PONTIFICIA UNIVERSIDAD CATÓLICA DE VALPARAÍSO ESCUELA …lep.eie.pucv.cl/tesisPalomino.pdf ·...
73
PONTIFICIA UNIVERSIDAD CATÓLICA DE VALPARAÍSO ESCUELA DE INGENIERÍA ELÉCTRICA “ANÁLISIS Y PROYECTO DE FILTROS PASIVOS DE DOBLE SINTONÍA” ANDRÉS EDUARDO PALOMINOS SOTO INFORME FINAL DEL PROYECTO PRESENTADO EN CUMPLIMIENTO DE LOS REQUISITOS PARA OPTAR AL TÍTULO PROFESIONAL DE INGENIERO CIVIL ELÉCTRICO Abril 2008
Transcript of PONTIFICIA UNIVERSIDAD CATÓLICA DE VALPARAÍSO ESCUELA …lep.eie.pucv.cl/tesisPalomino.pdf ·...
PONTIFICIA UNIVERSIDAD CATÓLICA DE VALPARAÍSO ESCUELA DE INGENIERÍA ELÉCTRICA
“ANÁLISIS Y PROYECTO DE FILTROS PASIVOS DE DOBLE SINTONÍA”
ANDRÉS EDUARDO PALOMINOS SOTO
INFORME FINAL DEL PROYECTO
PRESENTADO EN CUMPLIMIENTO
DE LOS REQUISITOS PARA OPTAR
AL TÍTULO PROFESIONAL DE
INGENIERO CIVIL ELÉCTRICO
Abril 2008

“ANÁLISIS Y PROYECTO DE FILTROS PASIVOS DE DOBLE SINTONÍA”
INFORME FINAL
Presentado en cumplimiento con los requisitos
para optar al título profesional de
INGENIERO CIVIL ELÉCTRICO otorgado por la Escuela de Ingeniería Eléctrica
de la
Pontificia Universidad Católica de Valparaíso
ANDRÉS EDUARDO PALOMINOS SOTO
Profesor Guía Sr. Domingo Ruiz Caballero Profesor Correferente Sr. René Sanhueza Robles
Abril 2008

ACTA DE APROBACIÓN
La Comisión Calificadora designada por la Escuela de Ingeniería Eléctrica ha aprobado el texto del Informe Final del Proyecto de Titulación, desarrollado
durante el primer y segundo semestre de 2005, denominado
“ANÁLISIS Y PROYECTO DE FILTROS PASIVOS DE DOBLE SINTONÍA”
Presentado por el Señor Andrés Eduardo Palominos Soto
Domingo Ruiz Caballero Profesor Guía
René Sanhueza Robles Segundo Revisor
Raimundo Villarroel Valencia Secretario Académico
Valparaíso, Abril 2008
“ANÁLISIS Y PROYECTO DE FILTROS PASIVOS DE DOBLE SINTONÍA”
Andrés Eduardo Palominos Soto
Profesor Guía Sr. Domingo Ruiz Caballero
RESUMEN
A partir de las diferentes etapas de este trabajo se desarrolló un estudio
teórico y práctico de la implementación de filtros pasivos, introduciendo una
variación en el diseño tradicional, la que consiste en realizar un acoplamiento
entre los elementos inductivos de los filtros diseñados.
En la primera parte se desarrolló un modelo matemático de filtros pasivos
aislados, generalmente utilizados para reducir el contenido armónico a través de
la disminución de una armónica individual, para luego complementar este
modelo considerando el acoplamiento de inductancias de dos filtros individuales.
A partir de los modelos desarrollados se obtuvo las ecuaciones de diseño que
permiten dimensionar los filtros a utilizar para una instalación determinada.
Se realizaron simulaciones digitales que permitieron realizar una
comparación con los modelos obtenidos, y se desarrolló una aplicación real a
partir del montaje de una experiencia de laboratorio para analizar y obtener
conclusiones en cuanto a la factibilidad de aplicación de la solución propuesta.
ÍNDICE pág.INTRODUCCIÓN 1 CAPÍTULO 1 TEORÍA DE INDUCTORES ACOPLADOS Y FILTROS PASIVOS 1.1 INTRODUCCIÓN 21.2 TEORÍA DE INDUCTORES ACOPLADOS 21.2.1 Fundamentos 21.2.2 Modelo eléctrico 71.2.3 Caracterización de inductores acoplados 71.2.4 Análisis de signos de la inductancia 81.2.5 Coeficiente de acoplamiento 101.3 FILTROS PASIVOS 111.3.1 Filtro de bloqueo 111.3.2 Filtros de confinamiento 111.4 ANÁLISIS DE FILTROS SINTONIZADOS 121.5 PROPIEDADES DE LOS FILTROS 151.5.1 Comportamiento en aplicación 151.5.2 Propiedades de componentes de filtros 15 CAPÍTULO 2 PRESENTACIÓN DEL FILTRO DE DOBLE SINTONÍA 2.1 INTRODUCCIÓN 172.2 FILTRO DE SINTONÍA DOBLE 172.3 DISEÑO PROPUESTO 192.4 ANÁLISIS MATEMÁTICO 202.4.1 Estudio sobre los tipos de acoplamiento despreciando la
impedancia del sistema 20
2.4.2 Verificación utilizando simulaciones digitales 222.4.3 Análisis considerando la impedancia del sistema 252.5 ECUACIONES DE DISEÑO 262.6 PROCEDIMIENTO DE PROYECTO 28
CAPÍTULO 3 MODELADO DE LA PLANTA Y SIMULACIONES 3.1 INTRODUCCIÓN 303.2 MODELADO DE LA PLANTA 303.3 DESARROLLO DE LAS SIMULACIONES 343.3.1 Desarrollo del cálculo del filtro de la quinta armónica 343.3.2 Desarrollo del cálculo del filtro de la 11ª armónica 39

CAPÍTULO 4 IMPLEMENTACIÓN FILTRO 4.1 INTRODUCCIÓN 454.2 PROCEDIMIENTO DE MEDIDA 454.3 RESULTADO DE LAS MEDICIONES 474.3.1 Análisis valores obtenidos en mediciones 474.3.2 Análisis gráfico de resultados 49 CONCLUSIONES 53 REFERENCIAS BIBLIOGRÁFICAS 55
APÉNDICE A NORMA INYECCIÓN ARMÓNICOS DE CORRIENTE
A-1
APÉNDICE B VALIDACIÓN DEL MODELO
B-1
APÉNDICE C COMPORTAMIENTO DE LOS FILTROS ANTE VARIACIÓN DE LOS PARÁMETROS
C-1

INTRODUCCIÓN
Debido al uso masivo de la electrónica de potencia, se ha ido
incrementando la presencia de armónicas que son generadas principalmente por
la interacción convertidor carga, con lo cual va disminuyendo la calidad del
suministro eléctrico. Es por esto que los filtros de armónicas tienen una
relevancia creciente en los sistemas eléctricos modernos, y la búsqueda de
estructuras que cumplan con mayor eficacia este propósito, es fundamental.
Uno de los principales objetivos de este proyecto es estudiar la posibilidad
de modificar la estructura clásica de los filtros pasivos utilizados comúnmente
para la disminución de contenido armónico y al mismo tiempo desarrollar un
procedimiento para calcular los parámetros de esta nueva estructura. Otro de los
objetivos propuestos es la implementación de la nueva estructura propuesta a
un sistema real, y de esta forma, analizar su comportamiento y eficiencia en
cuanto a la solución del problema. Importante en el desarrollo de este proyecto
será el modelado de una instalación real mediante simulación digital, para llevar
a cabo el estudio del comportamiento de los filtros calculados.
La relevancia de este estudio está relacionada con lo importancia que
representa la eficiencia y calidad de la energía en las diferentes aplicaciones, ya
sea por normativas vigentes o por estándares de calidad elevados. Además de
la importancia en la innovación en estructuras o circuitos que permitan mejores
soluciones para instalaciones eléctricas, principalmente industriales. Se estudia
la factibilidad de que filtros acoplados atenúen simultáneamente armónicos de
dos frecuencias, lo que será uno de los principales aportes del estudio. Es por
esto que en este trabajo se desarrolla la implementación de un filtro pasivo de
sintonía múltiple con la finalidad de obtener un filtro con doble sintonía y con la
posibilidad de ajustar la frecuencia de sintonización por medio de la variación de
su constante de acoplamiento k, basándose en el modelo del transformador
simplificado. Finalmente, se desarrolla una experiencia de laboratorio que
permitirá obtener resultados para validar los planteamientos propuestos.

CAPÍTULO 1
TEORÍA DE INDUCTORES ACOPLADOS Y FILTROS PASIVOS
1.1 INTRODUCCIÓN En este capitulo se desarrollarán los aspectos teóricos básicos que
entregaran las herramientas necesarias para la comprensión del comportamiento
de los inductores acoplados y a filtros pasivos necesarios para el estudio
propuesto, es decir, el diseño de filtros pasivos acoplados. 1.2 TEORÍA DE INDUCTORES ACOPLADOS Al igual que los transformadores, los inductores acoplados consisten en
una serie de bobinados sobre un núcleo magnético, a diferencia del
transformador los inductores acoplados tienen una brecha de aire. Un inductor
es principalmente para almacenamiento de energía que entra y la energía que
entra y que sale no es la misma en un instante determinado.
Para comprender el principio de los inductores acoplados es necesario realizar
una revisión de las leyes básicas que rigen las estructuras magnéticas: Las
ecuaciones usadas en el análisis son la ley de Faraday, ley de Ampère y la ley
de Gauss. 1.2.1 Fundamentos
Primero se tiene una revisión de la ley de Faraday que se muestra en su
forma integral en la Ecuación 1-1
∫∫ ⋅∂∂
−=⋅sl
dsBt
dlE (1-1)

Donde E es el campo eléctrico y B es la densidad de flujo magnético. Se
puede mostrar una forma más familiar de la ley de Faraday en la forma de la
ecuación1-2
dtdNv φ
= (1-2)
La segunda ley de interés para el tema es la ley de Ampère que se
muestra en la forma integral como:
∫∫∫ ⋅==⋅Sl
T dSJidlH (1-3)
Donde H es la intensidad de campo magnético, dl se considera a la
variación o incremento en el largo del camino magnético, J es la densidad de
corriente e Ti es el total de corriente pasando a través de la superficie S . Como
se muestra en la figura 1.1 la ley de Ampère establece que la integral lineal de la
intensidad de campo magnético H alrededor de un camino cerrado es igual a la
corriente total pasando a través de la superficie S encerrada por el camino l.
Nótese que las direcciones de H y de i se determinan de acuerdo a la regla de la
mano derecha. En la figura 1.2 se tiene que el devanado intercepta a la
superficie N veces por lo tanto la corriente total pasando a través de la superficie
Ni. Mientras la ley de Faraday determina la relación entre la tensión y el flujo
magnético correspondiente, la ley de Ampère determina la relación entre la
corriente de un conductor y el correspondiente campo magnético.
Figura 1.1 Representación ley de Faraday

Por último es importante mencionar la ley de Gauss para campo
magnéticos que esta dada por:
∫ =⋅GS
dsB 0 (1-4)
que establece que el flujo magnético neto que pasa a través de cualquier
cuerpo tridimensional con superficie GS es cero, es decir el flujo magnético que
entre al elemento es el mismo que sale del elemento. Para que se pueda
desarrollar el modelo del circuito magnético, es necesario considerar la relación
entre la densidad el flujo magnético B y del campo magnético que esta dada por
HB ⋅= 0μ . Donde 0μ es la permeabilidad del aire que tiene un valor de
7104 −⋅⋅π ⎥⎦
⎤⎢⎣
⎡mH
. En un material ferromagnético, la relación entre B y H está dada
por la curva B-H que muestra la histéresis y la saturación. En la parte lineal de la
curva la relación entre B y H es:
Donde la permeabilidad μ es el producto de la permeabilidad relativa rμ
HHB r ⋅⋅=⋅= 0μμμ (1-5)
y la del aire 0μ . Para materiales ferromagnéticos la permeabilidad negativa es
del orden de los 310 o 410 lo que resulta en una alta densidad de flujo B para
una intensidad de campo magnético H dado dentro del núcleo magnético.
Figura 1.2 Representación de Ley de Ampère
Para la obtención de un modelo de circuito magnético se debe primero;
asumir que el campo magnético H es constante en una región determinada, y se
encuentra alineada en el sentido del recorrido de integración. Esta es una
aproximación válida sobre una región de material ferromagnético uniforme, o
sobre pequeñas distancias en el aire. Cuando H es constante y alineada, la
integral de la ley de Ampère se reduce a la expresión mostrada en la ecuación:
iNlH ⋅=⋅ (1-6)
A partir de la ecuación 1-5 y de la definición SB ⋅=φ se llega a la
expresión:
iNRS
l⋅=⋅=
⋅φ
μφ (1-7)
RiN ⋅
=φ (1-8)
Luego se tiene que A
lR⋅
=μ
se conoce como el valor de la reluctancia
del circuito magnético. El valor de R es la reluctancia del recorrido l y la
cantidad Ni es conocida como la fuerza magnetomotriz. Ya que el flujo
magnético φ esta relacionado linealmente con la FMM a través de la
reluctancia se puede establecer un análogo de la ley de ohm para circuitos
magnéticos. Nótese que la reluctancia puede ser dividida en reluctancias
menores correspondientes a las secciones de 21 , ll , etc. En cuyo caso la ley de
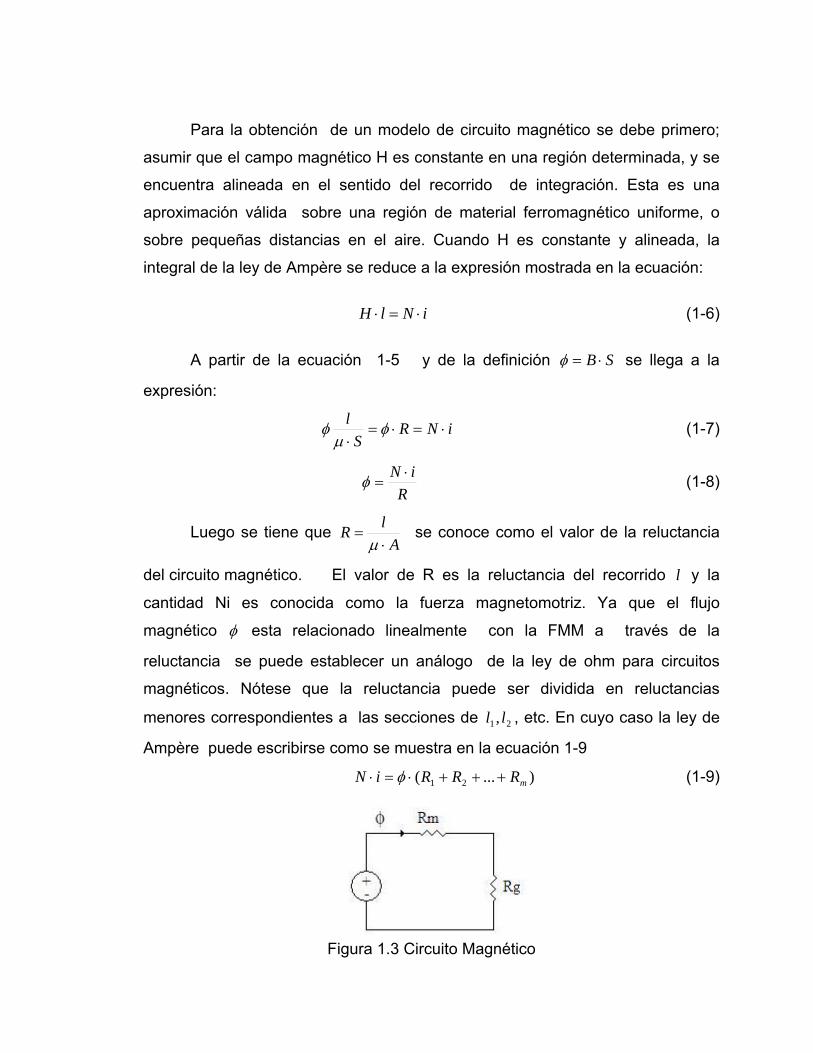
Ampère puede escribirse como se muestra en la ecuación 1-9
)...( 21 mRRRiN +++⋅=⋅ φ (1-9)
Figura 1.3 Circuito Magnético

Para un circuito magnético de una vuelta se tiene que:
∑∑ ⋅=m
i i
n
ii RF φ (1-10)
Es posible tener una equivalencia entre un circuito magnético y un circuito
eléctrico, el circuito magnético mostrado puede ser resuelto por el flujo
R
iN ⋅=φ (1-11)
Pero la ley de Faraday indica que la tensión inducida en un devanado de
multiples vueltas mostrado anteriormente es dtdi
RNN
dtdNv ⎟
⎠⎞
⎜⎝⎛==
φ , luego la
tensión puede ser escrita como
dtdiL
dtdi
RNv ==
2
(1-12)
Donde l
ANR
NL22 μ
== es el parámetro eléctrico de la inductancia en
términos de las características físicas del devanado y del núcleo. Si se considera la introducción de un entrehierro de longitud gl en el núcleo resulta el circuito de la figura.
Primero se define la reluctancia propia A
lR
r
CC ⋅=μ
y la reluctancia del
entrehierro A
lR g
g0μ
=
Luego el flujo esta dado por la ecuación 1-13
gc RRNi+
=φ (1-13)
En ambos devanados se tiene una tensión, y las direcciones de corriente
de 1i e 2i se encuentran dirigidas hacia la estructura del inductor. Una brecha
de aire se muestra en la estructura del inductor acoplado. Ambas fuentes FMM
tienen la misma polaridad en el modelo matemático y una reluctancia adicional
mostrada en la ecuación 1-13 representa el modelado del espacio de aire. La

presencia de este salto implica el almacenamiento de energía que se produce
en el inductor a diferencia del transformador.
Para inductores acoplados ideales sobre un mismo recorrido las tensiones
entre terminales deben ser iguales, para que se cumpla la ley de Faraday, ya
que ambos dev devanados tienen el mismo dtdφ .
1.2.2 Modelo Eléctrico
En el caso en que se tienen dos inductores acoplados el modelo se
obtiene partiendo de la base del flujo que circula en el núcleo
( )gc RRiNiN
++
= 2211φ (1-14)
La tensión en el lado primario se obtiene a través de la ley de Faraday
dtdiLi
NNi
dtd
RRN
dtdNv m
mGC
=⎟⎟⎠
⎞⎜⎜⎝
⎛+
+== 2
1
21
21
11φ (1-15)
Lo que se aproxima G
m RNL
21= lo que en inductores acoplados modela la
energía almacenada en el salto de aire. Si se tiene un material magnético de
elevada permeabilidad las líneas de flujo son guiadas dentro del recorrido por el
núcleo, esto es lo que se denomina un circuito magnético, en este caso el flujo φ
es mantenido por su fuente conocida como fuerza magnetomotriz. 1.2.3 Caracterización de inductores acoplados.
Si se supone que se tiene un par de inductores acoplados invariantes, al
ser lineales cada flujo debe ser una función de las corrientes. Como los
inductores son invariantes los coeficientes de las funciones lineales deben ser
constantes, es decir no dependen explícitamente del tiempo por lo que se
pueden escribir como se muestra en la ecuación 1-16
)()()( 2121111 tiMtiLt +=φ (1-16)

)()()( 2221212 tiLtiMt +=φ (1-17) Donde las constantes 11L , 22L y M no dependen del tiempo ni de las
corrientes 1i e 2i . Las inductancias propias y mutuas se miden en Henrios,
cuando las corrientes están expresadas en Ampère y el flujo en Weber. Debido a
consideraciones energéticas se sabe que 2112 MM = , si se denomina M este valor
común se puede escribir
21111 iMiL +=φ (1-18)
22212 iLiM +=φ (1-19)
A partir de la ley de Faraday se tiene la ecuaciones 1-20 y 1-21
dtdiM
dtdiLv 21
111 += (1-20)
dtdi
Ldtdi
Mv 222
12 += (1-21)
Por último en régimen sinusoidal permanente, si se presentan las
tensiones sinusoidales y las corrientes 1i e 2i por sus respectivos fasores 1V , 2V
y 1I , 2I respectivamente las ecuaciones quedan
21111 MIjILjV ωω += (1-22)
dtdi
Ldtdi
MV 222
12 += (1-23)
1.2.4 Análisis de signos de la inductancia
Como se sabe, los valores de inductancias propias 11L , 22L siempre son
positivos, sin embargo debe considerarse que la inductancia mutua M puedes
variar su signo dependiendo del sentido en que se encuentren enrolladas las
bobinas.

El signo de la inductancia mutua está determinado por la forma real del
circuito y por convención de signos. A partir de la figura 1.4 se puede explicar
el método para determinar el signo de M.
Si se tiene el segundo inductor en circuito abierto (B B’) y por lo tanto 2i
es cero, considerando las ecuaciones 1-19 y 1-23 se llega a:
12 iM=φ (1-24)
y
dtdi
MV 12 = (1-25)
Si se tuviera una corriente entrando por el terminal A del primer inductor
como lo muestra la figura dtdi1 sería mayor que cero y por lo tanto el signo de
2V sería el mismo de M debido a la ecuación (1-25). Se tiene que el potencial en
el inductor secundario está determinado en la figura 1.4. En este caso la
dirección de referencia determina que 2V es mayor que cero y por lo tanto M es
positiva. Se puede concluir que el signo de M depende tanto del aspecto
constructivo como de la dirección de referencia seleccionada.
Figura 1.4 Convención de signos de inductancia mutua.
Figura 1.5 Convención de puntos

Continuando se puede exponer brevemente la convención de puntos que
representan la forma particular en que están dispuesto el enrollado de las
bobinas.
La convención de puntos utiliza un punto colocado en cada uno de los
extremos de las dos bobinas que están acopladas. Una corriente que entra por
el terminal punteado de la bobina produce una tensión de circuito abierto en la
segunda bobina, cuyo sentido es el de la dirección indicada por una referencia
de voltaje positiva en el terminal punteada en esta segunda bobina [06].
Como se observa en la figura la corriente entra por el terminal punteado
de la primera bobina por lo tanto el sentido positivo de la tensión en el segundo
inductor esta en el terminal punteado. Se puede mencionar que no siempre es
posible seleccionar corrientes y voltajes que satisfaga la convención pasiva de
signos en todas partes, con el acoplamiento mutuo se presenta el mismo caso.
1.2.5 Coeficiente de Acoplamiento
Para inductores acoplados, lineales e invariantes, se necesitan tres
parámetros para caracterizar las relaciones entre corrientes y flujos, 11L , 22L y M.
Las inductancias propias son siempre positivas pero la inductancia mutua puede
ser positiva o negativa. La razón entre el valor absoluto de la inductancia y la
media geométrica de las auto-inductancias, es una medida del grado de
acoplamiento. Por lo tanto se define el grado de acoplamiento a partir de la
ecuación 1-24. El coeficiente k es un número positivo, independiente de las
direcciones de referencia seleccionadas. Si se tiene el caso en que los
inductores se encuentren sobre el mismo elemento magnético el valor de k será
cercano a 1.
2211 LLM
k⋅
= (1-25)
1.3 FILTROS PASIVOS Los filtros pasivos pueden considerarse principalmente de dos tipos, los
de bloqueo y los filtros de confinamiento, los primeros se refieren a filtros que
crean un camino de alta impedancia entre el alimentador y la carga y los
segundos que generan el efecto contrario, es decir, generan caminos de baja
impedancia para la circulación de corrientes armónicas, en paralelo con la
carga. 1.3.1 Filtro de bloqueo
El objetivo de estos filtros es impedir la resonancia paralela entre
transformador y condensador, evitando así la sobrecarga de armónicas en los
bancos de condensadores. El filtro está compuesto de varias ramas y puede
formarse con tantas ramas como sea necesario para compensar la energía
reactiva de la instalación. Estas ramas se podrán conectar y desconectar en
función de la demanda de compensación del factor de potencia. En resumen, el
dimensionado de los filtros de rechazo se hace en función de los kVAr
necesarios para llevar el factor de potencia a un valor cercano a la norma. 1.3.2 Filtros de Confinamiento
Es posible encontrar gran variedad de configuraciones de filtros que son
utilizados para limitar la distorsión armónica. Las configuraciones más comunes
son el filtro sintonizado simple y el filtro pasa alto de segundo orden.
Estos filtros pretenden derivar la mayor parte de la corriente de armónicas
generada por una determinada carga de forma que no vaya hacia la red ni hacia
otras cargas vecinas. Habitualmente se colocan en el lado de baja tensión o en
cualquier caso lo más próximo posible a las cargas que generan armónicas.
Constructivamente son similares a los de rechazo, formado por varias ramas,
cada una de ellas está dedicada a filtrar una determinada componente armónica.
Los valores de L y C están dimensionados según la corriente armónica que
deban absorber.
En la figura 1.5 se muestran las configuraciones más usuales de filtros
shunt pasivos.
A continuación será estudiado el filtro sintonizado simple que es la base
para el estudio propuesto. En relación a este tipo de filtros se podría mencionar
que tiene bastantes pérdidas a frecuencia fundamental. En relación a los otros
filtros enunciados en la figura 1.5 se puede mencionar que el Filtro Pasa Alto de
segundo orden (b) ofrece el mejor filtrado, pero sus pérdidas a la frecuencia
fundamental son superiores al de tercer orden. Y por último en cuanto a los filtros
de tercer orden se tiene que reducen las pérdidas, debido al aumento de su
impedancia a la frecuencia fundamental por la presencia del condensador C2; el
valor nominal de este condensador es muy reducido en comparación a C1. 1.4 ANÁLISIS DE FILTROS SINTONIZADOS Se puede mencionar que es la configuración de filtro más utilizada en la
atenuación de armónicas individuales. Estructurado por condensador,
inductancia y resistencia en serie. Para frecuencias bajas el filtro se comporta
capacitivo y entrega potencia reactiva al sistema. Para frecuencias altas el filtro
se comporta inductivo.
La resistencia denominada de amortiguamiento generalmente esta dada
por las resistencias serie equivalente del condensador y del inductor por lo que
no se requiere resistencia externa en el circuito. Cuando el filtro se encuentra en
frecuencia de resonancia, la reactancia capacitiva anula la reactancia inductiva
por lo tanto el filtro es resistivo completamente. [1]
Se puede mencionar que a frecuencias de sintonía (resonancia) la
impedancia del filtro es mínima, permitiendo la circulación de la corriente
armónica determinada.

Figura 1.6
a. Filtro sintonizado simple b. Filtro Pasa Alto de segundo orden c. Filtro Pasa Alto de tercer d. Filtro de tercer orden pasa alto. Estos filtros debido a su característica de ancho de banda reducido en las
frecuencias de interés, no permiten realizar el filtrado de corrientes que posean
formas de ondas semejantes a un pulso, debido a que estas poseen cambios
abruptos de magnitud, los cuales están generados por sumatoria de armónicas
de mayor orden por lo cual deben ser atenuadas por medio de filtros pasa bajos
ya que su característica de impedancia para esas frecuencias es muy baja.
Un aspecto importante de mencionar en el análisis de filtros
sintonizados, es el valor del Factor de Calidad, que determina el ancho de
banda del filtro diseñado. Para aplicaciones en alta tensión la corriente en el filtro
es de bajo valor eficaz, no se requieren conductores de gran sección y
generalmente los inductores son diseñados con núcleos de aire, el filtro es
diseñado con un valor de factor de calidad entre 50≤Q≤150. En baja tensión
se requieren inductores con núcleo de hierro con entrehierro.
Figura 1.7 Configuración filtro serie resonante (Filtro sintonizado)
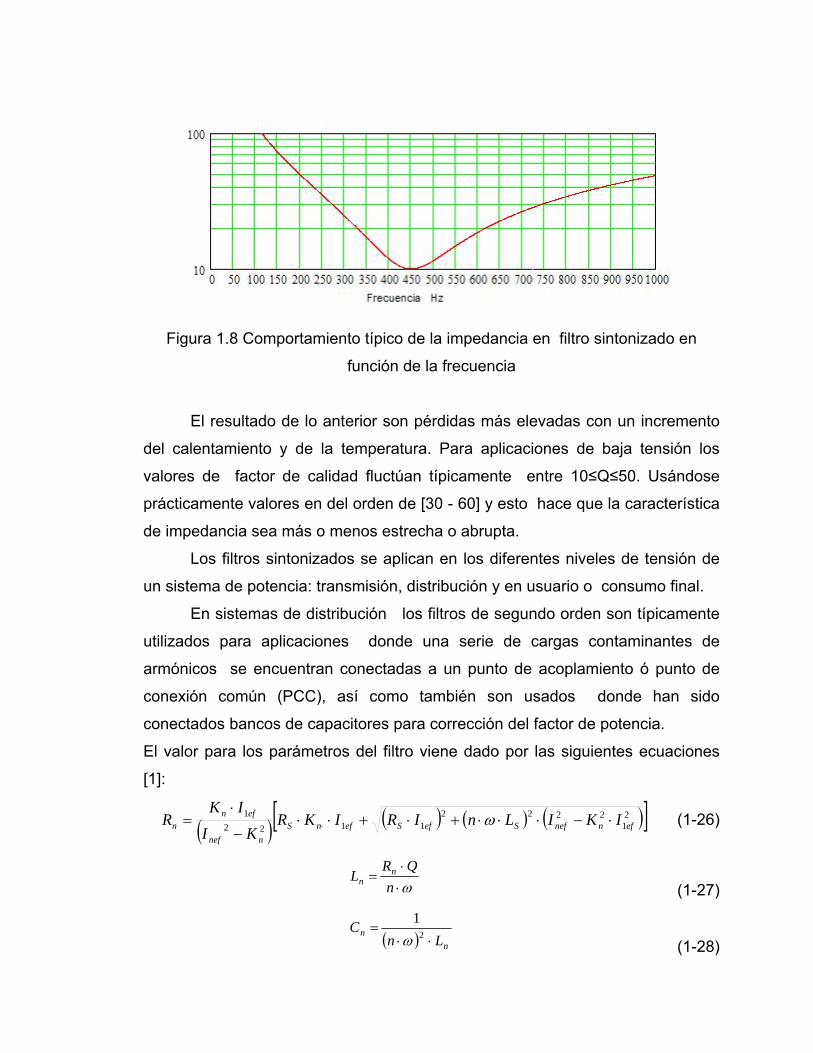
Figura 1.8 Comportamiento típico de la impedancia en filtro sintonizado en
función de la frecuencia
El resultado de lo anterior son pérdidas más elevadas con un incremento
del calentamiento y de la temperatura. Para aplicaciones de baja tensión los
valores de factor de calidad fluctúan típicamente entre 10≤Q≤50. Usándose
prácticamente valores en del orden de [30 - 60] y esto hace que la característica
de impedancia sea más o menos estrecha o abrupta.
Los filtros sintonizados se aplican en los diferentes niveles de tensión de
un sistema de potencia: transmisión, distribución y en usuario o consumo final.
En sistemas de distribución los filtros de segundo orden son típicamente
utilizados para aplicaciones donde una serie de cargas contaminantes de
armónicos se encuentran conectadas a un punto de acoplamiento ó punto de
conexión común (PCC), así como también son usados donde han sido
conectados bancos de capacitores para corrección del factor de potencia.
El valor para los parámetros del filtro viene dado por las siguientes ecuaciones
[1]:
( ) ( ) ( ) ( )[ ]21
22221122
1efnnefSefSefnS
nnef
efnn IKILnIRIKR
KI
IKR ⋅−⋅⋅⋅+⋅+⋅⋅
−
⋅= ⋅ ω (1-26)
ω⋅⋅
=n
QRL n
n (1-27)
( ) nn
LnC
⋅⋅= 2
1ω (1-28)

Donde:
Rn : Resistencia serie equivalente del filtro para la armónica n.
Kn Máx : Valor máximo permitido por norma para la armónica n
I1ef : Valor eficaz de la componente fundamental de la corriente de línea.
Inef : Valor eficaz de la armónica n de la corriente de línea.
Q : Factor de calidad del filtro, generalmente 5010 ≤≤Q .
Rs, Ls : Resistencia e inductancia serie equivalente de la fuente.
n : Orden de la armónica.
ω : Frecuencia angular fundamental de tensión de alimentación [rad/seg].
Kn : Valor de la armónica n, dado por el proyectista 1.5 PROPIEDADES DE FILTROS. 1.5.1 Comportamiento en aplicación.
Ventajas:
• Proporciona una máxima atenuación para una armónica específica.
• A frecuencia fundamental puede proporcionar la potencia reactiva
requerida en la red
• Tiene bajas pérdidas que está asociadas a la resistencia del inductor.
Desventajas:
• Vulnerable a la desintonía debido a la limitada tolerancias de elementos
con la temperatura y/o variaciones de frecuencia fundamental.
• Interactúan con la red originando una resonancia paralela al igual que un
banco de condensadores 1.5.2 Propiedades de componentes de filtros.
Las características nominales de los condensadores, bobinas y
resistencias del filtro, así como sus pérdidas, se obtienen de las tensiones
fundamentales y de las armónicas calculadas en su barra de conexión. Estas

características deben tener en cuenta las condiciones de funcionamiento más
rigurosas, tales como, tensión más elevada a tensión fundamental, mayor
desviación de la frecuencia, así como la presencia de corrientes armónicas
provenientes de otras fuentes y posibles resonancias entre los filtros y la red.
Condensadores.
Estos componentes están formados por unidades tipo, conectadas en
serie y paralelo, para conseguir las tensiones y potencias especificadas. Las
principales características a tener presente son:
a. Coeficiente de temperatura.
b. Potencia reactiva.
c. Pérdida de potencia.
d. Confiabilidad.
e. Costos
Los condensadores de los filtros sintonizados requieren coeficientes de
temperatura bajos para evitar la desintonización causada por cambios de la
capacitancia con la temperatura o por sobrecalentamiento interno.
Con el fin de optimizar la potencia reactiva, los condensadores deben
funcionar con pérdidas de potencia reducidas y a tensiones elevadas para evitar
la destrucción del dieléctrico; la IEC admite que la potencia reactiva del
condensador es la suma de las potencias reactivas de las distintas frecuencias a
las que está sometido.
Bobinas
El diseño de las bobinas de los filtros ha de hacerse teniendo en cuenta
las altas frecuencias que deben soportar, incluyendo en el cálculo de las
pérdidas de potencia, los efectos pelicular, histéresis, y Foucault. También debe
considerarse la no-linealidad del circuito magnético al determinar la posible
desintonización del filtro; este efecto sugiere el uso de inducciones reducidas y
preferiblemente el uso de núcleos de material no-magnético.
Las dimensiones de la bobina dependen de la corriente eficaz máxima y
del nivel de aislamiento requerido para soportar los impulsos de conexión.

CAPÍTULO 2
PRESENTACIÓN DEL FILTRO DE DOBLE SINTONÍA
2.1 INTRODUCCIÓN Debido a las necesidades de obtener una herramienta que permita
desarrollar una comprensión amplia del comportamiento de los filtros acoplados
de doble sintonía, se desarrollarán modelos matemáticos que representen el
comportamiento de estos como elementos individuales, a partir de un análisis
circuital. Además, se analizará el comportamiento de los filtros asociados a un
sistema el cual se desarrollara por medio de un análisis de mallas, este nos
entregará las frecuencia de sintonía de los filtros en relación al acoplamiento; lo
que se procederá a verificar por medio de la comparación de los resultados
obtenidos en Mathcad versus las simulaciones relacionadas en Pspice. 2.2 FILTRO SINTONÍA DOBLE A pesar que el objetivo de este análisis es obtener doble sintonía de
filtros a partir del acoplamiento de inductores de filtros pasivos serie
sintonizados, se puede obtener este comportamiento mediante el circuito
mostrado en la figura Nº 2.1 (b). Es importante mencionar que las impedancias
equivalentes de dos filtros serie sintonizados para dos frecuencias individuales,
en frecuencias cercanas a la resonancia; son muy similares a una configuración
de doble sintonía. Se debe cumplir con las relaciones que se muestran a
continuación.

Figura 2.1 (a) Dos filtros de sintonía única (b)Filtro de sintonía doble
( )( )( )2
2
2bbaa
bababa
CLCLLLCCCC
C−
++⋅= ⋅
(2-1)
ba
ba
LLLL
L+
=1
(2-2)
( )( )( )2
2
2bbaa
bababa
CLCLLLCCCC
C−
++⋅= ⋅
(2-1)
ba CCC +=1
(2-3)
( )( ) ( ) ( ) ( )
( )( )( )( )⎥⎦
⎤⎢⎣
⎡++−−
+⎥⎥⎦
⎤
⎢⎢⎣
⎡
++
−+
⎥⎥⎦
⎤
⎢⎢⎣
⎡
−−
−= 22
22
1222
2
222
22
2 1111
111
111
axxaxxR
xaxxR
xaxxaRR ba
(2-5)
b
a
CC
a =
(2-6)
aa
bb
CLCL
x =
(2-7)
Se puede mencionar que las ecuaciones 2-1 a 2-7 presentan la
equivalencia de los valores de los filtros individuales y el filtro mostrado de doble
(a)
(b)
sintonización. Para la obtención de las aproximaciones anteriores no se
considera 1R , en definitiva se reduce a la resistencia de la bobina 1L , esto tiene
la ventaja de reducir las pérdidas de energía a la frecuencia fundamental en
relación al caso de filtros independientes [2]. El filtro mostrado tiene ventaja en
algunas aplicaciones de alta tensión, lo anterior por el reducido número de
bobinas diseñadas para soportar fuertes impulsos de tensión en la línea. 2.3 DISEÑO PROPUESTO En el capitulo 1 se ha estudiado el comportamiento y análisis de un filtro
sintonizado serie resonante como medio de atenuación de armónicos
individuales de corriente, aquí se muestra una variación del diseño en la que
dos de los filtros estudiados anteriormente se encuentra acoplados físicamente,
permitiendo la atenuación de dos armónicas.
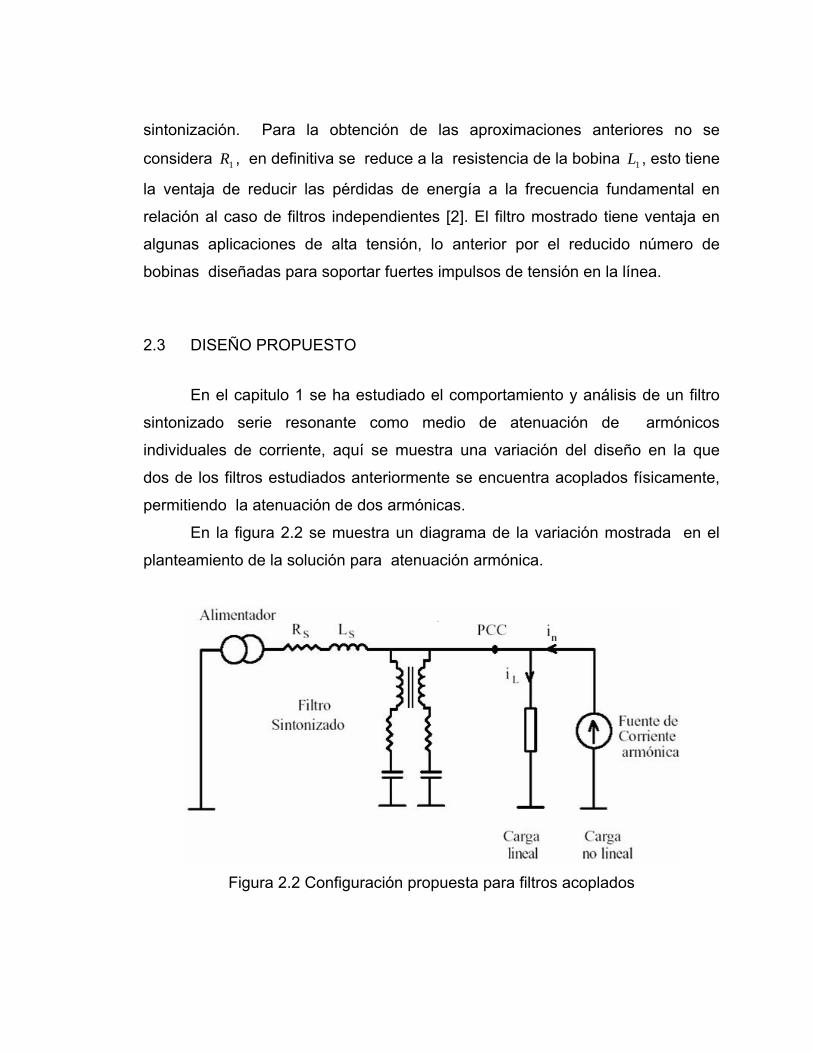
En la figura 2.2 se muestra un diagrama de la variación mostrada en el
planteamiento de la solución para atenuación armónica.
Figura 2.2 Configuración propuesta para filtros acoplados

2.4 ANÁLISIS MATEMÁTICO 2.4.1 Estudio sobre los tipos de acoplamiento despreciando la impedancia del
sistema El análisis matemático del modelo que representa el comportamiento del
filtro se ha desarrollado de maneras diferentes. A continuación se tiene este
desarrollo. Debido al gran numero de variables que rigen el comportamiento del
circuito se utiliza la herramienta computacional Mathcad para el desarrollo de la
ecuaciones utilizadas. Se tiene:
Se definen las impedancias, con el fin de hacer más claro el desarrollo de
la obtención del modelo, en las ecuaciones 2.8 y 2.9:
( )1
1111Cj
LjRZω
ωω ++= (2-8)
( )2
2221Cj
LjRZω
ωω ++= (2-9)
Por lo tanto el modelo esta definido por las siguientes ecuaciones a partir
del circuito de la figura 2.3:
21 III S += (2-10)
Figura 2.3 Configuración modelo con acoplamiento positivo

Se tiene la tensión 2V en relación a la impedancia de la rama cercana a
la fuente de corriente.
MjIZIV ω⋅+⋅= 2112 (2-11)
Se tiene además la relación con la rama para la segunda frecuencia
2212 ZIMjIV ⋅+⋅= ω (2-12)
Luego de la ecuación (2-12) se obtiene 2I
2
122 Z
MjIVI ω−= (2-13)
Reemplazando la ecuación (2-10) se obtiene
2
2
21
2
121 1
ZV
ZMjI
ZMjIVIIs +⎥
⎦
⎤⎢⎣
⎡−=
−+=
ωω (2-14)
Al despejar se obtiene
MjZVZI
I S
ω−−
=2
221 (2-15)
Utilizando la ecuación (2-13) se puede escribir la corriente 2I como:
⎥⎦
⎤⎢⎣
⎡−
−⎥⎦
⎤⎢⎣
⎡−
+=MjZ
ZI
ZMjMj
ZVI S ωω
ω
2
2
2222
1 (2-16)
Se tienen las corrientes en términos de las variables SI y 2V , luego se
tiene
MjMjZ
ZI
MjZMj
ZVZ
MjZV
MjZZ
IV SS ωωω
ωωω ⎥
⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−
−⎟⎟⎠
⎞⎜⎜⎝
⎛−
++⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−
−⎟⎟⎠
⎞⎜⎜⎝
⎛−
=2
2
2221
22
2
22
11 (2-17)
Como la impedancia equivalente del circuito esta dada por
ST I
VZ 2= (2-18)
Por lo tanto finalmente se obtiene la expresión en la ecuación 2-19 o
impedancia equivalente del circuito.
( )( )2
2221
12
MZMjZZZMjZZ
ZT ωωω++−
−= (2-19)

El desarrollo del modelo para la polaridad negativa se realiza de la misma
manera, donde la diferencia radica en los signos de las corrientes generadas por
el acoplamiento. Otra manera de obtener la ecuación para acoplamiento
negativo, es solo cambiar M de positivo a negativo.
La ecuación anterior muestra la impedancia total del sistema en función
de la frecuencia para los filtros serie acoplados. El paso siguiente, es determinar
el comportamiento de las frecuencias de corte por medio de la modificación de k
que genera su efecto en al inductancia mutua M. Se realizará el gráfico de la
impedancia equivalente para los valores de k: 0 ,0.2, 0.4 y 0.7. 2.4.2 Verificación utilizando simulaciones digitales.
Se tiene en la figura, el circuito simulado, del que se obtiene los
resultados mostrados en las figuras 2.5 a 2.7.
Para el desarrollo del circuito de la figura 2.4 se tiene los valores
[ ]mHL 131 = y de [ ]mHL 642 = , que son los mismos utilizados en el modelo
matemático posteriormente. Se puede comentar que estos valores fueron
obtenidos mediante las ecuaciones del cálculo simplificado de filtros [ ]1 . Los
valores son reajustados en el proceso de desarrollo de los filtros ya que los
valores obtenidos son valores iniciales.
Figura 2.4 Circuito simulado con PSpice
En el circuito de la figura 2.4 también se tiene el valor de impedancia del
sistema, que en este caso se considera del orden de los [ ]Ωμ .Se puede
mencionar que a medida que se analiza una impedancia mayor considerando
una tensión constante, esta tiene influencia en el comportamiento del filtro. A
medida que se tiene una impedancia menor se tiene una mejor sintonización.
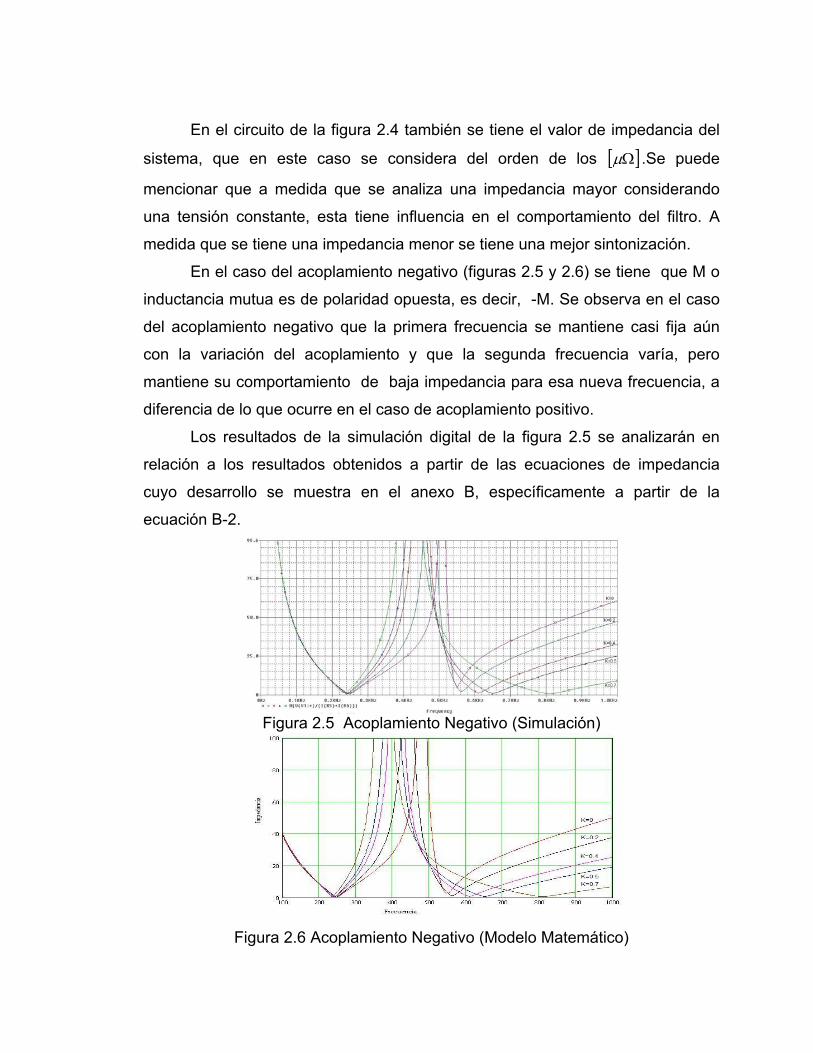
En el caso del acoplamiento negativo (figuras 2.5 y 2.6) se tiene que M o
inductancia mutua es de polaridad opuesta, es decir, -M. Se observa en el caso
del acoplamiento negativo que la primera frecuencia se mantiene casi fija aún
con la variación del acoplamiento y que la segunda frecuencia varía, pero
mantiene su comportamiento de baja impedancia para esa nueva frecuencia, a
diferencia de lo que ocurre en el caso de acoplamiento positivo.
Los resultados de la simulación digital de la figura 2.5 se analizarán en
relación a los resultados obtenidos a partir de las ecuaciones de impedancia
cuyo desarrollo se muestra en el anexo B, específicamente a partir de la
ecuación B-2.
Figura 2.5 Acoplamiento Negativo (Simulación)
Figura 2.6 Acoplamiento Negativo (Modelo Matemático)

Al igual que en el caso de implementación de filtros individuales, se debe
considerar la posibilidad de existencia de resonancias. En las figura 2.5 y 2.6 que
representan la impedancia para filtros con acoplamiento negativo, es posible
observar posibles resonancias paralelas en frecuencias cercanas a las
calculadas.
Cuando se sintonizan filtros para una determinada frecuencia se puede
producir un camino de alta impedancia para alguna otra armónica cercana a las
otras, lo que trae como resultado una distorsión de la tensión. Una corriente de
unos Ampères, para una determinada impedancia podría producir una caída de
tensión fuera de los márgenes aceptables. En este caso se pueden observar
impedancias del orden de los cientos de ohms para frecuencias en la vecindad
de las proyectadas inicialmente.
Figura 2.7 Acoplamiento Positivo (Simulación)
Figura 2.8 Acoplamiento Positivo (Modelo Matemático)

La impedancia de carga no influye en las frecuencias de los filtros debido
a que se asumen infinitas. Por otra parte las resistencias de los filtros son
despreciadas luego se asumirán iguales a cero.
Para realizar el análisis final y obtener las ecuaciones de proyecto; es
importante realizar la comparación entre los dos tipos de acoplamiento. A partir
de las simulaciones realizadas se puede concluir que el acoplamiento negativo
tiene un mejor comportamiento para las pretensiones de aplicar este tipo de
filtro. Si bien, las frecuencias de sintonización se desplazan con la variación del
acoplamiento k, el acoplamiento negativo mantiene mejor sintonización.
2.4.3 Análisis considerando la impedancia del Sistema
Es importante analizar la influencia del sistema en el comportamiento de
los filtros, y con esto en su diseño. A partir de simulaciones se observa que la
impedancia del sistema influye desplazando la frecuencia de sintonización de
los filtros a un valor único y no en la frecuencia calculada, tal como lo muestra la
figura 2.9, por lo que debe considerarse en el procedimiento final.
Se puede mostrar la relación que existe entre la frecuencia natural de
corte y la variación del factor de acoplamiento k entre los inductores. En las
ecuaciones (2-26) y (2-28) se muestra el resultado de igualar la parte compleja
de los elementos de los filtros diseñados a cero. En el apéndice B se muestra los
desarrollos.
( ) [ ]( ) jfLCLCMCC
MCCLCLCLCLCLCLCLLMCCw
⋅⋅⋅⋅⋅−⋅⋅⋅⋅⋅⋅+⋅+⋅⋅⋅⋅−⋅−⋅+⋅⋅⋅−⋅
=π222
42(2
22112
21
221
21
212211
22
22112221
221
1
(2-26)
( ) [ ]( ) jfLCLCMCC
MCCLCLCLCLCLCLCLLMCCw
⋅⋅⋅⋅⋅−⋅⋅⋅⋅⋅⋅+⋅+⋅⋅⋅⋅−⋅+⋅+⋅⋅⋅−⋅
=π222
42(2
22112
21
221
21
212211
22
22112221
221
2
(2-27)
Los resultados de la figura 2.9 son obtenidos a partir del circuito mostrado
en la figura 2.4 considerando diferente valor de impedancia del sistema. En este
caso se aumentó al orden de los [ ]mH .
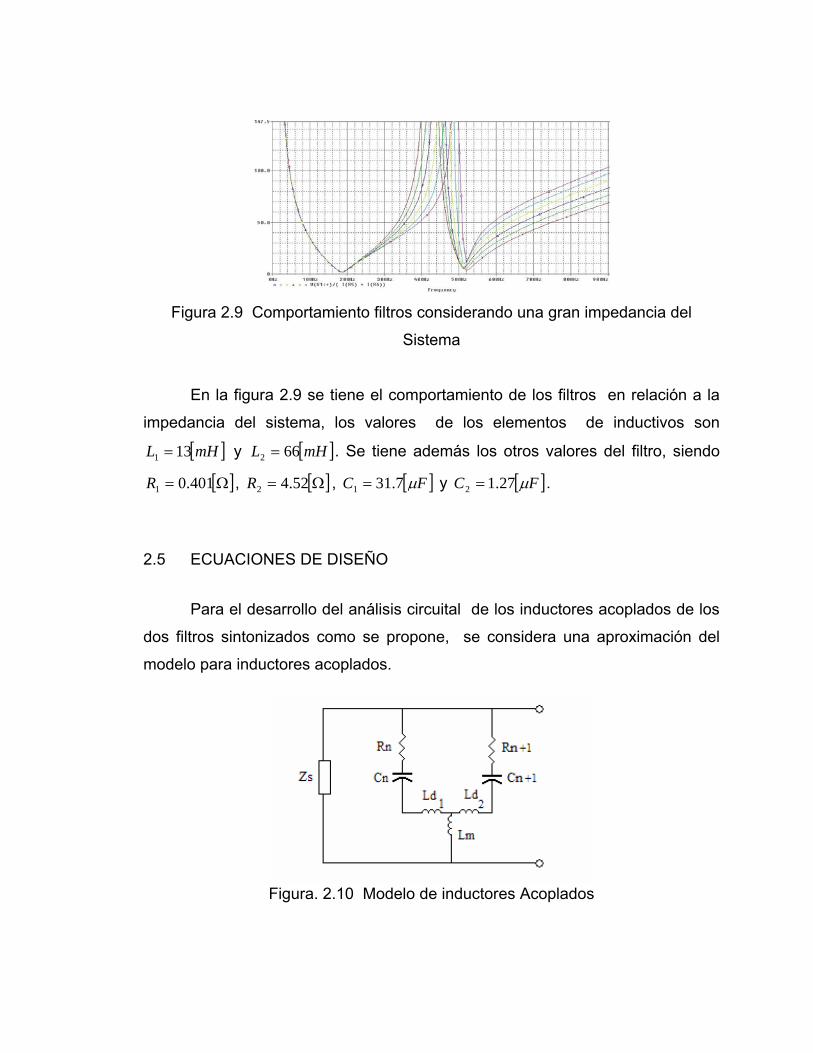
Figura 2.9 Comportamiento filtros considerando una gran impedancia del
Sistema
En la figura 2.9 se tiene el comportamiento de los filtros en relación a la
impedancia del sistema, los valores de los elementos de inductivos son
[ ]mHL 131 = y [ ]mHL 662 = . Se tiene además los otros valores del filtro, siendo
[ ]Ω= 401.01R , [ ]Ω= 52.42R , [ ]FC μ7.311 = y [ ]FC μ27.12 = .
2.5 ECUACIONES DE DISEÑO Para el desarrollo del análisis circuital de los inductores acoplados de los
dos filtros sintonizados como se propone, se considera una aproximación del
modelo para inductores acoplados.
Figura. 2.10 Modelo de inductores Acoplados
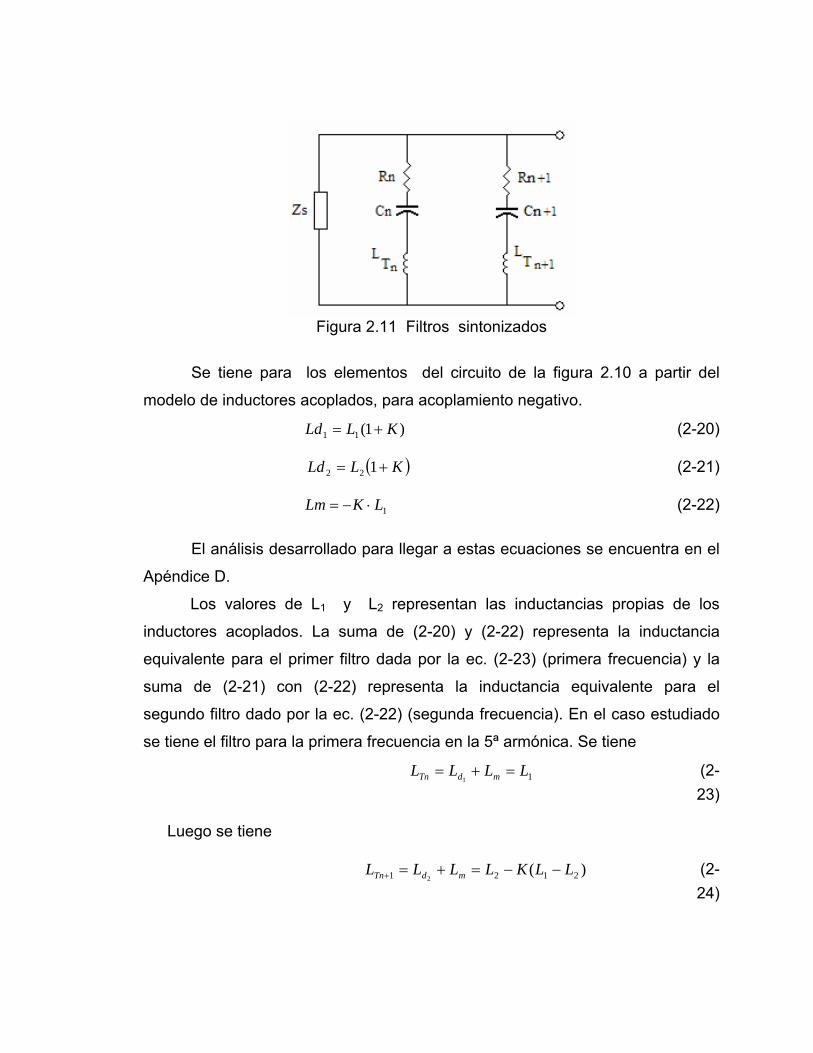
Figura 2.11 Filtros sintonizados
Se tiene para los elementos del circuito de la figura 2.10 a partir del
modelo de inductores acoplados, para acoplamiento negativo.
)1(11 KLLd += (2-20)
( )KLLd += 122 (2-21)
1LKLm ⋅−= (2-22)
El análisis desarrollado para llegar a estas ecuaciones se encuentra en el
Apéndice D.
Los valores de L1 y L2 representan las inductancias propias de los
inductores acoplados. La suma de (2-20) y (2-22) representa la inductancia
equivalente para el primer filtro dada por la ec. (2-23) (primera frecuencia) y la
suma de (2-21) con (2-22) representa la inductancia equivalente para el
segundo filtro dado por la ec. (2-22) (segunda frecuencia). En el caso estudiado
se tiene el filtro para la primera frecuencia en la 5ª armónica. Se tiene
11LLLL mdTn =+= (2-
23) Luego se tiene
)( 2121 2LLKLLLL mdTn −−=+=+ (2-
24)

2.6 PROCEDIMIENTO DE PROYECTO A partir del estudio desarrollado y de las ecuaciones obtenidas se plantea
un procedimiento para el cálculo de los filtros acoplados. En esta parte se
pretende el cálculo del filtro para una frecuencia de resonancia determinada y
una resintonización de acuerdo a las necesidades que presente el sistema
mediante el espectro de contenido armónico. Se tiene los siguientes pasos:
1. Consideraciones diseño
• Tipos de fuentes contaminantes
• Nivel de corrientes armónicas
• Espectro de corrientes armónicas
• Potencia reactiva requerida en la red
• Valor límite de distorsión
• Respuesta en frecuencia de impedancias Z
2. Datos del sistema
La primera parte del desarrollo consiste en reunir la información del
sistema además del espectro de contenido armónico. El sistema puede ser
modelado a partir de la decisión o requerimientos del diseñador. El objetivo
principal es controlar la distorsión de manera que cuando medidas reales sean
tomadas en terreno se encuentren dentro de los limites que establece la norma.
Entre los datos, a parte del contenido armónico es necesario disponer de
otros datos del sistema como frecuencia (ω ), Impedancia (Zs),(Rs),(Ls) y la
tensión (Vs)
3. Definición del PCC
Los limites de distorsión se aplican al sistema en el Punto de Conexión
Común. Es necesaria la ddeterminación de la relación de cortocircuito a partir de
la corriente de cortocircuito Isc y de la corriente IL que esta dada por el promedio
de las mediciones de corriente máxima durante los últimos meses. Se encuentra
la relación Isc/IL para aplicar la norma vigente de contenido armónico.
4. Cálculo Filtro Orden Menor
Como primer paso para el cálculo de los filtros pasivos es necesario el
cálculo del condensador C total, que debe ser igual a la suma de las
capacitancias de los condensadores de los filtros, con el fin de compensar la
potencia reactiva que demanda la carga. A continuación se tiene las siguientes
etapas.
A partir de los valores determinados en el ítem 3, anteriormente, es
necesario a partir de los valores permitidos por la norma, determinar Knmax.
Este valor es generalmente, varias veces menor que el valor de la distorsión
permitida por norma (hasta 10 veces).
Cálculo del filtro para la armónica de menor orden en el espectro del
sistema que se quiere compensar, es decir, a partir de las ecuaciones se tiene
Rn, Ln y Cn, parámetros que determinan el comportamiento del filtro. Luego de
haber calculado el filtro se conecta en paralelo con el sistema. Se comprueba
que el filtro atenúa la armónica que se esta analizando, es decir, se verifica el
filtro. [1]
5. Cálculo del filtro de orden mayor
En este paso, se desarrolla el mismo procedimiento que para el filtro
anterior o de menor frecuencia. A partir del modelo, es decir de las ecuaciones
(2-23) y (2-24) se desarrolla el cálculo para la inductancia propia del segundo
filtro sintonizado, a partir de un acoplamiento K determinado. Se tiene la
inductancia para la sintonía del primer filtro acoplado, la que permanece
constante, o con un muy bajo margen de variación en frecuencia, independiente
del valor de acoplamiento presentado en el modelo propuesto.
Ahora para el filtro de orden mayor se tiene que a partir de los valores
obtenidos de la inductancia del primer filtro (L1) y de la inductancia total para el
segundo (LTn+1), obtenida mediante las ecuaciones tradicionales de diseño [1], se
aplica la ecuación mostrada a continuación, de donde es posible obtener el
valor de la inductancia propia (L2) para el acoplamiento K dado.
)( 2121LLKLL
nT −−=+
(2-28)

CAPÍTULO 3
MODELADO DE LA PLANTA Y SIMULACIONES
3.1 INTRODUCCIÓN En este capitulo se desarrollará un ejemplo, en el que se modelará una
planta que posee dos bombas de 300hp, las cuales están comandadas por dos
variadores de frecuencia que comandan su velocidad.
Los variadores de frecuencias están constituidos básicamente por una
etapa rectificadora y una inversora. Debido a las características de Impedancia
existentes en entre estas etapas, el sistema solo puede ser modelado por su
etapa rectificadora que está constituida por un puente trifásico de rectificación
por medio de tiristores, los que dependiendo de su ángulo de disparo generarán
diversas características armónicas a desarrollar a continuación. 3.2 MODELADO PLANTA A modo de ejemplo de aplicación de los filtros pasivos serie sintonizados
acoplados físicamente, se analizará como ejemplo la situación de una planta
industrial de bombeo. Como se muestra en la figura
Figura 3.1 Planta de Bombeo

Figura 3.2 Corrientes en las tres fases en el punto de conexión
Se tiene una planta de bombeo, alimentada por dos transformadores de
12.47 kV a través de un Interruptor de transferencia automática, con una fuente
primaria débil y una secundaria más robusta que provienen de diferentes
subestaciones. La planta tiene entre sus instalaciones 3 motores con variador de
frecuencia de 300 HP. Los cuales generan la corriente que se puede observar en
la figura 3.2, la que ha sido simulada a partir de la puente rectificador que opera
con un ángulo de disparo α = 37.4º.
Cada motor se conecta a un transformador, con conexión estrella delta
en el devanado secundario para lograr la cancelación de armónicos, (en especial
la componente armónica de orden n=3). Debido a las características de la planta,
una bomba es operada independientemente en condiciones de poca carga, y a
medida que se incrementa la carga se considera el uso de las otras bombas.
Debido a la operación individual de las bombas, se considerará la
aplicación de filtros separados para cada una. Por lo cual se desarrollará el
análisis por fase suponiendo una carga simétrica y balanceada, analizaremos la
corriente en la fase a, ver figura 3.3.
Figura 3.3 Corriente en la fase a en el punto de conexión

Es posible observar la pendiente que posee la corriente al iniciar su
conducción, como se observa en la figura 3.3, la cual esta determinada por la
impedancia del sistema y del transformador de entrada a la carga. Luego es fácil
predecir que esta corriente está lejos de ser puramente sinusoidal por lo cual es
lógico esperar un alto nivel de contenido armónico, en su descomposición por
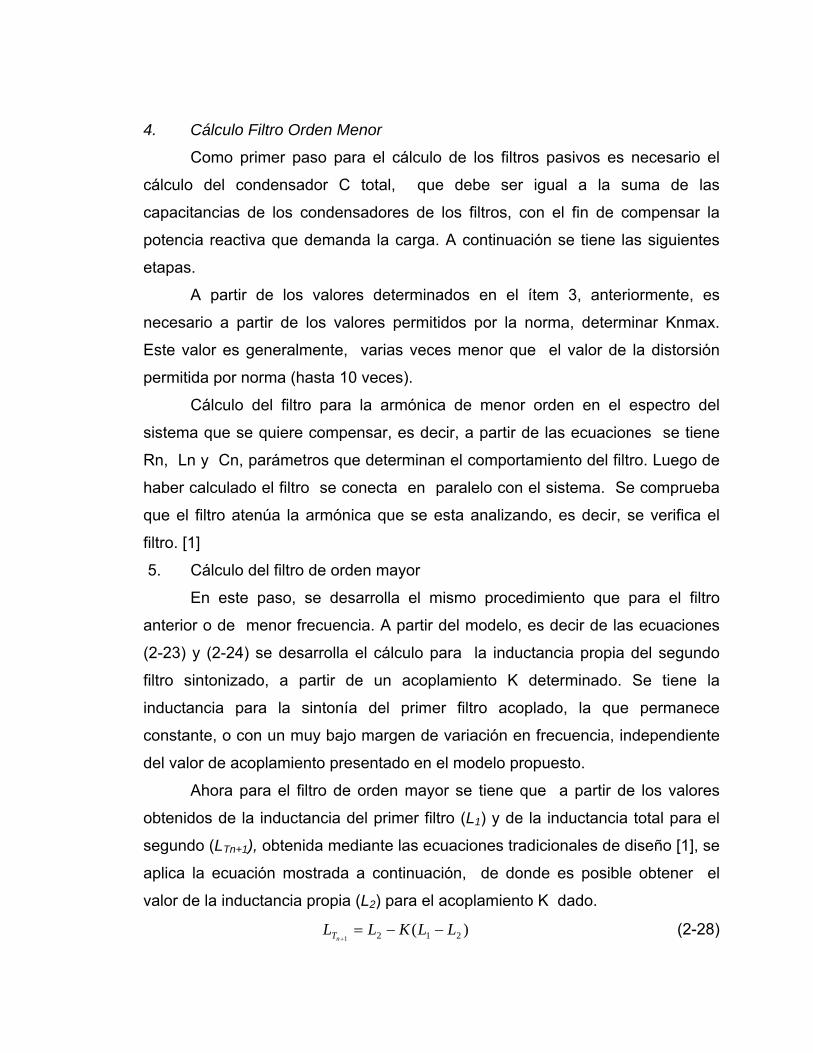
medio de las series de fourier, que se aprecian en figura 3.4.
Se puede apreciar que la quinta armónica esta fuera de la norma alcanzando
un 27% de la magnitud de su componente fundamental, por lo cual se procederá
a desarrollar al cálculo de un filtro sintonizado para esta armónica específica. Lo
anterior debido a que según la norma vigente se tienen limites para armónicas
individuales y en el caso de la quinta se puede tolerar un 4% de distorsión.
Es posible apreciar la tensión de la fase a en el punto PCC; en la que se
observan, tanto, notches generados por la conmutación de los tiristores que
conforman la etapa rectificadora de los variadores de frecuencia, como su
evidente contaminación armónica.
La armónica once también se encuentra fuera de margen siendo su valor
de 8% el valor de la corriente fundamental. A partir de lo anterior los filtros están
destinados a disminuir el contenido de las armónicas mencionadas.
La validación del sistema simulado con el real, la entrega la figura 3.6 en
la cual se puede apreciar que las magnitudes de cada una de las armónicas del
sistema real con el simulado corresponden en gran medida, debido a que el
sistema solo ve hasta la etapa rectificadora del variador de frecuencia por lo que
es una buena alternativa simular solo esta etapa como se observa en la figura
3.7.
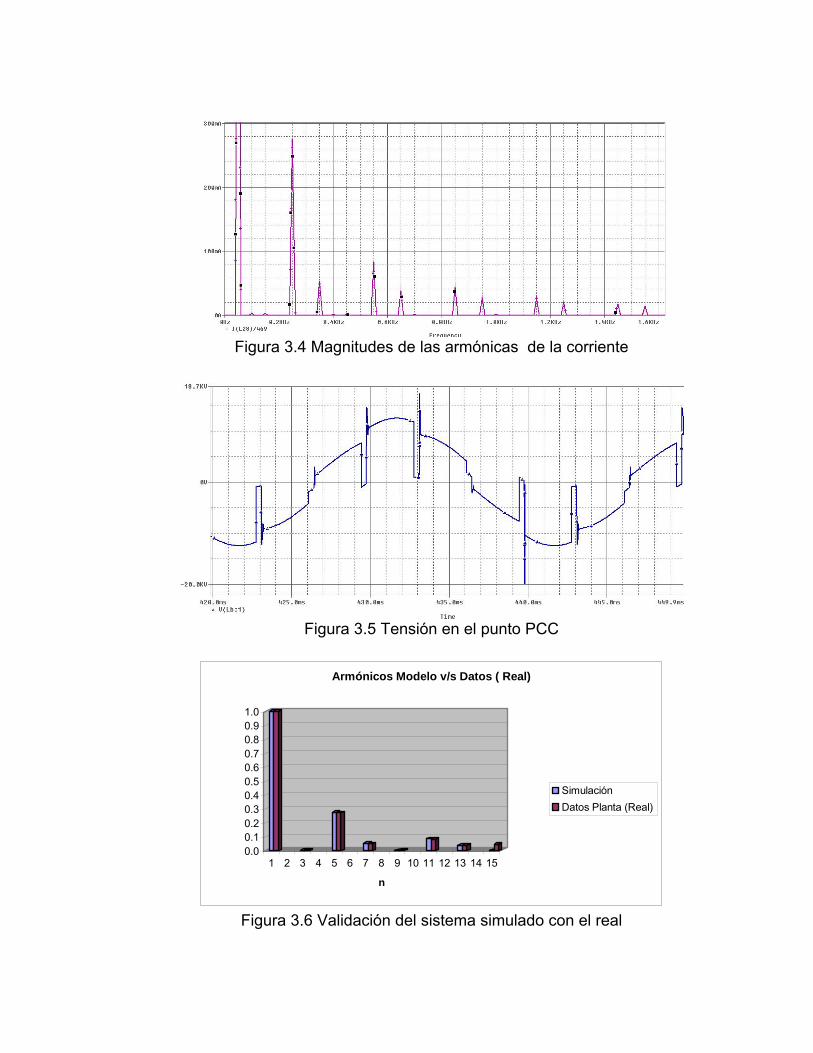
Figura 3.4 Magnitudes de las armónicas de la corriente
Figura 3.5 Tensión en el punto PCC
0.00.10.20.30.40.50.60.70.80.91.0
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
n
Armónicos Modelo v/s Datos ( Real)
SimulaciónDatos Planta (Real)
Figura 3.6 Validación del sistema simulado con el real
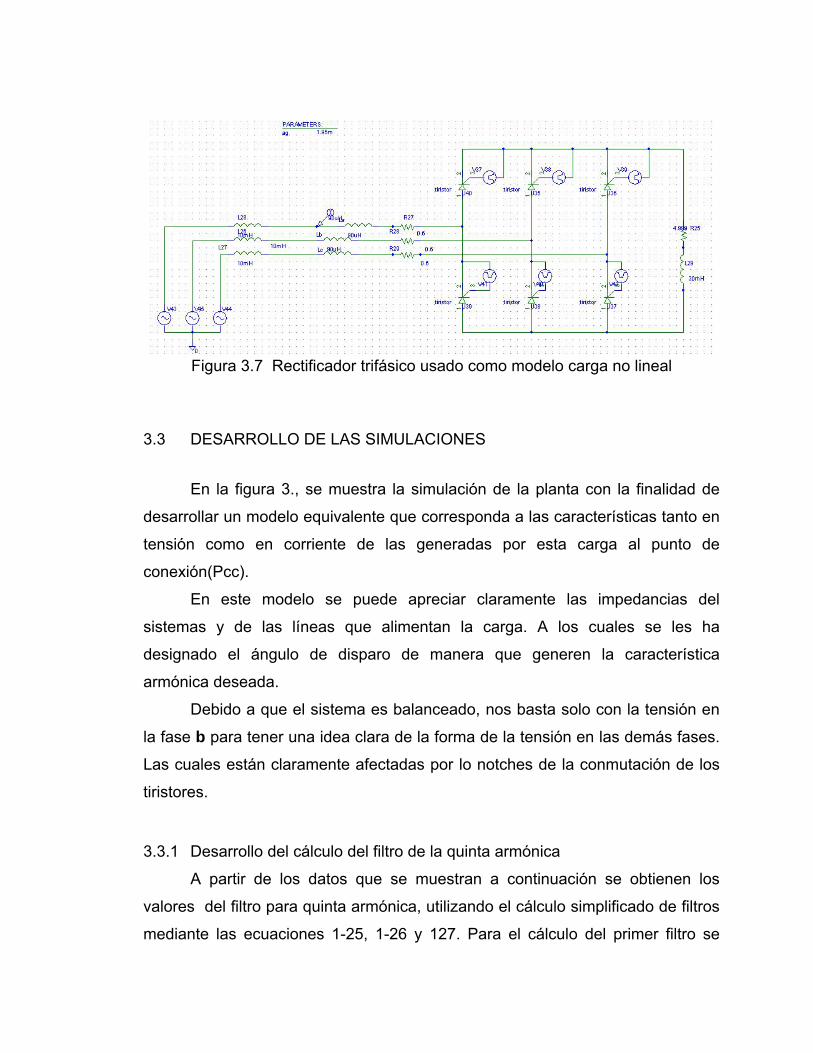
Figura 3.7 Rectificador trifásico usado como modelo carga no lineal
3.3 DESARROLLO DE LAS SIMULACIONES En la figura 3., se muestra la simulación de la planta con la finalidad de
desarrollar un modelo equivalente que corresponda a las características tanto en
tensión como en corriente de las generadas por esta carga al punto de
conexión(Pcc).
En este modelo se puede apreciar claramente las impedancias del
sistemas y de las líneas que alimentan la carga. A los cuales se les ha
designado el ángulo de disparo de manera que generen la característica
armónica deseada.
Debido a que el sistema es balanceado, nos basta solo con la tensión en
la fase b para tener una idea clara de la forma de la tensión en las demás fases.
Las cuales están claramente afectadas por lo notches de la conmutación de los
tiristores. 3.3.1 Desarrollo del cálculo del filtro de la quinta armónica
A partir de los datos que se muestran a continuación se obtienen los
valores del filtro para quinta armónica, utilizando el cálculo simplificado de filtros
mediante las ecuaciones 1-25, 1-26 y 127. Para el cálculo del primer filtro se

considera acoplamiento cero (K=0), el análisis del acoplamiento es tomado en
cuenta para el cálculo del segundo filtro.
[ ]Hzf 50=
[ ]HLs 010.0=
0=Rs
[ ]VVsef 62.88172
12470==
Para el cálculo de la 5ª armónica se tiene
50=Q
[ ]AefI 4701 =
[ ]AInef 1295 =
[ ]kAZs
VsefIsc 8.2==
007.05 =Kn
5=n
972.51
=efI
Isc
Rn1Kn5 I1ef⋅
Inef52 Kn52 I1ef 2⋅−( )
Rs Kn5⋅ I1ef⋅ Rs I1ef⋅( )2 n w⋅ Ls⋅( )2 Inef52 Kn52 I1ef 2⋅−( )⋅++⎡⎣ ⎤⎦⋅:=
Ln1
Rn1 Q⋅n w⋅
:=
Cn1
1
n2 w2⋅ Ln1⋅
:=
Rn1 = 0.229 [ ]Ω
Ln1= 0.0072 [ ]H
Cn1= 55.6 [ ]Fμ
Basándose en el procedimiento de proyecto mencionado y los datos de la
planta modelada fue posible calcular, en primer lugar el filtro para la menor

frecuencia. A partir de las ecuaciones dadas en [1] se encuentra Rn5 con un
valor de 0.229[Ω], Cn5 con 55.6[μF] y por último la inductancia propia Ln5 con
7.2[mH].
El filtro para la frecuencia de orden menor se mantiene en su frecuencia
inicial calculada independiente de la variación del acoplamiento.
Luego con estos valores se procede a la implementación de los filtros al
sistema que se puede apreciar a continuación en figura 3.8.
Luego debida a la influencia del filtro en el sistema se obtienen las
siguientes corrientes en Pcc y a continuación la corriente en la fase a: (ver figura
3.9)
Figura 3.8 Sistema con filtros para 5ª Armónica instalados
Figura 3.9 Corrientes con filtro de 5ª Armónica en el sistema
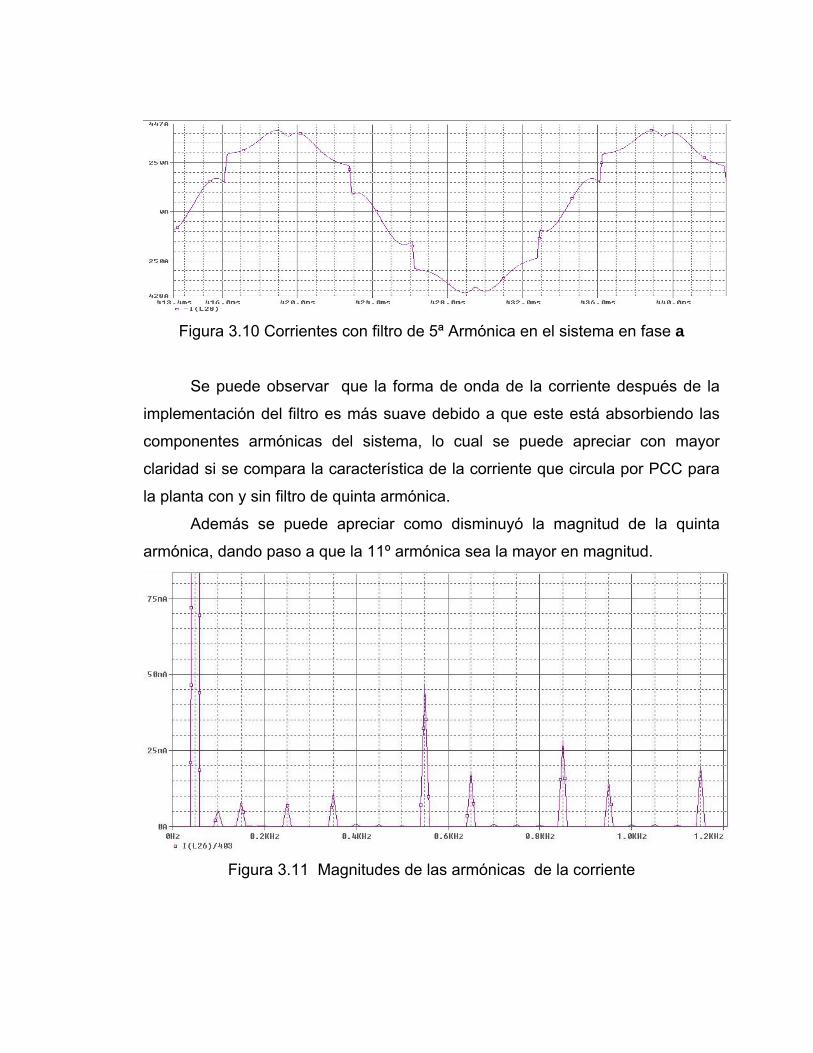
Figura 3.10 Corrientes con filtro de 5ª Armónica en el sistema en fase a
Se puede observar que la forma de onda de la corriente después de la
implementación del filtro es más suave debido a que este está absorbiendo las
componentes armónicas del sistema, lo cual se puede apreciar con mayor
claridad si se compara la característica de la corriente que circula por PCC para
la planta con y sin filtro de quinta armónica.
Además se puede apreciar como disminuyó la magnitud de la quinta
armónica, dando paso a que la 11º armónica sea la mayor en magnitud.
Figura 3.11 Magnitudes de las armónicas de la corriente

En la figura 3.12 se tiene la tensión en el punto de conexión luego de
haber instalado el filtro para la quinta armónica.
Figura 3.12 Tensión en el punto de conexión
A continuación se tiene la descomposición armónica:
Figura 3.13 Espectro armónico de la tensión en el PCC

Figura 3.14 Contenido Armónico con filtro 5ª Armónica
3.3.2 Desarrollo del cálculo del filtro de la 11ª armónica
A partir de los valores mostrados a continuación se desarrolla el cálculo
del segundo filtro a proyectar
50=Q
[ ]AefI 4031 =
[ ]AInef 6.1811 =
[ ]kAZs
VsefIsc 8.2== 007.011 =Kn 11=n
Rn11 = 1.284 [ ]Ω
Ln11 = 0.019 [ ]H
Cn11= 4.5 [ ]uF
Se tiene también los valores para el segundo filtro considerando el
acoplamiento nulo. Los valores serían Rn11 con un valor de 1.284[Ω], Cn11 con
4.5 [μF] y por ultimo la inductancia Ln11 con un valor calculado de 19[mH].
Por último para un coeficiente de acoplamiento determinado se obtiene el
valor de diseño de filtro.
Por ejemplo al determinar un valor de acoplamiento de 0.5 se tiene
mediante las ecuaciones anteriores, ecuación (2-28), la inductancia propia Ln11’
de 24.86 [mH].
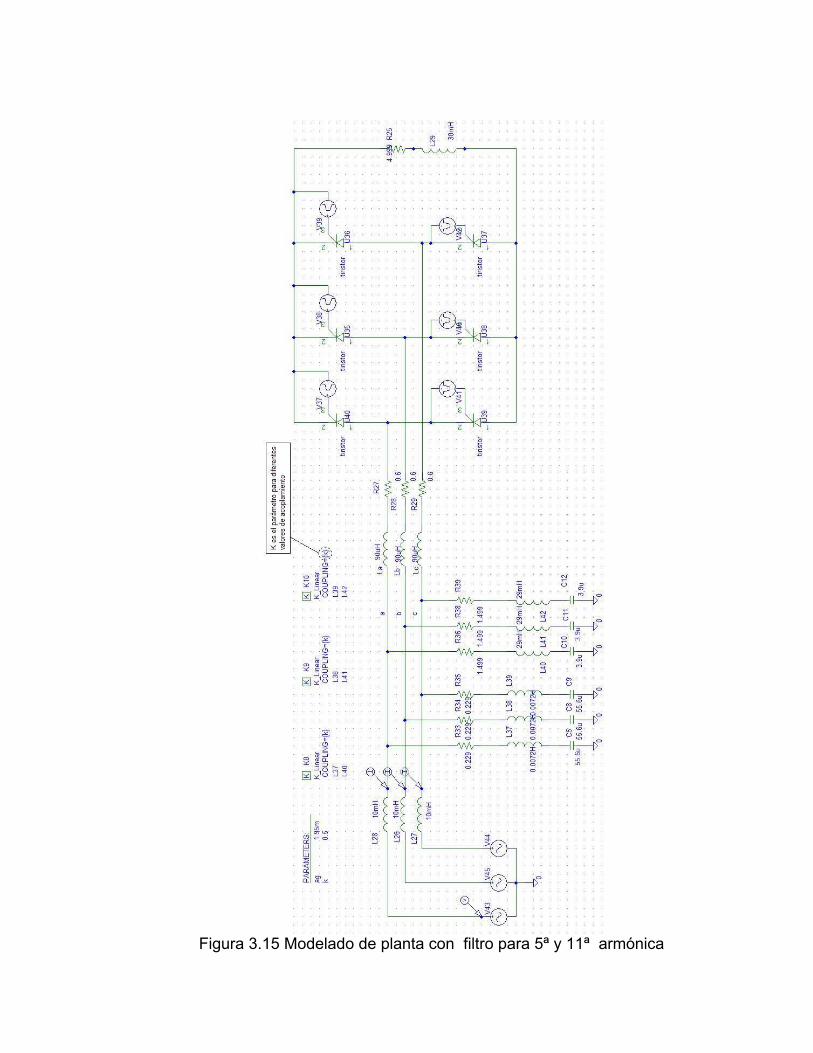
Figura 3.15 Modelado de planta con filtro para 5ª y 11ª armónica

Figura 3.16 Corriente compensada con filtro en 5ª y 11ª Armónica y K=0
Figura 3.17 Corriente compensada fase a con filtro en 5ª y 11ª Armónica y K=0
Figura 3.18 Descomposición armónica de la corriente K=0

Figura 3.19 Forma onda tensión en fase a
Figura 3.20 Corriente compensada con filtros y acoplamiento K=0.5
Por último se tiene a partir de las simulaciones digitales, que el contenido
armónico se ha reducido, en el caso de la quinta se tiene una reducción a 3.6 %
y en el caso de la onceava se tiene una reducción a 0.5%. Se puede mencionar
que ambos valores se encuentran dentro de los rangos establecidos por norma,
es decir 4% y 2% respectivamente. Es importante destacar que al igual que en
el diseño clásico de filtros [1] es necesario un ajuste final de los valores
mediante un proceso iterativo.

Figura 3.21 Contenido Armónico con filtro para 5ª y 11ª Armónica y sin filtro
En esta parte del análisis, se muestran la curva que representa la relación
de impedancia en función de la frecuencia para los filtros, con sus inductores
conectados de forma que exista acoplamiento negativo. Es importante destacar
que al ser realizadas mediante el programa PSpice las siguientes curvas
representan el comportamiento real de los filtros en relación a la variación del
acoplamiento.
Figura 3.22 Impedancia de filtros y sistema para acoplamiento negativo K=0.6

En el caso de la planta estudiada primero se ha calculado el filtro para la
armónica de menor orden, que era la 5ª y luego se ha calculado la armónica de
orden mayor, es decir, la 11ª. Para un coeficiente de acoplamiento determinado
se tiene, basándose en las ecuaciones de diseño (2-28) mencionadas
anteriormente, el valor de inductancia considerando el acoplamiento.
CAPÍTULO 4
IMPLEMENTACIÓN FILTRO
4.1 INTRODUCCIÓN Con la finalidad de obtener un comportamiento real del filtro se
implementa en el laboratorio de máquinas de la PUCV, un sistema de filtros de
armónicos pasivos acoplados por su reactancia. La carga no lineal generadora
de las corrientes armónicas será una luminaria que posee un consumo de 400
watts, a la cual se conectará en paralelo un filtro de 5ª y 9ª armónicas. Hay que
tener presente que los elementos con los que se generaron los filtros de
armónicos, eran solo los que se encontraban disponibles en el laboratorio, los
cuales no eran los más idóneos para la realización de este trabajo. 4.2 PROCEDIMIENTO DE MEDIDA La experiencia será desarrollada a partir de la utilización del equipo de
medida SAMTE Laboratorio, equipo que entrega la información del contenido
armónico del sistema seleccionado, que para efectos de la experiencia de
laboratorio será una red monofásica, con una carga que consiste en una
luminaria de 400 W , la que presenta un contenido armónico elevado en la 5 y 9
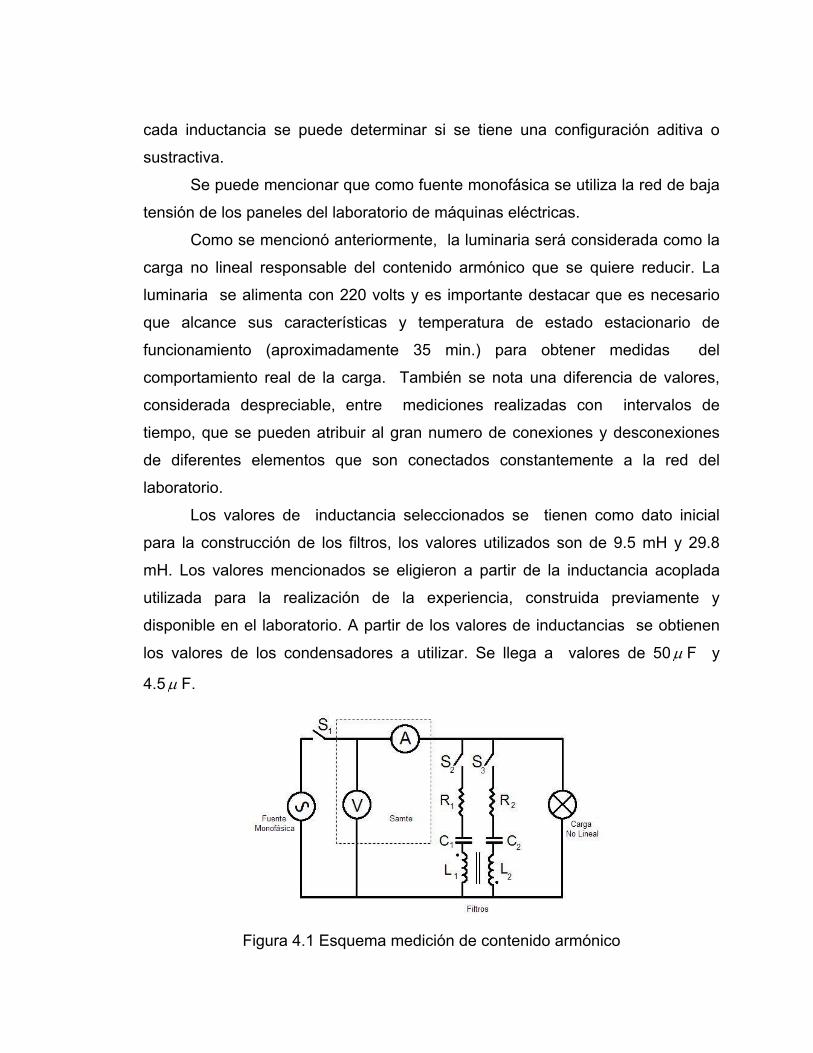
componente de la fundamental. En la figura 4.1 se muestra el esquema de
conexión en la experiencia realizada.
Se muestra que las inductancias se encuentran con acoplamiento
negativo, para realizar la conexión en forma adecuada se han identificado los
terminales de las inductancias, de la misma manera que es posible identificar la
polaridad de un transformador. Se realiza la aplicación de una tensión entre
terminales de ambas inductancias y a partir de la medición de las tensiones en
cada inductancia se puede determinar si se tiene una configuración aditiva o
sustractiva.
Se puede mencionar que como fuente monofásica se utiliza la red de baja
tensión de los paneles del laboratorio de máquinas eléctricas.
Como se mencionó anteriormente, la luminaria será considerada como la
carga no lineal responsable del contenido armónico que se quiere reducir. La
luminaria se alimenta con 220 volts y es importante destacar que es necesario
que alcance sus características y temperatura de estado estacionario de
funcionamiento (aproximadamente 35 min.) para obtener medidas del
comportamiento real de la carga. También se nota una diferencia de valores,
considerada despreciable, entre mediciones realizadas con intervalos de
tiempo, que se pueden atribuir al gran numero de conexiones y desconexiones
de diferentes elementos que son conectados constantemente a la red del
laboratorio.
Los valores de inductancia seleccionados se tienen como dato inicial
para la construcción de los filtros, los valores utilizados son de 9.5 mH y 29.8
mH. Los valores mencionados se eligieron a partir de la inductancia acoplada
utilizada para la realización de la experiencia, construida previamente y
disponible en el laboratorio. A partir de los valores de inductancias se obtienen
los valores de los condensadores a utilizar. Se llega a valores de 50μ F y
4.5μ F.
Figura 4.1 Esquema medición de contenido armónico

LnnCn
⋅⋅= 22
1ω
(4-1)
Los valores de resistencia aunque siempre son calculados mediante las
ecuaciones de diseño se recalculan en el momento de la implementación del
filtro para lograr la mejor sintonización de los mismos. Con la finalidad de obtener
la información necesaria para el estudio del sistema de filtros acoplados
propuestos, se desarrollaron tres medidas:
Caso 1: En la cual solo se encontraba conectada la luminaria.
Caso 2: la luminaria asociada a un filtro de 5 armónica.
Caso 3: La luminaria asociada a un filtro de 5 y 9 armónica. 4.3 RESULTADOS MEDICIONES 4.3.1 Análisis valores obtenidos mediciones
La información que se extraerá en cada una de estas medidas son THD-I,
THD-V, las formas de onda de tensión y corriente, el factor de potencia y la
descomposición armónica en frecuencia de la tensión y la corriente. A
continuación en la Tabla 4.1 que concentra los resultados de estas tres
mediciones.
De la tabla se desprende que existe relación directa entre la atenuación
de las corrientes armónicas con la conexión de los filtros diseñados. Para efectos
de la medición se realizo la medida con un acoplamiento K de un 0.1 (única
posibilidad de acoplamiento de existente con los equipos del laboratorio).
En el caso 1 se tiene un THD-I de 32,6% para una corriente de 2.1[A] en
donde las armónicas más importantes son la 3ª, 5ª, 7ª y 9ª, con un factor de
potencia inductivo de 0,9.
La distorsión armónica de 5ª Armónica se reduce en un 52%, lo que
implica que el filtro se encuentra funcionando adecuadamente.

Tabla 4.1 Resultados mediciones laboratorio Caso 1 Caso 2 Caso 3 Fuente de alimentación 226 226 226 cargas conectadas Luminaria Luminaria Filtro1 Luminaria Filtro1 y Filtro2 Corriente If 2.1 3.4 3.5 Tensión Vf 319.2 320 320 THD-V 4.3 4 3.9 THD-I 34.4 16.2 15.9 Vh3 2.9 2.84 2.64 Vh5 2.85 2.45 2.5 Vh7 0.84 0.95 0.96 Vh9 0.8 0.71 0.74 Vh11 0.08 0.05 0.06 Vh13 0.12 0.14 0.1 Vh15 0.17 0.16 0.18 Ih3 19.8 8.72 7.65 Ih5 22.17 11.62 11.98 Ih7 9.91 5.35 5.11 Ih9 11.13 4.4 3.53 Ih11 1.39 0.25 0.62 Ih13 2.81 1.23 0.27 Ih15 9.35 1.63 1.23 Factor de Potencia 0.9 IND 0.8 CAP 0.76 CAP
Potencia aparente 466 772 783 Potencia activa 419.4 617.6 595.08 Datos Filtro Filtro 1 Filtro 2 Resistencia 10 20 Inductancia mH 9.5 29.8 Capacitancia uF 50 4.5
La implementación del filtro acoplado por la bobinas de 9ª armónica de
reduce en un 20% la distorsión armónica de corriente, debido a que el filtro de
quinta armónica es tan amplio que él, por si mismo atenúa, en un 60 %.
A continuación se expondrá la característica de impedancia versus
frecuencia del filtro construido.
Figura 4.2 Curva impedancia en función de la frecuencia del filtro diseñado

En la figura 4.2 se observa el comportamiento de impedancia en función
de la frecuencia, en base al programa Mathcad. Se tienen las curvas de cada
filtro por separado y luego la curva resultante de los dos filtros conectados. En
la figura se observa la baja impedancia del filtro para la quinta armónica a partir
del diseño , en cuanto el filtro de orden mayor se observa que tiene una
amplitud mayor por lo que atenúa la armónica individual para la que está
diseñado y logra una reducción del THD-I de la carga considerada. 4.3.2 Análisis gráfico de resultados
A partir de la utilización del programa Samte View es posible analizar los
datos obtenidos.
Como se puede ver en la figura 4.4 se tiene una disminución notable en la
armónica 5ª de un 22.1% a un 11.6%.
Figura 4.3 Contenido Armónico sin filtros
Figura 4.4 Contenido Armónico con filtro 5ª armónica
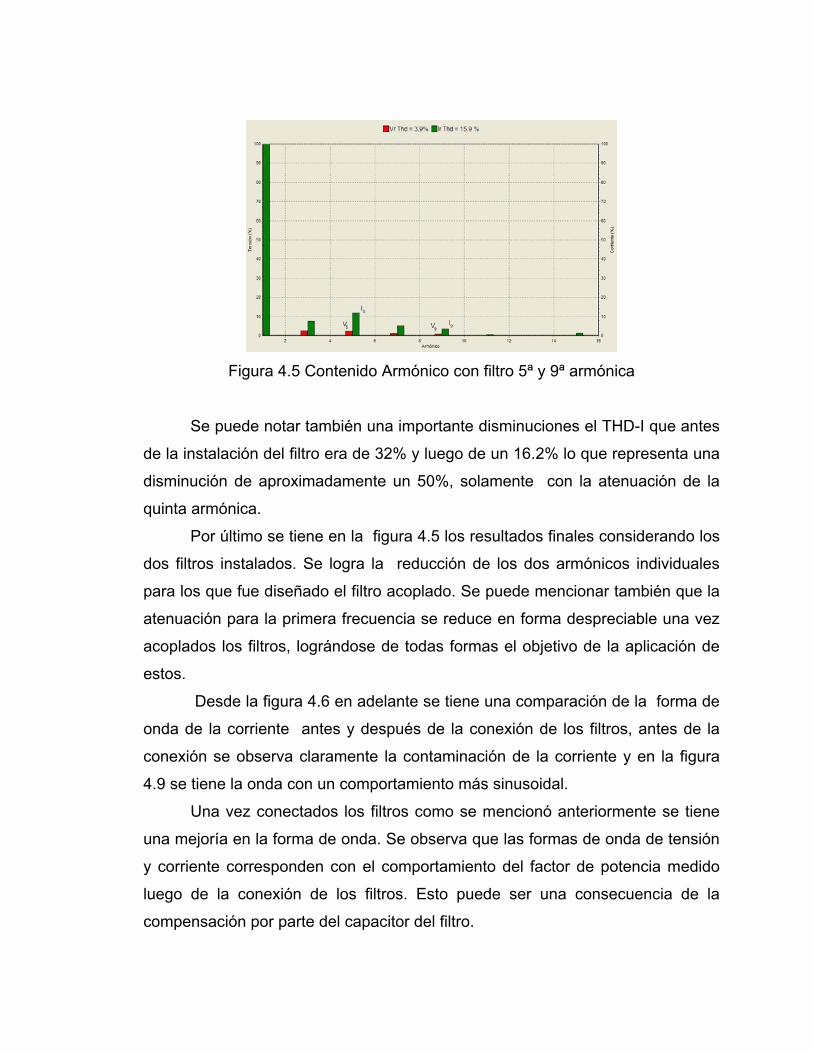
Figura 4.5 Contenido Armónico con filtro 5ª y 9ª armónica
Se puede notar también una importante disminuciones el THD-I que antes
de la instalación del filtro era de 32% y luego de un 16.2% lo que representa una
disminución de aproximadamente un 50%, solamente con la atenuación de la
quinta armónica.
Por último se tiene en la figura 4.5 los resultados finales considerando los
dos filtros instalados. Se logra la reducción de los dos armónicos individuales
para los que fue diseñado el filtro acoplado. Se puede mencionar también que la
atenuación para la primera frecuencia se reduce en forma despreciable una vez
acoplados los filtros, lográndose de todas formas el objetivo de la aplicación de
estos.
Desde la figura 4.6 en adelante se tiene una comparación de la forma de
onda de la corriente antes y después de la conexión de los filtros, antes de la
conexión se observa claramente la contaminación de la corriente y en la figura
4.9 se tiene la onda con un comportamiento más sinusoidal.
Una vez conectados los filtros como se mencionó anteriormente se tiene
una mejoría en la forma de onda. Se observa que las formas de onda de tensión
y corriente corresponden con el comportamiento del factor de potencia medido
luego de la conexión de los filtros. Esto puede ser una consecuencia de la
compensación por parte del capacitor del filtro.

Figura 4.6 Curva de corriente y tensión sin filtros
Figura 4.7 Curva de corriente y tensión con filtro 5ª armónica
A partir de las figuras 4.6, 4.7 y 4.8, donde se observan las curvas de
tensión y corriente, se puede mencionar que al conectar los filtros se tiene un
comportamiento capacitivo, es decir un adelanto de la tensión en relación a la
corriente. Para desarrollar la sintonía en la 5ª armónica se debió integrar una
gran capacitancia a la bobina de 50mH y 10 ohms, la cual, sobre compensó la
carga reactivamente en el caso 2, es por esto que se obtiene un factor de 0,8
capacitivo.

Figura 4.8 Curva de corriente y tensión con filtro 5ª y 9ª armónica
CONCLUSIÓN
En primer lugar es importante destacar que se ha cumplido el objetivo
propuesto para este proyecto, es decir, encontrar las ecuaciones que rigen el
comportamiento de la frecuencia de corte de un filtro en relación a su constante
de acoplamiento.
Mediante el análisis desarrollado durante este proyecto y por medio de la
observación de las curvas, se ha determinado que el acoplamiento negativo
genera un corrimiento de frecuencia hacia las armónicas de mayor orden de su
frecuencia de corte de orden superior en las cuales sus impedancias en
magnitud no se incrementan. Como es en caso del acoplamiento positivo.
Para ocupar esta estructura sería necesario implementar un control en la
resistencia del segundo filtro debido a que la magnitud de la impedancia en este
crece en directa proporción con el acoplamiento.
En el caso de utilizar un factor de calidad pequeño se corre el riesgo de
perder la sintonía fácilmente en el primer filtro, debido a que, aunque su
corrimiento en frecuencia hacia a las frecuencia de menor orden es pequeño,
puede ser significativo en un filtro con un ancho de banda reducido.
Esta estructura (con acoplamiento negativo) podría resultar práctica en
sistemas que posean filtros que tiendan a perder la sintonía fácilmente debido a
que esto podría ser corregido por medio de la variación del acoplamiento de las
bobinas.
Esta estructura de filtrado se comporta mejor en filtros consecutivos
debido a que la relación de vueltas entre los inductores es más cercana a uno
por lo cual el acoplamiento entre ellos resulta menos invasívo. Aunque la
desventaja que esto genera; es que el rango de barrido en frecuencia, que se
puede desarrollar variando el K, disminuye.
REFERENCIAS BIBLIOGRÁFICAS
[1] Ruiz C., Domingo, Apuntes del curso de Armónicos en Sistemas de Baja Tensión, Publicación Interna Laboratorio Electrónica de Potencia, Escuela de Ingeniería Eléctrica. Pontificia Universidad Católica de Valparaíso, Marzo 2002
[2] J. Arillaga, L.I.Eguiluz , Armónicos en Sistemas de Potencia, Servicio de
Publicaciones de la Universidad de Cantabria, España 1994 [3] Esteban Hermosilla ,“Armónicos en los sistemas eléctricos de baja
tensión” Seminario “Electrónica de Potencia” Laboratorio Electrónica de Potencia. Pontificia Universidad Católica de Valparaíso, Noviembre 2003
[4] James K. Phipps, “A Transfer Function Approach to Harmonic Filter
Desing” IEEE Inductry Aplications Magazine, Marzo / Abril 1997 [5] Arthur F. Witulski, “Introduction to Modeling of Transformers and Coupled
Inductors” IEEE Transactions on Power Electronics, Vol. 10,Nº3, Mayo 1995
[6] William H. Hayt Jr, Análisis de Circuitos en Ingeniería , Mc Graw Hill,
Quinta Edición , México, Noviembre 1996 [7] Norma Técnica Índices de Contaminación por inyección de armónicas de
tensión y de corriente. (Artículo 250º del D.S. 327/97) Comisión Nacional de Energía
[8] Ruiz C., Domingo, Fuentes Conmutadas, Publicación Interna Laboratorio
Electrónica de Potencia, Escuela de Ingeniería Eléctrica. Pontificia Universidad Católica de Valparaíso, Junio 2004
[9] Charles A. Desoer, “Basic Circuit Theory” , Mc Graw Hill, 1993 [10] Apuntes Electrónica de Potencia, “Compensación del factor de potencia Y
Control de armónicas en redes industriales” Capitulo 5 , UTFSM

APÉNDICE A
NORMA INYECCIÓN ARMÓNICOS DE CORRIENTE

APÉNDICE A
NORMA INYECCIÓN ARMÓNICOS DE CORRIENTE
A.1 DISTORSIÓN ARMÓNICA La distorsión armónica es una perturbación presente en los sistemas de
potencia debido a la existencia de cargas no lineales. Se puede decir que existe
distorsión armónica cuando la onda sinusoidal que se genera en las centrales
eléctricas se ve deformada o distorsionada en las redes de distribución y
usuarios finales del servicio.
La deformación de la onda no sinusoidal, debido a la distorsión armónica,
pero si periódica se puede cuantificar mediante su análisis en el dominio de la
frecuencia. El espectro de frecuencia de una señal es una representación que
permite conocer las amplitudes y ángulos de desfase relativos de cada una de
las componentes senoidales que integran la señal distorsionada.
El análisis se realiza mediante la Transformada de Fourier o su aplicación
denominada Transformada Rápida de Fourier FFT (Fast Fourier Transform).
Este algoritmo proporciona los contenidos de las diferentes ondas sinusoidales
puras que componen la onda deformada. Los contenidos se refieren a la
componente fundamental de la onda
(50 Hz de frecuencia) y a las componentes de frecuencias armónicas (múltiplos
de la frecuencia fundamental o 50 Hz) que se conocen como armónicos de
tensión o de intensidad.
En cuanto al método de análisis en el dominio de las frecuencias se aplica
el Teorema de Fourier según el cual cualquier señal periódica y continua de
periodo T puede descomponerse en una suma infinita de señales senoidales
de frecuencia múltiplos enteros de la frecuencia fundamental (T
f 1= ).

A.2 MARCO LEGAL La Norma Técnica, Índices de contaminación por inyección de
armónicas de tensión y de corriente ( Artículo 250º del D.S. 327/97), define los
parámetros mediante los cuales se cuantifica la contaminación armónica
producida por las componentes armónicas individuales , tanto de tensión como
de corriente, los índices normalizados son el índice de Distorsión Total Armónica
de tensión (THD-V) y el índice de Distorsión Total Armónica de corriente (THD-
I) cuyos valores limites se encuentran establecidos para los distintos niveles de
tensión y etapas del sistema.
Para el cálculo del THD-V se tiene la expresión:
1
50
2
2
V
VVTHD
k∑=− (A-1)
Donde:
kV : Componente armónica de la tensión de orden k
1V : Tensión de frecuencia fundamental
Ahora para el calculo de THD-I se debe utilizar la siguiente expresión:
1
50
2
2
I
IITHD
k∑=− (A-2)
Donde:
kI : Componente armónica de corriente de orden k
1I : Corriente de frecuencia fundamental
Frecuentemente se expresa en porcentaje, la mayor desventaja de este
índice es que se pierde la información de la influencia de cada armónico, por lo
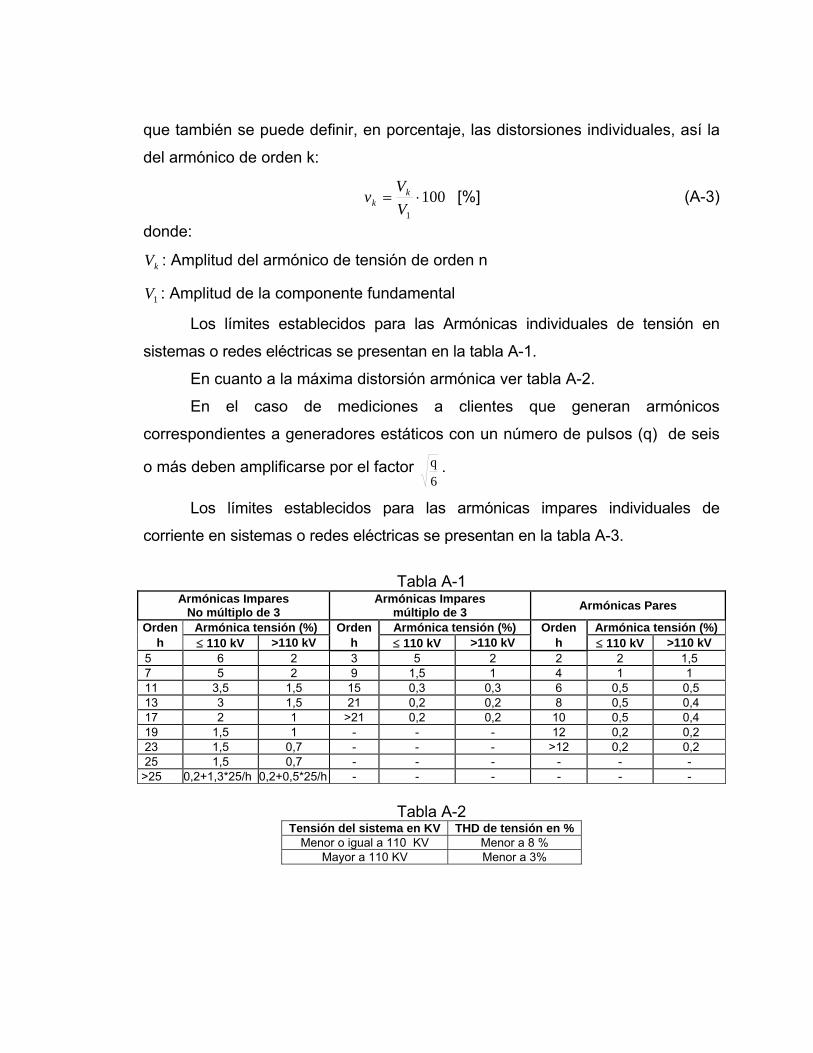
que también se puede definir, en porcentaje, las distorsiones individuales, así la
del armónico de orden k:
1001
⋅=VV
v kk [%] (A-3)
donde:
kV : Amplitud del armónico de tensión de orden n
1V : Amplitud de la componente fundamental
Los límites establecidos para las Armónicas individuales de tensión en
sistemas o redes eléctricas se presentan en la tabla A-1.
En cuanto a la máxima distorsión armónica ver tabla A-2.
En el caso de mediciones a clientes que generan armónicos
correspondientes a generadores estáticos con un número de pulsos (q) de seis
o más deben amplificarse por el factor 6q .
Los límites establecidos para las armónicas impares individuales de
corriente en sistemas o redes eléctricas se presentan en la tabla A-3.
Tabla A-1
Armónicas Impares No múltiplo de 3
Armónicas Impares múltiplo de 3 Armónicas Pares
Orden Armónica tensión (%) Orden Armónica tensión (%) Orden Armónica tensión (%) h ≤ 110 kV >110 kV h ≤ 110 kV >110 kV h ≤ 110 kV >110 kV
5 6 2 3 5 2 2 2 1,5 7 5 2 9 1,5 1 4 1 1 11 3,5 1,5 15 0,3 0,3 6 0,5 0,5 13 3 1,5 21 0,2 0,2 8 0,5 0,4 17 2 1 >21 0,2 0,2 10 0,5 0,4 19 1,5 1 - - - 12 0,2 0,2 23 1,5 0,7 - - - >12 0,2 0,2 25 1,5 0,7 - - - - - - >25 0,2+1,3*25/h 0,2+0,5*25/h - - - - - -
Tabla A-2 Tensión del sistema en KV THD de tensión en %
Menor o igual a 110 KV Menor a 8 % Mayor a 110 KV Menor a 3%
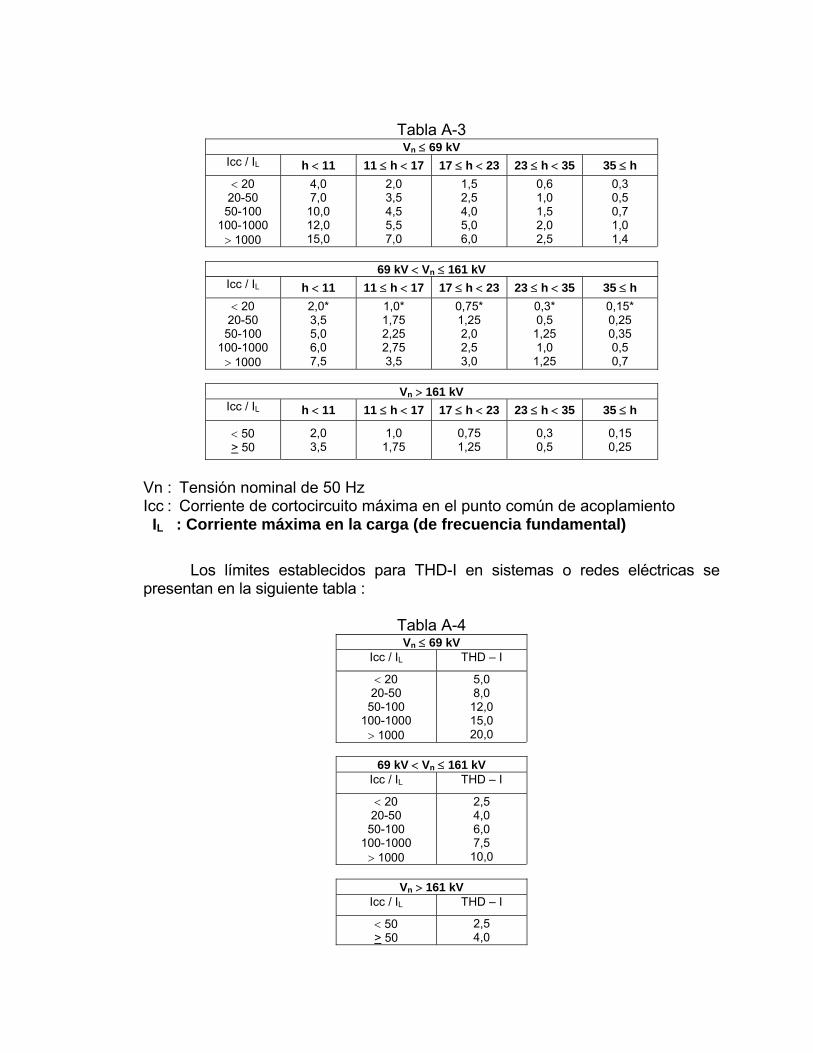
Tabla A-3 Vn ≤ 69 kV
Icc / IL h < 11 11 ≤ h < 17 17 ≤ h < 23 23 ≤ h < 35 35 ≤ h < 20
20-50 50-100
100-1000 > 1000
4,0 7,0
10,0 12,0 15,0
2,0 3,5 4,5 5,5 7,0
1,5 2,5 4,0 5,0 6,0
0,6 1,0 1,5 2,0 2,5
0,3 0,5 0,7 1,0 1,4
69 kV < Vn ≤ 161 kV
Icc / IL h < 11 11 ≤ h < 17 17 ≤ h < 23 23 ≤ h < 35 35 ≤ h < 20
20-50 50-100
100-1000 > 1000
2,0* 3,5 5,0 6,0 7,5
1,0* 1,75 2,25 2,75 3,5
0,75* 1,25 2,0 2,5 3,0
0,3* 0,5
1,25 1,0
1,25
0,15* 0,25 0,35 0,5 0,7
Vn > 161 kV
Icc / IL h < 11 11 ≤ h < 17 17 ≤ h < 23 23 ≤ h < 35 35 ≤ h
< 50 > 50
2,0 3,5
1,0 1,75
0,75 1,25
0,3 0,5
0,15 0,25
Vn : Tensión nominal de 50 Hz Icc : Corriente de cortocircuito máxima en el punto común de acoplamiento
IL : Corriente máxima en la carga (de frecuencia fundamental) Los límites establecidos para THD-I en sistemas o redes eléctricas se presentan en la siguiente tabla :
Tabla A-4 Vn ≤ 69 kV
Icc / IL THD – I
< 20 20-50
50-100 100-1000 > 1000
5,0 8,0
12,0 15,0 20,0
69 kV < Vn ≤ 161 kV
Icc / IL THD – I
< 20 20-50
50-100 100-1000 > 1000
2,5 4,0 6,0 7,5
10,0
Vn > 161 kV Icc / IL THD – I
< 50 > 50
2,5 4,0

APÉNDICE B
VALIDACIÓN DEL MODELO

APÉNDICE B
VALIDACIÓN DEL MODELO A continuación se muestra la comprobación realizada mediante el
programa PSpice de la validación del modelo ocupado, es decir, se muestra la
equivalencia entre el modelo de inductores acoplados mediante el transformador
y mediante el modelo T o aproximación del anterior.
Figura B-1 Modelo con transformador
Figura B-2 Modelo con circuito T

Figura B-3 Comportamiento utilizando modelo de transformador
Figura B-4 Comportamiento utilizando modelo T
FILTROS DE DOBLE SINTONÍA ASOCIADOS A UN SISTEMA
Se desarrollará a través del análisis de circuitos del siguiente sistema
donde Zs corresponde a la impedancia del sistema, Zc a la impedancia
equivalente de la carga

Figura B-5 Filtros acoplados representados por modelo T
[ ] [ ] [ ]CIA =⋅ ( B-1)
De Mathcad se tiene
A
R1 j w⋅ L1⋅+1
j w⋅ C1⋅+ Rs+ j w⋅ Ls⋅+
R1 j w⋅ L1 M−( )⋅+1
j w⋅ C1⋅+⎡⎢
⎣⎤⎥⎦
−
j− w⋅ M⋅
R1 j w⋅ L1 M−( )⋅+1
j w⋅ C1⋅+⎡⎢
⎣⎤⎥⎦
−
R1 R2+ j w⋅ L1 L2+ 2 M⋅−( )⋅+1
j w⋅ C1⋅+
1j w⋅ C2⋅
+
R2 j w⋅ L2 M−( )⋅+1
j w⋅ C2⋅+⎡⎢
⎣⎤⎥⎦
−
j− w⋅ M⋅
R2 j w⋅ L2 M−( )⋅+1
j w⋅ C2⋅+⎡⎢
⎣⎤⎥⎦
−
R2 j w⋅ L2⋅+1
j w⋅ C2⋅+ Rc+ j w⋅ Lc⋅+
⎡⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎦
:=
Luego el desarrollo de la obtención de la impedancia equivalente se
realizará por medio de la obtención de las corrientes por medio de Kramer.
Donde
AI
I1
1Δ
=
Donde,
:1IΔ
V
0
0
R1 j w⋅ L1 M−( )⋅+1
j w⋅ C1⋅+⎡⎢
⎣⎤⎥⎦
−
R1 R2+ j w⋅ L1 L2+ 2 M⋅−( )⋅+1
j w⋅ C1⋅+
1j w⋅ C2⋅
+
R2 j w⋅ L2 M−( )⋅+1
j w⋅ C2⋅+⎡⎢
⎣⎤⎥⎦
−
j− w⋅ M⋅
R2 j w⋅ L2 M−( )⋅+1
j w⋅ C2⋅+⎡⎢
⎣⎤⎥⎦
−
R2 j w⋅ L2⋅+1
j w⋅ C2⋅+ Rs+ j w⋅ Ls⋅+
⎡⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎦
C
V
0
0
⎛⎜⎜⎝
⎞⎟⎟⎠
:= I
I1
I2
I3
⎛⎜⎜⎝
⎞⎟⎟⎠
:= I2

Luego la impedancia equivalente del sistema estará determinada por
1I
VZeq = ( B-2)
A partir de la utilización de ecuación B-1 se realizaron los diversos ajustes
con la intención de eliminar todos los elementos que no influyen en la
sintonización de los filtros.
La impedancia de carga no influye en las frecuencias de los filtros por lo
cual se asume infinita. Por otra parte la impedancia de línea posee una
característica RL y su magnitud aumenta proporcional con la frecuencia debido
a su característica en ω . Esta al ser sumada en paralelo con los filtros no afecta
el comportamiento.
Por ultimo las resistencias propias de los filtros tampoco influyen debido
que son componentes continuas en la frecuencia por lo cual para efectos de este
análisis se asumirán iguales a cero.
Luego la expresión de Zeq es igualada a cero ya que al eliminar las
resistencias de los filtros, la impedancia de estos, para la frecuencia que están
proyectados es igual a cero.
Se puede mostrar la relación que existe entre la frecuencia natural de
corte y la variación del factor de acoplamiento k entre los inductores. Lo anterior
se realiza igualando la parte compleja de los elementos de los filtros diseñados
a cero.
Se tiene:
( )( )2·2·1···21·2·1··2··
2··1··2·2·1·1·1·1··2·2··12222
244442222
LCCjwLCCjwCjwCMCwjLCLCwjLCwjLCwj
+−−+−−−− (B-3)
De aquí se tiene las ecuaciones
(B-4)
W1
1
2− C1⋅ L1⋅ C2⋅ L2⋅ 2 C1⋅ M2⋅ C2⋅+( )
2⋅C1C2⋅ L1− L2⋅ M2
+( )⋅ C2L2⋅ C1L1⋅ C22 L22⋅ 2 C1⋅ L1⋅ C2⋅ L2⋅− C12 L12⋅+ 4 C1⋅ M2⋅ C2⋅+( )
1
2−+
⎡⎢⎢⎣
⎤⎥⎥⎦⋅
⎡⎢⎢⎣
⎤⎥⎥⎦
1
2
j⋅
⎡⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎦
2 π⋅ 50⋅( ):=

(B-5)
W2
1
2− C1⋅ L1⋅ C2⋅ L2⋅ 2 C1⋅ M2⋅ C2⋅+( )
2⋅C1 C2⋅ L1− L2⋅ M2
+( )⋅ C2 L2⋅ C1 L1⋅+ C22 L22⋅ 2 C1⋅ L1⋅ C2⋅ L2⋅− C12 L12⋅+ 4 C1⋅ M2⋅ C2⋅+( )
1
2+
⎡⎢⎢⎣
⎤⎥⎥⎦⋅
⎡⎢⎢⎣
⎤⎥⎥⎦
1
2
j⋅
⎡⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎦
2 π⋅ 50⋅:=

APÉNDICE C
COMPORTAMIENTO DE LOS FILTROS ANTE VARIACIÓN DE LOS PARÁMETROS

APÉNDICE C
COMPORTAMIENTO DE LOS FILTROS ANTE VARIACIÓN DE LOS PARÁMETROS
Una forma de solucionar el problema del aumento de la impedancia
equivalente para el acoplamiento positivo, es variando el valor de la resistencia
de filtro de mayor orden, como se puede apreciar en las figuras C-1 y C-2. Pero
la implementación de esta solución no es la ideal ya que significaría un aumento
innecesario de las variables a manipular.
Figura C-1 Filtros de doble sintonía con acoplamiento positivo
Figura C-2 Acercamiento Filtros de doble sintonía con acoplamiento positivo