Resistencia de Materiales - Luis Ortiz Berrocal
348
RESISTENCIA DE MATERIALES LUIS ORTIZ BERROCAL Catedrático de Elasticidad y Resistencia de Materiales Escuela Técnica Superior de Ingenieros Industriales Universidad Politécnica de Madrid McGravv-Hill MADRIO • BUENOS AIRES - CARACAS • GUATEMALA • LISBOA • MEXICO • NUEVA YORK PANAMA • SAN JUAN • SANTAFE DE BOGOTA ■ SANTIAGO • SAO PAULO AUCKLAND • HAMBURGO • LONDRES • MILAN • MONTREAL . NUEVA DELHI PARIS • SAN FRANCISCO • SIDNEY • SINGAPUR • ST. LOUIS . TOKIO • TORONTC
description
Resistencia de Materiales - Luis Ortiz Berrocal
Transcript of Resistencia de Materiales - Luis Ortiz Berrocal

RESISTENCIADE
MATERIALES
LUIS ORTIZ BERROCAL
C a ted rá t ico de E la s tic id ad y R es is ten c ia de M ate r ia le s E scuela T écn ica Su p er io r de In gen iero s In d ustria les
U n iv e rs id ad P o lité cn ic a de M ad rid
McGravv-HillM AD RIO • B U EN O S A IR ES - C A R A C A S • G U A T EM A LA • LISBO A • M EXICO • N U EVA YO RK
PAN AM A • SAN JU A N • SA N TA FE DE B O G O TA ■ SANTIAGO • SAO PAULOAUCKLAND • HAMBURGO • LONDRES • MILAN • MONTREAL . NUEVA DELHI
PARIS • SAN FRANCISCO • SIDNEY • SINGAPUR • ST. LOUIS . TOKIO • TORONTC
Presentación
El c o n t e n i d o d e e s t a o b r a , a l i g u a l q u e n u e s t r a «E la s t i c idad» , e s t á e n c u a d r a d o en e l d e un c u r s o d e «E la s t i c i d a d y R e s i s t e n c i a d e M a t e r i a l e s » pa ra a lu m n o s d e e s t a d i s c i p l i n a en E scu e la s T é cn i c a s . Aunque é s t a s é p u e d e c o n s i d e r a r c o m o una c o n t in u a c i ó n d e a q u é l l a e n e l d e sa r r o l l o d e la a s i gn a tu ra q u é im p a r t im o s e n la E scu e la T é c n i c a S u p e r i o r d e I n g e n i e r o s In du s t r ia l e s d e M adr id , p o r e n t e n d e r qu e e l e s t u d i o d e la s b a s e s d e la t e o r ía d e la E la s t i c i d a d d e b e p r e c e d e r a l d e la R e s i s t e n c i a d e M a te r ia l e s , s e r ep i t en aqu i la s c o n c l u s i o n e s d e a l g u n o s e p í g r a f e s c o n o b j e t o d e q u e p u e d a s e r u ti l izada c o m o t ex to d e « R e s i s t e n c i a d e M a t e r i a l e s » s in h a b e r e s t u d i a d o p r e v i a m en t e la E las t i c idad . En ta l c a s o hab r ía qu e adm it i r e s t a s c o n c l u s i o n e s a m o d o d e a x iom a s y t e n e r s i e m p r e p r e s e n t e qu e lo s in nu m e ra b l e s e s t u d i o s d e s a r r o l l a d o s a p l i c a n d o l o s m é t o d o s d e la t e o r ía d e la E la s t i c id ad s o n l o s q u e a va lan la v a l id ez d e la s h ip ó t e s i s s im p l i f i c a t i v a s q u e s e h a c e n en R e s i s t e n c i a d e M a t e r ia l e s c o m o son , p o r e j e m p l o , la c o n s e r v a c i ó n d e la s s e c c i o n e s p lana s , la p e q u en e z d e d e f o rm a c i o n e s , e t c .
Sin t e m o r a e q u i v o c a r n o s p o d r í a m o s a f i rm a r q u e s in la e x i s t e n c ia d e la t e o r í a d e la E la s t i c id a d la R e s i s t e n c i a d e M a t e r i a l e s s e r e d u c i r í a a una s e r i e d e « r e c e t a s » p a r a r e s o l v e r la i n n u m e ra b l e c a s u í s t i c a d e l o s c u e r p o s e l á s t i c o s c o m o e l em en t o s r e s i s t e n t e s , q u e s e p r e s e n t a n e n la p r á c t i c a .
El d e s a r r o l l o d e l c u r s o d e R e s i s t e n c i a d e M a t e r i a l e s p r e s u p o n e q u e e l a lu m n o p o s e e l o s r e c u r s o s p r o p i o s d e l c á l c u l o in f in i t e s im a l , c á l c u l o in t e g ra l , g e o m e t r í a d e m a sa s e n l o r e f e r e n t e a s a b e r c a l c u l a r c e n t r o s d e g r a v e d a d y m o m e n t o s d e in e r c ia d e f i g u r a s p la n a s , y , f u n d a m e n ta lm en t e , d e la Está ti ca , s in c u y o c o n o c im i e n t o e s im p en s a b l e p o d e r o b t e n e r un s u f i c i e n t e a p r o v e c h a m i e n t o d e l c u r s o .
El c o n t e n i d o d e la o b r a s e m u e v e en e l c a m p o d e la E la s t i c id ad l in eal, u t i l izando e l p r i s m a m e c á n i c o c o m o m o d e l o t e ó r i c o d e s ó l i d o e l á s t i c o .
En e l p r im e r c a p í t u l o s e h a c e una in t r o d u c c i ó n a l e s t u d i o d e la R e s i s t e n c i a d e M a t e r i a l e s m a r c a n d o s u s o b j e t i v o s y e s t a b l e c i e n d o l o s p r i n c i p i o s g e n e r a l e s , q u e c o m p l e t a n la s c o n c l u s i o n e s d e la t e o r í a d e la E las t i c idad , p a r a p o d e r d e s a r r o l l a r la d i s c ip l in a s i g u i e n d o e l m é t o d o l ó g i c o - d e d u c t i v o .
En e l r e s t o d e l o s c a p í t u l o s s e h a c e un aná l i s i s s i s t em á t i c o d e la s a c c i o n e s q u e s e d e r i v a n d e una s o l i c i t a c i ó n ex t e rn a a c t u a n d o s o b r e un p r i s m a m e c á n i c o . Y e s t e e s t u d i o s e h a c e c o n s i d e r a n d o l o s e f e c t o s p r o d u c i d o s p o r c a d a una d e la s p o s i b l e s m a g n i t u d e s c a u s a n t e s , a c t u a n d o c a d a una d e e l l a s i n d e p e n d i e n t e m en t e d e la s o t ra s . Así, l o s e s f u e r z o s n o r m a l y c o r t a n t e q u e s o m e t e n a l p r i s m a a t r a c c i ó n o c o m p r e s i ó n y a c o r ta d u ra , r e s p e c t i v a m e n t e , s o n t r a ta d o s e n l o s C ap í tu l o s 2 y 3.
A unque e s t e o r d e n n o p e r m i t e m á s q u e r e f e r i r s e a la t e o r ía e l em e n t a l d e la c o r t a d u r a , q u e d i s ta m u c h o d e a ju s ta r s e a l m o d e l o r ea l , p r e s e n t a v en ta ja s en e l p l a n o d i d á c t i c o p a r a e x p o n e r l o s m é t o d o s d e c á l c u l o d e u n i o n e s r em a ch a d a s , a t o rn i l la d a s y s o ld a da s , c u y o f u n d a m e n t o s e e n c u e n t r a e n e l la .

vi i i PRE S ENTAC I ON
L os c i n c o c a p í t u l o s s i g u i e n t e s s e d e d i c a n a i e s t u d i o d e la f l ex i ó n , e n s u s m ú l t ip l e s a s p e c t o s . En l o s d o s p r im e r o s d e é s t o s s e e x p o n e la t e o r ía g e n e r a l h a c i e n d o en u n o d e e l l o s un aná l i s i s d e l e s t a d o l e n s i o n a l q u e s e c r e a en e l p r i sm a m e c á n i c o c u a n d o s e l e s o m e t e a f l e x i ó n p u ra o f l e x i ó n s im p l e , r en e l o t r o , e l e s t u d i o d e la s d e f o r m a c i o n e s p r o d u c i d a s p o r la m ism a cau sa .
La f l e x i ó n s e g ú n d o s d i r e c c i o n e s , e s t o e s , l o s c a s o s d e f l e x i ó n d e s v ia d a , a s i c o m o c u a n d o é s t a va a c o m p a ñ a d a d e c o m p r e s i ó n o t r a c c i ó n ( f l e x i ó n c o m p u e s t a ) , s o n t ra ta d a s en e l Cap ítu lo 6 .
S e d e d i c a o t r o c a p i tu lo a e x p o n e r un m é t o d o g e n e r a l p a r a e ! c á l c u l o d e s i s t em a s h ip er - e s t á t i c o s : e l m é t o d o d e la s f u e r z a s , a c o n s e j a b l e p a r a r e s o l v e r p r o b l em a s d e p e q u eñ a d i j i cu l - ta d , y a q u e p r o b l e m a s m á s c o m p l e j o s , c o m o p u e d e n s e r l o s c á l c u l o s d e la s e s t r u c t u r a s d e e d i f i c i o s , c a e n d e n t r o d e l c a m p o d e o t r a d i s c ip l ina : la « t e o r í a d e la s e s t r u c tu ra s » .
El im p o r t a n t e t em a d e l p a n d e o e s t r a ta d o en e l C ap í tu lo 8 , en e l qu e h a y qu e a b an d on a r una d e la s h i p ó t e s i s f u n d a m e n t a l e s a dm i t id a s e n R e s i s t e n c i a d e M a t e r ia l e s c u a l e s la d e p e q u en e z d e la s d e f o rm a c i o n e s .
Con la e x p o s i c i ó n d e la t e o r í a d e la t o r s i ó n en e l Cap i tu lo 9 s e c o m p l e t a e l e s t u d i o in d iv idua l izado d e c a d a una d e la s f o r m a s d e t r aba ja r d e l p r i sm a m e c á n i c o . S e e x p o n e ¡a t e o r i a d e la t o r s i ó n d e Sa in t -V enan t d e s d e e l p u n t o d e v i s ta d e la t e o r ia d e la Elast ic idad .
F in a lm en te , un ú l t im o c a p i t u l o s e d e d i c a a l e s t u d i o d e l o s e s t a d o s l e n s i o n a l y d e d e f o r m a c i o n e s c u a n d o la s o l i c i t a c i ó n q u e a c t ú a s o b r e e l p r i sm a m e c á n i c o e s a rb it ra r ia . Era n e c e s a r i o a c a b a r la o b r a c o n un t em a q u e n o s h i c i e r a v e r la g e n e r a l i d a d d e a p l i c a c i ó n d e la s t e o r ía s d e la R e s i s t e n c i a d e M a t e r ia l e s a t o d o t ipo d e p i eza s . El e s t u d i o ind iv idua l izado d e l o s e f e c t o s h e c h o a n t e r i o r m en t e v la c o n s i d e r a c i ó n r e i t e r a d a d e p i e z a s r e c t a s p o d r ia l l e v a r e r r ó n e a m e n t e a la c r e e n c i a q u e lo e x p u e s t o s ó l o e s a p l i c a b l e a e s t e t ip o d e p iezas .
Sin em b a r g o , h a y q u e h a c e r la o b s e r v a c i ó n q u e t o d o l o aqu i e x p u e s t o n o e s s in o una m e r a in t r o d u c c i ó n a lo q u e h o y s e c o n s i d e r a c o m o e l c u e r p o d e d o c t r in a p r o p i o d e la R e s i s t e n c i a d e M a te r ia l e s , c u y a e v o lu c i ó n h i s t ó r i c a e n l o s ú l t im o s c i n c u e n t a a ñ o s ha s id o v e r d a d e r a m en t e n o ta b l e .
A c tu a lm en t e en t ra n d e n t r o d e l c a m p o d e n u e s t r a d i s c ip l ina t em a s t a l e s c o m o l o s r e f e r e n t e s a la f a t i g a y la t e o r ía d e la P la s t i c id ad . S e han in c o r p o r a d o o t r o s , c o m o p u e d e s e r la t e o r í a d e p l a c a s y e n v o l v e n t e s , q u e t r a d i c i o n a lm en t e e r a n t r a ta d o s en E las t i c idad . Y e s d e e s p e r a r e n un f u t u r o m u y p r ó x im o la i n c o r p o r a c i ó n a la R e s i s t e n c ia d e M a t e r i a l e s d e a l g u n o s t em a s d e la t e o r i a n o l in ea l d e l o s s i s t em a s e lá s t i c o s .
P e r o é s t o s y a l g u n o s o t r o s t em a s p u e d e n s e r e l o b j e t o d e o t r a o b r a s i e l f a v o r d e l o s l e c t o r e s a é s t a a s í lo a c o n s e j a r a .
Pa ra un e s t u d ia n t e d e in g en i e r í a , c u a lq u i e ra q u e s e a su e s p e c ia l id a d , n o b a s ta la s im p l e c o m p r e n s i ó n d e la t eo r ía , y a q u e d e n ada l e va le s i n o s a b e ap l i ca r la . P o r e l l o , a l f i n a l d e c a d a c a p i t u l o s e h an r e s u e l t o q u in c e p r o b l em a s , n ú m e r o m á s q u e raz onab l e s i s e t i e n e e n cu en ta q u e e s é s t e un l ib r o en e l q u e s e e x p o n e n la s t e o r í a s f u n d a m en t a l e s d e la R e s i s t e n c i a d e M a t e r i a l e s y n o un l ib r o d e p r o b l em a s . S e r e c o m i e n d a q u e e l l e c t o r p r o c e d a a la r e s o lu c i ó n d e e l l o s s in m i r a r la s o lu c i ó n d a d a en e l t ex to , y s o l a m e n t e d e s p u é s d e h a b e r l l e g a d o a su s r e s u l t a d o s c o m p r u e b e s i s o n é s t o s c o r r e c t o s y c o n t r a s t e la b o n d a d d e l m é t o d o q u e h a y a p o d i d o s e g u i r p a r a r e s o l v e r l o s .
En t o d a la o b r a s e h a p r o c u r a d o uti l izar e l S i s t em a I n t e r n a c i o n a l d e Unidades , a unqu e e n R e s i s t e n c i a d e M a t e r i a l e s n o s e r í a a c o n s e j a b l e a c t u a lm en t e d e ja r d e c o n s i d e r a r u n idad e s d e r i v a d a s c o m o s o n la s q u e e x p r e s a n la s t e n s i o n e s e n k n l cm 2 p o r la u t i l iza c ión e n t e n d id a qu e s e h a c e d e e s t a s u n id ad e s e n la s ta b la s d e l o s c a t á l o g o s t é c n i c o s .
PRE SEN TA C IO N i\
S e ha o p t a d o p o r u sar la n o t a c i ó n kp pa ra d e n o t a r la u n id a d d e f u e r z a , k i l o g r a m o - fu e r z a o k i lo p on d io , y d i s t in gu i r l o a s í d e k i l o g r am o -m a sa , t r a ta n d o d e e v i ta r la p o s i b l e c o n fu s i ó n en qu e p u e d e n c a e r l o s q u e n o m a n e ja n c o n la d eb id a s o l t u r a l o s s i s t em a s d e u n idad e s .
D eb o d e a g r a d e c e r a l o s p r o f e s o r e s A. R os v V. Z ub iza r r e ta , c o l a b o r a d o r e s e n las ta r ea s d e l d e p a r t a m en t o , p o r la s a t in a da s o b s e r v a c i o n e s q u e han h e c h o a la l e c t u r a d e l o s o r i g in a l e s .
No q u i e r o a c a b a r e s t a b r e v e p r e s e n t a c i ó n sin p e d i r b e n e v o l e n c i a a l l e c t o r p o r l o s p o s i b l e s f a l l o s y e r r a t a s q u e p u d i e r a t e n e r e s t a m o d e s t a ob ra , q u e e s t o v s e g u r o t en d rá , a p e s a r d e l e s f u e r z o h e c h o p a r a e v i ta r la s .
Y, f i n a lm e n t e , d e s e a r qu e e s t a o b r a s e a d e in t e r é s a l o s qu e d e c i d i e r o n h a c e r d e la i n g e n i e r ía su p r o f e s i ó n .
M adr id , m a y o d e 1990Luis ORTIZ BERROCAL

Contenido
P r e s e n t a c i ó n .................................................................................................................................................................... vii
N o ta c io n e s .......................................................................................................................................................................... x v
C a p ítu lo 1. I n tro d u c c ió n a l e s tu d io de la re s is te n c ia de m a te r ia le s ...................................... 1
1.1. Objeto y finalidad d é la Resistencia de M ateriales ..................................................... 11.2. Concepto de sólido e lá s t ic o ............................................................................................ 31.3. Modelo teórico de sólido utilizado en Resistencia de M ateriales. Prisma me
cánico 51.4. Equilibrio estático y equilibrio e lá s t ic o .................................................................... 81.5. Estado tensional de un prisma mecánico ......................................................................... 91.6. Estado de deformación de un prisma m ecán ico ................................................... 131.7. Principios generales de la Resistencia de M a te r ia le s ......................................... 161.8. Relaciones entre los estados tensional y de deformaciones ..................................... 201.9. Esfuerzos norm al y cortante y momentos de flexión y de torsión: sus rela
ciones con las componentes de la m atriz de ten s io n es 25• 1.10. T ipos de solicitaciones exteriores sobre un prisma mecánico ................................ 28
1.11. Reacciones de las ligaduras. Tipos de apoyos ............................................................... 291.12. Sistem as isostáticos e h iperestá tico s........................................................................... 311.13. Noción de coeficiente de seguridad. Tensión admisible ............................................ 321.14. C riterios de resistencia. Tensión equivalente ................................................................. 371.15. Teoria del potencial interno. Teoremas energético s........................................... 38Ejercicios ....................................................................................................................................................... 41
C a p ítu lo 2 . T ra c c ió n y c o m p r e s ió n ............................................................................................................... 6 9
2.1. Esfuerzo norm al y estado tensional de un prism a mecánico sometido a tracción o compresión m o n o ax ia l 69
2.2. Estado de deformaciones por tracción o compresión monoaxial............................ 762.3. Tensiones y deformaciones producidas en un prisma recto por su propio
peso. Concepto de sólido de igual re s is ten c ia ....................................................... 77
x ¡ ¡ C ONTENI DO
2.4. Expresión del potencial interno de un prism a mecánico sometido a traccióno compresión m onoaxial ................................................................................................................. 80
2.5. Tracción o compresión m onoaxial h iperestática ............................................................... 812.6. Tracción o compresión m onoaxial producida por variaciones térmicas o dctec-
tos de m o n ta je ........................................................................................................................ 902.7. Equilibrio de hilos y c a b le s ......................................................................................................... 942.8. Arcos fu n icu la res ............................................................................................................ * .............. 992.9. Tracción o compresión biaxial. Envolventes de revolución de pequeño es
pesor ....................................................................................................................................................... 1002.10. Tracción o compresión t r ia x ia l .................................................................................................... 107Ejercicios ............................................................................................................................................................ 110
Capítulo 3. Cortadura ........................................................................................................................... 139
3.1. Cortadura pura. T eoría elem ental de la cortadura ....................................................... 1393.2. Tensión cortante pura .................................................................................................................. 1413.3. Deformaciones producidas por co rtadura p u r a .............................................................. 1423.4. Cálculo de uniones rem achadas y a to rn illadas .............................................................. 1453.5. Cálculo de uniones s o ld a d a s ...................................................................................................... 154Ejercicios ............................................................................................................................................................ 160
Capitulo 4. Teoría general de la flexión. Análisis de ten sio n es . 180
4.1. Introducción ....................................................................................................................................... 1804.2. Flexión pura. Ley de N a v ie r ....................................................................................................... 1824.3. Flexión simpie. Convenio de signos para esfuerzos cortantes y momentos Héc
tores ....................................................................................................................................................... 1884.4. Determinación de momentos ( le c to re s ................................................................................... 1904.5. Determinación de esfuerzos cortantes .................................................................................. 1964.6. Relaciones entre el esfuerzo cortante, el momento (lector y la c a r g a .................. 2004.7. Tensiones producidas en la flexión sim ple por el esfuerzo cortante. Teorema
de C o lig n o n ........................................................................................................................................ 2024.8. Tensiones principales en flexión s im p le ................................................................................ 2104.9. Vigas a r m a d a s .................................................................................................................................... 2134.10. Vigas compuestas ............................................................................................................................. 2204.11. Estudio de las tensiones cortantes en el caso de perfiles delgados sometidos
a flexión s im p le ...................... FJ. ..................................................................................................... 2254.12. Secciones de perfiles delgados con eje principal vertical que no lo es de sime
tría. Centro de esfuerzos c o r ta n te s ......................................................................................... 228Ejercicios ............................................................................................................................................................ 234
Capítulo 5. Teoría general de la flexión. Análisis de deformaciones . 262
5.1. Introducción ....................................................................................................................................... 2625.2. Método de la doble integración para ia determ inación de la deformación de
vigas rectas som etidas a flexión simple. Ecuación de la línea elástica ............... 2635.3. Ecuación universal de la deform ada de una v iga de rigidez constante .............. 2695.4. Teoremas de M o h r ........................................................................................................................... 2745.5. Teoremas de la viga conjugada ............................................................................................... 2775.6. Expresión del potencia: interno de un prism a mecánico sometido a flexión
simple. Concepto de sección r e d u c id a .................................................................................. 280
5.7. Deformaciones por esfuerzos c o r ta n te s ...........................-.................................................. 2845.8. M étodo de M ohr para el cálculo de d efo rm aciones................................................... 2875.9. M étodo de m ultiplicación de los g rá f ic o s ......................................................................... 2905.10. Cálculo de desplazamientos en vigas sometidas a flexión simple mediante uso
de series de Fourier ..................................................................................................................... 29!5.11. Deformaciones de una viga por efecto de la tem peratura ....................................... 2955.12. Flexión simple de vigas producida por impacto ........................................................... 2975.13. Vigas de sección variable sometidas a flexión simple ................................................ 2985.14. Resortes de flexión ....................................................................................................................... 305Ejercicios ......................................................... 308
Capítulo 6 . Flexión desviada y flexión compuesta ................................................................... 338
6.1. Introducción .................. 3386.2. Flexión desviada en el-'dominio elástico. Análisis de ten s io n es ............................. 3396.3. Expresión del potencial interno de un prisma mecánico sometido a flexión
desviada. Análisis de deform aciones...................................................................................... 3446.4.- Relación entre la traza del plano de carga y el eje n e u tro ................ 3466.5. Flexión compuesta ....................................................................................................................... 3486 .6 . Tracción o compresión excéntrica. Centre de p re s io n es ............... 3496.7. Núcleo central de la se c c ió n .................................................................................................... 3546 .8 . Caso de m ateriales sin resistencia a la tra c c ió n ............................................................ 3586.9. Flexión de piezas curvas ........................................................................................................... 360Ejercicios ...................................-...................... 365
Capítulo 7. Flexión hiperestática ...................................................................................................... 399
7.1. Introducción .................................................................................................................................... 3997.2. M étodos de cálculo de vigas hiperestáticas de un solo t ra m o ................................ 4017.3. V iga em potrada en sus extremos .......................................................................................... 4077.4. Viga em potrada por un extremo y apoyada en el otro ............................................ 4087.5. V igas c o n tin u a s ............................................................................................................................... 4107.6. Sistem as hiperestáticos. Grado de hiperestaticidad de un sistema ...................... 4147.7. M étodo de las fuerzas para el cálculo de sistemas h ip e restá tico s ........................ 4197.8. Aplicación del teorema de Castigliano para la resolución de sistem as hiper
estáticos .............................................................................................................................................. 4227.9. Construcción de los diagram as de momentos flectores, esfuerzos cortantes
y normales en sistemas h iperestáticos................................................................................. 4257.10. Cálculo de deformaciones y desplazam ientos en los sistemas h iperestáticos . . 427Ejercicios ........................................................................................................................................................ 430
Capítulo 8 . Flexión lateral. Pandeo ................................................................................................. 480
8.1. Introducción .................................................................................................................................... 4808.2. E stabilidad del equilibrio elástico. Noción de carga c r í t ic a ..................................... 4818.3. Pandeo de barras rectas de sección constante som etidas a compresión. Fór
m ula de Euler ........................................................................... 4838.4. Compresión excéntrica de barras e sb e lta s ......................................................................... 4868.5. G randes desplazam ientos en barras esbeltas som etidas a co m p res ió n .............. 4898 .6 . V alor de la fuerza critica según el tipo de sustentación de la barra. Longitud
de p an d eo ............................................................................................................................................ 497
C O N T E N I D O x i i i

8.7. Límites de aplicación de la fórmula de E u le r .......................................................... 5008 .8 . Fórm ula empírica de Tetm ajer para la determ inación de las tensiones críticas
en columnas intermedias ........................................................................................................... 5028.9. Método de los coeficientes w para el cálculo de barras comprimidas.................... 5048.10. Flexión compuesta en vigas esbeltas ..................................................................................... 5088.11. Pandeo de columnas con empotramientos elásticos en los extremos sm des
plazam iento transversal .............................................................................................................. 5108.12. Estabilidad de anillos sometidos a presión exterior u n ifo rm e ........................ 514Ejercicios ........................................................................................................................................................ 517
Capítulo 9. Teoría de la torsión ....................................................................................................... 550
9.1. Introducción ..................................................................................................................................... 5509.2. Teoría elemental de la torsión en prismas de sección circular ............................... 5529.3. Determinación de momentos torsores. Cálculo de ejes de transmisión de po
tencia 5569.4. Expresión del potencial interno de un prism a mecánico sometido a torsión
pura ..................................................................................................................................................... 5649.5. Torsión en prismas mecánicos rectos de sección no c ir c u la r ................................... 5659.6. Estudio experimental de la torsión por la analogía de la m em b ran a .................... 5749.7. Torsión de perfiles delgados ................................................................................................... 578Ejercicios ........................................................................................................................................................ 586
Capítulo 10. Solicitaciones combinadas ........................................................................................ 613
10.1. Expresión del potencial interno de un prisma mecánico sometido a una so licitación exterior arb itraria ............................................................................................................ 613
10.2. M étodo de M ohr para el cálculo de desplazam ientos en el caso general deuna solicitación arb itraria ......................................................................................................... 616
10.3. Flexión y torsión co m b in adas................................................................................................. 61810.4. Torsión y cortadura. Resortes de torsión........................................................................... 62110.5. Fórm ulas de Bresse ...................................................................................................................... 623Ejercicios ........................................................................................................................................................ 627
Apéndice 1. Fórmulas generales de la Norma Básica MV-103 para el cálculo deuniones soldadas p la n a s ...................................................................................... 649
Apéndice 2. T ablas de perfiles laminados .................................................................................... 655
Bibliografía ................................................................................................................................................... 680
x i v C ONTE NI DO
In d ic e a n a lí t ic o 681
Notaciones
a , b , c , ... D istancias. /b Ancho de fibra en la sección recta. c Linea media de un prism a mecánico.
c i, c 2, c 3 Circunferencias concéntricas a los círculos de Mohr.A, B, C, ... Puntos.
C j, C 2, C 3, ... Constantes de integración.C t, C 2, C 3 C írculos de Mohr.
C C urvatura; centro de esfuerzos cortantes; centro de presiones. d D iám etro; d istancia.
d m D istancia del centro de gravedad del área de momentos ¡lectores isostá- ticos del tFamo m-ésimo a su apoyo derecho.
D D iámetro.Dm D istancia del centro de gravedad del área de momentos Héctores isostá-
ticos del tram o m-ésimo a su apoyo izquierdo.[D ] M atriz de deformación.
e D ilatación cúbica un itaria; excentricidad; espesor de envolvente de pequeño espesor o perfil delgado; espesor de placa; paso de remachado.
e y, e z Coordenadas del centro de presiones en el plano de la sección recta.E M ódulo de elastic idad o m ódulo de Young./ Función; flecha.
7„ Fuerza de m asa por unidad de volumen.7n Fuerza por unidad de superficie.F Fuerza.G Centro de gravedad o baricentro de una sección recta; módulo de elas
ticidad transversal; coeficiente de Lam e. h A ltura.
HÁ Componente horizontal de la reacción en el apoyo A.i Radio de giro.
¡min Radio de giro minimo.I0 M om ento de inercia po lar de la sección recta respecto del centro de
gravedad.I0 M om ento de inercia polar de la sección recta respecto del punto 0.
Iy, Iz M om entos de inercia de la sección recta respecto a sus ejes principalesde inercia.
J M ódulo de torsión.

X v i NOTACIONES
k En el criterio de M ohr ——; coenciente de concentración de tensiones;I^J __
c o n s t a n t e d e r e s o r t e ; e n p a n d e o v / P' .EP, c o n s t a n t e .
K C o n s t a n t e ; r i g id e z a t o r s ió n .
Á'¡, K 2, ... Constantes de integración./ Longitud.
lp Longitud de pandeo.m Momento por unidad de longitud; momento estático.
m r m . Momentos estáticos áxicos.M A Momento de empotramiento.M Momento resultante.
M 0x, iV/0v, M 0z Componentes cartesianas del m om ento resultante de un sistema de fuerzas respecto de un punto 0 .
M F Momento flector.M F Módulo del momento flector.M r Momento torsor.M t Módulo del momento torsor.
A/v, M . Componentes del momento flector según las direcciones principales de inercia de la sección recta.
Af(x) Ley de momentos flectores en la v iga conjugada.J/(x) Ley de momentos flectores de la v iga isostática.
J í Momento aislado aplicado a un prism a mecánico. n Coeficiente de seguridad; grado de h iperestaticidad; revoluciones por
minuto (rpm); normal exterior; d irección. ne Grado de hiperestaticidad exterior. n¡ Grado de hiperestaticidad interior.N Esfuerzo normal; potencia.O Origen de coordenadas. p Presión; carga por unidad de longitud.P Fuerza; carga concentrada; carga de compresión.
Pcr C arga critica.Pppim Carga de pandeo admisible.
r Radio.R Radio. ‘-¿iR Resultante de un sistema de fuerzas.
Ra Reacción en el apoyo A.Rx, Ry, R , Componentes cartesianas de la resultante de un sistem a de fuerzas.
R Reacción en la viga conjugada. s Longitud de arco de línea media.t Tem peratura; coordenada hom ogénea; flujo de cortadura.
T Esfuerzo cortante, r T. Componentes del esfuerzo cortante respecto de los ejes principales de
inercia de la sección.T(x) Ley de esfuerzos cortantes en la v iga conjugada.[T ] M atriz de tensiones.
te Energía de deformación o potencial interno.
NOTACI ONES x v i i
¡i Vector unitario.u. v , ir Componentes cartesianas del vector desplazamiento de un punto.
V Volumen.VA Componente vertical de la reacción en el apoyo A.IV M ódulo resistente a torsión.
IV. M ódulo resistente a flexión.y , y , r Coordenadas cartesianas; desplazamientos.
c, y G, : c Coordenadas del centro de gravedad.X, Y, Z Componentes cartesianas de
X, F, Z Componentes cartesianas de 7n-, X2, ... Incógnitas hiperestáticas.
x Angulo; coeficiente de d ilatación lineal,x, /?, y Componentes cartesianos del vector unitario ü .x, p , y Angulos que forma el vector unitario ü con las direcciones principales,
y Deformación angular; coeficiente de ponderación; peso específico; coeficiente para el cálculo de remaches y tornillos.
y„ Valor doble de la deformación transversal unitaria. y},., y :x Deformaciones angulares en los pianos xy, y : y r.v.
ó Desplazam iento; desviación cuadrática media.~dp Vector desplazam iento del punto P.<5¡j Coeficientes de influencia.A u Desplazamientos.
e Vector deformación unitaria.[e ] M atriz colum na representativa del vector deformación unitaria.
ex, e y, e . A largam ientos longitudinales unitarios en las direcciones de los ejes coordenados.
e„ Deformación longitudinal un itaria en la dirección n.i, 5 ,, e3 Deformaciones principales.
8 Angulo; ángulo de torsión por unidad de longitud.0 Invariante lineal de la matriz de tensiones.A Vector traslación.). Coeficiente de Lamé; esbeltez.
>.lim Valor minimo de la esbeltez para que sea aplicable la fórmula de Euler. u Coeficiente de Poisson.ti Plano.p Radio de curvatura.a Vector tensión en un punto según un plano.
[<?] M atriz colum na representativa del vector tensión.cr„v, a nz Tensiones normales en coordenadas cartesianas.
„ o y, a . Componentes cartesianas de! vector tensión., o 2, tr3 Tensiones principales.
cradm Tensión admisible.c „ Tensión critica a pandeo.o e Lím ite elástico.
Lím ite elástico a tracción.

x v i i i NOTACI ONES
Límite elástico a compresión.
tfcqui» Tensión equivalente.Tensión de fluencia.
O’lím Tensión límite.<7m Tensión meridional.<*l Tensión circunferencial.O n Tensión normal.Z Sección recta de un prisma mecánico.T Tensión tangencial o cortante.
adm Tensión adm isible a cortadura.yz’ :x Tensiones tangenciales en coordenadas cartesianas.
4> Angulo; carga ficticia; ángulo de torsión.<D Función de tensiones.* Función de alabeo.w Coeficiente de pandeo; velocidad angular; área sectorial.w Vector de giro.n Area de una sección recta.
íL Sección reducida.n * Area parcia l de una sección recta.
Area del d iagram a de momentos (lectores isostáticos del tramo m-ésimo.
A L F A B E T O G R IE G OA a alfa N V nyB p beta H C xir 7 gam m a o 0 ómicronA 5 delta n 71 P‘E e épsilon p P rhoZ c zeta x a sigmaH n eta T X tau© 9 theta Y V ípsilonI l io ta O <p phi
« K K kappa X A j¡A A lam bda T psiM M my 0 ( ú omega
1Introducción al estudio de la
resistencia de materiales
1.1. O bjeto y finalidad de la R esistencia de M a ter ia lesAI in iciar el estudio de cualqu ier disciplina es necesario establecer previamente su definición y fijar con la m áxim a claridad y precisión los objetivos que se pretenden alcanzar.
Esto no siempre resulta fácil y el afán de form ular una definición de la forma más simple posible puede llevarnos a dar una solución sim plista que, sin poder tacharla de incorrecta, pueda ser incom pleta e inexacta.
Aun a riesgo de caer en ello, podemos decir que las teorías de la R e s i s t e n c i a d e M ate r ia l e s tienen como objetivo establecer los criterios que nos perm itan determ inar el m aterial más conveniente, la forma y las dimensiones m ás adecuadas que hay que dar a los elementos de una construcción o de una m áquina para que puedan resistir la acción de las fuerzas exteriores que los solicitan, así como para obtener este resultado de la forma más económica posible.
Si sometemos dos cuerpos de la m isma forma y dimensiones, pero de distinto m aterial —como podian ser dos vigas rectas, como la representada en la F igura 1.1, de escayola una y de acero o tra— a un mismo sistema de fuerzas exteriores que vamos aum entando paulatinam ente, observaremos que el cuerpo de escayo la es el primero en el que se produce la rotura.
Diremos que el acero posee en m ayor grado que la escayo la la propiedad de r e s i s t e n c i a m e cá n i c a , entendiendo por ta l la capacidad de oponerse a la rotura al ser sometido a una solicitación exterior.
En cuanto a las deformaciones que experim entan am bos m ateriales, observamos que son d istintas. Llam arem os r i g i d e z a la propiedad que presenta el m aterial de oponerse a las deformaciones.
Esta consideración prim era nos conduce a tra ta r de buscar dos m agnitudes que nos permitan cuanrificar estas dos propiedades. Se desprende, asim ismo, la necesidad que se tiene en R e s i s t e n c i a d e M a t e r i a l e s de conocer las características mecánicas de los m ateriales y, en consecuencia, la im portancia que tiene en esta ciencia el método experim ental, es
1

RESISTEN CIA DE M ATERIALES
decir, los ensayos en el laboratorio conducentes a la determ inación, entre otras, de esas dos magnitudes.
Un importante aspecto se deduce del ejem plo anterior. Si im aginam os realizado un corte ideal, el mismo en ambas piezas, la d istribución de fuerzas interiores que equivalen al sistem a de fuerzas que actúan a un lado del corte realizado, será la m isma sí el sistema defuerzas exteriores es el mismo en los dos cuerpos y si en ambos m ateriales las deformaciones son elásticas.
Las normas de los distintos países sobre las construcciones de todo tipo suelen establecer límites superiores para los valores que pueden alcanzar los esfuerzos interiores y para las deformaciones de los diversos m ateriales.
Por consiguiente, podríamos decir que la Resistencia de M ateriales perm ite determ inar en una pieza sometida a un sistema dado de fuerzas exteriores:
a) los esfuerzos interiores que se engendran en la pieza,b ) las deformaciones que se originan;
y, en consecuencia, si esfuerzos interiores y deformaciones se mantienen inferiores a ciertos valores límites fijados de antemano.
Otro aspecto de gran importancia a tener en cuenta en la utilización de determ inado m aterial en un elemento integrante de una construcción es el de la e s ta b i l id ad , entendiendo por tal la capacidad de oposición del elemento a grandes desplazam ientos como consecuencia de pequeñas variaciones de la solicitación exterior. El cálculo de la estab ilidad de la pieza nos perm itirá conocer su capacidad de conservar las formas de equilibrio que adopta en estado deformado.
Teniendo presentes las anteriores consideraciones, podemos dar una definición más simple aún que la dada inicialmente, y decir que R e s i s t e n c i a d e M a t e r i a l e s es la ciencia que tra ta del cálculo de ¡a resistencia mecánica, rigidez y estab ilidad de las piezas de una estructura*.
Sus objetivos se pueden resumir en la resolución de los dos problemas fundamentales siguientes:
1.° P r o b l em a d e d im en s i on am t en to . Conocido el sistem a de cargas que solicita a una pieza de una estructura, calcu lar sus dim ensiones para que las tensiones o esfuerzos internos unitarios y las deformaciones que se o rig inan no sobrepasen unos valores límites fijados de antemano.
2.° P r o b l em a d e c o m p r o b a c i ó n . Conocida la solicitación exterior y hecho el dimensio- nam iento de la pieza, com probar que las tensiones y deformaciones no sobrepasan los valores lím ites prefijados.
U na observación es necesario hacer respecto a la relación entre la teoría de la E lasticidad y la Resistencia de M ateriales, ya que los objetivos de am bas d isciplinas son coincí- dentes. La diferencia estriba en el método seguido para llegar a resultados, ya que la Resistencia de M ateriales dism inuye la d ificultad de la resolución de los problemas de la teoría de la E lasticidad introduciendo hipótesis sim plificativas.
Es de señalar que la Resistencia de M ateria les estudia la pieza de una estructura. Por
w C uan do en io que sigue decim os e s t ruc t ura , nos referim os tan to a una construcción de ed ificación Cumo a una m áq u in a . *,
IN TRO D U C CIO N AL ESTU D IO DE LA RESISTEN CIA DE M A TE RIA LE S 3
ello, no abarca el estudio de los problemas que se refieren a la estructura en su conjunto, como puede ser el de estimación de su estab ilidad o su propio cálculo. Estos temas son materia de otra disciplina: la teoria de Estructuras, a la que la Resistencia de M ateriales rirve de base, y el conocimiento de am bas perm itirá al ingeniero m aterializar sus ideas creadoras dando las formas adecuadas ai diseño y sentir la satisfacción que siente todo espíritu creador al ver plasm ados en la realidad sus proyectos.
La Resistencia de M ateriales tiene im pottantes aplicaciones en todas las ramas de la ingeniería. Sus métodos los utilizan los ingenieros aeronáuticos y navales para el diseño y construcción de aviones y barcos, respectivaunente; los ingenieros civiles, al proyectar puentes, presas y cualqu ier tipo de estructura; los ingenieros de minas, para resolver la necesidad de conocimientos de construcción que exige su profesión; los ingenieros mecánicos. para el proyecto y construcción de m aqu inaria y todo tipo de construcciones mecánicas, como son los recipientes a. presión; los ingenieros energéticos, para proyectar los diferentes componentes de un .íeactor; los ingenieros metalúrgicos, por ¡a necesidad que tienen del conocimiento de los materiales actuales para la búsqueda de nuevos materiales; ios ingenieros eléctricos, para el proyecto de m áquinas y equipos eléctricos, y, en fin, los ingenieros químicos, para el diseño de instalaciones en industrias de su especialidad.
1.2. C oncepto de só lid o elásticoLa M ecánica teórica considera indeformables los cuerpos materiales, ya se encuentren en estado de movimiento o de Teposo. Esta propiedad no es, en el fondo, más que una abstracción, ya que no corresponde en la realidad a m aterial alguno. Sin embargo, es de gran utilidad por la com odidad y simplificación que introduce. Las conclusiones que se obtienen en gran número de casos son buenas aproxim aciones de lo que realmente ocurre. Pero avanzando en el estudio de la M ecán ica ap licada, se observa experimentalmente que las fuerzas que actúen sobre determ inado cuerpo, que poseerá unas características físicas y geométricas propias, no pueden ser arb itrariam ente grandes, pues el cuerpo se deforma y se rompe. Esta observación nos exige revisar el concepto de sólido que se admite en Mecánica.
Asi pues, la idea de sólido que interviene con harta frecuencia en Física y principalmente en M ecánica, evoluciona a m edida que se efectúa un estudio más profundo de los problemas que se derivan de la Estática ap licada.
Siguiendo la evolución indicada, harem os del sólido las tres siguientes consideraciones:
— Sólido rígido.— Sólido elástico.— Sólido verdadero.
S ó l id o r í g i d o es aquel que ante cualqu ier esfuerzo (por grande que sea) a que está sometido, la d istancia entre dos m oléculas cualesquiera permanece invariable.
Asi, cuando tenemos una viga AB apo yad a en dos pilares (Fig. 1.1), que recibe una carga vertical P en un punto C, si suponemos que se tra ta de un sólido rígido, nos bastaría calcular los empujes o reacciones que debe recibir de los pilares, para conocer las fuerzas a que está sometida.
Al hacer esta suposición no sería posible jam ás la rotura de la viga en contra de lo que realmente sucede, com probado por la experiencia, ya que al ir aumentando P siempre

4 RESISTENCIA DE MATERIALES
existe un valor que provoca la rotura de la viga a pesar de que las reacciones en los pilares fuesen suficientes para equilib rar la carga P.
Surge, por tanto, la necesidad de estud iar en general los límites de las cargas que se pueden ap licar a un determ inado cuerpo o bien el dim ensionado que hay que darle para soportar cierto esfuerzo, con la condición siem pre de que no exista peligro de rotura. Este estudio constituye, como hemos dicho anteriorm ente, el objeto de la R e s i s t e n c ia d e M a t e r ia les .
Naturalmente, si existiesen sólidos rígidos no ex istirían peligros de rotura ni deformaciones de ningún tipo y tanto la teoría de la E la s t i c i d a d como la R e s i s t e n c ia d e M a te r ia l e s carecerían de objeto. Si pudiera construirse una viga con m aterial que tuviera las propiedades de sólido rígido, por pequeña que fuera su sección y por grandes que fuesen las cargas a soportar, la estabilidad del sistem a estaría asegurada siempre que se cumplieran las condiciones generales de equilibrio
R x = 0
M 0x = 0Ry = 0
M 0, = 0R._ = 0
M 0z = 0( 1.2- 1)
siendo R x, Ry, R . y M 0x, M 0l„ M 0z las com ponentes referidas a un sistema cartesiano trirrectangular de la resultante de las fuerzas ejercidas sobre el sistema y del momento resultante de dichas fuerzas respecto de cualqu ier punto 0 .
En todo lo anteriormente expuesto hemos an tic ipado parcialm ente el concepto de s ó l i d o e l á s t i c o que podemos definir como aquel que ante un esfuerzo exterior se deforma y recupera su forma prim itiva al cesar la causa exterior.
A los sólidos elásticos se les supone una serie de cualidades como son las de i s o tr op ía , h o m o g e n e i d a d y con t inu idad .
Se dice que un cuerpo es i s ó t r o p o cuando sus p rop iedades físicas no dependen de la dirección en que se han medido en dicho cuerpo. Así, diremos que la isotropía que suponemos poseen los sólidos elásticos equ ivale a adm itir la propiedad de igual elasticidad en todas las direcciones*.
El suponer el sólido elástico h o m o g é n e o equ ivale a considerar que una parte arb itraria del mismo posee idéntica composición y características que otra cualquiera.
La propiedad de c o n t i n u id a d supone que no existen huecos entre partículas ni, por consiguiente, distancias intersticiales.
* C uando deb ido a un proceso na tu ra l o de fab ricac ió n los e lem en tos com ponentes de un cuerpo están o rien tados en una determ inada d irecc ión , será preciso co n sid e ra r la an iso tro p ía de los m ism os, com o ccu rre con la m adera , los m etales lam inados en frío o los p lá stico s re fo rzados con fibras cuando se em plean p ara fabricar m ateria les com puestos.
I NTRO DUC CI ON AL ESTUDIO DE LA RESISTENCIA DE M ATE RI AL E S 5
Algunas de estas propiedades, por ejemplo, isotropía y homogeneidad, suelen estar intimamente unidas, pues si un cuerpo es igualmente elástico en cualquier dirección, es de suponer que sea homogéneo, e inversamente, si suponemos que es homogéneo es presum ible que sea isótropo.
Sin embargo, estas propiedades de isotropía, homogeneidad y continuidad no concurren en ningún m aterial, ya sea natural o elaborado por el hombre: no es posible que se dé un grado de elasticidad exactamente igual en todas las direcciones debido a la distribución de sus átomos o moléculas en redes cristalinas ordenadam ente dispuestas. Tampoco existe en la realidad la homogeneidad perfecta-, asTcomo sabemos por las teorías m odernas de la materia que ésta no es continua y que existen espacios vacíos entre las moléculas y entre los mismos átomos que la componen.
No obstante, la consideración de sólido continuo es muy cómoda, pues permite admitir, cuando existe una deformación debida a la aplicación de una fuerza a unas moléculas del sólido, que el esfuerzo es absorbido en parte por las moléculas próxim as y de esta forma queda repartido de forma continua y apta para el cálculo.
Finalmente, s ó l i d o v e r d a d e r o es aquel que resulta de considerarlo como deformable ante los esfuerzos a que está sometido y falto de isotropía, homogeneidad y continuidad.
Los m ateriales a que nos refiramos en lo sucesivo los consideraremos como sólidos elásticos. Quiere ello decir que si m icroscópicamente no son ciertas las hipótesis que se hacen, sí lo son macroscópicamente, pues los resultados que se obtienen quedan sancionados por la experiencia.
Aún podremos en muchos casos, por ejemplo, cuando falte la hom ogeneidad en un sólido, considerar la existencia de varios sólidos elásticos dentro del sólido dado, cada uno de los cuales estará concretado por zonas que posean perfecta hom ogeneidad, y ap licarles las consideraciones teóricas que hagamos para los sólidos elásticos en general.
1.3. M od elo teórico de sólido utilizado en R esisten cia de M ateria les. P rism a m ecánico
Con objeto de estudiar los sólidos elásticos crearemos un modelo teórico que vam os a denom inar p r i sm a m e c á n i c o , que desde el punto de vista físico posea las propiedades de isotropía, hom ogeneidad y continuidad y que vamos a definir atendiendo a un criterio meramente geométrico.
Así, llam arem os p r i sm a m e c á n i c o al sólido engendrado por una sección p lana £ de área f i cuyo centro de gravedad G describe una curva c llam ada l ín ea m e d ia o d i r e c t r iz , siendo el plano que contiene a £ normal a la curva.
El prism a mecánico se dice que es a la b ea d o , p l a n o o, como caso particu lar de éste, r e c t o , cuando es alabeada, p lana o recta la línea media.
La línea media no ha de tener curvaturas muy pronunciadas, así como no deben existir cambios bruscos de sección a l pasar de una arb itraria a o tra próxima.
Si el área í í es constante, se dice que el prism a es de sección constante; en casocontrario diremos que el prisma es de sección variable.
P ara los cálculos consideraremos unos ejes de referenc;_ con origen en G; eje Gx latangente a la línea media en este punto, y ejes Gy y Gz los principales de inercia de lasección £ (Fig. 1.2). Como el plano de esta sección es norm al a la curva c , el eje Gx es normal a los ejes Gy y Gz contenidos en £. Por otra parte, los ejes G y y Gz son principales

6 RESI STENCI A DE MATERI ALES
F ig u ra 1.2.
de inercia de ia sección que. según sabemos, son perpendiculares entre sí, lo que indica que el sistema de referencia que hemos definido en el prism a mecánico es un sistema de ejes trirrectangulares.
La posición del punto G viene determ inada por su abscisa curvilínea s, longitud del arco de curva c contada a partir de un punto arb itrario , que puede ser el centro de gravedad C ¡ de la sección extrem a izquierda del prisma. Tomaremos como sentido positivo del eje G.x el correspondiente a los arcos crecientes sobre c. Los sentidos positivos de los ejes Gv y Gz serán tales que hagan que el sistema de referencia adoptado sea un sistema directo.
M ediante la ap licación dei m é t o d o d e la s s e c c i o n e s , realizando los cortes ideales adecuados, podemos reducir cualqu ier estructura, por compleja que sea, a un determ inado número de prismas mecánicos.
Sobre cada una de estas piezas, además de las cargas que estén ap licadas, habrá que considerar en las secciones extremas la acción que el resto de la estructura ejerce sobre ella que, en general, se m aterializará en una fuerza y en un momento. Es evidente que en cualqu ier sección común a dos piezas contiguas estas fuerzas y momentos respectivos serán vectores iguales y opuestos, en virtud del principio de acción y reacción.
La forma de los diversos prismas mecánicos que constituyen la m ayoría de las estructuras, se reduce esencialmente a los siguientes tipos:
a) Barra . Se llam a asi al prism a mecánico cuyas dimensiones de la sección transversal son pequeñas, en com paración con la longitud de la línea media (Fig. 1.3).
F ig u r a 1-3.O
En la m avoría de las estructuras, tanto en obras como en construcción de m aquinaria, es este tipo de prism a mecánico el que se utiliza. Dentro de este tipo, la m ayor parte de barras utilizadas son prismas mecánicos planos, es decir, con línea media contenida en un plano, siendo éste, adem ás, plano de sim etría del prisma.
En la determ inación de la forma de! prism a mecánico, es decir, de la pieza como elemento in tegrante de una estructura, se tendrá en cuenta, fundamentalmente, la clase de m aterial em pleado y el modo de trabajo a que va a estar sometido ésta.
Por ejemplo, en estructuras de hormigón arm ado la forma más em pleada es la sección transversal rectangular en vigas y cuadrada en pilares (Fig. 1.4), mientras que en estructuras m etálicas secciones m uy usuales son el perfil lam inado doble te I en vigas, o dos secciones en U so ldadas en p ilares (Fig. 1.5).
I N T RO D U C CI ON AL ES TUDI O DE LA RESI STENCI A DE MATERIALES 7
h) P laca . Es un cuerpo lim itado por dos planos, cuya distancia —el espesor— e.- pequeña en comparación con las otras dos dimensiones. En ia Figura 1.6 se representa una placa rectangular y otra circular.
Pertenecen a este tipo las losas que se fabrican para tapar depósitos subterráneos, asícomo las placas utilizadas como forjados en las edificaciones.
cj C ásca ra . Es un cuerpo lim itado p ó í dos superficies no planas, a d istancia pequeñaen comparación con las otras dos dim ensiones (Fig. 1.7).
Son de este tipo casi todos los depósitos, como los tanques de agua, silos, gasómetros, etc., asi c o m o las tuberías de gran d iám etro y, en general, las estructu ra laminares.
8 RESISTENCIA DE MATERI ALES
En los últimos tipos, es decir, en placas y cascaras, en vez de linea media se utiliza la s u p e r f i c i e m e d ia , que se define como la constitu ida por los puntos que dividen el espesor en dos partes iguales.
1.4. Equilibrio está tico y equilibrio e lá sticoPara que un sólido rígido se encuentre en equilibrio es necesario y suficiente que se verifiquen las ecuaciones (1.2 - 1), que son las condiciones generales del equilibrio estático.
Estas seis ecuaciones no son otra cosa que la traducción analítica de dos condiciones fundamentales;
1.a Que la suma de todas las fuerzas que actúan sobre el sólido sea igual a cero, o lo que es lo mismo, que la resultante sea nula. Esta condición asegura que el sólido no tenga desplazamientos.
2.a Que el momento resultante de todas las fuerzas respecto de cualquier punto sea igual a cero. Esta condición asegura que el sólido no experimente giros.
Téngase presente que momento resultante y momento de la resultante son conceptos distintos. M o m e n t o r e su l t a n t e de un sistema de fuerzas respecto a un punto es la suma de los momentos de las fuerzas que componen el sistem a, respecto a dicho punto. Por el contrario, m o m e n t o d e la r e s i d í a n t e es. como su nom bre indica, el momento respecto de un determinado punto de la resultante del sistema. Pero al ser la resultante vector libre no tiene sentido hab lar de su momento, a menos que el sistema sea reducible a un único vector: su resultante; entonces el momento de la resultante respecto de un punto es el momento de ésta, supuesta su línea de acción el eje central del sistema.
Los vectores momento resultante y momento de la resultante respecto de un mismo punto son iguales cuando se verifica esta circunstancia, como ocurre en los sistemas de vectores concurrentes, paralelos o coplanarios.
Sin embargo, en un sólido elástico estas condiciones son necesarias pero no suficientes, ya que si suponemos realizado en el sólido un corte ideal y prescindimos de una de las partes, es necesario que el sistema de fuerzas interiores en los puntos de la sección ideal sea equivalente al sistema de fuerzas que actúan sobre la parte elim inada. Llegamos asi al concepto de equ i l ib r io e l á s t i c o que exige se verifiquen en un sólido elástico no sólo las condiciones del equilibrio estático, sino tam bién que exista equilibrio entre las fuerzas exteriores y las internas en cada una de las infin itas secciones.
Esta ú ltim a condición es la característica del equ ilib rio elástico: es necesario que las fuerzas exteriores que actúan sobre ei sólido sean contrarrestadas por las fuerzas interiores de cohesión molecular.
Como esto debe suceder en las infinitas secciones del sólido, y siendo imposible el estudio en todas ellas, lo que se hace es estud iar solam ente las secciones que deben soportar un m ayor esfuerzo y, lógicamente, si éstas resisten es de suponer que las sometidas a esfuerzos menores también lo hagan, sobreentendiéndose que las diversas secciones están constituidas por m aterial homogéneo,, y a que hablam os de sólidos elásticos.
En definitiva, lo que realm ente hacemos es considerar el sólido como rígido excepto en una sección y comprobar si existe en ella equilib rio . Es como si las dos partes rígidas en que queda dividido el sólido estuviesen unidas por un m uelle, e investigáram os si éste puede resistir los esfuerzos a que está sometido.
I N T R O D U C CI O N AL ESTUDIO DE LA RESISTENCIA DE MATE RI ALE S 9
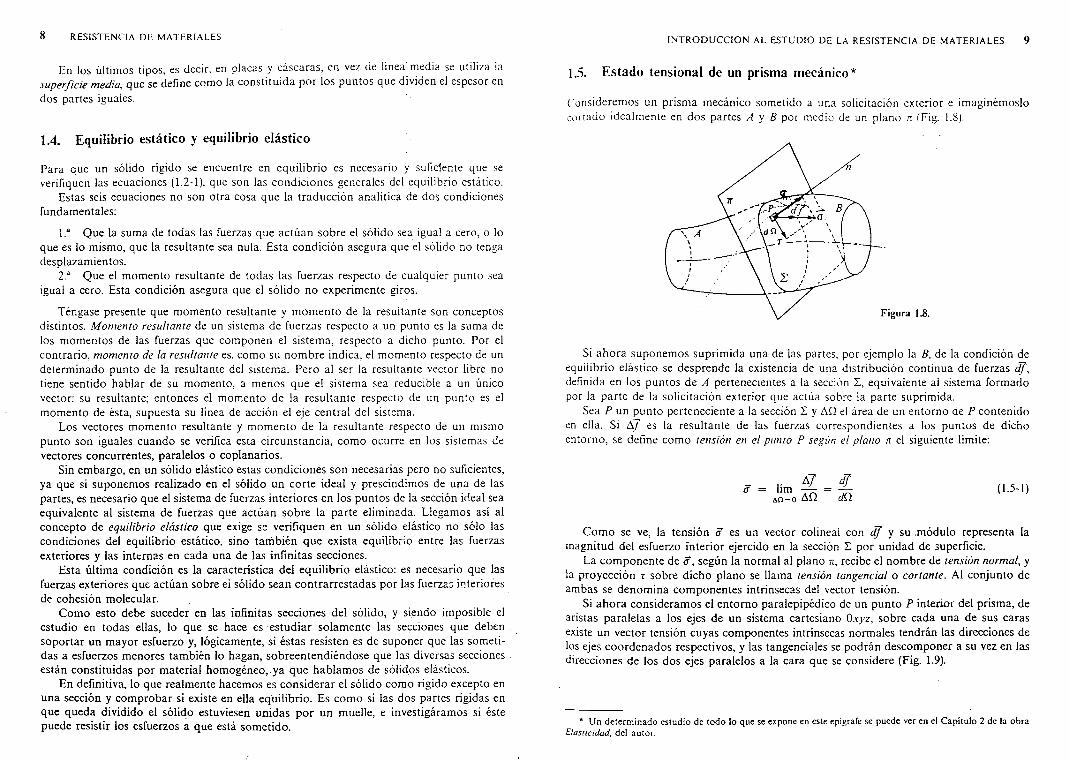
1.5. E stad o tensional de un prisma m ecánico*Consideremos un prism a mecánico sometido a una solicitación exterior e imaginémoslo cortado idealmente en dos partes A y B por medio de un plano n (Fig. 1.8).
Si ahora suponemos suprim ida una de las partes, por ejemplo la B, de la condición de equilibrio elástico se desprende la existencia de una distribución continua de fuerzas d f , definida en los puntos de A pertenecientes a la sección Z, equivalente ai sistema formado por la parte de la so licitación exterior que actúa sobre la parte suprim ida.
Sea P un punto perteneciente a la sección Z y AQ el área de un entorno de P contenido en ella. Si A j es la resultante de las fuerzas correspondientes a los puntos de dicho entorno, se define como t en s i ó n en e l p u n t o P s e g ú n e l p la n o ti el siguiente límite:
3 = Hm S = í (1'5' 1)AQ- 0 AÍ2 CiQ
Como se ve, la tensión S es un vector colineal con d f y su .módulo representa la magnitud del esfuerzo interior ejercido en la sección Z por unidad de superficie.
La com ponente de 3 , según la normal al plano n, recibe el nombre de t en s i ó n n o rm a l , y la proyección r sobre dicho plano se llam a t en s ión t a n g e n c i a l o c o r t a n t e . Al conjunto de ambas se denom ina componentes intrínsecas del vector tensión.
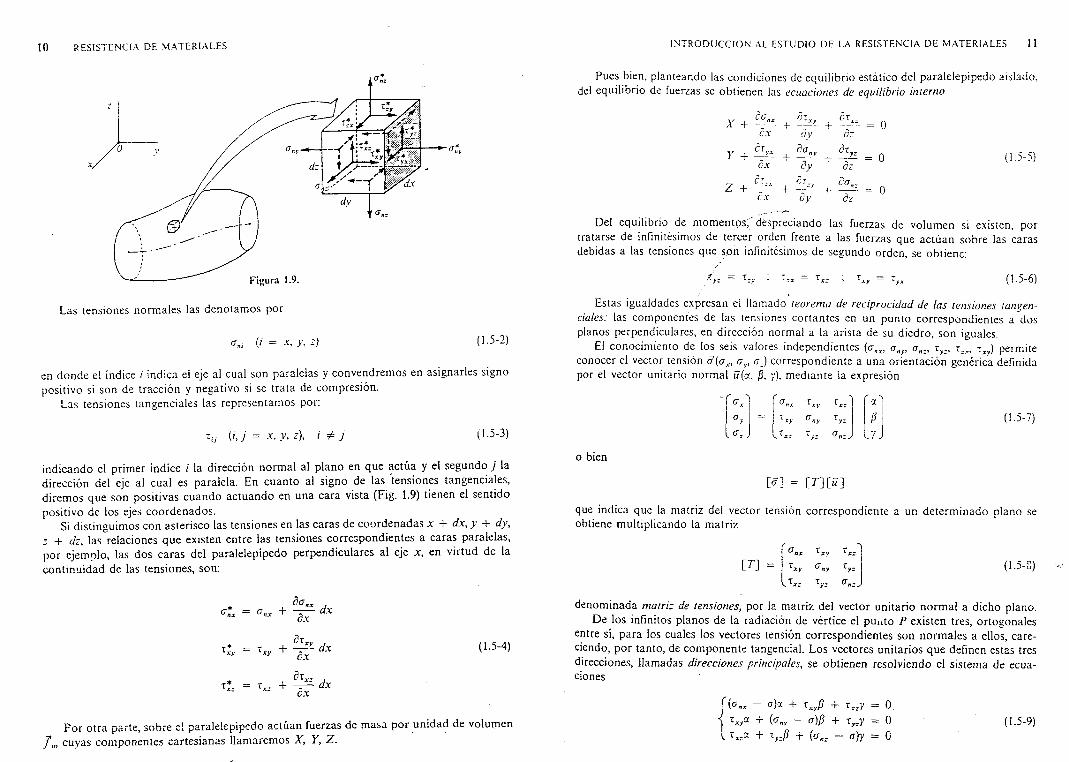
Si ah o ra consideram os el entorno paralepipédico de un punto P interior del prisma, de aristas p ara le las a los ejes de un sistema cartesiano 0 xyz, sobre cada una de sus caras existe un vector tensión cuyas componentes intrínsecas normales tendrán las direcciones de los ejes coordenados respectivos, y las tangenciales se podrán descomponer a su vez en las direcciones de los dos ejes paralelos a la cara que se considere (Fig. 1.9).
* U n d eterm inado estud io de todo lo que se expone en este epígrafe se puede ver en el C ap ítu lo 2 de la obra Elast i c idad, del autor.
10 RESISTENCIA DE MA T E R I AL E S
Las tensiones norm ales las denotamos por
(i = .y, y , z) (1.5-2)
en donde el índice i indica el eje al cual son paralelas y convendremos en asignarles signo positivo si son de tracción y negativo si se trata de compresión.
Las tensiones tangenciales las representamos por:
(;, j = x, y , z), (1.5-3)
indicando el primer índice i la dirección norm al al plano en que actúa y el segundo j la dirección del eje al cual es paralela. En cuanto al signo de las tensiones tangenciales, direm os que son positivas cuando actuando en una cara vista (Fig. 1.9) tienen el sentido positivo de los ejes coordenados.
Si distinguim os con asterisco las tensiones en las caras de coordenadas x + dx, y + dy , z + dz, las relaciones que existen entre las tensiones correspondientes a caras parale las, por ejemplo, las dos caras del paralelepípedo perpendiculares a l eje x, en v irtud de la continuidad de las tensiones, son:
, 5 a»* A°"x = a "x I T
= +
dxx.x* = r x. + dx
dx
dx
dx (1.5-4)
Por otra parte, sobre el paralelepípedo actúan fuerzas de m asa por unidad de volumen cuyas componentes cartesianas llam arem os X, Y, Z.
I NTRODUC CI ON AL ESTUDIO DE LA RESISTENCIA DE MATERI ALES 11
Pues bien, planteando las condiciones de equilibrio estático del paralelepipedo aislado, del equilibrio de fuerzas se obtienen las e c u a c i o n e s d e equ i l ib r i o in t e rn o
C G n x f í l r „ C T x -X + --------- xy
e x d y d z
C T y x d o n y d x , ,Y + +
d x d y d z
C T. e x V ( J n ~Z + — -L -)
e x d y + ~ d T
= 0
= 0
= o
(1.5-5)
Del equilibrio de momentos, despreciando las fuerzas de volumen si existen, por tratarse de infinitésimos de tercer orden frente a las fuerzas que actúan sobre las caras debidas a las tensiones que son infinitésimos de segundo orden, se obtiene:
L-x = (1.5-6)
Estas igualdades expresan el llamado t e o r e m a d e r e c i p r o c i d a d d e la s t e n s i o n e s t a n g e n c ia l e s : las componentes de las tensiones cortantes en un punto correspondientes a dos planos perpendiculares, en dirección normal a la arista de su diedro, son iguales.
El conocimiento de ios seis valores independientes a„y, a nz, xy., x.„ xxy) permite conocer el vector tensión a ( a x, a y, a.) correspondiente a una orientación genérica definida por el vector unitario normal ü(a , /?, •/), mediante la expresión
<¡x<?>■a .
'x 3
0 I. y j
(1.5-7)
o bien
[ ? ! = m e * ]
que indica que la matriz del vector tensión correspondiente a un determ inado plano se obtiene multiplicando la m atriz
denominada matr iz d e t en s i on e s , por la matriz del vector unitario norm al a dicho plano.De los infinitos planos de la radiación de vértice el punto P existen tres, ortogonales
entre sí, para los cuales los vectores tensión correspondientes son norm ales a ellos, careciendo, por tanto, de componente tangencial. Los vectores unitarios que definen estas tresdirecciones, llam adas d i r e c c i o n e s p r in c ip a le s , se obtienen resolviendo el sistema de ecuaciones
r íff„ x - o ) * + z xy¡s + xX2y = 0 .
-j Tx?a + ( c ny ~ o ) P + xy2y = 0 (1.5-9)y x x.a + xr.¡} -f (o„. — a)y = 0

12 RESI STENCI A DE MATERI ALES
en donde <x toma los valores de las raíces de la e c u a c i ó n c a r a c t e r í s t i c a
xy ( 1 .5 - 1 0 )
que se obtiene al imponer la condición de com patib ilidad del anterior sistema homogéneo de ecuaciones.
Las ralees de esta ecuación, que no son otra cosa que los valores propios de la matriz de tensiones [7"], reciben el nombre de t e n s i o n e s p r i n c i p a l e s . Son las tensiones correspondientes a los planos normales a las direcciones principales.
El lugar geométrico de los extremos de los vectores tensión para la infinidad de planos de la rad iación de vértice el punto que se considera es un elipsoide llam ado e l i p s o i d e d e t e n s i o n e s o e l i p s o i d e d e Lamé. Su ecuación, referida a un sistema de ejes coincidentes con las direcciones principales, es:
+ ( 1 .5 - 1 1 )
siendo oq, oq, oq los valores de las tensiones principales.Los vectores tensión correspondientes a los infinitos planos que pasan por un punto
son susceptibles de una representación gráfica p lana por medio de sus componentes intrínsecas.
Si suponemos oq ^ o 2 > o 3 y representamos en unos ejes coordenados planos, llevando en abscisas la tensión normal y en ordenadas la tensión tangencial, el punto M, representativo de la tensión de cualqu iera de los planos de la rad iación, pertenece al área som breada en la F igura 1.10.
Las tres circunferencias de centros en el eje de abscisas y de diám etros cr2 — oq, °rí — y °T — oq rec>ben el nombre de c i r c u i o s d e M oh r .
I N T R O DU C CI O N AL ES TUDI O DE LA RESISTENCIA DE MATERIALES 13
1.6. E stado de deform ación de un prism a m ecán ico*Consideremos un sólido elástico en estado neutro, es decir, no sometido a solicitación alguna y, por consiguiente, sin que se haya producido en él ninguna deformación.
Sea P un punto del mismo y Q otro punto perteneciente al entorno de P. tal que
PQ = d r = d.x i + d y j + dz k
vector referido a un sistem a cartesiano ortogonal O.xvz (Fig. 1.11).
Q'
( 1.6- 1)
F ig u ra 1 .1 1.
Producida la deformación, los puntos P y Q pasan a las nuevas posiciones P ‘ y Q' definidas por los ve c t o r e s c o r r im i e n t o ó P(u, v, n j y 5 Q(u , v w '), respectivamente.
El vector F Q ' = d ' r se puede expresar de la siguiente forma
d ' T = d r + [ / / ] d r + [£> ] d r ( 1.6- 2)
siendo:
[//] =1 / o v2 ydx
1 í d w2 I d J
3ud y
du\Tz)
[D ] =
8udx
1 í dv2
o u
dy.1 í d w du2 l dx dz
1 ( dJ i2 \ J y
1 ( Svvd y
dvdx
dvTz
1 /du dv2 dx
dvTy
1 í dw dv2 l o v dz
1 í d u dw2 \dz dx1 ( dv dw'2 f e “ dv
du2 \ T
1 ( dv2 \dz
+
c w5x
dwdy
d w
T
(1.6-3)
(1.6-4)
* Un deten ido estud io de todo lo que se expone en este ep igrafe se puede ver en el C ap ítu lo 3 de la obra Elast i c idad , del autor.
14 RESISTENCIA DF. MATERI ALES
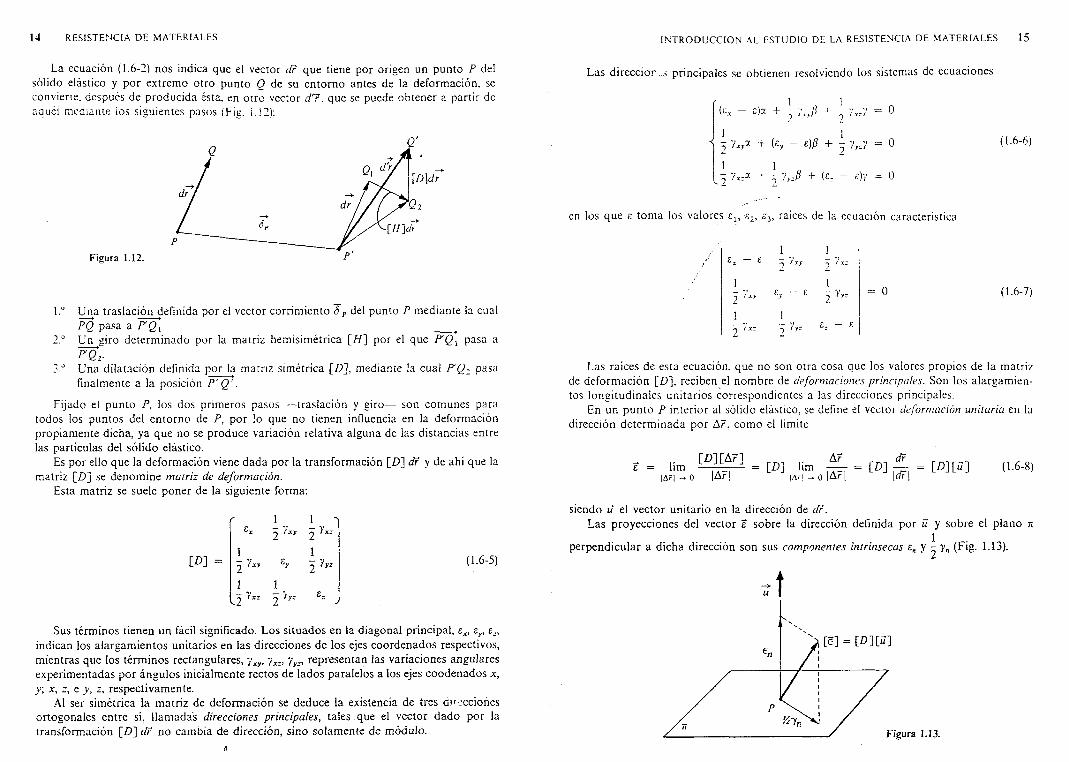
La ecuación (1.6-2) nos indica que el vector dr que tiene por origen un punto P del sólido elástico y por extremo otro punto 0 de su entorno antes de la deformación, se convierte, después de producida ésta, en otro vector d'7. que se puede obtener a partir de aquel mediante ¡os siguientes pasos (Fig. i. 12):
F ig u ra 1 .12 .
1.” Una traslac ión definida por el vector corrim iento ó ¡> del punto P m ediante la cualPO pasa a F Q { ___ r
2.° Un giro determ inado por la m atriz hem isim étrica [/ f] por el que F Q ¿ pasa ar o l
3° Una dilatación definida por la matriz sim étrica [D], mediante la cual F Q Z pasafinalmente a la posición P' Q ' .
Fijado el punto P, los dos primeros pasos —traslación y giro— son comunes para todos los puntos del entorno de P, por ¡o que no tienen influencia en la deformación propiamente dicha, ya que no se produce variación relativa alguna de las d istancias entre las partículas del sólido elástico.
Es por ello que la deformación viene dada por la transformación [D~\ d r y de ahí que la matriz [D ] se denomine matr iz d e d e f o rm a c i ó n .
Esta matriz se suele poner de la siguiente forma:
[DI =
r 1 1£x ’lxy 2 y;c‘'
1 12 y*y £, 21 1
J i 'i l z 2 )y :£.
(1.6-5)
Sus términos tienen un fácil significado. Los situados en la diagonal principal, e x, e y, e,, indican los alargam ientos unitarios en las direcciones de los ejes coordenados respectivos, m ientras que los términos rectangulares, yx>, y xz, y yz, representan las variaciones angulares experimentadas por ángulos inicialmente rectos de lados paralelos a los ejes coodenados x, y ; x, z, e y , z, respectivamente.
Al ser sim étrica la m atriz de deformación se deduce la existencia de tres duocciones ortogonales entre si, llam adas d i r e c c i o n e s p r in c ip a l e s , tales que el vector dado por la transformación [/ )] d r no cam bia de dirección, sino solam ente de módulo.
I NT R O DUC C I ON AL ESTUDIO DE LA RESISTENCIA DE MAT E R I AL E S 15
Las d irecc io r.s principales se obtienen resolviendo los sistemas de ecuaciones
(£i — 2)2 + '‘ xyP A ^
1‘ xy■/xyX + (£„ - E)P + \ y y = 0 ( 1.6-6)
1, 7xF + 7yJ + (e.: - e)y = 0
en los que e tom a los valores £j, t , , £3, raíces de la ecuación característica
¡XV °v
fxy
2 y - £
1y*.- ^ v,=
= o (1.6-7)
Las raices de esta ecuación, que no son otra cosa que los valores propios de la matriz de deformación [£)], reciben el nombre de d e f o r m a c i o n e s p r in c ip a l e s . Son los alargam ientos longitud inales unitarios correspondientes a las direcciones principales.
En un punto P interior al sólido elástico, se define el vector d e f o rm a c i ó n un i ta r ia en la dirección determ inada por Ar , como el límite
e = lim — = [ 0 ] lím = [D ] = [Z>][u] (1.6 -8 )IAN- 0 |Ar| |af| - o |Ar | \dr\
siendo u el vector unitario en la dirección de d r .Las proyecciones del vector e sobre la dirección definida por U y sobre el plano 71
perpendicular a d icha dirección son sus c o m p o n e n t e s in t r ín s e c a s £„ y - y„ (Fig. 1.13).

e„ es la d e f o r m a c i ó n lo n g i tu d in a l un i ta r ia , y ^ y„ representa la d e f o r m a c i ó n t r a n sv e r sa l
unitaria, ambas correspondientes a la dirección definida por u .El lugar geométrico de los extremos de los vectores deformación un itaria para las
infinitas direcciones que pasan por el punto P es un elipsoide llam ado e l i p s o i d e d e d e f o r m a c i o n e s . Su ecuación, referida a un sistema cartesiano ortogonal de ejes coincidentes con las direcciones principales en P, es
16 RESISTENCIA DE MATE RI ALE S
siendo c ¡ , e2, e } los valores de los alargam ientos principales.En virtud de la analogía existente entre las expresiones de los vectores tensión 5 y
deformación un itaria e, según hemos visto, se podrán representar gráficam ente en un
plano las componentes intrínsecas e„ y de este último, análogam ente a como se ha
expuesto para o en el epígrafe anterior.Suponiendo e ¡ > e, ^ £> s¡ representamos en unos ejes coordenados planos llevando
en abscisas los valores de la deformación longitudinal un itaria y en ordenadas los correspondientes de la deformación transversal un itaria , el punto M, cuyas coordenadas son estas componentes intrínsecas del vector deformación un itaria, pertenece al área som breada en la F igura 1.14, para las infinitas direcciones que parten del punto P.
Las tres circunferencias, de centros en el eje de abscisas y de d iám etros e2 — £3, Ei — e3, e, — e2, reciben el nombre de c i r c u i o s d e M o h r de deformaciones.
1.7. P rincip ios generales de la R esistencia de M a ter ia lesSe ha dicho anteriorm ente uce la Resistencia de M ateria les introduce hipótesis simplifica- tivas e incluso ya se han establecido algunas cuando hemos supuesto que el m ateria l de los sólidos elásticos posee las propiedades de hom ogeneidad, continuidad e isotropía.
I NT R O DUC C I ON AL ES TUDI O DE LA RESISTENCIA DE MATERI ALES 17
Estas hipótesis y otras que en el momento oportuno se establecerán al estudiar el comportamiento de los m ateriales ante determ inado tipo de solicitación, son insuficientes. Es necesario aceptar algunos postulados que tengan carácter general y sirvan de base para la solución de la m ayoria de los problemas que se nos puedan presentar.
En Resistencia de M ateriales existen tres principios generales: el principio de rigidez relativa de los sistemas elásticos, el principio de superposición de efectos y el principio de Saint-Venant. En este capítulo introductorio es obligado exponer —que no demostrar, pues como tales principios carecen de dem ostración— estos principios generales que vamos a utilizar en todo el desarrollo de la disciplina.
P rin c ip io de r ig id ez r e la t iv a d e lo s s is te m a s e lá s t ic o s
Según este principio, se adm ite que al ap licar el sistema exterior de fuerzas, la forma del sólido no varía de forma significativa. Por ello, se expresan las condiciones de equilibrio como si el sólido deformado tuviera la misma forma y dimensiones que antes de producirse la deformación.
Así, por ejemplo, si se ap lica una carga P en la articulación O del sistema formado por las dos barras O A y OB de la F igura 1.15-a, el sistema se deforma en la forma indicada por puntos en la misma figura.
A',A
a —■P - &P
(o) ( c )
F ig u r a 1 .15 .
Si no existiera el principio de rigidez re lativa de los sistemas elásticos, las ecuaciones de equilibrio del nudo O serían (Fig. 1.15-6): '-3
N2 sen (P - A/?) = N í sen (a - Aa)N¡ eos (a — Aa) + N2 eos ( 8 — A/?) = P
(1.7-1)
Pero la resolución de este sistem a de ecuaciones presenta dificultades, ya que las deformaciones del sistema son desconocidas hasta tanto se determinen los esfuerzos y
en las barras.El principio de rigidez, d ada la pequeñez de las deformaciones, permite suponer el
sistema indeformado (Fig. 1.15-c), por lo que las ecuaciones de equilibrio del nudo serán.

1 8 RESISTENCIA DE MATERI ALES
sistema de ecuaciones que permite obtener, sin m ás, los valores de los esfuerzos en las barras sin necesidad de tener en cuenta las deformaciones.
Este principio no será aplicable cuando las condiciones de equilibrio en las posiciones deform ada y sin deform ar sean sustancialm ente d istin tas, c o m o ocurre, por ejemplo, en los casos indicados en la F igura 1.16, en los que las m agnitudes que se consideren dependen de la nueva geom etría del sistema.
En el primer caso (Fig. 1.16-a), el momento, por ejemplo, en una sección de abscisa x seria nulo si fuera cierto el principio. Por el contrario , su valor depende del desplazam iento experim entado por la sección de la viga.
El caso indicado en la F igura 1.16-6 es el ejem plo típico que se suele poner de sistema en el que, siendo sus elementos elásticos, existe una dependencia no lineal entre desplazamientos y las fuerzas exteriores aplicadas. La consideración de la nueva configuración geométrica del sistem a es esencial en la form ulación del problema. Por tanto, no será aplicable el principio.
Es de hacer notar, sin embargo, que el principio de rigidez puede ser ap licable a sistemas de m aterial que no siga la ley de Hooke, es decir, en los que exista una relación de dependencia no lineal entre desplazam ientos y fuerzas exteriores, siempre que la variación de forma experim entada por el sistema no sea sign ificativa.
P r in c ip io d e su p e rp o s ic ió n d e e fe c to s
Es aplicable a los sistem as en que son lineales las relaciones entre fueizas exteriores y desplazam ientos y en los que las líneas de acción de las fuerzas no quedan modificadas de
'«forma sign ificativa por los desplazam ientos. E xpresa que el estado de equilibrio debido a varias acciones exteriores es igual a la superposición de las soluciones que corresponden a cada uno de los estados si cada acción exterior a c tu a ra independientemente, o dicho de otra forma, los desplazam ientos y las tensiones en un punto de un sólido elástico sometido a varias fuerzas exteriores directamente ap licadas son, respectivamente, la suma de los desplazam ientos y las tensiones que se producen en dicho punto por cada fuerza actuando aisladam ente.
Una consecuencia inm ediata que se deduce del c itado principio es que el estado final del cuerpo no depende del orden en que se ap liquen las fuerzas.
Hemos indicado que este principio es v á lid a su ap licación a sistemas en los que son lineales las relaciones entre fuerzas exteriores y desp lazam ientos, o, lo que es lo mismo, las tensiones son proporcionales a las deformaciones, es decir, sistemas en los que se verifica la ley de Hooke.
Este principio es de gran utilidad dado que perm ite d iv id ir el caso de una solicitación
I N T R O D U C CI ON AL ESTUDIO DE LA RESISTENCIA DE M A T ER I AL E S 19
general, que puede ser compleja, en casos sencillos que resultan haciendo actuar por separado las diversas fuerzas o acciones de cualqu ier tipo, como pueden ser variaciones térmicas, asientos de los apoyos de una estructura, etc.
A pesar de que el principio de superposición es de aplicación generalizada a los sistemas elásticos, tiene sus lim itaciones. Asi, no será válido en los casos en los que no sea aplicable el principio de rigidez que hemos visto anteriormente. Ni en los casos en los que los efectos de las fuerzas no sean independientes de las deformaciones como ocurre en la viga recta AB ind icada en la F igura 1.17, som etida a una fuerza de compresión F y a una carga P ap licada en la sección media de A 5.
ZT
F ig u r a 1 .17 .
Es evidente que si se ap lican sim ultáneam ente F y P, la deformación de la línea media de la v iga es diferente si se ap lica P por una parte y F por otra, separadam ente, ya que la fuerza F (sin sobrepasar un determ inado valor crítico, como veremos m ás adelante) no produce, actuando sola, desplazam iento alguno en la dirección del eje y . Por el contrario , si actúan sim ultáneam ente, el momento producido por F aum enta la deform ación producida por P.
Tampoco se verificará en el sistema indicado en la F igura 1.16-6, ya que no se verifica una relación lineal entre la fuerza P y el desplazam iento 5.
P r in c ip io d e S a in t - V e n a n t
Este principio establece que a partir de una distancia suficiente de los puntos de la superficie de un sólido elástico en los que está ap licado un determ inado sistem a de fuerzas, las tensiones y deformaciones son prácticam ente iguales para todos los sistem as de fuerzas que sean estáticam ente equivalentes al dado.
Fácilm ente se comprende que en el caso de cargas puntuales, p ara ev itar que en los puntos de localización de esas cargas la tensión tome valor infinito, será preciso suponer una d istribución uniforme tal que sea estáticam ente equivalente a la real, esto es, que respecto de cualqu ier punto los sistemas real y supuesto tengan la m ism a resultante y el mismo momento resultante. El reparto de tensiones en las proxim idades de los puntos de ap licación de las fuerzas es evidente que no son iguales en am bos casos.

20 RE SISTE N CIA DE M A T E R IA LE S
Con cualqu ier esquem a de cálculo que podamos considerar, podemos representar un sinfín de disposiciones constructivas equivalentes. El principio de Sa im -V enan l nos dice que en todas ellas ¡a distribución de tensiones y deformaciones es la misma, a distancia suficiente de los puntos de aplicación de las fuerzas exteriores. En vigas norm ales esta d istancia suficiente suele ser del orden de las dimensiones de la sección transversal.
Aunque este principio es aplicable a la m ayoría de los sistem as que nos pedam os encontrar en la práctica, no tendrá sentido referirnos a él cuando se trate de ca lcu lar las tensiones en la zona próxim a a la aplicación de las fuerzas. En tal caso tendremos que recurrir a la teoría de la E lasticidad y el grado de exactitud con que la solución del problem a elástico, nos dé la distribución de tensiones en esa zona dependerá del grado de coincidencia de la d istribución real de las fuerzas ap licadas al sólido elástico con la distribución supuesta en las condiciones de contorno.
1.8. R elacion es entre los estados tensional y de deform acion es*En dos epigrafes anteriores hemos expuesto las principales particu laridades que presentan los estados tensional y de deformación creados en el interior de un sólido elástico. El tratam iento de am bas cuestiones ha sido totalmente independiente. Sin em bargo, dado que deformación y tensión son causa y efecto, es de esperar que las matrices de tensiones y de deformación estén relacionadas entre si.
F ijada la so licitación exterior es evidente que la deformación que se origina y, en consecuencia, la tensión creada en el sólido elástico, dependen de las fuerzas de atracción m olecular, es decir, de la estructura interna del m aterial.
Se deduce, por tanto , que para obtener la relación entre tensiones y deformaciones tendremos que proceder necesariam ente por v ia experim ental m ediante ensayos realizados en el laboratorio , en donde se comprueba, en efecto, que p ara dos piezas de distintos m ateriales, de iguales dimensiones y sometidas al mismo estado de cargas, las deform aciones son distintas.
Q uizá el ensayo m ás simple que se pueda hacer sea el de tracción. Se realiza este ensayo sometiendo una pieza de dimensiones norm alizadas llam ada p r o b e t a a un esfuerzo de tracción que se aum enta gradualm ente hasta la rotura. En la probeta se realizan previamente dos m arcas, que determ inan una longitud denom inada d i s ta n c ia e n t r e p u n t o s , sobre las que se efectúa, por medio de un extensómetro, la m edida de los alargam ientos.
Consideremos una probeta de sección f í a la que aplicam os en sus extremos una fuerza F en dirección ax ia l. Esta fuerza causa en el interior del m ateria l un estado de tensiones que supondremos uniforme para cualqu ier sección recta. L a tensión normal a está relacio- naa con la fuerza F m ediante la ecuación
* U n deten ido estud io de todo lo que se expone en este epígrafe se puede ver en ei C ap ítu lo 4 de la obra Elast i c idad, del au to r.
IN T R O D U C C IO N AL ESTU D IO DF. LA RE SISTE N CIA DE M A TE RIA LE S 21
La probeta, debido al esfuerzo, se a larga . Llamemos e a l a largam iento unitario en el sentido longitudinal. Aum entando progresivam ente el valor de F y llevando ios valores de a y £ a un gráfico cuyo eje de ordenadas m ida tensiones (a) y el de abscisas deformaciones unitarias (e), se obtiene para el acero dulce el d ia g r a m a t e n s i ó n - d e f o r m a c i ó n indicado e n la Figura 1.18-a.
F ig u r a 1 .18 .
Al ir aumentando el valor de la tensión desde 0 hasta o B, existe proporcionalidad con las deformaciones un itarias. La gráfica es recta y el punto p correspondiente recibe el nombre de l ím i t e d e p r o p o r c i o n a l i d a d . P ara el acero es cr„ = 2000 kp/cm2, aproxim adamente.
Sobrepasando este valor, se entra en la zona de elasticidad no proporcional. La gráfica es curva, siendo nulas las deformaciones permanentes hasta el punto e llam ado l im i t e d e e la s t i c idad , que separa el período elástico del periodo elástico-plástico.
En la zona elástico-p lástica, en el caso de cesar la fuerza, se observarían deformaciones permanentes, lo que im posib ilita que el m aterial vué?va a recuperar las condiciones iniciales.
Llegado a este punto, se pueden observar unas líneas que forman 45° con el eje de la probeta llam adas l ín ea s d e L üd er s , y que son producidas por las tensiones tangenciales cuyos valores máximos, según veremos en el C ap ítu lo 2, corresponden a esas direcciones y originan un desplazam iento relativo de las redes cristalinas de m oléculas del m aterial.
Hasta un punto f s que se llam a l ím i t e d e f l u e n c i a los alargam ientos son pequeños, pero al llegar a él aum entan considerablem ente sin necesidad de aum entar la fuerza F. Para cierto tipo de m ateriales la fuerza dism inuye hasta un valor determ inado por el p un to / , denominado l ím i t e i n f e r i o r d e f l u e n c i a (en este caso / se llam a l ím i t e s u p e r i o r d e f lu e n c ia ) . Se advierte que el a largam iento de la probeta a partir del momento que comienza a fluir es un gran número de veces m ayor que el producido antes de fluir. Cuando el valor de la tensión alcanza cierto valor, la sección de una parte de la probeta comienza a disminuir.

2 2 RESISTENCIA DE MATERI ALES
Este fenómeno se conoce como e s t r i c c i ó n . Las tensiones permanecen constantes produciéndose un notable alargam iento a partir del momento en que el m aterial empieza a fluir.
A partir de este alargam iento a tensión constante es preciso aum entar la fuerza de tracción sobre la probeta hasta un valor a mix. Esto se debe a la propiedad del material, conocida como e n d u r e c im i e n t o p o r d e f o rm a c i ó n . Después, la tensión dism inuye, el a largamiento aum enta hasta producirse la rotura para un valor <jr de la tensión. Para el acero dulce la tensión de rotura vale de 4000 a 5000 kp/cm2.
Cuando hemos hablado de que se ha alcanzado un valor determ inado de la tensión, se ha calculado ésta dividiendo la fuerza F ejercida por la sección in icial que tenia la probeta, pero esta sección ha ido dism inuyendo, lo que hace que el valor indicado en la gráfica sea un valor erróneo por defecto que irá aumentando con las deformaciones. Esto hace que la gráfica obtenida sea falsa; sin embargo, es la que se utiliza en la práctica dado lo laborioso que seria tener en cuenta continuamente en el valor de la tensión las variaciones de la sección.
La determ inación del lím ite de elasticidad es, en general, bastante difícil, por lo que en la práctica se toma este lim ite el punto f i que se llam a entonces l ím i t e a p a r en t e d e e la s t i c id a d .
La rotura se produce en una sección media de la gargan ta o huso que se forma como consecuencia de la estricción. Esta garganta forma una superficie cónica, cuyo semiangulo tiene un valor aproxim ado de 45 '. lo que nos indica que son las tensiones cortantes las principales causantes de la rotura de los materiales dúctiles.
Por el contrario, el comportamiento de los m ateriales frágiles, como la fundición, el vidrio o la porcelana, es distinto. La rotura se produce sin que se manifieste el fenómeno de estricción, en una sección perpendicular al eje de la probeta, lo que nos indica que son las tensiones normales las causantes de la rotura de los m ateriales frágiles.
Una observación es necesario hacer respecto a las diferentes características de fluencia que presentan los m ateriales dúctiles, como son el acero de construcción y el aluminio. En el caso del acero, como hemos visto, en el período de fluencia se presenta alargam iento a tensión constante y el fenómeno de endurecimiento por deformación (Fig. 1.18-tf).
En el caso del alum inio (Fig. 1.18-6) y de otros muchos m ateriales dúctiles no existe el aum ento de la deformación a tensión constante, sino que es creciente hasta un valor o mix en el que comienza la estricción y aum enta el alargam iento a la par que disminuye la tensión hasta que se produce la rotura. En este caso, se define el lím ite elástico a un tanto por ciento del alargam iento. En la F igura 1.19 se ind ica la forma como se determina el lím ite elástico en un m aterial dúctil de las características indicadas cuando el alargam iento longitudinal unitario de la probeta es del 0 . 2 por 1 0 0 .
cr |
I N T R O D U C C I O N AL ESTUDIO DE LA RESISTENCIA DE MAT E R I AL E S 2 3
Por el punto del eje de abscisas correspondiente a £ = 0.2 por 100 se traza una recta parale la a la parte del d iagram a tensión-deformación. La ordenada del punto A de intersección de esta recta con la curva nos da e! valor del límite elástico cre.
Se observa una zona de e lastic idad proporcional en la que la relación tensión-deformación será lineal, es decir, su ecuación analítica tendrá ia forma
<r„ = Erx (1-8-2)
siendo E una constante llam ada m ó d u l o d e e l a s t i c i d a d lon g i tu d ina l o m ó d u l o d e Young.Esta expresión constituye la l e y d e H ook e : en la zona elástica de los m ateriales, las
tensiones son proporcionales a lo s.a largam ientos unitarios.El m ódulo de elastic idad £, que según la ecuación (1.8-2) tiene las dimensiones de una
tensión ( [ £ ] [ £ ] ” 2), es diferente para cada m aterial. En la Tabla 1.1 figura su valor para algunos m ateriales de uso frecuente.
T a b la 1 .1 . V a lo r e s d e l m ó d u lo d e e la s t ic id a d E
M a te r ia l E k p / cm 2
A c e ro ( 0 .1 5 -0 .3 0 % C ) 2.1 x 106A c e ro (3 -3 .5 % N i) 2.1 x 106F u n d ic ió n g r is 1.05 x 106H o r m ig ó n (1 : 2 : 3 .5) 1.76 x 105M a d e r a p in o 1.27 x 105M a d e r a d e ro b le 1.12 x 105A lu m in io , fu n d ic ió n (99 % A i) 0 .7 x 106L a tó n (6 0 % C u ; 4 0 % Zn) 0 .9 x 106B ro n c e (9 0 % C u ; 10 % S n ) 0 .8 x 106C o b r e O kO X 106
En el mismo ensayo a tracción se observa que simultáneamente al alargam iento de la probeta se produce un acortam iento de las dimensiones de la sección transversal. Para una pieza de sección rectangu lar (Fig. 1.20), las deformaciones transversales un itarias se rigen por las expresiones
e y = - n a- f - , s z = - p ? f ( 1 . 8 - 3 )
en donde p es el llam ado c o e f i c i e n t e d e P o i s s on , que es constante para cada m aterial. Su valor para m ateriales isótropos es aproxim adam ente igual a 0.25. Par?, el acero dulce er. deformaciones elásticas se suele tom ar el valor p = 0.3. Los valores correspondientes para el alum in io y cobre que se deform an elásticam ente son ligeramente superiores.
F i g u r a 1.20.

2 4 RESI STENCI A DE MATE RI ALE S
Las ecuaciones (1.8-2) y (1.8-3) nos relacionan los elementos de la m atriz de tensiones con la de deformaciones en un caso m uy simple, en el que oy = <j„x; a 2 = oy = 0 .
Si consideram os ahora un estado elástico tridim ensional, se dem uestra que las direcciones principales de ambas matrices son coincidentes.
Admitido el principio de superposición, las relaciones entre las deformaciones y tensiones principales serán:
£i = £ [ay - /t(ay c 3)l
< s 2 = 7 : [<72 - M<?i + ^ 3)] t
£3 = 7 : [a-j - /'(ay + ay)] t
(1.8-4)
Si el sistem a de ejes coordenados no coincide con las direcciones principales, las relaciones entre las componentes de la m atriz de tensiones [ 7 ] y de deformación [£>] son:
fe* = [°"*E
= ¡ K v - F (o„ + O ]
e. = - K - E L " - + O ]
|<2 >II II II
oliT
(1.8-5)
Estas relaciones constituyen las l e y e s d e H ook e g en e r a l i z a d a s . G recibe el nombre de m ó d u l o d e e l a s t i c i d a d t ra n sv e r sa l . Su expresión en función de E y de ¡x
G =2(1 + n)
( 1.8-6)
nos hace ver que tiene las m ism as dimensiones que E ([F "][L ]~ 2), ya que p es adimer.sio- nal, y que depende exclusivam ente del m aterial.
En la T ab la 1.2 se recogen los valores de G p ara algunos m ateriales de frecuente uso en la práctica.
Tabla 1.2. Valores del módulo de elasticidad G
M a t e r ia l G k p / cm 2
A ce ro (0 .1 5 -0 .3 0 % C )A c e ro (3 -3 .5 % N i)F u n d ic ió n g r isA lu m in io , fu n d ic ió n (99 % A l) L a tó n (6 0 % C u ; 4 0 % Z n ) B ro n c e (9 0 % C u ; 10 % S n ) C o b re
8 .4 4 x 1 0 58 .4 4 x 1054 .2 2 x 105 2 .8 x 105 3 .5 2 x 1 0 54 .2 2 x 1054 .2 2 x 105
I NTRODUC CI ON AL ESTUDIO DE LA RESISTENCIA DE MA T E R I AL E S 2 5
1.9. E sfuerzos norm al y cortante y m om entos de flex ión y de torsión: sus relaciones con las com ponentes de la z.iatriz de tensiones
Consideremos un prisma mecánico que suponemos en equilibrio estático bajo la acción de un sistema de fuerzas F¡(i = 1, 2, 7, en la F igura 1.21), que representa laacción exterior y emplearemos el método de las secciones para analizar el equilibrio elástico en una sección mn.
El método consiste en im aginar realizado un corte en el prisma. Este corte determ ina una sección m n que consideraremos plana por comodidad (aunque no es necesario que lo sea). Supondremos, asimismo, que mn es una sección recta, es decir, contenida en un plano normal a la línea media del prisma.
Es evidente que realizado este seccionamiento y elim inada, por ejemplo, la parte de la derecha, sobre la parte de la izquierda se rom pería radicalm ente el equilibrio a no ser por la existencia de una fuerza y un par, es decir, del torsor* equivalente a la acción externa que ejerce la parte de la derecha, que se ha elim inado.
Ya se comprende, según se deduce de las condiciones generales del equilibrio estático, que esta fuerza y par son, respectivamente, la resultante R y momento resultante M respecto al centro de gravedad G de la sección, de las fuerzas que actúan en la parte elim inada.
Esta consideración no nos permite conocer la distribución de esfuerzos en los diferentes puntos de la sección, para ello es necesario establecer hipótesis sim plificativas suplem entarias que ya se indicarán más adelante, pero sí nos permite obtener unas interesantes conclusiones acerca del tipo de esfuerzos a que está som etida la sección.
En efecto, refiriendo la resultante R al triedro trirrectángulo Gxyz, cuyos vectores unitarios son i , j , k (Fig. 1.22), se tiene
r = N i + TyJ + T i (1.9-1)
Sus tres componentes son: N, Ty y Tz.
* Se denom ina ’ orsor de un sistem a de vectores deslizantes en un punto a l con jun to fo rm ado p o r dos vectores — resu ltan te y m om ento resu ltan te del sistem a respecto de d icho punto— que form an un sistem a equivalen te a éste.

2 6 RESI STENCI A DE MATERI ALES
Veamos el significado de cada una de estas componentes.N, llam ado e s f u e r z o n o rm a l , por serlo a la superficie de la sección considerada, tiende a
em pujar o separar a am bas partes del prisma dando lugar a esfuerzos de compresión o tracción, respectivamente.
71 y 71, por estar en el mismo plano de la sección efectúan la misma clase de esfuerzo y, por tanto, podemos obtener su resultante T
T = T j + T i (1.9-2)
que es la expresión de un esfuerzo que actúa tangencialm ente a la superficie de la seccióncomo si se tratase de deslizar la sección respecto de una muy próxima, separándola ocortándola. Es por ello que esta componente de la resultante se denom ina e s fu e r z o t a n g e n c i a l o c o r t a n t e . Si el prism a se rompiese por la sección recta, el vector T nos ind icaría la dirección en que saldrían despedidos los dos trozos del prisma.
A nálogam ente podemos proceder a descomponer el momento resultante M en la dirección perpendicular a l plano de la sección y en o tra componente contenida en dicho plano (Fig. 1.23)
M = M tz + M j + M J c (1.9-3)
I NT RO D U C CI ON AL ES TUDI O DE LA RESISTENCIA DE MA T E R I A L E S 2 7
Como ya sabemos, el vector momento nos expresa una tendencia al giro. Expresado M en función de sus componentes M r , M y y M . , veamos qué efecto produce cada una de ellas sobre el prisma.
M T actúa perpendicularm ente al plano de la sección en la dirección de la línea media, . por tanto, tiende a hacer g irar el sólido sobre si mismo, creando un efecto de torsión. Se •llama por ello a M T m o m e n t o t o r s o r .
M y y M . tienden a obligar al sólido a girar lateralm ente curvándolo en los planos ,xr y .vv, respectivamente, fiexionándolo, por lo que se denominan m o m e n t o s J l e c t o r e s . Su ‘resultante está contenida en el plano de la sección recta; es el m o m e n t o j l e c t o r
M F — M yj + M .k (1.9-4)
Para encontrar las relaciqnes entre las componentes d e R y M y las componentes de la matriz de tensiones, tendremos en cuenta que las fuerzas engendradas por las tensiones en toda la sección recta forman un sistema cuya resultante es R y cuyo momento resultante respecto de G es A7. Por tanto, los esfuerzos norm al N y cortantes Ty y 71, en función de las componentes de la m atriz de tensiones, serán:
V = dQ 71 = r xy dQ. ; 71 = r r. dQ (1.9-5)
F ig ura 1.24.
Las expresiones de los momentos torsor M T y flectores M y y M . se obtienen de
M =p * 1 j k rr0 y z = i
Jj Q o„x dQ r xy dQ r x, dQ Jn
+ / dQ - k
[y*x: - ZXxy) t i l +
y a nx dQ = M j i + M j + M zk (1.9-6)
Identificando coeficientes, se tiene

2 8 r e s i s t e n c i a d h m a t e r i a l e s
1.10. T ipos de so licitacion es ex teriores sobre un prism a m ecánicoLa solicitación exterior sobre un prisma m ecánico está constitu ida, en general, por las fuerzas activas o directamente aplicadas que llam am os c a r g a s y las fuerzas de reacción o r e a c c i o n e s debidas a las ligaduras. Las cargas que actúan sobre el prisma mecánico están constituidas por fuerzas y momentos (pares). Las reacciones se m aterializarán , en el caso de que la sección extrema se obtenga m ediante un corte ideal por aplicación del método de las secciones, en la acción que ejerce el resto de la estructura sobre la pieza que se considera, o en una reacción en el caso de que exista un vinculo exterior, tal como un apoyo o un empotramiento.
La acción en el primer caso o la reacción en e l segundo estarán formadas, en general, por una fuerza y un momento. En el epígrafe siguiente le dedicarem os a las reacciones en los apoyos un estudio más detenido.
Intentemos ahora hacer una clasificación de las f u e r z a s d i r e c t a m en t e a p l i c a d a s o c a r g a s .
Una primera clasificación distingue entre f u e r z a s d e v o lu m en y f u e r z a s d e s u p e r f i c i e .Las primeras actúan sobre todos los puntos del sólido y son debidas a campos de
fuerzas tales como el campo gravitatorio , el cam po de fuerzas de inercia engendradas en un solido afectado de aceleración, o el campo m agnético cuya existencia puede afectar a determ inados materiales.
Sí llam am os J v a la fuerza por unidad de volum en (_/„ será, en general, función de la posición del punto), sobre cada elemento de volumen dv del prisma estará ap licada la fuerza /„ dv.
Las fuerzas de superficie son las que se ap lican a la superficie exterior del prisma. Pueden ser c o n c e n t r a d a s o repa r t id a s .
En realidad no existen fuerzas concentradas. Todas las fuerzas de superficie reales son fuerzas que se distribuyen sobre cierta área. Así, en el caso de una rueda que transm ite al carril que la gu ia una cierta carga, ésta se reparte sobre el área , aunque reducida, debida a la deformación local que se produce alrededor del punto teórico de contacto.
En el caso de que estuvieran repartidas, s i/ n es la fuerza que se ejerce por unidad de superficie, sobre un elemento de área dD. ac tu ará f n dQ. Ejemplos de este tipo de fuerzas son las debidas al viento sobre una pared, la acción ejercida sobre una compuerta de un depósito por el fluido que contiene, el empuje de tierras sobre un muro de contención, la reacción de un cuerpo, etc.
En el caso de una barra, el peso propio se considera, generalm ente, no como una fuerza de volumen, sino como fuerza de superficie en form a de carga lineal repartida a lo largo de ella.
Si atendemos a la continuidad de presencia sobre la estructura, las cargas se pueden clasificar en:
a) C a r g a s p e rm a n e n t e s , que como su nom bre indica, son las que existen siempre manteniéndose constantes en m agnitud y posición. Ejemplos de este tipo de cargas son el peso propio, los pavim entos, los m ateriales de cubrición de los techos, etc.
b) C a r g a s a c c i d e n t a l e s o s o b r e c a r g a s , que con m ayor o menor probabilidad pueden a ectar a la estructura y que se tendrán que tener en cuenta en el cálculo resistente de la pieza. Ejemplos de cargas accidentales son las personas, m uebles, m áquinas y vehículos. A este tipo de cargas pertenecen también las de explotación y uso de la estructura; las
I NT R O DU C C I O N AL ESTUDIO DE LA RESISTENCIA DE MATE RI ALE S 2 9
c l im á t i ca s , tales como las acciones debidas al viento, a la nieve, a las variaciones térmicas y acciones sísm icas, y las producidas por el peso del terreno y el empuje de tierras.
La determ inación de los valores de estas sobrecargas ocasionales a efectos del cálculo se hace m ediante la ap licación de métodos estadísticos y cálculo de probabilidades.
Si atendemos a que existan o no fuerzas de inercia, las cargas las podemos clasificar en:
a) C a r g a s e s t á t i c a s , cuando el módulo, punto de aplicación o dirección si varían, lo hacen tan lentamente que permiten despreciar las fuerzas de inercia.
b) C a r g a s d in ám ica s , que son las que varian con el tiempo. La acción de este tipo de tuerzas es acom pañada de vibraciones de las estructuras, apareciendo fuerzas de inercia que hay que tener en cuenta, ya que pueden superar de forma muy notable los valores de las cargas estáticas.
En la práctica se presentan con frecuencia las cargas dinám icas en forma de c a r g a s r e p e t i d a s de carácter periódico, es decir, la variación de su módulo respecto al tiempo presenta forma ciclica. Tal o tu rre en bielas, balancines y resortes que cierran las válvulas en los motores de explosión, asi como en determ inadas piezas de mecanismos en los que las cargas periódicas dan lu ga r al fenómeno conocido como f a t i g a , que será estudiado con detenimiento en otro lugar.
Otras veces la variación es no periódica, como puede ser, por ejemplo, las que actúan sobre edificios debidas a la acción del viento, nieve, etc. Dentro de este grupo podemos incluir también las llam adas c a r g a s d e c h o q u e o im pa c to , que son aquellas que actúan sobre la pieza durante un pequeño intervalo de tiempo, tal como la que ejerce un martillo al clavar un clavo, o la de un cuerpo que cae al suelo desde una cierta altura.
1.11. R eacciones de las ligaduras. T ip os de apoyosAl considerar la pieza genérica de una estructura, ésta estará sometida a una o varias ligaduras que la unen a l resto de la misma o al suelo. En cada ligadura existe una reacción que, en general, estará form ada por una fuerza y por un momento.
Es condición necesaria p ara que la pieza esté en equilibrio que el sistema de fuerzas constituido por las fuerzas directam ente ap licadas y las reacciones verifiquen las condiciones generales ( 1.2 -1).
Es evidente que la reacción dependerá de la solicitación exterior y Sfel tipo de vínculo. Una sección no som etida a ligadura alguna tiene, según sabemos, seis grados de libertad: tres posibles desplazam ientos en las direcciones de los ejes coordenados x , y , z y los posibles giros alrededor de los mismos ejes. A cada grado de libertad impedido por la ligadura corresponde una componente de la reacción: si está impedido el movim iento de la sección en la dirección de uno de los ejes, la reacción de la ligadura comprende una fuerza que tiene una componente en la dirección de ese eje. Si adem ás, está impedido el giro de la sección alrededor de alguno de los ejes coordenados mediante un em potram iento, por ejemplo, la reacción com prende un momento que tiene una componente en la dirección de ese eje, es decir, si está im pedido el giro en alguno de los planos coordenados, forma parte de la reacción de la ligadura un momento en dirección perpendicular a ése plano.
Se deduce, por tanto, que en una pieza sometida a una solicitación arb itraria de fuerzas tridimensional un em potram iento equivale a seis incógnitas (Fig. 1.25). Si solam ente se
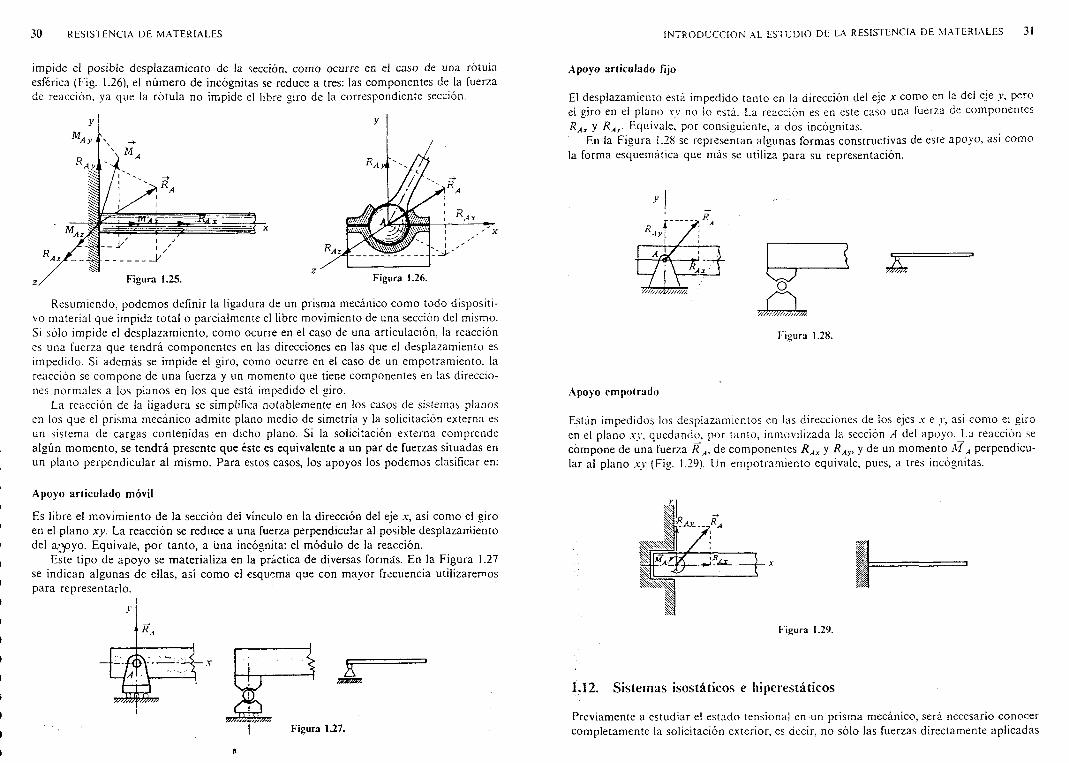
3 0 RESI STENCI A DE M A T E R I AL E S
impide el posible desp lazam iento de la sección, como ocurre en el caso de una rótula esférica (Fig. 1.26), el número de incógnitas se reduce a tres: las componentes de la fuerza de reacción, ya que la rótu la no impide el libre giro de la correspondiente sección.
Resumiendo, podemos definir la ligadura de un prisma mecánico como todo dispositivo m aterial que im pida total o parcialm ente el libre movimiento de una sección del mismo. Si sólo im pide el desp lazam iento , como ocurre en el caso de una articulación, la reacción es una fuerza que tendrá componentes en las direcciones en las que el desplazam iento es impedido. Si adem ás se im pide el giro, como ocurre en el caso de un empotram iento, la reacción se compone de una fuerza y un momento que tiene componentes en las direcciones norm ales a los planos en los que está impedido el giro.
La reacción de la ligadura se simplifica notablemente en los casos de sistemas planos en los que el prism a m ecánico adm ite plano medio de sim etría y la solicitación externa es un sistem a de cargas contenidas en dicho plano. Si la solicitación externa comprende algún momento, se tendrá presente que éste es equivalente a un par de fuerzas situadas en un plano perpendicular a l mismo. P ara estos casos, los apoyos los podemos clasificar en:
Apoyo a r t ic u la d o m ó v il
Es libre el movim iento de la sección del vinculo en la dirección del eje x, así como el giro en el p lano xy. La reacción se reduce a una fuerza perpendicular al posible desplazam iento del a p p y o . Equivale, por tanto , a úna incógnita: el módulo de la reacción.
Este tipo de apoyo se m ateria liza en la práctica de diversas formas. En la F igura 1.27 se indican a lgunas de ellas, así como el esquema que con m ayor frecuencia utilizarem os para representarlo.
I F i g u r a 1.27.
I NT R O DUC C I ON AL ESTUDIO DE LA RESISTENCIA DE MA T E R I A L E S 31
A p o y o a r t ic u la d o fi jo
El desplazam iento está impedido tanto en la dirección del eje x como en la del eje y , pero el giro en el plano xv no lo está. La reacción es en este caso una fuerza de componentes RAx y RAy. Equivale, por consiguiente, a dos incógnitas.
En la F igura 1.28 se representan algunas formas constructivas de este apoyo, así como la forma esquem ática que más se utiliza para su representación.
(PnF ig u r a 1 .28 .
A p o y o e m p o tra d o
Están impedidos los desplazam ientos en las direcciones de los ejes x e y , así como el giro en el plano xv, quedando, por tanto, inm ovilizada la sección A del apoyo. La reacción se compone de una fuerza R A, de componentes R Ax y R Ay, y de un momento M A perpendicular al plano x y (Fig. 1.29). Un empotram iento equivale, pues, a tres incógnitas.
F ig u ra 1 .29 .
1.12. S istem a s iso stá tico s e h ip erestáticosPreviamente a estudiar el estado tensional en un prism a mecánico, será necesario conocer completamente la solicitación exterior, es decir, no sólo las fuerzas directam ente ap licadas

3 2 RESISTENCIA DE MATERI ALES
que, generalmente, serán conocidas, sino las reacciones de las ligaduras que son desconocidas.
Las ecuaciones que disponemos para determ inar las correspondientes incógnitas son las (1.2-1), que expresan las condiciones de equilibrio de la pieza. Estas ecuaciones, que son seis en el caso general, permiten calcular otras tantas incógnitas. Por tanto, para poder determ inar las reacciones de las ligaduras exteriores dentro del marco de la Estática, será necesario que el número de incógnitas de éstas no supere a, seis para un sistema arbitrario de fuerzas directam ente aplicadas.
En casos particulares de carga, como ocurre en las vigas con plano medio de simetría y las cargas contenidas en dicho plano, el número de ecuaciones disponibles disminuye a tres:
Rx = 0 ; Ry = 0 ; M 0z = 0 (1.12-1)
y, por tanto, también se reduce a tres el número de incógnitas posibles de las ligaduras para que el problema esté determ inado aplicando las ecuaciones de equilibrio.
Los sistemas tales que la sola aplicación de las ecuaciones de la Estática permiten determ inar las reacciones de las ligaduras, reciben el nombre de s i s t em a s i s o s t á t i c o s .
Por el contrario , si existen ligaduras exteriores superabundantes, el número de incógnitas supera al de ecuaciones de equilibrio. Se dice entonces que se trata de un sistema h ip e r e s t á t i c o . P ara la determ inación de las reacciones será necesario hacer intervenir las deformaciones.
En este último caso se llam a g r a d o d e h i p e r e s t a l i c i d a d al exceso de incógnitas respecto al número de ecuaciones de equilibrio .
Por ejemplo, en vigas rectas con plano medio de sim etría, cargada en dicho plano, disponemos de las tres ecuaciones (1.12-1). Se pueden presentar los siguientes casos, según sean los apoyos (F ig. 1.30):
a) Viga con un extremo articu lado fijo (dos incógnitas) y el otro articulado móvil (una incógnita). Sistem a, por tanto, isostático.
b) V iga con apoyos articu lados fijos en ambos extremos (cuatro incógnitas). Sistema hiperestático de prim er grado.
c ) V iga em potrada en un extremo (tres incógnitas) y sustentada en el otro mediante apoyo articu lado móvil (una incógnita). Sistem a hiperestático de primer grado.
d ) V iga em potrada en un extremo (tres incógnitas) y con apoyo articu lado fijo en el otro (dos incógnitas). S istem a hiperestático de segundo grado.
e ) V iga b iem potrada (seis incógnitas). Sistem a hiperestático de tercer grado.f ) V iga em potrada en un extremo (tres incógnitas) y libre en el otro. Se le suele
denom inar v i g a e n v o lad iz o . Sistema isostático.
1.13. N o c ió n de coefic ien te de seguridad. T en sión adm isib le
Uno de los objetivos que nos hemos impuesto en el curso de Resistencia de M ateriales es el de calcu lar las tensiones que se producen en la pieza de una m áquina o una estructura al ap licarle un determ inado sistem a de fuerzas exteriores.
I NT R O DU C C I ON A L ES TUDI O DE LA RESISTENCIA DE MATE RI ALE S 3 3
ib)
A77777Z
VAH í i - .
= R B1777777?,
id)
r — / , R A/ i
< / i ' / 1 s > i
VB.
p í
V ~ H a - ............................... i
VA '
le) ^ ____________
A1 1 ) ,
r "a i-Hb
( / )
F ig u r a 1 .30 .
Hay, sin em bargo, una serie de factores que hacen que las tensiones a las que realm ente va a estar som etida la pieza sean superiores a las que obtenemos en el cálculo.
Estos factores a los que nos referimos son entre otros, por ejemplo, el de la heterogeneidad del m aterial, en contra de la hipótesis de hom ogeneidad que se ha adm itido; el de variación de la forma y dim ensiones teóricas, como las que pueden presentar los perfiles y chapas lam inadas, asi como las arm aduras en el horm igón armado; el de posibles errores de cálculo; el de actuar sobrecargas im previstas, como las debidas a la acción de! viento, empuje de tierras, acciones sism icas, etc.
Dado que el diseño de cualqu ier pieza de una estructura se deberá hacer siguiendo el principio de m áxim a econom ía de m ateria l, es necesario conocer para u_ diseño el grado de seguridad que tiene esa pieza o la estructura.
r _et£frñiriac

3 4 RESISTENCIA DE MATE RI ALE S
Una forma de averiguarlo seria hacer crecer las fuerzas exteriores multiplicando todas ellas por un mismo factor n m ayor que la unidad hasta producir la rotura en u.,u pieza o en una estructura, igual a la proyectada. Este valor de n , que podríamos llam ar c o e f i c i e n t e d e s e g u r i d a d . nos resolvería el problema. Pero este método para calcular la seguridad de la pieza o la estructura ya se comprende que sería extraordinariam ente costoso. Nos interesaría poder medir la seguridad de la pieza atendiendo a las características del m aterial en cuanto a la capacidad de resistencia m edida en términos de tensiones, que podemos obtener fácilmente en el laboratorio . Es decir, cam biaríam os el coeficiente de seguridad de las fuerzas externas por el correspondiente a las tensiones internas.
En este sentido, para garan tizar que las tensiones no sobrepasen en ningún punto del sólido elástico un determ inado valor considerarem os como tensión m áxim a de cálculo o t en s i ón adm is ib l e el valor dado por la expresión
a adm = ^ (1.13-1)n
siendo n un número mayor que la unidad llam ado c o e f i c i e n t e d e s e gu r idad .Como el comportamiento de los m ateriales frágiles y dúctiles es distinto, ya que
mientras los primeros tienen un comportam iento elástico hasta la rotura y los segundos presentan el comportamiento descrito en el epígrafe 1.8 , se toma como crUm la tensión de rotura a , en el caso de m ateriales frágiles, como son los hormigones, piedras y m ateriales cerámicos, y el limite elástico <xe en el caso de m ateriales dúctiles, tales como acero dulce, alum inio, cobre (sin tratam ientos térmicos ni m ecanizados en frío).
En la construcción de m áquinas ha sido adoptado el cálculo de la resistencia atendiendo a las tensiones admisibles. El coeficiente de seguridad varía, aproxim adam ente, entre los limites de 1.5 a 2.5.
Es indudable que este coeficiente va a ser un factor numérico que nos va a representar en cierta forma el margen de seguridad de la pieza. Esta forma de proceder, que podríamos calificar de criterio clásico, resuelve el problema de la seguridad de una forma parcial, ya que parece evidente que para fijar un determ inado valor para el coeficiente de seguridad será necesario tener en cuenta las condiciones de trabajo de la construcción que se calcula y dependerá, asimismo, del grado de precisión del método de cálculo que se siga para la determ inación de las tensiones y de la evaluación cuan titativa de las consecuencias que se derivaran de la destrucción de la estructura.
Dado que es la ley del azar la única que rige la determ inación del valor numérico de las variables citadas, será necesario recurrir, para su estudio, a las leyes estadísticas del cálculo de probabilidades.
Modernamente, el coeficiente de seguridad n se descompone en una serie de coeficientes parciales, tales que su producto es igual a n
n = « j x n 2 x « 3 x (1.13-2)
C ada uno de estos coeficientes de seguridad parciales responde a una posible desviación del valor teórico de cálculo de determ inado factor, respecto del valor que realm ente tiene.
El número de coeficientes parciales, unido a los factores que representan, que hay que
a
I N T R O D U C CI ON AL ESTUDIO DE LA RESISTENCIA DE MATERI ALES 3 5
considerar en las piezas de m áquinas y construcciones, asi como los valores que se deben tomar, suelen venir dados en las normas de los diferentes países.
El valor de cada uno de estos coeficientes se suele obtener estadísticam ente estudiando un considerab le número de construcciones análogas.
Otra forma de fijar el coeficiente de seguridad es utilizar c o e f i c i e n t e s d e p o n d e r a c i ó n para m ayoración de las cargas, por una parte, y para minoración de la resistencia del m aterial, por otra.
Así, la norm a española MV-103-1972 para cálculo de las estructuras de acero lam inado en ed ilicación establece como coeficientes de ponderación de cargas los indicados en la Tabla 1.3.
T a b la 1 .3. C o e f ic ien te s de p o n d e ra c ió n
C A S O D E C A R C A C L A S E D E A C C IO N
C o e f ic ie n te de p o n d erac ió n s i e l e fe c to de la a c c ió n es :
D es fav o rab le F a v o ra b le
CASO I A cc io n es c o n s ta n te s 1.33 1.33 1.0A c c io n e s c o n s t a n te s l a S o b re c a r g a 1.33 1.50 0y c o m b in a c io n e s d e d o s V ien to 1.50 1.33 0
in d e p e n d ie n te s A cc io n es c o n s ta n te s 1.33 1.0Ib S o b re c a r g a 1.50 0
N ieve 1. >0 0
A cc io n es c o n s ta n te s 1.33 1.0I c V ien to 1.50 0
N iev e 1.50 0
CASO II A cc io n es c o n s ta n te s 1.33 1.0A c c io n e s c o n s t a n t e s y c o m b in a c ió n S o b re c a r g a 1.33 0d e tre s a c c io n e s v a r ia b le s V ien to 1.33 0in d e p e n d ie n te s N iev e 1.33 0
CASO III A c c io n es c o n s ta n te s 1.00 1.0A c c io n e s c o n s t a n t e s y c o m b in a c ió n S o b re c a r g a d i ) 0d e c u a t r o a c c io n e s v a r ia b le s V ien to 0 .25 (2 ) 0in d e p e n d ie n te s , in c lu s o N ieve 0 .5 0 (3 ) 0la s a c c io n e s s ís m ic a s A c c io n es s ís m ic a s 1.00 0
(1) r es el coefic ien te reducto r p a ra la s so b recargas (T ab la VIII de la N orm a P .G .-S -l, p arte A), que indica:
c a s o 1.° A zo teas, v iv iendas y hoteles (salvo locales de reunión): r = 0.50.c a s o 2.“ O fic inas, com ercios, c a lz ad as y gara jes : r = 0.60.CASO 3.° H osp ita les , cárce les, ed ificios docentes, ig lesias, ed ificios de reunión y espectácu lo s y sa la s de
reun io nes de hoteles: r — 0.80.
(2) Só lo se co n s id e ra rá en construcciones en situación topográfica o m uy expuesta (N orm a M V -I01).(3) En caso de lu g are s en los que la n ieve perm anece acu m u lada hab itualm ente m ás de tre in ta d ias, en caso
co n tra r io el coefic ien te será cero.

3 6 RESISTENCIA DE MATERIALES
La resistencia de cálculo del acero viene fijada, en la misma citada norma, por la expresión
ff„ = — (1 -1 3 -3 )y a
siendo a e el lím ite elástico del acero y -/„ un coeficiente que tom a los siguientes'valores:
yu = 1, para los aceros con limite elástico mínimo garantizado■;a = 1. 1, para los aceros cuyo límite elástico sea determ inado por métodos estadísticos
En cuanto al lím ite a e se fijan los siguientes valores según el tipo de acero:
a) Aceros lam inados fabricados según la N orm a M V-102-1975.Acero lam inado para estructuras de edificación
T ipo de a c e ro L ím ite e lá s t ic o a t k p / cm 2
A 42 2 6 0 0A 52 3 6 0 0
b) Otros aceros laminados.El lím ite elástico garantizado por el fabricante, verificado m ediante ensayos de recep
ción. Si no existe este mínimo garantizado, se obtendrá el lím ite elástico a e m ediante ensayos, de acuerdo con los métodos estadísticos y se tom ará
«r, = a m(\ - 25) (1.13-4)
siendo crm el valor medio, y 5 la desviación cuadrática m edia re lativa de los resultados de los ensayos.
Esto que acabam os de decir, como se ha indicado, es ap licab le a las estructuras de acero lam inado en edificación. Pero para otro m ateria l que se utilice en la fabricación de una pieza de cualquier tipo de estructura, se suele proceder de la siguiente forma: se p repara una serie de probetas del m aterial que se v aya a utilizar y se las ensaya a tracción. Los resultados que se obtienen presentan una dispersión tal que si el número de probetas ensayadas es suficientemente grande, los resultados siguen la ley de una distribución norm al de. Gauss. Pues bien, obtenidos los resultados de los ensayos, calcularem os la llam ada r e s i s t e n c i a c a r a c t e r í s t i c a , que se define como el valor ta l que la p robab ilidad de obtener valores inferiores a él es del 5 por 100. U na vez obtenida la resistencia característica, se toma como tensión de cálculo <j u el valor dado por la expresión
resistencia característica= ■ . :-----— ■ (1.13-5)
coeficiente de m inoración
I NT R O DU C C I ON AL ESTUDIO DE LA RESISTENCIA DE MATERI ALES 3 7
1.14. Criterios de resistencia. T ensión equivalenteExisten infinidad de casos en los que un m aterial va a estar sometido a un estado tensional complejo. Como generalmente la información que disponemos de ese m aterial es su limite elástico <re, obtenido en el ensayo a tracción, sería deseable poder establecer algún criterio que nos permita encontrar un estado de tracción monoaxial equivalente al estado triple que se considere y asi hacer posible la com paración de esta tensión equivalente con el límite elástico del m aterial.
Varios son los criterios que se han propuesto para fijar la t en s ión e q u i v a l e n t e , es decir, la tensión que existiría en una probeta de ese-m aterial sometido a tracción m onoaxial tal que tuviera igual resistencia que el elemento del sólido elástico sometido al estado triple dado. Todos ellos inspirados en las teorías propuestas para explicar el comienzo del comportamiento no elástico del m aterial* .
F ig u ra 1.31.
Si consideramos un m aterial sometido a un estado tensional cualquiera, cuyas tensiones principales en un punto son oq, tr2, <x3 (crl > <x, > tr3), las tensiones equivalentes,según los diversos criterios, son las siguientes:
1. Crit e r io d e la t en s i ón p r i n c i p a l m áx im a o d e Rankine. Según este criterio, para ffi > 0 y IctJ > [a3|
<T=quiv = ff i ( 1 - 1 4 - 1 )
es decir, si la m ayor tensión principal es de tracción y adem ás ésta es la de mayor valor absoluto, el campo elástico del m aterial en el entorno del punto que se considera está lim itado por ella.
En la práctica, cuando |ff3| > a u el cálculo de la resistencia por este criterio se hace imponiendo las siguientes condiciones sim ultáneas:
Oí < <?« l k a l < K d (1-14-2)
siendo o et y los lím ites elásticos a tracción y a compresión, respectivamente.
* Véase ei cap itu lo I 1 de la ob ra Elast i c idad, del auto r.

3 8 RESISTENCIA DE MAT E R I AL E S
2. C ri t e r i o d e la t en s i ó n t a n g e n c i a l m á x im a o d e T r e s ca . Según este criterio
equiv 2 lmáx &i U3 (1.14 3)
Este criterio es razonablem ente aceptab le para m ateriales dúctiles sometidos a estados de tensión en los que se presentan tensiones tangenciales relativamente grandes.
3. C r i t e r i o d e ¡a d e f o r m a c i ó n l o n g i tu d in a l m á x im a o d e Saint-Venant. Aquí, la tensión equivalente es
ttequiv = £«1 = ffl - MCT2 + a l) (1.14-4)
siendo £,. como sabemos, la deformación principal positiva de m ayor módulo.Este criterio, como ocurre con el de la tensión principal máxima, es aceptable cuando
el m aterial rompe por fractura frágil, pero no lo es cuando la acción anelástica se produce por fluencia.
4. Crit e r io d e la e n e r g í a d e d i s t o r s i ó n o d e v o n M is e s . Según este criterio, solamenteparte de la energía de deformación, la deb ida al cam bio de forma, determ ina la apariciónde deformaciones plásticas. Se establece como tensión equivalente la siguiente:
[(ffi - a z)2 + - a s )2 + “ ffi)2] (1.14-5)
Este criterio coincide en la form ulación de la tensión equivalente con el de la t en s ión tangencia ' ! o c t a é d r i c a . Numerosas experiencias realizadas con m ateriales dúctiles han puesto de manifiesto que la teoría de von M i s e s , o su equivalente de la tensión tangencial octaédrica, son las que explican de un modo más satisfactorio el comienzo de deformaciones plásticas en estos m ateriales sometidos a cargas estáticas.
5. C ri t e r i o d e l o s e s t a d o s l im i t e s d e M oh r . Este criterio obtiene la expresión de la tensión equivalente al imponer la condición de que es la que existiría en una probeta del mismo m aterial som etida a tracción, tal que el coeficiente de seguridad del estado tensional dado y el de la probeta a tracción fuera el mismo.
Se llega a
Oequiv = ffl - k a s (1.14-6)<3
siendo k = o e,/\oec\, cociente entre las tensiones que corresponden a l lím ite elástico a tracción y a compresión.
1.15. T eoría del potencial interno. T eo rem a s en ergéticos*Es de gran interés conocer cómo se produce la deform ación de un sólido elástico desde el punto de vista energético. Al ap licarle un sistem a de fuerzas exteriores, el cuerpo elástico se deforma y este sistem a de fuerzas realiza un trabajo que llam arem os ¥e.
* Un deten ido estud io de todo lo q ue se expone en este ep ígrafe se puede ver en el C ap itu lo 10 de la obra Elast i c idad, del au to r.
I N T R O DU C CI O N AL ESTUDIO DE LA RESISTENCIA DE M A TE R I A L E S 3 9
Por el teorema de las fuerzas vivas, y de una forma general, parte de este trabajo ¥ e se utiliza en vencer la resistencia al rozamiento de las ligaduras externas e internas, parte se transforma en energía cinética y el resto en trabajo de deformación debido a las fuerzas interiores.
Supondremos que el paso del estado inicial indeformado al final (deformado) se realiza de una m anera reversible, es decir, que en cualquier estado intermedio de deformación el sistema de fuerzas exteriores es equilibrado por otro sistema an tacon isía , lo que origina que la velocidad sea infinitamente pequeña y nula, por consiguiente, la variación de energía cinética.
Por otra parte, supondremos despreciable el trabajo originado por las fuerzas de rozamiento de los enlaces exteriores, asi como el debido a las fuerzas de rozamiento interno, por tratarse de cuerpos perfectamente elásticos.
En estas condiciones, la expresión del teorema de las fuerzas vivas se reduce a
/ ' AEcin = I F = ¥, + ¥¡ = 0 (1.15-1)
siendo ¥¡ el trabajo de deformación de las fuerzas interiores.Esta ecuación indica que en cualquier instante de la deformación la sum a de los
trabajo de las fuerzas exteriores e interiores es nula.Resulta así que la función es una función de punto, es decir, depende solam ente de
los estados in icial y final sin que intervengan los intermedios. Esta función recibe el nombre de p o t e n c i a l in t e r n o o bien el de e n e r g í a e l á s t i c a o e n e r g í a d e d e f o rm a c i ó n .Equivale a la energía mecánica que adquiere el cuerpo elástico y que es capaz de restituiral recuperar la forma que tenía en estado neutro.
El potencial interno, según (1.15-1)
b ¡ = - ¥ „ (1.15-2)
es igual y de signo contrario al trabajo de las fuerzas exteriores. Por tanto, para obtener su valor será indistinto ca lcu lar ¥e o ¥:. En adelante lo designarem os por ¥.
Como ¥ es el trabajo realizado en la deformación por las fuerzas exteriores, es evidente que podremos expresarlo en función de éstas. Se dem uestra que la expresión del potencial interno de un sólido elástico al que aplicam os un sistema de fuerzas F ¡ viene dada por la llam ada f ó r m u l a d e C la p e y r o n
¥ = X- I F¡5¡ (E15-3)
siendo 6 , la proyección del desplazam iento del punto de aproxim ación de la fuerza F¡ sobre la línea de acción de d icha fuerza cuando actúan sim ultáneam ente sobre el sólido todas las fuerzas del sistem a, estando extendido el sum atorio a todas las fuerzas y pares qiie le solicitan. En el caso que F¡ sea el valor de un par, 5¡ es la proyección del vector del giro en el punto de ap licación sobre el momento del par.
Tam bién se puede expresar el potencial interno en función de las componentes de la matriz de tensiones y de la m atriz de deformación
£ \ | + xy. y yz) dx d y dz (1.15-4)

4 0 RESISTENCIA DE MATERIALES
estando extendida la integral a todo el volumen del sólido elástico, o bien en función exclusivam ente de las componentes de la matriz de tensiones
(o = j [>»* + l y + + GnyOnz + +
+ — ( t ;v + fv- + r j . ) j dx d y dz „ (1.15-5)
De la teoría del potencial interno se deducen im portantísim os teoremas, de algunos de los cuales habremos de hacer uso en los capítulos siguientes. Expondremos a continuación estos teoremas reduciéndonos solamente a sus enunciados.
á) T e o r e m a d e r e c i p r o c i d a d d e M ax w e l l -B e t t i
Apliquemos a un sólido elástico dos sistemas de fuerzas F¡ y <f> •; el primero aplicado en los puntos A¡ y el segundo en los B¡.
Llamemos al corrimiento de los puntos A¡ y fi'j al corrim iento de los puntos Bp en la dirección de las líneas de acción de las fuerzas respectivas, cuando aplicam os al sólido elástico solam ente el sistema de fuerzas F ¡.
Sea, asim ismo, p ¡ el corrimiento de los puntos Bj y X¡ el corrim iento de los puntos A¡, en la dirección de las lineas de acción de las fuerzas respectivas, cuando se ap lica al sólido elástico solamente el sistema de fuerzas tj> P
Se dem uestra que
Z C'-i = Z 4>¡Bj (1.15-6)‘ j
Esta igualdad expresa el teorema de M ax w e l l -B e t t i :
En un s ó l i d o e lá s t i c o , e l t r aba jo r ea l izado p o r un s i s t em a d e f u e r z a s F ¡ a l a p l i c a r un s i s t em a d e f u e r z a s <pj e s i g u a l a l t ra ba jo r ea l izado p o r e l s i s t em a tj>¡ a l a p l i c a r e l s i s t em a F ¡.
b) T e o r e m a d e Castig/iano
L a expresión de este teorema es
3F■zzz = <5; (1-15-7)oF¡
que se puede enunciar de la siguiente forma:
S i s e e x p r e s a e l p o t e n c i a l in t e rn o en f u n c i ó n d e la s f u e r z a s a p l i c a d a s y s e d e r i v a r e s p e c t o d e u na d e e l l a s , s e o b t i e n e la p r o y e c c i ó n d e l c o r r im i e n t o d e l p u n t o d e a p l i c a c i ó n d e e s t a f u e r z a s o b r e s u l in ea d e a c c i ó n .
c ) T e o r em a d e M en a b r e a
Si tenemos un sistema hiperestático de grado n cuyas incógnitas hiperestáticas sean X¡, X2, ..., X„, podemos expresar el poten .ia l interno en función de éstas
F = F(XU X2, ..., X„) (1.15-8)
I N T RO D U C CI O N AL ESTUDIO DE LA RESISTENCIA DE MATERIALES 41
Se dem uestra que
3F 3F 3F = 0 ; ------ = 0 ; ••• : = 0 (1-15-9)5Xl dX 2 cX„
Podemos, pues, enunciar el siguiente teorema denominado de M en a b r ea o del t raba jom ín im o :
En un s i s t em a d e s ó l i d o s e l á s t i c o s , l o s v a l o r e s qu e t om an las r e a c c i o n e s h ip e r e s tá t i c a s c o r r e s p o n d i e n t e s a l o s e n l a c e s su p e ra b u n d an t y s - jb a c en e s t a c i o n a r i o e l p o t e n c i a l in t e rn o d e l s i s t em a .
E J E R C IC IO S
1.1. S o b re la v ig a de la F ig u r a I . l - a a c tú a e l s is te m a de fu e rz a s in d ic ad o . C a lc u la r :
1.° L a s r e a c c io n e s en lo s a p o y o s A y B, s ien d o p un a c a r g a u n ifo rm e por u n id ad de lo ng itud .2.° L o s e s fu e rzo s n o rm a l y c o r ta n te y m o m en to s de to rs ió n y de f le x ió n en la secc ió n C de
la v ig a .
F ig u r a 1.1-ü.
l .° L a s r e a c c io n e s e n A y en B so n v e r t ic a le s . T o m a r e m o s s e n t id o p o s it iv o h a c ia a r r ib a . D e la e c u a c ió n d e m o m e n to s re sp e c to d e B
3R Á ■ 3 a — P ■ 2a — 2 P ■ a — a p ■ -
se o b t ie n e la r e a c c ió n e n A
M = 0
3 3M + 4 aP + - a2p 6aP + - a2p
3 a 3 a
T o m a n d o a h o r a m o m e n to s re sp e c to d e A
R„ ■ 3a + M - 2 P ■ 2 a - P ■ a - a p - a = 0

4 2 RESISTENCIA DE MATERI ALES
se o b t ie n e la r e a c c ió n en B
3 , , „ i ,- M + 5 u P + - a ~ p 2 a P + ~a~p
“ 3 a 3a
P o r ta n to , la s e x p re s io n e s d e la s r e a c c io n e s en fu n c ió n d e a, P y p se re d u c e n a
a p a pR Á = 2 P + - ~ ; R , = P + ±
Se c o m p ru e b a , e v id e n te m e n te , q u e R , + R s = 3 P + ap .
2 ° S i r e a l iz a m o s u n c o r te en la s e c c ió n C (F ig . I .l-A ), la r e s u lt a n te y m o m e n to r e s u lt a n te d e l s is te m a d e fu e rz a s q u e a c tú a n en la p a r te e l im in a d a , r e sp e c to d e la re fe re n c ia in d ic a d a , so n :
7777771.
Figura
R ~ ~ [ r a - P - ? P j j = - P j
_ f 3 a a p a 2\— (5 aP 5 a 2p \ _
" c ^ + F 2 + x f = ( x / X /D e e s ta s e x p re s io n e s se d e d u c e n io s e s fu e r z o s y m o m e n to s e n la se c c ió n C p e d id o s .
tV = 0 ; Ty = - P ■ T . = 0
5 a P 5 a 2 pMr = 0 ; A/ = 0 ; AL = — + — í-
2 o
1.2 . S e co n s id e ra la v ig a en v o lad izo in d ic a d a en la F ig u r a I .2 - a . S e p id e c a l c u la r
1.° L a ac c ió n q ue e je rc e so b re e l la e l e m p o tr a m ie n to en A.2." t i m o m en to f le c to r en la s se c c io n e s de ¡a v ig a , re p re s e n ta n d o g r á f ic a m e n te su v a r ia c ió n a
lo la r g o de e l la .it
I N T R O D U C C I ON AL ESTUDIO DE LA RESISTENCIA DE MATE RI ALE S 4 3
r A *<i 'i2 a
-
Y 1a \ a \ j a
F ig u r a 1 .2 -a .
1.° L a re a c c ió n d e l e m p o tr a m ie n to c o m p re n d e u n a fu e rza v e r t ic a l y u n m o m e n to p e r p e n d ic u la r a l p la n o d e c a r g a , - ^ -
Im p o n ie n d o la c o n d ic ió n d e se r n u la la r e s u lt a n te y n u lo e l m o m e n to re sp e c to d e l
e m p o tr a m ie n to , se tienfe:
R A - 2 a p - P = 0
M A — 2 a p ■ a — M ¡ — P ■ 4a = 0
de d o n d e :
R A = P + 2 a p ; M a = M , -i- 4 a P + 2a 2p
L a fu e rz a t ie n e s e n t id o h a c ia a r r ib a y e l m o m e n to es s a lie n te de l p la n o d e la f ig u ra .
2.° P a r a u n a se c c ió n d e a b s c is a .v, la le y de m o m e n to s f lec to res es:
M = - ( ,W , + 4 a P + 2a 2p ) + ( P + 2a p ) x - ^L- p a r a 0 s í x < 2a
M = —(A/, + 4 a P + 2 a 2p ) + [ P + 2a p ) x - 2ap (x — a) » 2a x < 3aM = — P{4a - x ) » 3a < x < 4 a
M = 0 » 4 a < x $ 6 a

RESISTENCIA DE MAT E R I AL E S
U n a b a r r a r íg id a A C , d o b la d a en un punto B t a l q u e A B = 2 B C = 2a fo rm an d o án gu lo re c to , e s tá e m p o tra d a en su e x tre m o A c o n st itu y e n d o e l s is te m a e s p a c ia l in d icad o en la F ig u ra 1.3-u. L a b a r r a e s tá c o n ten id a en un p lan o h o r iz o n ta l. S o b re d ich a b a r ra a c tú a una fu e rza v e r t ic a l P a p l ic a d a en su e x tre m o C y o tr a h o r iz o n ta l Q c u y a lín ea de acc ió n co in c id e con el lad o AB. C a lc u la r lo s e s fu e rz o s n o rm a l y c o r ta n te s , a s í co m o los m o m en to s to rso r v ( le c to r .
1.° En la se c c ió n A d e l e m p o tra m ie n to .2 .” En la se c c ió n M , m e d ia de AB.3.° En la se cc ió n B, e x t r e m a de AB.4.° En la se cc ió n B, e x t r e m a de BC.
1.° T o m a n d o e l^ s is te m a d e e je s in d ic a d o en la F ig u r a 1 .3-a, la r e s u lt a n te R y m o m e n to r e s u lt a n te M A d e to d a s la s fu e rz a s q u e a c tú a n s o b re e l s is te m a s i tu a d a s a la d e r e c h a de la se c c ió n A t ie n e n p o r e x p re s io n e s r e sp e c t iv a s
t úR = Q i - P j
M . = —a P i — 2a Pk
d e d o n d e se d e d u c e , p a r a la se c c ió n A d e l e m p o tr a m ie n to
N = Q
M r = ~ a P
Ty = - P
M = 0 :
T. = 0
M . = - 2 a P
2. A n á lo g a m e n te , to m a n d o c o n o r ig e n en M e l s is t e m a d e e je s in d ic a d o en la F in u r a 1 .3-6 B
I NT R O DU C C I O N AL ESTUDIO DE LA RESI STENCI A DE MA T E R I AL E S
A n á lo g a m e n te (F ig . \3 - d )
R = - P ] - Qk
M H = —a P k
oIISí II 1 ■x>
OIIIF."
s; -t ii o ; M , = 0 M . = —aP
F i g u r a 1.3-d .

RESISTENCIA DE MATERIALES
L a m a tr iz de ten s iones en un punto in te r io r de un só lid o e lá s t ic o , re fe r id o a un s is te m a c a r te s ia n o o r to g o n a l O x y ; , es
t n =5 0 0
0 —6 - 1 20 - 1 2 1
e s tan d o e x p re s a d a s sus co m p o n en tes en N '/m m 2. S e p ide :
1.° D e te r m in a r la s ten s io n es y d irecc io n es p r in c ip a le s .2.° C a lc u la r a n a l ít ic a y g r á f ic a m e n te la s co m p o n en te s in tr ín s e c a s d e l v e c to r ten s ió n c o r re s
p o n d ien te a l p lano de v ecto r u n ita r io u ( \ ¡ ^ / 2 , 1/2, 1/2).
1 ° D e la m a t r iz d e ten s io n e s d a d a se d e d u c e la e c u a c ió n c a r a c t e r ís t ic a
5 - a 0 0
0 — 6 — <7 — 12
0 - 1 2 1 — <r
D e s a r ro lla n d o e l d e te rm in a n te se l le g a a
(5 - cr)(cr2 + 5cr - 150) = 0
c u y a s r a ic e s so n la s te n s io n e s p r in c ip a le s
o, = lONymm2 ; <7, = 5N/mm2 ; a¡ = — 15N/mm2
L a s d ire c c io n e s p r in c ip a le s la s d e te r m in a m o s s u s t i tu y e n d o lo s v a lo r e s d e la s te n s io n e s p r in c ip a le s en e l s is te m a h o m o g é n e o d e e c u a c io n e s (1 .5 -9 )
f - 5 a = 0 / 3 4P a r a cr, = 10< — 16/? — 12y = 0 => ü , l 0 , — -> -
[ - 1 2 / J - 9 y = 0 '
P a r a cr, = 5, l a s im p le o b se rv a c ió n d e l a m a t r iz d e te n s io n e s se d e d u c e q u e e l e je x e s d ir e c c ió n p r in c ip a l: ü , ( l , 0 , 0)
L 2 0 a = 0
P a r a cr3 = — 155 9/J — 12y = 0 =» ü 3. L — 12/? + 16-/ = 0
P o r ta n to , la s d ire c c io n e s p r in c ip a le s v ie n e n d e f in id a s p o r lo s v e c to r e s u n it a r io s
s ig u ie n te s
°-H) í72(1, 0 , 0 )
IN T R O D U C C IO N AL E STU D IO DE LA RESISTEN CIA DE M A TE RIA LE S 4 7
S e r e p re s e n ta n en la F ig u r a 1 .4 -a , re fe r id o s a la te rn a O.rvr.
oo>n fVx/2' ' 5/v /2 '
[<?] = m [" ] = 0 - 6 -12 1/2 = - 9r41o_y c 1/2 . v - 11/2-
d e l q u e fá c ilm e n te se d e d u c e n lo s v a lo r e s d e la s c o m p o n e n te s in tr ín s e c a s
5 9 11a . = S ■ u = — -------- — — = —4 .75 N /m m *
2 2 4
t - J a 1 - cr„2 = ^ 7 1 2 3 .7 5 - 2 2 .5 6 = 10 .06 N /m m 2
t;„ = —4 .7 5 N / m m 2 ; t = 10 .06 N /m m 2
P a r a la r e s o lu c ió n g r á f ic a d e la m is m a c u e s t ió n , q u e se a c a b a d e H acer d e fo rm a a n a l í t i c a , c a lc u la r e m o s p r e v ia m e n te la s c o m p o n e n te s d e ú re sp e c to d e la t e rn a O.vyr, c o in c id e n te c o n la s d ir e c c io n e s p r in c ip a le s .
L a m a t r iz d e l c a m b io d e c o o r d e n a d a s d e O .vyi a 0 X Y Z es:
[ * ]
3 4^
5 5
0 0A 3
5 5 ,

RESISTENCIA DE MATE RI ALE S
P o r ta n to , la s c o m p o n e n te s d e u re sp e c to d e 0 X Y Z s e rán
[ " ]
0 3 4>
5 5 f l/ v / 2 " ' 1/10 ° 'e o s 8 4 .2 6 ° '
0 0 1/2 = l/ V '2 = eo s 45°
4 3 . 1/2 . . 7/10 > _cos 4 5 .5 7 \
5 5^
d e d o n d e se d e d u c e q u e lo s á n g u lo s q u e S fo rm a co n lo s e je s X y Z so n :
i = 8 4 .2 6 ° = 84° 15 ' 36"
y = 4 5 .5 7 ° = 45° 3 4 ' 12"
C o n e s to s d a to s la r e s o lu c ió n g r á f ic a e s in m e d ia t a . S e p ro c e d e de la s ig u ie n te fo rm a (F ig . I.4-A):
F ig u r a 1 .4 -6 .
P o r £(cr3, 0), y fo r m a n d o u n á n g u lo á c o n e l e je d e a b s c is a s p o s it iv o , se t r a z a u n a s e m ir r e c ta q u e c o r t a e n D a C 2. P o r A( a ¡ , 0 ) se t r a z a o t r a s e m ir r e c ta q u e fo rm a un á n g u lo y co n e l e je d e a b s c is a s n e g a t iv o y c o r t a en £ a C , . C o n c e n t ro e n 0 ¡ y r a d io 0 ¡ D s e t r a z a la c ir c u n f e r e n c ia c „ c o n c é n t r ic a co n C t ; y c o n c e n tro en 0 3 y r a d io 0 3E la c ir c u n fe re n c ia c ¡ , c o n c é n t r ic a c o n C 3. L a in te rs e c c ió n d e a m b a s c ir c u n fe re n c ia s c ¡ y c 3 e s e l p u n to M , s o lu c ió n d e l p r o b le m a .
S e c o m p ru e b a q u e lo s v a lo r e s d e la s c o m p o n e n te s in t r ín s e c a s d e l v e c to r te n s ió n c o r r e s p o n d ie n te a l p la n o c o n s id e r a d o , a lo s q u e se l le g a g r á f ic a m e n te , c o in c id e n c o n lo s v a lo r e s o b te n id o s d e fo r m a a n a l í t ic a .
I N T RO D U C CI ON AL ESTUDIO DE LA RESISTENCIA DE MATE RI ALE S 4 9
1.5. L a m a t r iz d e ten s io n es en lo s p un to s de un só lid o e lá s t ic o es :
' 40 i < y 3 0 '
m = 1 0 v /3 20 0 M P a
l 0 0 0 .
D e te r m in a r la s ten s io n e s p r in c ip a le s y la s d ire c c io n e s p r in c ip a le s :
1.° A n a l ít ic a m e n te .2.° G r á f ic a m e n te .
L a m a t r iz d e te n s io n e s d a d a c o r r e s p o n d e a un e s ta d o te n s io n a l p la n o c u y o e s q u e m a se r e p r e s e n ta e n la F ig u r a I.5-r¡.
2 0 M P a
1 0 ,/3 M P a
4 0 M P a
F ig u r a 1 .5 -a .
El c á lc u lo a n a l í t ic o d e lo s v a lo r e s d e la s te n s io n e s p r in c ip a le s lo h a r e m o s m e d ia n te la e c u a c ió n c a r a c t e r ís t ic a . O b te n d re m o s la fó rm u la c o r r e s p o n d ie n te p a r a e l c a s o d e un e s ta d o te n s io n a l p la n o d e m a t r iz d e te n s io n e s g e n é r ic a
’ f , . ?xy 0 '
t n = G y G y 0
Oo
0^
e l d e te r m in a n te
* — a Gy 0
G>- J ry ~ V 0
0 0 — n
c u y o d e s a r r o l lo es :
-cr|V - + <r„y)(7 + a„xa n¡
y c u y a s r a ic e s so n la s t e n s io n e s p r in c ip a le s
+ a *> ,J = c x
= 0
T Í ,] = 0
+ Tí.
L a o t r a e s n u la , c o m o y a s a b ía m o s , a l t r a t a r s e d e u n e s ta d o te n s io n a l p la n o .

S u s t i tu y e n d o en e s ta e x p re s ió n lo s v a lo r e s d a d o s
RESI STENCI A DE MATERIALES
4 0 _ 4 J0 ± / p Z ^ Y + 300 = 30 ± 20
se o b t ie n e n la s ten s io n e s p r in c ip a le s p e d id a s
<7, = 50 M Pa ; a1 = 10 MPa
q u e so n c o n s ta n te s en to d o s lo s p u n to s d e l s ó l id o e lá s t ic o .2 o P a r a la r e so lu c ió n g r á f ic a u t il iz a r e m o s e l c ir c u lo d e M o h r (F ig . 1.5-6).
T o m e m o s u n s is te m a de re fe re n c ia c a r t e s ia n o o r to g o n a l en e l q u e e l e je d e a b s c is a s m id e la s te n s io n e s n o rm a le s <r„ y e l d e o r d e n a d a s la s t e n s io n e s t a n g e n c ia le s r . D ib u ja m o s e l p u n to D, c u y a s c o o rd e n a d a s so n la s c o m p o n e n te s in t r ín s e c a s d e l v e c to r ten s ió n c o r r e s p o n d ie n te a l p la n o q u e t ie n e p o r n o rm a l a l e je .*. E s ta s c o o r d e n a d a s so n +<j„„ p u e s to q u e es d e t r a c c ió n , y — r iy , y a q u e l a t e n s ió n t a n g e n c ia l d e b e s e r a f e c t a d a d e l s ig n o « —» en v ir tu d d e l co n v e n io q u e se e s ta b le c e p a r a l a r e p r e s e n ta c ió n g r á f ic a de M o h r (s ig n o p o s it iv o s i e l m o m e n to d e f r e sp e c to d e u n p u n to in t e r io r d e l e le m e n to es e n t r a n te e n e l p la n o d e l p ap e l) . A n á lo g a m e n te , d ib u ja m o s e l p u n to D' d e c o o rd e n a d a s + a „ , , + T i r q u e so n la s c o m p o n e n te s in t r ín s e c a s d e l v e c to r te n s ió n c o r r e s p o n d ie n te a l a c a r a q u e t ie n e p o r n o rm a l e l e je y.
D y D’ so n d o s p u n to s d ia m e t r a lm e n te o p u e s to s d e l c í r c u lo d e M o h r , c u y o c e n tro C s e r á e l p u n to d e in te rs e c c ió n d e la r e c ta DD‘ c o n e l e je u„.
C o n s t ru id o e l c ír c u lo d e M o h r , l a in te r s e c c ió n d e é s te c o n e l e je cr„ d a lo s p u n to s A y B c u y a s a b s c is a s so n p r e c is a m e n te la s t e n s io n e s p r in c ip a le s p e d id a s cq y oq.
P a r a c a lc u la r a h o r a la s d ire c c io n e s p r in c ip a le s 1, 2 , to m a r e m o s a r b it r a r ia m e n t e é s ta s c o in c id e n te s c o n lo s e je s cr„ y t (v é a se l a m is m a F ig u r a 1 .5 -6 ) y s i tu a r e m o s lo s e je s x, y te n ie n d o en c u e n ta q u e e l á n g u lo ACD = 20, s ie n d o 6 e l á n g u lo q u e fo r m a e l e je x co n e l e je 1. P o r t a n to , p ro lo n g a n d o e l s e g m e n to D'A é s te s e r á e l e je x, y a q u e fo r m a co n el e je 1 u n á n g u lo 6, s e g ú n se d e s p re n d e fá c i lm e n te d e la f ig u ra .
P a r a te n e r l a d ir e c c ió n re a l d e lo s e je s 1, 2 , s e r á su f ic ie n te g i r a r l a f ig u r a o b te n id a u n á n g u lo 6, c o m o se in d ic a en la F ig u r a 1 .5-c.
I NTRODUC CI ON AL ESTUDIO DE LA RESISTENCIA DE MATE RI ALE S 51
En un d e te rm in a d o punto P d e la su p e rf ic ie de un só lid o e lá s t ic o so m etid o a c a r g a se m id ie ro n la s s ig u ie n te s d e fo rm ac io n e s : un a la r g a m ie n to lo n g itu d in a l u n ita r io de 0 .0001 en la d ire c c ió n x ; un a c o r ta m ie n to lo n g itu d in a l u n ita r io de 0 .0 0 0 5 en la d ire cc ió n de >\ p e rp e n d ic u la r a .r , y una
d e fo rm a c ió n a n g u la r y x¡. = - i j l x 10 4 ra d .
1.° C a lc u la r a n a l í t ic a y g r á f ic a m e n te la s d e fo rm a c io n e s p r in c ip a le s , a s í co m o la s d ire c c io n e s c o rre sp o n d ien te s .
2.° D e te r m in a r e l v a lo r de la d e fo rm a c ió n a n g u la r m á x im a .3.° H a l la r la s co m p o n en tes in tr ín s e c a s d e l v ec to r d e fo rm ac ió n u n ita r ia co r re sp o n d ie n te a una
d ire c c ió n co n ten id a en e l p lan o x y que fo rm a un á n g u lo de 4 5 ' con la d ire c c ió n p o sitiv a de l e je x, co n tad o en se n tid o a tr t ih ó ra r io .
l .° L a m a t r iz d e d e fo rm a c ió n en e l p u n to q u e se c o n s id e r a , re fe r id a a l s is te m a d e e je s P x v y to m a n d o co m o u n id a d 10~ 4 , es
L a e c u a c ió n c a r a c t e r ís t ic a
- x / 7v
-5 — £= 0 - 4 £ - 12 = 0
t ie n e d e ra íc e s
-4 + J 16 + 4 x 12 — v ----------------------= - 2 + 4
2
P o r ta n to , la s d e fo rm a c io n e s p r in c ip a le s so n
q = 2 x 10 ■“ ; £, = -6 x 10 4
C o n e s to s v a lo re s se d e te r m in a n la s d ir e c c io n e s p r in c ip a le s r e so lv ie n d o lo s s ig u ie n te s s is te m a s d e e c u a c io n e s :
P ara e = 2 í ^ ‘ 1 . J 1l - / 7 a -7/1 = 0 V 4la - J lf i = 0
- f í a + fi = 0P a r a s = — 6
L a s d ir e c c io n e s p r in c ip a le s v ie n e n , p u e s , d e f in id a s p o r lo s v ec to re s u n it a r io s
Z Z 44 4
f í ,/ Í4 \ 4 ’ 4 )
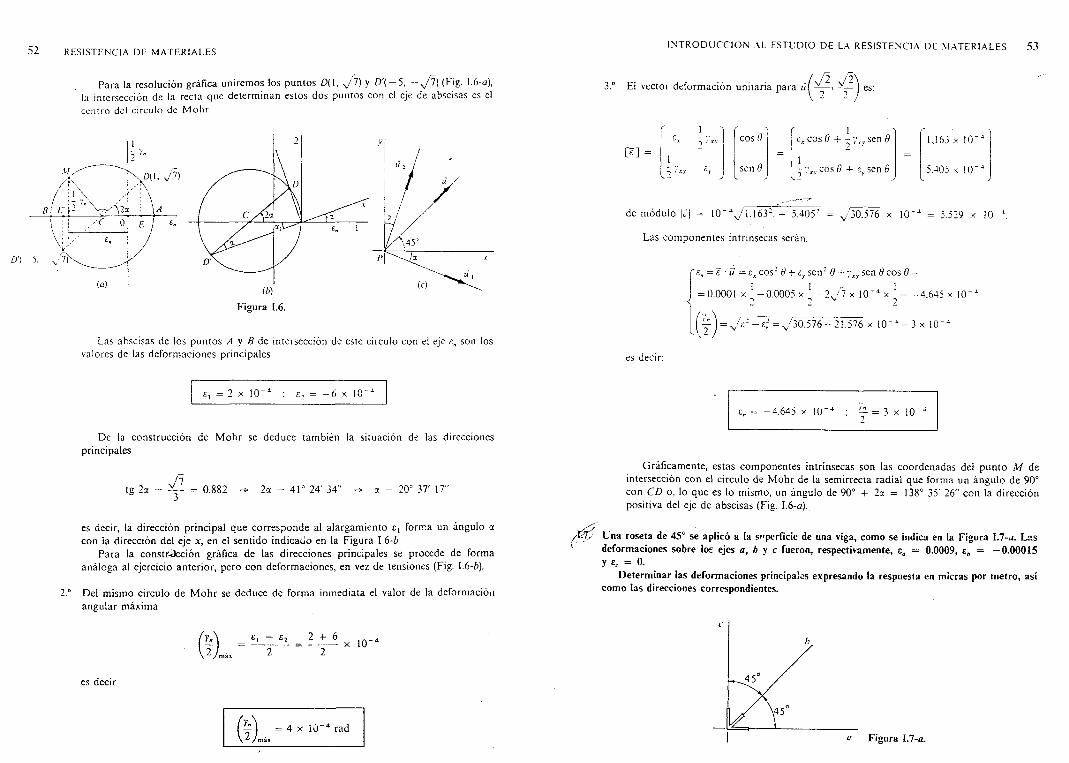
3 2 RESISTENCIA DE MAT E R I AL E S
P a r a la r e so lu c ió n g r á f ic a u n ire m o s lo s p u n to s D( 1, J l ) y £>'( — 5, — (F ig . I .6-n), la in te rs e c c ió n d e la r e c ta q u e d e te r m in a n e s to s d o s p u n to s co n e l e je d e a b s c is a s es el c e n tro d e l c ir c u lo d e M o h r .
D( 1. V 7)
F ig ura 1.6.
L a s a b s c is a s d e lo s p u n to s A y B d e in te r s e c c ió n d e e s te c ir c u lo co n el e je £„ so n lo s v a lo re s d e la s d e fo r m a c io n e s p r in c ip a le s
e , = 2 x 1 0 ~ 4 ; £7 — — 6 x ÍCT4
D e la c o n s t ru c c ió n d e M o h r se d e d u c e ta m b ié n la s i tu a c ió n d e la s d ir e c c io n e s p r in c ip a le s
tg 2c¡ = = 0.882 => 2a = 41° 24' 34" = a = 20° 37 ' 17"
e s d e c ir , la d ir e c c ió n p r in c ip a l q u e c o r r e s p o n d e a l a la r g a m ie n to fo rm a u n á n g u lo a c o n la d ir e c c ió n d e l e je x, e n e l s e n t id o in d ic a d o en la F ig u r a 1.6-6.
P a r a la c o n s t r ic c ió n g r á f ic a d e la s d ir e c c io n e s p r in c ip a le s se p ro c e d e d e fo rm a a n á lo g a a l e je r c ic io a n t e r io r , p e ro c o n d e fo r m a c io n e s , e n v ez d e te n s io n e s (F ig . 1.6-6).
2.° D el m ism o c ír c u lo d e M o h r se d e d u c e d e fo r m a in m e d ia t a e l v a lo r d e la d e fo rm a c ió n a n g u la r m á x im a
y \ = = 2 ^ x2ymá< 2 2
e s d e c ir
I N T R O D U C CI O N AL ESTUDIO DE LA RESISTENCIA DE M ATE RI AL E S 5 3
/ ñ /2 \3.° El v e c to r d e fo r m a c ió n u n it a r ia p a r a ¿71 I es:
P ] =r 1
f-v2 '
eo s 0r „ 1
£x e o s 9 + - y xv sen 9r "a
1.163 x 1 0 -4
1se n 0
1- y xy e o s 0 -e e,. sen 8 5 .405 x 1 0 " 4
d e m ó d u lo |c| = 10 4N/ 1 .1 6 3 v + 5 .4 0 5 2 = v '3 0 .5 7 6 x 10~ 4 = 5 .529 x 10~ 4.
L a s c o m p o n e n te s in t r ín s e c a s s e rá n :
£„ = e ■ i7 = £x e o s 2 0 + e s e n 2 0 -f y xy sen 0 e o s 0 =
= 0 .0001 x - - 0 . 0 0 0 5 x - - 2 / 7 x 1 0 " 4 x - = - 4 .6 4 5 x 1 0 ‘ 4 2 2 2
7 p V E 2 - ! ; = v /3 ° . 5 7 6 - 2 1 .5 7 6 x 1 0 “ 4 = 3 x 10
es d e c ir :
£„ = - 4 .6 4 5 x 10 4 y = 3 x 1 0 “ “-
G r á f ic a m e n te , e s ta s c o m p o n e n te s in t r ín s e c a s so n la s c o o rd e n a d a s d e l p u n to M d e in te r s e c c ió n c o n e l c í r c u lo d e M o h r d e la s e m ir r e c ta r a d ia l q u e fo rm a u n á n g u lo d e 90° co n C D o , lo q u e e s lo m ism o , un á n g u lo d e 90° + 2 i = 138° 3 5 ' 26" c o n la d ir e c c ió n p o s it iv a d e l e je d e a b s c is a s (F ig . I.6-0).
1<Jy U na roseta de 4 5 ” se ap licó a la superficie de una viga, com o se indica en la F igura 1 .7 - j . L asdeform aciones sobre los ejes a, b y c fueron, respectivam ente, t a — 0 .0 0 0 9 , Eb = —0 .0 0 0 1 5y £„ = 0.
D e term in ar las d efo rm aciones principales expresando la respuesta en m ieras por m etro , así com o las d irecciones correspondientes.
a F i g u r a I .7-a .
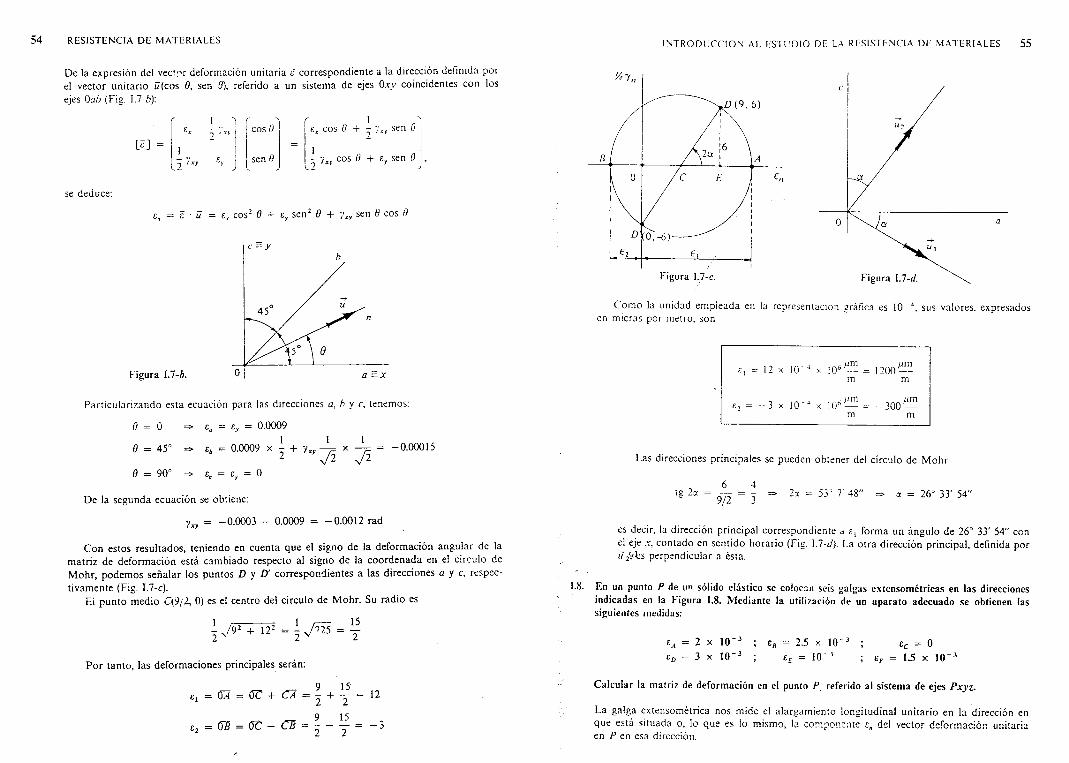
5 4 RESI STENCI A DE MATE RI ALE S
D e la e x p re s ió n d e l v e c to r d e fo rm a c ió n u n it a r ia e c o r r e s p o n d ie n te a la d ir e c c ió n d e f in id a p o r e l v e c to r u n it a r io ¿7(cos 0 , se n 0), re fe r id o a u n s is te m a d e e je s Qxy c o in c id e n te s co n lo s e je s 0 a b (F ig . i . 7 -6):
p ] =
r i 7 (** 2 -> eo s 0
1sen 02 i*y °y
f.x eo s 0 + - y xy sen 0
y xr e o s 0 + F.y sen 0
se d e d u c e :
£n = f, - ü = ex e o s2 0 + £y s e n 2 8 + yxy se n 8 e o s 8
F ig u r a l . l r b .
P a r t ic u la r iz a n d o e s ta e c u a c ió n p a r a la s d ir e c c io n e s a , b y c , ten e m o s :
£„ = £, = 0.00091
£„ = 0.0009 x - + yxy
e , = £,. = 0
1 x - í= = -0 .0 0 0 1 5
0 = 0 8 = 45°
0 = 90°
D e la s e g u n d a e c u a c ió n se o b t ie n e :
y xy = -0.0003 - 0.0009 = -0.0012 r a d
C o n e s to s r e s u lt a d o s , te n ie n d o en c u e n ta q u e e l s ig n o d e la d e fo rm a c ió n a n g u la r d e la m a t r iz d e d e fo r m a c ió n e s tá c a m b ia d o re sp e c to a l s ig n o d e la c o o r d e n a d a en e l c i r c u lo d e M o h r , p o d e m o s s e ñ a la r lo s p u n to s D y D' c o r r e s p o n d ie n te s a la s d ir e c c io n e s a y c , r e s p e c t iv a m e n te (F ig . I .7 -c ) .
E i p u n to m e d io C(9¡2, 0) e s e l c e n tro d e l c í r c u lo d e M o h r . S u r a d io es
I n/92 + 122 = i JW S15T
P o r ta n to , l a s d e fo rm a c io n e s p r in c ip a le s s e r á n :
9 15£j = 0 A = ÚÜ + CA = — + — = 12
9 15f1 =6B = <5Ü-CB = - ~ — = - 3
I NT R O DUC C I ON AL ESTUDIO DE LA RESISTENCIA DE MAT E R I AL E S 5 5
C o m o la u n id a d e m p le a d a en la re p re s e n ta c ió n g r á f ic a es 10 4, su s v a lo r e s , e x p re s a d o s en m ie r a s p o r m e tro , so n
£, = 12 X I 0 ' 4 X 1 0 " ~ =tim
1200 —m m
E, = — 3 X 1 0 - 4 x 10o — = 1 Ua O 0 ¡ ^ 1 3
m m
L a s d ire c c io n e s p r in c ip a le s se p u e d e n o b te n e r d e l c ír c u lo d e M o h r
6 4tg 2 a = — = - 2 a = 53= T 4 8 " a = 26° 3 3 ' 54"
y}2 o
es d e c ir , la d ir e c c ió n p r in c ip a l c o r re s p o n d ie n te a £, fo rm a u n á n g u lo d e 26° 3 3 ' 54" co n el e je x, c o n ta d o en s e n t id o h o r a r io (F ig . \.7-d). L a o t r a d ir e c c ió n p r in c ip a l , d e f in id a p o r u J f k s p e r p e n d ic u la r a é s ta .
En un punto P d e un só lid o e lá s t ic o se co lo can se is g a lg a s e x te n s o m é tr ic a s en la s d ire c c io n e s in d ic a d a s en la F ig u r a 1.8. M e d ia n te la u t il iz a c ió n d e un a p a r a to a d e c u a d o s e o b tien en la s s ig u ie n te s m ed id as :
t A = 2 x 1 0 ' 3 ; e „ = 2 .5 x 10 3 ; ec = 0
c D = 3 x 1 0 - 3 ; t E = 1 0 ~ 3 ; e F = 1.5 x 1 0 “ 3
C a lc u la r la m a tr iz de d e fo rm a c ió n en e l punto P re fe r id o a l s is te m a de e je s P x y z .
L a g a lg a e x te n s o m é tr ic a n o s m id e e l a la r g a m ie n to lo n g itu d in a l u n it a r io en la d ir e c c ió n en q u e e s tá s i tu a d a o , lo q u e e s lo m ism o , la c o m p o n e n te e„ d e l v e c to r d e fo r m a c ió n u n it a r ia en P en e s a d ire c c ió n .

5 6 RESISTENCIA DE MATERI ALES
L a e x p re s ió n g e n e r a l d e £„ e n fu n c ió n d e lo s p a r á m e t r o s q u e d e f in e n la d ir e c c ió n d a d a p o r ü se rá :
£„ = e - u = [ ñ ] r [ £ > ] [ u ] = (a p y )
1 y*y ■1
p
7"
= £xz~ + £yP 2 + e : y 2 + y xyx p + y f J y + y „ a y
A p lic a n d o e s ta e c u a c ió n a la s se is g a lg a s d a d a s , te n e m o s :
=> 2 x 10“3 = c.. u
¿ A l 0 , 0 )
7 ^ ’° )«c(I, 1, 0 )
u ¿ 0, 0, 1)
e'0 r°'7l
2.5 x 10 3 = - ex + ^ £ , + - y
0 = e,1 1 1
3 x 10 = - e, + - e z + - y „
10“ 3 = £ .
11.5 x 10 3 = - £ x + - £ , + - y :
s is te m a d e se is e c u a c io n e s c o n s e is in c ó g n ita s , c u y a s s o lu c io n e s so n :
zx — 2 x 1 0 ' 3 ; £y = 0 ; e . = 1 0 “ 3
1y x, = 1 .5 x 1 0 ' 0 ; = 2 .5 x 1 0 “ 3
IN TRO D U C C IO N AL ESTU D IO DE LA RESISTEN CIA DE M A T E R IA LE S 5 7
P o r ta n to , la m a t r iz d e d e fo rm a c ió n [ D ] en P es:
f 2 1.5 0 '
[O ] = 1.5 0 2.5 L O 2 .5 1 x
X o
E l v ec to r c o r r im ie n to 5 de un punto de un só lid o e lá s t ic o t ien e , re spec to de u n a re fe re n c ia c a r t e s ia n a o r to g o n a l, la s s ig u ie n te s co m p o n en tes
u = 4 a x — a y ; y — 5 a x — 4 a y ; w = 0
s ien d o a una co n stan te . S e p ide :
1.° L a m a tr iz de g iro .2.°. L a m a tr iz de d e fo rm ac ió n .3.° C a lc u la r la s co m p o n en te s in t r ín s e c a s d e l v ec to r d e fo rm ac ió n u n ita r ia en la d ire c c ió n del
e je x.4.° D ib u ja r lo s c írc u lo s de M o h r de d e fo rm ac io n e s .
1 “ D a d a s la s c o m p o n e n te s d e l v e c to r c o r r im ie n to , la m a t r iz [/ / ] de g iro v ie n e d a d a p o r la e x p re s ió n (1 .6 -3 )
f 0 -3 o 0 "[//] = 3 a 0 0
l o 0 0 .
2.° A n á lo g a m e n te , la m a t r iz [£>] d e d e fo rm a c ió n , s e g ú n la e x p re s ió n (1 .6 -4 ), s e rá :
4 a 2 a 0 '
IIcTi 2o - 4 o 0
U 0 0 „
3.° El v e c to r d e fo rm a c ió n u n i t a r ia e n la d ir e c c ió n d e l e je ,x es. en v ir tu d d e su d e f in ic ió n (1 .6 -8 ):
'4 o 2 a 0
[ £ ] = [ £ > ] [ « ] = 2a — 4 a 0[ o 0 0
d e d o n d e fá c ilm e n te se d e d u c e n lo s v a lo r e s d e su s c o m p o n e n te s in t r ín s e c a s
' 1 ' '4 o '
0 = 2o
J - 0 . . 0 .
1£„ = 4o - y . = 2o
2

5 8 RESI STENCI A DE MA T E R I A L E S
4.° Los v a lo res de los a la rg a m ie n to s p r in c ip a le s se ob tienen reso lv iendo la ecuac ió n ca- ra c te r is t ic a
4(7 — £
- 4 ( 7 — e 0
0 - e
= 0
— £ [ (4 ( 7 — £)( — 4(7 — £) — 4(72 ] = 0
— e í e 1 — 20(3’ ) = 0 =■ £, = + a^/20 ; £, = 0 ; e3 = — a ^ /20
F ig ura I.9-a.
O b te n id o s e s to s v a lo r e s , e ¡ d ib u jo d e lo s c ic u lo s d e M o h r es in m e d ia to .
1 .10. D em o stra r las ecuaciones de L am e, que ex p resan las com ponentes de la m atriz de tensiones en función de las com ponentes de la m atriz d e fo rm aciones
a „ x = X e + 2G f.x ; er„y = Xe + 2 Gzy ; <r„. = Xe + 2 G e . xxy = G y x„ ; x „ = G yx._ ; xy ! = G y yz
siendo e = e x + zy + ez la d ilatación cúbica u n itaria .
I NTRODUC CI ON AL ESTUDIO DE LA RESISTENCIA DE M A TE R I A L E S 5 9
Se darán las expresiones de los dos coeficientes / y G en función del m ódulo de elasticidad E y del coeficiente de Poisson ¡i.
P a r t im o s d e las e c u a c io n e s (1 .8-5), q u e e x p r e s a n la s leves de H o o k e g e n e r a l i z a d a s
= — [ > „ - ft((7„y + o „ j ]
ey = + <Tj]
F~-
■yx, =l x.
G G • •>-' G
S u m a n d o m iem b ro / a m ie m b ro la s tre s p r im e ra s , se t ien e :
1 - 2/ í e = —---------- (cr_1 - 2u
°„y + "d-) = ----------- ©- E 0 =
e£1 - 2,7
s ie n d o 0 = a rx + a uy + a„z.L a s e c u a c io n e s de H o o k e g e n e r a l iz a d a s se p u e d e n p o n e r d e la s ig u ie n te fo rm a :
f-x = J !>...<(1 + f1) ~ i'©]
£>■ = - 0™>(1 + id - ."©]L
£; = ^ 0 „.-(l + /<) ~ /‘©]
D e s p e ja n d o d e e s ta s e x p re s io n e s la s te n s io n e s n o rm a le s y s u s t i tu y e n d o 0 en fu n c ió n de la d i la t a c ió n c ú b ic a u n it a r ia
,iE Ee + e r
1+/7 (I+ | () ‘ (1 + M)(l - 2/x) 1+/7
e _ £ /<£ £= ------- 0 + £ = -------------------- e H--------£!+/( (!+;■') (1 + A0 U — 2/() 1 +/'
l1 A £ . , /t£(T„. = ------ 0 + £. = -E
e + ---------£,l + ¿ 7 ( 1 + / 7 ) ( 1 + / 7 X 1 - 2 / 7 ) 1 + / 7
S i h a c e m o s
(1 + M)d - 2/,)<7 =
2(1 + ¡i)
r e s u lt a n , ju n t o co n la s te n s io n e s t a n g e n c ia le s d e s p e ja d a s d ir e c t a m e n te d e la s le y e s d e H o o k e , la s e c u a c io n e s d e L am é
11 + 2 Gex ’ i>- Gy xy0 ,,. = /.e + 2 Gey T,.- = Cy,=c„. — /.e _j_2Ge1 t „ = Gyx.
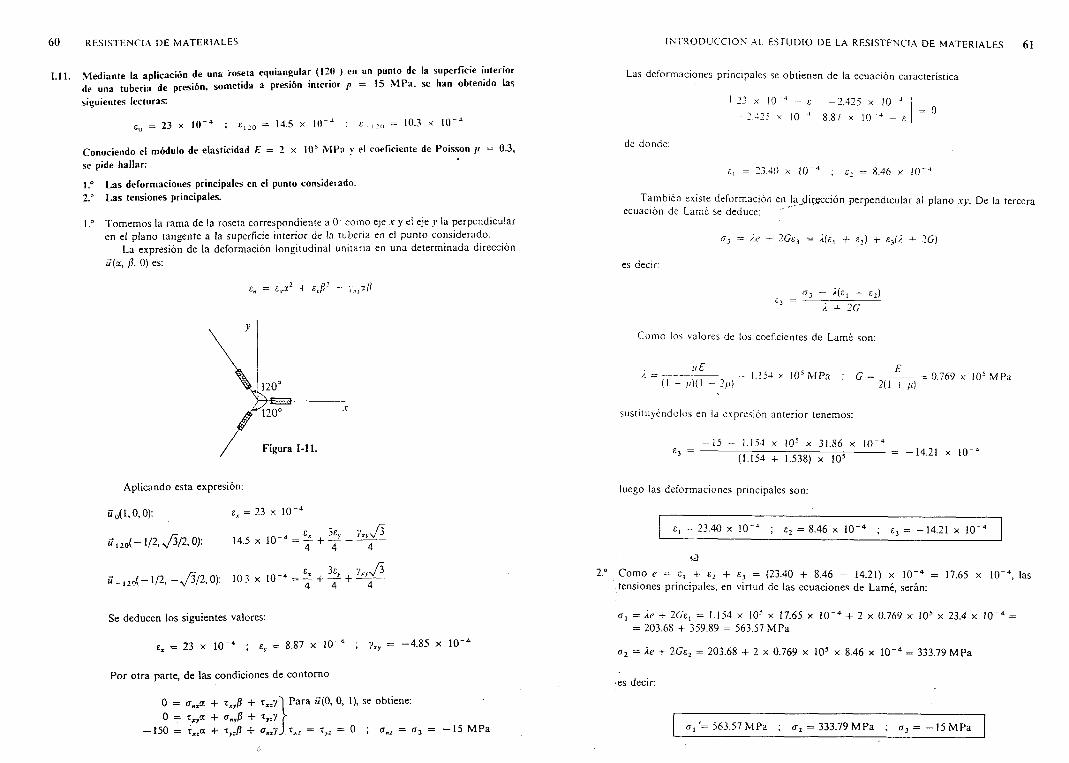
6 0 RESI STENCI A DE MATE RI ALE S
I 11 M ed ian te la aplicación de una roseta equiangular ( 1 2 0 ) en un punto de la superficie interiorde una tubería de presión, som etida a presión interior p = 15 M P a , se han obtenido las
siguientes lecturas:
£u = 23 X 10 4 ; r [20 = 14 .5 x I I P 4 : = 10.3 x I 0 ~4
C onociendo el m ódulo de e lasticidad E = 2 x I 0 5 M P a y el coeficiente de Poisson p = 0.3,se pide h allar:
1.° L as deform aciones principales en el punto considerado.2.° L as tensiones principales.
1.° T o m e m o s la r a m a d e la ro se ta c o r re s p o n d ie n te a 0 co m o e je .v y e l e je y la p e r p e n d ic u la r en e l p la n o ta n g e n te a la su p e rf ic ie in t e r io r d e la tu b e r ía en el p u n to c o n s id e ra d o .
L a e x p re s ió n d e la d e fo rm a c ió n lo n g itu d in a l u n i t a r ia en u n a d e t e r m in a d a d ire c c ió n
u ( x , /1, 0 ) es:
£„ = cx x 2 + eyl¡- + yxyy-P
Aplicando esta expresión:
«o(l.O .O ): G = 23 x 10 ~4
^ 20( - l / 2 , 7 3 / 2 ,0 ) : 14.5 x 1 0 ' * = J + | ^
¡ 7 _ , 20( - 1 / 2 , - 7 3 / 2 , 0 ) : 10.3 x 1 0 “ = ^ + ^ + ^ -
Se deducen los siguientes valores:
ex = 23 x 1 0 ' 4 ; e,. = 8 .87 x 1 0 ' 4 ; a , = - 4 . 8 5 x 1 0 44
Por otra parte, de las condiciones de contorno
0 = anxa + xx,P + t„y'| Para ¡7(0, 0 , 1), se obtiene:0 = + a „ J3 + t y:y >
— Í5 0 = r xxa + xyJ + <r„.yj xxz = ry, = 0 ; er„. = <r3 = — 15 MPa
IN TRO D U C C IO N AL ESTUD IO DE LA RESISTEN CIA DE M A TE RIA LE S 61
L a s d e fo rm a c io n e s p r in c ip a le s se o b t ie n e n d e la e c u a c ió n c a r a c t e r ís t ic a
23 x 1 0 ' 4 - £ - 2 . 4 2 5 x 1 0 “ 4- 2.425 X 1 0 " 4 8 .87 X 1CT4 - r.
0
de d o n d e :
23 .4 0 x 10~ 4 ; e 2 = 8 .4 6 x I0 ~ 4
T a m b ié n e x is te d e fo rm a c ió n en la jd ix g c c ió n p e r p e n d ic u la r a l p la n o xy . D e la te rc e ra e c u a c ió n d e L a m e se d e d u c e :
es d e c ir :
/.e - 2G sy = á (r, + e 2) + + 2G)
á + 2C
C o m o lo s v a lo re s d e lo s c o e f ic ie n te s d e L a m é so n :
fiE1.154 x 105 M P a ; G =(1 + ,n)(l - 2p) " ’ ~ 2(1 + p)
s u s t i tu y é n d o lo s en la e x p re s ió n a n te r io r te n e m o s :
- 15 - 1 .154 x 1 0 5 x 3 1 .8 6 x \Q-
0.769 x 105 M P a
(1 .1 5 4 + 1 .538 ) x 105
lu e g o la s d e fo r m a c io n e s p r in c ip a le s so n :
- 1 4 .2 1 x 1 0 '
e , = 2 3 .4 0 x ! 0 ' 4 ; e 2 = 8 .4 6 x 1 0 “ 4 ; t 3 = - 1 4 .2 1 x 1 0 ' 4
fe)
C o m o e = c , + r 2 + e 3 = (2 3 .4 0 + 8 .4 6 - 14 .21 ) x 1 0 “ 4 = 17.65 x 1 0 “ 4, la ste n s io n e s p r in c ip a le s , en v ir tu d d e la s e c u a c io n e s d e L a m é , se rá n :
cr, = ke + 2Ge ¡ = 1 .154 x 105 x 17 .65 x 1 0 ' 4 + 2 x 0 .7 6 9 x 105 x 2 3 .4 x !0 ~ 4 == 2 0 3 .6 8 + 3 5 9 .8 9 = 5 6 3 .5 7 M P a
a 2 = l e + 2 Ge2 = 2 0 3 .6 8 + 2 x 0 .7 6 9 x 105 x 8 .4 6 x 1 0 “ 4 = 3 3 3 .7 9 M P a
■es d e c ir :
cr, °= 5 6 3 .5 7 M P a ; cr2 = 3 3 3 .7 9 M P a ; ct3 = — 15 M P a

6 2 RESISTENCIA DE MATERI ALES
1. 12. L a m a t r iz d e ten s io n es en todo punto de un só lid o e lá s t ic o , re sp ec to de un s is te m a de re fe re n c ia c a r te s ia n o o r to g o n a l, es
c nf 2 1 A
= | 108 A”Il o
108 A 0 '
8 4 A' 0
0 1 0 0 ,
e s tan d o e x p re s a d a s su s co m p o n en tes en N /m m *- y s ien d o A un p a r á m e tro p o sitivo de c a r g a .
1.° D e te r m in a r , en función de K. la s ten s io n es p r in c ip a le s a n a l í t i c a y g r á f ic a m e n te m e d ia n te
lo s c irc u io s de M o h r.2.° C a lc u la r la s d ire cc io n e s p r in c ip a le s .3.° S a b ie n d o q ue e l m a te r ia l a d m ite un a ten s ió n t a n g e n c ia l m á x im a de 60 N / m m 2 o b ten id a
en un e n sa y o a t r a c c ió n , d e te rm in a r e l v a lo r m á x im o q u e p u ed e to m a r A p a r a a s e g u r a r q ue e l só lid o t r a b a ja en ré g im e n e lá s t ic o : n ) a p l ic a n d o e l c r it e r io de T r e s c a , b) ap lic an d o
e l c r it e r io de von M is e s .
l .° D e la s im p le o b se rv a c ió n d e la m a t r iz d e te n s io n e s , a l s e r xx. = r y. = 0 , se d e d u c e q u ee l e je r es d ir e c c ió n p r in c ip a l . L o s v a lo r e s d e la s te n s io n e s p r in c ip a le s se p u ed en o b te n e r a n a l ít ic a m e n te re so lv ie n d o la e c u a c ió n c a r a c t e r ís t ic a
21 Al - a108 A'
0
108 A
8 4 A - a 0
00
100 - o= 0
(1 0 0 - a)(o -2 - 1 0 5 A a - 9 9 0 0 A 2) = 0
cr t = 1 6 5 A N / m m 2 ; <r2 6 0 A N / m m 2 ; <r3 = 100 N /m m 2
N o se h a te n id o e n c u e n ta e l o rd e n d e m a y o r a m e n o r , p u e s d e p e n d e r á d e l v a lo r d e A.G r á f ic a m e n te , s e p a r a n d o la te n s ió n p r in c ip a l <si = 100 N / m m 2, la s o t r a s d o s e s ta r á n
c o n te n id a s en e l p la n o x v . S u s v a lo r e s v ie n e n d a d o s p o r la s a b s c is a s d e lo s p u n to s d e in te r s e c c ió n d e l c í r c u lo d e M o h r q u e p a s a p o r lo s p u n to s A Í(21A , — 108A ) y A f (8 4 A , 1 0 8 A). S e c o m p ru e b a , en e fe c to , q u e lo s v a lo r e s d e la s te n s io n e s p r in c ip a le s s o n (F ig . 1 .12-n)
<rí = 165A N /m m 2 ; o 2 = - 6 0 A N / m m 2
2.° P a r a c a lc u la r la s d ir e c c io n e s p r in c ip a le s a p l ic a r e m o s la s e c u a c io n e s (1 .5 -9 )
1 4 4 A a + 108A/J = 0 3 4P a r a a , = 1 6 5 A = „ => a - -
5
f 8 1 K z + 1 0 8 K f i = 0 4 _ 3P a r a <r, = - 6 0 A < ^ + m K ¡ ¡ _ Q - * - ~ 5 5
a
I N T R O D U C C I ON AL ES TUDI O DE LA RESISTENCIA DE MATERI ALES 6 3
84 K
21 K 1
7
i <
1 0 8 K
-----21 K
8 4 K ,
F ig u r a 1.12 -a . p
P o r t a n to , la s d ir e c c io n e s p r in c ip a le s v ien en d e f in id a s p o r io s v ec to re s u n ita r io s :
z =3
ü, = ~or + 4/»
iu , = - ( —4i + 3/)
0u 3 = k
/ \u 2 \
‘ 53
F ig u r a 1 .12-6 .
L a s itu a c ió n re sp e c to d e l s is te m a d e re fe re n c ia O.vvr se in d ic a en la F ig u r a 1 .12-6 .
E n e l e n s a y o a t r a c c ió n a = 2 r m il = 2 x 60 N /m m 2 = 120 N /m m 2.
o) A p lic a n d o e l c r it e r io d e T r e s c a , o rd e n e m o s la s ten s io n e s p r in c ip a le s d e m a y o r a m e n o r
100S i A > — = 0 .6 0 6
165
ct, = 165 K N / m m 2 ; a 2 = 100 N / m m 2 ; = —6 0 A N /m m 2
E l v a lo r m á x im o d e A se o b te n d r á a l im p o n e r la co n d ic ió n d e e s te c r it e r io
P 0o-, - <r3 < O' 1 6 5 A + 6 0 A 120 => A i = 0 .53
225
r e s u lt a d o q u e e s tá en c o n t r a d ic c ió n c o n la h ip ó te s is e s ta b le c id a a n te r io rm e n te .

6 4 RESISTENCIA DE MAT E R I AL E S
1.13.
P o r ta n to , t e n d r á q u e se r K < 0 .6 0 6 . En e s te c a s o la s te n s io n e s p r in c ip a le s o r d e
n a d a s so n :
a , = 100 N / m m 2 ; a 2 = 165AT N / m m 2 ; <r3 = - 6 0 5 / N /m m 2
S e te n d rá q u e v e r if ic a r :
100 + 6 0 K $ 120
de d o n d e
b ) A p lic a n d o e l c r i t e r io d e v o n M is e s (cr, — a 2)2 + (<x, — cr3)2 + (<r3 — o q )2 ^ 2a ]
(1 0 0 - 165A/)2 + (165AT + 60AT)2 + (60// + 100 )2 i 2 x 1202
se o b t ie n e la e c u a c ió n
1629//2 - 420// - 176 $ 0
c u y a s r a íc e s so n : K ¡ = 0 .4 8 2 ; K 2 = —0 .2 2 4 .
D e la r e p r e s e n ta c ió n g r á f ic a d e e s te t r in o m io in d ic a d a en la F ig u r a 1 .12 -c , se d e d u c e q u e e l in te rv a lo d e v a r ia c ió n d e K p a r a q u e se v e r if iq u e la a n te r io r in e c u a c ió n es:
- 0 . 2 2 4 s : K ^ 0 .4 8 2
P o r t a n to , s e g ú n e l c r it e r io d e v o n M is e s , e l v a lo r m á x im o d e Ai e s
So b re las ca ra s la te ra le s de un prism a de espesor e = 1 cm actúan uniform em ente repartidas las fu erzas indicadas en la fig u ra , estando lib res las o tra s dos. Conociendo el coeficiente de Poisson n — 0 .3 , ca lcu la r la tensión que hab ría que so m eter a una probeta del m ism o m ateria l en un ensayo a tracción p ara que tuv iera e l m ism o coeficiente de seguridad que el prism a considerado, de acuerdo con:
1-° El c rite rio de T resca.2.° El crite rio de Sa in t-V en a n t.3.° El c rite rio de von M ises.
INTRODUC CI ON AL ESTUDIO DE LA RESISTENCIA DE MATERI ALES 6 5
1200
/500 N /cm 2
1500 N
/ l500 N
Figura I.13-a . F igura I.I3-Ó.
S o b re la s c a r a s la te r a le s de l p r ism a a c tú a el s is te m a de fu e rz a s su p e r f ic ia le s in d ic a d o en la F ig u r a 1.13-6 . s e g ú n se d e sp re n d e d e l e n u n c ia d o .
L a m a tr iz d e te n s io n e s q u e c a r a c t e r iz a e l e s ta d o te n s io n a l a q u e e s tá s o m e t id o el p r ism a es c o n s ta n te en to d o s su s p u n to s . C a lc u le m o s su s c o m p o n e n te s : lo s v a lo re s de rxy y a„y se p u e d e n o b te n e r d ir e c ta m e n te d e la s c o n d ic io n e s de c o n to rn o en la c a r a AB
r xy = 500 eo s 60° = 250 N c m 2
a = 500 sen 60° = 250 '3 N / cm 2
P o r o t r a p a r te , en la c a r a B C
[ a ] = [ T ] [ .7 ] =
I d e n t if ic a n d o te n e m o s
I X = e o s 30° — t „ se n 30°
eo s 3 0 ‘
— sen 3 0 :
/ 200 V 0
i x 2 5 0 . ñ = 2 0 0
l F = xxy eo s 3 0 c - a n) se n 30° = 0
D e la p r im e ra e c u a c ió n , se o b t ie n e e l v a lo r d e a„x
= 2 0 0 + 125^/3 =• <r„ = 4 8 0 .9 4 N /cm 2
P o r ta n to , la s c o m p o n e n te s d e la m a t r iz d e te n s io n e s so n :
o „x = 4 8 0 .9 4 N /cm 2 ; a„„ = 4 3 3 .01 N /cm 2 ; t xy = 2 5 0 N / cm 2

66 RESISTENCIA DE MATERI ALES
P ro c e d ie n d o a h o r a a n á lo g a m e n te a co m o se h a h e c h o en e l e je rc ic io 1.5, o b te n d re m o s la s te n s io n e s p r in c ip a le s
A <?„>■ , lí O.v -a, , = ------ i +
= 48Q.94_ -H J 3 3 .0 1 ± ^ 4 80.94 - 4 3 3 .0 1 J + 25q3 = 45fi „ ± ^ 15
P o r t a n to , la s te n s io n e s p r in c ip a le s se rá n :
cr, = 708.12 N /cm 2 ; <r, = 205.82 N /cm 2 ; cr3 = 0
L a te n s ió n q u e te n d r ía u n a p ro b e ta d e l m ism o m a t e r ia l en un e n s a y o a t r a c c ió n co n el m ism o c o e f ic ie n te d e s e g u r id a d q u e e l p r is m a c o n s id e r a d o es p r e c is a m e n te la te n s ió n e q u iv a le n te . V e a m o s c u á l s e r ia el v a lo r d e é s ta en c a d a u n o d e lo s c a s o s p e d id o s :
a) C r it e r io d e T re s c a
crcquiv = <r, — tr3 = 7 0 8 .1 2 N /cm ”
b ) C r i t e r io d e S a in t -V e n a n t
- P a z = 708 .12 - 0 .3 x 2 0 5 .8 2 = 6 4 6 .3 7 N /cm 2
c ) C r it e r io de v o n M ise s
: [(<r i - (t, )2 + (<t2 - <r3)2 + (<r3 - a J 2 =
- [ ( 7 0 8 .1 2 - 2 0 5 .8 2 )2 + 2 0 5 .8 2 2 + 7 0 8 .122] = 6 3 0 .91 N / cm 2
1.14. En un punto P in terio r de un sólido elástico ex is te el estado tensional indicado en la Figura 1 .14 -a , estando expresadas las tensiones en M P a . Sabiendo que el d ia g ram a tensión-deform ación del m ateria l del sólido elástico es e l de la F ig u ra 1.14-A , ca lcu lar el coeficiente deseguridad, según el crite rio sim plificado de M o h r.
D e la o b s e r v a c ió n d e la f i g u r a I .1 4 -a se d e d u c e q u e e l e je z e s d ir e c c ió n p r in c ip a l . L a m a tr iz d e te n s io n e s en e l p u n to c o n s id e r a d o d e l s ó l id o e lá s t ic o e s
[ r ¡ =20 - í o y j 0
-1 0 ^ / 3 4 0 00 6 0 J
M P a
IN T R O D U C C I ON AL E S TU DI O DE LA RESISTENCIA DE MATE RI ALE S 6 7
L a s te n s io n e s p r in c ip ó le s la s p o d e m o s o b te n e r a p a r t i r d e la e c u a c ió n c a r a c t e r ís t ic a
rz, u0
20 - a - 10^ 3 0— 10N/ 3 4 0 - u 0
0 0 6 0 - a
(6 0 — oj(<r2 — 60<r + 5 0 0 ) = 0
de d o n d e :
o , = 6 0 M P a ; <j2 = 50 M P a ; <r3 = 10 M P a
E l c r it e r io d e M o h r e s ta b le c e q u e la e x p r e s ió n d e la ten s ió n e q u iv a le n te es
° 7qu¡v = a i ~
C o m o K = a „ l |<r„|, d e l d i a g r a m a d e t e n s ió n -d e fo r m a c ió n se d e d u c e e l v a lo r d e K-. K = 150/250 = 0 .6 . U n a vez o b te n id a la t e n s ió n e q u iv a le n te
ffequiv = 6 0 — 0 .6 x 10 = 54 M P a
la d e te r m in a c ió n d e l c o e f ic ie n te d e s e g u r id a d p e d id o e s in m e d ia t a[— 1 <Tel 150LüJ= — = i r = 2 .7
C a lc u la r en ju lios el potencial interno del para lelep ípedo de la F igura Í .I5 sabiendo que la so lic itac ión e x te rio r causa un estado tensional ta l que en cualquiera de sus puntos la m atriz
de tensiones es
M P a'8 0 0 2 0 '
r—i
i_I II 0 3 0 0
.2 0 0 - 1 0 ,
D atos: m ódulo de elasticidad E = 2 x 1 0 5 M P a , coeficiente de Poisson /I = 0 .25 .

RESISTENCIA DE MATERI ALES
A p lic a re m o s la fó rm u la (1 .1 5 -5 ) q u e e x p re s a e l p o te n c ia l in te rn o en fu n c ió n de la s c o m p o n en te s d e la m a t r iz d e te n s io n e s
& - \ j£ ^ " x + <T">' + <r”= ~-2fJÍa’'*a "y + a”ya ’ -- + +
+ 2<Txr + xr- + TÍ-)j dx d>’ dzS u s t i tu y e n d o v a lo re s , te n ie n d o en c u e n ta el v a lo r d e G
E 2 x 1 0 5
ten e m o s :
2(1 + n ) 2 x 1 .25= 8 x 10* M P a
r [ 8 0 2 + 3 0 2 + 1 0 2 - 0 .5 (8 0 x 30 - 30 x 10 - 10 x 8 0 )] +
I 2 0 2 > 106 dx d v dz =2 x 8 x 10*
+ 19 .3754 x 1 0 5 16 x 1 0 V
= 19 375 x 0 .4 x 0 .3 x 0 .1 = 2 3 2 .5 J
dx d v dz
es d e c ir
f = 2 3 2 .5 J
2Tracción y compresión
2.1. Esfuerzo y estad o tensional de un prism a m ecánico som etid o a tracción o com presión m on oaxia l
Diremos que un prism a mecánico está sometido a t r a c c i ó n o c o m p r e s i ó n cuando al realizarun corte por cualqu ier sección recta el torsor de las fuerzas que actúan sobre la parteelim inada se reduce en el centro de gravedad de la sección al esfuerzo normal N, es decir, en todas las secciones rectas del prisma se anulan el esfuerzo cortante y los momentos torsor y flector.
Por convenio, tom arem os el esfuerzo normal positivo cuando la sección trabaje a tracción y negativo cuando lo haga a compresión. Aunque desde el punto de vista formal la tracción y la compresión no difieren más que en el signo del esfuerzo normal N, pueden existir diferencias cualitativas entre estos dos modos de carga, como veremos en su momento que ocurre en el caso de barras esbeltas sometidas a compresión.
Aunque en lo que sigue consideraremos prismas mecánicos de línea media rectilínea, en este mismo cap itu lo estudiarem os más adelante algunos casos en los que el prism a mecánico trabaje a tracción o compresión siendo curva su directriz, como ocurre en los cables o en los arcos funiculares.
El esfuerzo norm al en un prisma mecánico será, en general, una función de la abscisa que determ ina la posición de la sección recta
N = N(x) (2.1-1)
La representación gráfica de esta función da lugar al d ia g r am a d e e s f u e r z o s n o r m a l e s del prism a, ta l como el indicado en la F igura 2.1.
Las correspondientes leyes de esfuerzos normales en este caso serán:
N = P ¡ p ara 0 < x < aN — P j — P 2 para a < x < bN = P x — P 2 — P 3 para b < x < l
f .o

7 0 RESI STENCI A DE MATE RI ALE S
Veamos cómo se distribuyen las tensiones que se engendran en el prisma mecánico. Considerando un elemento (Fig. 2.2), cuya cara som breada forma parte de una sección recta, las componentes de la m atriz de tensiones a„x, i xy, r x. sobre esta cara habrán de verificar, por el principio de equivalencia:
a„x d y dz N xxy d y dz = 0 ; r,_ d v dz
( W - Txyz) d y dz = 0 ;J a
a„xz d v dz = 0 ;( 2 . 1-2)
ct„x v d v dz = 0
Con estas seis ecuaciones no se pueden determ inar las tensiones o„x, xxy y xxi que el esfuerzo norm al N origina en la sección; es necesario recurrir a hipótesis sim plificativas.
La hipótesis que nos resuelve la indeterm inación del sistema de ecuaciones es la llam ada h ip ó t e s i s d e B ern ou l l i o d e c o n s e r v a c i ó n d e la s s e c c i o n e s planas'. Las secciones transversales del prism a mecánico, que eran p lanas y perpendiculares a su línea media antes de la deformación, permanecen planas y norm ales a dicha línea media después de producida ésta.
Se com prueba experim entalm ente la verificación de esta hipótesis sometiendo a tracción una barra prism ática en la que se han d ibu jado sobre su superficie una retícu la de líneas rectas, unas perpendiculares y otras para le las a l eje longitudinal. En efecto, después de producida la deformación (Fig. 2.3) se observa que cada recta de la retícula sigue siendo parale la a la m isma recta antes de someter la b arra a tracción. Como es de suponer que en
T R A C C IO N Y C O M P R E SIO N 71
p n— -----------. , t.
u uF ig ura 2.3.
el interior del prisma se produce el mismo fenómeno, se deduce la verificación de la hipótesis de Bernoulli antes enunciada.
Al ser constante la deformación longitudinal un itaria en todos los puntos de la sección transversal, también será constante la tensión o„x. Por tanto, al existir una distribución uniforme de o nx en cada sección transversal de la viga, de la prim era ecuación (2 . 1-2 ) se deduce:
cKl = N, es decir:NO.
(2.1-3)
siendo Q el área de la sección recta que se considera.Por otra parte, cualquier paralelepípedo elem ental que consideremos en la barra, de
lados paralelos a la retícula d ibu jada en su superficie, se deform ará según otro paralele - pipedo cuyas caras son paralelas a las de aquél, por lo que se conservará el paralelism o de sus aristas. Quiere esto decir que no existen distorsiones angulares, es decir,
I xy = y X2 = 7,-r = 0
y, por tanto, que
Ley = = Ty. = 0 i 2 - 1 "4 )
Se comprueba que con estos resultados se verifican idénticamente las ecuaciones segunda, tercera y cuarta de las (2.1-2). Tam bién se verifican las dos restantes, pues ambas son el producto de una constante por el momento estático de la sección respecto de un eje que pasa por el centro de gravedad que, como sabemos, es nulo.
Fácilmente se comprende que en el tramo de una b arra prism ática en el que el esfuerzo normal es constante, las tensiones norm ales son constantes en todas las secciones del tramo, es decir, en todos los puntos del tram o del sólido elástico al estado tensional es el mismo. Este estado tensional se denom ina e s t a d o t e n s i o n a l h o m o g é n e o .
La hipótesis de Bernoulli no es válida para secciones cercanas a aquéllas en que se aplican fuerzas concentradas pero sí es acorde con el p r in c i p i o d e Sa in t -V enan t q.^e establece que, exceptuando un pequeño tram o in icial de la barra, las tensiones internas no varían si se sustituye una fuerza externa concentrada por un sistem a de fuerzas equivalente, como puede ser el formado por una distribución uniforme en la sección extrema.

7 2 RESISTENCIA DE MATERIALES
Tampoco es ap licable a las secciones próximas a aquellas que presentan variaciones bruscas del área de la sección, como ocurre en entallas, agujeros, etc., ya que entonces hay ciertas zonas en las que se producen concentración de tensiones, como veremos más a d e la n t e .
El hecho que en los puntos de la sección recta y para la orientación de ésta se anule la tensión tangencial indica que la dirección del eje del prism a es dirección principal. Las tensiones principales son:
El vector tensión a en un punto interior, para una orientación cuya normal n forme un ángulo 9 con la dirección del eje del prisma (Fig. 2.4), será
F ig ura 2.4.
o o eos 9' COS 9 '[<?] = 0 0 0 sen 9 = 0OOo
. 0 , . o ^
(2.1-6)
De esta expresión se deduce que en cualqu ier sección oblicua el vector tensión tiene la dirección del eje del prisma.
Sus componentes intrínsecas serán
a„ = a ■ u = (cr, eos 9, 0, 0)eossen
0= cr, COS
t = a ■ sen 6 = a , eos 6 sen 6 = — sen 2(2.1-7)
TRACCION Y C O M P R E S I O N 7 3
Para una sección oblicua ortogonal a la anterior, es decir, cuya normal r í forma un
ánaulo 9 + - con el eje x (Fig. 2.4), el vector tensión es:
'<*1 0 0>
l--1
■A i—j 11 0 0 0
O___j 0 O V__
eos 9 +
sen | 9 + — I
0
' — oq sen 6 '
= 0
0
(2. 1-8)
y por tanto, sus componentes intrínsecas serán
o'„ = 5 ‘ ■ ü ' = ( —oq sen 9, 0, 0)— sen eos 9
0
a' sen 9 = —a x sen 9 eos 9 = — - y sen 2 9
(2.1-9)
A los mismos resultados podríam os haber llegado utilizando el círculo de M ohr (Fig. 2.5)
WB = ÜÜ + C B = —■ + eos 29 = a x eos2 2 2
B M = C M sen 29 = y sen 29 — x
(2 .1- 10)
W - UC - DÜ = y - y eos 29 = a , sen2
DAT = - C M ' sen 29 = - y sen 29 = T
(2.1- 11)
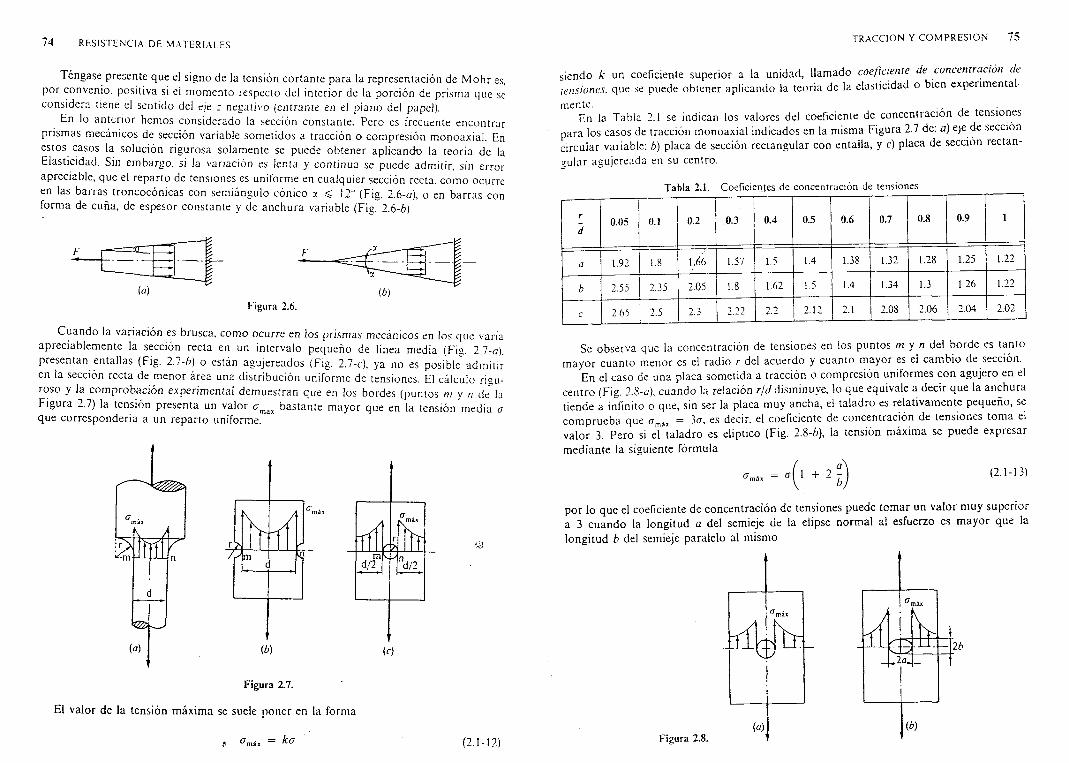
7 4 RESISTENCIA DE MATERI ALES
Téngase presente que el signo de la tensión cortante para la representación de M ohr es, por convenio, positiva si el momento respecto del interior de la porción de prisma que se considera tiene el sentido del eje _■ negativo (entrante en el piano del papel).
En lo anterior hemos considerado la sección constante. Pero es frecuente encontrar prismas mecánicos de sección variable sometidos a tracción o compresión monoaxial. En estos casos la solución rigurosa solamente se puede obtener aplicando la teoría de la Elasticidad. Sin embargo, si la variación e s lenta y continua se puede adm itir, sin error apreciable, que el reparto de tensiones es uniforme en cualqu ier sección recta, como ocurre en las barras troncocónicas con semiángulo cónico x íC 12° (Fia. 2.6-tr), o en barras con forma de cuña, de espesor constante y de anchura variable (Fig. 2.6-6).
Figura 2.6.
Cuando la variación es brusca, como ocurre en los prismas mecánicos en ¡os que varía apreciablem ente la sección recta en un intervalo pequeño de línea medía (Fia. 2 .7 -a), presentan entallas (Fig. 2.7-6) o están agujereados (Fig. 2.7-cj, ya no es posible adm itir en la sección recta de menor área una distribución uniforme de tensiones. El cálculo riguroso y la comprobación experimental demuestran que en los bordes (puntos m y n de la F igura 2.7) la tensión presenta un valor <rmax bastante m ayor que en la tensión media a que corresponderia a un reparto uniforme.
(o)
T Í f i
iM
md/ 2 knd/2
(b) (c)
F ig ura 2.7.
El valor de la tensión m áxim a se suele poner en la forma
a <Fna, = k a (2 . 1- 12)
T RACCION Y C O M P R E S I O N 7 5
siendo k un coeficiente superior a la unidad, llam ado c o e f i c i e n t e d e c o n c e n t r a c i ó n d e t en s i on e s , que se puede obtener aplicando la teoria de la elasticidad o bien experimental- mente.
En la Tabla 2.1 se indican los valores del coeficiente de concentración de tensiones para los casos de tracción m onoaxial indicados en la misma Figura 2.7 de: a) eje de sección circular variable: b) placa de sección rectangular con entalla, y c) placa de sección rectangular agujereada en su centro.
Tabla 2.1. Coeficientes de concentración de tensiones
rd
0 .05 0.1 0 .2 0 .3 0 .4 0 .5 0 .6 0 .7 0 .8 0 .9 1
a 1.92 1.8 1.66 1.57 1.5 1.4 1.38 1.32 1.28 1.25 1.22
b 2.55 2.35 2.05 1.8 1.62 1.5 1.4 1.34 1.3 1.26 1.22
c 2.65 2.5 2.3 2 22 2.2 2 .12 2.1 2.08 2 .06 2 .04 2 .02
Se observa que la concentración de tensiones en los puntos m y n del borde es tanto m ayor cuanto menor es el radio r del acuerdo y cuanto mayor es el cam bio de sección.
En el caso de una placa sometida a tracción o compresión uniformes con agujero en el centro (Fig. 2.8-a), cuando la relación r j d dism inuye, lo que equivale a decir que la anchura tiende a infinito o que, sin ser la placa muy ancha, el taladro es relativam ente pequeño, se com prueba que crmáx = 3<r, es decir, el coeficiente de concentración de tensiones toma el valor 3. Pero si e l taladro es elíptico (Fig. 2.8-6), la tensión m áxim a se puede expresar mediante la siguiente fórmula
por lo que el coeficiente de concentración de tensiones puede tom ar un valor m uy superior a 3 cuando la longitud a del semieje de la elipse normal al esfuerzo es m ayor que la longitud 6 del semieje paralelo al mismo

7 6 RESI STENCI A DE MATERI ALES
Todo lo dicho es válido en régimen elástico, es decir, cuando el valor de crmix no supera el del lím ite elástico <re. En el caso de materiales frágiles en los que el lím ite elástico es muy próximo al de rotura, el efecto de concentración de tensiones puede ocasionar la fractura de la pieza aún para valores de a muy inferiores a cr,,. Por el contrario, en el caso de m ateriales dúctiles, en los que se alcanza el lím ite elástico y tensión de fluencia mucho antes que se produzca la rotura, la formación de deformaciones plásticas hace que la d istribución de tensiones sea aproximadamente uniforme.
2.2. E stad o de deform aciones por tracción o com presión m on oax ia l
Conocida la m atriz de tensiones, la obtención de la m atriz de deformación es inm ediata ap licando las leyes de Hooke generalizadas [ecuaciones (1.8-5)]
El corrim iento u de una sección de abscisa x en dirección del eje x se puede calcu lar integrando la prim era de estas ecuaciones, teniendo en cuenta que u depende exclusivamente de .y
dudx
dx = N jE ñ dx
(2.2-2)
La representación gráfica de la función u = u(x) da lugar al d ia g r a m a d e d e s p la z a m i en t o s d e la s s e c c i o n e s r e c t a s .
El a largam iento absoluto Al del prisma no es otra cosa que el corrim iento u de la sección extrem a. Por tanto, su valor se obtendrá particu larizando el de u para x = /
t í)
Al = — dxE n
(2.2-3).
F i g u r a 2.9.
TRAC CI ON Y C OM P R E S I ON 7 7
Para un prisma tal como el de la F igura 2.9 en el que N = P y £2 es constante, se tiene
P lA = — (2.2-4)
ECí
expresión que proporciona el valor del a largam iento total experimentado por el prisma.Para barras escalonadas en las que se produzcan saltos discretos de los valores del área
de la sección, o del esfuerzo normal, la fórmula a ap licar para el cálculo de! alargam iento absoluto sería ~
" " NI-« - 1 4 , , - ! ^ , 2 .M ,
siendo /, la longitud de la porción de prism a en la que son constantes los valores de Nh Q. v, por supuesto, el del módulo de elasticidad E¡.
Consideremos ahora el entorno elem ental de un punto interior del prisma mecánico dela Figura 2.9. Sea V el volumen de dicho entorno antes de la deformación y AV lavariación de volumen experim entada una vez ap licada la fuerza axial P
V = d x d y d z
V + AV = ( d x + Exd x ) ( d y + Eyd y ) ( d : + £: d z ) = d x d y d z (1 + sx)(l — p s x)2
La d i l a t a c i ó n c ú b i c a u n i t a r i a será, despreciando infinitésimos de orden superior
^ 7 = (1 + £*)(< - PZx)2 ~ 1 - £ * 0 - 2p) (2 .2 -6)
que se anula para p = 0.5.Esta expresión nos indica que la d ilatación cúbica un itaria será tanto menor cuanto
más se aproxime el coeficiente de Poisson a 0.5, como ocurre en algunos m ateriales tales como la goma y la parafina.
2.3. T ension es y d eform acion es producidas en un prism a recto por su propio peso. C on cep to de só lid o de igual resistencia
En algunas ocasiones la m agnitud de las cargas que actúan sobre el prism a es muy grande, lo que hace que ei peso propio del mismo se pueda considerar despreciable. En otras, por el contrario, sólo el propio peso puede producir por sí mismo unas tensiones que pudieran ser del mismo orden de m agnitud, e incluso superiores, que las debidas a las cargas y que, evidentemente, habrá que tener en cuenta.
Supongamos el prisma recto de peso P, longitud / y sección recta de área constante Q indicado en la F igura 2.10, en uno de cuyos extremos está som etida a una carga F, que supondremos uniformemente repartida en esa sección, creando un estado tensional de tracción en el caso (a) y de compresión en el (b).

7 8 RESISTENCIA DE MATE RI ALE S
(b)F igura 2 .10 .
Si el peso P fuera despreciable frente a la carga F podríamos considerar que la tensión normal a en cualqu ier sección recta de área Q sería* en valor absoluto
- = £ (2.3-1)
y el a largam iento o acortam iento, en su caso, del prism a en dirección axial
FlA/ = m (2.3-2)
En el caso que el peso no fuera despreciable, la tensión dada por (2.3-1) solamente seríacierta para la sección extrem a inferior en el caso (a), o la superior en el caso (b ). Paracualquier sección interm edia la fuerza que habría que considerar sería F aum entada en el peso de la parte del prism a existente entre esta sección y la que está ap licada la carga. La tensión es variab le, alcanzando su valor máximo en la sección de empotramiento. Su valor seria:
F + Pffmáx = — j j — (2.3-3)
Para una sección cualqu iera nn , a d istancia x de la sección extrema en la que se aplica la carga, la tensión toma el valor
F + y í lx<x = X — (2.3-4)
siendo y el peso especifico del m aterial de la barra.
* Suprimimos en este epígrafe los subíndices de la tensión normal por innecesarios, ya que solamente se van í considerar secciones rectas y no oblicuas.
a
T RACCI ON Y C O M P R E S I O N 7 9
Supongam os dos secciones rectas separadas dx. El estado de tensiones definido por 12.3-4) produce un a largam iento o acortam iento de este prisma elemental.
= F _ + jQ x (2 3_5)EQ
El alargam iento , o acortam iento , total del prisma se obtendrá integrando esta expresión a lo largo de la barra:
A/ ='' F + yQx , Fl 1 vQI2 / / p \
--------------- dx = — + - t----- = — ( F + — i (2.3-6)0 EQ EQ 1 EQ. EQ. I 2 1
El resultado a que hemos llegado nos dice que cuando se considera un prism a de sección constante sometido a tracción (o compresión) y se tiene en cuenta el peso propio, la variación de longitud' que experimenta dicho prisma es la misma que presentaría un prisma de peso despreciable sometido a un esfuerzo de tracción (o compresión) igual a la carga ap licada increm entada en otra igual a la mitad del peso propio de la pieza.
En el caso estudiado hemos supuesto constante la sección £2. Asegurando que la tensión m áxim a dada por (2.3-3) sea menor o igual a la tensión admisible, en cualqu ier otra sección del prism a la tensión será inferior a la a aim con toda seguridad. Esta circunstancia nos permite d ism inuir las secciones dei prisma hasta conseguir que en cualqu iera de ellas la tensión sea la m ism a; con un consiguiente ahorro de material.
L legamos así al concepto de s ó l i d o d e i g u a l r e s i s t e n c ia , es decir, un sólido en el que se tiene en cuenta su propio peso y es tal que en cualquier sección recta la tensión a es la misma.
Considerem os el p ila r de la F igura 2.11, y calculemos la función que da el valor de la sección Í2 del mismo para que verifique estas condiciones.
Sean dos secciones próxim as m m y nn ; sobre la inferior ¡a carga es igual a la correspondiente a la sección superior aum entada en el peso del prisma comprendido entre am bas.

8 0 RESISTENCIA DE MATERI ALES
La superficie de la sección nn será mayor que la de m m y la diferencia dQ entre una y otra ha de ser tal que la tensión producida por el peso del prisma elemental sea a, es decir:
dQ. a = yQ dx
ecuación diferencial en la que separando variables e integrando, se tiene:
( 2 .3 - 7 )
dQn~
— dx a
LQ =yx
(2 .3 - 8
LC => Q — C e<¡
siendo C una constante de integración, cuyo valor es igual al área de la sección superiordel pilar, según se desprende a l particularizar esta ecuación para x = 0 .
C = fio = -cr
La ecuación (2.3-8) toma, pues, la forma:
Q = - e P (2.3-9)<7
La sección va aum entando y es máxima en la base del pilar, es decir, para x = /.
Qmix = - e E (2.3-10)a
2.4. E xp resión del potencial interno de un prism a m ecán ico som etid o a tracción o com presión m on oax ia l
D ada la m atriz de tensiones [7"] y la m atriz de deformación [ZJJ}de un sólido elástico sometido a una solicitación exterior, se dem uestra que el p o t e n c i a l in t e rn o o e n e r g í a e l á s t i c a d e d e f o r m a c i ó n por unidad de volumen que el sólido posee, en función de las componentes de ám bas matrices, según la expresión (1.15-4), es
d& 1+ anyt y + a n. e z + t xyy xy + xyzy yz + r xzy x:) (2.4-1)
En el caso de tracción o compresión m onoaxial, según hemos visto, se anu lan todas las componentes de la m atriz de tensiones, excepto cr„*. Por tanto , el potencial interno de un paralelepípedo elemental del prism a será
& = 2 c * x d x d y d z (2.4-2)
TR A C C I O N Y C O M P R E S I O N 81
Si se considera la porción de prisma comprendida entre dos secciones rectas indefinidamente próximas, separadas dx. esta expresión se puede poner en la forma
dF = - o„x r.x Q dx (2.4-3)
Expresando la deformación unitaria e x en función de o„x, y ésta en función del esfuerzo normal N, se tiene: ^ ^
1 ' N 2d& = — a 2 Q dx = dx (2.4-4)
2 E "x 2EQ
Integrando, obtendremos el'potencial interno de todo el prisma
1 N2Cr =
o 2 EQdx (2.4-5)
Si N = P es constante, así como el área Q de la sección
N2l P 2It = ------ = (2.4-6)
1EQ 2EQ
A partir de esta expresión se puede comprobar el a largam iento absoluto A/, aplicando el teorema de Castigliano
dE P lAl = — = — (2.4-7)
d P EQ
2.5. T racción o com presión m on oaxia l h iperestáticaAl p lantear el equilibrio de un sistema sucede frecuentemente que el número de incógnitas es superior al número de ecuaciones que proporciona la Estática y, por lo tanto, no son suficientes para resolver el problema. Tales sistemas reciben el nombre de s i s t em a s e s t á t i c a m e n t e i n d e t e rm in a d o s o s i s t em a s h i p e r e s t á i i c o s .
Llam arem os g r a d o d e h i p e r e s t a t i c i d a d n al número que expresa la diferencia entre el número de ecuaciones independientes de que se dispone y el número de incógnitas.
La causa de que la Estática no resuelva esta clase de problemas está en que allí considerábam os el sólido como rígido. Las deformaciones que presentan las diferentes partes de un sistema, consideradas como sólidos elásticos, proporcionan el número de ecuaciones restantes necesarias para obtener la solución del problema. Estas ecuaciones adicionales expresan las condiciones geométricas de las ligaduras im puestas a los sistemas deformables y reciben el nombre de e c u a c i o n e s d e c om p a t i b i l i d a d d e la s d e f o r m a c i o n e s .
Consideremos en lo que sigue, con objeto de dejar c lara la idea de equilib rio hiper- estático, algunos ejemplos de casos elementales de este tipo de sistemas.
El prim er ejemplo que vamos a considerar es el sistem a constituido por una barra de
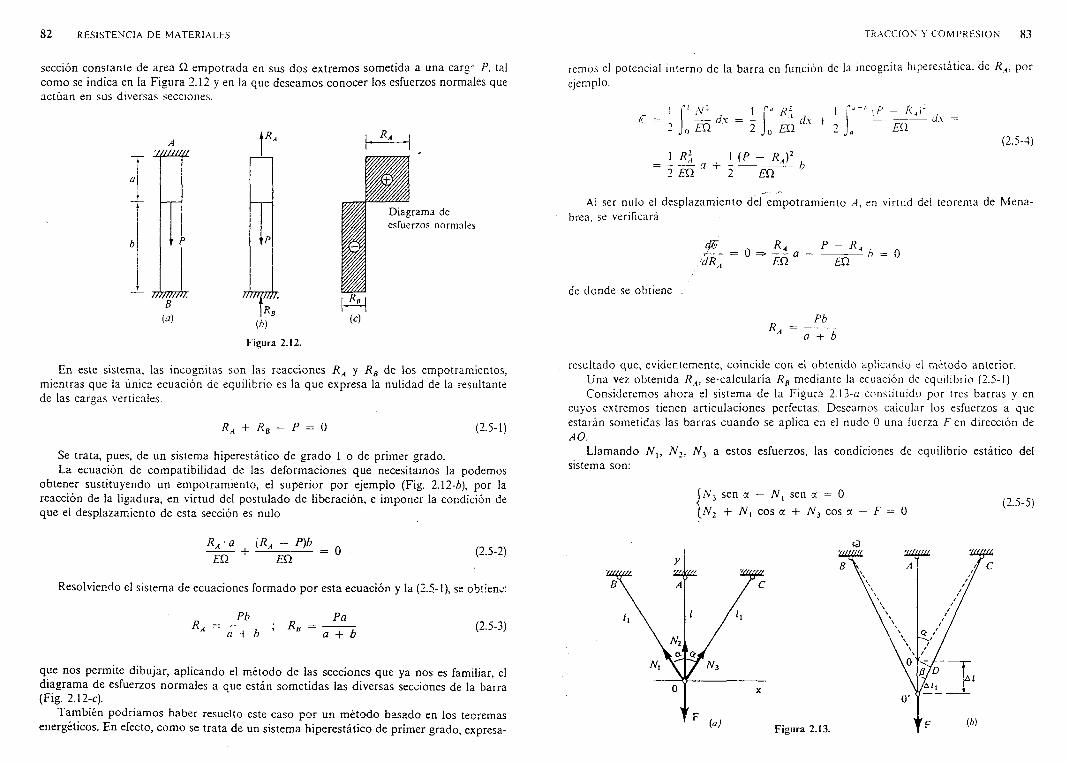
8 2 RESISTENCIA DE MAT E R I AL E S
sección constante de area Q. em potrada en sus dos extrem os som etida a una carg" P, tal como se indica en la F igura 2.12 y en la que deseam os conocer los esfuerzos normales que actúan en sus diversas secciones.
Ay///./////
///m /rti:B(a)
WIIUIII.
Ve(b)
F igura 2 .12 .
En este sistema, las incógnitas son las reacciones R Á y R B de los empotramientos, m ientras que la única ecuación de equilibrio es la que expresa la nulidad de la resultante de las careas verticales.
R a + R r P = 0 (2.5-1)
Se trata , pues, de un sistem a hiperestático de grado 1 o de prim er grado.La ecuación de com patib ilidad de las deform aciones que necesitamos la podemos
obtener sustituyendo un em potram iento, el superior por ejemplo (Fig. 2.12-ú), por la reacción de la ligadura, en virtud del postulado de liberación, e im poner la condición de que ei desplazam iento de esta sección es nulo
P a ' 0 + yRA - P ) b = 0 (2.5-2)E n E n
Resolviendo el sistem a de ecuaciones formado por esta ecuación y la (2.5-1), se obtiene:
Pb _ P aR a
a + bR „ a + b
(2.5-3)
que nos perm ite d ibujar, ap licando el método de las secciones que ya nos es fam iliar, el d iagram a de esfuerzos norm ales a que están som etidas las d iversas secciones de la barra (Fig. 2.12-c).
Tam bién podríam os haber resuelto este caso por un método basado en los teoremas energéticos. En efecto, como se trata de un sistem a hiperestático de prim er grado, expresa-
TRAC CI O N Y C O M P R E S I O N 8 3
remos el potencial interno de la barra en función de la incógnita hiperestática, de RA, por ejemplo.
€ =1
£ ñ dX = 2
* 2<
1 3 a2 EQ
o E n
( E ~ R a) 1 E n
d x +i [ P - r a ¡ 2
En dx
(2.5-4)
Al ser nulo el desplazam iento del em potram iento A, en virtud del teorema de M ena- brea, se verificará
de donde se obtiene
& r a P ~ r aa— = 0 => —£ a -------------- 5 = 0xír , E n En
PbR a = a + b
resultado que, evidentemente, coincide con el obtenido aplicando el método anterior.Una vez obtenida RA, se-ca lcu laría R B m ediante la ecuación de equilibrio (2.5-1)Consideremos ahora el sistem a de la F igura 2.13-a constituido por tres barras y en
cuyos extremos tienen articu laciones perfectas. Deseamos calcular los esfuerzos a que estarán sometidas las barras cuando se ap lica en el nudo 0 una fuerza F en dirección de A O.
Llam ando N,, A L , A ^ a estos esfuerzos, las condiciones de equilibrio estático del sistema son:
AL sen a — N, sen a — 0 (2.5-5)N2 + AL eos a + N} e o s a — F = 0

8 4 RESISTENCIA DE MATERIALES
sistema de ecuaciones equivalente a:
Í íV , + 2 iV j e o s ct = FK = * 3 ( 1 5 ~6 )
Por otra parte, la condición de momento nulo no aporta ninguna nueva ecuación ya que las fuerzas son concurrentes y necesariamente se cumple. Tenemos, por'tan to , dos ecuaciones algebraicam ente insuficientes para calcu lar los esfuerzos AL y
El problema aparentem ente está indeterminado, pero teniendo en cuenta la com patib ilidad de las deformaciones de las barras, el sistema adopta una configuración tal como la representada exageradam ente en la Figura 2.13-6.
Los ángulos a y / ? que forman las barras inclinadas, antes y después de la deformación respectivamente, respecto a la vertical, son sensiblemente iguales (a es /?), ya que las deformaciones son muy pequeñas, por lo que la ecuación (2.5-6) sigue siendo válida.
Los alargam ientos A/ y A/, de la barra vertical e inclinadas, respectivamente, no son independientes, sino que están relacionadas por medio de la ecuación:
A/[ = Al eos a (2.5-7)
que se obtiene considerando el triángulo 0D0', rectángulo en D.Aplicando la ley de Hooke, pues suponemos que estam os en la zona de elasticidad
proporcional, se tiene:
A ' ’ m 1 : - £ '■ <1 5 - 8 >
Sustituyendo estos valores en (2.5-7) y teniendo en cuenta que l = l x eos a se obtiene la ecuación:
Arl = N2 eos2 a
que junto con (2.5-6) forma un sistema de solución única:
F eos2 aA 'i =
N, =
1 4- 2 eos3 a. F
t + 2 eos3 a
(2.5-9)
«3
(2.5-10).
De lo expuesto se desprende que cuando nos encontremos con un caso de tracción o compresión h iperestática, a las ecuaciones de equilibrio de la E stática hay que añad ir la condición de com patib ilidad de las deformaciones de las diversas partes del sistema. U na forma de expresar esta condición es hacer un esquem a en el que figure el sistem a deform ado (como se ha hecho en la F igura 2.13-ú) y a la vista de la configuración geom étrica que éste adopta se deducen las relaciones que existen entre las deformaciones de las diferentes partes. Es evidente que el número de ecuaciones independientes entre deformaciones que se necesitan para la determ inación del problema es igual al grado de hiperestaticidad del sistema.
TRAC CI O N Y C O M P R E S I O N 8 5
Otro posible método a ap licar para la resolución de problemas de tracción o compresión hiperestática está basado en el teorema de Castigliano. Para exponerlo consideremos el mismo ejemplo representado en la F igura 2.13 que hemos contemplado anteriormente.
El método consiste en sustitu ir las barras superabundantes del sistema, que lo hacen hiperestático. por fuerzas X¡ en los nudos extremos. En nuestro caso, suprim iendo una sola barra, pues se trata de un sistem a hiperestático de primer grado, la barra 0 A, por ejemplo, tenemos el sistema indicado en la F igura 2.14.
De las ecuaciones de equilibrio
iV3 sen a — ñ/, sen a = 0
X + Nj eos a + iV3 eos a — F = 0(2.5-11)
se deducen las expresiones
F - X 2 eos a
(2.5-12)
que permiten expresar el potencial interno de! sistema en función exclusivam ente de la incógnita X
ZT = 1 ^ / + 1 * 1 / = {F ~ X)2 ‘2 E n 1 2 E n 1 4 E n eos3 a
(2.5.13)
Pues bien, el desplazam iento relativo de los nudos extremos de la barra suprim ida que vale, en virtud del teorema de Castigliano
día5 qa = d X
(F - X)/ 2EÍ2 eos3 a
(2 .5 .1 4 )
tiene que ser igual a la variación de longitud que experim entará esta b arra som etida al esfuerzo normal X. Pero como la fuerza X que hemos considerado es sobre el nudo, por el

8 6 RESISTENCIA DE MATERI ALES
principio de acción y reacción la que actúa sobre la barra es igual y opuesta. Por tanto, tendremos que cam biarle de signo, es decir
ó t s
ÓaA = MXI
H 2 (2 .5 .1 5 )
Igualando, pues, estas expresiones, se tiene la ecuación ad icional que nos hacia falta para la determ inación del problema
(F - X)l 2 EQ. eos3 a
A 7
'EQ
de donde
X =+ 2 eos
(2.5-16)
que coincide, evidentemente, con el valor obtenido para .V, por el o t r o método.El valor de la otra incógnita N 1 se obtiene de forma inm ediata de la segunda ecuación
(2.5-11).En los dos métodos de cálculo expuestos se ha supuesto que las barras trabajaban en
régimen elástico. Es evidente que si vamos aum entando gradualm ente el valor de F llegaremos al límite elástico en alguna de las barras antes que en otras.
Estudiemos ahora el comportam iento del m ismo sistem a considerado anteriormente cuando aumentamos F y sobrepasam os el régim en elástico, suponiendo que el m aterial de las barras presente un e s c a l ó n d e f l u e n c i a , es decir, el d iagram a tensión-deform ación fuera de la forma indicada en la F igura 2.15.
De las expresiones (2.5-10) se deduce, a l ser eos a < 1 y haber supuesta que las barras son del mismo m aterial e igual área de sección, que N2 > F\. Por tanto , la barra que alcanza antes la tensión del lim ite elástico <je es la 0 A.
TRAC CI O N Y C O M P R E S I O N 8 7
Si N2 < . <Je Q, o lo que es lo mismo
F < (1 + 2 eos3 a) a e Q = Fe (2 .5 -1 7 ) .
siendo Fe la carga máxim a para que todo el sistema trabaje en r é g im e n e lá s t i c o .En una representación gráfica N — F (F ig . 2.16), las leyes de variación de los esfuerzos
normales N2 y N2 en función de la fuerza F ap licada vienen dadas por los segmentos 0 A x y Odi respectivamente.
F ig ura 2 .16 .
Para valores de F superiores a la c a r g a m áx im a e lá s t i c a Fe, la barra QA se a larga sin variar el valor del esfuerzo normal N2, es decir. As se mantiene constante. Las barras laterales trabajarán en régimen elástico hasta tanto el valor de F valga Fp, para el que A j = o eQ .
Durante este período, que podríamos decir que el sistema trabaja en r é g im e n e lá s t i c o - p lá s t i c o , las expresiones que nos dan los valores de N t y N2 son
FeN-, = --------------- ;— = constante1 + 2 C ° S a , N (2.5-18)
= £ '1 2 eos a 2 eos a \ 1 + 2 eos3 cc
Las leyes gráficas correspondientes vienen representadas por los segmentos A2A^ yA¡A¡ respectivamente (Fig. 2.16).
Al llegar F a tom ar el valor Fp las dos barras entran en r é g im e n p l á s t i c o p r o d u c i é n d o s e la ruina d e l s i s t em a . La c a r g a Fp recibe el nombre de c a r g a l ím i t e . No es posible sobrepasarla pues las barras del sistem a se a largarían indefinidamente manteniéndose constante Fp.
Estudiemos ahora la variación del desplazam iento <5 del nudo 0, punto de ap licación de la fuerza F, al ir aum entando el valor de ésta.
M ientras la barra central traba ja en régimen elástico, es decir, si F < Fe, el valor de ó será
N2l F lH 2 ~ £Q(1 + 2 eos3 a)<5 = = VvvTi . V — 377 (2'5- 19:'

8 8 RESISTENCIA DE MAT E R I AL E S
Su valor, para F = Fe, es
<5,, =F_ ■ I
£0 ( 1 £ 2 eos 2 ) E(2.5-20)
La expresión (2.5-19) es lineal, por lo que en un d iagram a F — ó, tal como el representado en la F igura 2.17-a. la gráfica correspondiente viene representada por el segmento rectilíneo 0 A.
Si suprim imos la carga F antes de alcanzar el valor de Fe, el sistema seguiría la recta de descarga +0 , es decir, a l cabo de un tiempo suficiente se anu laría la deformación ó y el sistema adop taría la m isma configuración geom étrica que tenía antes de empezar a cargarla.
En régimen elástico-p lástico (Fr < F < Fp), el valor de <5 se puede obtener a partir de la ecuación (2.5-18) que nos da el valor del esfuerzo N¡ en las barras laterales, ya que al estar éstas en régimen elástico siguen la ley de Hooke.
Si = e q ’ y como
<5„„ =
/ = ! 1 eos a S l = 5 eos a
/
EQ. eos2 a 2 EQ eos3 a
5 eos 7. —N ,l
EQ eos a
N J
1 + 2 eos3 a(2.5.21)
Veamos qué ocurre a l sistem a si cuando está cargado con una fuerza F comprendida entre Fe y Fp, se suprim e ésta.
Sabemos que en el d iagram a tensio--deform ación de un m aterial que ha superado la tensión de fluencia, la descarga viene representada por un segmento rectilíneo paralelo al de carga proporcional, es decir, si el m aterial se encuentra en el estado representado por el punto B en la F igura 2. \ l-b , la descarga sigue el segmento BD, paralelo a l O A. Esto nos
TRACCION Y C O M P R E S I O N 8 9
indica que si se supera la tensión de fluencia y después se descarga, en el m aterial queda una deformación permanente cuyo valor unitario viene dado por la abscisa OD.
Volviendo a nuestro sistema hiperestático de las tres barras, si la carga es F y el punto representativo en el d iagram a F — S es B (Fig. 2 .17-c;), la descarga seguirá la recta BD. Vemos que el sistema no recupera su posición in icial, cuando estaba descargado, sino que existe una deformación permanente, cuyo valor es
= OD = AE = AH - EH = -BHtg /?
BH tg x
(2.5-22)
Ahora bien, ~BH = F — Fe y las tangentes de los ángulos 7 y /) son los coeficientes angulares de las rectas 0 7 y 7 C respectivamente, cuyos valores fácilmente se deducen de las ecuaciones (2.5-19) y (2.5-21).
Por tanto, el valor de la deformación permanente del sistema será
(F - £„)/(F - F«)/_____________________2 EQ eos3 a EQ( 1 + 2 eos3 2 )
(2.5-23)
Esta deformación permanente que ha sido causada porque una parte del sistema hiperestático, en nuestro caso la barra central, ha rebasado la tensión de fluencia, es evidente que producirá en las barras laterales esfuerzos de tracción que, a su vez, producen un efecto de compresión sobre ella. En las tres barras del sistema descargado existirán esfuerzos residuales.
Los valores de estos esfuerzos residuales se pueden obtener fácilmente de forma gráfica mediante la utilización de un d iagram a N — F , tal como se indica en la F igura 2.18.
Las barras laterales se descargarán siguiendo la recta que pasa por E y es parale la a 0)4 j. Por tanto , el esfuerzo residual en ellas será
* lr = ES = H ¡{F )cp = (2 .5 -2 4 )2 eos a 1 + 2 eos3 a + 2 eos a

9 0 RESISTENCIA DE MATERIALES
ya que N1(F)ep y Ni(F)e son los valores dados respectivamente por la prim era ecuación (2.5-18) y la segunda (2.5-10), al particularizarlas para el valor de F considerado.
Por su parte, la barra central se descargará siguiendo la recta que pasa por P y es paralela a 0 d : .
Por tanto
f - Fy , r = - 0 R ISI = - A , P - te a = r-----V - (2.5-25)
" 1 + 2 eos a
Si ahora volviéramos a cargar, el sistema seguiría la recta DB (Fig. 2.17-a) y se com portaría como elástico hasta alcanzar el punto B. O sea, que se ha conseguido aum entar la carga elástica máxima del sistema.
Si llegado nuevamente al punto B seguimos aum entando el valor de P, la ley gráfica seguirá los puntos del segmento BC. Al llegar a C (para F = Fp) la deformación <5 crece indefinidamente a carga constante: se produce la ruina del sistema.
2.6. T racción o com presión m onoaxia l producida por variaciones térm icas o defectos de m ontaje
Cuando tenemos un prisma mecánico recto y se calienta de forma uniforme de tal m anera que su tem peratura se eleva At 3C, la longitud I de cualqu iera de sus dimensiones experim enta una variación Al dada por la ecuación
Al = oíIAi (2.6-1)
en donde a es el c o e f i c i e n t e d e d i la ta c i ón linea l , que es constante para cada m aterial y cuyos valores para un conjunto de m ateriales de uso bastante común se recogen en la Tabla 2.2.
T abla 2.2. C oeficientes de d ila tac ió n lineal
M ate ria l aj q -6 oc - ! M a te ria l
a, 0 -6 oc - l
A c e ro de a lta resistenciaA c e ro inox idab leA cero estru ctu ra lA lu m in io y sus aleacionesL ató nH orm igónN iquel
141712
23.419 .1 -2 1 .2
11.213
H ierro fund ido F u n dic ión gris L a d rillo B ron ceB ron ce a l m anganesoV id rioN y lo n
9 .9 -12Í010
5-718 -2 1
205 -1 1
7 5 -1 0 0
Esta variación de las dimensiones iniciales no producirá tensión alguna si no hay ninguna causa que im pida la libre d ilatación. Pero si se pueden producir tensiones en la pieza si la deformación se ve impedida total o parcialm ente como ocurre, generalm ente, en los sistem as hiperestáticos.
TRACCI ON Y C OM P R E S I O N 91
A£iT i 777 7T. 7/7YFF
iAí 1 Figura 2 .19 .
Consideremos, por ejemplo, la viga isostática indicada en la F igura 2.19. Al producirse una elevación Al °C de la tem peratura experim entará un alargam iento AI = 7.1 At, puesto que no está restringida su libre dilatación , pero no existirá en la viga ninguna tensión como consecuencia de esta variación térmica.
Por el contrario , si la m isma viga en vez de tener un apoyo fijo y otro móvil tuviera dos apoyos fijos (Fig. 2.20-a) y es, por tanto, un sistem a hiperestático, la d ilatación ya no es libre. El sistem a queda ep una situación equivalente a haber dejado libre la d ilatación Ai y haber ap licado a contirtuación una fuerza N de tracción o compresión (de compresión, en nuestro caso) de valor tal que la deformación producida sea precisamente Al.
(o)
(b) 7)77)17?.
F igura 2.20.
Ahora sí existen tensiones en la viga, que llam arem os t e n s i o n e s t é rm i c a s o t e n s i o n e s d e o r i g e n t é rm i c o . Su valor se puede deducir fácilmente igualando, en este caso, las expresiones de Al
N tr A/ = a . / A t = - / = I /
de donde:
a = — a E At (2.6-2)
En el caso que tengamos una b arra como la representada en la F igura 2.9 sometida a tracción o compresión, las matrices de tensiones y de deformación son, respectivamente:
T T ] =<7*7 0 0 '0 0 0 ; [ 0 ]0 0 o ,
<7*7 0 0E
0 - A t — 0 F £
0 A ^ nx0 - > * T
(2.6-3)
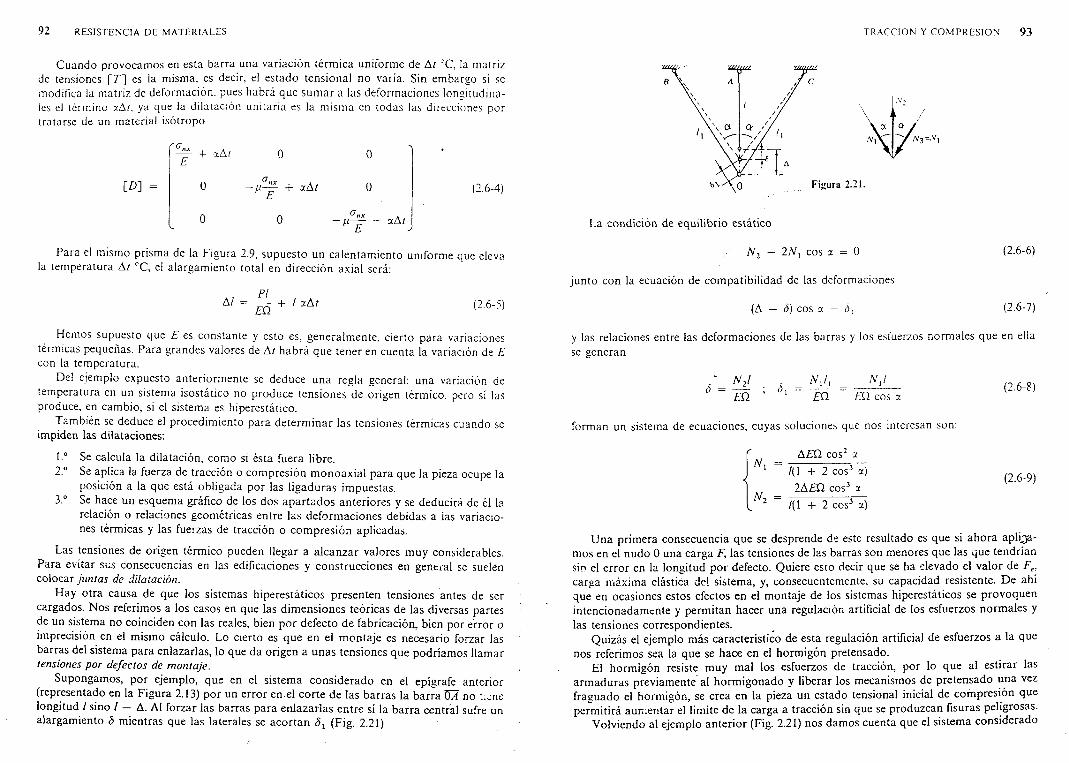
9 2 RESISTENCIA DE MATE RI ALE S
Cuando provocamos en esta barra una variación térm ica uniforme de A t CC. la matriz de tensiones [T ] es la misma, es decir, el estado tensional no varía. Sin embargo si se modifica la matriz de deformación, pues habrá que sum ar a las deformaciones longitudinales el término xA í, ya que la dilatación un itaria es la m ism a en todas las direcciones por tratarse de un m aterial isótropo
[ 2? ] =
+ xA t
0
0
- p . -~ + xA; t
n X *-/ r— + xAt
E
(2.6-4)
Para el mismo prism a de la F igura 2.9, supuesto un calentam iento uniforme que eleva la tem peratura Ar °C, el a largam iento total en dirección ax ia l será:
PlA/ = — + / xA/ t i l ( 2 .6 - 5 )
Hemos supuesto que E es constante y esto es, generalm ente, cierto para variaciones térmicas pequeñas. Para grandes valores de A i habrá que tener en cuenta la variación de E con la tem peratura.
Del ejemplo expuesto anteriorm ente se deduce una regla general: una variación de tem peratura en un sistema isostático no produce tensiones de origen térmico, pero sí las produce, en cambio, si el sistem a es hiperestático.
También se deduce el procedimiento para determ inar las tensiones térm icas cuando se impiden las d ilataciones:
1.° Se calcula la d ilatación , como si ésta fuera libre.2.a Se ap lica la fuerza de tracción o com presión m onoaxial para que la pieza ocupe la
posición a la que está obligada por las ligadu ras impuestas.3.° Se hace un esquema gráfico de los dos apartados anteriores y se deducirá de él la
relación o relaciones geom étricas entre las deform aciones debidas a ias variaciones térm icas y las fuerzas de tracción o com presión ap licadas.
Las tensiones de origen térmico pueden llegar a a lcan zar valores m uy considerables. Para evitar sus consecuencias en las edificaciones y construcciones en general se suelen colocar j u n t a s d e d i la ta c i ón .
Hay otra causa de que los sistemas hiperestáticos presenten tensiones antes de ser cargados. Nos referimos a los casos en que las dim ensiones teóricas de las diversas partes de un sistema no coinciden con las reales, bien por defecto de fabricación, bien por error o imprecisión en el mismo cálculo . Lo cierto es que en el m ontaje es necesario forzar las barras del sistema para en lazarlas, lo que da origen a unas tensiones que podríamos llam ar t e n s i o n e s p o r d e f e c t o s d e m on ta j e .
Supongamos, por ejemplo, que en el sistem a considerado en el epígrafe anterior (representado en la F igura 2.13) por un error en.el corte de la s barras la barra ÜA no *.;cne longitud / sino / — A. Al forzar las barras para en lazarlas entre si la b arra central sufre un alargam iento 3 m ientras que las laterales se aco rtan <5, (F ig. 2.21)
TRAC CI O N Y C O M P R E S I O N 9 3
La condición de equilibrio estático
N2 — 26/, eos a = 0
junto con la ecuación de com patib ilidad de las deformaciones
(A — 3) eos a = ó.
(2.6-6)
(2.6-7)
y las relaciones entre las deformaciones de las barras y los esfuerzos normales que en ella se generan
■ 3 = = N JEQ. ’ 1 EQ En eos X
(2 .6-8)
forman un sistema de ecuaciones, cuyas soluciones que nos interesan son:
A E n eos2 x /(I + 2 eos3 a)
2AEn eos3 x /(I + 2 eos3 x)
Una prim era consecuencia que se desprende de este resultado es que si ahora ap licamos en el nudo 0 una carga F, las tensiones de las barras son menores que las que tendrían sin el error en la longitud por defecto. Quiere esto decir que se ha elevado el valor de Fe, carga m áxim a elástica del sistem a, y, consecuentemente, su capacidad resistente. De ahí que en ocasiones estos efectos en el m ontaje de los sistemas hiperestáticos se provoquen intencionadam ente y perm itan hacer una regulación artificial de los esfuerzos norm ales y las tensiones correspondientes.
Q uizás el ejemplo más característico de esta regulación artificial de esfuerzos a la que nos referimos sea la que se hace en el hormigón pretensado.
El hormigón resiste m uy m al los esfuerzos de tracción, por lo que al estirar las arm aduras previamente al horm igonado y liberar los mecanismos de pretensado una vez fraguado el hormigón, se crea en la pieza un estado tensional in icial de compresión que perm itirá aum entar el lim ite de la carga a tracción sin que se produzcan fisuras peligrosas.
Volviendo al ejemplo anterior (Fig. 2.21) nos damos cuenta que el sistem a considerado
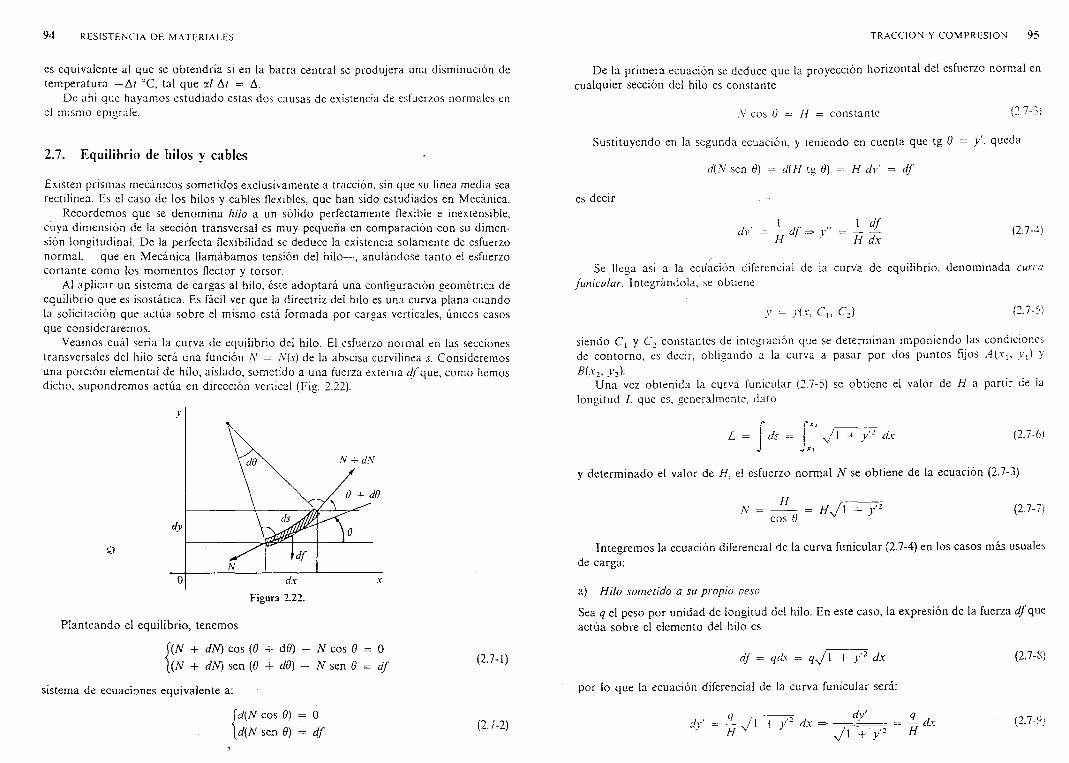
9 4 RESISTENCIA DE MAT E R I AL E S
es equivalente al que se obtendría sí en la barra central se produjera una disminución de tem peratura —At °C, tal que a l A/ = A.
De ahí que hayam os estudiado estas dos causas de existencia de esfuerzos normales en el mismo epigrafe.
2.7. E quilibrio de hilos y cablesExisten prismas mecánicos sometidos exclusivam ente a tracción, sin que su línea media sea rectilínea. Es el caso de los hilos y cables flexibles, que han sido estudiados en M ecánica.
Recordemos que se denom ina h i lo a un sólido perfectamente flexible e inextensible, cuya dim ensión de la sección transversal es muy pequeña en comparación con su dimensión longitudinal. De la perfecta flexibilidad se deduce la existencia solamente de esfuerzo norm al, —que en M ecán ica llam ábam os tensión del hilo—, anulándose tanto el esfuerzo cortante como los momentos fiector y torsor.
Al ap licar un sistem a de cargas al hilo, éste adoptará una configuración geométrica de equilibrio que es isostática. Es fácil ver que la directriz del hilo es una curva plana cuando la solicitación que actúa sobre el mismo está formada por cargas verticales, únicos casos que considerarem os.
Veamos cuál sería la curva de equilibrio del hilo. El esfuerzo normal en las secciones transversales del hilo será una función N = N(s) de la abscisa curvilínea j . Consideremos una porción elem ental de hilo, aislado , sometido a una fuerza externa d f q u e , como hemos dicho, supondremos actúa en dirección vertical (Fig. 2.22).
P lanteando el equilibrio , tenemos
UN + dN) eos (8 + d0) — N eos 0 = 0 {(iV + dN) sen (8 + d 8) — N sen 8 = d f
sistem a de ecuaciones equivalente a:
[d(N eos 0) = 0 |d(fV sen 8) = d f
1
( 2 . 1-2)
T R A C CI O N Y C O M P R E S I O N 9 5
De la prim era ecuación se deduce que la proyección horizontal del esfuerzo normal en cualqu ier sección del hilo es constante
N eos 8 = H = constante (2.7-e)
Sustituyendo en la segunda ecuación, y teniendo en cuenta que tg 8 = y ' , queda
d(N sen 8 ) = d(H tg 8 ) = H d y ' = d f
es decir
dv ' = i í// => v" = - — (2.7-4)H J ■ H dx
Se llega así a la ecuación diferencial de la curva de equilibrio , denom inada c u r i afu n i c u l a r . Integrándola, se obtiene
y = v(x, C „ C 2) (2.7-5)
siendo y C 2 constantes de integración que se determ inan imponiendo las condiciones de contorno, es decir, obligando a la curva a pasar por dos puntos fijos ztj.Y!, y .) y B(x2, y 2).
U na vez obtenida la curva funicular (2.7-5) se obtiene el valor de H a partir de ¡a longitud L que es, generalmente, dato
L = ds V/¡ + y ' 2 dx (2.7-6)
y determ inado el valor de H, el esfuerzo normal N se obtiene de la ecuación (2.7-5)
HN = - í — = H j 1 + y ' 2 (2.7-7)
eos 8
Integremos la ecuación diferencial de la curva funicular (2.7-4) en los casos más usuales de carga:
a) Hilo s o m e t i d o a su p r o p i o p e s o
Sea q el peso por unidad de longitud del hilo. En este caso, la expresión de la fuerza d f que actúa sobre el elemento del hilo es
d f = q d s — q^J 1 + y ' 2 dx
por lo que la ecuación diferencial de la curva fun icular será:
(2.7-8)

9 6 RESISTENCIA DE MATERIALES
que es de variables separadas y de integración inm ediata
arg sh r' = — x + C, ' H
Integrando nuevamente, se obtiene
siendo C\ y C , constantes de integración Esta ecuación corresponde a una c a t en a r ia
sh ( - a- + C, (2.7-10)
(2.7-11)
Tom ando adecuadamente los ejes coordenados podemos sim plificar la ecuación de la catenaria . Así, si tomamos como eje y el que contenga al vértice V, punto de menor
ordenada, y el eje x a distancia a = — por debajo de este punto, se anu lan las constantes9
de integración y la ecuación (2.7-11) de la catenaria se reduce a su forma canónica
y = a c h — a
(2.7-12)
Cuando la relación /// entre la flecha / y la cuerda I (Fig. 2.23) es m uy pequeña, se puede despreciar el valor de y ' respecto a la unidad. La ecuación (2.7-9) se reduce a
d yH
dx (2.7-13)
Integrando, se obtiene
TRACCION Y C O M P R E S I O N 9 7
ecuación que corresponde a una parábola. Es decir, para valores pequeños de la relación / /, se puede considerar la parábo la como figura aproxim ada de la catenaria.
b) Hito s o m e t i d o a c a r g a u n i f o rm em e n t e r e p a r t i d a s e g ú n e l e j e x
Es el caso del puente colgante. Si es p la carga por unidad de longitud horizontal, la expresión de la fuerza d f que actúa sobre el elemento de hilo es:
d f = p d x (2.7-15)
por lo que la ecuación diferencial de la curva funicular será
d y ' ^ - d x (2.7-16)
cuva integración nos da
1Hx 1 + C,.y + C, (2.7-17)
ecuación que corresponde a-una parábola.
Tomando el sistem a de ejes indicado en la F igura 2.24 esta ecuación se reduce a
r -(2.7-18)
(a) A
V1 -15
y f \ xf
D ia g r a m a d e e s fu e rzo s n o rm a le s
F i g u r a 2 . 24 .

9 8 RESISTENCIA DE MAT E R I AL E S
L" longitud L del hilo es
r u 2L = 2 V 1 + v' 2 dx ~ 2
= / +P 2! 2
2 4 H 2
o 2 + t ) * = 2 L l +2 H 2
dx
ecuación que permite calcu lar H en función de L
¡2De la condición v(0) = — f = — — se deduce
J 8 H
(2.7-19)
H = P j f8/
o bien, se obtiene la flecha / e n función de H
/ = e!l&H
(2.7-20)
(2.7-21)
Sustituyendo la expresión de y ' en la ecuación (2.7-7) se obtiene el esfuerzo normal N en función de la abscisa x
N = H J 1 + W X1 (2.7-22)
cuyo d iagram a se representa en la F igura 2 . 2 4 - i . Se observa que el valor máximo de N se presenta en los puntos de am arre y el m ínim o en el vértice
c) Hilo s o m e t i d o a c a r g a s p u n tu a l e s
En este caso, en los puntos en los que no h ay carga , se verificará: d f = 0, por lo que la integración de la ecuación de la curva fu n ic u la y io s da
y - C tx + C z (2.1-23)
que es la ecuación de una recta.
F i g u r a 2 . 25 .
TRAC CI ON Y C O M P R E S I O N 9 9
En los puntos en los que están aplicadas las cargas podemos poner
FA r ' = l ím —
i-o Hd f
H
es decir, se produce un punto anguloso.La curva funicular se convierte, pues, en una poligonal (polígono funicular)
2.8. A rcos funicularesEn un hilo sometido a una carga arb itraria p = p(x), su línea media adopta una forma tal que los esfuerzos en cualquier sección transversal se reducen exclusivamente a los esfuer zos normales: el hilo está sometido a tracción pura en todas las secciones.
Si ahora consideramos un prisma mecánico cuya línea media coincida con la curva funicular de un hilo solicitado por el mismo sistema de cargas, este prisma m ecánico estará también sometido a tracción pura. Sin embargo, existe una diferencia entre el hilo y el sólido elástico. M ientras que aquél es inextensible y, por lo tanto, indeformable, en éste si que se producirá deformación. Esta circunstancia trae como consecuencia que en el sólido elástico aparezcan esfuerzos de cortadura y de flexión, que se denominan e s f u e r z o s s e c u n d a r io s y que, generalmente,-son despreciables.
Si el cable o hilo de la F igura 2.26-a lo giramos 180° alrededor del eje .v y lo sometemos al mismo sistema de fuerzas exteriores p = p(x), es evidente que sus secciones quedarán sometidas a compresión en vez de a tracción.

1 0 0 RESISTEN C IA DE M A TER IA LES
Si en vez de ser un hilo, que es perfectamente flexible y por tanto inestable, es un sólido elástico cuya linea media es coincidente con el hilo, tenemos un arco que recibe el nombre de a r c o f u n i c u l a r (Fig. 2.26-A).
Es evidente que en un arco funicular, respecto del hilo o cable que tuviera la misma línea media, hay que aum entar las dimensiones de la sección transversal para evitar que aparezcan fenómenos de inestabilidad. Pero este aumento de las dimensiones de la sección da lugar a la aparición de esfuerzos cortantes y momentos Héctores, que serán tanto más despreciables cuanto menos sea la deformación que experimenta el arco.
Por otra parte, como el arco, considerado como una estructura, ha de soportar además de las cargas permanentes otras variables, ya sean fijas o móviles, sólo será posible que coincida el eje del arco con el funicular correspondiente a una determ inada posición de la carga exterior y, por tanto, no es posible evitar la aparición de esfuerzos cortantes y momentos flectores, cuando de alguna manera se modifica dicha carga.
Para la determ inación de la ley de esfuerzos normales en las diferentes secciones de un arco funicular, así como su proyección horizontal que será constante en todas las secciones del arco, o cualqu ier otro parám etro que nos pueda interesar, será de aplicación todo lo expuesto en el epígrafe anterior para el caso de cables.
2.9. T racción o com presión biaxial. Envolventes de revolución de pequeño espesor
Así como hemos visto la existencia de sólidos elásticos de línea media no rectilínea que trabajan a tracción pura (hilos o cables) o a compresión pura (arco funicular), es decir, a tracción o compresión m onoaxial, también es frecuente encontrar cuerpos elásticos no planos cuya forma de trabajo sea a tracción o compresión biaxial. Tal es el caso de las e n v o l v e n t e s d e p e q u e ñ o e s p e s o r .
Podemos definir una e n v o l v e n t e como el sólido elástico en el que una de sus dimensiones —el espesor— es mucho más pequeña que las otras. No cabe aquí hablar de línea media pero sí de s u p e r f i c i e m e d i a , entendiendo por tal la superficie formada por los puntos que equid istan de las dos superficies que lim itan la envolvente.
Atendiendo a la forma de la superficie media podemos hacer una clasificación de las envolventes en: p l a c a s , si la superficie media es un plano, y e n v o l v e n t e s propiamente dichas si la superficie media 110 es p lana.
En lo que sigue considerarem os solamente envolventes y dentro de éstas aquéllas cuya superficie media es de revolución y están cargadas simétricamente respecto a su eje.
El cálculo del estado tensional b iaxial a que está sometida una envolvente de revolución con las hipótesis de carga señaladas se reduce de forma m uy notable como a continuación veremos en los casos en los que se pueda adm itir un reparto uniforme de tensiones en su espesor. T a l hipótesis es la base de la llam ada t e o r ía d e la m e m b r a n a , que no es ap licab le a envolventes som etidas a flexión.
La ap licación más im portante de esta teoría es a depósitos de pared delgada sometidos a presión interior p que, en general, estará provocada por un gas o un líquido. La presión p no tiene que ser necesariam ente constante, pero si es necesario que presente sim etría respecto a l eje de revolución y varíe de forma continua.
Consideremos una envolvente de revolución de espesor constante e , tal como la representada en la F igura 2.27.
TRACCION Y C O M PRESIO N 101
F ig u r a 2 .27 .
En la F igura 2 .2 1 - c se ha aislado un elemento del depósito lim itado por dos planos m eridianos y por dos secciones normales a las líneas m eridianas, en el que se ha designado:
p m, el radio de curvatura del arco de m eridiano de la superficie mediap,, el radio de curvatura de la sección normal perpendicular al arco de meridianotrm, la tensión en dirección del meridiano o t e n s i ó n m e r i d i a n a .cr,, la tensión en dirección normal a la sección m eridiana o t e n s i ó n c i r c u n f e r e n c i a ld s t , longitud del elemento de arco meridianod s 2, longitud del elemento de arco perpendicular al arco de meridiano
Sobre el elemento considerado actúan las siguientes fuerzas:
— la debida a la presión interior p : p d s ¡ d s 2 que tiene dirección norm al al elemento— las engendradas por las tensiones <jm: o „ e d s 2— las engendradas por las tensiones a , : o , e d s ¡
La condición de equilibrio , proyectando las citadas fuerzas sobre la norm al a l elemento, nos da
dd, J dd2pdsl ■ ds2 — 2ome ds2 —-------2 o,e ds¡ - y = 0
y como
d s x = p md Q í ; d s 2 = p , d 0 2
sustituyendo y simplificando, obtenemos
aJE + Í í = p- ( 7 .9 -1 )p m P , e
expresión que constituye la llam ada e c u a c i ó n d e L a p l a c e .

1 0 2 RESISTENC IA DE M ATER IALES
Esta ecuación nos proporciona una relación entre <x_ y c t. Pero ella sola es insuficiente para encontrar los valores de las tensiones. P ara ca lcu lar éstas necesitamos otra ecuación, como puede ser la que se obtiene al considerar cortada la envolvente por una sección cónica normal a la superficie media de la envolvente (Fig. 2.27-b).
Si P es la resultante axial de las fuerzas exteriores, la ecuación buscada es:
■ 2nr ■ e sen 9 = P (2.9-2)
que nos da directamente el valor de la tensión a m. Una vez obtenida a m, la obtención de o, es inm ediata aplicando ¡a ecuación de Laplace. Al no existir tensiones tangenciales sobre las caras del elemento considerado (Fig. 2.27-c), las tensiones <xm y tr, son principales.
A lo largo del espesor, entre las paredes interior y exterior de la envolvente, existe otra tensión principal que varía entre los valores — p y 0, pero se considera despreciable respecto a o „ y a oy.
La distribución de tensiones en las envolventes constituye, pues, un estado tensional b iaxial en el que las líneas isostáticas están form adas por las dos fam ilias de m eridianos y paralelos a la superficie media de la envolvente.
Del razonamiento seguido se desprende que si se puede adm itir la hipótesis de que las tensiones se reparten uniformemente en el espesor de la envolvente, las tensiones en la misma se pueden determ inar aplicando solamente las condiciones de equilibrio.
Apliquemos los resultados obtenidos para ca lcu lar las tensiones en diversos casos de depósitos y de anillos.
a) D ep ó s i t o c i l i n d r i c o d e rad io r s o m e t i d o a p r e s i ó n in t e r i o r u n i f o rm e p (Fig. 2.28)
Figura 2.28.
Calculem os las tensiones meridiana y circunferencial en la superficie latera l del depósito. En este caso: p m = oc y p, = r, por lo que la ecuación de Lap lace se reduce a:
o , p p r- = - => a , = — (2.9-3)r e e
Para calcu lar o m, la ecuación de equilibrio nos da
u „ ■ 2 n r ■ e = p • n r 1
t i
TRACCION Y CO M PRESIO N 1 0 3
de donde
P f"V
(2.9-4)
b) D ep ó s i t o e s f é r i c o s o m e t i d o a p r e s i ó n u n i f o rm e p (Fig. 2.29).
En este caso p m = p, = r. Tam bién se verifica a „ = o , = a, por razón de sim etría. La sola aplicación de la ecuación de Laplace nos permite obtener las tensiones
P Pr~e=> ° ~ l e
(2.9-5)
c) D ep ó s i t o c ó n i c o a b i e r t o c o n t e n i e n d o un l íqu ido d e p e s o e s p e c i f i c o y (Fig. 2.30)
En este caso p m = o o ; p, = r. La tensión o , se obtiene mediante la aplicación de la ecuación de Laplace.
= p- => a _ p rr e ' e
pero en este caso tanto r como p son variab les
(2.9-6)
Figura 2.3Ü.
Podemos expresar am bas en función de la cota y
y tg a eos a
( 2 . 9 - 7 )

104 RESISTENC IA DE M A TER IA LES
Sustituyendo en la ecuación (2.9-6), obtenemos
y t g x
e eos a }'{h - y ) (2.9-8)
es decir, la tensión circunferencial varía según una ley parabólica (Fig. 2.30-6),- cuyo valor
máximo se presenta en los puntos del depósito de cota y = -
7 tg * h - (2.9-9)J tmÁx A4 e e o s a
Para calcular la tensión m eridiana <jm en los puntos de cota y cortamos el depósito por una superficie cónica de generatrices perpendiculares a las paredes del depósito (Fig. 2.30-íj).
La proyección vertical de las fuerzas de tracción engendradas por las tensiones meridianas a m sobre la sección del corte
2 try tg a • e o m eos a (2 .9 - 10)
se ha de equilibrar con el peso del volumen del líquido OAEFB
t O r (6 - >) tg 2 a + - 7ty~ y tg 2 x ] = 771 y 1 tg2 x^/i - ^ y j (2 .9 - 11)
Igualando ambas expresiones se obtiene
y t g x / , 2 \y [ h - - y \ (2.9-12)2e eos a y 3
La tensión m eridiana crm sigue también una ley parabó lica que se representa en la Figura 2.30-c. Su valor máximo se presenta en los puntos del depósito que verifican
d a m y tg a / 4 \ 3 ,\ h - - y ) = Q => y = - hd y 2 e eos a \ 3 / 4
Determ inada la cota y , el valor máximo de la tensión m eridiana será
J m m á x3y tg q
16e eos a h 2 (2.9-13)
d) Anillo d e p e q u e ñ o e s p e s o r s o m e t i d o a p r e s i ó n u n i f o rm e p
Consideremos ahora el an illo de pequeño espesor e y radio interior r¡ sometido a presión uniforme p en su cara interna, representado en la F igura 2.31-a. P ara el cálculo de las
TRACCION Y CO M PRESIO N 1 0 5
tensiones en el an illo será aplicable lo dicho anteriormente para el depósito cilindrico, es decir, la tensión circunferencial o, será
P'\ (2.9-14)
m ien tra s q u e la t en s ión m e r i d i a n a am es n u la por t r a ta r s e de un dep ó s i to ab ie r to
Figura 2 .31.
Por la hipótesis adm itida de la teoría de la membrana, la distribución de la tensión a, en el espesor del an illo es uniforme.
En dirección circunferencial se producirá una deformación unitaria e, cuya expresión, en virtud de la ley de Hooke, será:
£l = EliE eE
(2.9-15)
ya que en este caso el estado tensional es monoaxial.Si la presión p actúa sobre la cara exterior del anillo (Fig. 2.31-6) la tensión <r, será de
compresión y las expresiones de o , y de e, cam biarán de signo
p r e (2.9-16)
.EÜ (2.9-17)eE
Aunque el rad io que figura en las expresiones de las tensiones y de las deformaciones corresponde a la superficie c ilindrica de la cara del anillo sobre la que actúa la presión p ,

1 0 6 RESISTEN C IA DE M ATER IALES
Se puede calcu lar fácilmente el valor del radio r de la superficie media deformada. En efecto, el incremento de longitud de la circunferencia media será
A/ = 2?i r £ = +eE
por lo que el nuevo radio r' verificará
2 nr' = 2 n r +2npr~~eE~
es decir:
r' = r + Pr"eE
(2.9-18)
e) Anillo d e p e q u e ñ o e s p e s o r g i r a t o r i o a l r e d e d o r d e su e j e
El caso de un anillo de pequeño espesor e y peso especifico y que gira alrededor de su eje con velocidad angu lar co (Fig. 2.32) presenta cierta analogía formal con el caso anterior.
En efecto, sobre la m asa dm = - Ler dQ del elemento de an illo indicado en la figura
actúa una fuerza centrífuga de valor
dFc = dm co2r = - L eco2r2 dü (2.9-19)
TRACCION Y C O M PRES IO N 107
que _s equivalente a la fuerza que produciría una presión p actuando sobre su superficie media
dFc = pL r di)
Igualando ambas expresiones, se tiene
(2.9-20)
- L e u r r 1 dO = pL r dO => p = ----- r (2.9-21)
Será aplicable la expresión (2.9-14) del caso anterior, por lo que la tensión circunferencial a, será
p r y t ü 2r 2(2.9-22)
y la deformación longitudinal un itaria correspondiente
y o )2r 2(2.9-231
2.10. T racción o com presión triax ia lSi sobre un cuerpo e lástico 'de forma paralelepipédica (Fig. 2.33) actúan fuerzas superficiales uniformes perpendiculares a sus caras, el cuerpo está sometido a un estado triaxial de tracción o de compresión, según sea el sentido de las fuerzas superficiales aplicadas.
Si p x, p-, y p son las fuerzas superficiales ap licadas por unidad de superficie, el estado tensional en un paralelepípedo elemental interior al cuerpo elástico de caras parale las a la? del cuerpo será, en virtud del principio de superposición, el indicado en la m ism a F igura 2.33. En el interior del sólido elástico existe un estado tensional homogéneo y en cualqu iera de sus puntos las tensiones principales son
Oí = ~ Pi 1 ff2 = ~ P i i = ~ P s (2.10-1 i
siendo coincidentes las direcciones principales con las correspondientes a sus ejes.

1 0 8 r e s i s t e n c ia d e m a t e r ia l e s
En cualqu ier punto, el vector tensión correspondiente a un plano definido por el vector i7(a. ¡}. y), referido a un sistema de ejes coincidentes con las direcciones principales, es
(2.10-2)
c* 0 0 J
a ^ O j 2
[<?] = cn tff ] = 0 <72 0 P = a 2P_ 0 0 < j 2 y - / -
cuyas componentes intrínsecas son:
foy, = a ■ ü — + a 2í ¡2 + (T3y:
+ a lP 2 + + o 2p 2 + ff3y2)-( 2 .1 0 - 3 )
Del circulo de Mohr (Fig. 2.34-a) se deduce que la tensión tangencial m áxim a tiene el valor
(2.10-4)
y se presenta en los dos planos del haz de vértice el eje 2 (que corresponde a la tensión de valor intermedio) y contienen respectivamente a las bisectrices de los ejes 1 y 3 (Fig. 2.34-b)
Figura 2.34.
La m atriz de deformación en cualquier punto será
[ D ] =£3 0 00 e2 0
.0 0 s3 ( 2 . 1 0 - 5 )
TRACCION Y CO M PRESIO N 1 0 9
siendo e2 y e3 los alargam ientos principales, que se obtienen de forma inm ediata en función de las tensiones aplicando las leyes de Hooke.
Ei = ~ l> i - + ^ 3)]
5 «•> = 7 : [>•> - PÍ^ i + c-3)] (2 . 10-6 )t
£ 3 = f ‘ ( e ¡ + ff2)]
Si consideramos ahora el caso particu lar de ser p ¡ = p 2 = p ; p 3 = //(Fig. 2.35c/), las tensiones principales en cualqu ier punto serán
o i = o 2 = —p ; <7 3 = - q (2.10-7)
Figura 2.35.
El círculo de M ohr C 3 se reduce a l punto A (Fig. 2.35-6) Para cualqu ier plano paralelo al eje r el vector tensión correspondiente tiene de componentes intrínsecas
<r„ = - p ; x = 0
por lo que cualqu ier dirección para le la al plano x y es dirección principal. Quiere esto decir que cualqu ier cilindro que im aginem os interior a l prisma considerado, de generatrices parale las al eje z, estará sometido a una presión constante p, normal en todos los puntos de su superficie lateral (Fig. 2.35-c).
Si adem ás se verifica que q = p , e s decir
P i = P i = P 3 = P (2.10-8)
entonces las tensiones principales en cualquier punto de prisma son
°T = a z — °3 ~ ~P (2.10-9)

1 1 0 RESISTENC IA DE M A T ER IA LES
En este caso los tres círculos de M ohr se reducen al punto A (Fig. 2.36-b). Para cualqu ier plano, el vector tensión correspondiente tiene de componentes intrínsecas
a „ = - p ; t = 0
por lo que todas las direcciones son principales. Quiere esto decir que cualquier cuerpo que podamos im aginar interior al prism a considerado estará sometido a una presión constante p, normal en todos los puntos de su superficie lateral (Fig. 2.36-c).
Como este estado tensional es análogo al que se engendra en un fluido ideal (no viscoso) recibe el nombre de e s t a d o t e n s i o n a l h i d r o s tá t i c o .
E J E R C IC IO S
I I . l . C a lc u la r e l e s fu e rzo n o rm a l /V, la s te n s io n e s a y lo s d e s p la z a m ie n to s v e r t ic a le s de la s se c c io n e s t r a n s v e r s a le s de la c o lu m n a d e a c e ro , d e m ó d u lo d e e la s t ic id a d E = 2 x 106 kp/cm 2, in d ic a d a en la F ig u r a I I . l - a , re p re s e n ta n d o g r á f ic a m e n te lo s r e s u lta d o s m e d ia n te lo s co rre sp o n d ien te s d ia g r a m a s . f-3
S e p re sc in d ir á d e l p o s ib le e fe c to d e p an d eo .
L a re a c c ió n en e l e m p o t r a m ie n to e s R = P , — P 2 + P ¡ + - W = 10 ton .T o m a n d o e l o r ig e n d e a b s c is a s e n e l e m p o t r a m ie n to , la s le y e s d e lo s e s fu e rz o s n o rm a le s
A', te n s io n e s n o rm a le s cr y d e s p la z a m ie n to s v e r t ic a le s u d e la s s e c c io n e s t r a n s v e r s a le s d e la c o lu m n a d e a c e ro c o n s id e r a d a , e x p r e s a n d o .x e n m e tr o s , so n :
• Para 0 < .x
N = - R = -1 0 0 0 0 kp
N 10000a =
n t 15= — 6 6 6 .5 k p / cm 2
TRACCION Y C O M PRESIO N 1 1 1
• Para a < x < 3a
M = - R + P¡ + q(x ~ á) = -5000 + 5000(.v - a) = 5000U - 2) kp
N_ = 5000(.t —_2) = ^ _ mja 2 10
u = -0 .3 mm + i 103 dx mm = { -0 .3 + 0.125[(.x - 2)2 - 1]} mmJ i 2 x 106
( j j ) kp/cm 2 ,
1000
D iagram a de tensiones norm ales
D iagram a de desp lazam ien to s
F i g u r a I I . l -A

1 1 2 RESISTENCIA DE MATERIALES
II.2.
• P a r a 3 a < a < 4 a
v = _ / ? + />, 4- q (x - a) - P2 = 5 0 0 0 (.v - 2) - 2 0 0 0 0 = 5000.x - 3 0 0 0 0 k p
,V 5000.x - 30 0 0 0
a = oT = ÍÓ”= 500.x - 3 0 0 0 k p / cm 2
u = —0 ,3 m m +: 5 0 0 a - 3000
2 x 106103 ¿xmm = - 0 .3 + — r(1 2 5 .v 2 - 1500.x + 3375 )
103m m
L o s d ia g r a m a s c o r re s p o n d ie n te s se re p re s e n ta n en la F ig u r a II. 1-6.
El sistem a articu lado indicado en la F igura II.2-n está fo rm ado por una b arra de acero A tí y una viga de m adera ÜÜ, situadas am bas piezas en un plano vertica l. Si se ap lica en el nudo com ún una ca rg a P = 15 0 0 kp se pide:
1.° D eterm in ar las dim ensiones de la b arra de acero de sección circu lar y de la de m adera de sección cuadrada.
2.° C a lcu la r el desplazam iento del nudo tí:
" P = 1500 kp
a ) a p artir de las deform aciones longitudinales de la b arra de acero y de la viga de m adera ;
b) ap licando el teorem a de C astigliano.L as tensiones adm isibles del acero y de la m adera son respectivam ente <r, = 8 0 0 kp/cm 2; a 2 — 1 0 kp/cm2 y sus m ódulos de elasticidad £ , = 2 x 1 0 6 kp/cm 2 y E2 = 1 .2 x 1 0 5 kp/cm 2.Se prescindirá del posible efecto de pandeo de la viga de m adera.
C alcu lem os p rim eram en te los'esfuerzos n o rm ales a lo s que están so m etidas las b arras ~ÁB y ~tí€. P o r tra ta rse de un sistem a isostá tico lo s va lo res de estos esfuerzos se d eterm in an m ediante las ecuaciones de eq u ilib rio .
Si 2Vj es el esfuerzo n o rm al de tra cció n en la b a rra A tí y N2 el de com p resió n en la v iga B C , las ecuaciones de eq u ilib rio del nudo B, son (Fig. 11.2-6).
F i g u r a I I .2-6
N2 — eos a = 0
sen a —. P = 0
N2 = - N i
l N 2 = 1500
P= 15 00 kp
T R A C C I O N Y C O M P R E S I O N 1 1 3
d e d o n d e se o b t ie r -n :
N t = 2 500 k p ; N2 = 2 0 0 0 kp
L a s se c c io n e s d e la s d o s b a r r a s s e rá n m in im a s c u a n d o la s t e n s io n e s en am b o s m a te r ia le s a lc a n c e n lo s v a lo r e s d e la s te n s io n e s a d m is ib le s
'V 1 2 5 0 0 7ZlP= ------- == 3 .1 2 5 c m 2 — ----- => d = 2 cm
<*l 800 4
M 2 2 0 0 0= ------- == 2 0 0 cm‘ == a~ => a = 14.2 cm(71 10
P o r ta n to , la s lo n g itu d e s d e l d iá m e t r o d d e la b a r r a AB y d e l la d o a d e la se cc ió n c u a d r a d a d e la v ig a ~BÜ so n :
d = 2 cm ; a = 14.2 cm
2.° o) S u p u e s ta s la s b a r r a s c o n la s d im e n s io n e s c a lc u la d a s , lo s a la r g a m ie n to s en a m b a s b a r r a s so n :
-A / , =tV,/, £. O,
25 0 0 x 3 0 0 0
2 x 106 • irm m = 1 .19 m m
A/, m m = —0 .2 0 m m
Si <5,) son las co m p o n en tes del co rrim ien to del n u do al que se ap lica la carga P, re feridas a l sistem a de ejes ind icad os en la F ig u ra 11.2-c, p ro yec ta n d o sob re am b as b arra s , tenem os:
(A /, = 5X eos a + ó,, sen a {A /2 = 6 ,
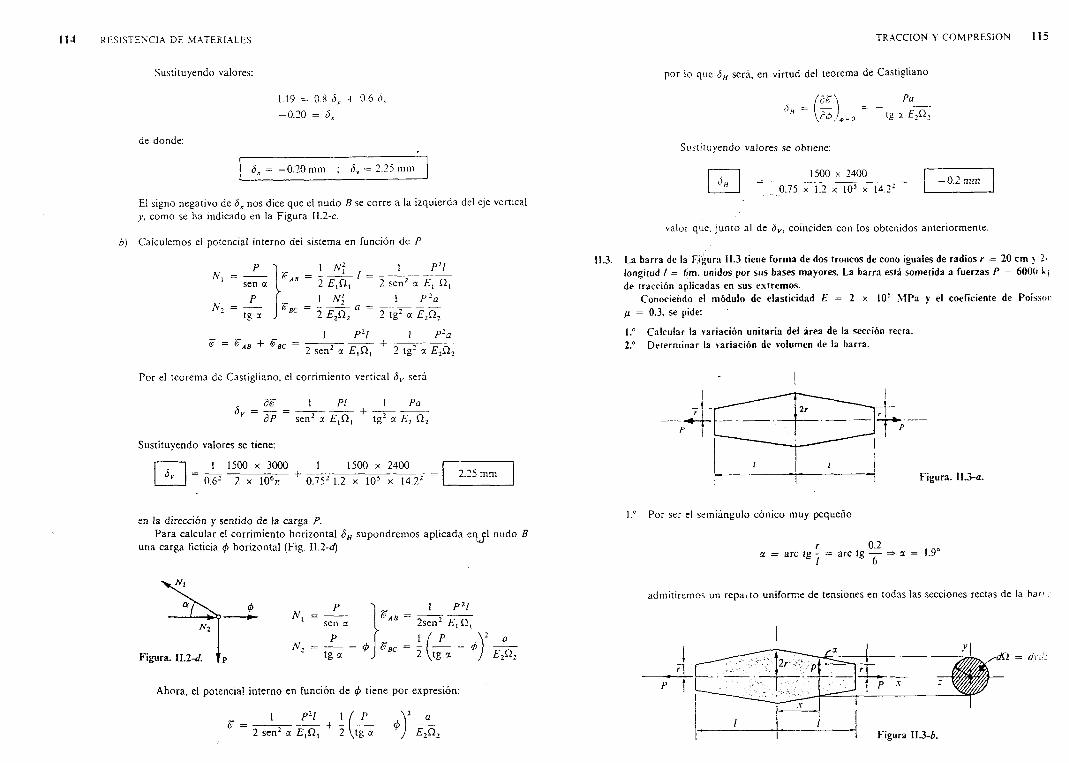
RESISTENC IA DF. M ATER IALES
S u s t itu y e n d o v a lo re s :
1.19 = 0 .8 d x + 0 .6 <)..
- 0 . 2 0 = Sx
d e d o n d e :
- 0 .2 0 m m ; Sy = 2 .2 5 m m
El s ig n o n e g a t iv o de 5X n o s d ic e q u e e l n u d o B se c o r re a la iz q u ie r d a d e l e je v e r t ic a l y , c o m o se h a in d ic a d o en la F ig u r a 11.2-c.
b) C a lc u le m o s el p o te n c ia l in te rn o d e l s is te m a en fu n c ió n d e P
p o i i v ; , i p 2i
2 2 se n a £ , Í2 ,
1 P 2a
2 £ ,Q 2 2 t g 2 a E2Q 2
l P 2l 1 P 2a^ r ab + Vbc j s e n t a jE 'jf ij 2 t g 2 i £ 2Í12
P o r e l te o r e m a de C a s t ig l ia n o , e l c o r r im ie n to v e r t ic a l S¡, s e rá
<5, =d e _d P s e n 2 a £ , 0 , t g 2 x E 2 Cl2
P l 1 P a+
S u s t i tu y e n d o v a lo re s se t ie n e :
1 1500 x 3000 1500 x 2 4 0 0
0 .6 2 2 x 106ti 0 .7 5 2 1.2 x 1 0 5 x 1 4 .2 22 .2 5 m m
en la d ir e c c ió n y s e n t id o d e la c a r g a P.P a r a c a lc u la r e l c o r r im ie n to h o r iz o n ta l <5H s u p o n d r e m o s a p l i c a d a e n e l n u d o B
u n a c a r g a f ic t ic ia $ h o r iz o n ta l (F ig . \\2-d )
A '. =
N2 =
P
s e n a
P
t g a
1 P 1!
2 se n £ , Í2 ,
E bc —2 \ tg a
A h o ra , e l p o te n c ia ! in te rn o en fu n c ió n d e <p t ie n e p o r e x p re s ió n :
TRACCION Y CO M PRESIO N 1 1 5
p o r lo q u e <5„ s e r á , e n v ir tu d d e l te o re m a d e C a s t ig lia n o
Pa____
tg x £ ,n .
S u s t i tu y e n d o v a lo r e s se o b t ie n e :
~ _ 1500 x 2400
H _ ~ 0 .7 5 x 1.2 x 105 x 14 .2 2
v a lo r q u e , ju n to a l d e d v , c o in c id e n co n lo s o b te n id o s a n te r io rm e n te .
11.3. L a b a r ra de la F ig u ra 11.3 t ie n e fo rm a de dos tro n co s de cono ig u a le s de r a d io s r = 20 c m y 2> lo n g itu d / = 6 m . u n idos p o r su s b a s e s m a y o re s . L a b a r ra e s tá so m e tid a a fu e rz a s P = 6 0 0 0 l> ¡ de tra c c ió n a p l ic a d a s en su s e x tre m o s .
C o n o c ien d o el m ó d u lo d e e la s t ic id a d £ = 2 x 105 M P a y e l co e f ic ien te d e Po isson
f i = 0 .3 , se p ide:
1.° C a lc u la r la v a r ia c ió n u n it a r ia d e l á r e a de la se cc ió n re c ta .2.° D e te rm in a r la v a r ia c ió n de v o lu m en de la b a r ra .
— 0 .2 m m
F ig u r a . 1 1 3 -a .
1.° P o r se r e l s e m iá n g u lo c ó n ic o m u y p e q u e ñ o
r 02a = a r e tg - = a r e tg —- =» a = 1.9 / 6
a d m it ir e m o s un r e p a i t o u n ifo rm e d e te n s io n e s en to d a s la s se c c io n e s r e c ta s d e la bar>

RESISTEN C IA DE M A TER IA LES
C o n s id e r a n d o e l á r e a e le m e n ta l d Q = d y d z en u n a se cc ió n re c ta (F ig . II .3 -6 ) a n te s d e la d e fo rm a c ió n , d e s p u é s d e e l la l a n u e v a á r e a se p u e d e e x p re s a r d e la s ig u ie n te fo rm a
dQ + AdQ = ( d y + A dy ) ( d z + A dz) = d y d z ! 1 - Ey) ( l + s . )
C o m o dQ = d y dz, re s ta n d o s e t ie n e :
AdQ ~ (ey + s . ) d y dz
A h o ra b ie n , p o r la s le y e s d e H o o k e
- - . ^ 2(3 y = t? ^ £» + - — zz <znx£ ' E
la e x p re s ió n a n te r io r to m a la fo rm a
dAQ = — — <? dQ E
A u n q u e la te n s ió n a nx es v a r ia b le y d e p e n d e e x c lu s iv a m e n te de x p o d e m o s h a c e r la in te g r a c ió n d e e s ta e c u a c ió n , e x te n d id a a u n a d e te r m in a d a se cc ió n re c ta
AO _ _ 2 ft 2fí P ' 2/iPQ E E n p 2 E n [ r + (/ - v) tg j ] 2
S u s t i tu y e n d o lo s v a lo re s d a d o s , la v a r ia c ió n u n it a r ia d e l á re a de la s se c c io n e s r e c ta s s i t u a d a s a d is t a n c ia x d e la se c c ió n m e d ía e s
AQ
~Q2 x 0 .3 x 6 0 0 0 x 9 .8 5 .05 x 1 0 ' 5
2 x 1 0 “ x ;t 0 .2 + (6 - . v ) l2 (12 - x )2
q u e , c o m o se o b s e r v a e n la F ig u r a 11 .3-c, to m a su v a lo r m ín im o en la se c c ió n m e d ia y e l v a lo r m á x im o e n la s se c c io n e s e x t re m a s .
L a a p l ic a c ió n d e la fó r m u la (2 .2 -6 ) d e la d e fo r m a c ió n c ú b ic a u n it a r ia , a la p o rc ió n d e b a r r a c o m p r e n d id a e n t r e d o s s e c c io n e s r e c ta s in d e f in id a m e n te p r ó x im a s n o s d a la v a r ia c ió n d e v o lu m e n d e e s ta p a r te d e l a b a r r a
11.4.
T R A C C IO N Y C O M P R E SIO N 1 1 7
In te g ra n d o a lo la r g o d e to d a la b a r r a , la v a r ia c ió n d e v o lu m e n se rá :
Al = 2 z J g »
S u s t i tu y e n d o v a lo re s , se o b t ie n e :
A V2 x 6 0 0 0 x 9 .8 x 6(1 — 0 .6 ) ,
= ------------------------------------------------------------ m-* =2 x J , 0 ‘
m 3 = 1411 .2 x lO " 0 m 3
es d ec ir :
A K = 1.41 c m 3
L n prism a m ecánico de sección variab le, longitud / = 30 m, y eje recto vertica l tiene el extrem o superior ríg idam ente fijo. En el ex trem o inferior está ap licada una c a rg a P — 15 ton. Conociendo la tensión adm isible tradm = 12 0 0 kp/cm: , el m ódulo de elasticidad E = 2 x 1 0 6 kp/cm 3 y el peso específico del m ateria l y = 7.8 ton/m3, se pide ca lcu lar:
1.° El á rea de la sección recta del em potram iento , si el p rim a es un só lido de igual resistencia .2.° El volumen del prism a m ecánico.3.° El a la rgam ien to total.4.° El potencial interno alm acenado por el prism a.
17 El á r e a d e l a se c c ió n r e c t a d e l e m p o tr a m ie n to , e n v ir tu d d e la fó r m u la (2 .3 -1 0 ) , e s
P y' 1 5 0 0 0 7 . 8 x 1 0 -3 * 3 0 0 0 2q , = — ,-^dST = — —— e 1 2 0 0 = 1 2 .7 5 cm1200
n ml, = 12.75 cm2

R ESI STENCI A DE MATERI ALES
2.° L a e x p re s ió n d e l v o lu m en de un só lid o d e ig u a l r e s is te n c ia , en g e n e r a l , s e rá
f ' p f ' p / >•/ \f ~ j d x = j r ' a a d m r CÍX — ~~ I ¿ ’o a d m — I
1 5 0 0 0 ( 7.8 » 10-1 » 3000= xtt. e 1200 — 1 ) m = 0 .0 3 7 8 6 5 m 3
/.8 x 10
K = 3 7 .8 6 5 d m 3
3.° A l se r a = c o n s ta n te , ta m b ié n lo es e l a la r g a m ie n to u n ita r io , en v ir tu d d e la lev de H o o k e . El a la r g a m ie n to to ta l s e rá
Al d = - l = E
1200 x 3000
106cm = 1.8 cm
e s d e c ir
Al = 18 m m
4.° E l p o te n c ia l in te rn o a lm a c e n a d o p o r e l p r is m a , se g ú n la fó rm u la (2 .4 -5 ) s e rá
1 1 Nz _ a 22 E ñ X ~ 2 É Q dx
a 2 P
T e <7
0 1 P ( y¿ 3 e « dx t e * — !
2 Ey
P a r a lo s v a lo r e s d a d o s :
1 2 0 0 2 x 15 0 0 0
2 x 2 x 106 x 7.8 x 1 0 “
o e x p r e s a d o en ju l io s
7 .8 x 1 0 - J x 3 0 0 01 ) k g - c m = 1 3 632 .5 k p - c m
V = 1336 ju l io s
U n a pieza p rism ática vertica l de longitud / = 3 m y sección de área Q = 4 cm 2 está em potrada p o r su sección e x tre m a superior. E stá som etida a una fuerza de tracción P = 6 ton a p l ic a d a en su sección e x tre m a in ferio r y a una fuerza an tagon ista que actúa de fo rm a un ifo rm e sobre su superfic ie , de v a lo r p = 1 ton/m. Conociendo el v a lo r del m ódulo de elasticidad E = 2 x 1 0 6 kp/cm 2, ca lcu la r.
1.” El a la rg a m ien to total.2.° L a energ ía de deform ación acum ulada en la pieza.
1. L a l e y d e te n s io n e s n o rm a le s e n la p ie z a , to m a n d o c o m o o r ig e n d e a b s c is a s la s e cc ió n in f e r io r , e s
TRAC CI O N Y C O M P R E S I O N 1 1 9
" P = 6 i o n F ig u r a . 11.5.
D e la e c u a c ió n d e H o o k e
A d x n
d x E
I n te g ra n d o , se o b t ie n e el a l a r g a m ie n to to ta l
p l\ 300
P-xEn
Al = P ~P* ± . 1 i P _EO ' E n \ 2 1 2 x 106 x 4 y
1000 x 3 \ „6 0 0 0 -------------------- j = 0 .1 6 8 c m
es d ec ir
Al = 1 .68 m m
2.° C a lc u la r e m o s la e n e r g ía d e d e fo r m a c ió n a p l ic a n d o la fó rm u la (2 .4 -5 )
1;V 1
, 2T ñ X = 2£ñ( P - p x f d x =
2EQ\P ¿ + -
$■Ppl\ =
3 0 0
2£n
36 x 106 4
(E 2 + p 2x 2 - 2 P p x ) d x =
106 x 9
2 x 2 x 106 x 4\
= 3 9 3 .7 5 k p x cm
- 6 x 106 x 3
& = 38 .5 9 ju l io s
11.6. L as únicas fu erzas que actúan sobre la b a rra p rism ática escalonada de eje vertica l indicada en la F igura 11.6-u son las debidas a su p ropio peso. Conociendo el peso específico y del m ateri-.l, el coeficiente de d ila tac ió n lineal a y el m ódulo de elasticidad £, se pide:
1.° C a lcu lar las reacciones en los em potram ien tos.2.° D ibu jar el d ia g ram a de tensiones en la s secciones rectas de la barra .3.° ¿C uál se ría la reacción en el em po tram ien to superior si se e leva la tem p eratu ra At ( :
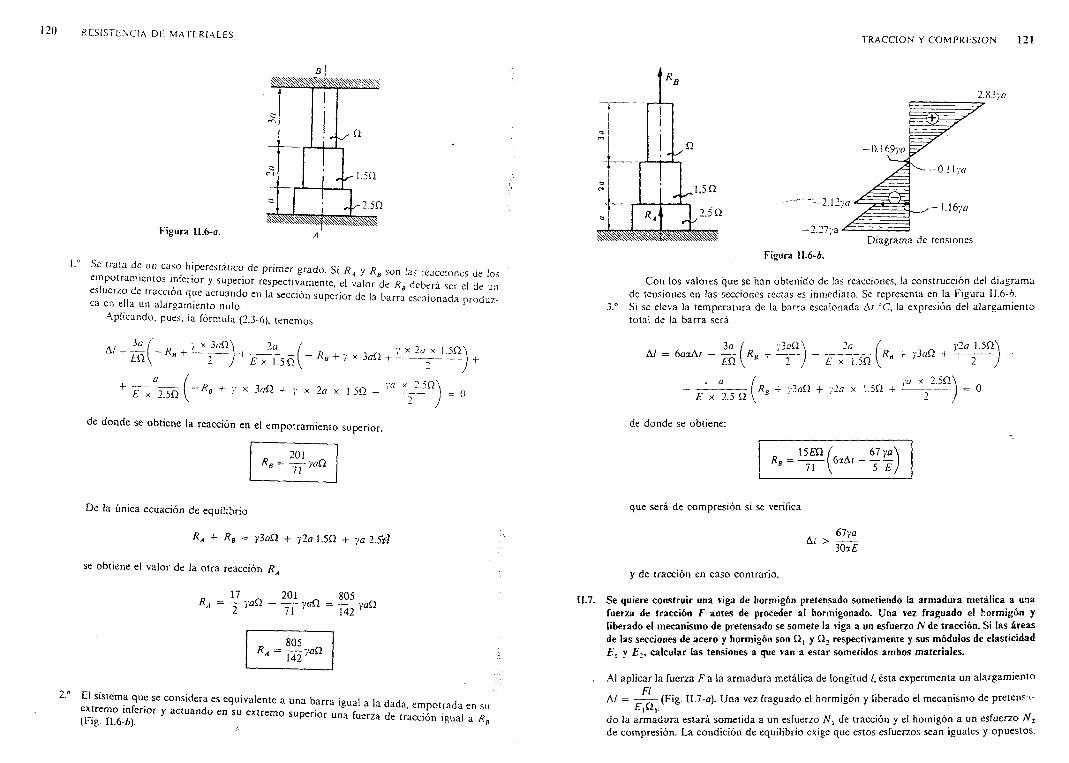
r e s i s t e n c ia d e m a t e r ia l e s
F igura 11.6-a.
’ ° eSm D o t'^ lm n CaÍOr hÍPereS!al,C0 Pnm£r grad°' S¡ ^ y R* Son las a c o n e s de los em potrarem os inferior y superior respectivamente, el valor de R„ deberá ser el de un
Í r e í u n T '° n “ " T * 0 “ SeCC'° n SUpen0r de ,a barra - alo"a^ P ^ u “ -ca en ella un alargamiento nulo.Aplicando, pues, la fórmula (2.3-6), tenemos
A/ = ^ ( - K i + > Jí2 í!0\ + _ J f L _ £Q\ - / £ x l . 5 f i Rfi + y x 3 a O +
'/ x 2a x 1.50
-R B + y x 3í70 + ;• x 2a x 1,50 + ya X 2.50£ x 2.50 V
de donde se obtiene la reacción en el empotramiento superior.
201r b - - j f Ya íi
De la única ecuación de equilibrio
r a 5" r b “ }’3oO + y2a 1.50 T- ya 2.5íl
se obtiene el valor de la otra reacción R ,
p 17 201 805Ra = Y yaO. - — yaCl = _ yaQ
805 = 142
2 " e»remom,an?erC * “ eqUÍVa‘ente a Una barra a la dada, empotrada en su(f J n w f " 3 en su extrem° superior una fuerza de tracdón ¡gual a
TRACCION Y CO M PRESIO N 121
2.83-/0
Figura 11.6-A.
Con los valores que se han obtenido de las reacciones, la construcción del diagrama de tensiones en las secciones rectas es inmediato. Se representa en la Figura 11.6-A.
3.° Si se eleva la temperatura de la barra escalonada A/ °C, la expresión del alargamiento total de la barra será
A / = 6aaAt3a£0
y3aü7 £ x 1.50
Rg -)- >'3aO +
E x 2.5 O
de donde se obtiene:
y3aO + y2a x 1.50 +ya x 2.50
y l a 1.50T~
= o
R* = -15£Q
716xA(
67 yaT ~E
que será de compresión si se verifica
67ya ‘ > 30a£
y de tracción en caso contrario.
1.7. Se quiere constru ir una viga de horm igón pretensado som etiendo la arm ad u ra m etá lica a una fuerza de tracción F antes de proceder a l horm igonado. U na vez fraguado el horm igón y liberado el m ecanism o de pretensado se som ete la viga a un esfuerzo N de tracción . S i las á rea s de las secciones de ace ro y horm igón son Q ¡ y O . respectivam ente y sus m ódulos de e lasticidad £, y E2, ca lcu la r las tensiones a que van a esta r som etidos am bos m ateriales.
Al aplicar la fuerza £ a la armadura metálica de longitud /, ésta experimenta un alargamiento FlAl = —— (Fig. 11.7-zz). Una vez fraguado el hormigón y liberado el mecanismo de pretensx-
E i“ i-do la armadura estará sometida a un esfuerzo N¡ de tracción y el homigón a un esfuerzo N2 de compresión. La condición de equilibrio exige que estos esfuerzos sean iguales y opuestos.

1 2 2 RESI STENCI A DE MATERI ALES
(o)
(b)
F ig u r a 11.7.
M Nt -N2_N , + A j -4—
-JV2 -JV2
Mi+M'¡
A j - A j = 0
I g u a la n d o lo s a c o r ta m ie n to s q u e se p r o d u c e n en a m b o s m a te r ia le s
F ~ N¡ = A ,
£&i E2Q2
h a b ie n d o d e s p r e c ia d o en e l s e g u n d o m ie m b ro Al f ren te a /.D e e s ta s d o s e c u a c io n e s se o b t ie n e :
A ', = /V, = F i - 2 --------£ ,n , + £2q 2
A l a p l i c a r a h o r a un e s fu e rz o N a l c o n ju n to fo r m a d o s o l id a r ia m e n te p o r lo s d o s m a t e r ia le s , é s te se r e p a r te e n t r e a m b o s : A j so b re la a r m a d u r a y A'2 e n e l h o rm ig ó n (F ig . 11 .7 -rj, que se s u p e rp o n e n a lo s e s fu e rz o s A j y A j q u e e x is t ia n a n te r io rm e n te .
N\ + A ', = A
a ; > => a ; = a 1—1— • a ; = a■ /J £,n, + ES¡. ’ 2
£ ,Q , E2Q 2
2*2£ ,n , + £2n 2
L a a r m a d u r a q u e d a s o m e t id a a u n e s fu e r z o d e t r a c c ió n A ( + A j y e l h o rm ig ó n a u r e s fu e rz o d e A j - A j , q u e e s d e t r a c c ió n s i e s p o s it iv o o d e c o m p re s ió n s i e s n e g a t iv o
P o r t a n to , e n v ir tu d d e l p r in c ip io d e s u p e rp o s ic ió n , la s te n s io n e s r e s p e c t iv a s s e r á n :
/v, -t a ; f e 2q 2 a £ . n . a \ = = — : ---------- — — + 1
£2i í j E S i T £ 2^2 ^ 1 E S i + E2Ci2
~ n 2 + A j _ £ E2n 2 + a £ 2n 2
n , Q2 £ 1 ! -E E2Cl2 Q, £ 1Ol -F £2í i 2
TR A C C I O N Y C O M P R E S I O N 123
S im p lif ic a n d o , se t ie n e f in a lm e n te
F £ , n , + A £ , n , ( A - F ) £ ,
fJl ~ a j f . a , + £ , n , j ’ ff2 £ , n . £ 2 ^ 2
U .S. U n a v ig a r íg id a e in d e fo rm a b le de peso P = 1000 k p e s tá su sp e n d id a po r c u a t ro h ilo s v e r t ic a le s de la m ism a lo n g itu d , de la m ism a se cc ió n , d e l m ism o m e ta l , s itu a d o s en un m ism o p lano v e r t ic a l , com o se in d ic a en la F ig u ra II .8 -a .
D e te rm in a r e l e s fu e rz o de tra c c ió n en c a d a h ilo c a lc u la n d o la s in c ó g n ita s h ip e re s tá t ic a s :
a ) e x p re san d o la c o m p a t ib i lid a d de la s d e fo rm a c io n e s ;b ) ap lic an d o e l te o re m a d e M e n a b re a .
4m 2 m
Y 1 f 1f 4
1 ,6 m
, , ... _ L ,c
1 r /> = 1000 k p F ig u r a I I .8 - a .
S e t r a t a de un s is t e m a h íp e r e s tá t ic o d e g r a d o 2, y a q u e te n e m o s c u a t r o in c ó g n ita s , los e s fu e rz o s en lo s c u a t r o h i lo s ; y só lo d o s e c u a c io n e s d e e q u i l ib r io : la s q u e e x p re s a n n u lid a d de
r e s u lt a n te y d e m o m e n to
f A j + A 2 + A 3 + A „ = 1000
[ 3 .6 A , + 1 .5 A , = 2 .4 A j + 4 .4 jV4ti)
h a b ie n d o to m a d o m o m e n to s re sp e c to d e l c e n tro d e g r a v e d a d d e la v ig a .
a ) L a s o tr a s d o s e c u a c io n e s q u e n e c e s ita m o s p a r a la d e te r m in a c ió n de la s in c ó g n it a s las p o d e m o s o b te n e r e x p r e s a n d o la c o m p a t ib i l id a d d e la s d e fo r m a c io n e s (F ig . 1I.8-Ó)
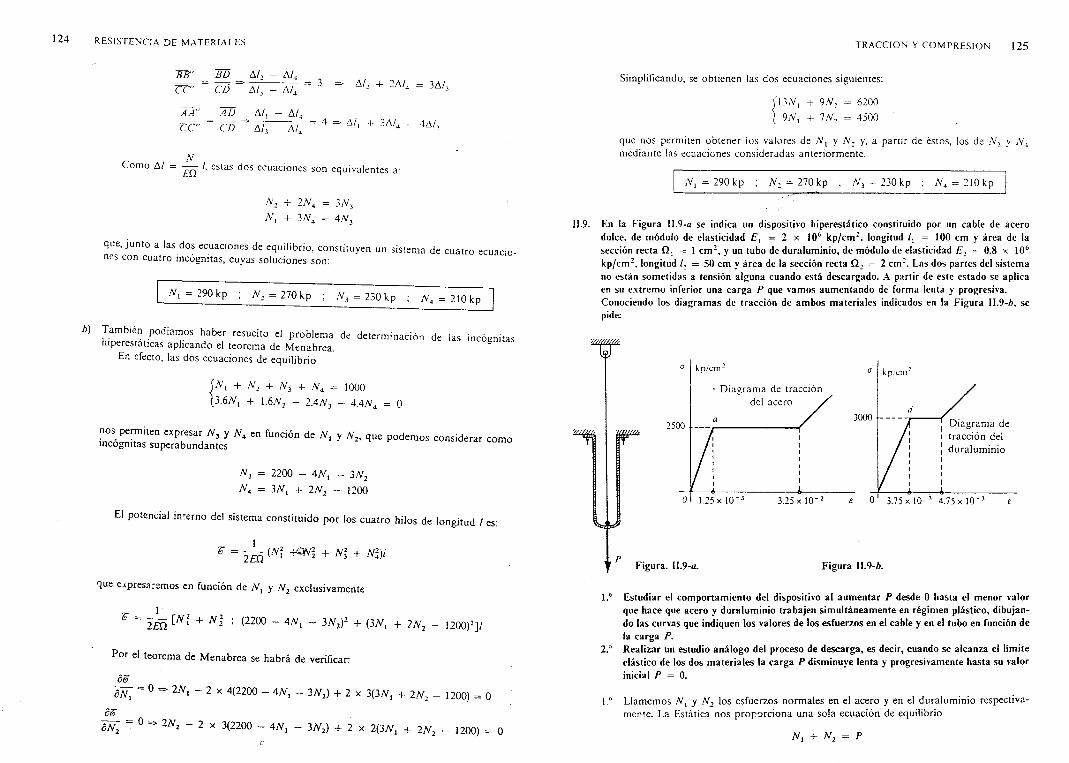
1 2 4 RESISTENCIA DE MATERI ALES
B B " B D A/, - AUT r 7 ~ W ^ a /3 - a = 3 ^ A/: + 2A/4 = 3AA>
Z 7 " _ Z D A/, - A/4ü ü 77 ~ W ^ A/3 - A/4 = 4 =• A/. + 3 A ^ = 4A /j
NC o m o A/ = — /, e s ta s d o s e c u a c io n e s so n e q u iv a le n te s a :
-'V, + 3/V4 = 4:V 3
q u e , ju n to a la s d o s e c u a c io n e s d e e q u i l ib r io , c o n s t . tu y e n un s is t e m a d e c u a t r o e c u a c io - n es co n c u a t ro in c ó g n ita s , c u y a s so lu c io n e s so n :
Af, - 290 kp ; AL = 270kp ; A-3 = 230 kp ; ^ = 210 kp
b ) T a m b ié n p o d ía m o s h a b e r r e su e lto e l p r o b le m a d e d e t e r m in a c ió n d e la s in c ó g n ita s h ip e r e s ta t ic a s a p l ic a n d o e l te o r e m a d e M e n a b r e a . in c ó g n ita s
En e fec to , la s d o s e c u a c io n e s d e e q u i l ib r io
ftVi + N2 + N3 + = 1000(3 .6 A ', + l .6 N 2 - 2A N 3 - 4 .4W * = 0
£XP" Saü y N* Cn fundÓn de -v ^ ^ue P°dem°s considerar comoincógnitas superabundantes
N 3 = 2 2 0 0 - 4AT, - 3 N 2
= 3/V, + 2 N 2 - 1200
E l p o te n c ia l in te rn o d e l s is te m a c o n s t i tu id o p o r lo s c u a t r o h i lo s d e lo n g itu d / es :
^ = 2 l ñ (N‘ + " I + Nl)‘
q u e e x p re s a re m o s en fu n c ió n d e y N 2 e x c lu s iv a m e n te
^ ~~ 2EQ ^N i + 1 f2 2 0 0 ~ 4 N i ~ 3iV¿ )2 + (3A i + 2 N 2 - 1 2 0 0 )2]/
P o r e l te o r e m a d e M e n a b r e a se h a b r á d e v e r if ic a r :
c i ó= o 2 N t - 2 X 4 (2 2 0 0 - 4JV , - 3 AL,) + 2 x 3 (3A f, + 2 N 2 - 1200 ) = 0
oS"
= 0 => 2M 2 - 2 X 3 (2 2 0 0 - 4/V, - 3 N 2) + 2 x 2 0 J V , + 2 N 2 - 12 0 0 ) = 0
TRAC CI ON Y C O M P R E S I O N 1 2 5
S im p lif ic a n d o , se o b t ie n e n la s d o s e c u a c io n e s s ig u ie n te s :
f 13/Vj + 9 A l, = 6 2 0 0
j 9jV, + 7N 2 = 4 5 0 0
q u e no s p e rm iten o b te n e r lo s v a lo re s d e N¡ y AL y , a p a r t i r d e é s to s , lo s d e A '3 y ,V4 m e d ia n te la s e c u a c io n e s c o n s id e r a d a s a n te r io rm e n te .
N, = 290 kp ; AL = 270kp ; /V3 = 230 kp ; A'4 = 210kp
11.9. En la F igura II.9-a se indica un dispositivo hiperestático constituido por un cable de acero dulce, de m ódulo de elasticidad E¡ — 2 x 1 0 6 kp/cm 2, longitud 1¡ = 10 0 cm y área de la sección recta Í2, = 1 cm 2, y un tubo de duralum inio , de m ódulo de elasticidad £ , = 0 .8 x 1 0 6 kp/cm 2, longitud /, = 50 cm y área de la sección recta Í2 , = 2 cm 2. Las dos partes del sistem a no están som etidas a tensión alguna cuando está descargado. A p artir de este estado se ap lica en su extrem o inferior una carg a P que vam os aum entando de fo rm a lenta y progresiva. C onociendo los d iagram as de tracción de am bos m ateria les indicados en la F igura II.9-A, se pide:
1.° E studiar el com portam iento del dispositivo a l au m entar P desde 0 hasta el m enor va lo r que hace que acero y dura lum in io traba jen sim ultáneam ente en régim en plástico, dibujando las curvas que indiquen los va lo res de los esfuerzos en el cable y en el tubo en función de la carga P.
2° R ea liza r un estudio an á lo g o del proceso de d escarga, es decir, cuando se a lcanza el lím iteelástico de los dos m ateria les la carg a P d ism inuye lenta y progresivam ente hasta su va lo r inicial P = 0.
I o L la m e m o s ¿V, y N2 lo s e s fu e r z o s n o rm a le s en e l a c e ro y en e l d u r a lu m in io r e s p e c t iv a m en te . L a E s tá t ic a n o s p r o p o r c io n a u n a s o la e c u a c ió n d e e q u il ib r io
N¡ + N2 = P

RESI STENCI A DE MATERI ALES
P o r ta n to , e l d is p o s it iv o c o n s id e r a d o e s un s is te m a h ip e re s tá t ic o de p r im e r g r a d o . L a e c u a c ió n n e c e s a r ia p a r a l a d e te r m in a c ió n d e lo s e s fu e rzo s n o rm a le s , m ie n tr a s la s d c .o r - m a c io n e s se an e lá s t ic a s , la p o d e m o s o b te n e r e x p re s a n d o la ig u a ld a d de a la r g a m ie n to s d e l c a b le d e a c e ro y d e l tu b o de d u r a lu m in io
, . AVt AV:^ £ , n t e , ci2
E sta e c u a c ió n , ju n to co n la d e e q u i l ib r io , c o n s t itu y e un s is te m a de d o s e c u a c io n e s co n d o s in c ó g n ita s , c u y a s so lu c io n e s so n :
£ , n ,
n 2i 2
tV, p l i£'i^ t/,£, n , + /,£2n .
Pll p 2a 2/2£,Í2, + /,£, n .
A p a r t i r d e lo s e s fu e rz o s n o rm a le s , l a d e te r m in a c ió n d e la te n s ió n a a en e l c a b le d e a c e ro y en el tu b o d e d u r a lu m in io e s in m e d ia t a
„ PL- E' ■ - PI>E2“ / ,£ ,n, + / ,£ ,n , ’ °d i , e ¡ü ¡ + /,£,n .
S u s t i tu y e n d o v a lo re s , se t ien e :
_ P x 50 x 2 x 106 P
5 0 x 2 x 106 x 1 + 100 x 0 .8 x 106 x 2 2.6
P X 100 X 0 .8 X 106 0 .8 P
* ~ 50 x 2 x 106 x 1 + 100 x 0 .8 x 106 x 2 = U
P a r a q u e se c u m p la la h ip ó te s is d e d e fo rm a c io n e s e lá s t ic a s , se te n d rá q u e v e r if ic a r :
P= — < 2 5 0 0 k p / cm - =- P < 6 5 0 0 k p
2.6
0 .8£<r„ = — < 3 0 0 0 k p / c m 2 ^ P < 9 7 5 0 k p
e s d e c ir , la s d o s p a r te s d e l d is p o s it iv o t r a b a ja n e n ré g im e n e lá s t ic o m ie n tr a s l a c a r g a P s e m a n t ie n e in fe r io r a 6 5 0 0 k p . C u a n d o P a lc a n z a e s te v a lo r , lo s e s fu e rzo s N l y N2 v a le n
6 5 0 0
~L6~x 1 2500 k p
0-8 x 6 5 0 0N 2 = a¿ ■ Cl2 = ------- — x 2 = 4 0 0 0 k p2.6
E n e s te in s ta n te e l a c e ro in ic ia la f lu e n c ia , m a n te n ié n d o s e AL c o n s ta n te c u a n d o P a u m e n ta .
TRA C CIO N Y C O M P R E SIO N 1 2 7
L a s e c u a c io n e s q u e n o s d a n a h o r a lo s v a lo re s de y AN so n :
f .V , = 2 5 0 0 kp
{ ,V , - P - A ', = P - 2 5 0 0 k p
q u e s e r á n v á l id a s m ie n t r a s se v e r if iq u e n la s d o s c o n d ic io n e s s ig u ie n te s :а ) q u e la te n s ió n en e l tu b o se a m e n o r q u e e l l ím ite e lá s t ic o de l d u r a lu m in io
<jj < 3 0 0 0 k p c m 2
б) q u e e l a la r g a m ie n to d e l c a b le e s té c o m p re n d id o en el e s c a ló n de p la s t ic id a d de l a c e ro .
D e la p r im e r a c o n d ic ió n se d ed u ce :
P - 2500 -------- < 3 0 0 0 => P < 8 5 0 0 k p
C u a n d o P = 8 5 0 0 k p e l tu b o a lc a n z a su l ím ite e lá s t ic o (p u n to J e n e l d ia g r a m a d e t r a c c ió n d e l d u r a lu m in io ) .
En c u a n to a la s e g u n d a c o n d ic ió n , c a lc u le m o s e l a la r g a m ie n to u n it a r io d e l c a b le
jV ,/ , 6 0 0 0 x 50A/< = A ' 2 = É ^ ¡ = 0 .8 x 10» ™ = 0-1875 cm
= = = , . 875 x l o -/, 100
q u e c o m o v e m o s , a l o b s e r v a r e l d ia g r a m a d e t r a c c ió n d e l a c e ro , se e n c u e n t r a d e n tr o d e ! e s c a ló n d e p la s t ic id a d (p u n to a ¡ en la F ig u r a II .9 -c).
F ig u r a 11.9-c.
P o r t a n to , la s c u r v a s N — P q u e e x p re s a n la v a r ia c ió n d e lo s e s fu e rz o s en el c a b le y en e l tu b o e n fu n c ió n d e P s e r á n , en e l p ro c e so d e c a r g a , la s in d ic a d a s e n la F ig u r a I I .9 -d, es d e c ir , s e g m e n to s r e c t il ín e o s : 0/ ?! y A t A 2 p a r a e l a c e ro ; y D í D l p a r a e l d u r a lu m in io .
S i l a c a r g a P s e d is m in u y e le n t a y p r o g r e s iv a m e n te a p a r t i r d e l v a lo r d e 8 5 0 0 k p , l a d e s c a r g a d e l a c e r o se r e a l iz a s ig u ie n d o el s e g m e n to r e c t il ín e o a ¡ a 2. ^ p a ra le lo a 0 ü
( F ig u r a 11.9-c).

RESISTENCIA DE MATERIALES
-V,AL
F ig u r a II.9-A . kp
El c a b le p r e s e n ta r ía u n a d e fo rm ac ió n p e r m a n e n te u n i t a r ia d a d a p o r D a,
Da, = ñü! = 1.875 x 10-3 - 1.25 x 1(T3 = 0.625 x 1CT3
q u e c o r re s p o n d e a un a la r g a m ie n to A/0
A l 0 = 0.625 x 1 0 '3 x 10: cm = 0.625 m m
P o r t a n to , a p a r t i r d e l m o m en to en q u e se in ic ia la d e s c a r g a , l a r e la c ió n e n t r e e s fu e rz o y d e fo rm a c ió n en e l c a b le d e a c e ro s e rá
N±_ F (U in, V .
E.Q.(A/, - A/„)
‘ i
E n e l tu b o la d e s c a rg a se h a c e s ig u ie n d o l a r e c ta dO d e l d i a g r a m a d e t r a c c ió n , d e fo rm a re v e r s ib le re sp e c to d e l p ro ceso d e c a r g a .
E2C12AL
áL a d e te r m in a c ió n d e lo s e s fu e rzo s N¡ y N2 e n fu n c ió n d e P s e h a r á r e s o lv ie n d o e l
s ig u ie n te s is te m a d e e c u a c io n e s
N l + AL = P
A/, = A l2(Ai - A/0) + a/ = P
'i L
d e d o n d e
Al = ^1^2 ~b l2EíCllAlQi2e , q , + /,£2n 2
N = Ein i(Pl2 - E2a 2Alü) = E2Cl2(P ll ¡2 + LE.O.A/p)1 ,n , + hE2 n 2 ’ 2 i2(i2e 1í í 1 + /,£'2q 2)
T R A C C I O N Y C O M P R E S I O N 1 2 9
11.10.
e x p re s io n e s v á l id a s m ie n t r a s Af, s e a un v a lo r p o s it iv o , y a q u e e l c a b le no p u e d e e s ta r so m e t id o a c o m p re s ió n , e s d e c ir , p a r a v a lo r e s d e P m e n o re s d e 8 5 0 0 k p y q u e v e r if iq u e n la in e c u a c ió n :
P l 2 - E2Ci2AI0 > 0
£ , f i , 0,8 x 106 x 2P > AL = 0 .0 6 2 5 = 2 0 0 0 kp
/, 0 50
P a r a v a lo re s d e P m e n o re s d e 2 0 0 0 k p
,-Vl = 0 ; N2 = P
L a s c u rv a s .V - P d e l p ro c e s o d e d e s c a r g a , d e a c u e rd o c o n lo s r e s u lt a d o s o b te n id o s , se r e p re s e n ta n en la F ig u r a II .9 - d m e d ia n te lo s s e g m e n to s r e c t il ín e o s : A2A3 p a r a el a c e ro ; D : D ¡ y D }0 p a r a el d u r a lu m in io .
S e p revé la su jecc ió n de u n a b a r r a AB p e r fe c ta m e n te r íg id a m e d ia n te tre s b a r ra s de l m ism o m a te r ia l e n la z a d a s por m ed io de a r t ic u la c io n e s co m o se in d ic a en la F ig u ra 11.10-a. P o r un e r ro r co m etid o a l c o r ta r la s b a r r a s , la p re v is ta s i tu a r la en po sic ió n v e r t ic a l de lo n g itu d l p re sen ta un d efec to A en su lo n g itu d . E l á r e a de la s se cc io n e s de to d as la s b a r ra s t ien en el m ism o v a lo r f i y e l m ó du lo de e la s t ic id a d e s E.C a lc u la r la s ten s io n es de m o n ta je
( o )
( «
F i g u r a 11.10.

130 RESISTENCIA DE MATERI ALES
A l s e r A p e q u e ñ o en c o m p a ra c ió n c o n a p o d e m o s a d m it i r q u e la s d o s b a r r a s in c l in a d a s e x p e r im e n ta n e l m ism o a c o r t a m ie n to AL, p o r lo q u e e s t a r á n s o m e t id a s a e s fu e rzo s n o rm a le s ig u a le s .
P a r a c a lc u la r lo s e s fu e rz o s ,V, d e la b a r r a v e r t ic a l y /V, d e la s b a r r a s in c l in a d a s d is p o n e m o s d e la e c u a c ió n d e e q u i l ib r io d e la b a r r a r í g id a ~AB q u e e x p r e s a la n u l id a d de m o m en to re sp e c to de la a r t ic u la c ió n B (F ig . II. 10-6).
/V, 2 a — 2 ,V2 eo s 2 x a = 0 = > iV 1 = A f2 e o s a
y la e c u a c ió n d e c o m p a t ib i l id a d d e d e fo r m a c io n e s q u e se d e d u c e d e la F ig u r a 11.10-c.
ALA - A l !
c u s a
E x p re sa n d o la s d e fo rm a c io n e s en fu n c ió n d e lo s e s fu e rz o s , d e e s ta ú lt im a e c u a c ió n se o b t ie n e o t r a e q u iv a le n te
A _ N'1 2 N' 1EQ e o s i EQ e o s a
q u e ju n to co n la e c u a c ió n de m o m e n to s p e r m it e c a l c u la r lo s v a lo re s d e lo s e s fu e rzo s n o rm a le s
A = A V ^ 2 A V = N_¿ f 2 \ ¡Vj/(2 + e o s 5 a )
EQ EQ e o s 2 y. EQ V e o s ' a ) EQ e o s ' a
■V,EQ A e o s 3 a
‘ 1(2 + e o s 3 a )iV, = EQ A c o s 'a
1(2 + e o s 3 a )
11 .11 . Se considera el sistem a articu lado plano indicado en la F ig u ra 11 .1 1 fo rm ado por cinco b arras del m ism o m ateria l e igual sección. C onociendo el m ódulo de elasticidad £, la longitud a de las cu atro b arra s iguales que fo rm an un cu ad rad o y el á rea Q de la sección de las m ism as, ca lcu lar la variación de la d istancia entre los vértices A y B cuando se aplica en ellos una fuerza F en la dirección de la diagonal que los une, a s í com o los a la rgam ien tos de las barras.
TRACCION Y C O M P R E S I O N 131
P o r r a z ó n d e s im e tr ía lo s e s fu e rz o s n o rm a le s en la s b a r r a s q u e fo rm a n lo s la d o s d e l
c u a d r a d o so n ig u a le s
tV, = <V, = N¡ = N¿
D e la e c u a c ió n d e e q u i l ib r io en e l n u d o A o B:
2 .V , eo s 4 5 ' = F, se d e d u c e : .V, =F j 2
e s d e c ir :
;V, = N 2 = A'j = =
q u e so n e s fu e rzo s d e t r a c c ió n .El e s fu e rzo ;V5 e n la q u in t a b a r r a , q u e es de c o m p re s ió n , se o b t ie n e de la e c u a c ió n de
e q u i l ib r io en e l n u d o C o D.
N ¡ = 2 ,V , eo s 4 5 ' = F
O b te n id o s lo s e s fu e rz o s a lo s q u e e s tá n s o m e t id a s la s b a r r a s e l c á lc u lo d e l p o te n c ia l
in te rn o d e l s is te m a es in m e d ia to :
£ = = 4 — + F 2 ^ = — P + ¡2)2 EQ 8 F.Q 2EQ 2EQ ^
y e x p re s a d o é s te en fu n c ió n d e la fu e rz a F, la v a r ia c ió n 3 de la d is t a n c ia e n tr e lo s v é r t ic e s A y B p e d id a , en v ir tu d d e l te o r e m a d e C a s t ig lia n o , se rá :
6 =BE Fa( 2 + s /2)
SF EQ
L as b a r r a s 1, 2 , 3 y 4 e s tá n s o m e t id a s a u n a fu e rz a d e t r a c c ió n d e l m ism o m ó d u lo
N =r V/ -
El a la r g a m ie n to d e e s ta s b a r r a s es:
i/, - Ai2 = Al¡ -= AL =Na a F ^ J 2
EQ = 2EQ
L a b a r r a d ia g o n a l e s tá s o m e t id a a c o m p re s ió n . L a v a r ia c ió n d e su lo n g itu d se rá :
AL =N5a J 2 _ a F j í
EQ EQ
El s ig n o m e n o s in d ic a q u e la b a r r a 5 h a e x p e r im e n ta d o un a c o r ta m ie n to .
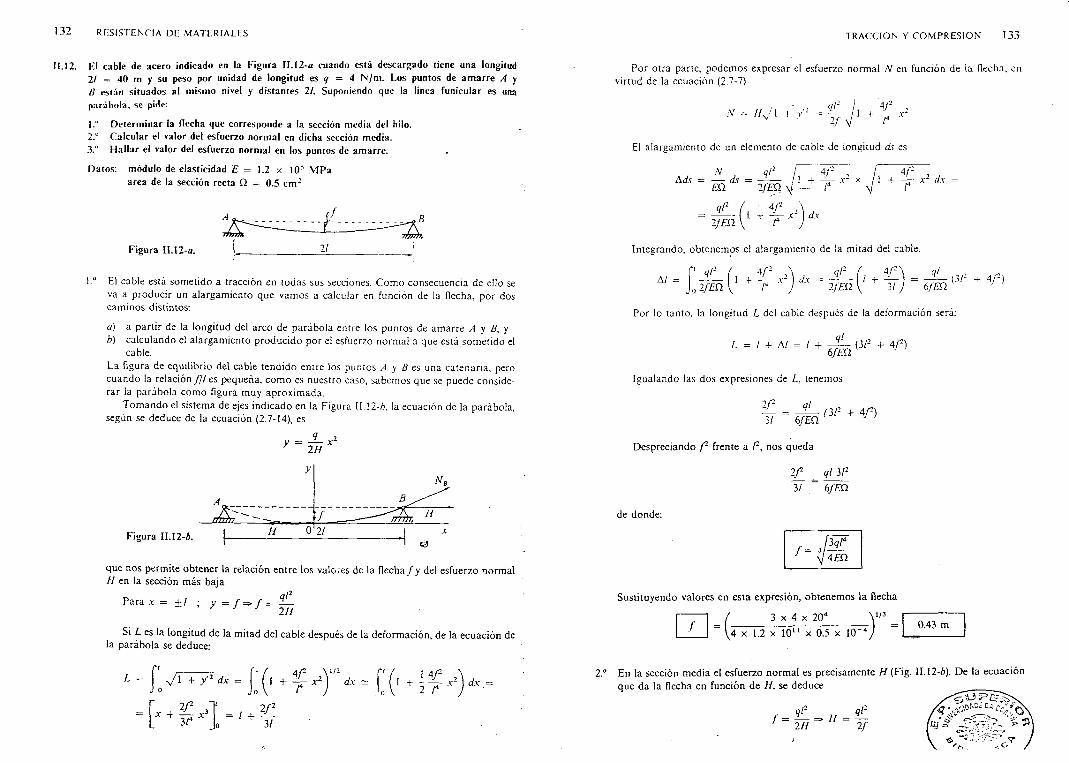
RESISTENCIA DE MATERI ALES
El c a b le de a c e ro in d ic ad o en la F ig u r a 11 .12-a cu an d o e s tá d e s c a rg a d o tien e u n a long itud 2/ = 4 0 m y su peso po r u n id ad de lo n g itu d e s q = 4 N /m . L o s p u n to s de a m a r r e A y B e s tá n s itu a d o s a l m ism o n ive l y d is ta n te s 21. S u p o n ien d o q ue la lín e a f u n ic u la r e s una p a r á b o la , s e p ide:
1." D e te rm in a r la f lech a q u e co rre sp o n d e a la se cc ió n m e d ia d e l h ilo .2 .” C a lc u la r e l v a lo r de l e s fu e rzo n o rm a l en d ic h a se cc ió n m e d ia .3.° H a lla r e l v a lo r d e l e s fu e rzo n o rm a l en lo s p un to s de a m a r r e .
D a to s : m ó du lo de e la s t ic id a d E = 1 .2 x 1 0 5 ÍVTPaa r e a de la se cc ió n re c ta Q = 0 .5 c m 2
F ig u r a 11.12-a.
1° El c a b le e s tá so m e t id o a t r a c c ió n en to d a s su s se cc io n e s . C o m o c o n s e c u e n c ia d e e l lo se v a a p r o d u c ir u n a la r g a m ie n to q u e v a m o s a c a lc u la r en fu n c ió n d e la f le c h a , p o r dos c a m in o s d is t in to s :
a) a p a r t i r d e la lo n g itu d d e l a r c o d e p a r á b o la e n tr e lo s p u n to s d e a m a r r e A y B, yb) c a lc u la n d o e l a la r g a m ie n to p r o d u c id o p o r e l e s fu e rzo n o rm a l a q u e e s tá so m e t id o el
c a b le .L a f ig u r a d e e q u i l ib r io d e l c a b le t e n d id o e n tr e lo s p u n to s A y B e s u n a c a t e n a r ia , p ero c u a n d o la r e la c ió n f ¡ ¡ e s p e q u e ñ a , c o m o e s n u e s tro c a so , s a b e m o s q u e se p u e d e c o n s id e r a r la p a r á b o la c o m o f ig u r a m u y a p r o x im a d a .
T o m a n d o e l s is te m a d e e je s in d ic a d o en la F ig u r a II. 12-6, la e c u a c ió n d e la p a r á b o la , s e g ú n se d e d u c e d e la e c u a c ió n (2 .7 -1 4 ), es
9 2y = x* 2 H
-
y
B
/ ____. ■ H
F ig u r a II .1 2 -6 . H 21t í )
q u e n o s p e r m ite o b te n e r l a r e la c ió n e n t r e lo s v a lo r e s d e la f le c h a / y d e l e s fu e rz o n o rm a l H en la se c c ió n m á s b a ja
P a r a x = +1 : y = f => f = ? !—2H
S i L e s l a lo n g itu d d e la m ita d d e l c a b le d e s p u é s d e la d e fo r m a c ió n , d e la e c u a c ió n de la p a r á b o la se d e d u c e :
TRAC CI ON Y C O M P R E S I O N 1 3 3
P o r o t r a p a r te , p o d e m o s e x p re s a r e l e s fu e rz o n o rm a l N e n fu n c ió n d e la f le c h a , en v ir tu d d e la e c u a c ió n (2 .7 -7 )
q- > + ¥ 2 / VN = H j 1 + y -
El a la r g a m ie n to d e un e le m e n to d e c a b le d e lo n g itu d d s es
iV q l 2 / A f , / 4/2 , ,
A& = m * = - l ^ x' x J l + T x~ dx == ^ ( 1 + íp U2 fm V /
I n te g r a n d o , o b te n e m o s e l a la r g a m ie n to d e la m ita d d e l c a b le .
A/ = f J Í L ( , + 4I l A d x = J L ( i + 4J L ) = J L (3 r- + A f )j 0 2 / £ n v /4 ) 2J E Q \ V ) 6/EQ
P o r lo t a n to , la lo n g itu d L d e l c a b le d e s p u é s d e la d e fo rm a c ió n se rá :
9/L = 1 + Al = 1 +6/H2
(3/2 + A f )
I g u a la n d o la s d o s e x p re s io n e s d e L, te n e m o s
2f q l a r- + Af)y 6/EQ
D e s p re c ia n d o f f ren te a P , n o s q u e d a
2f q l 3 P
' í f ~ 6 fE Q
d e d o n d e :
/= 3
S u s t i tu y e n d o v a lo r e s en e s t a e x p re s ió n , o b te n e m o s l a f le c h a
3 x 4 x 2 0 4 V '3/ = 4 x 1.2 x 1 0 “ x 0 .5 x 1 0 ' 4
0 .4 3 m
E n la se c c ió n m e d ia e l e s fu e rz o n o rm a l e s p r e c is a m e n te H (F ig . II . 12-6). D e la e c u a c ió n q u e d a la f le c h a en fu n c ió n d e H, se d e d u c e

1 3 4 RE S I ST E N C I A DE MATE RI ALE S
11.13.
S u s t i t u y e n d o v a lo re s :
II ■U X SJ O
2 x 0.431861 N
3.° C o m o se h a v is to a n te r io rm e n te , la le y d e e s fu e r z o s n o r m a le s es
c u y o s v a lo r e s m á x im o s c o r r e s p o n d e n a la s s e c c io n e s d e lo s p u n to s d e a m a r r e , y se o b t ie n e n h a c ie n d o .r = ± / en e s ta e x p re s ió n .
A ' a = 'V 84 x 2 0 / 4 x 0 .4 3 ,
= -------— — /1 + --------- r ----- 2 0 = 1862 N2 x 0 .4 3 \J 20
U n n e u m á t ic o de fo rm a tó r ic a , d e la s d im e n s io n e s in d ic a d a s en la F ig u r a I I .I 3 - a . e s tá so m etid o a u n a p re s ió n in te r io r p — 10 k p / cm 2. S i su e sp e so r e s e = 1 m m c a lc u la r la s ten s io n es de m e m b ra n a en c u a lq u ie r a de lo s pun to s m á s c e r c a n o s a l e je d e re v o lu c ió n .
I
A p lic a r e m o s la e c u a c ió n d e L a p la c e te n ie n d o e n c u e n ta q u e p „ = 3 c m : p , = — 9 cm
Zjl - Zl 3 9
10
d e d o n d e
3crm — cr, = 9 0 0 k p / c m 2
L a o t r a e c u a c ió n q u e n e c e s it a m o s p a r a d e t e r m in a r l a s t e n s io n e s d e m e m b r a n a en los p u n to s m á s c e r c a n o s a l e je d e r e v o lu c ió n d e l to r o , la o b te n e m o s a l p l a n t e a r e l e q u i l ib r io en el s e c c io n a m ie n to in d ic a d o en la F ig u r a II. 13 -6 .
2rt - e = p r JO ■ 2n\ - + r + r e o s 0 ) se n 0
d e d o n d e
p r{a + r ) 10 x 3 (18 + 3)a m :-------------- —-— ------ = 3 5 0 k p / c m 2
a e«
18 x 0.1
T RA C C I ON Y C O M P R E S I O N 1 3 5
CU
a = 18 cmF ig u ra W .13-6
O b te n id o e l v a lo r d e <r„. d e la e c u a c ió n 3 e r - a , = 9 0 0 se d e d u c e
a , = 3erm - 9 0 0 = 150 k p / cm 2
P o r ta n to , la s t e n s io n e s d e m e m b r a n a p e d id a s so n :
= 3 5 0 k p / c m 2 : er, = 1 5 0 k p / cm 2 j
11.14. R e p re s e n ta r g r á f ic a m e n te la v a r ia c ió n d e la ten s ió n e q u iv a le n te a lo la rg o de la g e n e r a t r iz del re c ip ie n te c il in d r ic o de p a r e d e s d e lg a d a s in d ic a d o en la F ig u r a 11 .14a, lleno h a s ta u n a a l tu r a // de un l íq u id o de peso e s p e c if ic o y , a p l ic a n d o lo s c r it e r io s de T re s c a y de von M is e s .
S e c o n s id e ra r á n d e s p re c ia b le s la s te n s io n e s de f le x ió n e n g e n d rad a s en la s p a r e d e s de l
re c ip ie n te , a s í co m o en e l peso p ro p io d e l m ism o .
7¿T'T a
F ig u ra II.14-A .
D e la s d o s te n s io n e s p r in c ip a le s d e l e s ta d o b ia x ia l e x is te n te en e l d e p ó s ito (F ig . II . 1 4 -6 ), a m e s
c o n s t a n te > la p o d e m o s c a lc u la r im a g in a n d o u n c o r te d e l r e c ip ie n te p o r un p ia n o h o r iz o n ta l
n d 1' ~T~ 11 y l i d
n d e 4c

136 RESISTENCIA DE MAT E R I AL E S
L a d e te r m in a c ió n d e la ten s ió n c ir c u n fe r e n c ia l la h a c e m o s a p l ic a n d o la e c u a c ió n de L a p la c e . te n ie n d o en c u e n ta q u e p m = x
y a q u e la p re s ió n p s o b re la p a r e d in te rn a d e l d e p ó s ito es la d e b id a a la a c c ió n h id ro s tá t ic a de l l iq u id o q u e , c o m o s a b e m o s es
P = y-t
s ie n d o .v la d is t a n c ia a la su p e rf ic ie lib re .
P o r ta n to , la s te n s io n e s p r in c ip a le s en e l d e p ó s ito c i l in d r ic o , s in p r e ju z g a r e l o rd e n de m a y o r a m e n o r , s o n :
y H d y d■ T x • 0 Ae 2 e
C o m o en lo s c r it e r io s in te rv ie n e el o r d e n , e s n e c e s a r io e s ta b le c e r é s te p r e v iam e n te .S i a m ^ a , , q u e se v e r if ic a p a r a
y H d y d f l—— > — v, e s d e c ir , p a r a 0 < x ^ —
4 e 2 e 2
la s ten s io n e s p r in c ip a le s so n : <j, = o „ ; <r, = a , ; = 0.H
S i, p o r e l c o n t r a r io <j„ ¡S a „ q u e se v e r if ic a p a r a ~ $ x ^ //, e n to n c e s la s ten s io n e s p r in c ip a le s so n : o , = ir ,; <r, = a„\ rr3 = 0.
C a lc u le m o s a h o r a la te n s ió n e q u iv a le n te .u) S e g ú n e l c r i t e r i o d e T re s c a <rcqiJ¡y = <r, - <r¡. P o r c o n s ig u ie n te
r y H dp a ra 0 ^ x
H= = — ,
4ettequiv
y d H.r < f l
v 2 e X’p a ra — <
c u y a r e p r e s e n ta c ió n g r á f ic a se h a c e e n la F ig u r a 11.14-cb ) S i a p l ic a m o s e l c r it e r io d e v o n M is e s :
P a r a 0 ¿ x £H /I
[ ( t r , - a , ) 1 + (<r2 ~ o 2y- + ( ff j _ =
¡2 [(<T” “ + +H I/2J - - X) + + 4
T R A C C I O N Y C O M P R E S I O N 1 3 7
T re sc a
y H d
7 7
von M is e s
Figura 11.14-c .
P a r a ,v > <reqil|y = [{a, - < x j2 + <r2 + o 2] , se o b t ie n e la m ism a e x p re
s ió n q u e p a r a 0 ^ x ^ e s d e c ir , l a e x p r e s ió n d e la te n s ió n e q u iv a le n t e ,
p a r a 0 ^ x ^ H, e s :
c u y a re p re se n ta c ió n g rá fica se hace tam bién en la F ig u ra 11.14-c.Se o b s e rv a q u e la tensión eq u iva len te según el c r ite rio de v on M ises es, en to d as
las secciones d el recip ien te , m enor que la que resu lta de ap lica r el c rite rio de T resca, s a lv o en los p u n to s del a n illo c o rresp o n d ien te a x = H/2. P odem os, pues, d ec ir que el co e fic ien te de seg u rid a d del estad o tension a l en c u a lq u ie r p u nto del d ep ó sito es m a y o r según el c r ite rio de von M ises que según T resca . P o r consiguien te, el c rite rio d e T resca es m ás c o n s e rv a d o r que el de v on M ises.
.15 . U n a b a r ia OA de sección constan te y pequeña tiene una longitud L y g ira con una velocidad an g u la r u n ifo rm e oí a lre d ed o r de un eje vertica l fijo que pasa por el ex trem o 0 de la b a rra y se m antiene p erp en d icu lar a l e je longitudinal de la m ism a. C onociendo la densidad p del m ate ria l de la b a rra , a s í com o su m ódulo de elasticidad £, se pide:
1.° H a lla r la ley de d is trib u ción de tensiones norm ales en la s secciones de la b a rra en función
de la d is tan c ia r a l e je de giro.2.° C a lc u la r el a la rg a m ie n to experim entado por la b arra .
1* L a fu e rz a c e n tr ifu g a s o b re e l e lem ento de b a rra dx es (F ig. II .15 -a)
dfe = dm w 2x = pCl dx (o2x
s iend o dm = p í 2 dx la m asa del d e m e n to co n s id e ra d o y f l e l á re a de la sección recta de
la b a rra .

138 R E S I S T EN CI A DE MA T E R I A L E S
(6)F ig u r a 11.15.
El esfuerzo normal en una sección a distancia r oel eje será
N — dfc = p w 2Q. J x dx = P^ ’ [L1 — r2)
y, por tanto, la ley de distribución de tensiones normales en las secciones de la barra es
N n ú 2 a = — = - — ( L 2 - r 2)
n 2
Se observa que la ley es parabólica tomando su valor máximo en la sección más próxima al eje de giro. Se representa gráficamente en la Figura II.15-6.
2.° Por la ley de Hooke, si u = u(x) es el desplazamiento de la sección situada a distancia x del eje de giro, tenemos:
du du a p t e 2L2 ,a = E t = £ — => — = — = -: ------------ j
dr dr E 2E L1 '
El alargamiento ped'do es el desplazamiento de la sección extrema. Por tanto, integrando
'L pu P - t2du = ---------
o 2 E1 - 4
L ) 3£
es decir:
AE =p co2L3
3 E~
Cortadura
3.1. C ortadura pura. T eor ía elem ental de la cortaduraCuando en una sección recta de un prisma mecánico la resultante de las fuerzas situadas a un lado de la misma está contenida en su plano y el momento resultante es nulo, diremos que esa sección del prisma trab a ja a c o r l a d u r a p u r a (Fig. 3.1-a). Pero si esto ocurre en una determ inada sección, en las secciones próximas existe también un momento Héctor M producido por esta resultante, es decir, no es posible que en un tramo finito de un prisma mecánico se dé en todo el un estado de cortadura pura. En el próximo cap ítu lo veremos que el esfuerzo cortante es la derivada del momento flector. Quiere esto decir que si existe un esfuerzo cortante no nulo, existe un momento flector variab le, y éste sólo se anu lará en una o varias secciones determ inadas del prisma.
No obstante, en el cálculo de elementos de unión, como tornillos, remaches o cordones de so ldadura, se suele adm itir la presencia únicamente del esíuerzo cortante y la nulidad del momento flector en todas las secciones. Esto es aceptable porque, en estos elementos, los efectos (las tensiones y deformaciones) debidos a! esfuerzo cortante son mucho mayores que los debidos al momento flector.
En los prismas mecánicos rectos que adm iten plano medio de sim etría y las cargas verticales están contenidas en este plano, adoptarem os para el esfuerzo cortante T el convenio de signos indicado en la F igura 3.1-ó. La tendencia a la rotura de la b arra para T positivo se indica asim ismo en la F igura 3.1-c.
En la teoría elemental se adm iten las siguientes hipótesis:
1. H ipó t e s i s d e B ernou l l i , según la cual las secciones rectas permanecen planas después de la deformación.
2. La tensión tangencial x que produce el esfuerzo cortante tiene la m ism a dirección que este. Es decir, para la referencia de la Figura 3.1 las componentes tangenciales de la m atriz de tensiones en los puntos de la sección recta son:
t x. = 0 ; xxf = r = constante (3.1-1)

1 4 0 RESISTENCIA DE MATERI ALES
T + dT
F ig u ra 3 .1 .(Al (el
es decir, el esfuerzo corlante T se reparte uniformemente en la sección recta. Si f í es el área de la misma:
TU , = j j (3.1-2)
y la tensión tangencial es constante en toda la sección y para le la a T.
A esta teoria elemental se le puede hacer una seria observación que la hace inadm isible, ya que contraviene las condiciones de equilibrio in terior del sólido elástico y, en particu lar, el teorema de reciprocidad de ¡as tensiones tangenciales.
En efecto, la tensión en un elemento superficial adyacente al contorno de la sección recta tiene la dirección del eje vertical y se puede descomponer en dirección norma] y tangente al contorno.
Por el teorema de reciprocidad de las tensiones tangenciales deberá existir una tensión tangencial igual sobre la cara ortogonal al elemento, situada sobre la superficie latera l del prism a (Fig. 3.2), lo que no es posible al no existir fuerzas exteriores ap licadas a su superficie.
F i g u r a 3.2.
C O R T A D U R A 141
3.2. T ensión cortan te puraLo dicho en el epíerafe anterior se refiere a l esfuerzo de cortadura pura en la sección recta de un prism a mecánico. Pero puede ser de interés conocer en un determ inado punto del sólido elástico si existen planos para los cuales el vector tensión esté contenido en el plano al que corresponde. Si existen, d irem os que en ese punto el sólido elástico está sometido según esos planos a t en s i ó n c o r l a n t e p u ra .
La condición para que esto ocurra se deduce fácilmente de los círculos de M ohr: será necesario que los puntos representativos de los planos sometidos a tensión cortante pura estén situados sobre el eje de o rdenadas, e s^ ec ir^ s i el área som breada de la F igura 3.3 corta al eje de ordenadas.
F ig u ra 3 3 .
De los circuios de M ohr se desprende, asim ism o, que no existen planos de tensión cortante pura cuando las tres tensiones principales tienen el mismo signo.
En el caso de que existan , la determ inación del plano correspondiente a cada punto M se puede hacer, como sabem os, m ediante los círculos de M ohr. En efecto, los circuios c , y c3 (concéntricos a los de M ohr C , y C 3 respectivamente) que pasan por un punto M perteneciente al eje de ordenadas, cortan a C 2 en sendos puntos H y K, según se indica en la F igura 3.3. Uniendo estos puntos con los extremos F y D del círculo C 2 se obtienen los ángulos d = HFD y y = KDF, que form a la norm al al plano, cuyo punto representativo es M, con las direcciones correspondientes a las tensiones principales a ¡ y <r3 respectivamente.
Por otra parte, tam bién sabem os que las norm ales de los planos sometidos a tensión cortante pura son coincidentes con las generatrices del cono asintótico de las cuádncas indicatrices.
Es de particu lar interés el caso de un estado de elasticidad plana en el que las tensiones

1 4 2 R E S I S T EN CI A DE M A T E R I A L E S
principales contenidas en el plano director son iguales en valor absoluto , pero de signo con rano, a , - <7j. Los puntos M , y M 2 del círculo de M ohr (Fig. 3.4-a) indican que las
ras e en orno ABCD (Fig. 3.4-6) p ara le las a las bisectrices de las direcciones principales, están som etidas a tensión cortante pura.
^ F ig u r a 3 .4 . (b )
Inversam ente, si las cuatro caras del entorno de un punto están som etidas a tensión cortante pura en un estado de elastic idad p lana, las tensiones principales son una de tracción y o tra de com presión, am bas del m ismo valor absoluto .
3.3 . D efo rm a c io n es producidas por cortadura puraAntes de estud iar la deform ación de la rebanada del prism a m ecánico, es decir, la deformación de la porción de prism a com prendida entre dos secciones indefinidam ente próxim as veamos como se produce la deform ación de un elemento som etido a tensión cortante pura ’ como puede ser el caso de un estado de elastic idad p lana en el que o , = - ffí, a ¡ que nos hemos referido en el ep ígrafe anterior.
F i g u r a 3. 5 .
C O R T A D U R A 143
En la F igura 3.5-0 se ha dibujado el paralelepípedo elemental ya orientado, es decir, que los planos que trabajan a tensión cortante pura son paralelos a los planos coordenados.
Debido a la acción de las tensiones tangenciales el paralelepípedo elem ental se deforma pero sin que las longitudes de sus lados varíen, o sea que el paralelepípedo inicialm ente rectangular cam bia de forma pasando a tener la de un paralelepípedo oblicuo. El rectángulo ABCD de la cara frontal se deforma en el romboide A'B'C'D' (Fig. 3.5-/;). El lado AB y la cara que la contiene experimentan el giro de un ángulo y/2 respecto de su plano x : inicial en sentido antihorario , así como el lado /ID y el plano de la cara que la contiene experimenta también el giro de un ángulo y/2 respecto de su plano y z in icial, pero este giro en sentido horario.
Los ángulos entre caras en los puntos A y C, inicialmente rectos, pasan a ser de k¡ 2 — y. El ángulo y que nos mide la distorsión o cambio de forma del elemento se denom ina d e f o r m a c i ó n a n gu la r y viene medida en radianes.
La relación entre r y y viene dada por la ley de Hooke
i = Gy (3.3-1)
siendo G, como sabemos, el módulo de elasticidad transversal del m ateria !, que está relacionado con el módulo de elasticidad £ y con el coeficiente de Poissón /i m ediante la relación (1.8-6).
Una observación conviene hacer respecto ul signo de las deformaciones angulares. Para ac la rar los conven ios'de signos, tanto para las componentes cartesianas de ¡as tensiones tangenciales como para las correspondientes deformaciones angulares, conviene d istingu ir entre caras positivas y caras negativas del paralelepípedo elem ental.
Diremos que una cara es positiva si su normal exterior tiene la dirección y sentido positivo de un eje coordenado y negativa, en caso contrario . Pues bien, sentada esta distinción expresaremos de otra forma el convenio para las tensiones tangenciales que va fue establecido en el epígrafe 1.5: la tensión tangencial que actúa sobre una cara positiva del elemento es positiva si tiene la dirección y sentido positivo de uno de los ejes coordenados, y es negativa si tiene el sentido negativo del eje. La tensión tangencial que actúa sobre una cara negativa del elemento es positiva si tiene la dirección y sentido negativo de uno de los ejes coordenados, y negativa si tiene el sentido positivo del
ejC- . . QEn cuanto al convenio de signos para las deformaciones angulares es necesario que se
relacione con el de las tensiones. Asi, diremos que la deformación an gu lar de un elemento es positiva cuando dism inuye el ángulo entre dos caras positivas, o entre dos caras negativas; la deformación angular es negativa cuando el ángulo entre dos caras positivas, o entre dos caras negativas, aumenta.
Pasemos ahora a estudiar la deformación de la rebanada en la que existe un esfuerzo cortante 1\ tal como la que existe en el pasador del mecanismo indicado en la F igura 3.6. Si suponemos anulado el momento de la fuerza £, o consideram os despreciables las tensiones que engendra frente a las tensiones tangenciales producidas por el esfuerzo cortante T = F, es evidente que la sección recta del pasador situada entre los dos trozos del mecanismo está sometida a cortadura pura.
Expcriinentalm cnte se observa que dos secciones CD y AB indefinidam ente próximas, pertenecientes a la zona del pasador situada entre las dos piezas que une, desliza una

1 44 r e s i s t e n c i a d e m a t e r i a l e s
F
B
4 -
¿ W r - r -f : i «.■ « t eT
( a )
8 c
A ó "
(■b)
F i» u r a 3 .6 .
respecto a ]a otra. Esta deformación viene dada por el á n g u l o d e d e s l i z a m i e n t o y, cuyo valor, viene dado por la ley de Hooke.
Adm itida la teoria elemental de la cortadura, la expresión de y será:
7 ~ G = c ñ (3,3‘ 2)
siendo í i el área de la sección recta del pasador.Se com prueba experim entalm ente dicha ley, ya que si construim os el d iag ram a tensión
cortante-ángulo de deslizam iento para un m aterial dúctil tal como el acero de construcción obtenemos una gráfica como la representada en la F igura 3.7.
O
C O R T A D U R A 1 4 5
M ientras la tensión tangencial se mantiene inferior a t „ t y ;■ son proporcionales y la deformación desaparece cuando cesa la fuerza que la ha causado. La zona representada por el segmento (54 es la zona d e d e f o r m a c i ó n e lá s t i c a . La fuerza F p a ra la cual la tensión tangencial es r , define la carga e lástica límite. Para valores de r superiores a ze se entra en el campo de las deform aciones permanentes.
Otra forma de obtener el valor del ángulo de deslizam iento y seria aplicando el teorema de Castigliano.
En efecto, el potencial interno de la porción de prism a entre las secciones AB y CD (Fig. 3.6-c) es, particu larizando la expresión (1.15-5) para a nx = a„y = o„. = 0; r ly = r; 4.- = V- = 0 '
i(E = dx1
2Gd y d z = dx
* ‘j ' l ~p2
n 2G i l2 d y íL ~ 2C ñ dX(3.3-3)
El corrim iento 5 de la sección CD respecto de la AB será:
5 =d(cW ) T
d T ~ GQdx
S_ T_GQ.
3.4. C álculo de uniones rem ach adas y a torn illad asExisten algunas estructuras o piezas de determ inadas m áqu inas que están com puestas de partes que hay que unir de forma adecuada para que cum plan la función para la que han sido diseñadas. Si se trata de m ateriales metálicos, lós medios de unión comúnmente em pleados son remaches, torn illos y soldadura. Las uniones con bulones tienen poca aplicación, y las uniones por medios adhesivos se encuentran aún en fase experim ental.
La distribución de tensiones en estos medios de unión es bastante com pleja, dependiendo en gran parte de las deformaciones propias de los elementos que la constituyen. Esto hace que el cálcu lo riguroso de las uniones sea siem pre difícil y m uchas veces imposible de realizar. Por esto, en el terreno práctico es necesario contrastar los resultados obtenidos aplicando los m étodos simplificados de cálcu lo , con el com portam iento real de los m ateriales de las uniones. Por ello, el cálculo de uniones rem achadas o a torn illadas que estudiam os en este ep ígrafe y las uniones so ldadas que estudiarem os en el siguiente, se basan en la teoria e lem ental de la cortadura que se ha expuesto anteriorm ente, cuyos resultados están sancionados por la experiencia. No considerarem os las uniones m ediante tornillos de a lta resistencia, en cuyo cálculo habría que tener en cuenta el efecto del par de apriete (muy elevado) y la consiguiente compresión de las chapas, que hace que los esfuerzos puedan transm itirse solam ente por rozam iento.
Las u n io n e s r e m a c h a d a s se llevan a cabo m ediante piezas denom inadas r o b l o n e s o r e m a c h e s . Un remache es un elem ento de unión que está form ado por una esp iga c ilindrica llam ada cañ a , uno de cuyos extrem os tiene una cabeza esférica, bom beada o p lana, llam ada c a b e z a d e a s i e n t o . El remache se introduce, calentándolo previam ente entre 1050 °C (rojo naranja) y 950 °C (rojo cereza claro), en un agu jero efectuado en las p iezas a unir y se golpea bien con m artillo neumático o m áquina roblonadora de presión uniforme en el otro extremo, para form ar una segunda cabeza ( c a b e z a d e c i e r r e ) que asegure la unión.
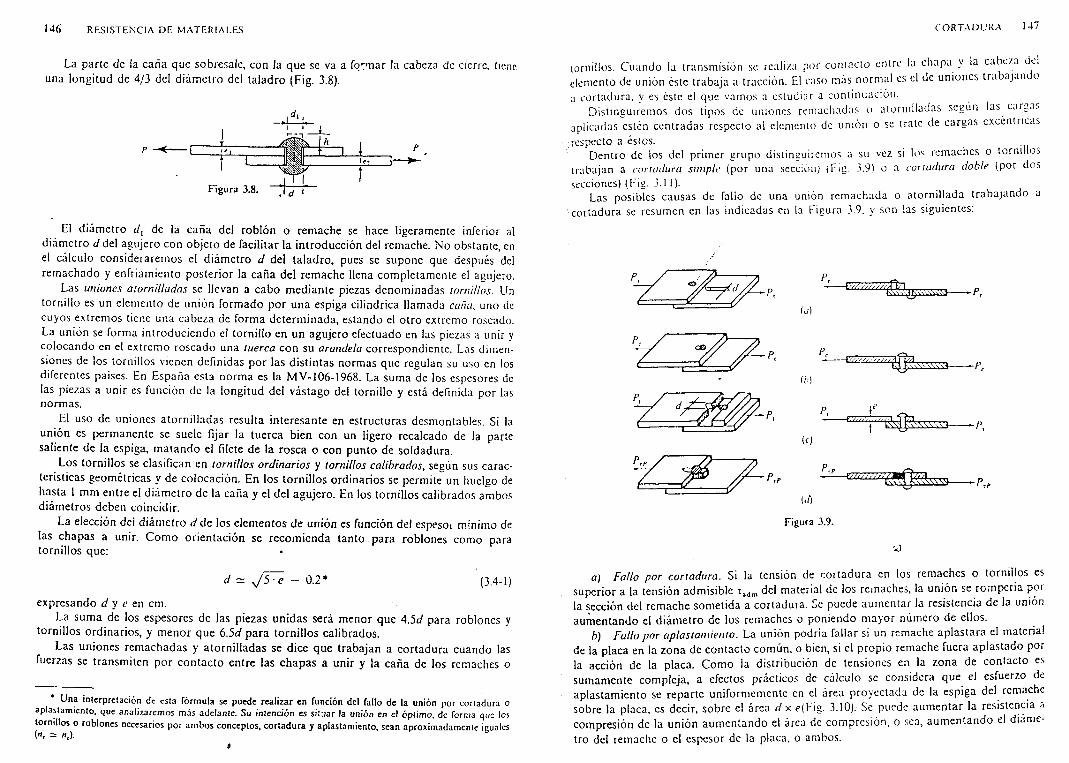
1 4 6 R E S I S TENCI A DE M A T E R I A L E S
La parte de ¡a caña que sobresale, con la que se va a forrn ar la cabeza de cierre, tiene una longitud de 4/3 del d iám etro del ta ladro (F ig. 3.8).
El d iám etro d ¡ de la caña del roblón o rem ache se hace ligeram ente inferior al d iám etro d del agujero con objeto de fac ilitar la introducción del remache. No obstante, en el cálculo considerarem os el d iám etro d del ta lad ro , pues se supone que después del rem achado y enfriam iento posterior la caña del rem ache llena com pletam ente el agujero.
Las u n i o n e s a t o rn i l l a d a s se llevan a cabo m ediante piezas denom inadas t o rn i l lo s . Un tornillo es un elemento de unión formado por una espiga cilindrica llam ada c a ñ a , uno de cuyos extrem os tiene una cabeza de forma determ inada, estando el otro extremo roscado. La unión se forma introduciendo el torn illo en un agujero efectuado en las piezas a unir y colocando en el extrem o roscado una t u e r c a con su a ra n d e la correspondiente. Las dimensiones de los tornillos vienen definidas por las d istin tas normas que regulan su uso en los diferentes paises. En España esta norm a es la M V-106-1968. La sum a de los espesores de las piezas a unir es función de la longitud del vástago del tornillo y está definida por las normas.
El uso de uniones a to rn illad as resulta in teresante en estructuras desmontables. Si la unión es perm anente se suele fijar la tuerca bien con un ligero recalcado de la parte saliente de la espiga, m atando el filete de la rosca o con punto de so ldadura.
Los torn illos se clasifican en t o r n i l l o s o r d i n a r i o s y t o rn i l l o s c a l i b r a d o s , según sus características geom étricas y de co locación. En los torn illos ordinarios se perm ite un huelgo de hasta 1 mm entre el d iám etro de la caña y el del agu jero . En los torn illos calibrados ambos diám etros deben coincidir.
La elección dei d iám etro d de los elem entos de unión es función del espesoi mínimo de las chapas a unir. Com o orientación se recom ienda tanto para roblones como para tornillos que:
d ~ y w - 0 .2* (3.4-1)
expresando d y e en cm.La sum a de los espesores de las p iezas un idas será menor que 4 ,5 d para roblones y
tom illos ord inarios, y menor que 6.5d p a ra torn illos calibrados.Las uniones rem achadas y a to rn illad as se dice que trabajan a cortadura cuando las
fuerzas se transm iten por contacto entre las chapas a un ir y la caña de los remaches o
U na in terp re tac ió n de e s ta fó rm u la se puede re a liz a r en función del fa llo de la un ión por co rtad ura o ap lastam ien to , que an a liz a rem o s m ás ad e lan te . Su in tenc ió n es s itu a r la un ión en el óp tim o , de form a que los to rn illo s o rob lones necesarios po r am b o s conceptos, c o r tad u ra y ap lastam ien to , sean ap ro x im adam en te iguales (". - n,).
C O R T A D U R A 1 47
lom illos. Cuando la transm isión se realiza por contacto entre la chapa > la ca eza e elemento de unión éste trabaja a tracción. El caso más norm al es el de uniones tra ajan o a cortadura, y es éste el que vamos a estudiar a continuación.
D istinguiremos dos tipos de uniones rem achadas o atorn illadas según las cargas aplicadas estén centradas respecto a l elemento de unión o se trate de cargas excéntricas respecto a éstos.
Dentro de los del primer grupo distinguiremos a su vez si los remaches o tornillos trabajan a c o r t a d u r a s im p l e (por una sección) (I ig. 3.9) o a c o r t a d u r a d o b l e (por dos secciones) (Fig. 3 .11).
Las posibles causas de fallo de una unión rem achada o atorn illada trabajando a cortadura se resumen en las indicadas en la F igura 3.9. y son las siguientes:
(al
P,
P,r
P< .T?' ---------------------------------- -P '
(b)
k)
-E Z Z Z Z Z
fifiF ig u r a 3 .9 .
•J
a ) Fal lo p o r c o r t a d u r a . Si la tensión de cortadura en los remaches o tornillos es superior a la tensión adm isib le r adm del m aterial de los remaches, la unión se rom perla por la sección del rem ache som etida a cortadura. Se puede aum entar la resistencia de la unión aum entando el d iám etro de los remaches o poniendo m ayor número de ellos.
b) F a l lo p o r a p la s t a m i e n t o . La unión podría fallar si un remache ap la s ta ra el m aterial de la p laca en la zona de contacto común, o bien, si el propio remache fuera ap lastado por la acción de la p laca. Como la distribución de tensiones en la zona de contacto es sumamente com pleja, a efectos prácticos de cálcu lo se considera que el esfuerzo de ap lastam iento se reparte uniformemente en el área p royectada de la esp iga del remache sobre la p laca, es decir, sobre el área d x e(F ig. 3.10). Se puede aum entar la resistencia a compresión de la unión aum entando el área de com presión, o sea, aum entando el díame-

1 4 8 RESISTENCIA DE M A T E R I A L E S
c ) Fa l lo p o r r o t u r a d e la p l a c a a t r a c c i ó n . ,En una pieza sometida a iracción, de una unión m ediante remaches, se puede producir el fallo por rotura de la sección deb ilitada por los agujeros para los remaches. Al cargar la p laca, antes que se produzca la rotura, se producen concentraciones de tensiones en los bordes de los agujeros de los remaches, como se ha visto en el cap ítu lo anterior. No obstante, en el caso de m ateriales dúctiles, que son únicamente los em pleados en uniones rem achadas, la distribución de tensiones en la sección deb ilitada tenderá a ser uniforme en el punto de fluencia cuando aum enta la fuerza de tracción sobre la p laca. A efectos prácticos del cálculo se admite la hipótesis de ser uniforme la distribución de tensiones en la sección neta de la placa, esto es, descontando al área de la sección recta de la p laca la correspondiente a los agujeros de los remaches o tornillos. Se puede e levar la resistencia de la unión aum entando el espesor o el ancho de la p laca, o ambos.
d ) Fal lo p o r c o r l a d u r a d e la p l a c a . Se produce este fallo por desgarro de la placa en la parte situada detrás del remache. Este fallo se evita aum entando la superficie de la placa sometida a cortadura, es decir, dando suficiente longitud a la p laca detrás del remache, como puede ser el de dos a tres veces el d iám etro del remache.
Las roturas por fallo de la chapa a tracción o cortante no se suelen considerar en el cálculo de la unión, ya que se evitan a l tener en cuenta las recomendaciones de las normas en cuanto a d istancias m ínim as entre agujeros, y entre éstos y los bordes de las chapas. No obstante, la com probación de una determ inada unión a estos dos posibles fallos no reviste ninguna dificultad. Se u tilizará la tensión adm isib le a tracción en el prim er caso y la tensión adm isib le a co rtadura en el segundo, tensiones en. ambos casos referentes al m aterial de la pieza que puede presentar esos fa lljs .
Nos centrarem os, pues, en el cálculo de las uniones rem achadas o atorn illadas aten diendo a su posible fallo por cortadura de los remaches o fallo por ap lastam iento.
Supongam os que deseam os unir dos chapas de espesores e ¡ y e 2 m ediante una fila de remaches o tornillos (F ig. 3.10-a) y propongám onos ca lcu lar el número de ellos necesarios para que la unión resista la fuerza P. Adm itirem os que el esfuerzo P se distribuye uniformemente entre los n elementos de unión.
El cálculo a cortadura se hace considerando un reparto uniforme de tensiones cortan tes sobre la sección recta. Si radm es la tensión adm isib le a cortadura, el número mínimo n, de remaches o tornillos que se precisarían para no sobrepasarla verificaría la condición de equilibrio
C O RTAD URA 1 4 9
de donde:
4 P= (3.4-3)
siendo d el diám etro del agujero para remaches y tornillos calibrados, o d iám etro de la espiga para tornillos ordinarios.
En el cálculo a aplastam iento de la chapa contra la espiga del remache o tornillo se adm ite que la presión se reparte uniformemente sobre la superficie de contacto entre chapa y espiga, tomándose ésta como la suporficié 'que resulta de m ultip licar el d iám etro del agujero por el espesor de la chapa o chapas que transm iten el esfuerzo /' (F ig. 3.10-6). Si a c l im es la tensión admisible a compresión en la chapa, el mínimo número nc de remaches o tornillos que se precisarán verificará
P = ncd e a c , im (3.4-4)
de donde:
n c = - — ------ (3.4-5)d - e - o c, ám
siendo e el espesor menor tje las chapas a unir.De acuerdo con la norma española M V -I03-1968, suponiendo P como carga ponde
rada, podemos considerar como valores adm isib les para cortadura y com presión los s iguientes:
= f i e , (3-4-6)
siendo:
P = Coeficiente que toma el valor 0.80 para roblones y tornillos calibrados, y 0.65 para tornillos ordinarios.
a r = Resistencia de cálculo del acero del elemento de unión. N orm alm ente igual a 2400 kp/cm2 para roblones, y a 2400 ó 3000 kp/cm2 para tornillos según la clase de acero, 4D ó 5D
siendo:
a = Coeficiente que toma el valor 2 para uniones con tornillos o rd inarios y 2.5 para uniones con remaches o tornillos calibrados.
a u = Resistencia de cálculo del acero de la chapa. N orm alm ente, 2400 kp/cm2 para aceros A-37; 2600 kp/cm2 para aceros, A-42; y 3600 kp/cm2 para aceros A-52.
De los valores obtenidos para el número de remaches o tornillos dados por (3.4-3) y (3.4-5), se habrá de adoptar el mayor. Resulta fácil ver la condición que se ha de verificar

1 5 0 R ES ISTEN C IA DE M A T ER IA LES
entre el valor del espesor menor de las chapas y el diám etro del elemento de unión, para que el cálculo se haga de una u otra forma.
En efecto, la condición para que n. = n c será:
4 Pd 2 n x,óm d e a e ,
de donde:
siendo:
(3.4-8)
e = * J 2 ± 2 - d = * ^ d = y d (3.4-9)4 o ciara 4o«t„
y = ^ 4 (3.4-10)4 a <ru
Los valores de y para los distintos elementos de unión (remaches, tornillos calibrados o torn illos ord inarios) y las distin tas clases de acero de las chapas a unir (A-37, A-42 o A-52) pueden verse en la siguiente tabla.
Tabla 3.1. Valores de y
E lem e n to de un ión
A ce ro de la s c h a p a s
T ip o A c e roA -37
a , = 2 4 0 0
A -42
a . = 2 6 0 0
A -52
<r„ = 3600
RA -3 7 b
(<rr = 2 4 0 0 )0 .2 4 6 0 .2 2 7 0 .1 6 4
T .O .4 D
( a , = 2 4 0 0 )0 .2 5 5 0 .2 3 5
N o se re c o m ie n d a su u so
T .C .5D
( o , = 30 0 0 )0 .3 1 4 , 0 .2 9 0 0 .2 0 9
L as tensiones están ex p resad as en kp/cmL
Por tanto , las uniones m ediante una fila de rem aches o tornillos, cuando éstos trabajan a co rtadura simple, se ca lcu larán a cortadura cuando el menor espesor de las chapas a unir verifique c > yd, y a com presión o ap lastam iento de la chapa contra la espiga cuando e < yd .
Una unión m ediante costura simple tiene el inconveniente de que al efecto del esfuerzo cortante en la sección recta se añade un momento debido a no tener las fuerzas iguales y opuestas ap licadas a las chapas la misma línea de acción. La existencia de este momento tenderá a provocar una deform ación de la costura del tipo indicado en las F iguras 3 .11-« y 3.1 l-ó , según se trate de unión con una o dos filas de remaches.
C O R T A D U R A 151
( a )
F ig u r a 3 .1 1.
Este efecto se puede ev itar co locando las p lacas en alguna de las disposiciones indica das en la F igura 3.12.
En este caso los elem entos de unión trabajan a d o b l e c o r ta d u ra . Para el cálcul cortadura del número menor n t de tornillos o remaches se tendría.
n d 2 2 PP - n t -2 4 r adm a, ^
mientras que para el cálcu lo por ap lastam ien to .
P = n ce d a czim n c = —
Igualando las expresiones de n t y n„ se tiene:
2 P J P
¿ d m
K d2Tllím e d a c ad
de donde:
e = —2 a r
(3
(34 L
( 3 .4 - 1 ;
n T,,lm d = (3.4 I-'
es decir, las uniones m ediante torn illos o remaches, cuando éstos trabajan a doble co i. dura, se ca lcu laran a cortante cuando el m enor espesor de las piezas a unir v cn íiu e > 2yd, y a ap lastam ien to de la chapa contra la espiga del elemento de unión. e < 2 y d (valores de y dados en la T ab la 3.1).
/-nnciHrmHn /Irtr fiUr /í/» rnm'irllí''; pl nUíTlCrO dC

152 RESISTENCIA DE MA T E R I A L E S
aum enta, el problema es hiperestático. El reparto de tensiones de cortadura en los rem aches pertenecientes a distintas filas ya no es la misma, sino que los pertenecientes a las lilas extremas aparecen más cargados que los centrales. Puede ocurrir que los remaches de las filas extremas lleguen a la fluencia. En estos casos, la plasticidad del m aterial actúa de regulador alejando el peligro de rotura, ya que si el d iagram a tensión-deformación de los remaches es del tipo indicado en la F igura 3.13-6, cuando las dos filas extrem as llegan a la tensión de fluencia la tensión tangencial se mantiene constante en los correspondientes remaches. M ientras, la tensión tangencial en la fila central (Fig. 3.13-a) se mantiene inferior a la de las filas extrem as, absorbiendo posibles aum entos de la carga P.
Como en una unión por remaches o tornillos, de las que hasta aqui hemos considerado, los agujeros reducen el área de la sección recta de la placa y es evidente que la resistencia de la unión es siempre menor que la resistencia de la placa sin agujerear, definiremos como e f i c i e n c i a d e la un ión al cociente
carga adm isib le de la unión carga adm isib le en la p laca sin remaches
Todo lo expuesto anteriorm ente se refiere al cálculo de uniones rem achadas en las que la carga está centrada respecto a la posición de los remaches. Se presentan con frecuencia casos de uniones rem achadas en las que la carga es excéntrica, como ocurre en la unión indicada en la F igura 3.14-n, y cuyo cálculo simplificado se basa en la teoría elem ental de la cortadura.
La solicitación exterior (Fig. 3.14-a) es equivalente a una carga P y un momento M = Pe, aplicados ambos vectores en el centro de gravedad G de los taladros (Fig. 3.14-6). La carga P se reparte entre los remaches de forma uniforme, es decir, sobre cada rem ache actuará en sentido vertical un esfuerzo cortante Pjn , si n es el número de ellos (F ig. 3.14-c).
Admitiremos que el momento es absorbido por fuerzas cortantes Fl de dirección perpendicular a la recta que une el centro del ta ladro A¡ con el centro de gravedad G y de módulo directam ente proporcional a la d istancia r¡ entre am bos puntos, siendo la constante de proporcionalidad la m ism a para todos los remaches, es decir, F¡ = kr¡.
C O R T A D U R A 1 5 3
F = kr.
(b) (d)
(a) F ig u r a 3 .1 4 .
Por tanto, se tendrá que verificar
P e = Í F ¡ri = Í k r ? = k Í r f (3.4-15)
D espejando el valor de k de esta expresión y sustituyendo en F¡ = kr¡, obtenemos el esfuerzo cortante F¡ sobre cada remache debido al momento Pe.
F¡ = kr, =Pe
I r !
(3.4-16)
Respecto de un sistema de referencia G xy este esfuerzo cortante tiene las componentes:
■Pe P eFix = - F ¡ sen a¡ = r¡ sen a,- = ----------------- y ¡
I r f I (Tf + >7)i i
P e P eFif = F¡ eos <x¡ = r¡ eos a, = ------------------.x¡
I r f I (x f + y f )1 i
(3.4-17)
(3.4-18)

1 5 4 RESI STENCI A DE MA T E R I A L E S
P ara ca lcu lar el esfuerzo cortante total sobre cada rem ache habrá que componer vectorialm ente P ¡n en dirección de la carga P y F¡, cuyo m ódulo viene dado por (3.4-16), en dirección perpendicular a la recta que une el centro del ta lad ro con el centro de gravedad G (Fig. 3.15).
3.5 . C álcu lo de uniones so ld adasEn los últimos años la so ldadura ha tenido un gran desarro llo en su ap licación a las uniones en construcciones m etálicas. Es un procedim iento m ediante el cual los metales se unen por fusión. Se reblandece y se funde el m etal en ios bordes a so ldar m ediante el calor producido por un arco eléctrico o un soplete de oxiacetileno.
En la so ldadura eléctrica se provoca el arco eléctrico entre las piezas que se van a so ldar y un electrodo que constituye el m e t a l d e a p o r t a c i ó n que queda depositado entre las p iezas a unir formando lo que se llam a el c o r d ó n d e s o l d a d u r a .
Los tipos de so ldadura más frecuentes son: s o l d a d u r a a t o p e (Fig. 3.16-a) y s o ld a d u ra en á n g u l o (Fig. 3.16-6). Del prim er tipo so lam ente indicarem os que se trata de una unión de penetración com pleta y forma una transición casi perfecta entre los elementos soldados, de forma que evita el efecto de en talla en la unión. Las especificaciones de las normas al uso establecen, en el caso de so ldaduras a tope som etidas a cargas estáticas en estructuras m etálicas de edificios, la misma tensión de co rtadura adm isib le para la so ldadura y para el m etal base. En general este tipo de so ldadura no requiere cálcu lo de com probación y su capacidad de resistencia m ecánica es igual a la de la chapa de menor espesor de las dos que forman parte de la unión.
d-r(a)
Figura 3.16.(*)
C entrarem os nuestro interés en el estudio de uniones m ediante so ldaduras del segundo tipo, ya que el cálculo de éstas se basa en la teoria de la co rtadura .
En las s o l d a d u r a s e n á n g u l o se d istinguen c o n d o n e s f r o n t a l e s y c o r d o n e s l a t e r a l e s , según que su situación respecto a la dirección del esfuerzo sea perpend icu lar o para le la respectivamente.
La m ínim a anchura del cordón recibe el nom bre de g a r g a n t a y se designa por a. L lam arem os, asim ism o, a l tu ra h del cordón a la d istanc ia que hay en la sección recta de la so ldadura entre los centros de los dos bordes (F ig. 3.17).
Considerem os dos chapas unidas entre sí m ediante n cordones de so ldadura de la m ism a longitud, paralelos al esfuerzo long itud inal ap licado (n = 2 en el esquem a indicado en la Fig. 3.17).
Supondrem os que el plano que proyecta la línea de acción de la fuerza F d e tracción ap licad a sobre el p lano de la superficie com ún de am bas piezas contiene el centro de gravedad de los cordones.
En el cálculo de las so ldaduras en ángulo se adm iten las hipótesis de que los cordones
C O R T A D U R A 1 55
Y
trabajan a cortadura y que la tensión cortante r se distribuye uniformemente so re sección longitudinal de m inim a anchura del cordón (sección de gargan ta), independa de la dirección de la fuerza ap licada. El esfuerzo cortante por unidad de longitud ser,,
F = r ¿ a , / , - (3 .5 -11
La tensión r será variab le a lo largo del cordón. Veamos cual es la ley de variación > esta tensión cortante t = r(.x), que supondremos es una función continua y diferencia! respecto a la variable x. abscisa en el sentido longitudinal del cordon.
F i g u r a 3 . 18.

1 5 6 RESI STENCI A DE MATERI ALES
Para ello realicem os un corte transversal m n de las dos piezas mudas (Fig. 3.18). La condición de equilibrio , si A , y N, son los esfuerzos normales sobre las secciones rectas de las dos piezas superior e inferior respectivamente, es
.-V, + ;V, — F = 0 (3.5-2)
Considerando ahora la porción de pieza inferior comprendida entre dos plarjos transversales indefinidamente próximos, el equilibrio nos proporciona la ecuación
N2 4- dN2 - N2 - T d x = 0 (3.5-3) '
o lo que es lo mismo
AV,- n a i = 0 (3.5-4)
Las dos ecuaciones (3.5-2) y (3.5-4) son las únicas ecuaciones de equilibrio. Como es tres el número de incógnitas: yVu N2 y r, esto nos hace ver el carácter hiperestático del problem a. Para resolverlo tenemos que hacer intervenir las deformaciones.
Por tanto, si A y B son dos puntos del cordón pertenecientes a las lineas medias de las superficies comunes del cordón y piezas superior e inferior respectivamente, y ambos están contenidos en el mismo plano transversal antes de ap licar la fuerza longitudinal F, después de la deformación habrán pasado a ocupar las posiciones respectivas A' y B\ tales que A A' = i/,; B S = u ,; B 'A ’ ,BA = y (Fig. 3.19). Supondremos que u ¡ , y, sonfunciones continuas y diferenciables de .v.
u, j h
A‘
7*F igura 3 .19 .
La condición de com patib ilidad de las deformaciones, según se desprende de la F igura 3.19 será:
« 2 — — y h = 0
Ahora bien, adm itiendo la verificación de la ley de Hooke:
(3.5-5)
C O R T A D U R A 1 5 7
-Icndo E el m ódulo de elastic idad de las piezas a unir, que suponemos de! mismo m aterial. " Con estas relaciones, las ecuaciones (3.5-2) y (3.5-4) se podrán poner de la sigu.ente
forma:
0 (3.5-81tlx dx
± ( E C l , p ) - n a G y = 0 (3-5-9)dx V ‘ dx )
Además, de la ecuación (3.5-5) se desprende
¿ l l . = Í í i _ /, (3.5-10)dx dx dx
suponiendo la a ltu ra del cordón constante.E lim inando i e n t r e las ecuaciones (3.5-8) y (3.5-10) se tiene
EClJi ~ - + F d u 2 _ dxdx E(Si i + Í22)
ón que sustitu ida en (3.5-9) nos da
(3.5-11)
expresión
. , E d & 2h íjü- +________\ _ „ flCy = 0 (3.5-12)
dx V Í2i + F22 )
Si como suele ocurrir, son constantes las áreas f l , y de las secciones rectas de laspiezas a unir así como la gargan ta del cordón y su m odulo de elasticidad transversal, se
tiene<3
d 2y " oG ( + 0 2) = k 2 (3.5-13)d x 1 E S l f a h
siendo k una constante positiva. _Por tanto , llegam os a obtener una ecuación diferencial de segundo orden de coeficien
tes constantes
€ l - k2y = 0 (3.5-14)d x 2 1
cuya in tegración nos perm ite obtener la función y = y(x) a lo largo del cordon y, por consiguiente, la función t = t(-x) = Gy.

1 5 8 R E S I S TENCI A DE MATERI ALES
La solución integral de esta ecuación diferencial, al ser reales las raíces de su ecuación característica , se podrá expresar mediante funciones h iperbólicas de la forma siguiente:
V = C| senh(/r.\') + C , cosh(A:.v) (3.5-15)
siendo C¡ y C 2 constantes de integración que tendremos que determ inar im poniendo lascondiciones de contorno:
(AL), = o = 0 : (W .) ,- i = 0 (3.5-16)
De lo anteriorm ente expuesto se deduce la d ificultad de un estudio riguroso para el-cá lcu lo de so ldaduras trabajando a esfuerzo cortante. Téngase presente que solam ente hemos estud iado un caso particu lar de la innum erable casu ística que se puede presentar en la práctica. Quede, pues, lo expuesto como ejem plo del tratam iento que deberíam os hacer en cualqu ier caso particu lar de uniones so ldadas, en las condiciones de trabajo señaladas, para conocer de una forma más aproxim ada la distribución de las tensiones cortantes, respecto a las hipótesis simpüficativas que se suelen hacer para el cálcu lo de las so ldaduras en la p ráctica*.
Considerem os, finalmente, el caso de que la fuerza a que va a estar som etida una de las piezas está situada en el plano de las so ldaduras pero su linea de acción no pasa por el centro de gravedad de los cordones.
P ara el cálculo de los cordones en este caso de excentricidad de la carga se puede seguir un método aproxim ado sim ilar al indicado para el caso de unión m ediante rem aches (Fig. 3.20-a).
F ig u r a 3 .2 0 .
Reduciendo la acción exterior al centro de gravedad G de los cordones, el sistem a equivalente está constituido por una carga P equipolente a la d ada y a un momento M — P e ,
En el A péndice I se recogen las fó rm ulas de cá lcu lo q u e figuran en la N o rm a B ásica M V -103 . p a ra los caso s de un iones so ld ad as so lic itad as a esfuerzo co rlan te .
C O R T A D U RA 1 5 9
La fuerza P da lugar a una tensión cortante r , . que adm itim os se distribuye uniformemente sobre los planos de gargan ta de los cordones
r = ( 3 .5 - 1 7 )I «,/,
siendo a¡ y /, la longitud de gargan ta y longitud propiam ente dicha de cada cordón, r , tiene la dirección de P. En el caso que la fuerza P no sea vertical sino inclinada y tenga unas componentes P x. P r respecto de una referencia CJ.vr. las componentes cartesianas de la tensión r , serán
(3.5-1 S i
y üjl¡ ¿ a¡l¡
En cuanto al momento Pe. queda absorbido por un sistema de fuerzas engendradas p tensiones r ,. tales que en cada punto del cordón t , es perpendicular al segmento que un dicho punto cotí el centro de gravedad G y su m ódulo es directamente proporcional a I longitud de este segmento.
Como r 2 = kr, se tiene:
M = k r ' c K l = k lQ
estando extendida la integral a todos los cordones. De aqu i:
* = “ (3-¡C.
siendo Ia el momento de inercia de los planos de garganta de todos los cordera:1 supuestos dichos planos coincidentes con el de carga, respecto del centro de gravedad <
Por tanto, la expresión de la tensión r 2 en un punto situado a distancia r de G es:
M P e , , 5_?cr 2 = - , = — r ,3.5
l G l C
T anto r , como r 2 son m agnitudes vectoriales. Tom ando un sistema de referencia Cx (Fig. 3.21) si los vectores r , y f 2 tienen componentes f , ( r u , r , r ); x2(r J;c, i 2)), la tcnS10 cortante en cada punto del plano de gargan ta del cordón será

160 RESI STENCI A DE MATE RI ALE S
El ancho de la base de los cordones se determ ina a partir del máximo valor de t dado por esta expresión.
E J E R C IC IO S
I I I .1. P a r a t ro q u e la r un a g u je ro en una p la c a de a c e ro de e sp e so r e = 8 n im se u t il iz a un punzón de d iá m e tro d = 5 cm (F ig . 111.1). C o n o c ie n d o la ten s ió n de ro tu ra a c o r ta d u r a de l m a te r ia l d e la c h ap a a R = 3 0 0 M P a , se p ide :
1.° C a lc u la r la fu e rza F q ue tien e q ue a p l ic a r s e a l punzón p a r a r e a l iz a r el c o r te d e la p la c a .2.° D e te r m in a r la ten sión de c o m p re s ió n a d m is ib le m ín im a q ue d eb e ten e r e l m a te r ia l del
p un zó n u t il iz a d o .
I
e i —!—f 7773 - \y/,i
F ig u ra I I I . l .
I. E l p u n z ó n p r o d u c ir á en la c h a p a u n e s fu e r z o d e c o r t a d u r a p u r a s o b re la su p e rf ic ie l a t e r a l d e l a g u je r o d e á r e a n d e . C o m o en e l p r o c e s o d e t r o q u e la d o h a y q u e ro m p e r el m a t e r ia l p o r e s ta su p e r f ic ie , la fu e rz a m in im a q u e h a y q u e a p l i c a r a l p u n z ó n se rá :
x 0 .0 0 8 x 3 0 0 x I 0 6 N = 3 7 6 9 9 2 N
o b ie n en to n e la d a s F = 38 .5 to n
C O R T A D U R A 1 6 1
2.° E l p u n z ó n d e b e r á te n e r u n a te n s ió n d e c o m p re s ió n a d m is ib le m ín im a ta l q u e a l a p l ic a r el e s fu e rz o d e c o m p re s ió n F la te n s ió n e n g e n d r a d a no su p e re e l v a lo r d e e s ta
F 4 x 376 9 9 2 = ^ ^ )q6
f n d 1/4 n0 .05
es d e c ir
a c , d m -> 192 M P a
II 1 .2 . L a s d o s p ie z a s A y B in d ic a d a s en la F ig u r a 111.2 s o m e t id a s a tra c c ió n e s tá n u n id a s m e d ia n tela p ie z a en c u ñ a C. S i la ten s ió n de c o r ta d u r a a d m is ib le tan to en la s p ie z a s co m o en la c u ñ a esd e 120 M P a , in d ic a r q u é p a r te de la u n ión e s tá m á s c e r c a n a a l f a l lo p o r c o r t a d u r a .
C itla j en cin
F ig u r a I1 I.2 .
V e a m o s en c a d a u n a d e la s p a r te s c o n s id e r a d a s q u é p la n o s e s tá n s o m e t id o s a c o r t a d u r a
p u r a .
a ) P i e z a A
L a c o r t a d u r a se p r o d u c e e n lo s p la n o s a b y c d . S e t r a t a , p o r t a n to , d e u n a d o b le
c o r t a d u r a . C o m o e l á r e a e s
f i - 2 x 0 .0 3 x 0 .0 6 = 3 .6 x 10~ 3 m 2
e l e s fu e r z o c o r t a n t e q u e p u e d e s o p o r t a r la p ie z a A e s
F = xCí = 120 x 106 x 3 .6 x 10~ 3 N = 4 3 2 k N

1 6 2 R ES IST EN C IA D E M A TER IA LES
b) Pieza D
La cortadura se produce en los planos e f y g h . El área es
O = 4 x 0.03 X 0.025 = 3 x 10‘ 3 m:
por lo que el esfuerzo cortante que puede soportar la pieza B es
F = rí2 = 120 x 106 x 3 x 1 0 '3 N = 360 kN.
c) Pieza C
La cortadura se produce en los planos m n y p q . Es una doble cortadura sobre una superficie de área total
Q = 2 x 0.06 x 0.02 = 2.4 x 10"3 m2
El esfuerzo cortante máximo a que puede estar sometida la pieza C es
F = t í) = 120 x 106 x 2.4 x 10’ 3 N = 288 kN
De los resultados obtenidos se deduce que la pieza más cercana al fallo por cortadura es la pieza C.
II13. El eje de un motor acciona el eje de una máquina mediante la brida de unión indicada en la Figura II 1.3. La unión se realiza mediante 6 tornillos de diámetro d = 24 mm cuyos ejespertenecen a un cilindro de diámetro D — 30 cm. Conociendo la tensión de cortaduraadmisible en los tornillos r„dm = 60 MPa, determinar la potencia que puede transmitir el eje girando a n — 250 rpm.
P a r a t r a n s m it i r e l e je u n a p o te n c ia N a u n a v e lo c id a d a n g u la i cu rad / seg lo h a c e a p l ic a n d o u n p a r m o to r M , t a l q u e
Af = M eo
El p a r m o to r s e t r a n s m it e a l e j e d e la m á q u in a a t r a v é s d e la s s e is s e c c io n e s r e c ta s d e lo s t o r n i l lo s p e r t e n e c ie n te s a l p la n o c o m ú n a la s d o s p a r te s d e la b r id a , q u e t r a b a ja n a c o r t a d u r a p u r a .
L a p o te n c ia m á x im a d e l m o to r q u e p u e d e t r a n s m it ir su e je c o r r e s p o n d e a l p a r m o to r q u e p r o d u c e e n la s s e c c io n e s d e lo s t o r n i l lo s u n a te n s ió n d e c o r t a d u r a ig u a l a la a d m is ib le . P o r t a n to e l p a r m o to r s e r ía
Mn d 1
6 ^ r T-D n x 0.0242 , 0.30
= 6 ------- 60 x 106 —2 4 2
24 429 mN
C O R T A D U R A 163
C o m o
la p o te n c ia /V se ra
_ i™ = = — rad / secW 60 ■ 6 0 3
2 5 n24 4 2 9 x — W 639 .5 k W
D o s p la c a s m e tá l ic a s de e sp e so r e = I c m y a n c h u ra b - 10 cm c a d a u n a se unen m e d ia n te c u a t ro r e m a c h e s de d iá m e tro d = 20 m m c o m o se in d ic a en la F ig u ra 111.4. S . la s p la c a s e s tán
s o m e t id a s a una tra c c ió n c e n t r a d a de v a lo r F = 10 0 0 0 kp c a lc u la r .
1.” L a ten s ió n de c o r ta d u r a en lo s r e m a c h e s .2.° L a ten s ió n de c o m p re s ió n co n tra la s p a r e d e s de lo s ta la d ro s .
3 .” L a ten s ió n n o rm a l m á x im a en la s p la c a s .
F ig u r a 111.4.
1.° S i e l á r e a d e c a d a r e m a c h e es
n d 2 3 .1 4 x 2 0 2O = m m 2 = 3 .14 c m 2
4 4
la te n s ió n d e c o r t a d u r a en lo s r e m a c h e s , s u p u e s t a d is t r ib u id a u n ifo rm e m e n te , s e ra
10000nÜ 4 x 3.14
795 .8 k p / 'c iir
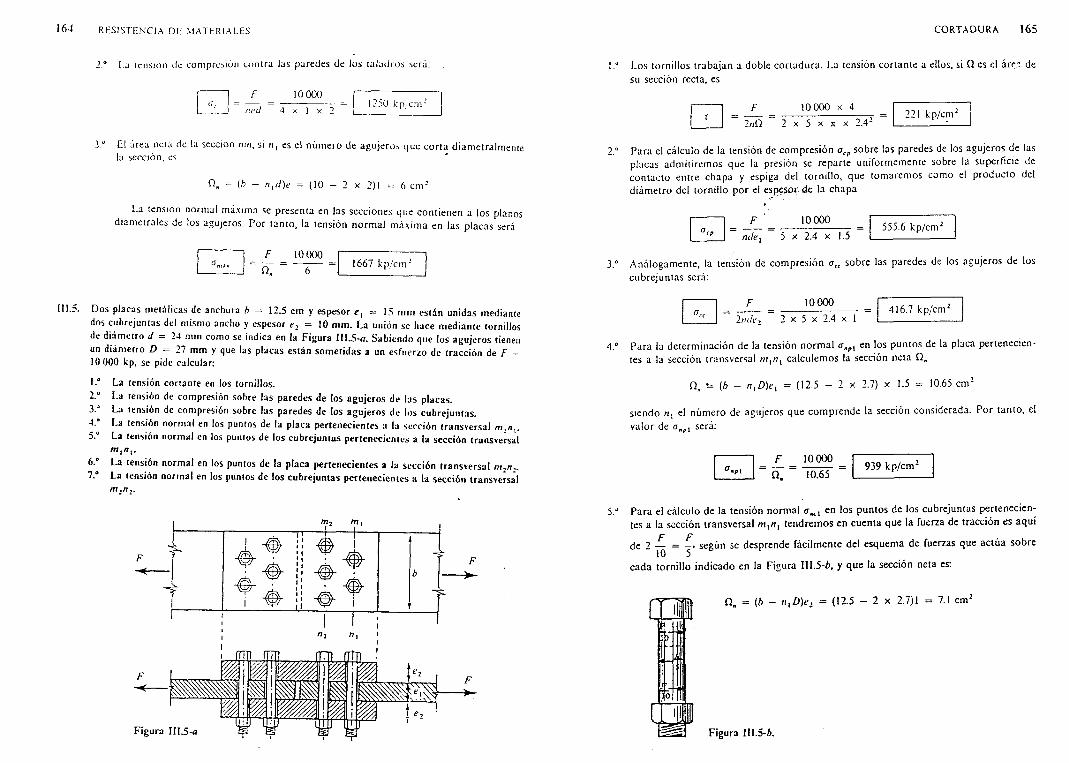
164 RESISTENCIA Dr: MATERIALES
2 “ L a te n s ió n de c o m p re s ió n c o n t r a la s p a r e d e s d e lo s t a la d lo s se rá :
F 10 0 0 0
n cd 4 x 1 x 2 1250 kp/cm *
3 ° El á r e a n e ta d e la se c c ió n m n , s i n , e s e l n ú m e r o d e a g u je r o s q u e c o r t a d ia m e tr a lm e n te la s e c c ió n , es
= (6 — n ¡ d ) e — (1 0 — 2 x 2)1 = 6 c m 2
L a ten s ió n n o rm a l m á x im a se p r e s e n ta en la s s e c c io n e s q u e c o n t ie n e n a lo s p lan o s d ia m e t r a le s de lo s a g u je ro s . P o r t a n to , la te n s ió n n o r m a l m á x im a en la s p la c a s se rá
F 1 0 0 0 0frmí. II
Pl II
05
11 1 667 k p / c m 2
IIL 5 . D os p la c a s m e tá l ic a s de an ch u ra h — 12 .5 cm y e sp e so r e ¡ = 15 m m e s tá n u n id a s m ed ian te dos c u b re ju n ta s de l m ism o an ch o y e sp e so r e 2 = 10 m m . L a un ió n se h a c e m e d ia n te to rn illo s de d iá m e tro d = 24 m m com o se in d ic a en la F ig u r a I I I .5 - a . S a b ie n d o q u e lo s a g u je r o s tienen un d iá m e tro D = 27 m m y que la s p la c a s e s tá n s o m e t id a s a un e s fu e rz o d e t r a c c ió n de F = 10 0 0 0 k p , se p ide c a lc u la n
1.° L a ten s ió n c o r ta n te en los to rn illo s .
2.° L a ten s ió n de co m p re s ió n so b re la s p a r e d e s de lo s a g u je r o s de la s p la c a s .3.° L a ten s ió n de co m p re s ió n so b re la s p a r e d e s de lo s a g u je r o s de lo s c u b r e ju n ta s .4 .“ L a ten s ió n n o rm a l en los puntos de la p la c a p e r te n e c ie n te s a la s e c c ió n t r a n s v e r s a l5.° L a ten s ió n n o rm a l en lo s puntos de lo s c u b re ju n ta s p e r te n e c ie n te s a la s e c c ió n t r a n s v e r s a l
m,n,.6.° L a ten s ió n n o rm a l en lo s puntos de la p la c a p e r te n e c ie n te s a la s e c c ió n t r a n s v e r s a l7.° L a ten s ió n n o rm a l en lo s p un to s de lo s c u b r e ju n ta s p e r te n e c ie n te s a la s e c c ió n t r a n s v e r s a l
m 2n 2.
C O R T A D U R A 1 6 5
l . “ L o s to r n i l lo s t r a b a ja n a d o b le c o r t a d u r a . L a te n s ió n c o r t a n te a e llo s , s i O e s e l á re - : d e
su se c c ió n r e c ta , es
F 1 0 0 0 0 x 4
2/iCl 2 x 5 x a x 2 .4 2221 k p / cm 2
P a r a e l c á lc u lo d e la te n s ió n d e c o m p re s ió n a cp s o b re la s p a r e d e s de lo s a g u je r o s d e la s p la c a s a d m it ir e m o s q u e la p re s ió n se r e p a r t e u n ifo rm e m e n te so b re la su p e r f ic ie d e c o n ta c to e n tr e c h a p a y e s p ig a d e l to r n i l lo , q u e to m a re m o s co m o el p r o d u c to d e l d iá m e t r o d e l to r n i l lo p o r e l e s p e s o r -d e la c h a p a
100005 x 2 .4 x 1.5
55 5 .6 k p / cm 2
3.° A n á lo g a m e n te , la te n s ió n de c o m p re s ió n tr„ s o b re la s p a r e d e s de lo s a g u je r o s d e lo s
c u b r e ju n ta s s e rá :
100002 n d e , 2 x 5 x 2 .4 x 1
4 1 6 .7 k p / cm 2
4.° P a r a la d e te r m in a c ió n d e la te n s ió n n o r m a l o ñpK en lo s p u n to s de la p la c a p e r t e n e c ie n te s a la s e c c ió n t r a n s v e r s a l m , n l c a lc u le m o s la se c c ió n n e t a Q„
Q n (b - n l D ) e l = (1 2 .5 - 2 x 2 .7 ) x 1.5 = 10.65 c m 2
s ie n d o rt l e l n ú m e ro d e a g u je r o s q u e c o m p re n d e la se c c ió n c o n s id e r a d a . P o r t a n to , el
v a lo r d e <r„,, s e rá :
F_
CL10 000 10 .65
9 3 9 k p / cm 2
5 ° P a r a e l c á lc u lo d e la te n s ió n n o rm a l <r„, e n lo s p u n to s d e lo s c u b r e ju n ta s p e r t e n e c ie n te s a la se c c ió n t r a n s v e r s a l m ,n , t e n d r e m o s e n c u e n ta q u e la fu e rz a d e t r a c c ió n e s a q u i
F Fd e 2 — = -■ s e g ú n se d e s p re n d e f á c i lm e n te d e l e s q u e m a d e fu e rz a s q u e a c t ú a so b re
c a d a to r n i l lo in d ic a d o e n la F ig u r a I I I .5 -6 , y q u e la s e c c ió n n e ta es:
O „ = (6 - n xD ) e 2 = (1 2 .5 - 2 x 2 .7 j l = 7.1 c m 2
F igu ra III.5-A.

1 6 6 R E S I S T E N C I A DE MA T E R I A L E S
P o r t a n to
FJlñT
F 1 0 0 0 0
5 a “ 5 x 7.12 8 1 .7 k p / cm 2
6.° En la s e c c ió n t r a n s v e r s a l m 2n 2, e l á r e a n e t a d e la p la c a es:
a = ( b - n 1D ) e l = (1 2 .5 - 3 x 2 .7 ) x 1.5 = 6 .6 c m 2
3 FC o m o la fu e rz a s o p o r t a d a p o r lo s t o r n i l lo s d e e s ta se c c ió n e s — • la te n s ió n n o rm a l
3/75 3 F 3 x 10 0 0 0
”f i T ~ 5 í T 5 x 6 .6909.1 kp/cm2
A n á lo g a m e n t e , e l á r e a n e ta d e l c u b r e ju n t a s e n la se c c ió n n ¡ 2n 2 es
a = (b — n 2D ) e 2 = (1 2 .5 — 3 x 2 .7)1 = 4 .4 cm2
T e n ie n d o en c u e n t a q u e e l e s fu e r z o s o p o r t a d o p o r e s ta se c c ió n es F ¡ 2. la ten s ió n n o rm a l <r„2 s e rá
F/2a
F
2a1 0 0 0 0
2 x 4 .41 136 .4 k p / cm 2
S e o b s e r v a q u e é s t a e s la s e c c ió n q u e v a a e s t a r s o m e t id a a la m a y o r te n s ió n .
111.6. S e d e s e a p r o y e c t a r e l c u e rp o c i l in d r ic o d e u n r e c ip ie n te a p re s ió n , d e r a d io m ed io R = 1 m , p a r a a lm a c e n a m ie n to d e g a s a p re s ió n p = 1 5 a tm ó s f e r a s . D ich o cu e rp o e s tá fo rm a d o por v iro la s de c h a p a u n id a s t a l co m o se in d ic a en la F ig u r a 111.6-a. S e p id e :
1.” D e te r m in a r e l e s p e so r e d e la c h a p a a p l ic a n d o e l c r it e r io de von M is e s .2 ° S i l a s c o s tu r a s v e r t ic a le s y h o r iz o n ta le s s e e f e c tú a n m e d ia n te c u b re ju n ta s de e sp e so r e ¡ 2 y
u n a f i la d e r e m a c h e s a r p a d a la d o , d e t e r m in a r en a m b o s c a so s e l d iá m e tro d y la s e p a r a c ió n s e n t r e lo s r e m a c h e s . *D a to s : ten s ió n a d m is ib le a c o r t a d u r a en lo s r e m a c h e s : = 120 M P a ; tra c c ió na d m is ib le a t r a c c ió n en la s c h a p a s : x ,dm = 1 0 0 M P a ; t r a c c ió n a d m is ib le a a p la s ta m ie n to en ia s c h a c a s : <rjdm = 2 2 6 M P a .
1.° C a lc u le m o s p r e v ia m e n t e la s t e n s io n e s a „ y a , (F ig . I I I .6 -6 ) a p l ic a n d o la s fó rm u la s d e late o r ia d e l a m e m b r a n a , te n ie n d o e n c u e n t a e n la e c u a c ió n d e L a p la c e q u e p m = 0 0 ;p , = R
ZlR
2tt R e a „ = p n R 2
p R
e
p R
2 e
«
C O R T A D U R A 1 6 7
F ig u r a I I I .6 -a .
' n <
.a s te n s io n e s p r in c ip a le s en c u a lq u ie r p u n to d e l c u e rp o d e l d e p o s i to s e r á n :
P R pR
A p lic a n d o e l c r i t e r io d e vo n M ise s
- [ (o , - a : )2 + ( c 2 - + 1er: “ ^ a *
el e s p e s o r m in im o c v e r i f ic a r á
11 ( p z R 2 ¡ p ' -R ^ P R~12 4 c 2 ' 4 e 2 e 2 J 2 e
s u s t i t u y e n d o v a lo r e s e n e s ta e x p re s ió n , te n ie n d o en c u e n ta q u e
1 a tm ó s f e r a = 1 .013 x 1 0 5 P a ^ 0.1 M P a
o b te n e m o s e l e s p e s o r e p e d id o
p R ^ f í2 a , .
! -5 x ‘. J L ó Z Í = 0 .0 1 2 9 m2 x 100
13 m m
En e l c á lc u lo d e e s te e s p e s o r no se h a te n id o en c u e n ta la r e d u c c ió n d e l a r e a en f
c h a p a d e b id a a lo s a g u je r o s en la z o n a d e u n ió n .S i l la m a m o s 5 la s e p a r a c ió n e n tr e re m a c h e s (S ,- en la s c o s tu r a s v e r t ic a le s y en
c o s tu r a s h o r iz o n ta le s ) , la fu e rz a F q u e s o p o r t a c a d a re m a c h e es.
F = a , e S y , en la s c o s tu r a s v e r t ic a le s (F ig . II I .6 -c )
p _ 0ine S H , en la s c o s tu r a s h o r iz o n ta le s (F ig . I I I .6 - d )

RESISTENCIA DE M A TER IA LES
-Av i-v-
-A/V A V
er,eS ,, F = a me S H
F ig u r a 111.6-c.
E s ta fu e rz a F i a s o p o r ta c a d a re m a c h e t r a b a ja n d o a c o r t a d u r a p u r a
o b ie n , la p la c a a a p la s t a m ie n to
n d 2f “ 2 — r-
F = d e a ,
o lo s c u b r e ju n ta s , ta m b ié n a a p la s t a m ie n to
t cadm
q u e , c o m o v em o s , es la m ism a e c u a c ió n a n t e r io r re fe re n te a l a p la s t a m ie n to d e la p la c a .E n a m b o s c a so s h e m o s s u p u e s to la s t e n s io n e s a d m is ib le s p o r c o n s id e r a r q u e c a d a
r e m a c h e e s tá s im u lt á n e a m e n te a l l im ite d e su c a p a c id a d r e s is te n te en la z o n a a d m is ib le , t a n to a c o r t a d u ia c o m o a a p la s t a m ie n to .
P a r a q u e e l n ú m e ro d e r e m a c h e s p a r a c a d a c o s tu r a s e a e l m ism o , y a se h a g a el c á lc u lo a c o r t a d u r a o a a p la s t a m ie n to , se t ie n e q u e v e r if ic a r
d eac, j n]
e s d e c ir , la e x p re s ió n d e l d iá m e t r o d e lo s r e m a c h e s s e r á :
d 2etrc,jm
fó r m u la v á l id a t a n to p a r a lo s re m a c h e s d e la s c o s tu r a s v e r t ic a le s c o m o p a r a la s c o s tú r a s h o r iz o n ta le s .
C O R T A D U R A 1 6 9
111.7.
S u s t i t u y e n d o v a lo r e s , se o b t ie n e
2 x 1.3 x 2 2 6
k x 12016 m m
En c u a n to a l a s e p a r a c ió n e n t r e r e m a c h e s te n d re m o s .
a) En la s c o s tu r a s v e r t ic a le s :
•A =d ea c .
a , e PR" 0 .0 1 6 x 0 .0 1 3 x 2 2 6
1.5 x 13 .13 cm
q u e e q u iv a le a 32 re m ach es/ m .b) E n la s c o s tu r a s h o r iz o n ta le s :
AiF_ =
a „ e p R6 .2 6 cm
q u e e q u iv a le a 16 r e m a c h e s /m.
D e te r m in a r la m a y o r fu e rz a de c o r ta d u r a q ue a c tú a en lo s re m a c h e s de la F ig u r a 111.7-a ,>ara lo s s ig u ie n te s v a lo re s d é lo s p a r á m e tro s : P = 5 0 0 0 k p ; e = 4 0 c m ; a = 7 c m ; b - 1 - c m . b e
i-om or> íiA c rn rr f »< in n n d e .
R e d u c id ' ' e l s is t e m a d e fu e r z a s a p l ic a d a s a l c e n t ro d e g r a v e d a d G d e lo s r e m a c h “ ; J* r e s u lt a n t e P d a r á lu g a r a u n e s fu e rz o J , v e r t ic a l s o b re c a d a re m a c h e en s e n t .d o a s c e n d e n te
d e v a lo r
f = H — £ 2 2 2 = 8 3 3 .3 k p J\y „ A
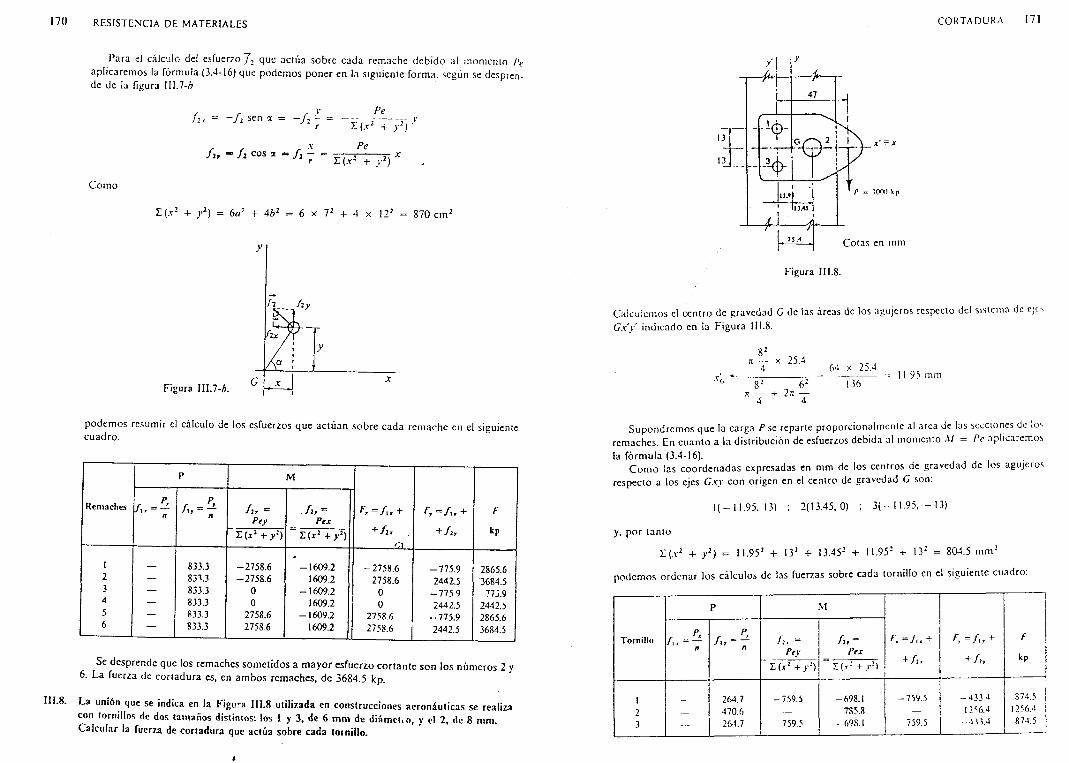
1 7 0 R ESI STENCI A DE M ATE RI AL E S
I I 1.8.
P a r a el c á lc u lo d e l e s f u e r z o / , q u e a c lú a s o b r e c a d a r e m a c h e d e b id o a l m o m e n to Pe a p l ic a r e m o s la fó rm u la { 3 .4 -1G) q u e p o d e m o s p o n e r e n la s ig u ie n te fo r m a , se g ú n se d e s p re n d e d e la f ig u ra I I I .7-6
>• _ P e
1 r Z ( . t 2 + y 2) *
r :1 - P e J 1 r Z ( x 1 + y 2) X .
C o m o
f i , = ~ fi se n i =
f l , “ f l COS 3 =
I ( . r 2 + y 2) = 6 a 2 + 4A2 = 6 x 7 2 + 4 x 122 = 8 7 0 c m 2
F ig u r a III.7-A .
p o d e m o s re s u m ir el c á lc u lo d e lo s e s fu e r z o s q u e a c t ú a n s o b r e c a d a r e m a c h e en e l s ig u ie n te c u a d r o .
Rem aches
P M
f , - A , +
+ f i ,
F
kp
Px/ „ = - n
II*
.
11 57
A *•
1
f i , - P ex
/ w , , +
+ / „' 'i
Z ( x J + / ) 53 ( x2 + y 2)
I __ 833.3 - 2 7 5 8 .6 - 1 6 0 9 .2 - 2 7 5 8 .6 - 7 7 5 .9 2865.62 — 833.3 - 2 7 5 8 .6 1609.2 2758.6 2442.5 '3684.53 — 833.3 0 -1 6 0 9 .2 0 - 7 7 5 9 775.94 _ 833.3 0 1609.2 0 2442.5 2442.55 833.3 2758.6 - 1 6 0 9 .2 2758.6 - 7 7 5 .9 2865.66 833.3 2758.6 1609.2 2758.6 j 2442.5 3684.5
S e d e s p re n d e q u e lo s r e m a c h e s s o m e t id o s a m a y o r e s fu e r z o c o r t a n t e s o n lo s n ú m e r o s 2 y6 . L a fu e rz a d e c o r t a d u r a e s , en a m b o s r e m a c h e s , d e 3 6 8 4 .5 kp .
L a un ió n que se in d ic a en la F ig u -a I I I .8 u t i l iz a d a en c o n s tru c c io n e s a e r o n á u t ic a s se r e a l iz a co n to rn illo s de d o s t a m a ñ o s d is t in to s : lo s I y 3 , d e 6 m m d e d iá m e t .o , y e l 2 , d e 8 m m . C a lc u la r la fu e rz a de c o r ta d u r a q ue a c tú a s o b re c a d a to rn illo .
C O R T A D U R A 171
F ig u ra 111.8.
C a lc u le m o s e l c e n t r o d e g r a v e d a d C d e la s á r e a s de lo s a g u je ro s re sp e c to d e l s is t e m a d e e je s
Gx'y ' in d ic a d o en la F ig u r a II 1.8.
82a - - x 25 .4
4 64 x 25.4I 1.95 m m
8 2 6 2 136n — + 2a —
4 4
S u p o n d r e m o s q u e la c a r g a P se r e p a r te p r o p o rc io n a lm e n te a l a r e a d e la s s e c c io n e s d e lo s r e m a c h e s . En c u a n to a l a d is t r ib u c ió n d e e s fu e rz o s d e b id a a l m o m e n to M = P e a p l ic a r e m o s
la fó r m u la (3 .4 -1 6 ).C o m o la s c o o r d e n a d a s e x p re s a d a s en m m d e lo s c e n tro s de g r a v e d a d d e lo s a g u je r o s
r e sp e c to a lo s e je s G x y c o n o r ig e n en e l c e n tro de g r a v e d a d G so n :
1( — 11 .95 . 13) : 2 ( 1 3 .4 5 ,0 ) : 3 ( - 1 1.95 , - 13)
y . p o r t a n to
I ( . v 2 + y 1) = 1 1.9 5 2 + 1 3 2 + I 3 .4 5 2 + I1 .9 5 2 + 132 = 8 0 4 .5 m m 2
p o d e m o s o r d e n a r lo s c á lc u lo s d e la s fu e rz a s so b re c a d a to r n i l lo en el s ig u ie n te c u a d ro :
Tornillo
P M
/ W . . +
+ / ¡.
c = / . , +
+ /ir
F
kp
P,n f i . =
P e y Pex
t u 2 + r ) + r )
1 264.7 - 759.5 -698 .1 -75 9 .5 -4 3 3 .4 874.5
2 __ 470.6 — 785.8 — 1256.4 1256.4
3 — 264.7 759.5 -698 .1 759.5 -43 3 .4 874.5
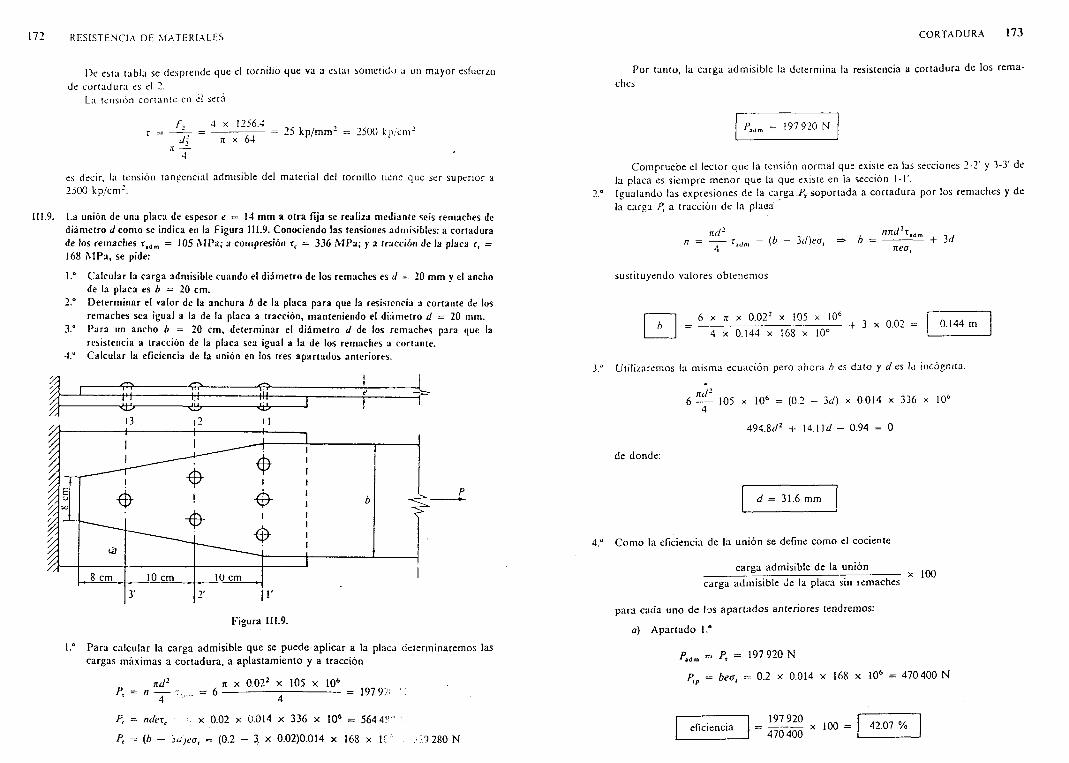
172 RESISTENCIA d e m a t e r i a l e s
De esta labia se desprende que el tornillo que va a estar sometido a un mayor esfuerzo de cortadura es el 2.
La tensión cortante en él será
4 x 1256 .4
a x 64= 25 k p / m m 2 = 2 5 0 0 k p / cm 2
es d e c ir , la te n s ió n t a n g e n c ia l a d m is ib le d e l m a t e r ia l d e l to r n i llo t ie n e q u e se r s u p e r io r a 2 5 0 0 k p / cm 2.
111.9. L a un ión de u n a p la c a de e sp e so r e — 14 m m a o t r a f i ja s e r e a l iz a m e d ia n te se is re m a c h e s de d iá m e tro d co m o se in d ic a en la F ig u ra I I I .9 . C o n o c ie n d o la s ten s io n es a d m is ib le s : a c o r ta d u ra de lo s r e m a c h e s r ldm = 105 ¡V IP a; a co m p re s ió n r c — 3 3 6 ¡V IPa; y a t r a c c ió n d e la p la c a r , = 168 M P a , s e p id e :
1.°
2.°
3.°
4 .“
C a lc u la r la c a r g a a d m is ib le cu an d o e l d iá m e tro d e lo s r e m a c h e s es d = 20 m m y e l anch o de la p la c a e s b = 20 cm .D e te r m in a r e l v a lo r de la a n c h u ra b d e la p la c a p a r a q u e la re s is te n c ia a c o r ta n te de los re m a c h e s s e a ig u a l a la de la p la c a a t r a c c ió n , m a n te n ie n d o e l d iá m e tro d = 20 m m . P a r a un an ch o b = 20 c m , d e te r m in a r e l d iá m e tro d de los re m a c h e s p a r a que la re s is te n c ia a tra c c ió n de la p la c a s e a ig u a l a la d e lo s re m a c h e s a c o r ta n te .C a lc u la r la e f ic ie n c ia de la un ión en lo s tre s a p a r t a d o s a n te r io re s .
-t+t-V i-w - -4f-
13-vü4-
I 1
_L
1.° P a r a c a l c u la r l a c a r g a a d m is ib le q u e s e p u e d e a p l i c a r a l a p la c a d e te r m in a r e m o s la s c a r g a s m á x im a s a c o r t a d u r a , a a p la s t a m ie n to y a t r a c c ió n
n d 1 n x 0 .0 2 2 x 105 x 106 6 --------------------- ;---------------------- = 197 92
4
F, — nder c 5 x 0 .0 2 x 0 .0 1 4 x 336 x 10® = 564 4?'
P, = (ó - j a )ea , = (0 .2 - \ x 0 .0 2 )0 .0 1 4 x 168 x 10 29 280 N
C O R T A D U R A 1 7 3
P o r t a n to , la c a r g a a d m is ib le la d e te r m in a la r e s is te n c ia a c o r t a d u r a d e lo s r e m a
ch e s
C o m p r u e b e e l le c to r q u e la te n s ió n n o rm a l q u e e x is te en la s se c c io n e s 2 -2 ' y 3 -3 ' d e la p la c a e s s ie m p re m e n o r q u e la q u e e x is te en la se c c ió n 1-1'.I g u a la n d o la s e x p r e s io n e s d e la c a r g a F, s o p o r t a d a a c o r t a d u r a p o r lo s r e m a c h e s y d e la c a r g a P, a t r a c c ió n d e la p la o a
n = = (b ~ 3d ) e a , b =n n d 1x,i
n e a ,+ 3 d
s u s t i tu y e n d o v a lo r e s o b te n e m o s
6 x a x 0 .0 2 2 x 105 x I 0 6
4 x 0 .1 4 4 x 168 x 10°+ 3 x 0 .02 = 0 .1 4 4 m
Utilizaremos la misma ecuación pero ahora b es dato y d es la incógnita.
6 — 105 x 106 = (0 .2 - I d ) x 0 .0 1 4 x 3 3 6 x 10°4
d e d o n d e :
4 94 .8 r/ 2 + 14.1 I d - 0 .9 4 = 0
d = 3 1 .6 m m
C o m o la e f ic ie n c ia d e la u n ió n s e d e f in e c o m o e l c o c ie n te
c a r g a a d m is ib le d e la u n ió n x 100c a r g a a d m is ib le J e la p la c a s in r e m a c h e s
p a r a c a d a u n o d e lo s a p a r t a d o s a n te r io r e s te n d re m o s :
a ) A p a r t a d o 1.°
^ = P' = 197 9 2 0 N
Pip = b e a , = 0 .2 x 0 .0 1 4 x 168 x 106 = 4 7 0 4 0 0 N
e f ic ie n c ia1 9 7 9 2 0
4 7 0 4 0 0x 100 = 4 2 .0 7 %

174 R E S I S T E N C I A DE M ATE RI AL E S
b ) A p a r t a d o 2.°
/>idin = = />, = 197 9 2 0 N
p = bc<7, = 0 .1 4 4 x 0 .0 1 4 x 168 x 106 = 338 688 N
e f ic ie n c ia197 9 2 0
58 .44 %x 100 -338 688
c) A p a r t a d o 3.°
p , im = p t = p t = (0 .2 - 3 x 0 .0 3 1 6 ) x 0 .0 1 4 x 168 x 106 = 2 4 7 4 3 0 N
Plp = 4 7 0 4 0 0 N
e f ic ie n c ia2 4 7 4 3 0
= ------------- x 100 = 52 .6 %4 7 0 4 0 0
111.10. D o s p la c a s de e sp e so r e = 12 m m y a n c h u ra b = 25 c m se unen m e d ia n te u n a so ld a d u ra a to p e co m o in d ic a la F ig u r a III. 10. S i la ten s ió n de t r a b a jo p a r a la so ld a d u ra es <r„ = 900 k p / c m 2, c a lc u la r la fu e rz a de tra c c ió n F q ue p o d rá s e r a p l ic a d a a la s p la c a s .
F
F ig u r a 111.10
D e a c u e r d o c o n la s p r e s c r ip c io n e s d e la N o rm a M V - I 0 3 re fe re n te a la s s o ld a d u r a s a to p e , la fu e r z a m á x im a a d m is ib le a t r a c c ió n s e r á
= o - b - e = 9 0 0 x 25 x 1 .2 = 2 7 0 0 k p
111.11. U n a n g u la r 150 x 7 5 x 10 ha de e s ta r un ido a u n a p ie z a c o n t ig u a de u n a e s t r u c tu r a m e tá l ic a m e d ia n te d o s co rd o n e s lo n g itu d in a le s de so ld a d u ra co m o se in d ic a en la F ig u r a I l l . l l - a . El a n g u la r e s tá so m e tid o a u n a fu e rz a de t r a c c ió n de F — 2 5 0 0 0 kp c u y a l in e a de a c c ió n p asa po r e l c e n tro de g r a v e d a d de la se c c ió n .S a b ie n d o q u e la ten s ió n ta n g e n c ia l a d m is ib le de la s o ld a d u ra e s x,óm = 8 0 0 k p / cm 2, c a lc u la r l a s lo n g itu d e s de lo s co rd o n es .
C a lc u le m o s lo s e s fu e r z o s q u e t ie n e n q u e a b s o r b e r c a d a c o r d ó n d e s o ld a d u r a .
P o r la s c o n d ic io n e s d e e q u i l ib r io p o d e m o s p o n e r
F,y - F2(h - y) = o
F i + F2 = FFx
. h — v
C O R T A D U R A 1 75
**/ p i F -10
h - y
SU"532
1 5 0
C o ta s en m m
10F ig u ra 111.11 - a .
A h o ra b ie n , c o m o la s lo n g itu d e s so n d ir e c t a m e n te p r o p o r c io n a le s a la s fu e rz a s a p l ic a d a s , si L = + L 2 e s la lo n g itu d to ta l d e lo s c o r d o n e s , la s e x p re s io n e s de la s lo n g itu d e s
L | y L2 s e r á n
F\h - v y
L~ - L — ■ L- - - L i y f
h - yF ig u r a 111.1 l-ó .
C o m o la s u p e r f ic ie r e s is te n te d e la s o ld a d u r a e s T u , se d e b e r á v e r if ic a r
F a x , dm = F
S u s t i t u y e n d o v a lo r e s , se o b t ie n e
L- 1 x se n 4 5 ° x 8 0 0 = 25 0 0 0 k p
d e d o n d e
O
P o r ta n to :
25000 ' = 4 4 .2 cm0 .7 0 7 x 8 0 0
h - v 150 - 53 .2Li = 4 4 .2 - ^ 3 ^ — = 2 8 .4 3 cm
í ' 2 = ^ = 44'2 l M = 1 5 -68Cm
S e to m a r á n
L , = 28 .6 c m ; L z = 15 .7 cm
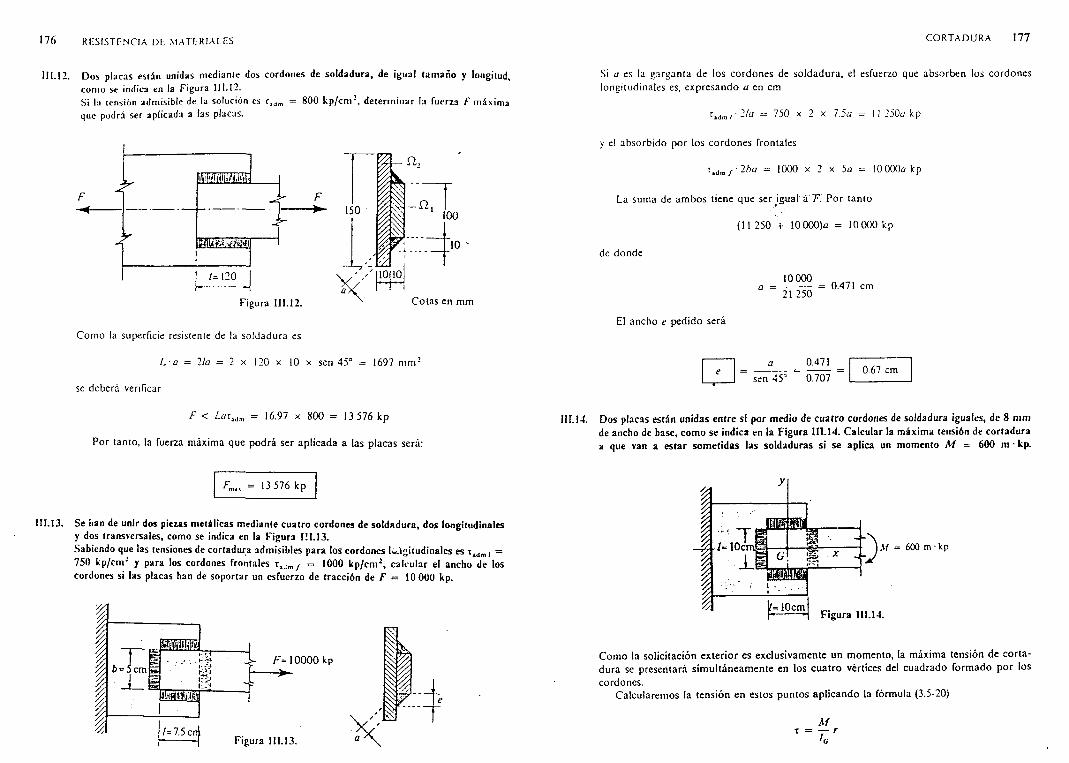
1 7 6 RESISTENCIA DE MATERI ALES
III.12. D os p lacas están unidas m edíanle dos cordones de so ld ad u ra , de igual tam añ o y longitud, com o se indica en la F igura III.12.Si la tensión adm isible de la solución es r ldm = 8 0 0 kp/cm -, d e te rm in ar la fuerza F m áxim a que podrá ser aplicada a las placas.
Como la superficie resistente de la soldadura es
L -a = 21a = 2 x 120 x 10 x sen 45° = 1697 mrrr
se deberá verificar
F < Laii¡ím = 16.97 x 800 = 13 576 kp
Por tanto, la fuerza máxima que podrá ser aplicada a las placas será:
= 13 576 kp
III .J3, S e úan de unir dos piezas m etá licas m ediante cu a tro cordones de so ld ad u ra , dos longitudinales y dos transversales, com o se indica en la F ig ura III. 13 .Sabiendo que las tensiones de co rtad u ra adm isib les p a ra los cordones lu ág itud ina les es = 7 5 0 kp/cm-* y para los cordones fron tales T.Jm/ = 10 0 0 kp/cm 2, c a lc u la r el ancho de los cordones si las p lacas han de so p ortar un esfuerzo de tracción de F = 10 0 0 0 kp.
C O R T A D U R A 1 7 7
Si a es la garganta de los cordones de soldadura, el esfuerzo que absorben los cordones longitudinales es, expresando a en cm
rljm | - 2/a = 750 x 2 x 1.5a = 11 250u kp
y el absorbido por los cordones frontales
t.dra / ' 26o = 1000 x 2 x 5o = 10 000o kp
La suma de ambos tiene que ser igual a 7\ Por tanto
(11 250 + 10000)a = 10000 kp
de donde
10 000 = = 0 47j cm21 250
El ancho e pedido será
0.471sen 45’ 0.707
0.67 cm
III. 14. D os p lacas están unidas en tre si p o r m edio de c u a tro cordones de so ldadura iguales, de 8 m m de ancho de base, com o se indica en la F ig ura 111 .14 . C a lc u la r la m áxim a tensión de c o rtad u ra a que van a e s ta r so m etid a s la s so ld ad uras si se ap lica un m om ento M = 6 0 0 m - kp.
f T i/= 10cm
1 G
lOcm
\{ = 600 m • kp
F ig u ra 111.14 .
Como la solicitación exterior es exclusivamente un momento, la máxima tensión de cortadura se presentará simultáneamente en los cuatro vértices del cuadrado formado por los cordones.
Calcularemos la tensión en estos puntos aplicando la fórmula (3.5-20)
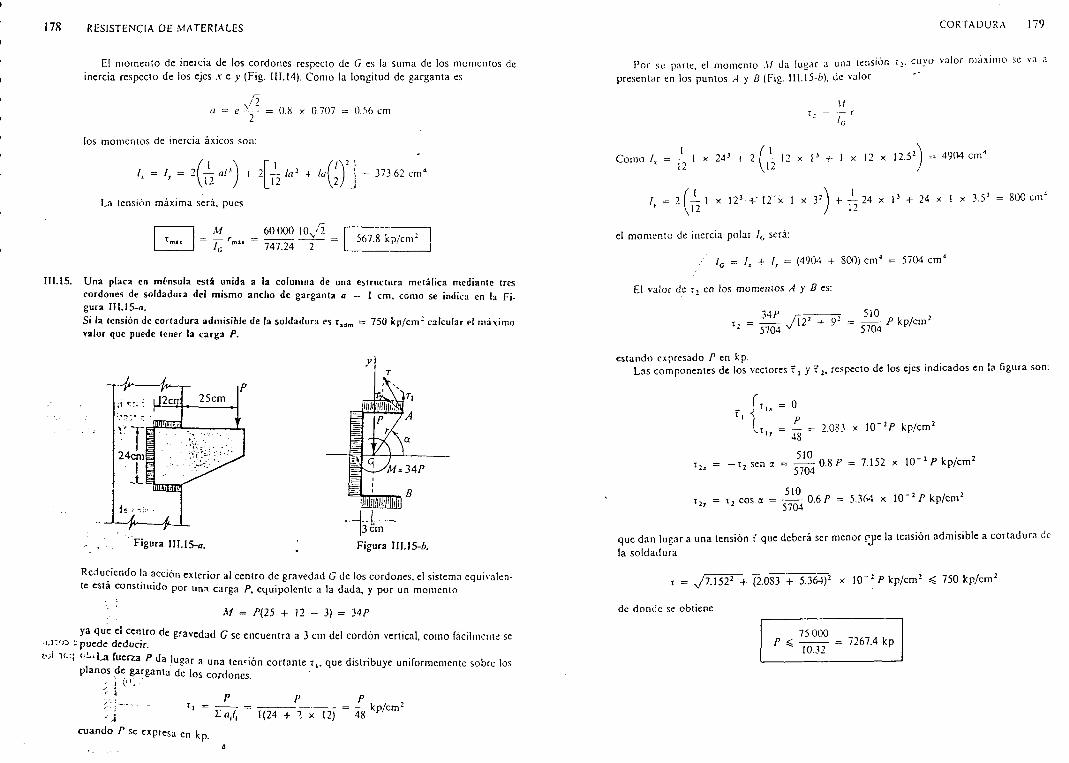
1 7 8i
i
i
i
I I I .15.
• r .::oo : >.<;! lo-;
El m o m e n to d e in e r c ia d e lo s c o r d o n e s re sp e c to d e G e s la s u m a d e lo s m o m e n to s de in e r c ia r e s p e c to d e lo s e je s .v e y (F ig . I I I .14). C o m o la lo n g itu d d e g a r g a n t a es
R ES IST EN C IA DE M A T ER IA LES
a = e —— = 0 .8 x 0 .7 0 7 = 0 .5 6 cm
lo s m o m e n to s d e in e r c ia á x ic o s so n :
i ,a> + J L 3 7 3 .6 2 cm *
L a te n s ió n m á x im a s e r á , p u e s
M= — r_
6 0 0 0 0 IOv /2
7 4 7 .2 4 25 6 7 .8 k p / c m '
U n a p la c a en m é n su la e s tá u n id a a la c o lu m n a de u n a e s tr u c tu r a m e tá l ic a m e d ia n te tres co rd o n e s de so ld a d u ra d e l m ism o a n c h o d e g a r g a n t a a = 1 c m , co m o se in d ic a en la F ig u r a I I I .1 5 -a .S i la ten s ió n de c o r ta d u r a a d m is ib le de la so ld a d u ra es t Jdm = 7 5 0 k p / c m ’ c a lc u la r e l m á x im o v a lo r q ue pued e ten e r la c a r g a P.
R e d u c ie n d o la a c c ió n e x t e r io r a l c e n t r o d e g r a v e d a d G d e lo s c o r d o n e s , e l s is te m a e q u iv a le n te e s t á c o n s t i tu id o p o r u n a c a r g a P, e q u ip o le n te a la d a d a , y p o r u n m o m e n to
■ ' M = P ( 25 + 12 — 3) = 34 P
y a q u e e l c e n t ro d e g r a v e d a d G s e e n c u e n t r a a 3 cm d e l c o r d ó n v e r t ic a l , c o m o fá c ilm e n te se - p u e d e d e d u c ir .
' - " L a fu e rz a P d a lu g a r a u n a t e n s ió n c o r t a n t e t , , q u e d is t r ib u y e u n ifo rm e m e n te s o b re lo s p la n o s d e g a r g a n t a d e lo s c o r d o n e s .
; ¡ |il- ■’p p p
■ j 11 “ w ; = w n ^ r i i j = 48 kp/cm ‘
c u a n d o P s e e x p re s a en k p .
C O R T A D U R A 1 79
P o r su p a r te , e l m o m e n to M d a lu g a r a u n a te n s ió n r , . c u y o v a lo r m á x im o se x a a
p r e s e n ta r en lo s p u n to s A y B (F ig . I I I .15-6), d e v a lo r
- Ir,
C o m o /, = ^ 1 x 2 4 3 + 2 12 x l 3 + 1 x 12 x 12.52^ = 4 9 0 4 c m *
í y = 2 ^ 1 x 1 2 3 + 12 x 1 x 3 2j + ~ 24 x l 3 + 24 x 1 x 3 .5 2 = 8 0 0 c m 3
e l m o m e n to de in e r c ia p o la r ¡ 0 se rá :
/ /c = /x + I, = (4 9 0 4 + 8 0 0 ) c m * = 5 7 0 4 c m 4
El v a lo r d e r , en lo s m o m e n to s A y B es:
34 P 510
t2 = 5704 ^ + ^ = ^ P kp/C m '5704
e s ta n d o e x p re s a d o P en kp .L a s c o m p o n e n te s d e lo s v e c to r e s f j t , , r e sp e c to d e lo s e je s in d ic a d o s en la f ig u r a so n :
r = — = 2 .0 8 3 x 10 1P k p / c m 2 ,r 48
i j , = — 1 2 se n a
t , . = t , e o s a =
510
5704
510
5704
0 .8 P = 7 .1 5 2 x 1 0 ' 2 P k p / c m 2
0 .6 P = 5 .3 6 4 x 10 ' 2 P k p / c m 2
q u e d a n lu g a r a u n a t e n s ió n t q u e d e b e r á s e r m e n o r o y e la t e n s ió n a d m is ib le a c o r t a d u r a uv
l a s o ld a d u r a
r = J 1 . X 5 2 1 + (2 .0 8 3 + 5 .3 6 4 )1 x 10 2 P k p / c m 2 1$ 7 5 0 k p / c m 2
d e d o n d e se o b t ie n e
75 0 0 0P ^ ----------- = /267 .4 k p
10 .32

4Teoría general de la f lex ión .
Análisis de tensiones
4.1. IntroducciónCuando en toda sección recta de un prisma mecánico la resultante de las fuerzas situadas a un lado de la m isma es nula y el vector momento resultante está contenido en dicha sección, direm os que el prism a está sometido a f l e x i ó n pura . Esta es f l e x i ó n p u ra a s im é t r i c a (Fig. 4.1-a) cuando el momento (lector S í f tiene componentes M y y S í . según los ejes principales de inercia de la sección; y f l e x i ó n p u ra s im é t r i c a (Fig. 4.1-ó), si el vector momento que actúa en esa sección tiene solam ente componente según uno de los ejes principales de inercia.
la) Flexión pura asimétrica F ig u r a 4 .1 .
Si adem ás del momento (lector M r actúan esfuerzos cortantes T, se dice que el prisma trabaja a f l e x i ó n s im p l e , que puede ser f l e x i ó n s im p l e propiamente d icha cuando el momento Héctor M r tiene la dirección de uno de los ejes principales de inercia de la sección (Fig. 4.2-íj), o f l e x i ó n d e s v i a d a cuando el momento Héctor M F tiene componentes según los dos ejes principales de inercia (Fia. 4.2-/>).
T EORI A G E N E R A L DE LA FLEXION. ANAL I S I S DE TE N S I O N E S 1 8 1
F ig u ra 4 .2 .
Finalm ente, si en los casos de Hexión pura o de Hexión sim ple actúa sim ultáneam ente el esfuerzo normal N, a la Hexión se le denom ina f l e x i ó n c o m p u e s t a (Fig. 4.3).
En este capítulo analizarem os la d istribución de tensiones en la sección recta en los casos de Hexión pura sim étrica y de Hexión sim ple. La Hexión desv iada y la nexioncompuesta serán estudiadas en el C ap ítu lo 6.
Para los casos de Hexión pura o nexión sim ple adoptarem os el convento usual de asignar el signo positivo a l m om ento nector M . cuando el prism a Hexa com o se muestra en la F igura 4.4, es decir, cuando el momento Héctor hace que la Hbra inferior este sometida a tracción.
M.
X
©
M,
F i g u r a 4.4.

1 8 2 RE S I S TENCI A DE MA T E R I A L E S
4.2. F le x ió n pura. L ey de N avierComo hemos indicado, considerarem os en lo que sigue el caso de flexión pura, sobreentendiéndose que se trata de flexión pura sim étrica, como ocurre en los tramos AB de las vigas indicadas en la F isu ra 4.5.
F ig u r a 4 .5 .
V -4 B i
a ’f A " 'T .í 1
Cuando consideram os un prism a m ecánico y lo sometemos a flexión pura observamos que varia la curvatura de su línea media, acortándose unas fibras m ientras que otras se a largan . Las prim eras estarán necesariam ente som etidas a esfuerzos de compresión y las segundas a esfuerzos de tracción. Es evidente (adm itidas las hipótesis de homogeneidad, continuidad e isotropía), que una fibra no se aco rtará ni se a largará , por lo que no estará som etida a tensión alguna y de ahí su nombre de « f i b r a n eu t r a » . M ás adelante, veremos que dicha fibra contiene los centros de gravedad de las d istin tas secciones del prisma.
En el estudio de la flexión adm itirem os las siguientes hipótesis fundamentales:
1. El sólido en flexión se m antiene dentro de los lím ites de elasticidad proporcional.2. Las secciones planas antes de la deform ación siguen siendo planas después de ella
( h i p ó t e s i s d e B e r n o u i l i ) .3. Las deformaciones son suficientemente pequeñas para que la acción de las fuerzas
exteriores no se vea m odificada, en prim era aproxim ación, por la deformación.
Una consecuencia inm ediata que se deduce de las hipótesis estab lecidas es que en la sección no existen tensiones tangenciales. En efecto, en cualqu ier punto P del prisma, el ángulo in icialm ente recto form ado por una fibra long itud inal que pasa por él y la sección recta correspondiente, sigue siendo recto después de la deformación en virtud de la hipótesis de Bernouili, por lo que según la ley efe H ooke: r = Gy = 0, al ser nula la d istorsión y.
En la sección recta existirán , pues, solam ente tensiones normales.Es intuitivo que las fibras extrem as, al ser las m ás deform adas, serán las sometidas a
tensiones m ás elevadas. Pero, ¿cuánto valen dichas tensiones? ¿Cómo varían al pasar de una fibra a o tra? Vamos a deducir la l e y d e N av i e r que nos expresa dicha variación.
D em ostrarem os ¡a c itada ley siguiendo dos métodos distintos: método geométrico y método analítico .
a) M étodo geométrico
Sean DE y C F las trazas de los planos que contienen a dos secciones rectas indefinidamente próxim as de un prism a m ecánico, sometido a flexión pura (Fig. 4.6).
T E O R I A G E N E R A L DE LA FLEXION. A N A L I S I S DE T E N S I O N E S 1 8 3
M
t1L________1------------------_ s
F ig u r a 4 .6 .
S, unas fibras se a la rgan y otras se acortan , por la continuidad de . a s deformaciones existirá una fibra neutra que-no experim ente variación de longitud alguna.
Sea AB la traza de la superficie neutra, cuyo radio de curvatura es p.Es fácil dem ostrar que M N B ~ ABO, por lo que se podra escribir.
MNu
M B (4.2-1
Como A777 = Adx; AB = dx\ M B = y; d(5 = p. se tiene:
Adx _ y
dx p(4.2-2
• . . . j i„ i„ ,, A f H í i g L t A dx ld .x — n 'F ñor lo aue:
o lo que es lo mismo:
o _ -vE ~ P
E (4.2-3)o — — y
P
labiendo puesto el signo negativo ya que para la ordenada y positiva la tensión cr - rciHín rtp rnrvnlnra

•84 RESISTEN C IA DE M A TER IA LES
Como el cociente Efp es constante en cada sección podemos enunciar la l e y d e Navier. «En una s e c c i ó n s a m e ¡ ida a f l ex ión p u r a , l o s m ó d u l o s d e la s t e n s i o n e s qu e s e e j e r c e n s o b r e la s d i s t in ta s J i b r a s s o n d i r e c t a m e n t e p r o p o r c i o n a l e s a s u s d i s t a n c ia s a la f ib ra n eu t r a .»
La representación gráfica de dichas tensiones será lineal (Fig. 4.7) y, como era de esperar, las m áxim as tensiones de compresión y de tracción corresponden a las fibras extremas.
Vamos a dem ostrar ahora que Ja fibra neutra contiene el c e n t r o de gravedad de la sección. En efecto, al tenerse que cumplir las condiciones del equilibrio elástico, la resultante de las fuerzas exteriores e interiores debe ser nula en cualqu ier sección. Por tratarse de flexión pura, la resultante de las fuerzas exteriores es nula, por lo que la resultante de fuerzas interiores debe ser igual a cero.
Podemos escribir, pues, que:
ad í> = u - í/n0 • d a = -
Jo o y y . o p Jy dCl = 0 (4.2-4)
Para que J y d Q sea igual a cero, las d istancias y deben contarse con relación a un eje que contenga el centro de gravedad, ya que {y dCl es el momento estático de una superficie p lana respecto a un eje contenido en el mismo plano y solam ente se anu la en dicho caso.
P ara garan tizar el equilib rio elástico en cualqu ier sección no es suficiente la nulidad de la resultante. Se tiene que verificar, además, que el momento resultante del s is 'jm a de fuerzas engendradas por ¡as tensiones normales tiene que ser igual al momento flectcr en dicha sección. Teniendo en cuenta que para un momento (lector M f positivo (Fig. 4.8) las tensiones normales son negativas para ordenadas y positivas, tendremos
M f = - y o dCl = ----n y J
y 1 dCl = Ln y
(4.2-5)
siendo /. el momento de inercia de la sección respecto del eje z.Este resultado nos permite expresar la constante de la ley de N avier en función del
momento fiector que actúa en la sección y las características geom étricas de ésta,
TEORI A G E N E R A L DE LA FLEXION. ANAL I S I S DE T EN S I O N E S 1 8 5
b) Método analítico
A este mismo resultado llegam os siguiendo un razonam iento puram ente analítico .En efecto, si la flexión es pura, la única componente no nula de la m atriz de tensiones
será la tensión norm al o nx — o sobre las caras coincidentes con la sección recta.Adm itida la hipótesis de Bernoullí sobre las secciones planas, la tensión norm al cr será,
en virtud de la ley de Hooke, una función lineal de y , z
o = a + b y + c : (4.2-7)
siendo a, b, c , constantes, estando esta ecuación referida al sistema usual de coordenadas, es decir, a los ejes principales de inercia de la sección en el centro de gravedad , que será el origen.
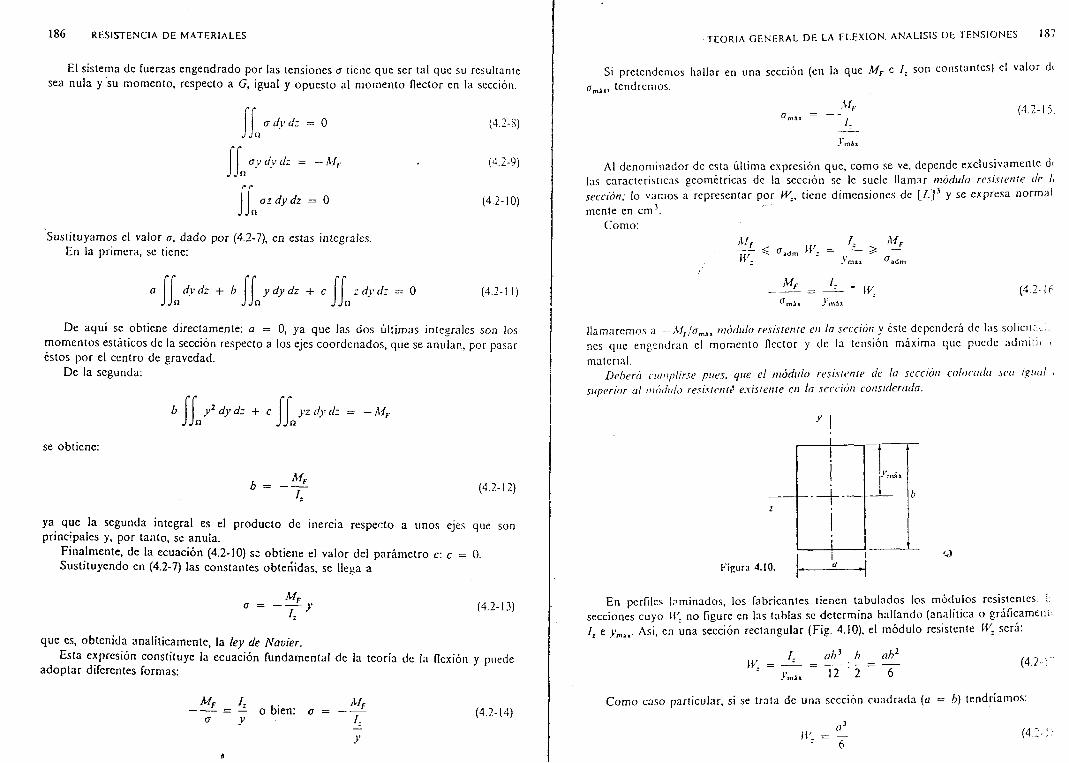
1 8 6 RESI STENCI A DE M A T E R I A L E S
El sistem a de fuerzas engendrado por las tensiones a tiene que ser tal que su resultante sea nula y su momento, respecto a G, igual y opuesto al momento flector en la sección.
cr d v dz = 0
a y d y d : = — M r
az d y dz = 0
(4.2-8)
(4.2-9)
(4.2-10)
Sustituyam os el valor a, dado por (4.2-7), en estas integrales. En la prim era, se tiene:
a d y dz + b y d y dz -V cJJn JJn
r d y dz = 0 (4.2-11)
De aqu i se obtiene directam ente: a = 0, y a que las dos ú ltim as integrales son los momentos estáticos de la sección respecto a los ejes coordenados, que se anu lan , por pasar éstos por el centro de gravedad.
De la segunda:
y 2 d y dz + c y z d y dz = — Mf
se obtiene:
b = tÍLI. (4.2-12)
ya que la segunda in tegral es el producto de inercia respecto a unos ejes que son principales y, por tanto, se anu la.
F inalm ente, de la ecuación (4.2-10) se obtiene el valor del parám etro c : c = 0. Sustituyendo en (4.2-7) las constantes obtenidas, se llega a
(4.2-13)
que es, obtenida analíticam ente, la l e y d e N avier .Esta expresión constituye la ecuación fundam ental de la teoría de la flexión y puede
adop tar diferentes formas:
TEORI A G E N E R A L DE LA FLEXION. ANALI SI S DE TE NS I ON E S 187
Si pretendemos hallar en una sección (en la que Mf c /. son constantes) el valor d< dmi„ tendremos:
(4.2-15
Al denom inador de esta últim a expresión que, como se ve, depende exclusivam ente di las características geom étricas de la sección se le suele llam ar m ó d u l o r e s i s t e n t e d e L s e c c i ó n : lo vamos a representar por W., tiene dim ensiones de [ ¿ ] 3 y se expresa normal mente en cm 3.
Como:M r l--n f < * - » J,/= = ^
z y m u ^ a d m
= A . = i v ; (4.2-16} m i.t
llam arem os a - M r ,’a mix m ó d u l o r e s i s t e n t e e n la s e c c i ó n y éste dependerá de las solicita..::, nes que engendran el momento flector y de la tensión m áxim a que puede adm itir < m aterial.
D eb e r á cu m p l i r s e p u e s , q u e e l m ó d u l o r e s i s t e n t e d e la s e c c i ó n c o l o c a d a s e a i g u a l ¡ s u p e r i o r a l m ó d u l o r e s i s t e n t e e x i s t e n t e e n la s e c c i ó n c o n s i d e r a d a .
F ig u r a 4 .1 0 .
En perfiles lam inados, los fabricantes tienen tabu lados los m ódulos resistentes. 1 secciones cuyo IV. no figure en las tab las se determ ina hallando (analítica o gráficam eiit /. e y mi,. Asi, en una sección rectangular (F ig. 4.10), el m ódulo resistente W. será:
' a b i b a b 2
= 1 2 ' 2 = I TW. = (4.2-
Como caso particu lar, si se trata de una sección cuad rada (a = b) tendríam os:
(4.2
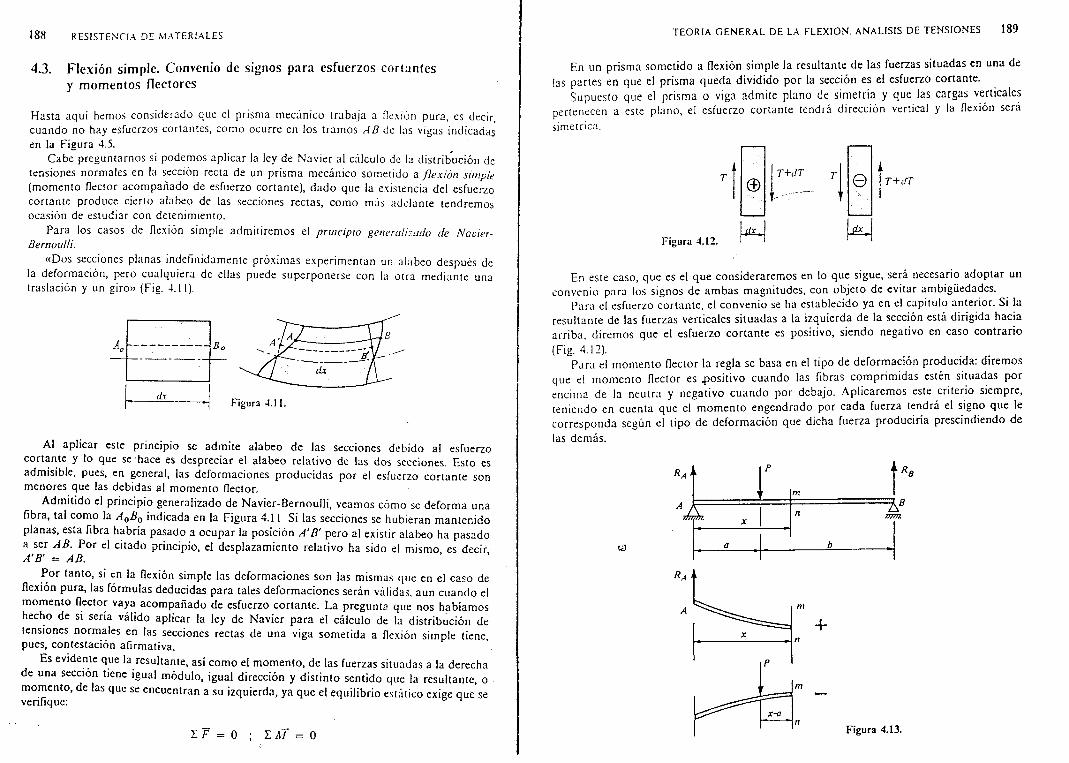
1 88 RESISTENCIA DE MATERI ALES
4.3. F lexión sim ple. Convenio de signos para esfu erzos cortantes y m om entos Héctores
Hasta aqui hemos considerado que el prisma m ecánico trabaja a flexión pura, es decir, cuando no hay esfuerzos cortantes, como ocurre en los tramos AB de las vigas indicadas en la F igura 4.5.
Cabe preguntarnos si podemos ap licar la ley de N avier al cálculo de la distribución de tensiones normales en la sección recta de un prism a mecánico sometido a f l e x i ó n s im p l e (momento (lector acom pañado de esfuerzo cortante), dado que la existencia del esfuerzo cortante produce cierto alabeo de las secciones rectas, como más adelante tendremos ocasión de estudiar con detenimiento.
Para los casos de flexión simple adm itirem os el p r i n c i p i o g e n e r a l i z a d o d e Nauier- Bernou l l i .
«Dos secciones planas indefinidamente próxim as experimentan un alabeo después de la deformación, pero cualqu iera de ellas puede superponerse con la otra m ediante una traslación y un g iro» (Fig. 4.11).
Al ap licar este principio se adm ite alabeo de las secciones debido al esfuerzo cortante y lo que se hace es despreciar el alabeo relativo de las dos secciones. Esto es adm isible, pues, en general, las deformaciones producidas por el esfuerzo cortante son menores que las debidas al momento (lector.
Admitido el principio generalizado de N avier-Bernoulli, veamos cómo se deforma una fibra, tal como la A0B0 indicada en la F igura 4.11 Si las secciones se hubieran m antenido p lanas, esta fibra habria pasado a ocupar la posición A'B' pero al existir alabeo ha pasado a ser AB. Por el citado principio, el desplazam iento relativo ha sido el mismo es decir A'B' = AB. ’
Por tanto, si en la flexión simple las deformaciones son las m ismas que en el caso de flexión pura, las fórmulas deducidas para tales deform aciones serán válidas, aun cuando el momento flector vaya acom pañado de esfuerzo cortante. L a pregunta que nos habíam os hecho de si sería válido ap licar la ley de Navier para el cálculo de la distribución de tensiones normales en las secciones rectas de una v iga som etida a flexión simple tiene, pues, contestación afirm ativa.
Es evidente que la resultante, así como el momento, de las fuerzas situadas a la derechade una sección tiene igual módulo, igual dirección y distinto sentido que la resultante, omomento, de las que se encuentran a su izquierda, ya que el equilib rio estático exige que se verifique:
I F = 0 ; I M = 0
TEO RI A G E N E R A L DE LA FLEXION. ANAL I SI S DE TENS I ONES 1 8 9
En un prism a sometido a flexión simple la resultante de las fuerzas situadas en una de las partes en que el prism a queda dividido por la sección es el esfuerzo cortante.
Supuesto que el prism a o viga adm ite plano de sim etría y que las cargas verticales pertenecen a este p lano, el esfuerzo cortante tendrá dirección vertical y la flexión sera simétrica.
©
Figura 4.12. HT+dT ©
-ÉL
T+dT
En este caso, que es el que considerarem os en lo que sigue, será necesario adoptar un convenio para los signos de am bas m agnitudes, con objeto de evitar ambigüedades.
Para el esfuerzo cortante, el convenio se ha establecido ya en el capitulo anterior. Si la resultante de las fuerzas verticales situadas a la izquierda de la sección está dirigida hacia arriba, direm os que el esfuerzo cortante es positivo, siendo negativo en caso contrario (Fig. 4.12).
P ara el momento flector la regla se basa en el tipo de deformación producida: diremos que el momento flector es .positivo cuando las fibras com prim idas estén situadas por encima de la neutra y negativo cuando por debajo. Aplicarem os este criterio siempre, teniendo en cuenta que el momento engendrado por cada fuerza tendrá el signo que le corresponda según el tipo de deformación que dicha fuerza produciría prescindiendo de las demás.
+
F i g u r a 4 . 13 .

1 9 0 RE S I S T E N C I A DE MA T E R I A L E S
Asi, en una viga apo yada en sus extremos A y B (Fig. 4.13) el momento en una sección mn a d istancia .r de A, considerando las fuerzas s ituadas a su izquierda, será
M¡{x) = R ax — P[x — a) (4.3-1)
y el esfuerzo corlan te
T¿x) = RA - P - (4.3-2)
Si consideram os las fuerzas situadas a la derecha de la sección, se tendría
M d{x) = R s (a + b - x) (4.3-3)
TI-x) = - R b (4.3-4)
Evidentemente se habrá de cum plir
Mflx) = M ,(x ) (4.3-5)
TÁx) = U x ) (4.3-6)
El esfuerzo cortante y el momento flector serán funciones de la abscisa .v de la sección
T = T(x) ; M = M (x ) (4.3-7)
La representación gráfica de estas funciones da lugar a l d i a g r a m a d e e s f u e r z o s c o r t a n t e s y d ia g r a m a d e m o m e n t o s j l e c t o r e s , respectivamente.
4.4. D eter m in a c ió n de m om en tos flectoresEl problem a de d im ensionado, atendiendo exclusivam ente a la flexión, exige el conocimiento de los valores que adop ta el momento (lector en cada sección de la viga. Vamos, por tanto, a determ inar los momentos flectores insistiendo especialm ente en su valor m áxim o, en diversos casos isostáticos de sustentación y carga .
Com o norm a general, la determ inación de momentos im plica el conocim iento de todas las fuerzas que actúan sobre el prism a mecánico. En los casos que vam os a considerar se conocen d irectam ente las cargas exteriores y hay que ca lcu lar las equilib rantes. Estas últim as se h a lla rán im poniendo las condiciones de equ ilib rio estático. T ratarem os, a modo de ejem plo, los siguientes casos de sustentación;
A) V iga sim plem ente apoyada.B) V iga en voladizo.
A) V iga sim plem ente apoyada
En todos los casos que oc estudian a continuación se supone el peso propio de la viga despreciable respecto a las cargas que actúan sobre la m ism a.
TEORIA GENERAL DE LA FLEXION. ANALISIS DE TE N S I O N E S 191
a) C arga centrada y concentrada (Fig. 4.14)
D eterm inación de las reacciones:Condiciór Jc componente vertical nula:
RA + R„ - P = 0 (4 '4 '
Tom ando mementos respecto del punto medio:
R a Í ~ R b ~2 = °
Leyes de momentos (lectores:
Af = R x = — x , válida en 0 ^ x $ - (4.4-2)2
M X1 = R a x - P^.v - (/ _ ,t ), para ~ $ .v ^ l (4.4-3)
El momento flector máximo se presentará en el punto medio de la viga (obsérvese que se tra ta de un máximo absoluto y, por tanto, la prim era derivada no es nula). Su valor se obtendrá haciendo .v = //2 en (4.4-2) o (4.4-3)

1 92 RESISTENCIA DE MAT E R I AL E S
b) C arga descentrada y concentrada (Fig. 4.15)
D eterm inación de las reacciones:Condición de componente vertical nula:
Ra + R„ - P = 0
Tom ando momentos respecto del extremo B\ R Á -1 - Pb = 0, de donde
Ra =PbT
PaT
(4.4-5)
(4.4-6)
Leyes de momentos flectores:
Pb .M x¡ = r a :x = — .x, v a lida en 0 ^ x ^ aI
P a= P ax ~ P ( * — «) = — (/ — -v), para a ^ .x ^ /
(4.4-7)
(4.4-8)
El momento flector máximo tendrá lugar en la sección en la que está ap licad a la carga y su valor se obtiene haciendo .x = a en cualqu iera de las ecuaciones de momentos:
=P ab
(4.4-9)
c ) C arga uniformen?: «te re;: :a ( F i g . 4.16)
Representarem os por p la car; : 'r unidad de longitud. Suele eypresars? ' toneladas por metro lineal (ton/m).
La determ inación de las reacciones es m uy simple, ya que por sime: .:
-A . — P n —Pl
(4.4-10)
TEORI A G E N E R A L DE LA FLEXION. ANAL I S I S DE TENS IONES 1 9 3
P l
Jí Kx i \
R r = p l
7777777'
Diagrama de momentos flectores
En este caso rige una so la ecuación de momentos para toda la viga:
U = R_,x - p x ~ = y . x - para 0 « .v < / ( 4 .4 - 1 1 )
ecuación de una parábo la, por lo que el d iagram a de momentos (lectores será un arco deeste tipo de cónica.
Para hallar el momento flector m áxim o igualarem os a cero la primera derivada, en virtud de la continuidad de la función en toda la viga:
d M p l l
valor que sustitu ido en ( 4 .4 - 1 1 ) nos da:
&
= 4 - (4 -4- 12)
d) Carga triangular (Fig. 4.17)
Supondremos variab le la carga por unidad de longitud, aum entando linealmente desde 0 en el apoyo A hasta el valor p mix en el B.
Las cargas p dx sobre cada elemento diferencial de viga constituyen un sistem a de vectores paralelos cuya resultante, la carga total Pt es:
n Pmix ' l

1 9 4 RE S I S T E N C I A DE MATERI ALES
y tiene por línea de acción la recta x — - l. Las condiciones generales del equilibrio nos
proporcionan las ecuaciones.
- R Á + R b = P
R j - l = P(4.4-13)
de donde:
n ^ P i u i x ' l ry 2 P P m i X ■ /R * - 7 = — 7 — • R B = T - = — T— (4.4-14)
La ecuación de momentos será única y tendrá validez en 0 < x ^ /
v « P P x 3M = R ax - P(x) - = - x - ~
3 3 3/ (4.4-15)
D erivando e igualando a cero, se obtiene x = //73, por lo que:
P l P /3 2PI=
3 ^ 3 3 / 2 3 7 3 9 7 5 (4.4-16)
B) V iga en voladizo
Vamos a suponerla perfectamente em potrada en un extrem e (im posibilidad de giro en él), en lodos los casos que se estudian a continuación.
TEORI A G E N E R A L DE LA FLEXION. ANALISIS DE TE N S I O N E S 195
a) C arga concentrada en el extremo libre (Fig. 4.18)
La ecuación de momentos puede escribirse directamente:
M = Px . válida en 0 í .v ^ /
D iagram a de
m om entos (lectores
El momento flector m áxim o se dará en el em potram iento y valdrá:
A U , = - P l
y según se com prende fácilmente se trata de un máximo absoluto.
b) C arga uniformemente repartida (Fig. 4.19)
Sea p la carga por unidad de longitud:La ecuación de momentos será:
Mx px
— px — = -------- > válida en 0 ^ ,v < /1 1 ?
n p D iaeram a de ' iT momentos (lectores
El m om ento flector m áxim o se d ará en el empotram iento y valdrá:
Pl1A/n*. = - V
(4.4-17)
(4.4-17
(4.4-19)
( 4 . 4 - 2 0 )
y, com o en el caso anterior, se trata de un máximo absoluto.
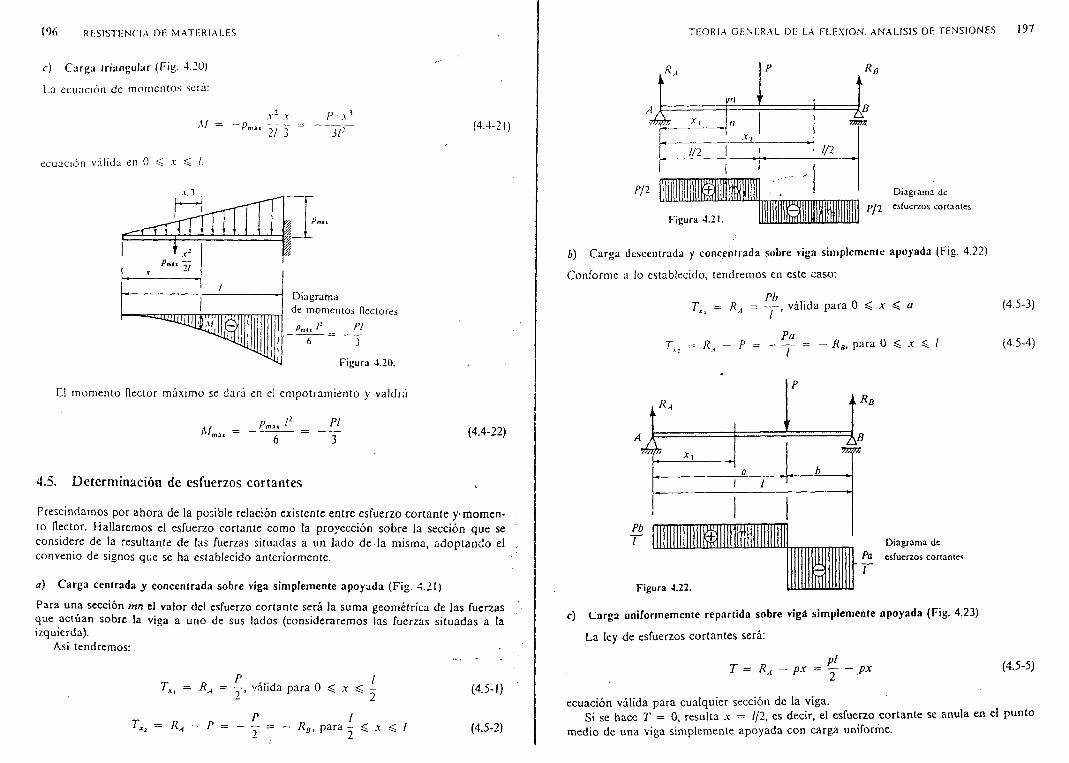
1 % RESISTENCIA DE MATERI ALES
c ) C arga Iriangular (Fig. 4.20)
La ecuación de momentos será:
M
ecuación válida en 0 í .v ó /.
P m i xX ~ X
Ti 3P ■ A-3
~Tír (4.4-21)
El momento flector m áxim o se dará en el em potram iento y valdrá
Pf xx i x ^~A/«
P1T
( 4 .4 - 2 2 )
4.5. D eterm in ac ión de esfu erzos cortantesPrescindamos por ahora de la posible relación existente entre esfuerzo cortante y momento flector. Hallarem os el esfuerzo cortante como la proyección sobre la sección que se considere de la resultante de las fuerzas situadas a un lado de la m ism a, adoptando el convenio de signos que se ha establecido anteriormente.
a) C arga centrada y concentrada sobre viga simplemente apoyada (F ig. 4.21)
Para una sección m n el valor del esfuerzo cortante será la sum a geom étrica de las fuerzas que actúan sobre la viga a uno de sus lados (considerarem os las fuerzas s itu adas a la izquierda).
Asi tendremos:
P lTx¡ = R A = válida para 0 ^ .r < -
Tx = R a - P =
(4.5-1)
(4.5-2)
TEORIA GE NERAL DE LA FLEXION. ANAL I S I S DE TENSIONES 1 97
|/71
X i
1/2
m ■F ig u ra 4 .2 1 .
1/2
tul
D iagram a de
p j 2 esfuerzos cortan tes
b) C arga descentrada y concentrada sobre viga simplemente apoyada (Fig. 4.22)
Conforme a lo establecido, tendremos en este caso:
PbTx¡ = R a = - j - , válida para 0 ^ x < a
TX1 = RA - PP a
= — R B, para 0 ^ x ^ /
(4.5-3)
(4.5-4)
c ) Carga uniformemente repartida sobre vigd simplemente apoyada (Fig. 4.23)
La ley de esfuerzos cortantes será:
p lT = Ra - p x = — - ,px (4.5-5)
ecuación válida para cualqu ier sección de la viga.Si se hace T — 0, resulta x = 1/2, es decir, el esfuerzo cortante se anu la en el punto
medio de una viga simplemente apoyada con carga uniforme.

1 9 8 RE S I ST E N C I A DE M A T E R I A L E S
D iagram a de
esfuerzos co rlan tes
d) C arga triangu lar sobre viga simplem ente apoyada (Fig. 4.24)
Tam bién tenemos en este caso una función única para la lev de esfuerzos cortantes.
ecuación válida p ara cualqu ier sección de la viga.El esfuerzo cortante se anu la en una so la sección: la de abscisa
(4.5-6)
(4.5-7)
T EORI A GE NE R A L DE LA FLEXION. ANAL I S I S DE T EN S I O N E S 1 9 9
e ) Viga en voladiza con carga concentrada en el extremo libre (Fig. 4.25)
El esfuerzo es constante en todas las secciones de la viga.
T = — P, para 0 ^ x $ /
D iagram a de
esfuerzos co n stan tes- P
F ig u ra 4 .2 5 .
f ) Viga en voladizo con carga uniformemente repartida (Fig. 4.26)
D iag ram a de
( 4 .5 - 8 )
La ley de esfuerzos cortantes es:
T = — p x , para 0 < x ^ / (4.5-9)
ecuación válida p ara cualqu ier sección de la viga. El valor m áxim o corresponde a la sección de em potram iento.
H aciendo .x = / en la ecuación (4.5-9), se obtiene:
7™, = - P t = ~ P
que como se ve, se tra ta de un máximo absoluto.
( 4 . 5 - 1 0 )

g ) Viga en voladizo con carga triangular (Fig. 4.27)
1En este caso, como fácilmente se deduce de la Figura 4.27, si P = - p n, ¡x l es la carga total
2 0 0 RESI STENCI A DE MATERIALES
se tiene:
T _ _ ^ X_l _ _ Pm*./ ’ 2 / (4.5-11)
D iagram a de
El d iagram a de esfuerzos cortantes es una parábo la de tangente horizontal en el punto correspondiente a l extrem o libre. El valor máximo (máximo absoluto) se presenta en la sección de em potram iento. Haciendo .x = / en la ecuación (4.5-11) se obtiene:
(4.5-12)
4.6 . R elacion es en tre el esfuerzo cortante, el m om en to flecto r y la cargaH asta aqu í hemos estud iado independientemente momentos flectores y esfuerzos cortantes de una viga som etida a flexión simple, sin tener en cuenta las relaciones que existen entre am bas m agnitudes. Veamos cuáles son estas relaciones que nos serán de gran u tilidad .
Antes de seguir adelan te conviene que quede c lara la inexistencia de fuerzas concentradas, ya que a l ac tuar sobre una superficie de área nula engendrarían tensiones un itarias infinitas que sólo podrían resistir los sólidos rígidos que, como sabem os, no se dan en la N aturaleza. En rigor, las llam adas fuerzas concentradas son fuerzas uniformemente repartidas que actúan en superficies muy pequeñas o, lo que es lo m ismo, dan valores de p (carga por unidad de longitud) muy grandes.
Entre dos secciones indefinidamente próximas podemos considerar que actúa una carga uniformemente repartida p que será función de la d istancia x, incluso en el caso de fuerzas concentradas, o, por el contrario, que no actúa carga a lgun a (Fig. 4.28). ¡
T E O R I A G E N E R A L DE LA FLEXION. ANALISIS DE TENS I ONES 2 0 1
T > d T T
M.dM
F ig u ra 4 .2 8 .
T * d T
M. dM
En el primer caso, tom andó momentos respecto al centro de gravedad de la sección situada a la derecha, tendremos:
M + T dx = A7 + d Mdx
+ P dx —
de donde, despreciando infinitésim os de segundo orden, se tiene:
d MT d x = d M T =
dx
(4.6-1)
(4.6-2)
En esta expresión, como se ve, no interviene la carga. Por tanto, esta expresión sera ap licab le tanto al caso en que sobre el elemento de viga exista carga repartida como s. no.
Se puede afirm ar pues: «E l e s f u e r z o c o r t a n t e e n u na s e c c i ó n d e u na v i g a s o m e t i d a a f l e x i ó n s im p l e c o i n c i d e c o n la d e r i v a d a d e la f u n c i ó n m o m e n t o f l e c t o r e n d i c h a s e c c i ó n . » G eométricamente, el esfuerzo cortante en una determ inada sección viene medido por e valor de la tangente trigonom étrica del ángulo que forma con el eje .x (eje de la viga) la tangente al d iagram a de momentos flectores en el punto de abscisa de esa sección.

202 R ES ISTEN C IA DE M A TER IA LES
Basándonos en esta propiedad podríam os obtener el d iag ram a de esfuerzos cortantes por derivación del de momentos flectores. Inversam ente, dado el d iagram a de esfuerzos cortantes se obtendría, por integración, el de momentos flectores.
Veamos ahora que el esfuerzo cortante T y la función de carga p. funciones ambas de x, están relacionadas entre sí. En efecto, del equilibrio de fuerzas (Fig. 4.28-ci)
T = p dx + T + d T (4.6-3)
se deduce
ÓT— = - p (4.6-4)dx
que podemos a su vez relacionar con M m ediante (4.6-2) y poner:
d T d 2M~P = ~T = - T T (4-6' 5>dx dx
es decir, la p e n d i e n t e d e la c u r v a d e e s f u e r z o s c o r t a n t e s c o i n c i d e e n c a d a s e c c i ó n c o n e l va lo r d e la c a r g a u n i ta r ia , c a m b ia d a d e s i g n o .
De lo anterior se deduce que si la carga d istr ibu ida varía según una función algebraica,las funciones del esfuerzo cortante y del momento fiector serán tam bién algebraicas de unoy dos órdenes superiores, respectivamente.
4.7. T en sion es producidas en la flex ió n s im p le por el esfu erzo cortan te. T eorem a de C olignon
Al principio de este cap ítu lo se ha estudiado la d istribución de tensiones debidas al momento fiector. En los prism as m ecánicos som etidos a Hexión pura, al ser el esfuerzo cortante nulo en todas las secciones, la ley de N avier nos d a una información completa, tanto cua lita tiva como cuan titativa , del estado tensional creado en el interior del medio elástico, ya que el conocim iento de la tensión p rincipa^ ún ica no nula, norm al a la sección recta, lo determ ina plenamente.
En el caso que el prism a m ecánico o viga trabaje a flexión sim ple hemos indicado que las secciones rectas de la viga, in icialm ente p lanas, presentan después de la deformación cierto alabeo producido por el esfuerzo corlante.
Admitido el principio generalizado de N avier-B ernoulli la distribución de tensiones normales sigue estando regida por la ley de N avier, si bien la d irección del eje de la viga ahora no es dirección principal. P ara com pletar el estud io del estado tensional en Hexión simple necesitamos, pues, conocer cómo se d istribuye el esfuerzo T(x) a lo largo y a lo ancho de la superficie de la sección recta.
Para ello nos basarem os en el teorem a de reciprocidad de las tensiones tangenciales, esdecir, la existencia de una tensión tangencial r en un punto de la sección recta exige lapresencia de o tra también tangencial, del m ismo valor, sobre la superficie de la fibralongitudinal que pasa por ese punto.
TEO R IA G EN ER A L DE LA FLEX IO N , A N ALIS IS DE T EN S IO N ES 203
Considerem os la porción elem ental de prism a m ecánico sometí o a cx l° pie com prendido entre dos secciones rectas indefinidam ente p iox im as, separa (Fig. 4.30). Sobre las secciones de abscisas . t y .x + dx los momentos Héctores i leren
d \(.
Ai
Figura 4.30.
Cortemos este elemento por un plano a distancia y de la fibra neutra y considerem os el equilib rio de la parte superior: la resullánte de las fuerzas norm ales tiene que ser eq u ilib ra da por las fuerzas engendradas por las tensiones t sobre la porción de fibra long itud inal.
La resultante de las fuerzas normales en la parte izquierda sobre el area som breada
í l* es:
N* = o d n J a
que se puede poner, en virtud de la ley de Navier, de la siguiente forma:
M f M mN' = T ) ^ 1 ~ ¡T
(4.7-1)
(4.7-2)
siendo m el momento estático respecto al eje r (fibra neutra) del área de la sección s itu ada por encim a de la sección longitud inal (área som breada en la F igura 4.30).
En la sección derecha, la resultante de las fuerzas norm ales sera:
p¡* + dN* =(M + d M )m
T.(4.7-3)
Su diferencia
dN* =d¡\{ ni
/.(4.7-4)
tiene que ser equ ilib rada por la resultante de las fuerzas debidas a las tensiones r en lasección longitudinal. , ,
Adm itiendo que las tensiones tangenciales se reparten uniformemente a lo largo e,segmento de longitud b, se tiene:
i b dxd M ■ m T dx - m
¡ 7 ~(4.7-5)

2 0 4 RESISTENCIA DE MAT E R I AL E S
de donde obtenemos:Tm
T il (4.7-6)
expresión llam ada f ó r m u l a d e C o l i gn on , que nos permite calcular la distribución de tensiones tangenciales en las secciones rectas.
Al ser las tensiones tangenciales en las secciones longitudinales (llam adas también tensiones rasantes) iguales a las correspondientes en las secciones rectas, la fórmula de Colignon es válida para el cálculo de ambas.
Una prim era consecuencia que se deduce de esta fórmula es que las tensiones cortantes son nulas en los puntos superior e inferior de la sección, ya que para ambos se verifica m = 0; en el punto superior por ser nula el área som breada, y en el inferior por ser m el momento estático de toda la sección, que es nula al ser el eje z principal de inercia.
A modo de ejem plo veamos cuál es la distribución de tensiones tangenciales en la sección recta de un prism a mecánico sometido a flexión simple, aplicando a secciones de diferentes formas la fórmula de Colignon.
a) Sección rectangular (Fig. 4.31)
El momento estático del área rayada es:
b y d y =
y el momento de inercia de la sección:
b y 2 b f l P2 I T
"V2 h¡2/. - 2 b y 1 d y ~ 2
0 _ 3 _0
b/P~\2
Sustituyendo en (4.7-6), se obtiene:
r _ (/l2 _ 4^
■ ba»12
3 r h 2 - 4y 22 ñ T2 (4.7-7)
siendo Q = lib el á rea de la sección.
TEORIA G E N E R A L DE LA FLEXION. ANALISIS DE T ENS I ONES 2 0 5
El d iagram a de tensiones tangenciales según la a ltu ra de la sección es una parábo la. La tensión tangencial m áxim a se presenta en la fibra neutra ( y = 0)
_ 3 T máx "2 (4.7-8)
y representa un 50 por 100 más del que resu ltaría si T se repartiera uniformemente en toda la superficie.
b) Sección circular (Fig. 4.32) ------ -
El m omento estático es:
b v d v = 2 1 y J T F ^ J 2 d y = C ( * 2 - y 2n = U Rl - y 2)312
4 r 3 ñ
y el momento de inercia:
I . =n R 4
Sustituyendo en la fórmula de Colignon, se obtiene:
T j ( R 2 - y 2) 3'2 4 T R 2 — y 2
r - 5--------k nR*2 J r 2 - y 2 - r3 n r 2
(4.7-9)
El d iag ram a de tensiones tangenciales según la a ltu ra de la sección es una parábo la . La tensión tangencial m áxim a se presenta en la fibra neutra ( y = 0)
_ 4 T Tmlx ' 3 Q
(4.7-10)
y resu lta ser un 33 por 100 más del valor que resu ltaría si T se repartiera uniform em ente en toda la superficie.
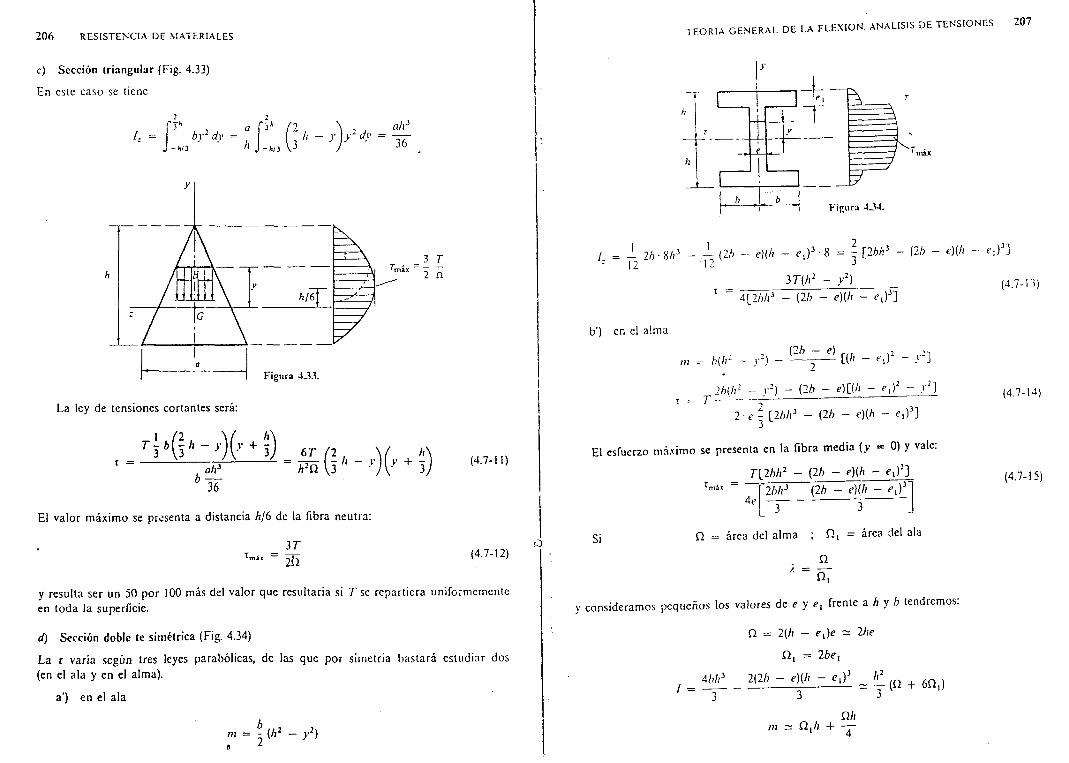
2 0 6 RE S I ST E N C I A DE MATERIALES
c) Sección triangu lar (Fig. 4.33)
En este caso se tiene
I . = h d y = 7- h ! 3 “ -fc/3
/' - >' >'2 d y =ah3Jó~
3 T 2 n
La ley de tensiones cortantes será:
fl/l3
"3 6 “
(4.7-11)
El valor m áxim o se presenta a d istancia /i/6 de la fibra neutra:
- I ITmi‘ ~ 2Í2
(4.7-12)
y resulta ser un 50 por 100 más del valor que resultaría si T se repartiera uniformemente en toda la superficie.
d) Sección doble te sim étrica (Fig. 4.34)
La r varia según tres leyes parabólicas, de las que por sim etría b asta rá estud iar dos (en el a la y en el alm a).
a ') en el a la
m = - ( b 1 - y 2) *
TEORI A G E N E R A L DE LA FLEXION. ANALISIS DE TENS I ONES 2 0 7
F ig u r a 4 3 4 .
¡ = 1 2b ■ 8/i3 - X- (2b - e)(h - e ^ - 8 = - [2Wi3 - (2b - e)(h 12 12 3
3T(h2 - y 2)4[2ó/i3 - (2b - e)(h - e ,)3]
b’) en el alm a
= b ( l r - y 2) - ^ r - 3 1 [(/, - e ,)2 - r ]
r = T2b(lr - y 2) - (2b - e)[(ó - f , ) 2 - . r ]
2 - e ^ [2ó/i3 - (2b - e ) (h - e ,)3]
El esfuerzo m áxim o se presenta en la fibra m edia ( y - 0) y vale.
r [2 W i2 - (2b - e )(h - e ,)2]2bb3 (2b - e ) (h - e ¿ y
Si
3 3 J
Í2 = área del a lm a ; ÍT, = área del ala
n
Á ~ ñ 7y consideram os pequeños los valores de e y e ¡ frente a b y b tendremos:
f í = 2(/i — e ¡ ) e = 2/ie
Í2, = 2 b e ,
4bh3 2(2b - e ) (h - tq)3 _ h2/ = 3
~ - (Q + 6 0 .)
m cz Q J i +fi/ i
? , ) J ]
(4.7-13)
(4.7-14)
(4.7-15)
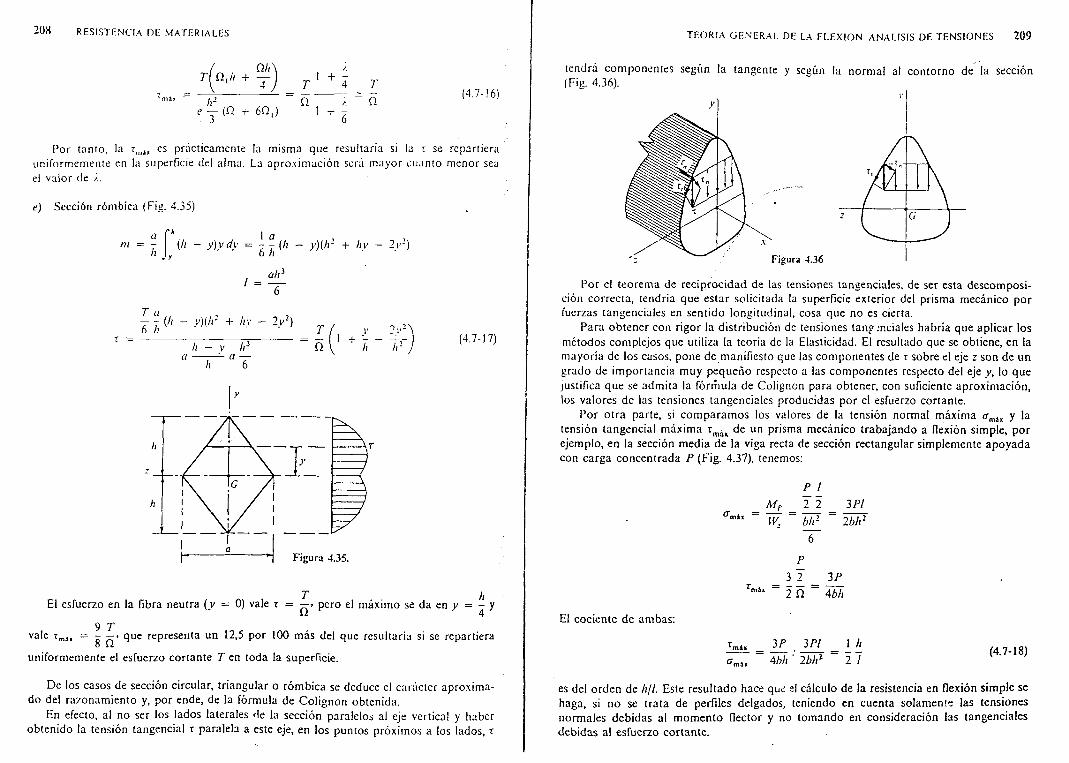
2 0 8 RESISTENCIA DE MATERI ALES
r a ,/ i +Q/i
T 1 + 4
e y (H + 6 0 ,)o
' + 6
rñ (4.7-16)
Por tanto, la rmJ, es prácticamente la m isma que resultaría si la r se repartiera uniformemente en la superficie del alma. La aproxim ación será m ayor cuanto menor sea el valor de
e ) Sección rómbica (Fig. 4.35)
(h - y ) y d y = ¿ j (h - y ) (/ r + h y - 2 / ) 6 h
I =a h 3
T a 6 h
{h - y ) ( l r + h y - 2v2)
h — y Id a a —
Tñ /r
(4.7-17)
y
El esfuerzo en la fibra neutra ( y = 0) vale r = —> pero el máximo se da en y = - y
9 Tvale rma, = - - t que representa un 12,5 por 100 más del que resultarla si se repartiera
O i¿uniformemente el esfuerzo cortante T en toda la superficie.
De los casos de sección circular, triangular o róm bica se deduce el carácter aproxim ado del razonam iento y, por ende, de la fórmula de Colignon obtenida.
En efecto, al no ser los lados laterales de la sección paralelos al eje vertical y haber obtenido la tensión tangencial x p arale la a este eje, en los puntos próximos a los lados, x
TEORI A GE NE R AL DE LA FLEXION. ANALISIS DE T ENS I ONES 2 0 9
tendrá componentes según la tangente y según la normal al contorno de la sección (Fig. 4.36).
Por el teorem a de reciprocidad de las tensiones tangenciales, de ser esta descom posición correcta, tendria que estar solicitada la superficie exterior del prisma mecánico por fuerzas tangenciales en sentido longitudinal, cosa que no es cierta.
P ara obtener con rigor la d istribución de tensiones tang.-ncíales habría que ap licar los métodos complejos que utiliza la teoría de la Elasticidad. El resultado que se obtiene, en la m ayoría de los casos, pone de manifiesto que las componentes de x sobre el eje z son de un grado de im portancia m uy pequeño respecto a las componentes respecto del eje y , lo que justifica que se adm ita la fórm ula de Colignon para obtener, con suficiente aproxim ación, los valores de las tensiones tangenciales producidas por el esfuerzo cortante.
Por o tra parte, si com param os los valores de la tensión normal m áxim a <xmáx y la tensión tangencial m áxim a t mii de un prisma mecánico trabajando a flexión sim ple, por ejemplo, en la sección m edia de la viga recta de sección rectangular simplemente apo yada con carga concentrada P (F ig. 4.37), tenemos:
El cociente de am bas:
M fW ,
P /2 2 w 6
P3 2 3 P2 ñ ~ 4bíi
3 P l2W
3 P4 bh
3 P l2bh l
l_ h 2 l
(4 .7- 18)
es del orden de h/l. Este resu ltado hace que el cálculo de la resistencia en flexión sim ple se haga, si no se tra ta de perfiles delgados, teniendo en cuenta solam ente las tensiones normales deb idas al momento flector y no tomando en consideración las tangenciales debidas a l esfuerzo cortante.

2 1 0 RE S I S TENCI A DE MAT E R I AL E S
F ig u r a 4 3 7 .
4.8. T en sion es principales en flex ión sim p leHemos visto cómo en las secciones rectas de una viga som etida a flexión simple existen tensiones norm ales, dadas por la ley de Navier, y tensiones tangenciales, que se calculan por la fórm ula de Colignon. Si consideramos una viga simplem ente ap o yada , de sección constante y carga continua, de los d iagram as de momentos (lectores y esfuerzos cortantes se deducen las variaciones relativas a las tensiones norm ales y tangenciales en los planos de las secciones rectas (F ig. 4.38).
p
i
TEORIA G E N E R A L DE LA FLEXION. ANALISIS DE T ENS I ONES 21 1
En las secciones extrem as la distribución de esfuerzos cortantes es de tipo parabólico, m ientras que los esfuerzos norm ales se anulan . Si vamos recorriendo las secciones, a partir de uno de los extremos, a medida que nos acercam os a la sección de momento flector máximo dism inuyen las tensiones cortantes a la vez que aum entan las normales
En la sección del m áxim o momento Héctor se anulan las tensiones tangenciales y la tensión normal m áxim a se presenta en los puntos más alejados de la fibra neutra. Salvo en esta sección en la que las tensiones normales son tensiones principales en todos los puntos de ella, en cualqu ier otro punto de la viga el cálculo de los valores de las tensiones principales no es tan inm ediato.
En una viga como la ind icada en la F igura 4.38, que adm ita plano vertical de sim etría, las componentes de la m atriz de tensiones en los puntos de la m isma son:
<
M n<7„x = - y y ’ = o
Tm „i = ---- ; r ... = t_- = 0
b l . ’ •
(4.8-1)
Se observa que las tensiones son constantes en los puntos pertenecientes al eje z. Se trata , por tanto, de un estado tensional plano. En cada punto P existen dos tensiones principales uy. ít,. contenidas en el plano paralelo al de sim etría de la viga.
P ara un determ inado punto P la tensión m áxim a será la m ayor de las tensiones principales, cuyos valores se pueden obtener fácilmente mediante la construcción gráfica de M ohr (Fig. 4.39-6).
= ' - ( o ± (4-8-2!2
Ahora bien, por medio de la ley de N avier y fórmula de Colignon
M Tm~ T y ; T “ w 7
F i g u r a 4 3 9 .

2 1 2 RESISTENCIA DE MA T E R I A L E S
siendo M y T el momento Héctor y esfuerzo cortante, respectivamente, que actúan en la sección recta a la que pertenece el punto P, podemos expresar las tensiones principales en función de M, T y de la d istancia y del punto a la fibra neutra
* 1.2 = ± J m 2}'2 + (4.8-3)
expresión que nos perm ite ca lcu lar el valor de la tensión máxim a en los puntos de la sección que se considera.
Del mismo circulo de M ohr se deducen las direcciones principales definidas por el ángulo 0, tal que
tg 29 = — (4.8-4)
es decir, las direcciones principales en cualqu ier punto de la sección están en un plano paralelo al de sim etría vertical de la viga y la dirección principal I forma con el eje longitudinal de la m ism a un ángulo 0, contado en sentido horario , como se indica en la F igura 4.39-c.
Para estudiar cómo varían las direcciones principales se pueden utilizar las líneas isostáticas. Se denom inan así a las curvas tales que en cada uno de sus puntos las tangentes son coincidentes con las direcciones principales. Existen dos fam ilias de líneas isostáticas que son ortogonales entre si.
De la ecuación (4.8-4) se deduce lo siguiente:
a) En las fibras extrem as superior e inferior una fam ilia de isostáticas es norm al a lafibra, ya que en ellas r = 0 y, por tanto
Xg28 = 0 => Qt = 0 ; 02 = ^
es decir, las isostáticas en los bordes superior e inferior de la pieza los cortanortogonal o asintóticam ente.
b) En la fibra r.eut?a: a = 0
tg 2 0 = ±oo 6 = + - ~ 4
es decir, en los puntos de la línea neutra las isostáticas corta a ésta bajo ángulos de ± 45°.
En la F igura 4.40-a se han d ibu jado las isostáticas en el caso de una viga de sección rectangular con carga P en su extrem o libre, obtenidas m ediante la determ inación en un cierto número de puntos de las direcciones principales por el método gráfico de M ohr como se ha indicado anteriorm ente, y que es el método que se sigue en Resistencia de M ateriales.
T E O R I A G E N E R A L DE LA FLEXION. ANAL I S I S DE T E N S I O N E S 2 1 3
En la F igura 4.40-6 se han d ibu jado , asim ismo, las isostáticas de la m isma viga anterior sometida al mismo estado de carga , pero obtenidas experim entalm ente m ediante los métodos propios de la fo toelastic idad , es decir, se obtienen las isoclinas en el banco fotoelástico y a partir de éstas, m ediante integración gráfica, se llega a las isostáticas.
De la observación de am bas figuras se desprende que las isostáticas determ inadas por la Resistencia de M ateria les co inciden con las obtenidas experim entalm ente, salvo en las zonas próximas a la ap licación de las cargas, como, por otra parte, establece el principio de Saint-Venant.
4.9. V igas arm adasEl diseño de una viga que va a estar som etida a flexión simple se suele reducir a la elección de su sección recta entre perfiles com erciales norm alizados, de tal forma que las tensiones máxim as en la v iga no superen los valores de las tensiones adm isibles.
Si las tensiones adm isib les a tracción y a compresión son iguales en valor absoluto , se deberá elegir una viga cuya sección recta tenga su centro de gravedad a m itad de su a ltura. Si, por el contrario , no son iguales en valor absoluto, es aconsejable em plear vigas de sección recta asim étrica ta l que las d istancias del centro de gravedad a las fibras extrem as estén aproxim adam ente en la m ism a relación que la de los valores absolutos de las tensiones adm isibles.
De las fórmulas de N avier y C o lignon se puede deducir la forma estim ada de la sección recta ideal de una viga som etida a flexión simple, en el caso de ser iguales en valo r absoluto las tensiones adm isib les a tracción y a compresión, con la condición de utilizar la menor cantidad posible de m ateria l.
En efecto, de la ley de N avier, ap licada a la fibra más a le jada de la neutra
M
Ir
se desprende que para soportar el momento flector M, la capacidad resistente será tanto m ayor cuanto más pequeña sea la tensión m áxim a o, lo que es lo mismo, cuanto m ayor sea el momento de inercia /., p ara un valor de y max constante.
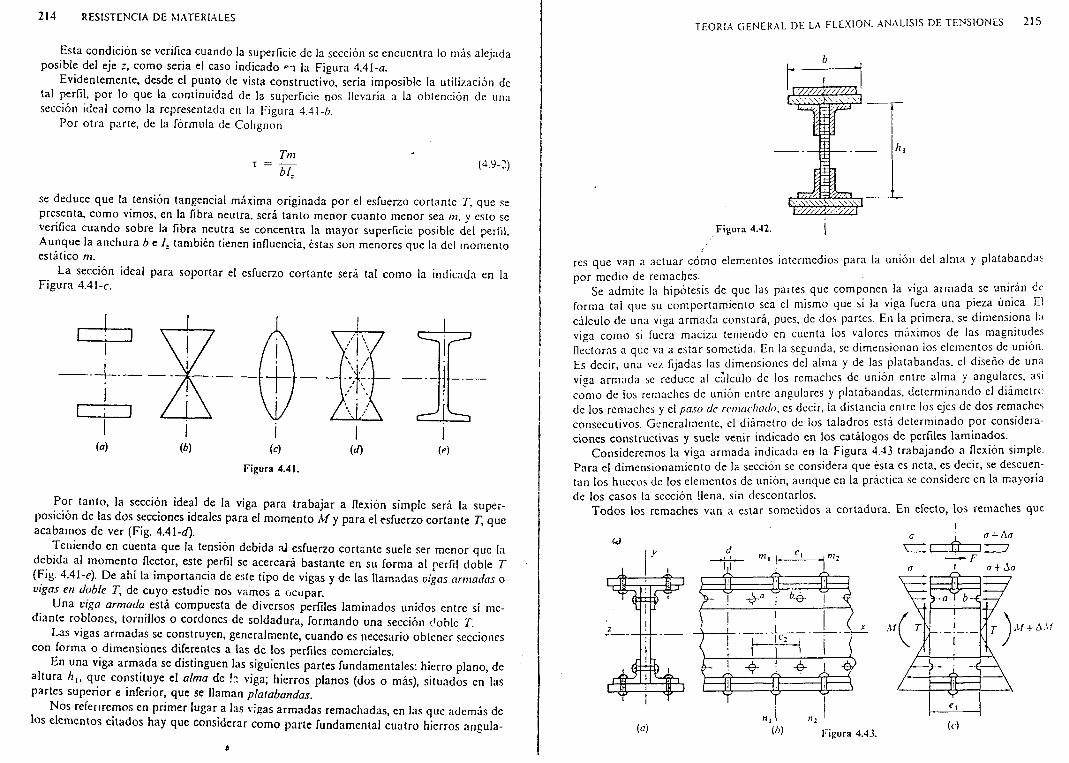
214 R ES IST EN C IA D E M A TER IA LES
Esta condición se verifica cuando la superficie de la sección se encuentra lo más ale jada posible del eje z, como seria el caso indicado p-i la F igura 4.41-a.
Evidentemente, desde el punto de vista constructivo, seria im posible la utilización de tal perfil, por lo que la continuidad de la superficie nos llevaría a la obtención de una sección ideal como la representada en la F igura 4.41-ó.
Por otra parte, de la fórmula de Colignon
TmT l
(4.9-2)
se deduce que la tensión tangencial m áxim a orig inada por el esfuerzo cortante T, que se presenta, como vimos, en la fibra neutra, será tanto menor cuanto menor sea m, y esto se verifica cuando sobre la fibra neutra se concentra la m ayor superficie posible del perfil. Aunque la anchura b e l . también tienen influencia, éstas son menores que la del momento estático ni.
La sección ideal para soportar el esfuerzo cortante será tal como la indicada en la F igura 4.4 l-c.
(o) ib) (e)
Por tanto, la sección ideal de la viga para trab a ja r a flexión sim ple será la superposición de las dos secciones ideales para el momento M y para el esfuerzo cortante T, que acabam os de ver (Fig. 4.4 l-c/).
Teniendo en cuenta que la tensión debida a l esfuerzo cortante suele ser menor que la deb ida a l momento flector, este perfil se acercará bastante en su forma a l perfil doble T (Fig. 4.41-e). De ah i la im portancia de este tipo de v igas y de las llam adas vigas armadas o vigas en doble T, de cuyo estud ie nos vamos a ocupar.
U na viga armada está com puesta de diversos perfiles lam inados unidos entre sí med ian te roblones, tornillos o cordones de so ldadura, formando una sección doble T.
Las vigas arm adas se construyen, generalm ente, cuando es necesario obtener secciones con forma o dim ensiones diferentes a las de los perfiles com erciales.
En una viga arm ada se distinguen las siguientes partes fundam entales: hierro p lano, de a ltu ra A„ que constituye el alma de h viga; h ierros planos (dos o más), situados en las partes superior e inferior, que se llam an platabandas.
Nos referiremos en prim er lugar a las v;gas arm adas rem achadas, en las que adem ás de los elem entos citados hay que considerar como parte fundam ental cuatro hierros angula-
TEORI A G E N E R A L DE LA FLEXION. ANALI SI S DE TE NS I ON E S 2 1 5
res que van a actuar cómo elementos intermedios para la unión del a lm a y p latabandas por medio de remaches.
Se adm ite la hipótesis de que las partes que componen la viga arm ada se unirán de forma tal que su com portam iento sea el mismo que si la viga fuera una pieza única El cálculo de una viga arm ada constará, pues, de dos partes. En la prim era, se dimensiona la viga como si fuera m aciza teniendo en cuenta los valores máximos de las magnitudes flectoras a que va a estar som etida. En la segunda, se dim ensionan los elem entos de unión. Es decir, una vez fijadas las dimensiones del alm a y de las p latabandas, el diseño de una v isa arm ada se reduce al calculo de los remaches de unión entre alm a y angulares, asi como de los remaches de unión entre angulares y p latabandas, determ inando el diámetro de los remaches y el paso de remachado, es decir, la d istancia entre los ejes de dos remaches consecutivos. Generalm ente, el d iám etro de los taladros está determ inado por consideraciones constructivas y suele venir indicado en los catálogos de perfiles lam inados.
Considerem os la viga arm ada indicada en la F igura 4.43 trabajando a flexión simple. P ara el dim ensionam iento de la sección se considera que ésta es neta, es decir, se descuentan los huecos de los elementos de unión, aunque en la práctica se considere en la m ayoría de los casos la sección llena, sin descontarlos.
Todos los remaches van a estar sometidos a cortadura. En efecto, los remaches quei

2 1 6 RESISTENCIA DE MATE RI ALE S
unen p latabandas y angulares han de soportar los esfuerzos rasantes que existen en la superficie p lana común de am bas partes de la viga arm ada. Tam bién, los remaches que unen angulares y alm a han de soportar los esfuerzos rasantes que se engendran entre alm a y el conjunto formado por angulares y p latabanda de la correspondiente cabeza de la viga arm ada.
Para la determ inación del paso de rem achado considerarem os la porción de viga que comprende una pareja de remaches con sus ejes en un p lano medio, lim itada por dos planos que equidistan de esta pareja de remaches y las o tras dos parejas de remaches contiguas a un lado y a otro de ella (Fig. 4.43-c).
Sobre la sección de la izquierda en la que actúa un momento fiector M existe una distribución de tensiones normales a , y sobre la sección de la derecha, en la que el momento fiector es M + AM, las tensiones norm ales serán a + A a (Fig. 4.43-c). Esta diferencia de tensiones normales es causa de una fuerza rasante que tiende a hacer deslizar el a la de la viga, formada por la p latabanda y los dos angulares, a lo largo del eje longitudinal del alm a, deslizam iento que es im pedido por las fuerzas de rozamiento existentes entre las superficies en contacto de a la y a lm a y por los rem aches que unen angulares y alm a.
Suponiendo despreciable el efecto de rozam iento, la fuerza F que actúa sobre cada pareja de remaches será:
F = (cr + A a) dQ —n,
cr dQ =n,
A a dQ (4.9-3)n,
estando extendida la integral a la superficie f i„ form ada por la sección recta de las p latabandas.
Por la ley de N avier, al ser constante la sección, podemos poner
A M17Aa = ~ ^ ~ y (4.9-4)
y como de la ecuación de momentos en el equilibrio de la rebanada considerada (F igura 4.43-c)
(M + AM) - M - Te, = 0*cj
se deduce:
AM = Te, (4.9-5)
la ecuación (4.9-4) tom a la forma
F = f I í L y ( t Q = f y í K l = T l m { 4 9 _ 6 )
Jo. '= A Jn, /,siendo ni el momento estático respecto al eje z de la sección recta de la p latabanda.
En el caso q ue T sea v a riab le en la porción de v iga co n sid erad a , se to m ará un v a lo r m ed io T *.
TEORI A G E N E R A L DE LA FLEXION. ANALISIS DE T E NS I ON E S 2 1 7
Ahora bien, esta fuerza F es absorb ida por la pareja de roblones a través de sussecciones rectas pertenecientes al plano de separación entre p latabandas y angulares.Suponiendo un reparto uniforme de F en estas secciones, la tensión cortante r en ellas verificará:
F = x • 2n ^ = TíL (4.9-7)4 /.
es decir: „___—
2 T e ^ i ^L /2 r ^n d i .
de donde se obtiene la expresión del valor m áxim o del paso de remachado en las p la tab an das
^ 71 (4.9-8)21 m
Por otra parte, los roblones que unen angu lares al alm a están sometidos a doble cortadura como consecuencia de la existencia de una fuerza rasante. Razonando an á lo ga mente a cómo se ha hecho para el cálcu lo de la fuerza F q u e actúa sobre los roblones que unen los angulares a la p latabanda, llegaríam os a obtener como expresión de la fuerza rasante
= — f1z Jn i+ n ,
y d Q = ^ ± r r i (4.9-9)
en dor.de e2 es el paso de rem achado en el alm a, y m ' el momento estático respecto del eje z de las secciones de la p lataban da y de la pareja de angulares de una de las cabezas de la viga arm ada (Fig. 4.4-a).
“F iT ,
- Hl —
J uI_____ i
ib)
F ig ura 4 .44 .

2 1 8 R E S I ST EN CI A DE M A T ER I A L E S
Como son dos secciones del roblón las que soportan esta fuerza rasante, el paso de rem achado e 2 en el a lm a deberá verificar
n d 2L t„ 2T m (4.9-10)
Si querem os que el paso de rem achado sea el mismo en alas y alm a, y si el diám etro d es común para todos los roblones, se tom ará como paso de rem achado 'e el menor valor entre e, y e 2.
Tam bién, en la sección a b del a lm a (Fig. 4.43-Ó) existe una fuerza rasante
F =Te7 7
Te ■■ y dQ. = — mI ' ~
(4.9-11)
en donde m " es el momento estático respecto del eje r de las secciones de p latabandas, angu lares y parte del a lm a situada por encim a de la sección considerada (Fig. 4 .44-h).
Como esta fuerza se supone que se reparte uniformemente sobre el área (e - d ) b de la sección long itud inal ab o rig ina una tensión cortan te de valor
F Teb ( e — d ) b ( e — d ) l : (4.9-12)
O tra forma de unir las partes fundam entales de una viga arm ada es mediante cordones de so ldadura. Se tienen asi las v i g a s s o l d a d a s , en las que los cordones de soldadura pueden ser continuos o discontinuos (Fig. 4.45).
Figura 4.45.
Pueden estar constitu idas por varias p lataban das y se pueden ejecutar, también, so ldando p la tab an das a perfiles lam inados I.
Para el cálcu lo de los cordones de so ldadura que unen alm a y p latabandas tendremos en cuenta que estos han de soportar los esfuerzos rasan tes que tienden a hacer deslizar las p latabandas respecto al alm a.
TEORI A G E N E R A L DE LA FLEXION. ANAL I S I S DE TE NS I ON E S 2 1 9
De la ecuación (4.9-7) se deduce que el esfuerzo rasante por unidad de longitud de la viga es
f = I — (4.9-13)1 I.
siendo T el esfuerzo cortante que actúa en la sección transversal de la viga; /. el momento de inercia de la sección respecto al eje -; y m el momento estático de la sección de la p latabanda que se considere, respecto al eje r.
Si t es la tensión a cortadura de la so ldadura, el ancho de gargan ta a de los cordonesverificará
r2 ¿ = ^ U b dm (4.9-14)■ ‘ - r ‘ a d m
expresión que permite determ inar las dimensiones que deberán tener los cordones en el caso de so ldadura continua como es el indicado en la F igura 4.45-ú.
No obstante, las normas de los diferentes paises suelen establecer los valores mínimos que debe tener el ancho de gargan ta en vigas arm adas soldadas.
Si los cordones son discontinuos (Fig. 4.45-c). los parám etros del problem a verificarán
Tin¿x • s ■ a = (4.9-15)
expresión que relaciona los tres parám etros s, a y e. y que permite calcu lar cualqu iera de ellos si son fijados previam ente los valores de los otros dos.
U na de las principales ventajas que presentan las vigas arm adas es poder constru irlas de sección variab le . Como hemos indicado anteriorm ente, en la m ayoría de las secciones de una viga de sección constante som etida a flexión simple está in frau tilizada su capacidad resistente, y a que la v iga se d iseña para que cualqu iera de sus secciones resista la acción fiectora más desfavorable. Esto nos induce a pensar en la posibilidad de d iseñar vigas de sección variab le con la consiguiente economía de m aterial.
En este tipo de vigas se m antiene constante el ancho y la sección variab le se consigue variando el núm ero de p latabandas, de tal forma que el momento resistente m áxim o que cada sección puede soportar se adapte, por defecto, lo más posible, al d iagram a de momentos flectorcs a que va a estar som etida la viga.
La determ inación de las longitudes de las p latabandas se suele hacer por el método gráfico que se indica en la F igura 4.45 -d.
El d iagram a de momentos flectorcs se envuelve por una poligonal escalonada, en la que la ordenada del prim er escalón corresponde al momento flector m áxim o que puede soportar la sección sin p latabandas; la ordenada del segundo escalón es el momento (lector m áxim o que puede soportar la sección con una p latabanda; la ordenada del tercer escalón, el m om ento flector m áxim o que puede soportar la sección con dos p latabandas; la ordenada del cuarto escalón, el momento flector m áxim o que pueden soportar las secciones con tres p latabandas (en la F igura 4.45-rfcl momento Héctor m áxim o a que va a estar som etida la viga).

r e s i s t e n c i a d e m a t e r i a l e s
Los vértices de la poligonal, que pertenecen al contorno del d iagram a de momentos fiectores, determ inan, como fácilmente se deduce de la observación de la F igura 4 45-4 las
ambosUlaedose° nCaS ^ P Í a ta b a n d a S ' En la Práctica se Prolongan una longitud ' b a
Los espesores de las p latabandas se fijarán de tal forma que se verifique en el tramo con n p latabandas:
(4.9-16)
siendo Wr el m ódulo resistente de la sección con las „ p latabandas, y A/„ . el momento flector m áxim o en el tram o correspondiente. max
4.10. V igas com puestas
En todo lo anterior hemos considerado que el m aterial del que está fabricada una viga trabajando a flexión era homogéneo. Pero existen razones que pueden aconsejar utilizar en las estructuras vigas que esten construidas de más de un m aterial. A estas vigas se rás denom ina v . g a s c o m p u e s t a s Son ejemplos de secciones de vigas com puestas las ind icadas en la F igura 4.46, aunque el ejemplo más generalizado de este tipo de vigas lo constituye las vigas de horm igón arm ado (Fig. 4.46-4).
TEORI A G E N E R A L DE LA FLEXION. AN A L I SI S DE TENS IONES 2 2 1
La hipótesis que se adm ite en este tipo de vigas es la de la conservación de las secciones planas, es decir, las secciones rectas que son planas antes de la deformación permanecen planas después de ella.
Consideremos la viga form ada por dos materiales, cuya sección es la indicada en la Figura 4.47-u. Suponiendo que esta sección está som etida a un momento positivo M, la deformación que experim enta la sección en sentido longitud inal será tal como la representada en la Figura 4.47-6.
F ig u r a AA1.
Unas fibras se alargan y o tras se acortan, existiendo, como en el caso de vigas de un solo m aterial, una fibra que no se a la rg a rá ni acortará: es la fibra neutra, pero ahora esta fibra neutra no contendrá al baricentro de la sección.
Las leyes de las tensiones norm ales en cada una de las partes se pueden obtener aplicando la ley de Navier en su forma (4.2-3)
AP
. hp
(4.10-1)
siendo £ j y £\ los m ódulos de e lastic idad de los m ateriales 1 y 2 , respectivamente; p, el radio de curvatura de la fibra neutra en la sección considerada; e y , la d istancia de la fibra que se trate a la fibra neutra. La d istribución de tensiones en la sección se representa en la F igura 4.47-c.
Ahora bien, la fuerza que se ejerce sobre un elemento de área dQ del prim er m ateria l es
clF¡ = a l dQ = —— y dQ P
(4.10-2)
m ientras que la expresión de la fuerza que se ejerce sobre un elem ento de área igual a dQ del segundo m aterial es
£dFz = cr2 dQ. = ----- y dQ
P( 4 . 1 0 - 3 )
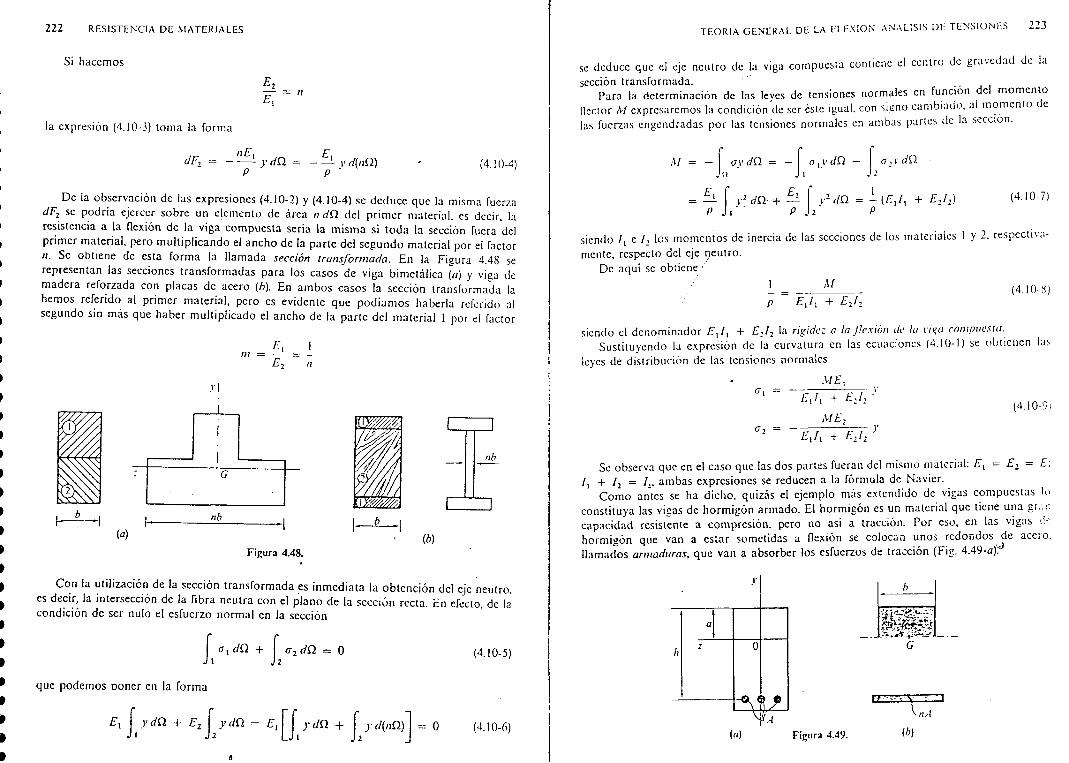
222 RES ISTEN C IA D E M A T ER IA LES
Si hacemos
Ei
la expresión (4.10-3) toma la forma
n £ EídFi = - y ciQ. = ----- !■ v d (n í l ) - (4.10-4)
P p '
De la observación de las expresiones (4.10-2) y (4.10-4) se deduce que la misma fuerza dF2 se podria ejercer sobre un elemento de área n d í l del prim er m aterial, es decir, la resistencia a la flexión de la v iga com puesta sería la m ism a si toda la sección fuera del prim er m aterial, pero m ultip licando el ancho de la parte del segundo m aterial por el factor n. Se obtiene de esta forma la llam ada s e c c i ó n t r a n s f o rm a d a . En la F isura 4.48 se representan las secciones transform adas para los casos de viga bim etálica (a) y viga de m adera reforzada con placas de acero (h). En am bos casos la sección transform ada la hemos referido al prim er m ateria l, pero es evidente que podíam os haberla referido al segundo sin más que haber m ultip licado el ancho de la parte del m ateria l 1 por el factor
Ti
(«)
nb
Figura 4.48.
nb
(b)
Con la utilización de la sección transform ada es inm ed iata la obtención del eje neutro, es decir, la intersección de la fibra neutra con el p lano de la sección recta. En efecto, de la condición de ser nulo el esfuerzo norm al en la sección
ff, d í l + a 2 d Q = 0 (4.10-5)
que podemos Doner en la forma
E , y dQ + E2 y dQ = £, y d í l + y d (nQ) = 0 (4.10-6)
a
TEORI A GENERAL DE LA FLEXION. ANALISIS DE T E NS I ON E S 2 2 3
se deduce que el eje neutro de la viga compuesta contiene el centro de grave a e asección transform ada.
Para la determ inación de las leyes de tensiones normales en función c momento flector M expresaremos la condición de ser éste igual, con signo cam biado, al m om ento e las fuerzas engendradas por las tensiones normales en ambas partes de la sección.
M = -
£ i p .
a v d í l = —
v2 d í l + ^
<T[ l' d í l a , e d í l
v 2 dQ = - ( £ ,/ , + E J 2) (4.10-7)P
siendo /, e /-, los momentos de inercia de las secciones de los m ateriales 1 v 2 . respectivamente, respecto del eje neutro.
De aqu i se obtiene/
1 ,U (4.10-8)E\11 + E2¡ 2
siendo el denom inador £ ,/ , + E2¡ 2 la r i g id ez a la f l e x i ó n d e la c i g a c o m p u e s t a .Sustituyendo la expresión de ía curvatura en las ecuaciones (4.10-1) se obtienen las
leyes de distribución de las tensiones normales
ME,£ ,/ , + E2I2
m e 2' Exl i + E2I2
(4.10-9 ¡
Se observa que en el caso que las dos partes fueran del mismo m aterial: £ , — E2 — £. /, + I 2 = /., am bas expresiones se reducen a la fórmula de Navier.
Como antes se ha dicho, quizás el ejemplo más extendido de vigas com puestas lo constituya las vigas de horm igón arm ado. El hormigón es un m aterial que tiene una gr.-.i, capacidad resistente a com presión, pero no así a tracción. Por eso, en las v igas de hormigón que van a estar som etidas a flexión se colocan unos redondos j i e acero, llam ados a rm adu ra s , que van a absorber los esfuerzos de tracción (Fig. 4.49-a).
y
a
b 1 0 G
t f • V r Zl
v„,t
(«) Figura 4 .49 . (b)

2 2 4 RESISTENCIA DE MA T E R I AL E S
En las vigas de horm igón arm ado se supone que la resistencia a tracción es nula, por lo que en la sección transform ada (Fig. 4.49-Ó) se prescinde de la zona sometida a tracción. La sección transform ada del acero será nA, siendo .4 el área de la sección de las arm adurasy n
" = 7 r -(4.10-10)£h
es la relación entre los m ódulos de elasticidad del acero v del hormicón.El eje neutro, dado que contiene el centro de gravedad de la sección transform ada, se
puede determ inar im poniendo la condición de ser nulo respecto de él el momento estáticode dicha sección
ah a - - nA(h - a) = 0 (4.10-11)
Se obtiene así la ecuación de segundo grado
- h a 2 + nAa — nAh = 0
cuya raiz válida determ ina la d istancia del eje neutro a la fibra superior de la sección de la viga compuesta
- n A + J n 2A2 + 2bnAh nA ( I 2bh \a = ------------------1--------------------- T W 1 + m - 1 j (4'1(M2>
Las expresiones de las tensiones en horm igón y acero, en virtud del (4.10-9), son
_ ■'4/ /Ti, Af AfCh ~ ~ EkI> + E J . y " ~7„ + n l a y = ~ T y
„ - M E ° n t M n M (>' ~ a ) ( 4 . 1 0 - 1 3 )
| ( , i + | 4 ) — r -
siendo:
Ih e /„, los momentos de inercia respecto del eje neutro de la parte de horm igón som etida a com presión y del acero de las arm aduras, respectivamente.L, el momento de inercia de la sección transform ada, referida al hormigón, respecto del eje neutro.
U na vez determ inada la situación de éste, la expresión de I . será
TEORI A GE NE R A L DE LA FLEXION. ANA L I S I S DE T ENS I ONES 2 2 5
4 .1 1 . Estudio de las tensiones cortantes en el ca so de perfiles d e lgados so m etid o s a flexión simple
Llam arem os p e r f i l d e p a r e d d e l g a d a o, simplemente, p e r f i l d e l g a d o a un prism a m ecánico cuya sección recta está lim itada por dos curvas próxim as, cuya distancia e entre e llas se denom ina e s p e s o r d e la p a r e d .
Anteriorm ente se ha indicado que en el cálculo de una pieza que trabaja a flexión simple, si no se trata de un perfil de pared delgada, juegan un papel im portante las tensiones norm ales debidas al momento (lector y tienen poca im portancia las tangenciales debidas al esfuerzo cortante.
Por el contrario , cuando consideram os perfiles delgados, el conocim iento de cómo se d istribuyen las tensiones tangenciales en la sección recta del perfil tiene un extraord inario interés. /
Con objeto de ir fijando las ideas, consideremos el perfil delgado representado en la F igura 4.50 som etido a una carga vertical situada en el p lano principal Gxy. La d istribu ción de tensiones norm ales se regirá por la ley de N avier. Por ello, al considerar un corte ideal nui, norm al a la linea m edia del contorno, ei razonam iento para ca lcu lar el valor de la tensión cortante t , igual £ la tensión rasante en el p lano para le lo a l eje long itud inal del perfil, es idéntico al seguido para la obtención de la fórm ula de Colignon. Por tanto , la expresión de la tensión tangencial en los puntos de la traza del p lano m n de corte será
en donde Ty es el esfuerzo cortante en la sección en la d irección del eje y ; m . , el m omento estático de la sección rayad a en la figura respecto del eje z; e, el espesor del perfil, e el momento de inercia de toda la sección respecto del eje z.
H ay, sin em bargo, una diferencia importante respecto a l estudio hecho anteriorm ente sobre la tensión cortante en perfiles no delgados. A llí suponíam os que la tensión cortante tenía la d irección del eje vertical, no obstante hacer la observación de que esta suposición estaba en contrad icción con el teorema de reciprocidad de las tensiones tangenciales. En

2 2 6 R E S I S TENCI A DE MATERI ALES
los perfiles delgados, por el contrario, supondremos que las tensiones tangenciales son parale las a l contorno y sensiblemente constantes según el espesor.
Como la dirección de la tensión tangencial en un punto depende de la forma del perfil y no de la carga ap licada, sí las cargas son tales que el esfuerzo cortan te T en la sección tiene com ponentes Ty y T. respecto de los ejes principales de inercia, la fórm ula (4 . 1 1- !) se convertirá en:
7> i. T.my
r = - 7 / 7 + i r <4» - 2>expresión del valor m odular de la tensión cortante en los puntos de la sección del perfil. La dirección ya hemos indicado que es paralela al contorno. En cuanto al sentido, la reciprocidad de las tensiones tangenciales permite determ inarlo sin que exista am bigüedad.
El producto t e recibe el nombre de f l u j o d e c o r t a d u r a y lo designarem os por t.Es evidente que en el caso de un p e r f d d e s e c c i ó n a b i e r ta , como es el indicado en la
F igura 4.50, la fórmula (4.11-1) determina el valor de la tensión tangencial r. De esta fórm ula se deduce que en los extremos del perfil r = 0 , que tiene que ser así, pues, en caso contrario tendría que estar sometido en el borde a una tensión tangencial que no existe.
Pero cuando se trata de un p e r f i l d e s e c c i ó n c e r r a d a , ya no se puede afirm ar que esta fórm ula nos da el valor de la tensión tangencial, porque, ¿qué significado tiene entonces el momento estático m?
Considerem os la porción de perfil delgado de sección cerrada contenido entre dos planos indefinidam ente próximos, separados entre si dx, y en ella la parte com prendida entre las secciones longitudinales que contienen los puntos A y B (F ig. 4.51).
Com o consecuencia de actuar en la sección izqu ierda una tensión norm al cr y en la de la derecha a + da , ex istirá una fuerza resultante, de valor
M + d My d í l -
_ Ty dx I.
T ydQ . =0 ‘ ‘ z
d M
y d í l =
n- ¡z
Ty dx m .
y d í l =
(4.11-3)
TEORI A G E N E R A L DE LA FLEXION. ANALISIS DE T ENS I ONES 2 2 7
en donde m es el momento estático de la superficie rayada O* en la F igura 4.51 respectoal eje Gz. .
Si e A y e B son los espesores de la pared del perfil en A y D. v r A y r„ las tensiones tamzenciales respectivas, proyectando sobre el eje x las fuerzas que actúan sobre e elemento de perfil indicado en la F igura 4.51. se tiene
xB - e Bdx - rA- e Adx - í p dx = 0 (4.11-4)
de donde:
+ Z £ (4.11-51
Esta expresión nos permite obtener el (lujo de cortadura t en una sección transversal de la pared del perfil si es conocida esta magnitud en otra. Es evidente que si la sección del perfil tiene un eje de sim etría y el esfuerzo cortante tiene su dirección y está contenido en el plano longitudinal que le contiene, los puntos de intersección del eje con el contorno son puntos de cizaliam iento nulo, como fácilmente se deduce, por razón de sim etría. Tom ando uno de estos puntos como punto A, la fórmula (4.11-5) nos permite conocer el flujo de cortadura a lo largo de todo el contorno.
Pero si la sección es de forma cualqu iera, la ecuación (4.11-5) es insuficiente para calcularlo . Consideremos en este caso un rectángulo elemental, en un plano tangente al prisma, lim itado por dos generatrices AB, CD, y dos arcos AC. BD, de dos secciones indefinidamente próxim as (Fig. 4.52).
Al producirse la deformación del perfil, una vez cargado, las generatrices AB y CD del prisma no giran. Sin em bargo, las aristas AC y BD del rectángulo giran un ángulo y, tal que ÜÜl - y d s , siendo d s la longitud del arco AC.
Si llam am os u al desplazam iento de A en la dirección del eje .v, el desplazam iento de du
C sera u + — ds.d s

El desplazam iento relativo longitudinal del punto C respecto del A sera:
CC¡ = y iis = — d s = d u G
2 2 8 RESISTENCIA DE MA T E R I A L E S
(4 .11-6)
y como la integral curvilínea a lo largo del contorno cerrado c e s
O d u = 0 (4.11-7)
se tiene, finalmente
O r ds = 0 (4.11-8)
Si sustituimos ahora r por su expresión (4.11-5), tenemos
(J) r d s = <J) ¡ — + ,e e l .
T jm.d s = 0
de donde:
(4.U-9)
¡ A O
d s= - (t) — 1 d s (4.11-10)
expresión que, como vemos, nos permite ca lcu lar tA.Una vez conocido el flujo de cortadura tA en el punto A, origen de arcos, la ecuación
(4.11-5) nos perm itirá obtener el flujo de cortadura en cualqu ier otro punto del contorno.
4.12. Secc iones de perfiles de lgados con eje principal vertical que no lo es de s im etr ía . Centro de esfuerzos cortantes
Consideremos ahora un perfil de sección ab ierta que presenta sim etría respecto al eje principal horizontal, pero no respecto al eje principal vertical, como es el perfil cuya sección sem icircular se indica en la F igura 4.53. Supondrem os constante el espesor e y que el esfuerzo cortante que actúa en la sección está contenido en el plano Gy.
Como
T EO RI A G E N E R A L DE LA FLEXION. ANALI SI S DE TENSIONES 229
la tensión cortante en la sección m n es, en virtud de la fórmula de Colignon
_ T y i u 27je l . n R e
eos 8 ( 4 . 1 2 - 1 )
Podemos com probar que la resultante de las fuerzas de cortadura engendradas por estas tensiones tangenciales en toda la sección es igual al esfuerzo cortante.
En electo, proyectando las fuerzas de cortadura sobre el eje vertical y tomando sentido positivo el descendente, se tiene
*/2
4 TiT eos (7t — 6) (Kl = —y— n R e
e o s 2 ORe dO =k / 2
2 T6 +
sen 20= T (4.12-2)
Si calculam os ahora el momento de las fuerzas de cortadura respecto del centro 0 del
arco, tenemos
M 0 = 2*/ 2
2 T f* ^ 4RT,x R eR dO = —l e R 2 e o s OdO = — —
J h/2 71n R e(4.12-3)
'*/ 2Esto nos indica que ap licando el esfuerzo cortante en el plano vertical, la reducción
del sistema de fuerzas de co rtadu ra de la sección recta en el centro 0 del arco se com pone4 R
de una fuerza, igual al esfuerzo cortante Tr y un momento M 0 = — Ty (Fig. 5.54-a)
Si reducimos el sistem a de fuerzas al centro de gravedad G (Fig. 4.54-Ó), la resu ltante T es la misma y el momento
M q = M q + (70 x Ty
^ 4 K 2 R _ 2RTyM g = M 0 - 05?- Ty - ^ Ty n Tr n (4. 12-4)
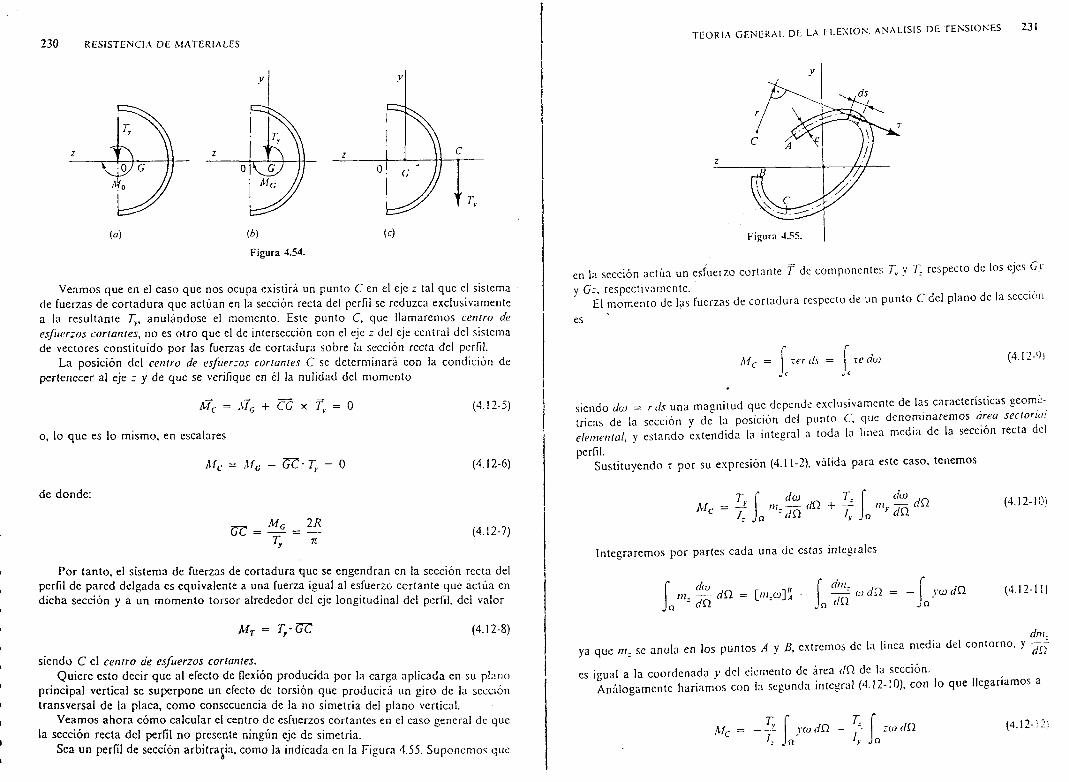
230 R E S I S T E N C I A DE MAT E R I AL E S
Figura 4.54.
Veam os que en el caso que nos ocupa existirá un punto C en el eje z tal que el sistema de fuerzas de co rtadura que actúan en la sección recta del perfil se reduzca exclusivam ente a la resultante 7j., anulándose el momento. Este punto C, que llam arem os c e n t r o d ee s f u e r z o s c o r t a n t e s , no es otro que el de intersección con el eje z del eje central del sistemade vectores constitu ido por las fuerzas de cortadura sobre la sección recta del perfil.
La posición del c e n t r o d e e s f u e r z o s c o r t a n t e s C se determ inará con la condición de pertenecer a l eje r y de que se verifique en él la nulidad del momento
M c = \70 + CG x Ty = 0 (4.12-5)
o, lo que es lo m ismo, en escalares
M c = u 0 - Ü £ -T r = 0 (4.12-6)
de donde:
GÜ = ^ = — (4.12-7)Tr n
Por tanto , el sistem a de fuerzas de cortadura que se engendran en la sección recta del perfil de pared de lgada es equivalente a una fuerza igual a l esfuerzo cortante que actúa en d icha sección y a un momento torsor alrededor del eje longitud inal del perfil, del valor
M T = T,-<T£ (4.12-8)
siendo C el c e n t r o d e e s f u e r z o s c o r l a n t e s .Q uiere esto decir que a l efecto de flexión producida por la carga ap licada en su plano
principal vertica l se superpone un efecto de torsión que producirá un giro de la sección transversal de la p laca, como consecuencia de la no sim etría del plano vertical.
Veam os ahora cómo ca lcu lar el centro de esfuerzos cortantes en el caso general de que la sección recta del perfil no presente ningún eje de sim etría.
Sea un perfil de sección arb itraria , como la indicada en la F igura 4.55. Suponem os que
T EO RI A GE NE R A L DE LA FLEXION. ANAL I S I S DE T ENS I ONES 231
en la sección actúa un esfuerzo cortante 7 de componentes 7 , y T: respecto de los ejes C ry Gz. respectivamente.
El momento de las fuerzas de cortadura respecto de un punto C del plano de la sección
es
M c = xer d s = re d w (4.12-9)
siendo d w = r d s una m agnitud que depende exclusivam ente de las características geométricas de la sección y de la posición del punto C, que denom inarem os o r e a s e c t o r i a l e l e m e n t a l , y estando extendida la integral a toda la línea m edia de la sección recta del
perfil.Sustituyendo r por su expresión (4.11-2), válida para este caso , tenemos
M c I zL
d w T.m z— d n + -
ly Jckú r tnm — d í l
, ' d Q(4.12-10)
Integrarem os por partes cada una de estas integrales
d m .dQ
w dQ = v w dQ (4.12-11)
dm .a que n ,z se anu la en los puntos A y B, extremos de la linca m edia del contorno, y ^
:s igual a la coordenada y del elemento de área dQ de la sección.A nálogam ente haríam os con la segunda integral (4.12-10), con lo que llegaríam os a
M r =7. vw dQ
T. fzw d Q (4.12-12)

2 3 2 RESISTENCIA DE MATERI ALES
El punió C será el centro de esfuerzos cortantes si esta expresión se anu la , independientemente de los valores que tengan 7j. y T., es decir, si
y w dQ = 0 zw dQ = 0 (4.12-13)Jn
Estas serán, pues, las ecuaciones que definen el centro de esfuerzos cortantes del perfil que, como vemos, no depende del esfuerzo cortante aplicado, sino solamente de las características geom étricas de la sección recta del mismo.
Haremos, finalmente, algunas observaciones sobre la forma práctica de ap licar estas ecuaciones.
La m asnitud
r ds (4.12-14)
llam ada ú r e a s e c t o r i a l , presupone la elección de un punto P, llam ado p o l o , y la elección, también, de un punto arb itrario pero fijo 0 sobre la línea media del contorno, como origen de la abscisa curvilínea s (Fig. 4.56).
Vemos que el área sectorial es el doble del área barrida por el radio vector con origen en el polo y extremo en la línea media del contorno. Convendremos en tom arla positiva si el radio vector gira en el sentido de las agujas del reloj, y negativa en caso contrario.
El área vectorial asi definida será una función del arco x y dependerá del origen de arcos y de la posición del polo P.
Tomando un sistem a de ejes con origen en el polo P (Fig. 4.57), el área sectorial elem ental se puede expresar de la forma siguiente:
d w | PA x AB\ = z d y — v dz (4.12-15)
y, por consiguiente, el área sectorial en un punto de abscisa curvilínea s será, de acuerdo con el convenio de signos adoptado
z d y — y dz (4.12-16)
¿t
>'2 Ti
F i g u r a 4 . 58 .
C\
TEO RI A G E N E R A L DE LA FLEXION. ANALI SI S DE T ENS I ONES 2 3 3
Considerem os ahora dos polos Px y P2, a los que corresponden las áreas sectoriales w,(.v) y o j2(s ), respectivam ente, y veamos cuál es la relación entre ambos valores.
Tom ando los sistemas de ejes indicados en la F igura 4.58 tenemos
- i = : i ~ c i ¡ d z2 = d z x
y 2 = T i ~ T 1 d y z = T ' i
w 2(x) = ~2 d y 2 — y 2 d : 2 = ( - r - c 2) d y x - (>-! - b 2) d z ¡ =
= oqjx) - c2(v , - >'oi) + b 2( : x - z01) (4.12-17)
siendo ( y 01, - 0 i) las coordenadas/del origen 0 de la abscisa curvilínea x.Como z¡ = z — c ,; y x = y — b ¡ , podemos expresar esta relación en función de las
coordenadas del punto de la linea m edia del contorno, respecto de los ejes principales de inercia de la sección.
ü j2(s ) = a>,(x) — c2(y - .i'oi - ¿ i ) + - -oí ~ c i) (4.12-18)
Supongam os ahora que tom am os un polo arb itrario P x y hacemos coincidir P2 con el centro de esfuerzos cortantes C. Teniendo en cuenta la expresión (4.12-18), las ecuaciones (4.12-13) se pueden poner d é l a forma sguiente:
vio dQ y [cu , + y c(z — z01 — Cj) — z£ y j'o i T ) ] ^ ^
y c o ¡ dQ — zc y 2 dQ = 0 (4.12-19)
ZW dQ = : [ » i + y c(z - z0 i - c i) - -A y “ Toi - bi)~]dQ =
= z w 2 d $ + y c J n J t
z2 d Q — 0 (4 .12 -2 0 )
De estas ecuaciones se deducen las expresiones de las coordenadas ( vc, zc) del centro de esfuerzos cortantes respecto del sistem a de ejes con origen el polo arb itrario P x

2 3 4 R ESI STENCI A DE M ATE RI AL E S
E J E R C IC I O SIV.1. Hallar los módulos resistentes lVf , W. del perfil en U indicado en la Figura
Respecto de los ejes Gyz, principales de inercia de la sección, las expresiones de los momeo tos resistentes V/r y lVt son:
W, = Z2- i H'', =
Calculemos las coordenadas del centro de gravedad G {v'G, zG) del perfil respecto del sistema de ejes 0 v'z'.
Por razón de simetría y'G = 0.Para el cálculo de z'G supondremos descompuesta la sección recta del perfil en tres
. superficies, cuyos centros de gravedad y áreas respectivas son:
Gx (4.5; 2.5) ; Í2, = 5G1 (0; 0.5) ; = 8G, (-4 .5 ; 2.5) ; n 3 = 5
Zfi.r,. 2(5 x 2.5) + 8 x 0.5 29íc “ z a , ---------- i8-------- -- Ü = 161 cm
Respecto a los ejes de este mismo sistema de referencia, los momentos de inercia son:
TEORIA GE NE R A L DE LA FLEXION. ANALISIS DE T E NS I ON E S 2 3 5
Los momentos de inercia respecto de los ejes principales de inercia serían, en virtud del teorema de Stciner.
792 ,/, = - n_-¿ = 86 - 18 X — ~ = 39 .27 cm
/. = /.. = 246 cm*
Por tanto, los módulos resistentes pedidos serán:
II'39.27
11.69 cm3 IV.246 49.2 cm3
29 5
IV.2. Una viga, cuya sección recta es la indicada en la Figura IV.2-a. trabaja a flexión simple, d<" tal forma que en una determinada sección la fibra superior está sometida a una tensión d¡ compresión = 1000 kp/cm2. mientras que en la inferior la tensión es de tracción y suvalor es o ,ml< = 500 kp/cm2. Se pide:
1.° Situación de la fibra neutra.2.° Calcular la anchura b del ala de la viga.3.° Determinar el momento flector que actúa en la sección considerada.
y i
1.° Conocidos los valores de las tensiones normales en las fibras extremas se deduce inmediatamente la situación de la fibra neutra.
En efecto, como la variación de la tensión normal es lineal, de la semejanza de los triángulos GAA' y GBB (Fig. 1V.2-Ó), se deduce:
ó, 1000h 3 a, mJ> 500

RESISTENC IA d e m a t e r i a l e s
2/i hComo //, + h< = li = 30 cm =» = 20 cm; //, = - = 10 cm.
Es decir.
la linea neuira se encuentra a una distancia de 10 cm por encima de la fibra inferior de la viga.
2.° La situación de la linea neutra depende exclusivamente de la geometria de la sección. La anchura b se determinará imponiendo la condición de ser nulo el momento estático
.de la sección respecto del eje c.
b y d y + e y d y = 0I - - n
b r ,
de donde
b [ ( h , - e ) : - ó ; ] + e [/ i2 - {l¡2 — e ) 2] = 0
b =b j - ( h , - e ) 2
e { 2 b 2 - e)
Sustituyendo valores, se obtiene:
LU- 400 - 8119
16.79 cm
3 * La expresión de la tensión normal que existe en la sección considerada es, en virtud de la lev de Navier
1000= = ~50>’
El momento flector que actúa en dicha sección es igual al momento, cambiado de signo, de las fuerzas engendradas por las tensiones normales.
M = í b 50.1-’J - 10
d y + e 50y 2 dy 16.79 x 50 3
[( -9 )3 _ ( — 10)7] +
+ y C(20)3 - ( —9)3] cm • kp = 1970.18 m • kp
TEO RIA G EN ER A L DE LA FLEX IO N . A N A L IS IS DE TEN SIO N ES 237
IV.3. Una viga de longitud L, sometida a tres cargas concentradas P ¡guales —dos en los extremos y una en el centro— descansa sobre dos apoyos situados en un mismo plano horizontal. Si los dos apoyos, situados a una distancia mutua </, están centrados, se pide:
1.° Determinar la relación que tiene que existir entre L y d para que el momento flector máximo sea el menor posible.
2." En estas condiciones y s ií/ = 4m , P = 4 ton, dimensionar la viga en los dos supuestos siguientes:
u) la viga es de madera, de sección rectangular de ancho b = 10 cm y <rjjm = 100 kp/cm2;b) la viga es un 1PN de <rJdm = 1000 kp/cm2.
I o En la Figura IV.3 se obtiene el diagrama de momentos flectores de la viga como superposición de dos estados; uno de ellos formado por las cargas aplicadas en los extremosde los voladizos (Fig. IV.3-Ó) y el otro por la carga central (Fig. lV.3-c).
(«I
(*)
(f)
«/) &
Para que el momento flector máximo sea el menor posible, la distancia entre apoyos ha de ser tal que el valor del momento máximo positivo, que se presenta en el centro de la viga, sea igual al valor absoluto del momento máximo negativo, que se presenta en cualquiera de los apoyos.
Como el valor del momento máximo negativo es
= ~ PL - d

y el del momento máximo positivo
« - . ( + ) = ~2 4
igualando los valores absolutos de ambos, se tiene:
P(L - d) Pd ‘ ....... fX — —2 g
de donde se obtiene la relación pedida
2 3 8 R E S I S T EN C I A DE M A T E R I A L E S
£. _ 5 d ~ 4
2. Si d - 4 m, la relación obtenida anteriormente nos da la longitud de la viga
2- 4 d - S m => 2 a — L — d => a = 50 cm
Figura IV.3 -e.
a) Si la viga es de madera, el módulo resistente es:
W = 5 * ’ wTmáx h¡2 6
Como el momento (lector máximo es Af^. = Fa, se tiene
ACW
6PabÍF h = 6 Pa
' ba„
Sustituyendo valores se obtiene la mínima longitud que deberá tener el cíe la viga de madera
h = v¡6 x 4000 x 5010 x 100 34.65 cm
canto
TEORIA G E N E R A L DE LA FLEXION. ANAL I S I S DE T E NS I ON E S 2 3 9
b ) Si s c trata de un perfil normal doble T, entramo . ¡ la tabla de perfiles laminados con el valor del módulo resistente
lióM Pa 4000 x 50
F l = íóoó= 200 cm3
y encontramos
I P N 2 0 0
al que corresponde un módulo resistente de 214 cmJ. el más próximo por exceso al valor necesario.
IV.4. El perfil croquizado es el estrictamente necesario para resistir el mínimo momento máximo de la viga dibujada. En la sección sometida al máximo momento flector la fuerza total que actúa en los rectángulos rayados es de F — 1400 kp.
Sabiendo que el número que expresa la carga lineal sobre el tramo AP en kp/m es igual al de la carga concentrada en el extremo del voladizo expresada en kp, determinar los diagramas de momentos (lectores v de esfuerzos cortantes.
/P (kp/m)
I I I Id I I I
F ig u r a IV .4 -a ,
P (kp) 414 m
777,
a
Cotas en cm
i .
10
16
Al conocer la fuerza total sobre el área rayada queda determinado el momento (lector máximo.
En efecto, sean a y a ' las tensiones normales que corresponden a las fibras extremas del área rayada (Fig. 1V.4-6).
En la expresión de Fa + a'
F = 2 — /i,e = (cr + <r )/r,e
podemos poner <r y a' en función de omlt (Fig. IV.4-/>)
J L - _ A" CS ~ TÓ
<7 = — O5
UNÚÑ
4Tó5 F
6/i, e

RESISTENCIA d e m a t e r i a l e s
Sustituyendo valores, se tiene
5 x 1400°mii - y 1 T = 291.7 kp/cm26 x 4 x 1
Por otra parte, el momento de inercia de la sección respecto al eje horizontal r, cuyo valor es
/- = 2 ^j x 10 x 103 - | x 8 x 8 3 ] = 3936 cmJ
nos permite calcular el módulo resistente del perfil
/. 3936W. = — = —— = 393.6 cmJ 10
Por tanto, el momento flector máximo será
= ‘F .-a mlI = 393.6 x 291.7 cm -kg = 1148 m • kp
Este momento flector máximo, con signo negativo, se presenta en la sección del apoyo B, según se desprende oe i j condición de ser el perfil croe]uizado el estrictamente necesario para resistir el minimo momento máximo. Además, este momento flector es, en valor absoluto, igual al momento (lector máximo que se presenta en la zona de momentos positivos.
Calcularemos ahora las reacciones RA y Rg en los apoyos tomando momentos respecto d e B y A, respectivamente.
Ra x 4 — AP x 2 + Pa = 0 = RA = ~ a\4
R„ x 4 - P(4 + a) - 4P x 2 = 0 => R . = P (1 2 + n)
L a s leyes d e m o m e n t o s Rec to res y d e e s fu e r z o s c o r t a n t e s e n el t r a m o A B s e r á n
p (8 - a) P ,M = A' — — x~
4 2
T = W ^ ) _ Px4
El m o m e n t o R ec to r p o s i t i v o m á x i m o e n e s te t r a m o se p r e s e n t a en la s e c c i ó n p a r a la
c u a l e s n u lo el e s fu e r z o c o r t a n t e
d M „ 8 - aT = ---- = 0 => v = --------
d x 4
P o r t a n to , el m o m e n t o Rec to r m á x im o p o s i t i v o
P (8 - a ) 2 P (8 - a ) 2 P (8 - u )2¿ L J + ) = ¡g J ^
t e n d r á q u e s e r i g u a l a l v a l o r a b s o l u t o de l m o m e n t o m á x i m o n e g a t i v o
W „u.(-) =
e s d e c i r
Pa = P(8 ~ =. a 2 - 48a + 64 = 0
d e d o n d e se o b t i e n e la l o n g i t u d a d e l v o l a d i z o :
a = 1.37 m
El v a l o r d e l a c a r g a P se o b t e n d r á a p a r t i r d e l m o m e n t o R e c to r m á x im o .
4 4 * . = 1148 = a P = 1 .3 7 P ~ P = ^ = 8 3 7 .9 5 k p
C o n e s to s v a lo r e s , l a s r e a c c io n e s v a l d r á n
= Pl8 - c) _ 837.95(8 - 1.37) = ^ ?■ * 4 4
Rb = P(1 2 + q) = 837.95(12 + 1.37) = 28QO g kp
C o n e s to s r e s u l t a d o s el d i b u jo d e lo s d i a g r a m a s p e d i d o s e s i n m e d i a t o ( F i g . IV .4 c).
TEORIA GENERAL DF. LA FLEXION. ANAL I S I S DE TENS I ONES 241

2 4 2 R E S I S T EN CI A DE MA T E R I AL E S
l v -5. So b re una viga rec ta AB de longitud 1 = 6 m y sección rec tan g u la r actúa la solicitación e x te rio r indicada en la F ig u ra IV .5-n . S e pide:
1.° D ib u jar el d ia g ra m a de m om entos flectores.2 .° D im en sio n ar la sección a x b, im poniendo la condición a + b = 3 0 cm para que sea
m áx im a la resisten cia a la flex ión .3.° C a lc u la r la tensión m áx im a p rovocada por la flex ión , indicando la sección o secciones
en que este v a lo r m á x im o se alcanza.
1500 kp
1.° C á l c u l o d e l a s r e a c c io n e s
R¿ T Bu — 1500 = 0 }6 Ra - 1500 x 4 + 1800 = 0J ^ = 700 kp ; Rs = 800 kp
TEORIA GE NE R A L DE LA FLEXION. ANAL I S I S DE T E NS I ON E S 2 4 3
Si .v es la distancia de la sección que se considera al extremo A. las leyes de momentos (lectores son:
M = RÁ ■ x = 700v pa™ 0 m .v « 2 mAi = 700.x - 1500(.x - 2) = -800.x + 3000 para 2 m s: .v < 4 mM = -800.x + 3000 + 1800 = -800.x + 4800 para 4 m $ .x í 6 m
Obtenidas las leyes de momentos flectores, el dibujo del diagrama correspondiente es inmediato (Fig. IV.5-Ó)
- 2 0 0 m- k p
1400 m ■ kp1600 m ■ kp
F igu ra IV.5-Ó. Diagrama de momentos flectores
2° La resistencia será máxima cuando para un momento (lector dado, la tensión máxima es minima.
M ab~= ----- 1 siendo \V = ——
m1' w z 6es decir, cuando el módulo resistente es máximo.
Como a A- b = k (k = 30 cm), podemos expresar el módulo resistente en función de la altura b
IK =ab1 (k - b)b2
6 6El valor de IV. máximo lo dará el valor de b, tal que
{6 = 0 (solución no válida)
, 2k 60 nn b = y = — = 20 cm
Por tan'u, la sección más resistente a la flexión es la que tiene por dimensiones
10 cm b = 20 cm
3.° La mayor tensión máxima se presentará en la sección situada a la derecha del apoyo D, en la que el momento flector es máximo = 1600 m - kp
A L,, 1600 x 102 cm kpII7 ~ ] ’ "
- x 10 x 20 cm= 240 kp/cm2
°mi. = 240 kp/cm2

244 RESISTENCIA DE MATERI ALES
IV .6 . S e c o n s id e ra una v iga r e c i a so m e t id a a l s i s l e m a de c a r g a s in d ic ad o en la F i g u r a IV.6-U. La se cc ió n es t u b u l a r - r e c l a n g u l a r de e s p e so r c o n s t a n t e e = 10 m m . S a b i e n d o q ue la tens ión
a d m is ib l e es o JJn, = 1200 k p / c m 2 v el m ó d u lo de e l a s t i c id a d E - 2.1 x 10° k p / c m 2, se pide:
1.° D ib u j a r el d i a g r a m a de e s fue r zo s c o r t a n t e s .2.° D ib u j a r el d i a g r a m a de m o m e n to s f le c to r e s .
3.° C a l c u l a r l a s d im e n s io n e s de la se c c ió n s a b ie n d o que se v e r i f ic a la r e la c ió n - = 2.b
4.° C a l c u l a r la f u e rz a n o rm a l sobre la m i t a d su p e r io r de l pe r f i l , en la se cc ión s o m e t i d a a m o m e n to f lec to r m á x im o .
1.° C a l c u l a r e m o s en p r im e r l u g a r l a s r e a c c io n e s en los a p o y o s , c o n s i d e r a n d o en A s o l a m e n t e la c o m p o n e n t e v e r t i c a l VÁ, y a q u e la h o r i z o n t a l no in f lu y e en el r e s to de la v ig a . P a r a e l lo u t i l i z a r e m o s el d i a g r a m a e q u i v a l e n t e de c a r g a s i n d i c a d o en la F i g u r a 1V.6-A.
450 kp
300 kp
I 150 m ■kpt0.5 mT 3 m
250 kp
1
¡JF i g u r a IV.6-A.
P r o y e c t a n d o fu e rz a s s o b r e la v e r t i c a l : VA + R B — 4 5 0 — 3 0 0 — 2 5 0 = 0
T o m a n d o m o m e n t o s r e s p e c to d e A: 150 — 4 5 0 x 0 .5 — 3 R a + 2 5 0 ^ 3 + = 0
se o b t i e n e n : R e = 2 5 2 .8 k p ; VA = 7 47 .2 k p
O b t e n id o s e s to s v a lo r e s , l a s l e y e s d e e s fu e r z o s c o r t a n t e s son :
T= — 250.x p a r a 0 r a C t < 0 . 5 mT = — 250.x — 2 0 0 p a r a 0 .5 m c . x c l m
T = —4 5 0 —3 0 0 + 7 4 7 . 2 = —2.8 p a r a 1 m < . v < 4 m
T = —2.8 + 2 5 2 . 8 + (.x — 4) = 250( .v — 5)* p a r a 4 m < . v < 5 m
T EO RI A G E N E R A L DE LA FLEXION. ANAL I S I S DE T ENS I ONES 2 4 5
S u d i a g r a m a s e r e p r e s e n t a e n l a F i g u r a IV.ó-c .
250 kp
2 .” L a s l e y e s d e m o m e n t o s f le c to r e s so n :
v2A/= — 2 50 — = — I2 5 .V p a r a 0 m i . v i 0 . 5 m
M = - 125.x2 — 2 0 0 ( x — 0 . 5 ) = — 125.v2 — 200 .V + 100 p a r a 0 . 5 m i . v < l m
M = —450( .v —0 . 5 ) + 150 + ( 7 4 7 . 2 — 3 0 0 ) ( .v — 1 )= — 2.8.x —72 .2 p a r a 1 m < . r ^ 4 m
5 0 0 , (5 — x) 2 5 0 , rM = ----- — (5 — x )~— - — = ------— (5 — p a r a 4 m i . r í 5 m
S u d i a g r a m a se r e p r e s e n t a e n l a F i g u r a IV .ó-n1.
El m o m e n t o f l e c t o r m á x i m o s e p r e s e n t a e n e l a p o y o A. S u v a l o r a b s o l u t o e s :
= 2 2 5 m • k p
P a r a e s t a s e c c i ó n , l a t e n s i ó n n o r m a l m á x i m a es :
= = _ , 8 . 7 5 c m 3adm W , ■ 1200 k p / c m 2
E x p r e s e m o s e l m ó d u l o r e s i s t e n t e e n fu n c ió n d e l a s d im e n s io n e s , t e n i e n d o ' n c u e n t a
l a r e l a c i ó n d a d a h/b = 2 , y q u e e = 10 m m = 1 c m .
yV - 7- l/12[¿/<3 — (ó — 2e)(/i — 2e)3] 8 ¿ 4 - ( b - 2 e ) ( b - e ? ■ 8 _ ?? ^: /t/2 h l 2 12b

RE SISTEN CIA DE M A T E R IA L E S
Se o b t i e n e l a e c u a c ió n
I0 ó J - \ i b 2 - 4 2 . 2 5 b - 4 = 0
c u y a s o lu c ió n e s ó = 3.2 cm
b — 3 .2 c m b = 6 .4 c m
17
F i g u r a IV.6-C
D e s c o m p o n e m o s l a m i t a d s u p e r i o r d e l pe r f i l e n t re s z o n a s , c o m o in d i c a la f i g u ra .
L a f u e r z a n o r m a l s o b r e l a z o n a I. t e n i e n d o en c u e n t a q u e ^ = b, es:
A', = y b d yJ „ - . I-.
S o b r e c a d a z o n a 2, a n á l o g a m e n t e :
71.| V - ( b - e ) 2]
■* al■ y e d y =
2 r.■ (b - e ) 1
OL a fu e r z a n o r m a l p e d id a , q u e e s d e t r a 'c c ió n p o r s e r el m o m e n t o f l e c to r n e e a t i v o .
N = N l + 2 N 1 = - b ( b - e ) 2 + 2 e ( b - e ) 2] = (4/,2 - 5b e + 2r’ 2)
Sustituyendo valores, y teniendo en cuenta que:
= w : -~ = Ws b = 1 8 .75 x 3 .2 = 6 0 c m 4
S 2 2 5 x I 0 2 , --------------------= -------Í2Ó~ (4 X - 5 x 3.2 + 2) k p = 5 0 5 5 k p
TEORIA GE NE R A L DE LA FLEXION. ANALISIS DE T ENS I ONES 2 4 7
1V.7. C o n s t r u i r los d i a g r a m a s de e s fue r zo s c o r t a n te s , m o m e n to s Hécto res y e s fue r zo s n o r m a l e s del
p ó r t ico in d i c a d o en la F i g u r a IV .7 - a .
El s i s t e m a e s i s o s t á t ic o . C a l c u l e m o s la s re ac c io n e s :
P r o y e c c i ó n fu e r z a s s o b r e la v e r t i c a l : R A + R D - 2 = 0
T o m a n d o m o m e n t o s r e s p e c to d e A: 2 — 2 x 1 + 4 R D = 0
se o b t i e n e
R Á = 2 to n ; R¡ ¡ - 0
E s te r e s u l t a d o in d i c a q u e l a s b a r r a s B C y C D d e l p ó r t i c o d a d o n o e s t á n s o l i c i t a d a s po i
n i n g ú n u p o d e e s fu e r z o .
E s fue rzo s c o r t a n t e s M o m e n t o s ( l e c to r e s E s fue rzo s n o r m a l e s
b a r r a AB2
T — R , s e n i — —=2
M = - 7 = xy i ó
6N - R a e o s i = ------ =
b a r r a EB
oIIb. M = - 2 ;V = 0
b a r r a B C -i II o M = 0 A' = 0
b a r r a C U T = 0 M = 0 N = 0
L o s d i a g r a m a s d e e s fu e r z o s c o r t a n t e s , m o m e n t o s f lec to rcs y e s fu e r z o s n o r m a l e s
i n d i c a n en l a F i g u r a I V .7 -b.
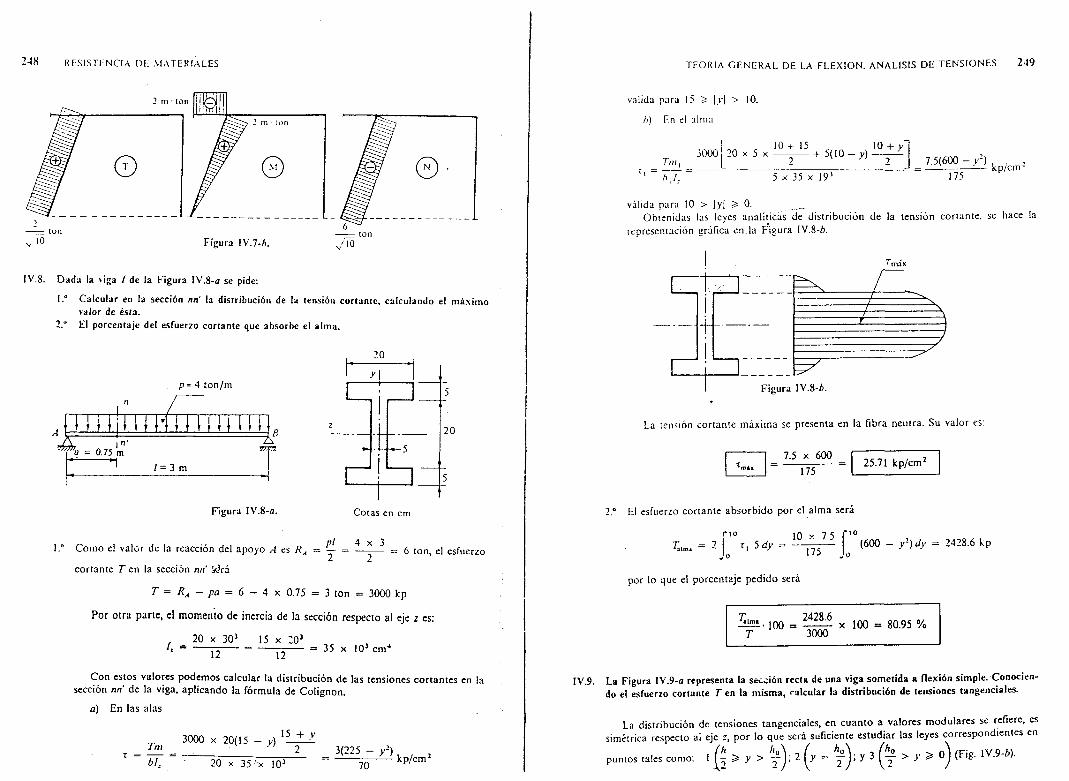
2 4 8 RESI STENCI A DE MAT E R I AL E S
10 F ig u r a IV.7-A. v/10
IV .8 . D a d a la v iga / de l a F i g u r a IV.8-U s e pide:
1.° C a l c u l a r en la se cc ió n nrt' la d i s i r i b u c ió n de la tens ión c o r t a n t e , c a l c u l a n d o el m á x im o v a lo r de é s ta .
2 .“ El p o r c e n t a j e de l e s fu e rzo c o r t a n t e que a b s o rb e el a l m a .
p « 4 ton /m
T T/> 7ta = 0.75 m
i T D H i r H H l i l i
i n ‘
I = 3 m
F i g u r a IV.8-Q. C o t a s en c m
p l 4 x 3l .° C o m o e l v a l o r d e l a r e a c c ió n d e l a p o y o A e s R A — — — — - — = 6 to n , e l e s fu e r z o
c o r t a n t e T e n l a s e c c ió n n n ísJrá
T = R A — p a — 6 — 4 x 0 .7 5 = 3 to n = 3 0 0 0 k p
Por otra parte, el momento de inercia de la sección respecto al eje z es:
2 0 x 3 0 a 15 x 2 0 aI . -------------------------------------------- 35 x 10a c m J12 12
C o n e s to s v a l o r e s p o d e m o s c a l c u l a r l a d i s t r i b u c ió n d e l a s t e n s i o n e s c o r t a n t e s en l a s e c c ió n n n d e l a v i g a , a p l i c a n d o l a f ó r m u la d e C o l i g n o n .
a ) En l a s a l a s
T m 3 0 0 0 x 2 0 (1 5 - y ) ü ± 2
b l . 20 x 3 5 '-x 1 0 a3 (2 2 5 - y 2)
70k p / c m 2
TEORI A G E N E R A L DE LA FLEXION. ANAL I S I S DE T E NS I ON E S 2 4 9
v á l id a p a r a 15 í |y| > 10.
h) En el a l m a
Tin¡b T
30 0 01 0 + 1 5 10 + v '
20 x 5 x - ------+ 5 ( 1 0 - y ) —7 .5 (6 0 0 - y 2)
5 x 3 5 x 1 9 a 175k p / c m 2
v á l i d a p a r a 10 > |y| > 0.O b t e n id a s la s l e y e s a n a l í t i c a s d e d i s t r i b u c i ó n d e la t e n s i ó n c o r t a n t e , se h a c e la
r e p r e s e n t a c ió n g r á f i c a e n la F i g u r a IV.8-6 .
L a t e n s ió n c o r t a n t e m á x i m a se p r e s e n t a e n l a f ib r a n e u t r a . S u v a l o r es :
7.5 x 6 0 0
17525.71 kp/cm2
2.° El e s fu e r z o c o r t a n t e a b s o r b id o p o r e l a l m a s e r á
rio= 2 j o r, 5 d v =
10 x 7.5
175(6 0 0 - y 2) d y = 2 4 2 8 .6 k p
p o r lo q u e e l p o r c e n t a j e p e d i d o s e r á
Z L^. 100 = x 100 = 80.95 %T 3 0 0 0
IV .9 . L a F i g u r a IV .9 - a r e p r e s e n t a l a s e c c ió n r e c t a de u n a v i g a s o m e t i d a a f l e x ió n s im p l e . C o n o c ie n do el e s fue rzo c o r t a n t e T en l a m i s m a , c a l c u l a r l a d i s t r ib u c ió n de t e n s io n e s t a n g e n c i a l e s .
L a d i s t r i b u c ió n d e t e n s i o n e s t a n g e n c i a l e s , e n c u a n t o a v a l o r e s m o d u l a r e s se re f ie r e , es s im é t r i c a r e s p e c to a i e j e z, p o r lo q u e s e r á su f i c i e n t e e s t u d i a r l a s l e y e s c o r r e s p o n d i e n t e s e n
p u n to s t a le s c o m o : 1 g > y > ^ ) ; 2 ( y = y 3 > y > o ) (F i g . IV .9 -6 ) .

RE S I S TENCI A DE MA T E R I A L E S
A p l i c a r e m o s l a f ó r m u l a d e C o l i g n o n r = En e s [ a f ó r m u ,a SQn C 0 ( l s [ a m c s r
„ ;D „ 1 .3 ’
— En lo s p u n t o s I ^ ^ y > -
b = a6 r (h
— En lo s p u n t o s 2 y =
b = a - on
« = 5 (/|2 - ¡<l)
- En lo s p u n t o s 3 ( > y > 0
37" a ( h 2 ~ h l
■ 2(</ - o0) a/i¡ - a„h*
= -A & + 2!i , 1 ° fl0 Ao
I 2 T
(<7 - a0) ah1 - a0liQ & h\) + (a - ag) ( - y 2
El d i a g r a m a d e t e n s io n e s t a n g e n c i a l e s se h a d i b u j a d o e n l a m i s m a F i g u r a IV.9-6 .£
IV. 10. H a l l a r la l e y de d i s t r ib u c ió n de t en s iones t a n g e n c i a l e s en las s e cc io n e s r e c t a s de la v iga en v o lad izo , de a n c h u r a c o n s t a n t e y e s p e so r v a r i a b l e , in d ic ad a en la F i g u r a IV .IO -a . que e s tá s o m e t i d a en su e x t r e m o a una c a r g a P u n i f o r m e m e n t e r e p a r t i d a so b re el bo rde t r a n s v e r s a l . D ib u j a r los d i a g r a m a s c o r r e s p o n d ie n te s en l a s s e cc iones e x t r e m a s y en la se cc ió n m e d i a de la v iga .
TEORI A G E N E R A L DE LA FLEXION. ANALISIS DE TE NS I ON E S 2 5 1
= 2 /;„
S i r e a l i z a m o s un c o r l e p o r un p l a n o l o n g i t u d i n a l p a r a l e l o a la f ib ra n e u t r a , a l a p o r c i ó n de p r i s m a c o m p r e n d i d a e n t r e d o s p l a n o s t r a n s v e r s a l e s i n d e f i n i d a m e n t e p r ó x im o s s e p a r a d o s
e n t r e si d x (F i g . IV .IO-ó) . l a c o n d i c ió n d e e q u i l i b r i o nos d a
(o + d c ) b d y o h d v zb dx
e n d o n d e r e s l a t e n s i ó n r a s a n t e en lo s p u n t o s de l p l a n o l o n g i t u d in a l d e c o r t e q u e , p o r el t e o r e m a d e r e c i p r o c i d a d d e l a s t e n s io n e s t a n g e n c i a l e s , es i g u a l a l a s t e n s i o n e s t a n g e n c i a l e s en lo s p u n t o s d e l a s e c c i ó n r e c t a d e la v i g a , c o m u n e s a a m b o s p l a n o s .
C o m o p o r l a l e y d e N a v i e r
M Ma = y = - — y =
' 12 bhl
1 2,\f■

RESISTENCIA DE MATERI ALES
la e c u a c ió n d e e q u i l i b r i o l o m a la l o r m a :
1r d x = " - 4"h1 \hs
M Í.UX + V .
(h + dh)2
6 M
b ¡ ?(/i + d h ) 2 h 2
4 T
y d y
6 ( h -
M x
12 A/X X
6 M I
b h 2 (>dv =
- v2 d ~
d e d o n d e :
3M dh 6 ( h 2t = ---- -|--------—
b í r dx b I 4
A h o r a bien , e x p r e s a n d o h y M en f u n c ió n d e v
d ( M
d x \ h 2
h = y,0 l 1 + ; S í = P x
e x p r e s i ó n q u e c o r r e s p o n d e a l a l e y d e d i s t r i b u c ió n p e d i d a d e t e n s io n e s t a n g e n c i a l e s e n los p u n to s d e la v iga .
O b s é r v e s e q u e , s a l v o en la s e c c ió n e x t r e m a , l a s t e n s i o n e s t a n g e n c i a l e s en lo s p u n t o s de la s f ib ra s s u p e r io r e i n fe r io r n o se a n u l a n .
3 P
Particularismos esta ecuación para las secciones extremas y sección media de la viga. ara x ~ ’ *a Iey de tens.unes tangenciales es parabólica
TEORIA GE NE R A L DE LA FLEXION. ANALISIS DE T EN S I O N E S 2 5 3
c o n el v a l o r m á x im o p a r a la f ib ra n e u t r a , es d ec i r , p a r a y = 0
/P a r a v = - se nene :
q u e e s c o n s t a n t e en t o d a la se c c ió n . F in a lm e n t e , p a r a v = /.
_ 2 P
"X"= 3 ¿ X
3 P 6 P
4Wi0 16Wi¿y (f'G - 3 ' : )
q u e i i e n e su v a l o r m á x im o en los p u n t o s d e la s f ib r a s s u p e r i o r e in fe r io r , e s d e c i r , p a r a
y = ± h0_ 3 P
Xmi' ~ 4 ¿ X
El v a l o r d e la t en s ió n t a n g e n c i a l m í n i m a en e s ta s e c c ió n se p r e s e n t a en l a f ib r a n e u t r a
_ 3 P~ 8 bh~0
I V . I I . C a l c u l a r los m ó du lo s y d i r e c c io n e s r e s p e c t i v a s de l a s t en s io n e s en los pun to s s i t u a d o s a d i s t a n c i a d = 6 c m por d e b a jo de la f ib ra n e u t r a en la s e cc ió n m n de l a v i g a en v o l a d i z o in d i c a d a en la F i g u r a I V . U - o , s o l i c i t a d a en su e x t r e m o l ib r e por u na c a r g a P = 1 5 0 0 k p . L a s e cc ió n r e c t a de la v ig a e s r e c t a n g u l a r , de a n c h u r a b = 12 c m y a l t u r a h = 2 4 c m .
F i g u r a IV . l l - o .
P = 1500 kp
V m
100 nCOTAS EN cm
y I
"ó- 12
h - 2 4
C a l c u l e m o s el m o m e n t o d e i n e r c i a d e la s e c c ió n r e s p e c to a l e j e z, y e l m o m e n t o e s t á t i c o d e
l a s e c c ió n r a y a d a en la f i g u r a
/ = — b h 1 = — x 12 x 2 4 3 = 13824 cm4 12 12
6 x 1 2 x 9 = 648 c m 3

2 5 4 R ESI STENCI A DE MAT E R I AL E S
Las tensiones normal y cortante, en virtud de la ley de Navier y de la fórmula de Colignon, son
AT - 1500 x 100* - - ~ y -------------— ------- ( - 6) = - 60 .IO kp/cm
Tm 1500 x 648 1 = T b = 13824 x 12 = 186 kp/Cm
Con estos valores, la obtención de las tensiones principales es inmediata
2 65.10 //65.10V2 ) + 1 = Y~ ± / (— — ] + 586 = - 32-55 ± 33.07
a x — 0.52 kp/cm3 ; o 2 = —65.62 kp/cm2
A los mismos resultados llegaríamos mediante los circuios de Mohr {Fig. IV. 1 1-6).
Si D (-65 .10 ; -5 .86) es el punto representativo de la cara perpendicular al eje .x y D' (0; 5.86) el correspondiente al plano perpendicular al eje y , la construcción del circulo de Mohr es inmediata, ya que el centro C es el ffunto medio del segmento DD'.
De la misma figura del circulo de Mohr se deduce que el ángulo x que forma el eje y con la dirección principal que corresponde a la tensión principal positiva, contado en sentido antihorario, es tal que
. , 2r 2 x 5.86tg 2at = — = -- = 0.180a 65.10 a = 5o 6 ' 10"
IV.I2. Se desea construir una viga cajón uniendo mediante remaches dos perfiles UPN 200 y planchas de 25 mm de espesor, formando la sección recta indicada en la Figura IV.12.
Sabiendo que la tensión admisible a cortadura es rldm = 900 kp/cm2 y que el esfuerzo cortante máximo a que va a estar sometida la viga es de T = 3000 kp, calcular las uniones remachadas.
T EORI A G E N E R A L DE LA FLEXION. ANALI SI S DE TENS I ONES 2 5 5
200
ff5IN y?/V/}/777A 2 __
200
200
Cotas en mm I
Figura IV. 12.
Del prontuario de perfiles laminados se obtienen para el UPN 200 los siguientes valore-
Q = 32.2 cm2 ; Iy - 148 cm:
El momento de inercia respecto del eje r de la sección de la viga cajón, aplicando t. teorema de Stcincr para el cálculo de los momentos de inercia de los perfiles cu U, scia
I._ = 2(148 + 32.2 x 17.99-) + 2 ^ x 2.5 x 4 0 ^ = 47 805 cm1
El momento estático de uno de los perfiles respecto al eje r, es
m = 32.2 x 17.99 = 579.27 cm3
Si F es la fuerza de deslizamiento que soporta cada remache de la cabeza por unidad de longitud de viga, en virtud de la ecuación (4.9-6) aplicada a nuestro caso, se verifícala
Te2F = y m
Si fijamos el paso de remachado e = 25 cm, Q valor de la fuerza F será
Tem 3000 x 25 x 579.27F = 454.4 kp
2/. 2 x 47 805
La fuerza F suponemos que se reparte uniformemente en la sección recta del remache
F 4 F4adm n d 1 n i l1
De esta ecuación obtenemos el diámetro de los remaches
4 F x 454.4vía onn 0.S cm
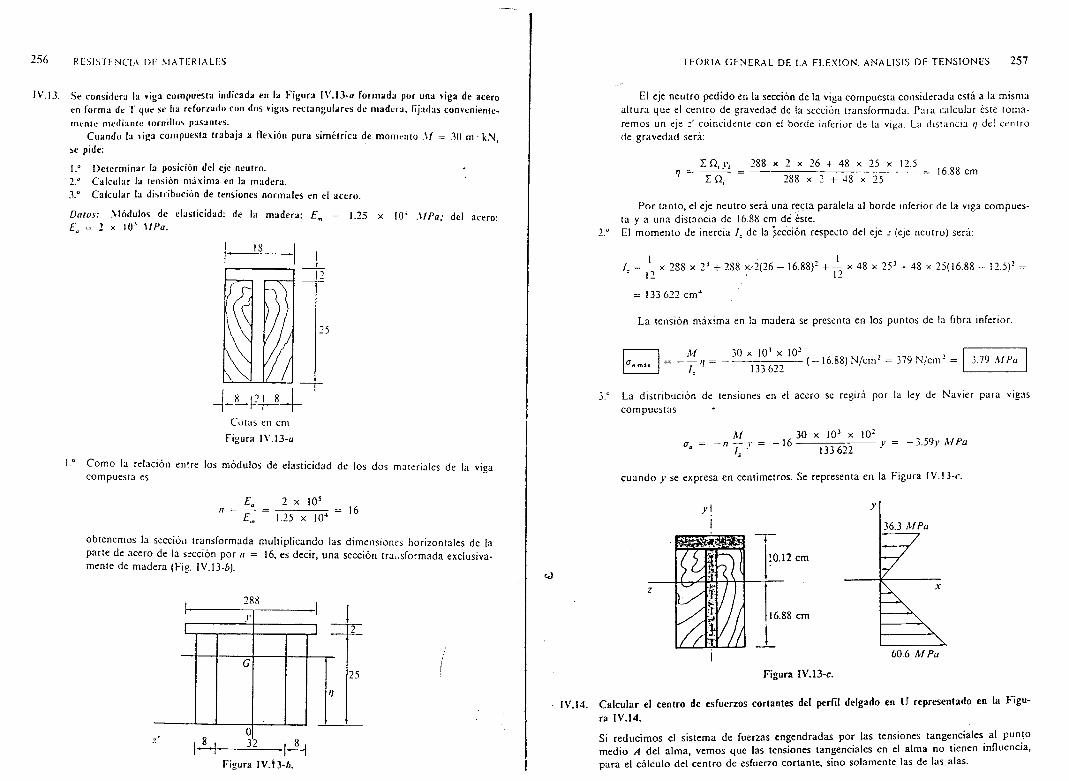
2 5 6 r e s i s t e n c i a d e m a t e r i a l e s
IV. 13. S e co n s id e r a la v iga c o m p u e s t a in d ic ad a en la F i g u r a I V .1 3 - a f o r m a d a por una v iga de ace ro en fo r m a de T qu e se ha r e fo rz ado con dos v ig a s r e c t a n g u l a r e s de m a d e r a , f i j a d a s con ven ien te m e n te m e d i a n t e to rn i l lo s p a s an te s .
C u a n d o la v iga c o m p u e s t a t r a b a j a a f l e x ió n p u ra s im é t r i c a de m o m e n to M = 30 m kN , se p ide:
I.° D e t e r m in a r la posic ión de l eje neutro .2T C a l c u l a r la tens ión m á x im a en la m a d e r a .3." C a l c u l a r la d i s t r ib uc ió n de tens iones n o r m a l e s en el a c e ro .
D a t o s : M ó d u lo s de e l a s t i c id a d : de la m a d e r a : Em = 1 .25 x I 0 J M P a - de l acero-E„ = 2 x I 0 S M P a .
C o t a s en c m
F ig u r a I V . I 3 - a
I ” C o m o la r e l a c ió n e n t r e los m ó d u lo s d e e l a s t i c i d a d d e lo s d o s m a t e r i a l e s d e l a v iga c o m p u e s t a es
E„ 2 x 10s
o b t e n e m o s l a s e c c ió n t r a n s f o r m a d a m u l t i p l i c a n d o l a s d im e n s i o n e s h o r i z o n t a l e s d e la p a r t e d e a c e r o d e la s e c c ió n p o r n = 16, e s d e c i r , u n a s e c c i ó n t r a n s f o r m a d a e x c l u s i v a m e n t e d e m a d e r a (F i g . IV. 13-6).
2 88
25
F i g u r a IV. 13 -6 .
TEORI A GE NERAL DE LA FLEXION. ANALI SI S DE T ENS I ONES 2 5 7
El e j e n e u t r o p e d id o en la s e cc ió n d e l a v i g a c o m p u e s t a c o n s i d e r a d a e s t á a l a m i s m a a l t u r a q u e el c e n t r o d e g r a v e d a d d e la s e c c ió n t r a n s f o r m a d a . P a r a c a l c u l a r é s te t o m a r e m o s u n e je z c o in c id e n t e c o n el b o rd e in fe r io r d e la v ig a . L a d i s t a n c i a t; de l c e n t r o d e g r a v e d a d s e rá :
1 0 , 1 - , 288 x 2 x 26 + 48 x 25 x 12.51 = z n , 288 x 2 + 48 x 25
16.88 cm
P o r t a n t o , e l e j e n e u t r o s e r á u n a r e c t a p a r a l e l a a l b o r d e in f e r io r d e la v i g a c o m p u e s ta y a u n a d i s t a n c i a d e 16.88 c m d é é s te .El m o m e n t o d e i n e r c i a /. d e la l e c c i ó n re s p e c to de l e je z (e je n e u t r o ) s e r á :
/ = — x 288 x 2 3 + 288 x,-2(26 - 16 .88 )2 + — x 48 x 2 5 3 + 48 x 2 5 (1 6 .8 8 - 12.5)-’ = 12 , 1 2
= 133 6 2 2 c m 1
L a t e n s ió n m á x i m a en l a m a d e r a se p r e s e n t a en lo s p u n t o s d e l a f i b r a in fe r io r .
M 30 x 10 x 10 '3.79 M P aGn mi» /. ' ' 133 622 1 ..................
3.° L a d i s t r i b u c i ó n d e t e n s io n e s en el a c e r o se r e g i r á p o r la l e y d e N a v i e r p a r a v i g a s
c o m p u e s t a s
M 3 0 x 103 x 1 0 ; . . . . . .a m = - n - y = - 1 6 --------------------- y = - 3.59.1- M P a
c u a n d o y se e x p r e s a e n c e n t ím e t r o s . S e r e p r e s e n t a e n l a F i g u r a IV .13-C .
y I I
F ig u r a IV.13-C.
IV .1 4 . C a l c u l a r e l c e n t ro de e s fu e r z o s c o r t a n t e s de l per f i l d e l g a d o en U r e p r e s e n t a d o en l a F i g u
r a IV .1 4 .
S i r e d u c i m o s e l s i s t e m a d e f u e r z a s e n g e n d r a d a s p o r l a s t e n s io n e s t a n g e n c i a l e s a l p u n t o m e d i o A d e l a l m a , v e m o s q u e l a s t e n s io n e s t a n g e n c i a l e s e n el a l m a n o t i e n e n i n f lu e n c i a , p a r a e l c á l c u l o d e l c e n t r o d e e s fue r zo c o r t a n t e , s in o s o l a m e n t e l a s d e l a s a l a s .

2 5 8 R ESI STENCI A DE M A T E R I A L E S
ñ y di
(b) (c) F i g u r a IV .I4 .
d e C o l i g n o n * 0 * ^ ^ Se° CÍÓn ( F ¡ 8 ' I V J 4 ' a ) S e r a ’ e " V lr tud d c ia fo r m u la
T m
e l ,
P e r o c o m o el m o m e n t o e s t á t i c o
m — s e - 2
y e! m o m e n t o d e i n e r c i a
/ tk * /3 b 2e■ b e 7 + ñ e = 7 1 (66 + h)
s u s t i t u y e n d o , s e o b t i e n e
6sT eh(h + 6 b)
expresión valida para los puntos de las alas del perfilH moi 1 •
será
p . - * v*v-i p v i i n .
alma s ^ Cngendradas Por estas ‘«p iones r, respecto al punto A del
m a h P j 362= 2 - xed s = T2 Jo h 4- 6b
d e d o n d e se d e d u c e q u e e l c e n t r o d e e s f u e r z o s c o r t a n t e s C s e e n c u e n t r a a u n a d i s t a n c i a
h + 66
la línea media del alma, a! otro lado del centro de gravedad (Fig, lV.14-c).
TEO RI A GE NERAL DE LA FLEXION. ANAL I S I S DE T ENS I ONES 2 5 9
IV .15. U n p r i s m a re c to de lo n g i tu d / = 4 m y se cc ió n r e c t a n g u la r , de a n c h o b = 3 ni y a l t u r a h = I n , e s t á s o m e t id o a l a so l ic i t a c ió n e x t e r i o r in d ic ad a en la F i g u r a I \ . 1 5 - a , a d e m á s de u n a t r a c c ió n u n i f o r m e de 2 .5 k p / c m : que a c t ú a en l a s c a r a s l a t e r a l e s A B F E y D C H J ,
A d m i t i e n d o u n a d i s t r ib uc ió n de tens iones dc a c u e rd o con l a s t c o r i a s de la R e s i s t e n c i a de M a t e r i a l e s y no ten ien d o en c u en ta e l peso prop io , se pide :
1.° H a l l a r la m a t r i z de ten s iones en un punto c u a lq u i e r a de l p r i s m a , r e fe r id a a un s i s t e m a de e j e s p a r a l e l o s a l a s a r i s t a s del m i sm o .
2.° D ib u j a r en p e r sp e c t i v a la s ten s iones n o r m a l e s y t a n g e n c i a l e s q u e a c t ú a n so b re e l p a r a l e l e p ípedo e l e m e n t a l q ue ro dea a l c en t ro g e o m é t r i c o de l p r i s m a .
1.° El p r o b l e m a p r o p u e s t o es e q u i v a l e n t e a la c o n s i d e r a c i ó n d c u n a v ig a r e c t a d e 1 m dc a n c h o , s o m e t i d a a l a s c a r g a s r e p r e s e n t a d a s cn la F i g u r a IV.15-Ó.
i m
0 , 5 m
F ig u r a IV.15-Ó.
T o m a n d o e l s i s t e m a d e e jes i n d i c a d o en la m i s m a f i g u r a , l a t e n s ió n n o r m a l a„x es e n v i r t u d d e l a l e y d c N a v i c r
M Af<r„ = y = v = — \ 2My
l / 1/12' }
L a s o t r a s d o s t e n s io n e s so n i n m e d i a t a s
<7„r = 0 : cr„. = 2.5 kp/cm’ = 25 t o n / m 7
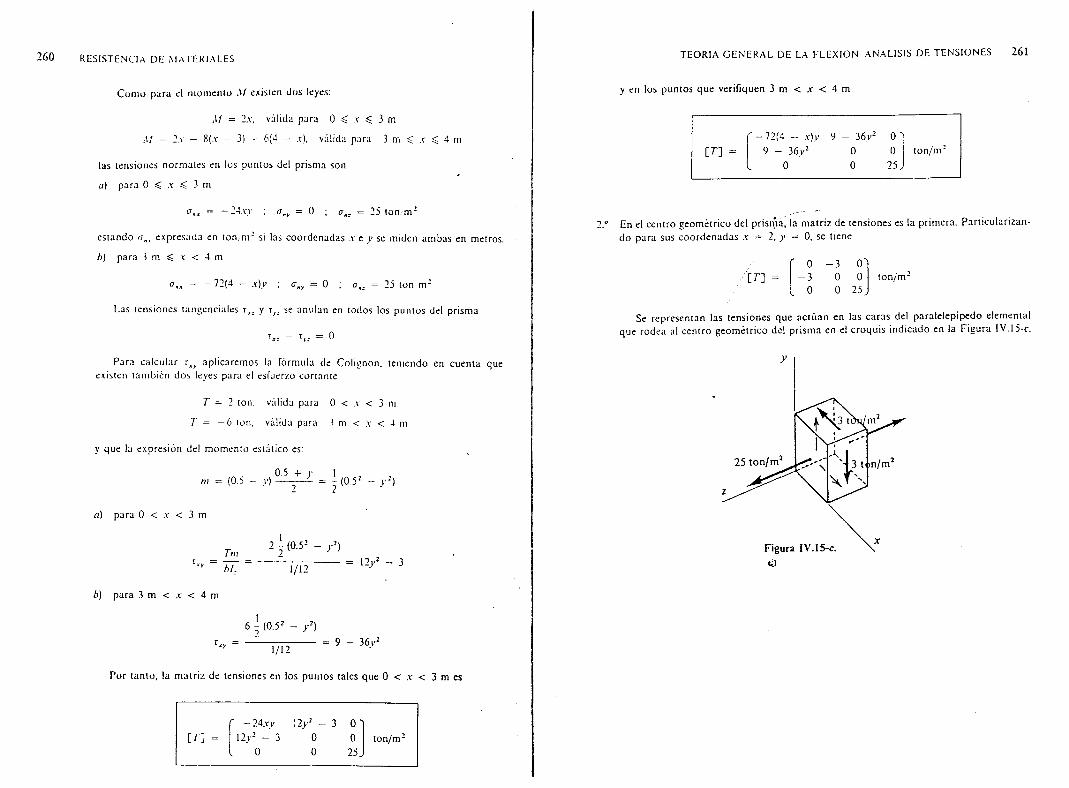
C o m o p a r a el m o m e n t o M e x i s t e n d o s leyes :
M = 2.x, v á l i d a p a r a 0 C t í í u
.V/ = 2 . y - 8 ( . y - 3) = 6(4 — .y ) , v á l id a p a r a ] m ( i ^ 4 m
la s t e n s io n e s n o r m a l e s en los p u n t o s de l p r i s m a so n
a) p a r a 0 ^ x < 3 m
= — 24 .v r ; a„y = 0 ; <r„. = 25 l o n / m ’
e s t a n d o e x p r e s a d a en t o n , m ; si l a s c o o r d e n a d a s .y e y se m id e n a m b a s en m etro s .
b) p a r a 3 m ^ y < 4 m
<7„, = - 7 2 ( 4 — x ) v ; f f . , = 0 ; o , . = 25 ton m 3
L a s t e n s i o n e s t a n g e n c i a l e s r x. y xf . se a n u l a n en to d o s los p u n t o s d e l p r i s m a
= T„. = 0
P a r a c a l c u l a r r x, a p l i c a r e m o s la f ó r m u la d e C o l i g n o n , t e n i e n d o en c u e n t a q u e e x i s t e n t a m b i é n d o s l e y e s p a r a el e s fu e r z o c o r t a n t e
T = 2 ton . v á l i d a p a r a 0 < x < 3 m
7 = —6 ton , v á l i d a p a r a 3 m < x < 4 m
y q u e la e x p r e s i ó n d e l m o m e n t o e s t á t i c o es:
0 .5 + y 1m = (0.5 - v ) = (0 .5 - y 2)
RESI STENCI A d e M A T E R I A L E S
n) para 0 < x < 3 m
Tu,~bf.
- 2 - (0 .5 3 - y 3)
Í7IT~= 12.4 - 3
b ) para 3 m < .y < 4 m
6 - (0.5- - y 2)
i/T29 - 36.4
Por tanto, la matriz de tensiones en los puntos tales que 0 < x < 3 m es
f - 2 4 . X V to 1 O
IIt^ 12.4 _ 3 0 0 ton/m3l 0 0 25 J
TEORI A G E N E R A L DE LA FLEXION. ANAL I S I S DE TENS I ONES 2 6 1
y en l os p u n t o s q u e v e r i f i q u e n 3 m < x < 4 m
r — 72(4 - x)y 9 - 3 6 y 2 0^IT ] = 9 - 36 v3 0 0 ton/m3
cioo
En el centro geométrico del prisma, la matriz de tensiones es la primera. Particularizando para sus coordenadas .y = 2, y = 0 , se tiene
m =0 - 3 o l
-3 0 00 0 25
ton/m3
Se representan las tensiones que actúan en las caras del paralelepípedo elemental que rodea al centro geométrico del prisma en el croquis indicado en la Figura IV.15-C.

Teoría general de la fle x ió n . Análisis de deformaciones
5.1. IntroducciónAsi como hemos dedicado el cap itu lo anterior al estudio de la d istribución de tensiones en una pieza prism ática de línea m edia rectilínea, so licitada a flexión pura o a flexión simple, dedicarem os este al análisis de las deformaciones que se producen en la pieza cuando se la somete a estos tipos de solicitación . Es decir, nuestro objetivo es ahora el estudio de la rigidez de las vigas.
H ay que hacer notar que el diseño de una pieza que va a constitu ir un elemento estructural, bien como órgano de una m áquina, tal como un tom o o una fresadora, o bien formando parte de una estructura de edificación, viene con frecuencia determ inada más por su rigidez que por su resistencia.
Por eso, en las norm as de los diferentes países, tanto d e construcciones de m áquinas como de edificaciones, se fijan las deformaciones m áxim as o d e f o r m a c i o n e s a d m i s i b l e s que pueden presentarse en los elem entos estructurales sometidos a flexión. Esto hace que, frecuentemente, determ inadas piezas de las estructuras se diseñen haciendo que las deformaciones m áxim as sean ¡guales a las deformaciones adm isibles. En tales casos, se realiza la comprobación de que las tensiones no superen los valores adm isibles.
En este cap itu lo se expondrán varios métodos que nos perm itan determ inar la deformación de las vigas so lic itadas a flexión bajo un sistem a de cargas externas dado y siendo conocidas las condiciones de sustentación. En prim er lugar, se obtendrá la deform ada de la linea m edia de la viga por el método clásico de la d o b l e i n t e g r a c i ó n y basándonos en este método establecerem os el procedim iento más moderno de la e c u a c i ó n un iv e r sa l , que simplifica de forma m uy notab le su aplicación.
Otro método, el del á r e a d e m o m en t o s , basado en los llam ados teorem as de M ohr, presenta notables ventajas en el caso que nos interese conocer la deform ación de una determ inada sección de la viga, as í como el m é t o d o d e la v i g a c o n j u g a d a que es, en realidad , una variante del anteriorm ente citado , pero que se distingue en su ap licación práctica.
No podía faltar algún método que se fundamente en los teorem as energéticos. T al es el
9
TEORI A G E N E R A L DE LA FLEXION. ANALISIS DE D E F OR M A C I O N E S 2 6 3
m é t o d o d e M oh r , que más adelante considerarem os como el más general para el cálculo de deform aciones de prismas mecánicos sometidos a solicitaciones arb itrarias.
Finalm ente, hemos de decir que los conocim ientos que nos proporciona el estudio de la deform ación de las vigas, los habremos de tener presentes para obtener las ecuaciones de deform ación necesarias que, junto a las ecuaciones de equilibrio estático, nos permitan la resolución de los sistemas hiperestáticos que estudiarem os en el C ap itu lo 7.
5.2. M é to d o de la doble integración para la determinación de la deform ación de vigas rectas som etidas a f lex ión simple. Ecuación de la línea elástica
Considerarem os un prisma mecánico de sección recta constante, inicialm ente recto, que adm ite plano medio de sim etría tal que las cargas están contenidas en él. Este prism a está som etido, pues, a flexión simple sim étrica siendo para cada sección el eje z el eje neutro, es decir, el lugar geom étrico 'de los puntos de la sección en los cuales se anu la la tensión norm al debida al momento flector. La superficie que está formada por los ejes neutros de todas las secciones rectas del prism a es la llam ada s u p e r f i c i e n eu tra . Esta superficie neutra contendrá las fibras longitudinales de la pieza que habrán variado de forma debido a la acción del sistem a de fuerzas exteriores, pero que no han variado de longitud. La in tersección de la superficie neutra con el plano medio es la deform ada de la linea media del prism a mecánico. A esta curva se la denom ina l in ea e lá s t i c a o, simplem ente, c l á s t i c a .
P ara estud iar la deformación de la pieza considerada obtendremos la ecuación de la linea c lástica referida a un sistema cartesiano ortogonal cuyo eje .v sea coincidente con la linea m edia del prism a mecánico antes de producirse la deformación, eje r positivo el eje vertical ascendente y el origen de coordenadas el baricentro de la sección extrem a A (F ig. 5.1). T oda sección C experim entará un corrim iento que tendrá, en general, com ponentes horizontal y vertical. En el caso de cargas verticales, único que considerarem os en este epígrafe, supondrem os despreciable el valor de las componentes en la dirección del eje long itud inal frente a las componenles en la dirección perpendicular al mismo. Quiere esto decir que la deformación de cualqu ier sección C estará definida por las dos m agnitudes siguientes (F ig. 5.1):
a) y c , desplazam iento perpendicular al eje longitudinal.b) 0t , ángulo de flexión o ángulo g irado por la sección
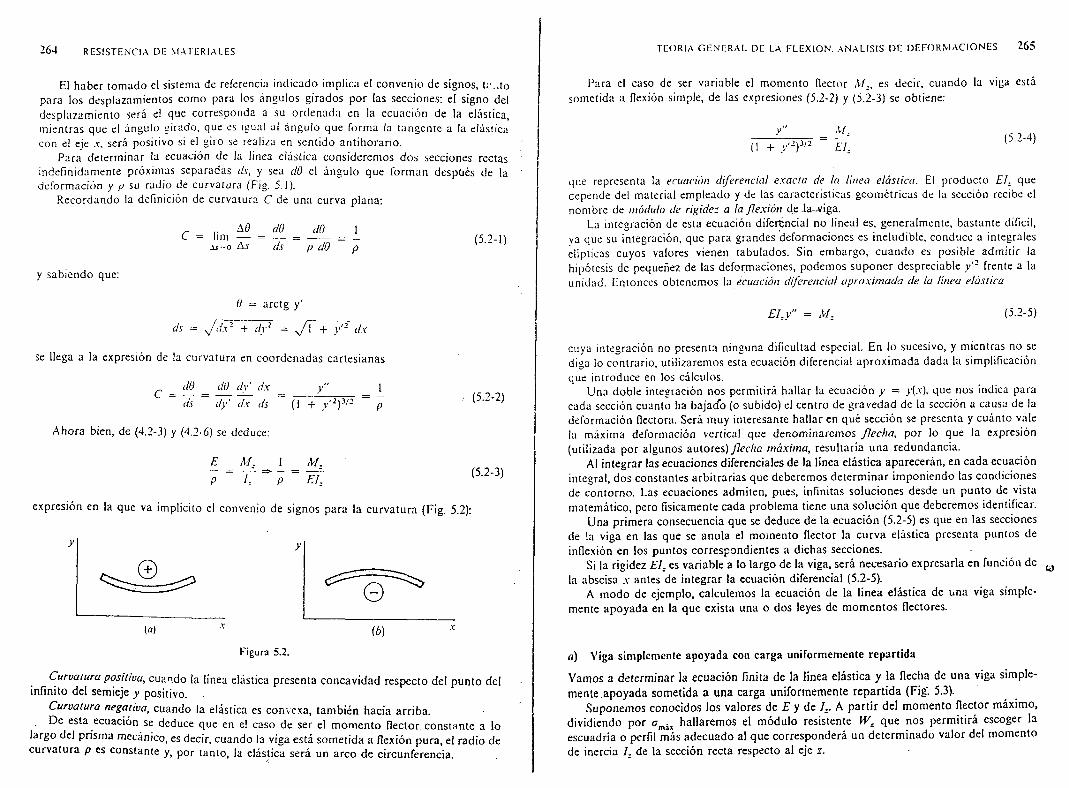
2 6 4 RESISTENCIA DE MATERIALES
El haber tomado el sistema de referencia indicado im plica el convenio de signos, tr.,to para los desplazam ientos como para los ángulos girados por las secciones: el signo del desplazam iento será el que corresponda a su ordenada en la ecuación de la elástica, m ientras que el ángulo girado, que es igual al ángulo que forma la tangente a la elástica con el eje .x, será positivo si el giro se realiza en sentido antihorario .
Para determ inar la ecuación de la línea e lástica considerem os dos secciones rectas indefinidamente próximas separadas ds, y sea dO el ángulo que forman despüés de la deformación y p su radio de curvatura (Fig. 5.1).
Recordando la definición de curvatura C de una curva p lana:
r r A0 C = lim —j j - o Ar
dOds
dOJU Ó
1
P
y sabiendo que:
(5.2-1)
= arctg y '
ds = J d . t : + d y 2 - J \ + y '2 dx
se llega a la expresión de la curvatura en coordenadas cartesianas
dQ dQ dy ' dxds d y ' dx d s (I + y ' 2)312
Ahora bien, de (4.2-3) y (4.2-6) se deduce:
(5.2-2)
E
P
A/*7 7
M .E l.
(5.2-3)
expresión en la que va implícito el convenio de signos para la curvatura (Fig. 5.2):
U) Y (b) vF igura 5 .2 .
C u rva tu ra p o s i t i v a , cuando la línea elástica presenta concavidad respecto del punto del infinito del semieje y positivo.
C u rva tu ra n e g a t i v a , cuando la elástica es convexa, tam bién hacia arrib a .. De esta ecuación se deduce que en el caso de ser el m om ento flector constante a lo
largo del prism a mecánico, es decir, cuando la viga está som etida a flexión pura, el rad io de curvatura p es constante y, por tanto, la e lástica será un arco de circunferencia.
TEORIA G E N E R A L DE LA FLEXION. ANAL I S I S DE D E F OR M A C I O N E S 2 6 5
Para el caso de ser variable el momento (lector A/., es decir, cuando la viga estásometida a flexión simple, de las expresiones (5.2-2) y (5.2-3) se obtiene:
( T T 7 ¥ * = K (5-2' 4)
que representa la e c u a c i ó n d i f e r e n c i a l e x a c t a d e la l i n ea e l á s t i c a . El producto El. que depende del m aterial em pleado y de las características geom étricas de la sección recibe el nombre de m ó d u l o d e r i g id ez a la j l e x i ó n de la viga.
La integración de esta ecuación diferencial no lineal es, generalm ente, bastante difícil, va que su integración, que para grandes deformaciones es ineludible, conduce a integrales elípticas cuyos valores vienen tabulados. Sin em bargo, cuando es posible adm itir la hipótesis de pequeñez de las deformaciones, podemos suponer despreciable y ' 2 frente a la unidad. Entonces obtenemos la e c u a c i ó n d i f e r e n c i a l a p r o x im a d a d e la l ín ea e l á s t i c a
EL y" = M . (5.2-5)
cuya integración no presenta ninguna dificultad especial. En lo sucesivo, y m ientras no se diga lo contrario , utilizarem os esta ecuación diferencial ap rox im ada dada la simplificación que introduce en los cálculos.
Una doble integración nos perm itirá h a llar la ecuación y — y(.v), que nos indica para cada sección cuanto ha bajado (o subido) el centro de gravedad de la sección a causa de la deformación (lectora. Será m uy interesante h allar en qué sección se presenta y cuánto vale la máxim a deformación vertical que denom inarem os f l e c h a , por lo que la expresión (utilizada por algunos autores) f l e c h a m áx im a , resu ltaría una redundancia.
Al in tegrar las ecuaciones diferenciales de la linea e lástica aparecerán, en cada ecuación integral, dos constantes arb itrarias que deberemos determ inar imponiendo las condiciones de contorno. Las ecuaciones adm iten, pues, infinitas soluciones desde un punto de vista m atem ático, pero físicamente cada problem a tiene una so lución que deberemos identificar.
Una prim era consecuencia que se deduce de la ecuación (5.2-5) es que en las secciones de la viga en las que se anu la el momento flector la curva e lástica presenta puntos de inflexión en los puntos correspondientes a dichas secciones.
Si la rigidez El. es variab le a lo largo de la viga, será necesario expresarla en función de la abscisa .v antes de in tegrar la ecuación diferencial (5.2-5).
A modo de ejemplo, calculem os la ecuación de la lín ea e lástica de una viga sim plemente apoyada en la que exista una o dos leyes de m om entos flectores.
a) V iga simplemente apoyada con carga uniformemente repartida
Vamos a determ inar la ecuación finita de la línea e lástica y la flecha de una viga simplemente apoyada som etida a una carga uniformemente repartid a (Fig. 5.3).
Suponemos conocidos los valores de £ y de /.. A p artir del momento flector máximo, dividiendo por crmix hallarem os el m ódulo resistente Wz que nos perm itirá escoger la escuadría o perfil m ás adecuado a l que corresponderá un determ inado valor del momento de inercia I . de la sección recta respecto al eje i .

2 6 6 RE S I ST E N C I A DE M A T E R I A L E S
>> R,.
T I t t > ♦ j t t t t K t t t M t t » iA K - - ------- ' I ' ' ------------------
/
Como la ley de momentos (lectores es
válida en toda la v iga (0 ^ x < /), la ecuación diferencial de la e lástica será:
M : = E l.y " = x — - .r2
Integrando dos veces, se tiene
O
E L / - P- x 3 + C ,
EI*y = ^ ^ ¿ •x4 + c --r + (5.2-6)
Para determ inar las constantes de integración C , y que nos definirán la única solución de la ecuación d iferencial, que adem ás de solución m atem ática se adap ta al problem a m ecánico o físico en cuestión, impondremos las condiciones de contorno
;■( 0) = 0 ; y ( l ) = 0
Por tanto, sustituyendo en (5.2-6) se obtiene:
V(0) = o => ÁT, = 0 / * , = < )
P l4 P lx ~ I Pt3>'(0 = 0 ^ ^ - - ^ + C J = 0 L e , = - p± (5.2-7)
TEORIA GE NE R AL DE LA FLEXION. ANAL I SI S DE D E F O R M A C I O N E S 2 6 7
por lo que la ecuación de la linca clástica es:
, = _L ÍE Í 3 - p- v4 - P— v£7. I l 2 ' r 2 4 ' 2 4 '
(5.2-8)
La flecha se dará donde r'(.v) = 0. Es fácil ver que esta condición se cumple para x = //2. Sustituyendo en (5.2-8) tendremos:
4 m il f ELp j ( i y _ p_ ( i y _ p¡} ( ¡12 \ 2 / 24 l 2 24 l 2
de donde simplificando, se obtiene:
/ = -_5_ P/4 384 £/.
(5.2-9)
A) Viga simplemente apoyada con carga concentrada
Veamos como se resuelve el mismo problem a cuando no rige una única ecuación de momentos flectores para todo el in tervalo (0, /).
Sea una viga simplemente apo yada con una carga concentrada y descen trada (Fig. 5.4).

2 6 8 r e s i s t e n c i a d e m a t e r i a l e s
Las leves de momentos Héctores son, en este caso
Pb= y x para 0 ^ a' $ u
Pb-v/.- = — x - p (x - d) a se a < a + b
Sustituyendo estos valores en la ecuación de la elástica, se tiene-
Pb Ph\ f z = E Ly i = — a- : ,V/; = E l.y ' í = — a - P(x - a)
El v' = — x2 + C ■ c r ’ Pb -> P(x ~ fl)"” 1 2/ + C 1 > 2 = ^ -A - - ? L + C 2
— v3 + r V + K ■ c r P b a P (x - " )36/ 1 , ’ Py 2 = j f g— + c,.v + /r,(5.2-10)
Sabemos, por la continuidad de la línea elástica, que la deform ación en todo punto de la misma tiene un solo valor y la tangente es única. Tam bién se cum plirá que en los apoyos la deformación es nula. De ahi, pues, imponiendo estas condiciones, se obtiene:
r.fo) = _!•,(«) => _ a - + c ¡ = ~ a 2 + C , , de donde C l = C 2
r \ , •. Pb , Ph.* i a - .»:(«) => — a + C ¡a + K ¡ = — a 3 + C 2a + K 2 , de donde = K 2
>’ i (0 ) = 0 => o =
y 2{[) = 0 = »o = ^ r /3 L _ L + c 2¡ t dc donde c2 = {l)2 _ /2)
Por lo tanto:
c r Pb , Pb ,~ 6/ V + ~ 6 ¡{b ~ ¡ ' ) X Para 0 < a ^ a (5.2-11)
cr - Pb 3 P(x - °)3 ^’~V2 ~ 61 X 6/ + 1 F {b ~ ! 2 )x para a ^ x ^ a + b (5.2-12)
La Hecha corresponde a un valor de ,X/ tal que y ( x f ) = 0. Por consiguiente, haremos
a = C MX/) = ° e Í3S d ° S soluciones anulan d ichas prim eras derivadas se adap tara a nuestro problem a aquella que corresponda al in tervalo de existencia real o fisica de la curva en cuestión. Compruebe el lector que esta c ircunstancia si a > 112 sólo se da para una solución de y \ = 0.
TEORIA G E N E R A L D E L A F L E X I O N A N A L I S I S D E D E F O R M A C I O N E S 2 6 9
d„ donde:
¡ t 2 - b 2 _ /(/ + b)( l - b ) /(/ + b)a3 V 3 - y/ 3
(5.2-13)
por lo que el valor de la Hecha es:
/3 má* f EL
Pb(5.2-14)
9/ J~3 ELV ü r r W
En el caso de estar la carga centrada, la Hecha se presentará en la sección media de la viga, es decir, su valor vendrá dado por la ecuación (5.2-14) particu larizada para x = lj2.
/ =Pl/2 /3/2N3‘-
9/73 EL V 4
P l ¡ ’ 48 El.
(5.2-15)
5.3. Ecuación universaf de la deform ada de una viga de rigidez constante
El segundo caso que hemos considerado en el epígrafe anterior para ilustrar la obtención de la ecuación de la linea e lástica de una viga recta nos hace ver la dificultad ana lítica que el método expuesto presenta, cuando existen varias leyes de momentos nectores a lo largo de su luz. Porque si existen n tram os será necesario resolver 2n ecuaciones para la determ inación de las 2/i constantes de integración, ya que el número de constantes es el doble del número de tramos.
Para dism inuir esta dificultad se trata de buscar una ecuación universal que, independientemente del número de tram os que existan en la viga, sea preciso determ inar so lamente dos constantes de integración.
Para la form ulación de esta ecuación universal utilizarem os las llam adas J u n c i o n e s d e d i s c on t in u id ad , que se definen de la siguiente forma:
r-, * ✓ x» í° cuando x ^ aE„(x) = <* - a> = <, .„ . . (5.3-1)[(x — a) cuando x ^ a
para n = 0, I, 2, ... número entero. En esta ecuación a es el valor a p artir del cual la función de la variab le independiente .r tiene un valor no nulo, es decir, los paréntesis angulares, que son el sím bolo m atem ático de una función de discontinuidad, nos indican que la función se anu la cuando la expresión entre estos paréntesis es negativa y que toma el valor (a — a)" para .r m ayor o igual que a.
Indicado esto sobre las funciones de discontinuidad, consideremos una viga de sección transversal constante a la que está aplicado un momento exterior J l , una fuerza concen-

2 7 0 R E S I S T E N C I A D E M A T E R I A L E S
Irada P, una carga uniformemente repartida p y una carga triangu lar, que considerarem os de signo positivo si tienen los sentidos indicados en la F igura 5.5, es decir, el momento exterior J ( sera positivo si tiene sentido horario , y las cargas concentrada, uniformemente repartida y triangu lar son positivas si tienen sentido ascendente.
Si tom am os el extremo izquierdo de la viga como origen de abscisas, sean a y b las correspondientes a las secciones en las que están ap licados el momento exterior J l y la fuerza concentrada respectivam ente. Sean, asim ism o, c y d las abscisas del comienzo y final de la carga uniform em ente repartida, asi como e y / las abscisas de comienzo y final de la carga triangu lar.
P ara llegar a obtener la ecuación universal que vam os buscando expresarem os el momento flector en cada uno de los siete tram os que se d istinguen en la v iga poniendo el momento exterior en la forma J ( ( x — á f .
Con este artificio , el momento flector y la ecuación de la línea e lástica en cada uno de los tram os serán:
tram o 1: 0 < x ^ a
ELVi = 0E lzy\ = C ,E l: y i = c ¡ x + K ¡
tram o 2: a ^ x ^ b
EIzy'{ = J ( { x - a)°
Elz y 'i = ~M(x - a) + C2J{{.x — a )2
E¡ zy i = + C 2x + K 2 (5.3-3)
O
(5-3-2)
tramo 3:
tramo 4:
tramo 5:
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S 2 71
b í .x ^ c
EI: y ‘i = J l ( x - a)° + P{x - b )
P(x - b )1 1
r \ x - rE l . y 3 = J ( ( x - a) + ——
E, „ . • * » - < + O L Z J H . 4- C , r + X , I5 ;'- 4 '
p{x - c)2E l-J ’i = J ( ( x - a f + P(X - b) + 2
P(x - b )2 p (x - c}¡E l . y i = X riv - o) + ------ ------- + 6------
J l i x - aV , P(x - b)2 . p íx - X r K (5.3-5) EL. y . = ------- ; -------- + 2------ -r 24 4
d <: x sí ep (x - c)2 p (x - d ) 2
ELv'i = J ({ x - a)° + P(x - b) + ------ j
+ C ,P(x - b )2 p (x - c)3 p{x - d ) 2
El-.y\ = J l{ x - a) + — ^ ------ + ------ 6------------------- 6
.//(.x - a )2 p{x - b ? P(x - c r _ Py - d f E L v s = r + ------1 24 24
(5.3-6)
En este tramo se ha supuesto que la carga uniformemente repartida se pro longa hasta la sección que se considera, descontando, naturalm ente, la parte añ ad ida (F ig. 5.6).

2 7 2 RESISTENCIA DE MATERI ALES
tramo 6: e ^ x í /
,, P(.v —c)2 p ( . x - d ) 1 q(x — f|JEl. i ' = . //(.v — a lü -E P{x - b) + ------- '— ------- -f-12------- !_
2 2 [ f - e ) 6
2 6 6 (/'— é-)24
c t .. _ -^ (-v -u )2 n v - A ) 3 , p ( x - c f p ( x - d ) i q ( x - e ) 5i 6 s r - + l7 ^ ¡ T 2 o + c - ' + ' r.
(5-3-7)
tramo 7: / $ .y
EL vV = - a f + />( v - 6) +^ I Z £ Ü _ + 9 [ ( .v -^ )3- ( . v - / ) 2I _2 2 ( f~ e )6
q(x ~ f ) 2
EL r'7 =..//( a- - u) + + P- ^ ~ C)Í P l x - W i y R - v - ^ - ( - t - / ) 4]2 6 6 (/'—e)24
— ^ ¡_ ( _ 7
E L v . - J/ (X ~ a)1 i />(-v ~ ^ 3 ,/; ( y ~ c)J _ P ( x - ‘tT q í ( x - e ) s - ( x - / ) 1] 7 2 6 24 24 + (/ -«•) 120
q ( x - f ) 124 - + C 7.y + á ' 7 (5 .3 -8 )
También en este ultimo tramo se ha supuesto que la carga triangu lar se pro longa como se indica en la F igura 5.7 descontando la parte añad ida, que en este caso se puede considerar como la suma de una carga negativa uniforme de valor q más otra, asimismo negativa, de igual pendiente que la carga triangu lar que actúa sobre la viea.
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S 273
Para obtener las catorce constantes de integración imponemos las siguientes condiciones de contorno, que expresan la continuidad de la linea elástica, así como la continuidadde su derivada
Para .v = a
Para x = b
Para x = c
Para .y = d
Para x = e
Para x = f
í/. = y'l =£» c, = c.L1'. = yi => C ,a + K , = C 2a + fí2 => = K-,ÍJ4 = y'i C 2 = C 3¡r . = y 3 => C 2b + K 2 — C 2b + k 3 => k 2 = k 3
= y'i => c 3 = c4
S i = y i => C j c + K , = C 4c + k 4 => K2 = K 4
’. ú = y i C4 = c5
..'4 = >'s =• C4d + K 4 = C ¡ d + => K i = As
. ' i = y'6 c 5 = c6
= y & C 5e + K s = C6e + K 6 => K , = K b
. ' 6 = y'i => c 6 = c7)~6 = yi c y + K 6 = C - J + => k 6 = a7
Vemos, en efecto, que las catorce constantes de integración se reducen a dos, ya que
C , = C 2 = C , = C 4 = C 5 = C6 = C 1 = C (5.3-9)
K , = K 2 = K 3 = K 4 = K s = K 6 = K-, = K (5.3-10)
Es fácil ver qué sign ificado tienen estas dos constantes ya que de las ecuacionescorrespondientes al prim er tram o, particu larizadas para .y = 0, obtenemos:
C = EIz0o ; K = E l j o (5.3-11)
La constante C = EI.0o representa el ángulo girado por la sección que contiene al origen de coordenadas m ultip licado por la rigidez de la sección de la viga. La otra constante, K = E I . y 0, representa el corrim iento vertical del centro de gravedad de la sección origen de abscisas m ultip licado por la rigidez EL.
Por tanto, utilizando las funciones de discontinuidad que se han definido an terio rmente, la ecuación más genera l de la e lástica se puede poner en la forma:
, r r n , v J ( <x ~ a ¡ y , v- P <X ~ b ¡ y . El. y = El. y 0 + EL0ox + Z —------- + Z --------- --------- +i A. i j
, „ , P [ ( x - c y - <x - d y - ] '+ f + --------------------4i " +
<.v - e ¡ y - <.v - / y <.y - / y
(5.3-12)
(/ - e ,)5! 4!

2 7 4 R E S I S TENCI A DE MATERI ALES
expresión que constituye la e c u a c i ó n u n iv e r sa ! d e ¡a d e f o r m a d a de una viga de rigidez constante, y en la que los parám etros J ( , P, p y q son los momentos exteriores, cargas concentradas, cargas uniformemente repartidas y valor máximo de las cargas triangulares que hubiera, respectivamente, situadas entre el origen de coordenadas y la sección que se considere. Evidentemente, las reacciones de los apoyos están incluidos en estos parámetros.
D erivando la ecuación (5.3-12) se obtiene la e c u a c i ó n u n i v e r s a l para los ángulos de giro
ELO = El: 0o + y . . d ( .x - a ,> + Z P(X ~ b — + Z ^- V • ^ ~ <Y ~ +
(5.3-13)< x - e y - <.v - /■>* <,r - f y ~
+ <? (/ - e)4\ 3!
en virtud del principio de pequenez de las deformaciones, ya que entonces y = 6, siendo 6 el ángulo girado por la sección.
5.4. T e or em a s de M ohrEn los epígrafes anteriores hemos calculado el desplazam iento r(.v) de las secciones de una viga som etida a flexión simple, así como los ángulos girados 0(x), m ediante un procedimiento m atem ático como es el de integrar una ecuación diferencial. El resultado es aplicable a cualqu ier sección de la viga.
Existen, sin embargo, numerosos casos en los que no es necesario hacer el cálculo completo de la elástica, ya que sólo se requiere conocer el desplazam iento del centro de gravedad o el giro de determ inada sección. P ara estos casos, y fundam entalm ente cuando la sección transversal es variable, son especialm ente aplicables los llam ados l e o r e m a s d e M o h r , denom inados por muchos autores t e o r e m a s d e la s o r e a s d e m o m e n t o s , que vamos a exponer a continuación.
Estos teorem as son dos, y en ambos se considera a lo largo de la viga el d iagram a obtenido dividiendo en cada punto de la e lástica el momento flector M . en la sección correspondiente por la rigidez a la flexión EIZ.
a) Prim er teorema de Mohr
De la expresión de la curvatura:
r _ M _ M .~ ~ds ~ EL
se obtiene la correspondiente al ángulo dO que forman después de la flexión dos secciones indefinidam ente próxim as, separadas inicialm cntc dx.
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S 2 7 5
Figura 5.8.
ya que y = 0 en virtud de la pequenez de las deformaciones.Esta expresión nos indica que el ángulo elem ental di) entre las normales o las tangentes
en dos puntos indefinidam ente próximos de la elástica, es igual al área elemental M . dx del d iaeram a de momentos flectorcs div id ida por el módulo de rigidez a la flexión El. (Fig. 5.8).
El ángulo 0CO que forman las tangentes a la elástica en los puntos de abscisas .vc y xD, que no es otra cosa que el giro relativo de la sección D respecto de la C, se obtendrá integrando (5.4-1).
0CD — 0D 6c —
x° M . , — 1 dx . EL
(5.4-2)
expresión del prim er t e o r e m a d e M oh r , que podemos enunciar asi: e l á n g u l o 0CU f o r m a d o p o r la s t a n g e n t e s t r a z a d a s e n d o s p u n t o s a la l i n ea e l á s t i c a d e una v i ga d e r i g i d e z EL e s i g u a l a l a r c a d e ! d i a g r a m a M .JE I . i n t e r c e p t a d a p o r la s v e r t i c a l e s t razada s p o r a q u e l l o s p u n t o s .
Se observa que el ángu lo 0CD tiene el mismo signo que el d iagram a de momentos (lectores, es decir, que para un área positiva del d iagram a de momentos (lectores, el giro de la tangente en la sección D respecto a la tangente en la sección C se mide en sentido an tihorario , como es el caso representado en la F igura 5.8. Por el contrario, si el área del d iagram a de m om entos (lectores es negativa entre las secciones C y D, el signo de la tangente en la sección D respecto de la tangente en la sección C se produciría en sentido horario.
Si, como suele ocurrir frecuentemente, el módulo de rigidez a la flexión es constante, esta ecuación se puede poner en la forma:
I f XDOca = 7 7 K - dx
JXc(5.4-3)

R E S I S T E N C I A D E M A T E R I A L E S
En este caso la expresión adm ite una sencilla interpretación y el primer teorema de M ohr se puede enunciar asi: e l á n g u l o 0CD f o r m a d o p o r l o s t a n g e n t e s t razada s en d o s p u n t o s a la l in ea e l á s t i c a d e una v i g a d e r i g i d e z c o n s t a n t e e s i g u a l a ! á r e a d e l d ia g r a m a d e m o m en t o s J l e c t u r e s i n t e r c e p t a d a p o r la s v e r t i c a l e s t r a z ada s p o r a q u e l l o s p u n t o s , d iv id id a p o r e l p r o d u c t oEL.
b) Segundo teorema de Moltr
Las tangentes en los puntos N y N' de la línea elástica de una viga recta (Fig. 5.9), correspondientes a las secciones de abscisas .v y x + dx respectivamente, cortan a la vertical trazada por la sección C, de abscisa „r„ en dos puntos P y P'. La longitud del segmento PP', que representam os por d o en la F igura 5.9, en virtud de (5.4-1) valdrá:
Mdv = - ( .v - xc) dx = - ( . y - xc) dx ( 5 . 4 - 4 )
habiendo puesto el signo menos consecuente con el convenio de asignar el signo positivo cuando el vector P P es ascendente, y negativo en caso contrario .
Si llam am os ó CD la d istancia desde la sección C hasta la intersección D' de la tangente en la sección D a la e lástica, con la vertical trazada por C, el valor de esta distancia se obtendrá integrando la expresión (5.4-4) entre las abscisas de la v iga correspondientes a las secciones C y D.
TEORIA G E N E R A L D E LA FLEXION. ANALISIS DE D E F O R M A C I O N E S 2 7 7
Veamos el significado de la expresión (5.4-5): dx representa el área infin itesim al
rayada en el d iagram a de momentos (lectores dividido por EL. Su m ultip licación por ( .y — .y J nos da el momento estático de dicha área respecto a un eje vertical de abscisa ,y c .
Podemos enunciar el s e g u n d o t e o r em a d e M o h r diciendo: e l s e g m e n t o d e f i n i d o s o b r e un e j e v e r t i c a l d e a b s c i s a xe p o r e l p u n t o d e la e lá s t i c a , c o m ú n a l e j e ( p u n t o C ) y e l d e i n t e r s e c c i ó n ( p u n t o D‘ ¡ c o n la t a n g e n t e a la e l á s t i c a en e l p u n t o D d e a b s c i s a x D, v a l e lo q u e e l m o m e n t o e s t á t i c o d e l á r e a d e l d ia g r a m a M J E I . c o m p r e n d i d a e n t r e la s v e r t i c a l e s d e a b s c i s a s xc y .y d r e s p e c t o a l e j e c o n s i d e r a d o . .... ...
En el caso de tratarse de vigas de rigidez EL constante, la expresión (5.4-5) se puede poner en la forma
6 c o = ~ J l
y el segundo teorema de M o h r se puede enunciar asi: la l o n g i t u d ó CD d e l s e g m e n t o d e f i n i d o p o r un p u n t o C d e la e l á s t i c a y e l p u n t o D' d e i n t e r s e c c i ó n d e Ia t a n g e n t e e n o t r o p u n t o D d e la m ism a , e s i g u a l a l m o m e n t o e s t á t i c o , r e s p e c t o a l e j e v e r t i c a l q u e p a s a p o r C, d e ! a r e a d e l d ia g r a m a d e m o m e n t o s j l e c t o r e s e n t r e l o s p u n t o s C y D, d i v id id o p o r la r i g i d e z EL.
De la expresión (5.4-5) se desprende que el signo de 5CD es el del sentido del vector C D ‘, es decir, es positivo si el punto C está situado por debajo de la tangente a la e lástica en el punto D, y negativo si está por encima.
( . y — xc) M . dx (5.4-6)
5.5. T e o r em a s de la viga conjugadaAdemás de contar con los teorem as de M ohr para ca lcu lar el desp lazam iento vertica l o el giro de determ inada sección de una viga som etida a flexión simple, puede ser p a rticu la rmente útil la ap licación de otro método constituido por los llam ados t e o r e m a s d e la v i g a c o n ju g a d a .
D ada una viga som etida a un sistema arb itrario de cargas, llam arem os v i g a c o n j u g a d a de ésta a la m ism a viga som etida a una carga ficticia d istribu ida igual a l d iag ram a de momentos (lectores d ividido por EL, con una sustentación regida por las reg las que más adelante se verán , y de tal forma que cuando el momento flector sea positivo la carga ficticia de la v iga conjugada está d irig ida hacia arrib a y cuando el m om ento flector sea negativo la carga ficticia está d irig ida hacia abajo .
Considerem os una viga simplemente apoyada som etida a un sistem a a rb itra rio de cargas (Fig. 5.10-n) y construyam os su viga conjugada (Fig. 5.10-ú)
En la viga d ada, si se tom a el sentido ascendente como sentido positivo para las cargas, las expresiones (4.6-5) que relacionan carga, esfuerzo cortante y m om ento (lector son:
d T d l M --, 5 S ' 1 )
Su linea elástica viene dada por la ecuación diferencial
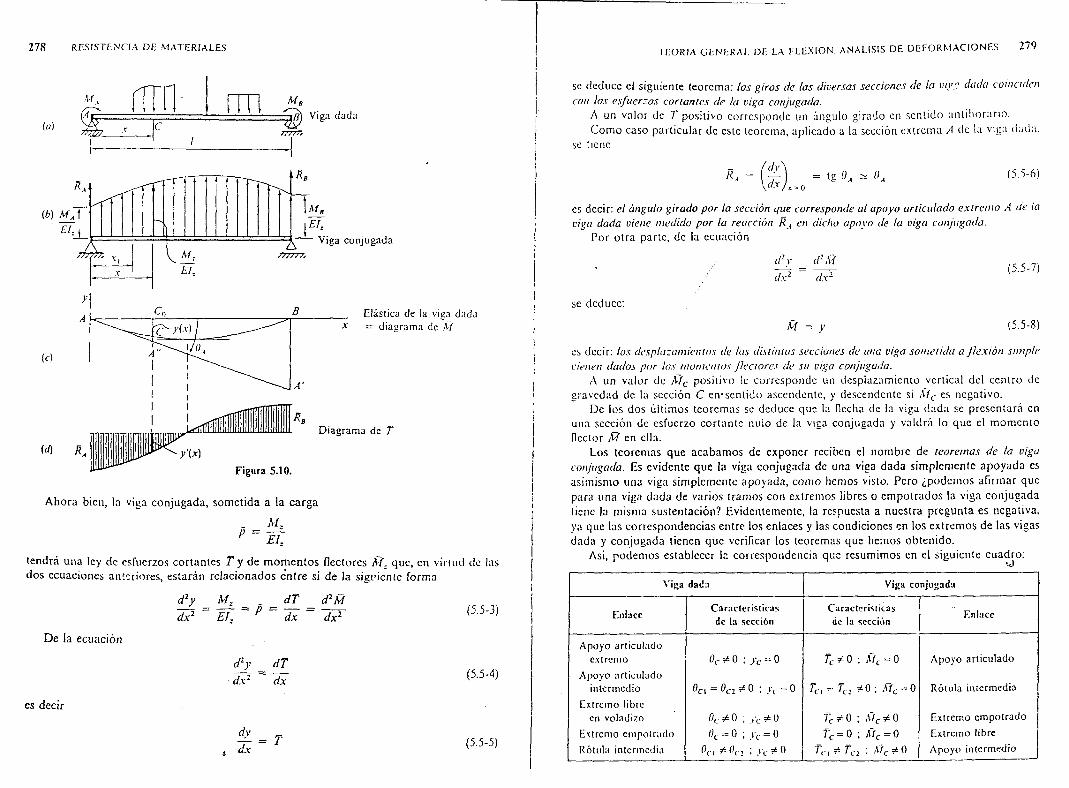
2 7 8 R ESI STENCI A DE . MATERIALES
AL,(íc= f f j V iga d a d a
(b) M j' El- i
(f)
7 y v A/.-
R-b
1I e l
^ Viga conjugada> 7 7 7 7 7 ,
Ahora bien, la viga conjugada, som etida a la carga
M .P = £7.
tendrá una ley de esfuerzos cortantes T y de m om entos flectores A/_ que, en virtud de las dos ecuaciones anteriores, estarán relacionados entre sí de la siguiente forma
¿f2y A/. _ d T c / M= m , = P = ~dx d x 2
De la ecuación
ff2 ^ r f r ¿ x 2
es decir
t/rr/.x
= T
( 5 . 5 - 3 )
(5.5-4)
(5.5-5)
TEORIA G E N E R A L DE LA FLEXION. ANALISIS DE D E F O R M A C I O N E S 2 7 9
se deduce el siguiente teorema: l o s g i r o s d e la s d i v e r s a s s e c c i o n e s d e la v i g g d a d a c o i n c i d e n c o n l o s e s f u e r z o s c o r l a n t e s d e la v i g a c o n ju g a d a .
A un valor de T positivo corresponde un ángulo girado en sentido antihorario . Como caso particu lar de este teorema, aplicado a la sección extrem a A de la viga dada,
se tiene
s ' ' ( £ ) , . . ' l e K l5-5-6’es decir: e l á n g u l o g i r a d o p o r la s e c c i ó n q u e c o r r e s p o n d e a l a p o y o a r t i c u la d o e x t r e m o A d e la v i g a d a d a v i e n e m e d i d o p o r la r e a c c i ó n R f en d i c h o a p o y o d e la v i g a c o n ju g a d a .
Por otra parte, de la ecuación
^ (5.5-7)dx d.\-
se deduce:
M = y 15.5-8)
es decir: l o s d e s p l a z a m i e n t o s d e la s d i s t in ta s s e c c i o n e s d e una v i g a s o m e t i d a a j l e x i ó n s im p l e v i en en d a d o s p o r l o s m o m e n t o s / l e c t o r e s d e s u v i g a c o n ju g a d a .
A un valor de A7C positivo le corresponde un desplazam iento vertical del centro de gravedad de la sección C en-sentido ascendente, y descendente si A?c es negativo.
De los dos últimos teoremas se deduce que la flecha de la viga dada se presentará en una sección de esfuerzo cortante nulo de la viga conjugada y valdrá lo que el momento flector M en ella.
Los teorem as que acabam os de exponer reciben el nombre de t e o r e m a s d e la v i g ac o n ju g a d a . Es evidente que la viga conjugada de una viga dada sim plem ente ap oyada esasim ismo una viga simplem ente apoyada, como hemos visto. Pero ¿podemos afirm ar quepara una viga dada de varios tramos con extremos libres o em potrados la viga conjugadatiene la m isma sustentación? Evidentemente, la respuesta a nuestra pregunta es negativa,ya que las correspondencias entre los enlaces y las condiciones en los extrem os de las vigasdada y conjugada tienen que verificar los teoremas que hemos obtenido.
Asi, podemos establecer la correspondencia que resumimos en el siguiente cuadro:'J
V ig a d a d a V ig a c o n ju g a d a
E n laceC a r a c t e r í s t i c a s
de la se cc iónC a r a c t e r í s t i c a s
de la se cc iónE n la c e
A p o y o a r t i c u l a d o e x t r e m o
A p o y o a r t i c u l a d o i n t e r m e d io
E x t r e m o l ib r e en v o l a d i z o
E x t r e m o e m p o t r a d o
R ó t u l a i n t e r m e d i a
0c y 0 ; y c = 0
®C1 = ®C2 r4 0 ’• J e = 0
Oc 0 , /<_. 0
t)c = 0 ; y c = 0
0 ,■ i y ; r c y 0
rc = 0 ; A?c = 0
= 0
7C y 0 ; a 7 c y 0
Tc = 0 ; A?c = 0
7 ( i 7- T, ■, ; A?c y 0
A p o y o a r t i c u l a d o
R ó t u l a i n t e r m e d i a
E x t r e m o e m p o t r a d o
E x t r e m o l ib r e
A p o y o i n t e r m e d i o

2 8 0 RESI STENCI A DE MAT E R I AL E S
habiendo indicado con los subíndices r i y C2 las secciones indefinidamente próximas a izquierda y derecha, respectivamente, de la sección C
Vigas c=
Vítíasconjugadas
Este cuadro nos permite establecer las siguientes reglas para obtener la sustentación de la viga conjugada de una dada:
1) el apoyo articu lado , extremo libre o empotram iento, en un extremo de la viga dada, permanece siendo apoyo articu lado o pasa a ser empotram iento o extremo libre, respectivamente, en la viga conjugada;
2) el apoyo articu lado de la vida dada que no esté situado en un extremo, pasa a ser una articu lación o rótu la en la viga conjugada;
3) la articu lación o rótula de la viga dada pasa a ser apoyo articu lado de la viga conjugada;
que se representan en la F igura 5.11.Como norm alm ente el m aterial utilizado es homogéneo y la sección recta no varia y,
por tanto, el m ódulo de rigidez a la flexión es constante, resulta cómodo trab a jar con una carga ficticia igual al d iagram a de momentos y d iv id ir luego los resultados por EL.
5.6. Expresión del potencial interno de un prisma m ecánico som etido a f lex ión sim ple. Concepto de sección reducida
Según hemos visto, sobre un elemento del prism a de aristas parale las a los ejes, las tensiones que se engendran sobre sus caras, cuando el prisma mecánico se somete a flexión simple, se reducen a las indicadas en la F igura 5.12.
F i g u r a 5 . 12 .
1 TEORI A G E N E R A L DE LA FLEXION. ANALISIS DE D E F O R M A C I O N E S 281
Para obtener la expresión del potencial interno del prisma mecánico podemos ap licar la fórmula (1.15-5) que nos da éste en función de las componentes de la m atriz de tensiones, en la que a„x = a, zxy = r siendo nulas las restantes componentes.
El potencial interno del elemento considerado será:
(IE = — a 1 dx d v dz + — i 2 dx d v dz 2 E 2G
( 5 . 6 - 1 )
Si el elemento de prism a que se considera es el comprendido entre dos secciones rectas indefinidam ente próxim as separadas dx, el potencial interno correspondiente se obtendría integrando esta ecuación y extendiendo la integral a la sección recta:
dx - dxa dCí + —— T2
J % 2 C . . 0dCl (5.6-2)
Ahora bien, sustituyendo los valores de <t y t dados por la ley de N avier y por la fórmula de Colignon respectivamente, tenemos:
c!E —M . V dx
n \ T }' ) 1 + 2Gdx 2E
^ f f v2 dQ +2EI. n ■ 2GI:
Í Y V '- Yb l .
b d y
(5.6-3)
d v
Como y2 dQ es el momento de inercia respecto a l eje de flexión, haciendo:
a1
7F• d y
la expresión (5.6-3) se puede poner en la forma:
dE = dx + dx
( 5 . 6 - 4 )
(5.6-5)d 2E L 2G fi„
El potencial interno del prisma se obtendrá i n t e g r a n d o a l o l a r g o d e I e j e d e l m i s m o
( 5 . 6 - 6 )E1 M : J
— jr d s +n 2 E L
1 7-2 d s
o 2e n ,
siendo d s el elemento de arco de linea media.Vemos que el potencial interno consta de dos términos: el primero representa el
potencial debido al momento flector; y el segundo, el debido al esfuerzo cortante. En este último aparece Í2ly que, según se ha definido, depende exclusivam ente de las características geom étricas de la sección. Por com paración con la expresión que nos da el potencial de un prism a debido al esfuerzo cortante, ya estudiado anteriorm ente, llam arem os a f t Iy s e c c i ó n r e d u c i d a .

2 8 2 R E S I S T E N C I A D E M A T E R I A L E S
Si com param os la expresión (5.6-4) con la (3.3-3) que obtuvim os en el C ap ítu lo 3 al estud iar la teoría elem ental de la cortadura, vemos que podemos considerar la sección reducida Q ,y como el área dc una sección ficticia de la viga tal que m anteniéndose p lana la sección recta y, por tanto, actuando sobre ella una tensión tangencial constante, el potencial interno es el mismo que tiene la viga con la sección real y la tensión tangencial variable.
A modo de ejemplo calculem os las secciones reducidas en caso de secciones rectas de forma rectangular, c ircu lar y rómbica.
a) Sección rectangular (Fig. 5.13)
/. = 2 b y2 d y =2b I r
b y d y = \ (h2 - y 2)
f i , , 4 b 2 h 6' h b 2(h 2 — y 2) 2 3 1
■ d y =4b 5 bh
Como 2 bh = f i, queda;
b ) Sección circular (Fig. 5.14)
6 í í ;
- rJ O
2 n r2 d r =nR*
/. =n R i
(5.6-7)
r*/22R eos <pR sen <pR eos <p d<p = 2R 3 eos2 (p sen <p d <p = —— eos3 0
» J » 32 R 3
n .16
n 2R*' y 2 4 R 6 eos6 0 o 9 - 2 R eos 9
R eos 9 dQ =64
9 n 2 R 2 eos6 9 dQ1 0
9 n R 2
Véase P. Pu ig Adam . « C á lcu lo In tegra l» , pág. 87.
p y i o n A N A L I S I S D E D E F O R M A C I O N E S 2 8 3T E O R I A G E N E R A L D E LA F L E X I O N . A N A L I S I S
Como Q = n R 2, queda:
n » - i ó n15.6-8)
c) Sección róm bica (Fig. 5.15)
Como
/. = 2
P ^ (/, _ V)F d v = ^ (/> - }) (l<2 + h y - 2y 2)J, > • ' ’ ‘ 6 h

2 8 4 r e s i s t e n c i a d e m a t e r i a l e s
Por tanto,_ 36 b 0h 5 3!
de d o n d e30Q., = J ¡ n . (5.6-9)
5.7. D eform acion es por esfuerzos cortantesEn el esiudio de la deformación de una viga som etida a flexión simple hecho hasta aqui se ha considerado solam ente el momento flector, es decir, se ha supuesto despreciable el electo producido por el esfuerzo cortante. En la m ayoria de los casos se puede considerar, efectivamente, despreciable la deformación debida al esfuerzo cortante, pero para vigas cortas el efecto del esfuerzo cortante frente al del momento flector puede ser apreciable, como veremos más adelante y, por tanto, habría que tenerlo en cuenta.
Como la tensión tangencial r debida al esfuerzo cortante no se mantiene constante en todos los puntos de la sección, la distorsión angu lar que sufren las fibras de la viga es variable. Las secciones rectas, por tanto, no se m antendrán planas después de la deform ación sino que experim entarán cierto alabeo.
No obstante, lo que vam os a determ inar es el desplazam iento relativo d v = y dx (Fig. 5.16) entre dos secciones indefinidam ente próximas a causa del esfuerzo cortante T Del segundo término del segundo miembro de la ecuación (5.6-5), que expresa el potencia*! interno del prísm a elem ental lim itado por am bas secciones debido al esfuerzo cortante T , se obtiene, ap licando el teorem a de C astig liano , el desplazam iento relativo dv.
, didG) Ty ,tl0 = ' d ^ = c ñ r / x ^
y como d v = y dx, se deduce que el ángulo de deslizam iento y (en realidad se trata de un valor medio) tiene por expresión:
( 5 . 7 - 2 )
TEORIA G E N E R A L DE LA FLEXION. ANAL I S I S DE D E F O R M A C I O N E S 2 8 5
La expresión (5.7-1) nos permite ca lcu lar de forma inm ediata, si la sección reducida de la viga es constante, la línea elástica de la deformación deb ida exclusivam ente al esfuerzo cortante.
d M .En efecto, teniendo en cuenta que T = — e integrando, se obtiene:
dx
>’i =' X T, 1
d v = — — d-x = — —o « 0 CDly C 7 0 ,,.
d M z = —~ [ M z(x) - A/.(0)] (5.7-3)o 6 Í Í 1(
en donde M .(x) es el momento en una sección de abscisa ,v y M 0 el momento en el origen.En realidad esta deformación h ab ría 'q u e superponerla a la d ad a por la e lástica que
hemos visto en el epígrafe 5.2, en la que solam ente hacíam os in terven ir el momento flector, pero como ya se ha indicado la deformación debida al esfuerzo cortante se suele despreciarrespecto a la producida por él momento flector.
A modo de ejemplo, calculem os la relación entre las flechas debidas a una y otra causa en los casos de una viga simplemente apoyada som etida a carga uniformemente repartida y a carga concentrada ap licada en su punto medio, am bas de sección rectangular.
En ambos casos las expresiones del momento de inercia de la sección respecto al eje z y de la sección reducida, son:
h¡- i 5 5b y 1 d y = — bhi ; = - f1 = - bh
a ) V iga bajo carga uniformemente repartida (Fig. 5.17-a)
La (lecha debida al momento (lector fue ca lcu lada anteriorm ente y su valor, según laecuación (5.2-9), es:
/ = ___1 . £Ü = -------5-EJ-- í (5.7-4)J s í ' 384 E¡z V-Ebh3
P ara calcu lar la debida al esfuerzo cortante ap licarem os la ecuación (5.7-3), teniendoen cuenta que la ley de momentos es
«.«- p{>■■ - p4 « '
y que la flecha se presenta en el punto medio de la viga.
h
F i g u r a 5 . 17 .
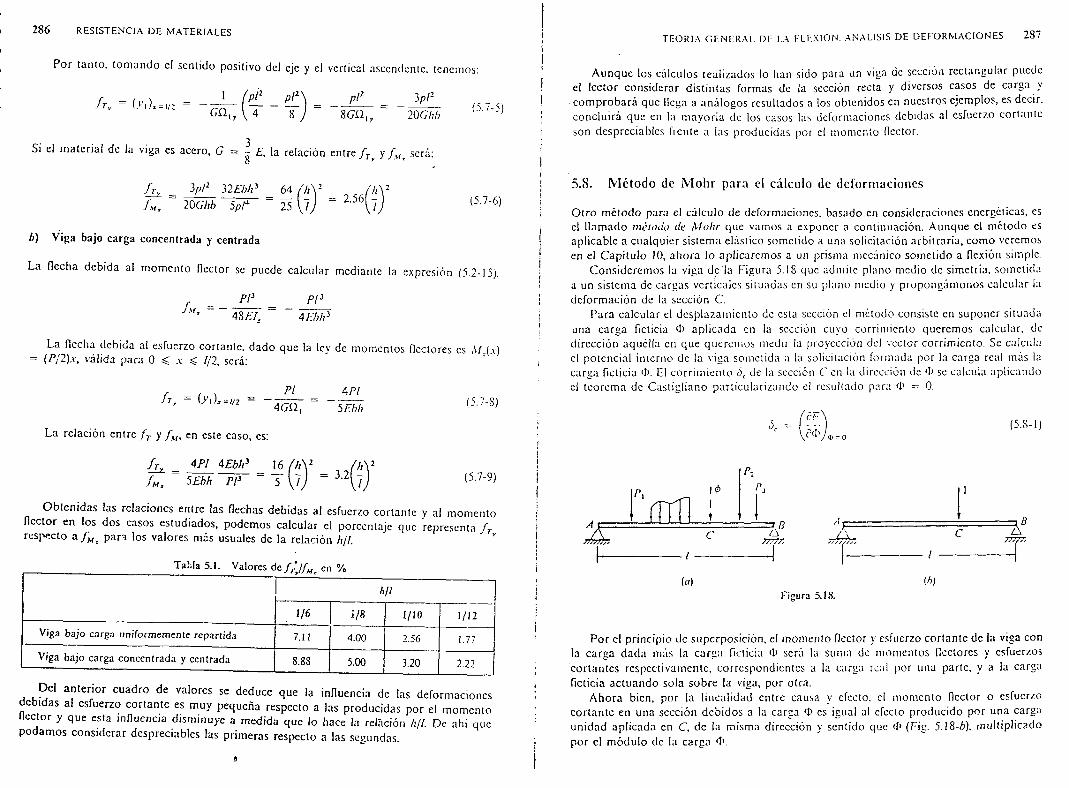
2 8 6 RE S I S TENCI A DE MAT E R I AL E S
Por tanto , tom ando el sentido positivo del eje y el vertical ascendente, tenemos:
f - ¡ y ) - 1 ( p i 1 p i1\ p /2 V 27 r v - (y i )x = ii2 ~ — —-------------- = -------------= -------- (5 7-51V 4 8 ) 8CÍ2„ IQGhb 1 j
Si el m ateria l de la viga es acero, G = - E, la relación entre f Ty y sera:
f r , 3/;/2 S lE b h 3 64 //A2 //A2(m . 20Ghb 5pi* ~ 25 \ l ) ~ 2 \~l) (5'7' 6)
b) V iga bajo carga concentrada y centrada
La (lecha debida al momento flector se puede ca lcu lar mediante la expresión (5.2-15).
P l3 P l 3f » , = -
4877/ . 4 77/;/;3
La flecha debida al esfuerzo cortante, dado que la ley de momentos flectores es /U.(.v) = ( P ¡2).v, válida para 0 < .v ^ 1/2, será:
r - i p l WTy {yi)x=ln 4 e n , “ 5Ebh l 5 J ' 8>
La relación entre f T y f M, en este caso, es:
f r y 4/7 4Ebh3 16 /VA2 //A2— - = 3 .2 (7 (5.7-9)/ „ . 577é/t P/3 5 \ l j _ - ^ /
O btenidas las relaciones entre fas flechas debidas al esfuerzo cortante y a ! momento Héctor en los dos casos estudiados, podemos ca lcu lar el porcentaje que representa f T respecto a f Mt para los valores más usuales de la relación h¡¡.
_____________ Tabla 5.1. Valores d e n %
h/l
1/6 3/8 1/10 1/12
Viga b a j o c a r g a u n i f o r m e m e n t e repartida 7.11 4.00 2.56 1.77
Viga bajo carga concentrada y centrada 8.88 5.00 3.20 2.22
Del an terio r cuadro de valores se deduce que la influencia de las deformaciones deb idas a l esfuerzo cortante es m uy pequeña respecto a las producidas por el momento Héctor y que esta influencia d ism inuye a m edida que lo hace la relación /;//. De ahí que podam os considerar despreciables las prim eras respecto a las secundas
TEORI A G E N E R A L DE LA FLEXION. ANALISIS DE D E F O R M A CI O N E S 2 8 7
Aunque los cálculos realizados lo han sido para un viga de sección rectangular puede el lector considerar d istin tas formas de la sección recta y diversos casos de carga y com probará que llega a análogos resultados a los obtenidos en nuestros ejemplos, es decir, conclu irá que en la m ayoría de los casos las deformaciones debidas al esfuerzo cortante son despreciables frente a las producidas por el momento flector.
5.8. M é to d o de M o h r para el cálculo de deform acionesOtro método para el cálcu lo de deformaciones, basado en consideraciones energéticas, es el llam ado m é t o d o d e M o h r que vamos a exponer a continuación. Aunque el método es ap licab le a cualqu ier sistem a elástico sometido a una solicitación arb itraria , como veremos en el C ap itu lo 10, ahora lo ap licarem os a un prisma mecánico sometido a flexión simple
Considerem os la viga de la F igura 5.18 que admite plano medio de sim etría, sometida a un sistem a de cargas verticales situadas en su plano medio y propongámonos ca lcu lar la deform ación de la sección C.
P ara ca lcu lar el desp lazam iento de esta sección el método consiste en suponer situada una carga ficticia <I> ap licada en la sección cuyo corrim iento queremos calcu lar, de dirección aquélla en que querem os medir la proyección del vector corrim iento. Se calcula el potencial interno de la v iga som etida a la solicitación formada por la carga real más la carga ficticia <I>. El corrim iento ó { de la sección C en la dirección de rh se calcula aplicando el teorem a de C astig liano particu larizando el resultado para = 0.
Pt
i r muc
Pl
A7777Z
- I -
(a)
0777777,c
- 1 -
ib)F ig u r a 5 .18 .
Por el principio de superposición, el momento flector y esfuerzo cortante de la viga con la carga d ada más la carga ficticia <1> será la suma de momentos (lectores y esfuerzos cortantes respectivam ente, coi respondientes a la carga real por una parte, y a la carga ficticia actuando so la sobre la viga, por otra.
A hora bien, por la lineaiidad entre causa y efecto, el momento (lector o esfuerzo cortante en una sección debidos a la carga O es igual al efecto producido por una carga un idad ap licada en C, de la m isma dirección y sentido que <[> (Fig. 5.18-b), m ultiplicado por el m ódulo de la carga <h.

2 8 8 R ESI STENCI A DE MATERI ALES
Por tanto, las leyes de momentos Héctores y esfuerzos cortantes en la viga con la carga real más la carga ficticia O serán:
A/: = ,V/.0 + 0 M =l Ty = Tí0 + 0 7 ; ,
(5.8-2)
en donde:
A/.0 es la ley de momentos Héctores de la viga dada som etida a la carga real.Ts0 es la ley de esfuerzos cortantes de la viga dada som etida a la carga real.
M .¡ es la ley de momentos Héctores producidos por una carga unidad ap licada en lasección C.
Tyl es la ley de esfuerzos cortantes producidos por una carga unidad ap licada en lasección C.
El potencial interno de la viga, en virtud de (5.6-6), es:
A/:2 El.
d s + '' t ;o 2C.O.,
d s =(M :0 + OA/.,)2
2 ELdx +
♦ -(5.8-3)
Por el teorema de Castig liano , el corrim iento vertical de la sección C será:
<5, =SE3 0
■' A'-qA/.-i n EL
dx + PyQ Py i GQiy
dx (5.8-4)
Como ya vimos anteriorm ente, el término debido al esfuerzo cortante podemos despreciarlo respecto a l debido al momento Héctor, por lo que podemos poner como expresión del corrim iento de cualqu ier sección C la siguiente:
c [ ' M ;0M : l
= Jo - n r llx(5.8-5)
en donde M : l es, como ya se ha dicho, la ley de momentos nectores debidos a una carga unidad ap licada en d icha sección C.
Puede ocurrir, como en el ejemplo que hemos puesto, que las leyes de momentos Hedores pueden ser d istin tas en los diversos tramos de la viga o del sistem a elástico que se considere. En estos casos la expresión (5.8-5) seria de la forma:
6C = IEL
ds (5.8-6)
en donde las integrales estarian extendidas a las líneas m edias de los tram os en cuyos intervalos de la abscisa s tuvieran validez sim ultánea las leyes de M z0 y A/.¡.
Si se presentara el caso de calcu lar el desplazam iento de una sección C de un sistema
TEORIA GE NE R AL DE LA FLEXION. ANAL I SI S DE D E F O R M A C I O N E S 2 8 9
elástico, tal como el indicado en la F igura 5.19, en el que no es posible suponer despreciable la componente horizontal, como se ha hecho en el caso de vigas rectas som etidas a cargas verticales, la aplicación del método exigiría la consideración de una carga ficticia vertical 0„ (Fig. 5.19-rr) para ca lcu lar la componente vertical t¡ci, del desplazam iento, m ientras que para calcu lar la componente horizontal 3ch seria necesario considerar una carga ficticia horizontal O,, (Fig. 5.19-Ó).
i
Si se trata de calcular el ángulo de giro de la sección C ap licando este método suponemos aplicado en ella un momento ficticio O (Fig. 5.20-u).
Se calcula el potencial interno de la viga som etida a la solicitación form ada por I? carga real más el momento ficticio O. El giro 0C de la sección C se ca lcu la ap licando ei teorema de Castigliano particu larizando el resultado para 0 = 0
Procediendo análogam ente a como hemos hecho anteriorm ente p ara el cálculo del desplazam iento, las leyes de momentos nectores y esfuerzos cortantes en la v iga con la carga dada más el momento ficticio 0 serán:
M z = M .0 + 0 M Z¡
P, = PyO + ^ ^ 1( 5 . 8 - 8 )

2 9 0 R E S I S T E N C I A D E M A T E R I A L E S
en donde M .0 y Ty0 tienen el m ismo significado que en las ecuaciones (5.8-2), pero ahora:
M : l es la ley de momentos (lectores producidos por un momento unidad aplicado en la sección C.
72, es la ley de esfuerzos cortantes producidos por un momento unidad aplicado en la sección C.
La expresión (5.8-3) del potencial interno sigue siendo válida, por lo que la aplicación del teorema de C astig liano nos dará :
0C —
c F ' M . qM . | EL
dx +o
dx (5.8-9)
e igualm ente que antes podemos considerar despreciable el término debido al esfuerzo cortante, y si existen varias leyes de momentos flectores a lo largo de la viga, la expresión del ángulo girado por la sección / será
= Z ' ' A/.-qA/„
n El.d s (5.8-10)
Indicarem os, finalm ente, que si el s igno ,'tan to del desplazam iento 5C como del giro 0C, es positivo quiere decir que el desplazam iento o el giro de ia sección que se considera coincide con el de la solicitación un ita ria ap licada.
5.9. M é to d o de m ultip l icación de los gráficosLa ap licación del método de M ohr nos lleva a ca lcu lar integrales del tipo (5.8-5) o (5.8-9), es decir, integrales en las que aparecen el producto de dos funciones de la misma variable x.
Teniendo en cuenta que el d iag ram a de momentos flectores en la pieza de la fuerza o momento unidad van a ser rectilíneos, vam os a exponer el denominado m é t o d o d e m u lt ip l i c a c i ó n d e l o s g r á f i c o s que perm ite encontrar los valores de las integrales de M ohr sin necesidad de calcu larlas.
Supongam os que querem os ca lcu la r la in tegral del producto F0(x) ■ F ¡(x) de dos funciones, una de las cuides a l menos es lineal en un in tervalo de longitud /.
I = F0( x ) - F l ( x ) d x (5.9-1)
Si F¡ es una función lineal
F l = ax + b (5.9-2)
la expresión (5.9-1) se convierte en:
/ = F0(x)(ax + b )dx = a xF0(x) dx + b F0(x) dx (5.9-3)
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S 2 91
La segunda integral es el área del d iagram a F0(\), que llam arem os f i0. m ientras que la segunda es el momento estático de este área respecto al eje y
xFn(x)dx = n n -xr, I5 -9 ' 4 »* 0
siendo ,vc la abscisa del centro de gravedad del d iagram a correspondiente a la función F0(x) (Fig. 5.21).
Sustituyendo en la expresión (5.9-3), tenemos:
/ = aQ 0xG + /;fi0 = O0(fl.v0. + b) = f io ó jU d (5-9-5)
es decir: la i n t e g r a l d e ! p r o d u c t o F f x ) • F ¡(x) d e d o s f u n c i o n e s , s i e n d o l i n ea l F , r p o d i e n d o s e t F0 d e c o n f i g u r a c i ó n a rb i t ra r ia , e s i g u a l a l p r o d u c t o d e l á r e a d e l d i a g r a m a d e F0 p o r la o r d e n a d a d e l d i a g r a m a l in ea l q u e c o r r e s p o n d e a la a b s c i s a d e l c e n t r o d e g r a v e d a d d e l á r e a fio-
Para el signo de / se tendrán en cuenta los signos que tengan los dos d iagram as, según la forma de trabajar que tenga la pieza som etida a la so licitación exterior dada o a la acción un itaria (fuerza o momento).
Si el signo de la m ultiplicación de los gráficos es positivo, el resultado nos ¡nd:ca que el sentido del corrim iento o giro de la sección que se considera coincide con el de la so licitación unitaria ap licada.
Conviene hacer ia observación que el producto de los dos gráficos, si uno de ellos es de configuración arb itraria , no es conm utativo. Sin em bargo, sí lo será si las dos funciones F0(x) y F ,(x) son am bas lineales.
5.10. C álculo de desp lazam ientos en vigas so m etid asa flexión sim ple m ediante uso de series de Fourier
Otro método que se puede utilizar para el cálculo ele! desp lazam iento de secciones de vigas som etidas a flexión simple es el basado en la utilización de series de Fourier.

2 9 2 R E S I S T E N C I A D E M A T E R I A L E S
Consideremos en primer lugar una viga simplemente apoyada de longitud / y rigidez EL constante, sometida a una distribución de carga definida por la ecuación
nnxP = Po sen — (5.10-1)
siendo n un número entero y p a una constante, que es el valor m áxim o de la cargaap licada a la viga. Tomaremos el semieje positivo de ordenadas el vertical ascendente.
Como la ecuación diferencial de la elástica es
d 2vEL- J ? = M : (5-’ ° -2>
y, como vimos en (4.6-5), la carga es la derivada segunda del momento Héctor, la ecuación (5.10-2) la podemos poner en la siguiente forma
r. ( d* v c f - M nnx£/- ^ ? = ^ = /,° S e n T ' (5' 10-3)
cuya integración nos da
r-. d }v p 0l nnxEL -T-J = eos —— + C , (5.10-4)dx n n !
(Ev ( I V nnxa - 1 ? ■ T + c ':' + c - ,5-10-5)
siendo C r y C 2 constantes de integración que podemos determ inar im poniendo las condiciones de contorno de ser nula la curvatura de la e lástica en los extrem os de la viga.
d l y= 0 , para .v = 0 y .t = / =■ C ¡ = C 2 = 0
De la ecuación resultante
c f y í l \ 2 n nxEL- d ? = s e n — (5- '° - 6)
com parándola con la (5.10-2) se deduce que la ley de momentos flectores en la viga som etida a una carga senoidal es también senoidal.
Integrando una y otra vez la ecuación diferencial anterior, tenemos
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S 2 9 3
Im poniendo la condición de contorno de ser nulos los desplazam ientos mos, se deduce la nulidad de las dos constantes de integración.
Para x = 0 ; y = 0 Para x = I ; y = 0
C4 = 0 C , = 0
La ecuación (5.10-8) se reduce a
( I Y nnx E I.v = — sen\ n n ¡ l
(5.10-9)
Si la carga que actúa sobre la viga tiene la forma más general de un desarro llo en seriede Fourier.
p = sen — + p 2 sen + p ¡ sen ^ + - . = £ p „ s e n ^ (5.10-10)n - 1 /
se puede ap licar el principio de superposición para obtener la ecuación in tegral de la elástica
, / Y nnx . E l , , - ! / . ( - ) * » - (5.10-11)
siendo p„{n = 1, 2, ...) los coeficientes de Fourier, cuyos valores se obtienen multiplicando
los dos miembros de (5.10-10) por sen ~ dx e in tegrando a lo largo de la viga
' n n xp s e n - y - d x = p ¡
\ *
Ttx n nx sen — sen —— dx + ••• + p„
nnx nnx sen—— sen —— dx + ••• (5.10-12)
* * »
Las integrales del segundo m iem bro se anu lan todas salvo la correspondiente a p n qüe vale 1/2*, por lo que los coeficientes de Fourier serán
1 n n x , p sen - y - dx (5.10-13)
A modo de ejem plo veam os a qué resultado nos conduce la aplicación de este método para obtener las flechas en dos de los casos que hemos visto anteriormente aplicando el método de integración.
El prim er caso a que nos referimos es al de una viga cargada con carga uniforme p porunidad de longitud (Fig. 5.22-a)
• Véase «C álcu lo Integral» de P. Puig Adam, Lección 10 § 7, o cualquier texto de matemáticas que contenga el estudio de series de Fourier.

2 9 4 RE S I S TENCI A DE MA T E R I AL E S
’m
Figura 5.22.
Los coeficientes de F ourier para este caso, según la ecuación (5.10-13), serán
nnx 2 ps e n dx = — L
/ // ri7r.r
e o s -----nn l
2p(1 — eos nn)
cuyo valor depende de que n sea par o impar:
para n par: eos nn = 1 => p n = 0
para n im p a r : e o s nn = — 1 => p n = _
La ecuación (5.10-11) de ¡a clástica tom ará la forma
E L
nn
l v = - aJL ( LK \K
1 3>n.x 1 S7rvscnT + - Se n - r + ? sen27 i + (5.10-14;
x =P //2 tan t° ’ la CCUaC¡Ón dc ,a " ccha sc obtendrá particu larizando esta ecuación pan:
/4/1/4
’ ñ^ETl 7 ¿ + ••• (5.10-15)
a p r o ^ Í r a 1 " 1'" 05 “ * ^ 3 ^ d d Seg^ ’ Se ° b l'C" C *>™> valor
f ~ = _ 5.019 ^ _ 5(1 + 0 .0 0 3 )^n EL 306EL 384EL 384£7 (5.10-16)
Si com param os esta expresión con ¡a (5 2-9) de la flecha nhi^nN a ui ■
El segundo caso al que vamos a ap licar el método que hemos expuesto es el de una
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S 2 9 5
viga simplemente apoyada sometida a una carga P en la sección media C (Fig. 5.22-b). Ln este caso la carga equivalente sc puede expresar asi:
2 P ( n nx 2n 2nx 3n 2>nx \ , , , n . 7 .i) = ---- — ( sen — sen — + sen — s e n + sen — sen —— + ■■■ 1 p . iu - i i)
1 \ 2 I 2 1 2 I ¡
y la ecuación de la clástica, según (5.10-11), será
2 El3 / n nx 1 2 n 2nx 1 3 a 3 nx \E Ly = j - I sen - sen — + — sen — sen — - + — sen — sen —-— F ---1 (5.10-18)
dc donde, particularizando para x = //2:
2 PI3 ( 1 \
f = >'<= - S E í X + ^ + " ■) (5' 10' ' '
Despreciando los términos de la serie a partir del segundo, se obtiene como valor aproxim ado de la flecha en este caso
2PP PP 0.985 PP/ - - - - — = ------------ = ------------------- (5.10-20)J - n EL 48.7EL 4 8 EL
Com parando esta expresión con la (5.2-15) que nos da el valor dc la flecha de la viga que estamos considerando cuando se aplica el método dc la doble integración, se deduce que el error cometido tomando solamente el primer termino dc la expresión obtenida aplicando el método basado en la utilización de las series de Fourier es del orden de 1.5 por 100 por defecto.
5 .Í1 . D eform aciones de una viga por efec to de la temperaturaYa vimos en el epígrafe 2.6 el comportam iento de un prism a mecánico cuando se produce una variación térmica. Allí se consideraba uniforme d icha variación, e s decir, todas las partícu las del m aterial experim entaban el mismo incremento dc tem peratura. En tales c ircunstancias, si la d ilatación de un prisma m ecánico recto de longitud I es libre, el incremento de longitud del prisma, cuando se produce una variación de tem peratura Ar, es
A / = la A /
siendo a el coeficiente dc dilatación lineal, que es constante para cada m aterial. En una viga simplemente apoyada, sin carga y de peso despreciable, la linea media seguirá siendo recta.
Ahora vamos a considerar una viga simplem ente ap oyada (Fig. 5.23) de sección recta rectangular, que está inicialm cnte toda clin a tem peratura r0, pero sc produce una varia ción térmica que hace que exista un gradiente térmico constante dc abajo a arriba, es

R E S I S T E N C I A d e m a t e r i a l e s
decir, ia tem peratura entre las caras inferior y superior varía linealm ente (f-'ig. 5.23-c). Sea /, la tem peratura de la cara inferior y t 2 la correspondiente a la cara superior
■"Adx
- / - (ai
F i y u r a 5 ,23 .
El com portam iento de la viga es ahora totalmente diferente, ya que los alargam ientos de las fibras longitudinales son distintos. Por este motivo, la linea media se curvará. Intuitivam ente vemos que el electo producido por la tem peratura es equivalente a un
a largam iento uniforme AI = h ( t m — i0) siendo tm = - 1—-— - la tem peratura media,
seguido de una flexión pura como la que genera un momento flector ap licado en las secciones- extremas.
Para obtener la ecuación diferencial de la elástica veámos cual seria la expresión de su curvatura que podemos obtener expresando el alargam iento relativo de las fibras de la cara inferior, según se desprende de la F igura 5.23-b
h dO = a{ti - t0) dx - a(/2 - r0) dx
De aqui se obtiene
dOdx
a ( í , - t 2)(5.11-1)
por lo que la ecuación diferencial de la elástica de la viga debida a la variación térm ica in d ia d a , en virtud de (5.2-2), será
La ecuación de la elástica se obtendría a partir de ésta por doble integración. Se observa que desde un punto de vista formal, y en lo que al cálculo de desplazam ientos verticales se refiere, la ecuación (5.11-2) se obtendría a partir de la (5.2-5) reem plazando
EL por a ( t ¡ — i 2)/h, por lo que ésta seria la sustitución que tendríam os que hacer si ap licam os los teoremas de M ohr o de la viga conjugada.
Si la tem peratura media tm difiere en un valor notable de la in icial /„ podria interesar tener en cuenta el desplazam iento horizontal. Para una sección de abscisa x seria
5a, = a(rm - t0)x (5.11-3)
TEORI A G E N E R A L DE LA FLEXION. ANA L I SI S DE D E F OR M A C I O NE S 2 9 7
Los giros de las secciones vendrían dados por la ecua.»ón obtenida al realizar la primera integración de la ecuación diferencial de la e lástica (5.11-2).
5.12. F lexión s im ple de vigas producida por im pactoHasta aqui siempre hemos considerado cargas estáticas actuando sobre un prisma m ecánico, es decir, cargas que se aplican al prism a de forma lenta y progresiva y que quedan en estado de reposo relativo respecto del mismo. Pero aho ra vamos a considerar que la flexión sobre una viga, que adm ite plano.m edio de sim etría vertical, tal como la representada en la F igura 5.24 es producida por- una carga de m asa M que cae sobre la sección media desde una a ltu ra h. El im pacto produce una flecha 5 que queremos calcular.
La resolución de problemas de este tipo se hace siem pre por consideraciones energéticas. Supondremos que no hay pérdidas de energía por rozamiento externo o interno, asi como que la masa M sigue unida a la v iga hasta que ésta alcance la deformación máxima Ó. En estas condiciones, la pérdida de energía potencial de la masa M, cuyo valor es
M g(h + ó) (5.12-1)
siendo g la aceleración de la gravedad , tiene que ser igual al potencial interno o energía de deformación alm acenada por la viga.
Ahora bien, para ca lcu lar el potencial interno de la viga tengamos presente el valor de la carga estática P que produciría una flecha 6, que según (5.2-15) seria ta! que
p p 48 El. &5 = ---------- de donde P = — ^—
48 £7. /3
y que el potencial interno se puede expresar en función de las fuerzas exteriores mediante la ecuación (1.15-3) de C lapeyron
5- = * PS = (5.12-2)
Igualando las expresiones (5.12-1) y (5.12-2), tenemos

298 R E S I S T E N C I A D E M A T E R I A L E S
o bien
24£/_<5 - M g P ó - M g l f i = 0 (5.12-4)
ecuación de segundo grado, cuya solución válida es
ó =M g l} + v'l/V/g/Y + 96E L M g f h M gP [ ( M g ^ Y 2/¡ MgP_ , 5 . 2 5 1
48E7. 48 £7. V I 4» E I . J 48 £/. ' ’
Si llam am os í)t„ a la flecha que correspondería a la carga M g co locada de forma estática en la sección media de la viga, la ecuación anterior se puede poner en la forma
«5 = + 7 ó c2s, + 2 h ó ~ (5.12-6)
De ia observación de esta ecuación y del razonam iento seguido se deduce:
1.° El desplazam iento vertical de la sección media de la viga producida por una cargad inám ica es siem pre m ayor que el correspondiente a la carga como estática.
2.° Si h = 0, es decir, si la carga se aplica súbitam ente sobre la viga y no de forma lenta y progresiva, el desplazam iento vertical debido a la carga d inám ica es el doble del correspondiente a la carga como estática.
3.° Si la a ltu ra h de ca ida es m uy grande com parada con 5, se puede despreciar <52„ frente a 2/;<)„, en la ecuación (5.12-6), y la expresión del desplazam iento debido a la carga d inám ica sería
<5 = 7 2 ^ (5.12-7)
4.° El valor de ó dado por (5.12-6) es el máximo que puede tener el desplazam ientovertical de la sección m edia, toda vez que en su obtención se ha supuesto que no hab ia perd idas de energia durante el impacto, es decir, no se ha considerado la energía d isipada en la deformación local de las superficies de contacto, tanto de la m asa como de la viga, ni la energia necesaria para el posible rebote hacia arriba de la m asa que choca con la viga.
5.13. V igas de secc ión variable som etidas a f lex ión s im pleEn la exposición de la teoría general de la flexión que se ha hecho hasta aqu í nos hemos referido fundam entalm ente a prism as mecánicos de sección recta constante. Pero hay innum erables casos en la práctica en los que las piezas que trabajan a flexión tienen sección variab le, ya sea porque ello va a significar una dism inución del coste de la pieza o por necesidades de la construcción de la que la pieza forma parte.
Adm itirem os para estas v igas la validez de la ley de Navier y de las fórmulas fundam entales de la teoría de la flexión. Supondremos, asim ism o, que no es brusca la variación de las secciones, ya que si asi fuera se presentarían concentración de tensiones.
Estudiarem os exclusivam ente las vigas d e i g u a l r e s i s t e n c i a a ¡a f l e x i ó n , entendiendo por tales aquellas vigas en las que la tensión m áxim a, correspondiente a ios puntos en cada sección más ale jados de la linea neutra, es constante en todas ellas.
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S 299
Esta condición se podra expresar de la siguiente forma.
M . ... (5.13-1)
siendo K una constante, es decir,
i v = d i r s .i :3-2)K
el m ódulo resistente de la sección es proporcional al valor absoluto del momento Rector en
6 3 En cuanto a la deformación de la linea media de estas vigas, si el eje z es de sim etría, laecuación diferencial de la línea e lástica será
Mz (5.13-3)y ~ W ~ h EW.h Eh
E n
tornando como sistema de referencia el formado por el eje x coincidcnte con la linea media no deform ada y el eje y positivo ascendente.
Como
I (5.13-4)P
siendo p el radio de curvatura de la linca elástica, de la ecuación (5.13-3) se deduce que si la a ltu ra /, de la viga es constante también lo es p y. por tanto, la linea e lástica es un arco
dC T m odT dc 'e jcm p io estudiarem os varios casos de interés en la práctica, de vigas en voladizo de sección rectangular de igual resistencia a la flexión.
Oa ) V iga en voladizo con altura constante y anchura variable,
som etida a carga concentrada en el extremo libre (Fig. 5.25)
A! ser la sección transversal rectangular de ancho b x y a ltu ra h, el módulo resistente es:
W. =12- M 3
/i/2 h¡ 2M 2
6
El momento flector en la sección de abscisa .x es:
M . = - P x

3 0 0 R E S I S T E N C I A d i : m a t e r i a l e s
Como en esta sección genérica la tensión m áxim a de tracción
M . _ 6Pxamai “ ~ W Z ~ ~bj?
ticne que ser igual a la a mix en el em potram iento
6PI
igualando arribas expresiones, se tiene
de donde:
b l r
6Px 6PI b j i 2 b h 2
b* = 1 Xes decir, el ancho de la viga ha de variar linealm ente (Fig. 5-25).
(5 .13 -5 )
(5.13-6)
(5.13-7)
(5 .í 3-8)
T E O R I A GE NERAL DE LA FLEXION. ANAL I S I S DE D E F O R M A C I O N E S 3 0 1
Como en la sección extrema libre del voladizo el momento fiector es culo , pero el esfuerzo cortante es igual a P, no se puede adm itir anchura nula. La anchura b 0 de la sección extrem a se determ ina imponiendo la condición de resistencia a las tensiones tangenciales
3 T 3 PTml’ ~ 2 ñ _ 2v ^ Tadm
de donde
• ' 3 Pb 0 > - -------- (5.13-9)
Podemos com probar que la linea es un arco de circunferencia. En efecto, el rad io de curvatura tiene por expresión
„ , P l , Í Ü Ü Ü . 2 * ! (5.13.10,P M-_ Px 12 P l
que es constante.Una forma sencilla de calcular la flecha es la de ap licar el segundo teorem a de M ohr
que nos da ¡a d istancia desde el extremo libre A a la tangente horizontal en el em potramiento B.
b AB = /A/.- , .V dx =EL
f ' \7Pl . 6 P l2x dx = y (5.13-11)
0 Ebh2 Ebh
Tam bién se puede hallar el valor de la flecha calcu lando la ecuación de la línea elástica y p articu larizarla para x = 0.
M._ 12 P ly ~ £E Ebh3
12 P ly = - Ebh
x + C
y = * 2 + Cx + K (5 .13 -1 2 )t b h
D eterm inarem os las constantes de integración m ediante las condiciones de contorno
12 P l2 „ 12 P l2/(/) = ° = " W + c - 0 => C -
6 P l1 12 P P „ „ ÓPPAO - 0 , + w + X = 0 - X - - j j j j

302 R E S I S T E N C I A D E M A T E R I A L E S
Por tanto , la ecuación de la línea elástica es:
6 P l , 12 P l1 6PI3y ~ Eb/T X + ~Eb¡? X ~ E b l? ( 5. 13- 13)
Se com prueba que el valor de la flecha que se deduce de esta ecuación [_f — y(0)] coincide con el obtenido ap licando el segundo teorem a de Mohr.
b) Viga en voladizo con altura variable y ancho constante som etida a carga uniformemente repartida (Fig. 5.26)
C onsiderando la linea media horizontal, si b es el ancho constante en toda la vica y h la a ltu ra en la sección del em potram iento, el m ódulo resistente de una sección de abscisa x es:
/ 12 bh*W. = — - = —------‘ V ? h J 2
M I6
y el momento flector
Por consigu iente, de la condición de igual resistencia a la flexión, la tensión m áxim a en la sección de absc isa x
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S 3 0 3
tiene que ser igual a la tensión m áxim a en la sección del empotram iento
(5.13-15)_ 2j !L<Jmlx h l r
Igualando am bas expresiones se deduce:
h = - * (5-13-16)/
es decir, la a ltura de la viga presenta una variac ión lineal.La flecha es el corrim iento vertical del extrem o libre y se puede calcu lar ap licando el
segundo teorema de Mohr.
\ í .= f = — — 5 v Jx =J r r
P*~
' -------- ~— ----- X dx = (5.1 3- 1o r 1 h b v3
Tí T
siendo I¡ el momento de inercia de la sección recta en el empotram iento, respecto del eje ...
La determ inación de la ecuación de la linea c lástica se puede hacer fácilmente por doble integración, como se ha hecho en el caso estud iado anteriormente.
c) V ig a en voladizo con a ltu ra variable y ancho constante,sometida a carga concentrada en el extremo libre (Fig. 5.27)
Considerando también en este caso la linea m edia horizontal sea b el ancho de la viga y ¡¡ la a ltu ra en la sección del em potram iento .
El m ódulo resistente de una sección de abscisa .x es:
W. =— bh\
I. 12 *h j l h j l
y el momento flector
M . = - P x
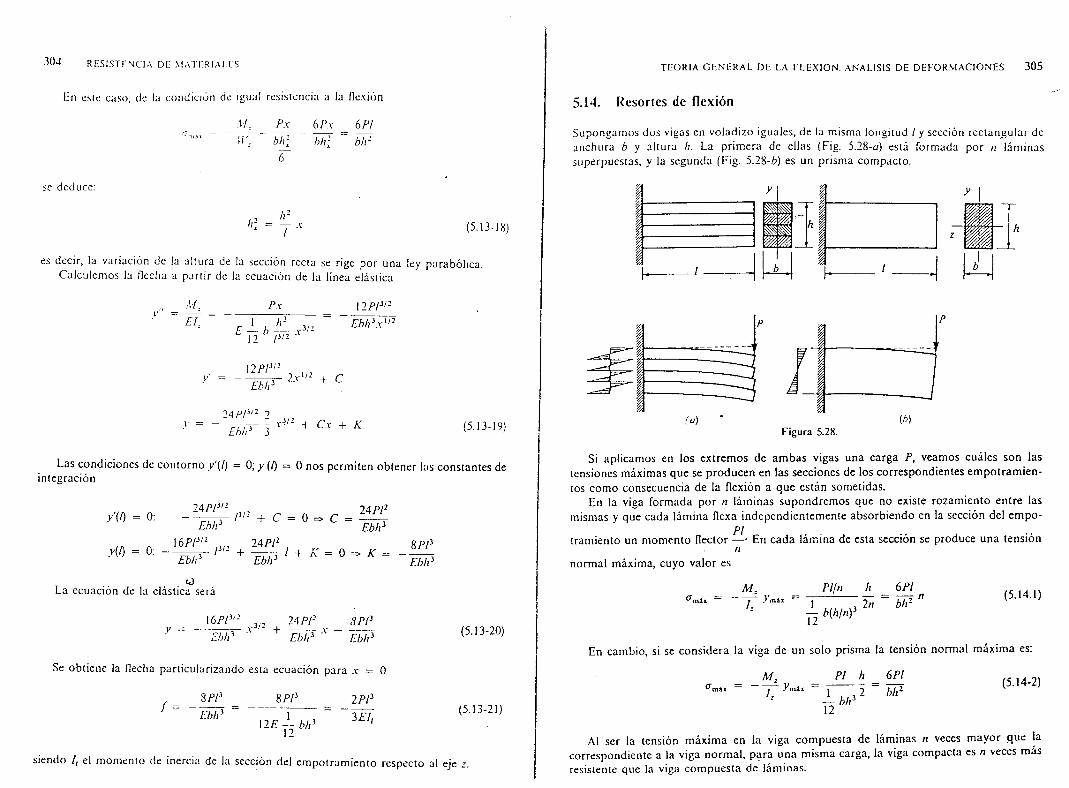
3 0 4 R E S I S T E N C I A D E M A T E R I A L E S
En este caso, de la condición de igual resistencia a la flexión
“'i ' HL Wi; bliz b h 2M. Px 6 Pa- 6PI
bb ¡T
se deduce:
(5.13-lí
es decir, la variación de la altura de la sección recta se rige por una ley parabólica. Calculem os la flecha a partir de la ecuación de la línea e lástica
A/. Px 12 P l312EE _ 1 , b 3 £ b h 3x 112
TI W 2 X
12 p¡3/2v = ---------------2 v /2 + C
Ebh3 + L
14PI312 2-~-yh ¡ y ] xV1 + C.t + K (5.13-19)
Las condiciones de contorno y '( l) = 0; y (/) = 0 nos permiten obtener las constantes de integración
24 P l312 24 P l2= 0: - - T J J T - 1112 + C = 0 => C = eI í LEhh Ebh3
Ebh Ebh3 Ebh3
ÁLa ecuación de la elástica será
16P/3/- 24 P l2 S P l3y = ‘ + T h J f x - E b ¡ ? (5‘ 13-20)
Se obtiene la flecha particularizando esta ecuación para ,v = 0
8 P l3 S P l3 2PI3 i— ■ ■ -JET, (5I3-21)
12 E — b h 3 112
siendo It el momento de inercia de la sección del em potram iento respecto al eje z.
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S 3 0 5
5.14. Resortes de f lexiónSupongam os dos vigas en voladizo iguales, de la misma longitud / y sección rectangu lar de anchura b y a ltura h. La prim era de ellas (Fig. 5.28-a) está formada por n lám inas superpuestas, y la segunda (Fig. 5.28-6) es un prism a compacto.
1
F ig u ra 5.28 .(b)
Si aplicam os en los extrem os de am bas vigas una carga P, veamos cuáles son las tensiones máxim as que se producen en las secciones de los correspondientes em potram ientos como consecuencia de la flexión a que están sometidas.
En la viga form ada por n lám inas supondrem os que no existe rozam iento entre las m ismas y que cada lám ina flexa independientem ente absorbiendo en la sección del empo-
P ltram iento un momento fiector — En cad a lám ina de esta sección se produce una tensión
norm al m áxim a, cuyo valor es
M ,T , y mix
Pl/n1
TI b (h ln )3
h2¡i
6P/b h 2
(5.14.1)
En cambio, si se considera la v iga de un solo prism a la tensión norm al m áxim a es:
M .j y m i X
P l h 2
— b h 3
6PIb h 2
(5 .14 -2 )
Al ser la tensión m áxim a en la viga com puesta de lám inas n veces m ayor .que la correspondiente a la v iga norm al, para una m ism a carga, la viga com pacta es n veces mas resistente que la viga com puesta de lám inas.

3 0 6 R E S I S T E N C I A D E M A T E R I A L E S
Veam os ahora la variación dc! valor absoluto dc la curvatura dc la c lástica en ambos casos. En la viga de lám inas, se tiene:
1 \M.\ Pl/n 12 P l ,- = — = --------- --------- = — ,-r n 1 5.14-1)p El. 1 , Ebh1 1
E - b (h/n)
m ientras que en la viga normal:
l _ m = _ n p ip £/. E ^ b h i Ebld
Com o las flechas varian proporcionalmente a la variación de la curvatura, los resu ltados an terio res nos indican que la viga formada por n lám inas es n 2 veces más flexible y so lam ente n veces menos resistente que la viga de una pieza de las m ism as dimensiones.
Precisam ente en la particu laridad de deform abilidad que presentan las vigas formadas por lám inas reside el fundamento de los denom inados r e s o r t e s d e f l e x i ó n o b a l l e s ta s .
La b a l l e s t a es una viga recta o de pequeña curvatura , com puesta de varias lám inas superpuestas llam adas h o j a s , destinadas a absorber con su deformación el máximo de energía.
Se utilizan principalm ente en los sistemas de suspensión de vehículos cuya misión fundam ental es am ortiguar las percusiones debidas a las irregu laridades de las carreteras y la inercia del propio vehículo.
Se fabrican de acero de alto lím ite elástico, con objeto de que puedan acum ular el m áxim o de energía interna. Suelen ser de acero al carbono aleado con m anganeso y silicio o con m anganeso, silicio y cromo.
La fijación de la ballesta al bastidor o a la estructura portante del vehículo se realiza por los extrem os de la hoja más larga llam ada h o j a m a e s t r a . Las restantes hojas son de longitud decreciente a m edida que se ale jan de la hoja m aestra. Se determ inan las longitudes de estas hojas de modo que la ballesta resulte una viga de igual resistencia a la flexión, que perm ita acum ular el máximo de energía interna media.
G eneralm ente, las hojas tienen una curvatura* creciente a m edida que las hojas se a leja n de la hoja m aestra, aunque no se aprecien por su aspecto exterior, ya que para formar el resorte se prensa el paquete de hojas m anteniéndolas unidas m ediante abrazaderas.
En la F igura 5.29 se representan dos tipos de m uelles de ballesta: (a) sem ieliptica; (ó) recta.
F ig u r a 5 .2 9 .
TEO RIA G EN ER A L DE LA F LEX IO N AN AEIS IS DE D EFO RM AC IO N ES 3»7
• j i„ h-illesta nuedan cam biar bajo carga es necesarioP ara que la longitud y curvatura dc la ballesta puco articulación
que uno de sus extremos se fije al bastidor m ediante la s g e m e l a s s.sieque permite los movimientos necesarios de flexión y a ar_amien triangular
Considerem os una ballesta cuyas hojas están obtenidas a partir de una viga tnang
dc espesor constante h (Fig. 5.30).
Suponiendo despreciable el rozam iento entre las diferentes h o .s q en la sección del em potram iento es absorbido en partes iguales por las n hojas,norm al m áxim a en la sección de cada una de las lam inas sera.
M . _ PUn h _ 6/>/7 (5.14 3;— 7~ 'V">“ — i 2 n b i r
— b ld 12
Se com prueba que esta tensión m áxim a tiene el mismo valor que la que correspondería a la viga triangu lar de partida (Fig. 5.30-n). En efecto, la tensión m ax.m a es.
M . _ p l h = 6PI (5.14-6)ttmii = T~ Eniii — i 2 n b h 1
: - - n/;/i312
que coincide con la tensión m áxim a en cada una de las h°Jas_ (es lam b icn losLas ballestas descritas son r e s o r t e s d e h o j a s t r i a n gu la r e s . ¿ ,
resortes dc hojas rectangulares, pero tanto cn estos como en aquellos el ancho
constante.

3 0 8 R E S I S T E N C I A D E M A T E R I A L E S
E J E R C IC I O S
V . l . D e t e r m in a r l a s d im e n s io n e s de la v iga de s e cc ió n r e c t a n g u l a r que puede o b te n e r s e de un ro l l izo de m a d e r a de r a d io R p a r a q ue p resen te m ín i m a d e f o r m a c ió n c u a n d o e s té so m e t id o a f lex ió n sim ple.
I n t e g r a n d o la e c u a c ió n d i f e r e n c i a l a p r o x i m a d a d e la l ín e a e l á s t i c a , o b t e n e m o s
E í . j = M :
f M . d x
' ■J t t * c
'"í(jTf)'/< + C' + ís i e n d o C y K c o n s t a n t e s d e i n t e g r a c ió n q u e d e p e n d e n d e l a s c o n d i c io n e s d e s u s t e n t a c ió n .
S i s u p o n e m o s q u e e l m a t e r i a l de l ro l l i z o es h o m o g é n e o E — c í e , d e e s t a e x p r e s i ó n se d e d u c e q u e p a r a v a r i a s p o s ib l e s v i g a s q u e o b t u v i é r a m o s d e ! ro l l i z o , s o m e t i d a s a l m i s m o s i s t e m a d e c a r g a s , l a f l e ch a / = y mí í s e r á m í n i m a p a r a el m a y o r v a l o r p o s ib l e de l m o m e n t o d e in e r c i a /.. , .
C o m e ‘ J
/- = — b h 3 y b 2 = 4 R 2 - I,2
sc p u e d e e x p r e s a r /. en f u n c ió n e x c l u s i v a m e n t e d e h.
h 3 ------- ------------l . = i2 x/4 K 2 - l r
L o s e x t r e m o s r e l a t i v o s d e e s t a fu n c ió n L = L ( h ) s e o b t e n d r á n d e l a e c u a c i ó n q u e a n u l a l a d e r i v a d a
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S 309
D e a q u i y d e la r e l a c i ó n e n t r e b y h se o b t ie n e
h = R J 2 ; b = R
q u e so n l a s s o l u c i o n e s q u e c o r r e s p o n d e n a l m á x im o d e /., y a q u e se c o m p r u e b a q u e p a r a
d 2 1.e s to s v a l o r e s — C < 0. L a s o l u c i ó n h = 0 de la e c u a c ió n q u e a n u l a l a d e r i v a d a c a r e c e d e
d h -s e n t id o .
V .2 . D im e n s io n a r l a v ig a de la f i g u r a p a r a uñ perfi l I P N , s a b ie n d o qu e la ten s ión a d m i s i b l e es (j idm = 1000 k p / c m 2 y el m ó d u lo de e l a s t i c id a d £ = 2 x 106 k p / c m 2. U n a vez d e t e r m in a d o el I P N a u t i l i z a r , c a l c u l a r l a d e f o r m a c ió n en el punto m e d io de l vano y en los e x t r e m o s d e los vo lad iz o s , a s í c o m o e l á n g u lo g i r a d o po r l a s se cc io n e s e x t r e m a s
El c á l c u lo d e l a s r e a c c io n e s en lo s a p o y o s es i n m e d i a t o , y a q u e s o n i g u a l e s p o r r a z ó n d e
s im e t r í a
R a + Ra - 13 ton => R A = R s = 6 to n
S i d i b u j a m o s e l d i a g r a m a d e m o m e n t o s f l ec to res (F i g . V .2 - b ) o b s e r v a m o s q u e e l v a l o r
a b s o l u t o m á x i m o d e l m o m e n t o f l e c to r es
A ' , mi . = 4 m ton

3 1 0 R E S I S T E N C I A D E M A T E R I A L E S
El m ó d u l o r e s i s t e n t e n e c e s a r i o s e rá :
W, M, 4 x 1 0 5 k p ■ c m
I 0 3 k p / c m 2= 4 0 0 c m 3
El v a l o r m á s p r ó x im o p o r e x c e s o d a d o p o r l a s t a b l a s d e pe r f i le s l a m i n a d o s es W . = 4 4 2 c m 3. q u e c o r r e s p o n d e a un I P N 2 6 0 y c u y o m o m e n t o d e i n e r c i a r e sp e c to al e je z es L = 5 7 4 0 c m 4.
P o r t a n to , el per f i l n e c e s a r i o es
I P N 2 6 0
P a r a c a l c u l a r l a s d e f o r m a c io n e s p e d i d a s d e t e r m i n a r e m o s l a e c u a c i ó n d e la l i n e a e l á s t i c a
EI . j ' l = — 4 x p a r a 0 + x + I
El - j ' z = — 4 x + 6 ( x — I) p a r a 1 ^ x < 3
h a b i e n d o c o n s i d e r a d o s o l a m e n t e la m i t a d d e l a v i g a , y a q u e la d e f o r m a d a d e la o t r a m i t a d sed e d u c e p o r s im e t r í a .
I n t e g r a n d o e s t a s d o s e c u a c io n e s .
EIx>\ = — 2 x 2 + C ¡
E l X' i — — - x 3 + C , x + C 2 : E l ¿ y
EIx<\ = — 1 x 1 + 3 ( x — l ) 2 + K¡2
2 = C X'J + (,V — l ) 3 + A j . V + A ,3
L a s c o n s t a n t e s d e i n t e g r a c i ó n se d e t e r m i n a n i m p o n i e n d o l a s c o n d i c io n e s de c o n t o r n o
r,(D = 0 ; - j + C, + C 2 = 0
A'jfl) = 0 : —- + K¡ + K2 = 0
/ , d ) = y'iW ; - 2 + c , = - 2 + k ,y'2(3) = 0 ; —18 + 3 x 4 + K¡ = 0
C , - K ¡ = 6
C, = = - 16
L a l i n e a e l á s t i c a d e l a m i t a d d e l a v i g a e s t á , p u e s , d e f i n i d a p o r l a s e c u a c io n e s
16\ j - I P a r a 0 < x $ 1
161p a r a I x < 3
>T i P + 6.rE l A 3
1EL - ¡ x > + ( x - l ) 3 + 6 x - ~
L a s d e f o r m a c io n e s p e d i d a s l a s p o d e m o s o b t e n e r p a r t i c u l a r i z a n d o e s t a s e c u a c io n e s p a r a x = 0 l a p r im e r a , y p a r a x = 3 m l a s e g u n d a
= +.(0) = -16 16 x IO6 x 1 0 3
3 EL ~ 3 x 2 x 105 x 5 7 4 0— 0 .4 6 4 c m
<5> = v2(3) = -1
Ai. - 18 + 8 + 18 -16
3 EL0 .2 3 2 c m
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S 3 1 1
V.3.
El á n g u l o q u e h a g i r a d o la s e c c ió n e x t r e m a C se d e t e r m in a p a r t i c u l a r i z a n d o la e c u a c ió n q u e se o b t i e n e en l a p r im e r a i n t e g r a c ió n d e la e c u a c ió n d i f e r e n c i a l d e l a e l á s t i c a p a r a x = 0
= .0(0)6 6 x 104 x I 0 3
~e T. ~= 5.22 x 1 0 " 3 r a d - ()c I 7' 58"
El s i g n o p o s i t i v o n o s i n d i c a q u e el g i r o de l e x t r e m o C t iene s e n t i d o a n t i h o r a r i o .
En l a s se cc io n e s C y D ( le u n a v ig a A B s im p le m e n t e a p o y a d a , de luz I = 5a , e s t á n a p l i c a d o sm o m e n to s .11 y — -//, r e s p e c t i v a m e n t e . L a a b s c i s a de la se cc ión C es 2 a y l a de D, 4 n , c o n t a d a sa m b a s a p a r t i r de l e x t r e m o A. S e pide :
1.° C a l c u l a r la e c u a c ió n de l a e l á s t i c a .2.° D ib u j a r la d e f o r m a d a de la v ig a , a e s t im a , in d ic an d o el v a lo r de la f l echa y la se cc ión ce
qu e se p r esen ta .3 .” El á n g u lo q ue f o r m a n los p lan o s de l a s s e cc io n e s C y D.
1 . ° L a v i g a d a d a se c o m p o n e d e t re s t r a m o s , en c a d a u n o de lo s c u a l e s e x i s t i r á u n a lev p a r a
l a d e f o r m a d a .P a r a su c á l c u lo a p l i c a r e m o s la e c u a c ió n u n i v e r s a ! (5 .3 -12 ) t e n i e n d o en c u e n t a q u e le s
p a r á m e t r o s d e la m i s m a p a r a n u e s t r o c a s o so n e x c l u s i v a m e n t e lo s i n d i c a d o s en la I ¡-
g u r a V .3 -a.
El x = E l . y n + EI .0„ x = EI.O,, x p a r a 0 < x < 2a
y a q u e la c o n d i c ió n d e c o n t o r n o en el a p o y o no s da i 0 = 0
J / ( x - 2 a ) 1EL v = EL0„ x p a r a 2 a ^ x ^ 4 a
F . í . y = £ 7 : 0 O +J /{x - 2 u )2 . f f f x - 4 a ) 2
2 2
= E I . 0 o x + 2 J / a x — 6 a 2.//, p a r a 4u í x í 5 «
P a r a la d e t e r m i n a c i ó n d e la c o n s t a n t e 0 o a p l i c a m o s la c o n d i c i ó n d e s e r n u lo es
d e s p l a z a m i e n t o e n el e x t r e m o B. P a r a
x = 5a : y = 0 => 0 = E/.0„ ■ 5a + .//-9 a 1 >EL0o = - -.-//o
P o r t a n to , l a s l e y e s q u e d e f in e n la l i n e a e l á s t i c a so n :

3 1 2 R E S I S T E N C I A d e m a t e r i a l e s
2 “ El á n g u l o g i r a d o p o r la s e cc ió n e x t r e m a A es p r e c i s a m e n t e 0o , q u e f i g u r a en la c o n s t a n t e d e i n t e g r a c ió n q u e h e m o s c a l c u l a d o a n t e r io r m e n t e
6, = 0n = -4 J t a
5 E L
(tí) AJ t
% =L‘777777.
(Ó) ADiagrama de
I B---------------1 momentos (lectores
(el B E l á s t i c a
Al m i s m o v a l o r l l e g a r í a m o s a p l i c a n d o el s e g u n d o t e o r e m a de M o h r . E n efec to , la d i s t a n c i a d e B a A', i n t e r s e c c ió n d e l a t a n g e n t e en A c o n la v e r t i c a l p o r B, e s e l m o m e n t o e s t á t i c o de l á r e a d e m o m e n t o s r e s p e c to d e B, d i v id i d o p o r £ / . (F ig . V .3 -6)
= BA' = -J t ■ 7a
El .2 a
- 4 J t a
eT,
BA '
A B
- 4 J t a 1
5a El ,
- 4 J ( a
5 E! .
L a f l e c h a se p r e s e n t a en el s e g u n d o t r a m o
d v 4= - - J t a + J t ( x 0 - 2a)
14
y su v a l o r s e o b t i e n e p a r t i c u l a r i z a n d o l a e c u a c ió n d e la e l á s t i c a de l s e g u n d o t r a m o p a r a .x = A'0
/1 r 4 1 4 j t ( 4 V ] 96 J t a 2
= ~ÉÍ,— J t a — a + —
5 5 2 3 T _ s o Y 7 / 7
C o n e s to s d a t o s y o b s e r v a n d o q u e lo s t r a m o s 4 C y D B s o n re c t i l ín e o s , f á c i lm e n t e se d i b u j a l a e l á s t i c a (F i g . V .3-c) .
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S 3 1 3
3.° A p l i c a n d o el p r im e r t e o r e m a d e M o h r , el á n g u l o q u e fo r m a n los p l a n o s d e l a s s e c c io n e s C y D s e r á
44 M . d x . t í 2 a
El . El .
V.4. C a l c u l a r el I P N tn á s a d e c u a d o de u n a v ig a s im p l e m e n t e a p o y a d a , de luz l = 6 m , que ha de s o p o r t a r l a s c a r g a s in d i c a d a s en l a F i g u r a V .4 - a , s ab ien d o q u e la tens ión a d m i s i b l e es <jldln = 1200 k p / c m 2 y el m é to d o dfc e l a s t i c id a d E = 2 x 106 k p / c m 2.
U n a vez f i jado el pe r f i l , d e t e r m i n a r l a f l echa e i n d i c a r la se cc ión en la q u e s e p r e sen ta .
L a s r e a c c io n e s en lo s a p o y o s e x t r e m o s son :
pl .uY + T
2 x
2
6— +
12
T = 8 ton
pi .// 2 x 6 12= 4 ton
Y + T 2— + T
C o n e s to s v a l o r e s e s fác i l e x p r e s a r l a l ey d e m o m e n t o s Héctores , v á l i d a p a r a t o d a l a v i g a
2 2 x 2M . = - . / / + R a x - P-Y— = - 12 + 8.x - - i - = - x 2 + 8.x - 12
y d i b u j a r e l c o r r e s p o n d i e n t e d i a g r a m a d e m e m e n t o s f l e c to r e s (F i g . V.4-¿>)D e s u o b s e r v a c i ó n se d e s p r e n d e q u e el v a l o r d e l m o m e n t o f l e c to r m á x i m o es
| A * » J = 12 m to n
y se p r e s e n t a e n la s e c c ió n e x t r e m a A.El m ó d u l o re s i s t e n t e m í n i m o d e l a s e c c ió n t i en e q u e se r
f í , ^ . 12 x 105 c m k p ,W = i = — — -------------- = iooo cm3°»<im 1 2 0 0 k p c m
S e g ú n l a t a b l a d e p e r f i l e s l a m i n a d o s , el m ó d u l o re s i s t e n t e m á s c e r c a n o p o r e x c e s o a é s te es d e 1090 c m 3, c o r r e s p o n d i e n t e a u n perfi l
I P N 360
c u y o m o m e n t o d e i n e r c i a es /. = 19 6 1 0 c m 4.

R E S I S TENCI A DE MATE RI ALE S
. 1 1 1 1 1 I I I I 1 1 1 I T
(c)
( d )
F ig u r a V .4 .
Calculemos ahora la elástica aplicando la ecuación universal (5.3-12), que se r ed u c e a
c , c , n S ' * 2 / > v 4El. v = El. v0 + El. 80 x h------------ e ~ — + —2 6 24
Sustituyendo valores, se tiene:
c r c r , e r o I2 -í2 8r:> 2 v *E ly = E ly0 + EIB0 x — + —-------—2 6 24
siendo EI.y0 y EI.0o constantes de integración, que determinaremos a partir de las c o n d i c i o nes de contorno.
.x = 0 ; y = 0 E l . y 0 = 0
4 12QAx = 6 ; y = 0 =* 0 = 6 Eí,B0 - 6 x 36 + - 2 1 6 — => EI._0o = 6
Por tanto, la ecuación de la elástica es
El , y = 6.x — 6.x2 + q .t3 - .x4-» 12
C o m o E — 2 x 107 to n / m 2 e It = 19 6 1 0 x 10 8 m 4, e s t a e c u a c i ó n s e p u ep u e d e e x p r e s a r
102 ( , 4 , 1 \y ~ 3922
o.t - 6x2 + Jc m
en la que y viene dada en centímetros cuando la x se expresa en metros.
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S 3 1 5
P a r a c a l c u l a r l a Flecha v e a m o s la se cc ió n o s e cc io n e s en la s q u e a n u l a l a t icri a d a
e l á s t i c a
d y _ i O2
dx ” 39226 - 12.x + 4.x
S e o b t i e n e n d o s v a lo r e s : .x, i 0 .62 m : v, ~ 3.8 mP a r a c a d a u n a d e e s t a s s e c c io n e s se t iene
1 (0 .62 ) = ^ 6 x 0 .62 - 6 x 0 . 6 2 2 + ^ 0.62- ' - A o 6 2 4 j c m = 0 .0 4 3 c m
i A2 / 4 j \v(3 g) = f 6 x 3.8 - 6 x 3 .8 2 + - 3 .S3 - - - 3 .84 c m = - 0 .205 c m - ' 3 9 2 2 V 3 12 /
P o r t a n t o , l a ( l e ch a es
f = - 0 .205 cm
y se p r e s e n t a en la s e cc ió n de a b s c i s a .x — 3 8 m.
V .5 . El perf i l c r o q u i z a d o es el e s t r i c t a m e n t e n e c e s a r io p a r a r e s i s t i r el m ín im o m o m e n to m á x i m o de
la v ig a de la F i g u r a V .5 -a .S a b i e n d o que la f u e rz a r e s u l t a n t e deb id a a l a s ten s iones n o r m a l e s sobre el á r e a r a y a d a
C D E F d e la se cc ión co r re s p o n d ien te a l a p o y o B es de 3 8 5 7 kp se pide :
1.° D e t e r m in a r los v a lo re s de l a s c a r g a s P y la long itud a de l vo lad izo .2.” C a l c u l a r el á n g u lo q ue fo r m a n la s t a n g e n te s a l a e l á s t i c a en los punto s de a b s c i s a s - o
y 4 ni.
El m ó d u lo d e e l a s t i c id a d e s E ~ 2 * 106 kp / cm .
j ,° C a l c u l e m o s p r im e r a m e n t e la p o s ic ió n de l c e n t r o d e g r a v e d a d C de l per f i l , r e s p e c to uc
s i s t e m a d e e j e s y ' : ' i n d i c a d o s en la F i g u r a V .5 -0 .

316 RESISTENCIA DE M A T E R I A L E S
D e s c o m p o n i e n d o el á r e a t o i a l d e l pe r l i l en do s p a r te s , se t iene :
I. (7,(0; 0.5) : D, = 9 c m : | _ _ 10,y’ 9 x 0.5 + 9 x 5.5<7,(0; 5 .5) ; O , = 9 c m ’ j I n, 9 + 9
Del d a t o d e s e r l a f u e r z a q u e a c t ú a so b re el á r e a r a y a d a d e v a l o r 3 8 5 7 k p , se d e d u c e (F ig . V.5-¿>)
' m i l u FF
F ='m i. + ”Er
X 5 X 1
° C F = J
J „ , I + ,7 7 95
X 5 — <F„2 14 m
d e d o n d e :
19 14° m i i = — f = “ 3857 = 1200 kp/cm 4d 45
2 c m
D
F
C o m o el m o m e n t o d e i n e r c i a r e s p e c to a l e je r es
L = ^ 1 x 73 + i (9 x 33 - 8 x 23) = 174 cm4
el m o m e n t o r e s i s t e n t e s e r á
,F. =m i l ^ m i i
D e e s t a e x p r e s i ó n d e d e d u c e el v a l o r d e l m o m e n t o f l e c to r m á x im o en l a v ig a c o n s i d e r a d a
L. 174m i i <7mlJ = — — 1 2 0 0 — 29 8 28 .5 c m • k p = 0 .2 9 8 m ton
Tmii /
TEORIA GE NE R A L DE LA FL EXI ON. ANAL I S I S DE D E F O R M A C I O N E S 3 1 7
Este m o m e n t o h a d e p r e s e n t a r s e e n l a s e c c ió n d e l a p o y o B y en l a s e c c i ó n C , m e d i a
d e AB, p a r a q u e se v e r i f ique la c o n d i c i ó n d e l e n u n c i a d o .T o m a n d o m o m e n t o s re sp ec to d e l a p o y o B t e n e m o s :
P a P4 R a + a P - 2 P = 0 => R Á = ---------
2 4
I g u a l a n d o lo s v a lo r e s a b s o l u t o s d e lo s m o m e n t o s f l e c to r e s m á x i m o s e n C y B,
a PM c = 2 R A = / > - — = a P
S e o b t i e n e l a l o n g i t u d a del v o l a d i z o
a = — ni = 0 .6 6 m
P o r o t r a p a r t e , c o m o A/mít = a P = 0 .2 9 8 m to n , u n a v e z c o n o c i d o e l v a l o r d e a, l a d e t e r m i n a c i ó n d e la c a r g a P es i n m e d i a t a
0.66 — 0 .4 4 7 ton
D e l p r im e r t e o r e m a d e M o h r se d e d u c e q u e el á n g u l o 0c e f o r m a d o p o r l a s t a n g e n t e s a l a e l á s t i c a en lo s c e n t r o s d e la s s e c c i o n e s C y B se a n u l a p o r s e r e l á r e a d e m o m e n t o s , c o m p r e n d i d a e n t r e l a s d o s a b s c i s a s c o r r e s p o n d i e n t e s , i g u a l a c e r o , c o m o f á c i lm e n t e se d e s p r e n d e d e l a o b s e r v a c i ó n d e l a F i g u r a V .5 - c .
S e c o m p r u e b a a n a l í t i c a m e n t e q u e , e n e fec to
0m “ 1 ^ M , d x = - J rEl . El .
[ R a x - P ( x - 2 ) ] d x =EL j: b X + 2 \dx 0
D i a g r a m a d e m o m e n t o s f l e c to r e s
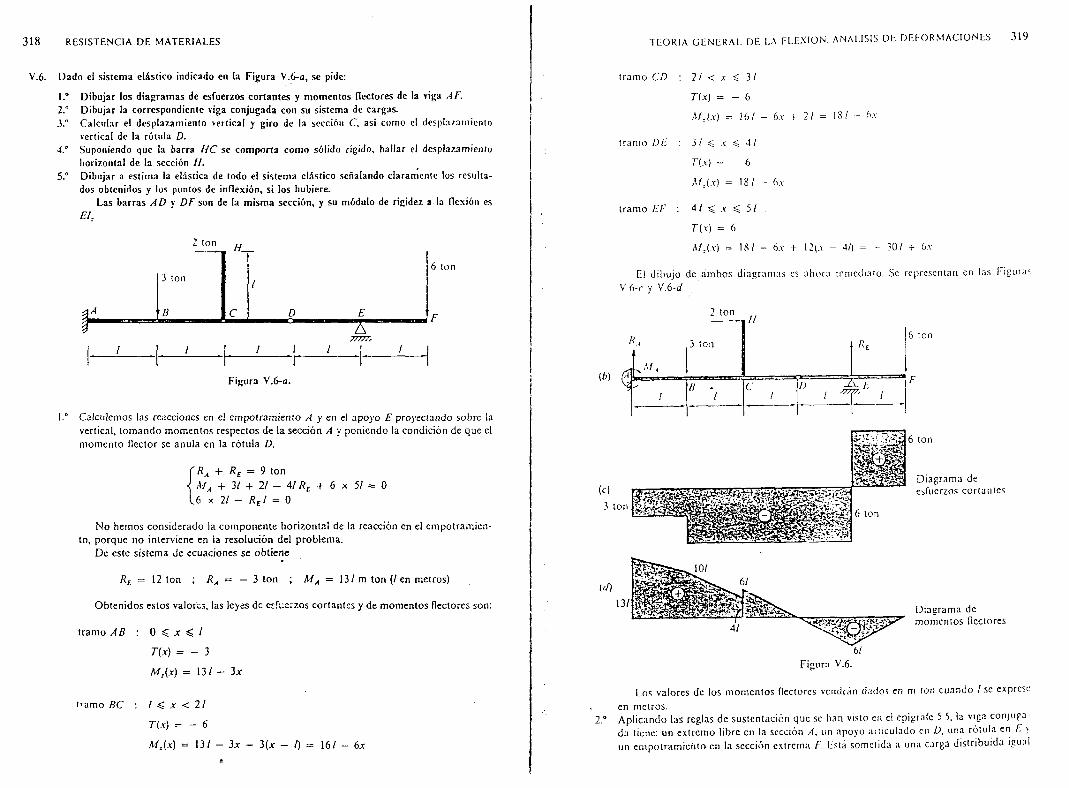
3 1 8 RESI STENCI A DE MAT E R I AL E S
V.6 . D a d o e l s i s t e m a e l á s t i c o in d ic a d o en la F i g u r a V .6 - a , s e pide:
1." D ib u j a r los d i a g r a m a s de e s fu e r z o s c o r t a n t e s y m o m e n t o s f l e c to r e s de la v ig a AF.2." D ib u j a r la co r r e s p o n d i e n te v ig a c o n ju g a d a con su s i s t e m a de c a r g a s .3 .” C a l c u l a r el d e s p l a z a m i e n t o v e r t i c a l y g i ro de l a se c c ió n C, a s i co m o el d e s p l a z a m ie n to
ve r t i c a l de l a r ó tu l a D.4 ° S u p o n ie n d o q u e la b a r r a H C s e c o m p o r t a c o m o só l id o r íg ido , h a l l a r el d e s p l a z a m ie n to
h o r iz o n ta l de l a se c c ió n //.5 .” D ib u j a r a e s t i m a l a e l á s t i c a de todo e l s i s t e m a e l á s t i c o s e ñ a la n d o c l a r a m e n t e los r e s u l t a
dos o b ten id o s y los puntos de in f l e x ió n , s i los hub ie r e .L a s b a r r a s AD y D F so n de l a m i s m a s e c c ió n , y su m ó d u lo de r ig id ez a la f l e x ió n es
El .
F i g u r a V .6 - a .
1.° Calculemos las reacciones en el empotramiento A y en el apoyo £ proyectando sobre lavertical, tomando momentos respectos de la sección A y poniendo la condición de que elmomento flector se anula en la rótula D.
f + Re = 9 ton1 M a + 3/ + 2/ - 41 R¡. + 6 x 51 = 0U * 2 / - f i E/ = 0
No hemos considerado la componente horizontal de la reacción en el empotramiento, porque no interviene en la resolución del problema.
De este sistema de ecuaciones se obtiene
Re = 12 ton ; R¿ — — 3 ton ; M Á = 13/ m ton (/ en metros)
Obtenidos estos valores, las leyes dc esfuerzos cortantes y de momentos (lectores son:
tramo AB : 0 < x < /
T(x) = - 3
M: (x) = 13/ - 3x
t r a m o BC : / < x < 21
T(x) = - 6
M : (x) — 13/ — 3.x — 3(.x — /) = 16/ - 6.x
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S 3 1 9
t r a m o C D : 2 / < x ^ 3 /
T(x) = - 6
M . J x ) = 16/ - 6,r + 21 = 1S / - 6.v
t r a m o DE : 3 / sí .x ^ 4 /
T(x) = - 6
Af.( .x) = 18/ - 6.x
t r a m o EF : 4 / $ .x ^ 5 /
7 » = 6
Af.(.v) = 18/ - 6.x + 1 2 (.v - 41] = - 30/ + 6a
El d i b u j o d e . a m b o s d i a g r a m a s es a h o r a in m e d i a to . Se r e p r e s e n t a n en l a s F i g u r a '
V .ó -c y V .6 - d
2 ton
ib]
B , 3 ton «r .
/B -
1C
1b-
i i
1
6 ton
6 ton
D i a g r a m a de e s fu e r z o s c o r t a n t e s
D i a g r a m a dc m o m e n t o s f l ec to res
F i g u r a V.6 .
L o s v a l o r e s d e lo s m o m e n t o s ( l e c to r e s v e n d r á n d a d o s en m ton c u a n d o / sc e x p re se
e n m e t r o s .2.° A p l i c a n d o l a s r e g l a s d e s u s t e n t a c ió n q u e se h a n v is to en el e p i g r a f c 5.5, l a v i g a c o n j u g a
d a t iene : un e x t r e m o l i b r e en l a s e c c ió n A, un a p o y o a r t i c u l a d o en Ü, u n a r ó t u l a en E > u n e m p o t r a m i e n t o e n l a s e c c i ó n e x t r e m a F E s tá s o m e t i d a a u n a c a r g a d i s t r i b u i d a ig u a l

320 R E S I S T E N C I A D E M A T E R I A L E S
a l d i a g r a m a d c m o m e n t o s Héctores d i v id i d o p o r la r i g id e z EL. S e r e p r e s e n t a en la F i
g u r a V .6 -e
10/
EI.
3.° A p l i c a n d o el s e g u n d o t e o r e m a d e M o h r , el d e s p l a z a m i e n t o v e r t i c a l d e l a s e c c ió n C s e rá :
f0 A/.(.t)(.r - 2/)= i>c
I
EL- d x =
+EL
(16/ — 6.r)(.r — 2 l ) d x = —
1EL
35 /3
YeT.
(13/ - 3.v)(.r - 2 t ) d x +
4 /
~EL4 3 / J
Ye T1
El s i g n o n e g a t i v o no s in d i c a q u e el c e n t r o d e g r a v e d a d d e la s e c c i ó n C d e la e l á s t i c a q u e d a p o r e n c im a d e la t a n g e n t e en A. e s d e c i r , l a o r d e n a d a y c es p o s i t i v a .
P a r a c a l c u l a r e l g i r o d e la s e c c ió n C a p l i c a r e m o s e l p r im e r t e o r e m a d e M o h r
- r M.( .x) I— :— dx = ------El. El. J
= R ! L 1,1~ 2 Elz + Y f .
i , p
(1 3 / - 3x)dx + — (1 6 / - 6x)dxi El. J ,
3 7 12
2 El,
El s i g n o p o s i t i v o n o s in d i c a q u e el g i r o d e l a s e c c i ó n C s e h a p r o d u c i d o e n s e n t i d o a n t i h o r a r i o .
El d e s p l a z a m i e n t o v e r t i c a l d e l a r ó t u l a D l o c a l c u l a r e m o s a p l i c a n d o e l s e g u n d o t e o r e m a d e M o h r .
y D f'3' A f . (x )(x - 3 !) , 1— : d x — —
EIZ EL(13/ - 3.v)( .r - 31) d x +
1 f 2' 1 f 3'+ -pr (16/ - 6.r)(.x - 3 l )dx + — (18/ _ 6.x)(.c - 3l)dx =
EL J , Elz J 2,
TEORIA GE NERAL DE LA FLEXION. AN A L I S I S DE D E F OR M A C I O N E S 3 2 1
El s ig n o n e g a t i v o n o s in d ic a , c o m o y a se ha d i c h o a n t e s p a r a la s e c c ió n C, q u e el c e n t r o de g r a v e d a d d e la s e cc ió n D q u e d a p o r e n c im a d e l a t a n g e n t e a l a e l á s t i c a en A.
4,“ Si la b a r r a C H se c o m p o r t a c o m o s ó l id o r ig id o , d e la F i g u r a V . 6 - / f á c i lm e n t e se d e d u c e el c á l c u lo de l d e s p l a z a m i e n t o h o r i z o n t a l d e la s e c c ió n e x t r e m a //
SH ~ H H ' = l ■ 0C
S u s t i t u y e n d o el v a l o r d e 0C o b t e n id o en el a p a r t a d o a n t e r io r , se ti ene :
37
TeTz
5." C o n to d o s los r e s u l t a d o s o b t e n id o s , se p u e d e d i b u j a r l a e l á s t i c a d e l s i s t e m a c o n s i d e r a d o(F ig . V.6-?)
tdSe o b s e r v a q u e n o ex i s te n i n g ú n p u n t o d e in f l e x ió n .
’. l . D a d o el s i s t e m a e l á s t i c o de l a F i g u r a V .7 - a , en e l q u e l a s v i g a s AB y BE so n de la m i s m asecc ió n y r i g id ez , s e p ide :
1.° D ib u ja r los d i a g r a m a s de e s fu e r zo s c o r t a n t e s y d e m o m e n t o s ( le c to r e s .2.° C a l c u l a r e l d e s p l a z a m ie n to v e r t i c a l de la ró tu l a B y d e l a s e cc ió n C , po r a p l i c a c i ó n de l
se gun do t e o r e m a de M o h r .3.° D e t e r m in a r el g i r o y el d e s p l a z a m i e n t o v e r t i c a l d e l a s e c c ió n e x t r e m a l ib r e E, por
ap l i c a c ió n de los t e o r e m a s de l a v i g a c o n ju g a d a .4.° D ib u j a r a e s t im a l a e l á s t i c a , s e ñ a l a n d o los r e s u l t a d o s ob ten ido s .
1.° C a l c u l e m o s l a s r e a c c io n e s en e l e m p o t r a m i e n t o y en e l a p o y o D. P r o y e c t a n d o l a s c a r g a s
s o b r e l a v e r t i c a l :
Ra A- RD = P

R E S I S T E N C I A D E M A T E R I A L E S
F ig u r a V .7 - a .
T o m a n d o m o m e n t o s r e s p e c to d e l a ró t u l a , d e la s o l i c i t a c i ó n a u n o y o t r o l a d o d e la m i s m a
{M - Rd ■ 21 + Pl = 0
D e e s te s i s t e m a d e e c u a c io n e s se o b t i e n e
OM , =
2 P P l
T" 3 ’ D 3
Las leyes de esfuerzos cortantes y de momentos flectores serán:
tramo A C : 0 $ .x $ 21
T(x) = Ra = j
M[x) = MA + RAx = j ( .x - 1)
tramo C D : 21 < x < 3/
2 PT(x) = RÁ - P = - y
M ( x ) = M a + Ra ■ x — P(.x - 21) = j ( 5 l - 2x)
tramo D E : 3 ! < x < 41
T(x) = RA - P + Rd = 0
= j ( 5 / - 2x) + R „ ( x . - 31 ) = - ~
Los diagramas de esfuerzos cortantes y de momentos Héctores se representan en las Figuras V J-c y V.7-d.El desplazamiento vertical de la rótula B es igual a la distancia de la sección B a latangente trazada a la elástica en el empotramiento A. Por el segundo teorema de Mohr:
, 1 P Pl3Xb~ S ba ~ ~ E l , y U - /)(-* - l ) d x =
V e T,
A n á l o g a m e n t e , p a r a l a s e c c i ó n C
H - / ) ( , - 2 f)r/ ,=2PP 9 E l ,
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S 3 2 3
77777,
Mpi
lili 2P_3
D i a g r a m a de e s fu e r z o s c o r t a n t e s
D i a g r a m a d e P l m o m e n t o s f lec to res
y
F ig u r a V.7 .
En a m b o s ca sos ' , el s e r p o s i t i v o s los d e s p l a z a m i e n t o s in d i c a q u e lo s p u n t o s de la e l á s t i c a c o r r e s p o n d i e n t e s a l a s s e c c io n e s B y ( q u e d a n p o r d e b a j o d e la t a n g e n t e a la
m i s m a en el e x t r e m o A.A p a r t i r de l d i a g r a m a d e m o m e n t o s f l ec to res y t e n i e n d o e n c u e n t a l a s r e g l a s c o r r e s p o n d i e n te s s o b r e la s u s t e n t a c ió n , p o d e m o s d i b u j a r l a v i g a c o n j u g a d a d e l a v i g a d a d a tal
c o m o se In d ic a en la F i g u r a V .7 -ePl
C a l c u l e m o s l a s r e a c c io n e s de l a s l i g a d u r a s en la v i g a c o n j u g a d a . P r o y e c t a n d o las
c a r g a s s o b r e l a v e r t i c a l :
1 PP~EL TR , + R f
T o m a n d o m o m e n t o s r e s p e c to d e l a r ó t u l a D, d e l a s o l i c i t a c i ó n q u e a c t ú a a u n o y
o t r o l a d o d e l a m i s m a :

RESISTENCIA DE MATERIALES
, Pt t \ I 1 Pt I Í I 2 12 TÉÍ. 2 I 2 ~ 2 J eF, 2 I 2 + 3 2
I P t í I
i n r ' l 1 * i
D e e s te s i s t e m a de e c u a c io n e s se o b t i e n e
5 P l '~ n P ¡ 1 - P l y“ 12 El. ' E ~ 4 El, ’ S<E Í2T í ,
P o r t a n to , el g i ro y el d e s p l a z a m i e n t o de la s e c c ió n e x t r e m a E s e r á n , en v i r t u d de los t e o r e m a s d e la v iga c o n ju g a d a
0 r = Te = -P t2
4 EL
= M r = P l3 V2EL
El s i g n o n e g a t i v o de 0C in d i c a q u e la s e c c ió n e x t r e m a E h a e x p e r im e n t a d o en la d e f o r m a c ió n un g i r o de s e n t id o h o r a r i o , a s i c o m o el n e g a t i v o d e la e x p r e s i ó n d e y E in d i c a q u e el d e s p l a z a m i e n t o d e e s t a s e c c ió n e s h a c i a a b a j o .
4 .° C o n to d o s e s to s r e s u l t a d o s fá c i lm e n te se d i b u j a l a e l á s t i c a (F i g . V.7-/).
Calcular el valor de la energía de deformación de una viga recta AB de longitud / = 5 m, sección rectangular de ancho b — 10 cm y altura h = 20 ctn, sometida a un momento exterior - t í — 20 m ton, aplicado en su extremo derecho B. en sentido antihorario.
Se conoce el módulo de elasticidad E = 2 x ÍO6 kp/cm3 y el valor del coeficiente de Foissoo ¡i = 0.25.
La viga que se considera está sometida a flexión simple. Según la ecuación (5.6-6) la expresión del potencia! interno es
' 'w_- 2EL
dx + r T)Jo 2cn„ d x
Las leyes de momentos (lectores y esfuerzos constantes, según se desprende de la Figura V.8 son:
TEORIA G E N E R A L DE LA FLEXION. ANALI SI S DE D E F O R M A C I O N E S 3 2 5
F i g u r a V.8 . a i Diagrama de esfuerzos cortantes
S u s t i t u y e n d o e s t a s e x p r e s i o n e s en l a d e ¿T, t e n i e n d o en c u e n t a q u e /. = Y
Q ly — — bh , se t iene 6
e s d e c i r
15 - J t 12 E U 1
x1 dx +2GÍ2,,/3 J c
dx =
J { 2 /3 J t 1 2(1 + f t ) 2 J ( 2
1 . „ J + 5 . . ~ E bh2E— blP l 2
122 E - b h t2
6
L 3(1 + p)h 2 + 5 1
2 X 2 0 3 X Í O 10
2 x 106 x 10 x 2 0
'500 _ 3(1 + 0.25)' 400 + 5 x 500
= 25 030 cm kp
9.8= 25 030 cm kp = 25 030 — j
lüu2452.94 julios
V.9. Un anillo circular de fundición de sección recta rectangular h = 6 mm; b — 4 mm y radio medio R = 50 mm, como indica la Figura V.9-a esta cortado radialmente. En ausencia de fuerzas exteriores, la separación entre las secciones del corte es despreciable.
Despreciando el efecto del esfuerzo normal calcular la separación de las secciones extremas cuando se aplican dos fuerzas ¡guales y opuestas F = 50 N, perpendicularmente a dichas secciones.
Datos del material del anillo: E = 12 x 104 MPa; G — 48 x 103 MPa.
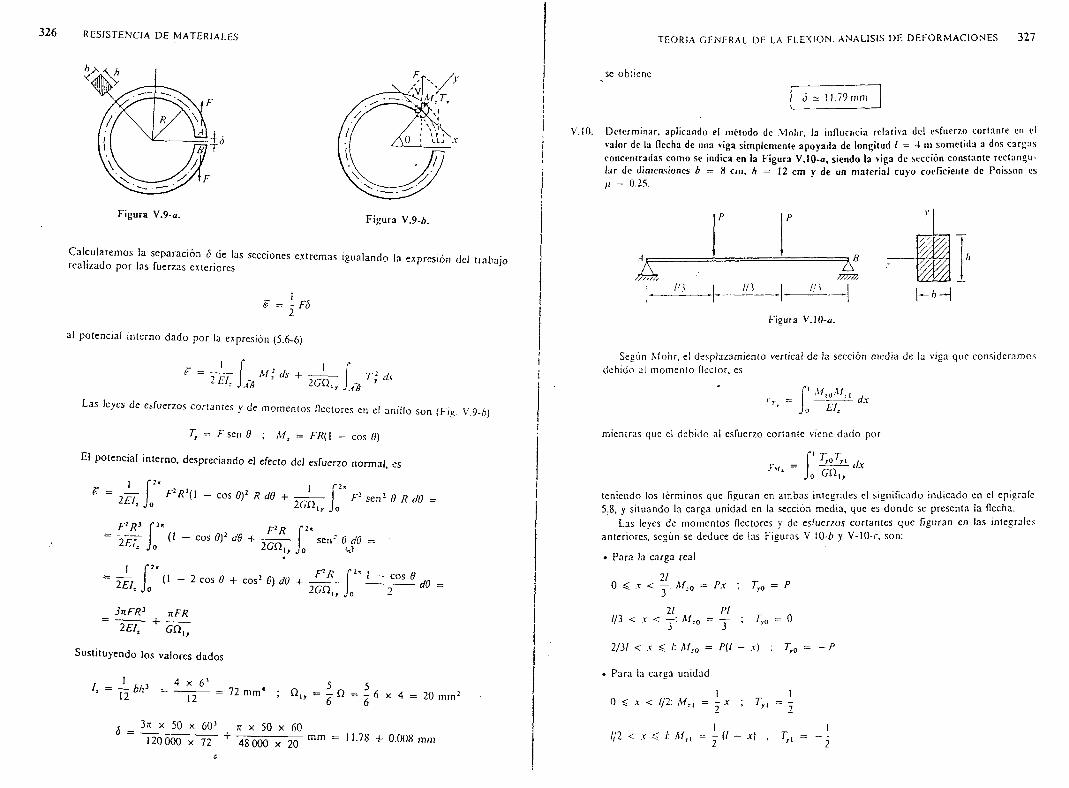
326 R E S I S T E N C I A D E M A T E R I A L E S
F i g u r a V .9 - a .
C a l c u l a r e m o s l a s e p a r a c i ó n 5 d e la s s e c c io n e s e x t r e m a s I g u a l a n d o la e x p r e s i ó n d e l t r a b a j o r e a l i z a d o p o r l a s f u e r z a s e x t e r i o r e s
a l p o t e n c i a l i n t e r n o d a d o p o r la e x p r e s ió n (5 .6 -6 )
2 El .1
M\ ds -l------ I— I r 2 ds2« A ).C8 ’
L a s l e y e s d e e s fu e r z o s c o r t a n t e s y d e m o m e n t o s ( l e c to r e s en e l a n i l l o s o n (F ig . V .9 -b)
Tf = F sen 0 ; M t = FR( I — e o s 0}
El p o t e n c i a l i n t e r n o , d e s p r e c i a n d o el e f e c to d e l e s f u e r z o n o r m a l , e s
E = TFT- i F' -R2(I - e o s O)2 R d O + — !— ¿E,‘ Jo 2 c n , F 2 s e n 2 0 R ¡JO =
F 2R }
2 E l . (1 — e o s O)2 d 6 +F 2R f 2*
2 C íC jo
2 El ,1 f 2w F 2 R
(I — 2 e o s 0 + e o s 2 0) dO + -----------2 e n ,
¡ — e o sdO
S n F R 3 n F R+ -------
2 £ 7 . G Q t ,
Sustituyendo los valores dados
, 1 , , , 4 x 6 3 5 eI ¡ = ~ b h > = _ — = 72mm< . = £ n = £ 6 x 4 = 20 mm212 '
& = 3 a x 50 x 6 0 3 n x 50 x 6 0
T O O O O x 72 + 4 8 0 0 0 x 2 0 m m = 1 1 7 8 + 0 0 0 8 m n l5
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S 327
se o b t ien e
<5 cr 1 1.79 m m
.10 . D e t e r m in a r , ap l i c a n d o el m é to d o de M o h r , l a in f lu e n c ia r e l a t i v a de l e s fu e r zo c o r t a n te en el v a lo r de la f lecha de una v ig a s im p le m e n t e a p o y a d a de lo n g i tu d í - 4 r a s o m e t id a a dos c a r g a s c o n c e n t r ad a s co m o se in d ic a en l a F i g u r a V .1 0 - a , s i en d o l a v ig a de s e c c ió n co n s t a n t e r e c t a n g u l a r de d im en s io n e s b — 8 c m , h = 12 c m y d e un m a t e r i a l c u y o co e f ic i e n te de P o is son es H = 0.25 .
s.II3
p p y
1A Y /
77777?,
IB IB h HF ig u r a V . lO -a .
S e g ú n M o h r , el d e s p l a z a m i e n t o ve r t i c a l d e ia s e c c ió n m e d í a d e la v ig a q u e c o n s i d e r a m o s d e b id o al m o m e n t o f lec tor , es
'' 3/ ; 0 A L ,
o FJ td x
m ie n t r a s q u e el d e b id o a l e s fu e r z o c o r t a n t e v i en e d a d o p o r
T T- f íA i t¡x0
t e n i e n d o lo s t é r m in o s q u e f i g u r a n en a m b a s i n t e g r a l e s el s i g n i f i c a d o i n d i c a d o en el e p i g r a f e 5 .8 , y s i t u a n d o la c a r g a u n i d a d e n la s e c c ió n m e d i a , q u e es d o n d e se p r e s e n t a l a f lecha .
L a s leyes d e m o m e n t o s ( l e c to r e s y d e e s fu e r z o s c o r t a n t e s q u e f i g u r a n en l a s i n t e g r a l e s a n t e r io r e s , s e g ú n se d e d u c e d e l a s F i g u r a s V.10-Ó y V - 1 0 -c , so n :
• P a r a la c a r g a r e a !
0 5 r < y : ALo = Px ; 7 )0 = P
21 PlI B < X < y : A L 0 = y ; Tr0 = 0
2/3/ < x n I: A L 0 = P{l - x) : Tf0
P a r a la c a r g a u n id a d
0 « ,t < //2: A L , = {- x ; T „ =
//2 < x -< /: A L , = j U - x ) ; Tf t = A

F i g u r a Y'. 10.
P o r t a n to , c o n s i d e r a n d o la m i t a d u e la v i g a y m u l t i p l i c a n d o p o r 2 p o r r a z ó n d e s im e t r í a , t e n e m o s :
f u .
Í t,
2 í í•í/3
p f u0
2 •í/3
0
P x - ,v d x +•1/2 p ¡
1/3 3
23 P I 3
6 4 8 El .
1 P lP - d x = ---------
2 3(7fi ,
1C o m o /, = — b h 3 y O , = - bh , s u s t i t u y e n d o , s e t ien e 12 6
23 P I 3 23 PI 3f u . =
6 4 8 £b h 3 54 E b h 3 12
T E O R I A G E N E R A L D E L A FLEXI ON. ANAL I S I S D E D E F O R M A C I O N E S 3 2 9
D iv id i e n d o a m b a s e x p r e s i o n e s
Í t , _ P l 54 E b h 3 _
f u . ~ Ebh 23 P l 3 = 2 3 4 \ 7
p a ra los v a lo res d ad o s , se o b tien e
( i x = 2 . 3 4 Í ^ \ = 0 .21 x 1 0 ~ 2J m . \ 4 0 0 J
El r e s u l t a d o n o s d i c e q u e la i n f l u e n c i a d e l e s f u e r z o c o r t a n t e e n e l v a l o r d e la f lecha , r e sp ec to d e la p r o d u c i d a p o r e l m o m e n t o f l e c to r , es d e l o r d e n d e l 0 .2 p o r 100.
C o m p r u e b e el l e c t o r q u e o b t e n i e n d o l a f l e c h a d e b i d a a l m o m e n t o f l e c to r p o r a p l i c a c i ó n d e la e c u a c ió n u n i v e r s a l d e l a e l á s t i c a y l a c o r r e s p o n d i e n t e a l e s fu e r z o c o r t a n t e m e d i a n t e la e c u a c i ó n (5 .7 -3 ) , se l l e g a a l m i s m o r e s u l t a d o .
V . I I . D a d o el s i s t e m a in d ic a d o en la F i g u r a V . l l - a , se p ide :
1.° D ib u j a r los d i a g r a m a s de e s fu e r z o s n o r m a l e s , e s fu e r z o s c o r t a n t e s y m o m e n to s f lec tores .2.° D e t e r m in a r el I P E n e c e s a r io , s a b i e n d o que :
o , ám = 1000 k p / c m 2 ; E = 2 x 106 k p / c m 2
3." C a l c u l a r el g i ro de l qudo F.
1 mA6 m • to n
D I m
3 to n
2 m
p = 2 to n / m H_
1 /2 m 1 m
A rA77771
1 m
5 m
F i g u r a V . I l - a .
1.° L a s r e a c c io n e s e n lo s a p o y o s A y B d e l s i s t e m a c o n s i d e r a d o so n a m b a s v e r t i c a l e s , y a q u e e l a p o y o a r t i c u l a d o A, a u n q u e e s f i jo , n o e x i s t e n i n g u n a o t r a f u e r z a h o r i z o n t a l . P r o y e c t a n d o s o b r e l a v e r t i c a l y t o m a n d o m o m e n t o s r e s p e c to d e B t e n e m o s :
f R a + R a = 7 to n
[6/?^ — 6 — 3 x 5 — 4 x 2 = 0
d e d o n d e :
R a = 4.83 ton ; R b = 2.16 ton

3 3 0 RESI STENCI A DE MATERI ALES
O b t e n id o s los v a lo r e s de las r e a c c io n e s , l a s l e y e s d e e s fu e r z o s n o r m a l e s , e s fue rzo s c o r t a n t e s y m o m e n t o s f lec tores so n in m e d i a t a s .
• E s fu e rzo s n o r m a l e s
~AÜ: ;V = R< = 4 ,83 ton
C'D: N = R A e o s 4 5 ; = 3.41 ton
2 7 : /V = 0
7 7 7 : /V = R a e o s 45= = 1.53 to n
7 75 : /V = - R b = - 2 . 1 6 ton
• E s fue rzo s c o r t a n t e s
AT : Ty = 0
(TZ5: Ty = 5 ^ se n 4 5 ' = 3.41 ton
DE: Tr = R a - 3 = 1.83 ton
2 7 : 7 , = 1.83 - 2(.x - 2) = 5 .83 - 2.x
777 : Ty = - 2 . 1 6 e o s 4 5 ; = — 1.53
7 7 5 : r,. = 0
• M o m e n t o s f l e c to r e s
I T : = 0
VD: = - 6 + 3.41 .r
TJE: M, = R J.r + 1) - 6 - 3.x = 1.83.x - 1.17
2 7 : Af, = 1.83.x - 1.17 - (.x - 2)2ntl
37, = R b 0 . 7 0 7 . x = 1.52.x
775 : Af . = 0
L o s d i a g r ; a m a s c o r r e s p o n d i e n t e s se r e p r e s e n t a n e n l a s F i g u r a s
1 m
5 m
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S 3 31
4 . 8 3 t o n
F i g u r a V . l l - e . F i g u r a V. II-/.
2 ° D e ! d i a g r a m a d e m o m e n t o s f l e c to r e s se d e d u c e e l v a l o r d e ! m o m e n t o f le c to r m á x im o
37 . m4, = 6 m ■ to n = 6 x 1 0 5 c m k p
El m ó d u l o r e s i s t e n t e s e r á
Af. mi. 6 x 105IV. — --------- = ----------- r— c m = 6 0 0 c m
10
O b s e r v a n d o la t a b l a c o r r e s p o n d i e n t e a i o s p e r f i l e s I P E , el v a l o r m á s p r ó x im o , p o r e x c e s o , c o r r e s p o n d e a l perfi l
IP E 330
3.° P a t a el c á l c u lo d e l g i r o d e la s e c c ió n 7 d e s p r e c i a r e m o s el e fec to d e los e s fu e r zo s n o r m a l y c o r t a n t e , f r en te a l m o m e n t o f lec tor .
S i g u i e n d o e l m é t o d o d e M o h r , a p l i c a m o s u n m o m e n t o u n i d a d en s e n t i d o h o r a r i o , c o m o se in d i c a en la F i g u r a V . l 1 -j\ y d i b u j a m o s el d i a g r a m a d e m o m e n t o s f l ec to res qu e ta l a p l i c a c i ó n p r o d u c e en el s i s t e m a , u n a vez c a l c u l a d a s l a s r e a c c io n e s
6 R . 1 = 0d e d o n d e : R A — R H - 0 .1 6 ton
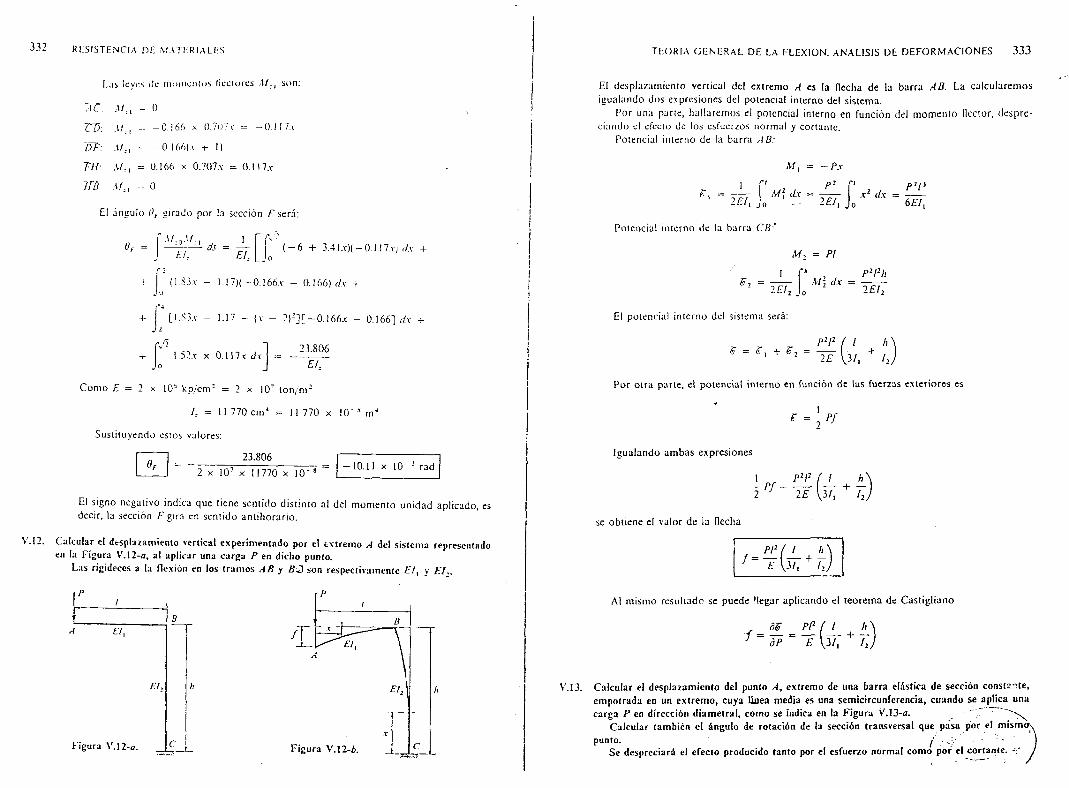
3 3 2 R E S I S T E N C I A D E M A T E R I A L E S
L a s leves d c m o m e n t o s H e d o r e s \ t , so n :
1 F . A L , = 0
6 7 5 : = - 0 . 1 6 6 x 0 . 7 0 7 v = - 0 . 1 1 7 . x
W : M ;l = - 0.1 6 6 ( . v + 1 )
t t l A L , = 0 . 1 6 6 X 0 . 7 0 7 a = 0 . 1 1 7 a
1Tb 3 ^ ; 1 = 0
1 El . EL
El á n g u l o 0F a i r a d o p o r la s e c c ió n F s e r á :
( - 6 + 3.41.v)( —0.117.v) dx +
(1 .83 a - 1 .17)( — 0 . 166.x - 0 .1 6 6 ) d x +
[LS3-V - 1.17 - ( v - 2 ) i ] [ - 0 . 1 6 6 . x - 0 . 1 6 6 ] d x +
1 ,5 2 .x x 0 . 1 1 7 a dx2 3 . 8 0 6
'~~EL~
C o m o E = 2 x 10° k p / c m : = 2 x 10 ’ t o n / m :
/. = 11 7 7 0 c m 4 = II 7 7 0 x 1 0 ' “ n i 4
S u s t i t u y e n d o e s to s v a lo re s :
23 .S 0 60F
2 x 1 0 7 x 11 7 7 0 x 1 0 ' s-10 .11 x I 0 _ J r a d
El s i g n o n e g a t i v o in d i c a q u e t i e n e s e n t i d o d i s t i n t o a l d e l m o m e n t o u n i d a d a p l i c a d o , es d e c i r , l a s e c c ió n F g i r a en s e n t i d o a n t i h o r a r i o .
V .12 . C a l c u l a r el d e s p l a z a m ie n to v e r t i c a l e x p e r im e n t a d o po r e l e x t r e m o A de l s i s t e m a r e p re s en tad o en la F i g u r a V .1 2 - a , a l a p l i c a r u na c a r g a P en d ic h o punto .
L a s r ig id e c e s a la f lex ió n en los t r a m o s A B y B J so n r e s p e c t i v a m e n t e £'/, y £ / , .
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S 333
El d e s p l a z a m i e n t o v e r t i c a l d e l e x t r e m o A e s l a f l e ch a d e la b a r r a AB. L a c a l c u l a r e m o s i g u a l a n d o d o s e x p r e s i o n e s de l p o t e n c i a l in t e rn o d e l s i s t e m a .
P o r u n a p a r te , h a l l a r e m o s el p o te n c i a l in t e rn o en fu n c ió n de l m o m e n t o f lec tor , d e s p r e c i a n d o el e fec to d e los e s fu e r z o s n o r m a l y c o r t a n t e .
P o t e n c i a l i n t e r n o d e la b a r r a AB:
12 El , J
P o t e n c i a l i n t e r n o d e la b a r r a CB: '
A i , = - P x
d x = --------„ ~>FIo - ^
x 2 d x =P l6~EÍX
A i , = P l
I2É L
d xP 2l 2h
2EL
El p o t e n c i a l i n t e r n o de l s i s t e m a se rá :
F = F . + 6\P 2!2 Í J _ h_J e U l + T ,
P o r o t r a p a r l e , e l p o t e n c i a l i n t e r n o en fu n c ió n d e l a s f u e r z a s e x t e r i o r e s es
I g u a l a n d o a m b a s e x p r e s i o n e s
1 P212 ( I2Pf ~ 2E (.3/.
o b t i e n e el v a l o r d e ¡a f l echa
r, P l 2 ( I h
f E V 3/, + I ,
A l m i s m o r e s u l t a d o s e p u e d e Megar a p l i c a n d o e l t e o r e m a d e C a s t i g l i a n o
y - - — ( —f ~ d P ~ E \ 3 I , + f j
V.13 . C a l c u l a r el d e s p l a z a m i e n t o de l p u n to A, e x t r e m o de u n a b a r r a e l á s t i c a d e s e c c ió n c o n s t a n t e , e m p o t r a d a en un e x t r e m o , c u y a l in e a m e d i a e s u na s e m i c i r c u n f e r e n c i a , c u a n d o s e a p l i c a u n a c a r g a P en d i r e c c ió n d i a m e t r a l , c o m o s e ind ica en l a F i g u r a vL13-a.
C a l c u l a r t a m b i é n e l á n g u lo de ro t a c ió n de la s e c c ió n t r a n s v e r s a l q u e p a s a p o r e l m i s m o s
punto . j -S e d e s p r e c i a r á e l e f e c to p ro d u c id o t an to por e l e s fu e rz o n o r m a l c o m o p o r e l c o r t a n t e . -V
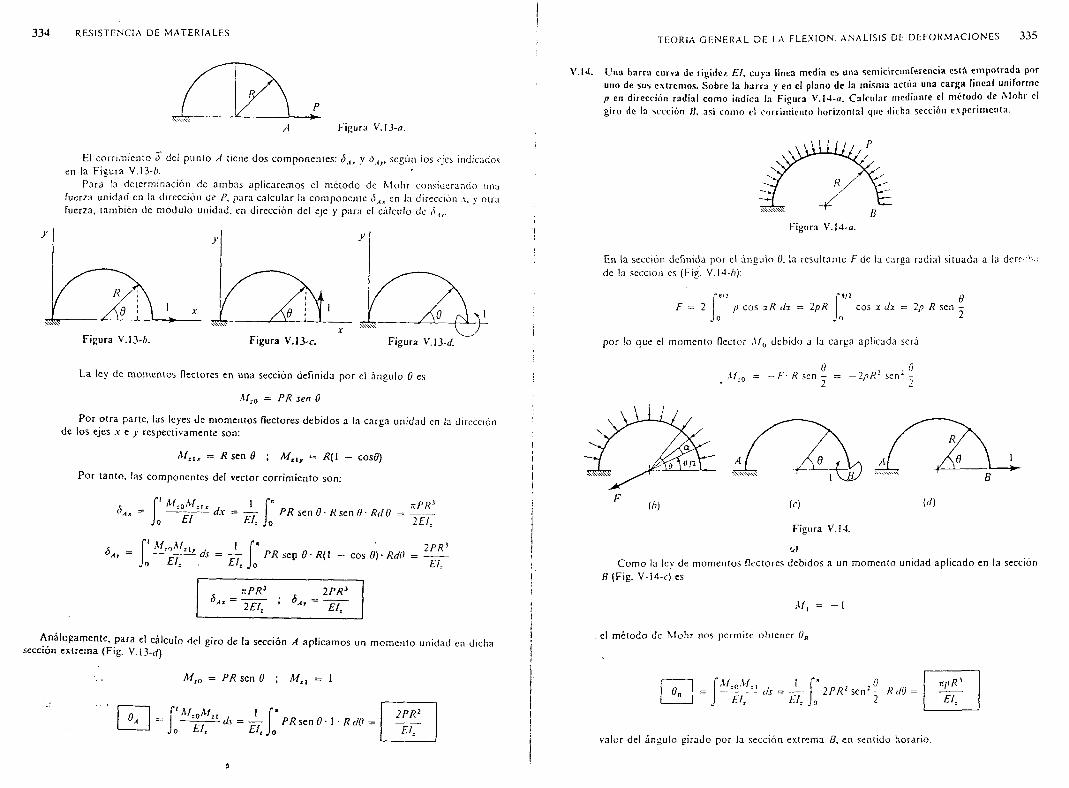
3 3 4 R E S I S T E N C I A D E M A T E R I A L E S
F ig u ra V. I3 -u .
E l c o r r im ie n to i) d e l p u n ió A l ie n e d o s c o m p o n e n le s : ó A¡¡ y ó Ay, s e g ú n lo s e je s in d ic a d o s en la F ig u r a V .I 3 -b.
P a ra la d e te r m in a c ió n de a m b a s a p l ic a r e m o s e l m é to d o d e M o h r c o n s id e ra n d o un a fu e rz a u n id a d en la d ir e c c ió n d e P, p a r a c a l c u la r la c o m p o n e n te en la d ir e c c ió n a , y o tra fu e rz a , ta m b ié n d e m o d u lo u n id a d , en d ir e c c ió n d e l e je y p a r a e l c á lc u lo de
F ig u r a V .1 3 -6 .
L a le y d e m o m e n to s f le c to r e s en u n a se c c ió n d e f in id a p o r el á n g u lo 0 es
M . 0 = P R s e n 0
P o r o t r a p a r te , la s le y e s de m o m e n to s f le c to r e s d e b id o s a la c a r g a u n id a d en la d ire c c ió n d e lo s e je s .x e y r e s p e c t iv a m e n te so n :
W .-u = E se n 8 ; M t l y = /?(! — c o sO)
P o r t a n to , la s c o m p o n e n te s d e l v e c to r c o r r im ie n to so n :
<5.. = ' « :»M ,u , _ 1 o E l A EL
K k P R JPR sen 0 ■ R sen 0 ■ RdO = -------
o 2 £ 7 .
o El. . EL* ' 2 p R *
P R s e p 0 ■ R(1 - e o s 0) • RdO = ---------o EL
¿ ; ¿ AA' 2 EL ' A
2 PR} ~EL
A n á lo g a m en te , p a ra el cá lcu lo del g iro de la sección A a p lic a m o s un m o m e n to unidad en d ic h a sección e x trem a (F ig . V. 13-tf)
A/,o = PR sen 0 ; M ,¡ = 1
7 n . í ' i L d L i A , i - 1 Jo £1, El,
2 P R 2P R se n 0 ■ ■R dO =Jo EL
&
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S 3 3 5
V .1 4 . U n a b a r r a c u rv a de r ig id e z El, c u y a l ín e a m ed ia e s u n a se m ic ir c u n fe re n c ia e s tá e m p o tr a d a por uno de su s e x tre m o s . S o b re la b a r r a y en e l p lan o de la m ism a a c tú a un a c a r g a l in e a l u n ifo rm e p en d ire cc ió n r a d ia l co m o in d ic a la F ig u ra V .1 4 -u . C a lc u la r m ed ian te e l m é to d o de M o h r el g iro de la se cc ió n ! ¡ , a s í co m o el c o r r im ie n to h o r iz o n ta l que d ich a se cc ió n e x p e r im e n ta .
En la se c c ió n d e f in id a p o r e l á n g u lo 0, la r e s u lt a n te F d e la c a rg a r a d ia l s i t u a d a a la d e r t ' d e la se c c ió n es (F ig . V.14-Ó ):
F = 2
72 gp e o s a R r/x = 2p R eo s x dy. = 2p R sen -
p o r lo q u e el m o m e n to ( le c to r ,U 0 d e b id o a la c a r g a a p l ic a d a se rá
0,\ f.0 = —F R sen - = —2pR~ sen -
F ig u r a V .I 4 .
C o m o la le y d e m o m e n to s f le c to r e s d e b id o s a un m o m e n to u n id a d a p l ic a d o en la se c c ió n B (F ig . V -1 4 -c ) es
AL, = - 1
el m é to d o d e M o h r n o s p e r m ite o b te n e r 0R
n p R 3
ELo B
j E l . EL2 P R 2 s e n 1 - - R dO =
■J - J
v a lo r d e l á n g u lo g ir a d o p o r la s e c c ió n e x t r e m a B , e n s e n t id o h o ra r io .

P a r a d e te r m in a r e l c o r r im ie n to h o r iz o n ta l d e la m ism a se c c ió n B a p l ic a r e m o s u n a fu erza u n id a d en la d ir e c c ió n en q u e q u e r e m o s c a lc u la r la p ro y e c c ió n d e l v e c to r c o r r im ie n to
(F ie . V .M -r/)
M - , = R sen tí
El .
1 f * , , 0d s = ----- — 2 p R s e n - - R sen ÜR di)
E l . l n
2pR* f * , tí tí tí 4 p R * 2s e n - - • 2 sen - e o s - di) = — -
E l. 2 2 2 E l . 3
8 pR-1" 3 E l .
El s ig n o m en o s n o s in d ic a q u e el c o r r im ie n to h o r iz o n ta l es h a c ia la iz q u ie rd a .
C a lc u la r los d e s p la z a m ie n to s v e r t ic a l, h o r iz o n ta l y a n g u la r d e la se cc ió n e x t r e m a de una b a rra en L con la su s te n ta c ió n y c a rg a in d ic a d a s en la F ig u r a V -1 5 -a . El t r a m o h o r iz o n ta l v e rt ic a l tien e r ig id e z £ / , y e l v e r t ic a l E l , .
S e h a r á el c á lc u lo ap lic a n d o la s in te g r a le s de M o h r y re so lv ien d o é s ta s m e d ia n te e l m éto do de m u lt ip lic a c ió n de g rá f ic o s .
S e p re sc in d ir á de lo s e fec to s p ro d u c id o s po r lo s e s fu e rz o s n o rm a l y c o r ta n te .
El,
F ig u ra V '- l5 - a .
O
En la s F ig u r a s V.15-Ó, c , d, e d ib u ja m o s lo s d i a g r a m a s d e m o m e n to s f le c to r e s : d e la c a r g a P {M 0); d e u n a c a r g a u n id a d v e r t ic a l a p l ic a d a e n d (A / ,) ; d e u n a c a r g a u n id a d h o r iz o n ta l a p l ic a d a ta m b ié n en y d e un m o m e n to u n id a d a p l ic a d o en la m is m a se c c ió n A (M ¡ )
T E O R I A G E N E R A L D E L A F L E X I O N . A N A L I S I S D E D E F O R M A C I O N E S
e s d e c ir , r e s u m ie n d o , lo s d e s p la z a m ie n to s p e d id o s so n :
Pa'b . Pb1 ó ’ _ 2£/7 : " £ U + 3/,
Pb I a b
q u e t ie n e n lo s s e n t id o s in d ic a d o s e n la F ig u r a V .1 5 -/

Flexión desviada y flex ión compuesta
6.1 . IntroducciónEn cap ítu los anteriores hemos considerado que el m om ento flector en una sección del prism a mecánico tenía la dirección coincidente con uno de los ejes centrales de inercia de la m ism a* (Fig. 6.1-a). Estudiarem os ahora las p articu laridades que presenta un prisma m ecánico en el que la solicitación exterior produce en una sección recta un momento contenido en su plano, pero cuya dirección no co incide con ninguno de los dos ejes centrales de inercia. Si, adem ás, el esfuerzo norm al es nulo, direm os que el prism a mecánico está sometido a f l e x i ó n d e s v i a d a (Fig. 6.1-6).
Cuando el esfuerzo norm al no es nulo y existe, adem ás, un momento (lector XÍF, direm os que el prisma trab a ja a f l e x i ó n c o m p u e s t a .
Se h ab rá observado que la ex is ten c ia del esfuerzo co rtan te im p lica la ex isten c ia en gen era l de un momento (lector. P o r tan to , cuando decim os que en la sección ex iste un esfuerzo co rtan te T entenderem os que existe im p líc itam en te un m om ento (lector M f .
3 3 8
FLEX IO N DESVIADA Y FLEX IO N C O M PU ESTA 339
En estos tipos de flexión, el convenio de signos para el momento Héctor en prismas mecánicos sometidos a flexión simple que se ha establecido en el C ap ítu lo 4 carece de sentido. Aunque, si nos dam os cuenta, el convenio de decir que el momento flector M . es positivo cuando la fibra inferior está som etida a tracción, es equivalente a decir que el momento Héctor en la sección que consideramos tiene positiva su componente M . respecto de la referencia rr definida en el prisma, como fácilmente se desprende de la observación de la F igura 4.4. siempre y cuando el semieje v positivo se tome hacia arriba.
Ahora, considerarem os que los signos de los momentos M , y M . son los que le corresponden según los ejes y : adoptados que, como sabemos, son coincidentcs con los ejes centrales de inercia de la sección.
No perdamos de vista que /V/ y M . son, en cada sección, las componentes del momento de las fuerzas que actúan sobre la parte elim inada situada a la derecha de la sección o, lo que es lo mismo, el momento de las fuerzas que actuán sobre la parte que esta a la izquierda de la sección, cam biado de signo.
6.2. F lex ión desviada en el dom inio e lástico . A nálisis de ten sion esConsideremos una viga, tal como la representada en la F igura 6.2, cargada en un plano que no contiene a ninguno de los dos ejes centrales de inercia de las secciones rectas. Sea M r el momento Héctor en una sección y M y, M . sus componentes respecto de los en > centrales Gy y Gz, respectivamente. Calculem os el valor de la tensión norm al a en un punto P ( r. e) d e la sección por aplicación del principio de s u p e r p o s i c i ó n , s u m a n d o los valores correspondientes a cada una de las componentes del momento Héctor, calculados mediante la ley de Navier.
m ientras que la expresión de la tensión a" producida por M r es
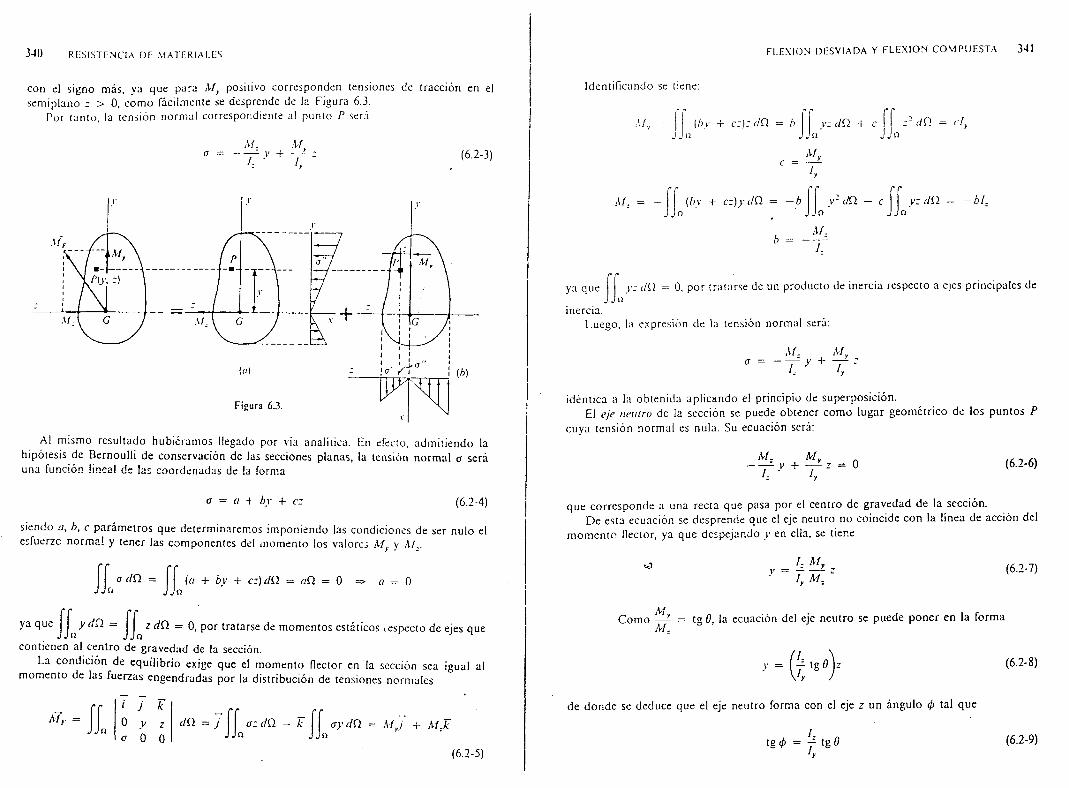
3-40 R E S I S T E N C I A D E M A T E R I A L E S
con el signo más, va que pura Aíy positivo corresponden tensiones de tracción en el sem iplano r > 0, como fácilmente se desprende de la F igura 6.3.
Por tanto, la tensión normal correspondiente al punto P será
AL Alya = - T y + ~ f : (6'2' 3)
Al mismo resultado hubiéramos llegado por via analítica. En efecto, adm itiendo la hipótesis de Bernoulli de conservación de las secciones planas, la tensión norm al a será una función linea! de las coordenadas de la forma
cr = a + b y + cz (6.2-4)
siendo a, b, c parám etros que determinaremos imponiendo las condiciones de ser nulo el esfuerzo norm a! y tener ¡as componentes del momento los valores Aíy y A!..
a dQ = {a + b y + c z ) d Q = aQ = 0 a = 0
ya que J ^ y d Q _ z dCl = 0, por tratarse de momentos estáticos .especto de ejes que
contienen a! centro de gravedad de la sección.La condición de equilib rio exige que el momento flector en la sección sea igual al
momento de las fuerzas engendradas por la distribución de tensiones normales
M r =' r 1 j k r
Q
o N
IIa
o z dQ. — k
OOb
' ao y d Q = A l j + A í.k
(6.2-5)
FLEX IO N DESVIADA Y F LEX IO N C O M PU EST A 341
Identificando se tiene
Al. = [by + cz)z dQ. = /> y : dQ + c In J J n J
AL
z2 dQ = cL
Ai. = - {by + c z ) y d Q = —b
b = - -
v2 dQ — cn
M .1 7
■dQ = - b l .
ya que )•; dQ = 0, por tratarse de un producto de inercia respecto a ejes principales de
inercia.Luego, la expresión de la tensión normal será:
AL Afv
T y + Xidéntica a la obtenida ap licando el principio de superposición.
El e j e n e u t r o de la sección se puede obtener como lugar geom étrico de los puntos P cuya tensión norm al es nula. Su ecuación será:
Al- Ai,J 7 y + 1 7 z =
(6.2- 6)
que corresponde a una recta que pasa por el centro de gravedad de la sección.De esta ecuación se desprende que el eje neutro no coincide con la línea de acción del
momento flector, ya que despejando y en ella, se tiene
_ L l í ly ~ L M .
(6.2-7)
MComo —- = tg 0, la ecuación del eje neutro se puede poner en la forma Ai.
(6 .2-8)
de donde se deduce que el eje neutro forma con el eje z un ángulo <p tal <íue
tg 4> = j tg 0 ( 6 . 2 - 9 )

3 4 2 R E SIST E N C IA DE M A T E R IA L E S
Vemos, en efecto, que salvo el caso en que se verifique l . = Iy , el eje neutro no coincid irá con la linea de acción del momento flector. Por eso se denom ina f l e x i ó n d e s v i a d a a este tipo de flexión.
A hora bien, como /. e Iy son m agnitudes esencialm ente positivas, los ángulos <p y 0 tendrán el mismo signo. Si /. > í y, el ángulo <p es m ayor que el ángulo 0: el eje neutro estará situado entre la línea de acción del momento flector y el eje y . Si, por el contrario , I. < l r el ángulo <p es menor que el ángulo 0, y el eje neutro estará situado-entre la linea de acción del momento flector y el el eje z. Se desprende, pues, que el eje neutro está situado siem pre entre el momento flector en la sección y el eje principal que corresponde aj momento de inercia mínimo.
El eje neutro divide a la sección en dos zonas, una traccionada y o tra com prim ida. P ara d istingu ir cada una de e llas se puede tom ar un punto cualqu iera de la sección perteneciente a una de las zonas y sustitu ir sus coordenadas en la ecuación (6.2-3). Si el valor de a es positivo, el punto elegido pertenece a la zona traccionada; si es negativo , a la zona com prim ida.
La tensión norm al en un punto P ( y , z) se puede expresar en función de la d istancia d a l eje neutro (Fig. 6.4). En efecto, por geom etría an a lítica sabem os que la d istanc ia d de un punto P ( y , z) a una recta cuya ecuación es la (6.2-6) tiene por expresión
d = +■
M .~ T y +
M .+
(6 .2 - 10)
Pero el num erador de esta expresión es precisam ente el valor de la tensión cr en el punto P, por lo que podemos poner:
d — i jr . siendo k = ^ constarFe en Ia sección.
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 343
o lo que es lo mismoa = k d (6-2-H)
hab iendo tomado como semiplano positivo el correspondiente a la zona traccionada.De esta expresión se deduce que la tensión normal es una función lineal de la distancia
al eje neutro, por lo que los puntos de la sección sometidos a ¡a tensión norm al maxima serán los más alejados de! eje neutro. La determ inación de estos puntos se hace fácilmente en el caso de secciones de forma sencilla. Pero si la sección es de forma com pleja, la ecuación (6.2-11) nos sugiere poder determ inar los puntos sometidos a tensiones máximas a tracción y a compresión, de forma gráfica como se indica en la F igura 6.5.
F ig u r a 6 .5 .
Se d ibu ja la sección y se trazan los ejes centrales de inercia y , r , asi como el eje neutro. T razando las tangentes a la sección paralelas al eje neutro obtenemos los puntos A y B, que son los que van a estar sometidos a tensiones normales máximas. En la F igura 6.5, en el punto A. la tensión normal es de compresión y en el B de tracción. De la ecuación (6.2-1 I) también se deduce ia posibilidad de representar la distribución de tensiones norm ales en el plano de la sección (Fig . 6.5). _
P ara la distribución de tensiones tangenciales, debidas al esfuerzo cortante T ( Ty. T .l podem os adm itir que cada una de sus componentes se rige por la fórmula de Colignon. si bien insistim os en el carácter aproxim ado de la misma.
En cada punto P ( v, z) de la sección existirá, pues, una tensión tangencial t decom ponentes xxy y r , . , dadas por ¡as siguientes expresiones:
r = ■ r = ^ (6.2-12)b f ' r/v
en las que las componentes Ty, T. dei esfuerzo cortante tienen el signo que les correspondarespecto de los ejes indicados en la figura*, y siendo:
* T en g ase présen le que el esfuerzo córran le que actú a en la sección es igu a l y opuesto a la p royecc ión sob .e .., p lan o de la m ism a de la resu ltan te de la so lic itación que ac tú a sobre la parte del p rism a com prendtua entre L sección o rig en y la que se considera .
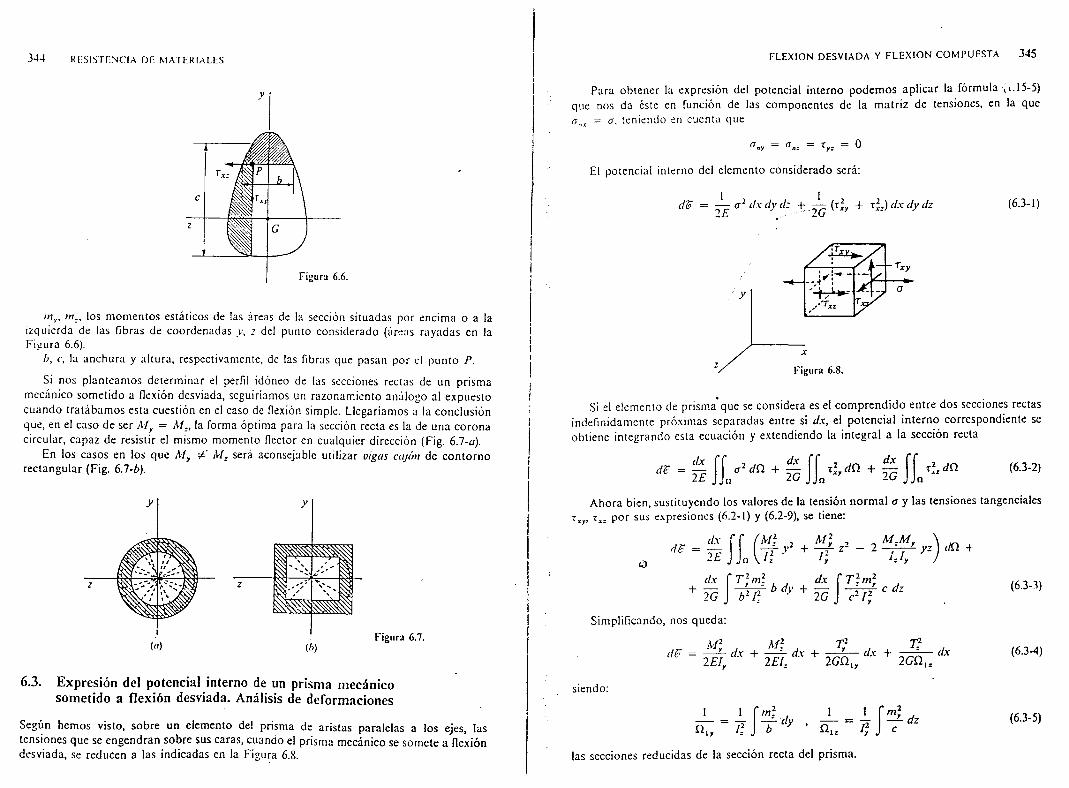
344 R E S I S T E N C I A D E M A T E R I A L E S
V
m y, m . , los momentos estáticos de las áreas de la sección situadas por encim a o a la izquierda de las fibras de coordenadas y , z del punto considerado (áreas rayadas en la F igura 6.6).
b , c , la anchura y a ltu ra , respectivamente, de las fibras que pasan por el punto P.
Si nos planteam os determ inar el perfil idóneo de las secciones rectas de un prism a mecánico sometido a flexión desviada, seguiríamos un razonam iento análogo a l expuesto cuando tratábam os esta cuestión en el caso de flexión simple. L legaríam os a la conclusión que, en el caso de ser M y = M ., la forma óptima para la sección recta es la de una corona circular, capaz de resistir el mismo momento flector en cualqu ier dirección (Fig. 6.7-a).
En los casos en los que M y ^ ' M . será aconsejable utilizar v i g a s c a j ó n de contorno rectangular (Fig. 6.7-6).
6.3. E xp resión del potencial interno de un prism a m ecán ico som etid o a flex ió n desviada. A nálisis de deform acion es
Según hemos visto, sobre un elemento del prisma de aristas parale las a los ejes, las tensiones que se engendran sobre sus caras, cuando el prisma mecánico se somete a flexión desviada, se reducen a las indicadas en la F igura 6.8.
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 4 5
Para obtener la expresión del potencial interno podem os ap licar la fórmula ki . 15-5) que nos da éste en función de las componentes de la m atriz de tensiones, en la queíjnc = a, teniendo en cuenta que
a »y = a »-. = f,.- = 0
El potencial interno del elemento considerado será:
d F1
2E— a 1 dx d y dz + — ( r j , + r 2_.) dx d y dz (6.3-1)
- , 4 ' f‘- b *yTxz
¿L1x y
X
F ig u r a 6 .8 .
Si el elemento de prism a que se considera es el com prendido entre dos secciones rectas indefinidamente próximas separadas entre si dx, el potencial interno correspondiente se obtiene integrando esta ecuación y extendiendo la in tegral a la sección recta
d F =dx 2£ I *■<«> + £2 G
x l . d C i + x2„ dQ (6.3-2)
Ahora bien, sustituyendo los valores de la tensión norm al a y las tensiones tangencialesxxy, xx. por sus expresiones (6.2-1) y (6.2-9), se tiene:
d F =d)
eJ l2E
dx 2G
M 2i - y +
M iI 2
T 2y m 2. dxW + 2C
z2 - 2 M .M ,
T \ m 2y -T -Z T c dz e l i
y z ) itCl +
Sim plificando, nos queda:
M i , M i J T ; J T : ;M ~ 2e T + Í E i / X + 2 G ñ j / X + 2 G C ¡ : , ‘'X
(6.3-3)
(6.3-4)
siendo:
Í2 i y
17F
n 2 1 1 [ m 2y (6-3-5)
inc w rinnp*: reducidas de la sección recta del crism a.
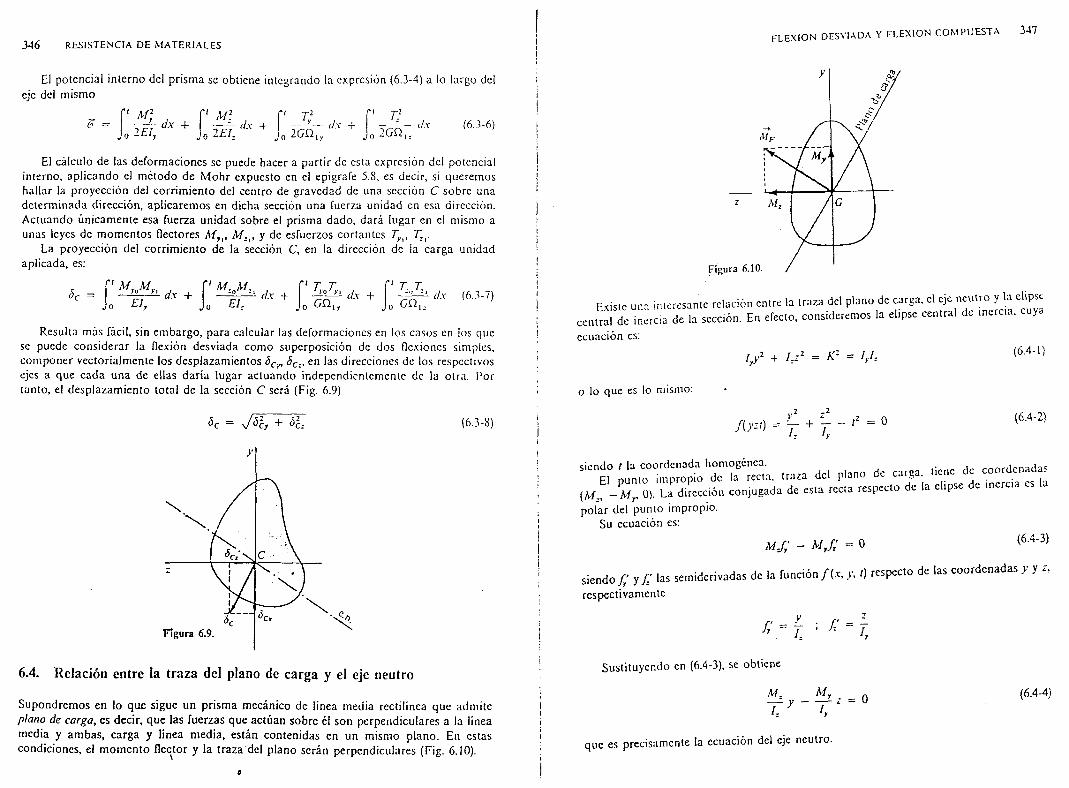
3 4 6 R E S I S T E N C I A D E M A T E R I A L E S
El potencial interno del prism a se obtiene integrando la expresión (6.3-4) a lo largo del eje del mismo
¥ = r> K ,— — dx + o 2EI,
M\2EL
dx +T2y
odx +
T.2
o 2c n l;(6 .3 -6 )
El cálcu lo de las deform aciones se puede hacer a p artir de esta expresión del potencial interno, ap licando el método de M ohr expuesto en el epígrafe 5.8, es decir, si queremos hallar la proyección del corrim iento del centro de gravedad de una sección C sobre una determ inada d irección, ap licarem os en dicha sección una fuerza unidad en esa dirección. Actuando ún icam ente esa fuerza unidad sobre el prism a dado, d ará lugar en el mismo a unas leyes de momentos flectores M y¡, M : ¡ , y de esfuerzos cortantes Tf l , T.r
La proyección del corrim iento de la sección C, en la dirección de la carga unidad ap licada, es:
<5c =f ' M M.. , f ' M . M . f ' Ty T
— dx + -° - dx + 21 dx +0 E l y o El-. o G n 1}.
'' T. T.- O - I
0 G fl,:dx (6 .3 -7 )
Resulta más fácil, sin em bargo, para ca lcu lar las deformaciones en los casos en los que se puede considerar la flexión desviada como superposición de dos flexiones simples, com poner vectorialm ente los desplazam ientos 5Cy, <5C;, en las direcciones de los respectivos ejes a que cad a una de e llas d ar ía lugar actuando independientem ente de la otra. Por tanto, el desp lazam iento total de la sección C será (Fig. 6.9)
Se = v/<5 h + ¿é.- (6.3-8)
6.4. R elac ión entre la traza del plano de carga y el eje neutro
Supondrem os en lo que sigue un prism a mecánico de línea media rectilínea que adm ite p la n o d e c a r g a , es decir, que las fuerzas que actúan sobre él son perpendiculares a la línea media y am bas, carga y línea m edía, están contenidas en un mismo plano. En estas condiciones, el m om ento flector y la traza del p lano serán perpendiculares (Fig. 6.10).
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 347
Existe una interesante relación entre la traza del plano de carga, el eje neutro y la elipse central de inercia de la sección. En efecto, consideremos la elipse central de m erca , ya
ecuación es:
V 2 + /--2 = K 2 = (6-4 ‘ U
o lo que es lo mismo:
/ w , ¿ + i ! - , , 0 (0-4.2,i z i y
siendo t la coordenada homogénea. ^ .v le n a d a sEl punto impropio de la recta, traza del plano de carga, tiene de coordenadas
(M ., —M y, 0). La dirección conjugada de esta recta respecto de la elipse de m e rca .
po lar del punto impropio.Su ecuación es:
m j ; - m j ; = o (6-4'3)siendo f ¡ y f las sem iderivadas de la función/(.x, y, /) respecto de las coordenadas y y z,
respectivamente
Sustituyendo en (6.4-3), se obtiene
_ M , = 0 (6.4-4)
L y ¡y ‘
que es precisamente la ecuación del eje neutro.
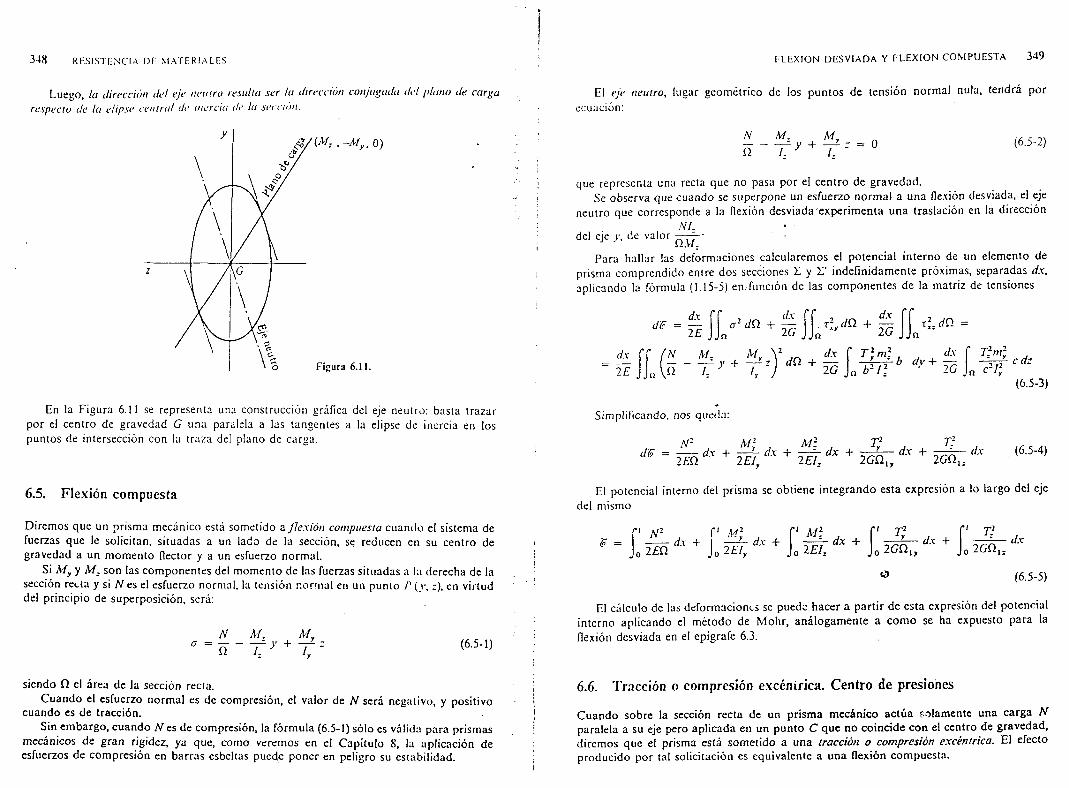
3 4 8 R E S I S T E N C I A D E M A T E R I A L E S
Luego, la d i r e c c i ó n d e l e j e n e u t r o r e su l ta s e r la d i r e c c i ó n c o n ju g a d a d e l p l a n o d e c a r g a r e s p e c t o d e la e l i p s e c e n t r a ! d e in e r c ia d e la s e c c i ó n .
En la F igura 6.11 se representa una construcción gráfica del eje neutro: basta trazar por el centro de gravedad G una paralela a las tangentes a la elipse de inercia en los puntos de intersección con la traza del plano de carga.
6.5. F lex ió n com p u esta
Diremos que un prism a m ecánico está sometido a f l e x i ó n c o m p u e s t a cuando el sistem a de fuerzas que le solicitan , situadas a un lado de la sección, se reducen en su centro de gravedad a un momento fiector y a un esfuerzo norm al.
Si M y y M z son las componentes del momento de las fuerzas situadas a la derecha de la sección recta y si A' es el esfuerzo normal, la tensión norm al en un punto P ( r, -), en virtud del principio de superposición, será:
N M . M y
+ ( 6 M )
siendo Q el área de la sección recta.Cuando el esfuerzo norm al es de compresión, el valor de N será negativo, y positivo
cuando es de tracción.Sin em bargo, cuando N es de compresión, la fórm ula (6.5-1) sólo es válida para prism as
mecánicos de gran rigidez, ya que, como veremos en el C ap ítu lo 8, la ap licación de esfuerzos de com presión en barras esbeltas puede poner en peligro su estab ilidad .
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 4 9
El e j e n eu t r o , lugar geom étrico de los puntos de tensión norm al nula, tendrá porecuación:
N M . Myí ¡ ^ 1 7 r ^ i f = - 0
(6.5.2)
que representa una recta que no pasa por el centro de gravedad .Se observa que cuando se superpone un esfuerzo norm al a una flexión desviada, el eje
neutro que corresponde a la flexión desviada experim enta una traslación en la dirección NI.
del eje y , de valor ■ — - i 2 . V/.
Para h a llar las deformaciones calcularem os el potencial in terno de un elemento de prism a comprendido entre dos secciones I y L ' indefin idam ente próximas, separadas dx, aplicando la fórmula (1.15-5) en función de las com ponentes de la matriz de tensiones
d e
dxTÉ
d.X = 2£
N M
• , dx • , dx * Ca dQ + — . x~y dQ + —J. 2 C . , 2 G , J
x2. dQ =
M .n L y +
2 dxd ñ + 2G
T í m ? , , *. W * 2G
* 'T'l 7T:m'yc dz
(6.5-3)
Sim plificando, nos queda:
N2 M i , Mz . T 2 , T:•a ’ 3 ñ * + l é i f + T Ü , i x * í c a r / x + ü m r / x (6.5-4)
El potencial interno del prisma se obtiene in tegrando esta expresión a lo largo del eje del mismo
& =■' N2 y r M ; J
dx + I z r c r r dx +o 2 EQ J . 2 EL
*' M io 2 EIZ
dx +T2i v
o 2
Cc>
dx +Ti
o 2 c a u.dx
(6.5-5)
El cálculo de las deformaciones se puedo hacer a p artir de esta expresión del potencial interno ap licando el método de M ohr, análogam ente a com o se ha expuesto para laf|jviÁn H»»c\/ioWq An #»! Aniomfp n 5
6.6. T racción o com presión excén trica . C entro de presion esCuando sobre la sección recta de un prism a m ecánico ac tú a solamente una carga N para le la a su eje pero ap licada en un punto C que no co incide con el centro de gravedad , direm os que el prisma está som etido a una t r a c c i ó n o c o m p r e s i ó n ex c é n t r i c a . El efecto producido por tal so licitación es equivalente a una flexión compuesta.

3 5 0 R E S I S T E N C I A D E M A T E R I A L E S
En efecto, si reducim os el sistema de fuerzas form ado por la carga N ap licada cn el punto C ( e y, <?_), llam ado c e n t r o d e p r e s i o n e s , al centro de gravedad de la sección (Fig. 6.12), el torsor equ ivalente está constituido por una fuerza normal N , equipolente a la ap licada en C, y un m omento contenido en el plano de la sección, de componentes:
M r = N - e . ; M . = - N ■ e , (6.6-1)
m agnitudes que caracterizan a la flexión compuesta.
El eje neutro se puede obtener sustituyendo en la ecuación (6.5-2) los valores de los m om entos flectores dados por las expresiones (6.6-1)
¿ + ?'V + Í Z = ° (66'2)De esta ecuación se deduce que la posición del eje neutro no depende de la m agnitud
de la carga norm al N ap licada. °Si el centro de presiones está situado sobre uno de los ejes centrales de inercia dc la
sección, de la m ism a ecuación (6.6-2) se desprende que el eje neutro correspondiente es perpend icu lar a esc eje principal. En efecto, si el centro de presiones C , está sobre el cié principal z:
e , = 0 => el eje neutro es - - — lz_e.S l (6.6-3)
Si C 2 está sobre el eje y :
e . = 0 => el eje neutro es y = - -Zf_ ^ ^
Los signos negativos de las expresiones (6.6-3) y (6.6-4), al ser los momentos dc inercia y el a rea dc la sección m agn itudes esencialm ente positivas, indican que los ejes neutros cortan a los ejes p rincipales en puntos cuya coordenada no nula tiene signo opuesto a la correspondiente del centro de presiones.
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 5 1
De lo anterior se deduce o tra interesante propiedad dc la tracción o compresión excéntrica. Supongam os que el centro de presiones se desplaza a lo largo de una recta que corta a los ejes principales en los puntos C, y C 2 (Fig. 6.13). Por el principio dc super posición, el efecto producido por el esfuerzo norm al A' aplicado en el centro de presiones C es equivalente a la acción dc dos esfuerzos normales Ar, y A'2 aplicados en C¡ y C\, respectivam cnic, tales que *
A'i • C (C 2 = N - C C Z : A V C ,C ¡ = A '-C C , (6.6-5)
Ahora bien, los ejes neutros correspondientes a am bas tracciones o compresiones excéntricas se cortan cn el punto C' cuyas coordenadas son:
rc- = ------------------ ; zc - = ------- ¿ = - (6.6-6)n c c 2 q - c c ,
que son constantes e independientes, por tanto, de la posición C sobre la recta considerada. Quiere esto decir que cuando en una tracción o compresión excéntrica, el centro de presiones se desplaza sobre una recta, su correspondiente eje neutro pasa por un punto fijo C .
Hemos visto que una tracción o compresión excéntrica es equivalente a una flexión compuesta. Recíprocam ente, toda flexión com puesta es equivalente a un esfuerzo normal excéntrico, es decir, a una fuerza de tracción o compresión ap licada en un punto no coincidentc con el centro dc gravedad .
En efecto, sea M r el m om ento flector y N es el esfuerzo norm al en una determ inada sección (Fig. 6.12). El eje central <ic( sistema dc vectores constitu ido por este torsor es parale lo a A' y perpendicular, por tanto, al p lano de la sección. Como el eje centra! es único, y el segundo invarian te del sistem a de vectores es cero por ser M r perpendicular a N, existe un punto C (e , e .) , tal que el momento cn él es nulo
M F - G £ x N = 0 ( 6 .6
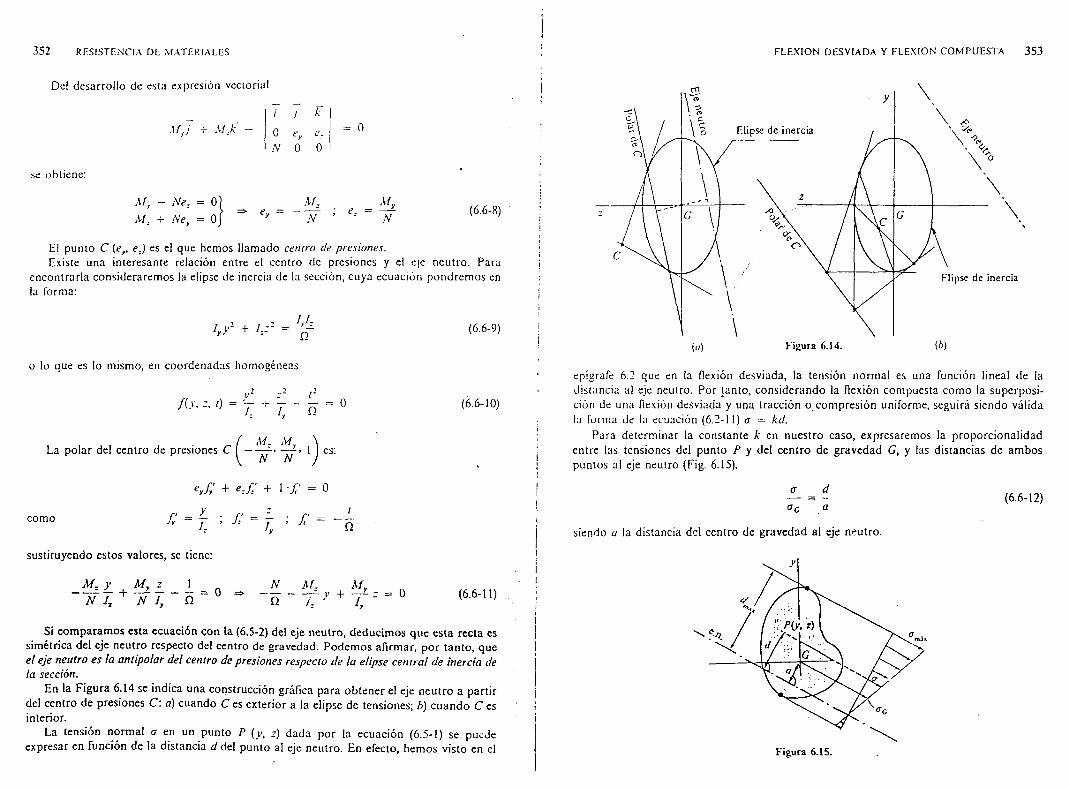
3 5 2 R E S I S T E N C I A D E M A T E R I A L E S
Del desarro llo de esta expresión vectorial
i J k\ Í J -i- XI:k — 0 e r e . = 0
N 0 0
se obtiene:
Áf, - Ne. = 0NI. + Ne 0 ' 7 T
M% N
(6 .6- 8)
El punto C ( e y, e .) es el que hemos llam ado c e n t r o d e p r e s i o n e s .Existe una interesante relación entre el centro de presiones y el eje neutro. Para
encontrarla considerarem os la elipse de inercia de la sección, cuya ecuación pondrem os en la forma:
L v 1 + I . : 2 =¡J._7 T
(6.6-9)
o lo que es lo mismo, en coordenadas homogéneas
Ax /) = — + — L /,
PQ
= 0 (6 .6- 10)
La polar del centro de presiones CNI. Nfr
'7 7 ” 7 7 ”1 es:
e , f , ' + e - . f ! + ! ' / ' = 0
como r = y.Q
sustituyendo estos valores, se tiene:
_ M L y_ M . : ~~W I , + n i . n 0
Nñ
M . M y7 T 2’ + 7 : r = 0
(6 .6- 11)
Si com param os esta ecuación con la (6.5-2) del eje neutro, deducim os que esta recta es sim étrica del eje neutro respecto del centro de gravedad. Podem os afirm ar, por tanto , que e l e j e n e u t r o e s la a n t ip o l a r d e l c e n t r o d e p r e s i o n e s r e s p e c t o d e la e l i p s e c e n t r a l d e i n e r c i a d e la sección.
En la F igura 6.14 se indica una construcción gráfica para obtener el eje neutro a partir del centro de presiones C : a) cuando C es exterior a la elipse de tensiones; b) cuando C es interior.
La tensión norm al a en un punto P ( y, ¿) dada por la ecuación (6.5-1) se puede expresar en función de la distancia d del punto a l eje neutro. En efecto, hemos visto en el
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 5 3
epígrafe 6.2 que en la flexión desviada, la tensión norm al es una función lineal de la distancia al eje neutro. Por tanto, considerando la flexión compuesta como la superposición de una flexión desviada y una tracción o.com presión uniforme, seguirá siendo válida la forma de la ecuación (6.2-11) a = kd.
Para determ inar la constante k en nuestro caso, expresaremos la proporcionalidad entre las tensiones del punto P y del centro de gravedad G, y las d istancias de ambos puntos al eje neutro (Fig. 6.15).
a da
( 6.6- 12)
siendo a la d istancia del centro de gravedad a l eje neutro.

3 5 4 R E SIST E N C IA DE M A T E R IA L E S
Como Nñ
(6.6-13)
la expresión de la tensión norm al en P será
N ia = —— d í l a
(6.6-14)
De esta expresión se deduce la fórmula para obtener el valor de la tensión normal m áxim a
Nñ a
(6.6-15)
en donde d m¡J es la d istanc ia al eje neutro del punto de la sección más ale jado del mismo (Fig. 6.15).
6.7. N ú c le o cen tral de la secciónUna sección recta de un prism a mecánico som etido a tracción o compresión excéntrica puede ser co rtada o no por el eje neutro. En caso afirm ativo, el eje neutro d ivide a la sección en dos partes, una de las cuales está som etida a tracción y la otra a compresión. Si no la corta, toda la sección está som etida a tracción o a compresión.
Hemos visto en el epígrafe an terio r que el eje neutro depende de la situación del centro de presiones. De la expresión de la d istancia a del centro de gravedad de la sección al eje neutro, cuya ecuación es la (6.6-2)
o
(6.7-1)
FLEXION DESVIADA Y FL E X IO N C O M P U E S T A 3 5 5
se deduce que a medida que el centro de presiones C se ap roxim a al centro de gravedad dela sección, el eje neutro se a le ja de él.
Existirá en el plano de la sección una curva cerrada y que rodea al centro de gravedad, tal que considcrandcT cualqu iera 3e~sus puntos como ccniro dc presiones el eje neutro es tangente a la sección del prism a mecánico. PoTlo dicho en el párrafo anterior, si tomam os como centro de presiones cua lqu ier punto interior al área_enccrrada por la curva y estar_a asegurado que las tensiones norm ales en toda la sección sean de tracción o de compresión. Á la zona delim itacTapor esta curva y se la denom ina n ú c l e o c e n t r a l d e lo s e c c i ó n .
Podemos definir, pues, el n ú c l e o c e n t r a l d e la s e c c i ó n como el luear geométrico de lospuntos tales que tom ados_gQmCLj:catiQ_.de presiones en una tracc ión o compresiónexcéntrica, lasTtensiones norm ales en todos los puntos de la sección tjenen_d mis.mo signo.
Veamos cómo determ inam os el núcleo central de la sección: considerem os un punto C ,
tal que su antipo lar c, respecto de la elipse central de inercia de la sección sea tangente a la misma. Para las infinitas tangentes a la sección, los an tipo los correspondientes describen una curva cerrada y (Fig. 6.17). Si el centro de presiones es uno de los puntos situados en el interior de dicha curva, el eje neutro correspondiente no co rtará a la sección.
Por consiguiente, el núcleo central de una sección está form ado por los puntos interiores a una curva cerrada, lugar geom étrico de los an tipo los de las tangentes que envuelven a ¡a sección.
A modo de ejemplo calculem os el núcleo central de a lgun as secciones particulares:
a) Sección rectangular
Si sustituim os los valores de los momentos de inercia y el área de la sección
b h 3 h b } , ,I = ------- ; / =------- ; n = bh
12 12
y2 :2 1en la ecuación de la elipse de inercia — + — = queda:
/ i ! _ 1 I,1 + b 2 ~ 12
( 6 . 7 -

3 5 6 R E S I S T E N C I A DF. M A T E R I A L E S
Sean A, B, A', B\ los antipolos de las rectas PQ, QN, NM y M P, respectivamente (Fig. 6.18). Los antipolos de las rectas tangentes en uno de los vértices del rectángulo, por ejemplo, el vértice Xf, por las propiedades de la polaridad serán puntos alineados comprendidos entre los antipolos de AÍN y MP, es decir, puntos del segmento A'B'.
El núcleo central de la sección será el rombo ABA'B1 (Fig. 6.18).
Podemos calcular fácilmente las longitudes de las d iagonales de este rombo, expresando la condición de que la antipo lar del punto A (;/, 0) es la recta PQ, o lo que es lo mismo, por razones de sim etría, que la polar de A es la recta M N ( y = h ¡ 2).
La ecuación de la polar de A es:
n y _ 1 _ I r _ h hh 1 ~ ^ ~ T b j ~ 2 ^ n = 6
Por tanto, las longitudes de las d iagonales del rombo resultan ser:
— h bA A’ = - ; B f f = - (6.7-3)
b) Sección en doble T
La fam ilia de rectas tangentes a la sección en doble T (Fig. 6.19) es idéntica a la de sección rectangular. Por consiguiente, el núcleo central será también un rom bo, si bien las longitudes de las d iagonales se obtendrían en este caso de la siguiente forma:
La polar A respecto de la elipse de inercia será:
ny i /_. h 21.i-. n = > y ~ n n ~ 2 ^ r , ~ h ñ
AA' = ____hPl ’ ¿>Q
luego
41. 4/AA = m (6-7-4)
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 5 7
v
es decir, el núcleo central de una sección en doble T es un rombo cuyo centro es co incidente con el centro de gravedad , tiene los vértices sobre los ejes principales, y las longitudes de las d iagonales vienen dadas por las ecuaciones (6.7-4).
c ) Sección circular
La elipse de inercia es una circunferencia, ya que los momentos de inercia Iy e I . son iguales: Py = l . = kR'1/4. Como f i = k R 2, la ecuación de la elipse de inercia es:
4y 2 4z2 _ 1VR* * nR* ~ tÜR1
y 2 + z- =RV
que corresponde a una circunferencia de radio R j2.
El núcleo central será un circulo , cuyo radio r podemos calcular expresando la condición de que la polar del punto A (r, 0), perteneciente a la curva que lim ita el núcleo central, es la recta y = 7?(Fig. 6.20)
R 2r v —
R 2
de donde ( 6 . 7 - 5 )

3 5 8 R E S I S T E N C I A D E M A T E R I A L E S
es decir, el núcleo central de una sección circu lar es un círculo cuyo rad io es la cuarta parte del correspondiente a la sección.
6.8. C aso de m ateria les sin resistencia a la tracciónComo se ha visto anteriorm ente, si el esfuerzo norm al excéntrico ap licado tiene el punto de ap licación fuera del núcleo central, el eje neutro corta a la sección y 1a divide en dos zonas: una com prim ida y otra traccionada.
Existen diversos m ateriales, tales como la fábrica de lad rillo y el horm igón en masa, m uy poco resistentes a la tracción, por lo que en el cálcu lo se supondrá nu la la tensión en la zona som etida a tracción. En estos casos, para la determ inación del eje neutro no son válidas las fórmulas obtenidas en los epígrafes anteriores. La condición que tendrem os que im poner para determ inarlo será que el sistem a de fuerzas engendrado por la d istribución de tensiones en la zona de compresión exclusivam ente sea equ ivalente al esfuerzo normal ¡V y al momento flector M en la sección y adm itirem os la hipótesis de que la tensión de com presión es proporcional a la d istancia al eje neutro.
C uando se trate de una sección cualqu iera, la determ inación del eje neutro se puede hacer por aproxim aciones sucesivas: en prim er lu ga r se ca lcu la el eje neutro ap licando la fórm ula (6.5-2) y se suprime la parte de la sección som etida a tracción; se vuelve a calcu lar el eje neutro para la parte de sección restante y se suprim e la parte que este som etida a tracción..., y asi sucesivamente. Se llegará a obtener por este procedim iento una sección residual som etida exclusivam ente a compresión.
Considerem os el caso, muy frecuente en la p ráctica, de sección sim étrica y el punto C de paso de la fuerza exterior esté sobre el eje de sim etría (Fig. 6 .21).
La d istancia r¡c del punto de paso de la fuerza ex terio r a la recta AB que lim ita la zona com prim ida se puede obtener im poniendo las condiciones de equ ilib rio . La resultante de las fuerzas de compresión engendradas por las tensiones norm ales ha de ser ¡cual a N
N = [ a d í l = kt¡ d í l = k m t (6.8- 1)
siendo n i, el momento estático de la zona com prim ida respecto de la recta AB que la lim ita.
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 5 9
El momento respecto de esta recta AB del sistema de fuerzas debidas a las tensiones normales ha de ser igual al momento de la fuerza N respecto de la misma recta.
'"L U l j d í l k>i2 d í l = k lr ( 6 .8 - 2 )
siendo Ie el momento de inercia de la zona com prim ida respecto de la recta AB. D ividiendo miembro a miembro am bas expresiones, se tiene:
L’h = ( 6 .8 - 3 )
expresión que permite determ inar la posición de la recta AB que lim ita la zona compri mida.
En el caso de una sección rectangular (Fig. 6.22), caso que se da con mucha frecuencia en la práctica, el momento de inercia de la zona com prim ida respecto de la recta AB e s :
I. = bi]1 dii =bh\
El momento estático, análogam ente, tiene por expresión:
ú,m e = 6/t,
b h ]
~ T
Por tanto, la d istancia del centro de presiones al eje neutro es:

3 6 0 R E S I S T E N C I A D E M A T E R I A L E S
El valor de la tensión máxima se obiiene igualando la resultante de las fuerzas engendradas por las tensiones norm ales y la fuerza /V ap licada
T < w W 'i = -v
de donde
2;VT~¡b h l (6.8-5)
es decir, la tensión máxima es el doble de la que correspondería si el esfuerzo normal M se repartiera de forma uniforme sobre la sección eficaz.
6.9. F lex ión de piezas curvasA pesar de que iniciamos nuestro estudio considerando un prism a mecánico en general, en toda la exposición que se ha hecho hasta aqu í hemos particu larizado para vigas cuya línea media o directriz era una recta. H ay, sin em bargo, innum erables ejemplos prácticos en los que las piezas presentan in icialm ente cierta curvatura, como es el caso de los arcos, ganchos de grúa y eslabones de cadena.
En piezas de curvatura pequeña se obtiene una buena aproxim ación aplicando las fórmulas obtenidas para las vigas rectas. So lam ente habría que tener en cuenta que la variación de curvatura, que en el caso de piezas rectas viene dada por la ecuación (5.2-3), habría que sustitu irla por
1 1 M . = T T (6.9-1)P Po E l.
siendo p 0 el radio de curvatura de la línea m edia de la barra antes de la deformación, y p el radio de curvatura de la línea media deform ada.
Para estud iar las piezas de gran curvatura, es decir, piezas en las que los valores del radíOj de curvatura p0 y las dimensiones de' la sección recta son del mismo orden de magnitud, es necesario hacer una revisión de las hipótesis que se adm itieron y del método seguido en el estudio de las piezas rectas.
Considerarem os en lo que sigue prismas mecánicos de d irectriz curva y plano medio, es decir, prismas que posean un p lano de sim etría y se verifique que las fuerzas que les soliciten estén contenidas en dicho plano. Esto equ ivale a decir que la línea media es una curva plana, que la intersección de cualqu ier sección recta con el plano medio es una dirección principal de inercia de d icha sección, y que la curva elástica está contenida en el citado plano medio.
Consideremos una pieza de curvatura constante como la ind icada en la F igura 6.23-n y apliquemos momentos M en las secciones extrem as (Fig. 6.23-b), con lo que la pieza considerada estará sometida a flexión pura. Seguirem os adm itiendo la hipótesis de Bernoulli, es decir, las secciones rectas que son p lanas antes de la deformación, siguen siendo planas después de ella. El centro de curvatura C de la línea m edia de la pieza pasa a la
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 6 1
F ig u r a 6 .2 3 .
posición C'. O bservam os que la fibra superior se acorta y la inferior se a la rga , por lo que existirá una superficie neutra, es decir, form ada por fibras que ni se a largan ni se acortan.
Pero ahora la fibra neutra, es decir, la intersección de la superficie neutra con el plano medio de sim etría, no coincide con la línea media, como dem ostrarem os más adelante. Sea r 0 el rad io de cu rvatura de la fibra de la pieza que va a ser neutra después de la deformación. Para estud iar la distribución de tensiones en la sección consideremos el elemento de pieza com prendido entre dos secciones indefinidamente próximas (Fig. 6.23-tj que forman un ángulo dd , y sea DD' la fibra neutra de este elemento. La deformación relativa de la sección A' B' respecto de la AB será un giro de ángulo AdO alrededor de D‘, punto perteneciente a la fibra neutra.
Fijém onos en la fibra EE' que dista y de la fibra neutra. El a largam iento longitudinal unitario que experim enta esta fibra es
FT "e = (6.9-2)
EE'
pero como E‘E[ = y AdO ; EE' = ( r0 — y ) dQ
la expresión (6.9-2) tom a la forma
- - y A d ° (6.9-3)(ro - y ) d °
Ahora bien, de la expresión de la longitud de la fibra neutra
DD' = r(dO + AdO) = rQdO
siendo r el rad io de cu rvatu ra de la superficie neutra, se deduce:

3 6 2 RE SISTEN CIA DE M ATE RIALE S
Suslituycndo en la ecuación (6.9-3), se tiene:
E = - - - 1 — : (6.9-5)r
Por tanto, la tensión normal en los puntos de la sección recta será, en v irtud de la ley de Hooke
<r = - E r 0 ( - - — } — ---- (6.9-6)V r o J r0 ~ y
Esta expresión nos dice que en piezas de gran cu rvatura las tensiones norm ales en una sección se d istribuyen según una ley hiperbólica (Fig. 6.24-a). Sc observa que las tensiones m áxim as a tracción y a compresión se presentan en las fibras superior c inferior de la sección.
F ig u r a 6 .2 4 .
Se ha dicho antes que la fibra neutra no coincide en las p iezas de gran cu rva tu ra con la linea m edia, es decir, el eje neutro de una sección recta no pasa por el centro de gravedad de la m ism a. Calculem os la localización de la fibra neutra im poniendo la condición de ser la resultante y momento resultante de las fuerzas engendradas por las tensiones^normales en toda la sección un sistema estáticam ente equ ivalente al momento flector M r , es decir
N = a d Q = 0 ; A/f = — J a y d Q (6.9-7)
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 6 3
Sustituyendo en la prim era dc estas ecuaciones la expresión de a dada por (6.9-6), sc tiene
y dQ. = 0o r o y
de donde se dedi
rn - rdQ = 0
Procediendo igualm ente en la segunda ecuación (6.9-7), se tiene
M f = Er0 - d Q = Er0 ----------V \ r r
v d Q -
(6.9-8)
dQn o
De esta últim a expresión se deduce que el eje neutro no pasa por el centro de gravedad, ya que si pasara, la primera integral se anu laría por ser nulo el momento estático de la sección respecto de un eje que pasa por el centro de gravedad, y como se anula la segunda en v irtud de (6.9-8), tendría que ser cero M r , lo que no es posible. Por tanto, el valor de la prim era integral es fie, siendo e la d istancia del eje neutro ai centro dc gravedad, pues es el momento estático dc [a fecc ió n respecto del eje neutro, que tomaremos como eje r.
La expresión del momento flector se reduce a
M f Q e = <y(r0 - y) Qey
que nos perm ite expresar la tensión norm al en función de \ l F
M r y
(6.9-9)
(6.9-10)Q e r 0 - y
P ara determ inar la posición del eje neutro haremos en (6.9-8) el cambio de variable
" = r0 - y => y = r 0 - u
d Q - r ^ r / n = ^ dQ - Q = 0n ro ~~ y n « j n u
Asi, se obtiene:
adQ
(6.9-11)
expresión dc la que sc deduce que, al ser el denom inador una integral que es una caractcristica geom étrica de la sección, la situación del eje neutro en una pieza curva

3 6 4 R E S I S T E N C I A D E M A T E R I A L E S
sometida a flexión pura depende e.x lusivam ente de la geom etría de la sección y es, por tanto, independiente del valor del momento flector.
Se dem uestra que el eje neutro en una sección transversal está siempre localizado entre el centro de gravedad de la misma y el centro de curvatura.
A modo de ejemplo, calculem os la posición del eje neutro en una sección rectangular de una pieza de gran curvatura som etida a flexión (F ig. 6.25).
y
u
- d u
r o P o
h G
e
lF ig u r a 6 .2 5 .
El denom inador de la fórmula (6.9-11) en este caso tendrá por expresión
hdQ. b du P o +
= b lnJ p o ~ h ¡ 2
P 0
Por tanto, el radio de curvatura de la fibra que después de ap licar el momento Héctor va a ser la fibra neutra será
O hr0 = -------- j (6.9-12)
Po + jin — ------
hP o ~ - 2
Para cualqu ier otra sección se procedería de an á lo ga forma. En la F igura 6.26 se indican las expresiones de los radios de curvatura de las superficies neutras que posicionan el eje neutro de diversas secciones que se utilizan con bastan te frecuencia en piezas de gran curvatura.
En el caso que la sección estuviera som etida, adem ás de un momento (lector, a una tracción o compresión, para ca ícu lar la distribución de tensiones se ap licaría , obviamente, el principio de superposición.
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 6 5
'o — ÍPo + \J Pb R ro — / ^21 ¿ ln - -
\/t r ,
Figura 6.26.
/r|/>, + b 2)
(A ,r , — b 2r ¡ ) ln — — l i ( b t — b 2)
E J E R C IC IO S
VI.I. La correa AB de un tejado de pendiente a = 30° está solicitada por una carga vertical uniformemente repartida p• = 600 kp/m. Si la sección recta de la correa es rectangular de dimensiones b = 9 cm y h = 20 cm, se pide:
1.“ Calcular las tensiones normales que se producen en la sección de máximo momentoflector.
2.° Determinar analítica y gráficamente el eje neutro correspondiente a dicha solicitación.
n 1 1 1 1 1 1 n n 1 1 1 1
JE I = 4 m 7777771
U¡) Figura VI.l.
I “ El momento flector máximo se presenta en la sección media de la viga. Su valor es:
I I I p l1 600 x 4 2Xí , = R , --------n - - = — = ------ = 1200 m - kp
ml- A 2 1 2 4 & 8
Sus componentes respecto a los ejes coordenados son:
Xíy = M sena = 1200 x sen 30° = 600 m kp
X!. = A/eo s a = 1200 x eo s 30° = 1039.2 m • kp

3 6 6 R E SIST E N C IA DE M A T E R IA LE S
F ig u r a V f .I -c .
L o s m o m e n to s d e in e r c ia r e sp e c to a lo s m is m o s e je s so n :
1. = — W i3 = — 9 x 2 0 3 = 6 0 0 0 etn * 12 12
/, = /i63 = ^ 20 x 93 = 1215 cm1
P o r t a n to , la d is t r ib u c ió n d e te n s io n e s n o r m a le s en lo s p u n to s d e la se c c ió n re c ta q u e se c o n s id e r a v e n d r á d e f in id a p o r la e c u a c ió n :
M M.* = - — y + Yí j i y
10 39 .2 x 102 6 0 0 x 102v +
6 0 0 0 1215
en la q u e a v ie n e e x p r e s a d a e n k p / c m 2 c u a n d o la s c o o r d e n a d a s se m id e n en cm .
2 .° L a e c u a c ió n d e l e je n e u t ro se o b te n d r á a n u la n d o la te n s ió n a
1 0 3 9 .2 6 0 0 — y + z = 0
6 0 0 0 y 1215
Simplificando, se obtiene
y = 2.85z
»
FLEXION DESVIADA Y FLEXION C O M P U E S T A 3 6 7
L a te n s ió n m á x im a , s e g ú n se d e sp re n d e d e la F ig u r a V T .I-e se p r e s e n ta en lo s p u n to s C ( — 10; 4 .5 ) ( t r a c c ió n ) y D (1 0 : - 4 . 5 ) (c o m p re s ió n )
1 0 39 .2 x I 0 2 600 x 102 ’<rmá, --------------- 10 "i-----------------4.0 = 395.4 kp/cm -6 0 0 0 ¡2 1 5
L a c o n s t r u c c ió n p a r a la d e te r m in a c ió n g r á f ic a d e l e je n e u tro q u e d a in d ic a d a en la F ig u r a V L l-r/ .
S e d ib u ja la e l ip s e c e n t r a l d e in e r c ia d e la se c c ió n c u y a e c u a c ió n a n a l i t i c a p o d e m o s p o n e r e n la fo rm a
■ L y 2 + I.:2 = ljk ~ = i■>> - 60 / ¡ r \ i / r rv r
tDe n la q u e s im p l if ic a n d o y s u s t i tu y e n d o v a lo re s , se t ien e :
K)2 T 4Ü2 = ’
y s e c a l c u la la d ir e c c ió n c o n ju g a d a re sp e c to d e e l la d e la d ir e c c ió n d e f in id a p o r e l p la n od e c a r g a , t r a z a n d o t a n g e n te s a la e l ip s e p a r a le la s a la t r a z a d e d ic h o p la n o d e c a r g a .S i O y £ so n lo s p u n to s d e t a n g e n c ia , e l e je n e u tro e s la r e c ta q u e u n e d ic h o s p u n to s .
V I .2 . U n a v ig a de m a d e r a d e se c c ió n r e c t a n g u la r y l a r I — 3 e s tá a p o y a d a en su s e x t r e m o s y actúa so b re e l la u n a c a r g a u n ifo rm e m e n te re p a r t id a p = 3 0 0 kp/m . F l p lan o de c a r g a e s v e r t ic a l y c o n t ie n e lo s c e n tro s de g r a v e d a d de la s se cc io n e s , in c l in a d a s un á n g u lo a = a r e (g 1/3 (F ig . V I .2 -o ) . E l m ó d u lo de e la s t ic id a d es £ = 1 0 5 k p / cm 2. D e te r m in a r la ten s ió n norma! m á x im a y e l c o r r im ie n to v e r t ic a l d e la se cc ió n en que é s ta se p re se n ta .

R E S I S T E N C I A D E M A T E R I A L E S
vfinhr.
t . - l -
/ = 3 m
Al ser la sección constante, la tensión normal máxima se presenta en los puntos más alejados del eje neutro en la sección de máximo momento fiector. Esta es la sección media de la viga, en la que el momento (lector vale
= = 33 750 cm • kp
Los momentos flectores respecto a los ejes principales de inercia de la sección son:
S i = S ímix sen a = 33 750 — : = = 10 672 cm • kpv/10
Sí. = Sím„ eos a = 33 750 —= — 32 018 cm • kpy i ó
La distribución de tensiones normales en la sección se obtiene aplicando la fórmula (6.2-3)
S í . S í ,a ~ + 7 ~ "1 - I y
y como
h =
í . =
b P12
tó 312
12 SI.bh }’ +
12 Sí,
La ecuación del eje neutro será:
12SÍ, 12 Sí,- W y + l * f
h2SÍ, ]627
La tensión normal máxima pedida se presenta en los vértices A y B más alejados del eje neutro (Fig. VI.2-6): en A será de tracción y en B de compresión. Su valor modular es:
12 x 32018 tf 20\ 12 x 10672 /15\O A = lCTfll = rnO(NX1II
2 ) ' 20 x 153 ( 2 ) "46.25 kp/cm2
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 6 9
Para calcular el corrimiento vertical tendremos en cuenta los corrimientos 5, y 5. debidos a Sí. y Síy, respectivamente (en este caso los corrimientos son las flechas correspondientes, es decir, las deformaciones máximas) (Fig. VI.2-c).
El corrimiento <T tiene de componentes, en valor absoluto
5 p eos al* 5 p sen al*S’ = 384 EI: ' 1 = 384 El,
Proyectando sobre la vertical se obtiene corrimiento pedido
5. = 5, cosa F 6z sen a
5 p l * /eos2 a sen2 a\¿“ = 384 - r ( , - 7 r + - 7 r J
Sustituyendo valores
5 3 x 300“' ~ 384 Í05
yl o
il o
15 x 20317 2 0 x 1 5 317
cm
se obtiene:
S „ = 3.41 c m

370 R E SISTEN CIA DE M A T E R IA L E S
V I J . L a se cc ió n r e c ia d e u n a v ig a en vo lad izo d e lo n g itu d i — 1 .5 m e s la in d ic a d a en la F ig u r a V I J - u . L a v ig a e s tá so m e t id a a u n a c a r g a u n ifo rm e m e n te r e p a r t id a p = 3 5 0 kp/m , c o n ten id a en e l p lan o v e r t ic a l q u e c o n tie n e la l ín e a m e d ia de l p e r f i l. P a r a la se cc ió n del em p o tra m ie n to , se p id e :
1.° H a lla r a n a l í t i c a y g r á f ic a m e n te e l e je n e u tro .2 .” C a lc u la r la s te n s io n e s m á x im a s de t r a c c ió n y d e co m p re s ió n .
/ = 1.5 m
co tas en cm
F ig u r a V I J - a .
1.° P a r a la d e t e r m in a c ió n d e l p la n o d e c a r g a c a lc u le m o s p r e v ia m e n te la s i tu a c ió n del c e n t ro d e g r a v e d a d d e la s e c c ió n . T o m a n d o e l s is te m a d e e je s o, te in d ic a d o en la F ig u r a V I .3 -6 y d e s c o m p o n ie n d o la s e c c ió n e n t r e s á r e a s p a r c ia le s , se t ie n e
G ¡ (0 .5 ; 4) f i j = 6 c m 2
C 2 (5 ; 2 .5 ) Í22 = 8 c m 2
G¡ (9.5; 2) O, = 4 cm2
0 .5 x 6 + 5 x 8 + 9 .5 x 4I v ,Q ,
T ñ T :
i iv,. n,m ,
6 + 8 + 4
4 x 6 + 2 . 5 x 8 + 2 x 4
6 + 8 + 4
81
= Ts52
Ts =
4 .5 cm
V Ro ■
Gj □
2 W0
(
VG
r • G u |
0 w cFigura VI.3-A.
í
FLEXION DESVIADA Y F L E M O N C O M P U E S T A 3 7
V e a m o s a h o r a la s i tu a c ió n de lo s e je s p r in c ip a le s de in e r c ia r . ; p a r a , u n a ve c o n o c id o s , c a l c u la r lo s m o m e n to s d e in e r c ia /_.. P a r a e llo c a lc u le m o s lo s m o m e n to d e in e r c ia á x ic o s /„.0 y p ro d u c to d e in e r c ia Pro».„ r e sp e c to d e lo s e je s v n. u 0. qu p a s a n p o r e l c e n t ro d e g r a v e d a d y so n p a r a le lo s a lo s c . ir.
/, = ~ (1 x 7 3 - I x l 3) + 1 (8 x 3 3 - S x 2 3) + ^ I x 4 3 = 186 c m '
= - (4 x 103 — 3 x 9 3) + ^ 5 x 13 = 6 0 6 c m ‘
P ,w = v d vo
iv d n +1*9 r3 po
v d v \ w d w 4- I f d v w d w — 188 cm
A p lic a n d o e ! t e o r e m a d e S te in e r , te n e m o s :
¡ v<¡ = ¡ v - O ír2 = 186 - 18 X 2 .8 S 2 = 36 .7 cm *
L , = L ~ A t e = 6 0 6 - 18 x 4 .5 2 = 2 4 1 .5 c m ‘
= / , w - Q c 0 . r c = 188 - 18 X 4 .5 X 2 .88 = - 4 5 .2 8 c m 1
C o n e s to s v a lo r e s p o d e m o s c a lc u la r la s d ir e c c io n e s p r in c ip a le s d e in e r c ia de
se c c ió n e n e l c e n t r o d e g r a v e d a d G *
2 P - 2 x 45 .2 8- , „ 7 2 = -------' .I-:.- - = ------------------------- = 0 .4 4 2 1 8
/ ., - 36 .7 - 241 .5
d e d o n d e 2 a = 2 3 .8 5 4 ° =■ x = 1 1 .927° = I I o 55 ' 38".L o s m o m e n to s d e in e r c ia p r in c ip a le s s e rá n :
I , = L „ s e n 2 * + e o s 2 a + Pw o se n 2 a = 2 7 .1 3 c m ‘
¡ i — e o s 2 a + s e n 2 a — P».0,,0 sen 2 a = 2 5 1 .0 6 c m ‘
L a d is t r ib u c ió n d e te n s io n e s n o rm a le s , en v ir tu d d e la fó rm u la (6 .2 -3 ), s e rá :
M. My _
C o m o la s c o m p o n e n te s d e l m o m e n to f le c to r en la se c c ió n d e l e m p o tra m ie n to
r e s p e c to d e lo s e je s p r in c ip a le s , so n :
A/. = — A / e o s 2 = —^ — c o s a = ----------------------- 0 .9 7 0 = — 3 8 5 .2 4 m * k p
A/ = — A/ s e n a = — s e n a = ------------------- — 0 .2 0 6 = —8 1 .3 7 m * k p
V case la o b ra G eom e t r í a d e m asa s , del autor.

3 7 2 R E S I S T E N C I A D E M A T E R I A L E S
la le y d e d is t r ib u c ió n d e la ten s ió n n o rm a l v e n d rá d a d a po r:
38 524 8137= ----------- i - ---------------------- ; = 1 5 3 . 4 i - - 2 9 9 .9 ;
2 5 1 .0 6 ' 27 .13
en k p / cm : c u a n d o la s c o o rd e n a d a s y , ; se e x p re s a n en cm .L a e c u a c ió n d e l e je n e u tro se o b t ie n e h a c ie n d o a = 0 en la a n t e r io r e x p re s ió n
>' =299 .9
153.41.95:
q u e fo rm a u n á n g u lo 0 = 27° 5 ’ 23" co n e l e je y .
G r á f ic a m e n te , p a r a e n c o n t r a r la p o s ic ió n d e l e je n e u tro , p ro c e d e m o s c o m o se in d ic a en la F ig u r a V I.3-C . D ib u ja d a la e l ip s e c e n t r a l d e in e r c ia b u s c a r e m o s e l d iá m e t r o c o n ju g a d o d e la t r a z a d e l p la n o d e c a r g a , p a r a lo c u a l p o r e l p u n to Q d e in te r s e c c ió n d e la t r a z a d e l p la n o d e c a r g a co n la e lip s e t r a z a m o s la t a n g e n te Q R a la m is m a , y p o r G u n a p a r a le la a Q R , q u e s e r á e l e je n e u tro b u sc ad o .
2.° P a r a d e te r m in a r la s te n s io n e s m á x im a s d e c o m p re s ió n y t r a c c ió n e s n e c e s a r io e n c o n t r a r e n q u é p u n to s se d a n e s to s e x tre m o s . U n a vez d e te r m in a d o e l e je n e u t ro se c o m p r u e b a q u e lo s p u n to s m á s a le ja d o s d e é l y , p o r t a n to , so m e t id o s a l a s t e n s io n e s m á x im a s so n lo s v é r t ic e s 2 y 6 (F ig . V I .3 -c ): e l v é r t ic e 2 a t r a c c ió n y e l v é r t ic e 6 a co m p re s ió n .
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 7 3
V e a m o s c u á le s so n la s c o o r d e n a d a s d e d ic h o s v é r t ic e s re sp e c to d e lo s e je s y , z. fó r m u la s d e t r a n s fo rm a c ió n so n :
y = uu eo s x — o ) 0 sen x
— z = e0 sen x + n-„ e o s x
P a r a el v é r t ic e 2: u0 , = 5 .5 cm ; iv02 = 4 — 2.Í 1.12 cm
y , = 5 .5 x 0 .9 7 8 - 1.12 x 0 .2 0 6 = 5 .14 cm
, = - 5 . 5 x 0 .2 0 6 - 1 .12 x 0 .9 7 8 = - 2 . 2 2 cm
1 53 .4 x 5 .14 + 2 9 9 .9 x 2 .2 2 = 1454 k p / c m ’
P a r a e l v é r t ic e 6 : = —4 .5 c m ; i r 0 , = — 1.88 cm
y 6 = - 4 . 5 X 0 .9 7 8 + 1.88 x 0 .2 0 6 = - 4 . 0 1 cm
; 6 = 4 .5 X 0 .2 0 6 + 1.88 x 0 .9 7 8 = 2 .7 6 cm
= - 153 .4 x 4 .01 - 2 9 9 .9 x 2 .7 6 — 1443 k p / cm 2
V I.4 . En la F ig u r a V I .4 -a se r e p re s e n ta n la s se c c io n e s d e lo s p e r f i le s IP N 8 0 y tu b u la r , de d im e n s io n e s 4 0 x 8 0 m m y e sp e so r e = 2 m m , q ue se p u eden u t i l iz a r co m o c o r r e a s en un te ja d o de p en d ien te a = 20°.
S i a m b a s v ig a s van a e s t a r s o m e t id a s a c a r g a v e r t ic a l , s e p ide :
1.° I n d ic a r c u á l de la s d o s se c c io n e s e s m á s re s is te n te .2 .° V a lo r q u e te n d r ía q u e te n e r e l á n g u lo a p a r a q u e a m b a s se c c io n e s p re sen ten ig u a l re s is
te n c ia .
uj
1.° D e l P r o n tu a r io d e p e r f i le s la m in a d o s (v é a se A p é n d ic e ) s e o b t ie n e n la s c a r a c t e r ís t ic a s m e c á n ic o - g e o m é tr ic a s d e l p e r f il I P N 8 0
/, = 6 .2 9 c m 4 ; I , = 7 7 .8 c m 4

3 7 4 R E SIST E N C IA DE M A T E R IA LE S
Las correspondientes a la sección tubular son:
/, = — (80 x 40J - 76 x 363) x 10"4 = 13.12 cm4 12
/. = i - (4o x 802 - 36 x 76J) x 1 0 '4 = 38.97 cm4 12
Como:
My = M sen a = 0.342AT ; M. = M eos a = 0.940A/
para un mismo momento flector M actuando sobre ambas secciones, las tensiones normales que se producen en cada una de ellas serán:
o) En la sección IPN:La fórmula a aplicar para el cálculo de la tensión normal es:
M. M,Jz *)
Las tensiones máximas s e producen en los vértices A y B (Fig. VL4-6).
Para el punto A (4; —2.1)
0.940Ai x I0J . 0.342Ai x 10277.8 6.29
2.1 = — 16.25A7
que viene dada en kp/cm2 cuando el momento flector se expresa en m • kp.Para el punto B { — 4; 2.1) se obtiene la misma tensión en valor absoluto, pero
de tracción.
b) En la sección tubular:Análogamente, para el punto A (4, —2), obtenemos:
— 0.940Ai x I02 0.342AF x 10! ,a = -----------------------4 --------------------------2 = - 14.86 Ai38.97 13.12«
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 7 5
y en el punto B ( — 4, 2): = 14.86AÍ que son de compresión en A y de tracciónen B,
De los valores de las tensiones máximas obtenidas a que van a estar sometidas ambas secciones se deduce que la s e c c i ón tubular e s cas i un 10 p o r 100 más res is ten te que e l IPN.
2.° De la expresión de ia tensión normal
Ai eos i Ai sen ct cr = ------------- i' + ------------- r
' I,
se deduce que el valor máximo de ésta depende del ángulo x El valor de este ángulo para el que ambbs perfiles presenten igual resistencia, vendrá dado por la ecuación oml< = cr'ml<, es decir, igualamos las tensiones máximas en ambos casos.
eos x sen a eos i sen i 4 + ------- 2.1 = 4 + 277.8 6.29 38.97 13.12
Simplificando:
0.051230 eos a = 0.181424 sen z
0.051230tg a — ----------- = 0.2a236 0.181424
de donde se obtiene el valor del ángulo z para que los dos perfiles considerados presenten igual resistencia
a = 15° 46' 6"
VI.5. Una viga en voladizo de sección rectangular constante, ancho b = 30 cm, altura h = 40 cm y longitud 1 = 2 m, está sometida en su sección extrema a una fuerza F = 500 kp y cuya linca de acción contiene a la diagonal AC de dicha sección, como se indica en la Figura VI.5-e Se pide:
1.° Hallar las leyes de variación del vector tensión en los puntos de la linea media de la viga sobre los planos diagonales de la misma.
2.° Calcular, en el plano qtic contiene a la sección recta media, el vector tensión en los puntos medios de los lados del rectángulo que la limita.

3 7 6 R E S I S T E N C I A d i ; m a t e r i a l e s
I.° L a v ig a q u e se c o n s id e r a e s tá s o m e t id a a f lex ió n d e s v ia d a . C o m o en la l in e a m e d ia sea n u la n la s t e n s io n e s n o rm a le s d e b id a s a l m o m e n to ( le c to r , só lo h a b r á te n s io n e s t a n g e n c ia le s p r o d u c id a s p o r e l e s fu e rzo c o r ta n te
4Tr = F e o s a = 5 0 0 - = 4 0 0 k p
7 j = — F se n a = - 5 0 0 ^ = - 3 0 0 k p
L o s v a lo r e s d e la s te n s io n e s ta n g e n c ia le s en lo s p u n to s d e la l in e a m e d ia so n :
3 T , 3 4 0 0 . ,r ,„ = --- = ----------------= 0 .5 k p / c m '
2 0 2 1200 y
3 7 . 3 3 0 0 , ,r . . = — 1 = -----------------= —0 .3 7 5 kp/cm -'• 2Í1 2 1200 ■ y \
L a s r e s t a n te s te n s io n e s so n n u la s , p o r lo q u e la m a t r iz d e te n s io n e s en lo s p u n to s d e la l in e a m e d ia d e la v ig a , re fe r id a a la te rn a d e e je s in d ic a d o s e n la F ig u r a V I .5 -6 , s e rá :
[ 7 ] =0 0 .5
0 .5 0
- 0 .3 7 5 0
- 0 .3 7 5
00
F ig u ra V I.5 -A.
FLEXION DESVIADA Y FLEXION C O M P U E S T A 3 7 7
El v e c to r u n it a r io d e l p la n o d ia g o n a l d e t e r m in a d o p o r la l ín e a m e d ia y la l in e a d e a c c ió n de la fu e rz a F es:
i7 (0 , sen a , e o s a ) = (0 ; 0 .6 ; 0 .8 )
El v e c to r te n s ió n c o r r e s p o n d ie n te s e rá :
[ a ] = m c ü ]
0 0 .5 - 0 . 3 7 5
0 .5 0 0
. - 0 . 3 7 5 0 0
' 0 ' ' o '0 .6 = 00.8 0
es d e c ir , l a t e n s i ó n e s n u l a a l o l a r g o d e t o d a l a l i n e a m e d i a e n e l p l a n o d e f i n i d o p o r la l i n e a m e d i a y l a d i a g o n a l A C d e l a s e c c i ó n e x t r e m a l i b r e .
C o n s id e ra n d o a h o r a el o tro p la n o d ia g o n a l , d e v e c to r u n ita r io U {0, s e n a , —c o s a ) = = (0; 0 .6 ; —0 .8 ), se t ien e :
[ í ] =0 0 .5
0 .5 0
- 0 . 3 7 5 0
- 0 .3 7 5
0 0
' 0 0.6'0.6 = 0
-0 .8 0
E ste r e s u lt a d o n o s in d ic a q u e s o b r e e l p l a n o d i a g o n a l d e f i n i d o p o r l a l í n e a m e d i a y la d i a g o n a l BD, l a t e n s i ó n e s c o n s t a n t e a l o l a r g o d e t o d a l a l i n e a m e d i a y t i e n e l a m i s m a d i r e c c i ó n i j i t e é s t a . '
L as c o m p o n e n te s d e l m o m e n to f le c to r en la s e c c ió n m e d ia d e la v ig a ( v = 100 c m ) so n :
M t — M s e n a = Fx se n a = —500 x 100 x j = —3 x 104 c m k p
4M . = —M c o s a = Fx c o s a = —500 x 100 x - = —4 x 104 cm k p
En lo s p u n to s P y Q, p u n to s m e d io s d e la s a r i s t a s s u p e r io r e in fe r io r , r e s p e c t iv a m en te , la t e n s ió n n o rm a l d e b id a a My se a n u la , a s i c o m o la t a n g e n c ia l d e b id a a Tr
En P :
M .
T y = i 12
¿3
4 x 1042 0 = 5 k p / c m 2, q u e e s d e t r a c c ió n
30 x 4 0 3
y en Q:
y = — 5 k p / cm 2, q u e e s d e c o m p re s ió n
3 1 3 ( - 3 0 0 )xx. = ------- = --------------— = 0 .3 7 5 kp/cm2 0 2 1200
d i r i g i d a en l a d i r e c c ió n d e l e j e z n e g a t i v o .
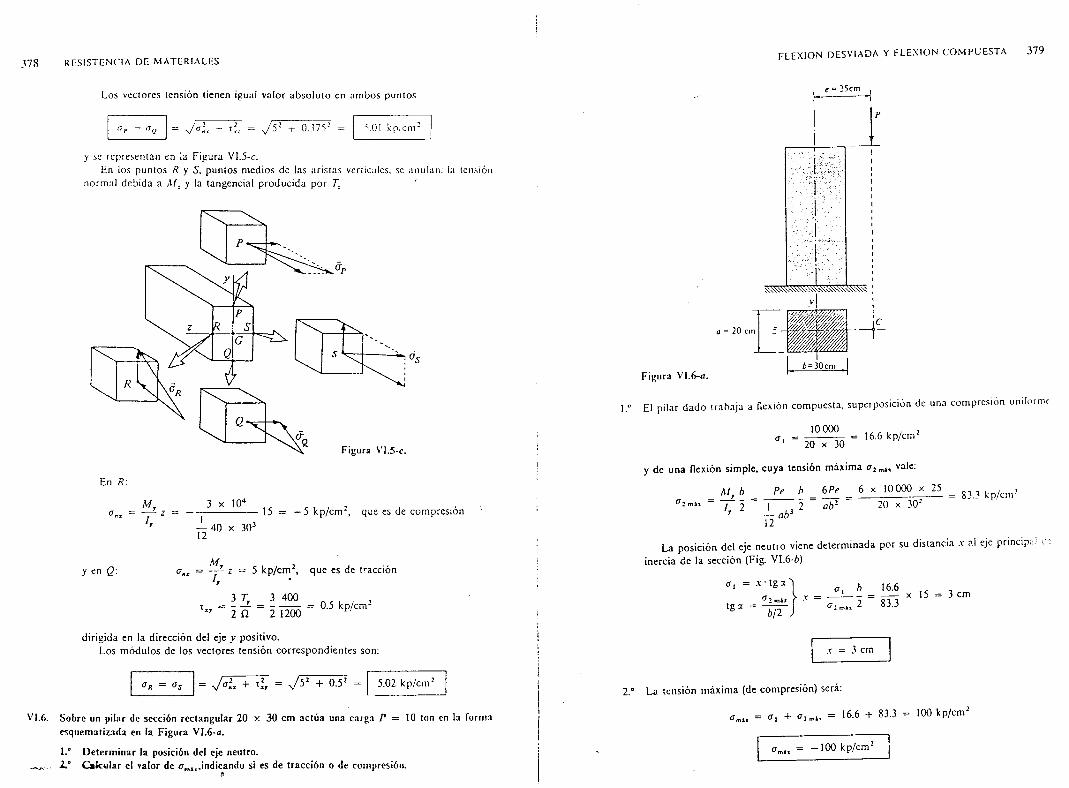
3 7 8 R E S I S T E N C I A D C M A T E R I A L E S
L o s v e c to r e s te n s ió n t ie n e n ig u a l v a lo r a b s o lu to en a m b o s p u n to s
= + *1-. = J s 1 + 0 .3 7 5 : = 5.01 k p , c m 2
y se r e p re s e n ta n en la F ig u r a VI.5-C .En lo s p u n to s R y S . p u n to s m e d io s d e la s a r i s t a s v e r t ic a le s , se a n u la n : la ten s ió n
n o rm a l d e b id a a M . y la t a n g e n c ia l p r o d u c id a p o r T.
En R:
M,I.
3 x 104
— 4 0 x 3 0 3 12
15 = —5 k p / c m 2, q u e e s d e c o m p re s ió n '
y en Q:M,
5 k p / c m 2, q u e e s d e t r a c c ió n
3 71 3 4 0 0t „ = — - = ----------- = 0 .5 kp/cm *" 2 f i 2 1200
d ir ig id a en la d ir e c c ió n d e l e je y p o s it iv o .L o s m ó d u lo s d e lo s v e c to r e s t e n s ió n c o r r e s p o n d ie n te s so n :
N/ ° lx + xl y - v / 5 2 + 0 .5 2 = 5 .0 2 k p / c m 2
V I.6. So b re un p ilar de sección rec tan g u la r 2 0 x 3 0 cm actú a una carga P = 10 ton en la fo rm a
esquem atizada en la F ig u ra V I.6 -a .
1.° D ete rm in ar la posición del eje neutro.. 2.° C a lc u la r el v a lo r de indicando si es de tra cció n o de com presión.
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 7 9
El p i l a r d a d o t r a b a ja a f le x ió n c o m p u e s ta , s u p e rp o s ic ió n d c u n a c o m p re s ió n u m fo rm t
10000 . . ,= 16.6 kp/cm
‘ 20 x 30
y d c u n a f le x ió n s im p le , c u y a te n s ió n m á x im a a lm l l v a le .
_ M , b _ P e b = 6 P e = 6 x 1 0 0 0 0 * 25 = 8 3 .x k p / cm 2 <r2m l, - 2 - j 2 a b i 20 x 3 0 2
Í2 °
L a p o s ic ió n d e l e je n e u tro v ien e d e te r m in a d a p o r su d is t a n c ia ,x a l e je p r in c ip a .'
in e r c ia d e !a s e c c ió n (F ig . V I .6 -6 )
= -r ' t g a I o 1 b 16.6<r2mi , > x = ~ —
tg ib ¡ 2
15 = 3 cm
x = 3 cm
L a t e n s ió n m á x im a (d e c o m p re s ió n ) se rá :
ffml< = a ¡ + <7j „ t , = 16.6 + 83 .3 = 100 k p / cm 2
a mlI = - 100 k p / cm 2

3 8 0 R E S I S T E N C I A D E M A T E R I A L E S
V I.7. U n p i la r d e 3 m de a l tu r a e s tá fo rm a d o p o r dos p e r f ile s n o rm a le s U P N 180 y u x ta p u e s to s .S o b re e s te p i la r a c tú a un a c a r g a v e r t ic a l P = 10 ton en e l p u n to C in d ic a d o en la F i
g u ra V I .7 -a .
1.° I n d ic a r r a z o n a d a m e n te s i e l punto de ap lic a c ió n p e r ten ece a l n ú c leo c e n t r a l d e la se c c ió n .2.“ C a lc u la r e l p u n to o p un to s so m e tid o s a m a y o r ten s ió n in d ic a n d o e l v a lo r d e é s ta .3 .” ¿ C u á l s e r ia la p o s ic ió n m á s d e s fav o ra b le del p lan o de c a r g a s i e s ta se c c ió n e s tu v ie ra
s o l ic i t a d a po r f le x ió n d e s v ia d a ?
f\ C (e,, e .)
/ *
C o tas en cm
I." D el P r o n tu a r io d e perO les la m in a d o s (v é a se A p é n d ic e ) s e re c o g e n lo s s ig u ie n te s d a to s p a r a u n p e rf il U P N 180
Q = 28 cm: ; I. = 1350 cm4 ; I, = 114cm4 ; c = 1.92 cm
d e d o n d e se d e d u c e n la s c a r a c t e r ís t ic a s m e c á n ic o - g e o m é tr ic a s d e lo s d o s p e r f i le s y u x t a p u e s to s . re fe r id a s a lo s e je s in d ic a d o s en la F ig u r a VI.7-u.
n = 2 x 28 -= 56 c m 2 ; /: = 1350 x 2 = 2 7 0 0 c m 4 ;
/, = 2 (1 1 4 + 28 x 1 .9 2 2) = 4 3 4 c m 4
P a r a c o n t e s t a r a la p r im e ra p r e g u n ta c a lc u la r e m o s e l e je n e u t ro p a r a la c a r g a a p l i c a d a e n C c o m o a n t ip o la r d e e s te p u n to re sp e c to d e la e l ip s e d e in e r c ia d e la se c c ió n
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 381
L a a n t ip o la r d e l p u n to C ( e , , e j t ie n e la e c u a c ió n
v z IH + n + o = 0S u s t itu y e n d o v a lo re s , se tien e
4 .5 3 .5 1
2 7 0 0 y ~ 4 3 4 ' + 56 = °
d e d o n d e la e c u a c ió n d e l e je n e u tro es :
y = 4 .8 6 • i - 10.71
q u e c o r ta a lo s e je s en lo s p u n to s :
A ( - 10 .71 ; 0) ; B ( 0 :2 .2 0 )
c u y a s c o o rd e n a d a s e s tá n e x p r e s a d a s e n c e n t ím e t ro s .En la F ig u r a V I .7 -6 se o b se rv a q u e e l e je n e u t ro c o r ta a la s e c c ió n , p o r lo q u e e l
p u n t o C e s e x t e r i o r a l n ú c l e o c e n t r a ! .
F ig u r a V I .7 -6 . \
El p u n to so m e t id o a la te n s ió n n o rm a l m á x im a e s e l m á s a l e ja d o d e l e je n e u t r o , e s d e c ir , e l D. L a e x p re s ió n d e d ic h a te n s ió n m á x im a s e r á :
P Mz M, P P e , Pe ,a ° = ~ a ~ T y ° + i ; Z a = - ñ ~ T yD + T ZD
S u s t i tu y e n d o v a lo r e s , se t ie n e
= 1 0 0 0 0 ) -------------------— 9 — 7 | = —8 9 3 k p / c m 2 ( c o m p re s ió n )V 56 2 7 0 0 4 3 4 J 1
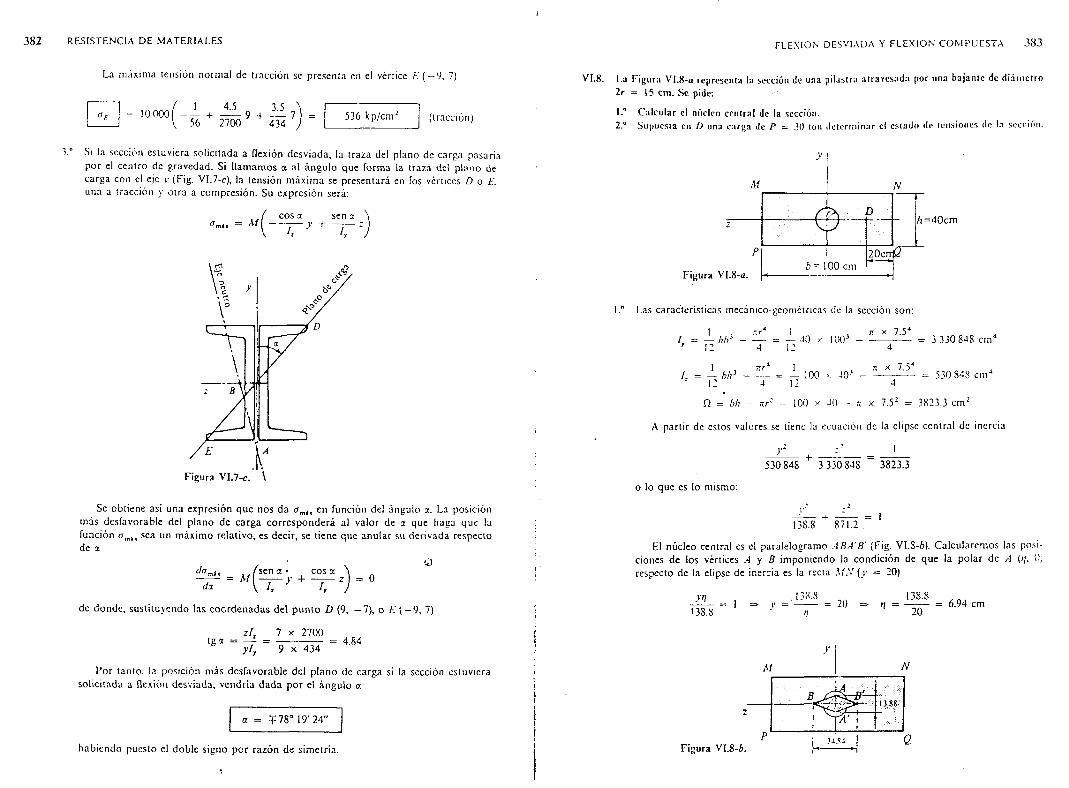
I
3 8 2 R E S I S T E N C I A D E M A T E R I A L E S
L a m á x im a te n s ió n n o rm a l d e t r a c c ió n se p r e s e n ta en e l v é r t ic e E ( - 9, 7)
10 000 [ - — + — 9 + — 7 56 2 7 0 0 4 3 4
536 k p / cm 2 (t r a c c ió n )
3.° S i la s e c c ió n e s tu v ie r a s o l ic i t a d a a f le x ió n d e s v ia d a , la t r a z a d e l p la n o d e c a r g a p a s a r ía p o r el c e n t ro d e g r a v e d a d . S i l la m a m o s a a l á n g u lo q u e fo rm a la t r a z a d e l p la n o de c a r g a c o n e l e je v (F ig . V I .7 -c ) , la te n s ió n m á x im a se p r e s e n ta r á en fos v é r t ic e s D o E. u n a a t r a c c ió n y o t r a a c o m p re s ió n . S u e x p r e s ió n s e r á :
e o s ct sen x
~~TT y + ~1 ~
S e o b t ie n e a s í u n a e x p re s ió n q u e n o s d a a mit e n fu n c ió n d e l á n g u lo i . L a p o s ic ió n m á s d e s f a v o r a b le d e l p la n o d e c a r g a c o r r e s p o n d e r á a l v a lo r d e x q u e h a g a q u e la fu n c ió n (7m>, s e a u n m á x im o r e la t iv o , e s d e c i r , s e t ie n e q u e a n u la r su d e r iv a d a re sp e c to d e a
d o mJ, f s e n a - e o s a \ J—-— = M y 4----------z = 0
d* \ I, I, )
d e d o n d e , s u s t i t u y e n d o la s c o o r d e n a d a s d e l p u n to D (9 , —7), o E ( —9 , 7)
z l, 1 x 2 7 0 0
~ 9 x 4 3 4tga 4 .8 4
P o r t a n to , la p o s ic ió n m á s d e s f a v o r a b le d e l p la n o d e c a r g a s i la se c c ió n e s tu v ie r a s o l ic i t a d a a f le x ió n d e s v ia d a , v e n d r ía d a d a p o r e l á n g u lo a
+ 7 8 ° 19 ' 2 4 "
h a b ie n d o p u e s to e l d o b le s ig n o p o r r a z ó n d e s im e t r ia .
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 8 3
V I.8 . L a F ig u ra V L 8 -a re p re sen ta la se cc ió n de una p i la s t r a a t r a v e s a d a po r un a b a ja n te de d iá m e tro 2 r = 15 c m . S e p ide :
1.° C a lc u la r e l núc leo c e n tra l de la secc ión .2.° Supuesta en O una c a rg a de P — 30 ton determ inar el estado de tensiones de la seeeiou.
1." L a s c a r a c t e r ís t ic a s m e c á n ic o -g e o m é tr ic a s d e la se c c ió n so n :
1 , n r4 I 7T x 7 .5 4 ,/ = — h h ¡ = — 4 0 X 1003 = 3 3 3 0 8 4 8 c m 4’ 12 4 12 4
I 7tr l 1 n x 7 .5 4 ,/. = _ b h 3 = — 100 > 40 = 5 3 0 848 c m 4
12 4 12 4
n = b h - rtr: = 100 x 40 — rr x 7 .5 2 = 3 8 2 3 .3 c m 2
A p a r t i r d e e s to s v a lo re s se tien e la e c u a c ió n d e la e l ip s e c e n t r a l d e in e r c ia
+ = _ i _5 3 0 848 3 330 848 3 8 2 3 .3
o lo q u e e s lo m ism o :
I3S7S + 8 71 .2 ~ '
El n ú c le o c e n t r a l es e l p a r a le lo g r a m o ABA'B ' ¡F ig . V I .S -ó ). C a lc u la r e m o s la s p o s ic io n e s d e lo s v é r t ic e s A y B im p o n ie n d o la c o n d ic ió n d e q u e la p o la r d e A ( i¡ . 0 ; re sp e c to d e la e l ip s e d e in e r c ia e s la re c ta ALT ( r = 20)
rn 133.8 138.8—— = 1 => i’ = --------- = 20 =- ij = --------- = 6 .9 4 cm'3 8 .8 n 20

38-4 R E S L S T E N C I A D E M A T E R I A L E S
y q u e la p o la r d e B (0 , C) es Ia re c ta ~ ^0}
871 .2
871 . 2= 1 = 50
8 71 .2f = -----------= 17 .4 2 cm
50
El n ú c le o c e n t r a l e s un ro m b o c u y a s lo n g itu d e s d e la s d ia g o n a le s so n : A A' = = 2 x 6 .9 4 = 13 .88 c m , y B B ‘ = 2 x 17.42 = 34 .8 4 cm .
L a c a r g a P = 30 to n a p l ic a d a en D o r ig in a un e s ta d o de te n s io n e s e q u iv a le n te a la s u p e rp o s ic ió n d e u n a c o m p re s ió n u n ifo rm e
P 30 0 0 0<7. = — = -------------= 7 .84 kp/cm
1 Í1 3 8 2 3 .3 v ‘
y la te n s ió n o r ig in a d a p o r un m o m e n to M t = P x 30 = 30 0 0 0 x 30 = 9 x 103 cm • kp . E ste m o m e n to d a lu g a r a u n a d is t r ib u c ió n l in e a l , c u y o v a lo r m á x im o (d e t r a c c ió n en A fP y d e c o m p re s ió n en NQ) es
M,T
9 x 103
3 3 3 0 84850 = 13.5 k p / cm 2
0 2 i
o-t ^ I- P 4 1
u2 max - O,
►01
F ig u ra V I .8 -c .
D e la F ig u r a V I .íP c se d e d u c e fá c ilm e n te la s i tu a c ió n d e l e je n e u t ro
-x b (1 3 .5 - 7 .8 4 )1 0 0- -- = 21 cm
En la m is m a F ig u r a VI.8-C se in d ic a la d is t r ib u c ió n d e te n s io n e s p e d id a .
V I .9 . U n p i la r c u y a se c c ió n r e c t a se r e p re se n ta en la F ig u r a V l.9 - 0 e s tá so m e t id o , a t r a v é s de una p la c a s u f ic ie n te m e n te r íg id a s i tu a d a en su p a r te su p e r io r , a u n a c a r g a d e co m p re s ió n /V = 15 ton a p l ic a d a en e l p un to A. S e p ide :
1 ° D e te r m in a r a n a l í t i c a y g r á f ic a m e n te la s itu a c ió n d e l e je n eu tro .2.° E l e s ta d o d e te n s io n e s q ue la c a r g a /V o r ig in a , in d ic an d o lo s v a lo re s m á x im o s de la s
ten s io n e s a t r a c c ió n y a co m p re s ió n .
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 8 5
L a s c a r a c t e r ís t ic a s m e c á n ic o - g e o m é tr ic a s d e la s e c c ió n , r e sp e c to de lo s e je s v w in d ic a d o s en la f ig u ra , t ie n e n lo s s ig u ie n te s v a lo r e s :
/ = - 8 0 x 103 + 2 - 10(453 — 5J) = 6 1 3 3 3 3 .3 cm4 , 12 3
I/w = 2 - (5 0 x 4 0 3 - 4 0 x 3 0 3) = 1 4 1 3 3 3 3 .3 c m 3
= v d v > d v = — 2 -4 0 2 - 3 0 2 4 5 2 - 5 2
- 7 0 0 0 0 0 c m 4
Cl = 8 0 x 10 + 2 x 4 0 x 10 = 1 6 0 0 c m 2
L a s d ir e c c io n e s p r in c ip a le s v ie n e n d a d a s p o r :
2 Pvw - 2 x 7 0 0 0 0 0tg 2 a
/„ - /w 6 1 3 3 3 3 ,3 - 1 4 1 3 3 3 3 .3= 1.75
d e d o n d e 2a = 6 0 .2 5 5 ° => a = 3 0 .1 2 7 5 ° .L o s m o m e n to s d e in e r c ia p r in c ip a le s s e r á n :
I, = /„ s e n 2 a -F /„ e o s 2 a + /*„„ s e n 2 a = 2 0 7 107 c m 4
/. = /„ e o s 2 a + /„ s e n 2 a — Pvw s e n 2 a = 1 8 1 9 559 c m 4
El m o m e n to f ie c to r M e n la s e c c ió n t ie n e d e m ó d u lo
M = Af • d = 15 0 0 0 7 4 0 2 + 4 5 2 = 9 0 3 119 .6 cm • k p
y fo rm a u n á n g u lo ¡ i c o n e l e je tv (F ig . VI.9-¿>), t a l q u e

R E S I S T E N C I A D E M A T E R I A L E S
F ig u r a V I.9-A .
Las componentes del momento flector M respecto de los ejes principales de inercia de la sección son:
Mt = M sen (x + /?) = 903 119.6 • sen 78.49" = 384 969 c m k p
M, = M eos (a + ¡i) = 903 119.6 ■ eos 78.49° = 180 208 cm kp
La tensión normal en la sección tiene por expresión:
„ _ /V My - 15000 180 208 884 969° ~ O /. ’ 7,. Í60Ó~ ~ 1 819 559 1 4 2ÓTTÓ7 ^
por lo que la ecuación del eje neutro será:
<7 — 0 => -9 .375 - 0.099>- + 4.273c = 0
!■ = 43.16z - 94.70
Para calcular gráficamente el eje neutro dibujamos la elipse central de inercia
.4 . 1 ) „i -1(33.73)2 (11.38)2
que tiene de longitudes de semiejes 33.73 cm y 11.38 cm.El eje neutro es la antipolar del punto A respecto de esta elipse (Fig. VI.9-c).
2.” La distribución de tensiones viene dada por la ley
a = -9 .375 - 0.099v 4- 4.272c
que nos indica que por encima del eje neutro las tensiones son de compresión y por debajo de tracción. Los puntos sometidos a las tensiones máximas son los más alejados del eje neutro, es decir, el punto B a compresión y el O a tracción (Fig. VI.9-cj.
Calculemos las coordenadas y , z de ambos puntos. Referidos a los ejes u, u las coordenadas de B son ( — 30, 45) y las de D (30, —45).
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 8 7
Figura V1.9-C.
Como las fórmulas de transformación son:
' jtenemos:
y = v eos a — w sen a — : = v sen a + »• eos a
y 8 = — 30 x 0.S65 — 45 x 0.502 = —48.54 cmcg = 30 x 0.502 - 45 x 0.855 = -23 .87 cm
y D = 30 x 0.865 + 45 x 0.502 = 48.54 cm. 0 = -3 0 x 0.502 + 45 x 0,865 = 23.87 cm
Sustituyendo estos valores en la ecuación de a, se obtiene:
cs = -9 .375 + 0.099 x 48.54 - 4.272 x 23.87 = - 106.5 kp/cm2
<7p = -9 .375 - 0.099 x 48.54 t 4.272 x 23.87 = 87.8 kp/cm2

3 8 8 R E S I S T E N C I A D E M A T E R I A L E S
V I .10. S e c o n s id e ra un p r is m a m ec án ic o re c to c u y a se cc ió n t r a n s v e r s a l e s la in d ic a d a en la F ig u
ra V l.IO -a . S e p ide:
1.° D e te rm in a r g r á f ic a m e n te el núcleo c e n tr a l.2 .“ C a lc u la r el e je n eu tro p ara una fu erza A 'd e co m p re s ió n q u e a c tú a en el punto P ( — 4, —2),
re fe r id o a l s is te m a de e je s y , p r in c ip a le s de in e r c ia de la se c c ió n .3.° V a lo r de la s ten s io n e s n o rm a le s m á x im a s a t r a c c ió n y a c o m p re s ió n c u a n d o /V = 5 ton.4 .“ S i la ten s ió n a d m is ib le es <T,Jm = 1200 k p / c m ’ y E = 2 x 106 k p / c m ’ , h a l l a r e l m á x im o
v a lo r q ue puede to m a r la c a rg a <V.
S e su p o n d rá el p r is m a lo su f ic ie n te m e n te c o r to p a r a no te n e r en c u e n ta e l e fe c to d e p an deo .
1.° D e te rm in e m o s p r im e ra m e n te la p o s ic ió n d e l c e n t r o d e g r a v e d a d (7. P o r r a z ó n de s im e t r ía G e s tá en e l e je y . P a r a su c á lc u lo d e s c o m p o n d r e m o s la s e c c ió n en t r e s á r e a s p a r c ia le s
n , = 2 x 7 = 14 c m 2 ; G , (1 , 0 ) ^
f i , = 10 x I = 10 c m 2 ; G 2 (7 , 0 )
n 3 = 2 x 3 = 6 c m 2 ; G } (1 3 , 0 )
0 = 2 x 7 + 1 0 x 1 + 2 x 3 = 3 0 c m 2
14 x 1 + 10 x 7 + 6 x 13 162--o = ------------------------ j o - j ó “ 5 .4 cm
C a lc u le m o s a h o r a lo s v a lo re s d e lo s m o m e n to s d e in e r c ia á x ic o s , q u e n e c e s ita m o s c o n o c e r p a r a d ib u ja r la e lip se d e in e r c ia .
/, = 2 (o x 7 3 + 10 x l 3 + 2 x 3 3) = 6 2 .5 c m 4
^ (7 x 5 .4 3 - 6 x 3 .4 3) + ^ (3 x 8 .6 3 - 2 x 6 .6 3) = 7 3 3 .2 c m 4
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 8 9
L a ec .a c ió n d e la e l ip s e d e in e r c ia es:
/ c2 _ 1 y 2 r 27 , f i ^ (4 .9 4 )- + (L 4 4 )2 ~ 1
D ib u ja d a la e l ip s e c e n t r a l d e in e r c ia (F ig . VI.10-6), lo s v é r t ic e s M N P Q d e l n ú c le o c e n t ra l so n lo s a n t íp o lo s d e la s t a n g e n te s a l p e r f il m , n, p , q, r e s p e c t iv a m e n te .
Figura VI.lO-ó.
F igu ra V I.lO -c.

R E S I S T E N C I A D E M A T E R I A L E S
2.° El momento flector M forma con el eje r un ángulo i cuya tangente vale:
2te x = — = 0.5
426.565°
Sus componentes son:
M, = M sen a — Nd sen r
M . - — M eos a = — Nd eos a
siendo d = v/22 + 42 = 4.472 cm la distancia de P al centro de gravedad G. Sustituyendo valores, se tiene:
M, = - N x 4.472 x 0.447 = - 2 N
M. = N x 4.472 x 0.894 = - 4 N
La distribución de tensiones normales en la sección viene regida por la ecuación
N M.I. ■ I.
- N AN lo ~ + 733.2 }'
2 N 615
en la que a vendrá dada en kp/cm3 cuando N se expresa en kp y las coordenadas en cm. La obtención de la ecuación del eje neutro es inmediata
N 4 N 2/Vo — 0 —* ----- -{--------- y ~— ~
30 733.2 y 62.5
de donde, simplificando, se obtiene
y = — 5.86r + 6.11
Podemos obtener el eje neutro gráficamente calculando la antipolar del punto P respecto de la eiipsc central de inercia.
El procedimiento gráfico queda indicado en la Figura Vl.lO-rf.
3.° Los puntos sometidos a mayor tensión son los más alejados del eje neutro, es decir, los puntos R y S indicados en la misma Figura VI.10-d.
Para el punto R de coordenadas ( — 5.4; —3.5), se tiene
5000 4 x 5000 2 x 5000“ l o 7312~ 5 4 615 3'5
— 874 kp/cm2 ( co m pres ión )
Para .5(8,6; 1.5)
5000 4 x 5000 2 x 5000t7j j = f- ------------- s.6 + 1.5
30 733.2 62.5307.93 kp/cm2 (tracción)
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 9 1
4.” Como la máxima tensión se presenta en el punto R. podemos poner
a = 5.4 - 3.5 = — 0 .174/V*dm 30 733.2 62.5
de donde se obtiene el máximo valor que puede tener la carga N
AL1200
0.174= -6896 kp
VI. 11. Calcular la anchura h del muro de una presa de altura k = 5 m (Fig. V l.ll-a ) para que en ¡os puntos, de la sección de su base no se produzcan tensiones de tracción. El muro es de hormigón, de peso especifico y h = 2.4 ton/niJ.
Consideremos la porción de muro de longitud unidad (1 m) en la dirección del eje . (Fig. VI. 11-6). Sobre la base de este prisma actúa:
— la compresión del peso propio del muro
P = -/,«! = 24006 x 5 = 12 500 kp
estando expresado el ancho b en metros; y

392 R t l S I S I ' E N C I A D I : M A T E R I A L E S
F ig u r a V I .1 1-u.
— un m o m e n to f le c to r d e b id o a la fu e rz a F r e s u lt a n te d e la a c c ió n h id r o s t á t ic a so b re la c a r a en c o n ta c to co n el a g u a .
C o m o el v a lo r d e F e s :
1 , IF = - y j r x 1 = - 1000 x 25 = 12 5 0 0 k p
y su l in e a d e a c c ió n e s tá a 1/3 de la a l tu r a , s o b re la b a s e , e l v a lo r d e l m o m e n to f le c to r se rá :
62 5 0 0h 5AL = - F - = - 12 500 y =
3m • k p
S e t r a t a , p u e s , d e un c a s o d e f lex ió n c o m p u e s ta . L a e c u a c ió n q u e n o s d a la te n s ió n n o rm a l en lo s p u n to s d e la b a s e es:
P M ,o = — -i y
O I.
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 9 3
de d o n d e se d e d u c e la c o r r e s p o n d ie n te a l e je n e u tro
62 500
12 0 0 0 3 30 ,-----------------+ = 0 =- v - —
6 1 I , - * • 62512
P a r a q u e no se p r o d u z c a n te n s io n e s d e t r a c c ió n en la se c c ió n de la b a se , e l e je n e u tro tien e q u e se r e x t e r io r a la b a s e , e s d e c ir ,
30 x bv = b l > -
625 2
d e d o n d e se o b t ie n e la a n c h u r a m ín im a d e l m u ro p a r a q u e n o se p r o d u z c a n te n s io n e s de t r a c c ió n en lo s p u n to s d e la s e c c ió n d e la b a se .
V I. 12. H a l la r e l n ú c leo c e n t ra l d e u n a c o ro n a c ir c u la r .
S e a n 2?, y R¡ lo s r a d io s in t e r io r y e x te r io r , r e s p e c t iv a m e n te , d e la c o r o n a c ir c u la r . P o r r a z ó n d e s im e t r ía , el n ú c le o í e n t r a l s e r á u n c ir c u lo d e r a d io , r, q u e d e te r m in a r e m o s im p o n ie n d o la c o n d ic ió n d e q u e la p o la r d e l p u n to A (r , 0) r e sp e c to d e la e lip s e de in e r c ia
^ - 1 = 0i . /„ n
es la r e c t a y = R.
2 ! _ I = 0 - y = A = / f ,/. Q } r í i

3 9 4 R E S I S T E N C I A D E M A T E R I A L E S
d e d o n d e :
n/?,
A h o r a b ie n , c o m o f t = n(/f| — R 2¡) y lo s m o m e n to s d c in e r c ia d e la s e c c ió n re sp ec to a lo s e je s so n :
* ( * í - -R?)
S u s t i t u y e n d o la s e x p re s io n e s de Cl e en fu n c ió n d e lo s r a d io s e x t e r io r /?2 e in te r io r / ?„ se t ie n e :
7i( R\ - R\) R\ + R\
- R \)R 4 R 2
E l n ú c le o c e n t r a l d e la se c c ió n d e u n a c o r o n a c i r c u la r e s , p u e s , u n c ir c u lo d e r a d io r.
V I. 13. H a l l a r e l n ú c leo c e n t r a l d e un t r i á n g u l o e q u i lá t e r o d e a l t u r a h .
P o r r a z ó n d e s im e t r ía , e l n ú c le o c e n t r a l s e r á u n t r iá n g u lo , e q u i l á t e r o t a m b ié n , q u e t ie n e el m is m o c e n t ro d e g r a v e d a d q u e e l t r iá n g u lo d a d o . B a s t a r á , p u e s , d e t e r m in a r l a p o s ic ió n de a lg u n o s d e lo s v é r t ic e s , p o r e je m p lo , la p o s ic ió n d e A'
C a lc u le m o s e l m o m e n to d e in e r c ia r e s p e c to d e l e je z' (F ig . V I .1 3 - a )
¡C A3/b y d y 2 (h - y ) tg 30° y 2 d y =
6 ^ 3 12
R e s p e c to a l e j e z, p a r a le lo a l z\ e n v ir tu d d e l t e o r e m a d e S t e in c r , c l m o m e n to d e in e r c ia l x e s :
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 3 9 5
V I .14.
C a lc u la r e m o s la p o s ic ió n d c A' (q, 0 ) im p o n ie n d o la c o n d ic ió n de q u e e s te p u n to e s el a n t ip o lo S C re sp e c to d e la e l ip s e d e in e r c ia
es d e c ir , q u e la p o la r d e l p u n to d c c o o r d e n a d a s ( — q, 0 ) es y = — -
q y I h 2 h
~7>? ~ 1 = 0 “ ■ -1’ = _ Í S Í = ~~ 3
36 2
d c d o n d e :
" = 6
El n ú c le o c e n t r a l s e r á , p u e s , e l t r iá n g u lo e q u i lá t e r o A'B'C' in d ic a d o en la F ig u r a V I . 13-6
L a se cc ió n re c ta de un p r is m a m e c án ic o so m e tid o a co m p re s ió n e x c é n t r ic a e s un t r iá n g u lo e q u ilá te ro , d e lad o a = 3 m . S a b ie n d o q ue e l m a t e r ia l d e l p r is m a no re s is te a t r a c c ió n c a lc u la r la se c c ió n p a r c ia lm e n te e f ic a z y e l v a lo r de la ten s ió n m á x im a , s i la c a r g a dc c o m p re s ió n es A ' = 8 0 ton y e s tá a p l ic a d a en un pun to a d is t a n c ia d — 0 .5 m de uno de los v é r t ic e s y so b re e l e je d e s im e tr ia de la se cc ió n q ue p a s a p o r e l m ism o .
S e a C e l p u n to d e a p l ic a c ió n d c la c a r g a /V. L a c a r g a d a lu g a r a u n a d is t r ib u c ió n l in e a l d e te n s io n e s d c c o m p re s ió n <r(.v). N o e x is te n te n s io n e s d e t r a c c ió n . C a lc u la r e m o s la lo n g itu d D q u e d e te r m in a la s e c c ió n p a r c ia lm e n te e f ic a z im p o n ie n d o la c o n d ic ió n q u e la r e s u lt a n t e d e la s fu e rz a s e n g e n d r a d a s p o r la d is t r ib u c ió n d e te n s io n e s e s u n v e c to r ig u a l a l a c a r g a N y co n su m is m a l in e a d e a c c ió n (F ig . V I. 14).
N =
N d =
o ( x ) ■ b (x ) d x
c ( x ) ■ b (x )x d x
C o m o <r(.xj y b (x ) t ie n e n p o r e x p re s io n e s
, , O tmub (x ) = - x ; o ( x ) = <rm. , - x
c o m o f á c i lm e n te se d e s p re n d e o b s e r v a n d o la F ig u r a V I .14, s u s t itu y e n d o , se t ie n e :
N =
N d
* 0 ( "m í, a
. 0"m i. D x ) h
r oa
. 0 ~ ~D~ x ) h
ab)2o^6/t
a 0 3o mix
= I2h

R E S I S T E N C I A D E M A T E R I A L E S
Dividiendo estas dos expresiones obtenemos:
d = y => /) = 2t/ = 2 x 0.5 = I m
es decir, la sección parcialmente eficaz es un triángulo equilátero de altura O = 1 m, situado como se indica en la Figura VI. 14,
Sustituyendo en la primera ecuación el valor de D, se obtiene el valor de la tensión máxima pedida.
6A7i _ 6 N a J l l 7 _ 3 x 80 000 x ^ 3aD2 aD2 1002
= 41.57 kp/cnt2
= 41.57 kp/cm2
Mediante la soldadura de tres placas con la forma y dimensiones adecuadas se construye la viga curva de sección en doble te indicada en la Figura V1.15-«. Se pide:
1.° Calcular la distancia e entre el centro de gravedad de la sección y el eje neutro queproduce exclusivamente el momento (lector.
2.° Hallar la distribución de tensiones normales en la sección m-n , indicando los valorescorrespondientes a los puntos que están sometidos a tensión normal máxima a tracción y a compresión.
F L E X I O N D E S V I A D A Y F L E X I O N C O M P U E S T A 397
3.“ Sabiendo que la tensión admisible a comprensión de material es <r„, determinar el máximo valor de P que puede aplicarse a la viga.
= 65 M Pa,
40
1.° Según se desprende de la Figura VI.15-a el radio de curvatura de la linea media en la sección considerada es p 0 = 55 mm. Para calcular el radio r0 de la superficie neutra aplicaremos la fórmula dada por la ecuación (6.9-11)
a 2 x 40 x 10 + 30 x 10tlCl f 40 40 r ° io O O
— du + — du + — duJ 30 " iO « 70 U
1100 1100— -------- mm = —----- mm = 49 mm
4 7 „ , 8 22.44440 In - + 10 In - + 40 In -
3 4 7
La distancia e entre el centro de gravedad G de la sección y el eje neutro que produce exclusivamente el momento flector será:
e = p0 — r0 = 55 — 49 = 6 mm
2.° La distribución de tensicjes normales debidas al momento flector viene dada por la ecuación (6.9-10)
Wf yí i e r0 - y
mientras que la debida al esfuerzo normal es
hiendo: Mr = P (40 + 55) = 95P mm • N, expresando P en newtons
f l = 1100 mm2 ; e = 6 mm ; r0 49 mm

Aplicando el principio de superposición y sustituyendo valores se obtiene
a = - J - _______ ™ ------- --— N/mm21100 1100 X 6 49 - y
estando expresada la coordenada y en mm.
A
R E SIST E N C IA DE M ATE RIALE S
Las tensiones máximas a tracción y a compresión se presentan en los puntos A y B, respectivamente (Fig. VI. 15-6). Sus valores se obtendrán sin más que sustituir y = —31 mm para A, e y = 19 mm, para B, en la ecuación anterior
P 31 + 0.0144/*------------ N/mm21100 49 + 31
4.67 x 10" i P N/mm2
P 19 O.OWl’ ------------ N/mm21100 4 9 — 19
—10.03 x 10“ 3/> N/mm2
3.° El máximo valor de P que se puede aplicar a la viga curva considerada será aquel que haga que la tensión en B sea igual a er,dm
-65 x 106ícF = - P m
de donde
Pmi*
í —?— '+ Oj ‘ \1100
650.0100
0.0144 ■19 \
I N/mm249 — ís y
6500 N
Flexión hiperestática
7.1. IntroducciónEn todos los casos de flexión de vigas estudiadas hasta ahora hemos supuesto que éstas eran isostáticas, es decir, que la sola ap licación de las ecuaciones de la Estática permite determ inar las reacciones de las ligaduras y, por consiguiente, son suficientes para calcular la distribución de tensiones en el in terior de las vigas.
Sin em bargo, hay infinidad de casos en los que las ecuaciones de equilibrio son insuficientes para determ inar las reacciones de las ligaduras, como ocurre, por ejemplo, en las vigas rectas representadas en la F igura 7.1.
(c) ( f )F ig u r a 7 .1 .
En todos los casos indicados supondremos que las vigas adm iten plano medio de sim etría y las cargas están contenidas en dicho plano. En todos los casos, son tres las ecuaciones de equilib rio de las que se dispone para calcu lar las reacciones de las ligaduras, dos que expresan la nulidad de la resultante de las fuerzas exteriores y las reacciones de las ligaduras, y otra que traduce la condición de ser nulo el momento resultante de todas estas fuerzas respecto de cualqu ier punto.

4 0 0 R E S I S T E N C I A D E M A T E R I A L E S
Si el número de incógnitas que determ inan la to talidad de las reacciones sobre la viga es superior a tres, es evidente que la viga está indeterm inada desde el punto de vista estático. Así, en la viga em potrado-apovada con el apoyo móvil indicada en la Figura 7.1-a, el número de incógnitas es de cuatro : tres, que definen la reacción RA y el momento M A en la sección em potrada; y otra, la reacción en el otro extremo B que sólo tiene componente vertical por tratarse de un apoyo móvil. Si en vez de ser el apoyo móvil es f jo (Fig. 7.1-ó), existe una incógnita más respecto del caso anterior, que es la componente horizontal HB de la reacción en la sección extrem a B, es decir, ex istirían cinco incógnitas.
La indeterm inación aum enta en la viga biem potrada (Fig. 7.1-c), ya que son seis las incógnitas, tres por cada em potram iento. Obsérvese que en este caso existirían componentes horizontales de las reacciones en las secciones extrem as, aun cuando todas las cargas fueran verticales. Para obviar esta circunstancia, las vigas b iem potradas que consideraremos en lo que sigue serán en realidad em potradas en un extrem o y con una corredera longitudinal en el otro (Fig. 7.1-<•/).
Finalmente, en la F igura 7.1 se han representado vigas de dos tramos; la prim era, con tres apoyos (Fig. 7.1-e), tiene cuatro incógnitas; la segunda, con un extremo em potrado y dos apoyos (Fig. 7.1-/), el número de incógnitas p ara la determ inación de las reacciones es de cinco. P ara vigas de más tram os, cada apoyo móvil introduce una incógnita más en el problema. Las vigas que tienen más de un tram o reciben el nombre de v i g a s c o n t i nuas .
En todos los casos indicados es posible e lim inar ligaduras sin que la viga deje de estar en equilibrio . Podemos decir, por consiguiente, que existen ligaduras que son superfluas para m antener el equilibrio .
Estas vigas reciben el nombre de vigas h i p e r e s t á t i c a s o e s t á t i c a m e n t e in d e t e rm in ad a s . L lamaremos g r a d o d e h i p e r e s t a t i c i d a d al numero de incógnitas superfluas, es decir, a la diferencia entre el número de incógnitas y el núm ero de ecuaciones de equilibrio que tenemos al ap licar las leyes de la Estática.
En el caso de que alguno de los extremos de la viga esté em potrado, distinguirem os entre em potram iento elástico y em potram iento perfecto. Diremos que el e m p o t r a m ien t o e l á s t i c o se presenta cuando el ángulo girado por la sección extrem a es proporciortaTal momento que en ella actúa:
C " 3a = kAM A (7.1-1)
Cuando la constante de proporcionalidad se an u la , kA = 0, tenemos e m p o t r a m i e n t o p e r f e c t o . Se deduce entonces: 9A = 0, es decir, cuando el em potram iento es perfecto el ángulo girado por la sección extrem a es nulo.
Así pues, los grados de h iperestaticidad de las v igas representadas en la F igura 7.1 son:a) uno; b ) dos; c) tres; d ) dos; e ) uno; f ) dos.
Es evidente que las ecuaciones de equilib rio son necesarias para la resolución de los problemas hiperestáticos, pero no son suficientes. H abrá que com pletarlas haciendo intervenir las características de deform ación de la viga, en número igual a su grado de h iperestaticidad. Tales ecuaciones se denom inan e c u a c i o n e s d e c o m p a t i b i l i d a d d e la s d e f o r m a c i o n e s ^
En este cap ítu lo estudiarem os la flexión h iperestática de vigas de un solo tramo, y de varios, como es el caso de las vigas continuas. Extenderemos el estudio de las vigas ai caso de sistemas hiperestáticos y se expondrán algunos m étodos entre los que se utilizan para hacer su cálculo .
FLEXION H IP E R E S T A T IC A 4 0 1
7.2. M éto d o s de cálcu lo de v igas h iperestáticas de un so lo tram oComo ya se ha indicado, cuando nos encontramos con una viga h iperestática es necesario considerar jun to a las ecuaciones de equilibrio otras que hemos llam ado ecuaciones de com patib ilidad de las deformaciones.
Existen varios métodos para el cálculo de vigas h iperestáticas de un solo tram o, únicas que considerarem os en este epígrafe. Veamos en qué consisten los m étodos, que están basados en:
a) la ecuac ión diferencial de la linea elástica,b) Tos teoremas de Mohr, • ~c ) el principio de superposición,
viendo cómo se ap lica cada uno de ellos en casos concretos, a modo de ejem plo.
a) Método basado en la ecuación diferencial de la e lástica
El procedim iento a seguir es esencialm ente el mismo que el descrito en el C ap ítu lo 5 para la determ inación de la deform ada de la viga, m ediante doble integración. Se form ula la ecuación diferencial de la e lástica considerando las incógnitas como si fueran valores conocidos. Se determ inan éstos, más los valores de las dos constantes de in tegración que este método introduce como nuevas incógnitas, m ediante el sistema de ecuaciones form ado por las ecuaciones de equilibrio y las que se obtienen a l imponer las condiciones de contorno en la ecuación de ]a elástica.
Veamos cómo se ap lica el método al caso de una viga em potrado-apoyada som etida a una carga uniforme p (Fig. 7.2).
M- f \
A/7777.
Figura 7.2. tá
Existen tres incógnitas; las reacciones R A y RB en las secciones extrem as y el m om ento de em potram iento M A. Como en este case las ecuaciones de equilibrio son dos, y a que no existen fuerzas oblicuas, tenemos;
Z F f = 0: RA + R„ - p l = 0 (7.2-1)
Z M = 0: M Á + ~ - R ¿ = 0 (7.2-2)
El sistem a es, pues, h irerestático de'prim er grado. La ecuación de la lin ea e lástica será
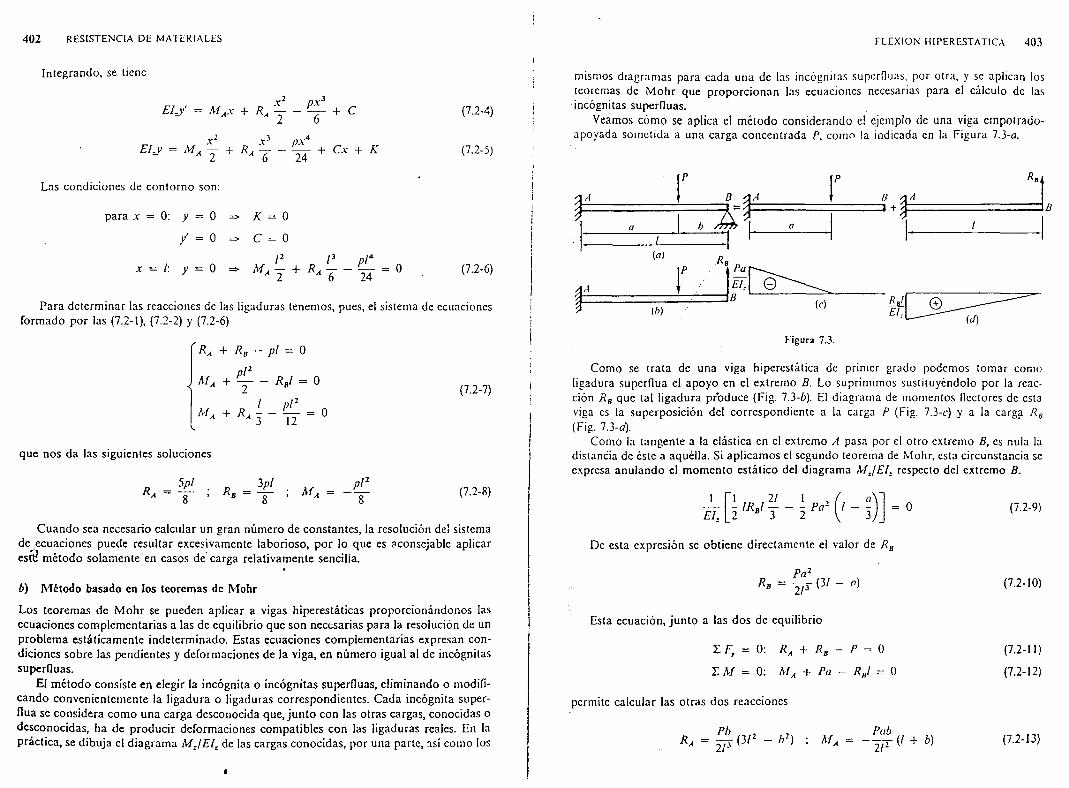
4 0 2 RE SISTE N CIA DE M A T E R IA L E S
Integrando, se tiene
E l . j = M Ax + RÁ~ - P-^~ + C (7.2-4)
E I . j — M A — + Ra —-----+ Cx + K (7.2-5)
Las condiciones de contorno son:
para t = 0: y = 0 => K — 0
/ = o => C = 0
l 2 l 2 p l*x = /: y = 0 => M Á - + ^ - - y— = 0 (7.2-6)
P ara determ inar las reacciones de las ligaduras tenemos, pues, el sistema de ecuacionesformado por las (7.2-1), (7.2-2) y (7.2-6)
Ra + R B ~ P l = 0
p l2M a + ~2 /?í/ ~ ° (7.2-7)
M A + RA !r - = 03 12
que nos da las siguientes soluciones
= t ¡ t : r b = > m a = ~^í~ (7-2-8)8 8 8
C uando sea necesario ca lcu lar un gran número de constantes, la resolución de! sistema de ecuaciones puede resu ltar excesivam ente laborioso , por lo que es aconsejable ap licar esté método so lam ente en casos de carga relativam ente sencilla .
b ) M é t o d o b a s a d o e n lo s t e o r e m a s d e M o h r
Los teorem as de M ohr se pueden ap licar a vigas h iperestáticas proporcionándonos las ecuaciones com plem entarias a las de equilib rio que son necesarias para la resolución de un problem a estáticam ente indeterm inado. Estas ecuaciones com plem entarias expresan condiciones sobre las pendientes y deform aciones de la v iga, en núm ero igual al de incógnitas superfluas.
El método consiste en elegir la incógnita o incógn itas superfluas, elim inando o modificando convenientem ente la ligad u ra o ligaduras correspondientes. C ada incógnita super- flua se considera como una carga desconocida que, ju n to con las o tras cargas, conocidas o desconocidas, ha de p roducir deformaciones com patib les con las ligaduras reales. En la p ractica, se d ibu ja el d iag ram a M J E l , de las cargas conocidas, por una parte, asi como los
FLEXION H IPER ESTATIC A 4 0 3
mismos d iagram as para cada una de las incógnitas superfluas, por otra, y se aplican los teoremas de M ohr que proporcionan las ecuaciones necesarias para el cálculo de las incógnitas superfluas.
Veamos cómo se ap lica el método considerando el ejemplo de una viga em potrado- apoyada som etida a una carga concentrada P, como la indicada en la F igura 7.3-a.
Figura 7.3.
Como se tra ta de una viga h ipercstática de primer grado podemos tom ar como ligadura superflua el apoyo en el extrem o B. Lo suprim imos sustituyéndolo por la reacción R B que tal ligadura produce (Fig. 7.3-ú). El d iagram a de momentos flectores de esta viga es la superposición del correspondiente a la carga P (Fig. 7.3-c) y a la carga R s (Fig. 7.3-d).
Como la tangente a la e lástica en el extremo A pasa por el otro extremo B, es nula la d istancia de éste a aquélla . Si ap licam os el segundo teorema de Mohr, esta circunstancia se expresa anu lando el momento estático del d iagram a M J E I . respecto del extrem o B.
1W .
0 (7.2-9)
De esta expresión se obtiene directam ente el valor de RB
P a 2R t = 2 P (3/ " a)
(7.2-10)
Esta ecuación, jun to a las dos de equilibrio
E Fr = 0: RA + R B - P = 0
E M = 0 : M a + P a - RhI = 0
permite ca lcu lar las o tras dos reacciones
(7.2-11)
(7.2-12)
R a = S (3/2 - : M A = - P- ^ r ( l + b)2 P( 7 . 2 - 1 3 )

4 0 4 RESISTENCIA DE M A T E R IA LE S
Hemos indicado anteriorm ente que se elige una incógnita superflua, e lim inando o modificando convenientemente la ligadura correspondiente. En la resolución que acab amos de exponer se ha elegido la reacción del apoyo B y, consecuentemente, se ha suprim ido dicho apoyo. Pero podiam os haber elegido el momento de em potram iento M A como incógnita superflua. En este caso habría que modificar la ligadura del em potram iento convirtiéndola en un apoyo simple fijo, ya que lo que hay que liberar es la posib ilidad de giro de la sección A, pero no dejar libre el desplazam iento pues se co n sid erarán dos incócnitas superfluas —el momento M A y la reacción RA— cuando en realidad sólo existe una incógnita superflua ya que si asi se hiciera, la viga se convertiría en un mecanismo inestable.
Si se hubiera elegido el momento \ fA como incógnita superflua (Fig. 7.4) d ibujaríam os los diagram as M J E I . indicados en la misma figura y ap licaríam os el segundo teorem a de Mohr.
J_/l I H j . o (7.2-14)E l .V l í 3 2 A 3 }
Figura 7 .4 .
Se obtiene, evidentemente, el mismo resultado anterior
m a = V + b )
Una vez determ inadas todas las reacciones de las ligaduras, las tensiones y deform aciones se calcu larían como se ha expuesto en el Capítulo 5. Una forma de ca lcu lar el giro de cualquier sección o, lo que es lo mismo, la pendiente a la elástica, así como la deformación de cualqu ier sección de la viga es, precisamente, ap licar los teoremas de M ohr.
c ) Método basado en el principio de superposición
En algunas ocasiones puede ser de utilidad la aplicación del m é t o d o d e s u p e r p o s i c i ó n que está basado en el principio del mismo nombre.
El método consiste, igualm ente al basado en los teoremas de M ohr, en elegir la incógnita o incógnitas superfluas, elim inando o modificando convenientemente la ligadura o ligaduras correspondientes. C ada incógnita superflua se considera como una carga desconocida que, jun to con las otras cargas, conocidas o desconocidas, ha de producir
F L E X I O N H I P E R E S T A T I C A 4 0 5
delorm aciones compatibles con las ligaduras reales. La pendiente o desplazam iento de la sección, en la que se ha elim inado o modificado la ligadura, se obtiene superponiendo los valores obtenidos de las deformaciones que producen las cargas conocidas y las incógnitas superfluas, actuando cada una de ellas separadam ente.
Veamos con un ejemplo cómo se ap lica el método. Consideremos la viga biem potrada sobre la que actúa una carga concentrada P, indicada en la F igura 7.5. Supondremos, como ya se ha indicado, que uno de los em potram ientos es una corredera horizontal para ev itar la aparición de componentes horizontales de las reacciones en las secciones extremas.
A
P
B
a C bi
Figura 7.5 .
Al tratarse de una viga hiperestática de segundo grado tenemos que elegir dos incógnitas superfluas. Consideremos como ligadura superflua el em potram iento de la sección B. Esta ligadura comprende dos incógnitas superfluas, la reacción RB y el momento ;V/g, por lo que podemos elim inar el empotram iento. De esta forma obtenemos la viga en voladizo ind icada en la F igura 7.6.-
Pa0'fl)p
W .)u .
F ig u ra 7 .6 .
C alculem os las deformaciones que producen la carga P, la reacción R B, y el momento de em potram iento M B, actuando separadam ente.
La carga P produce una deformación an gu lar que se puede obtener fácilm ente ap lican do el prim er teorema de Mohr, teniendo en cuenta que la e lástica es rectilínea en la porción de viga CB
(^s)e — (0 c)rP a 2
~2ÉL (7.2-15)

4 0 6 R E SIST E N C IA DE M A T E R IA LE S
El desplazam iento vertical de B debido a P se puede obtener así:
( y . ) , = M , + < 0 M - ~ 3 • - g » - - ¡ g P « + m
habiendo calcu lado ( y c )P m ediante el segundo teorem a de M ohr.Análogam ente, se calculan las deformaciones deb idas a la reacción R B
l 0 ) • ( ,. ) = ^ 2L = *a!L (72-17)( b)r 2e l ■ (- b)r 2 e l 3 3EE
y al momento AÍB
m i - • r . x - t í á i - " f í l ,7 2-IRiB M E l. ’ ' EL 2 2 E l.
Las ecuaciones de com patib ilidad de las deform aciones son en nuestro caso
0B = 0 i y a = 0 (7.2-19)
El principio de superposición nos perm ite poner:
o B = (o„ )P + (e 8)R + (o„)M = + + ^ = 0 (? -2-20)
>’b = ( y B)r + (>'b)r + (3's).w = - 6 £ y 'í2a + + j f / " + ¿J/T (7'2‘21)
Resolviendo el sistem a formado por las ecuaciones (7.2-20) y (7.2-21) se obtienen losvalores de las dos incógnitas que hemos elegido com o superfluas
P z P a 2b Rfl = ^ - ( fl + 3ó) ; M b = (7.2-22)
Las o tras incógnitas se determ inan m ediante las ecuaciones di'Pequilibrio
£ F, = 0: R a + R„ - P = 0
Z M = 0: M Á + RÁl - P b - M B = 0
De aqu i se obtienen:
Ph2 P o h 2R A = ™ - Q a + b) ; ~ (7.2-23)
con lo que se da por resuelta la viga considerada, y a que conociendo todas las reacciones de las ligaduras se obtienen con toda facilidad las leyes de esfuerzos y momentos en la viga.
F L E X I O N H I P E R E S T A T I C A 4 0 7
7.3. V iga em potrada en sus extrem osEn el epígrafe anterior hemos expuesto diversos métodos para el cálculo de vigas hiper- estáticas dc un solo tram o, y los hemos aplicado a casos sencillos dc carga. Podemos observar cómo en los dos últimos lo que hemos hecho en realidad, al e lim inar las ligaduras superfluas, es convertir la viga hipcreslática dada en una viga isostática con su carga real, y superponerla con otra igual sometida exclusivam ente a las incógn itas super- fluas.
Esto es lo que haremos ahora para calcular las incógnitas superfluas de una viga b iem potrada. som etida a una carga p(.x) por unidad de longitud (Fig. 1.1-a). Tom ando como incógnitas hipercstáticas los momentos de em potram iento, esta viga b iem potrada se puede considerar como la superposición de una viga isostática simplem ente apo yad a en sus extremos som etida a la carga p(x) (Fig. 7.7-ó), y otra, que podemos llam ar viga hiperestática. en cuyos extremos actúan exclusivam ente las incógnitas hiperestáticas, es decir, los momentos AfÁ y M B (Fig. 7.7-c).
El d iagram a de momentos isostáticos podrá hallarse fácilmente (Fig. 1.1-d). Sea su ecuación J¿ (x ) . El d iagram a correspondiente a la segunda viga som etida cn sus extrem os a los momentos h iperestáticos será lineal, tal como el representado cn la F igura 7.7-e.
El d iagram a de momentos flectores de la viga b iem potrada que se considera será, en v irtud del principio de superposición, el resultado de sum ar a lgebraicam ente las leyes dc am bos.
M.(x) = JL (x ) + M a + B- , ‘ - - x (7.3-1)
P ara la determ inación analítica dc los momentos de em potram iento M A y M B, ‘ i condición de em potram ientos perfectos exige la nulidad dc giro dc am bas secciones

4 0 8 R E S I S T E N C I A D E M A T E R I A L E S
extremas. Por tanto, ap licando el primero y segundo teoremas de M ohr, supuesto que el m aterial es homogéneo (E = cte) y la sección recta se m antiene constante, tenemos:
M .(x ) d x =
M .(x )x d x =
,//.(x)dx +
J i z{x)xdx +
A/, +M „ - M Á
lx ) d x = 0
XfA -PM . M a
lx ,x dx = 0
(7.3-2)
(7.3-3)
sistema de dos ecuaciones con dos incógnitas, cuya solución nos resuelve el problema.De lasecuac ion es (7.3-2) y (7.3-3) se deduce:
a) El área del d iagram a de momentos flectores isostáticos es igual, en valor absoluto, al área del d iag ram a de momentos hiperestáticos.
b) Los momentos estáticos de los ciiados diagram as, respecto a l eje vertical que pase por uno de los extremos, tienen igual valor absoluto.
De aquí se desprende que los centros de gravedad de los d iagram as de momentos isostáticos e h iperestáticos están a la misma d istancia de las verticales que pasan por los extremos.
En algunos casos en que se presente sim etria de cargas y se verifique M A = M B, la viga b iem potrada que es h iperestática de segundo grado pasaría a ser h iperestática de primer grado, por lo que seria suficiente ap licar solamente el prim er teorem a de M ohr para calcu lar los momentos hiperestáticos.
Determinemos ahora las reacciones verticales en los em potram ientos, que nos perm itirán representar los d iagram as de esfuerzos cortantes. Nos lim itarem os a derivar la ecuación de momentos flectores (7.3-1) haciendo x = 0 y x = l respectivam ente. Así, pues:
R a = Ty( 0) =
~EB = T r ( l) =
d M ,
dx j x=o
dM E dx /*=,
d J l . dx y x=o
d J l E dx
M b - M a— R aí +
M » ~ A/,= — Rui +
M r - A / ,
/
es decir:<3
R a = R aí + :M a - AL,
/R r — Rr: m b - m a
l
(7.3-4)
(7.3-5)
(7.3-6)
suendo RÁ¡ y R B¡ las reacciones en los apoyos de la viga isostática.Vemos que los m om entos de empotram iento hacen variar los valores de las reacciones
(excepto si M A = M B) y , como es lógico, el aum ento en una presupone una dism inución idéntica en la otra.
7.4. V iga em p otrada por un extrem o y apoyada en el otroConsideremos ahora una v iga em potrada por un extremo y apo yad a en el otro, que está som etida a una carga p(x ) por unidad de longitud (Fig. 7.8). Esta viga es h iperestática de
F L E X I O N H I P E R E S T A T I C A 4 0 9
r íM r í ím .1 7 'Á
F ig u r a 7 .8 .
prim er grado. Podemos elegir, como incógnita h iperestática el momento de empotram ientoA / ,.
La ley de momentos flectores se obtiene de forma inm ediata particu larizando la ecuación (7.3-1) al hacer M B = 0
Af.(.t) = J { z(x) + M a - x -■= J ( z(x) + M A(\ - y (7.4-1)
El valor del momento hiperestático M A se puede obtener ap licando el segundo teorema de M ohr, tomando coiyio referencia el extrem o B .
M ,(x ) ( l — x) dx = 0 (7.4-2)
Sustituyendo la expresión de A/.(.v), d ad a por (7.4-1), queda:
~B; {x)(l - x) dx + M a : h >->x) dx = 0
ecuación que nos perm ite obtener M Á
J t z(x)(l - x) dxA/, =
o ^1 — y )(/ — x ) d x
Las reacciones en el em potram iento y en la sección extrem a B serán
(7-4-3)
(7.4-4)
R a = 7 (0 )d M zdx
dJi._dx
M aI
M a- A . - W = "
(7.4-5)
( 7 . 4 - 6 )

4 1 0 R E SIST E N C IA DE M A T E R IA L E S
es decir:
*.< = R m ~ ¡ Rb = R ai + (7.4-7)
siendo R Á¡ y R B¡ las reacciones en los apoyos de la viga isostálica.
7.5. V ig a s continuasCon frecuencia se encuentran en las estructuras de edificios, en las cub iertas dc naves industria les y en o tras clases de estructuras, vigas de varios tram os o v i g a s c o n t i n u a s que son estáticam ente indeterm inadas.
Podem os definir la v i g a c o n t i n u a como un prism a m ecánico recto som etido a flexión, apoyado simplem ente en una o varias secciones interm edias y cuyos extremos son apoyos sim ples o em potram ientos. La F igura 7.9 representa la viga continua más sencilla , o sea, una v iga recta sobre tres apoyos, uno articu lado fijo y dos móviles. Con objeto dc evitar com ponentes horizontales de las reacciones en los apoyos intermedios, no deseables, considerarem os que todos los apoyos interm edios son articu lados móviles. Asi, un extremo es siem pre apoyo fijo o em potram iento perfecto y el resto de ligaduras son apoyos articu lados móviles.
Diagrama de momentos isostáticos
Diagrama de momentos hiperestáticos
Diagrama de momentos (lectores
F i g u r a 7 .9 .
a
F L E X I O N H I P E R E S T A T I C A 4 1 1
De la simple observación de la F igura 7.9 se deduce la principal ventaja de las vigas continuas: la dism inución de los momentos flectores máximos en los tramos. Como consecuencia, resultarán más económicas que una serie de vigas de longitudes iguales a la de cada tram o, y som etidas a las mismas cargas, apoyadas independientemente.
Los diferentes tipos de vigas continuas que se pueden presentar se esquem atizan en la F igura 7.9. Estudiemos el grado de hiperestaticidad de una viga continua. Para ello tendremos en cuenta que el apoyo articulado fijo equivale a dos incógnitas, el apoyo móvil a una y el em potram iento a tres, como ya hemos visto en repetidas ocasiones.
£(o )
T T/ 7 7 T
AS7777
n - I
S7 7Z ////*
. A ■ -/.
r
A/7 7 Z /7 7 7
n — 1
S777.
0 1 ___ r J ^ - J ¿A " “ ' nU//
......... A " * z r > a ........... V7?
2(c) ¿
A^ • /777. S777. '7 7 7
F ig u ra 7 .10 .
Supuesto cl sistem a de cargas contenidas en un plano vertical, el número de ecuaciones de equ ilib rio es de tres. Por tanto, el grado de hiperestaticidad de los tres tipos señalados será:
tipo (a): (n '+ 2) incógnitas — 3 ecuaciones = n — Itipo (b ): (n + 3) incógnitas — 3 ecuaciones = ntipo (c): (n — 1) + 3 + 2 incógnitas - 3 ecuaciones = n + 1
En una v iga continua la rigidez de un tramo dificulta la deform ación del tramo contiguo por lo que cada apoyo actúa como un em potram iento elástico . La acción de! trap ío i - é simo de longitud l¡ sobre el i'+ I-ésimo de longitud /,*, equivale , pues, a la ap licación de un momento M¡. El cálculo de una viga continua se sim plifica de forma muy notable elig iendo como incógnitas superfluas los momentos flectores M ¡ que actúan en las secciones rectas correspondientes a los apoyos intermedios. Tom arem os como incógnitas h ipercstáticas estos momentos M¡ en los apoyos. Lina vez conocidos dichos momentos quedan perfectamente determ inadas las leyes de los momentos flectores en los diversos tram os de la viga. Las leyes de esfuerzos cortantes se podrán obtener por derivación.
Aunque una viga continua se puede resolver ap licando cualqu iera de los métodos descritos en cl epígrafe 7.2 es particularm ente aconsejable ap licar el método de superposición y e legir como incógnitas superfluas los momentos flectores en las secciones de los apoyos interm edios, como ya se ha indicado. De esta forma cada tram o se convierte en una viga sim plem ente apoyada so licitada por la carga real y los momentos hiperestáticos en los extrem os (Fig. 7.11).

412 R E S I S T E N C I A DF . M A T E R I A L E S
Mx r mM,£>
" XFigura 7.11
Tom ando como incógnitas superfluas los momentos (lectores en las secciones correspondientes a los apoyos, veamos cómo se resuelve una viga continua.
Comenzaremos considerando una viga continua, uno de cuyos extremos está em potrado. Basándonos en la horizontalidad de la tangente a la línea elástica en un em potram iento perfecto vamos a estab lecer una relación analítica entre el valor del momento Af0 en el em potram iento y M i en el apoyo inmediato (Fig. 7.12).
^TrmTTTTnTT fd .
F ig u r a 7 .1 2 .
Si f i , es el área del d iagram a de momentos isostáticos y G¡ el centro de gravedad de dicha área, por ap licación del segundo teorema de M ohr respecto del apoyo móvil, tenemos
o l ¿ 1 + ^ ? / l + ^ V | = 0E l. V 1 1 2 3 1 2 3 '
de donde:
2 M 0 + A/, = —6fV A
/«
6
"¡í Jexpresión an a lítica del llam ado t e o r e m a d e l o s d o s m o m e n t o s .
(7.5-1)
F L E X I O N H I P E R E S T A T I C A 4 1 3
Si la linea elástica presentara un punto anguloso en alguno de los apoyos sign ificaría que en ese apoyo habríam os sobrepasado las deform aciones elásticas. Com o nos movemos en el campo de elasticidad, la derivada de la línea e lástica ha de ser una función continua. Esto significa que la tangente a dicha linea, en cua lqu ier apoyo, es única. Esta condición nos permite escribir (Fig. 7.13)
í , + = -(/?,• + k ) (7.5-2)
F ig u ra 7 .13 .
Supondremos la viga hom ogénea y de sección constan te (Elz constante). Por el segundo teorema de M ohr, tenemos:
a ./m = (7.5-3)E l-
' M J m 2 /,E l A 2 3 " 2 3

4 1 4 RE SIST E N C IA DE M A T E R IA L E S
n 1 +• 1 + j= — Y i— (7-5_5)
n ¡ _ fM mlm + l2 Mm+ ¡lm+, lm+ A( V m + i - EL 1 j 3 1 + 2- - - 3~ i ' *D espejando de estas expresiones cr,-, a*, /?,., f ih y sustituyendo en (7.5-2), se obtiene
£/./„ 6£A " " 6£ V £/-/m+1 6EL ” m + 1 6EL
de donde;
A/m_ ,/m + 2Aím(lm + im+l) + M m+llm+1 = - ó ( ~ Y + (7.5-7)
expresión an a lítica del denom inado t e o r e m a d e l o s t r e s m o m e n t o s . Este teorem a es denom inado tam bién de C la p e y r o n , y a que es C lapeyron (1799-1864) quien estableció que debido a la continuidad de la e lástica y de su derivada en los apoyos interm edios de una viga continua, las pendientes en los extrem os de dos tram os contiguos en el apoyo común deben ser iguales.
Ahora se com prende m uy bien porqué la elección como momentos hiperestáticos de los momentos flectores en las secciones correspondientes a los apoyos interm edios simplifica de forma notable los cálcu los, y a que m ediante la ap licación del teorem a de los tres momentos tenemos un sistem a de ecuaciones en el que en cada una de e llas aparecen como m áxim o tres incógnitas, independientem ente del número de incógnitas que existan.
La ap licación de este teorem a a cada terna de apoyos consecutivos nos proporciona en casos de vigas continuas del tipo (a) n — I ecuaciones, que resuelven la h iperestaticidad del problema.
Si las vigas son del tipo (b) o (c) ap licarem os tam bién el teorem a de los dos momentos obteniendo una o dos ecuaciones m ás, según el tipo de que se trate.
U na vez que se conocen los m om entos h iperestáticos, se obtienen, de forma inm ediata sin d ificu ltad aiguna, los d iag ram as de momentos flectores y de esfuerzos cortantes, lo que perm ite determ inar las tensiones en los puntos de cualqu ier sección de la viga continua.
7.6 . S is tem a s h ip erestá ticos. G rad o de h ip erestaticid ad de un s istem aC uando se nos presenta la necesidad de estud iar un sistem a h iperestático, esto es, cuando tenemos que ca lcu lar las leyes de momentos flectores, esfuerzos cortantes y esfuerzos norm ales, lo prim ero que hay que hacer es an a lizar su esquem a para determ inar el g r a d o d e h i p e r e s t a t i c i d a d , que ya hemos definido en 7.2 en el caso de vigas.
En lo que sigue considerarem os sistem as hiperestáticos planos en los que las cargas estén contenidas en su plano.
Fijém onos en el sistem a representado en la F igu ra 7.14-o formado por un doble pórtico cuyos nudos supondrem os perfectam ente rígidos y sus tres soportes perfectamente em potrados en terreno firme.
F L E X I O N H I P E R E S T A T I C A 4 1 5
77777. 7Z77.
(o )
77777;.
F ig u ra 7 .1 4 . (U
Según vimos en el epígrafe 1.11 un em potram iento equivale a tres incógnitas: dos componentes de la reacción y la tercera que corresponde a l momento. Por tanto, parn conocer las acciones de las ligaduras externas sobre el sistem a de la F igura 7.14-a se necesita determ inar nueve incógnitas. Como el número de ecuaciones de equilibrio es t r e s
por tratarse de un sistema plano, tenemos seis incógnitas estáticam ente indeterm inadas o h iperestáticas. Es evidente que conocidas las reacciones y los momentos en las secciones de los em potram ientos de los soportes del sistem a considerado están perfectamente determ inadas las leyes de momentos [lectores, esfuerzos cortantes y esfuerzos normales en todas y
cada una de las parles del sistem a. Pero si consideram os el pórtico de la F igura 7.14-/?, que tiene las m ismas ligaduras externas que el an terior, vemos que el conocim iento de las scís incógnitas estáticam ente indeterm inadas es insuficiente para la determ inación de momentos y esfuerzos en todas las b arras del sistema. Esto es debido a que se han introducido contornos cerrados.
Pero antes de seguir adelante y ver a cuantos grados de h iperestaticidad equivale u n
contorno cerrado, nos dam os cuenta que existen dos causas que hacen que el sistema sea hiperestático: las incógnitas en exceso de los enlaces provenientes de las ligaduras externas al sistem a, y las que se derivan de la forma que estén conectadas entre sí las diversas partes del propio sistem a. En el prim er caso tenemos los s i s t e m a s e x t e r i o r m e n t e h ip e r e s t á t i c o s . como es el caso de la viga continua representada en la F igura 7.15-a; y en el segundo, ios s i s t em a s i n t e r i o rm en t e h i p e r e s t á t i c o s , como es el pórtico de la F igura 7.15-6 con un apoyo fijo en A y otro móvil en B.
Si llam am os l i g a d u r a s s u p e r f i n a s a aquéllas cuya e lim inación se puede realizar sin perjudicar la invariab ilidad del sistem a, d irem oj que el g r a d o d e h i p e r e s t a t i c i d a d es igual ai
I “ 7 T -7Z777T,.
(o)
~ ~ E ~7777777?.
F ig u r a 7 .1 5 .
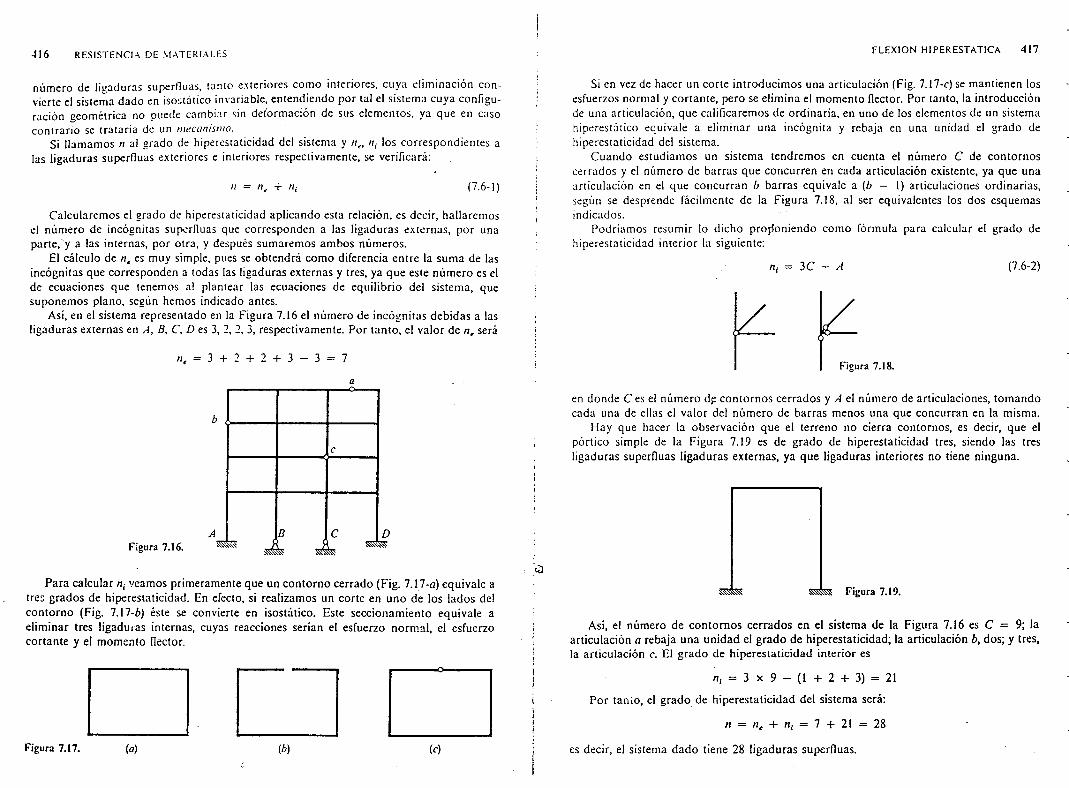
416 R E S I S T E N C I A D E M A T E R I A L E S
número de bitaduras superfluas, tanto exteriores como interiores, cuya elim inación convierte el sistem a dado en ¡sostático invariable, entendiendo por tal el sistem a cuya configuración geom étrica no puede cam biar sin deformación de sus elementos, ya que en caso contrario se trataría de un m e ca n i sm o .
Si llam am os n al grado de hiperestaticidad del sistem a y n e, n¡ los correspondientes a las ligaduras superfluas exteriores e interiores respectivamente, se verificará:
n = ne + n¡ (7.6-1)
Calcularem os el grado de hiperestaticidad ap licando esta relación, es decir, hallarem os el número de incógnitas superfluas que corresponden a las ligaduras externas, por una p arte .'y a las internas, por otra, y después sum arem os ambos números.
El cálculo de n t es m uy simple, pues se obtendrá como diferencia entre la sum a de las incógnitas que corresponden a todas las ligaduras externas y tres, ya que este núm ero es el de ecuaciones que tenemos al plantear las ecuaciones de equilib rio del sistem a, que suponemos plano, según hemos indicado antes.
Asi, en el sistema representado en la F igura 7.16 el número de incógnitas deb idas a las ligaduras externas en A, B, C, D es 3, 2, 2, 3, respectivamente. Por tanto , el valor de n t será
/i, = 3 + 2 + 2 + 3 - 3 = 7
a- — i o .
b
F ig u ra 7 .1 6 .
P ara ca lcu lar n¡ veamos primeramente que un contorno cerrado (F ig. 7.17-a) equ ivale a tres grados de hiperestaticidad. En efecto, si realizam os un corte en uno de los lados del contorno (Fig. 7.17-6) éste se convierte en isostático. Este seccionam iento equ ivale a e lim inar tres ligaduras internas, cuyas reacciones serían el esfuerzo norm al, el esfuerzo cortante y el momento (lector.
F ig u r a 7 .1 7 .
F L E X I O N H l P E R E S T A T I C A 4 1 7
Si en vez de hacer un corte introducim os una articulación (Fig. 7.17-c) se mantienen los esfuerzos normal y cortante, pero se elim ina el momento flector. Por tanto, la introducción de una articulación, que calificarem os de o rd inaria , en uno de los elementos de un sistema hiperestático equivale a e lim inar una incógnita y rebaja en una unidad el grado de hiperestaticidad del sistema.
Cuando estudiam os un sistem a tendremos en cuenta el número C de contornos cerrados y el número de barras que concurren en cada articulación existente, ya que una articulación en el que concurran b barras equivale a (b — 1) articulaciones ordinarias, según se desprende fácilmente de la F igura 7.18, al ser equivalentes los dos esquemas indicados.
Podríamos resumir lo dicho proponiendo como fórmula para calcular el grado de hiperestaticidad interior la siguiente:
n¡ = 3C — A (7.6-2)
en donde C es el número dp contornos cerrados y A el número de articulaciones, tom ando cada una de ellas el valor del número de barras menos una que concurran en la m isma.
H ay que hacer la observación que el terreno no cierra contornos, es decir, que el pórtico simple de la F igura 7.19 es de grado de hiperestaticidad tres, siendo las tres ligaduras superfluas ligaduras externas, ya que ligaduras interiores no tiene ninguna.
Así, el número de contornos cerrados en el sistem a de la F igura 7.16 es C = 9; la articu lación a rebaja una unidad el grado de h iperestaticidad; la articulación b, dos; y tres, la articu lación c . El grado de h iperestaticidad interior es
n¡ = 3 x 9 - (1 + 2 + 3) = 21
Por tarúo, el grado de h iperestaticidad del sistem a será:
n — n e + n¡ — 7 + 21 = 28
es decir, el sistema dado tiene 28 ligaduras superfluas.

4 1 8 R E SIST E N C IA DE M A T E R IA L E S
C onvertido un sistem a hiperestático en isostático elim inando las ligaduras superfluas, la elim inación de una ligad u ra más cualqu iera de este sistem a isostático lo transform a en mecanism o y, por consigu iente, un sistem a Lustático tiene el número de ligadu ras estrictamente m ínim o necesario para asegurar su invariab ilidad .
Por el contrario , si introducim os en un sistema isostático cualqu ier ligad u ra por encim a de este número m ínim o, la ligadura es superflua y transform a el sistem a dado en sistem a hiperestático.
Al e lim inar las lig ad u ras superfluas hay que tener buen cu idado de no elim inar aquéllas que puedan convertir el sistema en mecanismo.
F ig u r a 7 .2 0 .
Por ejemplo, en el pórtico de la F igura 7.20-n, de grado de h iperestatic idad tres, no podríam os elim inar el apoyo móvil e in troducir la articu lac ión a (F ig. 7.20-Ó), ya que se convertiría en un sistem a variab le , es decir, en un m ecanismo. Si podríam os, por el contrario , realizar un corte en cualqu iera de los lados del contorno cerrado (Fig. 7.20-c).
El grado de h iperestatic idad de un sistem a puede d ism inuir cuando la estructura adm ite un p lano de sim etría y la carga ap licada presenta sim etría o an tis im etría respecto a él. Decimos que la carga es s im é t r i c a , cuando la carga sobre la parte del sistem a que queda a un lado del p lano de sim etría es im agen especular, respecto de d icho p lano , de la carga que actúa sobre la o tra parte . Y entendem os que la carga es a n t i s im é t r i c a cuando la carga sobre la parte del sistem a que queda a un lado del p lano de sim etría es im agen especular, respecto de dicho p lano , de la carga que actúa sobre la o tra parte , pero de sentido contrario .
De la m ism a form a se definen los esfuerzos interiores sim étricos y an tisim étricos, según presenten esta particu larid ad respecto del p lano de corte. De la F igura 7.21 se deduce que existen tres esfuerzos sim étricos respecto del p lano de corte; los m om entos flectores M r M t y el esfuerzo norm al N. Los otros tres esfuerzos: m om ento torsor M r y esfuerzos cortantes 7 j y Tz, son antisim étricos.
Por razón de sim etría podem os afirm ar que en los cortes que el p lano de sim etría determ ina en el sistem a, los esfuerzos interiores sim étricos son nulos cuando la carga es antisim étrica. En el caso de ser la carga sim étrica los que se anu lan son los esfuerzos antisim étricos.
Es evidente que cu a lq u iera de estas circunstancias hace d ism inuir el g rado de hiperestatic idad del sistem a. P or ejem plo, en el pórtico ind icado en la F igura 1.22-a la carga que actúa en su p lano es sim étrica. De ¡os tres esfuerzos interiores que existen, pues, es un
FL E X IO N H IPE R E ST A T IC A 4 1 9
caso plano, dos son simétricos (N y M .) y el tercero (F ) es antisim ctrico. Si la carga no fuera sim étrica, el grado de hiperestaticidad del sistem a seria 3. Sin em bargo, como el esfuerzo cortante es nulo en la sección perteneciente al plano de sim etría, el grado de hiperestaticidad es realmente 2.
A
/7T77 S 7 7 7 7 /7T77
(a)F ig u r a 7 .2 2 .
(b)
A nálogam ente, en el pórtico sim étrico con carga an tis im étrica ind icado en la F igura 7.22-ú, son nulos los esfuerzos interiores sim étricos N y M . , por lo que e! grado de hiperestaticidad real es 1.
7,7 . M étod o de las fu erzas para el cá lcu lo de s is te m a s h ip erestá tico sEn epígrafes anteriores se han considerado exclusivam ente v igas rectas h iperestáticas y se han resuelto los casos m uy frecuentes en la p ráctica de vigas b iem potradas o em potra- do-apoyadas ap licando los teorem as de M ohr. No es éste el único m étodo para la resolución de tales vigas. Ya hemos visto que existen otros, com o puede ser el que se basa en la utilización de la ecuación de la linea e lástica o aquellos que tienen su

■420 R E S I S T E N C I A D E M A T E R I A L E S
fundam ento en los teorem as energéticos. Por un cam ino o por otro llegaríam os, evidentem ente, a los mismos resultados.
Pero en la práctica nos encontram os con sistem as c iertam ente más com plejos, como pueden ser los compuestos por barras unidas rígidam ente. Su resolución pertenece al cam po de « t e o r í a d e la s e s t r u c t u r a s » . Sin em bargo, vam os a exponer aqu i un método sen era l de cálcu lo de sistem as hiperestáticos reticu lados, denom inado m é t o d o d e la s
f u e r z a s , que nos perm itirá resolver sistem as de re lativa com plejidad.Consiste el m é t o d o d e la s f u e r z a s en lib erar el sistem a hiperestático de las ligaduras
superfluas sustituyéndo las por las fuerzas y momentos correspondientes, una vez determ inado el grado de h iperestaticidad del sistem a que, como hemos visto anteriorm ente, es igual al número de ligaduras superfluas. El sistem a estáticam ente determ inado así obtenido se denom ina s i s t e m a b a s e . H ay que hacer notar que se pueden e leg ir a rb itra ria m ente las n reacciones h iperestáticas entre las n + 3 incógn itas del sistem a, pudiendo obtenerse
í n + 3\ (n + 3)(/t + 2)(n + 1)V n ) ~ 6
sistem as base a p artir del mismo sistem a hiperestático. Es evidente que el resu ltado a que se llega es el mismo independientem ente del sistem a base que se haya elegido , pero una elección afortunada del mismo puede sim plificar los cálcu lo s de forma notable.
Asi, por ejem plo, dado el pórtico de la F igura 7.23 - a es fácil ver que el grado de h iperestatic idad es dos. E lim inando, pues, dos incógn itas superfluas como pueden ser las correspondientes al apoyo fijo, sustituyendo éste por las fuerzas A j y X2, obtenemos el s i s t e m a b a s e ind icado en la F igura 7.23-b.
Volvam os a l caso general de un sistem a de grado de h iperestatic idad ri. En virtud del p rincip io de superposición de efectos si A( es el desp lazam ien to del punto de ap licación dc la fuerza X¡, la condición de com patib ilidad de este desp lazam ien to del sistem a base respecto del sistem a hiperestático dado se puede expresar de la sigu ien te forma:
A,(•Vi, X2, ..., Aj,, P ) — Aix¡ + A¡X2 + + A¡x" + A¡P — 0 (7.7-1)
F L E X I O N H I P E R E S T A T I C A -421
Este desp lazam ien to siem pre será nu lo , pues la .V, es una reacción que existe debido a que el m ovim iento de la correspondiente sección está im pedido en esa dirección.
Ahora bien, como
= á.-t-V. : - : AiXn = <5¡(1Aj, (7.7-2)
sustituyendo, se obtiene:
6ixX x + ÓnX, + ••• + ó i 'X . + Aie = 0 (7.7-3)
en donde c¡,7 es el desp lazam ien to en el sistem a base del punto de ap licación de la fuerzaAj. en la d irección de e lla m ism a, a l ap lica r la fuerza X¡ — 1, y siendo AiP el desp lazamiento en el sistem a base del punto de ap licación de la fuerza X¡, en su dirección, debido a la carga que ac tú a sobre el sistem a.
Como se tienen u incógn itas Aj, se obtendrán n ecuaciones (7.7-3)
r ¿ n A j + <512A j + - ■ + S lmx„ + > II O¿ 2 , A í< + ¿ 22A j + ■■ + ¿2„X„ + a 2P = o
L ó . i -v , + + • • + <5n„.V„ + A ., = 0
Las ecuaciones de este sistem a reciben el nom bre de e c u a c i o n e s c a n ó n i c a s del método de las fuerzas. Se pueden expresar m atric ia lm en te de la siguiente forma:
[Z )][A f] + [£>,] = 0 (7.7-5)
siendo [£>] la m atriz de los coeficientes de las ecuaciones canón icas; [A '] el vector cuyas com ponentes son las incógn itas h iperestáticas, y [£>,,] el vector de los desp lazam ientos debidos a las cargas
r<5n <5 2 1
^12 ¿22 •
• ¿ I - ' '• ¿2 .
; m =
rA fpx 2
; [ £ , ] =
' A1P' Al e
S“ n 2 ^X„-
Los coeficientes 5¡¡ de las incógn itas se pueden ca lcu la r , en caso de b arras rectas o barras curvas de pequeña cu rva tu ra , m ediante el m étodo de M ohr expuesto en 5.8
¿o = I ELd s + £
Eí2 ^ J GElly(7.7-7)
siendo:
M.¡, Aj, 7j„ las leyes de m om entos flectores, esfuerzos norm ales y esfuerzos cortantes, respectivam ente, del sistem a base som etido a la fuerza Aj = 1.
M xJ, Nj, Ty¡, las leyes de m om entos flectores, esfuerzos norm ales y esfuerzos cortantes, respectivam ente, producidos por la fuerza A j = 1.

4 2 2 R E S I S T E N C I A D E M A T E R I A L E S
Por o tra parte , los desplazam ientos A,r , térm inos independientes de las ecuaciones canón icas, se ca lcu lan de igual forma ap licando el m étodo de M ohr.
A¡p — X EL■ds + l
NiNrEQ. d s + Z
TyjTyrGEíly
d s (7.7-8)
sienao:
\ f - r - Af F, TyP, las leyes de momentos hedores, esfuerzos norm ales y esfuerzos cortantes,respectivam ente, en el sistema base sometido tema.
a la carga ap licada al sis-
En el caso de sistem as de barras de sección constante cada una de las in tegrales que aparecen en las expresiones (7.7-7) y (7.7-8) se pueden ca lcu la r por el m étodo de m u ltip licación de los gráficos expuesto en 5.9. Como ya se ha indicado , la in fluencia de los esfuerzos norm al y cortan te se puede considerar despreciab le frente a l m om ento flector, por lo que las c itad as expresiones se reducen a
M Z¡M Z¡¡i = ^ ~ n 7 ' ’ ip = £ EL
ds (7.7-9)
El cálcu lo de estas in tegrales se puede sim plificar adop tando un sistem a base adecuado, de entre los sistem as base posibles.
7.8 . A p lica c ió n del teorem a de C astig lian o para la reso lu c ión de s is te m a s h ip erestá ticos
Uno de los m étodos que se pueden u tilizar para el cá lcu lo de las incógn itas superfluas de un sistem a h iperestático consiste en ap licar el teorem a de C astig liano . Se em pieza procediendo de la m ism a forma a como se hace ap licando el m étodo de las fuerzas, esto es, se e ligen las incógn itas superfluas X¡ que sustituyen a las correspondientes ligaduras. T ales incógn itas superfluas se consideran como cargas desconocidas que, ju n to a las cargas que ac tú an sobre el sistem a considerado, deben de d a r lu g a r a deform aciones com patib les con las condiciones que imponen las. lig ad u ras reales.
Como el m ovim iento de una determ inada incógnita h iperestática, que será un desp lazam iento en su d irección si es una fuerza, o un g iro si se tra ta de un m om ento, viene dado por la d er iv ad a p arc ia l del potencial interno respecto de e lla , ca lcu larem os p rev iam ente la expresión del potencial interno del sistem a debido a la acción con jun ta de las cargas d adas y de las reacciones superfluas. Se obtiene asi una expresión
¥ = ¥{XU X2, ..., T„, P ) (7.8-1)
Si las lig ad u ras no perm iten el desplazam iento de la reacción de la lig ad u ra X, en la dirección de la m ism a, o el giro alrededor del eje definido por el m om ento, en su caso , las condiciones de com patib ilid ad de los desp lazam ientos serán
F L E X I O N H I P E R E S T A T I C A 4 2 3
que constituyen un sistem a de ecuaciones que nos permite obtener todas las incógnitas h iperestáticas.
U na vez obtenidas éstas, el cá lcu lo de las reacciones isostáticas se puede hacer m ediante la ap licación de las ecuaciones de equilibrio de la Estática.
Ilustram os la ap licación del m étodo expuesto resolviendo ei pórtico de rigidez constante EL indicado en la F igura 7.24-u
i l
v p -V,A',
Se tra ta de un pórtico de extrem os em potrados, de tercer grado de hipercstaticidad. E legimos como incógnitas superfluas las tres deb idas al em potram iento en la sección A (Fig. 7.24-6). L iberado el pórtico del em potram iento en A, las leyes de momentos flectores, esfuerzos norm ales, y esfuerzos cortantes en el soporte AB y en el dintel BC son:
S o p o r t e AB:
D in t e l BC :
M . = X , - X ¡x
N = - X 2
Ty = — 'V,
p x 2M . = Xi - X J i + X2x - —-
N = - X ,
Ty = X2 ~ PX
El potencial interno del pórtico que se considera, es
¥ =
+
(X3 - á ',.* )22 EL
dx +
px
I L2 e n
dx I L2EQ
dx +X 2
o 2.GQly
2 EI.
dx +
• dx +
(X2 - px )2
odx

4 2 4 RESISTENCIA DE M A T E R IA LE S
Como ya se ha indicado, jc pueden despreciar los térm inos deb idos a los esfuerzos norm al y cortante frente a ios debidos al momento flector, por lo que el potencial interno se reducirá a los dos primeros sumandos de la expresión an terio r.
Teniendo en cuenta esta c ircunstancia y ap licando las condiciones de com patib ilidad de las deformaciones, se tiene:
c Fw ,
c F
SFT x ¡
o bien
= 0
= 0
= 0
EL
EL
1J T .
(X3 - \ \ . v)( — v) </.v +
p.Y-
,V'3 - X xh + T ,.r -px -
h) dx = 0
x 3 - .v y ¡ + x 2x - \x (lx = o
(X3 - .r,.v) dx + f [ x 3 - X xh + - P £ dx = 0
X3 ^ — X l x r + X3h l — X J r l + X2h = 01 i 2 6
/2 .. h/2 . . I ¡ p l 4X x . — + X, - - ' — = 0
h ~ l 2 l 2X3h - X l ^ - + X3l - X J d + X , - - ^ — = 0 2 2 6
Sustituyendo los valores numéricos indicados en la F igu ra 7 .24-a y simplificando, este sistema se reduce a
3X3 - Í6X1 + 6X2 = 32
A'j - 6X¡ + 4X2 = 24
2 .r3 - 9Xx + 3A\ = 16
cuyas soluciones son:
X x — 1 ton ; X2 = 7 ton ; X3 = 2 m - ton
La obtención ahora de la reacción, así como el m om ento de em potram ien to en la sección C, es inm ediata ap licando las ecuaciones de eq u ilib r io (F ig . 7.24-c)
EEX = 0 : X¡ - Hc = 0
E Fy — 0: X2 4- Vc — p l ~ 0
Z M = 0: X3 + X2l - X xh - ^ + M c = 0
=> Hc — 1 ton
=- Vc = 9 ton
=»■ M c = 10 m • ton
F L E X I O N H l P E R E S T A T I C A 4 2 5
7.9. C on stru cción de los d ia g ra m a s de m o m en to s flec to rcs , e sfu erzo s cortan tes y n orm ales en s is te m a s h ip erestá ticos
Una vez obtenidas las incógn itas h iperestáticas X¡(i = 1 , 2 , ..., n ) m ediante la ap licación de alguno de los m étodos expuestos p ara la resolución de sistem as h iperestáticos, las leyes de momentos flectores, esfuerzos cortantes y esfuerzos norm ales, en virtud del principio de superposición de efectos, se pueden h a llar m ediante la expresión
5 = S.Af, + S 2A\ + ••• + S .X K + S P (7.9-1)
siendo:
S, la m agnitud a determ inar.S,, la m agnitud a determ inar que se produce en el sistem a básico al ap lica r X¡ = 1.
S r , la m agnitud a determ inar p roducida en el sistem a básico a l ac tu ar la carga ap licad a al sistem a.
En el caso de sistem as h iperestáticos de barras rectas podemos constru ir los d ia g ra mas de momentos (lectores representando gráficam ente las leyes que en cada una de dichas barras vienen dadas por la ap licación de la ecuación (7.9-1)
M . = M : í X x + M z2X2 + + M :nXn + A1zF (7.9-2)
Los d iagram as de esfuerzos cortan tes se pueden constru ir a p artir de los correspondientes a los m om entos flectores, sim plificando de este modo la ap licación de la fórm ula (7.9-1). En efecto, considerarem os un prism a mecánico (F ig. 7.25-a) obtenido a l rea liz ar dos cortes en las secciones A y B. A islando el prism a ind icado del sistem a h iperestático , éste estará som etido , en el caso m ás general, a:
a) las cargas exteriores que están directam ente ap licadas al sistem a h iperestático dado,
b) los mom entos flectores M AB y M BA que el resto del sistem a ejerce sobre el prism a a is lado y cuyos valores pueden ser obtenidos del d iagram a de m om entos correspondientes,
c) los esfuerzos cortan tes T'ab y tba y los esfuerzos norm ales NAB y NBA que ejerce tam bién el resto del sistem a sobre el prism a. A nálogam ente a com o hemos hecffo en 7.3 la accción genera l descrita sobre la p ieza se puede descom poner en la acción sobre una v iga iso stá tica con la m ism a carga (F ig . 7.25-b ) y sobre o tra no ca rgad a en cuyos extrem os actúan los m om entos M AB y M BA respectivam ente(Fig. 7.25-c).
El m om ento flector en una sección de abscisa x, en v irtud del p rincip io de superposición, será:
M z(x) = J í z{x) + M AB + M ba ~ M a “ x (7.9-3)
siendo -//.(.r) la ley de m om entos sobre la viga isostática.

4 2 6 RE SISTE N CIA D E M A T E R I A L E S
Por la relación existente entre esfuerzo cortan te y m om ento (lector, tenemos:
Ty (x ) = = d J { ^ + M ba - M abdx dx (7.9-4)
. d J ( . ( x )siendo — ^ la ley de esfuerzos cortantes sobre la viga iso stática (Fig. 7.25-6).
ecuación nos m uestra que es posible determ inar los esfuerzos cortantes en laslas c T rp T s Í Unf S1Stema h ’Perestálico ^ n o c ie n d o el d iag ram a de m om entos Héctores y las cargas d irectam ente ap licad as a i mismo.
los e s fu / r lL d ,a ¿ ram a f esfuerzos cortantes se puede obtener el correspondiente acargas eex7° orn; ; malef als lan do los nudos deI Esterna y ap licando a los m ism os lasm om entos flert ? « d i e r a n d ,r e c lín e n le ap licadas los esfuerzos cortantes y losexpresando la c H-3 J ° rn,CnIC dclcrm inados- Los « fu e rzo s norm ales se calcu larán expresando la condición de equilibrio de los nudos (Fig. 7.26).
F L E X I O N H I P E R E S T A T I C A 4 2 7
/.1U. C álcu lo de d e fo rm a cio n es y d e sp la z a m ien to s en los s is te m a s h ip erestá tico s
El razonam iento seguido en 5.8 cuando se expuso el método de M ohr para el cálculo dr desplazam ientos en un sistem a elástico es válido tanto para sistemas isostáticos come h iperestáticos. Por ejem plo, si se qu iere h a lla r el desp lazam iento de la sección D de pórtico representado en la F igu ra 1.21-a ap licam os en ella una carga ficticia unidad. El desp lazam iento en la d irección de esa c a rg a es, según el c itado método de M ohr
' A/.-oAC-, EL d s + Y. ' AfpAf.
EQ. d s + Y.7~vo Ty iGÍ2„
d s (7.10-1
en donde:
Figura 7.27.
A/.q, N0, r , 0. son las leyes de m om entos fiectores, esfuerzos normales y esfuerzos cortantes del sistem a h iperestático sometido a la carga real,
M . x, Ty l , son las leyes de m om entos (lectores, esfuerzos norm ales y esfuerzos cortantes producidas en el sistem a hiperestático descargado cuando se ap lica una carga unidad en D.
Si son despreciab les los efectos p roducidos por los e s f u e r z o s norm al y cortante, suposición que harem os en lo que sigue, la an terio r expresión se reduce a:
Af-oA/-,EL
ds (7.
Pero este método presenta el gran inconveniente de tener que ca lcu la r dos veces <: sistem a h iperestático , por lo que no es ú til su ap licación .

■128 RESISTENCIA DE MATERIALES
La utilización del referido método de M ohr se puede sim plificar notablem ente teniendo en cuenta la equivalencia del sistem a h iperestático dado y cua lqu iera de los sistemas isostáticos que se obtienen al e lim inar las ligadu ras superfluas, sustituyéndolas por las reacciones correspondientes.
Así, por ejemplo, si en el pórtico considerado en el epígrafe 7.8 (F ig. 7.24-a) e lim inamos las ligaduras superfluas del em potram iento A, y las sustitu im os por las fuerzas Xu X-, y momento .F3 (Fig. 7.28-a), el desp lazam iento ÓD buscado sera:
ELds (7.10-3)
siendo:
.V/.0, la ley de momentos flectores en el sistem a base cuando está so lic itado por la carga ap licada al sistema y por las reacciones que sustituyen a las ligadu ras superfluas (Fig. 7.28-6) (equivalente al sistema h iperestático dado),
A/.,, la ley de momentos flectores en el sistem a base debidos a la carga unidad ap licada en el punto D cuyo desplazam iento, en la dirección de d icha carga unidad, queremos calcu lar (Fig. 7.28-c).
Figura 7.28.
Para los valores numéricos del e itado ejem plo y p ara el punto D s ituado a la a ltu ra de un tercio de la longitud del soporte AB, se tiene:
1 / 1 2 \ 4 ‘~E1. w 3 4 ) _ ~e T. - 3 A"
+ 7.r — 4 I dx3 EL
Este calculo podríam os hacerlo también considerando el d iag ram a M . r de momentos flectores en el sistem a base isostático, debido a la c arga , y el d iag ram a M zl de momentos flectores en el sistem a hiperestático debido a la c a rg a un idad ap licad a en el punto D.
FLEXION H1 PER ESTATIC A 4 2 9
En este caso la expresión del desplazam iento del punto D es:
¿ o = X El.d s (7.10-4)
Las leyes de m om entos flectores son, respectivam ente
A/.,<
43en el soporte: XL, = — 1 + — x ; 0 ^ .v ^ 2 m
54
M . , = x + ! ; 2 m O í 6 m 54
en el d in tel: A/., = —- + y x ; 0 < x < 6 m
en el soporte: M . P = 0
en el dintel: M .? — —y x 2
Por tanto , el va lo r de SD será:
S„ =EL 9 + 18 Xj [ 3 'r
dx =3 EL
A la v ista de este ejem plo y pudiendo ap licar este proceder a cua lqu ier caso, podemos d ar la sigu ien te reg la p a ra ca lcu lar el desp lazam iento de un punto de un sistem a h iperestático : In tegrarem os a lo largo de todas las b arras del sistem a el producto de dos leyes de m om entos flectores d iv id idas por EI„ de las cuales una de e llas puede ser la engendrada por las c a rg a s reales, o bien la deb ida a la carga u n ita ria en el sistem a h iperestático dado ; la o tra puede ser obtenida para el sistem a au x ilia r derivado del dado por e lim inación de las lig ad u ra s superfluas.
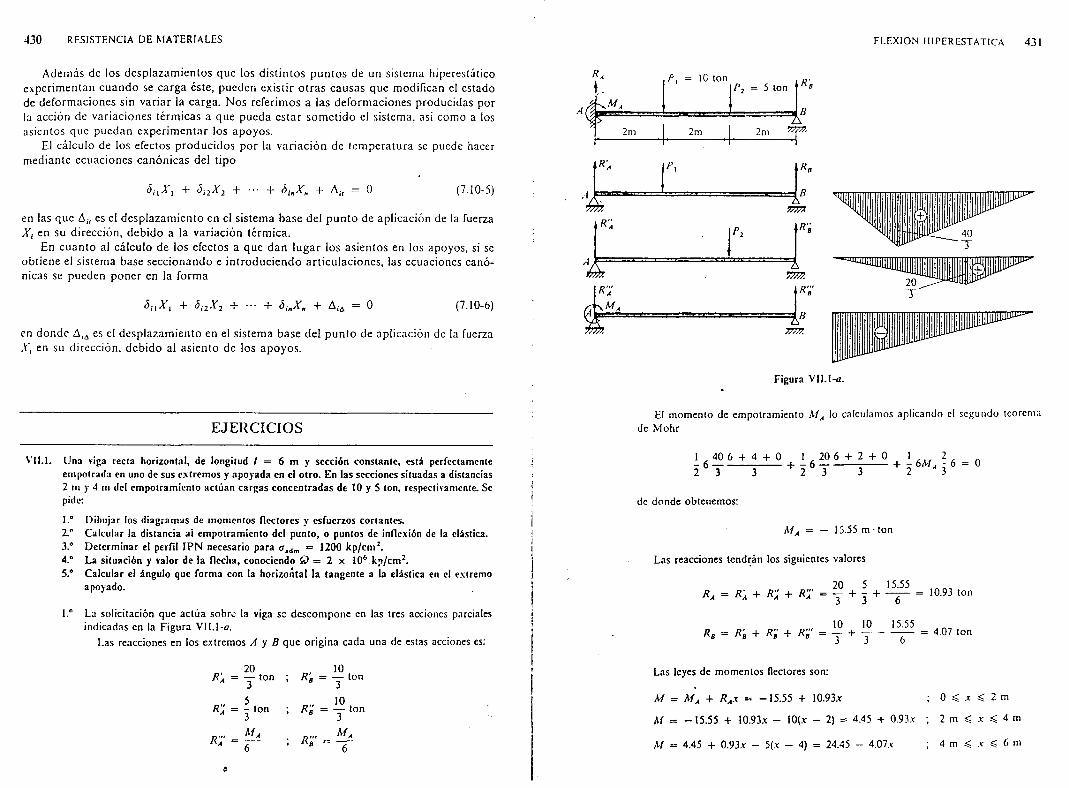
430 RES ISTEN C IA D E M A T ER IA LES
Adem ás de los desp lazam ien tos que los d istin tos puntos de un sistem a hiperestático experim entan cuando se carga éste, pueden ex istir o tras causas que modifican el estado de deform aciones sin varia r la carga . Nos referim os a las deform aciones producidas por la acción de variac iones térm icas a que pueda e sta r som etido el sistem a, así como a los asientos que puedan experim entar los apoyos.
El cálcu lo de los efectos producidos por la v ariac ió n de tem peratu ra se puede hacer m ediante ecuaciones canón icas del tipo
<5,-1 X x + 5n X2 + - + ¿ ¡n3r„ + A;, = 0 (7.10-5)
en las que A¡r es el desp lazam ien to en el sistem a base del punto de ap licación de la fuerzaX, en su dirección, debido a la variac ión térm ica.
En cuanto al cálcu lo de los efectos a que dan lu g a r los asien tos en los apoyos, si se obtiene el sistem a base seccionando e in troduciendo articu lac io n es , las ecuaciones canónicas se pueden poner en la forma
5lx X, + &i2X2 + - + S¡„X„ + Aia = 0 (7.10-6)
en donde Aia es el desp lazam iento en el sistem a base del punto de ap licación de la fuerzaX¡ en su dirección, debido al asiento de los apoyos.
E J E R C IC IO S
V II. 1. U na viga rec ta ho rizon tal, de longitud / = 6 m y sección constante , está perfectam ente em potrad a en uno de sus e x trem o s y ap o yad a en el o tro . En las secciones situadas a distancias 2 m y 4 m del em po tram ien to actú an ca rg a s c o n cen tra d a s de 1 0 y 5 ton, respectivam ente. Se pide:
1.° D ib u jar los d ia g ram as de m om entos fle c to re s y esfu erzos co rtan tes.2.° C a lc u la r la d istancia a l em po tram ien to del punto, o puntos de in flexión de la clástica.3.° D e te rm in a r el perfil IP N necesario p ara <rJdm = 1 2 0 0 kp/cm 2.4.” L a situación y v a lo r de la flech a , conociendo Q = 2 x 10 6 kp/cm 2.5 .° C a lc u la r e l ángulo que fo rm a con la h o rizo n ta l la tan gen te a la e lástica en el extrem o
apoyado.
1.° L a so lic ita c ió n q u e a c tú a so b re la v ig a se d e sc o m p o n e en las tres acciones parcia les ind icad as en la F ig u ra V I I .i-a.
L as reacc ion es en los e x trem o s A y B q u e o rig in a c a d a u n a de estas acciones es:
20 10 R . ■= — to n ; R „ = — ton
3 * 3
R'Á - 3 “>n ; R'é = y ton
t
FLEXION H IPE R E ST A T IC A 4 3 1
P. = 1G ton
2m
P, = 5 ton
2m= K77 7.
77777.
Figura V I L l-a .
4 0T
El m om en to de em p o tra m ien to MA lo ca lcu lam os a p lica n d o el seg u n d o teorem a
de M o h r
1 4 0 6 + 4 + 0 1 2 0 6 + 2 + 0 1 2- 6 ------------------------------------+ - 6 + - 6 M a - 6 = 02 3 3 2 3 3 2 3
de d o n d e ob ten em os:
Ma = — 15 .55 m • ton
L as reaccion es ten d rá n los sigu ientes va lo res
2 0 5 15 .55
A 3 ' 3 ' 6
10 10 15 .55Rb = R'b + R'b + R'b = y + y
L as leyes d e m om en to s flectores son:
M = M a + R a .x = - 1 5 . 5 5 + 10.93.x
A f = - 1 5 . 5 5 + 10 .9 3 x - 10(.x - 2) = 4 .45 + 0.93.x
M = 4 .4 5 + 0.93.x - 5(.x - 4) = 2 4 .4 5 - 4.07.x
10 .93 ton
4 .0 7 ton

432 R E S I S T E N C I A D E M A T E R I A L E S
y las correspondientes de esfuerzos cortantes.
T = R, = 10.93 tonT = R.t - Px = 0.93 tonT = Ra - P¡ - P2 = -4 .07 ton
0 < x < 2 m2 m < .v < 4 m
4 m < x < 6 m
15.55 m.ton
P x = 10 ton
í 2 = 5 ton
2m
R-b
B
Diagrama de momentos flectores
0 5 3 to n
Diagrama de esfuerzos constantes
Figura VII.l-A. 4.07 ton
Los diagramas pedidos de momentos flectores y de esfuerzos cortantes se representan en la Figura VII. 1 -6 .Los puntos de inflexión de la elástica se presentan en las secciones en las que se anula el momento flector. Por tanto, en la viga que consideramos solamente existe un punto de inflexión, según se deduce de la observación del diagrama de momentos flectores. Si .r0 es la distancia de dicho punto al empotramiento, se habrá de verificar
- 1 5 . 5 5 + 10.93.ro = 0
de donde:
x 0 = 1.42 m
3 “ De la simple observación del diagrama de momentos flectores de la v¡ga se deduce que el valor absoluto del momento flector máximo es
= 1 5 . 5 5 m - t o n = 1 5 . 5 5 x 1 0 5 c m - k p
FLEXION H IPE R E STA TIC A 4 3 3
Para resistirlo, es necesario que la sección tenga como mínimo un módulo resistente Ws de valor
15.55 x 105 cm ■ kp 3IV. = — = ----------------------------- = 1296.25 cmcr.dm 1200 kp cm -
que corresponde a un
IPN 400
cuyo momento de inercia es: /. = 29 210 cm*.
SKSL'SS
Para determinar la situación de la flecha se intuye que deberá presentarse en una sección del tramo comprendido entre las dos cargas P¡ y Pz aplicadas. Por el primer teorema de Mohr, si .x, es la abscisa de la sección que buscamos, se tiene (Fig. VII. 1-c):
— 1.42 x 15 .55 + - 0 .5 8 x 6 .3 1 + 2 2
6 .3 1 + (4 .45 + 0.93.x)(x - 2) = 0
Simplificando:
0.93x5 + 8.9x, - 39.94 = 0
ecuación de segundo grado cuya solución válida es:
x , = 3 .38 m

4 3 4 R E S I S T E N C I A D E M A T E R I A L E S
P a ra c a l c u la r e l v a lo r d e la f le ch a a p l ic a r e m o s e l s e g u n d o le o r e m a d e M o l i r
El.- - 1.42 x 15 .55 x - 1 .42 + - 0 .5 8 x 6 .31 ( 1 .42 + \ 0 .5 8 I +
2 3 2 1 3 '
(4 .4 5 + 0 .9 3 x )x d .x24 .09 m 3 ■ to n
El, k p • c m 2
24.09 x 106 x 103f = ---------- cm = 0.41 cmJ 2 x 106 x 29 2 1 0
/ = 4.1 m m
5.° A p lic a n d o e l p r im e r le o r e m a d e M o h r l e l á n g u lo 0B q u e fo rm a c o n la h o r iz o n ta l el e x tre m o a p o y a d o s e rá ig u a l a l á r e a d e l d i a g r a m a d e m o m e n to s ( le c to r e s , d iv id id a p o r El,.
A re a d e m o m e n to s p o s it iv o s :
- 0 . 5 8 x 6.31 + - (6 .31 + 8 .1 7 )2 + i 2 x 8 .1 7 = 2 4 .4 8 m 2 • to n 2 2 2
A re a d e m o m e n to s n e g a t iv o s :
11.42 x 15 .5 5 = 11 .04 m 2 - to n
A re a to ta l:
2 4 .4 8 — 11 .04 = 13 .4 4 m 2 ■ to n = 13 .44 x 107 c m 2 k p
Por tanto
13 .44 x 1 0 7
2 x I 0 6 x 29 2 1 0= 2.3 x 1 0 '3 rad = 0 ’ r 54"5
O
V JI.2 . U na viga rec ia AB de longitud / = 5 m está em potrad a en uno de sus ex trem o s y ap oyad a en el o tro . L a sección es constante, de fo rm a rec tan g u la r, de an ch u ra b y a ltu ra h. En un punto, a 3 m de distancia de! em potram ien to A, s e ap lica un m om ento A/, = 1 5 0 0 m - kp de eje perpendicular al p lano vertica l de s im etría de la Y¡ga. S e pide:
1.® D ib u jar los d iag ram as de m om entos flec tores y de esfu erzos co rtan tes.2.® D ete rm in ar la s dim ensiones de la sección sab iendo que la re lación en tre los lados de la
m ism a es b ¡h = 1/3 y que la tensión m á x im a adm isib le es a , im = 1 2 0 0 kp/cm 2.
1 ° Consideramos la solicitación equivalente formada por el momento M , y por el momento de empotramiento, actuando sobre una viga igual pero simplemente apoya-
FLEXION H IPE R E ST A T IC A 4 3 5
d a cu lo s e x t re m o s . D e s c o m p o n ie n d o la s o l ic it a c ió n d a d a s o b re la v ig a h ip e r e s t á t ic a .
en la s a c c io n e s in d ic a d a s s o b re la v ig a is o s t á t ic a , se t ien e :
R\ =
r : = —
■1500
1Af„
= - 3 0 0 k p ; R'„ = 300 k p
: R i = -71
C o n la s r e a c c io n e s i s o s t á t ic a s e l d ia g r a m a de m o m e n to s f le c to r e s e s t á p e r fe c ta m e n te d e t e r m in a d o (F ig . V II .2 -o ).
R*M . = 1500 m - k p a
=ۤ=f
/7mr,
r&
3 m
3 9 0 m • k p
/ = 5 m
Ai,R',
A777777
A/7T77777
900 m • kp
D ia g r a m a d e m o m e n to s f le c to r e s
D ia g r a m a d e e s fu e rz o s c o r t a n t e s
378 kpF ig u r a V II -2 -a .

4 3 6 R E S I S T E N C I A D E M A T E R I A L E S
S u p o n ie n d o q u e e l m o m e n to h ip e re s tá t ic o t ie n e e l s e n t id o in d ic a d o en la f ig u ra ,
a p l ic a n d o e l s e g u n d o te o r e m a d e M o h r se t ie n e .
i 1 2 5 2- - 3 x 9 0 0 (2 + 1) T - 2 x 6 0 0 - 2 + ^ M A - 5 = 0
d e d o n d e :
M < = 3 9 0 m • k p
L a s r e a c c io n e s h ip e r e s t á t ic a s so n :
3 9 0 . . . . 3 9 0= — — = —78 k p ; R'¿ = 78 k p
5 " r ' ” 5
L a s r e a c c io n e s d e f in i t iv a s s e rá n :
R A = R'a + R a = - 3 0 0 - 78 = - 3 7 8 k p
R a = R b + R b = 3 0 0 + 78 = 378 k p
L a s le y e s d e m o m e n to s ( le c to re s so n :
M = 3 9 0 — 378 .* v á l id a p a r a 0 í , t ^ 3 m
M = 3 9 0 - 378 .* + 1500 = - 1890 - 37 8 ; 3 m 5 m
y la d e e s fu e r z o s c o r t a n te s :
T = - 3 7 8 k p
c o n s t a n te e n to d a s la s s e c c io n e s d e la v ig a .L o s d ia g r a m a s c o r r e s p o n d ie n te s se r e p r e s e n ta n en la m is m a F ig u r a V II .2 -n .
2.° E l m ó d u lo re s is t e n te n e c e s a r io es:
A jn . , 75 6 0 0 cm • k p _ 3",•**= ■-------- = r - 63 cma ,ám 1200 kp-cm '
C o m o
se d e d u c e :
W , =/. 12
b h 1
h/2
b h 1 _ 3 ó 3
T ~ ~
^ 63 = ^/42 = 3.476 cm
h = 36 = 3 x 3 .4 7 6 = 10.428 cm
F L E X I O N H I P E R E S T A T I C A 4 3 7
V IL 3 .
- I F ig u r a V II.2-A .
S e to m a r á n , p u e s :
b = 35 m m 105 m m
U n a v ig a A B d e lo n g itu d / q u e tien e su e x t r e m o A p e r f e c ta m e n te e m p o tra d o y e l e x t r e m o B so b re a p o y o m ó v il, e s tá s o m e t id a a u n a c a r g a u n ifo rm e m e n te r e p a r t id a p . S e p ide :
1.° C a lc u la r la r e a c c ió n en e l ap o y o m ó v ila ) po r lo s te o r e m a s d e M o h r ,b ) po r e l m é to d o de la s fu e rz a s ,c ) po r e l m éto d o d e M o h r
2 ° D ib u ja r e l d ia g / a m a de m o m en to s f le c to r e s in d ic a n d o lo s v a lo re s d e lo s m o m en to sp o sitivo s y n e g a t iv o s m á x im o s , a s í c o m o la s s e c c io n e s en la s q u e se p re se n tan .
3.° C a lc u la r e l á n g u lo q u e fo rm a n la s t a n g e n te s en lo s e x t r e m o s d e la v ig a .4.° D e te rm in a r la s i tu a c ió n d e la f le c h a y e l v a lo r de é s ta .
I.® a ) P o r l o s t e o r e m a s d e M o h r
A n á lo g a m e n te a c o m o se h a p r o c e d id o e n e je r c ic io s a n t e r io r e s d ib u ja m o s lo s d i a g r a m a s d e m o m e n to s f le c to r e s is o s t á t ic o s y d e m o m e n to s f le c to r e s h ip e r e s t á t ic o s , o b te n ie n d o e l d ia g r a m a d e f in it iv o d e m o m e n to s p o r s u p e r p o s ic ió n (F ig . V II .3 - íj).
P a r a c a l c u la r e l v a lo r d e l m o m e n to d e e m p o t r a m ie n to M A a p l ic a n d o e l s e g u n d o te o r e m a d e M o h r , s e t ie n e :
.* d x + ^ M Ál \ I — 0 2 A 3
d e d o n d e :
P ' 2
L a s r e a c c io n e s i s o s t á t ic a s e h ip e r e s t á t ic a s so n :
p l p lRa í - Y : *a. = y
R - P ' ■ R - P ‘

4 3 8 R E SIST E N C IA DE M A T E R IA L E S
Por tanto, las reacciones definitivas serán:
5 p lRa — Raí + Raí, — ~z~
Rb — Rbí + Rbh —3 p l
La reacción pedida es RB
JPI
b) Por e l m é to d o d e las fu erzas
Se trata de un sistema hiperestático de primer grado. Obtenemos el sistema base eliminando el apoyo móvil y sustituyéndolo por una fuerza X, (Fig. VII.3-Ó).
En este caso tendremos solamente una ecuación canónica
í
FLEXION HI PER E STATIC A 4 3 9
1 1 /
(ó)
(c)
Ul)
/
X ^
p '2 s 8
i k
A T - = M !y 128
t i
3/4 /
i rDiagrama de momentos (lectores
Figura VII.3.
Calcularemos los valores de los coeficientes (5M y A ,» aplicando el método de multiplicación de los gráficos (Fig. VII.3-C y d)
1 3 ,A ,- = --------/
, f El. 4 2 8 El.
Por tanto, el valor de la reacción Xx en el apoyo móvil es:
X, = -A i e 3pl
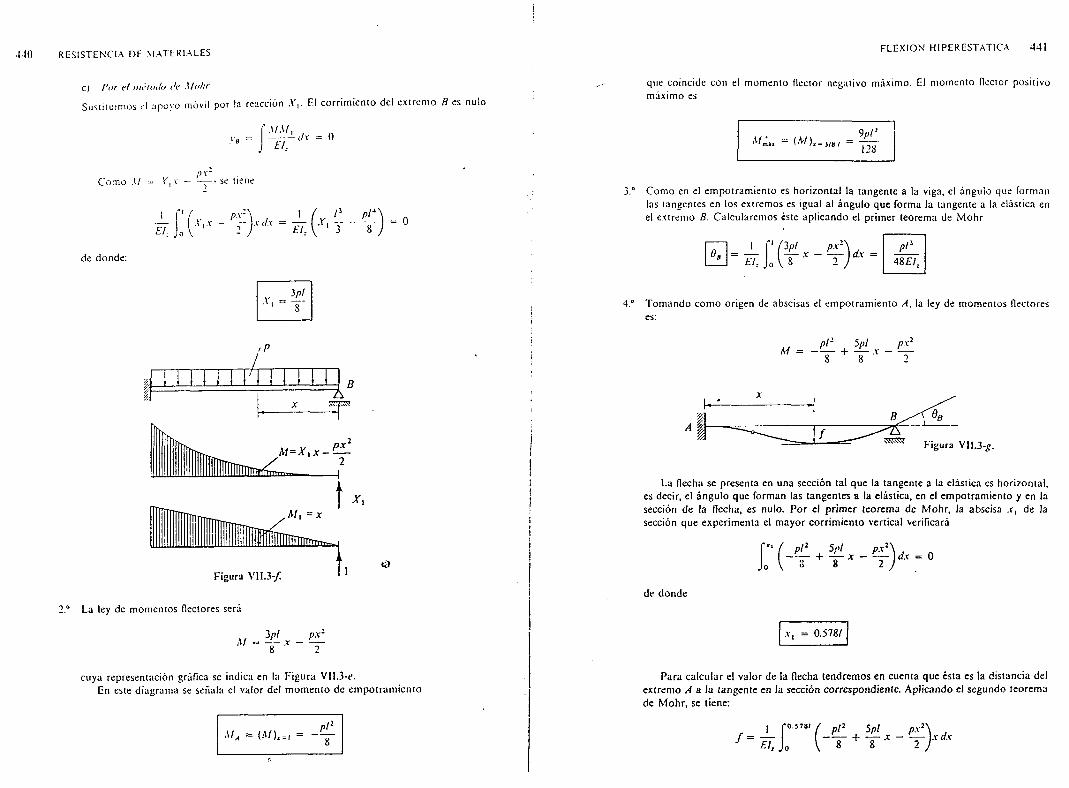
440 R E S I S T E N C I A D E M A T E R I A L E S
c) Por i't nicltii/u i'r MohrS u s t i tu im o s el ap o yo móvil por la reacción .V,. El corrimiento del extremo B es nulo
= | ^ J x = 0
p.\-C'omo M = X ¡ , v — • se tiene
I~É T. Y'x - pt ) xí,x = M x>t ~ pt ) = °
de donde:
i
liiíííílTTlTnTnT ^M=Xí X -
p x
\ -
2.“ La ley de momentos flectores será
cuya representación gráfica se indica en la Figura V11.3-C.En este diagrama se señala el valor del momento de empotramiento
F L E X I O N H I P E R E S T A T I C A 441
que coincide con el momento fiector negativo máximo. El momento fiector positivo máximo es
9 p l 1l ñ
Como en el empotramiento es horizontal la tangente a la viga, el ángulo que forman las tangentes en los extremos es igual al ángulo que forma la tangente a la elástica en el extremo B. Calcularemos éste aplicando el primer teorema de Mohr
Pl 1EI-. Jo V S ) 48 £7.
Tomando como origen de abscisas el empotramiento A, la ley de momentos flectores es:
La flecha se presenta en una sección tal que la tangente a la elástica es horizontal, es decir, el ángulo que forman las tangentes a la elástica, en el empotramiento y en la sección de la flecha, es nulo. Por el primer teorema de Mohr, la abscisa .r, de la sección que experimenta el mayor corrimiento vertical verificará
f* ' f p l 2 5,n/ px 2\ .( - T + T ' - - , r - 0
de donde
-v, = 0.578/
Para calcular el valor de la flecha tendremos en cuenta que ésta es la distancia del extremo A a la tangente en la sección correspondiente. Aplicando el segundo teorema de Mohr, se tiene:

4 4 2 R E SIST E N C IA DE M A T E R IA LE S
d e d o n d e :
V II .4 . L a v ig a r e c t a de la F ig u r a V II.4-U e s tá e m p o tr a d a p o r su s e x t re m o s y s e e n c u e n tra so m e tid a a la c a r g a in d ic a d a . S e p ide :
1.° C a lc u la r lo s m o m en to s en lo s e m p o tra m ie n to s .2 .” D e te r m in a r la s re a c c io n e s v e r t ic a le s en a m b o s e x t r e m o s .3 .° D ib u ja r lo s d ia g r a m a s de m o m en to s f le c to r e s y d e e s fu e rz o s c o r ta n te s .4 ." C a lc u la r la s i tu a c ió n de lo s p u n to s d e in f le x ió n de la e lá s t ic a .
j s t o n
A B
3 m 2 m
1.” D e l s is t e m a d a d o p a s a m o s a l s is t e m a e q u iv a le n t e in d ic a d o en la F ig u r a V II .4-lt, q u e d e s c o m p o n e m o s e n fo rm a a n á lo g a a c o m o h e m o s h e c h o en e je r c ic io s a n te r io r e s .
El c á lc u lo d e lo s m o m e n to s d e e m p o t r a m ie n to lo h a r e m o s p o r a p l ic a c ió n d e lo s
t e o r e m a s d e M o h r .P o r e l p r im e r te o r e m a :
1 1 1 M . + „- 5 x 6 - - 3 x 1 .2 + - 2 x 0 .8 + — ------- 5 = 02 2 2 2
y a p l ic a n d o e l s e g u n d o :
. ; 5 x 6 i ± i i 2 - ^ x , a j 3 t i 2 x o . 8 ( 3 + ] ) + i w 4 + i 5« , L » - o
se o b t ie n e e l s is t e m a d e e c u a c io n e s
A/, + Mu28
' 5
M a + I M g = - 9 . 4 4
2 .° L a s r e a c c io n e s i s o s t á t ic a s so n :
c u y a s s o lu c io n e s so n :
A / , = — 1 .7 6 m • to n ; M B = — 3 .8 4 m - t o n
Raí = R'a + R'Á = 2 - 0 4 = [-6 ton R Bi = R'b 4- R g = 3 + 0 .4 = 3 .4 to n
t
F L E X I O N H I P E R E S T A T I C A 4 4 3
( ó )
(</)
\RA
5 to n i
M , r 2m.ton Mb
................ - = 4 — " ,
r -
6 m .to n
(e l
F ig u r a V II .4 .
y la s h ip e r e s t á t ic a s : y
R - t l í Z J O * - ~ 3 '84 + H * = - 0 . 4 1 6 to nA ja — i *“ c
= 0 .4 1 6 to n
p o r lo q u e la s r e a c c io n e s d c f in i l iv a s s e r á n :
= R a¡ + R Ak = 1 .184 to n
Rg = Rg, + Rgk = 3 .8 1 6 to n
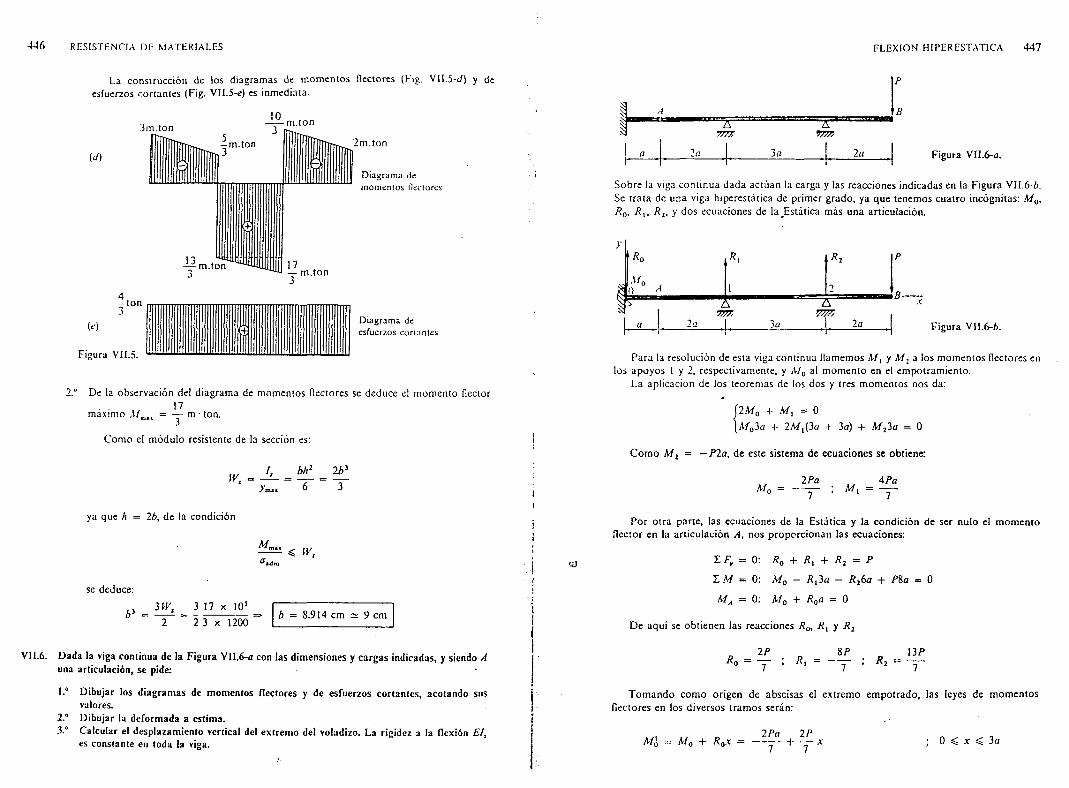
446 r e s i s t e n c i a d e m a t e r i a l e s
VII.6.
La consirucción de los diagramas de momentos flectores (Fig. VI1.5-J) y de esfuerzos cortantes (Fig. VII.5-e) es inmediata.
3m.ton m.ton
(</)
4 ,-to n3
(e)
Figura VI 1.5.
m.ton
2m.ton
Diagrama de momentos flectores
Diagrama de esfuerzos cortantes
2.° De la observación del diagrama de momentos (lectores se deduce el momento (lector. . 17
m áx im o A/m„ = — m • ton.
Como el módulo resistente de la sección es:
1. bh1 2b1IV. =
-Km..
ya que h = 2b, de la condición
A/„
se deduce:
b 3 =3IK, 3 17 x 105
2 3 x 1200b — 8.914 cm ^ 9 era
Dada la viga continua dc la Figura Y11.6-a con las dimensiones y cargas indicadas, y siendo A una articulación, se pide:
1.* Dibujar los diagramas de momentos (lectores y de esfuerzos cortantes, acotando sus valores.
2.° Dibujar la deformada a estima.3.° Calcular el desplazamiento vertical del extremo del voladizo. La rigidez a la flexión El,
es constante en toda la viga.
F L E X I O N H I P E R E S T A T I C A 447
P
•B
777Z
3a 2a Figura VII.6-a.
Sobre la viga continua dada actúan la carga y las reacciones indicadas en la Figura VII.6-b. Se trata de una viga hiperestática de primer grado, ya que tenemos cuatro incógnitas: A/0, R0, R l , R2, y dos ecuaciones de ^E stática más una articulación.
Ro \R' [RiA/o 0- A 1 2
A7VZ
3 aV777>
2a Figura VI1.6-6.
Para la resolución de esta viga continua llamemos M , y M , a los momentos flectores en los apoyos 1 y 2, respectivamente, y A/0 al momento en el empotramiento.
La aplicación de los teoremas de los dos y tres momentos nos da:
2 M 0 + A/, = 0Af03a + 2A/,(3a + 3a) + Af23a = 0
Como Ai¡ = — Pía , de este sistema de ecuaciones se obtiene:
2 Pa 4Pa; M t = —
Por otra parte, las ecuaciones de la Estática y la condición de ser nulo el momento flector en la articulación A, nos proporcionan las ecuaciones:
«a ZF, = 0
I . « = 0
= o
Rq 4- Ri 4- R2 = P
M 0 — 7J,3a — R26a + P&a = 0
A/0 4- R0a = 0
De aqui se obtienen las reacciones R0, R¡ y R2
R - 2P0 ~ T
8 P 13 P
Tomando como origen de abscisas el extremo empotrado, las leyes de momentos flectores en los diversos tramos serán:
2 Pa 2 P M 0 = A/0 4- R0x = ----- — 4- — x 0 < x < 3a

RE SISTEN CIA DE M A T E R IA L E S
2 P a 2 P 8 P 22 P a 6 PA/,- = ----— — .y - — (.v - 3o) = — -----------— x ■ 2a x 6a
2 2 P a 6 P 13P 56 P aS í f = ---------- — — .r + -------- (.v — 6o) = ---------------+ P x ; 6o < x C 8o
7 7 7 7
L a s le y e s de esfuerzos cortantes se obtienen fácilmente por derivación d e e s ta s ú lt im a s
7"ó = ~y ~ ; T\ — ~~y~ < t \ =* p •
Los diagramas pedidos se dibujan en las Figuras VII.6-c y <1.
fe)
(</)
(e)
a 2a 7 la 2a1 2o 3
Diagrama de momentos (lectores
Diagrama de esfuerzos cortantes
Elástica
2° Obtenido el diagrama de momentos (lectores se puede dibujar, sin ninguna dificultad,la clástica de la viga continua considerada. Es lo que se hace en la Figura VII.6-e, en la que se ha señalado el punto de inflexión que existe. En la articulación A la elástica presenta un punto anguloso.
3.° Para el cálculo del desplazamiento de la sección extrema B podemos aplicar cualquiera de los métodos que se han expuesto en el Capítulo 5. Sin embargo, en nuestro caso, es particularmente aconsejable aplicar el método de Mohr y calcular las integrales correspondientes mediante la aplicación del método de multiplicación de gráficos, ya que el diagrama de momentos (lectores M 0 de la carga real ya lo hemos calculado (Fig. VII.6-yj, y el correspondiente a la carga unidad aplicada en B es particularizado el anterior para P = 1 (Fig. VII.6-g).
|FLEXION H IRER ESTATIC A 4 4 '
-Af,
E l.
Figura V11.6.
1 /I 2Pa 2 2a 1 4Po , 2 4a I APa 2a 2 4«M°M' dx = EL 2 T flI T + 2 T 2fl3 T + 2 T T ) T
1 , „ l a 2 , l „ 2 , \ 6.09Pa1 + - 2Pa — - 2a + - 2Pa2a - 2a = ———2 3 j 2 2 1 t i .
es decir, el desplazamiento de B es
6.09 Pa3 El.
VII.7. Dada la viga continua indicada en la Figura V'II.7-a. se pide:
1.° Dibujar los diagramas de momentos (lectores y de esfuerzos cortantes.2.° Calcular el IPN necesario si la tensión admisible del material de la viga es oldm = H 1
MPa./3 ton/m
2 ton/m 3 ton 2 ton/m
T o > . ,T vV777X A a T
J7777?.
4 m 2m 3 m 3 rn I 2 m
Figura VII.7-a.
1.° Dibujemos los diagramas de momentos isostáticos de cada tramo de la viga coníi considerada, indicando las distancias de los centros de gravedad de las áreas de c uno de estos diagramas a los apoyos extremos (Fig. VI 1.7-6).

4 5 0 R E S I S T E N C I A D E M A T E R I A L E S
Si A/0 es el momento en el empotramiento y A/,, A/2, A/3 son los momentos flectores en las secciones de los apoyos 1, 2 y 3, respectivamente, aplicando los teoremas de los dos y tres momentos tenemos:
2A/0 + A/, = - 6
f n .D . f w ,A/0/, + 2A / ,(/ l + l 2) + M 2l 2 = + ~ j ^
/fliD , Í2,c/jA/,/j + 2 \ í 2(I2 + /3) + A/3/3 = - 6 | - 4 - ^ +
Como:
f i, = ' / W . P tx2\ . p J Ír = i 2 -
32m ■ ton
1 Pa-,b2 .0 2 = - 12 -= 9 m2 ■ ton
Q3 - = 4.5 m2 • ton
n 4 =o 12
sustituyendo valores, se tiene:
dx = —1 m ■ ton
32 .T42
2A/0 + A/, = —6 — = —8 m-ton
F L E X I O N H I P E R E S T A T I C A 4 5 1
4 A f0 + 18 A/, + 5 M 2 = - 63 “ 3
”T~ + T~304
" T
5A f, + 16A/¡ + 3A/3 = - 6
79 -
3 4.5 x 1.5
T + 3
387"Í0
Como se conoce A73 = , —-/>/* y = —2 m • ton, este sistema nos da:
A/0 = — 2.8 m- ton ; A/, = — 2.4 m- t on ; A/2 = — 1.3 m ■ ton ; A/3 = — 2 n
Calculemos ahora las reacciones definitivas (Fig. VII.7-c)
Figura VII.7-c.
7?, = CAJ- _ 2
A/, - M 0
/>A/| - M 0
h
^ 3 - m 2
a/3 - A/,
-2 .4 + 2.8 4 -t--------------------= 4.1 ton
= 5.92 ton
= 3.75 ton
+ — pU = 6-23 ton
■ ton
A/, - A/,
4
Una vez obtenidas las reacciones definitivas, calcularemos las leyes de momentos (lectores tomando como origen de abscisas en cada tramo el apoyo izquierdo, salvo en el voladizo que tomaremos como origen la sección extrema
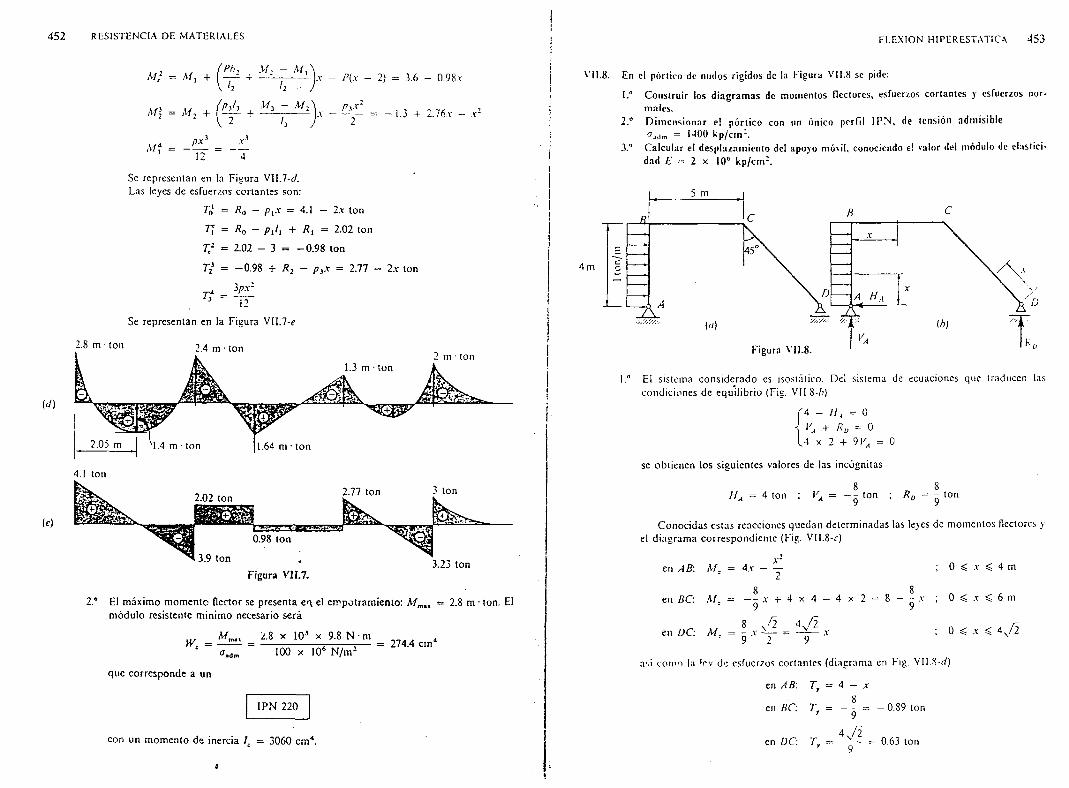
4 5 2 RE SISTEN CIA DE M ATE RIA LE S
M ¡ = Ai, +
M\ = M 2 + -1 .3 + 2.76.V - .v2
Se representan en la Figura VII. 1-d.Las leyes de esfuerzos cortantes son:
2o - Ro ~ Pi-X = 4.1 — 2,t ton77 = R0 — p j t + /?, = 2.02 ton
TS = 2.02 - 3 = -0 .9 8 ton
r 23 = -0 .98 + = 2.77 - 2.x ton
T < _ ^
3 - ~TTSe representan en la Figura VII.7-e
(e)
4.1 ton
I 3.9 tonFigura VII.7.
3.23 ton
2.” El máximo momento flector se presenta en. el empotramiento: A/mt, = 2.8 m • ton. El módulo resistente minimo necesario será
í-8 x 103 x 9.8 N • m *W, = ------- = — —------ .— = 274.4 cm100 x 106 N/m2
que corresponde a un
IPN 220
con un momento de inercia /. = 3060 cm‘ .
t
1 ton
/m
F L E X I O N H I P E R E S T A T I C A 4 5 3
VII.8. En el pórtico de nudos rígidos de la figura VIL8 se pide:
1.° Construir los diagramas de momentos (lectores, esfuerz.os cortantes y esfuerzos normales.
2.° Dimensionar el pórtico con un único perfil IPN, de tensión admisible= 1400 kp/cm2.
3.° Calcular el desplazamiento del apoyo móvil, conociendo el valor del módulo de elasticidad £ = 2 x 10° kp/cm2.
1.° El sistema considerado es isostático. Del sistema de ecuaciones que traducen las condiciones de equilibrio (Fig. V il.8-6)
CA - 7 / 3 = 0
I VA + Rd = 0 U x 2 + 9K, = 0
se obtienen los siguientes valores de las incógnitas
8 8 Ha = 4 ton ; VA = - - ton ;/ ? „ = - ton
Conocidas estas reacciones quedan determinadas las leyes de momentos (lectores y el diagrama correspondiente (Fig. VII.8-c)
en AB: M . = 4 .v ---- — ; 0 < .v í 4 m
8 8 en BO. M . = .v + 4 x 4 - 4 x 2 = 8 - - .v ; 0 $ x < 6 m
8 /7 4 / 7 ren DO. M . = - x ~ x : 0 sg .v s: A^fl
asi como la lev de esfuerzos cortantes (diagrama en fig. VII.8-(7)
en AB: Ty = A — x8
en BC. 0.89 ton
en DO T, = = 0.63 ton

R E S I S T E N C I A DE M A T E R I A L E S
Figura VII.8-C.
y de esfuerzos normales (diagrama en Figura VII.8-é
en AB: N = — VA =en BC: N = 0
8 J íen DC: N = 9 2
— 0.63 ton (compresión)
2° Para el dimensionado tendremos en cuenta que la sección más desfavorable es la del extremo B del soporte AB que trabaja a flexión compuesta en la que los valores del momento y esfuerzos son:
M z — 8 m ton ; N — 0.89 ton ; Tf — 0
La tensión normal máxima en la sección es:
AL N a = — + — < 1400 kp/cm2 Wt ¿2
800 000 8000 ,~~w T + la * 1 00 kp/c
Los valores de un perfil IPN que verifican esta inecuación (véase Apéndice 2) son:
W. - 653 cm3 ; C1 = 69.1 cm2
800 000 80006 5 3 9 x 69.1
= 1225 .11 + 12 .86 = 1238 < 1400 k p / c m 2
FLEX IO N HI PER ESTA TIC A 4 5 5
que corresponde a un perfil
IPN 300
de momento de inercia /. = 9800 cm4.Calcularemos el desplazamiento del apoyo móvil D aplicando el método de Mohr. Para ello dibujamos el diagrama de momentos flectores que produce en el sistema sin carga la aplicación en D de una fuerza horizontal unidad (Fig. VII.8-/).
4 m
1 1 r- 32 2 195 .65+ A J I 4 = --------
EI. 2 v 9 3 El,
Sustituyendo valores
195.65 x 109— — cm = 9.98 cm
D 2 x 106 x 9800
VII.9. En el pórtico representado en la Figura VII.9-U formado por tres barras de las rigidecesindicadas, se pide:
1.° Calcular, por aplicación del teorema de Menabrea, las reacciones en las articulaciones de los apoyos fijos.
2.° Dibujar los diagramas de momentos flectores, esfuerzos cortantes y esfuerzos axiales.3.° Calcular el desplazamiento del punto B en el que está aplicada la fuerza F.4.° Dibujar a estima la deformada del pórtico señalando la situación de los puntos de in
flexión, si los hubiere.1.° El sistema tiene cuatro incógnitas: las componentes verticales K,, V¡, y las horizontales
//,, H2 de las reacciones en las articulaciones de los apoyos fijos (Fig. VII.9-6). Por tanto, se trata de un sistema hiperestático de primer grado. Para resolverlo por el método de Menabrea, las tres ecuaciones de equilibrio
F + W, + H2 = 0 K, + K2 = 0 Fh + V,l = 0

R E S I S T E N C I A DE M A T E R I A L E S
permiten expresar tres incógnitas en función de la otra
f //, = - F - //,Fh
K =
FhA = —
I
l
F B * - C
Vx
A
El 3
El,
H,
Figura VII.9-6.
V,
£A
H ,
A
Calcularemos el potencial interno del sistema como suma de las energías de deformación de cada una de las barras que lo constituyen, despreciando los efectos producidos por esfuerzos normales y cortantes.
FLEXION H IPE R E ST A T IC A 4 5 7
El potencial interno del sistema es:
H h i3 h 2 ¡ F21 , \ ( F + H , ) 2!!1Z - Z . S + Ebc + Fdc = -^ 7- + ~ ( - t + / / ,/ + F H , j + 6£/2
Por el teorema de Menabrea:
SFS i l , 3 £/, 2EJ1
de donde se obtiene:
3£A
3//,/j + 2/1/,/j
2[/i/ J( / 1 + A ) + 32/,/,]
La otra componente horizontal se obtiene de la ecuación de equilibrio
= 3 + 2 h i 2¡ 32 2[/t/j(/, + A ) + 3//,A ]
Los signos menos nos indican que las componentes horizontales calculadas tienen sentido contrario aj supuesto en la Figura VII.9-6.
Las componentes verticales ya se obtuvieron directamente
A = —Fh Fh
K, = -
Los sentidos de las reacciones se indican en la Figura VII.9-C.2.° Una vez obtenidas las reacciones en las articulaciones, la construcción de los d ia
gramas de momentos flectores, esfuerzos cortantes y esfuerzos normales es inmediata (Fig. VIL9-r/).
H-,
F ig u ra V11.9-C.
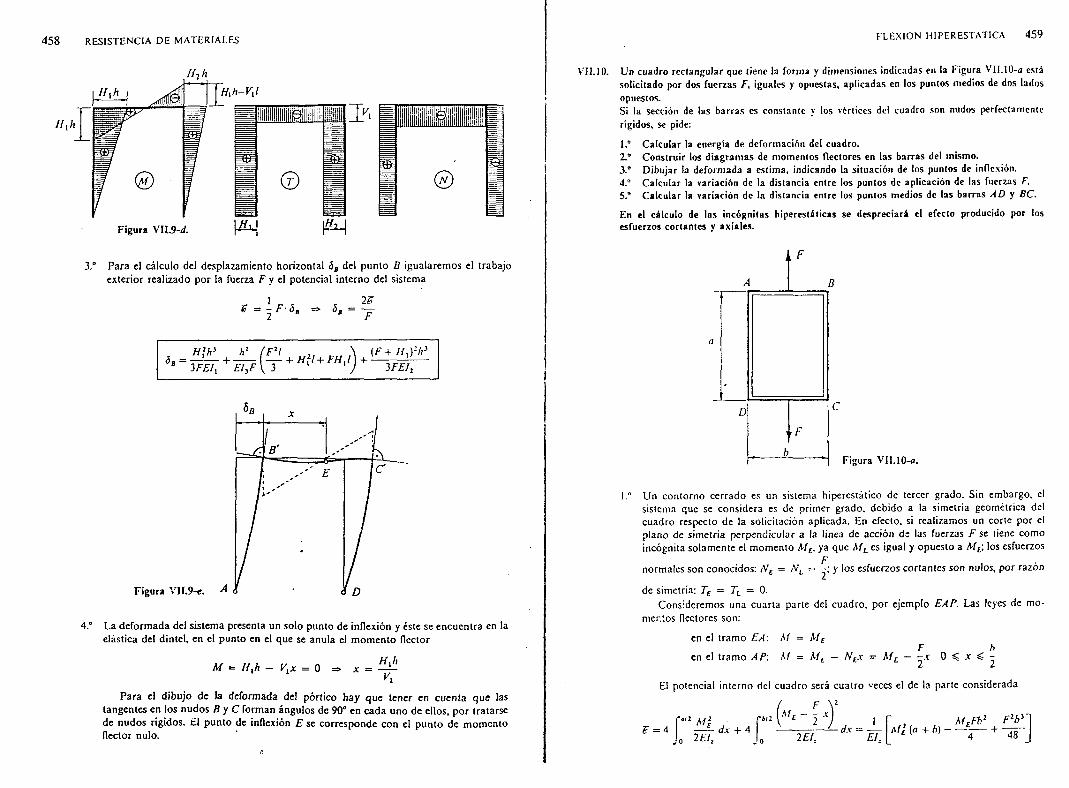
4 5 8 R E S I S T E N C I A D E M A T E R I A L E S
m
B0
Para el cálculo del desplazamiento horizontal 5a del punto B igualaremos el trabajo exterior realizado por la fuerza F y el potencial interno del sistema
1 2F F — - F ' h g => óB — —-2 F
H\h3 3FE!, ' E/3F V 3 ■') (f +
3 FEJ,
4° La deformada del sistema presenta un solo punto de inflexión y éste se encuentra en la elástica del dintel, en el punto en el que se anula el momento flector
M = Hyh — Vlx = 0 => x = ^K,
Para el dibujo de Ja deformada del pórtico hay que tener en cuenta que las tangentes en los nudos B y C forman ángulos de 90° en cada uno de ellos, por tratarse de nudos rígidos, t i punto de inflexión E se corresponde con el punto de momento (lector nulo.
F L E X I O N H I P E R E S T A T I C A 4 5 9
VH.10. Un cuadro rectangular que tiene la forma y dimensiones indicadas en la Figura VII.10-a está solicitado por dos fuerzas F, iguales y opuestas, aplicadas en los puntos medios de dos lados opuestos.Si la sección de las barras es constante y los vértices del cuadro son nudos perfectamente rígidos, se pide:
1.” Calcular la energía de deformación del cuadro.2.° Construir los diagramas de momentos flectores en las barras del mismo.3.° Dibujar la deformada a estima, indicando la situación de los puntos de inflexión.4.° Calcular la variación de la distancia entre los puntos de aplicación de las fuerzas F.5.“ Calcular la variación de la distancia entre los puntos medios de las barras AD y BC.
En el cálculo de las incógnitas hiperestáticas se despreciará el efecto producido por los esfuerzos cortantes y axiales.
F
D C
Un contorno cerrado es un sistema hiperestático de tercer grado. Sin embargo, el sistema que se considera es de primer grado, debido a la simetría geométrica del cuadro respecto de la solicitación aplicada. En efecto, si realizamos un corte por el plano de simetría perpendicular a la linea de acción de las fuerzas F se tiene como incógnita solamente el momento Af£, ya que AfL es igual y opuesto a Af£; los esfuerzos
Fnormales son conocidos: A'£ = i\\ — y los esfuerzos cortantes son nulos, por razón
de simetría: Tt = TL = 0.Consideremos una cuarta parte del cuadro, por ejemplo EAP. Las leyes de mo
mentos (lectores son:
en el tramo EA: M = M£F b
en el tramo AP: M - Af£ — NEx = Af£ — - .r 0 ^ x ^ -
El potencial interno del cuadro será cuatro veces el de la parte considerada
V = 4 ,2 E L
dx = — 2 El. El.
M fFb1 F2b y M£ (a + b ) - — + - ¿ g -

4 6 0 R E S I S T E N C I A DE M A T E R I A L E S
Figura VII. 10-A.
Por el teorema de Menabrea
d fEÁ77
Fb2 Fb20 =- 2MAa + b ) = 0 =. ,U£ = -----------
4 £ 8(u + A|
Sustituyendo en la expresión del potencial interno, se tiene:
1 F 2b 4 F 2b4 F2b 364(u + b) ~ 32(a + b) + 48
y simplificando:
F 2b 3 4 a + b192 EL a + b
2.° Se representa el diagrama de momentos flectores en la Figura VII.lO-c.
b 2^PQ 4 (a+b)
F oD
M
F~ 4(a+b)
Figura VII.IO. a
FLEXION H1 PER E S T A TIC A 4 6 1
Del diagrama de momentos flectores fácilmente se deduce la forma de la deformada (Fig. VH.I0-</).
Los puntos de inflexión se presentan en los tramos AB y DC a una distancia x de los vértices tal que verifica:
Fb2 FM = M - ¡V x = .v — 0£ £ 8(a + b) 2
de donde:
b14(u + b)
La variación de la distancia entre los puntos P y Q de aplicación de las fuerzas se puede obtener igualando el trabajo realizado por las fuerzas aplicadas y el potencial interno
I , _ _ F2b> 4a + b 2 rQ ' 19267. a + b
de donde:
t Fb3 4a + b fQ = 96 El, a + b
El cálculo de la variación ñEL de la distancia entre los puntos E y L lo haremos teniendo en cuenta que las barras AD y BC trabajan a flexión pura y, por consiguiente, la elástica de cualquiera de estas barras es un arco de circunferencia de radio
El &E!t(a + b )P ~ W E ~ Fb1
De la relación
2 . = fP - P ~ f )
siendo / la mitad de 1» variación 6ÍL pedida, se deduce:

4 6 2 R E S I S T E N C I A DE M A T E R I A L E S
e cu ac ió n de segundo grad o , cu ya ra iz v á lid a es:
f = P - J P2 - J = ? ( i
a2 Fa2b28 p (AEI,(a + b )
1 - 1 -8 p 2
= 2/ =Fa2b 1
32 (a + b)E¡,
V II .I I . En el sistem a plano indicado en la F igura V l l . l l - a se pide:
1.° C o n stru ir el d iag ram a de m om entos flectores.2.° D ib u ja r a estim a la deform ada del s istem a señalando la situación de los puntos de
in flex ión .
" S i(*)
F igura V II. 1 1 .
C a lc u la re m o s las incógn itas h ip erestá ticas del p ó rtic o p o r ap lica c ió n del m éto d o de las fuerzas. C o m o el g rad o de h ip eresta tic id a d del sistem a es dos, e lim inam o s las dos lig a d u ra s su p erflu a s co rresp o nd ien tes í\ a p o y o fijo y la s sustitu im os p o r las fuerzas X¡ y X2, o b ten ien d o de esta fo rm a el s istem a b ase (F ig. V II. 11 -b).
L as ecu ac ion es can ón icas son :
J ó í t X i + Sl2X2 + A t/> = 0
+ S22X2 + &2F = 0
L os v a lo re s de los coeficientes y té rm in o s ind ep en dien tes lo s p odem os o b ten er m u ltip lic a n d o lo s corresp ond ien tes d ia g ra m a s de m om en to s Mzl , M ,2, M zF, rep resen ta d o s en la F ig u ra V I I .l l -c .
4a3JET.
F L E X I O N H I P E R E S T A T I C A 4 6 3
S ó ‘ > '<5,: = á 21 = - « = - —
<5 1 1 2 2 c ,iZ1 ~ eT. 1 ° 3 a ~ JET.
Aíf —1
ETZ_ .r dx + a 2
o 2 2
5 pa SEÍ.
1 1 2 p a 2 p a 2
U z2 ° T~ = ~Ee¡._
Por consiguiente, el sistema de ecuaciones canónicas es:
{4 1 5 pa
1 1 pa
~2 ‘ + 3 * 2 ~ 4 = °
3ap 3apc u y a s so lu cio n es son : X, — -------- : X, = —
7 8

4 6 4 R E S I S T E N C I A DE M A T E R I A L E S
VII. 12
Conocidos los valores de A", y .V,, la construcción del diagram a de momentos flectores es inmediata. Se representa en la Figura VII. 11 -z/, en la que se han indicado los valores del momento de empotramiento, del momento flector positivo máximo asi co m o su s itu a c ió n y la abscisa sobre el dintel del punto de momento nulo.
2.° Teniendo en cuenta el diagrama de momentos Héctores, con toda la información quedel mismo se deduce, se representa la deformada del pórtico en la Figura VII. 11-e, enla que se indica la situación de los puntos de inHexión.
Sobre el sistema plano de la Figura VII.I2-U actúa la carga indicada. Se pide:
!.° Calcular las reacciones en los extremos articulados A y B.2.° Dibujar los diagramas de esfuerzos normales, esfuerzos cortantes y momentos flectores
para la siguiente aplicación numérica: q = 5 kN/rn; a - 16 m; h — 6 m.3.° Dibujar a estima la elástica.
1." El sistema considerado es de primer grado de hiperestaticidad. Tomaremos como incógnita hiperestática la componente horizontal del apoyo B, por lo que el sistema base se obtendrá modificando el apoyo fijo B en apoyo móvil (Fig. V i l .12-6).
C
Calcularemos esta incógnita aplicando el método de las fuerzas
Para la determinación de los coeficientes ón y ¿ lf. dibujemos los d iagram as de momentos flectores A/, y \fr
La obtención del primero es inmediata (Fig. VI1.12-c). Para la determinación de las leyes de momentos Hedores en el sistema base calculemos previamente las reacciones en los apoyos
1/7 = 0: qh + H'a 0I F, = 0: V'A + = 0
I A/ = 0 : VBa - = 0
=
=> K =
qh
q lr v: s!t2 a
F L E X I O N H I P E R E S T A T I C A 4 6 5
Figura VII.12.
Por tanto, las leyes de M P serán:
Barra AC:
QXMe = ( V'A eos x — H'Á sen a ) .v — sen2 a =
qh1 a qh2\ qh2 2 _ qh1 í l x x1" l a 21 + ~¡~JX ~ 2 p X = ~tT 1*2 T
Barra BC:
, qh1 a qh2M f = ( Kb eos ofj.x = — - x = — x
l a 21 4/
Los coeficientes de la ecuación canónica son:
i
M fdx =El.
£/.{ 2/3 J ~ 2 El,
h \ ( q h 2 (Zx X2\ 1 1 2 qh2- r ) { - 2 í { T - - Y * -
J _ q h 3e T .W 4/
1 qh3l _ 5 qh2lo ~ EÍl I T 24~e T2
Una vez determinados los coeficientes, la ecuación canónica nos permite obtener el valor de la incógnita hiperestática
y - 5J Í3 E l. 1 24 Elt ' 16
El resto de las reacciones se obtienen aplicando las ecuaciones de equilibrio
I Fx = 0: HA ■>- H , + qh = 0 E F, = 0: VA + = 0
£ Af = 0: V „ - a - ~ .= 0
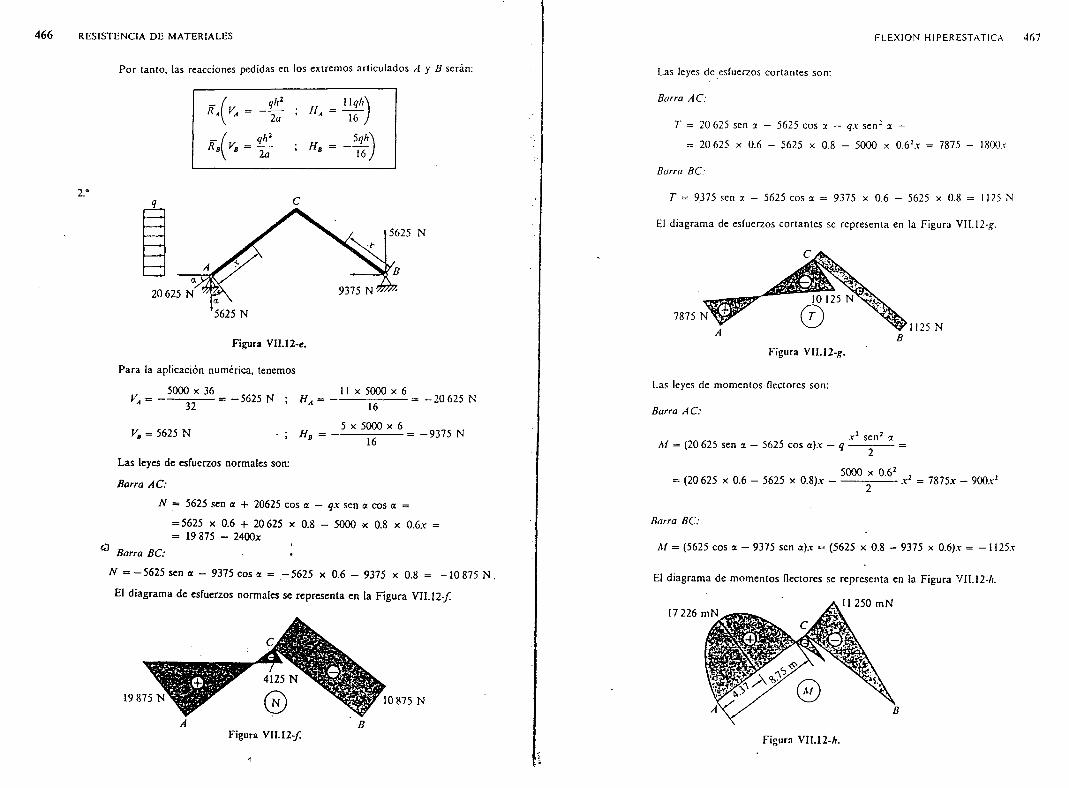
Por tanto, las reacciones pedidas en los extremos articulados A y B serán:
R E S I S T E N C I A D E M A T E R I A L E S
*■ (V qhl Ha =
11Á ~ 16 1
Rsl
^1II H„ = - P l\ 2a 16 J
Figura VII.12-e.
Para la aplicación numérica, tenemos
5000 x 36V. = —' 32
V. = 5625 N
■ = —5625 N ; HA =
Ha =
1 1 X 5000 X 6
16
5 x 5000 x 6
-2 0 625 N
16 ■= -9375 N
a
Las leyes de esfuerzos normales son:
Barra AC:
N — 5625 sen a + 20625 eos a — g.x sen a eos a =
= 5625 x 0.6 + 20 625 x 0.8 - 5000 x 0.8 x 0.6.x == 19 875 - 2400.x
Barra BC:
N = -5625 sen a - 9375 eos a = -5625 x 0.6 - 9375 x 0.8 = - 1 0 875 N .
El diagrama de esfuerzos normales se representa en la Figura VII. 12-/
Las leyes de esfuerzos cortantes son:
Barra AC:
T = 20 625 sen a — 5625 eos x — q.x sen2 a =
= 20 625 x 0.6 - 5625 x 0.8 - 5000 x 0.62.x = 7875 - 1800.x
Barra BC:
T = 9375 sen x — 5625 eos a = 9375 x 0.6 — 5625 x 0.8 = 1125 N
El diagrama de esfuerzos cortantes se representa en la Figura V11.12-g.
F L E X I O N H I P E R E S T A T I C A
Las leyes de momentos flectores son:
Barra AC:
.X2 sen2 xM = (20 625 sen a — 5625 eos a).x — q -------=
5000 x 0.62 ,= (20 625 x 0.6 - 5625 x 0.8).x---------- .x2 = 7875.x - 900.x2
Barra BC:
M = (5625 eos a - 9375 sen «).x = (5625 x 0.8 - 9375 x 0.6).x = - 1 125.x
El diagrama de momentos flectores se representa en la Figura VII. 12-/r.
F ig u ra V II.12-A .
4 6 7

4 6 8 R E S I S T E N C I A DE M A T E R I A L E S
3 “ En los resultados obtenidos, reflejados en el diagrama de P momentos flectorcs, se dibuja sin ninguna dificultad la deformada |Fig. VII.12-/).
Figura VII.12-/.
VII.13. Dada la estructura indicada en la Figura VII.13-a, constituida por barras de la misma rigidez El, se pide:
1.° Calcular el grado de hiperestaticidad del sistema.2.° Diagramas de esfuerzos normales, de esfuerzos cortantes v de momentos flectores.3.° Dibujar a estima la deformada, indicando la situación de los puntos de inflexión, si los
hubiere.
No se considerarán las deformaciones debidas a los esfuerzos normal y cortante.
C D P
I
A*7777.
" AFigura VII.I3-U.
1.° La estructura dada es un sistema que es exteriormente isostático, ya que sólo hay tres incógnitas debidas a las ligaduras externas: dos en el apoyo fijo A y una en el apoyo móvil E. Interiormente existe un contorno cerrado, por lo que el grado de hiperestaticidad seria de tres, pero al existir una rótuía en C disminuye en una unidad. Así pues, el grado de hiperestaticidad es
s
¡iI F L E X I O N H IP E R E ST A T IC A 4 6 9
1
C D P
Va
Figura VII.13-A.
Las reacciones de las ligaduras externas se obtienen aplicando las ecuaciones de equilibrio
I F , = 0 I F , = 0 I M = 0
P + HA = 0 V£ + VA = 0
VEl - P2I = 0
//, = - P
• Vl = - VA = 2P
2." Tomaremos como incógnitas hiperestáticas los esfuerzos normal y cortante transmitidos a través de la rótula C. Al realizar el corte por esta rótula podemos descomponer el sistema dado, en virtud del principio de superposición, como se indica en la Figura VII.I3-C.
F ig u ra V1L13-C.

4 7 0 R E S I S T E N C I A DE M A T E R I A L E S
Las ecuaciones canónicas del método de las fuerzas son:
+ 3,2^2 T A12> — 0 T ¿22^2 "L A 2/» — 0
Para el cálculo de los coeficientes 5¡¡ consideraremos los diagramas de momentos (lectores M r , Af , y Af¡ (Fig. VII.13-4).
Figura VII.I3-<f.
El H ') - P !3~Wr
El sistema de ecuaciones será:
'5 2 P3 Xi ~ * 2 + y - 0
5 P- * l + 3 * 2 - y = 0
cuyas soluciones son:
x - - 1 L - x 1 16 ’ 2 16
F L E X I O N H I P E R E S T A T I C A 4 7 1
Con estos resultados, la obtención de los diagramas de esfuerzos normales, esfuerzos cortantes y momentos flectores es inmediata (Fig. VII.13-C, f g )
(/V)
2P
■IIP16
10 Pl~ W
. Figura VII.13.
3.° Con el diagrama de momentos obtenidos se dibuja sin ninguna dificultad la deformada a estima de la estructura dada (Fig. VII. 13-/i).
VIí. 14. El sistema elástico plano indicado en la Figura V11.14-a está formado por las pletinas verticales de acero AC y BD y por el tablero horizontal AB, que tiene rigidez prácticamente infinita. Ambas pletinas están empotradas por sus extremos inferiores, e igualmente resultan empotradas al tablero por sus extremos superiores. En el nudo superior izquierdo actúa una fuerza horizontal F = 200 kp. Se pide:
1.° Dibujar los diagramas de esfuerzos normales, esfuerzos cortantes y momentos flectores, en todas las partes de la estructura.
2.° Calcular el desplazamiento horizontal del punto de aplicación de la fuerza F.
El módulo de elasticidad de las pletinas es E = 2 x 106 kp/cm2.

4 7 2 RE SISTE N CIA DE M ATE RIA LE S
/ = 2 m 1 c m
EUliC
7X7,
E'uu777.
10 cm
h. = 0.8 cm
S e c c ió n E ~ E '
Figura VII.I4-U.
La estructura dada es un sistema hiperestático de tercer grado. Tomaremos como incógnitas hiperestáticas las componentes vertical y horizontal de la reacción en el empotramiento D, asi como el momento en dicho empotramiento (Fig. VII.14-6). El sistema base es la estructura dada, liberada del empotramiento D (Fig. VII 14-c).
t>7777,
* ,
(/>)•r,
Figura VII.14.
77777,< c )
Por tanto, para el cálculo de los coeficientes del sistema de ecuaciones canónicas del método de las fuerzas
6 , , * , + ú l 2.V2 + ¿ , 3*3 + A ,, = 0¿ 2 ,* i + ¿ 33X3 + ¿ 23X3 + Aj,, = 0(53 jA 1 -E 6 3 3 X 3 -E 6 3 3 .-V3 -E A 32. = 0
aplicaremos el método de multiplicación de los gráficos, para lo cual consideraremoslos diagramas de momentos (lectores A/,, A/,, Af3 y M r (Fig. VII.14-r/)*.
Figura VII.14-í/. 2 0 0 m • kp
-7,0.8
• En el dibujo de las leyes de momentos flectores adoptaremos el convenio de dibujar el diagrama en la parte que corresponde a la fibra traccionada.
FLEXIO N Hl PER ESTATICA 4 7 3
Sea / el momento de inercia de la sección de las pletinas respecto al eje perpendicular al plano de flexión. Teniendo en cuenta que la rigidez del tablero AB es infinita, los valores de los coeficientes S¡¡ serán:
1 4o ,, = — (2 x 1 x 2) = —
" Eí 1 El
612 — 621I I \ 0.6
•- 0.8 x 0.8 x 2 + - 0.2 x 0.2 x 2 j = - —
6|3 — ¿31 _ El
. , 1 2 1 2 „ \ 0.344,5, , = — 2 x - 0.8 x 0.8 x - 0.8 + - 0 .2 x 0.2 x - 0.2 = -
El El
1 í 1A = 6 = — — 0.8 x 0.8 x I - - 0.8 x 0.8 x I e - ( I . 2 x 0 . 2 x 1 = -13 33 Eí\ 1 2 2 /
o.a:1Í7
1 1.8A33 = — (1 x 1 x 1 + 1 x 0.8 x I) = —
El El
3 0 0 x 2200
' ~E¡
1A, » = — Et
1 1 1 ( 2 - 0.8 x 0.8 x - 160 - - 0.2 x 0.2Í 160 + - 40
13.33El
= - L ( lEl \2
200 x l x l = -100~ÉÍ
Con estos valores, tenemos el sistema
f 4X, - O.óAfj + 2*3 = 2 0 0
^ - 0 . 6 * , -E 0 .3 4 4 * 2 - 0 .6 2 * 3 = - 1 3 . 3 3
U-V, - 0.62*2 + 1.8*, = 100 t í
cuyas soluciones son:
* , = 43.38 kp ; * 2 = 132.27 kp ; * 3 = 52.91 m -kp
Las restantes incógnitas, debidas al empotramiento en la sección extrema C, ¡t obtienen aplicando las ecuaciones de equilibrio
£ Fx = 0: 200 - Hc - X2 = 0 =- Hc = 67.72 kp
£ F, = 0 : * , - Vc = 0 Vc = 43.38 kp
£ M = 0: * 3 + Mc + X2{li - 6 ,) + * ,/ - F = 0=* Mc = 33.87 m • kp
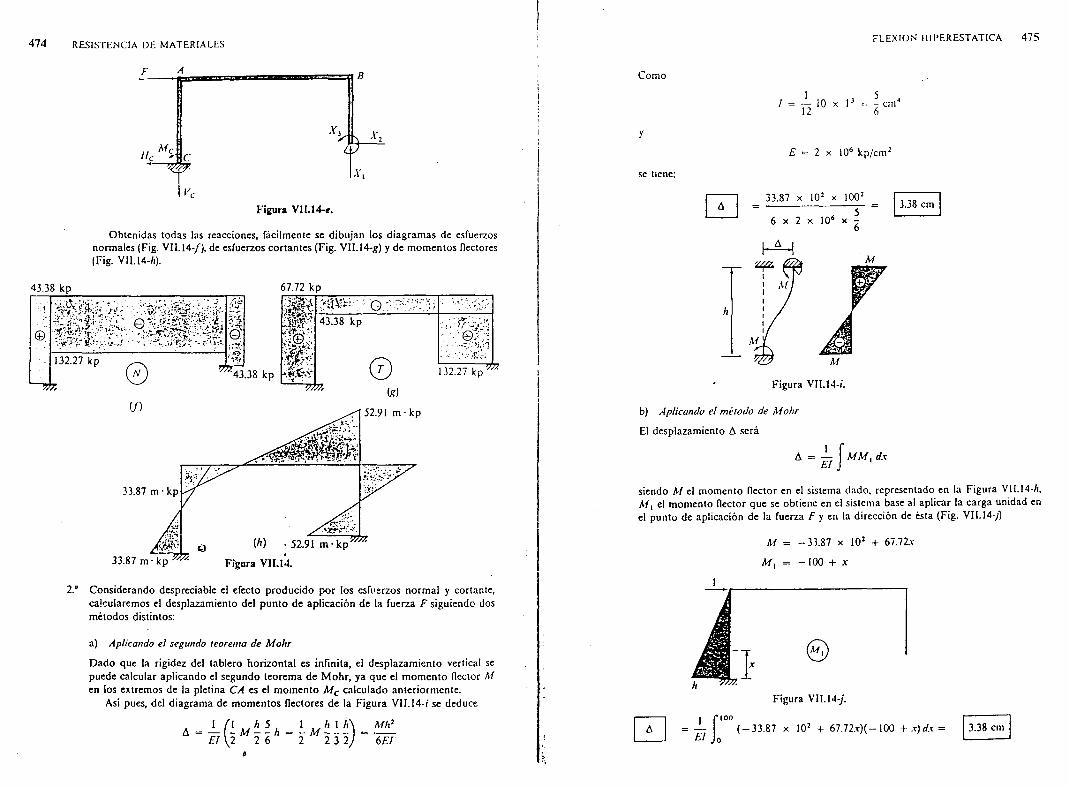
4 7 4 R E S I S T E N C I A DE M A T E R I A L E S
Figura VII.14-Í.
Obtenidas todas las reacciones, fácilmente se dibujan los diagramas de esfuerzos normales (Fig. VII.14-/), de esfuerzos cortantes (Fig. VII.14-g) y de momentos flectores (Fig. V1I.14-6).
43.38 kp 67.72 kp
©- ■ i : o
•y :© .'*© -V..' • ’ ' ¡ 0 1 -- r':V-3
J32.27 kp ©U)
43.38 kp
M
i ■ ■
© P © : G ■' '©'© : • ; © ; © ©
4 3 . 3 8 kp
©
- • •• ;* '© ' . i ¿
• ¡ I
- - .• ■ S - - 4 Í .V
132.27 k p '^
33.87 m • kp
33.87 m - k p ^(*) • 52.91 m -kp
Figura VII. 14.
7777.
52.91 m • kp
Considerando despreciable el efecto producido por los esfuerzos normal y cortante, calcularemos el desplazamiento del punto de aplicación de la fuerza F siguiendo dos métodos distintos:
a) Aplicando e l s egundo t eo r ema d e Mohr
Dado que la rigidez del tablero horizontal es infinita, el desplazamiento vertical se puede calcular aplicando el segundo teorema de Mohr, ya que ei momento (lector M en los extremos de la pletina CA es el momento M c calculado anteriormente.
Asi pues, del diagrama de momentos (lectores de la Figura VII. 14-/ se deduce
M - - h - - M - - - \ =E ¡\ 2 2 6 2 2 3 2/ 6EI
6
F L E X I O N H I P E R E S T A T I C A 4 7 5
Como
12 10 * ’ 35 ,- cm6
se tiene:
E = 2 x 106 kp/cm2
33.87 x 102 x 1002
6 x 2 x 106 x -
b) Aplicando e l m é to d o d e Mohr
El desplazamiento A será
3.38 cm
MM, dx
siendo M el momento (lector en el sistema dado, representado en la Figura VII.14-A, M, el momento flector que se obtiene en el sistema base al aplicar la carga unidad en el punto de aplicación de la fuerza F y en la dirección de ésta (Fig. VII. I4-y)
M = -33 .87 x 102 + 67.72.x
M , = -1 0 0 + .x
Figura VII. 14-/.
— (-33 .8 7 x (O2 + 67.72.x)(— 100 + .x)¿x =El Jo
3.38 cm

<
-476
V i l . 15. Se considera un anillo cuya linea media es una circunferencia de radio R — 2 m, de sección recta constante y sometido a las fuerzas contenidas en el plano de su directriz que se indican en la Figura VI1.I5-U. Calcular las leyes de momentos flectores y de esfuerzos normales y cortantes, dibujando v a c o t a n d o los correspondientes diagramas.
En el cálculo de las incógnitas hiperestáticas se despreciarán los efectos producidos por los esfuerzos normal v cortante.
R E S I S T E N C I A DE M A T E R I A L E S
El anillo que se considera, por ser cerrado, es interiormente hiperestático de tercer grado. Sin embargo, por tratarse de un sistema simétrico y con carga simétrica respecto del diámetro AD coincidente con la linea de acción de la fuerza de 6N/2 ton, el grado de hiperestaticidad se reduce a segundo grado.
Tomaremos como incógnitas hiperestáticas el esfuerzo normal y el momento (lector en la sección A (Fig. V il.15-6).
Las leyes de momentos flectores son:
Af, = NR{\ - eos 0) - Af - 3^/2 R sen 0 ; O í M j
Ai. = NR{ 1 — eos 0) — Af — 3^/2 R sen 0 — 6R sen f o — ^ j ; ^ < 0 ^ n
FLEXION H 1PERE STATIC A 4 7 7
Calcularemos las incógnitas hiperestáticas N y Af aplicando el teorema de Menabrea. Para ello, calculemos el potencial interno de medio anillo
e =
_ i ¿ A f “ ~EÍ.
2EÍ.ds +
Af?
3«A 2 EL— ds
Af °EL RdO = — — [ M.dO = 0 z o A f El. j o ‘
[tV/?(l - eos 0) - Af - 3v/2 R sen 0] dO + 6 R sen ( 0 — — ) dO = 0
NR[0 - sen 0]S - tcAf + 3y2A [co s OjJ + 6R eos^0 - = 0
Teniendo en cuenta ü = 2 ra, de aqui se obtiene la ecuación
2nN - nM - 6 ^ 2 - 12 = 0
« SE. = _ L í M. EEj . RdO = — { Af.(l — eos 0) dO = 0 oN EL Jo ‘ 8N El, J 0 ‘
[NR( 1 — eos O)2 — Af( 1 — eos 0) — 3^/2R sen 0(1 — eos 0)] dO —
6R sen ¡0 — — )(1 — eos 0) dO = 0
i „ n sen 20/Vf?( 0 — 2 sen 0 + - 1(0 -I — — Af[0 - sen 0]¿ + 3v/2f?[cos 0]5 +
+ 3 7 2 R
Como
sen2 0 * r+ 6R2 0
0 — + 6R j* sen ^0 — eos 0 dO = 0
(* “ t ) - j Z. [“ (2Í - t ) + “ ( - 7 )3*/4
16
sustituyendo valores y simplificando se obtiene la ecuación
12itzV - 4trAf - 24^ 2 - 48 - 3 *^ 2 = 0
que junto con
2nN - nM - 6 ^ 2 - 12 = 0
forman un sistema de dos ecuaciones con dos incógnitas, cuyas soluciones son:
Af = —4.4 m -ton : N = 1.06 ton

4 7 8 R E S I S T E N C I A D E M A T E R I A L E S
C o n o c id o s lo s v a lo re s d e la s in c ó g n it a s h ip e r e s t á t ic a s , la o b te n c ió n d e la s le y e s dc m o m e n to s ( le c to r e s , e s fu e rz o s n o r m a le s y e s fu e r z o s c o r t a n te s en la m ita d d e l a n i l lo es in m e d ia t a . En la o t r a m ita d s e o b te n d r á n p o r s im e t r ía
3nM, = 2 .12 (1 - e o s 0) + 4 .4 — 8 .4 8 se n 04
M; = 2 .1 2 (1 -- e o s 0) + 4 .4 — 8 .4 8 se n 0 — 12 sen M ) 371; — ^ 0 < k
4
S e d ib u ja e l d i a g r a m a a c o t a d o d e m o m e n to s ( le c to r e s en la F ig u r a V II.15-C .
L a s le y e s d e e s fu e rz o s n o r m a le s so n
N, = — 1.06 e o s 0 — 4 .2 4 s e n 0
( 3n\
4
3 aN, = — 1.06 e o s 0 — 4 .2 4 se n 0 — 6 se n ; — < 0 < a 4
S e d ib u ja e l d i a g r a m a a c o t a d o d e e s fu e rz o s n o r m a le s e n la F ig u r a V I I .1 5 -d
a
FLEXIO N H1PERESTATICA 4 7 9
L a s le y e s d e e s fu e rz o s c o r t a n t e s so n :
„ 3,1T, = 1 .06 sen 0 -- 4 .2 4 eo s 0 ; 0 « : 0 sS —
4
HaT, = 1.06 se n 0 -- 4 .2 4 eo s 0 — 6 eo s
( » - t ); — < 0 $ a
4
S e d ib u ja e l d i a g r a m a a c o t a d o d e e s fu e rz o s c o r t a n te s en la F ig u r a V IL15-C .
F ig u r a V lL 1 5 -e .
v

Flexión lateral. Pandeo
8.1. Introducción
El com portam iento de los materiales cuando se les somete a tracción ya ha sido descrito y estudiado en los primeros capítulos. Sin em bargo, cuando la fuerza ax ia l que se ejerce sobre un prisma mecánico recto es de compresión, el com portam iento es tanto más d istante del que corresponde a un esfuerzo de tracción cuanto m ayor es la relación entre la longitud y la dimensión de la sección recta, es decir, cuanto más esbelta sea la pieza.
Si estudiam os el comportam iento de m ateriales tan distintos como son el acero, horm igón y m adera, cuando se someten a compresión prism as de estos m ateria les cuya altu ra sea de 5 a 10 veces la dimensión de la sección transversal, experim entalm ente se obtiene que el agotam iento se produce para tensiones de rotura que son: superiores a la tensión de fluencia por tracción en los aceros; de 7 a 12 veces las tensiones de rotura por tracción en los hormigones y piedras naturales; y sólo el 40 por 100 de la resistencia por tracción en el sentido longitudinal de las fibras, en el caso de m aderas.
A m edida que aum enta la relación entre la a ltu ra y la longitud de la sección recta, experim enta una variación más m arcada el com portam iento. Por ejem plo, para piezas prism áticas en las que esta relación es superior a 100, cuando la carga tom a un cierto valor critico, el eje de la pieza abandona su forma recta y adopta forma curva. Este fenómeno, por el cuai la pieza som etida a compresión flexa lateralm ente, recibe el nom bre de p a n d e o o f l e x i ó n la t e ra l .
Tam bién observamos que si sometemos a compresión ax ia l piezas de la m ism a sección recta, del mismo m aterial, pero de diferentes longitudes, la carga que produce el cam bio de forma de la linea media es menor cuanto más esbelta es la pieza, y que una vez producido el cam bio de forma, si la carga de compresión sigue aum entando lentam ente, las deformaciones que se producen en la pieza crecen muy ráp idam ente y la p ieza se rompe para un valor de la carga ligeram ente superior a la carga critica.
Dc lo dicho se deduce que al llegar la carga exterior a a lcanzar el va lo r de la carga critica, la pieza prism ática considerada deja de estar en equilib rio estab le, por lo que el fenómeno de pandeo es un problema de estab ilidad elástica.
«J 9 0
F L E X I O N L A T E R A L . P A N D E O 4 8 1
En este cap ítulo analizarem os las causas y efectos del pandeo en las piezas rectas, que llam arem os c o l u m n a s , som etidas a com presión, así como la influencia que tienen los posibles tipos de ligaduras a que se puede ver som etida la pieza. Y puesto que, como hemos dicho, el fenómeno de pandeo es un problem a de estabilidad, comenzaremos nuestro estudio con el análisis de ésta.
8.2. Estabilidad del equilibrio elástico. Noción de carga crítica
Para entender con claridad este nuevo concepto de pandeo recordemos el ejemplo que se suele poner en M ecánica. Sea la b arra T igida O A, articu lada en el extremo fijo O. Por medio de un resorte de constante k se m antiene la barra en posición vertical (Fig. 8.1-u).
Supongam os que el extremo A, contado a p artir de su posición de equilibrio , sufre un pequeño desplazam iento AA' — x. Sobre el extrem o A‘ actúa una fuerza horizontal de módulo kx que ejerce el resorte y que, en caso de desaparecer la fuerza causante de! desplazam iento, hace que la barra vuelva a ocupar su posición vertical de equilibrio . E) equilib rio en este caso es estable.
Supongam os que en el extremo de la b arra actúa una fuerza F d irigida hacia abajo (Fig. 8.1-ó).
&oV/////,
(«)
A ‘
Figura 8.1.
P ara estud iar la estab ilidad del sistem a en este caso consideraremos el momentorespecto del extrem o O de las fuerzas que actúan sobre la barra: por una parte, elmomento Fx de la fuerza F que tiende a sep arar la barra de su posición de equilib rio y, por otra, el momento kxl, an tagon ista del an terio r, producido por la fuerza horizontal kx del resorte que tiende a recuperar el equ ilib rio . El equilibrio de la barra será estab le si se verifica:
kx l > Fxo
F < k l (8.2-1)
es decir, el equilibrio es estab le so lam ente si la fuerza F ap licada es inferior a un ciertovalor critico Fcr — kl. Superado este valo r el equilibrio ya es inestable.

4 8 2 R E S I S T E N C I A D E M A T E R I A L E S
Veamos cómo aplicam os estos conceptos a l estud io del com portam iento de una colum na de sección constante con extrem os articu lados, som etida a una carga de compresión P (Fig. 8.2-a). Supondrem os que la fuerza P está ap licada en el baricentro de la sección extrem a, es decir, que la linea de acción de la fuerza F es coincidente con el eje longitudinal de la colum na, así como que el p lano x y indicado es un plano de simetria, en el que se lleva a cabo cualqu ier flexión a que se puede someter la columna.
xP
ih
Para valores pequeños de la carga P la co lum na permanece recta. La tensión de compresión ax ia l es, como sabem os
siendo f i el área de la sección recta.P ara ana lizar la estab ilid ad del equ ilib rio se ap lica una carga transversal F (F ig . 8.2-6)
que da lugar a que la colum na flexe en el £¡fino Xy y , seguidam ente, se retira la carga F. En este instante, la so licitación que existe en una sección cualqu iera C (Fig. 8.2-d ) está com puesta por un esfuerzo norm al igual a la carga de compresión P y por un momento flector M x, que no depende de la carga P sino so lam ente de la cu rvatura de la elástica, en virtud de la relación que se vio en el C ap ítu lo 4 al obtener la ley de Navier
M z E EL- j r = - =* Mz - — (8.2-2)L P p
Analicem os el com portam iento de la co lum na a p artir del momento en que retiramos la carga transversal F ¡ estudiando el equ ilib rio de la porción AC de colum na. El momento de la so licitación que actúa sobre AC respecto del extrem o A es
M A = M , — P y
F L E X I O N L A T E R A L . P A N D E O 4 8 3
Para que la colum na se quedara flexada como estaba antes de ser retirada la carga transversal, es decir, para que la colum na se encuentre en una posición de equilibrio indiferente, tendría que ser M Á = 0, para lo cual se tendría que verificar P y = M z.
Si no se cumple esta igualdad , la colum na no está en equilibrio y se moverá a partir del instante en que retirem os la carga transversal. Si P y < M.. entonces M A > 0 y el movimiento hará que la colum na recupere su forma rectilínea de equilibrio : el equilibrio es estable.
Si, por el contrario , P y > M ., entonces M A < 0 y la columna sigue curvándose progresivamente hasta la rotura: el equilibrio es inestable.
El valor de la carga que hace que el equilibrio de la columna sea indiferente se denomina c a r g a c r í t i c a . Dicho de otra forma, podemos definir la c a r g a c r í t i c a como la fuerza de compresión para la cual son formas igualm ente de equilibrio tanto la forma rectilínea como la curvilínea próxim a a ella.
La experiencia dem uestra que m ientras la carga de compresión se m antenga inferior al valor de la carga crítica, las deformaciones de la colum na son pequeñas, pero cuando el valor de la carga a lcanza el valor crítico, la columna pierde la estabilidad y las deformaciones aum entan de forma ráp ida produciendo su rotura.
La colum na que hemos considerado en nuestro razonam iento es una colum na ideal, es decir, de m aterial homogéneo, de sección recta constante, inicialm ente recta y som etida a una carga ax ial de compresión que se ap lica en el baricentro de la sección extrema.
Sin em bargo, las colum nas suelen presentar pequeñas imperfecciones en la com posición del m aterial, defectos dc fabricación, así como una inevitable excentricidad en la aplicación de la carga , que htfce que la colum na flexe incluso para pequeños valores de la carga. Aún tratándose de una co lum na ideal, cuando la carga de compresión alcanza el valor P„ la colum na pierde la estab ilidad , ya que cualqu ier perturbación, entre las que se encuentran las imperfecciones inevitables aludidas, hará que se produzcan bruscamente grandes deformaciones que provocarán su rotura.
Q ueda, pues, patente el peligro que corre la colum na cuando la carga de compresión alcanza el valor de Pcr. P ara evitarlo , se considera una carga de pandeo adm isib le Pp , im.
siendo n el c o e f i c i e n t e d e s e g u r i d a d p o r p a n d e o , que se suele tom ar m ayor que el correspondiente coeficiente de seguridad por resistencia, ya que hay que tener en cuenta factores de riesgo desfavorables como son las imperfecciones de la colum na, a que antes hemos hecho referencia, asi como a posibles defectos de fabricación, excentricidad de la carga , etc.
8.3. Pandeo de barras rectas de sección constante sometidas a compresión. Fórm ula de Euler
Consideremos una barra recta AB de sección constante Q articu lada en sus extrem os y som etida a compresión m ediante una fuerza P. Si por un defecto dc sim etría, o por falta de hom ogeneidad, la b arra sc deform a lateralm ente, aparece en cada sección un momento flector.
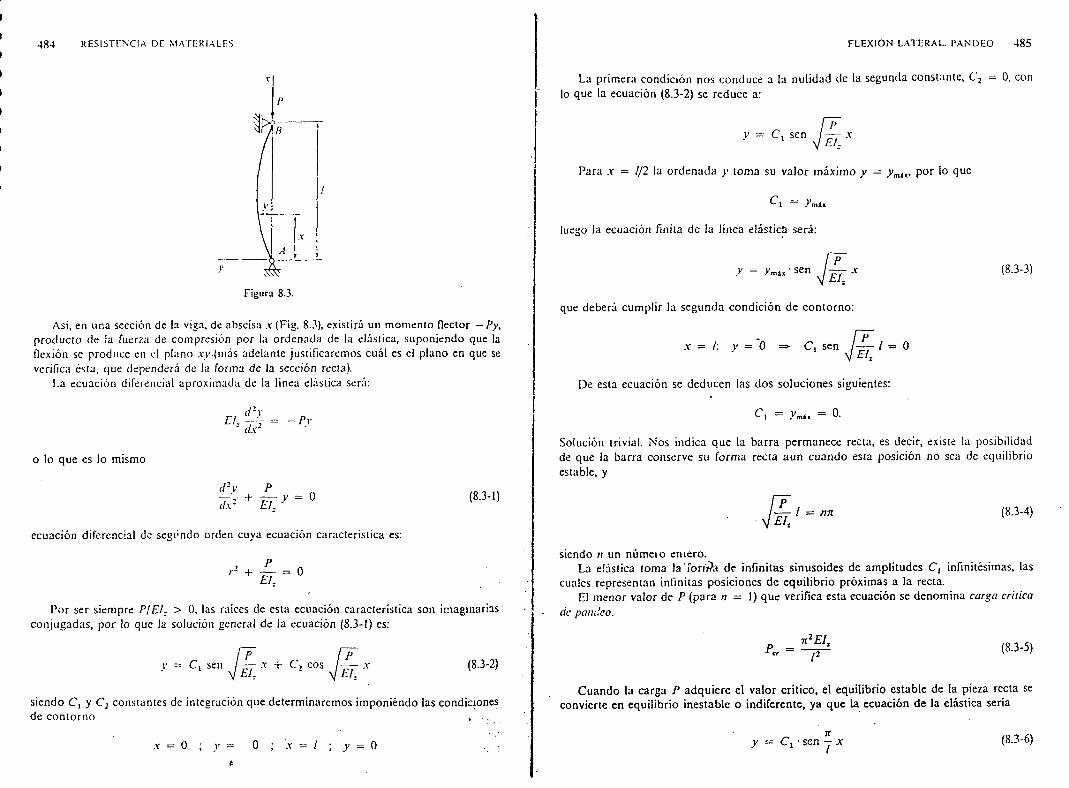
4 8 4 R E S I S T E N C I A DE M A T E R I A L E S
F ig u ra 8 .3 .
Asi, en una sección de la viga, de abscisa .x (Fig. 8.3), existirá un momento fiector — Py, p roducto de la fuerza de compresión por la ordenada de la elástica, suponiendo que la flexión se produce en el plano .vy.(más adelante justificarem os cuál es el plano en que se verifica ésta, que dependerá de la forma de la sección recta).
La ecuación diferencial aproxim ada de la línea elástica será:
ii'-v
o lo que es lo mismo
rí - v Pt i + y r- y - odx El.(8.3-1)
ecuación diferencial de segundo orden cuya ecuación caracteristica es:
Por ser siempre P jE I. > 0, las raíces de esta ecuación característica son im aginarias con jugadas, por lo que la solución general de la ecuación (8.3-1) es:
P Pr = C , sen x + x i eos x (8.3-2)
siendo C , y C 2 constantes de integración que determ inarem os imponiendo las condiciones de contorno
F L E X I O N L A T E R A L . P A N D E O 4 8 5
La prim era condición nos conduce a la nulidad de la segunda constante, C2 — 0, con lo que la ecuación (8.3-2) se reduce a:
^ / p y = C\ sen /— .r- < E l .
Para x = f/2 la ordenada y tom a su va lo r m áxim o y = y mil, por lo que
.Emáx
luego la ecuación finita de la línea e lástica será:
y — y m i i ' sen J j j - x (8.3-3)
que deberá cum plir la segunda condición de contorno:
f~P~x = l: y = 0 => C í sen /— - 1 = 0V
De esta ecuación se deducen las dos so luciones siguientes:
= 0.
Solución trivial. Nos ind ica que la b arra perm anece recta, es decir, existe la posibilidadde que la barra conserve su form a recta aun cuando esta posición no sea de equilibrioestable, y
L L I = m t (8.3-4)V E li
siendo n un número entero.La e lástica toma la 'forfffe de in fin itas sinusoides de am plitudes C , infinitésim as, las
cuales representan infin itas posiciones de equ ilib rio próxim as a la recta.El menor valor de P (para n = 1) que verifica esta ecuación se denom ina c a r g a c r í t i c a
d e p a n d e o .
7xd E lPcr = ^ (8-3-5)
Cuando la carga P adqu iere el valor crítico , el equilibrio estab le de la pieza recta se convierte en equilibrio inestab le o indiferente, y a que la ecuación de la e lástica seria
„ 7ty = C p sen — x ( 8 . 3 - 6 )

4 8 6 R E S I S T E N C I A DE M A T E R I A L E S
La expresión (8.3-5) es llam ada f ó r m u l a d e Euler Nos dice que si la fuerza de compresión que actúa sobre la viga de sección recta constante alcanza la carga crítica de pandeo, la constante C , de la ecuación de la e lástica (que representa la m áxim a deformación) se puede hacer arb itrariam ente grande, lo que produciría inexorablemente la ruina o rotura de la viga.
Es notable que esta fórm ula, expuesta por Euler en 1744 en la mem oria «De curvis e lastic is», hace aproxim adam ente doscientos cincuenta años, fue obtenida en una época en la que los m ateria les em pleados comúnmente en la construcción eran la m adera y la p iedra, y p ara los que no tenia especial interés el problem a de la estab ilidad elástica.
Hemos supuesto que la v iga recta de sección constante y som etida a compresión flexaba en el p lano determ inado por la fibra m edia y los ejes G y de las secciones rectas. Pero podemos preguntarnos ¿por qué la flexión no se realiza en otro plano distinto?, o aún dicho de o tra form a ¿qué condiciones deben cum plirse para que la flexión se produzca, en efecto, en el p lano supuesto?
Esta condición la deducim os directam ente por sim ple inspección de la fórmula (8.3-5). El plano de pandeo vendrá determ inado por el menor valor de la carga crítica de pandeo, pues corresponderá a l m enor valor del momento de inercia (ya que todos los restantes factores que aparecen en la fórm ula son constantes). Pero como G y y Gz son ejes principales de inercia de la sección, uno de ellos es el m áxim o y otro el mínimo. Suponiendo que /r < Iy la flexión la tera l se produce en efecto en el plano supuesto. De una forma general se podrá decir que e l pandeo se producirá en el plano perpendicular al eje mayor de la elipse de inercia de la sección.
La fórmula de Euler, que nos da la carga crítica de una colum na con sus extremos articu lados
ir^ p fPer ~ — j r ± (8.3-7)
se puede poner en función de la relación Á = llam ad a e s b e l t e z m e c á n i c a de la pieza,
siendo el rad io de giro m ínim o de la sección de área Cl.
<3
_ * 2£~4,in _ n 2EO. _ n 2Eíl¡ 2 ~ / ¡ y J ~ (O.J-o)
Vml n j
Pcr vendrá expresada en kp , si E lo está eh kp/cm2.y en cm 2.
8.4. Compresión excéntrica de barras esbeltas
Considerem os una barra em potrada en uno de sus extrem os, y con una carga que la com prim e excéntricam ente en el otro. P a ra valores pequeños de la carga P (Fig. 8.4-a), el m om ento en cua lqu ier sección de la barra , despreciando la deformación que se produce, es P e , por lo que la ecuación d iferencial de la línea e lástica será:
E l .y" = M z = P e (8.4-1)
F L E X I O N L A T E R A L . P A N D E O 4 8 7
(o) (/>)
Figura 8.4.
La b arra se deform ará presentando la flecha en la sección extrem a libre. Aplicando el segundo teorem a de M ohr se puede calcu lar la flecha como la d istancia de la sección B a la tangente trazada por A a la linea elástica
/ = — (8.4-2)J 2 EL
Este resu ltado nos dice que para valores pequeños de P la flecha crece proporcionalmente a la carga.
Sin em bargo, a m edida que vamos aum entando la carga P, no es posible despreciar la deformación. La ecuación diferencial de la elástica de la barra , considerando la posición de equilib rio final, será:
EL = M ; - P ( f + e - y ) (8-4-3)
pH aciendo —— = k 2, queda:
E l.
d x 2f Z + k2y = k2( f + e ) (8.4-4)
cuya solución es:
y = C ¡ sen kx + C 1 eos kx + f + e (8.4-5)

4 9 2 RE SISTEN CIA DE M A T E R IA L E S
Ahora bien, como en dicho punto de momento flector es nulo, se verificará:
I AL <13p EL <is
y de la ecuación (S.5-10), se deduce el valor de ij/0
0
2kin eos i¡/0 = 0 => eos <j/0 = 0 => i¡/0 =
por lo que la integral an terior se puede poner en la forma siguiente:
ks = '*12 d<¡j
J * x/ 1 — n r sen2 ip o v -' 1 — n r sen2 ip o N/ 1 — n r sen2 ip(8.5-14)
en la que las in tegrales vienen tabu ladas en función del ángulo ip y del valor del parámetro ni.
H agam os la discusión cualitativa de los resultados analíticos obtenidos. Si integramos (8.5-14) entre el origen y el punto medio de la viga, punto en el que 0 = 0 y, por tanto, ip = 0 en virtud de (8.5-8), la segunda integral de (8.5-14) se anula, por lo que dicha ecuación se reduce a
o \ — n r sen2 ip(8.5-15)
De la circunstancia de ser m ínim a esta in tegral para m = 0 se deduce la condición para que la forma de sem ionda sea una forma de equilib rio
kl ni EL l -
y por tanto:
n-E Lr-
(8.5-16)
El menor valor de esta expresión es precisam ente el valor de la prim era carga crítica de pandeo que fue obtenida en (8.5-5).
P„ =n 2EL~ T ~
es decir, la condición para que, adem ás de la e lástica rectilínea como forma de equilibrio, tenga la viga una e lástica en forma de sem ionda, la carga ap licada tiene que ser m ayor que la prim era carga critica.
FLEXION LA TE RAL. PAND EO 493
F ig ura 8.6 .
Pero tam bién adopta la e lástica de la viga la forma de dos sem iondas (Fig. 8.6-b). En este caso 3 = 0 y, por tanto , ¡p — 0, para s = 1/4, por lo que la condición para que estas dos sem iondas sea forma de equilib rio será:
kl n7 ^ 2
4n2
de donde:
4 k 2ELr -
(8.5-17)
es decir, la carga ap licad a tiene que ser m ayor que la segunda carga crítica de pandeo
4 n 2ELP„ = l 2
Podíam os segu ir considerando como posibles formas de equilibrio elásticas de tres sem iondas, cuatro sem iondas, ... y así sucesivam ente hasta n sem iondas. En este caso genérico, 3 = 0 p ara s — l/2n, por lo que la condición correspondiente será ahora:
tp / ti , n 2n 21 2i¡ * 2 ~ ^ ~ T
de donde:
Pn 2yi2 EL
T2 (8.5-18)
es decir, la carga de com presión tendría que ser superior a la /t-ésima carga crítica de pandeo
=n 2n 2E I z
1 2

4 9 0 R E S I S T E N C I A D E M A T E R I A L E S
PH aciendo = k 1, esta ecuación diferencial se puede poner en la forma:
EL
X- = - k 2y (8.5-2)'
y como d s = p dB, queda:
d9 , 1d ¡ = ~ y (8-5' 3)
D erivando esta ecuación respecto al arco s y teniendo en cuenta que
¿ y „ , 9 3— = sen 3 = 2 sen — eos —d s 2 2
tenemos:
o bien:
d s \ d s J d s 2 2
d ^\ » , ? 9 3 J— I = —2k sen — eos — d s (8.5-4)d s J 2 2
M ultip licando los dos miembros de esta ecuación por d9/ds e integrando, se tiene:
[ ' d S / d B \ f * dB 9 3— 4 — ) = —2/: — sen - eos - d s
Jo d s \ d s j Jo d s 2 2
1 f d B V 1 f d B V , 9 fl\2 ( * ) - 2 ( * ) . . „ - 2 + 24 ( “ ” 2 ) . . . (8 '5' 5 ) :
H aciendo
K?)...+ 0... ■2*'"’ <s-5'6)
ya que el prim er m iem bro siem pre será positivo, la ecuación an terio r se puede expresar así:
(§)” - «’(»! - 0 <8.5-’)en donde m se puede considerar aqu í como una constante a rb itra ria de integración.
F L E X I O N L A T E R A L . P A N D E O 4 9 1
Hagam os ahora el cambio de la función 3 por o tra ip, que verifique:
sen — = m sen ip (8.5-2 Y
Sustituyendo en (8.5-7), se tiene:
( d B X2= Ak2(m 2 — m 2 sen2 1p) = 4k 2/n2 eos2 1// (8.5-9)
d s !
en donde:
dB 2km eos 1p (8.5-10)d s
Eliminando ,9 entre esta ecuación y la que se obtiene derivando la (8.5-8) respecto delarco s
1 3 dB , d*P- e o s = —ni eos ip ——2 2 d s d s
dB eos 1/1 dipT , ’ - 1"---------------9 * ( 8 - 5 ' n )eos —
2
y teniendo en cuenta, en virtud de (8.5-8), que
2
se tiene:
eos = ^/l — m 1 sen2 t/r
eos <p d é2km eos i¡/ = —2m — (8-5-12)
, / l — m sen ip d s
ecuación diferencial de variab les separadas, cuya integración nos conduce a una integral elíptica de primera especie*
ks = * ________^ (8 .5 -13 )*0 ^/l — w 2 sen2 <p
siendo 1p 0 el valor de ip para a = 0, es decir, el valor de 1p en el origen de la abscisa curvilínea j auc es el extremo dc la v ;ea en el que se ap lica la carga dc compresión P.
’ Esto es asi porque ce puede dem ostrar que m es estrictamente menor que la unidad y, por tanto, es igual al seno de un cierto ángulo cq que es la condición para que esta integral sea elíptica.

4 9 2 R E S I S T E N C I A DE M A T E R I A L E S
Ahora bien, como en dicho punto de momento flector es nulo, se verificará:
I = ^ = ^ = 0p EL d s
y de la ecuación (8.5-10), se deduce el valor de ip 0
2km eos tp0 = 0 => eos tp0 = 0 =■ tp0 = —
por lo que la in tegral anterior se puede poner en la forma siguiente:
chp 'ni 2 dtp dtp
J* v/1 — n r sen2 ip ° y ¡ — n r sen2 ip . 0 - n r sen2 ip
en la que las integrales vienen tabu ladas en función del ángulo tp y del valor del parámetro ni.
H agam os la discusión cua lita tiva de los resultados analíticos obtenidos. Si integramos (8.5-14) entre el origen y el punto medio de la viga, punto en el que 0 = 0 y, por tanto, tp = 0 en virtud dc (8.5-8), la segunda integral de (8.5-14) se anula, por lo que dicha ecuación se reduce a
"'2 #(8.5-15)
o y j l — n r sen2 tp
De la circunstancia de ser m ínim a esta in tegral para m = 0 se deduce la condición para que la forma de sem ionda sea una forma de equilibrio
kl n n , , P n 25 -- => k L — => k~ = A —
2 2 / EL l -
y por tanto:
P > (8.5-16)
El menor valor de esta expresión es precisam ente el valor de la prim era carga critica de pandeo que fue obtenida en (8.5-5).
n 2EI.
es decir, la condición para que, adem ás Je la e lástica rectilínea como forma de equilibrio, tenga la viga una e lástica en forma de sem ionda, la carga ap licada tiene que ser m ayor que la prim era carga crítica. • ■ .
F L E X I O N L A T E R A L . P A N D E O 4 9 3
F ig u r a 8 .6 .
Pero tam bién adop ta la e lástica de la viga la forma de dos sem iondas (Fig. 8.6-Ó). En este caso 3 = 0 y, por tanto, i¡/ = 0, para s = 1/4, por lo que la condición para que estas dos sem iondas sea forma de equilibrio será:
kl 7i 4 ^ 2
de donde:
k 2 5
4 n 2El.T 2 -
4 n 2
(8.5-17)
es decir, la carga ap licada tiene que ser m ayor que la segunda carga critica de pandeo
4 n 2EI.P'r = l 1
Podíam os seguir considerando como posibles formas de equilibrio e lásticas de tres sem iondas, cuatro sem iondas, ... y así sucesivam ente hasta n sem iondas. En este caso genérico, 3 = 0 para s = l/2n, por lo que la condición correspondiente será ahora:
'4i / 71
de donde:
n n ELT2 (8.5-18)
es decir, la carga de com presión tendría que ser superior a la n-ésima carga crítica de pandeo
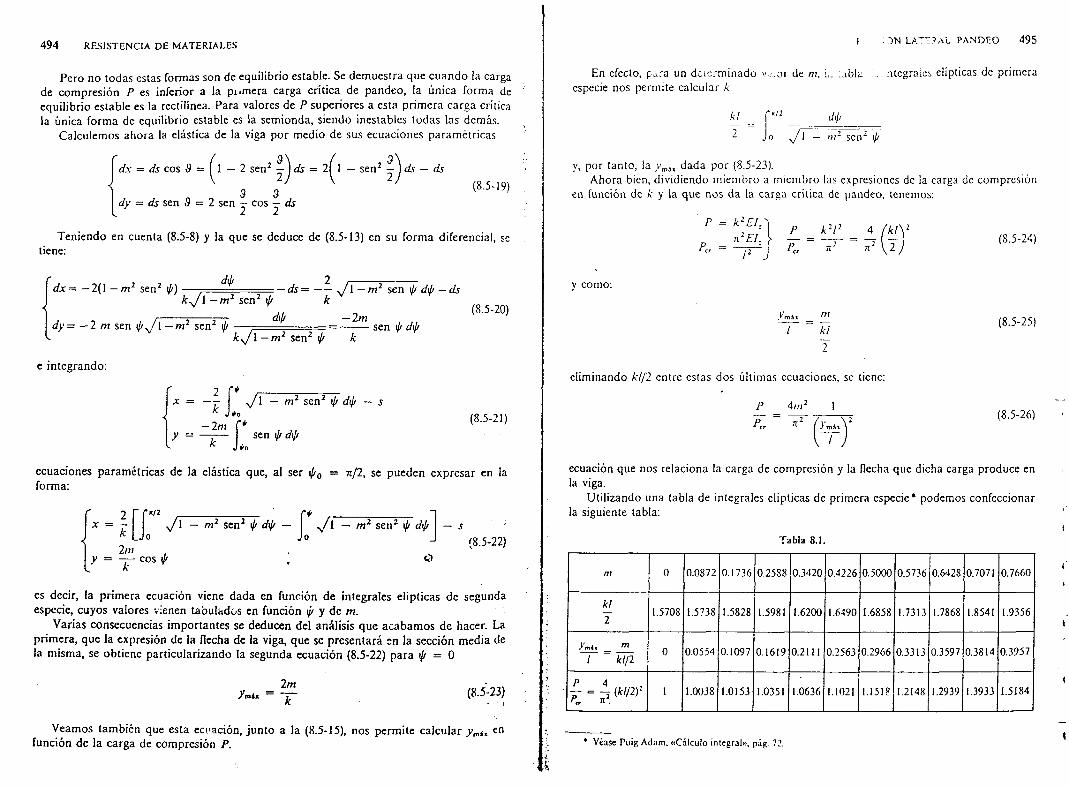
4 9 4 R E S I S T E N C I A DE M A T E R I A L E S
Pero no todas estas formas son de equilibrio estable. Se dem uestra que cuando la carga de com presión P es inferior a la prim era carga crítica de pandeo, la ún ica forma de equilibrio estab le es la rectilínea. Para valores de P superiores a esta prim era carga crítica la única forma de equilibrio estable es la sem ionda, siendo inestables todas las demás.
Calculem os ahora la e lástica de la viga por medio de sus ecuaciones param étricas
dx = d s eos 9 = ^1 — 2 sen2 d s — 2^1 — sen2 ^ ) d s — d s
9 9d y — d s sen 9 = 2 sen — eos — d s
2 2
(8.5-19)
Teniendo en cuenta (8.5-8) y la que se deduce de (8.5-13) en su form a diferencial, se tiene:
d x = — 2(1 — m 2 sen2 i]/) # 2 ,— — 5---------— —d s = ------ y j 1 — tn sen i]/ d\j/ — d sk y j 1 — m 2 sen2 \¡/ k
d y = —2 m sen i]/yf\ — m 2 sen2 ifidi]/ -2 m
(8.5-20)
k y j 1 — m 2 sen2 ip ksen i¡/ dtp
e integrando:
*= "jfc
y =
2k2m
y j 1 — m 2 sen2 ip dtp — s*0 (8.5-21)
sen ip di¡/
ecuaciones param étricas de la e lástica que, a l ser t[/0 = tt/2, se pueden expresar en la forma:
k 2 m
y = — eos ip
ío m 1 sen2 \jt dtj/ — ^ y / T — m 2 sen2 i¡/ di]/(8.5-22)
O
es decir, la prim era ecuación viene dada en función de in tegrales e líp ticas de segunda especie, cuyos valores vienen tabu lados en función i]/ y de m .
V arias consecuencias im portantes se deducen del anális is que acabam os de hacer. La p rim era, que la expresión de la flecha de la viga, que se p resentará en la sección m edia de la m ism a, se obtiene particu larizando la segunda ecuación (8.5-22) p ara i]/ = 0
y mil2 m
(8.5-23)
Veam os también que esta ecuación, jun to a la (8.5-15), nos perm ite ca lcu la r en función de la carga de compresión P.
f : T N L A T E ? . A L P A N D E O 4 9 5
En efecto, para un determ inado v.r.or de m, i¿. tabla i . ntegraies elípticas de primera especie nos permite ca lcu lar k
k l
J dij,
y/ 1 — m sen i]/
y, por tanto, la vmá< dada por (8.5-23).Ahora bien, dividiendo miembro a miembro las expresiones de la carga de compresión
en función de k y la que nos da la carga critica de pandeo, tenemos:
P = , 2 , y
Pr, = ■ = ( P„ n 2 n 2 \2
y mi, = m / kl
T
(8.5-25)
elim inando A7/2 entre estas dos últim as ecuaciones, se tiene:
P 4 m 2 1
Pcr k 2/
(8.5-26)
ecuación que nos relaciona la carga de compresión y la flecha que dicha carga produce en la viga.
U tilizando una tabla de integrales elipticas de prim era especie* podemos confeccionar la siguiente tabla:
Tabla 8.1.
m 0 0.0872 0.1736 0.2588 0.3420 0.4226 0.5000 0.5736 0.6428 0.7071 0.7660
klT
1.5708 1.5738 1.5828 1.5981 1.6200 1.6490 1.6858 1.7313 1.7868 1.8541 1.9356
>'ml, ml kl/2
0 0.0554 0.1097 0.1619 0.2111 0.2563 0.2966 0.3313 0.3597 0.3814 0.3957
P 4T = - i m
rr >1 .1 1.0038 1.0153 1.0351 1.0636 1.1021 1.1518 1.2148 1.2939 1.3933 1.5184
* Véase Pu ig A dam . «C á lcu lo in teg ra l» , pág . 72.

4 9 6 R E S I S T E N C I A D E M A T E R I A L E S
A partir de esta tab la podemos construir la gráfica indicada en la F igura 8.7.
La gráfica obtenida nos hace ver que las flechas crecen muy deprisa cuando la carga de compresión supera el valor de la carga critica. Asi, para una carga P que sobrepase en un 15 por 100 el valor critico, la Hecha se hace aproxim adam ente un 30 por 100 del valor de la longitud de la viga.
De lo dicho se deduce que cuando la carga P toma un valor superior al valor de la carga crítica no es válida la suposición de pequeñas deformaciones, pero es suficiente la utilización de la fórm ula de Euler para la determ inación de las cargas criticas, con las lim itaciones que se verán más adelante.
Si hacemos un estudio tensional en la barra cuando la carga P es m ayor que la carga critica, es decir, cuando la forma de equilib rio es la sem ionda, vemos que la tensión en la barra se puede considerar como la superposición de la debida a la compresión
P<7‘ “ ~ ü
y la debida a la flexión
M .17
P yI,
siendo y * la d istancia de la fibra que consideremos a l eje z de la sección (Fig. 8.8).
y
z t
F i g u r a 8 . 8 .
F L E X I O N L A T E R A L . P A N D E O 4 9 7
El valor máximo de a 2 se presenta en la sección media de la barra en la que y = y míx, y dentro de esta sección en las fibras periféricas.
es decir, o 2 aum enta muy ráp idam ente, igual a como lo hace y miI.De ello se deduce que en el caso de piezas m uy esbeltas, como son los flejes, varillas,
etcétera, la carga Pcr tiene un valor m uy pequeño y, por consiguiente a ¡ , asi como es pequeño el valor i'*, lo que hace posible que P supere notablem ente el va lo r de Pcr y que la pieza adquiera grandes deform aciones sin romperse.
Por el contrario , en las estructuras norm ales no se suelen em plear barras de esbelteces exageradas, por lo que la carga crítica tom a valores de consideración, así como cr,, sin que quede apenas margen para a 2. En estos casos, un pequeño incremento de y mil en la e lástica de la columna hará que a 2 aum ente m uy rápidam ente y en segu ida se alcance el valor de la tensión de rotura del m aterial. Por tanto, con las esbelteces y m ateria les que norm alm ente se emplean en las estructuras no se puede aceptar la form a curva de equilibrio . De ahi que consideremos iguales, a efectos prácticos, la carga crítica y la carga de rotura.
8.6. Valor de la fuerza crítica según el tipo de sustentación de la barra. Longitud de pandeo
Tanto la fórmula (8.3-5) como su equ ivalente (8.3-8) en función de la esbeltez se han obtenido considerando articu lados los dos extrem os de la barra com prim ida. A hora bien, en el caso de modificar las condiciones de articu lación en los extrem os de la barra podemos utilizar fa fórmula c itada para ca lcu la r la carga crítica de pandeo sustituyendo la longitud / por la que llam arem os l o n g i t u d d e p a n d e o lp, que es la que existe entre dos puntos consecutivos de inflexión de la línea e lástica. Así, si consideram os, por ejem plo, la barra em potrada en un extrem o y libre en el otro (Fig. 8.9-<a) este sistem a elástico es equivalente a una barra b iarticu lada de longitud ¡p = 21. P or tanto, la carga critica de pandeo en este caso sería:
'■■ = W
Asimismo, para los casos de sujeción indicados en la F igura 8.9-b y c la long itud de pandeo es l p = //2 y, por tanto, la carga crítica de pandeo será:
n 2E I.p ” = W (8-6-2)
La consideración de la longitud de pandeo lp = a l nos perm ite genera lizar la fórmula de Euler para calcu lar la carga crítica de pandeo de una b arra com prim ida
P n2£I- " («/)2
( 8 . 6 - 3 )

4 9 8 R E S I S T E N C I A D E M A T E R I A L E S
(a) (6) M
Figura 8.9.
donde a es el c o e f i c i e n t e d e r e d u c c i ó n d e la l o n g i t u d de la barra , que depende del tipo de sujeción de sus extremos.
El cálcu lo de la longitud de pandeo de un prism a m ecánico recto som etido a compresión, sujeto en los extremos de una forma arb itraria , se hará integrando la ecuacióndiferencial de la linea elástica. Imponiendo las condiciones de contorno se determ inará el va lo r de la constante k = y/ P / E f y a p artir de ella la carga de pandeo, igualando k al m enor valo r que verifique la ecuación que resulte. Finalm ente, identificando con la fórmula de Euler, se obtiene la longitud de pandeo lp o, si se quiere, el coeficiente de reducción de la longitud.
A m odo de ejemplo, apliquem os lo dicho a l cálculo de la longitud de pandeo de una b arra em potrada en un extremo y articu lada en el otro (Fig. 8.10)
En este caso , en la expresión del momento habrá que tener en cuenta la reacción R de la articu lac ión causada por el momento de em potram iento en el otro extremo. En una sección de abscisa x, el momento (lector es:
M x = - P y + R{! - x) .
por lo que la ecuación diferencial de la línea elástica será:
E l.y" = - P y + R(l — x) (8.6-4)
o bien, d iv idiendo por EIZ y haciendo P/EIZ = k 2
y " + k2y = A (I - x )EIZ
( 8 . 6 - 5 )
x
F L E X I O N L A T E R A L . P A N D E O 4 9 9
xvX'.'Xxy Figura 8.10.
La solución de esta ecuación diferencial es:
y — sen kx + C 2 e o s kx + - — j i V ~ -r ) (8.6-6)ÍLt j/í
siendo C ¡ y C2 constantes de integración que determ inarem os imponiendo las condiciones de contorno:
II o !toII
+ E IJ c2 = °
-V = 0 flOII
C ¡k E I J c2 ~ °► (8.6-7)
x = / y = 0 => C j sen kl + C 2 eos kl — 0
Estas tres ecuaciones constituyen un sistem a hom ogéneo de tres ecuaciones con tres incógnitas. La condición para que el sistem a tenga solución distinta de la trivial, que carece de interés, es:
0 1
k 0
sen kl eos kl
E l J e 1 1
~TiJ?o
= o ( 8 . 6 - 8 )
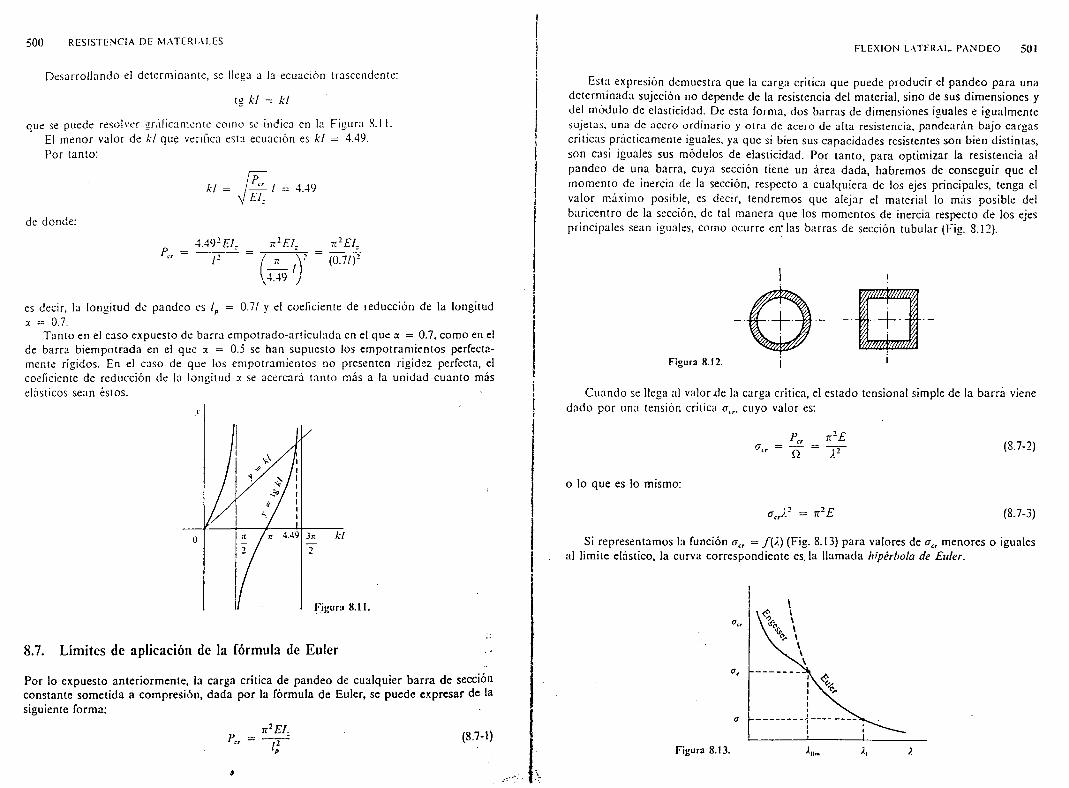
5 0 0 R E S I S T E N C I A DE M A T E R I A L E S
D esarrollando el determ inante, se llega a la ecuación trascendente:
tg kl = kl
que se puede resolver gráficam ente como se indica en la F igura 8.11. El menor valor de kl que verifica esta ecuación es kl = 4.49.Por tanto:
kl t = 4.49
de donde:
P„ =4.492
T 2n 2EI. n
T49
n-EI._¡ ó J i y
es decir, la longitud de pandeo es l p = 0.7/ y el coeficiente de reducción de la longitud x = 0.7.
Tanto en el caso expuesto de barra em potrado-articu lada en el que a = 0.7, como en el de barra b iem potrada en el que a = 0.5 se han supuesto los em potram ientos perfectamente rígidos. En el caso de que los em potram ientos no presenten rigidez perfecta, el coeficiente de reducción de la longitud x se acercará tanto más a la unidad cuanto más elásticos sean éstos.
8.7. Límites de aplicación de la fórmula de Euler
Por lo expuesto anteriorm ente, la carga crítica de pandeo de cualqu ier b arra de sección constante som etida a com presión, dada por la fórm ula de Euler, se puede expresar de la siguiente forma:
n-EI-(8 .7 -1 )
t
F L E X I O N L A T E R A L . P A N D E O 501
Esta expresión demuestra que la carga critica que puede producir el pandeo para una determ inada sujeción no depende de la resistencia del m aterial, sino de sus dim ensiones y del m ódulo de elasticidad. De esta forma, dos barras de dimensiones ¡guales e igualm ente sujetas, una de acero ordinario y o tra de acero de a lta resistencia, pandearán bajo cargas criticas prácticam ente iguales, ya que si bien sus capacidades resistentes son bien distintas, son casi iguales sus módulos de elastic idad . Por tanto, para optim izar la resistencia al pandeo de una barra, cuya sección tiene un área dada, habremos de conseguir que el momento de inercia de la sección, respecto a cualqu iera de los ejes principales, tenga el valor máximo posible, es decir, tendremos que a le jar el m aterial lo más posible del baricentro de la sección, de tal m anera que los momentos de inercia respecto de los ejes principales sean iguales, como ocurre en- las barras de sección tubular (Fig. 8.12).
F ig u ra 8 .1 2 .
— j r H ~ - 1 —
Cuando se llega al valor de la carga critica, el estado tensional simple de la b arra viene dado por una tensión critica a er, cuyo valor es:
nn 2E1 ^ (8.7-2)
o lo que es lo mismo:
a rr)} = n 2E (8.7-3)
Si representam os la función <r„ = f ( ) . ) (Fig. 8.13) para valores de crcr menores o iguales al lim ite elástico , la curva correspondiente es. la llam ada h ip é r b o la d e Euler.
F ig u r a 8 .13 .

5 0 2 R E S I S T E N C I A DE M A T E R I A L E S
Del estudio de es"t curva se deduce que para piezas de esbeltez elevada, la tensión crítica es m uy pequeña, es decir, que una pieza m uy esbelta pandea para una tensión de compresión m uy pequeña.
A f ir dism inuyendo la esbeltez, la tensión critica aum enta, pero la h ipérbola de Euler sólo es válida hasta un valor ÁMm de la esbeltez a la que corresponde una tensión critica igual a l lim ite elástico a , (pues para valores superiores no tiene sentido hab lar de la ley de Hooke).
A partir de este valor, el m ódulo de e lastic idad Er d ism inuye con lo que la fórmula de Euler se convierte en:
n Et(8.7-4)
llam ada f ó r m u l a d e l m ó d u l o t a n g e n c i a l o d e E n g e s s e r para pandeo inelástico, cuya representación se ha indicado en la m ism a F igura 8.13.
La fórm ula de Euler es válida solam ente p ara piezas de esbeltez superior a aquélla para la cual la tensión critica co incida con el lím ite elástico o e. P ara esbelteces X < 2„m, el problem a de estab ilidad de la b arra exige un p lanteam iento consecuente con el estado de p lastificación a que va a estar som etida la m ism a, por lo que no vamos a en trar en él.
P ara el acero de construcción de bajo contenido en carbono , cuyo m ódulo de elasticidad vale E = 2 000 000 kp/cm2 y a t = 2000 kp/cm2, la esbeltez m ínim a que deberá tener la pieza para que sea ap licab le la fórm ula de Euler es:
2 000 0007t2V * V — 2000— = 100 <8 7-51
En construcciones m etálicas, las piezas que generalm ente se em plean tienen esbelteces inferiores a este valor. No es ap licab le, por tanto , la fórm ula de Euler p ara el cálculo de la carga crítica.
Tenemos que tener en cuenta que la fórm ula de Euler nos da la carga critica y no la carga de trabajo . P ara ca lcu lar la carga adm isib le Pp , im hab rá que d iv id ir la carga crítica por un coeficiente de seguridad a pandeo.
= — (8.7-6)n
8.8. Fórmula empírica de Tetm ajer para !a determinación de las tensiones criticas en columnas intermedias
C uando decimos que la fórm ula de Euler es ap licab le a co lum nas esbeltas estamos adm itiendo que c o l u m n a s e s b e l t a s son aquellas cuya esbeltez es superior a 2„m. El valor de • iim depende, como hemos visto, del m ódulo de elastic idad y del lim ite elástico , por lo que cada m ateria l tendrá su esbeltez 2nm a p artir de la cual la b arra se considera esbelta.
Por o tra parte, se dice que una c o l u m n a e s c o r t a cuando su longitud no excede de diez veces su menor dim ensión transversal. P ara estas co lum nas se considera como tensión
F L E X I O N L A T E R A L . P A N D E O 5 0 3
crítica la tensión de fluencia o f del m aterial y su cálculo se hace, por tanto, a compresión y~ no a pandeo.
Las colum nas que tienen esbelteces com prendidas entre los valores lim ite superior de las colum nas cortas y el lim ite inferior de las colum nas esbeltas, se denominan c o l u m n a s ^ in t e rm ed ia s . Se han propuesto diversas fórm ulas para el cálculo de la carga critica de pandeo en este tipo de colum nas, aunque n inguna de e llas ha sido generalmente aceptada. Este problem a, como ya se ha indicado, exige, en rigor, la consideración del com portamiento inelástico del m aterial. A pesar de ello, se han intentado establecer fó rm ulas__ obtenidas experim entalm enle ensayando gran número de piezas de distinta esbeltez, siem pre de valor inferior al minimo para la que es ap licab le la fórmula de Euler. U na de e llas es la del m ódulo tangencial o de Engesser, a la que ya nos hemos referido, que tiene en cuenta la variación del módulo de elasticidad al superar la tensión limite de p ropo rc ionali-— dad.
En la F igura 8.14 se ha representado la forma típica de la curva que nos da la carga crítica en función de la esbeltez ap licando para el lím ite de la estab ilidad e lástica la fórmula de Engesser. ~
T e tm a j e r propuso, para la zona inelástica, la ló rm ula:
o „ = a r — aX + bX1 (8.8-1)O
siendo a r la resistencia a la compresión sim ple, X la esbeltez mecánica, y a y b dos coeficientes a determ inar experim entalm ente p ara cada m aterial.
En la T ab la 8.2 figuran los valores correspondientes para fundición gris, acero dulce, m adera de pino y hormigón.
Tabla 8.2.
MATERIAL Ekp/cm2 kp/cm2
Xlímite
a f = a, — aX + bX2 kp/cm2
Fundición gris 1 000000 1620 80 7760 - 1202 + 0.5422Acero dulce 2 100 000 1900 105 3100 - 11.42Madera de pino 100 000 99 100 293 - 1.942Hormigón 210000 29 85 80<r,(I - 0.00322)

504 R E S I S T E N C I A 1)1: M A T E R I A L E S
T anto en la obtención de la fórmula teórica de Euler como en las em p íreas de T elm ajer se adm itía que la pieza com prim ida era inicialmente perfectamente recta y que la carga actuaba totalm ente centrada. En realidad, ni las cargas están generalm ente centradas m las piezas son perfectamente rectas, sino que pueden presentar alguna curvatura in icial. Por tanto, con objeto de cubrir estas imperfecciones es necesario considerar un coeficiente de seguridad que aumente con la esbeltez.
En la F igura 8.15 se representan, para una columna de acero A 37, la función del cod ic íen te de seguridad n = /i|/.j. asi como la curva de Euler-Tetmajer a cr = a cr(/.) adoptadas por las norm as de diversos países. A partir de ellas, por división, se obtiene la curva de la tensión critica adm isible ffcrldm
= —: (8.8-2)
8.9. M étodo de los coeficientes a> para el cálculo de barras comprimidas
En los casos en los que pueden resolverse los problemas de pandeo m ediante la in troducción de la longitud de pandeo, es decir, en el supuesto de que se m antengan constantes la sección transversal y la fuerza de compresión, se puede exigir que se verifique simplemente
Pñ- ^ f f t r a d n ( 8 . 9 - 1 )
en donde o-„adra es la tensión adm isible a compresión, que depende de la esbeltez A. Ahora bien, para no tener que estab lecer tablas especiales de los valores de ffcrldm para diferentes hipótesis de carga , para facilitar el cálculo numérico y, finalmente, para poder establecer fórmulas ap roxim adas sencillas para el cálculo de barras rectas som etidas a compresión ax ial, se escribe la condición (8.9-1) en la forma
& £ < < F.dm ( 8 . 9 - 2 )
6
FLEXIO N LA TE RA L. PAND EO 5 0 5
Tabla 8.3. C o e f ic ie n te s u> p a r a a c e ro s A 33 y A 37
A 0 1 2 3 4 5 6 7 8 9 A
20 1.01 1.02 1.02 1.02 1.02 1.02 1.02 1.03 1.03 1.03 20
30 1.03 1.04 1.04 1.04 1.05 1.05 1.05 1.06 1.06 1.06 30
40 1.07 1.07 1.08 1.08 1.08 1.09 1.09 1.10 1.10 1.11 40
50 1.12 1.12 1.13 1.14 1.14 1.15 1.16 1.17 1.17 1.18 50
60 1.19 1.20 1.21 1.22 1.23 1.24 1.25 1.26 1.28 1.29 60
70 1.30 1.31 1.33 1.34 1.36 1.37 1.39 1.40 1.42 1.44 70
80 1.45 1.47 1.49 1.51 1.53 1.55 1.57 1.59 1.61 1.63 80
90 1.65 1.67 1.70 1.72 1.74 1.77 1.79 1.82 1.84 1.87 90
100 1.89 1.92 1.95 1.97 2.00 2.03 2.06 2.09 2.12 2.15 100
110 2.18 2.21 2.24 2.27 2.30 2.33 2.37 2.40 2.43 2.47 110
120 2.50 2.53 2.57 2.60 2.64 2.6S 2.71 2.75 2.78 2.82 120
130 2.86 2.90 2.94 2.97 3.01 3.05 3.09 3.13 3.17 3.21 130
140 3.25 3.29 3.33 3.38 3.42 3.46 3.50 3.55 3.59 3.63 140
150 3.68 3.72 3.77 3.81 3.86 3.90 3.95 4.00 4.04 4.09 150
160 4.14 4.18 4.23 4.28 4.33 4.38 4.43 4.48 4.53 4.58 160
170 4.63 4.68 4.73 4.78 4.83 4.88 4.94 4.99 5.04 5.09 170
180 5.15 5.20 5.26 5.31 5.36 5.42 5.48 5.53 5.59 5.64 180
190 5.70 5.76 5.31 5.87 5.93 5.99 6.05 6.11 6.16 6.22 190
200 6.28 6.34 6.40 6.46 6.53 6.59 6.65 6.71 6.77 6.84 200
210 6.90 6.96 7.03 7.09 7.15 7.22 7.28 7.35 7.41 7.48 210
220 7.54 7.61 7.67 7.74 7.81 7.88 7.94 8.01 8.08 8.15 220
230 8.22 8.29 8.36 8.43 8.49 8.57 8.64 8.71 8.78 8.85 230
240
250
8.92
9.66
8.99 9.07 9.14 9.21 9.29 9.36 9.43 9.51 9.58 240

5 0 6 R E S I S T E N C I A D E M A T E R I A L E S
T a b la 8 .4 . C o e f ic ie n te s a i p a r a a c e r o s A 4 2
X 0 1 2 3 4 5 6 7 8 9 X
20 1.02 1.02 1.02 1.02 1.02 1.03 1.03 1.03 1.03 1.04 20
30 1.04 1.04 1 .04 1.05 1.05 1 .05 1 .06 1.06 1.07 1.07 30
4 0 1.07 1.08 1.08 1.09 1.09 1 .10 1 .1 0 l . l l 1 .12 1 .12 4 0
50 1.13 1.14 1.14 1.15 1 .16 1 .17 1.18 1.19 1 .20 1.21 50
6 0 1 .22 1.23 1 .24 1.25 1.26 1.27 1 .29 1 .30 1.31 1.33 60
70 1.34 1.36 1.37 1.39 1.40 1.42 1 .44 1.46 1.47 1.49 70
8 0 1.51 1.53 1.55 1.57 1 .60 1 .62 1 .64 1.66 1.69 1.71 80
9 0 1.74 1.76 1.79 1.81 1.84 1 .86 1 .89 1.92 1.95 1.98 90
100 2.01 2 .03 2 .0 6 2 .0 9 2 .1 3 2 .1 6 2 .1 9 2 .2 2 2 .2 5 2 .2 9 100
110 3 .32 2 .3 5 2 .39 2 .4 2 2 .4 6 2 .4 9 2 .5 3 2 .5 6 2 .6 0 2 .6 4 110
120 2 .67 2.71 2 .7 5 2 .79 2 .8 2 2 .8 6 2 .9 0 2 .9 4 2 .9 8 3 .0 2 120
130 3 .0 6 3.11 3 .1 5 3 .1 9 3 .2 3 3 .2 7 3 .3 2 3 .3 6 3 .4 0 3 .45 130
140 3 .4 9 3 .5 4 3 .5 8 3 .63 3 .6 7 3 .7 2 3 .7 7 3.81 3 .8 6 3.91 140
150 3 .9 6 4 .0 0 4 .0 5 4 .1 0 4 .1 5 4 .2 0 4 .2 5 4 .3 0 4 .3 5 4 .4 0 150
160 4 .4 5 4 .51 4 .5 6 4 .61 4 .6 6 4 .7 2 4 .7 7 4 .8 2 4 .8 8 4 .93 160
170 4 .9 9 5 .0 4 5 .1 0 5 .1 5 5 .21 5 .2 6 5 .3 2 5 .38 5 .4 4 5 .49 170
180 5 .5 5 5 .61 5 .6 7 5 .7 3 5 .7 5 5 .8 5 5 .9 1 5 .9 7 6 .0 3 6 .0 9 180
190 6 .1 5 6.21 6 .2 7 6 .3 4 6 .4 0 6 .4 6 6 .5 3 6 .5 9 6 .6 5 6 .7 2 190
2 0 0 6 .7 8 6 .8 5 6 ,9 1 6 .9 8 7 .0 5 7 .11 7 .1 8 7 .2 5 7.31 7 .38 200
2 1 0 7 .4 5 7 .5 2 7 .5 9 7 .6 6 7 .7 2 7 .79 7 .8 6 7 .9 3 8 .01 8 .0 8 2 1 0
2 2 0 8 .1 5 8 .2 2 8 .29 8 .3 6 8 .4 4 8.51 8 .5 8 8 .6 6 8 .7 3 8 .8 0 220
2 3 0 8 .8 8 8 .9 5 9 .0 3 9 .11 9 .1 8 9 .2 6 9 .3 3 9 .41 9 .4 9 9 .5 7 230
2 4 0
2 5 0
9 .6 4
10 .44
9 .7 2 9 .8 0 9 .8 8 9 .9 6 10 .04 1 0 .1 2 1 0 .2 0 10 .28 10 .36 240
FLEXION LATERAL. PANDEO 5 0 7
T a b la 8 .5 . C o e f ic ie n te s w p a r a a c e ro s A 52
X 0 1 2 3 4 5 6 7 8 9 X
20 1.02 1.02 1.03 1.03 1.03 1.04 1.04 1.04 1.05 1.05 20
30 1.05 1.06 1.06 1.07 1.07 1.08 1.08 1.09 1.10 1.10 30
40 1.11 1.12 1.13 1.13 1.14 1.15 1.16 1.17 1.18 1.19 40
50 1.20 1.22 1.23 1.24 1.25 1.27 1.28 1.30 1.31 1.33 50
6 0 1.35 1.37 1.39 1.41 1.43 1.45 1.47 1.49 1.51 1.54 60
70 1.56 1.59 1.61 1.64 1.66 1.69 1.72 1.75 1.78 1.81 70
80 1.84 1.87 1.90 1.94 1.97 2.01 2.04 2.08 2.11 2 .15 80
9 0 2 .18 2 .22 3 .26 2 .3 0 2 .34 2.38 2.42 2 .46 2 .5 0 2 .54 90
100 2 .59 2 .6 3 2 .67 2 .72 2 .7 6 2.81 2.85 2 .90 2 .95 2 .99 100
110 3 .04 3 .09 3 .14 3 .19 3.24 3.29 3.34 3.39 3.44 3 .49 110
120 3 .55 3 .6 0 3 .65 3.71 3 .76 3.82 3.87 3 .93 3.98 4 .0 4 120
130 4 .1 0 4 .1 6 4 .2 2 4 .2 7 4 .33 4.39 4 .45 4 .52 4 .5 8 4 .6 4 130
140 4 .7 0 4 .7 6 4 .8 3 4 .8 9 4 .9 5 5.02 5.08 5.15 5 .22 5.28 140
150 5 .3 5 5 .4 2 5 .48 5 .55 5 .62 5.69 5 .76 5.83 5 .90 5.97 150
160 6 .04 6 .1 2 6 .1 9 6 .26 6 .3 4 6.41 6 .48 6 .56 6 .6 3 6.71 160
170 6 .79 6 .8 6 6 .9 4 7 .02 7 .0 9 7.17 7 .25 7.33 7.41 7 .29 170
180 7 .57 7 .65 7 .7 3 7 .8 2 7 .9 0 7 .98 8 .07 8 .15 8 .2 4 8 .3 2 180
190 8 .4 0 8 .49 8 .5 8 8 .6 6 8 .75 8 .84 8 .93 9 .02 9 .1 0 9 .1 9 190
2 0 0 9 .2 8 9 .37 9 .4 7 9 .5 6 9 .6 5 9 .74 9 .83 9 .92 10.02 10.11 2 0 0
2 1 0 10.21 10 .30 10 .40 10.49 10.59 10.69 10.78 10.88 10.98 11.08 2 1 0
2 2 0 11.18 11 .27 11 .38 11.48 11 .57 11.68 11.78 11.88 11.98 12 .09 2 2 0
2 3 0 12 .19 12.29 12 .40 12 .50 12.61 12.72 12.82 12.93 13.03 13.14 2 3 0
2 4 0
2 5 0
13 .25
14 .36
13.36 13 .47 13.58 13 .69 13.80 13.91 14.02 14.13 14.25 2 4 0

5 0 8 r e s i s t e n c i a d e m a t e r i a i . e s
en donde rxjdm es la tensión de compresión adm isib le del m aterial em pleado que coincide con la tensión critica de una barra de esbeltez nula, y
w = (8.9-3)Cr jdm
e l c o e f i c i e n t e d e p a n d e o .Los coeficientes de pandeo dependen del tipo de m aterial y del grado de esbeltez de la
barra. En las T ablas 8.3, 8.4 y 8.5 figuran los valores de los coeficientes tu de pandeo para l o s a c e r o s de l o s t i p o s A 33 o A 37, A 42 y A 52, respectivamente.
Se observa que la esbeltez menor que figura en las tablas de los coeficientes ai es 20. La causa de esto es que, según las diversas normas, para barras con esbelteces menores a 20 no hay que hacer la com probación al pandeo. En estos casos se tom ará a i = 1. La esbeltez m ayor que figura en las tab las es de 250 ya que las normas no perm iten utilizar columnas de esbeltez m ayor de este valor.
Con estas tablas podemos resolver el problem a directo de ca lcu lar la carga admisible de pandeo dada la sección de la pieza com prim ida, o bien el problem a inverso de dada la carga que va a com prim ir la pieza, calcu lar la sección m inim a necesaria p ara soportarla.
/’cdm = = — O-(O
de donde:
= a ú im -Si (8.9-4)
El problem a se resuelve como si se tra tara de una compresión sim ple considerando no la carga real sino una carga ficticia igual a a iP.
8.10. Flexión compuesta en vigas esbeltasO ;
Considerem os ahora una v iga esbelta que adem ás de la fuerza P de com presión que actúa sobre ella, está som etida a cargas transversales, es decir, la viga trab a ja a flexión compuesta (Fig. 8.16).
4
F L E X I O N L A T E R A L . P A N D E O
La ecuación diferencial de la e lástica será:
El, y " = - P y + A/„ (8.10-1)
en d o n d e A/,, es e l m o m e n t o f i e c t o r d e b i d o a l a s c a r g a s t r a n s v e r s a l e s .Como \ í ,r es independiente de P y de v, dependiendo exclusivam ente de x, la ecuación
diferencial (8.10-1) se puede poner en la forma
y " + k 2y = (8.10-2)LI.
Psiendo k2 = — •
La solución in tegral de esta ecuación diferencial es:
y — A sen kx + B eos kx + y * (8.10-3)
siendo y * una solución particu lar de la ecuación diferencial (8.10-2).Ya se com prende la dificultad que ex istirá cuando el momento fiector A/,, debido a las
cargas transversales venga dado por diferentes leyes en los diversos tramos de la viga. Parasubsanar esta d ificultad existen métodos aproxim ados, entre los cuales quizás el más utilizado sea el que consiste en suponer que la deform ada de la viga sea una sinusoide
nxy — f sen — (8.10-4)
asi como tam bién la deform ada de la v iga som etida exclusivam ente a las cargas transversales
y ,r = f u sen y (8.10-5)
En este supuesto, la ecuación (8.10-1), se puede expresar de la forma siguiente:
E l . y " = - P y + E Izy", (8.10-6)
Si sustitu im os en esta ecuación diferencial las soluciones (8.10-4) y (8.10-5) supuestas, setiene
- £ / s/ £ sen ^ = — P f sen ~ - E I J U £ sen ^ (8.10-7)
n 2EI¡Si suponemos los extrem os articu lados, la carga critica de pandeo es P„ = —p —' L>e
la ecuación an terio r se deduce:
f P cr = P f + f , P „
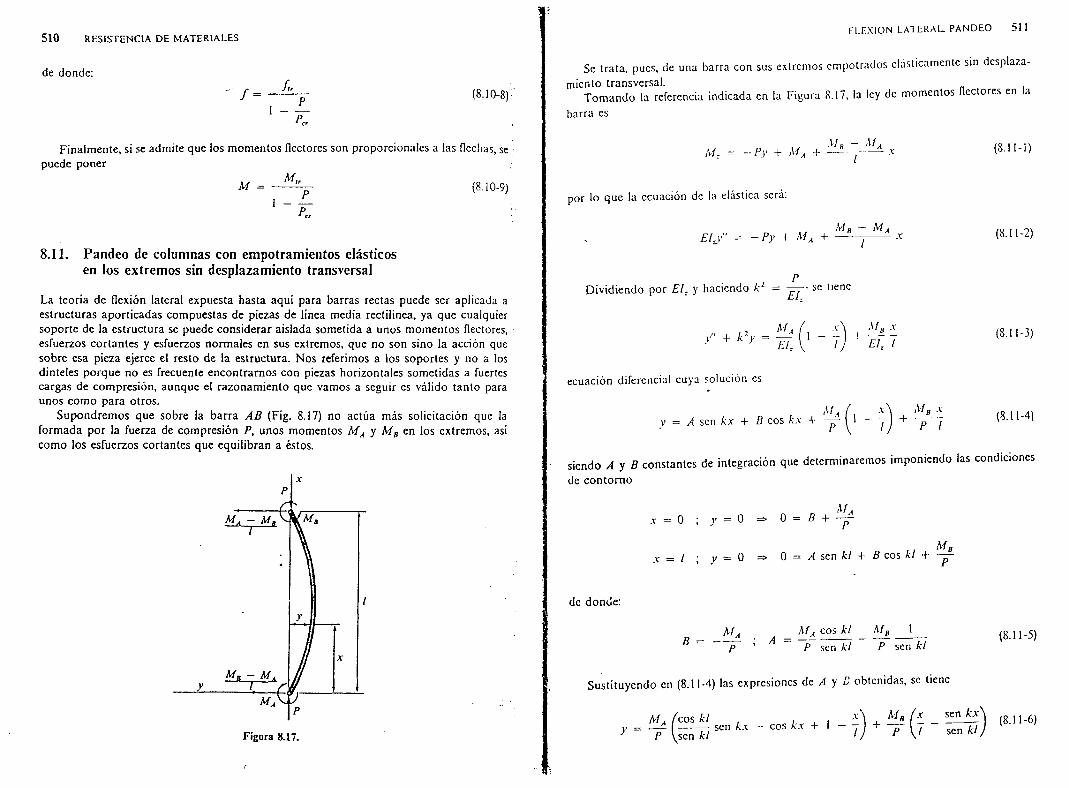
5 1 0 R E S I S T E N C I A D E M A T E R I A L E S
de donde:
• / = _ ( 8 . 1 0 - 8 ) '
1 ~ KFinalm ente, si se adm ite que los momentos flectores son proporcionales a las flechas, se
puede ponerM,r
M = ' d y (8.10-9)
1 ~~ ^
8.11. Pandeo de columnas con empotramientos elásticos en los extremos sin desplazamiento transversal
La teoría de flexión lateral expuesta hasta aqu i para barras rectas puede ser ap licada a estructuras aporticadas com puestas de piezas de línea media rectilínea, ya que cualquier soporte de la estructura se puede considerar a islada som etida a unos momentos flectores, esfuerzos cortantes y esfuerzos norm ales en sus extremos, que no son sino la acción que sobre esa pieza ejerce el resto de la estructura. Nos referimos a los soportes y no a los dinteles porque no es frecuente encontrarnos con piezas horizontales som etidas a fuertes cargas de com presión, aunque el razonam iento que vamos a seguir es válido tanto para unos como para otros.
Supondrem os que sobre la b arra AB (Fig. 8.17) no actúa más solicitación que la form ada por la fuerza de com presión P, unos momentos M A y M s en los extremos, asi como los esfuerzos cortantes que equilib ran a éstos.
F L E X I O N L A T E R A L . P A N D E O 5 1 1
Se trata , pues, de una barra con sus extremos empotrados clásticamente sin desplazamiento transversal.
Tom ando la referencia indicada en la F igura 8.17, la ley de momentos [lectores en la barra es
AL = - P v + M A + í A z j A . x (8.11-D
por lo qlo que la ecuación de la e lástica será:
PD ividiendo por El. y haciendo k — s c tiene
M a / .v
ecuación diferencial cuya solución es
(8.11-3)
y = A sen kx + B eos kx + y ^1 - - j j + 7 (8.11-4)
siendo A y B constantes de integración que determ inaremos imponiendo las condicionesyde contorno
M av = 0 ; y = 0 => 0 = 5 +
M bx = l ; y = 0 =» 0 = A sen kl + 5 eos kl + —
de donde:
d M á • , M a cos kl M b 1__ (8.11-5)D = — —r - , A — _ , , n /-/
Sustituyendo en (8.11-4) las expresiones de A y B obtenidas, sc tiene

5 1 2 R E S I S T E N C I A DE M A T E R I A L E S
Sl- pueden obiener los ángulos U y 0B en las secciones extrem as de la pieza considerada derivando la expresión (8-11-6) y particu larizando la ecuación resultante para .v = 0 y .v = /, respectivamente.
M t í eos kl— k — eos k.x + k sen kxP \ sen kl
M A / eos k l eos kx + sen kl sen kx P l \ sen kl
K ," p i
kl eos k(l — x) sen kl
+Aí„P l
kl
M„( ! -
P sen kl
U/
M B I P l '
]
u-, 1 O
eosr kx\sen kl
eos kx sen kl
(8.11-7)
Para .v = 0 : y ' = 0A
ÜA - (k! cota kl — 1) + _ ¿/ COsec kl) (8.11-8)
Para v = / : r ' = ü u
0„ = (kl cosec kl — 1) + ^ (1 - kl cota kl) (8.11-9)
Haciendo:
EL 1 - k l cotg k l , k l cosec kl — 1T ■ * • - - w - — ¡Í 7 ? —
en las ecuaciones (8.11-8) y (8.11-9), se tiene:
O _ A ,.3,2 M B m (2 ) , _ M a
k 2 El.
^ A J f . 2 ¡ 2 , i ¡ m ^ A x , ^ B X / O l í n \
" ¥ e l ¡ * 2 1 + r -E L I 4> lk l = ~ K 4>2 + ~E * x (8- J
Las expresiones (8.11-11) y (S .11-12) perm iten despejar los momentos M A y M B en función de los ángulos 6A y 8B
F L E X I O N L A T E R A L . P A N D E O 5 1 3
e s d e c i r :
M a+ M j
<t>\ ~ 02
K(0A<t>2 + Oa<l>i)<t>\ - 4>i
Si ahora hacemos
' “2 4>l - 4>¡
las expresiones (8.11-13) y (8.11-14) toman la forma
4>2
MEl.
a - — f ( « i 0 A + a 20 B)
El.M b = - y ( a 28A + X A )
(8.11-13)
(8.11-14)
(8.11-15)
(8.11-16)
(8.11-17)
y si expresam os los ángulos girados en función de las constantes de em potram iento e lástico, según (7.1-1) tenemos:
0A = kAMA - Ma = (a A + a A )0B = k BM B =» M b = = ~ r (“ i 8.4 + “ A )K o I
(8.11-18)
(8.11-19)
En la b arra se tendrán que verificar sim ultáneam ente estas dos últim as expresiones que constituyen un sistem a de ecuaciones homogéneo.
« i +/
F J Jca
“ 2 0 A + ( a l
0A + x 20B — o
/(8.11-20)
eB = o
P ara que este sistem a tenga solución d istinta de la triv ial se habrá de verificar la condición de com patib ilidad , que se traduce en la anulación del determ inante de los coeficientes
“ i +/
EI:kÁ
a 2 « 1
a-,
/E1±b
12
= 0 (8.11-21)
+ a \ E I .k Á E l . k J (EL)2kAkB °
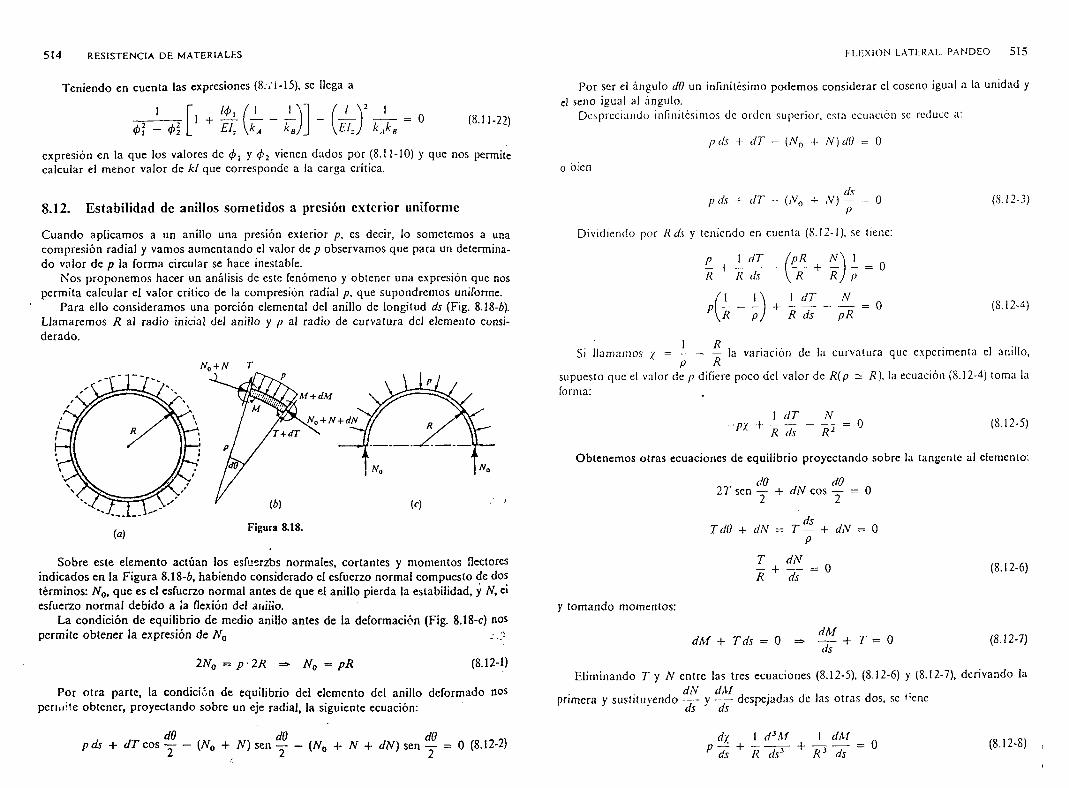
5 1 4 R E S I S T E N C I A D E M A T E R I A L E S
T eniendo en cuenta las expresiones (8. Ti -15), se llega a
- <t>\ Li +
EL \kl \2
EL= 0 (8.11-22)
expresión en la que los valores de 0 , y <¡>2 vienen dados por (8.11-10) y que nos permite ca lcu lar el m enor valor de k l que corresponde a la carga crítica.
8.12. Estabilidad de anillos sometidos a presión exterior uniforme
Cuando ap licam os a un an illo una presión exterior p , es decir, lo sometemos a una com presión rad ia l y vamos aum entando el valor de p observamos que para un determinado valor de p la form a c ircu lar se hace inestable.
Nos proponem os hacer un análisis de este fenómeno y obtener una expresión que nos perm ita ca lcu la r el valor crítico de la compresión rad ial p , que supondrem os uniforme.
P ara ello consideram os una porción elem ental del an illo de longitud d s (Fig. 8.18-6). L lam arem os R al rad io in icial del an illo y p a l rad io de curvatura del elemento considerado.
N„ + N T
Sobre este elem ento actúan los esfuerzbs norm ales, cortantes y momentos flectores ind icados en la F igu ra 8.18-6, habiendo considerado el esfuerzo norm al compuesto de dos térm inos: N0, que es el esfuerzo norm al antes de que el an illo p ierda la estab ilidad , y N, ei esfuerzo norm al debido a ¡a flexión del aniiio.
L a condición de equilibrio de medio an illo antes de la deformación (Fig. 8.18-c) nos perm ite obtener la expresión de N0
2N0 = p - 2 R => N0 = p R (8.12-1)
Por o tra parte , la condición de equilibrio del elem ento del an illo deformado nos perm ite obtener, proyectando sobre un eje rad ia l, la siguiente ecuación:
F L E X I O N L A T E R A L . P A N D E O 5 1 5
Por ser el ángulo dO un infinitésimo podemos considerar el coseno igual a la unidad y el seno igual al ángulo.
Despreciando infinitésimos de orden superior, esta ecuación se reduce a:
p d s + d T - [N0 + N) dü = 0
o bien
p d s + d T - (/V0 + ,V) — = 0 (8.12-3)P
D ividiendo por R d s y teniendo en cuenta (8.12-1), se tiene:
' = oR R d s \ R R J p
/ í _ I ) + i í _ I = 0 (8.12-4)1 \R p ) R d s pR
1 RSi llam am os / = - — — la variación de la curvatura que experim enta el anillo,
P Rsupuesto que el valor de p difiere poco del valor de R (p ^ R). la ecuación (8.12-4) toma la forma:
+ s í - F * 0 ( S ,2 -51
Obtenemos otras ecuaciones de equ ilib rio proyectando sobre la tangente al elemento:
dQ , dO2 T sen — + dN eos — = 0
d sTdO + dN = T — + dN = 0
P
1 + ^ = 0 (8.12-6) R d s
y tom ando momentos:
d M + T d s = 0 ~ + T = 0 (8.12-7)d s
Elim inando T y N entre las tres ecuaciones (8.12-5), (8.12-6) y (8.12-7), derivando la . dN d \ f ,
primera y sustituyendo y despejadas de las o tras dos, se *'ene d s d s

5 1 6 R E S I S T E N C I A DE M A T E R I A L E S
Esta ecuación es de integración inm ediata
1 d ' -U M
siendo C una constante.Ahora bien, en una pieza con fuerte curvatura in icial el momento flector M está
relacionado con la variación de curvatura mediante la ecuación
1 1 M <*• ,2-|0>de la que se deduce
d 2M d 21
Estas dos ecuaciones nos permiten elim inar en (8.12-9) el momento .U, obteniendo una ecuación exclusivam ente en y
E l d 2x 1 „ „ d 2/ f p R 1 \ CRPX + 7 f ^ + R~> EI/ ~ C ~ d ^ + V E I + R í }/- - ~ E I ( 8 J 2 ' 12)
o bien
•El + k'-y . siendo k ' - E + J , ( S J M J ,d s 1 E l E l R 1 K
La solución integral de esta ecuación diferencial es:
X = A sen ks + B eos ks + - 2—- (8.12-14)CR
F e iO
Ahora bien, esta solución en la que la variab le j es el arco de circunferencia, línea m edia del anillo, tiene que ser periódica, es decir, tiene que verificar:
k(s + 2n R ) - ks = 2™ => k = j (8.12-15)
siendo n un número entero.La carga critica se obtendrá elim inando la variab le aux ilia r k entre esta relación y la
(8.1-13)
i r _ p R 1R2 ~ Y l + J 2
FLEXION LA TE RA L. PAN D EO 5 1 7
de d o n d e :
P ara un anillo libre de ligaduras fijas la carga crítica vendrá dada por el menor valor de esta ecuación, es decir, para n = 2
3£7= - J T (8.12-17)
El an illo se deforma adoptando una configuración como la indicada en la F igura 8.19.
E JE RC IC IO S
V I I I . l . Calcular la carga de un soporte sometido a compresión, formado por dos perfiles U P N 16 0 soldados por sus alas, de longitud / = 8 m y cuyos extremos están articulados.El módulo de elasticidad es E = 2 x 106 kp/cm2.
De la tabla de perfiles laminados (véase Apéndice 2) se obtienen los siguientes datos para un perfil UPN 160
/. = 92o cm4 ; l t = 85.3 cm4 ; O = 24 cm2 ; d = 4.66 cm
Para los dos perfiles soldados por sus alas tendremos:
/. = 2 x 925 = 1850 cm4
l , = 2(85.3 + 24 x 4.662) = 1213 cm4
Q = 2 x 24 = 48 cm2

5 1 8 R E S I S T E N C I A DE M A T E R I A L E S
C o m o lo s e x t re m o s e s tá n a r t ic u la d o s , la lo n g it u d d e p a n d e o e s
/, = / = ! m
Por tanto, la esbeltez es:
X = — = 1 6 0 > 105
P o r s e r X > 105 c a lc u la r e m o s l a c a r g a c r i t i c a p e d id a p o r a p l ic a c ió n d e la fó rm u la dc E u le r
pti £/„,„ ir2 x 2 x 106 x 1213
37412 kp* er /2 8002
V III.2 . C a lc u la r la ca rg a c ritica de un sop orte fo rm a d o por dos p erfiles de U, com o el indicado en la F ig u ra V III.2 -a , q u y ie n e una longitud l = 5 m y está a rticu lad o en am bos extrem os.L a tensión adm isib le es axim = 1 2 0 M P a y e l m ódulo de e lastic id ad £ = 2 x 1 0 3 M P a.
F ig u ra V III .2 -a .
F L E X I O N L A T E R A L . P A N D E O 5 1 9
P a r a d e t e r m in a r la s p o s ib i l id a d e s d e r e s is t e n c ia d e u n a p ie z a a f lex ió n la te r a l e s n e c e s a r io c o n o c e r el p la n o d e p a n d e o q u e , s e g ú n se s a b e e s tá r e la c io n a d o co n e l e je q u e p a s a p o r cl c e n t ro d e g r a v e d a d re s p e c to d e l c u a l e l m o m e n to de in e r c ia de la se c c ió n es m ín im o .
S i tu a r e m o s lo s p e r f i le s d e ta l fo rm a q u e la te n d e n c ia a flexo r en lo s p la n o s d e f in id o s p o r lo s e je s p r in c ip a le s de in e r c ia s e a la m is m a , e s d e c ir , te n d r á n q u e se r ig u a le s lo s m o m e n to s p r in c ip a le s d e in e r c ia /_ e />..
F ig u r a V II 1.2. ( b )(c ) C o ta s e n cm
L = /,
5 “ 4 4 ''/, = 4| y - y ] = 492 e r a 1
P e ro p o r o t r a p a r te , l l a m a n d o s a la d i s t a n c ia e n tr e el e je y y la c a r a e x t e r io r d e l p e r f il, a p l ic a n d o e l t e o r e m a d e S l e i n e r , se t ie n e :
/ / 5A 4 a 4 9 2= - f = — + 2 5 (x + 2 .5 )2 - - - 16(5 + 3 )2 = — = 123 c m 1
4 4 12 12 4
D e s a r r o lla n d o y s im p l if ic a n d o se t ie n e :
•9 5 2 + 295 - SO = 0
e c u a c ió n d e s e g u n d o g r a d o , c u y a s s o lu c io n e s so n :
325| = — = 1.78 cm
90 s í2 = -1 8 = ~ 5 C m
E x is te n , p o r t a n to , d o s s o lu c io n e s d e id é n t ic a re s is te n c ia a la f lex ió n la te r a l , r e p r e s e n ta
d a s en la s F ig u r a s V l l l . 2 - 6 y c .

5 2 0 R E S I S T E N C I A DI: M A T E R I A L E S
VIII.3.
Las características geométricas y mecánicas son:
2s, = 3.56 cm : /,=/■, = 492 cm*
2s2 — 10 cm ; 0 ¡ — 0 , — 56 cm2
[Y ¡492’ n 36
= 3.7 cm : = /, = 3.7 cm
Por estar el soporte articulado cn sus extremos, la longitud de pandeo coincide con la longitud real:
Como la esbeltez mecánica
/„ = / = 5 m
I 500 /. = - = — = 135 > 105
/ j.7
es aplicable la fórmula de Euler.Por tanto, la carga critica del soporte es
p n El n 1 x 2 x 10u x 402 x 10 8388.47 kNr cr
/; 5: A ”
Determinar la fuerza critica de una barra sometida a compresión, formada por dos partes de igual longitud, teniendo una de ellas doble rigidez a la flexión que la otra, y estando articulada en ambos extremos.
El
1/2
2 El
II2 •V77.
Las ecuaciones de la elástr
Figura VIII.3.
elástica son:
EIy'[ + P y , = 0 0 í : .v ^
2 El y", + Py-, = 0 - < x $ /
PHaciendo ---- = k~ queda:
2E¡ s
>7 + 2L'2_i’l = 0 y , + k~y2 — 0
FLEXIO N LA TE RAL. PANDEO 5 2 1
cuyas ecuaciones integrales son:
y, = C, sen k^/2x + C, eos k s/2x y , = C¡ sen kx + C , e o s kx
Condiciones de contorno:
y,(0) = 0 y2(/) = 0
C2 = 0Cj sen kl + C , eos kl = 0
/ .. kl klC¡ sen k s j 2 - = C3 sen — + Cx eos —
C ls/2 eos k^J2 - = C3 eos k - — C4 sen k
Sistema homogéneo que para que tenga solución distinta de la trivial C, = C3 = C j = 0, se tiene que verificar:
sen k j 2
ky/21
sen kl eos klkl kl
— sen — — eos —2 2kl kl
— eos — sen — 2 2
= 0
. / k j2 1 kl R k j 2 l k¡\Ar/f sen — sen ~ 2 eos — eos — J +
, / k J l t kl r- k J l l kl\+ eos a7| —sen ~~~— eos ~ 2 eos ~~~— sen — I = 0
Poniendo:
. . - kl kl 2 kl 2 klsen kl = 2 sen — eos — ; eos kl — e o s sen* —2 2 2 2
y simplificando, y obtiene la ecuación
rr kl k J l lv / 2 t g y = - t g - * —
Haciendo
k± = o 2
ecuación cuya menor raíz no nula es:
kl
^ 2 tg 0 = - t g v/20
0 = — = 72” 31' 12" = 1.265 rad9
l r j
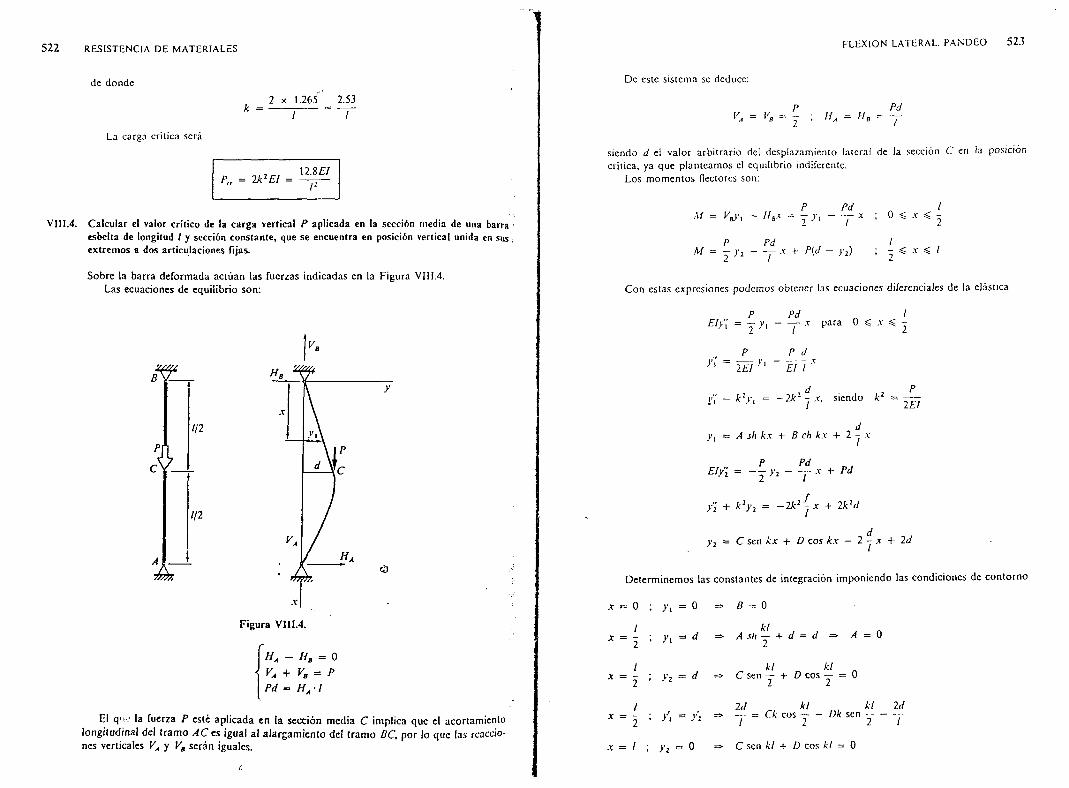
5 2 2 R E S I S T E N C I A D E M A T E R I A L E S
de donde
2 x 1.265 2.53k = — /— = ~
La carga critica será
2k 2EI12.8£7~ ¡ r ~
VII 1.4. Calcular el valor critico de la carga vertical P aplicada en la sección media de una barra esbelta de longitud / y sección constante, que se encuentra en posición vertical unida en sus extremos a dos articulaciones fijas.
Sobre la barra deformada actúan las fuerzas indicadas en la Figura VIII.4. Las ecuaciones de equilibrio son:
fVL
p
&
¡I 2
112
Figura VIII.4,
HA - H„ = 0
Va + V . = P
El que la fuerza P esté ap licada en la sección media C implica que el acortamiento longitudinal del tram o AC es igual a l alargam iento del tramo BC, por lo que las reacciones verticales VA y VB serán iguales.
F L E X I O N L A T E R A L . P A N D E O 5 2 3
De este sistema se deduce:
P PdyA = y. = y ; u* = H" = t
siendo d el valor arbitrario del desplazamiento lateral de la sección C en la posición critica, ya que planteamos el equilibrio indiferente.
Los momentos flectores son:
P Pd M = PrIT ~ Un* = 7 >T - y -x
P Pd ,M = - y 2 - y x + P(d - >-2)
Con estas expresiones podemos obtener las ecuaciones diferenciales de la elástica
P Pd 1F.Iy'l = y y , — x para 0 < x ^ -
P P d= 2T i -1' 1 " El 1 *
_d P- k 1 y , = -2 U 1 ~ x, siendo k = —
dy , = A slt kx + B ch kx + 2 - x
P PdE lyí = - y > 2 - y x + Pd
y'í + k l y i - — 2fc2 ^ x + 2k2d
dy 2 = C sen kx + D eos kx — 2 - x + 2d
Determinemos las constantes de integración imponiendo las condiciones de contorno
x = 0 ; y , = 0
/2
/2 ’
/
y , = d =>
>’z = d =-
>'j = /j ^* ~ 2 ’
.t = I ; y 2 = 0
B = 0
A sil — + d = d => A = 0
kl k i nC s e n ---- F D eos — = 0
2 2
2d k l k l 2 d—- = Cf: eos — - f)k sen - ---- -/ 2 2 /
C sen k l + D eos kl = 0
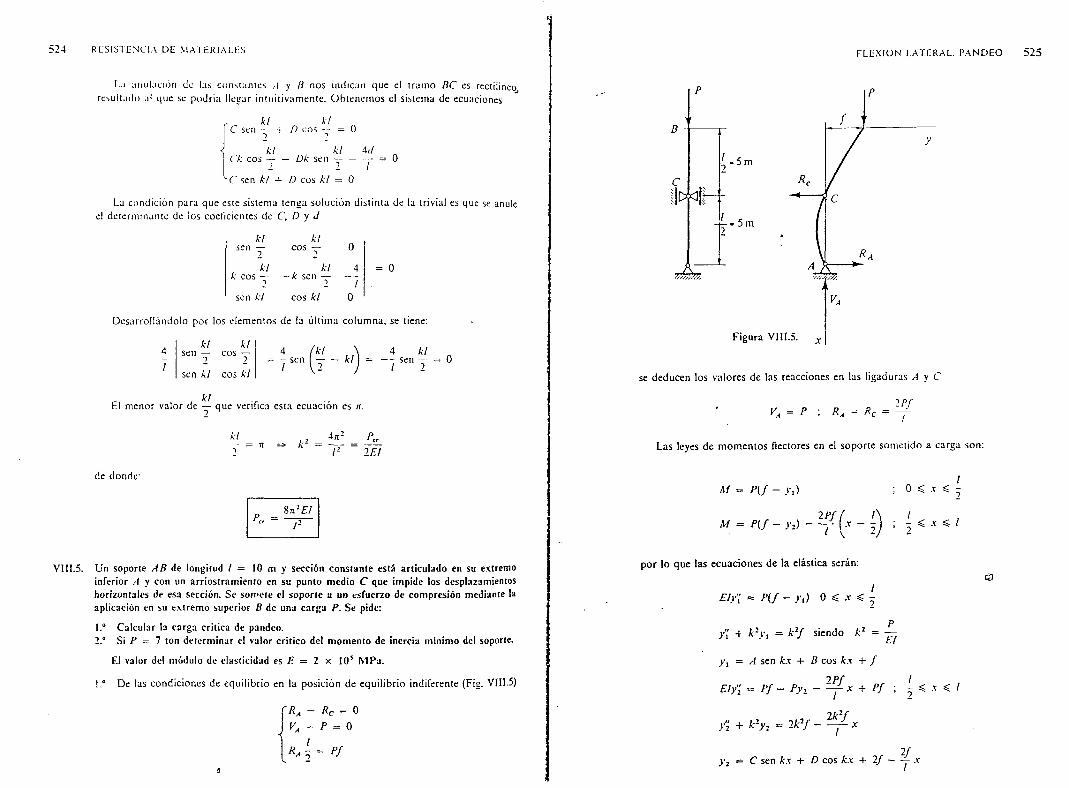
5 2 4 R E S I S T E N C I A D E M A T E R I A L E S
La anulación de las constantes A y B nos indican que el tramo BC es rectilíneo resultado al que sc podría llegar intuitivamente. Obtenemos el sistema de ecuaciones
k l k lC sen — + O eos -- 0
klCk eos
C sen kl + D eos kt = 0
kl 4 dDk sen — — —
La condición para que este sistema tenga solución distinta de la trivial es que se anule el determinante de los coeficientes de C, D y d
= 0
Desarrollándolo por los elementos de la última columna, se tiene:
kl kl
kl kl0sen — e o s —2 V
kl kl 4k eos — — k sen — __
2 s /sen kl eos kl 0
sen — eos — 2 2
sen kl eos kl
kl
4= - sen
Ikl
- k l) =4 kl7 sen T
El menor valor de — que verifica esta ecuación es n.
4 n2 P„kl— = 71 k2 =
I1 2E1
de donde:
P,. =in 'E I~ l ~
VIII.5. Un soporte AB de longitud / = 10 m y sección constante está articulado en su extremo inferior A y con un arriostramiento en su punto medio C que impide los desplazamientos horizontales de esa sección. Se somete el soporte a un esfuerzo de compresión mediante la aplicación en su extremo superior B de una carga P. Se pide:
1.° Calcular la carga critica de pandeo.2.° Si P = 7 ton determinar el valor critico del momento de inercia minimo del soporte.
El valor del módulo de elasticidad es E = 2 x 105 MPa.
I o De las condiciones de equilibrio en la posición de equilibrio indiferente (Fig. VIII.5)
a
F L E X I O N L A T E R A L . P A N D E O 5 2 5
se deducen los valores de las reacciones en las ligaduras A y C
Las leyes de momentos flectores en el soporte sometido a carga son:
IM = P ( f - y i) ; 0 s: .x < ^
M = P ( f - y ,) - ^ ( x - ^ ^ a < I
por lo que las ecuaciones de la elástica serán:<3
Elv[ = P ( f - y i)
Py'í + ¿ 'V i = k1/ siendo k2 = —n
y ¡ = A sen k.x + B eos kx + f
~>Pf IEly'í = Ef - P y , x + P f ; - s: .v < /
l k 2f/ ' + k2y 2 = 2 k2f - - f x
2/y 2 = C sen kx + D eos kx + 2 / ---- x

R E S I S T E N C I A DE M A T E R I A L E S
Determinación de las constantes de integración
x = 0 — f = > f = B + f = > B = 0
1 k lx = - ; = 0 => A sen y + / = 0
/ kl kl , ,.r = - ; >’2 = 0 =■ C sen y + D eos y + 2/ — / = 0
1 kl , kl kl 2/.r = - ; y . = y , => y4Ar eos — = Ck e o s Dk sen -----------2 2 2 2 1
x = l ; y 2 — 0 => C sen kl + D eos A7 + 2/ — 2/ = 0
Estas condiciones de contorno constituyen un sistema homogéneo de cuatroecuaciones con cuatro incógnitas: A, C, D y / La condición para que este sistema tenga solución distinta de la trivial, que no interesa, es que el determinante de los coeficientes sea igual a cero
kl
k eos
kl
0
klCOS y
kl kl kl 2-k eos y k sen — -
sen kl eos kl 0
= 0
Desarrollándolo por los elementos de la primera lila, se tiene:
kl
kl sen y
kl klsen — eos — 12 2t kl í. kl 2— k eos — k sen — -
2 2 /sen kl eos kl 0
+ k eoskl
kl klsen — eos —
2 2sen kl eos kl
kl2 , , kl kl- sen kl eos —— k eos — eos kl — k sen — sen kl -
kl ( kl kl \+ k eos y (sen — eos kl — eos — sen kl j
■ eos kl sen
Simplificando:
F L E X I O N L A T E R A L . P A N D E O 5 2 7
Haciendo kl — 0, tenemos la ecuación transcendente
0tg - = 0 6 2
cuya solución menor no nula es 0 = kl = 2.331.Por tanto, la carga crítica pedida para l = 10 m será
2.3312 £7n . tiO1!II 0.0543£7
que viene dada en newtons cuando E se expresa en pascales e l e n m1.
2° Si P„ = 7 ton, el momento de inercia minimo del soporte será:
7000 x 9.80.0543 x 2 x 10“
= 632 x 10-8 m“ = 632 era*
VI1I.6. Hallar la carga critica de pandeo de un puntal de longitud /, de sección variable, constituido por un tramo de longitud //2 de sección cuadrada de lado a y otro de la misma longitud y sección cuadrada de lado a ¡2. Ambos tramos, unidos rígidamente entre sí, admiten los mismos planos de simetría. El puntal está empotrado en el extremo de mayor sección y soporta una carga axial en el de sección menor. El módulo de elasticidad es E.
Al ser distintas las rigideces en los tramos 0A y AB existirán dos expresiones analíticas de la ecuación de la elástica
Elíy x — P ( f y ,) ; 0 < x sí ^
y'I + *í>7 = k \ í siendo k\P
eT,
E fi/ i = n f - y 2) i - ü x H l
y'í + k\y2 = k \ f siendo k\ =EL

5 2 8 R E S I S T E N C I A DE M A T E R I A L E S
Las ecuaciones integrales de estas ecuaciones diferenciales son:
v, = A sen A,.v + B eos A,.x + /
i-, - ( ' sen A,.v + D eos A,.x + f
Determinemos las constantes de integración imponiendo las condiciones de contorno-
.x = 0 ; y , = 0 => 0 — B + / => B = - j )x = 0 0 0 NA, A = 0 =- }'i = /(I - eos A,.x)
I , , k xl k J k J, i -Vi = -D => J ~ /eos -y- = C sen y - + £> eos -y- + /
IA = - ; /, = y't
X = I ; .1-, = /
k ,/ A,/ k JJk. sen — = Ck, eos — — £>A, sen —
2 2 2
/ = C sen A,/ + O eos A,/ + /
La condición para que este sistema homogéneo de tres ecuaciones con las incógnitas C, D ,/tenga solución distinta de la trivial es
k J k J k J
I ^2¡ i A./ i A,/Ai eos — —A, sen — —A. sen — - 2 1
= 0
sen k2l eos k J 0
Desarrollando por los elementos de la última columna se tiene:
A,// k2l , k2tA, eos — I eos — eos A,/ + sen — sen A,/ ] +
A,// A,/ A,/+ A, sen — ^sen y - eos k2l — eos -y- sen k J | = 0
Simplificando:
A,/ A,/ A,/.A, eos —- eos - f A, sen — sen2 2 * 2
k J
de donde:
Ahora bien, como
A,/ k2l A,tg — tg — = —
2 b 2 A,
/. = — a* 1 12
=
i :1 a4
1 2 Tó
a
A | ^ kl 4k>
FLEXIO N LA TE RAL. PAN D EO 5 2 9
la ecuación anterior toma la forma
o bien haciendo 0 = —2
tg 0 • tg 40 = 4
tg0-tg40
Figura VII1.6-A. 0.368
ecuación trascendente, cuya solución es 0 = 0.368 rad
„ nlfio ,.2 P * °-368>2 2>0.368 - — ~ A , ---------- ? ------------ —
de donde se obtiene la carga de pandeo pedida
0.54 \EIlT1
V III.7 . U n so p orte de longitud / = 3 m , que tiene articu lados sus ex trem os, tiene fo rm a tu b u la r de d iá m etro e x te r io r 2R = 8 0 m m y d iám etro in te rio r 2 r = 64 m m . E l so p o rte está som etido z un esfu erzo de com presión m ediante una fuerza P p arale la al eje pero excén trica . C a lc u la r la excen tric id ad m áx im a para una carg a de pandeo igual a 0 .7 5 del v a lo r de la c a rg a c ritica de Euler.L a tensión de fluencia es a f — 3 2 0 M P a y el m ódulo de e lasticidad E = 2 .1 x 1 0 5 M P a .

5 3 0 R E S I S T E N C I A D E M A T E R I A L E S
El momento de inercia de la sección tubular respecto de un eje diametral es:
= ~ r*A = 71(40 ~ 32 } = I 187 069 mm* = 118.7 x 1 0 '8 m‘4 4
Por tener articulados los extremos, la carga critica de Euler para carga centrada es:
tí1 El n 1 x 2.1 x 10" x 118.7 x 10‘ 8P„ = /2 32
La carga excéntrica aplicada, según el enunciado, es:
P = 0.75P„ = 205 016 N
= 273 355 N
Veamos cuál es la ecuación de la deformada del soporte para, a partir de ella, obtener la expresión del momento (lector máximo que se presenta en la sección media del soporte.
Respecto de los ejes indicados en la Figura VIII.7, la ecuación diferencial de la elástica es:
Ely" = P ( f + e - y )-t - L a x ^ L
y" + k2y = k2( f + e)
siendo
k 1 =P 205 01oTi ~ 2.1 x 106 x 118.7 x 1 0 '8
= 0 .8 2 2 4 m '
FLEXION LATERAL. PANDEO 5 3 1
La solución integral es:
i- = A sen kx + B eos kx j- / + e
cuyas constantes de integración obtendremos aplicando las condiciones de contorno
.x = 0 ; .r = 0 => 0 = B + f + e => B = - ( / + e)X = 0 ; y = 0 => 0 = Ak => A = 0
1 . . r *■•/ e.X = x ; y = / = > / - B e o s — + f + e => B = --------—¿ kl
cos —
y = — { f -f_ e j cos kx 4- f + e = {/ 4- e){ 1 — eos kx)
Esta ecuación nos permite obtener / en función de e
f = (/ + e ) f 1 - cos ~ f + e _ e2 J kl
cos — 2
y expresar asi el momento (lector máximo en función de e
Pe= P(e + /) kl
cos — 2
Sustituyendo valores, se tiene
205 016c"’** ~ 9.069 x 1 0 'J x 300 = 9 8 ,5 fm N
cos -----------------------------
estando expresada la excentricidad e en metros.De la expresión de la tensión máxima
_ & Mq + | /mil
,n6 205016 9815e320 x 106 = ---- =----------=---------- + 4 x 1 0 '2Jt(4 - 3.2 ) 10" 118.7 x 1 0 '8
se obtiene:
e = 0.624 m
Sobre el soporte biempotrado representado en la Figura VIII.8 actúa una fuerza de compresión P. Si la longitud del soporte es / = 1.50 m y el material es fundición determinar el valor crítico de la carga P.

RESISTEN CIA DF. M A T E R IA LE S
y \
L a s c a r a c t e r ís t ic a s d e la se c c ió n re c ta so n :
1 I 129m o m e n to d e in e r c ia : /. = - I x 5 3 + 2 — 2 x l 3 = — c m 4 = 10 .75 c m 4
á r e a : f l = 5 2 — 4 x 4 = 9 c m 3
C o n e s to s d a to s o b te n e m o s e l v a lo r d e l r a d io d e g iro
0 .75/9 = 1 .092 cm
A l e s t a r lo s e x t r e m o s e m p o t r a d o s , l a lo n g itu d d e p a n d e o es
/, = l- = 0 .7 5 m
C o m o la e s b e lte z d e l so p o r te
75
L 0 9 2= 6 8 .6 8 < 80
es m e n o r d e l v a lo r l im ite p a r a u n a p ie z a d e fu n d ic ió n , se g ú n la T a b la 8 .2 , c a lc u la r e m o s la te n s ió n c r it ic a a p l ic a n d o la fó r m u la e m p ir ic a d e T e tm a je r
<r„ = 7 7 6 0 - 120 - /. + 0 .5 4 2 2 = 7 7 6 0 - 120 x 6 8 .6 8 + 0 .5 4 x 6 8 .6 8 2 = 2 0 6 5 .5 4 k p / cm 2
P o r ta n to , la c a r g a c r it ic a p e d id a s e r á
1> = o r O = 2 0 6 5 .5 4 x 9 18 5 9 0 k p
FLEXION LA TE RA L. PAND EO 5 3 3
V III.9. U n a b a r r a c u y a á r e a f l d e la se cc ió n re c ta e s c o n s ta n te se c a l ie n t a , d e t a l m u ñ e r a q u e une x t r e m o e s tá a d o b le te m p e ra tu r a q ue e l o tro , s ien d o lin e a l la v a r ia c ió n de te m p e r a tu r a a lo la r g o de la lo n g itu d / de e l la .L l e x t r e m o su p e r io r e s tá un id o a u n a a r t ic u la c ió n f ija m ie n tr a s q ue el in fe r io r e s tá a r t i c u la do , pero no e s tá im p ed id o e l d e s p la z a m ie n to de la a r t ic u la c ió n en la d ire c c ió n de la b a r r a . S e c o lo c a un r e s o r te de c o n s t a n t e d e r ig id e z k, co m o se in d ic a en la F ig u r a V H I.9 -U , p a r a c o n t r a r r e s t a r la d i la ta c ió n t é r m ic a . E l r e so r te no e s tá so m e tid o a n in g ún e s fu e rz o p a r a la t e m p e r a tu r a t = 0 . S e p ide :
1.° C a lc u la r e l e s fu e rzo n o rm a l en la b a r r a cu an d o se c a l ie n t a , co n o c ien d o e l v a lo r del c o e f ic ie n te de d i la ta c ió n l in e a l a d e l m a t e r ia l d e la b a r ra .
2." S i la r ig id e z a la f le x ió n e s E l, d e te r m in a r la te m p e ra tu r a t p p a r a la c u a l p a n d e a la b a r r a .
(¿)
F ig u r a V II I .9 .
! . ° S i l a t e m p e r a tu r a en u n e x t r e m o e s t y e n e l o t r o 2/, la d i la t a c ió n q u e e x p e r im e n t a r ia l a b a r r a , s i n o e x is t ie r a e l re so r te , s e r ia :
A h o r a b ie n , s i N e s e l e s fu e r z o q u e e l re s o r te e je rc e s o b re la b a r r a , é s te p r o v o c a u n a c o r t a m ie n to s o b re la m is m a , d e v a lo r
Nl_£fl
P o r t a n to , ig u a la r e m o s e l a l a r g a m ie n to r e a l d e la b a r r a a l a c o r t a m ie n to A l d e l
r e s o r te AI = —

5 3 4 R E S I S T E N C I A D E M A T E R I A L E S
de donde:
Por tener ambos extremos articulados la barra pandeará cuando
n 2EI 3 i l l .N. = p
de donde se obtiene:
_ 2n2EI ( I l\ ‘r ~ 3a/3 \ £ ñ + k)
VIII.10. Las barras AB y BC de la Figura VIII.10-a tienen la misma longitud y están situadas en un plano vertical. La barra AB está empotrada en B y la barra BC es biarticulada.Calcular las citadas barras, sabiendo que AB es un perfil IPN y BC está formado por dos angulares en L de lados desiguales.
Por la disposición de la figura, la fuerza .normal que actúa en las barras AB y BC es precisamente N = P.
Cálculo de la barra AB
La longitud de esta barra es:
I =eos 60°
pero la longitud que nos interesa para el cálculo es la de pandeo, que por tratarse de una barra empotrado-articulada es:
= 4 = = " T = 5-7 mn/2 7 2
F L E X I O N L A T E R A L . P A N D E O 5 3 5
Procederemos por tanteo: consideremos un IPN 200
O = 33.5 cm3
= 1.87 cm
570a = —— = 304 > 250
1.87
Se excluye este perfil por darnos una esbeltez superior a 250. Ensayamos el IPN 300
Q = 69.1 cm2 / , = 2.56 cm
570Á = ----- = 222 =» o) = 7.67
2.56
wN = oQ ; 7.67 x 5000 = <7-69.1
de donde:
<7 = 555 kp/cm2 < <7ldm
luego es válido este perfil IPN 300
(Compruebe el lector si existe otro perfil más pequeño comprendido entre éste y el IPN 200 ensayado anteriormente, que sea asimismo válido.)
Cálculo de la barra BC
Se pueden considerar dos disposiciones J L o ”Ip .Para la disposición primera y considerando el angular de mayores dimensiones que se
fabrica 75 x 150, teniendo en cuenta que en este caso la longitud de pandeo es
/, = I = 8 m
fi = 43.2 cm2 /m|„ = 2.70 cm
el valor de la esbeltez sería
800O Á = — = 296 > 250
Al ser la esbeltez de valor superior a 250, cor. la disposición adoptada no tiene solución el problema.
Para la disposición segunda y para el mismo perfil de dimensiones máxima
O = 43.2 cm2
la esbeltez sería
800Á = —- = 380 > 250 2.10
es decir, tampoco tiene solución con esta disposición, por lo que habrá que recurrir a otro tipo de perfil más robusto.

5 3 6 R E S I S T E N C I A DE M A T E R I A L E S
V I I I .1 1. I .a F ig u ra V I I I .1 l - u r e p ré s e n la un so p o rte J e lo n g itu d / = 4 m , so m e tid o a un a c a rg a P = 20 0 0 0 k p en su e x tre m o su p e r io r (q u e e s tá l ib re p a r a d e s p la z a r s e t r a n s v e r s a lm e n te ) v e m p o tra d o en su e x t r e m o in fe r io r . S e q u ie re d im e n s io n a r con un a se c c ió n a n u la r d e d iám e tro e x te r io r Ü = 20 cm . S e p ide:
1.“ E sp eso r m ín im o e de la se cc ió n p a ra q ue no e x is t a r ie sg o de p an d eo .(A ce ro A 4 2 ; <raJm = 1500 k p / c m '; F. = 2 x 10° k p / c m ’ ).
2.° A c o r ta m ie n to to ta l d e l so p o rte en e s ta s co n d ic io n e s .
P
1° Aplicando el método de los coeficientes tu, se tiene que verificar
P to
Q < a ,.
es decir
Procederemos por tanteo. — Para e = 2 cm
20 OOOat O 1500 kp/cm2
Í2 = zr( 102 — 82) cm2 = 113.09 cm2
tt(104 - 84) 4/- = cm = 4637 cm4
/ 4637, = V IT l0 9 cm = 640 cm
El soporte tiene una longitud de pandeo
/, = 2/ = 8 m = 800 cm
por lo que la esbeltez es
800A = -— = 124.93
6.40
correspondiéndole un coeficiente ai. a> = 2.86, según la Tabla 8.4 para aceros A 42.
FLEXIO N L A TE R A L. PA N D E O 5 3 7
Como
20 0 0 0 x 2 .86
113.09505.79 kp/cm2 < <rldm
vemos que podemos disminuir el espesor notablemente.— Para e = 1 cm
O = ir(102 — 92) cm2 = 59.69 cm2
t r (1 0 4 - 9 4 ) a/- = cm4 = 2700 cm4
Como
/27001 = cm = 6.72 cmV 59.69
800a = — = 118.9 = cu = 2.636.72
20 000 x 2.63 — ------ = 871 kp/cm- < <ra,
podemos seguir disminuyendo el espesor. — Para e = 0.6 cm
Í2 = 7t(I02 — 9.4-) cm2 = 36.56 cm2
, rr(104 - 9.44) 4 4/. = ----- cm = 1722 cm
4
í 1722cm = 6.86 cm
' 36.56
800X = — = 116.56 =* (o = 2.53
6.86
20000 x 2.53 ------ = 1384 kp/cm2 < <r.dra
— Para e = 0.5 cm
í l = tc( 102 — 9.52) cm2 = 30.63 cm2
71(10 , 9 5 } cm4 = 1456.86 cm44
1456.86 cm = 6.89 cm30.63
800X = ■----- = 116 o) — 2.53
6.89

R E S I S T E N C I A D E M A T E R I A L E S
Como
20 000 x 2.5330.63
= 1651 > a„
este espesor no es válido.Por consiguiente, el menor valor de e pedido es
e = 6 mm
El desplazamiento vertical de una sección recta situada a distancia x de la base (Fig.VIII.1 l-ó) viene dado por la expresión
c_ dx = , P dx — xE CIE
x
' ,
x\\v\v2\\v ‘
Figura VIII.lI-ó.
El acortamiento total del soporte será el desplazamiento de la base superior de! soporte. Por tanto:
Un soporte de acero A 37, cuya sección recta viene representada en la Figura VIII.12-a, se encuentra articulado-empotrado según el plano xz y biempotrado según el xy, tal como indica la Figura VIII.12-A. Se pide:
I.° Calcular el valor de b para el cual la estabilidad según los planos xy y xz es la misma. - 2° Para el valor de b hallado, determinar la longitud máxima del soporte sabiendo que ,
la carga de compresión es P ■= 36.5 ton.3.° Manteniendo la condición de igualdad de estabilidad, razouzr si el valor de b debe .’
aumentar o disminuir cuando la rótula cilindrica se sustituye por una esfera.
La tensión admisible del acero A 37 es <r,dm = 1000 kp/cm2.
I —1.09 mm I__________
F L E X I O N L A T E R A L . P A N D E O 5 3 9
Figura VIII.12.
1* En el plano .xr el soporte es articulado-empotrado, por lo que la longitud de pandeo para que el soporte flexe en ese plano es
= 0.7/
La esbeltez correspondiente será:
l x: f).xz = — • siendo / = /-J
i, V fi
De las tablas de perfiles laminados se obtienen los datos de los perfiles IPN 120 y UPN 300
I, = 2^,.,eN + ÍVn + 2/, upn = 2(21.5 + 14.2 bT ) + 2 x 8030 cm*
= 16 103 + 7.1 b 1 cm4
estando expresada la distancia d en cm.Como n = 2(nUPN + n ,PN) = 2(58.8 + 14.2) cm! = 146 cm2 la esbeltez es:
0.7/
/16 103 + 7.16V 146
En el plano xy el soporte es biempotrado, por lo que la longitud de pandeo es.
¡V = 0.5/

5 4 0 R E S I S T E N C I A DE M A T E R I A L E S
La esbeltez correspondiente será
xy — s i e n d o L
/. = 21. iiY!>' UPN T ULpN C T
2 X 328 T 2[495 + 58.8(2.7 + 6 ) 2 ] cm4 = 10 547.14 cm
0.5/10 547.14
146
Para que la estabilidad en los planos xy y xz sea la misma, se tiene que verificar la igualdad de las esbelteces. Por tanto, igualando Xx‘ a Xx’\
0.7 0.5
/ l6 103 + 7.1/r y iO 547.14
de donde se obtiene
b = 25.37 cm
2° Considerando la carga P como la carga de pandeo admisible, al soporte le corresponderá un coeficiente cu que tendrá que verificar
u f ^ <j,dra n
Para la longitud máxima del soporte, de esta ecuación se deduce
rraJm-0 1000 x 14636 500
= 4
En la Tabla 8.3 a cu = 4 le corresponde una esbeltez X = 157. Por tanto, igualando a 157 una de las expresiones de las esbelteces obtenidas anteriormente, se tiene:
d e d o n d e :
;/y = X" = 157 =0.5/m
/10 547.14 8.5
146
1.5 x 157 05
26.7 m
F L E X I O N L A T E R A L . P A N D E O 5 4 1
3.° Si la rótula cilindrica se sustituye por una ró e la esférica, la sustentación del soporteen el plano .ry pasa a ser del tipo articulado-empotrado por lo que la esbeltez Xxyaumenta un 40 por 100 (pasa de 0.5/ a 0.7/).
Para que siga cumpliéndose la igualdad de estabilidad en ambos planos, es decir, la igualdad de las esbelteces correspondientes, la esbeltez en el plano rr debe aumentar, lo que se conseguiría dism inuyendo Ia distancia b.
\ III.13. LIn pilar de una instalación industrial de 9.80 m de altura está empotrado en su base inferior, y la disposición constructiva de la estructura hace que el extremo superior pueda moverse libremente en la dirección de un eje, pero no puede hacerlo en la dirección perpendicular (el giro no está impedido en ninguna dirección). El pilar deberá soportar una carga en punta de 145 kN y estará constituido por 1 UPN de acero A 42. Se pide:
1.° Calcular los perfiles UPN a emplear para la construcción del pilar.2.° Dibujar un croquis acotado de la sección del pilar.3.° Hallar el coeficiente de seguridad.
Los datos del acero A 42 son:
£ = 2 x 105 M Pa; <rlJm = 170 MPa; a , = 260 MPa
1.° Supongamos la disposición indicada en la Figura VIH. 13-zz y que el extremo superior del pilar puede moverse libremente en la dirección del eje z, pero no puede hacerlo c n
la dirección del eje y.
y\y
iíI
r <« -z kftX«
*íÉ G G c1í
d
Figura VIII.13-a.
Según lo indicado en el enunciado, las longitudes de pandeo son:
l y = 0.7/ — 0.7 x 980 cm = 692.96 cm
/*•■ = 2/ = 2 x 980 cm = 1960 cm
Aplicaremos el método de los coeficientes cu determinando el mayor coeficiente cu que verifique
para lo cual procederemos por tanteo.Consideremos dos perfiles UPN 100. En la tabla correspondiente de perfile.:
laminados UPN se tiene:
i. = 3.91 cm ; O = 2 x 13.5 cmJ = 27 cm2
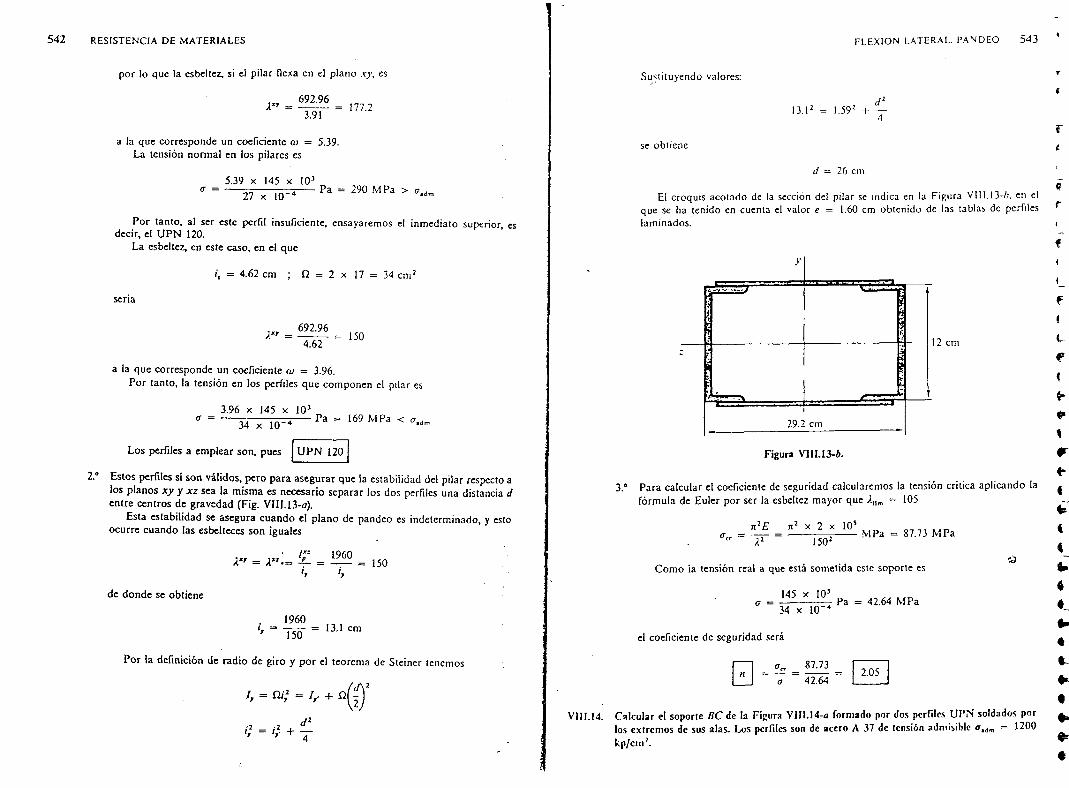
5 4 2
por lo que la esbeltez, si el pilar flexa en el plano xy, es
692.96^ - T 9 T " 177'2
a la que corresponde un coeficiente u> = 5.39.La tensión normal en los pilares es
5.39 x 145 x 10J17 = TÍ~~x 1 0 “ * P a = 2 9 0 M P a >
Por tanto, al ser este perfil insuficiente, ensayaremos el inmediato superior, es decir, el UPN 120.
La esbeltez, en este caso, en el que
i, = 4.62 cm ; Í2 = 2 x 17 = 34 cm2
sería
R E S I S T E N C I A D E M A T E R I A L E S
Xx’ =4.62
150
a la que corresponde un coeficiente w = 3.96.Por tanto, la tensión en los perfiles que componen el pilar es
3.96 x 145 x 103a = -----—-------- —z------Pa34 x 10
Los perfiles a emplear son, pues
169 MPa < <j
UPN 120
2.° Estos perfiles sí son válidos, pero para asegurar que la estabilidad del pilar respecto a los planos x y y xz sea la misma es necesario separar los dos perfiles una distancia d entre centros de gravedad (Fig. VIII.13-a).
Esta estabilidad se asegura cuando el plano de pandeo es indeterminado, y esto ocurre cuando las esbelteces son ¡guales
2 " = 2” -= /" 1960= 150
de donde se obtiene
1960' ' = “¡SO = 131 Cm
Por la definición de radio de giro y por el teorema de Steiner tenemos
v i
F L E X I O N L A T E R A L . P A N D E O 5 4 3
Sustituyendo valores:
. d 1 13.12 = 1.59 +
4
se obtiene
d = 26 cm
El croquis acotado de la sección del pilar se indica en la Figura Vil 1.13-6. en el que se ha tenido en cuenta el valor e = 1.60 cm obtenido de las tablas de perfiles laminados.
y
f<iHl6<11
29.1 i
Figura VIII.13-6.
3.° Para calcular el coeficiente de seguridad calcularemos la tensión critica aplicando la fórmula de Euler por ser la esbeltez mayor que 2„m = 105
^ = *11 = *-l-X- 2 MPa = 87.73 MPa;.2 150
Como ¡a tensión real a que está sometida este soporte es
145 x 10334 x 1 0 -1
el coeficiente de seguridad será
ir = 87J342.64
Pa = 42.64 MPa
□ 2.05
Calcular el soporte BC de la Figura VIIL14-a formado por dos perfiles UPN soldados por los extremos de sus alas. Los perfiles son de acero A 37 de tensión admisible a , im = 1200 kp/enr.

5 4 4 R E SISTEN CIA d e m a t e r i a l e s
a)
La fuerza normal que actúa sobre el soporte es igual y contraria a la reacción que corresponde a la viga horizontal AB, apoyada en la articulación B. Esta reacción la obtenemos por superposición:
a) debida a la carga uniforme de p — 2 ton/m actuando a lo largo de toda la viga
Raí = •R'b. = 5 ton
Aplicando el segundo teorema de Mohr
(5.r - ,v2)(5 - x)i lx + 5 -M A y 5 = 0
se obtiene el momento M A en el empotramiento
MA = —6.25 m ■ ton
de donde:
RM = 1.25 ton ; RBh = —1.25 ton
b ) debido a la carga P = 8 ton
R"a, = 1.6 ton ; R¡¡¡ = 6.4 ton
Aplicando el segundo teorema de Mohr:
i 1 + 5 1 2- a x 6.4 — — + - 5Ma - 5 = 0
d e d o n d e :
MA — — 3.84 m ■ ton
M .R A i — - j - = 0 .7 6 8 t o n ; = —0 .7 6 8 to n
a !I
F L E X I O N L A T E R A L . P A N D E O 5 4 5
La reacción en B es, pues:
B , = 1? ; + R¿ = R¡¡¡ + Reh + Rm + R¿> = 5 - 1.25 + 6.4 - 0.768 = 9.382 ton
Este es el esfuerzo normal que actúa sobre el soporte BC, cuya longitud de pandeo, por tratarse de barra empotrado-articulada, es
l 500= 354 cm
J l >414
Ensayemos el peftl más pequeño UPN 80. Las características de los dos perfiles son:
f í = 22 cm2 ; = 3.10 cm
p o r lo q u e l a e s b e l t e z d e l s o p o r t e s e r á

5 4 6 R E S I S T E N C I A D E M A T E R I A L E S
a la que corresponde un coeficiente a» — 2.30
wN — aQ => 2.30 x 9382 = a ■ 22
de donde:
a = 981 kp/cm2 < a i6m
El soporte BC considerado se construirá, pues, con dos perfiles UPN 80 soldados porí, los extremos de sus alas formando una viga cajón.
VIII.15. Un marco rectangular de nudos rígidos está formado por dos soportes verticales AB y CD de.longitud l a unidos por dos dinteles AD y BC de longitud a, sustentado y cargado como indica la Figura VIII.I5-a.Sabiendo que las secciones de soportes y dinteles son iguales, calcular el valor crítico de la carga P.
Supondremos que las barras del marco flexan en el plano de la figura (plano .ty), por lo que el momento de inercia minimo es /, •= /.
Considerando la cuarta parte del mafco (Fig. VIII.15-6) los esfuerzos cortantes en las secciones E y E s on nulos, por razón de simetría. Por la misma razón es nulo el esfuerzo normal en la sección F.
La ley de momentos flectores en EB en la posición de equilibrio indiferente es:
M = M e + Px ; 0 ^ x < a
La ecuación diferencial de la linea elástica es:
Elx" = —(Mt + Px) ; 0 < y < a
o bien:
M PX" + k2x = — - f . siendo k2 = —
M ek2Et
Se deduce la solución integral
v = A sen ky + B eos kyy
cuyas constantes de integración determinaremos imponiendo las condiciones de contorno
y = 0 ; .t = 0 => i
y = 0 ; .x' = 0
Mr
F L E X I O N L A T E R A L . P A N D E O 5 4 7
a/£B ------ - zx> B = —
P P
0 = Ak -
OII
1) 0 s; y < a
Se puede expresar ME en función de la flecha/del soporte y de la carga P igualando en B los giros del soporte y del dintel, por tratarse de nudos rígidos.
En el soporte:
(dx\ Mfk6 . = — I — I = sen ka
W 7 r = * r
En el dintel, la ley de momentos es M = — Mr . Tomando momentos respecto de E tenemos
M l + Mf - P f = 0
d e d o n d e
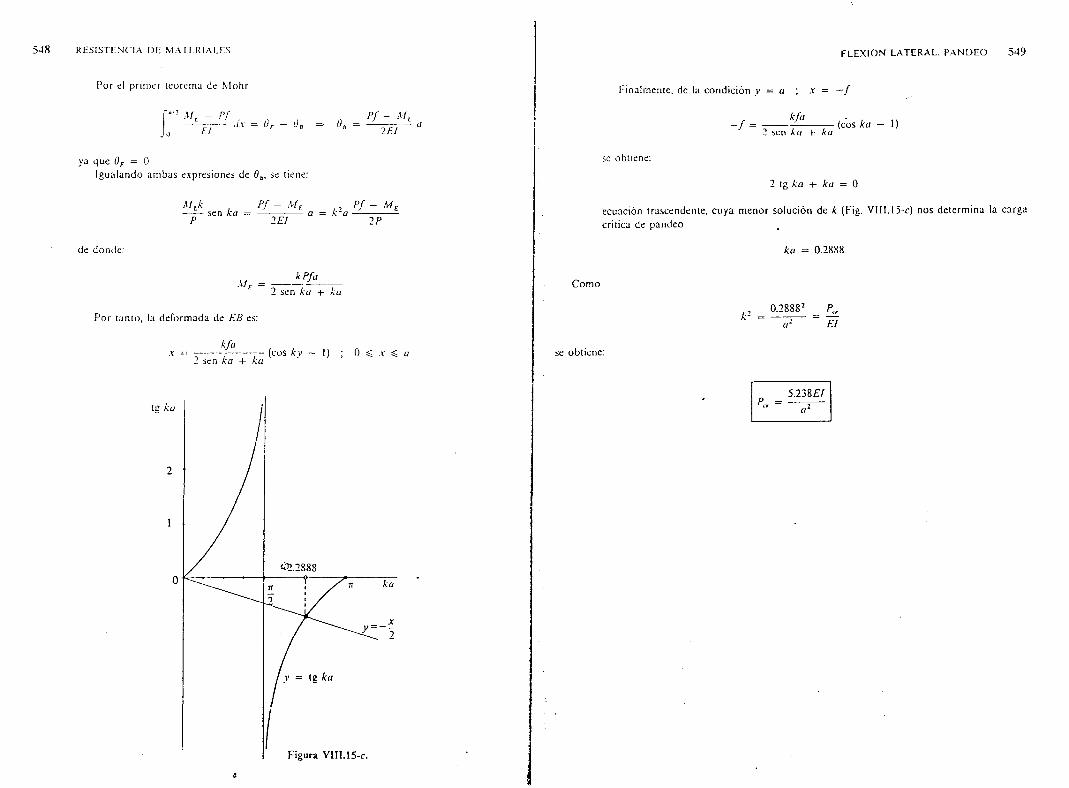
5-48 R E SISTE N CIA DE M A T E R IA LE S
Por el primer teorema de Mohr
1,2 M£ - P fEl
./v = ÚF P f -2E I
ya que 0F = 0Igualando ambas expresiones de 0B, se tiene:
Mtk , P f - M e t , P f - sen ka = a = k~a------
P 2 El
de donde:
kPfaM r = 2 sen ku + ka
Por tanto, la deformada de EB es:
kfa2 sen ka + ka
(eos k v — I) ; 0 $ t ^ a
a
FLEXIO N LA TE R A L. PAND EO 5 4 9
Finalmente, de la condición y = a ; x = —f
kfa- / = T2 sen ka ka
(eos ka — 1)
se obtiene:
2 tg ka + ka = 0
ecuación trascendente, cuya menor solución de k (Fig. VIII. 15-c) nos determina la carga critica de pandeo
ka = 0.2888
Como
obtiene:
, _ 0.28882 _ P^ a 2 El
5.238 El

9Teoría de la torsión
9.1. Introducción
Ya vimos que al realizar un seccionamiento en un prism a mecánico y elim inada una de sus partes (por ejemplo, la parte de la derecha en la F igura 9.1), hemos de considerar en el centro de gravedad J e la sección, para que la parte a is lad a siga en equilibrio , una fuerza y un par equivalentes a la acción externa que se ejerce sobre la parte elim inada. Fuerza y par que no son o tra cosa que la resultante y el momento resultante respecto del centro de gravedad de la sección, de las fuerzas que so licitan a d icha parte elim inada.
x
Figura 9.1.
Descom puesta la resultante según los ejes del triedro trirrectángulo definido por la tangente a la línea m edia y las direcciones principales de inercia de la sección, obtenemos una componente norm al según el prim er eje (que o rig ina e r el prism a un trabajo de t r a c c i ó n o c o m p r e s i ó n ) y o tra componente en el p lano de la sección (que origina el fenómeno de c o r ta d u ra ) . Ambos efectos ya han sido tratados.
Por o tra parte, descompuesto el momento resultante en estas tres mismas direcciones da origen a tres componentes: la prim era, tangente a la línea m edia, es llam ada m o m en t o t o r s o r , las o tras dos, en las direcciones de los ejes p rincipales de inercia de la sección, son los m o m e n t o s f l e c t o r e s , q u e j a hemos estudiado.
TEORIA DE LA TO R SIO N 5 5 1
Diremos que un prism a m ecánico está sometido a t o r s i ón s im p l e cuando el momento en cualqu ier sección del m ismo tiene solam ente componente en la dirección del eje x, es decir, es nulo el momento fiector adem ás de anularse los esfuerzos normal y cortante. Si el momento torsor es constante direm os que el prisma mecánico está sometido a t o r s ión pura .
P ara la representación de m om entos torsores emplearemos indistintam ente flechas curvas, que indican el sentido de giro, en representaciones axonométricas (Fig. 9.2-b). o una línea perpendicular al eje de la barra con dos círculos en representaciones planas. En uno de ellos se coloca un punto que ind ica la salida de la flecha curva hacia el lector, y en el otro un aspa que sign ifica que la flecha curva entra en el plano alejándose del lector (Fig. 9.2-c)
(a)
© p ,
t f ’ — - 4 T/
yy
d 2
y
© ®
Figura 9.2.
El convenio de signos que adoptarem os para el momento torsor es el indicado en la F igura 9.3, en la que se. ha representado una rebanada del prisma mecánico, es decir, la porción de barra com prendida entre dos secciones rectas indefinidamente próximas.
Figura 9.3.
En este capitulo se hará un estudio de la distribución de tensiones y deformaciones que se producen en barras rectilíneas de sección recta circular sometidas a torsión, que tiene ap licación inm ediata ai cálcu lo de ejes de transm isión de potencia. Se expondrá la teoría de Saint-V cnant para el estud io de la torsión en barras de sección recta no circu lar desde

5 5 2 RE SISTENCIA DE M ATE RIA LE S
el pumo de vista de la teoria de la E lasticidad, y se estud iarán , asim ism o, las tensiones y deformaciones que el momento torsor produce en perfiles de sección recta de pequeño espesor, tanto abiertos como cerrados.
9.2. Teot i.! = ícinentai dc la torsión en prismas de sección circular
En la teoría elemental de la torsión se admite que en un prisma mecánico sometido a torsión pura las secciones recias permanecen planas y la deformación se reduce, para dos secciones indefinidamente próximas d istantas entre sí dx, a una rotación de eje perpendicular a las mismas y ángulo d<f>.
Con estas hipótesis de la teoría elem ental se consiguen resultados exactos en barras prism áticas cuya sección recta sea un circulo o una corona circular.
v v-
d'GMt
Figura 9 .4 .
Consideremos, pues, un prisma recto de sección c ircu lar constante sometido a un momento torsor M r conseguido aplicando pares iguales M T y —AÍT a las secciones extremas, tal como se indica en la F igura 9.4.
Sean Z y I ' dos secciones rectas m uy próximas distantes entre si dx. Si AA‘ es la porción de una fibra del prisma com prendida entre estas dos secciones, el punto A' pasará después de la deformación a ocupar la posición A\, tal que A'G'A] = dtp y G'A' = G'Aj ,cn virtud de la segunda hipótesis adm itida.
El á n g u l o d e t o r s i ó n , <p, es el de giro relativo total de los extremos de la barra cilindrica.El ángulo de torsión por unidad de longitud será 'e l cociente ü = dtpjdx.
Fácilmente se comprende que el giro relativo de una sección respecto de o tra indefinó damente próxima es constante en el prism a considerado por lo que d(f>/dx también lo es.
Haciendo d<¡>/dx = l/k, siendo k una constante, resulta:
x = k<¡> + C (9.2-1)
en donde C es una constante de integración. Este resultado indica que la d istancia de cualqu ier punto del prism a a un plano lijo arb itrario perpendicular al eje del mismo, es directam ente proporcional al ángulo total girado en la deformación. Como, por otra parte, cn la deformación se conservan las d istancias al eje del prism a, de am bas condiciones se deduce que la deformada de cualqu ier lib ra del prism a es una hélice cilindrica. Asi, si BC (Fig. 9.4) es una generatriz (fibra periférica) de la barra considerada, después de la deformación producida por el momento torsor, ésta p asará a ocupar la posición B C U tal que 5C [ es un arco de hélice. . . , .q,
TEORIA DE LA T O R SIO N 5 5 3
Las hélices cilindricas, según sabemos, tienen la propiedad de que las tangentes trazadas en cualqu iera de sus puntos forman ángulo constante con el eje del cilindro al que pertenecen. L lam arem os á n g u l o d e h é l i c e d e t o r s ión , al desplazam iento angular de un elemento longitud inal, in icialm ente recto en la superficie de una barra cilindrica circu lar enestado tensional neutro, que se vuelve helicoidal después de la torsión. ____
Para deform aciones pequeñas, el arco C C ¡ se confunde con la cuerda C C ¡, y BC¡ se puede considerar como un segmento recto. Igualando el valor de CC ¡ en los triángulos C G iC l y C B C ¡, se obtiene la expresión
R$> = /<D (9.2-2)
que relaciona el ángulo de torsión con el helicoidal.Lo indicado hasta ahora se refiere al estudio cualitativo de la deformación. El estudio
cuantitativo entraña el conocim iento del estado tensional que se crea en el interior del prisma al ap licarle el momento M r .
En virtud de las hipótesis adm itidas, la deformación consiste en un desplazam iento relativo de dos secciones próxim as, por lo que las únicas tensiones que actúan sobre una sección recta son tensiones de cortadura, de dirección, para cada punto, perpendicular al segmento que le une con el centro del circulo.
F ig u ra 9 .5 . ib)
Considerem os el elemento de b arra com prendida entre las secciones l y l ' (Fig. 9.5). El punto A' perteneciente a la sección Z' pasa, después de la deformación, a la posición
A\. La fibra A A" ha sufrido una distorsión angu lar
y =A’A¡ rd<p
dx(9.2-3)
AA'
Si G es el m ódulo de e lastic idad transversal del m aterial de la barra, la tensión cortante i será:
_ r d4>x = Gy = G — r dx
(9.2-4)
Al ser d(¡>ldx de valor constante en toda la barra, resulta que la tensión cortante x e: una función lineal de la d istancia al centro de la sección por lo que el espectro tensional para los puntos de un rad io G'D\ es el representado en la F igura 9.5.

5 5 4 RESISTEN CIA DE M ATE RIA LE S
La tensión cortante m áxim a se presenta en ios puntos periféricos de la barra y su valor
„ d<t>(9.2-5)
La d istribución de tensiones en ia sección d e l prism a engendra un sistema de fuerzas de resultante nula, cuyo momento resultante es el momento torsor. Esto nos permite obtener la relación entre la tensión cortante r y el momento M T.
Figura 9.6.
ferendal3 ^ ^ ^ |S° mbr!T da “ 9 6 ' 3 d,stnbuclón d<= b erzas es circunferencial. Si dQ es el area de esta superficie, el momento de las fuerzas sobre ellas es:
„ _ d<t> ,T a U r = t> —— r dQ
dx (9.2-6)
^ “ ,alOT abSO'“'»’m t = ■* _ d<t> ,
G ~ - r 2 dn. = G —dx o dxdx (9.2-7)
^ P° Iar dC 1& S6CCÍÓn C¡rCular de su centro. Elproducto G/q recibe el nom bre de r i g i d e z , a la t o r s i ó n .
Sustituyendo el valor de G — dado por esta expresión, en la fórmula (9.2-4) de la
tensión cortante, se obtiene:
M t(9.2-8)
ecuación que re laciona la tensión cortante con el momento torsor. El valor de la tensión cortante m áxim a es:
TEO RIA DE LA T O R SIO N 5 5 :
Si hacemos R — rmlI tratando de buscar una analogía con la teoría de la flexión, es_ expresión se puede poner en la forma:
^ = A - = w * ' (9.2-1_fmix
AI segundo miembro, que depende exclusivam ente de las características geométricas cia sección, se le suele llam ar m ó d u l o r e s i s t e n t e a la t o r s i ó n d e la s e c c i ó n . Lo representar_mos por W, y sus dimensiones son [ L ] 3.
Al primer miembro le llam arem os m ó d u l o r e s i s t e n t e a la t o r s i ó n en la s e c c i ó n y ést> dependerá de las so licitaciones que engendran el momento torsor y de la tensión máxima cortadura que puede adm itir el m aterial.____________________________________________
D eb e r á c u m p l i r s e p u e s , q u e e l m ó d u l o r e s i s t e n t e a la t o r s i ó n d e la s e c c i ó n c o l o c a d a se. i g u a l o s u p e r i o r a l m ó d u l o r e s i s t e n t e e x i s t e n t e en la s e c c i ó n c o n s i d e r a d a .
Por o tra parte, la expresión (9.2-7) nos permite calcu lar el ángulo de torsión <p:
M t<t> = —f l (9.2-1'
U na vez realizado el estudio del estado tensional en el interior de la barra prismátic; de sección circular, se puede deducir la forma de rotura que se puede presentar en !• m ism a, si el m aterial de que está hecha no resistiese por igual a tracción y a compresió
En efecto, según sabem os, las tensiones cortantes correspondientes a dos planos pe^ pendiculares entre si son iguales en valor absoluto. Por tanto, las tensiones tangenciales er las secciones transversal y longitud inal a lo largo del radio G'D’ presentan un espectro t; como se indica en la F igura 9.7.
Ahora bien, consideremos un elem ento de superficie c ilindrica de la barra torsionada- lim itado por dos generatrices m uy próxim as y por dos secciones rectas también muy próxim as entre sí (Fig. 9.8-a). Por lo dicho anteriormente, sobre los lados de esta superfici elem ental solam ente actúan tensiones tangenciales. _
El círculo de M ohr correspondiente a este caso (Fig. 9.8-b) ind ica que las dos direcciones principales son las bisectrices de los ejes de la superficie elem enta! considerada
* C om párese con la ig u a ld ad que sc o b ten ía en la flexión ----- *- = — —•

5 5 6 r e s i s t e n c i a d e m a t e r i a l e s
(Fig. 9.8-c). Las tensiones principales son una de tracción y otra de compresión. Si el material es menos resistente a la tracción que a la compresión y el momento torsor es lo suficientemente grande para que la tensión cortante m áxim a supere el valor de la tensión de rotura a tracción, se producirán grietas norm ales a la dirección de la tracción a ¡ . Las grietas se m anifestarán, pues, según hélices sobre la superficie de la barra torsiona- da, formando un ángulo de 45° con el eje de la misma.
Este fenómeno ocurrirá también en los puntos interiores del prism a, pero como los valores máximos de la tensión cortante se tienen en la superficie exterior del mismo, será en esta superficie donde primero se manifiesten las grietas (Fig. 9.9).
9.3. Determinación de momentos torsores. Cálculo de ejes de transmisión de potencia
Entre las aplicaciones prácticas de la ingeniería es m uy frecuente encontrarnos con piezas som etidas a torsión. Quizás la más usual sea la de los árboles de transm isión de potencia, como puede ser el caso del árbol o eje que transm ite el movim iento de rotación de una
«
TEORIA DE LA TO RSIO N 5 5 7
turbina de vapor A a un generador eléctrico B representado en la F igura 9.10. Otros casos muy corrientes que se presentan en la práctica son los árboles que transmiten la potencia del motor de un autom óvil al eje de transm isión, o del árbol que transmite el m ovim iento de un motor a una m áquina-herram ienta.
Si el giro del eje de la turbina de la F igura 9.10 es el indicado, éste ejerce sobre el árbo l un momento torsor ¡WT que transm ite el eje del generador, que a su vez, por el principio de acción y reacción, ejerce sobre el extremo del árbol un momento torsor igual y opuesto — M t . El árbol estará sometido a torsión pura.
Nos interesa conocer, en el caso que un árbol o eje esté sometido a torsión sim ple, la ley de momentos torsores que actúan en el eje, con objeto de poder calcu lar las d im ensiones que éste tiene que tener para que sea capaz de transm itir la potencia que se le ex ija , sin riesgo de rotura ni siquiera que se produzcan deformaciones plásticas.
P ara ello, considerem os un prisma m ecánico de revolución, para que las secciones sean circulares aunque no necesariam ente de sección constante, sometido a un sistem a de pares cuyos momentos tengan la dirección de la linea media del prisma (Fig. 9.1 l-o). Tenemos de esta forma una pieza trabajando a torsión simple.

5 5 8 R E SIST E N C IA DE M ATE RIA LE S
U na sección recta £ divide al prisma en dos partes. Es evidente que el momento torsor sobre la sección £ como perteneciente a la parte de la izquierda es igual a la suma de los momentos de los pares que actúan sobre la parte de la derecha. Podemos, por tanto, obtener analíticam ente el momento torsor M T a lo largo de todo el prisma en función de la d istancia .r desde la sección recta al extremo de la izquierda
M t = M r (x) (9.3-1)
Esta función se puede representar gráficamente obteniéndose el llam ado d ia g ram a de m o m e n t o s t o r s o r e s (Fig. 9 .1 1-b).
En el prism a indicado en la F igura 9.1 1-sr las leyes de momentos torsores serán:
M Tl = — ; 0 < x < aM T2 = —M x + M 2 ; a < x < bM Ti = - M , + M 2 — A/j = — M x ; b < x < l
Cuando se presenta la necesidad de diseñar un eje, suelen ser datos la potencia /V que tiene que transm itir y el número de revoluciones. Como sabemos, la potencia y el par ap licado al eje (momento torsor) están relacionados por la ecuación
N = M tw (9.3-2)
siendo tu la velocidad angu lar del eje. En esta ecuación, la potencia N viene dada enkp - m/seg cuando M T se expresa en kp -rn y cu en radianes por segundo (rad/seg).
Com o la potencia //suele venir dada en CV y la velocidad de rotación en revoluciones por m inuto, la expresión (9.3-2) tom ará la forma
1SN = M t — (9.3-3)T 60
de donde podem os despejar el momento torsor
60 x 75 ir , 225 000Ar ,M r — — N m • kp = -------------- cm • kp (9 3-4)
¿n n , nn
Esta fórm ula nos da, por tanto, el momento torsor M T en función de la potencia N expresada en CV y la velocidad de rotación n expresada en revoluciones por minuto.
Por su notable im portancia en la práctica, a modo de ejemplo, considerarem os algunos casos particu lares de b arras de sección circu lar constante o tubular som etidas a torsión cuando se utilizan como ejes de transm isión de potencia, obteniendo en cada caso el radio o rad ios correspondientes a p artir del d iagram a de momentos torsores.
Eje sometido a pares aislados (Fig. 9.12)
Si se tra ta de una barra cilindrica som etida a pares aislados a lo largo de la longitud de la m ism a, el d iag ram a de momentos torsores seria el indicado en la F igura 9.12. A partir del d iag ram a obtendríam os la sección som etida a m ayor momento torsor. :
TEORIA DE LA TO R SIO N 559
Si r ,dm es la tensión m áxim a adm isib le a cortadura que adm ite el m aterial y M tm¡, el momento torsor m áxim o obtenido del d iagram a, el módulo resistente IV d e la sección será tal que:
M r ^ < H'-t.dn. í9 -3' 5)
Ahora bien, el módulo resistente W tiene, para las secciones circular y tubular (Fig. 9.13), los siguientes valores:
Para la sección c ircu lar:.
n R 4 n R } (9.3-6)
F ig u r a 9 .1 3 .
P ara la sección anular:
; Mrt - r ? rW = — ------— (9.3-7)
Por tanto, se verificará para la prim era sección:
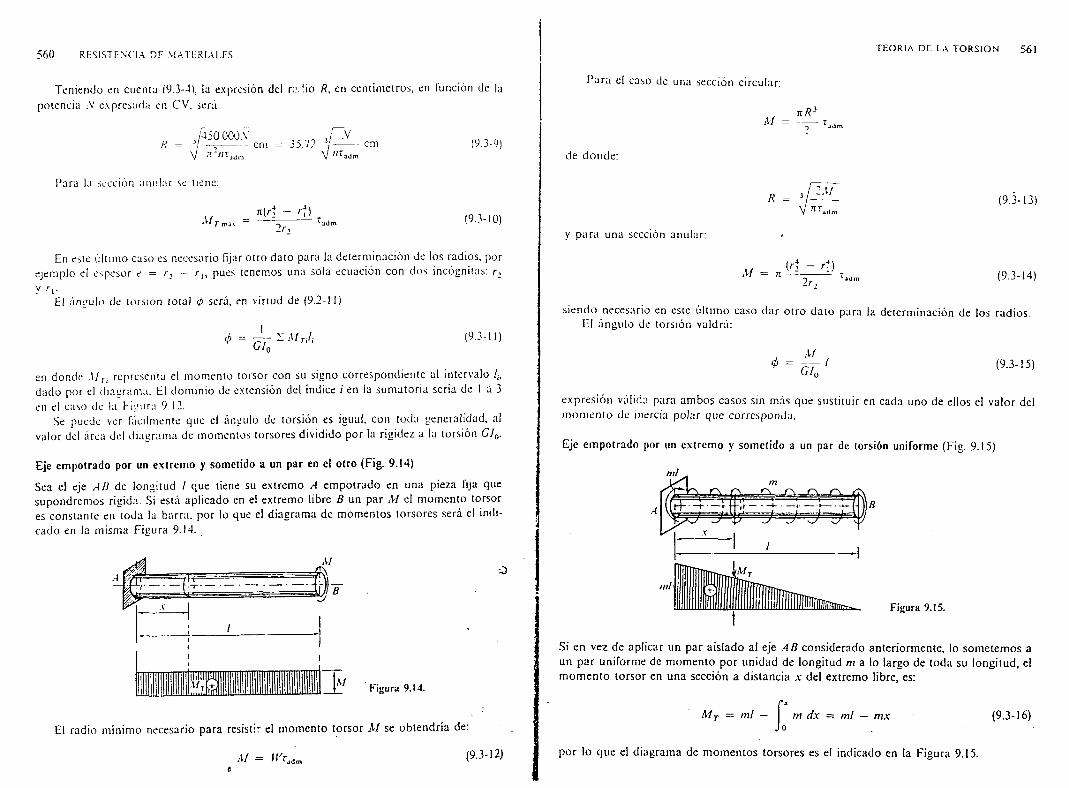
5 6 0 RESISTENCIA DF M ATE RIA LE S
Teniendo en cuenta (9.3-4), la expresión del radio R, en centímetros, en función de la potencia .V expresada en CV, será
R =/450 00Ü.V 3/
VPara la sección anular se tiene:
cm = 35.72.V
n ( r i - /-f)\f — ------ r---------- ra i T mix
(9.3-9)
(9.3-10)
En este último caso es necesario fijar otro dato para la determ inación de los radios, por ejemplo el espesor e = r 2 - r , , pues tenemos una sola ecuación con dos incógnitas: r ,
y r \-El ángulo de torsión total ip será, en virtud de (9.2-11)
^ = — I A/n /¡O/o
(9.3-11)
en donde ,V/n representa el momento torsor con su signo correspondiente al intervalo /,, dado por el d iagram a. El dominio de extensión del Índice / en la sum atoria seria de 1 a 3 en el caso de la Eigura 9.12.
Se puede ver fácilmente que el ángulo de torsión es igual, con toda generalidad, al valor del área del d iagram a de momentos torsores dividido por la rigidez a la torsión GI0.
Eje empotrado por un extremo y sometido a un par en el otro (Fig. 9.14)
Sea el eje AB de longitud / que tiene su extremo A em potrado en una pieza fija que supondremos rígida. Si está ap licado en el extremo libre B un par M el momento torsor es constante en toda la barra, por lo que el d iagram a de momentos torsores será el indicado en la m isma F igura 9.14.
•O
F ig u r a 9 .1 4 .
El radio mínimo necesario para resistir el momento torsor M se obtendría de:
A/ = (9.3-12)
TEO RIA D E LA T O R SIO N 5 6 1
P ara el caso de una sección circular:
de donde:
u n R iAl = r .
R = (9.3-13)
y p ara una sección anular:
( ' í ~ O\ t — 71 --------------------- T .-y v adnI r , (9.3-14)
siendo necesario en este último caso dar otro dato para la determ inación de los radios. El ángulo de torsión valdrá:
Mg L (9.3-15)
expresión válida para ambos casos sin más que sustitu ir en cada uno de ellos el valor del m om ento de inercia polar que corresponda.
Eje empotrado por un extremo y sometido a un par de torsión uniforme (Fig. 9.15)
F ig u r a 9 .1 5 .
Si en vez de ap licar un par aislado al eje AB considerado anteriorm ente, lo sometemos a un par uniforme de momento por unidad de longitud m a lo largo de toda su longitud, el m om ento torsor en una sección a d istancia x del extremo libre, es:
M t — m i m dx = m i — ( 9 . 3 - 1 6 )
por lo que el d iagram a de m om entos torsores es el indicado en la F igura 9.15.

5 6 2 RESISTEN CIA DE MATERIALES
Las dimensiones de m serán = C^J- es decir’ las m ism as que una fuerza. En eiL^J
sistem a técnico vendrá expresado en kp.El d iagram a nos indica que la sección som etida al momento torsor máximo (máximo
absoluto) es la correspondiente al extremo em potrado.El rad io mínimo necesario para resistir este momento se obtendría de:
m i = \Y • r . (9.3-17)
P ara una sección circular:
n R ¡ ,/ 2m í>nl = t ldm => R = 7 -------
2 V a r ,rfm(9.3-18)
y para una sección anular
, *(*1 - r t )= x--------Ir-,(9.3-19)
El ángulo de torsión será:
<i> =o GIq G ¡0 %
■' J m i 2.V ox = -------
o 2£7/0(9.3-20)
que como se ve es igual al valor del área del d iagram a de momentos torsores dividido por la rigidez a la torsión.
Eje em p otrad o en sus ex trem os som etido a un par a islad o (F ig . 9 .16)Es este un caso de torsión hiperestática. En efecto, sea el eje AB de longitud /. Si en la sección de centro C situada a distancia /, del extrem o A se ap lica un par de momento M aparecerán en los extremos empotrados unos momentos que llam arem os M A y M B. Por tratarse de pares, la resultante es nula, con lo que las ecuaciones de la Estática se reducen a una so la: M r = 0
M — M i + M b (9.3-21)
Figura 9.16.
TEORIA DE LA TORSIO N 5 6 3
P ara la determ inación de los momentos en los empotramientos es necesario hacer intervenir la deformación. Fácilm ente se ve que la condición necesaria la obtenemosconsiderando los em potram ientos fijos. Al ser esto asi. cl ángulo dc torsión total del eje esnulo. Por (amo. sc verificará:
‘} h ± ¡ + t h i , = o (9.3-22)GIo 1 GI0 2
siendo M T¡ y M r „ los momentos torsores en los intervalos [0. /,] y [/,. /] respectivamente
¡\IT¡ = \ f A para 0 < x < /,M T, = M a — M = —M g para /, < x < l
es decir,
^Lí. — ií. (9.3-23)M b h
El sistem a formado por las ecuaciones (9.3-21) y (9.3-23) resuelve el problema:
/M = M Á + M B M a = j M
- (9-3-24)M B /, M B = j M
El resultado nos indica que el m áxim o momento torsor se presenta en la sección delem potram iento más próxim a a l par M. Este momento máximo es el que interviene para elcálculo del eje, que se haria de form a exactam ente igual a como se ha indicado en los casos anteriores.
Eje empotrado en sus extrem os sometido a un par de torsión uniforme (Fig. 9.17)
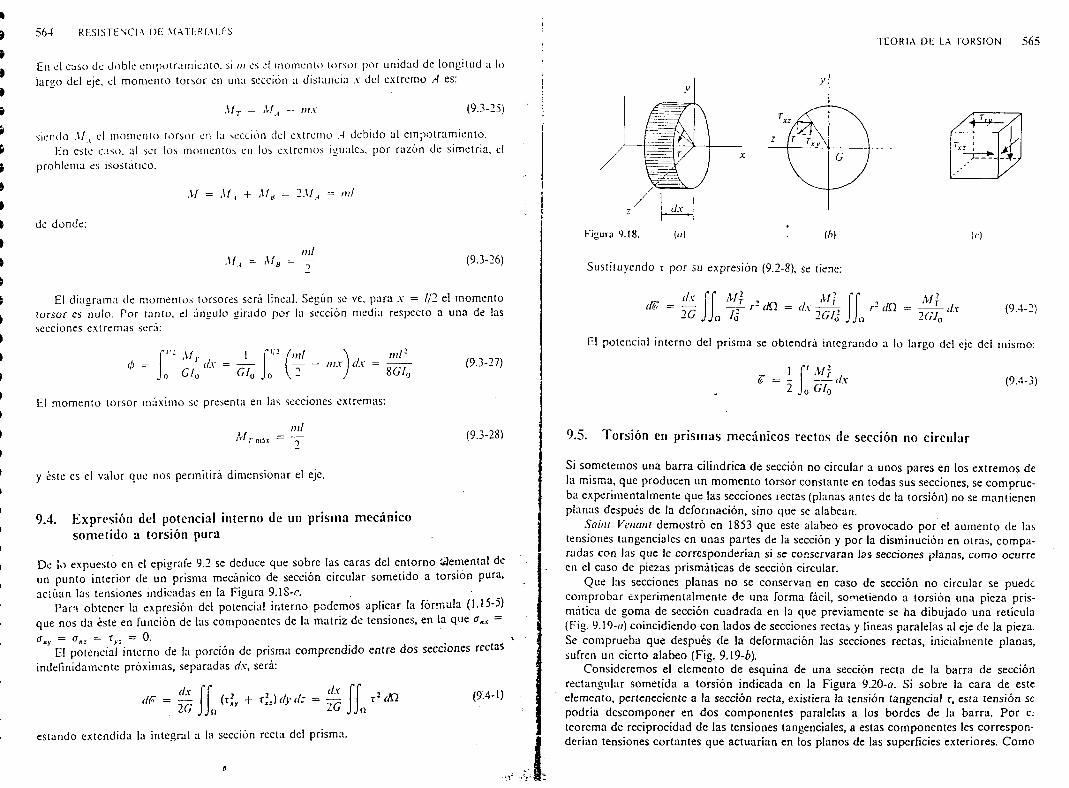
5 6 4 RE SISTEN CIA DE M ATE RIALE S
En el caso de doble em potram iento, si m es el momento torsor por unidad de longitud a lo larao del eje. el momento torsor en una sección a distancia ,v del extremo A es:
M t = M ( - m .v (9.3-25)
siendo M , el momento torsor en la sección del extremo A debido al empotram iento.En este caso, al ser los momentos en los extremos iguales, por razón de sim etria, el
problema es isostático.
M = M a + Af„ = 2M a = m i
de donde:
M.t = Ai B = ~ (9.3-26)
El d iagram a de momentos torsores será lineal. Según se ve, para ,v — 1/2 el momento torsor es nulo. Por tanto, el ángulo girado por la sección media respecto a una de las secciones extrem as será:
4> dxGl,o J
'''■ f m i \ m i 1- m x U x = 8GL
El momento torsor m áxim o se presenta en las secciones extremas:
m iAlT mil — "V
(9.3-27)
(9.3-28)
y éste es el valor que nos perm itirá dim ensionar el eje.
9.4. Expresión del potencial interno de un prisma mecánico sometido a torsión pura
De lo expuesto en el epigrafe 9.2 se deduce que sobre las caras del entorno Sem en tal de un punto interior de un prisma mecánico de sección circu lar sometido a torsión pura, actúan las tensiones indicadas en la F igura 9.1 S-c.
P ara obtener la expresión del potencial interno podemos ap licar la fórmula (1.15-5) que nos da éste en función de las componentes de la m atriz de tensiones, en la que a nx —
' El potencial interno de la porción de prism a com prendido entre dos secciones rectas indefinidamente próxim as, separadas dx, será:
dx i i d-x*
(t2„ + r l . J d y d : = —ÍJ ¿U .
e s t a n d o e x t e n d i d a l a i n t e g r a l a l a s e c c i ó n r e c t a d e l p r i s m a .
TE O R IA DE LA TO R SIO N 5 6 5
Sustituyendo r por su expresión (9.2-8), se tiene:
dxl{iñ =
2(7A'fj ■. , Al f—— r í l í l = dx
2G/¿
- y^ i i
/
r~ dQ Afj_2GI0
dx (9.4-2)
El potencia] interno del prism a se obtendrá integrando a lo largo del eje del mismo:
Al}¥ = -dx (9.4-3)
9.5. Torsión en prismas mecánicos rectos de sección no circular
Si sometemos una barra cilindrica de sección no circu lar a unos pares en los extrem os de la misma, que producen un momento torsor constante en todas sus secciones, se com prueba experim entalm ente que las secciones rectas (planas antes de la torsión) no se mantienen p lanas después de la deform ación, sino que se alabean.
S a in i Venctni dem ostró en 1853 que este alabeo es provocado por el aum ento de las tensiones tangenciales en unas partes de la sección y por la d ism inución en otras, com paradas con las que le corresponderían si se conservaran las secciones planas, como ocurre en el caso de piezas p rism áticas de sección circular.
Que las secciones planas no se conservan en caso de sección no c ircu lar se puede com probar experim entalm ente de una forma fácil, sometiendo a torsión una pieza prism ática de gom a de sección cuadrada en la que previamente se ha dibujado una retícula (Fig. 9 .19-u) coincidiendo con lados de secciones rectas y lineas p ara le las al eje de la pieza. Se com prueba que después de la deformación las secciones rectas, inicialm ente planas, sufren un cierto alabeo (Fig. 9.19-¿>).
Consideremos el elem ento de esquina de una sección recta de la barra de sección rectangular som etida a torsión ind icada en la F igura 9.20-n. Si sobre la cara de este elemento, perteneciente a la sección recta, existiera la tensión tangencial r, esta tensión se podría descomponer en dos componentes paralelas a los bordes de la barra . P or ci teorema de reciprocidad de las tensiones tangenciales, a estas componentes les corresponderían tensiones cortantes que actuarían en los planos de las superficies exteriores. Como

5 6 6 RE SISTEN CIA DE M ATE RIA LE S
(a) (b)F ig ura 9.19.
esto no es posible, ya que estas superficies están libres de todo esfuerzo, se deduce que t debe ser nula.
Tam bién se obtiene experim entalm ente que para una pieza p rism ática de sección no circu lar, por ejemplo elíptica, la tensión de cortadura tom a sus valores máximos en los extrem os del eje menor, o sea, en los puntos del contorno más cercanos al eje de la pieza. Para una sección rectangular, mediante un estudio teórico, sigu iendo los métodos de la teoría de la E lasticidad, se llega a obtener la d istribución de tensiones tangenciales indicadas en la F igura 9.20 -b. Estos resultados, com probados experim entaim ente, nos indican que las tensiones m áxim as se presentan en los puntos del contorno más cercanos al centro de la sección, m ientras que las tensiones se anu lan en los vértices del rectángulo, que son los puntos más ale jados del centro.
Esto está en contradicción con las hipótesis adm itidas en la teo ria elem ental que, de ser generalizab le a secciones cualesquiera, seria condición necesaria aunque no suficiente, que la tensión m áxim a He cortadura se presentara en los puntos m ás a le jados del eje y nunca en los m ás cercanos.
Es por ello necesario abandonar la teoria elem ental cuando las secciones de las piezas prism áticas no son circulares. En estos casos ca lcu lar la d istribución tensional en el in terior del prism a es un problem a que solam ente se resuelve de form a rigurosa aplicando
TEORIA DE LA TORSION 5 6 7
la teoria de la E lasticidad, considerando que la distorsión de un ángulo recto, uno de cuyos lados coincide con una fibra del prisma, es debida no solamente a la rotación relativa de dos secciones muy próxim as, sino también al alabeo de las mismas.
Expondremos a continuación la t e o r i a d e S iimt-Vetumi referente a la torsión, en la que se adm iten las siguientes hipótesis:
1.a La deformación de cualqu ier sección recta es un giro alrededor de un punto Oacom pañado de un alabeo que es igual para todas las secciones.
2.a El ángulo ,9 g irado por unidad de longitud es constante.
En virtud de la prim era hipótesis de ser el alabeo el mismo para todas las secciones, la componente u del vector corrim iento ó de un punto de una sección de abscisa x (Fig. 9.21-a) será independiente de x. Por tanto, si llamamos ip a la f u n c i ó n d e a la b e o , podemos poner:
u = 3t¡/(y, : ) (9.5-1)
Por o tra parte, las otras dos componentes i> y ir, teniendo en cuenta la constancia del ángulo g irado por unidad de longitud, serán:
v = — p3 x eos a = — 3xz ir = p3 x sen a = 3xy
(9.5-2)
Conocidas las com ponentes del vector corrim iento, la obtención de las componentes de la m atriz de deformación es inm ediata

5 6 8 R E S I S T E N C I A D E M A T E R I A L E S
A purtir dc esia:> se obtiene la m atn¿ dc tensiones ap licando las ecuaciones dc Lame.
r
m -
0Ver
c , [ :l - =) 0
í/
i'ib \gb{T + " 0
GlÁ + v
0
0
(9.5-4)
Podemos com probar que la solución obtenida verifica todas las condiciones que requiere la solución del problema elástico.
En efecto, las ecuaciones de equilibrio interno se reducen a las siguientes:
‘:!i>(T
= o — ^ = 0 o.x
= o (9.5-5)
Las dos últim as se verifican idénticamente, ya que tanto r V(. como rA_. no dependen de .v. En cuanto a la primera ecuación, también se cum ple si se considera una función de tensiones <!>( i-, r) tai que:
c'<t>¿5.
P<I>
d v(9.5-6)
Podemos ver la condición que tiene que cum plir esta función de tensiones elim inando la función de alabeo ip entre las ecuaciones que resultan de sustitu ir en (9.5-6) las expresiones de xxy y tx: dadas por la matriz de tensiones
™ = g b ( l -c z V Jr
<?<$c v - K í • -)
D erivando la prim era ecuación re sD e c to a ; , la segunda respecto a y , y sumando miembro a miembro, se tiene:
c4P-íb í7“ft>— + — = = — 2GBcz~ c v
(9.5-7)
es decir, la función de tensiones es tal que su lap lac iana es constante e igual a —2GB.Que la m atriz de deformación, cuyas com ponentes vienen dadas por las ecuaciones
(9.5-3), verifican las condiciones de com patib ilidad es evidente, ya que hemos partido de la solución de corrim ientos.
En cuanto a las condiciones de contorno, por ser éste libre (Fig. 9.22), se habrá de verificar:
O H 0 ' 0 'm i x i = c , 0 0 | ■ sen a = 00 0 J eos a. 0
9
T EORI A DE LA T OR S I O N 5 6 9
es decir:
Como
r „ sen a + eos a = 0
dz d vsen a = — — ; eos a = —
da d s
teniendo en cuenta (9.5-6), resulta:
c<I> dz d<I> d y dd>dz d s d y d s d s
Este resultado nos dice que la función de tensiones <t> es independiente de la abscisa curvilínea 5 en el contorno de la sección, por lo que ha de tener un valor constante en todos los puntos del mismo.
Finalm ente, comprobemos que en cualqu ier sección recta la resultante de las fueiza engendradas por las tensiones tangenciales xxy y i* , es nula, así como que el moment resultante respecto de O de dichas fuerzas es igual al momento torsor M T.

5 7 0 R E S I S T E N C I A D E M A T E R I A L E S
En efecto, las componentes de la resultante son:
- * fII
i5 d y — d z = 0Jn Oí
t x_ d y dz = — dz
Por otra parte, el momento ha de verificar:
M r =
v v■dv = 0
* -
iiiM1 — v d C l -J , n *n d y '
r dQ. (9-5-9)
integrem os por partes estas dos últim as in tegrales teniendo en cuenta que si se trata de secciones que sean recintos simplemente conexos la función <D, que es igual a una constante en los puntos de contorno según hemos visto anteriorm ente, podemos considerar que se anu la en dicho contorno, ya que en este caso la constante se puede elegir arbitrariam ente.
c<l— y d n = -
n c ydz dx
• c<t> •dr í c zi i
J «n ~ z d C l - d y
c ,Z! ^ d
=i ° zd y - J 0) dz> = <I> d v dz
Sustituyendo en (9.5-9), se obtiene:
M t = 2 I ® 0 ’' :) d y dz (9.5-10)
Los resultados antcriorec nos indican que es necesario que la lap lac iana de la función de tensiones O, que nos resuelve el problem a elástico de la torsión, sea constante en todos los puntos de la sección recta, y que el va lo r que tom a dicha función en los puntos del contorno es también igual a una constante, que puede ser elegida arb itrariam ente.
T E O R I A D E LA T O R S I O N 5 7 1
Veamos otra relación de interés entre la tensión tangencial F y la función de tensionesd>. La tensión F se puede expresar asi:
— id» - C<J) _ - , . ,n r t , ,i = z xj + -í x _k = — j - — k = — i a grad <t> (9.5-11)
c z dy
Ahora bien, la función <I> representa una superficie o, mejor dicho, un casquete desuperficie que se apoya en el contorno de la sección, ya que <h se anu la en el citadocontorno.
Si cortam os el casquete por planos paralelos al plano de la sección se obtienen unaserie de curvas que no son otra cosa que las lineas de nivel del campo escalar <t> = dH.r, ; )(Fig. 9.25).
Com o el grad iente de la función O es, en cualquier punto P de la sección, perpendicular a la linca de nivel que pasa por él, y la tensión tangencial viene dada por (9.5-11), F resulta ser tangente a d icha curva de nivel.
En cuanto al m ódulo de F, de la misma ecuación (9.5-11) se desprende:
r = |/.t grad d>| = Igrad 0| = — (9.5-12)dn
es decir, el m ódulo de la tensión tangencial en un punte cualqu iera de la sección es igual a la derivada de la función O en la dirección normal a la linea de nivel que pasa por él.
De lo an terio r se deduce que dibujadas en el plano de la sección las curvas de nivel de la función de tensiones, la tensión tangencial creada en un determ inado punto P por un momento torsor es tangente a la curva de nivel que pasa por él y su módulo será tanto m ayor cuanto m ás próxim as se encuentren entre sí las lincas de nivel.
Veamos, como ap licación de lo expuesto, cómo podríam os resolver el cálculo de la d istribución de tensiones en el caso de sección recta cuya ecuación analítica de la curva de su contorno fuera de la forma:
ñy. -i = o (9.5-13)

y tal que su lap laciana fuera constante
A/( r. cj = constante
5 7 2 R E S I S T E N C I A D E M A T E R I A L E S
(9.5-14)
E n t a l c a s o , c o m p r o b a m o s q u e c u a lq u i e r f u n c ió n d e l t ip o
'«» = c) (9.5-15)
siendo C una constante, puede ser tomada como función de tensiones que nos resuelve el problema elástico de la torsión.
En efecto, la función tf> se anula en los puntos del contorno, en virtud de (9.5-13)
<D = Cj\y, r) = 0
La constante C se determ ina teniendo en cuenta la ecuación (9.5-10) que relaciona O y el momento torsor .\1T
M t = 2 <D(r, z ) d y d z = 2C f ( y , z ) d y d zJ J n . Jn
de donde:
C =M r (9.5-16)
f (\\ z) d y dz
Obtenida esta constante, el valor 3 del ángulo girado por unidad de longitud, en virtud de (9.5-7), será:
A<1> = CA/( r, _-) = —2(73
de donde:
3 = -C á f{ y , z)
2 G(9.5-17)
Al punto O, alrededor del cual gira una sección respecto a la indefin idam ente próxima se denom ina c e n t r o d e t o r s ión .
Es evidente que si la sección adm ite dos ejes de sim etria, el centro de torsión coincide con el centro de gravedad.
En la Tabla 9.1 figuran las tensiones m áxim as de cortadura y ángulos de torsión por unidad de longitud, correspondientes a las secciones más usuales de prism as mecánicos sometidos a un momento torsor constante M r .
En el caso de sección rectangular la tensión m áxim a de co rtadura y el ángulo de torsión se expresan en función de los parám etros a y /? que varian con la relación a/b y cuyos valores se recogen en la T abla 9.2.
T E O R I A D E L A T O R S I O N 5 7 3
T a b la 9 .1 . V a lo r e s d e la te n s ió n m á x im a d e c o r t a d u r a v á n g u lo s d e to r s ió n en p r is m a s m e c á n ic o s d e se c c ió n no c ir c u la r
Sección
TRIANGULO EQUILATERO
CUADRADO
a —
Tensión máxima de cortadura
20 Mr
Mr0 .2 0 8 u
Angulo de to rsión por unidad de longitud
0 =80AY T
s g J í
7.11M TGM
RECTANGULO
F L E JE
E L IP S E
T U B O R E C T A N G U L A Rf i ___
_^mi* »■>a abM r
Gfttib3
P a r a lo s v a lo re s d e a y ¡ i v é a s e T a b la 9 .2
3A/r
16Mt
nab2
Mj_lab t
0 =3A/rGat2
0 =16(tr + b 2)M T
Cna3b 3
0 =Ca + b)tMT
G2t2a 2b 2

Tabla 9.2. Valores de i j ¡i para secciones rectangulares
5 7 4 R E S I S T E N C I A D E M A T E R I A L E S
a/b 1 1.5 2 2.5 3 4 6 10 co
y 0.208 0.231 0.246 0.256 0.267 0.282 0.299 0.312 0.333
P 0.141 0.196 0.229 0.249 0.263 0.281 0.299 0.312 0.333
De la T abla 9.2 se deduce que cuando la relación a ¡b es m uy grande, a/b > 10, como es el caso de los flejes, am bos coeficientes son iguales y su valor común es 1/3.
9.6. Estudio experimental de la torsión por la analogía de la membrana
La resolución m atem ática del problema elástico en un prism a mecánico sometido a torsión puede presentar cierta dificultad, especialm ente si la sección carece de simetría. Para estos casos, el análisis de las tensiones cortantes en la sección se realiza expcrim ental- mente. El método empírico que más se ap lica es el conocido con el nombre de an a l o g í a d e . la m em b r a n a . Fue presentado por el ingeniero y científico alem án L. P rand t l en el año 1903, y se basa en la sem ejanza de la ecuación de la superficie de equilibrio de una m em brana som etida a presión en una cara , con la ecuación diferencial de la función de tensiones en problem as de torsión.
En efecto, consideremos un prisma mecánico som etido a torsión pura (Fig. 9.26). En el epigrafe anterior hemos visto que la función de tensiones <t> en torsión tiene que verificar las siguientes condiciones:
A<D = - 2 G 6 (9.6-1)
en los puntos de la sección, y
d®(9.6-2)
en los puntos del contorno.
Figura 9.26.
T E O R I A DE LA T O R S I O N 5 7 5
Veamos ahora cuál es la ecuación de la superficie de equilibrio de una m embrana delgada, por ejemplo una película de jabón , colocada en el contorno plano de la sección de un tubo de paredes indefinidamente delgadas de la misma forma que la sección que se estudia, cuando se provoca en el interior de este tubo lim itado por la membrana una presión uniforme p.
La superficie de equilibrio de ésta será de la forma
•V = /O', -i (9.6-3)
La perfecta flexibilidad de la m embrana nos permite asegurar que ésta no puede estar som etida a esfuerzos de flexión, por lo que las tensiones que actúan en los lados que lim itan un elemento de superficie de la deformada de la membrana han de estar contenidas en el plano tangente (Fig. 9.21-b).
Si la m em brana no soporta momentos flectores, tampoco podrá resistir esfuerzos cortantes. Del circulo de M ohr se deduce que las tensiones normales a en los lados del elem ento que rodee a un punto 0 han de ser iguales en cualquier dirección.
Si en el punto 0 tom am os una terna de vectores unitarios trirrectangulares (I „ i 2, ñ ) ; los dos prim eros en el plano tangente a la superficie deformada de la m embrana en el punto 0 y de direcciones las de los lados de la superficie elemental; el tercero en dirección de la norm al exterior, las tensiones por unidad de longitud del contorno* serán las indicadas en la F igura 9.27-b.
* Se supone la membrana m uy fina, de espesor constante.

5 7 6 R E S I S T E N C I A 1 >r M A T E R I A L E S
S ob re el e lem en to c o n s id e r a d o a c t u a r á n la s fu e rz a s d e b id a s a e s t a s t ens iones ad em ás de la p ro d u c id a por la p re s ió n un ifo rm e p , d e v a lo r
p c/.v, í/.v, ñ
P la n te a n d o , pues , el e q u i l ib r io de fuerzas s o b r e el e l e m e n to su p e r l ic i a l , se tiene:
('//",) í/v, í/.v, + - - - (ur ,)í/ .v, í/.r, + pr/.v, í/.s; H = 0 o , ' ( .1 ,
(9.6-4)
A h o r a bien, co m o a es c o n s t a n t e y por la s fó r m u la s d e F ren e t
v i , n v i 2 nex-, p 2 ' d s t p ¡
(9.6-5)
s iendo p ¡ , /), los r ad io s de c u r v a t u r a de los a r c o s í/.v, y í/.sn, r e sp ec t iv a m en te , su s t i tu y en d o en (9.6-4) v d iv id ie n d o por e t/ s ¡ í/.v; , se t iene:
n , n P - n— -f — + - íi = 0P i P i
o lo qu e es lo m ism o
— H------P l Pi
Pff
(9.6-6)
Como las expresiones de las curvaturas de los arcos que lim itan el elemento superficialconsiderado son:
c~x' . .2
d 2xd v 2
P i 1 0 X \ 23/2
1 +P i
u)* (¥>r\ o v
si suponemos que la presión ¡> es la suficiente para no provocar una gran deformación de l-i membrana, podemos despreciar los valores de las derivadas de ,x respecto de y , y de z frente a la unidad en los denom inadores de las an terio res expresiones, quedando
_L ~ —P i ~ ¿ : 2
_ L ~ f íP i ¿ y 1
Sustituyendo en (9.6-6), se tiene:
Í.’ -.V C"X
ty2 dz26
_PO
(9.6-7)
TEORIA DE LA T OR S I O N 5 7 7
Vemos que esta ecuación diferencial de la superficie deformada de la m em brana tiene lap iác iana constante
A.x = —— = constante (9.6-8)a
y. adem ás, se verifica en el contorno
~ = 0 (9.6-9)(ts
ya que la función .v se anu la en todos los puntos del mismo.La ecuación diferencial de la superficie de la membrana .y = / ( v, : ) presenta, pues,
an a lo g ía formal con la función de tensiones <t> en torsión. La relación entre am bas se puede obtener dividiendo las expresiones (9.6-1) y (9.6-8)
2 GOA<t> = A.y (9.6-10)
p/a
2G0C o m o es constante, de esta expresión se deduce
p í a
2 GOD = .y (9.6-11)
p/a
De todo lo expuesto se desprende que la sim ple observación de la forma de la m em brana perm ite deducir im portantes relaciones cualitativas acerca de la distribución de tensiones tangenciales en una sección debidas a la acción de un momento torsor.
Puesto que
dO 2GO dx cO 2GO dxt = — = — — ; zx. = = ------- — — (9.6-12)
dz p j a oz o y p/a o y
las tensiones tangenciales y t x. son proporcionales a las pendientes de las curvas que se obtienen al cortar la m em brana por planos parale los a los coordenados .xr y x y respectivamente.
Vimos también que el vector tangencial t en un punto de la sección es tangente a la línea de nivel del cam po esca la r O = C>(y, r ) que pasa por dicho punto. Por consiguiente, la tensión tangencial f será tangente a la linea de nivel del campo esca lar .x = f ( y , z) que define la configuración de equ ilib rio de la m em brana.
Adem ás, el m ódulo de la tensión tangencial total en un punto también resulta ser proporcional a la pendiente m áxim a de la m em brana en el punto considerado

5 7 8 RESI STENCI A DE M A TE R I A L E S
Por tanto, la tensión tangencial será tanto m ayor cuanto más c e '.a n a s estén las lineas de nivel del campo esca lar .x = f ( y , r) que define la superficie de la membrana.
Seeún esto, en una elipse, en la que las curvas de nivel son del tipo indicado en la F igura 9.28, la tensión tangencial m áxim a se presentará en los extremos de los semiejes menores, que son los puntos del contorno más cercanos al centro.
Resumiendo, cuando sea necesario estud iar la distribución de tensiones en una barra rectilínea de sección no c ircu lar, independientemente de la forma de la sección, el problema de la torsión de la b arra se puede resolver mediante la analogia de la membrana. Dicho método consiste en obtener experim entalm ente la superficie de equilibrio de una m em brana estirada sobre un contorno de la misma configuración que la sección recta de la barra y so licitada por una presión uniforme. La simple observación de la membrana deform ada nos da la siguiente información:
1.° La tensión cortante en un punto de la barra en estudio es proporcional a la pendiente en el punto correspondiente de la mem brana estirada.
2.” La dirección de la tensión cortante en un punto es perpendicular a la linea de m áxim a pendiente de la m em brana en ese punto.
3.° El volumen encerrado por la m em brana es proporcional al momento torsor que resiste la sección.
9.7. Torsión de perfiles delgados j
En construcciones m ecánicas se presenta con frecuencia la necesidad de ca lcu lar barras de paredes delgadas som etidas a torsión. Diremos que un prism a mecánico o barra es un p e r f i l d e l g a d o cuando el espesor que presenta su sección recta es m uy pequeño en com paración con las o tras dim ensiones lineales de la misma.
En epígrafes anteriores hemos visto cómo para determ inar la distribución de tensiones tangenciales en barras de sección recta no c ircu lar ha sido necesario utilizar los métodos m atem áticos de la teoria de la E lasticidad, y ya se comprende la com plejidad del problema cuando la sección carezca de sim etrías. Sin em bargo, no es éste el caso de perfiles de pared delgada, en los que m edíante ciertas hipótesis sim plificatívas es posible determ inar de forma bastante sencilla la d istribución de tensiones con suficiente aproxim ación para nuestros propósitos.
Asi como en una b arra de sección circu lar el ángulo de torsión por unidad de longitud
TEORIA D E LA T OR S I O N 5 7 9
es el cociente entre el momento torsor A/r v el módulo de torsión G l0, según se deduce de (9.2-11)
0 = Air G ! n
en una barra de sección no c ircu lar, o en un perfil delgado, el ángulo de torsión por unidad de longitud se suele expresar en la forma
0 t i lGJ
en donde J es el m ó d u l o d e t o r s i ó n y el producto G J se denom ina r i g id ez a la t o r s ión .Los perfiles delgados adm iten una clasificación, según la forma de la sección recta, que
podemos resum ir en el siguiente cuadro.
Perfiles delgados <perfiles abiertos
perfiles cerrados
sin ram ificar ram ificados
de una sola célula de varias células
En todos ellos llam arem os l i n e a m e d ia al lugar geométrico de los puntos medios de los espesores en una sección recta. Un punto cualqu iera A vendrá definido por su abscisa j m edida a partir de un origen 0 que podemos elegir arb itrariam ente sobre la linea media.
Estudiemos separadam ente los perfiles abiertos y los cerrados.
Perfiles delgados abiertos
Como se acab a de indicar, dentro de éstos distinguirem os perfiles sin ram ificar y ram ificados.
a) Pe r f i l e s ab i e r t o s s in r ami f i c a r (Fig. 9.29-a)
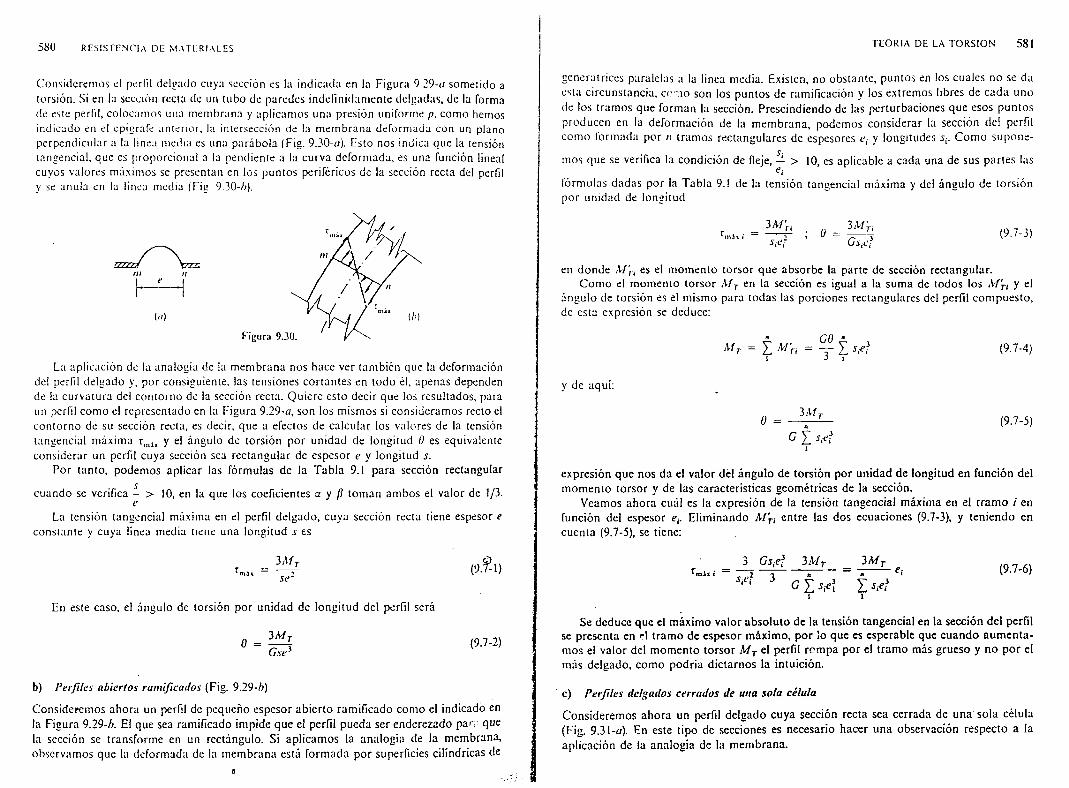
5 8 0 r e s i s t e n c i a d e m a t e r i a l e s
Consideremos el perfil delgado cuya sección es la indicada en la F igura 9.29-a sometido a torsión. Si en la sección recta de un tubo de paredes indefinidam ente delgadas, de la forma de este perfil, colocamos una membrana y ap licam os una presión uniforme p. como hemos indicado en el epígrafe anterior, la intersección de la m em brana deformada con un plano perpendicular a la línea media es una parábo la (Fig. 9.30-u). Esto nos indica que la tensión tangencial, que es proporcional a la pendiente a la curva deform ada, es una función lineal cuyos valores máximos se presentan en los puntos periféricos de la sección recta del perfil y se anula en la linca media (Fig. 9.30-Ó).
ni n
La ap licación de la analogía de la m em brana nos hace ver también que la deformación del perfil delgado y, por consiguiente, las tensiones cortantes en todo él, apenas dependen de la curvatura del contorno de la sección recta. Quiere esto decir que los resultados, para un perfil como el representado en la F igura 9.29-a, son los mismos si consideram os recto el contorno de su sección recta, es decir, que a efectos de ca lcu lar los valores de la tensión tangencial m áxim a rnllI y el ángulo de torsión por unidad de longitud 0 es equivalente considerar un perfil cuya sección sea rectangular de espesor e y longitud s.
Por tanto, podemos ap licar las fórmulas de la T ab la 9.1 para sección rectangularS
cuando se verifica - > 10, en la que los coeficientes a y /? tom an ambos el valor de 1/3. £'
La tensión tangencial m áxim a en el perfil delgado, cuya sección recta tiene espesor e constante y cuya línea media tiene una longitud s es
(9.#1)
En este caso, el ángulo de torsión por unidad de longitud del perfil será
3 M t
b) P e r f i l e s a b i e r t o s r a m i f i c a d o s (Fig. 9.29-b)
Consideremos ahora un perfil de pequeño espesor ab ierto ram ificado como el indicado en la F igura 9.29-b. El que sea ram ificado impide que el perfil pueda ser enderezado pan: que la sección se transforme en un rectángulo. Si ap licam os la analogía de la membrana, observamos que la deformada de la m embrana está form ada por superficies c ilindricas de
TEORI A DE LA T OR S I O N 5 8 1
generatrices parale las a la línea media. Existen, no obstante, puntos en los cuales no se da esta circunstancia, como son los puntos de ramificación y los extremos libres de cada uno de los tram os que forman la sección. Prescindiendo de las perturbaciones que esos puntos producen en la deformación de la m em brana, podemos considerar la sección del perfil como form ada por n tramos rectangulares de espesores e ¡ y longitudes s¡. Como supone-
mos que se verifica la condición de fleje, — > 10, es ap licab le a cada una de sus partes lasC
fórmulas dadas por la T abla 9.1 de la tensión tangencial m áxim a y del ángulo de torsión por unidad de longitud
^ ; 0 = ~ T~Í (9.7-3)s ¡ e - G s ,e f
en donde M'n es el momento torsor que absorbe la parte de sección rectangular.Como el momento torsor A/r en la sección es igual a la sum a de todos los M'Tl y el
ángulo de torsión es el mismo para todas las porciones rectangulares del perfil com puesto, de esta expresión se deduce:
" G0 "M r = X M't ¡ = - - X A/',3 (9.7-4)
I J i
y de aquí:
o = (9.7.5)G I V ?
1
expresión que nos da el valor del ángulo de torsión por unidad de longitud en función del momento torsor y de las características geom étricas de la sección.
Veamos ahora cuál es la expresión de la tensión tangencial máxima en el tram o i enfunción del espesor e¡. E lim inando M'r ¡ entre las dos ecuaciones (9.7-3), y teniendo encuenta (9.7-5), se tiene:
3 Gs¡e f 3 M t 3 M T _; ---------;---------= T¡ e ¡ (9-7 ' 6)
G2>? Zv/
Se deduce que el m áxim o valor abso luto de la tensión tangencial en la sección del perfil se presenta en el tram o de espesor m áxim o, por ¡o que es espcrable que cuando aum en tamos el valor del momento torsor M r el perfil rom pa por el tramo más grueso y no por el más delgado, como podria d ictarnos la intuición.
c) P e r f i l e s d e l g a d o s c e r r a d o s d e u na s o l a c é l u l a
Considerem os ahora un perfil delgado cuya sección recta sea cerrada de una so la célula (Fig. 9 .3\-a). En este tipo de secciones es necesario hacer una observación respecto a la ap licación de la analogia de la m em brana.
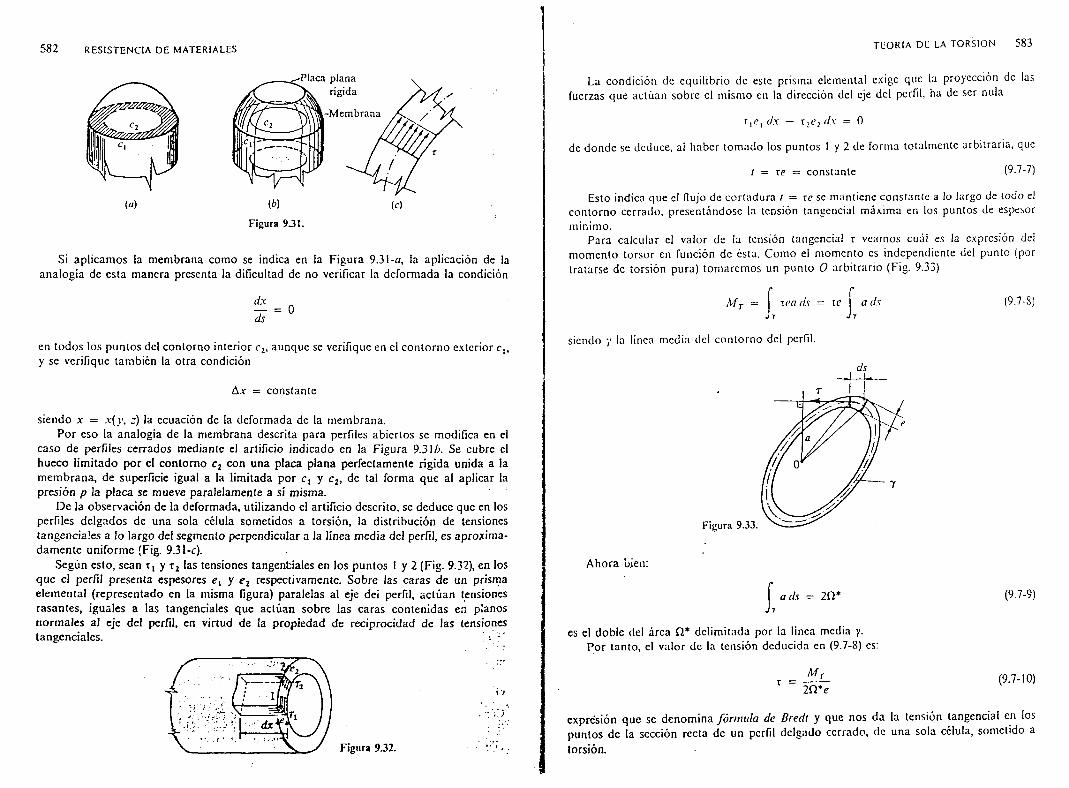
5 8 2 R E S I S T E N C I A D E M A T E R I A L E S
F ig u r a 9231.
S¡ ap licam os la m em brana como se indica en la F igura 9.31-o, la ap licación de la ana lo g ía de esta m anera presenta la dificultad de no verificar la deform ada la condición
en todos los puntos del contorno interior c 2, aunque se verifique en el contorno exterior c ,, y se verifique también la otra condición
Ax — constante
siendo x = x{y, : ) la ecuación de la deform ada de la m em brana.Por eso la analogía de la m embrana descrita para perfiles ab iertos se modifica en el
caso de perfiles cerrados mediante el artificio indicado en la F igura 9.31 b. Se cubre el hueco lim itado por el contorno c2 con una p laca p lana perfectam ente r íg ida unida a la m em brana, de superficie igual a la lim itada por c ¡ y c2, de tal forma que al ap licar la presión p la p laca se mueve paralelam ente a si m isma.
De la observación de la deformada, utilizando el artificio descrito , se deduce que en los perfiles delgados de una sola célula sometidos a torsión, la distribución de tensiones tangenciales a lo largo del segmento perpendicular a la línea m edia del perfil, es aproxim adam ente uniforme (Fig. 9 .31-rr).
Según esto, sean t , y t 2 las tensiones tangentia les en los puntos 1 y 2 (Fig. 9.32), en los que el perfil presenta espesores e 2 y e 2 respectivamente. Sobre las caras de un prisma elem ental (representado en la misma figura) para le las al eje dei perfil, actúan tensiones rasantes, iguales a las tangenciales que actúan sobre las caras contenidas en planos norm ales a l eje del perfil, en virtud de la propiedad de reciprocidad de las tensiones tangenciales. ' -. - '
T E O R I A DE LA T O R S I O N 5 8 3
La condición de equilib rio de este prisma elemental exige que la proyección de las fuerzas que actúan sobre el mismo en la dirección del eje del perfil, ha de ser nula
r|cj dx — x2e 2 dx = 0
de donde se deduce, al haber tomado los puntos 1 y 2 de forma totalmente arb itraria , que
í — xe — constante (9.7-7)
Esto indica que el flujo de cortadura i = xe se mantiene constante a lo largo de todo el contorno cerrado, presentándose la tensión tangencial m áxim a en los puntos de espesor minimo.
Para ca lcu lar el valor de ¡a tensión tangencia! r veamos cuál es la expresión del momento torsor en función de ésta. Como el momento es independiente del punto (por tratarse de torsión pura) tom arem os un punto O arb itrario (Fig. 9.33)
M t = xea d s = xe a d s (9 .7 -8 )
siendo y la linca media del contorno del perfil.
Ahora ujen:
a d s = 2Í2* (9.7-9)J 7
es el doble del área Q* delim itada por la linca media y.Por tanto, el valor de la tensión deducida en (9.7-8) es:
T = -A/-r- (9.7-10)2Í2*<?
expresión que se denom ina f ó r m u l a d e B r ed t y que nos d a la tensión tangencial en lospuntos de la sección recta de un perfil delgado cerrado, de una sola célula, sometido atorsión.

5 .8 4 R E S I S T E N C I A DE M A T E R I A L E S
S¡ el e sp e so r es v a r i a b le , la t en s ión t a n g e n c ia l m á x im a se p r e s e n ta r á en los p un to s del s eg m en to c o r r e sp o n d ie n t e a l m ín im o esp eso r .
EniSiM r
2fi*t' ,(9.7-11)
P a ra el c á l c u lo del á n g u lo de to r s ió n p o r u n id a d de lo n g i t u d 0, co n s id e re m o s la exp re s ió n del p o ten c ia l in t e rn o d e u n a r e b a n a d a d e perfi l l im i t a d a p o r d o s secc iones rectas s e p a r a d a s u n a d i s t a n c i a dx
dF = e d s dx
P a r a el perf i l d e lo n g i t u d /. el p o ten c i a l in t e rn o se rá
le = — 2 G
x2e d s =h 2e 2 ~2G~
v co m o reM r
esta expresión toma la forma
d se (9.7-12)
F =I M f
8G Ü * 2
d s(9.7-13)
El valor de la in tegral que aqu i aparece depende de cómo varié el espesor a lo largo del contorno y, es decir, es una característica geom étrica de la sección.
Por otra parte, podemos expresar el potencial interno en función del momento torsor M r y del ángulo de torsión <}> = 01, ya que 0 es el ángulo de torsión por unidad de loneitud
F — - M t4> — - M T0l ^
Igualando las expresiones (9.7-13) y (9.7-14), se obtiene finalmente:
0 =2F Mr
M f i 4GQ*2d s
, e
(9.7-14)
(9.7-15)
d) P e r f iL s d e l g a d o s c e r r a d o s d e va r ia s c é l u l a s
Consideremos ahora un perfil cerrado cuya sección es m ulticelu lar, como el indicado en la F igura 9.34-n.
C ada célu la es un. perfil cerrado , por lo que el flujo de cortadura t = xe es constante en cualquier segmento perpendicu lar a la linea m edia de la sección recta. L lam em os i¡ al flujo de cortadura en las paredes que rodeap a la celd illa /, y i¡j el flujo de co rtadura en la pared
TEORI A DE LA T OR S I O N 5 8 5
común a las celd illas i y j . Realizando el corte alrededor del nudo indicado en la F igu ra 9.34 y planteando el equilibrio en la dirección longitudinal del perfil
i, dx — t¡ + ¡ dx — t¡ ¡+¡ dx = 0
se obtiene la ecuación de continuidad del flujo
h. i r i = h ~ *1 + 1
(9.7-16)
(9.7-17)
que nos perm ite obtener los flujos de cortadura en las paredes entre celd illas.En una sección cerrada como la indicada, son incógnitas los flujos de co rtad u ra r„
t 2, ..., /„ en las paredes superior e inferior, pues los flujos de co rtadura en las paredes in tercelu lares están determ inados en función de éstos, en virtud de (9.7-17).
Com o la única ecuación de la Estática es la que expresa la qu ivalencia entre el momento torsor M T y los flujos cortantes de la sección
M T = 2 r t n t + 2 t 2C2t + ••• + 2r„ n * (9.7-18)
siendo íí¡* el área encerrada por la línea m edia de la ce ld illa el problem a es dé grado de h iperestatic idad n — 1. Por tanto, para peder ca lcu lar los flujos de cortadura se necesitan n — 1 ecuaciones com plem entarias, que se tienen que obtener considerando la deform ación de la sección recta.
Se obtienen estas n — 1 ecuaciones expresando la condición de g ira r todas las ce ld illas el m ism o ángulo de torsión per unidad del longitud.
0 , = 02 = - = 0n (9.7-19)
En un perfil cerrado, el ángulo de torsión dado por (9.7-15) se puede expresar en función del flujo de cortadura

A plicando esta expresión a la celdilla i (Fig. 9.35) de linea media y , se tiene
5 8 6 RE S I S TENCI A DE MATE RI ALE S
0, = 2 GC1? ■’ ¡-*B ds ds 'D
— + h — — tf+ ia e „ e c
d se
(9.7-21)
'i-,.,-
Figura 9.35.
El sistem a de ecuaciones formado por la ecuación (9.7-18) y las n — 1 (9.7-19) permite obtener los (lujos de cortadura t2, in- Una vez obtenidos éstos, se determ ina el valor del ángu lo de torsión por unidad de longitudinal aplicando (9.7-21).
E JE R C IC IO S
IX .l. Dimensionar un eje cuyo esquema es el indicado en la Figura IX.l-n, sabiendo que las poleas A y C son motrices, de potencias TV, = 3 C V y /V, = 6 C V respectivamente y que las B y D, mediante correas accionan una fresadora y un torno, de potencias /V2 = 4 C V y Ar1 = 5 C V respectivamente. La velocidad angular del eje es n = 200 rpm y la tensión máxima admisible r.dm = 700 kp/cm2.Se supondrá que existe el número de apoyos, de rozamiento despreciable, necesarios para no considerar el efecto del momento flector.
A B C D
60 cm 80 cm 60 cmF
La potencia transmitida por una polea es igual al producto del momento M T por la velocidad angular ai
M t ■ cu = 75N m • kp/seg
en donde N es la potencia en CV, M T viene expresada en m -kp y cu en radianes/seg.Si la velocidad angular se expresa en rpm
TEORIA DE LA TORSION 5 8 7
dc donde:
2250 225 000 wA = ----- (V m -kp = ----------- .v cm • kp
it/i mi
Ahora bien, el momento torsor M T está relacionado con la r ldm p o r m ed io del módulo resistente
izR1Afj- = lL -r ,dm = —— t ,dm
Si radm viene expresada en kp/cm2, R vendrá dado en cm.Igualando las dos últimas expresiones
n R1 _ 225 000 N ~ T t,dm " 3.14 ñ
de donde
Í450000 N ,VR = 3/------ -----------cm = 35.72 cmV 3 1 4 "Ldm
Apliquemos este resultado al árbol de la Figura IX.l-a. De la relación:
2250\ÍT = 3.14n
/V m • kp
resulta que la potencia que transmite el eje es proporcional ai momento torsor. Haciendo n = 200 rpm, queda:
M t = ----- — — - N m • kp = 358.25/V cm • kpT 3.14 x 2000 F
de donde se deduce el diagrama de momentos torsores en la Figura IX.l.-ó.

5 8 8 r e s i s t e n c i a d e m a t e r i a l e s
l ; l m o m e n to to r so r n u iM in o en v a lo r a b s o lu to M r = 1 7 91 .25 cm ■ k p c o r re s p o n d e a la p o rc ió n d e e je C D q u e n en e q u e t r a n s m it ir u n a p o te n c ia N = 5 C V . S u s t i tu y e n d o e s te v a lo r en la fó r m u la q u e se h a o b te n id o a n te r io rm e n te , se t ien e :
R = 35 .7 2 !/y/ 200 x 700
cm = 1.2 cm
es d e c ir , e l d iá m e t r o m ín im o q u e tien e q u e te n e r e l e je p a r a t r a n s m it i r la s p o te n c ia s in d ic a d a s es
D = 24 m m
IX .2 . U n e je d eb e t r a n s m it ir una p o ten c ia de A ' = 70U C V a n = 180 rp m . S a b ie n d o que la s c o n d ic io n e s de t r a b a jo d e un e je q ue t r a n s m ite p o ten c ia so n q u e e l á n g u lo d e t o r s i ó n n o d eb e se r su p e r io r a un g r a d o en u n a lo n g itu d de 15 v eces e l d iá m e tro , y q ue la ten s ió n a d m is ib le esUdm = 6 0 0 k p / c m 2, se p ide:
1.a D e te r m in a r la ten s ió n c o r ta n te m á x im a .2.° C a lc u la r e l d iá m e tro m ín im o d e l e je .
E l m ó d u l o d e e la s t ic id a d t r a n s v e r s a l es C = 8 0 0 0 0 0 k p / c m 2.
l . u V e a m o s c u á l e s e l m o m e n to to r s o r m á x im o a q u e p u e d e e s t a r s o m e t id o el e je p a r a q u e v e r if iq u e s im u lt á n e a m e n te la s c o n d ic io n e s d e t r a b a jo in d ic a d a s .
D e la e c u a c ió n (9 .2 -1 1 ) se d e d u c e p a r a la p r im e r a c o n d ic ió n :
C L 8 0 0 0 0 0 x n D * n
15D x 32 180= 9 1 .3 8 D 3 c m • k p
si e l d iá m e t r o D v ien e e x p re s a d o en cm .P o r o t r a p a r te , d e la e c u a c ió n (9 .2 -9 ) se d e s p re n d e p a r a la s e g u n d a c o n d ic ió n
2 x 6 0 0 x ttD j
" £>321 1 7 .8 I D 3 c m • k p
T o m a r e m o s e l v a lo r m ás p e q u e ñ o d e la s in e c u a c io n e s o b te n id a s , q u e n o s a s e g u r a q u e la t e n s ió n d e t r a b a jo e s m e n o r q u e la a d m is ib le .
9 1 .3 S D 3 D r,DA¡ n 2
9 1 .38 x 16k p / c m 2 = 4 6 5 .4 k p / c m 2
2.° L a e x p re s ió n d e la p o te n c ia N en fu n c ió n d e l m o m e n to to r s o r es :
N = a i • M T
s ie n d o cu la v e lo c id a d a n g u la r e n rad / seg . S i M r s e e x p re s a e n m - k p la p o te n c ia v ien e d a d a en k p ■ m /seg .
TEORI A DE LA TOR S I O N 5 8 9
S i cu se e x p re s a en r e v o lu c io n e s p o r m in u to y la p o te n c ia en C V . e s ta e x p re s ió n se
c o n v ie r te en :
.V 2anA£r = 1 0 1 8 0 - 3 / ^ 7oo c v6 0 75 2 2 5 0
d e d o n d e :
7 0 0 x 2 2 5 0M r = ----------------------- = 2785 .21 m k p
r ir • 180
M t = 9 1 .38D 3 cm • k p
->7 g 5 9 j£>■* = 7------- — = 3 0 4 7 .9 c m 3
9 1 .3 8
= , y 3 0 4 7 .9 cm 145 m m
U n e je que d eb e t r a n s m it ir u n a p o te n c ia de 3 0 0 k W e s tá fo rm ad o p o r d o s t r a m o s d e d is t in to m a t e r ia l , r íg id a m e n te u n id o s e n tr e s í : e l p r im e ro , m a c iz o , es d e u n a a le a c ió n q ue tien e de d iá m e tro D = 6 c m ; e í s e g u n d o , tu b u la r de a c e ro , t ien e e l m ism o d iá m e tro e x t e r io r q ue e l
p r im e r tra m o .S a b ie n d o q u e l a s t e n s io n e s d e c o r t a d u r a a d m is ib le s en la a le a c ió n y en e l a c e r o so n Udm 1 = 6 0 0 k p / c m 2, y t aJm , = 8 0 0 k p / c m 2, re sp e c t iv a m e n te , y q u e e l á n g u lo de to rs ió n por u n idad de long itud d e l e je d e a c e ro e s un 75 por 100 de l co rresp o n d ien te a ! e je d e a le a c ió n , s e p ide:
1.° C alcular el d iám etro interior del eje de acero.2.° H a lla r la v e lo c id ad a n g u la r a q ue d eb e g i r a r e l e je .
S e con oce la r e la c ió n de lo s m ó d u lo s de e la s t ic id a d t r a n s v e r s a l d e l a c e ro <7, y d e la a le a c ió n (7 ,
F ig u r a IX .3 .
1.° D e la e c u a c ió n (9 .2 -1 1 ) y d e la r e la c ió n d a d a e n t r e lo s á n g u lo s d e to r s ió n d e a m b o s
m a te r ia le s , se t ie n e :
M T0 .7 5
M T
Gi/02 Gl/oi
e x p re s ió n e n la q u e e l ín d ic e 1 se re f ie re a l a a le a c ió n y e l ín d ic e 2 a l a c e ro .
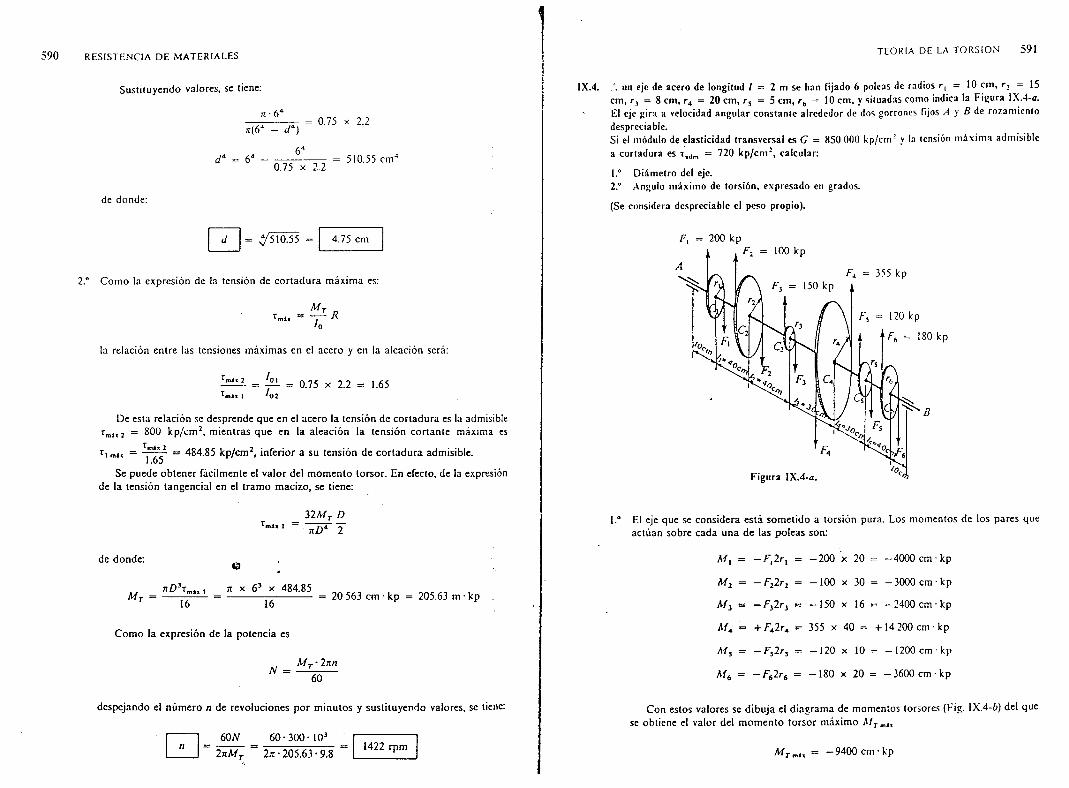
5 9 0 R ESI STENCI A DE MATE RI ALE S
Sustituyendo valores, se tiene:
Tt-64
r/4 = 6
n(64 - r/4)
6
= 0.75 x 2.2
0.75 x 2.2= 510.55 cm4
de donde:
= ^510.55 = 4.75
Como la expresión de la tensión de cortadura máxima es:
M t R
la relación entre las tensiones máximas en el acero y en la aleación será:
Tmái2 An = 0.75 x 2.2 = 1.65
De esta relación se desprende que en el acero la tensión de cortadura es la admisible rmll2 = 800 kp/cm2, mientras que en la aleación la tensión cortante máxima es
484.85 kp/cm2, inferior a su tensión de cortadura admisible.1.65
Se puede obtener fácilmente el valor del momento torsor. En efecto, de la expresión de la tensión tangencial en el tramo macizo, se tiene:
32 M t DZmlx ‘ " " í z / - 7
de donde:
M TxD1 r„ jt x 63 x 484.85
16 16
Como la expresión de la potencia es
N =
20 563 cm • kp = 205.63 m ■ kp
M t - 2nn 60
despejando el número n de revoluciones por minutos y sustituyendo valores, se tiene:
60-300- 10360 N2k M t 2 a -2 0 5 .6 3 -9 .8
1422 rpm
TEORIA DE LA T OR S I O N 591
IX.4. A un eje de acero de longitud / = 2 m se han fijado 6 poleas de radios r, = 10 cm, r , = 15 cm, r ¡ = 8 cm, r4 = 20 cm, r 5 = 5 cm, r6 = 10 cm, y situadas como indica la Figura 1X.4-U. El eje gira a velocidad angular constante alrededor de dos gorrones fijos A y B de rozamiento despreciable.Si el módulo de elasticidad transversal es G — 850 000 kp/cm2 v la tensión máxima admisible a cortadura es r ldm = 720 kp/cm2, calcular:
1.° Diámetro del eje.2.° Angulo máximo de torsión, expresado en grados.
(Se considera despreciable el peso propio).
F, = 200 kp
1.° El eje que se considera está sometido a torsión pura. Los momentos de los pares que actúan sobre cada una de las poleas son:
A/, = —F¡2rl = —200 x 20 = — 4000 cm - kp
M1 = —F12r1 = —100 x 30 = — 3000 cm • kp
M , = — F32r¡ = -1 5 0 x 16 = -2400 cm-kp
M* = +Ft2rt = 355 x 40 = +14 200 cm kp
M s = — F52r3 = -1 2 0 x 10 = -1200 cm -kp
M6 = —F62r6 = —180 x 20 = — 3600 cm-kp
Con estos valores se dibuja el diagrama de momentos torsores (Fig. IX.4-6) del que se obtiene el valor del momento torsor máximo Afr „lt
Afr » i . = - 9 4 0 0 c m - k p

5 9 2 RE S I S TENCI A DE MATE RI ALE S
Si R es el radio del eje, como éste es de sección circular, el módulo resistente es:
nR3W = -----
por lo que.
de donde:
nR¡M j mil ~ ~ Udrr
R =„2A/TlM.
Sustituyendo valores:
J 2 x 9400R = cm = 2.1 cm
3.14 x 720
El diámetro pedido será:
O = 42 mm
2° Según se deduce de la observación del diagram a de momentos torsores, al ser el área de momentos negativos mayor, en valor absoluto, que el de positivos, resulta que el
e
TEO RI A DE LA TOR SI ON 5 9 3
I N.5.
máximo ángulo de torsión será el ángulo relativo girado por la polea C, respecto de la C j. Su valor es, en radianes:
I ’ I0 = M tJ í = — O / ,/ , + (A/, + A-/,)/, + (A/, + A/, + A / jl/ J0/o i 0/0
Sustituyendo valores y operando en el sistema técnico
10 = —
85 x 10a7i2 x |0- 8 T40 x 0.4 + (40 + 30)0.4 + (40 + 30 + 24) ■ 0.3] rad
de donde
cuyo valor pedido en grados es:
0 = 0.0278 rad
ISO0° = — 0 = 57.32 X 0.0278 = 1 .6 =n
Un eje horizontal de longitud I = 6 m tiene los extremos perfectamente empotrados. A partir de uno de sus extremos actúan dos momentos torsores aislados de M TX — 10 m • ton y A / , , — 15 m • ton en las secciones situadas a distancias a , = 2 m y a 2 = 4 m, respectivamente, de dicho extremo. Los momentos torsores tienen el sentido indicado en la Figura IX-5-a. Se pide:
1.° Determinar los momentos de empotramiento.2.“ C a lcu la r el m ínim o d iám etro del eje si la tensión de cortadura adm isib le es
Udm = 800 kp/cm: .3.“ Hallar la expresión 0 = 0(.\) del ángulo girado por las secciones, representándola
gráficamente e indicando el valor máximo y sección en la que se alcanza. Se tomará G= 8 x IO5 kp/cm2.
4.° Si el material se fisura por tracción, determinar las lineas de rotura.
'•"ÁírxFigura IX.5-a.
M 71 M-T i Ai,
Sean M ¡ y M 2 los momentos de empotramiento (Fig. IX.5-a). La condición de equilibrio
M | — A /r i + MTi + A /2 = 0
junto a la condición de ser nulo el giro relativo de las secciones empotradas:
M ,a ¡ (A i, — M Ti)(a2 — a , ) (Af, — A/r i + M T2)(l - a 2)GIn GI0
+GIn
0
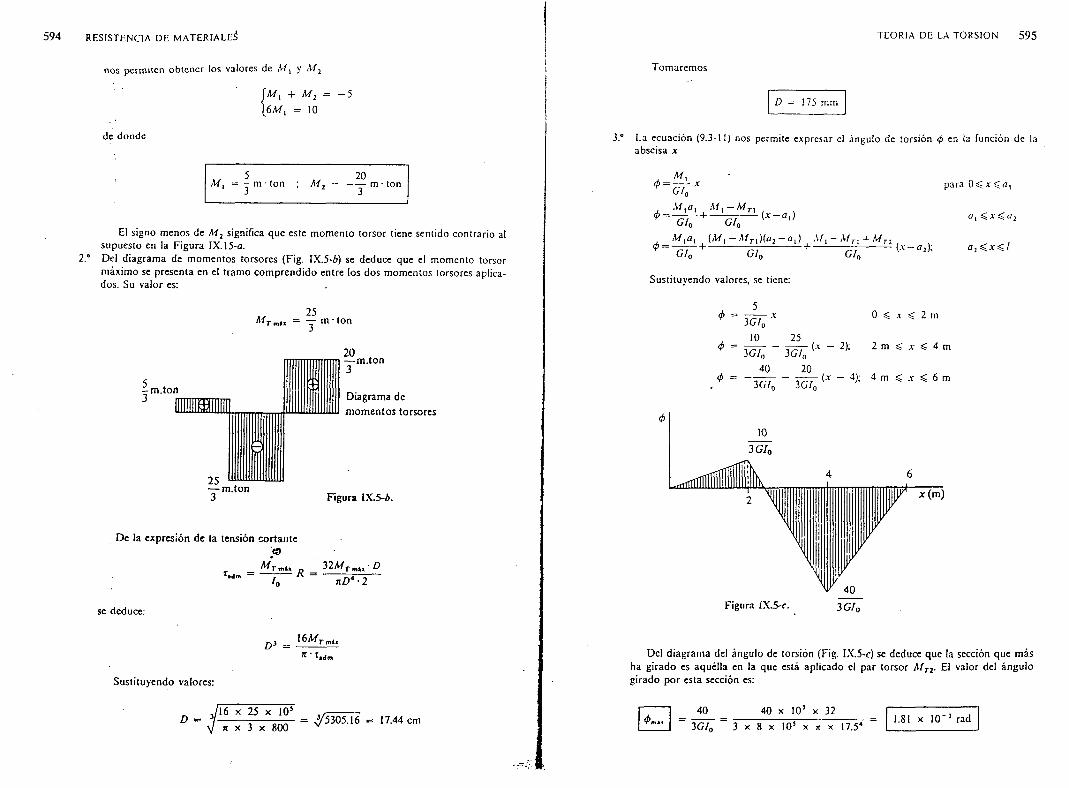
RESISTENCIA DE MATE RI ALE S
permiten obtener los valores de Ai, y M 2
M , + M 2 = 6 AL, = 10
- 5
de donde
5 20M. = - m ■ ton Ai, = -----m * ton1 3 2 3
El signo menos de M 2 significa que este momento torsor tiene sentido contrario al supuesto en la Figura IX.15-a.Del diagrama de momentos torsores (Fig. IX.5-Ó) se deduce que el momento torsor máximo se presenta en el tramo comprendido entre los dos momentos torsores aplicados. Su valor es:
25w r « i . = ~ m ■ ton
-m .ton 3
2 5-m.ton
1 20-m.ton3
Diagrama de momentos torsores
Figura 1X.5-6.
De la expresión de la tensión cortante<0
... „ _ 32A/T mt, • D' im /0 JiD* ■ 2
se deduce:
S u s t i t u y e n d o v a l o r e s :
TEORIA DE LA TORSI ON 5 9 5
Tomaremos
D = 175 mm
La ecuación (9.3-11) nos permite expresar el ángulo de torsión <á en la función de la abscisa x
AT,= .rC/0M ta t M X—M T,
( x - a |)Gl0 Gí0 M\Q\ (3T| MTi)(a2 — a ,) S fx—M TX + MT2G/0 G/„ G/n
para
a l ^ x ^ a 2
( x - a 2)- a 2^ x ^ l
Sustituyendo valores, se tiene:
3 G/0 10 25
0 C t < 2 m
■ (.x — 2); 2 m < x $ 4 m
40 _ 20~í g T0 ~ J g T0
(a — 4); 4 m ^ .t < 6 m
Figura ÍXS-c. 3 Gí0
Del diagrama del ángulo de torsión (Fig. IX.5-c) se deduce que la sección que más ha girado es aquélla en la que está aplicado el par torsor A/r2. El valor del ángulo girado por esta sección es:
40 x I07 x 32403G/0 3 x 8 x I 0 5 x a x 17.5*
1.81 x 1 0 'J rad

5 9 6 RESISTENCIA DE MATERIALES
4 ° S i c o n s id e r a m o s d o s p la n o s d e l h a z d e v é r t ic e un r a d io : u n o c o in c id e n te co n la se cc ió n r e c ta ; e l o tro , un p la n o lo n g itu d in a l (F ig . IX .i- i/ ), d e l c ir c u lo d e M o h r (F ie . IX .5 -e) se d e d u c e q u e la s l in e a s d e ro tu r a so n h é lic e s c u y a s ta n g e n te s fo rm an 45 co n el e je , ya q u e la s g r ie ta s se fo rm a rá n en d ire c c ió n p e r p e n d ic u la r a la ten s ió n p r in c ip a l d e tra c c ió n <j, (Fie. IX.5-/).
IX .6 . U n a b a r ra de la tó n de se cc ió n c u a d ra d a de lad o a = 10 c m , q ue e s tá em p o trad a en sus e s t r e ñ io s , se to rs in n a m ed ian te un p a r de fu e rz a s F c u y a s l in e a s de acc ió n e s tán s e p a ra d a s una d is ta n c ia d = 5(1 c m , a c tu an d o d icho p a r en u n a se cc ió n a d is ta n c ia i , = 1 m de uno de sus e x t r e m o s . S i la lo n g itu d de la b a r ra es / = 3 m , c a lc u la r el v a lo r m á x im o de F con la cond ición de que e l án g u lo m á x im o de to rsión s e a de 1/4°.S e to m a r á co m o m ó du lo de e la s t ic id a d f r a n s ie r s a l G = 3 .51 x l ü 5 k p / cm ’ y com o tensión m á x im a a d m is ib le e l v a lo r r í4m = 6 0 0 k p / cm ’ .
A f
--------------------------- J p-
I * ^ «i- 1 m
if Hh - 2m i
y F ig u r a IX .6- 0 .
S e t r a t a d e un c a s o d e to r s ió n h ip e r e s tá t ic a . S i M e s e l m o m e n to to r s o r p ro d u c id o p o r e l p a r d e fu e rz a s F
M = F d
L o s m o m e n to s d e e m p o tr a m ie n to so n :
/2 1 2 FM a = A/ y = F - y. - = j m k p
/, 1 I FA/s = Af y = F - x - = - m • k p
e s ta n d o e x p re s a d a la fu e rz a F en kp .a
TEORIA DE LA T OR S I ON 5 9 7
IX .7 .
D e la T a b la 9.1 se o b t ie n e n lo s v a lo r e s d e la ten s ió n m á x im a d e c o r t a d u r a y d e l á n g u lo de to r s ió n , a m b o s e n fu n c ió n d e l m o m e n to to r s o r A/r
= M t ■ = 7JI ,X,rXmi' 0.202.a1 ’ Ga*
m o m e n to s to r so r e s
D e la p r im e r a e c u a c ió n se o b t ie n e :
F k p / m ’ F ,
r "'“ ~ 0 .2 0 8 « 3 _ 3 x 0 .2 0 8 x 0 .1 3 _ 0 .6 2 4 x 1 0 ' 3 x 10* P//Cm ^ t í 'lm ~ k p ^Cm
d e d o n d e
F s : 6 .2 4 x 6 0 0 = 3744 k p
es d e c ir , la p r im e r a e c u a c ió n a c o t a e l v a lo r d e F p a r a q u e e l v a lo r d e la te n s ió n m á x im a de c o r t a d u r a n o s o b r e p a s e e l v a lo r d e la te n s ió n a d m is ib le .
L a s e g u n d a n o s d a r í a o t r a a c o t a c ió n a l e s ta b le c e r q u e e l á n g u lo d e to r s ió n e n tr e la se c c ió n e n la q u e se a p l ic a e l p a r y c u a lq u ie r a d e la s e x t r e m a s e s m e n o r o ig u a l a 0 .2 5 ° .
P o r t a n to
F7.11 x 1 x - x 10*
0 , 5 = J L > = ______________ l ________ISO Ga* 3 .52 x 10 5 x 10*
d e d o n d e td
F < 6 4 8 k p
El v a lo r m á x im o d e F q u e c u m p le a m b a s a c o ta c io n e s es , p o r c o n s ig u ie n te
F = 6 4 8 k p
En un e je h u eco de t r a n s m is ió n de p o te n c ia , q ue tien e d iá m e tro e x t e r io r D e in te r io r </, so m e tid o a to rs ió n p u ra s e a lc a n z a u n a ten s ió n c o r ta n te m á x im a r mlI.
5 r 21.° S a b ie n d o q u e e l p o te n c ia l in te rn o p o r u n id ad de vo lum en es - J - - d e te r m in a r la re la c ió n
16Gde l os d i á m e t r o s de l ej e.

5 9 8 RESI STENCI A DE MA T E R I A L E S
2.° S i e s co n o c id o e l p o te n c ia l in te rn o p o r u n id a d de vo lum en = 2 2 0 0 m • k p / m 3 y elm ó d u lo de e la s t ic id a d t r a n s v e r s a l G = 8 x 1 0 5 k p / cm 2, c a lc u la r lo s d iá m e tro s del ejes i h a de t r a n s m it ir u n a p o ten c ia de N — 5 0 0 k\V a n = 180 rp m .
1.° D e la e x p re s ió n (9 .4 -1 ) q u e n o s d a e l p o te n c ia l in te rn o
dx^ = r-e
2 Gx2 dO. =
d x M 2
2 G l f
d x M i 1 n ( D 2 — d 2)
■DI 2
r 2 ■ 2 n r d r =¿1 2 2 ( 7 /0 4
dx M i 2n D* — d*
1 6
( D 1 + d 1)G II 16 . 4
se d e d u c e la c o r r e s p o n d ie n te a l p o te n c ia l in t e r n o p o r u n id a d d e v o lu m e n
^ ' ^ . {D2 + d 2) ‘ 4 l-d x n ( D 2 - d 2) ¡4 16G i l 16 G D
"-P- (D 2 + d 2)
I g u a la n d o e s ta e x p re s ió n a la d a d a e n e l e n u n c ia d o , se t ien e :
1 4 r 2¡ o 2 + d 2) =
16(7 D 1 y 1 16(7
S r 2 ’2r _ JTmi«
d e d o n d e :
2 . ' E l v a lo r d e la r m íl s e p u e d e o b te n e r a p a r t i r d e la e x p re s ió n d e l p o te n c ia l in te rn o p o r u n id a d d e v o lu m e n
g. = 5 r L , 16(7r.16(7
S u s t i t u y e n d o v a le r e s , s e t ie n e :
/16 x 8 x I 0 3 x 2 2 0 0 x 1 0 " 1 = /-------------------------------------------- = 7 5 0 .4 7 k p / cm 2
P o r o t r a p a r te , e l m o m e n to r to r s o r M T a q u e e s tá s o m e t id o e l e je , e n fu n c ió n cíe la p o te n c ia N a t r a n s m it ir , e s :
, , „ 2 n n _ 3 0 N 3 0 x 5 0 0 x 103 „ ,N = M t —— =■ M T = ------- = = 26 5 2 5 .8 N • m
6 0 T roí a -1 8 0
L a t e n s ió r c o r t a n t e m á x im a s e p r e s e n ta e n lo s p u n to s p e r ifé r ic o s . P o r ta n to :
_ M t D _ \ 6 M t D _ 16 M Ti *7" '/„ 2 niD* - d 4) tiD3[ l - (d/D)2]
TEORIA DE LA T OR S I O N 5 9 9
IX .8 .
D e s p e ja n d o y su s t itu y e n d o v a lo re s , se t ien e :
O3 =16A7r 16 x 26 525 .8 x I 0 2 = 2 4 4 9 21 cm 3
d 2\ 9 .8 x a x 750 .47 (1 - 0 .2 5 )
d e d o n d e :
D = 13.48 cm ; d = 6 .74 cm
U n a b a r r a r e c ta tien e co m o secc ió n un a e lip se c u y a s lo n g itu d e s de lo s s e m ie je s son a y b ( a > b ) . S e so m e te la b a r r a a to rsió n p u ra .
1.° D e te r m in a r la fu n c ió n de ten s io n es .2.° H a l la r l a s ten s io n e s ta n g e n c ia le s en la se c c ió n , dedu c ien do e l v a lo r de la ten s ió n m á x im a
y p u n to , o p u n to s, d o n d e se p roduce.3 .° H a l l a r la func ió n de a lab e o y d ed u c ir la so lu c ió n de c o r r im ie n to s .
1.° L a e c u a c ió n a n a l í t i c a d e la c u rv a d e l c o n to rn o dc la se c c ió n es
/ ( y , z) = 4 + V - 1 = 0 cr o
E sta e c u a c ió n , e v id e n te m e n te , se a n u la en su c o n to rn o . A d e m á s , su la p la c ia n a es
c o n s ta n te
2 2■ A / (y . r ) = - + r y a b
En e s ta s c o n d ic io n e s , s e g ú n s a b e m o s , la fu n c ió n d e te n s io n e s e s d e la fo rm a
* .c ( £ + £i-i
s ie n d o C u n a c o n s ta n te q u e d e te r m in a r e m o s a p l ic a n d o la F ó r m u la (9 .5 -1 6 )
M r M t M t___C =
C o m o
2 f f g + i i - i W
n a b 3 , n a 2b „ ,/ = -------- ; í . = -------- ; D = n a b’ 4 - 4
s u s t i tu y e n d o , te n e m o s :
M t A/t
n a b ( a 2 b 1 \ n a b21 + u - 4
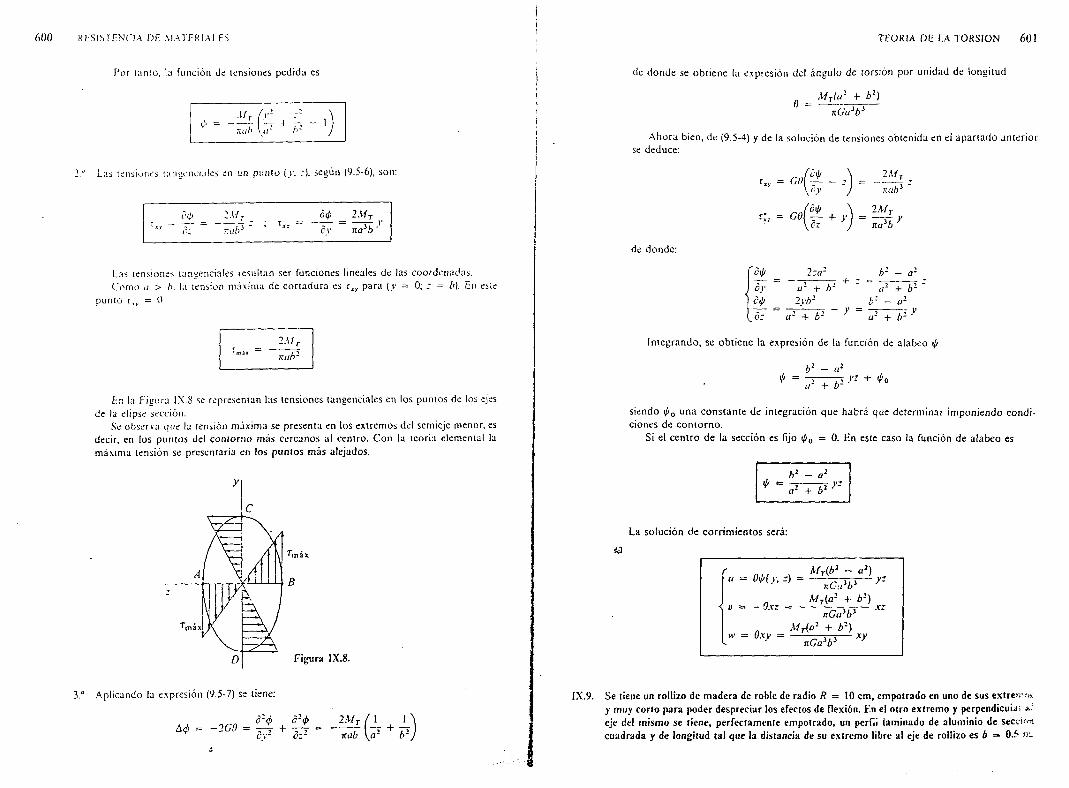
6 0 0
P o r ta m o , la fu n c ió n de te n s io n e s p e d id a es
RESISTENCIA DE MATERI ALES
,\ÍTV ruih \<r b 2
L as ten s io n e s t a n g e n c ia le s en un p u n t o ( y , : ) . s e g ú n (9 .5 -6 ), so n :
Ó0 2Mt ctp 2 MTT" cz r.iib3 Xz 5y na2b '
L a s te n s io n e s ta n g e n c ia le s r e s u lt a n se r fu n c io n e s l in e a le s d e la s c o o rd e n a d a s . C o m o a > b. la ten s ió n m á x im a d e c o r t a d u r a e s r IX p a r a ( y = 0; z = 6). En este
p u n to i xy = 0
2M rn a b 2
En la F ig u r a IX .S se re p re s e n ta n la s te n s io n e s t a n g e n c ia le s en lo s p u n to s d e lo s e jes d e la e l ip s e se cc ió n .
S e o b se rv a q u e la ten s ió n m á x im a s e p r e s e n ta en lo s e x tre m o s d e l s e m ie je m en o r , es d e c ir , en lo s p u m o s d e l c o n to rn o m á s c e r c a n o s a l c e n tro . C o n la t c o r ia e le m e n ta l la m á x im a te n s ió n se p r e s e n ta r ía en lo s p u n to s m á s a le ja d o s .
F igura IX .8.
3.° A p lic a n d o la e x p re s ió n (9 .5 -7 ) se t ie n e :
d2ó o 24> A<p = - 2 G 0 = - 4 - + - r r
d v c z -
2 Mt n a b
T E O R I A D E LA T O R S I O N 6 0 1
de d o n d e se o b t ie n e la e x p re s ió n d e l á n g u l o d e to r s ió n p o r u n id a d d e lo n g itu d
M TU r + b 2)
nÓ uV
A h o ra b ie n , d e (9 .5 -4 ) y d e la s o lu c ió n d e te n s io n e s o b te n id a en e l a p a r t a d o a n te r io r se d e d u c e :
r , , = C 0 ( 5± - z ) =c v I n a b
r-n\d^ \ 2MtC.- = C0( — + y ) = —n yc z j n a b
d e d o n d e :
b 1 — a 2
a 2 + b 2 a 2 + b 22 i' b2 b 2 — a 2y = — - y- yo z a 2 + b 2 a 2 + b ’
I n te g r a n d o , se o b t ie n e la e x p re s ió n d e la fu n c ió n d e a la b e o t¡/
b 2 - a 2<P = T y ? + >Po
a ' + b~
s ie n d o t¡/0 u n a c o n s t a n te d e in t e g r a c ió n q u e h a b r á q u e d e t e r m in a r i m p o n i e n d o c o n d ic io n e s d e c o n to rn o .
S i e l c e n t ro d e la se c c ió n e s f ijo ip0 = 0 . En e s te c a so la fu n c ió n d e a la b e o e s
b2 — a2<P = ry y~a- + b
La so lu ció n de c o rr im ie n to s será:
«a„ , , 4 M r ( b 2 - a 2)
M T( a 2 + b 2)
0 = - 0xz = —. M r ( a 2 + b 2)
w» = Oxv = r ? -------x yn G a b y
IX .9. S e tiene un ro llizo de m ad era de rob le de rad io R = 10 cm , em potrado en uno de sus extrem o s y m uy co rto p ara poder despreciar los efectos de flexión . En el o tro ex trem o y perpendicular ai eje del m ism o se tiene, p erfectam ente em potrado, un perfii lam inado de a lum inio de sección cu adrada y de longitud ta l que la distancia de su extrem o libre al eje de ro llizo es b = 0 .5 rr-

6 0 2 RESI STENCI A DE MAT E R I AL E S
S e e je rc e u n a c ie r t a fu e rz a P en e l e x t r e m o l ib re de la b a r r a de a lu m in io , de d irecc ió n la p e rp e n d ic u la r co m ú n a lo s e je s d e a m b a s p ie z a s , a lc a n z á n d o s e s im u ltá n e a m e n te los l im ite s a d m is ib le s de ten s io n e s d e c o r ta d u ra en e l ro ll iz o y d e t r a c c ió n en la b a r ra de a lu m in io . C a lc u la r e l v a lo r de la fu e rz a P y la d im e n s ió n de l la d o d e l c u a d ra d o de la se cc ió n de p erfil. D a to s : T e n s ió n a d m is ib le a c o r ta d u r a d e l ro b le x Idm = 7 0 k p / cm 2.
T en s ió n a d m is ib le a tra c c ió n de l a lu m in io <ridm = 4 5 0 k p / cm 2.
P
i ■ y
i J ~ m z i ?&
i F ig u r a IX .9 .
El ro ll iz o t r a b a ja a to r s ió n y la b a r r a d e a lu m in io a f le x ió n .El m o m e n to to r s o r s o b re e l r o ll iz o es :
M t = P b
q u e p r o v o c a u n a te n s ió n m á x im a d e c o r t a d u r a
_ M T _ 2 P b
tml' ~ 1 7 R ~ ^
i g u a l a r , dm c u a n d o a lc a n z a e l v a lo r l im ite .D e e s ta e c u a c ió n se o b t ie n e e l v a lo r d e P p a r a q u e e s to o c u r r a
P =2b
3.14 x 103 x 70 2 x 50
2 1 9 8 k p
C o n s id e r e m o s a h o r a e l p e r f i l c u a d r a d o d e a lu m in io . El m o m e n to ( le c to r m á x im o se p r e s e n ta en la se c c ió n d e e m p o t r a m ie n to c o n e l r o ll iz o y su v a lo r es :
M f = P [ b - R ). <a
q u e se p u e d e e x p r e s a r e n fu n c ió n d e la s c a r a c t e r ís t i c a s g e o m é t r ic a s d e la se cc ió n .
a 3M f = IV, ■ <rml, = — <r.dm
I g u a la n d o a m b a s e x p re s io n e s :
,3j - <3.an, = P ( b - R )
- ^ P{b ~ R)
d e d o n d e :
TEORIA DE LA TO R SIO N 6 0 3
S u s t i tu y e n d o v a lo re s se o b t ie n e la lo n g itu d d e l la d o d e l c u a d r a r ' : d e la se c c ió n
6 x 2 1 9 8 x 40
4 5 0cm = ’/’ l 172 .26 cm
a = 10.6 cm
I X .10. S e c o n s id e ra u n a v ig a c il in d r ic a de se cc ió n e l íp t ic a de lo n g itu d es de s e m ie je s a y h ( a > b ) s o m e t id a a to rs ió n p u ra . D e te rm in a r lo s p un to s de la se cc ió n en lo s c u a le s e l m ó d u lo de la ten s ió n ta n g e n c ia l t ien e po r v a lo r la s e m isu m a de lo s v a lo re s m o d u la re s q ue é s ta to m a e n lo s e x t r e m o s de lo s se m ie je s .
L a s te n s io n e s t a n g e n c ia le s en lo s p u n to s d e la se c c ió n e l ip t ic a so n (v é a se e je r c id o 1X .8)
2 M r
n a b 3
2 M tr« = t t y n a ! b
El m ó d u lo d e x es :
En A {y = a; z = 0):
En B ( y = 0 ; z = b);
n ------------- y - 2 M r y 1 r 2
n / t" + T' : n a b J a * + b *
2 Mrn a 2b
2 Mt n a b 2

6 0 4 RESISTENCIA DE M ATE RI AL E S
L a s e m isu m a d e e s lo s v a lo re s es:
T< + rB = Mj_(\ + 1 2 n a h b
I g u a la n d o e s ta e x p re s ió n a la o b te n id a a n te r io rm e n te , la s c o o rd e n a d a s de lo s p u n to s P ( y , r ) , en lo s c u a le s la te n s ió n ta n g e n c ia l e s r , v e r if ic a n :
d e d o n d e :
" l A + I ¡>± + ±Tíub \a b nub \l u4 ¿4
i’’ r2 (a + b)2’t +a 4 ó 4 4 t r b
o b ien
a l a + b ) '\ 2 ( b í a + b ) \ 2
2T
= I
E sta e c u a c ió n r e p r e s e n ta u n a e lip se , c u y a s lo n g itu d e s d e lo s s e m ie je s so n :
a(a + b) b(a + b)a — --- —----- > a ; b = < b2b 2a
y a q u e a > b.P o r ta n to , lo s_ p u n to s en lo s c u a le s el m ó d u lo d e la te n s ió n ta n g e n c ia l es x so n lo s de los
a r c o s d e e lip se C D y FE in d ic a d o s en la F ig u r a IX .1 0.
U n tu bo de a c e ro de d iá m e tro e x te r io r D = 5 0 m m e in te r io r el = 4 6 m m e s tá so lic itad o a to rs ió n p u ra . S a b ie n d o q u e la ten s ió n de f lu e n c ia de l a c e ro e s a , = 2 5 0 0 k p / cm 2 y e lc o e f ic ie n te de P o is so n f t = 0 .3 , c a lc u la r e l m á x im o m o m en to to r so r q ue pu ede t r a n s m it ir eltub o s i e l c o e f ic ie n te de s e g u r id a d e s n = 2 .5 , a p lic a n d o :
a ) e l c r it e r io de T r e s c a ,b ) e l c r it e r io de la e n e rg ía de d e fo rm a c ió n m á x im a ,c ) e l c r it e r io de von M is e s .
El m o m e n to d e in e r c ia p o la r d e la se c c ió n t u b u la r re sp e c to d e u n d iá m e tro es :
, n (D i - d * ) 7 i(504 — 4 6 4 ) io ( A in 4/o = -------- — --------- = ----------—---------- = 174 0 1 9 m m
L a te n s ió n t a n g e n c ia l m á x im a en k p / cm 2, s i e l m o m e n to M T se e x p re s a en m • k p , es:
Tmlí _ t i l £ = i o ’ = 14 .36 M t k p / cm 2/„ 2 1 7 4 0 1 9 r V‘
t
\
T E O R I A DE LA T O R S I O N 6 0 5
S i e l c o e f ic ie n te d e s e g u r id a d e s n = 2 .5 , la te n s ió n l im ite d e t r a c c ió n es:
Í 2 = = 1000 k p / cm 2n 2 . 5
C o n e s to s d a to s v e a m o s c u á l e s el m o m e n to to r s o r m á x im o q u e p u e d e t r a n s m it ir e l tu b o :
a ) P a r e l c r i t e r i o d e T r e s c a :
En e s te c a s o la c o n d ic ió n s e rá
es d e c ir :
d e d o n d e
10001 4 .3 6 3 / r íJ — — = 5 0 0 kp/cm
3 / r < 3 4 .82 m ■ k p
b) P o r e l c r i t e r i o d e l a e n e r g i a d e d e f o r m a c i ó n m á x i m a :
L a e x p re s ió n d e la e n e r g ia d e d e fo rm a c ió n p o r u n id a d de v o lu m e n es
.2
2G
C o m o e n e l e n s a y o a t r a c c ió n e s ta m a g n itu d t ie n e p o r e x p re s ió n
se t e n d r á q u e v e r if ic a r
idmYe
<3
i l2 G 2 E
1 4 .3 6 2A / í 10'1 <2 E
2(1 + 0 .3 )
2 É
d e d o n d e :
1031 4 .36^ / 2 .6
4 3 .1 9 m • k p

6 0 6 RESISTENCIA DE MA T E R I AL E S
c) P o r e l c r i t e r i o d e v o n M i s e s :
S e g ú n e s le c r it e r io (<r, — o 2)2 + ( o 2 — <r3)2 + (cr3 — c r ,)2 ^ 2 o \dm. P e ro lo s v a lo re s d e la s te n s io n e s p r in c ip a le s so n :
<r, = t ; cr2 = 0. ; cr3 = — r
c o m o fá c ilm e n te se d e d u c e d e l c i r c u lo d e M o h r .P o r ta n to :
t 2 + r 2 + 4 t 2 < 2 o ; im
106 10614.362A/2 ^ — => W Í í -------— - 5 = 1616.48
3 3 x I4 . j 6
d e d o n d e :
M t $ 4 0 .2 0 m • k p
1X .12 . U n p erf il d e lg a d o , c u y a se cc ió n e s u n a I d e la s d im en s io n e s in d ic a d a s en la F ig u r a IX .1 2 , está so m e tid o a to rs ió n p u ra . S i e l m ó d u lo de e la s t ic id a d t r a n s v e r s a l e s C = 8 1 0 0 0 0 kp/cm 2, c a lc u la r e l m á x im o v a lo r d e l m o m en to to r so r s i la ten s ió n ta n g e n c ia l a d m is ib le e s t ldm = 450 k p / cm 2, no d eb ien d o d e s u p e r a r e l á n g u lo de to rs ió n por m e tro de lo n g itu d el v a lo r de 6 ’ .
C o ta s en m m
F ig u r a IX . >2.
D e la e x p re s ió n (9 .7 -6 ) q u e n o s d a l a te n s ió n ta n g e n c ia l m á x im a en fu n c ió n d e l m o m en to to r s o r , se d e d u c e
M t =1 Z s ¡ e f (1 0 0 x 4 3 + 2 x 6 0 x 5 J ) 1 0 “
3 H I T rm* ' 3 x 5 x 1 0 - '4 5 0 = 6 4 2 cm ■ k p
E ste s e r ia e l v a lo r d e l m o m e n to to r s o r a p l ic a d o a l p e rf il q u e p r o d u c ir ia e n c l m ism o u n a te n s ió n ta n g e n c ia l m á x im a ig u a l a l a te n s ió n a d m is ib le .
P a r a v e r s i c u m p le la o t r a c o n d ic ió n re fe re n te a l á n g u lo d e to r s ió n v e a m o s q u é m o m en to to r s o r te n d r ía m o s q u e a p l i c a r a l p e r f il p a r a q u e e l á n g u lo g i r a d o p o r d o s s e c c io n e s s e p a r a d a s e n tr e s i 1 m s e a d e 6 o. P a r a e l lo e x p re s a m o s e l m o m e n to to r s o r en fu n c ió n d c 0 d e s p e já n d o lo d e la e c u a c ió n (9 .7 -5 )
TEORIA DE LA TOR S I O N 6 0 7
S u s t i tu y e n d o v a lo r e s , sc t ien e :
8 1 0 0 0 0 (1 0 0 x 4 3 + 2 x 60 x 5 3) - I O ' J 6 ir M r “ ------------------------------------------------------------------------------------ 605 cm • k n
r 3 x 100 180
T o m a r e m o s e l m e n o r d e lo s v a lo re s o b te n id o s :
M T $ 605 cm ■ k p
IX .13. S e c o n s id e ran dos tubos de p ared d e lg a d a , d e la s m is m a s d im en s io n es y m a te r ia l . El rad io m ed io es R y e sp e so r e . U no de e llo s es de se cc ió n c e r r a d a y e l o tro s e rá a b ie r to lo n g itu d in a lm en te . S i a a m b o s se le s so m e te a to rsión p u ra , se p id e :
1." H a lla r la s r e la c io n e s en tre la s ten s iones ta n g e n c ia le s m á x im a s , y en tre la s r ig id e c e s a to rs ió n c u an d o a m b o s tu bos e s tán so m etid o s a l m ism o m o m en to to r so r A 7r .
2.° C a lc u la r l a re la c ió n en tre lo s m o m entos to rso re s que se pueden a p l ic a r a lo s tubos.3 ." D e te rm in a r la re la c ió n de los án g u lo s de to rs ió n de am b o s tubos.
F ig u r a IX .13. («) (/>)
1." En c l tu b o c e r r a d o , en v ir tu d de la e c u a c ió n (9 .7 -1 0 ) . ten em o s:
M t M t
2 t-n * 2 e n R 2
s ie n d o í i * = n R 2 c l á r e a d e l im ita d a p o r la l in e a m e d ia y d e la se c c ió n .L a r ig id e z to r s io n a l e s , se g ú n sa b e m o s :
M rK. - G7 - y
y tc n ic n r lo en c u e n ta la e c u a c ió n (9 .7 -15 ) q u e r e la c io n a á n g u lo d e to r s ió n p o r u n id a d de lo n g itu d y m o m e n to to r s o r , se tien e
M t 4 C n * 2 4 G n 2R 1e .K = — - = —;------- = = 2 G n R }e
0 f d s 2 k R
, e
En e l tu b o a b ie r to , d c (9 .7 -1 ) sc d e d u c e
3 M r 2 M T~ 2nRe2

y p o r ilc I i i l ic ió n de r ig id ez .1 lo r s io n , d e (9 .7 -2 ) se d e d u c e
^ .17,. G s e 2 G 2 n R e ¡
D is id ie n d o e n lr e si la s e c u a c io n e s c o r r e s p o n d ie n te s , te n e m o s :
RESISTENCIA DE MATERIALES
3.17 , 2 e n R 2 3 R G 2 n R e 2 I e 2
2 n R e 2 M T í' 3 2 G t iR ¡ e 3 R 2
S e o b se rv a q u e e l c o c ie n te d e la s te n s io n e s e s u n v a lo r g r a n d e . P o r el c o n tra r io , la re la c ió n e n tre la s r ig id e c e s es un v a lo r p e q u e ñ o .
2 ° A p lic a re m o s a a m b o s tu b o s , c e r r a d o y a b ie r to , s e n d o s m o m e n to s to r so re s M Tc y M ra re sp e c t iv a m e n te , p a r a q u e en a m b o s se a lc a n c e la te n s ió n t a n g e n c ia l a d m is ib le .
En el tu b o c e r r a d o , en v ir tu d d e ( 9 .7 - 1 1), se t ie n e :
M Tt = 2Q*erjJn, = 2nR2e r íá„
En el tu b o a b ie r to , p o r (9 .7 -1 ), p o d e m o s p o n e r
A (r» = ^ • « '\ < im = y 2rt/?e2r Jdra
D iv id ie n d o a m b a s e x p re s io n e s :
M Tc 37?
A i r , e
3.° A h o ra e l m o m e n to to r so r a p l ic a d o a c a d a p e r f i l e s e l m ism o , p u e s se t r a t a d e c o m p a ra r
lo s á n g u lo s d e to r s ió n p a r a u n a m ism a s o l ic i t a c ió n d e to r s ió n .
D e la e c u a c ió n (9 .7 -15 ) se d e d u c e :
Mr f d s A/r ■ 2nR M T
= 4 C n * 3 J . . V = 4GK2R*e = 2GnRse
y d e (9 .7 -2 ), a n á lo g a m e n te
3A 7 r = 3 M T
* G s e 3 G 2 n R i
D iv id ie n d o , se tien e
TEORIA DE LA T OR S I O N 6 0 9
L a v a r i l la d e l a g i t a d o r r e p re s e n ta d o en la F ig u ra IX .14-U tien e una lo n g itu d /, s ien d o su se cc ió n t r a n s v e r s a l la in d ic a d a en la F ig u r a IX .14-A . L a s c u a tro a le t a s de la v a r i l la t ien en id é n t ic a s d im e n s io n e s , p u d ién d o se c o n s id e ra r la se cc ió n com o de p a red d e lg a d a . S e p ide:
1. D e te r m in a r e l m á x im o m o m en to to rso r q ue es c a p a z de r e s is t ir la se cc ió n .2. S u p o n ien d o q ue la a c c ió n d e l f lu id o a g it a d o es un m o m en to por u n id ad de lo n g itu d m ,
ta l co m o s e in d ic a en la F ig u r a IX .14-U , d e te rm in a r e l g iro re la t iv o en tre la s se c c io n e s e x t r e m a s d e la v a r i l la .
D a to s : <r,dm, G.N o ta . E l á n g u lo de to rs ió n p o r u n id ad de lo n g itu d es ún ico p a r a e l co n jun to de la se c c ió n .
F ig u r a IX . 14.
I .° El m o m e n to to r s o r M T e s a b s o rb id o p o r la s se c c io n e s d e la s c u a t r o a le t a s y p o r la se c c ió n d e l tu b o .
M t = 4 M T, + M t ,
V e a m o s c u á le s so n la s e x p re s io n e s d e l á n g u lo d e to r s ió n d e c a d a u n a d e la s a le t a s , p o r u n a p a r te , y d e l tu b o p o r o t r a . El d e la a le t a , en v ir tu d d e (9 .7 -2 ), s e r á
0 - ™ T‘9‘ - G ^
y e l d e l tu b o , s e g ú n (9 .7 -1 5 )
d s M r , 2 n R
e 4 G ( n R 2)2 e 2 n G R i e4 c n * 2
I g u a la n d o a m b a s e x p re s io n e s , se o b t ie n e la e c u a c ió n
0. = 0.G s a 2 2 n G R 2e
q u e ju n t o c o n M T = 4 M T, + M TI c o n s t itu y e u n s is te m a d e e c u a c io n e s q u e n o s p e rm ite o b te n e r A/r „ y M r ,

6 1 0 RESI STENCI A DE MATERI ALES
M t , = 7 i-------------- 7 M r6nR + 4se6nR 3
Calculemos las tensiones tangenciales máximas en aletas y cilindro, respectivamente
= 3MT<¡ = 3 M Tml"“ s e 2 6 nR3 + 4 s e 2
MT, 3 RMtI 2Q*e e{6nR3 + 4xe2)
Como R » e, se deduce que rmlI, > Tmllo por lo que la condición que se tiene que verificar será
3RMt
Tml" “ e(6nR3 + 4se2) ^ T- ‘m
de donde se obtiene el momento torsor máximo que es capaz de resistir la sección
e(6nR3 + 4.re2) ™ r « a = r »,
2° La variación del momento torsor en la varilla es lineal desde un valor nulo en el extremo libre hasta el valor mi en el otro extremo
Mt = mx
Para el cálculo del ángulo de torsión por unidad de longitud es indistinto hacerlo en una aleta o en el tubo. Considerando una aleta, tenemos:
3A/r dOGse3 Ge(6nR3 + 4xe2) dx
por lo que el giro relativo pedido entfe las secciones extremas de la varilla será
0 - i 3m.vGe(6xR3 + 4 se2)
dx 3 m i22Ge(6nR3 + 4 je2)
IX.15. Las paredes del perfil delgado cuya sección es la indicada en la Figura IX.15-a tiene espesor constante e — 1 cm. El perfil está sometido a un momento torsor M T = 8 m • ton en sentido antihorario. Conociendo el módulo de elasticidad transversal del material G = 41 GPa, se pide:
1.° Hallar la distribución de tensiones tangenciales en la sección del perfil.2.° Calcular la rigidez a torsión del perfil.
TEORIA DE LA TOR SI ON 6 1 1
60 cm
Figura IX.15-a. Figura IX. 15-6.
1.° Aplicando la ecuación (9.7-21) obtenemos los ángulos de torsión por unidad de longitud. correspondiente a cada una de las células que forman la sección, en función de los flujos de cortadura (Fig. IX.15-6).
1 ( 180 60\ 3f, - i 2' 2G x 30 x 60 \ e e ) 60(7?
1 ( 60 240\ _ - r t + 4/,2 2G x 60 « 60 \ 1 e 1 e J 120(7e
Como los ángulos de torsión por unidad de longitud de ambas células tienen que ser iguales
3/, — l , —!, + áf.
de donde
60Ce 120 Ge
16
Por otra parte, de la expresión (9.7-18) que expresa la equivalencia entre el momento torsor y los flujos cortantes de la sección se obtiene la ecuación
M t = 2/,(60 x 30) + 2/j(60 x 60) = 3600t, + 720012 = 12 x 103(,
que junto con la anterior relación entre t, y t2 forman un sistema de dos ecuaciones con dos incógnitas, cuyas soluciones son:
M t 7 MT1 12 x 103 ’ 2 72 x 103
Sustituyendo el valor de Afr , obtenemos
8 x 103 x 9.8 N N■ — = 63 334
12 x 103 x lO"1 m ' m
7 x 8 x I03 x 9.8 N ^ , , , N----------------------- — 76 223 —72 x 103 x 10 m m
612 RESISTENCIA DE MATERIALES
El f lu jo de c o r la d u r a en la p a r e d c o m ú n , s e g ú n (9 .7 -1 7 ), es
N- 1 0 8 8 9 -
m
El s ig n o n e g a u v o in d ic a q u e el f lu jo d e c o r t a d u r a tien e s e n t id o c o n t r a r io a l s u p u e s to y , p o r ta n to , la ten s ió n t a n g e n c ia l r .
í , _ 65 334 N
e 0 .01 m 26 .5 M P a
/, 76 223 N7 .6 M P a
e 0 .01 m 2
/, , 10 8 8 9 N- 1.1 M P a
e 0 .01 m -
2 ° L a r ig id e z a la to r s ió n , p o r d e f in ic ió n , es
K = 6 7
C o m o
M t
1 r
M t = 8 m ■ ton = 8 x 103 x 9.8 m • N = 78 400 m • N
0 = 0 ,=3r, - r 2 3 x 65 334 - 7 6 2 2 3
60G e 60 x 41 x 109 x 1 x 10
S u s t i tu y e n d o v a lo re s , se t ie n e
— rad/m = 4 .8 6 x 10 4 rad/m
78 4 0 0K . m 3 N - 1.61 x 108 m J • N
4 .8 6 x 10~ 4
a
1 0
Solicitaciones combinadas
10.1. Expresión del potencial interno de un prisma mecánico sometido a una solicitación exterior arbitraria
En los cap ítulos precedentes hemos estudiado separadam ente las tensiones y deform aciones producidas en un prism a mecánico por las cuatro solicitaciones simples: esfuerzo normal, esfuerzo cortante, momento flector y momento torsor.
Se trata ahora de encontrar un método que nos perm ita obtener los estados tensional y de deformaciones que se producen en el prisma mecánico cuando, en el caso más general, está sometido sim ultáneam ente a los cuatro tipos de solicitaciones citadas.
En cuanto al estado tensional, el problema queda resuelto al adm itir el principio de superposición: la tensión norm al c„ en un punto de la sección es la sum a a lgeb raica de las tensiones normales debidas a l esfuerzo normal N y a los momentos flectores M y y M-, actuando cada uno de ellos separadam ente. Por la m isma razón, la tensión tangencial F es la sum a vectorial de las tensiones tangenciales engendradas por Tr T. y A/r .
El conocim iento del estado de deformaciones ya no es tan simple. Se trata , pues, de encontrar una forma sistem ática de resolver este problema. Iniciaremos nuestro análisis obteniendo la expresión del potencial interno de un prism a mecánico sometido a una solicitación exterior arb itraria .
Si realizam os un corte ideal del prisma por una sección recta de centro de gravedad G y elim inam os la parte de la derecha (Fig. 10.1), la reducción en G del sistema de fuerzas que equivale a la solicitación sobre la parte elim inada consta de una resultante R y de un momento resultante M , cuyas componentes respecto de la terna G.xyz, siendo el eje x tangente a la línea media y los ejes r, r los principales de inercia de la sección, son:
m Tr t : )
A7(A/„ Mr Ms)
La resultante R y e ! momento resultante M serán, en general, funciones de la abscisa curvilínea s de linea m edia, por lo que al considerar el tramo elem ental de p rism a mecánico lim itado por dos secciones rectas Z y l ' que interceptan un elem ento de línea
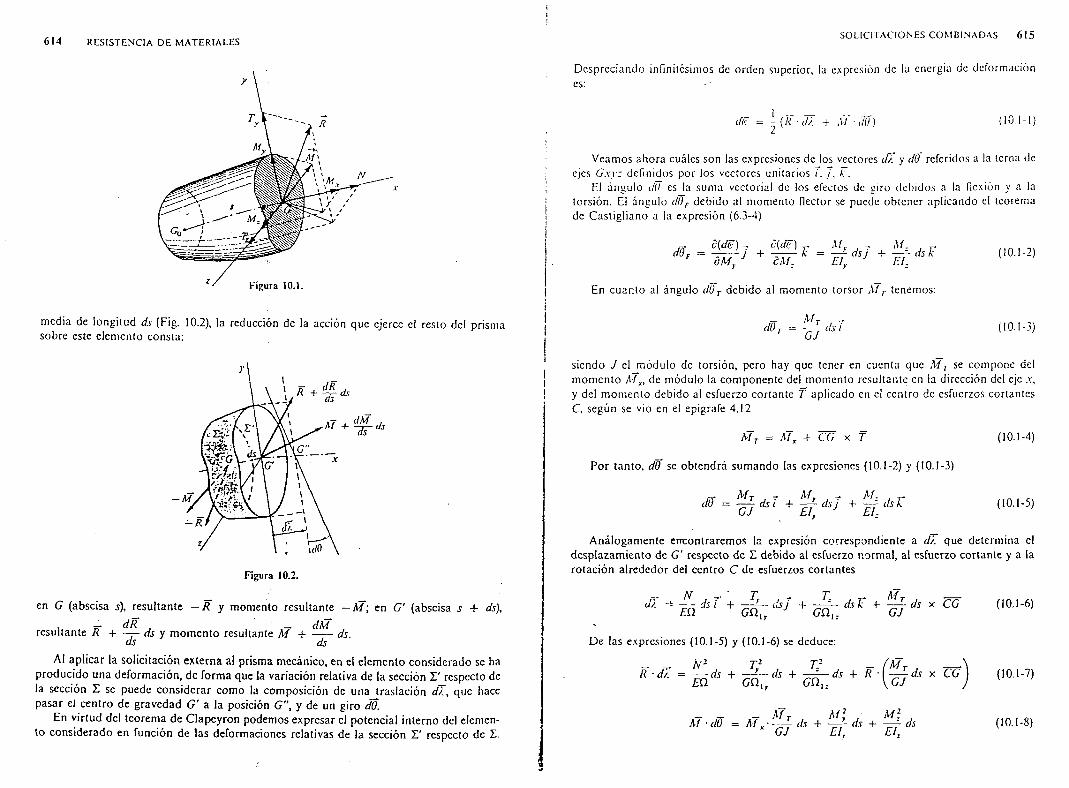
6 1 4 RESI STENCI A DE MATE RI ALE S
F ig u ra 10 .1 .
media de longitud d s (Fig. 10.2), la reducción de la acción que ejerce el resto del prisma sobre este elemento consta:
d s
en G (abscisa j), resultante — R y momento resultante — M ; en G' (abscisa s + ds),
v ¿A , - d Mresultante R -t— — d s y momento resultante M -t ds.d s d s
Al ap licar la so licitación externa al prisma mecánico, en el elemento considerado se ha producido una deformación, de forma que la variación relativa de la sección Z' respecto de la sección Z se puede considerar como la composición de una traslación d i , que hace pasar el centro de gravedad G' a la posición G", y de un giro dO.
En virtud del teorem a de C lapeyron podemos expresar el potencial interno del elemento considerado en función de las deformaciones relativas de la sección Z' respecto de Z.
S OLI CI TACI ONES C OM B I N A D A S 6 1 5
Despreciando infinitésimos dc orden superior, la expresión dc la energia de deformaciónes:
db = - (R d/. + M - di)) (10.1-1)
Veamos ahora cuáles son las expresiones de los vectores d). y dO referidos a la terna de ejes G.xyz definidos por los vectores unitarios i . j . k.
El ángulo dü es la suma vectorial de los efectos dc giro debidos a la flexión y a la torsión. El ángulo d0 F debido al momento flector se puede obtener aplicando el teorema de C astig liano a la expresión (6.3-4)
f d M y CM, EIy 1 El,
En cuanto al ángulo d 0 T debido al momento torsor M T tenemos:
dÓT = ^-dsi (10.1-3)(J j
siendo J el módulo de torsión, pero hay que tener en cuenta que M T se compone del momento M x, de módulo la componente del momento resultante en la dirección del eje x, y del momento debido al esfuerzo cortante T aplicado en el centro dc esfuerzos cortantes C, según se vio en el epigrafe 4.12
M r = M x + CG x f (10.1-4)
Por tanto, dO se obtendrá sumando las expresiones (10.1-2) y (10.1-3)
dO = ‘- í j d s i + j j - d s j + ~ d s k (10.1-5)G J E l, EL
Análogam ente encontraremos la expresión correspondiente a d). que determ ina eldesplazam iento dc G' respecto de Z debido al esfuerzo norm al, al esfuerzo cortante y a la rotación alrededor del centro C de esfuerzos cortantes
A T " T * A 4
di. =4 - - d s T + - z - d s j + — f - d s k + - L d s X CG (10.1-6)¿12 012|. Cj J
De las expresiones (10.1-5) y (10.1-6) se deduce:
_ _ j i 1 T 2 T 2 - ( M t ___ \R d). = -— d s + — 2 -r/ j + - - j - d s + R - [ ~ d s x CC (10.1-7)
¿12 O iij j 012¡_ y Oj j
- - M t M i ■ M i ,M - dO = M x ■ —— d s + — - d s + - j - d s
(J J L í y t i Z(10.1-8)

616 r e s i s t e n c i a d e m a t e r i a l e s
Ahora bien, como:
R * « T j = b V + / '• </\ x C ü ) = /• L x c e ) ( 1 0 ,1 - 9 )
ya que .V es colineal con M T y el producto mixto es nulo.Además, en virtud de (¡0.1-4)
- ,\7t _ - M T M i ___ . M t= ( M t + C C X T ) ■ — y d s = - y ( / í + (C C X T ) • — — íZr =
0 7 0 7 0 7 0 7A/í - /A7r ___ \
= - é ‘I S - T \ G J d s X C G j (,0.1-10)
Teniendo en cuenta estos resultados, si sumamos (10.1-7, y (10.1 -S ) y sustituimos en 110.1-1) se tiene
^ 1 ( N 2 T 2 T? M i M ; M : \ ,tW ~ 2 \ m + c í v + c ñ T ; + c l + l í y + 1 1 ) ( ,0 1 ' 11)
Esta expresión nos indica q . • el potencial interno por unidad de longitud de lineamedia del prisma no es sino la superposición de los potenciales internos debidos a cada una de las solicitaciones actuando independientemente unas de otras.
El potencial interno de todo el prisma se obtendrá integrando la expresión anterior
<F = -N 2 T2 T? M i M i M :\ ,EQ + GÍ2~ + C Í2^ + ~GJ + ! T y + T l ) ‘ s 1-1
en donde s0 y s , son las abscisas curvilíneas de los centros de gravedad de las dos secciones extrem as del prism a mecánico.
Esta expresión del potencial interno es la que utilizarem os para ap licar los teoremas de Castigliano, M enabrea y M axwell-Betti.
10.2. Método de M ohr para el cálculo de desplazamientos en el caso general de una solicitación arbitraria
En el epígrafe 5.8 se expuso el método de M ohr para el cálculo de desplazam ientos de los puntos de un prisma mecánico sometido a flexión simple. Ahora veremos que el método es generalizable al cálculo de desplazam ientos, tanto para corrim ientos de puntos como para giros de las secciones, en el caso general de una solicitación arb itraria .
En efecto, siguiendo la metodología a llí expuesta supondrem os ap licada una carga ficticia <j>, que será una fuerza en el caso que queram os ca lcu lar el corrim iento del punto en el que se aplica, o bien un momento si se trata de h a lla r cl giro de la sección sob'v- la que se hace actuar.
Por el principio de superposición, el esfuerzo norm al, los esfuerzos cortantes, el momento torsor y los momentos flectores del prism a m ecánico serán la sum a de los esfuerzos
S OLI C I TACI ONES C O M B I N A D A S 617
normales, esfuerzos cortantes, momentos torsores y momentos (lectores respectivos, deb idos a la carga real, por una parte, y a la carga ficticia actuando sola sobre el prism a, por otra.
Por la linealidad entre causa y efecto, cualqu iera de estas m agnitudes debidas a la carga (/> es igual al efecto producido por una carga unidad ap licada en el mismo punto o sección, de la misma dirección y sentido que 4>, m ultiplicado por el módulo de la carga <¡>.
Según esto, las leyes de esfuerzos y momentos en las secciones del prism a serán:
N = N0 + 4>Ny
Ty = Ty0 + 4>Tyl
Tz = Tz0 + 4>T=i (10.2-1)
M t = M tq + (¡>MTi
M y = M y o + 4>Myl
M . = M z0 + tp M . ,
en donde:
A'o, T>0, T.0 son las leyes de esfuerzos normales y cortantes en el prism a mecánicosometido a la solicitación real dada.
M t o , M }-o, M :0 son las leyes de momentos torsores y flectores en el prism a mecánico sometido a la solicitación real dada.
^ ,i ' son as *eyes esfuerzos normales y cortantes producidos en el prism apor una solicitación form ada exclusivam ente por una carga unidad, o unmomento unidad ap licada al punto, o sección, en el que se qu iera m edir el corrim iento, o giro, respectivamente.
M Tl, M y ¡, A/., son las leyes de momentos torsores y [lectores producidos en el prismapor una solicitación form ada exclusivam ente por una carga unidad, o unmomento unidad ap licada a l punto, o sección, en el que se qu iera m edir el corrim iento, o giro, respectivamente.
El potencial interno de la viga, en virtud de (10.1-12) y teniendo en cuenta (10.2-1), es:
1 f 1' R^o + , (Ty0 + 4>Tf l )2 , (Tz0 + 4>T: ¡ )2 .
10 j ds (10.2-2). M ro + 4>MTy) , (M y0 + 4>MyX)2 . + _ + +
Si ip es una fuerza y se tra ta de ca lcu lar la proyección sobre dicha fuerza del corrim iento del punto C en el que se ap lica , por el teorema de C astig liano , se tiene:
~d&~3<f> 4>=*Q EC1
, T y o h , l o h M T0M Tl + H------- -------- +e n 1» c n , r G J
+ M f0M yl + M .0M zl JE L E L
(10.2-3)
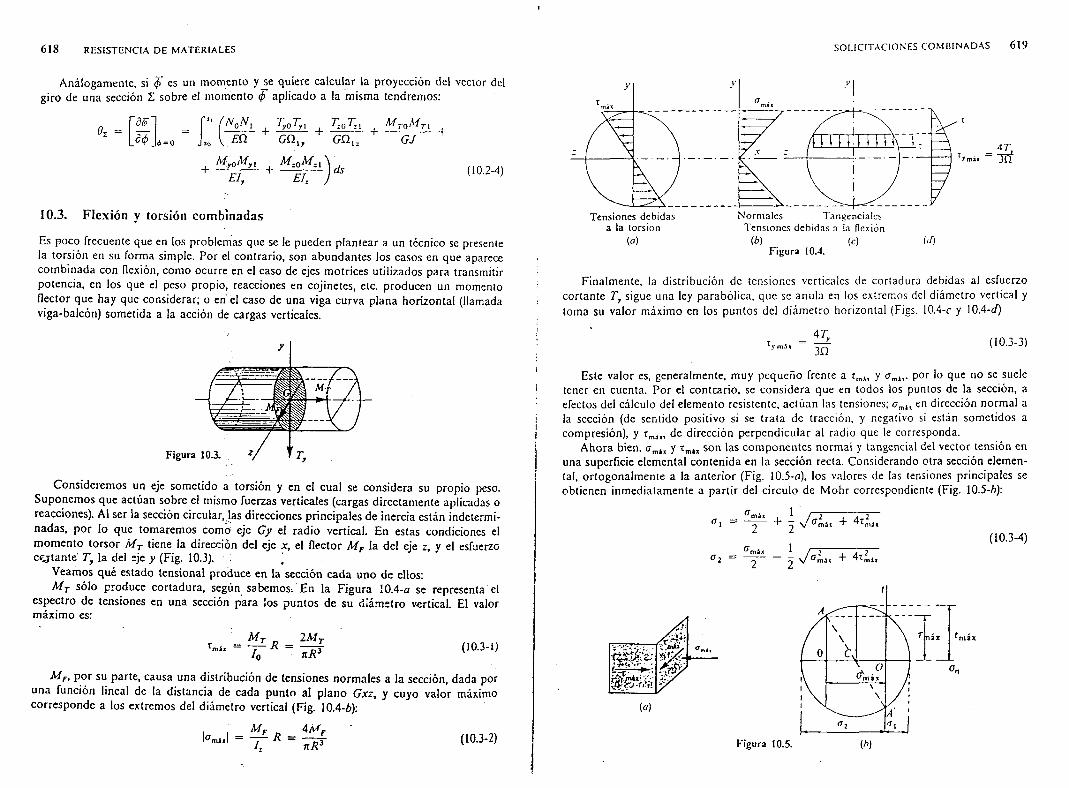
6 1 8 RESISTENCIA DE MATERI ALES
Análogam ente, si <p es un momento y_se quiere ca lcu lar la proyección del vector del giro de una sección Z sobre el momento <p aplicado a la m ism a tendremos:
0Z =d f o ( W r , T y O T y i
d<¡> 4> = 0 So \ E Q c n íy+
EL EL
TzqTzí M TnM Tl
+ MypMyl + M sqM z1'
G J+
(10.2-4)
10.3. Flexión y torsión combinadas
Es poco frecuente que en los problemas que se le pueden p lantear a un técnico se presente la torsión en su forma simple. Por el contrario , son abundantes los casos en que aparece com binada con flexión, como ocurre en el caso de ejes motrices utilizados para transmitir potencia, en los que el peso propio, reacciones en cojinetes, etc. producen un momento flector que hay que considerar; o en el caso de una v iga curva p lana horizontal (llamada viga-balcón) som etida a la acción de cargas verticales.
Consideremos un eje sometido a torsión y en el cual se considera su propio peso. Suponem os que actúan sobre el mismo fuerzas verticales (cargas directam ente aplicadas o reacciones). Al ser la sección circular, las direcciones principales de inercia están indeterminadas, por lo que tomaremos como eje Gy el rad io vertical. En estas condiciones el momento torsor M T tiene la dirección del eje x, el flector M F la del eje z, y el esfuerzo ce jtan te ' Ty la del eje y (Fig. 10.3). - j
Veamos qué estado tensional produce en la sección cada uno de ellos:M t sólo produce cortadura, según sabemos, En la F igura 10.4-a se representa el
espectro de tensiones en una sección para ¡os puntos de su d iám etro vertical. El valor m áxim o es:
r _ Mr fí _ 2 Mt (10.3-1)
M f , por su parte, causa una distribución de tensiones norm ales a la sección, dada por una función lineal de la distancia de cada punto al p lano Gxz, y cuyo valor máximo corresponde a los extremos del diám etro vertical (Fig. 10.4-6):
SOLICITACIONES C OM B I N A D A S 6 1 9
a la to r s ió n
(a)T e n s io n e s d e b id a s a la f lex ió n
(6) . (c)F ig u r a 10.4 .
un
Finalm ente, la distribución de tensiones verticales de cortadura debidas al esfuerzo cortante Tt sigue una ley parabólica, que se anu la en los extremos del diámetro vertical y toma su valor máximo en los puntos del d iám etro horizontal (Figs. 10.4-c y 10.4-tf)
3fi(i 0.3-3)
Este valor es, generalmente, m uy pequeño frente a r ,^ , y <jml>. por lo que no se suele tener en cuenta. Por el contrario , se considera que en todos los puntos de la sección, a efectos del cálculo del elemento resistente, actúan las tensiones; <7m ll en dirección norm al a la sección (de sentido positivo si se tra ta de tracción, y negativo si están sometidos a compresión), y rmáI, de dirección perpendicu lar al radio que le corresponda.
A hora bien. a mix y t ml, son las com ponentes norm al y tangencial del vector tensión en una superficie elem ental contenida en la sección recta. Considerando otra sección elem ental, ortogonalm ente a la anterior (Fig. 10.5-a), los valores de las tensiones principales se obtienen inm ediatam ente a partir del circulo de M ohr correspondiente (Fig. 10.5-6):
0 m ii 1 / 2 i ~A 2
*^máx 1 / 2 i A ’^2 = - j j V +
(10.3-4)
míi
m
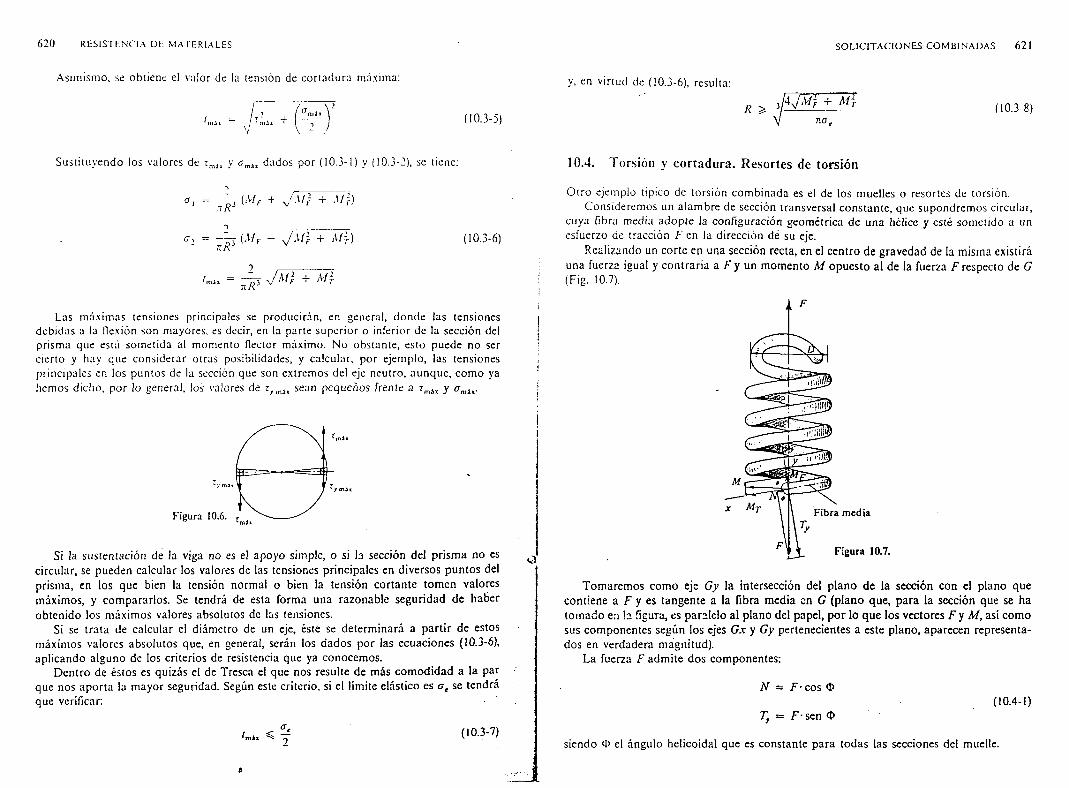
6 2 0 RESISTENCIA DE MATERIALES
Asimismo, se obtiene el valor de la tensión de cortadura máxima:
7 r"'J(10.3-5)
Sustituyendo los valores de rmit y <rmlx dados por (10.3-1) y (10.3-2), se tiene:
cr, = + v '- v/r + )
«7 , = ~ (A/f - J S 1 -F + A/y) (10.3-6)71A
Las m áxim as tensiones principales se producirán, en general, donde las tensiones debidas a la Hexión son mayores, es decir, en la parte superior o inferior de la sección de! prisma que está sometida al momento fiector máximo. No obstante, esto puede no ser cierto y hay que considerar otras posibilidades, y calcu lar, por ejemplo, las tensiones principales en los puntos de la sección que son extremos del eje neutro, aunque, como ya hemos dicho, por lo general, los valores de zrmit sean pequeños frente a rmáI y
Si la sustentación de la viga no es el apoyo simple, o si la sección del prism a no es circu lar, se pueden calcu lar los valores de las tensiones principales en diversos puntos del prisma, en los que bien la tensión normal o bien la tensión cortante tomen valores máximos, y com pararlos. Se tendrá de esta forma una razonable seguridad de haber obtenido los máximos valores absolutos de las tensiones.
Si se trata de calcu lar el diámetro de un eje, éste se determ inará a partir de estos máximos valores absolutos que, en general, serán los dados por las ecuaciones (10.3-6), ap licando alguno de los criterios de resistencia que ya conocemos.
Dentro de éstos es quizás el de Tresca el que nos resulte de más com odidad a la par que nos aporta la m ayor seguridad. Según este criterio, si el lím ite elástico es a t se tendrá que verificar:
( 1 0 . 3 - 7 )
a
S O L I C I TA C I O N E S C O M B I N A D A S 6 2 1
v, en virtud de (10.3-6), resulta:
r > 3 p / 'v/f + M1 (10.3-8)n o .
10.4. Torsión y cortadura. Resortes de torsión
Otro ejemplo típico de torsión com binada es el de los muelles o resortes de torsión.Consideremos un alam bre de sección transversal constante, que supondremos circular,
cuya fibra media adopte la configuración geom étrica de una hélice y esté sometido a un esfuerzo de tracción F en la dirección dé su eje.
Realizando un corte en una sección recta, en el centro de gravedad de la m isma existirá una fuerza igual y contraria a f y u n momento M opuesto al de la fuerza F respecto de G (Fig. 10.7).
Tomaremos como eje Gy la intersección del p lano de la sección con el plano que contiene a F y es tangente a la fibra m edia en G (p lano que, para la sección que se ha tom ado en h figuTa, es parale lo a l plano del papel, por lo que los vectores F y M , asi como sus componentes según los ejes Gx y G y pertenecientes a este plano, aparecen representados en verdadera m agnitud).
La fuerza F adm ite dos componentes:
N *= F -eos 0(10.4-1)
Tt = F -sen O
siendo O el ángulo helicoidal que es constante para todas las secciones del muelle.
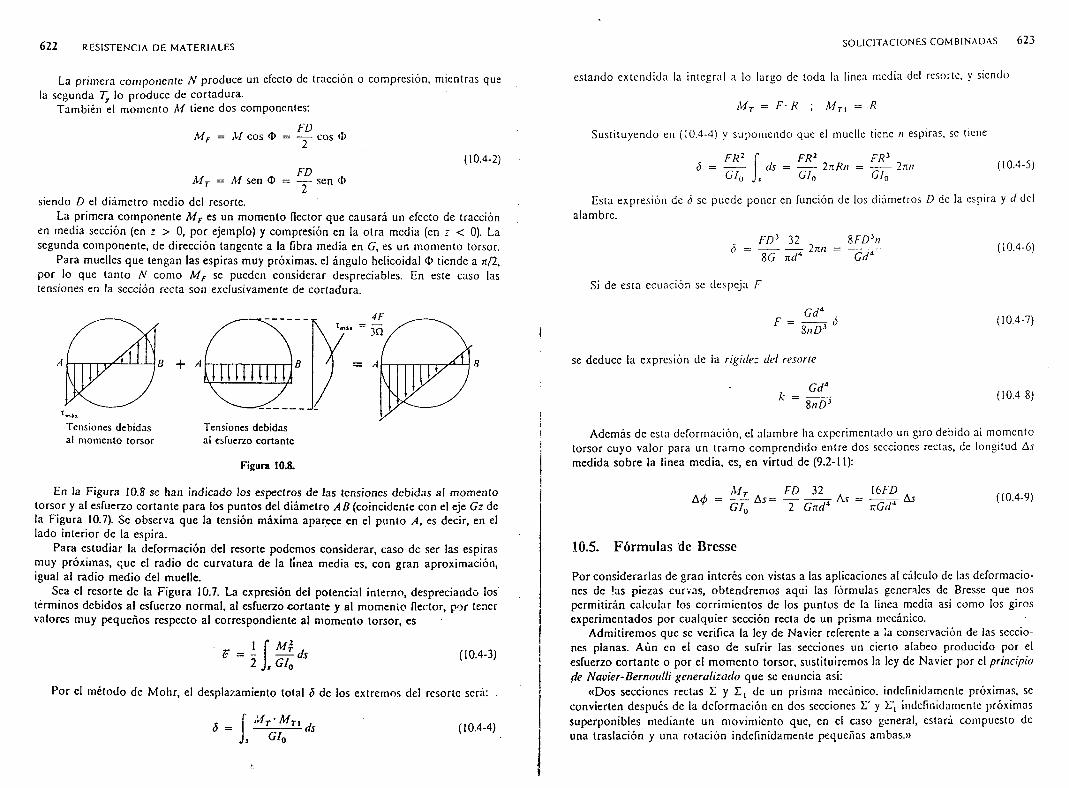
6 2 2 R E S I S T E N C I A D E M A T E R I A L E S
La primera c o m p o n e n t e N produce un efecto de tracción o compresión, mientras que ia segunda Tr lo produce de cortadura.
También el momento M tiene dos componentes:
FDM f = Xí eos <t> = — eos O
FDM T — Xí sen O = sen O
(10.4-2)
siendo D el diám etro medio del resorte.La primera componente M f es un momento flector que causará un efecto de tracción
en media sección (en 2 > 0, por ejemplo) y compresión en la otra media (en r < 0). La segunda componente, de dirección tangente a la fibra media en G, es un momento torsor.
Para muelles que tengan las espiras muy próximas, el ángulo helicoidal <J> tiende a n ¡2, por lo que tanto N como M F se pueden considerar despreciables. En este caso las tensiones en la sección recta son exclusivamente de cortadura.
Tensiones debidas al momento torsor al esfuerzo cortante
Figura 10.8.
En la F igura 10.8 se han indicado los espectros de las tensiones debidas al momento torsor y al esfuerzo cortante para los puntos del diám etro AB (coincidente con el eje Gz de la F igura 10.7). Se observa que la tensión máxima aparece en el punto A, es decir, en el lado interior de la espira.
Para estud iar la deformación del resorte podemos considerar, caso de ser las espiras muy próximas, que el radio de curvatura de la línea media es, con gran aproximación, igual al radio medio del muelle.
Sea el resorte de la F igura 10.7. La expresión del potencial interno, despreciando los términos debidos al esfuerzo norm al, al esfuerzo cortante y al momento flector, por tener valores m uy pequeños respecto al correspondiente al momento torsor, es
f = i2 M ds(10.4-3)
Por el método de Mohr, el desplazam iento total 5 de los extremos del resorte será:
M t - M t ,5 =
g i q- d s (10.4-4)
SOLICITACIONES COMBI NADAS 6 2 3
estando extendida la integral a lo largo de toda la línea media del resorte, y siendo
XfT = F - R ; XÍT¡ = R
Sustituyendo en (10.4-4) y suponiendo que el muelle tiene n espiras, se tiene
<5 =FR
G 1o J
r n )d s = — 2a Rn = — 2 nn (10.4-5)
G/n C/n
Esta expresión de <5 se puede poner en función de los diámetros D de la espira y d del alambre.
. FDi 32 8FD'n= ---------- T 271/1 = — — 10.4-6
8G ad 4 Gd
Si de esta ecuación se despeja F
G dA . ., n , ...
se deduce la expresión de la r i g i d e z d e l r e s o r t e
' * - £
Además de esta deformación, el alam bre ha experimentado un giro debido al momento torsor cuyo valor para un tram o comprendido entre dos secciones rectas, de longitud As medida sobre la linea m edia, es, en virtud de (9.2-11):
Xír , FD 32 A 16 FD . . . . Q.A<¡> = -pz r Ax = - z r 7r - 73: Ar = — As (10.4-9)G í0 2 G nd nGd
10.5. Fórmulas de Bresse
Por considerarlas de gran interés con vistas a las aplicaciones al cálculo de las deformaciones de las piezas curvas, obtendrem os aqui las fórmulas generales de Bresse que nosperm itirán ca lcu lar los corrim ientos de los puntos de la línea media asi como los girosexperim entados por cualqu ier sección recta de un prisma mecánico.
Adm itirem os que se verifica la ley de Navier referente a ia conservación de las secciones planas. Aún en el caso de sufrir las secciones un cierto alabeo producido por el esfuerzo cortante o por el m om ento torsor, sustituiremos la ley de Navier por el p r in c ip i o d e N a v i e r -B e rn ou l l i g e n e r a l i z a d o que se enuncia asi:
«D os secciones rectas L y L , de un prisma mecánico, indefinidamente próximas, se convierten después de la deformación en dos secciones I ' y L j indefinidamente próximas superponibles m ediante un movim iento que, en el caso general, estará compuesto de una traslación y una rotación indefinidamente pequeñas am bas.»

6 2 4 RESISTENCIA DE MATERIALES
Consideremos, pues, dos secciones rectas I y I , correspondienles a las abscisas curvilíneas s y s + ds, medidas sobre la linea media.
Antes de !a deformación, el movimiento para superponer X y X, consta de una traslación 7. d s y de una rotación di ds iF ig. 10.9-a), si /. y d i son la traslación y giro, respectivamente, por unidad de longitud de línea media entre las secciones rectas del prism a mecánico. _
Después de la deformación, la traslación tiene por valor (/. + 5/ .)d s y la rotación (w -t- 5o7) d s (Fig. 10.9-6).
Por tanto, después de la deformación la sección Xj sufre un desplazam iento relativo respecto de la misma sección Xj antes de la deformación, compuesto de una traslación
(/. + ¿>/.}ds — /. d s = ó/, d s (10.5-1)
y de una rotación:
(cu + ¿ d ¡ ) d s — d i d s — 5(3 d s (10.5-2)
Obsérvese que se ha despreciado la traslación debida al ángulo de giro. Esto es válido por tratarse de un infinitésimo de orden superior respecto a 5/. ■ ds. En edicto, el módulo de la traslación de Xt debida al ángulo de giro de X será:
I<5c5 ds x íá| = ó w d s 2
Consideremos ahora dos secciones rectas I 0 y Z , de abscisas curvilíneas j „ y hrespectivamente. En este caso no será válido despreciar la traslación deb ida al ángulo degiro, pues el radio no será, en general, un diferencial, y al g ira r cualqu ier sección intermedia j un cierto ángulo arrastrará en su giro a todo el resto de la pieza (F ig. 10.10).
Debido a! giro de la sección ó la sección X, de centro de gravedad G¡ experim enta una traslación:
5(3 ds x G G 2
S OLICITACIONES C O M B I N A D A S 6 2 5
J «o ds
lu irusiacion ue ia sección z., aeo ia a al giro de todas las secciones interm edias.considerando el efecto de todas estas secciones intermedias, es:
5(3 d s x GG¡ = i (<5df x GG 2) d sJ 30
Por consiguiente, la traslación total será:
057. + 5(3 x G G ¡) d s
v la rotación:
w - | 5<3 d sJ 3o
(10.5-3)
(10.5-4)
(10.5-5)
Si la sección X0 pasa a la posición X'0 m ediante la traslación J„ y el giro <30, las ecuaciones (10.5-4) y (10.5-5) se convierten en:
_ , En _ __k = .2 0 + <30xG0G j + I (<5¿ + 5(3 x GGt ) d s
Jso
(3 = (3n + 5(3 d s
(10.5-6)
(10.5-7)
Veamos cómo están relacionados 5X y 5(3 con los esfuerzos que se derivan en el prisma mecánico ante una so licitación externa general.
Del razonamiento hecho anteriorm ente se deduce que 5?. y 5(3 son la traslación y el giro de una sección debidos a la deformación. La causa de la traslación definida por 57 en la sección X (Fig. 10.11) es la resultante R de las fuerzas que actúan sobre la parte s itu ada
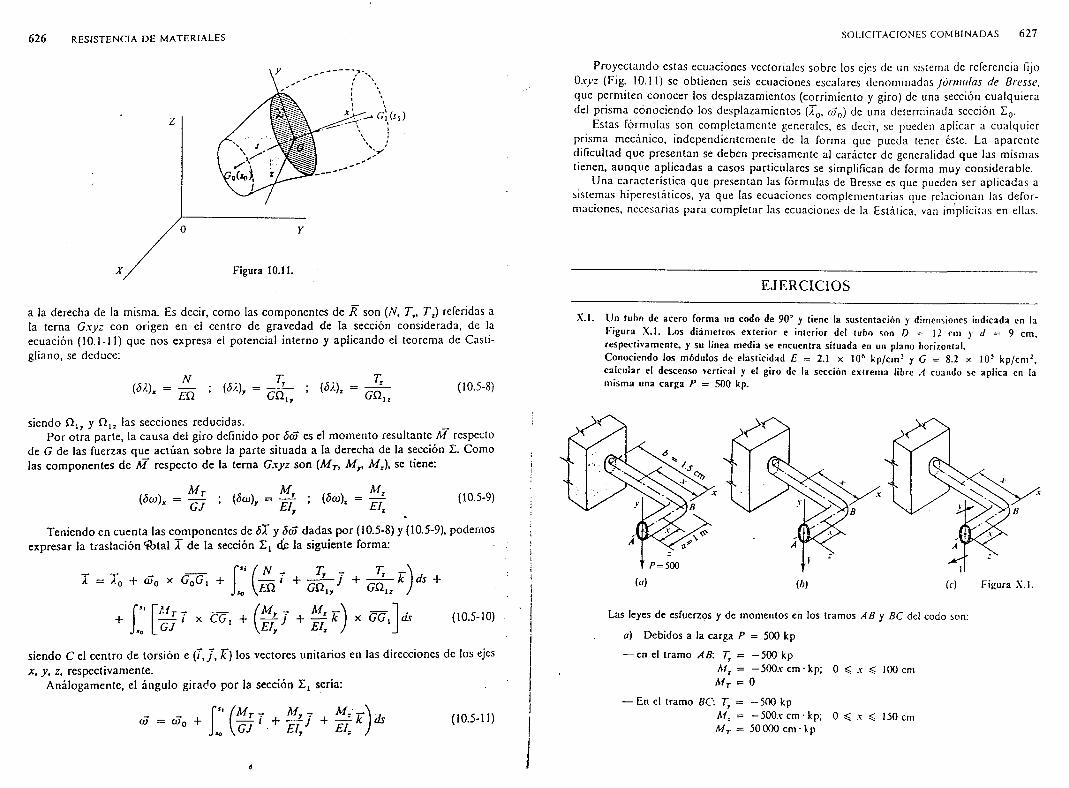
6 2 6 RESI STENCI A DE MA T E R I AL E S
a la derecha de la misma. Es decir, como las componentes de R son (N, T„ T z) referidas a la terna G.xyz con origen en el centro de gravedad de la sección considerada, de la ecuación (10.1-11) que nos expresa el potencial interno y ap licando el teorema de Casti- gliano, se deduce:
; ( « ) , enT T.
; (¿A), = — -cn,2 (10.5-8)
siendo n , , y f i l2 las secciones reducidas. _Por otra parte, la causa del giro definido por 6(3 es el momento resultante M respecto
de G de las fuerzas que actúan sobre la parte situada a la derecha de la sección Z. Como las componentes de M respecto de la terna G.xyz son (AfT, M y, M z), se tiene:
(*“)■ = § : (5cü)' “ W y ’ ^ = %(10.5-9)
Teniendo en cuenta las componentes de ¿X y Sw dadas por (10.5-8) y (10.5-9), podemos expresar la tras lac ió n 'tb ta l X de la sección Z t dje la siguiente forma:
A. = A.0 + <30 x G0G ! +N
EQ ' + G ü ly J + T* k \ d s +GC2lz
§ r *“ ' + ( t ; + é F) xCC‘. d s (10.5-10)
siendo C el centro de torsión e ( f , J , k ) los vectores unitarios en las direcciones de ios ejes x, y , z, respectivamente.
Análogam ente, el ángu lo girado por la sección Z , sería:
M r - ,G J
i +M y
El,j +
M z .EL
1c I d s (10.5-11)
SOLICI TACI ONES C O M BI N A D A S 6 2 7
Proyectando estas ecuaciones vectoriales sobre los ejes de un sistema de referencia fijo O.vvz (Fig. 10.11) se obtienen seis ecuaciones escalares denominadas f ó r m u l a s d e B r e s s e , que permiten conocer los desplazam ientos (corrimiento y giro) de una sección cualqu iera del prisma conociendo los desplazam ientos (Á0, uj0) de una determinada sección Z0.
Estas fórmulas son completamente generales, es decir, se pueden ap licar a cualqu ier prisma m ecánico, independientemente de la forma que pueda tener éste. La aparente dificultad que presentan se deben precisamente al carácter de generalidad que las m ismas tienen, aunque ap licadas a casos particulares se simplifican de forma muy considerable.
Una característica que presentan las fórmulas de Bresse es que pueden ser ap licadas a sistemas hiperestáticos, ya que las ecuaciones com plem entarias que relacionan las deformaciones, necesarias para com pletar las ecuaciones de la Estática, van implícitas en ellas.
E JERCICIO S
X.l. Un tubo de acero forma un codo de 90° y tiene la sustentación y dimensiones indicada en la Figura X.L Los diámetros exterior e interior del tubo son D = 12 cm y d = 9 cm, respectivamente, y su línea media se encuentra situada en un plano horizontal.Conociendo los módulos de elasticidad E = 2.1 x 106 kp/cm’ y G = 8.2 x 105 kp/cm2, calcular el descenso vertical y el giro de la sección extrema libre A cuando se aplica en la misma una carga P = 500 kp.
Las leyes de esfuerzos y de momentos en los tramos AB y BC del codo son:
a) Debidos a la carga P = 500 kp
— en el tramo AB: Ty = —500 kpM. = — SOO.vcm-kp; 0 í x ^ 100 cm M t = 0
— En el tramo BC: Tf = —500 kpM. - — 500.r cm ■ kp; 0 í 150 cm Mt = 50000 cm • kp

6 2 8 RESISTENCIA DE MATERI A! . FS
h) Debidos a una carga unidad aplicada en la sección extrema A (Fig. 8.1-6)
— en el tramo AB. Ttl = —IA/., v ; 0 s; v ^ 100 cm
- 0
— en el tramo BC: T ¡ = —1A/., = t .v : 0 C t í 150 cm A/,, = 100
c) Debidos a un momento unidad aplicado a la sección extrema A (Fig. X.I-c)— en el tramo AB: Tt¡ = 0
AC, = I Af T¡ = 0
— en el tramo BC: TfX = 0A /., = 0 A / , , = - 1
Para calcular el descenso vertical de la sección A aplicaremos el método de Mohr. Despreciando el efecto producido por el esfuerzo cortante, tenemos:
A/.Ai.i/.V +
¿7.
50 000 x 100
M TM TlC ¡a
íl.X =500v-
EE- í/.V +
500.V 2
~fJ7 dx +
01,dx 2.1 x 10° x íi(
500 X- ^ L __ 1 (1003 + 150J ) +íi( 12 - 9 ) 3
5 x 10° x 328.2 x 105 x zr( 12"1 - 94)
150 = 0.1397 + 0.6572 cm = 0.797 cm
<5 , = 0.797 cm
El signo positivo nos indica que el desplazamiento de la sección extrema A tiene el mismo sentido que el de la carga Ficticia aplicada, es decir, que tiene sentido descendente.
Análoeamente, para calcular el giro de la sección A aplicaremos también el método de Mohr
ACA/.,
EEdx + M tMt,
GI0dx =
500 v ~EL
- dx -150 50 000
GEdx--
500 x 64 100* 50 000x321 2.1 x 10” x n(I24 — 94) 2 8.2 x 105 x n(124 - 9 4)
150= 1.71 x 10“3 —6.57 x 10“
0. = -0.00486 rad
El signo negativo nos indica que el giro de la sección extrema A tiene el sentido opuesto al del momento ficticio aplicado, es decir, el giro experimentado por la sección tiene sentido antihorario.
&
S OLICITACIONES C O M B I N A DA S 6 2 9
X.2. --------- , “ — V “ V 14MM 1 CJIJIUIIV-IU, U C l u i l g l i u u i — I.IIW !!■« t i UIIJIIIIIV U l l i l put t . I IX. l t l | T — Ut/I)
CV girando a n — 300 rpm. El árbol lleva fi¡n un volante que equidista de las poleas y pesa P = 1500 kp. Se supone que los cojinetes están situados en los centros de las poleas.Calcular el radio mínimo del árbol si la tensión admisible a tracción es trJlíal = 1600 kp/cm’.
Volante
El árbol está solicitado a torsión y a flexión. Según se ve en la Figura X.2 la sección del ejesometida a mayor momento fiector es la situada en la mitad del eje.
Pl 1500 x 1.8XIf — — - --------------- — 675 m ■ kp
4 4
El momento fiector Mf origina una distribución lineal de tensiones normales, cuyo valormáximo se presenta en los puntos de las fibras superior e inferior:
Mr M r 2 MFa - ' = w . = - r R = - ¡ f R
Por su parte, el momento torsor produce una distribución de tensiones de cortadura cuyo valor máximo, para los puntos periféricos, es:
c3 r - t L i Rr má* — Ain
De las condiciones dadas en el enunciado se deduce el valor de A/r. Si N se expresa en CV, se tiene
60 x 75 „ 2250 x 800M T = —-------- N = ——----— = 1910 m -kp
2mt 3.14 x 300
En los puntos que presentan simultáneamente los valores de cr^, y rml, se pueden calcular los valores de las tensiones principales y la tensión de cortadura máxima rml„ mediante el circulo de Mohr.
fmi* 2 s/^mSx "F 4tmJ,

6 3 0 R E S I ST EN CI A DE MAT E R I AL E S
Sustituyendo los valores de cm4l y rml, en función de los momentos Mr y M T queda:
Aplicando el criterio de Tresca, se habrá de verificar
2 fde donde
4 x 10: k x 1600
y Jb lS 1 + 19102 cm3 = 161.20 cm3
R = 55 mm
X.3. Un redondo de acero al carbono que tiene la forma y dimensiones indicadas en la Figura X3-o está perfectamente empotrado en un paramento vertical.Calcular el radio necesario para resistir una carga P = 250 kp aplicada en el punto medio del lado paralelo al paramento, si las tensiones máximas admisibles a tracción y cortadura son cr,dm = 1200 kp/cm2 y Ttdm = 720 kp/cm2 respectivamente. ***
Supondremos la dimensión b pequeña en relación a a. Esto nos permite considerar la parte AB empotrada en sus extremos.
Esta parte trabaja a flexión, mientras que las BC y AD a torsión principalmente. Los momentos de empotramiento en A y B son precisamente los momentos torsores que actúan sobre AD y BC.
Supongamos, pues, una viga recta de longitud a = 1.20 m empotrada en sus extremos: y cargada en su punto medio con P = 250 kp. Los momentos de empotramiento en B y A son iguales, por razón de simetría.
De la observación del diagrama de momentos flectores en esta viga (Fig. X.3-6), se deduce que los momentos de empotramiento son, en valor absoluto:
Pa 250 x 1.20= 3 7 . 5 m ■ k p
SOLI C I TACI ONES C O M B I N A D A S 6 3 1
P = 250 kp
C /
a= 1.20m
D
F ig u r a X -3 -u .
F ig u r a X .3 -6 .
y que el momento flector máximo tiene también este valor.
A/ml< = 3750 cm • kp = W. ■ a ,a
de donde:
4 x 3750 3.14 x 1200
= 4 cm3
el diámetro del redondo será:
O = 32 mm
Este resultado será válido si no se supera en AD y BC la tensión admisible a cortadura.Se comprueba, en efecto, que la tensión de cortadura máxima en estos tramos es:
M t „ idm . i 2 "7-tn t I 1= - ¡ y = —n ,3 — = 600 kp/cm2 < r,dm = 720 kp/cm-
Un prisma mecánico de linea media rectilínea y sección recta constante está sometido a flexión y torsión combinadas. En un punto P del prisma, se pide:
1.” Determinar la matriz de tensiones.2° Calcular las tensiones principales.3.° Hallar las relaciones que tienen que verificar las componentes de la matriz de tensiones
para que el material del prisma en el punto P no se plastifique si se toma como criterio:а) el criterio de la tensión principal máxima, ó) el criterio de Trcsca.б) el criterio de von Mises.

6 3 2 RESISTENCIA DE MAT E R I AL E S
1 “ T o m a n d o un s is tema de referencia de eje .v co inc idem e con la línea m ed ia y ejes r. : los pr in c ipa le s de inerc ia de la sección en la que se encuentra s i tu ado el punto P, el m om ento (lector, que . en genera l, tendrá co m ponen tes M d a r á luga r a tensiones (7^, ; u , sobre las c a r a s de un en torno e lem enta l que envuelva al punto O. El va lo r de la pr im era vendrá d a d a por la ley de Navier : la s o tras dos. por la fó rm ula de Colignon.
El m o m e n to torsor, po r su par te , d a r á lu ga r a tensiones ry l, r , . .En v ir tud del pr inc ip io de superpos ic ión , la m atr iz de tensiones sera
[<*.. U» Tx
11 0 0r , . 0 0
2 ° De la m a t r iz de icns iones se deduce la ecuac ió n carac ter ís t ica
ot , . 0 — a
— a j + axxa~ + (rf,. + = 0
de la que se ob t ienen la s tensiones pr inc ipa le s :
3 o a) Seeún el criterio de la tensión principal máxima el valor de ésta tiene que ser menor que el límite elástico a t
a , < a , => u„, + J a \ x + 4(t*, + r;_) < 2<r,
b\ Si se aplica el criterio de Tresca se tiene que verificar
a ;x + 4 (t;r + r ;.) < a ;
<■) Según el criterio de von Mises:
(cr, - C,)- + (<r, — Uj)2 + (<r3 — CT,)2 < 2a2
«
SOLI C I TACI ONES C O M B I N A D A S 6 3 3
Sustituyendo las expresiones de las tensiones principales anteriormente obtenidas y simplificando se obtiene:
+ 3 ( r ; y + r ; . ) < a ;
Un prisma cilindrico de sección recta circular de radio R = 5 cm y longitud / = I m está empotrado en un extremo y libre en el otro, de forma que su línea media está contenida en un plano horizontal. Mediante una pieza de rigidez infinita, unida a la sección del extremo libre, se aplica una carga P = 500 kp cuya línea de acción se encuentra a distancia J = 30 cm del eje vertical que contiene el centro de la "sección. Se pide:
1." Determinar la ley de variación del módulo del vector tensión en los puntos de la generatriz superior del prisma para planos perpendiculares a la línea media.
2° Conociendo los valores de los módulos de elasticidad E = 2.1 x 106 kp/cm2 y G = 8.4 x 105 kp/cm2, calcular el corrimiento vertical del punto de la línea de acción de la carga que antes de ser aplicada pertenece al plano horizontal que contiene a la línea media del prisma.
Una sección a distancia ,x del extremo libre se encuentra sometida a un momento (lector MF — — Px y a un momento torsor M T = Pd.
En el punto de la generatriz superior ¿ B y en el plano de la sección el vector tensión correspondiente tiene de componentes intrínsecas la trmJ, debida al momento (lector y la
debida al momento torsor.
Mr _ <t fxR =
/. trB2
M j 2 PdR =
‘ o
Por tanto, la ley de variación del módulo del vector tensión será:

6 3 4 RESI STENCI A DE M A T E R I A L E S
Sustituyendo valores, se obtiene:
4 x 5007t x 53
3 0 V + I y ) = 5.09v/.t2 + 225 kp/cm2
2.” El descenso del punto C consta de dos términos: uno, el correspondiente al descenso del centro 0 de la sección extrema debido a la flexión que, como sabemos, tiene por expresión
¿o =PP 4 PP
3EL 3EnR*
y otro, debido a la torsión del prisma.El giro de la sección extrema, según (9.2-11) es:
M rGIn
El corrimiento debido al giro será
M T _ 2Pd2IGI0 ~ GnR4
Por tanto, el corrimiento vertical del punto C será:
2 Pl í l P4 PP 2 P d2lc ~ 3EnR* + GnR1 ~ nR4 \3£
d 2~G
Sustituyendo valores:
2 x 500 x 100¿ c =
se obtiene:
n x 5*2 x 1002 302
3 x 2.1 x 106 8.4 x 103, cm = 0.216 cm
ó c = 2.16 mm
X.6. Sobte una pieza de forma paralelepipédica, cuyas longitudes de las aristas son: a = 40 cm; b = 20 cm; c = 10 cm, actúa la solicitacióqjndicada^ en la Figura X.6-a y compuesta pon
a) un momento flector M f = 200 m • kp, que se supondrá uniformemente repartido en planos perpendiculares a las caras de aristas de longitudes a y c .
b) un momento torsor M'T = 80 m • kp, de eje paralelo a la arista de longitud a.c ) un momento torsor M'j = 210 m- kp de eje paralelo a la arista de longitud b.
Calcular el vector tensión en el punto L, centro de la cara superior, para la orientación definida por el plano que pasa por L y por los vértices E y J.
Veamos qué tensiones existen en las caras del elemento que rodea al punto L, referida al sistema 0xyz indicado en la Figura X.6-6..
El momento flector M f produce una tensión normal cr,, (Fig. X.6-c), de valor
Mr°n, = r =
1 2 A f f cac3 2
6 M r-„2
6 X 2 0 0 X 1 0 24 0 x 1 0 2
= — 3 0 k p / c m 2
S O L I C I TACI ONE S C OM B I N A D A S 6 3 5
Figura X.6-a. 3 ^ ¡ ¡gura X.6-b.
O- i----\ >
***— ^ —
Figura X.6-C. Figura X.6-d. Figura X.6-e.
Por su parte, el momento torsor M\ da lugar a una tensión tangencial xty (Fig. X.6-d) cuyo valor se deduce dé las Tablas 9.1 y 9.2, teniendo en cuenta que es en el punto L de la sección rectangular en el que se presenta la tensión máxima
ab e280 x I02
0.246 x 20 x 10-= —16.26 kp/cm2
2: a = 0.246.
Análogamente, el momento torsor M'í da lugar a otra tensión (Fig. X.6-e), de valor
ya que para - c
M r 210 x I02 0.282 x 40 x I0:
= 18.62 kp/cm2
ya que para - = 4: a — 0.282. c
La superposición de los tres efectos da lugar a un estado tensional, cuya matriz de tensiones en L es
' 0 2.36 0 'm = 2.36 -3 0 0
0 0 o j
Veamos ahora cuál es el vector unitario normal al plano BEJ
£(20, 10, 5) £ (-2 0 , -1 0 , 5) / (-20 , 10, - 5 )
£ £ (-4 0 . -2 0 , 0): £ 2 (-4 0 . 0. -1 0 ) £ j x ££ = -2007 + 400/ + 800k

6 3 6 R ESI STENCI A DE MAT E R I AL E S
De este producto vectorial, normal al plano, se deduce el vector unitario i7 al mismo
El vector tensión pedido es, pues
' 0 2 .36 0^ ' - í / y i r ' 1.03 '[ ,T ] = [ 7 - ] [ , 7 ] = 2 .36 - 3 0 0 2/v / 2 ! = - 1 3 .6 0OOO
v 4 / ^ 2 J L 0 ,
es decir, el vector tensión en L, para la orientación definida por el vector unitario ü, es paralelo al plano de la cara superior de la pieza. Su módulo es:
a = v' 1.032 + 13.602 = 13.64 kp/cm2
X.7. Un tubo de acero de radio exterior R ~ 10 cm y espesor e = 1 cm y de longitud prácticamente indefinida está sometido a un momento torsor ¡\tT — 600 m ■ kp y a una presión interna p. Conociendo el valor de la tensión admisible en el material, tanto a tracción como a compresión,
— 1-0 kp/cm2 y admitiendo que las tensiones tangenciales debidas al momento torsor son uniformes en el espesor, determinar el máximo valor que puede tomar la presión interna p.
Aislando un elemento limitado por dos planos diametrales y por dos planos transversales, indefinidamente próximos entre si ambos (Fig. X.7-a), se tienen sobre sus caras las tensiones indicadas en la Figura X.7-h.
El valor de la tensión normal a se puede obtener planteando el equilibrio en medio tubo (Fig. X.7-c) de longitud unidad
2 a e = 2p R ¡
p sen 0 ■ R¡ (10 => a — = 9pe
siendo R, el radio interior.
S OLI CI TACI ONES C O M B I N A D A S 6 3 7
i_a len sion tan g en c ia l r es üeD iaa a l m om ento to rso i. au vuiui, si u i- i es.
,V/r 600 x I02 x 2 „ , 2t = —- R = ---------------------- 9.5 = 105.52 kp/cm2
/„ m MIO4 - 9 )
Podemos considerar que el elemento está sometido a deformación plana. Teniendo en cuenta que la tensión principal máxima no puede superar el valor <r,dm = 12(30 kp/cm*, del circulo de Mohr (Fig. X.7-e) se deduce:
'9p\z i + I05.522 = 1200 kp/cm2
de donde:
p í 132.3 kp/cm2
X.8. Un eje vertical de acero dulce del tipo A 37, que está empotrado por su extremo inferior, tiene un radio R = 5 cm. En la sección extrema superior se aplica un momento torsor M T = 1000 ni • kp y sobre ella descansa una carga P — 10 ton.Estudiar e l estado tensional ex is tente en e l interior del eje calculando en particular las tensiones principales en magnitud y dirección para un punto a distancia r = R/2 del eje geométrico de la pieza.Comprobar si es superada en algún punto la tensión máxima admisible.Datos del acero A 37: <r,dm = 1200 kp/cm2; r ldm = 800 kp/cm2.
El eje considerado está solicitado per una acción combinada de compresión y torsión.Sea P un punto interior a distancia r del centro de la sección recta que la contiene. El
primer efecto de compresión se traduce, para una superficie elemental que rodea a P y está contenida en la sección recta, en una tensión normal a„ a la superficie, de valor:
Pñ ¥
-1 0 0 0 0 3.14 x 52
7 = -127.32 kp/cm2
que es constante cn toda la pieza.

RESI STENCI A DE MATERIALES
Por otra parte el momento torsor M T causa una tensión de cortadura r contenida en el plano de la sección recta, perpendicular al radio CP y de valor:
M T 1MT 1 x 100 000 5 , , ,r = — r = — r r = — —------- j - - kp/cm2 = 254.65 kp/cm-
/„ x/ r 3.14 x 5 2
Sea n el plano que contiene a ambas tensiones. Este plano resulta paralelo al eje de lapieza y perpendicular por tanto a la sección recta. Considerando un haz de planos quecontienen el radio CP se pueden obtener para estas orientaciones las componentes normal y tangencial del vector tensión utilizando el circulo de Mohr (Fig. X.8-Ó).
Fácilmente se deducen los valores de las tensiones principales:
U = y + 2 s/a ~ + 4r
Sustituyendo valores se obtiene:
cr, = - X- ^ Y ~ + X- N/l27.322 + 4 x 254.652 = 198.8 kp/cm2
<r2 = — — 1 v /l27.322 + 4 x 254.652'= —326.1 kp/cm2
Las tensiones principales están contenidas en el plano n y valen:
cr, = 198.8 kp/cm2 (tracción)
a 2 = —326.1 kp/cm2 (compresión)
del mismo circulo de Mohr se obtienen las direcciones principales:
SOLICITACIONES C OMBI NADAS 6 3 9
de don de :
direcciones contenidas en el plano k indicado en la Figura X.8-n.Las tensiones tangenciales máximas se dan en los puntos periféricos en los que
a„ = — 127.32 kp/cm2
rml< = 2 tf = 509.30 kp/cm2
Las tensiones principales en estos puntos son:
= T + \ ^ + 4 ' 2 = ~ 6 1 6 6 + v X63 .662 + 509 .32 = 449.6 kp/cm2
<r2 = y - — - J a l + 4 r 2 = - 6 3 .6 6 - v '6 3 .6 6 2 + 509 .32 = -5 7 6 .9 2 kp/cm 2
que no supera el valor de la tensión admisible.
X.9. Un eje hueco de acero, de diámetro exterior D = 12 cm e interior d = 6 cm, ha de transmitir una potencia de N — 800 CV girando a n = 500 rpm. El eje está sometido a una compresión de P = 5 ton y es lo suficientemente corto para que no haya que considerar fenómenos de pandeo. También lleva un volante que produce en el eje un momento flector máximo M r.Calcular el mayor valor que puede tener Alr para que el valor de la máxima tensión principal no supere el valor <rjdm = 1000 kp/cm2.El eje que se considera está sometido a una solicitación combinada de compresión, flexión y torsión.
Los valores máximos de la tensión tangencial debida al momento torsor y la normal debida al momento flector se presentan en los puntos de las secciones rectas que pertenecen a las generatrices superior e inferior del eje. Sus correspondientes expresiones son:
M r D 60N 32 D 60 x 800 x 75 x I02 x 32 x 1270 2 2rrn n(Dl - </“) 2 2ir x 500 x rrl^-1 - 6*)2
M f Dj 2
360.25 kp/'cm2
Como la tensión principal máxima es:
J j - J a l + = 1 0 0 0 k p / c m 2

6 4 0 RESISTENCIA DE MATERI ALES
s ie n d o a la te n s ió n n o rm a l en el p u m o q u e se c o n s id e r a , s u p e rp o s ic ió n de la s te n s io n e s n o rm a le s d e b id a s a la f le x ió n y a la c o m p re s ió n . D e e s ta e c u a c ió n se d e d u c e :
a - + 4 r ; Sl = (2 0 0 0 - a ) 2
l ' ) '1 - d , , 10° - 3 6 0 .2 5 -a =1000 1000
= 8 7 0 .2 2 k p / c m -
El c a so l im ite se t ie n e en lo s p u m o s en lo s q u e <rnj< es de c o m p re s ió n . L a s u m a de d e b id a a la f lex ió n y la ten c ió n de la c o m p re s ió n a p l ic a d a a l e je n o p u e d e se r s u p e r io r a o.
El v a lo r de la te n s ió n o . d e b id a a la c o m p re s ió n es , en v a lo r a b s o lu to
4 P 4 x 5 0 0 0= 59 kp/cm *
n[D~ — t i 2) r r ( l2 : - 6 2)
P o r t a m o , la a miL d e b id a a la f lex ió n
a ma< = ir - a , = 8 7 0 .2 2 - 59 = 8 1 1 .2 2 k p / c m 2
y co m o
,1/,. D M f x 64 D
<7”'“ ~ 17 2 ~ ñÍDr H 7 r) 2
d e s p e ja n d o M r y s u s t i tu y e n d o v a lo re s se t ien e :
n ( D 4 - 71(12-* - 6 4 )81 1.27M = _2-------- — 1T2L = _ ------------------------- = 2 9 0 1 9 cm - kp
f i : D 32 x 12 H
es d e c ir , e l m á x im o v a lo r q u e p u ed e te n e r e l m o m e n to flector/V/f es
M f = 1290 .2 m ■ k p
X .10 . U n a v ig a r e c t a , c u y a se cc ió n e s una e lip s e de lo n g itu d e s de s e m ie je s a y b ( a > A), e s tá so m e t id a s im u ltá n e a m e n te en una de su s se c c io n e s a la a c c ió n de un m o m en to f le c to r en la d ire c c ió n de l e je : ( F ig . X .1 0 ) y de un m o m en to to r so r , a m b o s d e l m ism o v a lo r M . D e te rm in a r lo s p un to s de e s ta se c c ió n en lo s q u e la ten s ió n e s m á x im a y c u á l e s su v a lo r .
SO L I C I T A C I ONE S C O M B I N A D A S 6 4 1
V eam o s lo s e fe c to s p ro d u c id o s p o r el m o m e n to to r s o r y p o r e l m o m e n to ( le c to r a c tu a n d o in d e p e n d ie n te m e n te .
F.l m o m en to to r so r , c o m o h em o s v is to en e l e je r c ic io IX .8, d a lu g a r a u n a d is t r ib u c ió n de ten s io n e s t a n g e n c ia le s t a l q u e p a r a un p u n to P ( y , - ) d e la se c c ió n q u e se c o n s id e r a e l m ó d u lo de la ten s ió n d e c o r t a d u r a es:
r = 2M r 7_n u b \ j t i4 + ó 4
P o r su p a r te , el m o m e n to ( le c to r d a lu g a r a u n a d is t r ib u c ió n d e te n s io n e s n o rm a le s , re g id a p o r la le y d e N a v ie r . T e n ie n d o en c u e n ta q u e lo s m o m e n to s d e in e r c ia d e la s e c c ió n re sp ec to de lo s e je s so n
12 . > 71 ./ = — ab ; /. = - a b4 4
la ten s ió n n o rm a l a , en fu n c ió n d e ! m o m e n to f le c to r M , s e rá :
M AM
a = L y = l ^ b y
L a ten s ió n p r in c ip a l m á x im a en e l p u n to P ( y , z), s e g ú n s a b e m o s , e s
I . 2 M / v Í H 1‘ n 2M f »'a , = > + 4 r = _ ? +
A h o ra b ie n , la te n s ió n m á x im a se p r e s e n ta en lo s p u n to s d e l c o n to r n o , e s d e c ir , la s c o o rd e n a d a s d e P v e r if ic a n la e c u a c ió n d e la e lip se
p o r lo q u e e l im in a n d o z e n t r e e s ta s d o s e c u a c io n e s se t ie n e :
2 M
n a b[ y . Iy2 ( 2 Í T T l l 2 M f y . ¡ y 2(2b2 - a1) _ I <<¡>l a 2 + y j a 2 \a2 b2) b 2] ~ nab l a 1 + yj a*b2 + 6 2 J
D e e s ta e x p re s ió n se d e d u c e q u e lo s p u n to s d e la s e c c ió n e n lo s q u e <r, e s m á x im o d e p e n d e d e lo s v a lo re s r e la t iv o s d e o y ó . P u e d e s u c e d e r
l .° S i 2 b 1 — a2 > 0 , o b ie n a < b^/2.a ¡ es u n a fu n c ió n c r e c ie n te d e y , p o r lo q u e su m á x im o e s u n m á x im o a b s o lu to q u e
se p re se n ta en e l v é r t ic e s u p e r io r A. S u v a lo r se o b t ie n e p a r t i c u la r i z a n d o e s t a e c u a c ió n p a r a
y = a
2 M í\ 2 \ _
jrab i a + v a 2 J2 M r
— j t 1 + 7 2 ) n a o

6 4 2 RE S I S T EN CI A DE MATERIALES
2 .” S ¡ a = b f í . .a , e s t a m b ié n u n a fu n c ió n c r e c ie n te . S u m á x im o se p r e s e n ta ta m b ié n e n e l v é r t ic e A. Su
v a lo r es :
2 M :ra2A2
[a + b)
3 .” S i a > b ^ f l .E s tu d ie m o s la fu n c ió n <r, = / ( i-). V e a m o s s i t ie n e m á x im o s r e la t iv o s . S i lo s t ie n e se tien e
q u e v e r if ic a r :
v ( 2 1d a ¡ 2 M
d y n a b
1= 0
d e d o n d e
s o lu c ió n v á l id a s i y ^ a.
a1*22b* + a* - W b 1
X .I I . U n re so r te h e lic o id a l de una b a la n z a p a r a c a r g a m á x im a P = 10 k p t ie n e un d iá m e tro de e s p ir a d e 2/? = 4 cm . S e p id e c a lc u la n
1.° El d iá m e tro de l a la m b re , s i la ten s ió n m á x im a a d m is ib le a c o r ta d u r a e s t , dm = 1000 k p / cm 2.
2.° E l a la r g a m ie n to d e l m u e lle cu an d o e s tá a p l ic a d a la c a r g a m á x im a , s i n = 12 e s e l n úm ero de e s p ir a s .
S e to m a r á co m o m ó d u lo de e la s t ic id a d t r a n s v e r s a l G = 845 x 1 0 3 k p / cm 2.
F i g u r a X . l l .
SOLICITACIONES C OM BI N ADAS 6 4 3
1.” S e g ú n sc h a v is to (F ig . 10 .8), la te n s ió n m á x im a d e c o r ta d u r a en la se cc ió n de un m u e lle se p r e se n ta en e l p u n to in t e r io r d e la e s p ir a . E sta ten s ió n m á x im a c o n s ta d e d o s té rm in o s : r , . d e b id a a l m o m e n to to r so r
\ 1 T = P R
y t 2, d e b id a a l e s fu e rz o c o r la n t e
2 P R
S e te n d r á q u e v e r if ic a r .
2 P R APu + u = — r + s—’ ^n r i n r
S u s t i tu y e n d o v a lo r e s :
2 x 10 x 20 4 x 10T í 10 kp/cm *
3 .1 4 r3 3 x 3 .1 4 r2
en d o n d e r v ien e e x p r e s a d o en m il ím e tro s . E sta in e c u a c ió n sc p u ed e re so lv e r p o r ta n te o v ie n d o c l m e n o r v a lo r e n te r o d c r q u e la s a t is fa c e .
R e s u lta :
r = 3 m m
2." A p lic a n d o la e c u a c ió n (1 0 .4 -5 ) te n e m o s :
P R 3 10 x 2 3 x 2rt x 12<5 = — — 2n n = ----------------------------- — r = 0 .5 5 cm
GIn - 71 X 0.30 8 .5 x 1 0 3 ----------------
O S = 5 .5 m m
X .12 . U n re so r te h e lic o id a l co m p u e s to e s tá fo rm ad o por dos re so r te s , co lo cad o uno en e l in te r io r del o tro . L a s c a r a c t e r ís t ic a s d e l r e s o r te in te r io r so n la s s ig u ien te s : t ien e n , = 10 e s p ir a s de d iá m e tro d ¡ = 5 m m , e l d iá m e t r o m ed io e s D x = 6 0 m m y su lo n g itu d cu an d o no e s tá so m e tid o a e s fu e rz o a lg u n o e s /, = 8 0 m m .E l r e so r te e x t e r io r tien e n 2 = 8 e s p ir a s d e d iá m e tro d , = 7 m m , su d iá m e tro m ed io es D 2 = 7 5 m m y su lo n g itu d c u a n d o no e s tá c o m p r im id o l 2 = 70 m m .S e c o m p rim e n a m b o s re so r te s e n tr e d o s p la c a s p a r a le la s h a s ta q ue la d is ta n c ia en tre la s dos p la c a s e s de 6 0 m m . S i e l m ó d u lo d e e la s t ic id a d t ra n s v e rs a l es G = 8 .4 x 105 kp / cm 2, se p ide:
1.° C a lc u la r la r ig id e z d e c a d a uno de lo s re so r te s .2.° H a l la r la c a r g a a p l ic a d a a l a s p la c a s .3 .” D e te r m in a r e l v a lo r dc la te n s ió n m á x im a de c o r ta d u ra en c a d a re so rte .

6 4 4 RESI STENCI A DE MATERIALES
I." La rigidez de cada resoné es. según la expresión (10.4-81
Gdt S 400 x 5 4
8/1, Df S - 600.303S kp/cm
Gdi 8400 x 74 8/i,D f ~ S~~x 8 x 753
0.7469 kp/cm
2.° La carga que sopona cada uno de los resortes es:
F, = A, o, = 0.3038(80 - 60) = 6.076 kp
F, = A,ó, = 0.7469(70 - 60) = 7.469 kp
La carga total aplicada a las placas será
F = F, + F, = 6.076 + 7.469 = 13.545 kp
3.° Despreciando el efecto del esfuerzo cortante la tensión tangencia! en un resorte será la debida al momento torsor. Su valor máximo es:
_ A/,- d _ 8 FDTml‘ ~ 7 7 2 ~ Y F
Particularizando esta ecuación para los resortes interior y exterior, respectivamente,tenemos
8F,D, _ 8 x 6.076 x 60 ■ndl k x 53
7.427 kp/cm2
Ctml.8 F,D,nd\
x 7.469 x 75 i x 7J
4.159 kp/cm2
X.I3. Se quiere construir un resorte helicoidal de rigidez k = I kp/cm, tal que su longitud con las espiras tocándose entre si se« I = 60 mm, para una carga máxima de P = 5 kp. Sabiendo que la tensión tangencial admisible del material es t , ím = 800 kp/cm2 y que su módulo de elasticidad transversal es C = 6 x 105 kp/cm2 se pide calcular el diámetro del alambre, el diámetro medio del resorte y el número de espiras.
De la expresión (10.4-8) que nos da la rigidez se deduce una relación entre las incógnitas
G<t* S 8 X 1 0 '1 4k =
8//D3SA , 8 x 1 0 -1
d-1 = — nO3 = ------------r nD¡ =G 6 x I0J 3 x 104
s
S OLI C I TACI ONE S C O M B I N A DA S 6 4 5
La condición de longitud del resorte c a n d o las espiras se tocan nos proporciona la ecuación
mi — / — 60 mm
y de la condición de ser la tensión tangencial máxima igual a la tensión admisible a cortadura, se tiene:
_ n P D d _ 8 PDr"“' - Y u F 2 ~ Y iF
x #5 x Dmi*
D = 0.6283</3
Sustituyendo en la primera ecuación, teniendo en cuenta la segunda:
4 60,/4
3 x I04 d— 0.62833i/‘í => i/4 = 503.97 mm4
de donde:
d = 4.74 mm
D = 0.6283 • r/3 D — 66.2 mm
Finalmente, el número /> de espiras es:
/ _ 60 " ~ d ~ 4/74
n = 13
X.14. Cuando se comprime un resorte helicoidal de n — 10 espiras cerradas, produciéndose un acortamiento S = 5 cm, se absorbe una energía F = 2.5 m- kp. Si el diámetro medio de la espira es nueve veces el del alambre, calcular los diámetros de la espira y del alambre, asi como el valor de la tensión tangencial máxima.El módulo de elasticidad transversal es G = 8.4 x 105 kp/cm2.
De la expresión de la energía de deformación, expresada como trabajo de las fuerzas exteriores.
F = - F¿
se deduce el valor de la fuerza que comprime el resorte
2.5 x 102 = X- F x 5 F = 100 kp
Como D = 9r/ y n = 10, en virtud de (10.4-6), se tiene:
S =8F D \ 8 x 100 x 9V 1 x 10 5832
G d i 8.4 x 1 0 V 4 8.4rf= 50

RE SISTEN CIA DE M ATE RIALE S
d e d o n d e :
5832d — = 13 .88 m m
8.4 x 50
d = 13 .88 m m D = 125 m m
L a te n s ió n t a n g e n c ia l m á x im a , d e s p r e c ia n d o e l e fe c to d e l e s fu e rz o c o r t a n te , es:
M r d 8 FD 8 x 100 x 125 „ , , ,t . . , = ----------- = — r = ----------------------- 5— = i 1.9 kp/m m
/„ 2 n d k x 13 .88
t mlI = 1190 k p / cm 2
U n a v ig a de se cc ió n c i r c u la r c o n s ta n te , q u e a d m ite un p la n o v e r t ic a l co m o p lan o de s im e tr ia , t ien e po r l in e a m e d ia u n a s e m ic ir c u n fe re n c ia d e r a d io R. E l e x tre m o A e s tá su je to a una a r t ic u la c ió n f i ja , m ie n t r a s q ue e l e x t r e m o B lo e s tá a u n a a r t ic u la c ió n m ó v il, a m b a s en el m ism o p lan o h o r iz o n ta l. L a v ig a e s tá s o m e t id a a u n a c a r g a v e r t ic a l F a p l ic a d a en su punto m ed io C .C a lc u la r , m e d ia n te la a p l ic a c ió n de la s fó r m u la s dc B re s s e , e l c o r r im ie n to v e r t ic a l d e l punto C y e l g iro de la s se c c io n e s e x t r e m a s A y B.
C o n s id e r a r e m o s e l t r a m o AC, es d e c ir , la s s e c c io n e s p a r a v a lo r e s d e 6 c o m p re n d id o s e n tr e 0 y n/2. L o s e s fu e rz o s y m o m e n to s en la s e c c ió n d e c e n t ro d e g r a v e d a d G so n :
SOLI CI TACI ONES c o m b i n a d a s 6 4 7
L a e c u a c ió n (1 0 .5 -1 0 ) q u e n o s d a e l v ec to r c o r r im ie n to d e u n a d e te r m in a d a se c c ió n , a p l ic a d a a la s e c c ió n C d e la v ig a q u e c o n s id e ra m o s , se re d u c e a
/ = i o . x A C + f ( — i T — :— / J R ilO 4- I ' I — k x (j 0 \ R ilOJ0 \Ea G-n./y J0 lEL Is i e n d o ? , y . k lo s v e c to r e s u n it a r io s en la s d ire c c io n e s d e lo s e je s .c, r. r , re sp e c tiv a m e n te .
C a lc u le m o s p r e v ia m e n te el g iro d e la s se cc io n e s e x tre m a s .L a p r o y e c c ió n d e la e c u a c ió n (1 0 .5 -1 1 ), so b re el e je c . te n ie n d o en c u e n ta q u e la ro ta c ió n
d c la se c c ió n C e s n u la p o r ra z ó n d e s im e tr ia . nos p e rm ite o b te n e r e s to s g iro s
"2 M.— 1 R dO — lo . 4- EL A
FR (1 - eo s 0) (10 = 02 EL
de d o n d e :
ER2 F R 1 (7t — 2); ujB = in - 2)
4 £ 7 . 6 4 EL
P a ra c a lc u la r e l c o r r im ie n to v e r t ic a l i\ d e l p u n to C p r o y e c ta r e m o s lo s té rm in o s d e e s ta e c u a c ió n v e c to r ia l s o b re e l e je v e r t ic a l )'.
i d . x A C =' J k 0 0 o>AR R 0
FR¡4JT.
( a - 2 ) iFR14EÍ. (a - 2);
F C'í2 F■ e o s 2 OR dO — s e n 2 0 R dO +
J o 2 C f i „
9 0 - 0 90 + 0 s e n ------------- R ilO =
Jo 2£n
f " 2 AL+ ---- 2 R sen
o E l.
FR : , i , + eo s 20
Teü _0 2dO
FR
I G ñ . r JL' 2 1 — eo s 20
dO +
F R ¡
2EJ.eo s 0 (1 — e o s 0)í/04)
P o r t a n to , e l c o r r im ie n to v e r t ic a l d e l p u n to C es :
n F R k F R í 3rr\ F R 3
8 F ñ ~ 8 c n „ + V - T y El,
Apéndice
Fórmulas generales de la Norma Básica M V-103 para el cálculo
de uniones soldadas planas

6 5 0 RESISTENCIA DE MATE RI ALE S
R E S IS T E N C IA D E U N C O N J U N T O D E C O R D O N E S D E S O L D A D U R A
F órm u las gen e ra le s de la N orm a B ás ica M V -I0 3
L a d is t r ib u c ió n d e lo s e s fu e rz o s en c a d a c o r d ó n se h a c e se g ú n lo s p r o c e d im ie n to s d e la R e s is te n c ia d e M a t e r ia le s . L a N o rm a B á s ic a M V -1 0 3 , e n su a n e jo 6 , re c o g e lo s c a s o s e s tu d ia d o s en la U N E - 14035 , d e b id a m e n te a d a p t a d o s a l c á lc u lo e n a g o ta m ie n to , q u e r e p ro d u c im o s e n la s p á g in a s 651 y 652 .
APENDICE I 6 5 1
Caso Solicitación Unión Expresión práctica
Tracción
Tracción
Tracción
Soldaduras frontales y laterales, combinadas
Soldaduras frontales y laterales, combinadas
ñtL, r
.........
"1/ ■
L, vT1 A '
. A_ J \
Soldaduras frontales y laterales, combinadas
|ü|
í>*\!
Para 0,5/r < Lx K l.5/i Esfuerzo máximo capaz de transmitir la unión.
+ FiFx = {ÍLxa x0. Fz =OJ5La2L2a m
En estas expresiones:
1K =1+2 seni 0
0 K
0 1.0010 0.95 Los valores de p20 0.81 según el caso 3.JO 0.6640 0.5* Debe cum plirse:50 0.4660 0.40 F* £ Fmi%70 0.3680 0.3490 0.33
Para 0.5/» < Lz ^ 1,5/». Esfuerzo máximo capaz de transmitir la unión.
Fmtl = 1/3 Fi +F2 = OJ5LazLz0m F¡=0¡-,a,a.
Eos valores de /? según el caso 3. Debe cumplirse:
F* < F„it
Para L2 < 0.5/».Esfuerzo máximo capaz de transmitir la uruón.
Fmit = F, + 1/3 F2 F, = /¡L,o,<7.F2 * = 0 J 5 Z L 2a 2f fm
Los valores de p según el caso 3. Debe cumplirse:
F ' < Fmi .

6 5 2 r e s i s t e n c i a d e m a t e r i a l e s
Caso Solicitación
f- le x ion simple
Flexiónsimple
Unión
Sólo soldaduras frontales longitudinales
Expresión práctica
Sólo soldaduras frontales transversales
Debe cumplirse:
<r,u < v -t- i.Sír;* + i ‘ 2) <:
En estas expresiones:
3 F*e
2 Ü 1 3 F*e
vf l aLl Fm
Para e » L
S •- F' eat*= ü/1 ^ a"
f*
, 1 fVa 1F -
, 1 FmeT‘ ~~ /T ~W v ~
= = F ' e
= — - y 1.4 ^ 1,18 -l t / V w
Siendo IF el módulo resistente de las soldaduras.Para h » e
' 1,18 Lha ^ ° "
Soldaduras frontales, longitudinales y transversales
Soldadura o,
Flexiónsimple
FVs 1,18 — < tf,irSoldaduras
/i> —a , F*e atm 5 1,18 i — < <r./i, -t-tí, i r
Soldaduras a ,
Siendo i r el módulo resistente de las soldaduras.Puede también considerarse absorbido el momento por las soldaduras a, y c:2 y el esfuerzo cortante por las soldaduras a y
6
A P E N D I C E I 6 5 3
Solicitación Unión Expresión práctica
Torsión y esfuerzo cortante
combinados
Sólo soldaduras laterales Para 0,5h < L < 2fi
r
\ ~ J Z,J5U
f F ’ e I V f
+ J ° - i5 + L\ h T J
12Torsión y esfuerzo cortante
combinados
Sólo soldaduras frontales Para 0,Sh < L < Ih F*
x ( ' + ' ) a l J 4 p ,\2 h + a j La
13
Torsión y esfuerzo cortante
combinados
Dos soldaduras laterales y dos frontales Para 0,5/i < L2 < 2h.Máximo momento torsor admisible para las soldaduras 1:
M l ~QJ5<r.Ll a ¿ L + a l )
Máximo momento torsor admisible para las soldaduras 2:
AT % = GJ5a„L2a 2(h + a 2)
Máximo esfuerzo cortante admisible para las soldaduras 1:
F, = \.5o.L1a ¡
Máximo esfuerzo cortante admisible para las soldaduras 2:
i.7 trML 2a t
El momento torsor M* *■ F*e se descompone proporcionalmente a S í K y A/,.El esfuerzo cortante F* se descompone proporcionalmente af, y f»Las soldaduras 1 se calculan como el caso 12.Las soldaduras 2 se calculan como el caso 11.

6 5 4 R E SISTE N CIA DE MATERIALES
Caso Solicitación Unión Expresión práctica
Dos soldaduras laterales y una frontal
Torsión y esfuerzo cortante
combinados
Para 0.50 < L2 < 2h.Máximo momento admisible para la soldadura 1:
M , = 0.14ffBLJ,a t Máximo momento torsor admisible para las soldaduras 2:
Ai 2 =0,15<T¥L2ÜJ{h + a2)El momento Af*^F*e se descompone proporcionalmente a M, y A/j.El esfuerzo cortante F* (si está contenido en el plano de la jun ta. o su excentricidad es pequeña) se considera absorbido por las soldaduras 2.La soldadura 1 se calcula a flexión pura.La soldadura 2 se calcula como en el caso 11.
15
Flexión, torsión y esfuerzo cortante
combinados
Para 0.5A < L < 2h. Caso a:
M} = F*e2 ; M ? ~ F * e tLos valores de <r. t , y t,, debidos a Ai, y F*, se obtienen como en el caso 13.Los valores de a y t., debidos a A/*, se obtienen como en el caso 10 ( t " / = 0).Caso b: debido a A/*, obtenemos unas tensiones:
A/*t.w’ = —-í- ; <rw' = 0 ; = 02Aa
Donde: A, área encerrada por la línea media de la sección de garganta de las soldaduras, abatida sobre e! plano de la unión; a, dimensión de gaiganta de la soldadura en el punto que se considera.El resto dc las tensiones y la comprobación de las soldaduras como en el caso a.Debe cumplirse en todos los casos:
16Torsión y esfuerzo cortante
combi.iados
En general, se pueden omitir en estas uniones los cálculos de las tensiones debidas a la torsión.
Apéndice
Tablas de perfiles laminados

DOBLE T PERFIL N O RM AL (IPN)
656 RESISTENCIA DE MAT E R I AL E S
IP N
D im e n s io n e s(m m ) S e c c ió n
Ac m ’
P e soP
kg/m
R e fe r id o a l e je x -x
h b e = r r i >h/*
c m 4\VX
c m 3i ,
cm
80 80 42 3,9 5,9 2 ,3 59 7 ,5 8 5 ,95 7 7 ,8 19,5 3 ,20
100 100 50 4 ,5 6 ,8 2 ,7 75 10,6 8 ,3 2 171 3 4 ,2 4,01
120 120 58 5,1 7 ,7 3,1 92 14 ,2 11,1 3 2 8 54 ,7 4,81
140 140 66 5,7 8 ,6 3 ,4 109 18,3 14,4 573 81 ,9 5,61
160 160 74 6,3 9 ,5 3,8 125 2 2 ,8 17,9 9 3 5 117 6 ,40
180 180 82 6 ,9 10,4 4,1 142 27 ,9 21 ,9 1 .4 5 0 161 7 ,20
200 2 0 0 9 0 7 ,5 11.3 4 ,5 159 33 ,5 26 ,3 2 .1 4 0 2 1 4 ’ 8 ,0 0
220 22C 98 8,1 12,2 4 ,9 175 3 9 ,6 31,1 3 .0 6 0 278 8 ,80
240 2 4 0 106 8 ,7 13,1 5 ,2 192 36 ,2 4 .2 5 0 354 9 ,5 9
260 2 6 0 113 9 ,4 14,1 5 ,6 208 5 a ,4 4 1 ,9 5 .7 4 0 4 4 2 10,4
280 2 8 0 119 10,1 15,2 6.1 225 61 ,1 4 8 ,0 7 .5 9 0 5 4 2 11.1
300 3 0 0 125 10,8 16,2 6 ,5 241 69 ,1 5 4 ,2 9 .8 0 0 6 5 3 11,9
320 3 2 0 131 11,5 17,3 6 ,9 2 5 7 7 7 ,8 61 ,1 1 2 .5 1 0 7 8 2 12.7
340 3 4 0 137 12,2 18,3 7 .3 274 8 6 ,8 68,1 1 5 .7 0 0 9 2 3 13,5
360 3 60 143 13,0 19,5 7 ,8 2 9 0 97 ,1 7 6 ,2 1 9 .6 1 0 1 .090 14,2
380 3 80 149 13,7 20 ,5 8 ,2 3 0 6 107 8 4 ,0 2 4 .0 1 0 1 .260 15.0
4 0 0 4 0 0 155 14,4 2 1 ,6 8 ,6 3 2 3 11S 9 2 ,6 2 9 .2 1 0 1 .4 6 0 15,7
4 5 0 4 5 0 170 16,2 24 ,3 9 ,7 363 147 115 4 5 .8 5 0 2 .0 4 0 17,7
500 5 0 0 185 18,0 2 7 ,0 10,8 4 0 4 180 141 6 8 .7 4 0 2 .7 5 0 19,6
550 550 2 0 0 19,0 3 0 ,0 11 ,9 4 4 4 2 1 3 167 9 9 .1 8 0 3 .6 1 0 21 ,6
600 6 0 0 215 2 1 ,6 32 ,4 13 ,0 4 8 5 2 5 4 199 1 3 9 .0 0 0 4 .6 3 0 23 ,4
í
AP EN DI CE 2 657
A = A re a d e la se c c ió n I = M o m e n to d e in e r c ia
M ó d u lo re s is te n te
[7IV
i
S x
s x
n
= R a d io d e g iroV AM o m e n to e s tá t ic o d e m e d ia se c c ió n
— = D is ta n c ia e n t r e lo s c e n tro s d e c o m p re s ió n y t r a c c ió n•S*R e n d im ie n toS u p e r f ic ie l a t e r a l p o r m e tro l in e a l
R e fe r id o a l e je y - yU'
m m .«T
m m
0d
m m
e 2m m
■5,c m 3 cm
n = WJP
um 2/m
IP N
c m 4w ,
c m 3/, = / cm
6 ,2 9 3 ,00 0 ,91 22 10 — 4 ,4 3 11,4 6 ,84 3 ,28 0 ,3 0 4 80
12,2 4 ,88 1,07 28 12 — 5 ,0 5 19,9 8 ,5 7 4 ,11 0 ,3 7 0 100
2 1 ,5 7 ,41 1,23 32 14 — 5 ,6 7 31 ,8 10,3 4 ,91 0 ,4 3 9 1203 5 ,2 10,7 1 ,40 34 ¡ó i i 6 ,2 9 4 7 ,7 12,0 5 ,7 0 0 ,5 0 2 1405 4 ,7 14,8 1,55 40 18 11 6,91 6 8 ,0 13,7 6 ,5 4 0 ,5 7 5 16081 ,3 19,8 1,71 4 4 19 13 7 ,5 3 9 3 ,4 15,5 7 ,3 5 0 ,6 4 0 180
117 2 6 ,0 1 .87 48 22 13 8 ,1 5 125 17,2 8 .1 4 0 ,7 0 9 2 0 0
162 33,1 2 ,0 2 52 23 13 8 ,7 7 162 18,9 8 ,9 4 0 ,7 7 5 2 2 0221 4 1 ,7 2 ,2 0 56 25 17 9 ,3 9 2 0 6 20 ,6 9 ,7 8 0 ,8 4 4 2 4 0
288 5 1 ,0 2 ,3 2 60 27 .5 17 10 ,15 2 5 7 22 ,3 10.5 0 ,9 0 6 2 6 0
364 61 ,2 2 ,45 62 28 ,5 17 11 ,04 3 1 6 24 ,0 11,3 0 ,9 6 6 2 8 0
451 72 ,2 2 ,5 6 64 3 0 ,5 21 11,83 381 2 5 ,7 12,0 1 ,030 3 0 0
555 84 ,7 2 ,6 7 70 3 0 ,5 • 21 1 2 ,7 2 4 5 7 2 7 ,4 12,8 1 ,091 3 2 0
6 7 4 9 8 ,4 2 ,8 0 74 31 ,5 21 13,51 5 4 0 29 ,1 13,6 1 ,152 3 4 0
8 1 8 114 2 ,9 0 76 34 ,5 23 14 ,5 0 638 3 0 ,7 14,3 1 ,208 3 6 0
9 7 5 131 3 ,02 82 34 ,5 23 15 ,29 741 3 2 ,4 15.1 1 ,266 3 8 0
1 .160 149 3 ,13 86 35 ,5 23 16 ,18 8 5 7 34,1 15,8 1 ,330 4 0 0
1 .730 2 0 3 3 .43 94 39 25 18 ,35 1 .200 3 8 ,3 17,7 1 ,478 4 5 0
2 .4 8 0 2 6 8 3 ,72 100 4 2 ,5 28 2 0 ,5 3 1 .620 4 2 ,4 19 .5 1 ,626 5 0 0
3 .4 9 0 349 4 ,0 2 110 45 28 2 3 ,0 0 2 .1 2 0 4 6 ,8 2 1 ,6 1 ,797 5 5 0
4 .6 7 0 4 3 4 4 ,3 0 120 47 ,5 28 2 4 ,8 8 2 .7 3 0 50 ,9 2 3 ,2 1 ,924 6 0 0

DO BLE T PER FIL EUROPEO (IPE)
6 5 8 RESISTEN CIA DE M ATE RIALE S
T<
A P E N D I C E 2 6 5 9 ,
W, | .US ,w , .
ñ p r u I Lhx r iI
A re a d e la se c c ió n M o m e n to d e in e r c ia
W = M ó d u lo re s is te n te
1— - R a d io d e g iro
S x = M o m e n to e s tá t ic o d e m e d ia se cc ió n
s = — = D is ta n c ia e n tr e lo s c e n tro s d e c o m p re s ió n y t r a c c ió n
rj = R e n d im ie n tou = P e r ím e tro
IP E
D im e n s io n e s(m m ) S e c c ió n
Ac m 2
P e soP
kg/m
R e fe r id o a l e je x - x
1i
R e fe r id o a l e je y - yvr
m mw \
m m
0d
m m
s .c m 3 cm
n =IV JP
um 2/m
IP E
h b e r i Kh
c m *w *
c m 3'x
cm1,
cm * c m 3'y
cm
8 0 8 0 4 6 3,8 5 ,2 5 59 7 ,64 6 ,0 0 80,1 2 0 ,0 3 ,24 8 ,49 3 ,69 1,05 25 10,5 6 ,4 11 ,6 6 ,90 3 ,34 0 ,328 80
100 100 55 4,1 5 ,7 7 74 10,3 8 ,1 0 171 34 ,2 4 ,0 7 15,9 5 ,79 1,24 30 12,5 8 ,4 19,7 8 ,68 4 ,2 2 0 ,4 0 0 100
120 120 64 4 ,4 6 ,3 7 93 13,2 10,4 318 5 3 ,0 4 ,9 0 27 ,7 8 ,65 1,45 35 14,5 8,4 30 ,4 10,5 5,11 0 ,475 120
140 140 73 4 ,7 6 ,9 7 112 16,4 12,9 541 77 ,3 5 ,7 4 44 ,9 12,3 1,65 40 16,5 11 4 4 ,2 12,3 6 ,0 0 0,551 140
160 160 82 5 ,0 7 ,4 9 127 20 ,1 15,8 8 6 9 109 6 ,58 68 ,3 16,7 1,84 44 19 13 61 ,9 14,0 6 .89 0 ,623 160
180 180 91 5,3 8 ,0 9 146 23 ,9 18,8 1 .3 2 0 146 7 ,4 2 101 2 ¿ ,2 2 ,05 48 21 ,5 13 8 3 ,2 15,8 7 ,78 0 ,698 180
2 0 0 2 0 0 100 5 ,6 8 ,5 12 159 28 ,5 2 2 ,4 1 .940 194 8 ,2 6 142 28 ,5 2 ,24 52 24 13 110 17,6 8 .69 0 ,768 2 0 0
2 2 0 2 2 0 110 5,9 9 ,2 12 177 33 ,4 26 ,2 2 .7 7 0 2 5 2 9,11 205 37 ,3 2 ,48 58 26 17 143 19,4 9 ,62 0 ,848 220
2 4 0 2 4 0 120 6 ,2 9 ,8 15 190 39 , i 30 ,7 3 .8 9 0 3 2 4 9 ,9 7 284 4 7 ,3 2 ,69 65 27 ,5 17 183 21,2 10,6 0 ,922 2 4 0
2 7 0 2 7 0 135 6 ,6 10,2 15 219 4 5 ,9 36 ,1 5 .790 ' 429 1 U 4 2 0 6 2 ,2 3 ,02 72 31 ,5 21 2 4 2 23 ,9 11,9 1,041 2 7 0
3 0 0 3 0 0 150 7,1 10,7 15 248 53 ,8 4 2 ,2 8 3 6 0 557 12 ,5 604 80 ,5 3 ,35 80 35 23 314 26 ,6 13,2 1,159 3 0 0
3 3 0 3 3 0 160 7,5 11 .5 18 271 6 2 ,6 49 ,1 1 1 .7 7 0 7 1 3 13,7 788 98 ,5 3 ,55 ' 85 37 ,5 25 4 0 2 29 ,3 14,5 1,254 330
3 6 0 3 6 0 170 8 ,0 12,7 18 298 72 ,7 57,1 1 6 .2 7 0 9 0 4 15,0 1 .040 123 3 ,79 90 4 0 25 5 1 0 31 ,9 15,8 1,353 360
4 0 0 4 0 0 180 8 ,6 13,5 21 331 84 ,5 66 ,3 2 3 .1 3 0 1 .160 16,5 1 .320 146 3 ,95 95 42 ,5 28 6 5 4 35 ,4 17,4 1,467 4 0 0
4 5 0 4 5 0 190 9 ,4 14 ,6 21 3 7 8 98 ,8 77 ,6 3 3 .7 4 0 1 .500 18,5i
1 .680 176 4 ,1 2 100 45 28 851 39 ,7 19,3 1,605 4 5 0
5 0 0 5 0 0 2 0 0 10 ,2 16,0 21 4 2 6 116 9 0 ,7 4 8 .2 0 0 1 .930 20 ,4 2 .1 4 0 214 4 ,31 110 45 28 1 .100 43 .9 21 ,3 1 ,744 5 0 0
5 5 0 5 5 0 2 1 0 11,1 17,2 24 4 6 7 134 106 6 7 .1 2 0 2 .4 4 0 22 ,3 2 .6 7 0 2 5 4 4 ,45 115 4 7 ,5 28 1 .390 48 ,2 23,1 1,877 550
6 0 0 6 0 0 2 2 0 12 ,0 19,0 24 5 1 4 156 122 9 2 .0 8 0 3 .0 7 0 24 ,3______ -
3 .3 9 0 308 4 ,6 6 120 50 28 1 .760 52 ,4 25,1 2 ,015 6 0 0
i

J
DOBLE T ALA ANCHA. SERIE M EDIA (HEB)
6 6 0 RESISTENCIA DE MATERI ALES
H E B
D im e n s io n e s(m m ) S e c c ió n
Ac m 2
P esoP
kgy'm
R efe r id o a l e je x -x
h b e r'i T >h7,
c m 4 c m 3>x
cm
100 100 100 6 10 12 56 2 6 ,0 20 ,4 4 5 0 89 ,9 4 ,1 6
120 120 120 6,5 11 12 74 34 ,0 26 ,7 864 144 5 ,04
140 140 140 7 12 12 92 4 3 ,0 33 ,7 1 .510 216 5 ,93
160 160 160 8 13 15 104 54 ,3 4 2 ,6 2 .4 9 0 311 6 ,78
180 ISO ISO 8,5 14 15 122 65 ,3 51 ,2 3 .8 3 0 426 7 ,66
2 0 0 2 0 0 2 0 0 9 15 18 134 78,1 61 ,3 5 .700 570 8 ,54
220 220 2 2 0 9 ,5 16 18 152 9 1 ,0 71 ,5 8 .0 9 0 736 9 ,43
240 2 4 0 2 4 0 10 17 4 l 164 106 83 ,2 11 .260 938 10,3
2 6 0 260 2 6 0 10 17,5 24 177 118 9 3 ,0 14 .920 1.150 1 U
2 8 0 280 2 8 0 10,5 18 24 196 131 103 19 .270 1.380 12,1
3 0 0 300 300 11 19 27 208 149 117 2 5 .1 7 0 1.680 13 ,0
3 2 0 320 300 11,5 20 ,5 27 225 161 127 3 0 .8 2 0 1.930 13,8
3 4 0 340 300 12 21 ,5 27 243 171 134 3 6 .6 6 0 2 .160 14,6
360 360 300 12,5 22 ,5 27 261 181 142 4 3 .1 9 0 2 .400 15 ,5 .
4 0 0 4 0 0 3 0 0 13,5 24 27 298 198 155 5 7 .6 8 0 2 .880 17.1
4 5 0 4 5 0 3 0 0 14 26 27 3 4 4 2 1 8 171 7 9 .8 9 0 3 .550 19.1 :
5 0 0 500 300 14,5 28 27 3 9 0 2 3 9 187 107 .200 4 .290 2 U :
550 550 300 15 29 27 4 3 8 2 5 4 199 136 .700 4 .970 2 3 ,2 :
6 0 0 600 300 15,5 30 27 4 8 6 2 7 0 2 1 2 171 .000 5 .700 2 5 ,2
A P E N D I C E 2 6 6 1
A = A re a d e la se c c ió n / = M e m e n to d e in e r c ia
W = M ó d u lo r e s is te n te
17I =
5 , =
=
n =u =
= R a d io d e g iro V ^M o m e n to e s tá t ic o d e m e d ia se c c ió n
— = D is t a n c ia e n tr e lo s c e n t ro s d e c o m p r e s ió n y t r a c c ió n*-*XR e n d im ie n toP e r ím e t ro
R e fe r id o a l e je y - y
I,cm4
167318550889
1 .360
2.0002 .8 4 03 .9 2 05 .1 3 06 .5 9 0
8 .5 6 09 .2 4 09 .6 9 0
10 .140
10 .820 11 .720
12 .62013 .080
13 .530
IV.
33 .5 52 ,978 .5
111 151
200258327395471
5716 1 66 4 66 7 6
721781
8428 7 2
9 0 2
cm
2 ,533 .063 .58 4 ,0 54 .5 7
5 .075 .596 .0 86 .58 7 ,0 9
7 .58 7 ,5 7 ■7,53 7 ,49
7 ,4 07 ,3 3
7 ,2 77 ,1 7
7 ,0 8
53657585
100110120
9 0100110
120120120120
120120
120120
120
354 04 5
50505050
505 0
4 54 5
45
22 .527 .532 .53 7 .5 4 0
45504 04 04 0
4 04 04 04 0
4 04 0
4545
45
0d
m m
1317212325
2525252525
2 525252 5
2525
2828
28
S„cm3
52,182 ,6
123177241
3214 1 45276417 6 7
9 3 41 .0701.2001 .340
1 .6201 .990
2 .4 1 02 .8 0 0
3 .2 1 0
cm
8 ,6 3tn <112.314.115.9
17,719 .62 1 .42 3 .325 .1
2 6 .92 8 .73 0 .43 2 .2
3 5 .740 .1
4 4 .54 8 .9
5 3 .2
n =W J P
4 .41 5 ,3 96 .417 .3 0 8 ,3 2
9 .3 010 .311.312 .413 .4
14.4 15 ,2 16,116 .9
1 8 ,620,8
2 2 .9 2 5 ,0
2 6 .9
um 2/m
0 ,5 6 70,6860 ,8 0 50 ,9 1 81 ,04
1 ,151 ,271 .381 ,501 .62
1 ,731 ,77
1.811 ,85
1 ,932 ,0 3
2,122,22
2 ,3 2
H E B
100120140160180
2002202 4 02 6 02 8 0
3 0 03 2 03 4 03 6 0
4 0 04 5 0
5 0 05 5 0
6 0 0

DOBLE T A L A AN CH A. SERIE LIGERA (HEA)
6 6 2 RE S I S TENCI A DE MATERI ALES
Dimensiones(mm)
HEA
h i
SecciónA
c m 2
PesoP
kg/m
Referido al eje x-x
hcm4
W.cm
100120140160180
2002202 4 02 6 02 8 0
3 0 03 2 03 4 03 6 0
4 0 04 5 0
5 0 05 5 0
6 0 0
9 6114133152171
1902102 3 02 5 02 7 0
2 9 03 1 03 3 03 5 0
3 9 04 4 0
4 9 05 4 0
5 9 0
100120140160180
2002202 4 02 6 02 8 0
3 0 03 0 03 0 03 0 0
3 0 03 0 0
3 0 03 0 0
3 0 0
555 .56 6
6.577 .57 .58
8 .5 99 .5
10
1111 .5
1212.5
13
888 .5 99 .5
10111212.513
14
15.516.517.5
1921
232 4 ■
25
1212121515
1818212424
27272727
2727
2727
27
567492
104122
134152164177196
208225243261
298344
390438
4 8 6
21,22 5 .33 1 .43 8 .84 5 .3
53 .86 4 .3
; 7 6 ,886.8 97 ,2
113124133143
159178
198212
2 2 6
16.7 19,92 4 .73 0 .435 .5
4 2 .350 .560 .3 68,27 6 .4
8 8 ,39 7 .6
105 112
125140
155166
178
3496 0 6
1 .0301 .6702 .5 1 0
3 .6 9 05 .4 1 07 .7 6 0
1 0 .4501 3 .670
18 .2602 2 .9 3 02 7 .6 9 03 3 .0 9 0
4 5 .0 7 06 3 .7 2 0
8 6 .9 7 01 1 1 .900
1 4 1 .200
72,11061552202 9 4
3 8 95 1 56 7 58 3 6
1.010
1 .2601 .4 8 01 .6801 .890
2 .3 1 02 .9 0 0
3 .5 5 04 .1 5 0
4 .7 9 0
4 ,0 64 ,8 95 ,736 ,577 ,45
8 ,289 ,1 7
10,1111,011.9
12.7 13,6 14,4 15 ,2
16.818.9
21,023 .0
2 5 .0
APENDICE 2 6 6 3
AI
W
s x
’l
Area de la sección Momento de inercia Módulo resistente
/— = Radio de giro V AMomento estático de media sección
— = Distancia entre los centros de compresión y tracción•5,RendimientoPerímetro
Referido al eje _
1,cm4
1342313896 1 6925
1 .3401 .9502 .7 7 03 .6 7 04 .7 6 0
6 .3 1 06 .9 9 07 .4 4 07 .8 9 0
8 .5 6 09 .4 7 0
10 .37010 .820
11 .270
IV.
2 6 ,838 .555 .6 76 ,9
103
1341782312 8 23 40
4214 6 64 9 6526
571631
691721
751
e y-yvv « 'i
0dm m
s,cm 3 cm
4 = W J P
um 2/m
H E A
cm
2,51 55 22 ,5 13 4 1 ,5 8 ,41 4 ,36 0 ,561 100
3 ,02 65 —. 27 ,5 17 59 ,7 10,1 5 ,33 0 ,6 7 7 120
3 ,52 ■ 75 _ 32 ,5 21 86 ,7 11,9 6 ,28 0 ,7 9 4 140
3,98 85 _ 37 ,5 23 123 13,6 7 ,24 0 ,9 0 6 160
4 ,52 100 — 4 0 25 162 15,5 8 ,28 1,02 180
4 ,98 110 _ 45 25 215 17,2 9 ,20 1 ,14 200
5.51 i 20 _— 5.0 25 284 19 ,0 10,2 i , 2 6 220
6 ,0 0 SO 35 4 0 25 372 20 ,9 11,2 1,37 2 4 0
6 ,5 0 100 4 0 4 0 25 4 6 0 22 ,7 12.3 1,48 2 6 0
7 ,00 110 45 4 0 25 556 24 ,6 13,2 1 ,60 2 8 0
7 ,4 7 120 50 4 0 25 692 26 ,4 14,3 1,72 300 '
7 ,51 120 50 4 0 25 8 1 4 28 ,2 15,2 1,76 320
7 ,46 120 50 4 0 25 925 29 ,9 16,0 1,79 340
7 ,43 120 50 4 0 25 1 .040 31 ,7 16,9 1,83 360
7 ,34 120 50 4 0 25 1 .280 3 5 ,2 18,5 1,91 4 0 0
7 ,29 120 50 4 5 2 5 1 .610 3 9 ,6 20 ,7 2 ,01 4 5 0
7 ,24 120 4 5 45 28 1 .970 44 ,1 22 ,9 2,11 500
7 ,15 120 4 5 4 5 2 8 2 .3 1 0 4 8 ,4 25 ,0 2.21 5 5 0
7 ,05 120 45 45 28 2 .6 8 0 52 ,8 26 ,9 2,31 600

6 6 6 r e s i s t e n c i a d e m a t e r i a l e s
P E R F I L EN U N O R M A L (UPN)
APENDI CE 2 6 6 7
i i
c y - f
\T
x M, J e
I Fr
A1
W
S,
s x
A re a d e la s e c c ió n M o m e n to d e in e r c ia M ó d u lo re s is te n te
£M o m e n to e s tá t ic o de m e d ia se cc ió n
/S,
R a d io d e g iro
to e s tá t ic o de r
= D is t a n c ia e n tr e lo s c e n tro s de c o m p re s ió n y t r a c c ió n
n =D is t a n c ia d e l b a r ic e n t r o G a l c e n tro d e e s fu e rz o s c o r t a n te s Af
R e n d im ie n toS u p e r f ic ie l a t e r a l p o r m e tro lin e a l
UPN
D im en s io n e s(mm) S ec .
Acm2
P esoP
kg/m
R e fe r id o a l e je x -x R e fe r id o a l e je y - yVv'
mmwi
mmd
mm?2
mm<0
mmS ,
cm3s x
cmc
cmm
cm1 =
W J Pu
m2/m U P N
h b e e , = r r ¡ h i Lcm4
Kcm3
ócm
Kcm4
Wycm3
/, = /cm
SO 80 45 6,0 8 ,0 4 ,0 46 11,0 8 ,64 106 26 ,5 3 ,1 0 19,4 6 ,3 6 1 ,33 25 20 13 9 ,8 0 6 ,20 15,9 6 ,6 5 1,45 2 ,67 3 ,07 0 ,3 1 2 80
100 100 50 6 ,0 8,5 4 ,5 64 13,5 10,6 206 4 1 ,2 3 9 1 29 3 8 4 9 1,47 30 20 13 10 ,50 6 ,50 24 ,5 8 ,4 2 1,55 2 ,93 3 ,89 0 ,3 7 2 100
120 120 55 7,0 9 ,0 4 ,5 82 17,0 13,4 364 60 ,7 4 ,6 2 4 3 .2 11,1 1 ,59 30 25 17 11 .20 6 ,80 36 ,3 10 ,0 1 ,60 3,03 4 ,55 0 ,4 3 4 120
140 140 60 7,0 10,0 5 ,0 98 20,4 16,0 605 86 ,4 5 ,4 5 6 2 ,7 n i 4 ,8 1 75 35 25 17 i 2 ,4 0 7 ,6 0 51 ,4 11,8 1,75 3 ,37 5 ,4 0 0 ,4 8 9 140
160 160 65 7,5 10,5 5,5 115 24 ,0 18,8 9 2 5 116 6 ,21 8 5 3 18,3 1 ,89 35 30 21 13 ,10 7 ,9 0 68 ,8 13,3 1,84 3 ,56 6 ,13 0 ,5 4 6 160
180 180 70 8,0 11,0 5,5 133 28 ,0 2 2 ,0 1 .350 150 6 ,9 5 114 2 2 ,4 2 ,0 2 40 30 21 13,80- 8 ,2 0 8 9 ,6 15,1 1 ,92 3 ,75 6 ,82 0 ,611 180
2 0 0 2 0 0 75 8,5 11,5 6 ,0 151 32 ,2 25 ,3 1 .910 191 7 ,7 0 148 2 7 ,0 2 ,14 40 35 23 14 ,50 8 ,5 0 114 16,8 2 ,01 3 .94 7 .56 0,661 2 0 0
2 2 0 2 2 0 80 9,0 12,5 6,5 167 37,4 29 ,4 2 .6 9 0 245 8 ,4 8 197 33 ,6 2 ,3 0 45 35 23 15 ,70 9 ,3 0 146 18,5 2 ,14 4 ,2 0 8 ,35 0 ,7 1 8 2 2 0
2 4 0 2 4 0 85 9 .5 13,0 6,5 184 42 ,3 33 ,2 3 .6 0 0 3 0 0 9 ,2 2 2 4 8 3 9 ,6 2 ,4 2 , 45 4 0 25 16 ,40 9 ,6 0 179 20 ,1 2 ,23 4 ,3 9 9 ,03 0 ,7 7 5 240
2 6 0 260 90 10,0 14,0 7 ,0 200 48 ,3 37 ,9 4.8'>0 371 9 ,9 9 3 1 7 4 7 ,7 2 ,5 6 50 4 0 25 17 ,60 10,40 221 2 1 ,8 2 ,36 4 ,6 6 9 ,78 0 ,834 260
2 8 0 2 8 0 95 10,0 15,0 7,5 216 53,3 41 ,8 6 .2 8 0 4 4 8 10 ,90 399 5 7 ,2 2 ,74 50 45 25 18 ,80 11 ,20 266 23 ,6 2 ,53 5,02 10 ,70 0 .8 9 0 2 8 0
3 0 0 300 100 10,0 16,0 8 ,0 232 58,8 46 ,2 8 .0 3 0 535 11 ,70 4 9 5 6 7 ,8 2 ,9 0 55 45 25 2 0 ,0 0 12 ,00 316 2 5 ,4 2 ,7 0 5,41 11 ,60 0 ,9 5 0 3 0 0
3 2 0 3 2 0 100 1 4 0 17,5 8,75 246 75,8 59 ,5 10 .870 679 12,1 597 8 0 ,6 2 ,81 55 4 5 25 2 0 ,3 5 15,35 4 1 3 26 ,3 2 ,6 0 4 ,8 2 11,4 0 ,9 8 2 3 2 0
3 5 0 3 5 0 100 14,0 16,0 8 ,0 282 77,3 60 ,6 12 .840 7 3 4 12,9 5 7 0 7 5 ,0 2 ,7 2 55 45 25 18 ,85 13,85 4 5 9 2 8 ,6 2 ,4 0 4 ,4 5 12,1 1 ,047 350
3 8 0 3 8 0 102 13,5 16,0 8 ,0 313 80 ,4 63,1 15 .760 829 14 ,0 6 1 5 7 8 ,7 2 ,7 7 60 42 25 18 ,89 13,79 507 31,1 2 ,38 4 ,5 8 13,2 1 ,110 3 8 0
4 0 0 4 0 0 110 14,0 18,0 9 ,0 324 91 ,5 71 ,8 2 0 .3 5 0 1 .020 14,9 8 4 6 102 3 ,0 41i
60 50 2 5 2 1 ,1 0 15 ,60 6 18 32 ,9 2 ,65 5,11 14,2 1,182 4 0 0
e
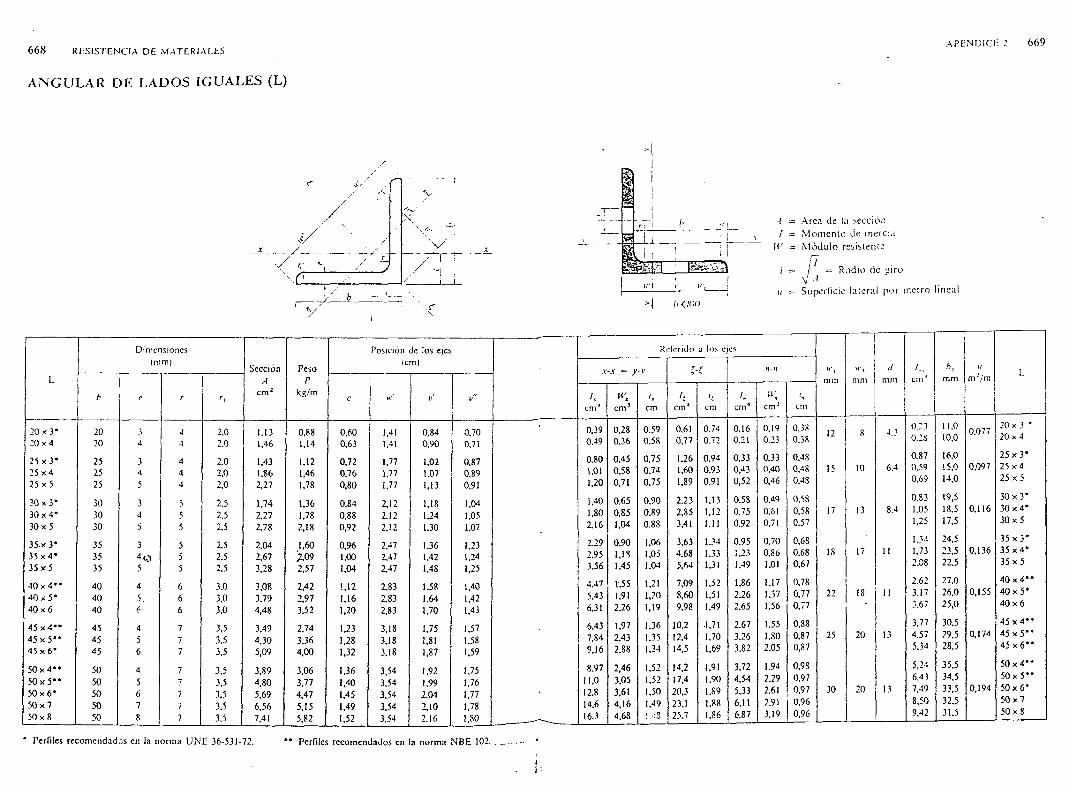
A N G U L A R DE LAD O S IG U ALE S (L)
6 6 8 RE SISTEN CIA DE M ATERIALESA P E N D I C E 2 6 6 9
-I = A re a de la se c c ió n / = M o m e n to de in e r c ia
W = M ó d u lo re s is te n te
[7 R a d io de s i r o
= S u p e r f ic ie la te r a l p o r m e tro l in e a l
L
Dimensiones(rnmj
SecciónA
cm 1
PesoP
kg/m
Posición de los ejes lem)
R Terido a los ejes
X-a = >'-r í - í n - t
b e c w’ v' v"r r i /,cm*
IV7cm3 cm
/.cm4
i,cm cm4
" ,cm3
i,cm
20 x 3* 20 3 4 2.0 1.13 0,88 0.60 1,41 0,84 0.70 0.39 0.28 0.59 0.61 0.74 0.16 0.19 0.3820 x 4 20 4 4 2.0 1.46 1.14 0,63 1,41 0,90 0,71 0.49 0.36 0.58 0,77 0.72 0.21 0.23 0,38
25 x 3* 25 3 4 2.0 1.43 1.12 0,72 1.77 1.02 0,87 0.80 0.45 0.75 1,26 0.94 0.33 0.33 0.482 5 x 4 25 4 4 2.0 1.86 1,46 0.76 1.77 1.07 0.89 1.01 0.58 0.74 1,60 0,93 0,43 0,40 0.48
2 5 x 5 25 5 4 2,0 2,27 1,78 0,80 1,77 1.13 0,91 1,20 0,71 0,75 1,89 0,91 0,52 0,46 0.48
3 0 x 3 * 30 3 5 2,5 1,74 1,36 0,84 2.12 1,18 1,04 1,40 0,65 0.90 2.23 1.13 0.58 0.49 0.58
3 0 x 4 * 30 4 5 2.5 2,27 1,78 0,88 2.12 1.24 1.05 1.80 0,85 0.89 2,85 1.12 0.75 0.61 0.58
3 0 x 5 30 5 5 2,5 2.78 2,18 0,92 2,12 1,30 1.07 2.16 1,04 0,88 3,41 1.11 0,92 0.71 0.57
35.x 3* 35 3 5 2.5 2.04 1,60 0,96 2,47 1.36 1.23 2.29 0,90 1,06 3.63 1.34 0.95 0.70 0,683 5 x 4 * 35 4<0 5 2.5 2.67 >,09 1.00 147 1.42 1.24 2,95 1,18 1.05 4,68 1.33 1.23 0.86 0.683 5 x 5 35 5 5 2.5 3,28 2.57 1,04 147 1,48 1.25 3,56 1,45 1.04 5,64 1.31 1.49 1.01 0.67
4 0 x 4 * * 40 4 6 3.0 3,08 2,42 1.12 2,83 1.58 1.40 4.47 1.55 1.21 7,09 1.52 1,86 1.17 0,78
4 0 x 5 * 40 5. 6 3,0 3,79 2,97 1,16 183 1.64 1,42 5,43 1.91 1,20 8,60 1,51 2.26 1.37 0,77
4 0 x 6 40 6- 6 3,0 4,48 3,52 1,20 2,83 1.70 1,43 6,31 2.26 1,19 9,98 1,49 2,65 1.56 0,77
4 5 x 4 * * 45 4 7 3,5 3,49 2,74 1,23 3,18 1.75 1,57 6.43 1,97 1,36 10,2 ■1,71 2.67 1.55 0.884 5 x 5 * * 45 5 7 3,5 4.30 3,36 1,28 3.18 1,81 1.58 7.84 2,43 1.35 12,4 1.70 3.26 1.80 0.87
4 5 x 6 * 45 6 7 3,5 5,09 4,00 1,32 3.18 1,87 1,59 9,16 2,88 1,34 14,5 1,69 3.82 2,05 0,87
5 0 x 4 * * 50 4 7 3,5 3.89 3,06 1,36 3,54 1.92 1.75 8.97 2,46 1,52 14,2 1.91 3,72 1.94 0.98
5 0 x 5 * * 50 5 7 3,5 4,80 3.77 1,40 3.54 1,99 1,76 11.0 3.05 1.52 17,4 1.90 4.54 2.29 0.97
5 0 x 6 * 50 6 7 3.5 5,69 4,47 1,45 3,54 2.04 1,77 12,8 3,61 1.50 20,3 1,89 5.33 2.61 0,97
5 0 x 7 50 7 7 3.5 6,56 5,15 1,49 3,54 110 1,78 14,6 4,16 1.49 23.1 1.88 6.11 2.91 0,96
5 0 x 8 50 8 7 3,5 7,41 5,82 1.52 3,54 2.16 1,80 16,3 4,68 ! . : 3 25.7 1,86 6,87 3.19 0,96
mmM" ,
mmd
mm cm4h,
mmu
m'/m L
12 8 4.3 0.230.28
11.010,0 0.077 2 0 x 3 *
2 0 x 4
15 10 6.40.870.590.69
16.015.014.0
0,0972 5 x 3 * 25 x 4 2 5 x 5
17 13 8.40.831.051.25
19.518.517.5
0,1163 0 x 3 *3 0 x 4 *3 0 x 5
18 17 111.341.732.08
24.523.522.5
0,13635 x 3* 3 5 x 4 * 3 5 x 5
22 18 112.623,173.67
27.026.0 25,0
0,1554 0 x 4 * *4 0 x 5 *4 0 x 6
25 20 133,774.575.34
30.529.528.5
0,1744 5 x 4 * *4 5 x 5 * *4 5 x 6 * *
30 20 13
5,246.437.498.50 9.42
35.534.533.532.531.5
0,194
5 0 x 4 * *5 0x5 **5 0 x 6 *5 0 x 75 0 x 8
* Perfiles recomendados en la norma UNE 36-531-72. *• Perfiles recomendados en la norma NBE 102.

A N G U L A R D E LADOS IGUALES (L)
6 7 0 R E S I S T E N C I A DE M A T E R I A L E S
L
Dimensiones(mm)
SecciónA
cm2
PesoP
kg/m
Posición de los ejes (cm)
b e r r r c t/ ir' ir"
60 x 5 ’ * 60 5 8 4,0 5,82 4,57 1,64 4,24 2,32 2,1160 x 6” 60 - 6 8 4,0 6,91 5,42 1,69 4,24 2,39 2,1160 x 8' 60 8 8 4,0 9,03 7,09 1,77 4,24 2,50 2,146 0 x 10 60 10 8 4,0 11,10 8,69 1,85 4,24 2,61 2,177 0 x 6 '» 70 6 9 4,5 8,13 6,38 1.93 4,95 2,73 2,4670 x 7 ” 70 7 9 4,5 9,40 7,38 1,97 4,95 2,79 2,4770 x 8' 70 8 0 4,5 10,60 8,36 2.01 4,95 2,85 2,4770 x 10 70 10 9 4,5 13,10 10,30 2,09 4,95 2,96 2,50
.80 x 8“ 80 8 10 5.0 12,30 9,63 2,26 5.66 3,19 2,8280 x 10- 80 10 10 5,0 15,10 11,90 2,34 5,66 3,30 2,85SO x 12 80 12 10 5,0 17,90 14,00 2,41 5,66 3,41 2,89 490 x 8 “ 90 8 1 1 5,5 13,90 10,90 2,50 6,36 3,53 3,17
-90 x 10* 90 10 11 5,5 17,10 13,40 2,58 6,36 3,65 3,1990 x 12 90 12 11 5,5 20,30 15,90 2,66 6,36 3.76 3,22 - -
Perfiles re com endados en la norma UNE 36-531-72. “ Perfiles recomendados en la no rm a NBE 102.
A P E N D I C E 2 6 7 1
A — A r e a d e la se c c ió n I — M o m e n to d e in e r c ia
W = M ó d u lo re s is te n te
17= R a d io d e g iro
S u p e r f ic ie l a t e r a l p o r m e t r o l in e a l
Referido a los ejes
Xx = y-y í - í n-n w i d G u2 t
Lmm mm mm cm* mrn m /m
1, K r. /. i. h **;cm4 cm2 cm cm4 cm cm4 cm3 cm
19,4 4,45 1,82 30,7 2,30 8,02 3,45 1,17 11,3 43,0 60 x 5“22,829,2
5,296,89
1,821,80
36.246.2
2,292,26 12,2
3.954,86
1,171,16 35 25 17
13,417,0
42.040.0 0,233
.50 x 64* 6 0 x 8 *
34,9 8,41 1,78 55,1 2,23 14,8 5,67 1,16 20,3 38,0 6 0 x 1036.9 7,27 2,13 58,5 2,68 15,3 5,59 1,37 21,6 50,5 7 0 x 6 “42,3 8,41 2,12 67,1 2,67 17,5 6,27 1,36 1 24,3 49,5
0,2727 0 x 7 “
47,5 9,52 2,11 75,3 2,66 19,7 6,91 1,36 j U ^ 127,8 47,5 7 0 x 8 '
57,2 11,7 . 2,09 90,5 2,63 23,9 8,10 1,35 33,3 46,5 70 x ¡0
72,2 12,6 2,43 115 3,06 29,9 9,36 1,56 42,7 57,0 80 x 8“87,5 13,4 2,41 139 3,03 36,3 11,0 1,55 45 35 23 51,6 55,0 0,311 80 x 10*
102 18,2 2,39 161 3,00 42,7 12,5 1,55 59,0 53,0 80 x 12104 16,1 2,74 166 3,45 43,1 12,2 1,76 61,5 65,5 9 0 x 8 “
'127 19,8 2,72 201 3,43 52,5 14,4 1,75 50 40 25 74,2 63,5 0,351 90 x 10'148 23,3 2,70 234 3,40 61,7 16,4 1.74 86,1 61.5 9 0 x 1 2

A N G U L A R DE LAD O S IG U ALES (L)
6 7 2 RESISTENCIA DE MATERIALES
xC 4/
x r N " . /
* / H/A
/■' \
i A'1 / i ■\ rV
/ ! \1 fc.L------- r -
. e
■V
D im ensiones(mm)
100x8** 100x 10** 100 x 12. 100 x 15
120x 10** 120 x 12** 120 x 15
.150 x 12** 1 5 0 x 1 5 * *
.1 5 0 x 1 8
1 8 0 x 1 5 * 180 x 18 1 8 0 x 2 0
2 0 0 x 16* 2 0 0 x 1 8 * 200 x 20 200 x 24
100100100100
.120120120
150150150
180180180
200200200200
101215
101215
121518
15 18 20
1618-2024
12121212
131313
16.1616
181818
18181818
6,06,06,06,Q6.56.56.5
8,08,08,0
9.09.09.0
9.09.09.09.0
SecciónA
cm2
15.519.222.727.9
23.227.533.9
34.843.051.0
52.161.968.3
61,869.176.390.6
PesoP
kg/m
12,215.017.821.9
18,221,626,6
27,333.840.1
40.948.653.7
48,554.259.9 71,1
Posición de los ejes (cm)
2,742,822,903,02
3,313,403.51
4,124,254,37
4,985,105,18
5.52 5,60 5,68 5,84
7.077.077.077.07
8.498.498.49
10,610,610,6
12.712.712.7
14.114.114.114.1
3,873,994,114,27
4,694.80 4,97
5,836,016,17
7,057,227,33
7.81 7,93 8,04 8,26
3,523,543,573,61
4,234.28 4,31
5.29 5,33 5,38
6,366,416,44
7,097,127,157,21
* Perfiles recom endados en la no rm a UNE 36-531-72. ** Perfiles recom endados en la no rm a N BE 102.
.APENDICE 2 6 7 3
A — A re a de la se c c ió n I M o m e n to d e in e r c ia
W = M ó d u lo r e s is te n te
i = /— — R a d io de g iro\l A . . . .
u = S u p e r f ic ie l a te r a l p o r m e tro l in e a l
Referido, a los ejes
X-x = y-2 'i- í n-n wi w3 d u u Lmm mm mm mm cm 4 mm m 2/m
4 Wx i. h h h Kcm4 cm 3 cm cm4 cm cm4 cm 3 cm
145 19,9 3,06 230 3,85 59,8 15,5 1,96 85,1 74,0 100 x 8**177 24,6 3,04 280 3,83 72,9 18,3 1,95 A ^ ¿.Cl AC\ 104 72,0 100 x 10*207 29,1 3,02 328 3,80 85,7 20,9 1,94 ou 40 25 121 70,0
0,390 100 x 12249 25,6 2,89 393- 3,75 104 24,4 1,93 145 67,0 100 x 15
313 36,0 3,67 497 4,63 129 27,5 2,36 184 90,5 120 x 10**368' 42,7 3,65 584 4,60 152 31,5 2,35 50 80 40 25 2.16 88,5 0,469 120 x 12**445 52,4 3,62 705 4,56 185 37,1 2,33 260 85,5 120 x 15
737 67,7 4,60 1.170 5,80 303 52,0 2,95 434 114 150 x 12**898 83,5 4,57 1.430 5,76 370 61,6 2,93 50 Í05 45 28 530 131 0,586 150 x 15**
1.050 98,7 4,54 1.670 5,71 435 70,4 2,92 612 128 150 x 18
1.590 122 5,52 2.520 6,96 653 92,6 3,54 933 138 180 x 15*1.870 145 5,49 2.960 6,92 768 106 3,52 60 135 45 28 1.096 135 0,705 180 x 182.040 159 5,47 3.240 6,89 843 115 3,51 1.198 133 180 x 20
2.540 162 6,16 3.720 7,76 960 123 - 3,94 1.380 157 200 x 16*2.6002.850
181199
6,136,11
4.1304.530
7,737,70
1.0701.170
135146
3,933,92
60 150 50 281.5301.680
155153
0,785200 x 200 x
18*20
3.330 235 6,06 ' 5.280 7,64 1.380 167 ' 3,90 1.950 149 200 x 24

AN G U LAR DE LAD O S D ESIG U ALES (LD)
6 7 4 : RE SISTEN CIA DE M A T E R IA LE S
LD
D im ensiones ' ‘ : (mm)
Sec.A
cm 2
PesoP
kg/m
Posición de los ejes
a i e r U ...A -cm
' cy cm
t/ 'cm
v"cm
v'" ' ‘ cm
Vcm
tg a
3 0 x 2 0 x 3 * 30 20 3 4 2,0 1,43 1,12 0,99 0,50' 0,86 ' 1 04 0 56' 2 05 0,42830 x 20 x 4* 30 20 4 4 2,0 1,86 1,46 1,03 0,54 0,91 1,04 0,58 2,02 0,42130 x 20 x 5 30 20 5 4 2,0 2,27 1,78 1,07 0,58. 0,94 1,04 0,60 2,00 0,412.40 x 20 x 3* 40 20 3 4 2,0 1,73 1,36 1,42 0,44 0,79 1,19 0,46 2,61 0,25740 x 20 x 4* 40 20 4 4 2,0 2,26 1,77 1,47 0,48 0,83 1,17 0,50 2,58 0,25240 x 20 x 5 40 ■20 5 4 2,0 2,77 2,17 1,51 0,52 0,86 1,16 0,53 2,55 0,2454 0 x 2 5 x 4 ' 40 25 4 4 2,0 2,46 1,93 1,36 0,62 1,06 1,35 0 68 2,69 0,38140 x 25 x 5 40 25 s- 4 2,0 3,02 2,37 1,40 0,66 1,11 1,35 0,70 2,66 0,3754 5 x 3 0 x 4 * 45 30 4 4 2,0 2,86 2,24 1,48 0,74 1,27 1,58 0,83 3,06 0,43445 x 30 x 5* 45 30 5 4 2,0 3,52 ■2,76 1,52 0,78 1,32 1,57 .0 ,85 3,04 0,42960 x 30 x 5 60 30 5 6 3,0- 4,29 3,37 2,15 0,68 1,20 1,77 0,72 3,89 0,25660 x 30 x 6 60 30 6 6 3,0 5,08 3,99 . 2,20 0,72 1,23 1,75 0,75 3,86 0,25260 x 40 x 5* 60 40 5 6 3,0 4,79 3,76 1,96 0,97 1,68 2,10 1,10 4,10 0,43460 x 40 x 6* 60 40 6 6 3,0 5,68 4,46 2,00 1,01 1,72 2,10 1,12 4,08 0,4316 0 x 4 0 x 7 60 40 7 6 3,0 6,55 5,14 2,04 1,05 -1,77 2,09 1,14 4,06 0,42765 x 50 x 5* 65 50 5 6 3,0 5,54 4,35 1,99 1,25 2,08 2.39 1 50 4 53 0,57765 x 50 x 6 65 50 6 6 3,0 6,58 5,16 2,04 1,29 2,13 2,39 1,51 4,52 0,57565 x 50 x 7* 65 . 50 , 7 6 3,0 7,60 5,96 2,08 1,33 2,19 2,39 1 5? 4,50 0,57265 x 50 x 8 65 50 8 6 3,0 8,60 6,75 .2,11 1,37 2,23 2,39 1,53 4,49 0,569
* Perfiles recom endados en la norm a U N E 36-532-72.
APEN D ICE 2 6 7 5
A = Area de la sección I = Momento de inercia
W — Módulo resistente[7
i = — = Radio de giro
Referido a los ejes
LDx-x y-y '1-7
Ixcm*
Wxcm 3
Ácm
7c m 4
Wycm3
‘ycm
hcm 4
hcm
hcm 4
hcm
1,25 0,62 0,93 0,44 0,29 0,55 1,43 1,00 0,26 0,42 3 0 x 2 0 x 3 *1,59 0,81 0,92 0,55 0,38 0,55 1,81 0,99 0,33 0,42 30 x 20 x 4*1,90 0,98 0,91 0,66 0,46 0,54 2,15 0,97 0,40 0,42 30 x 20 x 5
'2,80 1,09 1,27 0,47 0,30 0,52 2,96 1,31 0,31 0,42 40 x 20 x 3*3,59 1,42 ■ 1,26 0,60 0,39 0,51 3,80 1,30 0,39 0,42 40 x 20 x 4*4,32 1,75 1,25 0,71 0,48 0,51 4,55 1,28 0,48 0,42 40 x 20 x 53,89 1,4,7 1,26 1,16 0,62 0,69 4,35 1,33 0,70 0,53 40 x 25 x 44,69 - 1,81 1,25 1,39 0,76 0,68 5,23 1,32 0,85 0,53 4 0 x 2 5 x 5 ■5,77 1,91 - 1,42 2,05 0,91 0,85 6,63 1,52 1,19 0,65 45 x 30 x 4* .6,98 2,35 1,41 2,47 1,11 0,84 8,00 1,51 1,45 0,64 45 x 30 x 5*
15,5 4,04 1,90 2,60 1,12 0,78 16,5 1,96 1,70 0,63 60 x 30 x 5> 18,2 4,78 1,89 3,02 1,32 0,77 19,2 1,95 1,99 0,63 60 x 30 x 6
17,2 4,25 1,89 6,11 2,02 1,13 19,8 2,03 3,54 0,86 60 x 40 x 5*20.1 5,03 1,88 7,12 2,38 1,12 23,1 2,02 4,15 0,86 60 x 40 x 6*22,9 5,79 1,87 8,07 2,74 1,11 26,3 2,00 4,75 0,85 60 x 40 x 723,2 5,14 2,05 11,9 3,19 1,47 28,8 2,28 6,32, 1,07 6 5 x 5 0 x 5 *27,2 6,10 2,03 14,0 3,77 1,46 33,8 2,27 7,43 1,06 65 x 50 x 631,1 7,03 2,02 15,9 4,34 1,45 38,5 2,25 8,51 1,06 65 x 50 x 7*
—-------... 34,$ 7,93 2,01 17,7 4,89 -1,44 43,0 2,24 9,56 1,05 6 5 x 5 0 x 8

6 7 6 ; RE SISTE N CIA DE M ATE RIALE S
A N G U L A R DE LAD O S D ESIGUALES (LD)
A APE N D IC E .2 6 7 7 :
.
LD
i
Dimensiones(mm)
Sec.A
cm J
PesoP
kg/m
Posición de lo s ejes
■------------Referido a los ejes
LD. x-x y-y í-í n-n
a ' b e r Ucxcm
c,cm
u' ■ ,cm
v" cm
v‘". cm
w'cm
tg a 4cm4
Wxcm 3
ixcm
A :cin4
Wycm 3
Ócm
hcm 4
kcm
Acm 4
, ' icm
75 * 5 0 x 5 * ' 75 50 5 7 3,5 6,05 4,75 2,39 1,17 2,03 2,65 1,32 5,15 0,436 34,4 6,74 2,38 12,3 3,21 1,43 39,6 2,56 7,11- 1,08 7 5 x 5 0 x 5*75 x 50 x 6 75 50 6 7 3,5 7,19 5,65 2,44 1,21 2,08 2,63 1,35 5,12 0,435 40,5 8,01 ' '2,37 14,4 3,81 1,42 46,6 2,55 8,36 1,08 75 X 50 x 675 x 50 x 7* 75 50 7 7 3,5 8,31 6,53 2,48 1,25 2,13 2,63 1,38 5,10 0,433 46,4 9,24 2,36- 16,5 . 4,39 1,41 53,3 2,53 9,57. 1,07 75 x 50 x 7*7 5 x 5 0 x 8 75 50 8 7 3,5 9,41 7,39 2,52 ' 1,29 2,18 2,62 1,42 5,08 0,430 52,0 10,4 2,35 18,4 4,95 1,40 59,7 2,52 10,8 . 1,07 75 x 50 x 880 x 40 x 5 80 40 5 7 3,5 5,80 4,56 2,81 0,84 1,51 2,40 0,91 5,24 0,260 38,2 7,55 2,56 6,49 2,06 1,06 ’ 40,5 2,64 4,19- 0,85 80 x 40 x 580 x 40 x 6* 80 40 6 7 3,5 6,89 5,41 2,85 0,88 1,55 2,38 0,89 5,20 0,258 44,9 8,73 2,55 7,59 2,44 1,05 47,6 2,63 4,92 0,85 80 x 40 x 6*80 x 40 x 7 80 40 7 7 3,5 7,96 6,25 2,90 0,92 1,61 2,36 0,97 5,17 0,256 51,4 10,1 2,54 ' 8,63 2,81 1,04 54,4 2,61 5,64 0,84 80 x 40 x 780 x 40 x 8* 80 40 8 7 3,5 9,01 7,07 2,94 0,96 1,65 2,34 1,04 5,14 0,253 57,6 11,4 2,53 9,61 3,16 1,03 60,9 2,60 6,33 0,84 80 x 40 x 8*80 x 60 x 6 80 60 6 8 4,0 8,11 6,37 2,47 1,48 2,50 2,92 1,72 5,57 0,548 51,4 9,29 _ 2,52 24,8 5,49 1,75 62,8 ■ 2,78 13,4 -1,29 80 x 60 x 680 x 60 x 7* 80 60 7 8 4,0 9,38 7,56 2,51 1,52 2,53 2,92 1,77 5,55 0,546 59,0 10,7 2,51 28,4 6,34 1,74 72,0 2,77 15,4 ' 1,28 8 0 x 6 0 x 7 *80 x 60 x 8 80 60 8 8 4,0 10,6 8,34 2,55 1,56 2,58 2,92 1,80 5,53 0,544 66,3 12,2 2,50 31,8 7,16 1,73 80,8 2,76 . 17,3 1,27 80 X 60 x 81 0 0 x 5 0 x 6 * 100 50 6 9 4,5 8,73 6,85, 3,49 1,04 1,91 3,00 1,15 6,56 0,260 89,7 13,8 3,21 15,3 3,85 1,32 95;1 . 3,30 • 9,85 1,06 100 x 50 x 6*1 0 0 x 5 0 x 7 ' 100 50 7 9 4,5 10,1 7,93 3,54 1,08 1,93 2,98 1,15 6,52 0,259 103 16,0 3,20 17,4 4,46 1,31 109 . 3,29 11,3 ■ 1,06 100 x 50 x 71 0 0 x 5 0 x 8 * 100 50 8 9 4,5 11,4 8,99 3,59 1,12 2,00 2,96 1,18 6,49 0,257 116 18,1 3,18 19,5 5,04 1,31 123 3,28 12,7 1,05 100 x 50 x 8*100 x 50x10 100 50 10 9 4,5 14,1 11,1 3,67 1,20 2,08 2,93 1,22 6,43 0,253 141 22,2 3,16 23,4 6,17 1,29 149 3,25 15,4 1,05 100 x 50 x 10
1 0 0 x 6 5 x 7 100 65 7 10 5,0 11,2 8,77 3,23 1,51 2,66 3,48 1,73 6,83 0,415 113 16,6 3,17 57,6 7,53 1,83 128 3,39 22,0 1,40 1 0 0 x 6 5 x 71 0 0 x 6 5 x 8 * 100. 65 8 10 5,0 12,7 9,94 3,27 1.55 2,68 3,47 1,73 6,81 0,414 127 18,9 3,16 42,2 8,54 1,83 144 ■ 3,37 24,8 1,40 100 x 65 x 8*1 0 0 x 65 x 10* 100 65 10 10 5,0 15,6 12,3 3,36 1,63 2,78 3,45 1,78 6,76 0,410 i 154 23,2 3,14 51,0 10,5 1,81 175 3,35 30,1 1,39 100 x 65 x 10*
1 0 0 x 7 5 x 8** 100 75 8 10 5,0 13,5 10,6 3,10 1,87 3,12 3,65 2,19 6,95 0,547 133 19,3 3,14 64,1 11,4 2,18 163 ' 3,47 34,6 ' 1,60 1 0 0 x 7 5 x 8 * *1 0 0 x 7 5 x 10** 100 75 10 10 5,0 16,6 13,0 3,19 1,95 3,23 3,65 2,24 6,92 0,544 162 23,8 3,12 77,6 14,0 . 2 ,16 ’ 197 : 3,45 42,2 1,59 100 x 75 x 10**
,100 x 75-x 12** 100 75 12 10 5,0 19,7 15,4 3,27 2,03 3,34 3,65 2,29 6,89 0,540 189 28,0 3,10 90,2 16,5 2,14 230 3,42 49,5 1,59 100 x 75 x 12**
A — Area de la sección / = Momento de inercia
W = Módulo resistente
i = -- = Radio de giro
* Perfiles recom endados en la norm a UNE 36-532-72. ** Perfiles recom endados en la norm a NBE 102.

6 7 8 ■ R E SIST E N C IA DE M A TE RIA LE S
A N G U L AR DE LAD O S D E SIG U ALES (LD)
LD
D im ensiones(mm)
Sec.A
cm 2
PesoP
kg/m
Posición de los ejes
a *■■ b e r e U ■ cm ’cy
cmv'
cm iv" ‘
cmy'"cm
Wcm
tg a
1 2 0 x 8 0 x 8** ■ 120 80 8 11. 5,5 15,5 12,2 3,83 1,87 3,27 : 4 ,23. 2,16 8,23 0,4371 2 0 x 8 0 x 1 0 * * 120 80 10 11 5,5 19,1 15,0 3,92 1,95 3,37 4;21 2,19 8,19 0,4351 20x 8 0 x 12** 120 80 ' 12 11 5,5 22,7 17,8 4,00 2,03 3,46 4,20 2,25 8,15 0,431
1 3 0 x 65 x 8 130 65 8 1.1 5,5 15,1 11,8 4,56 1,37 2,49 3,90 1,47 8,51 0,261130 x 65 x 10* 130 65 10 11 5,5 18,6 14,6 4,65 1,45 2,58 3,86 1,54 8,44 0,258130 x 65 x 12* 130 65 12 11 5,5 22,1 17,3 4,74 1,53 2,66 3,83 1,60 8,38 ■0,255
1 5 0 x 7 5 x 9 150 75 9 11 5,5 ' 19,6 15,4 5,27 1,57 2,90 4,50 1,72 9,81 0,2621 5 0 x 7 5 x 10* 150 75 10 11 5,5 21,6 17,0 5,32 1,61 2,90 4,4.8 1,73 , 9,77 0,261150 x 75 x 12* 150 75 . ■12 11 5,5, .25,7 20,2 5,41 1,69 2,9.9 4,45 1,81 9,71 0,2591 5 0 x 7 5 x 15 150 75 15 11 5,5 31,6 24,8 5,53 1,81 3,11 4,41 1,91 9,62 0,254
150 x 90 x 10* 150 90 10 12 6,0 23,2 18,2 5,00 2,04 3,60 5,03 2,24 10,1 0,361 -.150 x 90 x 12 150 90 . 12 12 6,0 27,5 21,6 5,08 2,12 3,70 5,00 2,30 10,1 0,3581 5 0 x 9 0 x 1 5 * 150 90 15 12 6,0 33,9 26,6 5,21 2,23 3,84 4,98 2,46 9,9 8 0,354
200 x 100 x 10 200 100 10 15 7,5 29,2 23,0 6,93 2,01 3,75 6,05 2,22 13,2 0,265200 x 100 x 12 200 100 12 15 7,5 34,8 27,3 7,03 2,10 3,84 6,00 2,26 13,1 0,262200 x 100 x 15 200 100 15 15 7,5 43,0 33,7 7,16 2,22 3,94 5,95 2,37 13,0 0,260
2 0 0 x 1 5 0 x 10 200 150 10 15 7,5 34,2 26,9 5,99 3,53 5,98 7,35 4,55 14,0 0,553200 x 150 x 12 200 150 12 15 7,5 40,8 32,0 6,08 3,61 6,09 7,34 4,17 13,9 0,5522 0 0 x 1 5 0 x 15 200 150 15 15 7,5 50,5 39,6 6,21 3,73 6,26 7,33 3,99 13,9 0,5512 0 0 x 1 5 0 x 1 8 200 150 18 15 7,5 60,0 •47,1 6,33 3,85 6,41 7,33 3,69 13,8 0,548
* Perfiles recom endados en la norm a UN E 36-532-72. ** Perfiles recom endados en la norm a NBE 102,
APEN D ICE 2 6 79
A — Area de la sección I = M om ento de inercia
W = M ódulo resistente17
i- = ■ — = R adio de giro
Referido a los ejes
LDA-X y.-y í - í . tj-tj
7,cm4
Wxcm 3
Ácm
¡ycm4
W y 1cm 3
‘ycm ■ .
. h ' .cm4
kcm
hcm4 cm
226 27,6 3,82 80,8 13,2 2,28 ^ 260 4,10 46,6 ■ 1,73 1 2 0 x 8 0 x 8 * *276 34,1 3,80 98,1 16,2 2,26 317 4,07 56,8 1,72 120 x 80 x 10**323 40,4 3,77 114 19,1 2,24 . 371 4,04 76,6 1,71 120 x 80 x 12**263 31,1 4,17 44,8 8,2 1,72 278 4,30 28,9 1,38 130 x 65 x 8320 38,4 4,15 54,2 10,7 1,71 339 4,27 35,2 1,37 130 x 65 x 10*375 45,4 4,12 63,0 . 12,7 1,69 397 4,24 41,2 1,37 130 x 65 x 12*456 46,9 4,83 78,3 13,2 2,00 484 4,97 50,4 1,60 1 5 0 x 7 5 x 950} 51,8 4,81 85,8 14,6 1,99 532 4,96 55,3 1,60 150 x 75 x 10*589 61,4 4,79 - 99,9 17,2 1,97 624 4,93 64,9 1,59 150 x 75 x 12*.713 75,3 4,75 120 21,0 1,94 754 4,88 78,8 1,58 150 x 75 x 15533 53,3 4,80 146 21,0 2,51 591 5,05 88 1,95 150 x 90 x 10*627 63,3 4,77 171 24,8 2,49 695 5,02 104 1,94 1 5 0 x 9 0 x 1 2761 77,7 4,74 205 30,4 2,46 841 4,98 126 1,93 1 5 0 x 9 0 x 15*
1.220 93,2 6,46 210 26,3 2,68 1.290 6,65 135 2,15 200 x 100 x 101.440 111 6,43 247 31,3 2,67 1.530 6,63 159 2,14 200 x 100 x 121.760 137 6,40 299 38,4 2,64 1.860 6,58 194 2,12 2 0 0 x 1 0 0 x 1 51.400 99,6 6,38 680 59,2 4,46 1.710 7,07 364 3,26 2 0 0 x 1 5 0 x 101.650 119 6,36 803 70,5 4,44 2.030 7,05 430 3,25 2 0 0 x 1 5 0 x 122.020 147 6,33 979 86,9 4,40 2.480 7,00 526 ' 3,23. 2 0 0 x 1 5 0 x 1 52.380 174 6,29 1.150 103 4,37 2.900 6,96 618 3,21 2 0 0 x 1 5 0 x1 8
i
Bibliografía
B e e r , F . P . , y J o h n s t o n , E . R . Jr.: M ecá n i c a d e m a t e r ia l e s . McGraw-Hill, Inc. Bogotá,1 9 8 2 . . ; _
B e l l u z z i , O.: C ien c ia d e la C on s t r u c c i ó n (4 tomos), Águilar. M adrid, 1967.R o r e s i , A. P., y L y n n , P. P.: E las t i c i t y in E n g in e e r in g M ech a n i c s . Prentíce-Hall. New i Jersey, 1974.P o u r b o n , J.: Tra tado d e R e s i s t e n c ia d e M a t e r ia l e s (2 to m o s ) . Aguilar. M adrid, 1968. ¡ F a v r e , H.: C ou rs d e M éca n iq u e (T o m o s 1.° y 3.°). Leemann. Zurich, 1953. .pÉODO SsiEV, Y.: R és i s ta n c e d e s M até r iaux . M ir. M oscú, 1971. ;pERE-TiM O SH EN KO : M ecá n i c a d e m a t e r ia l e s . Grupo Editorial Iberoamérica. México, 1986. K e r g u i g n a s , M., y C a i g n a é r t , G.: R é s i s t e n c e d e s M até r iaux . Dunod Université. París,| 1977. -I C is e u o v , Y. A.: M ecá n i c a d e C on s t r u c c i ó n (2 tomos). M ir. Moscú, 1976.I v I a s s o n n e t , Ch: R é s i s t a n c e d e s M atér iaux . Sciences et Lettres. Lieja, 1 9 6 0 .
S e e l y , F. B., y S m i t h , J. O.: Curso S u p e r i o r d e R e s i s t e n c ia d e M a te r ia l e s . N igar. Buenos Aires, 1967.
T im o s h b n k o , S., y Y o u n g , D. H.: E lem en t o s d e R e s i s t e n c ia d e M ate r ia l e s . M ontaner y Simón. Barcelona,. 1979.
6 8 0
Indice analítico
A nalogía de la m em brana, 574 Angulo:
de deslizam iento, 144 de hélice de torsión , 553 de torsión , 552
Anillo de pequeño espesor:giratorio alrededor de su eje, 106 som etido a presión uniform e, 104
Apoyos:articulado fijo, 30 articulado m óvil, 30 em potrado, 31
Arco funicular, 99 Area sectorial, 232
elem ental, 231 A rm adas, vigas, 212
B arra, 6 B arras esbeltas:
com presión excéntrica de, 486 grandes desplazam ientos en, 489 pandeo de, 483
Bernoulli, h ipótesis de, 70 Betti, teorem a de reciprocidad de, 40 Bredt, fórm ula de, 583
C arga critica de pandeo, 485 Cargas, tipos de, 28 C áscara, 7Castigliano, teorem a de, 40 C atenaria, 96
C en tro de esfuerzos cortan tes, 229 C en tro de torsión , 572 C írculos de M ohr:
de deform aciones, 16 de torsiones, 12
C lapeyron, fó rm ula de, 39 Coeficiente:
de concen tración de tensiones, 75 de d ila tación lineal, 90 dc ponderación , 35 de Poisson, 23de reducción de la longitud , 498 de seguridad, 34
C olignon, fórm ula de, 204 C olum nas cortas, 502 C olum nas esbeltas, 502
pandeo con em potram ien tos elásticos en los extrem os, de 510
C olum nas in term edias, 503fórm ula em pírica de T etm ajer p a ra la de
term inación de tensiones'criticas, 502 C om patib ilidad de las deform aciones, ecuacio
nes, de 400 C om ponentes intrínsecas:
del vector deform ación un itaria , 15 del vector tensión , 9
C om presión m onoaxia):estado de deform aciones en, 76 estado tensional en, 69
C om puestas, vigas, 220 C ontinuas, vigas, 410
6 8 1

6 8 2 ■ IN D ICE AN ALITICO
C o n tin u id ad de los sólidos elásticos, 4 ■ C onvenio de "signos:
p a ra deform aciones angulares, 143 p a ra esfuerzos cortantes, 139 para esfuerzos normales, 69 p a ra m om entos flectores, 188
C ortadura : doble, 147 sim ple, 147
C riterios de resistencia, 37 de la deform ación longitudinal m áxim a, 38 de la energía de distorsión, 38 de la tensión principal m áxim a, 37 de la tensión tangencial m áxim a, 38 de los estados límites de M ohr, 38
D eform aciones principales, 15 D epósito :
cilindrico som etido a presión uniforme, 102 cónico abierto conteniendo líquido, 103 esférico som etido a presión uniforme, 103
D iag ram a: .ude desplazam iento de las secciones rectas, .76de esfuerzos cortantes, 1 9 0 .................de esfuerzos norm ales, 69 ' ■■■'.>de m om entos flectorés, 190 - ■ ■de m om entos torsores, 558 tensión-deform ación, 21 •••*.-..
D irecciones principales:de la m atriz de deform ación, 14 de la m atriz de tensiones, 11
Ecuación:diferencial aproxim ada de la línea elástica,
265diferencial exacta de la línea elástica, 265 un iversal de la deform ada de una viga de
rigidez constante, 274 universal de los ángulos girados p o r las sec
ciones de u n a viga, 274 ' sE cuación de Laplace, 101 E cuaciones de com patib ilidad de las deform a
ciones, 81, 400 E cuaciones de equilibrio, 4
in te rn o , 11 Eficiencia de la unión, 152 Eje neu tro , 341Ejes de transm isión de potencia, 556 Elipsoide:
de deform aciones, 16 de tensiones de Lam é, 12
Endurecim iento p o r deform ación, 22 E nergía de deform ación (véase Potencial in ter- -
no)Ensayo de tracción, 20 Equilibrio elástico, 8 Esbeltez, 486 Esfuerzo cortan te , 26 Esfuerzo norm al, 26 E stabilidad , 2E stado tensional h idrostático, 110 E státicam ente indeterm inadas (véase H íper-
estáticas) ó"'Estricción, 22 Euler, fórm ula d e ,'483
Flexión: com puesta, 348 de piezas curvas, 360 desviada, 339 pura, 182resortes de, 305 -simple, 188
F luencia, lím ite de, 21 F lu jo de cortadura , 226, 583 ■ • -F ó rm u la de Colignon, 204 F ó rm u la de Euler, 483 F unción de alabeo, 567 Funciones de d iscontinuidad, 269,
G arg an ta de un cordón de so ldadura, 154 G rado de h iperestaticidad , 8.1, 414
H ilos, equilibrio de, 94 H ipótesis de Bernoulli, 70 H om ogeneidad de los sólidos elásticos, 4 B ooke , ley de, 23
leyes generalizadas de, 24
Iso tro p ía de los sólidos elásticos, 4
Lam é, elipsoide de, 12 Laplace, ecuación de, 101 L igadura, reacciones de, 29 Lím ite aparen te de elasticidad, 22 Lím ite de elasticidad, 21 Lím ite de fluencia, 21 Lím ite de p roporcionalidad , 21 L ínea elástica, 263L ínea m edia de un perfil delgado, 579 L ínea m edia de un prism a m ecánico, 5 L ongitud de pandeo, 497.L üders, líneas de, 21
M atriz de tensiones, 11 ' M étodo de los coeficientes o , 504 M étodo de las fuerzas p a ra el cálculo de siste
m as hiperestáticos, 419 M étodo de M o h r para el cálculo de desplaza
m ientos, 287, 616 M étodo de m ultiplicación de los gráficos, 290
j. v M ódulo de elasticidad:.' i longitudinal, 23
transversal, 24 M oduló de rigidez:
a la flexión, 265 , ' "L a la torsión , 579 y ' ': ' y ‘
M ódulo resistente de la sección': j;)- en flexión, 187
- en torsión, 555 M ohr:
criterio de, 38- prim er teorem a de, 274
segundo teorem a de, 276M om ento flector, 27 M om ento to rsor, 28
N avier, ley de, 182 - N úcleo central, 354
, P andeo de barra s rectas, 483 P aso de rem achado, 215 Perfiles delgados som etidos a flexión, 225
. Perfiles delgados som etidos a torsión: abiertos ram ificados, 580 abiertos sin ram ificar, 579 ■
• cerrados de una sola célula, 581 cerrados de varias células, 584
Placa, 6Poisson, coeficiente de, 23 Potencial interno:- en cortadura , 14.5- en flexión com puesta, 344
en flexión simple, 280, en-torsión, 564 :* en tracción o com presión m onoaxial, 80
ú Principio: ■* de rigidez relativa de los sistemas elásticos,
17de Saint-V enant, 19 de superposición de efectos, 18 generalizado de Navier-Bernoulli, 188
P rism a mecánico, 5
R ankine, criterio de la tensión principal m áxim a o de, 37
.IN D ICE AN A LITICO ' tK 6 8 3
- -'"707/Relaciones entre el esfuerzo . c o r ta n te ,,e lm o -b r -
m ento flector y la c a rg a ,.200 ,,p y .vy"-.Resistencia característica, 36 : ■'Resistencia m ecánica, 1 .1Resortes:. ■ . u-
de flexión, 305 . ■ -de torsión , 621 , -
Rigidez, 1 a flexión, 265a flexión de una viga com puesta , 223 a torsión, 554, 579
Saint-V enant: criterio de, 38 principio de, 19 teoría de to rsión de, 567
Sección reducida, 281 Sección transform ada, 222 Sistemas:
hiperestáticos, 31, 414 isostátícos, 31
Soldadura: a tope, 154 en ángulo, 154
Sólido: elástico, 4 rígido, 3 verdadero, 5
Sólido de igual resistencia: a esfuerzos norm ales, 79 a flexión, 298
Superficie m edia, 8
Tensión: adm isible, 34 equivalente, 37 norm al, 9 principal, 12 tangencial, 9
Tensiones de origen térm ico, 91 Tensiones p o r defectos de m ontaje, 92 Teorem a:
de C astigliano, 40 de los dos m om entos, 412 de los tres m om entos, 414 de M axwell-Betti, 40 de M enabrea, 40de reciprocidad de las tensiones tangencia
les, 11Teorem as de M ohr, 274

o o - i HNUt A- t AI NA L1 n e o
T eo rem as de la viga con jugada, 277 T eoría de la m em b ran a , 100 T o rs ió n , 550
án gu lo dc, 552 de perfdes d elgados, 578 en p rism as de sección circu lar, 552 en prism as de sección no circu lar, 565 pu ra , 551 sim ple, 551 y co r ta d u ra , 621 y flexión co m b in ad as , 618
T racc ió n o co m p resió n m onoaxial, 69 h iperestá tica , 81
U niones: a to rn illa d a s , 146 rem ach ad as , 145
V e c to r de fo rm ac ió n un itaria , 15 tensión , 9
Vigas: a rm a d a s , 213 co m p u estas , 220 c o n tin u as , 410
V on M ises, criterio de, 38
Y oung , m ó d u lo de, 23






![[UNED][Libro] RESISTENCIA DE MATERIALES-Ortiz Berrocal.pdf](https://static.fdocuments.es/doc/165x107/55cf8abc55034654898d58ae/unedlibro-resistencia-de-materiales-ortiz-berrocalpdf.jpg)


![[Mcgraw-hill] Resistencia de Materiales - Luis Ortiz Berrocal](https://static.fdocuments.es/doc/165x107/55cf9dcc550346d033af3cf0/mcgraw-hill-resistencia-de-materiales-luis-ortiz-berrocal.jpg)