
APENDICE A - bdigital.unal.edu.co · • Las componentes de secuencia cero de las tensiones y...
40
APENDICE A Relaciones entre las definiciones de potencia A l INTRODUCCIÓN Las ecuaciones generales que relacionan la potencia instantánea y las componentes simétricas (también conocidas como transformadas de Foitescue [1]) fueron presentadas en [2]. Estas ecuaciones fundamentales tratan de elucidar algunas características importantes de la potencia instantánea que son ampliamente utilizadas para el análisis de la calidad de la potencia eléctrica y la evaluación de las características de la carga. A.2 Sistema,bajo consideración: Se considerara un sistema trifásico de cuatro hilos, con tensiones y corrientes genéricas. Las formas de onda de la tensión y la corriente pueden ser descompuestas en sus componentes de Fourier según: co (A.1) h (0 = HV2i fel sin(íy M t + S j ) ; k = (a,b,c) "=> (A.2) y escribiéndolas en notación fasorial, incluyendo los fasores armónicos y la fundamental, se tiene: (A. 3) h=±I^,=ÍL ; k = (a,b,c) »- 1 "=1 (A.4) A continuación se aplica la transformada de Fortescue [1] a cada grupo de fasores armónicos a - b - c j c tensiones y corrientes para determinar sus componentes de secuencia positiva, negativa y cero: A-l
Transcript of APENDICE A - bdigital.unal.edu.co · • Las componentes de secuencia cero de las tensiones y...

APENDICE A Relaciones entre las definiciones de potencia
A l INTRODUCCIÓN Las ecuaciones generales que relacionan la potencia instantánea y las
componentes simétricas (también conocidas como transformadas de Foitescue [1]) fueron presentadas en [2].
Estas ecuaciones fundamentales tratan de elucidar algunas características importantes de la potencia instantánea que son ampliamente utilizadas para el análisis de la calidad de la potencia eléctrica y la evaluación de las características de la carga.
A.2 Sistema,bajo consideración: Se considerara un sistema trifásico de cuatro hilos, con tensiones y corrientes
genéricas. Las formas de onda de la tensión y la corriente pueden ser descompuestas en sus componentes de Fourier según:
co
(A.1)
h (0 = HV2ifelsin(íyM t + S j ) ; k = (a,b,c) "=> (A.2)
y escribiéndolas en notación fasorial, incluyendo los fasores armónicos y la fundamental, se tiene:
(A. 3)
h = ± I ^ , = Í L ; k = (a,b,c) »-1 "=1 (A.4)
A continuación se aplica la transformada de Fortescue [1] a cada grupo de fasores armónicos a - b - c j c tensiones y corrientes para determinar sus componentes de secuencia positiva, negativa y cero:
A-l

K On
K, 1 1 1
1 a K
1 a2 a K„ (A.5)
Los subíndices "0", "+" y corresponden a la secuencia cero, positiva y negativa respectivamente y a es un operador complejo de desplazamiento en 120°:
a=lZ120-=eJ^ ( A 6 )
La transformación inversa de (A.5) está dada por:
Van ~1 1 1 v 0n i
v v bn = 1 a K „
V m 1 a a 2 K (A.7)
Las expresiones temporales equivalentes a los fasores obtenidos en (A.7) pueden ser expresadas para el n-ésimo componente armónico de la tensión según:
v a „ ( i ) = v2K0„ sin(ffl„/ + ) + s i n + <P+n) + V2K_„ sin(ú}¿ + tj>_n)
v6„ (i) = 4lVan sin(ffl„í + + sin(®„í + <¿+„ - y ) + V2Kn sin(<y„í + <¡>_n +
vc„ (t) = 4lVa„ ún{coJ + f»0n) + V2F+n sin(ffl„í + <¡>,n + y ) + sin(<Ba/ + <¡>_n -
A. 8)
y se pueden expresar de manera similar las componentes de la corriente.
Una de las ventajas de la descomposición en componentes simétricas es la posibilidad de analizar un sistema trifásico desbalanceado como la suma de tres sistemas balanceados.
Las tensiones armónicas en términos de las componentes simétricas están dadas en (A.8) y para la corriente se usan expresiones equivalentes, éstas se pueden reemplazar
en (A.1) y (A.2). Además, la transformación a ~ e s tá definida en (2.12). Ahora utilizando la transformación P definida por (2.12) se obtiene la siguiente expresión genérica de tensiones y corrientes en el plano a ~ & ~~ ® [2]:
A-2

CO OD
Va = £ Sv+„sin(a}„t + + X Sv_„sin(0)„t + <f>_„ ) M= 1 H=1
CO co
= Z - cos(cy„/ + + X V3K „ eos(ü)nt + ) n-1 «=1 CO v0 = Z + )
(A.9)
oo co
= Z + ) + Z Sl_nsin(a)nt + 8_n ) n=\ M-l
co co
V = Z " ^ h » C0S K * + J + Z «*(»,, / + S_„ ) M= 1 >1=1 00
'a (A. 10)
De las expresiones precedentes es posible concluir que las componentes de
secuencia positiva y negativa contribuyen al eJe~a y al eJe~ P de la tensión y corriente, mientras que el e J e ~ Q de la tensión y corriente comprende solamente la componente de secuencia cero.
Además, la potencia real P , la imaginaria^ y la potencia de secuencia cero^Q
fueron definidas en (2.29) y (2.30) respectivamente, pueden ser calculadas utilizando los términos de tensión y corriente en componentes simétricas dados por (A.9 )y (A. 10).
Para entender más fácilmente los conceptos convencionales de potencia y los
nuevos (teoría de potencia instantánea), las potencias P ' l y P° se presentan a
continuación descompuestas en sus valores promedio ( P ' l ' P a ) y sus partes
oscilatorias^' 9 ' P° ) :
P = Z w+ J + n c o s ( ^ - ^ J + V 3 V„I_n c o s ^ - )
(A. 11)
A-3
p =
z Z J+ « C 0 S ( K , - < » n ) t + < j > + m - s + n )
m=1 373 # H
+z M=1
+z >1=1
)1=1
I X ^ c o s C K + - J J 773=1 773
Z - C O S ( K +0)Ji+ <¡)+m + S_n ) m= 1 m
Z - 3K„ I+n cos((<ym +<»Jt+ <j>_m + ) m=l
<7 =
£ X - sin((¿ym - ) / + - ) m=i
z n-1
z M=1
z W=1
X sm((œm -Û)„)t+ <j>_m - S.n) »1=1
X IKJ-r, S i l l ( (® , + « ! . ) ' + + ) m=1
X - s i n ( K + )/+<i>-m + ) m=1 773 #71
OD
Po =Z3K0M/0„COS(^0M -^OJ
»=1
(A. 12)
(A. 13)
(A. 14)
(A. 15)
A-4

Po = \
I Z 3K0m/0„ eos((a>m -ü)„)t+ <j>0m 771=1 772 *73
n= 1 ¿ - 3FD r a / a„ cos((iUm + <y„ ) / + + J 0 m ) 771=1 777*71
(A. 16)
Estas expresiones genéricas de la potencia muestran la relación entre la potencia convencional y los conceptos de potencia instantánea. Con ellos se puede relacionar la potencia activa, reactiva y de distorsión. De esta forma, es posible ver que el término
bien conocido de potencia activa trifásica y fundamental ~ ^ C0S ^ es un término
de la potencia promedio P , mientras que la potencia reactiva trifásica ~ ^Vlsintp) está incluido en ^ . Todos los armónicos en tensión y corriente pueden contribuir a los valores de las potencias promedios P y ? si tienen la misma frecuencia y son del mismo grupo de componentes de secuencia (positivo o negativo), como se muestra en (A. 11) y (A. 13). Sin embargo, de acuerdo con (A. 12) y (A. 14), la presencia de más de un armónico de frecuencia, o de más de una componente de secuencia, también produce
potencias oscilantes P y %. Por otra parte, en la potencia de secuencia cero Po - Po + Po s u m a de (A. 15) y (A. 16), no se puede separar la parte continua de la oscilatoria. Además, la parte fundamental de la secuencia cero indica solamente la presencia del fasor de secuencia cero de la coniente y de la tensión.
A.3 INTERPRETACIÓN FÍSICA DE LA POTENCIA INSTANTÁNEA EN EL MARCO a-fi- o ;
En el desarrollo de instrumentación electrónica para evaluar la calidad de la potencia, el concepto de potencia instantánea en el marco a ~ P ~ ® puede sér mucho mejor aprovechado si se tiene una clara interpretación física de lo que se entiende por potencia instantánea. La figura A.1 resume estos conceptos.
A-5

a
b
c
0
A i a
- À V ¡0 .
p + p o
Figura A.l : Interpretación física de la potencia instantánea
a-ß-0 p n '
• Las componentes de secuencia cero de las tensiones y corrientes no contribuyen a la potencia instantánea py q.
• El flujo total de energía por unidad de tiempo, esto es, la potencia instantánea activa trifásica, siempre es igual a la suma de la potencia real y la potencia de secuencia cero. (p3p = p+ p0).
• La potencia imaginaria q representa una energía que puede ser constante o no y resulta ser un intercambio oscilatorio entre las fases. Esto hace comprender que q no contribuye a la transferencia de energía entre fuente y carga en ningún momento.
En el marco a- /3- 0 las definiciones de potencia no dependen de los valores RMS de la tensión y de la corriente resultando la definición de potencia en sistemas senoidales y balanceados como un caso particular. Por ello, ambos enfoques (convencional y teoría de potencia instantánea) no son contradictorios y resultan complementarios en la definición de potencia activa y reactiva.
A.4 REFERENCIAS BIBLIOGRÁFICAS [1] C. L. Fortescue "Method of Symmetrical Co-ordinates Applied to the Solution of Polyphase Networks", Transactions of the AIEE, Vol. 36, pp. 1027-114, June 1918.
[2] M. Aredes, "Active Power Line Conditioners" PhD Tesis, del Departamento de Ingeniería Eléctrica Universidad Tecnológica de Berlín, Berlín, 1996.
A-6

Apéndice A: Relaciones entre las definiciones de potencia
A - 7
r
APENDICE B Consideraciones teóricas de la transformada ondita
B.l INTRODUCCIÓN:
En el campo de procesamiento de señales se pretende extraer de la señal solamente la información de interés contenida en ella.
Una manera de lograrlo es descomponer la señal x en componentes elementales xi de alguna importancia de tal modo que x=Exi, donde xi son ondas más simples.
Además de esta descomposición, se desea que esta onda (xi) tenga una interpretación física. Finalmente, se debe responder a la pregunta ¿Cómo descomponer la señal de una manera práctica?. Para ello debe contarse con un algoritmo eficiente (sencillo y rápido) para lograrlo.
Una herramienta clásica para obtener esta representación es la teoría de Fourier. Pese a su utilidad, esta herramienta no brinda una representación en el plano tiempo-frecuencia.
Sección 1.01 Una manera intuitiva para pasar este obstáculo es localizar la señal en la representación de Fourier a través de una ventana, esto es construyendo un bloque w(t — zr)¿" ' " donde w(t) es una ventana cuyo objetivo es la localización temporal, así se obtiene una transformada de Fourier por ventana o transformada Gabor, también conocida como STFT , acrónimo del inglés - Shoit-time Fourier Transformer-,
Es importante destacar que no es posible obtener una localización fina y arbitraria debido al principio de incertidumbre.
Considérese una señal con energía unitaria f ( t ) con transformada de Fourier F(cü) (centrada alrededor del origen en tiempo y frecuencia) y que satisfaga las siguientes condiciones:
(B.l)
Se define el ancho de tiempo Ai de / ( / ) por:
K = \t2\f{ti(dt (B.2)
Se define el ancho de frecuencia Aco de F(co) por:
(B.3)
B-l

Teorema (B-l): Principio de íncertídumbre.
Si f ( t ) se hace cero a razón y cuando entonces: A t2 A a
2 ~¿7tÁ la / -J t /
igualdad se cumple para señales Gaussianas f(t)= J— e -ai"
Demostración [1]'.
Considérese la integral de tf (/) / ' ( / ) donde = f ( t ) y usando la desigualdad dt
de Cauchy-Schwaiz:
2
¡íf(t)f'(t)dt <\\m\2dt J | f X t t f d t (B.4) ÍF¡ J¡ ¡R
4
La primera integral del lado derecho es igual a A ( . Además la transformada de Fourier de / ' ( / ) es jojF(oj) y utilizando la identidad de Parseval, se puede ver que la
segunda integral de (B.4) es igual a í Y(0 \ ]A2a . Así, la integral del lado izquierdo de la (2 n ) j
ecuación. (B.4) está acotada por Q ^ ^ A 2 ^ • Utilizando integración por paites y
notando que / ( / ) / ' ( / ) = (1 / 2)(df2 (t))/(dt) se tiene:
\ t f ( t ) f ( t ) d t = = i / / 2 ( 0 | 1 \ f 2 {t)dt (B.5)
Suponiendo que el límite de t f 2 (/) es cero en infinito (función de energía finita) y dado que la función es de norma unitaria, lo anterior es igual a -1/2.
Reemplazando este resultado en (B.5) se obtiene—< — A 2 A2 . Por lo tanto, no se 4 2n
puede tener certeza en cuanto al valor exacto de la frecuencia y su exacta localización temporal [1-3],
B.2 TRANSFORMADA ONDITA CONTINUA: Considerando una familia de funciones obtenidas por cambios de escala y
traslaciones de una onda denominada "onda madre":
B-2
f \ 1
M <A(t-b)/a)
(B-6)
donde: a, b e9í(a^0).
Por normalización se tiene que:
IM>HK>)II (B.7).
Se supone que la función satisface la condición de admisibilidad si:
C = f1 , / l d(D< oo V H (B.8)
donde ) es la transformada de Fourier de vp(t). En la práctica la onda representada en el marco de la frecuencia cae tan rápido que la condición de
, . . , T(0) = 0 ó \ifÁt)dt = 0 admisibilidad se reduce a J
Normalizar la onditapara que su energía sea unitaria implica:
co < c»
ll^of = ¡\mt dt=— da>= 1
¿ n - (B.9)
Así, un resultado adicional será:
Wa. ,<oH<*í=i (B.10)
La transformada ondita continua de una función, f(t)eL2(9Ií) (donde L2 es el espacio de funciones de cuadrado integrable) se define como:
CWTf (a, b) = f (t)f(t)dt = {<//, (/), /(/)>
(B . l l )
y la pregunta que surge es ¿la función luego de transformada se puede reconstruir?.
A continuación se verá cómo esto es posible.
B-3

Proposición (B-l):
Dada la transformada ondita continua CWTf (a,b) de una función f(t) eL2 (9Í),
la función f(t) puede ser reconstruida por:
dadb
(B.12) c J J J - - ' 2
-oo-oo "
Dado el espacio de funciones y la medida considerada esta integración se interpreta según Lebesgue.
Demostración [1]:
Para simplificar la demostración se asumió que qj(t)eLl, f[t)e L l n L así como F(oo) e L1 (o f(t) continua). Primero se expresa CWTf(a,b) en términos de la transformada de Fourier de la ondita y de la señal.
Nótese que la transformada de Fourier de ipa,b(t) es:
De acuerdo con la igualdad de Parseval: qo i ca CWTf(a,b)= j yf,b(i)mdt = {Vsab(t), /(0> = — ¡Xt(.a>Wa>)da>
2n | VF* (aco)F(a))eiba dco
(B.14)
Obsérvese que la integral en (B.14) es proporcional a la transformada inversa de
Fourier de y e s una función de b.
Sea:
J(a)= |CWlf (a, b)if/ab(í)db
; (B. 15)
reemplazando (B.14) en (B.15):
B-4

J(a) = j ]^\aeo)F{co)elb°dcof7ab(t)db 2n 3 3
Aplicando el teorema de Fubini [5]:
\a\ V <® J{a) = ̂ \V\aa>)F{a>)\iffa¡b(t) e'b°>dbdco
Sustituyendo b '= ((t-b)/a) en la segunda integral se obtiene:
= §a\eSa' |¡//(b'y^ db' = ^e'^iaóJ) — CO
y reemplazando este resultado en (B.17) se obtiene:
I I ao
J(a) = i l f |T(a¿y)|2 F(<v)eíatdco
Evaluando (B. 14) respecto de la variable a :
= — f [ l ^ ^ l F(a>)e'atdcoda 3 a 2n 33 \a\
(B.16)
(B.17)
(B.18)
(B.19)
(B.20)
Dadas las restricciones impuestas sobre f(t) y vp(t) se puede cambiar el orden de integración aplicando el teorema de Fubini y haciendo el cambio de variable a ' = a a se obtiene:
J w 2tt J a s (B.21)
Esta integral es independiente de ce>, por lo tanto, se resume en:
B-5

FW*C¥da>=Cv-f{t) (B.22)
Cabe decir que la transformada ondita tiene las propiedades de linealidad desplazamiento y cambio de escala. En lo que sigue se hará énfasis en la propiedad de conservación de la energía.
Proposición (B-2):
Dada f(t)e L2(5K) y su transformada ondita CWTf(a,b), se verifica la siguiente igualdad:
CU . OJ OJ
í | / ( ' ) f¿* = — \\\cWTf{a,bP i dadb
y / - C Q - 0 0 a
(B.23)
Demostración [1]:
A partir de la expresión,
J J|CWTf(a,b)\ 2 dadb
a
J— » í í?3 jx¥\aa>)F(a>)efi"'da}
2 \ db da
a2
haciendo el cambio de función:
P(a}) = xi,'(aco)F(ü}) >
la igualdad anterior se puede plantear como:
oo co _7 77 od f co ^ ra
]]\cWTf{a,b)l^= ] J — \p{ü))eibadco — r r w m ^ m ÉVI ^ ^ rr»
2 \
db da U
2 A = J J | p H d b
— COI —CO
da a l
(B.24)
(B.25)
(B.26)
Aplicando la identidad de Parseval:
2 \ CO ao 7 77 CO CD da
M
B-6

j ¿ JKM W Au'iîw W-*-» - J ' 1 - I l (B.27)
NOTA: El cambio de integración se hace según Fubini y la segunda integral del C
lado derecho es v .
Aplicando la igualdad de Parseval nuevamente:
± J|CWT,(aa,f * * - j ^ * , : J|/(,)f a, % -» H W L n -» (B.28)
Esta es la condición de admisibilidad que quería demostrarse, o sea la existencia de funciones transformables y sin cambio de energía.
B.3 TRANSFORMADA ONDITA DISCRETA: 4
Si elegimos a = y b-nbac¿£ donde y ba son constantes fijas con c¡q > 1, b0 > 0 y m, n enteros, a partir de la ondita madre se obtiene:
(* - i _» \ -mi 2
rr, \ j
(B.29) V
A esta ondita le corresponde su transformada así:
oo
DWTvf(m,n)= ¡mvi,„(i)dt (B.30) —co
Mediante una elección adecuada de ^ y ¿0 la f a m i l i a ^ m (/)} de onditas
constituye una base ortonormal de L-¿(R)-
BA DEFINICIÓN AXIOMÁTICA DE MULTIRRESOLUCIÓN: Una idea intuitiva para la división del espectro por series de onditas discretas,
utilizando filtros sería la que se representa en la figura. B. 1.
B-7

v2
Vi
Vü
V J Wj W2 W a
¿r 7Z T 2
Figura B.l : El espectro es simétrico en la cercanías de cero. La división en Vi
espacios ( 1 ' " ' ) , resulta en Wi espacios. (El ancho de V J y WJ es 2 ^ y tienen norma unitaria).
Definición: Una estructura de multirresolución es una sucesión de subespacios }en L2(R) tales que:
Vy > 0
2) y , Kj es denso enL2(R)
3) r.,K,={<>}
4 ) K = K J + 1 0 ^ + 1 V j > 0
5) / ( / ) eK J + 1 0 / ( 2 í ) e K .
(B.31)
El símbolo © se debe interpretar como la suma ortogonal de dos subespacios.
De la figura. B.l se observa que WJ+1 es el complemento ortogonal de VJ+J en V}. W ¡ es el subespacio de banda limitada al intervalo [ 2 "
;
, 2 "J + 1
j y una base oitonormal de este subespacio la constituyen las funciones {<¿/„ m (/)}.
Teorema (B-2): cualquier sucesión de espacios que satisfaga las 5 ecuaciones de la definición (B .31), muestra que existe una base ortononnal paraL2(R) de forma que:
V„.„(0 = 2 /2 V<2-/-i.), m,neZ (B.32)
B - 8

siendo: jiym n neZ una base oitonormal para Wm donde Wm es el complemento
ortogonal de Vm en Vm.¡. Puede verse la demostración en [1],
En virtud del teorema anterior la simple elección de c¡o=2 y b0=l genera una base ortonormal de funciones.
Observación: Del análisis de multirresolución se tienen pues, dos espacios y para cada uno de ellos un conjunto de funciones que lo genera.
Como Vx c Va y Wx c V0, las funciones de estos subespacios son límites (en L¡) de combinaciones lineales de las funciones de base de Fn , o sea, existe una sucesión {v(&)} tal que:
jí(/) = ̂ v(k)0(2t-k) (relación de dos escalas) (B.33) *
(B.34) k
reorganizando el paréntesis interno:
(B.35) k
por el teorema del muestreo resulta:
v(k) = 2/2 <j>(k ! 2) = sin(7rA: / 4) / nk (B.36)
y dado que </>(t) cumple la relación de dos escalas, se llama función escala.
De la misma manera se encuentra una sucesión {w(£)}tal que:
(B.37) k
resultando:
(B.38)
De la ortogonalidad resultan las siguientes relaciones:
(m,M-m)) = S{m),
{y{t\v{t-m)) = 8(m) (B.39)
(¿(/X ¥ < / - « ) ) = 0.
B-9

Donde S(m) es una función generalizada o un delta de Dirac [1], El producto interno entre las funciones se simboliza con (,}.
Los GSp¿lCÍOS V SOTl generados por funciones escala ( f ) y de manera similar los espacios W son generados por las funciones onditas ip{k).
En otras palabras, funciones ondita y funciones escala son usadas como bloques para construir o descomponerla señal en diferentes niveles de resolución. Las funciones ondita generarán la versión de los detalles de la señal compuesta y la función escala generará la versión aproximada de la señal objeto de la descomposición. Esto, matemáticamente puede ser representado por la siguiente ecuación:
/ ( / ) = - *)+zíx (*)2"2 -k) (B-44) k k j=0
donde, c es el coeficiente de la escala y d- es el coeficiente de la ondita en la escala j,
<¡>{t) y if/ (t) son las funciones escala y ondita respectivamente y k es el coeficiente de traslación.
B.5 CRITERIO PARA LA ELECCIÓN DE LA ONDITA: No existe un consenso en la elección de la ondita para el análisis de sistemas de
potencia. Definir si una función acotada en el tiempo es una ondita, que puede generar una base oitonormal y cumple con las condiciones de la definición de multirresolución, no ha sido el objeto del presente trabajo.
El criterio seguido fue determinar cuál de las onditas tradicionalmente reconocidas por la literatura era la más usada en el análisis de sistemas de potencia. De éstas cuál era la que presentaba menor error por dispersión, adoptando un número pequeño de ciclos para la evaluación de la potencia activa (cinco). Se midió la potencia activa en el sistema representado por la figura B.2 (proceso simulado con EMTP). De este sistema se extraj eron las conclusiones que se listan en la Tabla B-1.
Se escogió un sistema tipo flyback con el objeto de hacer una evaluación del grado de deformación que inyecta en la red, la relación de potencia medida y la detección de la frecuencia de conmutación. Es un circuito de prueba para evaluar el comportamiento de la ondita madre. Este circuito tiene la particularidad de presentar dos frecuencias, la de la red y la de conmutación del interruptor.
B-10

Conversor Flyback
IJITUIH
l D G k
F r e c u e n c i a d e C o n m u t a c i ó n
Figura B.2: Sistema flyback para medir la potencia con la transformada ondita.
Nivel dbl db2 db3 db4 db5 db6 db7
1 100 100 100 100 100 100 100
2 99 99 100 100 100 100 100
3 99 99 100 100 100 100 100
4 99 99 100 100 100 100 100
5 100 99 99 100 100 100 100
6 99 100 100 99 99 100 100
La Tabla B-2 detalla la mañera como se hace la distribución de frecuencias en el algoritmo de multirresolución. Para el caso particular de la tabla se consideró una muestra de 64 ciclos por 60Hz de la fundamental. Si el objetivo es visualizar subarmónicos y flicker, el procedimiento que se recomienda es el aumento del número de ciclos a 20, lo que implica un total de 1280 puntos y así se podrá descomponer en 8 niveles
B- l l

Tabla B-2: Número de coeficientes y banda de frecuencia para un registro con 64 muestras de una frecuencia fundamental de 60 Hz.
Nivel # de Banda de Banda de
Coeficientes Frecuencia armónicos impares
6 32 1920-3840 (Hz) 33-63 (los
impares)
5 16 960-1920 17-31
4 8 480-960 9,11,13,15
3 8 240-480 5,7
2 4 120-240 3
2* 4 DC-120 1
La Tabla B-2 varía según la propiedad de la transformada ondita en octavas por frecuencia.
B.6 CONCLUSIONES El algoritmo de I. Daubechies [1] genera una ondita equivalente a un filtro
realizable (del tipo FIR). Para el presente trabajo se escogieron seis niveles de descomposición para la medida de la potencia en línea y de los primeros siete componentes del polinomio de potencias.
Considerando los resultados de la Tabla B-l , se eligió la ondita Daubechies 4 por ser efectiva y rápida en cuanto al número de coeficientes.
B- l 2
B. 7REFERENCIAS BIBLIOGRÁFICAS [1] I. Daubechies "Ten Lectures on Wavelets" Society for Industrial and Applied Mathematics, 1992.
[2] M. Vetterli, J. Kovacevic, "Wavelets and Subband coding" Prentice Hall 1995.
[3] G. Strang and T. Nguyen, "Wavelets and Filter Banks" Wellesley -Cambridge Press, 1996.
[4] C. E. D'Altellis, M. T. Anaya, M. I. Cavallaro, F , F. Villaverde, "Introducción a las Onditas - Una presentación para curso de grado de Ingeniería con Matlab", Editorial Nueva Librería 1995.
[5] W.Rudin "Functional Analysis", Mcgraw- Hill, 2nd. Edition, 1973
B-13
APENDICE C Metodología desarrollada para la simulación con ATP
C.1 INTRODUCCIÓN. TEORÍA DEL EMTP-ATP C.l . l Introducción histórica:
El programa para el cálculo de transitorios electromagnéticos "Electromagnetic Transient Program -EMTP" ha sido desarrollado para el análisis de fenómenos transitorios en las redes eléctricas de potencia pero en razón de los métodos utilizados, también puede aplicarse para el estudio de circuitos electrónicos y de la calidad de la potencia.
Este programa fue concebido por "Bonneville Power Administration (BPA)" al final de los años sesenta gracias a los trabajos de H. Dommel y W.S. Meyer [1-2], con el fin de reemplazar a los analizadores de transitorios clásicos (TNA - Transients Network Analyzer) por una herramienta más flexible. •
Durante su evolución en BPA, esta herramienta ha recibido contribuciones de otros organismos de investigación públicos y privados. Debido a su constante desarrollo, el EMTP se considera hoy día un elemento de referencia en el anáfisis de los regímenes transitorios.
Desde 1974 el EMTP puede utilizarse en prácticamente todos los tipos de computadores gracias a un módulo de traducción universal y por consiguiente un sólo lenguaje de programación (Fortran) facilita su empleo.
En 1985, después de una tentativa de comercialización del programa EMTP, BPA no volvió a recibir la ayuda de aquellos que habían trabajado por su mantenimiento y su difusión. En ese momento fue elaborada una nueva versión bajo el nombre de ATP - Alternative Transients Program. Esta versión (ATP) es gratuita pero no es de dominio público (como la original de BPA) para quedar protegida de la eventual explotación comercial.
Contemporáneamente, diversos grupos de usuarios se fueron formando a nivel mundial a partir del Ame/Can EMTP Group, entidad autorizada para la utilización y el libre desarrollo del material ATP (organismo que trabaja bajo la forma de un club de usuarios).
Para hispano parlantes existe el grupo de usuarios en lengua española administrado por el Comité Argentino de Usuarios del EMTP - CAUE (www, iitree.ing.unlp.edu.ar).
C-ló
C.2 METODOLOGÍA DE SIMULACIÓN Uno de los objetivos de la simulación con EMTP es estimar el efecto de
fenómenos transitorios sobre la estabilidad del sistema con el fin de decidir las leyes de mando que se deben implantar para mejorar su funcionamiento.
Con el propósito de simular el comportamiento de un sistema eléctrico de potencia operando en regímenes transitorios, el EMTP está basado sobre dos módulos de programación, NETWORK y TACS [1] que incluyen un gran número de modelos de los elementos constituyentes típicos de los sistemas eléctricos (NETWORKS) y de elementos de control y maniobra (TACS - Transient Analysis of Control Systems).
En NETWORK, se dispone de:
• Resistencias.
• Inductancias.
• Capacitores.
• Modelos polifásicos de componentes R-L-C en II o en T.
• Modelos polifásicos de lineas de transmisión con parámetros distribuidos.
• Cables subterráneos.
• Transformadores.
• Resistencias no lineales.
• Resistencias variantes con el tiempo.
• Inductancias no lineales.
• Descargadores.
• Protectores de sobre tensiones.
• Interruptores, diodos y tiristores.
• Captadores de tensión, de corriente, de par y de velocidad.
• Fuentes de corriente y de tensión.
• Máquinas eléctricas giratorias.
• Analizadores de armónicos (transformada de Fourier).
• Analizadores de carga (flujo de caiga).
C-2
• Analizadores de espectro (respuesta en frecuencia).
• Simplificación de redes (equivalentes de Thévenin).
En TACS es posible modelar:
• Los sistemas de control dinámico.
• Los dispositivos o fenómenos que no están modelados en NETWORK.
Dado que en un estudio de regímenes transitorios, una red eléctrica puede ser un sistema muy complejo a causa del modelado de las interacciones electro-magneto-mecánicas, la descripción numérica de los elementos representados por las ecuaciones diferenciales debe ser estable. Por esta razón, el método de integración trapezoidal (Dahlquist, 1963 [1,5]) ha sido escogido por su simplicidad y por su eficacia en los sistemas llamados "rígidos" (Willoughby, 1974 [1,5]).
Con este método de integración, la sMulación de una red eléctrica con n nodos, que tenga resistencias, capacidades, inductancias, máquinas eléctricas estáticas y rotativas y otros dispositivos, se reduce a la solución de un conjunto de ecuaciones algebraicas reales simultáneas expresadas bajo la forma de conductancia nodal (formulación nodal), que pueden ser resueltas en sucesivos pasos de tiempo At (DOMMEL, 1969, 1986 [L5,6]).
La descripción del proceso es la siguiente:
Suponiendo conocidas las corrientes y tensiones de una red eléctrica con n nodos en los instantes 0, At, 2At... hasta t-At, el sistema de ecuaciones en el instante t es:
|g| |v(/)| = |/(/)| - ( c . i )
con:
\G\: Matriz simétrica (n x n) de conductancia nodal
|v(/)j: Vector (n x 1) de tensiones de nodo
|/(/)|: Vector (n x 1) de fuentes de corriente
\hisí\: Vector (nx 1) de términos históricos de lared conocidos
Normalmente, hay nodos donde se conoce la tensión, sea porque hay fuentes conectadas o porque están puestos a tierra. Entonces, (C.l) puede ser nuevamente planteada a partir de los valores conocidos, así:
[ G D J k ( / ) ] = (C.2)
C-3

Con:
\yD (/)] : Vector de tensiones desconocidas
[vc(/)] : Vector de tensiones conocidas
Una expresión más simple de (C.2) es:
[ G m ] [ v d ( / ) ] = K ( / ) ] (C.3)
Con:
Conjunto de términos históricos (tensiones y corrientes conocidas).
De esta forma, el sistema lineal (C.3) queda resuelto por el conocimiento de vector [vD(/)] de las tensiones desconocidas, a partir de la factorización triangular de la matriz [GDD ].
C.3 ECUACIONES DISCRETAS DE LOS COMPONENTES ELEMENTALES CON AYUDA DEL MÉTODO DE INTEGRACIÓN TRAPEZOIDAL
Como se ha dicho, el ATP utiliza la regla de integración trapezoidal [1-3] para hacer el cálculo de la evolución temporal en las redes eléctricas y a pesar de que los métodos de integración de mayor orden se encuentran muy difundidos, esta regla ha mostrado ser muy estable numéricamente.
Sea:
dx f = T ¡ (C.4)
Mediante la regla de integración trapezoidal se resolverá esta función así:
/ ( O + f(* - a o m - x(t - a o AL AI — = — = > * ( ' ) = y • / ( O ¿o + X O - AO (C.5) ,
C.3.1 Elementos lineales no emparejados:
C.3.1.1 Resistencia:
La formulación continua del elemento resistivo es:
veo v = R * / = > I(F) = — (C.6) R
Para la representación nodal discreta, la ecuación (C.6) en el instante t toma la forma:
C-4

V ( 0 V ( f - Af) 1 ¡ ( f ) = — + — — — - / ( f - Af) = — * V( f ) + hiSkt - Af) (C.7)
C.3.1.2 Inductancia
La formulación continua del elemento inductivo es:
di v- L- —
di (C.8)
De la representación discreta de esta ecuación, aplicando el método trapezoidal, se obtiene:
Ai Ai At , I'm = — * V(f) + — * v(f - ¿o + i(t - af) = — * wco + nistft - Af)
2 L 2 L 2 L (C.9)
hist.
<E>
Figura C . l: Representación discreta de la inductancia
2 L Es decir, un inductor es representado con un una resistencia de valor en
paralelo con una fuente de corriente de valor hista - ao (figura C.l).
C.3.1.3 Capacitor
La formulación continua del elemento capacitivo es:
dv i-C- —
dt (C.10)
De la representación discreta de esta ecuación con ayuda del método trapezoidal, se obtiene:
2 c 2 C 2C /(O = * veo — * V(f - Af) + i(t -aí) — * veo + histv - ao
At At At (C. l l )
2C
Es decir, un capacitor es representado con una conductancia de valor en
paralelo con una fuente de corriente de valor hist(t - At).
C-5

En forma similar al caso de la inductancia para el capacitor se obtiene un circuito equivalente como el mostrado en figura C. 1
C.3.1.4 Componentes entre nodos
Las ecuaciones precedentes consideran los componentes conectados de nodo a tierra. En el caso más general (componentes entre dos nodos) las ecuaciones se plantean en su formulación nodal:
1)m 'nú • L «
?—CZ1 k
Figura C.2: Componente entre nodos
(C.12)
Discre tizando:
V),(Q+VfcCf-AO vm (0+y„(> - ¿0 =L ¿KO-ltoKf - ¿o
2 2 At { ' '
Despejando ihn'.
At At ' t a . « = — (V k ( f ) - V m ( 0 ) - — ( V t ( f - A 0 - Vm ( f - A 0 ) + Í ^ C f - A O (C.14)
La misma ecuación se plantea para el nodo m respecto de la corriente ¿^co .
C.3.2 Elementos no lineales Para conservar el mismo algoritmo de resolución de ecuaciones en EMTP, se han
realizado adaptaciones sobre el modelo lineal en lugar de utilizar métodos no lineales que serían menos eficaces para simular la totalidad de la red.
Principalmente hay dos técnicas utilizadas para el tratamiento de elementos no lineales: el método de compensación y el método de descomposición en subsistemas lineales por fragmentos (tramos) (Dommel, 1971 [1,5,6]).
C.3.2.1 Linealización por tramos La descomposición de una característica no lineal en una función lineal por
fragmentos como se puede observar en las figuras. C.3 y C.4, puede ser tratada de dos maneras: Por medio de interruptores o por reemplazo directo de los valores de la matriz
C-6
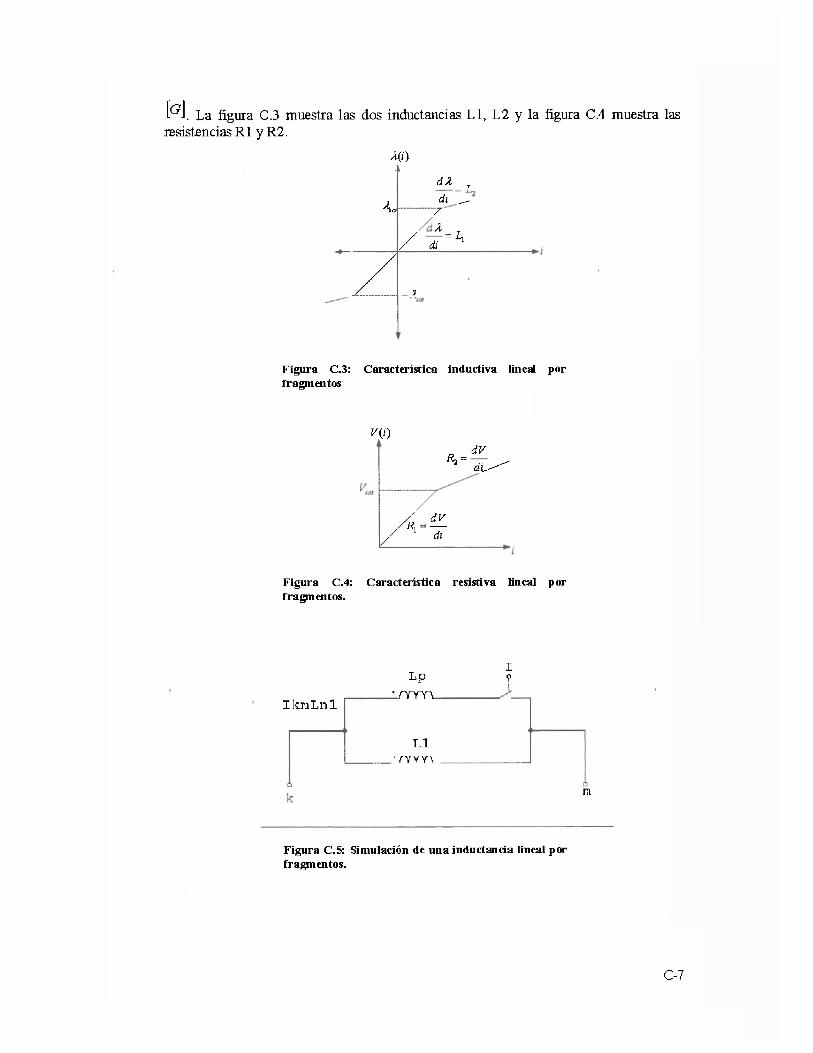
[G] . La figura C.3 muestra las dos inductancias Ll , L2 y la figura C.4 muestra las resistencias R1 y R2.
m i
dX T
/ l di^-
' i d 7
/ Á ~ L i / di
' /
3
Figura C.3: Característica inductiva lineal por fragmentos
no «2 =
dV «2 = di^"
/ dV /Ri =
/ d i
Figura C.4: Característica resistiva lineal por fragmentos.
I k m L n l
Lp
_L/YYT\_
I 9
L l L / Y Y T \ _
m
Figura C.5: Simulación de una inductancia lineal por fragmentos.
C-7

I k m R n l
Figura C.6: Simulación de una resistencia no lineal por fragmentos.
Utilizando interruptores, el elemento no lineal es simulado con elementos lineales en paralelo (como muestran las figuras C.5 y C.6) pero en el caso de una inductancia (observe la figura C.5) el flujo es calculado por integración de la tensión entre los terminales k y m independientemente de la posición del interruptor I. El interruptor I se cierra cuando \Á\> \\a t \ (jv|> [v3flt|) y se abre cuando\Á\< UMt| (¡v|< |vMt|).
Otro método comúnmente utilizado en la linealización de sistemas no lineales es adoptar un criterio muy empleado para analizar estados de saturación en máquinas eléctricas, haciendo la representación mediante rectas tangentes.
Figura C.7: Linealización usando rectas tangentes
En la figura C.7 se muestra la curva de saturación de un inductor no lineal. En este caso, es posible representar un punto sobre la curva a través de una recta tangente cuya ecuación será:
Mt). L(t)i(í) - L(t)i(t) + Ak(t) (C.15)
donde el subíndice i está indicando que se trata de una inductancia incremental y el subíndice j inductancia saturada.
Derivando A respecto de la corriente i(t) se obtienen las siguientes ecuaciones:
C-8

dA dL¡ dA k L" * <C16'
De la figura C.7 se tiene que la derivada es la recta tangente y esto implica:
dA dh dAk i ; = L * ' i t - h r <C17>
Multiplicando por se obtiene:
dLi di dAk di dh dAk di dt di di dt dt v y
Tomando la derivada respecto del tiempo del fluj o:
dA d{Li+Ak} di
4
Utilizando el concepto de inductancia incremental en componentes no lineales, se obtienen ecuaciones idénticas a las de los componentes lineales. El problema reside en que L se modifica en cada instante, debiéndose actualizar la matriz de admitancia.
Discretizando estas ecuaciones se obtiene:
d i V ( t ) + V ( t - AI-) I ( Q - / C > - A Q v=L¡—r = Li(,t - aí) (C.2Ü)
di 2 At v >
pudiéndose despejar el valor de la corriente i„ en el instante t.
C.3.2.2 Método de compensación Los métodos llamados de compensación simulan los elementos no lineales como
fuentes de corrientes que son impuestas en la red lineal (C.3) sin tener en cuenta las no linealidades.
En el caso de un solo elemento no lineal entre los nodos k y m, éste debe ser excluido de la solución de la red lineal y debe simularse como una fuente de corriente i que sale del nodo k y entra al nodo m (si el elemento es tratado como una caiga).
La corriente ikm resulta de la solución simultánea de la ecuación del circuito equivalente de Thévenin entre los nodos A y rn, utilizando la ecuación no lineal del elemento en cuestión. Este procedimiento también es conocido como teorema de compensación.
Es decir, se aisla el componente no lineal del resto de la red y el sistema se resuelve sumando la solución de la red lineal activa (desconectada del componente no lineal) con la solución de la red lineal pasiva, sometida a la acción de una fuente de corriente que reemplaza al componente no lineal.
C-9

De esta manera:
V h n = V , km o Fjhw i km (C.21)
Donde el subíndice o indica tensión de circuito abierto. El elemento no lineal es planteado según su función de dependencia:
Vkm f i 'km ) (C.22)
Resolviendo (C.21) y (C.22) se obtiene /km que es la incógnita a determinar.
De la misma forma, se procede para el caso de múltiples fuentes de perturbación y/o elementos no lineales conectados a diferentes nodos de la red. Las ecuaciones (C.21) y (C.22) anteriores serán expresadas como:
K J = [ / ( i * J ]
Para obtener la matriz [ R ] se aplican fuentes de corrientes de valor unitario en los nodos con componentes no lineales. Para hallar los elementos fuera de la diagonal se restan las tensiones entre los nodos involucrados.
Comúnmente se utiliza el método de Newton-Raphson para resolver el sistema de ecuaciones, aunque también podría utilizarse otra metodología. También se pueden utilizar métodos iterativos a pesar de ser la solución general de la red secuencial (caso EMTP-96).
C.3,4 Ecuaciones de una línea de transmisión con parámetros distribuidos y sin pérdidas
En el caso de la simulación de las líneas de transmisión el ATP tiene múltiples modelos. A modo de introducción al método de Beigeron, se presenta el caso de una línea monofásica ideal sin pérdidas (modelo K.C.Lee) [1,5,6].
L ' i + di
c v + dv
Figura C.8: Línea de transmisión.
Son conocidas, para este caso, las ecuaciones de onda:
C-10
d v , di dx dt
di d a v dx ~ dt
(C.23)
con:
L',C': inductancia y capacidad por unidad de longitud.
x : La posición de la línea en relación al nodo emisor.
D' Alembert plantea la siguiente solución:
i = F (x - ct) - f (x + ct) (C.24) «
V = Z * F (x - ct) + Z * f(x + ct) (C.25)
Donde F y f son funciones independientes, x es la coordenada espacial a lo largo de la linea ' es el tiempo y Z es la impedancia de onda definida como: Z = yjL ' /c ' siendo L' y C' la inductancia y la capacidad por unidad de longitud respectivamente. Combinando las ecuaciones de tensión y corriente:
v + Zi = 2 Z F (x - c§ (C.26)
Si (x - ct) es constante, v + Z i también adquiere un valor constante.
Una onda que se propaga de un extremo a otro de la línea tarda un tiempo z en arribar al final de la misma (tiempo de viaje).
Considerando la longitud de toda la línea para una velocidad de propagación c y una longitud total 1:
=>x-ct = l - c t = - /) = - c ( í - t ) (C.27)
O sea que en el extremo receptor la combinación de tensión y corriente adquiere un valor igual a una función dependiente de z segundos antes, pero éste es el valor que tenía la función V + Zi en el instante (t - r ) en el nodo emisor.
Es decir:
irm=^v rm+hist r(t-^ (C.28)
B - l l

con:
1 hÍSt r ( t - 0 = — V ( f - r) - O
nodos:
(C.29)
De la misma forma, dado que la línea constituye un vínculo rígido entre ambos
y o = veco + Aij/c(f-o (C.30)
con:
hisí^t-cr, - — vr(t-o - /r(f-Q
De estas expresiones se concluye que:
(C.31)
• Se debe mantener un registro de los valores en — v - i de los instantes
previos al instante considerado.
• Si x no es múltiplo de At, debe interpolarse. El ATP tiene incluida la interpolación lineal.
• Cuando se simulan varias líneas, no puede utilizarse un Ai menor que el menor de los C del conjunto de líneas.
• No existe error de discretización porque no se está aplicando ninguna regla de integración.
• Los nodos emisor y receptor están desacoplados.
Finalmente, el modelo que se obtiene para la línea es:
Figura C.9: Linea de transmisión en el ATP
C-12

C.3.5 Simulación de interruptores:
En una red eléctrica, la manipulación de interruptores es una fuente importante de fenómenos transitorios. En EMTP, éstos son representados como elementos perfectos con apertura y cierre instantáneos, siendo respectivamente R=°o y R=0 los valores de resistencia equivalente en estos dos estados (figura C.10).
Cuando un interruptor entre los nodos k y m se abre, los dos nodos tendrán una representación en él sistema de ecuaciones nodales. Pero si éste se encuentra, cerrado, los nodos k y m se convierten en uno solo por lo que el método de simulación en EMTP es de topología variable.
La apertura y cierre de los interruptores puede ser controlada temporalmente, condicionando la tensión en los terminales y la corriente pasante, o por acción de las señales de comando (definidas en TACS).
El efecto de los interruptores en EMTP es simulado por compensación (apartado C.3.2.2). Para representar M interruptores, M circuitos equivalentes de Thévenin son calculados (C.21) y las ecuaciones de los interruptores necesarias para la superposición (C.22) son:
L * ] = ° s i l o s interruptores están abiertos y [jttm!. í ' f c ^ J s i ^
interruptores cerrados.
Con J que se obtiene eliminando las filas y las columnas de \ (C.21)
correspondiente a los nodos de los interruptores abiertos.
Figura C.10: Simulación de un interruptor.
En principio, este método resulta el mismo utilizado para los elementos no lineales, pero en el caso de los interruptores los detalles de programación son diferentes.
C.3.6Simulación de fuentes de tensión y de corriente
Las fuentes de corriente y/o tensión que se utilizan en el análisis de la red eléctrica también son modeladas por EMTP. Podemos utilizar fuentes continuas (en escalón o rampas), fuentes alternas (sinusoidales) o fuentes de impulsos. Estas últimas
C-13

son previstas para simular las pruebas de impulso en transformadores y otros aparatos eléctricos. Hay también fuentes de tensión controladas por corriente para la simulación simplificada de estaciones de conversión en corriente continua.
Además de las fuentes residentes ya citadas, existe también la posibilidad de definir otras (analíticas o experimentales) con la ayuda de instrucciones FORTRAN escritas en el módulo TACS [2,5,6].
C. 4 ANÁLISIS DE ERROR
Las principales fuentes de ejror en las soluciones del EMTP provienen del método trapezoidal de integración asociado a la topología particular de la red.
Para una inductancia conectada a una fuente de tensión, el método trapezoidal se comporta como un filtro de alta frecuencia para las corrientes.
En el caso dual de la alimentación en corriente de un condensador, el método es el equivalente a un filtro pasa-bajo para las tensiones. Un caso simple para el cual este problema se presenta, se obtiene en la interrupción de la corriente en una inductancia. Resultan oscilaciones de tensión con la frecuencia inversa del paso de cálculo con una amplitud igual al valor precedido de la interrupción.
Un problema de oscilaciones de corriente, se presenta también en una capacidad en el curso de una variación brusca de la tensión en sus bornes.
Las causas de estas oscilaciones corresponden a una mala modelación del dispositivo de interrupción por parte del usuario. En EMTP, el modelo de interruptor es ideal y es el usuario quien debe completarlo para que su funcionamiento sea el más próximo a la realidad.
El método trapezoidal puede dar una interpretación física de la representación discreta de las ecuaciones de la bobina y del condensador. Esta explicación viene de la solución de un elemento de línea con parámetros distribuidos sin pérdidas (Maier, 1968 [1]), que ha sido puesto en corto circuito para la inductancia (figura C. 11) o en circuito abierto para la capacidad (figura C. 12).
Para la inductancia, el valor del parámetro distribuido L ' multiplicado por la longitud de la línea 1 es igual al valor del parámetro concentrado L:
L'l = L
Con L ' l conocido, el parámetro siguiente a calcular es el tiempo de propagación T •
T=4(L'ÍÍC'¡)
Para reducir T (el tiempo de propagación) en esta expresión es necesario disminuir el valor C'l de la capacidad parásita. El tiempo de propagación más débil en una simulación de paso de cálculo es:
C-14

T= 2
Esto quiere decir que las variaciones en los terminales y en el instante (t-At) no serán vistas (t-At/2) en los terminales r para ser devueltas en el instante t.
m t m r r r u
V , = 0
Figura C.11: Interpretación física de la representación discreta de la ecuación de la inductancia
Entonces, la representación mejor adaptada de esta linea es:
„ 2 L At Z = — con r = —
Ai 2
Una línea con estas características guarda una relación entre tensiones y corrientes (apartado C.3.4) dada por:
( At\ Ve (i - Ai) + Zie (í - Ai) = Zir I í partiendo de los terminales e a los V 2 y
terminales r.
los terminales e. •
de regreso de los terminales r hacia
Estas dos ecuaciones se pueden reducir auna sola:
ie(t)=±Ve(t)+\±Ve(t-At)+at-Al) (C.32)
lo que da una solución idéntica a aquella que fue hallada para el modelo numérico de la inductancia (apartado 3.1.2).
C-15

Figura C.12: Interpretación física de la representación discreta de la ecuación de la capacidad
La ecuación (C.32) ilustra también el problema de las oscilaciones numéricas que aparecen cuando la corriente en la inductancia es interrumpida. Las oscilaciones de tensión, pueden comprenderse como reflexiones no amortiguadas de la onda de propagación entre los bornes k y m. En esta ecuación, la pérdida de precisión del método debido al paso Ai es tomada en cuenta como una capacidad parásita más o menos importante, según el valor del paso de simulación.
Por su parte, para la capacidad, C'l resulta una inductancia parásita que es mínima en una simulación con paso de cálculo At para:
„ 2 L Ai Z = — con r = —
At 2
Un análisis similar a aquel que fuera hecho para la inductancia realizado para una capacidad, da la siguiente respuesta:
^K{i-Ai)+it(i-Ai) (C.33)
En la metodología del EMTP uno de los objetivos principales es lograr, siempre la estabilidad de simulación antes que obtener una alta precisión. Al respecto, un teorema fundamental sobre la estabilidad de los métodos lineales, debido a Dhalquist [1,5] establece:
Un método de pasos (integración numérica) es estable si cuando es aplicado a la dx
ecuación di
Entonces:
l [ x j R e ( / l ) < 0 resulta estable para todo At > 0 .
Ningún método lineal multipaso explícito es estable.
Ningún método lineal implícito de orden superior a dos es estable.
C-ló
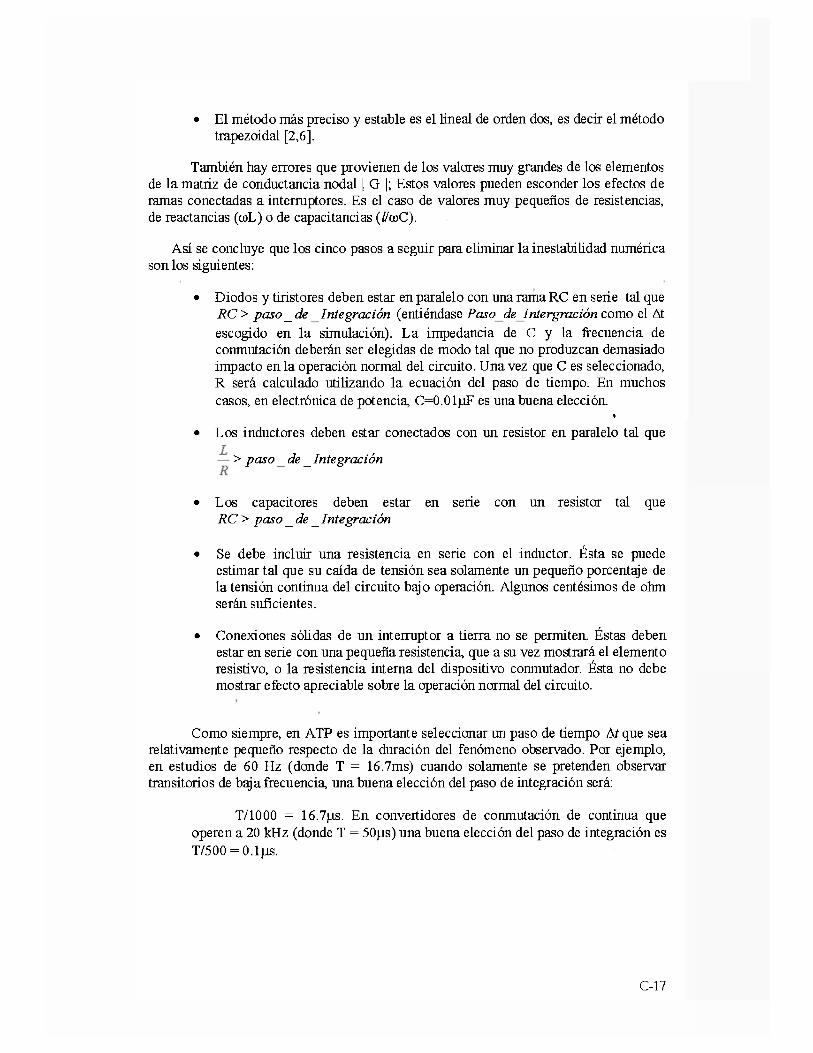
• El método más preciso y estable es el lineal de orden dos, es decir el método trapezoidal [2,6].
También hay errores que provienen de los valores muy grandes de los elementos de la matriz de conductancia nodal | G |; Estos valores pueden esconder los efectos de ramas conectadas a interruptores. Es el caso de valores muy pequeños de resistencias, de reactancias (coL) o de capacitancias (¿7toC).
Así se concluye que los cinco pasos a seguir para eliminar la inestabilidad numérica son los siguientes:
• Diodos y tiristores deben estar en paralelo con una rama RC en serie tal que RC > paso _ de Integración (entiéndase Paso de lntergración como el At escogido en la simulación). La impedancia de C y la frecuencia de conmutación deberán ser elegidas de modo tal que no produzcan demasiado impacto en la operación normal del circuito. Una vez que C es seleccionado, R será calculado utilizando la ecuación del paso de tiempo. En muchos casos, en electrónica de potencia, C=0.01fjF es una buena elección.
4
• Los inductores deben estar conectados con un resistor en paralelo tal que
> paso de _ Integración
• Los capacitores deben estar en serie con un resistor tal que RC > paso_ de _Integración
• Se debe incluir una resistencia en serie con el inductor. Ésta se puede estimar tal que su caída de tensión sea solamente un pequeño porcentaje de la tensión continua del circuito baj o operación. Algunos centésimos de ohm serán suficientes.
• Conexiones sólidas de un interruptor a tierra no se permiten. Éstas deben estar en serie con una pequeña resistencia, que a su vez mostrará el elemento resistivo, o la resistencia interna del dispositivo conmutador. Ésta no debe mostrar efecto apreciable sobre la operación normal del circuito.
Como siempre, en ATP es importante seleccionar un paso de tiempo At que sea relativamente pequeño respecto de la duración del fenómeno observado. Por ejemplo, en estudios de 60 Hz (donde T = 16.7ms) cuando solamente se pretenden observar transitorios de baj a frecuencia, una buena elección del paso de integración será:
T/1000 = 16.7}is. En convertidores de conmutación de continua que operen a 20 kHz (donde T = 50ps) una buena elección del paso de integración es T/500 = O.IJÍS.
C-17

C.5 GENERACIÓN DE UN FICHERO DE SIMULACIÓN Y OBTENCIÓN DE RESULTADOS
Un fichero de simulación para EMTP puede ser generado de manera modular o siguiendo una cierta disposición de la información requerida.
La disposición de la información en un fichero de entrada de datos es la siguiente:
i. Instrucciones que definan el nuevo caso para simular en el contexto de los utilitarios (rutinas especializadas) y del eventual redimensionamiento del espacio de memoria.
ii. Modelo del sistema de control.
iii. Ramas de la red eléctrica (lineales y lineales por fragmentos), transformadores, líneas de transmisión o cables.
iv. Interruptores.
v. Fuentes de tensión o de corriente y máquinas eléctricas giratorias.
vi. Restricciones en la red para el cálculo del flujo de caiga (condiciones de funcionamiento en régimen permanente)
vii. Condiciones iniciales prioritarias de la red.
viii. Variables de salida solicitadas.
ix. Funciones de representación de los resultados cuando la simulación es efectuada por lotes (no-interactiva).
Un fichero modular puede seguir no importa qué orden, siempre clasificando los datos de manera de poder constituir una base común. Los datos clasificados e identificados por su código asociado pueden ser colocados separadamente en ficheros diferentes. Todo fichero debe respetar una delimitación de 80 columnas en virtud del programa base que permanece escrito en FORTRAN 77.
La descripción de la red se hace a través de uno de los nodos y la información que define cada una de las ramas. Los nombres de los nodos tienen como máximo una longitud de 6 caracteres alfanuméricos. Se puede incluir también, en un fichero, comentarios como en un programa FORTRAN poniendo "C" sobre las dos primeras columnas.
El sistema de control es descrito por funciones de transferencia en p, operaciones no lineales y expresiones lógicas. A cada expresión se asocia un nombre de 6 caracteres alfanuméricos que identifica la señal en cuestión. Los bloques son definidos e interconectados hasta realizar la descripción completa del circuito de control.
Los resultados de simulación pueden ser tratados de manera diferente según el tipo de computador utilizado. En general, una simulación EMTP da dos tipos de
C-18
ficheros de resultados, uno para el tratamiento de gráficos (*.pl4) y otro para informaciones particulares del sistema simulado (*.pch) y finalmente, un archivo de tipo de texto (*.lis). En este último, también están los resultados numéricos en forma de tablas.
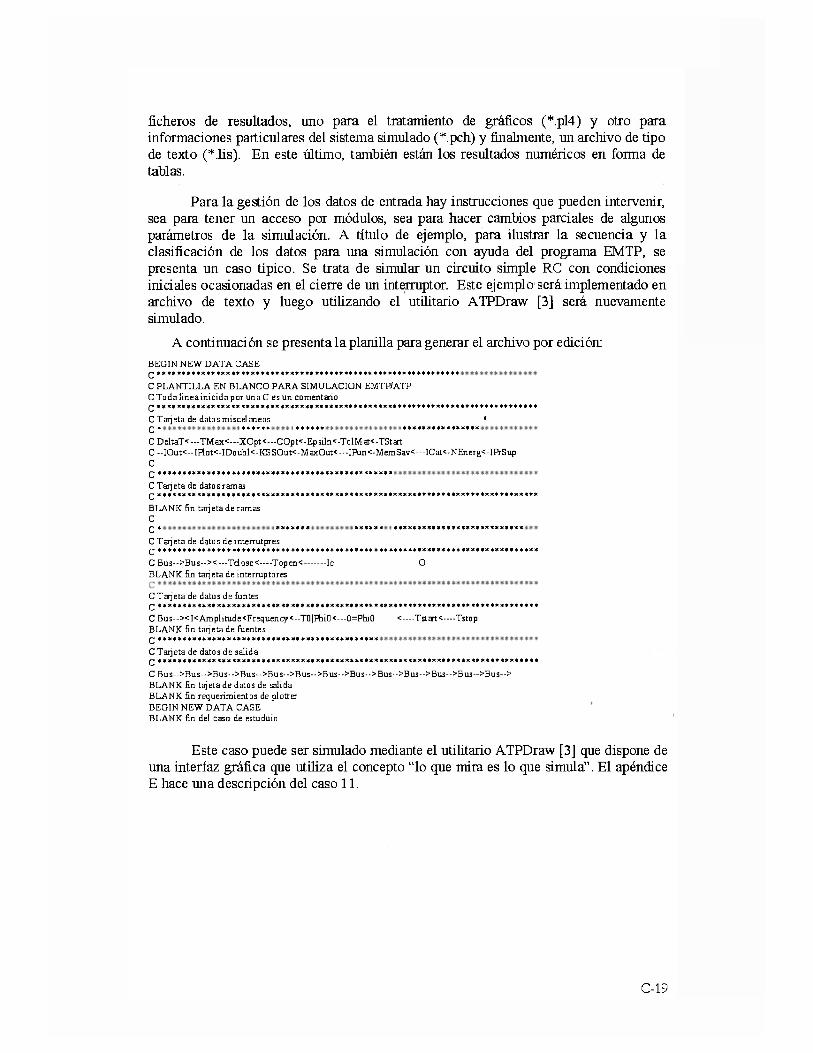
Para la gestión de los datos de entrada hay instrucciones que pueden intervenir, sea para tener un acceso por módulos, sea para hacer cambios parciales de algunos parámetros de la simulación. A título de ejemplo, para ilustrar la secuencia y la clasificación de los datos para una simulación con ayuda del programa EMTP, se presenta un caso típico. Se trata de simular un circuito simple RC con condiciones iniciales ocasionadas en el cierre de un interruptor. Este ejemplo1 será implementado en archivo de texto y luego utilizando el utilitario ATPDraw [3] será nuevamente simulado.
A continuación se presenta la planilla para generar el archivo por edición: BEGIN N E W D A T A C A S E Q**************************************************************
C P L A N T I L L A EN B L A N C O P A R A S I M U L A C I O N EMTP/ATP C T a d a l i n e a i n i c i d a p o r u n a C es un comentario Q ******************************************************************************
C T a p e t a de datos misceláneos 4
q
C Del taT<—'TMax<—XOpt<—COpt<-Eps i ln<-TolMat<-TStar t C- - IOu t<- IP lo t< - IDouh l<-KSSOut<-MaxOut<—IPun<-MemSav<—ICat<-NEnerg<- IP rSup C ^ • • » • • • • » « » • • » • • • » « » • • t » »
C Ta i je ta de datos ramas Q *********************** ************************ *******************************
B L A N K fin ta i je ta de ramas C q a
C Tar je ta de datos de interrutpres Q * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *
C B u s - > B u s - - > < — T d o s e < — - T o p e n < le O B L A N K fin tar je ta de interruptores
C Taq eta de dato s de funtes Q******************************************************************************
C Bus-><I<Ampl i tude<Frequency<-TÜ|Ph iO<—0=Phiü <—-Tstart<—-Tstop B L A N K fin tai] eta de fuentes
Q*#*at*a'***<**at***ai)a***a<**ai**a<**<at**iai*******#»**^
C Tar je ta de datos de sal ida Q**************************************** ************************************** C Bus-->Bus-->Bus-->Bus—>Bus-->Bus-->Bus-->Bus-->Bus-->Bus-->Bus-->Bus~>Bus—> B L A N K fin ta je ta de datos de salida B L A N K fin requerimientos de plotter BEGIN N E W D A T A C A S E B L A N K fin del caso de estuduio
Este caso puede ser simulado mediante el utilitario ATPDraw [3] que dispone de una interfaz gráfica que utiliza el concepto "lo que mira es lo que simula". El apéndice E hace una descripción del caso 11.
C-19
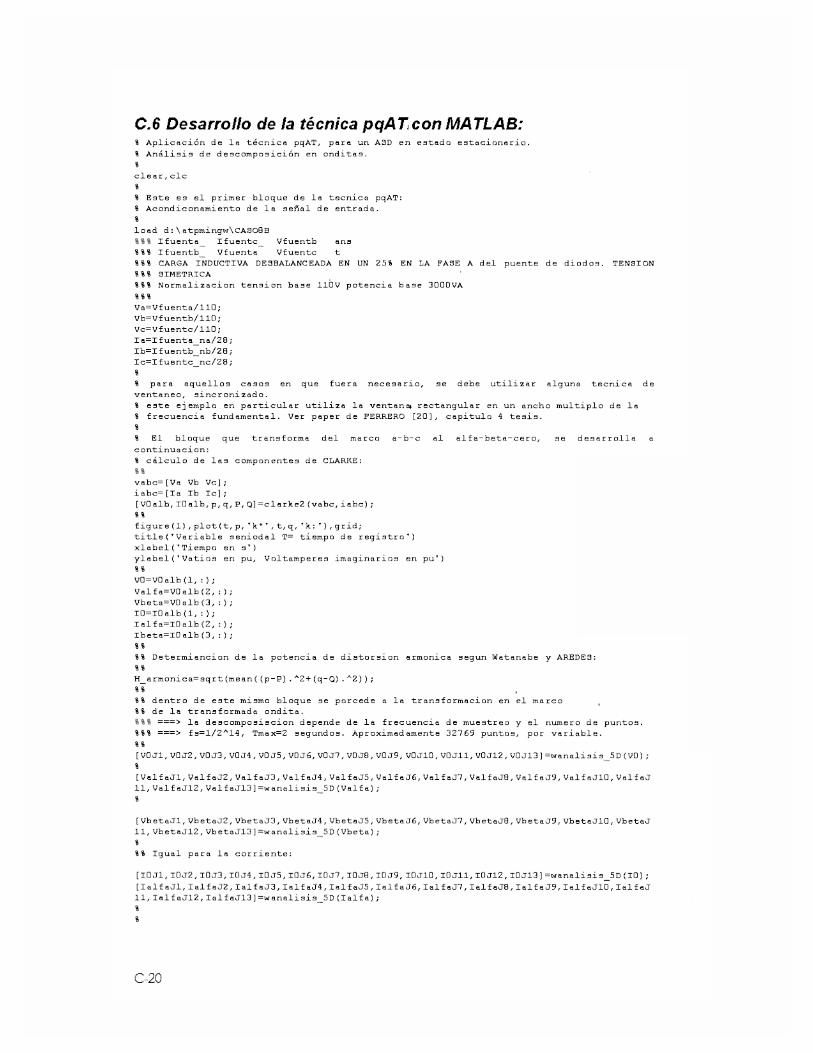
C.6 Desarrollo de la técnica pqAT con MATLAB: % Aplicación de la técnica pqAT, para un A3D en estado estacionario. % Análisis de descomposición en onditas. %
clear,ele % % Este es el primer bloque de la técnica pqAT: % Acondiconamiento de la señal de entrada. % load d:\atpmingw\CASOBB
Ifuenta_ Ifuentc_ Vfuentb ans %%% Ifuentb_ Vfuenta Vfuentc t %%% CARGA INDUCTIVA DE SBALANCEADA EN UN 25% EN LA FASE A del puente de diodos. TENSION % % % SIMETRICA %%% Normalización tensión base 11QV potencia base 3000VA %%%
Va=Vfuenta/110; Vb=Vfuentb/110; Vc=Vfuentc/110; Ia=Ifuenta_na/28; Ib=Ifuentb_nb/2B; Ic=Ifuentc_nc/28; %
% para aquellos casos en que fuera necesario, se debe utilizar alguna técnica de ventaneo, sincronizado. % este ejemplo en particular utiliza la ventana» rectangular en un ancho múltiplo de la % frecuencia fundamental. Ver paper de FERRERO [20], capitulo 4 tesis. % % El bloque que transforma del marco a-b-c al alfa-beta-cero, se desarrolla a continuación: % cálculo de las componentes de CLARKE:
vabc=[Va Vb Ve]; iabc=[Ia Ib Ic]; [V0alfa,lOalb,p,q,P,Q]=clarke2(vabe,iabe) ; ftft figure(1),plot(t,p,Tk*T,t,q,Tk:T),grid; title(TVariable seniodal T= tiempo de registro*) xlabel(TTiempo en sT) ylabel(TVatios en pu, Voltamperes imaginarios en puT) %%
va=v0alb(l,:); Valfa=VQ alb(2, :); Vbeta=V0 alta(3, :); I0=lüalb(l,:); lalfa=l0 alb(2, :); Ibeta=lD alb(3, :); %% %% Determiancion de la potencia de distorsión armónica según Watanabe y AREDES: %%
H_armonica=sqrt(mean((p-P).A2+(q-Q).A2)); %% t
%% dentro de este mismo bloque se porcede a la transformación en el marco > %% de la transformada ondita.
===> la descomposiscion depende de la frecuencia de muestreo y el numero de puntos. %%% ===> fs=l/2A14, Tmax=2 segundos. Aproximadamente 32769 puntos, por variahle. % %
[V0 Jl, VO J2, V0 J3, VQ J4, V0 J5, V0 J6, V0 J7, VDJ8, Vü J9, VQJ1G, VdJll, V0 J12, Vü J13] =wanalisis_5D (VD) ; %
[ValfaJl,ValfaJ2,ValfaJ3,ValfaJ4,ValfaJ5,ValfaJ6,ValfaJ7,ValfaJ0, ValfaJ9, ValfaJ10, ValfaJ 11,ValfaJl2,ValfaJ13]=wanalisis_5D(Valfa) ; %
[VbetaJl, VbetaJ2,VbetaJ3,VbetaJ4,VbetaJ5,VbetaJ6,VbetaJ7,VbetaJS, VbetaJ9, VbetaJlO, VbetaJ 11,VbetaJ12,VbetaJ13]=wanalisis_5D(Vbeta) ; % %% Igual para la corriente:
[10Jl, I0J2,10J3,10J4,IGJ5,IüJ6,10J7,10J0,10J9,10J10,10Jll,10J12,10J13]=wanalisis_5D(10); [lalfaJl,lalfaJ2,IalfaJ3,IalfaJ4,IalfaJ5,IalfaJ6,IalfaJ7,IalfaJ8, IalfaJ9,IalfaJ10,IalfaJ 11, IalfaJl2,IalfaJl3]=wanalisis_5D(Ialfa) ; %
%
C-20


















