Unidad II – Analisis de Velocidad en El Movimiento Coplonario.
16
UNIDAD II – ANALISIS DE VELOCIDAD EN EL MOVIMIENTO COPLONARIO. Rodriguez, William C.I V -14.227.250 Colina, Jose C.I V - 25.605.357 Chirinos, Robinson C.I V - 22.505.399 TRABAJO VIRTUAL
-
Upload
willian-jose-rodriguez-carrasquero -
Category
Documents
-
view
18 -
download
0
description
Equipo n°7Rodriguez, William C.I V -14.227.250Colina, Jose C.I V - 25.605.357 Chirinos, Robinson C.I V - 22.505.399
Transcript of Unidad II – Analisis de Velocidad en El Movimiento Coplonario.
UNIDAD II – ANALISIS DE
VELOCIDAD EN EL MOVIMIENTO
COPLONARIO.
Rodriguez, William C.I V -14.227.250
Colina, Jose C.I V - 25.605.357
Chirinos, Robinson C.I V - 22.505.399
TRABAJO VIRTUAL
Eslabones
Los cuerpos sólidos que forman parte de un mecanismo se denominan (eslabones). Un eslabón tiene
dos o más pares o elementos de conexión, por medio de los cuales se pueden unir a otros elementos
con el fin de transmitir fuerza o movimiento.
Clasificación de los Eslabones
• Según su Numero de Nodos: Definición e Imágenes.
• Según el Movimiento: Definición e Imágenes.
• Según la Función: Definición e Imágenes.
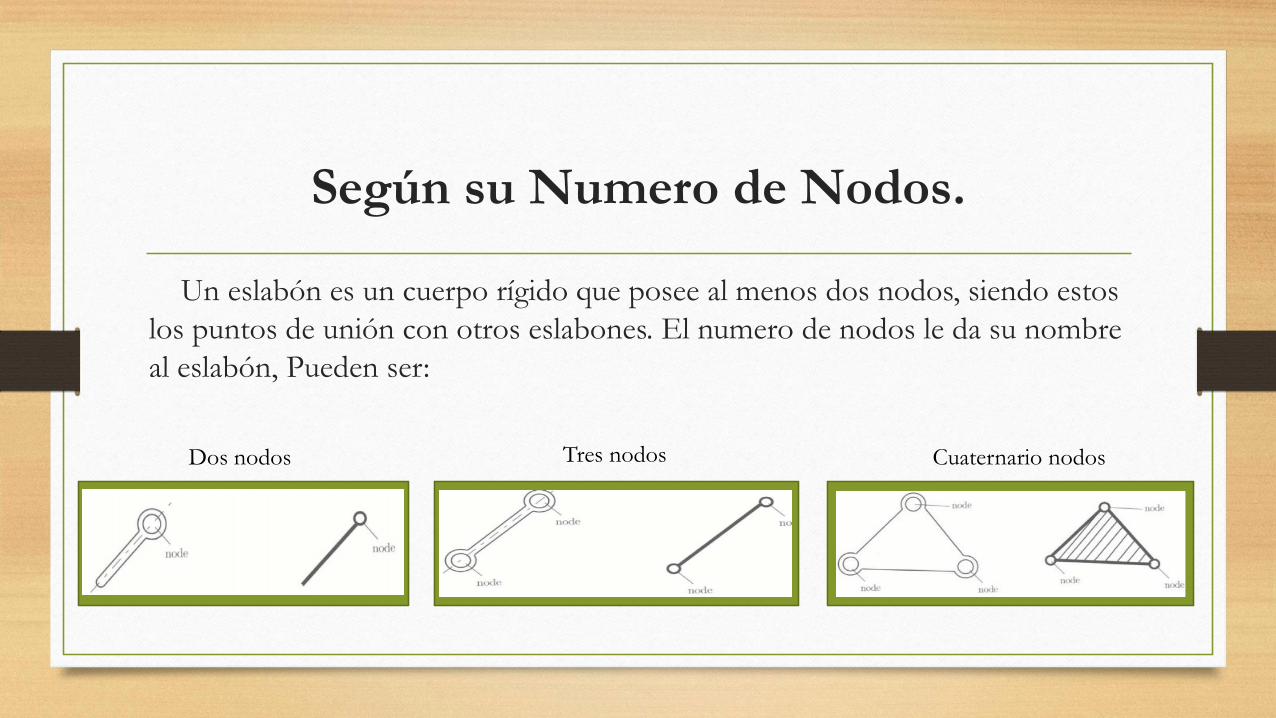
Según su Numero de Nodos.
Dos nodos Tres nodos Cuaternario nodos
Un eslabón es un cuerpo rígido que posee al menos dos nodos, siendo estos
los puntos de unión con otros eslabones. El numero de nodos le da su nombre
al eslabón, Pueden ser:
Según el Movimiento.
Ahora se pueden dividir los eslabones de acuerdo a su movimiento, como se muestra a continuación
• 1.- BANCADA.- es cualquier eslabón o eslabones que están fijos (inmóviles) respecto a un marco de referencia.
• 2.- MANIVELA.- es un eslabón que realiza una revolución completa y esta pivotada a la bancada.
• 3.- BALANCIN.- es un eslabón que tiene rotación oscilatoria de (vaiven) y esta pivotada a la bancada.
• 4.- ACOPLADOR.- (o biela).- es un eslabón que tiene movimiento complejo (rotación y traslación) y no esta pivotado a la bancada.
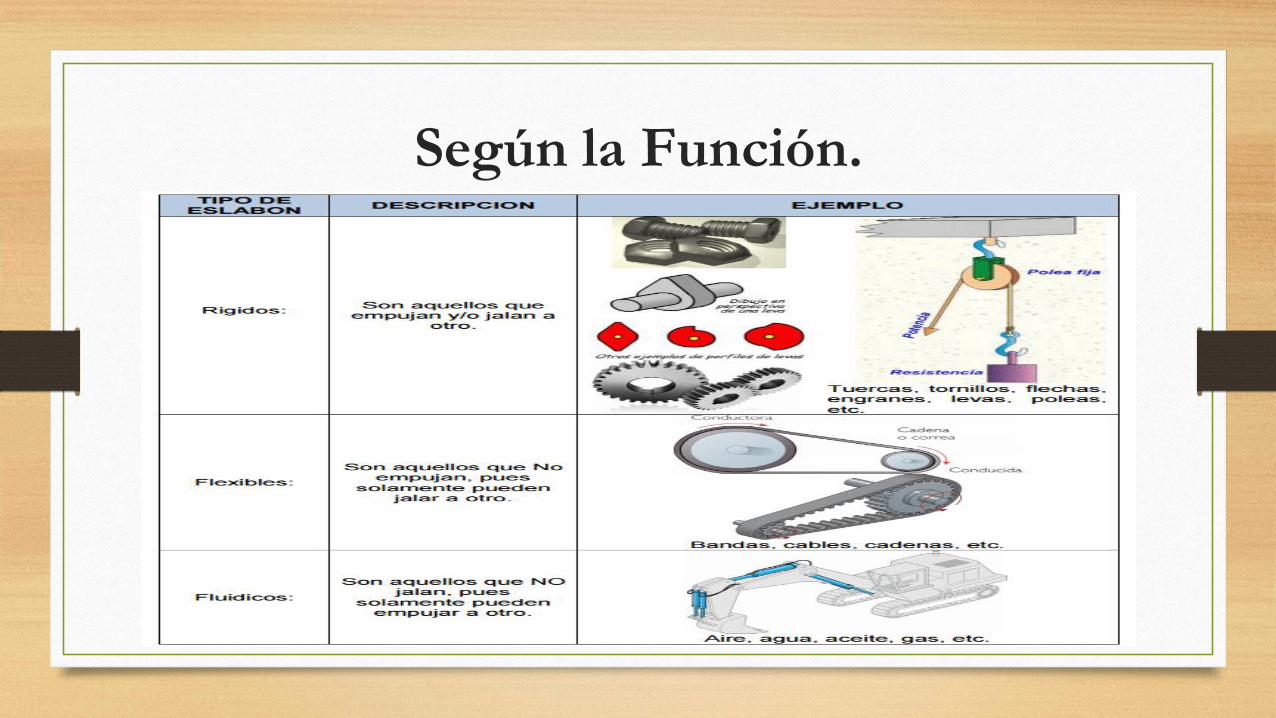
Según la Función.
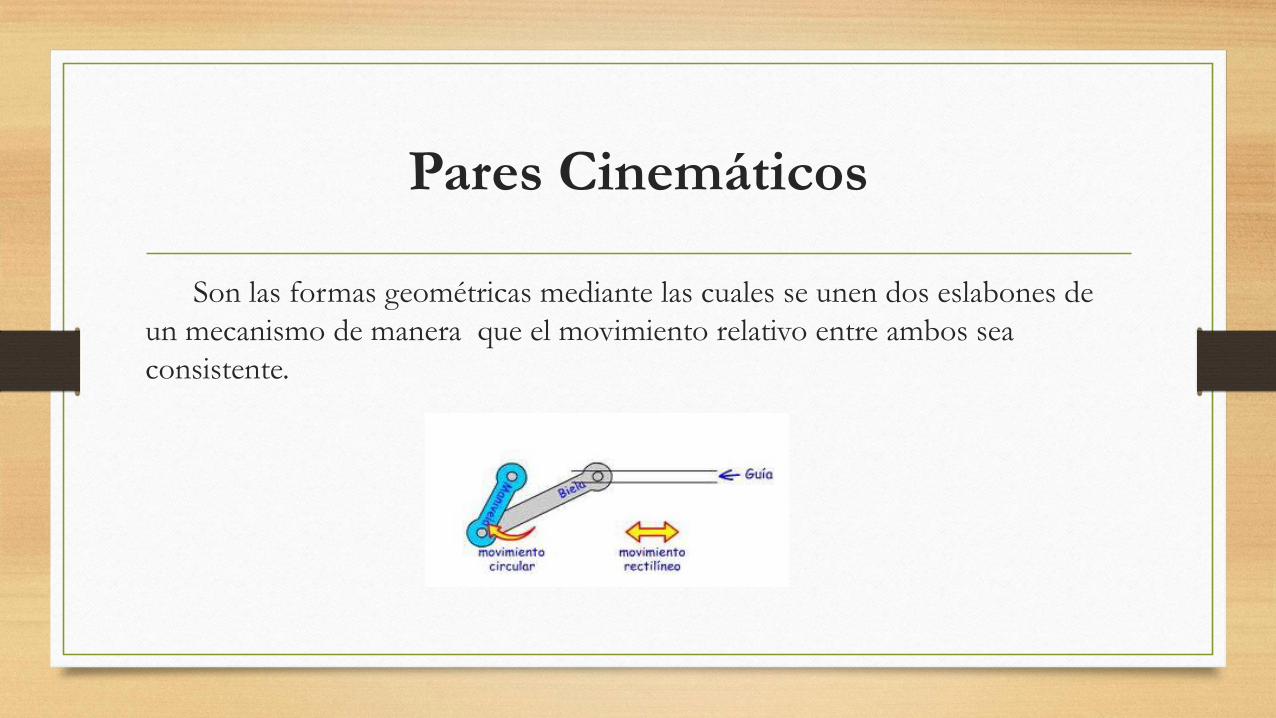
Pares Cinemáticos
Son las formas geométricas mediante las cuales se unen dos eslabones de
un mecanismo de manera que el movimiento relativo entre ambos sea
consistente.

Tipos de pares cinemáticos
PARES INFERIORES
La unión articulada mediante la cual se conectan dos eslabones que
tienen contacto superficial, como la unión de un perno.
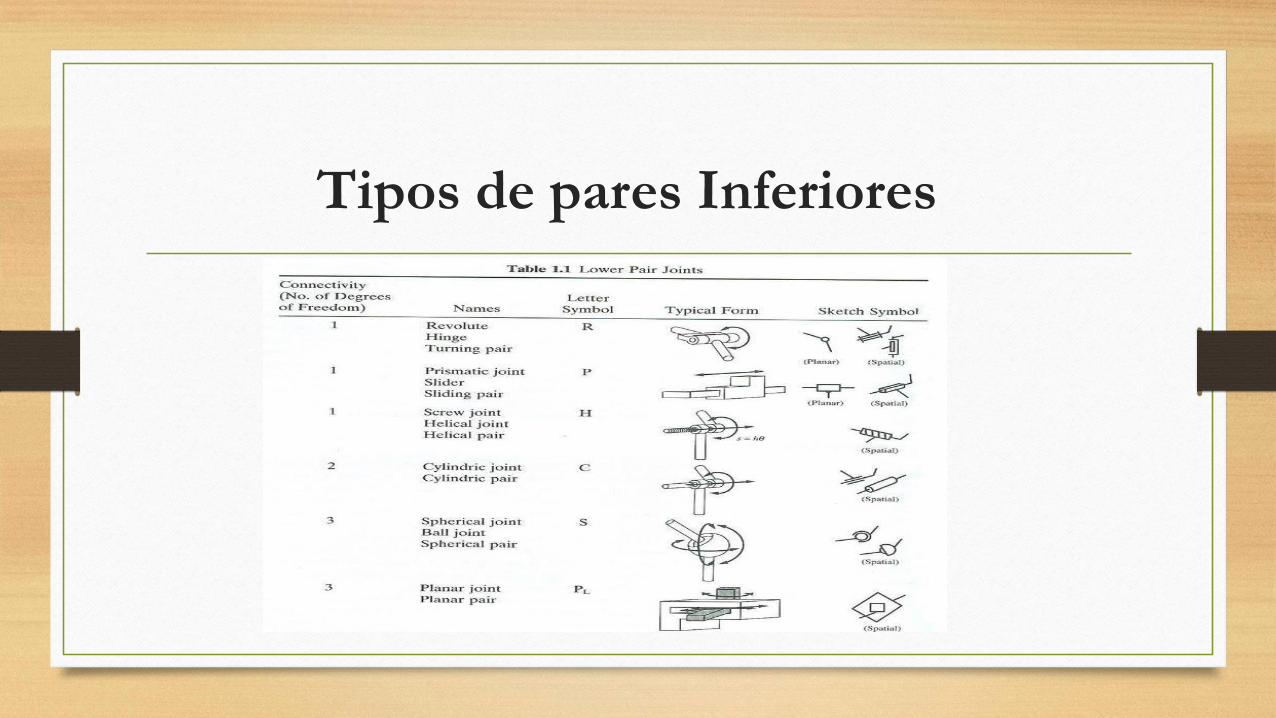
Tipos de pares Inferiores
Tipos de pares cinemáticos
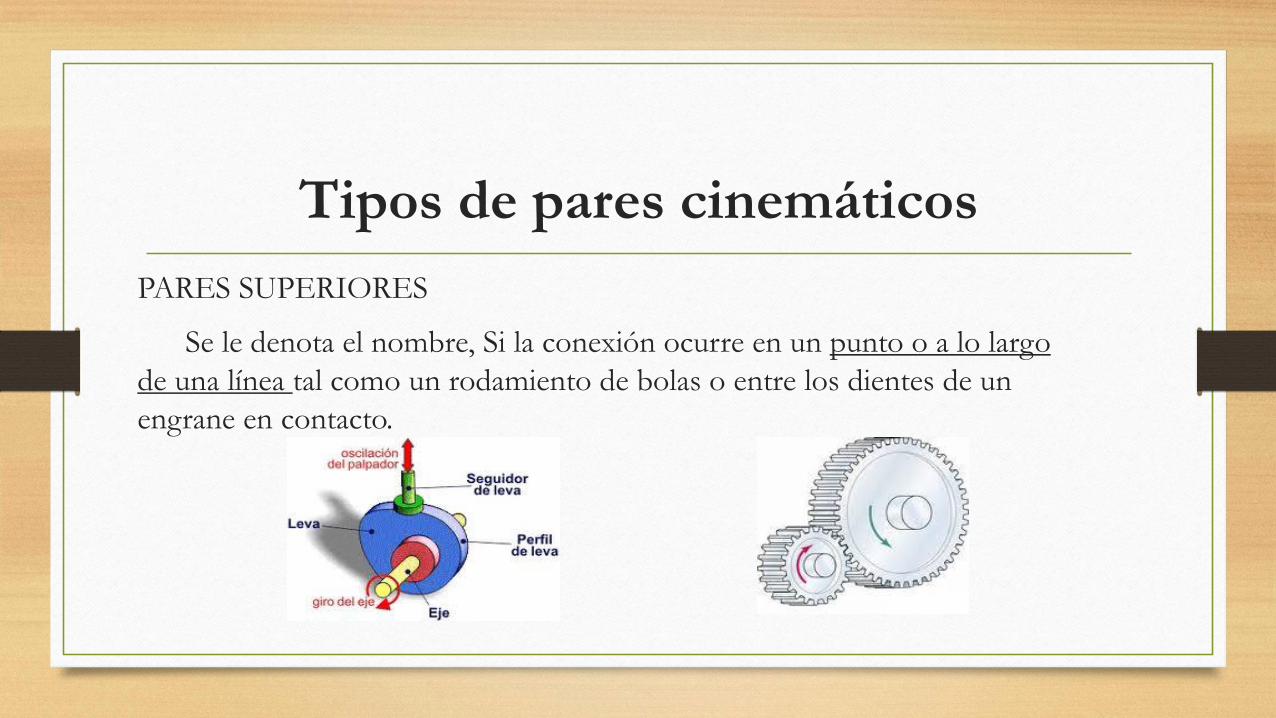
PARES SUPERIORES
Se le denota el nombre, Si la conexión ocurre en un punto o a lo largo
de una línea tal como un rodamiento de bolas o entre los dientes de un
engrane en contacto.
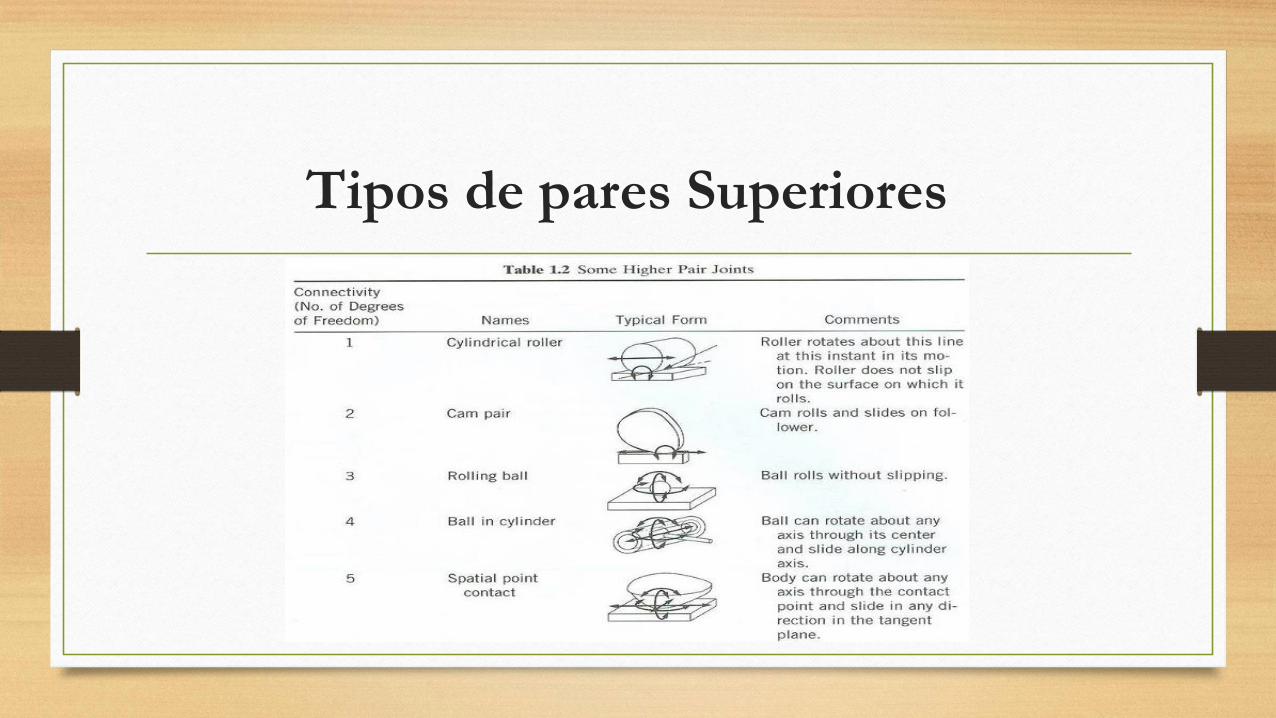
Tipos de pares Superiores
Cadenas cinemáticas
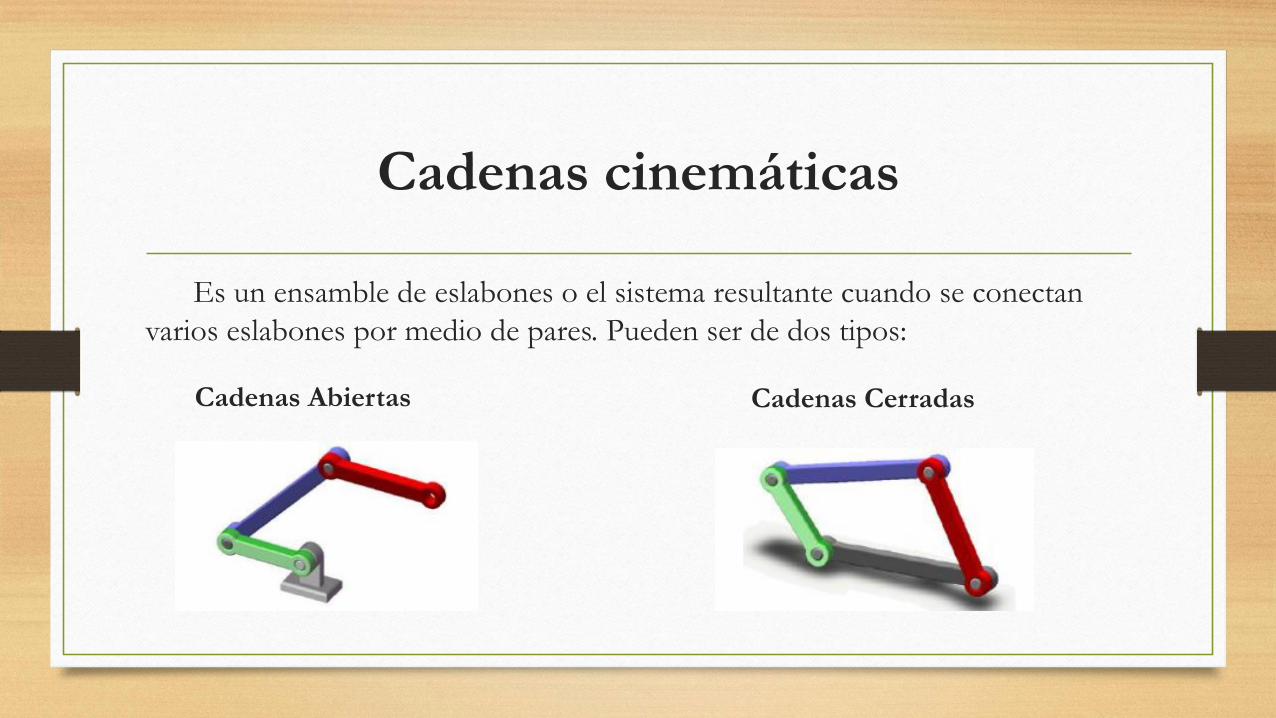
Es un ensamble de eslabones o el sistema resultante cuando se conectan
varios eslabones por medio de pares. Pueden ser de dos tipos:
Cadenas Abiertas Cadenas Cerradas
Cadenas cinemáticas
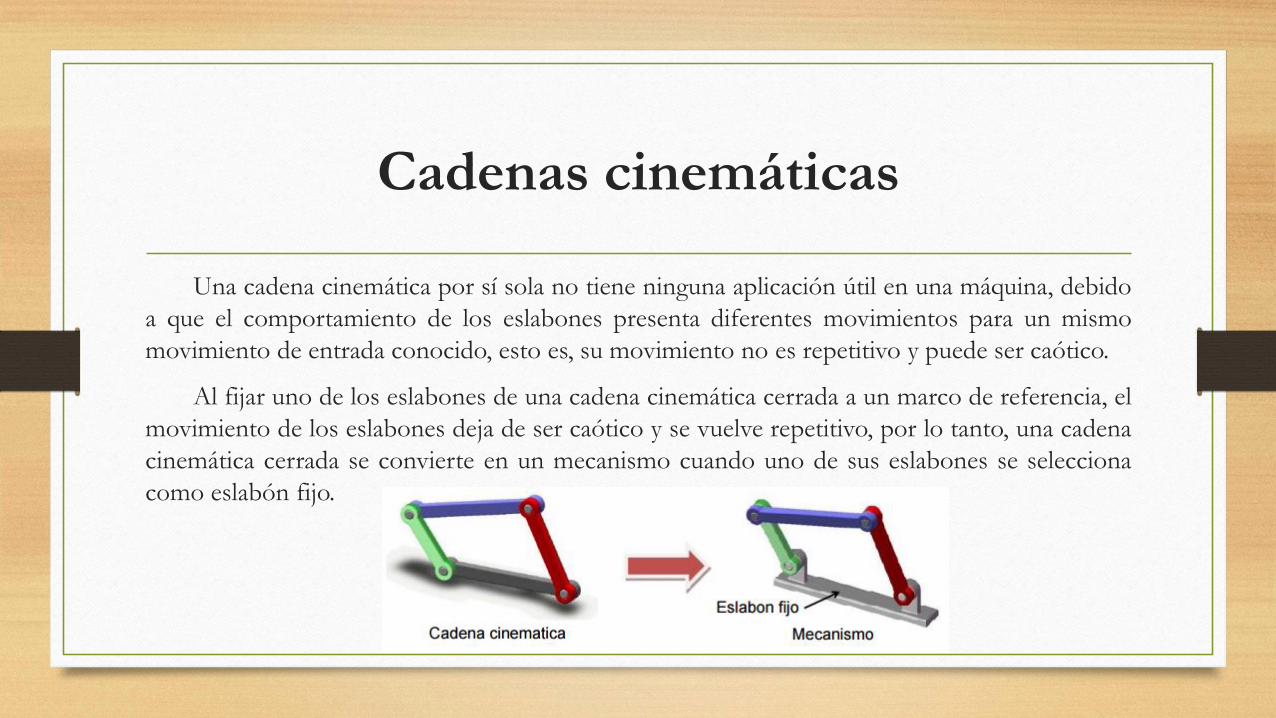
Una cadena cinemática por sí sola no tiene ninguna aplicación útil en una máquina, debido
a que el comportamiento de los eslabones presenta diferentes movimientos para un mismo
movimiento de entrada conocido, esto es, su movimiento no es repetitivo y puede ser caótico.
Al fijar uno de los eslabones de una cadena cinemática cerrada a un marco de referencia, el
movimiento de los eslabones deja de ser caótico y se vuelve repetitivo, por lo tanto, una cadena
cinemática cerrada se convierte en un mecanismo cuando uno de sus eslabones se selecciona
como eslabón fijo.
Cadenas cinemáticas
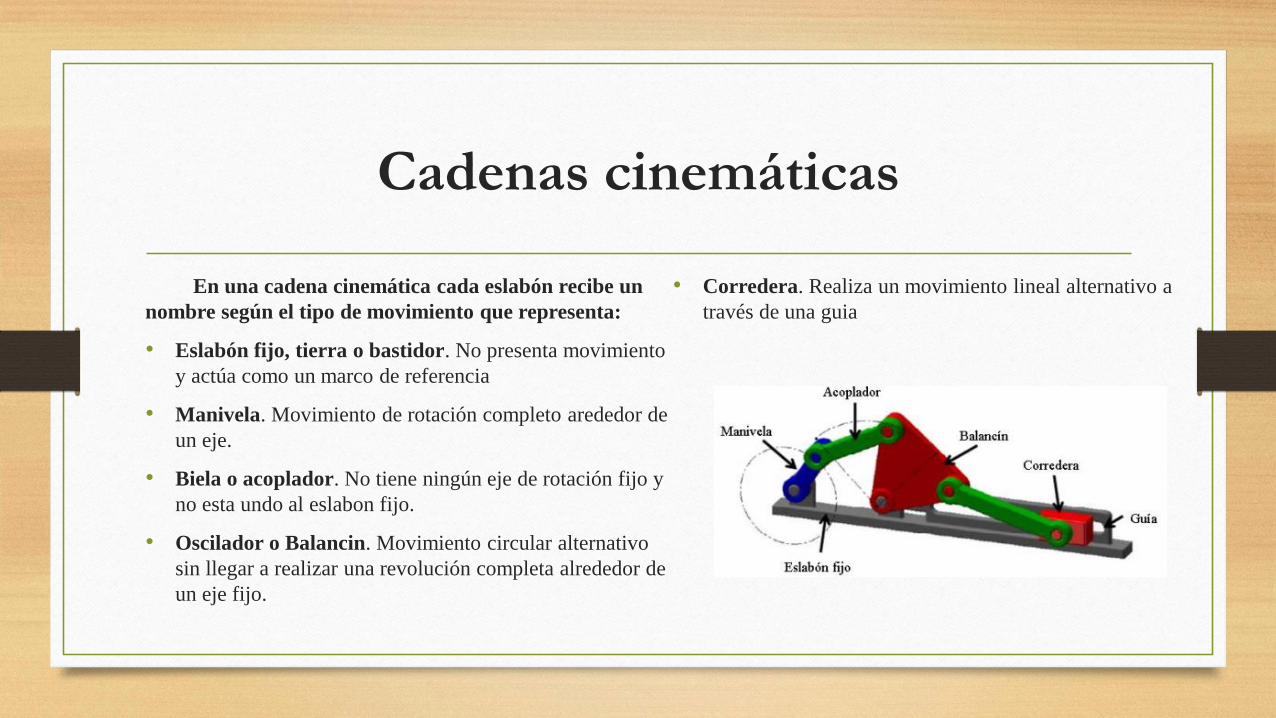
En una cadena cinemática cada eslabón recibe un
nombre según el tipo de movimiento que representa:
• Eslabón fijo, tierra o bastidor. No presenta movimiento
y actúa como un marco de referencia
• Manivela. Movimiento de rotación completo arededor de
un eje.
• Biela o acoplador. No tiene ningún eje de rotación fijo y
no esta undo al eslabon fijo.
• Oscilador o Balancin. Movimiento circular alternativo
sin llegar a realizar una revolución completa alrededor de
un eje fijo.
• Corredera. Realiza un movimiento lineal alternativo a
través de una guia
Inversión de una Cadena Cinemática
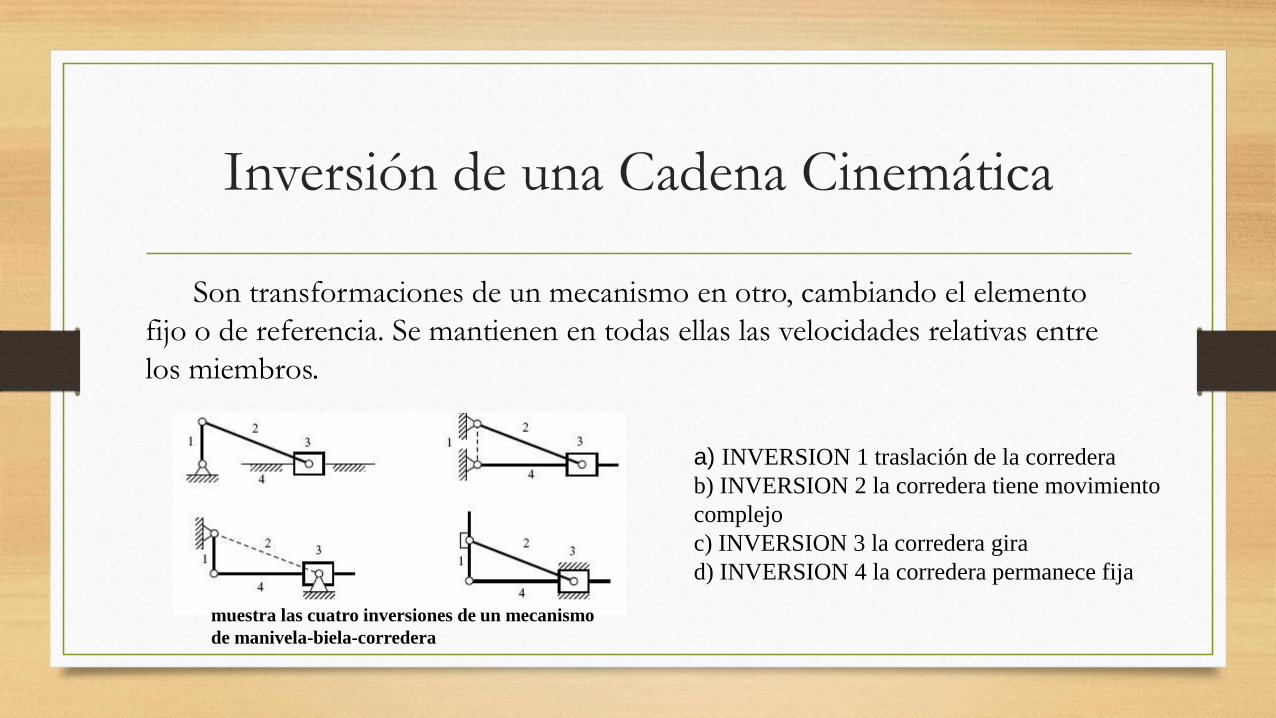
Son transformaciones de un mecanismo en otro, cambiando el elemento
fijo o de referencia. Se mantienen en todas ellas las velocidades relativas entre
los miembros.
muestra las cuatro inversiones de un mecanismo
de manivela-biela-corredera
a) INVERSION 1 traslación de la corredera
b) INVERSION 2 la corredera tiene movimiento
complejo
c) INVERSION 3 la corredera gira
d) INVERSION 4 la corredera permanece fija