Pendulo Simple
6
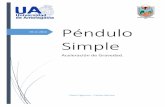
Laboratorio de Control Práctica 2 Nombre: Franklin Mayaguari Tema: El péndulo simple Procedimiento: 1. nali!ar en "ué lugares se presenta #ricci $n en el péndul o y su e#ecto. En un sistema de péndulo simple hay dos lugares en los que se presenta fricción y estos son: • Fricción ocasionada por la resistencia del aire. • Fricción interna del sistema, la misma que se disipa en forma de calor. Esto ocasiona que el sistema vaya perdiendo energa y por consigui ente este se detenga. 2. %btener el modelo matemático del péndulo simple considerando el amortiguamiento. !e la "gura # tenemos: $% L . θ =¿ !istancia desde & a m v = dθ dt =velocida d dela masa Energa cinética: T = 1 2 m v 2 = 1 2 m ( ds dt ) 2 = 1 2 m L 2 ( dθ dt ) 2 ( 1) 'ltura vertical: h = L ( 1− cos θ ) Energa potencial: V =m∗g∗ L ( 1−cos ( θ ) ) ( 2 ) $umamos la ecuación # y ( y obtenemos una constante: Figura 1. Péndulo &imple
-
Upload
franklin-mauricio -
Category
Documents
-
view
47 -
download
0
description
pendulo
Transcript of Pendulo Simple
Laboratorio de Control Prctica 2Nombre: Franklin MayaguariTema: El pndulo simpleProcedimiento:1. Analizar en qu lugares se presenta friccin en el pndulo y su efecto.En un sistema de pndulo simple hay dos lugares en los que se presenta friccin y estos son: Friccin ocasionada por la resistencia del aire. Friccin interna del sistema, la misma que se disipa en forma de calor. Esto ocasiona que el sistema vaya perdiendo energa y por consiguiente este se detenga.
2. Obtener el modelo matemtico del pndulo simple considerando el amortiguamiento. De la figura 1 tenemos: S= Distancia desde 0 a m Energa cintica:
Altura vertical:Figura 1. Pndulo Simple
Energa potencial:
Sumamos la ecuacin 1 y 2 y obtenemos una constante:
Derivando la ecuacin 3 se obtiene:
Se aade una constante c la misma que representa la friccin del sistema
3. Calcular la aceleracin de la gravedad mediante la frmula del perodo. Coincide la aceleracin de la gravedad con la que se debe obtener en el ecuador? Por qu?El periodo para un sistema de pndulo simple viene dado por:
De la ecuacin para el periodo del pndulo simple se despeja la gravedad y se tiene:
Dnde:
El valor obtenido de la gravedad no concuerda con el valor de gravedad del Ecuador debido a que los instrumentos de medicin no son tan precisos, adems se debe de considerar que existen fallas al medir.El clculo tiene una aproximacin del 96%, los errores se deben a los tiempos de medicin.4. Analizar cmo puedo transformar las oscilacin mecnicas en seales elctricas para su manipulacin (describa qu componentes fsicos usara y por qu).Para esta prctica usaramos un transductor ya que este dispositivo nos permite transformar una determinada energa de entrada en otra diferente a la salida. Un transductor electromagntico nos permite transformar las oscilaciones mecnicas en seales elctricas. 5. Basado en el modelo obtenido, simular en MATLAB la respuesta de este sistema en el tiempo y graficarla.La ecuacin caracterstica del sistema es:
6. Observar y graficar la respuesta natural del pndulo simple en el tiempo a travs del osciloscopio y compararla con la obtenida en MATLAB. Son iguales? Por qu?
Figura 2. Oscilaciones del pndulo simple, Matlab
Figura 3. Oscilaciones del pndulo simple, Osciloscopio.En la figura 3 y 4 se observa las oscilaciones tanto en Matlab como en el osciloscopio, en ellas se nota que los tiempos de estabilizacin son diferentes debido que se asumi como constante de amortiguamiento el valor de la viscosidad del aire para el experimento real y no se sabe con exactitud que parmetros usa el programa para su modelacin. 7. Obtener la frecuencia y el perodo del sistema en base a la respuesta en el tiempo observada en el osciloscopio. Obtener adems estos mismos datos de forma prctica y comparar los dos. Son iguales? Por qu?
Figura 4. Oscilaciones, pndulo simple En la figura 4 se observa que cada divisin del osciloscopio equivale a 500ms. Aproximadamente cada oscilacin del sistema se est cumpliendo en 2.5 divisiones, por lo tanto el valor del periodo que nos brinda es osciloscopio es de: , el valor del periodo obtenido en la prctica es de: El valor de las frecuencias es:
8. Obtener el coeficiente de amortiguamiento en base a la respuesta en el tiempo observada en el osciloscopio mnimo 5 veces.
Figura 5. Oscilaciones del pndulo simple, obtenidas del osciloscopio
El coeficiente de amortiguamiento es igual a: Para un tiempo t=0 se tiene un valor de Para un tiempo t=60seg se tiene
9. Obtener las conclusiones de la prctica.Una vez culminada la prctica se pueden extraer las siguientes conclusiones:
Los modelos matemticos y experimentales difieren en sus resultados, sin embargo ambos son necesarios, el primero nos brinda una idea de lo que se espera o va a suceder y el segundo nos muestra lo que ocurre en la vida real, las variaciones entre estos se deben a factores como la precisin de los instrumentos de medicin, fallas en la obtencin de medidas entre otros factores.La mayora de las oscilaciones que se presentan son del tipo mecnico mientras que instrumentos de medicin requieren de seales elctricas para su operacin, es por ello que se usa un transductor, este dispositivo permite realizar dicha conversin. 10. Bibliografa.http://www.uclm.es/profesorado/ajbarbero/Practicas/15%20MAS%20amortiguado.pdfhttp://www.monografias.com/trabajos-pdf4/sistema-control-pendulo-pid/sistema-control-pendulo-pid.pdf