Aproximación y Simulaciones de Un Modelo de Dispersión de Contaminantes en Superficies Esféricas
80
APROXIMACI ´ ON Y SIMULACIONES DE UN MODELO DE DISPERSI ´ ON DE CONTAMINANTES EN SUPERFICIES ESF ´ ERICAS CARMEN ALICIA RAM ´ IREZ BERNATE Universidad de Quind´ ıo Facultad de Ciencias B´ asicas y Tecnolog´ ıas Programa de Maestr´ ıa en Biomatem´ aticas Armenia, Quind´ ıo 2006
-
Upload
german-yesid-luque-diaz -
Category
Documents
-
view
228 -
download
5
description
Aproximación y simulaciones de un modelo de dispersión de contaminantes en superficies esféricas.pdf
Transcript of Aproximación y Simulaciones de Un Modelo de Dispersión de Contaminantes en Superficies Esféricas
APROXIMACION Y SIMULACIONES DE UN MODELO DE
DISPERSION DE CONTAMINANTES EN SUPERFICIES
ESFERICAS
CARMEN ALICIA RAMIREZ BERNATE
Universidad de Quindıo
Facultad de Ciencias Basicas y Tecnologıas
Programa de Maestrıa en Biomatematicas
Armenia, Quindıo
2006
APROXIMACION Y SIMULACIONES DE UN MODELO DE
DISPERSION DE CONTAMINANTES EN SUPERFICIES
ESFERICAS
CARMEN ALICIA RAMIREZ BERNATE
Director: Ph. D. GERALDO LUCIO DINIZ
Se presenta este trabajo de investigacion como requisito parcial para optar el
tıtulo de Magister en Biomatematicas.
Universidad de Quindıo
Facultad de Ciencias Basicas y Tecnologıas
Programa de Maestrıa en Biomatematicas
Armenia, Quindıo
2006
Resumen y Abstract
1 Resumen
En este trabajo, presentamos una aproximacion numerica y algunas simulaciones
del proceso evolutivo de la dispersion de contaminantes sobre superficies esfericas. El codigo
numerico para la simulacion se desarrollo por el metodo de elementos finitos (MEF). En
el modelo, consideramos el proceso de la difusion, el fenomeno de transporte por el medio,
el decaimiento en sentido global y una fuente de contaminantes. Para la clasica ecuacion
de difusion-reaccion obtuvimos la formulacion debil en el sentido de aplicar el metodo de
elementos finitos.
Este modelo ha sido estudiado por el grupo de Modelamiento de Fenomenos de
Difusion Macroscopica del programa de Maestrıa en Biomatematicas en la Universidad del
Quindıo, Colombia. Creemos que la importancia del trabajo desarrollado conduce a su
uso potencial en procesos de medio ambiente para la definicion de estrategias evaluativas,
preventivas y de limpieza.
Palabras Claves: Aproximacion numerica, simulacion computacional, dispersion, metodo
de elementos finitos, superficie esferica.
iii

2 Abstract
In this work, we present an approximation and simulation of evolutionary process
for pollutant dispersal on spherical surfaces. The numerical code of simulations was made by
finite elements method (FEM). In the model, we consider the diffusion process, the transport
phenomena by the mean, the decay in global sense and a pollutant source. For the classical
diffusion-reaction equation we obtained the weak formulation in the sense of applying the
finite elements method.
This model is being studied by group of Phenomena Modelling of Macroscopic Diffu-
sion in the Biomathematics at the University of Quindıo, Colombia. The authors believe that
the importance of this work is it potential use in environmental processes for the definition
of strategies of evaluation, preventive and cleaning.
Key words: Numerical approximation, computational simulations, dispersion, finite ele-
ments method (FEM), spherical surfaces.
iv

Para mis hijos:
Leandro y Sergio.
v

“...
Caminante no hay camino,
se hace el camino al andar.
Al andar se hace camino,
y al volver la vista atras
se ve la senda que nunca
se ha de volver a pisar.
...”
Antonio Machado,
parte del poema “Cantares”.
vi
Agradecimientos
Quiero dar en primer lugar mis mas sinceros agradecimientos al profesor Geraldo
Lucio Diniz quien con su, paciencia, orientacion y sugerencias supo brindarme gran apoyo y
ayuda en la realizacion y culminacion del presente trabajo. A los profesores de la Universidad
del Quindio: Dumar Villa, Hernando Hurtado, Paulo Cesar Carmona, e Irene Duarte, cada
uno de ellos supieron igualmente brindarme valiosas contribuciones para el desarrollo de este
trabajo. Asi como tambien a la Directora de la Maestria en Biomatematicas, Maria Dolly
Garcia por su preocupacion y gestion de recursos. A COLCIENCIAS por su contribucion
financiera a traves de una beca de movilizacion al Brasil evento crucial para la terminacion
del trabajo.
Mi gratitud especial a los companeros de la Maestria en Biomatematicas, espe-
cialmente a Fulvia Esperanza por su companerismo y por lograr un ambiente de trabajo
agradable y productivo.
A mi madre Alicia por el empuje y apoyo en los momentos mas dificiles. Finalmente
a mis hijos: Leandro y Sergio por ser mis mejores alicientes de este proceso y por la paciencia
durante todo el tiempo que no les dedique.
Armenia, agosto de 2006. Carmen Alicia Ramırez Bernate
vii
Indice General
Resumen y Abstract iii
1 Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
2 Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv
Agradecimientos vii
Indice de Figuras x
Indice de Tablas xi
Indice de Sımbolos xii
Introduccion 1
1 Modelo matematico 4
1 Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Construccion del modelo matematico . . . . . . . . . . . . . . . . . . . . . . 5
2 Formulacion debil 8
1 Definicion de los espacios convenientes . . . . . . . . . . . . . . . . . . . . . 8
2 Obtencion de la formulacion debil . . . . . . . . . . . . . . . . . . . . . . . . 9
3 Existencia y unicidad de la solucion . . . . . . . . . . . . . . . . . . . . . . . 10
3 Discretizacion del problema 16
1 Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2 Discretizacion espacial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3 Discretizacion temporal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4 Resultados obtenidos 21
1 Simulaciones de escenarios . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
viii

2 Analisis de resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3 Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4 Consideraciones finales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Bibliografıa 29
A Conceptos y definiciones 32
1 Elemento finito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2 Integracion de Lebesgue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3 Algunas desigualdades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
B Codigos fuentes 37
1 Codigo fuente para Matlabr . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2 Codigo fuente para Mathematicar . . . . . . . . . . . . . . . . . . . . . . . 44
2.1 Programas para los triangulos inferiores . . . . . . . . . . . . . . . . 45
2.2 Programas para los triangulos superiores . . . . . . . . . . . . . . . . 55
ix
Indice de Figuras
1 Imagen tomada por satelite en el Golfo de Mexico, donde se pueden apreciar
los vertidos de petroleo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.1 Grafico con las coordenadas esfericas . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Descripcion del dominio escogido . . . . . . . . . . . . . . . . . . . . . . . . 6
3.1 Grafico de la funcion piramide para un nodo j . . . . . . . . . . . . . . . . . 20
4.1 Simulacion del escenario 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.2 Comportamiento en los nodos a lo largo del tiempo – escenario 1 . . . . . . . 23
4.3 Simulacion del escenario 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.4 Comportamiento en los nodos a lo largo del tiempo – escenario 2 . . . . . . . 24
4.5 Simulacion del escenario 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.6 Comportamiento en los nodos a lo largo del tiempo – escenario 3 . . . . . . . 25
x
Indice de Tablas
4.1 Parametros para la simulacion del escenario 1 . . . . . . . . . . . . . . . . . 22
xi
Indice de Sımbolos
div Divergencia;
∇ Operador del (o nabla);
∆ =n∑
j=1
∂j2 Operador diferencial de Laplace;
Ω Dominio considerado;
Lp (Ω)Espacio de clases de equivalencias de funciones con medida de
Lebesgue cuyas potencias pth son sumables sobre Ω;
Hk (Ω) Espacio de Sobolev;
Hk0 (Ω) Subespacio propio de Hk (Ω);
L2 ((0, T ] , U) Espacio de funciones cuadrado integrables de (0, T ] → U ;
‖·‖Lp(Ω), ‖·‖H1(Ω) Norma definida en los espacios Lp (Ω) y H1 (Ω);
‖·‖2Lp(Ω), ‖·‖2
H1(Ω) Cuadrado de la norma definida en los espacios Lp (Ω) y H1 (Ω);
ess sup, ess inf Supremo esencial, Infimo esencial.
En conformidad con Showalter (1977) y Brener y Scott (1994)
xii
Introduccion
La dispersion de partıculas contaminantes ha sido estudiada principalmente, a traves
de modelos matematicos en ecuaciones diferenciales ordinarias y parciales que tienen en
cuenta el movimiento de las partıculas a lo largo y ancho del medio de propagacion. Por
esta vıa se puede analizar la dispersion de partıculas contaminantes a traves del tiempo.
En este sentido, un modelo de dispersion de partıculas contaminantes sobre superfi-
cies esfericas fue propuesto por Mendez (2005), a traves de una adaptacion de los operadores
gradiente y laplaciano y de esta manera se extienden las ecuaciones de difusion superficial
euclidiana a fenomenos de difusion en superficies esfericas.
Este modelo de difusion en superficies esfericas tiene soluciones analıticas exactas,
pero para obtenerlas es demasiado complejo, esto es, los procedimientos analıticos que per-
mitan determinar la concentracion del contaminante modelado en un tiempo y lugar deter-
minado no estan en las metas de este trabajo. Lo que se propone en este trabajo es, entonces,
la posibilidad de analizar este ultimo modelo por la vıa de la aproximacion numerica y la
simulacion computacional de escenarios.
La determinacion de la contaminacion del agua es de gran interes para establecer
controles encaminados a la conservacion del ambiente. Esta determinacion, y mas que todo
su dinamica, en muchos casos es extremadamente compleja y por esta razon el modelo
matematico se convierte en una de las herramientas mas efectivas ya que permite interpretar
dinamicas de contaminacion en cuerpos de agua. Sin embargo, el modelo como herramienta
carece de utilidad sino es correctamente construido y simulado, tal que permita conocer la
concentracion de contaminantes en las aguas de forma continua en el espacio y en el tiempo
a partir de un mınimo de mediciones experimentales.
Algunos modelos presentados por Meyer (1998) y Diniz (2003), han resultado muy
utiles en rıos, lagos y/o lagunas, pero su aplicacion no es tan significativa en el oceano
por estar construido para superficies planas. Una extension de este modelo de difusion a
superficies esfericas fue construido por Mendez (2005).
1
La aproximacion de la solucion por el metodo de diferencias finitas, que es la pro-
puesta por Mendez (2005), no es la mas precisa para este tipo de situaciones. Se espera que
la alternativa propuesta usando el metodo de elementos finitos de lugar a mejores interpreta-
ciones al problema fısico estudiado.
La contaminacion en grandes extensiones de mar no ha sido considerada aun por
quienes estudian la modelacion matematica y menos aun se ha hecho algun tipo de simu-
lacion del fenomeno en caso de llegar a presentarse. Lo que hacemos es un estudio teorico,
para establecer la aproximacion y simulacion numerica de un modelo de dispersion de con-
taminantes sobre la superficie esferica con miras a una aplicacion a gran escala en alta mar,
donde pueda llegar a tener efecto la curvatura de la tierrra durante el proceso de difusion
del contaminante.
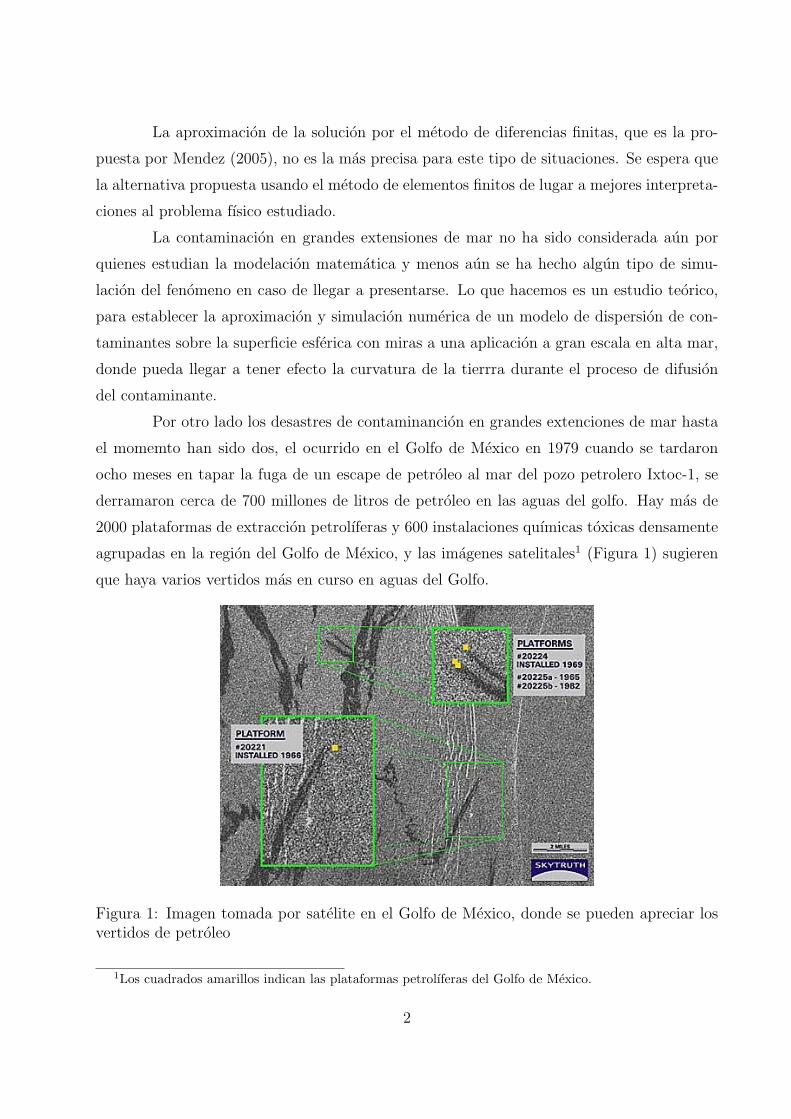
Por otro lado los desastres de contaminancion en grandes extenciones de mar hasta
el momemto han sido dos, el ocurrido en el Golfo de Mexico en 1979 cuando se tardaron
ocho meses en tapar la fuga de un escape de petroleo al mar del pozo petrolero Ixtoc-1, se
derramaron cerca de 700 millones de litros de petroleo en las aguas del golfo. Hay mas de
2000 plataformas de extraccion petrolıferas y 600 instalaciones quımicas toxicas densamente
agrupadas en la region del Golfo de Mexico, y las imagenes satelitales1 (Figura 1) sugieren
que haya varios vertidos mas en curso en aguas del Golfo.
Figura 1: Imagen tomada por satelite en el Golfo de Mexico, donde se pueden apreciar losvertidos de petroleo
1Los cuadrados amarillos indican las plataformas petrolıferas del Golfo de Mexico.
2
El otro derrame de petroleo importante fue el ocurrido en 1991 en el Golfo Persico
durante la guerra de Irak y una coalicion de paises encabezados por los Estados Unidos, cinco
barcos petroleros kuwaitıes cargados completamente con petroleo crudo fueron arrojados al
mar desde la terminal de almacenamiento de petroleo en la isla del Mar de Kuwait; se
estimo que 525 millones de litros de petroleo crudo fueron arrojados al Golfo Persico. El
Golfo Persico es especialmente vulnerable a la contaminacion porque tiene poca profundidad
(unos 34 metros) y es casi cerrado, por lo que se calcula que para limpiar el Golfo Persico
se requieren 200 anos.
Es debido a estas catastrofes de contaminacion ambiental que se hace necesario un
estudio a mayor escala del fenomeno de dispersion, es por esto que damos un pequeno paso
al tratamiento de este problema.
De esta manera sera presentado en primer lugar el modelo considerado con las
condiciones de contorno. En seguida se presentara la formulacion debil, una demostracion de
la existencia y unicidad de las soluciones debiles y las discretizaciones espacial y temporal,
luego se hara una presentacion de los resultados obtenidos, a traves de graficos para mejor
visualizacion y por ultimo se haran unas consideraciones finales.
3
Capıtulo 1
Modelo matematico
En este capıtulo haremos la descripcion del problema y su formulacion matematica –
el modelo matematico, ası como los trabajos principales que dan apoyo a lo que se presentara
aquı.
1 Introduccion
Algunas de las consideraciones a partir de las cuales se establece el modelo matema-
tico que describe el comportamiento de contaminantes en medios acuıferos esfericos son las
siguientes:
Llamamos las coordenadas esfericas por ρ, λ, φ, donde:
– La esfera es considerada con centro en el origen y radio ρ;
– El plano λ es medido en sentido contrario a las manecillas del reloj;
– La constante cono φ cuyo vertice es el origen y su eje es el eje z.
En el modelo, ρ sera constante, ya que se considera como el promedio del radio de la super-
ficie de la esfera, esta consideracion la hacemos debido a que una ecuacion nunca describe
enteramente un fenomeno y especialmente una situacion tan compleja como esta.
4

Figura 1.1: Grafico con las coordenadas esfericas
2 Construccion del modelo matematico
En el modelo se ha considerado el fenomeno de difusion (o dispersion, segun Okubo
(1980)), el transporte advectivo, la tasa de decaimiento y las fuentes de contaminacion en
el medio estudiado. De esta manera llamando c (λ, φ, t) la concentracion del contaminante
(medida en partes por millon – ppm), en el punto (λ, φ), para un instante del tiempo t, el
modelo puede ser descrito por:
∂c (λ, φ, t)
∂t= difusion + transporte − decaimiento + fuente
donde
X difusion = −div (−α∇c) representa el efecto de la difusion (Marchuk, 1986; Okubo,
1980);
X transporte = −div(−→
V c)
representa el transporte advectivo por las corrientes marinas
o el viento (Edelstein-Keshet, 1988),
X decaimiento = σc, linealmente aproximando decaimiento global en el ambiente (Bas-
sanezi, 2002) y,
X fuente = F (λ, φ, t), modelando fuentes de contaminancion (Simonit et al., 2005; Silva
et al., 2005; Zingales et al., 1984).
Por lo tanto, la ecuacion evolutiva que modela la concentracion de contaminantes
esta dada por:
∂c (λ, φ, t)
∂t= −div (−α∇c)− div
(−→V c
)− σc + F (λ, φ, t) (1.2.1)
5

∀ (λ, φ) ∈ Ω, Ω ⊂ [0, 2π]× (−π2, π
2
), ∀ t ∈ (0, T ]
Donde α es la constante del efecto difusivo en el medio considerado,−→V es el campo
de velocidades, y σ es la tasa de decaimiento global en el ambiente.
Ahora, aplicando los operadores diferenciales y usando el factor de escala (Mendez,
2005) para coordenadas esfericas, (1.2.1) se llega a:
∂c (λ, φ, t)
∂t= α (∆c)− V1
1
cos φ
∂c
∂λ− V2
∂c
∂φ− σc + F (λ, φ, t) (1.2.2)
∀ (λ, φ) ∈ Ω, Ω ⊂ [0, 2π]× (−π2, π
2
), ∀ t ∈ (0, T ]
Donde V1 y V2 son las proyecciones del campo−→V en las direcciones este - oeste y
norte - sur, respectivamente, que modela un campo de velocidades bien comportado, es decir,
div−→V = 0.
El dominio que consideraremos llamado por Ω tiene definida la frontera (Figura 1.2)
por ∂Ω = Γ0 ∪ Γ1 ∪ Γ2 ∪ Γ3, con Γi ∩ Γj = ∅ (vacıo), para i 6= j.
Figura 1.2: Descripcion del dominio escogido
Y las condiciones de frontera escogidas son
−α∂c
∂η
∣∣∣∣Γ1
= k1g (1.2.3)
modelando una entrada de contaminante en el dominio a traves de esta parte de la frontera
(Diniz y Meyer, 2005; Diniz, 2003), conforme a la funcion g;
6
−α∂c
∂η
∣∣∣∣Γ0∪Γ3
= 0 (1.2.4)
modelando una condicion asintotica (Meyer y Diniz, 2006) en la frontera lejos del dominio,
−α∂c
∂η
∣∣∣∣Γ2
= k2 (c− ce) (1.2.5)
representando el paso del contaminante dependiendo de la concentracion externa (Diniz,
2003) y, η es el vector normal unitario externo.
La expresion, F (λ, φ, t) sera definida como el termino fuente en la ecuacion (1.2.2),
y en nuestro modelo la hemos considerado como una fuente puntual en el centro del dominio,
que es dada por F (λ, φ, t) = A0e−κt.
Finalmente como condicion inicial consideramos,
c (λ, φ, 0) = c0 (1.2.6)
Las ecuaciones (1.2.1–1.2.6) son expresadas en su formulacion clasica o fuerte, para
las cuales tenemos solidos resultados mientras se considere la existencia y unicidad de las
soluciones (Bressan, 2000; Weidemaier, 1998), sin embargo estos resultados son realmente
exigentes con respecto a que la regularidad es necesaria en los parametros y en algunas de
las condiciones.
Tendremos que recurrir a la formulacion debil o variacional, un ambiente matematico
de menor rigor, desde que las derivadas sean consideradas en el sentido de distribuciones y
las integrales sean del tipo Lebesgue, una opcion que permanece valida con la escogencia
del metodo de elementos finitos, el cual usaremos para la discretizacion espacial. Para la
variable temporal, nuestra opcion de aproximacion es la de Crank-Nicolson, produciendo
aproximaciones de precision de segundo orden. Este procedimiento es lo que presentamos en
los capıtulos siguientes.
7
Capıtulo 2
Formulacion debil
Para transformar el sistema dado en su formulacion fuerte a la expresion debil,
usando la ecuacion (1.2.2) con las condiciones de frontera (1.2.3–1.2.5), se debe dedicar
atencion especial a los espacios en los cuales la llamada formulacion sera desarrollada. Esto
es lo que presentaremos en las secciones siguientes.
1 Definicion de los espacios convenientes
Definiremos el siguiente espacio en el cual se establecera la deseada aproximacion
espacial (para mayor claridad ver definciones en el Apendice A):
V =
ν ∈ L 2 ((0, T ] , U) :
∂ν
∂t∈ L 2 (Ω)
, con U definido por
U =
c ∈ H1 (Ω) :
∂c
∂η
∣∣∣∣Γ0∪Γ3
= 0
Donde el espacio H1 es un espacio de Hilbert separable con los productos internos
dados por:
(f |g)0,Ω :=
∫∫
Ω
f (λ, φ) · g (λ, φ) dµ (2.1.1)
(∇f ‖ ∇g)0,Ω :=
∫∫
Ω
∇f (λ, φ) · ∇g (λ, φ) dµ (2.1.2)
〈f |g〉0,Γ :=
∫
Γ
f (λ, φ) .g (λ, φ) dγ (2.1.3)
8

2 Obtencion de la formulacion debil
Para resolver el problema de la ecuacion en derivadas parciales por el metodo de
elementos finitos, se comienza planteandolo en su forma debil, que bajo ciertas condiciones
puede resultar analogo a un problema de minimizacion funcional. El MEF permite convertir
el problema continuo en su forma debil en un problema discreto que finalmente resulta en
un problema de ecuaciones algebraicas.
Para obtener la formulacion debil multiplicamos los terminos de la ecuacion (1.2.2)
por una funcion de prueba (en el ingles funcion test and trial: c es la funcion trial en el sentido
de prueba como tanteo, es decir la funcion que se propone como solucion y v es la funcion test
en el sentido de poner a prueba, es decir la funcion con la cual se “pesa” la solucion propuesta)
que pertenece al espacio V , dentro de cada subdominio las funciones de prueba se construyen
como polinomios a los cuales se les impone un determinado orden de continuidad con los
elementos adyacentes. Por lo tanto, la solucion obtenida estara formada por funciones que
resultaran polinomicas a trozos en el dominio completo; despues hacemos la integracion en
sentido de Lebesgue. Ası, usando el producto interno (2.1.1–2.1.3) apropiadamente, tenemos
en lugar de la ecuacion (1.2.2) con condiciones de frontera (1.2.3–1.2.5), lo siguiente:
(∂c
∂t
∣∣∣∣ν)
0,Ω
− α (∆c|ν)0,Ω +(div
[→V c
]|ν
)0,Ω
+ σ (c|ν)0,Ω = (F|ν)0,Ω
∀ ν ∈ V , ∀ t ∈ (0, T ] .
(2.2.1)
Para resolver el termino −α (∆c|ν)0,Ω aplicamos una de las identidades de Green
(Wikimedia, 2006) y obtenemos:
−α (∆c|ν)0,Ω = α (∇c ‖ ∇ν)0,Ω − α
⟨∂c
∂η|ν
⟩
∂Ω
y desarrollando el termino(div
[→V c
]|ν
)0,Ω
obtenemos que(div
[→V c
]|ν
)0,Ω
=(→V · ∇c|ν
)0,Ω
ya que div→V = 0, una vez que suponemos el campo de velocidades
→V conservativo.
Luego (recordando que ∂Ω = Γ) la ecuacion (2.2.1) nos queda:
(∂c
∂t
∣∣∣∣ν)
0,Ω
+ α (∇c ‖ ∇ν)− α
⟨∂c
∂η
∣∣∣∣ν⟩
Γ
+(→V · ∇c|ν
)0,Ω
+ σ (c|ν)0,Ω = (F|ν)0,Ω
∀ ν ∈ V ,∀ t ∈ (0, T ]
(2.2.2)
9
Ahora aplicando la definicion de gradiente en coordenadas esfericas, las condiciones
de frontera y la definicion anterior de producto interno (ecuaciones 2.1.1–2.1.3), la ecuacion
(2.2.2) queda:
(∂c
∂t
∣∣∣∣ν)
0,Ω
+ α
[(1
cos2 φ
∂c
∂λ
∣∣∣∣∂ν
∂λ
)
0,Ω
+
(∂c
∂φ
∣∣∣∣∂ν
∂λ
)
0,Ω
]+ V1
(1
cos φ
∂c
∂λ
∣∣∣∣ν)
0,Ω
+ V2
(∂c
∂φ
∣∣∣∣ν)
0,Ω
+ σ (c|ν)0,Ω + k2 〈c|ν〉Γ2
= −k1 〈g|ν〉Γ1+ k2 〈ce|ν〉Γ2
+ (F|ν)0,Ω ∀ ν ∈ V ,∀ t ∈ (0, T ]
(2.2.3)
Observemos que en esta ultima ecuacion, aparecen derivadas de primer orden, en el
sentido de distribuciones o “debil”, de la solucion c (λ, φ, t), en cuanto a que en la ecuacion
(1.2.2) aparecen derivadas de segundo orden, en el sentido clasico. De esta forma se debilitan
las hipotesis de regularidad de la solucion, proporcionando un aumento de las funciones para
las cuales el problema tiene sentido.
3 Existencia y unicidad de la solucion
A continuacion haremos una demostracion de la existencia y unicidad de la solucion
de la ecuacion obtenida en (2.2.3), de acuerdo a lo siguiente: Sera utilizado el Teorema de
Lions (ver Lions, 1961, Teorema. 1.1, Cap. IV, pag. 46) y probaremos que este problema
en su formulacion variacional satisface las hipotesis de dicho teorema.
Teorema 3.1 (Lions). Dado un conjunto abierto Ω ⊂ Rn, considere los espacios H1 (Ω),
H10 (Ω) y V tales que H1
0 (Ω) ⊂ V ⊂ H1 (Ω) para w = w (x, t) y v = v (x, t), sea un operador
A dado por1:
A(t; w, v) =n∑
i,j=1
∫
Ω
aij(x, t)∂w
∂xj
∂v
∂xi
dx +n∑i
∫
Ω
ai(x, t)∂w
∂xi
vdx +n∑i
∫
Ω
a0(x, t)wvdx
Si
i) aij, ai y a0 ∈ L 2 (Ω× (0, T ));
1En Rn sera considerado dx = dx1dx2...dxn
10

ii) ∀w, v ∈ V, una funcion Λ : t → A (t; w, v) es medible;
iii) ∃λ ∈ R tal que: |A(t, w, v)|+ λ‖w‖L 2 ≥ δ‖w‖H1(Ω), δ > 0, w ∈ V;
iv) |A (t; w, v)| ≤ M ‖w‖H1(Ω) ‖v‖H1(Ω);
v) Lf (v) =
∫
Ω
fvdx +
(∫
Ω
w0νdx
)δ0(t) es continuo;
vi) f ∈ L 2 ((−∞, T ) ; L 2 (Ω)) y w0 (x) ∈ L 2 (Ω).
entonces existe una unica funcion w ∈ L 2 ((−∞, T ) ; L 2 (Ω)) y w : (−∞, 0) → 0 que es
solucion del problema variacional
(∂w
∂t, v
)+ A (t; w, v) = Lf (v) .
Para una demostracion del teorema consultar (Lions, 1961, Teor. 1.1 – Cap. IV).
Para demostrar que el problema (2.2.3) satisface las hipotesis del mencionado teo-
rema, agrupamos terminos para introducir la notacion del referido teorema, ası tenemos:
A (t; ·) =2∑
i,j=1
∂
∂xj
(Aij (x, t)
∂
∂xi
)+
2∑i=1
∂
∂xi
Ai (x, t) + A0 (2.3.1)
y haciendo las siguientes escogencias, tenemos:(
∂c
∂t
∣∣∣∣ν)
0,Ω
+(A (t, c) |ν
)0,Ω
+ k2 〈c|ν〉Γ2= −k1 〈g|ν〉Γ1
+ k2 〈ce|ν〉Γ2
+ (F|ν)0,Ω + (c0|ν)0,Ω δ0t ∀ ν ∈ V ,∀ t ∈ (0, T ]
(2.3.2)
o en una forma mas compacta:(
∂c
∂t
∣∣∣∣ν)
+ A (t; c, ν) = Lf (ν) (2.3.3)
donde
A (t; c, ν) =(A (t; c) |ν
)0;Ω
+ k2 〈c|ν〉Γ2
y
Lf (ν) = −k1 〈g|ν〉Γ1+ k2 〈ce|ν〉Γ2
+ (F|v)0,Ω + (c0|v)0,Ω δ0(t)
dadas las escogencias en (2.3.2) de:
Aij =
α si i = j
0 si i 6= j
11

Ai =
V1 si i = 1
V2 si i = 2
A0 = σ
y llamando a δ0(t) al operador de Dirac que “fija” la condicion incial.
Para verificar que (2.3.3) satisface las hipotesis del teorema de Lions, procedemos
como sigue:
1. Es inmediato verificar que A satisface las hipotesis i) y ii) del teorema enunciado,
teniendo en cuenta las escogencias de Aij, Ai y A0
2. La hipotesis iii) en (2.3.3) llamada coercividad2 del operador A puede ser obtenida
como sigue:
A (t; v, v) + λ ‖v‖2L 2 =
∫∫
Ω
A (t; v) v dµ + k2
∫
Γ2
v2 dγ + λ ‖v‖2L 2
= α
∫∫
Ω
∇v · ∇v dµ + V1
∫∫
Ω
1
cos φ
∂v
∂λv dµ + V2
∫∫
Ω
∂v
∂φv dµ
+ σ
∫∫
Ω
v2 dµ + k2
∫
Γ2
v2 dγ + λ ‖v‖2L 2
o sea,
A (t; v, v) + λ ‖v‖2L 2 = α
∫∫
Ω
[1
cos2 φ
(∂v
∂λ
)2
+
(∂v
∂φ
)2]
dµ
+V1
∫∫
Ω
1
cos φ
∂v
∂λv dµ + V2
∫∫
Ω
∂v
∂φv dµ
+ k2
∫
Γ2
v2 dγ + (λ + σ) ‖v‖2L 2
(2.3.4)
tenemos que:∣∣∣∣V1
∫∫
Ω
1
cos φ
∂v
∂λv dµ
∣∣∣∣ ≤ |V1|∫∫
Ω
∣∣∣∣1
cos φ
∂v
∂λv
∣∣∣∣ dµ ≤∣∣∣∣V1
1
cos φ
∣∣∣∣∫∫
Ω
∣∣∣∣∂v
∂λv
∣∣∣∣ dµ
por la desigualdad de Cauchy–Schwarz (ver seccion 3, pag. 34) se tiene:∣∣∣∣V1
1
cos φ
∣∣∣∣∫∫
Ω
∣∣∣∣∂v
∂λ
∣∣∣∣ |v| dµ ≤∣∣∣∣V1
1
cos φ
∣∣∣∣∥∥∥∥
∂v
∂λ
∥∥∥∥L 2
‖v‖L 2
2El operador A : Rn → R+ se dice coercivo si para cualquier sucesion ukk∈N ⊂ Rn se cumple‖uk‖Rn →∞ entonces A (uk) → ∞ (cuando k →∞ ).
12

luego
−∣∣∣∣V1
∫∫
Ω
1
cos φ
∂v
∂λv dµ
∣∣∣∣ ≥ −∣∣∣∣V1
1
cos φ
∣∣∣∣∥∥∥∥
∂v
∂λ
∥∥∥∥L 2
‖v‖L 2
y como
α
∫∫
Ω
[1
cos2 φ
(∂v
∂λ
)2
+
(∂v
∂φ
)2]
dµ ≥ α
∫∫
Ω
[(∂v
∂λ
)2
+
(∂v
∂φ
)2]
dµ
Ahora, sea ζ = max
∣∣∣∣V11
cos φ
∣∣∣∣ , |V2|
, esto se puede hacer una vez que φ pertenence a
un intervalo compacto (ver la hipotesis sobre el compacto Ω en la ecuacion 1.2.1 – pag.
5), por lo tanto∣∣∣ 1cos φ
∣∣∣ esta acotado por un valor maximo y aplicando la desigualdad de
Holder (ver seccion 3, pag. 34) en el 2o y 3o termino del lado derecho de la ecuacion
(2.3.4), tenemos:
A (t; v, v) + λ ‖v‖2L 2 ≥ α
∫∫
Ω
[(∂v
∂λ
)2
+
(∂v
∂φ
)2]
dµ + (λ + σ) ‖v‖2L 2
−ζ
[∥∥∥∥∂v
∂λ
∥∥∥∥L 2
‖v‖L 2 +
∥∥∥∥∂v
∂φ
∥∥∥∥L 2
‖v‖L 2
]+ k2 ‖v‖2
L 2
o
A (t; v, v) + λ ‖v‖2L 2 ≥ α
(∥∥∥∥∂v
∂λ
∥∥∥∥2
L 2
+
∥∥∥∥∂v
∂φ
∥∥∥∥2
L 2
)+ (λ + σ + k2) ‖v‖2
L 2
−ζ
[∥∥∥∥∂v
∂λ
∥∥∥∥L 2
‖v‖L 2 +
∥∥∥∥∂v
∂φ
∥∥∥∥L 2
‖v‖L 2
] (2.3.5)
Usando el recurso clasico de desigualdad
ab ≤ ε
2a2 +
1
4εb2 ∀ a, b positivos,
que aplicado a los terminos:
∥∥∥∥∂v
∂λ
∥∥∥∥L 2
‖v‖L 2 ≤ ε
2
∥∥∥∥∂v
∂λ
∥∥∥∥2
L 2
+1
4ε‖v‖2
L 2
y ∥∥∥∥∂v
∂φ
∥∥∥∥L 2
‖v‖L 2 ≤ ε
2
∥∥∥∥∂v
∂φ
∥∥∥∥2
L 2
+1
4ε‖v‖2
L 2
sumando miembro a miembro se llega a la desigualdad:
[∥∥∥∥∂v
∂λ
∥∥∥∥L 2
+
∥∥∥∥∂v
∂φ
∥∥∥∥L 2
]‖v‖L 2 ≤ ε
2
(∥∥∥∥∂v
∂λ
∥∥∥∥2
L 2
+
∥∥∥∥∂v
∂φ
∥∥∥∥2
L 2
)+
1
4ε‖v‖2
L 2
13

y
−ζ
[∥∥∥∥∂v
∂λ
∥∥∥∥L 2
+
∥∥∥∥∂v
∂φ
∥∥∥∥L 2
]‖v‖L 2 ≥ −ζε
2
(∥∥∥∥∂v
∂λ
∥∥∥∥2
L 2
+
∥∥∥∥∂v
∂φ
∥∥∥∥2
L 2
)− ζ
4ε‖v‖2
L 2
luego la desigualdad (2.3.5) queda:
A (t; v, v) + λ ‖v‖2L 2 ≥
(α− ζε
2
) [∥∥∥∥∂v
∂λ
∥∥∥∥2
L 2
+
∥∥∥∥∂v
∂φ
∥∥∥∥2
L 2
]+
(λ + σ + k2 − ζ
4ε
)‖v‖2
L 2
Ası tomando
δ = min
(α− ζε
2
);
(λ + σ + k2 − ζ
4ε
)
podemos escoger ζ y ε, de modo que δ > 0 y por lo tanto tenemos;
A (t; v, v) + λ ‖v‖2L 2 ≥ δ
(‖v‖2
L 2 +
∥∥∥∥∂v
∂λ
∥∥∥∥2
L 2
+
∥∥∥∥∂v
∂φ
∥∥∥∥2
L 2
)= δ ‖v‖2
H1(Ω)
∀ v ∈ V ,∀ t ∈ (0, T ]
3. La condicion dada en la hipotesis iv) en (2.3.3) denominada continuidad del operador
A puede ser obtenida de la siguiente forma: Dado que
∫∫
Ω
∂c
∂tv dµ + A (t; c, v) = Lf (v)
donde
A (t; c, v) =
∫∫
Ω
A (t; c) v dµ + k2
∫
Γ2
c v dµ
y
∫∫
Ω
A (t; c) v dµ = α
∫∫
Ω
∇c ·∇v dµ+V1
∫∫
Ω
1
cos φ
∂c
∂λv dµ+V2
∫∫
Ω
∂c
∂φv dµ+σ
∫∫
Ω
c v dµ
como
α
∫∫
Ω
∇c · ∇v dµ ≤ |α|∫∫
Ω
∇c · ∇v dµ
luego, para cada t ∈ (0, T ], sea ε = max |α| , |σ| y usando la desigualdad de Cauchy–
Schwarz, se obtiene:
|α|∫∫
Ω
∇c · ∇v dµ + σ
∫∫
Ω
c v dµ ≤ ε ‖c‖H1(Ω) ‖v‖H1(Ω)
ademas
|V1|∫∫
Ω
1
cos φ
∂c
∂λv dµ ≤
∣∣∣∣V11
cos φ
∣∣∣∣∫∫
Ω
∂c
∂λv dµ
14

y por la desigualdad de Holder se tiene:∣∣∣∣V11
cos φ
∣∣∣∣∫∫
Ω
∂c
∂λv dµ ≤
∣∣∣∣V11
cos φ
∣∣∣∣∥∥∥∥
∂c
∂λ
∥∥∥∥L 2
‖v‖L 2 ≤∣∣∣∣V1
1
cos φ
∣∣∣∣ ‖c‖H1(Ω) ‖v‖H1(Ω)
|V2|∫∫
Ω
∂c
∂φv dµ ≤ |V2|
∥∥∥∥∂c
∂φ
∥∥∥∥L 2
‖v‖L 2 ≤ |V2| ‖c‖H1(Ω) ‖v‖H1(Ω)
dada la continuidad de inmersion de H1 (Ω) en L 2, se obtiene
k2
∫
Γ2
c v dµ ≤ |k2| ‖c‖L 2(Γ2) ‖v‖L 2(Γ2) ≤ |k2| ‖c‖L 2(∂Ω) ‖v‖L 2(∂Ω)
≤ |k2| ‖c‖H1(Ω) ‖v‖H1(Ω)
de ahı
|A (t; c, v)| ≤ ε ‖c‖H1(Ω) ‖v‖H1(Ω) +∣∣∣V1
1cos φ
∣∣∣ ‖c‖H1(Ω) ‖v‖H1(Ω)
+ |V2| ‖c‖H1(Ω) ‖v‖H1(Ω) + |k2| ‖c‖H1(Ω) ‖v‖H1(Ω)
luego, tomando
M = ε +
∣∣∣∣V11
cos φ
∣∣∣∣ + |V2|+ |k2|tenemos
|A (t; c, v)| ≤ M ‖c‖H1(Ω) ‖v‖H1(Ω)
4. Como el termino Lf (v) de (2.3.3) esta dado por:
Lf (v) = −k1 〈g|v〉Γ1+ k2 〈ce|v〉Γ2
+ (F|v)0,Ω + (c0|v)0,Ω δ0(t)
= −k1
∫
Γ1
g v dγ + k2
∫
Γ2
ce v dγ +
∫∫
Ω
F v dµ +
(∫∫
Ω
c0v dµ
)δ0(t)
y teniendo que,
‖v‖L 2 ≤ µ (Ω) ‖v‖H1(Ω) ∀v ∈ Vdadas las escogencias de g, ce, F , y c0 ∈ L 2 (Ω× (0, T ]) se tiene
|Lf (v)| =∣∣∣−k1
∫Γ1
g v dγ + k2
∫Γ2
ce v dγ +∫∫
ΩF v dµ +
(∫∫Ω
c0 v dµ)δ0(t)
∣∣∣
≤ k1
∫
Γ1
|g v| dγ + k2
∫
Γ2
|ce v| dγ +
∫∫
Ω
|F v| dµ +
(∫∫
Ω
|c0 v| dµ
)δ0(t)
≤ k1 ‖g‖L 2 ‖v‖L 2 + k2 ‖ce‖L 2 ‖v‖L 2 + ‖F‖L 2 ‖v‖L 2 + ‖c0‖L 2 ‖v‖L 2
≤ (k1 ‖g‖L 2 + k2 ‖ce‖L 2 + ‖F‖L 2 + ‖c0‖L 2) ‖v‖H1(Ω)
que satisfacen las hipotesis v) y vi) del teorema.
Por lo tanto existe una unica solucion al problema (2.3.3), formulado variacional-
mente.
15
Capıtulo 3
Discretizacion del problema
En este capıtulo presentamos el proceso de discretizacion de la ecuacion en su for-
mulacion debil. Para lograrlo, usaremos el metodo de elementos finitos – a traves de la
escogencia de la tecnica de Galerkin standard para la discretizacion espacial, y el esquema
de Crank-Nicolson para la discretizacion temporal.
1 Introduccion
Para la discretizacion de la ecuacion (2.2.3), en lugar de obtener funciones en V ,
numericamente obtenemos aproximaciones, en la forma:
c (λ, φ, t) ∼= ch (λ, φ, t) =
Nh∑j=1
cj (t) ϕj (λ, φ) (3.1.1)
y llamando Vh el subespacio de V de dimension Nh < +∞ generado por las Nh funciones
base ϕj (λ, φ) de Vh.
Intuitivamente la idea central es remitirnos a un metodo muy tradicional de resolu-
cion analıtica de ecuaciones diferenciales parciales llamada separacion de variables, donde
asumimos la solucion como un producto de funciones independientes en las variables tempo-
ral y espacial. En la tecnica de Galerkin tambien se tiene esta separacion no de la solucion,
sino mas bien del espacio en que buscamos esta solucion (algo muy similar al intentar descom-
poner V como una suma directa de subespacios convenientes, solo que aqui la descomposicion
no es una suma directa).
La opcion para la presente aproximacion son los triangulos de primer orden en el
dominio; esto generalmente significa que el dominio discretizado Ωh ya no coincide con el
16

original pero lo aproxima en cierto sentido que, cuando los tamanos de los triangulos mas
grandes en cada discretizacion van a cero, el dominio discretizado tiende al original. No
obstante mantendremos la misma identificacion, es decir Ω, sin la perdida de informacion.
2 Discretizacion espacial
Reescribiendo (2.2.3) para las funciones aproximadas dadas en (3.1.1), resulta en
ecuaciones validas para cualquier funcion en el ahora subespacio finito-dimensional. Lo
que sugiere verificar el sistema unicamente para los elementos de la base del espacio finito-
dimensional. Por consiguiente, lo que tenemos es equivalente al sistema discreto dado, para
t ∈ (0, T ], por:
(∂ch
∂t
∣∣∣∣ν)
0,Ω
+ α
[(1
cos2 φ
∂ch
∂λ
∣∣∣∣∂ν
∂λ
)
0,Ω
+
(∂ch
∂φ
∣∣∣∣∂ν
∂φ
)
0,Ω
]
+ V1
(1
cos φ
∂ch
∂λ
∣∣∣∣ν)
0,Ω
+ V2
(∂ch
∂φ
∣∣∣∣ν)
0,Ω
+ σ (ch|ν)0,Ω
+ k2 〈ch|ν〉Γ2= k2 〈ce|ν〉Γ2
− k1 〈g|ν〉Γ1+ (F|ν)0,Ω ∀ ν ∈ Vh
(3.2.1)
que nos lleva al siguiente sistema de ecuaciones diferenciales ordinarias discretizado:
(Nh∑j=1
dcj
dtϕj
∣∣∣∣ν)
0,Ω
+ α
(1
cos2 φ
Nh∑j=1
cj∂ϕj
∂λ
∣∣∣∣∂ν
∂λ
)
0,Ω
+
(Nh∑j=1
cj∂ϕj
∂φ
∣∣∣∣∂ν
∂φ
)
0,Ω
+ V1
(1
cos φ
Nh∑j=1
cj∂ϕj
∂λ
∣∣∣∣ν)
0,Ω
+ V2
(Nh∑j=1
cj∂ϕj
∂φ
∣∣∣∣ν)
0,Ω
+ σ
(Nh∑j=1
cjϕj
∣∣∣∣ν)
0,Ω
+ k2
⟨∑j∈Γ2
cjϕj
∣∣∣∣ν⟩
Γ2
= k2 〈ce|ν〉Γ2− k1 〈g|ν〉Γ1
+ (F|ν)0,Ω ∀ ν ∈ Vh
(3.2.2)
como los coeficientes cj = cj (t) no dependen de λ ni de φ pueden salir de los
productos internos, que son definidos solo para las variables espaciales, ası:
17

Nh∑j=1
dcj
dt
(ϕj
∣∣∣∣ν)
0,Ω
+
Nh∑j=1
cj
[α
(1
cos2 φ
∂ϕj
∂λ
∣∣∣∣∂ν
∂λ
)
0,Ω
+
(∂ϕj
∂φ
∣∣∣∣∂ν
∂φ
)
0,Ω
+ V1
(1
cos φ
∂ϕj
∂λ
∣∣∣∣ν)
0,Ω
+ V2
(∂ϕj
∂φ
∣∣∣∣ν)
0,Ω
+ σ (ϕj|ν)0,Ω
]
+ k2
∑j∈Γ2
cj 〈ϕj|ν〉Γ2= k2 〈ce|ν〉Γ2
− k1 〈g|ν〉Γ1+ (F|ν)0,Ω
∀ν ∈ Vh
(3.2.3)
Ahora, escribir la ecuacion (3.2.3) para ∀ ν ∈ Vh, equivale escribirla para los elemen-
tos de la base. Por lo tanto tenemos:
Nh∑j=1
dcj
dt
(ϕj
∣∣∣∣ϕi
)+ cj
α
[(1
cos2 φ
∂ϕj
∂λ
∣∣∣∣∂ϕi
∂λ
)+
(∂ϕj
∂φ
∣∣∣∣∂ϕi
∂φ
)]
+ V1
(1
cos φ
∂ϕj
∂λ
∣∣∣∣ϕi
)+ V2
(∂ϕj
∂φ
∣∣∣∣ϕi
)+ σ (ϕj|ϕi)Ω
+ k2
∑j∈Γ2
cj 〈ϕj|ϕi〉Γ2= k2 〈ce|ϕi〉Γ2
− k1 〈g|ϕi〉Γ1+ (F|ϕi)
∀ ϕj ∈ Vh
(3.2.4)
En la ecuacion anterior, las expresiones en las sumas las cuales se refieren a los
productos internos sobre la parte de las fronteras, en realidad indican que los unicos ındices
considerados seran aquellos que yacen sobre dichas partes de la frontera. La ecuacion (3.2.4)
describe, un sistema lineal de ecuaciones diferenciales ordinarias.
3 Discretizacion temporal
La ecuacion (3.2.4) sera ahora aproximada en su variable temporal usando el esque-
ma de Crank-Nicolson con diferencias centradas de segundo orden, para el cual usaremos las
aproximaciones dadas por (3.3.1) y (3.3.2). Los subindices i y j se refieren a la discretizacion
del dominio espacial, donde cij es la concentracion en el nodo (λi, φj) ∈ Ω.
d
dtcij
(tn +
∆t
2
)≈ cij (tn+1)− cij (tn)
∆t(3.3.1)
cij
(tn +
∆t
2
)≈ c
(n+1)ij + c
(n)ij
2(3.3.2)
18

Reescribiendo (3.2.4) para las funciones aproximadas dadas en (3.3.1–3.3.2), resulta
un sistema de ecuaciones lineales algebraico, para tn ∈ (0, T ] de c (tn), donde obtenemos el
sistema lineal discretizado (Meyer y Diniz, 2006):
Nh∑j=1
cn+1j
[(1 + σ
∆t
2
)(ϕj
∣∣∣∣ϕi
)+ α
∆t
2
(1
cos2 φ
∂ϕj
∂λ
∣∣∣∣∂ϕi
∂λ
)+ α
∆t
2
(∂ϕj
∂φ
∣∣∣∣∂ϕi
∂φ
)
+V1∆t
2
(1
cos φ
∂ϕj
∂λ
∣∣∣∣ϕi
)+ V2
∆t
2
(∂ϕj
∂φ
∣∣∣∣ϕi
)+ k2
∆t
2
⟨ϕj
∣∣∣∣ϕi
⟩
j∈Γ2
]=
Nh∑j=1
cnj
[(1− σ
∆t
2
)(ϕj
∣∣∣∣ϕi
)− α
∆t
2
(1
cos2 φ
∂ϕj
∂λ
∣∣∣∣∂ϕi
∂λ
)− α
∆t
2
(∂ϕj
∂φ
∣∣∣∣∂ϕi
∂φ
)
−V1∆t
2
(1
cos φ
∂ϕj
∂λ
∣∣∣∣ϕi
)− V2
∆t
2
(∂ϕj
∂φ
∣∣∣∣ϕi
)− k2
∆t
2
⟨ϕj
∣∣∣∣ϕi
⟩
j∈Γ2
]
−k1∆t
⟨g
∣∣∣∣ϕi
⟩
Γ1
+k2∆t
⟨ce
∣∣∣∣ϕi
⟩
Γ2
+∆t (F|ϕi) ∀ϕi ∈ Vh
(3.3.3)
Podemos representar el sistema discretizado (3.3.3) en la forma matricial por:
Ac(n+1) = Bc(n) + d (3.3.4)
donde
aij =
(1 + σ
∆t
2
)(ϕj
∣∣∣∣ϕi
)+ α
∆t
2
(1
cos2 φ
∂ϕj
∂λ
∣∣∣∣∂ϕi
∂λ
)+ α
∆t
2
(∂ϕj
∂φ
∣∣∣∣∂ϕi
∂φ
)
+ V1∆t
2
(1
cos φ
∂ϕj
∂λ
∣∣∣∣ϕi
)+ V2
∆t
2
(∂ϕj
∂φ
∣∣∣∣ϕi
)+ k2
∆t
2
⟨ϕj
∣∣∣∣ϕi
⟩
j∈Γ2
bij =
(1− σ
∆t
2
)(ϕj
∣∣∣∣ϕi
)− α
∆t
2
(1
cos2 φ
∂ϕj
∂λ
∣∣∣∣∂ϕi
∂λ
)− α
∆t
2
(∂ϕj
∂φ
∣∣∣∣∂ϕi
∂φ
)
− V1∆t
2
(1
cos φ
∂ϕj
∂λ
∣∣∣∣ϕi
)− V2
∆t
2
(∂ϕj
∂φ
∣∣∣∣ϕi
)− k2
∆t
2
⟨ϕj
∣∣∣∣ϕi
⟩
j∈Γ2
di = ∆t
[k2
⟨ce
∣∣∣∣ϕi
⟩
Γ2
− k1
⟨g
∣∣∣∣ϕi
⟩
Γ1
+
(F
∣∣∣∣ϕi
)]i = 1, 2, · · · , Nh
La matriz A en la ecuacion (3.3.4) es llamada matriz de rigidez y el vector re-
sultante de la operacion Bc(n) + d para cada instante tn +∆t
2es denominado el vector de
carga.
La escogencia de las funciones prueba ϕi se hara usando elementos finitos triangu-
lares de primer orden, que consiste en construir una malla de elementos finitos sobre un
19

dominio Ω y escoger las funciones base ϕ1, ϕ2, · · · , ϕNh definidas globalmente de tipo
lineal por partes y satisfaciendo la siguiente condicion:
ϕi (λj, φj) =
1 si i = j
0 si i 6= j
donde (λj, φj) son las coordenadas del j-esimo nodo en la malla.
De esta forma se obtiene una funcion piramide por cada nodo (ver la Figura 3.1),
que es lineal por partes, asumiendo el valor de 1 en el j-esimo nodo y 0 en los demas.
.
1
Figura 3.1: Grafico de la funcion piramide para un nodo j
En el capıtulo siguiente presentaremos los resultados para las simulaciones de algunos
escenarios.
20
Capıtulo 4
Resultados obtenidos
Presentaremos algunos resultados de las simulaciones realizadas con un codigo numerico
desarrollado en el software MATLAB r© con animaciones que pueden describir el proceso evo-
lutivo del contaminante en el dominio discretizado, en un intervalo de tiempo previamente
escogido, donde la principal caracterıstica es la visualizacion a traves de graficos que facilitan
su comprension.
1 Simulaciones de escenarios
Los parametros para las pruebas del modelo desarrollado y la simulacion de esce-
narios, fueron estimados dentro de los aspectos considerados razonables, algunos de ellos, tal
como el decaimiento, fue obtenido de las referencias disponibles, (por ejemplo Silva 2005),
otros fueron estimados una vez que el trabajo no esta aplicado a ningun problema real co-
mo por ejemplo la velocidad del viento que fue estimada cercana a los valores reales bajos,
(parametros empıricos).
Las simulaciones de los escenarios fueron obtenidas considerando la discretizacion del
dominio para algunos tipos de situaciones: bajas velocidades para el campo−→V y diferentes
valores para la permeabilidad en la frontera. La estimacion de la condicion inicial se basa
en la fuente de contaminacion derramada en el centro del dominio. Se hicieron los graficos
presentados en las simulaciones para los instantes de tiempo t = 0, t = 12, t = 24, y t = 40
horas, para los escenarios de las figuras 4.1, 4.3 y 4.5, respectivamente.
Los parametros usados para obtener los resultados en el escenario 1 (Figuras 4.1 y
4.2) son presentados en la tabla 4.1. Donde se ha considerado una baja difusion, corrientes
21
marinas debiles en la direccion de SO a NE, ası tenemos V1 = V cos π4, y V2 = V sen π
4donde
V es la magnitud de la velocidad de las corrientes marinas. Ademas estamos suponiendo que
despues de la descarga de contaminante en la parte central del dominio, la fuente continua
actuando en el mismo lugar.
Tabla 4.1: Parametros para la simulacion del escenario 1Parametros del modelo
Parametro Sımbolo Valor y Unidad
coeficiente de difusion α 0.0001 km2/h
decaimiento global σu 0.001 h−1
velocidad en la direccioneste-oeste
V1 0.008 cos π4
km/h
velocidad en la direccionnorte-sur
V2 0.008 sen π4
km/h
entrada por deriva en la fronteraΓ1
g 0.0001 ppm
permeabilidad en la frontera Γ1 k1 0.00001 h−1
permeabilidad en la frontera Γ2 k2 0.00001 h−1
concentracion externa en lafrontera Γ2
ce 0.0001 ppm
fuente de contamiacion F 0.01 ppm/h
constante de declinacion de lafuente
κ 0.01 ppm/h
discretizacion en la direccioneste-oeste
∆λ 0.0087 km
discretizacion en la direccionnorte-sur
∆φ 0.0087 km
discretizacion en el tiempo ∆t 0.02 horas
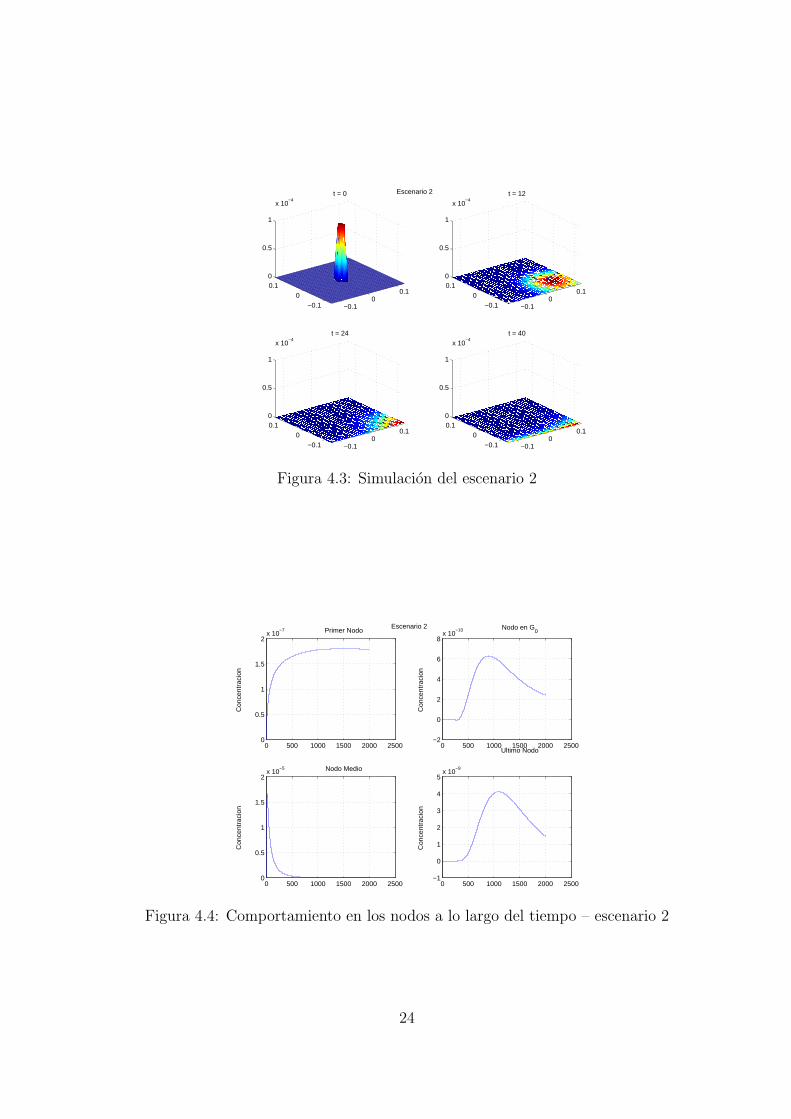
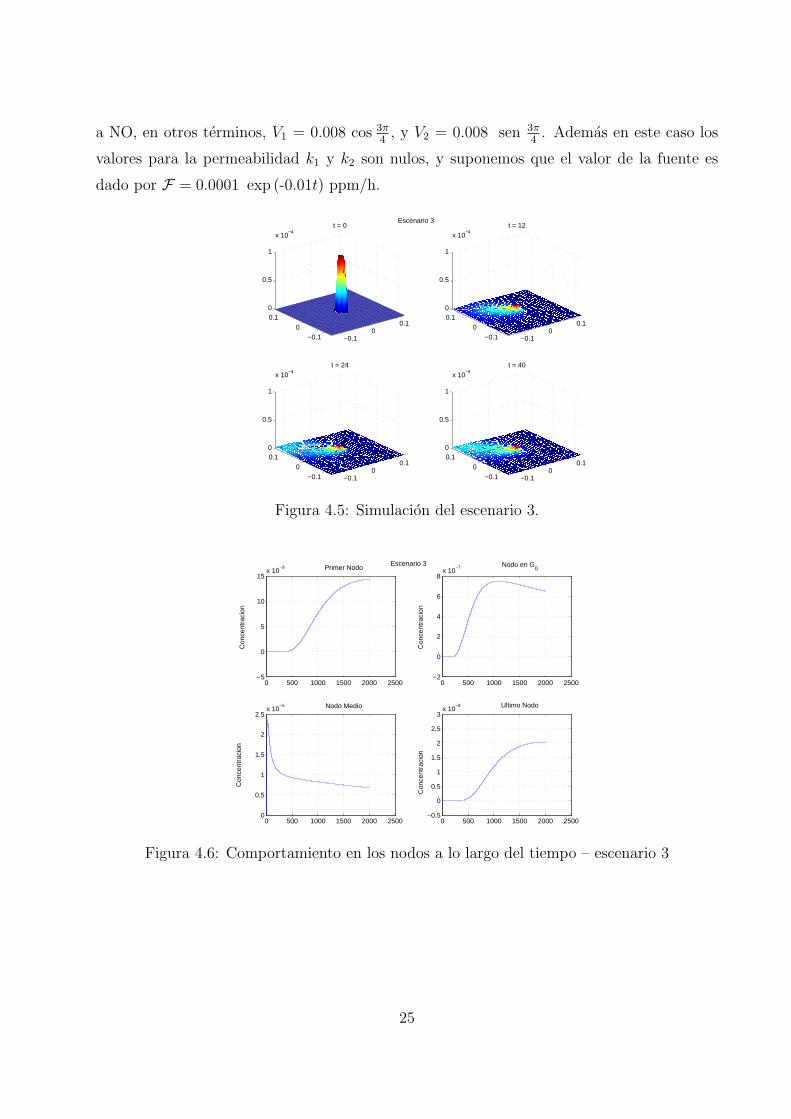
A continuacion, presentamos un segundo escenario donde se ha considerado igual-
mente una difusion baja, corrientes marinas debiles en la direccion NO a SE, sin fuente en
el centro. Los parametros usados para obtener los resultados de este escenario (Figuras 4.3
y 4.4) son los mismos presentados en la tabla 4.1, excepto k2 = ce = F = 0, V1 = 0.008
cos−π4, y V2 = 0.008 sen −π
4.
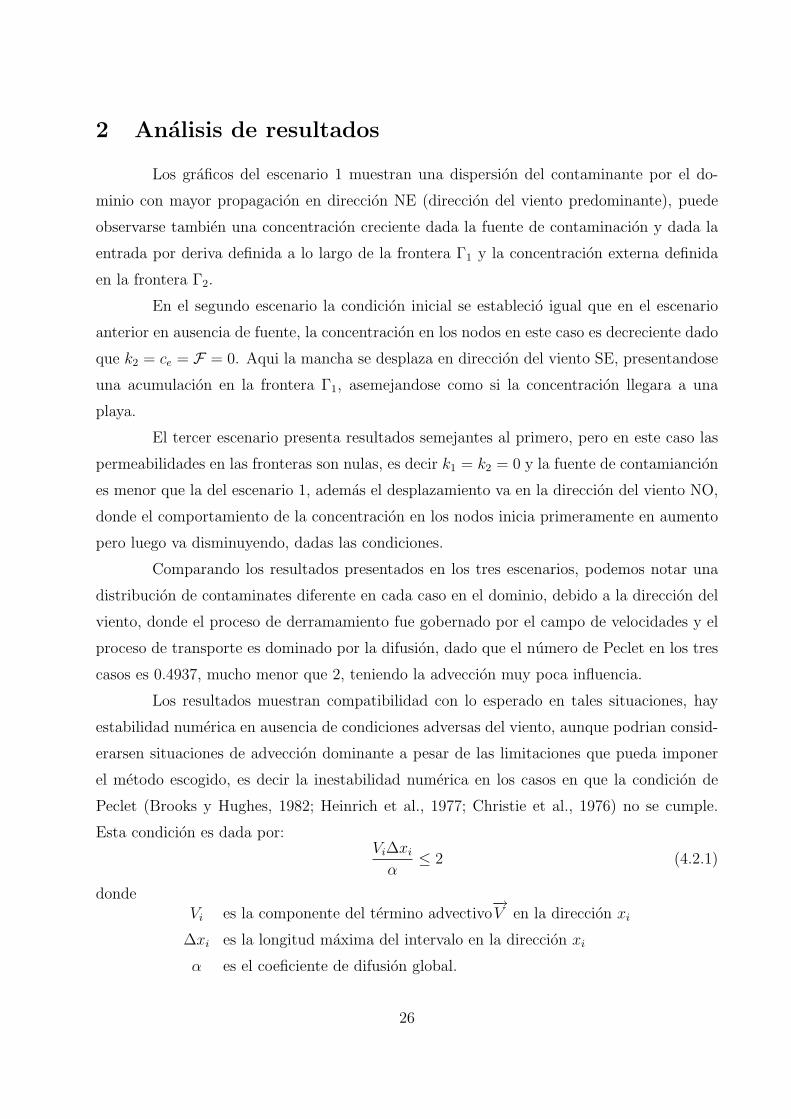
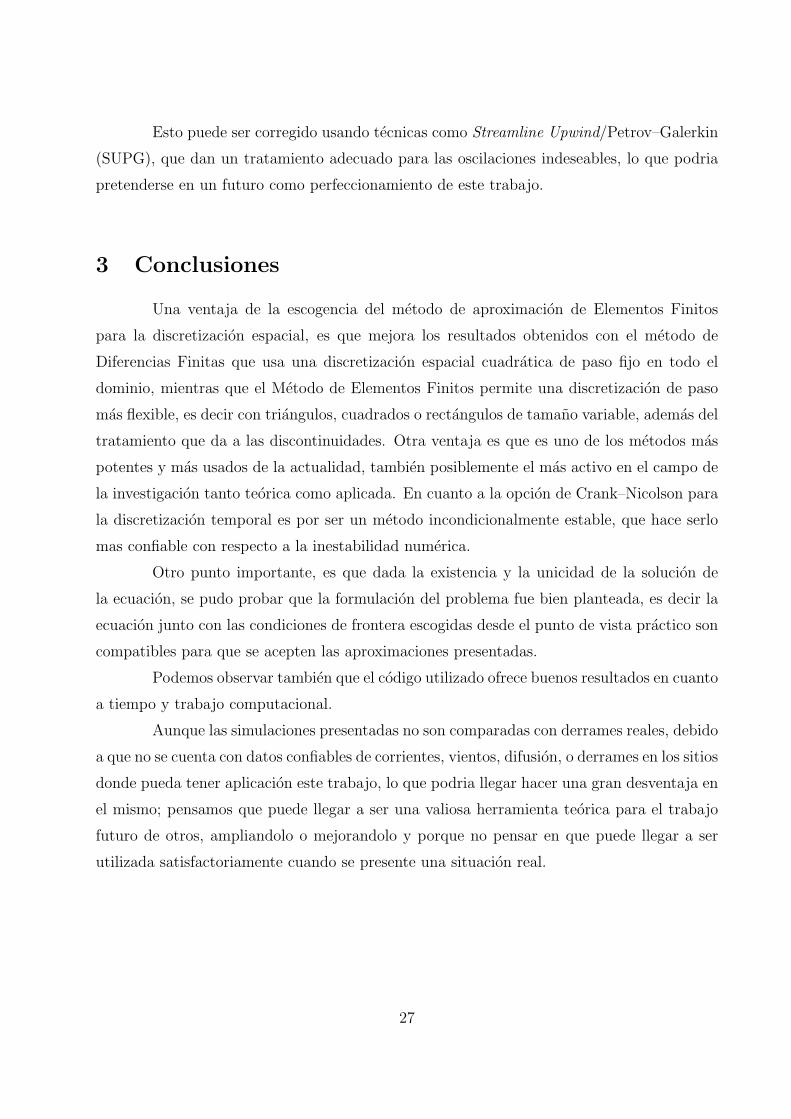
Finalmente, los parametros de los resultados presentados en el escenario 3 (Figuras
4.5 y 4.6) son los mismos mostrados en la tabla 4.1 cuyas condiciones difieren de las sim-
ulaciones previas en relacion a la direccion del campo de velocidades que suponemos es SE
22
−0.10
0.1
−0.10
0.10
0.5
1
x 10−4
t = 0
−0.10
0.1
−0.10
0.10
0.5
1
x 10−4
t = 12
−0.10
0.1
−0.10
0.10
0.5
1
x 10−4
t = 24
−0.10
0.1
−0.10
0.10
0.5
1
x 10−4
t = 40
Escenario 1
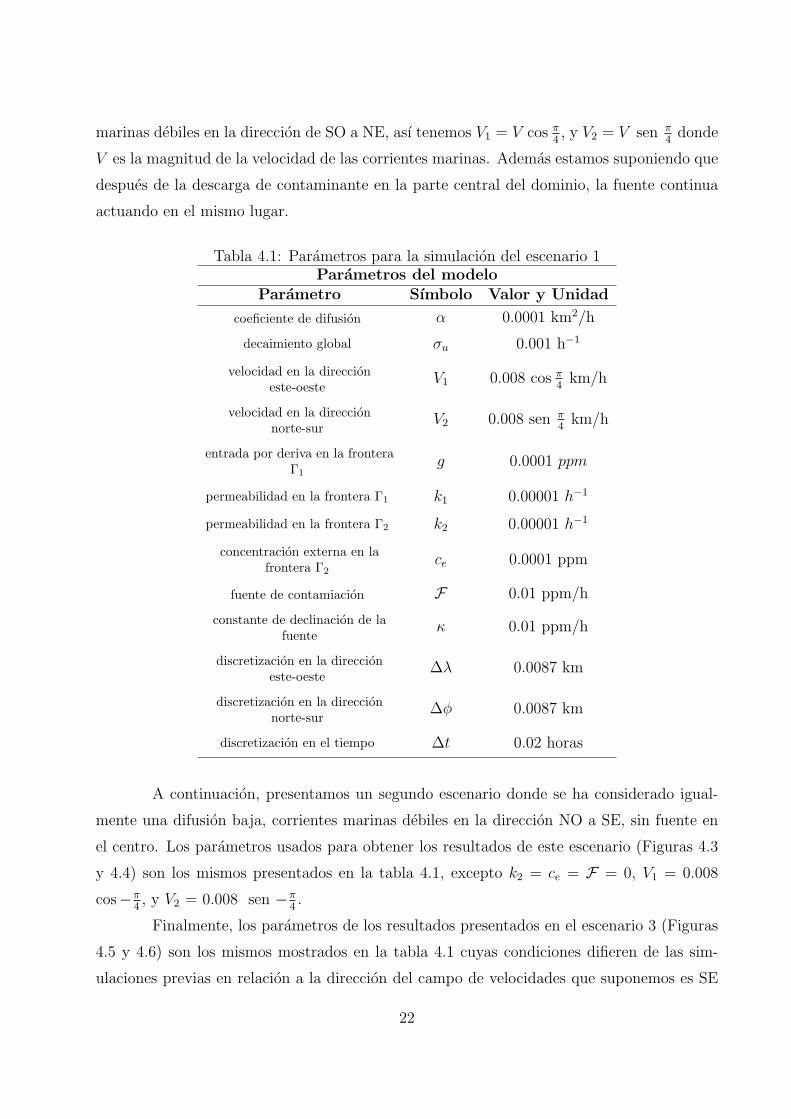
Figura 4.1: Simulacion del escenario 1
0 500 1000 1500 2000 25000
0.5
1
1.5
2
2.5x 10
−6 Primer Nodo
Con
cent
raci
on
0 500 1000 1500 2000 2500−5
0
5
10
15x 10
−7 Nodo en G0
Con
cent
raci
on
0 500 1000 1500 2000 25000
0.5
1
1.5x 10
−5 Nodo Medio
Con
cent
raci
on
0 500 1000 1500 2000 2500−1
0
1
2
3
4x 10
−6 Ultimo Nodo
Con
cent
raci
on
Escenario 1
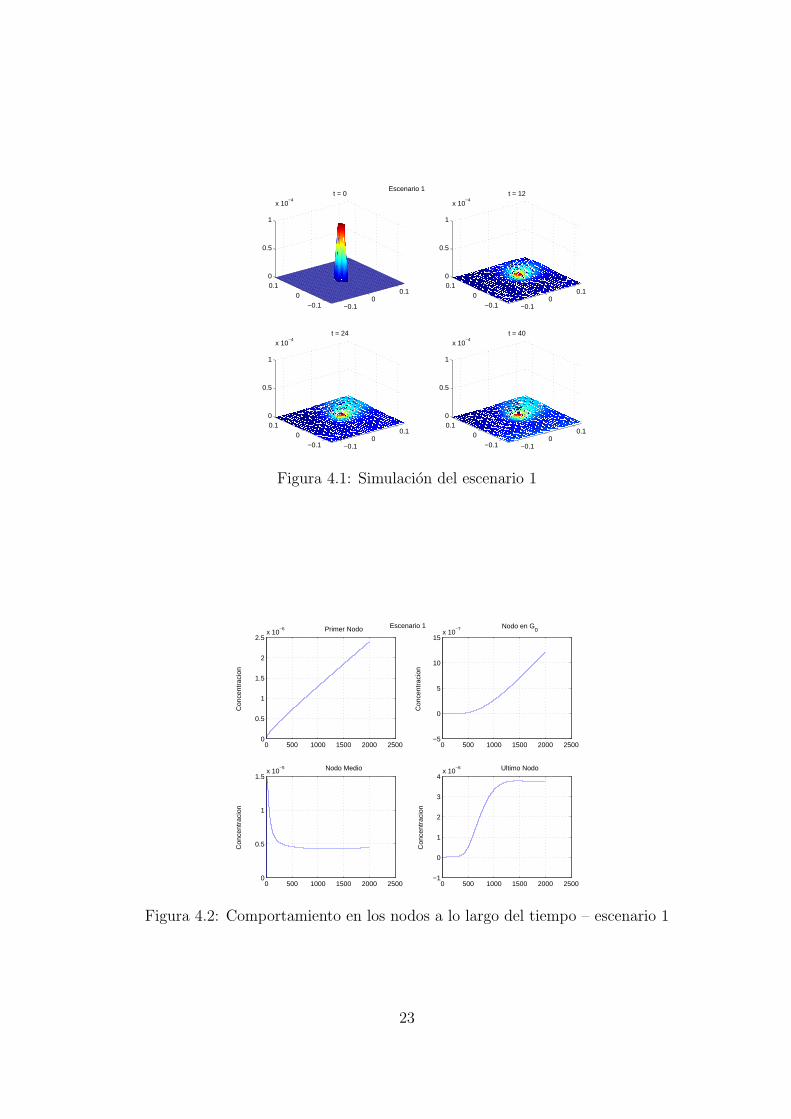
Figura 4.2: Comportamiento en los nodos a lo largo del tiempo – escenario 1
23
−0.10
0.1
−0.10
0.10
0.5
1
x 10−4
t = 0
−0.10
0.1
−0.10
0.10
0.5
1
x 10−4
t = 12
−0.10
0.1
−0.10
0.10
0.5
1
x 10−4
t = 24
−0.10
0.1
−0.10
0.10
0.5
1
x 10−4
t = 40
Escenario 2
Figura 4.3: Simulacion del escenario 2
0 500 1000 1500 2000 25000
0.5
1
1.5
2x 10
−7 Primer Nodo
Con
cent
raci
on
0 500 1000 1500 2000 2500−2
0
2
4
6
8x 10
−10 Nodo en G0
Con
cent
raci
on
0 500 1000 1500 2000 25000
0.5
1
1.5
2x 10
−5 Nodo Medio
Con
cent
raci
on
0 500 1000 1500 2000 2500−1
0
1
2
3
4
5x 10
−9
Ultimo Nodo
Con
cent
raci
on
Escenario 2
Figura 4.4: Comportamiento en los nodos a lo largo del tiempo – escenario 2
24
a NO, en otros terminos, V1 = 0.008 cos 3π4
, y V2 = 0.008 sen 3π4
. Ademas en este caso los
valores para la permeabilidad k1 y k2 son nulos, y suponemos que el valor de la fuente es
dado por F = 0.0001 exp (-0.01t) ppm/h.
−0.10
0.1
−0.10
0.10
0.5
1
x 10−4
t = 0
−0.10
0.1
−0.10
0.10
0.5
1
x 10−4
t = 12
−0.10
0.1
−0.10
0.10
0.5
1
x 10−4
t = 24
−0.10
0.1
−0.10
0.10
0.5
1
x 10−4
t = 40
Escenario 3
Figura 4.5: Simulacion del escenario 3.
0 500 1000 1500 2000 2500−5
0
5
10
15x 10
−9 Primer Nodo
Con
cent
raci
on
0 500 1000 1500 2000 2500−2
0
2
4
6
8x 10
−7 Nodo en G0
Con
cent
raci
on
0 500 1000 1500 2000 25000
0.5
1
1.5
2
2.5x 10
−5 Nodo Medio
Con
cent
raci
on
0 500 1000 1500 2000 2500−0.5
0
0.5
1
1.5
2
2.5
3x 10
−8 Ultimo Nodo
Con
cent
raci
on
Escenario 3
Figura 4.6: Comportamiento en los nodos a lo largo del tiempo – escenario 3
25
2 Analisis de resultados
Los graficos del escenario 1 muestran una dispersion del contaminante por el do-
minio con mayor propagacion en direccion NE (direccion del viento predominante), puede
observarse tambien una concentracion creciente dada la fuente de contaminacion y dada la
entrada por deriva definida a lo largo de la frontera Γ1 y la concentracion externa definida
en la frontera Γ2.
En el segundo escenario la condicion inicial se establecio igual que en el escenario
anterior en ausencia de fuente, la concentracion en los nodos en este caso es decreciente dado
que k2 = ce = F = 0. Aqui la mancha se desplaza en direccion del viento SE, presentandose
una acumulacion en la frontera Γ1, asemejandose como si la concentracion llegara a una
playa.
El tercer escenario presenta resultados semejantes al primero, pero en este caso las
permeabilidades en las fronteras son nulas, es decir k1 = k2 = 0 y la fuente de contamiancion
es menor que la del escenario 1, ademas el desplazamiento va en la direccion del viento NO,
donde el comportamiento de la concentracion en los nodos inicia primeramente en aumento
pero luego va disminuyendo, dadas las condiciones.
Comparando los resultados presentados en los tres escenarios, podemos notar una
distribucion de contaminates diferente en cada caso en el dominio, debido a la direccion del
viento, donde el proceso de derramamiento fue gobernado por el campo de velocidades y el
proceso de transporte es dominado por la difusion, dado que el numero de Peclet en los tres
casos es 0.4937, mucho menor que 2, teniendo la adveccion muy poca influencia.
Los resultados muestran compatibilidad con lo esperado en tales situaciones, hay
estabilidad numerica en ausencia de condiciones adversas del viento, aunque podrian consid-
erarsen situaciones de adveccion dominante a pesar de las limitaciones que pueda imponer
el metodo escogido, es decir la inestabilidad numerica en los casos en que la condicion de
Peclet (Brooks y Hughes, 1982; Heinrich et al., 1977; Christie et al., 1976) no se cumple.
Esta condicion es dada por:Vi∆xi
α≤ 2 (4.2.1)
dondeVi es la componente del termino advectivo
−→V en la direccion xi
∆xi es la longitud maxima del intervalo en la direccion xi
α es el coeficiente de difusion global.
26
Esto puede ser corregido usando tecnicas como Streamline Upwind/Petrov–Galerkin
(SUPG), que dan un tratamiento adecuado para las oscilaciones indeseables, lo que podria
pretenderse en un futuro como perfeccionamiento de este trabajo.
3 Conclusiones
Una ventaja de la escogencia del metodo de aproximacion de Elementos Finitos
para la discretizacion espacial, es que mejora los resultados obtenidos con el metodo de
Diferencias Finitas que usa una discretizacion espacial cuadratica de paso fijo en todo el
dominio, mientras que el Metodo de Elementos Finitos permite una discretizacion de paso
mas flexible, es decir con triangulos, cuadrados o rectangulos de tamano variable, ademas del
tratamiento que da a las discontinuidades. Otra ventaja es que es uno de los metodos mas
potentes y mas usados de la actualidad, tambien posiblemente el mas activo en el campo de
la investigacion tanto teorica como aplicada. En cuanto a la opcion de Crank–Nicolson para
la discretizacion temporal es por ser un metodo incondicionalmente estable, que hace serlo
mas confiable con respecto a la inestabilidad numerica.
Otro punto importante, es que dada la existencia y la unicidad de la solucion de
la ecuacion, se pudo probar que la formulacion del problema fue bien planteada, es decir la
ecuacion junto con las condiciones de frontera escogidas desde el punto de vista practico son
compatibles para que se acepten las aproximaciones presentadas.
Podemos observar tambien que el codigo utilizado ofrece buenos resultados en cuanto
a tiempo y trabajo computacional.
Aunque las simulaciones presentadas no son comparadas con derrames reales, debido
a que no se cuenta con datos confiables de corrientes, vientos, difusion, o derrames en los sitios
donde pueda tener aplicacion este trabajo, lo que podria llegar hacer una gran desventaja en
el mismo; pensamos que puede llegar a ser una valiosa herramienta teorica para el trabajo
futuro de otros, ampliandolo o mejorandolo y porque no pensar en que puede llegar a ser
utilizada satisfactoriamente cuando se presente una situacion real.
27
4 Consideraciones finales
Cabe reflexionar sobre las contribuciones que tuvo la realizacion de este trabajo y
las que puede tener para trabajos futuros de otros:
El codigo numerico utilizado es una adaptacion del codigo original disenado por Diniz
(2003) en su trabajo titulado “Dispersao de poluentes num sistema ar-agua; modelagem,
aproximacao e aplicacoes”.
Tenemos conciencia de las limitaciones o de la descontextualizacion de la aplicacion
que puede tener este trabajo, pero pensamos en que puede ser mas una base teorica para
nuevos desafios futuros, tales como:
- Usar otro metodo para la aproximacion de la solucion de la ecuacion como la
tecnica de Streamline Upwind/Petrov–Galerkin, tambien llamada SUPG.
- Realizacion de un analisis criticamente comparativo entre diferentes metodos.
- Inclusion de datos confiables que sirvan para la simulacion y calibracion del modelo
o insercion de parametros experimentales.
- Consideracion de otros dominios con otras condiciones de frontera, otros escenarios
y otros tipos de contaminantes.
- Profundizacion en estudios de analisis funcional y/o analisis numerico.
28
Bibliografıa
Bassanezi, R. C. (2002). Ensino–aprendizagem com modelagem matematica. Ed. Contexto,
S. Paulo.
Brener, S. C. y Scott, L. R. (1994). The Mathematical Theory of Finite Elements Methods.
Springer, N. York.
Bressan, A. (2000). Hyperbolic Systems of Conservation Laws, volume 20 de Oxford Lecture
Series in Mathematics and its Applications. Oxford University Press, Oxford.
Brooks, A. N. y Hughes, T. J. R. (1982). Streamline upwind/Petrov-Galerkin formulations
for convection dominated flows with particular emphasis on incompressible Navier-Stokes
equations. Computer Methods in Applied Mechanics and Engineering, 32:199–259.
Christie, I., Griffiths, D., Mitchell, A. R., y Zienkiewicz, O. C. (1976). Finite elements meth-
ods for second order differential equations with significant first derivatives. International
Journal for Numerical Methods in Engineering, 10:1389–1396.
Ciarlet, P. G. (1987). The finite element for elliptic problems. North-Holland, Amsterdan.
Diniz, G. L. (2003). Dispersao de poluentes em um sistema ar–agua: modelagem, aproxi-
macao e aplicacoes. PhD thesis, Faculdade de Engenharia Eletrica e de Computacao,
UNICAMP, Campinas, Brasil.
Diniz, G. L. y Meyer, J. F. C. A. (2005). Pollutant dispersal on stuary sistem: study and
mathematical modeling. In: Proceedings of the 4th Brazilian Symposium on Mathematical
and Computational Biology, vol. II:333–346.
Edelstein-Keshet, L. (1988). Mathematical Models in Biology. Random-House, N. York.
29
Heinrich, J. C., Huyakorn, P. S., Mitchell, A. R., y Zienkiewicz, O. C. (1977). An upwind
finite elements scheme for two-dimensional convective transport equation. International
Journal for Numerical Methods in Engineering, 11:131–143.
Lions, J. L. (1961). Equations Differentelles Operationelles. Springer.
Marchuk, G. I. (1986). Mathematical models in environmental problems, volume 16 de Studies
in Mathematical and its Applications. North-Holland, Amsterdan.
Mendez, R. M. (2005). Extension de un modelo de difusion de partıculas contaminantes a
superficies esfericas. Master’s thesis, Uniquindıo, Armenia, Quindıo, Colombia.
Meyer, J. F. C. A. (1998). Modelos matematicos de impacto ambiental – uma visao in-
trodutoria. Relatorio de Pesquisa; Instituto de Matematica, Estatıstica e Computacao
Cientıtica, UNICAMP, Campinas, Brasil.
Meyer, J. F. C. A. y Diniz, G. L. (2006). Pollutant dispersion in wetland systems: mathe-
matical modeling and numerical simulation. Ecological Modelling, (Accept – to appear).
Okubo, A. (1980). Diffusion and Ecological Problems: Mathematical Models. Springer,
Berlin.
Showalter, R. E. (1977). Hilbert Space Method for Partial Equations. University of Texas
Press, Austin.
Silva, C., Boia, C., Valente, J., y Borrego, C. (2005). Pesticides in Esteros del Ibera (AR):
evaluation of impacts and proposal of guidelines for water quality protection. Ecological
Modelling, 186(1):85–97.
Simonit, S., Cattaneo, F., y Perrings, C. (2005). Modelling the hydrological externalities
of agriculture in wetlands: the case of rice in Esteros del Ibera, Argentina. Ecological
Modelling, 186(1):123–141.
Weidemaier, P. (1998). Existence results in Lp–Lq spaces for second order parabolic equations
with inhomogeneous Dirichlet boundary conditions, in: Progress in Partial differential
equations, paginas 189–200. Longman, Harlow.
Wikimedia (2006). Green’s identities. in: Webpage of Wikipedia – The Free Encyclopedia,
direccion url: http://en.wikipedia.org/wiki/Green’s identities; aceso en: 22/04/2006.
30
Zingales, F., Marani, A., Rinaldo, A., y Bendoricchio, G. (1984). A conceptual model of
unit-mass response function for nonpoint source pollutant runoff. Ecological Modelling,
26:285–311.
31
Apendice A
Conceptos y definiciones
En este apendice, se presentan algunos conceptos basicos usados en los capıtulos 2
y 3, de manera que faciliten la comprension de las condiciones allı empleadas. Se presentan,
tambien, algunas definiciones cuya terminologa es mas especıfica, o no la hemos dado a lo
largo de los capıtulos.
1 Elemento finito
Se sigue la definicion de Ciarlet de Elemento Finito (Ciarlet, 1987).
Definicion 1.1. Sea
i) K ⊆ Rn un dominio con frontera suave a trozos (el dominio del elemento);
ii) P un espacio finito dimensional de funciones en K (las funciones de forma) y
iii) N = N1, N2, · · · , NK una base para P (las variables nodales).
Entonces (K, P, N) es llamado un elemento finito.
Definicion 1.2. Sea (K, P, N) un elemento finito, y sea φ1, φ2, · · · , φk la base dual para
P en N (Ni (φj) = δij). Esta es llamada la base nodal para P .
32

2 Integracion de Lebesgue
Definicion 2.1. Por dominio entendemos un subconjunto de Rn medible en el sentido de
Lebesgue (usualmente cualquier abierto o cerrado) con el interior no vacio. Restringiremos
nuestra atencion por simplicidad a funciones de valor real, f , en un dominio dado, Ω, esto
es medible en el sentido de Lebesgue; ası:
∫
Ω
f (x) dµ
denotamos la integral de Lebesgue de f (dµ denota la medida de Lebesgue). Para 1 ≤ p < ∞,
sea
‖f‖Lp (Ω) :=
(∫
Ω
|f (x)|p dµ
) 1p
y para el caso p = ∞ sea
‖f‖L∞ (Ω) := ess sup |f (x)| : x ∈ Ω .
En cada caso, definimos el espacio de Lebesgue
Lp (Ω) :=
f : ‖f‖Lp(Ω) < ∞
Para evitar diferencias triviales entre las funciones, identificamos dos funciones, f y
g, que satisfacen ‖f − g‖Lp(Ω) = 0. Por ejemplo, tomemos n = 1, Ω = [−1, 1] y
f (x) :=
1 si x ≥ 0
0 si x < 0
y g (x) :=
1 si x > 0
0 si x ≤ 0
Luego f y g difieren unicamente en un conjunto de medida cero (un punto en este
caso) vemos entonces como representar la misma funcion. Con una pequena ambiguedad de
33

notacion entonces pensamos de Lp (Ω) como un conjunto de clases equivalentes de funciones
con respecto a esta identificacion. Hay algunas desigualdades famosas (y utiles) que se
cumplen para las funcionales definidas arriba.
3 Algunas desigualdades
Desigualdad de Minkowski
Para 1 ≤ p ≤ ∞ y f, g ∈ Lp (Ω), tenemos
‖f + g‖Lp(Ω) ≤ ‖f‖Lp(Ω) + ‖g‖Lp(Ω)
Desigualdad de Holder
Para 1 ≤ p, q ≤ ∞ tal que 1 = 1p+ 1
q, si f ∈ Lp (Ω) y g ∈ Lq (Ω), entonces fg ∈ L1 (Ω)
y
‖fg‖L1(Ω) ≤ ‖f‖Lp(Ω) ‖g‖Lq(Ω)
Desigualdad de Cauchy–Schwarz
Esta es simplemente la desigualdad de Holder en el caso especial p = q = 2, si
f, g ∈ L2 (Ω) entonces fg ∈ L1 (Ω) y∫
Ω
|f (x) g (x)| dµ ≤ ‖f‖L2(Ω) ‖g‖L2(Ω)
En vista de que la Desigualdad de Minkowski y las definiciones de ‖·‖Lp(Ω), el espacio
Lp (Ω) es cerrado sobre combinaciones lineales, esto es un espacio lineal o vectorial. Ademas,
las funcionales ‖·‖Lp(Ω) tienen propiedades que las clasifican como normas.
Definicion 3.1. Dado un espacio lineal (vectorial) V , una norma ‖·‖, es una funcion en
V con valores en los reales no negativos teniendo las siguientes propiedades:
i) ‖v‖ ≥ 0∀ v ∈ V y ‖v‖ = 0 ⇐⇒ v = 0;
ii) ‖c.v‖ = |c| . ‖v‖ ∀ c ∈ R, v ∈ V , y
iii) ‖v + w‖ ≤ ‖v‖+ ‖w‖ ∀ v, w ∈ V (desigualdad triangular).
34

Una norma ‖·‖, puede ser usada para definir una nocion de distancia, o metrica,
d (v, w) = ‖v − w‖ para puntos v, w ∈ V . Un espacio vectorial dotado con la topologıa
inducida por esta metrica es llamado un espacio lineal normado.
Definicion 3.2. Un espacio lineal normado (V, ‖·‖) es llamado un espacio de Banach si
es completo con respecto a la metrica inducida por la norma, ‖·‖.
Teorema 3.1. Para 1 ≤ p ≤ ∞, Lp (Ω) es un espacio de Banach.
Definicion 3.3. Un espacio lineal V junto con un producto interno definido sobre este es
llamado un espacio de producto interno y es denotado por (V, (·, ·)).Los siguientes son ejemplos de espacios de producto interno:
i) V = Rn, (x, y) :=n∑
i=1
xiyi;
ii) V = L2 (Ω) , Ω ⊆ Rn, (u, v)L2(Ω) :=∫
Ωu (x) v (x) dµ;
iii) V = Wk2 (Ω) , Ω ⊆ Rn, (u, v)k :=
∑|α|≤k
(Dαu,Dαv)L2(Ω).
El espacio de producto interno iii) es frecuentemente denotado por Hk (Ω). Ası,
Hk (Ω) = Wk2 (Ω).
Definicion 3.4. Sea (V, (·, ·)) un espacio de producto interno. Si el asociado espacio lineal
normado (V, ‖·‖) es completo, entonces (V, (·, ·)) es llamado un espacio de Hilbert.
Los ejemplos i), ii) y iii) anteriores son todos espacios de Hilbert
Definicion 3.5. Sea
i) Ω ⊆ Rn un conjunto abierto y sea k un entero no negativo. El espacio vectorial de
todas las funciones:
Hk (Ω) =v ∈ L2 (Ω) : La derivada debil Dα(v) exista para todo |α| ≤ k
es llamado un espacio de Sobolev
35

ii) Para u, v ∈ Hk (Ω) sea (u, v)k = (u, v)k,Ω =∑|α|≤k
(Dαu, Dαv)Ω
y ‖u‖k = ‖u‖k,Ω = (u, u)12k,Ω
36
Apendice B
Codigos fuentes
En este apendice, se presentan los codigos numericos usados en la aplicacion del
metodo numerico escogido para las aproximaciones de la solucion del problema. En la
seccion 2), se presenta el codigo llevado a cabo en Mathematicar para la evaluacion de las
integrales dadas por los productos internos que aparecen en la ecuacion (3.3.3) – pg. 19.
1 Codigo fuente para Matlabr
El codigo siguiente se llevo a cabo en la version de Matlabr 6.1.0.450 descargado
12.1 para Windows XPr, en una computadora PC Pentium 4, con 1 GB de memoria RAM,
para obtener las animaciones y simular los escenarios presentados en el capıtulo de resultados
en las paginas 23, 24 y 25. El codigo presentado hace referencia al escenario 1, para los demas
escenarios solo hay que hacer los cambios en los parametros.
1 %
2 % Aproximacion y Simulacion de um Modelo de Dispersion de Contaminantes
3 % en um Dominio Bidimensional en Coordenadas Esfericas
4 %
5 clear all; t0=clock; %format long;
6 %
7 % Parametros del modelo
8 %
9 D = 0.0001; % componente del termino difusivo
10 g = 0.0001; % componente de deriva g
37
11 sg = 0.001; % coeficiente de decaimiento
12 teta = pi/4; % direccion del viento
13 v1 = .008*cos(teta); % componente advectiva en direccion lambda
14 v2 = .008*sin(teta); % componente advectiva en direccion phi
15 k1 = 0.00001; % permeabilidad en Gama 1
16 k2 = 0.00001; % permeabilidad en Gama 2
17 Ce = 0.0001; % concentracion en el medio externo en Gama_2
18 A0 = 0.0001; % concentracion inicial de la fuente
19 de = 0.01; % decaimiento de la fuente
20 %
21 % Parametros del dominio (espacio y tiempo)
22 %
23 lmin=-pi/24; lmax=pi/24; % intervalo en lambda
24 fmin=-pi/24; fmax=pi/24; % intervalo en phi
25 tfinal=40.0; % tiempo final
26 %
27 % Parametros de la discretizacion
28 %
29 nl = 30; % no. de subintervalos em lambda
30 nf = nl; % no. de subintervalos em phi
31 nnl= nl+1; % no. de nodos en la direccion lambda
32 nnf= nf+1; % no. de nodos en la direccion phi
33 npt= 2000; % no. de pasos en el tiempo
34 dl = (lmax-lmin)/nl; % amplitud de subintervalo en direccion lambda
35 df = (fmax-fmin)/nf; % amplitud de subintervalo en direccion phi
36 %
37 % Parametros auxiliares de la discretizacion
38 %
39 dlf=dl*df;
40 dldf=dl/df;
41 dfdl=df/dl;
42 dt=tfinal/npt;
43 mdt=dt/2;
44 ntr=2*nl*nf; % total de triangulos
45 ntf=2*nf; % no. de triangulos en la direccion phi
46 nn = nnl*nnf; % no. total de nodos
47 %
48 % Calculo del No. de Peclet
49 %
50 npec = [abs(v1*dl/D);abs(v2*df/D)];
51 %
52 % Montaje de la malla de los elementos finitos
53 %
54 k=0;
55 for i=1:nl;
38
56 for j=1:nf;
57 k=k+1;
58 ind = (i-1)*nnf + j;
59 malla(k,1)=ind;
60 malla(k,2)=ind+nnf;
61 malla(k,3)=ind+1;
62 k=k+1;
63 malla(k,1)=ind+nnf+1;
64 malla(k,2)=ind+1;
65 malla(k,3)=ind+nnf;
66 end;
67 end;
68 %
69 % Montaje de la malla de coordenadas de los nodos
70 %
71 k=0;
72 for i=1:nnl
73 l = lmin + (i-1)*dl;
74 for j = 1:nnf
75 f = fmin + (j-1)*df;
76 k = k + 1;
77 coord(k,1) = l;
78 coord(k,2) = f;
79 end;
80 end;
81 %
82 % Condicion inicial
83 %
84 u0 = zeros(nn,1);
85 tfue1 = ntf*(nl+1)/2;
86 for iel=tfue1:tfue1+1
87 for il=1:3
88 ig=malla(iel,il);
89 u0(ig) = 0.0001;
90 end;
91 end;
92 mm = max(u0);
93 %
94 % Submatrices de Rigidez
95 %
96 % (fi-j)*(fi-i)
97 %
98 m = (dlf/24)*[2 1 1; 1 2 1; 1 1 2];
99 %
100 % Submatrices (grad Fi_j : grad Fi_i) inferiores y superiores
39
101 %
102 n11 = (1/dlf)*[1 0 0;0 1 0;0 0 0];
103 %
104 n12 = (1/dlf)*[0 1 0;1 0 0;0 0 0];
105 %
106 n2 = (dl/(2*df))*[1 0 -1;0 0 0;-1 0 1];
107 %
108 % [(dfi-j/dl)*fi-i] e [(dfi-j/df)*fi-i]
109 % para los triangulos inferiores y superiores
110 %
111 p = (df/16)*[-1 1 0];
112 %
113 % vectores auxiliares para la cuadratura de Gauss
114 %
115 x = [0.8611363116 0.3399810436 -0.3399810436 -0.8611363116];
116 w = [0.3478548451 0.6521451549 0.6521451549 0.3478548451];
117 %
118 qi = (dl/6)*[-1 0 1];
119 qs = (dl/6)*[ 1 0 -1];
120 %
121 % Termino de entrada (por deriva) en la frontera abajo
122 %
123 % < g | fi-i > (en Gama-1)
124 %
125 si = dl/2*[1; 1; 0];
126 %
127 % Flujo en la frontera < fi-j | fi-i > (en Gama-2)
128 %
129 rs = (df/6)*[2 1;1 2];
130 %
131 % Flujo en la frontera < Ce | fi-i > (en Gama-2)
132 %
133 ts = df/2*[1;0;1];
134 %
135 % Submatriz para el termino fuente
136 %
137 u = dl*df/6*[ 1;1;1];
138 %
139 % Calculo de los parametros que no dependen de las coordenadas
140 %
141 cm = mdt*sg; % parte del coef. en (fi-j | fi-i)
142 cn = mdt*D; % coef. en (grad fi-j | grad fi-i) tri.inf.
143 cp = mdt*v1; % coef. V-1 dt/2 en (dfi-j/dx | fi-i)
144 cq = v2*mdt; % coef. V-2 dt/2 en (dfi-j/dy | fi-i)
145 cr = k2*mdt; % coef. k_2 dt/2 en <fi_j | fi-i> (Gama-2)
40
146 cs = k1*g*dt; % coef. g dt en <g | fi-i>
147 ct = k2*Ce*dt; % coef. Ce dt en <Ce| fi-i>
148 cu = A0*dt; % coef. A0 dt en ( f| fi-i)
149 %
150 % Montaje de las matrices del sistema
151 %
152 A = sparse(nn,nn);
153 B = sparse(nn,nn);
154 d = zeros(nn,1);
155 %
156 for iel=1:ntr;
157 itr = mod(iel,ntf);
158 if itr~=0
159 f1 = fix((itr-1)/2)*df;
160 f2 = f1+df;
161 else
162 f1 = (nf-1)*df;
163 f2 = nf*df;
164 end;
165 for il=1:3
166 ig=malla(iel,il);
167 for jl=1:3;
168 if il~=3
169 jg=malla(iel,jl);
170 if mod(iel,2)==1
171 A(ig,jg)=A(ig,jg)+(1+cm)*m(il,jl)+cn*((log(cos(f1)/cos(f2))...
172 +(f1-f2)*tan(f1))*n11(il,jl)...
173 +(log(cos(f2)/cos(f1))+df*tan(f1))*n12(il,jl)+n2(il,jl))...
174 +cp*p(jl)*(((1-x).*(1-x).*sec(df/2*(1+x)+f1))*w’)+cq*qi(jl);
175 B(ig,jg)=B(ig,jg)+(1-cm)*m(il,jl)-cn*((log(cos(f1)/cos(f2))...
176 +(f1-f2)*tan(f1))*n11(il,jl)...
177 +(log(cos(f2)/cos(f1))+df*tan(f1))*n12(il,jl)+n2(il,jl))...
178 -cp*p(jl)*(((1-x).*(1-x).*sec(df/2*(1+x)+f1))*w’)-cq*qi(jl);
179 else
180 A(ig,jg)=A(ig,jg)+(1+cm)*m(il,jl)+cn*((log(cos(f1)/cos(f2))...
181 +(f1-f2)*tan(f2))*n12(il,jl)...
182 +(log(cos(f2)/cos(f1))+df*tan(f2))*n11(il,jl)+n2(il,jl))...
183 -cp*p(jl)*(((1+x).*(1+x).*sec(df/2*(1+x)+f1))*w’)+cq*qs(jl);
184 B(ig,jg)=B(ig,jg)+(1-cm)*m(il,jl)-cn*((log(cos(f1)/cos(f2))...
185 +(f1-f2)*tan(f2))*n12(il,jl)...
186 +(log(cos(f2)/cos(f1))+df*tan(f2))*n11(il,jl)+n2(il,jl))...
187 +cp*p(jl)*(((1+x).*(1+x).*sec(df/2*(1+x)+f1))*w’)-cq*qs(jl);
188 end;
189 else
190 jg=malla(iel,jl);
41
191 if mod(iel,2)==1
192 A(ig,jg)=A(ig,jg)+(1+cm)*m(il,jl)+cn*((log(cos(f1)/cos(f2))...
193 +(f1-f2)*tan(f1))*n11(il,jl)...
194 +(log(cos(f2)/cos(f1))+df*tan(f1))*n12(il,jl)+n2(il,jl))...
195 +2*cp*p(jl)*(((1-x).*(1+x).*sec(df/2*(1+x)+f1))*w’)+cq*qi(jl);
196 B(ig,jg)=B(ig,jg)+(1-cm)*m(il,jl)-cn*((log(cos(f1)/cos(f2))...
197 +(f1-f2)*tan(f1))*n11(il,jl)...
198 +(log(cos(f2)/cos(f1))+df*tan(f1))*n12(il,jl)+n2(il,jl))...
199 -2*cp*p(jl)*(((1-x).*(1+x).*sec(df/2*(1+x)+f1))*w’)-cq*qi(jl);
200 else
201 A(ig,jg)=A(ig,jg)+(1+cm)*m(il,jl)+cn*((log(cos(f1)/cos(f2))...
202 +(f1-f2)*tan(f2))*n12(il,jl)...
203 +(log(cos(f2)/cos(f1))+df*tan(f2))*n11(il,jl)+n2(il,jl))...
204 -2*cp*p(jl)*(((1-x).*(1+x).*sec(df/2*(1+x)+f1))*w’)+cq*qs(jl);
205 B(ig,jg)=B(ig,jg)+(1-cm)*m(il,jl)-cn*((log(cos(f1)/cos(f2))...
206 +(f1-f2)*tan(f2))*n12(il,jl)...
207 +(log(cos(f2)/cos(f1))+df*tan(f2))*n11(il,jl)+n2(il,jl))...
208 +2*cp*p(jl)*(((1-x).*(1+x).*sec(df/2*(1+x)+f1))*w’)-cq*qs(jl);
209 end;
210 end;
211 end;
212 end;
213 end;
214 end;
215 %
216 % Inclusion del termino en la frontera Gama 2
217 %
218 for iel=ntf*(nl-1)+1:2:ntf*nl;
219 for il=1:2
220 ig=malla(iel,il);
221 for jl=1:2;
222 jg=malla(iel,jl);
223 A(ig,jg)=A(ig,jg)+cr*rs(il,jl);
224 B(ig,jg)=B(ig,jg)-cr*rs(il,jl);
225 end
226 end;
227 end
228 end;
229 end;
230 %
231 % Inclusion del termino independiente relativo a Gama 1
232 %
233 for iel=1:ntf:ntf*(nl-1)
234 for il=1:3
235 ig=malla(iel,il);
42
236 d(ig) = d(ig) + cs*si(il);
237 end;
238 end;
239 %
240 % Inclusion del termino independiente relativo a Gama 2
241 %
242 for iel=ntf*(nl-1)+1:2:ntf*nl;
243 for il=1:2
244 ig=malla(iel,il);
245 d(ig) = d(ig) + ct*ts(il);
246 end;
247 end;
248 %
249 % Inclusion de la fuente en el termino independiente
250 %
251 tfue1 = ntf*(nl+1)/2;
252 for iel=tfue1:tfue1+1
253 for il=1:3
254 ig=malla(iel,il);
255 d(ig) = cu*u(il);
256 end;
257 end;
258 %r = rcond(full(A));
259 %
260 % Fatorizacion L U de la matriz de rigidez
261 %
262 [ll uu] = lu(A);
263 %
264 % Abertura de la ventana y del archivo para montaje de la animacion
265 % abriendo la ventana para graficar
266 %
267 fig=figure;
268 set(fig,’DoubleBuffer’,’on’);
269 set(gca,’xlim’,[-80 80],’ylim’,[-80 80],’NextPlot’,’replace’,’Visible’,’off’)
270 mov = avifile(’sim_cf3.avi’)
271 trisurf(malla,coord(:,1),coord(:,2),u0),title(’Escenario 1’),shading interp,...
272 axis([lmin lmax fmin fmax 0 mm]);
273 F = getframe(gca);
274 mov = addframe(mov,F);
275 %
276 % Solucion de los sistemas sucesivos
277 %
278 nosep1(1) = u0(nnl*nnf);
279 nosep2(1) = u0(1);
280 nosep3(1) = u0(nl*nf/2);
43
281 nosep4(1) = u0(nf/2);
282 t = 0;
283 for it = 1:npt
284 ys = ll\(B*u0+d);
285 s = uu\ys;
286 nosep1(it+1) = u0(nnl*nnf);
287 nosep2(it+1) = u0(1);
288 nosep3(it+1) = u0(nl*nf/2);
289 nosep4(it+1) = u0(nf/2);
290 t = t + dt;
291 for iel=tfue1:tfue1+1
292 for il=1:3
293 ig=malla(iel,il);
294 d(ig) = cu*u(il)*exp(-de*t);
295 end;
296 end;
297 if mod(it,5)==1
298 %
299 % Haciendo el grafico de la aproximacion
300 %
301 trisurf(malla,coord(:,1),coord(:,2),s),title(’Escenario 1’),shading interp,...
302 axis([lmin lmax fmin fmax 0 mm]);
303 F = getframe(gca);
304 mov = addframe(mov,F);
305 end
306 u0=s;
307 end;
308 subplot(2,2,1)
309 plot(nosep2),title(’Node 1’),ylabel(’Concentration’),grid on;
310 subplot(2,2,2)
311 plot(nosep4),title(’Node 25’),ylabel(’Concentration’),grid on;
312 subplot(2,2,3)
313 plot(nosep3),title(’Node 750’),ylabel(’Concentration’),grid on;
314 subplot(2,2,4)
315 plot(nosep1),title(’Last Node’),ylabel(’Concentration’),grid on;
316 mov = close(mov);
317 etime(clock,t0)
2 Codigo fuente para Mathematicar
El siguiente es el programa usado para evaluar las integrales obtenidas en los pro-
ductos internos que se presentan en la ecuacion (3.3.3) sobre los elementos finitos, es decir,
44
las integrales evaluadas sobre las funciones de base y de prueba para el sistema discretizado
presentado por (3.3.3), en la pagina 19.
2.1 Programas para los triangulos inferiores
Programa para las integrales del producto interno
(ϕj
∣∣∣∣ϕi
)en los triangulos inferi-
ores:
1 ClearAll[F1,F2,F3,\[Lambda]min,\[Lambda]max,\[Phi]min,\[Phi]max];
2 ClearAll[G11,G12,G13,G21,G22,G23,G31,G32,G33];
3 ClearAll[G111,G112,G113,G121,G122,G123,G131,G132,G133];
4 ClaerAll[H111,H112,H113,H121,H122,H123,H131,H132,H133];
5
6 F1[\[Lambda]_,\[Phi]_]=1-\[Lambda]/d\[Lambda]-\[Phi]/d\[Phi];
7 F2[\[Lambda]_,\[Phi]_]=\[Lambda]/d\[Lambda];
8 F3[\[Lambda]_,\[Phi]_]=\[Phi]/d\[Phi];
9
10 \[Lambda]min=0;
11 \[Lambda]max=d\[Lambda];
12 \[Phi]min=0;
13 \[Phi]max=-(d\[Phi]/d\[Lambda]) (\[Lambda]-d\[Lambda]);
14
15 G11[\[Lambda]_,\[Phi]_]=
16 Integrate[F1[\[Lambda],\[Phi]] F1[\[Lambda],\[Phi]], \[Phi]];
17 G111[\[Lambda]_]=G11[\[Lambda],\[Phi]max]-G11[\[Lambda],\[Phi]min];
18 H111[\[Lambda]_]=Integrate[G111[\[Lambda]],\[Lambda]];
19 FI111=Simplify[H111[\[Lambda]max]-H111[\[Lambda]min]];
20
21 G12[\[Lambda]_,\[Phi]_]=
22 Integrate[F1[\[Lambda],\[Phi]] F2[\[Lambda],\[Phi]], \[Phi]];
23 G112[\[Lambda]_]=G12[\[Lambda],\[Phi]max]-G12[\[Lambda],\[Phi]min];
24 H112[\[Lambda]_]=Integrate[G112[\[Lambda]],\[Lambda]];
25 FI112=Simplify[H112[\[Lambda]max]-H112[\[Lambda]min]];
26
27 G13[\[Lambda]_,\[Phi]_]=
28 Integrate[F1[\[Lambda],\[Phi]] F3[\[Lambda],\[Phi]], \[Phi]];
29 G113[\[Lambda]_]=G13[\[Lambda],\[Phi]max]-G13[\[Lambda],\[Phi]min];
30 H113[\[Lambda]_]=Integrate[G113[\[Lambda]],\[Lambda]];
31 FI113=Simplify[H113[\[Lambda]max]-H113[\[Lambda]min]];
32
33 G21[\[Lambda]_,\[Phi]_]=
34 Integrate[F2[\[Lambda],\[Phi]] F1[\[Lambda],\[Phi]], \[Phi]];
35 G121[\[Lambda]_]=G21[\[Lambda],\[Phi]max]-G21[\[Lambda],\[Phi]min];
45

36 H121[\[Lambda]_]=Integrate[G121[\[Lambda]],\[Lambda]];
37 FI121=Simplify[H121[\[Lambda]max]-H121[\[Lambda]min]];
38
39 G22[\[Lambda]_,\[Phi]_]=
40 Integrate[F2[\[Lambda],\[Phi]] F2[\[Lambda],\[Phi]], \[Phi]];
41 G122[\[Lambda]_]=G22[\[Lambda],\[Phi]max]-G22[\[Lambda],\[Phi]min];
42 H122[\[Lambda]_]=Integrate[G122[\[Lambda]],\[Lambda]];
43 FI122=Simplify[H122[\[Lambda]max]-H122[\[Lambda]min]];
44
45 G23[\[Lambda]_,\[Phi]_]=
46 Integrate[F2[\[Lambda],\[Phi]] F3[\[Lambda],\[Phi]], \[Phi]];
47 G123[\[Lambda]_]=G23[\[Lambda],\[Phi]max]-G23[\[Lambda],\[Phi]min];
48 H123[\[Lambda]_]=Integrate[G123[\[Lambda]],\[Lambda]];
49 FI123=Simplify[H123[\[Lambda]max]-H123[\[Lambda]min]];
50
51 G31[\[Lambda]_,\[Phi]_]=
52 Integrate[F3[\[Lambda],\[Phi]] F1[\[Lambda],\[Phi]], \[Phi]];
53 G131[\[Lambda]_]=G31[\[Lambda],\[Phi]max]-G31[\[Lambda],\[Phi]min];
54 H131[\[Lambda]_]=Integrate[G131[\[Lambda]],\[Lambda]];
55 FI131=Simplify[H131[\[Lambda]max]-H131[\[Lambda]min]];
56
57 G32[\[Lambda]_,\[Phi]_]=
58 Integrate[F3[\[Lambda],\[Phi]] F2[\[Lambda],\[Phi]], \[Phi]];
59 G132[\[Lambda]_]=G32[\[Lambda],\[Phi]max]-G32[\[Lambda],\[Phi]min];
60 H132[\[Lambda]_]=Integrate[G132[\[Lambda]],\[Lambda]];
61 FI132=Simplify[H132[\[Lambda]max]-H132[\[Lambda]min]];
62
63 G33[\[Lambda]_,\[Phi]_]=
64 Integrate[F3[\[Lambda],\[Phi]] F3[\[Lambda],\[Phi]], \[Phi]];
65 G133[\[Lambda]_]=G33[\[Lambda],\[Phi]max]-G33[\[Lambda],\[Phi]min];
66 H133[\[Lambda]_]=Integrate[G133[\[Lambda]],\[Lambda]];
67 FI133=Simplify[H133[\[Lambda]max]-H133[\[Lambda]min]];
68
69 TRID1=FI111,FI112,FI113;
70 TRID2=FI121,FI122,FI123;
71 TRID3=FI131,FI132,FI133;
72 Mat1=MatrixForm[Transpose[TRID1,TRID2,TRID3]]
Programa para las integrales del producto interno
(1
cos2 φ
∂ϕj
∂λ
∣∣∣∣∂ϕi
∂λ
)en los triangulos
inferiores:
1 ClearAll[G11,G12,G13,G21,G22,G23,G31,G32,G33];
2 ClearAll[GI11,GI12,GI13,GI21,GI22,GI23,GI31,GI32,GI33];
3 ClearAll[H11,H12,H13,H21,H22,H23,H31,H32,H33];
4 ClearALL[FI11,FI12,FI13,FI21,FI22,FI23,FI31,FI32,FI33];
46

5 ClearALL[DF1\[Lambda],DF2\[Lambda],DF3\[Lambda]];
6 ClearAll[\[Phi]min,\[Phi]max,\[Lambda]min,\[Lambda]max,TRID1,TRID2,TRID3,
7 Mat1];
8
9 DF1\[Phi][\[Lambda]_,\[Phi]_]=
10 D[1-(\[Lambda]-\[Lambda]i)/d\[Lambda]-(\[Phi]-\[Phi]i)/
11 d\[Phi],\[Lambda]];
12 DF2\[Phi][\[Lambda]_,\[Phi]_]=D[(\[Lambda]-\[Lambda]i)/d\[Lambda],\[Lambda]];
13 DF3\[Phi][\[Lambda]_,\[Phi]_]=D[(\[Phi]-\[Phi]i)/d\[Phi],\[Lambda]];
14
15 \[Lambda]min=\[Lambda]i;
16 \[Lambda]max=\[Lambda]i+d\[Lambda];
17 \[Phi]min=\[Phi]i;
18 \[Phi]max=\[Phi]i-(d\[Phi]/d\[Lambda]) (\[Lambda]-\[Lambda]i-d\[Lambda]);
19
20 G11[\[Lambda]_,\[Phi]_]=
21 Integrate[
22 1/(Cos[\[Phi]])^2*DF1\[Lambda][\[Lambda],\[Phi]]*
23 DF1\[Lambda][\[Lambda],\[Phi]] , \[Phi]];
24 GI11[\[Lambda]_]=G11[\[Lambda],\[Phi]max]-G11[\[Lambda],\[Phi]min];
25 H11[\[Lambda]_]=Integrate[GI11[\[Lambda]],\[Lambda]];
26 FI11=Simplify[H11[\[Lambda]max]-H11[\[Lambda]min]];
27
28 G12[\[Lambda]_,\[Phi]_]=
29 Integrate[
30 1/(Cos[\[Phi]])^2*DF1\[Lambda][\[Lambda],\[Phi]]*
31 DF2\[Lambda][\[Lambda],\[Phi]] , \[Phi]];
32 GI12[\[Lambda]_]=G12[\[Lambda],\[Phi]max]-G12[\[Lambda],\[Phi]min];
33 H12[\[Lambda]_]=Integrate[GI12[\[Lambda]],\[Lambda]];
34 FI12=Simplify[H12[\[Lambda]max]-H12[\[Lambda]min]];
35
36 G13[\[Lambda]_,\[Phi]_]=
37 Integrate[
38 1/(Cos[\[Phi]])^2*DF1\[Lambda][\[Lambda],\[Phi]]*
39 DF3\[Lambda][\[Lambda],\[Phi]] , \[Phi]];
40 GI13[\[Lambda]_]=G13[\[Lambda],\[Phi]max]-G13[\[Lambda],\[Phi]min];
41 H13[\[Lambda]_]=Integrate[GI13[\[Lambda]],\[Lambda]];
42 FI13=Simplify[H13[\[Lambda]max]-H13[\[Lambda]min]];
43
44 G21[\[Lambda]_,\[Phi]_]=
45 Integrate[
46 1/(Cos[\[Phi]])^2*DF2\[Lambda][\[Lambda],\[Phi]]*
47 DF1\[Lambda][\[Lambda],\[Phi]] , \[Phi]];
48 GI21[\[Lambda]_]=G21[\[Lambda],\[Phi]max]-G21[\[Lambda],\[Phi]min];
49 H21[\[Lambda]_]=Integrate[GI21[\[Lambda]],\[Lambda]];
47

50 FI21=Simplify[H21[\[Lambda]max]-H21[\[Lambda]min]];
51
52 G22[\[Lambda]_,\[Phi]_]=
53 Integrate[
54 1/(Cos[\[Phi]])^2*DF2\[Lambda][\[Lambda],\[Phi]]*
55 DF2\[Lambda][\[Lambda],\[Phi]] , \[Phi]];
56 GI22[\[Lambda]_]=G22[\[Lambda],\[Phi]max]-G22[\[Lambda],\[Phi]min];
57 H22[\[Lambda]_]=Integrate[GI22[\[Lambda]],\[Lambda]];
58 FI22=Simplify[H22[\[Lambda]max]-H22[\[Lambda]min]];
59
60 G23[\[Lambda]_,\[Phi]_]=
61 Integrate[
62 1/(Cos[\[Phi]])^2*DF2\[Lambda][\[Lambda],\[Phi]]*
63 DF3\[Lambda][\[Lambda],\[Phi]] , \[Phi]];
64 GI23[\[Lambda]_]=G23[\[Lambda],\[Phi]max]-G23[\[Lambda],\[Phi]min];
65 H23[\[Lambda]_]=Integrate[GI23[\[Lambda]],\[Lambda]];
66 FI23=Simplify[H23[\[Lambda]max]-H23[\[Lambda]min]];
67
68 G31[\[Lambda]_,\[Phi]_]=
69 Integrate[
70 1/(Cos[\[Phi]])^2*DF3\[Lambda][\[Lambda],\[Phi]]*
71 DF1\[Lambda][\[Lambda],\[Phi]] , \[Phi]];
72 GI31[\[Lambda]_]=G31[\[Lambda],\[Phi]max]-G31[\[Lambda],\[Phi]min];
73 H31[\[Lambda]_]=Integrate[GI31[\[Lambda]],\[Lambda]];
74 FI31=Simplify[H31[\[Lambda]max]-H31[\[Lambda]min]];
75
76 G32[\[Lambda]_,\[Phi]_]=
77 Integrate[
78 1/(Cos[\[Phi]])^2*DF3\[Lambda][\[Lambda],\[Phi]]*
79 DF2\[Lambda][\[Lambda],\[Phi]] , \[Phi]];
80 GI32[\[Lambda]_]=G32[\[Lambda],\[Phi]max]-G32[\[Lambda],\[Phi]min];
81 H32[\[Lambda]_]=Integrate[GI32[\[Lambda]],\[Lambda]];
82 FI32=Simplify[H32[\[Lambda]max]-H32[\[Lambda]min]];
83
84 G33[\[Lambda]_,\[Phi]_]=
85 Integrate[
86 1/(Cos[\[Phi]])^2*DF3\[Lambda][\[Lambda],\[Phi]]*
87 DF3\[Lambda][\[Lambda],\[Phi]] , \[Phi]];
88 GI33[\[Lambda]_]=G33[\[Lambda],\[Phi]max]-G33[\[Lambda],\[Phi]min];
89 H33[\[Lambda]_]=Integrate[GI33[\[Lambda]],\[Lambda]];
90 FI33=Simplify[H33[\[Lambda]max]-H33[\[Lambda]min]];
91
92 TRID1=FI11,FI12,FI13;
93 TRID2=FI21,FI22,FI23;
94 TRID3=FI31,FI32,FI33;
48

95 Mat1=MatrixForm[Transpose[TRID1,TRID2,TRID3]]
96 Null
Programa para las integrales del producto interno
(∂ϕj
∂λ
∣∣∣∣∂ϕi
∂φ
)en los triangulos
inferiores:
1 ClearAll[G11,G12,G13,G21,G22,G23,G31,G32,G33];
2 ClearAll[GI11,GI12,GI13,GI21,GI22,GI23,GI31,GI32,GI33];
3 ClearAll[H11,H12,H13,H21,H22,H23,H31,H32,H33];
4 ClearALL[FI11,FI12,FI13,FI21,FI22,FI23,FI31,FI32,FI33];
5 ClearALL[DF1\[Phi],DF2\[Phi],DF3\[Phi]];
6 ClearAll[\[Phi]min,\[Phi]max,\[Lambda]min,\[Lambda]max,TRID1,TRID2,TRID3,
7 Mat1];
8
9 DF1\[Phi][\[Lambda]_,\[Phi]_]=
10 D[1-(\[Lambda]-\[Lambda]i)/d\[Lambda]-(\[Phi]-\[Phi]i)/d\[Phi],\[Phi]];
11 DF2\[Phi][\[Lambda]_,\[Phi]_]=D[(\[Lambda]-\[Lambda]i)/d\[Lambda],\[Phi]];
12 DF3\[Phi][\[Lambda]_,\[Phi]_]=D[(\[Phi]-\[Phi]i)/d\[Phi],\[Phi]];
13
14 \[Lambda]min=\[Lambda]i;
15 \[Lambda]max=\[Lambda]i+d\[Lambda];
16 \[Phi]min=\[Phi]i;
17 \[Phi]max=\[Phi]i-(d\[Phi]/d\[Lambda]) (\[Lambda]-\[Lambda]i-d\[Lambda]);
18
19 G11[\[Lambda]_,\[Phi]_]=
20 Integrate[
21 DF1\[Phi][\[Lambda],\[Phi]]*DF1\[Phi][\[Lambda],\[Phi]] , \[Phi]];
22 GI11[\[Lambda]_]=G11[\[Lambda],\[Phi]max]-G11[\[Lambda],\[Phi]min];
23 H11[\[Lambda]_]=Integrate[GI11[\[Lambda]],\[Lambda]];
24 FI11=Simplify[H11[\[Lambda]max]-H11[\[Lambda]min]];
25
26 G12[\[Lambda]_,\[Phi]_]=
27 Integrate[
28 DF1\[Phi][\[Lambda],\[Phi]]*DF2\[Phi][\[Lambda],\[Phi]] , \[Phi]];
29 GI12[\[Lambda]_]=G12[\[Lambda],\[Phi]max]-G12[\[Lambda],\[Phi]min];
30 H12[\[Lambda]_]=Integrate[GI12[\[Lambda]],\[Lambda]];
31 FI12=Simplify[H12[\[Lambda]max]-H12[\[Lambda]min]];
32
33 G13[\[Lambda]_,\[Phi]_]=
34 Integrate[
35 DF1\[Phi][\[Lambda],\[Phi]]*DF3\[Phi][\[Lambda],\[Phi]] , \[Phi]];
36 GI13[\[Lambda]_]=G13[\[Lambda],\[Phi]max]-G13[\[Lambda],\[Phi]min];
37 H13[\[Lambda]_]=Integrate[GI13[\[Lambda]],\[Lambda]];
38 FI13=Simplify[H13[\[Lambda]max]-H13[\[Lambda]min]];
39
49

40 G21[\[Lambda]_,\[Phi]_]=
41 Integrate[
42 DF2\[Phi][\[Lambda],\[Phi]]*DF1\[Phi][\[Lambda],\[Phi]] , \[Phi]];
43 GI21[\[Lambda]_]=G21[\[Lambda],\[Phi]max]-G21[\[Lambda],\[Phi]min];
44 H21[\[Lambda]_]=Integrate[GI21[\[Lambda]],\[Lambda]];
45 FI21=Simplify[H21[\[Lambda]max]-H21[\[Lambda]min]];
46
47 G22[\[Lambda]_,\[Phi]_]=
48 Integrate[
49 DF2\[Phi][\[Lambda],\[Phi]]*DF2\[Phi][\[Lambda],\[Phi]] , \[Phi]];
50 GI22[\[Lambda]_]=G22[\[Lambda],\[Phi]max]-G22[\[Lambda],\[Phi]min];
51 H22[\[Lambda]_]=Integrate[GI22[\[Lambda]],\[Lambda]];
52 FI22=Simplify[H22[\[Lambda]max]-H22[\[Lambda]min]];
53
54 G23[\[Lambda]_,\[Phi]_]=
55 Integrate[
56 DF2\[Phi][\[Lambda],\[Phi]]*DF3\[Phi][\[Lambda],\[Phi]] , \[Phi]];
57 GI23[\[Lambda]_]=G23[\[Lambda],\[Phi]max]-G23[\[Lambda],\[Phi]min];
58 H23[\[Lambda]_]=Integrate[GI23[\[Lambda]],\[Lambda]];
59 FI23=Simplify[H23[\[Lambda]max]-H23[\[Lambda]min]];
60
61 G31[\[Lambda]_,\[Phi]_]=
62 Integrate[
63 DF3\[Phi][\[Lambda],\[Phi]]*DF1\[Phi][\[Lambda],\[Phi]] , \[Phi]];
64 GI31[\[Lambda]_]=G31[\[Lambda],\[Phi]max]-G31[\[Lambda],\[Phi]min];
65 H31[\[Lambda]_]=Integrate[GI31[\[Lambda]],\[Lambda]];
66 FI31=Simplify[H31[\[Lambda]max]-H31[\[Lambda]min]];
67
68 G32[\[Lambda]_,\[Phi]_]=
69 Integrate[
70 DF3\[Phi][\[Lambda],\[Phi]]*DF2\[Phi][\[Lambda],\[Phi]] , \[Phi]];
71 GI32[\[Lambda]_]=G32[\[Lambda],\[Phi]max]-G32[\[Lambda],\[Phi]min];
72 H32[\[Lambda]_]=Integrate[GI32[\[Lambda]],\[Lambda]];
73 FI32=Simplify[H32[\[Lambda]max]-H32[\[Lambda]min]];
74
75 G33[\[Lambda]_,\[Phi]_]=
76 Integrate[
77 DF3\[Phi][\[Lambda],\[Phi]]*DF3\[Phi][\[Lambda],\[Phi]] , \[Phi]];
78 GI33[\[Lambda]_]=G33[\[Lambda],\[Phi]max]-G33[\[Lambda],\[Phi]min];
79 H33[\[Lambda]_]=Integrate[GI33[\[Lambda]],\[Lambda]];
80 FI33=Simplify[H33[\[Lambda]max]-H33[\[Lambda]min]];
81
82 TRID1=FI11,FI12,FI13;
83 TRID2=FI21,FI22,FI23;
84 TRID3=FI31,FI32,FI33;
50

85 Mat1=MatrixForm[Transpose[TRID1,TRID2,TRID3]]
86 Null
Programa para las integrales del producto interno
(1
cos φ
∂ϕj
∂λ
∣∣∣∣ϕi
)en los triangulos
inferiores:
1 ClearAll[F1,F2,F3,\[Lambda]min,\[Lambda]max,\[Phi]min,\[Phi]max];
2 ClearAll[DF1\[Lambda],DF2\[Lambda],DF3\[Lambda]];
3 ClearAll[G11,G12,G13,G21,G22,G23,G31,G32,G33];
4 ClearAll[G111,G112,G113,G121,G122,G123,G131,G132,G133];
5 ClaerAll[H111,H112,H113,H121,H122,H123,H131,H132,H133];
6
7 F1[\[Lambda],\[Phi]]=
8 1-(\[Lambda]-\[Lambda]i)/\[CapitalDelta]\[Lambda]-(\[Phi]-\[Phi]i)/\
9 \[CapitalDelta]\[Phi];
10 F2[\[Lambda],\[Phi]]=(\[Lambda]-\[Lambda]i)/\[CapitalDelta]\[Lambda];
11 F3[\[Lambda],\[Phi]]=(\[Phi]-\[Phi]i)/\[CapitalDelta]\[Phi];
12
13 \[Lambda]min= \[Lambda]i;
14 \[Lambda]max=\[Lambda]i+\[CapitalDelta]\[Lambda]-(\[CapitalDelta]\[Lambda]/\
15 \[CapitalDelta]\[Phi])(\[Phi]-\[Phi]i);
16 \[Phi]min=\[Phi]i;
17 \[Phi]max=\[Phi]i+\[CapitalDelta]\[Phi];
18
19 DF1\[Lambda]=D[F1[\[Lambda],\[Phi]],\[Lambda]];
20 DF2\[Lambda]=D[F2[\[Lambda],\[Phi]],\[Lambda]];
21 DF3\[Lambda]=D[F3[\[Lambda],\[Phi]],\[Lambda]];
22
23 G11[\[Lambda]_,\[Phi]_]=
24 Integrate[Sec[\[Phi]]DF1\[Lambda] F1[\[Lambda],\[Phi]],\[Lambda]];
25 G111[\[Phi]_]=Simplify[G11[\[Lambda]max,\[Phi]]-G11[\[Lambda]min,\[Phi]]];
26 H111[\[Phi]_]=Simplify[Integrate[G111[\[Phi]],\[Phi]]];
27
28 G12[\[Lambda]_,\[Phi]_]=
29 Integrate[Sec[\[Phi]]DF2\[Lambda] F1[\[Lambda],\[Phi]],\[Lambda]];
30 G112[\[Phi]_]=Simplify[G12[\[Lambda]max,\[Phi]]-G12[\[Lambda]min,\[Phi]]];
31 H112[\[Phi]_]=Simplify[Integrate[G112[\[Phi]],\[Phi]]];
32
33 G13[\[Lambda]_,\[Phi]_]=
34 Integrate[Sec[\[Phi]]DF3\[Lambda] F1[\[Lambda],\[Phi]], \[Lambda]];
35 G113[\[Phi]_]=Simplify[G13[\[Lambda]max,\[Phi]]-G13[\[Lambda]min,\[Phi]]];
36 H113[\[Phi]_]=Simplify[Integrate[G113[\[Phi]],\[Phi]]];
37
38 G21[\[Lambda]_,\[Phi]_]=
39 Integrate[Sec[\[Phi]]DF1\[Lambda] F2[\[Lambda],\[Phi]], \[Lambda]];
51
40 G121[\[Phi]_]=Simplify[G21[\[Lambda]max,\[Phi]]-G21[\[Lambda]min,\[Phi]]];
41 H121[\[Phi]_]=Simplify[Integrate[G121[\[Phi]],\[Phi]]];
42
43 G22[\[Lambda]_,\[Phi]_]=
44 Integrate[Sec[\[Phi]]DF2\[Lambda] F2[\[Lambda],\[Phi]], \[Lambda]];
45 G122[\[Phi]_]=Simplify[G22[\[Lambda]max,\[Phi]]-G22[\[Lambda]min,\[Phi]]];
46 H122[\[Phi]_]=Simplify[Integrate[G122[\[Phi]],\[Phi]]];
47
48 G23[\[Lambda]_,\[Phi]_]=
49 Integrate[Sec[\[Phi]]DF3\[Lambda] F2[\[Lambda],\[Phi]], \[Lambda]];
50 G123[\[Phi]_]=Simplify[G23[\[Lambda]max,\[Phi]]-G23[\[Lambda]min,\[Phi]]];
51 H123[\[Phi]_]=Simplify[Integrate[G123[\[Phi]],\[Phi]]];
52
53 G31[\[Lambda]_,\[Phi]_]=
54 Integrate[Sec[\[Phi]]DF1\[Lambda] F3[\[Lambda],\[Phi]],\[Lambda]];
55 G131[\[Phi]_]=Simplify[G31[\[Lambda]max,\[Phi]]-G31[\[Lambda]min,\[Phi]]];
56 H131[\[Phi]_]=Simplify[Integrate[G131[\[Phi]],\[Phi]]];
57
58 G32[\[Lambda]_,\[Phi]_]=
59 Integrate[Sec[\[Phi]]DF2\[Lambda] F3[\[Lambda],\[Phi]],\[Lambda]];
60 G132[\[Phi]_]=Simplify[G32[\[Lambda]max,\[Phi]]-G32[\[Lambda]min,\[Phi]]];
61 H132[\[Phi]_]=Simplify[Integrate[G132[\[Phi]],\[Phi]]];
62
63 G33[\[Lambda]_,\[Phi]_]=
64 Integrate[Sec[\[Phi]]DF3\[Lambda] F3[\[Lambda],\[Phi]],\[Lambda]];
65 G133[\[Phi]_]=Simplify[G33[\[Lambda]max,\[Phi]]-G33[\[Lambda]min,\[Phi]]];
66 H133[\[Phi]_]=Simplify[Integrate[G133[\[Phi]],\[Phi]]];
67
68 TRID1=H111[\[Phi]],H112[\[Phi]],H113[\[Phi]];
69 TRID2=H121[\[Phi]],H122[\[Phi]],H123[\[Phi]];
70 TRID3=H131[\[Phi]],H132[\[Phi]],H133[\[Phi]];
71 Mat1=MatrixForm[TRID1,TRID2,TRID3]
72 Null
Programa para las integrales del producto interno
(∂ϕj
∂φ
∣∣∣∣ϕi
)en los triangulos infe-
riores:
1 ClearAll[F1,F2,F3,\[Lambda]min,\[Lambda]max,\[Phi]min,\[Phi]max];
2 ClearAll[DF1\[Phi],DF2\[Phi],DF3\[Phi]];
3 ClearAll[G11,G12,G13,G21,G22,G23,G31,G32,G33];
4 ClearAll[G111,G112,G113,G121,G122,G123,G131,G132,G133];
5 ClaerAll[H111,H112,H113,H121,H122,H123,H131,H132,H133];
6
7 F1[\[Lambda]_,\[Phi]_]=1-\[Lambda]/d\[Lambda]-\[Phi]/d\[Phi];
8 F2[\[Lambda]_,\[Phi]_]=\[Lambda]/d\[Lambda];
52
9 F3[\[Lambda]_,\[Phi]_]=\[Phi]/d\[Phi];
10
11 \[Lambda]min=0;
12 \[Lambda]max=d\[Lambda];
13 \[Phi]min=0;
14 \[Phi]max=-(d\[Phi]/d\[Lambda]) (\[Lambda]-d\[Lambda]);
15
16 DF1\[Phi]=D[F1[\[Lambda],\[Phi]],\[Phi]];
17 DF2\[Phi]=D[F2[\[Lambda],\[Phi]],\[Phi]];
18 DF3\[Phi]=D[F3[\[Lambda],\[Phi]],\[Phi]];
19
20 G11[\[Lambda]_,\[Phi]_]=Integrate[DF1\[Phi] F1[\[Lambda],\[Phi]], \[Phi]];
21 G111[\[Lambda]_]=G11[\[Lambda],\[Phi]max]-G11[\[Lambda],\[Phi]min];
22 H111[\[Lambda]_]=Integrate[G111[\[Lambda]],\[Lambda]];
23 FI111=Simplify[H111[\[Lambda]max]-H111[\[Lambda]min]];
24
25 G12[\[Lambda]_,\[Phi]_]=Integrate[DF2\[Phi] F1[\[Lambda],\[Phi]], \[Phi]];
26 G112[\[Lambda]_]=G12[\[Lambda],\[Phi]max]-G12[\[Lambda],\[Phi]min];
27 H112[\[Lambda]_]=Integrate[G112[\[Lambda]],\[Lambda]];
28 FI112=Simplify[H112[\[Lambda]max]-H112[\[Lambda]min]];
29
30 G13[\[Lambda]_,\[Phi]_]=Integrate[DF3\[Phi] F1[\[Lambda],\[Phi]], \[Phi]];
31 G113[\[Lambda]_]=G13[\[Lambda],\[Phi]max]-G13[\[Lambda],\[Phi]min];
32 H113[\[Lambda]_]=Integrate[G113[\[Lambda]],\[Lambda]];
33 FI113=Simplify[H113[\[Lambda]max]-H113[\[Lambda]min]];
34
35 G21[\[Lambda]_,\[Phi]_]=Integrate[DF1\[Phi] F2[\[Lambda],\[Phi]], \[Phi]];
36 G121[\[Lambda]_]=G21[\[Lambda],\[Phi]max]-G21[\[Lambda],\[Phi]min];
37 H121[\[Lambda]_]=Integrate[G121[\[Lambda]],\[Lambda]];
38 FI121=Simplify[H121[\[Lambda]max]-H121[\[Lambda]min]];
39
40 G22[\[Lambda]_,\[Phi]_]=Integrate[DF2\[Phi] F2[\[Lambda],\[Phi]], \[Phi]];
41 G122[\[Lambda]_]=G22[\[Lambda],\[Phi]max]-G22[\[Lambda],\[Phi]min];
42 H122[\[Lambda]_]=Integrate[G122[\[Lambda]],\[Lambda]];
43 FI122=Simplify[H122[\[Lambda]max]-H122[\[Lambda]min]];
44
45 G23[\[Lambda]_,\[Phi]_]=Integrate[DF3\[Phi] F2[\[Lambda],\[Phi]], \[Phi]];
46 G123[\[Lambda]_]=G23[\[Lambda],\[Phi]max]-G23[\[Lambda],\[Phi]min];
47 H123[\[Lambda]_]=Integrate[G123[\[Lambda]],\[Lambda]];
48 FI123=Simplify[H123[\[Lambda]max]-H123[\[Lambda]min]];
49
50 G31[\[Lambda]_,\[Phi]_]=Integrate[DF1\[Phi] F3[\[Lambda],\[Phi]], \[Phi]];
51 G131[\[Lambda]_]=G31[\[Lambda],\[Phi]max]-G31[\[Lambda],\[Phi]min];
52 H131[\[Lambda]_]=Integrate[G131[\[Lambda]],\[Lambda]];
53 FI131=Simplify[H131[\[Lambda]max]-H131[\[Lambda]min]];
53
54
55 G32[\[Lambda]_,\[Phi]_]=Integrate[DF2\[Phi] F3[\[Lambda],\[Phi]], \[Phi]];
56 G132[\[Lambda]_]=G32[\[Lambda],\[Phi]max]-G32[\[Lambda],\[Phi]min];
57 H132[\[Lambda]_]=Integrate[G132[\[Lambda]],\[Lambda]];
58 FI132=Simplify[H132[\[Lambda]max]-H132[\[Lambda]min]];
59
60 G33[\[Lambda]_,\[Phi]_]=Integrate[DF3\[Phi] F3[\[Lambda],\[Phi]], \[Phi]];
61 G133[\[Lambda]_]=G33[\[Lambda],\[Phi]max]-G33[\[Lambda],\[Phi]min];
62 H133[\[Lambda]_]=Integrate[G133[\[Lambda]],\[Lambda]];
63 FI133=Simplify[H133[\[Lambda]max]-H133[\[Lambda]min]];
64
65 TRID1=FI111,FI112,FI113;
66 TRID2=FI121,FI122,FI123;
67 TRID3=FI131,FI132,FI133;
68 Mat1=MatrixForm[TRID1,TRID2,TRID3]
69
Programa para las integrales del producto interno
⟨g
∣∣∣∣ϕi
⟩
Γ1
en los triangulos infe-
riores:
1 ClearAll[F1,F2,F3,\[Lambda]min,\[Lambda]max,\[Phi]min,\[Phi]max];
2 ClearAll[g11,g12,g13];
3 ClearAll[h11,h12,h13];
4
5 F1[\[Lambda]_,\[Phi]_]=1-\[Lambda]/d\[Lambda]-\[Phi]/d\[Phi];
6 F2[\[Lambda]_,\[Phi]_]=\[Lambda]/d\[Lambda];
7 F3[\[Lambda]_,\[Phi]_]=\[Phi]/d\[Phi];
8
9 g[\[Phi]_]=1;
10
11 \[Lambda]min=0;
12 \[Lambda]max=d\[Lambda];
13 \[Phi]min=0;
14 \[Phi]max=d\[Phi];
15
16 g11[\[Lambda]_]=Integrate[F1[\[Lambda],\[Phi]min], \[Lambda]];
17 h11=Simplify[g11[\[Lambda]max]-g11[\[Lambda]min]];
18
19 g12[\[Lambda]_]=Integrate[F2[\[Lambda],\[Phi]min], \[Lambda]];
20 h12=Simplify[g12[\[Lambda]max]-g12[\[Lambda]min]];
21
22 g13[\[Lambda]_]=Integrate[F3[\[Lambda],\[Phi]min], \[Lambda]];
23 h13=Simplify[g13[\[Lambda]max]-g13[\[Lambda]min]];
24
25 MATR=h11,h12,h13;
54

26 VET=MatrixForm[Transpose[MATR]]
Programa para las integrales del producto interno (F|ϕi) en los triangulos inferiores:
1 ClearAll[F1,F2,F3,\[Lambda]min,\[Lambda]max,\[Phi]min,\[Phi]max];
2 ClearAll[G11,G12,G13];
3 ClearAll[G111,G112,G113];
4 ClaerAll[H111,H112,H113];
5
6 F1[\[Lambda]_,\[Phi]_]=1-\[Lambda]/d\[Lambda]-\[Phi]/d\[Phi];
7 F2[\[Lambda]_,\[Phi]_]=\[Lambda]/d\[Lambda];
8 F3[\[Lambda]_,\[Phi]_]=\[Phi]/d\[Phi];
9
10 \[Lambda]min=0;
11 \[Lambda]max=d\[Lambda];
12 \[Phi]min=0;
13 \[Phi]max=-(d\[Phi]/d\[Lambda]) (\[Lambda]-d\[Lambda]);
14
15 G11[\[Lambda]_,\[Phi]_]=Integrate[ F1[\[Lambda],\[Phi]], \[Phi]];
16 G111[\[Lambda]_]=G11[\[Lambda],\[Phi]max]-G11[\[Lambda],\[Phi]min];
17 H111[\[Lambda]_]=Integrate[G111[\[Lambda]],\[Lambda]];
18 FI111=Simplify[H111[\[Lambda]max]-H111[\[Lambda]min]];
19
20 G12[\[Lambda]_,\[Phi]_]=Integrate[ F2[\[Lambda],\[Phi]], \[Phi]];
21 G112[\[Lambda]_]=G12[\[Lambda],\[Phi]max]-G12[\[Lambda],\[Phi]min];
22 H112[\[Lambda]_]=Integrate[G112[\[Lambda]],\[Lambda]];
23 FI112=Simplify[H112[\[Lambda]max]-H112[\[Lambda]min]];
24
25 G13[\[Lambda]_,\[Phi]_]=Integrate[ F3[\[Lambda],\[Phi]], \[Phi]];
26 G113[\[Lambda]_]=G13[\[Lambda],\[Phi]max]-G13[\[Lambda],\[Phi]min];
27 H113[\[Lambda]_]=Integrate[G113[\[Lambda]],\[Lambda]];
28 FI113=Simplify[H113[\[Lambda]max]-H113[\[Lambda]min]];
29
30 TRID=FI111,FI112,FI113;
31 Mat=MatrixForm[Transpose[TRID]]
32
2.2 Programas para los triangulos superiores
Programa para las integrales del producto interno
(ϕj
∣∣∣∣ϕi
)en los triangulos supe-
riores:
1 ClearAll[F1, F2, F3, \[Lambda]min, \[Lambda]max, \[Phi]min, \[Phi]max];
2 ClearAll[G11, G12, G13, G21, G22, G23, G31, G32, G33];
55
3 ClearAll[G111, G112, G113, G121, G122, G123, G131, G132, G133];
4 ClaerAll[H111, H112, H113, H121, H122, H123, H131, H132, H133];
5
6 F1[\[Lambda]_, \[Phi]_] = \[Lambda]/d\[Lambda] + \[Phi]/d\[Phi] - 1;
7 F2[\[Lambda]_, \[Phi]_] = 1 - \[Lambda]/d\[Lambda];
8 F3[\[Lambda]_, \[Phi]_] = 1 - \[Phi]/d\[Phi];
9
10 \[Lambda]min = 0;
11 \[Lambda]max = d\[Lambda];
12 \[Phi]min = -(d\[Phi]/d\[Lambda]) (\[Lambda] - d\[Lambda]);
13 \[Phi]max = d\[Phi];
14
15 G11[\[Lambda]_, \[Phi]_] =
16 Integrate[F1[\[Lambda], \[Phi]] F1[\[Lambda], \[Phi]], \[Phi]];
17 G111[\[Lambda]_] = G11[\[Lambda], \[Phi]max] - G11[\[Lambda], \[Phi]min];
18 H111[\[Lambda]_] = Integrate[G111[\[Lambda]], \[Lambda]];
19 FI111 = Simplify[H111[\[Lambda]max] - H111[\[Lambda]min]];
20
21 G12[\[Lambda]_, \[Phi]_] =
22 Integrate[F1[\[Lambda], \[Phi]] F2[\[Lambda], \[Phi]], \[Phi]];
23 G112[\[Lambda]_] = G12[\[Lambda], \[Phi]max] - G12[\[Lambda], \[Phi]min];
24 H112[\[Lambda]_] = Integrate[G112[\[Lambda]], \[Lambda]];
25 FI112 = Simplify[H112[\[Lambda]max] - H112[\[Lambda]min]];
26
27 G13[\[Lambda]_, \[Phi]_] =
28 Integrate[F1[\[Lambda], \[Phi]] F3[\[Lambda], \[Phi]], \[Phi]];
29 G113[\[Lambda]_] = G13[\[Lambda], \[Phi]max] - G13[\[Lambda], \[Phi]min];
30 H113[\[Lambda]_] = Integrate[G113[\[Lambda]], \[Lambda]];
31 FI113 = Simplify[H113[\[Lambda]max] - H113[\[Lambda]min]];
32
33 G21[\[Lambda]_, \[Phi]_] =
34 Integrate[F2[\[Lambda], \[Phi]] F1[\[Lambda], \[Phi]], \[Phi]];
35 G121[\[Lambda]_] = G21[\[Lambda], \[Phi]max] - G21[\[Lambda], \[Phi]min];
36 H121[\[Lambda]_] = Integrate[G121[\[Lambda]], \[Lambda]];
37 FI121 = Simplify[H121[\[Lambda]max] - H121[\[Lambda]min]];
38
39 G22[\[Lambda]_, \[Phi]_] =
40 Integrate[F2[\[Lambda], \[Phi]] F2[\[Lambda], \[Phi]], \[Phi]];
41 G122[\[Lambda]_] = G22[\[Lambda], \[Phi]max] - G22[\[Lambda], \[Phi]min];
42 H122[\[Lambda]_] = Integrate[G122[\[Lambda]], \[Lambda]];
43 FI122 = Simplify[H122[\[Lambda]max] - H122[\[Lambda]min]];
44
45 G23[\[Lambda]_, \[Phi]_] =
46 Integrate[F2[\[Lambda], \[Phi]] F3[\[Lambda], \[Phi]], \[Phi]];
47 G123[\[Lambda]_] = G23[\[Lambda], \[Phi]max] - G23[\[Lambda], \[Phi]min];
56

48 H123[\[Lambda]_] = Integrate[G123[\[Lambda]], \[Lambda]];
49 FI123 = Simplify[H123[\[Lambda]max] - H123[\[Lambda]min]];
50
51 G31[\[Lambda]_, \[Phi]_] =
52 Integrate[F3[\[Lambda], \[Phi]] F1[\[Lambda], \[Phi]], \[Phi]];
53 G131[\[Lambda]_] = G31[\[Lambda], \[Phi]max] - G31[\[Lambda], \[Phi]min];
54 H131[\[Lambda]_] = Integrate[G131[\[Lambda]], \[Lambda]];
55 FI131 = Simplify[H131[\[Lambda]max] - H131[\[Lambda]min]];
56
57 G32[\[Lambda]_, \[Phi]_] =
58 Integrate[F3[\[Lambda], \[Phi]] F2[\[Lambda], \[Phi]], \[Phi]];
59 G132[\[Lambda]_] = G32[\[Lambda], \[Phi]max] - G32[\[Lambda], \[Phi]min];
60 H132[\[Lambda]_] = Integrate[G132[\[Lambda]], \[Lambda]];
61 FI132 = Simplify[H132[\[Lambda]max] - H132[\[Lambda]min]];
62
63 G33[\[Lambda]_, \[Phi]_] =
64 Integrate[F3[\[Lambda], \[Phi]] F3[\[Lambda], \[Phi]], \[Phi]];
65 G133[\[Lambda]_] = G33[\[Lambda], \[Phi]max] - G33[\[Lambda], \[Phi]min];
66 H133[\[Lambda]_] = Integrate[G133[\[Lambda]], \[Lambda]];
67 FI133 = Simplify[H133[\[Lambda]max] - H133[\[Lambda]min]];
68
69 TRID1 = FI111, FI112, FI113;
70 TRID2 = FI121, FI122, FI123;
71 TRID3 = FI131, FI132, FI133;
72 Mat1 = MatrixForm[Transpose[TRID1, TRID2, TRID3]]
Programa para las integrales del producto interno
(1
cos2 φ
∂ϕj
∂λ
∣∣∣∣∂ϕi
∂λ
)en los triangulos
superiores:
1 ClearAll[G11,G12,G13,G21,G22,G23,G31,G32,G33];
2 ClearAll[GI11,GI12,GI13,GI21,GI22,GI23,GI31,GI32,GI33];
3 ClearAll[H11,H12,H13,H21,H22,H23,H31,H32,H33];
4 ClearALL[FI11,FI12,FI13,FI21,FI22,FI23,FI31,FI32,FI33];
5 ClearALL[DF1\[Lambda],DF2\[Lambda],DF3\[Lambda]];
6 ClearAll[\[Phi]min,\[Phi]max,\[Lambda]min,\[Lambda]max,TRID1,TRID2,TRID3,
7 Mat1];
8
9 DF1\[Lambda][\[Lambda]_,\[Phi]_]=
10 D[(\[Lambda]-\[Lambda]i)/d\[Lambda]+(\[Phi]-\[Phi]i)/
11 d\[Phi]-1,\[Lambda]];
12 DF2\[Lambda][\[Lambda]_,\[Phi]_]=
13 D[1-(\[Lambda]-\[Lambda]i)/d\[Lambda],\[Lambda]];
14 DF3\[Lambda][\[Lambda]_,\[Phi]_]=D[1-(\[Phi]-\[Phi]i)/d\[Phi],\[Lambda]];
15
16 \[Lambda]min=\[Lambda]i;
57
17 \[Lambda]max=\[Lambda]i+d\[Lambda];
18 \[Phi]min=\[Phi]i-(d\[Phi]/d\[Lambda]) (\[Lambda]-\[Lambda]i-d\[Lambda]);
19 \[Phi]max=\[Phi]i+d\[Phi];
20
21 G11[\[Lambda]_,\[Phi]_]=
22 Integrate[
23 1/(Cos[\[Phi]])^2*DF1\[Lambda][\[Lambda],\[Phi]]*
24 DF1\[Lambda][\[Lambda],\[Phi]] , \[Phi]];
25 GI11[\[Lambda]_]=G11[\[Lambda],\[Phi]max]-G11[\[Lambda],\[Phi]min];
26 H11[\[Lambda]_]=Integrate[GI11[\[Lambda]],\[Lambda]];
27 FI11=Simplify[H11[\[Lambda]max]-H11[\[Lambda]min]];
28
29 G12[\[Lambda]_,\[Phi]_]=
30 Integrate[
31 1/(Cos[\[Phi]])^2*DF1\[Lambda][\[Lambda],\[Phi]]*
32 DF2\[Lambda][\[Lambda],\[Phi]] , \[Phi]];
33 GI12[\[Lambda]_]=G12[\[Lambda],\[Phi]max]-G12[\[Lambda],\[Phi]min];
34 H12[\[Lambda]_]=Integrate[GI12[\[Lambda]],\[Lambda]];
35 FI12=Simplify[H12[\[Lambda]max]-H12[\[Lambda]min]];
36
37 G13[\[Lambda]_,\[Phi]_]=
38 Integrate[
39 1/(Cos[\[Phi]])^2*DF1\[Lambda][\[Lambda],\[Phi]]*
40 DF3\[Lambda][\[Lambda],\[Phi]] , \[Phi]];
41 GI13[\[Lambda]_]=G13[\[Lambda],\[Phi]max]-G13[\[Lambda],\[Phi]min];
42 H13[\[Lambda]_]=Integrate[GI13[\[Lambda]],\[Lambda]];
43 FI13=Simplify[H13[\[Lambda]max]-H13[\[Lambda]min]];
44
45 G21[\[Lambda]_,\[Phi]_]=
46 Integrate[
47 1/(Cos[\[Phi]])^2*DF2\[Lambda][\[Lambda],\[Phi]]*
48 DF1\[Lambda][\[Lambda],\[Phi]] , \[Phi]];
49 GI21[\[Lambda]_]=G21[\[Lambda],\[Phi]max]-G21[\[Lambda],\[Phi]min];
50 H21[\[Lambda]_]=Integrate[GI21[\[Lambda]],\[Lambda]];
51 FI21=Simplify[H21[\[Lambda]max]-H21[\[Lambda]min]];
52
53 G22[\[Lambda]_,\[Phi]_]=
54 Integrate[
55 1/(Cos[\[Phi]])^2*DF2\[Lambda][\[Lambda],\[Phi]]*
56 DF2\[Lambda][\[Lambda],\[Phi]] , \[Phi]];
57 GI22[\[Lambda]_]=G22[\[Lambda],\[Phi]max]-G22[\[Lambda],\[Phi]min];
58 H22[\[Lambda]_]=Integrate[GI22[\[Lambda]],\[Lambda]];
59 FI22=Simplify[H22[\[Lambda]max]-H22[\[Lambda]min]];
60
61 G23[\[Lambda]_,\[Phi]_]=
58

62 Integrate[
63 1/(Cos[\[Phi]])^2*DF2\[Lambda][\[Lambda],\[Phi]]*
64 DF3\[Lambda][\[Lambda],\[Phi]] , \[Phi]];
65 GI23[\[Lambda]_]=G23[\[Lambda],\[Phi]max]-G23[\[Lambda],\[Phi]min];
66 H23[\[Lambda]_]=Integrate[GI23[\[Lambda]],\[Lambda]];
67 FI23=Simplify[H23[\[Lambda]max]-H23[\[Lambda]min]];
68
69 G31[\[Lambda]_,\[Phi]_]=
70 Integrate[
71 1/(Cos[\[Phi]])^2*DF3\[Lambda][\[Lambda],\[Phi]]*
72 DF1\[Lambda][\[Lambda],\[Phi]] , \[Phi]];
73 GI31[\[Lambda]_]=G31[\[Lambda],\[Phi]max]-G31[\[Lambda],\[Phi]min];
74 H31[\[Lambda]_]=Integrate[GI31[\[Lambda]],\[Lambda]];
75 FI31=Simplify[H31[\[Lambda]max]-H31[\[Lambda]min]];
76
77 G32[\[Lambda]_,\[Phi]_]=
78 Integrate[
79 1/(Cos[\[Phi]])^2*DF3\[Lambda][\[Lambda],\[Phi]]*
80 DF2\[Lambda][\[Lambda],\[Phi]] , \[Phi]];
81 GI32[\[Lambda]_]=G32[\[Lambda],\[Phi]max]-G32[\[Lambda],\[Phi]min];
82 H32[\[Lambda]_]=Integrate[GI32[\[Lambda]],\[Lambda]];
83 FI32=Simplify[H32[\[Lambda]max]-H32[\[Lambda]min]];
84
85 G33[\[Lambda]_,\[Phi]_]=
86 Integrate[
87 1/(Cos[\[Phi]])^2*DF3\[Lambda][\[Lambda],\[Phi]]*
88 DF3\[Lambda][\[Lambda],\[Phi]] , \[Phi]];
89 GI33[\[Lambda]_]=G33[\[Lambda],\[Phi]max]-G33[\[Lambda],\[Phi]min];
90 H33[\[Lambda]_]=Integrate[GI33[\[Lambda]],\[Lambda]];
91 FI33=Simplify[H33[\[Lambda]max]-H33[\[Lambda]min]];
92
93 TRID1=FI11,FI12,FI13;
94 TRID2=FI21,FI22,FI23;
95 TRID3=FI31,FI32,FI33;
96 Mat1=MatrixForm[Transpose[TRID1,TRID2,TRID3]]
97 Null
Programa para las integrales del producto interno
(∂ϕj
∂λ
∣∣∣∣∂ϕi
∂φ
)en los triangulos
superiores:
1 ClearAll[G11,G12,G13,G21,G22,G23,G31,G32,G33];
2 ClearAll[GI11,GI12,GI13,GI21,GI22,GI23,GI31,GI32,GI33];
3 ClearAll[H11,H12,H13,H21,H22,H23,H31,H32,H33];
4 ClearALL[FI11,FI12,FI13,FI21,FI22,FI23,FI31,FI32,FI33];
5 ClearALL[DF1\[Phi],DF2\[Phi],DF3\[Phi]];
59

6 ClearAll[\[Phi]min,\[Phi]max,\[Lambda]min,\[Lambda]max,TRID1,TRID2,TRID3,
7 Mat1];
8
9 DF1\[Phi][\[Lambda]_,\[Phi]_]=
10 D[(\[Lambda]-\[Lambda]i)/d\[Lambda]+(\[Phi]-\[Phi]i)/d\[Phi]-1,\[Phi]];
11 DF2\[Phi][\[Lambda]_,\[Phi]_]=D[1-(\[Lambda]-\[Lambda]i)/d\[Lambda],\[Phi]];
12 DF3\[Phi][\[Lambda]_,\[Phi]_]=D[1-(\[Phi]-\[Phi]i)/d\[Phi],\[Phi]];
13
14 \[Lambda]min=\[Lambda]i;
15 \[Lambda]max=\[Lambda]i+d\[Lambda];
16 \[Phi]min=\[Phi]i-(d\[Phi]/d\[Lambda]) (\[Lambda]-\[Lambda]i-d\[Lambda]);
17 \[Phi]max=\[Phi]i+d\[Phi];
18
19 G11[\[Lambda]_,\[Phi]_]=
20 Integrate[
21 DF1\[Phi][\[Lambda],\[Phi]]*DF1\[Phi][\[Lambda],\[Phi]] , \[Phi]];
22 GI11[\[Lambda]_]=G11[\[Lambda],\[Phi]max]-G11[\[Lambda],\[Phi]min];
23 H11[\[Lambda]_]=Integrate[GI11[\[Lambda]],\[Lambda]];
24 FI11=Simplify[H11[\[Lambda]max]-H11[\[Lambda]min]];
25
26 G12[\[Lambda]_,\[Phi]_]=
27 Integrate[
28 DF1\[Phi][\[Lambda],\[Phi]]*DF2\[Phi][\[Lambda],\[Phi]] , \[Phi]];
29 GI12[\[Lambda]_]=G12[\[Lambda],\[Phi]max]-G12[\[Lambda],\[Phi]min];
30 H12[\[Lambda]_]=Integrate[GI12[\[Lambda]],\[Lambda]];
31 FI12=Simplify[H12[\[Lambda]max]-H12[\[Lambda]min]];
32
33 G13[\[Lambda]_,\[Phi]_]=
34 Integrate[
35 DF1\[Phi][\[Lambda],\[Phi]]*DF3\[Phi][\[Lambda],\[Phi]] , \[Phi]];
36 GI13[\[Lambda]_]=G13[\[Lambda],\[Phi]max]-G13[\[Lambda],\[Phi]min];
37 H13[\[Lambda]_]=Integrate[GI13[\[Lambda]],\[Lambda]];
38 FI13=Simplify[H13[\[Lambda]max]-H13[\[Lambda]min]];
39
40 G21[\[Lambda]_,\[Phi]_]=
41 Integrate[
42 DF2\[Phi][\[Lambda],\[Phi]]*DF1\[Phi][\[Lambda],\[Phi]] , \[Phi]];
43 GI21[\[Lambda]_]=G21[\[Lambda],\[Phi]max]-G21[\[Lambda],\[Phi]min];
44 H21[\[Lambda]_]=Integrate[GI21[\[Lambda]],\[Lambda]];
45 FI21=Simplify[H21[\[Lambda]max]-H21[\[Lambda]min]];
46
47 G22[\[Lambda]_,\[Phi]_]=
48 Integrate[
49 DF2\[Phi][\[Lambda],\[Phi]]*DF2\[Phi][\[Lambda],\[Phi]] , \[Phi]];
50 GI22[\[Lambda]_]=G22[\[Lambda],\[Phi]max]-G22[\[Lambda],\[Phi]min];
60

51 H22[\[Lambda]_]=Integrate[GI22[\[Lambda]],\[Lambda]];
52 FI22=Simplify[H22[\[Lambda]max]-H22[\[Lambda]min]];
53
54 G23[\[Lambda]_,\[Phi]_]=
55 Integrate[
56 DF2\[Phi][\[Lambda],\[Phi]]*DF3\[Phi][\[Lambda],\[Phi]] , \[Phi]];
57 GI23[\[Lambda]_]=G23[\[Lambda],\[Phi]max]-G23[\[Lambda],\[Phi]min];
58 H23[\[Lambda]_]=Integrate[GI23[\[Lambda]],\[Lambda]];
59 FI23=Simplify[H23[\[Lambda]max]-H23[\[Lambda]min]];
60
61 G31[\[Lambda]_,\[Phi]_]=
62 Integrate[
63 DF3\[Phi][\[Lambda],\[Phi]]*DF1\[Phi][\[Lambda],\[Phi]] , \[Phi]];
64 GI31[\[Lambda]_]=G31[\[Lambda],\[Phi]max]-G31[\[Lambda],\[Phi]min];
65 H31[\[Lambda]_]=Integrate[GI31[\[Lambda]],\[Lambda]];
66 FI31=Simplify[H31[\[Lambda]max]-H31[\[Lambda]min]];
67
68 G32[\[Lambda]_,\[Phi]_]=
69 Integrate[
70 DF3\[Phi][\[Lambda],\[Phi]]*DF2\[Phi][\[Lambda],\[Phi]] , \[Phi]];
71 GI32[\[Lambda]_]=G32[\[Lambda],\[Phi]max]-G32[\[Lambda],\[Phi]min];
72 H32[\[Lambda]_]=Integrate[GI32[\[Lambda]],\[Lambda]];
73 FI32=Simplify[H32[\[Lambda]max]-H32[\[Lambda]min]];
74
75 G33[\[Lambda]_,\[Phi]_]=
76 Integrate[
77 DF3\[Phi][\[Lambda],\[Phi]]*DF3\[Phi][\[Lambda],\[Phi]] , \[Phi]];
78 GI33[\[Lambda]_]=G33[\[Lambda],\[Phi]max]-G33[\[Lambda],\[Phi]min];
79 H33[\[Lambda]_]=Integrate[GI33[\[Lambda]],\[Lambda]];
80 FI33=Simplify[H33[\[Lambda]max]-H33[\[Lambda]min]];
81
82 TRID1=FI11,FI12,FI13;
83 TRID2=FI21,FI22,FI23;
84 TRID3=FI31,FI32,FI33;
85 Mat1=MatrixForm[Transpose[TRID1,TRID2,TRID3]]
86 Null
Programa para las integrales del producto interno
(1
cos φ
∂ϕj
∂λ
∣∣∣∣ϕi
)en los triangulos
superiores:
1 ClearAll[F1,F2,F3,\[Lambda]min,\[Lambda]max,\[Phi]min,\[Phi]max];
2 ClearAll[DF1\[Lambda],DF2\[Lambda],DF3\[Lambda]];
3 ClearAll[G11,G12,G13,G21,G22,G23,G31,G32,G33];
4 ClearAll[G111,G112,G113,G121,G122,G123,G131,G132,G133];
5 ClaerAll[H111,H112,H113,H121,H122,H123,H131,H132,H133];
61
6
7 F1[\[Lambda]_,\[Phi]_]=-1+(\[Lambda]-\[Lambda]i)/\[CapitalDelta]\[Lambda]+(\
8 \[Phi]-\[Phi]i)/\[CapitalDelta]\[Phi];
9 F2[\[Lambda]_,\[Phi]_]=1-(\[Lambda]-\[Lambda]i)/\[CapitalDelta]\[Lambda];
10 F3[\[Lambda]_,\[Phi]_]=1-(\[Phi]-\[Phi]i)/\[CapitalDelta]\[Phi];
11
12 \[Lambda]min=\[Lambda]i+\[CapitalDelta]\[Lambda]-(\[CapitalDelta]\[Lambda]/\
13 \[CapitalDelta]\[Phi])(\[Phi]-\[Phi]i) ;
14 \[Lambda]max=\[Lambda]i+\[CapitalDelta]\[Lambda];
15 \[Phi]min=\[Phi]i;
16 \[Phi]max=\[Phi]i+\[CapitalDelta]\[Phi];
17
18 DF1\[Lambda]=D[F1[\[Lambda],\[Phi]],\[Lambda]];
19 DF2\[Lambda]=D[F2[\[Lambda],\[Phi]],\[Lambda]];
20 DF3\[Lambda]=D[F3[\[Lambda],\[Phi]],\[Lambda]];
21
22 G11[\[Lambda]_,\[Phi]_]=
23 Integrate[Sec[\[Phi]]DF1\[Lambda] F1[\[Lambda],\[Phi]],\[Lambda]];
24 G111[\[Phi]_]=G11[\[Lambda]max,\[Phi]]-G11[\[Lambda]min,\[Phi]];
25 H111[\[Phi]_]=Integrate[G111[\[Phi]],\[Phi]];
26 FI111=Simplify[H111[\[Phi]max]-H111[\[Phi]min]];
27
28 G12[\[Lambda]_,\[Phi]_]=
29 Integrate[Sec[\[Phi]]DF2\[Lambda] F1[\[Lambda],\[Phi]],\[Lambda]];
30 G112[\[Phi]_]=G12[\[Lambda]max,\[Phi]]-G12[\[Lambda]min,\[Phi]];
31 H112[\[Phi]_]=Integrate[G112[\[Phi]],\[Phi]];
32 FI112=Simplify[H112[\[Phi]max]-H112[\[Phi]min]];
33
34 G13[\[Lambda]_,\[Phi]_]=
35 Integrate[Sec[\[Phi]]DF3\[Lambda] F1[\[Lambda],\[Phi]], \[Lambda]];
36 G113[\[Phi]_]=G13[\[Lambda]max,\[Phi]]-G13[\[Lambda]min,\[Phi]];
37 H113[\[Phi]_]=Integrate[G113[\[Phi]],\[Phi]];
38 FI113=Simplify[H113[\[Phi]max]-H113[\[Phi]min]];
39
40 G21[\[Lambda]_,\[Phi]_]=
41 Integrate[Sec[\[Phi]]DF1\[Lambda] F2[\[Lambda],\[Phi]], \[Lambda]];
42 G121[\[Phi]_]=G21[\[Lambda]max,\[Phi]]-G21[\[Lambda]min,\[Phi]];
43 H121[\[Phi]_]=Integrate[G121[\[Phi]],\[Phi]];
44 FI121=Simplify[H121[\[Phi]max]-H121[\[Phi]min]];
45
46 G22[\[Lambda]_,\[Phi]_]=
47 Integrate[Sec[\[Phi]]DF2\[Lambda] F2[\[Lambda],\[Phi]], \[Lambda]];
48 G122[\[Phi]_]=G22[\[Lambda]max,\[Phi]]-G22[\[Lambda]min,\[Phi]];
49 H122[\[Phi]_]=Integrate[G122[\[Phi]],\[Phi]];
50 FI122=Simplify[H122[\[Phi]max]-H122[\[Phi]min]];
62

51
52 G23[\[Lambda]_,\[Phi]_]=
53 Integrate[Sec[\[Phi]]DF3\[Lambda] F2[\[Lambda],\[Phi]], \[Lambda]];
54 G123[\[Phi]_]=G23[\[Lambda]max,\[Phi]]-G23[\[Lambda]min,\[Phi]];
55 H123[\[Phi]_]=Integrate[G123[\[Phi]],\[Phi]];
56 FI123=Simplify[H123[\[Phi]max]-H123[\[Phi]min]];
57
58 G31[\[Lambda]_,\[Phi]_]=
59 Integrate[Sec[\[Phi]]DF1\[Lambda] F3[\[Lambda],\[Phi]],\[Lambda]];
60 G131[\[Phi]_]=G31[\[Lambda]max,\[Phi]]-G31[\[Lambda]min,\[Phi]];
61 H131[\[Phi]_]=Integrate[G131[\[Phi]],\[Phi]];
62 FI131=Simplify[H131[\[Phi]max]-H131[\[Phi]min]];
63
64 G32[\[Lambda]_,\[Phi]_]=
65 Integrate[Sec[\[Phi]]DF2\[Lambda] F3[\[Lambda],\[Phi]],\[Lambda]];
66 G132[\[Phi]_]=G32[\[Lambda]max,\[Phi]]-G32[\[Lambda]min,\[Phi]];
67 H132[\[Phi]_]=Integrate[G132[\[Phi]],\[Phi]];
68 FI132=Simplify[H132[\[Phi]max]-H132[\[Phi]min]];
69
70 G33[\[Lambda]_,\[Phi]_]=
71 Integrate[Sec[\[Phi]]DF3\[Lambda] F3[\[Lambda],\[Phi]],\[Lambda]];
72 G133[\[Phi]_]=G33[\[Lambda]max,\[Phi]]-G33[\[Lambda]min,\[Phi]];
73 H133[\[Phi]_]=Integrate[G133[\[Phi]],\[Phi]];
74 FI133=Simplify[H133[\[Phi]max]-H133[\[Phi]min]];
75
76 TRID1=FI111,FI112,FI113;
77 TRID2=FI121,FI122,FI123;
78 TRID3=FI131,FI132,FI133;
79 Mat1=MatrixForm[TRID1,TRID2,TRID3]
80 Null
81 \[Lambda]min=\[Lambda]i+\[CapitalDelta]\[Lambda]-(\[CapitalDelta]\[Lambda]/\
82 \[CapitalDelta]\[Phi])(\[Phi]-\[Phi]i) ;
83 \[Lambda]max=\[Lambda]i+\[CapitalDelta]\[Lambda];
84 \[Phi]min=\[Phi]i;
85 \[Phi]max=\[Phi]i+\[CapitalDelta]\[Phi];
86
87 G11[\[Lambda]_,\[Phi]_]=
88 Integrate[Sec[\[Phi]]DF1\[Lambda] F1[\[Lambda],\[Phi]],\[Lambda]];
89 G111[\[Phi]_]=Simplify[G11[\[Lambda]max,\[Phi]]-G11[\[Lambda]min,\[Phi]]];
90 H111[\[Phi]_]=Simplify[Integrate[G111[\[Phi]],\[Phi]]];
91 FI111=Simplify[H111[\[Phi]max]-H111[\[Phi]min]];
92
93 G12[\[Lambda]_,\[Phi]_]=
94 Integrate[Sec[\[Phi]]DF2\[Lambda] F1[\[Lambda],\[Phi]],\[Lambda]];
95 G112[\[Phi]_]=Simplify[G12[\[Lambda]max,\[Phi]]-G12[\[Lambda]min,\[Phi]]];
63

96 H112[\[Phi]_]=Simplify[Integrate[G112[\[Phi]],\[Phi]]];
97
98 G13[\[Lambda]_,\[Phi]_]=
99 Integrate[Sec[\[Phi]]DF3\[Lambda] F1[\[Lambda],\[Phi]], \[Lambda]];
100 G113[\[Phi]_]=Simplify[G13[\[Lambda]max,\[Phi]]-G13[\[Lambda]min,\[Phi]]];
101 H113[\[Phi]_]=Simplify[Integrate[G113[\[Phi]],\[Phi]]];
102
103 G21[\[Lambda]_,\[Phi]_]=
104 Integrate[Sec[\[Phi]]DF1\[Lambda] F2[\[Lambda],\[Phi]], \[Lambda]];
105 G121[\[Phi]_]=Simplify[G21[\[Lambda]max,\[Phi]]-G21[\[Lambda]min,\[Phi]]];
106 H121[\[Phi]_]=Simplify[Integrate[G121[\[Phi]],\[Phi]]];
107 G22[\[Lambda]_,\[Phi]_]=
108 Integrate[Sec[\[Phi]]DF2\[Lambda] F2[\[Lambda],\[Phi]], \[Lambda]];
109 G122[\[Phi]_]=Simplify[G22[\[Lambda]max,\[Phi]]-G22[\[Lambda]min,\[Phi]]];
110 H122[\[Phi]_]=Simplify[Integrate[G122[\[Phi]],\[Phi]]];
Programa para las integrales del producto interno
(∂ϕj
∂φ
∣∣∣∣ϕi
)en los triangulos su-
periores:
1 ClearAll[F1,F2,F3,\[Lambda]min,\[Lambda]max,\[Phi]min,\[Phi]max];
2 ClearAll[DF1\[Phi],DF2\[Phi],DF3\[Phi]];
3 ClearAll[G11,G12,G13,G21,G22,G23,G31,G32,G33];
4 ClearAll[G111,G112,G113,G121,G122,G123,G131,G132,G133];
5 ClaerAll[H111,H112,H113,H121,H122,H123,H131,H132,H133];
6
7 F1[\[Lambda]_,\[Phi]_]=\[Lambda]/d\[Lambda]+\[Phi]/d\[Phi]-1;
8 F2[\[Lambda]_,\[Phi]_]=1-\[Lambda]/d\[Lambda];
9 F3[\[Lambda]_,\[Phi]_]=1-\[Phi]/d\[Phi];
10
11 \[Lambda]min=0;
12 \[Lambda]max=d\[Lambda];
13 \[Phi]min=-(d\[Phi]/d\[Lambda]) (\[Lambda]-d\[Lambda]);
14 \[Phi]max=d\[Phi];
15
16 DF1\[Phi]=D[F1[\[Lambda],\[Phi]],\[Phi]];
17 DF2\[Phi]=D[F2[\[Lambda],\[Phi]],\[Phi]];
18 DF3\[Phi]=D[F3[\[Lambda],\[Phi]],\[Phi]];
19
20 G11[\[Lambda]_,\[Phi]_]=Integrate[DF1\[Phi] F1[\[Lambda],\[Phi]], \[Phi]];
21 G111[\[Lambda]_]=G11[\[Lambda],\[Phi]max]-G11[\[Lambda],\[Phi]min];
22 H111[\[Lambda]_]=Integrate[G111[\[Lambda]],\[Lambda]];
23 FI111=Simplify[H111[\[Lambda]max]-H111[\[Lambda]min]];
24
25 G12[\[Lambda]_,\[Phi]_]=Integrate[DF2\[Phi] F1[\[Lambda],\[Phi]], \[Phi]];
26 G112[\[Lambda]_]=G12[\[Lambda],\[Phi]max]-G12[\[Lambda],\[Phi]min];
64
27 H112[\[Lambda]_]=Integrate[G112[\[Lambda]],\[Lambda]];
28 FI112=Simplify[H112[\[Lambda]max]-H112[\[Lambda]min]];
29
30 G13[\[Lambda]_,\[Phi]_]=Integrate[DF3\[Phi] F1[\[Lambda],\[Phi]], \[Phi]];
31 G113[\[Lambda]_]=G13[\[Lambda],\[Phi]max]-G13[\[Lambda],\[Phi]min];
32 H113[\[Lambda]_]=Integrate[G113[\[Lambda]],\[Lambda]];
33 FI113=Simplify[H113[\[Lambda]max]-H113[\[Lambda]min]];
34
35 G21[\[Lambda]_,\[Phi]_]=Integrate[DF1\[Phi] F2[\[Lambda],\[Phi]], \[Phi]];
36 G121[\[Lambda]_]=G21[\[Lambda],\[Phi]max]-G21[\[Lambda],\[Phi]min];
37 H121[\[Lambda]_]=Integrate[G121[\[Lambda]],\[Lambda]];
38 FI121=Simplify[H121[\[Lambda]max]-H121[\[Lambda]min]];
39
40 G22[\[Lambda]_,\[Phi]_]=Integrate[DF2\[Phi] F2[\[Lambda],\[Phi]], \[Phi]];
41 G122[\[Lambda]_]=G22[\[Lambda],\[Phi]max]-G22[\[Lambda],\[Phi]min];
42 H122[\[Lambda]_]=Integrate[G122[\[Lambda]],\[Lambda]];
43 FI122=Simplify[H122[\[Lambda]max]-H122[\[Lambda]min]];
44
45 G23[\[Lambda]_,\[Phi]_]=Integrate[DF3\[Phi] F2[\[Lambda],\[Phi]], \[Phi]];
46 G123[\[Lambda]_]=G23[\[Lambda],\[Phi]max]-G23[\[Lambda],\[Phi]min];
47 H123[\[Lambda]_]=Integrate[G123[\[Lambda]],\[Lambda]];
48 FI123=Simplify[H123[\[Lambda]max]-H123[\[Lambda]min]];
49
50 G31[\[Lambda]_,\[Phi]_]=Integrate[DF1\[Phi] F3[\[Lambda],\[Phi]], \[Phi]];
51 G131[\[Lambda]_]=G31[\[Lambda],\[Phi]max]-G31[\[Lambda],\[Phi]min];
52 H131[\[Lambda]_]=Integrate[G131[\[Lambda]],\[Lambda]];
53 FI131=Simplify[H131[\[Lambda]max]-H131[\[Lambda]min]];
54
55 G32[\[Lambda]_,\[Phi]_]=Integrate[DF2\[Phi] F3[\[Lambda],\[Phi]], \[Phi]];
56 G132[\[Lambda]_]=G32[\[Lambda],\[Phi]max]-G32[\[Lambda],\[Phi]min];
57 H132[\[Lambda]_]=Integrate[G132[\[Lambda]],\[Lambda]];
58 FI132=Simplify[H132[\[Lambda]max]-H132[\[Lambda]min]];
59
60 G33[\[Lambda]_,\[Phi]_]=Integrate[DF3\[Phi] F3[\[Lambda],\[Phi]], \[Phi]];
61 G133[\[Lambda]_]=G33[\[Lambda],\[Phi]max]-G33[\[Lambda],\[Phi]min];
62 H133[\[Lambda]_]=Integrate[G133[\[Lambda]],\[Lambda]];
63 FI133=Simplify[H133[\[Lambda]max]-H133[\[Lambda]min]];
64
65 TRID1=FI111,FI112,FI113;
66 TRID2=FI121,FI122,FI123;
67 TRID3=FI131,FI132,FI133;
68 Mat1=MatrixForm[TRID1,TRID2,TRID3]
Programa para las integrales del producto interno
⟨ϕj
∣∣∣∣ϕi
⟩
j∈Γ2
en los triangulos
superiores:
65
1 ClearAll[F1,F2,F3,\[Lambda]min,\[Lambda]max,\[Phi]min,\[Phi]max];
2 ClearAll[g11,g12,g13,g21,g22,g23,g31,g32,g33];
3 ClearAll[h11,h12,h13,h21,h22,h23,h31,h32,h33];
4
5 F1[\[Lambda]_,\[Phi]_]=\[Lambda]/d\[Lambda]+\[Phi]/d\[Phi]-1;
6 F2[\[Lambda]_,\[Phi]_]=1-\[Lambda]/d\[Lambda];
7 F3[\[Lambda]_,\[Phi]_]=1-\[Phi]/d\[Phi];
8
9 g[\[Phi]_]=1;
10
11 \[Lambda]min=0;
12 \[Lambda]max=d\[Lambda];
13 \[Phi]min=0;
14 \[Phi]max=d\[Phi];
15
16 g11[\[Phi]_]=
17 Integrate[F1[\[Lambda]max,\[Phi]] F1[\[Lambda]max,\[Phi]], \[Phi]];
18 h11=Simplify[g11[\[Phi]max]-g11[\[Phi]min]];
19
20 g12[\[Phi]_]=
21 Integrate[F1[\[Lambda]max,\[Phi]] F2[\[Lambda]max,\[Phi]], \[Phi]];
22 h12=Simplify[g12[\[Phi]max]-g12[\[Phi]min]];
23
24 g13[\[Phi]_]=
25 Integrate[F1[\[Lambda]max,\[Phi]] F3[\[Lambda]max,\[Phi]], \[Phi]];
26 h13=Simplify[g13[\[Phi]max]-g13[\[Phi]min]];
27
28 g21[\[Phi]_]=
29 Integrate[F2[\[Lambda]max,\[Phi]] F1[\[Lambda]max,\[Phi]], \[Phi]];
30 h21=Simplify[g21[\[Phi]max]-g21[\[Phi]min]];
31
32 g22[\[Phi]_]=
33 Integrate[F2[\[Lambda]max,\[Phi]] F2[\[Lambda]max,\[Phi]], \[Phi]];
34 h22=Simplify[g22[\[Phi]max]-g22[\[Phi]min]];
35
36 g23[\[Phi]_]=
37 Integrate[F2[\[Lambda]max,\[Phi]] F3[\[Lambda]max,\[Phi]], \[Phi]];
38 h23=Simplify[g23[\[Phi]max]-g23[\[Phi]min]];
39
40 g31[\[Phi]_]=
41 Integrate[F3[\[Lambda]max,\[Phi]] F1[\[Lambda]max,\[Phi]], \[Phi]];
42 h31=Simplify[g31[\[Phi]max]-g31[\[Phi]min]];
43
44 g32[\[Phi]_]=
45 Integrate[F3[\[Lambda]max,\[Phi]] F2[\[Lambda]max,\[Phi]], \[Phi]];
66
46 h32=Simplify[g32[\[Phi]max]-g32[\[Phi]min]];
47
48 g33[\[Phi]_]=
49 Integrate[F3[\[Lambda]max,\[Phi]] F3[\[Lambda]max,\[Phi]], \[Phi]];
50 h33=Simplify[g33[\[Phi]max]-g33[\[Phi]min]];
51
52 TRID1=h11,h12,h13;
53 TRID2=h21,h22,h23;
54 TRID3=h31,h32,h33;
55 Mat1=MatrixForm[TRID1,TRID2,TRID3]
Programa para las integrales del producto interno
⟨ce
∣∣∣∣ϕi
⟩
i∈Γ2
en los triangulos
superiores:
1 ClearAll[F1,F2,F3,\[Lambda]min,\[Lambda]max,\[Phi]min,\[Phi]max];
2 ClearAll[g11,g12,g13];
3 ClearAll[h11,h12,h13];
4
5 F1[\[Lambda]_,\[Phi]_]=\[Lambda]/d\[Lambda]+\[Phi]/d\[Phi]-1;
6 F2[\[Lambda]_,\[Phi]_]=1-\[Lambda]/d\[Lambda];
7 F3[\[Lambda]_,\[Phi]_]=1-\[Phi]/d\[Phi];
8
9 \[Lambda]min=0;
10 \[Lambda]max=d\[Lambda];
11 \[Phi]min=0;
12 \[Phi]max=d\[Phi];
13
14 g11[\[Phi]_]= Integrate[F1[\[Lambda]max,\[Phi]], \[Phi]];
15 h11=Simplify[g11[\[Phi]max]-g11[\[Phi]min]];
16
17 g12[\[Phi]_]=Integrate[F2[\[Lambda]max,\[Phi]], \[Phi]];
18 h12=Simplify[g12[\[Phi]max]-g12[\[Phi]min]];
19
20 g13[\[Phi]_]=Integrate[F3[\[Lambda]max,\[Phi]], \[Phi]];
21 h13=Simplify[g13[\[Phi]max]-g13[\[Phi]min]];
22
23 MATR=h11,h12,h13;
24 VET=MatrixForm[Transpose[MATR]]
Programa para las integrales del producto interno (F|ϕi) en los triangulos superiores:
1 ClearAll[F1,F2,F3,\[Lambda]min,\[Lambda]max,\[Phi]min,\[Phi]max];
2 ClearAll[G11,G12,G13];
3 ClearAll[G111,G112,G113];
4 ClaerAll[H111,H112,H1133];
67

5
6 F1[\[Lambda]_,\[Phi]_]=\[Lambda]/d\[Lambda]+\[Phi]/d\[Phi]-1;
7 F2[\[Lambda]_,\[Phi]_]=1-\[Lambda]/d\[Lambda];
8 F3[\[Lambda]_,\[Phi]_]=1-\[Phi]/d\[Phi];
9
10 \[Lambda]min=0;
11 \[Lambda]max=d\[Lambda];
12 \[Phi]min=-(d\[Phi]/d\[Lambda]) (\[Lambda]-d\[Lambda]);
13 \[Phi]max=d\[Phi];
14
15 G11[\[Lambda]_,\[Phi]_]=Integrate[ F1[\[Lambda],\[Phi]], \[Phi]];
16 G111[\[Lambda]_]=G11[\[Lambda],\[Phi]max]-G11[\[Lambda],\[Phi]min];
17 H111[\[Lambda]_]=Integrate[G111[\[Lambda]],\[Lambda]];
18 FI111=Simplify[H111[\[Lambda]max]-H111[\[Lambda]min]];
19
20 G12[\[Lambda]_,\[Phi]_]=Integrate[ F2[\[Lambda],\[Phi]], \[Phi]];
21 G112[\[Lambda]_]=G12[\[Lambda],\[Phi]max]-G12[\[Lambda],\[Phi]min];
22 H112[\[Lambda]_]=Integrate[G112[\[Lambda]],\[Lambda]];
23 FI112=Simplify[H112[\[Lambda]max]-H112[\[Lambda]min]];
24
25 G13[\[Lambda]_,\[Phi]_]=Integrate[ F3[\[Lambda],\[Phi]], \[Phi]];
26 G113[\[Lambda]_]=G13[\[Lambda],\[Phi]max]-G13[\[Lambda],\[Phi]min];
27 H113[\[Lambda]_]=Integrate[G113[\[Lambda]],\[Lambda]];
28 FI113=Simplify[H113[\[Lambda]max]-H113[\[Lambda]min]];
29
30 TRID=FI111,FI112,FI113;
31 Mat=MatrixForm[Transpose[TRID]]
68