1 DCS Evolucion Automatizacion Industrial
24
UNIVERSIDAD IBEROAMERICANA DE CIENCIAS Y TENCNOLOGÍA Escuela de Ingeniería Electrónica Carrera: Ingeniería en Electrónica SISTEMAS DE CONTROL DISTRIBUIDOS
-
Upload
diego-toloza -
Category
Documents
-
view
25 -
download
1
description
EAI
Transcript of 1 DCS Evolucion Automatizacion Industrial

UNIVERSIDAD IBEROAMERICANA DE CIENCIAS Y TENCNOLOGÍAEscuela de Ingeniería ElectrónicaCarrera: Ingeniería en Electrónica
SISTEMAS DE CONTROL DISTRIBUIDOS
TEMARIO
Introducc ión
Evoluc ión de la Automat izac ión Industr ia l
Estructuras Genera les de los S istemas de ControlIndustr ia les
Inter faces en DCS
Redes Industr ia les
DCS comerc ia les
CONTENIDOS
DCS
Introducción (1de5)
En la industria, el desarrollo del control distribuido se haefectuado de forma paralela al de las comunicaciones.
Cada vez es más necesario disponer de dispositivosinteligentes para realizar el control o la supervisión remota,tanto de procesos de fabricación, como de almacenamientoo distribución.
Los sistemas o redes de comunicación empleados enentornos industriales se encuentran sometidos a unaproblemática específica que condiciona enormemente sudiseño y los diferencia de las redes de datos o redes deoficina.

DCS
Introducción (2de5)
El desarrollo de los microprocesadores, microcontroladoresy los Controladores Lógicos Programables (PLC’s) dio lugar ala aparición del control distribuido.
En este tipo de esquema, un PLC o un microprocesadorcontrola una o más variables del sistema realizando uncontrol directo de las mismas.
Estos equipos de control local se comunican con otroselementos de su nivel y con el nivel superior de supervisión.
DCS
Introducción (3de5)
Se presentará el tema sistemas de control distribuido,referido siempre al control en el ámbito industrial.
Para esto, en primer lugar se describirá sintéticamente laevolución cronológica de los sistemas de control industrial,hasta llegar a los controladores actuales.
Se describirán las estructuras que pueden tener estossistemas de control y las características que deben tener lossistemas de supervisión.
DCS
Introducción (4de5)
Se analizarán las redes que sustentan el ambiente deplantas industriales, describiendo las características quecada una debe tener, y las implementaciones tecnológicasde las mismas.
Por último, se realizará un estudio de casos específicos deredes de comunicación en sistemas de control distribuidos ysus principales características.
DCS
Introducción (5de5)
Se utilizará el término control distribuido para aplicacionesde control de arquitectura distribuida, como las descritasanteriormente, sin referirnos específicamente acontroladores, conocidos como Sistemas de ControlDistribuidos (DSC’s) únicamente.
Esto es porque en la actualidad todos los dispositivos decontrol, ya sean DSC’s, PLC’s u otros, están capacitados paratrabajar con arquitecturas distribuidas que serán estudiadasen el presente curso.
DCS
Evolución de la Automatización Industrial (1de15)
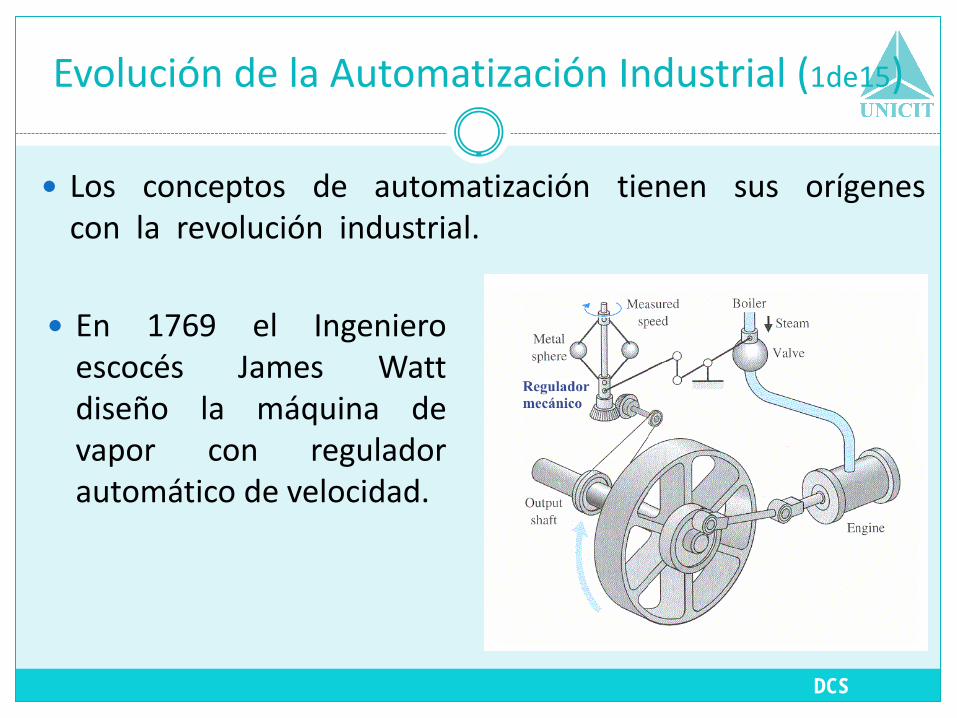
Los conceptos de automatización tienen sus orígenescon la revolución industrial.
En 1769 el Ingenieroescocés James Wattdiseño la máquina devapor con reguladorautomático de velocidad.
DCS
Evolución de la Automatización Industrial (2de15)
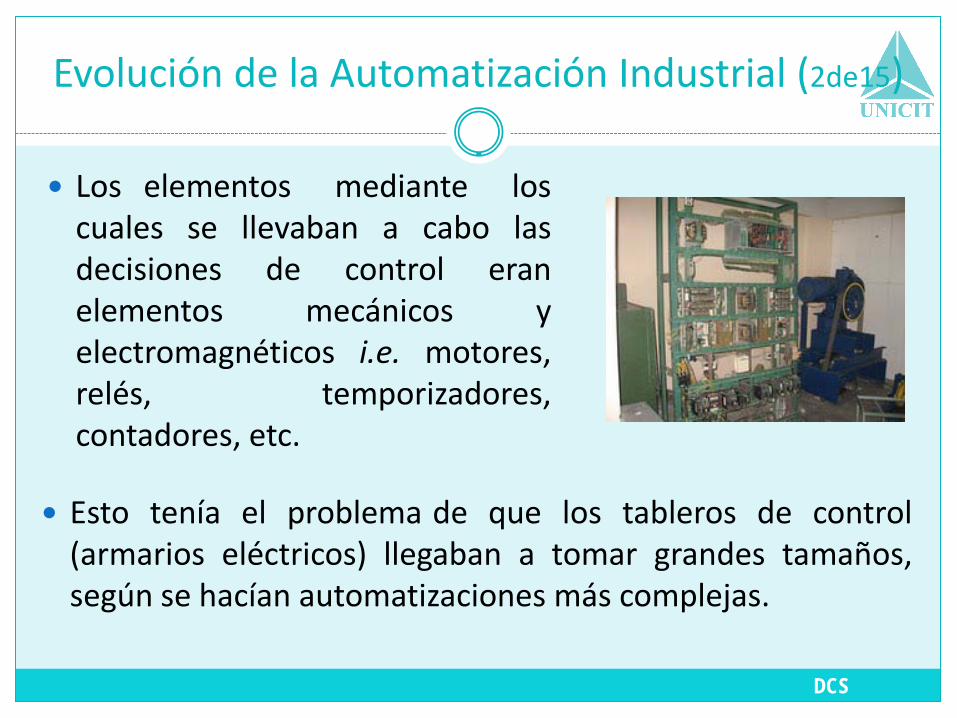
Esto tenía el problema de que los tableros de control(armarios eléctricos) llegaban a tomar grandes tamaños,según se hacían automatizaciones más complejas.
Los elementos mediante loscuales se llevaban a cabo lasdecisiones de control eranelementos mecánicos yelectromagnéticos i.e. motores,relés, temporizadores,contadores, etc.

DCS
Evolución de la Automatización Industrial (3de15)
En los años 1950, gracias a la aparición de la electrónicacomienzan a utilizarse los semiconductores, con lo que sereduce el tamaño de los armarios eléctricos y se reduce elnúmero de averías por desgaste de componentes.
Amplificador Operacional (1952) George A. Philbrick
Primer Transistor(1947) Laboratorios Bell
Evolución del Transistor

DCS
Evolución de la Automatización Industrial (4de15)
Aunque esto resultaba mucho másamigable que los grandes tableroseléctricos del principio, presentaba unproblema de falta de flexibilidad; ya queun sistema de control sólo sirve parauna aplicación específica, y no esreutilizable.

DCS
Evolución de la Automatización Industrial (5de15)
Debido a esto, y a la creciente demanda industrial delmomento en el año 1968, Ford y General Motors planteanlas especificaciones que debe cumplir un controladorelectrónico programable para ser realmente útil en laindustria.
Es así que Bedford Associates de Boston, Masachusetsdesarrolla un prototipo de controlador industrial designado“084” (posteriormente Modicon MOdular DIgital CONtrollero Controlador Digital Modular), que puede ser consideradocomo el primer PLC de la historia (Programmable LogicController o Controlador Lógico Programable).
DCS
Evolución de la Automatización Industrial (6de15)
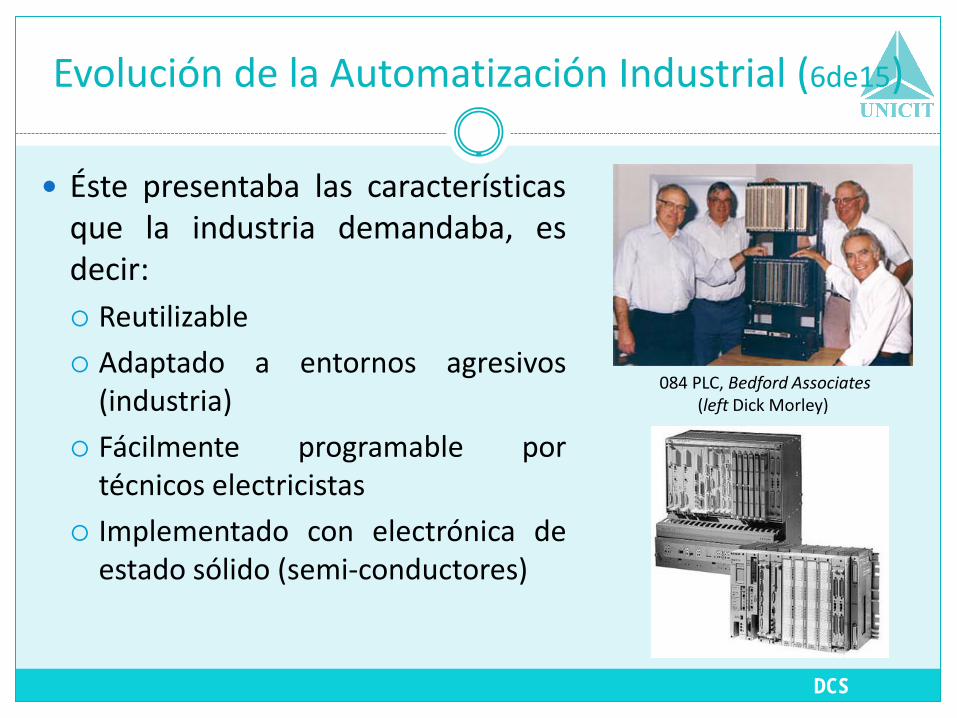
Éste presentaba las característicasque la industria demandaba, esdecir: Reutilizable
Adaptado a entornos agresivos(industria)
Fácilmente programable portécnicos electricistas
Implementado con electrónica deestado sólido (semi-conductores)
084 PLC, Bedford Associates(left Dick Morley)

DCS
Evolución de la Automatización Industrial (7de15)
Los primeros PLC’s se usaron para controlar procesossecuenciales (cadenas de montaje, transporte, etc.).
El problema que presentaba era que su memoria estabacableada, por lo que la reutilización era posible, perocostosa.
A principios de 1970 Intel (TedHoff) lanzó el primermicroprocesador: el 4004, unpequeño chip de silicio.
Aparecen los primeroscomputadores digitales.

DCS
Evolución de la Automatización Industrial (8de15)
Se empezaron a implementar memorias con semicon-ductores, eliminando las memorias cableadas ypermitiendo mayor flexibilidad, gracias a la facilidad deprogramación.
Sin embargo, por entonces todavía latecnología de los microprocesadoresno era utilizable en la industria porfalta de robustez, dificultad deconexión a equipos mecánicos y deprogramación.

DCS
Evolución de la Automatización Industrial (8de15)
Además, permiten realizarcálculos matemáticos ycomunicar con un computadorcentral (computador encargadode controlar la planta enviandoórdenes a los autómatas quegobiernan cada proceso).
A mediados de los 70’s los autómatasincorporan el microprocesador y lasmemorias semiconductoras, lo quepermite programar sin recablear(aumenta la flexibilidad).

DCS
Evolución de la Automatización Industrial (9de15)
Junto con esto aparecen los primeros DCS’s que erancontroladores lógicos al igual que los PLC’s, sólo que éstosen el principio dominaban el reino del control de variablesanalógicas.

DCS
Evolución de la Automatización Industrial (10de15)
De esta manera, los DCS’s trabajaban a la par con lossistemas separados de PLC’s para control discreto devariables on/off.
Hacia finales de los 70’s aparecen mejoras en losautómatas, tales como: Mayor memoria
Capacidad de gobernar bucles de control
Más tipos de E/S (conexión más flexible de sensores/ac-tuadores)
Lenguajes de programación más potentes
Comunicaciones más potentes
DCS
Evolución de la Automatización Industrial (10de15)
En los años 80’s se continúa con las mejoras, siendo algunasde éstas: Mayor velocidad de procesamiento
Dimensiones más reducidas
Técnicas de control más complejas (PID, inteligente, fuzzy, etc.)
Múltiples lenguajes (contactos, lista instrucciones, GRAFCET,etc.)
DCS
Evolución de la Automatización Industrial (11de15)
En los años 90’s cuando los sistemas de control, basados enComputadores Personales (PC’s), hicieron su aparición en laautomatización industrial, los partidarios de estos sistemas(más poderosos y abiertos) afirmaban que dichos sistemaspodrían llegar a reemplazar los PLC´s, y hasta los DCS´s ennumerosas aplicaciones.
El PC tenía mucho que ofrecer, pero no suplantaría lasplataformas de control industrial ya probadas, no por lomenos en la forma de un PC de escritorio.
DCS
Evolución de la Automatización Industrial (12de15)
El PC era la mejor opción a la hora de integrar funcionalidadavanzada, como puede ser conectividad de base de datos,integración, control analógico y simulación, basados enWeb y comunicación de datos con terceros.
El problema con el control basado en PC’s ha sido siemprela confiabilidad.
Los PC´s que corren en sistemas operativos estándares conhardware común, resultan demasiado frágiles ytemperamentales como para brindar un control industrialconfiable.
DCS
Evolución de la Automatización Industrial (13de15)
El resultado de todas estas innovaciones fue la aparición decontroladores híbridos, que permiten manejo de variablesanalógicas y digitales, en conjunto con características talescomo: Procesador de punto flotante para cálculos personales
Servidor Web interactivo embebido que facilita las tareas decontrol y monitoreo
Flash compacto removible para la recolección y registro dedatos
Puertos seriales múltiples y conexionado mediante buses decampo para la comunicación con terceros
DCS
Evolución de la Automatización Industrial (14de15)
En la actualidad, tenemos disponibles gran variedad deautómatas híbridos compactos, sencillos y modulares, paraaplicaciones incluso domésticas.
Presentan grandes posibilidades de ampliación y con unatendencia hacia una evolución continua de los sistemasde comunicación, constituyendo redes de autómatas quepermitan implementaciones más complejas y seguras.

DCS
Evolución de la Automatización Industrial (15de15)
Las nuevas características de los sistemas deautomatización apuntan a incorporar características de lossistemas distribuidos, tales como: Escalabilidad1
Apertura
Concurrencia2
Tolerancia a fallas
Transparencia
1 Conserva su efectividad al incrementar el número de recursos y en el número de usuarios.
2 Propiedad de los sistemas que permiten que múltiples procesos sean ejecutados al mismo tiempo, y que
potencialmente puedan interactuar entre sí.