebo/Nota_Materiales/ne.pdf · notas de ecuaciones...
31
NOTAS DE ECUACIONES DIFERENCIALES ORDINARIAS (VERSIÓN PRELIMINAR - 0.1) JAVIER FERNANDEZ Índice 1. Introducción 1 2. Ecuaciones de primer orden 3 2.1. Ecuaciones con variables separables 3 2.2. Ecuaciones homogéneas 4 2.3. Diferenciales exactas 5 2.4. Factor integrante 7 2.5. Ecuaciones lineales 8 2.6. Reducción del orden 9 2.7. Interpretación geométrica 10 3. Teoremas de existencia 11 4. Ecuaciones lineales de segundo orden 16 4.1. Estructura del conjunto de soluciones 16 4.2. Segunda solución de una ecuación 18 4.3. Ecuación homogénea con coeficientes constantes 18 4.4. Soluciones particulares de ecuaciones inhomogéneas 19 5. Resolución por series 21 5.1. Ecuación lineal de segundo orden con coeficientes analíticos 21 5.2. Ecuación lineal de segundo orden con singularidades regulares 24 Referencias 31 Estas breves notas tocan algunos aspectos básicos de las ecuaciones diferenciales ordina- rias. Fundamentalmente se mencionan algunas técnicas explícitas y se enuncian resultados sobre la existencia de soluciones. En lo que sigue algunos comentarios marcados con “ ♦” pueden ser omitidos en una primera lectura. 1. Introducción En el estudio de la matemática y las ciencias aparecen y se estudian distintos tipos de ecuaciones. Los tipos más frecuentes y básicos son: Ecuaciones algebraicas : una relación algebraica entre una o varias variables. Por ejemplo: x 3 +2y 2 =0. Ecuaciones diferenciales ordinarias : relación, usualmente algebraica, entre una fun- ción de una única variable y algunas de sus derivadas. Por ejemplo d dx y (x)= xy (x). Ecuaciones diferenciales en derivadas parciales : relación, usualmente algebraica, entre una función de varias variables y algunas de sus derivadas parciales. Por ejemplo, u xx (x, y )+ u yy (x, y )=0. Date : 4 de diciembre de 2008. 1
Transcript of Índice - UNAMprofesores.dcb.unam.mx/users/aideebo/Nota_Materiales/ne.pdf · notas de ecuaciones...

NOTAS DE ECUACIONES DIFERENCIALES ORDINARIAS
(VERSIÓN PRELIMINAR - 0.1)
JAVIER FERNANDEZ
Índice
1. Introducción 12. Ecuaciones de primer orden 32.1. Ecuaciones con variables separables 32.2. Ecuaciones homogéneas 42.3. Diferenciales exactas 52.4. Factor integrante 72.5. Ecuaciones lineales 82.6. Reducción del orden 92.7. Interpretación geométrica 103. Teoremas de existencia 114. Ecuaciones lineales de segundo orden 164.1. Estructura del conjunto de soluciones 164.2. Segunda solución de una ecuación 184.3. Ecuación homogénea con coeficientes constantes 184.4. Soluciones particulares de ecuaciones inhomogéneas 195. Resolución por series 215.1. Ecuación lineal de segundo orden con coeficientes analíticos 215.2. Ecuación lineal de segundo orden con singularidades regulares 24Referencias 31
Estas breves notas tocan algunos aspectos básicos de las ecuaciones diferenciales ordina-rias. Fundamentalmente se mencionan algunas técnicas explícitas y se enuncian resultadossobre la existencia de soluciones. En lo que sigue algunos comentarios marcados con “♦”pueden ser omitidos en una primera lectura.
1. Introducción
En el estudio de la matemática y las ciencias aparecen y se estudian distintos tipos deecuaciones. Los tipos más frecuentes y básicos son:
Ecuaciones algebraicas: una relación algebraica entre una o varias variables. Porejemplo: x3 + 2y2 = 0.Ecuaciones diferenciales ordinarias: relación, usualmente algebraica, entre una fun-ción de una única variable y algunas de sus derivadas. Por ejemplo d
dxy(x) = xy(x).
Ecuaciones diferenciales en derivadas parciales: relación, usualmente algebraica,entre una función de varias variables y algunas de sus derivadas parciales. Porejemplo, uxx(x, y) + uyy(x, y) = 0.
Date: 4 de diciembre de 2008.1

2 JAVIER FERNANDEZ
Ecuaciones integrales: relación, usualmente algebraica entre una función de una ovarias variables y expresiones que involucran distintas integrales de la misma. Porejemplo: y(x) = 3 +
∫ x
0ty(t)dt.
En todos los casos anteriores también es posible considerar la resolución simultánea devarias ecuaciones que involucran a más de una incógnita o a una incógnita con valoresvectoriales. En estos casos se habla de sistemas de ecuaciones. También es común elestudio de sistemas mixtos de ecuaciones, como por ejemplo:
{ddx
y(x) = xy(x),
y(0) = 1.(1.1)
En el estudio de las ecuaciones diferenciales es común dar sistemas que junto con unaecuación diferencial imponen valores para la solución (y sus derivadas) en un punto dado,como la condición y(0) = 1 en (1.1). Este tipo de condiciones se conocen como condicionesiniciales ya que en muchos casos la ecuación describe la evolución de un sistema y lascondiciones iniciales son, por ejemplo, la posición y velocidad iniciales.
Cabe preguntarse ¿qué es una solución de una ecuación? Por supuesto, la respuestadepende del tipo de ecuación considerada. Por ejemplo, para una ecuación algebraica,su solución consiste de todos los valores posibles de las incógnitas que, reemplazados enla ecuación original la convierten en una identidad. Para las ecuaciones que involucranfunciones, el conjunto de soluciones es el conjunto de funciones que, reemplazadas en laecuación original (calculando las derivadas o integrales que aparezcan) la transforman enuna identidad. En general, una ecuación puede tener una solución única, o dos soluciones,o un número finito de soluciones, o un número infinito, o ninguna solución.
Se habla de solución general de una ecuación diferencial para referirse a una expresiónque involucra constantes o funciones indeterminadas y para cualquiera de cuyos valoresse obtiene una solución de la ecuación dada. Además, cualquier solución de la ecuacióndebe corresponder a alguna elección de dichas constantes o funciones. Una expresióndeterminada, es decir, que no contiene ni constantes ni funciones desconocidas, y que essolución de la ecuación diferencial es llamada una solución particular.
El estudio de las ecuaciones es, por lo común, bastante complejo. Uno de sus objetivoses, obviamente, poder hallar las expresiones explícitas de las soluciones de las mismas. Sinembargo, también es muy importante poder estudiar las propiedades de las soluciones aúnsi no se las puede hallar explícitamente, ya que en muchos casos se está interesado en elestudio cualitativo de las soluciones1. En casos en que no es posible hallar una expresiónexplícita de la solución (y aún cuando lo es) es común el uso de métodos numéricos parahallar buenas aproximaciones de la solución real.
Dentro de las ecuaciones diferenciales resulta útil tener una clasificación según el mayororden de la derivada que aparece en la ecuación. Por ejemplo, uxx(x, y) + uyy(x, y) −2ux(x, y) = 0 es una ecuación de segundo orden ya que el orden de la derivada de ordenmás alto que aparece es 2.
La bibliografía de ecuaciones diferenciales ordinarias es muy extensa. Para comenzar,se sugieren los libros de texto de M. Balanzat [1], L. Elsgolts [2] y G. Simmons [4].
1Por ejemplo, no es fácil hallar las soluciones de la ecuación polinómica x6 − 7x + 1 = 0. Sin embargo,es sabido que un polinomio de grado 6 puede tener, como mucho, 6 raíces, o sea que la ecuación dadatiene, a lo sumo, 6 soluciones.

NOTAS DE ECUACIONES ORDINARIAS 3
2. Ecuaciones de primer orden
Consideraremos a continuación ecuaciones diferenciales ordinarias de orden 1, es decirecuaciones de la forma
F (x, y(x), y′(x)) = 0 (2.1)
para alguna F : R3 → R dada. En estos casos, y(x) es la incógnita y una solución es unafunción y(x) tal que reemplazada en (2.1) transforma la ecuación en una identidad. Severán distintos métodos explícitos para resolver algunas clases de ecuaciones simples yútiles.
2.1. Ecuaciones con variables separables. Se trata de ecuaciones que pueden serreescritas de modo que la función incógnita y su derivada sólo aparezcan en un lado de laecuación y la variable independiente sólo aparezca explícitamente en el otro. La resolucióncompleta se logra, entonces, mediante el cálculo de primitivas.
Ejemplo 2.1. Consideremos
y′ − xy = 0 (2.2)
o, equivalentemente, y′ = xy. Se puede reescribir la ecuación en la forma
y′
y= x. (2.3)
La expresión (2.3) muestra que es posible reescribir la ecuación original de modo que lasvariables aparezcan separadas (las y y sus derivadas a la izquierda y la variable indepen-diente x a la derecha). En estos casos es posible hallar la solución integrando ambos ladosde la ecuación respecto de la variable independiente:
y′
y= x ⇒
∫y′
ydx =
∫
xdx ⇒
∫dy
y=
∫
xdx ⇒ ln(y) =1
2x2 + C1 ⇒
y = e1
2x2+C1 = C2e
1
2x2
donde C2 ∈ R es alguna constante2. Es fácil verificar que y(x) = C2e1
2x2
es solución de (2.2)
puesto que y′(x) = C2xe1
2x2
= xy(x).Si, además, se pide la condición inicial y(0) = 3, se tiene 3 = y(0) = C2e
0 = C2, con lo
que la solución particular correspondiente es y(x) = 3e1
2x2
.
Nota 2.2. El Ejemplo 2.1 muestra la manera usual de resolver una ecuación diferencial:se opera con la expresión original hasta poder hallar una expresión explícita para lafunción solución en términos de la variable independiente. En este proceso se incorporanun número de constantes indeterminadas, constantes de integración, que hacen que lasolución hallada no sea única.
El proceso seguido presenta, sin embargo, una serie de puntos oscuros. La razón usual-mente es que se deben aplicar técnicas que requieren hipótesis (continuidad, diferenciabi-lidad, etc.) a una función incógnita y que, por tanto, no se sabe si las satisface o no. Unejemplo de esto es el paso de (2.2) a (2.3) que presupone que y no se anula. De hecho,observando (2.2) directamente se verifica que y(x) = 0 es una solución de la misma. Elrazonamiento usual es que se buscan las soluciones no idénticamente nulas y se continúacon el cálculo, agregando al final la solución nula como otra posibilidad.
2La constante C2 es eC1 , pero siendo C1 desconocida, es conveniente encapsular esta expresión en laconstante C2. Esta práctica es común ya que facilita la legibilidad y será usada en el resto de las notas.

4 JAVIER FERNANDEZ
Otro punto para observar es el de los posibles valores de la constante C2 = eC1 . SiendoC1 una constante de integración, C1 puede tomar cualquier valor real. Sin embargo, porsu definición, C2 > 0. Ahora bien, es claro que C2e
1
2x2
es solución de (2.2) para valoresC2 ∈ R, no sólo positivos. Esta diferencia es importante si uno trata de hallar todas lassoluciones de (2.2). ¿Cómo se justifica el haber “perdido” los valores C2 ≤ 0? El valorC2 = 0 corresponde a y(x) = 0 y ya se vio como se pierde en el paso de (2.2) a (2.3).Para entender que ocurrió con el caso C2 < 0 hay que recordar que
∫dy
y= ln(y) si se
supone que y > 0 ya que en caso contrario ln(y) no está definido. Un razonamiento máscompleto lleva a
∫dy
y= ln(|y|) que, como el lector debe verificar, es válida siempre que
y 6= 0. Usando esta fórmula obtenemos
ln(|y|) =1
2x2 + C1 ⇒ |y| = e
1
2x2+C1 = C2e
1
2x2
⇒ y = ±C2e1
2x2
,
donde aparecen tanto valores positivos como negativos de la constante.
Ejemplo 2.3. Dada la ecuación
y′ = y2 con y(1) = 1, (2.4)
se la puede resolver separando variables como:
y′ = y2 ⇒y′
y2= 1 ⇒ −
1
y= x + C ⇒ y =
1
−C − x
e, imponiendo la condición inicial, 1 = 1−C−1
por lo que C = −2 y se obtiene la solución
y(x) =1
2 − x.
Notemos que, sin embargo hay muchas otras soluciones de (2.4). Todas están dadas por
ya(x) :=
{1
2−xsi x < 2
1a−x
si x > 2
para a ∈ R. Intuitivamente, las constantes de integración quedan determinadas por el datoinicial en toda la componente conexa del dominio de la solución en la que se encuentra eldato inicial pero, si dicho dominio no es conexo, quedan partes del dominio de la solucióndonde las constantes de integración no quedan determinadas, como ocurre en este ejemplo.
2.2. Ecuaciones homogéneas. Estas ecuaciones son de la forma
y′ = f(x, y). (2.5)
donde f : R2 → R tiene la propiedad f(λx, λy) = f(x, y) para todo λ ∈ R y (x, y) ∈ R2.Una forma de resolver este tipo de ecuaciones es mediante la sustitución de la incógnita
y(x) por z(x) = y(x)x
. La ecuación queda:
z′ =xy′ − y
x2=
xf(x, y) − y
x2=
f(x, y)
x−
z
x=
f(1, y
x)
x−
z
x=
f(1, z)
x−
z
x=
f(1, z) − z
x
donde es posible separar variables para obtener
z′
f(1, z) − z=
1
x.
Esta última ecuación se resuelve con el método discutido en la Sección 2.1, obteniéndosela solución z(x) y la solución de (2.5) como y(x) = xz(x).

NOTAS DE ECUACIONES ORDINARIAS 5
Ejemplo 2.4. La ecuación
(x2 − 2y2) + xyy′ = 0 (2.6)
puede reescribirse como
y′ =2y2 − x2
xy= 2
y
x−
x
y
que es una ecuación homogénea con f(x, y) = 2y2−x2
xy.
Se reemplaza la incógnita por z(x) = y(x)x
de modo que
z′ =xy′ − y
x2=
x(2 y
x− x
y) − y
x2=
2z − 1z− z
x=
z − 1z
x. (2.7)
Separando variables se obtienez′
z − 1z
=1
x.
Integrando ambos lados respecto de x:
ln(|x|) + C1 =
∫1
xdx =
∫z′
z − 1z
dx =
∫1
z − 1z
dz =
∫z
z2 − 1dz
=1
2
∫1
z2 − 1d(z2 − 1) =
1
2ln(|z2 − 1|)
y, exponenciando ambos lados:
C2|x| = e1
2ln(z2−1) = (z2 − 1)
1
2 =√
|z2 − 1|,
que es una forma implícita de la solución de (2.7). Notemos que permitiendo valores nega-
tivos de C2, esta última expresión se puede escribir como C2|x| =√
|z2 − 1|. Resolviendoz suponiendo que z2 ≥ 1:
z(x) = ±√
C3x2 + 1
con lo que la solución de (2.6) es
y(x) = ±x√
C3x2 + 1.
La resolución de z para el caso z2 ≤ 1 es análoga y se obtiene una expresión idéntica a laúltima, solo que con valores negativos de C3.
2.3. Diferenciales exactas. Las ecuaciones del tipo
dy
dx= y′ = −
P (x, y)
Q(x, y)(2.8)
pueden ser reescritas como
P (x, y)dx + Q(x, y)dy = 0. (2.9)
Esta forma de escribir la ecuación se asemeja al resultado de diferenciar una relación deltipo f(x, y) = C, para alguna constante C ∈ R, que da por resultado
∂f
∂xdx +
∂f
∂ydy = 0 (2.10)
Se sabe que la condición para que (2.9) sea exactamente de la forma (2.10) es que
∂P (x, y)
∂y=
∂Q(x, y)
∂x. (2.11)

6 JAVIER FERNANDEZ
Las ecuaciones del tipo (2.9) que satisfacen la condición (2.11) son llamadas diferenciales
exactas. En este caso es posible hallar una función f(x, y) de modo que ∂f(x,y)∂x
= P (x, y)
y ∂f(x,y)∂y
= Q(x, y), con lo que (2.9) expresa que df(x, y) = 0, de donde
f(x, y) = C, (2.12)
que expresa una relación entre la incógnita y(x) y la variable independiente x (el Teoremade la Función Implícita da condiciones para que esto sea cierto). En muchos casos esposible despejar explícitamente y como función de x a partir de (2.12).
Ejemplo 2.5. Consideremos
(y − x3)dx + (x + y3)dy = 0. (2.13)
Tomando P (x, y) := y − x3 y Q(x, y) := x + y3 se ve que Py(x, y) = 1 = Qx(x, y), con loque (2.13) es una diferencial exacta.
Buscamos f(x, y) tal que ∂f(x,y)∂x
= P (x, y) y ∂f(x,y)∂y
= Q(x, y). Como∫
∂f(x, y)
∂xdx = f(x, y) + g(y)
para alguna función g(y) (ya que para cada y fijo aparece una constante de integración),de la primera condición se obtiene:
f(x, y) + g(y) =
∫∂f(x, y)
∂xdx =
∫
P (x, y)dx =
∫
(y − x3)dx = yx −1
4x4
con lo que
f(x, y) = yx −1
4x4 − g(y).
Usando la segunda condición se tiene
∂f(x, y)
∂y= Q(x, y) ⇒ x − g′(y) = x + y3 ⇒ g′(y) = −y3
de donde g(y) = −14y4 + C1 y, finalmente,
f(x, y) = yx−1
4(x4 − y4) − C1
con lo que (2.13) dice que yx − 14(x4 − y4) − C1 = C2 o, reescribiendo C := C2 + C1,
yx −1
4(x4 − y4) = C
que define y(x) implícitamente.
Nota 2.6. Es posible introducir la noción de diferencial exacta sin pasar por la notación“diferencial” de (2.9). Para esto notemos que (2.8) puede reescribirse como
P (x, y) + Q(x, y)dy
dx= 0 (2.14)
cuyo lado izquierdo se asemeja a la derivada respecto de x de una función compuestaf(x, y(x)):
d
dxf(x, y(x)) =
∂f
∂x
dx
dx+
∂f
∂y
dy
dx=
∂f
∂x+
∂f
∂y
dy
dx. (2.15)
Para que el lado izquierdo de (2.14) sea exactamente la derivada total (2.15) es necesa-rio y suficiente que se satisfaga la condición (2.11). En este caso, la ecuación (2.14) esequivalente a
d
dxf(x, y(x)) = 0

NOTAS DE ECUACIONES ORDINARIAS 7
o sea quef(x, y(x)) = C
para alguna constante C ∈ R, tal como se obtuvo usando la notación diferencial.
2.4. Factor integrante. En muchos casos se tiene una ecuación diferencial de la for-ma (2.9) pero que no satisface la condición (2.11) y, por tanto, no es una diferencial exacta.En estos casos, una alternativa es proceder como sigue. Si vale (2.9), entonces tambiénvale
µ(x, y)P (x, y)dx + µ(x, y)Q(x, y)dy = 0 (2.16)
para cualquier función µ(x, y). Entonces cabe la posibilidad de que (2.16) sea una dife-rencial exacta para alguna función µ(x, y) convenientemente elegida. En este caso, se diceque µ es un factor integrante. La condición (2.11) aplicada a (2.16) es
µyP + µPy = µxQ + µQx. (2.17)
Esta condición es muy complicada (de hecho, es una ecuación en derivadas parciales en lanueva incógnita µ) y son raras las ocasiones en que se la aplica directamente. Sin embargo,haciendo alguna suposición sobre la forma de µ (por ejemplo que depende sólo de x, o dey, o de xy2, etc.) es posible usar (2.17) para hallar µ y resolver (2.16) con la técnica de laSección 2.3.
Ejemplo 2.7. La ecuación
(x − 1 − y2)dy − ydx = 0 (2.18)
no es exacta. Multiplicando por µ(x, y) la condición (2.17) es
− µyy − µ = µx(x − 1 − y2) + µ. (2.19)
Si µ = µ(y), (2.19) se convierte en
−µy(y)y = 2µ(y)
que es una ecuación en la única variable y y puede ser resuelta por separación de variables:
−µy(y)y = 2µ(y) ⇒ −µy
µ=
2
y⇒ − ln(µ) = 2 ln(y) ⇒ µ(y) =
1
y2.
Cabe notar que en este último cálculo no nos interesa hallar todos los factores integrantessino que alcanza con uno solo que permita transformar la ecuación dada en diferencialexacta.
Multiplicando (2.18) por µ se obtiene
x − 1 − y2
y2dy −
1
ydx = 0 (2.20)
que es diferencial exacta como se verifica inmediatamente.El paso siguiente es resolver (2.20) con la técnica de la Sección 2.3. Buscamos f tal que
fx = −1
y⇒ f(x, y) + g(y) = −
∫1
ydx = −
x
y.
Además,
fy =x − 1 − y2
y2⇒
x
y2− g′(y) =
x − 1 − y2
y2⇒ g′(y) =
1
y2+ 1 ⇒ g(y) = −
1
y+ y + C1
y vale que la solución y(x) satisface la ecuación algebraica
−x + 1
y− y = C (2.21)

8 JAVIER FERNANDEZ
para alguna constante C ∈ R. Por último, se puede despejar y de (2.21):
(−x + 1) − y2 = Cy ⇒ y2 + Cy + x − 1 = 0 ⇒ y(x) =−C ±
√
C2 − 4(x − 1)
2
Nota 2.8. Hay que tener en cuenta que la multiplicación de una ecuación por un factorintegrante puede introducir soluciones espúreas, es decir soluciones de la ecuación dife-rencial exacta que no son soluciones de la ecuación original. Esto puede ocurrir cuandola solución hallada anula idénticamente el factor integrante. En el Ejemplo 2.7, el factorintegrante hallado es siempre positivo y, por tanto, no puede haber soluciones espúreas.
2.5. Ecuaciones lineales. Estas son las ecuaciones del tipo
y′(x) = P (x)y(x) + Q(x) (2.22)
para funciones P y Q dadas. La ecuación lineal puede reescribirse en forma diferencial
(Py + Q)dx − dy = 0 (2.23)
que no es una diferencial exacta por lo común. Sin embargo, (2.23) admite un factorintegrante de la forma µ = µ(x). La condición (2.17) para factores integrantes de estaforma se reduce a
−µx = µP
que se resuelve por separación de variables:
µx = −µP ⇒µx
µ= −P ⇒ ln(µ) = −
∫
P (x)dx ⇒ µ(x) = e−R
P (x)dx.
Debido a la forma del factor integrante, éste no introduce soluciones espúreas, como semenciona en la Nota 2.8. Multiplicando (2.23) por µ se obtiene
e−R
P (x)dx(Py + Q)dx − e−R
P (x)dxdy = 0
que claramente es una diferencial exacta. Se busca f(x, y) tal que
fy(x, y) = −e−R
P (x)dx ⇒ f(x, y) = −ye−R
P (x)dx + g(x)
y
fx(x, y) = e−R
P (x)dx(Py + Q) ⇒ ye−R
P (x)dxP + g′(x) = e−R
P (x)dx(Py + Q) ⇒
g′(x) = e−R
P (x)dxQ(x) ⇒ g(x) =
∫
e−R
P (x)dxQ(x)dx
con lo que
f(x, y) = −ye−R
P (x)dx +
∫
e−R
P (x)dxQ(x)dx = C1
de donde se despeja
y(x) =C +
∫e−
R
P (x)dxQ(x)dx
e−R
P (x)dx. (2.24)
Ejemplo 2.9. La ecuación
y′ + y =1
1 + e2x(2.25)
es una ecuación lineal de primer orden con coeficientes P (x) = −1 y Q(x) = 11+e2x . Para
aplicar la fórmula (2.24) es conveniente calcular primero
e−R
P (x)dx = ex

NOTAS DE ECUACIONES ORDINARIAS 9
con lo que
y(x) =C +
∫ex 1
1+e2x dx
ex=
C +∫
ex
1+e2x dx
ex=
C +∫
11+(ex)2
dex
ex=
C + arctan(ex)
ex,
que es la solución general de la ecuación lineal dada.Si se pide hallar las soluciones de (2.25) que satisfacen la condición inicial y(0) = π,
hay que hallar los valores de C que hagan valer esta última condición:
π = y(0) =C + arctan(e0)
e0=
C + arctan(1)
1= C +
π
4⇒ C =
3π
4
y la única solución es
y(x) =3π4
+ arctan(ex)
ex.
2.6. Reducción del orden. Como se vio, hay una cantidad de métodos para atacarla resolución explícita de ecuaciones de primer orden. Las ecuaciones de orden más altopueden, en algunos casos, transformarse en ecuaciones de primer orden y, así, beneficiarsede este tipo de métodos. Veremos a continuación dos casos en donde esto puede hacersepara ecuaciones de segundo orden F (x, y, y′, y′′) = 0.
2.6.1. Ecuaciones de la forma F (x, y′, y′′) = 0. Se propone una nueva incógnita u(x) =y′(x), con lo que u′(x) = y′′(x) y la ecuación original toma la forma F (x, u, u′) = 0, quees una ecuación de primer orden.
Ejemplo 2.10. Dada la ecuación
xy′′ = y′ + (y′)2, (2.26)
que es de segundo orden y donde la incógnita y no aparece explícitamente, se hace elcambio de incógnita u(x) = y′(x) lo que transforma la ecuación en
xu′ = u + u2,
que es de primer orden y puede resolverse usando separación de variables. Cuando u 6= 0,
xu′ = u + u2 ⇒u′
u(1 + u)=
1
x⇒
∫u′
u(1 + u)dx =
∫1
xdx ⇒
ln(x) + C1 =
∫1
u(1 + u)du =
∫ (1
u−
1
1 + u
)
du = ln(u) − ln(u + 1) = ln(u
u + 1) ⇒
C2x =u
u + 1⇒ u =
C2x
1 − C2x=
x
C3 − x.
A estas soluciones hay que agregar u(x) = 0 que habíamos dejado de lado en un comienzoy, por inspección, es solución de la ecuación. Por último, como u = y′,
y′ =x
C3 − x⇒
y =
∫x
C3 − xdx =
∫ (−C3 + x
C3 − x+
C3
C3 − x
)
dx = −x − C3 ln(|C3 − x|) + C4,
con lo que se tiene la familia de soluciones de (2.26)
y(x) = −x − C3 ln(|C3 − x|) + C4
con C3, C4 ∈ R. Otras soluciones se obtienen de y′ = u = 0, que da y(x) = C5, paraC5 ∈ R.

10 JAVIER FERNANDEZ
2.6.2. Ecuaciones de la forma F (y, y′, y′′) = 0. Se propone un cambio de incógnita,u = y′, así como también un cambio de variable independiente, de x a y. Teniendo encuenta que
y′′ =d2
dx2y =
d
dxu =
du
dy
dy
dx= u
du
dy,
la ecuación de segundo ordenF (y, y′, y′′) = 0
se convierte en la ecuación de primer orden
F (y, u, udu
dy) = 0
en la incógnita u y con variable independiente y.
Ejemplo 2.11. La ecuaciónyy′′ + (y′)2 = 0 (2.27)
no depende explícitamente de la variable independiente x y por tanto puede ser tratadacomo se describe arriba. Se toma y como la nueva variable independiente y u = y′, lo quelleva a que y′′ = udu
dy, con lo que (2.27) se convierte en
yudu
dy+ u2 = 0
Notemos que esta ecuación puede ser factorizada
u(ydu
dy+ u) = 0
que lleva a que u = 0 o y dudy
+ u = 0. En el primer caso no hay nada que decir; en el
segundo caso, la ecuación se resuelve por separación de variables:
ydu
dy+ u = 0 ⇒
1
u
du
dy= −
1
y⇒
∫1
u
du
dydy = −
∫1
ydy ⇒
− ln(y) + C1 =
∫1
udu = ln(u) ⇒ u =
C2
y.
Recordando que u = dy
dxse obtiene
dy
dx=
C2
y⇒ y
dy
dx= C2 ⇒
∫
ydy
dxdx =
∫
C2dx ⇒ C2x + C3 =
∫
ydy =1
2y2 ⇒
y(x) = ±√
2C2x + 2C3 = ±√
C4x + C5.
Notemos que el caso u = 0 que vimos con anterioridad corresponde a y constante, que esun caso particular de la última fórmula cuando C4 = 0.
2.7. Interpretación geométrica. Hasta aquí se han considerado las ecuaciones deprimer orden desde un punto de vista algorítmico: se opera con ellas para hallar soluciones.En esta sección se presenta una interpretación de las ecuaciones más relacionada con lageometría.
Una ecuación de primer orden del tipo
y′ = f(x, y)
se puede interpretar como determinando una familia de curvas en el plano. Las curvas sonde la forma (x, y(x)) y la ecuación determina en cada posición del plano (x, y), cuál es elvector velocidad de la curva: (1, y′(x)) = (1, f(x, y)).
Una curva cuyas velocidades están determinadas por un campo vectorial es llamadauna curva integral del campo vectorial o línea de flujo de dicho campo.

NOTAS DE ECUACIONES ORDINARIAS 11
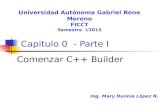
Ejemplo 2.12. Consideremos la ecuación del Ejemplo 2.1,
y′ − xy = 0.
Por ejemplo, en el punto (1,−1), el vector velocidad determinado por la ecuación es(1,−1). La Figura 1 muestra los vectores velocidad asociados a la ecuación en una regióndel plano.
1.2
−0.4
y
0.0
1.6
−0.8−1.6
−1.6
x
−2.0
0.8
1.2
2.0
2.00.8
0.4
−2.0
0.4
−1.2
−0.4−1.2 1.6
−0.8
0.0
Figura 1. Campo de velocidades de la ecuación y′ − xy = 0
Una solución de la ecuación diferencial dada (con condición inicial) corresponde a unacurva cuya velocidad en cada punto coincide con el valor del campo de velocidades de laFigura 1. Por ejemplo, si la condición inicial es y(0) = 1, mirando el campo de velocidadesvemos que, cualitativamente, la curva integral comenzará desde el punto (0, 1), moviéndosehacia la derecha (observar el campo de velocidades) y continuará desplazándose haciaarriba y la derecha.
Cabe notar que el razonamiento del párrafo anterior sólo usa el campo de velocidades,que se dibuja usando la ecuación dada y ningún conocimiento de la solución de la misma.
Usando la solución general de la ecuación hallada en el Ejemplo 2.1
y(x) = C2e1
2x2
concluimos que la condición inicial y(0) = 1 implica que C2 = 1, con lo que la soluciónparticular es
y(x) = e1
2x2
.
Por tanto, la curva integral que pasa por (0, 1) está parametrizada por
(x, e1
2x2
).
La Figura 2 muestra la curva integral y el campo de velocidades.
3. Teoremas de existencia
En la Sección 2 se mencionaron una serie de métodos para hallar soluciones de distintostipos de ecuaciones diferenciales de primer orden. Una pregunta que queda pendiente essi toda ecuación diferencial de primer orden admite una solución y, dada una condicióninicial para la ecuación, cuántas soluciones la satisfacen. El siguiente resultado da unarespuesta a esta pregunta.

12 JAVIER FERNANDEZ
1.6
−2.0
0.8−2.0
−0.8
2.0
2.0
1.6
−1.6
0.4
0.0
1.2
−1.2
−0.4−1.2
y
x
−0.8 0.0 0.4
1.2
−1.6
0.8
−0.4
Figura 2. Curva integral
Teorema 3.1 (Picard). Sea R := (x0 − a, x0 + a) × (y0 − b, y0 + b) para (x0, y0) ∈ R2 ya, b ∈ R>0 (ver Figura 3). Dada f(x, y) continua en R y tal que
|f(x, y1) − f(x, y2)| ≤ K|y1 − y2| en R (3.1)
para alguna constante K ∈ R, si M := max(x,y)∈R |f(x, y)| y δ := mın(a, bM
, 1K
) entonces
existe una única función y : (x0 − δ, x0 + δ) → R de modo que
y′(x) = f(x, y(x)) e y(x0) = y0.
R
(x0, y0)
x0 − a x0 + a
y0 + b
y0 − b
Figura 3. curva integral por (x0, y0)
Demostración. Ver el Teorema 1.1 de [2]. �
Nota 3.2. El Teorema 3.1 establece la existencia de la solución y en (x0 − δ, x0 + δ) quepuede ser estrictamente menor que (x0 − a, x0 + a).
Ejemplo 3.3. Dada la ecuación
y′ = y2 con y(1) = 1, (3.2)
se toma f(x, y) = y2 que es una función C∞(R2). Para demostrar la existencia y unicidadde solución es necesario trabajar en un entorno de x = 1 e y = 1. En principio es posible

NOTAS DE ECUACIONES ORDINARIAS 13
tomar un rectángulo R := (1 − a, 1 + a) × (1 − b, 1 + b) con a, b > 0 arbitrarios. En estecaso y usando la notación del Teorema 3.1, M = (1 + b)2. Además,
|f(x, y1)−f(x, y2)| = |y21−y2
2| = |(y1+y2)(y1−y2)| = |(y1+y2)||(y1−y2)| ≤ 2(1+b)|y1−y2|,
con lo que K ≤ 2(1 + b) pero tomando y1 e y2 ≃ 1 + b se ve que K = 2(1 + b). Conestos datos, el Teorema 3.1 asegura la existencia y unicidad de solución en el intervalo(1 − δ, 1 + δ) para δ = mın(a, b
(1+b)2, 1
2(1+b)). El mínimo de b
(1+b)2y 1
2(1+b)está dado por
{b
(1+b)2si b ≤ 1
12(1+b)
) si b ≥ 1
y, en todos los casos, es ≤ 14
con lo que δ ≤ 14, más allá de la región R que se haya elegido.
La pregunta que queda es ¿por qué si f es una función tan buena, el dominio de validezde la solución afirmado por el Teorema es tan limitado? En parte, se puede deber a unalimitación propia del método de demostración del Teorema. Sin embargo, además, hay unproblema intrínseco a la ecuación, como se ve al observar la solución explícita de (3.2)
y(x) =1
2 − x
hallada en el Ejemplo 2.3.Es claro que esta solución tiene una singularidad en x = 2. La comparación con el
cálculo de δ anterior muestra que, si bien la solución no existe para todos los reales, existe(y es única) en −∞ < x < 2, que es más que lo que asegura el Teorema 3.1.
Nota 3.4. La condición (3.1) se satisface automáticamente si fy(x, y) es continua en Rya que, por el Teorema del Valor Medio: f(x, y1)− f(x, y2) = fy(x, y)(y1 − y2) para algúny entre y1 e y2. Tomando módulos y usando la continuidad de fy en R se tiene
|f(x, y1) − f(x, y2)| = |fy(x, y)||y1 − y2| ≤ max(r,s)∈R
|fy(r, s)||y1 − y2|,
con lo que (3.1) se satisface para K := max(r,s)∈R |fy(r, s)|.
El siguiente Ejemplo muestra que la condición de que fy esté controlada (sea continua,por ejemplo) del Teorema 3.1 es necesaria para la unicidad de la solución.
Ejemplo 3.5. Dada la ecuación
y′ = 3y2
3
con la condición inicial y(0) = 0, vemos que las funciones
y1(x) := x3 e y2(x) := 0
son soluciones de la ecuación y satisfacen la condición inicial. La razón para la aparentecontradicción con el Teorema 3.1 es que f(x, y) = 3y
2
3 tiene fy(x, y) = 2y− 1
3 que no escontinua en y = 0 y, dado que la condición inicial está dada para ese valor de y no es posiblehallar un rectángulo R que contenga a la condición inicial y donde se satisfaga (3.1).
Nota 3.6. Si se elimina la condición (3.1) puede dejar de valer la unicidad de la soluciónde una ecuación diferencial, como muestra el Ejemplo 3.5. Sin embargo, aún en este caso,un resultado de G. Peano asegura la existencia de solución (no necesariamente única)para la ecuación, con solo suponer la continuidad de f en R.
Nota 3.7. El Teorema 3.1 también es válido para funciones vectoriales, es decir, cuandoy : R→ Rn y f : R× Rn → Rn. Ver [3], página 71.

14 JAVIER FERNANDEZ
Teorema 3.8. Sea f(x, y) continua y tal que, para algún K ∈ R, satisface |f(x, y1) −f(x, y2)| ≤ K|y1− y2| en R := (α, β)×R y para K ∈ R. Si (x0, y0) ∈ R, entonces hay unaúnica función y : (α, β) → R tal que y′ = f(x, y) e y(x0) = y0. Ver Figura 4.
R
α β
(x0, y0)
Figura 4. curva integral por (x0, y0)
Demostración. Ver Theorem B en la página 430 de [4]. �
Nota 3.9. A diferencia del Teorema 3.1, el Teorema 3.8 asegura la existencia de la soluciónde la ecuación diferencial en toda la región donde valen las condiciones del enunciado yno solo en un intervalo alrededor del dato inicial. Comparar las Figuras 3 y 4.
Ejemplo 3.10. Dada la ecuación lineal de primer orden
y′ = P (x)y + Q(x)
con la condición inicial y(x0) = y0, se define f(x, y) = P (x)y + Q(x). Si P y Q sonfunciones continuas en [a, b], entonces
|f(x, y1) − f(x, y2)| = |P (x)y1 + Q(x) − (P (x)y2 + Q(x))| = |P (x)||y1 − y2| ≤ K|y1 − y2|
donde K := supx∈[a,b] |P (x)|, que existe y es finito por la continuidad de P . En resumen, fsatisface la hipótesis del Teorema 3.8. Por tanto, la ecuación lineal de primer orden tienesolución única en la región en que los coeficientes son continuos.
Notemos que en la Sección 2.5 ya se había hallado una fórmula para la solución de estetipo de ecuaciones. La existencia de la solución sobre un intervalo en que los coeficientesson continuos se desprende de (2.24) ya que las primitivas que allí aparecen existen debidoa la continuidad de P y Q.
Nota 3.11. El Teorema 3.8 también vale en forma vectorial.
Teorema 3.12. Dada la ecuación lineal de segundo orden{
y′′ + P (x)y′ + Q(x)y = R(x)
y(x0) = y0 e y′(x0) = y′0
(3.3)
con P, Q, R funciones continuas en [a, b] y constantes y0, y′0 ∈ R, existe una única solución
y : (a, b) → R de (3.3).
Demostración. Se propone el cambio de variables z1 = y y z2 = y′. Las nuevas variablessatisfacen {
z′1 = z2
z′2 = −P (x)z2 − Q(x)z1 + R(x)

NOTAS DE ECUACIONES ORDINARIAS 15
o, en forma vectorial
z′ = A(x)z + B(x) = F (x, z)
con
z(x) :=
(z1(x)z2(x)
)
, A(x) :=
(0 1
−Q(x) −P (x)
)
y B(x) :=
(0
R(x)
)
.
Por último, la condición inicial de la ecuación de segundo orden, y(x0) = y0 e y′(x0) = y′0
se convierte en z(x0) = z0 :=
(y0
y′0
)
. En total, mediante el cambio de variables propuesto,
la ecuación (3.3) es equivalente a
z′ = F (x, z) con z(x0) = z0 (3.4)
que es una ecuación de primer orden vectorial. De la continuidad de P, Q, R sale que Fes continua. Por otro lado:
|F (x, z) − F (x, z)| = |A(x)(z − z)| ≤ C(x)|z − z| ≤ K|z − z|
donde C(x) :=√
1 + P 2(x) + Q2(x) y K := supx∈[a,b] C(x), que existe debido a la conti-
nuidad de P y Q3 Aplicando el Teorema 3.8 en su forma vectorial se concluye que (3.4)tiene solución única para todo x ∈ (a, b). Por tanto, (3.3) también posee solución únicay(x) = z1(x). �
En las aplicaciones, muchas veces los coeficientes de una ecuación diferencial o la con-dición inicial, están determinados mediante magnitudes determinadas experimentalmente(por ejemplo masas o velocidades). Es importante entender como afecta a la soluciónde una ecuación diferencial un pequeño cambio en estos datos ya que todo proceso demedición conlleva una indeterminación en el resultado. Si pequeños cambios en los datosproducen grandes variaciones en la solución, el valor del uso de las ecuaciones diferen-ciales en las aplicaciones sería más dudoso. Resultados como el siguiente muestran quepor lo común las soluciones de una ecuación varían “razonablemente” con el valor de losparámetros.
Teorema 3.13. En las condiciones del Teorema 3.1, si f(x, y, µ) es continua en R ×[µ0, µ1] y la constante K de (3.1) no depende de µ, entonces la solución y(x, µ) de laecuación dy
dx= f(x, y(x, µ), µ) con condición inicial y(x0, µ) = x0(µ) depende continua-
mente de µ.
Demostración. Ver el Teorema 1.2 de [2]. �
Los resultados vistos en esta sección no dan información alguna sobre la forma de lassoluciones de las respectivas ecuaciones. Sin embargo son de gran valor por demostrarla existencia y unicidad de soluciones, aún en casos en que no es posible hallar fórmulasexplícitas para las mismas. En estos casos, partiendo de la existencia de soluciones, es
3La fórmula para C(x) es un caso especial de
|Hv| ≤
√∑
jk
H2jk |v|
para cualquier H ∈ Rn×n y v =∑
j vjej ∈ Rn×1, donde los ej son la base canónica de Rn. Esta fórmulavale pues
|Hv| ≤∑
l
|vl||H(el)| ≤
√∑
l
|vl|2√
∑
k
|H(ek)|2 = |v|
√∑
jk
|Hjk|2,
donde la desigualdad es la desigualdad de Cauchy-Schwarz en Rn.

16 JAVIER FERNANDEZ
posible describir la solución a través de series de potencias o mediante aproximacionesnuméricas.
4. Ecuaciones lineales de segundo orden
La ecuación lineal de segundo orden tiene la forma
y′′ + P (x)y′ + Q(x)y = R(x). (4.1)
Cuando R(x) ≡ 0 se dice que la ecuación es homogénea. Dada la ecuación (4.1), es comúnconsiderar su ecuación homogénea asociada:
y′′ + P (x)y′ + Q(x)y = 0 (4.2)
Las ecuaciones de segundo orden son muy importantes en las aplicaciones ya que buenaparte de las ecuaciones originadas en la física son de este tipo. Por ejemplo, la famosaecuación de Newton F = ma es una ecuación lineal de segundo orden en la variable t yaque la aceleración a es x′′(t).
Nota 4.1. La palabra lineal en el nombre de las ecuaciones del tipo de (4.1) se debe aque, dada la ecuación (4.1), se puede construir el operador
E(y) := y′′ + P (x)y′ + Q(x)y
dado por el lado izquierdo de la ecuación. Dicho operador es un operador R-lineal4.En efecto,
E(y1 + y2) = (y1 + y2)′′ + P (x)(y1 + y2)
′ + Q(x)(y1 + y2)
= y′′1 + y′′
2 + P (x)y′1 + P (x)y′
2 + Q(x)y1 + Q(x)y2 = E(y1) + E(y2)
y, si r ∈ R,
E(ry) = (ry)′′ + P (x)(ry)′ + Q(x)(ry) = ry′′ + rP (x)y′ + rQ(x)y = rE(y).
En el marco del álgebra lineal, E define un operador lineal entre dos espacios de funcio-nes. Una posibilidad sencilla aunque no del todo adecuada es tomar E : C2(R) → C0(R),aunque otros espacios de funciones son utilizados en el estudio de estos problemas.
4.1. Estructura del conjunto de soluciones. Se describe a continuación la estruc-tura básica del conjunto de soluciones de (4.1).
Proposición 4.2. Fijada una solución yp de (4.1), toda solución de (4.1) es de la formayp+yh con yh solución de (4.2) y, al revés, toda función de esta forma es solución de (4.1).
Demostración. Si y es solución de (4.1) entonces, usando el operador E de la Nota 4.1,yh := y − yp satisface
E(yh) = E(y − yp) = E(y) − E(yp) = R − R = 0
con lo que yh es solución de (4.2) e y = yp + yh.Al revés, si yh es solución de (4.2), entonces
E(yp + yh) = E(yp) + E(yh) = R + 0 = R
es decir que yp + yh es solución de (4.1) �
Nota 4.3. Hay un resultado completamente análogo a la Proposición 4.2 en el marco delos sistemas lineales de ecuaciones, donde cualquier solución de un sistema inhomogéneoes la suma de una solución del sistema homogéneo con otra (fija) del sistema inhomogéneo.
4Los escalares considerados dependen del problema a analizar. En muchas situaciones se buscan solu-ciones reales a problemas reales: en estos casos hay que tomar escalares reales. En otros casos se buscansoluciones complejas y hay que tomar escalares complejos.

NOTAS DE ECUACIONES ORDINARIAS 17
La Proposición 4.2 permite simplificar el estudio de las ecuaciones inhomogéneas al delas homogéneas, siempre que se sepan hallar soluciones particulares yp de las ecuacionesinhomogéneas. En lo que sigue se tratarán ambos temas: el estudio de las ecuacioneshomogéneas y el de las soluciones particulares de las inhomogéneas.
Antes de enunciar el siguiente resultado, es conveniente definir V := {y : [a, b] → R :y ∈ C2((a, b)) y es continua y con derivadas continuas en [a, b]}. Es claro que V es un Respacio vectorial de dimensión infinita.
Teorema 4.4. Dadas funciones continuas P, Q : [a, b] → R, el conjunto H := {y ∈ V :y′′ + P (x)y′ + Q(x)y = 0} es un subespacio vectorial de dimensión 2 de V .
Demostración. Que H es un subespacio de V es una simple verificación usando las pro-piedades de linealidad del operador E definido en la Nota 4.1. Es claro que si y ≡ 0,entonces E(y) = 0, por lo que 0 ∈ H . Si y1, y2 ∈ H , como
E(y1 + y2) = E(y1) + E(y2) = 0 + 0 = 0
resulta y1 + y2 ∈ H y, del mismo modo, para r ∈ R e y ∈ H ,
E(ry) = rR(y) = 0
por lo que ry ∈ H y H es subespacio de V .Sea x0 ∈ (a, b). Se definen y1, y2 ∈ H tales que
y1(x0) = 1, y′1(x0) = 0 e y2(x0) = 0, y′
2(x0) = 1.
La existencia de tales funciones se debe al Teorema 3.12 ya que tanto y1 como y2 sonsoluciones de la ecuación (3.3) con R(x) = 0.
Si r1y1 + r2y2 = 0 en V para constantes r1, r2 ∈ R, como la igualdad es una igualdadentre funciones, debe seguir siendo válida si se evalúan ambos lados en un punto x, porejemplo en x0. De este modo se obtiene que 0 = r1y1(x0) + r2y2(x0) = r1. Por lo tantovale r2y2 = 0 en V ; derivando y evaluando en x0 se obtiene 0 = r2y
′2(x0) = r2, con lo
que r1 = r2 = 0. Se concluye que {y1, y2} son linealmente independientes en V y, enconsecuencia, en H .
Sea v ∈ H . Se definen r1 = v(x0), r2 = v′(x0) y u(x) := r1y1(x) + r2y2(x) ∈ H . Comovale que u(x0) = r1 = v(x0) y u′(x0) = r2 = v′(x0), tanto u como v son soluciones de (4.2),con condición inicial y(x0) = r1 e y′(x0) = r2. Como por el Teorema 3.12 dicha ecuacióncon condiciones iniciales tiene solución única, se concluye que v = u = r1y1 + r2y2, con loque {y1, y2} genera H .
En conclusión, {y1, y2} es base de H que, por tanto, tiene dimensión 2. �
De la Proposición 4.2 y el Teorema 4.4 se concluye lo siguiente.
Corolario 4.5. La solución general de (4.1) tiene la forma yp + r1y1 + r2y2, donde yp esuna solución particular de (4.1), {y1, y2} es una base del espacio de soluciones de (4.2)y r1, r2 ∈ R.
Nota 4.6. En el marco del álgebra lineal, usando el operador E introducido en la No-ta 4.1, el espacio de soluciones de la ecuación homogénea (4.2) resulta ser H := ker(E),que es naturalmente un subespacio de V . El espacio de soluciones de la ecuación inho-mogénea (4.1) es la variedad afín E−1(R), con lo que es el espacio trasladado de H porcualquier solución particular, es decir, por cualquier elemento de E−1(R).

18 JAVIER FERNANDEZ
4.2. Segunda solución de una ecuación. En la práctica puede no ser fácil hallaruna base del espacio de soluciones de una ecuación homogénea. Por eso es útil el siguientemétodo que permite hallar una segunda solución de una ecuación, conocida una primerasolución y sabiendo evaluar integrales.
Sea y1 una solución de (4.2). Se busca una segunda solución de (4.2) de la formay2(x) = u(x)y1(x). Como
y′2 = u′y1 + uy′
1
e
y′′2 = u′′y1 + 2u′y′
1 + uy′′1 ,
reemplazando en (4.2) se obtiene
0 = y′′2 + Py′
2 + Qy2 = u′′y1 + 2u′y′1 + uy′′
1 + P (u′y1 + uy′1) + Quy1 =
u′′y1 + 2u′y′1 + Pu′y1 + u (y′′
1 + Py′1 + Qy1)
︸ ︷︷ ︸
=0
= y1u′′ + (2y′
1 + Py1)u′
que puede resolverse separando variables:
0 = y1u′′ + (2y′
1 + Py1)u′ ⇒
u′′
u′=
−2y′1 − Py1
y1
⇒
ln(u′) =
∫−2y′
1 − Py1
y1dx = −2 ln(y1) −
∫
P (x)dx ⇒
u′ =1
y21
e−R
P (x)dx ⇒ u =
∫1
y21(x)
e−R
P (x)dxdx
y, finalmente
y2(x) = y1(x)
∫1
y21(x)
e−R
P (x)dxdx. (4.3)
Ejemplos de aplicación de esta técnica aparecen en la nota de pie de página en la páginasiguiente y en la Nota 5.8.
4.3. Ecuación homogénea con coeficientes constantes. El caso especial de (4.2)con P y Q constantes es especialmente sencillo y se puede resolver por completo como sedetalla a continuación.
Se trata de resolver la ecuación
y′′ + py′ + qy = 0 con p, q ∈ R. (4.4)
Proponiendo una solución de la ecuación de la forma y = erx para r constante, sustitu-yendo en la ecuación se obtiene
r2erx + prerx + qerx = 0 ⇒ r2 + pr + q = 0,
es decir que si r es una raíz del polinomio I(x) := x2 + px + q —llamado polinomioindicial—, erx es solución de (4.4). Para describir todas las posibles soluciones de (4.4)hay que ver cuales son las posibles raíces de I. Hay 3 casos a considerar:
Dos raíces reales distintas. Si r1 6= r2 son las raíces de I, entonces y1(x) := er1x ey2(x) := er2x son soluciones de (4.4). Si a1y1 + a2y2 = 0 en V , entonces, evaluandoen un x0 en la región donde se busca la solución se obtiene a1e
r1x0 +a2er2x0 = 0. Por
otro lado, derivando y evaluando en x0, a1r1er1x0 + a2r2e
r2x0 = 0 que es un sistemade dos ecuaciones con incógnitas a1 y a2. Como el determinante de la matriz de loscoeficientes es (r2−r1)e
(r1+r2)x0 6= 0 se concluye que el sistema tiene única solución,que resulta ser la nula y, por tanto, {er1x, er2x} son linealmente independientes y,entonces, son una base del espacio de soluciones de (4.4).

NOTAS DE ECUACIONES ORDINARIAS 19
Dos raíces complejas conjugadas. Si las raíces son de la forma r = a ± bi paraa, b ∈ R, una solución es y(x) := e(a+bi)x = eax(cos(bx) + i sin(bx)). Sin embargo,siendo y una función compleja, esta respuesta no es satisfactoria. Una mejor soluciónpasa por notar que, como p y q son reales, si y es solución, tanto Re(y) como Im(y)son soluciones de (4.4). Un cálculo análogo al hecho en el caso de las raíces realesmuestra que {eax cos(bx), eax sin(bx)} es una base del espacio de soluciones de (4.4).Una única raíz real con multiplicidad 2. Si la raíz es r, erx es una única solucióny cualquier otra solución de (4.4) ha de tener otra forma funcional. De hecho, esinmediato verificar que xerx es solución de (4.4)5 y un cálculo análogo al del caso dedos soluciones reales muestra que {erx, xerx} es una base del espacio de solucionesde (4.4).
Ejemplo 4.7. La ecuacióny′′ − 4y′ + 4y = 0
tiene por polinomio indicial I(x) = x2 − 4x + 4 = (x− 2)2 que tiene a r = 2 como raíz demultiplicidad 2. Por tanto, la solución general de la ecuación es y(x) = r1e
2x + r2xe2x.
4.4. Soluciones particulares de ecuaciones inhomogéneas. No hay un métodogeneral efectivo para hallar soluciones particulares de la ecuación lineal de segundo or-den inhomogénea (4.1). A continuación se describen dos métodos para buscar solucionesparticulares. El primero se aplica sólo a cierto tipo de inhomogeneidades. El segundo esgeneral pero depende del conocimiento de una base de soluciones del problema homogéneoy de poder evaluar integrales.
Una observación general es que si la inhomogeneidad de la ecuación es una suma detérminos, alcanza con hallar una solución particular para cada término de la inhomogenei-dad ya que la linealidad de la ecuación lleva a que la suma de las soluciones particularessea solución particular de la inhomogeneidad total.
4.4.1. Método de los coeficientes indeterminados. Si la inhomogeneidad (R(x) en (4.1))es del tipo eax, sin(ax), cos(ax) o un polinomio en x, básicamente se propone una soluciónparticular con términos de forma similar y con coeficientes indeterminados que se elijen alsustituir la solución propuesta en la ecuación. Hay que tener cuidado especial en el casoen que la inhomogeneidad es solución de la ecuación homogénea asociada.
Ejemplo 4.8. Daday′′ − y = x2,
se propone una solución del tipo yp(x) := A2x2 + A1x + A0:
x2 = y′′p − yp = 2A2 − (A2x
2 + A1x + A0) = −A2x2 − A1x + (2A2 − A0)
con lo que A2 = −1, A1 = 0 y A0 = −2 resuelven el problema. Entonces, la soluciónparticular hallada es yp = −x2 − 2.
Ejemplo 4.9. Daday′′ − y = e2x
se propone una solución del tipo yp(x) := Ae2x:
e2x = y′′p − yp = 4Ae2x − Ae2x = (4A − A)e2x
5 Esta solución se obtiene a partir de la solución y1(x) = erx mediante el procedimiento descripto enla Sección 4.2: como r es raíz doble de x2 + px + q vale que 2r + p = 0 con lo que la segunda solución es
y2(x) = y1(x)
∫1
y21(x)
e−R
P (x)dxdx = erx
∫
e−2rxe−pxdx = erx
∫
e−(2r+p)xdx = erxx.

20 JAVIER FERNANDEZ
que lleva a tomar A = 13, con lo que la solución particular hallada es yp = 1
3e2x.
Ejemplo 4.10. Dada
y′′ − y = ex
se propone una solución del tipo yp(x) := Aex:
ex = y′′p − yp = Aex − Aex = 0
que no se verifica para ningún valor de A. Por lo tanto, la solución propuesta no esadecuada. Para resolver este problema se propone una solución del tipo yp(x) := Axex:
ex = y′′p − yp = A(ex + xex)′ − Axex = A(2ex + xex) − Axex = 2Aex
con lo que A = 12
resuelve el problema. La solución particular hallada es yp(x) := x2ex.
En este caso, el motivo por el que no funcionó la primera propuesta es que la propues-ta resultó ser una solución del sistema homogéneo. En este tipo de casos se proponensoluciones multiplicando a la propuesta original por distintas potencias de x.
4.4.2. Método de variación de los parámetros. Sea {y1, y2} una base del espacio de so-luciones de la ecuación homogénea (4.2). Si C1, C2 ∈ R, C1y1 +C2y2 es la solución generalde (4.2). Sin embargo, si los parámetros C1 y C2 son funciones, C1y1 + C2y2 puede dejarde ser solución de esa ecuación. De hecho, en el método de variación de los parámetros sepropone como solución particular yp(x) := C1(x)y1(x) + C2(x)y2(x).
Se tiene
y′p = C ′
1y1 + C1y′1 + C ′
2y2 + C2y′2.
Las funciones C1 y C2 son desconocidas y se trata de determinarlas. En este punto seimpone la condición
C ′1y1 + C ′
2y2 = 0
sin otra justificación que la de que simplifica los cálculos ulteriores. En consecuencia,
y′p = C1y
′1 + C2y
′2 ⇒
y′′p = C ′
1y′1 + C1y
′′1 + C ′
2y′2 + C2y
′′2
Reemplazando en (4.1) se obtiene
R = y′′p + Py′
p + Qyp =
C ′1y
′1 + C1y
′′1 + C ′
2y′2 + C2y
′′2 + P (C1y
′1 + C2y
′2) + Q(C1y1 + C2y2) =
C ′1y
′1 + C ′
2y′2 + C1 (y′′
1 + Py′1 + Qy1)
︸ ︷︷ ︸
=0
+C2 (y′′2 + Py′
2 + Qy2)︸ ︷︷ ︸
=0
.
En resumen, las funciones C1(x) y C2(x) satisfacen el sistema lineal{
C ′1y1 + C ′
2y2 = 0
C ′1y
′1 + C ′
2y′2 = R.
Se puede demostrar que la independencia lineal de {y1, y2} implica que la matriz decoeficientes del sistema es inversible y, por tanto, siempre se pueden despejar C1(x)′ yC2(x)′. Integrando se encuentran C1(x) y C2(x) con lo que se tiene yp.
Ejemplo 4.11. Dada
y′′ − y = ex
se tiene la ecuación homogénea y′′ − y = 0 que tiene coeficientes constantes y puede serresuelta con el método de la Sección 4.3. El polinomio indicial es I(x) = x2 − 1 que tieneraíces ±1, con lo que la base de soluciones de la ecuación homogénea es {ex, e−x}.

NOTAS DE ECUACIONES ORDINARIAS 21
El sistema lineal a resolver es{
C ′1e
x + C ′2e
−x = 0
C ′1e
x − C ′2e
−x = ex.
Sumando las ecuaciones sale que 2C ′1e
x = ex con lo que C ′1 = 1
2. Restando las ecuaciones
se obtiene 2C ′2e
−x = −ex, con lo que C ′2 = −1
2e2x. Integrando se obtiene C1(x) = x
2y
C2(x) = −14e2x (notar que se pusieron constantes de integración nulas ya que se busca
una solución particular y no todas las posibles soluciones).En conclusión, la solución particular resulta
yp(x) = C1(x)y1(x) + C2(x)y2(x) =x
2ex −
1
4e2xe−x =
x
2ex −
1
4ex.
Nota 4.12. Las soluciones particulares de la ecuación y′′ − y = ex halladas en los Ejem-plos 4.10 y 4.11 no coinciden. De hecho, no hay razón para que coincidan ya que hayinfinitas soluciones particulares. Lo que si ocurre es que la diferencia de las soluciones hade ser solución de la ecuación homogénea como, de hecho, se verifica.
5. Resolución por series
El Teorema 3.12 prueba que, cuando los coeficientes de la ecuación (3.3) son continuos,existen soluciones con dos derivadas de la misma. En muchos casos los coeficientes de laecuación son funciones analíticas o, al menos, sus singularidades son, a lo sumo, polos. Enmuchos de estos casos es posible refinar la teoría y demostrar que la solución exhibe elmismo tipo de propiedad que las funciones coeficientes. Más aún, existe un procedimientoexplícito para hallar las soluciones por medio de series de funciones. En lo que sigue,veremos como ocurre esto, comenzando por el caso en que las funciones coeficientes sonfunciones analíticas.
5.1. Ecuación lineal de segundo orden con coeficientes analíticos.
Teorema 5.1. Si P y Q son funciones analíticas en Br(x0) entonces la ecuación
y′′ + P (x)y′ + Q(x)y = 0 (5.1)
tiene un espacio de soluciones analíticas de dimensión 2. Más aún, toda solución analíticade (5.1) es convergente, al menos, en Br(x0).
Demostración. Ver [4], Theorem A en la página 155 y el Apéndice A del Capítulo 5. �
Ejemplo 5.2. La ecuacióny′′ + y = 0 (5.2)
tiene coeficientes P ≡ 0 y Q ≡ 1 analíticos con radio de convergencia ∞. Por el Teore-ma 5.1 las soluciones de (5.2) son funciones enteras. Se busca hallar el desarrollo en seriecentrado en x = 0 de tales soluciones, para lo cual se propone la forma
y(x) =
∞∑
n=0
anxn,
y, por lo tanto,
y′(x) =∞∑
n=1
nanxn−1
y′′(x) =∞∑
n=2
n(n − 1)anxn−2 =
∞∑
n=0
(n + 2)(n + 1)an+2xn.

22 JAVIER FERNANDEZ
Reemplazando en (5.2) se obtiene:
0 = y′′ + y = (
∞∑
n=0
(n + 2)(n + 1)an+2xn) + (
∞∑
n=0
anxn)
=
∞∑
n=0
((n + 2)(n + 1)an+2 + an)xn.
Por el principio de identidad, la igualdad anterior implica que (n+2)(n+1)an+2 +an = 0para todo n ≥ 0, es decir que
an+2 = −an
(n + 2)(n + 1)para todo n ≥ 0.
De aquí se deduce que los primeros coeficientes son
a2 = −a0
2 · 1, a3 = −
a1
3 · 2,
a4 = −a2
4 · 3=
a0
4 · 3 · 2 · 1, a5 = −
a3
5 · 4=
a1
5 · 4 · 3 · 2,
y, en general,
a2k =(−1)k
(2k)!a0 y a2k+1 =
(−1)k
(2k + 1)!a1 para todo k ≥ 0.
En conclusión, la solución general de (5.2) es
y(x) =∞∑
k=0
(−1)k
(2k)!a0x
2k +∞∑
k=0
(−1)k
(2k + 1)!a1x
2k+1
= a0
∞∑
k=0
(−1)k
(2k)!x2k + a1
∞∑
k=0
(−1)k
(2k + 1)!x2k+1
donde a0 y a1 son constantes reales sin determinar. En particular, reconociendo que∑∞
k=0(−1)k
(2k)!x2k = cos(x) y
∑∞
k=0(−1)k
(2k+1)!x2k+1 = sin(x) se tiene la solución general
y(x) = a0 cos(x) + a1 sin(x) para cualquier a0, a1 ∈ R.
Esta última expresión coincide con la que se encuentra aplicando el método de la Sec-ción 4.3 a (5.2).
En el Ejemplo 5.2 fue posible hallar la serie de potencias que representa la solución dela ecuación y, además, identificar la serie con funciones conocidas. Esto no siempre es así,como se verá en el próximo ejemplo.
Ejemplo 5.3. La ecuación
(1 − x2)y′′ − xy′ + p2y = 0 (5.3)
con p ∈ R, es conocida como ecuación de Chebyshev. (5.3) puede escribirse en la forma (5.1)
tomando P (x) := −x1−x2 y Q(x) := p2
1−x2 , que son funciones analíticas en, por ejemplo,
|x| < 1. En lo que sigue se buscan las soluciones de (5.3) en esa región. Por el Teorema 5.1dichas soluciones son de la forma:
y(x) =∞∑
n=0
anxn ⇒ p2y =
∞∑
n=0
p2anxn,

NOTAS DE ECUACIONES ORDINARIAS 23
y, por lo tanto,
y′(x) =
∞∑
n=1
nanxn−1 ⇒ −xy′ =
∞∑
n=1
−nanxn
y′′(x) =
∞∑
n=2
n(n − 1)anxn−2 ⇒
(1 − x2)y′′ =
∞∑
n=2
n(n − 1)anxn−2
︸ ︷︷ ︸
=P
∞
n=0(n+2)(n+1)an+2xn
−
∞∑
n=2
n(n − 1)anxn.
Reemplazando en (5.3) se obtiene
0 =∞∑
n=2
(p2an − nan + (n + 2)(n + 1)an+2 − n(n − 1)an)xn
+ (p2a1 − a1 + 6a3)x + (p2a0 + 2a2).
Por el principio de identidad, todos los coeficientes de xn se deben anular, y por tanto:
a2 = −p2
2a0 (5.4)
a3 =1 − p2
6a1 (5.5)
an+2 =n2 − p2
(n + 2)(n + 1)an para todo n ≥ 2 (5.6)
Los primeros coeficientes son
a4 =22 − p2
4 · 3a2 =
(22 − p2)(−p2)
4 · 3 · 2a0
y
a5 =32 − p2
5 · 4a3 =
(32 − p2)(12 − p2)
5 · 4 · 3 · 2a1,
de donde no es difícil ver que
a2k =((2(k − 1))2 − p2)((2(k − 2))2 − p2) · · · (22 − p2)(−p2)
(2k)!a0 (5.7)
a2k+1 =((2(k − 1) + 1)2 − p2)((2(k − 2) + 1)2 − p2) · · · (1 − p2)
(2k + 1)!a1 (5.8)
para k ≥ 1. Por lo tanto, si se definen
y0(x) := 1 +
∞∑
k=1
((2(k − 1))2 − p2)((2(k − 2))2 − p2) · · · (22 − p2)(−p2)
(2k)!x2k
y1(x) := x +
∞∑
k=1
((2(k − 1) + 1)2 − p2)((2(k − 2) + 1)2 − p2) · · · (1 − p2)
(2k + 1)!x2k+1,
se tiene que la solución general de (5.3) es
y(x) = a0y0(x) + a1y1(x) (5.9)
con a0, a1 ∈ R constantes indeterminadas.

24 JAVIER FERNANDEZ
Cabe notar que las funciones y0 e y1 halladas son una base de soluciones de (5.3)6. Aúnsin conocer las funciones y0 e y1 hay una propiedad que es evidente: si p ∈ Z, y0 o y1
resultan ser un polinomio. Esto es así ya que, por ejemplo, cuando p = 2m con m ∈ Z,
a2(m+1) =((
=p︷︸︸︷
2m )2 − p2)((2(m − 1))2 − p2) · · · (22 − p2)(−p2)
(2(m + 1))!a0 = 0
y, por la fórmula de recurrencia (5.7), todos los coeficientes pares siguientes también seanulan, con lo que y0 es un polinomio de grado |p|.
Nota 5.4. La ecuación (5.3) es, en verdad, un caso particular de la ecuación de Gegen-bauer, cuyas soluciones son expresables en términos de las llamadas funciones de Legendre.
También se puede observar que cuando p 6= 0, mediante el cambio de variables t =p arcsin(x), la ecuación (5.3) se convierte en
d2y
dt2+ y = 0
que tiene por base de soluciones a y0(t) = cos(t) e y1(t) = sin(t), por lo que (5.3) tienepor base de soluciones a y0(x) = cos(p arcsin(x)) y y1(x) = sin(p arcsin(x)). Considerandolas paridades y valores en el origen es fácil concluir que y0(x) = y0(x) e y1(x) = 1
py1(x).
Nota 5.5. Así como el Teorema 3.13 establece, bajo ciertas condiciones, la dependenciacontinua de la solución de una ecuación diferencial de los posibles parámetros, en el casoanalítico también hay un enunciado análogo. Ver el Teorema 1.3 de [2], página 58.
5.2. Ecuación lineal de segundo orden con singularidades regulares. Cuandolos coeficientes P y Q de (5.1) no son analíticos en un punto, dependiendo del tipo desingularidad que presenten, aún es posible hallar soluciones empleando series de potencias,utilizando el método de Frobenius descripto en esta Sección.
Definición 5.6. Se dice que x0 es un punto regular de
y′′ + P (x)y′ + Q(x)y = 0 (5.10)
si P y Q son analíticas en Br(x0) para algún r > 0. En caso contrario, x0 es un puntosingular. En este último caso, x0 es un punto singular regular si x0 es, a lo sumo, un polosimple de P y un polo doble de Q. En todo otro caso x0 es un punto singular irregular.
Para hallar una solución de (5.10) en un entorno del punto singular regular x0 se proponeuna solución de la forma
y(x) := (x − x0)r
∞∑
n=0
cn(x − x0)n (5.11)
con c0 6= 0 y r constante a determinar. Para simplificar la escritura, en lo que sigue sesupondrá que x0 = 0. Se tienen los desarrollos de P y Q
P (x) =A
x+
∞∑
n=0
an(x − x0)n
Q(x) =B
x2+
C
x+
∞∑
n=0
bn(x − x0)n.
6Esto se puede ver de muchas maneras. Por ejemplo, se sabe que el espacio de soluciones tiene dimensión2 y (5.9) muestra que {y0, y1} es un conjunto de generadores de tal espacio y, por tanto son una base.También es claro que son linealmente independientes pues y0 es una función par mientras que y1 es impary, por tanto, no pueden ser múltiplos una de la otra.

NOTAS DE ECUACIONES ORDINARIAS 25
Sustituyendo (5.11) en (5.10) y asociando en potencias de orden creciente se tiene
0 = c0(r(r − 1) + Ar + B)xr−2 + potencias más altas de x, (5.12)
con lo que r es raíz del polinomio indicial I(x) := x(x−1)+Ax+B. Siendo I un polinomiode grado 2, se obtienen, a lo sumo, 2 valores posibles para r. De los coeficientes de laspotencias superiores de (5.12) se obtienen relaciones de recurrencia del tipo
I(r + n)cn = Tn(c0, . . . , cn−1) para todo n ≥ 1, (5.13)
de donde se pueden despejar los cn inductivamente, siempre que I(r + n) 6= 0.Si r1 y r2 son las raíces de I, siempre se puede suponer que Re(r1) ≤ Re(r2). Para el
caso r = r2, la recurrencia (5.13) siempre puede resolverse pues I(r2 + n) 6= 0 para todon ∈ N. Sin embargo, para r = r1 puede no ser posible hacerlo. En general se presentantres casos, dependiendo de r1 y r2.
1. r2 − r1 /∈ N: en este caso I(r1 + n) 6= 0 para todo n ∈ N y se pueden despejar todoslos cn usando la fórmula (5.13).
2. r2 − r1 ∈ N: en este caso I(r1 + n) = 0 para n = r2 − r1 ∈ N. En estas condicioneshay dos sub-casos:a) Tn(c0, . . . , cn−1) = 0 para ese n, en cuyo caso (5.13) es compatible para ese
n y se puede tomar cualquier valor para cn, continuando con la recurrencianormalmente.
b) Tn(c0, . . . , cn−1) 6= 0 para ese n. En este caso (5.13) es incompatible para ese ny no hay ninguna solución cn ni, más en general, de la forma (5.11).
3. r2 = r1: hay una única solución de la forma (5.11).
En los casos en los que se halla una única solución, una segunda solución se puede hallara partir de la solución correspondiente a r = r2 usando el método de la Sección 4.2.
El siguiente resultado resume lo anterior.
Teorema 5.7. Sea x0 un punto singular regular de (5.10) y sean r1 y r2 las raíces delpolinomio indicial I(x) de modo que Re(r2) ≥ Re(r1). Entonces siempre hay una soluciónde (5.10) del tipo (5.11) para r = r2. Si r2 − r1 /∈ N entonces r = r1 produce una nuevasolución del tipo (5.11), linealmente independiente con la anterior. Si r2 = r1 se puedehallar una segunda solución linealmente independiente de la hallada mediante el métodode la Sección 4.2. Si r2 − r1 ∈ N, puede o no haber una segunda solución del tipo (5.11).
Demostración. Ver [4]. �
Nota 5.8. ♦ Con anterioridad se dijo que la segunda solución en un punto singularregular puede ser hallada usando el método de la Sección 4.2. Esto es de interés cuandolas raíces del polinomio indicial difieren en un entero, es decir, r2 − r1 ∈ Z≥0, ya queen este caso pueden no existir soluciones linealmente independientes de la forma (5.11).A continuación se presenta un bosquejo de esta idea, suponiendo que el punto singularregular en cuestión es x0 = 0 y que r2 − r1 ∈ Z≥0. Sea
y2(x) = xr2
∞∑
n=0
cnxn con c0 6= 0
la solución de la forma (5.11) que siempre existe por el Teorema 5.7. El método de laSección 4.2 consiste en buscar una segunda solución de la forma y1(x) = u(x)y2(x).De (4.3) sale que
u′(x) =1
y22(x)
e−R
P (x)dx.

26 JAVIER FERNANDEZ
Usando las series de y2 y P se obtiene
u′(x) =1
y22(x)
e−R
P (x)dx =1
(xr2
∑∞
n=0 cnxn)2e−
R
(A
x+
P
∞
n=0anxn)dx
=1
x2r2(∑∞
n=0 cnxn)2e−(A ln(x)+
P
∞
n=0an
n+1xn+1) =
1
x2r2+A
e−(P
∞
n=0an
n+1xn+1)
(∑∞
n=0 cnxn)2.
Definiendo
g(x) :=e−(
P
∞
n=0an
n+1xn+1)
(∑∞
n=0 cnxn)2
se tiene
u′(x) =g(x)
x2r2+A(5.14)
con g analítica en x = 0 pues c0 6= 0. Además, g(0) = 1c20
6= 0. Por lo tanto, vale un
desarrollo de la forma
g(x) =
∞∑
n=0
dnxn con d0 =
1
c20
6= 0
Se define k := 2r2 + A. Por ser r1 y r2 raíces del polinomio indicial I(r) := r(r − 1) +Ar + B = r2 − (1 − A)r + B vale que r1 + r2 = 1 − A, de donde se deduce que
k = r2 − r1 + 1 ∈ N. (5.15)
Volviendo a (5.14) se tiene
u′(x) =
∞∑
n=0
dnxn−k ⇒ u(x) =
∞∑
n=0,n 6=k−1
dn
n − k + 1xn−k+1 + dk−1 ln(|x|).
En conclusión,
y1(x) = y2(x)(dk−1 ln(|x|) +
∞∑
n=0,n 6=k−1
dn
n − k + 1xn−k+1)
= dk−1 ln(|x|)y2(x) + xr2(
∞∑
n=0
cnxn)(
∞∑
n=0,n 6=k−1
dn
n − k + 1xn−k+1)
= dk−1 ln(|x|)y2(x) + xr2−k+1∞∑
n=0
enxn
(5.16)
con e0 6= 0. Por (5.15) r2 − k + 1 = r1, con lo que
y1(x) = dk−1 ln(|x|)y2(x) + xr1f(x) (5.17)
para dk−1 ∈ R constante y f analítica y no nula en x = 0. Cabe notar que el coeficientedk−1 puede anularse dando una solución y1 de la forma (5.11). En general, sin embargo,y1 puede tener un término logarítmico, y por lo tanto no ser de la forma (5.11). En esteúltimo caso se dice que es una solución de Frobenius de segundo tipo.
Ejemplo 5.9. La ecuación
x(x − 1)y′′ + y′ = 0 (5.18)
tiene a x = 0 y x = 1 como sus únicos puntos singulares regulares en C. Se analiza acontinuación el conjunto de soluciones en cada uno de dichos puntos.

NOTAS DE ECUACIONES ORDINARIAS 27
En x = 0. Reescribiendo (5.18) como
0 = y′′ +1
x(x − 1)y′ = y′′ −
∑∞
n=0 xn
xy′ = y′′ − (
1
x+
∞∑
n=1
xn−1)y′,
se verifica que x = 0 es un punto singular regular. El polinomio indicial es
I(r) = r(r − 1) − r = r2 − 2r = r(r − 2)
que tiene a r1 = 0 y r2 = 2 por raíces. Dado que r2 − r1 ∈ N no es claro que sepueda hallar una base de soluciones de la forma (5.11). En concreto, se proponeuna solución de la forma
y(x) = xr
∞∑
n=0
cnxn =
∞∑
n=0
cnxn+r.
Derivando se obtiene
y′ =
∞∑
n=0
(n + r)cnxn+r−1
e
y′′ =∞∑
n=0
(n + r)(n + r − 1)cnxn+r−2 ⇒
x(x − 1)y′′ =∞∑
n=0
(n + r)(n + r − 1)cnxn+r
︸ ︷︷ ︸P
∞
n=1(n+r−1)(n+r−2)cn−1xn+r−1
−∞∑
n=0
(n + r)(n + r − 1)cnxn+r−1.
Por lo tanto,
0 = x(x − 1)y′′ + y′ =∞∑
n=1
((n + r − 1)(n + r − 2)cn−1 − cn(n + r)(n + r − 2))xn+r−1 + c0(2r − r2)xr−1
de donde sale que
2r − r2 = 0 ⇒ r = 0, 2
como ya se sabía y
(n + r − 1)(n + r − 2)cn−1 = cn(n + r)(n + r − 2) para todo n ≥ 1 (5.19)
Si r = r2 = 2 el coeficiente n + r − 2 = n no se anula en el rango dado con loque (5.19) se puede simplificar a
(n + 1)cn−1 = cn(n + 2) para todo n ≥ 1
de donde
cn =n + 1
n + 2cn−1 para todo n ≥ 1.
Los primeros coeficientes de la solución son entonces
c1 =2
3c0, c2 =
3
4c1 =
2 · 3
3 · 4c0, · · ·
de donde es fácil concluir que en general vale
cn = 2(n + 1)!
(n + 2)!c0 =
2
n + 2c0 para todo n ≥ 0

28 JAVIER FERNANDEZ
e
y2(x) = x2∞∑
n=0
2c0
n + 2xn = c0
∞∑
n=2
2
nxn (5.20)
Volviendo a (5.19), si r = r1 = 0, la recurrencia queda
(n − 1)(n − 2)cn−1 = cnn(n − 2) para todo n ≥ 1
y, para n = 1 sale que 0 = −c1, con lo que c1 = 0. Para n = 2 se tiene 0 = 0 y engeneral
(n − 1)cn−1 = ncn para todo n ≥ 3.
Tomando c2 = 0 (que es lícito ya que no está determinado ni debe satisfacer ningunacondición) se ve que cn = 0 para todo n ≥ 2. De aquí se concluye que
y1(x) = c0 (5.21)
es la forma de la segunda familia de soluciones.En resumen, una base de soluciones de (5.18) está dada por {y1(x), y2(x)} defini-
das por (5.21) y (5.20), tomando c0 = 1. Cabe observar que para el punto singularregular x = 0, la ecuación (5.18) tiene una base de soluciones analíticas.En x = 1. Reescribiendo (5.18) como
0 = y′′ +1
x(x − 1)y′ = y′′ +
11+(x−1)
x − 1y′ = y′′ +
∑∞n=0(−1)n(x − 1)n
x − 1y′
= y′′ + (1
x − 1−
∞∑
n=0
(−1)n(x − 1)n)y′
se verifica que x = 1 es un punto singular regular. El polinomio indicial es
I(r) = r(r − 1) + r = r2
por lo que se puede construir una única solución de Frobenius (5.11) (de primer tipo)y la segunda solución es de la forma (5.17). Para hallar la solución de tipo (5.11)se propone
y(x) = (x − 1)r
∞∑
n=0
cn(x − 1)n =∞∑
n=0
cn(x − 1)n+r
Derivando:
y′(x) =
∞∑
n=0
(n + r)cn(x − 1)n+r−1
y′′(x) =
∞∑
n=0
(n + r)(n + r − 1)cn(x − 1)n+r−2
con lo que
x(x − 1)y′′ = ((x − 1) + 1)(x − 1)y′′ = ((x − 1)2 + (x − 1))y′′
=∞∑
n=0
(n + r)(n + r − 1)cn(x − 1)n+r
︸ ︷︷ ︸P
∞
n=1(n+r−1)(n+r−2)cn−1(x−1)n+r−1
+∞∑
n=0
(n + r)(n + r − 1)cn(x − 1)n+r−1.

NOTAS DE ECUACIONES ORDINARIAS 29
Por lo tanto,
0 = x(x − 1)y′′ + y′ =∞∑
n=1
((n + r − 1)(n + r − 2)cn−1 + (n + r)2cn)(x − 1)n+r−1 + c0r2(x − 1)r−1
de donde se obtiene r = 0 y
(n + r − 1)(n + r − 2)cn−1 = −(n + r)2cn para todo n ≥ 1,
con lo que
(n − 1)(n − 2)cn−1 = −n2cn para todo n ≥ 1.
Evaluando esta última recurrencia en n = 1 se obtiene 0 = −c1, o sea c1 = 0. Comon2 6= 0 en el rango dado, de la recurrencia se deduce que
cn = −(n − 1)(n − 2)
n2cn−1 para todo n ≥ 1
de donde es inmediato que, siendo c1 = 0, vale cn = 0 para todo n ≥ 1. Enconclusión, la solución de (5.18) en x = 1 de la forma (5.11) es
y(x) = c0. (5.22)
Se define y2(x) como la solución correspondiente a c0 = 1. Para hallar otra soluciónde (5.18), tomando en cuenta la Nota 5.8 se propone una solución de la forma (5.17),pero reemplazando x por x − 1 ya que se están estudiando soluciones en x = 1:
y(x) = α ln(|x − 1|)y2(x) +
∞∑
n=0
cn(x − 1)n = α ln(|x − 1|) +
∞∑
n=0
cn(x − 1)n
con α, cn ∈ R a determinar. Derivando se tiene
y′ =α
x − 1+
∞∑
n=1
ncn(x − 1)n−1
y′′ = −α
(x − 1)2+
∞∑
n=2
n(n − 1)cn(x − 1)n−2,
con lo que
x(x − 1)y′′ = ((x − 1)2 + (x − 1))y′′
= −α −α
x − 1+
∞∑
n=2
n(n − 1)cn(x − 1)n
︸ ︷︷ ︸P
∞
n=3(n−1)(n−2)cn−1(x−1)n−1
+∞∑
n=2
n(n − 1)cn(x − 1)n−1.
Por lo tanto
0 = x(x − 1)y′′ + y′ =∞∑
n=3
((n − 1)(n − 2)cn−1 + n2cn)(x − 1)n−1 + 4c2(x − 1) + c1 − α.
De aquí que c1 = α y c2 = 0. Además
(n − 1)(n − 2)cn−1 = −n2cn para todo n ≥ 3,
con lo que
cn = −(n − 1)(n − 2)
n2cn−1 para todo n ≥ 3.

30 JAVIER FERNANDEZ
Teniendo en cuenta que c2 = 0, es inmediato que cn = 0 para todo n ≥ 2. Enconclusión, la solución hallada es
y(x) = c1 ln(|x − 1|) + c0 + c1(x − 1) = c0 + c1(ln(|x − 1|) + x − 1).
Se definey1(x) = ln(|x − 1|) + x − 1. (5.23)
y, entonces se tiene que {y1, y2} forman una base de soluciones de (5.18) en x = 1.
Nota 5.10. Es interesante observar que la ecuación (5.18) tiene una base de solucionesanalíticas en x = 0 y por tanto toda solución en dicho punto es analítica. Sin embargo, lasfunciones y1 e y2 definidas por (5.21) y (5.20), tomando c0 = 1 tienen la particularidadde que su derivada primera se anula en x = 0 y, por tanto, cualquier problema con datoinicial en x = 0 para el cual y′(0) 6= 0 no tendrá solución. Esto se relaciona con que x = 0es una singularidad de (5.18) y es un resultado básico de la teoría que un punto x0 esregular si y sólo si el problema de valores iniciales y(x0) = y0 e y′(x0) = y′
0 tiene soluciónpara todo y0, y
′0 ∈ R.
Nota 5.11. La ecuación (5.18) del Ejemplo 5.9 puede ser resuelta, también, mediante latécnica de reducción del orden vista en la Sección 2.6.1 ya que y(x) no aparece explícita-mente. En este caso se define u(x) = y′(x), en términos de la cual, (5.18) se reescribe:
x(x − 1)u′ + u = 0
que puede resolverse por separación de variables:
0 = x(x − 1)u′ + u ⇒u′
u= −
1
x(x − 1)=
1
x−
1
x − 1
e, integrando respecto de x,
ln(|u|) = ln(|x|) − ln(|x − 1|) + K1 = ln(|x
x − 1|) + K1
con lo que
u(x) = K2x
x − 1para K2 = ±eK1 . Volviendo a la variable original, se tiene
y′(x) = K2x
x − 1
por lo que
y(x) =
∫
K2x
x − 1dx = K2(
∫x − 1
x − 1dx +
∫1
x − 1dx) = K2(x + ln(|x − 1|) + K3)
= K2(x + ln(|x − 1|)) + K4
Comparando esta solución con las obtenidas en el Ejemplo 5.9 se ve que los resultadoscoinciden.
El Teorema 5.1 no sólo determina que las soluciones de la ecuación lineal de segundoorden con coeficientes son analíticas sino que también determina (parcialmente) su regiónde convergencia. El siguiente resultado hace lo mismo para las ecuaciones con puntossingulares regulares.
Teorema 5.12. Sea x0 un punto singular regular de la ecuación (5.10) y supóngase quelas funciones (x− x0)P (x) y (x− x0)
2Q(x) son analíticas en Bδ(x0) para algún δ > 0. Siy(x) es una solución de (5.10) de la forma de Frobenius (5.11), entonces y(x) es soluciónde (5.10) en, al menos, el intervalo (x0, x0 +δ). Más aún, la serie de potencias
∑∞
n=0 cnxn
de la representación (5.11) es convergente en Bδ(x0).

NOTAS DE ECUACIONES ORDINARIAS 31
Demostración. Ver [4], Theorem A en la página 170. �
Ejemplo 5.13. En el Ejemplo 5.9 se vio que la ecuación (5.18) tiene por soluciones enx = 0 a
y1(x) = 1
y2(x) =
∞∑
n=2
2
nxn
y1 es, obviamente, analítica en toda la recta. Usando el criterio de D’Alembert se ve quey2 converge en B1(0). Estos resultados son compatibles con el Teorema 5.12 dado que
xP (x) =1
x − 1
x2Q(x) = 0
convergen en B1(0). Un análisis similar puede realizarse para las soluciones en x = 1.
Referencias
1. Manuel Balanzat, Matemática avanzada para la física, Manuales, EUDEBA, Buenos Aires, 1977.2. L. Elsgolts, Differential equations and the calculus of variations, Translated from the Russian by George
Yankovsky, Mir Publishers, Moscow, 1970. MR MR0279361 (43 #5083)3. E. L. Ince, Ordinary Differential Equations, Dover Publications, New York, 1944. MR MR0010757
(6,65f)4. George F. Simmons, Differential equations with applications and historical notes, McGraw-Hill Book
Co., New York, 1972, International Series in Pure and Applied Mathematics. MR MR0499365 (58#17258)
Instituto Balseiro, Universidad Nacional de Cuyo – C.N.E.A., Bariloche, Río Negro,
República Argentina
E-mail address : [email protected]