9. Algunas Simulaciones - Servidor de la Biblioteca de...
29
Control en invernaderos hidropónicos. 1 9. Algunas Simulaciones 9.1. Estudio comparativo de ajuste en el regulador PID para el clima del invernadero con linealización Feedback-Feedforward y desacoplamiento. Considerando el modelo climático dinámico invernadero más utilizado, basado en energía y la masa equilibrada dentro del invernadero (fue desarrollado por Albright, ecuaciones diferenciales para la energía y el agua). El espacio de estado no lineal acoplado del modelo del invernadero se expresa como: Las variables de estado x 1 y x 2 (idéntica a las variables de salida y 1 , y 2 ) son las temperaturas interior del invernadero (T in ) y la humedad interior absoluta (w in ). El control de entrada u 1 y u 2 son la tasa de ventilación ( ̇ ) y del capacidad del agua de la niebla del sistema (Q fog ). Se consideran dos escenarios de simulación para las pruebas para comparar el rendimiento del sistema de control con diferentes controladores PID: cambios en escalón de consignas y cambio de rampa de consignas. En la siguiente figura se presenta el sistema climático del invernadero con linealización y desacoplamiento, que ya se vio anteriormente, para control de la temperatura y la humedad. Cambios del Set-Point en escalón: en el primer experimento se realiza un cambio en escalón de la consigna tanto de la temperatura del aire y humedad absoluta en el invernadero, aplicados sucesivamente.
Transcript of 9. Algunas Simulaciones - Servidor de la Biblioteca de...

Control en invernaderos hidropónicos.
1
9. Algunas Simulaciones
9.1. Estudio comparativo de ajuste en el regulador PID para el clima del
invernadero con linealización Feedback-Feedforward y
desacoplamiento.
Considerando el modelo climático dinámico invernadero más utilizado, basado en
energía y la masa equilibrada dentro del invernadero (fue desarrollado por Albright,
ecuaciones diferenciales para la energía y el agua). El espacio de estado no lineal acoplado del
modelo del invernadero se expresa como:
Las variables de estado x1 y x2 (idéntica a las variables de salida y1, y2) son las
temperaturas interior del invernadero (Tin) y la humedad interior absoluta (win). El control de
entrada u1 y u2 son la tasa de ventilación ( ̇) y del capacidad del agua de la niebla del sistema
(Qfog). Se consideran dos escenarios de simulación para las pruebas para comparar el
rendimiento del sistema de control con diferentes controladores PID: cambios en escalón de
consignas y cambio de rampa de consignas.
En la siguiente figura se presenta el sistema climático del invernadero con linealización
y desacoplamiento, que ya se vio anteriormente, para control de la temperatura y la humedad.
Cambios del Set-Point en escalón: en el primer experimento se realiza un cambio en
escalón de la consigna tanto de la temperatura del aire y humedad absoluta en el invernadero,
aplicados sucesivamente.

Control en invernaderos hidropónicos.
2
Cambios del Set-Point en Rampa: en la segunda prueba de simulación, se consideran
que cambia en forma de rampa el punto de referencia tanto de la temperatura del aire y de la
humedad dentro del invernadero.

Control en invernaderos hidropónicos.
3
Basado en un modelo climático del invernadero con perturbaciones medibles externas,
con compensador por realimentación-feedforward para linealizar, desacoplamiento y

Control en invernaderos hidropónicos.
4
compensaciones perturbación el problema se reduce a procesos desacoplados más tiempos
muertos, adecuados para la temperatura y la humedad de control de clima del invernadero
Las pruebas de simulación muestran que en el caso de un cambio en escalón del punto
de referencia, el desacoplamiento puede perderse ya que las variables de control están
limitadas por los actuadores (tasa de ventilación y de débito niebla), es decir, se realiza un
control en bucle abierto. La mejor solución es utilizar un cambio de consigna de rampa en
lugar de los cambios en escalón, que respeta el proceso de linealización y desacoplo. Los
resultados de la simulación demuestran buen rechazo de perturbaciones por el compensador
basado en linealización por realimentación-feedforward y desacoplamiento.
9.2. Sintonía de controladores PID no lineales Multi-Objetivo para
Invernadero con Algoritmos Evolutivos
El controlador PID es un sistema de dos entradas, dos salidas continuo y no lineal.
Consideramos un control PID multivariable estructurado como se muestra en la figura
siguiente.
La figura siguiente muestra la eficacia de las respuestas a escalón del control PID en
cada población. Es muy bueno el rendimiento del control en su conjunto, con pequeñas
sobreoscilaciones, rápido tiempo de establecimiento y el buen rendimiento de la señal de
consigna.

Control en invernaderos hidropónicos.
5
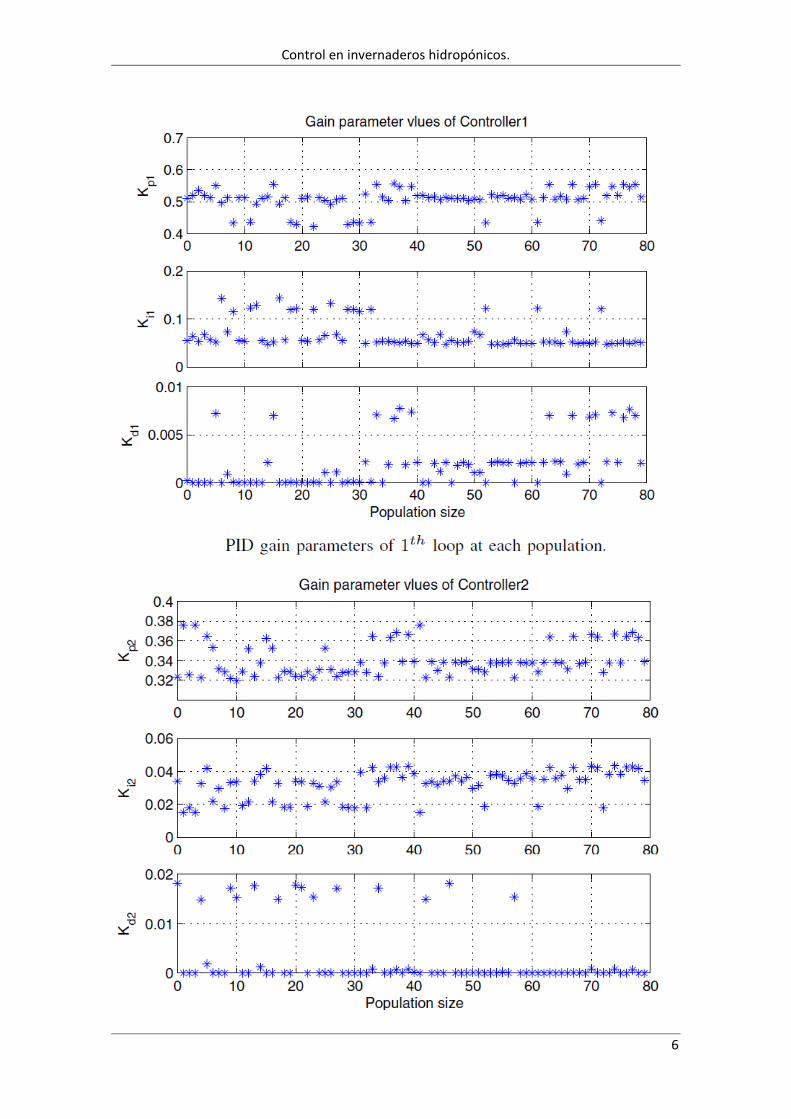
En las figuras siguientes se muestran las distribuciones de los parámetros de ganancia
PID en cada población. Los resultados muestran que los controladores tienen pequeñas
ganancias derivadas, o incluso que se pueden implementar mediante la adopción de bucle PI
bajo la mayoría de condiciones, mientras que las ganancias proporcional son grandes para los
dos lazos de control.
Con el fin de demostrar la eficacia del método de sintonización propuesto,
consideramos otros criterios de rendimiento, tales como la sobreoscilación, tiempo de subida,
tiempo y error de estado estacionario. Para simplificar el análisis, se realiza una simple suma
de los respectivos criterios de desempeño de tipo en cada población.
Control en invernaderos hidropónicos.
6

Control en invernaderos hidropónicos.
7
Los resultados muestran la eficacia y la facilidad de uso del método propuesto para
respuestas a un escalón. Las ganancias obtenidas se aplican en los controladores PID y se
puede lograr un buen rendimiento de control, tales como pequeña sobreoscilación, rápido
tiempo de estabilización, y menos tiempo de subida y el error de estado estacionario.
9.3. Diseño Controlador No lineal adaptativo Neuro-PID de
Invernaderos basado en la red RBF
Para el control del clima de un invernadero se propone una adaptación de un esquema
de control neural y la incorporación de los controladores PID convencionales. Se prevé que la
combinación se aprovechará de la simplicidad de los controladores PID y la potente capacidad
de aprendizaje, adaptabilidad y la capacidad de abordar a sistemas no lineales de las redes
RBF.
A fin de demostrar la capacidad del sistema de control propuesto para proporcionar
seguimiento a una consigna dada y rechazo de perturbaciones, se realiza una series de
simulaciones. En primer lugar el rendimiento de la estabilidad y rechazo de perturbaciones se
muestra en la siguiente figura.

Control en invernaderos hidropónicos.
8
En segundo lugar, la capacidad de adaptación, el seguimiento y la respuesta de bucle
cerrado a los cambios de punto de referencia demuestra seguimiento suave. Consideramos un
par de entradas de referencia de onda cuadrada para probar su control.

Control en invernaderos hidropónicos.
9
Las respuestas correspondientes para el cambio en el punto de referencia de onda
cuadrada en la relación de temperatura y humedad se muestran en la figura anterior. Los
resultados muestran que hay algunas ligeras oscilaciones alrededor de los puntos de referencia
durante un cierto tiempo. En general, las salidas del sistema pueden realizar un seguimiento
de las entradas de referencia, y el controlador de Neuro-PID tiene una buena adaptación y
rendimiento de seguimiento.
Además, las figuras siguientes muestran como varían los parámetros de las ganancias del
controlador Neuro-PID con los cambios de punto de referencia durante el proceso de ajuste.

Control en invernaderos hidropónicos.
10
Para demostrar la superioridad del esquema de control frente al simple control PID se
realiza el mismo experimento, los mejores parámetros de ganancia para el controlador PID
convencional se logran mediante el uso de la optimización GA fuera de línea. En la siguiente
figura se muestra el control PID convencional.

Control en invernaderos hidropónicos.
11
En comparación con el controlador PID convencional, el esquema de control Neuro-PID
tiene una precisión más alta, sobreoscilaciones más pequeñas y la respuesta de bucle cerrado
más suave.
Los resultados muestran que el controlador propuesto tiene buena capacidad de
adaptación, robustez y rendimiento de control satisfactorio mediante el seguimiento de la
trayectoria de onda cuadrada al ser comparardo con los métodos convencionales de control
PID.

Control en invernaderos hidropónicos.
12
9.4. Aplicación del sistema de lógica difusa adaptativo para el
modelado del clima de un invernadero
Es bastante difícil para modelar completamente el invernadero sólo basándose en las
leyes físicas que intervienen en el proceso. Completar el modelado físico con el sistema de
lógica difusa adaptativo es una manera de obtener la relación funcional no lineal entre la
temperatura del invernadero y diversos factores climáticos. La simulación muestra que este
método se puede realizar el seguimiento del sistema real.
9.5. Modelo de Control Predictivo del clima del invernadero Basado en
la optimización del enjambre de partículas para ahorrar consumo de
energía.
Debido a que el invernadero se trata de un sistema no lineal es necesario encontrar un
nuevo enfoque para aplicar el control predictivo (MPC) sobre la base de la optimización de

Control en invernaderos hidropónicos.
13
enjambre de partículas (PSO) para reducir al mínimo el costo y resolver la no linealidad
restringida al problema de optimización.
La complejidad del sistema de un invernadero, la gran interacción entre las diferentes
variables, y las fuertes perturbaciones externas son las principales razones para elegir MPC. El
rendimiento del MPC depende en gran medida de la exactitud del modelo del proceso. La
temperatura interior se regula en el valor adecuado con dos variables manipuladas:
calefacción artificial y ventilación natural (ángulo de ventana). El consumo de energía es
causada principalmente por las dos variables. Con el fin de ahorrar consumo de energía, las
acciones de control futuras se calculan para minimizar una función de coste especificado.
Los costos se representan como coste acumulado para cada actuador (calefacción y
ventilación) por el que se analizó el desempeño de controlador. Los costes se definen como:
∑‖ ( ) ( )‖
( ) ∑ ( )
( ) ∑ ( )
Para validar el rendimiento de los dos controladores se comparan varios parámetros
ER (precisión seguimiento set point), E (H) (consumo de energía de la calefacción), E (V)
(consumo de energía de la ventilación), σ∆H (desviación estándar de la calefacción de la señal
de control) y σ∆V (desviación estándar de la señal de control de la ventilación). Las tablas
siguientes muestran los resultados obtenidos con respecto controlador convencional y el
controlador MPC. Se puede concluir que el MPC con controlador de PSO fue capaz de reducir
el consumo de energía para las actividades de control de calefacción y ventilación con las
mismas consignas.

Control en invernaderos hidropónicos.
14
Combinando MPC con PSO no sólo es capaz de indicar la función de coste de energía
con flexibilidad, también se puede resolver problemas de optimización de procesos no lineales.
El controlador sugerido es capaz de minimizar los costos de energía para conseguir actuaciones
de temperatura dentro de una gama de objetivos.
9.6. Aplicación de métodos de inteligencia computacional para
modelar el ambiente de un Invernadero
Para construir los suficientes modelos climáticos del invernadero para el control
predictivo basado en modelos (MBPC), la influencia del clima exterior se debe tener en cuenta
una red neuronal Feed-forward de capas, que han sido ampliamente aplicadas en el campo de
modelado e identificación de sistemas no lineales que actúan como aproximaciones del
modelo.
Los modelos de cromosoma acoplados consisten en la concatenación de dos
cromosomas RNFBR individuales. El número de términos de entrada para cada modelo se
establece en 33 lo que hace que una longitud total de 68 cromosomas. Teniendo en cuenta el
aumento de tamaño del cromosoma individuos, el tamaño de la población Moga se aumentó a
250 individuos con el fin de garantizar que todos los términos de entrada aparecen varias
veces en la población inicial. Todos los parámetros de Moga restantes se han descrito con
anterioridad.
La tabla presenta la forma de la configuración de los objetivos del Moga para este
caso. Las expresiones OSATE (T+H) y OSAGE (T+H) se utilizan para la suma de los errores de
entrenamiento y la generalización de Feed-forward obtenidos por los modelos de temperatura
y humedad acoplados.

Control en invernaderos hidropónicos.
15
La figura siguiente muestra la relación entre pares de objetivos para los modelos en el
conjunto preferible.
La parte superior izquierda muestra claramente la relación lineal entre la formación y
los errores de generalización, y la pequeña degradación de error obtenido en los objetivos de
Feed-forward. El resto de la parte superior muestran la relación entre los errores de
entrenamiento sumados y las medidas de rendimiento de la predicción para los dos modelos
de la temperatura y la humedad. Cabe señalar que los mejores resultados de la predicción a
largo plazo no se obtienen los mejores predictores Feed-forward. En la parte inferior izquierda

Control en invernaderos hidropónicos.
16
de la figura (4 cuadrículas) permiten una mejor comprensión de esta característica, al mostrar
la relación entre los modelos de error de entrenamiento individual frente a las medidas de
desempeño de predicción a largo plazo. El mismo comportamiento es visible en las cuatro
parcelas, con énfasis en que la presentación de la OSATE (H) frente a máx (R (ET)) (T), que
muestra que la reducción al mínimo de la humedad de error de Feed-forward que se perjudica
la predicción a largo plazo del rendimiento de modelos de temperatura. En la parcela central
derecho, el conflicto entre ambos objetivos de predicción a largo plazo es evidente, que
muestra que la elección de los mejores modelos acoplados de predicción a largo plazo implica
un compromiso entre estos objetivos. Esta relación se mantiene cuando teniendo en cuenta
los objetivos de predicción a largo plazo obtenidos sobre el conjunto de datos de validación
(figura de abajo a la derecha) a pesar de la diferente escala x comprime el efecto.
La radiación solar es la variable de entrada predominante en las entradas de los
modelos y sus retrasos más grandes parece ser empleados para formar la incorporación básica
de la atractor que representa dinámica lenta durante períodos más largos de tiempo. Esto es
más evidente en el modelo de temperatura del invernadero y, en este caso, también se aplica
para la temperatura del aire exterior. El modelo de humedad no incluye ningún término de la
variable de entrada de humedad relativa exterior. La tendencia de esta variable ha rechazado
en los datos del modelo de humedad presente en la mayoría de los modelos de cromosomas.
Las figuras siguientes ilustran la predicción del rendimiento de los modelos elegidos.

Control en invernaderos hidropónicos.
17
Las predicciones Feed-forward siguen con precisión los valores medidos. Los
accesorios obtenidos para las predicciones de tres hora por delante demuestran un buen
seguimiento de los valores reales, aunque se deterioró por la propagación de errores, como
consecuencia de la operación a largo plazo de predicción de múltiples etapas y la cascada de
valores predichos perturbaciones externas empleadas en las entradas de los modelos. Las
evoluciones de R (ET) muestran claramente que está delimitado el error máximo y, como para
los modelos meteorológicos, muestra que, probablemente, es posible extender el horizonte de
predicción sin gran pérdida en el rendimiento de la predicción.

Control en invernaderos hidropónicos.
18
Todos los modelos, tanto de la temperatura y la humedad, en el conjunto de neuronas
preferible tenían 4. A este respecto, el acuerdo fue máximo. En cuanto al número de entradas,
la mayoría de los pares modelo tiende a tener un gran número de entradas,
predominantemente alrededor de 26 para la humedad y 33 (el máximo) para la temperatura,
lo que confirma que los modelos de temperatura tienen una mayor complejidad. Para los
modelos de temperatura, todas las variables ambientales estaban presentes en todos los
modelos, lo cual no era cierto para los modelos de humedad, donde la temperatura del
invernadero y la humedad exterior tenía términos sólo en una fracción de los modelos. Es
evidente que las variables ambientales tienen el mayor número de términos en los modelos. A
este respecto, el valor obtenido para la humedad exterior en el modelo de humedad
invernadero es considerablemente menor cuando se compara con las variables ambientales
restantes.

Control en invernaderos hidropónicos.
19
El esquema anterior presenta la disposición del modelo final para ser empleado en el
sistema de GEC, que muestra las interconexiones entre todos los modelos y que muestra de
manera explícita los caminos para el modelo que predice valores necesarios para la predicción
a largo plazo de varios pasos. Las predicciones necesarias para el control predictivo de la
temperatura y la humedad implican una cascada de 4 modelos, teniendo en cuenta la
retroalimentación de las variables modeladas. Esta disposición del modelo se aplicó para el
control predictivo del clima del invernadero y también en varias simulaciones del sistema de
control. En este caso, el clima del invernadero fue simulado usando los modelos y el ruido
aditivo tomadas a partir de distribuciones normales que se aproximan bastante bien las
distribuciones de error para Feed-forward obtenidos durante el entrenamiento del modelo.
Los datos del tiempo fuera empleado fue el medido por los sensores en el lugar de efecto
invernadero, a pesar de los valores del modelo de predicción se utilizan dentro del horizonte
de predicción como en la aplicación real.
La figura siguiente muestra las temperaturas reales y simuladas para los dos primeros
días del experimento. A pesar de algún desplazamiento desde el valor real a los valores
simulados, a nivel general, la tendencia de la evolución de la temperatura fue bien reflejada
por el modelo como una función de la verdadera del tiempo exterior y el clima pasado
simulada invernadero.

Control en invernaderos hidropónicos.
20
9.7. Enfoque híbrido Neuro-Difuso para modelar el clima de un
invernadero
Las redes neuronales difusas, al tener la capacidad de aproximaciones universales,
pueden modelar correctamente el comportamiento no lineal del clima del invernadero. Este
enfoque se ve fuertemente afectado por el ajuste inicial de parámetros.
Como se puede ver en las figuras, el modelado físico es insuficiente para las
predicciones precisas del comportamiento de las salidas del sistema. Con el fin de superar este
problema, se controla mediante una modificación menor del algoritmo.

Control en invernaderos hidropónicos.
21
Para solucionar el problema, se utilizó el algoritmo de clustering cercano, junto con la
adaptación de los centros de conglomerados. En este enfoque el centro de cada grupo se
desplaza hacia el centro de los datos.
Basado en el error de mínimos cuadrados, se puede inferir que la media de los datos
para cada grupo se representa más correctamente como el centro de ese clúster.

Control en invernaderos hidropónicos.
22
El centro de los clusters no es óptimo basado en el error de mínimos cuadrados
obtenidos de enfoque fuzzy clustering.
9.8 Optimización de modelo Fuzzy Clustering con algoritmo SOFM
Los algoritmos de asignación de funciones Autoconvocados (SOFM) se basan en el
aprendizaje competitivo y su principal objetivo es transformar un patrón de señal de entrada
de dimensión arbitraria en un solo mapa, y para llevar a cabo esta transformación adaptativa
de una manera ordenada topológicamente. El algoritmo se resume de la siguiente manera:
contenido de la organización y edición de organización antes de formatear.
Inicialización
Muestreo
Agrupación por similitud.
Actualización
Vuelta al inicio.
El algoritmo SOFM se utiliza con el fin de optimizar la estrategia de aproximación
propuesta modificada. Como se observa en la figura, los resultados de la simulación muestran
la eficacia del procedimiento propuesto y verificar la teoría para este enfoque.

Control en invernaderos hidropónicos.
23
Con el fin de diseñar controlador óptimo para el ahorro de energía, es necesario
predicción precisa de la temperatura del invernadero y la humedad para compensar los
efectos negativos del tiempo de retardo inherente del clima del invernadero. Los resultados de
la simulación demuestran la eficacia del enfoque propuesto para el modelado de clima del
invernadero y que verifican la teoría para el algoritmo, un modelo híbrido compuesto por un
método de aproximación (Clustering) y redes neuronales artificiales (SOFM) se propone para
predecir el clima del invernadero, es decir, la generación automática de reglas para la
estrategia de aproximación se ha optimizado con las redes neuronales. Usando el algoritmo de
agrupamiento, mejora significativamente la velocidad de convergencia del algoritmo de auto-
organizado muy lento.

Control en invernaderos hidropónicos.
24
9.9. Un algoritmo de control compatible para el control del clima de un
invernadero basado en una estrategia MOCC (Multi-Objective
Compatible Control)
Optimización Multi-Objetivo (MOO) es una de las áreas de investigación más activas en
la comunidad de computación evolutiva. Se propone un modelo climático del invernadero y un
nuevo algoritmo de control compatible con la adopción de un intervalo o de objetivos de
control de la región en lugar de los objetivos de control de set point, es decir, resolver este
tipo de problemas de optimización de control de conflictos de objetivos múltiples.
La figura muestra anterior el resultado obtenido por el uso del algoritmo de nivel de
optimización compatible. Se ve claramente que el consumo de energía siempre está en
conflicto con las precisiones de control. Para lograr diferente velocidad de convergencia, se
adoptan diferentes métodos de ajuste para el control de la tolerancia a la desviación ∆x en
cada paso iterativo:
Caso 1: ( )
Caso2:
√
√

Control en invernaderos hidropónicos.
25
La figura anterior muestra el efecto de control rápido en el caso 1. La temperatura y la
humedad están casi cerca de los puntos de referencia en la segunda iteración de forma
simultánea. El estado curva objetivo regula a las líneas horizontales, y es muy estable. La figura
siguiente muestra los resultados del control mediante el método de ajuste de caso 2. La
temperatura se regula rápidamente a entrar en las regiones del objetivo compatibles deseados
en la segunda iteración. En contraste, la humedad se acerca lentamente a la región de control
con el aumento de iteración. De los resultados anteriores, el efecto de control en el caso 1 es
mejor que en el caso 2, y lograr una estabilidad muy buena y robusta.

Control en invernaderos hidropónicos.
26
Se ha adoptado una arquitectura de control de bucle abierto para validar el
rendimiento, la población obtenida en cada iteración está involucrada directamente en la
siguiente optimización iterativa, y las salidas no tienen influencia en las entradas. Se muestra
en la figura siguiente que la temperatura y la humedad relativa regulada fluctúan a 29 ° C y
45%, respectivamente. Ninguno de los dos se regula a las regiones del objetivo. Especialmente,
la humedad relativa es sólo 45%, no es adecuado para el crecimiento de plantas. Además, el
rango de fluctuación de la temperatura se drástica en comparación con la humedad. En
comparación con la arquitectura de control bucle cerrado anteriormente, es obvio que la
estabilidad y robusto de control de lazo abierto son peor que el control de cierre de circuito.

Control en invernaderos hidropónicos.
27
El algoritmo propuesto tiene un buen rendimiento robusto y la estabilidad. Los
resultados de control pueden ser de gran valor y utilidad para la formulación de estrategias de
control ambiental, para perseguir el ahorro de energía, y para realizar gradualmente el
objetivo último de un control óptimo del medio ambiente.
9.10. Conclusiones
Ha sido ampliamente expuesto que el clima del invernadero es complejo. Compuesto
por dos subsistemas, el físico y el biológico, presenta una alta interacción no lineal entre
ambos, de hecho, se trata de sistemas no lineales, de múltiples entradas y múltiples salidas.
Debido al fuerte acoplamiento de las dos variables controladas principales: temperatura y
humedad, el problema del control no es trivial.
Los métodos convencionales de control (basados en encendido y apagado, o enfoques
PID) para el control del clima de un invernadero no son efectivos, a pesar de la facilidad de uso
e implementación. El motivo de la ineficacia de estos métodos son el bajo rendimiento
energético que poseen, y por lo tanto la pérdida económica que pueden producir. Tras el
estudio de los resultados anteriores se puede sacar las siguientes conclusiones.
Control en invernaderos hidropónicos.
28
El método para la linealización y de desacoplamiento para los sistemas con
perturbaciones externas medible como el que se tiene está basado en la técnica de
linealización feedback-feedforward permite relajar las no linealidades y acoplamiento del
invernadero, permitiendo el uso de métodos de control convencionales. Sin embargo al ser
una aproximación del sistema real existen ciertas discrepancias entre el modelo y la realidad.
Las limitaciones físicas de los actuadores son un problema añadido para el control.
Los algoritmos evolutivos para sintonización de control PID tienen en cuenta los
acoplamientos entre variables del sistema. Además establece un criterio de optimización para
el control. Muestran un buen rendimiento del control en su conjunto, a pesar de observarse
pequeñas sobreoscilaciones. Por otro lado se obtiene un tiempo de establecimiento rápido y
un buen rendimiento de la señal de cosigna.
La lógica difusa tiene la capacidad de aprendizaje para que, automáticamente, se
puedan modificar las reglas difusas. El modelado con reglas difusas de las leyes físicas del
invernadero permite manejar la no linealidad y acoplamiento del sistema.
Enjambre de partículas para la modelización del invernadero permite la aplicación de
control predictivo. El rendimiento del MPC depende en gran medida de la exactitud del
modelo del proceso. El controlador sugerido es capaz de minimizar los costos de energía para
conseguir actuaciones de temperatura dentro de una gama de objetivos.
Para el modelado e identificación de sistemas no lineales que actúan como
aproximaciones del modelo pueden ser aplicadas las redes neuronales Feed-forward de capas.
Se obtienen mejores resultados de la predicción a largo plazo.
Una estrategia hibrida neuro-difusa puede permitir el modelado del sistema del
invernadero. En contraste con un identificador de red neuronal, un identificador difuso tiene
algunas ventajas esenciales. Debido a su capacidad para manejar tanto los datos numéricos e
información lingüística, es factible aplicar sistema de lógica difusa para el modelado de clima
del invernadero y, a continuación proporcionar predicción para la elección de la decisión de
control óptimo.
Los algoritmos evolutivos multiobjetivo permite el modelado a pesar de que existan
objetivos contrapuesto en las variable de control. El algoritmo tiene un buen rendimiento
robusto y estable.
La complejidad del modelo y del control aumenta conforme se pretende modelar las
no linealidades y acoplamientos del invernadero. Sin embargo el aumento del rendimiento y,
por tanto, del ahorro energético y rendimiento productivo compensa el esfuerzo en el control
del sistema.
Con la linealización Feedback-Feedforward y desacoplamiento se obtiene un modo
simple de control donde es posible aplicar las técnicas clásicas de control, sin embargo es
mejorable puesto que no se ajusta perfectamente a la realidad.

Control en invernaderos hidropónicos.
29
Si se utilizan controladores PID no lineal Multi-Objetivo para Invernadero con
Algoritmos Evolutivos se mejoran los resultados, no obstante empezamos a introducir mayores
necesidades computacionales con los algoritmos evolutivos.
Una de las grandes lineas de investigación se basa en la utilización de redes
neurolanes. Un controlador no lineal adaptativo Neuro-PID de basado en la red RBF nos
proporciona el modelado que en los casos anteriores no se han tenido encuenta.
Sin embargo la complejidad de las redes neuronales, la convergencia y la necesidad de
aprendizaje suponen un tiempo inicial que se le debe dedicar para el ajuste del invernadero.
Con el uso de sistemas de lógica difusa adaptativo para el modelado del clima de un
invernadero se pueden introducir conocimiento de los operadores y falicitar la puesta en
funcionamiento del control. No obstante este modelo no demuestra todas las bondades que
debería, siendo aconsejables el uso de otros tipos de control.
Otro sistema de control avanzado es el modelo de control Predictivo del clima del
invernadero, basado en la optimización del enjambre de partículas. A diferencia de los casos
anteriores, es posible modelar las no linealidades y conseguir mejores rendimientos para el
consumo de energía.
Aplicación de métodos de inteligencia computacional para modelar el ambiente de un
Invernadero, es decir, uso de redes neuronales únicamente, los enfoques híbrido Neuro-Difuso
para modelar el clima de un invernadero y la optimización de modelo Fuzzy Clustering con
algoritmo SOFM pueden modelar las no linealidades del sistema, consiguiendo buenos
resultados para el control, aumentando el coste computacional en todos los casos.
9.11. Acciones futuras
Hasta ahora sólo se han considerado el control sobre las dos variables principales de
control: temperatura y humedad. Se propone como acciones futuras cambiar las variables a
controlar; del mismo modo se proponer aumentar el número de entradas y salidas en el
sistema de control, aumentando la complejidad de los modelos.
Por otro lado se han desacoplado el control del clima y el control del sustrato. Se
propone realizar un control conjunto en ambos subsistemas, considerando el acoplamiento
debido a la evaporación del agua y arrastre de nutrientes juntos con la humedad del propio
invernadero.