Clase lugar geometrico ciclo 2014 3
69
PASOS PARA TRZAR EL LUGAR GEOMÉTRICO DE LAS RAÍCES (LGR) 1. Escribir la Ecuación Característica (EC) en la forma polos y ceros con el parámetro de interés K como multiplicador. 0 ) ( 1 s kP 0 ) ( ) ( 1 1 1 n j j M i i p S z S K Y el factor P(S) en términos de n polos y M ceros de lazo abierto.
Transcript of Clase lugar geometrico ciclo 2014 3

PASOS PARA TRZAR EL LUGAR GEOMÉTRICO DE LAS RAÍCES (LGR)
1. Escribir la Ecuación Característica (EC) en la forma polos y ceros con el parámetro de interés K como multiplicador.
0)(1 skP
0
)(
)(
1
1
1
n
j
j
M
i
i
pS
zS
K
Y el factor P(S) en términos de n polos y M ceros de lazo abierto.

2. Localizar los polos y ceros de lazo abierto de P(S) en el plano s con símbolos seleccionados, . cerospolos
3. Hallar el LGR sobre el eje real del plano s. Existe LGR sobre el eje real del plano s a la izquierda de un número de impar de polos y ceros de lazo abierto.
4. Determinar el número de ramas separadas del LGR, RS.
RS = cuando .Mn
n: número finito de polos; M: número finito de ceros.
Nota.- El LGR es simétrico con respecto al eje real del plano s.

5. Hallar el centroide y las orientaciones de las asíntotas.
,A A
.)()(
Mn
zp ij
A
).1(...,2,1,0,º180)12(
Mnq
Mn
qA
Las rama separada del LGR inician en polos de lazo abierto (donde K vale cero) y
terminan en ceros de lazo abierto en el plano s o en ceros de lazo abierto en el
infinito (donde K vale infinito, siguiendo asíntotas que se interceptan en el
centroide).

6. Hallar los puntos de cruce del LGR por el eje imaginario del plano s. Utilice el tercer caso del criterio de Routh-Hurwitz (estabilidad límite).
𝑈 𝑠 = 3𝑠2 + 𝐾 = 0
(Para límite de estabilidad)
(Ecuación auxiliar)
(Puntos de cruce por eje jw.
Otra forma:
En la Ecuación Característica:

7. Determine los puntos de salida del LGR desde el eje real del plano s y/o los puntos de ingreso del LGR al eje real del plano s.
Supóngase que ).(spK Obténgase .0)(
ds
sdp
Existen puntos de salida del LGR desde el eje real del plano s para 𝑲𝒎𝒂𝒙.
Existen puntos de ingreso del LGR al eje real del plano s para 𝑲𝒎𝒊𝒏.
Otra formas: Ejemplo 1:

Ejemplo 2: Dada la Ecuación Característica siguiente, hallar el punto de salida Del LGR desde el eje real del plano s.
Solución aproximada: K= P(s) 83.57, para s = -1.577

8. Hallar los ángulos de salida del LGR desde los polos complejos de lazo abierto y/o los ángulos de llegada del LGR a los ceros complejos de lazo abierto. Use el criterio del ángulo.
Ángulo de salida desde un polo complejo = 180° - (suma de los ángulos de vectores
hacia el polo complejo en cuestión desde otros polos) + (suma de los ángulos de vectores hacia el polo complejo en cuestión desde los ceros)
Ángulo de llegada a un cero complejo = 180° - (suma de los ángulos de vectores hacia el cero complejo en cuestión desde otro cero) + (suma de los ángulos de vectores hacia el cero complejo en cuestión desde los polos)
𝜃𝑧 − 𝜃𝑝 = 180°
COMPLÉTESE EL LGR
Walter R. Evans Walter R. Evans (January 15, 1920 - July 10, 1999) was born in St. Louis and received his bachelor's degree in Electrical Engineering from Washington University in 1941. He worked as an instructor at Washington University from 1946 to 1948. He is widely known for his 1948 invention of the root locus method (http://www.spirule.com), which is now a key tool in control theory. He received his master's degree in Electrical Engineering from UCLA in 1951. Over the course of his career, he worked for such companies as General Electric, Rockwell International, and Ford Aeronautic Company. In recognition of his contributions to control theory, he received both the 1987 American Society of Mechanical Engineers Rufus Oldenburger Medal and the 1988 AACC Richard E. Bellman Control Heritage Award.

PROBLEMA
Una forma simplificada de la función de transferencia de lazo abierto de un aeroplano con un autopiloto en el modo longitudinal es
𝐺 𝑠 𝐻 𝑠 =𝐾(𝑠 + 1)
𝑠(𝑠 − 1)(𝑠2 + 4𝑠 + 16)
Mediante la técnica del lugar geométrico de las raíces, halle el rango de K para estabilidad del aeroplano.
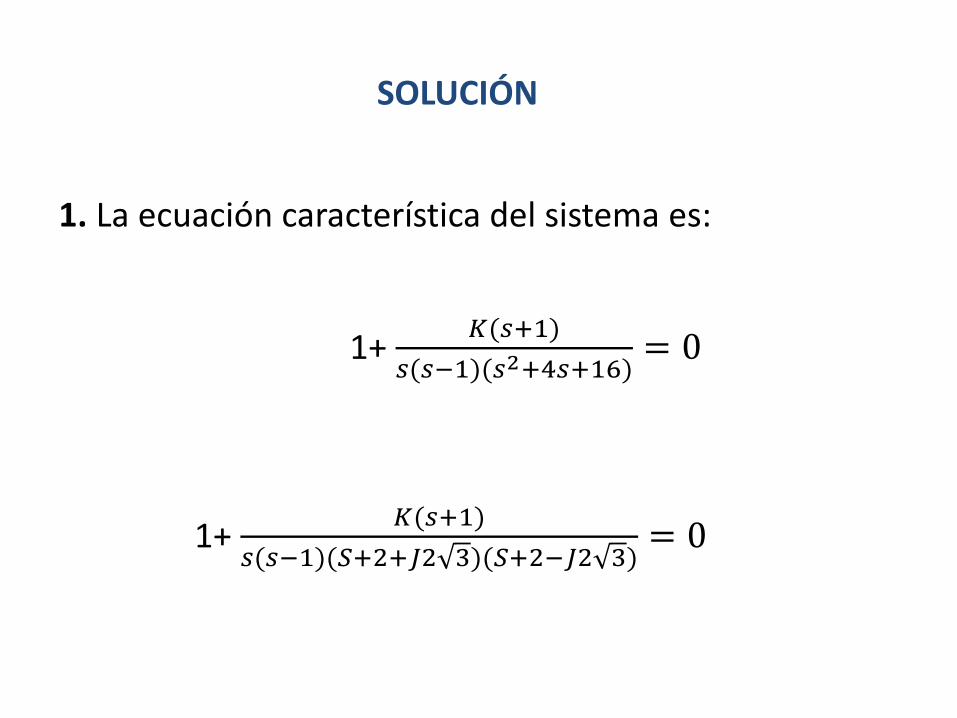
SOLUCIÓN
1. La ecuación característica del sistema es:
1+ 𝐾(𝑠+1)
𝑠(𝑠−1)(𝑠2+4𝑠+16)= 0
1+ 𝐾(𝑠+1)
𝑠(𝑠−1)(𝑆+2+𝐽2 3)(𝑆+2−𝐽2 3)= 0
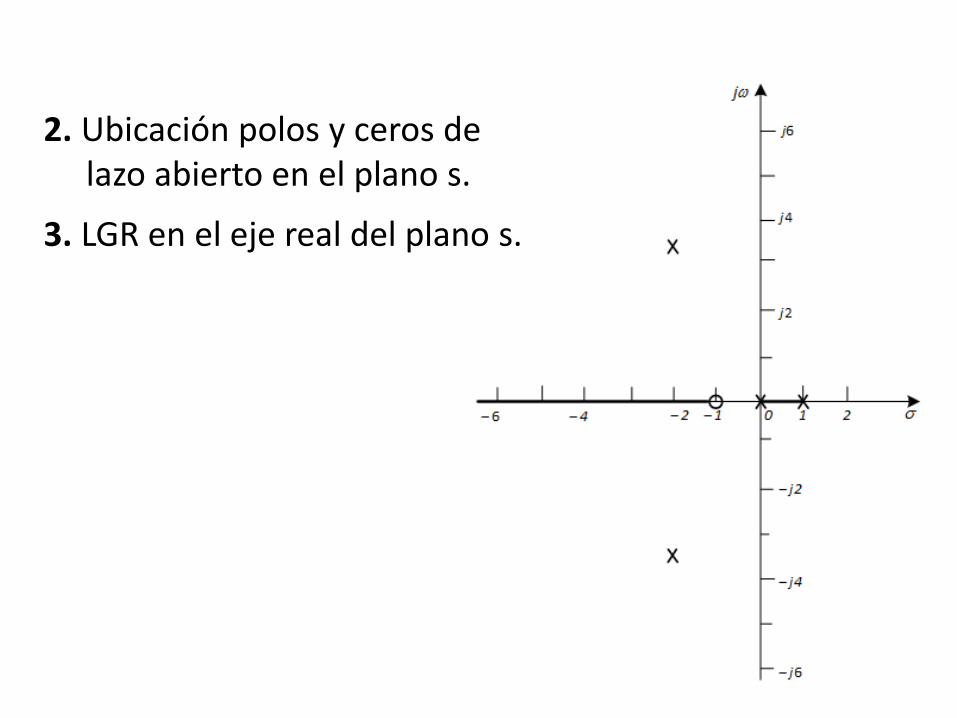
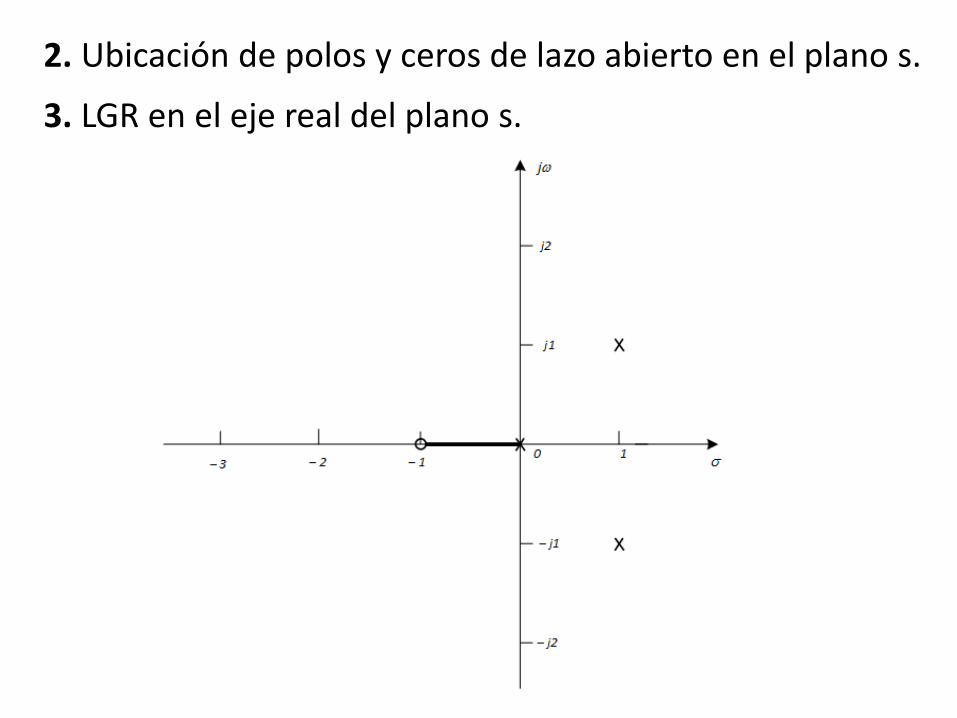
2. Ubicación polos y ceros de lazo abierto en el plano s.
3. LGR en el eje real del plano s.

4. Número de ramas separadas del LGR
𝑅𝑆 = 𝑛 = 4
Cada rama separada empieza en un polo de lazo abierto, donde K vale 0 y termina en un cero de lazo abierto, donde K vale .
Porque el número de polos de lazo abierto es mayor al número de ceros de lazo abierto,
𝑀 = 1.

5. Centroide y orientación de asíntotas.
Centroide
𝜎𝐴 =0 + 1 − 2 + 𝑗2 3 − 2 − 𝑗2 3 − (−1)
4 − 1= −2
3
Orientación de las Asíntotas
𝜙𝐴 =(2𝑞 + 1)
𝑛 −𝑀180°
𝑞 = 0, 1, 2.
𝑞 = 0,1,… , (𝑛 −𝑀 − 1)
𝜙𝐴 = 60°, −60°, 180°
𝜎𝐴 =( 𝑝𝑗 − (𝑧𝑖)
𝑀𝑖=1
𝑛𝑗=1
𝑛 −𝑀
n= Número de polos de lazo abierto. M= Número de ceros de lazo abierto
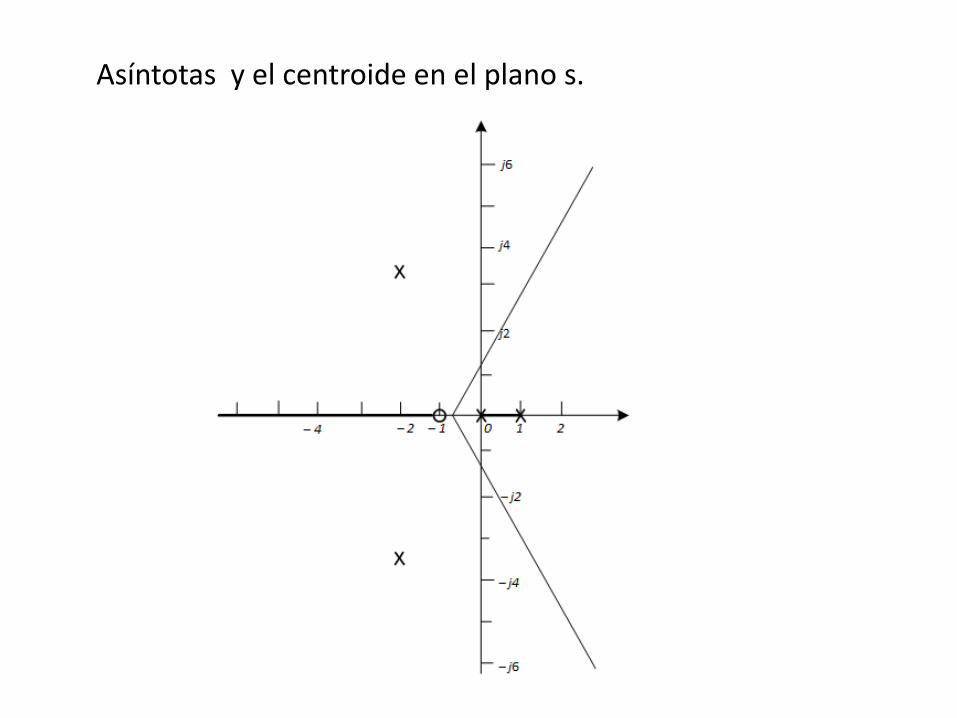
Asíntotas y el centroide en el plano s.
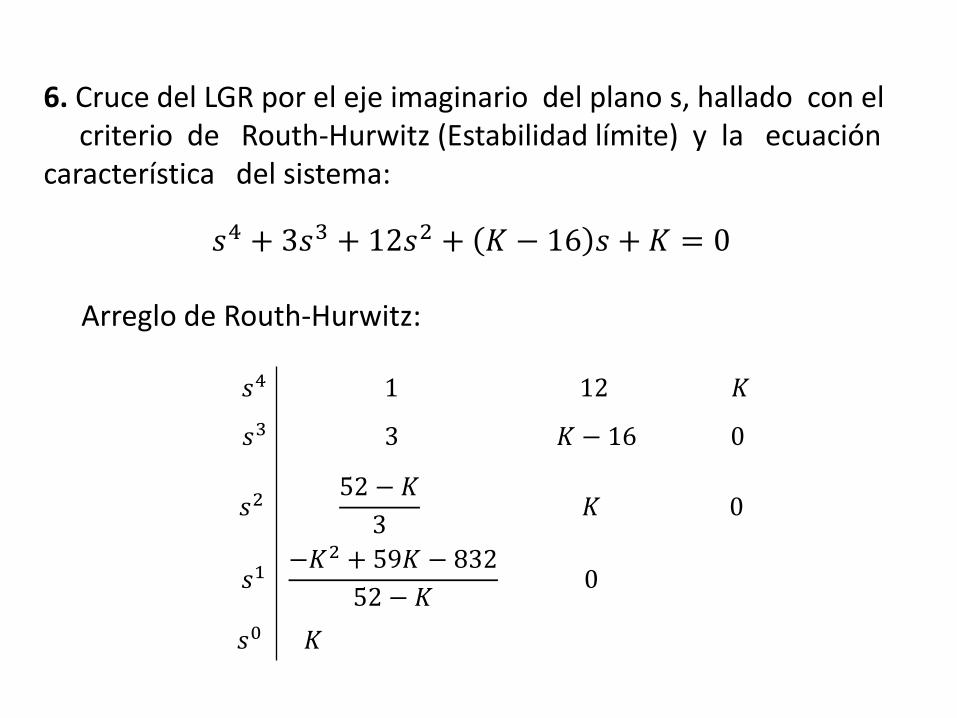
6. Cruce del LGR por el eje imaginario del plano s, hallado con el criterio de Routh-Hurwitz (Estabilidad límite) y la ecuación característica del sistema:
𝑠4 + 3𝑠3 + 12𝑠2 + 𝐾 − 16 𝑠 + 𝐾 = 0
Arreglo de Routh-Hurwitz:
𝑠4 1 12 𝐾
𝑠3 3 𝐾 − 16 0
𝑠2 52 − 𝐾
3 𝐾 0
𝑠1 −𝐾2 + 59𝐾 − 832
52 − 𝐾 0
𝑠0 𝐾
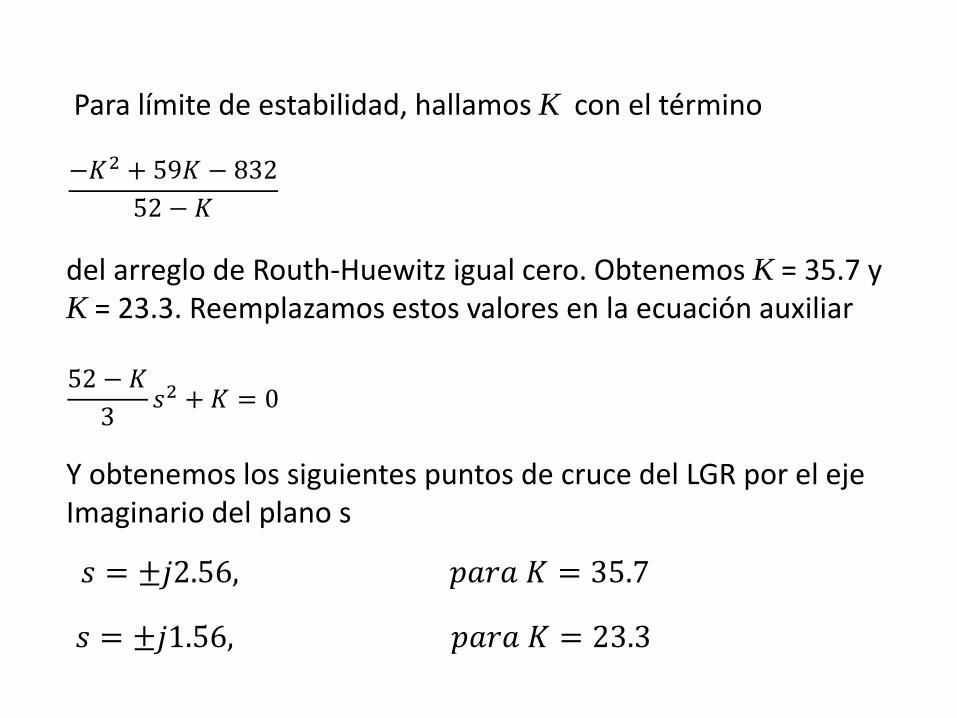
Para límite de estabilidad, hallamos K con el término
−𝐾2 + 59𝐾 − 832
52 − 𝐾
del arreglo de Routh-Huewitz igual cero. Obtenemos K = 35.7 y K = 23.3. Reemplazamos estos valores en la ecuación auxiliar
Y obtenemos los siguientes puntos de cruce del LGR por el eje Imaginario del plano s
52 − 𝐾
3𝑠2 + 𝐾 = 0
𝑠 = ±𝑗2.56, 𝑝𝑎𝑟𝑎 𝐾 = 35.7
𝑠 = ±𝑗1.56, 𝑝𝑎𝑟𝑎 𝐾 = 23.3
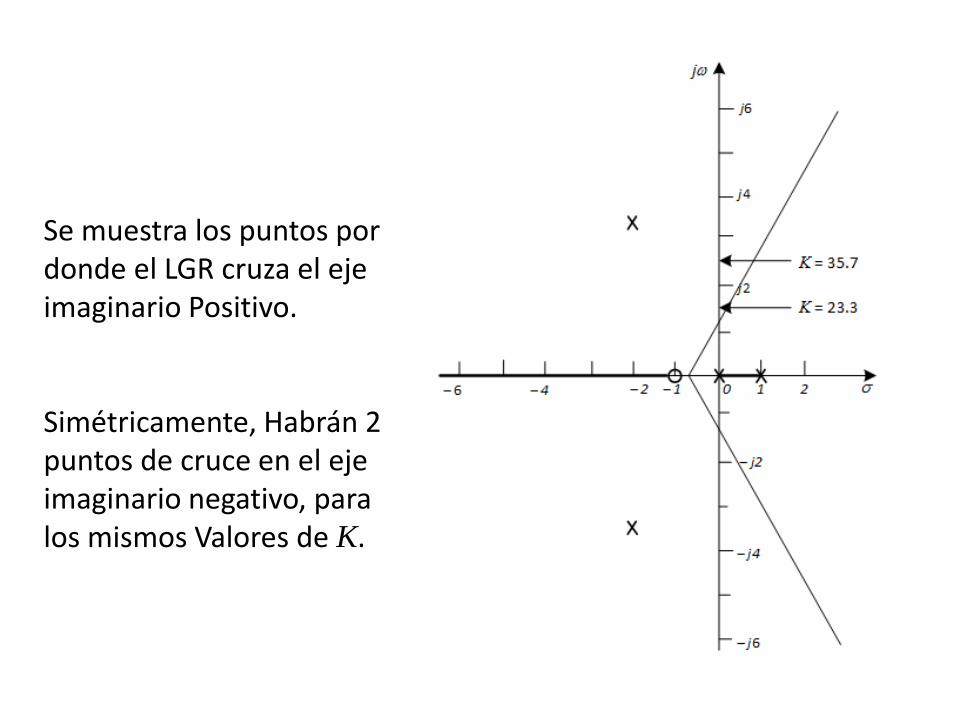
Se muestra los puntos por donde el LGR cruza el eje imaginario Positivo. Simétricamente, Habrán 2 puntos de cruce en el eje imaginario negativo, para los mismos Valores de K.

7. Salida del LGR desde el eje real hacia el plano complejo e ingreso del LGR al eje real desde el plano complejo. De la ecuación característica hallamos K:
1 +𝐾(𝑠 + 1)
𝑠(𝑠 − 1)(𝑠2 + 4𝑠 + 16)= 0
𝐾 = −𝑠(𝑠 − 1)(𝑠2 + 4𝑠 + 16)
𝑠 + 1
De donde
Luego,
𝑑𝐾
𝑑𝑠= −3𝑠4 + 10𝑠3 + 21𝑠2 + 24𝑠 − 16
(1 + 𝑠)2= 0
3𝑠4 + 10𝑠3 + 21𝑠2 + 24𝑠 − 16=0
Cuyas 4 raíces son:
𝑠 = −2.26
𝑠 = 0.45
𝑠 = −0.76±𝑗2.16
Punto de ingreso del LGR al eje real, Kmin
Punto de salida del LGR al eje real, Kmax
Raíces no válidas
𝜃1 𝜃2 𝜃3
𝜃4
𝜃5
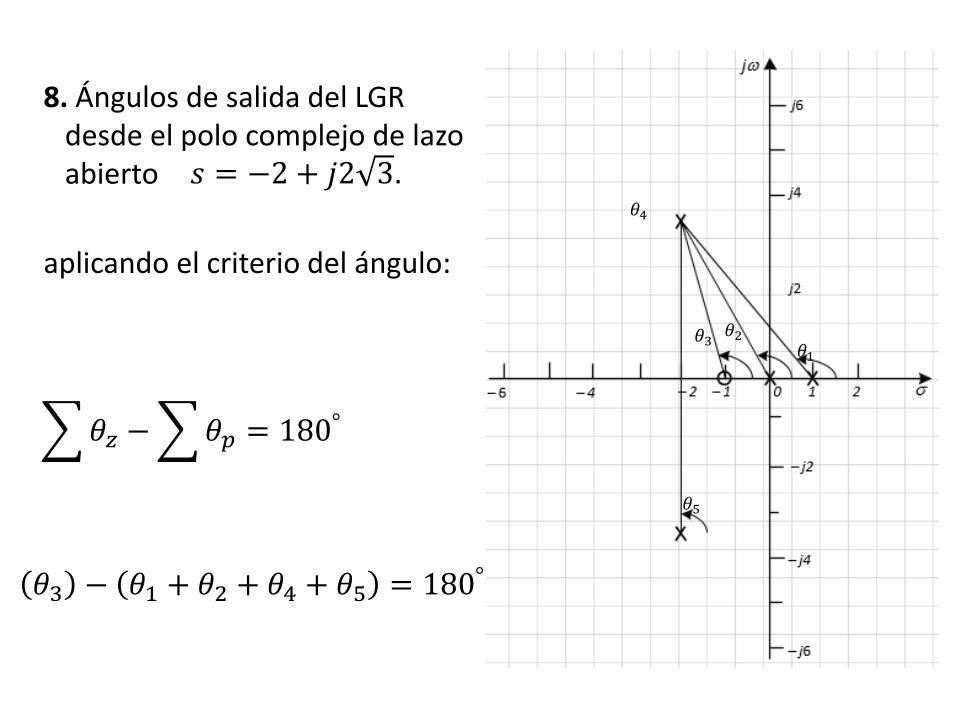
8. Ángulos de salida del LGR desde el polo complejo de lazo abierto 𝑠 = −2 + 𝑗2 3.
aplicando el criterio del ángulo:
𝜃𝑧 − 𝜃𝑝 = 180°
𝜃3 − 𝜃1 + 𝜃2 + 𝜃4 + 𝜃5 = 180°
𝜃4 = −180° − 𝜃1 − 𝜃2 − 𝜃5 + 𝜃3
𝜃4 = −180° − 130.5° − 120° − 90° + 106° = −414.5°
𝜃4 = −54.5°
Por simetría, el ángulo de salida del LGR desde el polo complejo conjugado 𝒔 = −𝟐 − 𝒋𝟐 𝟑, es 𝜃5 = +54.5
°
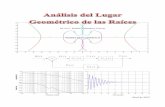
Con todos los valores notables calculados, ya se puede completar el LGR del sistema.

LGR de un Aeroplano con Autopiloto en Modo Longitudinal.
Del LGR se aprecia que el sistema es estable para valores de 23.3 < K < 35.7.
Respuesta:
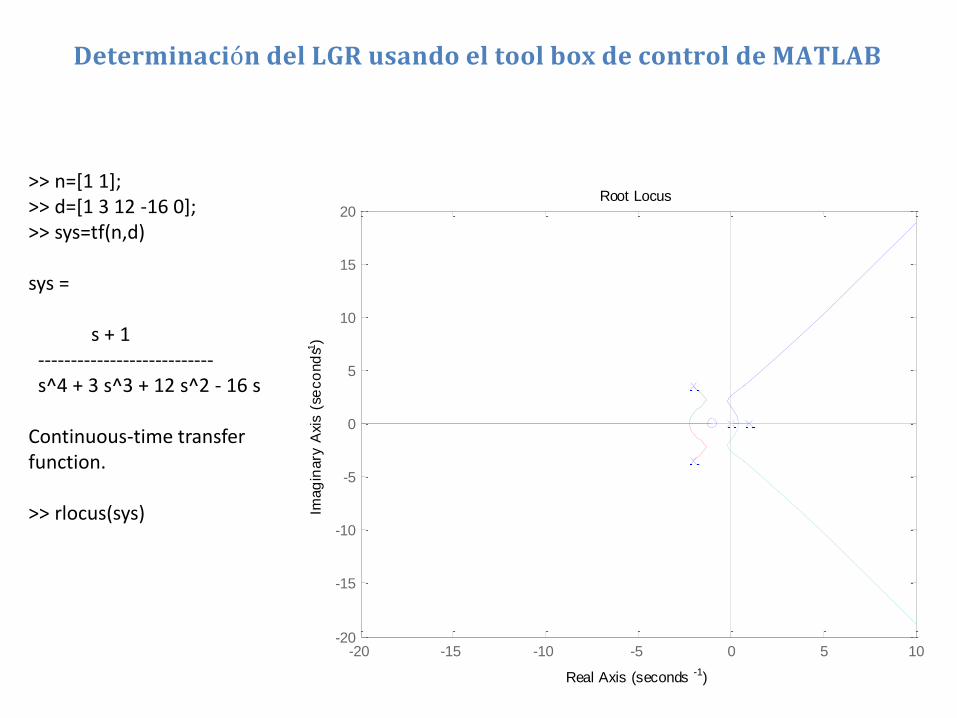
>> n=[1 1]; >> d=[1 3 12 -16 0]; >> sys=tf(n,d) sys = s + 1 --------------------------- s^4 + 3 s^3 + 12 s^2 - 16 s Continuous-time transfer function. >> rlocus(sys)
-20 -15 -10 -5 0 5 10-20
-15
-10
-5
0
5
10
15
20Root Locus
Real Axis (seconds -1)
Imag
inary
Axi
s (
seco
nd
s-1)
𝐃𝐞𝐭𝐞𝐫𝐦𝐢𝐧𝐚𝐜𝐢ó𝐧 𝐝𝐞𝐥 𝐋𝐆𝐑 𝐮𝐬𝐚𝐧𝐝𝐨 𝐞𝐥 𝐭𝐨𝐨𝐥 𝐛𝐨𝐱 𝐝𝐞 𝐜𝐨𝐧𝐭𝐫𝐨𝐥 𝐝𝐞 𝐌𝐀𝐓𝐋𝐀𝐁
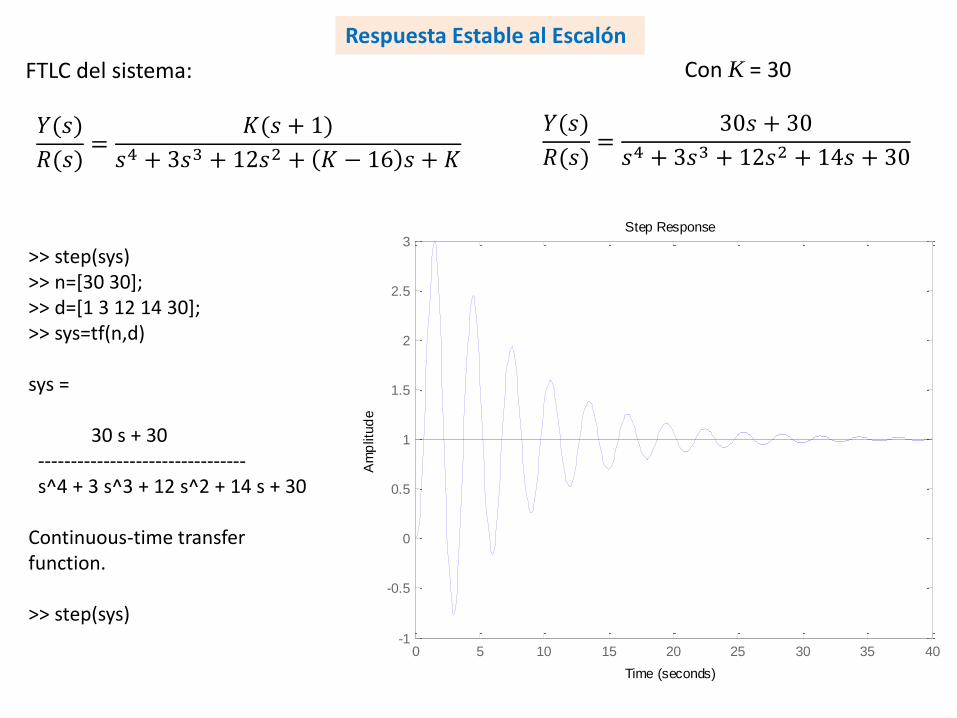
Con K = 30
𝑌(𝑠)
𝑅(𝑠)=
𝐾(𝑠 + 1)
𝑠4 + 3𝑠3 + 12𝑠2 + 𝐾 − 16 𝑠 + 𝐾
FTLC del sistema:
𝑌(𝑠)
𝑅(𝑠)=
30𝑠 + 30
𝑠4 + 3𝑠3 + 12𝑠2 + 14𝑠 + 30
Respuesta Estable al Escalón
0 5 10 15 20 25 30 35 40-1
-0.5
0
0.5
1
1.5
2
2.5
3Step Response
Time (seconds)
Am
plit
ud
e
>> step(sys) >> n=[30 30]; >> d=[1 3 12 14 30]; >> sys=tf(n,d) sys = 30 s + 30 -------------------------------- s^4 + 3 s^3 + 12 s^2 + 14 s + 30 Continuous-time transfer function. >> step(sys)

Con K = 50
𝑌(𝑠)
𝑅(𝑠)=
𝐾(𝑠 + 1)
𝑠4 + 3𝑠3 + 12𝑠2 + 𝐾 − 16 𝑠 + 𝐾
FTLC del sistema:
𝑌(𝑠)
𝑅(𝑠)=
50𝑠 + 50
𝑠4 + 3𝑠3 + 12𝑠2 + 34𝑠 + 50
Respuesta Inestable al Escalón
0 5 10 15 20 25 30-1.5
-1
-0.5
0
0.5
1
1.5x 10
5Step Response
Time (seconds)
Am
plit
ud
e
>> step(sys) >> n=[50 50]; >> d=[1 3 12 34 50]; >> sys=tf(n,d) sys = 50 s + 50 -------------------------------- s^4 + 3 s^3 + 12 s^2 + 34 s + 50 Continuous-time transfer function. >> step(sys)

PROBLEMA
Para el sistema mostrado, considere los tres tipos de control: Proporcional: Proporcional + Derivativo: Proporcional + Integral:
𝐺𝑐 𝑠 = 𝐾
𝐺𝑐 𝑠 = 𝐾(1 + 𝑠)
𝐺𝑐 𝑠 = 𝐾(1 +1
𝑠)
Grafique el LGR del sistema con cada uno de los controladores y compare su comportamiento.
SOLUCIÓN
1. La ecuación característica del sistema es:
1+ 𝐾
(𝑠2−2𝑠+2)= 0
1+ 𝐾
(𝑆−1+𝐽1)(𝑆−1−𝐽1)= 0
Control Proporcional: 𝐺𝑐 𝑠 = 𝐾
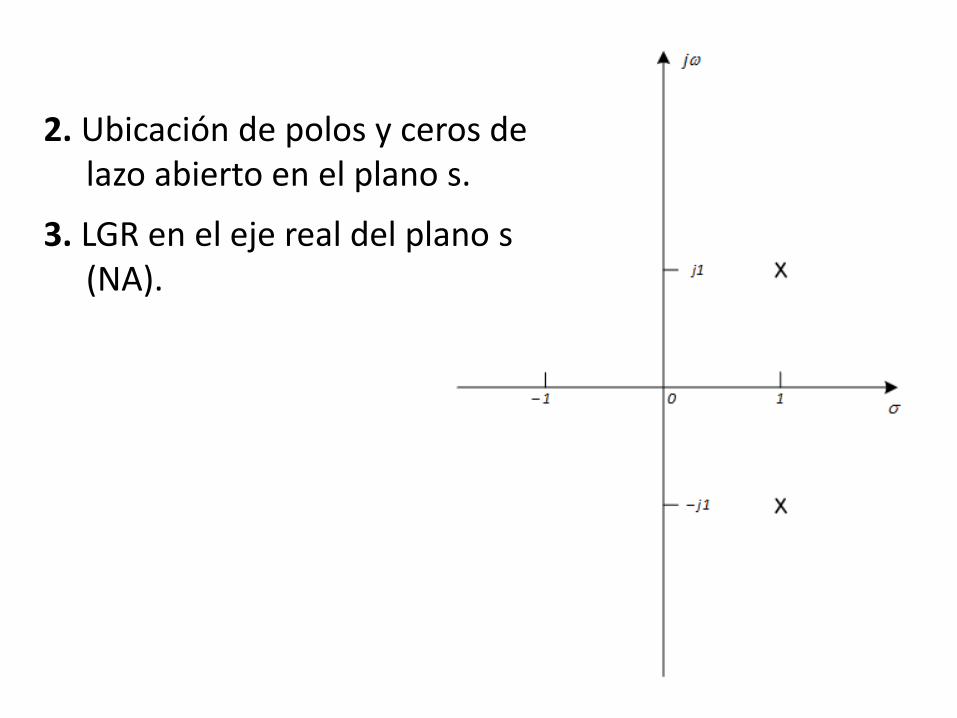
2. Ubicación de polos y ceros de lazo abierto en el plano s.
3. LGR en el eje real del plano s (NA).

4. Número de ramas separadas del LGR
𝑅𝑆 = 𝑛 = 2
Cada rama separada empieza en un polo de lazo abierto, donde K vale 0 y termina en un cero de lazo abierto, donde K vale .
Porque el número de polos de lazo abierto es mayor al número de ceros de lazo abierto,
𝑀 = 0.

5. Centroide y orientación de asíntotas.
Centroide
𝜎𝐴 =+1 + 𝑗1 + 1 − 𝑗1 − (0)
2 − 0= 1
Orientación de las Asíntotas
𝜙𝐴 =(2𝑞 + 1)
2 − 0180° = 90°, 270°
𝑞 = 0, 1.
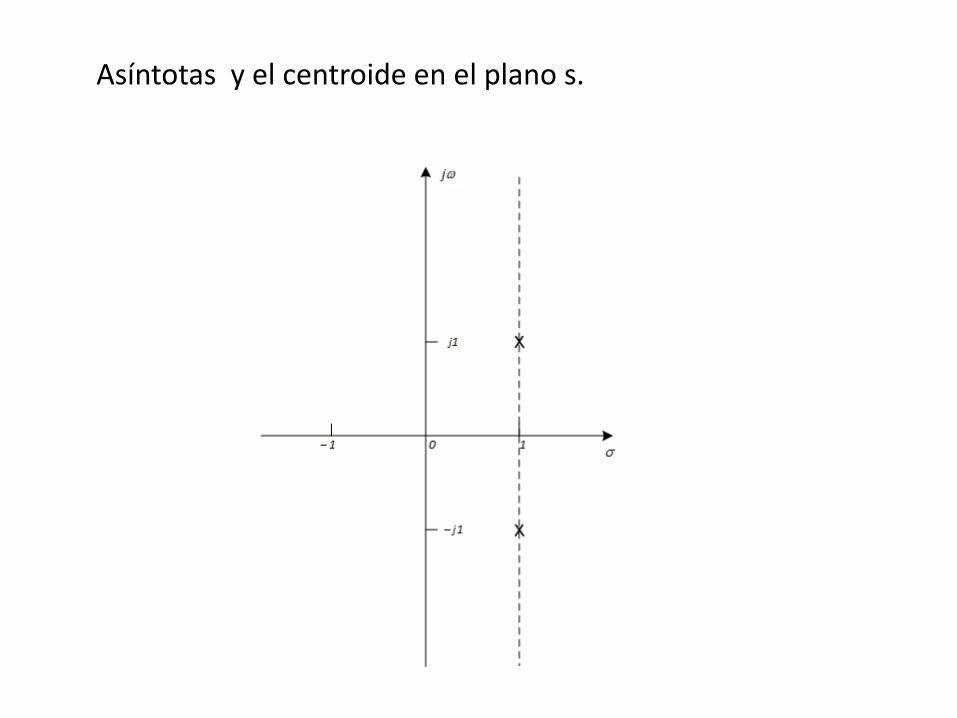
Asíntotas y el centroide en el plano s.
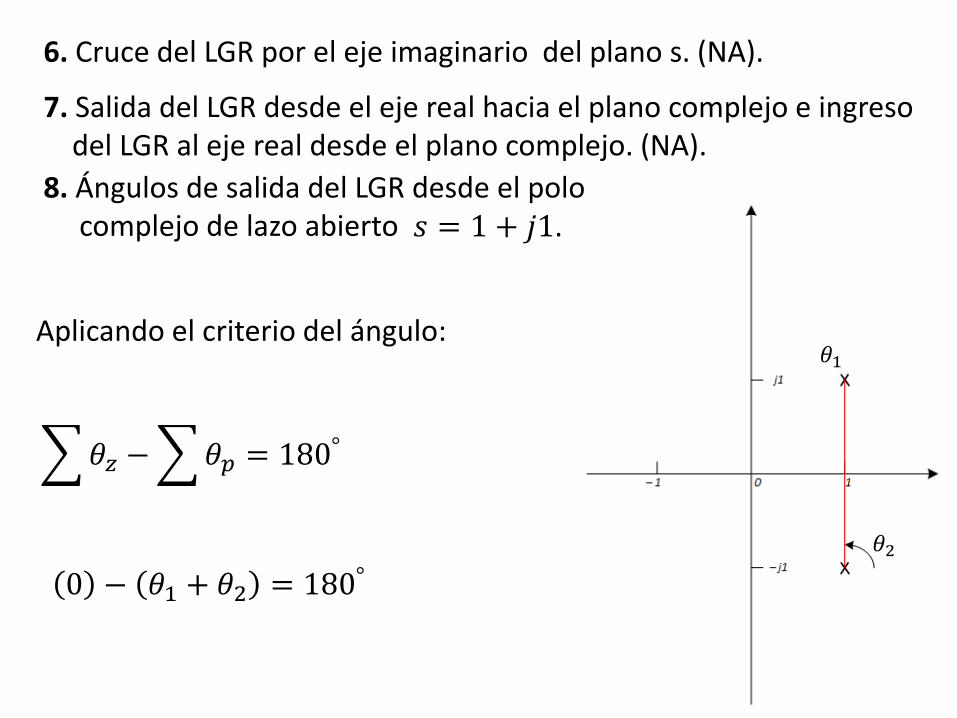
6. Cruce del LGR por el eje imaginario del plano s. (NA).
7. Salida del LGR desde el eje real hacia el plano complejo e ingreso del LGR al eje real desde el plano complejo. (NA).
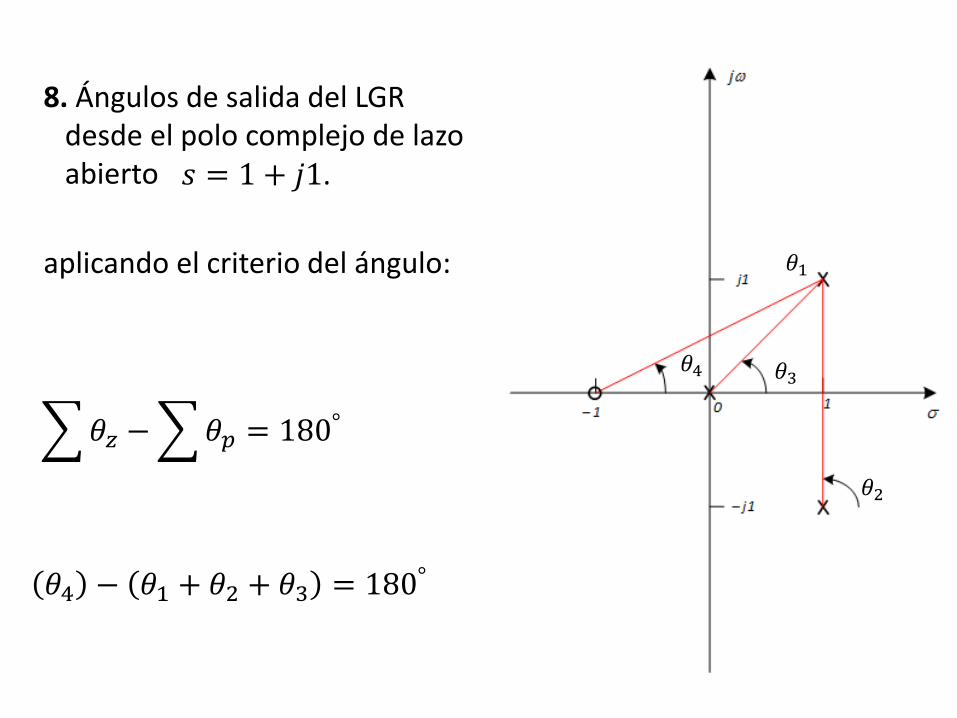
8. Ángulos de salida del LGR desde el polo complejo de lazo abierto 𝑠 = 1 + 𝑗1.
Aplicando el criterio del ángulo:
𝜃𝑧 − 𝜃𝑝 = 180°
0 − 𝜃1 + 𝜃2 = 180°
𝜃1
𝜃2

Por simetría, el ángulo de salida del LGR desde el polo complejo es
Con todos los valores notables calculados, ya se puede completar el LGR del sistema.
𝜃1 = 180° − 𝜃2 = 180
° − 90° = 90°
𝜃1 = 90°
𝑠 = 1 − 𝑗1 𝜃2 = −90°.

LGR del sistema con controlador Proporcional (P).
El sistema es inestable para todo valor de K.
Respuesta:

Proporcional + Derivativo: 𝐺𝑐 𝑠 = 𝐾(1 + 𝑠)
1. La ecuación característica del sistema es:
1+ 𝐾(1+𝑠)
(𝑠2−2𝑠+2)= 0
1+ 𝐾(1+𝑠)
(𝑆−1+𝐽1)(𝑆−1−𝐽1)= 0

2. Ubicación de polos y ceros de lazo abierto en el plano s.
3. LGR en el eje real del plano s.
4. Número de ramas separadas del LGR
𝑅𝑆 = 𝑛 = 2
Cada rama separada empieza en un polo de lazo abierto, donde K vale 0 y termina en un cero de lazo abierto, donde K vale .
Porque el número de polos de lazo abierto es mayor al número de ceros de lazo abierto,
M= 1.

5. Centroide y orientación de asíntotas.
Centroide
𝜎𝐴 =+1 + 𝑗1 + 1 − 𝑗1 − (−1)
2 − 1= 3
Orientación de las Asíntotas
𝜙𝐴 =(2𝑞 + 1)
2 − 1180° = 180°
𝑞 = 0.

6. Cruce del LGR por el eje imaginario del plano s, hallado con el criterio de Routh-Hurwitz y la ecuación característica del sistema:
𝑠2 + 𝐾 − 2 𝑠 + 𝐾 + 2 = 0
Arreglo de Routh-Hurwitz:
𝑠2 1 𝐾 + 2
𝑠1 𝐾 − 2 0
𝑠0 𝐾 + 2

Para límite de estabilidad, hallamos K con el término
𝐾 − 2
del arreglo de Routh-Huewitz igual cero. Obtenemos K = 2. Reemplazamos este valor en la ecuación auxiliar
Y obtenemos los siguientes puntos de cruce del LGR por el eje Imaginario del plano s
𝑠 = ±𝑗2 𝑝𝑎𝑟𝑎 𝐾 = 2
𝑠2 + 𝐾 + 2 = 0

Se muestra los puntos por donde el LGR cruza el eje imaginario Positivo.

7. Ingreso del LGR al eje real desde el plano complejo. De la ecuación característica hallamos K:
1 +𝐾(1 + 𝑠)
𝑠2 − 2𝑠 + 2= 0
𝐾 = −(𝑠2 − 2𝑠 + 2)
1 + 𝑠

De donde
Luego,
𝑑𝐾
𝑑𝑠= −𝑠2 + 2𝑠 − 4
(1 + 𝑠)2= 0
𝑠2 + 2𝑠 − 4=0
Cuyas 2 raíces son:
𝑠 = −1 + 5
Punto de ingreso del LGR al eje real, Kmin
Raíz no válida
𝑠 = −1 − 5
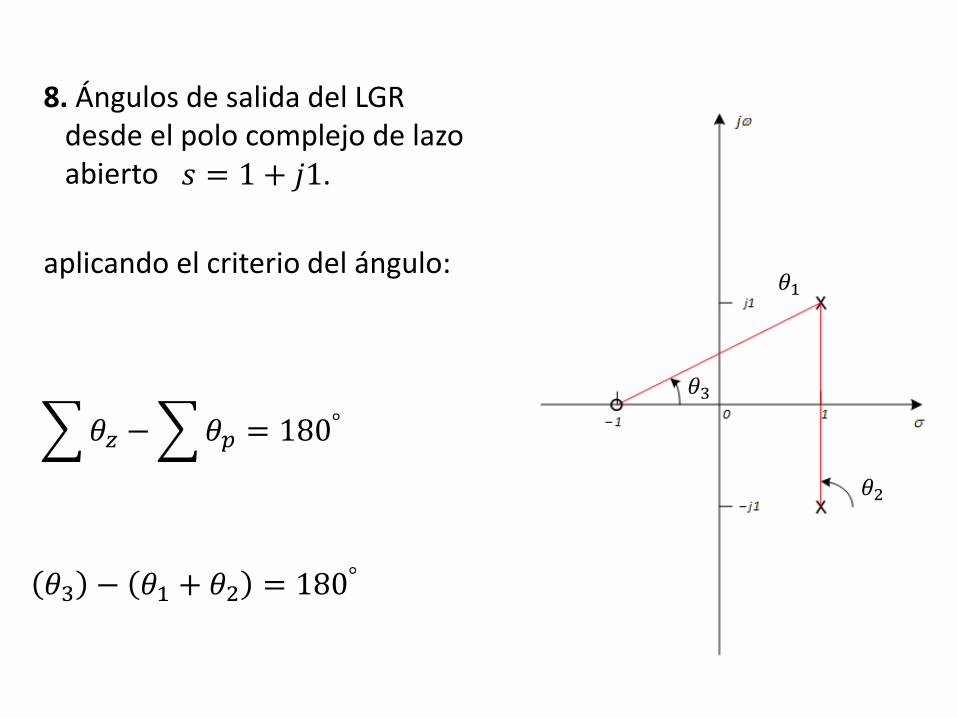
8. Ángulos de salida del LGR desde el polo complejo de lazo abierto
aplicando el criterio del ángulo:
𝜃𝑧 − 𝜃𝑝 = 180°
𝜃3 − 𝜃1 + 𝜃2 = 180°
𝑠 = 1 + 𝑗1.
𝜃2
𝜃1
𝜃3
Con todos los valores notables calculados, ya se puede completar el LGR del sistema.
𝜃1 = 180° − 𝜃2 + 𝜃3
𝜃1 = 180° − 90° + 26.6°
𝜃1 = 116.6°
Por simetría, el ángulo de salida del LGR desde el polo complejo conjugado 𝒔 = −𝟏 − 𝒋1, es 𝜃2 = −116.6
°
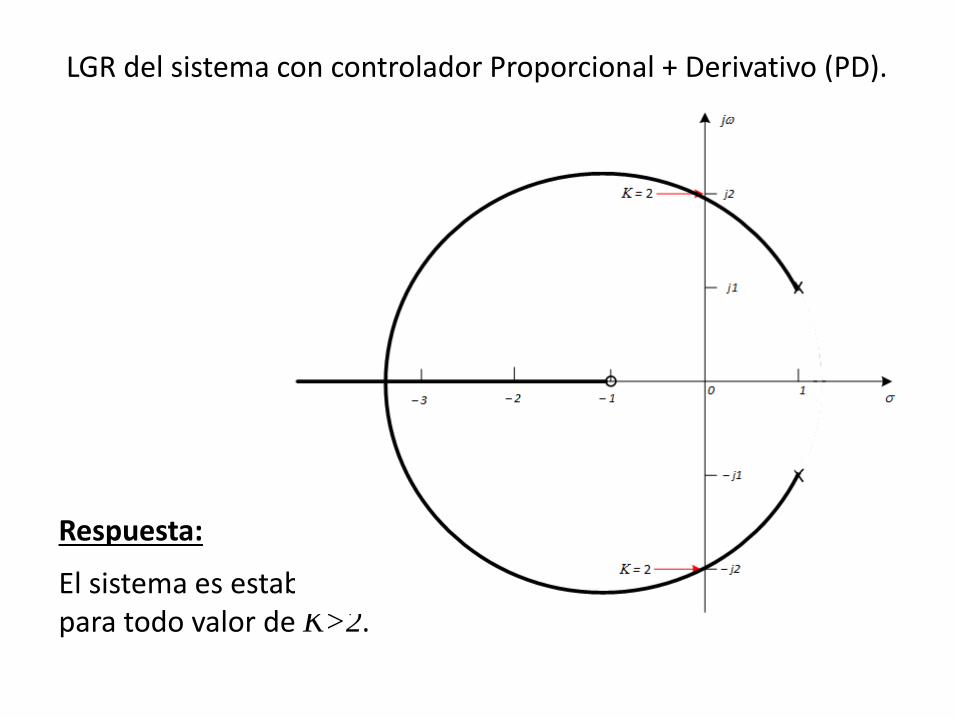
LGR del sistema con controlador Proporcional + Derivativo (PD).
El sistema es estable para todo valor de K>2.
Respuesta:
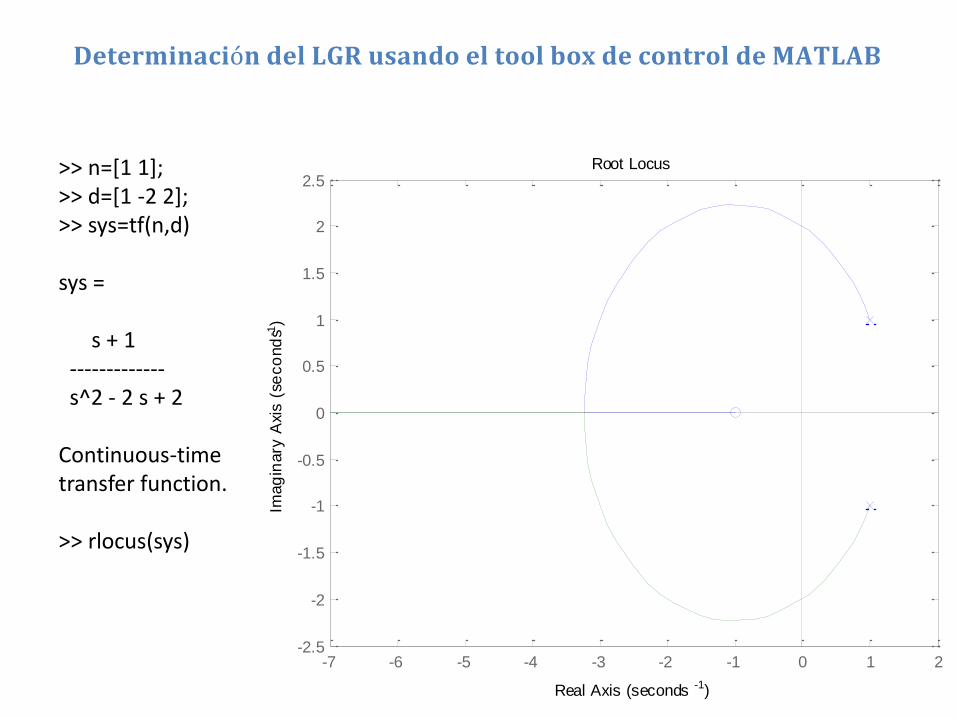
>> n=[1 1]; >> d=[1 -2 2]; >> sys=tf(n,d) sys = s + 1 ------------- s^2 - 2 s + 2 Continuous-time transfer function. >> rlocus(sys)
Root Locus
Real Axis (seconds -1)
Imag
inary
Axi
s (
seco
nd
s-1)
-7 -6 -5 -4 -3 -2 -1 0 1 2-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
𝐃𝐞𝐭𝐞𝐫𝐦𝐢𝐧𝐚𝐜𝐢ó𝐧 𝐝𝐞𝐥 𝐋𝐆𝐑 𝐮𝐬𝐚𝐧𝐝𝐨 𝐞𝐥 𝐭𝐨𝐨𝐥 𝐛𝐨𝐱 𝐝𝐞 𝐜𝐨𝐧𝐭𝐫𝐨𝐥 𝐝𝐞 𝐌𝐀𝐓𝐋𝐀𝐁
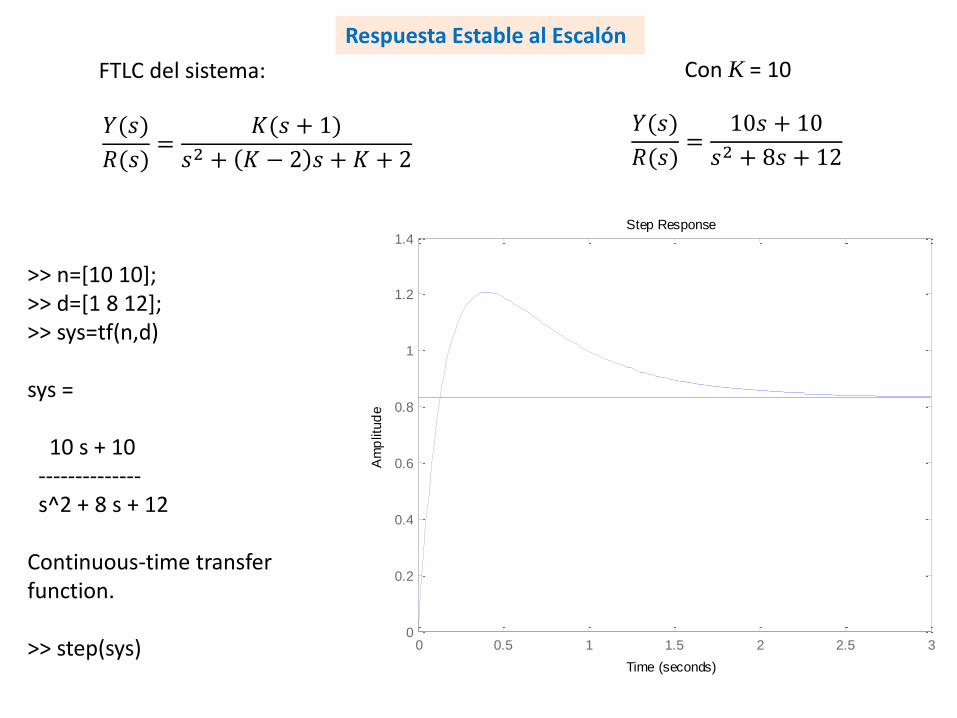
Con K = 10
𝑌(𝑠)
𝑅(𝑠)=
𝐾(𝑠 + 1)
𝑠2 + 𝐾 − 2 𝑠 + 𝐾 + 2
FTLC del sistema:
𝑌(𝑠)
𝑅(𝑠)=10𝑠 + 10
𝑠2 + 8𝑠 + 12
Respuesta Estable al Escalón
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
1.2
1.4Step Response
Time (seconds)
Am
plit
ud
e
>> n=[10 10]; >> d=[1 8 12]; >> sys=tf(n,d) sys = 10 s + 10 -------------- s^2 + 8 s + 12 Continuous-time transfer function. >> step(sys)

Con K = 2
𝑌(𝑠)
𝑅(𝑠)=
𝐾(𝑠 + 1)
𝑠2 + 𝐾 − 2 𝑠 + 𝐾 + 2
FTLC del sistema:
𝑌(𝑠)
𝑅(𝑠)=2𝑠 + 2
𝑠2 + 4
Respuesta Oscilante al Escalón
0 5 10 15 20 25 30 35 40 45 50-1
-0.5
0
0.5
1
1.5
2Step Response
Time (seconds)
Am
plit
ud
e
>> n=[2 2]; >> d=[1 0 4]; >> sys=tf(n,d) >> step(sys)
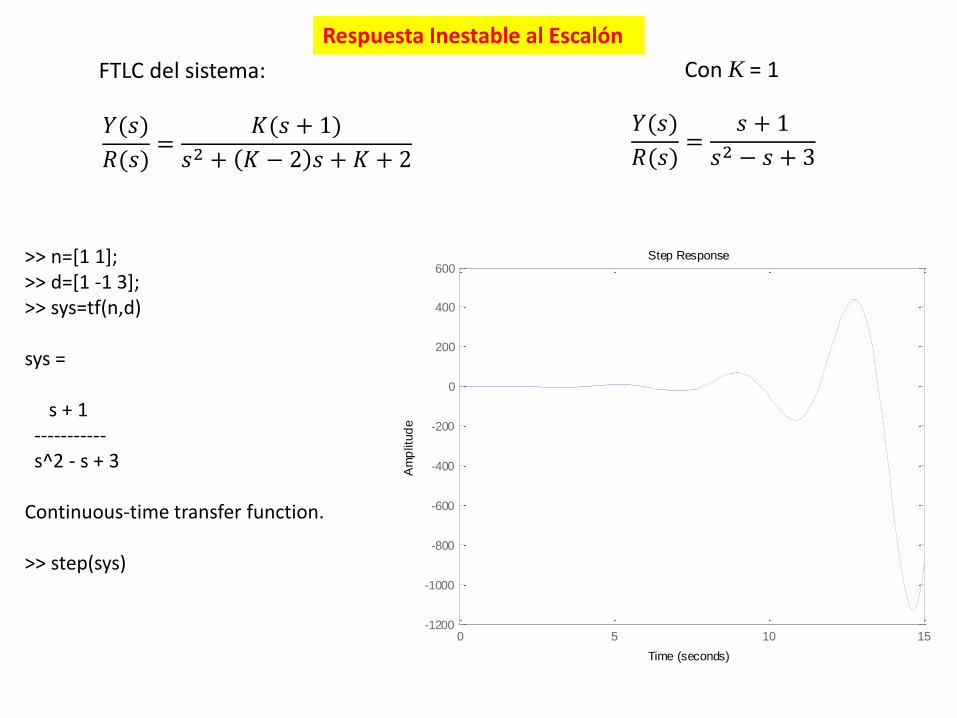
Con K = 1
𝑌(𝑠)
𝑅(𝑠)=
𝐾(𝑠 + 1)
𝑠2 + 𝐾 − 2 𝑠 + 𝐾 + 2
FTLC del sistema:
𝑌(𝑠)
𝑅(𝑠)=𝑠 + 1
𝑠2 − 𝑠 + 3
Respuesta Inestable al Escalón
0 5 10 15-1200
-1000
-800
-600
-400
-200
0
200
400
600Step Response
Time (seconds)
Am
plit
ud
e
>> n=[1 1]; >> d=[1 -1 3]; >> sys=tf(n,d) sys = s + 1 ----------- s^2 - s + 3 Continuous-time transfer function. >> step(sys)

Proporcional + Integral:
1. La ecuación característica del sistema es:
1+ 𝐾(1+𝑠)
𝑠(𝑠2−2𝑠+2)= 0
1+ 𝐾(1+𝑠)
𝑆(𝑆−1+𝐽1)(𝑆−1−𝐽1)= 0
𝐺𝑐 𝑠 = 𝐾(1 +1
𝑠)
2. Ubicación de polos y ceros de lazo abierto en el plano s.
3. LGR en el eje real del plano s.

4. Número de ramas separadas del LGR
𝑅𝑆 = 𝑛 = 3
Cada rama separada empieza en un polo de lazo abierto, donde K vale 0 y termina en un cero de lazo abierto, donde K vale .
Porque el número de polos de lazo abierto es mayor al número de ceros de lazo abierto,
M= 1.
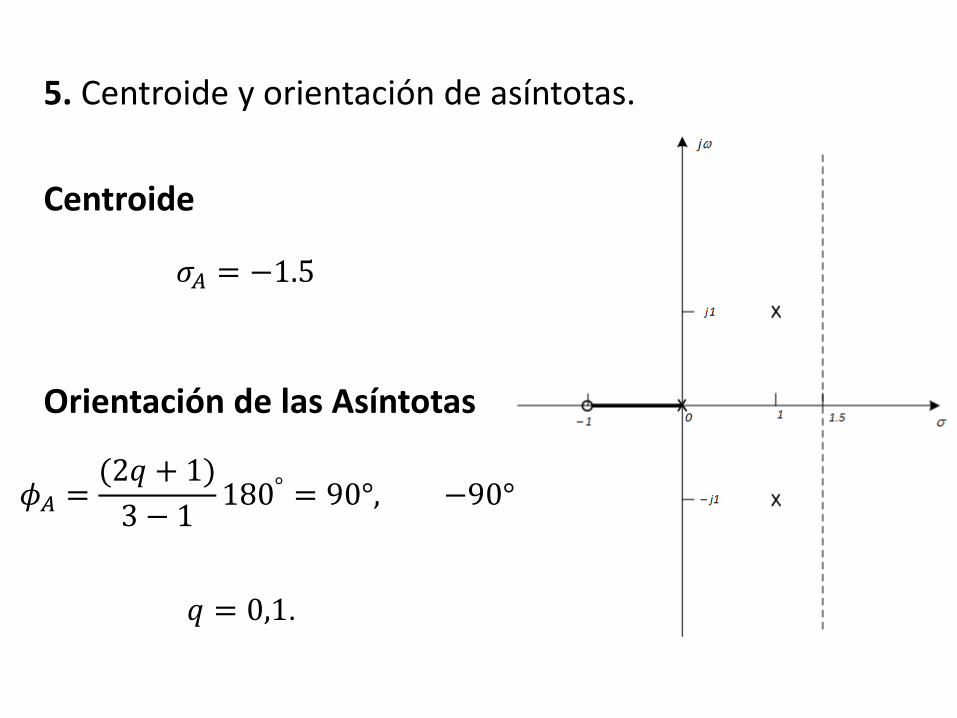
5. Centroide y orientación de asíntotas.
Centroide
𝜎𝐴 = −1.5
Orientación de las Asíntotas
𝜙𝐴 =(2𝑞 + 1)
3 − 1180° = 90°, −90°
𝑞 = 0,1.

6. Cruce del LGR por el eje imaginario del plano s. (NA).
7. Salida del LGR del eje real al plano complejo e ingreso del LGR al eje real desde el plano complejo. (NA).
8. Ángulos de salida del LGR desde el polo complejo de lazo abierto
aplicando el criterio del ángulo:
𝜃𝑧 − 𝜃𝑝 = 180°
𝜃4 − 𝜃1 + 𝜃2 + 𝜃3 = 180°
𝑠 = 1 + 𝑗1.
𝜃2
𝜃1
𝜃4 𝜃3

Con todos los valores notables calculados, ya se puede completar el LGR del sistema.
𝜃1 = 180° − 𝜃2 − 𝜃3 + 𝜃4
𝜃1 = 180° − 90° − 45° + 26.6°
𝜃1 = 71.6°
Por simetría, el ángulo de salida del LGR desde el polo complejo conjugado 𝒔 = −𝟏 − 𝒋1, es 𝜃2 = −71.6
°

LGR del sistema con controlador Proporcional + Integral (PI).
El sistema es inestable para todo valor de K.
Respuesta:

>> rlocus(sys) >> n=[1 4 8]; >> d=[1 2 2]; >> sys=tf(n,d) sys = s^2 + 4 s + 8 ------------- s^2 + 2 s + 2 Continuous-time transfer function. >> rlocus(sys) -2.5 -2 -1.5 -1 -0.5 0 0.5
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Root Locus
Real Axis (seconds -1)
Imag
inary
Axi
s (
seco
nd
s-1)
PROBLEMA: Halle el LGR de un sistema con FTLA usando MATLAB
𝐺𝐻 𝑠 =𝑠2 + 4𝑠 + 8
𝑠2 + 2𝑠 + 2
SOLUCIÓN
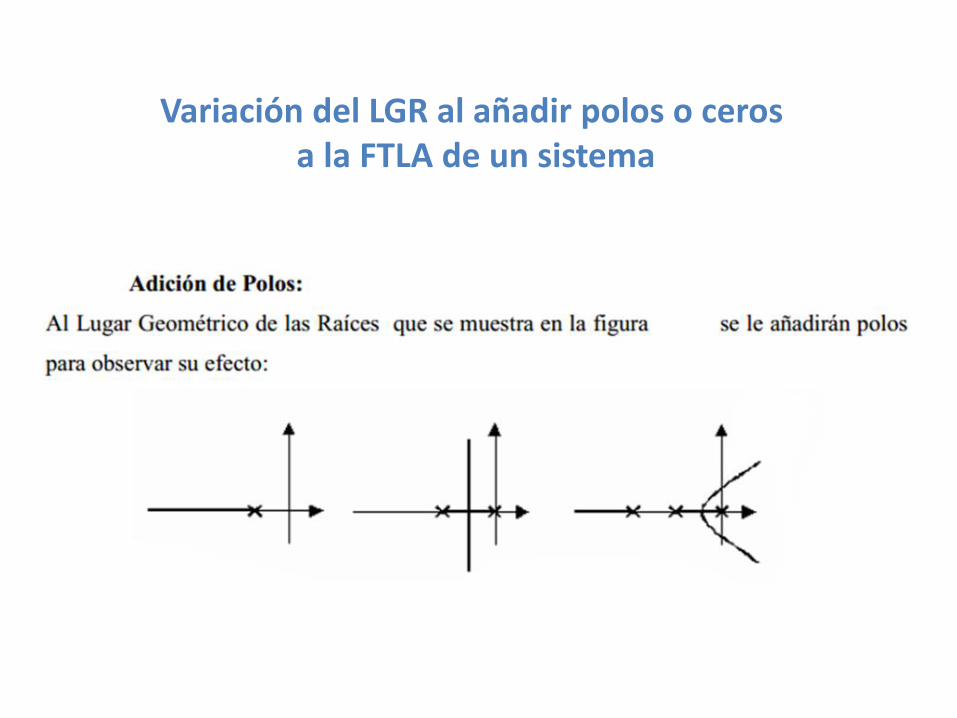
Variación del LGR al añadir polos o ceros a la FTLA de un sistema


PROBLEMA:
5
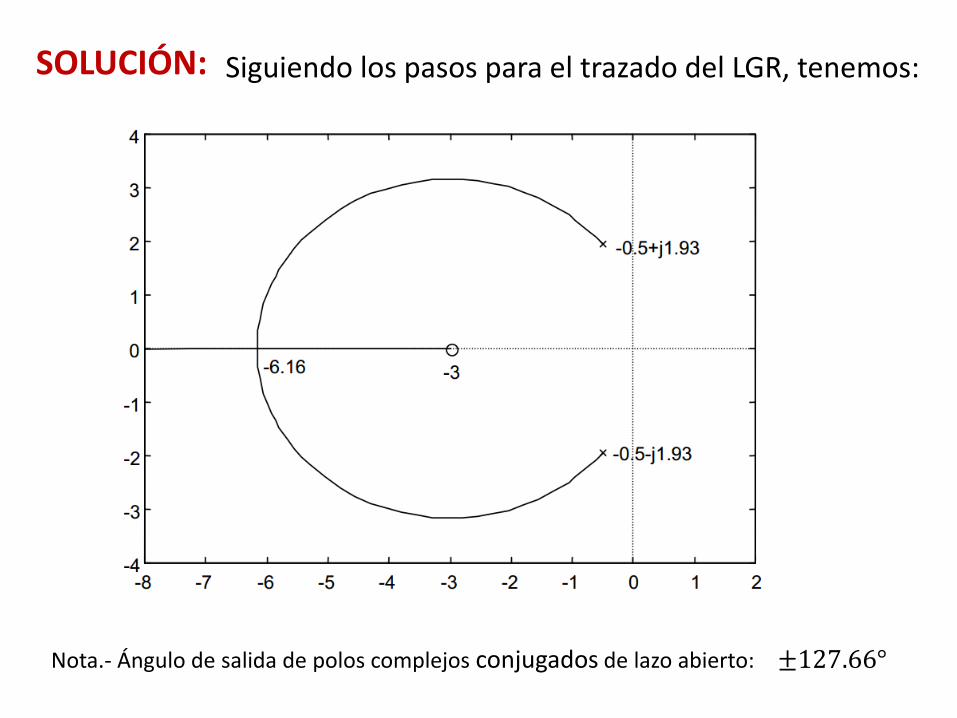
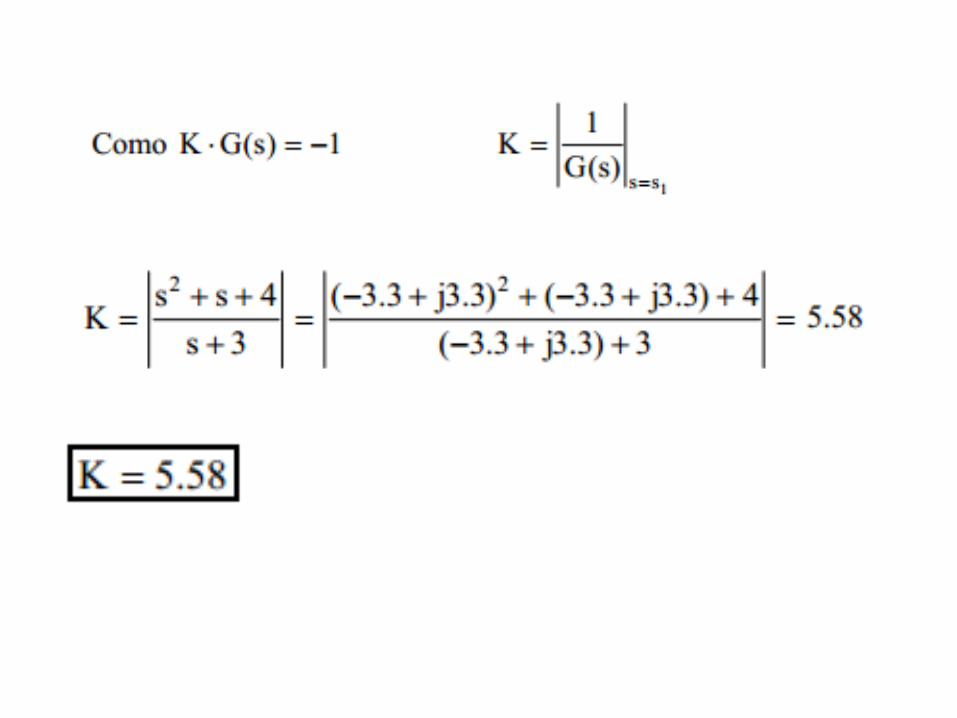
SOLUCIÓN:
Nota.- Ángulo de salida de polos complejos conjugados de lazo abierto: ±127.66°
Siguiendo los pasos para el trazado del LGR, tenemos:

Para el cálculo de K, de tal manera que el sistema tenga un SP del 5%, hallaos la relación de amortiguamiento 𝜉 = 0.707, con lo que se halla una recta que Parte del origen del plano s con una inclinación 𝜃 = 𝑐𝑜𝑠−1 𝜉 = 45°, que corta al LGR donde se obtienen los polos dominantes que representan la respuesta del sistema con aproximación a uno de segundo orden.
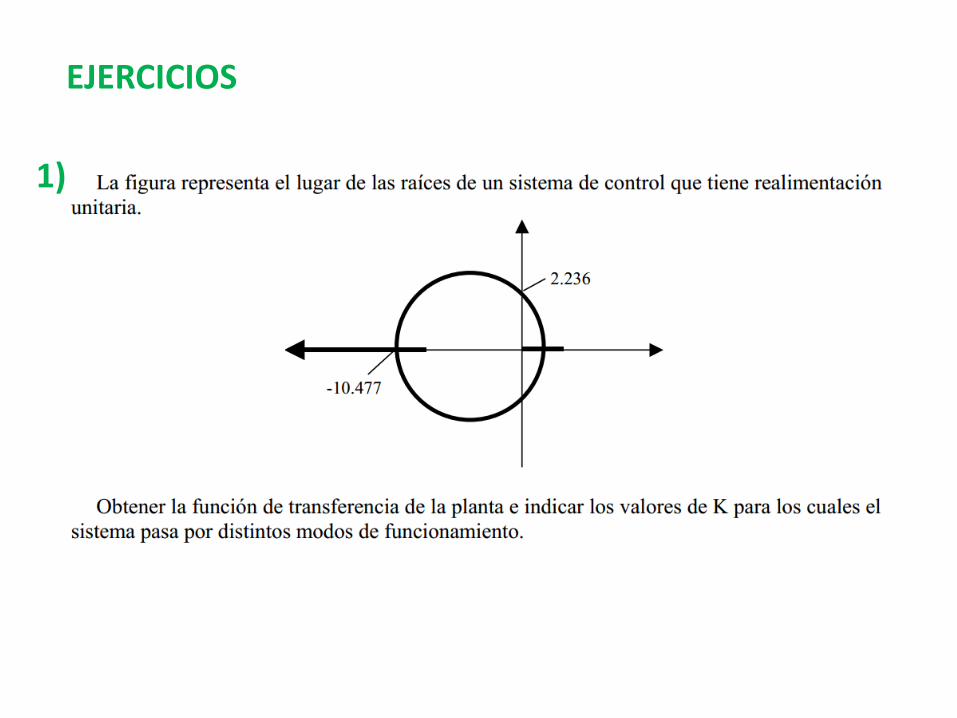
EJERCICIOS
1)
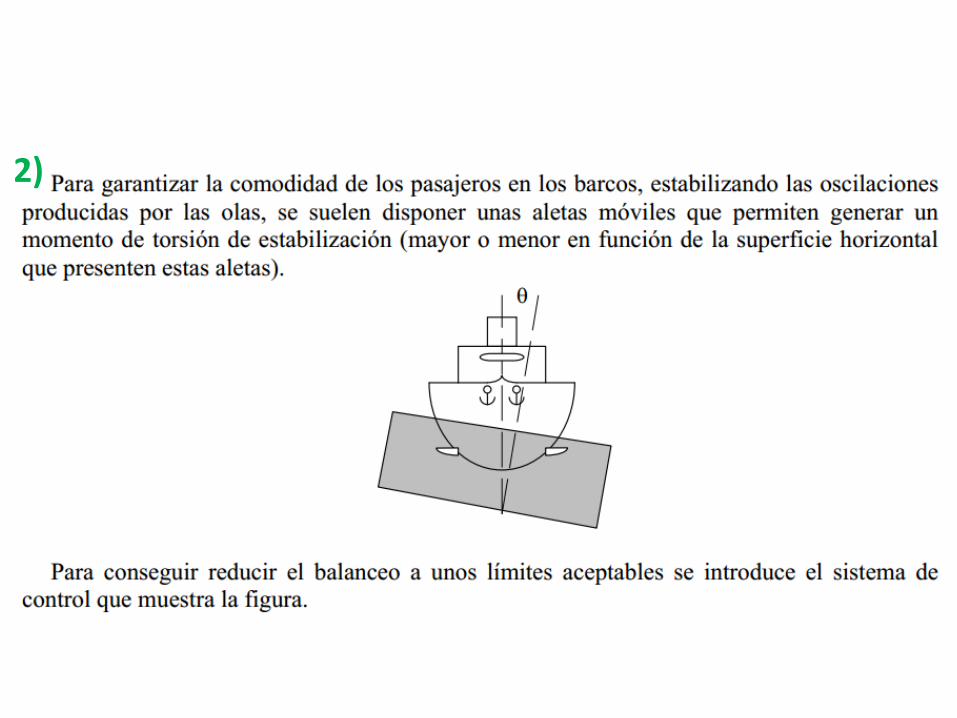
2)

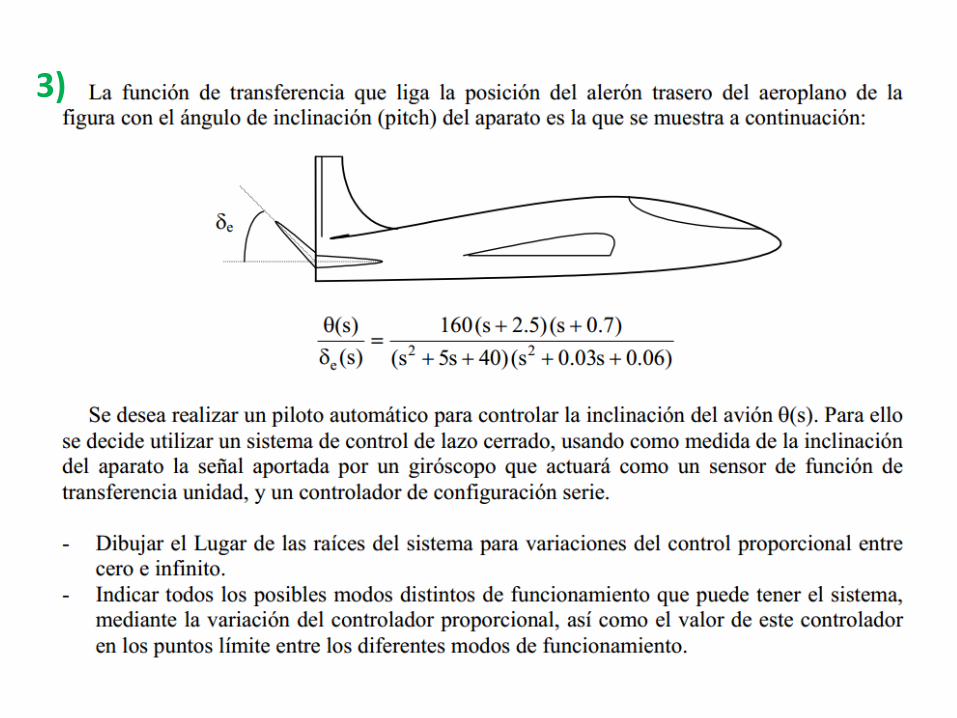
3)