CP 06 corregido con formato - aadeca.org · 3.1 Descripción del controlador borroso 17...
60
Transcript of CP 06 corregido con formato - aadeca.org · 3.1 Descripción del controlador borroso 17...


CONSEJO DIRECTIVO AADECA
Presidente: Ing. Jonas Paiuk Vicepresidente 12: Ing. Aurelio T. Casucci Vicepresidente 22: Ing. Zoltán L Barkasz
Secretario General: Ing. Víctor F. Marinescu Prosecretario: Ing. Antonio A. Quijano Tesorero: Ing. Osvaldo H. Capino Protesorero: Ing. Ricardo J. Agostinelli Vocales Titulares: Ing. Oreste D. Lupi Dr. Ricardo S. Sánchez Peña Vocales Suplentes: Ing. Sergio Szklanny Ing. Ricardo 0. Carelli Adscripta a Consejo Directivo: Susana Terlizzi


A modo de introducción...
Las reticencias de determinados sectores hacia los temas relacionados con la tecnología fuzzy han hecho que, salvo en el Japón, los investigadores interesados en el tema, hasta hace poco, tuvieran muy pocos incentivos para continuar su labor en un campo tan interesante como es éste.
La explicación que se puede dar es laya habitual en estos casos: un pensamiento anclado en la tradición, que ve en la lógica borrosa un choque frontal con la clásica.
Sin embargo, esta situación va cambiando paulatinamente. En nuestro país ya hay trabajos de desarrollo implementados
en el Instituto de Automática de la Universidad de San Juan y recientemente AADECA ha instituido y otorgado una Beca Anual para trabajos en el Control Fuzzy.
Los autores de este Cuaderno Profesional, Agustín Jiménez
y Fernando Matía, se ubican en la primera línea en este campo de investigación en el cual España es uno de los punteros de Europa. Su aporte a la difusión y conocimiento del Control Fuzzy en la Argentina lo consideramos valioso.
Gracias.


SUMARIO 1. Introducción 3
2. Lógica borrosa 5
2.1 Lógica y lógicas 5 2.2 Lógica de proposiciones 7 2.3 Lógica de predicados 8 2.4 Lógica borrosa 9
3. Controladores borrosos 17
3.1 Descripción del controlador borroso 17
4.Aplicaciones industriales 29 4.1 Aplicaciones al control 30 4.2 Otras aplicaciones 40 4.3 Herramientas de desarrollo 43
5. Conclusión 47
6. Referencias 49


CONTROL FUZZY: ESTADO ACTUAL Y APLICACIONES
Agustín Jiménez, Fernando Matía Departamento de Automática, Ingeniería
Electrónica e Informática Industrial Escuela Técnica Superior de Ingenieros Industriales
Universidad Politécnica de Madrid (España).
1

1. Introducción
Desde las primeras ideas formalizadas de la Lógica Borrosa en los años 60, se ha venido intentando con mayor o menor éxito la aplicación de esta rama de la lógica al Control de Procesos. Es nuestra pretensión ofrecer una visión genérica de esta evolución, desde los orígenes de la Lógica Borrosa hasta las aplicaciones industriales más_ recientes.
La lógica borrosa surge como un intento de formalización del razonamiento con incertidumbre. En particular, y al contrario que otras formas de razonamiento, intenta abordar problemas definidos en términos lingüísticos, y por tanto imprecisos, donde los datos están expresados en términos cualitativos. Estudiaremos diversas técnicas de control borroso para su aplicación en tiempo real.
Procedente del inglés, el término fuzzy se ha venido traduciendo por difuso o borroso (¡pero no por confuso, como titulan algunos!), según las preferencias de cada autor. Sin embargo, es también una práctica aconsejable no traducirlo ya que, aparte de dar una idea poco afortunada sobre el mismo, se evita la ingrata tarea de tener que traducir también otros términos que aparecen frecuentemente en la literatura sobre lógica fuzzy. fuzzyfication (borrosificación), defuzzyfication (que, si queremos ser consecuentes, deberíamos traducirlo por desborrosificación), etc. En el presente texto emplearemos indistinta-mente las expresiones fuzzy y borroso.
En un primer acercamiento, la lógica borrosa puede ser contemplada en contraposición a la lógica clásica. Esta última establece que cualquier enunciado o proposición puede tomar un valor lógico Verdadero o Falso, en definitiva, 1 ó 0 (parece evidente que una puerta, o está abierta o está cerrada).
Sin embargo, en el año 1965, la aparición de un trabajo del soviético Lotfi Zadeh sobre Conjuntos Borrosos [Zadeh 65], revolucio-na la matemática al proponer una nueva lógica denominada fuzzy. Según la misma, una puerta no tiene porqué estar necesariamente abierta (1) o cerrada (0), sino que puede estar abierta a medias (0.5), bastante abierta (0.8), casi cerrada (0.1), etc.
La principal ventaja de utilizar términos lingüísticos como a medias, bastante, casi, poco, mucho, algo, etc., está en que permite
3

plantear el problema en los mismos términos en los que lo haría un experto humano. De hecho, el propio Zadeh justifica el inexplicable éxito de sus trabajos con la frase: El mundo es fuzzy. En otras palabras, no tiene sentido buscar la solución a un problema no perfectamente definido, por medio de un planteamiento matemático muy exacto, cuando es el ser humano el primero que razona empleando inexacti-tud.
Según el teórico Berkeley, ... "cualquiera de nosotros es capaz de estacionar su automóvil en unos pocos segundos, porque no hace falta encajarlo exactamente en un espacio perfectísimamente delimi-tado. Si pretendiéramos hacerlo así, tardaríamos tres años"...
Según lo dicho, puede deducirse que el empleo de las lógicas borrosa y clásica, es función directa del problema a resolver. El conjunto de los números pares e impares encajaría perfectamente dentro de la clásica: cualquier número es par o es impar. Sin embargo, pretendamos contestar al siguiente interrogante: ¿Carlos es alto, algo bajo o tiene una estatura normal? Más aún, ¿qué significa ser algo bajo y cómo se representa este concepto en términos matemáticos? Este tipo de problemas precisamente son los que aborda la lógica fuzzy.
4

2. Lógica borrosa El concepto de lógica borrosa [Dubois 80, Trillas 80, Zimmermann 91] hay que asociarlo a Zadeh que, a partir de 1965, publica sus trabajos sobre teoría de conjuntos borrosos [Bellman 70, Zadeh 73], por lo que las fundamentales referencias deben ser suyas. Asimismo se podrían dar numerosas referencias, muchas de ellas de la revista especializada "Fuzzy Sets and Systems". Afortunadamente, aunque hasta hace algunos años, la bibliografía en castellano sobre el tema era escasa, cada vez son más los grupos de investigación existentes y por tanto la producción bibliográfica. Hay que destacar la excelente aproximación a la lógica y, en particular, a la lógica borrosa que hacen G. Fernández y F. Sáez Vacas en su libro "Fundamentos de Informática" [Fernández 87].
2.1 Lógica y lógicas
Para hablar de Lógica hay que partir de su posible definición: "Ciencia que estudia las condiciones formales de validez de una inferencia y, en general, de una argumentación cualquiera". Dicho de otra manera más fácil, Lógica es la formalización del pensamiento humano.
Para definir una lógica hay que determinar su sintaxis y su semántica. La sintaxis nos permitirá determinar cuándo una sentencia es válida dentro de la lógica. Para ello, en primer lugar, se definen las variables o enunciados elementales y las conectivas que pueden unir a las variables para dar lugar a sentencias o enunciados compuestos.
En segundo lugar hay que enunciar los axiomas como enunciados básicos pertenecientes a la lógica que estemos definiendo, y las reglas operativas que permiten derivar un enunciado de otro.
Llegados a este punto se pueden enunciar teoremas que serán sentencias que mediante demostración, esto es, aplicación consecutiva de reglas operativas, se pueden obtener a partir de los axiomas. Se dice asimismo que una sentencia es una tesis si es o bien un axioma o bien un teorema.
El siguiente paso es la semántica, esto es, dar significado o interpretar las sentencias. Para ello hay que definir un conjunto de
5

valores semánticos, con un mínimo de dos elementos, y un conjunto de operaciones cerradas con los elementos del conjunto, de modo que a cada variable le corresponda un valor semántico y a cada conectiva una operación. De este modo será posible calcular el valor semántico de cualquier sentencia.
En este punto hay que resaltar, por las implicaciones en el tema que nos ocupa, que aunque tradicionalmente el conjunto de valores semánticos es de dos elementos {verdadero, falso}, {1, 0}, desde un punto de vista general no se impone ninguna restricción al número máximo de elementos, ni siquiera que sea finito.
Un concepto relacionado con la semántica es el de tautología: cuando dentro del conjunto de valores semánticos está el valor '1' o 'verdadero', se define tautología como aquella sentencia cuya interpretación, para cualquier interpretación de sus variables, es siempre verdadera. Cuando la interpretación es siempre 'falsa' se llama contradicción.
La relación entre sentencias válidas o tésis, con su valor semántico, es lo que lleva a los conceptos de completitud y consistencia de las lógicas. Si en una lógica toda tautología es una tesis, se dice que es completa, y se dice que es consistente cuando toda tesis es una tautología.
Figura 1. Clasificación de Lógicas.
6

Con estos conceptos fundamentales se construyen las diferen-tes lógicas según se definan sus variables y conectivas, sus reglas operativas y su semántica. Actualmente podemos seguir el esquema de la Figura 1, no completo, para agrupar las lógicas más conocidas. En el mismo se ha hecho una primera división, un tanto subjetiva, de lógicas clásicas y no clásicas, agrupando en las clásicas las conocidas en la antigüedad y formalizadas el siglo pasado, y en las no clásicas las formalizadas en el presente siglo como derivación de las anteriores.
2.2 Lógica de proposiciones
Se revisan aquí las bases de las lógicas clásicas siguiendo las
líneas de definición apuntadas en el apartado anterior. Por una parte son las bases de las demás lógicas, y en particular de la lógica borrosa, y por otra nos permitirá destacar las diferencias entre las lógicas clásicas y la borrosa.
Esquemáticamente, la lógica de proposiciones se define de la siguiente manera:
• Variables: las variables proposicionales son meros enunciados
declarativos, por ejemplo: «hoy es martes».
• Conectivas: ¬ negación, A conjunción, V disyunción, -> condicional, ↔ bicondicional.
• Axiomas: existen varias posibilidades; la más conocida es la
siguiente:
• Reglas operativas: la regla fundamental es la operación de sustitu-
ción por la que una variable proposicional se sustituye por una
7

sentencia. Se podrían definir otras reglas como la de unión (si A y B son tesis entonces A ^ B es tesis) y la de separación (si A es tesis y A--->B es tesis entonces B es tesis).
• Valores semánticos: {verdadero, falso} o bien {1, 0}
• Operaciones semánticas: son las operaciones conocidas del Álgebra de
Boole.
Como comentarios a la lógica de proposiciones cabe decir que es completa y consistente.
2.3 Lógica de predicados
La idea básica de la lógica de predicados es formalizar el concepto de propiedad («Alberto es un ser vivo») y el de relación («Juan vive en Madrid»). Con este objetivo se consideran dentro de las variables dos tipos:
• Colectivo («los peces», »los seres vivos»), con la notación usual x, y, z,
para los miembros genéricos del colectivo, denominadas variables propiamente dichas. Se denomina universo del discurso al conjunto de posibles valores particulares que pueden tomar dichas variables.
• Miembro («Juan», «Madrid»), con la notación usual a, b, c, denominadas
constantes.
Asimismo se definen dos nuevas conectivas: la de propiedad y la de relación.
• La expresión de una propiedad da lugar a un predicado monádico
«Alberto es un ser vivo»: S(a)
• La expresión de una relación da lugar a un predicado poliádico
«Juan vive en Madrid»: V (j, m)
8

Se introduce además un nuevo tipo de conectiva denominado Cuantificador: el cuantificador universal V formaliza la idea de «para todo elemento ... se verifica…» el cuantificador existencial � formaliza la idea de «existe un elemento ... tal que…» En un sentido estricto bastaría haber definido un único cuantificador ya que el otro se puede expresar en función del primero mediante negaciones.
En cuanto a los axiomas hay que añadir dos nuevos a los cuatro antes definidos.
La semántica vista anteriormente para la lógica de proposicio-nes se conserva extendiéndose a los cuantificadores. La interpreta-ción del cuantificador `d corresponde a la interpretación de la conjunción de todos los posibles miembros, mientras que la interpretación del 3 es la de la disyunción.
Como comentario cabe señalar que también la lógica de
predicados es completa y consistente, en el sentido ya indicado de que toda sentencia verdadera es una tesis y todas las tesis son verdaderas.
2.4 Lógica borrosa
La lógica borrosa surge como un intento de formalización del razonamiento con incertidumbre. En particular, y al contrario que otras formas de razonamiento, intenta abordar problemas definidos en términos lingüísticos, y por tanto imprecisos, donde los datos están expresados en términos cualitativos.
El primer punto que debe afrontarse al enfocar el tema es el de la representación matemática de las expresiones lingüísticas. Podemos formalizar que una persona varón es alto cuando mide 1.90, y que
9

hace frío cuando la temperatura es de 10°C. Evidentemente, una estatura de 1.75 ya no correspondería a un varón alto, sino a uno de estatura normal. «1.90 es alto» es cierto al 100%, «1.75 es alto» es cierto al 0%, pero «1.75 es normal» es cierto al 100%. Pues bien, la aplicación de la lógica borrosa consiste en asignar a estaturas comprendidas entre 1.75 y 1.90, valores borrosos entre 0 y 1. Si la interpolación se hace de forma lineal, entonces «1.80 es alto» es algo
cierto (0.33 fuzzy). La lógica borrosa tendrá, por una parte, el mismo aspecto
sintáctico que la lógica de predicados y, por otra, su semántica se basa en el concepto de borrosidad que se formaliza en la teoría de conjuntos borrosos.
2.4.1 Conjuntos Borrosos
Para abordar y entender la teoría de los conjuntos borrosos
es casi preferible olvidarse, por lo menos durante un tiempo, de nuestros conocimientos de la teoría clásica de conjuntos, ya que la idea de partida es completamente distinta. En la teoría clásica, un elemento cualquiera o bien pertenece a un conjunto o bien no pertenece al mismo. En la teoría de conjuntos borrosos, un elemento siempre pertenece en cierto grado a un conjunto y nunca pertenece del todo al mismo.
Una definición podría ser la siguiente:
El grado de pertenencia no tiene un sentido probabilístico, como en otras lógicas, sino más bien representa un alto grado de compatibilidad de un cierto predicado, o un grado de posibilidad que éste sea cierto.
Siguiendo con el ejemplo de las estaturas, se representan en la Figura 2 las funciones de pertenencia de distintos conjuntos. Por ejemplo, la función de pertenencia del conjunto muy bajo se ha tomado como
10

En la Figura 2 se han definido como ejemplo una gama completa de conjuntos borrosos de estaturas en base a términos lingüísticos: muy bajo, bajo, normal, alto y muy alto.
Análogamente se razonaría para el ejemplo de las temperaturas, con los términos frío, agradable y calor.
Las operaciones básicas que se definen normalmente con conjuntos borrosos son las mismas que con los conjuntos clásicos.
11
Adicionalmente se pueden definir un conjunto de operaciones como el producto, la potenciación, distancia, etc.
Observando las operaciones definidas, se concluye que los conjuntos clásicos se pueden considerar un caso particular de los conjuntos borrosos, en los que la función de pertenencia toma exclusivamente valores 0 ó 1. En particular, el conjunto vacío 1 será aquel cuya función de pertenencia sea constante e igual a cero, y el conjunto completo, el universo X, el que tiene función de pertenencia constante e igual a uno.
Una observación importante que va a diferenciar la lógica borrosa de las clásicas es que la operación de complemento, por la propia definición de conjunto borroso, no da en general un conjunto disjunto ni complementario en el sentido clásico y por lo tanto
Un concepto a destacar es el de relación borrosa entre conjuntos borrosos. Para lo que se va a definir en primer lugar el producto cartesiano:
Dados dos subconjuntos borrosos A y B de universos X e
Y respectivamente, se define producto cartesiano como
Se define entonces relación borrosa como cualquier subconjunto del producto cartesiano.
Por último se define la composición de relaciones:
Dados tres subconjuntos A, B y C de universos X, Y y Z
entre los que se tienen definidas las siguientes relaciones
12

se define la relación compuesta de R1 y R2 como
2.4.2 Semántica borrosa
En la lógica borrosa, los valores semánticos serán subconjuntos borrosos del intervalo real [0, 1], siendo necesario definir para cada predicado los correspondientes subconjuntos que, en el caso normal, serán un número finito.
Llegados a este punto, conviene definir o recordar algunos conceptos que se emplean con asiduidad:
• Universo del discurso • Etiquetas lingüísticas • Funciones de pertenencia
Como ya se ha definido en apartados anteriores, se
denomina universo del discurso al conjunto de posibles valores particulares que pueden tomar las variables que intervienen en el predicado. En el eje de abcisas del ejemplo de la Figura 2 se representa el Universo del Discurso, es decir, el rango de variación de las variables de estatura y temperatura, que se han elegido entre 1.50 y 2.00 m, y entre 10 y 40°C, respectivamente.
Se denominan etiquetas lingüísticas los valores semánticos correspondientes a un predicado. En el ejemplo se han tomado cinco etiquetas lingüísticas en el primer caso y tres en el segundo. Estas etiquetas se corresponden en gran medida con el lenguaje natural.
Habitualmente se toman entre 5 y 9 términos, ya que menos no definen bien el problema, y más se salen fuera de los límites que sería capaz de discernir una persona (hay diferencia entre muy bueno y buenísimo, pero ¿en qué se diferenciaría muy muy bueno si lo intercalásemos entre los dos anteriores?). Se define granularidad como la capacidad de discernir entre dos términos lingüísticos. Ya hemos indicado que se suelen emplear alrededor de 7, pero cabe
13
advertir que los tests se han hecho en inglés, cuya semántica posee matices diferentes al castellano.
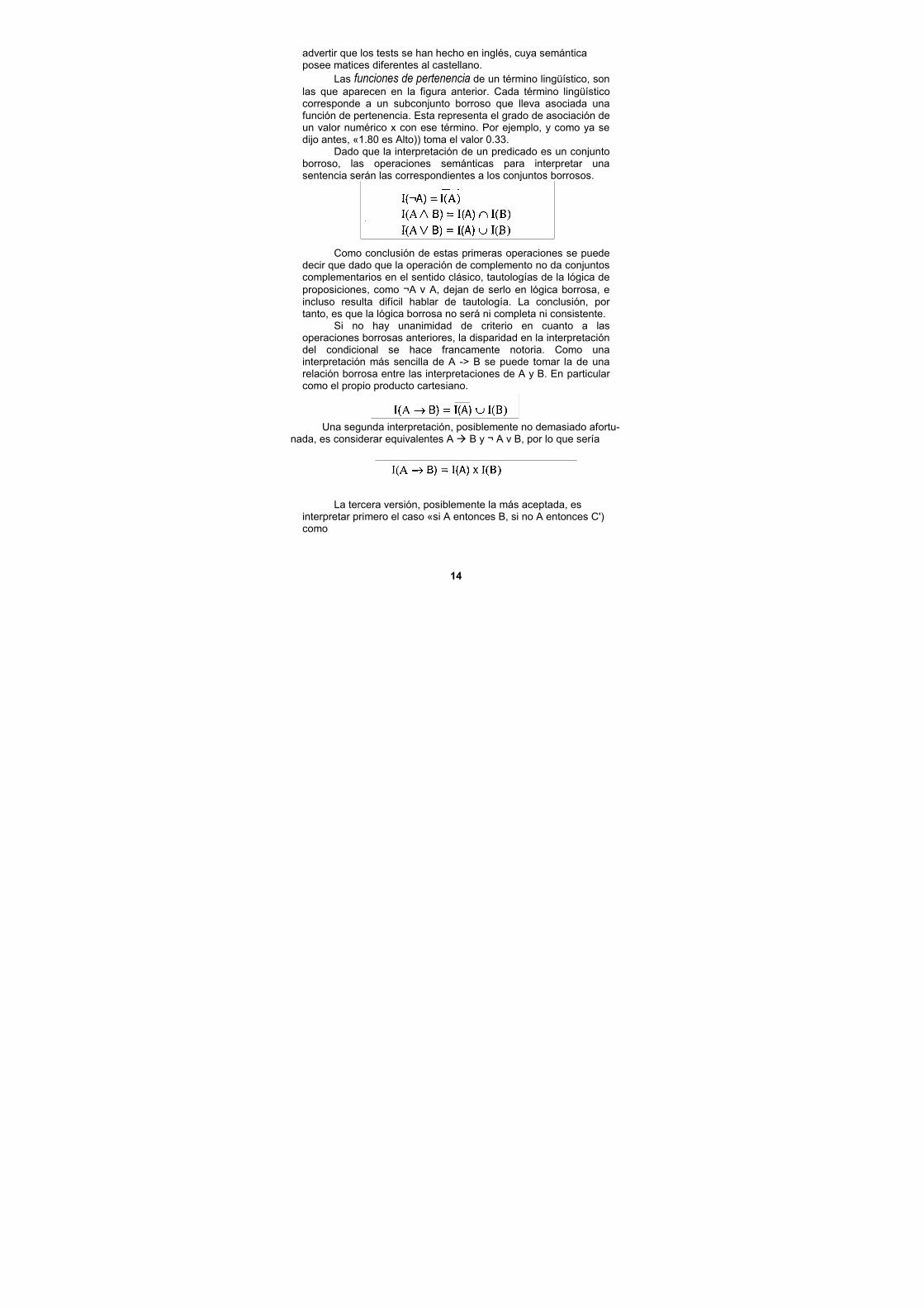
Las funciones de pertenencia de un término lingüístico, son las que aparecen en la figura anterior. Cada término lingüístico corresponde a un subconjunto borroso que lleva asociada una función de pertenencia. Esta representa el grado de asociación de un valor numérico x con ese término. Por ejemplo, y como ya se dijo antes, «1.80 es Alto)) toma el valor 0.33.
Dado que la interpretación de un predicado es un conjunto borroso, las operaciones semánticas para interpretar una sentencia serán las correspondientes a los conjuntos borrosos.
Como conclusión de estas primeras operaciones se puede decir que dado que la operación de complemento no da conjuntos complementarios en el sentido clásico, tautologías de la lógica de proposiciones, como ¬A v A, dejan de serlo en lógica borrosa, e incluso resulta difícil hablar de tautología. La conclusión, por tanto, es que la lógica borrosa no será ni completa ni consistente.
Si no hay unanimidad de criterio en cuanto a las operaciones borrosas anteriores, la disparidad en la interpretación del condicional se hace francamente notoria. Como una interpretación más sencilla de A -> B se puede tomar la de una relación borrosa entre las interpretaciones de A y B. En particular como el propio producto cartesiano.
Una segunda interpretación, posiblemente no demasiado afortu-nada, es considerar equivalentes A � B y ¬ A v B, por lo que sería
La tercera versión, posiblemente la más aceptada, es
interpretar primero el caso «si A entonces B, si no A entonces C') como
14

y considerar entonces A � B como un caso particular del anterior, donde C coincide con su universo
15


3. Controladores borrosos
Resulta interesante, antes de afrontar el estudio del controlador borroso, repasar algunas ideas básicas empleadas en el control clásico. Un PID convencional se compone de una acción Proporcional-Derivativa-Integral. La primera establece la ganancia, la segunda controla el transitorio y la última el régimen permanente.
Como puede observarse, el algoritmo consiste en una ecuación matemática lineal en el error, la integral del error y la derivada del mismo. Como diferencia respecto al tipo de control que vamos a estudiar, cabe resaltar que emplearemos sólo dos de las componentes P + I + D anteriores, y la falta de linealidad.
En lo sucesivo, para simplificar llamaremos:
3.1 Descripción del controlador borroso
La idea básica del Regulador Fuzzy [Braae 79, Driamkov 93,
Jiménez 92, King 77, Sugeno 85, Tong 77] aparece reflejada en la Figura 3. Como en ella puede verse, a partir de la consigna y del valor de la variable de entrada, se calculan el error (E) y el cambio en el error (CE). La acción de cada uno de ellos puede ponderarse mediante dos constantes K1 y K2. El Controlador Fuzzy toma como variables de partida E y CE, y tiene como variable de salida el cambio en la acción de control a aplicar (CU), o bien una acción de control absoluta (U).
17

Un regulador fuzzy se compone internamente de un conjunto de reglas lingüísticas que tienen como condiciones los valores posibles de las variables de entrada, y que concluyen la variación a efectuar en la acción de control, en términos también lingüísticos. Esta actuación es transformada posteriormente en un valor determinista.
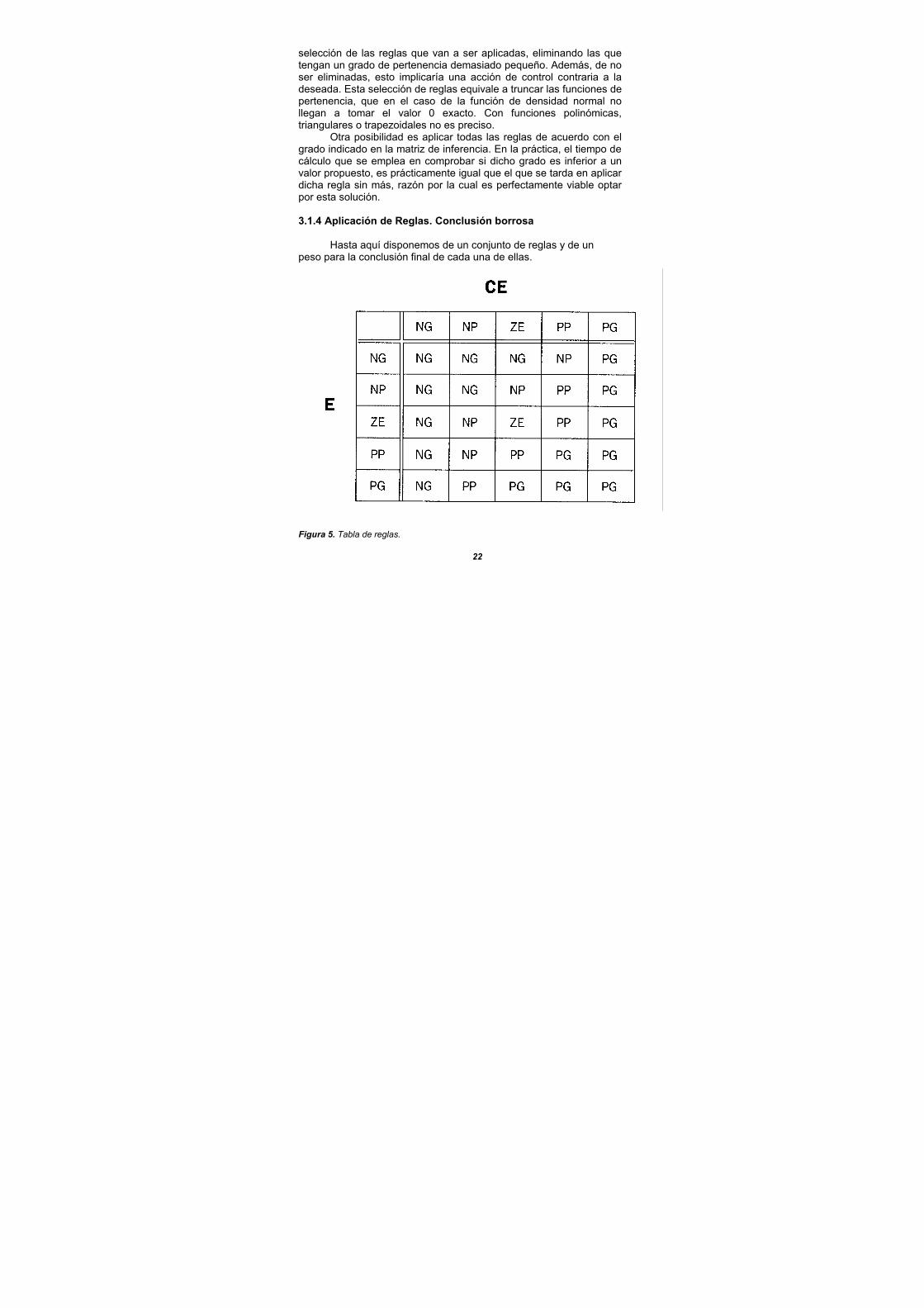
Las reglas se agrupan en una tabla bidimensional que almacena el valor lingüístico de la acción de control para cada combinación posible de E y CE.
Cabe mencionar también que opcionalmente puede existir un módulo de supervisión que ajuste los parámetros del regulador on-line. La regulación fuzzy consta de las siguientes etapas:
3.1.1 Fuzzyfication (borrosificación)
La primera acción que hay que realizar es obtener, a partir de
los valores deterministas de E y CE, sus equivalentes valores borrosos.
18

Para ello es preciso tener definidos el Universo de Discurso y las Etiquetas Lingüísticas que se van a emplear, así como la Función de Pertenencia asociada a cada una de ellas. Un ejemplo se muestra en la Figura 4.
El eje de abcisas representa el Universo de Discurso, es decir, el
rango de variación de la variable de entrada (E o CE), que en este caso se ha elegido entre ±3.
Como etiquetas lingüísticas se han tomado siete:
PG: Positivo Grande, centrado en + 3
PM: Positivo Medio, centrado en +2
PP: Positivo Pequeño, centrado en +1
ZE: Cero, centrado en 0
NP: Negativo Pequeño, centrado en -1
NM: Negativo Medio, centrado en -2
NG: Negativo Grande, centrado en -3
En cuanto a las funciones de pertenencia de un término lingüís-tico, éstas representan el grado de asociación del valor numérico de e(t) o c(t) con ese término, como ya dijimos anteriormente. Por ejemplo, 0 sería ZE con un grado de certeza 1 y tendría un grado de certeza casi 0 para las restantes etiquetas, ya que no corta a ninguna de sus funciones de pertenencia; mientras que -0.4 sería ZE con un grado de certeza 0.2 y NP con un grado de certeza 0.8.
Figura 4. Funciones de pertenencia.
19

Emplearemos la siguiente notación:
La borrosificación consiste en calcular el grado de pertenencia de las variables de entrada a cada una de las etiquetas lingüísticas, mediante las funciones de pertenencia. Este será un número comprendido entre 0 y 1 para cada etiqueta.
En cuanto a la elección de la forma de las funciones de pertenencia, éstas pueden ser básicamente de 5 tipos:
• Trapezoidales: Pueden derivar en rectangulares o en triangulares.
• Rectangulares: No tienen significado físico, pues una variable
borrosa no puede pasar bruscamente de valer 1 a valer 0, o a la inversa. En todo caso, corresponderían a conjuntos clásicos.
• Triangulares: Son funciones lineales por tramos, pero presentan
una discontinuidad en la primera derivada que hereda la acción de control.
• Exponenciales: (distribución normal) Muestran un comportamiento
muy adecuado y no presentan discontinuidad en la derivada, aunque tienen el inconveniente de su lentitud de cálculo.
• Polinómicas: Son funciones sencillas de calcular y tienen una forma
similar a la de las funciones de densidad normales, siendo más rápidas de calcular.
20

3.1.2 Planteamiento de las reglas
Tras haber traducido los valores deterministas de las variables de entrada a valores borrosos, se pasa a aplicar aquellas reglas que puedan ser disparadas. Para ello se dispone de una tabla de reglas con dos entradas (E y CE) por cada variable de entrada al regulador.
La tabla contiene las reglas a aplicar por el regulador y son de la forma:
La Figura 4 muestra una tabla de ejemplo (5 x 5). En el caso de múltiples variables de entrada, es posible no
considerar CE, de forma que las entradas de la tabla sean sólo los errores de dichas variables.
3.1.3 Selección de reglas
Después de la borrosificación, para cada regla de la tabla
tenemos un valor numérico de entrada de E y otro de CE. Podemos construir una tabla adicional o matriz de inferencia, que representa el peso que tendrá cada una de las reglas en la conclusión final. Al ser reglas del tipo:
el grado de cumplimiento de la premisa será el menor de cada una de sus condiciones, tomándose este grado como peso de la conclusión final. Por lo tanto, cada término de la matriz de inferencia tiene como peso o masa mij el menor de los respectivos grados de pertenencia de E y CE a las etiquetas correspondientes a esa fila y columna.
A partir de la matriz de inferencia, resulta posible hacer una
21
selección de las reglas que van a ser aplicadas, eliminando las que tengan un grado de pertenencia demasiado pequeño. Además, de no ser eliminadas, esto implicaría una acción de control contraria a la deseada. Esta selección de reglas equivale a truncar las funciones de pertenencia, que en el caso de la función de densidad normal no llegan a tomar el valor 0 exacto. Con funciones polinómicas, triangulares o trapezoidales no es preciso.
Otra posibilidad es aplicar todas las reglas de acuerdo con el grado indicado en la matriz de inferencia. En la práctica, el tiempo de cálculo que se emplea en comprobar si dicho grado es inferior a un valor propuesto, es prácticamente igual que el que se tarda en aplicar dicha regla sin más, razón por la cual es perfectamente viable optar por esta solución.
3.1.4 Aplicación de Reglas. Conclusión borrosa
Hasta aquí disponemos de un conjunto de reglas y de un
peso para la conclusión final de cada una de ellas.
Figura 5. Tabla de reglas.
22

La acción de control que concluye cada regla es un conjunto borroso al que se le ha asignado un peso mij La interpretación usual de este conjunto con peso es otro conjunto borroso en el que la función de pertenencia se calcula como producto de la función de pertenencia primitiva por el peso (Figura 6).
Por lo tanto, el resultado final de la aplicación de todas las reglas es un conjunto de conjuntos borrosos con sus respectivas funciones de pertenencia.
3.1.5 Defuzzyfication. Conclusión numérica.
Finalmente, a partir del conjunto de curvas de salida, se
procede al cálculo del valor numérico de la conclusión. Para ello existen varios métodos:
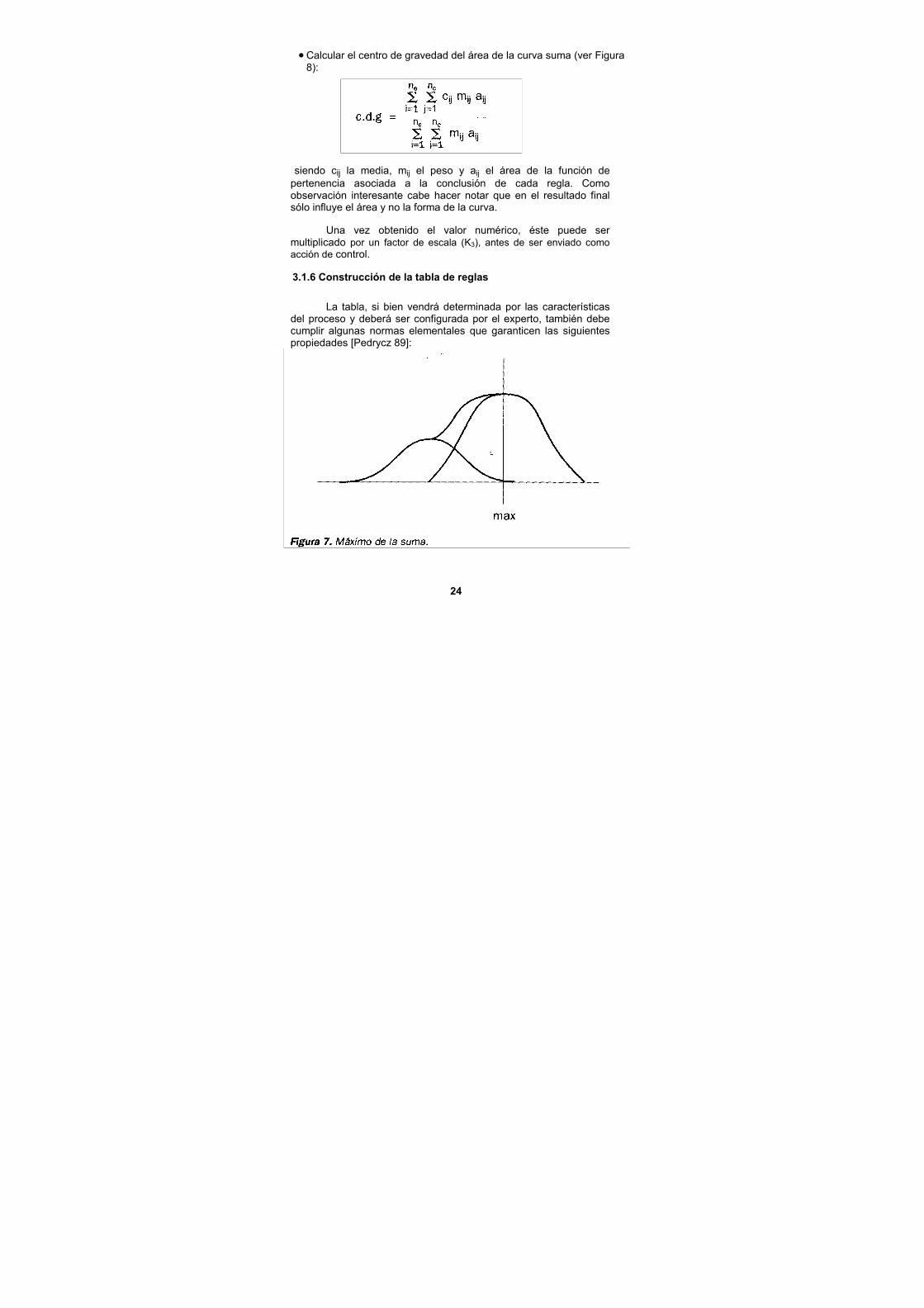
• Tomar como conclusión el máximo de la curva suma de todas
las anteriores (ver Figura 7).
Figura 6. Aplicación de reglas.
23
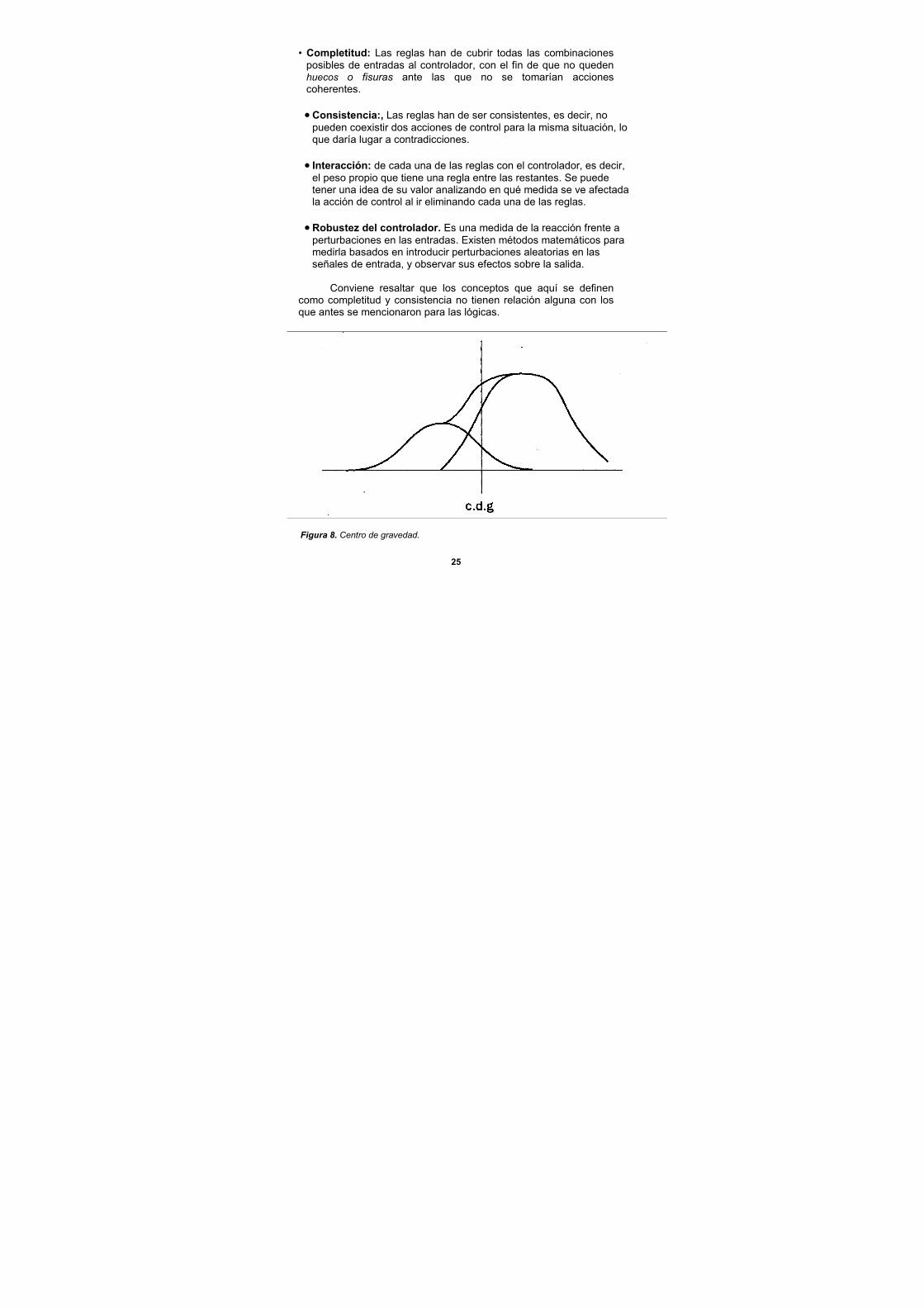
• Calcular el centro de gravedad del área de la curva suma (ver Figura 8):
siendo cij la media, mij el peso y aij el área de la función de pertenencia asociada a la conclusión de cada regla. Como observación interesante cabe hacer notar que en el resultado final sólo influye el área y no la forma de la curva.
Una vez obtenido el valor numérico, éste puede ser multiplicado por un factor de escala (K3), antes de ser enviado como acción de control.
3.1.6 Construcción de la tabla de reglas
La tabla, si bien vendrá determinada por las características del proceso y deberá ser configurada por el experto, también debe cumplir algunas normas elementales que garanticen las siguientes propiedades [Pedrycz 89]:
24
• Completitud: Las reglas han de cubrir todas las combinaciones posibles de entradas al controlador, con el fin de que no queden huecos o fisuras ante las que no se tomarían acciones coherentes.
• Consistencia:, Las reglas han de ser consistentes, es decir, no
pueden coexistir dos acciones de control para la misma situación, lo que daría lugar a contradicciones.
• Interacción: de cada una de las reglas con el controlador, es decir,
el peso propio que tiene una regla entre las restantes. Se puede tener una idea de su valor analizando en qué medida se ve afectada la acción de control al ir eliminando cada una de las reglas.
• Robustez del controlador. Es una medida de la reacción frente a
perturbaciones en las entradas. Existen métodos matemáticos para medirla basados en introducir perturbaciones aleatorias en las señales de entrada, y observar sus efectos sobre la salida.
Conviene resaltar que los conceptos que aquí se definen
como completitud y consistencia no tienen relación alguna con los que antes se mencionaron para las lógicas.
Figura 8. Centro de gravedad.
25

3.1.7 Configuración de reguladores fuzzy
La configuración de un Regulador Fuzzy se lleva a cabo dando valores adecuados a determinados parámetros de los que intervienen en él. Pueden distinguirse dos tipos de parámetros: de configuración y de ajuste.
• Parámetros de configuración:
(1) Número de variables de salida
(2) Número de variables de entrada
(3) Errores y Cambios en el Error a considerar de entre todos
los posibles de las variables de entrada (variables útiles). Como máximo serán el doble del número de entradas.
(4) Número de términos lingüísticos a emplear para cada
variable útil anterior.
(5) Número de términos lingüísticos a emplear para cada variable de salida.
(6) La tabla de reglas (su dimensión viene definida por la
elección de los parámetros anteriores).
• Parámetros de ajuste:
(7) Media o centro de cada función de pertenencia de las variables de entrada.
(8) Amplitud, ancho o desviación típica de cada función de
pertenencia (según el tipo de curvas que se empleen) de las variables de entrada.
(9) Media o centro de cada etiqueta lingüística de las variables
de salida o acción de control.
26
(10) Amplitud, ancho o desviación típica de cada función de pertenencia (según el tipo de curvas que se empleen) de la variable de salida. Si la desborrosificación se hace por centro de gravedad, se utiliza el área en lugar de la amplitud.
En primer lugar, deberán fijarse los parámetros de configuración
. y dar un valor inicial adecuado a los parámetros de ajuste. Los parámetros (7) y (8) vienen determinados en gran medida por las características del sistema a controlar (error máximo y transitorio), por lo que una vez determinados, ya no es necesario volverlos a tocar. El ajuste, por tanto, se basará fundamentalmente en el establecimiento de (9) y (10).
3.1.8 Consideraciones adicionales
Una versión más genérica del esquema de regulador analizado
podría incluir tres funciones del error: integral o suma del error (SE), error (E) y cambio en el error (CE):
Por similitud con el control clásico, puede pensarse que resulta-ría interesante disponer de los tres eventos (P+I+D), lo que denomina-remos un FPID. Sin embargo, elaborar una tabla que incluya tres condiciones en cada regla se presenta como una misión casi imposi-ble, pues ya es de por sí comprometido establecer condiciones de robustez y estabilidad para el caso bidimensional. Podría reducirse entonces el problema a utilizar uno de los dos reguladores siguientes:
Inclusive, yendo un poco más lejos, podemos observar que
también es posible obtener error nulo en régimen permanente con un regulador del tipo:
27
sin más que derivar la función de transferencia asociada al caso (3). Con ello, es válida toda la teoría presentada para el regulador con E y CE, sin más que elegir U o CU a la salida.
Adicionalmente, los reguladores pueden tener múltiples varia-bles de entrada. Reguladores fuzzy con más de una salida son inmediatos de analizar, pues pueden resolverse trivialmente por superposición de varios reguladores. Este mismo principio de super-posición no es posible aplicarlo a la entrada, pues la relación (E, CE) a CU es claramente no lineal.
28

4. Aplicaciones Industriales La Tecnología Fuzzy no sólo no es incompatible con las
técnicas de control convencionales, sino que ambas pueden integrarse para lograr controladores más robustos. Sin embargo, el control fuzzy tiene algunas particularidades, que lo hacen claramente susceptible de ser utilizado en el control de procesos que reúnen alguna o varias de las siguientes características:
• Procesos difíciles de Automatizar y que, paradójicamente, son
controlados fácilmente por operadores humanos.
• Procesos con Incertidumbre, poco definidos.
• Difícil Estimación de los parámetros que definen el proceso.
• Sistemas Complejos, no lineales, de orden elevado, variantes con el tiempo.
• Situaciones en las que resulta difícil la Medición del valor de las
variables a controlar (procesos biológicos, reacciones químicas complejas).
• Cuando las medidas No Son Fiables (sensor de temperatura puntual).
Entre las principales ventajas que un controlador de tipo borroso
puede reportar, podemos citar las siguientes:
• No es necesario un Modelo preciso del sistema a controlar.
• Se implementan fácilmente los Conocimientos del operador humano (reglas expresadas en términos lingüísticos).
• Resulta posible alcanzar con facilidad las Especificaciones dinámicas
fijadas.
29

• El controlador fuzzy es Poco Sensible a cambios de los parámetros del sistema a controlar.
• Presenta un alto rechazo al Ruido.
• Permite contemplar situaciones excepcionales del Estado del Proceso, gracias a su forma de representar el conocimiento.
Por supuesto, que también existen algunas dificultades para su
implementación que sería improcedente no reconocer:
• Resulta imprescindible la presencia de un Experto que suministre el conocimiento necesario.
• Una Modificación en los parámetros del controlador obliga a una revisión de todo el conjunto de reglas, para detectar la aparición de nuevas inconsistencias o de tendencias hacia la inestabilidad.
• Es prácticamente inexistente una Teoría que nos indique los pasos a seguir para el diseño del sistema de control.
4.1 Aplicaciones al control
Japón es el país que ha adoptado con mayor entusiasmo la lógica fuzzy. Los japoneses son los que más productos basados en lógica borrosa han sacado al mercado desde 1985 [Maiers 85]. Al contrario ocurre en Estados Unidos y en casi todos los países occidentales, cuyo recelo nos ha llevado a emplearla prácticamente sólo en el desarrollo de software.
Los principales casos en los que resulta interesante emplear control fuzzy frente a otro tipo de control, son aquellos en los que se tratan problemas concretos con información parcial o imprecisa.
Se comentan a continuación algunas aplicaciones interesantes de la tecnología fuzzy al control.
30

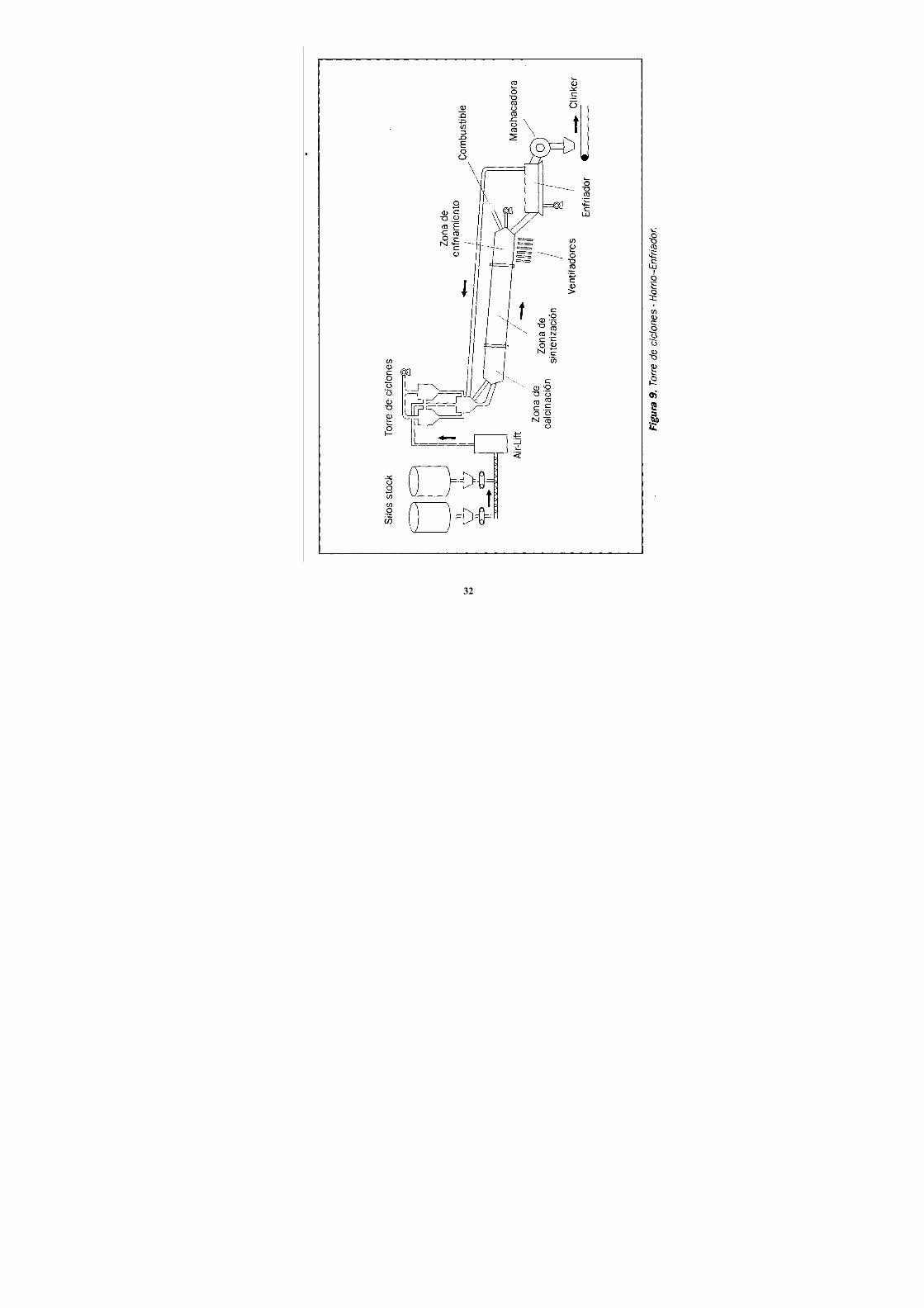
4.1.1 Control de un horno de clinker [Haspel 87, Holmblad 87, Sanz 91]
Se trata de una de las primeras aplicaciones al control de la
lógica borrosa. La idea surgió a mediados de los años 70, siendo Ostergaad uno de los pioneros, y actualmente lo implementan algunos sistemas de control como los de F. L. Smidth & Co. A/S, LINKMan y ASLAND & UPM-DISAM (CONEX).
En líneas generales, se pueden enunciar reglas para el control del horno, expresadas en términos lingüísticos, de la forma:
SI la temperatura de zona es alta
Y la temperatura de zona es creciente
Y el %02 de los gases de salida es alto,
Entonces reducir un poco la apertura de la clapeta del exhaustor.
Tradicionalmente, el control de hornos de cemento ha sido llevado a cabo mediante los sistemas de F.L.S. y LINKMan.
Las ideas básicas de F.L.S. pasan por estabilizar la temperatura de zona del horno y minimizar el exceso de 02. Debido a las dificultades para obtener la temperatura de zona, ésta es estimada a partir del par resistente del horno, de la concentración de NO, a la salida del tubo y del peso por litro de clinker. Conocida la temperatura de zona (correcta, elevada o baja) y su tendencia (calentamiento o enfriamiento), determina la acción a tomar actuando sobre el caudal de alimentación, la velocidad del horno y el caudal de combustible. Además, si la temperatura de zona es alta y su tendencia es el calentamiento, se reduce el exceso de 02 reduciendo la apertura de la clapeta del exhaustor.
El sistema de control de F.L.S. realiza una evaluación global de las variables significativas del horno, reacciona antes que el operador y se centra en la evolución de las variables a corto y medio plazo. Sin embargo, tiene algunas limitaciones que no permiten aprovechar el potencial de las técnicas fuzzy.
31
32

Para paliar la concepción cerrada de este tipo de sistemas de control, surge CONEX.
CONEX es una arquitectura de control inteligente cuya primera aplicación ha sido la conducción automática de hornos de cemento, que suple la poca flexibilidad de otros sistemas, integrando las técnicas Fuzzy en el sistema global de control de la fábrica y permitiendo su coexistencia con otras filosofías de regulación clásicas como PIDs.
Por una parte, recoge el conocimiento de los operadores de fábrica de una forma exhaustiva, logrando un profundo modelado del comportamiento del operador y abarcando un amplio rango de situa-ciones controladas. Por otra, incorpora un modelado a diferentes niveles obtenido a partir del conocimiento de los expertos del proceso (no operadores). Esta fusión del conocimiento permite emplear con éxito la tecnología fuzzy, e interpretar de manera mucho más amplia la situación y evolución de las variables del horno.
4.1.2 Control de un proceso de purificación de agua [Tong 80]
El proceso de purificación activa de agua es ampliamente
utilizado para el tratamiento de aguas residuales o con impurezas. Se caracteriza por una instrumentación compleja, objetivos de control no siempre bien definidos, empleo de información cualitativa para la toma de decisiones y un insuficiente conocimiento de los mecanismos de comportamiento de los organismos biológicos.
El proceso se basa en la descomposición de las complejas sustancias orgánicas en suspensión, en productos finales sencillos como dióxido de carbono y agua. La purificación activa consiste en el empleo de micro-organismos para llevar a cabo dicha descomposición.
La instalación de control se compone de dos partes fundamen-tales: un tanque de aireación y un clarificador. Las partículas orgánicas empleadas para la purificación son mezcladas íntimamente con el agua ya reciclada. Esta mezcla es introducida al tanque de aireación, en el que se insufla aire regulado por un controlador. Esto le proporciona a la mezcla la suficiente agitación como para afrontar la siguiente etapa de clarificación. A la salida de esta última, el flujo de líquido se
33

divide en tres: el flujo de salida, residuos sin purificar y agua a reciclar que vuelve a la entrada del proceso.
El problema de control se reduce al mantenimiento de tres consignas:
• Consigna de caudal a reciclar.
• Consigna de oxígeno a la entrada de la cámara de aireación.
• Consigna de flujo de agua residual sin purificar.
En esta situación, el control fuzzy es utilizado para explotar al
máximo la experiencia de los operadores y controlar el problema de coordinación entre las diferentes partes de la planta. Además, resulta
Figura 10. Procesos de purificación de agua.
34

sencillo manipular mediante un controlador fuzzy la información expresada en términos lingüísticos. Las acciones de control se plantean de la forma: aumentar la consigna de 02 mucho, y las variables de entrada al controlador se expresan como: si la cantidad de sólidos en suspensión es inferior a la correcta ...
Como variables de entrada se utilizan: caudal de salida, cantidad de sólidos en suspensión (a la salida, en los tanques de aireación, a la salida de los mismos y en el agua reciclada), una medida de bondad para la calidad de la mezcla en el clarificador, caudal de aireación y flujo de líquido reciclado. Como salidas se tienen: modificación de la consigna del caudal de aire, del caudal de agua reciclada y del caudal de agua residual sin purificar.
La tabla de reglas, lógicamente, no contiene todas las combina-ciones, sino las fundamentales. Estas reglas son del tipo: si el porcentaje de sólidos en suspensión en la mezcla a la salida del tanque de aireación es muy pequeño y el caudal de agua residual es pequeño, entonces efectuar un incremento pequeño en el caudal de agua reciclada.
Como conclusión se puede indicar que, para comprobar la bondad del controlador, se llevó a cabo una simulación antes de su implantación que resultó satisfactoria. Esto se consiguió a pesar de que el conocimiento del modelo biológico no era muy diferente al que se tenía con anterioridad y de que la identificación de los parámetros del sistema era particularmente complicada. Hasta el momento, el control existente se reducía a un control convencional distribuido en puntos aislados de la planta. Y aunque no se quiera defender la utilización del algoritmo fuzzy, realmente no se ve otra posibilidad mejor para controlar coordinadamente toda la instalación.
4.1.3 Aplicaciones en robótica
Esta es una clásica aplicación del control fuzzy desarrollada en
diferentes centros de investigación mundiales. El caso más típico es el control de vehículos autónomos. El
ejemplo más sencillo [Gasós 89] consiste en mantener un coche, que circula a velocidad constante, paralelo a una pared no rectilínea. Para ello se toman como variables de entrada al controlador la distancia d
35

del coche a la pared y el ángulo a que forma con la misma el eje longitudinal del coche. Como variable de control se utiliza el ángulo de giro de las ruedas delanteras (positivo a derecha y negativo a izquierda).
Colocando cada vez entornos físicos y obstáculos más compli-cados, se ha podido llegar siempre (no sin algún que otro accidente durante el ajuste de los parámetros del regulador) a un más que satisfactorio control del coche. En un alarde de hacer el más difícil todavía, se ha utilizado un circuito cerrado, haciendo circular por él a dos coches, uno a velocidad el doble que el otro. Por tanto, periódica-mente el vehículo más veloz alcanzará al lento. El primero identificará al segundo como un obstáculo (aunque móvil) y desviará su trayectoria para evitar la colisión. Circulará paralelamente a él hasta rebasarlo, tras lo cual detectará una distancia a la pared muy grande, y reaccionará girando hacia la misma, con lo que finaliza la operación de adelantamiento.
Un caso más general pasa por incluir el cálculo de la trayectoria a seguir por el robot. Un robot móvil genérico [Cerezo 93] debe disponer de un sistema de navegación que incluya tres tareas:
• Planificación de trayectorias: esto incluye evitar obstáculos imprevis-
tos.
Figura 11. Control de un Vehículo. 36

• Percepción del entorno: modelado del entorno y detección de obstáculos.
• Control de movimiento: eliminando los errores de posición y velocidad
entre la trayectoria real y la deseada.
La lógica borrosa puede utilizarse en cualquiera de los tres niveles anteriores.
Otros sistemas [Sugeno 89] incluyen un sistema de reconoci-miento de voz para dar las órdenes de control. De esta forma, es posible dar instrucciones del tipo: «gira a la derecha», «sigue derecho» o «entra al garaje».
En [Hirota 89] se presenta una aplicación a la robótica un poco diferente. En ese caso se trata de controlar el brazo de un robot que juega al ping-pong. Para ello, se dispone de dos cámaras, un sistema de reconocimiento de imágenes que permite observar el entorno (posición de la pelota). Esta información es procesada en un compu-tador personal que es el que envía las órdenes al robot. Existen dos brazos a controlar y el control se lleva a cabo suponiendo que la pelota describe un movimiento lineal en dos dimensiones.
4.1.4 Otras aplicaciones de control
Conducción automática de trenes
Entre las aplicaciones que ya podemos encontrar en la vida
cotidiana, cabe mencionar esta aplicación en tiempo real implantada en el metro de Senda¡, ciudad 300 km al norte de Tokio [Serrano 90]. Los convoyes consiguen frenar con niveles de precisión comparables a otros sistemas sin conductor, con un margen de error de 7 cm. Además, los cambios de velocidad se gradúan deforma que hacen casi innecesario que los viajeros tengan que agarrarse a las barras de sujeción.
Control del tráfico en un cruce [Pappis 77]
El sistema de control tiene como objetivo fundamental la
37

regulación de la fluidez del tráfico, mediante una adecuada gestión de los semáforos en un cruce de calles. El controlador utiliza reglas de control expresadas en términos lingüísticos de la forma:
SI el flujo de coches que llegan al cruce es medio
Y los coches acumulados en el semáforo son pocos
ENTONCES el tiempo de apertura del disco debe ser medio
Los resultados obtenidos experimentalmente demuestran que
se logra una mayor velocidad media en las dos calles afectadas por el cruce. Únicamente en el caso de unas vías muy saturadas (práctica-mente atasco total), el semáforo convencional ofrece mejores presta-ciones.
Desde hace algunos años, la policía de Tokio dispone de un sistema mejorado para el control de accidentes y reorganización óptima del tráfico en la ciudad [Tokio News 89].
Controladores de temperatura [Mitsubishi 89, Omron 92]
Los sistemas de acondicionamiento de aire son altamente no
lineales y tienen importantes retardos. Los convencionales deben ser programados de forma diferente cuando se varía el entorno en el que se los va a hacer trabajar.
Los aparatos normales, controlados por termostatos, se conectan cuando la temperatura alcanza un máximo previsto y se desconectan al bajar por debajo de un mínimo también prefijado. Sin embargo, este sistema fuzzy incorpora un microprocesador, también fuzzy, que va rebajando la potencia a medida que la temperatura se va aproximando a la ideal, con lo que se evitan fluctuaciones bruscas en el termómetro.
El acondicionador desarrollado por Mitsubishi, permite que el sistema se adapte suavemente a cambios en el tamaño de la habitación, en la temperatura del entorno o en las propiedades de la masa de aire circundante. El sistema controla la temperatura, cantidad y dirección del aire de salida.
38

Una de sus características principales reside en que se comporta como lo haría un sensor de temperatura humano. Además, trabaja con un consumo mínimo de aire acondicionado: con este tipo de sistemas se aprecia una mejora en el ahorro del orden del 20%.
El controlador de temperatura de Oraron combina lógica fuzzy con algoritmos PID. Entre otras características, responde un 50% más rápido a las especificaciones de control que con los métodos convencionales por separado. El controlador borroso está ya preprogramado y no es necesario ajustarlo. El controlador monitoriza dos variables: el error en la variable controlada y la derivada de la temperatura. Emplea reglas del tipo:
SI el error es positivo grande
Y la temperatura cae deprisa
ENTONCES aumentar mucho la acción de control
Durante las etapas de arranque y de aproximación al régimen
permanente, sólo se utiliza el PID, pues no se observaba una influencia apreciable del controlador fuzzy. Ante perturbaciones externas, es cuando entra en juego este último.
Sistemas ABS de frenado y transmisiones automáticas (Nissan Motor Co. Ltd.)
En los sistemas convencionales de transmisión, el control del
embrague se lleva a cabo en función de la información procedente de los sensores que detectan la velocidad del vehículo y la apertura de la mariposa. Sin embargo, Nissan patentó un sistema [G. King 89] que incorporaba también medidas de la aceleración y de la derivada de la apertura de la mariposa. Una vez hecho esto, su principal interés se centró en patentar un sistema que, siguiendo el mismo esquema, utilizase lógica borrosa, de forma que la influencia de las distintas variables quedase ponderada de forma no lineal.
En lo referente a los sistemas ABS, Nissan patentó, también a finales de los 80, un sistema basado en lógica borrosa que, además
39

de medir la velocidad del vehículo y de las ruedas como hacen los sistemas convencionales, utilizaba también las aceleraciones de ambos.
Imagen y sonido (Sanyo)
En la actualidad, éste es uno de los casos curiosos de la aplicación de la lógica fuzzy. Como ejemplo, cabe citar las nuevas videocámaras de Sanyo. Si hemos de dar crédito a la publicidad, su sistema fuzzy logic, conseguido mediante unos nuevos microprocesa-dores, se basa en el funcionamiento del ojo humano y procesa las imágenes con mayor claridad. Analiza la luz otorgando prioridades y compensando las distintas zonas. Garantiza un enfoque perfecto en cualquier situación (incluso frente al sol), nitidez en los contraluces y colores reales.
4.2 Otras aplicaciones
4.2.1 Sistemas expertos [Godo 89]
Se analiza a continuación el papel que juega la incertidumbre como parámetro de control de la inferencia en los sistemas expertos.
Un claro ejemplo de utilización de incertidumbre en un sistema experto, es el motor de inferencia MILORD (Motor de Inferencia LOgica para el Razonamiento Difuso), desarrollado por el grupo de Inteligencia Artificial del Centro de Estudios Avanzados de Blanes (dependiente del CSIC) y dirigido por Ramón López de Mántaras. Un sistema experto construido sobre él puede constar fácilmente de al menos 1000 reglas y 150 metarreglas, y trabajar con expresiones lingüísticas. Las conclusiones de las reglas no se toman como ciertas al 100%, sino que, dependiendo del peso de cada regla o grupo de reglas, la conclusión puede ser, por ejemplo, muy posible.
Sobre este motor de inferencia se implementó un sistema experto para resolver casos de neumonía. El objetivo era que fuese capaz de apoyar a los médicos a la hora de diagnosticar casos de neumonía a partir de los síntomas presentados por el paciente.
En el momento de su construcción, se trataba del único sistema
40

experto válido en Europa, empleando lógica fuzzy. Sin embargo, la estructura del motor de inferencia MILORD presenta algunas caracte-rísticas con entidad propia que sientan las bases de lo que puede ser un sistema experto para el control en tiempo real, puesto que la estructura de razonamiento borroso sería la misma.
Existen más herramientas para la construcción de sistemas expertos que permiten trabajar con Lógica Fuzzy. Tal es el caso de GURU que, estando basado en lógica de proposiciones, incorpora en su entorno integrado de trabajo la facilidad de emplear reglas cuyas condiciones y conclusiones aparecen expresadas en términos cualita-tivos, pudiendo tomar cualquier proposición un rango de valores comprendido en el intervalo [0, 1].
4.2.2 Validación de datos [Aguilar 92, Matía 94]
Comentaremos la aplicación de la lógica borrosa al problema de validación de datos.
El conocimiento del experto humano sobre el comportamiento de las principales variables de una planta de procesos continuos, está normalmente expresado en términos lingüísticos, y por tanto con imprecisión e incertidumbre: sensores poco fiables, medidas que
Fig. 12. Restricción borrosa.
41

parecen estar mal, medidas que a menudo fluctúan mucho, variables que deben tener un valor mayor que uno determinado, variables que deben ser aproximadamente iguales a un valor dado, etc.
Pues bien, la lógica borrosa permite trabajar cómodamente con expresiones como las anteriores: muy poco, mal, mucho, mayor que y aproximadamente igual a. El conocimiento habitual que aparece en los problemas de validación es del tipo
si la presión crece, entonces la temperatura también debe
crecer o bien
estas temperaturas deben ser similares
Entre las soluciones que se ofrecen, utilizando lógica borrosa,
están las siguientes:
• Empleo de restricciones individuales: Una restricción permite com-probar si el dato se encuentra dentro de límites, siendo en este caso límites borrosos (Figura 12): el dato debe ser aproximadamente mayor que 10 y aproximadamente menor que 50. De esta forma es posible obtener un valor de confianza para la variable, como el grado de pertenencia al conjunto borroso que representa la restricción.
• Análisis del comportamiento histórico: Para cada variable se alma-
cenan, en una distribución normalizada, históricos de valores. Estas distribuciones representan el comportamiento normal del sensor. El grado de pertenencia de un dato al histograma, se interpreta como un valor de confianza para la variable. Existe también un algoritmo de adaptación dinámica de las distribuciones.
• Razonamiento basado en reglas: El conocimiento sobre la relación
entre varias variables puede implementarse fácilmente en base a reglas, de las cuales se obtiene directamente el valor de confianza:
si la temperatura crece mucho y el caudal aumenta poco, entonces la confianza en la temperatura es baja y la confianza en el caudal es media.
42

• Restricciones colectivas: Otra forma de representar la relación de dependencia entre un grupo de variables, es por medio de relaciones borrosas. Por ejemplo, la implementación de la restricción
el dato 1 debe ser aproximadamente igual a 10* dato 2,
puede hacerse mediante la relación borrosa 1.Ox aproximadamente igual a y, definida como
El grado de verdad de la relación proporciona directamente el grado
de confianza de las variables que intervienen en la misma. Por último, los distintos valores de confianza obtenidos para
una misma variable, por distintos métodos, deben integrarse en un único valor final mediante una fórmula que las pondere adecuadamente.
Una aplicación de estos métodos se ha desarrollado para la validación de datos en una unidad de desparafinado de Repsól Petróleo S. A. en Cartagena (España), en el marco del proyecto ESPRIT HINT (Heterogeneous INTegration Architecture for Intelligent Control Systems). El objetivo fundamental del mismo está siendo el desarrollo de una arquitectura y una metodología que permitan la interacción y cooperación en tiempo real de diferentes técnicas de inteligencia artificial, como razonamiento basado en modelos, sistemas expertos, redes neuronales y lógica borrosa.
El objetivo del módulo de lógica borrosa es la construcción de una herramienta para filtrado y validación de sensores (FFV-tool) que permite introducir el conocimiento e implementar los módulos de validación.
4.3 Herramientas de desarrollo
4.3.1 Computadores de sexta generación [Moraga 93, Sultán 88]
Está en fase experimental la idea de construir un computador
fuzzy de propósito general. Este sería un computador amigable, que
43
comprendería conceptos cualitativos (semánticos) del lenguaje, al igual que lo hace una persona. Sería capaz de procesar a gran velocidad grandes cantidades de información fuzzy y razonamientos borrosos.
En la arquitectura del computador fuzzy coexistirían los procesadores convencionales con los procesadores fuzzy, colaborando en los entornos multitarea y multiusuario de forma que el computador fuera aplicable a problemas de gran envergadura.
El diseño de máquinas de procesamiento en paralelo y su integración a gran escala es motivo de investigación en el presente.
Es Labib Sultán quien sienta las bases de los requerimientos que debería tener un procesador borroso. La principal idea que se persigue en este campo es la construcción de un ensamblador con instrucciones que permitan el empleo directo de información borrosa, y la representación en bloques de memoria de funciones de pertenen- cia.
Hasta el momento, lo más parecido que existe en el mercado al computador propuesto, pretende ser la estación de trabajo Fuzzy Luna de Oraron. Otro ejemplo, aunque no se trata de un ordenador en el sentido clásico, es el computador compacto de Sony PTC-500 basado en lógica borrosa. De reducidas dimensiones y peso (1.3 Kg), es capaz de leer la escritura a mano, reconociendo más de 3500 caracteres japoneses. No dispone de teclado y el acceso se hace por medio de una pantalla sobre la que se escribe con un lápiz. Con esto pueden sustituirse los sistemas existentes hasta el momento, consistentes en periféricos conectables a computadores convencionales.
4.3.2 Hardware [Ruiz 92, Yamakawa 88, 89]
En el terreno del hardware fuzzy, ya es posible encontrar chips
programables que implementan reglas de las utilizadas en lógica fuzzy. El tamaño de estos chips era, en un principio, grande en comparación con sus limitadas prestaciones (sólo una o unas pocas reglas a lo sumo), si bien cabe decir que esto era intencionado con el fin de facilitar su experimentación. Disponían además de una circuitería adicional externa para ajustar los parámetros de las reglas.
El pionero en este terreno fue Yamakawa, quien diseñó y creó el
44

primer chip basado en lógica borrosa. Este ofrecía una velocidad de 1 millón de inferencias por segundo y su primera aplicación fue al control de un péndulo invertido.
Pero si bien la tecnología de punta ha sido siempre la japonesa, merece la pena destacar que también en determinados centros de investigación españoles se están haciendo esfuerzos al respecto en el campo de los procesadores fuzzy.
4.3.3 Entornos de desarrollo [Toga¡ 89a, 89b, Toshiba]
Son varias las firmas comerciales que tienen disponible en el
mercado paquetes software para el desarrollo de sistemas basados en lógica fuzzy.
El TIL Shell de Togai Infralogic corre sobre MS-DOS y Macintosh. Incluye un editor gráfico que permite diseñar con comodidad y salvar bases de conocimiento en un pseudo-lenguaje que utiliza expresiones lingüísticas y funciones de pertenencia. Asimismo dispone de un compilador que traduce esta fuente y genera código C compatible con ANSI o Kernighan & Ritchie. También dispone de compiladores que
Figura 13. Chips basados en lógica borrosa.
45

generan código ensamblador que corre sobre el hardware disponible en tarjetas que también se comercializan.
El software fuzzy está siendo desarrollado de forma que los compiladores proporcionen altas prestaciones a la hora de convertir lenguajes de alto nivel convencionales (tipo C) a un ensamblador que aproveche los recursos de un soporte hardware fuzzy.
FuzzyTech es un entorno para Windows basado en lógica borrosa qúe permite el desarrollo y optimización de estrategias de control en tiempo real así como la generación de código C. Dispone de herramientas gráficas para las distintas fases de diseño.
El Fuzzy Demonstrations-Zentrum Dortmund comercializa los siguientes productos: Software para control fuzzy, Software para sistemas de decisión fuzzy, Software para sistemas y algoritmos fuzzy y Hardware fuzzy.
Entre el soporte hardware existente, cabe mencionar que existen ya productos comerciales a disposición de usuarios de computadores tipo PC. Por ejemplo, Toga¡ Infralogic comercializa tarjetas que incorporan chips como los ya comentados.
Toshiba comercializa un procesador con 8 entradas/1 salida, 10 bits de resolución, 7 funciones de pertenencia de cinco tipos diferentes, una velocidad de 4 millones de inferencias por segundo y desborrosificación por centro de gravedad y por máximo. También vende dos tipos de tarjetas para PC y un pequeño software de desarrollo para configurar la tarjeta.
46

5. Conclusión
Las reticencias de determinados sectores hacia los temas relacionados con la tecnología fuzzy han hecho que, salvo el caso ya reseñado de Japón, los investigadores interesados en el tema, hasta hace poco, tuvieran muy pocos incentivos para continuar su labor en un campo tan interesante como es éste. Como dato significativo, indicar que en Europa y en E.E.U.U. existían hasta hace unos años la décima parte de investigadores dedicados a este tema que en Japón.
La explicación que se puede dar es la ya habitual en estos casos: un pensamiento anclado en la tradición, que ve en la lógica borrosa un choque frontal con la clásica. Esta idea la expresa mucho mejor el propio Zadeh: Lo borroso empieza allí donde la lógica occidental acaba.
Sin embargo, esta situación va cambiando paulatinamente, encontrándonos actualmente con que en España, ya existen grupos que pueden considerarse punteros en este campo de investigación. Como muestra de este auge, puede destacarse la creación en 1991 de la Asociación Española de Tecnologías y Lógica Fuzzy, con sede en Granada.
Pues lo cierto es que la aplicación en tiempo real de la tecnología fuzzy, tal y como la conocemos hasta ahora, está abriendo campos inimaginables en el control de procesos, cuyo abordamiento, hasta el presente, había sido impensable.
47


6. Referencias
[Aguilar 92] J. A. Aguilar, E. de Pablo y X. Alamán, A Fuzzy Logic
Approach for Sensor Validation in Real Time Expert Systems, 4th. Information Processing and Management of Uncertainty Conference. Palma de Mallorca, España (1992) 435-438.
[Bellman 70] R. E. Bellman y L. A. Zadeh, Decision-Making in a
Fuzzy Environment, Management Science 17 B, (1970) 141-164.
[Braae 79] M. Braae y D. A. Rutherford, Theoretical and Linguistic Aspects of the Fuzzy Logic Controller, Automática 15 (1979) 553-557.
[Cerezo 93] A. García-Cerezo y A. Ollero, Aplicación de la
Lógica Borrosa en Control de Procesos y Robótica. En el libro Estudios de Lógica Borrosa y sus Aplicaciones, A. Sobrino y S. Barro (Eds). Universidad de Santiago de Compostela (1993) 51-67.
[Driamkov 93] D. Driamkov. H. Hellendoorn y M. Reinfrank,
An Introduction to Fuzzy Control, Springer-Verlag (1993).
[Dubois 80] D. Dubois and H. Prade, Fuzzy Sets and Systems: Theory and Applications, Academic Press (1980).
[Fernández 87] G. Fernández y F. S. Vacas, Fundamentos de
Informática, Alianza (1987).
[Gasós 89] J. Gasós, P. D. Fernández, M. C. García-Alegre y R. García-Rosa, Environment for the Development of Fuzzy Controllers, CSIC e Instituto de Automática (Univ. Nacional de San Juan, Argentina) (1989).
[Godo 89] L. Godo, R. López de Montaras, C. Sierra y A.
Verdaguer, MILORD: The Architecture and the Management of Linguis-tically Expressed Uncertainty, Int. Journal of Intelligent Systems 4 (1989) 471-501.
49

[Haspel 87] D. W. Haspel, C. J. Southan y R. A. Taylor, The Benefits of Kiln Optimisation Using LINKMAN and High Level Kiln Control Strategies, World Cement (1987).
[Hirota 89] K. Hirota, Y. Arai y S. Hachisu, Fuzzy Controlled Robot Arm Playing Two-Dimensional Ping-Pong Game, Fuzzy Sets and Systems 32 (1989) 149-159.
[Holmblad 87] L. P. Holmblad, Automatic Control of Cement Kilns by
Fuzzy Logic Techniques, F. L. Smith and Co. A/S, Universidad Internacional Menéndez Pelayo (1987).
[Jiménez 92] A. Jiménez y F. Matía, Aplicaciones de Fuzzy Logic en
Tiempo Real. En el libro La Inteligencia Artificial y el Control en Tiempo Real, REPSOL-IIC Colección,,Ensayo», (1992) 189-239.
[King 77] P. J. King y E. H. Mamdani, Application of Fuzzy Control
Systems to Industrial Processes, Automática 13 (1977) 235-242.
[G. King89]A. G. King, Nissan Patents Fuzzy LogicABS, Gearbox, Automotive Electronic News, 31 de Julio (1989).
[Maiers 85] J. Maiers y Y. S. Sherif, Applications of Fuzzy Set
Theory, IEEE Transactions on Systems, Man and Cybernetics SMC-15 (1) (1985) 175-189.
[Mamdani 74] E. H. Mamdani, Application of FuzzyAlgorithms for the Control of a Dynamic Plant, proc. IEE, Vol. 121 (12) pp 1585-1588 (1974).
[Matia 92] F. Matía, A. Jiménez, R. Galán y R. Sanz, Fuzzy
Controllers: Lifting the Linear-Nonlinear Frontier, Fuzzy Sets and Systems 52 (2) (1992) 113-128.
50

[Matía 94] F. Matía, A. Jiménez, J.A. Aguilar y A. Jiménez, Fuzzy
Logic and Data Quality in Real-Time Expert Systems, Int. Journal on Integrated Computer-Aided Engineering (Special issue on Integration Technology for Real-Time Intelligent Control Systems) (1994). En Imprenta.
[Mitsubishi 89] Mitsubishi, Fuzzy Control Application for Air-
Conditioning, Nihon Economics News, 10 de Agosto (1989).
[Moraga 93] C. Moraga, El Proyecto ORBE. En el libro Estudios de Lógica Borrosa y sus Aplicaciones, A. Sobrino y S. Barro (Eds). Universidad de Santiago de Compostela (1993) 327-332.
[Oraron 92] Oraron, Controlador de Temperatura Fuzzy, Oraron
Electronics, S.A. (1992).
[Pappis 77] C. P. Pappis y E. H. Mamdani, A Fuzzy Logic Controller for a Traffic Junction, IEEE Trans. Syst. Man, Cybern. SMC-17 (1977) 707-717.
[Pedrycz 89] W. Pedrycz, Fuzzy Control and Fuzzy Systems,
Research Studies Press ltd. (1989).
[Ruiz 92] A. Ruiz y J. Gutiérrez, Realización CMOS de un Circuito de Función de Pertenencia Programable: el Bloque Básico de Procesa-miento Borroso, Segundo Congreso Español sobre Tecnologías y Lógica Fuzzy, Madrid (1992) 313-321.
[Sanz 91] R. Sanz, A. Jiménez, R. Galán, F. Matía y E. A. Puente,
Intelligent Process Control: The CONEX Architecture. In Engineering Systems with Intelligence. Concepts, Tools and Applications, S. G.
Tzafestas (Ed.), (1991) 407-413.
[Serrano 90] S. Serrano, La Lógica Borrosa se infiltra en el Metro y hasta en las Lavadoras, El País, 10 de Octubre (1990).
51

[Sugeno 85] M. Sugeno, An Introductory Survey of Fuzzy Control,
Information Sciences 36 (1985) 59-83.
[Sugeno 89] M. Sugeno, T. Murofushi, T. Mori, T. Tatematesu y J. Tanaka, FuzzyAlgorithmic Control of a Model Car by Oral Instructions, Fuzzy Sets and Systems 32 (1989) 207-219.
[Sultán 88] L. Sultán, A Formal Approach forthe Organization and
Implementation of Fuzzy Micro-Processor Module, Fuzzy Computing (1988) 201-221.
[Togai 89a] Togai, Fuzzy -C Development System, Togai
Infralogic Inc. (1989).
[Togai 89b] Togai, Fuzzy Logic Processor for Real-Time Control, Togai Infralogic Inc., Electronic Engineering (1989).
[Tokio News 89] Tokio News, A Traffic Control System, Tokio
News, 15 de Septiembre (1989).
[Tong 77] R. M. Tong, A Control Engineering Review of Fuzzy Systems, Automática 13 (1977) 559-569.
[Tong 80] R.M. Tong, M. B. Becky A. Latten, Fuzzy Control of the
Activated Sludge Wastewater Treatment Process, Automática 16 (1980) 659-697.
[Toshiba] Toshiba, Toshiba Fuzzy System, Toshiba Corporation.
[Trillas 80] E. Trillas, Conjuntos Borrosos, Vicens Universidad
(1980).
[Yamakawa 88] T. Yamakawa, Fuzzy Microprocessors - Rule Chip and Defuzzifier Chip -, Int. Workshop on Fuzzy Systems Applications (1988) 51-52.
52

[Yamakawa 89] T. Yamakawa, Stabilization of an Inverted Pen-dulum by a High-Speed Fuzzy Logic Controller Hardware System, Fuzzy Sets and Systems 32 (1989) 161-180.
[Zadeh 65] L. A. Zadeh, Fuzzy Sets, Information and Control 8,
New York, Academic Press (1965) 338-353.
[Zadeh 73] L. A. Zadeh, Outline of a NewApproach to the Analysis of Complex Systems and Decision Processes, IEEE Trans. Systems, Man and Cybernetics, SMC-3 (1973) 28-44.
[Zimmerm. 91] H. J. Zimmermann, Fuzzy Set Theory and its
Applications, Kluwer Academic Publishers (1991).
53