Control Tolerante a Fallas en Equipos de Transferencia de ... Maria guerrero... · industria...
231
Centro Nacional de Investigaci´ on y Desarrollo Tecnol´ogico Departamento de Ingenier´ ıaElectr´onica TESIS DE MAESTR ´ IA EN CIENCIAS “Control Tolerante a Fallas en Equipos de Transferencia de Calor” presentada por Mar´ ıa Eusebia Guerrero S´ anchez Ing. Electr´onico por el I. T. de Minatitl´ an como requisito para la obtenci´on del grado de: Maestr´ ıa en Ciencias en Ingenier´ ıaElectr´onica Director de tesis: Dr. Carlos Daniel Garc´ ıa Beltr´ an Co-Director de tesis: Dr. David Ju´ arez Romero Cuernavaca, Morelos, M´ exico. Noviembre del 2007
Transcript of Control Tolerante a Fallas en Equipos de Transferencia de ... Maria guerrero... · industria...
Centro Nacional de Investigacion y Desarrollo Tecnologico
Departamento de Ingenierıa Electronica
TESIS DE MAESTRIA EN CIENCIAS
“Control Tolerante a Fallas en Equipos de
Transferencia de Calor”
presentada por
Marıa Eusebia Guerrero SanchezIng. Electronico por el I. T. de Minatitlan
como requisito para la obtencion del grado de:
Maestrıa en Ciencias en Ingenierıa Electronica
Director de tesis:Dr. Carlos Daniel Garcıa Beltran
Co-Director de tesis:Dr. David Juarez Romero
Cuernavaca, Morelos, Mexico. Noviembre del 2007


Centro Nacional de Investigacion y Desarrollo Tecnologico
Departamento de Ingenierıa Electronica
TESIS DE MAESTRIA EN CIENCIAS
“Control Tolerante a Fallas en Equipos de
Transferencia de Calor”
presentada por
Marıa Eusebia Guerrero SanchezIng. Electronico por el I. T. de Minatitlan
como requisito para la obtencion del grado de:
Maestrıa en Ciencias en Ingenierıa Electronica
Director de tesis:Dr. Carlos Daniel Garcıa Beltran
Co-Director de tesis:Dr. David Juarez Romero
Jurado:
Dr. - PresidenteDr. - Secretario
Dr. - VocalDr. - Vocal Suplente
Cuernavaca, Morelos, Mexico. Noviembre del 2007

Dedicatoria
Dedico este trabajo:
A la luz del mundo, Dios, por estar siempre a mi lado, apoyarme en todo
momento, guiarme por el camino del bien, darme fe, esperanza y amor en
cada uno de los dıas de mi existencia.
A mis padres Juan y Elizabeth, por la confianza, el apoyo, el amor, los
valores, por luchar siempre por mi y ser el mejor ejemplo en mi vida, ya que
sin ustedes y sin sus ensenanzas no hubiera sido posible subir este peldano
mas en mi vida estudiantil.
A mis hermanos Juan, Carmen, Rafael, Elizabeth y Estefany, por
quererme y apoyarme en todo momento, por esas palabras de aliento y
animo cuando mas lo he necesitado, tengan presente que los quiero y que
fueron parte de la inspiracion para realizar este trabajo.
A mis sobrinos Ivonne, Ivette, Giovana, Joaquın, Lupita, Neybeth
y Danielita, por darme tantas alegrıas, este logro es para ustedes.
A mi amor Omar, por la paciencia, el apoyo, la companıa y el amor que
siempre me ha dado, ¡Gracias por quererme tanto!.


Agradecimientos
Agradezco:
A mis asesores el Dr. Carlos Daniel Garcıa Beltran y el Dr. David Juarez
Romero, gracias por su apoyo, por sus consejos, ya que sin ellos no hubiera
sido posible realizar este trabajo de investigacion, pero sobre todo gracias
por su confianza y amistad.
A los miembros del comite revisor, al Dr. Alejandro Rodrıguez Palacios por
ensenarme muchas cosas, entre ellas tecnicas de estudio que me ayudaron
a realizar este trabajo de tesis y al Dr. Carlos Manuel Astorga Zaragoza
por los valiosos comentarios que enriquecieron este trabajo.
A mis profesores, Dr. Gerardo Vicente Guerrero Ramırez, Dr. Hugo
Calleja Gjumlich, Marco Antonio Oliver Salazar, Luis Gerardo Vela Valdes,
Enrique Quintero-Marmol Marquez y Victor Manuel Alvarado Martınez,
por todos los conocimientos brindados, ademas por sus valiosos consejos y
su amistad. Tambien quiero agradecer a todo el personal administrativo,
por ser personas cordiales y atentas.
A mis companeros y a mis amigos: Isaura, Dana, Gisela, Toy, Paco,
Miguel, Ronay, Benedicto, Manuel, Ivan, Diego, Jorge Luis y Nacho, por
todos los buenos y malos momentos que pasamos juntos, un agradecimiento
muy especial a Omar, por estar siempre conmigo, ayudarme y apoyarme,
pero sobre todo te agradezco tu gran amor hacia a mı, TE AMO.
A mis padres, por su carino, paciencia y por todos los consejos que me han
dado a lo largo de mi vida, los cuales sin duda me han servido a crecer
como persona.
Al CENIDET por brindarme los medios necesarios para obtener mayores
conocimientos y con ello crecer profesionalmente. Ademas por todas las
atenciones otorgadas de todo el personal.
Finalmente agradezco a CONACYT y a la DGEST por el apoyo economico
que me brindo para realizar este estudio.

Control Tolerante a Fallas en Equipos de
Transferencia de Calor
Autor
Marıa Eusebia Guerrero Sanchez
(RESUMEN)
Esta tesis presenta un Control Tolerante a Fallas utilizando la tecnica de Control
Predictivo Basado en Modelo aplicado a un evaporador de cinco efectos utilizado en la
industria azucarera. Se usa un modelo matematico simplificado de este para sintetizar
el controlador, considerando 10 estados, 6 entradas y 2 perturbaciones. Se desarrolla el
controlador predictivo en base al modelo linealizado discreto representado en espacio de
estado y se programa en Matlab. Se consideran restricciones en las salidas controladas y
en las senales de control.
Las fallas empleadas consisten en atasco y saturacion en actuadores, ası como fallas
internas del proceso (como fugas de producto o de vapor en algunos de los efectos del
evaporador). Para acomodar las fallas, se aprovechan los beneficios que aporta el control
multivariable y el comportamiento inherente del Control Predictivo Basado en Modelo,
esto es, en el caso de fallas internas; y se modifican las restricciones cuando existen fallas
en actuadores.
Se presentan los resultados obtenidos para diversos casos del Control Predictivo
Basado en Modelo, primero sin considerar restricciones, despues considerando restricciones.
En estos resultados, se incluye el rechazo de perturbaciones medibles y seguimiento de
trayectoria. Ademas se muestran y se comparan resultados de este controlador ante fallas
de tipo atasco, saturacion e internas del proceso, sin realizar un cambio de restricciones
y como Control Tolerante a Fallas. La comparacion se realiza a traves de los ındices de
desempeno.


Faults Tolerant Control in Equipment of Heat
Transference
Autor
Marıa Eusebia Guerrero Sanchez
(ABSTRACT)
This thesis presents a Faults Tolerant Control using the technique of Model Based
Predictive Control applied to an evaporator of five effects used in the sugar industry. A
mathematical model simplified of this one is used to synthesize the controller, considering
10 states, 6 inputs and 2 disturbances. It is developed the predictive controller on the
basis of the discrete linealizado model represented in state space and is programmed in
Matlab. Restrictions in the outputs and inputs are considered.
The used faults consist of jam and saturation in actuators, as well as internal faults
of the process (like steam or product drups in some of the effects of the evaporator). In
order to accommodate the faults, the benefits take advantage of that contribute to the
multi-variate control and the inherent behavior of the Model Based Predictive Control,
that is, in the case of internal faults; and the restrictions are modified when faults in
actuators exist.
The results obtained for diverse cases of the Model Based Predictive Control are
present, first without considering restrictions, later considering restrictions. In these re-
sults, one includes the rejection of measurable disturbances and pursuit of trajectory. In
addition they are and results of this controller before faults of type jam, saturation and
internal of the process are compared, without making a change of restrictions and like
Tolerant Control to Faults. The comparison is made through the performance indices.


Tabla de Contenido
Lista de figuras V
Lista de tablas XI
Notacion XIII
1. Introduccion 1
1.1 Interes y planteamiento del problema . . . . . . . . . . . . . . . . . . . . . 5
1.2 Hipotesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4 Alcance y limitaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.5 Motivacion y Justificacion . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.6 Aportacion y Originalidad . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.7 Estado del arte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.7.1 Areas de investigacion del Control Tolerante a Fallas . . . . . . . . 8
1.8 Organizacion del documento . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2. Generalidades del Control Tolerante a Fallas 13
2.1 Control Tolerante a Fallas . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2 Problema del Control Tolerante a Fallas . . . . . . . . . . . . . . . . . . . 15
2.3 Clasificacion de los mecanismos de tolerancia a fallas . . . . . . . . . . . . 16
2.3.1 Tolerancia por adaptacion de la estrategia de control . . . . . . . . 17
2.3.2 Tolerancia por reposicion de sensores y/o actuadores . . . . . . . . 20
I
2.3.3 Mecanismos de tolerancia a fallas en la ley de control . . . . . . . . 21
2.3.4 Mecanismos de tolerancia a fallas en sensores y actuadores . . . . . 23
2.4 Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3. El MBPC sin cambio de restricciones y como Control Tolerante a Fallas 27
3.1 Breve historia del MBPC . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.1.1 Situacion actual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.1.2 Tecnologıa industrial . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.2 Conceptos basicos del MBPC . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.2.1 Estrategia del MBPC . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.2.2 Elementos del MBPC . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.2.3 Formulacion del problema . . . . . . . . . . . . . . . . . . . . . . . 35
3.3 Diseno del MBPC multivariable . . . . . . . . . . . . . . . . . . . . . . . . 38
3.3.1 Diseno del MBPC multivariable sin restricciones . . . . . . . . . . . 38
3.3.2 Perturbaciones medibles . . . . . . . . . . . . . . . . . . . . . . . . 44
3.3.3 Diseno del MBPC multivariable con restricciones . . . . . . . . . . 45
3.4 Diseno del MBPC como Control Tolerante a Fallas . . . . . . . . . . . . . 50
3.4.1 El MBPC como una herramienta para reconfiguracion . . . . . . . . 50
3.4.2 Fallas en actuadores . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.4.3 Fallas internas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.4.4 Fallas en sensores . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.4.5 MBPC como Control Tolerante a Fallas ante fallas de tipo atasco . 53
3.4.6 MBPC como Control Tolerante a Fallas ante fallas de tipo saturacion 54
3.4.7 MBPC como Control Tolerante a Fallas ante fallas de tipo internas 54
3.5 Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4. Analisis y modelado del evaporador de cinco efectos 57
4.1 Proceso de evaporizacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.1.1 Evaporacion quımica . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.1.2 Evaporadores quımicos . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.1.3 Operacion de un evaporador de cinco efectos . . . . . . . . . . . . . 60
4.2 Modelado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.2.1 Modelado del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.2.2 Condiciones de estado estable . . . . . . . . . . . . . . . . . . . . . 68
4.2.3 Modelo linealizado . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
II
4.2.4 Analisis de Controlabilidad y Observabilidad del sistema linealizado 76
4.2.5 Restricciones en las salidas del evaporador de cinco efectos . . . . . 78
4.2.6 Restricciones en las entradas controladas del evaporador de cinco
efectos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4.2.7 Respuestas del modelo no lineal y del modelo linealizado . . . . . . 81
4.3 Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
5. Aplicacion del Control Tolerante a Fallas al evaporador de cinco efectos 87
5.1 MBPC sin restricciones aplicado al evaporador de cinco efectos . . . . . . . 87
5.2 Resultados del MBPC multivariable sin restricciones aplicado al evaporador
de cinco efectos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.3 MBPC con restricciones aplicado al evaporador de cinco efectos . . . . . . 92
5.4 Resultados del MBPC multivariable con restricciones aplicado al evaporador
de cinco efectos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
5.5 MBPC como Control Tolerante a Fallas aplicado al evaporador de cinco
efectos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
5.5.1 Fallas analizadas en el evaporador de cinco efectos . . . . . . . . . . 100
5.6 Resultados del MBPC como Control Tolerante a Fallas aplicado al evapo-
rador de cinco efectos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
5.6.1 Resultados de MBPC con restricciones ante fallas ocasionadas por
atasco en los actuadores . . . . . . . . . . . . . . . . . . . . . . . . 101
5.6.2 Resultados de MBPC con restricciones ante fallas ocasionadas por
saturacion en los actuadores . . . . . . . . . . . . . . . . . . . . . . 103
5.6.3 Resultados de MBPC con restricciones ante fallas internas provo-
cadas por fugas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
5.6.4 Comparacion del MBPC sin cambio de restricciones y del MBPC
tolerante a fallas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
5.7 Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
6. Conclusiones y trabajos futuros 123
6.1 Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
6.2 Trabajos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
Referencias 133
Anexos 135
III

A. Obtencion de las matrices Ac, Bc, Cc, Dc, Ec y Fc 135
A.1 Obtencion de la matriz Ac . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
A.2 Obtencion de la matriz Bc . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
A.3 Obtencion de la matriz Ec . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
A.4 Obtencion de la matriz Cc . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
A.5 Obtencion de la matriz Dc . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
A.6 Obtencion de la matriz Fc . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
B. Modelo discreto 150
C. Procedimiento para convertir la forma de la funcion objetivo en una
forma cuadrada 153
D. Funcion quadprog 155
E. Eleccion de los valores de los horizontes H1, Hp y Hc 157
F. Otros resultados del MBPC multivariable sin restricciones aplicado al
evaporador de cinco efectos 159
G. Otros resultados del MBPC multivariable con restricciones aplicado al
evaporador de cinco efectos 164
H. Otros resultados del MBPC con restricciones ante fallas ocasionadas por
atasco en los actuadores 169
I. Otros resultados del MBPC con restricciones ante fallas ocasionadas por
saturacion en los actuadores 178
J. Otros resultados del MBPC con restricciones ante fallas internas 196
IV
Lista de figuras
1.1 Proceso de produccion de azucar . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Areas de investigacion del Control Tolerante a Fallas . . . . . . . . . . . . 9
2.1 Clasificacion de los mecanismos para Control Tolerante a Fallas . . . . . . 17
2.2 Esquemas basicos del control tolerante activo fuera de lınea . . . . . . . . . 19
2.3 Esquemas basicos del control tolerante activo en lınea . . . . . . . . . . . . 19
3.1 Estrategia del MBPC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.2 Estructura basica del MBPC . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.3 Restricciones y punto de operacion optimo . . . . . . . . . . . . . . . . . . 46
3.4 Restricciones en la senal de control . . . . . . . . . . . . . . . . . . . . . . 47
3.5 Actuadores redundantes [Maciejowski, 1997] . . . . . . . . . . . . . . . . . 51
4.1 Evaporador de cinco efectos . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.2 Respuesta de las concentraciones Ci ante un cambio en F0 . . . . . . . . . 82
4.3 Respuesta de los niveles hi ante un cambio en F0 . . . . . . . . . . . . . . 83
4.4 Respuesta de las concentraciones ante un cambio en S . . . . . . . . . . . 84
4.5 Respuesta de los niveles ante un cambio en S . . . . . . . . . . . . . . . . 85
5.1 Diagrama de flujo del MBPC sin restricciones . . . . . . . . . . . . . . . . 89
5.2 Respuestas de las senales de control del MBPC sin restricciones . . . . . . 91
5.3 Respuestas de las salidas controladas C5 y h5 del MBPC sin restricciones . 92
5.4 Diagrama de flujo del MBPC con restricciones . . . . . . . . . . . . . . . . 93
5.5 Respuestas de las senales de control con restricciones cuando se presenta
una perturbacion en C0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
V

5.6 Respuestas de las salidas controladas con restricciones cuando se presenta
una perturbacion en C0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
5.7 Respuestas de las senales de control con restricciones cuando se presenta
una perturbacion en T0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
5.8 Respuestas de las salidas controladas con restricciones cuando se presenta
una perturbacion en T0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
5.9 Diagrama de flujo del MBPC como control tolerante a fallas . . . . . . . . 99
5.10 Respuestas de las senales de control ante efecto de una falla de tipo atasco
en K2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
5.11 Respuestas de las salidas controladas C5 y h5 ante efecto de una falla de
tipo atasco en K2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
5.12 Respuestas de las senales de control ante efecto de una falla de tipo satu-
racion en F0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
5.13 Respuestas de las senales de control ante efecto de una falla de tipo satu-
racion en F0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
5.14 Respuestas de las salidas controladas C5 y h5 ante efecto de un atasco en F0 107
5.15 Respuestas de las salidas controladas C5 y h5 ante efecto de un atasco en F0 107
5.16 Respuestas de las senales de control ante efecto de la fuga de vapor O3 (5%) 109
5.17 Respuestas de las senales de control ante efecto de la fuga de vapor O3 (10%)110
5.18 Respuestas de las salidas controladas C5 y h5 ante efecto de la fuga de vapor
O3 (5%) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
5.19 Respuestas de las salidas controladas C5 y h5 ante efecto de la fuga de vapor
O3 (10%) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
5.20 Senales de control del MBPC sin cambio de restricciones ante atasco de F0 113
5.21 Salidas controladas del MBPC sin cambio de restricciones ante atasco de F0 114
5.22 Senales de control del MBPC como Control Tolerante a Fallas ante atasco
de F0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
5.23 Salidas controladas del MBPC como Control Tolerante a Fallas ante atasco
de F0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
5.24 Senales de control del MBPC sin cambio de restricciones ante saturacion
de S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
5.25 Salidas controladas del MBPC en funcionamiento normal ante saturacion
de S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
VI
5.26 Senales de control del MBPC como Control Tolerante a Fallas ante satu-
racion de S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
5.27 Salidas controladas del MBPC como Control Tolerante a Fallas ante satu-
racion de S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
E.1 Respuesta al escalon del evaporador de cinco efectos . . . . . . . . . . . . . 158
F.1 Respuestas de las senales de control sin restricciones cuando se presenta
una perturbacion en C0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
F.2 Respuestas de las salidas controladas sin restricciones cuando se presenta
una perturbacion en C0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
F.3 Respuestas de las senales de control sin restricciones cuando se presenta
una perturbacion en T0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
F.4 Respuestas de las salidas controladas sin restricciones cuando se presenta
una perturbacion en T0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
G.1 Respuestas de las senales de control del MBPC con restricciones . . . . . . 165
G.2 Respuestas de las salidas controladas C5 y h5 del MBPC con restricciones . 166
G.3 Respuestas de la aplicacion del MBPC con restricciones a C5 y h5 . . . . . 167
G.4 Respuestas de la aplicacion del MBPC con restricciones a C5 y h5 . . . . . 168
H.1 Respuestas de las senales de control ante efecto de una falla de tipo atasco
en K1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
H.2 Respuestas de las salidas controladas C5 y h5 ante efecto de una falla de
tipo atasco en K1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
H.3 Respuestas de las senales de control ante efecto de una falla de tipo atasco
en K2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
H.4 Respuestas de las salidas controladas C5 y h5 ante efecto de una falla de
tipo atasco en K2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
H.5 Respuestas de las senales de control ante efecto de una falla de tipo atasco
en K3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
H.6 Respuestas de las salidas controladas C5 y h5 ante efecto de una falla de
tipo atasco en K3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
H.7 Respuestas de las senales de control ante efecto de una falla de tipo atasco
en K4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
VII

H.8 Respuestas de las salidas controladas C5 y h5 ante efecto de una falla de
tipo atasco en K4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
I.1 Respuestas de las senales de control ante efecto de una falla de tipo satu-
racion en S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
I.2 Respuestas de las senales de control ante efecto de una falla de tipo satu-
racion en S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
I.3 Respuestas de las salidas controladas C5 y h5 ante efecto de un saturacion
en S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
I.4 Respuestas de las salidas controladas C5 y h5 ante efecto de un saturacion
en S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
I.5 Respuestas de las senales de control ante efecto de una falla de tipo satu-
racion en K1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
I.6 Respuestas de las senales de control ante efecto de una falla de tipo satu-
racion en K1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
I.7 Respuestas de las salidas controladas C5 y h5 ante efecto de una saturacion
en K1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
I.8 Respuestas de las salidas controladas C5 y h5 ante efecto de una saturacion
en K1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
I.9 Respuestas de las senales de control ante efecto de una falla de tipo satu-
racion en K2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
I.10 Respuestas de las senales de control ante efecto de una falla de tipo satu-
racion en K2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
I.11 Respuestas de las salidas controladas C5 y h5 ante efecto de una saturacion
en K2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
I.12 Respuestas de las salidas controladas C5 y h5 ante efecto de una saturacion
en K2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
I.13 Respuestas de las senales de control ante efecto de una falla de tipo satu-
racion en K3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
I.14 Respuestas de las senales de control ante efecto de una falla de tipo satu-
racion en K3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
I.15 Respuestas de las salidas controladas C5 y h5 ante efecto de un saturacion
en K3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192
I.16 Respuestas de las salidas controladas C5 y h5 ante efecto de un saturacion
en K3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192
VIII
I.17 Respuestas de las senales de control ante efecto de una falla de tipo satu-
racion en K4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
I.18 Respuestas de las senales de control ante efecto de una falla de tipo satu-
racion en K4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
I.19 Respuestas de las salidas controladas C5 y h5 ante efecto de una saturacion
en K4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
I.20 Respuestas de las salidas controladas C5 y h5 ante efecto de una saturacion
en K4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
J.1 Respuestas de las senales de control ante efecto de la fuga de vapor O4 (5%) 197
J.2 Respuestas de las senales de control ante efecto de la fuga de vapor O4 (8%) 198
J.3 Respuestas de las salidas controladas C5 y h5 ante efecto de la fuga de vapor
O4 (5%) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
J.4 Respuestas de las salidas controladas C5 y h5 ante efecto de la fuga de vapor
O4 (10%) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
J.5 Respuestas de las senales de control ante efecto de la fuga de producto F5
(8%) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201
J.6 Respuestas de las senales de control ante efecto de la fuga de producto F5
(18%) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
J.7 Respuestas de las salidas controladas C5 y h5 ante efecto de la fuga de
producto F5 (8%) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
J.8 Respuestas de las salidas controladas C5 y h5 ante efecto de la fuga de F5
(18%) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
IX

X

Lista de tablas
4.1 Parametros y valores nominales del evaporador de cinco efectos . . . . . . 68
5.1 Atasco en F0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
5.2 Saturacion en S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
6.1 Correspondencias de las fallas en MBPC . . . . . . . . . . . . . . . . . . . 125
XI

XII

Notacion
Letras mayusculas
Ai Area en cada uno de los efectos (m2)
C Conjunto de restricciones
C0 Concentracion de entrada (%)
Ci Concentracion en cada uno de los efectos (%)
F ′ Respuesta libre debida a la variable manipulada y a la perturbacion
F0 Flujo de Producto de alimentacion (kg/min)
Fi Flujo de Producto en cada uno de los efectos (kg/min)
Hc Horizonte de control
Hp Horizonte maximo de prediccion
H1 Horizonte mınimo de prediccion
J Funcion objetivo o de coste
Ki Coeficiente de la valvula en cada uno de los efectos (m2.5/min)
Mi Masa en cada uno de los efectos (kg)
O Conjunto de objetivos de control
Oi Flujo de vapor en cada uno de los efectos (kg/min)
S Flujo de vapor de alimentacion (kg/min)
T0 Temperatura de entrada (◦C)
Ti Temperatura en cada uno de los efectos (◦C)
Ts Tiempo de muestreo (min)
U Conjunto de leyes de control
XIII

Letras minusculas
c Vector de restriccion
e Ruido blanco
f Funcion de espacio de estado
g Funcion de la salida
hi Nivel en cada uno de los efectos (m)
k Instante de tiempo
ki Ganancia estatica en cada uno de los efectos
m Numero de entradas manipuladas
n Numero de estados
nu Dimension del vector de entrada
nx Dimension del vector de estado
ny Dimension del vector de salida
p Dimension del vector de parametro
q Numero de perturbaciones
r Senal de salida deseada
u Vector de entrada
v Vector de perturbacion
w Trayectoria interna o de referencia
x Vector de estado
y Vector de salida
yc Respuesta forzada
yf Respuesta libre
z−1 Operador de retardo
Letras griegas
α Factor de sintonizacion de suavidad
∆u Incremento en u.
λ Factor de peso de la senal de control.
ρi Densidad en cada uno de los efectos (kg/m3)
σ Espectro de la matriz A
θ Conjunto de parametros
XIV
Caracteres especiales
C Matriz de controlabilidad
O Matriz de observabilidad
R Campo de los numeros reales
Subındices
d perturbacion
f Presencia de falla
i Numero de efectos
p variable manipulada
Superındices
max Valor maximo
min Valor mınimo
Marcas diacrıticas
ˆ Predicho
˜ Estimado′ Incremento
∗ Equilibrio
Siglas
CARIMA Controlador de Promedio de Movimiento Integrado
CENIDET Centro Nacional de Investigacion y Desarrollo Tecnologico
DMC Control de Matriz Dinamica
EHAC Control Adaptativo de Horizonte Extendido
EPSAC Control Predictivo Autoadaptable Extendido
FDI Aislamiento y Deteccion de Fallas
FTC Control Tolerante a Fallas
GMV Mınima Varianza Generalizada
GPC Control Predictivo Generalizado
XV

IAE Integral del Error Absoluto
IDCOM Comando e Identificacion
ISE Integral del Error Cuadratico
ITAE Integral del Error Absoluto por el Tiempo
LTI Lineal Invariante en el Tiempo
MAC Control Algorıtmico basado en Modelo
MBPC Control Predictivo Basado en Modelo
MPHC Control Predictivo Heurıstico basado en Modelo
MUSMAR Control Adaptativo Multivariable Multipaso
NMPC Control Predictivo No Lineal
OPC Control Predictivo Optimo
PBSAC Control Predictivo Autosintonizado
PCT Tecnologıa de Control Predictivo
PFC Control Predictivo Funcional
PID Proporcional Integral Derivativo
RMPCT Tecnologıa de Control Predictivo de Modelos Robustos
SMCA Arquitectura de Control de Referencia Multivariable
SP Punto de Referencia
XVI

Capıtulo 1
Introduccion
La evaporacion se define como el cambio de estado lıquido al estado de vapor, quetiene lugar de forma gradual, solo en la superficie del lıquido y a temperatura inferior a lade ebullicion.
La evaporacion es un proceso que se utiliza ampliamente en la industria de proce-sos, sobre todo en la industria alimenticia, debido a la amplia utilidad y versatilidad queeste proceso proporciona. Algunas de sus aplicaciones se encuentran en la elaboracion dejugos y concentrados de frutas, en algunas industrias quımicas para concentrar solucionesacuosas y en fabricacion de papel; sin embargo, su principal aplicacion se encuentra en losingenios azucareros [Garfias y col., 2005].
La cana de azucar ha sido sin lugar a dudas uno de los productos de mayor impor-tancia para el desarrollo comercial en los continentes americano y europeo. El azucar seconsume en todo el mundo, puesto que es una de las principales endulsantes en las dietasde todos los paıses.
El azucar puede obtenerse principalmente a partir de la cana de azucar y de la remo-lacha azucarera. Para su obtencion se requiere de un largo proceso, desde que la semillade cana germina hasta que el azucar se comercializa. En este proceso se encuentra elsistema de evaporacion el cual emplea comunmente evaporadores de multiple efecto paraconcentrar el jugo de cana de azucar. En la Figura 1.1 se muestra el proceso completo dela produccion de azucar.
Los pasos en la fabricacion del azucar de cana se detallan a continuacion [Kung, 2002]:
1

2 CAPITULO 1. INTRODUCCION
Figura 1.1: Proceso de produccion de azucar
Labores de Campo y Cosecha
El proceso productivo se inicia con la preparacion del terreno, etapa previa de lasiembra de la cana. Una vez que la planta madura (entre los 12 y 14 meses), las personasencargadas del area de cosecha se disponen a cortarla y recogerla a traves del alce mecanicoy llevarla hacia los patios de cana de los ingenios.
Patios de Cana
La cana que llega del campo se muestrea para determinar las caracterısticas de cali-dad y el contenido de sacarosa, fibra y nivel de impurezas. Luego se pesa en basculas y seconduce a los patios donde se almacena temporalmente o se dispone directamente en lasmesas de lavado de cana para dirigirla a una banda conductora que alimenta las picadoras.

3
Picado de Cana
Las picadoras son unos ejes colocados sobre los conductores accionados por turbinas,provistos de cuchillas giradoras que cortan los tallos y los convierten en astillas, dandolesun tamano mas uniforme para facilitar ası la extraccion del jugo en los molinos.
Molienda
La cana preparada por las picadoras llega a un tandem de molinos, constituıdo cadauno de ellos por tres o cuatro mazas metalicas y mediante presion extrae el jugo de lacana. Cada molino esta equipado con una turbina de alta presion. En el recorrido dela cana por el molino se agrega agua, generalmente caliente, para extraer al maximo lacantidad de sacarosa que contiene el material fibroso. Este proceso de extraccion es lla-mado maceracion. El bagazo que sale de la ultima unidad de molienda se conduce a unabagacera para su secado y luego se va a las calderas como combustible, produciendo elvapor de alta presion que se emplea en las turbinas de los molinos.
Pesado de Jugos
El jugo diluido que se extrae de la molienda se pesa para saber la cantidad de jugosacaroso que entra en la fabrica.
Clarificacion
El jugo obtenido en la etapa de molienda es de caracter acido, este se trata conlechada de cal, la cual eleva el pH con el objetivo de minimizar las posibles perdidas desacarosa. La cal tambien ayuda a precipitar impurezas organicas o inorganicas que vienenen el jugo y para aumentar o acelerar su poder coagulante, se eleva la temperatura deljugo encalado mediante un sistema de tubos calentadores. La clarificacion del jugo se dapor sedimentacion; los solidos no azucares se precipitan en forma de lodo llamado cachazay el jugo claro queda en la parte superior del tanque. Este jugo sobrante se envıa a losevaporadores y la cachaza sedimentada que todavıa contiene sacarosa pasa a un procesode filtracion antes de ser desechada al campo para el mejoramiento de los suelos pobresen materia organica.
Evaporacion
Aquı se comienza a evaporar el agua del jugo. El jugo claro que posee casi la mismacomposicion del jugo crudo extraıdo (con la excepcion de las impurezas eliminadas en la
4 CAPITULO 1. INTRODUCCION
cachaza) se recibe en los evaporadores con un porcentaje de solidos solubles entre 10 y12% y se obtiene jarabe con una concentracion aproximada de solidos solubles del 55 al60%.
Este proceso se da en evaporadores de multiples efectos, que consisten en una solucionde celdas de ebullicion dispuestas en serie. El jugo entra primero en el preevaporador y secalienta hasta el punto de ebullicion. Al comenzar a ebullir se generan vapores los cualessirven para calentar el jugo en el siguiente efecto, logrando ası un menor punto de ebullicionen cada evaporador. En el proceso de evaporacion se obtiene el jarabe. El jarabe se pu-rifica en un clarificador. La operacion es similar a la anterior para clarificar el jugo filtrado.
Cristalizacion
La cristalizacion se realiza en otro tipo de evaporador llamado tachos, que son re-cipientes al vacıo de un solo efecto. El material resultante que contiene lıquido (miel) ycristales (azucar) se denomina masa cocida. El trabajo de cristalizacion se lleva a caboempleando el sistema de tres cocimientos para lograr la mayor concentracion de sacarosa.
Centrifugacion
La masa cocida pasa por las centrıfugas, maquinas giratorias en las cuales los cristalesse separan del licor madre por medio de una masa centrıfuga aplicada a tambores rota-torios que contienen mallas interiores. La miel que sale de las centrıfugas se bombea atanques de almacenamiento para luego someterla a posteriores evaporaciones y cristaliza-ciones en los tachos. Al cabo de tres cristalizaciones sucesivas se obtiene una miel final quese retira del proceso y se comercializa como materia prima para la elaboracion de alcoholes.
Secado
El azucar humeda se transporta por elevadores y bandas para alimentar las secado-ras que son elevadores rotatorios en los cuales el azucar se coloca en contacto con el airecaliente que entra en contracorriente. El azucar debe tener baja humedad, aproximada-mente 0,05%, para evitar la formacion de terrones.
Enfriamiento
El azucar se seca con temperatura cercana a 60oC, se pasa por los enfriadores ro-tatorios inclinados que llevan el aire frıo en contracorriente, en donde se disminuye sutemperatura hasta aproximadamente 40-45oC para conducir al envase.

1.1. INTERES Y PLANTEAMIENTO DEL PROBLEMA 5
Envase
El azucar seca y frıa se empaca en sacos de diferentes pesos y presentaciones depen-diendo del mercado y se despacha a la bodega de producto terminado para su posteriorventa y comercio.
1.1 Interes y planteamiento del problema
Debido a que cualquier proceso con un controlador convencional como lo es un con-trolador Proporcional Integral Derivativo (PID) la medida de la variable controlada sedevuelve al controlador para que efectue la comparacion con el punto de ajuste. Comoresultado de esta comparacion, el controlador establece la senal de error o desviacion, enfuncion de la cual genera la senal de salida, pero si en el proceso hay presencia de algunafalla de cualquier ındole, el controlador ya no funciona correctamente y no alcanza losobjetivos deseados, pudiendo causar graves danos tanto humanos como materiales.
Por ejemplo, en el proceso de produccion de azucar una vez cortada la cana, lasacarosa se degrada rapidamente [Garcıa y col., 2007]. Un paro no programado por man-tenimiento tiene repercusiones importantes en la cadena de produccion, representandocuantiosas perdidas.
Es por ello, que para evitar estas situaciones se necesita emplear en los procesostecnicas fiables de control que permitan la operacion del proceso con gran eficiencia y altogrado de flexibilidad, y ademas que actuen en forma correcta en presencia de fallas, estetipo de control se conoce como Control Tolerante a Fallas (FTC).
El Control Tolerante a Fallas considera la posibilidad y disponibilidad de cambios es-tructurales en la planta que se controla (cambios incluyendo en comportamiento dinamico,los cambios en actuadores disponibles, y los cambios en sensores disponibles), ası como laposibilidad que los objetivos del control pueden necesitar ser cambiados. Debido a esto elControl Tolerante a Fallas puede corregir las posibles fallas de algun equipo e instrumentoantes de que esas fallas tengan consecuencias.
La incorporacion de mecanismos de control tolerante en el lazo de control dependefuertemente del tipo de control utilizado. Ası, por ejemplo, existen estrategias de controlcomo el control predictivo que, simplemente anadiendo nuevas restricciones al problemade optimizacion, permiten facilmente incorporar mecanismos de tolerancia a fallas. Lo quehace que este tipo de control tenga intrınsecamente propiedades que lo hagan tolerante a

6 CAPITULO 1. INTRODUCCION
fallas.
En este trabajo se pretende abordar la problematica de acomodacion de fallas me-diante la utilizacion del Control Predictivo Basado en Modelo (MBPC) cuando las fallastienen un efecto del tipo saturacion, por ejemplo, valvulas bloqueadas, atascadas o parcial-mente obstruidas; ademas cuando se presentan fallas internas en el proceso, por ejemplo,fugas en el producto. Dada la falla, es posible que los objetivos de control no se puedanobtener al 100 %, y se tenga un funcionamiento degradado.
Las fallas de actuadores tales como atascos y reducciones de la taza de incrementopueden ser representadas modificando las restricciones en la definicion del problema delControl Predictivo Basado en Modelo. Otras fallas se pueden representar modificandoel modelo interno usado por el MBPC o cambiando los primeros principios del modelo.Ademas, MBPC tiene un grado de tolerancia a fallas para fallas de actuador bajo ciertascondiciones, incluso si la falla no se detecta.
1.2 Hipotesis
La hipotesis en este trabajo de tesis es la siguiente:
Con el empleo del MBPC multivariable, se obtendra una correcta acomodacion defallas de tipo saturacion e internas en el proceso de un evaporador de cinco efectos. Estosimplemente se llevara a cabo, anadiendo nuevas restricciones al problema de optimizacionen el MBPC, para el caso de las fallas en actuadores y aprovechando los beneficios queproporciona un control multivariable, para el caso de fallas internas del proceso.
1.3 Objetivos
Objetivo general:
El objetivo general de este tema de tesis es: proponer y desarrollar una estrategiade Control Tolerante a Fallas basado en MBPC, que involucre la acomodacion de fallas enevaporadores, con el fin de tener un control eficiente para la concentracion aun en presen-cia de fallas.
Objetivo especıfico:
• Desarrollar el modelo matematico de un evaporador de cinco efectos aplicado a laproduccion de azucar.

1.4. ALCANCE Y LIMITACIONES 7
• Realizar un MBPC con restricciones para el sistema del evaporador de cinco efectos,donde las variables controladas sean las concentraciones y los niveles en cada uno delos efectos.
• Proponer una estrategia de Control Tolerante a Fallas de tipo saturacion para unevaporador de cinco efectos aplicado a la produccion de azucar.
• Proponer una estrategia de Control Tolerante a Fallas de tipo interna para un eva-porador de cinco efectos aplicado a la produccion de azucar.
1.4 Alcance y limitaciones
Alcance:
En este proyecto se considero el modelado y simulacion de un evaporador de cincoefectos. Se tomaron como base los modelos de [Wang y col., 2006] y [Lissane y col., 1998].Se consideraron solo fallas en actuadores y fallas internas del proceso. No se tomaron encuenta las fallas en sensores debido a que son mas difıciles de tratar, ya que para acomodareste tipo de falla se necesita modificar la funcion objetivo.
Limitaciones:
• Se considero un modelo simplificado del sistema de evaporadores de cinco efectosaplicado a la produccion de azucar. Se menciona que es un modelo simplificadodebido a que en el modelado no se considero el condensador barometrico.
• No se desarrollo un sistema de diagnostico, ya que la informacion de deteccion ylocalizacion no da informacion sobre las nuevas restricciones que se tiene cuandosucede la falla, lo que ocasiona que se requiera un sistema de diagnostico muy preciso.Por lo que entre el sistema y el control queda un espacio a cubrir.
• No se consideran fallas en sensores por no ser objetivo del tema de tesis.
• El proceso no se tiene fısicamente, lo que hace imposible realizar una implementacionpractica del controlador.
1.5 Motivacion y Justificacion
Dado que los procesos industriales crecen en complejidad, aumentan el numero devariables y parametros que se miden, ademas del numero de actuadores que se accionanautomaticamente en tiempo real; y en consecuencia aumenta el grado de probabilidad deaparicion de fallas. Por ello es indispensable utilizar tecnicas de control que actuen de

8 CAPITULO 1. INTRODUCCION
forma satisfactoria aun en presencia de fallas.
El control tolerante es una alternativa que cumple con las expectativas de los procesosactuales, ya que trata del diseno e implementacion de sistemas de control de procesosindustriales proclives a que se produzcan funcionamientos incorrectos, ya sea en sensores,actuadores, controladores, o componentes del proceso durante su operacion. Para ello setrata de tener en cuenta a la hora de disenar e implementar el sistema de control unasituacion en que se produzcan fallas en el mismo.
1.6 Aportacion y Originalidad
En este documento se contribuye en el estudio y modelado de equipos de transfe-rencia de calor industriales, ya que se proporciona la teorıa basica y elemental para laobtencion del modelo matematico no lineal de un evaporador de cinco efectos aplicado a laproduccion de azucar. Ademas se menciona la metodologıa empleada para la linealizacionde sistemas no lineales.
Tambien se presenta el desarrollo de un Control Tolerante a Fallas basado en MBPC,que permite a la especialidad de Control Automatico del CENIDET avanzar en la lıneade investigacion de diagnostico de fallas.
Quiza la mayor aportacion de este trabajo de investigacion sea, que se proporcionade forma especıfica la manera de acomodar distintos tipos de fallas, como son:
• fallas en actuadores,
• fallas en sensores y
• fallas internas del proceso
en el Control Predictivo Basado en Modelo.
1.7 Estado del arte
1.7.1 Areas de investigacion del Control Tolerante a Fallas
Las areas de investigacion del Control Tolerante a Fallas en las ultimas dos decadasse presentan en la Figura 1.2 [Patton, 1997].

1.7. ESTADO DEL ARTE 9
Figura 1.2: Areas de investigacion del Control Tolerante a Fallas
1. Aislamiento y Diagnostico de Fallas (FDI): La mayorıa de las investiga-ciones en Aislamiento y Deteccion de Fallas no incluyen la combinacion del diseno decontroladores con la deteccion de fallas, el aislamiento de fallas y la identificacion de fallas(estimacion). Sin embargo, la investigacion de FDI es ahora un campo muy maduro queproporciona muchas herramientas cuantitativas y/o cualitativas que modelan inteligenciaartificial. Referencias de investigaciones en esta area se pueden encontrar en: [Willsky,2006] donde se realizo un analisis de los metodos de diseno para la deteccion de fallasen sistemas dinamicos, [Mironovski, 1980] donde se estudio el diagnostico funcional delos sistemas dinamicos, [Walker, 1983] donde se realizo un estudio generalizado del FDI,[Isermann, 1984] donde se analizo la deteccion de fallas basada en metodos de modeladoy estimacion, [Frank, 1990] donde se realizo un diagnostico de fallas usando redundanciaanalıtica, [Patton y col., 1993] donde se realizo un analisis de la robustez del diagnosticode fallas basado en modelo, [Krishnasaami y col., 1994] donde se desarrollo un generadorde residuos basado en un observador para FDI.
2. Control Robusto: El diseno del Control Robusto fue el asunto de investi-gacion mas importante desde los anos 70. Sin embargo, la informacion referente a losefectos de fallas sobre el proceso controlado no se consideraba generalmente. Algunas delas investigaciones realizadas en esta area se pueden encontrar en: [Morari y col., 1989],[Maciejowski, 1989] y [Zhou y col., 1996] donde se realizaron estudios extensos de ControlRobusto.
3. Control Reconfigurable: El problema del Control Reconfigurable trajo la

10 CAPITULO 1. INTRODUCCION
atencion de varios investigadores. Por ejemplo, [Lane y col., 1988] y [Ochi y col., 1991]propusieron el uso de la linealizacion realimentada, [Gao y col., 1991] describieron el uso demetodos pseudo inversos. [Astrom, 1996] y otros consideraron aproximaciones del ControlAdaptable, etc.
4. Control Robusto Reconfigurable: Esta area representa las ediciones de la ro-bustez que acompanan al Control Reconfigurable. Los estudios en esta area son pocos. En[Wu, 1997] se investigo el problema del funcionamiento de la robustez durante la operacionde un sistema normal contra la sensibilidad de la falla cuando se determinaba la falla deun componente del sistema. Se utilizaba un sistema parametrizado de controladores quesatisfacıan un nivel de funcionamiento prescrito. El sistema se optimizaba bajo un crite-rio de deteccion que sensibilizaba las medidas a las fallas especıficas. Se consideraba laintegracion de ediciones como un problema del diseno de control, donde estaba libre undiseno a elegir de un numero de tecnicas convenientes de FDI. Tambien se considerabauna medida de funcionamiento basada sobre un “intervalo de cobertura”. De esta maneralos requisitos de la confiabilidad y del funcionamiento de varios modulos pueden ser rela-cionados. [Jiang, 1994] investigo como el control reconfigurable se puede alcanzar usandoel diseno de la asignacion de la estructura propia.
5. Integracion del FDI y del Control Robusto: Los temas de ControladoresRobustos y de estimacion de fallas robustas fueron estudiados por muchos investigadoresa partir de los anos 80s. Por ejemplo, [Nett y col., 1988], [Tyler y col., 1994], [Murad ycol., 1996] y [Eich y col., 1997] realizaron estudios sobre la integracion del Control Ro-busto y diagnostico. El problema de la estimacion de fallas aquı no es el mismo que enlas aproximaciones de modelados cuantitativos tomados en FDI, segun el area l. Estosestudios se basan sobre la idea que la optimizacion de los Controladores Robustos y eldiseno de la estimacion de fallas estan combinados en gran medida. Sin embargo, estaaproximacion conduce a la interaccion compleja entre el controlador y los problemas dela robustez de FDI. El camino alternativo de realizar “lazo abierto” FDI (como en area1 ) y separar el diseno del controlador evita la complejidad de la libertad del diseno. Laseparacion del diseno tambien da lugar a un “acoplamiento unidireccional” en robustez,esto es, el controlador afecta la robustez FDI pero no viceversa. Este no es el caso en losproblemas de la estimacion de control/fallas.
6. Integracion del FDI y del Control Reconfigurable Robusto: Pocos estu-dios combinaron las funciones de FDI y del Control Reconfigurable. Ahora se entiende quela funcion de FDI puede evitar el desarrollo de fallas mas serias. Sin embargo la combi-nacion de la reconfiguracion de FDI/control es compleja. En [Mariton, 1989] se describiolas consecuencias importantes que el retraso de la deteccion tiene sobre la estabilidad delsistema. [Srichander y col., 1993] propusieron una aproximacion estocastica al analisisde la estabilidad de algunos sistemas de Control Tolerantes a Fallas activas que emplea-

1.8. ORGANIZACION DEL DOCUMENTO 11
ban esquemas de FDI. Tales sistemas se pueden mostrar para tener un comportamientodinamico gobernado por ecuaciones diferenciales estocasticas mientras que ocurren lasdecisiones aleatoriamente de fallas/falla. Los parametros de las ecuaciones diferencialesestocasticas varıan aleatoriamente en tiempo y las ecuaciones se pueden analizar usandola teorıa de Markov. Estas aproximaciones estocasticas para el analisis de la robustez sonun campo teorico que emerge en el Control Tolerante a Fallas.
En esta area se busca integrar el diseno y la puesta en practica de un esquema deControl Reconfigurable (basado sobre disenos de Controladores Robustos) y de una unidadde FDI. Segun lo indicado anteriormente, en esta area se estudio el diseno del empalmede los Controladores Robustos y la estimacion de fallas, sin embargo, estos estudios noincluıan la funcion completa del FDI y debido a la aproximacion tomada, la estimacion defallas afectaba la robustez del controlador. Cuando se realizo la deteccion y el aislamientode fallas usando la aproximacion de “lazo abierto” (que generan residuos que no influyenen el controlador), el problema de la robustez del controlador fue desacoplar el diseno dela unidad de FDI, aunque el controlador afectaba la robustez de la deteccion de fallas yde las tareas del aislamiento de fallas.
7. Supervision: [Rauch, 1995], [Eryurek y col., 1995], [Polycarpou y col., 1995],entre otros, introdujeron diversas formas de logica de seleccion y de sistema de adminis-tracion en el sistema tolerante a fallas. Mientras que la Supervision es esencial para laforma activa del Control Tolerante a Fallas, pocos investigadores prestan mucha atenciona esta area. El sistema de Supervision maneja la informacion de la decision de la fallay selecciona la funcion de control mas conveniente (parametros pero a veces estructura),subsecuente a la declaracion que ocurre una falla. El sistema de Supervision debe tambiendeterminar si la falla tiene un efecto perjudicial en el funcionamiento y la estabilidad delsistema para autorizar cambios del controlador. Es importante que la unidad de FDI seacapaz de proporcionar la informacion de diagnostico en un formato conveniente para fa-cilitar la adaptacion de la retroalimentacion del sistema.
El area del Control Tolerante a Fallas que se estudia en este tema de tesis, es elControl Reconfigurable. Ya que en este tema de tesis se desarrolla el FTC basado enMBPC, esto se detalla en el Capıtulo 3.
1.8 Organizacion del documento
El documento se encuentra dividido en 6 capıtulos y 4 apendices, a continuacion sedescribe brevemente el contenido de cada capıtulo.
En el Capıtulo 2 se presenta la teorıa correspondiente a el Control Tolerante a

12 CAPITULO 1. INTRODUCCION
Fallas. En el mismo capıtulo se muestra una clasificacion de los mecanismos de toleranciaa fallas.
En el Capıtulo 3 se muestran los conceptos basicos y el desarrollo matematico delControl Predictivo Basado en Modelo sin cambio de restricciones y como Control Toleran-te a Fallas.
El Capıtulo 4 muestra una descripcion del proceso de evaporacion. Tambien pre-senta el modelo no lineal del proceso del evaporador de cinco efectos aplicado a la pro-duccion de azucar tomando en cuenta ciertas suposiciones. En el mismo capıtulo se mues-tra la linealizacion de este modelo no lineal y se presentan graficas de dicho modelo enlazo abierto.
En el Capıtulo 5 se presentan los resultados obtenidos al aplicar el MBPC sin cam-bio de restricciones y como Control Tolerante a Fallas al proceso del evaporador de cincoefectos aplicado a la produccion de azucar.
En el Capıtulo 6 se presentan las conclusiones generales de la tesis, y los trabajosfuturos.
En el Apendice A se presentan los calculos realizados para llevar a cabo la lineali-zacion del modelo no lineal.
En el Apendice B se da un procedimiento para convertir la forma de la funcionobjetivo en una forma cuadrada.
El Apendice C contiene una descripcion de la funcion quadprog del Toolbox de opti-mizacion.
Finalmente el Apendice D contiene un argumento para la eleccion de los valoresde los horizontes H1, Hp y Hc
Capıtulo 2
Generalidades del Control Tolerante a Fallas
En este capıtulo se presentan los conceptos basicos correspondientes al Control To-lerante a Fallas, ası como la clasificacion de los mecanismos de tolerancia a fallas. Se daenfasis a una explicacion de la tolerancia en actuadores, por ser el componente de mayorinteres en esta tesis.
En la Seccion 2.1 se presentan conceptos basicos del Control Tolerante a Fallas. Enla Seccion 2.2 se muestra el problema del Control Tolerante a Fallas. En la Seccion 2.3se da la clasificacion de los mecanismos de tolerancia a fallas, enfatizando la descripciondel mecanismo de tolerancia a fallas en la ley de control. Finalmente en la Seccion 2.4 sepresentan algunas conclusiones.
2.1 Control Tolerante a Fallas
Los procesos industriales gobernados mediante controladores automaticos puedenpresentar fallas. Una forma de aumentar su fiabilidad consiste en dotarlos de mecanismosde tolerancia frente a las mismas. El diseno de sistemas de Control Tolerante a Fallas esuna area emergente en control automatico que aglutina diversas disciplinas y areas teoricasque tienen como objetivo alcanzar esta nueva funcionalidad.
El concepto de control tolerante nace hace a finales de los 70s de la mano del ControlTolerante a Fallas de aviones, si bien a nivel cientıfico aparece mas tarde como un objetivobasico en el primer congreso de IFAC SAFEPROCESS de 1991 y sobretodo se desarrollacon gran fuerza desde el inicio del sigloXXI1. El control tolerante trata del diseno e im-
16th IFAC SAFEPROCESS 2006, Beijing, R.P. China; 5th IFAC SAFEPROCESS 2003, Washington,D.C., USA; 4th IFAC SAFEPROCESS 2000, Budapest, Hungrıa.
13

14 CAPITULO 2. GENERALIDADES DEL CONTROL TOLERANTE A FALLAS
plementacion de sistemas de control de procesos industriales proclives a que se produzcanfuncionamientos incorrectos ya sea en sensores, actuadores, controladores, o componentesdel proceso durante su operacion. Para ello, se trata de tener en cuenta (a la hora dedisenar e implementar el sistema de control) una situacion en que se produzcan fallas enel mismo. En un entorno industrial esta es una situacion realista ya que los procesosindustriales crecen en complejidad, aumentan el numero de variables y parametros que semiden y de actuadores que se accionan automaticamente en tiempo real. En consecuencia,aumenta el grado de probabilidad de aparicion de fallas.
Las tecnicas empleadas para lograr la tolerancia a fallas se divide en dos clases princi-pales: las tecnicas pasivas y las tecnicas activas. La primera de ellas, utiliza la propiedadque tienen los sistemas realimentados de hacer frente a perturbaciones, cambios en ladinamica del sistema e incluso fallas en la misma. Un cambio inesperado en el sistemacrea un efecto sobre el mismo que se transmite al sistema de control que a su vez tratade compensarlo de forma mas o menos rapida. En este sentido, el control tolerante pasivoconsiste en un diseno robusto del sistema de control realimentado para hacerlo inmune adeterminadas fallas [Patton, 1997]. Sin embargo, la teorıa de Control Robusto muestra quesolo existen Controladores Robustos para una clase reducida de cambios en la dinamicadel sistema provocados por las fallas. Ademas, un Controlador Robusto funciona de formasuboptima para la planta nominal puesto que sus parametros se han obtenido medianteun compromiso entre prestaciones y robustez para toda la familia de plantas considera-da, incluyendo las posibles fallas. Por otro lado, el control tolerante activo consiste en eldiagnostico en lınea de la falla, es decir, en determinar el componente en falla, el tipo defalla, su tamano e instante de aparicion y, a partir de dicha informacion, activar algunmecanismo de acomodacion de la misma o de reconfiguracion del control o incluso depen-diendo de la gravedad de la falla, el paro del sistema. Este enfoque exige disponer de unsistema de diagnostico de fallas que, en tiempo real, pueda dar informacion a un sistemasupervisor para que active algun mecanismo de accion correctora [Blanke y col., 2003].
La estrategia de tolerancia a fallas a aplicar, depende del componente del lazo decontrol que se vea afectado por la falla. En primer lugar, si el proceso controlado disponede redundancia fısica, mas de un componente (sensor, actuador, elemento del proceso)para realizar la misma funcion, entonces la estrategia de tolerancia consistira simplementeen sustituir el componente que presente falla por otro igual que se encuentre en estadosaludable. Esta estrategia es costosa ya que supone duplicar o triplicar los componentescrıticos de un proceso controlado y no siempre es posible incorporarlos fısicamente en unespacio reducido.
En el caso de que no exista redundancia fısica, se distingue entre fallas en sensores,actuadores y en el proceso. Para acomodar fallas en sensores se suelen utilizar los deno-minados sensores virtuales que se basan en la estimacion de la medida del sensor en falla
2.2. PROBLEMA DEL CONTROL TOLERANTE A FALLAS 15
a partir del resto de sensores existentes en el sistema. Para acomodar fallas en actuadoresy/o la propia planta se opta por el rediseno de controladores, utilizandose principalmente,dos mecanismos: la acomodacion a la falla y la reconfiguracion, segun se cambie la ley ola estructura de control, respectivamente [Blanke y col., 2003].
La incorporacion de mecanismos de Control Tolerante a Fallas en el lazo de controldepende fuertemente del tipo de control utilizado. Ası, por ejemplo, existen estrategiasde control como el control predictivo que, simplemente anadiendo nuevas restriccionesal problema de optimizacion, permiten facilmente incorporar mecanismos de tolerancia afallas [Maciejowski, 2001].
2.2 Problema del Control Tolerante a Fallas
Los sistemas de Control Tolerantes a Fallas pueden ser obtenidos dando al sistema(o subsistema) de control la capacidad de detectar, localizar e identificar las fallas y dereaccionar con ciertas acciones para adaptarse a la falla. Para establecer correctamenteel problema de Control Tolerante a Fallas, comenzaremos con la definicion del problemadel control estandar: El problema de control estandar esta definido por un conjunto deobjetivos de control O, un conjunto de leyes de control U y un conjunto de restriccionesC. Estas ultimas estan definidas por la representacion del proceso (estructura U y θ).Solucionar el problema de control consiste en seleccionar una ley de control U que satis-faga C y permita alcanzar los objetivos O. Lo anterior puede ser formulado de la manerasiguiente [Blanke, 2000]:
Resolver 〈O,C (θ) , U〉
donde C(θ) denota la dependencia de las restricciones C sobre los parametros θ.
El Control Tolerante a Fallas esta relacionado con el control del sistema defectuoso.Esto se puede realizar cambiando la ley de control sin cambiar el sistema que esta siendoaccionado o bien, cambiando el sistema de control y el proceso. El problema del ControlTolerante a Fallas puede ser interpretado como una extension del problema de controlestandar; en el cual se representa la estructura posible del sistema defectuoso, en el con-junto de estructuras posibles y el conjunto de parametros que son asociados entre todoslos parametros posibles. El Control Tolerante a Fallas se obtiene entonces por:
Resolver 〈O,Cf (θf ) , U〉
Donde Cf (θf ) es la estimacion de las nuevas restricciones del proceso, y son deter-

16 CAPITULO 2. GENERALIDADES DEL CONTROL TOLERANTE A FALLAS
minadas por medio de las tareas de diagnostico.
Este trabajo se enfoca en la tolerancia activa a fallas. En este caso, para cada una delas situaciones, (sistema en buen estado y sistemas con falla) existe una solucion apropiada.Cada uno de los modos de funcionamiento (normal y anormal) esta asociado a un proble-ma de control, el sistema debe conocer en que estado de funcionamiento se encuentra. Losalgoritmos de diagnostico son quienes proporcionan esta informacion. De manera generalexisten dos estrategias de FTC activa: la acomodacion a las fallas y la reconfiguracion.
La acomodacion del sistema de control ante fallas consiste en un cambio de parametrosdel controlador o de su estructura con la finalidad de controlar el sistema en falla y evitelas consecuencias de la falla. Las conexiones entre las entradas y las salidas del sistemade control y el proceso permanecen sin cambios. El objetivo inicial del control se alcanzaa pesar de que los indicadores de desempeno pueden verse degradados. Por otro lado lareconfiguracion del sistema consiste en un cambio de entradas-salidas entre el controladordel proceso por medio de [Blanke, 2000]:
1. un cambio en la estructura y los parametros del controlador y/o
2. un cambio de la estructura del proceso.
El caso 2 supone la posibilidad de llegar a una estructura del proceso que contienesolamente los componentes en buen estado (aislamiento fısico del componente en falla).El objetivo original del control se alcanza a pesar de que los ındices de desempeno puedendegradarse.
2.3 Clasificacion de los mecanismos de tolerancia a
fallas
Dentro de un lazo de FTC se puede considerar que existe tolerancia a fallas al contarcon:
• mecanismos que introducen redundancia en los sensores y/o actuadores,
• estrategias de adaptacion de la ley de control que gobierna el lazo.
La Figura 2.1 sugiere una clasificacion de los mecanismos de tolerancia a fallas con-siderados en esta seccion.
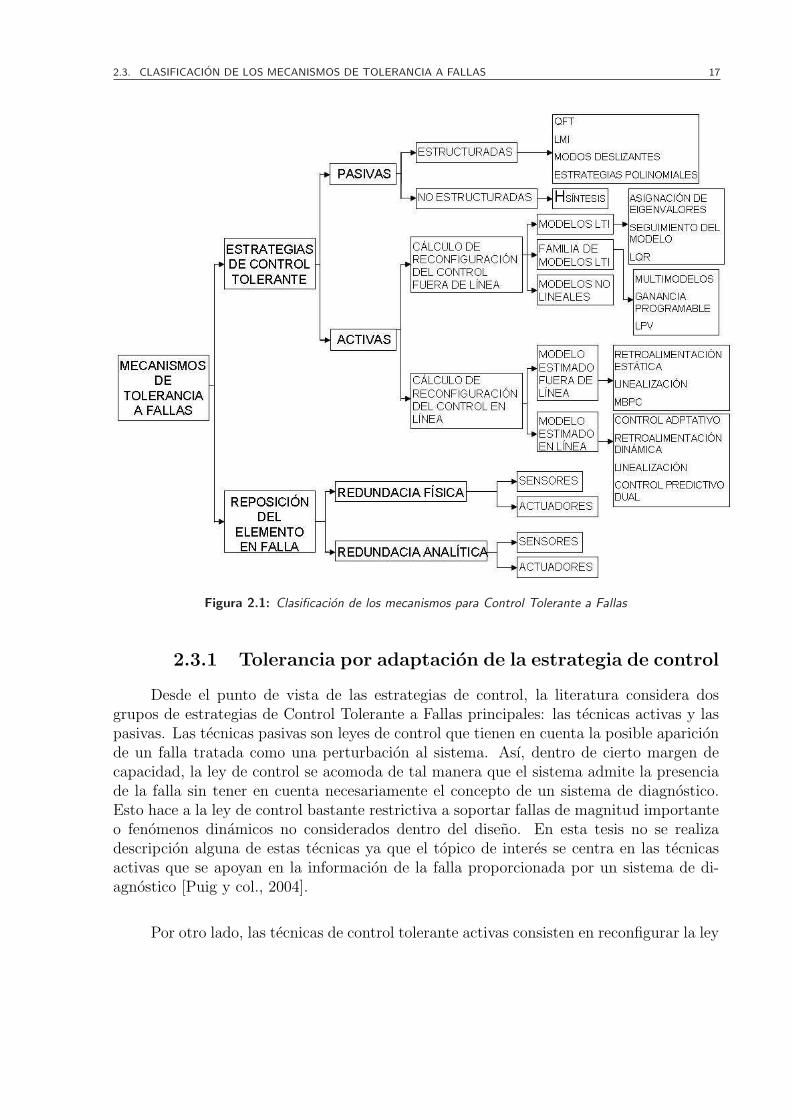
2.3. CLASIFICACION DE LOS MECANISMOS DE TOLERANCIA A FALLAS 17
Figura 2.1: Clasificacion de los mecanismos para Control Tolerante a Fallas
2.3.1 Tolerancia por adaptacion de la estrategia de control
Desde el punto de vista de las estrategias de control, la literatura considera dosgrupos de estrategias de Control Tolerante a Fallas principales: las tecnicas activas y laspasivas. Las tecnicas pasivas son leyes de control que tienen en cuenta la posible aparicionde un falla tratada como una perturbacion al sistema. Ası, dentro de cierto margen decapacidad, la ley de control se acomoda de tal manera que el sistema admite la presenciade la falla sin tener en cuenta necesariamente el concepto de un sistema de diagnostico.Esto hace a la ley de control bastante restrictiva a soportar fallas de magnitud importanteo fenomenos dinamicos no considerados dentro del diseno. En esta tesis no se realizadescripcion alguna de estas tecnicas ya que el topico de interes se centra en las tecnicasactivas que se apoyan en la informacion de la falla proporcionada por un sistema de di-agnostico [Puig y col., 2004].
Por otro lado, las tecnicas de control tolerante activas consisten en reconfigurar la ley

18 CAPITULO 2. GENERALIDADES DEL CONTROL TOLERANTE A FALLAS
de control basandose en el uso de un diagnosticador que provee la informacion necesariapara realizar automaticamente los ajustes necesarios con el fin de cumplir los objetivosde control. Para entender las diferentes estrategias de tolerancia activa a fallas que sepueden aplicar, se ha de considerar el impacto de las fallas en el problema de controlestandar < O, C(θ), U > (ver Definicion 1, [Puig y col., 2004]), donde C(θ) indica comodependen las restricciones de los parametros que a su vez dependen de las fallas. El sistemade diagnostico de fallas informa que restricciones cambian y que leyes de control ya nose pueden utilizar, debiendose considerar dos casos, dependiendo de si el algoritmo dediagnostico ha sido capaz de proporcionar:
• una estimacion Cf
(θf
)y Uf del impacto de la falla de forma que el problema de
control a resolver pasara a ser < O, Cf
(θf
), Uf > y
• solo la deteccion y el aislamiento de la falla pero no la estimacion de la magnitud desu impacto.
Existen dos formas principales de rediseno del sistema de control para introducirtolerancia frente a sus efectos segun si la falla produjo o no cambios en la estructura delsistema, esto es:
• Cambiando la ley de control sin cambiar los elementos del lazo de control mediantela acomodacion al efecto de la falla, en el caso de que haya sido posible estimar loscambios de estructura y parametros introducidos por la falla.
Definicion 1 Acomodacion a la falla.
La acomodacion a la falla consiste en resolver el problema de control < O, Cf
(θf
), Uf >,
siendo Cf
(θf
)una estimacion de las restricciones actuales proporcionadas por los
algoritmos de diagnostico de fallas.
• Cambiando la ley de control y los elementos del lazo mediante su reconfiguracionfrente a la falla, en el caso de que esta no haya podido estimar los cambios deestructura y parametros introducidos por la falla. En este caso, se desconectaranlos componentes en falla localizados por el sistema de diagnostico y se trataran dealcanzar los objetivos de control utilizando solo los componentes sin falla.
Definicion 2 Reconfiguracion del sistema.La reconfiguracion del sistema frente a la falla consiste en encontrar un nuevo con-
junto de restricciones Cf
(θf
)tal que el problema de control < O, Cf
(θf
), Uf >
tenga solucion.
2.3. CLASIFICACION DE LOS MECANISMOS DE TOLERANCIA A FALLAS 19
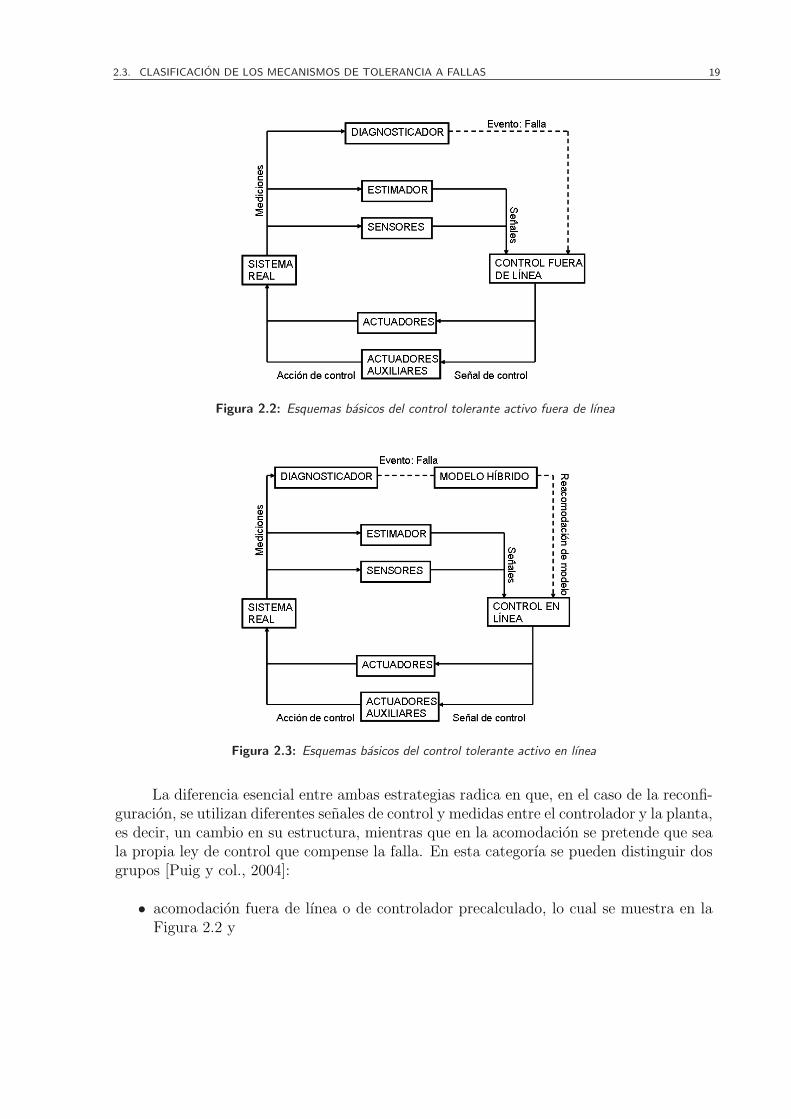
Figura 2.2: Esquemas basicos del control tolerante activo fuera de lınea
Figura 2.3: Esquemas basicos del control tolerante activo en lınea
La diferencia esencial entre ambas estrategias radica en que, en el caso de la reconfi-guracion, se utilizan diferentes senales de control y medidas entre el controlador y la planta,es decir, un cambio en su estructura, mientras que en la acomodacion se pretende que seala propia ley de control que compense la falla. En esta categorıa se pueden distinguir dosgrupos [Puig y col., 2004]:
• acomodacion fuera de lınea o de controlador precalculado, lo cual se muestra en laFigura 2.2 y

20 CAPITULO 2. GENERALIDADES DEL CONTROL TOLERANTE A FALLAS
• acomodacion en lınea o de controlador estimado en lınea, lo cual se muestra en laFigura 2.3.
En ambos esquemas se debera adaptar el controlador teniendo en cuenta que el sis-tema en situacion de funcionamiento normal viene representado por un modelo matematicoal que se llamara Modelo Nominal y que en general sera de la forma:
xn (t) = fn (xn (t) , u (t) , θn)
yn (t) = gn (xn (t) , u (t) , θn)(2.1)
donde x ∈ Rnx, u ∈ Rnu y y ∈ Rny son los vectores de estado, entrada y salida de dimensionnx, nu y ny, respectivamente; f y g son las funciones de espacio de estado y de salidamedida respectivamente; θ es el vector de parametros de dimension p.
En caso de que el modelo sea lineal e invariante en el tiempo se considera de la forma:
xn (t) = An (θn) xn (t) + Bn (θn) u (t)
yn (t) = Cn (θn) yn (t)(2.2)
En situacion de falla, el modelo del sistema vendra representado por el denominadoModelo en Falla y que en general sera de la forma:
xf (t) = ff (xf (t) , u (t) , θf )
yf (t) = gf (xf (t) , u (t) , θf )(2.3)
donde el subındice f denota la presencia de la falla, mientras que en caso particular deque el modelo sea lineal e invariante en el tiempo se considera de la forma:
xf (t) = Af (θf ) xf (t) + Bf (θf ) u (t)
yf (t) = Cf (θf ) yf (t)(2.4)
Cabe agregar que se supone que no hay variacion de la dimension del espacio deestado entre el modelo nominal y el modelo en falla y que no existe ninguna relacion entrelos dos modelos en los aspectos de controlabilidad y/o observabilidad.
2.3.2 Tolerancia por reposicion de sensores y/o actuadores
Para mantener el sistema controlado en funcionamiento, es necesario utilizar unconjunto diferente de actuadores (entradas) y/o sensores (salidas). Para ello se proponeutilizar un bloque de reconfiguracion que junto con la planta en falla, la planta reconfigu-rada se comporte igual que la planta sin falla. Al llevar a cabo esta solucion, se aplican
2.3. CLASIFICACION DE LOS MECANISMOS DE TOLERANCIA A FALLAS 21
cambios mınimos al lazo de control, de tal manera que el controlador estandar pueda con-tinuar controlando la planta como si no existiera falla.
En cualquier caso, ya sea en sensores o actuadores, se maneja la idea de reconfigu-racion desde los siguientes puntos de vista:
• Mediante redundancia fısica: tambien llamada redundancia de hardware. Para elcaso de sensores, esta redundancia consiste en contar con un numero generalmenteimpar de ellos, cuyas salidas se multiplexan dentro de un bloque de decision. En estebloque se determina la medida correcta a partir de la salida mas comun producidapor cada uno de los sensores. El caso de actuadores es mas directo, pues de producirseuna falla, la redundancia fısica implica contar con otro dispositivo alternativo listopara realizar la accion de control, previa determinacion de dano en el actuadorprincipal.
• Mediante redundancia analıtica: tambien conocida como redundancia mediante soft-ware o de elemento virtual. Para el caso de sensores, consiste en la incorporacion deun bloque que reconstruya las medidas mediante la estimacion de las mismas. En elcaso de sensores, se recurre a la aun idea teorica del reajuste de senales alternativaspara llevar a cabo la accion de control requerida. Ası se evita la incorporacion denuevo hardware en el sistema lo que se ve reflejado en costos de instrumentacion.
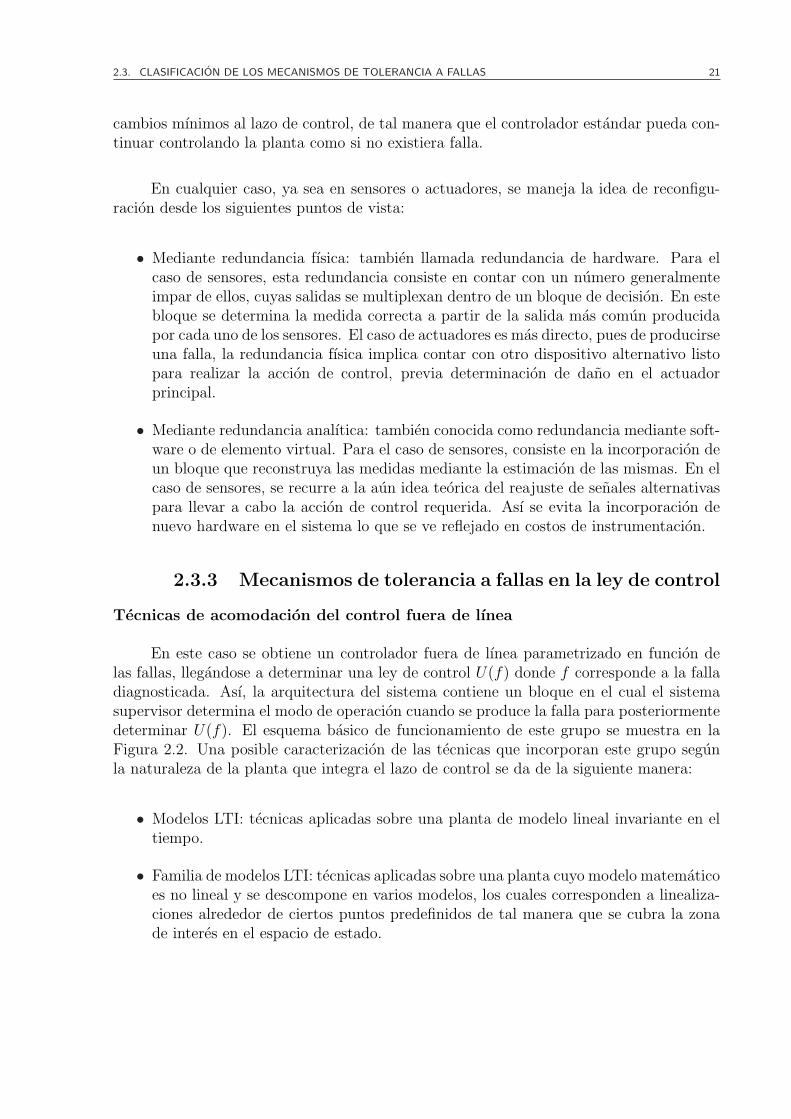
2.3.3 Mecanismos de tolerancia a fallas en la ley de control
Tecnicas de acomodacion del control fuera de lınea
En este caso se obtiene un controlador fuera de lınea parametrizado en funcion delas fallas, llegandose a determinar una ley de control U(f) donde f corresponde a la falladiagnosticada. Ası, la arquitectura del sistema contiene un bloque en el cual el sistemasupervisor determina el modo de operacion cuando se produce la falla para posteriormentedeterminar U(f). El esquema basico de funcionamiento de este grupo se muestra en laFigura 2.2. Una posible caracterizacion de las tecnicas que incorporan este grupo segunla naturaleza de la planta que integra el lazo de control se da de la siguiente manera:
• Modelos LTI: tecnicas aplicadas sobre una planta de modelo lineal invariante en eltiempo.
• Familia de modelos LTI: tecnicas aplicadas sobre una planta cuyo modelo matematicoes no lineal y se descompone en varios modelos, los cuales corresponden a linealiza-ciones alrededor de ciertos puntos predefinidos de tal manera que se cubra la zonade interes en el espacio de estado.

22 CAPITULO 2. GENERALIDADES DEL CONTROL TOLERANTE A FALLAS
• Modelos no lineales: tecnicas de control que se aplican sobre sistemas cuyo modeloes directamente no lineal. En este caso se hace uso de tecnicas de soft-computingpara realizar la implementacion de los controladores. A este grupo pertenecen lastecnicas como control Difuso, Neuronal y Neuro-difuso, entre otras.
Tecnicas de acomodacion del control en lınea
En este caso se obtiene en lınea una ley de control U a partir una estimacion delas restricciones actuales Cf (θf ) despues de la aparicion de la falla. El esquema basico defuncionamiento de este grupo se muestra en la Figura 2.3. A su vez, para la estimaciondel efecto de la falla sobre las restricciones existen dos alternativas:
• Estimacion fuera de lınea. Previamente se estudia el efecto de las fallas sobre lasrestricciones parametrizandose las mismas en funcion de la falla. Al diagnosticarsela falla se cambiaran dichas restricciones de acuerdo con la falla, lo que afectaratambien al controlador puesto que tambien se calcula en lınea a partir de las mismas.A este grupo corresponden las tecnicas de Control Predictivo Basado en Modelo yde Linealizacion Estatica por Realimentacion.
• Estimacion en lınea. El efecto de la falla sobre las restricciones se estima en lınea deforma que el controlador, que tambien se calcula en lınea a partir de las mismas, seadaptara a los cambios que se produzcan. A este grupo corresponden tecnicas comoel Control Adaptativo, la Linealizacion Dinamica por Realimentacion y el ControlPredictivo Dual.
Control Predictivo
Las leyes de control predictivo permiten incluir de forma facil estrategias de controltolerante, puesto que la accion de control se determina a cada instante resolviendo unproblema de optimizacion en un horizonte temporal utilizando como restriccion el modelodel sistema. Si dicho modelo se actualiza a partir de la informacion proporcionada porel sistema de diagnostico acerca de la falla, las nuevas acciones de control se calcularanteniendo en cuenta el efecto de la falla sobre el sistema. La informacion acerca de la fallase puede incluir mediante [Maciejowski, 2001]:
• La redefinicion de las restricciones para representar determinados tipos de falla,siendo especialmente adecuada para fallas en actuadores. Ası, por ejemplo, el rangode operacion puede quedar reducido a un nuevo rango, o prefijado a un determinadovalor.
• El cambio del modelo del proceso para reflejar cambios en la planta real bajo falla.
2.3. CLASIFICACION DE LOS MECANISMOS DE TOLERANCIA A FALLAS 23
• El cambio de los objetivos de control para reflejar limitaciones debido a la operacionbajo condiciones de falla, eliminando, por ejemplo, el control de una variable a raız deuna falla en el sensor que la medıa, en el caso de que esta no pueda ser reconstruidamediante otros mecanismos.
Una extension de esta tecnica al caso de multimodelos la propuso [Gopinathan y col.,1998], en la cual aparecen ciertas interrogantes de operacion y desempeno cuyas respuestasson particulares para cada aplicacion [Aufderheide y col., 2001]. Se pueden citar cuestionesabiertas como el numero requerido de modelos, la estabilidad de cada uno de ellos en ellazo cerrado, la transicion entre ellos y los tiempos de retardo mas la consideracion delretardo del FDI, entre otras.
Por otro lado, una variante de la tecnica de control predictivo consiste en la utilizaciondel denominado Control Predictivo Dual propuesto por [Veres y col., 1998], la cual puedeusarse cuando ocurren cambios dinamicos inesperados. Basicamente, esta estrategia sebasa en el control predictivo agregando ademas una componente que consiste en usarentradas con una accion de prueba para obtener mas informacion de la planta con el finde beneficiar un control futuro. Este tipo de ley de control tiene en cuenta tres aspectos:
• Precaucion del controlador: Significa que se tiene en cuenta la incertidumbre delmodelo del sistema. Esto se logra incluyendo un modelo de la incertidumbre en lafuncion de costo del controlador.
• Prueba del controlador: Significa que tiene en cuenta el efecto de la entrada decontrol en la precision del modelado basada en la estimacion en lınea.
• Inclusion de restricciones: La cual se realiza en el proceso de optimizacion de lafuncion de costo predictiva. Dichas restricciones pueden ser de naturaleza “duras”o “blandas”.
2.3.4 Mecanismos de tolerancia a fallas en sensores y ac-tuadores
Tolerancia en sensores
En el caso de sensores, el bloque de reconfiguracion consiste en utilizar un observadorque permita reconstruir las medidas del sistema a partir de otros sensores existentes, porlo que se denomina sensor virtual o soft sensor. Las tecnicas de reposicion de medidasbasadas en filtros de Kalman no solo tienen validez en el ambito de fallas sino tambien enla idea de optimizar el proceso de medicion de variables dentro de un control industrialmoderno. La posibilidad de estimar variables se encuentra estrechamente ligada con lasespecificaciones particulares del sistema y con la disponibilidad de elementos de medida.El diseno de una red de sensores teniendo en cuenta los criterios de tolerancia a fallas,
24 CAPITULO 2. GENERALIDADES DEL CONTROL TOLERANTE A FALLAS
observabilidad del sistema, costos y robustez es tema de amplio estudio actualmente enla literatura. [Staroswiecki y col., 2004] proponen la estimacion de la tolerancia a fallasasociada al diseno de redes de sensores, analizando el tiempo de utilidad del conjunto desensores, evaluando su capacidad de tolerancia y conjunto mınimo necesario de sensoresconsiderando la redundancia. En el campo de las aplicaciones en este tema se pueden citarlos trabajos basados en fallas de sensores en aeronautica [Hou y col., 1994].
Tolerancia en actuadores
La tolerancia en actuadores consiste en la capacidad que tiene el lazo de controlde soportar la influencia de una falla originada en la etapa de ejecucion de las accionesdeterminadas por el controlador. Estas acciones, por estar relacionadas con actuadoresfısicos, pueden ser irremplazables y una falla originarıa la incapacidad del sistema paraejecutar cualquier accion, lo que implicarıa en la practica una necesidad casi inminente deincorporar al menos otro actuador redundante.
Sin embargo, se propuso en [Lunze y col., 2003] una estrategia que se muestra como eldual del sensor virtual conocida como actuador virtual. Esta estrategia supone, de nuevo,un modelo nominal del proceso y un modelo de la planta cuando se presenta falla en elactuador. Mediante la inclusion de un observador y un controlador por realimentacion deestados se pretenden cumplir los siguientes objetivos:
• que el controlador haga que el lazo de control reconfigurado se comporte como elmodelo nominal del sistema y
• que la salida del sistema reconfigurado tienda al valor de la salida del modelo nominalen presencia de una senal de consigna constante.
La condicion fundamental para el empleo de la tecnica descrita y para asegurar laestabilidad del sistema reconfigurado es que este modelo del sistema en falla sea contro-lable. En estas condiciones, dado un modelo en falla, un controlador nominal y un puntode equilibrio se disena el actuador virtual (observador y realimentacion de estados) paraincorporarlo al lazo de control y obtener el sistema reconfigurado capaz de tolerar fallasen actuadores.
Sin embargo, esta estrategia deja cuestiones abiertas en cuanto a sus limitacionesde implementacion. Entre otras, se puede citar el conocimiento necesario de los efectosde la falla sobre el actuador y su modelado para obtener el modelo del sistema necesarioa usar en el calculo del actuador virtual. En este campo se plantean topicos abiertoscomo son la parametrizacion automatica del bloque de reconfiguracion, la evaluacion delcomportamineto de la tecnica en escenarios reales, el diseno de la instrumentacion pre-viendo las influencias de las fallas, las restricciones dadas por la estimacion de la falla

2.4. CONCLUSIONES 25
y la incertidumbre dada por el calculo del punto de equilibrio del sistema y la posteriorobtencion tanto del modelo nominal como del modelo en falla, entre otras. Notese queestas tecnicas heredan todos los problemas considerados en las estrategias de modeladodinamico y control clasico.
Una manera mas implıcita de plantear la tolerancia a fallas en actuadores consisteen utilizar la informacion del diagnosticador para realizar las consideraciones necesariasque se puedan incorporar en los criterios de modificacion del controlador o en su ley deajuste [Wang y col., 1996]. De esta manera la falla ocurre en el actuador pero quien asumela funcion de tolerancia y reposicion es la ley de control, pudiendose suponer la existenciade redundancia fısica o una disposicion apropiada de actuadores y una combinacion ade-cuada de comandos que, mediante relaciones indirectas, hagan que se cumpla el objetivode control predefinido. Estas tecnicas se acercan mas a la filosofıa de acomodacion, ligadaa la ley de control, que a la reconfiguracion.
Otras estrategias como: el control reconfigurable con fallas en actuadores y el controlretroalimentado con fallas en actuadores; se basan en la deteccion de la magnitud de lafalla y el aprovechamiento de esta informacion utilizando el modelo nominal, el modelo enfalla y una relacion definida entre ambos, para generar el modelo del sistema.
2.4 Conclusiones
En este capıtulo se presentaron conceptos basicos y relevantes del Control Tolerante aFallas, ademas se menciona claramente el problema del FTC y se realiza una comparacionde este con el problema de control estandar.
Tambien se presentaron los mecanismos de tolerancia a fallas, se realizo un mayorenfasis en el mecanismo de tolerancia a fallas en la ley de control, ya que dentro de estemecanismo se encuentran las tecnicas de acomodacion de control fuera de lınea y en lınea.En esta ultima categorıa se encuentra el Control Predictivo Basado en Modelo, el cual esla tecnica que se utiliza en este tema de tesis para desarrollar el Control Tolerante a Fallasen el proceso del evaporador de cinco efectos aplicado a la produccion de azucar.
Ya que en el control predictivo la accion de control se determina a cada instanteresolviendo un problema de optimizacion, se permite incluir de forma sencilla estrategiasde Control Tolerante a Fallas.

26 CAPITULO 2. GENERALIDADES DEL CONTROL TOLERANTE A FALLAS

Capıtulo 3
El MBPC sin cambio de restricciones y comoControl Tolerante a Fallas
En este capıtulo se desarrolla el algoritmo del Control Predictivo Basado en Modelo.Este algoritmo se desarrolla a partir del modelo discreto del sistema representado en es-pacio de estados. Tambien se presentan las consideraciones que se toman en cuenta paraemplear al MBPC como un Control Tolerante a Fallas.
En la Seccion 3.1 se presenta una breve historia del MBPC. En la Seccion 3.2 sedan conceptos basicos sobre el MBPC. Tambien en esta seccion se presentan: los elemen-tos del MBPC, la estrategia del MBPC y la formulacion del problema del MBPC. En laSeccion 3.3 se muestra el diseno del algoritmo del MBPC, se desarrolla el algoritmo sinrestricciones y con restricciones. En la Seccion 3.4 se muestra el diseno del MBPC comoControl Tolerante a Fallas. En esta seccion se presentan los diferentes tipos de fallas conlas que el MBPC puede tratar. Finalmente en la Seccion 3.5 se presentan las conclusiones.
3.1 Breve historia del MBPC
Desde finales de la decada de los 70 aparecieron varios artıculos mostrando un in-teres incipiente en el control predictivo en la industria, en ellos se estudiaba el MPHC(Control Predictivo Heurıstico basado en Modelo) mas tarde conocido como MAC (Con-trol Algorıtmico basado en Modelo) y el DMC (Control con Matriz Dinamica). Ambosalgoritmos utilizan explıcitamente un modelo dinamico del proceso (la respuesta impulsoen el primer caso y la respuesta escalon en el segundo) para predecir el efecto de las fu-turas senales de control en las variables a controlar. Estas formulaciones eran heurısticase hicieron uso del potencial cada vez mayor de los computadores digitales en aquellos
27

28 CAPITULO 3. EL MBPC SIN CAMBIO DE RESTRICCIONES Y COMO CONTROL TOLERANTE A FALLAS
tiempos [Camacho y col., 2002].
El control predictivo llego a ser popular, y particularmente en la industria de procesosquımicos, debido a la simplicidad del algoritmo y a la utilizacion del modelo de respuestaante impulso que, aunque requiere muchos mas parametros que las formulaciones en elespacio de estado o en el dominio de entrada y salida, resulta mas intuitivo y requieremucha menos informacion a priori para la identificacion.
La mayorıa de estas aplicaciones se llevaron a cabo en sistemas multivariables queincluıan restricciones. A pesar de este exito, estas formulaciones carecıan de una teorıaformal para proveer resultados sobre la estabilidad y robustez. De hecho, el caso de hori-zonte finito parecıa demasiado difıcil de analizar excepto en casos muy especıficos.
Otra lınea de trabajo se desarrollo independientemente en torno a las ideas de controladaptativo, desarrollandose estrategias de control predictivo para sistemas monovariablesy formulada sobre modelos de entrada y salida. Como lo son: El PBSAC (Control Autosin-tonizado Basado en Predictores), el EHAC (Control Adaptativo de Horizonte Extendido),el EPSAC (Controlador Autoadaptable Predictivo Extendido), y el GPC (Control Predic-tivo Generalizado). El GPC utiliza ideas de los controladores de GMV (Mınima VarianzaGeneralizada) y es en la actualidad uno de los metodos mas utilizados a nivel academico[Wang y col., 1996].
Existen numerosas formulaciones de control predictivo basadas en las mismas ideascomunes, entre las que se pueden incluir MUSMAR (Control Adaptativo MultivariableMultipaso), PFC (Control Predictivo Funcional). El MBPC se formula en espacio deestados, lo que permite una utilizacion de resultados bien conocidos sobre estabilidad ytambien la generalizacion a casos mas complejos como procesos multivariables, procesosno lineales y sistemas con perturbaciones estocasticas. Aunque los primeros trabajos sobreGPC contienen algunos resultados de estabilidad para el caso nominal, la falta de resul-tados generales sobre la estabilidad de los controladores de horizontes finito y deslizanteconstituyo un inconveniente para su utilizacion. Para hacer frente a esto, aparecio en los90s una nueva lınea de trabajo sobre controladores predictivos con estabilidad garantizada.
Para el caso de restricciones, el analisis de estabilidad parecıa ser un problema de-masiado complicado de resolver. Aun en el caso de que el optimizador fuera capaz deencontrar una solucion, no estaba garantizada la estabilidad del lazo cerrado. La uti-lizacion de penalizaciones terminales y/o restricciones, funciones de Lyapunov, o conjuntosinvariantes dan lugar a una familia de tecnicas que garantizan la estabilidad del sistema.Este problema se aborda desde distintos puntos de vista y han aparecido numerosas con-tribuciones en anos recientes, casi siempre analizando el problema del regulador (llevar elestado al reposo) y normalmente en el espacio de estados. Las principales formulaciones
3.1. BREVE HISTORIA DEL MBPC 29
propuestas que garantizan estabilidad estan resumidas en [Mayne y col., 2000], donde sedan condiciones suficientes para disenar un regulador predictivo que garantice estabilidad.
Otra de la lıneas de investigacion abiertas en los ultimos anos es el control predictivorobusto. La idea basica es tener en cuenta las incertidumbres sobre el proceso de unamanera explıcita y disenar el controlador predictivo para optimizar la funcion objetivoante la peor situacion posible de las incertidumbres.
El control predictivo se puede considerar una tecnica madura para sistemas condinamica lenta, como los encontrados normalmente en la industria de procesos. Sistemasmas complejos, tales como sistemas no lineales, hıbridos o sistemas muy rapidos (como mo-tores), eran considerados como fuera del alcance de los controladores predictivos. Durantelos ultimos anos se produjeron resultados espectaculares en estos campos. Se demostro queun controlador predictivo con restricciones lineales resulta ser un controlador afın a trozosque puede ser implementado con poca carga de computacion. Recientemente se encuen-tran en la literatura aplicaciones de los controladores predictivos a sistemas no lineales ohıbridos. Tales como: [Badgwell y col., 2001] y [Qin y col., 1998].
3.1.1 Situacion actual
La situacion actual de aplicaciones de MBPC en la industria se encuentra prin-cipalmente en el sector petroquımico. La mayorıa de las aplicaciones son en procesosmultivariables. Sorprendentemente, MBPC tiene menor impacto en otro tipo de indus-trias, aunque algunos estudios realizados a mediados de los 90s reflejaron que unas 20,000aplicaciones se beneficiaron de esta tecnica.
El exito actual del MBPC en la industria se debe a tres razones principales:
• La incorporacion de un modelo explıcito del proceso en los calculos permite al con-trolador conocer la dinamica del proceso.
• La consideracion del comportamiento del proceso a lo largo de un horizonte fu-turo permite tener en cuenta el efecto de las perturbaciones en realimentacion ypre-alimentacion, permitiendo al controlador conducir la salida a la trayectoria dereferencia deseada.
• La consideracion de restricciones en la fase del diseno del controlador evita en loposible la violacion de estas, resultando un control mas preciso en torno al puntooptimo de operacion. La inclusion de restricciones es quizas la caracterıstica quemas distingue al MBPC respecto a otras metodologıas.
Otra de las razones que contribuyeron a que el MBPC se haya convertido en unexito comercial es el hecho de que existen unos 15 suministradores (como: AspenTech,

30 CAPITULO 3. EL MBPC SIN CAMBIO DE RESTRICCIONES Y COMO CONTROL TOLERANTE A FALLAS
Adersa, Honeywell Profimatics, etc) que instalan el producto llave en mano, con periodosde amortizacion de entre 3 y 12 meses, permitiendo que medianas empresas puedan teneracceso a esta tecnologıa. Aparte de esto, los nuevos Sistemas de Control Distribuidoempiezan a ofertar productos MBPC genericos que ofrecen al usuario la posibilidad derealizar futuras modificaciones sin depender de un producto cerrado.
3.1.2 Tecnologıa industrial
Existen miles de aplicaciones del control predictivo en la industria. La mayor partede las aplicaciones estan en el sector petroquımico en el area de refinamiento, pero tambienexisten numerosas aplicaciones en los sectores de pulpa y papel, procesado de alimentos,gas, minerıa, hornos, metalurgia, industria aeroespacial e industria del automovil.
3.2 Conceptos basicos del MBPC
El Control Predictivo Basado en Modelo, constituye un campo muy amplio demetodos de control desarrollados en torno a ciertas ideas comunes e integra diversas disci-plinas como control optimo, control estocastico, control de procesos con tiempos muertos,control multivariable o control con restricciones.
El control predictivo no es una estrategia de control especıfica, sino que se tratamas bien de un campo muy amplio de metodos de control desarrollados en torno a ciertasideas comunes. Estos metodos de diseno conducen a controladores lineales que poseenpracticamente la misma estructura y presentan suficientes grados de libertad. Las ideasque aparecen en mayor o menor medida en toda la familia de controladores predictivosson basicamente:
• Uso explıcito de un modelo para predecir la salida del proceso en futuros instantesde tiempo.
• Calculo de las senales de control minimizando una cierta funcion objetivo.
• Estrategia deslizante, de forma que en cada instante el horizonte control se va des-plazando hacia el futuro, lo que implica aplicar la primera senal de control en cadainstante y desechar el resto, repitiendo el calculo en cada instante de muestreo.
Los distintos algoritmos de MBPC difieren entre sı casi exclusivamente en el modelousado para representar el proceso y los ruido, ademas en la funcion objetivo a minimizar.Aunque las diferencias puedan parecer pequenas a priori, pueden provocar distintos com-portamientos en lazo cerrado, siendo crıticas para el desempeno de un determinado algo-ritmo en una determinada aplicacion.

3.2. CONCEPTOS BASICOS DEL MBPC 31
El control predictivo es un tipo de control de naturaleza abierta, el cual tiene unagran aceptacion tanto en aplicaciones industriales como en el mundo academico. En laactualidad existen numerosas aplicaciones de controladores predictivos funcionando conexito, tanto en la industria de procesos como en control de motores o robotica. El buenfuncionamiento de estas aplicaciones muestra la capacidad del MBPC para conseguir sis-temas de control de elevadas prestaciones capaces de operar sin intervenir durante largosperıodos de tiempo.
El MBPC presenta una serie de ventajas sobre otros metodos, entre las que destacan,las siguientes:
• Resulta particularmente atractivo para el personal que no cuenta con un conocimientoprofundo de control, puesto que los conceptos resultan muy intuitivos, a la vez quela sintonizacion es relativamente facil.
• Se puede usar para controlar una gran variedad de procesos, desde aquellos condinamica relativamente simple hasta otros mas complejos incluyendo sistemas congrandes retardos, de fase no mınima o inestables.
• Permite tratar con facilidad el caso multivariable.
• Posee intrınsecamente compensacion de retardos.
• Resulta conceptualmente simple la extension del MBPC al tratamiento de restricciones,que pueden ser incluidas de forma sistematica durante el proceso de diseno.
• Es muy util cuando se conocen las futuras referencias.
• Es una metodologıa completamente abierta basada en algunos principios basicos quepermite futuras extensiones.
Como es logico, tiene tambien sus inconvenientes. El principal es que, aunque suimplementacion no es compleja, resulta mas difıcil que la de los controladores clasicosPID. Si la dinamica del proceso no cambia y no existen restricciones, la mayor parte de loscalculos se pueden realizar fuera de lınea y el controlador resultante es simple, pudiendoseaplicar a procesos de dinamica rapida; en caso contrario, los requisitos de calculo sonmucho mayores. Pero la mayor dificultad que presenta para su aplicacion es la necesidadde un modelo apropiado del proceso ya que el diseno del algoritmo esta basado en elconocimiento previo del modelo y es dependiente de este, pero resulta evidente que lasprestaciones obtenidas dependeran de las discrepancias existentes entre el proceso real yel modelo usado.

32 CAPITULO 3. EL MBPC SIN CAMBIO DE RESTRICCIONES Y COMO CONTROL TOLERANTE A FALLAS
3.2.1 Estrategia del MBPC
La metodologıa general de los controladores pertenecientes a la familia MBPC se carac-teriza por la siguiente estrategia (ver la Figura 3.1):
Figura 3.1: Estrategia del MBPC
1. Las salidas futuras para un horizonte determinado Hp, llamado horizonte de prediccion,se predicen cada instante k utilizando el modelo del proceso. Estas predicciones dela salida y (k + i| k) para i = 1...Hp dependen de los valores conocidos hasta el ins-tante k (entradas y salidas conocidas) y de las senales de control futuras u (k + i| k),i = 1...Hp − 1, que se calculan y envıan al sistema.
2. La secuencia de senales de control futuras se calcula minimizando un criterio paramantener al proceso lo mas cerca posible de la trayectoria de referencia w(k + i).Este criterio toma normalmente la forma de una funcion cuadratica del error entre lasalida predicha y la trayectoria de referencias futuras. En la mayor parte de los casosse incluye tambien el esfuerzo de control dentro de la funcion objetivo. La solucionexplıcita se puede obtener cuando el criterio es cuadratico y el modelo lineal; en casocontrario se ha de utilizar un metodo numerico para buscar la solucion.
3. La senal de control u(k|k) se envıa al proceso mientras que el resto de las senalescalculadas no se consideran, ya que en el instante siguiente de muestreo y(k + 1)se conoce y los pasos anteriores se repiten con este nuevo valor. Por lo que u(k +1|k +1) se calcula con informacion diferente y en principio sera tambien diferente deu(k + 1|k).
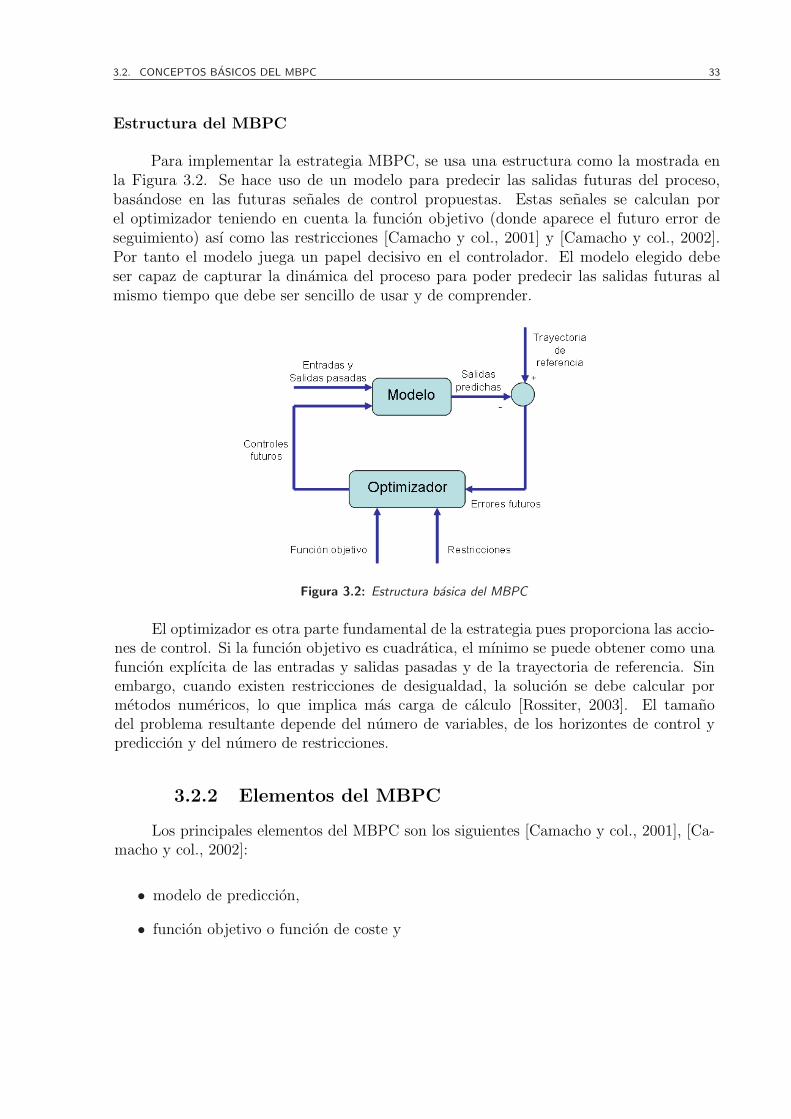
3.2. CONCEPTOS BASICOS DEL MBPC 33
Estructura del MBPC
Para implementar la estrategia MBPC, se usa una estructura como la mostrada enla Figura 3.2. Se hace uso de un modelo para predecir las salidas futuras del proceso,basandose en las futuras senales de control propuestas. Estas senales se calculan porel optimizador teniendo en cuenta la funcion objetivo (donde aparece el futuro error deseguimiento) ası como las restricciones [Camacho y col., 2001] y [Camacho y col., 2002].Por tanto el modelo juega un papel decisivo en el controlador. El modelo elegido debeser capaz de capturar la dinamica del proceso para poder predecir las salidas futuras almismo tiempo que debe ser sencillo de usar y de comprender.
Figura 3.2: Estructura basica del MBPC
El optimizador es otra parte fundamental de la estrategia pues proporciona las accio-nes de control. Si la funcion objetivo es cuadratica, el mınimo se puede obtener como unafuncion explıcita de las entradas y salidas pasadas y de la trayectoria de referencia. Sinembargo, cuando existen restricciones de desigualdad, la solucion se debe calcular pormetodos numericos, lo que implica mas carga de calculo [Rossiter, 2003]. El tamanodel problema resultante depende del numero de variables, de los horizontes de control yprediccion y del numero de restricciones.
3.2.2 Elementos del MBPC
Los principales elementos del MBPC son los siguientes [Camacho y col., 2001], [Ca-macho y col., 2002]:
• modelo de prediccion,
• funcion objetivo o funcion de coste y

34 CAPITULO 3. EL MBPC SIN CAMBIO DE RESTRICCIONES Y COMO CONTROL TOLERANTE A FALLAS
• obtencion de la ley de control.
Modelo de prediccion
El empleo de un modelo del proceso correcto es de suma importancia ya que viene de-terminado por la necesidad del calculo de la salida predicha en instantes futuros yp (k + i| k).En este trabajo se utiliza la representacion en espacio de estado para el modelo.
La prediccion de la salida se compone por dos partes. Una de ellas yf (k) llamadarespuesta libre ya que corresponde a la evolucion del proceso debido a su estado actualy a las acciones de control pasadas. La otra es, yc (k) la respuesta forzada se debe a lasacciones de control futuras.
Funcion objetivo o funcion de coste
En el MBPC se requiere que la salida futura en el horizonte considerado siga unadeterminada senal de referencia al mismo tiempo que se penalize el esfuerzo de control re-querido para hacerlo. En terminos matematicos la funcion objetivo se expresa comunmentede la siguiente manera:
J =
Hp∑i=H1
[w (k + i| k)− y (k + i| k)]2 +Hc∑i=1
λ (i) [∆u (k + i− 1| k)]2 (3.1)
Los parametros H1 y Hp son los horizontes mınimo y maximo de prediccion, estosmarcan los lımites de los instantes en que se desea que la salida siga a la referencia. Hc es elhorizonte de control. El coeficiente λ (i) es una secuencia que pondera el comportamientofuturo.
La trayectoria de referencia w (k + i| k), es la respuesta deseada en lazo cerrado delsistema. Matematicamente se expresa de la siguiente manera:
w (k + i| k) = r (k + i| k)− αi [r (k)− y (k)] i = 1...Hp (3.2)
α es un parametro comprendido entre 0 y 1 (mientras mas proximo a 1 mas suave sera laaproximacion) que constituye un valor ajustable que influira en la respuesta dinamica delsistema. y (k) es la salida actual del proceso y r (k) es la senal de salida que se desea.

3.2. CONCEPTOS BASICOS DEL MBPC 35
Obtencion de la ley de control
Para obtener la ley de control se minimiza la funcion objetivo J dada por la Ecuacion(3.1). Para llevar esto a cabo se necesita calcular los valores de las salidas predichasy (k + i| k) en funcion de valores pasados de entradas y salidas y de senales de controlfuturas.
Si no existen restricciones, la minimizacion de la funcion objetivo cuadratica se puedehacer de forma analıtica calculando la derivada de J e igualandola a 0.
Si existen restricciones, la minimizacion de la funcion objetivo no es directa, yaque la solucion se convierte en un problema de optimizacion de mınimos cuadrados conrestricciones lineales y ello requiere la solucion de un problema de programacion cuadratica.
3.2.3 Formulacion del problema
En la seccion anterior se mostro la forma generica de resolver el problema MBPC, queconsiste basicamente en minimizar la funcion objetivo haciendo uso del modelo del sistemapara calcular las predicciones. La solucion del problema depende principalmente del tipode modelo que se use para representar la dinamica del proceso. Aunque el procedimientogeneral es practicamente el mismo, los pasos necesarios para formular los algoritmos decontrol son ligeramente distintos.
Se analizan aquı tres tipos de modelo: funcion de transferencia, modelos de con-volucion y modelo de espacio de estados.
Modelo de funcion de transferencia
La formulacion mas conocida que usa este tipo de modelo es sin duda el GPC (ControlPredictivo Generalizado), aunque existen otras formulaciones que tambien usan modelosde funcion de transferencia. El GPC se convirtio en uno de los metodos mas popularestanto en el mundo industrial como en el academico y funciona con exito en muchas apli-caciones industriales, pudiendo tratar plantas inestables y de fase no mınima a la vez queincorpora la idea de horizonte de control y la consideracion de pesos o ponderaciones enlos incrementos de la senal de control [Camacho y col., 2002]. En el GPC, el modelo dela planta viene dado por una funcion de transferencia discreta en la forma de un modeloCARIMA:
A(z−1
)y (k) = B
(z−1
)z−du (k − 1) + C
(z−1
) e (k)
1− z−1(3.3)
donde u(k) e y(k) son las variables de entrada y salida respectivamente y e(k) es un ruido

36 CAPITULO 3. EL MBPC SIN CAMBIO DE RESTRICCIONES Y COMO CONTROL TOLERANTE A FALLAS
blanco de media cero. A, B y C son polinomios en el operador retardo z−1 y d es el tiempomuerto del sistema. Este modelo es muy apropiado para muchas aplicaciones industrialesen las que las perturbaciones no son estacionarias. A partir de ahora el polinomio C setoma igual a 1. El algoritmo GPC consiste en aplicar la secuencia de control que minimizauna funcion objetivo de la forma (3.1).
Con objeto de minimizar la funcion objetivo, hay que calcular la prediccion optimay(k + i) para H1 6 i 6 Hp.
Modelo de convolucion
Los modelos de convolucion engloban los modelos de respuesta impulso y respuestaante escalon, de gran exito en la industria por ser muy intuitivos y permitir un procedi-miento de identificacion relativamente sencillo. Estos tipos de modelo dan lugar a dos delos controladores mas extendidos en la practica: DMC (Control de Matriz Dinamica) yMAC (Control Algorıtmico del Modelo). Se muestra aquı la formulacion del primero deellos, siendo la del segundo muy similar, la cual se puede consultar en [Richalet y col., 1978]
Como se indico previamente, se usa un modelo de respuesta ante escalon para cap-turar la dinamica del proceso. El procedimiento para obtener las predicciones se muestraa continuacion:
Al usar el siguiente modelo de respuesta ante escalon
y (t) =∞∑
j=1
gj∆u (k − j) (3.4)
los valores predichos de la salida a lo largo del horizonte seran:
y (k + i| k) =∞∑
j=1
gj∆u (k + i− j) + n (k + i| k)
=k∑
j=1
gj∆u (k + i− j) +∞∑
j=i+1
gj∆u (k + i− j) + n (k + i| k)
Como se considera que las perturbaciones son constantes en el futuro, n (k + i| k) =

3.2. CONCEPTOS BASICOS DEL MBPC 37
n (k| k) = ym (k)− y (k| k), se puede escribir:
y (k + i| k) =k∑
j=1
gj∆u (k + i− j) + ym (t) +∞∑
j=i+1
gj∆u (k + i− j)−∞∑
j=1
gj∆u (k − j)
(3.5)
Es decir, la prediccion viene dada por:
y (k + i| k) =k∑
j=1
gj∆u (k + i− j) + f (k + i) (3.6)
donde f(k + i) es la respuesta libre del sistema, que como se sabe no depende de lasacciones de control futuras, y viene dada por:
f (k + i) = ym (k) +∞∑
j=1
(gi+j − gj) ∆u (k − j) (3.7)
Modelo en el espacio de estados
Los modelos de espacio de estados o descripcion interna se pueden usar tambien paraformular el problema del control predictivo. Ademas, los principales resultados teoricosrelacionados con la estabilidad provienen de este tipo de formulacion, que puede ser usadatanto para problemas monovariables como multivariables y se puede extender facilmente alcaso no lineal. Se usan las siguientes ecuaciones para representar la dinamica del proceso:
x (k + 1) = Ax (k) + Bu (k)
y (k) = Cx (k)(3.8)
En el caso monovariable y(k) y u(k) son escalares y x(t) es el vector de estados. Unproceso multivariable tiene la misma descripcion pero con el vector u de dimension m yel vector y de dimension n.
Tambien se puede usar un modelo incremental si se considera como variable deentrada el incremento de la senal de control ∆u(k) en lugar de u(k). Este modelo se puedeescribir en la forma generica de espacio de estados simplemente teniendo en cuenta que∆u(k) = u(k)− u(k − 1). Combinando esta expresion con la Ecuacion (3.8) se obtiene la

38 CAPITULO 3. EL MBPC SIN CAMBIO DE RESTRICCIONES Y COMO CONTROL TOLERANTE A FALLAS
siguiente representacion:
[x (k + 1)
u (k)
]=
[A B0 I
] [x (k)
u (k − 1)
]+
[BI
]∆u (k)
y (k) =[
C 0] [
x (k)u (k − 1)
] (3.9)
Con la idea de minimizar la funcion objetivo, hay que calcular las predicciones a lolargo del horizonte. Para este modelo la prediccion viene dada por:
y (k + i| k) = Cx (k + i| k) = C
[Aix (k) +
i∑j=1
Aj−1Bu (k + i− j| k)
](3.10)
Cabe aclarar que en la siguiente seccion se desarrollara con mas detalle el MBPC apartir de la representacion en espacio de estados, ya que en este trabajo de tesis se realizael Control Tolerante a Fallas basado en el MBPC considerando dicha representacion.
3.3 Diseno del MBPC multivariable
3.3.1 Diseno del MBPC multivariable sin restricciones
La formulacion del MBPC se elabora en base al modelo linealizado representado enespacio de estado. El modelo linealizado tiene la siguiente forma:
{x = Acx + Bcu + Ecv
y = Ccx + Dcv(3.11)
donde x ∈ Rn es el vector de estados, y ∈ Rn es el vector de salidas, u ∈ Rm es el vectorde entradas y v ∈ Rq es el vector de perturbaciones.
Discretizando el modelo sin considerar el vector de perturbaciones se obtiene unsistema discreto de la siguiente forma:
{x (k + 1) = Ax (k) + Bu (k)
y (k) = Cx (k)(3.12)
donde x(k) ∈ Rn son los estados, u(k) ∈ Rm son las senales de control y y(k) ∈ Rn son lassalidas.

3.3. DISENO DEL MBPC MULTIVARIABLE 39
Se consideran todos los estados medibles (es decir, x(k) = y(k)) para predecir laevolucion de los estados en los siguientes instantes de muestreo Hp. Esto se lleva a caboiterando la ecuacion de estado descrita en (3.12) [Maciejowski, 2002] y [Rossiter, 2003], locual se muestra a continuacion.
x (k + 1 |k ) = Ax (k) + Bu (k |k )
x (k + 2 |k ) = Ax (k + 1 |k ) + Bu (k + 1 |k )
= A (Ax (k) + Bu (k |k )) + Bu (k + 1 |k )
= A2x (k) + ABu (k |k ) + Bu (k + 1 |k )
...
x (k + Hp |k ) = Ax (k + Hp − 1 |k ) + Bu (k + Hp − 1 |k )
= AHpx (k) + AHp−1Bu (k |k ) + . . . + Bu (k + Hp − 1 |k )
(3.13)
En la primera lınea se utiliza u (k |k ) en lugar de u(k), ya que en el momento que senecesite realizar el calculo de las predicciones se desconoce u(k).
Se asume que las acciones del actuador solamente cambian en los tiempos: k, k +1, . . .,k +Hc−1 y permaneceran constante despues de esto. Ası se tiene que u (k + i |k ) =u (k + Hc − 1) para i = Hc . . . Hp − 1.
Se tiene que los incrementos en la senal son igual a la diferencia entre la senal decontrol actual y la senal de control anterior. Matematicamente se expresa de la siguientemanera:
∆u (k + i |k ) = u (k + i |k )− u (k + i− 1 |k ) (3.14)
y que para cada tiempo k se conoce u(k−1), entonces iterando hasta el instante k+Hc−1se tiene:
u (k |k ) = ∆u (k |k )− u (k − 1)
u (k + 1 |k ) = ∆u (k + 1 |k ) + ∆u (k |k ) + u (k − 1)
...
u (k + Hc − 1 |k ) = ∆u (k + Hc − 1 |k ) + . . . + ∆u (k |k ) + u (k − 1)
(3.15)
40 CAPITULO 3. EL MBPC SIN CAMBIO DE RESTRICCIONES Y COMO CONTROL TOLERANTE A FALLAS
Sustituyendo lo descrito en la Ecuacion (3.15) en la ecuacion de prediccion de estadosdada por la Ecuacion (3.13), se obtiene:
x (k + 1 |k ) = Ax (k) + B [∆u (k |k )− u (k − 1)]
x (k + 2 |k ) = A2x (k) + AB [∆u (k |k )− u (k − 1)] + B [∆u (k + 1 |k ) + ∆u (k |k ) + u (k − 1)]
= A2x (k) + (A + I) B∆u (k |k ) + B∆u (k + 1 |k ) + (A + I) Bu (k − 1)
...
x (k + Hc |k ) = AHcx (k) +(AHc−1 + . . . + A + I
)B∆u (k |k ) + . . . + B∆u (k + Hc − 1 |k )
+(AHc−1 + . . . + A + I
)Bu (k − 1)
(3.16)
x (k + Hc + 1 |k ) = AHc+1x (k) +(AHc + . . . + A + I
)B∆u (k |k ) + . . .
+ (A + l) B∆u (k + Hc − 1 |k ) +(AHc + . . . + A + I
)Bu (k − 1)
...
x (k + Hp |k ) = AHpx (k) +(AHp−1 + . . . + A + I
)B∆u (k |k ) + . . . + B∆u (k + Hc − 1 |k )
+(AHp−Hc + . . . + A + I
)B∆u (k + Hc − 1 |k ) +
(AHp−1 + . . . + A + I
)Bu (k − 1)
En forma matricial lo anterior se representa de la siguiente manera:
x (k + 1 |k )...
x (k + Hc |k )x (k + Hc + 1 |k )
...x (k + Hp |k )
=
A...
AHc
AHc+1
...AHp
x (k) +
B...∑Hc−1
i=0 AiB∑Hc
i=0 AiB...∑Hp−1
i=0 AiB
u (k − 1)
︸ ︷︷ ︸Pasado
+
B . . . 0AB + B . . . 0
.... . .
...∑Hc−1i=0 AiB . . . B∑Hc
i=0 AiB . . . AB + B...
......∑Hp−1
i=0 AiB . . .∑Hp−Hc
i=0 AiB
∆u (k |k )...
∆u (k + Hc − 1 |k )
︸ ︷︷ ︸Futuro
(3.17)

3.3. DISENO DEL MBPC MULTIVARIABLE 41
Las salidas predichas se dan por:
yp (k + 1 |k ) = Cx (k + 1 |k )
yp (k + 2 |k ) = Cx (k + 2 |k )
...
yp (k + Hp |k ) = Cx (k + Hp |k )
(3.18)
En forma matricial se representa de la siguiente manera:
yp (k + 1 |k )yp (k + 2 |k )
...yp (k + Hp |k )
=
C 0 . . . 00 C . . . 0...
.... . .
...0 0 . . . C
x (k + 1 |k )x (k + 2 |k )
...x (k + Hp |k )
(3.19)
Sustituyendo la Ecuacion(3.17) en la Ecuacion (3.19), se tiene:
yp (k + 1 |k )yp (k + 2 |k )
...yp (k + Hp |k )
=
C 0 . . . 00 C . . . 0...
.... . .
...0 0 . . . C
A...
AHc
AHc+1
...AHp
x (k) +
B...∑Hc−1
i=0 AiB∑Hc
i=0 AiB...∑Hp−1
i=0 AiB
u (k − 1)
︸ ︷︷ ︸Pasado
+
C 0 . . . 00 C . . . 0...
.... . .
...0 0 . . . C
B . . . 0AB + B . . . 0
.... . .
...∑Hc−1i=0 AiB . . . B∑Hc
i=0 AiB . . . AB + B...
......∑Hp−1
i=0 AiB . . .∑Hp−Hc
i=0 AiB
∆u (k |k )...
∆u (k + Hc − 1 |k )
︸ ︷︷ ︸Futuro
(3.20)

42 CAPITULO 3. EL MBPC SIN CAMBIO DE RESTRICCIONES Y COMO CONTROL TOLERANTE A FALLAS
Realizando operaciones matriciales, se obtiene la formula para obtener la salidapredicha hasta el instante k + Hp. Lo cual matematicamente se expresa de la siguientemanera:
yp (k + 1 |k )yp (k + 2 |k )
...yp (k + Hp |k )
=
CA...
CAHc
CAHc+1
...CAHp
x (k) +
CB...∑Hc−1
i=0 CAiB∑Hc
i=0 CAiB...∑Hp−1
i=0 CAiB
u (k − 1)
︸ ︷︷ ︸pasado
+
CB . . . 0CAB + CB . . . 0
.... . .
...∑Hc−1i=0 CAiB . . . CB∑Hc
i=0 CAiB . . . CAB + CB...
......∑Hp−1
i=0 CAiB . . .∑Hp−Hc
i=0 CAiB
∆u (k |k )...
∆u (k + Hc − 1 |k )
︸ ︷︷ ︸Futuro
(3.21)
Se puede observar que la representacion descrita en la Ecuacion (3.21) se componede una parte que depende de los estados actuales y la senal de control anterior, y otra quedepende de los incrementos futuros de la senal de control. Por lo que tambien se puederepresentar de la siguiente manera:
yp = Fp + Gpc∆uc (3.22)
de donde:
yp =
yp (k + 1 |k )yp (k + 2 |k )
...yp (k + Hp |k )
Fp = βx (k) + µu (k − 1)
3.3. DISENO DEL MBPC MULTIVARIABLE 43
β =
CA...
CAHc
CAHc+1
...CAHp
µ =
CB...∑Hc−1
i=0 CAiB∑Hc
i=0 CAiB...∑Hp−1
i=0 CAiB
Gpc =
CB . . . 0CAB + CB . . . 0
.... . .
...∑Hc−1i=0 CAiB . . . CB∑Hc
i=0 CAiB . . . CAB + CB...
......∑Hp−1
i=0 CAiB . . .∑Hp−Hc
i=0 CAiB
∆uc =
∆u (k |k )...
∆u (k + Hc − 1 |k )
Utilizando esta terminologıa, la funcion objetivo descrita por la Ecuacion (3.1) sepuede escribir de la siguiente manera:
J = (Gpc∆uc + Fp − w)T (Gpc∆uc + Fp − w) + ∆uTc λ∆uc (3.23)
Como ya se menciono, si no existen restricciones, la minimizacion de la funcionobjetivo de la Ecuacion (3.23) se puede hacer de forma analıtica igualando a cero elgradiente de J . Esto es:
∂J
∂∆uc
= 0
Realizando este calculo en la Ecuacion (3.23) se obtiene:
(Gpc∆uc + Fp − w)T Gpc + ∆uTc λI = 0 (3.24)

44 CAPITULO 3. EL MBPC SIN CAMBIO DE RESTRICCIONES Y COMO CONTROL TOLERANTE A FALLAS
donde I es una matriz identidad.
Despejando ∆uc de la Ecuacion (3.24), se obtiene la expresion que describe los in-crementos de la senal de control:
∆uc =(GT
pcGpc + λI)−1
GTpc (w − Fp) (3.25)
Recuerdese que, como en todas las estrategias predictivas, solo se envıa al procesoel primer elemento del vector ∆uc. No es aconsejable implementar la secuencia completasobre los siguientes intervalos, ya que al ser imposible estimar de forma exacta las pertur-baciones, no es posible anticiparse a las perturbaciones inevitables que provocan que lasalida real difiera de las predicciones que se emplean para calcular la secuencia futura deacciones de control [Camacho y col., 2001], [Camacho y col., 2002].
Se debe notar que cuando los horizontes de control y de prediccion tienden a infinitoy no existen restricciones, este controlador se convierte en el problema de LQR (ReguladorLineal Optimo Cuadratico). La secuencia de control optima se genera entonces por unarealimentacion lineal del vector de estado donde la matriz de ganancia se calcula mediantela resolucion de una ecuacion de Riccati. Esta equivalencia permite un estudio teorico delos problemas de MBPC basado en los resultados del campo del Control Optimo, como esel caso de la estabilidad en lazo cerrado.
3.3.2 Perturbaciones medibles
Una gran variedad de procesos se encuentran sometidos a perturbaciones externasprovocadas por cambios en las variables que se pueden medir. Esta es una situaciontıpica en procesos cuyas salidas se ven afectadas por variaciones en el regimen de carga.Considerese, por ejemplo, un reactor encamisado donde la temperatura se controla ma-nipulando el caudal de agua que entra en la camisa refrigerante. Cualquier variacion delcaudal de reactivo influira en la temperatura del reactor. Este tipo de perturbaciones,tambien conocidas como perturbaciones en la carga, se pueden abordar mediante el usode accion “hacia adelante”. Como se vera a continuacion, las perturbaciones conocidastambien se pueden considerar de forma explıcita en MBPC.
La idea es que, si se conoce el efecto de estas perturbaciones en la salida del sistema,entonces pueden ser incluidas en las predicciones. Esto permite que los controladorespredictivos incluyan accion “hacia adelante”, usada con gran exito en conjuncion con loscontroladores PID. Las perturbaciones medibles se pueden incluir facilmente en las ecua-ciones de prediccion, ya que se pueden tratar como entradas al sistema.
Para sistemas lineales, el principio de superposicion permite calcular las predicciones

3.3. DISENO DEL MBPC MULTIVARIABLE 45
de la salida como la suma del efecto de ambas entradas: la variable manipulable y laperturbacion medible. Por tanto, cualquiera que sea el controlador usado, la prediccionviene dada por [Camacho y col., 2001] y [Camacho y col., 2002]:
ypt = yp + yd = Fp + Gpc∆uc + Fd + Dd∆d (3.26)
donde yd es la contribucion de la perturbacion medible a la salida del sistema; Dd es unamatriz similar a Gpc, que se calcula igual a esta y es de la misma dimension, con la dife-rencia que se utiliza la matriz de perturbacion en lugar de la matriz de entrada para sucalculo; ∆d es el vector de incrementos en la perturbacion y Fd es la parte de la respuestaque no depende de la perturbacion.
El termino Dd∆d depende de las perturbaciones futuras. En algunos casos, cuandoestas estan relacionadas con la carga, las perturbaciones futuras son conocidas o se puedenpredecir usando tendencias u otros medios. Si este es el caso, el termino correspondientea las perturbaciones futuras se puede calcular. En la mayorıa de los casos se consideraque las futuras perturbaciones de carga van a ser constantes durante el horizonte e igualesal ultimo valor medido (es decir, d(k + i) = d(k)) y entonces ∆d(k + i) = 0 y el cuartotermino de la Ecuacion (3.26) desaparece.
Entonces, la prediccion viene dada en la forma generica de respuesta libre y forzada:
ypt = F ′ + Gpc∆uc (3.27)
donde F ′ incluye el efecto de la respuesta libre debida a la variable manipulada y elefecto de la perturbacion, que es parte de la nueva respuesta libre, ya que no dependede la secuencia de acciones de control y por tanto es una constante que no influye en laminimizacion. Esta ecuacion es el unico cambio que se debe hacer en la formulacion delcontrolador para incluir el efecto de las perturbaciones medibles.
3.3.3 Diseno del MBPC multivariable con restricciones
En aplicaciones reales, los procesos estan sujetos a restricciones. Los actuadores tienen uncampo limitado de accion impuesto por lımites fısicos (por ejemplo una valvula no puedeabrir mas de un 100% o un calentador no puede aportar mas de su potencia maxima.Tambien existen lımites de seguridad (por ejemplo presiones o temperaturas maximas),requerimientos tecnologicos (por ejemplo mantener temperaturas en un rango dado), limi-taciones de calidad del producto (no salirse de cierta zona) o normativa medioambiental.
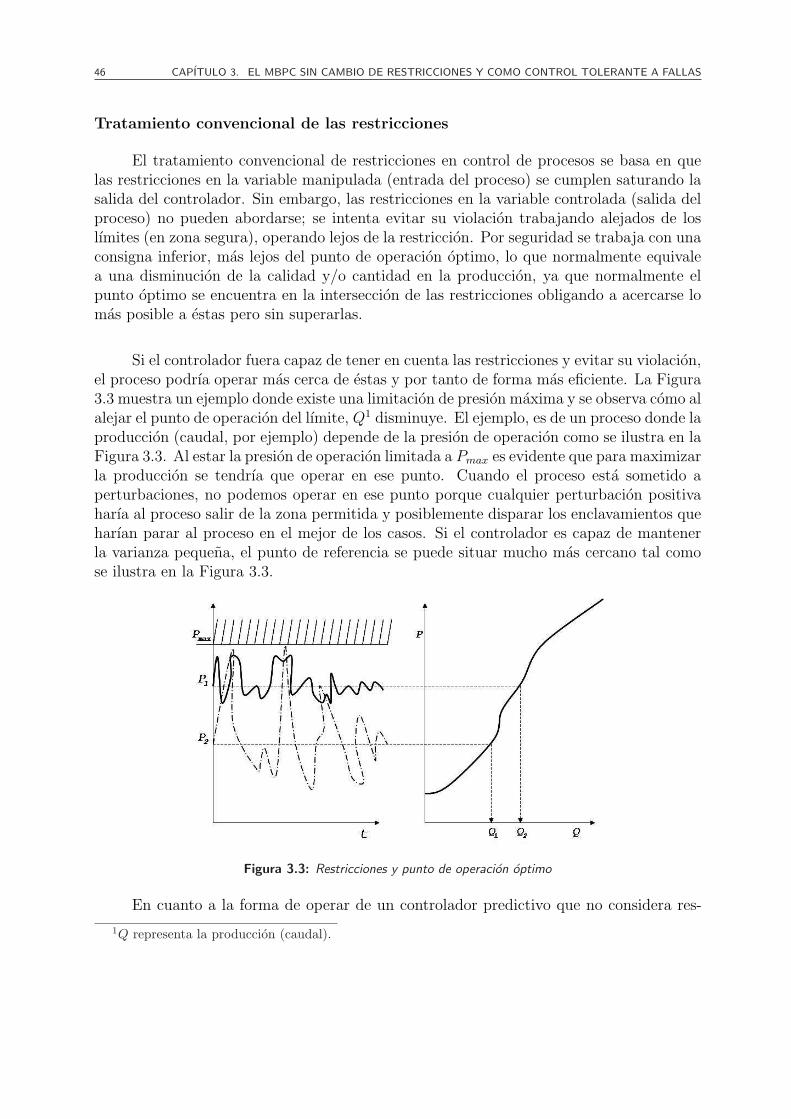
46 CAPITULO 3. EL MBPC SIN CAMBIO DE RESTRICCIONES Y COMO CONTROL TOLERANTE A FALLAS
Tratamiento convencional de las restricciones
El tratamiento convencional de restricciones en control de procesos se basa en quelas restricciones en la variable manipulada (entrada del proceso) se cumplen saturando lasalida del controlador. Sin embargo, las restricciones en la variable controlada (salida delproceso) no pueden abordarse; se intenta evitar su violacion trabajando alejados de loslımites (en zona segura), operando lejos de la restriccion. Por seguridad se trabaja con unaconsigna inferior, mas lejos del punto de operacion optimo, lo que normalmente equivalea una disminucion de la calidad y/o cantidad en la produccion, ya que normalmente elpunto optimo se encuentra en la interseccion de las restricciones obligando a acercarse lomas posible a estas pero sin superarlas.
Si el controlador fuera capaz de tener en cuenta las restricciones y evitar su violacion,el proceso podrıa operar mas cerca de estas y por tanto de forma mas eficiente. La Figura3.3 muestra un ejemplo donde existe una limitacion de presion maxima y se observa como alalejar el punto de operacion del lımite, Q1 disminuye. El ejemplo, es de un proceso donde laproduccion (caudal, por ejemplo) depende de la presion de operacion como se ilustra en laFigura 3.3. Al estar la presion de operacion limitada a Pmax es evidente que para maximizarla produccion se tendrıa que operar en ese punto. Cuando el proceso esta sometido aperturbaciones, no podemos operar en ese punto porque cualquier perturbacion positivaharıa al proceso salir de la zona permitida y posiblemente disparar los enclavamientos queharıan parar al proceso en el mejor de los casos. Si el controlador es capaz de mantenerla varianza pequena, el punto de referencia se puede situar mucho mas cercano tal comose ilustra en la Figura 3.3.
Figura 3.3: Restricciones y punto de operacion optimo
En cuanto a la forma de operar de un controlador predictivo que no considera res-
1Q representa la produccion (caudal).

3.3. DISENO DEL MBPC MULTIVARIABLE 47
tricciones el procedimiento es similar: si la senal de control calculada viola la restriccion,esta se satura. Las senales futuras ni siquiera se tienen en cuenta, ya que normalmente nose calculan. Esta forma de proceder no garantiza el caracter optimo de la solucion y enningun caso garantiza el cumplimiento de las restricciones en la salida. La violacion de loslımites de las variables controladas puede ser mas costoso y peligroso, produciendo danosen equipos y perdidas en la produccion.
La Figura 3.4 muestra con claridad el fenomeno de perdida de la solucion optimacuando las variables manipuladas se mantienen en sus lımites por el programa de controlo por el propio actuador. Este hecho puede llevar a valores mayores de la funcion objetivoy a un comportamiento no deseado (incluso inestabiliad). En la Figura 3.4a se muestraun caso con horizonte de control igual a 2, donde u(k) > umax. En este caso lo normalserıa aplicar umax al proceso en lugar de uc que es el valor mınimo cuando se consideranrestricciones. En el caso que se muestra en la Figura 3.4b, u(k) no viola las restriccionesy serıa aplicada al sistema en lugar de la senal uc que es la que se debıa haber aplicado.
Figura 3.4: Restricciones en la senal de control
Restricciones en el MBPC
El MBPC incorpora las restricciones de forma sistematica en la fase de diseno delcontrolador, siendo esta caracterıstica una de las razones de su gran exito en la indus-tria. Parece logico que al disponer de un modelo dinamico del proceso se pueda conocerla evolucion futura de su salida y por tanto se pueda saber si esta va a violar o no lasrestricciones y actuar en consecuencia.
Para formular el algoritmo MBPC con restricciones hay que expresar estas en funcionde la variable sobre la que se puede actuar, es decir, en funcion de ∆uc. Las restricciones

48 CAPITULO 3. EL MBPC SIN CAMBIO DE RESTRICCIONES Y COMO CONTROL TOLERANTE A FALLAS
en la entrada estan expresadas en funcion de ∆uc. Para las restricciones en la salida,se hace uso de las ecuaciones de prediccion, que expresan el valor futuro de las salidasen funcion de los incrementos de la senales de control futuros y valores conocidos en elinstante k.
Las restricciones que aparecen seran basicamente amplitud y velocidad de cambio enla senal de control y amplitud en la salida. Estas se pueden expresar como:
umin ≤ u(k) ≤ umax
∆umin ≤ u(k)− u(k − 1) ≤ ∆umax
ymin ≤ y(k) ≤ ymax
(3.28)
Las restricciones se pueden expresar como:
Lzumin ≤ K∆u + Lzu(k − 1) ≤ Lzumax
Lz∆umin ≤ ∆u ≤ Lz∆umax
Lsymin ≤ Fp + Gpc∆uc ≤ Lsymax
(3.29)
donde Lz es una matriz de dimension (Hc × z)× z formada por Hc matrices identidad dez × z. Ls es una matriz de dimension (Hp × s) × s formada por Hp matrices identidadde s × s; y K es una matriz triangular inferior por bloques cuyos elementos no nulos sonmatrices identidad de dimension z. En forma condensada se pueden expresar como:
R∆uc ≤ c (3.30)
siendo:
R =
IHc×Hc
−IHc×Hc
K−KGpc
−Gpc
c =
Lz∆umax
Lz∆umin
Lzumax − Lzu (k − 1)−Lzumin + Lzu (k − 1)
Lsymax − Fp
−Lsymin + Fp
La formulacion del control predictivo con restricciones es:
minimizar J (u)
sujeto a R∆uc ≤ c
Lo cual se expresa de la siguiente manera (el procedimiento para llegar de la ecuacion

3.3. DISENO DEL MBPC MULTIVARIABLE 49
(3.23) a la (3.31) se encuentra en el Anexo B):
min∆u
J (∆u) = min∆u
1
2∆uT H∆u + fT ∆u + b
sujeto a Ru ≤ c(3.31)
donde:H = 2(GT
pcGpc + λI)
f =(2 (Fp − w)T Gpc
)T
b = (Fp − w)T (Fp − w)
Es decir, el problema consiste en la minimizacion de una funcion cuadratica con res-tricciones lineales, lo que se conoce como Programacion Cuadratica, (QP). En este casono se puede encontrar una solucion analıtica como en el caso sin restricciones, sino quehay que recurrir a metodos numericos iterativos.
Para resolver el problema QP existen diversos algoritmos suficientemente probados,como por ejemplo conjuntos activos, puntos interiores, etc [Montiel y col., 2001].
En este trabajo para resolver dicho problema se utilizo la funcion quadprog del Tool-box de Optimizacion, dicha funcion encuentra un mınimo para un problema especificadopor [Coleman y col., 1996]:
minx
1
2xT Hx + fT x
sujeto a Riq · x ≤ biq
Req · x = beq
lb ≤ x ≤ ub
(3.32)
donde H, Riq y Req son matrices y f , biq, beq, lb, ub y x son vectores (nomenclaturautilizada en la funcion).
El metodo usado para el tratamiento de restricciones en el Toolbox de Optimizaciones una estrategia de conjunto activo (tambien conocido como metodo de proyeccion).
El procedimiento de solucion implica dos fases: la primera fase implica el calculode un punto factible2 (si existe), la segunda fase implica la generacion de una secuenciaiterativa de los puntos factibles que convergen a la solucion. Lo anterior se detalla en el
2Un punto factible es cada punto x que satisface las ecuaciones de igualdad y desigualdad lineales(restricciones).

50 CAPITULO 3. EL MBPC SIN CAMBIO DE RESTRICCIONES Y COMO CONTROL TOLERANTE A FALLAS
Anexo D.
3.4 Diseno del MBPC como Control Tolerante a Fa-
llas
El MBPC usa todas las senales de entrada ui disponibles y las senales de salida yi. Sien el nivel de supervision se detecta una falla, las restricciones de desigualdades incluidasen el problema de optimizacion pueden cambiarse de modo que el MBPC se adapta a lasfallas del sistema. Esto se puede realizar de una manera muy facil para fallas en actuadores[Blanke y col., 2003]) y [Maciejowski, 2000]).
Si el algoritmo de diagnostico muestra que el actuador j-esimo falla, las restriccionesde igualdad uj = 0 se incluyen en el problema de optimizacion para asegurarse que elcontrolador realmente no usa la entrada j-esima. Entonces el MBPC mueve la actividadde control hacia los actuadores disponibles, lo cual puede ser interpretado como una re-configuracion en lınea del lazo de control [Majanne y col., 2003]).
El control predictivo ofrece bastantes recursos para tratar un control tolerante afallas. Si un sensor de una salida controlada falla, por ejemplo, es posible abandonar elcontrol de esa salida quitando la salida correspondiente de la funcion de objetivo. Unatasco en un actuador se representa facilmente cambiando las restricciones (|∆uj = 0|).Si una falla afecta las capacidades de la planta, entonces es posible cambiar los objetivos,o las restricciones, o ambos, por consiguiente. Lo anterior es relativamente claro en laformulacion del control predictivo. Esto es principalmente debido al hecho que la senal decontrol es recalculada en cada paso para resolver un problema de optimizacion, tal que sepueden hacer cambios en la formulacion del problema. Esto es una estrategia diferente acambiar las ganancias o constantes de tiempo en un controlador precalculado [Maciejowski,2002]) y [Maciejowski y col., 2003].
Puede no ser un problema facil conocer como cambia la formulacion del problemasi la falla ocurre. Todo lo que se puede decir es que, si un cambio es conocido, es facilintroducirlo e implementarlo en la estructura del control predictivo.
3.4.1 El MBPC como una herramienta para reconfigu-racion
Como ya se menciono, el MBPC con restricciones tiene la capacidad inherente deactuar como un Control Tolerante a Fallas, si hay actuadores redundantes y uno de estosactuadores falla. En un sistema con actuadores redundantes, se presenta un arreglo en elcual un actuador se usa en operacion normal, pero otro entra en operacion si el primero se

3.4. DISENO DEL MBPC COMO CONTROL TOLERANTE A FALLAS 51
satura o falla, esto se muestra en la Figura 3.5. Esta figura muestra el uso de un modelode la saturacion caracterıstica de un actuador. Tal esquema se usa en la saturacion delactuador. Pero tambien es efectivo en el caso de que el actuador usado en operacionnormal (actuador 1) falle, por ejemplo un atascamiento en un valor constante, teniendo encuenta que la accion integral esta presente en el controlador. El actuador redundante noes puesto en operacion inmediatamente, pero un error persistente en la salida controladaconduce a un incremento en la senal de control de la accion integral, hasta que el sistema“piense” que el actuador normal se saturo, con lo cual el actuador redundante (el actuador2) entra a trabajar.
Figura 3.5: Actuadores redundantes [Maciejowski, 1997]
El MBPC con restricciones exhibe esencialmente el mismo comportamiento, con-siderando que la saturacion del actuador se modela por conveniencia con restricciones, yque la accion integral se presenta (lo cual esta en la formulacion del problema estandar).Suponga que una planta tiene actuadores redundantes, y que uno de estos actuadores em-pieza a atascarse en una posicion, la cual no es la de equilibrio. El controlador “piensa”que todos los actuadores se fijan para corregir la posicion de equilibrio pero, debido a lafalla la salida no alcanza a la referencia. En el controlador, esta discrepancia se atribuyea un disturbio en la salida; este disturbio se asume que persiste en el mismo nivel en elfuturo, y los ajustes del actuador por lo tanto se cambian para compensar el disturbioestimado. Ahora el ajuste del actuador en falla no cambia realmente. Pero, desde un e-rror persistente similar en la senal de un actuador aparentemente “grande”, el controladoratribuye este error a un disturbio grande que estima previamente. Por lo tanto un cambiomayor en el ajuste del actuador “j-esimo” se exige. Este proceso se repite hasta que elcontrolador “piensa” que el actuador en falla rechaza el nivel de saturacion. Ahora mueveel otro actuador mas vigorosamente para combatir el disturbio grande. La salida se acercamas a la referencia y el error estimado se reduce, aunque no a cero. Si la falla es compatiblecon la especificacion de la referencia, la accion de control se aplica eventualmente para quela planta vuelva a la referencia correcta.
Es significativo que este comportamiento ocurre sin la necesidad de anticipar ciertospatrones de la falla del actuador, o disenar esquemas para manejarlos, esto se debe al

52 CAPITULO 3. EL MBPC SIN CAMBIO DE RESTRICCIONES Y COMO CONTROL TOLERANTE A FALLAS
MBPC con restricciones.
Tipos de fallas
Las fallas que pueden ocurrir pueden ser de tres tipos:
Fallas en actuadores. El rango reducido del actuador, posiblemente a cero, o fallasdonde un actuador permanece en una de sus posiciones extremas.
Fallas internas. Alguna de las partes de la planta falla, con la consecuencia de uncambio significativo de la dinamica y ganancias de la planta. (Un actuador falla lo cualsolo cambia la dinamica del propio actuador). Ejemplo de este tipo de falla es: la fuga deproducto en alguno de los efectos del evaporador.
Falla en sensores. Algunas mediciones se convierten indisponibles, o incorrectas, oinusualmente ruidos.
Por supuesto que muchas fallas seran la combinacion de estas. En las siguientessubsecciones se estudia este tipo de fallas con mas detalle.
3.4.2 Fallas en actuadores
Las fallas del actuador son probablemente las mas faciles de tratar, proporcionandocierto grado de redundancia. Segun lo discutido anteriormente, el MBPC con restriccionesacomoda tales fallas a un cierto grado, incluso si no hay informacion explıcita del FDIpara decir que ocurre una falla. Por supuesto se mejora la situacion si tal informacionesta disponible, y es facil de incorporarla en el marco del MBPC, sobre todo modificandolas restricciones explıcitas en los niveles de los actuadores correspondientes, u obligandoal elemento apropiado de que sea cero si se atasca el actuador.
3.4.3 Fallas internas
Las fallas internas son mas difıciles de acomodar, a menos que sus efectos sean sufi-cientemente pequenos para ser ocupados por la robustez inherente del sistema de controlnormal. Si no, la informacion del FDI es esencial, para actualizar el modelo interno usadopor el MBPC. La dificultad principal es obtener la informacion correcta del FDI.
3.4.4 Fallas en sensores
Las fallas en sensores son potencialmente las mas difıciles a tratar, desde el punto devista de la correccion dentro del MBPC. Si un sensor proporciona la unica medida de unavariable de salida controlada y este falla, no es posible continuar el control sin la modifi-
3.4. DISENO DEL MBPC COMO CONTROL TOLERANTE A FALLAS 53
cacion de la funcion objetivo del MBPC. Por lo menos el control de esa variable tendraque ser abandonado. Puede ser posible substituir el control de otra variable disponible, sise requiere, o quizas substituir la funcion objetivo por los objetivos de alto nivel que seespecifican. En estos casos se requiere un supervisor de alto nivel para ajustar la formu-lacion del MBPC y decidir si necesita el ajuste. No esta clara en que medida tal supervisorpodrıa ser generico, en el sentido que podrıa ocuparse de fallas inesperadas. No todas lasfallas en sensores necesitan tener consecuencias drasticas. Si la medicion se pierde, noaparece directamente en la funcion objetivo, pero se utiliza para mejorar la calidad de unacierta variable estimada. Despues el modelo interno se usa por el MBPC.
Parece muy simple creer, que basta con cambiar el modelo interno, o cambiar las res-tricciones, para que el controlador MBPC tenga un comportamiento satisfactorio cuandose presente una falla. En algunos casos esto servira. Pero en general el controlador necesi-tara ser resintonizado para tener un funcionamiento mejor. La sintonizacion en este tipode controladores significa el ajuste de los horizontes y los pesos que aparecen en la funcionobjetivo, y posiblemente la representacion activa de las restricciones. Parece ser necesario“ablandar” ciertas restricciones para conservar la viabilidad, la cual es necesaria para ase-gurar estabilidad en algunos casos [Maciejowski, 2000], [Maciejowski y col., 2003].
Otra caracterıstica importante del control predictivo con restricciones es que, ademasde exhibir la accion integral, tiene un comportamiento inherente3 cuando existen fallas so-bre todo en actuadores. Tomando en cuenta que las caracterısticas de la saturacion delactuador estan modeladas razonablemente por restricciones en las entradas, entonces uncontrolador predictivo nunca envıa una senal a un actuador que exceda sus capacidades,incluso cuando se estima que un disturbio esta presente. Esta caracterıstica es de importan-cia practica, particularmente en aplicaciones donde cambiando entre varios controladoresse anticipa, por ejemplo la reconfiguracion.
En este trabajo se estudian las fallas en actuadores y fallas internas, por lo que enlos siguientes parrafos se describe matematicamente como se acomodan en el MBPC estostipos de fallas.
3.4.5 MBPC como Control Tolerante a Fallas ante fallasde tipo atasco
Este tipo de fallas sucede en los actuadores y fısicamente se visualizan cuando alactuador se le pide que abra o cierra, segun las necesidades del control y dicho actuadorse fija en un valor.
El MBPC ante estas fallas de tipo atasco, solo necesita la informacion de las nuevas
3Comportamiento inherente se refiere a una conducta propia del controlador.

54 CAPITULO 3. EL MBPC SIN CAMBIO DE RESTRICCIONES Y COMO CONTROL TOLERANTE A FALLAS
restricciones dadas por el diagnostico, ya que el MBPC anadiendo estas nuevas restriccio-nes al problema de optimizacion, permite facilmente incorporar mecanismos de toleranciaa fallas.
Las fallas ocasionadas por tales atascos en los actuadores, se acomodan modificandolas restricciones para este caso. Especıficamente se cambia el incremento de la senal decontrol correspondiente al actuador donde sucedio la falla. Matematicamente se expresacomo: (|∆uj = 0|).
Lo mencionado en el parrafo anterior provocara que la senal de control del actuadorfallado permanezca constante desde el momento en que la falla se presente, mas sin em-bargo las otras senales de control (considerando un proceso multivariable) moveran todasu actividad de control para compensar la falla.
3.4.6 MBPC como Control Tolerante a Fallas ante fallasde tipo saturacion
Este tipo de fallas tambien se presenta en los actuadores y su presencia de estasfallas se nota cuando al actuador se le pide que abra o cierra hasta un cierto grado, massin embargo el actuador se abre o cierra pero no llega al valor que se le pide, teniendo unrango de operacion menor al especificado en operacion normal.
El MBPC tambien ante este tipo de fallas de saturacion en los actuadores, solo nece-sita la informacion de las nuevas restricciones dadas por el diagnostico (esto es, los valoresmınimo y maximo de apertura de la valvula), ya que como ya se menciono, el MBPC(anadiendo estas nuevas restricciones al problema de optimizacion) permite facilmente in-corporar mecanismos de tolerancia a fallas.
Las fallas ocasionadas por la saturacion en las valvulas, se representan cambiandolas restricciones de uj (correspondiente a la entrada del actuador en falla), a valores querepresenten las saturaciones en dicha valvula.
3.4.7 MBPC como Control Tolerante a Fallas ante fallasde tipo internas
Las fallas internas en algunos casos son muy faciles de tratar. Lo anterior sucedecuando sus efectos sean suficientemente pequenos para lograr ser compensados por la ro-bustez inherente del sistema de control normal.
Por lo que es preciso mencionar que para este tipo de fallas no es necesario cam-biar o modificar las restricciones (cuando los efectos de las fallas sean pequenos), mas sin
3.5. CONCLUSIONES 55
embargo el MBPC presenta un comportamiento adecuado ante este tipo de fallas [Ma-ciejowski, 2002]. Dicho comportamiento adecuado que presenta el MBPC, se atribuye soloa que es un control multivariable.
Cabe mencionar que en este tema de tesis se abordara este tipo de fallas, el tratamientode tales fallas se realiza aprovechando las bondades del proceso y del control multivariable.
3.5 Conclusiones
En este capıtulo se presentaron ademas de conceptos basicos del MBPC, el desarrollo dedicho controlador. Se menciono lo que necesita el MBPC para actuar como Control Tole-rante a Fallas. En la Seccion 3.3 se visualiza facilmente que el diseno del MBPC resultasencillo, aun mas cuando no se presentan restricciones, esto es siempre y cuando se tengaun correcto modelo matematico del sistema. El diseno del MBPC se desarrollo en base aun modelo lineal discreto representado en espacio de estados.
Referente al desarrollo del MBPC como Control Tolerante a Fallas, este resulta muysencillo cuando se tratan fallas en actuadores, ya que simplemente el MBPC las tratacambiando o modificando las restricciones sin la necesidad de modificar el modelo interno.Lo anterior no sucede para las fallas en sensores ya que el MBPC, para tratar estas, tieneque modificar el modelo interno. Con respecto a las fallas internas en ocasiones pueden sermuy faciles de tratar simplemente aprovechando la dinamica del proceso y que el controlsea multivariable.

56 CAPITULO 3. EL MBPC SIN CAMBIO DE RESTRICCIONES Y COMO CONTROL TOLERANTE A FALLAS

Capıtulo 4
Analisis y modelado del evaporador de cincoefectos
El objetivo principal de este capıtulo es presentar el modelo no lineal del evaporadorde cinco efectos usado en la produccion de azucar. Cabe aclarar que el modelo linealizadose utilizara para la construccion del Controlador Predictivo Basado en Modelo para esteproceso.
En la Seccion 4.1 se presenta una breve explicacion sobre el proceso de evaporacion.Tambien se muestra informacion sobre la evaporacion quımica y los evaporadores quımicos;en esta seccion se da la operacion de un evaporador de cinco efectos aplicado a la pro-duccion de azucar. En la Seccion 4.2 se describe el modelo no lineal del evaporador decinco efectos. Ademas en esta seccion se presentan las condiciones de estado estacionarioutilizadas para linealizar el modelo, se desarrolla el modelo linealizado del evaporador,se muestra el analisis de la controlabilidad y observabilidad del sistema linealizado y semuestran las respuestas del modelo lineal y linealizado. Por ultimo en la Seccion 4.3 sepresentan las conclusiones.
4.1 Proceso de evaporizacion
La evaporacion, como ya se menciono, es un proceso que se utiliza con frecuencia enla industria de procesos, y una de su mayor aplicacion se encuentra en la produccion deazucar.
El objetivo de la evaporacion es concentrar una solucion que consta de un soluto novolatil y un disolvente volatil. En la inmensa mayorıa de las evaporaciones el disolvente
57

58 CAPITULO 4. ANALISIS Y MODELADO DEL EVAPORADOR DE CINCO EFECTOS
es el agua. La evaporacion se lleva a cabo vaporizando una parte del disolvente con el finde obtener una solucion concentrada. La evaporacion se diferencia del secado en que elresiduo es un lıquido, y no un solido y de la destilacion, en que el vapor es generalmenteun solo componente.
Generalmente, en evaporacion, el lıquido concentrado es el producto valioso mien-tras que el vapor se condensa y desprecia. Sin embargo, en algunos casos concretos puedeocurrir lo contrario.
Aunque el lıquido que entra como alimentacion a un evaporador puede estar suficien-temente diluido y poseer muchas de las propiedades fısicas del agua, a medida que aumentala concentracion, la solucion adquiere progresivamente caracterısticas particulares. La den-sidad y viscosidad aumentan con el contenido de solidos hasta que la solucion se satura oadquiere caracterısticas que dificultan la adecuada transmision de calor.
En general, los evaporadores se construyen en hierro colado o acero. Sin embargo,muchas soluciones atacan a los metales ferreos o son contaminadas por ellos, siendo en-tonces preciso utilizar materiales especiales tales como cobre, nıquel, acero inoxidable,aluminio, grafito y plomo. Como estos materiales son caros, resulta muy convenienteobtener velocidades elevadas de transmision de calor, con el fin de disminuir el coste deinversion del equipo.
Hay dos tipos principales de equipo vaporizador usados en las industrias: calderase intercambiadores vaporizadores. Las calderas son aparatos tubulares calentados direc-tamente, que por principio convierten la energıa del combustible en calor latente de va-porizacion. Los intercambiadores vaporizadores no tienen fuego directo y convierten elcalor latente o sensible de un fluido en calor latente de evaporizacion de otro. Si se usaun intercambiador vaporizador para la evaporacion de agua o de una solucion acuosa, escasi convencional llamarlo evaporador. Si se usa para suministrar los requerimientos decalor en el fondo de una columna de destilacion ya sea que el vapor formado sea vapor deagua o no, es llamado hervidor. Cuando no se usa para la formacion de vapor de agua yno forma parte de un proceso de destilacion, un intercambiador vaporizador se llama sim-plemente vaporizador. Cuando, en conexion con un sistema de generacion de energıa, seusa un evaporador para la produccion de agua pura o para cualquiera de los evaporadoresasociados con la generacion de potencia, se llaman evaporadores para plantas generadorasde energıa. Cuando se usa un evaporador para concentrar una solucion quımica mediantela evaporizacion del solvente agua, se llama evaporador quımico [Kern, 1998].
Un evaporador es un intercambiador de temperaturas entre medios, de modo quemientras uno de ellos se calienta aumentando su temperatura, el otro se enfrıa disminu-yendo su temperatura. Pasando habitualmente, de su estado lıquido original a estado
4.1. PROCESO DE EVAPORIZACION 59
vapor (cabiendo la posibilidad de un calentamiento ulterior, con lo que se dice que alcanzael estado de vapor sobrecalentado). Los evaporadores se fabrican en muy diversos tamanosy con distintas disposiciones, siendo profusamente empleados en gran cantidad de procesostermicos.
La funcion principal de un evaporador es extraer agua de un lıquido mediante ebu-llicion, utilizando vapor de agua como energıa calorıfica. El reto tecnologico es minimizarla gran cantidad de energıa relacionada a la extraccion de agua [Charbonnier y col., 2005].
4.1.1 Evaporacion quımica
Comparacion entre evaporizacion en las plantas de fuerza y la evaporacionquımica:
El proposito principal de la mayorıa de los evaporadores en las plantas generadorasde energıa, es la separacion de agua pura a partir de agua cruda o tratada. Las im-purezas se retiran continuamente del sistema mediante la purga. En la industria quımicala manufactura de agentes quımicos tales como la sosa caustica, sal de mesa y azucar,empiezan con soluciones acuosas diluidas de las que deben eliminarse grandes cantidadesde agua antes de poder llegar a la cristalizacion en un equipo adecuado para este fin. Enlos evaporadores de plantas generadoras de energıa, la porcion no evaporada de agua dealimentacion es el residuo, mientras que en los evaporadores quımicos es el producto.
4.1.2 Evaporadores quımicos
Los evaporadores quımicos se clasifican en dos grandes grupos: de circulacion naturaly de circulacion forzada. Los evaporadores de circulacion natural se usan unitariamente oen efecto multiple para los requerimientos mas simples de evaporizacion. Los evaporadoresde circulacion natural se clasifican en cuatro clases principales [Kern, 1998]:
• evaporador de tubos horizontales,
• evaporador de calandria con tubos verticales,
• evaporador de tubos verticales con canasta,
• y evaporador de tubos verticales largos.
Los evaporadores de circulacion forzadas se usan para lıquidos viscosos, para los queforman sales, y las soluciones que tienden a incrustarse.
Los evaporadores de circulacion forzada se fabrican en gran variedad de arreglos.Estos pueden no ser tan economicos en operacion como los evaporadores de circulacion
60 CAPITULO 4. ANALISIS Y MODELADO DEL EVAPORADOR DE CINCO EFECTOS
natural, pero son necesarios cuando los problemas de concentracion involucran solucionesde flujo pobre, incrustante, y ciertas caracterısticas termicas. Con materiales muy viscososno hay otra alternativa sino la de usar este tipo de evaporador. Tambien, donde hay ten-dencia a la formacion de incrustaciones o al deposito de sales, las altas velocidades que seobtienen por las bombas de recirculacion, son los unicos medios de prevenir la formacion dedepositos excesivos. Los evaporadores de circulacion forzada estan bien adaptados para uncontrol preciso del flujo, particularmente cuando un tiempo de contacto excesivo puede serperjudicial a la solucion quımica. Los tubos para los evaporadores de circulacion forzadason mas pequenos que los tubos de circulacion natural.
La clasificacion antes mencionada sirvio para ubicar el evaporador usado en la pro-duccion de azucar, tal sistema se usa de efecto multiple para los requerimientos simples deevaporizacion, es por ello que pertenece al grupo de circulacion natural en la clasificacionde calandria con tubos verticales.
Actualmente, los evaporadores de multiples efectos son muy utilizados en las indus-trias ya que disminuyen el consumo de energıa para una concentracion casi proporcionalal numero de efectos [Newell y col., 1972], es por ello que en este tema de tesis se tomaracomo proceso a un evaporador de cinco efectos aplicado a la produccion de azucar.
La economıa de la industria azucarera depende fuertemente de los evaporadores demultiple efecto debido a la cantidad enorme de energıa termica (vapor) requerida duranteel proceso.
El control automatico es un importante factor para optimizar los evaporadores demultiple efecto. El objetivo principal para reducir al mınimo el consumo de energıa se lograpor medio del desarrollo de un esquema de control para los evaporadores de multiple efectopara controlar la concentracion del ultimo efecto a un valor constante que proporcionala evaporacion maxima permitida. Debido a la gran cantidad de energıa manejada, esnecesario crear esquemas que garanticen un alto grado de confiabilidad y seguridad defuncionamiento.
4.1.3 Operacion de un evaporador de cinco efectos
El evaporador que se muestra en la Figura 4.1 es un evaporador de cinco efectosutilizado para reducir el contenido de agua en el jugo de cana (producto antes de laevaporacion) extraıdo de la cana de azucar el cual tiene una concentracion aproximada del15% de sacaroza [Lissane y col., 1998], [Kulakov, 2003] y [Pitteea y col., 2004]. En estetrabajo se considera que todos los efectos tienen las mismas dimensiones.

4.2. MODELADO 61
Figura 4.1: Evaporador de cinco efectos
El primer efecto se alimenta con jugo de cana de azucar con un caudal masico F0, unaconcentracion de soluto C0 y temperatura T0. La solucion se concentra en el primer efectopor accion de un caudal de vapor S, el cual genera un caudal de vapor O1, y un caudalde fondos de soluto concentrado C1. La corriente de fondos F1 se alimenta al cambiadorde calor del segundo efecto al igual que el caudal de vapor O1, el producto de salida deeste efecto se alimenta al tercer efecto, el mismo proceso se repite en los otros efectos. Lacorriente de salida F5, que es el producto que se desea, abandona el quinto efecto, con unaconcentracion de soluto C5 (% en peso). El caudal de vapor producido en el quinto efectoO5 se envıa a condensacion.
La cantidad masica del lıquido retenido en cada efecto son M1, M2, M3, M4 y M5,mientras que T1, T2, T3, T4 y T5 son las temperaturas en cada uno de los efectos.
4.2 Modelado
Para llegar a un modelo dinamico simplificado se propusieron las siguientes suposi-ciones [Perez y col., 2004]) y [Wang y col., 2006]:
• El lıquido del proceso se encuentra perfectamente mezclado.
• La dinamica de los balances de energıa es muy rapida.
• Los cambios de calor sensible entre temperaturas de producto y vapor son conside-rados pequenos comparados con el calor latente.
• El vapor esta bajo condiciones de saturacion.
• La dinamica dentro de la chaqueta del vapor es muy rapida.

62 CAPITULO 4. ANALISIS Y MODELADO DEL EVAPORADOR DE CINCO EFECTOS
4.2.1 Modelado del sistema
Es importante mencionar que se tomaron como base los modelos de [Lissane y col.,1998] y [Nielsen y col., 1997]. El modelo no lineal que toma en cuenta las suposicionesanteriores, se describe a continuacion.
En las siguientes ecuaciones i = 1 para el primer efecto, i = 2 para el segundo efecto,i = 3 para el tercer efecto, i = 4 para el cuarto efecto e i = 5 para el quinto efecto.
Balance de masa
La ecuacion del balance de masa describe la relacion entre los niveles hi y los flujosde producto Fi y de vapor Oi de cada efecto y se da por la expresion que a continuacionse describe [Lissane y col., 1998]:
ρiAidhi
dt= Fi−1 − Fi −Oi (4.1)
en donde Ai son las areas y ρi son las densidades en cada uno de los efectos, estas cons-tantes aparecen tambien en algunas de las ecuaciones posteriores.
Balance de composicion
La ecuacion del balance de composicion describe la relacion entre las composicionesCi, los niveles hi y los flujos de producto Fi de cada efecto y se da por la siguiente expresion:
ρiAid (hiCi)
dt= Fi−1Ci−1 − FiCi (4.2)
Flujo de producto
La ecuacion que describe la relacion entre los flujos Fi y los niveles hi de cada efecto,se da por la expresion [Kern, 1998]:
Fi = Ki
√hiρi (4.3)
donde Ki son las constantes de las valvulas en cada uno de los efectos.

4.2. MODELADO 63
Flujo de vapor
Las siguientes expresiones describen la relacion entre el flujo de vapor de entrada yde salida de cada efecto:
O1 = kiS para i = 1
Oi = ki (Oi−1) para i = 2, ..., 5(4.4)
donde ki son las ganancias estaticas en cada uno de los efectos y S es el flujo de vapor dealimentacion.
Por lo que el modelo no lineal se compone de las siguientes ecuaciones diferencialesy algebraicas.
a) Las ecuaciones de las variables de estado respectivas a las concentraciones son lassiguientes:
dC1
dt=
F0C0 − (F0 −O1) C1
A1ρ1h1
(4.5)
dC2
dt=
F1C1 − (F1 −O2) C2
A2ρ2h2
(4.6)
dC3
dt=
F2C2 − (F2 −O3) C3
A3ρ3h3
(4.7)
dC4
dt=
F3C3 − (F3 −O4) C4
A4ρ4h4
(4.8)
dC5
dt=
F4C4 − (F4 −O5) C5
A5ρ5h5
(4.9)
b) Las ecuaciones de las variables de estado correspondientes a los niveles son las si-guientes:
dh1
dt=
F0 − F1 −O1
ρ1A1
(4.10)
dh2
dt=
F1 − F2 −O2
ρ2A2
(4.11)
dh3
dt=
F2 − F3 −O3
ρ3A3
(4.12)
dh4
dt=
F3 − F4 −O4
ρ4A4
(4.13)
dh5
dt=
F4 − F5 −O5
ρ5A5
(4.14)

64 CAPITULO 4. ANALISIS Y MODELADO DEL EVAPORADOR DE CINCO EFECTOS
c) Las ecuaciones correspondientes al flujo de producto de cada efecto se expresan dela siguiente manera:
F1 = K1
√h1ρ1 (4.15)
F2 = K2
√h2ρ2 (4.16)
F3 = K3
√h3ρ3 (4.17)
F4 = K4
√h4ρ4 (4.18)
F5 = K5
√h5ρ5 (4.19)
d) Por ultimo, las ecuaciones respectivas al flujo de vapor de cada efecto se expresancomo a continuacion se describe:
O1 = k1S (4.20)
O2 = k2O1 (4.21)
O3 = k3O2 (4.22)
O4 = k4O3 (4.23)
O5 = k5O4 (4.24)
Del modelo no lineal compuesto por las ecuaciones (4.5) a (4.24) se consideran comovariables de estado las 5 concentraciones y los 5 niveles. El vector de estados quedaexpresado de la siguiente manera:
x = [C1, C2, C3, C4, C5, h1, h2, h3, h4, h5]T ∈ R10 (4.25)
por lo que xi = Ci, i ∈ 5 y xj = hj−5, j = 6, ..., 10.
Se consideran como senales de control los caudales de producto de entrada y de vaporde entrada, ası como tambien cada una de las valvulas que regulan el flujo de cada efectoa otro (las valvulas de V3 a V6 mostradas en la Figura 4.1 son modelada con K1 a K4
respectivamente):
u = [F0, S, K1, K2, K3, K4]T ∈ R6 (4.26)
por lo que u1 = F0, u2 = S y ui+2 = Ki, i = 1, ..., 4.
Cabe mencionar que las senales de control para este sistema en particular se con-sideran fijas. Los valores fijos se mencionan posteriormente, la eleccion de tales valoresse realizo en base a la dinamica propia del sistema (esto se menciona posteriormente conmayor detalle).

4.2. MODELADO 65
Las proporciones de los componentes del jugo de cana de azucar varıan de acuerdocon la variedad (familia) de la cana, edad, madurez, clima, suelo, metodo de cultivo,abonos, lluvias, riegos, etc. Sin embargo, uno de los mas importantes es la concentracionde sacarosa la cual varıa de un 8-15% [Kung, 2002]; estas variaciones se consideran comoperturbaciones en el sistema.
Con lo anterior las entradas de perturbacion son:
v = [C0, k1]T ∈ R2 (4.27)
por lo que v1 = C0 y v2 = k1.
k1 es la ganancia estatica en el primer efecto. Se considera como perturbacion debidoa que depende de la temperatura.
Ya que se considera que todos los estados son medibles, el vector de salida es elsiguiente:
y = [C1, C2, C3, C4, C5, h1, h2, h3, h4, h5]T ∈ R10 (4.28)
por lo que yi = Ci, i ∈ 5 y yj = hj−5, j = 6, ..., 10.
Teniendo en cuenta las denominaciones de variables de estado, control y perturba-ciones dadas por las ecuaciones (4.25), (4.26) y (4.27) respectivamente, las ecuaciones delos estados se pueden escribir de forma general de la siguiente manera:
x1 (t) = f1(x|u, v) = f1 (x1, x6|u1, u2, v1, v2)
x2 (t) = f2(x|u, v) = f2 (x1, x2, x6, x7|u2, u3, v2)
x3 (t) = f3(x|u, v) = f3 (x2, x3, x7, x8|u2, u4, v2)
x4 (t) = f4(x|u, v) = f4 (x3, x4, x8, x9|u2, u5, v2)
x5 (t) = f5(x|u, v) = f5 (x4, x5, x9, x10|u2, u6, v2)
x6 (t) = f6(x|u, v) = f6 (x6|u1, u2, u3, v2)
x7 (t) = f7(x|u, v) = f7 (x6, x7|u2, u3, u4, v2)
x8 (t) = f8(x|u, v) = f8 (x7, x8|u2, u4, u5, v2)
x9 (t) = f9(x|u, v) = f9 (x8, x9|u2, u5, u6, v2)
x10 (t) = f10(x|u, v) = f10 (x9, x10|u2, u6, v2)
La notacion fi(x|u, v) siendo i = 1...10 indica que fi depende directamente de losestados y de manera indirecta de las entradas de control y las perturbaciones. Esto se

66 CAPITULO 4. ANALISIS Y MODELADO DEL EVAPORADOR DE CINCO EFECTOS
debe a que los estados son variables, no ası las entradas de control y disturbios, ya queestas se consideran fijas para obtener los puntos de equilibrio de los estados.
De forma explıcita, las ecuaciones de estado se expresan como:
x1 (t) = f1 (x|u, v) =u1v1 − (u1 − v2u2) x1
A1ρ1x6
(4.29)
x2 (t) = f2 (x|u, v) =u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
(4.30)
x3 (t) = f3 (x|u, v) =u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
(4.31)
x4 (t) = f4 (x| u, v) =u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
(4.32)
x5 (t) = f5 (x|u, v) =u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
(4.33)
x6 (t) = f6 (x|u, v) =u1 − u3
√x6ρ1 − v2u2
A1ρ1
(4.34)
x7 (t) = f7 (x|u, v) =u3√
x6ρ1 − u4√
x7ρ2 − k2v2u2
A2ρ2
(4.35)
x8 (t) = f8 (x|u, v) =u4√
x7ρ2 − u5√
x8ρ3 − k3k2v2u2
A3ρ3
(4.36)
x9 (t) = f9 (x|u, v) =u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2v2u2
A4ρ4
(4.37)
x10 (t) = f10 (x|u, v) =u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2v2u2
A5ρ5
(4.38)
Las ecuaciones de salida se expresan de la siguiente manera:
y1 (t) = g1 (x1) = x1 (4.39)
y2 (t) = g2 (x2) = x2 (4.40)
y3 (t) = g3 (x3) = x3 (4.41)
y4 (t) = g4 (x4) = x4 (4.42)
y5 (t) = g5 (x5) = x5 (4.43)
y6 (t) = g6 (x6) = x6 (4.44)
y7 (t) = g7 (x7) = x7 (4.45)
y8 (t) = g8 (x8) = x8 (4.46)
y9 (t) = g9 (x9) = x9 (4.47)
y10 (t) = g10 (x10) = x10 (4.48)

4.2. MODELADO 67
Tomando en cuenta las ecuaciones anteriores se llega a un sistema no lineal de lasiguiente forma:
{x = f (x|u, v)
y = g (x)(4.49)
donde los vectores f y g son campos vectoriales de la forma:
f(x|u, v) =
f1 (x|u, v) =u1v1 − (u1 − v2u2) x1
A1ρ1x6
f2 (x|u, v) =u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
f3 (x|u, v) =u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
f4 (x|u, v) =u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
f5 (x|u, v) =u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
f6 (x|u, v) =u1 − u3
√x6ρ1 − v2u2
A1ρ1
f7 (x|u, v) =u3√
x6ρ1 − u4√
x7ρ2 − k2v2u2
A2ρ2
f8 (x|u, v) =u4√
x7ρ2 − u5√
x8ρ3 − k3k2v2u2
A3ρ3
f9 (x|u, v) =u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2v2u2
A4ρ4
f10 (x|u, v) =u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2v2u2
A5ρ5
g(x) =
g1 (x) = x1
g2 (x) = x2
g3 (x) = x3
g4 (x) = x4
g5 (x) = x5
g6 (x) = x6
g7 (x) = x7
g8 (x) = x8
g9 (x) = x9
g10 (x) = x10
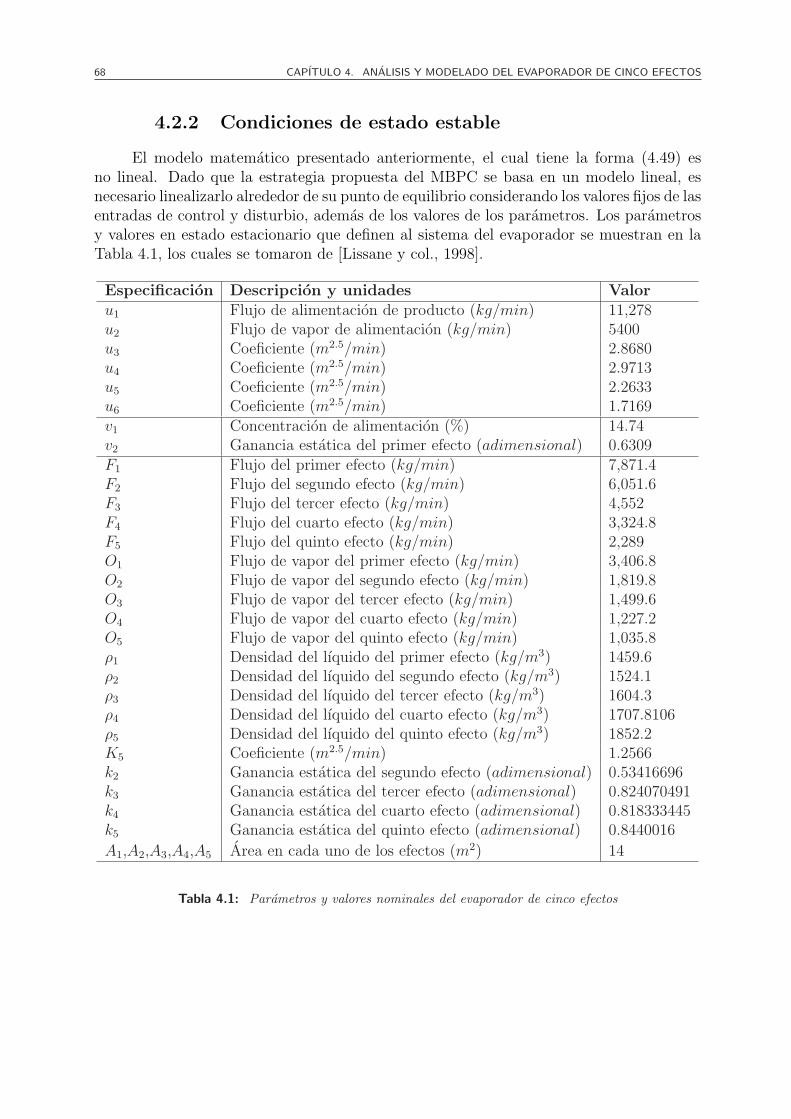
68 CAPITULO 4. ANALISIS Y MODELADO DEL EVAPORADOR DE CINCO EFECTOS
4.2.2 Condiciones de estado estable
El modelo matematico presentado anteriormente, el cual tiene la forma (4.49) esno lineal. Dado que la estrategia propuesta del MBPC se basa en un modelo lineal, esnecesario linealizarlo alrededor de su punto de equilibrio considerando los valores fijos de lasentradas de control y disturbio, ademas de los valores de los parametros. Los parametrosy valores en estado estacionario que definen al sistema del evaporador se muestran en laTabla 4.1, los cuales se tomaron de [Lissane y col., 1998].
Especificacion Descripcion y unidades Valoru1 Flujo de alimentacion de producto (kg/min) 11,278u2 Flujo de vapor de alimentacion (kg/min) 5400u3 Coeficiente (m2.5/min) 2.8680u4 Coeficiente (m2.5/min) 2.9713u5 Coeficiente (m2.5/min) 2.2633u6 Coeficiente (m2.5/min) 1.7169v1 Concentracion de alimentacion (%) 14.74v2 Ganancia estatica del primer efecto (adimensional) 0.6309F1 Flujo del primer efecto (kg/min) 7,871.4F2 Flujo del segundo efecto (kg/min) 6,051.6F3 Flujo del tercer efecto (kg/min) 4,552F4 Flujo del cuarto efecto (kg/min) 3,324.8F5 Flujo del quinto efecto (kg/min) 2,289O1 Flujo de vapor del primer efecto (kg/min) 3,406.8O2 Flujo de vapor del segundo efecto (kg/min) 1,819.8O3 Flujo de vapor del tercer efecto (kg/min) 1,499.6O4 Flujo de vapor del cuarto efecto (kg/min) 1,227.2O5 Flujo de vapor del quinto efecto (kg/min) 1,035.8ρ1 Densidad del lıquido del primer efecto (kg/m3) 1459.6ρ2 Densidad del lıquido del segundo efecto (kg/m3) 1524.1ρ3 Densidad del lıquido del tercer efecto (kg/m3) 1604.3ρ4 Densidad del lıquido del cuarto efecto (kg/m3) 1707.8106ρ5 Densidad del lıquido del quinto efecto (kg/m3) 1852.2K5 Coeficiente (m2.5/min) 1.2566k2 Ganancia estatica del segundo efecto (adimensional) 0.53416696k3 Ganancia estatica del tercer efecto (adimensional) 0.824070491k4 Ganancia estatica del cuarto efecto (adimensional) 0.818333445k5 Ganancia estatica del quinto efecto (adimensional) 0.8440016
A1,A2,A3,A4,A5 Area en cada uno de los efectos (m2) 14
Tabla 4.1: Parametros y valores nominales del evaporador de cinco efectos

4.2. MODELADO 69
Con los valores de la Tabla 4.1 y las ecuaciones de los balances de materia, balancesde componente y flujos en cada efecto se determinan los valores de punto de equilibrio dex1, x2, x3, x4, x5, x6, x7, x8, x9 y x10, considerando valores fijos de las entradas de controly perturbacion (ya que a esos valores de entradas fijas opera el proceso).
Para obtener los puntos de equilibrio de los estados, se llevan a cabo los siguientespasos:
1. Se iguala a cero cada uno de los componentes del campo vectorial f(x|u, v).
2. Se despeja de cada una de las ecuaciones resultantes del paso anterior un punto deequilibrio de algun estado.
3. Se obtiene el valor numerico del punto de equilibrio a entradas de control y disturbiosfijos.
Cabe mencionar que primero se encuentran los puntos de equilibrio de los estados x6
a x10 y despues se calculan los puntos de equilibrio de x1 a x5, ya que para calcular estosultimos se requieren los valores de los puntos de equilibrio de los primeros. Esto es, paracalcular el punto de equilibrio de x1, se requiere el valor del punto de equilibrio de x6.
Tomando los valores correspondientes de estado estacionario de la ecuacion (4.34) sededuce:
dx6
dt= 0 ⇒ u1 − u3
√x6∗ρ1 − v2u2
ρ1A1
= 0
u1 − u3
√x6∗ρ1 − v2u2 = 0
x6∗ =
(u1 − v2u2
u3ρ1
)2
x6∗ = 3.535714m
La ecuacion (4.35) particularizada en estado estacionario permite calcular el valorde x∗7:
dx7
dt= 0 ⇒ u3
√x6∗ρ1 − u4
√x7∗ρ2 − k2v2u2
ρ2A2
= 0
u3
√x6∗ρ1 − u4
√x7∗ρ2 − k2v2u2 = 0
x7∗ =
(u3
√x6∗ρ1 − k2v2u2
u4ρ2
)2
x7∗ = 1.785714m

70 CAPITULO 4. ANALISIS Y MODELADO DEL EVAPORADOR DE CINCO EFECTOS
De la ecuacion (4.36) en estado estacionario se obtiene:
dx8
dt= 0 ⇒ u4
√x7∗ρ2 − u5
√x8∗ρ3 − k3k2v2u2
ρ3A3
= 0
u4
√x7∗ρ2 − u5
√x8∗ρ3 − k3k2v2u2 = 0
x8∗ =
(u4
√x7∗ρ2 − k3k2v2u2
u5ρ3
)2
x8∗ = 1.5714m
De la ecuacion (4.37) en estado estacionario se deduce:
dx9
dt= 0 ⇒ u5
√x8∗ρ3 − u6
√x9∗ρ4 − k4k3k2v2u2
ρ4A4
= 0
u5
√x8∗ρ3 − u6
√x9∗ρ4 − k4k3k2v2u2 = 0
x9∗ =
(u5
√x8∗ρ3 − k4k3k2v2u2
u6ρ4
)2
x9∗ = 1.285714m
La ecuacion (4.38) particularizada en estado estado estacionario permite calcular x∗10:
dx10
dt= 0 ⇒ u6
√x9∗ρ4 −K5
√x10
∗ρ5 − k5k4k3k2v2u2
ρ5A5
= 0
u6
√x9∗ρ4 −K5
√x10
∗ρ5 − k5k4k3k2v2u2 = 0
x10∗ =
(u6
√x9∗ρ4 − k5k4k3k2v2u2
K5ρ5
)2
x10∗ = 0.2967142m
De la ecuacion (4.29) en estado estacionario se deduce:
dx1
dt= 0 ⇒ u1v1 − x∗1 (u0 − v2u2)
A1ρ1x6∗ = 0
x∗1 =u1v1
u1 − v2u2
= 21.12%
La ecuacion (4.30) particularizada en estado estado estacionario permite calcular elvalor de x∗2:
dx2
dt= 0 ⇒ u3
√x6∗ρ1x
∗1 − x∗2
(u3
√x6∗ρ1 − k2v2u2
)
A2ρ2x7∗ = 0
x∗2 =u3
√x6∗ρ1x
∗1
u3
√x6∗ρ1 − k2v2u2
= 27.47%

4.2. MODELADO 71
De la ecuacion (4.31) en estado estacionario se deduce:
dx3
dt= 0 ⇒ u4
√x7∗ρ2x
∗2 − x∗3
(u4
√x7∗ρ2 − k3k2v2u2
)
A3ρ3x8∗ = 0
x∗3 =u4
√x7∗ρ2x
∗2
u4
√x7∗ρ2 − k3k2v2u2
= 36.52%
La ecuacion (4.32) particularizada en estado estado estacionario permite calcular elvalor de x∗4:
dx4
dt= 0 ⇒ u5
√x8∗ρ3x
∗3 − x∗4
(u5
√x8∗ρ3 − k4k3k2v2u2
)
A4ρ4x9∗ = 0
x∗4 =u5
√x8∗ρ3x
∗3
u5
√x8∗ρ3 − k4k3k2v2u2
= 50%
De la ecuacion (4.33) en estado estacionario se deduce:
dx5
dt= 0 ⇒ u6
√x9∗ρ4x
∗4 − x∗5
(u6
√x9∗ρ4 − k5k4k3k2v2u2
)
A5ρ5x10∗ = 0
x∗5 =u6
√x9∗ρ4x
∗4
u6
√x9∗ρ4 − k5k4k3k2v2u2
= 72.625%
Tomando en cuenta los calculos anteriores, el vector de los puntos de equilibrio delos estados es:
x∗ =[
21.12 27.47 36.52 50 72.625 3.535714 1.785714 1.5714 1.285714 0.967142]T
Cabe mencionar que en este vector se observa una diferencia muy marcada entre losvalores de x∗1 a x∗5 y los valores de x∗6 a x∗10, debido a que los primeros valores correspondena las concentraciones (en %) y los ultimos a los niveles (en metros) de cada efecto.
4.2.3 Modelo linealizado
Se linealiza el modelo alrededor del punto (x|u, v) = (x∗, u, v), donde x∗ representael vector de los puntos de equilibrio de los estados y u, v los valores fijos de las entradas decontrol y disturbio (los valores nominales y calculados en estado estable para la linealiza-cion del sistema de evaporacion se presentan en la subseccion anterior). Con ello se llegaa un sistema lineal de la forma:
{x = Acx + Bcu + Ecv
y = Ccx + Dcu + Fcv(4.50)
72 CAPITULO 4. ANALISIS Y MODELADO DEL EVAPORADOR DE CINCO EFECTOS
donde las matrices Ac ∈ R10×10, Bc ∈ R10×6, Cc ∈ R10×10, Dc ∈ R10×6, Ec ∈ R10×2 yFc ∈ R10×2 se obtienen realizando el calculo de las matrices Jacobianas del sistema dadopor la forma (4.49). Por lo que:
Ac =∂f
∂x
∣∣∣∣x∗,u,v
Bc =∂f
∂u
∣∣∣∣x∗,u,v
Ec =∂f
∂v
∣∣∣∣x∗,u,v
Cc =∂g
∂x
∣∣∣∣x∗,u,v
Dc =∂g
∂u
∣∣∣∣x∗,u,v
Fc =∂g
∂v
∣∣∣∣x∗,u,v
donde ∂f∂x
representa el Jacobiano del vector f , definido por:
∂f
∂x
∣∣∣∣x∗,u,v
=
∂f1
∂x1
∂f1
∂x2· · · ∂f1
∂x10∂f2
∂x1
∂f2
∂x2· · · ∂f2
∂x10...
......
...∂f10
∂x1
∂f10
∂x2· · · ∂f10
∂x10
∣∣∣∣∣∣∣∣∣x∗,u,v
De manera similar, se calcula el resto de las matrices.
En esta representacion es facil apreciar que el valor numerico de las matrices, de-pende de los valores de los puntos de equilibrio de los estados y de las entradas de controly disturbios fijas.
Por ejemplo para obtener el renglon 1 de la matriz Ac se tienen que realizar los

4.2. MODELADO 73
siguientes calculos:
∂f1
∂x1
∣∣∣∣x∗,u,v
=∂
∂x1
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= − (u1 − v2u2)
A1ρ1x6
∣∣∣∣x∗,u,v
= −0.11
∂f1
∂x2
∣∣∣∣x∗,u,v
=∂
∂x2
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0
∂f1
∂x3
∣∣∣∣x∗,u,v
=∂
∂x3
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0
∂f1
∂x4
∣∣∣∣x∗,u,v
=∂
∂x4
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0
∂f1
∂x5
∣∣∣∣x∗,u,v
=∂
∂x5
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0
∂f1
∂x6
∣∣∣∣x∗,u,v
=∂
∂x6
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= − A1ρ1 (u1v1 − (u1 − v2u2) x1)
(A1ρ1x6)2
∣∣∣∣x∗,u,v
= −0.8e−6
∂f1
∂x7
∣∣∣∣x∗,u,v
=∂
∂x7
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0
∂f1
∂x8
∣∣∣∣x∗,u,v
=∂
∂x8
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0
∂f1
∂x9
∣∣∣∣x∗,u,v
=∂
∂x9
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0
∂f1
∂x10
∣∣∣∣x∗,u,v
=∂
∂x10
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0
Los calculos para obtener los renglones restantes de la matriz Ac, ası como paraobtener las matrices Bc, Cc, Dc, Ec y Fc se muestran en el Anexo A.
Teniendo el resultado de estos calculos, se obtiene el valor numerico de las matricesdel sistema lineal de la forma (4.50). A continuacion se muestran las matrices resultantesde dichos calculos:

74 CAPITULO 4. ANALISIS Y MODELADO DEL EVAPORADOR DE CINCO EFECTOS
Ac =
−0.11 0 0 0 0 −8e−6 0 0 0 00.21 −0.16 0 0 0 −0.19 −1.1e−4 0 0 00 0.17 −0.13 0 0 0 −0.44 −2.1e−5 0 00 0 0.15 −0.17 0 0 0 −0.64 −9.5e−5 00 0 0 0.13 −0.09 0 0 0 −1.17 −5.4e−5
0 0 0 0 0 −0.06 0 0 0 00 0 0 0 0 0.05 −0.08 0 0 00 0 0 0 0 0 0.08 −0.07 0 00 0 0 0 0 0 0 0.06 −0.05 00 0 0 0 0 0 0 0 0.05 −0.07
Bc =
−8.8e−5 1.8e−4 0 0 0 00 2.4e−4 −0.46 0 0 00 2.8e−4 0 −0.52 0 00 5.1e−4 0 0 −0.86 00 3.8e−4 0 0 0 −1.8
4.9e−5 −3.1e−5 −0.13 0 0 00 −1.6e−5 0.13 −0.10 0 00 −1.2e−5 0 0.09 −0.09 00 −1.2e−6 0 0 0.08 −0.080 −5.1e−6 0 0 0 0.08
Cc = Id10×10
Dc = 010×6
Fc = 010×2
donde Id10×10 representa una matriz identidad de 10× 10, 010×6 y 010×2 representan unamatriz de ceros de dimension 10× 6 y de 10× 2 respectivamente.
Ec =
0.16 1.60 2.10 2.50 3.10 4.80 −0.260 −0.140 −0.110 −0.080 −0.06
La matriz Dc y Fc son matrices nulas ya que la salida solo se afecta por los estados,

4.2. MODELADO 75
no ası por las entradas de control y perturbaciones.
Teniendo numericamente la matriz Ac, es posible calcular los valores propios de estesistema, y a partir de ello evaluar su estabilidad. Los valores propios de la matriz Ac son:
σ (A) =
[ −0.109 −0.159 −0.129 −0.108 −0.091 · · ·· · · −0.055 −0.079 −0.065 −0.054 −0.046
]
Como se puede observar los valores propios del sistema son muy cercanos a cero.Tener un valor propio con parte real cero significarıa que la linealizacion a la Taylordesarrollada es erronea ya que los puntos de equilibrio calculados no serıan puntos deequilibrio hiperbolicos y si esto sucede no se puede linealizar a la Taylor. Sin embargo,en este caso no sucede lo anterior.
Es importante reflexionar ¿porque los valores propios para este sistema en particularson muy pequenos, aunque se considera que el sistema es estable en gran medida?. Unmotivo de porque los valores propios son cercanos a cero se debe a que el sistema es muylento, su constante de tiempo es de aproximadamente 1 hora 40 minutos y los valores delos parametros, de las entradas y de los puntos de equilibrio de los estados que en susunidades interviene el tiempo se tomo en minutos. Por lo que si se hubiera tomado horasen vez de minutos, los valores de los puntos de equilibrio no serıan tan cercanos a cero.
Es importante tener en cuenta que al haber calculado las matrices Ac, Bc, Cc, Dc,Ec y Fc a partir de las ecuaciones no lineales del sistema, particularizando las derivadasen los valores correspondientes al punto de equilibrio, como consecuencia del desarrollo enseries de Taylor, las ecuaciones lineales que se obtienen vienen expresadas en terminos devariables incrementales o de desviacion. Por lo que las ecuaciones del sistema seran de laforma:
x′ (t) = Acx′ (t) + Bcu
′ (t) + Ecv′ (t)
y′(t) = Ccx′ (t)
(4.51)

76 CAPITULO 4. ANALISIS Y MODELADO DEL EVAPORADOR DE CINCO EFECTOS
en donde las variables de estado incrementales se definen de la forma:
x′ (t) =
x′1 (t) = x1 (t)− x∗1x′2 (t) = x2 (t)− x∗2x′3 (t) = x3 (t)− x∗3x′4 (t) = x4 (t)− x∗4x′5 (t) = x5 (t)− x∗5x′6 (t) = x6 (t)− x∗6x′6 (t) = x7 (t)− x∗7x′8 (t) = x8 (t)− x∗8x′9 (t) = x9 (t)− x∗9x′10 (t) = x10 (t)− x∗10
De forma similar, las variables de control incrementales vienen expresadas como:
u′ (t) =
u′1 (t) = u1 (t)− u∗1u′2 (t) = u2 (t)− u∗2u′3 (t) = u3 (t)− u∗3u′4 (t) = u4 (t)− u∗4u′5 (t) = u5 (t)− u∗5u′6 (t) = u6 (t)− u∗6
Las variables de perturbacion incrementales asociadas al flujo de entrada se escribende la forma:
v′ (t) =
{v′1 (t) = v1 (t)− v∗1v′2 (t) = v2 (t)− v∗2
4.2.4 Analisis de Controlabilidad y Observabilidad del sis-tema linealizado
Un sistema es controlable, si dado un estado inicial x(0), el rango de la matriz decontrolabilidad con dimension n × n tiene el mismo rango de la matriz Ac. Esto es, quela matriz de controlabilidad sea de rango n. En otras palabras, un sistema es controlablesiempre y cuando el rango de la matriz de controlabilidad sea de rango pleno, es decirque todos los renglones y/o columnas que formen a la matriz de controlabilidad seanlinealmente independientes. La matriz de controlabilidad para un sistema lineal se obtienede la siguiente manera:
C =[
Bc AcBc A2cBc · · · An−1
c Bc
](4.52)
4.2. MODELADO 77
Para obtener la matriz de controlabilidad del sistema en estudio hay que tomar encuenta que la matriz Ac de este sistema es de dimension 10× 10, es decir el sistema es de10 estados. Por lo que la matriz de controlabilidad es:
C =[
Bc AcBc A2cBc A3
cBc A4cBc A5
cBc A6cBc A7
cBc A8cBc A9
cBc
](4.53)
La matriz de controlabilidad para el caso particular del sistema lineal del evaporadorde cinco efectos mostrada en la ecuacion (4.53) es una matriz de dimension 10× 60, estose debe a que la dimension de Bc es 10 × 6 y las dimensiones de las matrices resultantesde los producto AcBc, A2
cBc, A3cBc, A4
cBc, A5cBc, A6
cBc, A7cBc, A8
cBc y A9cBc tambien son
de 10× 6, esto es, la misma dimension de la matriz Bc.
Se verifico el rango de C y se pudo constatar que su rango es de 10. Es por ello quese afirma que el sistema tiene rango pleno, y con ello que es completamente controlable.
Para que un sistema sea completamente observable, se requiere que el rango dela matriz de observabilidad con dimensiones de nn × n sea n. Es decir, un sistema esobservable siempre y cuando el rango de la matriz de observabilidad sea de rango pleno,es decir que todos los renglones y/o columnas que formen a la matriz de observabilidadsean linealmente independientes. La matriz de observabilidad para un sistema lineal seobtiene de la siguiente manera:
O =
Cc
CcAc
CcA2c
...CcA
n−1c
(4.54)
Para obtener la matriz de observabilidad del sistema en estudio hay que tambienconsiderar que la matriz Ac de este sistema es de dimension 10× 10. Por lo que la matriz

78 CAPITULO 4. ANALISIS Y MODELADO DEL EVAPORADOR DE CINCO EFECTOS
de observabilidad es:
O =
Cc
CcAc
CcA2c
CcA3c
CcA4c
CcA5c
CcA6c
CcA7c
CcA8c
CcA9c
(4.55)
En el caso del evaporador de cinco efectos la matriz de observabilidad del sistemamostrado en la ecuacion (4.55) tiene una dimension de 100 × 10, esto se debe a que ladimension de Cc es 10× 10 y las dimensiones de las matrices resultantes de los productosCcAc, CcA
2c , CcA
3c , CcA
4c , CcA
5c , CcA
6c , CcA
7c , CcA
8c y CcA
9c tambien son de 10 × 10, esto
es, la misma dimension de la matriz Cc.
El rango de la matriz de observabilidad de este modelo es 10, esto quiere decir quetiene rango pleno. Es por ello que se afirma que el sistema linealizado junto del punto deoperacion seleccionado tiene rango pleno, y con ello que es totalmente observable.
Es importante obtener y tener en cuenta las restricciones que se tienen en el procesodel evaporador de cinco efectos, ya que estas se utilizaran en la elaboracion del MBPC conrestricciones. En las siguientes subsecciones se obtienen las restricciones en las salidas yen las senales de control de este proceso.
La obtencion del sistema discreto se presenta en el Anexo B. En este mismo anexose presentan los valores propios para el sistema discreto, un analisis de la influencia quetiene la eleccion del perıodo de muestreo sobre los polos discretos.
4.2.5 Restricciones en las salidas del evaporador de cincoefectos
Las salidas del sistema como ya se menciono anteriormente, son la concentracion encada uno de los efectos, esto es, C1, C2, C3, C4 y C5; y el nivel en cada uno de los efectosh1, h2, h3, h4 y h5.
Por diferentes cuestiones como la calidad y economıa del producto obtenido (jugode cana de azucar a una mayor concentracion que a la entrada del proceso), no debe ex-

4.2. MODELADO 79
istir una concentracion menor al 60%. Si esto sucede, no se obtiene un buen productopara la siguiente fase de la produccion de azucar (esto es, la cristalizacion). Tambien, laconcentracion del producto no debe ser mayor que el 85% ya que a esta concentracion elproducto se empieza a cristalizar y con ello podrıa ocasionar bloqueo e incrustaciones enlos tubos de transporte de los efectos de los evaporadores Kung [2002]. Con lo anterior seestablece que 60 ≤ C5 ≤ 85.
Las consideraciones anteriores son la base para elegir las restricciones en las demasconcentraciones. Ya que C5 debe ser mayor del 60%, C4 no debe ser mayor a ese valor,y, considerando los valores de los puntos de equilibrio de las concentraciones, esta concen-tracion no debe ser menor al 42%. Referente a C3, esta no debe ser mayor al 42% ya queeste es el maximo porcentaje que puede tener C4 y considerando tambien los valores delos puntos de equilibrio de las concentraciones, esta concentracion no debe ser menor del30%. Considerando el mismo criterio se obtienen las restricciones para C2 y C1.
De aquı las restricciones en las concentraciones son:
10 ≤ y1 ≤ 24
24 ≤ y2 ≤ 30
30 ≤ y3 ≤ 42
42 ≤ y4 ≤ 60
60 ≤ y5 ≤ 85
Referente al nivel del producto obtenido, por cuestiones de economıa y produccion,el nivel no debe ser menor del 15% del nivel del primer efecto, es decir, el nivel en el primerefecto es aproximadamente 3.5m, por lo que no se debe tener un nivel en el quinto efectomenor a 0.5m. Por cuestiones de calidad, entre otros, el nivel en el quito efecto no debeser mayor del 40% del nivel del primer efecto, es decir, el nivel en el primer efecto como yase menciono es aproximadamente 3.5m, por lo que no se debe tener un nivel en el quintoefecto mayor a 1.3m. Con lo anterior se tiene que 0.5 ≤ h5 ≤ 1.3.
Las consideraciones anteriores ayudan a tener una idea elemental para elegir las re-stricciones en los demas niveles. Considerando los valores de los puntos de equilibrio de losniveles, se deduce que h4, probablemente no debe ser mayor a 1.5m ni menor a 0.7m. Con-siderando lo anteriormente mencionado se tiene que posiblemente h3 no debe ser mayor a1.7m ni menor a 1.3m. Referente al nivel en h2 este probablemente no deba ser mayor a3.5m ni menor a 1.6m. Por lo que para h1, no se debe tener un nivel arriba de 4m ni porde bajo de 3.2m.

80 CAPITULO 4. ANALISIS Y MODELADO DEL EVAPORADOR DE CINCO EFECTOS
De aquı las restricciones en los niveles son:
3.2 ≤ y6 ≤ 4
1.6 ≤ y7 ≤ 3.5
1.3 ≤ y8 ≤ 1.7
0.7 ≤ y9 ≤ 1.5
0.5 ≤ y10 ≤ 1.3
4.2.6 Restricciones en las entradas controladas del evapo-rador de cinco efectos
Las entradas controladas del sistema como se menciono anteriormente, son los flujosde producto y vapor de alimentacion F0 y S respectivamente y las constantes de valvulasen cada uno de los efectos, esto es K1, K2, K3 y K4.
Los actuadores tienen un campo limitado de accion debido a lımites fısicos (porejemplo una valvula no puede abrir mas de un 100%). En este proceso en particular seconsidera que la valvula del flujo de alimentacion de producto inicialmente esta abierta aun 35% y que la valvula del flujo de alimentacion de vapor inicialmente esta abierta a un30%. Tambien es importante mencionar que las valvulas de flujo de producto en cada unode los efectos (las cuales dependen de las constantes de las valvulas) se consideran abiertasa un 40%. Es importante mencionar que flujo maximo pueden dejar pasar cuando estas,esten abiertas a un 100%.
El flujo de alimentacion de producto inicial es de 11, 278kg/min, por lo que lo maximode flujo que se puede obtener cuando el actuador de tal entrada esta a un 100% (con-siderando que la relacion % de apertura de flujo es lineal) es 32, 500kg/min.
El flujo de vapor inicial es de 5, 400kg/min, por lo que lo maximo de flujo que sepuede obtener cuando el actuador de tal entrada este completamente abierto, es decir aun 100% es 18, 000kg/min.
En lo referente al flujo de producto del primer efecto, este es de 7, 871.4kg/min,por lo que el maximo flujo que se puede obtener cuando el actuador de tal entrada estetotalmente abierto es 19, 678kg/min. Despejando K1 de la ecuacion (4.15), se obtiene elmaximo valor que puede tener esta constante lo cual es de aproximadamente 7.2m2.5/min,Esto es:
K1 =F1√h1ρ1
=19, 678kg/ min√
3.5m× 1459.8kg/m3= 7.2m2.5/ min
El flujo de producto del segundo efecto es de 6, 051.6kg/min, por lo que el flujo
4.2. MODELADO 81
maximo que se puede obtener cuando el actuador de tal entrada esta a un 100% es15, 129kg/min. Despejando K2 de la ecuacion (4.16), se obtiene el maximo valor quepuede tener esta constante el cual es de 7.4m2.5/min.
El flujo de producto del tercer efecto es de 4, 552kg/min, el maximo flujo que sepuede obtener cuando el actuador de dicha entrada esta a un 100% es 11, 380kg/min. Porlo que despejando K3 de la ecuacion (4.17), se obtiene el maximo valor que puede teneresta constante el cual es de 5.7m2.5/min.
El flujo de producto del cuarto efecto es de 3, 324.8kg/min, por lo que lo maximode flujo que se puede obtener cuando el actuador de tal entrada este totalmente abiertoes 8, 312kg/min. Despejando K4 de la ecuacion (4.18), se obtiene el maximo valor quepuede tener esta constante el cual es de 4.3m2.5/min.
Los lımites inferiores de las entradas son propuestos de manera que siempre hayauna cantidad significativa de produccion.
De aquı, las restricciones en las entradas son:
10, 000 ≤ u1 ≤ 32, 500
4, 500 ≤ u2 ≤ 18, 000
2.5 ≤ u3 ≤ 7.2
2.5 ≤ u4 ≤ 7.4
1.7 ≤ u5 ≤ 5.7
1.5 ≤ u6 ≤ 4.3
4.2.7 Respuestas del modelo no lineal y del modelo linea-lizado
Las respuestas en lazo abierto ante una variacion en la variable de entrada F0 delmodelo lineal y no lineal se muestran a continuacion.
Simulacion 1. Efecto de una variacion en F0:
El objetivo de esta simulacion es apreciar el efecto que causa la variacion de F0 enlos estados, del sistema en lazo abierto del modelo lineal y no lineal.
La simulacion se llevo a cabo considerando una variacion en F0 de 11,278 kg/min a11,841 kg/min, en el minuto 2000.

82 CAPITULO 4. ANALISIS Y MODELADO DEL EVAPORADOR DE CINCO EFECTOS
Las Figuras 4.2 y 4.3 muestran los resultados obtenidos en esta simulacion. En estasse puede apreciar que las respuestas del sistema lineal y no lineal son similares ante unavariacion de la entrada F0.
Los resultados obtenidos en esta simulacion, permiten concluir que el sistema lineal,linealizado alrededor del punto (x|u, v) = (x∗, u, v) tiene un comportamiento similar alsistema no lineal.
Figura 4.2: Respuesta de las concentraciones Ci ante un cambio en F0

4.2. MODELADO 83
Figura 4.3: Respuesta de los niveles hi ante un cambio en F0
Simulacion 2. Efecto de una variacion en S:
El objetivo de esta simulacion es apreciar el efecto que causa la variacion de S en losestados, del sistema en lazo abierto del modelo lineal y no lineal.
La simulacion se llevo a cabo considerando una variacion en S de 5,400 kg/min a5,832 kg/min, en el minuto 2000.
Las Figuras 4.4 y 4.5 muestran los resultados obtenidos en esta simulacion. En estasse puede apreciar que las respuestas del sistema lineal y no lineal son similares ante una
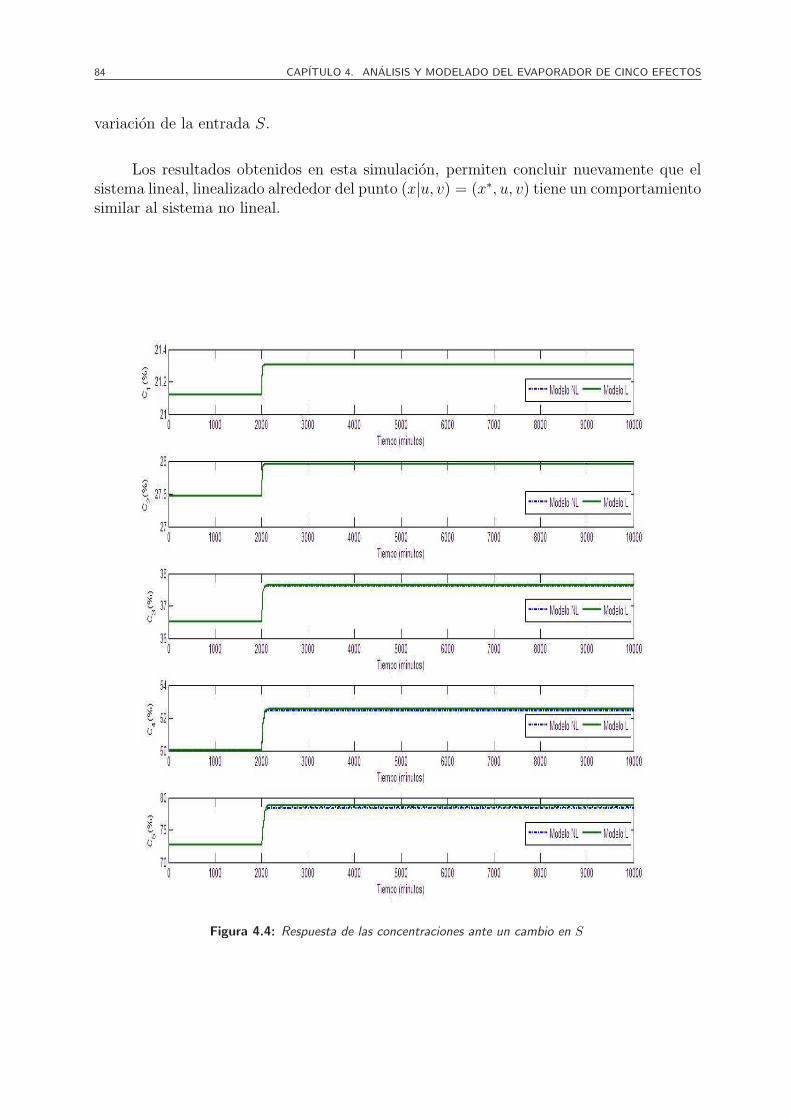
84 CAPITULO 4. ANALISIS Y MODELADO DEL EVAPORADOR DE CINCO EFECTOS
variacion de la entrada S.
Los resultados obtenidos en esta simulacion, permiten concluir nuevamente que elsistema lineal, linealizado alrededor del punto (x|u, v) = (x∗, u, v) tiene un comportamientosimilar al sistema no lineal.
Figura 4.4: Respuesta de las concentraciones ante un cambio en S
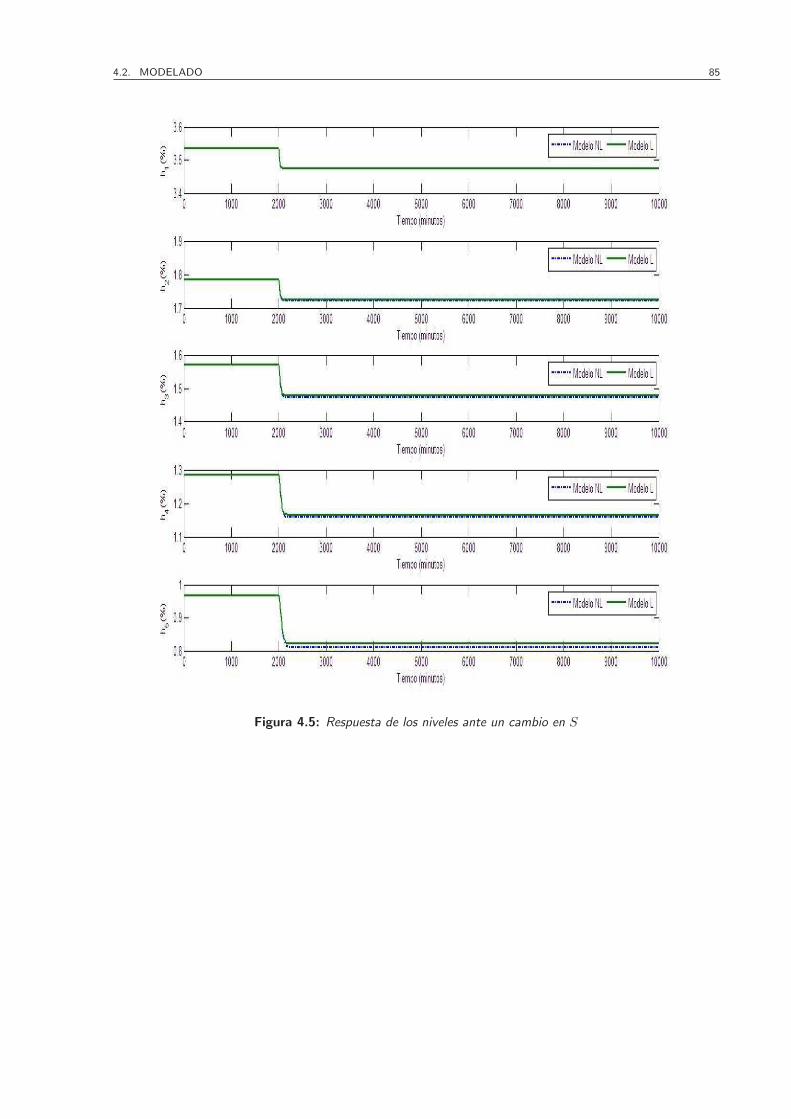
4.2. MODELADO 85
Figura 4.5: Respuesta de los niveles ante un cambio en S
86 CAPITULO 4. ANALISIS Y MODELADO DEL EVAPORADOR DE CINCO EFECTOS
4.3 Conclusiones
En este capıtulo se presento el modelo matematico no lineal para un evaporadorde cinco efectos aplicado a la produccion de azucar. Este modelo es simplificado, ya quepara su elaboracion se tomaron en cuenta ciertas hipotesis. Se realizo una linealizacion ala Taylor del modelo no lineal, debido a que para la elaboracion del MBPC se parte delmodelo lineal.
Como se muestra en este capıtulo los valores propios del modelo lineal del procesoen estudio resultaron muy cercanos a cero, esto se debe a que la dinamica del proceso eslenta (tiene una constante de tiempo de aproximadamente 2 horas) y las unidades quedependıan del tiempo de todos los parametros y variables estaban en funcion de minutos.Esto ocasiona que los valores propios sean cercanos a cero.
En lo que se refiere al comportamiento del proceso, se obtuvieron las restriccionespara los estados y para las senales de control. Esto se realizo con la finalidad de tener unmayor conocimiento del proceso y ademas tomarlas en cuenta para elaborar el MBPC conrestricciones.

Capıtulo 5
Aplicacion del Control Tolerante a Fallas alevaporador de cinco efectos
En este capıtulo se presentan los resultados obtenidos de la aplicacion del ControlTolerante a Fallas basado en el control predictivo al proceso del evaporador de cinco efec-tos aplicado a la produccion de azucar. Se muestra una tabla de ındices de desempenopara comparar el comportamiento del control predictivo con acomodacion de fallas y sinacomodacion de ellas.
En la Seccion 5.1 se desarrolla la aplicacion del MBPC sin restricciones al evaporadorde cinco efectos. En la Seccion 5.2 se muestran los resultados obtenidos de lo desarrolladoen la seccion anterior. En la Seccion 5.3 se presenta el MBPC con restricciones aplicadoal proceso de evaporacion. En la Seccion 5.4 se muestran los resultados del MBPC conrestricciones ante cambios de referencia y perturbaciones. En la Seccion 5.5 se presentael desarrollo del MBPC como Control Tolerante a Fallas aplicado al evaporador de cincoefecto. En la Seccion 5.6 se muestran los resultados del Control Tolerante a Fallas ante fa-llas de tipo saturacion y atasco en actuadores, ası como fallas internas del proceso, ademasse muestra una comparacion del funcionamiento del MBPC sin cambio de restricciones ycomo Control Tolerante a Fallas ante la presencia de fallas. Por ultimo en la Seccion 5.7se presentan las conclusiones.
5.1 MBPC sin restricciones aplicado al evaporador
de cinco efectos
En el Capıtulo 4 se presento el modelo linealizado representado en espacio de estadosdel evaporador de cinco efectos aplicado a la produccion de azucar. La formulacion del
87

88 CAPITULO 5. APLICACION DEL CONTROL TOLERANTE A FALLAS AL EVAPORADOR DE CINCO EFECTOS
MBPC se elabora en base a este modelo linealizado representado en espacio de estado.
De acuerdo a lo presentado en el Capıtulo 4 el modelo linealizado tiene la siguienteforma:
{x = Acx + Bcu + Ecv
y = Ccx + Dcv(5.1)
donde x ∈ R10 es el vector de estados, y ∈ R10 es el vector de salidas, u ∈ R6 es el vectorde entradas y v ∈ R2 es el vector de perturbaciones. Los cuales se definen como sigue:
x = [C1, C2, C3, C4, C5, h1, h2, h3, h4, h5]T
u = [F0, S, K1, K2, K3, K4]T
y = [C1, C2, C3, C4, C5, h1, h2, h3, h4, h5]T
v = [C0, k1]T
las matrices Ac, Bc, Cc, Dc, Ec y Fc de este modelo matematico continuo se presentaronen el capıtulo 4 en la subseccion 4.2.3.
Discretizando el modelo sin considerar el vector de perturbaciones se obtiene unsistema discreto de la siguiente forma:
{x (k + 1) = Ax (k) + Bu (k)
y (k) = Cx (k)(5.2)
donde x(k) ∈ R10 son los estados, u(k) ∈ R6 son los controles y y(k) ∈ R10 son las salidas.Siendo definidos como sigue:
x(k) = [C1, C2, C3, C4, C5, h1, h2, h3, h4, h5]T
u(k) = [F0, S, K1, K2, K3, K4]T
y(k) = [C1, C2, C3, C4, C5, h1, h2, h3, h4, h5]T
Realizando lo descrito en la Subseccion 3.2.1 se obtiene la funcion objetivo para estesistema, la cual es:
J = (Gpc∆uc + Fp − w)T (Gpc∆uc + Fp − w) + ∆uTc λ∆uc (5.3)
donde la matriz Gpc tiene una dimension de 350 × 108 para esta aplicacion en particularya que se utilizo H1 = 1, Hp = 35 y Hc = 18 (la eleccion de los valores de los horizontes
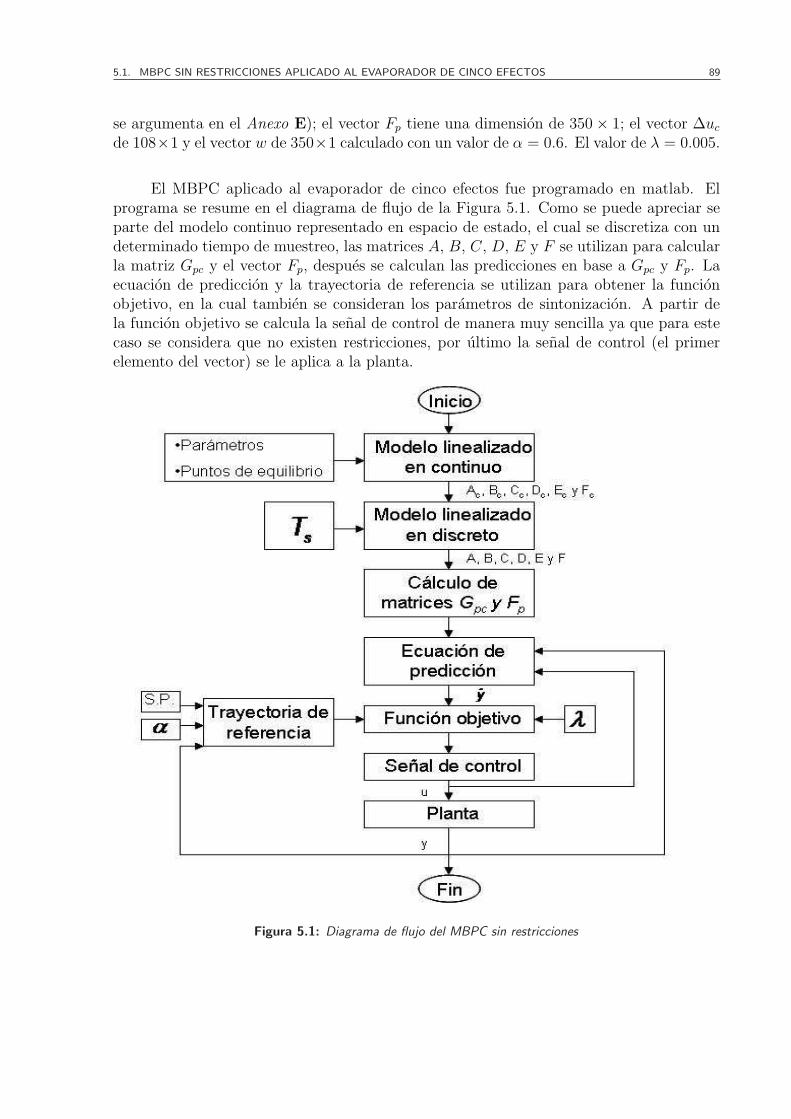
5.1. MBPC SIN RESTRICCIONES APLICADO AL EVAPORADOR DE CINCO EFECTOS 89
se argumenta en el Anexo E); el vector Fp tiene una dimension de 350× 1; el vector ∆uc
de 108×1 y el vector w de 350×1 calculado con un valor de α = 0.6. El valor de λ = 0.005.
El MBPC aplicado al evaporador de cinco efectos fue programado en matlab. Elprograma se resume en el diagrama de flujo de la Figura 5.1. Como se puede apreciar separte del modelo continuo representado en espacio de estado, el cual se discretiza con undeterminado tiempo de muestreo, las matrices A, B, C, D, E y F se utilizan para calcularla matriz Gpc y el vector Fp, despues se calculan las predicciones en base a Gpc y Fp. Laecuacion de prediccion y la trayectoria de referencia se utilizan para obtener la funcionobjetivo, en la cual tambien se consideran los parametros de sintonizacion. A partir dela funcion objetivo se calcula la senal de control de manera muy sencilla ya que para estecaso se considera que no existen restricciones, por ultimo la senal de control (el primerelemento del vector) se le aplica a la planta.
Figura 5.1: Diagrama de flujo del MBPC sin restricciones
90 CAPITULO 5. APLICACION DEL CONTROL TOLERANTE A FALLAS AL EVAPORADOR DE CINCO EFECTOS
5.2 Resultados del MBPC multivariable sin restriccio-
nes aplicado al evaporador de cinco efectos
En este apartado se muestran solo los resultados obtenidos de C5 y h5 (por ser las sa-lidas controladas de mayor importancia, ya que de estas depende la calidad y cantidad delproducto deseado), ası como las senales de control al aplicarle el MBPC sin restriccionesa las concentracion y a los niveles de cada uno de los efectos, cabe aclarar que el MBPCdesarrollado se programo siguiendo el diagrama de flujo de la Figura 5.1.
Aunque no es el proposito para un proceso como el evaporador de cinco efectos apli-cado a la produccion de azucar los cambios de referencia, se presentan en este trabajo,para asegurar el buen funcionamiento del MBPC desarrollado. Se menciona que no es elproposito debido a que en este proceso lo que se requiere es que el producto obtenido tengauna determinada concentracion aunque la concentracion en el producto de alimentacionvarıe; es por ello que tambien se presenta en este documento (en el Anexo F) las respuestasante perturbaciones en la concentracion de entrada C0 y en la temperatura de entrada T0
(en funcion de k1).
El proceso por naturaleza propia tiene restricciones, en este controlador no se tomanen cuenta dichas restricciones, por lo que si se presenta un cambio de referencia muygrande en magnitud o si se presenta un cambio en la senal de control fuera de lo normalya sea en magnitud o velocidad, se obtendran comportamientos no deseados en el control.Lo que posiblemente ocasionara perdidas y mal funcionamiento del proceso. Es por elloque en las siguientes secciones se abordara el MBPC con restricciones.
Simulacion 3. Efecto de cambios de referencia en las variables C5 y h5 sinrestricciones y sin perturbaciones:
El objetivo de esta simulacion es apreciar el efecto que causan los cambios de refe-rencia en C5 y h5, en las mismas y en las senales de control.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625%a 80%, en el minuto 1200 y en h5 de 0.967m a 0.85m, en el minuto 400.
Las Figuras 5.2 y 5.3 muestran los resultados obtenidos en esta simulacion. En estasse puede apreciar que cuando hay cambios de referencia en cualquiera de las variables C5
y h5, tambien hay cambios en las senales de control; es facil apreciar la mutua depen-dencia de las variables controladas, ya que cuando una de ellas cambia se afecta la otra(esto sucede por el control multivariable), es por ello que en el minuto 1200, C5 sufre unavariacion, debido al cambio de referencia de h5 y en el minuto 400, h5 sufre tambien una

5.2. RESULTADOS DEL MBPC MULTIVARIABLE SIN RESTRICCIONES APLICADO AL EVAPORADOR DE CINCOEFECTOS 91
variacion, por el cambio de referencia de C5.
Los resultados obtenidos en esta simulacion, permiten concluir que un cambio dereferencia en C5, implica un cambio en h5 y viceversa. Se logra un buen control para lasdos salidas C5 y h5, teniendo en cuenta que este es lento, debido a que el proceso pornaturaleza propia tambien lo es.
Figura 5.2: Respuestas de las senales de control del MBPC sin restricciones

92 CAPITULO 5. APLICACION DEL CONTROL TOLERANTE A FALLAS AL EVAPORADOR DE CINCO EFECTOS
Figura 5.3: Respuestas de las salidas controladas C5 y h5 del MBPC sin restricciones
5.3 MBPC con restricciones aplicado al evaporador
de cinco efectos
En el capıtulo 3 se menciono que si existen restricciones, la formulacion del con-trol predictivo cambia, ya que para obtener la senal de control se tiene que resolver laminimizacion de una funcion cuadratica con restricciones lineales, esto se conoce comoprogramacion cuadratica. En este tema de tesis para resolver lo anterior se utilizo unafuncion del Toolbox de Optimizacion llamada quadprog.
El diagrama de flujo del MBPC considerando restricciones en la magnitudes de lassalidas y las entradas, se muestra en la Figura 5.4.

5.3. MBPC CON RESTRICCIONES APLICADO AL EVAPORADOR DE CINCO EFECTOS 93
Figura 5.4: Diagrama de flujo del MBPC con restricciones
Es facil visualizar que el diagrama de flujo de la Figura 5.4 aunque es muy similar alde la Figura 5.1, presenta una marcada diferencia, esta consiste en que la senal de controlno se obtiene directamente (como en el MBPC sin restricciones), por lo que se incluye elbloque de optimizacion, el cual considera las restricciones para poder obtener la senal decontrol.
Cabe aclarar que para este proceso en particular solo se consideran restricciones enla amplitud de las variables manipuladas y de salidas.
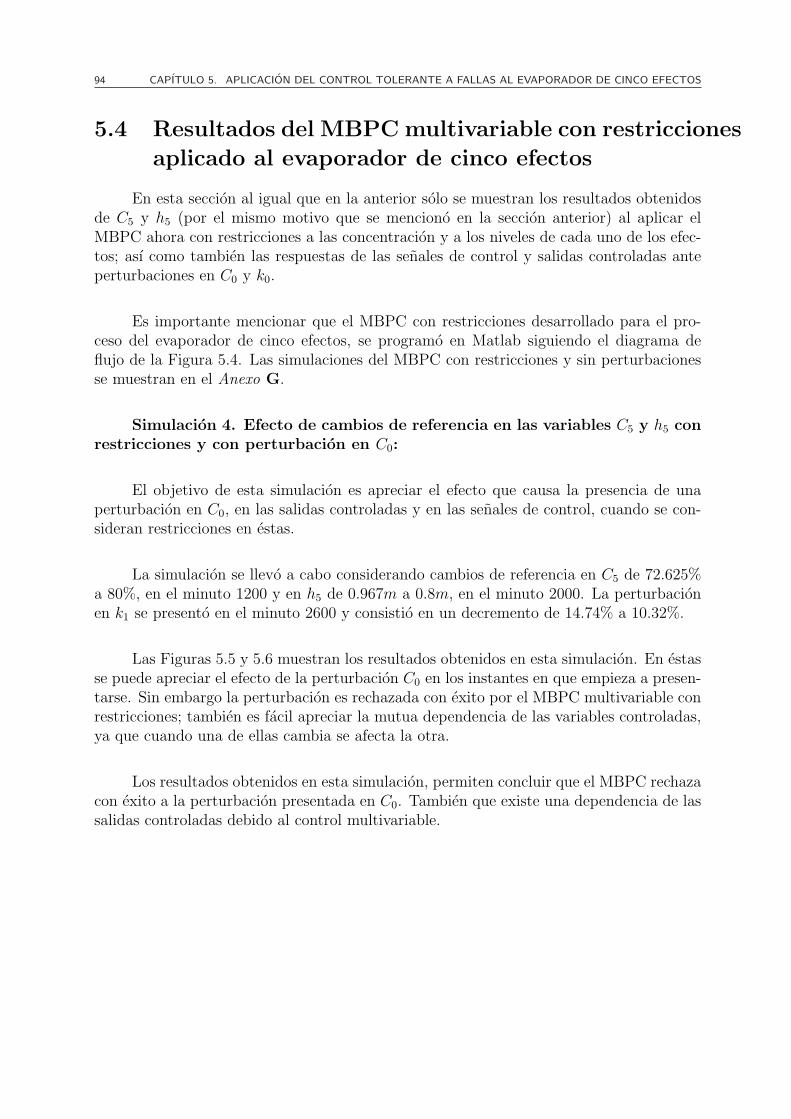
94 CAPITULO 5. APLICACION DEL CONTROL TOLERANTE A FALLAS AL EVAPORADOR DE CINCO EFECTOS
5.4 Resultados del MBPC multivariable con restricciones
aplicado al evaporador de cinco efectos
En esta seccion al igual que en la anterior solo se muestran los resultados obtenidosde C5 y h5 (por el mismo motivo que se menciono en la seccion anterior) al aplicar elMBPC ahora con restricciones a las concentracion y a los niveles de cada uno de los efec-tos; ası como tambien las respuestas de las senales de control y salidas controladas anteperturbaciones en C0 y k0.
Es importante mencionar que el MBPC con restricciones desarrollado para el pro-ceso del evaporador de cinco efectos, se programo en Matlab siguiendo el diagrama deflujo de la Figura 5.4. Las simulaciones del MBPC con restricciones y sin perturbacionesse muestran en el Anexo G.
Simulacion 4. Efecto de cambios de referencia en las variables C5 y h5 conrestricciones y con perturbacion en C0:
El objetivo de esta simulacion es apreciar el efecto que causa la presencia de unaperturbacion en C0, en las salidas controladas y en las senales de control, cuando se con-sideran restricciones en estas.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625%a 80%, en el minuto 1200 y en h5 de 0.967m a 0.8m, en el minuto 2000. La perturbacionen k1 se presento en el minuto 2600 y consistio en un decremento de 14.74% a 10.32%.
Las Figuras 5.5 y 5.6 muestran los resultados obtenidos en esta simulacion. En estasse puede apreciar el efecto de la perturbacion C0 en los instantes en que empieza a presen-tarse. Sin embargo la perturbacion es rechazada con exito por el MBPC multivariable conrestricciones; tambien es facil apreciar la mutua dependencia de las variables controladas,ya que cuando una de ellas cambia se afecta la otra.
Los resultados obtenidos en esta simulacion, permiten concluir que el MBPC rechazacon exito a la perturbacion presentada en C0. Tambien que existe una dependencia de lassalidas controladas debido al control multivariable.

5.4. RESULTADOS DEL MBPC MULTIVARIABLE CON RESTRICCIONES APLICADO AL EVAPORADOR DE CINCOEFECTOS 95
Figura 5.5: Respuestas de las senales de control con restricciones cuando se presenta una perturbacion en C0
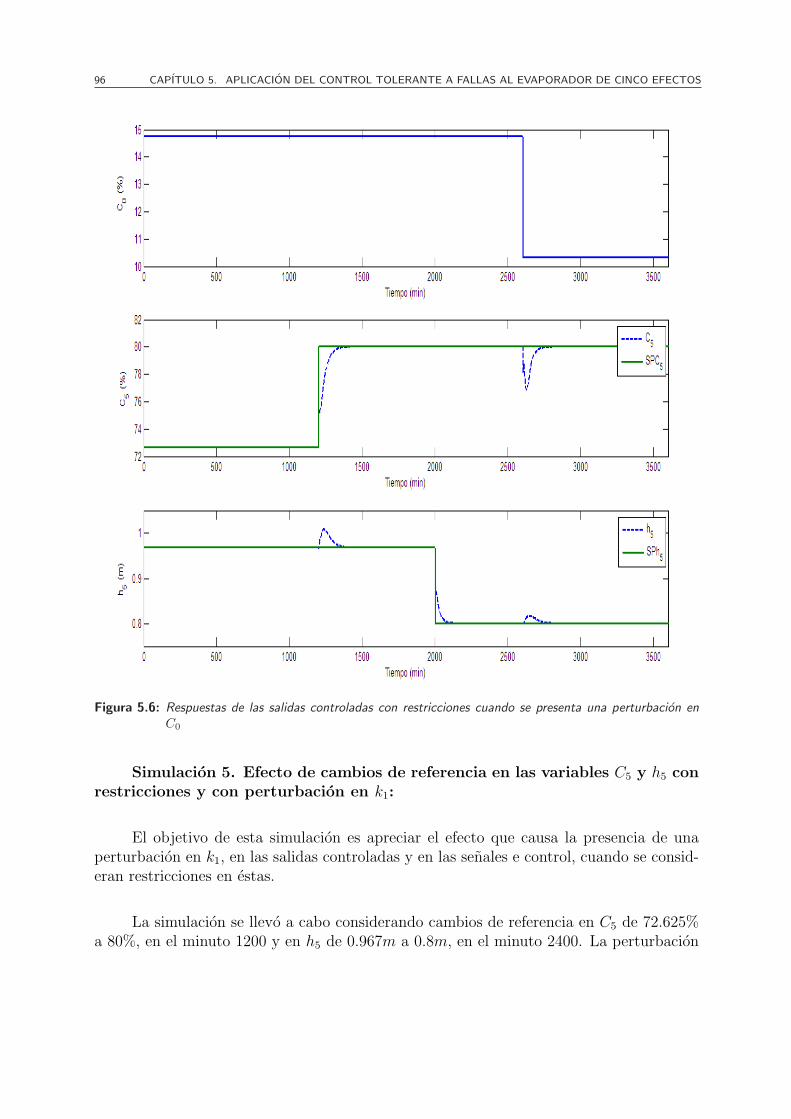
96 CAPITULO 5. APLICACION DEL CONTROL TOLERANTE A FALLAS AL EVAPORADOR DE CINCO EFECTOS
Figura 5.6: Respuestas de las salidas controladas con restricciones cuando se presenta una perturbacion enC0
Simulacion 5. Efecto de cambios de referencia en las variables C5 y h5 conrestricciones y con perturbacion en k1:
El objetivo de esta simulacion es apreciar el efecto que causa la presencia de unaperturbacion en k1, en las salidas controladas y en las senales e control, cuando se consid-eran restricciones en estas.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625%a 80%, en el minuto 1200 y en h5 de 0.967m a 0.8m, en el minuto 2400. La perturbacion
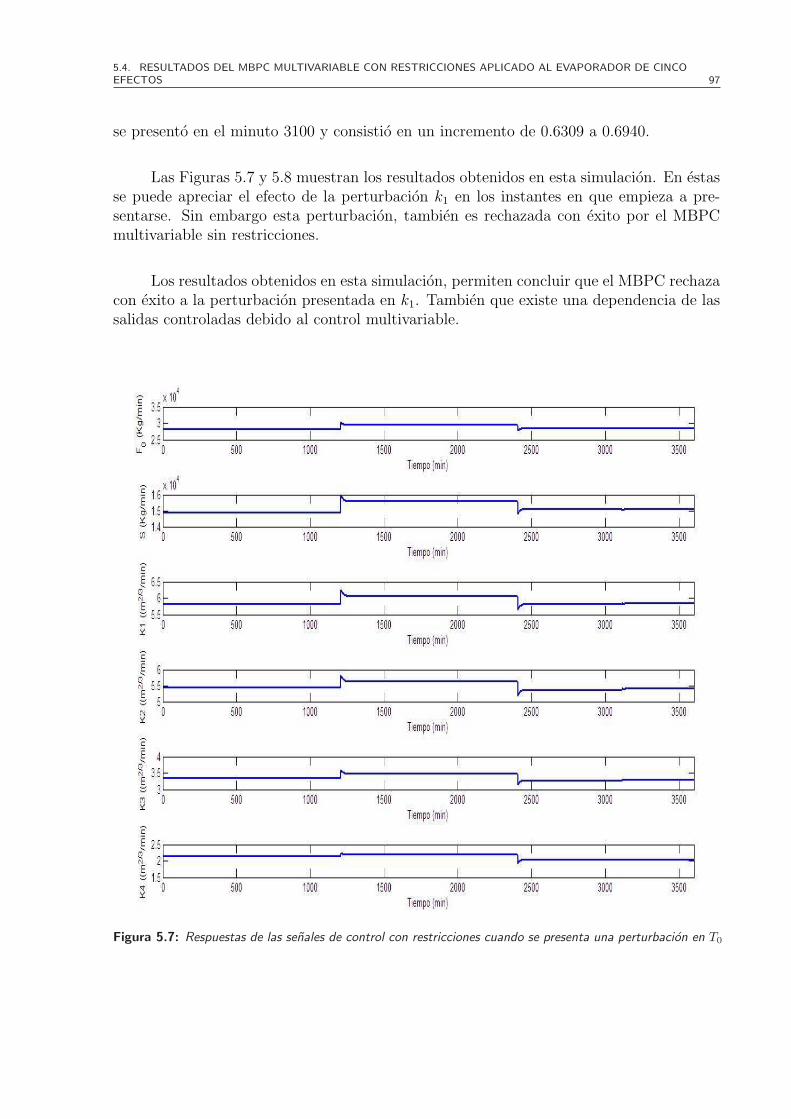
5.4. RESULTADOS DEL MBPC MULTIVARIABLE CON RESTRICCIONES APLICADO AL EVAPORADOR DE CINCOEFECTOS 97
se presento en el minuto 3100 y consistio en un incremento de 0.6309 a 0.6940.
Las Figuras 5.7 y 5.8 muestran los resultados obtenidos en esta simulacion. En estasse puede apreciar el efecto de la perturbacion k1 en los instantes en que empieza a pre-sentarse. Sin embargo esta perturbacion, tambien es rechazada con exito por el MBPCmultivariable sin restricciones.
Los resultados obtenidos en esta simulacion, permiten concluir que el MBPC rechazacon exito a la perturbacion presentada en k1. Tambien que existe una dependencia de lassalidas controladas debido al control multivariable.
Figura 5.7: Respuestas de las senales de control con restricciones cuando se presenta una perturbacion en T0
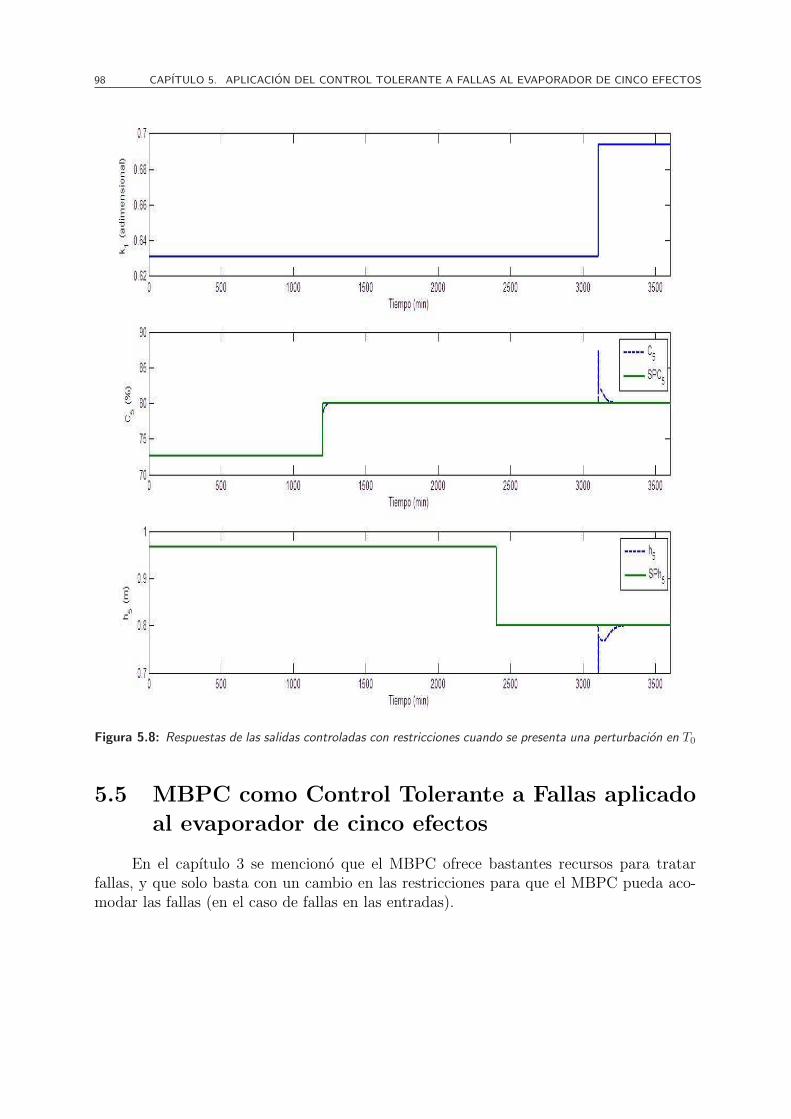
98 CAPITULO 5. APLICACION DEL CONTROL TOLERANTE A FALLAS AL EVAPORADOR DE CINCO EFECTOS
Figura 5.8: Respuestas de las salidas controladas con restricciones cuando se presenta una perturbacion en T0
5.5 MBPC como Control Tolerante a Fallas aplicado
al evaporador de cinco efectos
En el capıtulo 3 se menciono que el MBPC ofrece bastantes recursos para tratarfallas, y que solo basta con un cambio en las restricciones para que el MBPC pueda aco-modar las fallas (en el caso de fallas en las entradas).

5.5. MBPC COMO CONTROL TOLERANTE A FALLAS APLICADO AL EVAPORADOR DE CINCO EFECTOS 99
El diagrama de flujo del MBPC como Control Tolerante a Fallas se muestra en laFigura 5.9.
Figura 5.9: Diagrama de flujo del MBPC como control tolerante a fallas
El diagrama de flujo presentado en la Figura 5.9 es muy similar a los presentadosen las Figuras 5.1 y 5.4, lo nuevo que incluye este diagrama de flujo con respecto al dela Figura 5.4 es un bloque de decision que contiene la falla, ya que si existe una falla (enlos actuadores), este bloque manda a cambiar la restriccion correspondiente al actuadordonde sucede la falla (informacion proveniente del FDI), y con ende la optimizacion, esdecir, se tienen nuevas restricciones para poder acomodar la falla, y si no existe falla sufuncionamiento es igual al del MBPC con restricciones.

100 CAPITULO 5. APLICACION DEL CONTROL TOLERANTE A FALLAS AL EVAPORADOR DE CINCO EFECTOS
5.5.1 Fallas analizadas en el evaporador de cinco efectos
Las fallas analizadas para probar si el MBPC desarrollado actua como un Control Tolerantea Fallas, son las siguientes:
• atasco en los actuadores F0, K1, K2, K3 y K4;
• saturacion en el actuador F0, S, K1, K2, K3 y K4;
• fuga del flujo de vapor O3 y O4;
• fuga del flujo de producto F5.
5.6 Resultados del MBPC como Control Tolerante a
Fallas aplicado al evaporador de cinco efectos
En esta seccion se presentan los resultados del Control Tolerante a Fallas aplicadoal evaporador de cinco efectos. Se presentan pruebas de este controlador ante fallas enactuadores (saturacion y atasco), ası como fallas internas del proceso (fuga de vapor y deproducto). En esta seccion tambien se presentan tablas comparativas de los ındices dedesempeno de las pruebas realizadas.
Es importante mencionar que en las primeras subsecciones se presentan pruebas delControl Tolerante a Fallas, donde la falla inicia desde el instante en que se arranca laplanta. En las ultimas subsecciones se presentan pruebas donde la falla se presenta en untiempo determinado diferente de cero, se realiza una comparacion de estas pruebas con elMBPC no adaptado como Control Tolerante a Fallas.
Cabe mencionar que para programar este controlador se siguio los pasos del diagramade flujo mostrado en la Figura 5.9. Tambien es importante mencionar que para desarrollareste controlador se supuso una fuerte hipotesis, la cual es la siguiente:
Se considera que se tiene un diagnostico de fallas perfecto para el evaporador de cincoefectos, el cual envıa toda la informacion que necesita el MBPC, es decir, el diagnosticoademas de dar informacion si hay falla y en donde exactamente se presenta la falla, dalas nuevas restricciones necesarias para que el MBPC pueda acomodar la falla de formaexitosa.
5.6. RESULTADOS DEL MBPC COMO CONTROL TOLERANTE A FALLAS APLICADO AL EVAPORADOR DE CINCOEFECTOS 101
5.6.1 Resultados de MBPC con restricciones ante fallasocasionadas por atasco en los actuadores
En esta subseccion se presentan los resultados obtenidos del MBPC multivariablecon restricciones ante la presencia de fallas causadas por atasco en los actuadores F0, K1,K2, K3 y K4. Este tipo de falla como ya se menciono, se representan cambiando las res-tricciones a (|∆uj = 0|).
El MBPC ante este tipo de fallas solo necesita la informacion de las nuevas res-tricciones dadas por el diagnostico (lo cual se supone que se tiene de una manera rapiday acertada), ya que el MBPC anadiendo estas nuevas restricciones al problema de opti-mizacion, permite facilmente incorporar mecanismos de tolerancia a fallas.
Cabe mencionar que al hablar de un atasco en un actuador se refiere a que el actua-dor ya no se puede ni abrir ni cerrar, es decir, permanece en una determinada apertura ypor lo tanto proporciona un flujo constante.
Las fallas ocasionadas por tales atascos en los actuadores del flujo de alimentacion F0
(entrada 1), del flujo del primer efecto por medio de K1 (entrada 3), del flujo del segundoefecto por medio de K2 (entrada 4), del flujo del tercer efecto por medio de K3 (entrada5) y del flujo del cuarto efecto por medio de K4 (entrada 6), se representan cambiando lasrestricciones a (|∆u1 = 0|), (|∆u3 = 0|), (|∆u4 = 0|), (|∆u5 = 0|) y (|∆u6 = 0|) respecti-vamente.
Simulacion 6. Acomodacion de una falla causada por un atasco del actu-ador del segundo efecto por medio de K2:
El objetivo de esta simulacion es apreciar el efecto que causa una falla que consisteen un atasco del actuador de K2, en las salidas controladas y en las senales de control.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625%a 80%, en el minuto 1200 y en h5 de 0.967m a 0.8m,en el minuto 2400. La falla consistioen un atasco del actuador K2 desde el momento en que arranco la planta, es decir, la fallaocurrio en 0min.
Las Figuras 5.10 y 5.11 muestran los resultados obtenidos en esta simulacion. En laFigura 5.10 se observa que la senal de control K2 es constante debido a la falla ocurridaen el actuador del segundo efecto, lo que ocasiona (|∆u4 = 0|), ası mismo esto provocaque las senales de control K3 y K4 tambien sean constantes, sin embargo se tiene un buencomportamiento en el control de C5 y h5. En la Figura 5.11 se aprecia que aun en presencia

102 CAPITULO 5. APLICACION DEL CONTROL TOLERANTE A FALLAS AL EVAPORADOR DE CINCO EFECTOS
de falla, el control de C5 funciona correctamente. Aunque tambien se aprecia que la salidacontrolada h5 no sigue a la perfeccion a la referencia, sin embargo llega al nivel requerido.
Los resultados obtenidos en esta simulacion, permiten concluir que el MBPC lograen gran medida acomodar la falla presentada en el actuador del segundo efecto. Aunque lasalida controlada h5 no sigue de manera exacta a la referencia, para fines de este procesoel controlador es correcto, ya que la salida controlada C5 si lo hace.
Figura 5.10: Respuestas de las senales de control ante efecto de una falla de tipo atasco en K2

5.6. RESULTADOS DEL MBPC COMO CONTROL TOLERANTE A FALLAS APLICADO AL EVAPORADOR DE CINCOEFECTOS 103
Figura 5.11: Respuestas de las salidas controladas C5 y h5 ante efecto de una falla de tipo atasco en K2
En el Anexo H se presentan los resultados obtenidos ante este tipo de falla en losactuadores F0, K1, K3 y K4.
5.6.2 Resultados de MBPC con restricciones ante fallasocasionadas por saturacion en los actuadores
En esta subseccion se presentan los resultados obtenidos del MBPC multivariablecon restricciones ante la presencia de fallas causadas por saturacion en los actuadores.Este tipo de falla como ya se menciono, se acomoda cambiando las restricciones a valoresque representen las saturaciones.
104 CAPITULO 5. APLICACION DEL CONTROL TOLERANTE A FALLAS AL EVAPORADOR DE CINCO EFECTOS
El MBPC tambien ante este tipo de fallas solo necesita la informacion de las nuevasrestricciones dadas por el diagnostico, ya que como se menciono el MBPC anadiendo estasnuevas restricciones al problema de optimizacion, permite facilmente incorporar mecanis-mos de tolerancia a fallas.
Cuando se menciona saturacion en un actuador se refiere a que el actuador ya no sepuede completamente abrir ni completamente cerrar, es decir, tiene un rango muy limitadode apertura-cierre, el cual no coincide con el rango del actuador en condiciones normales.
Las fallas ocasionadas por la saturacion en las valvulas que alimentan el flujo dealimentacion F0 (entrada 1), el flujo de alimentacion de vapor S (entrada 2), el flujo delprimer efecto por medio de K1 (entrada 3), el flujo del segundo efecto por medio de K2
(entrada 4), el flujo del tercer efecto por medio de K3 (entrada 5) y el flujo del cuartoefecto por medio de K4 (entrada 6), se representan cambiando las restricciones de u1, u2,u3, u4, u5 y u6 respectivamente a valores que representen las saturaciones (por ejemplo setiene la restriccion 10, 000 ≤ u1 ≤ 32, 500, la cual se cambia a 15, 000 ≤ u1 ≤ 20, 000 porsaturacion de la valvula que alimentan el flujo de alimentacion F0).
Cabe mencionar que solo se presenta la simulacion cuando hay una falla causada porsaturacion del actuador de F0. En el Anexo I se presentan los resultados obtenidos anteeste tipo de falla en los actuadores S, K1, K2, K3 y K4.
Simulacion 7. Acomodacion de una falla causada por saturacion del ac-tuador de F0:
El objetivo de esta simulacion es apreciar el efecto que causa una falla que consisteen una saturacion del actuador de F0, en las salidas controladas y en las senales de control.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625%a 80%, en el minuto 1200 y en h5 de 0.967m a 0.8m, en el minuto 2400. La falla consistioen una saturacion del actuador de F0 desde el momento en que arranco la planta, es decir,hay un cambio de restricciones de 10, 000 ≤ u1 ≤ 32, 500 a 15, 000 ≤ u1 ≤ 29, 000 para laFigura 5.12 y de 10, 000 ≤ u1 ≤ 32, 500 a 15, 000 ≤ u1 ≤ 28, 000 para la Figura 5.13 en0min.
Las Figuras 5.12, 5.13, 5.14 y 5.15 muestran los resultados obtenidos en esta simu-lacion. En las Figuras 5.12 y 5.13 se observa que la senal de control del flujo de alimentacionF0 esta saturada debido a la falla ocurrida en ese actuador. En lo que respecta a las demassenales de control estas varıan para compensar la saturacion en el actuador F0. En lasFiguras 5.14 y 5.15 se aprecia que aun en presencia de falla, el control de C5 y h5 tiene un

5.6. RESULTADOS DEL MBPC COMO CONTROL TOLERANTE A FALLAS APLICADO AL EVAPORADOR DE CINCOEFECTOS 105
buen funcionamiento. Cuando hay una saturacion menor, el cual es el caso de la Figura5.14 el control en h5 es mejor que cuando hay una saturacion mayor, caso de la Figura5.15; sin embargo el control en C5 funciona correctamente para ambos casos.
Como ya se menciono para este tipo de proceso lo importante es obtener el productoa la concentracion deseada y que el nivel no baje del mınimo por lo que se considerancorrectos los resultados obtenidos.
Figura 5.12: Respuestas de las senales de control ante efecto de una falla de tipo saturacion en F0

106 CAPITULO 5. APLICACION DEL CONTROL TOLERANTE A FALLAS AL EVAPORADOR DE CINCO EFECTOS
Figura 5.13: Respuestas de las senales de control ante efecto de una falla de tipo saturacion en F0
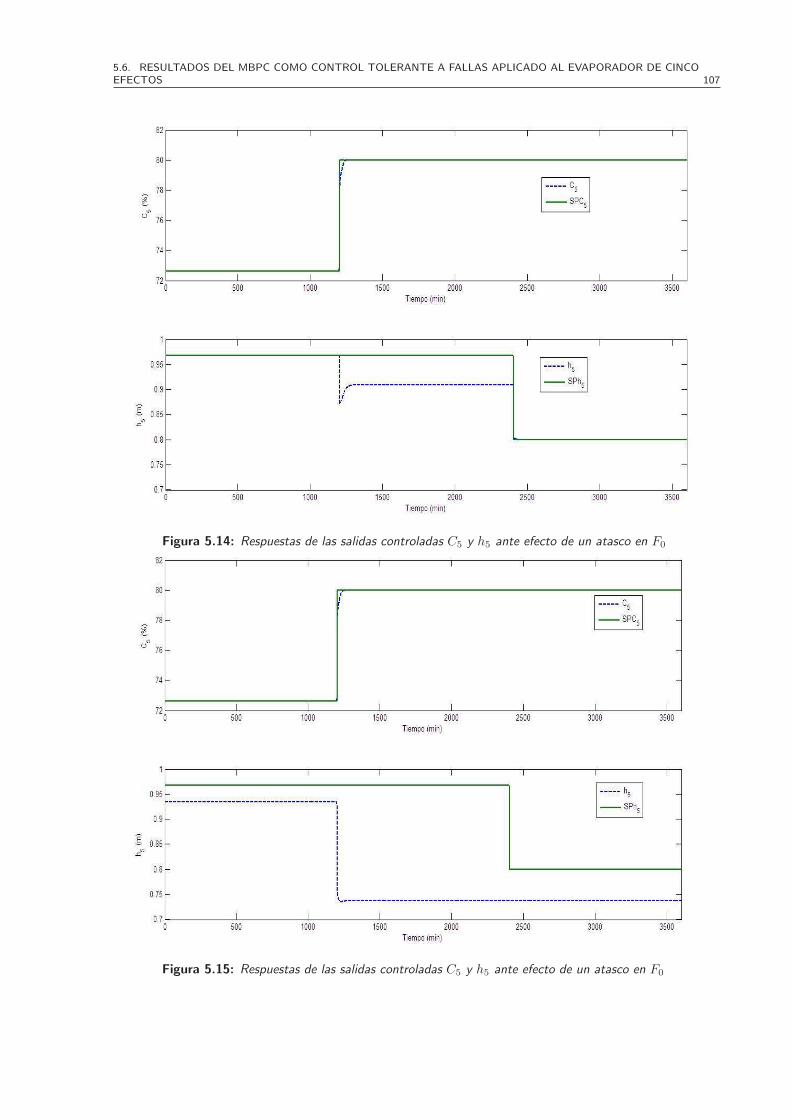
5.6. RESULTADOS DEL MBPC COMO CONTROL TOLERANTE A FALLAS APLICADO AL EVAPORADOR DE CINCOEFECTOS 107
Figura 5.14: Respuestas de las salidas controladas C5 y h5 ante efecto de un atasco en F0
Figura 5.15: Respuestas de las salidas controladas C5 y h5 ante efecto de un atasco en F0
108 CAPITULO 5. APLICACION DEL CONTROL TOLERANTE A FALLAS AL EVAPORADOR DE CINCO EFECTOS
5.6.3 Resultados de MBPC con restricciones ante fallasinternas provocadas por fugas
En esta subseccion se presentan los resultados obtenidos del MBPC multivariablecon restricciones ante la presencia de fallas internas causadas por fugas. Cabe mencionarque con este tipo de fallas no se cambio las restricciones, el comportamiento adecuado delMBPC se atribuye solo a que es un control multivariable. Es decir, gracias a la redundan-cia de actuadores es posible obtener para este caso en particular, un buen control aunqueexistan fallas internas.
Para poder visualizar el efecto de este tipo de fallas fue necesario realizar una linea-lizacion en lınea del modelo. Esta se programo debido a que para visualizar las fallas deeste tipo se tiene que efectuar la falla en un tiempo distinto de 0min, ya que si la fallase realizara en este tiempo, las matrices que se utilizan para calcular la salida predichase calcularıan con las matrices A, B y C que consideran la falla, por lo que la falla no seapreciarıa.
La falla ocasionada por fuga del flujo de vapor O3 en el tanque del tercer efectose representa multiplicando O3 por un factor que represente la fuga del flujo de vapor.Lo mismo sucede para la fuga de vapor O4 en el cuarto efecto. La falla ocasionada porfuga del flujo de producto F5 se representa tambien multiplicando F5 por un factor querepresente la fuga del flujo de producto.
Para poder apreciar las fallas ocasionadas por las fugas del flujo de producto F5,del flujo de vapor O3 y O4 se necesita realizar como ya se menciono una linealizacion delproceso en cada periodo de muestreo conocida como ”linealizacion en lınea”, esta se realizacada 60 minutos, esto es, cada 60 minutos se actualiza.
Se presenta la simulacion cuando hay una falla causada por la fuga de vapor en eltercer efecto. En el Anexo J se presentan los resultados obtenidos ante fuga de vapor enel cuarto efecto y de producto en el quinto efecto.
Simulacion 8. Acomodacion de una falla causada por la fuga de vapor enel tercer efecto:
El objetivo de esta simulacion es apreciar en el MBPC el efecto que causa una fallainterna, que consiste en la fuga de vapor en el tercer efecto.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625% a73.36%, en el minuto 800 y en h5 de 0.967m a 0.8m, en el minuto 2800. La falla consistio
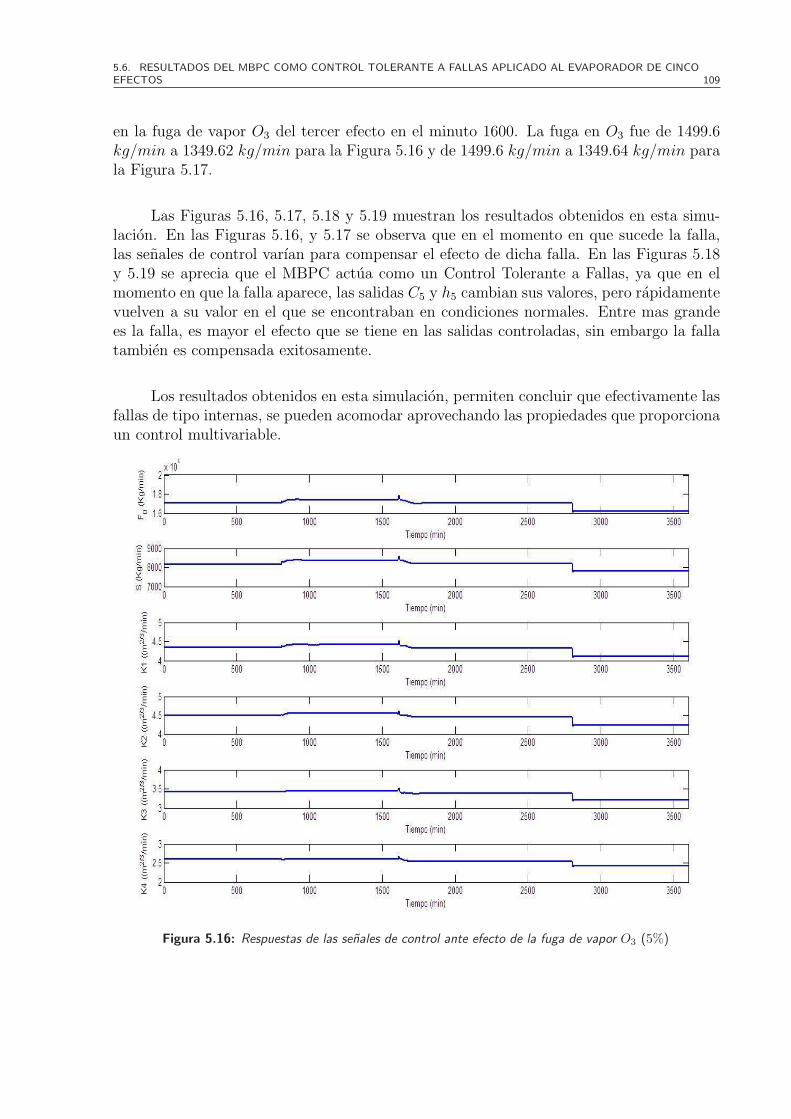
5.6. RESULTADOS DEL MBPC COMO CONTROL TOLERANTE A FALLAS APLICADO AL EVAPORADOR DE CINCOEFECTOS 109
en la fuga de vapor O3 del tercer efecto en el minuto 1600. La fuga en O3 fue de 1499.6kg/min a 1349.62 kg/min para la Figura 5.16 y de 1499.6 kg/min a 1349.64 kg/min parala Figura 5.17.
Las Figuras 5.16, 5.17, 5.18 y 5.19 muestran los resultados obtenidos en esta simu-lacion. En las Figuras 5.16, y 5.17 se observa que en el momento en que sucede la falla,las senales de control varıan para compensar el efecto de dicha falla. En las Figuras 5.18y 5.19 se aprecia que el MBPC actua como un Control Tolerante a Fallas, ya que en elmomento en que la falla aparece, las salidas C5 y h5 cambian sus valores, pero rapidamentevuelven a su valor en el que se encontraban en condiciones normales. Entre mas grandees la falla, es mayor el efecto que se tiene en las salidas controladas, sin embargo la fallatambien es compensada exitosamente.
Los resultados obtenidos en esta simulacion, permiten concluir que efectivamente lasfallas de tipo internas, se pueden acomodar aprovechando las propiedades que proporcionaun control multivariable.
Figura 5.16: Respuestas de las senales de control ante efecto de la fuga de vapor O3 (5%)

110 CAPITULO 5. APLICACION DEL CONTROL TOLERANTE A FALLAS AL EVAPORADOR DE CINCO EFECTOS
Figura 5.17: Respuestas de las senales de control ante efecto de la fuga de vapor O3 (10%)
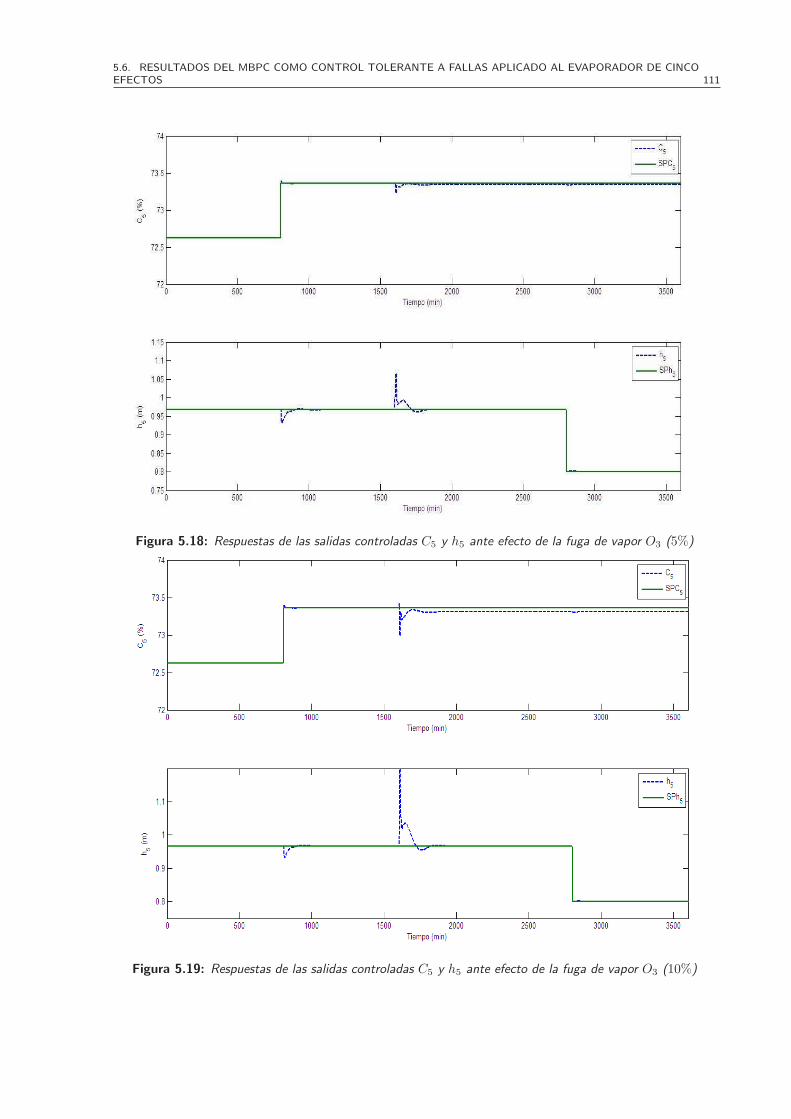
5.6. RESULTADOS DEL MBPC COMO CONTROL TOLERANTE A FALLAS APLICADO AL EVAPORADOR DE CINCOEFECTOS 111
Figura 5.18: Respuestas de las salidas controladas C5 y h5 ante efecto de la fuga de vapor O3 (5%)
Figura 5.19: Respuestas de las salidas controladas C5 y h5 ante efecto de la fuga de vapor O3 (10%)

112 CAPITULO 5. APLICACION DEL CONTROL TOLERANTE A FALLAS AL EVAPORADOR DE CINCO EFECTOS
5.6.4 Comparacion del MBPC sin cambio de restriccionesy del MBPC tolerante a fallas
Para poder apreciar el comportamiento del controlador propuesto aplicado al evapo-rador de cinco efectos ante la presencia de falla, en esta subseccion se presentan algunaspruebas representativas para comparar los comportamientos del MBPC clasico (sin cam-bio de restricciones) y como Control Tolerante a Fallas ante la presencia de fallas de tipoatasco y saturacion en actuadores.
Cabe mencionar que solo se presentan los resultados obtenidos cuando suceden fallasen los actuadores del flujo de producto de entrada y del flujo del vapor de entrada, F0 yS respectivamente, por ser las fallas en actuadores que mas influyen en la dinamica delproceso.
Para realizar una comparacion con mayor certeza de los comportamientos del MBPCclasico y como Control Tolerante a Fallas se utilizan los ındices de desempeno IAE, ASEe ITAE.
Comparacion del MBPC sin cambio de restricciones y del MBPC tolerante afallas ante fallas de tipo atasco
En este apartado se realiza una comparacion del funcionamiento del MBPC sin cam-bio de restricciones con el funcionamiento del MBPC como Control Tolerante a Fallas,cuando secede una falla que consiste en el atasco de algun actuador.
Para realizar dicha comparacion se utilizan los ındices de desempeno como punto departida. Ademas se muestran las graficas de las senales de control y de las salidas contro-ladas en los dos casos (cuando el MBPC no cambia restricciones y cuando esta adaptadopara Control Tolerante a Fallas).
Simulacion 9. Efecto de una falla de tipo atasco en el MBPC sin cambiode restricciones:
El objetivo de esta simulacion es apreciar el efecto que causa en el MBPC una fallade tipo atasco, considerando un MBPC sin cambio de restricciones.
La simulacion se llevo a cabo considerando un cambio de referencia en C5 de 72.625%a 70% en el minuto 1200. La falla consistio en el atasco del actuador de F0 en el minuto600, es decir, en mantener la senal de control de F0 en un valor constante, el cual fue de28,190.7 Kg/min.

5.6. RESULTADOS DEL MBPC COMO CONTROL TOLERANTE A FALLAS APLICADO AL EVAPORADOR DE CINCOEFECTOS 113
Las Figuras 5.20 y 5.21 muestran los resultados obtenidos en esta simulacion. En laFigura 5.20 se observa que la senal de control F0 continua constante, aun cuando haya uncambio de referencia en alguna salida controlada. En la Figura 5.20 se aprecia que aunquesucede la falla en el minuto 600 se tiene un buen control hasta el cambio de referenciade C5 en el minuto 1, 200, esto se debe a que antes del cambio de referencia en la salidacontrolada, la senal de control de F0 no necesitaba incrementos. Sin embargo despues delcambio de referencia no se obtiene un buen control principalmente para C5, esto repercuteen el producto obtenido, ya que este no esta en condiciones adecuadas para la siguientefase, de ahı la importancia de configurar al MBPC como Control Tolerante a Fallas.
Los resultados obtenidos en esta simulacion, permiten concluir que si en el MBPCno se realiza un cambio de restricciones, cuando hay fallas en actuadores, no se logra unbuen acomodo de dichas fallas.
Figura 5.20: Senales de control del MBPC sin cambio de restricciones ante atasco de F0

114 CAPITULO 5. APLICACION DEL CONTROL TOLERANTE A FALLAS AL EVAPORADOR DE CINCO EFECTOS
Figura 5.21: Salidas controladas del MBPC sin cambio de restricciones ante atasco de F0
Simulacion 10. Efecto de una falla de tipo atasco en el MBPC con cambiode restricciones:
El objetivo de esta simulacion es apreciar el efecto que causa una falla de tipo atasco,considerando un MBPC con cambio de restricciones, en las salidas controladas y en lassenales de control.
La simulacion se llevo a cabo considerando un cambio de referencia en C5 de 72.625%a 70% en el minuto 1200. La falla consistio en el atasco del actuador de F0 en el minuto600, es decir, en mantener la senal de control de F0 en un valor constante, el cual fue de28,190.7 Kg/min.
Las Figuras 5.22 y 5.23 muestran los resultados obtenidos en esta simulacion. En laFigura 5.22 se observa que cuando hay un cambio de referencia en alguna salida contro-lada, la senal de control F0 continua constante. La falla del atasco en el actuador F0 seacomodo cambiando las restricciones (|∆u1 = 0|) a partir del minuto 600. Esto es facil de

5.6. RESULTADOS DEL MBPC COMO CONTROL TOLERANTE A FALLAS APLICADO AL EVAPORADOR DE CINCOEFECTOS 115
apreciar en la senal de control F0. Las demas senales de control se mueven para compensarla falla. En la Figura 5.23 se aprecia que aunque sucede la falla en el minuto 600 se tieneun buen control hasta el cambio de referencia de C5 en el minuto 1, 200, esto se debe aque antes del cambio de referencia en la salida controlada, la senal de control de F0 nonecesita cambios. Sin embargo despues del cambio de referencia hay ciertas variaciones enla salida controlada C5, debido a la falla, pero rapidamente el control vuelve a funcionarcorrectamente. En el caso de la salida controlada h5, esta despues del cambio de referenciatiene una ligera variacion y no sigue exactamente a la referencia.
Los resultados obtenidos en esta simulacion, permiten concluir que para efectos deeste proceso, el control como otras veces se ha mencionado es muy bueno ya que se obtieneel principal objetivo, el cual es que se obtenga un producto a una determinada concen-tracion, lo cual se cumple para este caso, no ası en las respuestas del MBPC sin cambiode restricciones.
Figura 5.22: Senales de control del MBPC como Control Tolerante a Fallas ante atasco de F0
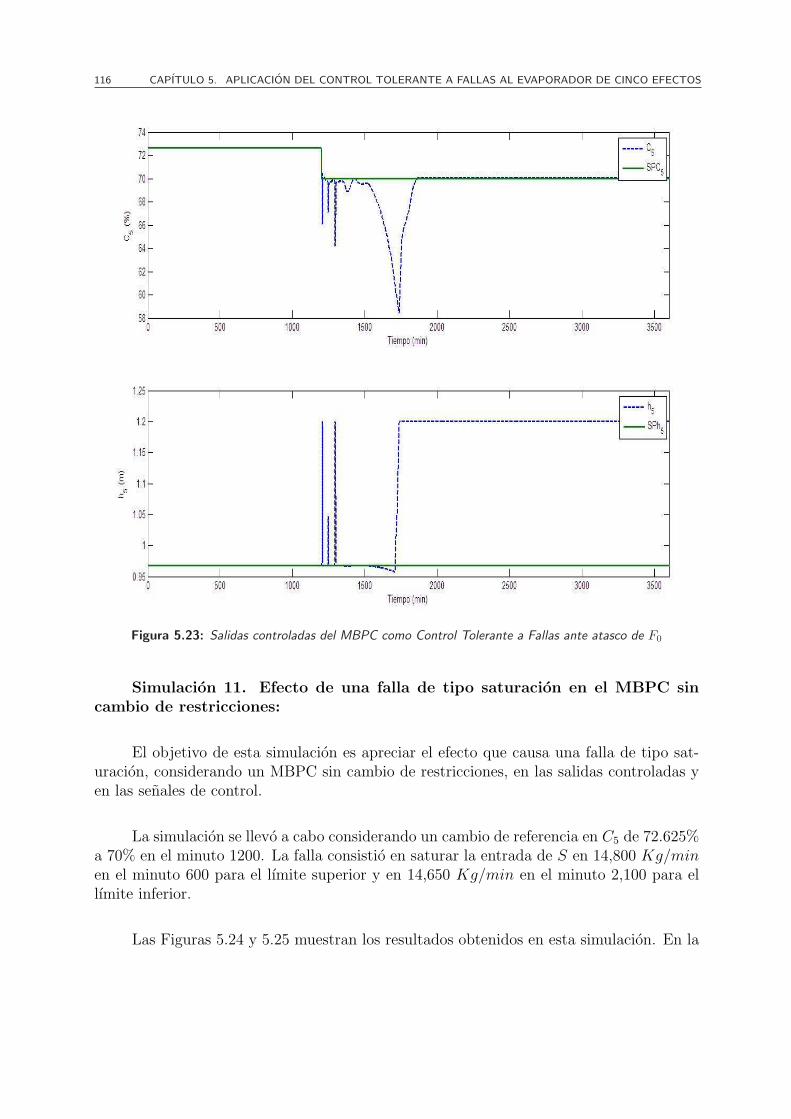
116 CAPITULO 5. APLICACION DEL CONTROL TOLERANTE A FALLAS AL EVAPORADOR DE CINCO EFECTOS
Figura 5.23: Salidas controladas del MBPC como Control Tolerante a Fallas ante atasco de F0
Simulacion 11. Efecto de una falla de tipo saturacion en el MBPC sincambio de restricciones:
El objetivo de esta simulacion es apreciar el efecto que causa una falla de tipo sat-uracion, considerando un MBPC sin cambio de restricciones, en las salidas controladas yen las senales de control.
La simulacion se llevo a cabo considerando un cambio de referencia en C5 de 72.625%a 70% en el minuto 1200. La falla consistio en saturar la entrada de S en 14,800 Kg/minen el minuto 600 para el lımite superior y en 14,650 Kg/min en el minuto 2,100 para ellımite inferior.
Las Figuras 5.24 y 5.25 muestran los resultados obtenidos en esta simulacion. En la

5.6. RESULTADOS DEL MBPC COMO CONTROL TOLERANTE A FALLAS APLICADO AL EVAPORADOR DE CINCOEFECTOS 117
Figura 5.24 se observa que la senal de control S continua saturada, aunque haya un cambiode referencia de C5. Las demas senales de control se mueven para compensar la falla. Enla Figura 5.25 se aprecia que en el minuto 600 cuando sucede una falla representativa enlımite superior, las salidas controladas tienen ciertas variaciones, lo mismo pasa cuandosucede una falla representativa en lımite inferior en el minuto 1,200. Referente a la salidacontrolada C5 es interesante notar que no se obtiene un buen control, ya que el productoobtenido como ya se menciono, no se encuentra en condiciones adecuadas para la siguientefase, de ahı la importancia de configurar al MBPC como Control Tolerante a Fallas.
Los resultados obtenidos en esta simulacion, permiten concluir que si en el MBPCno se realiza un cambio de restricciones, cuando hay fallas en actuadores, no se logra unbuen acomodo de dichas fallas.
Figura 5.24: Senales de control del MBPC sin cambio de restricciones ante saturacion de S
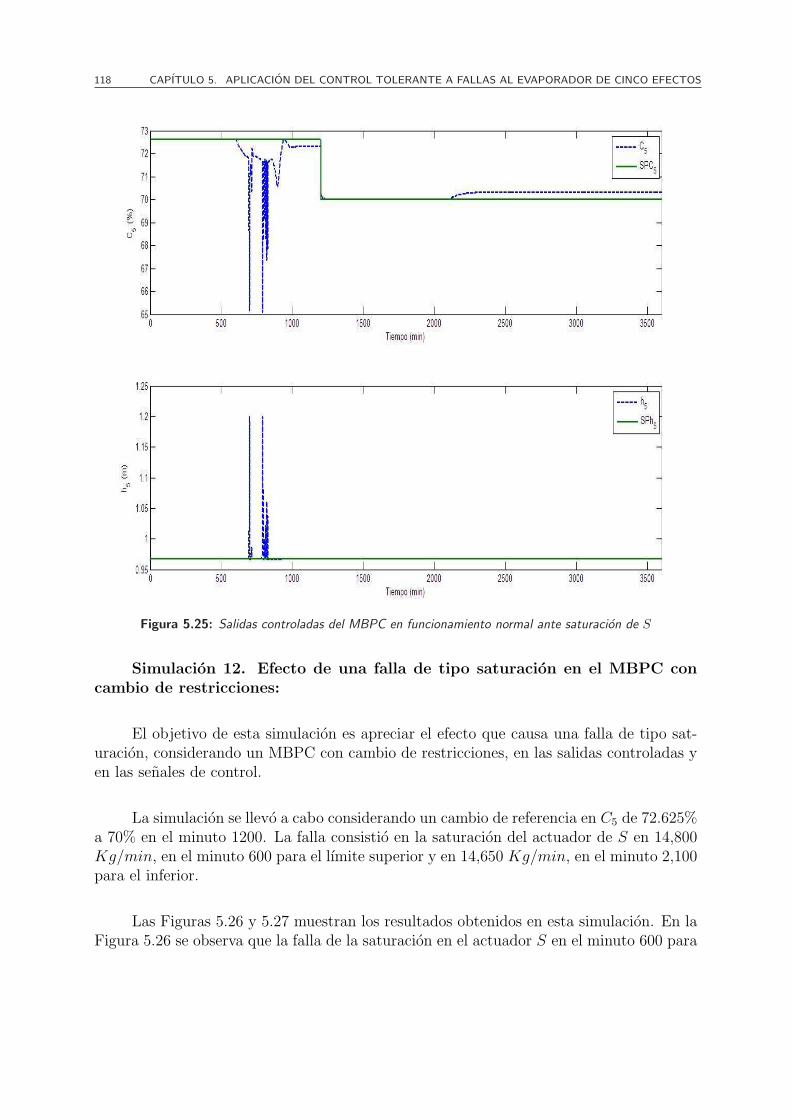
118 CAPITULO 5. APLICACION DEL CONTROL TOLERANTE A FALLAS AL EVAPORADOR DE CINCO EFECTOS
Figura 5.25: Salidas controladas del MBPC en funcionamiento normal ante saturacion de S
Simulacion 12. Efecto de una falla de tipo saturacion en el MBPC concambio de restricciones:
El objetivo de esta simulacion es apreciar el efecto que causa una falla de tipo sat-uracion, considerando un MBPC con cambio de restricciones, en las salidas controladas yen las senales de control.
La simulacion se llevo a cabo considerando un cambio de referencia en C5 de 72.625%a 70% en el minuto 1200. La falla consistio en la saturacion del actuador de S en 14,800Kg/min, en el minuto 600 para el lımite superior y en 14,650 Kg/min, en el minuto 2,100para el inferior.
Las Figuras 5.26 y 5.27 muestran los resultados obtenidos en esta simulacion. En laFigura 5.26 se observa que la falla de la saturacion en el actuador S en el minuto 600 para
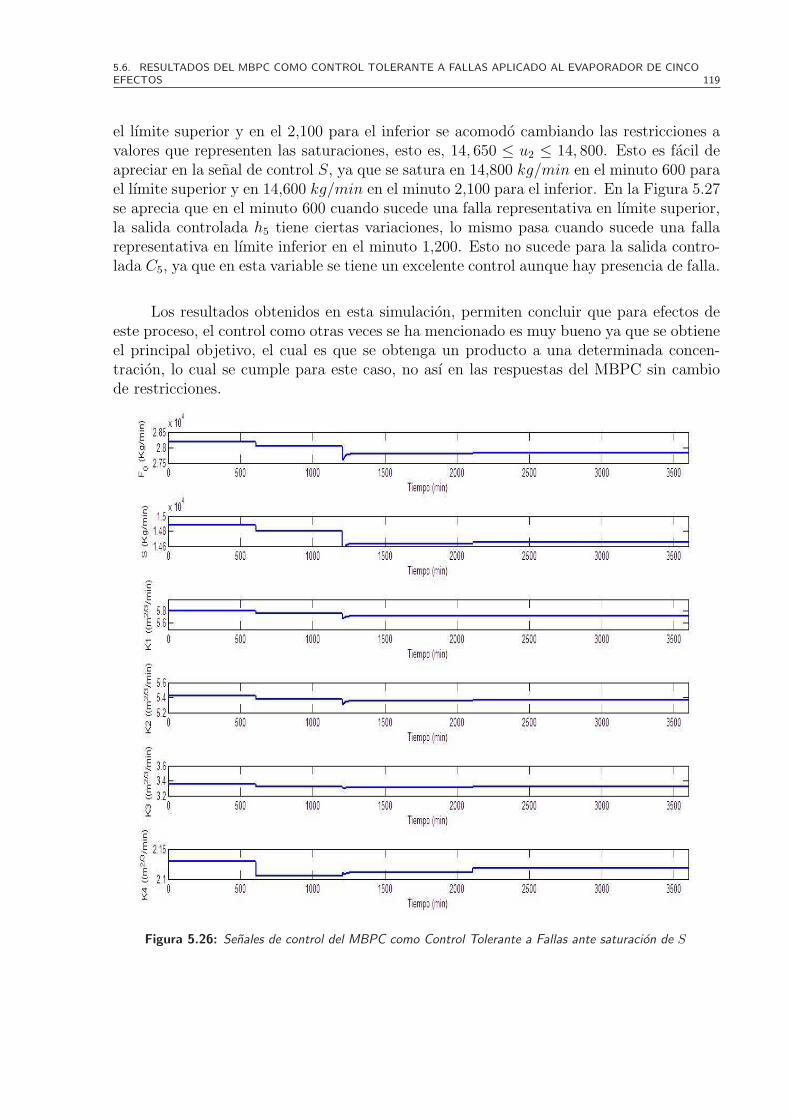
5.6. RESULTADOS DEL MBPC COMO CONTROL TOLERANTE A FALLAS APLICADO AL EVAPORADOR DE CINCOEFECTOS 119
el lımite superior y en el 2,100 para el inferior se acomodo cambiando las restricciones avalores que representen las saturaciones, esto es, 14, 650 ≤ u2 ≤ 14, 800. Esto es facil deapreciar en la senal de control S, ya que se satura en 14,800 kg/min en el minuto 600 parael lımite superior y en 14,600 kg/min en el minuto 2,100 para el inferior. En la Figura 5.27se aprecia que en el minuto 600 cuando sucede una falla representativa en lımite superior,la salida controlada h5 tiene ciertas variaciones, lo mismo pasa cuando sucede una fallarepresentativa en lımite inferior en el minuto 1,200. Esto no sucede para la salida contro-lada C5, ya que en esta variable se tiene un excelente control aunque hay presencia de falla.
Los resultados obtenidos en esta simulacion, permiten concluir que para efectos deeste proceso, el control como otras veces se ha mencionado es muy bueno ya que se obtieneel principal objetivo, el cual es que se obtenga un producto a una determinada concen-tracion, lo cual se cumple para este caso, no ası en las respuestas del MBPC sin cambiode restricciones.
Figura 5.26: Senales de control del MBPC como Control Tolerante a Fallas ante saturacion de S
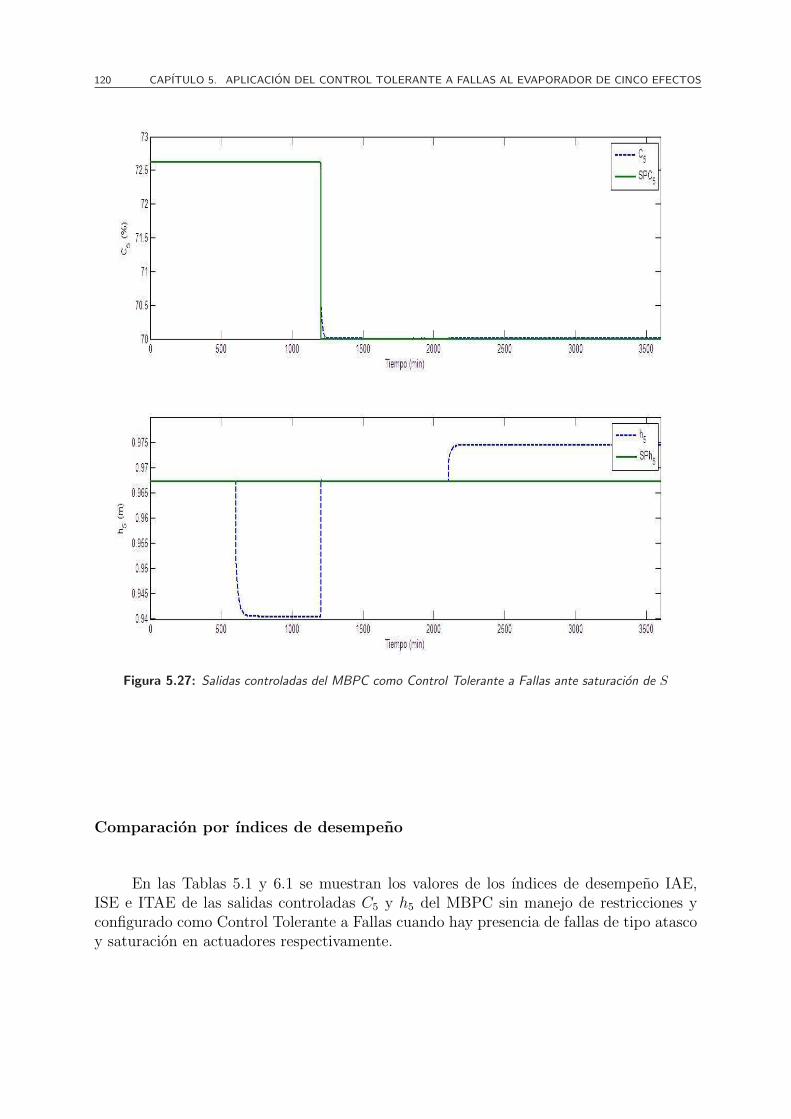
120 CAPITULO 5. APLICACION DEL CONTROL TOLERANTE A FALLAS AL EVAPORADOR DE CINCO EFECTOS
Figura 5.27: Salidas controladas del MBPC como Control Tolerante a Fallas ante saturacion de S
Comparacion por ındices de desempeno
En las Tablas 5.1 y 6.1 se muestran los valores de los ındices de desempeno IAE,ISE e ITAE de las salidas controladas C5 y h5 del MBPC sin manejo de restricciones yconfigurado como Control Tolerante a Fallas cuando hay presencia de fallas de tipo atascoy saturacion en actuadores respectivamente.
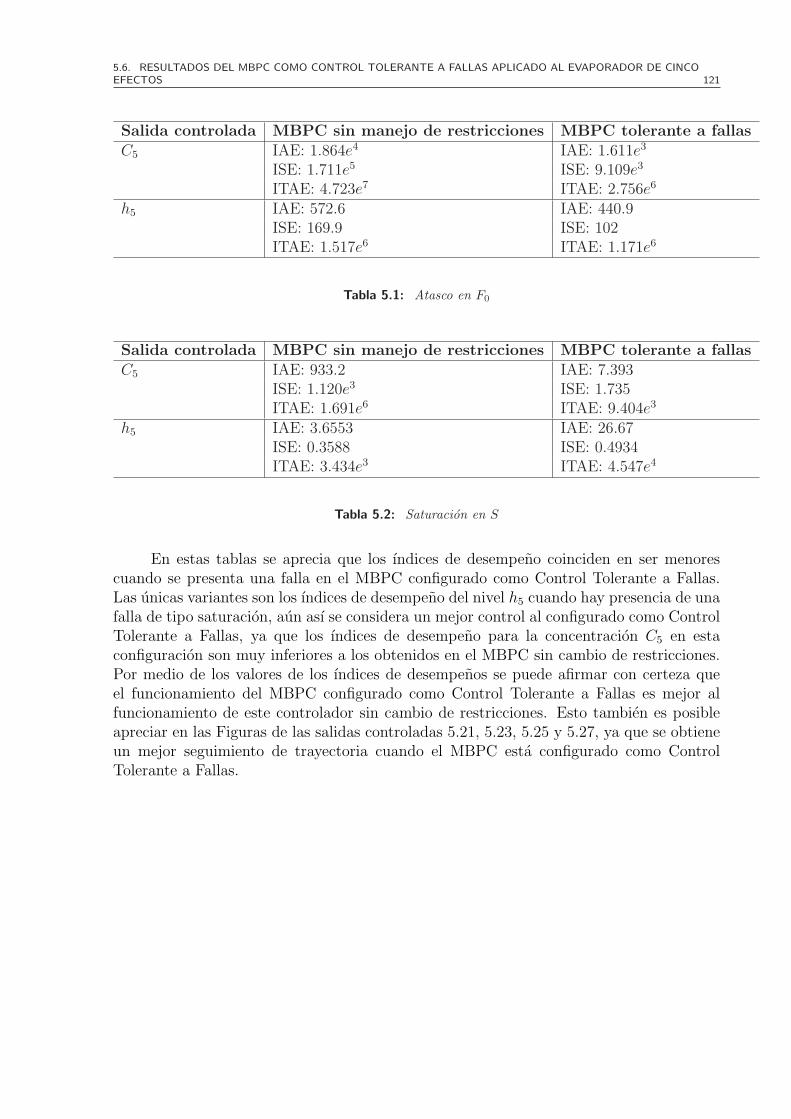
5.6. RESULTADOS DEL MBPC COMO CONTROL TOLERANTE A FALLAS APLICADO AL EVAPORADOR DE CINCOEFECTOS 121
Salida controlada MBPC sin manejo de restricciones MBPC tolerante a fallasC5 IAE: 1.864e4 IAE: 1.611e3
ISE: 1.711e5 ISE: 9.109e3
ITAE: 4.723e7 ITAE: 2.756e6
h5 IAE: 572.6 IAE: 440.9ISE: 169.9 ISE: 102ITAE: 1.517e6 ITAE: 1.171e6
Tabla 5.1: Atasco en F0
Salida controlada MBPC sin manejo de restricciones MBPC tolerante a fallasC5 IAE: 933.2 IAE: 7.393
ISE: 1.120e3 ISE: 1.735ITAE: 1.691e6 ITAE: 9.404e3
h5 IAE: 3.6553 IAE: 26.67ISE: 0.3588 ISE: 0.4934ITAE: 3.434e3 ITAE: 4.547e4
Tabla 5.2: Saturacion en S
En estas tablas se aprecia que los ındices de desempeno coinciden en ser menorescuando se presenta una falla en el MBPC configurado como Control Tolerante a Fallas.Las unicas variantes son los ındices de desempeno del nivel h5 cuando hay presencia de unafalla de tipo saturacion, aun ası se considera un mejor control al configurado como ControlTolerante a Fallas, ya que los ındices de desempeno para la concentracion C5 en estaconfiguracion son muy inferiores a los obtenidos en el MBPC sin cambio de restricciones.Por medio de los valores de los ındices de desempenos se puede afirmar con certeza queel funcionamiento del MBPC configurado como Control Tolerante a Fallas es mejor alfuncionamiento de este controlador sin cambio de restricciones. Esto tambien es posibleapreciar en las Figuras de las salidas controladas 5.21, 5.23, 5.25 y 5.27, ya que se obtieneun mejor seguimiento de trayectoria cuando el MBPC esta configurado como ControlTolerante a Fallas.
122 CAPITULO 5. APLICACION DEL CONTROL TOLERANTE A FALLAS AL EVAPORADOR DE CINCO EFECTOS
5.7 Conclusiones
Se trabajo con la tecnica del MBPC multivariable con el enfoque de Control Tole-rante a fallas aplicado a un evaporador de cinco efectos. Se realizaron pruebas de cambiode referencia de este controlador sin y con restricciones, ademas de pruebas ante pertur-baciones y fallas de tipo saturacion y atasco en actuadores, ası como fallas internas (fugade vapor y producto en los efectos); los resultados fueron satisfactorios ya que el MBPCcumple con el seguimiento a trayectoria, rechazo a perturbacion y ademas muestra uncomportamiento aceptable ante la presencia de diferentes tipos de fallas.
Se realizo una comparacion utilizando los ındices de desempeno del MBPC sin cambiode restricciones con el MBPC como Control Tolerante a Fallas. Los resultados de estacomparacion fueron satisfactorios para el MBPC como Control Tolerante a Fallas. Ya quelos ındices de desempenos fueron menores para MBPC configurado como Control Tolerantea Fallas.

Capıtulo 6
Conclusiones ytrabajos futuros
En esta seccion se presentan las conclusiones generales del trabajo de investigaciony los trabajos futuros propuestos para enriquecer dicho trabajo.
6.1 Conclusiones
Se estudio el proceso de evaporacion y se utilizo como caso de estudio un evaporadorde cinco efectos aplicado a la produccion de azucar. Se presento un modelo matematicono lineal considerando ciertas suposiciones. Se linealizo el modelo alrededor de un puntode operacion.
Se obtuvo el sistema discreto a partir del sistema continuo utilizando un periodode muestreo de 10 minutos. Este periodo de muestro se eligio en base a un analisis delcomportamiento de los polos discretos del sistema. Con periodos de muestreos pequenos,menores a 1 minuto, el sistema discreto se acercaba a la inestabilidad, ya que los valo-res propios discretos tendıan a 1 (es decir, estos se encontraban en el lımite del cırculounitario). Con periodos de muestreo grandes, mayores a 40 minutos, los valores propiosdiscretos tendıan a 0, sin embargo era imposible reproducir de manera exacta la dinamicadel sistema continuo.
La literatura menciona una recomendacion adecuada para elegir el periodo de muestreo.Esta es elegir el periodo de muestreo en el intervalo que resulte de dividir la constantede tiempo del sistema entre 4 y 10, para el sistema de estudio en esta tesis, el intervaloresultarıa de 9 a 22.5 minutos, ya que se tiene una constante de tiempo de aproximada-mente 90 minutos; sin embargo en este tema de tesis se amplia dicho intervalo en base a
123

124 CAPITULO 6. CONCLUSIONES Y TRABAJOS FUTUROS
lo obtenido en el analisis de la estabilidad del sistema en tiempo discreto. Se recomiendaelegir un periodo de muestreo entre 1 a 40 minutos para discretizar el sistema continuodel evaporador de cinco efectos.
En este trabajo se presenta el desarrollo del Control Predictivo Basado en Modeloaplicado a un evaporador de cinco efectos. El programa realizado en Matlab para simulareste control predictivo es generalizado, ya que puede simular un MBPC para cualquiersistema, sea SISO o MIMO, solo basta con incluir obviamente el modelo linealizado encontinuo del sistema que se requiere controlar, las restricciones, el tiempo de muestreo,el horizonte mınimo y maximo de prediccion, el horizonte de control y los parametros desintonizacion.
Para la eleccion de los horizontes de prediccion y control, se recomienda tener encuenta el tiempo de muestreo y la constante de tiempo del sistema. Ya que en base a estosse eligen los valores de los horizontes.
Los horizontes mınimo y maximo de prediccion marcan los lımites de los instantes enque se desea que la salida siga a la referencia. Si se toma un valor grande de H1 es porqueno importa que haya errores en los primeros instantes, lo cual provocara una respuestasuave del proceso. Para procesos con tiempo muerto d no tiene sentido que H1 sea menorque dicho valor, puesto que la salida no empezara a evolucionar hasta el instante k +d. Elvalor del horizonte maximo de prediccion se recomienda que sea como mınimo, el resul-tado de la division de la constante de tiempo del sistema entre el tiempo de muestreo. Sepueden elegir horizontes mayores a este valor, dependiendo del sistema y de los objetivosde control.
El horizonte de control no debe coincidir con el horizonte de prediccion. El horizontede control debe ser menor al horizonte de prediccion.
Respecto a λ y α, estos pueden ser usados como parametros de sintonizacion. αes un parametro comprendido entre 0 y 1 (mientras mas proximo a 1, mas suave sera laaproximacion) que constituye un valor ajustable que influye en la respuesta del sistema.Esto significa que penaliza mas a los errores mas alejados del instante k que a los masproximos, dando lugar a un control mas suave y con mayor esfuerzo. λ es un parametro deajuste respecto a los incrementos de la senal de control. Si este decrece, se tienen cambiosen la senal de control mas grandes. Entonces el valor de estos parametros dependera delos requerimientos del control.
El MBPC presentado en este trabajo no se considera un control muy robusto, ya quelas incertidumbres podrıan afectar a la capacidad de prediccion del modelo.

6.1. CONCLUSIONES 125
Una forma de hacer el MBPC muy robusto es imponer que las condiciones de esta-bilidad se verifiquen para cualquier realizacion de las restricciones. Tales condiciones deestabilidad en control predictivo requieren en general que la funcion objetivo contenga uncoste terminal y que el estado final del horizonte de prediccion este incluido en una regionterminal.
El control predictivo robusto consiste en encontrar los movimientos de control futurominimizando la funcion objetivo y forzando al estado terminal alcanzar la region terminalpara todos los valores posibles de las incertidumbres.
El MBPC como Control Tolerante a Fallas desarrollado en esta tesis no incluye laspropiedades necesarias para ser un control robusto, sin embargo puede acomodar variostipos de fallas cambiando las restricciones.
Por medio del estudio de esta tecnica, fue posible dar en este documento una formapara acomodar algunos tipos de fallas, como son: fallas de saturacion y atasco en actua-dores, fallas internas y fallas en sensores, de esta ultima no se realizaron pruebas por noser objetivo del trabajo de investigacion.
La manera de acomodar a los diferentes tipos de fallas en el MBPC se muestra en lasiguiente tabla:
Tipos de fallas ¿Como realiza la acomodacion de la falla?Atasco en actuadores Se cambian las restricciones a |∆u = 0|Saturacion en actuadores Se cambian los lımites en las restricciones
a valores que representen las saturacionesFalla interna del proceso Se aprovechan las ventajas de ser un control
multivariable, ya que trata de compensarMala lectura en un sensor Se abandona el control de esa salida quitandola
de la funcion de objetivo
Tabla 6.1: Correspondencias de las fallas en MBPC
El comportamiento aceptable del MBPC ante la presencia de fallas se debe a que elcontrol predictivo ofrece bastantes recursos para tratar diversos tipos de fallas, es decir elMBPC simplemente anadiendo nuevas restricciones al problema de optimizacion, permitenfacilmente incorporar mecanismos de tolerancia a fallas, pero ademas se debe tambien alos beneficios que proporciona un control multivariable. Es por ello que el MBPC actuacomo un Control Tolerante a Fallas.

126 CAPITULO 6. CONCLUSIONES Y TRABAJOS FUTUROS
6.2 Trabajos futuros
Algunos de los aspectos que se pueden seguir investigando referente a este tema, sonlos siguientes:
• Modelo matematico del sistema de evaporacion. La mayorıa de los proce-sos de evaporacion aplicados a la produccion de azucar contiene un condensadorbarometrico. Esto es, por que el caudal de vapor producido en el quinto efecto sepuede condensar en un separador de fases, que este a una presion y a una tempera-tura constante, precisamente por la accion del condensador barometrico. El modelomatematico del evaporador de cinco efectos presentado en el Capıtulo 4 no consideradicho efecto, ya que se consideran tanto un proceso como un modelo simplificado. Porlo que el modelo puede mejorarse al tomar en cuenta dicho condensador barometricoen el proceso de evaporacion, y con ello considerar tanto un proceso como un modelocon mayor similitud al de uso industrial.
• Diagnostico de fallas que proporcione la informacion necesaria para elMBPC. Ya se menciono que en este trabajo se considera una fuerte suposicion,la cual es que se tiene un diagnostico de fallas muy inteligente, ya que ademasde proporcionar la informacion de un diagnostico comun, da informacion sobre lasnuevas restricciones que necesita el MBPC para poder acomodar las fallas. Por loque para tener un Control Tolerante a Fallas completo se propone como trabajofuturo realizar el diagnostico de fallas que proporcione la informacion necesaria parael MBPC.
• Control predictivo no lineal. Para desarrollar el MBPC en el evaporador decinco efectos se considero un modelo linealizado alrededor de un punto de operacion,en el cual no se toman en cuenta las no-linealidades del proceso. Por lo que queda laduda si el control se mejorarıa utilizando un Control Predictivo No-lineal (NMPC).Ya que existen situaciones en las que los efectos no lineales justifican el uso de latecnologıa de controladores no-lineales. Estas situaciones entran dentro de las doscategorıas siguientes:
– Procesos fuertemente no lineales y sujetos a grandes perturbaciones, como porejemplo el control de pH.
– Problemas de seguimiento de consigna en los que el punto de operacion cambiacon frecuencia y estos cambios sacan a relucir la dinamica no lineal del proceso,como en el caso de la fabricacion de polımeros.
• Observador para la medicion de la concentracion en las etapas interme-dias. Como se menciono a lo largo de este trabajo la variable de mayor importanciaen este tipo de proceso es la concentracion, por lo que serıa correcto tener medida estavariable en cada una de las etapas intermedias, sin embargo tener instrumentacion

6.2. TRABAJOS FUTUROS 127
que mida esta variable es muy costoso; es por ello que se propone realizar sensoresvirtuales para medir esta variable.

128 CAPITULO 6. CONCLUSIONES Y TRABAJOS FUTUROS
REFERENCIAS 129
Referencias
Astrom K.J. (1996). Tuning and Adaptation. 13th IFAC World Congress.
Aufderheide, B., V. Prasad y B.W. Bequette (2001). A comparison of fundamental modelbased and multiple model predictive control. 40th IEEE Conference on Decision andControl, vol. 5, pag. 4863-4868.
Badgwell, T.A. y S.J. Qin (2001). Nonlinear Predictive Control. Chap. Review of NonlinearModel Predictive Control Applications. 40th IEE Control Engineering series.
Blanke, M. (1999). Fault-tolerant control systems. In: New Trends in Advanced Control.Springer-Verlag.
Blanke, M. (2000). What is fault tolerant control?. 4th IFAC Safeprocess, Budapest, Hun-gary.
Blanke, M. y M. Kinnaert (2003). Diagnosis and Fault-Tolerant Control. Springer-Verlag.
Camacho, E. y C. Bordons (2001). Control predictivo: pasado, presente y futuro. Reportetecnico. Escuela Superior de Ingenieros, Universidad de Sevilla.
Camacho, E. y C. Bordons (2002). Model Predictive Control. Springer-Verlag.
Charbonnier, S., C.D. Garcıa, C. Cadet y S. Gentil (2005). Trends extraction and analisisfor complex system monitoring and decision support. In Engineering Applications ofArtificial Intelligence.
Coleman, T.F. y Y. Li (1996). A Reflective Newton Method for Minimizing a QuadraticFunction Subject to Bounds on some of the Variables. SIAM Journal on Optimization,vol. 6, no. 4.
Eich J. y B. Sattler. (1997). Fault-tolerant control system design usign robust controltechniques. SAFEPROCESS, pag. 1246-1251.
Eryurek E. y B.R. Upadhyaya (1995). Fault-tolerant control and Diagnostic for Large-ScaleSystems. IEEE Conc. Sys. Mag., vol. 15, no. 5, pag. 34-42.
Fletcher, R. (1980). Practical methods of optimization. John Wiley y Sons Ltd.
Frank, P.M. (1990). Fault Diagnosis in dynamic system using analytical and knowledgebased redundancy - A survey and some new results. Autom., vol. 26, no. 3, pag.459-474.
Gao Z. y P.J. Antsaklis (1991). Stability of the pseudo inverse method for reconfigurablecontrol systems. Int. J. Control, vol. 53, no. 3, pag. 717-729.
130 CAPITULO 6. CONCLUSIONES Y TRABAJOS FUTUROS
Garcıa, M.A. y J.F. Rivera (2007). Diseno y construccion de un prototipo a escala de unacamara de separacion para la limpieza de cana de azucar. Tesis de Maestria, CENIDET,Cuernavaca, Mor., Mexico.
Garfias, M., R. Col, E. Rodrıguez, A. Solano, G. Rodrıguez, J. Munoz y D. Juarez (2005).Methodology for analysis and sintesis of control alternatives. Revista Mexicana de In-genierıa Quımica, vol. 4, no. 9.
Gopinathan, M., J.D. Boskovic, R.K. Mehra y C. Rago (1998). A multiple model predictivescheme for fault-tolerant flight control design. Rroceedings of the 37th IEEE Conferenceon Decision and Control, vol. 2, pag. 1376-1381.
Hou M. y P.C. Muller (1994). Fault detection and isolation observers. International J.Control, vol. 60, no. 5.
Isermann R. (1984). Process fault detection based on modeling and estimation methods:A survey. Autom., vol. 20, pag. 387-404.
Jiang J. (1994). Fault detection/diagnosis and controller reconfiguration in dynamic sys-tems. Proc. IFAC Symps. SAFEPROCESS, pag. 81-86.
Kern, D. (1998). Procesos de transferencia de calor. CECSA, Mexico.
Krishnasaami V. y G. Rizzoni (1994). A survey of oberverbased residual generation forFDI. IFAC Symposium SAFEPROCESS, Pag. 34-39.
Kulakov S. (2003). Model of the evaporator system as the control object. IEEE 9th Inter-national Scientific and Practical Conference of Students, Pag. 141- 143.
Kung, C.A. (2002). La ingenierıa de los alimentos y el proceso de refinacion de azucar.Tesis de Maestria, Universidad Nacional de la Amazonia Peruana.
Lane S.H. y R.F. Stengel (1988). Flight control desing using non-linear inverse dynamics.Autom., vol. 24, no. 4, pag. 471- 483.
Limon, D. (2002). Control predictivo de sistemas no lineales con restricciones: estabilidady robustez. Tesis de Doctorado, Escuela Superior de Ingenieros de la Universidad deSevilla.
Lissane, S., F. Giri y H. Unbehauen (1998). The development of controllers for a multiple-effect evaporator in sugar industry. International Journal of Control, vol. 73, no. 9.
Lunze, J. y T. Steffen (2003). Control reconfiguration by means of a virtual actuator. InProceedings of IFAC Symposium on SAFEPROCESS, pag. 133-138.
Maciejowski, J.M. (1989). Multivariable feedback design. Addison Wesley.
REFERENCIAS 131
Maciejowski, J.M. (1997). Reconfigurable control using constrained optimization. Semi-Plenary paper for ECC.
Maciejowski, J.M. (2000). Fault-Tolerant aspects of MPC. IEE., Pag. 1/1-1/4 .
Maciejowski, J.M. (2001). Predictive methods in fault-tolerant control. In: Control ofComplex Systems. Springer- Verlag.
Maciejowski, J.M. (2002). Predictive Control with Constrains. Prentice Hall.
Maciejowski, J.M. y C. Jones (2003). MPC fault-tolerant flight control case study: flight1862. Control Group, Department of Engineering University of Cambridge.
Majanne, Y. y P. Lautala (2003). Model predictive fault tolerant control scheme. TampereUniversity of Technology, Institute of Automation and Control.
Mariton M. (1989). Detection delays, false alarm rates and the reconfiguration of controlsystems. Int. J. Conc., vol. 49, no. 3, pag. 981.
Mayne D.Q, J.B. Rawlings, C.V. Rao y P.O.M. Scokaert (2000). Constrained Model Pre-dictive Control: Stability and Optimality. Automatica, vol. 36, pag. 789-814.
Mironovski, L.A. (1980). Functional Diagnosis of Dynamic System- a Survey. Autom. andRemote Control, vol. 41, pag. 1122.
Montiel, C., J. Aspron y I. Hernandez (2001). Metdos de optimizacion. UNAM.
Morari M. y E. Zafirou. (1989). Robust process control. Prentice Hall.
Murad G.A., I. Postlethwaite y D. Gu (1996). A robust desing approach to integratedcontrols and diagnostics. 13th IFAC World Congress, San Francisco.
Nett C.N., C.A. Jacobson y A.T. Miller (1988). An integrated approach to controls anddiagnostics: the 4 parameter controller. Proc. ACC, pag. 824-835.
Newell, R.B. y D.G. Fisher (1972). Model Development, reduction, and experimentalevaluation for an evaporator. Ind. Eng. Process Des., vol. 11, no. 2.
Nielsen, K.M. y T.S. Pedersen (1997). Simulation and control of a multiple effect evapo-rator. IEEE UKACC International Conference on Control., vol. 2, pag. 1166- 1171.
Ocampo, C.A. (2007). Model Predictive Control of Complex Systems including Fault To-lerance Capabilities: Application to Sewer Networks. Tesis de Doctorado, TechnicalUniversity of Catalonia.
Design of restructurable flight control systems using feedbak linearisation. j. of Guid.,Contr. and Dyn., vol. 14, no. 5, pag. 903-911.
132 CAPITULO 6. CONCLUSIONES Y TRABAJOS FUTUROS
Patton R., (1997). Fault-Tolerant Control: the 1997 situation. IFAC-SAFEPROCESS,1997.
A survey of robustness in quantitative model-based fault diagnosis. Appl. Math. y Comp.Sci., vol. 3, no. 3, pag. 399-416.
Perez, M., T.A. Berna y J. Gil (2004). Modelado, Analisis y Control de un evaporador dedoble efecto. XXV Jornadas de Automatica, Ciudad Real.
Pitteea, A., A. King y H. Rughooputh (2004). Intelligent Controller for Multiple-EffectEvaporator in the Sugar Industry. IEEE International Conference on Industrial Techno-logy., vol. 3, pag. 117- 182.
Puig, V., J. Quevedo, T. Escobet, B. Morcego y C. Ocampo (2004). Control Tolerantea Fallos: Mecanismos de tolerancia y sistema de supervisor. Revista Iberoamericana deAutomatica e Informatica Industrial, vol. 1, no. 2.
Polycarpou M. y A. Helmicki (1995). Automated Fault Detection and Accommodation:A Learning Systems Approach. IEEE Tr. Sys. Man and Cyb, vol. 25, no. 11.Qin, S.J. y T.A. Badgwell (1998). An Overview of Nonlinear Model Predictive ControlApplications. In: IFAC Workshop on Nonlinear Model Predictive Control. Assessmentand Future Directions. Ascona (Switzerland).
Qin, S.J. y T.A. Badgwell (1998). An Overview of Nonlinear Model Predictive ControlApplications. IFAC Workshop on Nonlinear Model Predictive Control, Ascona (Switzer-land).
Rauch, H.E. (1995). Autonomous Control Reconfiguration. IEEE Conc. Sys. Mag, vol.15, no. 6, pag. 37-38.
Richalet J., A. Rault, J.L. Testud y J. Papon (1978). Model predictive heuristic control:application to industrial processes. Automatica, vol. 14, no. 2, pag. 413-428.
Rıos-Bolivar, A.Y. (2004). Saturation and fault detection filters control compensation.Revista Ciencia e Ingenierıa, vol. 25, no. 1.
Rossiter, J.A. (2003). Model-Based Predictive Control. CRC PRESS.
Srichander R. y B.K. Walker. (1993). Stochastic stability analysis for continuous-timefault-tolerant control systems. Int. J. Con., vol. 57, no. 2, pag. 433-452.
Staroswiecki, M., G. Hoblos y A. Aitouche (2004). Sensor network design for fault tolerantestimation. International Journal of Adaptive Control and Signal Processing p. in press.
Tyler M. y Morari M. (1994). Optimal and robust desing of integrated control and diag-nostic modules. Proc. ACC.
The MathWorks (2004). Optimization Toolbox User’s Guide. Version 2.

REFERENCIAS 133
Veres, S.M. y H. Xia (1996). Dual predictive control for fault tolerant control. Conf. Publ.,vol. 2, pag. 1163-1168.
Walker, B.K. (1983). Recent developments in fault diagnosis and accomodation. Proc.AIAA Guid., Nav. and Con. Conf.
Wang, H. y S. Daley (1996). Actuator Faults: An adaptive Observer- Based Technique.IEEE Tran-sactions on Automatic Control, vol. 41, no. 7.
Wang, T., W. Lan y C. Chen (2006). An LMI and Fuzzy Model Approach to H∞ PIController Desing. Journal of the Chinese Institute of Engineers, vol. 29, no. 2.
Willsky, A.S. (1976). A survey of design methods for failure detection in dynamic systems.Autom., vol. 12, pag. 601-611.
Wu, E. (1997). Reliability criteria-based reconfigurable control system design. Proc. IFACSAFEPROCESS, pag. 1068-1073.
Zhou K., J. Doyle y K. Glover (1996). Robust and optimal control. Prentice Hall.

134 CAPITULO 6. CONCLUSIONES Y TRABAJOS FUTUROS
Anexo A
Obtencion de las matrices Ac, Bc, Cc, Dc, Ec
y Fc
A.1 Obtencion de la matriz Ac
Para obtener Ac(1, i) se tienen que realizar los siguientes calculos:
∂f1
∂x1
∣∣∣∣x∗,u,v
=∂
∂x1
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= − (u1 − v2u2)
A1ρ1x6
∣∣∣∣x∗,u,v
= −0.109
∂f1
∂x2
∣∣∣∣x∗,u,v
=∂
∂x2
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0
∂f1
∂x3
∣∣∣∣x∗,u,v
=∂
∂x3
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0
∂f1
∂x4
∣∣∣∣x∗,u,v
=∂
∂x4
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0
∂f1
∂x5
∣∣∣∣x∗,u,v
=∂
∂x5
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0
∂f1
∂x6
∣∣∣∣x∗,u,v
=∂
∂x6
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= − (u1v1 − (u1 − v2u2) x1)
A1ρ1x26
∣∣∣∣x∗,u,v
= −0.8e−6
∂f1
∂x7
∣∣∣∣x∗,u,v
=∂
∂x7
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0
∂f1
∂x8
∣∣∣∣x∗,u,v
=∂
∂x8
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0
∂f1
∂x9
∣∣∣∣x∗,u,v
=∂
∂x9
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0
∂f1
∂x10
∣∣∣∣x∗,u,v
=∂
∂x10
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0
135
136 ANEXO A. OBTENCION DE LAS MATRICES AC , BC , CC , DC , EC Y FC
Ac(2, i) se obtiene a partir de los siguientes calculos:
∂f2
∂x1
∣∣∣∣x∗,u,v
=∂
∂x1
(u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
)∣∣∣∣∣x∗,u,v
=u3√
x6ρ1
A2ρ2x7
∣∣∣∣x∗,u,v
= 0.21
∂f2
∂x2
∣∣∣∣x∗,u,v
=∂
∂x2
(u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
)∣∣∣∣∣x∗,u,v
= −(u3√
x6ρ1 − k2v2u2
)
A2ρ2x7
∣∣∣∣∣x∗,u,v
= −0.16
∂f2
∂x3
∣∣∣∣x∗,u,v
=∂
∂x3
(u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
)∣∣∣∣∣x∗,u,v
= 0
∂f2
∂x4
∣∣∣∣x∗,u,v
=∂
∂x4
(u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
)∣∣∣∣∣x∗,u,v
= 0
∂f2
∂x5
∣∣∣∣x∗,u,v
=∂
∂x5
(u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
)∣∣∣∣∣x∗,u,v
= 0
∂f2
∂x6
∣∣∣∣x∗,u,v
=∂
∂x6
(u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
)∣∣∣∣∣x∗,u,v
=(u3ρ1x1 − u3ρ1x2)
2A2ρ2√
x6x7
∣∣∣∣x∗,u,v
= −0.19
∂f2
∂x7
∣∣∣∣x∗,u,v
=∂
∂x7
(u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
)∣∣∣∣∣x∗,u,v
= − u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x27
∣∣∣∣∣x∗,u,v
= −1.1e−4
∂f2
∂x8
∣∣∣∣x∗,u,v
=∂
∂x8
(u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
)∣∣∣∣∣x∗,u,v
= 0
∂f2
∂x9
∣∣∣∣x∗,u,v
=∂
∂x9
(u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
)∣∣∣∣∣x∗,u,v
= 0
∂f2
∂x10
∣∣∣∣x∗,u,v
=∂
∂x10
(u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
)∣∣∣∣∣x∗,u,v
= 0
Ac(3, i) se obtiene a partir de los siguientes calculos:
∂f3
∂x1
∣∣∣∣x∗,u,v
=∂
∂x1
(u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
)∣∣∣∣∣x∗,u,v
= 0

A.1. OBTENCION DE LA MATRIZ AC 137
∂f3
∂x2
∣∣∣∣x∗,u,v
=∂
∂x2
(u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
)∣∣∣∣∣x∗,u,v
=u4√
x7ρ2
A3ρ3x8
∣∣∣∣x∗,u,v
= 0.17
∂f3
∂x3
∣∣∣∣x∗,u,v
=∂
∂x3
(u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
)∣∣∣∣∣x∗,u,v
=u4√
x7ρ2 − k3k2v2u2
A3ρ3x8
∣∣∣∣x∗,u,v
= −0.13
∂f3
∂x4
∣∣∣∣x∗,u,v
=∂
∂x4
(u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
)∣∣∣∣∣x∗,u,v
= 0
∂f3
∂x5
∣∣∣∣x∗,u,v
=∂
∂x5
(u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
)∣∣∣∣∣x∗,u,v
= 0
∂f3
∂x6
∣∣∣∣x∗,u,v
=∂
∂x6
(u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
)∣∣∣∣∣x∗,u,v
= 0
∂f3
∂x7
∣∣∣∣x∗,u,v
=∂
∂x7
(u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
)∣∣∣∣∣x∗,u,v
=u4ρ2x2 − u4ρ2x3
2A3ρ3√
x7x8
∣∣∣∣x∗,u,v
= −0.44
∂f3
∂x8
∣∣∣∣x∗,u,v
=∂
∂x8
(u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
)∣∣∣∣∣x∗,u,v
= − u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x28
∣∣∣∣∣x∗,u,v
= −2.1e−5
∂f3
∂x9
∣∣∣∣x∗,u,v
=∂
∂x9
(u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
)∣∣∣∣∣x∗,u,v
= 0
∂f3
∂x10
∣∣∣∣x∗,u,v
=∂
∂x10
(u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
)∣∣∣∣∣x∗,u,v
= 0
Ac(4, i) se obtiene a partir de los siguientes calculos:
∂f4
∂x1
∣∣∣∣x∗,u,v
=∂
∂x1
(u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
)∣∣∣∣∣x∗,u,v
= 0
∂f4
∂x2
∣∣∣∣x∗,u,v
=∂
∂x2
(u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
)∣∣∣∣∣x∗,u,v
= 0
138 ANEXO A. OBTENCION DE LAS MATRICES AC , BC , CC , DC , EC Y FC
∂f4
∂x3
∣∣∣∣x∗,u,v
=∂
∂x3
(u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
)∣∣∣∣∣x∗,u,v
=u5√
x8ρ3
A4ρ4x9
∣∣∣∣x∗,u,v
= 0.15
∂f4
∂x4
∣∣∣∣x∗,u,v
=∂
∂x4
(u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
)∣∣∣∣∣x∗,u,v
= −u5√
x8ρ3 − k4k3k2v2u2
A4ρ4x9
= −0.11
∂f4
∂x5
∣∣∣∣x∗,u,v
=∂
∂x5
(u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
)∣∣∣∣∣x∗,u,v
= 0
∂f4
∂x6
∣∣∣∣x∗,u,v
=∂
∂x6
(u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
)∣∣∣∣∣x∗,u,v
= 0
∂f4
∂x7
∣∣∣∣x∗,u,v
=∂
∂x7
(u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
)∣∣∣∣∣x∗,u,v
= 0
∂f4
∂x8
∣∣∣∣x∗,u,v
=∂
∂x8
(u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
)∣∣∣∣∣x∗,u,v
=u5ρ3x3 − u5ρ3x4
2A4ρ4√
x8x9
∣∣∣∣x∗,u,v
= −0.64
∂f4
∂x9
∣∣∣∣x∗,u,v
=∂
∂x9
(u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
)∣∣∣∣∣x∗,u,v
= − u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x29
∣∣∣∣∣x∗,u,v
= −9.5e−5
∂f4
∂x10
∣∣∣∣x∗,u,v
=∂
∂x10
(u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
)∣∣∣∣∣x∗,u,v
= 0
Ac(5, i) se obtiene a partir de los siguientes calculos:
∂f5
∂x1
∣∣∣∣x∗,u,v
=∂
∂x1
(u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
)∣∣∣∣∣x∗,u,v
= 0
∂f5
∂x2
∣∣∣∣x∗,u,v
=∂
∂x2
(u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
)∣∣∣∣∣x∗,u,v
= 0
∂f5
∂x3
∣∣∣∣x∗,u,v
=∂
∂x3
(u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
)∣∣∣∣∣x∗,u,v
= 0
∂f5
∂x4
∣∣∣∣x∗,u,v
=∂
∂x4
(u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
)∣∣∣∣∣x∗,u,v
=u6√
x9ρ4
A5ρ5x10
= 0.13

A.1. OBTENCION DE LA MATRIZ AC 139
∂f5
∂x5
∣∣∣∣x∗,u,v
=∂
∂x5
(u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
)∣∣∣∣∣x∗,u,v
= −(u6√
x9ρ4 − k5k4k3k2v2u2
)
A5ρ5x10
= −0.09
∂f5
∂x6
∣∣∣∣x∗,u,v
=∂
∂x6
(u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
)∣∣∣∣∣x∗,u,v
= 0
∂f5
∂x7
∣∣∣∣x∗,u,v
=∂
∂x7
(u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
)∣∣∣∣∣x∗,u,v
= 0
∂f5
∂x8
∣∣∣∣x∗,u,v
=∂
∂x8
(u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
)∣∣∣∣∣x∗,u,v
= 0
∂f5
∂x9
∣∣∣∣x∗,u,v
=∂
∂x9
(u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
)∣∣∣∣∣x∗,u,v
=u6ρ4x4 − u6ρ4x5
2A5ρ5√
x9x10
∣∣∣∣x∗,u,v
= −1.17
∂f5
∂x10
∣∣∣∣x∗,u,v
=∂
∂x10
(u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
)∣∣∣∣∣x∗,u,v
= − u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x210
∣∣∣∣∣x∗,u,v
= −5.4e−5
Ac(6, i) se obtiene a partir de los siguientes calculos:
∂f6
∂x1
∣∣∣∣x∗,u,v
=∂
∂x1
(u1 − u3
√x6ρ1 − u2v2
A1ρ1
)∣∣∣∣x∗,u,v
= 0
∂f6
∂x2
∣∣∣∣x∗,u,v
=∂
∂x2
(u1 − u3
√x6ρ1 − u2v2
A1ρ1
)∣∣∣∣x∗,u,v
= 0
∂f6
∂x3
∣∣∣∣x∗,u,v
=∂
∂x3
(u1 − u3
√x6ρ1 − u2v2
A1ρ1
)∣∣∣∣x∗,u,v
= 0
∂f6
∂x4
∣∣∣∣x∗,u,v
=∂
∂x4
(u1 − u3
√x6ρ1 − u2v2
A1ρ1
)∣∣∣∣x∗,u,v
= 0
∂f6
∂x5
∣∣∣∣x∗,u,v
=∂
∂x5
(u1 − u3
√x6ρ1 − u2v2
A1ρ1
)∣∣∣∣x∗,u,v
= 0
∂f6
∂x6
∣∣∣∣x∗,u,v
=∂
∂x6
(u1 − u3
√x6ρ1 − u2v2
A1ρ1
)∣∣∣∣x∗,u,v
= − u3
2A1√
x6
∣∣∣∣x∗,u,v
= −0.06
140 ANEXO A. OBTENCION DE LAS MATRICES AC , BC , CC , DC , EC Y FC
∂f6
∂x7
∣∣∣∣x∗,u,v
=∂
∂x7
(u1 − u3
√x6ρ1 − u2v2
A1ρ1
)∣∣∣∣x∗,u,v
= 0
∂f6
∂x8
∣∣∣∣x∗,u,v
=∂
∂x8
(u1 − u3
√x6ρ1 − u2v2
A1ρ1
)∣∣∣∣x∗,u,v
= 0
∂f6
∂x9
∣∣∣∣x∗,u,v
=∂
∂x9
(u1 − u3
√x6ρ1 − u2v2
A1ρ1
)∣∣∣∣x∗,u,v
= 0
∂f6
∂x10
∣∣∣∣x∗,u,v
=∂
∂x10
(u1 − u3
√x6ρ1 − u2v2
A1ρ1
)∣∣∣∣x∗,u,v
= 0
Ac(7, i) se obtiene a partir de los siguientes calculos:
∂f7
∂x1
∣∣∣∣x∗,u,v
=∂
∂x1
(u3√
x6ρ1 − u4√
x7ρ2 − k2u2v2
A2ρ2
)∣∣∣∣x∗,u,v
= 0
∂f7
∂x2
∣∣∣∣x∗,u,v
=∂
∂x2
(u3√
x6ρ1 − u4√
x7ρ2 − k2u2v2
A2ρ2
)∣∣∣∣x∗,u,v
= 0
∂f7
∂x3
∣∣∣∣x∗,u,v
=∂
∂x3
(u3√
x6ρ1 − u4√
x7ρ2 − k2u2v2
A2ρ2
)∣∣∣∣x∗,u,v
= 0
∂f7
∂x4
∣∣∣∣x∗,u,v
=∂
∂x4
(u3√
x6ρ1 − u4√
x7ρ2 − k2u2v2
A2ρ2
)∣∣∣∣x∗,u,v
= 0
∂f7
∂x5
∣∣∣∣x∗,u,v
=∂
∂x5
(u3√
x6ρ1 − u4√
x7ρ2 − k2u2v2
A2ρ2
)∣∣∣∣x∗,u,v
= 0
∂f7
∂x6
∣∣∣∣x∗,u,v
=∂
∂x6
(u3√
x6ρ1 − u4√
x7ρ2 − k2u2v2
A2ρ2
)∣∣∣∣x∗,u,v
=u3ρ1
2A2ρ2√
x6
∣∣∣∣x∗,u,v
= 0.05
∂f7
∂x7
∣∣∣∣x∗,u,v
=∂
∂x7
(u3√
x6ρ1 − u4√
x7ρ2 − k2u2v2
A2ρ2
)∣∣∣∣x∗,u,v
= − u4ρ2
2A2ρ2√
x7
∣∣∣∣x∗,u,v
= −0.08
∂f7
∂x8
∣∣∣∣x∗,u,v
=∂
∂x8
(u3√
x6ρ1 − u4√
x7ρ2 − k2u2v2
A2ρ2
)∣∣∣∣x∗,u,v
= 0
∂f7
∂x9
∣∣∣∣x∗,u,v
=∂
∂x9
(u3√
x6ρ1 − u4√
x7ρ2 − k2u2v2
A2ρ2
)∣∣∣∣x∗,u,v
= 0
∂f7
∂x10
∣∣∣∣x∗,u,v
=∂
∂x10
(u3√
x6ρ1 − u4√
x7ρ2 − k2u2v2
A2ρ2
)∣∣∣∣x∗,u,v
= 0
Ac(8, i) se obtiene a partir de los siguientes calculos:
∂f8
∂x1
∣∣∣∣x∗,u,v
=∂
∂x1
(u4√
x7ρ2 − u5√
x8ρ3 − k3k2u2v2
A3ρ3
)∣∣∣∣x∗,u,v
= 0
∂f8
∂x2
∣∣∣∣x∗,u,v
=∂
∂x2
(u4√
x7ρ2 − u5√
x8ρ3 − k3k2u2v2
A3ρ3
)∣∣∣∣x∗,u,v
= 0
A.1. OBTENCION DE LA MATRIZ AC 141
∂f8
∂x3
∣∣∣∣x∗,u,v
=∂
∂x3
(u4√
x7ρ2 − u5√
x8ρ3 − k3k2u2v2
A3ρ3
)∣∣∣∣x∗,u,v
= 0
∂f8
∂x4
∣∣∣∣x∗,u,v
=∂
∂x4
(u4√
x7ρ2 − u5√
x8ρ3 − k3k2u2v2
A3ρ3
)∣∣∣∣x∗,u,v
= 0
∂f8
∂x5
∣∣∣∣x∗,u,v
=∂
∂x5
(u4√
x7ρ2 − u5√
x8ρ3 − k3k2u2v2
A3ρ3
)∣∣∣∣x∗,u,v
= 0
∂f8
∂x6
∣∣∣∣x∗,u,v
=∂
∂x6
(u4√
x7ρ2 − u5√
x8ρ3 − k3k2u2v2
A3ρ3
)∣∣∣∣x∗,u,v
= 0
∂f8
∂x7
∣∣∣∣x∗,u,v
=∂
∂x7
(u4√
x7ρ2 − u5√
x8ρ3 − k3k2u2v2
A3ρ3
)∣∣∣∣x∗,u,v
=u4ρ2
2A3ρ3√
x7
∣∣∣∣x∗,u,v
= 0.08
∂f8
∂x8
∣∣∣∣x∗,u,v
=∂
∂x8
(u4√
x7ρ2 − u5√
x8ρ3 − k3k2u2v2
A3ρ3
)∣∣∣∣x∗,u,v
= − u5ρ3
2A3ρ3√
x8
∣∣∣∣x∗,u,v
= −0.07
∂f8
∂x9
∣∣∣∣x∗,u,v
=∂
∂x9
(u4√
x7ρ2 − u5√
x8ρ3 − k3k2u2v2
A3ρ3
)∣∣∣∣x∗,u,v
= 0
∂f8
∂x10
∣∣∣∣x∗,u,v
=∂
∂x10
(u4√
x7ρ2 − u5√
x8ρ3 − k3k2u2v2
A3ρ3
)∣∣∣∣x∗,u,v
= 0
Ac(9, i) se obtiene a partir de los siguientes calculos:
∂f9
∂x1
∣∣∣∣x∗,u,v
=∂
∂x1
(u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2u2v2
A4ρ4
)∣∣∣∣x∗,u,v
= 0
∂f9
∂x2
∣∣∣∣x∗,u,v
=∂
∂x2
(u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2u2v2
A4ρ4
)∣∣∣∣x∗,u,v
= 0
∂f9
∂x3
∣∣∣∣x∗,u,v
=∂
∂x3
(u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2u2v2
A4ρ4
)∣∣∣∣x∗,u,v
= 0
∂f9
∂x4
∣∣∣∣x∗,u,v
=∂
∂x4
(u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2u2v2
A4ρ4
)∣∣∣∣x∗,u,v
= 0
∂f9
∂x5
∣∣∣∣x∗,u,v
=∂
∂x5
(u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2u2v2
A4ρ4
)∣∣∣∣x∗,u,v
= 0
∂f9
∂x6
∣∣∣∣x∗,u,v
=∂
∂x6
(u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2u2v2
A4ρ4
)∣∣∣∣x∗,u,v
= 0
∂f9
∂x7
∣∣∣∣x∗,u,v
=∂
∂x7
(u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2u2v2
A4ρ4
)∣∣∣∣x∗,u,v
= 0
∂f9
∂x8
∣∣∣∣x∗,u,v
=∂
∂x8
(u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2u2v2
A4ρ4
)∣∣∣∣x∗,u,v
=u5ρ3
2A4ρ4√
x8
∣∣∣∣x∗,u,v
= 0.06
∂f9
∂x9
∣∣∣∣x∗,u,v
=∂
∂x9
(u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2u2v2
A4ρ4
)∣∣∣∣x∗,u,v
= − u6ρ4
2A4ρ4√
x9
∣∣∣∣x∗,u,v
= −0.05

142 ANEXO A. OBTENCION DE LAS MATRICES AC , BC , CC , DC , EC Y FC
∂f9
∂x10
∣∣∣∣x∗,u,v
=∂
∂x10
(u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2u2v2
A4ρ4
)∣∣∣∣x∗,u,v
= 0
Ac(10, i) se obtiene a partir de los siguientes calculos:
∂f10
∂x1
∣∣∣∣x∗,u,v
=∂
∂x1
(u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2u2v2
A5ρ5
)∣∣∣∣x∗,u,v
= 0
∂f10
∂x2
∣∣∣∣x∗,u,v
=∂
∂x2
(u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2u2v2
A5ρ5
)∣∣∣∣x∗,u,v
= 0
∂f10
∂x3
∣∣∣∣x∗,u,v
=∂
∂x3
(u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2u2v2
A5ρ5
)∣∣∣∣x∗,u,v
= 0
∂f10
∂x4
∣∣∣∣x∗,u,v
=∂
∂x4
(u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2u2v2
A5ρ5
)∣∣∣∣x∗,u,v
= 0
∂f10
∂x5
∣∣∣∣x∗,u,v
=∂
∂x5
(u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2u2v2
A5ρ5
)∣∣∣∣x∗,u,v
= 0
∂f10
∂x6
∣∣∣∣x∗,u,v
=∂
∂x6
(u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2u2v2
A5ρ5
)∣∣∣∣x∗,u,v
= 0
∂f10
∂x7
∣∣∣∣x∗,u,v
=∂
∂x7
(u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2u2v2
A5ρ5
)∣∣∣∣x∗,u,v
= 0
∂f10
∂x8
∣∣∣∣x∗,u,v
=∂
∂x8
(u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2u2v2
A5ρ5
)∣∣∣∣x∗,u,v
= 0
∂f10
∂x9
∣∣∣∣x∗,u,v
=∂
∂x9
(u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2u2v2
A5ρ5
)∣∣∣∣x∗,u,v
=u6ρ4
2A5ρ5√
x9
∣∣∣∣x∗,u,v
= 0.05
∂f10
∂x10
∣∣∣∣x∗,u,v
=∂
∂x10
(u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2u2v2
A5ρ5
)∣∣∣∣x∗,u,v
= − K5ρ5
2A5ρ5√
x10
∣∣∣∣x∗,u,v
= −0.05
A.2 Obtencion de la matriz Bc
Para obtener Bc(1, i) se tienen que realizar los siguientes calculos:
∂f1
∂u1
∣∣∣∣x∗,u,v
=∂
∂u1
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
=v1 − x1
A1ρ1x6
∣∣∣∣x∗,u,v
= −8.8e−5
∂f1
∂u2
∣∣∣∣x∗,u,v
=∂
∂u2
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
=v2x1
A1ρ1x6
∣∣∣∣x∗,u,v
= 1.8e−4
∂f1
∂u3
∣∣∣∣x∗,u,v
=∂
∂u3
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0
∂f1
∂u4
∣∣∣∣x∗,u,v
=∂
∂u4
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0

A.2. OBTENCION DE LA MATRIZ BC 143
∂f1
∂u5
∣∣∣∣x∗,u,v
=∂
∂u5
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0
∂f1
∂u6
∣∣∣∣x∗,u,v
=∂
∂u6
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
= 0
Bc(2, i) se obtiene a partir de los siguientes calculos:
∂f2
∂u1
∣∣∣∣x∗,u,v
=∂
∂u1
(u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
)∣∣∣∣∣x∗,u,v
= 0
∂f2
∂u2
∣∣∣∣x∗,u,v
=∂
∂u2
(u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
)∣∣∣∣∣x∗,u,v
=k2v2x2
A2ρ2x7
∣∣∣∣x∗,u,v
= 2.4e−4
∂f2
∂u3
∣∣∣∣x∗,u,v
=∂
∂u3
(u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
)∣∣∣∣∣x∗,u,v
=ρ1x1
√x6 − ρ1x2
√x6
A2ρ2x7
∣∣∣∣x∗,u,v
= −0.46
∂f2
∂u4
∣∣∣∣x∗,u,v
=∂
∂u4
(u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
)∣∣∣∣∣x∗,u,v
= 0
∂f2
∂u5
∣∣∣∣x∗,u,v
=∂
∂u5
(u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
)∣∣∣∣∣x∗,u,v
= 0
∂f2
∂u6
∣∣∣∣x∗,u,v
=∂
∂u6
(u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
)∣∣∣∣∣x∗,u,v
= 0
Bc(3, i) se obtiene a partir de los siguientes calculos:
∂f3
∂u1
∣∣∣∣x∗,u,v
=∂
∂u1
(u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
)∣∣∣∣∣x∗,u,v
= 0
∂f3
∂u2
∣∣∣∣x∗,u,v
=∂
∂u2
(u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
)∣∣∣∣∣x∗,u,v
=k3k2v2x3
A3ρ3x8
∣∣∣∣x∗,u,v
= 2.9e−4
∂f3
∂u3
∣∣∣∣x∗,u,v
=∂
∂u3
(u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
)∣∣∣∣∣x∗,u,v
= 0
∂f3
∂u4
∣∣∣∣x∗,u,v
=∂
∂u4
(u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
)∣∣∣∣∣x∗,u,v
=
√x7ρ2x2 −√x7ρ2x3
A3ρ3x8
∣∣∣∣x∗,u,v
= −0.52

144 ANEXO A. OBTENCION DE LAS MATRICES AC , BC , CC , DC , EC Y FC
∂f3
∂u5
∣∣∣∣x∗,u,v
=∂
∂u5
(u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
)∣∣∣∣∣x∗,u,v
= 0
∂f3
∂u6
∣∣∣∣x∗,u,v
=∂
∂u6
(u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
)∣∣∣∣∣x∗,u,v
= 0
Bc(4, i) se obtiene a partir de los siguientes calculos:
∂f4
∂u1
∣∣∣∣x∗,u,v
=∂
∂u1
(u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
)∣∣∣∣∣x∗,u,v
= 0
∂f4
∂u2
∣∣∣∣x∗,u,v
=∂
∂u2
(u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
)∣∣∣∣∣x∗,u,v
=k4k3k2v2x4
A4ρ4x9
∣∣∣∣x∗,u,v
= 3.7e−4
∂f4
∂u3
∣∣∣∣x∗,u,v
=∂
∂u3
(u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
)∣∣∣∣∣x∗,u,v
= 0
∂f4
∂u4
∣∣∣∣x∗,u,v
=∂
∂u4
(u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
)∣∣∣∣∣x∗,u,v
= 0
∂f4
∂u5
∣∣∣∣x∗,u,v
=∂
∂u5
(u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
)∣∣∣∣∣x∗,u,v
=
√x8ρ3x3 −√x8ρ3x4
A4ρ4x9
∣∣∣∣x∗,u,v
= −0.88
∂f4
∂u6
∣∣∣∣x∗,u,v
=∂
∂u6
(u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
)∣∣∣∣∣x∗,u,v
= 0
Bc(5, i) se obtiene a partir de los siguientes calculos:
∂f5
∂u1
∣∣∣∣x∗,u,v
=∂
∂u1
(u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
)∣∣∣∣∣x∗,u,v
= 0
∂f5
∂u2
∣∣∣∣x∗,u,v
=∂
∂u2
(u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
)∣∣∣∣∣x∗,u,v
=k5k4k3k2v2x5
A5ρ5x10
= 5.6e−4
∂f5
∂u3
∣∣∣∣x∗,u,v
=∂
∂u3
(u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
)∣∣∣∣∣x∗,u,v
= 0
∂f5
∂u4
∣∣∣∣x∗,u,v
=∂
∂u4
(u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
)∣∣∣∣∣x∗,u,v
= 0
∂f5
∂u5
∣∣∣∣x∗,u,v
=∂
∂u5
(u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
)∣∣∣∣∣x∗,u,v
= 0
A.2. OBTENCION DE LA MATRIZ BC 145
∂f5
∂u6
∣∣∣∣x∗,u,v
=∂
∂u6
(u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
)∣∣∣∣∣x∗,u,v
=
√x9ρ4x4 −√x9ρ4x5
A5ρ5x10
= −1.8
Bc(6, i) se obtiene a partir de los siguientes calculos:
∂f6
∂u1
∣∣∣∣x∗,u,v
=∂
∂u1
(u1 − u3
√x6ρ1 − u2v2
A1ρ1
)∣∣∣∣x∗,u,v
=1
A1ρ1
∣∣∣∣x∗,u,v
= 4.9e−5
∂f6
∂u2
∣∣∣∣x∗,u,v
=∂
∂u2
(u1 − u3
√x6ρ1 − u2v2
A1ρ1
)∣∣∣∣x∗,u,v
= − v2
A1ρ1
∣∣∣∣x∗,u,v
= −3.1e−5
∂f6
∂u3
∣∣∣∣x∗,u,v
=∂
∂u3
(u1 − u3
√x6ρ1 − u2v2
A1ρ1
)∣∣∣∣x∗,u,v
= −√
x6ρ1
A1ρ1
∣∣∣∣x∗,u,v
= −0.13
∂f6
∂u4
∣∣∣∣x∗,u,v
=∂
∂u4
(u1 − u3
√x6ρ1 − u2v2
A1ρ1
)∣∣∣∣x∗,u,v
= 0
∂f6
∂u5
∣∣∣∣x∗,u,v
=∂
∂u5
(u1 − u3
√x6ρ1 − u2v2
A1ρ1
)∣∣∣∣x∗,u,v
= 0
∂f6
∂u6
∣∣∣∣x∗,u,v
=∂
∂u6
(u1 − u3
√x6ρ1 − u2v2
A1ρ1
)∣∣∣∣x∗,u,v
= 0
Bc(7, i) se obtiene a partir de los siguientes calculos:
∂f7
∂u1
∣∣∣∣x∗,u,v
=∂
∂u1
(u3√
x6ρ1 − u4√
x7ρ2 − k2u2v2
A2ρ2
)∣∣∣∣x∗,u,v
= 0
∂f7
∂u2
∣∣∣∣x∗,u,v
=∂
∂u2
(u3√
x6ρ1 − u4√
x7ρ2 − k2u2v2
A2ρ2
)∣∣∣∣x∗,u,v
= − k2v2
A2ρ2
∣∣∣∣x∗,u,v
= −1.6e−5
∂f7
∂u3
∣∣∣∣x∗,u,v
=∂
∂u3
(u3√
x6ρ1 − u4√
x7ρ2 − k2u2v2
A2ρ2
)∣∣∣∣x∗,u,v
=
√x6ρ1
A2ρ2
∣∣∣∣x∗,u,v
= 0.13
∂f7
∂u4
∣∣∣∣x∗,u,v
=∂
∂u4
(u3√
x6ρ1 − u4√
x7ρ2 − k2u2v2
A2ρ2
)∣∣∣∣x∗,u,v
= −√
x7ρ2
A2ρ2
∣∣∣∣x∗,u,v
= −0.10
∂f7
∂u5
∣∣∣∣x∗,u,v
=∂
∂u5
(u3√
x6ρ1 − u4√
x7ρ2 − k2u2v2
A2ρ2
)∣∣∣∣x∗,u,v
= 0
∂f7
∂u6
∣∣∣∣x∗,u,v
=∂
∂u6
(u3√
x6ρ1 − u4√
x7ρ2 − k2u2v2
A2ρ2
)∣∣∣∣x∗,u,v
= 0
Bc(8, i) se obtiene a partir de los siguientes calculos:
∂f8
∂u1
∣∣∣∣x∗,u,v
=∂
∂u1
(u4√
x7ρ2 − u5√
x8ρ3 − k3k2u2v2
A3ρ3
)∣∣∣∣x∗,u,v
= 0
146 ANEXO A. OBTENCION DE LAS MATRICES AC , BC , CC , DC , EC Y FC
∂f8
∂u2
∣∣∣∣x∗,u,v
=∂
∂u2
(u4√
x7ρ2 − u5√
x8ρ3 − k3k2u2v2
A3ρ3
)∣∣∣∣x∗,u,v
= − k3k2v2
A3ρ3
∣∣∣∣x∗,u,v
= −1.2e−5
∂f8
∂u3
∣∣∣∣x∗,u,v
=∂
∂u3
(u4√
x7ρ2 − u5√
x8ρ3 − k3k2u2v2
A3ρ3
)∣∣∣∣x∗,u,v
= 0
∂f8
∂u4
∣∣∣∣x∗,u,v
=∂
∂u4
(u4√
x7ρ2 − u5√
x8ρ3 − k3k2u2v2
A3ρ3
)∣∣∣∣x∗,u,v
=
√x7ρ2
A3ρ3
∣∣∣∣x∗,u,v
= 0.09
∂f8
∂u5
∣∣∣∣x∗,u,v
=∂
∂u5
(u4√
x7ρ2 − u5√
x8ρ3 − k3k2u2v2
A3ρ3
)∣∣∣∣x∗,u,v
= −√
x8ρ3
A3ρ3
∣∣∣∣x∗,u,v
= −0.09
∂f8
∂u6
∣∣∣∣x∗,u,v
=∂
∂u6
(u4√
x7ρ2 − u5√
x8ρ3 − k3k2u2v2
A3ρ3
)∣∣∣∣x∗,u,v
= 0
Bc(9, i) se obtiene a partir de los siguientes calculos:
∂f9
∂u1
∣∣∣∣x∗,u,v
=∂
∂u1
(u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2u2v2
A4ρ4
)∣∣∣∣x∗,u,v
= 0
∂f9
∂u2
∣∣∣∣x∗,u,v
=∂
∂u2
(u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2u2v2
A4ρ4
)∣∣∣∣x∗,u,v
= − k4k3k2v2
A4ρ4
∣∣∣∣x∗,u,v
= −9.5e−6
∂f9
∂u3
∣∣∣∣x∗,u,v
=∂
∂u3
(u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2u2v2
A4ρ4
)∣∣∣∣x∗,u,v
= 0
∂f9
∂u4
∣∣∣∣x∗,u,v
=∂
∂u4
(u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2u2v2
A4ρ4
)∣∣∣∣x∗,u,v
= 0
∂f9
∂u5
∣∣∣∣x∗,u,v
=∂
∂u5
(u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2u2v2
A4ρ4
)∣∣∣∣x∗,u,v
=
√x8ρ3
A4ρ4
∣∣∣∣x∗,u,v
= 0.08
∂f9
∂u6
∣∣∣∣x∗,u,v
=∂
∂u6
(u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2u2v2
A4ρ4
)∣∣∣∣x∗,u,v
= −√
x9ρ4
A4ρ4
∣∣∣∣x∗,u,v
= −0.08
Bc(10, i) se obtiene a partir de los siguientes calculos:
∂f10
∂u1
∣∣∣∣x∗,u,v
=∂
∂u1
(u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2u2v2
A5ρ5
)∣∣∣∣x∗,u,v
= 0
∂f10
∂u2
∣∣∣∣x∗,u,v
=∂
∂u2
(u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2u2v2
A5ρ5
)∣∣∣∣x∗,u,v
= − k5k4k3k2v2
A5ρ5
∣∣∣∣x∗,u,v
= −7.4e−6
∂f10
∂u3
∣∣∣∣x∗,u,v
=∂
∂u3
(u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2u2v2
A5ρ5
)∣∣∣∣x∗,u,v
= 0
∂f10
∂u4
∣∣∣∣x∗,u,v
=∂
∂u4
(u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2u2v2
A5ρ5
)∣∣∣∣x∗,u,v
= 0
∂f10
∂u5
∣∣∣∣x∗,u,v
=∂
∂u5
(u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2u2v2
A5ρ5
)∣∣∣∣x∗,u,v
= 0
A.3. OBTENCION DE LA MATRIZ EC 147
∂f10
∂u6
∣∣∣∣x∗,u,v
=∂
∂u6
(u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2u2v2
A5ρ5
)∣∣∣∣x∗,u,v
=
√x9ρ4
A5ρ5
∣∣∣∣x∗,u,v
= 0.08
A.3 Obtencion de la matriz Ec
Ec(1, i) se obtiene a partir de los siguientes calculos:
∂f1
∂v1
∣∣∣∣x∗,u,v
=∂
∂v1
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
=u1
A1ρ1x6
∣∣∣∣x∗,u,v
= 0.16
∂f1
∂v2
∣∣∣∣x∗,u,v
=∂
∂v2
(u1v1 − (u1 − v2u2) x1
A1ρ1x6
)∣∣∣∣x∗,u,v
=u2x1
A1ρ1x6
∣∣∣∣x∗,u,v
= 1.6
Ec(2, i) se obtiene a partir de los siguientes calculos:
∂f2
∂v1
∣∣∣∣x∗,u,v
=∂
∂v1
(u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
)∣∣∣∣∣x∗,u,v
= 0
∂f2
∂v2
∣∣∣∣x∗,u,v
=∂
∂v2
(u3√
x6ρ1x1 −(u3√
x6ρ1 − k2v2u2
)x2
A2ρ2x7
)∣∣∣∣∣x∗,u,v
=k2u2x2
A2ρ2x7
∣∣∣∣x∗,u,v
= 2.1
Ec(3, i) se obtiene a partir de los siguientes calculos:
∂f3
∂v1
∣∣∣∣x∗,u,v
=∂
∂v1
(u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
)∣∣∣∣∣x∗,u,v
= 0
∂f3
∂v2
∣∣∣∣x∗,u,v
=∂
∂v2
(u4√
x7ρ2x2 −(u4√
x7ρ2 − k3k2v2u2
)x3
A3ρ3x8
)∣∣∣∣∣x∗,u,v
=k3k2u2x3
A3ρ3x8
∣∣∣∣x∗,u,v
= 2.5
Ec(4, i) se obtiene a partir de los siguientes calculos:
∂f4
∂v1
∣∣∣∣x∗,u,v
=∂
∂v1
(u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
)∣∣∣∣∣x∗,u,v
= 0
∂f4
∂v2
∣∣∣∣x∗,u,v
=∂
∂v2
(u5√
x8ρ3x3 −(u5√
x8ρ3 − k4k3k2v2u2
)x4
A4ρ4x9
)∣∣∣∣∣x∗,u,v
=k4k3k2u2x4
A4ρ4x9
∣∣∣∣x∗,u,v
= 3.2
Ec(5, i) se obtiene a partir de los siguientes calculos:
∂f5
∂v1
∣∣∣∣x∗,u,v
=∂
∂v1
(u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
)∣∣∣∣∣x∗,u,v
= 0
∂f5
∂v2
∣∣∣∣x∗,u,v
=∂
∂v2
(u6√
x9ρ4x4 −(u6√
x9ρ4 − k5k4k3k2v2u2
)x5
A5ρ5x10
)∣∣∣∣∣x∗,u,v
=k5k4k3k2u2x5
A5ρ5x10
= 4.8

148 ANEXO A. OBTENCION DE LAS MATRICES AC , BC , CC , DC , EC Y FC
Ec(6, i) se obtiene a partir de los siguientes calculos:
∂f6
∂v1
∣∣∣∣x∗,u,v
=∂
∂v1
(u1 − u3
√x6ρ1 − u2v2
A1ρ1
)∣∣∣∣x∗,u,v
= 0
∂f6
∂v2
∣∣∣∣x∗,u,v
=∂
∂v2
(u1 − u3
√x6ρ1 − u2v2
A1ρ1
)∣∣∣∣x∗,u,v
= − u2
A1ρ1
∣∣∣∣x∗,u,v
= −0.26
Ec(7, i) se obtiene a partir de los siguientes calculos:
∂f7
∂v1
∣∣∣∣x∗,u,v
=∂
∂v1
(u3√
x6ρ1 − u4√
x7ρ2 − k2u2v2
A2ρ2
)∣∣∣∣x∗,u,v
= 0
∂f7
∂v2
∣∣∣∣x∗,u,v
=∂
∂v2
(u3√
x6ρ1 − u4√
x7ρ2 − k2u2v2
A2ρ33
)∣∣∣∣x∗,u,v
= − k2u2
A2ρ2
∣∣∣∣x∗,u,v
= −0.13
Ec(8, i) se obtiene a partir de los siguientes calculos:
∂f8
∂v1
∣∣∣∣x∗,u,v
=∂
∂v1
(u4√
x7ρ2 − u5√
x8ρ3 − k3k2u2v2
A3ρ3
)∣∣∣∣x∗,u,v
= 0
∂f8
∂v2
∣∣∣∣x∗,u,v
=∂
∂v2
(u4√
x7ρ2 − u5√
x8ρ3 − k3k2u2v2
A3ρ3
)∣∣∣∣x∗,u,v
= − k3k2u2
A3ρ3
∣∣∣∣x∗,u,v
= −0.11
Ec(9, i) se obtiene a partir de los siguientes calculos:
∂f9
∂v1
∣∣∣∣x∗,u,v
=∂
∂v1
(u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2u2v2
A4ρ4
)∣∣∣∣x∗,u,v
= 0
∂f9
∂v2
∣∣∣∣x∗,u,v
=∂
∂v2
(u5√
x8ρ3 − u6√
x9ρ4 − k4k3k2u2v2
A4ρ4
)∣∣∣∣x∗,u,v
= − k4k3k2u2
A4ρ4
∣∣∣∣x∗,u,v
= −0.08
Ec(10, i) se obtiene a partir de los siguientes calculos:
∂f10
∂v1
∣∣∣∣x∗,u,v
=∂
∂v1
(u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2u2v2
A5ρ5
)∣∣∣∣x∗,u,v
= 0
∂f10
∂v2
∣∣∣∣x∗,u,v
=∂
∂v2
(u6√
x9ρ4 −K5√
x10ρ5 − k5k4k3k2u2v2
A5ρ5
)∣∣∣∣x∗,u,v
= − k5k4k3k2u2
A5ρ5
∣∣∣∣x∗,u,v
= −0.06
A.4 Obtencion de la matriz Cc
La matriz Cc es una matriz identidad de dimension 10×10, ya que como se mencionoen algunos de los capıtulos, se consideran todos los estados medibles.
A.5. OBTENCION DE LA MATRIZ DC 149
A.5 Obtencion de la matriz Dc
La matriz Dc es una matriz de ceros ya que la salida unicamente depende de losestados, no ası de las entradas, la dimension de dicha matriz es de 10× 6.
A.6 Obtencion de la matriz Fc
La matriz Fc es una matriz de ceros, esto se debe al mismo motivo mencionadoanteriormente (la salida solo depende de los estados), la dimension de esta matriz es de10× 2.
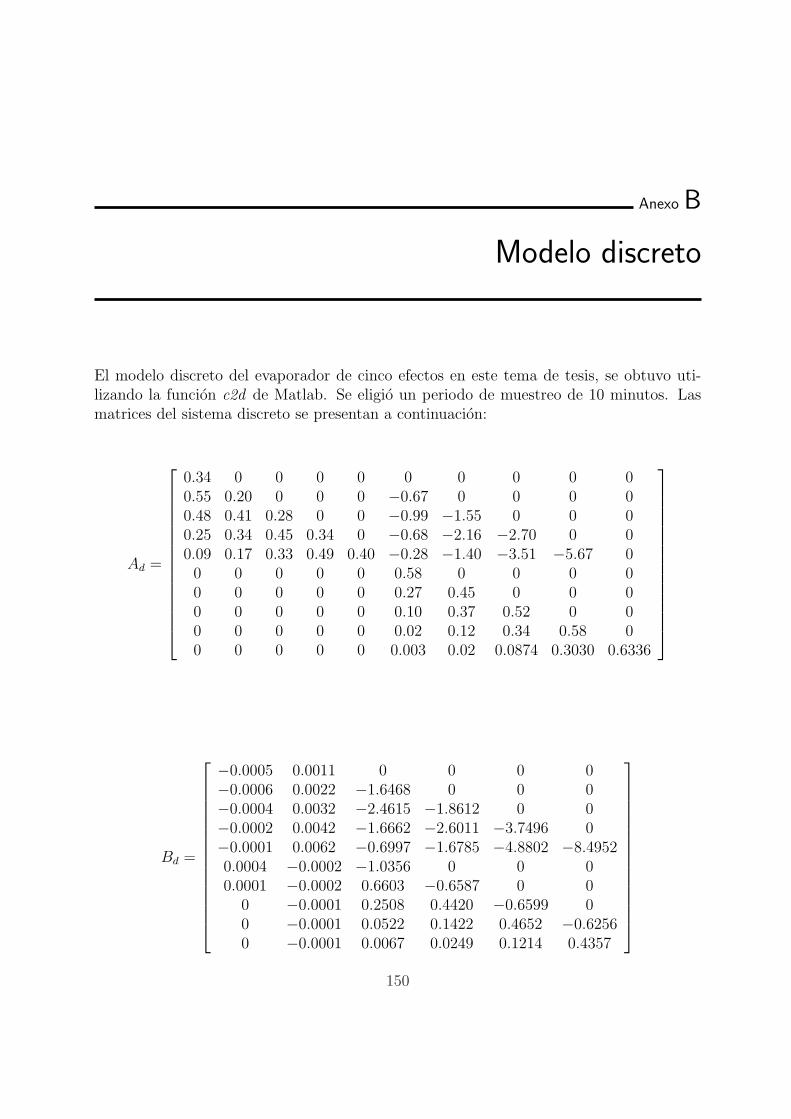
Anexo B
Modelo discreto
El modelo discreto del evaporador de cinco efectos en este tema de tesis, se obtuvo uti-lizando la funcion c2d de Matlab. Se eligio un periodo de muestreo de 10 minutos. Lasmatrices del sistema discreto se presentan a continuacion:
Ad =
0.34 0 0 0 0 0 0 0 0 00.55 0.20 0 0 0 −0.67 0 0 0 00.48 0.41 0.28 0 0 −0.99 −1.55 0 0 00.25 0.34 0.45 0.34 0 −0.68 −2.16 −2.70 0 00.09 0.17 0.33 0.49 0.40 −0.28 −1.40 −3.51 −5.67 00 0 0 0 0 0.58 0 0 0 00 0 0 0 0 0.27 0.45 0 0 00 0 0 0 0 0.10 0.37 0.52 0 00 0 0 0 0 0.02 0.12 0.34 0.58 00 0 0 0 0 0.003 0.02 0.0874 0.3030 0.6336
Bd =
−0.0005 0.0011 0 0 0 0−0.0006 0.0022 −1.6468 0 0 0−0.0004 0.0032 −2.4615 −1.8612 0 0−0.0002 0.0042 −1.6662 −2.6011 −3.7496 0−0.0001 0.0062 −0.6997 −1.6785 −4.8802 −8.49520.0004 −0.0002 −1.0356 0 0 00.0001 −0.0002 0.6603 −0.6587 0 0
0 −0.0001 0.2508 0.4420 −0.6599 00 −0.0001 0.0522 0.1422 0.4652 −0.62560 −0.0001 0.0067 0.0249 0.1214 0.4357
150

151
Ed =
0.9508 9.61490.6989 18.75530.3550 27.34740.1275 36.37510.0341 52.6395
0 −2.03750 −1.38030 −1.20700 −0.92580 −0.7000
Los valores propios discretos, se muestran a continuacion:
σ (Ad) =
[0.4014 0.3391 0.2753 0.2043 0.3364 · · ·· · · 0.6336 0.5823 0.5247 0.4520 0.5800
]
Todos los valores propios discretos del sistema estan dentro del cırculo unitario, loque afirma la estabilidad del sistema discreto.
Para elegir el tiempo de muestreo del sistema discreto, se realizo un analisis de laestabilidad del sistema en base a los polos discretos. Si se eligen periodos de muestreospequenos (como Ts < 1), los polos discretos se acercan a 1, por lo que el sistema dis-creto tiende a ser inestable (esto es, los polos se situan en el lımite del cırculo unitario).Si se eligen periodos de muestreos grandes (como Ts > 40), los polos discretos se acercana 0, sin embargo, con estos periodos de muestreo se pierde la dinamica del sistema continuo.
Aunque la literatura menciona, que se debe elegir un periodo de muestreo dentro delintervalo resultante de la division de la constante de tiempo entre 4 y 10, lo que darıa unintervalo de 9 a 22.5 minutos para este sistema, en esta tesis se propone un rango de 1 a40 minutos en base a lo obtenido en el analisis de estabilidad.
En el capıtulo 4, se realizo un analisis de la controlabiliad y observabilidad del sistemacontinuo. De manera similar se llevo a cabo para el sistema discreto. La matriz decontrolabilidad para el sistema discreto resulto de 10× 60, esta tenıa rango pleno, con loque se garantizaba un sistema completamente controlable. La matriz de observabilidadpara el sistema discreto resulto de 100 × 10, esta tambien tenıa rango pleno, con lo quetambien se garantizaba un sistema discreto completamente observable.

152 ANEXO B. MODELO DISCRETO

Anexo C
Procedimiento para convertir la forma de lafuncion objetivo en una forma cuadrada
Para obtener la ecuacion (3.31) de (3.23) se aplico el siguiente teorema:
Sean A y B matrices arbitrarias de ordenes compatibles para que las operacionesesten definidas y k ∈ R, un escalar cualesquiera.
(A + B)T = AT + BT
(AT
)T= A
(kA)T = kAT
(AB)T = BT AT
La ecuacion (3.23) es:
J = (Gpc∆uc + Fp − w)T (Gpc∆uc + Fp − w) + ∆uTc λ∆uc
Por lo que aplicando algunas igualdades del teorema anterior, se obtiene:
J =((Gpc∆uc)
T + F Tp − wT
)(Gpc∆uc + Fp − w) + ∆uT
c λ∆uc
J = ∆uTc GT G∆uc + (Gpc∆uc)
T (Fp − w) +(F T
p − wT)(Gpc∆uc) +
(F T
p − wT)(Fp − w) + ∆uT
c λ∆uc
J = ∆uTc
(GT G + λI
)∆uc + 2
(F T
p − wT)(Gpc∆uc) +
(F T
p − wT)(Fp − w)
J = ∆uTc
(GT G + λI
)∆uc + 2 (Fp − w)T (Gpc) ∆uc +
(F T
p − wT)(Fp − w)
Y se llega a la ecuacion (3.31) definiendo:
153

154ANEXO C. PROCEDIMIENTO PARA CONVERTIR LA FORMA DE LA FUNCION OBJETIVO EN UNA FORMA CUADRADA
H = 2(GTpcGpc + λI)
f =(2 (Fp − w)T Gpc
)T
b = (Fp − w)T (Fp − w)

Anexo D
Funcion quadprog
La funcion quadprog del Toolbox de Optimizacion de MATLAB encuentra un mınimopara un problema especificado por Coleman y col. [1996]:
min∆x∈Rn
q (∆x) =1
2∆xT H∆x + cT ∆x
Ai ·∆x = bi i = 1, ..., me
Ai ·∆x ≤ bi i = me + 1, ..., m
(D.1)
donde Ai es el reglon ith de la matriz A ∈ Rm ×Rn.
El metodo usado en el Toolbox de Optimizacion es una estrategia de conjunto activo(tambien conocido como metodo de proyeccion).
El procedimiento de solucion implica dos fases: la primera fase implica el calculode un punto factible (si existe), la segunda fase implica la generacion de una secuenciaiterativa de los puntos factibles que convergen a la solucion. En este metodo un conjuntoactivo es mantenido, Ak, el cual es una estimacion de las restricciones activas en el puntode solucion.
Ak es actualizado en cada iteracion, k, y esto se usa para formar una base parauna direccion de la busqueda dk. Las restricciones de igualdad siempre permanecen enel conjunto activo, Ak. La direccion de la busqueda dk, se calcula y minimiza la funcionobjetivo mientras que permanecen en algun lımite de una restriccion activa. El subespaciofactible para dk se forma de una base, Zk cuyas columnas son ortogonal a la estimaciondel conjunto activo Ak. Ası una direccion de la busqueda, la cual se forma de una adicionlineal de alguna combinacion de las columnas de Zk, se garantiza para permanecer en loslımites de las restricciones activas.
155

156 ANEXO D. FUNCION QUADPROG
La matriz Zk se forma de las columnas columnas pasadas m− l de la descomposicionQR de la matriz AT
k , donde l es el numero de las restricciones activas y l < m. Esto es,Zk se da por
Zk = Q [:, l + 1 : m] (D.2)
donde
QT ATk =
[R
0
]
Habiendo encontrado Zk, una nueva busqueda de direccion dk se busca que minimizeq(d) donde dk esta en los espacios nulos de las restricciones activas, esto es, dk es unacombinacion lineal de las columnas de Zk : dk = Zkp para un vector p.
Entonces si se pone en funcion de p, sustituyendo dk, se tiene
q (p) =1
2pT ZT
k HZkp + cT Zkp (D.3)
Diferenciando con respecto a p, se tiene
∇q (p) = ZTk HZkp + ZT
k c (D.4)
donde ∇q(p) es el gradiente proyectado de la funcion cuadratica porque es el gradien-te proyectado en el subespacio definido por Zk. El termino ZT
k HZk se llama el Hessianoproyectado. Asumiendo la matriz Hessiana H definida positiva, entonces el mınimo dela funcion q(p) en el sub-espacio definido por Zk ocurre cuando ∇q(p) = 0, lo cual es lasolucion del sistema de ecuaciones lineales
ZTk HZkp = −ZT
k c (D.5)

Anexo E
Eleccion de los valores de los horizontes H1,Hp y Hc
El tiempo de muestreo del sistema es de 5 minutos y la constante de tiempo delsistema es de 100 minutos, estos datos son necesarios tenerlos en cuenta ya que marcan lapauta para elegir Hp y Hc.
Se eligio un valor de H1 = 1, debido a que es importante que no haya errores en losprimeros instantes, de otro modo si se toma un valor grande de H1 es porque no importaque haya errores en los primeros instantes, lo cual provocara una respuesta suave del pro-ceso. Notese que para procesos con tiempo muerto d no tiene sentido que H1 sea menorque dicho valor puesto que la salida no empezara a evolucionar hasta el instante k + d.Ademas, si el proceso es de fase no mınima, este parametro permite eliminar de la funcionobjetivo los primeros instantes de respuesta inversa.
La eleccion del horizonte de prediccion Hp se hace con base en las constantes detiempo del sistema y el tiempo de muestreo. La respuesta al escalon unitario del sistemade evaporacion se muestra en la Figura E.1. La mayor constante de tiempo del sistemaes aproximadamente de 100 minutos. El tiempo de muestreo del sistema es de 5 minutos.Por lo que si cada instante es de 5 minutos bastara con un valor de Hp igual o mayor a20 para tener como mınimo el tiempo de la constante de tiempo del sistema. Se eligio unvalor de Hp = 35, ya que con este valor se obtenıan mejores resultados.
La eleccion del horizonte de control Hc se hace tambien con base en las constantes detiempo del sistema y el tiempo de muestreo. Pero tambien se tiene que tomar en cuentael valor del horizonte de prediccion Hp. Ya que el horizonte de control Hc se escoge menoral horizonte de prediccion Hp. Se eligio un valor de Hc = 18.
157
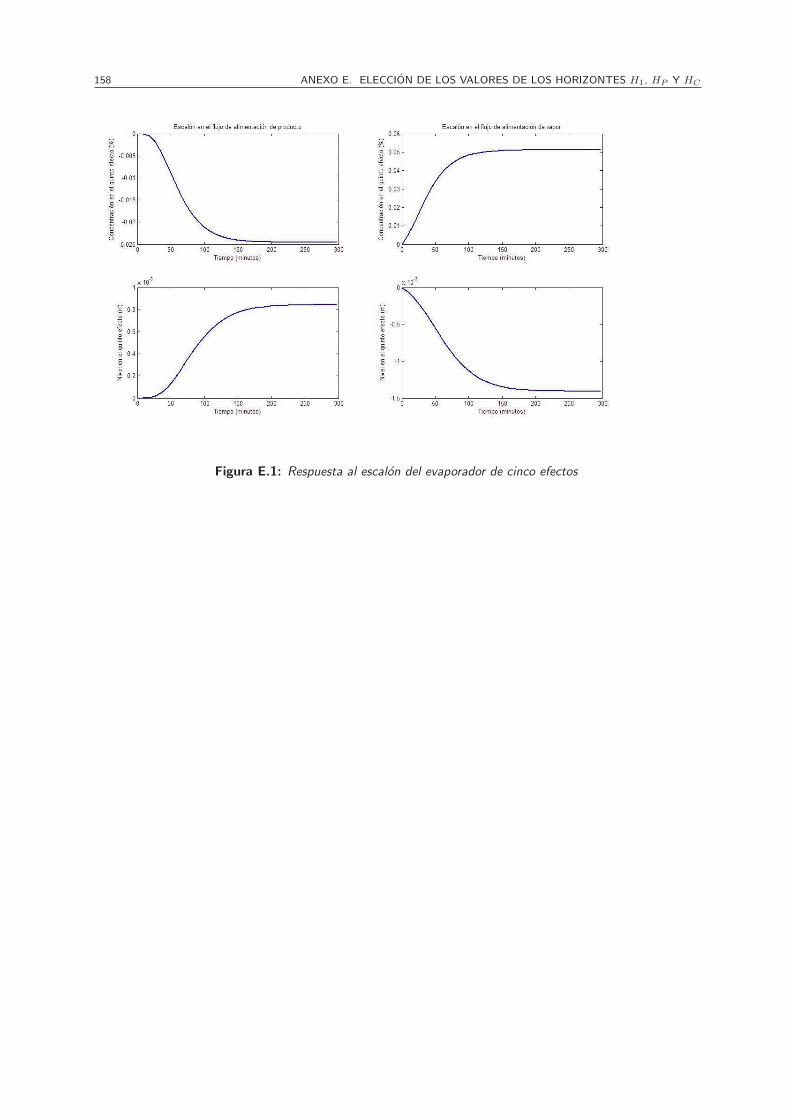
158 ANEXO E. ELECCION DE LOS VALORES DE LOS HORIZONTES H1, HP Y HC
Figura E.1: Respuesta al escalon del evaporador de cinco efectos

Anexo F
Otros resultados del MBPC multivariable sinrestricciones aplicado al evaporador de cinco
efectos
Las proporciones de los componentes del jugo de cana de azucar varıan de acuerdo con lavariedad (familia) de la cana, edad, madurez, clima, suelo, metodo de cultivo, abonos, llu-vias, riegos, etc. Sin embargo, uno de los mas importantes es la concentracion de sacarosala cual varıa de un 8-15% Kung [2002]; estas variaciones se consideran como perturba-ciones. Por lo que para este proceso se consideran como perturbaciones C0 y k1.
Simulacion 13. Efecto de cambios de referencia en las variables C5 y h5
sin restricciones y con perturbacion en C0:
El objetivo de esta simulacion es apreciar el efecto que causa la presencia de unaperturbacion en C0, en las salidas controladas y en las senales de control.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625%a 80%, en el minuto 1200 y en h5 de 0.967m a 0.85m, en el minuto 400. La perturbacionen C0 se presento en el minuto 1600 y consistio en un decremento de 14.74% a 10.32%.
Las Figuras F.1 y F.2 muestran los resultados obtenidos en esta simulacion. En estasse puede apreciar el efecto de la perturbacion C0 en los instantes en que empieza a presen-tarse. Sin embargo la perturbacion es rechazada con exito por el MBPC multivariable sinrestricciones; tambien es facil apreciar la mutua dependencia de las variables controladas,ya que cuando una de ellas cambia se afecta la otra.
159
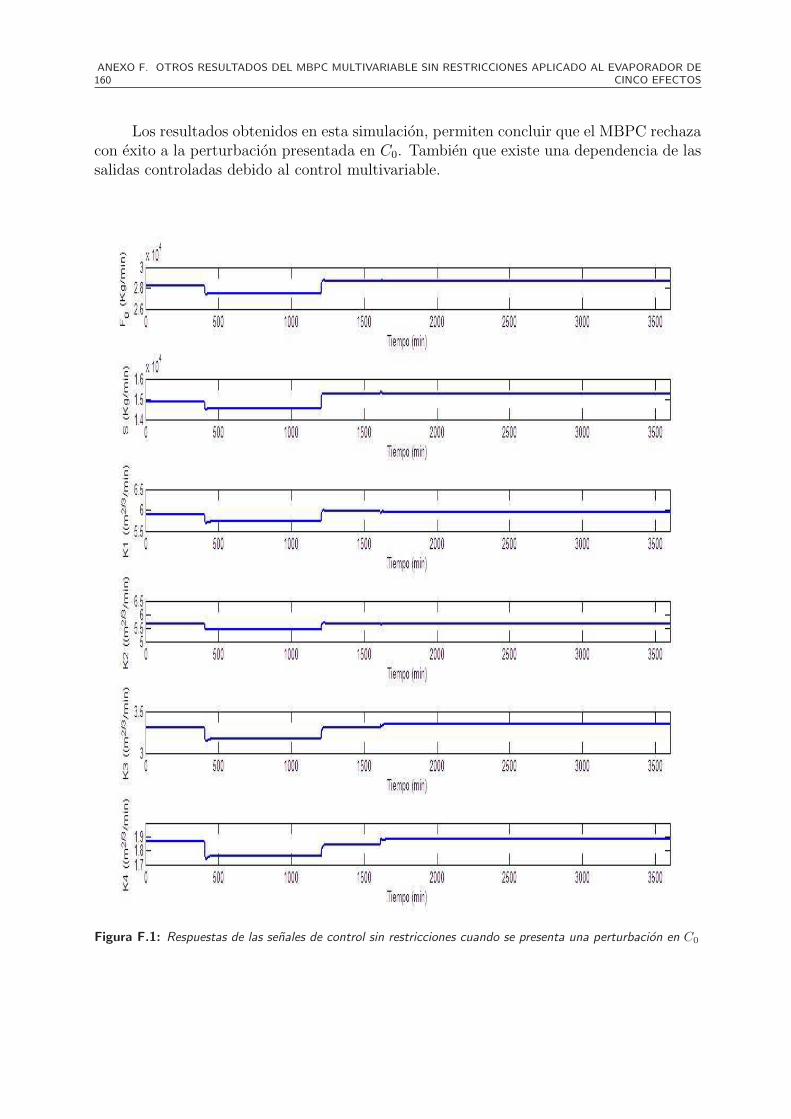
160ANEXO F. OTROS RESULTADOS DEL MBPC MULTIVARIABLE SIN RESTRICCIONES APLICADO AL EVAPORADOR DE
CINCO EFECTOS
Los resultados obtenidos en esta simulacion, permiten concluir que el MBPC rechazacon exito a la perturbacion presentada en C0. Tambien que existe una dependencia de lassalidas controladas debido al control multivariable.
Figura F.1: Respuestas de las senales de control sin restricciones cuando se presenta una perturbacion en C0

161
Figura F.2: Respuestas de las salidas controladas sin restricciones cuando se presenta una perturbacion en C0
Simulacion 14. Efecto de cambios de referencia en las variables C5 y h5
sin restricciones y con perturbacion en k1:
El objetivo de esta simulacion es apreciar el efecto que causa la presencia de unaperturbacion en k1, en las salidas controladas y en las senales de control.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625%a 80%, en el minuto 1200 y en h5 de 0.967m a 0.85m, en el minuto 400. La perturbacionse presento en el minuto 2400 y consistio en un incremento de 0.6309 a 0.6940.
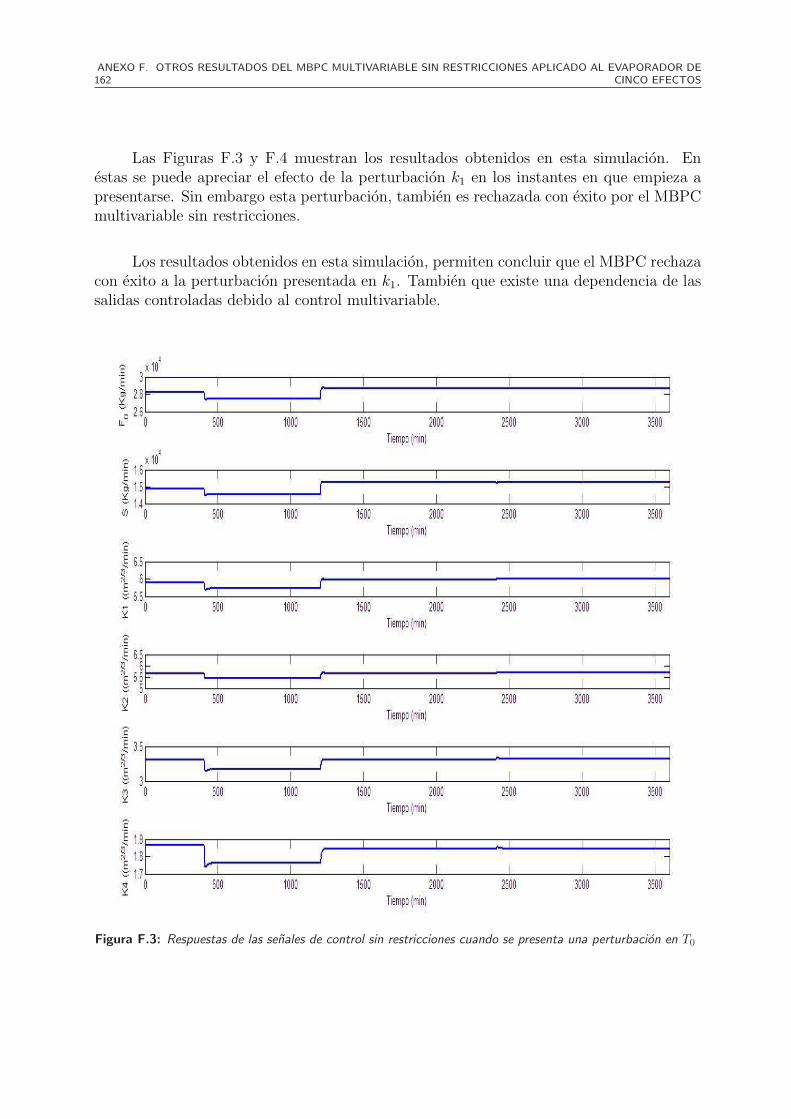
162ANEXO F. OTROS RESULTADOS DEL MBPC MULTIVARIABLE SIN RESTRICCIONES APLICADO AL EVAPORADOR DE
CINCO EFECTOS
Las Figuras F.3 y F.4 muestran los resultados obtenidos en esta simulacion. Enestas se puede apreciar el efecto de la perturbacion k1 en los instantes en que empieza apresentarse. Sin embargo esta perturbacion, tambien es rechazada con exito por el MBPCmultivariable sin restricciones.
Los resultados obtenidos en esta simulacion, permiten concluir que el MBPC rechazacon exito a la perturbacion presentada en k1. Tambien que existe una dependencia de lassalidas controladas debido al control multivariable.
Figura F.3: Respuestas de las senales de control sin restricciones cuando se presenta una perturbacion en T0
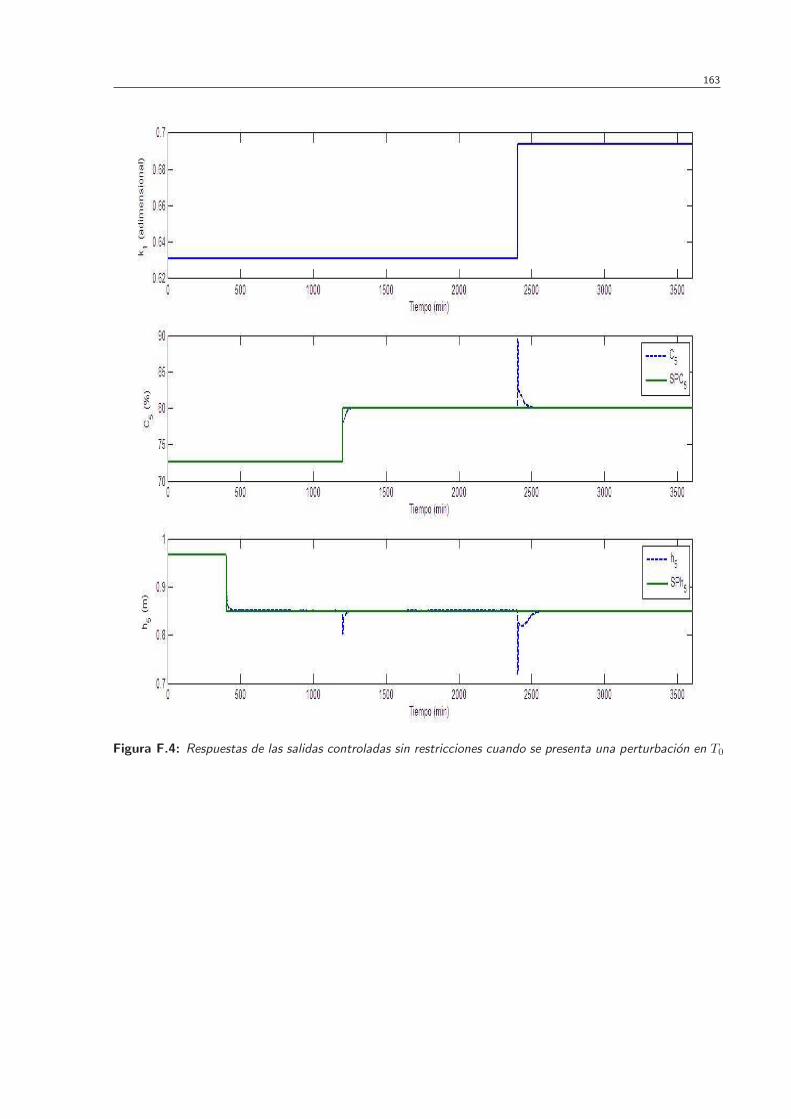
163
Figura F.4: Respuestas de las salidas controladas sin restricciones cuando se presenta una perturbacion en T0

Anexo G
Otros resultados del MBPC multivariable conrestricciones aplicado al evaporador de cinco
efectos
Simulacion 15. Efecto de cambios de referencia en las variables C5 y h5 conrestricciones y sin perturbaciones:
El objetivo de esta simulacion es apreciar el efecto que causan los cambios de referen-cia en C5 y h5, en las mismas y en las senales de control, cuando se consideran restricciones.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625%a 80%, en el minuto 1200 y en h5 de 0.967m a 0.8m, en el minuto 2000.
Las Figuras G.1 y G.2 muestran los resultados obtenidos en esta simulacion. Enestas se puede apreciar que cuando hay cambios de referencias en cualquiera de las varia-bles controladas, que cumplen con las restricciones, las senales de control no se saturan eincluso su dinamica es similar a la presentada en el MBPC sin restricciones; tambien esfacil apreciar la mutua dependencia de las variables controladas, ya que cuando una deellas cambia, se afecta la otra (ya que el controlador desarrollado es multivariable), es porello que en el minuto 2000 C5 sufre una variacion (la cual no se observa a simple vista, sinembargo si presenta una variacion), debido al cambio de referencia de h5 y en el minuto1200 h5 sufre tambien una variacion, por el cambio de referencia de C5.
Los resultados obtenidos en esta simulacion, permiten concluir que un cambio dereferencia en C5, implica un cambio en h5 y viceversa. Mientras los cambios de referencia delas salidas controladas cumplan con las restricciones y no se presente ninguna anormalidad,el MBPC con restricciones tendra un comportamiento similar al MBPC sin restricciones.
164

165
Figura G.1: Respuestas de las senales de control del MBPC con restricciones
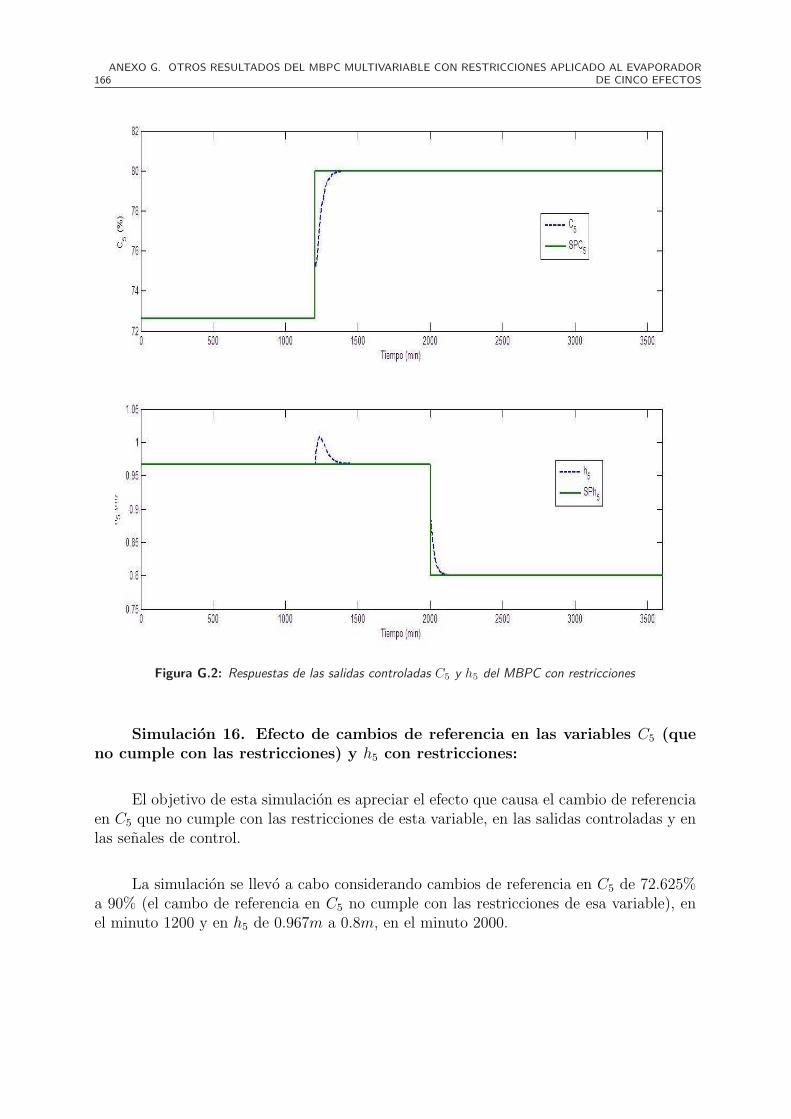
166ANEXO G. OTROS RESULTADOS DEL MBPC MULTIVARIABLE CON RESTRICCIONES APLICADO AL EVAPORADOR
DE CINCO EFECTOS
Figura G.2: Respuestas de las salidas controladas C5 y h5 del MBPC con restricciones
Simulacion 16. Efecto de cambios de referencia en las variables C5 (queno cumple con las restricciones) y h5 con restricciones:
El objetivo de esta simulacion es apreciar el efecto que causa el cambio de referenciaen C5 que no cumple con las restricciones de esta variable, en las salidas controladas y enlas senales de control.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625%a 90% (el cambo de referencia en C5 no cumple con las restricciones de esa variable), enel minuto 1200 y en h5 de 0.967m a 0.8m, en el minuto 2000.
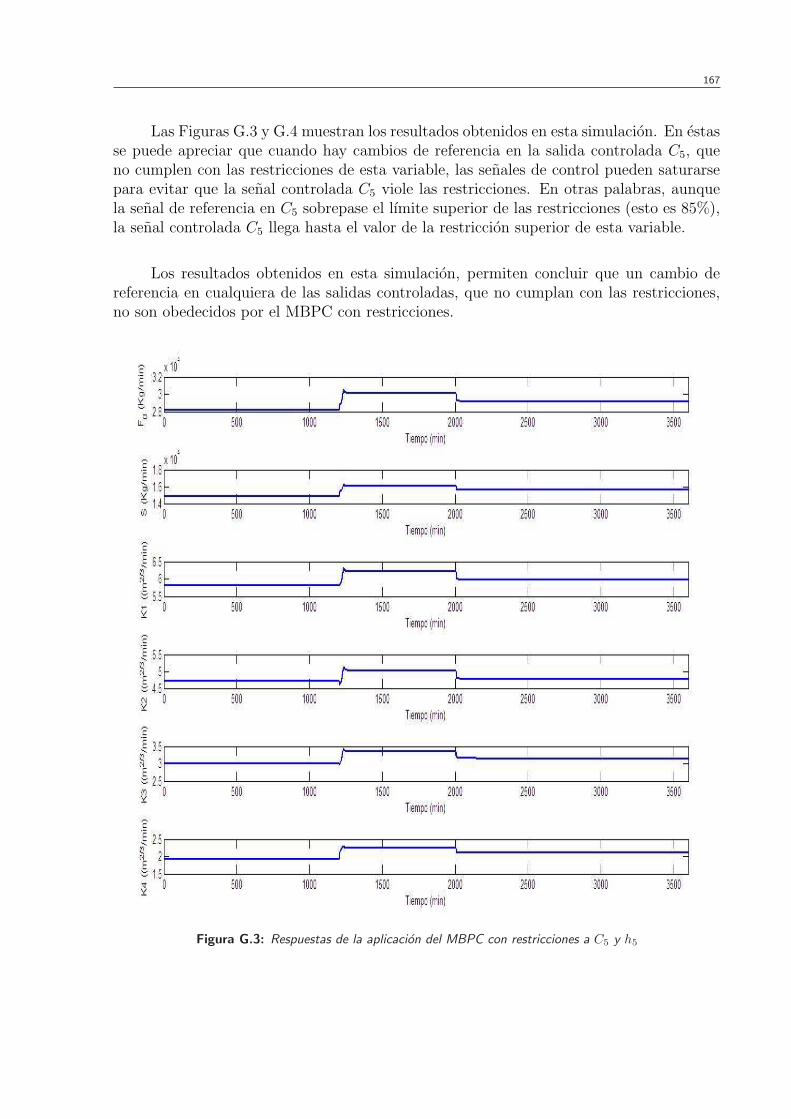
167
Las Figuras G.3 y G.4 muestran los resultados obtenidos en esta simulacion. En estasse puede apreciar que cuando hay cambios de referencia en la salida controlada C5, queno cumplen con las restricciones de esta variable, las senales de control pueden saturarsepara evitar que la senal controlada C5 viole las restricciones. En otras palabras, aunquela senal de referencia en C5 sobrepase el lımite superior de las restricciones (esto es 85%),la senal controlada C5 llega hasta el valor de la restriccion superior de esta variable.
Los resultados obtenidos en esta simulacion, permiten concluir que un cambio dereferencia en cualquiera de las salidas controladas, que no cumplan con las restricciones,no son obedecidos por el MBPC con restricciones.
Figura G.3: Respuestas de la aplicacion del MBPC con restricciones a C5 y h5
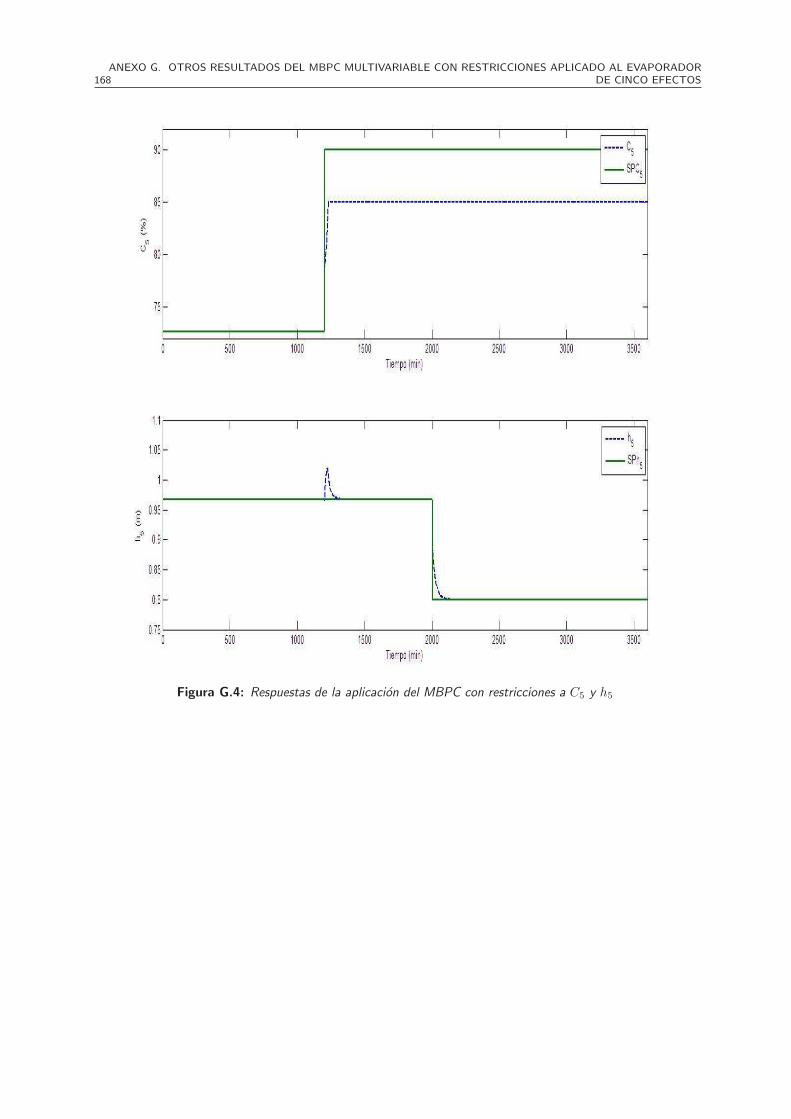
168ANEXO G. OTROS RESULTADOS DEL MBPC MULTIVARIABLE CON RESTRICCIONES APLICADO AL EVAPORADOR
DE CINCO EFECTOS
Figura G.4: Respuestas de la aplicacion del MBPC con restricciones a C5 y h5

Anexo H
Otros resultados del MBPC con restriccionesante fallas ocasionadas por atasco en los
actuadores
Simulacion 17. Acomodacion de una falla causada por un atasco del actuadordel primer efecto por medio de K1:
El objetivo de esta simulacion es apreciar el efecto que causa una falla que consisteen el atasco del actuador de K1, en las salidas controladas y en las senales de control.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625%a 80%, en el minuto 1200 y en h5 de 0.967m a 0.8m, en el minuto 2400. La falla consistioen un atasco del actuador K1 desde el momento en que arranco la planta, es decir, la fallaocurrio en 0min.
Las Figuras H.1 y H.2 muestran los resultados obtenidos en esta simulacion. En laFigura H.1 se observa que la senal de control K1 es constante debido a la falla ocurridaen el actuador del primer efecto, lo que ocasiona (|∆u3 = 0|). En lo que respecta a lasdemas senales de control estas varıan para compensar la falla, aunque esto no sucede paralas senales de control en K2 y K3, se logra el principal objetivo del controlador, esto es,tener una concentracion del 80%. En la Figura H.2 se aprecia que aun en presencia defalla, el control de C5 funciona correctamente. Aunque tambien se aprecia que la salidacontrolada h5 no alcanza la referencia, mas sin embargo conserva el nivel mınimo que serequiere en este tipo de proceso.
169
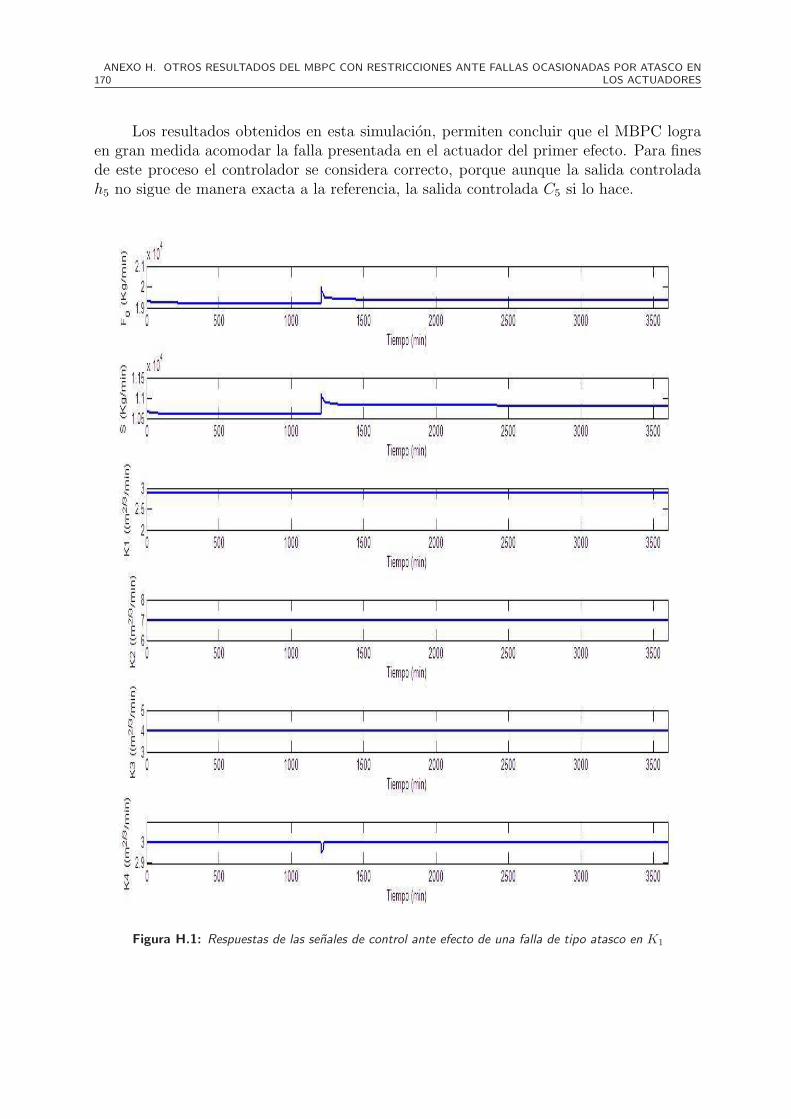
170ANEXO H. OTROS RESULTADOS DEL MBPC CON RESTRICCIONES ANTE FALLAS OCASIONADAS POR ATASCO EN
LOS ACTUADORES
Los resultados obtenidos en esta simulacion, permiten concluir que el MBPC lograen gran medida acomodar la falla presentada en el actuador del primer efecto. Para finesde este proceso el controlador se considera correcto, porque aunque la salida controladah5 no sigue de manera exacta a la referencia, la salida controlada C5 si lo hace.
Figura H.1: Respuestas de las senales de control ante efecto de una falla de tipo atasco en K1
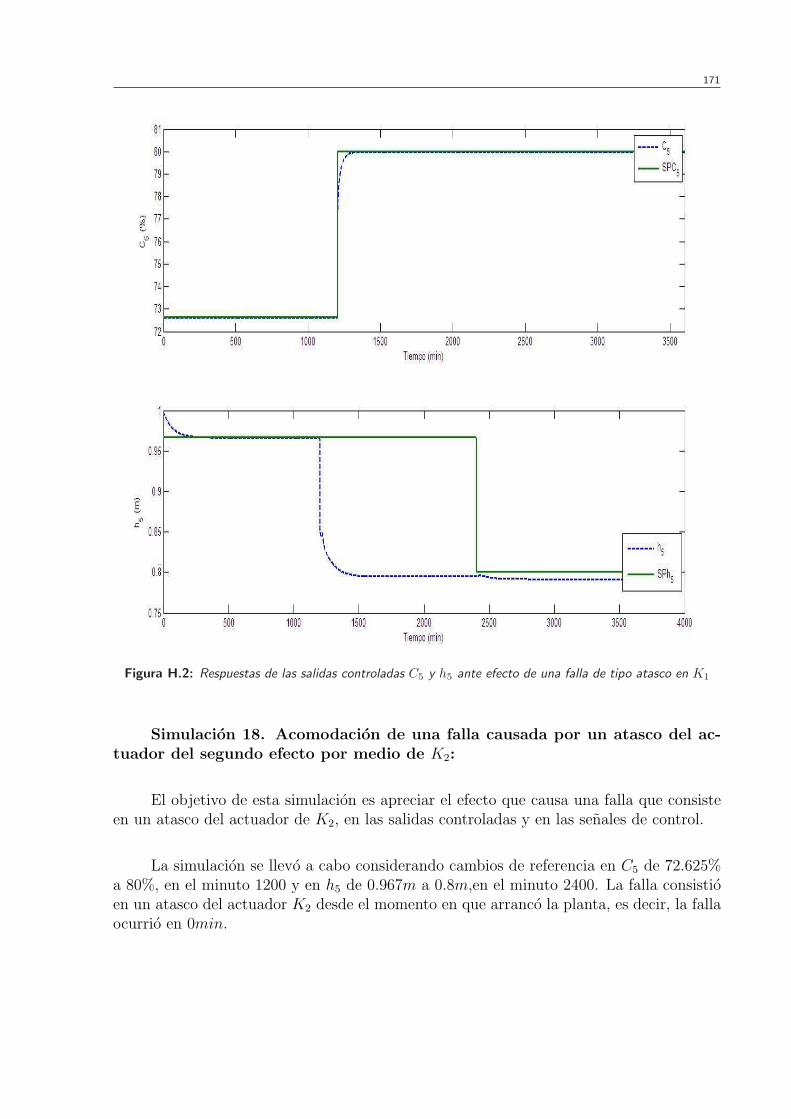
171
Figura H.2: Respuestas de las salidas controladas C5 y h5 ante efecto de una falla de tipo atasco en K1
Simulacion 18. Acomodacion de una falla causada por un atasco del ac-tuador del segundo efecto por medio de K2:
El objetivo de esta simulacion es apreciar el efecto que causa una falla que consisteen un atasco del actuador de K2, en las salidas controladas y en las senales de control.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625%a 80%, en el minuto 1200 y en h5 de 0.967m a 0.8m,en el minuto 2400. La falla consistioen un atasco del actuador K2 desde el momento en que arranco la planta, es decir, la fallaocurrio en 0min.

172ANEXO H. OTROS RESULTADOS DEL MBPC CON RESTRICCIONES ANTE FALLAS OCASIONADAS POR ATASCO EN
LOS ACTUADORES
Las Figuras H.3 y H.4 muestran los resultados obtenidos en esta simulacion. En laFigura H.3 se observa que la senal de control K2 es constante debido a la falla ocurridaen el actuador del segundo efecto, lo que ocasiona (|∆u4 = 0|), ası mismo esto provocaque las senales de control K3 y K4 tambien sean constantes, sin embargo se tiene un buencomportamiento en el control de C5 y h5. En la Figura H.4 se aprecia que aun en presenciade falla, el control de C5 funciona correctamente. Aunque tambien se aprecia que la salidacontrolada h5 no sigue a la perfeccion a la referencia, sin embargo llega al nivel requerido.
Los resultados obtenidos en esta simulacion, permiten concluir que el MBPC lograen gran medida acomodar la falla presentada en el actuador del segundo efecto. Aunque lasalida controlada h5 no sigue de manera exacta a la referencia, para fines de este procesoel controlador es correcto, ya que la salida controlada C5 si lo hace.
Figura H.3: Respuestas de las senales de control ante efecto de una falla de tipo atasco en K2
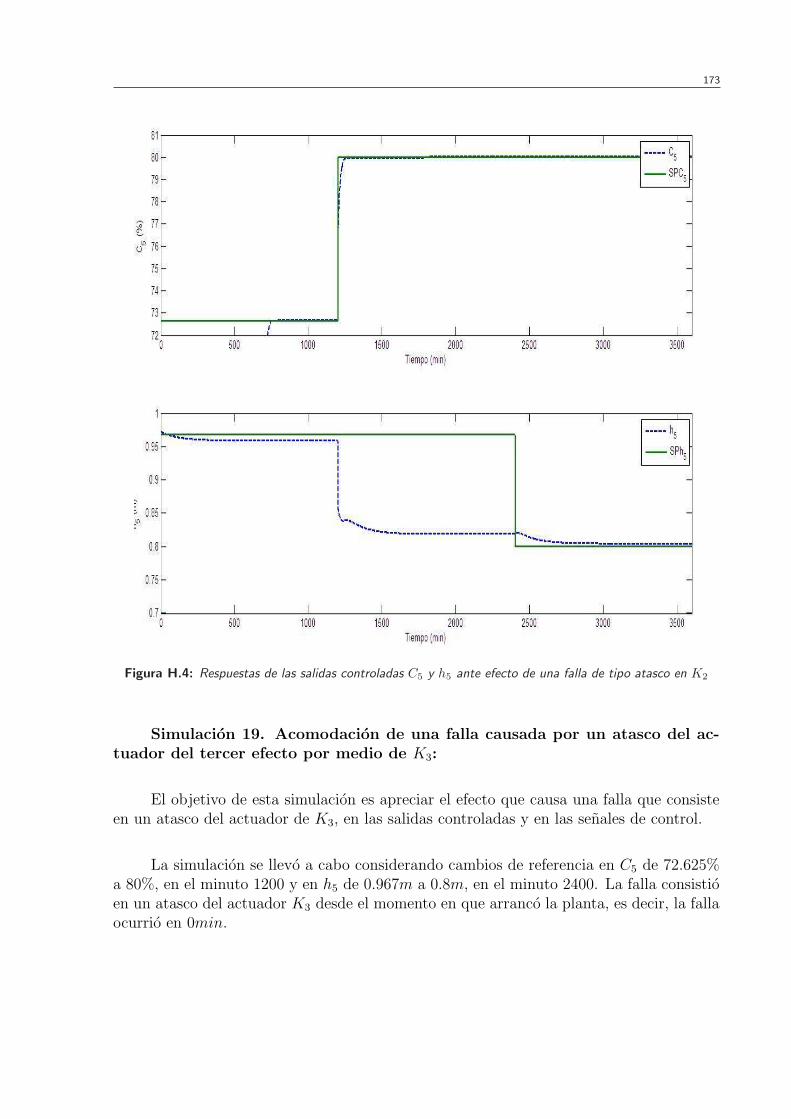
173
Figura H.4: Respuestas de las salidas controladas C5 y h5 ante efecto de una falla de tipo atasco en K2
Simulacion 19. Acomodacion de una falla causada por un atasco del ac-tuador del tercer efecto por medio de K3:
El objetivo de esta simulacion es apreciar el efecto que causa una falla que consisteen un atasco del actuador de K3, en las salidas controladas y en las senales de control.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625%a 80%, en el minuto 1200 y en h5 de 0.967m a 0.8m, en el minuto 2400. La falla consistioen un atasco del actuador K3 desde el momento en que arranco la planta, es decir, la fallaocurrio en 0min.

174ANEXO H. OTROS RESULTADOS DEL MBPC CON RESTRICCIONES ANTE FALLAS OCASIONADAS POR ATASCO EN
LOS ACTUADORES
Las Figuras H.5 y H.6 muestran los resultados obtenidos en esta simulacion. En laFigura H.5 se observa que la senal de control K3 es constante debido a la falla ocurridaen el actuador del tercer efecto, lo que ocasiona (|∆u5 = 0|). En lo que respecta a lasdemas senales de control estas varıan para compensar la falla, ya que en ellas recae todala actividad de control. En la Figura H.6 se aprecia que aun en presencia de falla, el con-trol de C5 funciona correctamente. Aunque tambien se aprecia que la salida controlada h5
no alcanza perfectamente la referencia, mas sin embargo el control es considerado correcto.
Para fines del proceso estos resultados son tomados como correctos, ya que lo prin-cipal que se busca en este proceso es que el producto de salida tenga una determinadaconcentracion, lo cual tambien se cumple en este caso.
Figura H.5: Respuestas de las senales de control ante efecto de una falla de tipo atasco en K3
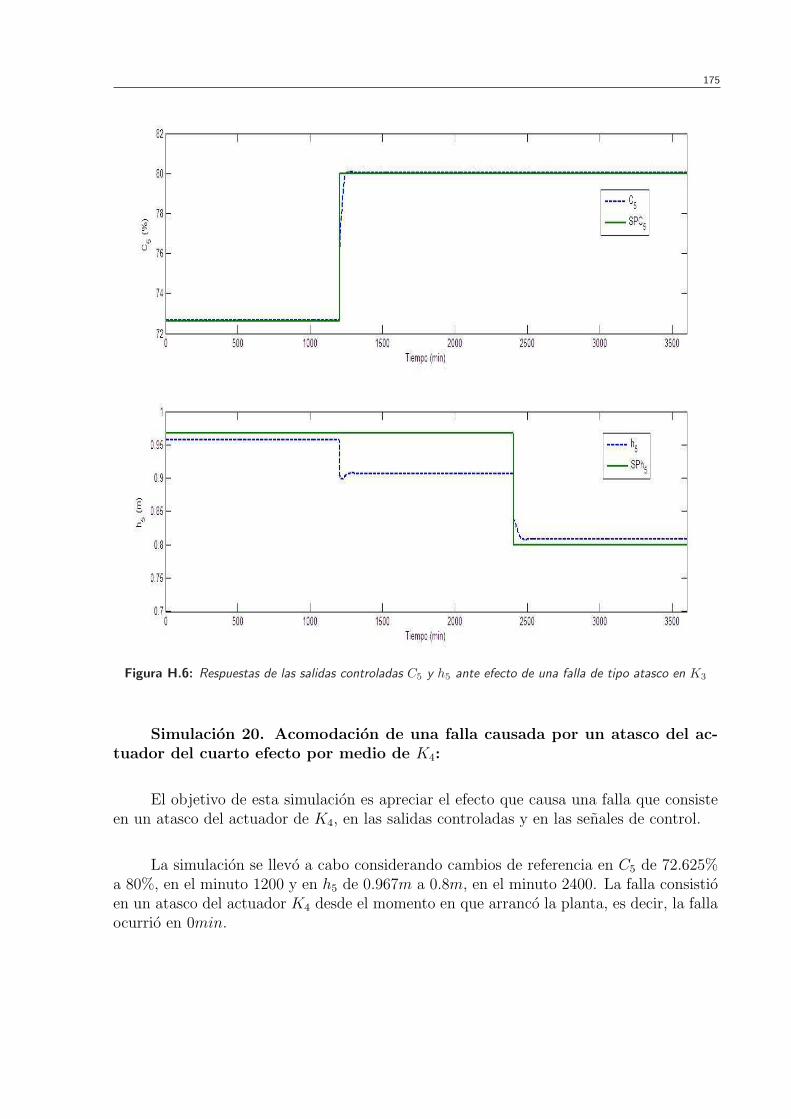
175
Figura H.6: Respuestas de las salidas controladas C5 y h5 ante efecto de una falla de tipo atasco en K3
Simulacion 20. Acomodacion de una falla causada por un atasco del ac-tuador del cuarto efecto por medio de K4:
El objetivo de esta simulacion es apreciar el efecto que causa una falla que consisteen un atasco del actuador de K4, en las salidas controladas y en las senales de control.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625%a 80%, en el minuto 1200 y en h5 de 0.967m a 0.8m, en el minuto 2400. La falla consistioen un atasco del actuador K4 desde el momento en que arranco la planta, es decir, la fallaocurrio en 0min.

176ANEXO H. OTROS RESULTADOS DEL MBPC CON RESTRICCIONES ANTE FALLAS OCASIONADAS POR ATASCO EN
LOS ACTUADORES
Las Figuras H.7 y H.8 muestran los resultados obtenidos en esta simulacion. En laFigura H.7 se observa que la senal de K4 es constante debido a la falla ocurrida en este ac-tuador, lo que ocasiona (|∆u6 = 0|). En lo que respecta a las demas senales de control estasvarıan para compensar el atasco en el actuador del cuarto efecto, ya que en ellas recae todala actividad de control. En la Figura H.8 se aprecia que aun en presencia de falla, el controlde C5 funciona correctamente. Aunque tambien se aprecia que h5 no presenta un excelentecontrol, sin embargo es aceptable ya que obedece considerablemente cambios de referencia.
Los resultados obtenidos en esta simulacion, permiten concluir que el MBPC lograen gran medida acomodar la falla presentada en el actuador del cuarto efecto. Aunque lasalida controlada h5 no sigue de manera exacta a la referencia, para fines de este procesoel controlador es correcto, ya que la salida controlada C5 si lo hace.
Figura H.7: Respuestas de las senales de control ante efecto de una falla de tipo atasco en K4

177
Figura H.8: Respuestas de las salidas controladas C5 y h5 ante efecto de una falla de tipo atasco en K4
Anexo I
Otros resultados del MBPC con restriccionesante fallas ocasionadas por saturacion en los
actuadores
Simulacion 21. Acomodacion de una falla causada por saturacion del actuadorde S:
El objetivo de esta simulacion es apreciar el efecto que causa una falla de tipo satu-racion, en las salidas controladas y en las senales de control.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625%a 80%, en el minuto 1200 y en h5 de 0.967m a 0.8m, en el minuto 2400. La falla consistioen una saturacion del actuador de S desde el momento en que arranco la planta, es decir,hay un cambio de restricciones de 4, 500 ≤ u2 ≤ 18, 000 a 7, 000 ≤ u2 ≤ 15, 500 para laFigura I.1 y de 4, 500 ≤ u2 ≤ 18, 000 a 7, 000 ≤ u2 ≤ 15, 000 para la Figura I.2 en 0min.
Las Figuras I.1, I.2, I.3 y I.4 muestran los resultados obtenidos en esta simulacion.En las Figuras I.1 y I.2 se observa que la senal de control del flujo de alimentacion de vaporS esta saturada desde el momento en que empieza la simulacion debido a la falla ocurridaen este actuador en 0min. En lo que respecta a las demas senales de control, estas varıanpara compensar la saturacion en el actuador S. En las Figuras I.3 y I.4 se aprecia queaun en presencia de este tipo de falla, los controles para C5 y h5 son relativamente buenos.Cuando hay una saturacion menor, el cual es el caso de la Figura I.3 se logra un mejorcontrol en h5 que cuando hay una saturacion mayor, el cual es el caso de la Figura I.4; sinembargo el control en C5 funciona correctamente para ambos casos.
178
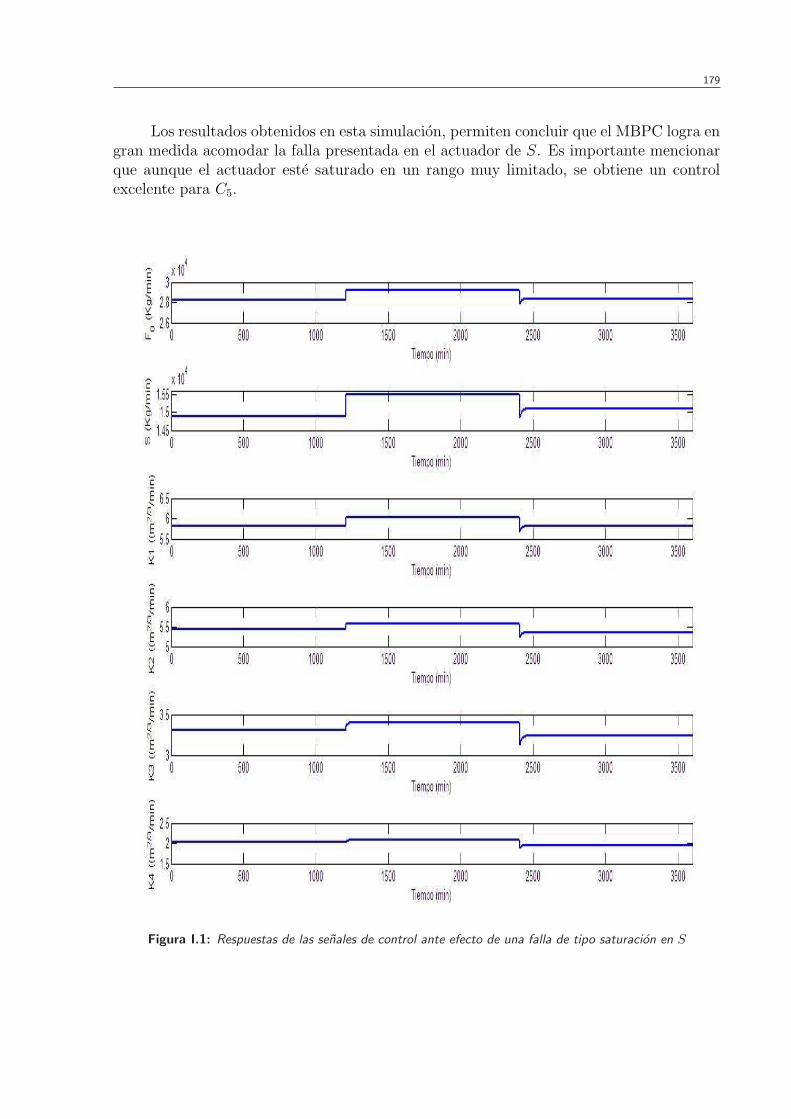
179
Los resultados obtenidos en esta simulacion, permiten concluir que el MBPC logra engran medida acomodar la falla presentada en el actuador de S. Es importante mencionarque aunque el actuador este saturado en un rango muy limitado, se obtiene un controlexcelente para C5.
Figura I.1: Respuestas de las senales de control ante efecto de una falla de tipo saturacion en S

180ANEXO I. OTROS RESULTADOS DEL MBPC CON RESTRICCIONES ANTE FALLAS OCASIONADAS POR SATURACION
EN LOS ACTUADORES
Figura I.2: Respuestas de las senales de control ante efecto de una falla de tipo saturacion en S
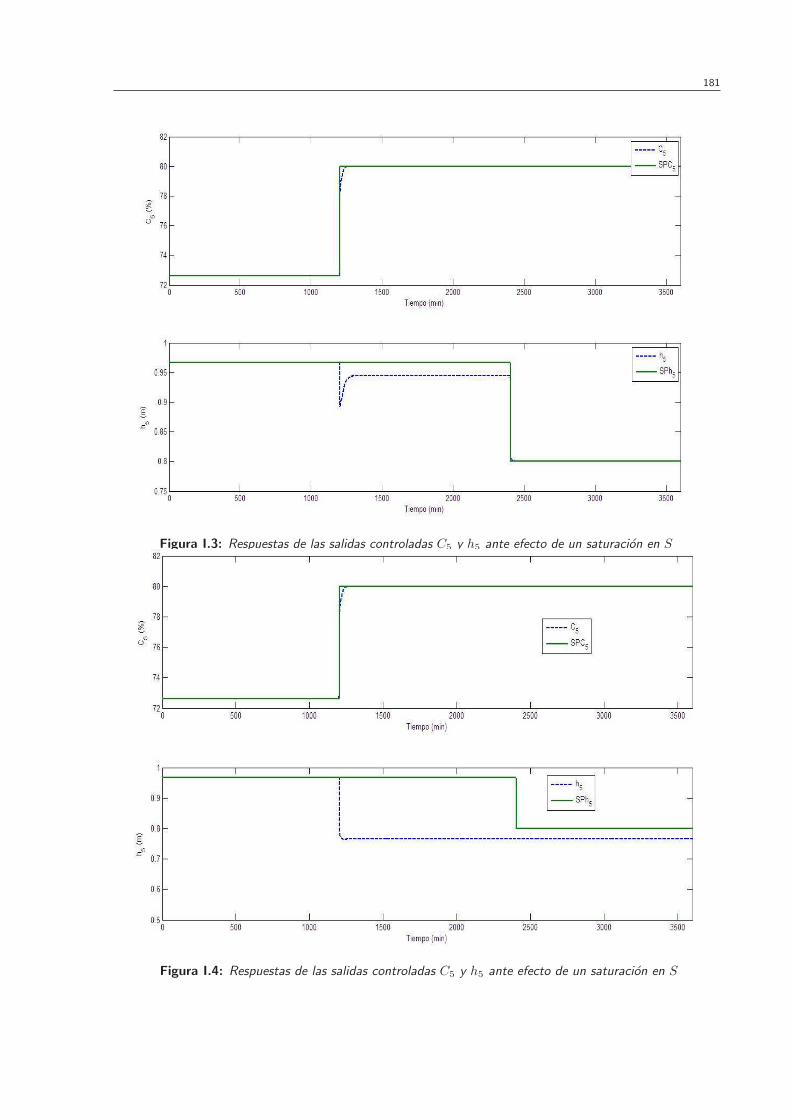
181
Figura I.3: Respuestas de las salidas controladas C5 y h5 ante efecto de un saturacion en S
Figura I.4: Respuestas de las salidas controladas C5 y h5 ante efecto de un saturacion en S

182ANEXO I. OTROS RESULTADOS DEL MBPC CON RESTRICCIONES ANTE FALLAS OCASIONADAS POR SATURACION
EN LOS ACTUADORES
Simulacion 22. Acomodacion de una falla causada por saturacion del ac-tuador del primer efecto por medio de K1:
El objetivo de esta simulacion es apreciar el efecto que causa una falla que consisteen una saturacion del actuador de K1, en las salidas controladas y en las senales de control.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625%a 80%, en el minuto 1200 y en h5 de 0.967m a 0.8m, en el minuto 2400. La falla consistioen la saturacion del actuador del primer efecto desde el momento en que arranca la planta,es decir, hay un cambio de restricciones de 2.5 ≤ u3 ≤ 7.2 a 3.5 ≤ u3 ≤ 6 para la FiguraI.5 y de 2.5 ≤ u3 ≤ 7.2 a 3.5 ≤ u3 ≤ 5.6 para la Figura I.6 en 0min.
Las Figuras I.5, I.6, I.7 y I.8 muestran los resultados obtenidos en esta simulacion.En las Figuras I.5 y I.6 se observa que la senal de control K1 esta saturada debido a la fallaocurrida en este actuador. En lo que respecta a las demas senales de control estas varıanpara compensar la falla. En las Figuras I.7 y I.8 se aprecia que aun en presencia de falla,el control para C5 y h5 actua bien. Nuevamente sucede que cuando hay una saturacionmenor, caso de la Figura I.7 se logra un mejor control en h5 que cuando hay una saturacionmayor, caso de la Figura I.8; sin embargo el control en C5 funciona correctamente paraambos casos.
Los resultados obtenidos en esta simulacion, permiten concluir que el MBPC lograen gran medida acomodar la falla presentada en el actuador de K1.
Simulacion 23. Acomodacion de una falla causada por saturacion del ac-tuador del segundo efecto por medio de K2:
El objetivo de esta simulacion es apreciar el efecto que causa una falla que consisteen la saturacion del actuador de K2, en las salidas controladas y en las senales de control.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625%a 80%, en el minuto 1200 y en h5 de 0.967m a 0.8m, en el minuto 2400. La falla consistioen una saturacion del actuador del segundo efecto desde el momento en que arranca laplanta, es decir, hay un cambio de restricciones de 2.5 ≤ u4 ≤ 7.4 a 3.5 ≤ u4 ≤ 4.6 parala Figura I.9 y de 2.5 ≤ u4 ≤ 7.4 a 3.5 ≤ u4 ≤ 4.2 para la Figura I.10 en 0min.
Las Figuras I.9, I.10, I.11 y I.12 muestran los resultados obtenidos en esta simu-lacion. En las Figuras I.9, I.10 se observa que la senal de control K2 esta saturada debidoa la falla ocurrida en este actuador. En lo que respecta a las demas senales de control,sucede lo mismo que en los demas casos, estas varıan para compensar la saturacion en el

183
actuador K2. En las Figuras I.11 y I.12 se aprecia que aun en presencia de este tipo defalla, el control para C5 y h5 actua bien. Igual que en las pruebas anteriores sucede quecuando hay una saturacion menor, el cual es el caso de la Figura I.11 se logra un mejorcontrol en h5 que cuando hay una saturacion mayor que es el caso de la Figura I.12; sinembargo tambien se obtiene que el control en C5 funciona correctamente para ambos casos.
Los resultados obtenidos en esta simulacion, permiten concluir que para fines delproceso, se obtiene un control aceptable, ya que se cumplen los objetivos deseados.
Figura I.5: Respuestas de las senales de control ante efecto de una falla de tipo saturacion en K1

184ANEXO I. OTROS RESULTADOS DEL MBPC CON RESTRICCIONES ANTE FALLAS OCASIONADAS POR SATURACION
EN LOS ACTUADORES
Figura I.6: Respuestas de las senales de control ante efecto de una falla de tipo saturacion en K1

185
Figura I.7: Respuestas de las salidas controladas C5 y h5 ante efecto de una saturacion en K1
Figura I.8: Respuestas de las salidas controladas C5 y h5 ante efecto de una saturacion en K1
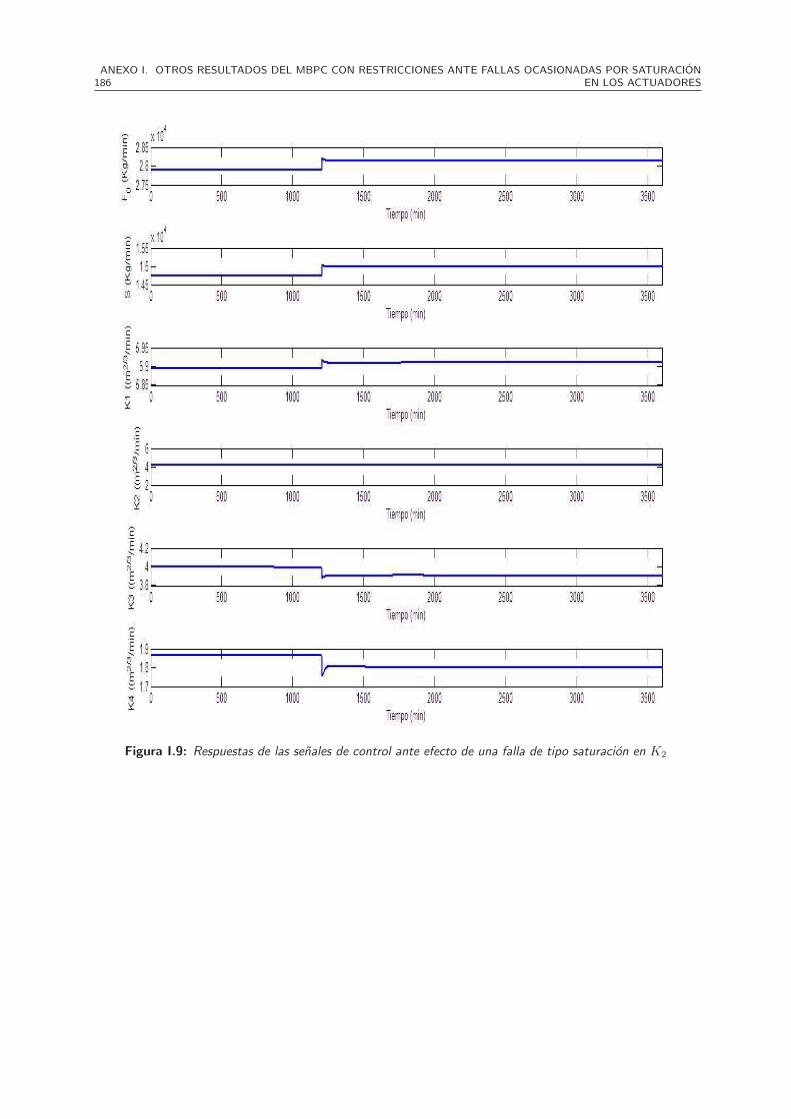
186ANEXO I. OTROS RESULTADOS DEL MBPC CON RESTRICCIONES ANTE FALLAS OCASIONADAS POR SATURACION
EN LOS ACTUADORES
Figura I.9: Respuestas de las senales de control ante efecto de una falla de tipo saturacion en K2

187
Figura I.10: Respuestas de las senales de control ante efecto de una falla de tipo saturacion en K2
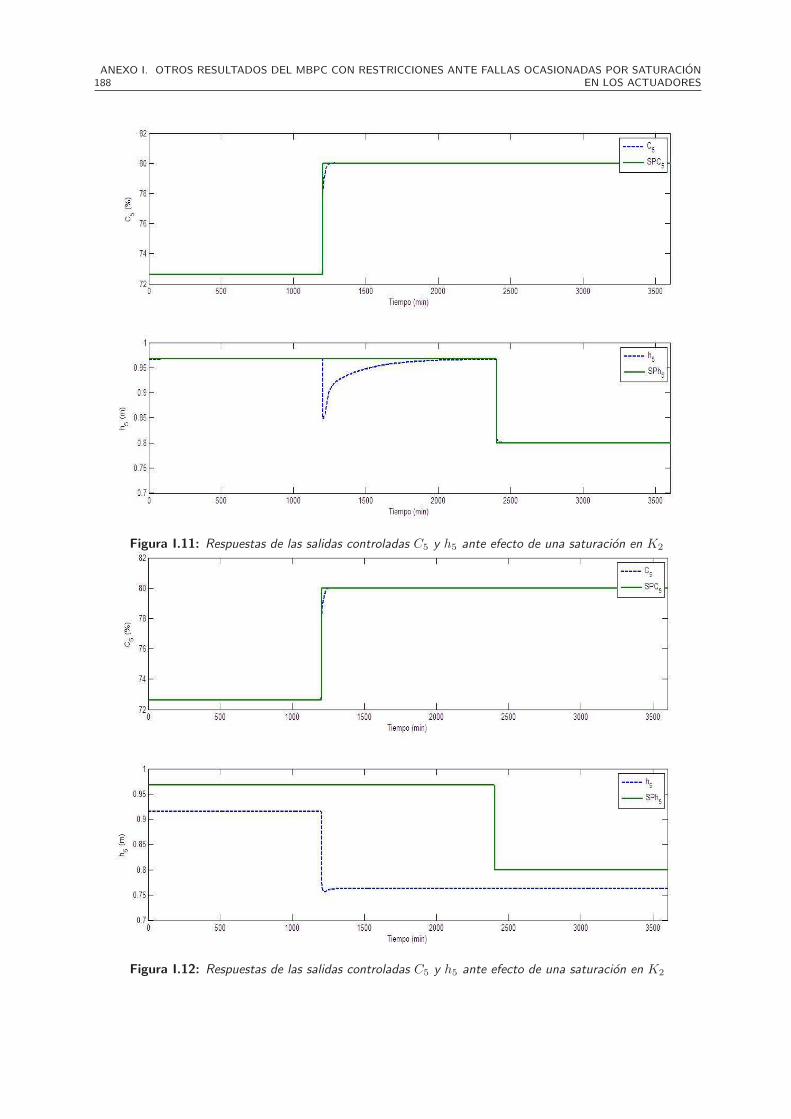
188ANEXO I. OTROS RESULTADOS DEL MBPC CON RESTRICCIONES ANTE FALLAS OCASIONADAS POR SATURACION
EN LOS ACTUADORES
Figura I.11: Respuestas de las salidas controladas C5 y h5 ante efecto de una saturacion en K2
Figura I.12: Respuestas de las salidas controladas C5 y h5 ante efecto de una saturacion en K2
189
Simulacion 24. Acomodacion de una falla causada por saturacion del ac-tuador del tercer efecto por medio de K3:
El objetivo de esta simulacion es apreciar el efecto que causa una falla que consisteen la saturacion del actuador de K3, en las salidas controladas y en las senales de control.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625%a 80%, en el minuto 1200 y en h5 de 0.967m a 0.8m, en el minuto 2400. La falla consistioen la saturacion del actuador del tercer efecto desde el momento en que arranca la planta,es decir, hay un cambio de restricciones de 1.7 ≤ u5 ≤ 5.7 a 2 ≤ u5 ≤ 3.2 para la FiguraI.13 y de 1.7 ≤ u5 ≤ 5.7 a 2 ≤ u5 ≤ 3 para la Figura I.14 en 0min.
Las Figuras I.13, I.14, I.15 y I.16 muestran los resultados obtenidos en esta simu-lacion. En las Figuras I.13 y I.14 se observa que la senal de control K3 esta saturada debidoa la falla ocurrida en este actuador. En lo que respecta a las demas senales de control,sucede lo mismo que en los demas casos, estas varıan para compensar la saturacion enel actuador K3. En las Figuras I.15 y I.16 se aprecia se aprecia que aun en presencia deeste tipo de falla, el control para C5 y h5 funciona bien. Igualmente que en las pruebasanteriores sucede que cuando hay una saturacion menor, el cual es el caso de la Figura I.15se logra un mejor control en h5 que cuando hay una saturacion mayor que es el caso de laFigura I.16; sin embargo tambien se obtiene que el control en C5 funciona correctamentepara ambos casos.
Los resultados obtenidos en esta simulacion, permiten concluir que para fines delproceso, se obtiene un control aceptable, ya que se obtiene la concentracion deseada a uncierto nivel.
Simulacion 25. Acomodacion de una falla causada por saturacion del ac-tuador del cuarto efecto por medio de K4:
El objetivo de esta simulacion es apreciar el efecto que causa una falla que consisteen la saturacion del actuador de K4, en las salidas controladas y en las senales de control.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625%a 80%, en el minuto 1200 y en h5 de 0.967m a 0.8m, en el minuto 2400. La falla consistioen una saturacion del actuador del cuarto desde el momento en que arranca la planta, esdecir, hay un cambio de restricciones de 1.5 ≤ u6 ≤ 4.3 a 1.7 ≤ u6 ≤ 2 para la Figura I.17y de 1.5 ≤ u6 ≤ 4.3 a 1.7 ≤ u6 ≤ 1.9 para la Figura I.18 en 0min.
Las Figuras I.17, I.18, I.19 y I.20 muestran los resultados obtenidos en esta simu-

190ANEXO I. OTROS RESULTADOS DEL MBPC CON RESTRICCIONES ANTE FALLAS OCASIONADAS POR SATURACION
EN LOS ACTUADORES
lacion. En las Figuras I.17 y I.18 se observa que la senal de control K4 esta saturada debidoa la falla ocurrida en este actuador. En lo que respecta a las demas senales de control,sucede lo mismo que en los casos anteriores, estas varıan para compensar la saturacion enel actuador K4. En las Figuras I.19 y I.20 se aprecia que aun en presencia de falla, el con-trol para C5 y h5 funciona correctamente. Igualmente que en las pruebas anteriores sucedeque cuando hay una saturacion menor, el cual es el caso de la Figura I.19 se logra un mejorcontrol en h5 que cuando hay una saturacion mayor que es el caso de la Figura I.20; sinembargo tambien se obtiene que el control en C5 funciona correctamente para ambos casos.
Los resultados obtenidos en esta simulacion, permiten concluir nuevamente que parafines del proceso, se obtiene un control aceptable, ya que se cumplen los objetivos deseados.
Figura I.13: Respuestas de las senales de control ante efecto de una falla de tipo saturacion en K3
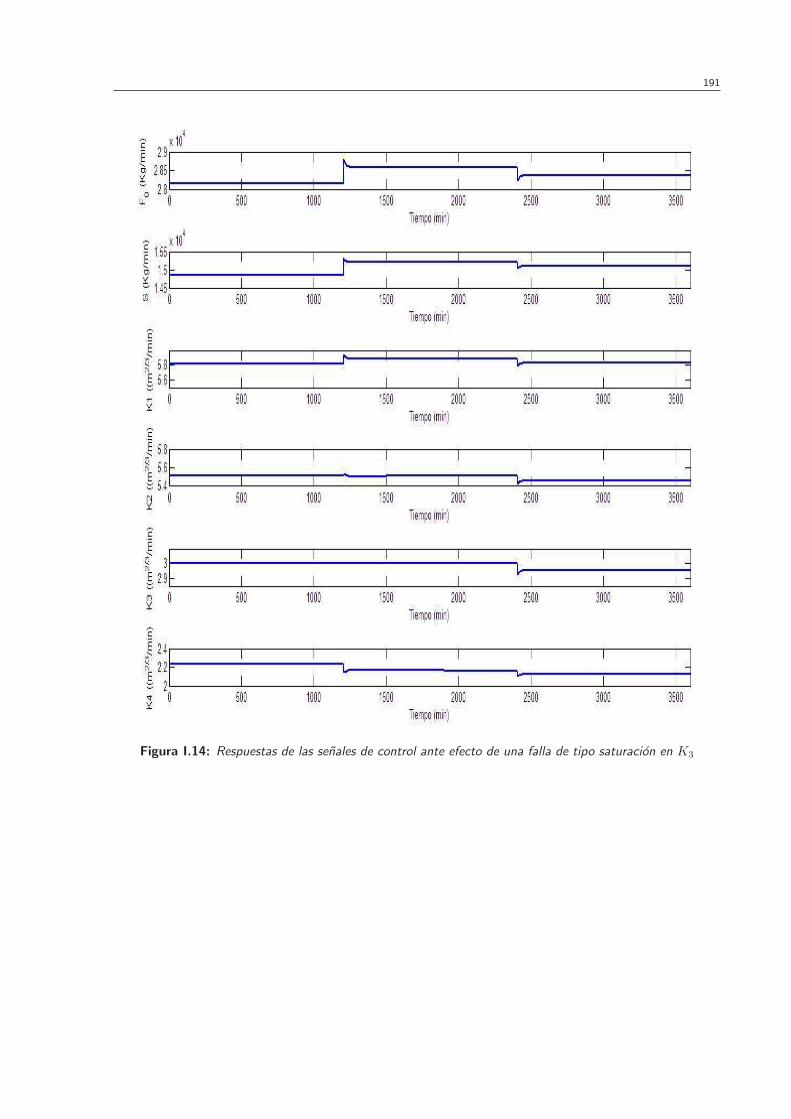
191
Figura I.14: Respuestas de las senales de control ante efecto de una falla de tipo saturacion en K3
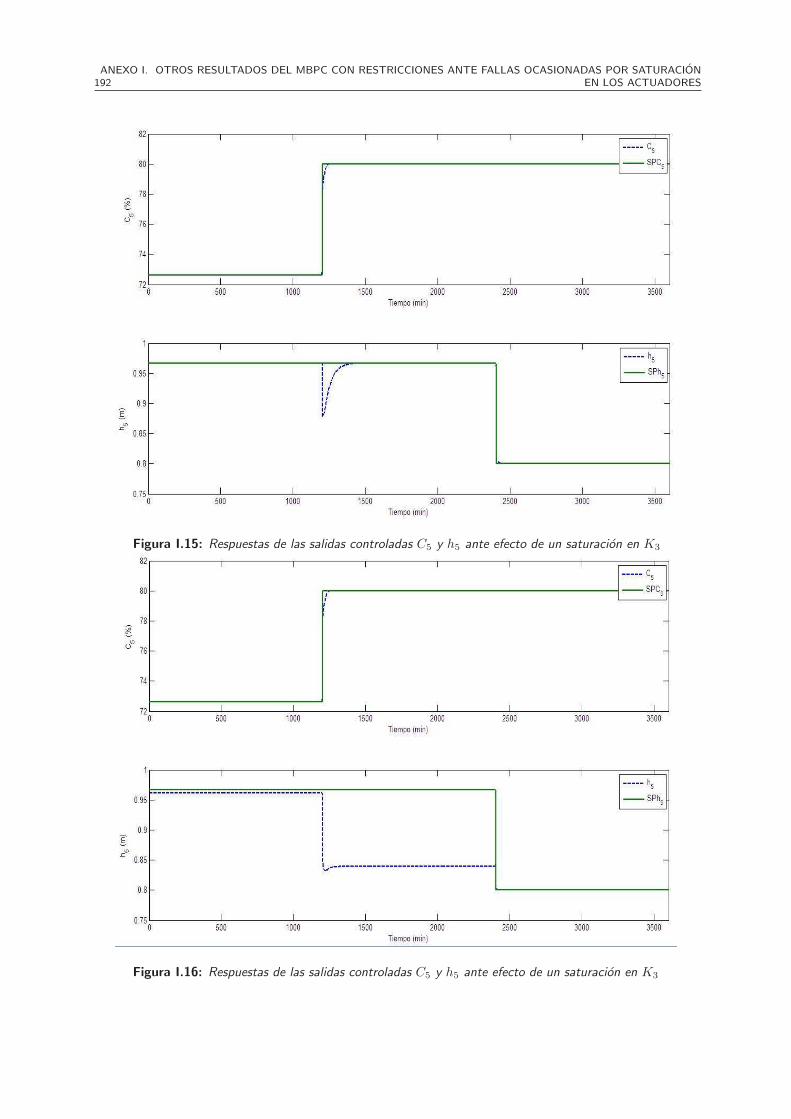
192ANEXO I. OTROS RESULTADOS DEL MBPC CON RESTRICCIONES ANTE FALLAS OCASIONADAS POR SATURACION
EN LOS ACTUADORES
Figura I.15: Respuestas de las salidas controladas C5 y h5 ante efecto de un saturacion en K3
Figura I.16: Respuestas de las salidas controladas C5 y h5 ante efecto de un saturacion en K3

193
Figura I.17: Respuestas de las senales de control ante efecto de una falla de tipo saturacion en K4

194ANEXO I. OTROS RESULTADOS DEL MBPC CON RESTRICCIONES ANTE FALLAS OCASIONADAS POR SATURACION
EN LOS ACTUADORES
Figura I.18: Respuestas de las senales de control ante efecto de una falla de tipo saturacion en K4
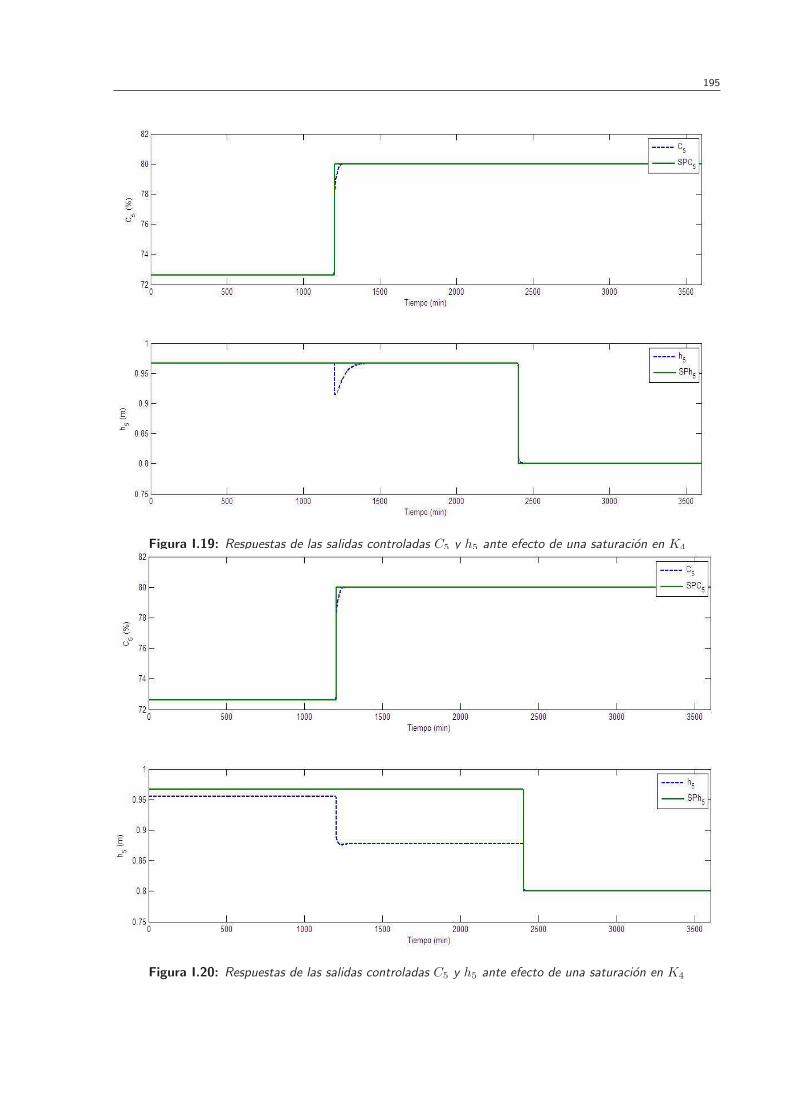
195
Figura I.19: Respuestas de las salidas controladas C5 y h5 ante efecto de una saturacion en K4
Figura I.20: Respuestas de las salidas controladas C5 y h5 ante efecto de una saturacion en K4
Anexo J
Otros resultados del MBPC con restriccionesante fallas internas
Simulacion 26. Acomodacion de una falla causada por la fuga de vapor en elcuarto efecto:
El objetivo de esta simulacion es apreciar el efecto que causa una falla interna, queconsiste en la fuga de vapor en el cuarto efecto, en las salidas controladas y en las senalesde control.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625% a73.36%, en el minuto 800 y en h5 de 0.967m a 0.8m, en el minuto 2800. La falla consistioen la fuga de vapor O4 del cuarto efecto en el minuto 2000. La fuga en O4 fue de 1227.2kg/min a 1166.12 kg/min para la Figura J.1 y de 1227.2 kg/min a 1129.3 kg/min parala Figura J.2.
Las Figuras J.1, J.2, J.3 y J.4 muestran los resultados obtenidos en esta simulacion.En las Figuras J.1 y J.2 se observa que en el momento en que sucede la falla, las senalesde control restantes varıan para compensar el efecto de dicha falla. En las Figuras J.3y J.4 se aprecia como el MBPC actua nuevamente como un Control Tolerante a Fallasaprovechando los beneficios del control multivariable, ya que en el momento en que la fallaaparece, las salidas C5 y h5 cambian sus valores, pero rapidamente vuelven a su valor enel que se encontraban en condiciones normales.
196

197
Los resultados obtenidos en esta simulacion, permiten concluir que efectivamente lasfallas de tipo internas, se pueden acomodar aprovechando las propiedades que proporcionaun control multivariable.
Figura J.1: Respuestas de las senales de control ante efecto de la fuga de vapor O4 (5%)
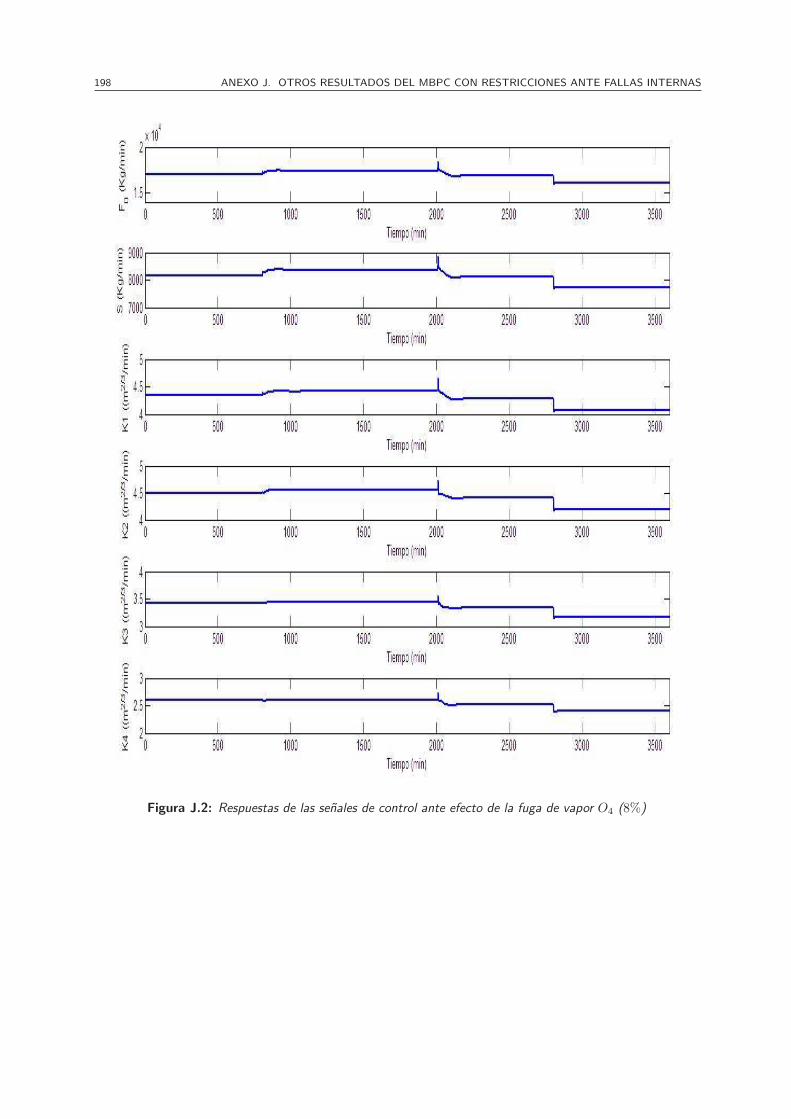
198 ANEXO J. OTROS RESULTADOS DEL MBPC CON RESTRICCIONES ANTE FALLAS INTERNAS
Figura J.2: Respuestas de las senales de control ante efecto de la fuga de vapor O4 (8%)
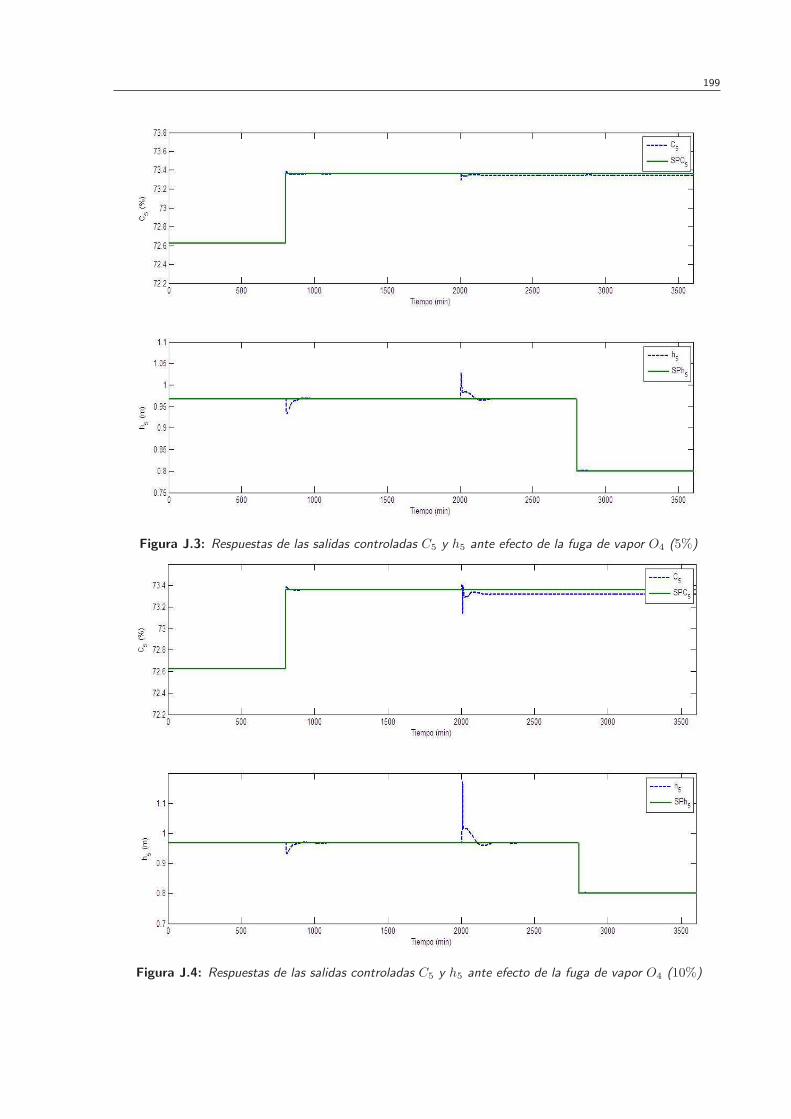
199
Figura J.3: Respuestas de las salidas controladas C5 y h5 ante efecto de la fuga de vapor O4 (5%)
Figura J.4: Respuestas de las salidas controladas C5 y h5 ante efecto de la fuga de vapor O4 (10%)

200 ANEXO J. OTROS RESULTADOS DEL MBPC CON RESTRICCIONES ANTE FALLAS INTERNAS
Simulacion 27. Acomodacion de una falla causada por la fuga de productoen el quinto efecto:
El objetivo de esta simulacion es apreciar el efecto que causa una falla interna, queconsiste en la fuga de producto en el quinto efecto, en las salidas controladas y en lassenales de control.
La simulacion se llevo a cabo considerando cambios de referencia en C5 de 72.625% a73.36%, en el minuto 800 y en h5 de 0.967m a 0.8m, en el minuto 2800. La falla consistioen la fuga de producto F5 del quinto efecto en el minuto 2000. La fuga en F5 fue de 2289kg/min a 2105.88 kg/min para la Figura J.5 y de 2289 kg/min a 1876.98 kg/min parala Figura J.6.
Las Figuras J.5, J.6, J.7 y J.8 muestran los resultados obtenidos en esta simulacion.En las Figuras J.5 y J.6 se observa que en el momento en que sucede la falla, las senales decontrol varıan para compensar el efecto de dicha falla. En las Figuras J.7 y J.8 se aprecianlos beneficios de emplear un MBPC multivariable, ya que en el momento en que la fallaaparece, las salidas C5 y h5 cambian sus valores, pero rapidamente vuelven a su valor enel que se encontraban en condiciones normales. Entre mayor es la magnitud de la falla,mayor es el efecto que se tiene sobre las salidas controladas, sin embargo la falla tambiense compensa exitosamente.
Los resultados obtenidos en esta simulacion, permiten concluir que para fines delproceso, se obtiene un control aceptable, ya que se cumplen los objetivos deseados.

201
Figura J.5: Respuestas de las senales de control ante efecto de la fuga de producto F5 (8%)
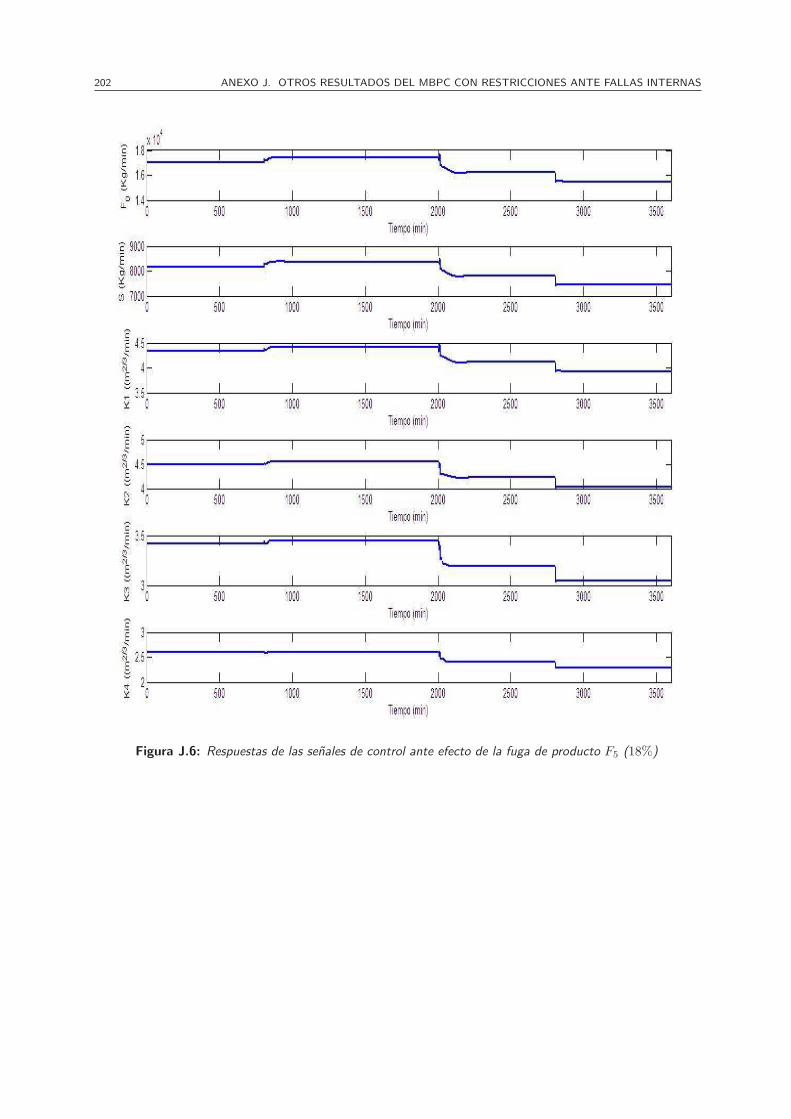
202 ANEXO J. OTROS RESULTADOS DEL MBPC CON RESTRICCIONES ANTE FALLAS INTERNAS
Figura J.6: Respuestas de las senales de control ante efecto de la fuga de producto F5 (18%)
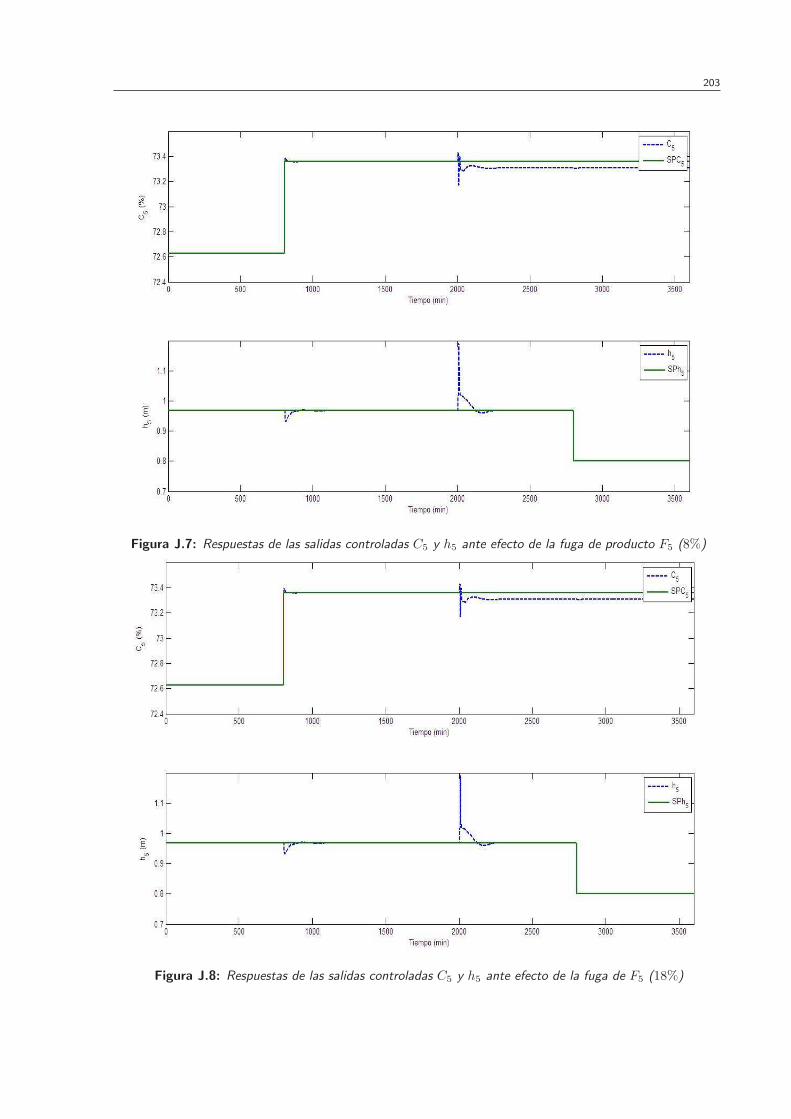
203
Figura J.7: Respuestas de las salidas controladas C5 y h5 ante efecto de la fuga de producto F5 (8%)
Figura J.8: Respuestas de las salidas controladas C5 y h5 ante efecto de la fuga de F5 (18%)


![4.1.3 Geología[1] - Infiltración Prueba](https://static.fdocuments.es/doc/165x107/577c781a1a28abe0548ebcc4/413-geologia1-infiltracion-prueba.jpg)