Practica
2
0 0.5 1 1.5 0 0.2 0.4 0.6 0.8 1 Tim e (s) art-1 0 0.5 1 1.5 -0.05 -0.04 -0.03 -0.02 -0.01 0 0.01 Tim e (s) art-2 0 0.5 1 1.5 -0.3 -0.25 -0.2 -0.15 -0.1 -0.05 Tim e (s) art-3 0 0.5 1 1.5 0 0.5 1 1.5 2 2.5 3 Tim e (s) art-4 0 0.5 1 1.5 0 0.02 0.04 0.06 0.08 0.1 Tim e (s) art-5 0 0.5 1 1.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 Tim e (s) art-6 Practica: Generación de trayectorias (Yenny Ortega Puma , Paulo Zambrano Rodriguez) Para esta práctica se requiere que el toolbox tenga cargado los sistemas de robot en el cual se encuentra el demo del robot Puma 560 generamos las coordenadas articulares de acuerdo a q1 y q2 y le creamos un vector de tiempo y los ploteamos en la figura 1 para poder ver si existe algún movimiento y luego se genera de manera cartesiana donde se ve como se mueven en función del tiempo, en la figura 1 se muestra el movimiento articular de cada articulación y en la 2 se muestra el movimiento cartesiano, luego se realiza una simulación en la cual se comprueba que el movimiento del brazo con coordenadas articulares y cartesianas y ambas simulaciones terminan en el mismo punto, moviéndose solo una articulación que también se aprecia en la simulación 3D aparte en las graficas cartesianas podemos apreciar que los brazos llegan en a 0. 0 1 2 0 0.5 1 Tim e (s) art-1 0 1 2 -1 0 1 Tim e (s) art-2 0 1 2 -2 0 2 Tim e (s) art-3 0 1 2 -2 0 2 Tim e (s) art-4 0 1 2 -2 0 2 Tim e (s) art-5 0 1 2 -2 0 2 Tim e (s) art-6
-
Upload
yenny-ortega -
Category
Documents
-
view
215 -
download
1
description
es una practica realizada en el lab
Transcript of Practica

0 0.5 1 1.50
0.2
0.4
0.6
0.8
1
Time (s)
art-
1
0 0.5 1 1.5-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
Time (s)
art-
2
0 0.5 1 1.5-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
Time (s)
art-
3
0 0.5 1 1.50
0.5
1
1.5
2
2.5
3
Time (s)
art-
4
0 0.5 1 1.50
0.02
0.04
0.06
0.08
0.1
Time (s)
art-
5
0 0.5 1 1.5-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
Time (s)
art-
6
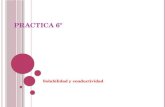
Practica: Generación de trayectorias (Yenny Ortega Puma , Paulo Zambrano Rodriguez)
Para esta práctica se requiere que el toolbox tenga cargado los sistemas de robot en el cual se encuentra el demo del robot Puma 560 generamos las coordenadas articulares de acuerdo a q1 y q2 y le creamos un vector de tiempo y los ploteamos en la figura 1 para poder ver si existe algún movimiento y luego se genera de manera cartesiana donde se ve como se mueven en función del tiempo, en la figura 1 se muestra el movimiento articular de cada articulación y en la 2 se muestra el movimiento cartesiano, luego se realiza una simulación en la cual se comprueba que el movimiento del brazo con coordenadas articulares y cartesianas y ambas simulaciones terminan en el mismo punto, moviéndose solo una articulación que también se aprecia en la simulación 3D aparte en las graficas cartesianas podemos apreciar que los brazos llegan en a 0.
0 1 20
0.5
1
Time (s)
art
-1
0 1 2-1
0
1
Time (s)
art
-2
0 1 2-2
0
2
Time (s)art
-3
0 1 2-2
0
2
Time (s)
art
-4
0 1 2-2
0
2
Time (s)
art
-5
0 1 2-2
0
2
Time (s)
art
-6

0 0.5 1 1.50
0.2
0.4
0.6
0.8
1
Time (s)
art-
1
0 0.5 1 1.5-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
Time (s)
art-
2
0 0.5 1 1.5-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
Time (s)
art-
3
0 0.5 1 1.50
0.5
1
1.5
2
2.5
3
Time (s)
art-
4
0 0.5 1 1.50
0.02
0.04
0.06
0.08
0.1
Time (s)
art-
5
0 0.5 1 1.5-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
Time (s)
art-
6-1
-0.50
0.51
-1
-0.5
0
0.5
1
-1
-0.5
0
0.5
1
XY
Z
otro
xy z