CONTROL INTELIGENTE.pptx
41
CONTROL INTELIGENTE
-
Upload
ppaparicio -
Category
Documents
-
view
214 -
download
1
Transcript of CONTROL INTELIGENTE.pptx

CONTROL INTELIGENTE

Evolución de las Técnicas de Control de Procesos
Las necesidades de la industria nos ha llevado a tener controladores cada vez mas sofisticados, en especial para manejar procesos especialmente complejos.
Evolución de las Técnicas de Control de Procesos
Por muchos años se ha intentado desarrollar técnicas diversas, no siempre exitosas debido a diversas razones:• Alta dimensionalidad del proceso.• Variación con el tiempo de las características
del sistema.• No linealidad en el comportamiento del
proceso.
Evolución de las Técnicas de Control de Procesos
• Problemas de medición bajo incertidumbre.• Objetivos de control demasiado complejos.• Condiciones de alarma rigurosas• Modelación muy pobre de la dinámica del
proceso.• Restricciones operativas del proceso.• Probabilidad de falla en sensores o
actuadores.

Evolución de las Técnicas de Control de Procesos
Es así que se requiere un control que goce de características inteligentes, con el cual sea posible controlar estos procesos en un grado mucho mayor que el actual y con las mismas o mejores prestaciones que lo hacen los sistemas convencionales.

Evolución de las Técnicas de Control de Procesos
• En las últimas décadas surgió una rama de la investigación en control aplicado, muy ligada con las ciencias del conocimiento y la computación: la investigación en control inteligente de procesos usando herramientas de inteligencia artificial.
Evolución de las Técnicas de Control de Procesos
• El ideal del control es el control autónomo, el cual podría en cualquier momento de su operación, cambiar las condiciones de mando al detectar cambios en el proceso que controla, todo sin que se requiera la supervisión humana.

Definición de Control Inteligente
• Es aquel control capaz de comprender, razonar y aprender acerca del proceso, perturbaciones y condiciones de operación.
• Una definición menos rígida denomina control inteligente a aquel control que puede aprender con base a alguna experiencia en el desempeño de la tarea de control.
Diferencias entre adaptación y aprendizaje
• Los controladores denominados adaptivos surgieron por la necesidad de que se adaptasen a las condiciones cambiantes del entorno donde el control desarrolla su trabajo. El inconveniente de ésta técnica es que se aplica normalmente a regiones pequeñas dentro del espacio general del problema de control.

Diferencias entre adaptación y aprendizaje
• Mucho mas avanzado es el concepto de aprendizaje. Aquí se pretende que el sistema de control realice una continua mejora de su desempeño frente a la tarea de control, de modo que aprende del comportamiento del proceso y pueda en cualquier momento presentar la mejor propuesta de acción de control sobre las variables que se manipulan.
Diferencias entre adaptación y aprendizaje
• Un control inteligente de procesos es un sistema que reune los componentes típicos de cualquier lazo de control ( sensores, controladores, actuadores) pero con la adición de mínimo un módulo característico encargado de realizar la tarea de evaluación de la eficiencia del control y aprendizaje de operaciones nuevas que mejoren permanentemente ésta eficiencia.
Tecnologías de inteligencia artificial
1. Redes neuronales.2. Sistemas basados en conocimientos.3. Sistemas híbridos.4. Controladores de procesos con lógica difusa.

1. Inteligencia artificial
• Hace medio siglo apareció el concepto de inteligencia artificial, desde entonces se han usado una serie de tecnologías de manejo de la información para implementar en las computadoras algunos comportamientos catalogados como inteligentes. Vamos a ver a continuación aquellas tecnologías que soportan el trabajo en inteligencia artificial y que se están usando con éxito en implementaciones de control asistido por computador.

Redes neuronales
Consideración del control industrial actual:Control distribuido con algún elemento inteligente para evaluar la información. En algunos casos se necesita gran rapidez en la respuesta del sistema de control y una adaptación al sistema, aunque éste varíe.Las redes neuronales artificiales se adaptan a estos requisitos.

Redes neuronales
• Con las redes neuronales artificiales ( RNA) se pretende modelar mediante funciones matemáticas simples, los procesos de transferencia y procesamiento de información que ocurren entre las neuronas de una red natural.

Redes neuronales
• Una red neuronal es un conjunto de elementos de computación independientes ( llamados neuronas) totalmente interconectados entre sí, actuando cada uno de ellos de forma autónoma pero en sincronía con los demás. Cada neurona recibe impulsos, que evalúa individualmente, procedentes de otras neuronas dándoles una importancia o “ peso sinaptico” determinado, según se les ha entrenado previamente. Después, transmite la señal resultante a otras neuronas.

Redes neuronales
• Las neuronas pueden ser circuitos electrónicos, microprocesadores, fragmentos de programa o bien elementos biológicos que almacenan sus estados mediante reacciones químicas ( neurotransmisores). Para el diseño de las redes suelen usarse topologías que distribuyen los nodos y sus interconexiones en capas sucesivas.

Redes neuronales
• Una característica de las redes neuronales es su capacidad de aprendizaje, el cual puede ser supervisado o no supervisado. En el primer caso, se presentan sucesivamente patrones de estímulo y las salidas correspondientes, hasta que la red aprenda a organizarlos todos.. En este caso se dirá que la red converge o está entrenada. El segundo caso consiste en presentar a la red una serie de patrones de estímulos y las reglas que debe usar para relacionar los datos.
Redes neuronales
• Cuando se habla de entrenamiento de una red neuronal, se hace referencia a la modificación de los pesos sinápticos para conseguir que cada neurona proporcione la respuesta correcta, en todas las situaciones que ha de aprender.
Elección del tipo de red neuronal
• Se necesita saber que parámetros se deben monitorear y qué aplicaciones se deben realizar para determinar con ello el número de entradas y salidas de la red. Ademas es necesario decidir acerca del tipo de control a desarrollar.

Aplicaciones de redes neuronales
• Movimientos de robots.• Predicción del movimiento de accionamientos.• Reconocimiento de posiciones espaciales.• Organización automática de movimientos en
manipuladores.• Predicción de cargas y energía en redes
eléctricas.• Procesamiento de señales.• Control de procesos contínuos.

2. Sistemas basados en conocimientos
• Este término encierra todas las implementaciones de inteligencia artificial que usan profusamente una base de datos reportados como conocimiento sobre un determinado campo del saber, denominada la base de conocimientos.

2. Sistemas basados en conocimientos
• Existe un componente vital en estos sistemas y es el módulo encargado de realizar la deducción o inferencia de la respuesta a un determinado conjunto de condiciones o evidencias que sobre el fenómeno se presentan en cualquier momento. A este módulo se le denomina motor de inferencia y encierra buena parte de de las diferencias entre diversas implementaciones de sistemas basados en conocimientos.
2.1 Sistemas expertos
• Los sistemas expertos son un subconjunto de los sistemas basados en conocimientos, su característica particular es que el conocimiento proviene siempre de un experto o grupo de ellos, de modo que su origen directo es la experiencia.
2.1 Sistemas expertos
• Una primera aproximación al control asistido por computador que usa técnicas de sistemas expertos, es el uso de reglas exactas sobre las cuales no pesa ninguna clase de incertidumbre.
• “ Si - entonces “

2.2 Lógica difusa
• La teoría de los conjuntos difusos o borrosos ( Fuzzy en inglés) fue desarrollada en la década de los 60.
• Se pensó entonces que la implementación de la misma podría primero aparecer en sistemas humanísticos ( ciencias sociales, lingüística, ciencias biológicas) en donde los modelos matemáticos precisos podrían no ser tan apropiados como en las ciencias físicas.
2.2 Lógica difusa
• Sin embargo, las primeras aplicaciones prácticas empezaron en las áreas de control. Esta tecnología permitió el uso de expresiones linguisticas de calificación de acciones de control., provenientes directamente del operador experto y que por otros medios resultaba distorsionada al pasar a su cuantificación numérica.

2.2 Teoría Fuzzy
• Es una teoría matemática que permite manejar un aspecto de incertidumbre o ambiguedad que puede ser encontrada en la definición de un concepto o el significado de una palabra tal como “ alta temperatura”.
2.2 Teoría Fuzzy
• La probabilidad se establece sobre hechos que van a ocurrir.
• Lo Fuzzy se establece sobre hechos imprecisos pero ciertos.
• El control difuso viene a ser una alternativa al control PID ante requerimientos especiales.
2.2 Teoría Fuzzy
En un controlador Fuzzy , las entradas son “ fuzzificadas” usando las funciones de correspondencia de entrada. Luego las salidas de éstas funciones son enviadas a un conjunto de reglas. Estas reglas se escriben por alguien que mejor pueda describir el comportamiento del proceso que se requiere controlar. Debido al requerimiento de “ un experto” este sistema puede ser considerado un sistema experto en tiempo real.

2.2 Teoría Fuzzy
• Las salidas de éstas reglas requieren “desfuzzificación” usando unas funciones de correspondencia de salida.
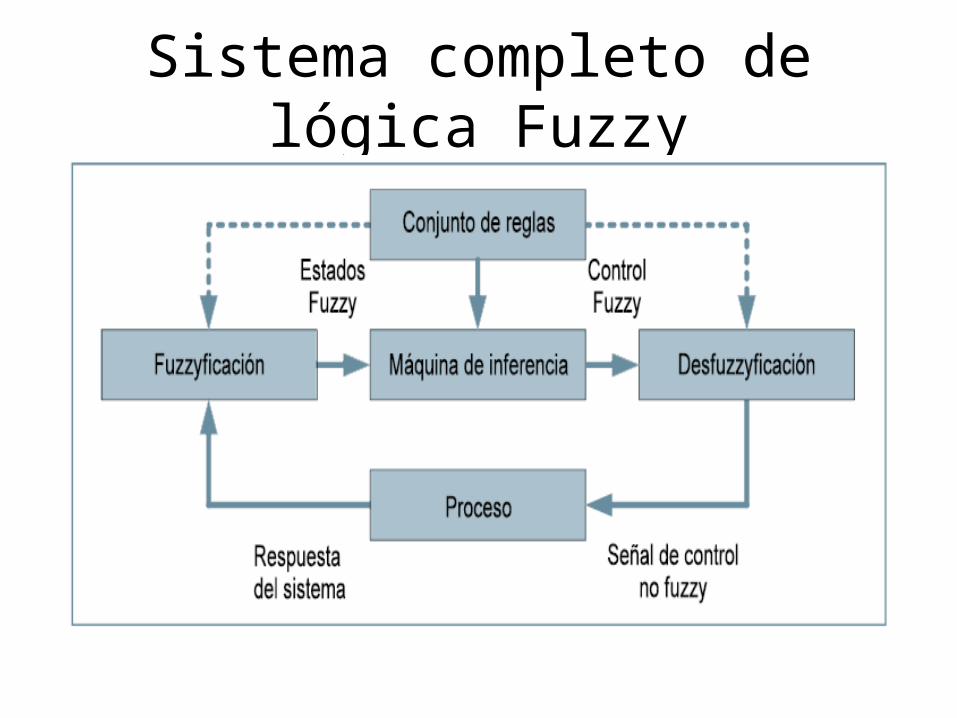
Sistema completo de lógica Fuzzy

Etapas funcionales de una regla difusa

2.2 Teoría Fuzzy
• Un método de implementación de un controlador de lógica difusa requiere de 2 señales de entrada: una señal de error y otra de razón de cambio del error. En la etapa de fuzzificación, cada una de éstas entradas ( error y delta del error) actúan como variables independientes de un conjunto de funciones que se traslapan y que forman el conjunto difuso.

2.2 Teoría Fuzzy
• Este conjunto es referido como una función de correspondencia de entrada y representa el grado al cual las entradas cumplen con la definición individual.
• En el controlador de lógica difusa descrito, existen 2 grupos de funciones de correspondencia, la de entrada del error y la de entrada delta del error.

2.2 Teoría Fuzzy
• En la figura siguiente se muestran las entradas triangulares de correspondencia de entrada para éstas entradas. Estas funciones se traslapan y no necesariamente deben ser triangulares, pudiendo ser trapezoidales o Gaussianas.

Funciones de pertenencia triangulares

3. Sistemas híbridos
• Se han planteado diversas combinaciones de las tecnologías individuales descritas para usar las habilidades de cada una de ellas en forma mas eficiente con lo cual se logra un mejor desempeño del controlador. Algunas de las combinaciones mas usadas son:
a) Redes neuronales con lógica difusa: control Neuro – Fuzzy.
b) Redes neuronales con sistemas expertos.c) Redes neuronales con lógica difusa y sistemas expertos.
3. Sistemas híbridos
• Existe una tecnología denominada Algoritmos genéticos que permite la obtenciión de valores optimos de una función desconocida mediante el uso de técnicas de genética.

4. Controladores de proceso con lógica difusa
• La lógica difusa es la única tecnología de inteligencia artificial que se ha embebido tanto en controladores de procesos como en PLC`s. Existen equipos de diversos fabricantes que ofrecen ésta posibilidad.
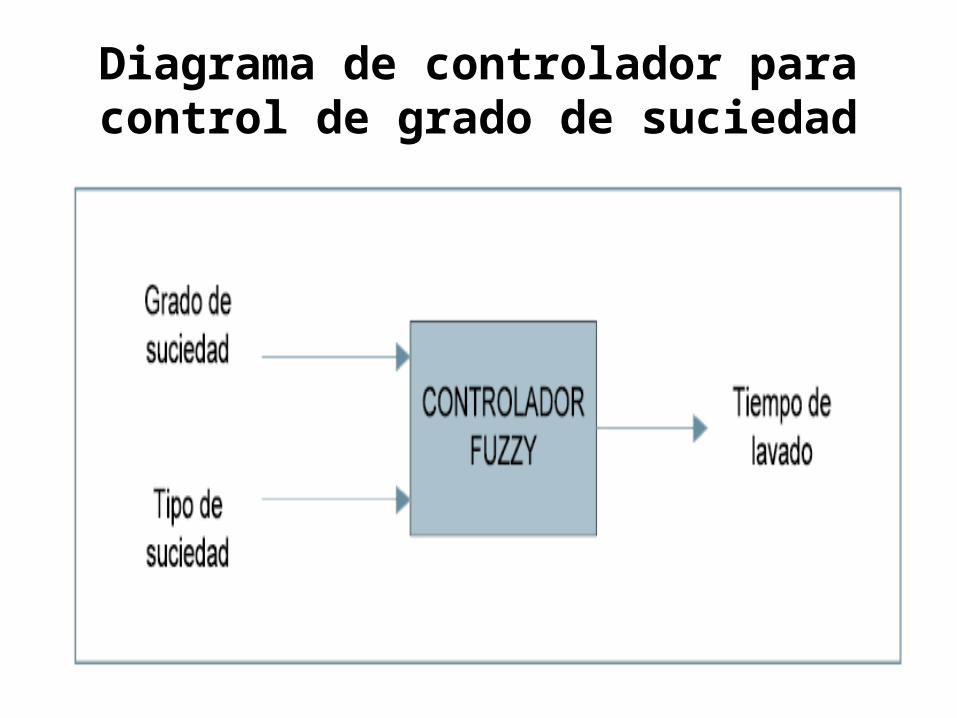
Diagrama de controlador para control de grado de suciedad