Control II (2017) Fernando di Sciascio Diseño de ...dea.unsj.edu.ar/control2/Clase05b-2-Ejemplos...
8
Control II (2017) Fernando di Sciascio 1 Diseño de Compensadores de Adelanto de Fase Mediante el Lugar de las Raíces Problema 1) Un sistema de control posee el diagrama de bloques siguiente: Figura 1 Se pide realizar el diseño de un compensador de adelanto de fase para que se cumplan las siguientes especificaciones: (%) 10% (5%) 4 seg e Mp T (1) A partir de las especificaciones (1) se obtienen las posiciones del par de polos complejos conjugados dominantes d d d s j . 2 1 (%) 4 ln 100 1 n e Mp a a T a Con Matlab: Te=4; Mp=10; a=-log(Mp/100)/pi, zeta=a/sqrt(1+a^2), wn=4/(zeta*Te) 0.73 0.59 1.69 n a (2) 2 1, 1 1.36 d n d n (3) 1 1.36 d d d s j j (4) Planta G(s)
Transcript of Control II (2017) Fernando di Sciascio Diseño de ...dea.unsj.edu.ar/control2/Clase05b-2-Ejemplos...
Control II (2017) Fernando di Sciascio
1
Diseño de Compensadores de Adelanto de Fase
Mediante el Lugar de las Raíces
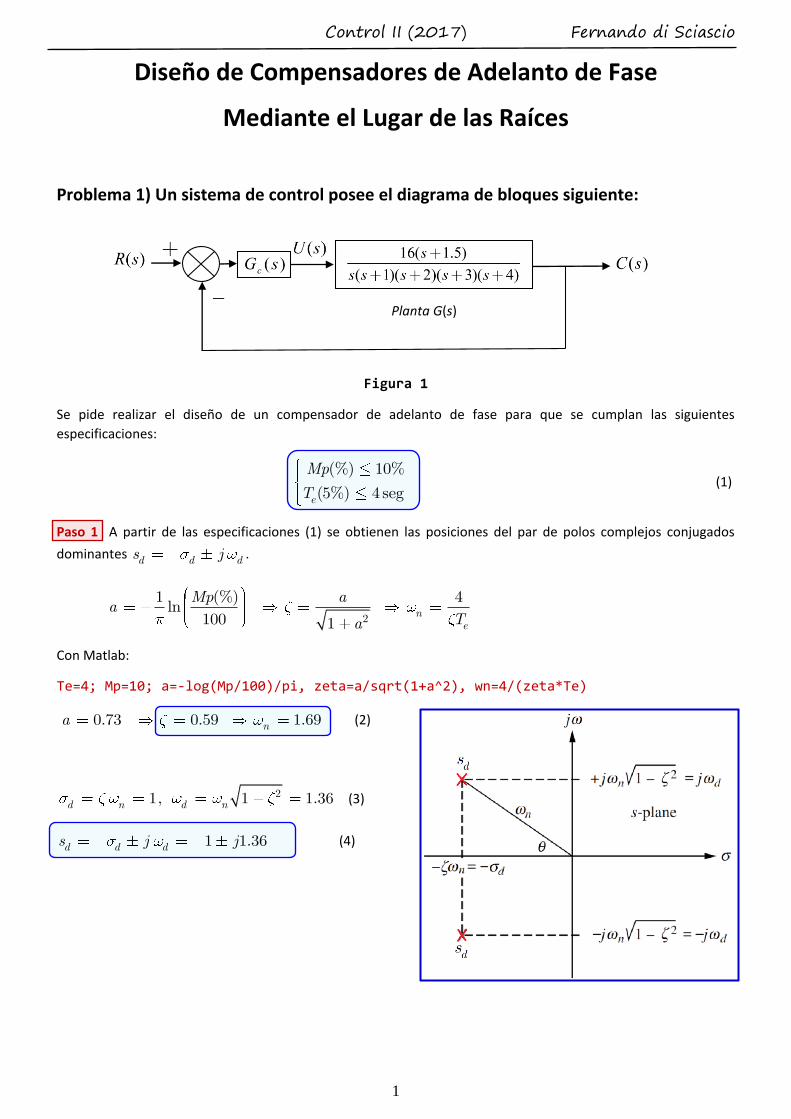
Problema 1) Un sistema de control posee el diagrama de bloques siguiente:
Figura 1
Se pide realizar el diseño de un compensador de adelanto de fase para que se cumplan las siguientes
especificaciones:
(%) 10%
(5%) 4 sege
Mp
T (1)
Paso 1 A partir de las especificaciones (1) se obtienen las posiciones del par de polos complejos conjugados
dominantes d d ds j .
2
1 (%) 4ln
100 1n
e
Mp aa
Ta
Con Matlab:
Te=4; Mp=10; a=-log(Mp/100)/pi, zeta=a/sqrt(1+a^2), wn=4/(zeta*Te)
0.73 0.59 1.69na (2)
21, 1 1.36d n d n (3)
1 1.36d d ds j j (4)
Planta G(s)
Control II (2017) Fernando di Sciascio
2
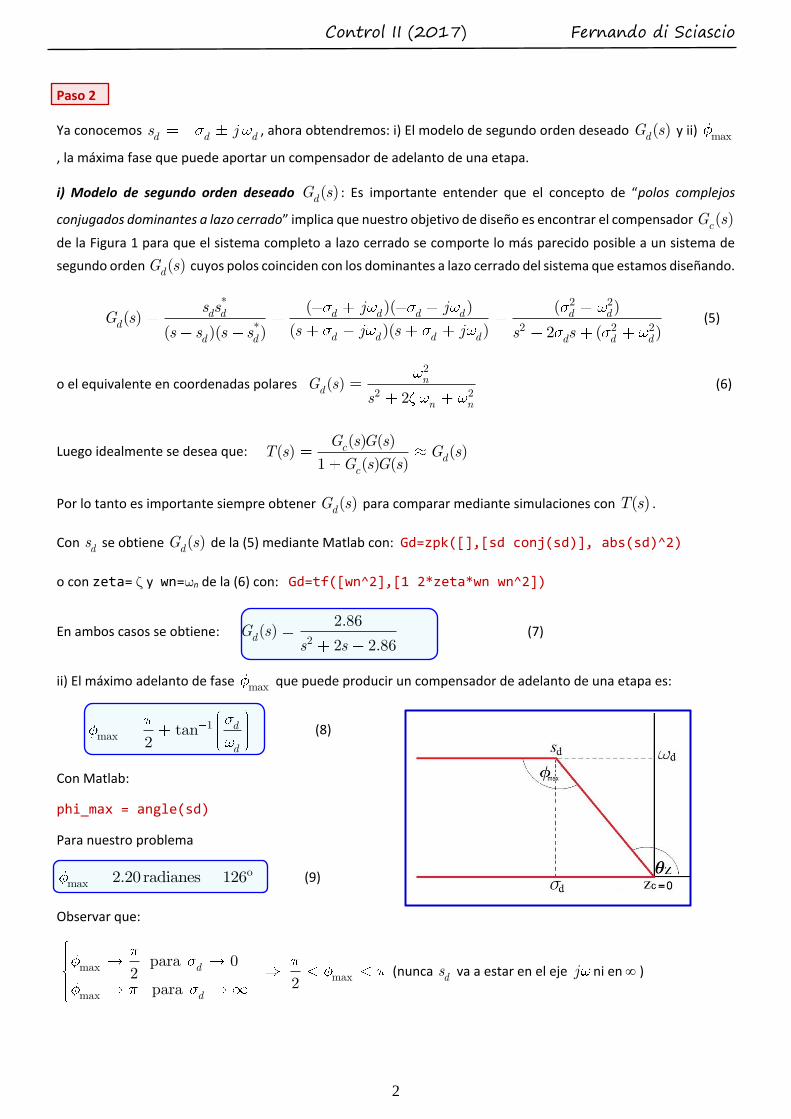
Paso 2
Ya conocemos d d ds j , ahora obtendremos: i) El modelo de segundo orden deseado ( )dG s y ii) max
, la máxima fase que puede aportar un compensador de adelanto de una etapa.
i) Modelo de segundo orden deseado ( )dG s : Es importante entender que el concepto de “polos complejos
conjugados dominantes a lazo cerrado” implica que nuestro objetivo de diseño es encontrar el compensador ( )cG s
de la Figura 1 para que el sistema completo a lazo cerrado se comporte lo más parecido posible a un sistema de
segundo orden ( )dG s cuyos polos coinciden con los dominantes a lazo cerrado del sistema que estamos diseñando.
* 2 2
* 2 2 2
( )( ) ( )( )
( )( )( )( ) 2 ( )d d d d d d d d
dd d d dd d d d d
s s j jG s
s j s js s s s s s (5)
o el equivalente en coordenadas polares 2
2 2( )
2n
dn n
G ss
(6)
Luego idealmente se desea que: ( ) ( )
( ) ( )1 ( ) ( )
cd
c
G s G sT s G s
G s G s
Por lo tanto es importante siempre obtener ( )dG s para comparar mediante simulaciones con ( )T s .
Con ds se obtiene ( )dG s de la (5) mediante Matlab con: Gd=zpk([],[sd conj(sd)], abs(sd)^2)
o con zeta= ywn=n de la (6) con: Gd=tf([wn^2],[1 2*zeta*wn wn^2])
En ambos casos se obtiene: 2
2.8
2 2.86
6( )d
s sG s (7)
ii) El máximo adelanto de fase max que puede producir un compensador de adelanto de una etapa es:
1max tan
2d
d
(8)
Con Matlab:
phi_max = angle(sd)
Para nuestro problema
omax 2.20radianes 126 (9)
Observar que:
maxmax
max
para 02
2para
d
d
(nunca ds va a estar en el eje j ni en )

Control II (2017) Fernando di Sciascio
3
Paso 3 Se calcula el adelanto de fase c que debe proveer el compensador para que el punto ds pertenezca al
lugar de las raíces de ( ) ( ) ( )cL s G s G s .
Aplicando la condición de fase a ( ) ( ) ( )cL s G s G s
( ) ( ) ( ) (2 1)
c
d c d dL s G s G s k (10)
Con #de ceros de ( ) #de polos de ( )
1 1
( ) ( ) ( )G s G s
d d i d ii i
G s s z s p (11)
Si se ajusta ( )dG s para que ( )dG s se tiene
( ) 0 2c d cG s (12)
Con Matlab lo calculamos de la siguiente manera ( ( )dG sfase_G )
fase_G = angle(evalfr(G,sd))
Con este comando la fase ya está ajustada entre . Si Z y P son los vectores con los ceros y polos de ( )G s
también se puede utilizar
fase_G=(sum(angle(sd-Z))-sum(angle(sd-P))); % en radianes
De esta manera la fase normalmente es un valor real cualquiera negativo.
Para nuestro problema
o1.76 radianes 1( 10)dG s = angle(evalfr(G,sd)) =
o o4.52 radianes 259 101( )dG s = ((sum angle(sd-Z) -sum(angle(sd-P))) = ( )
o( ) 1.38 79.16c dG s radianes (13)
Paso 4 Se calcula n, el número de etapas necesarias.
Si maxc con una etapa alcanza, en general
max
redondear hacia arriba cn (14)
y se utiliza para calcular las posiciones del cero y el polo de cada etapa *max
cc n
(15)
Con Matlab: n=ceil((phi_c)/phi_max), phi_c2=phi/n;
Para nuestro problema maxc , luego utilizamos una etapa.

Control II (2017) Fernando di Sciascio
4
Paso 5 Se calcula el intervalo min 0c cz z
donde se puede colocar el cero del compensador de
adelanto.
min tan( )d
c dc
z (16)
Para nuestro problema min 1.27cz
El intervalo para colocar el cero es:
1.27 0cz (17)
Paso 6 Se coloca el cero del compensador y se calcula la posición del polo.
Para nuestro problema se adopta: 1cz (18)
Este valor coincide con d y el primer polo de ( )G s distinto del integrador.
Se calcula la posición del polo con
tan( )d
c dz c
p (19)
Con Matlab:
theta_z=angle(sd-zc); theta_p=theta_z-phi_c;
pc=sigma_d+w_d/tan(theta_p);
Para nuestro problema se tiene: 7.95cp (20)
Paso 7 Finalmente se calcula la ganancia del compensador cK utilizando la condición de módulo.
( ) ( ) 1c d dG s G s (21)
( )( ) , #etapas
( )
nc c
c nc
K s zG s n
s p
( ) c d cc d
d c
K s zG s
s p
2
2
( )1c d c d
d c
K s z G s
s p
( )d c
cd c d
s pK
s z G s (22)
Para nuestro problema se tiene: 6.95cK (23)

Control II (2017) Fernando di Sciascio
5
De (18), (20) y (23) se tiene el controlador:
6.95( 1)
( )( 7.95)cs
G ss
(24)
La planta compensada es:
111.2( 1.5)( ) ( ) ( )
( 2)( 3)( 4)( 7.95)c
sL s G s G s
s s s s s (25)
El sistema compensado a lazo cerrado es:
2 2
111.2( 1.5)
(
(
1.212)( 13.73 48.11)(
) ( )( )
1 ( ) ( ) 2 2.862)c
c
G s G sT s
G s G s
s
s s s s s (26)
En la figura se muestra la respuesta al escalón de ( )dG s y ( )T s . Se observa que ( )T s cumple con las
especificaciones (1) y tiene un comportamiento razonablemente parecido al del sistema de segundo orden deseado
( )dG s .

Control II (2017) Fernando di Sciascio
6
En la figura siguiente se muestra el lugar de las raíces de ( ) ( ) ( )cL s G s G s . Los dos polos en d d ds j
son aproximadamente dominantes ya que el polo real en -1.21 influencia un poco la respuesta. Los dos polos
complejos alejados en 6.87 j ejercen muy poco efecto.
Problema 2) Un sistema de control posee el diagrama de bloques siguiente:
Figura 1
Se pide realizar el diseño de un compensador de adelanto de fase con las mismas especificaciones del problema 1,
(%) 10%Mp y (5%) 4 segeT . Los polos dominantes deseados serán los mismos del problema 1 al igual que
( )dG s y max .
1 1.36d d ds j j
2
2.8
2 2.86
6( )d
s sG s
omax 2.20radianes 126
Planta G(s)

Control II (2017) Fernando di Sciascio
7
Paso 3 Se calcula el adelanto de fase c que debe proveer el compensador para que el punto ds pertenezca al
lugar de las raíces de ( ) ( ) ( )cL s G s G s .
#de ceros #de polos
1 1
o0.548 radia( ) ( ) ( nes 31.4)d d i d ii i
G s s z s p
o0.548 radia( ) nes 31.4dG s = angle(evalfr(G,sd)) =
o( ) 2.6radianes 148.6c dG s
Paso 4 Se calcula n, el número de etapas necesarias. En este caso maxc será necesario más de una
etapa.
max
2.6redondear hacia arriba 2
2.2cn Luego utilizamos dos etapas.
* o2.6 radianes
1.3 radianes 74.32
cc n
Paso 5 Se calcula el intervalo min 0c cz z .
Para nuestro problema min 1.38cz
El intervalo para colocar el cero de cada etapa es: 1.38 0cz
Paso 6 Se coloca el cero del compensador y se calcula la posición del polo.
Para nuestro problema se adopta: 1.3cz
Se calcula la posición del polo con 24.88tan( )
dc d
z c
p
Paso 7 Se calcula la ganancia del compensador cK utilizando la condición de módulo.
( ) ( ) 1c d dG s G s
Ahora 2
2
( )( )
( )c c
cc
K s zG s
s p porque se tienen dos etapas
2
2( ) c d cc d
d c
K s zG s
s p
2
2
( )1c d c d
d c
K s z G s
s p
2
2( )
380d cc
d c d
s pK
s z G s

Control II (2017) Fernando di Sciascio
8
El compensador de adelanto de dos etapas será:
2
2
380( 1.3)( )
( 25)c
sG s
s
La planta compensada es:
2
2
9110( 1.3)
( 4)( 3)( 2)( 1)( 25( ) ( )
)( )c
s
s sL
s s sG s s
ss G
El sistema compensado a lazo cerrado es:
2
2 2
9110( 1.3)
( 25.73)( 23.92)( 5.75)( 2.362 1.526)( 2 2
( ) ( )( )
1 ( .85)) ( )c
c
s
s s s
G s G sT s
G s G s s s s s
En la figura se muestra la respuesta al escalón de ( )dG s y ( )T s . Se observa que ( )T s cumple con las
especificaciones (1) y tiene un comportamiento razonablemente parecido al del sistema de segundo orden
deseado ( )dG s .