8. SISTEMAS DE PARTÍCULAS - lfp.uba.ar de cursos/notasmecanicajuliogratton... · otra parte en la...
30
8. Sistemas de partículas 215 8. SISTEMAS DE PARTÍCULAS En este Capítulo tratamos la dinámica de sistemas constituidos por varias partículas puntiformes. Para ello generalizaremos los conceptos que introdujimos al tratar la dinámica de un único punto material (cantidad de movimiento, energía cinética, energía potencial, energía mecánica y momento angular) para sistemas de dos o más puntos materiales. La novedad principal es que ahora al tratar la fuerza que actúa sobre cada partícula hay que tener presente que la misma es la resultante de las fuerzas de origen externo al sistema y de las fuerzas que provienen de la inte- racción de la partícula con las demás partículas del sistema. Las reacciones de las fuerzas de origen externo se ejercen sobre objetos que están fuera del sistema, mientras que las reacciones de las fuerzas de interacción con otras partículas del sistema se ejercen sobre objetos del sistema. Por lo tanto la Tercera Ley de Newton, que en la dinámica de una única partícula no juega ningún rol, interviene explícitamente al tratar sistemas de varias partículas. El resultado funda- mental es que la dinámica del sistema se divide de manera natural en dos partes. La primera con- siste en el movimiento del sistema en su conjunto y depende de las fuerzas de origen externo. La segunda trata el movimiento interno del sistema y depende de las interacciones entre las partí- culas del mismo. Esta simplificación se consigue gracias al concepto de centro de masa del sis- tema y por lo tanto comenzaremos nuestro estudio definiendo el mismo. Centro de masa Sea un sistema de n partículas de masas m 1 , m 2 , ..., m n . Supondremos que sobre ellas actúan las fuerzas F 1 , F 2 , ..., F n (Fig. 8.1). O m i CM R r i R i m n m 2 m 1 F i m j Fig. 8.1. Sistema de masas puntiformes. CM es el centro de masa. Se llama centro de masa o baricentro del sistema al punto CM cuya posición R está dada por R r r = = ∑ ∑ ∑ m m m M ii i ii (8.1) donde Σ indica que sumamos sobre todo el conjunto de partículas, i n = … 12 , , , y M es la masa total. Claramente M m i i R r = ∑ (8.2)
-
Upload
duongthuan -
Category
Documents
-
view
220 -
download
3
Transcript of 8. SISTEMAS DE PARTÍCULAS - lfp.uba.ar de cursos/notasmecanicajuliogratton... · otra parte en la...

8. Sistemas de partículas
215
8. SISTEMAS DE PARTÍCULAS
En este Capítulo tratamos la dinámica de sistemas constituidos por varias partículas puntiformes.Para ello generalizaremos los conceptos que introdujimos al tratar la dinámica de un único puntomaterial (cantidad de movimiento, energía cinética, energía potencial, energía mecánica ymomento angular) para sistemas de dos o más puntos materiales. La novedad principal es queahora al tratar la fuerza que actúa sobre cada partícula hay que tener presente que la misma es laresultante de las fuerzas de origen externo al sistema y de las fuerzas que provienen de la inte-racción de la partícula con las demás partículas del sistema. Las reacciones de las fuerzas deorigen externo se ejercen sobre objetos que están fuera del sistema, mientras que las reaccionesde las fuerzas de interacción con otras partículas del sistema se ejercen sobre objetos del sistema.Por lo tanto la Tercera Ley de Newton, que en la dinámica de una única partícula no jueganingún rol, interviene explícitamente al tratar sistemas de varias partículas. El resultado funda-mental es que la dinámica del sistema se divide de manera natural en dos partes. La primera con-siste en el movimiento del sistema en su conjunto y depende de las fuerzas de origen externo. Lasegunda trata el movimiento interno del sistema y depende de las interacciones entre las partí-culas del mismo. Esta simplificación se consigue gracias al concepto de centro de masa del sis-tema y por lo tanto comenzaremos nuestro estudio definiendo el mismo.
Centro de masa
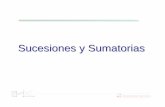
Sea un sistema de n partículas de masas m1 , m2 , ..., mn . Supondremos que sobre ellas actúan lasfuerzas F1 , F2 , ..., Fn (Fig. 8.1).
O
mi
CM
R
ri
Rimn
m2
m1
Fi
mj
Fig. 8.1. Sistema de masas puntiformes. CM es el centro de masa.
Se llama centro de masa o baricentro del sistema al punto CM cuya posición R está dada por
Rr r
= =∑∑
∑m
m
m
Mi i
i
i i (8.1)
donde Σ indica que sumamos sobre todo el conjunto de partículas, i n= …1 2, , , y M es la masatotal. Claramente
M mi iR r= ∑ (8.2)

8. Sistemas de partículas
216
El baricentro es la posición media pesada del sistema y debe quedar claro que no es un objetomaterial y que puede o no coincidir con alguno de los puntos del sistema.Derivando respecto del tiempo la (8.2) resulta
M m M mi i i iV v A a= =∑ ∑, (8.3)
donde V y A son la velocidad y la aceleración del baricentro.A veces tomaremos como origen de coordenadas al centro de masa. Sea Ri la posición de la i-ésima partícula referida al centro de masa, entonces
r R Ri i= + (8.4)
Por definición del centro de masa mi iR∑ = 0 y por lo tanto
m mi i i i iV P A∑ ∑ ∑= = =0 0, (8.5)
donde V v Vi i= − , P Vi i im= y A a Ai i= − son, respectivamente, la velocidad, la cantidad demovimiento y la aceleración de la i-ésima partícula respecto del baricentro.
Cantidad de movimiento del sistema
Cada partícula tiene una cantidad de movimiento p vi i im= y la cantidad de movimiento total es
P p v V= = =∑ ∑i i im M (8.6)
Luego la cantidad de movimiento del sistema es la que corresponde a una única partícula cuyamasa es la masa total y cuya velocidad es la velocidad del centro de masa. Derivando (8.6):
d
dtM mi i
PA a= = ∑ (8.7)
pero la ecuación de Newton para la i-ésima partícula es
iiim Fa = (8.8)
donde Fi es, en general
F F Fi iej i
ij= +≠Σ (8.9)
Aquí Fie es la fuerza externa sobre la partícula i y Fij es la fuerza sobre esa partícula debida a suinteracción con la partícula j. Pero entonces
mi i iei
ijj ii
∑ ∑ ∑∑= +≠
a F F (8.10)
Ahora bien, por la III Ley de Newton jiij FF −= , luego
Fijj ii ≠∑∑ = 0 (8.11)

8. Sistemas de partículas
217
y obtenemos el siguiente resultado importante:
d
dtM ie e
PA F F= = =∑ (8.12)
donde Fe es la resultante de las fuerzas externas. Las fuerzas de interacción entre partículas delsistema no influyen sobre el movimiento del baricentro, cuya ecuación de movimiento es
M eA F= (8.13)
Conservación de la cantidad de movimiento de un sistema aislado
Si sobre un sistema no actúan fuerzas exteriores d dt MP A/ = = 0 , luego
P V= =M cte. (8.14)
Esto significa que se conserva la cantidad de movimiento total de un sistema aislado, y en con-secuencia su baricentro se mueve con movimiento rectilíneo y uniforme.
Energía cinética del sistema
La energía cinética de un sistema de masas puntiformes es la suma de las energías cinéticas delas masas que lo componen, esto es
T T m vi i i= =∑ ∑ 12
2 (8.15)
Recordando que v V Vi i= + podemos escribir T en la forma
T MV m V T Ti i= + = +∑12
2 12
2CM int (8.16)
Aquí TCM es la energía cinética debida al movimiento del centro de masa y Tint es la energíacinética interna, debida al movimiento de las masas del sistema respecto del baricentro.Las (8.15) y (8.16) se pueden escribir en términos de las cantidades de movimiento como
Tp
mi
i= ∑
2
2(8.17)
y
TP
MT
P
mi
iCM int= = ∑
2 2
2 2, (8.18)
Aquí P V p Vi i i i im m= = − . Es fácil verificar que la variación de la energía cinética asociada conel movimiento del baricentro, dT dteCM = ⋅V F , se debe al trabajo de las fuerzas externas.
Energía potencial del sistema
En general la fuerza Fi sobre la i-ésima partícula es
F F Fi iej i
ij= +≠Σ (8.19)

8. Sistemas de partículas
218
donde Fie es la fuerza de origen externo y Fij es la fuerza debida a su interacción con la partí-cula j. Si la fuerza de origen externo es conservativa se puede definir una energía potencialVe( )r de modo que la energía potencial de la i-ésima partícula es Ve i( )r y entonces
F rie c i e iV, ( )= −∇ (8.20)
donde ∇ ≡i i i ix y z( ˆ / , ˆ / , ˆ / )x y z∂ ∂ ∂ ∂ ∂ ∂ . La energía potencial de todo el sistema debida a las fuer-zas externas (energía potencial externa) es entonces
V Ve e i= ∑ ( )r (8.21)
Si la fuerza Fij sobre la partícula i debida a su interacción con la partícula j es conservativa sepuede definir una energía potencial de interacción V Vij ij= ( )r donde r r rij j i≡ − , de modo que
F r F r Fij c i ij ji c j ij ij cV V, , ,( ) , ( )= −∇ = −∇ = − (8.22)
Si todas las interacciones entre pares de partículas del sistema son conservativas, la energía po-tencial del sistema debida a las interacciones entre partículas (energía potencial interna) es
V V Vijj ii
ijj ii
int ( )= =< <∑∑ ∑∑ r (8.23)
donde sumamos para j i< para contar una sola vez cada par de partículas.
Energía mecánica del sistema
Por lo que se acaba de ver la energía mecánica del sistema se puede escribir como
E E E= +CM int (8.24)
donde
EP
MV E T VeCM int int int,= + = +
2
2(8.25)
son respectivamente la energía mecánica asociada con el movimiento del baricentro y la energíamecánica interna. Examinaremos ahora las variaciones de ECM, Eint y E.Sea un intervalo dt en el que las partículas del sistema sufren desplazamientos d dti ir v=( i n= …1 2, , , ). El trabajo dWe de las fuerzas externas debido a esos desplazamientos es
dW d de i ie i ie c ie nc= ⋅ = ⋅ +∑ ∑r F r F F( ), , (8.26)
aquí F rie c i e iV. ( )= −∇ es la parte conservativa y Fie nc, la parte no conservativa de Fie . Comod V dVi i e i e ir r r⋅ ∇ =( ) ( ) resulta que
dW dV d dV dWe e i i ie nc e e nc= − + ⋅ = − +∑ ∑( ) , ,r r F (8.27)
donde
dW de nc i ie nc, ,= ⋅∑ r F (8.28)

8. Sistemas de partículas
219
es el trabajo de las fuerzas externas no conservativas. Del mismo modo el trabajo de las fuerzasde interacción en esos mismos desplazamientos es
dW d di ijj ii
i ij c ij ncj ii
int , ,( )= ⋅ = ⋅ +≠ ≠∑∑ ∑∑r F r F F (8.29)
donde F rij c i ijV, ( )= −∇ es la parte conservativa y Fij nc, la parte no conservativa de Fij . Aquíd V d Vi i ij i ijr r r⋅ ∇ =( ) ( ) es la variación de V ij( )r debida al desplazamiento de la partícula i. Porotra parte en la sumatoria doble sobre i y j aparece también el término d V d Vj j ij j ijr r r⋅ ∇ =( ) ( ),que es la variación de V ij( )r debida al desplazamiento de la partícula j. La suma de d Vi ij( )r másd Vj ij( )r es, la variación de V ij( )r debida a los desplazamientos de ambas partículas. Por lo tanto
d V dV d Vi ijj ii
ijj ii
ijj ii
( ) ( ) ( )r r r≠ < <∑∑ ∑∑ ∑∑= = (8.30)
y obtenemos
dW dV dW dW dnc nc i ij ncj ii
int int int, int, ,,= − + = ⋅≠∑∑ r F (8.31)
Relacionemos ahora el trabajo con la variación de la energía cinética
dW d m d m di i i i i i i= ⋅ = ⋅ =∑ ∑ ∑r F v v v12
2 (8.32)
Recordando que v V Vi i= + resulta
dW m d d MV d m V dT dTi i i i= + = + = +∑∑12
2 12
2 12
2( ) ( ) ( ) CM intV V (8.33)
Finalmente de (8.27), (8.31) y (8.33) obtenemos
dT dV dT dV dW dWe e nc ncCM int int , int,+ + + = + (8.34)
de donde resulta que
dE dT dV dWe e ncCM CM ,= + = (8.35)
pues el trabajo de las fuerzas de interacción (sean o no conservativas) no afecta a ECM. Luego
dE dT dV dW ncint int int int,= + = (8.36)
En conclusión, ECM se conserva si las fuerzas externas son conservativas, mientras que la ener-gía mecánica interna se conserva si las interacciones son conservativas.
Momento angular del sistema
Si referimos el movimiento a un origen O podemos definir el momento angular de la partícula icomo L r p r vi i i i i im= × = × . El momento angular total es:
L L r p r v= = × = ×∑ ∑ ∑i i i i i im (8.37)

8. Sistemas de partículas
220
De
r R R v V Vi i i i= + = +, (8.38)
resulta
L R R V V R P R V L L= + × + = × + × = +∑ ∑m mi i i i i i( ) ( ) CM int (8.39)
Aquí L R PCM = × es el momento angular debido al movimiento del centro de masa y
L R V R Pint = × = ×∑ ∑mi i i i i (8.40)
es el momento angular debido al movimiento de las partículas respecto del centro de masa.
O
mi
CM
R
ri
Ri
pi
Fig. 8.2. Diagrama auxiliar para definir el momento angular de una partícula del sistema.
Variación del momento angular del sistema
Calculemos la variación del momento angular del sistema:
d
dt
d
dtmi i i i i
Lr v r F= × = ×∑ ∑ (8.41)
Recordando que
F F Fi iej i
ij= +≠Σ (8.42)
obtenemos
d
dt i ie ii
ijj i
Lr F r F= × + ×∑ ∑ ∑
≠
(8.43)
Veamos el segundo término del miembro de la derecha. Será
r F r F r F
r F r F
r F r F
ii
ijj i
∑ ∑× = × + × +
+ × + × +
+ × + × +
≠1 12 1 13
2 21 2 23
3 31 3 32
K
K
K
(8.44)

8. Sistemas de partículas
221
Ahora, por la III Ley de Newton
jiij FF −= (8.45)
Los términos se agrupan entonces de a pares y para cada par
( )r r Fi j ij− × = 0 (8.46)
porque Fij está en la dirección de r ri j− , luego la sumatoria doble es nula. Queda entonces
d
dt i ie ie eL
r F M M= × = =∑ ∑ (8.47)
Por lo tanto sólo las fuerzas externas contribuyen a la variación del momento angular.
O
mi
ri
Fij mj
rj
ri–rj
Fji= –Fij
Fig. 8.3. La interacción de un par de partículas del sistema.
Recordando que L L L= +CM int y puesto que
M R F R Fe e i ie= × + ×∑ (8.48)
resulta que la variación de LCM proviene de R F× e , el momento de la resultante de las fuerzasexternas
d
dt eL
R FCM = × (8.49)
mientras que
d
dt i ieL
R Fint = ×∑ (8.50)
de debe a la suma de los momentos de las fuerzas externas, tomados respecto del centro de masa.
Conservación del momento angular del sistema
Como se acaba de ver
d
dt eL
M= (8.51)

8. Sistemas de partículas
222
Si el momento de las fuerzas externas es nulo, el momento angular del sistema se conserva. Si elsistema está aislado no hay fuerzas externas y por consiguiente Me = 0 . Luego el momento an-gular de un sistema aislado se conserva.
Reducción del problema de dos cuerpos
El sistema más simple es el que está formado por dos masas puntiformes m y M que interactúan(Fig. 8.4). Por la III Ley la interacción es una fuerza F r= F r( ) (aquí F puede ser positiva o ne-gativa). En este caso especial se puede simplificar el tratamiento
O
M
rM
m
rm
r
–FF
R
Fig. 8.4. Sistema de dos cuerpos.
Si no hay fuerzas externas las ecuaciones del movimiento son
m Mm Ma F a F= = −, (8.52)
y en este sistema aislado se conservan tanto la cantidad de movimiento
P p p= +m M (8.53)
como el momento angular
L L L= +CM int (8.54)
Sabemos entonces que el baricentro se mueve con movimiento rectilíneo y uniforme. Convieneentonces separar el movimiento del baricentro del movimiento de las partículas respecto del ba-ricentro, para lo cual introducimos
Rr r
r r r=++
= −M m
M mM m
m M, (8.55)
donde r es la posición relativa. Claramente
r R r r R rm MM
m M
m
m M= +
+= −
+, (8.56)
Luego conocidos R y r podemos obtener rm y rM . La ecuación de movimiento para R es:
˙Ra a
=++
=M m
M mM m 0 (8.57)

8. Sistemas de partículas
223
y expresa la conservación de la cantidad de movimiento del sistema. Si R0 y V0 son la posicióny la velocidad iniciales del CM la solución de (8.57) es R R V= +0 0t .La ecuación de movimiento de r es
˙ ,rF
= =+µ
µmM
m M(8.58)
La ecuación (8.58) describe el movimiento relativo y representa el movimiento de una únicapartícula ficticia de masa µ (que se llama masa reducida) que se mueve bajo la acción de lafuerza F. Claramente si M m>> , µ ≈ m . Como F es central, el movimiento relativo es el de unapartícula de masa µ en un campo de fuerzas centrales con centro en el origen que ya estudiamosen el Capítulo 7.Vemos así que la conservación de la cantidad de movimiento permite separar el problema de doscuerpos en dos problemas más sencillos.
Aplicación al movimiento planetario
Podemos aplicar estos resultados para analizar el movimiento de un planeta (m) alrededor delSol (M) que estudiamos en el Capítulo 7 suponiendo al Sol inmóvil. Es evidente que todos losresultados obtenidos en ese Capítulo siguen valiendo con tal de sustituir en lugar de m la masareducida
µ =+
mM
m M(8.59)
En particular la expresión de la III Ley de Kepler es ahora
TC
a C GmM22
34= =
πµ , (8.60)
o sea
TMG m M
a22
34 11
=+
π/
(8.61)
de aquí se ve que la proporcionalidad
T a2 3~ (8.62)
que obtuvimos en el Capítulo 7 es sólo aproximada por la presencia en la (8.61) del factor
11
1+
≈ −m M
m
M/(8.63)
En el caso de los planetas m << M y por lo tanto la aproximación (8.62) es buena.
Colisiones
Las colisiones son fenómenos que ocurren en todas las escalas del Universo. Se dan desde laescala subnuclear cuando involucran las partículas fundamentales que mencionamos en la In-troducción, hasta la escala cósmica como en los choques entre galaxias que estudian los astró-

8. Sistemas de partículas
224
nomos. En la escala humana comprenden los choques entre automotores que todo el mundo tuvoocasión de observar, acciones cotidianas como la de patear una pelota y son parte esencial dejuegos como las bochas, el billar, los bolos y juegos infantiles como las bolitas o canicas.No es sencillo caracterizar de una manera única y general una gama tan vasta de fenómenos,pero sin pretensión de rigor podemos decir que una colisión es un proceso que involucra dos omás objetos que inicialmente estaban separados (estado inicial) y que de repente se encuentrantodos juntos en una pequeña región del espacio donde interactúan durante un intervalo breve detiempo (Fig. 8.5). De resultas de la interacción pueden ocurrir muchas cosas distintas. Puedeocurrir que los objetos salgan de la región de interacción tal como entraron a la misma, even-tualmente habiendo cambiado su velocidad (y su cantidad de movimiento) como sucede cuandochocan dos bolas de billar. Pero también puede ocurrir que sufran transformaciones que cambiansu forma, su estructura interna e incluso su naturaleza, que se combinen entre sí o que se rompanen pedazos, etc. Según sean las características de los objetos que salen de la región deinteracción en relación con las características de los que entraron en la misma las colisiones seclasifican en diversos tipos. Pero en todos los casos los objetos que quedan después de la coli-sión (estado final) están separados y ya no interactúan (Fig. 8.5).
Antes de la colisión Después de la colisiónColisión (δt)
Fig. 8.5. Representación esquemática de una colisión.
Salta a la vista que el estudio de las colisiones es muy complejo y que la forma de encararlo de-pende del tipo de colisión. Pero todos los casos tienen una característica común que es que elobjetivo del estudio es encontrar la relación entre el estado final y el estado inicial. Para ello serequiere conocer los procesos que ocurren en la región de interacción, es decir conocer las fuer-zas que actúan. Sin embargo hay resultados de carácter general que no dependen de los detallesde lo que ocurre en la región de interacción, porque provienen de la conservación de la cantidadde movimiento y de la conservación de la energía (en todas sus formas, no solamente la energíamecánica!) que se cumplen porque el sistema se puede considerar aislado durante el proceso quelleva del estado inicial al estado final.En este Capítulo consideraremos solamente colisiones binarias, es decir colisiones en que inter-vienen dos cuerpos y en condiciones en que se puede aplicar la Mecánica Newtoniana (esto ex-cluye las colisiones entre partículas subatómicas, entre otras). También nos limitaremos a con-siderar colisiones en que los objetos que chocan no cambian su naturaleza, no se combinan entresí ni se rompen en pedazos. Oportunamente haremos otras hipótesis.

8. Sistemas de partículas
225
Choque elástico de masas puntiformes
Sea una masa m1 que inicialmente se mueve con la velocidad v0 hasta que choca con una masam2 inicialmente en reposo (para fijar ideas el lector puede imaginar que se trata de dos bochas).La interacción entre m1 y m2 ocurre durante un intervalo δt muy corto durante el cual se ejer-cen entre ellas fuerzas muy intensas cuyos detalles por el momento no conocemos. Luego de lainteracción las velocidades de las masas son v1 y v2 (Fig. 8.6).En estas condiciones el sistema (m1 , m2) se puede considerar aislado porque durante el breveintervalo δt se puede despreciar el impulso de las fuerzas externas que pudieran estar actuando.Por lo tanto se conserva la cantidad de movimiento P del sistema y podemos escribir
P p p p= = + =0 1 2 cte. (8.64)
donde p v p10 1 10 0= =m , p v20 2 20 0= =m y p v1 1 1= m , p v2 2 2= m son las cantidades de movi-miento de m1 y m2 antes y después de la colisión, respectivamente.
Antes de la colisión Después de la colisiónColisión (δt)
m1
m1
m2
v10=v0
m2
v20=0
v1
v2
θ1
θ2
Fig. 8.6. Choque de dos masas puntiformes.
Por el momento no haremos hipótesis acerca de las fuerzas de interacción, salvo suponer que sonconservativas de modo que se conserva la energía mecánica del sistema, esto es
Em
pm
pm
p= = + =1
21
21
2102
112
222 cte. (8.65)
que multiplicando por 2 1m podemos escribir como
p p p m m02
12
22
1 2= + = ′ ≡α αcte . , / (8.66)
También se conserva la energía mecánica asociada con el movimiento del CM ( E P MCM /= 2 2y P se conserva por estar aislado el sistema) así como la energía mecánica interna (porque lasfuerzas de interacción son conservativas). Los choques que cumplen las leyes de conservación(8.64) y (8.66) se llaman elásticos. Veremos ahora las consecuencias de esas leyes.

8. Sistemas de partículas
226
Consideremos lo que se ve desde el referencial del baricentro, cuya velocidad es
V v=+
αα 1 0 (8.67)
de acuerdo con la primera de las (8.3). Antes del choque tendremos que
V v V v V V v10 0 0 20 01
1 1= − =
+= − = −
+αα
α, (8.68)
de modo que
P V p P V p10 1 10 0 20 2 10 01
11
1= =
+= = −
+m m
α α, (8.69)
Después del choque tendremos que
V v V v v V v V v v1 1 1 2 2 2 1 21
1 1= − =
+− = − = −
+−
αα
α( ) , ( ) (8.70)
que podemos escribir de la forma
P p p P p p1 1 2 2 1 21
11
1=
+− = −
+−
αα
αα( ) , ( ) (8.71)
Se ve que
P P P P20 10 2 1= − = −, (8.72)
como debe ser en virtud de la segunda de las (8.5).
AA'
B
B'
C
P20 P10
P2
P1
v0
p0α +1
ψ
Fig. 8.7. Choque elástico de dos partículas visto desde el referencial del baricentro.
Por otra parte la conservación de la energía cinética interna requiere que
P P P P102
202
12
22+ = +α α (8.73)

8. Sistemas de partículas
227
que usando las (8.72) muestra que
P P P P p2 20 1 10 01
1= = = =
+α(8.74)
Los resultados (8.72) y (8.74) se muestran en la Fig. 8.7, donde los vectores P10, P20 , P1, P2 sedibujaron a partir del mismo punto C de modo que sus extremos están sobre una circunferenciade radio p0 1/( )α + , en puntos diametralmente opuestos los del par ( P10, P20) y el par ( P1, P2 ).Volviendo ahora al referencial del laboratorio, de v V V10 10= + tenemos que
p p P p10 0 10 01= = +
+α
α(8.75)
de manera que en el mismo diagrama podemos representar p0 como un vector que va desde elpunto O situado a la distancia α αp0 1/( )+ a la izquierda de C hasta el punto A, y que tiene lamisma dirección y sentido que P10 (Fig.8.8).
A
B
C
P1
ψA
B
C
P1
ψO
αα +1
p0
p1 p2
1α +1
p0
θ1θ2
θ2
O
p1 p2θ2
θ2
1α +1
p0α
α +1p0
θ1
(a) (b)
θ'1 θ'1
Fig. 8.8. Choque elástico de dos partículas visto desde el referencial del laboratorio. (a)α < 1; (b) α > 1.
Si α < 1 ( m m1 2< ) O está dentro del círculo (Fig. 8.8a) y si α > 1 ( m m1 2> ) O está fuera delcírculo (Fig. 8.8b). De v V V1 1= + resulta
p P p1 1 01= +
+α
α(8.76)
y por lo tanto p1 se representa en la Fig. 8.8 como el vector que va de O a B y forma un ánguloθ1 con p0 . En cuanto a p2, de v V V2 2= + se obtiene
p P p2 2 01
1= +
+α(8.77)
Si imaginamos desplazar P2 de modo que su origen sea B vemos que p2 es el vector de B a A.Se debe observar que cuando α > 1 (O fuera del círculo) se debe cumplir que θ θ1 ≤ * donde
θ α* arcsen( / ) arcsen( / )= =1 2 1m m (8.78)

8. Sistemas de partículas
228
Con la ayuda de la Fig. 8.8 es fácil resolver los triángulos OBA, OBC y CBA para expresar todaslas cantidades en términos de p0 y θ1. De OBC obtenemos sen sen′ =θ α θ1 1 de modo que
′ =θ α θ1 1arcsen( sen ) (8.79)
y además
p p1 0 1 11
1=
+± ′
αα θ θ( cos cos ) (8.80)
donde se usa el signo – si α > 1 y ′ >θ π1 2/ , y el signo + en los demás casos. De OBA resulta
θ π θ θ2 1 1 2= − − ′( ) / (8.81)
Finalmente de CBA de obtiene
ψ π θ θ θ= − = = ′2 2 1 1 (8.82)
y
p p2 0 22
1=
+αθcos (8.83)
Hasta aquí se llega a partir de la conservación de la cantidad de movimiento y la energía mecá-nica.
A
B
C
P1
ψO
2p0
p1 p2
θ1θ2
π/2
2p0
Fig. 8.9. Choque elástico de dos partículas de igual masa visto desde el referencial del la-boratorio.
El caso α = 1 ( m m2 1= ) es el más sencillo y figura en muchos textos. De la Fig. 8.9 se ve que
′ = = − = =
= = =
θ θ θ π θ θ π ψ θ
θ θ θ
1 1 2 1 1
1 0 1 2 0 2 0 1
2 2 2, / , /
cos , cos senp p p p p(8.84)
de donde resulta que el ángulo entre p1 y p2 es siempre de 90˚.

8. Sistemas de partículas
229
Choque elástico de esferas rígidas
Se debe observar que la conservación de la cantidad de movimiento y de la energía mecánica porsí solas no permiten alcanzar la solución del problema porque no nos dicen que relación hayentre θ1 y las condiciones iniciales. En efecto, cualquier posición del punto B sobre la circunfe-rencia de la Fig. 8.8 nos da una solución compatible con las condiciones (8.64) y (8.66). Parasaber algo más es necesario hacer alguna hipótesis acerca de lo que sucede en la región de inte-racción, para lo cual hay que proponer un modelo. Hay muchas maneras de hacerlo, depen-diendo de cuál es el choque elástico que nos interesa investigar.Si nos interesa describir el choque elástico de dos bochas el modelo que mejor se aproxima a larealidad es suponer que las mismas se comportan como esferas rígidas. Sean entonces m1 y m2
dos esferas rígidas de radios r1 y r2 . De la Fig. 8.10 resulta evidente que lo que ocurra dependeráde si el choque es frontal (Fig. 8.10a) u oblicuo (Fig. 8.10b). Esto depende de q, que se llamaparámetro de impacto y es la distancia mínima entre el centro de m1 y el centro de m2 que sealcanzaría si no hubiera interacción entre las partículas.
p0
p0
p0fp0tm1r1
r2m2 β
q
(a) (b)
Fig. 8.10. Choque frontal (a) y choque oblicuo (b) de dos esferas rígidas.
Choque frontal
El choque frontal ocurre si q = 0 y en este caso (Fig. 8.10a) es evidente que θ2 0= y que θ1 0=si α > 1 (en cuyo caso m1 se sigue moviendo hacia adelante) o bien θ π1 = si α < 1 (en cuyocaso m1 rebota hacia atrás). Si α = 1 (m m2 1= ) el ángulo θ1 queda indeterminado pues en estecaso p1 0= y p p2 0= o sea que después del choque m1 queda en reposo pues cedió toda sucantidad de movimiento a m2 . En general la cantidad de movimiento inicial se reparte entre m1
y m2 y se tiene que
p p p p1 0 2 011
21
=−+
=+
αα α
, (8.85)
fórmulas que valen para cualquier valor de α.
Choque oblicuo
Para tratar este caso recordemos que el movimiento tiene lugar en el plano Σ definido por p0 yel centro de m2 (plano de la Fig. 8.10b). Sea Π el plano tangente a las esferas en el punto decontacto, ˆ √t el versor de Σ paralelo a Π y ˆ ˆ√n el versor de Σ ortogonal a Π y que apunta hacia elcentro de m2 . El ángulo β entre p0 y n se llama ángulo de oblicuidad y está determinado por elparámetro de impacto por medio de
sen / ,β = ≡ +q d d r r1 2 (8.86)

8. Sistemas de partículas
230
Podemos entonces poner
p p p p n p t0 0 0 0 0 0 0= + = =,n ,t ,n ,t, ˆ cos , ˆ senp pβ β (8.87)
Si no hay rozamiento entre las esferas toda transferencia de cantidad de movimiento entre ellases en la dirección normal. Luego después del choque la cantidad de movimiento de m1 es
p p p p p1 1 1 1 0= + =,n ,t ,t ,t, (8.88)
y la de m2 es
p p2 2= ,n (8.89)
Además en la dirección normal podemos considerar que el choque es frontal y usar losresultados (8.85) para escribir
p p n p p n1 0 0 2 0 011
11
21
21,n ,n ,n ,nˆ cos , ˆ cos=
−+
=−+
=+
=+
αα
αα
βα α
βp p (8.90)
y sustituyendo las (8.90) en (8.88) y (8.89) resulta
p n2 02
1=
+αβˆ cosp (8.91)
Comparando este resultado con (8.83) obtenemos
θ β2 = (8.92)
luego el ángulo con el que sale despedida la masa blanco es igual al ángulo de oblicuidad.También obtenemos
p n t1 0 0 1 0
211
12
1=
−+
+ = −+
αα
β β αα
βˆ cos ˆ sen , cosp p p p (8.93)
Finalmente de cos /θ1 0 1 0 1= ⋅p p p p resulta
coscos
cos
θ αβ
αα
β1
2
2
12
1
12
1
=−
+
−+
(8.94)
fórmula que nos permite calcular θ1 en función del parámetro de impacto, con lo cual quedaresuelto el problema.Si α = 1 la (8.94) se simplifica y queda
cos senθ β1 = =q
d(8.95)
en concordancia con (8.84) y (8.92).

8. Sistemas de partículas
231
En la Fig. 8.11 se muestra θ1( )q para el choque elástico de dos esferas rígidas (ec. (8.94)).
0.2 0.4 0.6 0.8 1
θ1
α = 0.8
α = 1.0
α = 1.4
q/d
30
60
90
120
150
180
Fig. 8.11. La desviación del proyectil en función del parámetro de impacto para el choqueelástico de dos esferas rígidas.
Colisiones inelásticas
Hay una enorme variedad de colisiones inelásticas. Desde luego en todos los casos se cumple laconservación de la cantidad de movimiento pero no hay conservación de la energía mecánica.Aquí consideraremos tres casos sencillos al solo objeto de mostrar como se pueden analizar.
Captura
Esta es una colisión en que el proyectil ( m1) y el blanco ( m2) se combinan para formar unaúnica partícula compuesta cuya masa M es la suma de m1 y m2 y cuya cantidad de movimientoes p f . Si el blanco está inicialmente en reposo y p v0 1 0= m es la cantidad de movimiento delproyectil, la conservación de la cantidad de movimiento impone que
p pf = 0 (8.96)
Después de la colisión la velocidad de la partícula compuesta es
v V vf = =+
αα 1 0 (8.97)
donde V es la velocidad del baricentro y α ≡ m m1 2/ . Luego la partícula compuesta se mueve enla dirección de v0. La energía mecánica interna antes del choque es puramente cinética y vale
Tp
m
p
MT vint,0
02
1
02
0 02
2 21
112
= − =+
=α
µ (8.98)

8. Sistemas de partículas
232
donde T p m0 02
12= / es la energía mecánica inicial y µ es la masa reducida del sistema. Despuésdel choque la energía mecánica interna de traslación es nula. Por lo tanto en el proceso se pierdela fracción 1 1/( )α + de la energía mecánica inicial. Esta energía perdida se transforma en otraclase de energía pero los detalles de tal transformación no se pueden deducir de la conservaciónde la cantidad de movimiento. Para ello hay que ir más allá del modelo de partículas puntiformesy refinar la descripción del proyectil, el blanco y su interacción. Veamos un ejemplo para con-cretar: supongamos que un balín de plomo se incrusta en una bocha esférica de madera de radioR (Fig. 8.12). Trataremos el proyectil como puntiforme. Antes de la colisión el momento angularinterno del sistema proviene del movimiento de traslación de m1 y m2 respecto del centro demasa y su módulo vale
L qp q vint, tras =+
=1
1 0 0αµ (8.99)
Después de la colisión no hay movimiento de traslación de m1 y m2 respecto del centro demasa, pero la conservación del momento angular implica que la partícula compuesta debe tenerun momento angular que no puede provenir de otra cosa que de su rotación. En efecto si el im-pacto es oblicuo ( q ≠ 0 ) el cuerpo compuesto (la bocha con el balín incrustado) gira con unavelocidad angular ω y posee una energía cinética (interna) de rotación, que proviene de la ener-gía cinética interna de traslación que se perdió en el proceso (parte de la misma, no toda).
p0
q CM
m1
R
p0
ω
p0CM
R
(a) (b)
m1
m2 m2
r
Fig. 8.12. Balín que se incrusta en una esfera.
Podemos calcular la energía cinética de rotación del cuerpo compuesto usando los resultados quese deducen en el Capítulo 10. Supongamos que el balín queda incrustado a una distancia r delcentro de la bocha. El momento de inercia de una esfera que rota alrededor de su centro es2 52
2m R / y el centro está a la distancia m r M1 / del centro de masa. Por lo tanto en virtud delTeorema de Steiner el momento de inercia de la bocha respecto del centro de masa del sistemacompuesto vale 2 52
22 1
2 2m R m m M r/ ( / )+ . Por otra parte el balín está a la distancia m r M2 /del centro de masa y su momento de inercia respecto de ese punto es m m M r1 2
2 2( / ) . Luego elmomento de inercia del sistema compuesto respecto del centro de masa es
I m R mm
Mr m
m
Mr m R rCM = +
+
= +25
252
22
12
21
22
22
2 2µ (8.100)

8. Sistemas de partículas
233
El momento angular de rotación del sistema compuesto es L Irot CM= ω y por conservación delmomento angular se debe cumplir que L Lrot int, tras= . De esta igualdad podemos obtener
ωµ
=q v
I0
CM(8.101)
La energía cinética de rotación del sistema compuesto es entonces
T Iq v
m R rrot CM= =+
12
2 12
2 202
25 2
2 2ωµ
µ(8.102)
Es interesante comparar Trot con Tint,0 . De (8.98) y (8.102) obtenemos
T
T
qM
mR r
rot
int,0
2
25
1
2 2=
+(8.103)
Ahora bien, seguramente r q≥ según la profundidad a la que queda incrustado el balín, y desdeluego R q≥ . Por lo tanto
T
Trot
int,0
52 7
57
≤+
<α
α(8.104)
Este resultado muestra que sólo una fracción (en general pequeña) de Tint,0 se convierte en ener-gía cinética de rotación. El resto se gasta en el trabajo requerido para que el balín penetre en labocha.
Reacción
Consideremos el choque de una molécula A (de masa mA y velocidad vA ) con una molécula B(de masa mB y velocidad vB ) en el que ocurre una reacción química de resultas de la cual seproducen las moléculas C (de masa mC y velocidad vC ) y D (de masa mD y velocidad vD ):
A B C D Q+ → + + (8.105)
Aquí A y B se denominan reactivos, C y D productos y Q indica la energía química liberada (siQ > 0 ) o absorbida (si Q < 0 ) en el proceso, que se dice exotérmico en el primer caso y endo-térmico en el segundo. En una reacción exotérmica los reactivos pierden energía química, la quese convierte en energía cinética de los productos. Viceversa en una reacción endotérmica losproductos ganan energía química a expensas de la energía cinética de los reactivos. Trataremosla moléculas como puntiformes, por lo tanto en la reacción se cumplen las siguientes leyes deconservación:(a) conservación de la masa:
m m m m MA B C D+ = + = (8.106)
(b) conservación de la cantidad de movimiento:
p p p p PA B C D+ = + = (8.107)

8. Sistemas de partículas
234
donde P V= M es la cantidad de movimiento del sistema. Si P P P PA B C D, , , son las cantidadesde movimiento de las partículas en el sistema del centro de masa, se cumple
P P P PB A D C= − = −, (8.108)
en virtud de la (8.5).(c) conservación de la energía (mecánica + química):
P
m
P
m
P
m
P
mQC
C
D
D
A
A
B
B
2 2 2 2
2 2 2 2+ = + + (8.109)
Veamos ahora que consecuencias se pueden deducir de las (8.106-8.109). De (8.108) y (8.109)resulta
P PQ
m m
m m
m m
m mC
CD
A
ABAB
A B
A BCD
C D
C D
2 22
µ µµ µ= + =
+=
+, , (8.110)
donde µ µAB CD, son las masas reducidas de los sistemas (A, B) y (C, D), respectivamente. Deaquí obtenemos
PP
QC CDA
AB= +
µ
µ
22 (8.111)
AB
C
D
CM
PB PA
PC
vAψ
A
C
CMψ
O
pC
θC
(b)
mCM
P
pD
θD
θ'C θ'D
pA
(a)
PDmDM
P
Fig. 8.13. Una reacción química: (a) vista desde el centro de masa; (b) vista desde elreferencial del laboratorio, en el cual la molécula B está en reposo.
La relación (8.111) depende de 4 parámetros independientes, que podemos tomar comoε ≡ Q M/ (la energía química específica liberada en la reacción), P MA / , η ≡ m MA / yζ ≡ m MC / . Se debe notar que una reacción endotérmica (Q < 0 ) no se puede producir si
P QA AB2 2< − µ (8.112)

8. Sistemas de partículas
235
esto es, si la energía mecánica interna del sistema (A, B) no alcanza para proveer la energía quí-mica necesaria para la reacción. Claramente si µ µAB CD= se tiene que P PC A> para reaccionesexotérmicas y P PC A< para reacciones endotérmicas. Pero cuando µ µAB CD≠ no resulta obviode la (8.111) si PC es mayor o menor que PA . Así puede ocurrir que en una reacción endotér-mica se tenga que P PC A> y también que en una reacción exotérmica P PC A< .En cualquier caso, una vez determinada la relación entre PC y PA se puede usar una cons-truccion geométrica semejante a la que empleamos antes para estudiar colisiones elásticas. Porejemplo en la Fig. 8.13 se muestra un caso particular de reacción química vista desde elreferencial del centro de masa y desde el referencial en que la molécula B está en reposo.Procediendo de manera análoga a como hicimos para la colisión elástica podemos entoncescalcular pC , pD y los ángulos ′θC , θD , ′θD y ψ en función de pA y θC .No seguiremos profundizando este tema aquí, ni consideraremos reacciones que dan lugar a treso más productos.
Choque de esferas no rígidas
Volvamos por un momento al choque frontal elástico de dos esferas rígidas considerado antes.La velocidad relativa antes del choque es v v v10 20 10− = (porque hemos supuesto que inicial-mente m2 está en reposo). Es fácil verificar que después del choque v v v1 2 0− = − . Por lo tantoen un choque frontal elástico la velocidad relativa cambia de signo. Esto es una consecuencia dela conservación de la energía cinética interna de traslación. Sin embargo la experiencia muestraque esto no ocurre en la práctica. Todo el mundo ha visto que cuando una pelota cae y rebota enel piso no vuelve a subir a la misma altura debido a que en el choque contra el piso se pierde unaparte de la energía cinética interna de traslación (del sistema pelota + piso). Cosa semejante ocu-rre en mayor o menor medida para todas las colisiones entre cuerpos extensos, fundamental-mente porque en toda colisión real los cuerpos sufren deformaciones. A veces estas deformacio-nes son plásticas (o sea deformaciones permanentes), que son procesos en los que no se con-serva la energía mecánica. En otros casos (como el de la pelota que rebota contra el piso) loscuerpos sufren deformaciones elásticas que conservan la energía mecánica, pero no la energíacinética de traslación pues de resultas del choque parte de ella se gasta en excitar vibraciones delos cuerpos, que son movimientos que poseen energía mecánica, por eso la energía cinética detraslación del sistema después del choque es menor que la que tenía inicialmente. A la larga lasvibraciones se amortiguan y su energía se disipa pero los cuerpos recuperan su forma inicial.Para tratar estos casos, tanto si las deformaciones son plásticas como si son elásticas, se sueleintroducir un coeficiente de restitución e ≤ 1 y se escribe
v v v v1 2 10 20− = − −e( ) (8.113)
Si e = 1 se recuperan los resultados del choque elástico de dos esferas rígidas (es decir que no sedeforman ni elásticamente ni plásticamente). Si e < 1 se suele hablar de “choque plástico” aun-que esta denominación puede llevar a confusión pues como acabamos de ver muchos choquescon e < 1 no son plásticos, porque los cuerpos que chocan no sufren deformaciones permanentes.Por eso aquí preferimos hablar de choques de cuerpos no rígidos para subrayar el hecho que uncuerpo rígido se puede imaginar como el límite de un cuerpo elástico, cuando los módulos elás-ticos del mismo (ver el Capítulo 12) tienden al infinito de modo que las deformaciones que sufre

8. Sistemas de partículas
236
al chocar son nulas, entonces la amplitud de las vibraciones es nula y la energía mecánica detraslación se conserva.Al usar la (8.113) se suele suponer que e es una constante cuyo valor depende solamente de lanaturaleza de los cuerpos involucrados y no del módulo | |v v10 20− de la velocidad relativa. Asíharemos, pero poniendo en guardia al lector que se trata de una aproximación que no siempre secumple bien. Hecha esta salvedad es fácil extender el análisis del choque de esferas rígidas alcaso de esferas no rígidas. Usamos la misma notación que empleamos en esa ocasión e igual queantes suponemos que inicialmente el blanco m2 está en reposo y que no hay rozamiento demodo que toda transferencia de cantidad de movimiento entre m1 y m2 es en la direcciónnormal. La cantidad de movimiento P del sistema se conserva y podemos escribir como antes
p p p P1 2 0+ = = = cte. (8.114)
Todo el tratamiento que hicimos entonces para las componentes tangenciales de las cantidadesde movimiento sigue valiendo ahora y no hace falta repetirlo. La única novedad aparece al tratarlas componentes normales. De
p p p1 2 0,n ,n ,n+ = (8.115)
obtenemos
v v v2 0 1,n ,n ,n( )= −α (8.116)
Por otra parte aplicando la (8.113) a la componente normal de la velocidad relativa resulta
v v ev1 2 0,n ,n ,n− = − (8.117)
Resolviendo el sistema (8.117)-(8.117) encontramos
ve
v ve
v1 0 2 011
1,n ,n ,n ,n,=−+
=++
αα
αα
(8.118)
Recordando que la velocidad del baricentro (V) está dada por la (8.67), que V v V1 1,n ,n n= − y queV v V2 2,n ,n n= − podemos obtener
Pe
p Pe
p P1 0 2 0 11 1,n ,n ,ncos , cos= −+
=+
= −α
βα
β (8.119)
ya que p p0 0,n cos= β ; aquí β es el ángulo de oblicuidad, que se relaciona con el parámetro deimpacto q por medio de la (8.86). En cuanto a las componentes tangenciales siguen valiendo losresultados anteriores:
P p P p Pt t t1 0 2 0 11
11
1, , ,sen , sen=+
= −+
= −α
βα
β (8.120)
De (8.119) y (8.120) se obtiene que
P
e
P P
e
Pt t12
12
22
22
1 1,n , ,n ,,ρ ρ ρ ρ
+
=
+
= (8.121)

8. Sistemas de partículas
237
donde hemos introducido la notación
ρα
=+1
1 0p (8.122)
Estos resultados se representan gráficamente en la Fig. 8.14a y muestran que P P2 1= − y que losextremos de esos vectores están sobre una elipse cuyo semieje mayor es ρ y está en la direccióntangencial y cuyo semieje menor es eρ y está en la dirección normal. Si e = 1 la elipse es uncírculo y se recuperan los resultados del choque de esferas rígidas.
P10,nP10,t
A
A' P20 P10
P2
P1 ρ
eρ
p0C β A
P2
P1
p0C βO
B
p0
αα +1
p01
α +1p0
θ1 θ2
θ'1θ'2
(a) (b)
ψψ
t` t
`
nn
Fig. 8.14. Colisión de esferas no rígidas: (a) vista desde el referencial del centro de masa;(b) vista desde el laboratorio donde inicialmente m2 está en reposo.
Es sencillo calcular la variación de la energía cinética interna ∆T T Tint int, final int, inicial= − debidaa la colisión. El resultado es
∆T
Teint
int, inicial( )cos= − ≤2 21 0β (8.123)
Luego la pérdida de energía depende del coeficiente de restitución y es nula solamente si e = 1.Además si e < 1 la pérdida depende del ángulo de oblicuidad y es máxima para el choque frontal( β = 0) como es lógico porque proviene de la componente normal de la velocidad relativa.Conociendo P1 y P2 es fácil encontrar que
p p P p p P1 0 1 1 0 211
1=
++ =
++
αα α
, (8.124)
En la Fig. 8.14b se muestra la construcción geométrica correspondiente, de la que se ve que
θ β2 = (8.125)
como debe ser dado que en el referencial del laboratorio p2 es puramente normal cualquiera seael valor del coeficiente de restitución. Con la ayuda de la Fig. 8.14b es fácil resolver los trián-gulos OBA, OBC y CBA para expresar cualquier cantidad de interés en términos de p0 y delparámetro de impacto.

8. Sistemas de partículas
238
Sección eficaz
Muchas veces en los experimentos que involucran colisiones no se estudia un único choque sinoque se lleva a cabo una estadística sobre un número muy grande de ellos. Típicamente en estosexperimentos se hace incidir un haz uniforme de partículas de tipo 1 (de masa m1) sobre unblanco que consiste de una distribución también uniforme de partículas de tipo 2 (de masa m2)en reposo. Si el haz incide desde la izquierda (Fig. 8.15), suficientemente lejos de la región deinteracción se tienen partículas de los tipos 1 y 2 (de los tipos ′1 y ′2 si las colisiones involucrancambios de la naturaleza de las partículas como ocurre en reacciones químicas) que han chocadoy han sido dispersadas en varias direcciones por las interacciones que han sufrido. La cantidaddn1 1 1( , )θ ϕ de partículas del tipo 1 dispersadas en las direcciones comprendidas entre θ1 yθ θ1 1+ d y ϕ1 y ϕ ϕ1 1+ d se determina contando las que son recogidas por un detector ubicadolejos de la región de interacción en la dirección (θ, ϕ) y que subtiende el ángulo sólidod d dΩ = θ ϕ θsen . Análogamente se procede para las partículas dispersadas del tipo 2.
haz blanco
detector
θϕ
dθ
dϕ senθ
dΩ = dθ dϕ senθ
p0
Fig. 8.15. Experimento para estudiar colisiones: un haz uniforme de partículas tipo 1 in-cide sobre un blanco que consiste de una distribución uniforme de partículas tipo 2 en re-poso. La cantidad dn1 1 1( , )θ ϕ de partículas tipo 1 dispersadas en las direcciones compren-didas entre θ1 y θ θ1 1+ d y ϕ1 y ϕ ϕ1 1+ d se determina por medio de un detector ubicadolejos de la región de interacción en la dirección (θ, ϕ) y que subtiende el ángulo sólidod d dΩ = θ ϕ θsen .
La interpretación de los resultados experimentales se basa en el concepto de sección eficaz, quepermite relacionar los datos obtenidos en el laboratorio con lo que ocurre en cada colisión.El número de partículas que en la unidad de tiempo incide sobre el blanco, por unidad de áreadel blanco (la intensidad del haz incidente), es I n v1 1 0= , donde v0 es la velocidad de las partí-culas del haz y n1 es su densidad (número de partículas por unidad de volumen). El número de

8. Sistemas de partículas
239
partículas tipo 2 por unidad de área del blanco es N n2 2= l , donde n2 es la densidad del blancoy l su espesor. Vamos a suponer que n1 y n2 son pequeños para que se puedan despreciar lasinteracciones entre partículas del mismo tipo y al mismo tiempo que l es también pequeño demodo que cada partícula tipo 1 interactúa cuanto mucho una sola vez con una partícula tipo 2 (esdecir que no sufre colisiones múltiples). En estas condiciones el número dnΩ de partículas tipo 1(omitimos los suscriptos 1 y 2 porque no puede haber confusión) que recoge el detector ubicadoen la dirección (θ, ϕ) en un intervalo de tiempo dt es proporcional a dt , a la sección transversalS del haz y a I, N y al ángulo sólido dΩ subtendido por el detector. Podemos escribir entoncesque
dn dt S I N dΩ Ω Ω( , ) ( , )θ ϕ σ θ ϕ= (8.126)
En esta expresión el factor de proporcionalidad σ θ ϕΩ ( , ) tiene las dimensiones de área y de-pende de las características de la colisión. Se llama sección eficaz diferencial de dispersión porunidad de ángulo sólido y es la magnitud que se mide en experimentos como el que se representaen la Fig. 8.15. Para colisiones entre esferas y entre cuerpos de forma cualquiera, pero orientadosal azar tanto los del haz como los del blanco, es evidente que dnΩ y σΩ no dependen de ϕ. PerodnΩ y σΩ dependen de ϕ si las colisiones involucran cuerpos de forma no esférica que no estánorientados al azar (como ocurre en el juego de bolos).A veces interesa contar todas las partículas dispersadas entre θ y θ θ+ d , cualquiera sea el aci-mut ϕ, es decir las partículas dispersadas en el ángulo sólido d dΩ = 2π θ θsen , para lo cual hayque emplear un detector que recoja las partículas que pasan por el anillo punteado de la Fig.8.15. El número dnθ de partículas que recoge tal detector en el intervalo dt es
dn dt S I N dθ θθ σ θ θ( ) ( )= (8.127)
Aquí σ θθ ( ) es la sección eficaz diferencial por unidad de ángulo de desviación. Puesto que
dn dn dθπ
θ θ ϕ ϕ( ) ( , )= ∫ Ω0
2(8.128)
se tiene en general que
σ θ θ σ θ ϕ ϕθπ
( ) sen ( , )= ∫ Ω d0
2(8.129)
Cuando σΩ no depende de ϕ la integral se calcula de inmediato y se obtiene que
σ θ π θ σ θθ ( ) sen ( )= 2 Ω (8.130)
El número dn de partículas que chocaron en dt y fueron dispersadas en cualquier dirección es
dn dt S I N dn d d dn d= = ∫ = ∫ ∫σ θ θ θ θ θ ϕ ϕθπ π π
( ) sen ( , )0 0 0
2Ω (8.131)
de donde obtenemos la sección eficaz total de colisión:
σ σ θ θ θ θ σ θ ϕ ϕθπ π π
= ∫ = ∫ ∫( ) sen ( , )d d d0 0 0
2Ω (8.132)

8. Sistemas de partículas
240
haz
partícula blanco
θ
ϕdθ
dϕ senθ
dΩ = dθ dϕ senθ
p0
q
q+dq
Fig. 8.16. La desviación del proyectil en función del parámetro de impacto en un choque.
Para calcular σΩ precisamos conocer dnΩ . Consideraremos el caso en que σΩ no depende deϕ, entonces basta calcular dnθ en vista de la (8.130). Claramente las partículas tipo 1 se desvíanentre θ y θ θ+ d si pasan a la distancia correcta de una partícula del tipo 2, esto es, si suparámetro de impacto está comprendido entre q y q dq+ (Fig. 8.16). Luego dnθ es el número departículas incidentes que en dt atraviesan un anillo de radio interior q y radio exterior q dq+ , osea de área 2π q dq alrededor de una partícula del blanco, luego
dn dt S I N q dq dt S I N qdq
ddθ θ π π
θθ( ) = =2 2 (8.133)
donde tomamos el módulo de dq d/ θ porque dnθ es positivo por definición. Comparando estaexpresión con la (8.127) obtenemos el resultado buscado:
σ θ πθθ ( ) = 2 q
dq
d(8.134)
De aquí y recordando la (8.130) obtenemos
σ θθ θΩ ( )
sen=
q dq
d(8.135)
Si se cuenta con un modelo que describe los detalles de la colisión se puede calcular ladesviación del proyectil en función del parámetro de impacto q d= sen β y usando la (8.134) ola (8.135) se puede obtener la sección eficaz correspondiente. En general para toda colisión setiene pues que θ = f q( ) , donde la función f depende de las características de la interacción entreel proyectil y el blanco. A modo de ejemplo calcularemos la sección eficaz de colisión elástica

8. Sistemas de partículas
241
de esferas rígidas. Para eso usamos la (8.94) que junto con la (8.86) nos da q en función delparámetro de impacto. Con un poco de álgebra se obtiene
q d y q d2 12
2 2 12
21 1= + + ′ = − − ′[ cos( )] [ cos( )]θ θ θ θ (8.136)
donde ′ =θ α θarcsen( sen ) por la (8.79) y hemos omitido los suscriptos 1. Si α < 1 se debe usarla primera de las (8.136), pero cuando α > 1 se necesitan ambas expresiones porque para cada θhay dos valores posibles de q, como se ve de la Fig. 8.11. El valor de q que corresponde alángulo de desviación máxima θ* es
q q* *( )= =−
θα
α1
2(8.137)
y la primera de las (8.136) da q q> * mientras que la segunda da q q< * . Cuando hay un ángulode desviación máxima hay siempre dos valores de q para cada θ. Cada uno de ellos contribuye ala sección eficaz y por lo tanto las fórmulas (8.134), (8.135) se deben modificar y escribir
σ πθ
σθ θθ = =∑ ∑2 q
dq
d
q dq
dii
i
i i
i,
senΩ (8.138)
donde el subíndice i designa los valores de q que dan lugar al mismo θ. Derivando (8.136)resulta
dq
d
d
qθθ θ
θ θ=
± ′′
2 2
4sen ( )sen cos
(8.139)
donde el signo + corresponde a la primera de las (8.136) y el – a la segunda. Sustituyendo en(8.138) obtenemos finalmente
σπ θ θ
θ θα
σπ θ θ
θ θθ θ
θ θα
θ
θ
=+ ′
′<
=+ ′
′+
− ′′
>
d
d
2 2
2 2 2
21
21
sen ( )sen cos
sen ( )sen cos
sen ( )sen cos
para
para(8.140)
En la Fig. 8.17 mostramos σθ para diferentes valores de a. Se puede observar que cuando α > 1la sección eficaz diferencial se hace infinita para el ángulo de desviación máxima θ* y luego caeabruptamente a cero. Esto se debe a que para ese ángulo d dqθ / = 0 como se puede apreciar dela Fig. 8.11. Obviamente para θ θ> * la sección eficaz diferencial es nula porque no haydesviaciones mayores a θ* . En estos casos el grueso de las partículas sufre desviacionespróximas a θ* . Este fenómeno se llama dispersión en arco iris porque es análogo al que produceel conocido fenómeno atmosférico. La dispersión en arco iris se da toda vez que θ( )q es unafunción multivaluada, sea que se trate de una colisión elástica o no. En particular se puedepresentar en las colisiones de esferas no rígidas y en las reacciones químicas ya estudiadas.Si α = 1 de la (8.95) se obtiene
dq
dd
θθ θ π= ≤ ≤sen , /0 2 (8.141)

8. Sistemas de partículas
242
y entonces
σ π θθ = d2 2sen (8.142)
0.5
1.5
2.0
1.0
30˚ 60˚ 90˚ 120˚ 150˚ 180˚
θ1
α = 0.8
α = 1.0
α = 1.4 α = 1.1
α = 0.5
α = 0.1
σ(θ1)/πd2
Fig. 8.17. Sección eficaz diferencial σθ para la colisión elástica de esferas rígidas.
La sección eficaz total para la colisión de esferas rígidas es
σ πθ = = +d d r r21 2, (8.143)
Este resultado es evidente si se observa la Fig. 8.10 y por supuesto vale para todo α y tambiénpara el choque de esferas no rígidas.Se debe observar que la sección eficaz, tanto total como diferencial, si bien tiene dimensiones deárea, no es el área de la sección transversal de un objeto material sino que es una propiedad de lacolisión que depende de las características de las partículas involucradas y de su interacción.
Dispersión de Rutherford
El concepto de sección eficaz se aplica también a la colisión de partículas puntiformes que inte-ractúan por medio de una fuerza central. En general en toda colisión entre dos partículas
L q vint = µ 0 (8.144)
donde Lint es el momento angular respecto del centro de masa, µ es la masa reducida del sistemay v0 es la velocidad del proyectil muy lejos del blanco y en el referencial del blanco. Podemosentonces aplicar los resultados del Capítulo 7 para calcular la órbita del proyectil y obtener ladesviación en función de Lint y por lo tanto de q. A partir de eso se puede obtener la seccióneficaz de colisión. A modo de ejemplo trataremos la colisión de dos partículas que interactúan

8. Sistemas de partículas
243
debido a la atracción gravitatoria, es decir por medio de la fuerza dada por la (7.30), un pro-blema que ya tratamos en el Capitulo 7. Supongamos que el proyectil (de masa m) viene del in-finito (donde su velocidad es v0 ) en una órbita hiperbólica (Fig. 8.18) cuyo foco ocupa el blanco(masa M). La desviación θ depende del ángulo ψ entre las asíntotas y el eje de la hipérbola
ψπ θ
= +2 2
(8.145)
como se ve de la figura. De la ecuación polar de las cónicas (7.45) resulta cos /ψ = −1 e donde ees la excentricidad ( e >1 para una órbita hiperbólica). De (8.145) se obtiene entonces
senθ2
1=
e(8.146)
asíntota
θq
ψψ
P
O
C
asíntota
f
Fig. 8.18. Colisión de dos partículas que interactúan debido a la atracción gravitatoria.
Por otra parte de la (7.45) se tiene que
e = + =1 22L
C
E
CC GmM
µ, (8.147)
donde µ es la masa reducida del sistema (m, M). Sustituyendo E v= >12 0
2 0µ y L L q v= =int µ 0
en (8.147) obtenemos
e = + = =1 2 202
02q d d C v GmM v/ , / /µ µ (8.148)
Introduciendo esta expresión de e en (8.146) podemos despejar q:
q d= cotθ2
(8.149)
Esta relación nos permite calcular la sección eficaz. De la (8.135) resulta de inmediato
σ θΩ = d2
4
1
42
sen(8.150)

8. Sistemas de partículas
244
La (8.150) es la célebre fórmula de Rutherford de la sección eficaz diferencial para la dispersióndebida a una fuerza que depende de la inversa del cuadrado de la distancia, que fue obtenidaoriginalmente para la interaccion Coulombiana entre dos cargas eléctricas q1 y q2, en cuyo casod q q v= 1 2 0
2/ µ (en unidades Gaussianas). Se puede ver fácilmente de la (8.150) que la seccióneficaz total σ diverge debido al polo de σΩ en θ = 0 . Esto no debe sorprender porque laatracción gravitatoria (igual que la fuerza de Coulomb) tiene alcance infinito y por lo tanto todapartícula incidente es desviada, por grande que sea el parámetro de impacto.
Sección eficaz de impacto de un bólido
Consideremos un bólido (masa m) que se acerca a la Tierra (masa M). Como m M<< podemosponer µ = m . Puesto que su velocidad es seguramente mayor que la velocidad de escapev GM re T= ( / ) /2 1 2 ( rT es el radio de la Tierra) la órbita es hiperbólica y de acuerdo con la Tabla7.1 el perigeo es
fL mC q v C q d
q d=
+=
+=
+ +
2 202 2
2 21 1 1 1
/ / /
/e eµ
(8.151)
como resulta de la (7.45), la (8.144) y la (8.148). El bólido impacta en la superficie del planeta sif rT≤ . De la (8.151) se obtiene entonces que todo bólido cuyo parámetro de impacto satisface la
condición
q q rd
rr
v
vTT
Te2 2 2 22
021
21≤ = +
= +
impacto (8.152)
choca con el planeta. De aquí resulta que la sección eficaz de impacto es
σ π πimpacto impacto≤ = +
q r
v
vTe2 22
021 (8.153)
De esta fórmula se ve que σ impacto es siempre mayor que la sección geométrica del planeta π rT2
y tiende a ella para v0 → ∞ .
![Contabilidad4016enero2009[1] Corregida Por Ij](https://static.fdocuments.es/doc/165x107/555c8215d8b42a12348b52e4/contabilidad4016enero20091-corregida-por-ij.jpg)