Tabla Transformadas Propiedades

of 8
-
Upload
yarith-lopez -
Category
Documents
-
view
256 -
download
1
Transcript of Tabla Transformadas Propiedades
-
8/10/2019 Tabla Transformadas Propiedades
1/8
CHAP. 51
FOURIER ANALYSIS OF TIME SIGNALS AND SYSTEMS
Table
5 2.
Common Fourier Transforms airs
sin t
5 5
THE FREQUENCY RESPONSE OF CONTINUOUS TIME LTI SYSTEMS
A.
Frequency Response:
In Sec. 2.2 we showed tha t th e ou tput
y t )
of a continuous-time LTI system equals the
convolution of the input
x t )
with the impulse response
h t ;
that is
Applying th e convolution property
5.58),
we obtain
-
8/10/2019 Tabla Transformadas Propiedades
2/8
-
8/10/2019 Tabla Transformadas Propiedades
3/8
FOURIER ANALYSIS OF DISCRETE TIME SlGNALS
AND
SYSTEMS
[CHAP.
6
Table
6 2.
Common Fourier Transform Pairs
s n
n
o
-
8/10/2019 Tabla Transformadas Propiedades
4/8
CHAP.
6
FOUR IER ANALYSIS OF DISCRETE-TIME SIGNALS AND SYSTEMS
Table
6 1.
Properties of the ourier Transform
Property Sequence Fou rier transform
Periodicity
Linearity
Tim e shifting
Frequency shifting
Conjugat ion
Tim e reversal
Tim e scaling
Frequ ency differentiation
First difference
Accumulation
Convolution
Multiplication
Real sequence
Even component
Odd component
Parseval s r elations
-
8/10/2019 Tabla Transformadas Propiedades
5/8
CHAP. 3
LAPLACE TRANSFORM AN D CONTINUOU S-TIME LTI SYSTEMS
Table
3 1
Som e Laplace Transforms Pairs
All s
cos wotu t)
sin wotu t
s a
e- '
cos wotu t)
Re s ) Re a )
s + a 1 2 + w ;
A.
Linearity:
I f
The set notation
A
B
means that set
A
contains set
B,
while A
n
B
denotes the
intersection of sets A and B, that is the set containing all elements in both A and B.
Thus Eq
3 . 15 )
indicates that the
ROC
of the resultant Laplace transform is at least as
large as the region in common between
R ,
and
R 2 .
Usually we have simply
R R ,
n
R , .
This is illustrated in Fig. 3-4.
-
8/10/2019 Tabla Transformadas Propiedades
6/8
CHAP. 31
LAPLACE TRANSFORM AND CONTINUOUS-TIME LTI SYSTEMS
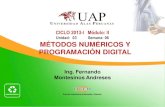
Table 3 2 Properties of the Laplace Transform
Property Signal Transform ROC
x ( t ) X ( s ) R
x , ( t ) x , w R
x 2 W x , w R2
Linearity
a , x , ( t )
+
a 2 x 2 ( l )
a ,X , ( s )
+
a , X 2 ( s) R ' I R , n R 2
Time shifting
x ( t o ) e - X ( s )
R' R
Shifting in
s
es 'x( X ( s o) R' R Re (s , )
Time scaling x( a t - X ( s ) R' aR
la
Time reversal R ' =
- R
Differentia tion in
Differentia tion in s x ( t )
d X( s )
R f = R
ds
Integration
Convolution
then
% ( t )
~ 2 0 ) X I ~ ) X ~ ~ ) R ' I R , n R 2 ( 3 . 2 3 )
Th is convolution p roperty plays a central role in th e analysis and design of continuous-time
LTI systems.
Table 3 2 summarizes the properties of the Laplace transform presented in this
section.
3 5 THE INVERSE LAPLACE TRANSFORM
Inversion of the Laplace transform to find the signal
x ( t )
from its Laplace transform
X s) is called the inverse Laplace transform, symbolically denoted as
A Inversion Formula:
There
is
a procedure that is applicable to all classes of transform functions that
involves the evaluation of a line integral in complex s-plane; that is,
In this integral, th e real c is to be selected such that if th e ROC of X s) is
a
Re s )
< a 2
then a < c
-
8/10/2019 Tabla Transformadas Propiedades
7/8
TH E Z-TRANSFORM AND DISCRETE-TIME LTI SYSTEMS
[CHAP.
4
Thus,
[n] all
B.
Unit Step Sequence
d n l :
Setting a in Eqs. ( 4 . 8 ) to (4.101, we obtain
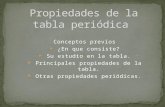
C.
z Transform Pairs:
Th e z-transforms of some common sequences are tabulated in Table 4-1.
Table 4 1. Some Common z Transform Pairs
All z
lzl
>
1
Iz l< 1
Z- '
All z except 0 if
m
>
0) r m if
m
0)
Z
1 - a z - ' ' 2 - a
Izl
>
lal
z 2 COS o ) z
(COS on)u[n l
z 2 2 co s R o )t
1
l z l >
(sin n o )
(sin R,n)u[ n]
z 2 ( 2cos R , ) z 1
Iz l>
z 2 r c o s R 0 ) z
( r n cos R,n)u[n]
z 2 2 r cos R o ) z r 2
Izl> r
( r sin R , )z
r n
in R,n)u[nI
z 2 2 r co s R , ) z r 2
Iz l>
r
O < n s N - 1 1 ~ ' z - ~
otherwise az- '
lz l> 0
-
8/10/2019 Tabla Transformadas Propiedades
8/8
CHAP. 41 T H E Z-TRANSFORM AND DISCRETE-TIME LTI SYSTEMS 173
Table
4 2.
Some Properties of the z Transform
Property Sequence Transform RO C
Linearity
Tim e shifting
Multiplication by
z,
Multiplication by
einon
Tim e reversal
Multiplication
by n
Accumulation
Convolution
( z )
2
d ?
H. Summary of Some z transform Properties
For convenient reference, the properties of the z-transform presented above are
summarized in Table
4-2.
4 5
THE
INVERSE Z TRANSFORM
Inversion of the z-transform to find the sequence x n ] from its z-transform X ( z ) is
called th e inverse z-transform , symbolically den oted as
~ [ n ]s - ' { X ( z > } ( 4 . 2 7 )
A.
Inversion Formula:
As in the case of the Laplace transform, there is a formal expression for the inverse
z-transform in terms of an integration in the z-plane; that is,
where C is a counterclockwise contour of integration enclosing the origin. Formal
evaluation of
Eq
(4.28 ) requires a n un derstanding of com plex variable theory.
B.
Use of Tables of z Transform Pairs:
In th e second method for the inversion of X (z ), we attem pt to express X (z ) as a sum
X ( z ) = X , ( z )
.
+X,(z) (4 .29)