Reporte Exposicion Final
11
CONTROL DIGITAL 1 CENTRO NACIONAL DE INVESTIGACIÓN Y DESARROLLO TECNOLÓGICO CONTROL DIGITAL EXPOSICIÓN TEMA: “Diseño de Filtros Digitales” ALUMNO: TORRECILLA COPTO ERIK FRANCISCO CATEDRÁTICO: Dr. José Francisco Gómez Aguilar POSGRADO DE ELECTRÓNICA CUERNAVACA MOR., A 3 DE JUNIO DEL 2015.
-
Upload
erik-francisco-torrecilla-copto -
Category
Documents
-
view
235 -
download
3
description
Ctrl Digital
Transcript of Reporte Exposicion Final

CONTROL DIGITAL
1
CENTRO NACIONAL DE INVESTIGACIÓN Y DESARROLLO TECNOLÓGICO
CONTROL DIGITAL
EXPOSICIÓN
TEMA:
“Diseño de Filtros Digitales”
ALUMNO: TORRECILLA COPTO ERIK FRANCISCO
CATEDRÁTICO: Dr. José Francisco Gómez Aguilar
POSGRADO DE ELECTRÓNICA
CUERNAVACA MOR., A 3 DE JUNIO DEL 2015.

CONTROL DIGITAL
2
ÍNDICE INTRODUCCIÓN .................................................................................................................................. 3
DESARROLLO ....................................................................................................................................... 3
CLASIFICACIÓN DE LOS FILTROS ......................................................................................................... 8
ACTIVIDAD .......................................................................................................................................... 9
CONCLUSIÓN ..................................................................................................................................... 11
BIBLIOGRAFÍA ................................................................................................................................... 11
CONTROL DIGITAL
3
INTRODUCCIÓN
El término filtro es comúnmente usado para describir un dispositivo que discrimina,
acorde a algún atributo los objetos aplicados a su entrada (Proakis, Manolakis,
1996).
En general, el filtrado es el procesamiento sobre una señal en el dominio del tiempo
que ocasiona algún cambio en el contenido espectral de la señal original. Con el
objetivo de reducir o filtrar ciertos componentes espectrales no deseados. (Lyons,
2004).
Una aplicación de un sistema discreto LTI es dejar pasar ciertos componentes de
frecuencia de una secuencia de entrada sin ninguna distorsión (si es posible) y
bloquear otros componentes de frecuencia. Esos sistemas se llaman filtros. (Mitra,
2005)
DESARROLLO
En el campo del procesamiento digital de señales, un filtro digital es un algoritmo de cálculo
que convierte una secuencia de números de entrada en una secuencia de salida, de modo
que las características de la señal se cambien de una manera predeterminada. Esto es, un
filtro digital procesa una señal digital pues permite el paso de algunas componentes de
frecuencia deseadas de la señal digital de entrada y rechaza algunas otras no deseadas. En
términos generales, un controlador digital es una forma de filtro digital.
Se observa que hay diferencias importantes entre el procesamiento digital de señales
utilizado en comunicaciones y el que se utiliza en control. En control digital el
procesamiento de señales se debe hacer en tiempo real. En comunicaciones, el
procesamiento de señales no se necesita hacer en tiempo real, y por lo tanto no se puede
tolerar retardos en el procesamiento para mejorar la exactitud.
Los propósitos generales de los filtros digitales son:
Separación de señales que han sido combinadas.
Restauración de señales que han sido distorsionadas de alguna manera. (Smith,
1999)
1.- La separación de señales es necesaria cuando una señal ha sido contaminada con
interferencia, ruido.Un ejemplo se puede encontrar, cuando se quiere examinar el latido
del corazón de un bebe cuando se encuentra aún en el útero de su madre. Se hace un
dispositivo que discrimine entre el latido del corazón de la madre con la del bebe.
CONTROL DIGITAL
4
2.- La restauración de una señal se usa cuando la señal ha sido distorsionada de alguna
manera. Un ejemplo de ello, es cuando se trata de restaurar una señal de audio,
contaminada con el ruido que se produce por la mala calidad de la grabadora, o por ejemplo
en una imagen que ha sido contaminada con ruido granular, o por lentes mal enfocados.
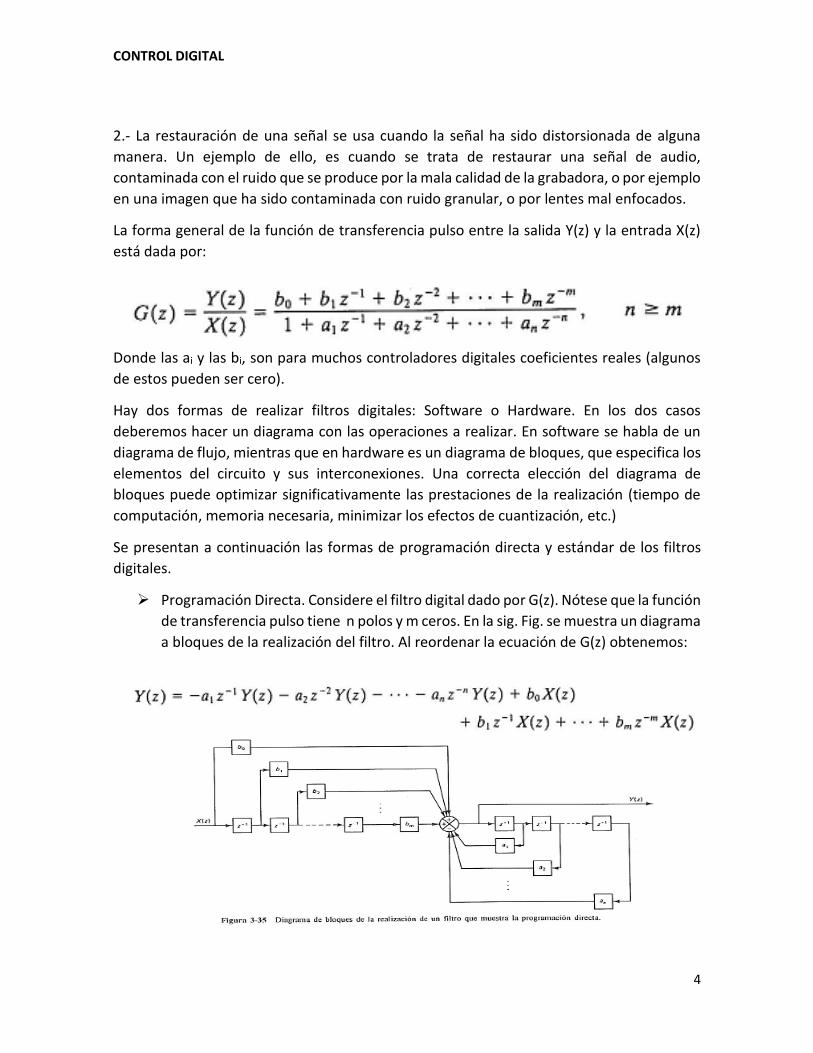
La forma general de la función de transferencia pulso entre la salida Y(z) y la entrada X(z)
está dada por:
Donde las ai y las bi, son para muchos controladores digitales coeficientes reales (algunos
de estos pueden ser cero).
Hay dos formas de realizar filtros digitales: Software o Hardware. En los dos casos
deberemos hacer un diagrama con las operaciones a realizar. En software se habla de un
diagrama de flujo, mientras que en hardware es un diagrama de bloques, que especifica los
elementos del circuito y sus interconexiones. Una correcta elección del diagrama de
bloques puede optimizar significativamente las prestaciones de la realización (tiempo de
computación, memoria necesaria, minimizar los efectos de cuantización, etc.)
Se presentan a continuación las formas de programación directa y estándar de los filtros
digitales.
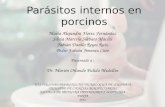
Programación Directa. Considere el filtro digital dado por G(z). Nótese que la función
de transferencia pulso tiene n polos y m ceros. En la sig. Fig. se muestra un diagrama
a bloques de la realización del filtro. Al reordenar la ecuación de G(z) obtenemos:
CONTROL DIGITAL
5
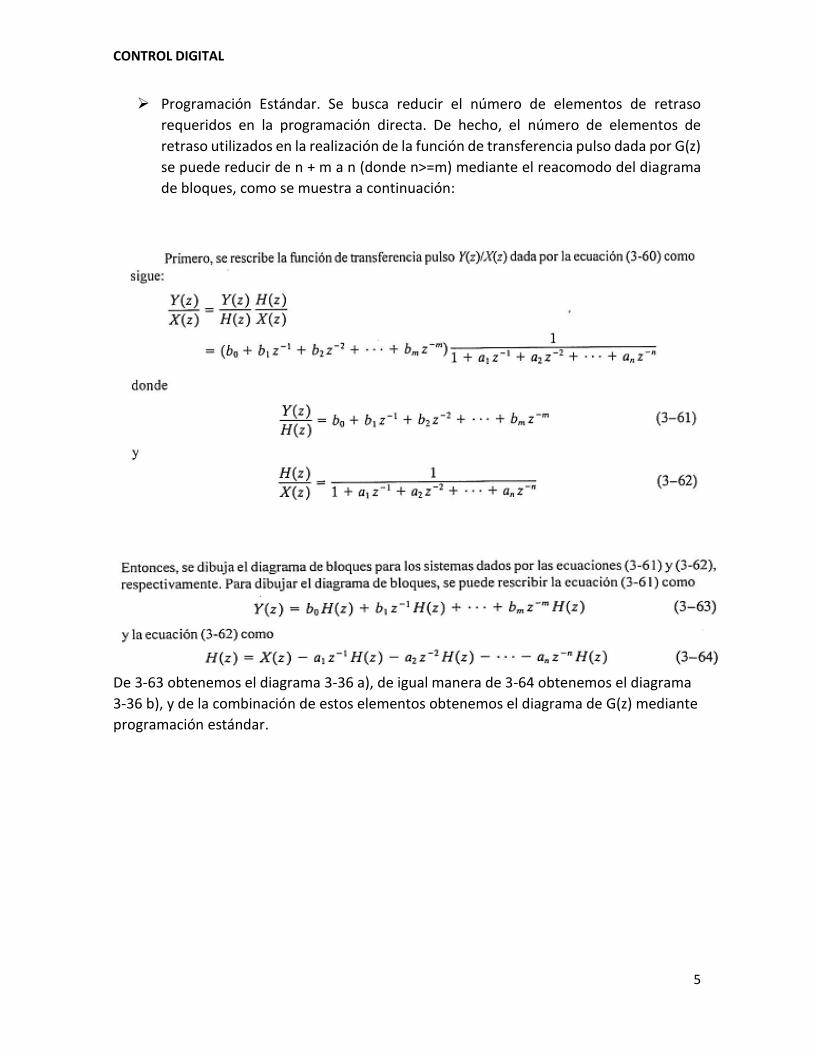
Programación Estándar. Se busca reducir el número de elementos de retraso
requeridos en la programación directa. De hecho, el número de elementos de
retraso utilizados en la realización de la función de transferencia pulso dada por G(z)
se puede reducir de n + m a n (donde n>=m) mediante el reacomodo del diagrama
de bloques, como se muestra a continuación:
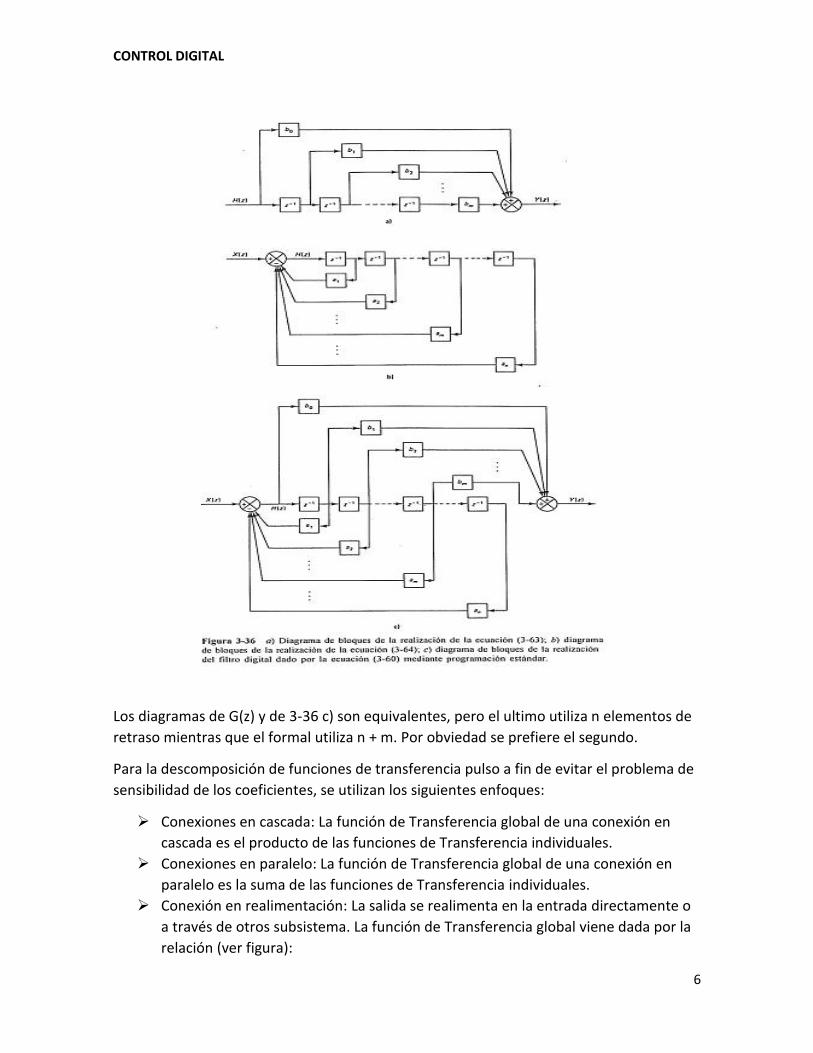
De 3-63 obtenemos el diagrama 3-36 a), de igual manera de 3-64 obtenemos el diagrama
3-36 b), y de la combinación de estos elementos obtenemos el diagrama de G(z) mediante
programación estándar.
CONTROL DIGITAL
6
Los diagramas de G(z) y de 3-36 c) son equivalentes, pero el ultimo utiliza n elementos de
retraso mientras que el formal utiliza n + m. Por obviedad se prefiere el segundo.
Para la descomposición de funciones de transferencia pulso a fin de evitar el problema de
sensibilidad de los coeficientes, se utilizan los siguientes enfoques:
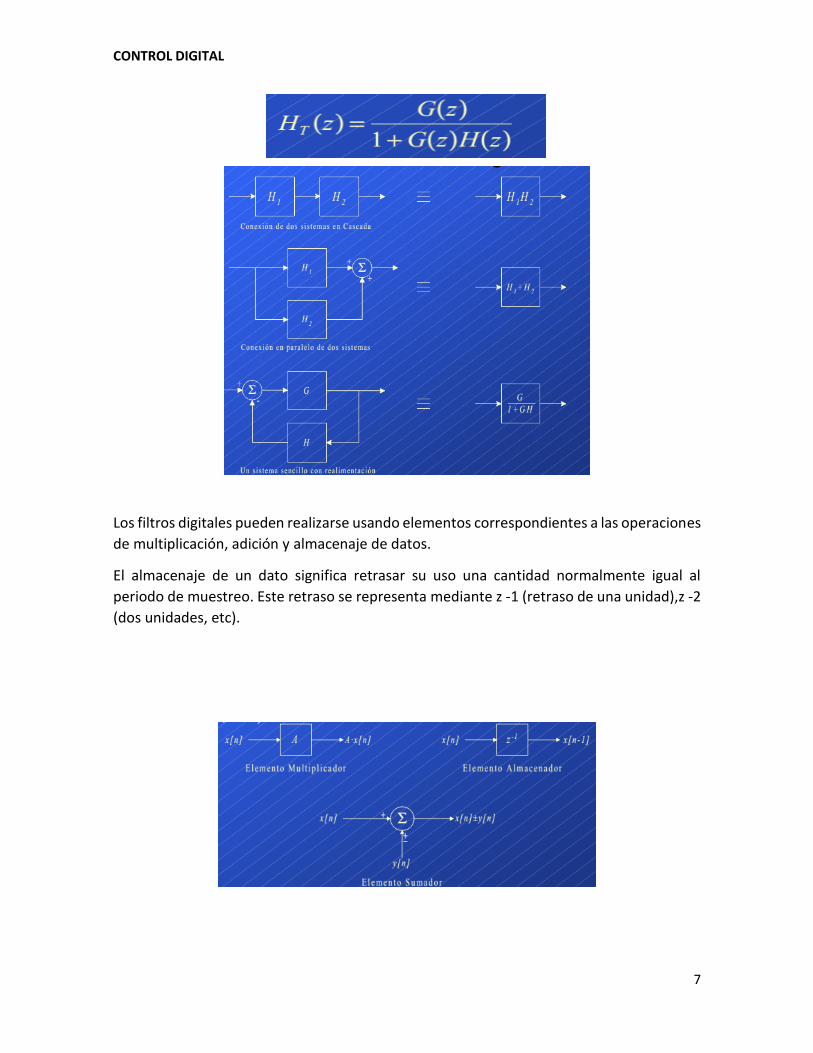
Conexiones en cascada: La función de Transferencia global de una conexión en
cascada es el producto de las funciones de Transferencia individuales.
Conexiones en paralelo: La función de Transferencia global de una conexión en
paralelo es la suma de las funciones de Transferencia individuales.
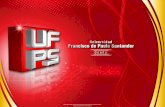
Conexión en realimentación: La salida se realimenta en la entrada directamente o
a través de otros subsistema. La función de Transferencia global viene dada por la
relación (ver figura):
CONTROL DIGITAL
7
Los filtros digitales pueden realizarse usando elementos correspondientes a las operaciones
de multiplicación, adición y almacenaje de datos.
El almacenaje de un dato significa retrasar su uso una cantidad normalmente igual al
periodo de muestreo. Este retraso se representa mediante z -1 (retraso de una unidad),z -2
(dos unidades, etc).

CONTROL DIGITAL
8
CLASIFICACIÓN DE LOS FILTROS Según su respuesta impulsiva se tienen 2 tipos:
1. Filtro IIR. Considere un filtro digital definido mediante la siguiente función de
pertenencia pulso:
En este filtro donde se supone que no todas las ai son cero, tiene un número infinito de
muestras distintas de cero. Este tipo de filtro digital también se le conoce como filtro de
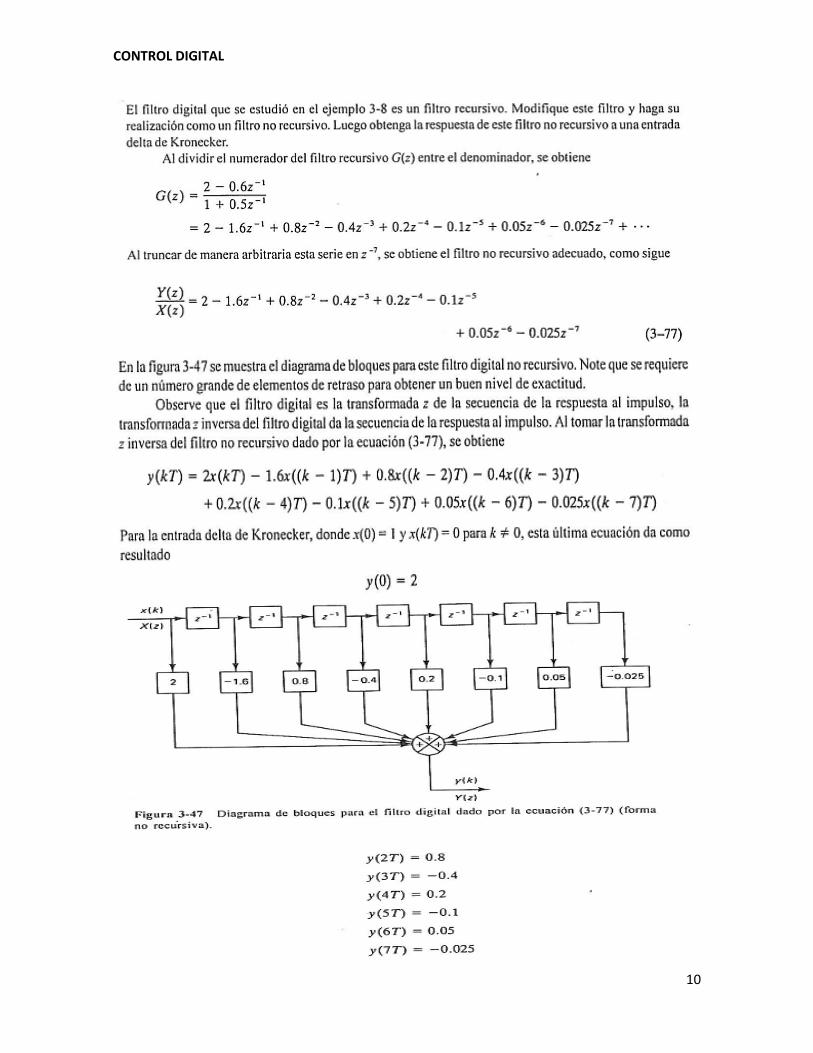
respuesta al impulso infinita o filtro recursivo.
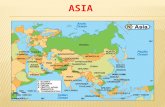
2. Filtro FIR. Ahora considere un filtro digital donde los coeficientes ai son todos 0,
o donde;
La respuesta al impulso del filtro definido en 3-73 está limitado a un número finito de
muestras definidas sobre un rango finito de intervalos de tiempo; esto es la respuesta es
una secuencia finita. Este tipo de filtro se denomina filtro de respuesta al impulso finita,
también llamado filtro no recursivo, o filtro de promedio móvil.
Diagramas de bloque filtros IIR (izq.) Y FIR (der.)
CONTROL DIGITAL
9
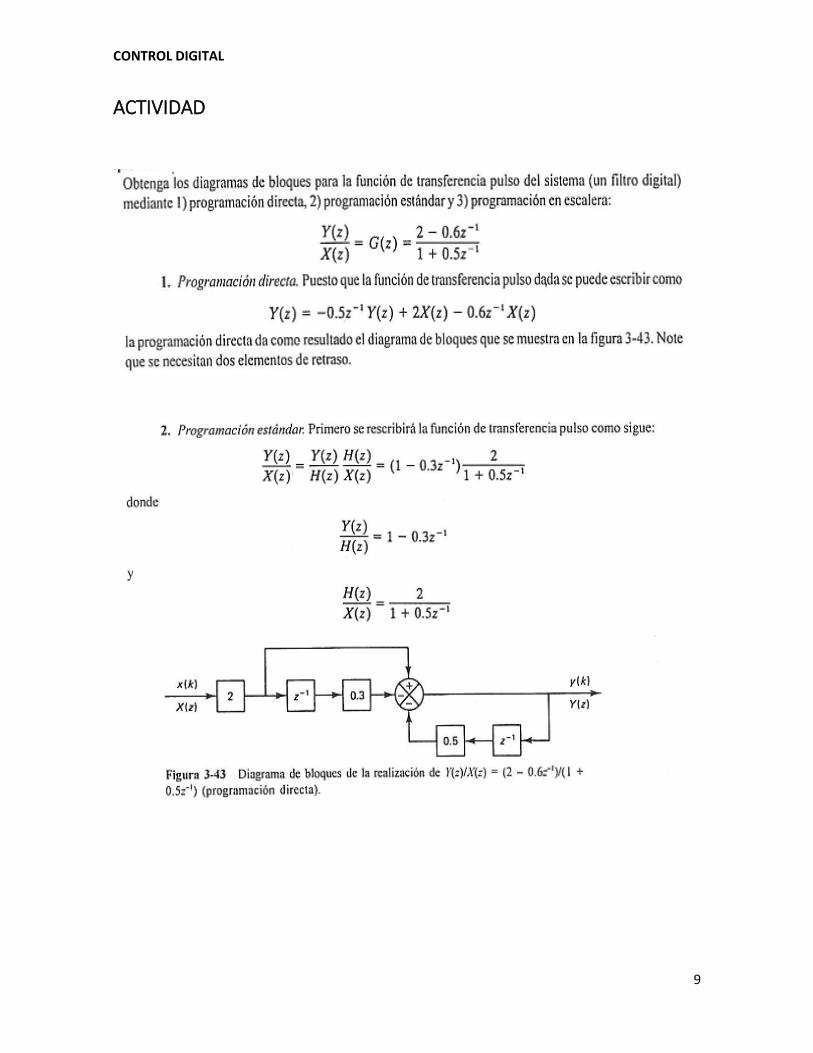
ACTIVIDAD
CONTROL DIGITAL
10

CONTROL DIGITAL
11
CONCLUSIÓN Con la realización de esta exposición se pudo comprender que es un filtro digital, así como
la relación que tiene este con un controlador digital, y además se puso en evidencia algunos
usos y formas de programación y algunas técnicas de diseño para filtros digitales, IIR y FIR
por mencionar algunos.
Por otra parte también se observó la relación temática entre los conocimientos previos
adquiridos durante el curso, por ejemplo función de transferencia pulso, transformada z, z
inversa y ecuaciones en diferencias, por mencionar algunos temas. Para la comprensión y
realización de Filtros Digitales.
BIBLIOGRAFÍA
[1] Katsuhiko Ogata, «Sistemas de Control en Tiempo Discreto» , Edit. PEARSON