
Centro de Investigación en Ciencia Aplicada y Tecnología ...
75
Centro de Investigación en Ciencia Aplicada y Tecnología Avanzada del Instituto Politécnico Nacional Filtrado de señales estacionarias por deconvolución: estimación de parámetros. Tesis que para obtener el grado de Doctorado en Tecnología Avanzada Presenta: Consuelo Varinia García Mendoza Directores de Tesis: Dr. José de Jesús Medel Juárez Dr. Pedro Guevara López Diciembre de 2009
Transcript of Centro de Investigación en Ciencia Aplicada y Tecnología ...
Centro de Investigación en Ciencia Aplicada y Tecnología
Avanzada del Instituto Politécnico Nacional
Filtrado de señales estacionarias por deconvolución: estimación de parámetros.
Tesis que para obtener el grado de Doctorado en Tecnología Avanzada Presenta:
Consuelo Varinia García Mendoza
Directores de Tesis:
Dr. José de Jesús Medel Juárez
Dr. Pedro Guevara López
Diciembre de 2009



Resumen
En este trabajo se presenta un estimador de parámetros recursivo con base al modelo matricial
de deconvolución como proceso de filtrado, con el cual es posible conocer la dinámica interna del
modelo tipo caja negra con respuesta lineal, y con evolución invariante en el tiempo.
La extensión del proceso de convolución a un periodo de tiempo conformado por un
grupo de intervalos en los cuales el sistema no cambia de contexto, permite hacer una
aproximación al producto matricial con base en el cual el sistema real, dadas sus entradas y
salidas dentro de ese periodo de tiempo, será visto como un sistema multivariable al no cambiar
de contexto y al mantener sus condiciones de invariancia, de manera que es necesario el uso de la
pseudoinversa en la estimación, ya que se observan problemas de inversión y de singularidad en
su desarrollo. De igual forma, las medidas de dispersión respecto a una referencia, considerando
la traza tanto de la matriz de referencia como de su estimada, permiten describir al error
cuadrático medio, error en decibeles y Bode, todos desarrollados de manera recursiva,
estableciendo un enlace con sus estados inmediatos anteriores para el consumo de la menor
cantidad de recursos computacionales.
Se realiza una descripción de las condiciones de estabilidad a cubrir por el estimador
tomado en cuenta los criterios de Lyapunov. De manera ilustrativa, se presentó una simulación
utilizando MatLab® ver. 7, en la que las formas extendidas dentro de un intervalo de tiempo son
vistas como matrices no cuadradas, permaneciendo el sistema invariante respecto a un vector de
entrada, y se tiene como resultado un proceso de estimación recursivo. Se concluyó que en el
proceso de deconvolución, la estimación extendida es una herramienta para sistemas no
cuadrados con evolución invariante en el tiempo.
En la investigación del estado del arte nos encontramos con diversos filtros como son el
filtro de mínimos cuadrados, Wiener y De la Rosa por lo cual nos dimos a la tarea de
desarrollarlos bajo los modelos de convolución y deconvolución expresados en diferencias finitas
y utilizarlos como referencia en el análisis del desempeño del estimador propuesto en esta tesis.
Por otra parte se presenta una aplicación del filtro estimador como un estimador del ruido
el modem QPSK.
Descriptores: Deconvolución, pseudoinversa de un matriz, funcional del error, diagrama
recursivo de Bode, estabilidad de Lyapunov.

Abstract
This work presents a parameter estimator in recursive form based in deconvolution matrix model
as a discrete filter process, in which is possible to know the internal convolution dynamics
respect to black box with time invariant lineal answer. Extending the convolution process to a
period conformed by a group of intervals where the system doesn’t change, allows the
approximation to matrix description in base to the real system, giving their inputs and outputs in
the same period, generating a multivariable description, without change the context holding its
invariance conditions, needs the pseudoinverse estimation, because observe in it singularities and
inversion problems. In the same way the dispersion measures respect to the reference,
considering the trace as the reference matrix as its estimated, described by the mean square error,
Decibels and Bode, all of its developed in recursive form, allowing to link between its immediate
past states to consume the minimal computational resources.
The stability conditions evolved required estimator, considered in this case the Lyapunov
Criteria. In illustrative sense, develop us the simulation in where the extended matrixes are non
square form and bounded temporally into time interval, considering time invariant conditions
respect to bounded input, having a recursive estimator as a final result. In this work concluded
considering that the deconvolution as an estimator is a tool required for non square systems
invariant in the time.
In the state of the art research we find various filters such as least-squares filter, Wiener
and De la Rosa for this reason we developing them under the convolution and deconvolution
models, and use them as reference in the analysis of performance of the estimator filter proposed
in this thesis.
Also presents an application of the estimator filter as an estimator filter of noise on QPSK
modem.
Keywords: Deconvolution, inverse matrix, pseudoinverse, functional error, recursively,
Lyapunov stability.

ÍNDICE
CAPITULO 1. EL PROBLEMA DE ESTIMACION DE PARAMETROS
1.1 Introducción _________________________________________________ 1
1.2 Planteamiento del Problema ______________________________________ 3
1.3 Hipótesis __________________________________________________ 4
1.4 Justificación __________________________________________________ 4
1.5 Objetivos __________________________________________________ 5
1.5.1 Objetivo General ______________________________________ 5
1.5.2 Objetivos Específicos ________________________________ 5
CAPITULO 2. ESTADO DEL ARTE DE MODELOS DE DECONVOLUCIÓN
2.1 Estado del arte de modelos de deconvolución ____________________ 6
2.2 Comentarios __________________________________________________8
CAPITULO 3. RESULTADOS TEÓRICOS
3.1 Convolución en diferencias finitas _______________________________ 10
3.2 Modelos de deconvolución matricial _______________________________ 11
3.3 Convolución por transformada de Fourier _________________________ 12
3.3.1 Convolución en diferencias finitas _________________________ 12
3.3.2 Convolución recursiva en diferencias finitas _____________ 12
3.4 Convolución por transformada Z _______________________________ 13
3.4.1 Convolución en diferencias finitas _________________________ 13
3.4.2 Convolución recursiva en diferencias finitas _____________ 13
3.5 Descripción de errores de manera recursiva _________________________ 14

3.5.1 Error cuadrático medio _________________________________ 14
3.5.2 Error expresado en decibeles _________________________________ 14
3.5.3 Error expresado en Bode _________________________________ 15
3.6 Modelos desarrollados a través de la convolución en diferencias finitas ____15
3.6.1 Modelo de deconvolución basado en un modelo de
identificación de sistemas __________________________________15
3.6.1.1 Simulación __________________________________16
3.6.2 Estimador por Mínimos Cuadrados ____________________________18
3.6.2.1 Simulación __________________________________19
3.6.3 Filtro de Wiener ________________________________________20
3.6.3.1 Simulación __________________________________21
CAPITULO 4. FILTRO ESTIMADOR POR DECONVOLUCIÓN
4.1 Filtro estimador por deconvolución ___________________________ 24
4.2 Filtro estimador por deconvolución de forma recursiva __________ 25
4.3 Estabilidad del filtro estimador ____________________________25
4.4 Simulación _____________________________________________ 26
4.5 Propuesta de aplicación del filtro estimador por deconvolución como
estimador de ruido en el modem QPSK _____________________ 31
CAPITULO 5 . CONCLUSIONES
5.1 Conclusiones ___________________________________________________ 36
Referencias _______________________________________________________________ 38
Anexo 1. Pruebas ___________________________________________________ 41
Anexo 2. Programas ___________________________________________________ 59
Anexo 3. Procesos Estocásticos _____________________________________________ 66
1
CAPITULO 1 El problema de estimación de parámetros
1.1 Introducción
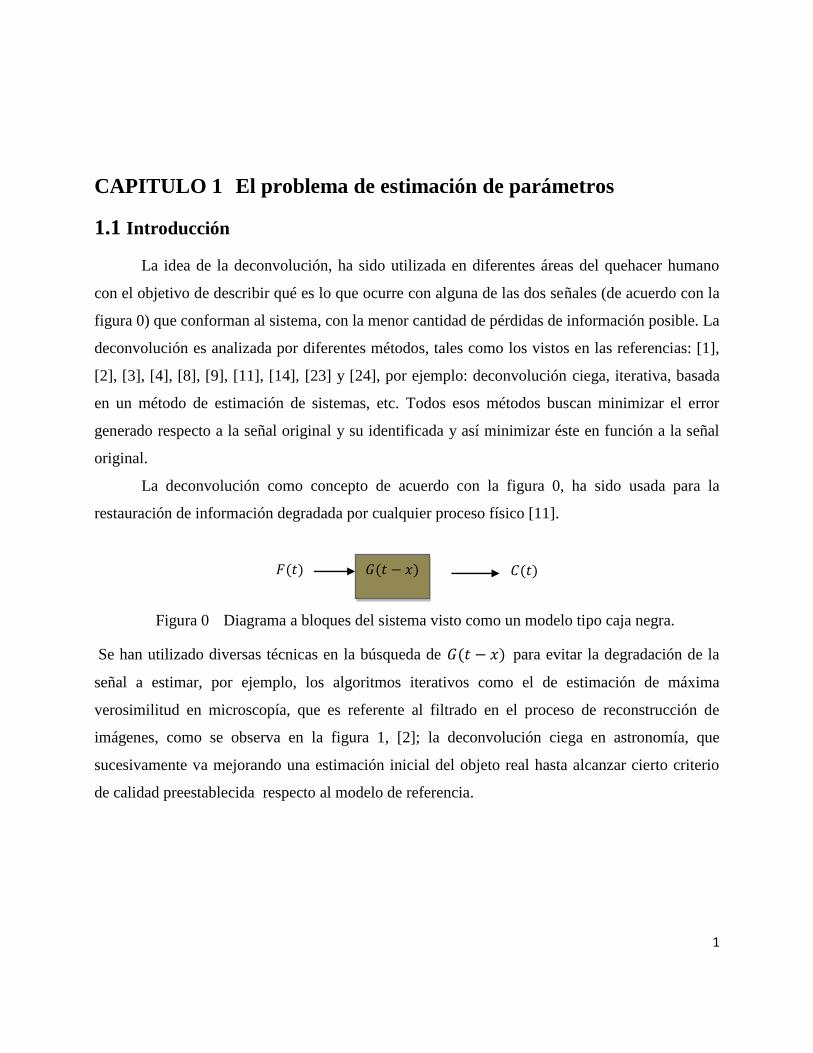
La idea de la deconvolución, ha sido utilizada en diferentes áreas del quehacer humano
con el objetivo de describir qué es lo que ocurre con alguna de las dos señales (de acuerdo con la
figura 0) que conforman al sistema, con la menor cantidad de pérdidas de información posible. La
deconvolución es analizada por diferentes métodos, tales como los vistos en las referencias: [1],
[2], [3], [4], [8], [9], [11], [14], [23] y [24], por ejemplo: deconvolución ciega, iterativa, basada
en un método de estimación de sistemas, etc. Todos esos métodos buscan minimizar el error
generado respecto a la señal original y su identificada y así minimizar éste en función a la señal
original.
La deconvolución como concepto de acuerdo con la figura 0, ha sido usada para la
restauración de información degradada por cualquier proceso físico [11].
Se han utilizado diversas técnicas en la búsqueda de 𝐺(𝑡 − 𝑥) para evitar la degradación de la
señal a estimar, por ejemplo, los algoritmos iterativos como el de estimación de máxima
verosimilitud en microscopía, que es referente al filtrado en el proceso de reconstrucción de
imágenes, como se observa en la figura 1, [2]; la deconvolución ciega en astronomía, que
sucesivamente va mejorando una estimación inicial del objeto real hasta alcanzar cierto criterio
de calidad preestablecida respecto al modelo de referencia.
Figura 0 Diagrama a bloques del sistema visto como un modelo tipo caja negra.
𝐺(𝑡 − 𝑥) 𝐹(𝑡) 𝐶(𝑡)

2
En el análisis de medidas sísmicas por el método de división espectral [3]; o mediante la
transformación discreta de paquetes de ondeletas [2]. Específicamente Snieder [23] propuso una
técnica para obtener la respuesta sísmica de un edificio basada en la deconvolución de los
movimientos registrados en los diferentes niveles de la construcción y observando la respuesta
estructural respecto a las vibraciones del suelo como se observa en la figura 2.
El uso de transformaciones lineales, ha ocasionado que dé como resultado una
divergencia respecto a la información esperada [14]. ¿Qué es lo que sucede? básicamente se diría
que hay pérdida de información durante la transformación directa (convolución) e inversa
(deconvolución), y que esa pérdida es sumada a las pérdidas ya existentes en la propia
información al viajar de un dispositivo a otro, o al cambiar de medio [20].
Figura 1 Diagrama a bloques del proceso de formación de una imagen degradada a
causa de desenfoque y ruido de la cámara.
Figura 2 Diagrama a bloques de la respuesta sísmica de un edificio de acuerdo al
modelo tipo caja negra
Vibraciones del
suelo por un
acelerógrafo
Movimientos de los
diferentes niveles de
construcción
registrados por los
acelerógrafos
Respuesta sísmica del
edificio
Desenfoque y
Ruido
Imagen
Degradada
Objeto
Real

3
La deconvolución vista como un proceso de filtrado cuenta con dos áreas básicas:
estimación de parámetros e identificación de estados, [9] y [14].
Se ha enfocado este trabajo a la estimación de parámetros, al sentar las bases que permitan
dar sustento a la reconstrucción de señales, como por ejemplo se pueden citar a [4] y [14].
Para lograr esta etapa de filtrado (la deconvolución), es necesario considerar sus
propiedades matriciales establecidas entre los vectores 𝐹(𝑡) y 𝐶(𝑡), que permiten llegar a la
señal deseada 𝐺 (𝑡 − 𝑥) de acuerdo con un criterio previamente establecido. Lo que permite
contar con la menor perdida de información, observando a la deconvolución como una matriz de
parámetros y no tan solo con una secuencia, como puede verse en [10], [12] y [20].
De forma que el estimador propuesto presenta un mayor nivel de convergencia con
respecto a los resultados descritos en [4] y [6], al usar el método del rotacional [15] lo que
permitió observar que el estimador es óptimo.
1.2 Planteamiento del Problema
La convolución 𝐶(𝑡) es el resultado del producto interno entre un modelo tipo caja negra
retardado 𝐺(𝑡 − 𝑥) , y la señal de excitación 𝐹(𝑡) como se observa en la figura 3.
Figura 3 Diagrama a bloques del sistema visto como un modelo tipo caja negra.
En el modelo tipo caja negra no se conoce la dinámica interna del sistema, que en función
de la figura 3, es descrita por 𝐺(𝑡 − 𝑥) . Entonces es necesario preguntarse cómo evoluciona
𝐺(𝑡 − 𝑥) al ser conocidas la señal de excitación 𝐹(𝑡) y la señal de respuesta𝐶(𝑡).
Para conocer cómo evoluciona 𝐺(𝑡 − 𝑥) se requiere de la operación inversa, la
deconvolución.
𝐺(𝑡 − 𝑥) 𝐹(𝑡) 𝐶(𝑡)

4
1.3 Hipótesis
¿Es posible desarrollar un filtro descriptor de las dinámicas internas de un sistema tipo caja negra
a través del proceso de deconvolución de forma recursiva?
1.4 Justificación
En el desarrollo de la teoría de control, el filtrado ha tenido un auge importante dada la necesidad
de describir las condiciones requeridas para llevar a un sistema hacia una referencia.
En los trabajos desarrollados en el siglo pasado al respecto, se considero realizar una
transformación lineal a través de Laplace, por ejemplo; llevando a describir la dinámica interna
del sistema (caja negra) en una vecindad de lo que debería ser correcto, perdiendo calidad y
ganando sencillez en su implementación. Base sobre la cual, los filtros digitales tuvieron su auge
y se convirtieron en herramientas para la predicción de comportamiento de sistemas específicos,
tales como la descripción de la trayectoria del Apolo 11 por medio del filtro de Kalman. Filtrado
que requería de un grupo de heurísticas que permitieran conocer la dinámica de las ganancias
dentro de la caja negra para realizar la descripción y predicción que se requería sobre su
comportamiento. Que llegó al grado de integrar a la Inteligencia Artificial, para a través de rasgos
de experiencia minimizar la selección de las mejores “reglas de evolución” de esas ganancias.
El problema del filtrado no había sido resuelto sino evadido y solventado por ciencias
auxiliares, no importando la cantidad de recursos de computo que se requirieran para dar una
respuesta considerada confiable o adecuada para un caso en específico.
Estas circunstancias, la de realizar una transformación lineal de un proceso de
convolución, en un tiempo específico es vista tan solo como un producto punto con ganancias y
señales de excitación fijas; entonces cómo lograr describir la dinámica del sistema visto como
5
caja negra, si este tiene una evolución temporal para las condiciones de excitación y de medio
ambiente en donde se encuentre.
1.5 Objetivos
1.5.1 Objetivo General
Desarrollar un filtro estimador recursivo discreto a través de la deconvolución para sistemas de
primer orden, lineales e invariantes en el tiempo.
1.5.2 Objetivos Específicos
Desarrollar la convolución discreta.
Desarrollar la deconvolución.
Desarrollo completo de los teoremas de convolución de Fourier y Z en forma recursiva.
Desarrollar otros filtros para tener una referencia sobre el desempeño del filtro estimador
propuesto.
Desarrollar el filtro estimador por deconvolución.
Garantizar la estabilidad del estimador.
Desarrollar de forma recursiva al error cuadrático medio, decibeles y Bode para observar en
línea la convergencia de los estimadores.
Proponer una aplicación del filtro.

6
CAPITULO 2. Estado del arte de los modelos de deconvolución
Parte importante de este trabajo es presentar los trabajos que se han realizado para estimar,
representar y analizar la dinámica de los sistema vistos como móldelos tipo caja negra.
2.1 Estado del arte de los modelos de deconvolución
Oppenheim y Ogata en [20] y [19] mencionan que las señales se pueden representar como una
combinación lineal de impulsos retardados y que este hecho junto con las propiedades de
superposición e invariancia en el tiempo permite realizar una caracterización completa de
cualquier sistema estacionario en términos de su respuesta a un sistema unitario. A esta
representación la llama suma de convolución en el caso discreto:
𝑦 𝑛 = 𝑥 𝑘 [𝑛 − 𝑘]
∞
𝑘=−∞
(1)
Por su parte autores como Holbrook, Kreysig [10] y [12] indican que la integral de
convolución de las funciones 𝑓 y 𝑔 , en el caso continuo está dada por:
𝑥 = 𝑓 ∗ 𝑔 𝑥 = 𝑓 𝑝 𝑔 𝑥 − 𝑝 𝑑𝑝 = 𝑓 𝑥 − 𝑝 𝑔 𝑝 𝑑𝑝∞
−∞
∞
−∞
(2)
Autores como Cordero y Glen [3], [26] mencionan que las herramientas del análisis de
Fourier son útiles en el análisis de vibraciones. Esto se debe a que las vibraciones se puede
representar mediante una combinación lineal de exponenciales complejos. La transformada
continua de Fourier proporciona una representación para vibraciones como combinaciones
lineales de exponenciales complejas de la forma 𝑒𝑗𝑤𝑡 . También mencionan que la interacción
entre las vibraciones 𝐹 𝑡 y 𝐺(𝑡 − 𝑥) de la figura 3, está dada por la transformada de Fourier de
la convolución entre ellas:
ℱ 𝐹 ∗ 𝐺 = 2𝜋 ℱ(𝐹)ℱ(𝐺) (3)

7
Snieder en [23] propone una técnica para obtener la respuesta sísmica de un edificio
𝐺(𝑡 − 𝑥) basada en la deconvolución en el dominio de la frecuencia. La cual es representada
como la división de las transformadas de Fourier de las señales a deconvolucionar y se expresa
como:
ℱ 𝐺 =ℱ 𝐹 ∗ 𝐺
ℱ 𝐹 (4)
Grewal y Haykin mencionan en [8] y [9], respectivamente que uno de los estimadores
más importantes es el filtro de Wiener, que en su forma más general, consiste en una señal de
entrada 𝑥 𝑛 , una respuesta deseada 𝑑(𝑛), y un filtro lineal de respuesta impulsional (𝑛).
Este filtro es alimentado por 𝑥(𝑛) y produce a su salida 𝑦(𝑛). La diferencia entre la señal
deseada 𝑑 𝑛 , y la señal de salida del filtro 𝑦(𝑛), es el error de estimación 𝑒(𝑛), como se
observa en la figura 5.
Figura 5. Filtro de Wiener
El objetivo del filtrado de Wiener es determinar la respuesta al impulso del sistema (𝑛)
de forma que el error 𝑒(𝑛) sea, en un sentido estocástico, lo más pequeño posible, a través de la
minimización del valor cuadrático medio del error.
Figura 4. Diagrama a bloques del sistema de vibraciones visto como un modelo tipo
caja negra.
𝐺(𝑡 − 𝑥) 𝐹(𝑡) 𝐶(𝑡)
𝑥(𝑛)
(𝑛)
𝑑(𝑛)
𝑒(𝑛)
𝑦(𝑛)

8
𝜉 = 𝐸 𝑒2 𝑛 (5)
Esta función de costo posee una dependencia de segundo orden con los coeficientes del
filtro, y tiene un mínimo que determina los coeficientes óptimos, es decir, el mejor diseño del
filtro.
Heimer y Cohen en [28] presentan un algoritmo de deconvolución ciega (la entrada y el
sistema mismo son desconocidos, de los cuales sólo se conoce la salida) multicanal de señales
sísmica a través de las capas de la Tierra tomando como base el modelo estocástico de Markov-
Bernuolli.
Dupré, Fadili y Starck en [29] proponen un algoritmo de deconvolución de imágenes, a
través de la transformada wavelet, cuando los datos están contaminados por ruido de Poisson,
proponiendo su aplicación en astronomía y microscopia.
En [30] Vonesch y Unser presentan un algoritmo de deconvolución utilizando la
transformada wavelet. Minimizan una base de datos de un modelo de segundo grado lo cual les
permite implementar su algoritmo en microscopia 3-D.
Cornwell en [31] menciona que en radioastronomía el algoritmo de filtrado más utilizado
es el algoritmo de limpieza propuesto por Högbom [27] el cual iterativamente minimiza el error
de la imagen sucia obtenida con la transformada inversa de Fourier.
Zhou y Do en [32] presentan un método de deconvolución multidimensional a través de
la inversa de la matriz de convolución y utilizando bases de Gröbner.
De la Rosa en [4] propone un modelo de deconvolución basada en el modelo de
identificación de sistemas (Mc Bride [33]), en donde la señal estimada es representada por series
de Fourier y el proceso de deconvolución se logra a través de la inversión de una matriz de
coeficientes.
2.2 Comentarios
Gran parte de los algoritmos de deconvolución desarrollados, que tienen aplicación en
análisis de de vibraciones, microscopia y astronomía, se basan en el análisis de Fourier [4], [8],
9
[9], [23], [26], [31], específicamente en su transformada o en un tipo especial de la transformada
de Fourier; la transformada wavelet de acuerdo con [2], [3], [29] y [30].
También se han utilizado el filtro de Wiener [8] y [9], en algoritmos de deconvolución
ciega [28], en donde solo es conocida la salida del sistema, sin embargo la teoría de Wiener
propone al sistema como un modelo caja negra en donde son conocidas tanto las entradas y
salidas del mismo.
Además en algunos trabajos se menciona que el proceso de deconvolución se lleva a cabo
a través de la inversión de la matriz de convolución o coeficientes [4] y [32]. Sin embargo
revisando la teoría de la convolución es posible identificar que la matriz de convolución es una
matriz singular y por lo tanto no puede ser invertida tradicionalmente a menos que se utilice la
pseudoinversa, de acuerdo con [13] y [18].

10
CAPITULO 3. Resultados Teóricos
En este capítulo se presentan diversos teoremas que fueron desarrollados a lo largo de la tesis.
Los teoremas de convolución y deconvolución que permitieron el desarrollo del filtro estimador
en el capitulo siguiente. La descripción extendida de los teoremas de convolución de Fourie y Z
de acuerdo a la teoría de convolución y su desarrollo en forma recursiva para el caso discreto. La
modificación de los Filtros de De la Rosa, Mínimos Cuadrados y Wiener considerando los
teoremas de convolución y deconvolución propuestos con su respectivas simulaciones que
permiten tener una referencia sobre el desempeño del filtro estimador por deconvolución.
También se desarrollan de forma recursiva al error cuadrático medio, decibeles y Bode para
observar en línea la convergencia de los filtros.
3.1 Convolución en diferencias finitas
Teorema 1 (convolución en diferencias finitas). La convolución en diferencias finitas dentro de
un conjunto de intervalos de tiempo con métricas contenidas en T, está dada de forma matricial:
𝐶(𝑇)𝑚𝑥1 = 𝐺(𝑇)𝑚𝑥𝑛 𝐹(𝑇)𝑛𝑥1 (6)
𝐶 ∈ 𝑅[𝑚𝑥1] es el vector de respuesta, resultado del producto matricial entre la matriz ampliada
𝐺 ∈ 𝑅[𝑚𝑥𝑛] (compuesta por filas de vectores desplazados de acuerdo al intervalo de tiempo
correspondiente) y el vector fijo 𝐹 ∈ 𝑅[𝑛𝑥1], que representa a la ventana de excitación para todos
los intervalos de tiempo con métricas contenidas en la métrica del intervalo de tiempo extendido
T.
Prueba 2 (véase anexo 1).

11
3.2 Modelos de deconvolución matricial
Teorema 2 (primer modelo de deconvolución matricial). La deconvolución para encontrar 𝐹𝑚𝑥1 con
error = 0, donde 𝐺𝑚𝑥𝑚 es una matriz cuadrada no singular, está dada:
𝐹𝑚𝑥1 = 𝐺𝑚𝑥𝑚−1 𝐶𝑚𝑥1 (7)
Prueba 2 (véase anexo 1).
Teorema 3 (segundo modelo de deconvolución matricial). La deconvolución para encontrar 𝐹𝑚𝑥1 con
error = 0, con 𝐺𝑚𝑥𝑛 que es una matriz ampliada rectangular, se expresa:
𝐹𝑛𝑥1 = 𝐺′𝑛𝑥𝑚 𝐺𝑚𝑥𝑛 + 𝐺′𝑛𝑥𝑚 𝐶𝑚𝑥1 (8)
Prueba 3 (véase anexo 1).
Teorema 4 (tercer modelo de deconvolución matricial). La deconvolución para encontrar 𝐺𝑚𝑥𝑛 con
error = 0, está dada por:
𝐺𝑚𝑥𝑛 = 𝐶𝑚𝑥1 𝐹′1𝑥𝑛 𝐹𝑛𝑥1 𝐹′1𝑥𝑛 +, 𝑐𝑜𝑛 𝑚 ≠ 𝑛 (9)
Prueba 4 (véase anexo 1).

12
3.3 Convolución por transformada de Fourier
Ya que gran parte de los algoritmos de deconvolución, que tienen aplicación en microscopia y
astronomía, se basan en la transformada de Fourier o en tipo especial de esta, tal como la
transformada wavelet; se desarrolló la convolución a través de la transformada de Fourier de
acuerdo a la teoría de convolución y su construcción en forma recursiva para el caso discreto, en
los siguientes teoremas.
3.3.1 Convolución en diferencias finitas
Teorema 5 (convolución en diferencias finitas a través de la transformada de Fourier). La
convolución en diferencias finitas a través de la Transformada de Fourier dentro de un conjunto
de intervalos de tiempo con métricas contenidas en T, está dada por:
𝐶𝑠 = 𝐺 𝑙 − 𝑥 𝐹(𝑥)
𝑒2𝜋𝑖𝑙𝑥𝑘
𝑛
𝑥=1
𝑚
𝑙=1
𝑠
𝑘=1
(10)
Prueba 5(véase anexo 1).
3.3.2 Convolución recursiva en diferencias finitas.
Teorema 6(convolución recursiva en diferencias finitas a través de la transformada de
Fourier). La convolución recursiva en diferencias finitas a través de la Transformada de Fourier
dentro de un conjunto de intervalos de tiempo con métricas contenidas en T, está dada por:
𝐶𝑠 =𝐺 𝑚− 𝑛 𝐹 𝑛
𝑒2𝜋𝑖𝑚𝑛
𝑠
+ 𝐼𝑛−1 + 𝐻𝑚−1 + 𝐶𝑠−1 (11)
Prueba 6 (véase anexo 1).

13
3.4 Convolución por transformada Z
3.4.1 Convolución en diferencias finitas
Teorema 7 (convolución en diferencias finitas a través de la Transformada Z). La
convolución en diferencias finitas a través de la Transformada Z dentro de un conjunto de
intervalos de tiempo con métricas contenidas en T, está dada por:
𝐶𝑐 = 𝐺 𝑙 − 𝑥 𝐹(𝑥)
𝑧𝑘
𝑛
𝑥=1
𝑚
𝑙=1
𝑠
𝑘=1
(12)
Prueba 7 (véase anexo 1).
Teorema 8 (convolución recursiva en diferencias finitas a través de la Transformada Z). La
convolución recursiva en diferencias finitas a través de la Transformada Z dentro de un conjunto
de intervalos de tiempo con métricas contenidas en T, está dada por:
𝐶𝑐 =𝐺 𝑚− 𝑛 𝐹(𝑛)
𝑧𝑠+ 𝐹𝑛−1 + 𝐸𝑚−1 + 𝐶𝑐−1 (13)
Prueba 8 (véase anexo 1).
Como se puede observar al utilizar el teorema 1 en el desarrollo de los teoremas 5 y 7
aparecen términos que no son considerados en los teoremas tradicionales, con lo cual se intuye
que si se utilizaran los teoremas 5 y 7 en los algoritmos de deconvolución desarrollados en las
áreas de microscopia, análisis de vibraciones y astronomía entre otras, se contaría con mayor
información para recuperar las imágenes, señales o vibraciones degradas por algún ruido.

14
3.5 Descripción de errores de manera recursiva
A continuación se presentan tres modelos recursivos para conocer el nivel de convergencia del
los modelos de estimación que se verán más adelante.
3.5.1 Error cuadrático medio
Teorema 9 (error cuadrático medio). El valor medio del error expresado de manera recursiva
(RMSE de sus siglas en inglés: Recursive Mean Square Error) se encuentra en el funcional
descrito por el segundo momento de probabilidad de la diferencia de la traza de la señal original
ampliada (𝑖 ∶= 𝑡𝑟𝑎𝑧𝑎 ( 𝐺𝑚×𝑛)𝑖) dentro del grupo de intervalos con métricas 𝑡𝑖 ↑ 𝑇, 𝑖 =
1, 𝑛 ,𝑛 ∈ 𝑍+ respecto a la traza estimada ( 𝑖 ≔ 𝑡𝑟𝑎𝑧𝑎 (𝐺 𝑚×𝑛)𝑖), diferencia descrita con base en
el error de estimación, definida como 𝐼𝑖:= 𝑖 − 𝑖:
𝑅𝑀𝑆𝐸𝑛 =1
𝑛 𝐼𝑛
2 + (𝑛 − 1)𝑅𝑀𝑆𝐸𝑛−1 (14)
Prueba 9 (véase anexo 1).
3.5.2 Error expresado en decibeles
Teorema 10 (error expresado en decibeles). En relación con el teorema 9, de acuerdo con el
error de estimación definido para el presente caso en función de la traza, tanto de la señal de
referencia como de su estimada 𝑒𝑖 ≔ 𝑖 𝑖 . Es descrito en decibeles de forma recursiva:
𝐷𝑛 = 10 𝑙𝑜𝑔10 𝑛−1
2𝑛 𝑒𝑛
2 + 𝐷𝑛−1 (15)
Prueba 10 (véase anexo 1).
15
3.5.3 Error expresado en Bode
Teorema 11 (error expresado en Bode). La descripción recursiva de es:
𝐵𝑛 = 5 𝑙𝑜𝑔10 𝑛 − 1
2𝑛 𝑒𝑛
2 + 𝐵𝑛−1 (16)
Prueba 11 (véase anexo 1).
3.6 Modelos desarrollados a través de la convolución en diferencias finitas
En esta sección se desarrollará el modelo de deconvolución basado en un modelo de
identificación de sistemas, el estimador por mínimos cuadrados y el filtro de Wiener de acuerdo
con los teoremas 1 y 4.
3.6.1 Modelo de deconvolución basado en un modelo de identificación de sistemas
Teorema 12: Considérese un sistema descrito para un conjunto de intervalos de tiempos
ti, 𝑖 = 1,𝑚 , en T.
𝑌′1𝑥𝑚 = 𝐴′
1𝑥𝑚 𝐸𝑚𝑥𝑚 .
(17)
Donde el vector de parámetros estimado:
𝐴 ′1𝑥𝑚 = 𝑌′1𝑥𝑚𝐸′𝑚𝑥𝑚 (𝐸𝑚𝑥𝑚 𝐸′𝑚𝑥𝑚 )+. (18)
Prueba 12 (véase anexo 1).
16
Teorema 13: Considérese al sistema (17), su identificador tiene la forma:
𝑌 𝑚𝑥1 = 𝐻𝑚𝑥𝑛 𝑋 𝑛𝑥1 . (19)
El identificador de los estados internos es:
𝑋′ 1𝑥𝑛 = 𝐴 ′1𝑥𝑚
𝜑′𝑚𝑥𝑛
,
(20)
Donde la matriz de funciones de acuerdo con [4]
𝜑𝑛𝑥𝑚 = 𝑐𝑜𝑠 𝑛𝜋𝑚
𝑁 . (21)
Prueba 13 (véase anexo 1).
3.6.3.1 Simulación
A continuación se presentan las simulaciones en MatLab® ver. 7, del modelo de deconvolución
basado en un modelo de identificación de sistemas (véase programa 1 en anexo 2). Para este
modelo tenemos una señal original descrita como 𝐹 𝑥 = 0.006 ∗ cos 𝑥 + 0.02 ∗ 𝑟𝑎𝑛𝑑𝑛, y la
salida descrita como 𝐶(𝑦, 𝑥) = 0.3 ∗ cos(𝑦 − 𝑥) + 0.02 ∗ 𝑟𝑎𝑛𝑑𝑛.
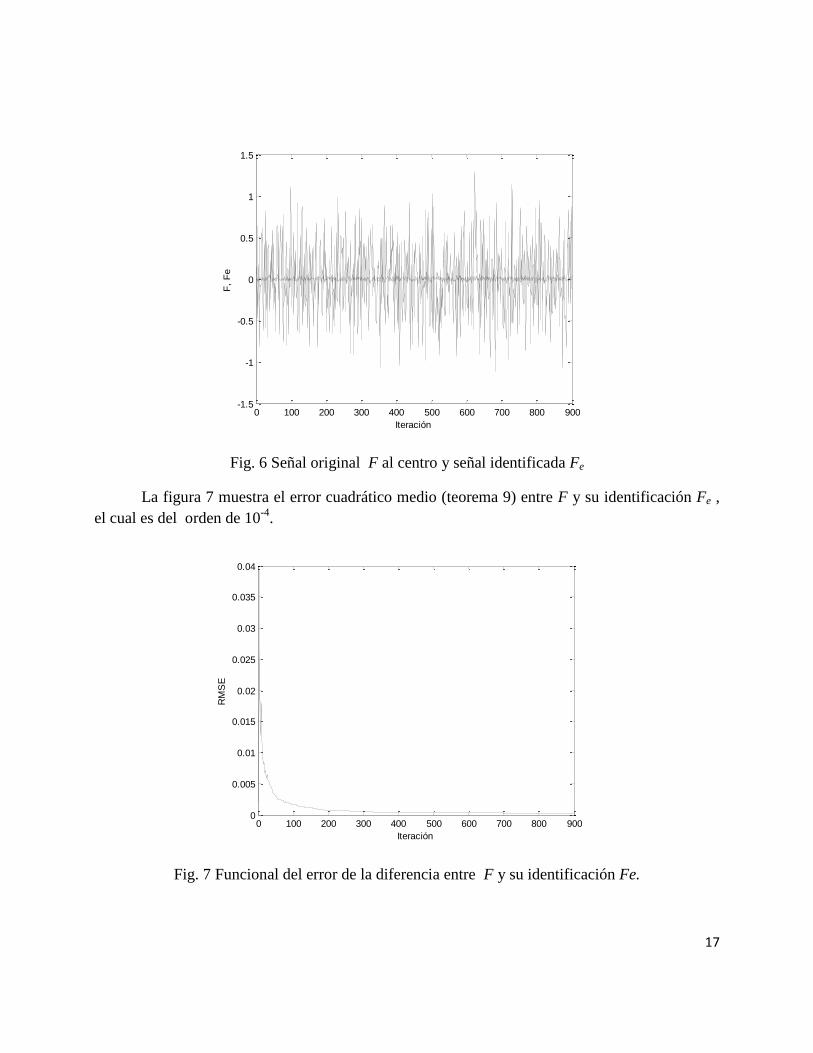
En la figura 6, se observan la señal original F al centro y señal identificada Fe con el
modelo de deconvolución expresado en el teorema 13.
17
Fig. 6 Señal original F al centro y señal identificada Fe
La figura 7 muestra el error cuadrático medio (teorema 9) entre F y su identificación Fe ,
el cual es del orden de 10-4
.
Fig. 7 Funcional del error de la diferencia entre F y su identificación Fe.
0 100 200 300 400 500 600 700 800 900-1.5
-1
-0.5
0
0.5
1
1.5
Iteración
F,
Fe
0 100 200 300 400 500 600 700 800 9000
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
Iteración
RM
SE
18
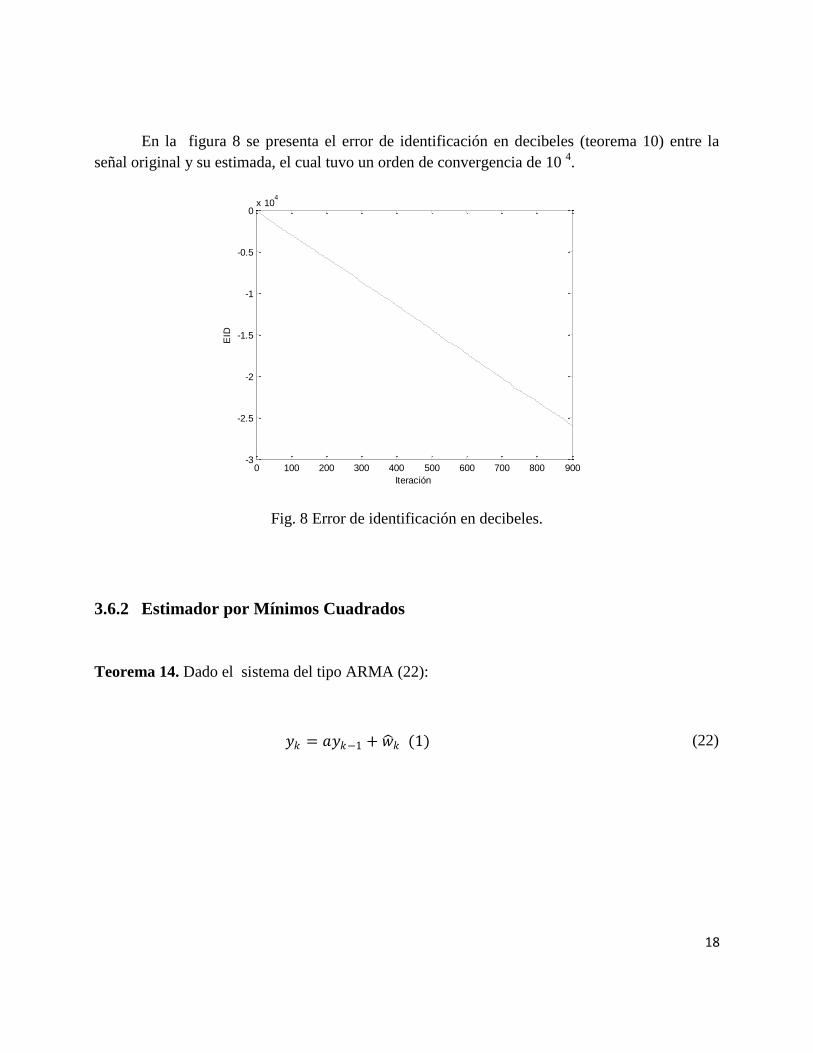
En la figura 8 se presenta el error de identificación en decibeles (teorema 10) entre la
señal original y su estimada, el cual tuvo un orden de convergencia de 10 4.
Fig. 8 Error de identificación en decibeles.
3.6.2 Estimador por Mínimos Cuadrados
Teorema 14. Dado el sistema del tipo ARMA (22):
𝑦𝑘 = 𝑎𝑦𝑘−1 + 𝑤 𝑘 (1) (22)
0 100 200 300 400 500 600 700 800 900-3
-2.5
-2
-1.5
-1
-0.5
0x 10
4
EID
Iteración

19
Su estimador de parámetro 𝑎𝑛 por el método de mínimos cuadrados de manera recursiva es:
𝑎𝑛 = 𝑀𝑛 + 𝑎𝑛−1𝐹𝑛 (2) (23)
Prueba 14 (véase anexo 1).
3.6.2.1 Simulación
A continuación se presentan las simulaciones en MatLab® ver. 7, del estimador por mínimos
cuadrados (véase programa 2 en anexo 2). Para este estimador tenemos una señal original
descrita como 𝐹 𝑥 = 0.006 ∗ cos 𝑥 + 0.02 ∗ 𝑟𝑎𝑛𝑑𝑛, y la salida descrita como 𝐶(𝑦, 𝑥) = 0.3 ∗
cos(𝑦 − 𝑥) + 0.02 ∗ 𝑟𝑎𝑛𝑑𝑛.
En la figura 9, se observan la señale original F al centro y señal identificada Fe con el
estimador por mínimos cuadrados expresado en el teorema 14.
Figura 9. Señal original F al centro y señal identificada Fe
La figura 10 muestra el error cuadrático medio (teorema 9) entre F y su identificación Fe ,
el cual es del orden de 10-5
.
0 100 200 300 400 500 600 700 800 900 1000-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Iteración
F,F
e

20
Figura 10. RMSE de acuerdo con la diferencia entre F y su identificación Fe
3.6.3 Filtro de Wiener modificado a través de la pseudoinversa.
Teorema 15: Considérese al sistema
𝑦 𝑛 = 𝑛 ∗ 𝑥 𝑛 (24)
Y que respecto a una referencia d n el error de identificación es descrito como:
𝑒 𝑛 = 𝑑 𝑛 − 𝑦 𝑛 (25)
Donde 𝑒 𝑛 es el error de identificación. La descripción del parámetro interno 𝑛 es descrito
como:
0 100 200 300 400 500 600 700 800 900 10000
5
10
15
20
25
30
Iteración
RM
SE

21
𝐻𝑚𝑥1 = 𝐸 𝑋𝑚𝑥𝑚 𝑋𝑚𝑥𝑚 +𝐸 𝑋𝑚𝑥𝑚 𝐷𝑚𝑥1 (26)
Prueba 15 (véase anexo 1).
3.6.3.1 Simulación
A continuación se presentan las simulaciones en MatLab® ver. 7, del filtro de Wiener (véase
programa 3 en anexo 2). Para este estimador tenemos una señal original descrita como 𝐹 𝑥 =
0.006 ∗ cos 𝑥 + 0.02 ∗ 𝑟𝑎𝑛𝑑𝑛, y la salida descrita como 𝐶(𝑦, 𝑥) = 0.3 ∗ cos(𝑦 − 𝑥) + 0.02 ∗
𝑟𝑎𝑛𝑑𝑛.
En la figura 11, se observan la señal original F al centro y señal identificada Fe con el
filtro de Wiener expresado en el teorema 15.
Figura 11. Señal original F al centro y señal identificada Fe
0 50 100 150 200 250 300-0.06
-0.04
-0.02
0
0.02
0.04
0.06
Iteración
F,F
e

22
La figura 12 muestra el error cuadrático medio (teorema 9) entre F y su identificación Fe , el cual
es del orden de 10-22
.
Figura 12. RMSE de acuerdo con la diferencia entre F y su identificación Fe
0 50 100 150 200 250 3000
0.5
1
1.5
2
2.5
3x 10
-22
Iteración
RM
SE

23
CAPITULO 4. Filtro estimador por deconvolución.
El problema a resolver como filtro una vez dado un modelo de tipo caja negra es describir la
dinámica interna del sistema; es decir, es necesario preguntarse cómo evoluciona 𝐺𝑚𝑥𝑛 al ser
conocidas, tanto la excitación 𝐹𝑛𝑥1 como la respuesta 𝐶𝑚𝑥1, tal y como se ve en el diagrama a
bloques de la figura 13.
Figura 13. Diagrama a bloques del sistema visto como un modelo tipo caja
negra.
El proceso de estimación, dado el modelo tipo caja negra de acuerdo a la figura 13, ayuda
a conocer la dinámica interna del sistema de referencia 𝐺𝑚𝑥𝑛 . Para ello es necesario saber qué es
lo que entra y sale de la caja con sus retardos, necesitando para ello usar el proceso de
deconvolución. De esta forma, la innovación es descrita por la diferencia existente entre la señal
de respuesta 𝐶𝑚𝑥1 respecto a la señal identificada 𝐶 𝑚𝑥1, teniendo así a dos sistemas en operación
paralela, como se ve en la figura 14.
𝐹𝑛𝑥1 𝐶𝑚𝑥1
24
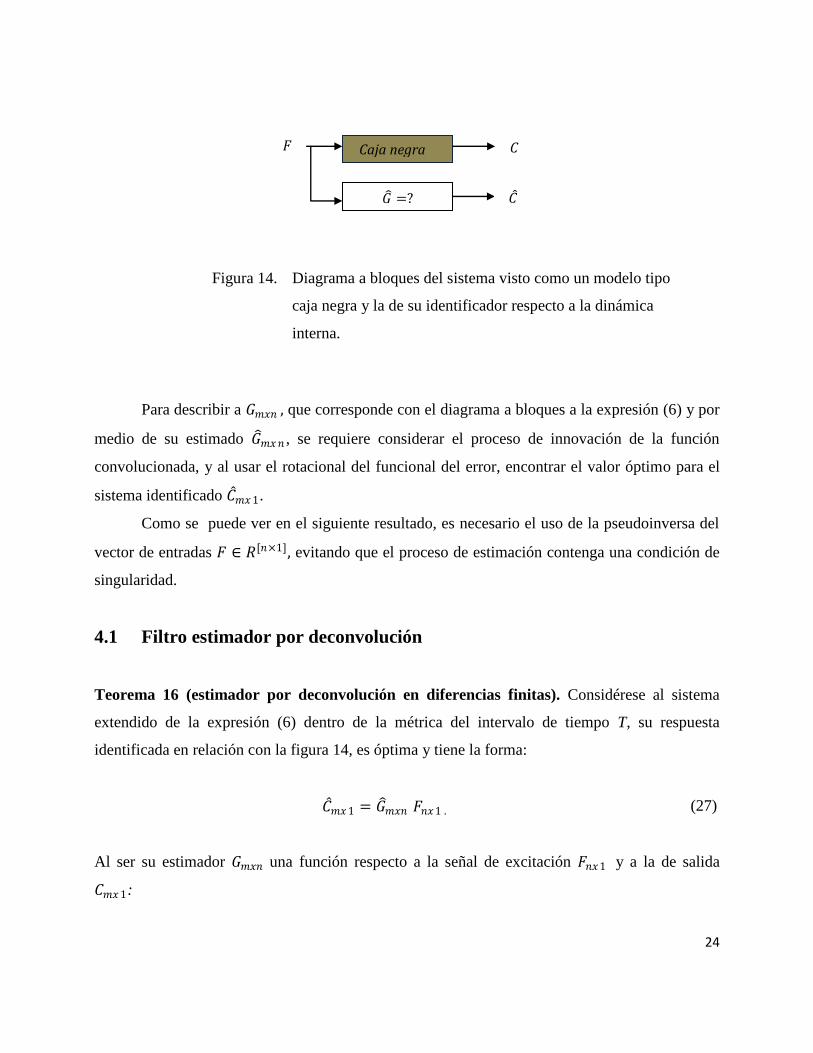
Figura 14. Diagrama a bloques del sistema visto como un modelo tipo
caja negra y la de su identificador respecto a la dinámica
interna.
Para describir a 𝐺𝑚𝑥𝑛 , que corresponde con el diagrama a bloques a la expresión (6) y por
medio de su estimado 𝐺 𝑚𝑥𝑛 , se requiere considerar el proceso de innovación de la función
convolucionada, y al usar el rotacional del funcional del error, encontrar el valor óptimo para el
sistema identificado 𝐶 𝑚𝑥1.
Como se puede ver en el siguiente resultado, es necesario el uso de la pseudoinversa del
vector de entradas 𝐹 ∈ 𝑅[𝑛×1], evitando que el proceso de estimación contenga una condición de
singularidad.
4.1 Filtro estimador por deconvolución
Teorema 16 (estimador por deconvolución en diferencias finitas). Considérese al sistema
extendido de la expresión (6) dentro de la métrica del intervalo de tiempo T, su respuesta
identificada en relación con la figura 14, es óptima y tiene la forma:
𝐶 𝑚𝑥1 = 𝐺 𝑚𝑥𝑛 𝐹𝑛𝑥1 . (27)
Al ser su estimador 𝐺𝑚𝑥𝑛 una función respecto a la señal de excitación 𝐹𝑛𝑥1 y a la de salida
𝐶𝑚𝑥1:
Caja negra
𝐺 =? 𝐶
𝐶 𝐹

25
𝐺 𝑇𝑛𝑥𝑚 = 𝐹𝑛𝑥1 𝐹𝑇
1𝑥𝑛 +𝐹𝑛𝑥1 𝐶
𝑇1𝑥𝑚 (28)
En donde el operador +
en el exponente indica que se ha realizado la pseudoinversa de
acuerdo con [13] y [18].
Comentario. El estimador es óptimo al considerar el punto de equilibrio usado en (101)
para describir (28).
Prueba 16 (véase anexo 1).
4.2 Filtro estimador por deconvolución de forma recursiva
Teorema 17 (estimador recursivo). El estimador (28), expresado de manera recursiva para
condiciones estacionarias en dos intervalos adyacentes con métricas descritas como T y T – 1, es:
𝐺 𝑇𝑛𝑥𝑚 ,𝑇 = 𝑃𝑠𝑛𝑥1,𝑇𝐶𝑇
1𝑥𝑚 ,𝑇+ 𝐺 𝑇𝑛𝑥𝑚 ,𝑇−1 (29)
Prueba 17 (véase anexo 1).
4.3 Estabilidad del filtro estimador
La respuesta del sistema es estable, considerando que al ser un sistema discreto expresado en
diferencias finitas de manera global de acuerdo con (27), existe una descripción de Lyapunov que
cubre la trayectoria del sistema dentro de una región, condición que cubre el estimador,
convergiendo a la matriz de parámetros.

26
Teorema 18 (estabilidad robusta). Considérese el sistema descrito en (6) como un sistema
afín, teniendo la siguiente estructura:
𝐹 𝑇 𝑛𝑥1 = 𝐺 𝑇 𝑛𝑥𝑛𝐹(𝑇 − 𝜀)𝑛𝑥1 (30)
Con 𝐺 𝑇 𝑛𝑥𝑛 : = 𝐼 − 𝐺 𝑇 − 𝜀 𝑛𝑥𝑛 𝜀 , es estable si cumple en el sentido de Lyapunov:
𝑀𝑛×𝑛𝑇 𝑇 𝑃 𝑛×𝑛(𝑇) + 𝑃 𝑛×𝑛 𝑇 𝑀𝑛×𝑛(𝑇) ≤ 0 (29)
Prueba 18 (véase anexo 1).
4.4 Simulación
En esta sección se considera al contar tan sólo con la información del emisor y del receptor, que
el estimador realice su trabajo de conocer la dinámica interna del modelo tipo caja negra (véase
programa 4 en anexo 2). A continuación se presentan las simulaciones en MatLab®
ver. 7, del
filtro con una señal original descrita como 𝐹 𝑥 = 0.006 ∗ cos 𝑥 + 0.02 ∗ 𝑟𝑎𝑛𝑑𝑛, y la salida
descrita como 𝐶(𝑦, 𝑥) = 0.3 ∗ cos(𝑦 − 𝑥) + 0.02 ∗ 𝑟𝑎𝑛𝑑𝑛.
El problema es encontrar la secuencia de vectores renglón que conforman a la matriz
𝐺 𝑦, 𝑥 , considerando a la señal fija 𝐹 𝑥 para un rango de 9 vectores cada uno de ellos formado
por un vector de 100 elementos. Se tiene de manera secuencial su descripción en la figura 15:

27
Figura 15. Señal original fija F para un intervalo de tiempo de 100 iteraciones
evolucionando 9 veces.
La respuesta de salida del sistema descrito en (6), dada su condición interna, fue simulada
y se presenta en la figura 16.
Figura 16. Señal de salida 𝐶𝑚𝑥1 vista a través de las 900 iteraciones.
De acuerdo con la figura 14, dada la excitación y la respuesta del sistema (6), así como la
matriz extendida formada por los 9 vectores fila, se presenta de manera ilustrativa como una
secuencia de 900 iteraciones. La estimación de acuerdo con la expresión (29) se presenta en la
figura 17.
28
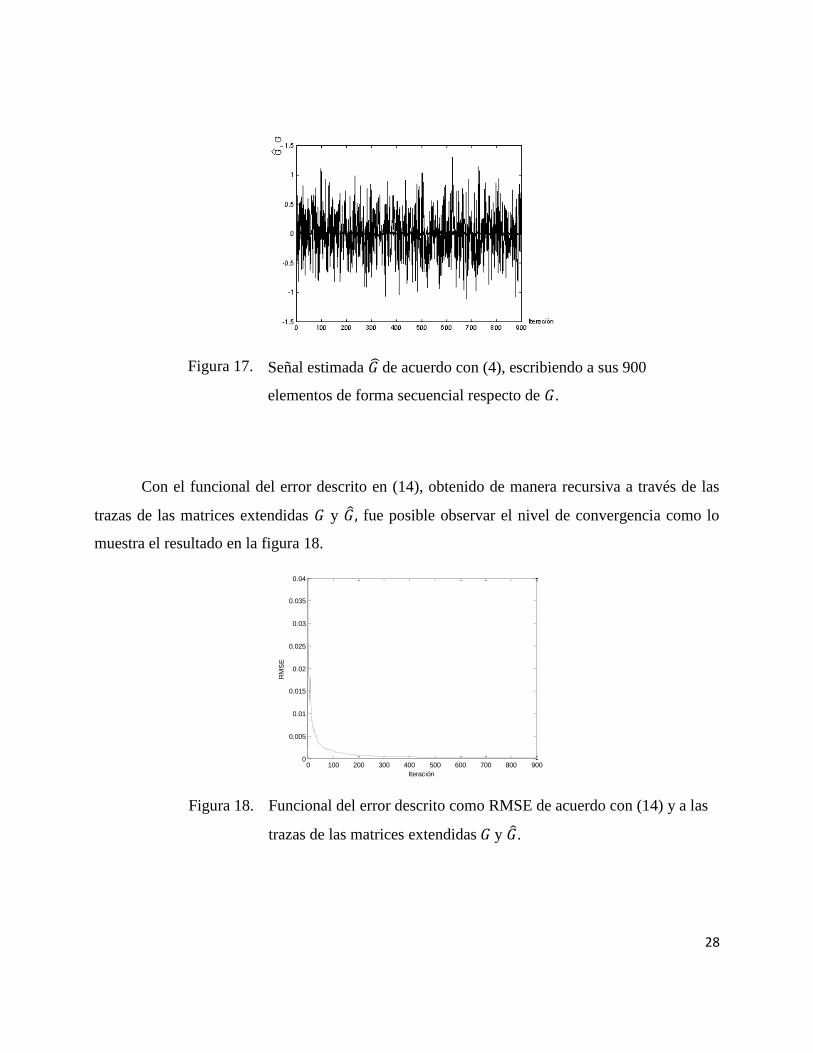
Figura 17. Señal estimada 𝐺 de acuerdo con (4), escribiendo a sus 900
elementos de forma secuencial respecto de 𝐺.
Con el funcional del error descrito en (14), obtenido de manera recursiva a través de las
trazas de las matrices extendidas 𝐺 y 𝐺 , fue posible observar el nivel de convergencia como lo
muestra el resultado en la figura 18.
Figura 18. Funcional del error descrito como RMSE de acuerdo con (14) y a las
trazas de las matrices extendidas 𝐺 y 𝐺 .
0 100 200 300 400 500 600 700 800 9000
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
Iteración
RM
SE
29
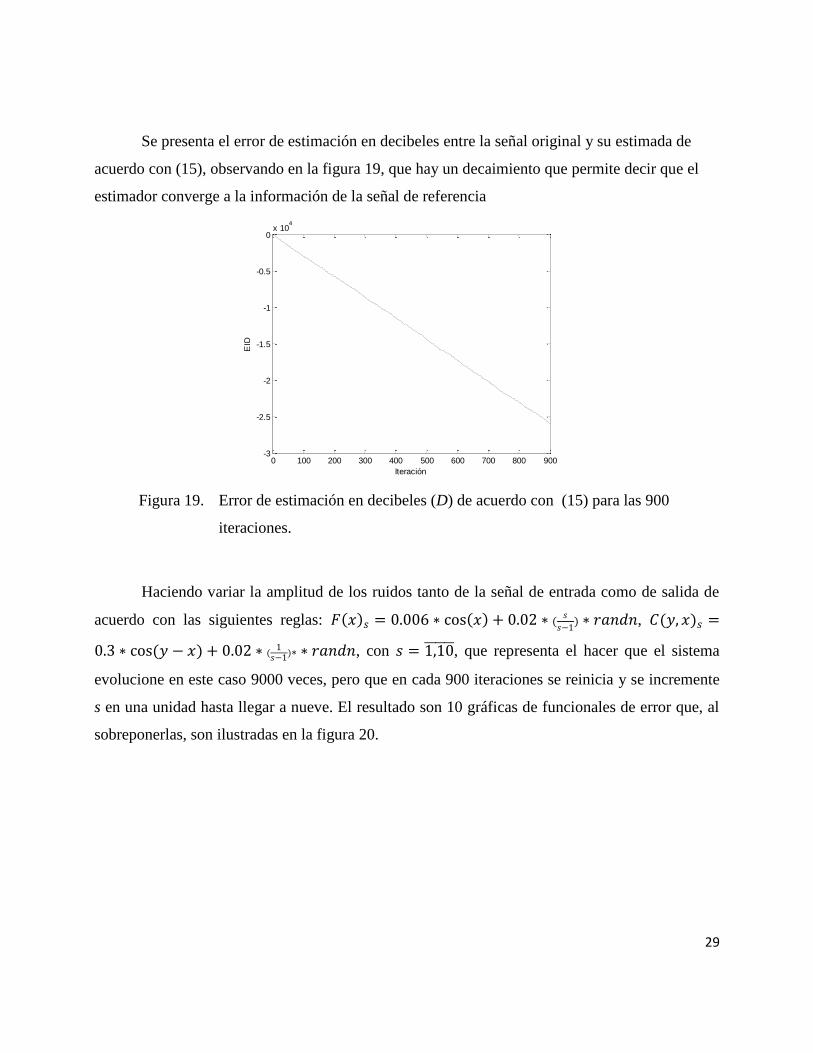
Se presenta el error de estimación en decibeles entre la señal original y su estimada de
acuerdo con (15), observando en la figura 19, que hay un decaimiento que permite decir que el
estimador converge a la información de la señal de referencia
Figura 19. Error de estimación en decibeles (D) de acuerdo con (15) para las 900
iteraciones.
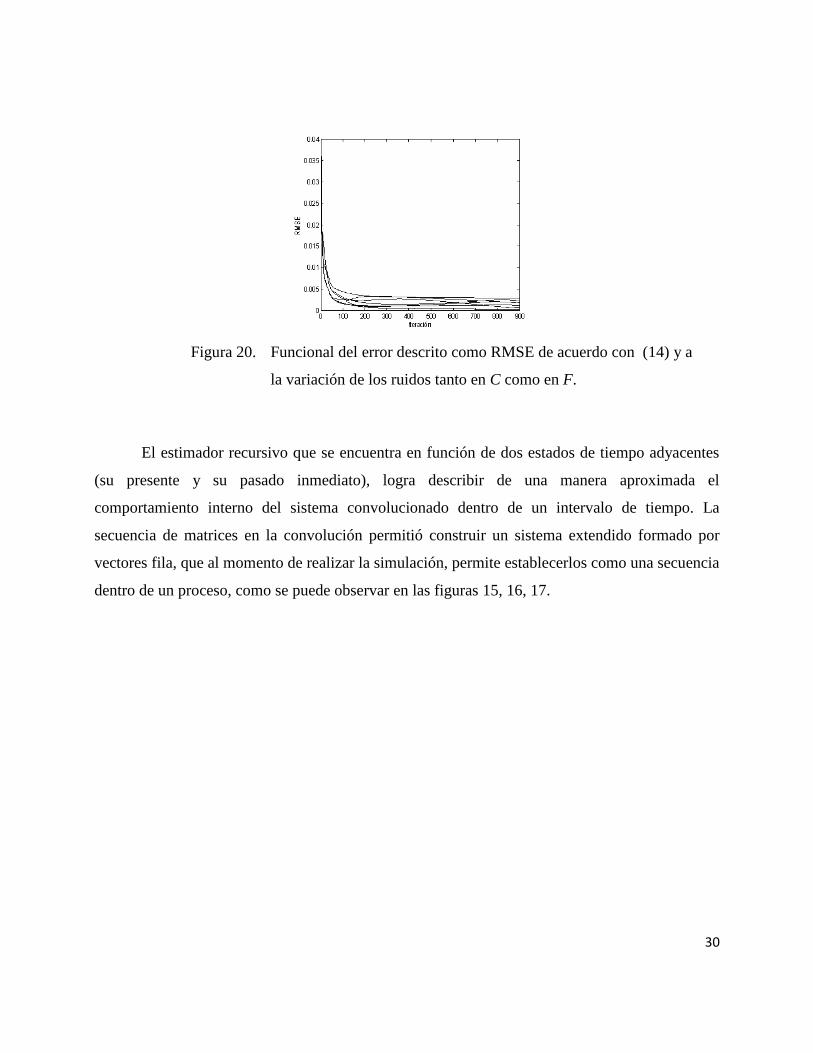
Haciendo variar la amplitud de los ruidos tanto de la señal de entrada como de salida de
acuerdo con las siguientes reglas: 𝐹 𝑥 𝑠 = 0.006 ∗ cos 𝑥 + 0.02 ∗ (𝑠
𝑠−1) ∗ 𝑟𝑎𝑛𝑑𝑛, 𝐶(𝑦, 𝑥)𝑠 =
0.3 ∗ cos(𝑦 − 𝑥) + 0.02 ∗ (1
𝑠−1)∗ ∗ 𝑟𝑎𝑛𝑑𝑛, con 𝑠 = 1,10 , que representa el hacer que el sistema
evolucione en este caso 9000 veces, pero que en cada 900 iteraciones se reinicia y se incremente
s en una unidad hasta llegar a nueve. El resultado son 10 gráficas de funcionales de error que, al
sobreponerlas, son ilustradas en la figura 20.
0 100 200 300 400 500 600 700 800 900-3
-2.5
-2
-1.5
-1
-0.5
0x 10
4
EID
Iteración
30
Figura 20. Funcional del error descrito como RMSE de acuerdo con (14) y a
la variación de los ruidos tanto en C como en F.
El estimador recursivo que se encuentra en función de dos estados de tiempo adyacentes
(su presente y su pasado inmediato), logra describir de una manera aproximada el
comportamiento interno del sistema convolucionado dentro de un intervalo de tiempo. La
secuencia de matrices en la convolución permitió construir un sistema extendido formado por
vectores fila, que al momento de realizar la simulación, permite establecerlos como una secuencia
dentro de un proceso, como se puede observar en las figuras 15, 16, 17.
31
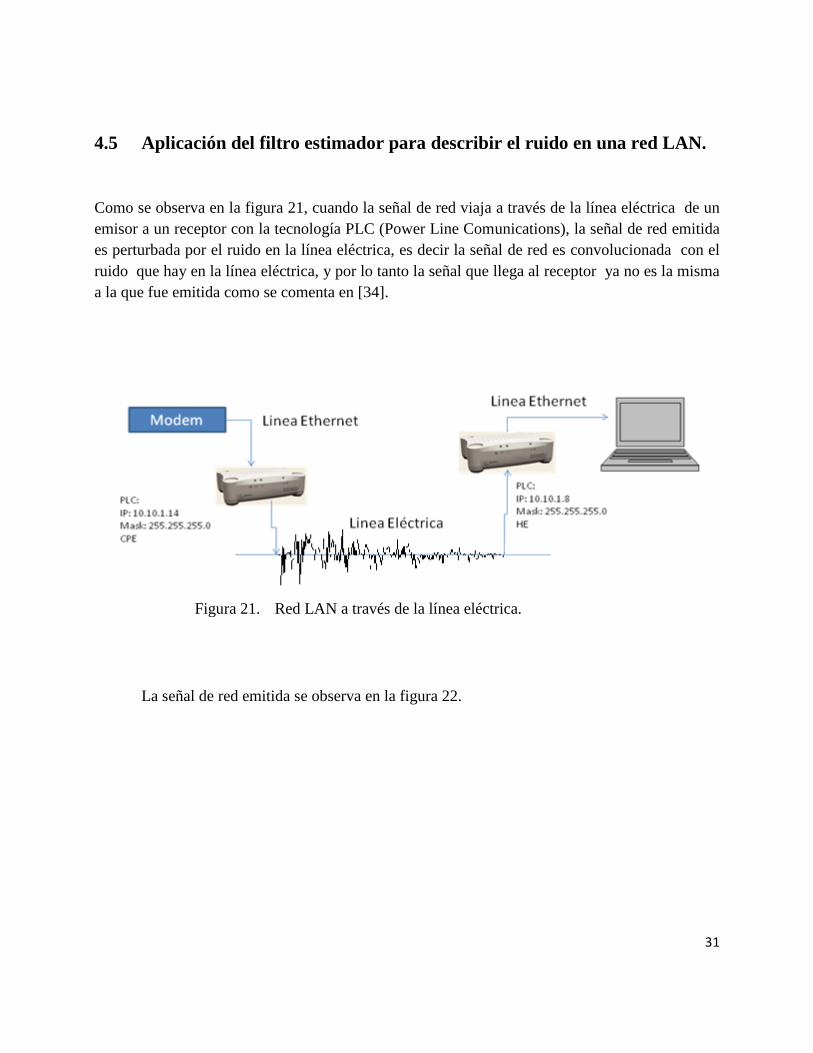
4.5 Aplicación del filtro estimador para describir el ruido en una red LAN.
Como se observa en la figura 21, cuando la señal de red viaja a través de la línea eléctrica de un
emisor a un receptor con la tecnología PLC (Power Line Comunications), la señal de red emitida
es perturbada por el ruido en la línea eléctrica, es decir la señal de red es convolucionada con el
ruido que hay en la línea eléctrica, y por lo tanto la señal que llega al receptor ya no es la misma
a la que fue emitida como se comenta en [34].
Figura 21. Red LAN a través de la línea eléctrica.
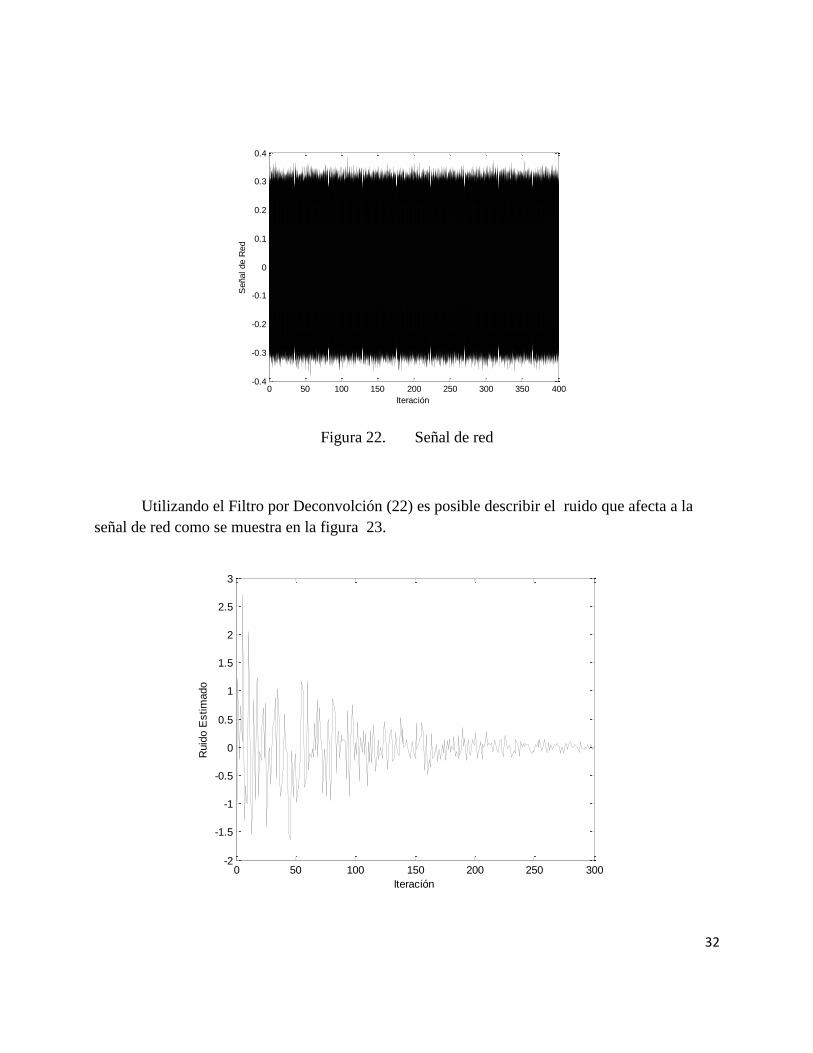
La señal de red emitida se observa en la figura 22.
32
Figura 22. Señal de red
Utilizando el Filtro por Deconvolción (22) es posible describir el ruido que afecta a la
señal de red como se muestra en la figura 23.
0 50 100 150 200 250 300 350 400-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
Iteración
Señal de R
ed
0 50 100 150 200 250 300-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3
Iteración
Ruid
o E
stim
ado

33
Figura 23. Ruido estimado con el Filtro por Deconvolución
El cual corresponde a un ruido tipo impulsivo.
El funcional del error del estimador es del orden de 10-22
unidades, como se
observa en la figura 24.
Figura 24. RMSE de acuerdo con la identificación del ruido
Se presenta el error de estimación del ruido en decibeles con (15), observando en
la figura 25, un decaimiento que permite observar la convergencia de la información a la
señal de referencia
0 50 100 150 200 250 3000
1
2
3
x 10-22
Iteración
RM
SE

34
Figura 25. Error de convergencia en decibeles
De acuerdo con el teorema 15, y al resultado de la figura 22, al utilizar el filtro de Wiener
modificado es posible describir el ruido que afecta a la señal de red como se muestra en la figura
26.
Figura 26. Estimación del ruido con el Filtro de Wiener.
0 50 100 150 200 250 300-1000
-900
-800
-700
-600
-500
-400
-300
-200
-100
0
ED
Iteración
0 50 100 150 200 250 300-2
-1.5
-1
-0.5
0
0.5
1
1.5
Ruid
o E
sstim
ado
Iteración

35
El funcional del error del estimador es del orden de 10-20
unidades, como se observa en la
figura 27.
Figura 27. Funcional del error de acuerdo al RMSE
Se presenta el error de estimación del ruido en decibeles con (15), observando en la figura
28, un decaimiento que permite observar la convergencia de la información a la señal de
referencia.
0 50 100 150 200 250 3000
0.5
1
1.5
2
2.5
3
3.5
4x 10
-20
Iteración
RM
SE

36
CAPITULO 5. Conclusiones
En este trabajo se presentó un modelo matricial que permitió observar a la convolución dentro de
un intervalo de tiempo T como un producto de matrices, una de ellas extendida respecto del
vector fijo al que se le dio el nombre de vector de excitación o de entrada, observando que en
todo este proceso no se perdiera el orden.
Se consideró el modelo tipo caja negra de acuerdo con la figura 4, para realizar la
deconvolución y estimar a la matriz 𝐺 de una manera recursiva.
El funcional del error de estimación se describió a través de las trazas tanto de la matriz
extendida de referencia como de su estimado para todos los intervalos de tiempo descritos en T.
En la simulación se propusieron dos funciones periódicas con la adición de perturbaciones
que afectaron tanto la entrada como la salida del modelo tipo caja negra.
Dentro de lo que fue el error de estimación, en la simulación se observó un nivel de
convergencia del orden de 10-25
unidades.
En relación con la estabilidad, esta es robusta, requiriendo que el modelo considerado
tuviera una forma cuadrática de Lyapunov como la expresada en la demostración del teorema 18.
Este tipo de descripción es válida para sistemas discretos a trozos, y se cumple la condición de
semidefinida negativa.
Gran parte de los algoritmos de deconvolución desarrollados, que tienen aplicación en
análisis de de vibraciones, microscopia y astronomía, se basan en el análisis de Fourier [4], [8],
37
[9], [23], [26], [31], específicamente en su transformada o en un tipo especial de la transformada
de Fourier; la transformada wavelet de acuerdo con [2], [3], [29] y [30].
También se han utilizado el filtro de Wiener [8] y [9], en algoritmos de deconvolución
ciega [28], en donde solo es conocida la salida del sistema, sin embargo la teoría de Wiener
propone al sistema como un modelo caja negra en donde son conocidas tanto las entradas y
salidas del mismo.
Además en algunos trabajos se menciona que el proceso de deconvolución se lleva a cabo
a través de la inversión de la matriz de convolución o coeficientes [4] y [32]. Sin embargo
revisando la teoría de la convolución es posible identificar que la matriz de convolución es una
matriz singular y por lo tanto no puede ser invertida tradicionalmente a menos que se utilice la
pseudoinversa, de acuerdo con [13] y [18].

38
Referencias
1. P. Bandzuch, M. Morhác, J. Kristiak, Study of the Van Cittert and Gold Iterative
Methods of Deconvolution and their Application in the Deconvolution of
Experimental Spectra of Positron Annihilation, Elsevier Science Publishers, Vol. A,
1997, p.p. 506.
2. M. Chacón, Procesamiento Digital de Imágenes, Ed. Trillas, 2007.
3. S. Cordero, CNDG-Library Geophysical Institute of Peru, Vol. 4, 2003, pp.131.
4. J. I De la Rosa, et al., Comparación de cuatro algoritmos que dan solución numérica
a la deconvolución en sistemas monodimencionales, Computación y Sistemas, Vol.
C10-2, 2006, pp. 135.
5. R. C. Dorf, R. H. Bishop, Sistemas de Control Moderno, (Pearson 2005).
6. C.V. García, J.J. Medel, Filtrado por Deconvolución, 2do. Simposio de Tecnología
Avanzada (IPN 2008) 60.
7. J. C. García, J. J Medel., et al., Sistemas con Lógica Difusa (IPN 2009).
8. M. S. Grewal, A. P. Andrews, Kalman Filtering Theory and Practice (Prentice Hall
1993).
9. S. Haykin, Adaptive Filter Theory (Prentice Hall, 2002).
10. J.G. Holbrook, Transformadas de Laplace Para Ingenieros en Electrónica (Limusa,
1990).
11. P. A. Jansson, Deconvolution with Applications in Spectroscopy (Academic Press,
1984).
12. E. Kreyszig, Matemáticas Avanzadas
para Ingeniería (Vol. I, Limusa, 2003).
13. D. C. Lay, Linear Algebra and its Applications (Pearson, 1999).
14. J. J. Medel, Computación y Sistemas 5-3 (2008) 215.
15. J. E. Marsden, A. J. Tromba, Cálculo Vectorial (Addison Wesley, 1988).
16. J. J. Medel, P. Guevara, D. Cruz, International Conference on Mathematical Methods

39
and Computational Techniques in Electrical Engineering 7 (2005) 214.
17. W. Mendenhall, T. Sincich., Probability and Statistics for Engineering and Science
(Prentice Hall, 1997).
18. B. Noble, J.W. Daniel, Applied Linear Algebra (Prentice Hall, 1989).
19. K. Ogata, Discrete Time Control Systems (Prentice Hall, 1996).
20. A. V. Oppenheim, A.S. Willsky, Señales y Sistemas (Pearson, 1998).
21. A. S. Poznyak, K. Najim, Learning Automata and Stochastic Optimization (Springer-
Verlag, 1997).
22. V. S. Pugachev, Introduction to the Theory of Probability (Mir Moscú, 1973).
23. R. Snieder, J. Sheiman, C. Rodney, Phys. Rev. E 73 (2006) 066620.
24. M. A. Toledo, J. J. Medel, International Conference on Automation and Information,
8 (2007) 271.
25. D. Cruz, Modelo para Tiempos en Arribo de Tareas en Tiempo Real Concurrentes,
2007.
26. G. White, Introducción al análisis de vibraciones (AZIMA DLI, 1990).
27. J. A. Högbom, Radio Astronomy at the Fringe, ed. J. A. Zensus, M. H. Cohen, & E.
Ros, ASP Conf. Ser., 300 (2003) 17.
28. A. Heimer, I. Cohen, Multichannel Seismic Deconvolution Using Markov–Bernoulli
Random-Field Modeling, IEEE Trans. on Geoscience and Remote Sensing, Vol. 47,
No. 7, July 2009.
29. F. X. Dupé, J. M. Fadili, J. L. Starck, A Proximal Iteration for Deconvolving Poisson
Noisy Images Using Sparse Representations, IEEE Trans. on Image Processing, Vol.
18, No. 2, February 2009.
30. C. Vonesch, M. Unser, A Fast Thresholded Landweber Algorithm for Wavelet-
Regularized Multidimensional Deconvolution, IEEE Trans. on Image Processing, Vol.
17, No. 4, April 2008.
31. T. J. Cornwell, Multiscale CLEAN Deconvolution of Radio Synthesis Images, IEEE
Journal of Selected Topics in Signal Processing, Vol. 2, No. 5 October 2008
32. J. Zhou, M. N. Do, Multidimensional Multichannel FIR Deconvolution Using
Gröbner Bases, IEEE Trans. on Image Processing, Vol. 15, No. 10, October 2006.
33. L. E. McBride, H. W. Schaefgen, K. Steiglitz, Time-Domine Approximation by
Iterative Methods, IEEE Trans. on Circuit Theory, Vol. CT-13, December 1996,
pp.381
40
34. G. Garrido, ,Gestión TMN para la determinación de Calidad de Servicio (QoS) en los
canales de comunicación BPL de baja y media tensión, Tesis Doctoral en proceso,
ESIME- Culhuacan.

41
ANEXO 1. Pruebas
Prueba 1. La convolución de forma aproximada por diferencias finitas con métricas de los
intervalos de tiempo 𝑡𝑖 ∈ 𝑇, y con 𝐶𝑖 ≔ 𝐶(𝑡𝑖), ∀𝑖 = 1,𝑚 , 𝑚 ∈ 𝑍+ , es descrita como:
𝐶 𝑡𝑖 = 𝐺 𝑡𝑖 − 𝑥𝑗
𝑛
𝑗=1
𝐹(𝑥𝑗 )
(30)
Desarrollando la sumatoria de (30) con el índice i fijo se tiene:
𝐺 𝑡𝑖 − 𝑥1 𝐹 𝑥1 + 𝐺 𝑡𝑖 − 𝑥2 𝐹 𝑥2 + ⋯ + 𝐺 𝑡𝑖 − 𝑥𝑛 𝐹 𝑥𝑛
(31)
Vectorialmente (31) para ∀𝑖 = 1,𝑚 ,𝑚 ∈ 𝑍+ es:
𝐶𝑖 =
𝐺 𝑡𝑖 − 𝑥1
𝐺 𝑡𝑖 − 𝑥2 ⋮
𝐺 𝑡𝑖 − 𝑥𝑛
1𝑥𝑛
𝑇
𝐹 𝑥𝑗=1
𝐹 𝑥𝑗=2
⋮𝐹 𝑥𝑗=𝑛
𝑛𝑥1
(32)
Sabiendo que el vector extendido 𝐹 𝑥𝑗=1,𝑛 es fijo para todos los intervalos de tiempo con
métricas contenidas en la métrica del intervalo de evolución del sistema T, la secuencia del vector
de salida que abarca todos los intervalos contenidos en el intervalo de evolución T con 𝐶𝑖 𝑖=1𝑚
queda expresada de acuerdo con (33):

42
𝐶𝑚𝑥1 = 𝐺 𝑡1 − 𝑥1 … 𝐺 𝑡1 − 𝑥𝑛
⋮ ⋮ ⋮𝐺 𝑡𝑚 − 𝑥2 … 𝐺 𝑡𝑚 − 𝑥𝑛
𝐹 𝑥1 ⋮
𝐹 𝑥𝑛
(33)
Y que simbólicamente se tiene:
𝐶(𝑇)𝑚𝑥1 = 𝐺(𝑇)𝑚𝑥𝑛 𝐹(𝑇)𝑛𝑥1■ (34)
Comentario. En (34), al considerar que el desplazamiento temporal entre los vectores fila
𝐺 𝑡𝑖 − 𝑥𝑗 para todos los casos contenidos en T no afecta a la descripción matricial del sistema,
se tiene un vector de excitación fijo 𝐹 𝑋 ,𝑋 = 𝑥𝑗 , 𝑗 = 1,𝑛 , 𝑛 ∈ 𝑍+ .
Prueba 2. Dada la expresión de convolución del teorema 1, con 𝐺𝑚𝑥𝑚 una matriz ampliada no
singular cuadrada es posible encontrar 𝐹𝑚𝑥1 a través de la inversa de 𝐺𝑚𝑥𝑚
𝐹𝑚𝑥1 = 𝐺𝑚𝑥𝑚−1 𝐶𝑚𝑥1. ■ (35)
Prueba 3. Dada la expresión de convolución del teorema 1 y siendo 𝐺𝑚𝑥𝑛 una matriz ampliada
rectangular, se multiplica por su transpuesta, para encontrar una matriz cuadrada:
𝐺′𝑛𝑥𝑚 𝐶𝑚𝑥1 = 𝐺′𝑛𝑥𝑚 𝐺𝑚𝑥𝑛 𝐹𝑛𝑥1 (36)
Pero dado que 𝐺′𝑛𝑥𝑚 𝐺𝑚𝑥𝑛 es una matriz singular es necesario obtener su pseudoinversa como
una aproximación para conocer a 𝐹𝑛𝑥1
𝐹𝑛𝑥1 = 𝐺′𝑛𝑥𝑚 𝐺𝑚𝑥𝑛 + 𝐺′𝑛𝑥𝑚 𝐶𝑚𝑥1. ■ (37)

43
Prueba 4. Dada la expresión de convolución del teorema 1 y ya que 𝐹𝑛𝑥1 no es una matriz
cuadrada; se multiplica por su transpuesta para usar los métodos tradicionales de inversión:
𝐶𝑚𝑥1 𝐹′1𝑥𝑛 = 𝐺𝑚𝑥𝑛 𝐹𝑛𝑥1 𝐹′1𝑥𝑛 (38)
Pero, dado que 𝐹𝑛𝑥1 𝐹′1𝑥𝑛 es un matriz singular se obtiene su pseudoinversa para despejar
𝐺𝑚𝑥𝑛 de (38), se tiene:
𝐺𝑚𝑥𝑛 = 𝐶𝑚𝑥1 𝐹′1𝑥𝑛 𝐹𝑛𝑥1 𝐹′1𝑥𝑛 +. ■ (39)
Prueba 5. Dado que el teorema 1 también puede expresarse como:
𝐶(𝑙) 𝑙=1𝑚 = 𝐺 𝑙 − 𝑥 𝐹(𝑥)
𝑛
𝑥=1
𝑚
𝑙=1
(40)
Y la transformada de Fourier para la función 𝑟 𝑚,𝑛 esta dada por:
ℱ 𝑟 𝑚,𝑛 = 𝑟(𝑚,𝑛)
𝑒2𝜋𝑖𝑠
𝑠
=1
(41)
Si 𝑟 𝑚, 𝑛 : = 𝐶(𝑙) 𝑙=1𝑚 , la transformada de Fourier de la convolución en diferencias finitas es
(10) ■.
44
Prueba 6. Realizando la separación del último término de la sumatoria de (10), se tiene:
𝐶𝑠 = 𝐺 𝑙 − 𝑥 𝐹(𝑥)
𝑒2𝜋𝑖𝑙𝑥𝑠
𝑛
𝑥=1
𝑚
𝑙=1
+ 𝐺 𝑙 − 𝑥 𝐹(𝑥)
𝑒2𝜋𝑖𝑙𝑥𝑘
𝑛
𝑥=1
𝑚
𝑙=1
𝑠−1
𝑘=1
(42)
Si 𝐶𝑠−1 = 𝐺 𝑙−𝑥 𝐹(𝑥)
𝑒2𝜋𝑖𝑙𝑥𝑘
𝑛𝑥=1
𝑚𝑙=1
𝑠−1𝑘=1 , entonces:
𝐶𝑠 = 𝐺 𝑙 − 𝑥 𝐹 𝑥
𝑒2𝜋𝑖𝑙𝑥𝑠
𝑛
𝑥=1
𝑚
𝑙=1
+ 𝐶𝑠−1 (43)
Reescribiendo el primer termino de (43) en función del último elemento de la sumatoria:
𝐶𝑠 = 𝐺 𝑚 − 𝑥 𝐹 𝑥
𝑒2𝜋𝑖𝑚𝑥
𝑠
𝑛
𝑥=1
+ 𝐺 𝑙 − 𝑥 𝐹 𝑥
𝑒2𝜋𝑖𝑙𝑥𝑠
𝑛
𝑥=1
𝑚−1
𝑙=1
+ 𝐶𝑠−1 (44)
Si 𝐻𝑚−1 = 𝐺 𝑙−𝑥 𝐹 𝑥
𝑒2𝜋𝑖𝑙𝑥𝑠
𝑛𝑥=1
𝑚−1𝑙=1 , entonces:
𝐶𝑠 =𝐺 𝑚 − 𝑛 𝐹 𝑛
𝑒2𝜋𝑖𝑚𝑛
𝑠
+ 𝐺 𝑚 − 𝑥 𝐹 𝑥
𝑒2𝜋𝑖𝑚𝑥
𝑠
𝑛−1
𝑥=1
+ 𝐻𝑚−1 + 𝐶𝑠−1 (45)
Si 𝐼𝑛−1 = 𝐺 𝑚−𝑥 𝐹 𝑥
𝑒2𝜋𝑖𝑚𝑥
𝑠
𝑛−1𝑥=1 , entonces se tiene (11) ■.

45
Prueba 7. Considerando (40) y la transformada Z para la función 𝑟 𝑚,𝑛 esta dada por:
ℱ 𝑟 𝑚,𝑛 = 𝑟(𝑚,𝑛)
𝑧𝑘
𝑠
=1
(46)
Si 𝑟 𝑚, 𝑛 : = 𝐶(𝑙) 𝑙=1𝑚 , la transformada de Z de la convolución en diferencias finitas es:
𝐶𝑐 = 𝐺 𝑙 − 𝑥 𝐹(𝑥)
𝑧𝑘 ■
𝑛
𝑥=1
𝑚
𝑙=1
𝑠
𝑘=1
(47)
Prueba 8. De manera similar a la prueba 6 pero cambiando el núcleo de transformación tenemos:
𝐶𝑐 =𝐺 𝑚 − 𝑛 𝐹(𝑛)
𝑧𝑠+ 𝐹𝑛−1 + 𝐸𝑚−1 + 𝐶𝑐−1 (48)
Siendo 𝐹𝑛−1 = 𝐺 𝑚−𝑥 𝐹(𝑥)
𝑧𝑠𝑛−1𝑥=1 , 𝐸𝑚−1 =
𝐺 𝑙−𝑥 𝐹(𝑥)
𝑧𝑠𝑛𝑥=1
𝑚−1𝑙=1 y
𝐶𝑐−1 = 𝐺 𝑙−𝑥 𝐹(𝑥)
𝑧𝑘𝑛𝑥=1
𝑚𝑙=1
𝑠−1𝑘=1 ■.
Prueba 9 (forma directa). El RMSE, al usar el segundo momento de probabilidad respecto a la
diferencia del error de estimación Ii para 𝑖 = 1,𝑛 , 𝑛 ∈ 𝑍+:
𝑅𝑀𝑆𝐸𝑛 : =1
𝑛 (𝐼𝑖
𝑛
𝑖=1
)2. (49)
Para el último término con i = n de (49):
46
𝑅𝑀𝑆𝐸𝑛 = 1
𝑛 𝐼𝑛
2 + (𝐼𝑖
𝑛−1
𝑖=1
)2 (50)
El RMSE retardado con 𝑖 = 1,𝑛 − 1 y condiciones estacionarias de acuerdo con [16], [17], [21]
y [22]:
𝑅𝑀𝑆𝐸𝑛−1 =1
𝑛 − 1 𝐼𝑖
2
𝑛−1
𝑖=1
. (51)
Al describir este último resultado de acuerdo con (50):
𝐼𝑖2
𝑛−1
𝑖=1
= (𝑛 − 1)𝑅𝑀𝑆𝐸𝑛−1 (52)
El RMSE, considerando (52) en (50), se obtiene (14). ■
Prueba 10. El error dentro de la secuencia de estimación se define como un vector expandido:
𝑒1𝑥1,𝑛 = 𝐸 𝑒1𝑥𝑛 ,𝑖𝑒𝑛𝑥1,𝑖𝑇
1/2 (53)
El comportamiento de error en decibeles de forma estocástica respecto a su segundo momento de
probabilidad para la secuencia 𝑖 = 1,𝑛 ,𝑛 ∈ 𝑍+ , es:
𝐷𝑛 = 20 𝑙𝑜𝑔10 𝐸 𝑒1𝑥𝑛 ,𝑖𝑒𝑛𝑥1,𝑖𝑇
𝑖=1,𝑛
1/2
. (54)
Su descripción discreta:

47
𝐷𝑛 = 10 𝑙𝑜𝑔10 1
𝑛 𝑒𝑖
2
𝑛
𝑖=1
(55)
Expandiendo respecto a su último término:
𝐷𝑛 = 10 𝑙𝑜𝑔10 1
𝑛 𝑒𝑛
2 +1
𝑛 𝑒𝑖
2
𝑛−1
𝑖=1
. (56)
Usando las propiedades de los logaritmos:
𝐷𝑛 = 10 𝑙𝑜𝑔10 𝑒𝑛2 − 10 𝑙𝑜𝑔10 𝑛 + 10 𝑙𝑜𝑔10 𝑒𝑖
2
𝑛−1
𝑖=1
.
(57)
Para las propiedades de decaimiento estacionario, en el mismo sentido de los conceptos
anteriores, la descripción en decibeles para 𝑖 = 1, 𝑛 − 1 :
𝐷𝑛−1: = 10 𝑙𝑜𝑔10 1
𝑛 − 1 𝑒𝑖
2
𝑛−1
𝑖=1
. (58)
Utilizando las propiedades de los logaritmos:
𝐷𝑛−1 = 10 𝑙𝑜𝑔10 𝑒𝑖2
𝑛−1
𝑖=1
− 10 𝑙𝑜𝑔10 𝑛 − 1 . (59)
Donde 10 𝑙𝑜𝑔10 𝑒𝑖2𝑛−1
𝑖=1 en términos de 𝐷𝑛−1:

48
10 𝑙𝑜𝑔10 𝑒𝑖2
𝑛−1
𝑖=1
= 10 𝑙𝑜𝑔10 𝑛 − 1 + 𝐷𝑛−1. (60)
Sustituyendo (60) en (57), se obtiene:
𝐷𝑛 = 10 𝑙𝑜𝑔10 𝑒𝑛2 − 10 𝑙𝑜𝑔10 2𝑛 + 10 𝑙𝑜𝑔10 𝑛 − 1 + 𝐷𝑛−1.
(61)
Reescribiendo, y usando las propiedades de los algoritmos se obtiene (15).■
Prueba 11. El error estocástico considera las propiedades de Bode y la descripción del error
respecto al segundo momento de probabilidad. Para 𝑖 = 1, 𝑛 , 𝑛 ∈ 𝑍+ es:
𝐵𝑛 = 10 𝑙𝑜𝑔10 𝐸 𝑒1𝑥𝑛𝑒𝑛𝑥1𝑇 𝑖=1,𝑛
1/2 (62)
Considerando las propiedades de los logaritmos, se obtiene (16). ■
Comentario 3. El Bode recursivo de acuerdo con (16) y respecto con (54), cumple 𝐵 𝑛 =
0.5 𝐷 𝑛 en un sentido logarítmico.
Prueba 12. De acuerdo con (17), para estimar 𝐴′1𝑥𝑚 al aplicar la transpuesta de la matriz
𝐸𝑚𝑥𝑚 a ambos lados de la igualdad 𝑌′1𝑥𝑚𝐸′𝑚𝑥𝑚 = 𝐴′
1𝑥𝑚 𝐸𝑚𝑥𝑚 𝐸′𝑚𝑥𝑚 , es posible obtener la
pseudoinversa del producto de 𝐸𝑚𝑥𝑚 𝐸′𝑚𝑥𝑚 y así encontrar (18).■
Prueba 13. Transponiendo (19)
𝑌′ 1𝑥𝑚 = 𝑋 ′1𝑥𝑛 𝐻′𝑛𝑥𝑚 (63)
Y considerando la condición (18), se tiene respecto del identificador:

49
𝑌′ 1𝑥𝑚 = 𝐴′1𝑥𝑚𝜑′𝑚𝑥𝑛
𝐻′𝑛𝑥𝑚 , (64)
𝐸𝑚𝑥𝑚 = 𝜑′𝑚𝑥𝑛
𝐻′𝑛𝑥𝑚 . (65)
Escribiendo (64) en términos de (65):
𝑌′ 1𝑥𝑚 = 𝐴′1𝑥𝑚 𝐸𝑚𝑥𝑚 . (66)
El proceso de innovación 𝑄, descrito como:
𝑄 = 𝑌′1𝑥𝑚 − 𝑌′ 1𝑥𝑚 (67)
Su gradiente estocástico respecto de los parámetros de la señal fija 𝜕𝑄
𝜕𝐴′1𝑥𝑚 = 0
𝜕𝑄
𝜕𝐴′1𝑥𝑚 = 𝑌′1𝑥𝑚 − 𝐴′1𝑥𝑚 𝐸𝑚𝑥𝑚
2 . (68)
𝜕𝑄
𝜕𝐴′1𝑥𝑚 = 2 𝑌′1𝑥𝑚 − 𝐴′
1𝑥𝑚 𝐸𝑚𝑥𝑚 −𝐸′𝑚𝑥𝑚 .
(69)
𝜕𝑄
𝜕𝐴′1𝑥𝑚 = −2𝑌′1𝑥𝑚𝐸
′𝑚𝑥𝑚 + 2 𝐴′
1𝑥𝑚 𝐸𝑚𝑥𝑚 𝐸′𝑚𝑥𝑚 . (70)
Desarrollando a (70) respecto de 𝐴′1𝑥𝑚 :
2 𝐴′1𝑥𝑚 𝐸𝑚𝑥𝑚 𝐸′𝑚𝑥𝑚 = 2𝑌′1𝑥𝑚𝐸
′𝑚𝑥𝑚 . (71)
Y reduciendo
𝐴 ′1𝑥𝑚 𝐸𝑚𝑥𝑚 𝐸′𝑚𝑥𝑚 = 𝑌′1𝑥𝑚𝐸′𝑚𝑥𝑚 . (72)
Despejando 𝐴 ′1𝑥𝑚 de (72), a través de la pseudoinversa tenemos:

50
𝐴 ′1𝑥𝑚 = 𝑌′1𝑥𝑚𝐸′𝑚𝑥𝑚 (𝐸𝑚𝑥𝑚 𝐸′𝑚𝑥𝑚 )+ . (73)
Conociendo (73) y dado que [4] propone 𝜑𝑚𝑥𝑛 = 𝐶𝑜 𝑛,𝑝 = 𝑐𝑜𝑠 𝑛𝜋𝑝
𝑁 , es posible encontrar la
señal fija identificada:
𝑋′ 1𝑥𝑛 = 𝐴 ′1𝑥𝑚
𝜑′𝑚𝑥𝑛
■ (74)
Prueba 14. Considérese que el sistema (22) respecto de la señal retardada de su propia salida
respecto de su segundo momento de probabilidad es:
𝐸 𝑦𝑘𝑦𝑘−1 = 𝑎𝐸 𝑦𝑘−12 + 𝐸 𝑤 𝑘𝑦𝑘−1 (75)
Tal que la descripción de la ganancia sea:
𝑎𝑘 =𝐸 𝑦𝑘𝑦𝑘−1 − 𝐸 𝑤 𝑘𝑦𝑘−1
𝐸 𝑦𝑘−12
(76)
Expresando los momentos de probabilidad de manera discreta con las propiedades de ergodicidad
se tiene:
𝑎𝑛 =
1𝑛 𝑦𝑘𝑦𝑘−1𝑛𝑘=1 −
1𝑛 𝑤 𝑘𝑦𝑘−1𝑛𝑘=1
1𝑛 𝑦𝑘−1
2𝑛𝑘=1
(77)
De forma estacionaria retardada (77):
51
𝑎𝑛−1 =
1𝑛 − 1
𝑦𝑘𝑦𝑘−1𝑛−1𝑘=1 −
1𝑛 − 1
𝑤 𝑘𝑦𝑘−1𝑛−1𝑘=1
1𝑛 − 1
𝑦𝑘−12𝑛−1
𝑘=1
(78)
Abreviando de manera simbólica:
𝑎𝑛−1 =𝑅𝑛−1 − 𝑆𝑛−1
𝑄𝑛−1 (78)
Al desarrollar cada elemento de (77):
𝑎𝑛 =
1𝑛 𝑦𝑛𝑦𝑛−1 + 𝑦𝑘𝑦𝑘−1
𝑛−1𝑘=1 −
1𝑛 𝑤 𝑛𝑦𝑛−1 + 𝑤 𝑘𝑦𝑘−1
𝑛−1𝑘=1
1𝑛 𝑦𝑛−1
2 + 𝑦𝑘−12𝑛−1
𝑘=1 (79)
Sustituyendo (78) en (79)
𝑎𝑛 =𝑦𝑛𝑦𝑛−1 − 𝑤 𝑛𝑦𝑛−1 + 𝑛 − 1 (𝑅𝑛−1 − 𝑆𝑛−1)
𝑦𝑛−12 + (𝑛 − 1)𝑄𝑛−1
(80)
Y al considerar que (𝑅𝑛−1 − 𝑆𝑛−1) requiere estar dividido por 𝑄𝑛−1 para tener 𝑎𝑛−1 se reescribe
(80)
𝑎𝑛 =𝑦𝑛𝑦𝑛−1 − 𝑤 𝑛𝑦𝑛−1 + 𝑛 − 1 (𝑅𝑛−1 − 𝑆𝑛−1)
𝑄𝑛−1
𝑄𝑛−1
𝑦𝑛−12 + (𝑛 − 1)𝑄𝑛−1
(81)

52
Lo que se reduce a:
𝑎𝑛 =𝑦𝑛𝑦𝑛−1 − 𝑤 𝑛𝑦𝑛−1 + 𝑛 − 1 𝑄𝑛−1𝑎𝑛−1
𝑦𝑛−12 + (𝑛 − 1)𝑄𝑛−1
(82)
Con 𝑀𝑛 =𝑦𝑛𝑦𝑛−1−𝑤 𝑛𝑦𝑛−1
𝑦𝑛−12 +(𝑛−1)𝑄𝑛−1
y 𝐹𝑛 = 𝑛−1 𝑄𝑛−1
𝑦𝑛−12 +(𝑛−1)𝑄𝑛−1
; se tiene:
𝑎𝑛 = 𝑀𝑛 + 𝑎𝑛−1𝐹𝑛 ■ (83)
Corolario Mínimos Cuadrados: Considérese que la varianza de la señal de salida retardada sea
descrita como:
𝑄𝑛−1 =1
𝑛 − 1 𝑦𝑘−1
2
𝑛−1
𝑘=1
(84)
Respecto de su último término:
𝑄𝑛−1 =1
𝑛 − 1 𝑦𝑛−1
2 + 𝑦𝑖−12
𝑛−2
𝑖=2
(85)
53
𝑄𝑛−2 =1
𝑛 − 2 𝑦𝑖−1
2
𝑛−2
𝑖=2
(86)
Su forma recursiva es:
𝑄𝑛−1 =1
𝑛 − 1 𝑦𝑛−1
2 + (𝑛 − 2)𝑄𝑛−2 (87)
Prueba 15: De acuerdo con (24),
𝑦 𝑛 = 𝑥 𝑛 − 𝑙 𝑙
𝑚
𝑙=1
𝑛=1,𝑚
(88)
Y tiene la forma matricial
𝑋𝑚𝑥𝑚𝐻𝑚𝑥1 (89)
Con funcional de error expresado por:
𝜉(𝑛) = 𝐸 𝑒2 𝑛 (90)

54
Y con (25) en (90)
𝜉(𝑛) = 𝐸 𝑑 𝑛 − 𝑦 𝑛 2 𝑛=1,𝑚
(91)
En forma ampliada
𝜉(𝑛) = 𝐸 𝑑 𝑛 − 𝑥(𝑛 − 𝑙) 𝑙
𝑚
𝑙=1
2
𝑛=1,𝑚
(92)
En forma vectorial
𝜉 𝑚×1 = 𝐸 𝐷𝑚𝑥1 − 𝑋𝑚𝑥𝑚𝐻𝑚𝑥1 2
(93)
Tal que su gradiente estocástico respecto de la señal fija se describe como:
𝜕𝜉 𝑚×1
𝜕𝐻𝑚𝑥1= 𝐸
𝜕 𝐷𝑚𝑥1 − 𝑋𝑚𝑥𝑚𝐻𝑚𝑥1 2
𝜕𝐻𝑚𝑥1
(94)
Y que al desarrollar, se tiene que la derivada de 𝑋𝑚𝑥𝑚𝐻𝑚𝑥1 respecto de 𝐻𝑚𝑥1 generará una
matriz ortogonal a 𝑋𝑚𝑥𝑚
2𝐸 𝐷𝑚𝑥1 − 𝑋𝑚𝑥𝑚𝐻𝑚𝑥1 𝑋𝑚×𝑚′ = 0
(95)
Con la congruencia correspondiente:
𝐸 𝑋𝑚𝑥𝑚 𝐷𝑚𝑥1 − 𝑋𝑚𝑥𝑚 𝑋𝑚𝑥𝑚𝐻𝑚𝑥1 = 0 (96)
En donde la señal fija respecto a la esperanza matemática es un vector de parámetros:

55
𝐸 𝑋𝑚𝑥𝑚 𝐷𝑚𝑥1 = 𝐸 𝑋𝑚𝑥𝑚 𝑋𝑚𝑥𝑚 𝐻𝑚𝑥1 (97)
Que requiere ser estimado, y para evitar las singularidades respecto al resultado anterior, se
considera la pseudoinversa:
𝐻𝑚𝑥1 = 𝐸 𝑋𝑚𝑥𝑚 𝑋𝑚𝑥𝑚 +𝐸 𝑋𝑚𝑥𝑚 𝐷𝑚𝑥1 .■
(98)
Prueba 16. Transponiendo (27), el proceso de innovación cuadrático 𝑄𝑇 es descrito como:
𝑄𝑇1𝑥𝑚 : = 𝐶𝑇1𝑥𝑚 − 𝐶 𝑇1𝑥𝑚
2 (99)
El rotacional del proceso de innovación ∇ × 𝑄𝑇𝐺′𝑛𝑥𝑚
es:
𝜕×𝑄𝑇
𝜕𝐺 𝑇𝑛𝑥𝑚 =
𝜕× 𝐶𝑇1𝑥𝑚 −𝐹𝑇1𝑥𝑛 𝐺 𝑇𝑛𝑥𝑚
2
𝜕𝐺 𝑇𝑛𝑥𝑚 . (100)
De forma que la derivada direccional de 𝐹𝑇1𝑥𝑛 𝐺 𝑇𝑛𝑥𝑚 respecto de 𝐺 𝑇𝑛𝑥𝑚 es 𝐹𝑛𝑥1, al ser
resultante ortogonal el vector derivado y aplicando (99) en (100):
𝜕 × 𝑄𝑇
𝜕𝐺 𝑇𝑛𝑥𝑚
= −2𝐹𝑛𝑥1 𝐶𝑇
1𝑥𝑚 + 2𝐹𝑛𝑥1 𝐹𝑇
1𝑥𝑛 𝐺 𝑇𝑛𝑥𝑚
(101)
En su punto de equilibrio, el rotacional del proceso de innovación es:
2𝐹𝑛𝑥1 𝐶𝑇
1𝑥𝑚 = 2𝐹𝑛𝑥1 𝐹𝑇
1𝑥𝑛 𝐺 𝑇𝑛𝑥𝑚 (102)

56
Y que al organizar (102), el estimador es descrito en (28). ■
Prueba 17. Considérese a (28) con 𝑃𝑠𝑇:=[ 𝐹𝑛𝑥1,𝑇 𝐹𝑇
1𝑥𝑛 ,𝑇 +𝐹𝑛𝑥1,𝑇] ∈ 𝑅[𝑛×1], se escribe para el
conjunto de métricas de los intervalos que conforman a T:
𝐺 𝑇𝑛𝑥𝑚 ,𝑇 = 𝑃𝑠𝑛𝑥1,𝑡
𝑇
𝑡=1
𝐶𝑇1𝑥𝑚 ,𝑡 (103)
Con condiciones estacionarias para el periodo de tiempo inmediato anterior:
𝐺 𝑇𝑛𝑥𝑚 ,𝑇−1 = 𝑃𝑠𝑛𝑥1,𝑡
𝑇−1
𝑡=1
𝐶𝑇1𝑥𝑚 ,𝑡 (104)
Y que al ver (104) en (103), tomando el último término 𝑃𝑠𝑛𝑥1,𝑇 de (103) se logra la obtención
de (29). ■
Prueba 18. Existe una matriz 𝑆𝑛𝑥𝑚 que permite tener la forma
𝐹 𝑇 = 𝐺 𝑛𝑥𝑛 (𝑇)𝐹(𝑇)𝑛𝑥1 (105)
Que en diferencias finitas tiene la estructura de (30) de acuerdo con:
𝐺 𝑇 𝑛𝑥𝑛 : = 𝐼𝑛𝑥𝑛 − 𝐺 𝑇 − 𝜀 𝑛𝑥𝑛 𝜀 (106)
Al ser:

57
𝐺 𝑇 𝑛𝑥𝑛 : = 𝑆(𝑇)𝑛𝑥𝑚 𝐺(𝑇)𝑚𝑥𝑛 (107)
Es estable si cumplen en el sentido de Lyapunov las condiciones siguientes:
𝑉 𝑇 = 𝐹 𝑇 𝑇𝑃𝐹 𝑇 (108)
Dada la función candidata definida positiva y que en el caso que su incremento sea semidefinido
negativo, es decir, que Δ𝑉 𝑇 ≤ 0.
La función candidata en su primera diferencia finita es: ∆𝑉(𝑡) = 𝜀𝑉 (𝑡), en donde:
𝑉 𝑇 = 𝐹 1×𝑛𝑇 𝑇 𝑃𝑛×𝑛𝐹𝑛×1 𝑇 + 𝐹1×𝑛
𝑇 𝑇 𝑃𝑛×𝑛𝐹 𝑛×1 𝑇 (109)
Y al considerar que se tiene el sistema afín:
𝐹 𝑛×1(𝑇) = 𝐺 𝑛×𝑛 𝑇 𝐹𝑛×1(𝑇) (110)
Al sistema (28), y en diferencias finitas a (30), donde:
𝐺 𝑛×𝑛 𝑇 − 𝜀 ≔ [𝐼𝑛×𝑛 − 𝐺 𝑛×𝑛 𝑇 − 𝜀 ] (111)
Así como:
𝑀𝑛×𝑛(𝑇) ≔ 𝐺 𝑛×𝑛(𝑇)𝐺 𝑛×𝑛 𝑇 − 𝜀 (112)
Y
𝑃 𝑛×𝑛(𝑇) ≔ 𝑃 𝑛×𝑛𝐺 𝑛×𝑛 𝑇 − 𝜀 (113)

58
Al desarrollar todo el proceso algebraico, considerando que la matriz 𝑃 es del tipo hermit, se
cumple (29). ■
59
ANEXO 2. Programas
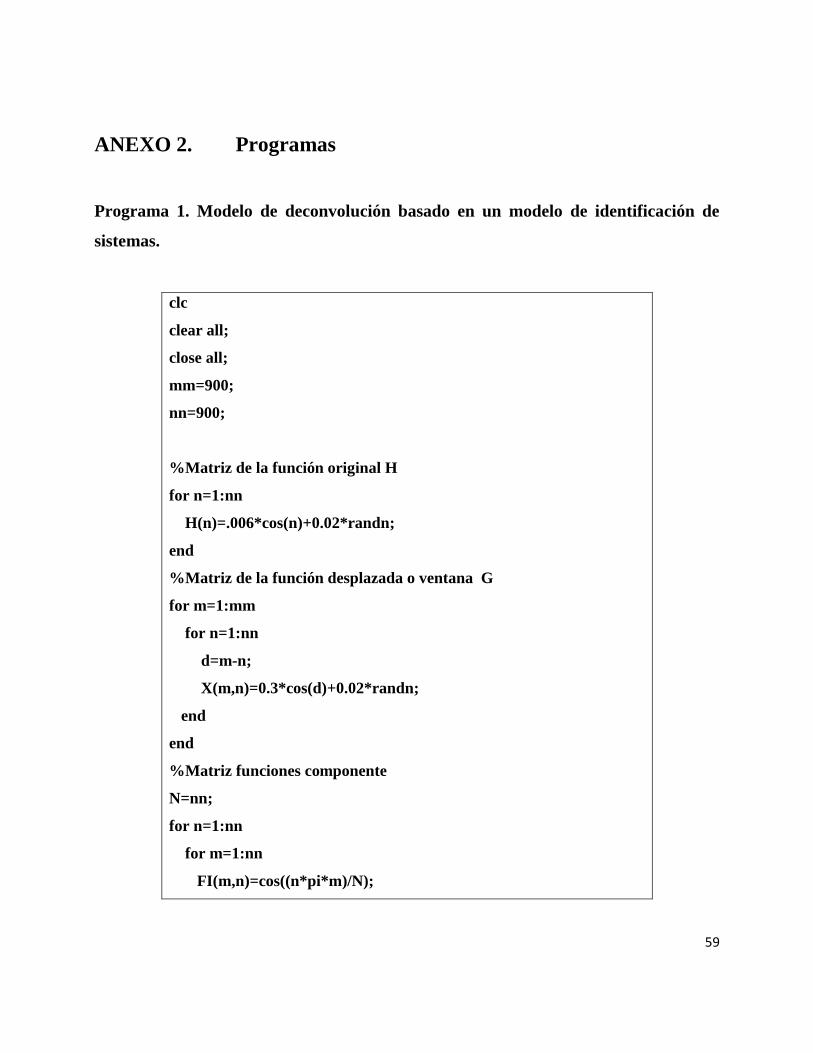
Programa 1. Modelo de deconvolución basado en un modelo de identificación de
sistemas.
clc
clear all;
close all;
mm=900;
nn=900;
%Matriz de la función original H
for n=1:nn
H(n)=.006*cos(n)+0.02*randn;
end
%Matriz de la función desplazada o ventana G
for m=1:mm
for n=1:nn
d=m-n;
X(m,n)=0.3*cos(d)+0.02*randn;
end
end
%Matriz funciones componente
N=nn;
for n=1:nn
for m=1:nn
FI(m,n)=cos((n*pi*m)/N);

60
end
end
E=X*FI;
%Vector de parametros
A=H*E'*pinv(E*E');
%Matriz de la función deconvolucionada He
He=A*FI';
%Error cuadrático medio recursivo
MSE(1)=(H(1)-He(1)).^2;
for n=2:nn
MSE(n)=(1/n.^2)*[((H(n)-He(n)).^2)+((n-1).^2*MSE(n-1))];
end
%Decibeles
D(1)=10*log10(H(1).^2/He(1).^2);
for n=2:nn
D(n)=10*log10(((n-1)/(2*n))*(H(n).^2/He(n).^2))+D(n-1);
end
%Gráfica de Deconvolución para encontrar F(x) y Fe(x)
figure
plot(H,'black')
figure
plot(He, 'black')
figure
plot(H, 'black')
hold on
plot(He, 'black')
%Grafica del error cuadratico medio
61
figure
plot(MSE, 'black')
%Gráfica de Decibeles
figure
plot(D, 'black')
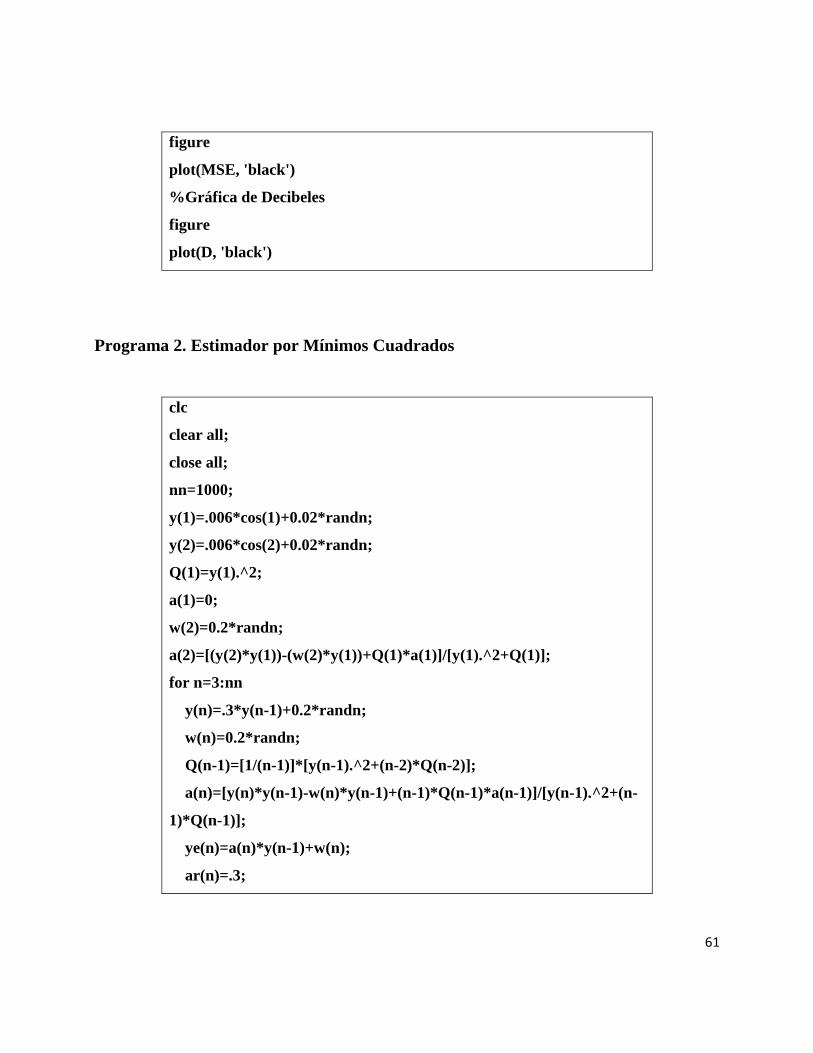
Programa 2. Estimador por Mínimos Cuadrados
clc
clear all;
close all;
nn=1000;
y(1)=.006*cos(1)+0.02*randn;
y(2)=.006*cos(2)+0.02*randn;
Q(1)=y(1).^2;
a(1)=0;
w(2)=0.2*randn;
a(2)=[(y(2)*y(1))-(w(2)*y(1))+Q(1)*a(1)]/[y(1).^2+Q(1)];
for n=3:nn
y(n)=.3*y(n-1)+0.2*randn;
w(n)=0.2*randn;
Q(n-1)=[1/(n-1)]*[y(n-1).^2+(n-2)*Q(n-2)];
a(n)=[y(n)*y(n-1)-w(n)*y(n-1)+(n-1)*Q(n-1)*a(n-1)]/[y(n-1).^2+(n-
1)*Q(n-1)];
ye(n)=a(n)*y(n-1)+w(n);
ar(n)=.3;

62
end
MSE(2)=(ar(2)-a(2)).^2;
for n=3:nn
MSE(n)=(1/n.^2)*[(ar(n)-a(n)).^2+(n-1).^2*MSE(n-1)];
end
Decibeles(2)=5;%20*log10(ar(2).^2/a(2).^2)
for n=3:nn
Decibeles(n)=20*log10(ar(n).^2/a(n).^2)+Decibeles(n-1);
end
BodeAr(2)=8;%10*log10(ar(n).^2)
for n=3:nn
BodeAr(n)=10*log10(ar(n).^2/n)+10*log10((n-1)/n)+BodeAr(n-1);
end
BodeA(2)=7;%10*log10(a(2).^2)
for n=3:nn
BodeA(n)=10*log10(a(n).^2/n)+10*log10((n-1)/n)+BodeA(n-1);
end
figure
plot(y,'r');
hold on
plot(ye,'b');
figure
plot(MSE,'b');
figure
plot(Decibeles,'r');
figure
plot(BodeAr,'b');

63
figure
plot(BodeA,'g');
Programa 3. Filtro de Wiener modificado a través de la pseudoinversa.
clc
clear all;
close all;
mm=300;
nn=300;
for n=1:nn
H(n)=.006*cos(n)+0.02*randn;
end
for m=1:mm
for n=1:nn
d=m-n;
X(m,n)=0.3*cos(d)+0.02*randn;
end
end
C=H*X';
He=pinv(X*X)*(X*C');
MSE(1)=(H(1)-He(1)).^2;
for n=2:nn
MSE(n)=(1/n.^2)*[(H(n)-He(n)).^2+(n-1).^2*MSE(n-1)];
end

64
Decibeles(1)=20*log10((H(1)/He(1)).^2);
for n=2:nn
Decibeles(n)=20*log10((H(n)/He(n)).^2)+Decibeles(n-1);
end
BodeH(1)=10*log10(H(n).^2)
for n=2:nn
BodeH(n)=10*log10(abs(H(n).^2/n))+10*log10((n-1)/n)+BodeH(n-
1);
end
BodeHe(1)=10*log10(He(n).^2)
for n=2:nn
BodeHe(n)=10*log10(abs(He(n).^2/n))+10*log10((n-
1)/n)+BodeHe(n-1);
end
figure
subplot 311
plot(Decibeles,'r')
subplot 312
plot(BodeH,'b')
subplot 313
plot(BodeHe, 'g')
figure
plot(MSE, 'b')
figure
plot(H,'r')
hold
plot(He,'b')
65
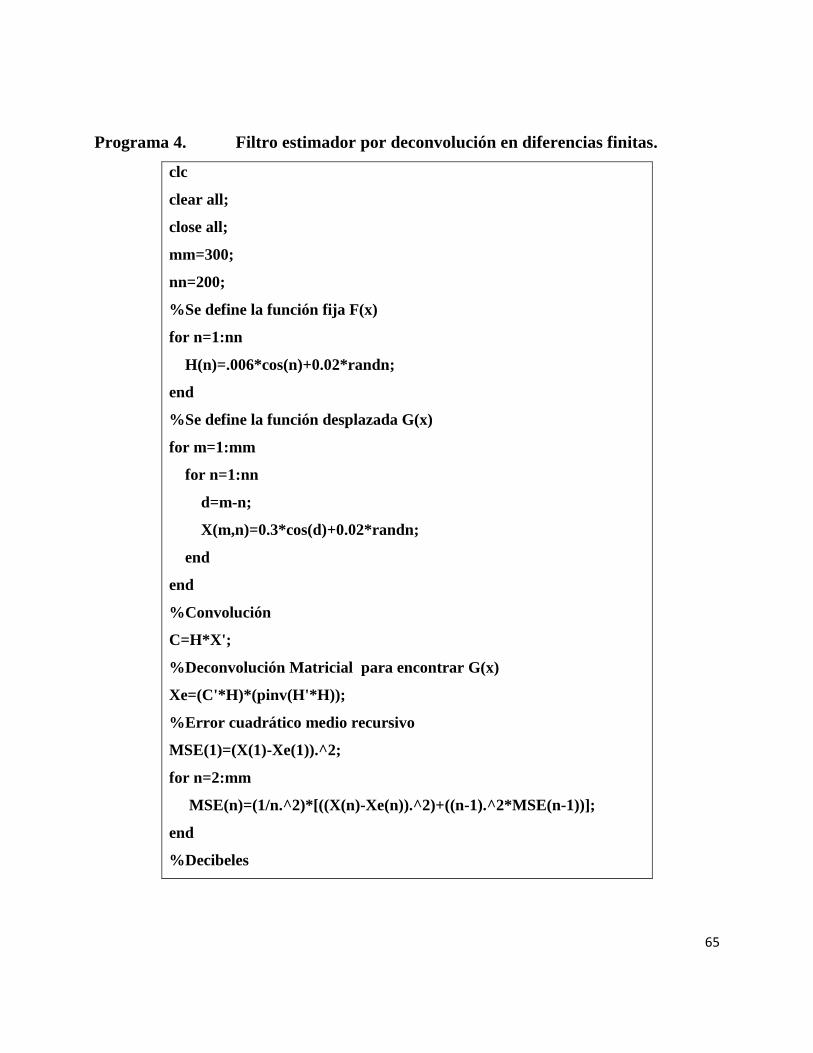
Programa 4. Filtro estimador por deconvolución en diferencias finitas.
clc
clear all;
close all;
mm=300;
nn=200;
%Se define la función fija F(x)
for n=1:nn
H(n)=.006*cos(n)+0.02*randn;
end
%Se define la función desplazada G(x)
for m=1:mm
for n=1:nn
d=m-n;
X(m,n)=0.3*cos(d)+0.02*randn;
end
end
%Convolución
C=H*X';
%Deconvolución Matricial para encontrar G(x)
Xe=(C'*H)*(pinv(H'*H));
%Error cuadrático medio recursivo
MSE(1)=(X(1)-Xe(1)).^2;
for n=2:mm
MSE(n)=(1/n.^2)*[((X(n)-Xe(n)).^2)+((n-1).^2*MSE(n-1))];
end
%Decibeles

66
D(1)=10*log10(X(1).^2/Xe(1).^2);
for n=2:nn
D(n)=10*log10(((n-1)/(2*n))*(X(n).^2/Xe(n).^2))+D(n-1);
end
%Gráfica de Deconvolución para encontrar F(x) y Fe(x)
figure
plot(X,'k')
figure
plot(Xe,'k')
%Grafica del error cuadratico medio
figure
plot(MSE, 'k')
%Gráfica de Decibeles
figure
plot(D,'k')

67
ANEXO 3. Proceso Estocásticos.
En este anexo se revisaran algunas definiciones y propiedades concernientes a procesos
estocásticos.
Un procesos estocástico, 𝑥𝑛 ,𝑛 𝜖 𝑁 es una colección de variables aleatorias indexadas
por un parámetro real 𝑛 definido en un espacio de probabilidad Ω,𝐹,𝑃 donde Ω es el espacio
de elemental de eventos 𝑤, 𝐹 la 𝜎 −algebra y 𝑃 la medida de probabilidad. Un 𝜎 −algebra de 𝐹
es un conjunto de subconjuntos Ω (colección de subconjuntos) 𝐹(𝑥𝑛) denota el 𝜎 −algebra
generada por un conjunto de variables aleatorias 𝑥𝑛 . El 𝜎 −algebra representa el conocimiento
acerca del proceso en un tiempo 𝑛.


















