
w3.iico.uaslp.mxw3.iico.uaslp.mx/SiteAssets/xvii-semana/memorias_digitales.pdf · Memorias del...
49
MEMORIAS PREMIO DE INSTRUMENTACIÓN Y ELECTRÓNICA 2017 “DR. GUSTAVO DEL CASTILLO Y GAMA”
Transcript of w3.iico.uaslp.mxw3.iico.uaslp.mx/SiteAssets/xvii-semana/memorias_digitales.pdf · Memorias del...

MEMORIAS
PREMIO DE INSTRUMENTACIÓN Y ELECTRÓNICA 2017
“DR. GUSTAVO DEL CASTILLO Y GAMA”

Diseño Gráfico y Formación Dr. Luis Felipe Lastras Martínez
Dra. Marcela Mejía Carlos Ing. Liliana del Carmen Mendoza Tello
Responsable de la Edición
Dr. Alfonso Lastras Martínez
ISBN:978-607-9343-37-8
©Instituto de Investigación en Comunicación Óptica, UASLP, 2017.
Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
Presentación
Nos complace presentar una edición más de las memorias del premio de
Instrumentación y Electrónica “Gustavo del Castillo y Gama” en su versión 2017. En
esta ocasión, la educación en la Física, es tema central de la semana del Instituto de
Investigación en Comunicación Óptica lo que enmarca de forma excelente la celebración
del premio, considerando que muchos de los proyectos tuvieron su origen en los cursos
académicos tanto de licenciatura como de posgrado asociados a las áreas de las ciencias
físico-matemáticas. En esta ocasión se han inscrito 12 proyectos desarrollados en
dependencias académicas de la Universidad tanto de los campus de San Luis Potosí
como del campus de Salinas de Hidalgo y de Instituciones académicas de la Ciudad. Así
mismo se cuenta con la participación de instituciones del estado de Zacatecas, por lo que
el concurso ha adquirido un rango regional. Contamos con participantes de la Facultad de
Ciencias, del Centro de Bachillerato Tecnológico industrial y de servicios No. 121
(Soledad de Graciano Sánchez), de la Coordinación Académica Región Altiplano Oeste
(Salinas de Hidalgo), de la Universidad Tecnológica del Estado de Zacatecas (Unidad
Académica Pinos) y del Instituto de Investigación en Comunicación Óptica.
Agradecemos a los jurados del premio por el interés y profesionalismo que mostraron.
En esta ocasión el jurado estuvo formado por los Profesores Dra. Luz Roxana de León
Lomelí del Consejo potosino de ciencia y tecnología, Dr. Miguel Ángel Bello Jiménez
del Instituto de Investigación en Comunicación Óptica y del Dr. Abel García Barrientos
de la Facultad de Ciencias. Muchas gracias nuevamente.
Comité organizador
San Luis Potosí, S.L.P. Abril 2017

Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
Rector Arq. Manuel Fermín Villar Rubio
Secretario General Dr. en Arq. Anuar Abraham Kasis Ariceaga
Director Dr. Alfonso Lastras Martínez
Comité organizador del concurso Dr. Raúl Eduardo Balderas Navarro Ing. Jorge Antonio González Fortuna Dr. Luís Felipe Lastras Martínez Dra. Marcela Mejía Carlos Ing. Liliana del Carmen Mendoza Tello Dr. Oscar F. Núñez Olvera Maestro Esequiel Ontiveros Hernández Ing. Francisco Ramírez Jacobo M. en I. Griselda Rodríguez Pedroza
Jurado Dra. Luz Roxana de León Lomelí Dr. Miguel Ángel Bello Jiménez Dr. Abel García Barrientos
Edición de memorias Dra. Marcela Mejía Carlos Dr. Luis Felipe Lastras Martínez Ing. Liliana del Carmen Mendoza Tello
Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
Índice
Pág.
1 Audio Visualización por medio de un Cubo de Led’s RGB Rodríguez Salas Lorena, Fortuna Cervantes Juan Manuel, Cerda Cerda Baltazar, Vértiz Hernández Juan Alberto
1
2 Implementación de un CanSat para competencias Ruiz Alvarado, Isaac Azahel, Martínez Espinosa, Rodolfo
7
3 Codificación y cifrado parcial de imágenes digitales Luis Felipe, Ramírez Torres Marco Tulio
11
4 Implementación de sistemas embebidos en cultivos Hidropónicos R. B. Leonardo Humberto, M. L. Maximiliano, R.C. Gustavo, S.S. Santiago , R. T. Marco Tulio, G.P. Luis Javier Ontañon
15
5 Quebrador de nueces compacto Cuevas Jaime, Martínez Erik, Martínez Mario, Tenorio Edgar, Ceballos Prudenciana, Torres Edgar
19
6 Red Celular de bajo costo para comunidades rurales incomunicadas Hugo Pérez Guerrero, Rocío Medellín Cortes, José Castro Juárez, Raúl Jaramillo de Lira, Dr. Marco Cárdenas Juárez
23
7 Seguidor de objeto con LabVIEW y LEGO mindstorm Torres Alonso Karla Maria, Olvera Guerrero Jose Albeto, Ramirez Torres Marco Tulio, Ontañon Garcia Pimentel Luis Javier
25
8 Sistemas embebidos e IoT para la medición y monitoreo de un cultivo hidropónico González Del Río Juan Daniel , Espíndola Paizano Blanca Jazmin, Lozano Alfaro Linda, Ramírez Torres Marco Tulio, Lara Juárez Omar Emmanuel.
27
9
Incubadora de control y monitoreo para neonatos Karla Larissa Villarreal Iturriaga, Isis Osiris de la Rosa Hernández, Darla Isabel Marrero Garza
29

10 CLOUD X Tec. Luis Felipe De La Rosa García, Dulce María Quiroz Moreira, Dalia Citlali Busson Ramires, Dr. Luis Javier Ontañon Garcia Pimentel, Dr. Marco Tulio Ramirez Torres
31
11 Monitoreo de la Trayectoria de un Péndulo Magnético J. M. Fortuna Cervantes, L. Rodríguez Salas, B. Cerda Cerda, J. A. Vértiz Hernández
33
12 Monitorización en tiempo real utilizando ESPino Aguilar Alvarado Adrián, Ramírez Torres Marco Tulio, Esquivel Gómez Ricardo
39

Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
1
Abstract— This paper the form of an application program with
VHDL you can send an analog signal and converted into a digital signal also to perform this Cambo signal has been used DAQ 6008 card and the deployment design filter system described lowpass held in the CYCLONE II FPGA card 2C35C672C6 development company Altera DE2 by Quartus II synthesis and simulation, VHDL.
Index Terms— Quartus II, HDL, Led’s RGB.
I. INTRODUCCIÓN os cubos de Leds en la actualidad son utilizados en diversos diseños y pueden ser manipulados gracias a la
programación en diversos lenguajes. En el diseño presentado se utilizan led’s RGB controlados por la tarjeta FPGA (Altera Cyclone II, EP2C35F672C6). Donde gracias a la descripción de hardware aplicada en el lenguaje estructurado para modelar, simular y sintetizar circuitos digitales ayuda delimitar una determina acción o realizar una serie de secuencias de acuerdo a la tarea que se quiere realizar. Tal es el caso de este proyecto donde se recurre a los lenguajes de descripción de hardware VHDL y Verilog, para realizar la manipulación y control del audio donde se procesa la señal y se visualizan las diferentes frecuencias tonales generadas por un teclado. Conjugándolo con un proceso de secuencias de led’s RGB.
II. OBJETIVOS 1. Crear una máquina de estados para generar una
secuencia audio-rítmica. 2. Procesar una señal de audio para visualizar los tonos
generados por el teclado mediante un cubo de led’s RGB.
III. DISEÑO Y ELABORACIÓN DEL CUBO DE LED’S 4*4*4 Se diseña el circuito de control del cubo de leds en el
software Proteus Design Suite Isis versión 7 (figura 1), el cuál consta de resistores y transistores que nos permiten controlar el cubo por niveles (0 a 3) y por columnas (0 a 15).
El código escrito en VHDL para generar la secuencia
audio rítmico se puede visualizar en la siguiente figura; como se puede observar, consta de un divisor de frecuencias, un contador y una unidad llamada cubo que es la máquina de estados. (Figura 2)
El contador, es un contador sencillo de 13 bits, se genera una señal ‘Z’ la cual se incrementa en uno si el reloj es ascendente. La máquina de estados cuenta con una entrada de reset, una entrada de reloj y la entrada del contador. Esta última es la señal que se compara para determinar si la máquina cambia o no cambia de estado, en caso de que la señal detectada no indique cambio de estado, la máquina permanecerá en el estado anterior. El proyecto presentado considera 69 estados con dos salidas, una salida de columna y otra de nivel. Estos dos vectores son los que determinan que leds se encienden o se apagan en cada cambio de estado de la máquina de estados.
La frecuencia entre cambios de estados está determinada en el código del contador y puede ser modificada según se desee.De forma alterna, se utiliza el cubo de leds para
Audio Visualización por medio de un Cubo de Led’s RGB
Rodríguez Salas Lorena, Fortuna Cervantes Juan Manuel, Cerda Cerda Baltazar, Vértiz Hernández Juan Alberto.
Instituto de Investigación en Comunicación Óptica, Universidad Autónoma de San Luis Potosí, Av. Karakorum 1470, C.P. 78210, Lomas 4°
L Fig. 1. Diagrama circuito de los led’s RGB.
Divisor de frecuencia Contador Máquina
de estados
Fig. 2. Diagrama de bloque de la codificación en VHDL para manipulación de del cubo led.

2
visualizar (con el encendido y apagado de columnas y filas) los cambios de tonos de las notas generadas en un teclado.
IV. IMPLEMENTACIÓN ELECTRÓNICA PARA EL CONTROL DEL CUBO LED
Como ya se mencionó el código descrito en VHDL se carga en la tarjeta Altera donde se conectan los jumper al puerto GPIO 0 y GPIO 1 (previamente configurados en el código) teniéndolos como salidas que se conectaran posteriormente a la placa de pruebas, utilizando resistencias de 33Ω, 47Ω, 100Ω y 1KΩ, al igual que transistores BC548, para después ser conectados a los led’s RGB, para su manipulación. (Figura 3)
Con ello se puede demostrar el control ya mencionado por
medio del contador obteniendo diversos los colores del RGB (como muestra la figura 4, 5 y 6) que llevara la secuencia acompañado de un ritmo musical o los tonos emitidos al momento de tocar las teclas. (Figura 7)
V. IMPLEMENTACIÓN DE FILTROS DIGITALES Los filtros son sistemas que se diseñan principalmente para
eliminar ciertas componentes no deseadas de una señal, por lo general estas componentes se describen en función de sus contenidos en frecuencia. Por los que los filtros de respuesta finita al impulso tienen la ventaja de ser utilizados con facilidad y poseer fase lineal para una respuesta al impulso par o impar, a esta propiedad se le llama simetría. Otra de las características que debe de tener un filtro FIR es que debe tener un retraso hacia los positivos y no debe existir señal en frecuencias negativas.
Existen tres técnicas de diseño de filtros FIR que son de gran importancia: La técnica de ventanas, la técnica de muestreo en frecuencia y la técnica de diseños con rizado uniforme.
A. Técnica de Ventanas La técnica de ventaneo se basa en a la respuesta de un filtro
al aplicarle la ventana deseada por medio de una multiplicación de sus ecuaciones, la ventana hace que en el filtro real diseñado se tengan menos variaciones de transición o supresión y con esto se logre y filtrado más efectivo. Existen varios tipos de ventana entre los cuales tenemos: Rectangular, Hamming, Blackman, Barlett, Hanning, etc. Misa que es aplicada para la realización de lo que se busca en la implementación del proyecto.
Para usar esta técnica lo que se hace es decidir las especificaciones de respuesta en frecuencia Hd(w) y determinar su correspondiente en respuesta al impulso hd(n). (1).
( ) jwn
ndd enhwH −
∞
=∑=
0)( ( ) ( ) dwewHnh jwn
dd ∫−
=π
ππ21 (1)
La respuesta hd(n) es infinita, pero esta es truncada mediante
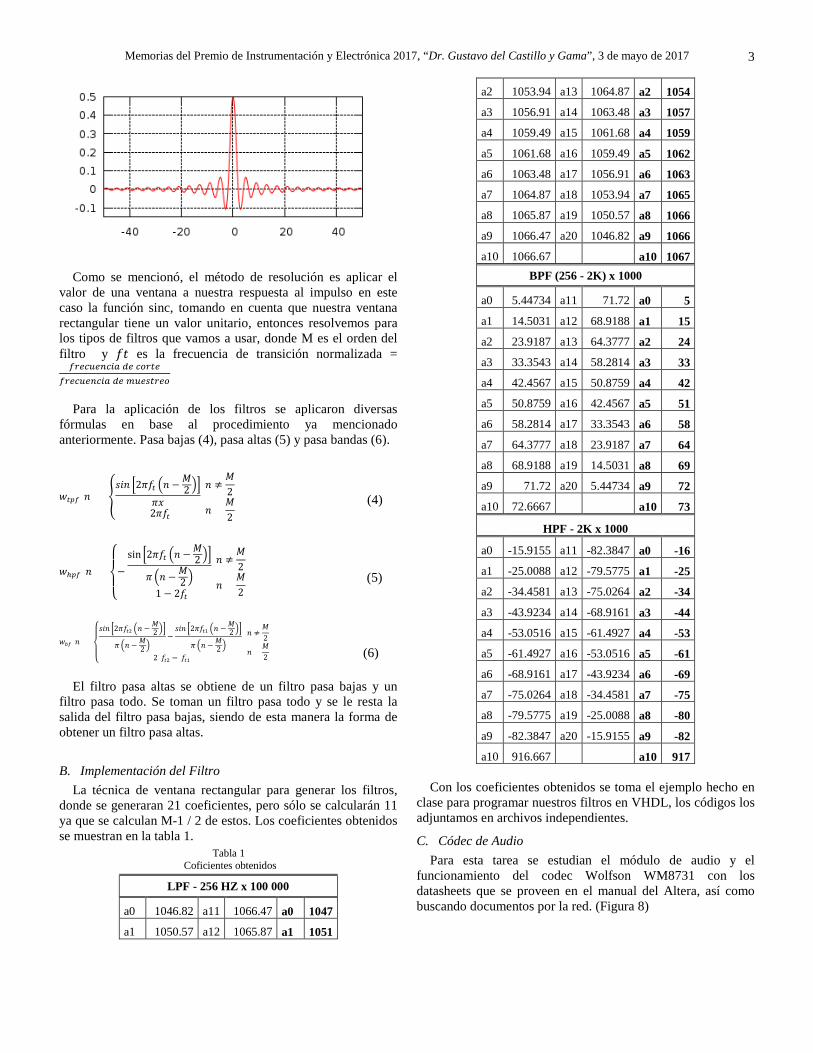
el ventaneo. En este caso usaremos la ventana Rectangular o unitaria, donde: 𝑤𝑤(𝑛𝑛) = 1 Otra forma de expresar la respuesta al impulso de un filtro
pasa bajas ideal (Figura 8) es una función sinc que está dada por la siguiente ecuación. (3)
ℎ(𝑥𝑥) = 2𝑓𝑓𝑡𝑡𝑠𝑠𝑠𝑠𝑛𝑛𝑠𝑠(2𝜋𝜋𝑓𝑓𝑡𝑡𝑥𝑥)
ℎ(𝑥𝑥) = 2𝑓𝑓𝑡𝑡𝑠𝑠𝑠𝑠𝑛𝑛𝑠𝑠(2𝜋𝜋𝑓𝑓𝑡𝑡𝑥𝑥)
2𝜋𝜋𝑓𝑓𝑡𝑡𝑥𝑥
ℎ(𝑥𝑥) =𝑠𝑠𝑠𝑠𝑛𝑛𝑠𝑠(2𝜋𝜋𝑓𝑓𝑡𝑡𝑥𝑥)
𝜋𝜋𝑥𝑥
Fig. 3. Circuito electrónico conectado a la tarjeta altera.
Fig. 6. Led RGB color azul y verde.
Fig. 4. Led RGB color azul.
Fig. 5. Led RGB color azul.
(3)
(2)
Fig. 7. Visualización de la secuencia de led’s mediante la frecuencia del audio.
Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
3
Como se mencionó, el método de resolución es aplicar el
valor de una ventana a nuestra respuesta al impulso en este caso la función sinc, tomando en cuenta que nuestra ventana rectangular tiene un valor unitario, entonces resolvemos para los tipos de filtros que vamos a usar, donde M es el orden del filtro y 𝑓𝑓𝑓𝑓 es la frecuencia de transición normalizada = 𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓 𝑑𝑑𝑓𝑓 𝑓𝑓𝑐𝑐𝑓𝑓𝑡𝑡𝑓𝑓
𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓 𝑑𝑑𝑓𝑓 𝑚𝑚𝑓𝑓𝑓𝑓𝑚𝑚𝑡𝑡𝑓𝑓𝑓𝑓𝑐𝑐
Para la aplicación de los filtros se aplicaron diversas
fórmulas en base al procedimiento ya mencionado anteriormente. Pasa bajas (4), pasa altas (5) y pasa bandas (6).
𝑤𝑤𝑡𝑡𝑡𝑡𝑓𝑓(𝑛𝑛) = 𝑠𝑠𝑠𝑠𝑛𝑛 2𝜋𝜋𝑓𝑓𝑡𝑡 𝑛𝑛 −
𝑀𝑀2
𝜋𝜋𝑥𝑥
2𝜋𝜋𝑓𝑓𝑡𝑡
𝑛𝑛 ≠𝑀𝑀2
𝑛𝑛 =𝑀𝑀2
𝑤𝑤ℎ𝑡𝑡𝑓𝑓(𝑛𝑛) =
⎩⎪⎨
⎪⎧−
sin 2𝜋𝜋𝑓𝑓𝑡𝑡 𝑛𝑛 −𝑀𝑀2
𝜋𝜋 𝑛𝑛 −𝑀𝑀2
1 − 2𝑓𝑓𝑡𝑡
𝑛𝑛 ≠𝑀𝑀2
𝑛𝑛 =𝑀𝑀2
𝑤𝑤𝑏𝑏𝑓𝑓(𝑛𝑛) =
⎩⎪⎨
⎪⎧𝑠𝑠𝑠𝑠𝑛𝑛 2𝜋𝜋𝑓𝑓𝑡𝑡2 𝑛𝑛 −
𝑀𝑀2
𝜋𝜋 𝑛𝑛 − 𝑀𝑀2
−𝑠𝑠𝑠𝑠𝑛𝑛 2𝜋𝜋𝑓𝑓𝑡𝑡1 𝑛𝑛 −
𝑀𝑀2
𝜋𝜋 𝑛𝑛 − 𝑀𝑀2
2(𝑓𝑓𝑡𝑡2 − 𝑓𝑓𝑡𝑡1)
𝑛𝑛 ≠𝑀𝑀2
𝑛𝑛 =𝑀𝑀2
El filtro pasa altas se obtiene de un filtro pasa bajas y un
filtro pasa todo. Se toman un filtro pasa todo y se le resta la salida del filtro pasa bajas, siendo de esta manera la forma de obtener un filtro pasa altas.
B. Implementación del Filtro La técnica de ventana rectangular para generar los filtros,
donde se generaran 21 coeficientes, pero sólo se calcularán 11 ya que se calculan M-1 / 2 de estos. Los coeficientes obtenidos se muestran en la tabla 1.
LPF - 256 HZ x 100 000
a0 1046.82 a11 1066.47 a0 1047
a1 1050.57 a12 1065.87 a1 1051
a2 1053.94 a13 1064.87 a2 1054
a3 1056.91 a14 1063.48 a3 1057
a4 1059.49 a15 1061.68 a4 1059
a5 1061.68 a16 1059.49 a5 1062
a6 1063.48 a17 1056.91 a6 1063
a7 1064.87 a18 1053.94 a7 1065
a8 1065.87 a19 1050.57 a8 1066
a9 1066.47 a20 1046.82 a9 1066
a10 1066.67
a10 1067 BPF (256 - 2K) x 1000
a0 5.44734 a11 71.72 a0 5
a1 14.5031 a12 68.9188 a1 15
a2 23.9187 a13 64.3777 a2 24
a3 33.3543 a14 58.2814 a3 33
a4 42.4567 a15 50.8759 a4 42
a5 50.8759 a16 42.4567 a5 51
a6 58.2814 a17 33.3543 a6 58
a7 64.3777 a18 23.9187 a7 64
a8 68.9188 a19 14.5031 a8 69
a9 71.72 a20 5.44734 a9 72
a10 72.6667
a10 73
HPF - 2K x 1000
a0 -15.9155 a11 -82.3847 a0 -16
a1 -25.0088 a12 -79.5775 a1 -25
a2 -34.4581 a13 -75.0264 a2 -34
a3 -43.9234 a14 -68.9161 a3 -44
a4 -53.0516 a15 -61.4927 a4 -53
a5 -61.4927 a16 -53.0516 a5 -61
a6 -68.9161 a17 -43.9234 a6 -69
a7 -75.0264 a18 -34.4581 a7 -75
a8 -79.5775 a19 -25.0088 a8 -80
a9 -82.3847 a20 -15.9155 a9 -82
a10 916.667
a10 917 Con los coeficientes obtenidos se toma el ejemplo hecho en
clase para programar nuestros filtros en VHDL, los códigos los adjuntamos en archivos independientes.
C. Códec de Audio Para esta tarea se estudian el módulo de audio y el
funcionamiento del codec Wolfson WM8731 con los datasheets que se proveen en el manual del Altera, así como buscando documentos por la red. (Figura 8)
(4)
(5)
(6)
Tabla 1 Coficientes obtenidos

4
El códec incluye una entrada de micrófono (MICIN) y una
línea estéreo (LLNEIN) de baja ruido. Las entradas de audio digital tienen una longitud de palabra que va desde 16 bits a 32 bits, con una frecuencia de muestreo, entre 8 KHz y 96 KHz. Por defecto, se va a utilizar una longitud de palabra de 24 bits, y una frecuencia de muestreo de 48 KHz. En la tabla 2 se pueden observar las entradas y salidas con las que se cuenta para trabajar con el códec de audio.
I2C_SCLK PIN_B7 I2C Clock I2C_SDAT PIN_A8 I2C Data AUD_XCK PIN_E1 Audio CODEC Chip Clock AUD_BCLK PIN_F2 Audio CODEC Bit-Steam Clock AUD_ADCLRCK PIN_C2 Audio CODEC ADC LR Clock AUD_ADCDAT PIN_D2 Audio CODEC ADC Data AUD_DACLRCK PIN_E3 Audio CODEC DAC LR Clock AUD_DACDAT PIN_D1 Audio CODEC DAC Data
1) Protocolo I2C El protocolo de comunicación serial cuenta con diferentes
aspectos: Los datos se transfieren cuando se inicializa por medio del bit de inicio (S), cuando SDA está bajando a bajo mientras SCL sigue en alto. Entonces SDA establece el bit transferido mientras SCL está en bajo y la información se muestrea (se recibe) cuando SCL pasa a alto. Cuando la transferencia se completa, un bit de parada (P) se manda liberando la línea de información para permitir que este bajando mientras SCL constantemente sigue en alto. Para evitar la detección de falsos marcadores, el nivel en SDA se cambia en el flanco descendente y se captura en el flanco ascendente de SCL.
Para comenzar a usar y entender el códec se toma un
ejemplo llamado audio1 programado en verilog y se trabaja sobre este, se siguen las indicaciones del manual sin embargo no es posible obtener el resultado que se desea ya que siempre se obtiene la señal original en cualquiera de las
configuraciones que se le dan al códec pasando por alto la programación que se le dada al configurarlo. Lo que se obtiene fue una especie de ruido blanco a la salida del códec atenuando la señal y al intentar conectar al puerto I2C se obtienen unos ruidos como “clicks” a diferentes frecuencias dependiendo del filtro que se tiene seleccionado.
D. Circuitos Adicionales
1) Registros de Corrimiento Para poder empatar el tipo de datos entre el códec de audio y
los filtros se tienen que hacer dos registros de corrimiento, uno donde los datos obtenidos del códec en serie los podamos insertar en paralelo a cualquiera de los filtros y otro donde los datos de salida de los filtros que están en paralelo puedan regresar en seria al códec. Un registro de corrimiento es un circuito síncrono secuencial que almacena y mueve datos de n bits, ya sea en serie o paralelo en n cantidad de flip-flops. En esta ocasión se usaron flop-flops tipo D.
2) Divisores de Frecuencia Para poder activar los relojes de nuestros filtros con la
frecuencia de muestreo deseada, en este caso 48KHz, es necesario crear un divisor de frecuencias donde usemos uno de los relojes que proporciona Quartus (50MHz) y este poderlo dividir de tal manera que a la salida se obtenga el reloj que se busca de 48kHz. De igual manera se implementa otro divisor donde se dividen los 48kHz entre 16, y con este poder activar la pata Shift/Load del Shift Register Paralelo Serie que se obtuvo. De esta manera cada 16 pulsos del reloj de 48kHz este reloj manda un pulso, si esta en alto acumula los bits en las entradas, si esta en alto deja pasar estos bits a la salida en serie del registro. Los códigos de dichos divisores se adjuntaron en archivos por separado.
VI. CONCLUSIÓN La idea de este proyecto surge de la inquietud de poder
controlar, generar y visualizar imágenes en el cubo de leds, como de nuestro gusto por la música. Se puede recalcar, que la utilización de leds RGR le da al proyecto una gama de colores muy atractiva. La relación que existe entre el trabajo presentado y lo estudiado en el presente curso, la obtenemos con el uso de las máquinas de estado, divisores de frecuencia y de una manera complementaria con el uso de filtros para procesar la señal de audio.
La ventaja de los lenguajes de descripción de hardware es que son compatibles mediante diagramas de bloques, lo cual facilita su aplicación.
Se pueden crear patrones con los led’s RGB y al mismo tiempo poder visualizar la secuencia de reproducción del audio bajo la implementación de máquinas de estado en VHDL.
Mediante un sintetizador de audio se logra generar una señal a diferente frecuencia siendo visualizada en el cubo led.
El códec de audio contiene un convertidor ADC y DAC que permite la fácil y rápida conversión de señales análogas a digitales y viceversa.
Y como trabajo futuro de lo presentado en este proyecto se puede mejorar aumentando el número de filas y columnas de
Fig. 8. Codec WM8731.
Tabla 2 Entradas y salidas del codec de audio
Fig. 9. Protocolo I2C.

Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
5
leds, ya que la generación de imágenes, letras o incluso animación de dibujos se podría visualizar mucho mejor
REFERENCES [1] J. O. Hamblen, T. S. Hall and M. D. Furman, “Rapid Prototyping of
Digital Systems”, SOPC, Springer ed. New York, NY, U. S. A., 2008. [2] “DE2 ALTERA Board User Guide.”
http://www.altera.com/education/univ/materials/boards/DE2_UserManual.pdf. Septiembre. 2016.
[3] M. Melgarejo y A. Pirajan. “Filtro FIR adaptativo sobre celdas lógicas programables FPGA”. Revista Ingeniería (2000). Universidad Distrital Francisco José de Caldas, Bogotá.
[4] R. N. Vera. Sistemas de transmisión, 2 ed. McGraw-Hill, 1998. [5] M. Vera Lizcano, G. Vejarano y J. Velazco Medina. “Diseño de
funciones DSP usando VHDL y CPLDs-FPGAs”. Ingeniería y Competitividad (2006). Universidad del Valle.
[6] E. Lahuerta Aguilar, C. Medrano Sánchez, y Pedro Ramos Lorente. Implementación de un filtro digital en VHDL. Universidad de Zaragoza.
[7] National Instruments. USB-6008. Dispositivo DAQ Multifunción de 12 Bits, 10kS/s. http://sine.ni.com/nips/cds/view/p/lang/es/nid/201986. Noviembre. 2016.
6
Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
7
Resumen— Se desarrolló un CanSat que lleva distintos
sensores integrados a una placa Arduino UNO para la obtención de diferentes datos durante su implementación para telemetría. Los sensores que se incluyen son un GPS, un acelerómetro, un magnetómetro, un giroscopio, un termómetro y un barómetro. Adicionalmente cuenta con una cámara en la parte inferior para capturar imágenes durante su trayectoria. Los diferentes datos se envían a través de comunicación de radiofrecuencias con ayuda de un módulo RF. Todos los componentes se colocaron dentro de una lata estándar de 355ml .Los datos se reciben en la plataforma LabVIEW donde se procesan y recopilan para posteriormente guardar en un documento con formato TXT.
Índice de Términos—CanSat, Telemetría, Arduino UNO, LabVIEW
I. INTRODUCCIÓN Un CanSat es una simulación de un satélite real integrado
dentro de un volumen y espacio de una lata de refresco. CanSat ofrece una oportunidad única para la primera experiencia práctica de un verdadero proyecto espacial.
El objetivo es implementar los subsistemas encontrados dentro de un satélite, como son la fuente de poder, un sistema de comunicación y sensores, dentro del volumen limitado de una lata.
Los datos a recopilar durante el viaje son los de temperatura, presión, altitud, coordenadas de longitud y latitud, al igual que las diferentes fuerzas que interactúan con el CanSat. Adicionalmente se cuenta con la función de tomar fotografías durante el viaje.
Para el sistema de comunicaciones se optó por utilizar un módulo RF que hace uso de las radiofrecuencias para la trasmisión de información a una estación donde se procesará los datos recopilados.
II. MARCO TEÓRICO En México los concursos de CanSat son organizados por la
Red Universitaria del Espacio RUE, con la intención de proporcionar a los estudiantes universitarios la experiencia de realizar un proyecto espacial. (Osorio, 2015)
El sistema de comunicación y de sensores a bordo del CanSat es un sistema de telemetría. La telemetría es una tecnología que permite la medición remota de magnitudes físicas y el posterior envío de la información hacia el operador del sistema. El envío de información hacia el operador en un sistema de telemetría se realiza típicamente mediante comunicación inalámbrica.
A medida que aumenta la altitud, la presión atmosférica disminuye. Se puede calcular la presión atmosférica a una altitud dada. Para altitudes más altas dentro de la troposfera, la siguiente ecuación (la fórmula barométrica ecuación 1) relaciona la presión atmosférica p a la altitud h.
p = p0 1- L·hT0
g·MR·L (1)
Donde p0 es la presión atmosférica a nivel del mar, L es el gradiente de temperatura=g/cp, cp es calor específico a presión constante ~ 1007 J/(kg•K), T0 temperatura estándar a nivel del mar, g constante gravitacional = 9.80665m/s2, M masa molar del aire = 0.0289644 kg/mol, R constante universal para gases = 8.31447 J/(mol•K).
La ecuación para calcular la altua en base a la presión atmosférica y la presión a nivel del mar.
III. METODOLOGÍA El proyecto se separó en dos partes la parte de programación
y el diseño del CanSat. Para el sistema de telemetría se utilizaron los siguientes componentes:
Adafruit 10 DOF IMU Breakout. El cual cuenta con un LSM303DLHC el cual tiene integrado un acelerómetro de 3 ejes y magnetómetro de 3 ejes, un L3GD20H que es un giroscopio de 3 ejes y un BMP180 que es un termómetro y un barómetro. Los tres sensores están integrados en uno solo dando 10 grados de libertad ergo su nombre “10 DOF”. Este
Ruiz Alvarado, Isaac Azahel., Martínez Espinosa, Rodolfo. Facultad de Ciencias,
Universidad Autónoma de San Luis Potosí
Implementación de un CanSat para competencias

8
hace uso de comandos 12C para la comunicación entre los distintos sensores.
Adafruit Ultimate GPS Breakout. Este cuenta con un MTK3339, un GPS de alta calidad con capacidad para conectarse a 22 satélites, este incluye una antena de parche estándar. EL GPS se comunica a través de un puerto serial.
2 XBee Pro 63mW RPSMA Series 2B. Este es un módulo de comunicación inalámbrica de 2.4GHz que permite comunicación hasta 1600 metros de distancia. Para la conexión entre los dos módulos se contó con 2 antenas de 2.4 Ghz. Estos módulos RF se programaron utilizando el software XCTU con una velocidad de trasmisión de 115200 baudios por segundo, uno como coordinador y el otro como rúter, una vez establecida la comunicación entre ambos módulos es irrelevante cual es el coordinador y cual el rúter.
También se contó con una cámara LinkSprite JPEG Color Camera TTL Interface. Es una cámara con resolución de 2MP que toma imágenes en formato JPEG y las manda a través de comunicación serial.
Todos los componentes se integraron juntos usando una placa Arduino UNO, el cual es un microcontrolador basado en el ATmega328P.
La programación para el Arduino se realizó en el Arduino Software IDE. Para el control de los sensores LSM303DLHC, L3GD20H, BMP180 y Adafruit Ultimate GPS Breakout se instalaron librerías de GidyHub.
El programa inicializa los diferentes sensores, para posteriormente leerlos. Cada sensor se lee en un lugar diferente del código. Cada segundo se lee los diferentes sensores iniciando con el GPS y manda la información, a través de comunicación serial por medio del módulo RF, de la hora en UTC con formato en hh/mm/ss, la fecha en formato dd/mm/aaaa, latitud y longitud en grados. Posteriormente se lee el LSM303DLHC, extrayendo la información del acelerómetro y el magnetómetro, se obtiene los 3 ángulos de orientación utilizados en aeronáutica de guiñada (heading o yawn), de cabeceo (pitch) y de alabeo (roll). Para calcular “roll” ecuación 2), para calcular “pitch” ecuación 3), para calcular “heading” ecuación 4).
roll = tan-1 yz (2)
pitch = tan-1 - xy· sin roll + z· cos (roll)
(3)
heading = tan-1mz· sin roll - my· cos (roll)
mx· cos pitch + my· sin (pitch)· sin roll + mz· sin (pitch)· cos (roll) (4)
Donde x, y, z son los valore que entrega el acelerómetro y mx, my, mz son los valores que entrega el magnetómetro.
Siguiendo se lee el BMP180 el cual regresa la presión atmosférica y la temperatura y con ayuda de la ecuación 1) se obtiene una aproximación para la altura la ecuación 5) para el cálculo de la altura.
h = 44330.8m 1 - pp0
0.1903
(5)
Una vez obtenidos los tres resultados se mandan la altura en m, temperatura en °C y presión en hPa.
El último sensor en leerse es el giroscopio el cual se leen los 3 ejes para obtener la velocidad de rotación de cada uno de los ejes en rad/s y se manda la información. Por último se manda la información de los 3 ejes del acelerómetro que se leyó previamente.
Se agrega un carácter de inicialización y un carácter de finalización entre cada paquete de información de tal manera que la información que se manda tiene la siguiente apariencia:
a “hora” r b “fecha” s c “latitud” t d “longitud” u e “roll” v f “pitch” w g “heading” x h “altura” y i “temperatura” z j “presión” k “rotación. x” l “rotación y” [ m “rotación z” ] n “aceleración x” < o “aceleración y” > p “aceleración z” !
Esto sirve para diferenciar entre la información que se está leyendo a la hora de recibirla además si ocurre un error y no se está recibiendo los caracteres esperados se reduce el impacto de los errores.
Lo anterior se manda cada segundo, pero la cámara se espera a llegar a cierta altura para mandar una fotografía esto se debe que para mandar una imagen JPEG a través del módulo RF se tarda aproximadamente 18 segundos. Primero se manda el comando para tomar una fotografía y posteriormente un comando para leer dicha fotografía. Los datos que se reciben son Bytes y mandarlos por el puerto serial crearía un conflicto con la información que se manda anteriormente de los sensores, por ejemplo si el Byte que se manda es el siguiente: 00111101 que corresponde al carácter “a” a la hora de leer la información se esperaría leer la hora en vez de la fotografía. Por lo anterior se decido utilizar el sistema hexadecimal ya que la mayoría de los caracteres se representarían con 2 dígitos. Para empezar a mandar la imagen se manda el carácter de inicialización “n” después la información en hexadecimal entre 5000 y 7000 números y por último el carácter para la finalización “?”, lo que se manda es algo similar a esto:
q FF D8 FF E0 00 10 4A 46 49 46 00 01 01 01 … FF D9 ? La información se manda a través de uno de los módulos RF
a una computadora donde se encuentra el otro módulo. Para recibir la información se lee el puerto serial de la
computadora con ayuda del software LabVIEW para esto se diseñó una estructura de casos donde se lee el puerto serial en busca de uno de los caracteres de inicialización de cada dato. Una vez que encontró el carácter lee el puerto serial y guarda los datos hasta encontrar el carácter de finalización. Los datos se van mostrando al usuario mientras se van recolectando. En el caso de obtener las fotografías el proceso es un poco diferente ya que al recibir todos los datos de la imagen en hexadecimal estos se vuelven a transformar en Bytes que se guardan en un archivo JPEG, una vez construida la imagen esta se muestra al usuario. Los datos recolectados de la longitud y latitud se grafican para mostrar la trayectoria recorrida, los datos de temperatura, presión y altitud se grafican individualmente. Al finalizar el programa todos los datos recopilados se guardan en un archivo TXT con formato que se puede importar a Excel donde se puede manipular fácilmente los datos.
Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
9
IV. RESULTADOS Y DISCUSIÓN El GPS tiene un tiempo para conectarse a los satélites es
decir al alimentar el GPS este no se conecta instantáneamente a los satélites, instalando una batería de CR 1220 de 3V ayuda a reducir este tiempo pero aún puede tardar de 30s a 5min depende del área donde se está, dentro de un edificio o rodeado de edificios altos. Esto provoca que la información que manda al principio es inútil con coordenadas 0.0 ,0.0, por lo tanto se modificó el programa en LabVIEW para ignorar estos datos a la hora de graficar la trayectoria.
Para el magnetómetro estar rodeado de metal es perjudicial debido que afecta los campos magnéticos que este lee y no presenta adecuadamente el “heading”, por lo que se debe de tener a una distancia mínima de 1m de cualquier objeto de metal. La lata no es un problema debido que esta se mueve junto con el sensor.
El cálculo de la altura no es totalmente acertado debido que para obtener la ecuación (2) se utilizó el valor de T0 = 288.15K que no es del todo cierto, ya que este valor que varía dependiendo del lugar donde se encuentre. También se dejó p0 como variable en la ecuación (2) para mejorar el cálculo de la altura, el valor estándar es 101325Pa pero se puede modificar en el código del Arduino, este valor se obtiene de los reportes climatológicos. Dejar el valor estándar puede resultar en un cálculo con una desviación de hasta 100m o más.
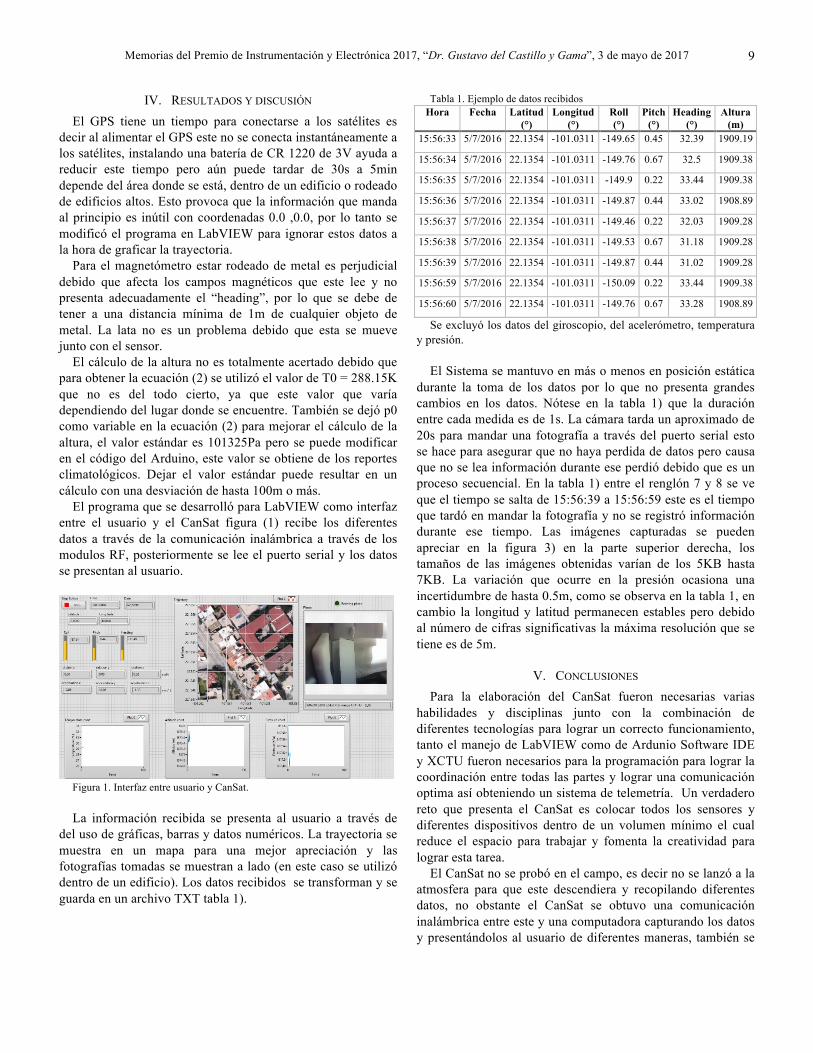
El programa que se desarrolló para LabVIEW como interfaz entre el usuario y el CanSat figura (1) recibe los diferentes datos a través de la comunicación inalámbrica a través de los modulos RF, posteriormente se lee el puerto serial y los datos se presentan al usuario.
Figura 1. Interfaz entre usuario y CanSat. La información recibida se presenta al usuario a través de
del uso de gráficas, barras y datos numéricos. La trayectoria se muestra en un mapa para una mejor apreciación y las fotografías tomadas se muestran a lado (en este caso se utilizó dentro de un edificio). Los datos recibidos se transforman y se guarda en un archivo TXT tabla 1).
Tabla 1. Ejemplo de datos recibidos Hora Fecha Latitud
(°) Longitud
(°) Roll (°)
Pitch (°)
Heading (°)
Altura (m)
15:56:33 5/7/2016 22.1354 -101.0311 -149.65 0.45 32.39 1909.19
15:56:34 5/7/2016 22.1354 -101.0311 -149.76 0.67 32.5 1909.38
15:56:35 5/7/2016 22.1354 -101.0311 -149.9 0.22 33.44 1909.38
15:56:36 5/7/2016 22.1354 -101.0311 -149.87 0.44 33.02 1908.89
15:56:37 5/7/2016 22.1354 -101.0311 -149.46 0.22 32.03 1909.28
15:56:38 5/7/2016 22.1354 -101.0311 -149.53 0.67 31.18 1909.28
15:56:39 5/7/2016 22.1354 -101.0311 -149.87 0.44 31.02 1909.28
15:56:59 5/7/2016 22.1354 -101.0311 -150.09 0.22 33.44 1909.38
15:56:60 5/7/2016 22.1354 -101.0311 -149.76 0.67 33.28 1908.89
Se excluyó los datos del giroscopio, del acelerómetro, temperatura y presión.
El Sistema se mantuvo en más o menos en posición estática
durante la toma de los datos por lo que no presenta grandes cambios en los datos. Nótese en la tabla 1) que la duración entre cada medida es de 1s. La cámara tarda un aproximado de 20s para mandar una fotografía a través del puerto serial esto se hace para asegurar que no haya perdida de datos pero causa que no se lea información durante ese perdió debido que es un proceso secuencial. En la tabla 1) entre el renglón 7 y 8 se ve que el tiempo se salta de 15:56:39 a 15:56:59 este es el tiempo que tardó en mandar la fotografía y no se registró información durante ese tiempo. Las imágenes capturadas se pueden apreciar en la figura 3) en la parte superior derecha, los tamaños de las imágenes obtenidas varían de los 5KB hasta 7KB. La variación que ocurre en la presión ocasiona una incertidumbre de hasta 0.5m, como se observa en la tabla 1, en cambio la longitud y latitud permanecen estables pero debido al número de cifras significativas la máxima resolución que se tiene es de 5m.
V. CONCLUSIONES Para la elaboración del CanSat fueron necesarias varias
habilidades y disciplinas junto con la combinación de diferentes tecnologías para lograr un correcto funcionamiento, tanto el manejo de LabVIEW como de Ardunio Software IDE y XCTU fueron necesarios para la programación para lograr la coordinación entre todas las partes y lograr una comunicación optima así obteniendo un sistema de telemetría. Un verdadero reto que presenta el CanSat es colocar todos los sensores y diferentes dispositivos dentro de un volumen mínimo el cual reduce el espacio para trabajar y fomenta la creatividad para lograr esta tarea.
El CanSat no se probó en el campo, es decir no se lanzó a la atmosfera para que este descendiera y recopilando diferentes datos, no obstante el CanSat se obtuvo una comunicación inalámbrica entre este y una computadora capturando los datos y presentándolos al usuario de diferentes maneras, también se

10
logró el funcionamiento autónomo del CanSat que basta con encenderlo para que este empieza a recopilar datos.
REFERENCIAS [1] O. J. Osorio, "Red Universitaria del Espacio," 2015. [Online].
Available: http://rue.unam.mx/Eventos/Realizados/CANSAT_II/Cartel_CanSat_2015.pdf.
[2] T. DiCola, "Adafruit Unified BMP085/BMP180 Driver (Barometric Pressure Sensor)," 10 Febrero 2013. [Online]. Available: https://github.com/adafruit/Adafruit_BMP085_Unified.
[3] T. DiCola, "Adafruit Unified L3GD20 Driver," 1 Diciembre 2013. [Online]. Available: https://github.com/adafruit/Adafruit_L3GD20_U.
[4] W. Roos, "Die barometrische Höhenformel," 01 Marzo 2010. [Online]. Available: http://wetter.andreae-gymnasium.de/interaktives/Druck/barometrische.htm.
[5] T. DiCola, "Adafruit LSM303DLHC Driver (Accelerometer + Magnetometer)," 10 Febrero 2013. [Online]. Available: https://github.com/adafruit/Adafruit_LSM303DLHC.
[6] L. Fried, "the ultimate GPS library," 25 Marzo 2012. [Online]. Available: https://github.com/adafruit/Adafruit_GPS.
[7] Ober, "XBee Series 2 Point to Point Communication," 8 Marzo 2012. [Online]. Available: http://tutorial.cytron.com.my/2012/03/08/xbee-series-2-point-to-point-communication/.
[8] Admin, "Tutorial of Using LinkSprite 2MP UART JPEG Camera with Arduino," 11 Marzo 2014. [Online]. Available: http://learn.linksprite.com/jpeg-camera/tutorial-of-using-linksprite-2mp-uart-jpeg-camera-with-arduino/.
[9] K. Townsend, "Adafruit 10DOF Library," 3 Noviembre 2013. [Online]. Available: https://github.com/adafruit/Adafruit_10DOF.
Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
11
Resumen—En esta investigación se propone realizar y validar una nueva versión de cifrado parcial del sistema CSAC. El sistema CSAC es un algoritmo criptográfico simétrico desarrollado en la UASLP, sus siglas significan Cifrado basado en la Sincronización de Autómatas Celulares. Este algoritmo, en su versión de cifrado completo ha sido utilizado para proteger imágenes, programado en la plataforma de LabVIEW. Este sistema de cifrado fue validado pasando satisfactoriamente diversas pruebas que consistían en ataques estadísticos y de criptoanálisis. Dada su alta latencia, el sistema CSAC necesita ser optimizado, objetivo principal de esta investigación. El método propuesto es realizar diversas modificaciones para ejecutar el cifrado de manera parcial, sin comprometer la seguridad. Esta nueva versión será validada incluyendo ataques específicos a algoritmos de cifrado parcial. Además en este panorama, para el desarrollo de esta investigación también se proponen varias formas de codificar las imágenes y reducir el número de bits necesarios para su representación.
I. INTRODUCCIÓN En la actualidad el envío de información como textos, imágenes, música, videos, juegos, aplicaciones, entre otros se realiza a través de diversos medios de comunicación, quedando expuestos a ataques, permitiendo el acceso no autorizado a todos los datos. Afortunadamente existen medidas de seguridad para proteger la información empleando técnicas como el cifrado y la esteganografía. El cifrado o encriptación de imágenes es un área de estudio que requiere de conocimientos específicos y consideraciones dadas las características intrínsecas que las imágenes poseen. El propósito principal es volver ininteligible la imagen impidiendo así que el personal no autorizado pueda visualizar su contenido. Mientras que la esteganografía permite ocultar información dentro de portadores, logrando así pasar información de manera inadvertida ante los atacantes de un sistema. Ante la creciente demanda de seguridad por parte de usuarios, gobiernos y empresas, estas dos técnicas podrían ser la solución a la problemática actual.
II. METODOLOGIA Durante el tiempo de desarrollo de la investigación se ha logrado conformar varios algoritmos, donde se han manipulado y transformado imágenes destacando algunas características o bien generando nuevas imágenes a partir de las originales. Para los algoritmos de criptografía y esteganografía se han usado imágenes ampliamente utilizadas en el procesamiento de
imágenes en RGB y escala de grises como: Lena, mandril y pimientos.
A. CODIFICACION DE IMÁGENES EN RGB La esteganografía es el método de ocultamiento de la información entre los bits de datos presentes en los bits menos significativos. El mensaje a ocultar se embebe en una imagen portadora, modulando los coeficientes originales en el dominio de transformación. El método más común de la esteganografía actual es hacer uso de LSB (Less Significant Bits) de los pixeles de la imagen portadora. Para volver a obtener la imagen oculta, se extraen los bits de datos de los coeficientes, se realiza la inserción en los MSB (Most Significant Bits) [1]. Basado en esta técnica, en esta investigación se propuso trabajar con un nuevo algoritmo que consiste principalmente en la codificación de imágenes en RGB, transformando así la imagen de 24 bits a 12 bits, de tal manera que siga conservando su calidad. Esta codificación nos sirve para la reconstrucción de la imagen original, consiste en solo almacenar los 4 bits más significativos de cada canal RGB. En comparativa también se diseñó otra forma de codificación que consiste en dividir y asignar un valor entre 16 posibles, dependiendo el coeficiente del pixel, es decir, existen 256 valores en una codificación a 8 bits, el valor es dividido entre 16 y se almacena solo el cociente. La misma operación se realiza para los tres canales de colores y el resultado se concatena obteniendo un número de 12 bits. Para la reconstrucción los valores se desconcatenan y multiplican por 16 y se le suma el valor de 8, para tratar de disminuir el error. El objetivo principal en ambas técnicas es reducir los bits por cifrar, optimizando el número de operaciones necesarias. En ambos casos se busca recuperar una imagen con baja degradación. Cabe destacar que aun cuando es posible realizar la conversión de una imagen en RGB a escala de grises y así reducir sus bits, no es posible posteriormente volver a obtener la imagen RGB inicial, ya que se pierden demasiados datos y existen colisiones de valores por lo que no se puede extraer un valor exacto ni aproximado. Sin embargo con estas técnicas se sacrifica una pequeña parte de la calidad de la imagen haciendo posible convertir los tres canales en un único valor, el cual mediante operación inversa
Codificación y cifrado parcial de imágenes digitales
Luis Felipe1, Ramírez Torres Marco Tulio1. 1Coordinacion Académica Región Altiplano Oeste, UASLP, Salinas, [email protected]
12
permitió extraer un valor muy aproximado a los coeficientes originales. Lo que tiene gran aplicación en algoritmos de cifrado ya que permite reducir el tiempo de procesamiento y hacer más eficiente el algoritmo.
EL algoritmo fracciona el valor escalándolo a un valor aproximado previamente determinado entre mayor número de niveles menor es la variación que puede tener un valor, pero hay que considerar los valores decimales que se descartan por lo que se recomienda la utilización de múltiplos de 2 para que los valores no se corten en los decimales.
B. CIFRADO PARCIAL DE IMÁGENES DIGITALES Otro objetivo en esta investigación es realizar una versión de cifrado parcial utilizando el sistema de Cifrado basado en el fenómeno de Sincronización de Autómatas Celulares (CSAC) [2]. Éste es un cifrador simétrico que trabaja con bloques de 2k-1 bits, utilizando una subllave para cada bloque, derivada de una llave generada inicialmente. Este sistema está formado por un algoritmo generador pseudoaleatorio de claves, que nos produce una secuencia de dígitos binarios con igual probabilidad de aparición [3]. Tomando como base el sistema CSAC y dada su alta latencia, el propósito principal es configurar este algoritmo a una forma parcial, para lograr que se optimice su ejecución, sin afectar la calidad y la seguridad del cifrado. Para llevar a cabo la optimización del algoritmo se propuso reutilizar la subllave de 31 bits para cifrar bloques de 8 bits, pero en esta ocasión nos enfocamos únicamente en cifrar los 3 o 4 bits más significativos del bloque de datos. Se notó que para el proceso de cifrado parcial solo se ocupan algunos bits de la subllave por lo cual se decidió reutilizar la subllave dando una rotación de una posición a todos los bits para no afectar las ecuaciones de cifrado. De esta manera ahorramos tiempo de procesamiento de dos formas: 1° Se omiten las ecuaciones de cifrado de los bits menos significativos. 2° En la generación de llaves que es el proceso de mayor consumo computacional, por lo que ahora podemos omitir la generación de subllaves para cada bloque. Esta nueva versión busca ser validada a través de pruebas estadísticas y de criptoanálisis incluyendo ataques específicos de los algoritmos de cifrado parcial ya existentes. Se hizo una comparación entre tiempos de ejecución de ambos cifrados utilizando una imagen de 512 por 512 pixeles, los resultados se muestran en la tabla I.
TABLA I TIEMPO DE EJECUCION ENTRE CIFRADO PARCIAL Y TOTAL
TIEMPO (segundos)
CIFRADO TOTAL 8.26
CIFRADO PARCIAL (3 bits) 4.34
CIFRADO PARCIAL (4 bits) 5.19
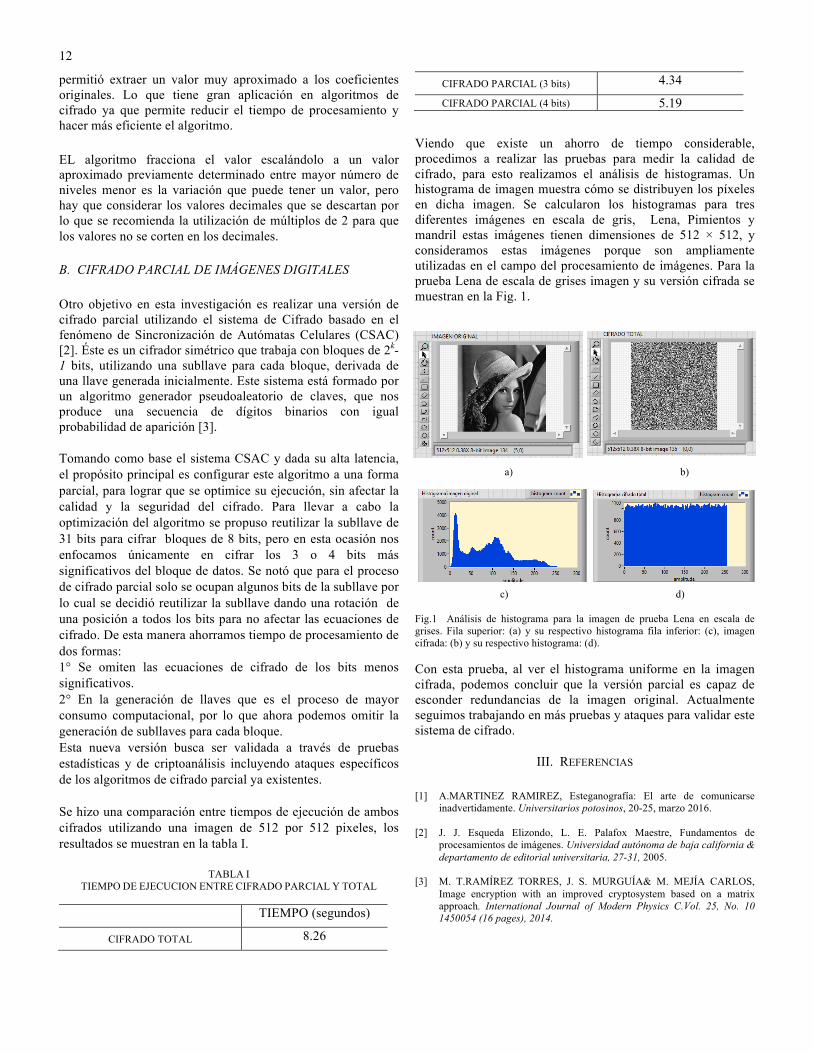
Viendo que existe un ahorro de tiempo considerable, procedimos a realizar las pruebas para medir la calidad de cifrado, para esto realizamos el análisis de histogramas. Un histograma de imagen muestra cómo se distribuyen los píxeles en dicha imagen. Se calcularon los histogramas para tres diferentes imágenes en escala de gris, Lena, Pimientos y mandril estas imágenes tienen dimensiones de 512 × 512, y consideramos estas imágenes porque son ampliamente utilizadas en el campo del procesamiento de imágenes. Para la prueba Lena de escala de grises imagen y su versión cifrada se muestran en la Fig. 1.
a) b)
c) d) Fig.1 Análisis de histograma para la imagen de prueba Lena en escala de grises. Fila superior: (a) y su respectivo histograma fila inferior: (c), imagen cifrada: (b) y su respectivo histograma: (d). Con esta prueba, al ver el histograma uniforme en la imagen cifrada, podemos concluir que la versión parcial es capaz de esconder redundancias de la imagen original. Actualmente seguimos trabajando en más pruebas y ataques para validar este sistema de cifrado.
III. REFERENCIAS [1] A.MARTINEZ RAMIREZ, Esteganografía: El arte de comunicarse
inadvertidamente. Universitarios potosinos, 20-25, marzo 2016.
[2] J. J. Esqueda Elizondo, L. E. Palafox Maestre, Fundamentos de procesamientos de imágenes. Universidad autónoma de baja california & departamento de editorial universitaria, 27-31, 2005.
[3] M. T.RAMÍREZ TORRES, J. S. MURGUÍA& M. MEJÍA CARLOS, Image encryption with an improved cryptosystem based on a matrix approach. International Journal of Modern Physics C.Vol. 25, No. 10 1450054 (16 pages), 2014.

Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
13
[4] M. T. RAMÍREZ TORRES Application and implementation of an improved encryption system.(Tesis Doctoral) Universidad Autónoma de San Luis Potosí, San Luis Potosí, S.L.P., México, 2015.
14
Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
15
Resumen—En este trabajo de investigación se presenta un conjunto para proyectos relacionados con la hidroponía, se busca automatizar el proceso de suministro de soluciones acuosas que tienen las plantas, y de esta manera poder ahorra tiempo, trabajo y dinero. Para llevar a cabo dicha automatización se hace uso de sistemas embebidos, así como de una serie de sensores capaces de medir las condiciones climáticas y atmosféricas en las que se encuentran las plantas, condiciones que son indicadores principales del estado en que se encuentra cualquier cultivo; además de que se cuenta con un registro temporizado de las condiciones capturadas por los sensores para no perder detalles de la evolución de las plantas y así optimizar su desarrollo y estandarizar la producción de tal manera que sea más eficaz.
I. INTRODUCCIÓN En la mayor parte del territorio donde se encuentra localizado el municipio de Salinas de Hidalgo se cuenta con una serie de adversidades que dificultan la agricultura, resaltando problemas como son la escasez y deterioro de suelo fértil, además de las condiciones climatologías, que al encontrarse en zona semidesértica, se tienen temperaturas extremas y las lluvias son escasas gran parte del año. Pese a toda esta problemática, una buena parte de la población del municipio ve reflejados sus ingresos en esta actividad económica, aferrándose a ella por medio de nuevas tecnologías o métodos para mejorar la producción que se tiene en los suelos. Un método que podría ser la solución a la problemática en Salinas de Hidalgo serían los sistemas hidropónicos. Esta técnica no requiere que las plantas estén sentadas en suelo firme, sino que, en una solución acuosa se mezclan los minerales necesarios para el crecimiento de los cultivos, además de que puede estar tanto a cielo abierto como en instalaciones bajo techo para proteger de las inclemencias del clima. Dentro de este proyecto se tiene como propósito perfeccionar la técnica hidropónica, automatizando la inserción de las soluciones acuosas a través de circuitos y sensores previamente calibrados y ajustados a las necesidades de la planta a tratar, de las cuales se tiene conocimiento gracias a un sondeo realizado en comunidades del municipio a campesinos de la región, enfocado directamente en los cultivos populares.
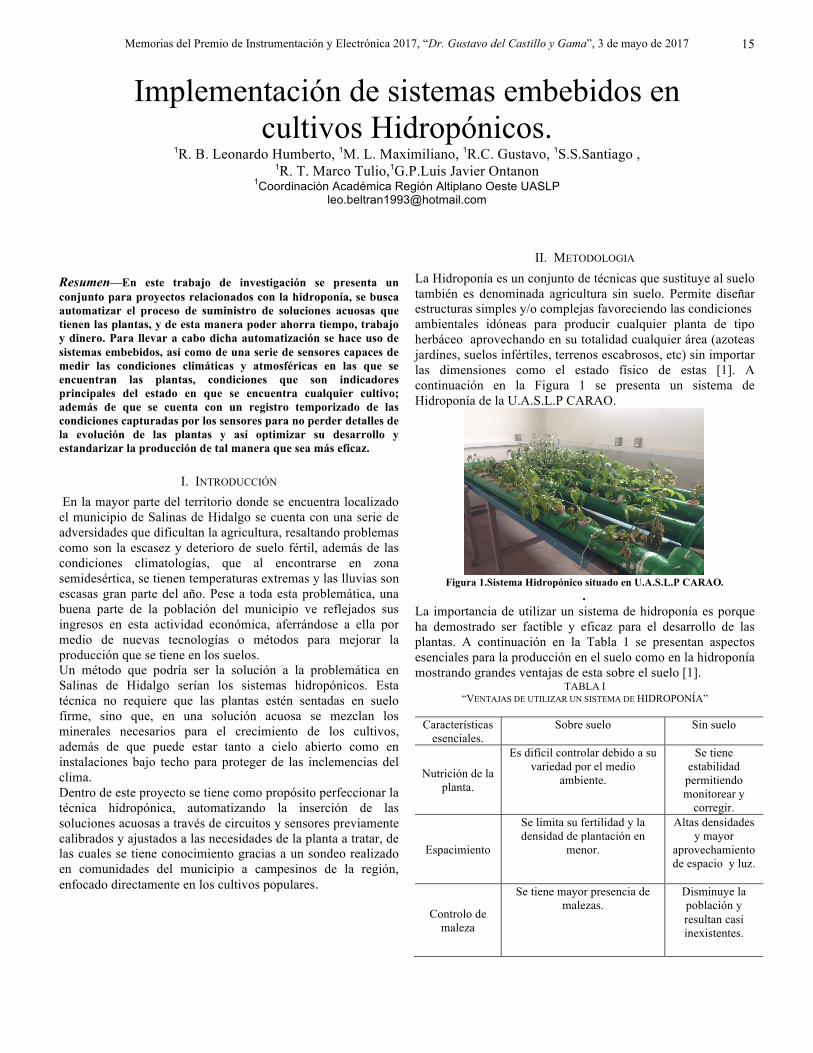
II. METODOLOGIA La Hidroponía es un conjunto de técnicas que sustituye al suelo también es denominada agricultura sin suelo. Permite diseñar estructuras simples y/o complejas favoreciendo las condiciones ambientales idóneas para producir cualquier planta de tipo herbáceo aprovechando en su totalidad cualquier área (azoteas jardines, suelos infértiles, terrenos escabrosos, etc) sin importar las dimensiones como el estado físico de estas [1]. A continuación en la Figura 1 se presenta un sistema de Hidroponía de la U.A.S.L.P CARAO.
Figura 1.Sistema Hidropónico situado en U.A.S.L.P CARAO.
. La importancia de utilizar un sistema de hidroponía es porque ha demostrado ser factible y eficaz para el desarrollo de las plantas. A continuación en la Tabla 1 se presentan aspectos esenciales para la producción en el suelo como en la hidroponía mostrando grandes ventajas de esta sobre el suelo [1].
TABLA I “VENTAJAS DE UTILIZAR UN SISTEMA DE HIDROPONÍA”
Características
esenciales. Sobre suelo Sin suelo
Nutrición de la planta.
Es difícil controlar debido a su variedad por el medio
ambiente.
Se tiene estabilidad
permitiendo monitorear y
corregir.
Espacimiento
Se limita su fertilidad y la densidad de plantación en
menor.
Altas densidades y mayor
aprovechamiento de espacio y luz.
Controlo de maleza
Se tiene mayor presencia de malezas.
Disminuye la población y resultan casi inexistentes.
Implementación de sistemas embebidos en cultivos Hidropónicos.
1R. B. Leonardo Humberto, 1M. L. Maximiliano, 1R.C. Gustavo, 1S.S.Santiago , 1R. T. Marco Tulio,1G.P.Luis Javier Ontanon
1Coordinación Académica Región Altiplano Oeste UASLP [email protected]
16
Enfermedades y patógenos en
el suelo
Son propensas a enfermedades producidas por el suelo.
No existent patógenos debido
a que se sustituyo el
suelo.
Agua
Tiende a un estrés hídrico debido que aunque el suelo
tenga agua no está disponible. en su totalidad.
No existe tal estrés ya que las
técnicas. hidropónicas
tienen siempre disponible el
agua
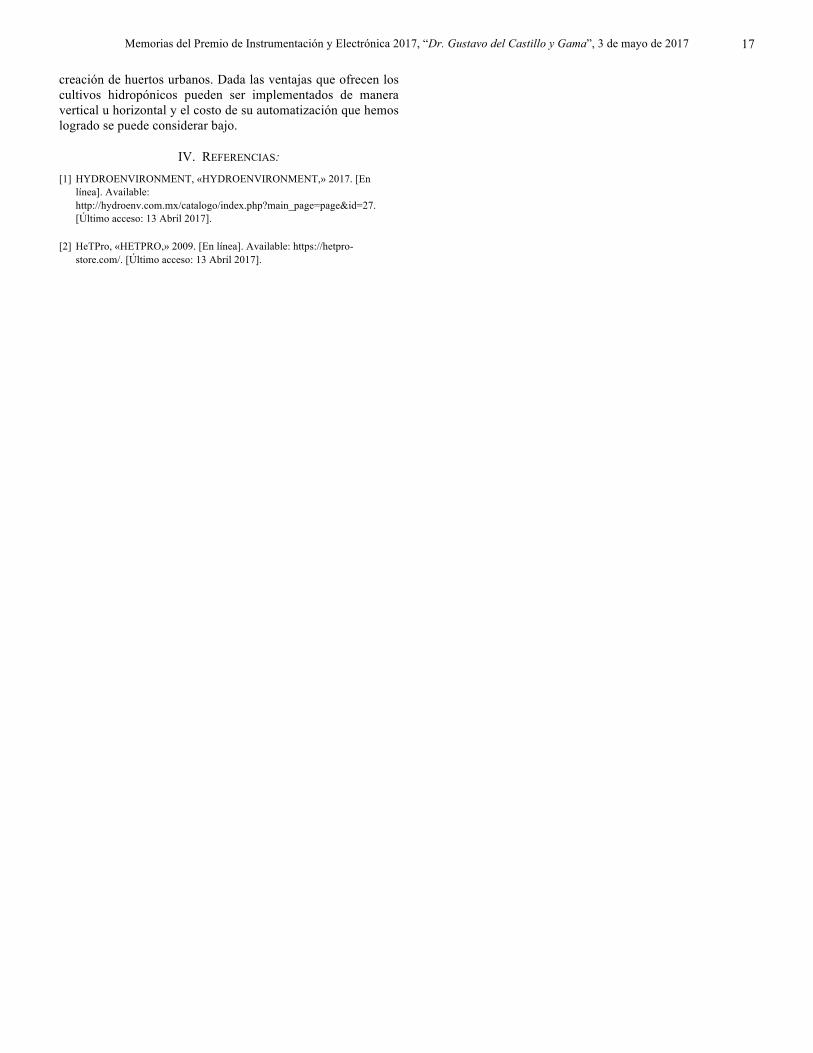
Para la realización de un sistema que sea capaz de capturar los datos de los cultivos, guardarlos, enviarlos a los usuarios y que además sea autosuficiente para activar el riego parecería se necesitaran una serie de circuitos electrónicos para cada una de las acciones, pero gracias a la placa Arduino, el trabajo de circuitería se simplifica en gran medida, ya que dicha placa puede sensar el entorno mediante la recepción de datos por las entradas utilizando una variedad de sensores, así como también puede afectar a su alrededor mediante el control de luces, motores y otros artefactos. El microcontrolador de la placa se programa usando el Arduino Programming Language y el Arduino Development Environment1.En este proyecto se hace uso de la palca Arduino Mega, el cual funge como dispositivo central de todas las tareas. Los principales sensores utilizados son para medir la humedad, la temperatura y la luminosidad el nivel de PH que tienen las plantas, como a continuación se presenta en la siguiente Figura 2 [2].
Figura 2. Principales sensores para mediciones de luminosidad,
temperatura, humedad y nivel de PH en las plantas. Los sensores antes mencionados fueron calibrados y programados acorde a la planta que se tenga, y de esta manera captar los puntos críticos de estado en que se encuentran, ya sea si está excediendo o si le está faltando alguna de las condiciones, indicándolo inmediatamente al usuario para que tome cartas en el asunto o que simplemente active el modo automático y el sistema se encargue de todo el desarrollo del cultivo. Se cuenta también con una base de datos, creada específicamente para guardar todos los datos que arrojen los sensores acerca de las plantas que se estén tratando los cuales son almacenados en una memoria Micro SD.
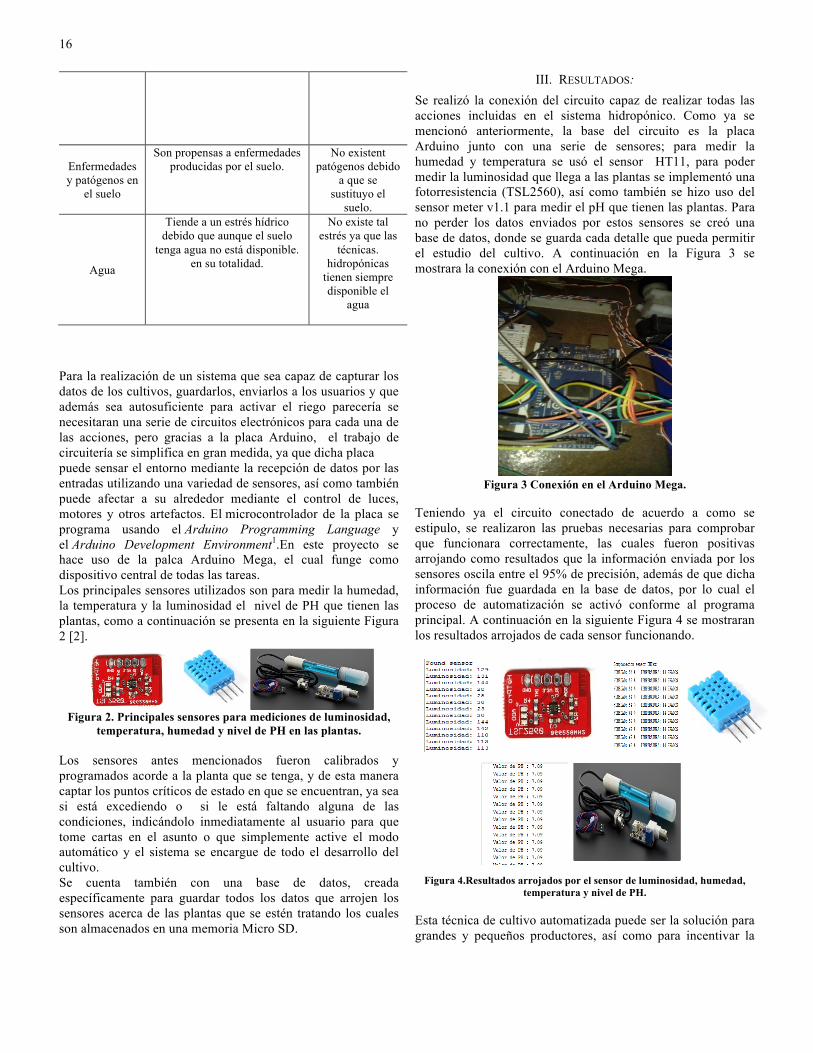
III. RESULTADOS: Se realizó la conexión del circuito capaz de realizar todas las acciones incluidas en el sistema hidropónico. Como ya se mencionó anteriormente, la base del circuito es la placa Arduino junto con una serie de sensores; para medir la humedad y temperatura se usó el sensor HT11, para poder medir la luminosidad que llega a las plantas se implementó una fotorresistencia (TSL2560), así como también se hizo uso del sensor meter v1.1 para medir el pH que tienen las plantas. Para no perder los datos enviados por estos sensores se creó una base de datos, donde se guarda cada detalle que pueda permitir el estudio del cultivo. A continuación en la Figura 3 se mostrara la conexión con el Arduino Mega.
Figura 3 Conexión en el Arduino Mega.
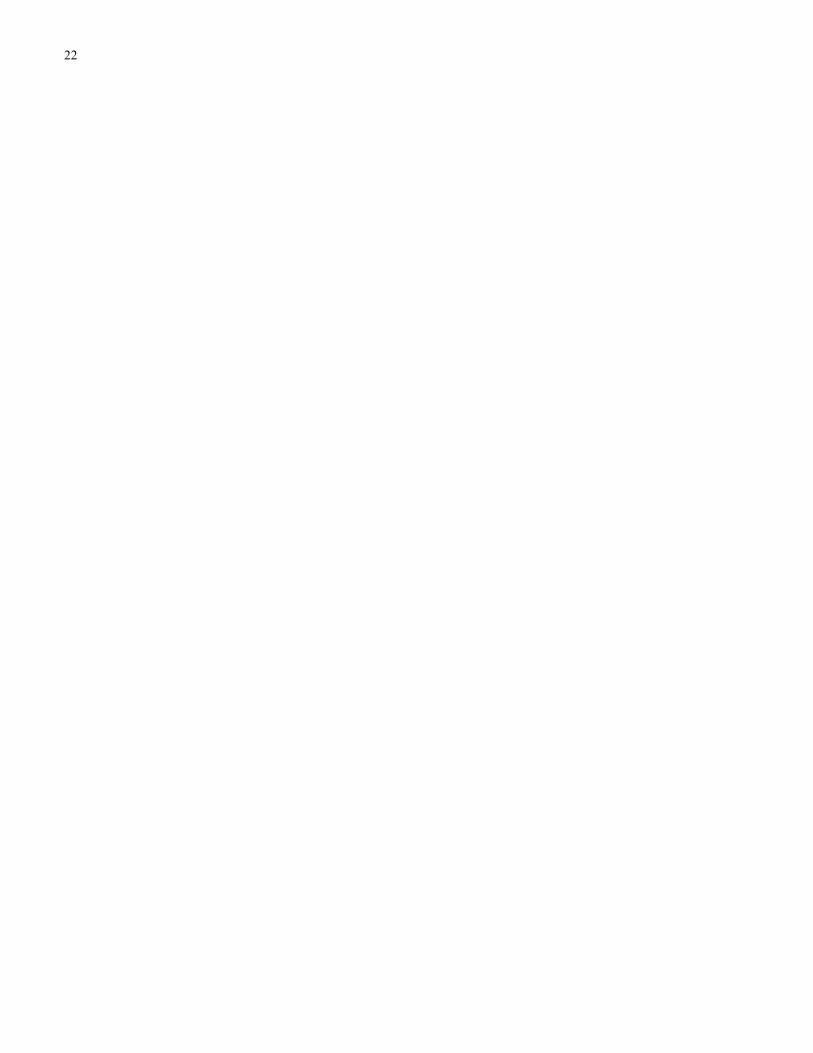
Teniendo ya el circuito conectado de acuerdo a como se estipulo, se realizaron las pruebas necesarias para comprobar que funcionara correctamente, las cuales fueron positivas arrojando como resultados que la información enviada por los sensores oscila entre el 95% de precisión, además de que dicha información fue guardada en la base de datos, por lo cual el proceso de automatización se activó conforme al programa principal. A continuación en la siguiente Figura 4 se mostraran los resultados arrojados de cada sensor funcionando.
Figura 4.Resultados arrojados por el sensor de luminosidad, humedad, temperatura y nivel de PH.
Esta técnica de cultivo automatizada puede ser la solución para grandes y pequeños productores, así como para incentivar la
Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
17
creación de huertos urbanos. Dada las ventajas que ofrecen los cultivos hidropónicos pueden ser implementados de manera vertical u horizontal y el costo de su automatización que hemos logrado se puede considerar bajo.
IV. REFERENCIAS: [1] HYDROENVIRONMENT, «HYDROENVIRONMENT,» 2017. [En
línea]. Available: http://hydroenv.com.mx/catalogo/index.php?main_page=page&id=27. [Último acceso: 13 Abril 2017].
[2] HeTPro, «HETPRO,» 2009. [En línea]. Available: https://hetpro-store.com/. [Último acceso: 13 Abril 2017].

18

Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
19
Quebrador de nueces compacto Cuevas Jaime1, Martínez Erik1, Martínez Mario1, Tenorio Edgar1, Ceballos Prudenciana2 & Torres Edgar1
1Centro de Bachillerato Tecnológico industrial y de servicios 121, Mecatrónica Soledad de Graciano Sánchez, San Luis Potosí
2Centro de Bachillerato Tecnológico industrial y de servicios 121, Programación Soledad de Graciano Sánchez, San Luis Potosí
[email protected], [email protected], [email protected], [email protected], [email protected], [email protected]
Resumen—En el presente trabajo se muestra el desarrollo e implementación de una máquina quebradora de nuez pecanera. En la actualidad la venta de este fruto en sus tres variantes (entera, quebrada y descascarada) es la fuente de ingresos principal para algunas familias del estado de San Luis Potosí. Con la implementación de este dispositivo se busca la agilización del proceso de quebrado, y que a su vez generé mayor producción mejorando los ingresos económicos.
Indice de terminos; nuez, pecanera, maquina quebradora.
I. INTRODUCCIÓN El árbol de pecan es el único nogal de origen americano,
nativo del norte de México y sur de Estados Unidos, su conocida nuez pecanera es la semilla de su fruto, que se encuentra dentro de una cáscara, formada de dos lóbulos carnosos comestibles. A diferencia de otras nueces, la nuez pecanera puede distinguirse por su cáscara delgada, denominada también “cáscara de papel”, misma que facilita el proceso de quebrado, esta nuez se caracteriza por un sabor y aroma agradable. [1].
La producción de nuez en México ha ido en aumento, cerca de un 80% en los últimos años, México exporta cerca de la mitad de las nueces que produce y es el segundo exportador mundial después de EEUU. [2].
Al ser la nuez, un producto con tal demanda, es importante apoyar dicho sector, por lo cual este trabajo se enfoca en la realización de un artefacto factible, que realice de forma automatizada el proceso de trituración, mejorando así las condiciones de trabajo de las familias del campo que se dedican a esta labor como fuente principal de ingresos.
II. PLANTEAMIENTO DEL PROBLEMA En la actualidad la nuez es uno de los frutos secos más
consumidos en el país, este fruto es consumido gracias a las propiedades benéficas que ofrece al cuerpo humano. Éste artículo es comercializado en tres variantes, la nuez entera, quebrada y descascarada. [1]
En el estado de San Luis Potosí y estados colindantes del norte, la venta de este fruto es la fuente de ingresos de algunas familias, las cuales realizan el proceso de quebrado de la nuez
de forma manual, utilizando una herramienta austera, que resulta en un proceso tardado, pues hace el quebrado de la nuez, de una por una, además de ser cansado para la persona que lo realiza.
Dicho proceso afecta las ganancias, debido a la relación tiempo – producción de la dinámica utilizada. Por otra parte los sistemas automatizados que existen actualmente enfocados en éste proceso son dispositivos industriales, de elevados costos o máquinas compactas pero no automatizadas.
III. JUSTIFICACIÓN Con esta propuesta, se pretende crear un dispositivo
factible, capaz de realizar la tarea de triturado de nueces con la mínima intervención de una persona y con un resultado que generé mayor producción, sin tener que invertir en maquinaria de costos más altos.
Con la utilización de éste dispositivo se apoyará a las familias del campo y pequeños productores de nuez, cuya principal fuente de ingresos es la comercialización de éste fruto seco, de tal forma que al realizar una serie de mecanismos semiautomáticos, que van desde recolectar las nueces, realizar el triturado de más de una nuez a la vez y finalmente despacharlas en un recipiente, se mejoraría la relación tiempo – producción y se optimiza su labor diaria.
Además del alto impacto que tendría este proyecto, es muy factible gracias a los materiales utilizados que son accesibles y funcionales, permitiendo la producción del mismo a un costo más bajo que las máquinas convencionales.
IV. HIPÓTESIS La hipótesis de esta investigación es “El aumento de la
producción de nuez quebrada y como consecuencia un aumento en los ingresos económicos”. La implementación de un sistema automatizado que facilite el proceso de quebrado y aumente la producción mejorando los ingresos para las familias dedicadas a la comercialización de este producto, así como ser una opción económica para la fácil adquisición del sistema.

20
V. OBJETIVOS
A. Objetivo general Diseñar y construir un prototipo de quebrado de nueces
automatizado, el cual facilite a los productores dicho proceso y garantice la seguridad del usuario.
B. Objetivos específicos • Diseñar un sistema autónomo que sea capaz de
quebrar más de una nuez a la vez. • Agilizar el proceso de quebrado de nuez. • Fabricar un dispositivo compacto, de fácil
adquisición y para uso doméstico.
VI. DESARROLLO
A. Fuerza necesaria para fracturar nuez pecanera Para determinar la fuerza promedio necesaria para lograr la
fractura de la nuez, se aplicaron tres pruebas diferentes a un total de 225 especimenes, usando 75 nueces para cada ensayo, intercambiando su posición principalmente, [3]. El primero de ellos consistió en aplicar una presión con la nuez en posición transversal. Posteriormente la segunda prueba consistió en aplicar presión con la nuez en posición longitudinal, Fig.1 . Y finalmente el último estudio fue someter la nuez a remojar en agua por un periodo de 10 minutos y después dejarla secar, enseguida se aplicó la presión en posición transversal. Todas las lecturas de fuerza se llevaron a cabo con la implementación de un sensor FSR 406 y la tarjeta Arduino Uno. Los resultados obtenidos se muestran en la Tabla I.
Figura 1. A) Posición transversal de la nuez, B) Posición Longitudinal de la nuez.
RESULTADOS DE LA FUERZA PROMEDIO PARA FRACTURAR LA NUEZ DEPENDIENDO LA POSICIÓN
Nuez posición transversal
Nuez posición transversal después de ser remojada en
agua
Nuez posición longitudinal
Fuerza promedio en Newton (N)
40.15 24.9 46.96
Al verificar los resultados obtenidos de dichas pruebas, se puede apreciar que la posición transversal después de que el
fruto ha sido remojado en agua y secado, es donde se requiere aplicar menor fuerza para lograr la fractura de la nuez, por lo tanto esta orientación es la que se tomó en cuenta en el diseño.
B. Tamaño promedio de la nuez pecanera Geométricamente la nuez pecanera es parecida a un elipse
irregular por lo cual se puede tomar dos ejes de referencia el eje mayor y el eje menor, Fig. 2, [3]. Teniendo en cuenta estas consideraciones se realizó la medida de ambos ejes en cada nuez, de un total de 100 frutos, los resultados se pueden apreciar en la Tabla II.
Figura 2. Ejes de la nuez pecanera.
LONGITUD PROMEDIO DE LA NUEZ PECANERA
Longitud promedio del eje mayor (cm)
Longitud promedio del eje menor (cm)
4.232 1.624
C. Diseño mecánico y construcción de la máquina quebradora de nueces Para el diseño del dispositivo de quebrado se tomó en
cuenta la altura promedio del eje menor, ya que en esta posición también es donde se requiere aplicar menor fuerza, además se maneja un ajuste de altura manual de 0.5 cm como tolerancia, Fig.3. Los actuadores empleados en este sistema son cilindros de doble efecto con una presión de funcionamiento de 10Bar, los cuales serán los encargados de quebrar la nuez. Para el control de estos actuadores se emplean electroválvulas 5/2 Fig. 4. Accionadas por medio de relevadores los cuales son manipulados por una tarjeta Arduino Mega 2560.
En cuanto al material de la estructura se seleccionó la madera de pino, pues es un componente que ofrece buenas propiedades mecánicas (resistencia), además de la facilidad para su manipulación, [4].
El dispositivo cumple la expectativa de ser un sistema compacto en comparación con las máquinas automatizadas que existen actualmente en el mercado, Fig. 5.

Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
21
Figura 3. Ajuste de altura para quebrar la nuez.
Figura 4. Diagrama neumático del sistema.
Figura 5. Diseño final de la máquina quebradora de nuez.
VII. DESCRIPCIÓN DEL GRADO DE INOVACIÓN Anteriormente se hizo mención que el proceso de
quebrado de nuez es manual mediante un sistema que tritura la nuez de manera individual siendo un proceso cansado para la persona que lo realiza, además los sistemas autónomos que existen son de elevados costos, es por eso que éste sistema propone en su diseño la reducción de costos de producción empleando materiales económicos garantizando eficiencia en su desempeño, ayudando con esto a disminuir el costo de venta para su fácil adquisición, trayendo también implícitas las ventajas de agilizar el proceso y aumentar la producción.
VIII. DESCRIPCIÓN DEL GRADO FACTIBILIDAD La ventaja principal que ofrece este sistema es fungir
como una herramienta más para el proceso de quebrado de nuez ya que no requiere de una instalación complicada, al ser un dispositivo de uso casero, además los materiales utilizados son económicos y de fácil adquisición lo cual facilitará su mantenimiento permitiendo alargar el periodo de vida útil del sistema.
Por otra parte es de fácil operación pues la persona solo se encargará de suministrar la materia prima (nuez entera) dar marcha al dispositivo y obtendrá el producto (nuez quebrada), para su comercialización.
IX. DESCRIPCIÓN DEL IMPACTO SOCIAL O TECNOLÓGICO Este dispositivo será una herramienta que ayude a
aumentar los ingresos de las personas del estado de San Luis Potosí y estados colindantes del norte que se dediquen a la comercialización de este fruto seco.
Disminuirá el esfuerzo y tiempo que se emplea al realizar el proceso de manera manual y aumentará la cantidad de producción, será una opción factible pues es relativamente más económica que los productos que existen actualmente.
X. CONCLUSIONES En la actualidad, en el país se requiere diseñar tecnologías
que permitan facilitar algunos procesos para poder mejorar el rendimiento, calidad y economía de ciertos sectores, por esta razón la implementación de este sistema motivará a las personas que son comerciantes de éste producto a formar pequeñas y medianas empresas, las cuales ayudarán a la economía del país haciendo uso de productos mexicanos.
REFERENCIAS [1] Camacho, J.A. & Ramos, S. (2012). Nuez. Febrero, 2017.
SAGARPA. Recuperado de http://2006-2012.sagarpa.gob.mx/agricultura/productodetemporada/_layouts/mobile/dispform.aspx?List=75320ba8-c685-403d-a5aa-b32646bacf02&View=5050ddad-bb6c-4d20-8e46-97b7179e8410&ID=68
[2] FND. (2014). Panorama de la Nuez. Enero 2017. FND-SHCP. Recuperado de http://www.financierarural.gob.mx/informacionsectorrural/Panoramas/Ficha%20Nuez.pdf
[3] Salazar Garibay A., Rodríguez Sánchez I., Corona Andrade J. & Ibarra Solís I. (2014, Abril - Junio). “Análisis Mecánico y Geométrico de la Nuez de Macadamia Previo al Diseño y Construcción de una Quebradora”. Innovación y Desarrollo Tecnológico Revista Digital, Vol 6, pp 33-43. 2016, Julio 05.
[4] Campos C. “Determinación de propiedades físicas y mecánicas de la madera de Pinus maximinoi h. e. Moore; Cobán, Alta Verapaz”. (Tesis de licenciatura). Universidad Rafael Landívar, Facultad de ciencias ambientales y agrícolas, San Juan Chamelco, Alta Verapaz, Guatemala, 2015.
22
Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
23
Red Celular de bajo costo para comunidades rurales incomunicadas
Hugo Pérez Guerrero, UASLP, Rocío Medellín Cortes, UASLP, José Castro Juárez, UASLP, Raúl Jaramillo de Lira, UASLP, Dr. Marco Cárdenas Juárez, Asesor, UASLP,
Resumen—Este prototipo presenta una solución factible pa-ra proporcionar servicios de telefonía celular en comunidades rurales mediante la implementación de estaciones bases celu-lares independientes de los operadores de telecomunicaciones comerciales. Esencialmente, se demuestra la implementación de una red de telefonía celular GSM escalable en número de usuarios y cobertura geográfica, cuya implementación es posible en comunidades rurales debido a que su precio puede ser aproximadamente el 5 % del costo de una estación base celular convencional.
Palabras clave; SDR, estación base, rural, red móvil, internet.
I. INTRODUCCIÓN Proporcionar el acceso a servicios de telefonía fija, internet
y telefonía celular a la población de México representa un gran reto en términos de economía, investigación, desarrollo tecnológico e innovación. De acuerdo con datos del Instituto Nacional de Estadística, Geografía en Informática (INEGI), en el año 2014 el 47 % de los hogares en el estado de San Luis Potosí contaba con servicio de telefonía fija; mientras que sólo el 40 % de los mismos tenía acceso a internet. Por otro lado, en el mismo año tan solo el 45.8 % de la población en el estado recibía señal de telefonía celular comercial, a pesar de que el 64 % de la población contaba con al menos un teléfono celular. Estas cifras son muestras contundentes del rezago tecnológico significativo en el acceso a estos servicios en el estado. Principalmente, en comunidades rurales cuya ubicación geográfica y número de habitantes hacen que el despliegue de infraestructura no sea redituable para los operadores de telecomunicaciones tradicionales; por lo que están practicamente incomunicadas.
A. Viabilidad tecnica Para subsanar estas deficiencias, se han propuesto diversas
soluciones para instalar casetas de uso público de telefonía fija y proveer servicios de internet en comunidades rurales. Sin embargo, éstas involucran el arrendamiento de costosos enlaces satelitales. Además, están tecnologicamente limitadas, por lo que no pueden brindar servicios de telefonía celular a usuarios rurales. En este contexto, la Secretaría de Co-municaciones y Transportes (SCT) del Gobierno del Estado de San Luis Potosí trabaja en la reducción de la brecha digital mediante la implementación de una red inalámbrica que habilita la introducción de telefonía fija e internet en comunidades rurales de San Luis Potosí a través de enlaces punto a punto en las bandas de 4.5 GHz y 5.4 GHz. Sin embargo, brindar servicios
de telefonía celular de bajo costo en estas comunidades es todavía un reto tecnológico abierto.
II. PROTOTIPO El prototipo propuesto es una solución factible para el
problema de falta de comunicación en comunidades rurales. El principal objetivo es el proporcionar servicios de telefonía celular en estas comunidades mediante la implementación de estaciones bases celulares a través de la cohesión de un sistema embebido Linux y un Radio Definido por Software (SDR). Esencialmente, se demuestra la implementación de una red de telefonía celular GSM escalable en número de usuarios y cobertura geográfica. De esta forma, los servicios que la red celular “Rurablame”´ está habilitada para ofrecer son:
• Llamadas de voz y mensajes SMS entre teléfonos celu-lares que se encuentran en la red celular rural.
• Llamadas de voz desde teléfonos celulares en la red ce-lular rural hacia teléfonos fijos y celulares de compañías comerciales en el exterior.
• Llamadas desde teléfonos fijos y celulares de compañías comerciales en el exterior hacia teléfonos dentro de la red celular rural.
B. Atributos La implementación del prototipo es posible en comunidades
rurales debido a que su precio puede ser aproximadamente el 5 % del costo de una estación base celular convencional. Este ahorro significativo es debido a que la tecnología utilizada es de última generación y es posible ponerla en funcionamiento en las zonas rurales con mucha mayor facilidad y rapidez que una estación base comercial. Lo cual proporciona un beneficio al medio ambiente al no requerir infraestructura contaminante e invasiva hacia el entorno en el que sea implementada. El prototipo conjuga los esfuerzos que la SCT está realizando para proporcionar internet en comunidades rurales del estado sin necesidad de utilizar costosos enlaces satelitales, la nueva legislación que permite tramitar un título de concesión para usar en forma experimental bandas de frecuencias del espectro radioeléctrico (específicamente en los 800 MHz) ante el Instituto Federal de Telecomunicaciones (IFT) y equipamiento de radiofrecuencia reconfigurable con tecnología de punta, lo que permite brindar una solución alternativa para proporcionar telefonía celular a más del 50 % de la población en el estado.

24
III. CONCLUSIÓN Los resultados muestran la factibilidad de implementación
del prototipo en escenarios reales. Aunque se requieren ciertas condiciones, como contar con el servicio de energía eléctrica.
Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
25
Seguidor de objeto con LabVIEW y LEGO mindstorm
Torres Alonso Karla Maria Olvera Guerrero Jose Albeto
CoordinaciónAcadémicaRegión Altiplano Oeste. UniversidadAutónoma de San Luis Potosí.
Salinas de Hidalgo, S.L.P. México. [email protected]
Ramirez Torres Marco Tulio Ontañon Garcia Pimentel Luis Javier
CoordinaciónAcadémicaRegión Altiplano Oeste. UniversidadAutónoma de San Luis Potosí.
Salinas de Hidalgo, S.L.P. México. [email protected]
Resumen—Este proyecto consiste en un seguidor de objetos. El código fue creado por medio de LabVIEW e implementado a un robot LEGO mindstorm. Se utiliza el modulo NI VISION para la detección del objeto, esto mediante el color, para esta función se emplea una cámara USB preinstalada, posicionada encima del robot. El objetivo es que, con ayuda de la cámara, el robot LEGO sea capaz de encontrar y centrar un objeto determinado. El código se realizó en LabVIEW Robotics para condicionar el movimiento del robot LEGO mindstorm a las coordenadas del objeto a encontrar.
Palabras Clave: Rastreo, LEGO mindstorm, LabVIEW, Visión.
I. INTRODUCCIÓN
En años recientes la búsqueda de automatización de diversas actividades, ha puesto a prueba la capacidad de desarrollo de investigadores e ingenieros. La automatización tienes diversos fines, entre ellos, reducir el número de accidentes ocasionados por descuidos, cansancio y otros factores presentes en las acciones humanas. Actualmente una de las tendencias con mayor auge es la navegación autónoma, donde varias empresas importantes ya han mostrado sus proyectos. Para esta tarea es necesario contar con sensores y algoritmos de programación, que se encargan de la toma de decisiones a partir de la lectura de variables físicas del entorno.
En esta investigación nos introducimos en esta área de desarrollo, utilizando los robots LEGO mindstorm[1], una webcam como sensor de visión y el entorno de programación LabVIEW[2]. La idea principal fue crear en el módulo NI-VISION un programa que trabaje con la webcam en la detección de objetos, basado en la codificación RGB y el aprendizaje de un patrón previo. Una vez señalada la coincidencia del patrón en el video, las coordenadas del objeto nos dan la pauta para mover el robot LEGO de forma tal que el objeto detectado quede en el centro de la imagen obtenida por la webcam. Esta primera versión funciona solo para el eje X, pero gracias a la programación modular de LabVIEW se espera en un futuro exportar este algoritmo a drones u otros vehículos
que trabajen de manera autónoma y tengan por fin el rastreo de objetos.
II. MARCO TEÓRICO
A. LabVIEW Labview es un lenguaje de programación gráfica , que se
basa en diagramas de bloques para crear aplicaciones, en lugar de numerosas líneas de código de texto. Lo cual lo hace una herramienta sencilla de programación.
Es principalmente utilizado en aplicaciones que involucren adquisición, control, análisis y representación de datos. Además, permite la integración de cualquier dispositivo de hardware.
B. Procesamiento de imágenes El procesamiento de imágenes[3] es un tema de gran
relevancia actualmente, el cual es una clase de procesamiento de señales que se capturan por medio de las fotografías o videos, y que se someten a un proceso para determinar y descifrar ciertas características o crear nuevas imágenes a partir de éstas. Al ser la imagen digital una matriz de bits que definen el color y la intensidad de cada pixel en una imagen, esta cantidad de bits que necesita cada pixel para guardar la información de la imagen depende de cómo se codifica el color.
El principal uso de este proceso se aplica en la reconstrucción, fusión y registro de imágenes, la segmentación, extracción de características, localización y mapeado simultaneo, ajustes de cámara y en el seguimiento de objetos, el cual es utilizado para rastrear la posición de un objeto utilizando diversas técnicas.
C. Robot LEGO mindstorm Dentro de la robótica, un área de conocimiento importante, se crea LEGO mindstorm, este es un set de construcción de robots programables el cual permiten construir, programar y controlar robots. Se construyen a partir de una serie de piezas, entre ellas servomotores, sensor de color, táctil, e infrarrojo, y el más importante el brick que es el cerebro del robot, y

26
además permite la comunicación inalámbrica a través del Wi-Fi y Bluetooth. Todo esto permite usarlos en diversas aplicaciones ya que pueden crearse diferentes diseños según la necesidad del programador. La tercera generación que es la versión mas actual EV3 incluye un software para poder controlar el robot desde una computadora, tableta o smartphone.
III. DESARROLLO
Para crear el algoritmo necesario para el correcto funcionamiento de los comandos del robot LEGO mindstorm. Se inicia con la creación de un objeto IMAQ create en el módulo Vision and Motion. En este caso se trata de una imagen a color que es lo más común hoy en día, además de contar con una amplia gama de colores, por lo que se selecciona el tipo de imagen RGB(U32), que es la que ofrece la salida de las imágenes a color. Después de asignar el nombre de la imagen de salida se procedió a crear un ciclo while el cual obedece la sintaxis del algoritmo y no deja de ejecutarse hasta que se cumpla una condición, la cual será detectar un template, una zona, color u objeto en específico. Para el proceso siguiente se usaron algunas de las funciones que contiene el programa Labview Robotics las cuales son Vision Acquisition y Vision Asistant. Estas funciones nos permiten a través de las modificaciones correctas, detectar y transmitir imagen y video en el cual se centra el algoritmo que se creó para este proyecto. Para el movimiento del robot en la función Mindstorm Robotics se hace uso de un case structure, donde se crea un algoritmo el cual consiste en mover el robot por medio de dos servomotores, hacia adelante o atrás según se necesite para ubicar la posición exacta de nuestro template, la cual está dada por una de las funciones del algoritmo en la cual se centra la cámara para detectar el objeto o color deseado y así proceder a detectarlo. Este código programado se trasmite a un modelo de LEGO mindstorm de tercera generación EV3, el cual lleva fijado sobre él una cámara USB preinstalada, la cual nos permite trasmitir la imagen de video a través de la
computadora y visualizarla en el panel frontal, y así controlar el robot.
IV. CONCLUSIONES
Para concluir se logró crear un robot capaz de identificar un objeto por medio del color de ciertos pixeles, y en base a esto es posible el seguimiento de este sobre el eje x. Esto es muy importante para el rastreo de objetos, ya que estamos identificando el objeto en un video en tiempo real y a partir de su posición determinamos las acciones del robot. En un futuro esperamos implementar este algoritmo en vehículos con más grados de libertad como lo es un dron. Las aplicaciones son muchas desde la detección de personas u objetos en un lugar de difícil acceso o la búsqueda de plagas dentro de un sembradío, entre otras.
AGRADECIMIENTOS
Agradecemos al doctor Marco Tulio Ramírez Torres y al doctor Luis Javier Ontañón García Pimentel, por sus enseñanzas, el tiempo y los materiales prestados, así como por su asesoría y paciencia. Gracias por la oportunidad de adquirir nuevos conocimientos y por la experiencia de vivir algo fascinante para nosotros.
REFERENCIAS
[1] Software de desarrollo de sistemas NI LabVIEW, National Instruments(2017). http://www.ni.com/labview/esa/
[2] Mindstorm EV3. LEGO(2017). https://www.lego.com/es-es/mindstorms [3] Posada-Gomez R, Sandoval-Gonzales O, Martinez-Sibaja A, Portillo
Rdz O, Alor-Hernandez G(2011). Digital Image Processing Using LabView, Practical Applications and Solutions Using LabVIEW™ Software, Dr. Silviu Folea (Ed.), InTech, DOI: 10.5772/23285. https://www.intechopen.com/books/practical-applications-and-solutions-using-labview-software/digital-image-processing-using-labview

Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
27
Resumen-- En este proyecto de investigación se realiza la
medición, monitoreo y visualización de información de distintos sensores y activación de actuadores en un cultivo hidropónico. Mediante los sensores se medirá la temperatura, humedad, luminosidad, pH y se controlará el encendido/apagado de una bomba de agua, haciendo uso de la placa Arduino UNO y el módulo ESP8266-01. Este módulo se conectará a una red WiFi para transferir la información a una base de datos y a ThingSpeak, un servidor web. Dicho servidor permitirá la visualización de los datos en tiempo real por medio de una aplicación web y móvil para su fácil acceso, haciendo uso de avances tecnológicos como el internet de las cosas y contribuyendo así con los sistemas en línea. Uno de los objetivos es proponer la implementación de esta tecnología a productores de la región, para prevenir y/o notificar fallas de manera remota y disminuir costos de producción. Palabras clave— ESP8266-01, Arduino UNO, ThingSpeak, IoT.
I. INTRODUCCIÓN El internet de las cosas (por sus siglas en ingles IoT, Internet of Things) es una de las creaciones más importantes y poderosas de la actualidad. Representa la próxima evolución de internet, la cual será un enorme avance en la capacidad para reunir, analizar y distribuir datos que podremos convertir en información y conocimiento. Existen hoy en día proyectos de IoT que prometen mejorar la distribución de los recursos del mundo enfocados en resolver problemas ambientales, ahorro de iluminación, desarrollo de invernaderos inteligentes y además de enfrentar los desafíos que nos presenta una sociedad cada vez más conectada, para lograr mejorar la calidad de vida de las personas en corto, mediano y largo plazo. A lo largo del proyecto de investigación se estudiará el IoT, así como las diferentes herramientas tanto de software, como de hardware y su relación entre ellos, para poder llevar a cabo de la manera más simple y clara posible, la lectura, monitoreo de sensores y manejo de actuadores implementados en cultivos hidropónicos, realizando un perfil detallado de las condiciones del cultivo, gracias a IoT, toda la información recogida a través de internet se podrá revisar en aplicaciones móviles y web en tiempo real para lograr anticiparse a posibles problemas y evitar pérdidas en la producción.
II. METODOLOGIA. Los materiales utilizados para este proyecto son: fuente de alimentación MB102, módulo ESP8266-01 [1], Protoboard y la placa Arduino UNO. La conexión del ESP8266-01 con Arduino UNO se llevó a cabo uniendo los pines Rx y Tx de ambos dispositivos y alimentando el ESP8266-01 a 3.3v con la fuente de alimentación MB102 como se muestra en la Fig. 1.
Fig. 1 Diagrama de conexión del módulo ESP8266 y Arduino UNO. Mediante la placa Arduino se miden las señales físicas como la temperatura, humedad, luminosidad, pH por medio de sensores y se controla el encendido/apagado de la bomba de agua. Dichas señales son convertidas en datos de distintos tipos, los cuales son transmitidos vía inalámbrica a través del módulo ESP8266-01, el cual permite conectarse a una red WiFi con el uso de comandos AT y realizar la conexión con un servidor web, para enviar dicha información que se estará actualizando constantemente para ser visualizada en tiempo real. Para ello se utiliza la plataforma ThingSpeak Open Source, para conectar productos y servicios al Internet de las Cosas (IoT), siendo un servidor gratuito y fácil de usar. Este servidor se maneja como un sustituto de la futura base de datos local. Básicamente, permite enviar datos a sus servidores y ellos se encargan de guardarlos y de facilitar las herramientas de visualización y gestión. La información se guarda en memorias, a través de lo que ThingSpeak denomina canales. En cada canal se pueden
González Del Río Juan Daniel1, Espíndola Paizano Blanca Jazmin1, Lozano Alfaro Linda1, Ramírez Torres Marco Tulio1, Lara Juárez Omar Emmanuel2.
1Coordinacion Académica Región Altiplano Oeste, UASLP, Salinas, S.L.P. 2Universidad Tecnológica del Estado de Zacatecas, UTZAC, Pinos, Zacatecas.
Sistemas embebidos e IoT para la medición y monitoreo de un cultivo hidropónico.
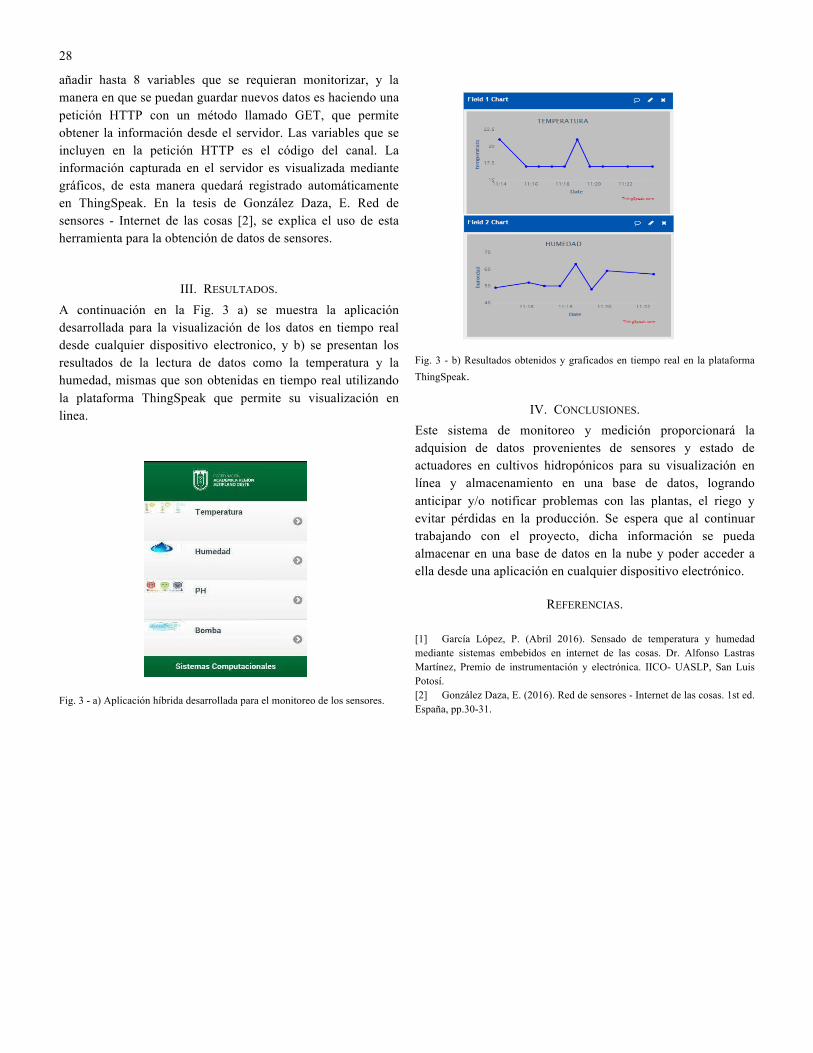
28
añadir hasta 8 variables que se requieran monitorizar, y la manera en que se puedan guardar nuevos datos es haciendo una petición HTTP con un método llamado GET, que permite obtener la información desde el servidor. Las variables que se incluyen en la petición HTTP es el código del canal. La información capturada en el servidor es visualizada mediante gráficos, de esta manera quedará registrado automáticamente en ThingSpeak. En la tesis de González Daza, E. Red de sensores - Internet de las cosas [2], se explica el uso de esta herramienta para la obtención de datos de sensores.
III. RESULTADOS. A continuación en la Fig. 3 a) se muestra la aplicación desarrollada para la visualización de los datos en tiempo real desde cualquier dispositivo electronico, y b) se presentan los resultados de la lectura de datos como la temperatura y la humedad, mismas que son obtenidas en tiempo real utilizando la plataforma ThingSpeak que permite su visualización en linea. Fig. 3 - a) Aplicación híbrida desarrollada para el monitoreo de los sensores.
Fig. 3 - b) Resultados obtenidos y graficados en tiempo real en la plataforma ThingSpeak.
IV. CONCLUSIONES. Este sistema de monitoreo y medición proporcionará la adquision de datos provenientes de sensores y estado de actuadores en cultivos hidropónicos para su visualización en línea y almacenamiento en una base de datos, logrando anticipar y/o notificar problemas con las plantas, el riego y evitar pérdidas en la producción. Se espera que al continuar trabajando con el proyecto, dicha información se pueda almacenar en una base de datos en la nube y poder acceder a ella desde una aplicación en cualquier dispositivo electrónico.
REFERENCIAS. [1] García López, P. (Abril 2016). Sensado de temperatura y humedad mediante sistemas embebidos en internet de las cosas. Dr. Alfonso Lastras Martínez, Premio de instrumentación y electrónica. IICO- UASLP, San Luis Potosí. [2] González Daza, E. (2016). Red de sensores - Internet de las cosas. 1st ed. España, pp.30-31.
Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
29
Incubadora de control y monitoreo para neonatos
Karla Larissa Villarreal Iturriaga IICO S.L.P. México
Isis Osiris de la Rosa Hernández IICO
S.L.P. México [email protected]
Darla Isabel Marrero Garza IICO
S.L.P. México [email protected]
Resumen—Se realizó un prototipo de incubadora automatizada. Colocando sensores de temperatura y humedad dentro de la cavidad, y calentando mediante un sistema de calefacción basado en una celda peltier en la parte inferior del prototipo, regulando con esto la temperatura interna del habitáculo según los estándares de salud utilizando instrumentos virtuales basados en arduino y Labview, de forma simultanea se monitorean los signos vitales del sujeto, (ritmo cardiaco, presión, etc), y así poder detectar la reacción a los cambios de temperatura y humedad, permitiendo a los médicos diagnosticar la causa.
I. INTRODUCCIÓN A continuación se presenta la implementación de los
conocimientos adquiridos en la materia de Biomédica, diseñando una incubadora de control, donde trabajaremos con las plataformas de labtutor y labchart para la adquisición de señales eléctricas de un sujeto.
Dentro del proyecto se utilizaron también tarjeta arduino, y una tarjeta DAQ, así como Labview, todo esto para el control de la sistematización del proyecto.
II. PROCEDIMIENTO Se diseñó una incubadora de 80cm X 40cm en su base y
una cavidad completamente cerrada de 41cm altura.
En la base de la incubadora se encuentra una placa de aluminio de 25cm X 20cm, la cual es calentada con una Celda Peltier TEC1-12706 y colocando sobre la cara fría un disipador para evitar fracturas en la celda. Para la regulación de la temperatura n el costado de la base se cuenta con un ventilador.
En la parte interna de la cavidad se colocó un sensor DHT11 para medir la temperatura y humedad, la cual se está midiendo con una tarjeta arduino en la cual se toma datos cada minuto.
III. FUNCIONAMIENTO Su funcionamiento comienza con el calentamiento de la
superficie de la placa donde el flujo de calor llegara hasta la parte interna de la incubadora, este procedimiento tarda alrededor de 30 minutos, por lo que en la mayoría de los casos se calentara con tiempo de anticipación. Esto resulta útil en
casos donde se presenta algún tipo de hipotermia y se tiene que calentar al sujeto gradualmente.
El sensor es colocado 3cm por encima del abdomen en una de las paredes del recubrimiento y estará siendo monitoreado en una pantalla, se cuenta con un margen de error de +-2o y en el caso de que baje o suba por encima del reglamento establecido por la norma de salud en neonatos, se activara la disminución de calor hasta llegar al rango requerido.
Durante toda la estancia del sujeto se estará monitoreando los signos vitales, de esta manera si se presentan anomalías durante este tiempo se mandara una alerta y las características ambientales en las cuales se encontraba mientras sucedió.
IV.RESULTADOS Con respecto a la adquisición de señales directas del
individuo, fue exitosa presentándose variación en ritmo cardiaco y cambios en síntomas vitales, dependiendo de la temperatura o presión que se va variando.
Dentro del análisis de calentamiento de la incubadora, la variación de temperatura o margen de error fue mayor al esperado habiendo variaciones de hasta +-4o.
En principio entra dentro de márgenes permitidos sin embargo se realizara un análisis termodinámico más específico para disminuir esta variación.

30

Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
31
CLOUD X
Tec. Luis Felipe De La Rosa García Dulce María Quiroz Moreira Dalia Citlali Busson Ramires
Dr. Luis Javier Ontañon Garcia Pimentel Dr. Marco Tulio Ramirez Torres
Coordinación Académica Región Altiplano Oeste Universidad Autónoma De San Luis Potosí
Salinas de Hidalgo, S.L.P, México. [email protected]; [email protected] ;
[email protected]; [email protected]; [email protected]
I. INTRODUCCIÓN El internet de las cosas a tomado gran fuerza en los últimos
años, ya que la posibilidad de poder interconectar cada uno de los dispositivos que se utilizan día con día brinda la capacidad de tener el control en la palma de tu mano de una forma totalmente revolucionaria. Sin embargo, aún se tienen que desarrollar nuevos dispositivos que faciliten la implementación y aumenten las capacidades para que esta nueva tendencia amplié mucho más sus capasidades. Pensando en la problemática de que al ser dispositivos tan pequeños muchas veces no cuentan con unidades de almacenamiento tan amplias, por lo que en ocasiones es necesario buscar un servidor que brinde un almacenamiento el cual no es una opcion tan economica, tomando en cuenta que son muy limitados los servidores en internet que brindan este servicio gratuitamente.
II. MARCO TEÓRICO El internet de las cosas es un concepto que hace referencia a
aquellos dispositivos que tienen la capacidad de mantener una conexión remota mediante dispositivos de conexión con um protocolo TCP/IP, similar al que utilizan las computadoras para mantener una conexión en red. A su vez un servidor es una aplicación en ejecucion capas de atender a las peticiones del cliente y devolver una respuesta en coorcondancia.
III. DESARROLLO Basados en la plataforma Arduino la cual es de codigo
abierto, decidimos emplear el Shiel Ethernet por su bajo costo el cual nos permite generar una coneccion TCP/IP en una red LAN de esta manera podemos establecer una comunicación cualquier dispositivo que se pueda conectar a la red LAN que estamos usando, asi mismo emplea un formulario en HTML 5 por lo que cualquier dispositivo que tenga un navegador de internet puede acceder a la base de datos asi mismo fue necesario establecer un control de acceso para qu solo personas
autorizadas puedan acceder. Buscando una alternativa para poder utilizarlo con dispositivos que manejen internet de las cosas se programo una funcion para que escriba los datos solamente con establecer la direccion IP y la contraseña correspondiente. Su capacidad de almacenamiento esta limitada al tipo de tarjeta SD que se emplee con el Shield Ethernet en este caso empleamos una memoria de 8gb ya que por el momento no se requiere de gran cantidad de datos.
IV. RESULTADOS El codigo empleado se desarrollo con ayuda del ID oficial
de arduino el cual permite emplear librerias que facilitan la comunicación TCP/IP la plataforma se mantiene estable cuando trabaja con un solo usuario ya que al usarlo con multiples usuarios, en ocasiones hay conflictos con los datos que se escriben. La interfaz para poder ver la base de datos, se aprecia ingresando a la direccion IP mediante algun navegador, esto permite que si se emplea el dispositivo con alguna implementacion que este sensando diversos valores apreciar las mediciones obtenidas. O bien que sea el lugar donde se almacenen los datos para hacer funcionar algun sistema como archivos multimedia.
V. CONCLUSIONES Los grandes avances en tecnologias de conectividad nos
han permitido hacer que las comunicaciones entre diversos dispositivos se realise de una manera mas facil sin embargo aun faltan grandes retos por resolver. Con la alternativa antes propuesta se pretende solucionar el problema de almacenamiento, que presentan muchas implementaciones todo a un costo muy accesible y con grandes posibilidades de desarrollo y crecimiento ya que las capacidades que nos ofrece el Hardware nos ayudan a que con la mejora continua de nuestro Software ir combirtiendolo en una aplicación mas robusta y con mejor desempeño, asi mismo permite la personalizacion para que sea utilizada con aplicaciones especificas. Con este dispositivo se pretende sea el prototipo
32
inicial de un sistema que en un futuro se pueda comercializar como una alternativa economica y de facil manejo para la implementacion en sistemas de tipo cliente/servidor.
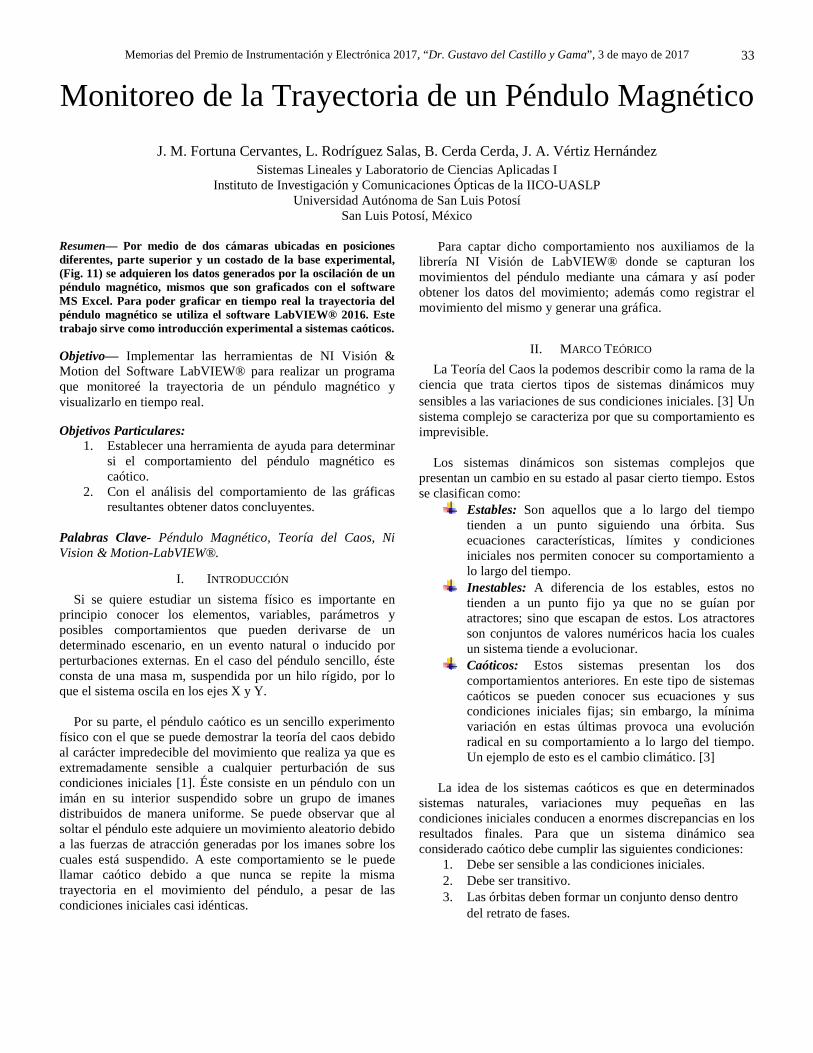
Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
33
Monitoreo de la Trayectoria de un Péndulo Magnético J. M. Fortuna Cervantes, L. Rodríguez Salas, B. Cerda Cerda, J. A. Vértiz Hernández
Sistemas Lineales y Laboratorio de Ciencias Aplicadas I Instituto de Investigación y Comunicaciones Ópticas de la IICO-UASLP
Universidad Autónoma de San Luis Potosí San Luis Potosí, México
Resumen— Por medio de dos cámaras ubicadas en posiciones diferentes, parte superior y un costado de la base experimental, (Fig. 11) se adquieren los datos generados por la oscilación de un péndulo magnético, mismos que son graficados con el software MS Excel. Para poder graficar en tiempo real la trayectoria del péndulo magnético se utiliza el software LabVIEW® 2016. Este trabajo sirve como introducción experimental a sistemas caóticos.
Objetivo— Implementar las herramientas de NI Visión & Motion del Software LabVIEW® para realizar un programa que monitoreé la trayectoria de un péndulo magnético y visualizarlo en tiempo real.
Objetivos Particulares: 1. Establecer una herramienta de ayuda para determinar
si el comportamiento del péndulo magnético es caótico.
2. Con el análisis del comportamiento de las gráficas resultantes obtener datos concluyentes.
Palabras Clave- Péndulo Magnético, Teoría del Caos, Ni Vision & Motion-LabVIEW®.
I. INTRODUCCIÓN Si se quiere estudiar un sistema físico es importante en
principio conocer los elementos, variables, parámetros y posibles comportamientos que pueden derivarse de un determinado escenario, en un evento natural o inducido por perturbaciones externas. En el caso del péndulo sencillo, éste consta de una masa m, suspendida por un hilo rígido, por lo que el sistema oscila en los ejes X y Y.
Por su parte, el péndulo caótico es un sencillo experimento
físico con el que se puede demostrar la teoría del caos debido al carácter impredecible del movimiento que realiza ya que es extremadamente sensible a cualquier perturbación de sus condiciones iniciales [1]. Éste consiste en un péndulo con un imán en su interior suspendido sobre un grupo de imanes distribuidos de manera uniforme. Se puede observar que al soltar el péndulo este adquiere un movimiento aleatorio debido a las fuerzas de atracción generadas por los imanes sobre los cuales está suspendido. A este comportamiento se le puede llamar caótico debido a que nunca se repite la misma trayectoria en el movimiento del péndulo, a pesar de las condiciones iniciales casi idénticas.
Para captar dicho comportamiento nos auxiliamos de la librería NI Visión de LabVIEW® donde se capturan los movimientos del péndulo mediante una cámara y así poder obtener los datos del movimiento; además como registrar el movimiento del mismo y generar una gráfica.
II. MARCO TEÓRICO La Teoría del Caos la podemos describir como la rama de la
ciencia que trata ciertos tipos de sistemas dinámicos muy sensibles a las variaciones de sus condiciones iniciales. [3] Un sistema complejo se caracteriza por que su comportamiento es imprevisible.
Los sistemas dinámicos son sistemas complejos que
presentan un cambio en su estado al pasar cierto tiempo. Estos se clasifican como:
Estables: Son aquellos que a lo largo del tiempo tienden a un punto siguiendo una órbita. Sus ecuaciones características, límites y condiciones iniciales nos permiten conocer su comportamiento a lo largo del tiempo.
Inestables: A diferencia de los estables, estos no tienden a un punto fijo ya que no se guían por atractores; sino que escapan de estos. Los atractores son conjuntos de valores numéricos hacia los cuales un sistema tiende a evolucionar.
Caóticos: Estos sistemas presentan los dos comportamientos anteriores. En este tipo de sistemas caóticos se pueden conocer sus ecuaciones y sus condiciones iniciales fijas; sin embargo, la mínima variación en estas últimas provoca una evolución radical en su comportamiento a lo largo del tiempo. Un ejemplo de esto es el cambio climático. [3]
La idea de los sistemas caóticos es que en determinados
sistemas naturales, variaciones muy pequeñas en las condiciones iniciales conducen a enormes discrepancias en los resultados finales. Para que un sistema dinámico sea considerado caótico debe cumplir las siguientes condiciones:
1. Debe ser sensible a las condiciones iniciales. 2. Debe ser transitivo. 3. Las órbitas deben formar un conjunto denso dentro
del retrato de fases.
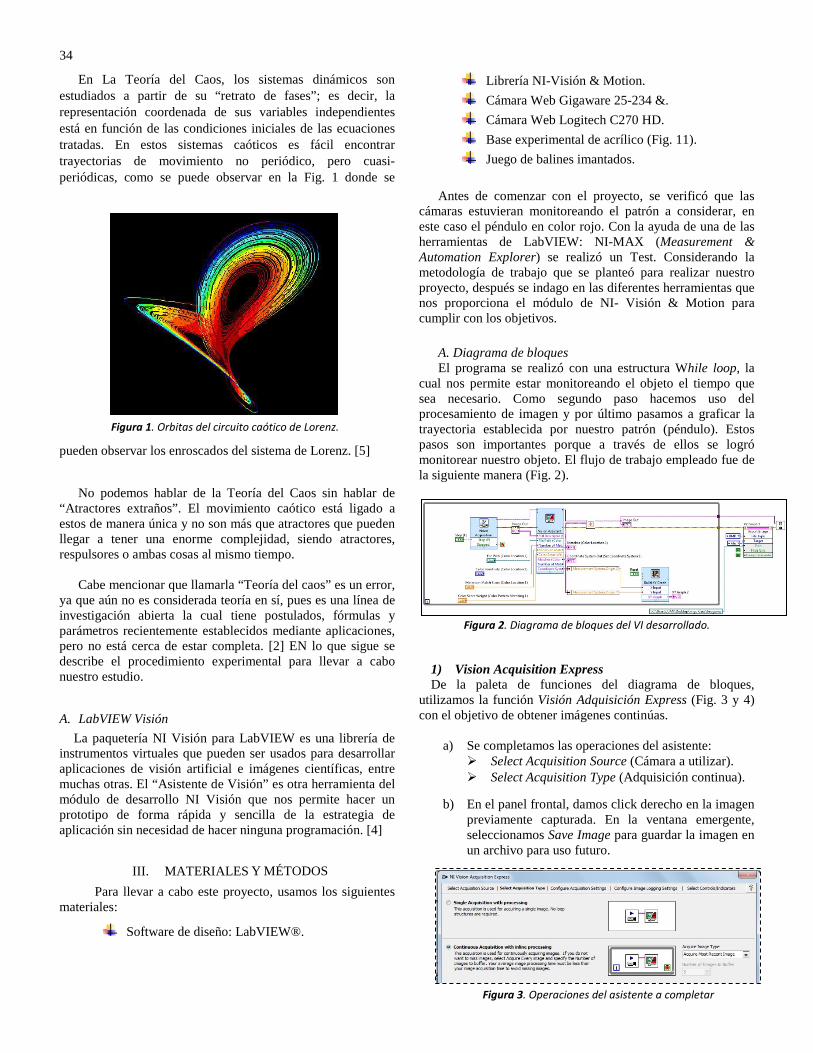
34
En La Teoría del Caos, los sistemas dinámicos son estudiados a partir de su “retrato de fases”; es decir, la representación coordenada de sus variables independientes está en función de las condiciones iniciales de las ecuaciones tratadas. En estos sistemas caóticos es fácil encontrar trayectorias de movimiento no periódico, pero cuasi-periódicas, como se puede observar en la Fig. 1 donde se
pueden observar los enroscados del sistema de Lorenz. [5]
No podemos hablar de la Teoría del Caos sin hablar de
“Atractores extraños”. El movimiento caótico está ligado a estos de manera única y no son más que atractores que pueden llegar a tener una enorme complejidad, siendo atractores, respulsores o ambas cosas al mismo tiempo.
Cabe mencionar que llamarla “Teoría del caos” es un error, ya que aún no es considerada teoría en sí, pues es una línea de investigación abierta la cual tiene postulados, fórmulas y parámetros recientemente establecidos mediante aplicaciones, pero no está cerca de estar completa. [2] EN lo que sigue se describe el procedimiento experimental para llevar a cabo nuestro estudio.
A. LabVIEW Visión La paquetería NI Visión para LabVIEW es una librería de
instrumentos virtuales que pueden ser usados para desarrollar aplicaciones de visión artificial e imágenes científicas, entre muchas otras. El “Asistente de Visión” es otra herramienta del módulo de desarrollo NI Visión que nos permite hacer un prototipo de forma rápida y sencilla de la estrategia de aplicación sin necesidad de hacer ninguna programación. [4]
III. MATERIALES Y MÉTODOS Para llevar a cabo este proyecto, usamos los siguientes
materiales:
Software de diseño: LabVIEW®.
Librería NI-Visión & Motion. Cámara Web Gigaware 25-234 &. Cámara Web Logitech C270 HD. Base experimental de acrílico (Fig. 11). Juego de balines imantados.
Antes de comenzar con el proyecto, se verificó que las
cámaras estuvieran monitoreando el patrón a considerar, en este caso el péndulo en color rojo. Con la ayuda de una de las herramientas de LabVIEW: NI-MAX (Measurement & Automation Explorer) se realizó un Test. Considerando la metodología de trabajo que se planteó para realizar nuestro proyecto, después se indago en las diferentes herramientas que nos proporciona el módulo de NI- Visión & Motion para cumplir con los objetivos.
A. Diagrama de bloques El programa se realizó con una estructura While loop, la
cual nos permite estar monitoreando el objeto el tiempo que sea necesario. Como segundo paso hacemos uso del procesamiento de imagen y por último pasamos a graficar la trayectoria establecida por nuestro patrón (péndulo). Estos pasos son importantes porque a través de ellos se logró monitorear nuestro objeto. El flujo de trabajo empleado fue de la siguiente manera (Fig. 2).
Figura 2. Diagrama de bloques del VI desarrollado.
1) Vision Acquisition Express De la paleta de funciones del diagrama de bloques,
utilizamos la función Visión Adquisición Express (Fig. 3 y 4) con el objetivo de obtener imágenes continúas.
a) Se completamos las operaciones del asistente:
Select Acquisition Source (Cámara a utilizar). Select Acquisition Type (Adquisición continua).
b) En el panel frontal, damos click derecho en la imagen previamente capturada. En la ventana emergente, seleccionamos Save Image para guardar la imagen en un archivo para uso futuro.
Figura 1. Orbitas del circuito caótico de Lorenz.
Figura 3. Operaciones del asistente a completar
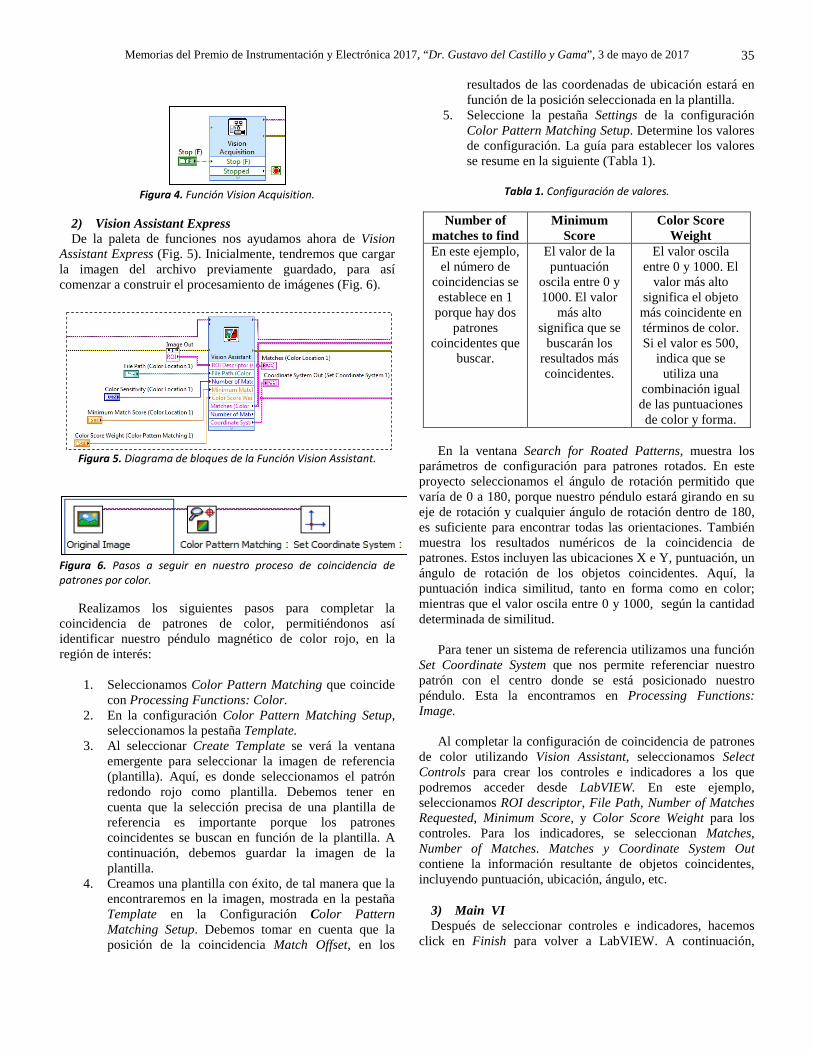
Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
35
Figura 4. Función Vision Acquisition.
2) Vision Assistant Express De la paleta de funciones nos ayudamos ahora de Vision
Assistant Express (Fig. 5). Inicialmente, tendremos que cargar la imagen del archivo previamente guardado, para así comenzar a construir el procesamiento de imágenes (Fig. 6).
Figura 5. Diagrama de bloques de la Función Vision Assistant.
Figura 6. Pasos a seguir en nuestro proceso de coincidencia de patrones por color.
Realizamos los siguientes pasos para completar la coincidencia de patrones de color, permitiéndonos así identificar nuestro péndulo magnético de color rojo, en la región de interés:
1. Seleccionamos Color Pattern Matching que coincide con Processing Functions: Color.
2. En la configuración Color Pattern Matching Setup, seleccionamos la pestaña Template.
3. Al seleccionar Create Template se verá la ventana emergente para seleccionar la imagen de referencia (plantilla). Aquí, es donde seleccionamos el patrón redondo rojo como plantilla. Debemos tener en cuenta que la selección precisa de una plantilla de referencia es importante porque los patrones coincidentes se buscan en función de la plantilla. A continuación, debemos guardar la imagen de la plantilla.
4. Creamos una plantilla con éxito, de tal manera que la encontraremos en la imagen, mostrada en la pestaña Template en la Configuración Color Pattern Matching Setup. Debemos tomar en cuenta que la posición de la coincidencia Match Offset, en los
resultados de las coordenadas de ubicación estará en función de la posición seleccionada en la plantilla.
5. Seleccione la pestaña Settings de la configuración Color Pattern Matching Setup. Determine los valores de configuración. La guía para establecer los valores se resume en la siguiente (Tabla 1).
Tabla 1. Configuración de valores.
Number of matches to find
Minimum Score
Color Score Weight
En este ejemplo, el número de
coincidencias se establece en 1
porque hay dos patrones
coincidentes que buscar.
El valor de la puntuación
oscila entre 0 y 1000. El valor
más alto significa que se
buscarán los resultados más coincidentes.
El valor oscila entre 0 y 1000. El
valor más alto significa el objeto más coincidente en términos de color. Si el valor es 500,
indica que se utiliza una
combinación igual de las puntuaciones de color y forma.
En la ventana Search for Roated Patterns, muestra los
parámetros de configuración para patrones rotados. En este proyecto seleccionamos el ángulo de rotación permitido que varía de 0 a 180, porque nuestro péndulo estará girando en su eje de rotación y cualquier ángulo de rotación dentro de 180, es suficiente para encontrar todas las orientaciones. También muestra los resultados numéricos de la coincidencia de patrones. Estos incluyen las ubicaciones X e Y, puntuación, un ángulo de rotación de los objetos coincidentes. Aquí, la puntuación indica similitud, tanto en forma como en color; mientras que el valor oscila entre 0 y 1000, según la cantidad determinada de similitud.
Para tener un sistema de referencia utilizamos una función Set Coordinate System que nos permite referenciar nuestro patrón con el centro donde se está posicionado nuestro péndulo. Esta la encontramos en Processing Functions: Image.
Al completar la configuración de coincidencia de patrones de color utilizando Vision Assistant, seleccionamos Select Controls para crear los controles e indicadores a los que podremos acceder desde LabVIEW. En este ejemplo, seleccionamos ROI descriptor, File Path, Number of Matches Requested, Minimum Score, y Color Score Weight para los controles. Para los indicadores, se seleccionan Matches, Number of Matches. Matches y Coordinate System Out contiene la información resultante de objetos coincidentes, incluyendo puntuación, ubicación, ángulo, etc.
3) Main VI Después de seleccionar controles e indicadores, hacemos
click en Finish para volver a LabVIEW. A continuación,
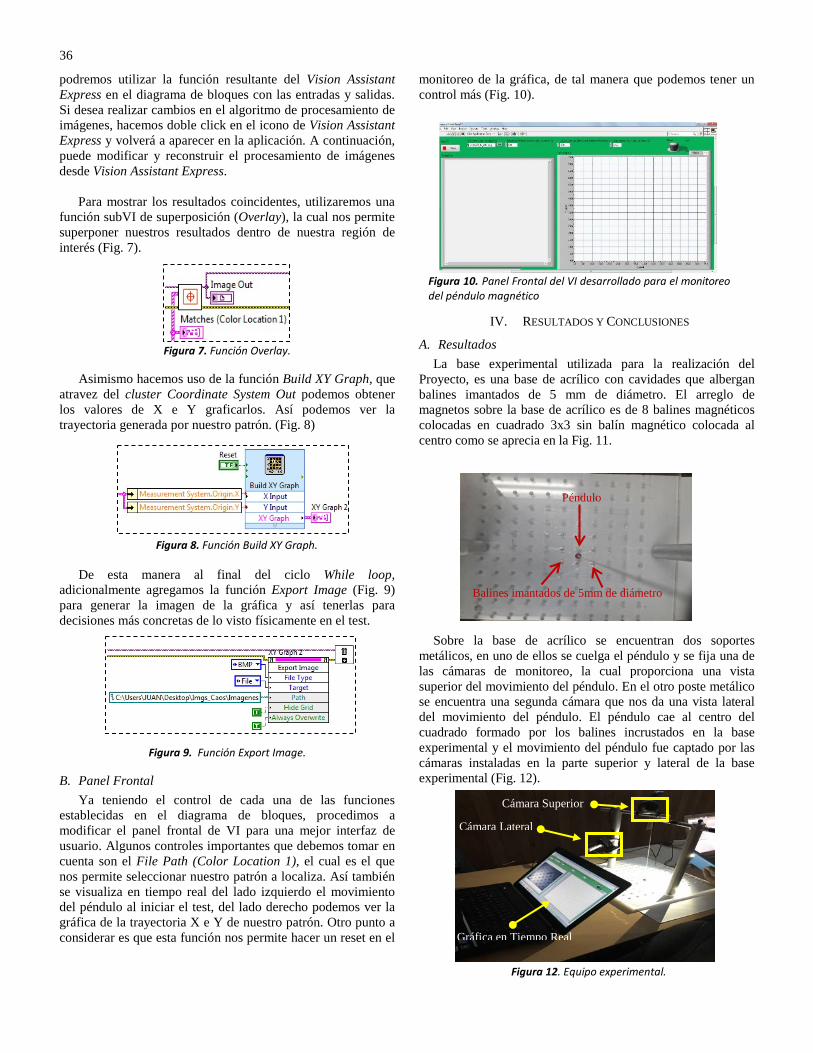
36
podremos utilizar la función resultante del Vision Assistant Express en el diagrama de bloques con las entradas y salidas. Si desea realizar cambios en el algoritmo de procesamiento de imágenes, hacemos doble click en el icono de Vision Assistant Express y volverá a aparecer en la aplicación. A continuación, puede modificar y reconstruir el procesamiento de imágenes desde Vision Assistant Express.
Para mostrar los resultados coincidentes, utilizaremos una
función subVI de superposición (Overlay), la cual nos permite superponer nuestros resultados dentro de nuestra región de interés (Fig. 7).
Figura 7. Función Overlay.
Asimismo hacemos uso de la función Build XY Graph, que atravez del cluster Coordinate System Out podemos obtener los valores de X e Y graficarlos. Así podemos ver la trayectoria generada por nuestro patrón. (Fig. 8)
Figura 8. Función Build XY Graph.
De esta manera al final del ciclo While loop,
adicionalmente agregamos la función Export Image (Fig. 9) para generar la imagen de la gráfica y así tenerlas para decisiones más concretas de lo visto físicamente en el test.
Figura 9. Función Export Image.
B. Panel Frontal Ya teniendo el control de cada una de las funciones
establecidas en el diagrama de bloques, procedimos a modificar el panel frontal de VI para una mejor interfaz de usuario. Algunos controles importantes que debemos tomar en cuenta son el File Path (Color Location 1), el cual es el que nos permite seleccionar nuestro patrón a localiza. Así también se visualiza en tiempo real del lado izquierdo el movimiento del péndulo al iniciar el test, del lado derecho podemos ver la gráfica de la trayectoria X e Y de nuestro patrón. Otro punto a considerar es que esta función nos permite hacer un reset en el
monitoreo de la gráfica, de tal manera que podemos tener un control más (Fig. 10).
Figura 10. Panel Frontal del VI desarrollado para el monitoreo del péndulo magnético
IV. RESULTADOS Y CONCLUSIONES
A. Resultados La base experimental utilizada para la realización del
Proyecto, es una base de acrílico con cavidades que albergan balines imantados de 5 mm de diámetro. El arreglo de magnetos sobre la base de acrílico es de 8 balines magnéticos colocadas en cuadrado 3x3 sin balín magnético colocada al centro como se aprecia en la Fig. 11.
Figura 11. Base experimental de acrílico.
Sobre la base de acrílico se encuentran dos soportes metálicos, en uno de ellos se cuelga el péndulo y se fija una de las cámaras de monitoreo, la cual proporciona una vista superior del movimiento del péndulo. En el otro poste metálico se encuentra una segunda cámara que nos da una vista lateral del movimiento del péndulo. El péndulo cae al centro del cuadrado formado por los balines incrustados en la base experimental y el movimiento del péndulo fue captado por las cámaras instaladas en la parte superior y lateral de la base experimental (Fig. 12).
Péndulo
Balines imantados de 5mm de diámetro
Figura 12. Equipo experimental.
Cámara Superior
Cámara Lateral
Gráfica en Tiempo Real
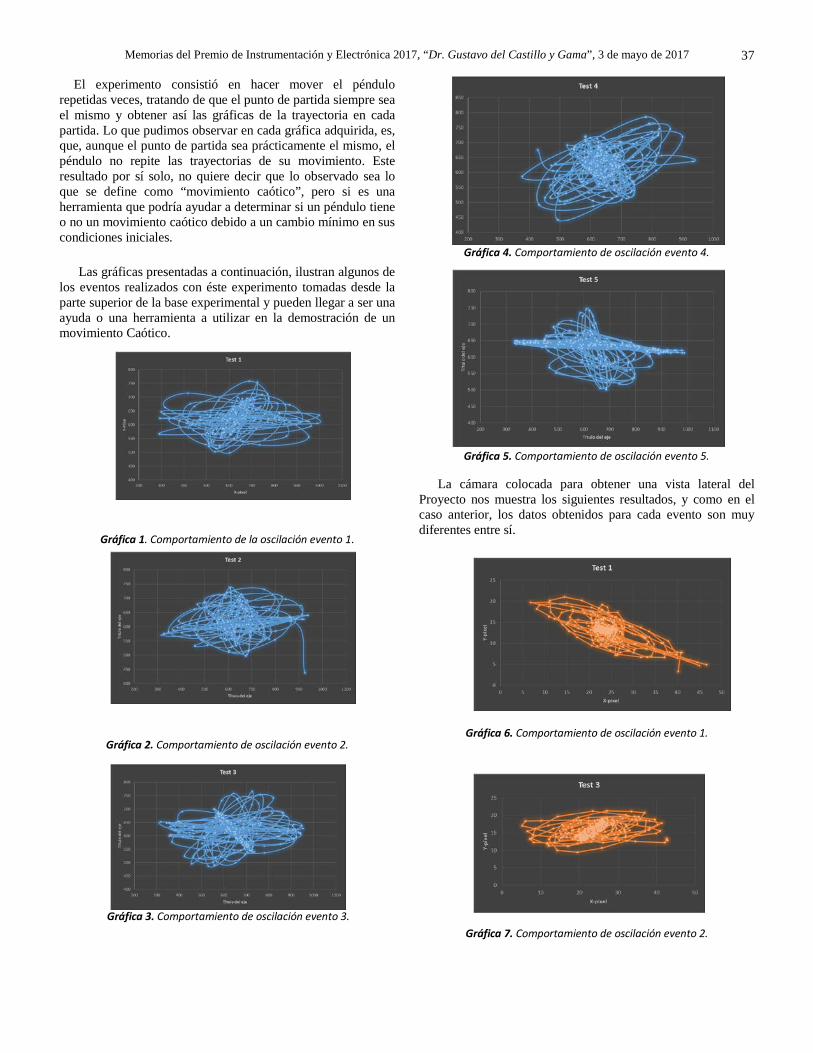
Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
37
El experimento consistió en hacer mover el péndulo repetidas veces, tratando de que el punto de partida siempre sea el mismo y obtener así las gráficas de la trayectoria en cada partida. Lo que pudimos observar en cada gráfica adquirida, es, que, aunque el punto de partida sea prácticamente el mismo, el péndulo no repite las trayectorias de su movimiento. Este resultado por sí solo, no quiere decir que lo observado sea lo que se define como “movimiento caótico”, pero si es una herramienta que podría ayudar a determinar si un péndulo tiene o no un movimiento caótico debido a un cambio mínimo en sus condiciones iniciales.
Las gráficas presentadas a continuación, ilustran algunos de los eventos realizados con éste experimento tomadas desde la parte superior de la base experimental y pueden llegar a ser una ayuda o una herramienta a utilizar en la demostración de un movimiento Caótico.
Gráfica 1. Comportamiento de la oscilación evento 1.
Gráfica 2. Comportamiento de oscilación evento 2.
Gráfica 3. Comportamiento de oscilación evento 3.
Gráfica 4. Comportamiento de oscilación evento 4.
Gráfica 5. Comportamiento de oscilación evento 5.
La cámara colocada para obtener una vista lateral del Proyecto nos muestra los siguientes resultados, y como en el caso anterior, los datos obtenidos para cada evento son muy diferentes entre sí.
Gráfica 6. Comportamiento de oscilación evento 1.
Gráfica 7. Comportamiento de oscilación evento 2.

38
Gráfica 8. Comportamiento de oscilación evento 3.
Gráfica 9. Comportamiento de oscilación evento 4
Gráfica 10. Comportamiento de oscilación evento 5.
B. CONCLUSIÓN Los datos sugieren que se realiza un movimiento a
velocidad constante con una trayectoria diferente en cada oscilación, lo cual concuerda con una de las condiciones que se debe cumplir para que un Sistema sea Caótico, ya que no se puede predecir su trayectoria, Sin embargo, como ya se mencionó con anterioridad, este experimento por sí solo no puede ser concluyente en afirmar si el Sistema es o no un Sistema Caótico.
La razón de la oscilación caótica es debido a que el
péndulo se mueve sobre un arreglo de balines magnéticos que ejercen una fuerza de atracción o de repulsión sobre él, por lo que su movimiento se vuelve aleatorio hasta que encuentra un
equilibrio y queda semi-estático sobre uno de los balines magnéticos.
En resumen, se propone que este sistema sea la base para
los cursos de licenciatura y posgrado a una introducción de sistemas dinámicos; más aún, permitiría expandirlo para considerar estructuras de os imanes con diferentes topologías y su ayuda en el estudio matemático del péndulo magnético.
REFERENCIAS [1] Boada Ferrer, M. (2017). Péndulo Caótico. Revista Investigación y Ciencia. Pp. 369. [2] ¿Dónde hay Matemáticas? (2017). Un poco de Teoría del Caos. [online] Available at: https://ciencimat.wordpress.com/2009/04/27/un-poco-de-teoria-del-caos/ [Accessed 8 Mar. 2017]. [3] Reich, C. (2009). La teoría del caos: definición y ejemplo. [online] Think, eat, travel... Available at: https://shreich.wordpress.com/2009/10/05/la-teoria-del-caos-definicion-y-ejemplo/ [Accessed 1 Apr. 2017]. [4] NI Vision for LabVIEW User Manual (2005. Noviembre) National Instruments. [5] Devaney, R. L. (1989). An Introduction to Chaotic Dynamical Systems. Addison-Wesley.

Memorias del Premio de Instrumentación y Electrónica 2017, “Dr. Gustavo del Castillo y Gama”, 3 de mayo de 2017
39
Monitorización en tiempo real utilizando ESPino
Aguilar Alvarado Adrián, Ramírez Torres Marco Tulio1, Esquivel Gómez Ricardo2. 1Coordinacion Académica Región Altiplano Oeste, UASLP, Salinas, S.L.P.
2Universidad Tecnológica del Estado de Zacatecas, UTZAC, Pinos, Zacatecas. [email protected]
Resumen—Este trabajo de investigación presenta la creación de una aplicación, es una intervención que busca poder adquirir parámetros importantes de aquellas personas que así lo requieren, en un momento determinado en tiempo real, también de una forma más concreta y rápida. Se desarrolla una aplicación para dispositivos móviles que utilizará el internet de las cosas conectadas entre sí, para poder consultar datos relevantes de cualquier persona que así lo desean. Se conectara una placa ESPino y un sensor de temperatura LM35 que nos ayudara a interpretar la temperatura corporal de una persona, este sensor nos ayudara a fomentar tecnología innovadora con la finalidad de que las personas puedan conocer o consultar datos relevantes de su cuerpo como lo puede ser su temperatura corporal.
Abstract —This research work is the creation of an application, an intervention that seeks to acquire important parameters of those persons who so require it, at a time determined in real-time, also more concrete and rapid. Develops an application for mobile devices that use the internet of things connected, to be able to consult relevant data of any person that so wish. I will connect a Hawthorn plate and a temperature sensor LM35 that helps us to interpret a person's body temperature, this sensor will help us to foster innovative technology in order that people may know or refer to relevant data from your body as your body temperature can be.
Palabras clave: Temperatura, ESPino, Sensor LM35
I. INTRODUCCIÓN Día a día se realizan investigaciones novedosas que aportan
beneficios cualitativos y cuantitativos para el diagnóstico de enfermedades que aquejan a la sociedad.
Los métodos y las técnicas para el manejo de la información médica, están avanzando de acuerdo a las necesidades que va teniendo el ser humano. Uno de los factores importantes que se está manejando dentro de los parámetros de las personas, es la cantidad de pacientes que necesitan servicios de exámenes médicos. Por estas razones, nace lo que se conoce como sistemas clínicos electrónicos, apoyada de tecnologías como lo son Arduino, diferentes sensores, ESPino, entre algunas otras tecnologías electrónicas. Estas se están desarrollando con la capacidad de compartir información de las personas de forma digital, ya que ayudará a facilitar algunas consultas en tiempo y forma. Estos sistemas evitaran que se manejen grandes cantidades de archivos clínicos, y no será necesario tenerlos en lugares donde se puedan extraviar.
II. MARCO TEÓRICO La placa ESPino integra un chip USB-Serial y un conector
micro-USB que permite conectarlo a una PC, ésta lo reconocerá como un puerto serial estándar, lo que nos permitirá programarlo y utilizar los monitores seriales para comunicarnos con la placa.
El modo “Bootloader” nos sirve para subir un nuevo firmware al ESP8266, o restaurar el firmware node-mcu que viene por defecto.
Pasos para poner el ESPino en modo Bootloader:
1. Presiona los botones RESET y USER/PROG al mismo tiempo sin soltarlos
2. Suelta el botón RESET, manteniendo USER/PROG presionado.
3. Espera un segundo y suelta USER/PROG
III. METODOLOGÍA En primera instancia se inició conociendo cada uno de los
componentes de requeridos para la realización del proyecto, sus componentes que se utilizarían, sensor LM35, cables macho macho, Placa ESPino.
Fig. 1. Placa Espino, protoboard, sensor LM35, cables macho-macho, cable de energía.
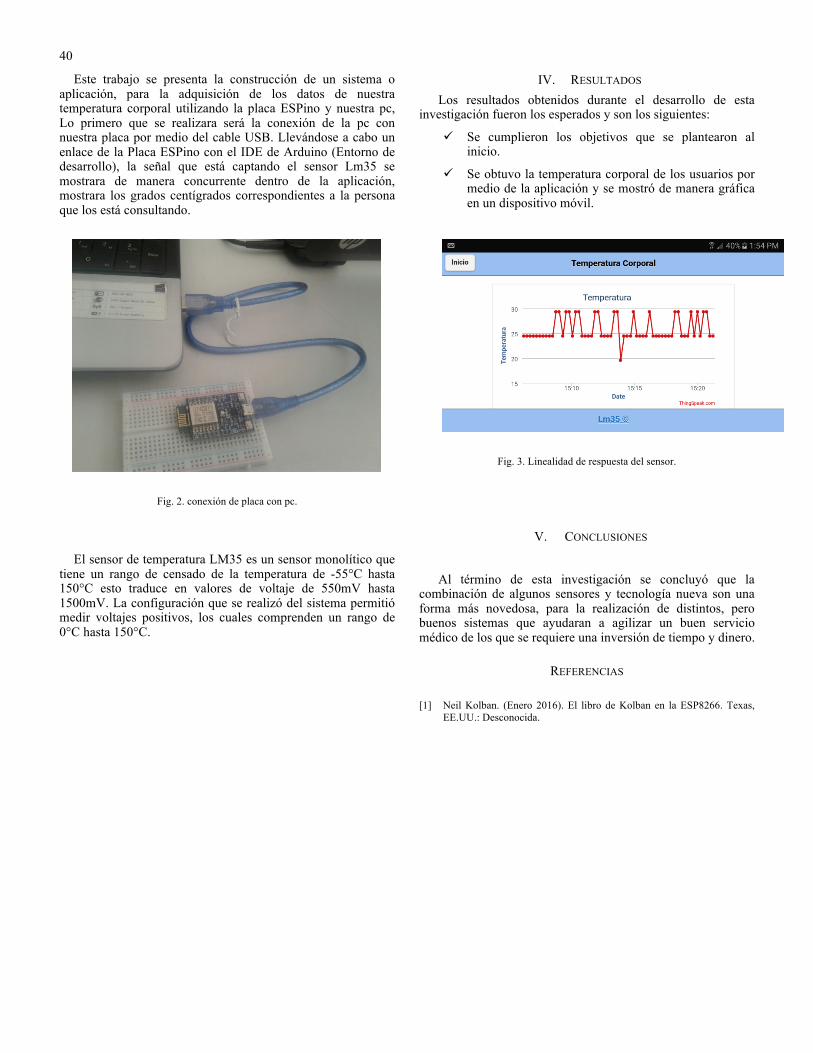
40
Este trabajo se presenta la construcción de un sistema o aplicación, para la adquisición de los datos de nuestra temperatura corporal utilizando la placa ESPino y nuestra pc, Lo primero que se realizara será la conexión de la pc con nuestra placa por medio del cable USB. Llevándose a cabo un enlace de la Placa ESPino con el IDE de Arduino (Entorno de desarrollo), la señal que está captando el sensor Lm35 se mostrara de manera concurrente dentro de la aplicación, mostrara los grados centígrados correspondientes a la persona que los está consultando.
Fig. 2. conexión de placa con pc.
El sensor de temperatura LM35 es un sensor monolítico que tiene un rango de censado de la temperatura de -55°C hasta 150°C esto traduce en valores de voltaje de 550mV hasta 1500mV. La configuración que se realizó del sistema permitió medir voltajes positivos, los cuales comprenden un rango de 0°C hasta 150°C.
IV. RESULTADOS Los resultados obtenidos durante el desarrollo de esta
investigación fueron los esperados y son los siguientes:
ü Se cumplieron los objetivos que se plantearon al inicio.
ü Se obtuvo la temperatura corporal de los usuarios por medio de la aplicación y se mostró de manera gráfica en un dispositivo móvil.
Fig. 3. Linealidad de respuesta del sensor.
V. CONCLUSIONES
Al término de esta investigación se concluyó que la combinación de algunos sensores y tecnología nueva son una forma más novedosa, para la realización de distintos, pero buenos sistemas que ayudaran a agilizar un buen servicio médico de los que se requiere una inversión de tiempo y dinero.
REFERENCIAS
[1] Neil Kolban. (Enero 2016). El libro de Kolban en la ESP8266. Texas, EE.UU.: Desconocida.

Las Memorias del Premio de Instrumentación y Electrónica 2017 “Dr. Gustavo del Castillo y Gama”, se terminaron de editar en Abril de 2017, por el Comité Editorial.
Se imprimieron 40 ejemplares.


















